

Page 1

Operating instructions for
KL3041, KL3042 and KL3044
Single-, Two- and Four-Channel Analog Input Terminals
Measuring range: 0 to 20 mA
and
KL3051, KL3052 and KL3054
Single-, Two- and Four-Channel Analog Input Terminals
Measuring range: 4 to 20 mA
Version: 3.3
Date: 2013-03-27
Page 2

Table of contents
Table of contents
1. Foreword 1
Notes on the documentation 1
2. Technical data 2
3. Connection 3
KL3041 and KL3051 3
KL3042 3
KL3052 4
KL3044 and KL3054 4
4. ATEX - Special conditions 5
5. Functional description 6
6. Terminal configuration 8
7. Register Description 9
General Description of Registers 9
Terminal-specific register description 12
Control and Status byte 15
Register communication 16
8. Appendix 18
Mapping 18
Register Table 21
Support and Service 22
KL304x and KL305x
Page 3

Foreword
Foreword
Notes on the documentation
This description is only intended for the use of trained specialists in control
and automation engineering who are familiar with the applicable national
standards. It is essential that the following notes and explanations are
followed when installing and commissioning these components.
The responsible staff must ensure that the application or use of the
products described satisfy all the requirements for safety, including all the
relevant laws, regulations, guidelines and standards.
Disclaimer
The documentation has been prepared with care. The products described
are, however, constantly under development. For that reason the
documentation is not in every case checked for consistency with
performance data, standards or other characteristics. In the event that it
contains technical or editorial errors, we retain the right to make alterations
at any time and without warning. No claims for the modification of products
that have already been supplied may be made on the basis of the data,
diagrams and descriptions in this documentation.
Delivery conditions
In addition, the general delivery conditions of the company Beckhoff
Automation GmbH apply.
Trademarks
Beckhoff
XFC
Automation GmbH. Other designations used in this publication may be
trademarks whose use by third parties for their own purposes could violate
the rights of the owners.
Patent Pending
The TwinCAT Technology is covered, including but not limited to the
following patent applications and patents: EP0851348, US6167425 with
corresponding applications or registrations in various other countries.
Copyright
© Beckhoff Automation GmbH.
The reproduction, distribution and utilization of this document as well as the
communication of its contents to others without express authorization are
prohibited. Offenders will be held liable for the payment of damages. All
rights reserved in the event of the grant of a patent, utility model or design.
®
, TwinCAT®, EtherCAT®, Safety over EtherCAT®, TwinSAFE®,
®
and XTS® are registered trademarks of and licensed by Beckhoff
KL304x and KL305x 1
Page 4
Technical data
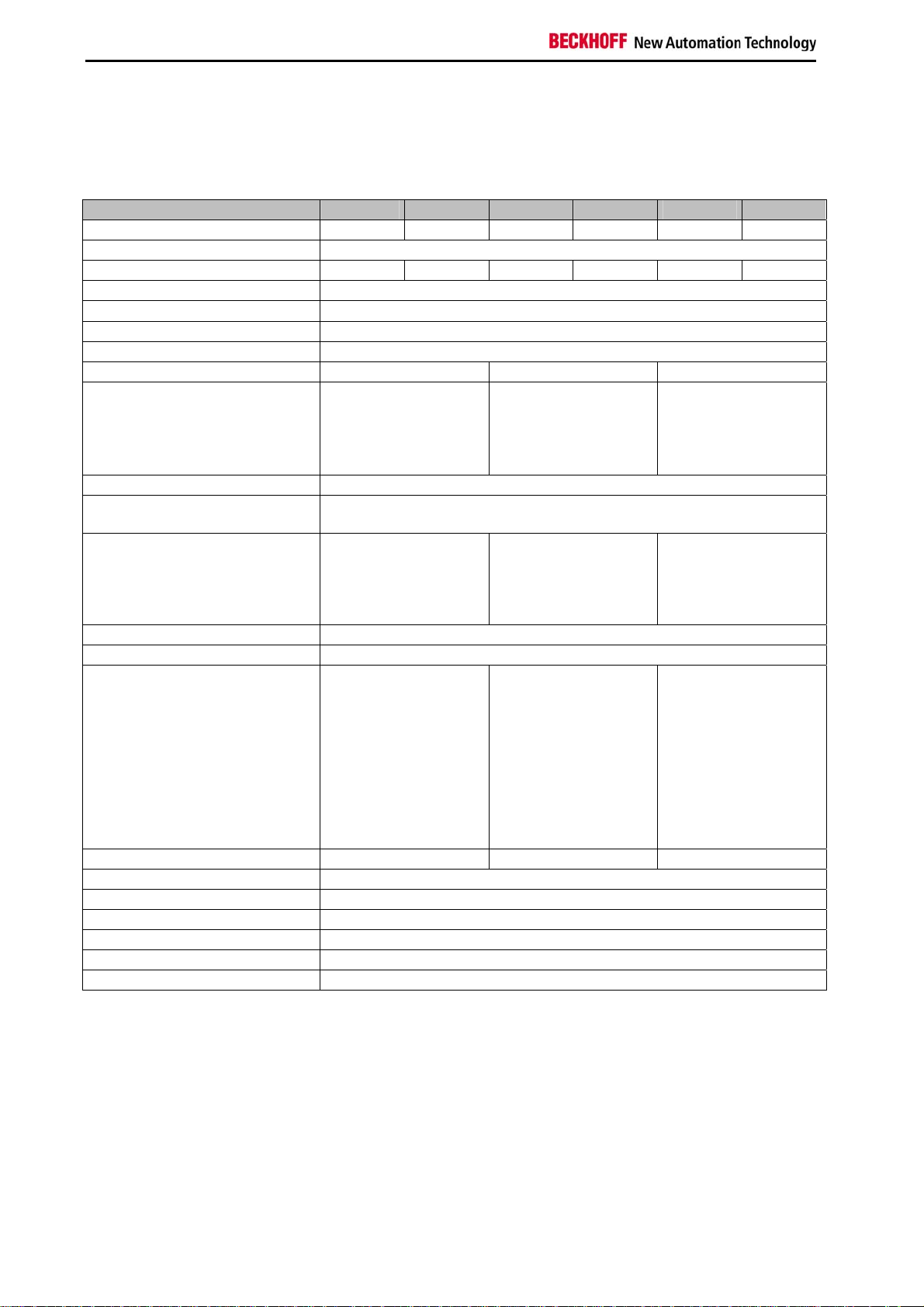
Technical data KL3041 KL3051 KL3042 KL3052 KL3044 KL3054
Number of inputs 1 1 2 2 4 4
Power supply 24 VDC via the power contacts
Signal current 0..20mA 4..20mA 0..20mA 4..20mA 0..20mA 4..20mA
Technology single-ended
Internal resistance
Surge voltage resistance 35 V max.
Resolution 12 bits
Conversion time
Meas. error (total meas. range)
Electrical isolation 500 V (K-Bus/signal voltage)
Current consumption from K-
Bus
Bits width in process image
Configuration no address or configuration settings
Weight approx. 70 g
Operating temperature 0°C ... +55°C
Storage temperature -25°C ... +85°C -40°C ... +85°C -25°C ... +85°C
Relative humidity 95 % no condensation
Vibration / shock resistance according to EN 60068-2-6 / EN 60068-2-27
EMC resistance burst / ESD according to EN 61000-6-2 / EN 61000-6-4
Installation position
Protection class IP20
Approvals CE, cULus, ATEX, GL
Technical data
typically 80 Ω + diode voltage 0.7V
~ 1 ms ~ 2 ms ~ 4 ms
< ± 0.3% (of the full
scale value)
typically 65 mA
Input: 1 x 16 bits of
data
(1 x 8 bit
control/status
optional)
any
< ± 0.30% (at 0°C ...
+55°C)
< ± 0.75% (at utilization
of the extended
temperature range)
Input: 2 x 16 bits of
data
(2 x 8 bit
control/status
optional)
-25°C ... +60°C
(extended
temperature range)
0°C ... +55°C
(according to cULus
for Canada and USA)
0°C ... +55°C
(according to ATEX,
see special
conditions)
< ± 0.3% (of the full
scale value)
Input: 4 x 16 bits of
data
(4 x 8 bit
control/status
optional)
0°C ... +55°C
2 KL304x and KL305x
Page 5
Connection
Connection
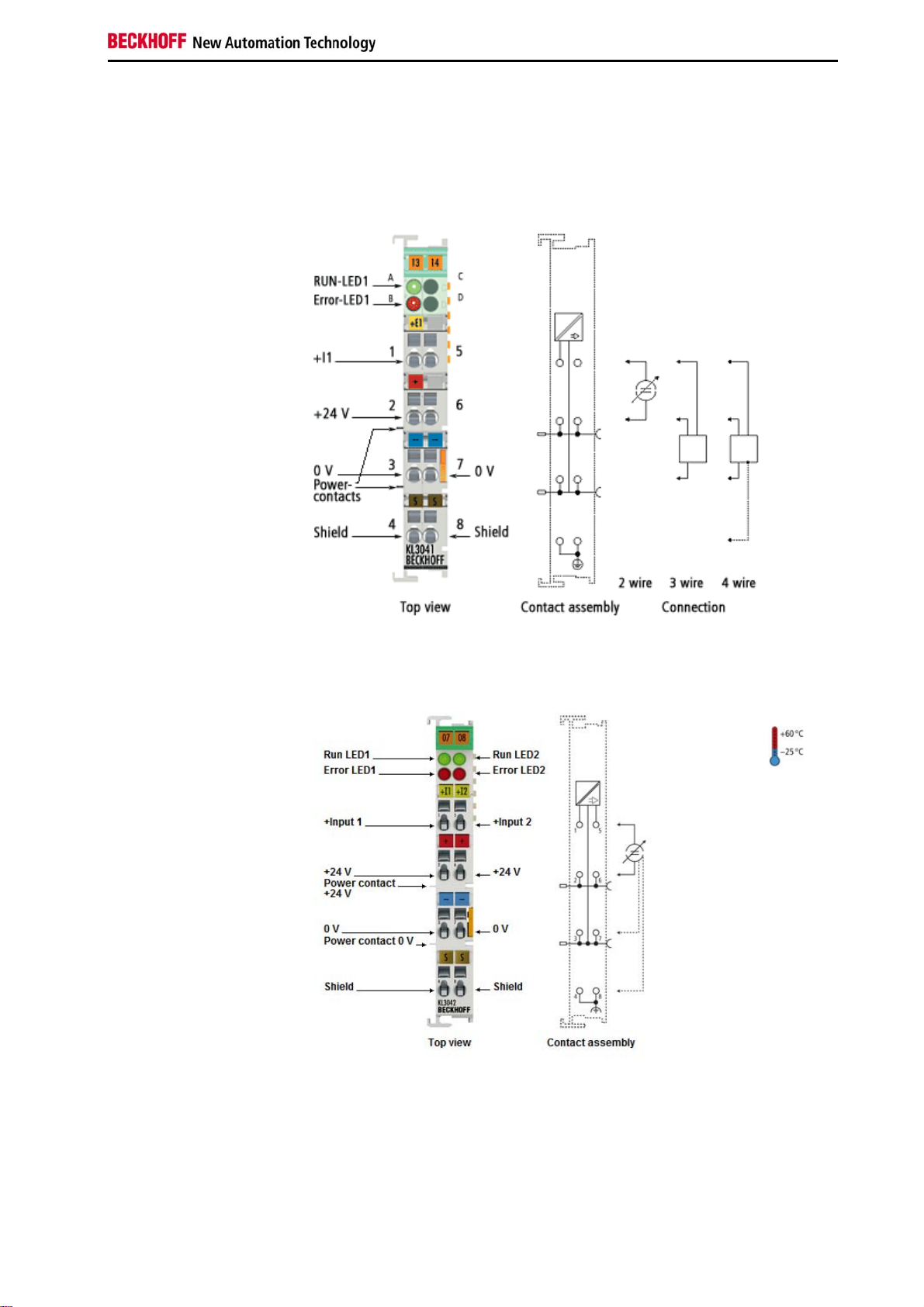
KL3041 and KL3051
KL3042
KL304x and KL305x 3
Page 6
Connection
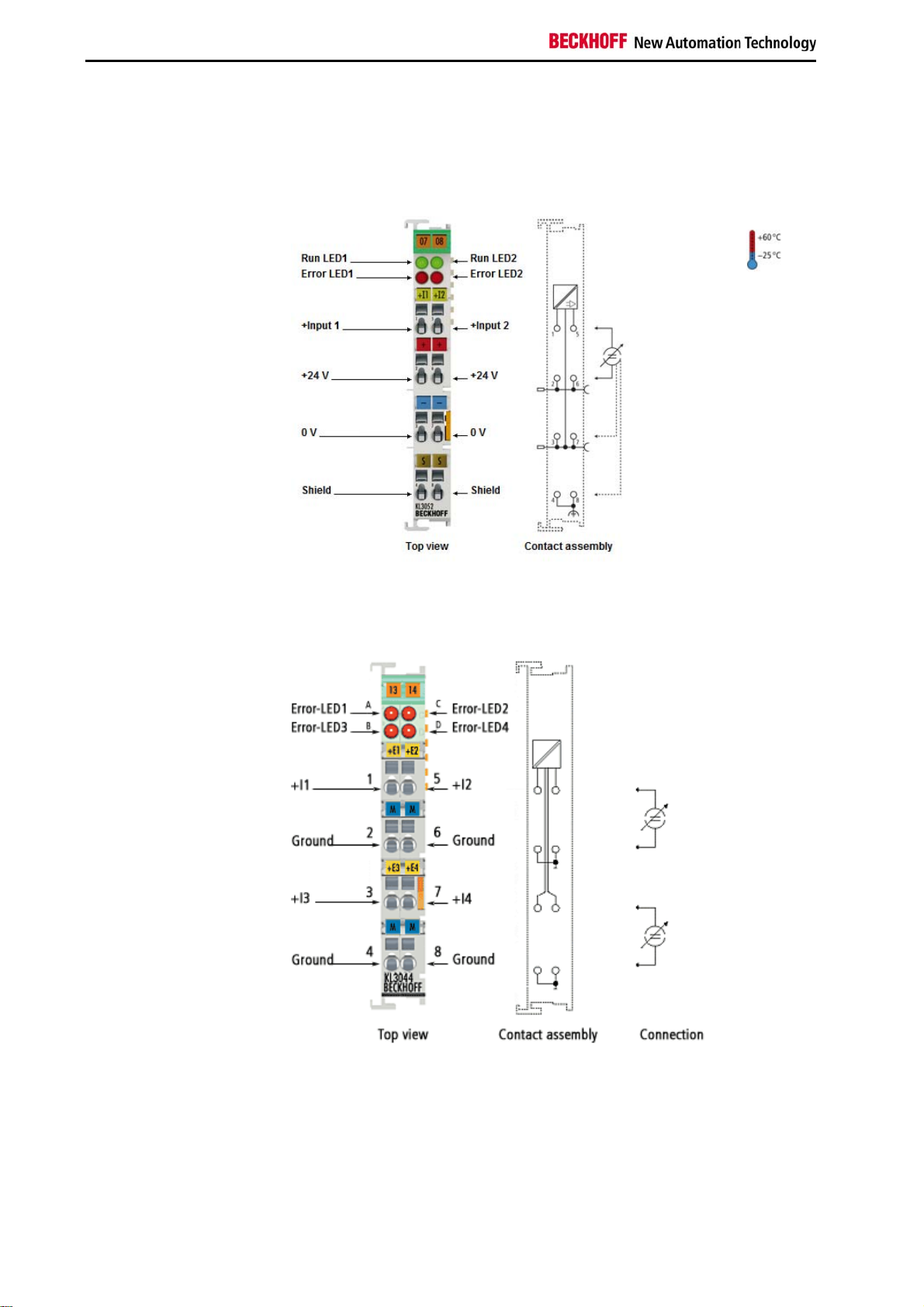
KL3052
KL3044 and KL3054
4 KL304x and KL305x
Page 7
ATEX - Special conditions
ATEX - Special conditions
Observe the special conditions for the intended use of
Beckhoff fieldbus components in potentially explosive areas (directive 94/9/EU)!
WARNING
• The certified components are to be installed in a suitable housing that guarantees
a protection class of at least IP54 in accordance with EN 60529! The environmental conditions during use are thereby to be taken into account!
• If the temperatures during rated operation are higher than 70°C at the feed-in
points of cables, lines or pipes, or higher than 80°C at the wire branching points,
then cables must be selected whose temperature data correspond to the actual
measured temperature values!
• Observe the permissible ambient temperature range of 0 - 55°C for the use of
Beckhoff fieldbus components in potentially explosive areas!
• Measures must be taken to protect against the rated operating voltage being ex-
ceeded by more than 40% due to short-term interference voltages!
• The individual terminals may only be unplugged or removed from the Bus Termi-
nal system if the supply voltage has been switched off or if a non-explosive atmosphere is ensured!
• The connections of the certified components may only be connected or discon-
nected if the supply voltage has been switched off or if a non-explosive atmosphere is ensured!
• The fuses of the KL92xx power feed terminals may only be exchanged if the sup-
ply voltage has been switched off or if a non-explosive atmosphere is ensured!
• Address selectors and ID switches may only be adjusted if the supply voltage has
been switched off or if a non-explosive atmosphere is ensured!
Operation of the Bus Terminal System in potentially explosive areas (ATEX)!
Note
Pay also attention to the continuative documentation
Notes about operation of the Bus Terminal System in potentially explosive areas (ATEX)
that is available in the download area
of the Beckhoff homepage http://www.beckhoff.com!
KL304x and KL305x 5
Page 8

Functional description
Functional description
The analog input terminals
- KL304x process signals in the range between 0 and 20 mA
- KL305x process signals in the range between 4 and 20 mA
with a resolution of 12 bits (4095 increments). They can supply the sensors
from voltage fed in via the power contacts. The power contacts can
optionally be supplied via the standard supply or via a feed terminal with
electrical isolation.
Process data output format In the delivery state the process data are shown in two's complement form
(integer -1 corresponds to 0xFFFF). Other display types can be selected
via the feature register (e.g. sign/amount representation, Siemens output
format).
Measured value Output
KL304x KL305x Decimal Hexadecimal
0 mA 4 mA
10 mA 12 mA
20 mA 20 mA
0 0x0000
16383 0x3FFF
32767 0x7FFF
LED display The LEDs indicate the operating state of the associated terminal channels.
Green LED: RUN (not applicable for KL3044 and KL3054)
• On: normal operation
• Off: Watchdog-timer overflow has occurred. If no process data is
transmitted to the bus coupler for 100 ms, the green LEDs go out.
Red LED: ERROR
• On: The limit stop of the A/D converter has been reached. The
current is greater than 21.5 mA.
• Off: normal operation
6 KL304x and KL305x
Page 9

Functional description
Process data The process data that are transferred to the Bus Coupler are calculated
using the following equations:
X_adc: Output values of the A/D converter
Y_aus: Process data to PLC
B_a,A_a: Manufacturer gain and offset compensation (R17, R18)
B_h,A_h: Manufacturer scaling (R19, R20)
B_w,A_w: User scaling (R33, R34)
a) Neither user nor manufacturer scaling are active:
Y_a = (B_a + X_adc) * A_a (1.0)
Y_aus = Y_a
b) Manufacturer scaling active (factory setting):
Y_1 = B_h + A_h * Y_a (1.1)
Y_aus = Y_1
c) User scaling active:
Y_2 =B_w + A_w * Y_a (1.2)
Y_aus = Y_2
d) Manufacturer and user scaling active:
Y_1 = B_h + A_h * Y_a (1.3)
Y_2 = B_w + A_w * Y_1 (1.4)
Y_aus = Y_2
The equations of the straight line are activated via register R32.
amount rep.
add. bits
user scalingmanuf. scal.Gain, Offset adjust.
KL304x and KL305x 7
Page 10

Terminal configuration
BK2000 Lightbus Coupler In the BK2000 Lightbus coupler, the control and status byte is mapped in
Example for KL3042 and KL3052:
Terminal configuration
The terminal can be configured and parameterized via the internal register
structure. Each terminal channel is mapped in the Bus Coupler. Depending
on the type of the Bus Coupler and the mapping configuration (e.g.
Motorola/Intel format, word alignment etc.) the terminal data are mapped in
different ways to the Bus Coupler memory. For parameterizing a terminal,
the control and status byte also has to be mapped.
addition to the data bytes. This is always located in the low byte at the
offset address of the terminal channel.
Beckhoff-Lightbus
bus coupler
BK2000
The terminal is
mapped in the
bus coupler.
C/S
Data H Data L
C/S
Data LData H
C/S
D1 - 1
D1 - 0
0 Offset Terminal1 Channel1 = 0
D0 - 1
C/S - 1
D0 - 0
C/S - 0
Offset Terminal2 Channel2 = 8
User data allocation depending
on mapping
Offset Terminal2 Channel1 = 4
KL3042
LH
K-Bus
To the bus terminal
BK3000 Profibus coupler For the BK3000 Profibus coupler, the master configuration should specify
for which terminal channels the control and status byte is to be inserted. If
the control and status byte are not evaluated, the terminals occupy 2 bytes
per channel:
• KL3041 and KL3051: 2 bytes of input data
• KL3042 and KL3052: 4 bytes of input data
• KL3044 and KL3054: 8 bytes of input data
Example for KL3042 and KL3052:
Profibus bus coupler
BK3000
The terminal is
mapped in the
bus coupler.
Data L
Data H
C/S
D0 - 1
D1 - 1
C/S - 1
D0 - 0
D1 - 0
C/S - 0
0
The control-/status byte
must be inserted for
parameterization.
Offset Terminal2 Channel1 = 6
KL 3042 Channel 2
Offset Terminal1 Channel2 = 3
KL 3042 Channel1
Offset Terminal1 Channel1 = 0
K-Bus
To the bus terminal
8 KL304x and KL305x
Page 11

Register Description
BK4000 Interbus Coupler The BK4000 Interbus Coupler maps the terminals in the delivery state with
2 bytes per channel:
• KL3041 and KL3051: 2 bytes of input data
• KL3042 and KL3052: 4 bytes of input data
• KL3044 and KL3054: 8 bytes of input data
Parameterization via the fieldbus is not possible. If the control and status
byte is to be used, the KS2000 configuration software is required.
Example for KL3042 and KL3052:
Interbus bus coupler
The control/status byte
must be inserted for
BK4000
The terminal is
mapped in the
bus coupler.
Data H
Data L
Data H
Data L
Data H
D0 - 1
D1 - 1
D0 - 0
D1 - 0
0
parameterization (KS2000).
Offset Terminal2 Channel1 = 6
Offset Terminal2 Channel1 = 4
Offset Terminal1 Channel2 = 2
Offset Terminal1 Channel1 = 0
K-Bus
To the bus terminal
Other Bus Couplers and
further information
i
Note
Parameterization with
KS2000
Further information about the mapping configuration of Bus Couplers can
be found in the Appendix of the respective Bus Coupler manual under
Master configuration.
The Appendix contains an overview of possible mapping configurations
depending on the parameters that can be set.
The parameterizations can be carried out independently of the fieldbus
system with the KS2000 configuration software via the serial configuration
interface in the Bus Coupler.
Register Description
Different operating modes or functionalities may be set for the complex
terminals. The General Description of Registers explains those register
contents that are the same for all complex terminals.
The terminal-specific registers are explained in the following section.
Access to the internal terminal registers is described in the Register
Communication section.
Complex terminals that possess a processor are able to exchange data bi-
General Description of Registers
directionally with the higher-level controller. These terminals are referred to
below as intelligent Bus Terminals. These include analog inputs, analog
outputs, serial interface terminals (RS485, RS232, TTY etc.), counter
terminals, encoder interface, SSI interface, PWM terminal and all other
parameterizable terminals.
KL304x and KL305x 9
Page 12

Register Description
The main features of the internal data structure are the same for all the
intelligent terminals. This data area is organized as words and comprises
64 registers. The important data and parameters of the terminal can be
read and set through this structure. It is also possible for functions to be
called by means of corresponding parameters. Each logical channel in an
intelligent terminal has such a structure (so a 4-channel analog terminal
has 4 sets of registers).
This structure is divided into the following areas:
(A detailed list of all registers can be found in the Appendix.)
Register Application
0 to 7
8 to 15
16 to 30
31 to 47
48 to 63
Process variables
Type register
Manufacturer parameters
User parameters
Extended user area
Process variables
R0 to R7 Registers in the terminal's internal RAM:
The process variables can be used in addition to the actual process image.
Their function is specific to the terminal.
R0 to R5: Terminal-specific registers
The function of these registers depends on the respective terminal type
(see terminal-specific register description).
R6: Diagnostic register
The diagnostic register can contain additional diagnostic information. Parity
errors, for instance, that occur in serial interface terminals during data
transmission are indicated here.
R7: Command register
High-Byte_Write = function parameter
Low-Byte_Write = function number
High-Byte_Read = function result
Low-Byte_Read = function number
Type register
R8 to R15: Registers in the internal ROM of the terminal
The type and system parameters are hard programmed by the
manufacturer, and the user can read them but cannot change them.
R8: Terminal type
The terminal type in register R8 is needed to identify the terminal.
R9: Software version (X.y)
The software version can be read as a string of ASCII characters.
R10: Data length
R10 contains the number of multiplexed shift registers and their length in
bits.
The Bus Coupler sees this structure.
R11: Signal channels
Related to R10, this contains the number of channels that are logically
present. Thus for example a shift register that is physically present can
perfectly well consist of several signal channels.
R12: Minimum data length
The particular byte contains the minimum data length for a channel that is
to be transferred. If the MSB is set, the control and status byte is not
necessarily required for the terminal function and is not transferred to the
control, if the Bus Coupler is configured accordingly.
10 KL304x and KL305x
Page 13

Register Description
R13: Data type register
Data type register
0x00
0x01
0x02
0x03
0x04
0x05
0x06
0x07
0x08
0x11
0x12 Structure 1 byte n bytes with variable logical channel
0x13
0x14 Structure 1 byte n words with variable logical channel
0x15
0x16 Structure 1 byte n double words with variable logical
Terminal with no valid data type
Byte array
Structure 1 byte n bytes
Word array
Structure 1 byte n words
Double word array
Structure 1 byte n double words
Structure 1 byte 1 double word
Structure 1 byte 1 double word
Byte array with variable logical channel length
length (e.g. 60xx)
Word array with variable logical channel length
length
Double word array with variable logical channel length
channel length
R14: reserved
R15: Alignment bits (RAM)
The alignment bits are used to place the analog terminal in the Bus
Coupler on a byte boundary.
Manufacturer parameters
R16 to R30: Manufacturer parameter area (SEEROM)
The manufacturer parameters are specific for each type of terminal. They
are programmed by the manufacturer, but can also be modified by the
controller. The manufacturer parameters are stored in a serial EEPROM in
the terminal, and are retained in the event of voltage drop-out.
These registers can only be altered after a code-word has been set in R31.
User parameters
R31 to R47: User parameter area (SEEROM)
The user parameters are specific for each type of terminal. They can be
modified by the programmer. The user parameters are stored in a serial
EEPROM in the terminal, and are retained in the event of voltage drop-out.
The user area is write-protected by a code-word.
R31: Code-word register in RAM
i
Note
The code-word 0x1235 must be entered here so that parameters in the
user area can be modified. If any other value is entered into this register,
the write-protection is active. When write protection is not active, the code
word is returned when the register is read. If the write protection is active,
the register contains a zero value.
R32: Feature register
This register specifies the terminal's operating modes. Thus, for instance, a
user-specific scaling can be activated for the analog I/Os.
R33 to R47 Terminal-specific Registers
The function of these registers depends on the respective terminal type
(see terminal-specific register description).
Extended application region
R47 to R63
Extended registers with additional functions.
KL304x and KL305x 11
Page 14

Register Description
Process variables
Manufacturer parameters
Terminal-specific register description
R0: Raw ADC value (X_R)
This register contains the raw ADC value with gain and offset error.
R1 to R5: Reserved
R6: Diagnostic register
High byte: reserved
Low byte: Status byte
R17: Hardware compensation - offset (B_a)
16 bit signed integer
This register is used for offset compensation of the terminal (Eq. 1.1).
Register value approx. 0xFFXX
Hardware compensation - gain (A_a)
16 Bit * 2
This register is used for gain compensation of the terminal (Eq. 1.1).
1 corresponds to 0x1000.
Register value approx. 0x11XX
R19: Manufacturer scaling - offset (B_h)
16 bit signed integer [0x0000]
This register contains the offset of the manufacturer's equation of the
straight line (1.3). The straight-line equation is activated via register R32.
R20: Manufacturer scaling - gain (A_h)
16 bits signed integer *2
This register contains the scale factor of the manufacturer's equation of the
straight line (1.3). The straight-line equation is activated via register R32.
1 corresponds to register value 0x0400.
R21: Over range limit (OVRL)
16 bits signed integer in Y_a Eq. 1.0 [0x0FFF]
This limit value limits the maximum measuring range of the input terminal.
If it is exceeded, the associated status bit is set, and the maximum value is
displayed.
R22: Under range limit: (UNRL)
16 bits signed integer in Y_a Eq.1.0 [0x0000]
If the actual value falls below this limit, the associated status bit is set, and
the minimum value is displayed.
R23: ADC hardware preset
[0x0000]
Initialisation of the ADC offset register.
-12
-10
[0x2002]
12 KL304x and KL305x
Page 15

Register Description
User parameters
R32: Feature register
[0x1106]
The feature register specifies the operating modes of the terminal.
Feature bit
no.
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4
Bit 7 to 5
Bit 8
Bit 9
Bit 10
Bit 11
Bit 12
Bit 15 to 13
Description of the operating mode
1 User scaling (R33, R34) active [0]
1 Manufacturer scaling (R19, R20) active [1]
1 Watchdog timer active [1]
In the delivery state, the watchdog timer is switched on.
1 Sign / amount representation [0]
Sign / amount representation is active instead of two'scomplement representation. (-1 = 0x8001)
1 Siemens output format [0]
This bit is used for inserting status information on the
lowest 3 bits (see below).
- reserved, do not change
1 Over range Protection [1]
If values exceed or fall below the limits of the registers
OVRL (R21) and UNRL (R22), the status bits are set and
the measuring range is restricted accordingly.
1 Limit value 1 active [0]
The process data are compared with limit value 1 (R35),
and appropriate status bits are set.
1 Limit value 2 active [0]
The process data are compared with limit value 1 (R36),
and appropriate status bits are set.
Filter 1 active [0], (not possible for KL3044 and KL3054)
1
filter characteristics see R37
1 Break active [1], do not change
- reserved, do not change
If the Siemens output format is selected, the lowest three bits are used for
status evaluation. The process data is represented in bits 3 to 15, with bit
15 representing the sign bit. Scaling of the measurement reading according
to the Siemens standard has to be done via user scaling (R33, R34).
Measured value
Measured value > 20 mA
Measured value < 20 mA
KL3041, KL3042 and KL3044
Bit
Bit 15 to 3
0 0 1
Process data 0 0 0
Bit 2
X
Bit 1
Error
Bit 0
Overflow
Measured value
Measured value > 20 mA
4 mA <measured value <20 mA
Measured value < 4 mA
KL3051, KL3052 and KL3054
Bit
Bit 15 to 3
0 0 1
Process data 0 0 0
Process data 0 1 1
Bit 2
X
Bit 1
Wire breakage
Bit 0
Overflow/Underflow
KL304x and KL305x 13
Page 16

Register Description
i
Note
If the internal filter is activated via R32.11, the following filter constants can
R37 Explanation
0x0000 2nd order FIR filter.
0x0100 1st order IIR filter, cut-off frequency fg approx.1 kHz
0x0200 1st order IIR filter, cut-off frequency fg approx. 100 Hz
0x0300 1st order IIR filter, cut-off frequency fg approx. 50 Hz
0x0400 1st order IIR filter, cut-off frequency fg approx. 20 Hz
0x0500 1st order IIR filter, cut-off frequency fg approx. 10 Hz
0x0600 1st order IIR filter, cut-off frequency fg approx. 5 Hz
0x0700 1st order IIR filter, cut-off frequency fg approx. 1 Hz
0x1000 50 Hz FIR filter
Averaging over 16 values and first notch 25 Hz
0x2000 60 Hz FIR filter
Averaging over 16 values and first notch 20 Hz
Other
values
No filter active
R33: User scaling - offset (B_w)
16 bit signed integer
This register contains the offset of the user straight-line equation (1.4). The
straight-line equation is activated via register R32.
R34: User scaling - gain (A_w)
16 bits signed integer* 2
This register contains the scale factor of the user straight-line equation
(1.4). The straight-line equation is activated via register R32.
R35: Limit value 1 in (Y_2)
If the process data are outside this limit value, the appropriate bits are set
in the status byte.
R36: Limit value 5.08 cm (Y_2)
If the process data are outside this limit value, the appropriate bits are set
in the status byte.
R37: Filter constant
[0x0000]
This documentation applies to all terminals from firmware version 3x. The
version number can be found within the serial number on the right-hand
side face of the terminal: xxxx3xxx
Example: 52983A2A The firmware version is 3A.
be selected in R37 (not possible for KL3044 and KL3054). In the standard
setting, the corresponding conversion time is 2.5 ms:
-8
default value
The implemented IIR filters do not
have any notch behavior, i.e., they do
not explicitly suppress any frequency.
In contrast to the IIR filters, FIR filter
have notch behavior. The timer
settings of the notch filters are set via
channel 0 of the terminal. This means
that the 50 Hz filter on channel 0 and
the 60 Hz filter on channel 1 cannot
be active simultaneously.
14 KL304x and KL305x
Page 17

Register Description
Control and Status byte
Control byte for process
data exchange Gain and
offset compensation
The control byte is transmitted from the controller to the terminal. It can be
used
- in register mode (REG = 1
- during process data exchange (REG = 0
) or
bin
bin
).
The control byte can be used to carry out gain and offset compensation for
the terminal (process data exchange). This requires the code word to be
entered in R31. The gain and offset of the terminal can then be
compensated.
The parameter will only be saved permanently once the code word is reset!
Control byte:
Bit 7 = 0
Bit 6 = 1
Bit 4 = 1
Bit 3 = 1
Bit 2 = 0
Bit 1 = 1
Bit 0 = 1
bin
: Terminal compensation function is activated
bin
: Gain compensation
bin
: Offset compensation
bin
: Slower cycle = 1000 ms,
bin
1
: Fast cycle = 50 ms
bin
: up
bin
: down
bin
Status byte for process
data exchange
The status byte is transmitted from the terminal to the controller. The status
byte contains various status bits for the analog input channel:
Status byte:
Bit 7 = 0
Bit 6 = 1
bin
: ERROR - general error bit
bin
Bit5 | Bit4
0
0
1
1
bin
bin
bin
bin
| 0
: Limit value 2 not activated
bin
| 1
: Process data less than limit value 2
bin
| 0
: Process data greater than limit value 2
bin
| 1
: Process data equal limit value 2
bin
Bit3 | Bit2
0
0
1
1
bin
bin
bin
bin
| 0
: Limit value 1 not activated
bin
| 1
: Process data less than limit value 1
bin
| 0
: Process data greater than limit value 1
bin
| 1
: Process data equal limit value 1
bin
Bit 1 = 1
Bit 0 = 1
: Over range
bin
: Under range
bin
KL304x and KL305x 15
Page 18

Register Description
Register communication
Register access via
process data exchange
Bit 7=1
: Register mode
bin
If bit 7 of the control byte is set, then the first two bytes of the user data are
not used for exchanging process data, but are written into or read from the
terminal's register set.
Bit 6=0
Bit 6=1
: read
bin
: write
bin
Bit 6 of the control byte specifies whether a register should be read or
written. If bit 6 is not set, then a register is read out without modifying it.
The value can then be taken from the input process image.
If bit 6 is set, then the user data is written into a register. As soon as the
status byte has supplied an acknowledgement in the input process image,
the procedure is completed (see example).
Bit 0 to 5: Address The address of the register that is to be addressed is entered into bits 0 to
5 of the control byte.
Control byte in
register mode
MSB
REG=1 W/R A5 A4 A3 A2 A1 A0
REG = 0
REG = 1
W/R = 0
W/R = 1
: Process data exchange
bin
: Access to register structure
bin
: Read register
bin
: Write register
bin
A5 to A0 = Register address
Address bits A5 to A0 can be used to address a total of 64 registers.
To the bus coupler
K-Bus
Control-/
status byte
C/S-bit 7
If control bit 6=0: read
If control bit 6=1: write
Complex bus te rmina l
The control or status byte occupies the lowest address of a logical channel.
The corresponding register values are located in the following 2 data bytes.
(The BK2000 is an exception: here, an unused data byte is inserted after
the control or status byte, and the register value is therefore placed on a
word boundary).
User data
2 or mors bytes
H
L
If contr ol bit 7=0 : input/output
If control bit 7=1:
registerconfiguration
If control bit 7=1:
adress in the control bit 0-5
Terminal´s
register set
64 words
63
0
H
L
16 KL304x and KL305x
Page 19

Register Description
Example 1 Reading of register 8 in the BK2000 with a KL3042 and the end terminal:
If the following bytes are transferred from the control to the terminal,
Byte
Name
Value
Byte 3 Byte 2 Byte 1 Byte 0
DataOUT 1 DataOUT 0 Not used Control byte
0xXX 0xXX 0xXX 0x88
the terminal returns the following type identifier (0x0BE2 corresponds to
unsigned integer 3042).
Byte
Name
Value
Byte 3 Byte 2 Byte 1 Byte 0
DataIN 1 DataIN 0 Not used Status byte
0x0B 0xE2 0x00 0x88
Example 2 Writing of register 31 in the BK2000 with an intelligent terminal and the end
terminal:
If the following bytes (code word) are transferred from the control to the
terminal,
Byte
Name
Value
Byte 3 Byte 2 Byte 1 Byte 0
DataOUT 1 DataOUT 0 Not used Control byte
0x12 0x35 0xXX 0xDF
the code word is set, and the terminal returns the register address with bit
7 for register access as acknowledgement.
Byte
Name
Value
Byte 3 Byte 2 Byte 1 Byte 0
DataIN 1 DataIN 0 Not used Status byte
0x00 0x00 0x00 0x9F
KL304x and KL305x 17
Page 20

Appendix
As already described in the Terminal Configuration section, each Bus
Default mapping for
CANopen, CANCAL,
DeviceNet, ControlNet,
Modbus, RS232 and
RS485 Coupler
Default mapping for
Profibus and Interbus
Coupler
Default mapping for
Lightbus and Ethernet
Coupler and
Bus Terminal Controller
(BCxxxx, BXxxxx)
Legend See KL3042 and KL3052 mapping.
Appendix
Mapping
Terminal is mapped in the Bus Coupler. In the delivery state, this mapping
occurs with the default settings of the Bus Coupler for this terminal. The
default setting can be changed with the KS2000 configuration software or
with a master configuration software (e.g. TwinCAT System Manager or
ComProfibus).
If the terminals are fully evaluated, they occupy memory space in the input
and output process image.
The following tables provide information about the terminal mapping,
depending on the conditions set in the Bus Coupler.
KL3041 and KL3051
Conditions Word offset High byte Low byte
Complete evaluation: no 0 Ch1 D1 Ch1 D0
Motorola format: no 1 - Word alignment: any 2 - 3 - -
Conditions Word offset High byte Low byte
Complete evaluation: no 0 Ch1 D0 Ch1 D1
Motorola format: yes 1 - Word alignment: any 2 - 3 - -
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 Ch1 D0 Ch1 CB/SB
Motorola format: no 1 - Ch1 D1
Word alignment: no 2 - 3 - -
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 Ch1 D1 Ch1 CB/SB
Motorola format: yes 1 - Ch1 D0
Word alignment: no 2 - 3 - -
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 res. Ch1 CB/SB
Motorola format: no 1 Ch1 D1 Ch1 D0
Word alignment: yes 2 - 3 - -
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 res. Ch1 CB/SB
Motorola format: yes 1 Ch1 D0 Ch1 D1
Word alignment: yes 2 - 3 - -
18 KL304x and KL305x
Page 21

Appendix
KL3042 and KL3052
Default mapping for
CANopen, CANCAL,
DeviceNet, ControlNet,
Modbus, RS232 and
RS485 Coupler
Conditions Word offset High byte Low byte
Complete evaluation: no 0 Ch1 D1 Ch1 D0
Motorola format: no 1 Ch2 D1 Ch2 D0
Word alignment: any 2 - 3 - -
Default mapping for
Profibus and Interbus
Coupler
Conditions Word offset High byte Low byte
Complete evaluation: no 0 Ch1 D0 Ch1 D1
Motorola format: yes 1 Ch2 D0 Ch2 D1
Word alignment: any 2 - 3 - -
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 Ch1 D0 Ch1 CB/SB
Motorola format: no 1 Ch2 CB/SB Ch1 D1
Word alignment: no 2 Ch2 D1 Ch2 D0
3 - -
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 Ch1 D1 Ch1 CB/SB
Motorola format: yes 1 Ch2 CB/SB Ch1 D0
Word alignment: no 2 Ch2 D0 Ch2 D1
3 - -
Default mapping for
Lightbus and Ethernet
Coupler and
Bus Terminal Controller
(BCxxxx, BXxxxx)
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 res. Ch1 CB/SB
Motorola format: no 1 Ch1 D1 Ch1 D0
Word alignment: yes 2 res. Ch2 CB/SB
3 Ch2 D1 Ch2 D0
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 res. Ch1 CB/SB
Motorola format: yes 1 Ch1 D0 Ch1 D1
Word alignment: yes 2 res. Ch2 CB/SB
3 Ch2 D0 Ch2 D1
Legend Complete evaluation:
The terminal is mapped with control and status byte.
Motorola format:
Motorola or Intel format can be set.
Word alignment:
The terminal is at word limit in the Bus Coupler.
Ch n SB: status byte for channel n (appears in the input process image).
Ch n CB: control byte for channel n (appears in the output process image).
Ch n D0: channel n, data byte 0 (byte with the lowest value)
Ch n D1: channel n, data byte 1 (byte with the highest value)
"-": This byte is not used or occupied by the terminal.
res.: reserved:
This byte occupies process data memory, although it is not used.
KL304x and KL305x 19
Page 22

Appendix
KL3044 and KL3054
Default mapping for
CANopen, CANCAL,
DeviceNet, ControlNet,
Modbus, RS232 and
RS485 Coupler
Conditions Word offset High byte Low byte
Complete evaluation: no 0 Ch1 D1 Ch1 D0
Motorola format: no 1 Ch2 D1 Ch2 D0
Word alignment: any 2 Ch3 D1 Ch3 D0
3 Ch4 D1 Ch4 D0
Default mapping for
Profibus and Interbus
Coupler
Conditions Word offset High byte Low byte
Complete evaluation: no 0 Ch1 D0 Ch1 D1
Motorola format: yes 1 Ch2 D0 Ch2 D1
Word alignment: any 2 Ch3 D0 Ch3 D1
3 Ch4 D0 Ch4 D1
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 Ch1 D0 Ch1 CB/SB
Motorola format: no 1 Ch2 CB/SB Ch1 D1
Word alignment: no 2 Ch2 D1 Ch2 D0
3 Ch3 D0 Ch3 CB/SB
4 Ch4 CB/SB Ch3 D1
5 Ch4 D1 Ch4 D0
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 Ch1 D1 Ch1 CB/SB
Motorola format: yes 1 Ch2 CB/SB Ch1 D0
Word alignment: no 2 Ch2 D0 Ch2 D1
3 Ch3 D1 Ch3 CB/SB
4 Ch4 CB/SB Ch3 D0
5 Ch4 D0 Ch4 D1
Default mapping for
Lightbus and Ethernet
Coupler and
Bus Terminal Controller
(BCxxxx, BXxxxx)
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 res. Ch1 CB/SB
Motorola format: no 1 Ch1 D1 Ch1 D0
Word alignment: yes 2 res. Ch2 CB/SB
3 Ch2 D1 Ch2 D0
4 res. Ch3 CB/SB
5 Ch3 D1 Ch3 D0
6 res. Ch4 CB/SB
7 Ch4 D1 Ch4 D0
Conditions Word offset High byte Low byte
Complete evaluation: yes 0 res. Ch1 CB/SB
Motorola format: yes 1 Ch1 D0 Ch1 D1
Word alignment: yes 2 res. Ch2 CB/SB
3 Ch2 D0 Ch2 D1
4 res. Ch3 CB/SB
5 Ch3 D0 Ch3 D1
6 res. Ch4 CB/SB
7 Ch4 D0 Ch4 D1
Legend See KL3042 and KL3052 mapping.
20 KL304x and KL305x
Page 23

Appendix
Register Table
These registers exist once for each channel.
Address Denomination Default value R/W Storage medium
R0
Raw ADC value variable R RAM
R1
reserved 0x0000 R
...
... ... ... ...
R5
reserved 0x0000 R
R6
Diagnostic register variable R RAM
R7
Command register not used 0x0000 R
R8
Terminal type e.g. 3042 R ROM
R9
Software version number 0x???? R ROM
R10
R11
R12
R13
R14
R15
R16
R17
R18
R19
R20
R21
R22
R23
R24
R30
R31
R32
R33
R34
R35
R36
R37
R63
Multiplex shift register 0x0218/0130 R ROM
Signal channels 0x0218 R ROM
Minimum data length 0x0098 R ROM
Data structure 0x0000 R ROM
reserved 0x0000 R
Alignment register variable R/W RAM
Hardware version number 0x???? R/W SEEROM
Hardware compensation offset specific R/W SEEROM
Hardware compensation gain specific R/W SEEROM
Manufacturer scaling: Offset 0x0000 R/W SEEROM
Manufacturer scaling: Gain 0x2002 R/W SEEROM
Over range limit
Under range limit 0x0000 R/W SEEROM
ADC hardware preset 0x0000 R/W SEEROM
reserved 0x0000 R/W SEEROM
...
... ... ... ...
reserved 0x0000 R/W SEEROM
Code word register variable R/W RAM
Feature register 0x1106 R/W SEEROM
User scaling: Offset 0x0000 R/W SEEROM
User scaling: Gain 0x0100 R/W SEEROM
Limit value 1 0x0000 R/W SEEROM
Limit value 2 0x0000 R/W SEEROM
reserved 0x0000 R/W SEEROM
...
... ... ... ...
reserved 0x0000 R/W SEEROM
0x0FFF R/W SEEROM
KL304x and KL305x 21
Page 24

Appendix
BECKHOFF and their partners around the world offer comprehensive service
Support and Service
and support, making available fast and competent assistance with all
questions related to BECKHOFF products and system solutions.
BECKHOFF Support
Support offers you comprehensive technical assistance, helping you not
only with the application of individual BECKHOFF products, but also with
other, wide-ranging services:
• world-wide support
• design, programming and commissioning of complex automation
systems
• and extensive training program for BECKHOFF system
components
Hotline: +49(0)5246/963-157
Fax: +49(0)5246/963-199
e-mail: support@beckhoff.com
BECKHOFF Service
The BECKHOFF Service Centre supports you in all matters of after-sales
service:
• on-site service
• repair service
• spare parts service
• hotline service
Hotline: +49(0)5246/963-460
Fax: +49(0)5246/963-479
e-mail: service@beckhoff.com
BECKHOFF company headquarters
Beckhoff Automation GmbH
Eiserstr. 5
D-33415 Verl
Germany
Phone: +49(0)5246/963-0
Fax: +49(0)5246/963-198
e-mail: info@beckhoff.com
The addresses of BECKHOFF's branch offices and representatives round the
world can be found on the internet pages:
http://www.beckhoff.com
You will also find further documentation for BECKHOFF components there.
22 KL304x and KL305x
 Loading...
Loading...