

1 Product Introduction
USER MANUAL
© Copyright Reserved Autonics Co., Ltd. 1

1 Product Introduction
2 © Copyright Reserved Autonics Co., Ltd.

1 Product Introduction
Preface
Thank you for purchasing an Autonics product.
Please familiarize yourself with the information contained in the Safety Precautions section
before using this product.
This user manual contains information about the product and its proper use, and should be kept
in a place where it will be easy to access.
© Copyright Reserved Autonics Co., Ltd. 3

1 Product Introduction
User Manual Guide
Please familiarize yourself with the information in this manual before using the product.
This manual provides detailed information on the product's features. It does not offer any
guarantee concerning matters beyond the scope of this manual.
This manual may not be edited or reproduced in either part or whole without permission.
A user manual is not provided as part of the product package.
Visit our web site (www.autonics.com) to download a copy.
The manual's content may vary depending on changes to the product's software and other
unforeseen developments within Autonics, and is subject to change without prior notice.
Upgrade notice is provided through out homepage.
We contrived to describe this manual more easily and correctly. However, if there are any
corrections or questions, please notify us these on our homepage.
4 © Copyright Reserved Autonics Co., Ltd.

1 Product Introduction
Symbol
Description
User Manual Symbols
Supplementary information for a particular feature.
Failure to follow instructions can result in serious injury or death.
Failure to follow instructions can lead to a minor injury or product damage.
An example of the concerned feature's use.
※1
Annotation mark.
© Copyright Reserved Autonics Co., Ltd. 5
1 Product Introduction
Safety Precautions
Following these safety precautions will ensure the safe and proper use of the product and
help prevent accidents, as well as minimizing possible hazards.
Safety precautions are categorized as Warnings and Cautions, as defined below:
Warning
Caution
Failure to follow the instructions may lead to a serious injury
or accident.
Failure to follow the instructions may lead to a minor injury
or accident.
Fail-safe device must be installed when using the unit with machinery that may cause
serious injury or substantial economic loss. (e.g. nuclear power control, medical equipment,
ships, vehicles, railways, aircraft, combustion apparatus, safety equipment, crime/disaster
prevention devices, etc.)
Failure to follow this instruction may result in personal injury, fire, or economic loss.
The unit must be installed on a device panel before use.
Failure to follow this instruction may result in electric shock.
Do not connect, repair, or inspect the unit while connected to a power source.
Failure to follow this instruction may result in electric shock.
Check the terminal numbers before connecting the power source.
Failure to follow this instruction may result in fire.
Do not disassemble or modify the unit. Please contact us if necessary.
Failure to follow this instruction may result in electric shock or fire.
Do not use the unit outdoors.
Failure to follow this instruction may result in shortening the life cycle of the unit, or electric
shock.
2
When connecting the power input and relay output cables, use AWG20 (0.05mm
) cables
and make sure to tighten the terminal screw bolt above 0.74N.m to 0.90N.m.
Failure to follow this instruction may result in fire due to contact failure.
Use the unit within the rated specifications.
Failure to follow this instruction may result in shortening the life cycle of the unit, or fire.
Do not use loads beyond the rated switching capacity of the relay contact.
Failure to follow this instruction may result in insulation failure, contact melt, contact failure,
relay broken, or fire.
Do not use water or oil-based detergent when cleaning the unit. Use dry cloth to clean the
unit.
Failure to follow this instruction may result in electric shock or fire.
Do not use the unit where flammable or explosive gas, humidity, direct sunlight, radiant heat,
vibration, or impact may be present.
Failure to follow this instruction may result in fire or explosion.
6 © Copyright Reserved Autonics Co., Ltd.

1 Product Introduction
Keep dust and wire residue from flowing into the unit.
Failure to follow this instruction may result in fire or product damage.
Check the polarity of the measurement input contact before wiring the temperature sensor.
Failure to follow this instruction may result in fire or explosion.
For installing the unit with reinforced insulation, use the power supply unit which basic level
is ensured.
The above specifications are subject to change and some models may be discontinued without
notice.
© Copyright Reserved Autonics Co., Ltd. 7

1 Product Introduction
8 © Copyright Reserved Autonics Co., Ltd.

1 Product Introduction
Table of Contents
Preface ................................................................................................................................. 3
User Manual Guide ................................................................................................................ 4
User Manual Symbols ............................................................................................................ 5
Safety Precautions ................................................................................................................. 6
Table of Contents ................................................................................................................... 9
1 Product Introduction................................................................................. 13
1.1 Features .................................................................................................................. 13
1.2 Components and Accessories ................................................................................. 14
1.3 Ordering information ............................................................................................... 20
1.4 Parts descriptions .................................................................................................... 22
2 Specifications ............................................................................................ 25
3 Dimensions ................................................................................................ 27
4 Connections .............................................................................................. 33
4.1 Precautions for wiring .............................................................................................. 35
4.1.1 Sensor connection ..................................................................................... 35
4.1.2 Communication connection ........................................................................ 35
5 Preparation and Startup ........................................................................... 37
5.1 Initial display when power ON ................................................................................. 37
5.2 Basic controls .......................................................................................................... 38
5.2.1 Parameter setting sequence ...................................................................... 38
5.2.2 Set value (SV) setting ................................................................................ 38
5.2.3 MV monitoring and manual control ............................................................ 39
5.3 Parameter group ..................................................................................................... 41
5.4 Parameter groups .................................................................................................... 44
5.4.1 Parameter 1 group [PAR1] ......................................................................... 44
5.4.2 Parameter 2 group [PAR2] ......................................................................... 45
5.4.3 Parameter 3 group [PAR3] ......................................................................... 47
5.4.4 Parameter 4 group [PAR4] ......................................................................... 49
5.4.5 Parameter 5 group [PAR5] ......................................................................... 52
6 Parameter Settings and Functions .......................................................... 55
6.1 Input ........................................................................................................................ 55
6.1.1 Input types and temperature ranges .......................................................... 55
6.1.2 Input type [PAR3 → IN-T] .......................................................................... 56
6.1.3 Sensor temperature unit [PAR3 → UNIT] ................................................... 56
6.1.4 Analog input/scale value ............................................................................ 57
6.1.5 Input correction [PAR3 → IN-B]................................................................. 59
6.1.6 Input digital filter [PAR3 → MAvF] ............................................................... 59
6.1.7 High/Low-limit value of setting value(SV) [PAR3 → H-SV/ L-SV] ............. 60
6.2 Control output .......................................................................................................... 61
6.2.1 Control output mode [PAR3 → O-FT] ......................................................... 61
© Copyright Reserved Autonics Co., Ltd. 9

1 Product Introduction
6.2.2 MV High/Low-limit value settings [PAR2 → H-MV / L-MV] ......................... 66
6.2.3 Ramp settings [PAR2 → RAMU/ RAMD/ rUNT] ............................................ 67
6.2.4 Auto/Manual control settings ...................................................................... 69
6.2.5 Output settings ........................................................................................... 72
6.3 Temperature control ................................................................................................ 73
6.3.1 Temperature control mode [PAR3 → C-MD] ............................................... 73
6.3.2 ON/OFF control [PAR3 → C-MD → ONOF] .................................................. 74
6.3.3 PID control [PAR3 → C-MD → PID] ............................................................ 75
6.3.4 Auto-tuning ................................................................................................. 77
6.4 Alarm output ............................................................................................................ 79
6.4.1 Alarm operation [PAR4 → AL-1/AL-2/AL-3] ............................................ 79
6.4.2 Alarm output options [PAR4 → AL!T/AL@T] .............................................. 81
6.4.3 Alarm SV settings [PAR1 → AL!L/AL!H/AL@L/AL@H/AL#L/AL#H] .......... 82
6.4.4 Alarm output hysteresis [PAR4 → A!HY/A@HY/A#HY] ............................... 82
6.4.5 Alarm N.O./N.C. [PAR4 → A!N/A@N/A#N] .................................................. 83
6.4.6 Alarm output delay settings
[PAR4 → A!ON / A!OF/ A@ON / A@OF/ A#ON / A#OF] .................................. 84
6.4.7 Loop break alarm(LBA) [PAR4 → AL-1/AL-2/AL-3 → LBA] .................... 85
6.4.8 Sensor break alarm [PAR4 → AL-1/AL-2/AL-3 → SBA] .......................... 87
6.4.9 Heater burnout alarm [PAR4 → AL-1/AL-2/AL-3 → HBA] ....................... 88
6.4.10 Alarm output deactivation [PAR5 → DI-K→ AlRE] .................................... 89
6.4.11 Alarm output examples ............................................................................... 90
6.5 Analog transmission ................................................................................................ 93
6.5.1 Analog transmission output value settings [PAR4 → AoM1/ AoM2] ............ 93
6.5.2 Transmission output high/low-limit value settings
[PAR4 → FsL1/ FsH1→ FsL2/ FsH2] .......................................................... 93
6.6 Communication settings .......................................................................................... 95
6.6.1 Unit address settings [PAR4 → ADRS] ........................................................ 95
6.6.2 BPS (bits per second) settings [PAR4 → BPS] ........................................... 95
6.6.3 Communication parity bit [PAR4 → PRTY] .................................................. 96
6.6.4 Communication stop bit settings [PAR4 → STP] ......................................... 96
6.6.5 Response wait time settings [PAR4→ RSwT].............................................. 96
6.6.6 Enable/Disable communication write[PAR4→ COMW] ................................. 97
6.6.7 USB to Serial communication connection .................................................. 97
6.7 Additional features ................................................................................................... 98
6.7.1 Monitoring ................................................................................................... 98
6.7.2 RUN/STOP [PAR1 → R-S] ......................................................................... 99
6.7.3 Multi SV .................................................................................................... 100
6.7.4 Digital input ............................................................................................... 101
6.7.5 Error .......................................................................................................... 103
6.7.6 User level setting [PAR5 → USER] ............................................................ 104
6.7.7 Lock settings ............................................................................................ 104
6.7.8 Parameter reset [INIT] ........................................................................... 105
6.7.9 Password settings [PAR5 → PWD]............................................................. 105
7 Setting group parameter description .................................................... 107
7.1 Setting group [ SV ] ............................................................................................... 107
7.2 MV monitoring/manual control setting group [ MV ] ............................................... 107
7.3 Parameter 1 setting group [ PAR1 ]....................................................................... 108
10 © Copyright Reserved Autonics Co., Ltd.

1 Product Introduction
7.4 Parameter 2 setting group [PAR2 ] ....................................................................... 109
7.5 Parameter 3 setting group [ PAR3 ] ....................................................................... 111
7.6 Parameter 4 setting group [ PAR4 ] ...................................................................... 113
7.7 Parameter 5 setting group [ PAR5 ] ...................................................................... 115
7.8 Password entry parameter .................................................................................... 116
7.9 Parameter change reset parameters .................................................................... 116
8 DAQMaster .............................................................................................. 117
8.1 Overview ............................................................................................................... 117
8.2 Major features ....................................................................................................... 118
8.3 Special feature for TK Series ................................................................................ 120
8.3.1 Parameter mask ....................................................................................... 120
8.3.2 User parameter group [PARU] .................................................................. 122
© Copyright Reserved Autonics Co., Ltd. 11

1 Product Introduction
12 © Copyright Reserved Autonics Co., Ltd.

1 Product Introduction
1 Product Introduction
1.1 Features
TK Series – standard PID temperature controller – realizes more powerful control with super
high-speed sampling cycles of 50 ms and ±0.3% display accuracy. It supports diverse control
modes including heating & cooling simultaneous control, and automatic/manual control and
communication functions. In addition, TK Series covers all necessary features for high
performance temperature controllers – that is, diverse input sensor support, multi SV setting,
SSR drive output + current output, high resolution display and compact size.
Improves convenience for parameter setting (using DAQMaster)
Parameter mask
To hide parameters which are not unnecessary or not used frequently
User parameter group
To group parameters which are used frequently as one group for more convenient
setting
Super high-speed sampling cycle (10 times faster compared to existing models);
50 ms sampling cycle and ±0.3% display accuracy
Improved visibility with wide display and high luminance LED
High performance control with heating & cooling control and automatic/manual control
modes
Communication function supported: RS485 (Modbus RTU type)
PC parameter setting (USB and RS 485 communication)
Free download comprehensive device management program (DAQMaster)
※Communication converter, sold separately
: SCM-WF48 (Wi-Fi to RS485·USB wireless communication converter),
SCM-US48I (USB to RS485 converter), SCM-38I (RS232C to RS485 converter),
SCM-US (USB to serial converter)
Current output or SSR drive output selectable
ON/OFF, Cycle, Phase control by SSRP function
Heater burn-out alarm (CT input) (except TK4SP)
※CT, sold separately: CSTC-E80LN, CSTC-E200LN, CSTS-E80PP
Multi SV setting function (Max. 4 ) – selectable via digital input terminals
Space saving mounting possible with compact design ; downsized by 38% (depth-based)
Multi-input/multi-range
© Copyright Reserved Autonics Co., Ltd. 13
1 Product Introduction
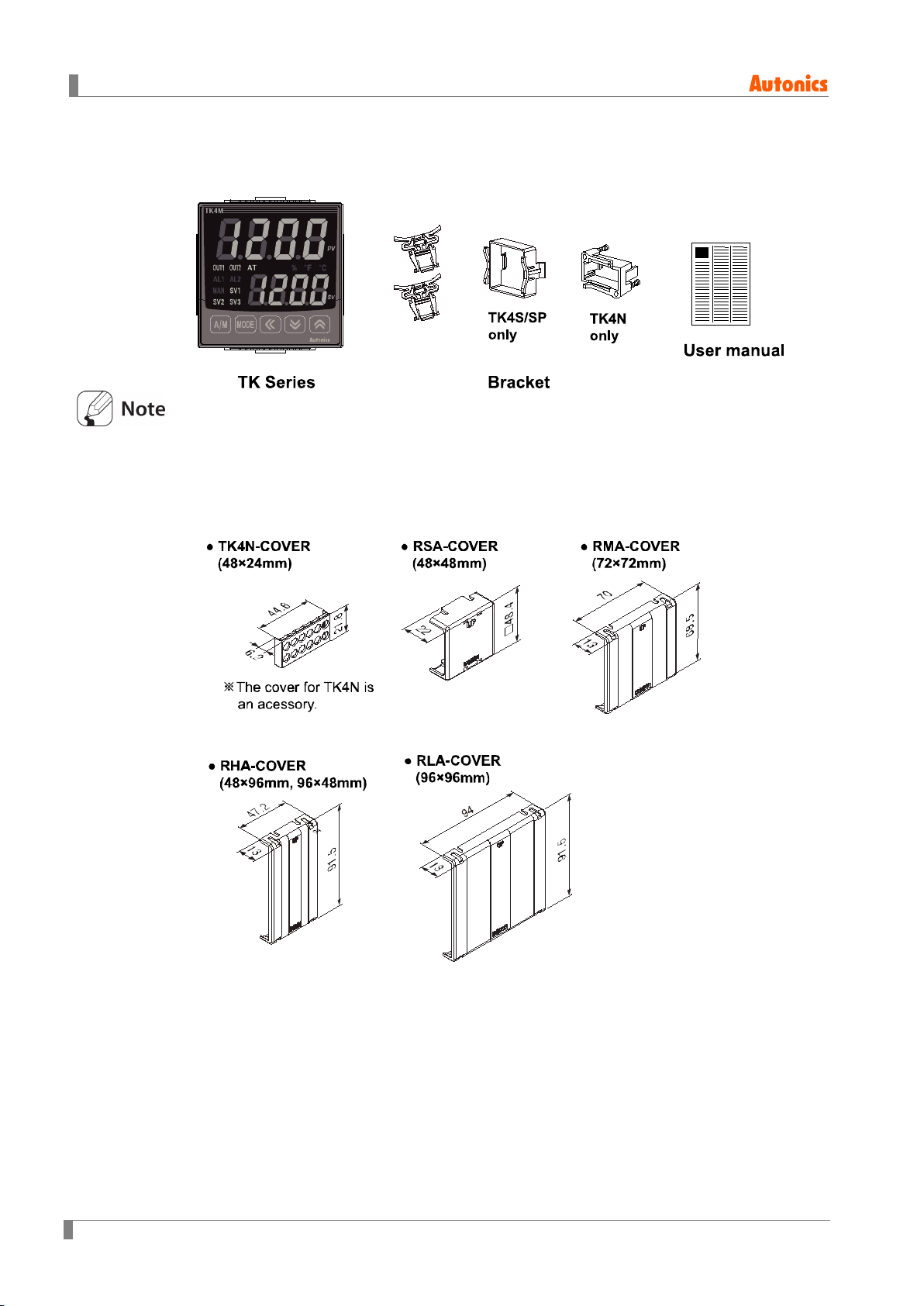
1.2 Components and Accessories
(1) Components
Make sure all of the above components are included with your product package before use.
If a component is missing or damaged, please contact Autonics or your distributor.
Visit www.autonics.com to download a copy of the user manual.
(2) Sold separately
Terminal cover (unit: mm)
14 © Copyright Reserved Autonics Co., Ltd.
1 Product Introduction
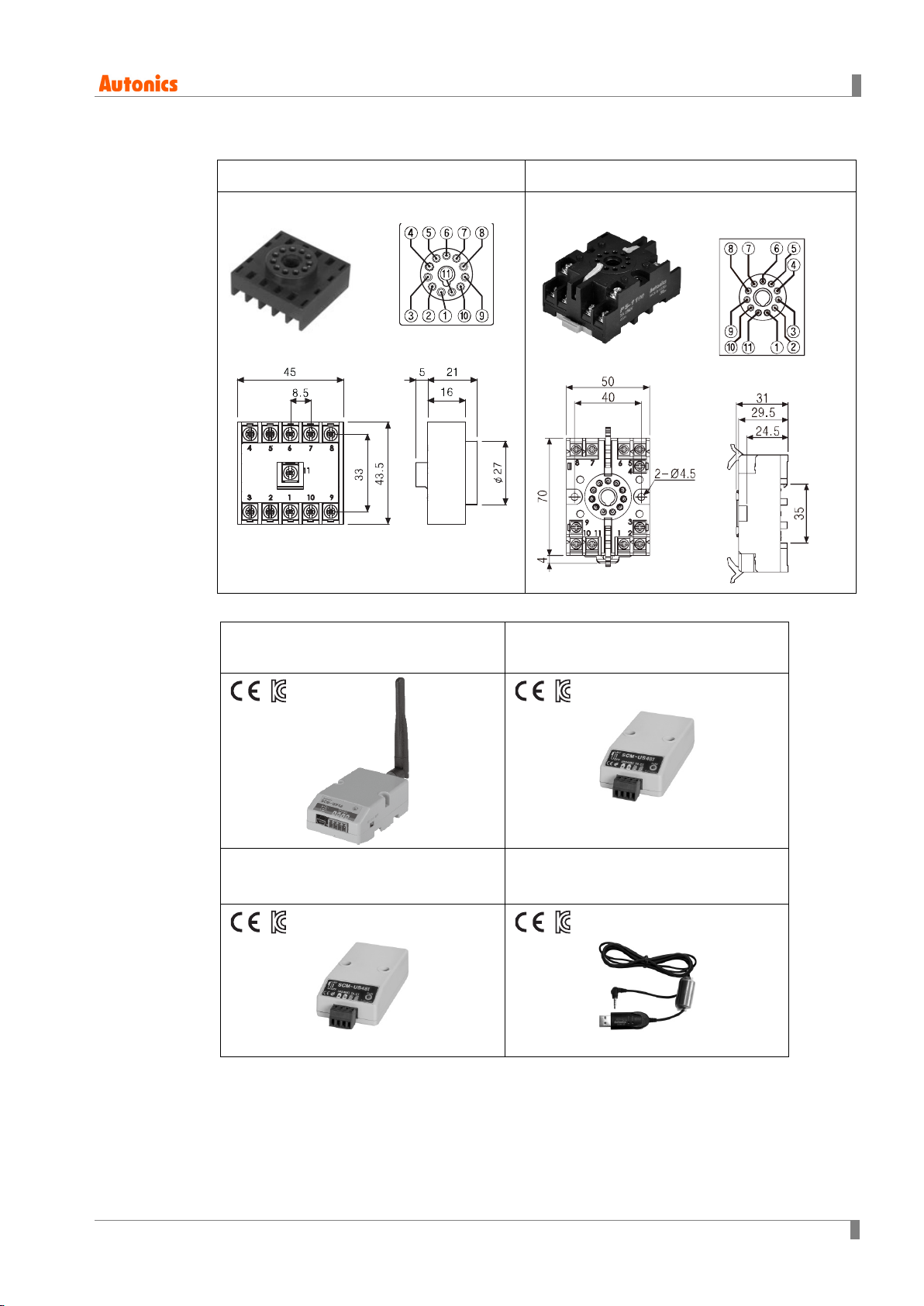
Socket (for TK4SP) (unit: mm)
PG-11 PS-11(N)
(unit: mm)
Communication converter
SCM-WF48 (Wi-Fi to RS485·USB
wireless communication converter)
(unit: mm)
SCM-US48I
(USB to RS485 converter)
SCM-38I
(RS232C to RS485 converter)
SCM-US
(USB to Serial converter)
© Copyright Reserved Autonics Co., Ltd. 15
1 Product Introduction
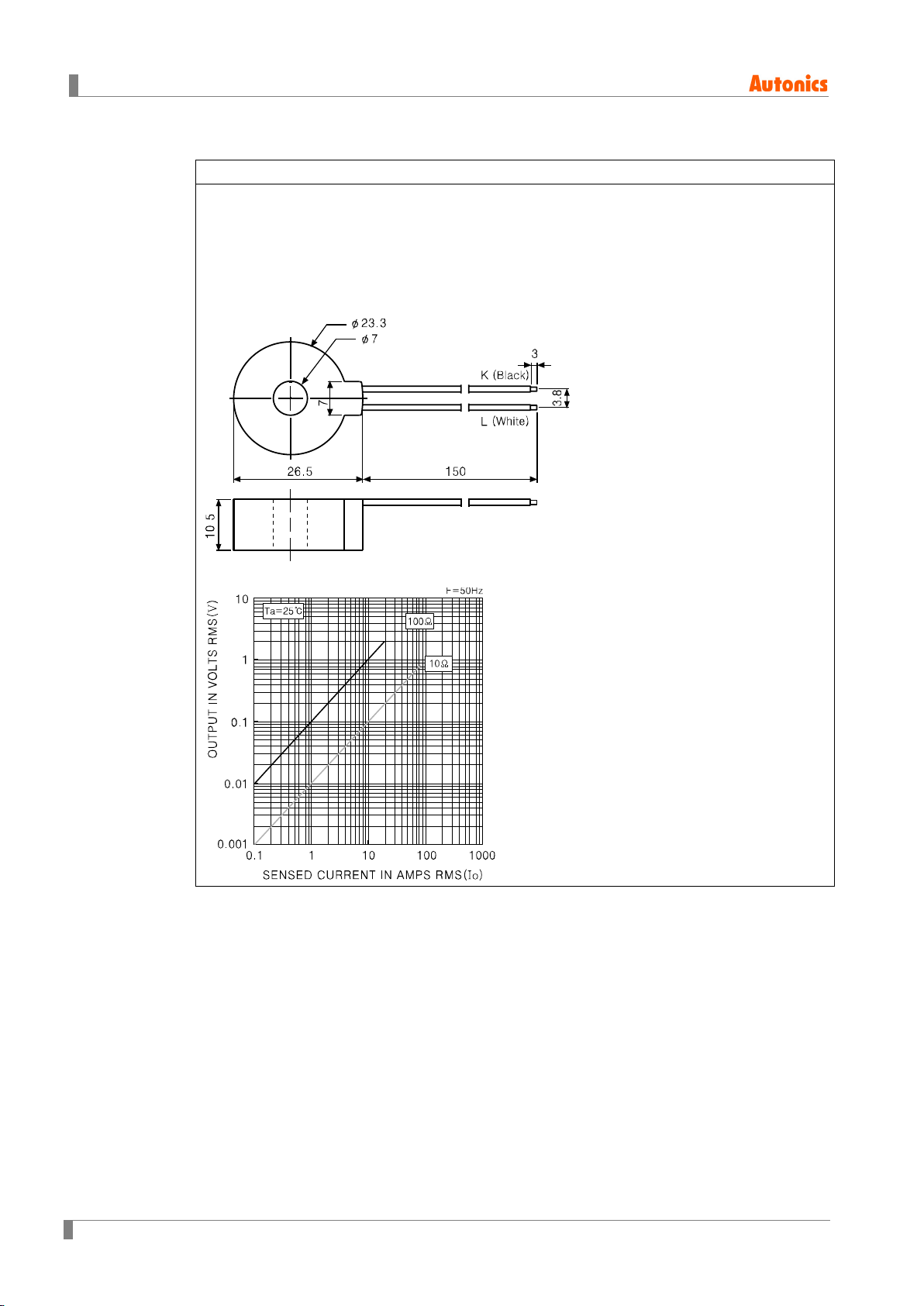
Current transformer(CT)
CSTC-E80LN
Max. load current: 80A (50/60Hz)
※Max. load current for TK4 Series is 50A.
Current ratio: 1/1000
Wire wounded resistance: 31Ω ±10%
(unit: mm)
16 © Copyright Reserved Autonics Co., Ltd.
1 Product Introduction
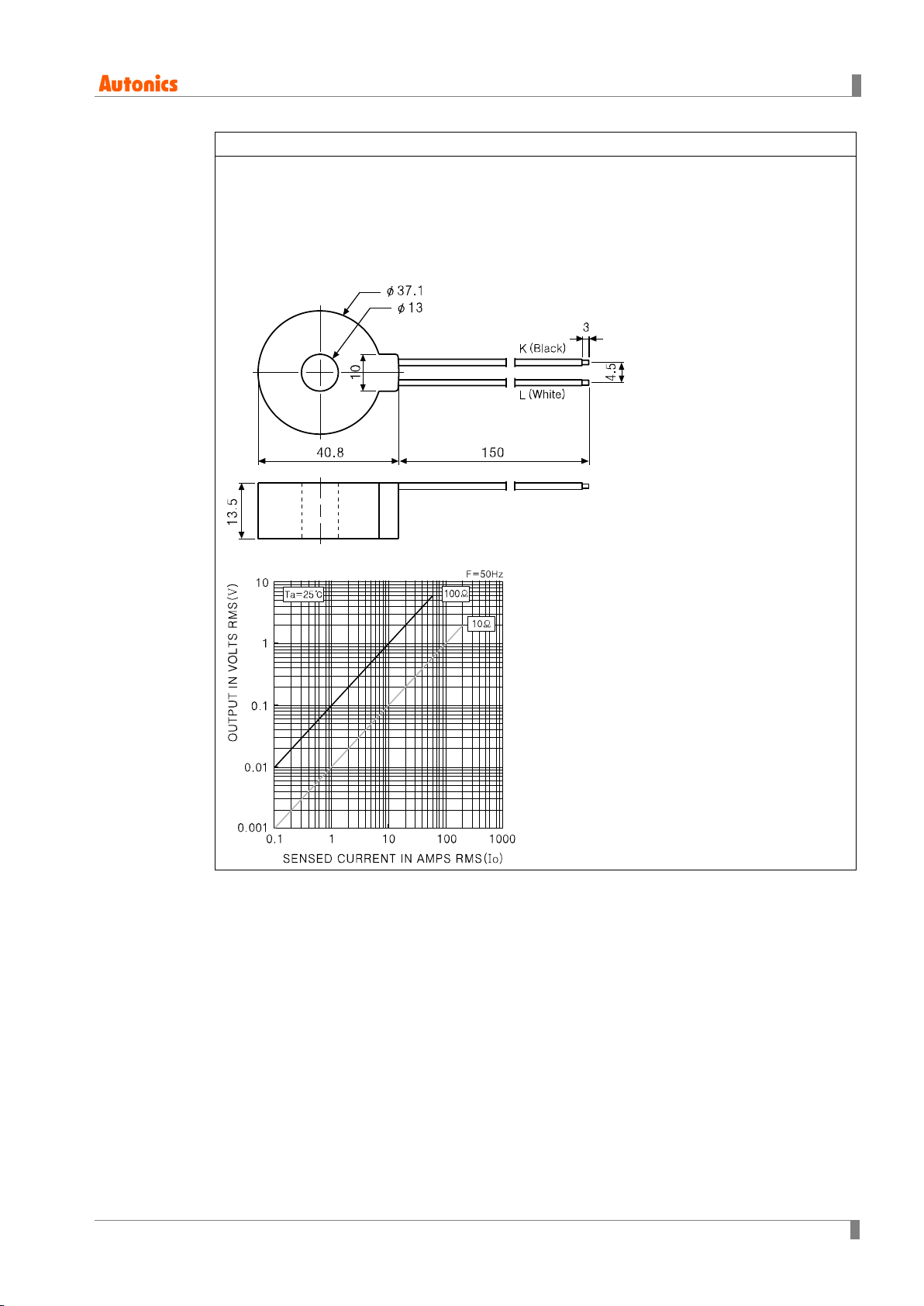
CSTC-E200LN
Max. load current: 200A (50/60Hz)
※Max. load current for TK4 Series is 50A.
Current ratio: 1/1000
Wire wounded resistance: 20Ω±10%
(unit: mm)
© Copyright Reserved Autonics Co., Ltd. 17
1 Product Introduction
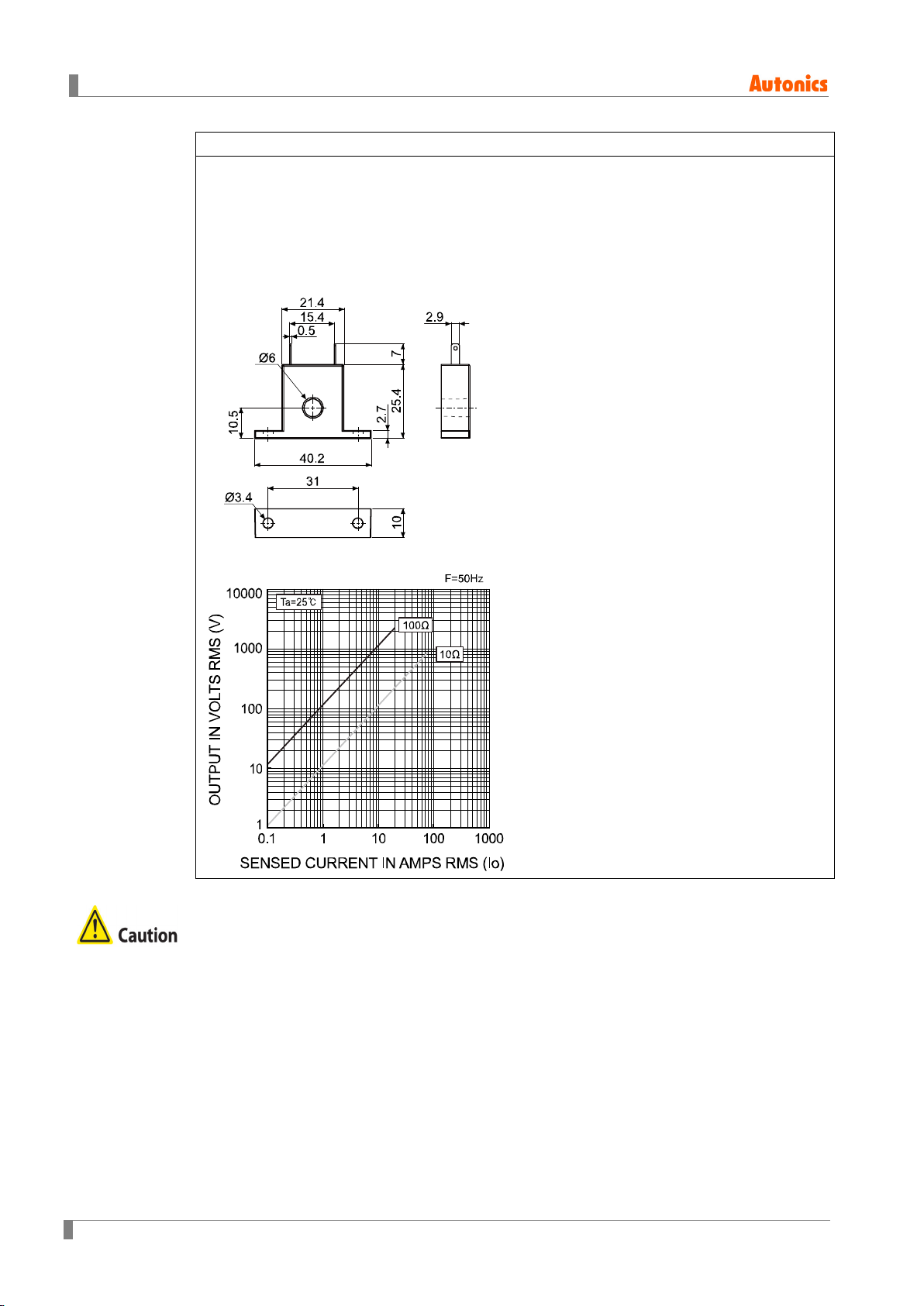
CSTS-E80PP
Max. load current: 80A (50/60Hz)
※Max. load current for TK4 Series is 50A.
Current ratio: 1/1000
Wire wounded resistance: 31Ω ±10%
(unit: mm)
For using CT, do not supply first part current when opening CT output.
It occurs high voltage at CT output part.
Using current of above CTs are same as 50A. But be sure that inner hole sizes are different.
Select it properly for the environment.
18 © Copyright Reserved Autonics Co., Ltd.
1 Product Introduction
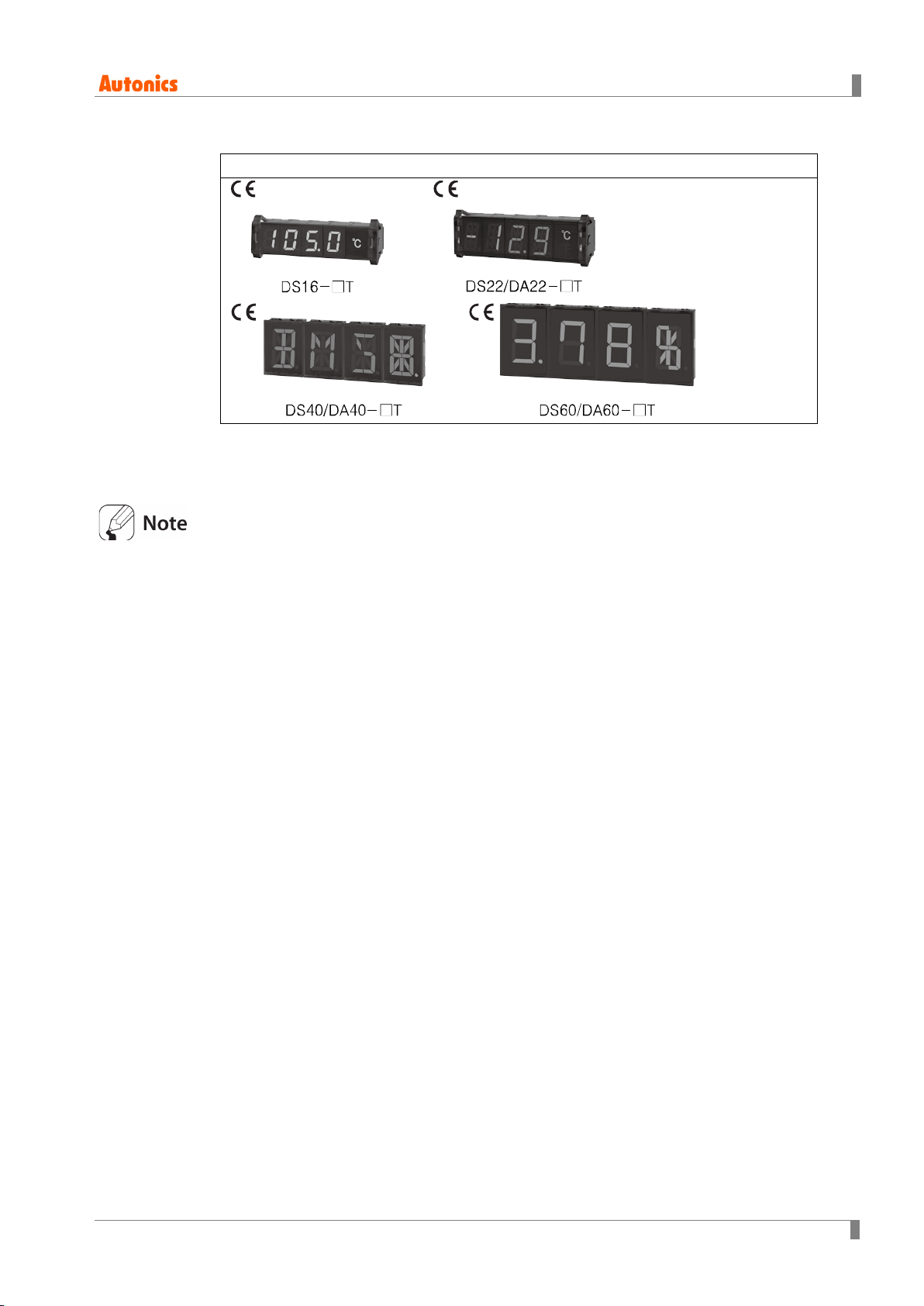
Display unit
DS/DA-T Series (RS485 communication input type display unit)
Connect RS485 communication input type display unit (DS/DA-T Series) and TK Series, the
display unit displays present value of the device without PC/PLC.
Images of components and accessories may differ from actual products.
For detailed information about any of the above products, please refer to the concerned
product's user manual.
Visit our website (www.autonics.com) to download copies of the user manuals.
© Copyright Reserved Autonics Co., Ltd. 19
1 Product Introduction
①
Category
Description
Standard: Alarm output 1+RS485com. output
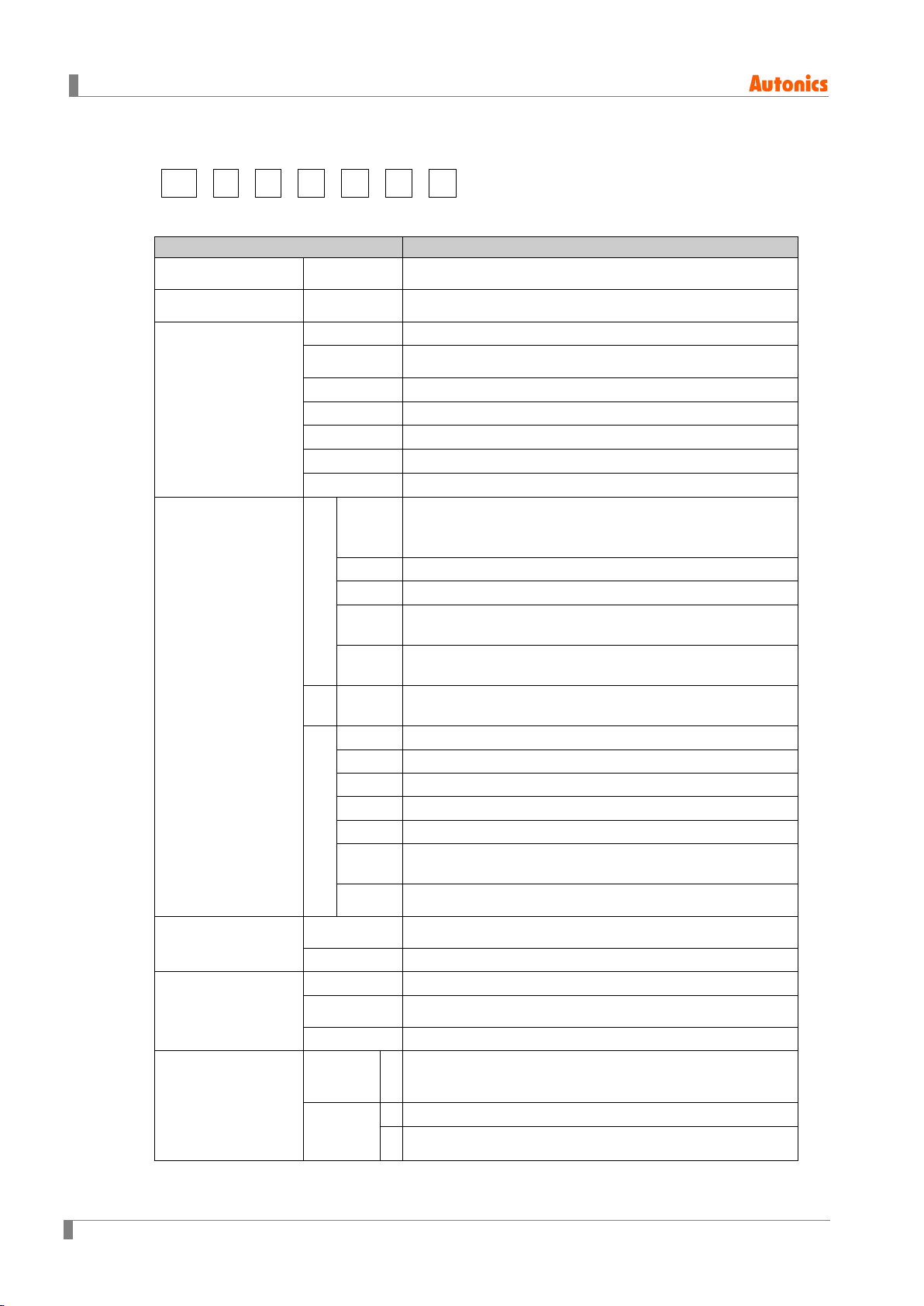
1.3 Ordering information
TK 4 S - 1 4 R R
② ③ ④ ⑤ ⑥ ⑦
① Item
② Digit
③ Size
④ Input/Output
Option
1
※
⑤ Power Supply
⑥ OUT1 Control
Output
2
※
⑦ OUT2 Control
3
※
Output
TK Temperature/Process controller
4 9999(4digit)
N
SP
DIN W48×H24mm
DIN W48×H48mm (11 pin plug type
9
※
)
S DIN W48×H48mm (terminal block type)
M DIN W72×H72mm
W DIN W96×H48mm
H DIN W48×H96mm
L DIN W96×H96mm
6,
1
Standard: Alarm output 1+CT input
Heating&Cooling: Alarm output 2
※
7
※
2 Standard: Alarm output 1+Alarm output 2
N
D Standard: Alarm output 1+Digital input(DI-1, DI-2)
R
T
S
1 Alarm output 1
P
Standard: Alarm output 1+Digital input, Heating&Cooling:
Trans. output
Heating&Cooling: RS485com. output
1 Alarm output 1
2 Alarm output 1+Alarm output 2
S
R Alarm output 1+Trans. output
M
T Alarm output 1+RS485com. output
W
A Alarm output 1+Alarm output 2+Trans. output
H
L
2
B
D
5
※
Alarm output 1+Alarm output 2+
RS485 com. output
Alarm output 1+Alarm output 2+Digital input(DI-1, DI-2)
24VAC 50/60Hz, 24-48VDC
4 100 to 240VAC, 50/60Hz
R Relay output
4
※
S
SSR drive output(standard ON/OFF, cycle, phase control)
C Current output or SSR drive output selectable
None
Standard
Heating
&
Cooling
N
※Select in case of standard control (heating or cooling)
R Relay output
C Current output or SSR drive output selectable
8
※
20 © Copyright Reserved Autonics Co., Ltd.

1 Product Introduction
※1. In case of TK4N/SP Series, option control output selection and digital input will be
limited due to number of terminals.
※2. “S” represents SSR drive output support models which SSRP function (standard
ON/OFF, cycle, phase)control are available. “C” represents selectable current and
SSR drive output support models.
※3. Select “R” or “C” type in case of using heating & cooling control. “N” type in case fo
using standard control.
※4. Does not support in AC/DC voltage type model.
※5. Does not support in TK4N.
※6. The CT input model of TK4N is selectable only for standard model which has alarm 1.
※7. The Heaing & Cooling model of TK4N-1□□□ has only alarm output 2.
※8. Only for TK4S-D□□□, OUT2 output terminal is used as DI-2 input terminal.
※9. 11Pin socket(PG-11, PS-11(N)): Sold separately
CT (Current Transformer) input is supported by all models.
However, TK4SP (11 pin plug type) does not support CT input due to its limited number of
terminal blocks.
© Copyright Reserved Autonics Co., Ltd. 21
1 Product Introduction
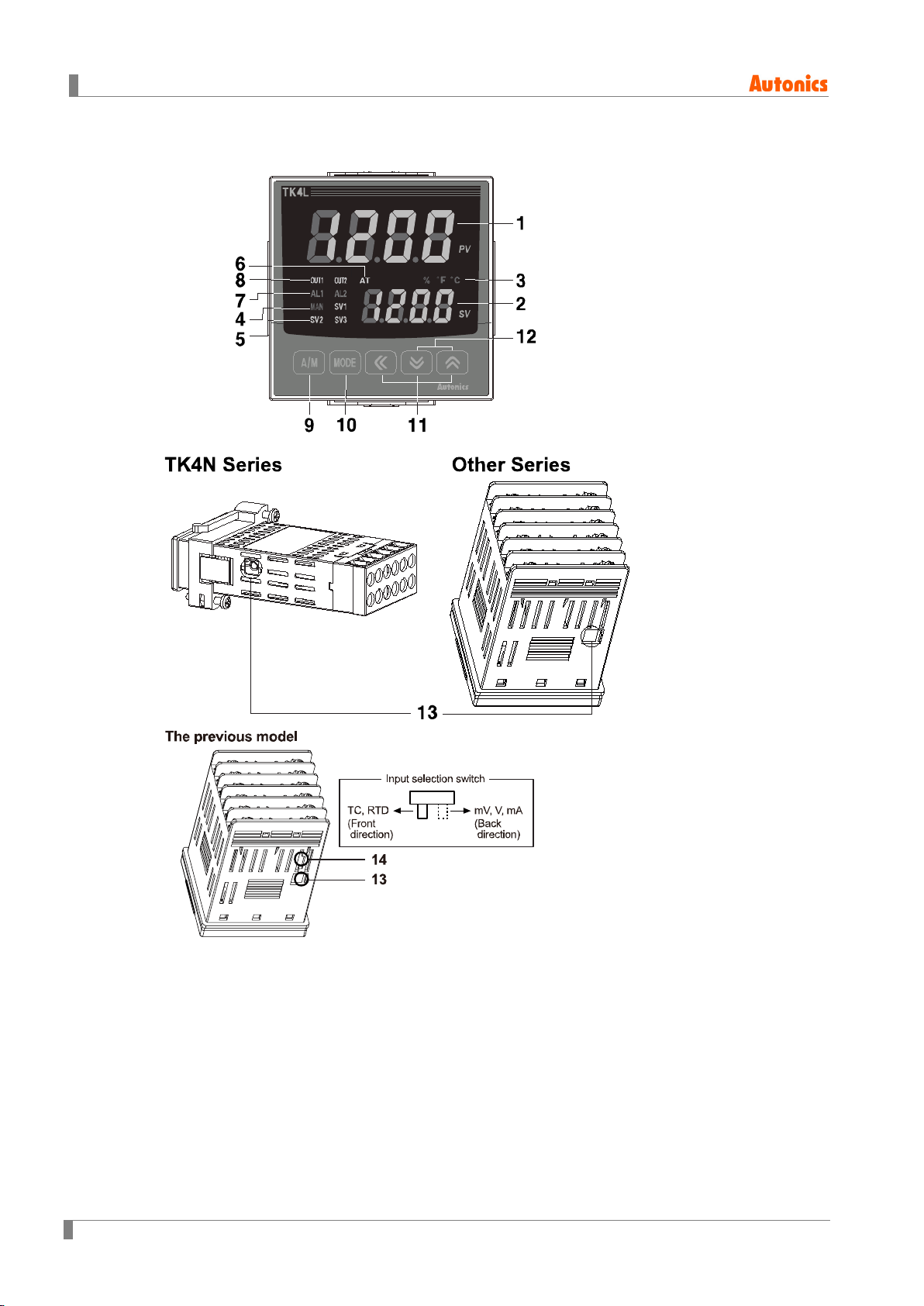
1.4 Parts descriptions
① Measured value(PV) display part:
RUN mode: It displays currently measured value (PV).
Setting mode: It displays the parameter.
② Set value (SV) display part:
RUN mode: It displays the set value (SV).
Setting mode: It displays the set value of the parameter.
③ Unit(℃/℉/%) indicator: It displays the unit set at display unit [UNT] in parameter 3 group.
(TK4N Seires does not support ‘%’ unit.)
④ Manual control indicator: It turns ON during manual controlling.
⑤ Multi SV indicator: One of SV1 to 3 indicator will be ON in case of selecting multi SV
function.
⑥ Auto tuning indicator: It flashes by 1 sec. when executing auto tuning.
22 © Copyright Reserved Autonics Co., Ltd.

1 Product Introduction
⑦ Alarm output (AL1, AL2) indicator: It turns ON when the alarm output is ON.
⑧ Control output (OUT1, OUT2) indicator: It turns ON when the control output is ON.
During cycle/phase controlling in SSRP function model (TK4□-□4S□)type, when MV is
over 5.0%, it turns ON.
※ To use current ouput, when MV is 0.0% in manual control, it turns OFF. Otherwise, it
always turns ON. When MV is over 3.0% in auto control, it turns ON and when MV is
below 2.0%, it turns OFF.
⑨ key: It is used when switching auto control to manual control.
※ TK4N/S/SP do not have the key. The key operates switching
simultaneously.
⑩ key: It is used when entering parameter group, returning to RUN mode, moving
parameter, saving the set value.
⑪ key: It is used when entering the set value changing mode and moving or
changing up/down digit.
⑫ Digital input key: When pressing the keys for 3 sec. at the same time, it operates
the function (RUN/STOP, alarm clear,auto tuning) set at digital input key [DI-K] in
parameter 5 group.
⑬ PC loader port: It is the PC loader port for serial communication to set parameter and
monitoring by DAQMaster installed in PC. Use this for connecting SCM-US(USB to Serial
converter, sold separately).
⑭ Input selection switch: Used when switching sensor (TC, RTD) input ↔ analog input(mV,
V, mA) (only the previous models)
7-Segment Display Characters
A B C D E F G H I J K L M
A B C D E F G H I J K L M
N O P Q R S T U V W X Y Z
N O P Q R S T U V W X Y Z
0 1 2 3 4 5 6 7 8 9 0 ` /
0 1 2 3 4 5 6 7 8 9 0 -1 /
© Copyright Reserved Autonics Co., Ltd. 23

1 Product Introduction
24 © Copyright Reserved Autonics Co., Ltd.
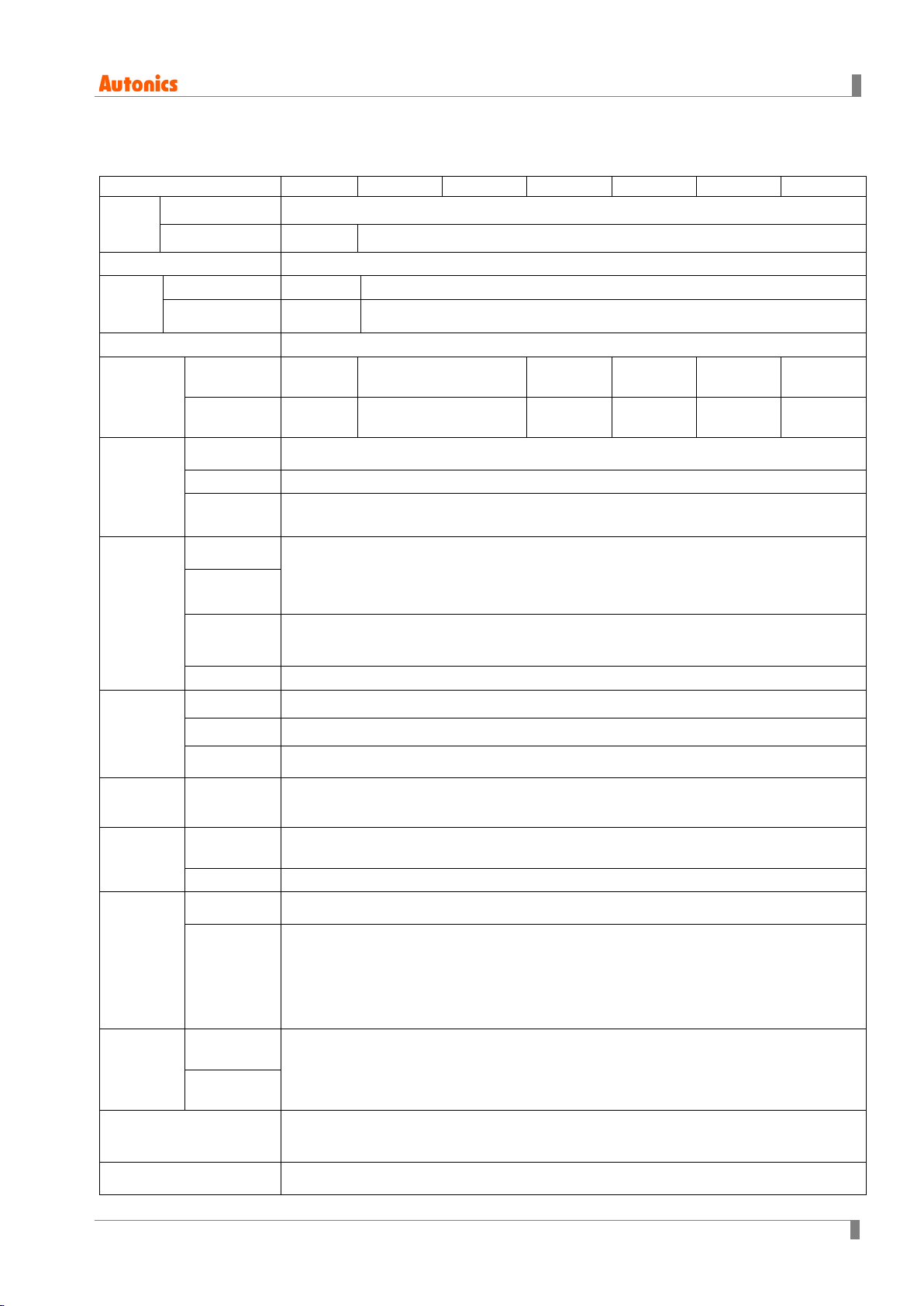
2 Specifications
Series
TK4N
TK4SP
TK4S
TK4M
TK4W
TK4H
TK4L
2 Specifications
Power
supply
AC voltage
AC/DC voltage -
100-240VACᜠ, 50/60Hz
24VACᜠ 50/60Hz, 24-48VDCᜡ
Allowable voltage range ±10% of rated voltage
Power
consu
mption
AC voltage Max. 6VA Max. 8VA
AC/DC voltage -
Max. 8VA(24VACᜠ 50/60Hz), Max. 5W(24-48VDCᜡ)
Display method 7 segment (PV: red, SV: green), all other displays (green, yellow, red) LED
Character
size
Input type
PV(W×H)
SV(W×H)
RTD
4.5 × 7.2
mm
3.5 × 5.8
mm
7.0×14.0mm
5.0×10.0mm
JPt 100Ω, DPt 100Ω, DPt 50Ω, Cu 100Ω, Cu 50Ω, and Nikel 120Ω (6 types)
TC K, J, E, T, L, N, U, R, S, B, C, G, and PLII (13 types)
Analog
RTD
Voltage: 0-100mV, 0-5V, 1-5V, and 0-10V (4 types)
Current: 0-20mA and 4-20mA (2 types)
At room temperature (23℃ ± 5℃): (PV ± 0.3% or ± 1℃, select the higher one) ± 1 digit
9.5×20.0
mm
7.5×15.0
mm
8.5×17.0
mm
6.0×12.0
mm
7.0×14.6
mm
6.0×12.0
mm
Out of room temperature ranges: (PV ± 0.5% or ± 2℃, select the higher one) ± 1 digit
Display
TC
accuracy
Analog
In case of TK4SP Series, ±1℃ will be added.
At room temperature (23℃ ± 5℃): ± 0.3% F.S. ± 1 digit
Out of room temperature ranges: ± 0.5% F.S. ± 1 digit
CT Input ± 5% F.S. ± 1 digit
OUT1, OUT2: 250VACᜠ 3A 1a
Max.11VDCᜡ ± 2V 20mA
DC4-20mA or DC0-20mA selectable (resistance load max. 500Ω)
Control
output
Relay
SSR
Current
11.0×22.0
mm
7.0×14.0
mm
1
※
Alarm
output
Option
output
Option
input
Relay
Transmissio
n output
Comm. RS485 Communication Output (Modbus RTU)
CT
Digital input
AL1, AL2 Relay: 250VACᜠ 3A 1a
(TK4N AL2: 250VACᜠ 0.5A 1a (max. 125VA), TK4SP has only AL1)
DC4-20mA (resistance load max. 500Ω, output accuracy: ±0.3% F.S)
0.0-50.0A (primary heater current reading range) ※CT Ratio is 1/1000 (except TK4SP)
Contact input - ON: Max. 2kΩ, OFF: Min. 90kΩ
Non-Contact input - ON: Residual voltage max. 1.0VDCᜡ, OFF: Leakage current min. 0.1mA
Leakage current: Approx. 0.5mA per input
※TK4S/M: 1 (TK4S-D□□□: 2, TK4SP: None), TK4N/H/W/L: 2 (except TK4SP)
Heating &
Control
type
cooling
Heating or
ON/OFF, P, PI, PD, PID control mode
Cooling
Hysteresis
RTD/ Thermocouples: 1 to 100℃/℉ (0.1 to 100.0℃/℉) variable
Analog: 1 to 100 digit
Proportional band (P)
0.1 to 999.9℃/℉ (0.1 to 999.9%)
© Copyright Reserved Autonics Co., Ltd. 25
2 Specifications
Manual reset value
0.0 to 100.0%
Ambient
Integral time (I) 0 to 9999sec.
Derivative time (D) 0 to 9999sec.
Control period (T)
Relay output, SSR drive output: 0.1 to 120.0 sec.
Current output+SSR drive output: 1.0 to 120.0 sec.
Sampling period 50 ms
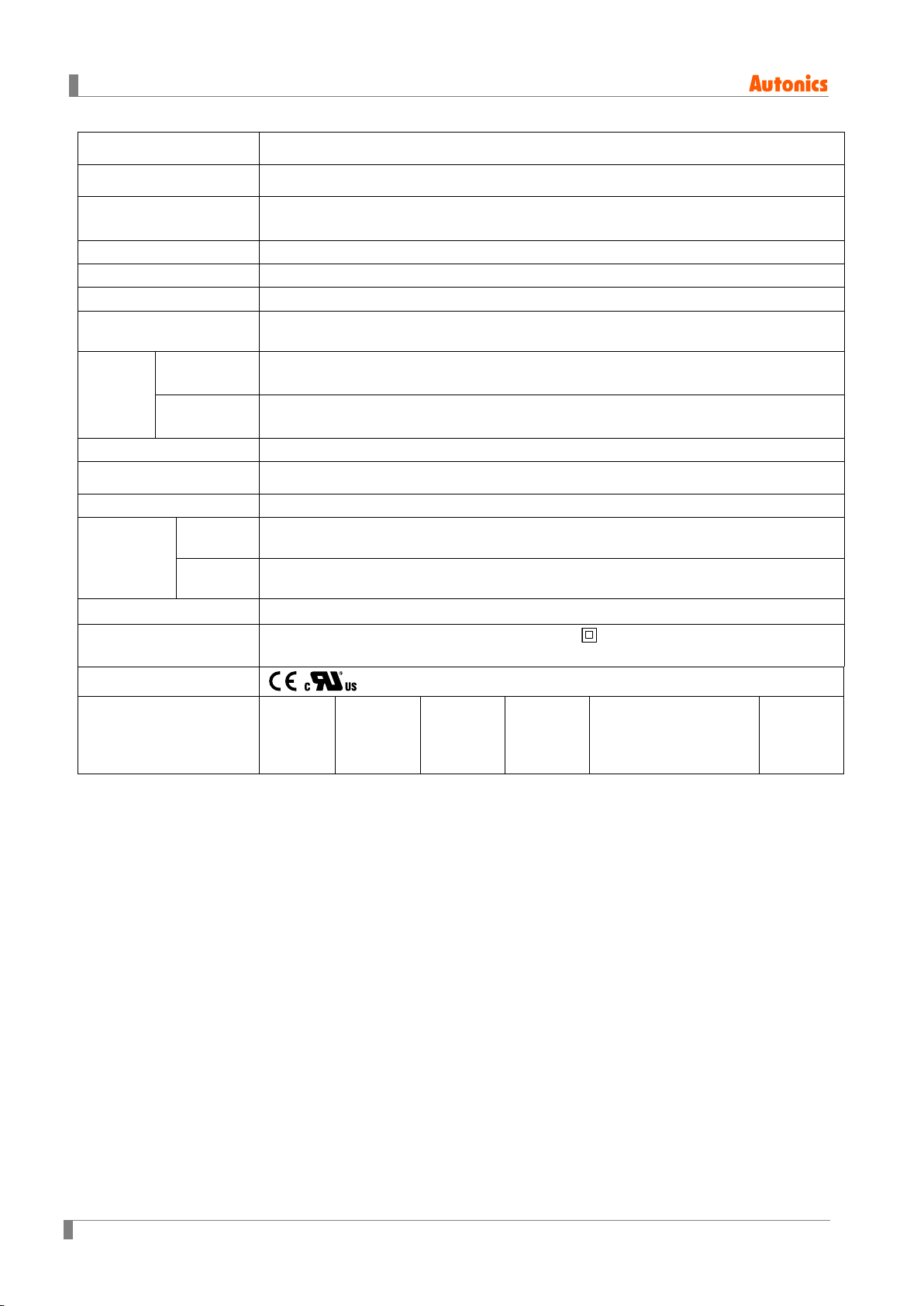
Dielectric strength 2,000 VAC 50/60 Hz for 1 min. (between power source terminal and input terminal)
Vibration resistance
Relay
Mechanical
life
cycle
Electrical
0.75mm amplitude at frequency of 5 to 55 Hz (for 1 min.) in each of X, Y, Z directions
for 2 hours
OUT1/OUT2: Min. 5,000,000 operations
AL1/2: Min. 20,000,000 operations (TK4H/W/L: Min. 5,000,000 operations)
OUT1/OUT2: Min. 200,000 operations
AL1/2: Min. 100,000 operations(TK4H/W/L: Min. 200,000 operations)
Insulation resistance Min. 100MΩ (at 500VDC megger)
Noise resistance
Square shaped noise by noise simulator (pulse width 1 ㎲) ±2 kV R-phase, S-phase
Memory retention Approx. 10 years (non-volatile semiconductor memory type)
Environ
-ment
Ambient
temp.
humi.
-10 to 50℃, Storage: -20 to 60℃
35 to 85% RH, Storage: 35 to 85% RH
Protection IP65 (front panel) ※TK4SP: IP50 (front panel)
Insulation type
Double insulation or reinforced insulation (mark: , dielectric strength between the
measuring input part and the power part: 2kV)
Approval
※
Weight
Approx.
2
140 g
(Approx.
70 g)
Approx.
130 g
(Approx.
85 g)
Approx.
150 g
(Approx.
105 g)
Approx.
210 g
(Approx.
140 g)
Approx. 211 g
(Approx. 141 g)
Approx.
249 g
(Approx.
198 g)
※1. At room Temperature range(23℃ ± 5℃)
TC K, J, T, N, E type , below -100℃ / TC L, U, PLⅡ, RTD Cu50
Ω, DPt50Ω:
(PV ±0.3% or ±2℃, select the higher one) ± 1digit
TC C, G, R, S type bellow 200℃: (PV ±0.3% or ±3℃, select the higher one)
± 1 digit
TC B type, below 400℃: There is no accuracy standard.
Out of room temperature range
RTD Cu50
Ω, DPt50Ω: (PV ±0.5% or ±3℃, select the higher one) ±1digit
TC R, S, B, C, G type: (PV ±0.5% or ±5℃, select the higher one) ±1digit
Others, Below -100℃, Within ±5℃
In case of TK4SP Series, ±1℃ will be added to the degree standard.
26 © Copyright Reserved Autonics Co., Ltd.
※2. The weight is with packaging and the weight in parentheses is only unit weight.
※Environment resistance is rated at no freezing or condensation.
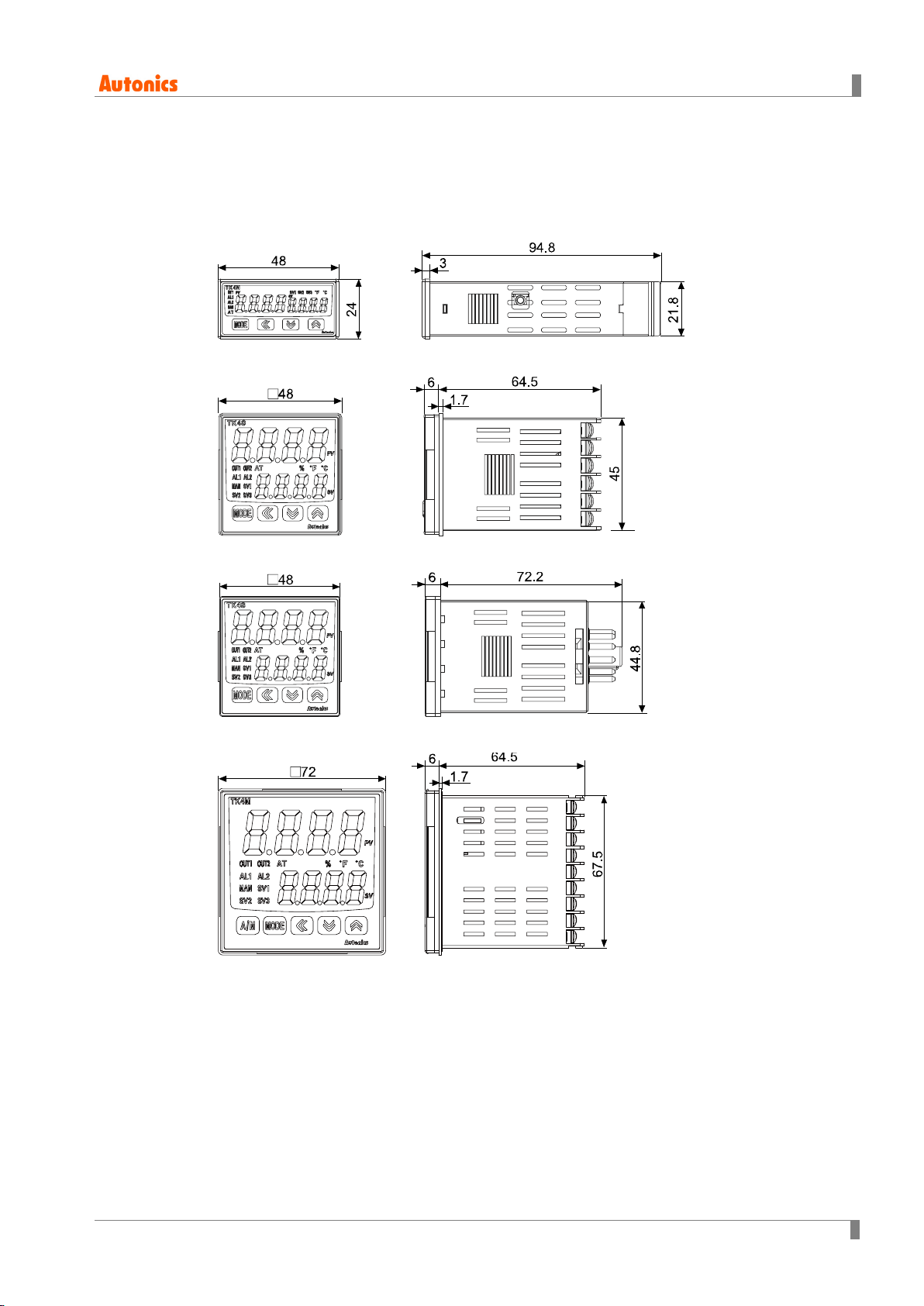
3 Dimensions
3 Dimensions
(1) TK4N Series
(2) TK4S Series
(unit: mm)
(3) TK4SP Series
(4) TK4M Series
© Copyright Reserved Autonics Co., Ltd. 27
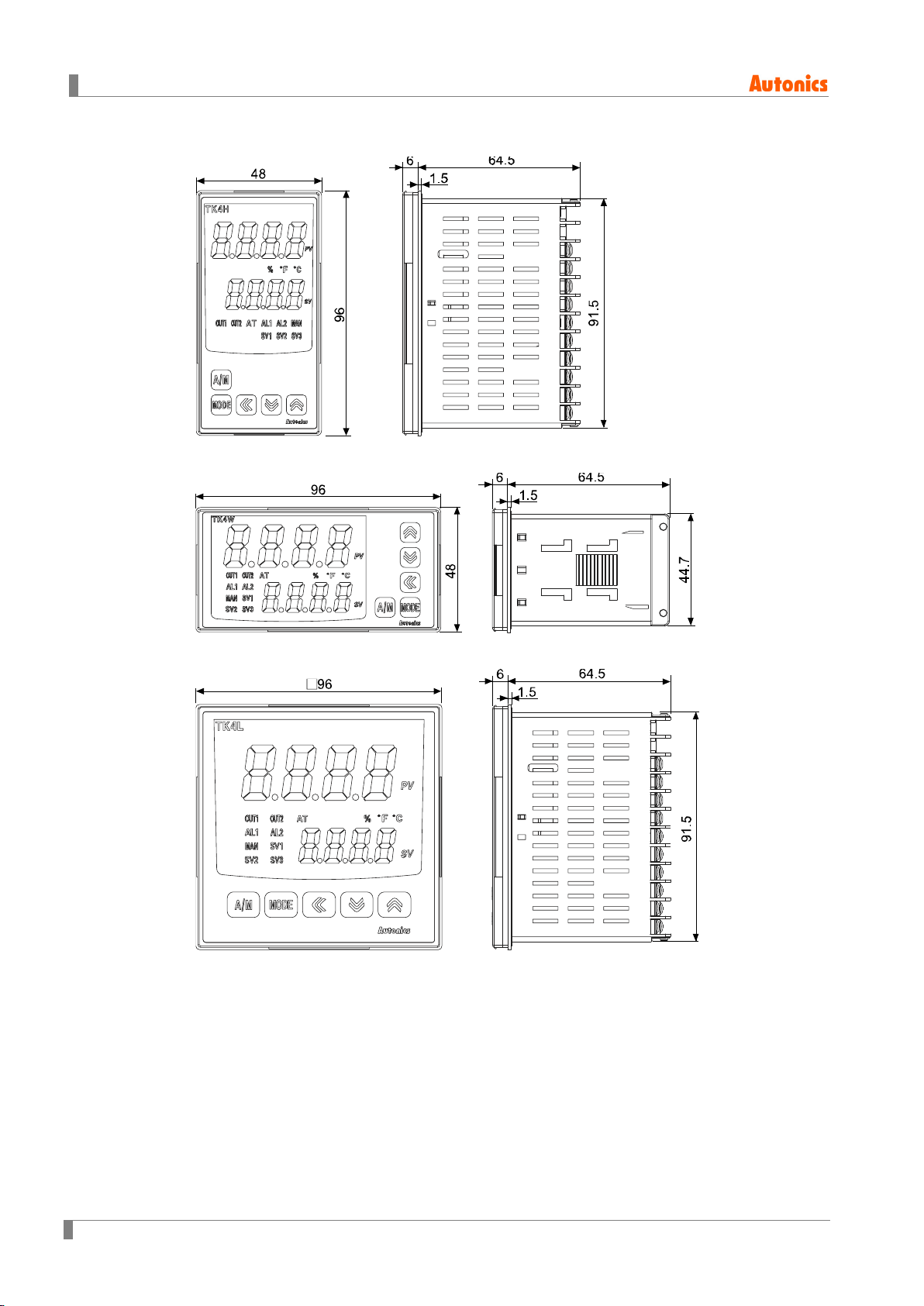
3 Dimensions
(5) TK4H Series
(6) TK4W Series
(7) TK4L Series
28 © Copyright Reserved Autonics Co., Ltd.
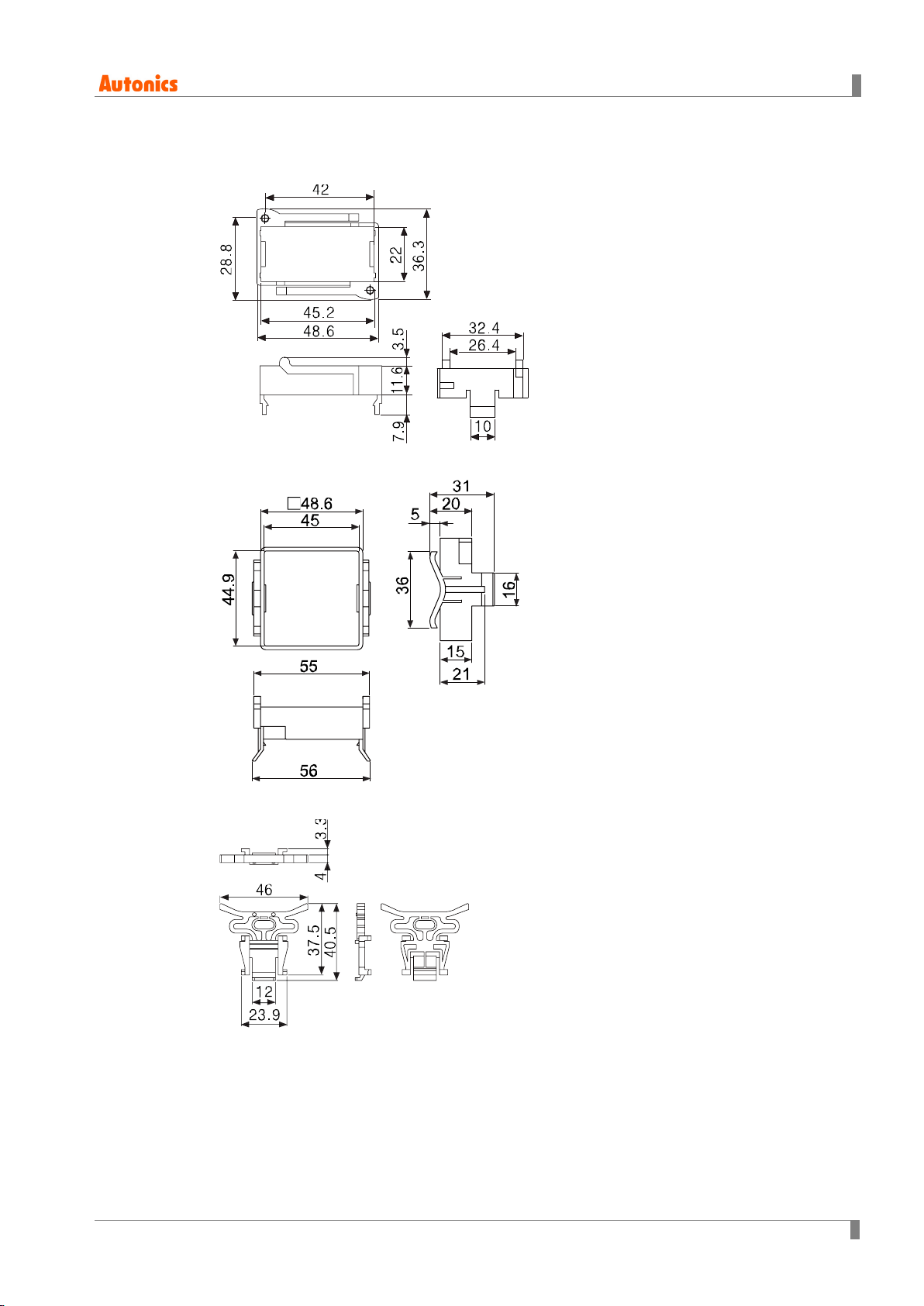
3 Dimensions
(8) Bracket
TK4N Series
TK4S, TK4SP Series
TK4M/W/H/L Series
© Copyright Reserved Autonics Co., Ltd. 29
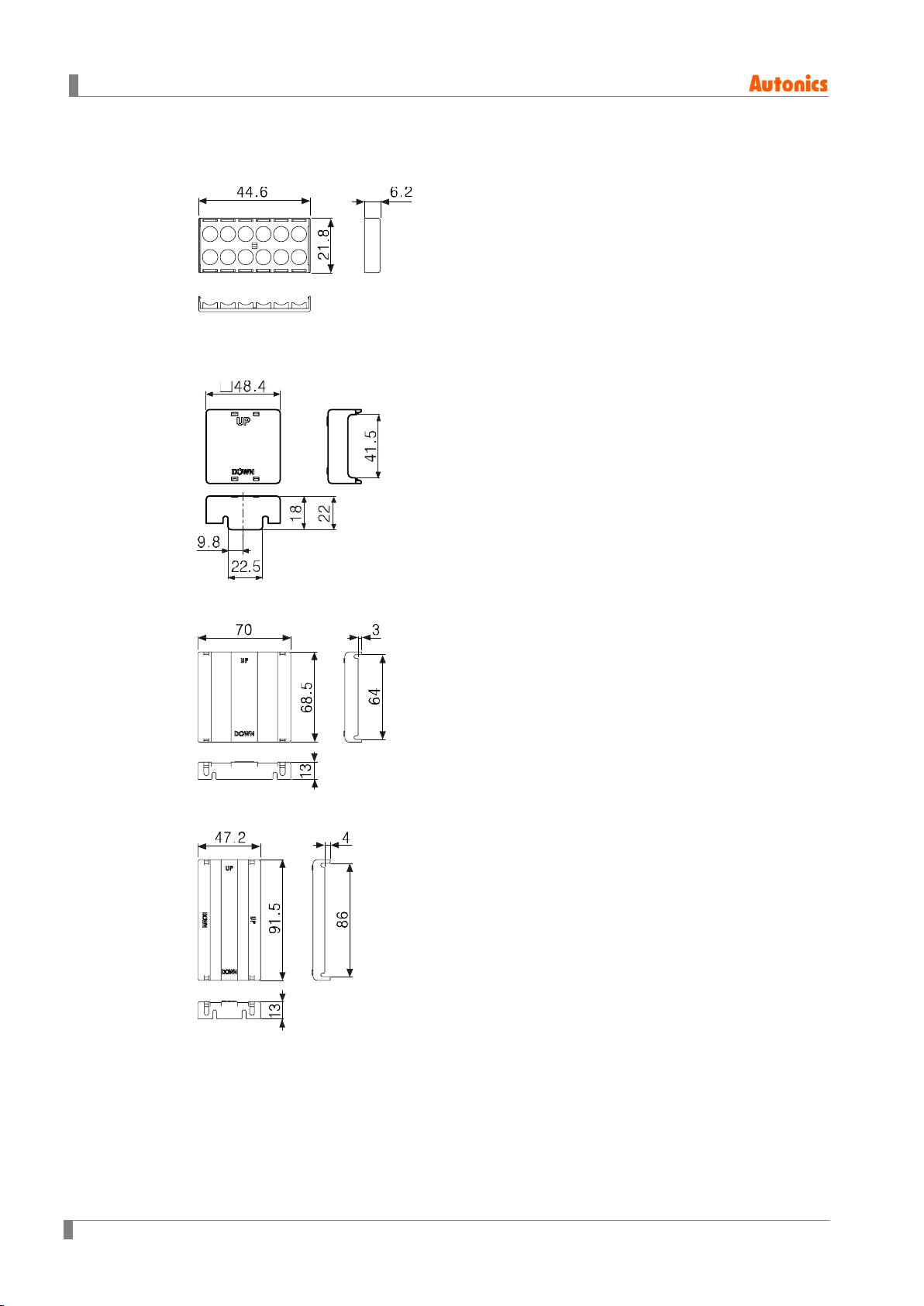
3 Dimensions
(9) Terminal cover (sold separately)
TK4N COVER (48×24mm)
※TK4N COVER is accessory.
RSA-COVER (48×48mm)
RMA-COVER (72×72mm)
RHA-COVER (48×96mm, 96×48mm)
30 © Copyright Reserved Autonics Co., Ltd.
3 Dimensions
TK4N
TK4S/SP
Other Series
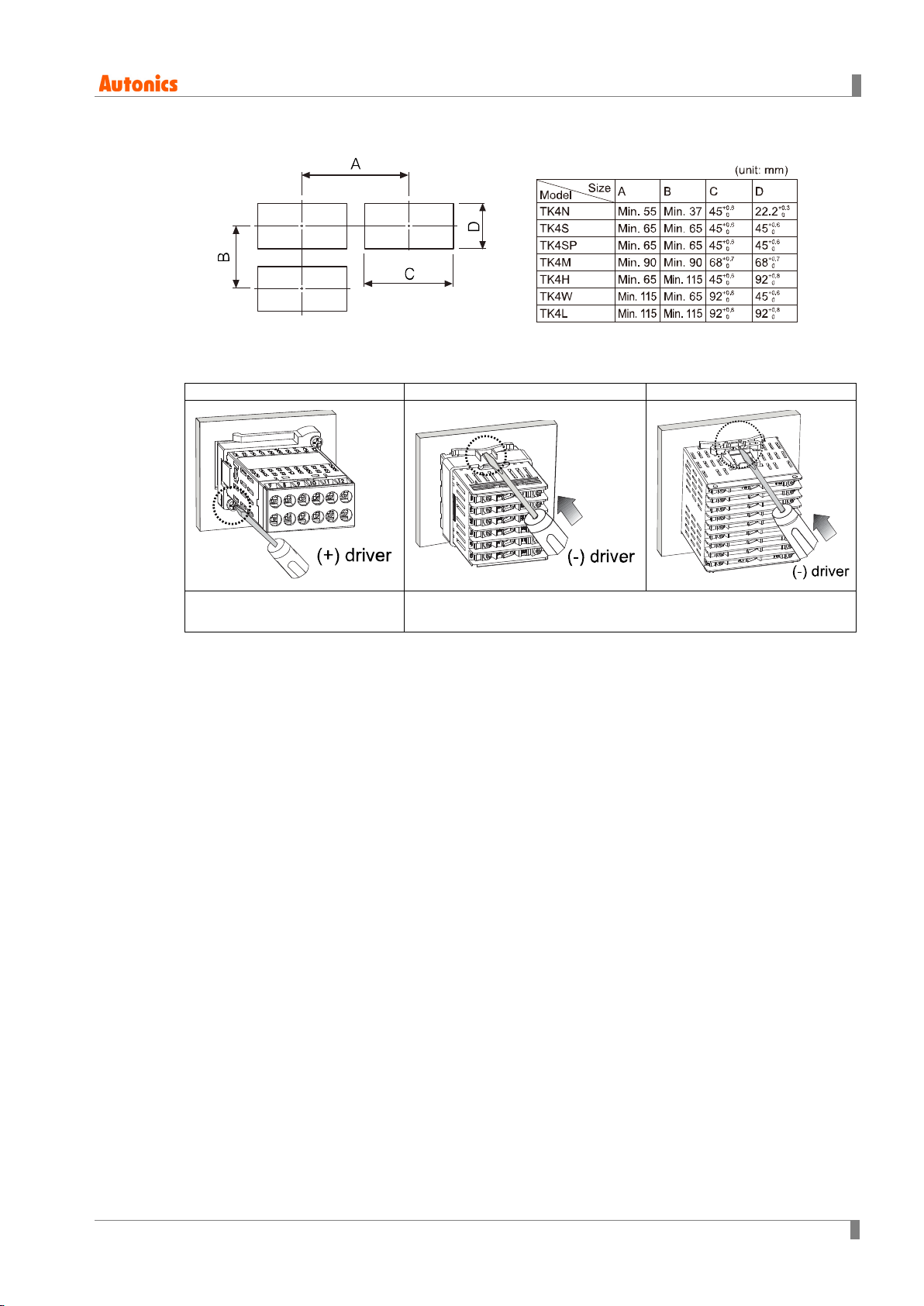
(10) Panel cut-out
Installation
Insert the unit into a panel
fasten the bolt with a (+) driver.
Insert the unit into a panel fasten the bracket by pushing with tools
with a (-) driver.
© Copyright Reserved Autonics Co., Ltd. 31

3 Dimensions
32 © Copyright Reserved Autonics Co., Ltd.

4 Connections
4 Connections
Be sure that the polarity for input connectiong a temperature sensor or analog input.
Standard model has shaded terminals only.
When the operation mode of heating&cooling OUT2 relay output model is heating or cooling
control, the OUT2 is usable as alarm output 3(except TK4N).
When the operation mode of heating & cooling OUT2 current model is heating or cooling control,
the OUT2 is usable as transmisstion output 2.
(1) TK4N Series
(2) TK4S Series
Features one digital input terminal (DI-1) due to limited number of terminal blocks. Supports
two multi SVs (SV1 and SV2) only.
© Copyright Reserved Autonics Co., Ltd. 33

4 Connections
(3) TK4SP Series
Does not feature any digital input terminal due to limited number of terminal blocks.
11Pin Socket(PG-11, PS-11): Sold separately
(4) TK4M Series
Features one digital input terminal (DI-1) due to limited number of terminal blocks. Supports
two multi SVs (SV1 and SV2) only.
(5) TK4W, TK4H, TK4L Series
※ Digital input is not electrically insulated from internal circuits, so it sholud be insulated when
connecting other circuits. (photocoupler, relay, independent switch)
34 © Copyright Reserved Autonics Co., Ltd.

4 Connections
4.1 Precautions for wiring
Mixing up the input terminals with output terminals and vice versa can lead to product
damage.
Use only sensors supported by the product.
Make sure to connect rated SSRs or loads to the output terminals. Make sure to connect
communication cable with correct communication terminals (A, B).
Make sure to observe correct polarity of power source terminals. (+ and -).
Make sure to connect correct polarity of temperature sensor and analog input.
4.1.1 Sensor connection
Compensation Wire Connection
For thermocouple sensors, use compensation wire of the same specification as input
sensors. Using an extension wire of different specifications and/or material will increase
inaccuracy of temperature sensing. It is recommended to choose high performance
compensation wire for more reliable sensing.
Measurement Error
Do not mix up the direction of the input sensor connector.
Carefully adjust both load and sensor positions.
Make sure the sensor is securely attached to the input connector.
AC Power Cable and Wiring
Do not put the sensor lines in close proximity of the AC power lines.
4.1.2 Communication connection
Do not tie together with the AC power line and communication line. Only use twisted pair wires
for the communication lines. Do not allow the communication line to exceed 800m in length.
For further details, please refer to ‘6.6 Communication ’.
© Copyright Reserved Autonics Co., Ltd. 35

4 Connections
36 © Copyright Reserved Autonics Co., Ltd.

5 Preparation and Startup
twice
Standard: Alarm output1+Digital input(DI-1, DI-2)
Heating & Cooling: Digital input (DI-1, DI-2)
Standard: Alarm output1+Trans. output
Heating & Cooling: Trans. output
Standard: Alarm output1+RS485 com. output
Heating & Cooling: RS485 comm. output
Alarm output1+ Trans. output
Alarm output1+RS485 com. output
Power
supply
SSR drive output
(standard ON/OFF, cycle, phase control)
Current + SSR drive output
5 Preparation and Startup
5.1 Initial display when power ON
When power is supplied, whole display parts flash for 1 sec. Afterwards, model name and input
sensor type will be flash twice and then in enters into RUN mode.
①Whole display part ②Model type display
SV display part Display type Type
1, 2, D, R, T TK4N
Option
Input/
Output
1, 2, R, T, A,
B, D
TK4S/SP/
M/W/H/L
③Input type display
Standard: Alarm output1+CT input
1
Heating & Cooling: Alarm output2
2 Standard: Alarm output1+Alarm output2
D
R
T
1 Alarm output1
2 Alarm output1+Alarm output2
R
T
A Alarm output1/2+ Trans. output
④RUN mode
4
R, S, C
N, R, C
© Copyright Reserved Autonics Co., Ltd. 37
OUT1
control
output
OUT2
control
output
B Alarm output1/2+RS485 com. output
D Alarm output1/2+ Digital input(DI-1, DI-2)
100-240VAC 50/60Hz
R Relay contact
S
C
N None
R Relay contact
C Current + SSR drive output

5 Preparation and Startup
5.2 Basic controls
5.2.1 Parameter setting sequence
Parameters of each group are connected each other. Therefore, follow the below parameter
order.
Parameter 3 Group [PAR3] → Parameter 4 Group [PAR4] → Parameter 5 Group [PAR5] →
Parameter 2 Group [PAR2] → Parameter 1 Group [PAR1] → SV Setting [SV]
Changing Parameter 3 Group's parameters can sometimes reset other associated parameters.
Always make sure to check if such parameters have been affected.
5.2.2 Set value (SV) setting
①
②
③
Press any key among , , in RUN mode to enter SV
setting mode. Last digit (10
Press the key to move digit.
0
→ 101 → 102 → 103 → 100)
(10
Press the , keys to raise or lower the set value.
0
digit) on SV display part flashes.
④
Press the key to save the set value. If there is no additional
key operations in 3 sec., the changed SV is automatically saved.
38 © Copyright Reserved Autonics Co., Ltd.
5 Preparation and Startup
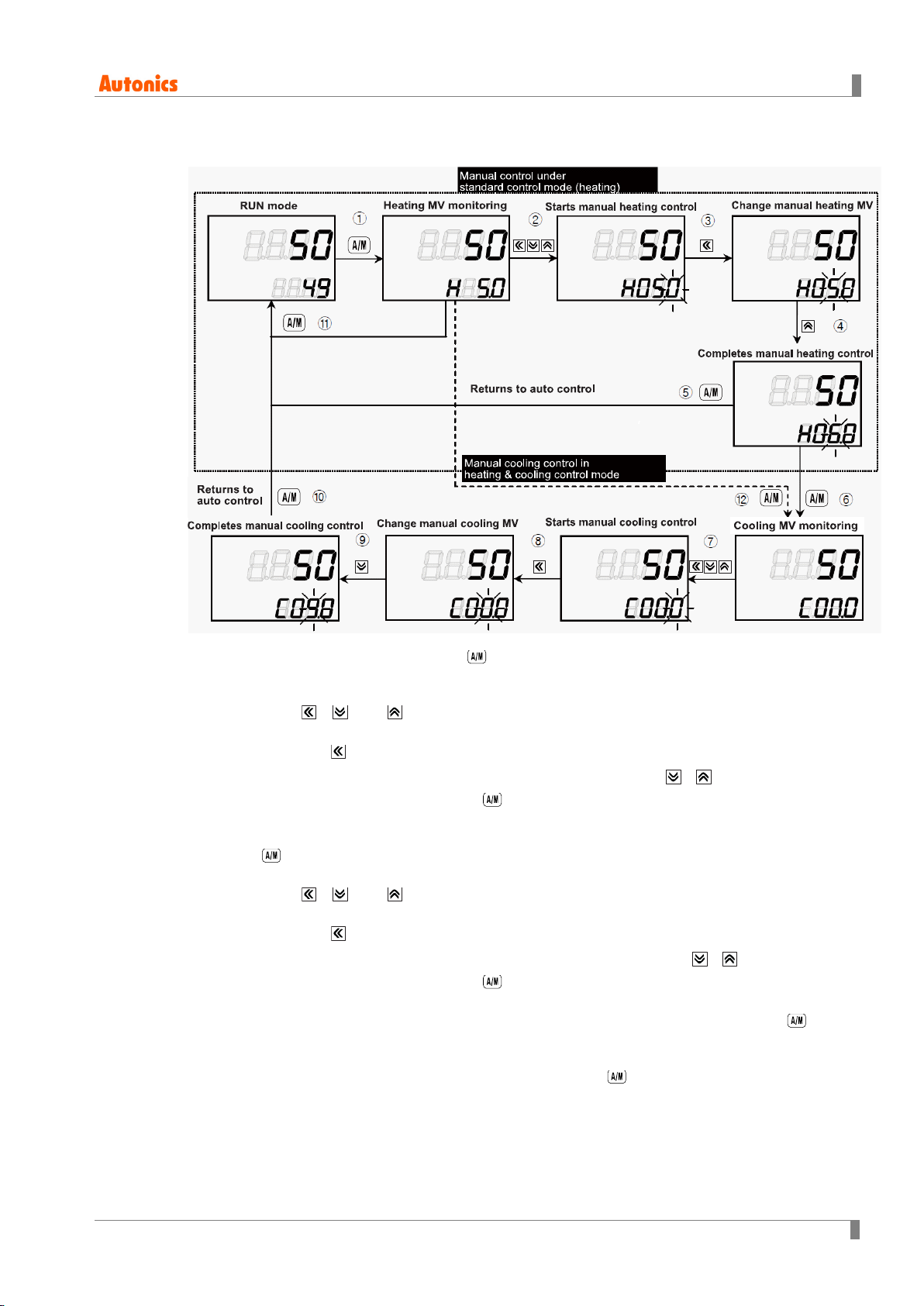
5.2.3 MV monitoring and manual control
① While in RUN mode, press the key to commence manual control. The SV display will
then show H (heating control) or C (cooling control) and simultaneously display the MV to
indicate commencement of MV monitoring.
② If the , , or is pressed while MV monitoring is in progress, the MAN indicator
will turn on and the last digit will start to flash to indicate activation of manual control.
0
③ Press the key to change the flashing digit (10
→ 101 → 102 → 103 → 100).
④ Select the digit and configure the desired MV value using the , keys.
⑤ To end manual control, press the key. The MAN indicator will turn off, and the system
will revert to auto control mode.
⑥ While in heating & cooling control mode, set the manual heating MV and then press the
key to see C (cooling control) and the current cooling MV value on the SV display
indicating commencement of cooling MV monitoring.
⑦ If the , , or is pressed while MV monitoring is in progress, the MAN indicator
turns on and the last digit starts to flash to indicate activation of manual control.
0
⑧ Press the key to change the flashing digit (10
→ 101 → 102 → 103 → 100).
⑨ Select the digit and configure desired cooling MV value using the , keys.
⑩ To end manual control, press the key. The MAN indicator will turn off, and the system
will revert to auto control mode.
⑪ While in standard control mode (heating control or cooling control), pressing the key
once from the MV monitoring stage, or any other stage, will revert the system to auto
control mode.
⑫ During heating & cooling control mode, pressing the key once from the MV
monitoring stage, or any other stage, will skip the system to the cooling MV monitoring
stage.
© Copyright Reserved Autonics Co., Ltd. 39

5 Preparation and Startup
Control status
MV
Monitoring
AUTO
Not changed
MANUAL
Changeable
For heating & cooling control, the system reverts to auto control after going through heating
monitoring, manual heating control, cooling monitoring, and manual cooling control stages in
sequence.
Heating MV remains in effect during cooling monitoring and manual cooling control.
When setting ditial input function as AUTO/MANUAL, MV monitoring and control status
Avaliable
TK4N/S/SP model’s the key alternates the ke y.
40 © Copyright Reserved Autonics Co., Ltd.
5 Preparation and Startup
5.3 Parameter group
© Copyright Reserved Autonics Co., Ltd. 41

5 Preparation and Startup
42 © Copyright Reserved Autonics Co., Ltd.
5 Preparation and Startup
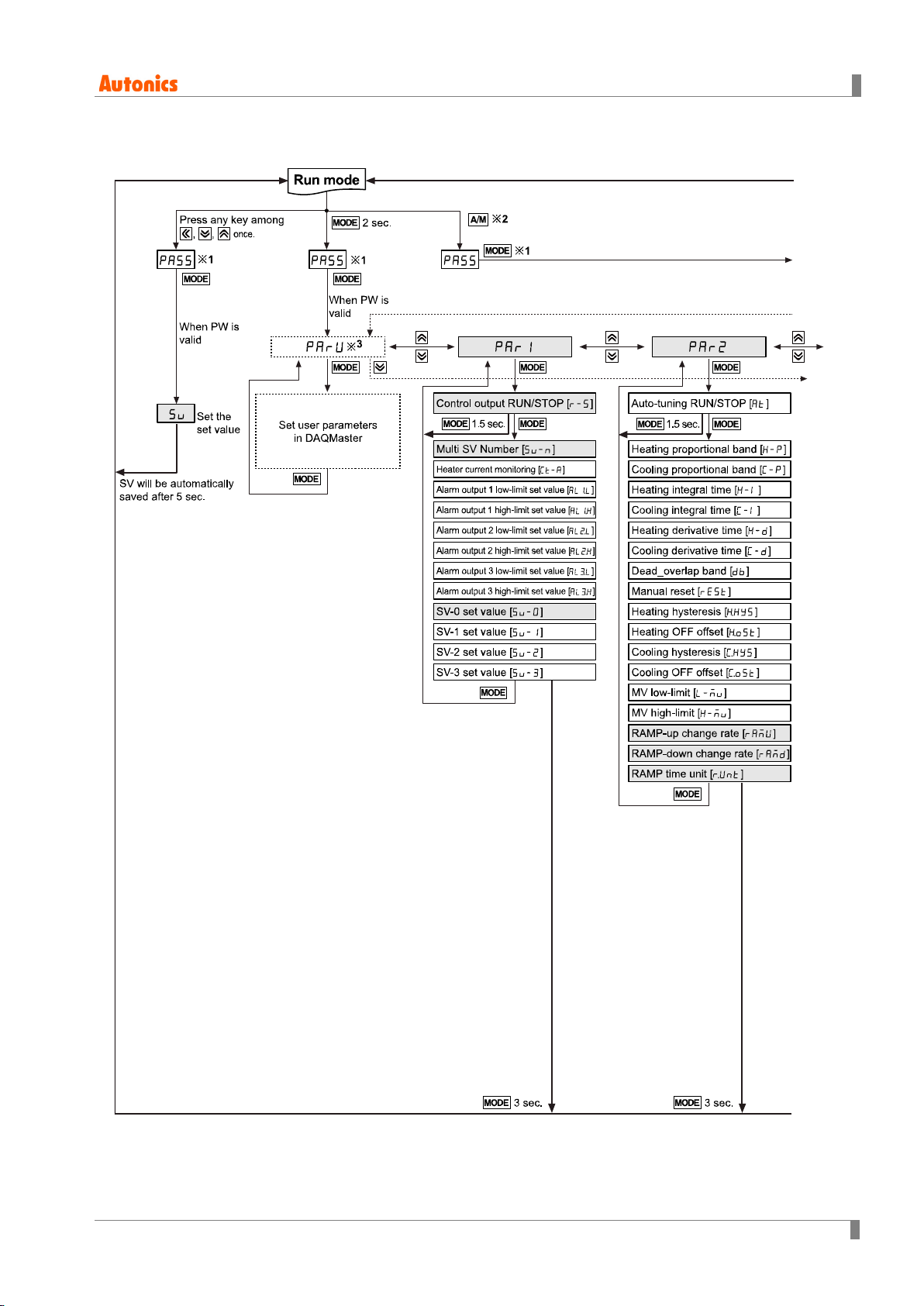
※1.
parameter will be displayed only when password is set. It is not displayed when
PASS
purchasing the unit since default password is set to
0000
.
If password is not valid, the screen will be shifted to password code required window.
Press any key among to return to password entering window. Press
key to return to RUN mode.
In case you forget password, contact Autonics after checking password code.
※2. TK4N/4S/4SP do not have key. The key replaces key.
※3. It is displayed when setting user parameter group in the comprehensive device
management program (DAQMaster).
Hold the key over 2 sec in RUN mode to enter into setting mode.
Hold the key for 1.5 sec while in setting mode to move to other parameter group.
Hold the key over 3 sec while in setting mode to return to RUN mode.
Press the key at the last parameter of each parameter, it moves to that parameter
name. You can move to other groups.
If there is no additional key operation within 30 sec after entering into setting mode, it will be
automatically returned to RUN mode and previous setting value will be remained
The shaded parameters are displayed in common.
The others may not be displayed by the specifications of the product, other parameter’s
setting, or parameter mask setting.
© Copyright Reserved Autonics Co., Ltd. 43

5 Preparation and Startup
5.4 Parameter groups
5.4.1 Parameter 1 group [PAR1]
44 © Copyright Reserved Autonics Co., Ltd.

5 Preparation and Startup
5.4.2 Parameter 2 group [PAR2]
© Copyright Reserved Autonics Co., Ltd. 45

5 Preparation and Startup
46 © Copyright Reserved Autonics Co., Ltd.

5 Preparation and Startup
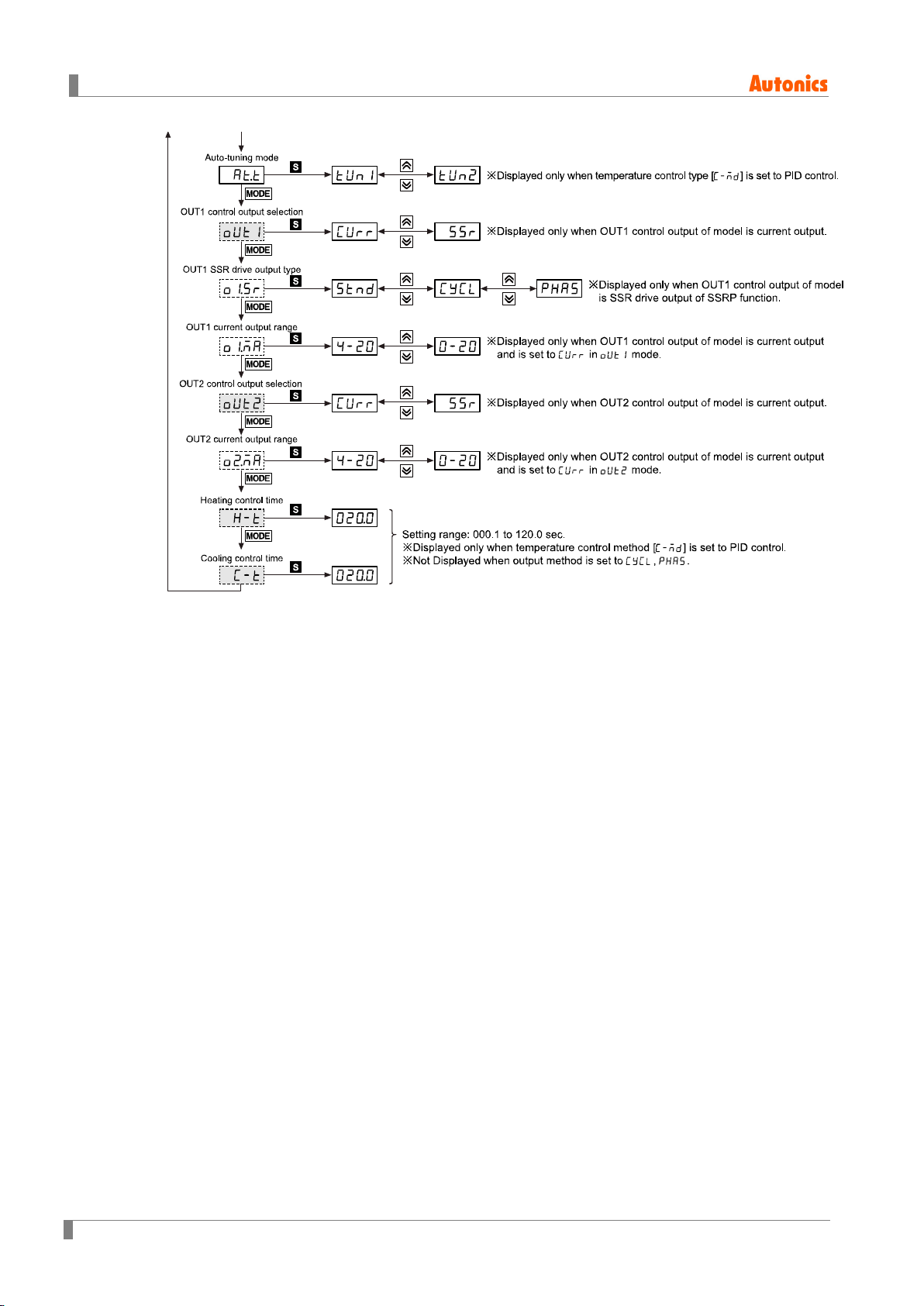
5.4.3 Parameter 3 group [PAR3]
© Copyright Reserved Autonics Co., Ltd. 47
5 Preparation and Startup
※ OUT1, OUT2 output:
In case that OUT1, OUT2 output is relay output type
: OUT1
, O!SR, O!MA, OUT2, O@SR, O@MA parameters are not displayed.
In case that OUT1,OUT2 output is current + SSR drive output type, when OUT1,OUT2
output is set to SSR
: Output method of O!SR
, O@SR is held in STND and parameter is not displayed.
In case that OUT1, output is SSR drive output model of SSRP function and OUT2 output is
current + SSR drive output
OUT1, O!MA are not displayed.
-
- O!SR can set to STND
, CYCL, PHAS
-When O@SR is set to SSR it is held in STND and parameter is not displayed.
48 © Copyright Reserved Autonics Co., Ltd.

5 Preparation and Startup
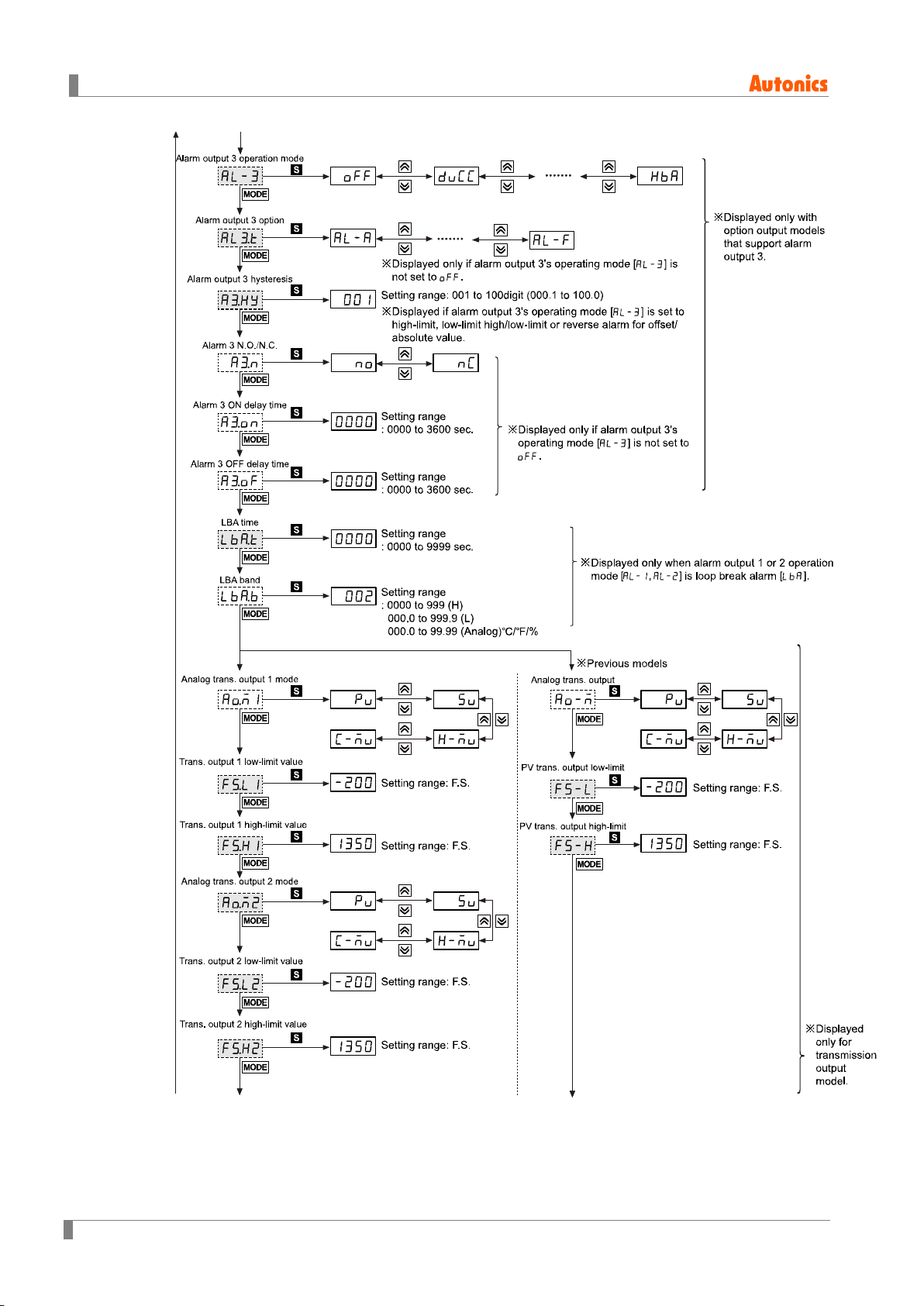
5.4.4 Parameter 4 group [PAR4]
© Copyright Reserved Autonics Co., Ltd. 49
5 Preparation and Startup
50 © Copyright Reserved Autonics Co., Ltd.

5 Preparation and Startup
© Copyright Reserved Autonics Co., Ltd. 51

5 Preparation and Startup
5.4.5 Parameter 5 group [PAR5]
52 © Copyright Reserved Autonics Co., Ltd.

5 Preparation and Startup
© Copyright Reserved Autonics Co., Ltd. 53

5 Preparation and Startup
54 © Copyright Reserved Autonics Co., Ltd.
6 Parameter Settings and Functions
Temperature range
Temperature range
6 Parameter Settings and Functions
6.1 Input
6.1.1 Input types and temperature ranges
Input types Display
1 KCaH -200 to 1350 -328 to 2463
K (CA)
0.1 KCaL -199.9 to 999.9 -199.9 to 999.9
1 JIcH -200 to 800 -328 to 1472
J (IC)
0.1 JIcL -199.9 to 800.0 -199.9 to 999.9
1 ECrH -200 to 800 -328 to 1472
E (CR)
0.1 ECrL -199.9 to 800.0 -199.9 to 999.9
1 TCcH -200 to 400 -328 to 752
T (CC)
0.1 TCcL -199.9 to 400.0 -199.9 to 752.0
B (PR) 1 B PR 0 to 1800 32 to 3272
Thermoc
ouple
(TC)
R (PR) 1 R PR 0 to 1750 32 to 3182
S (PR) 1 S PR 0 to 1750 32 to 3182
N (NN) 1 N NN -200 to 1300 -328 to 2372
1
C (TT)
G (TT)
※
2
※
1 C TT 0 to 2300 32 to 4172
1 G TT 0 to 2300 32 to 4172
(℃)
(℉)
1 LIcH -200 to 900 -328 to 1652
L (IC)
0.1 LIcL -199.9 to 900.0 -199.9 to 999.9
1 UCcH -200 to 400 -328 to 752
U (CC)
0.1 UCcL -199.9 to 400.0 -199.9 to 752,0
Platinel II 1 PLII 0 to 1390 32 to 2534
Cu 50Ω
Cu 100Ω
JPt 100Ω
RTD
© Copyright Reserved Autonics Co., Ltd. 55
JPt 100Ω
DPt 50Ω
DPt 100Ω
DPt 100Ω
0.1 CU 5 -199.9 to 200.0 -199.9 to 392.0
0.1 CU10 -199.9 to 200.0 -199.9 to 392.0
1 JPtH -200 to 650 -328 to 1202
0.1 JPtL -199.9 to 650.0 -199.9 to 999.9
0.1 DPt5 -199.9 to 600.0 -199.9 to 999.9
1 DPtH -200 to 650 -328 to 1202
0.1 DPtL -199.9 to 650.0 -199.9 to 999.9

6 Parameter Settings and Functions
Temperature range
Temperature range
Setting
group
Factory
default
Refer to 6.1.1. Input types and
temperature
Setting
group
Factory
default
Input types Display
Nickel 120Ω
Voltage
Analog
Current
1 NI12 -80 to 200 -112 to 392
0 to 10V AV1
0 to 5V AV2
1 to 5V AV3
0 to 100mV AMV1
0 to 20mA AMA1
4 to 20mA AMA2
(℃)
-1999 to 9999
(Display point will be changed according to
decimal point position)
(℉)
※1. C (TT): Same temperature sensor as former W5 (TT).
※2. G(TT): Same temperature sensor as former W (TT).
Temperature sensors are to convert subject temperature to electrical signals for the temperature
controller allowing it to control output.
SV (Setting Value) can only be set within the input range and do not set over the input range.
6.1.2 Input type [PAR3 → IN-T]
This product supports multiple input types, making it possible for the user to choose from
thermocouples, resistors, and analog voltage/current.
If you change the input specification, the SV's upper/low-limits are automatically set to the new
specification's max/min values for temperature sensors. As for analog inputs, analog upper/lower
input values are set to the max/min temperature range and the SV upper/low-limits set to
upper/lower scale values. Therefore, you need to reconfigure the settings.
Parameter Setting range
PAR3 IN-T
6.1.3 Sensor temperature unit [PAR3 → UNIT]
When selecting the input temperature sensor, you can set the desired units (℃, ℉) of
temperature/scale value to be displayed.
Parameter Setting range
PAR3 UNIT ?C / ?F ?C -
This parameter will not be displayed if analog input has been selected.
Unit
KCaH -
Unit
56 © Copyright Reserved Autonics Co., Ltd.

6 Parameter Settings and Functions
No.
PV
Display
Setting
group
Factory
default
Setting
group
Factory
default
6.1.4 Analog input/scale value
With analog input selected, you can set the analog input range (high/low limit input values) and
the display scale (high/low limit scale values) within the designated input range.
The decimal point positions remain fixed when configuring the high/low limit input values. You
can change the input values at AV1: 00.00, AV2/AV3: 0.000, AMV1: 000.0, AMA1/ AMA2: 00.00
decimal points.
If the upper and lower limit scale settings are identical, ERRflashes twice and setting mode is
displayed.
For analog input, ±5% of the set high/low limit input value is extended. Analog output is also
extended compairing input value. (For temperature sensor input, ±5% extension is applied
within the temperature range.)
① ±5% section
② ±5 to 10% section
③ Over ±10% section
Flashes PV
Flashes HHHH or LLLL
Flashes OPEN
This parameter is not displayed for temperature sensor input.
6.1.4.1 Low-limit input value [PAR3 → L-RG]
You can set the low limit input values for actual use within the analog input range.
Parameter Setting range
PAR3 L-RG
Minimum temperature range to high-limit
input value [H-RG] - F. S . 10%
6.1.4.2 High-limit input value [PAR3 → H -RG]
You can set high limit input values for actual use within the analog input range.
Parameter Setting range
PAR3 H-RG
Low-limit input value [L-RG] + F.S. 10% to
maximum temperature range
Unit
0)00 -
Unit
1)00 -
© Copyright Reserved Autonics Co., Ltd. 57
6 Parameter Settings and Functions
Setting
group
Factory
default
PAR3
DOT
0 / )0/ )00 / )000
)0
-
Setting
group
Factory
default
PAR3
L-SC
`999 to 9999
00)0
-
Setting
group
Factory
default
PAR3
H-SC
`999 to 9999
10)0
-
Setting
group
Factory
default
Setting
Parameter description
6.1.4.3 Scale decimal point position [PAR3 → DOT]
You can set the decimal point positions for present value (PV) and set value(SV) within high and
low limit scale values.
Parameter Setting range
6.1.4.4 Low-limit scale value [PAR3 → L-SC]
You can set the display scales of low-limit values for analog input [L-RG]. (Based on the decimal
point position setting.)
Parameter Setting range
6.1.4.5 High-limit scale value [PAR3 → H-SC]
You can set the display scales of high-limit values for analog input [H-RG]. (Based on the
decimal point position setting.)
Parameter Setting range
6.1.4.6 Display unit for front panel [PAR3 → dUNT]
When you select an analog input type, you can set the display units.
Parameter Setting range
Unit
Unit
Unit
Unit
PAR3 dUNT ?C / ?F / ?/O / OFF ?/O -
?C
?F
?/O Sets the display unit to % and turns on the % of front unit indicator.
OFF
Sets the display unit to ℃ and turns on the ℃ of front unit indicator.
Sets the display unit to ℉ and turns on the ℉ of front unit indicator.
Sets the display unit to an undefined unit. The LED unit indicator will not turn on.
58 © Copyright Reserved Autonics Co., Ltd.
6 Parameter Settings and Functions
Setting
group
Factory
default
-999 to 0999 (temperature H, analog)
`9(9 to 99(9 (temperature L)
Setting
group
Factory
default
to
Sec
6.1.5 Input correction [PAR3 → IN-B]
This feature is used to compensate for input correction produced by thermocouples, RTDs, or
analog input devices, NOT by the controller itself.
The Input correction function is mainly used when the sensor cannot be attached directly to
controlled objects. It is also used to compensate for temperature variance between the sensor's
installation point and the actual measuring point.
Parameter Setting range
PAR3 IN-B
If the controller displays 78℃ when the actual temperature is 80℃, set the input correction [IN-
B] as ‘002’ in order to adjust the controller's display temperature to 80℃.
If present value after input correction is out of the input range by each input sensor, it displays
‘HHHH’ or ‘LLLL’.
Make sure that an accurate temperature variance measurement is taken before set values of
input correction. An inaccurate initial measurement can lead to greater variance.
Many of today's temperature sensors are graded by their sensitivity. Since higher accuracy
usually comes at a higher cost, most people tend to choose sensors with medium sensitivity.
Measuring each sensor's sensitivity correction for input correction feature in order to ensure
higher accuracy in temperature reading.
6.1.6 Input digital filter [PAR3 → MAvF]
It is not possible to perform stable control if the present value (PV) fluctuates because of fast
changes of input signal. Using the Input digital Filter function can stabilize PV to realize more
reliable control.
0000
Unit
℃/℉/-
Parameter Setting range
PAR3 MAvF 00)1
12)0
)1
Unit
If the input digital filter is set to 0.4 sec., digital filtering is applied to a sampling value collected
over 0.4 sec. (400 ms).
When the input digital filter is used, present value (PV) can vary from the actual input value.
© Copyright Reserved Autonics Co., Ltd. 59

6 Parameter Settings and Functions
Setting
group
1350(temperature)
-200(temperature)
Parameter
Parameter Description
6.1.7 High/Low-limit value of setting value(SV) [PAR3 → H-SV/ L-SV]
You can limit the Set value(SV) range within the temperature range of the temperature sensor or
analog input type in order to prevent the system from controlling with improper SV.
Parameter Setting range Factory default Unit
SV low-limit + 1 digit to sensor
H-SV
PAR3
L-SV
input high-limit or analog highlimit scale value
Sensor low-limit or analog lowlimit scale value to SV high-limit 1 digit
00)0(analog)
10)0(analog)
℃/℉
℃/℉
L-SV
H-SV Set value(SV) high-limit
Set value(SV) low-limit
Attempts to set the limits outside the min/max input range, or analog's high/low-limits, are not
accepted. Instead, the previous settings are retained.
Set value(SV) can only be set within the SV low-limit [L-SV] and SV high-limit [H-SV] range.
SV lower-limit [L-SV] cannot exceed SV high-limit [H-SV].
60 © Copyright Reserved Autonics Co., Ltd.

6 Parameter Settings and Functions
Setting
group
Factory
default
Standard model:
-
Heating/Cooling model: HEAT / COOL / H-C
H-C
-
6.2 Control output
6.2.1 Control output mode [PAR3 → O-FT]
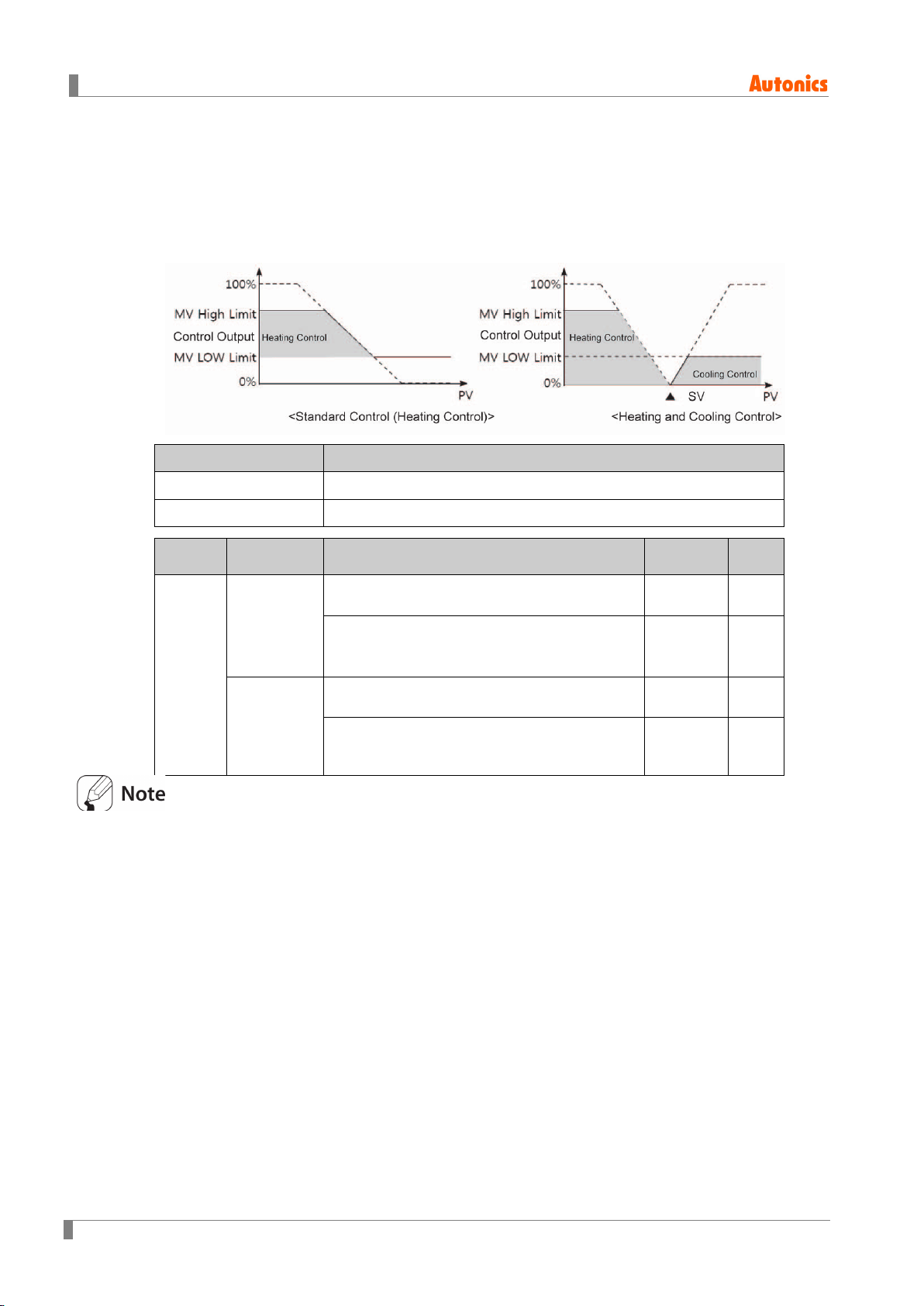
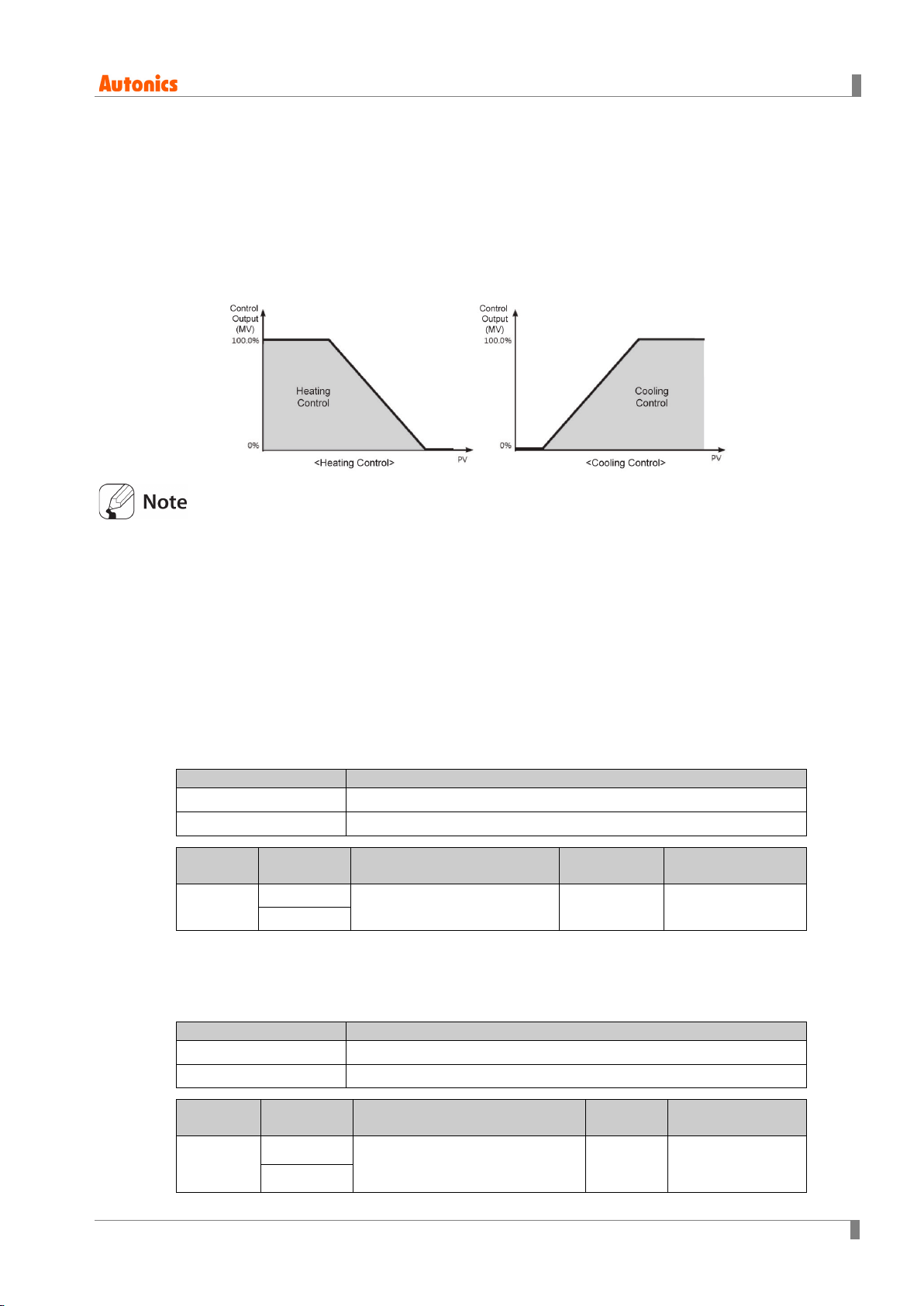
Control output modes for general temperature control include heating, cooling, and heating
& cooling.
Heating control and cooling control are mutually opposing operations with inverse outputs.
The PID time constant varies based on the controlled objects during PID control.
Parameter Set range
PAR3 O-FT
6.2.1.1 Heating control [PAR3 → O-FT → HEAT]
Heating control mode: the output will be provided in order to supply power to the load (heater) if
present value (PV) falls below set value(SV).
6.2.1.2 Cooling control [PAR3 → O-FT → COOL]
Cooling control mode: the output will be provided in order to supply power to the load (cooler) if
present value (PV) rises above set value(SV).
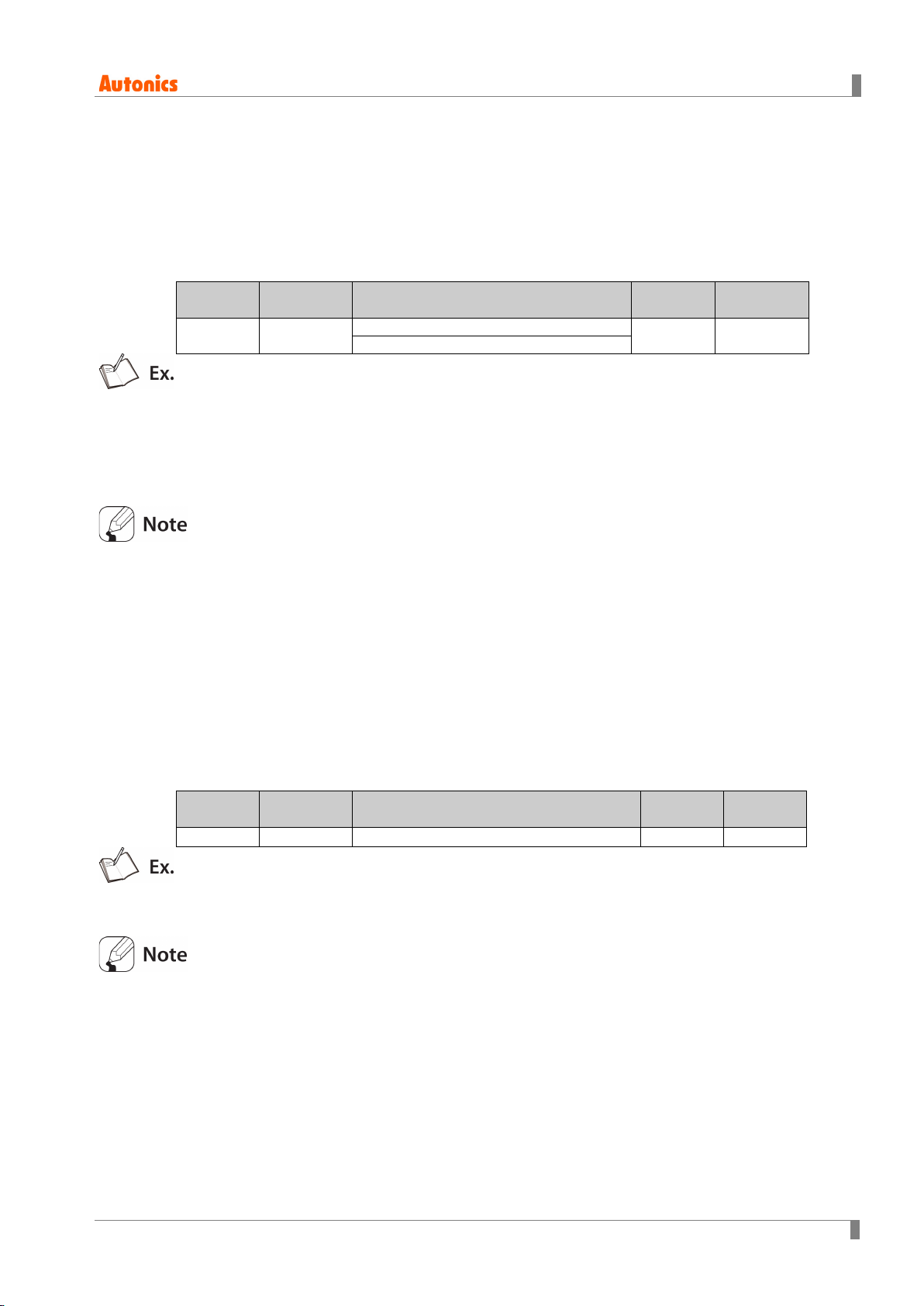
6.2.1.3 Heating & Cooling control [PAR3 → O-FT → H-C]
Heating & Cooling control mode: heating & cooling with a single temperature controller when it is
difficult to control subject temperature with only heating or cooling.
Heating & Cooling control mode controls the object using different PID time constants for each
heating & Cooling.
It is also possible to set heating & cooling control in both PID control or ON/OFF control mode.
Heating/cooling output can be selected among Relay output, SSR drive output and current
output depending on model types choosen according to your application environment. (Note that
SSR drive output of OUT2 operates standard control.)
HEAT / COOL
Unit
HEAT
© Copyright Reserved Autonics Co., Ltd. 61
6 Parameter Settings and Functions
Setting
group
Factory
default
See
below.
For heating & cooling control, OUT1 control output is dedicated to heating control and OUT2
control output to cooling control.
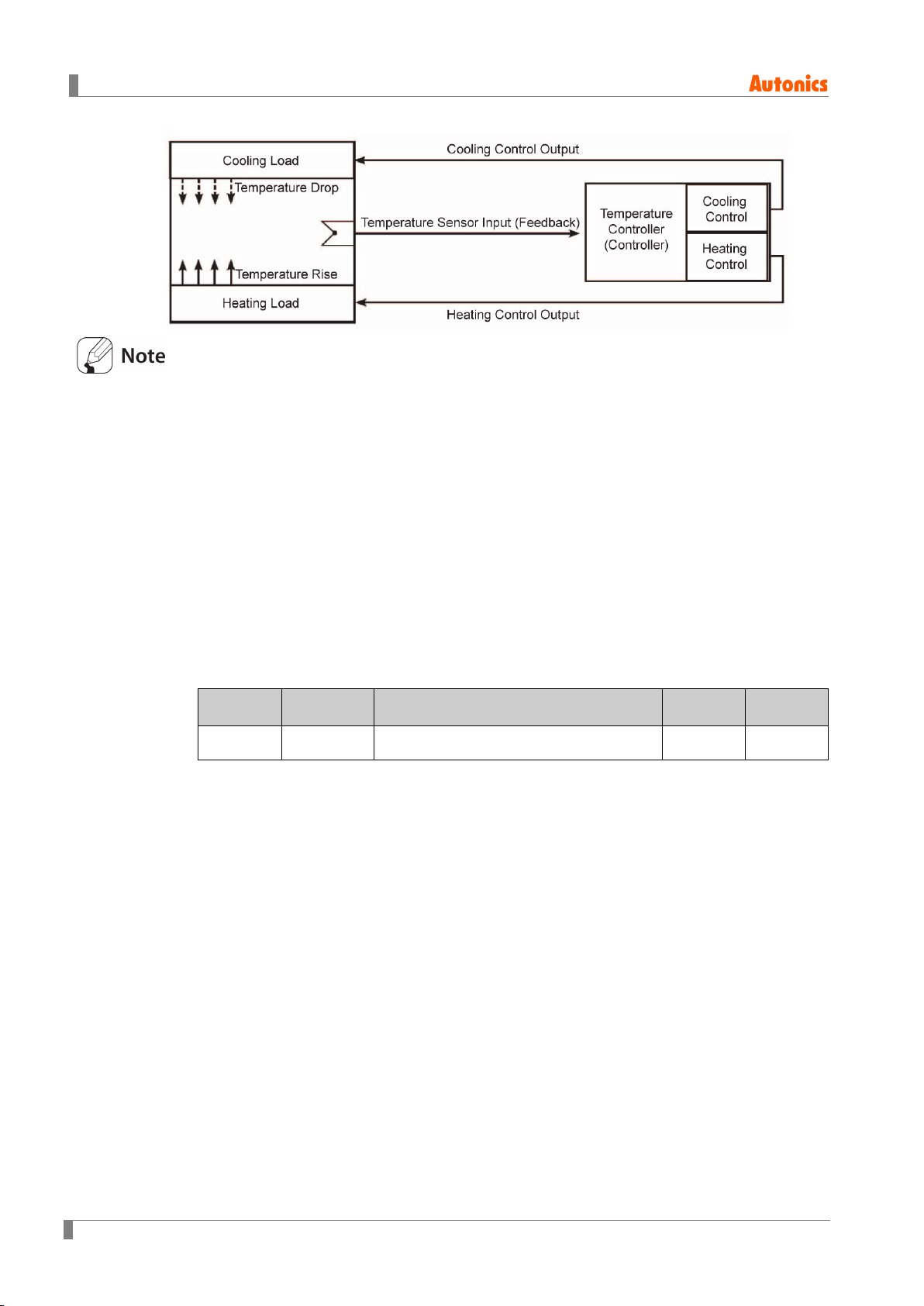
6.2.1.3.1. Dead band/Overlap band [PAR2 → DB]
In heating & cooling control, it is possible to designate a dead band between heating & cooling
control bands based on set value(SV).
A dead band forms around the SV when positive (+) value is set. No control occurs in the dead
band area. Therefore, heating & cooling MVs become 0.0% in the formed dead band.
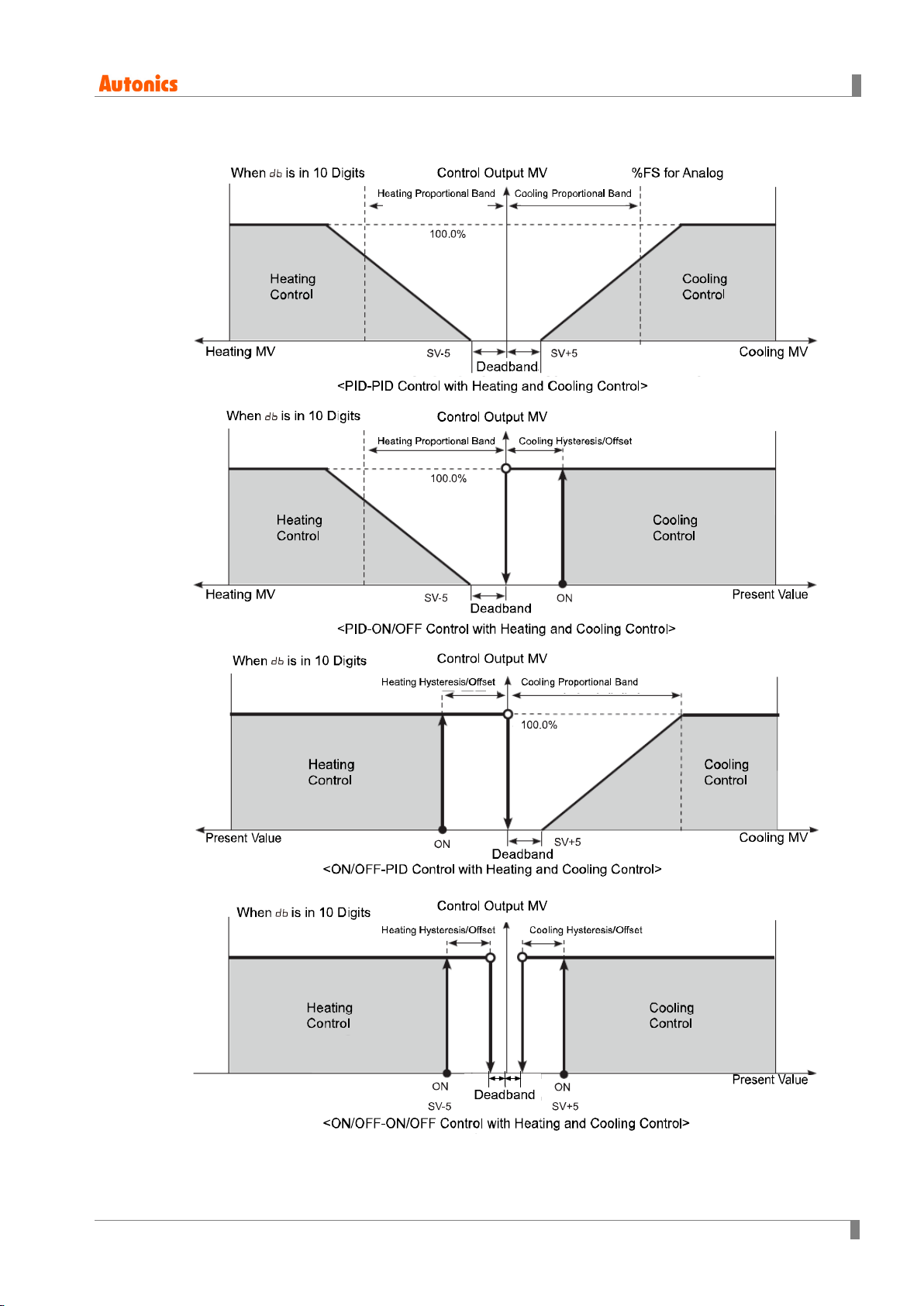
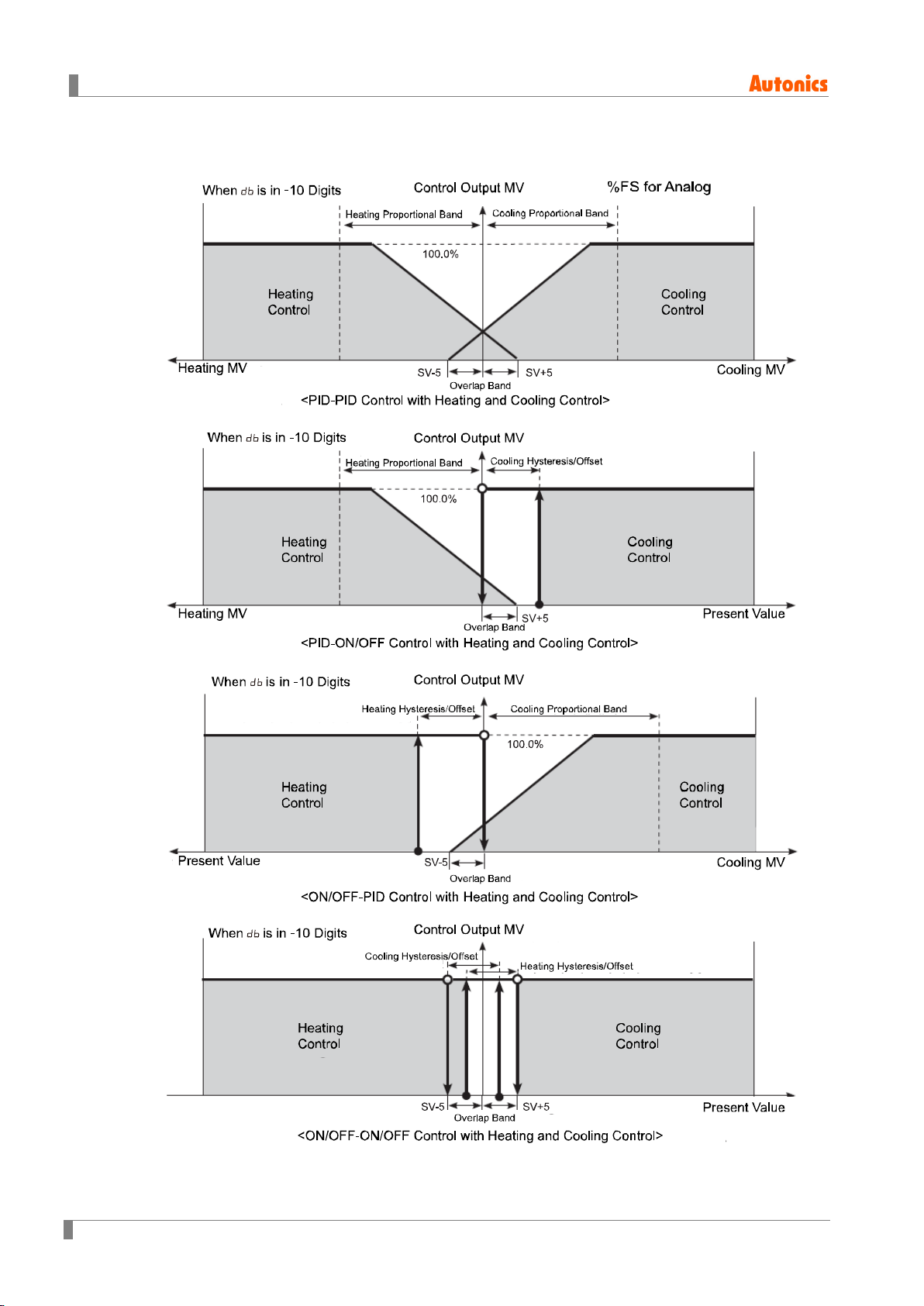
An overlap band (simultaneous application of heating & cooling MVs) forms around the SV when
negative (-) value is set.
Set as 0 when a dead band or an overlap band is not used.
When setting integration time, it is applied when the intengration time of heating control and
cooling control is set. In case of PI-P control and P-PI control, it also operates as P-P control.
Parameter Setting range
PAR2 DB See below.
Unit
PID/PID, PID/ON-OFF, and ON-OFF/PID Control
Set range (temperature): -(proportional band) to +(proportional band) (the lower value
when using different proportional bands)
Set range (analog): -99.9 to 099.9
Factory default: 0000 (temperature H), 000.0 (temperature L, analog),
(unit: temperature ℃/℉, analog % F. S. )
ON-OFF/ON-OFF Control
Set range (temperature):
-999 (overlap band) to 0000 (not used) to 0999 (dead band) (temperature H)
-199.9 (overlap band) to 000.0 (not used) to 999.9 (dead band) (temperature L)
Set range (analog): -99.9 (overlap band) to 000.0 (not used) to 099.9 (dead band)
Factory default: 0000 (temperature H), 000.0 (temperature L, analog),
(unit: temperature ℃/℉, analog % F. S. )
62 © Copyright Reserved Autonics Co., Ltd.
6 Parameter Settings and Functions
(1) Using a Deadband
© Copyright Reserved Autonics Co., Ltd. 63
6 Parameter Settings and Functions
(2) Using an Overlap Band
64 © Copyright Reserved Autonics Co., Ltd.

6 Parameter Settings and Functions
(3) Using neither a Dead band nor an Overlap Band
Depends on the set value of the heating integration time[H-I], cooling integration time[C-I],
actual operation may be different.
© Copyright Reserved Autonics Co., Ltd. 65
6 Parameter Settings and Functions
Setting
group
Factory
default
6.2.2 MV High/Low-limit value settings [PAR2 → H-MV / L-MV]
MV high/low-limit values [H-MV / L-MV] for control output can be configured to the actual MV,
provided the temperature controller's MV calculation exceeds the limits.
During heating & cooling control, cooling MV carries a "-" prefix. Therefore, the high-limit is
expressed as a + value on the heating side and the low-limit as a - value on the cooling side.
Parameter Description
L-MV
H-MV MV High-limit value setting
Parameter Set range
H-MV
PAR2
L-MV
MV Low-limit value setting
Standard Control: MV Low-limit value [L-MV]
+ )1 to 10)0
Heating & Cooling Control: 00)0 to 10)0
(PID control)
)0 (OFF)/10)0 (ON) (ON/OFF control)
Standard Control: 00)0 to MV high-limit value
[H-MV] – )1
Heating & Cooling Control: `0)0 to 00)0
(PID control), `0)0 (ON)/ )0 (OFF) (ON/OFF
control)
Unit
10)0 %
10)0 %
)0 %
`0)0 %
Same MV limits applied during auto-tuning.
MV limits are not applied to manual control, MV upon control stop, MV upon a sensor error, and
initial manual control MV.
MV high/low-limit configuration is not available for ON/OFF control in standard control mode
(heating or cooling control).
66 © Copyright Reserved Autonics Co., Ltd.
6 Parameter Settings and Functions
Parameter
Description
Setting
group
Factory
default
Operation Status
Ramp Up/Down
Ramp
6.2.3 Ramp settings [PAR2 → RAMU/ RAMD/ rUNT]
Ramp is a feature used to configure the slope toward set value(SV). The feature limits change
rate of set value(SV) and thereby restricts sudden temperature changes (increase and decrease)
in the control subject.
Ramp is commonly used in applications where rapid temperature changes (increase and
decrease) could impact negatively on the control subject.
RAMU
RAMD Settings for Ramp-down change rate.
rUNT
PAR2
Settings for Ramp-up change rate.
Settings for Ramp time unit.
Parameter Setting range
RAMU
RAMD
rUNT
000 to 999 (temperature H, analog),
00)0 to 99(9 (temperature L)
000 to 999 (temperature H, analog),
00)0 to 99(9 (temperature L)
SEC (seconds), MIN (minutes),
HOUR (hours)
Unit
000
000
MIN -
Activating the ramp feature when the ramp is not in operation limits the change rate of Set
value(SV) based on present value (PV). Changing SV or ramp parameters while the ramp is in
operation limits the change rate of SV based on SV at the point of the change.
Control will be carried out based on changed SV (hereinafter referred to as RAMP SV) changed by preset change rate (slope). RAMP-Up Change Rate and RAMP-Down Change Rate
can be configured independently.
Alarm operation during RAMP will be made based on final SV.
Setting the rate of ramp change to 0 deactivates the ramp feature.
If the ramp feature has been activated, RAMP SV will be displayed on SV display part.
Ramp depending on operation status
All operations When it is 0. Inactive
OPEN, HHHH, LLLL, Auto-tuning, Switching from
Auto to Manual, Switching from Run to Stop
OPEN, HHHH, LLLL, After Auto-tuning completed, PV
= SV
Power On, SV Change, Switching from Stop to Run,
Switching from Manual to Auto, Ramp Rate Change
Irrespective of
conditions.
Irrespective of
conditions.
When it is not 0. Active
Inactive
Inactive
© Copyright Reserved Autonics Co., Ltd. 67

6 Parameter Settings and Functions
(1 to 9999
(1 to 9999
Ramp operation graph
digit)
digit)
68 © Copyright Reserved Autonics Co., Ltd.

6 Parameter Settings and Functions
6.2.4 Auto/Manual control settings
Auto control mode is to make temperature reach SV with MV calculated by PID control. Manual
control mode is to make temperature reach SV with user’s defined MV.
When in manual control mode, parameter settings can only be viewed and cannot be modified
(except for lock parameters). When digital input terminal function is set as Auto/Manual control,
the key (the key for TK4N, TK4S, TK4SP) and the Auto/Manual swithcing by
communication do not operate. When the unit is powered on following a power interruption or
shutdown, previous control mode (auto or manual) will be maintained.
If switching to manual control during Auto-tuning, Auto-tuning will be terminated. It is still possible
to switch to manual control mode while in STOP. When a sensor break alarm [SBA] occurs in
standard control mode, the sensor error MV [ErMV] is applied. In this state, manual and auto
control MV settings can be modified. It is still possible to switch auto/manual control mode while
in controlling operation.
Operation Priority: Manual Control > Stop > Open (Sensor Disconnection)
6.2.4.1 Manual/Auto control switching
(1) Manual control switching for standard control (heating or cooling control)
①, ⑤: When in RUN mode, press the key (the key for TK4N, TK4S, TK4SP
model) and it enters MV monitoring mode. The SV display shows H (heating control) or
C (cooling control), and shows MV to indicate the start of MV monitoring.
②, ⑥: If the is pressed when MV monitoring is in progress, the MAN
0
indicator comes on and the lowest digit (10
digit) starts to flash, indicating activation of
manual control.
0
③, ⑦: Press the key to change the flashing digit (10
© Copyright Reserved Autonics Co., Ltd. 69
→ 101 → 102 → 103 → 100).
6 Parameter Settings and Functions
④, ⑧: Select the digit and configure the desired MV value using the keys
moving to 0→1→2→3→4→5→6→7→8→9→0 by the keys.
⑨: In ① to ⑧ status, press the key(the key for TK4N, TK4S, TK4SP
model) to end manual control. The MAN indicator goes off and the system reverts to
auto control mode.
(2) Manual control switching for heating & cooling control
①: When in RUN mode, press the key (the key for TK4N, TK4S, TK4SP
model) and it enters heating MV monitoring mode. The SV display shows ‘H’ and
shows MV to indicate the start of heating MV monitoring.
②: If the is pressed when heating MV monitoring is in progress, the MAN
0
indicator comes on and the lowest digit (10
digit) starts to flash, indicating activation of
manual control.
0
③: Press the key to change the flashing digit (10
→ 101 → 102 → 103 → 100).
④: Select the digit and configure the desired MV value using the keys
moving to 0→1→2→3→4→5→6→7→8→9→0 by the keys.
⑤: In ① to ④ status, press the key( key for N, S, SP model) and it enters
cooling MV monitoring mode. The SV display shows ‘C’ and shows MV to indicate the
start of cooling MV monitoring.
⑥: If the is pressed when cooling MV monitoring is in progress, the lowest
0
digit (10
⑦: Press the key to change the flashing digit (100 → 101 → 102 → 103 → 100).
digit) starts to flash.
⑧: Select the digit and configure the desired MV value using the keys
moving to 0→1→2→3→4→5→6→7→8→9→0 by the keys.
⑨: In ⑤ to ⑧ status, press the key(the key for TK4N, TK4S, TK4SP
model) to end manual control. The MAN indicator goes off and the system reverts to
auto control mode.
After heating & cooling control, the system reverts to auto control in sequence of heating
monitoring, manual heating control, cooling monitoring, and manual cooling control.
Heating MV remains in effect during cooling monitoring and manual cooling control.
TK4N/S/SP (W48×H48mm) does not have the key. Press the key once to change
between auto and manual controls.
If the digital Input [DI-1, DI-2] feature has been set for AUTO/MANUAL, the key ( the
key for TK4N, TK4S and TK4SP model) key located on the front and automatic/manual
control functions via communication do not act.
(3) Manual/Auto Control switching with the digital input (DI) terminal
If the digital Input (DI) feature has been configured for manual/auto control switching, turn
on the DI to activate manual control (MAN indicator goes on) and turn off the DI to activate
auto control. If the digital Input feature is automatic control status, you can be only to
monitor. In case it is manual control status, modifying MV and monitoring are possible.
See 6.7.4 Digital input, for detailed information on digital Input (DI) terminal settings.
When MV parameter is masked, MV parameter cannot be monitored and changed.
70 © Copyright Reserved Autonics Co., Ltd.

6 Parameter Settings and Functions
Auto-MV[AUTO]
Preset MV[PrMV]
Setting
group
Setting
group
Factory
default
6.2.4.2 Baseline MV for manual control [PAR5 → ItMV]
When switching from auto control [AUTO] to manual control [PrMU] you can set the initial MV.
AUTO: Controlling with auto control MV as an initial MV for manual control
PrMV: Controlling with preset manual MV [PrMV] as an initial M V.
Parameter Setting range Factory default Unit
PAR5 ItMV AUTO / PrMV AUTO -
When re-supplying the power, it controls with the MV which is at the power OFF.
6.2.4.3 Initial MV for manual control [PAR5 → PrMV]
If the baseline MV for manual control is configured to PrMV (Preset Manual MV), you can set the
initial MV for manual control.
Parameter Setting range
00)0 (OFF)
/10)0 (ON)
00)0 to10)0
`0)0 (Cooling ON)
/ 00)0(OFF)
/10)0 (Heating ON)
`0)0 (Cooling) to
00)0 (OFF) to
10)0 (Heating)
PAR5 PrMV
Standard
control
Heating
&
Cooling
control
ON/OFF
control
PID
control
ON/OFF
control
PID
control
Unit
00)0 %
© Copyright Reserved Autonics Co., Ltd. 71
When in heating & cooling control mode, a setting between )1 and 10)0 will be applied as
heating MV and a setting between )1 and `0)0 will be applied as cooling MV.

6 Parameter Settings and Functions
Setting
group
Factory
default
Setting
group
Factory
default
6.2.5 Output settings
6.2.5.1 Control output (OUT1/OUT2) selection [PAR3 → OUT1/OUT2]
In case of selecting the Models with current control output, both current and SSR drive
outputs are available. You can therefore choose the right output type depending on
application environments.
OUT1: Selects OUT1 control output.
OUT2: Selects OUT2 control output.
Parameter Setting range
PAR3
OUT1
SSR / CURR SSR -
OUT2
6.2.5.2 SSRP function [PAR3 → O!SR]
SSRP function of SSR drive output is selectable one of standard ON/OFF control, cycle, phase
control. By parameter setting, standard SSR drive is available. Also, cycle control connecting
with a zero cross turn-on method SSR, phase control connectiong with a random turn-on method
SSR are available.
Realizing high accuracy and cost effective temperature control with both current output (4-20mA)
and linear output(cycle control and phase control).
(1) Standard ON/OFF control [STND]
A mode to control the load in the same way as Relay output type.(ON: output level 100%,
OFF: output level 0%)
(2) Cycle control [CYCL]
A mode to control the load by repeating output ON / OFF according to the rate of output
within setting cycle. Having improved ON / OFF noise feature by Zero Cross type.
Unit
(3) Phase control [PHAS]
A mode to control the load by controlling the phase within AC half cycle. Serial control is
available. Random turn-on SSR must be used for this mode.
Parameter Setting range
PAR3 O!SR STND / CYCL/ PHAS STND -
72 © Copyright Reserved Autonics Co., Ltd.
Unit

6 Parameter Settings and Functions
Description
Heating
Cooling
Standard
Control
PID
PID control
ONOF
ON/OFF control
pP
PID control
PID control
pON
PID control
ON/OFF control
OnP
ON/OFF control
PID control
OnON
ON/OFF control
ON/OFF control
Setting
group
Factory
default
Standard
Control
Heating &
Control
Make sure that SSRP function is not available for OUT2. In case of current type models,
SSR is fixed to standard output [STND] only.
When selecting cycle output [CYCL] or phase output [PHAS], the power supply for the load
and temperature controllers must be the same.
In case of selecting SSRP function whether cycle output [CYCL] or phase output [PHAS]
with PID control type, control cycle is not available to set.
6.2.5.3 Current output range settings [PAR3 → O!MA/O@MA]
If the control output is set to current output, you can select upper and low-limit range for the
current output as either 4-20mA or 0-20mA.
O!MA: Sets OUT1's current output range.
O@MA: Sets OUT2's current output range.
This parameter is only available on models supporting current output [OUT1, OUT2].
6.3 Temperature control
6.3.1 Temperature control mode [PAR3 → C-MD]
You can choose the type of temperature control method.
Setting
Heating &
Cooling
Control
Parameter Setting range
PID / ONOF PID
PAR3 C-MD
Cooling
pP / pON / OnP / OnON pP
Unit
-
© Copyright Reserved Autonics Co., Ltd. 73
6 Parameter Settings and Functions
Parameter
Description
Setting
group
Factory
default
6.3.2 ON/OFF control [PAR3 → C-MD → ONOF]
Controls the temperature by comparing present value (PV) with set value(SV) and turning power
to the load on or off.
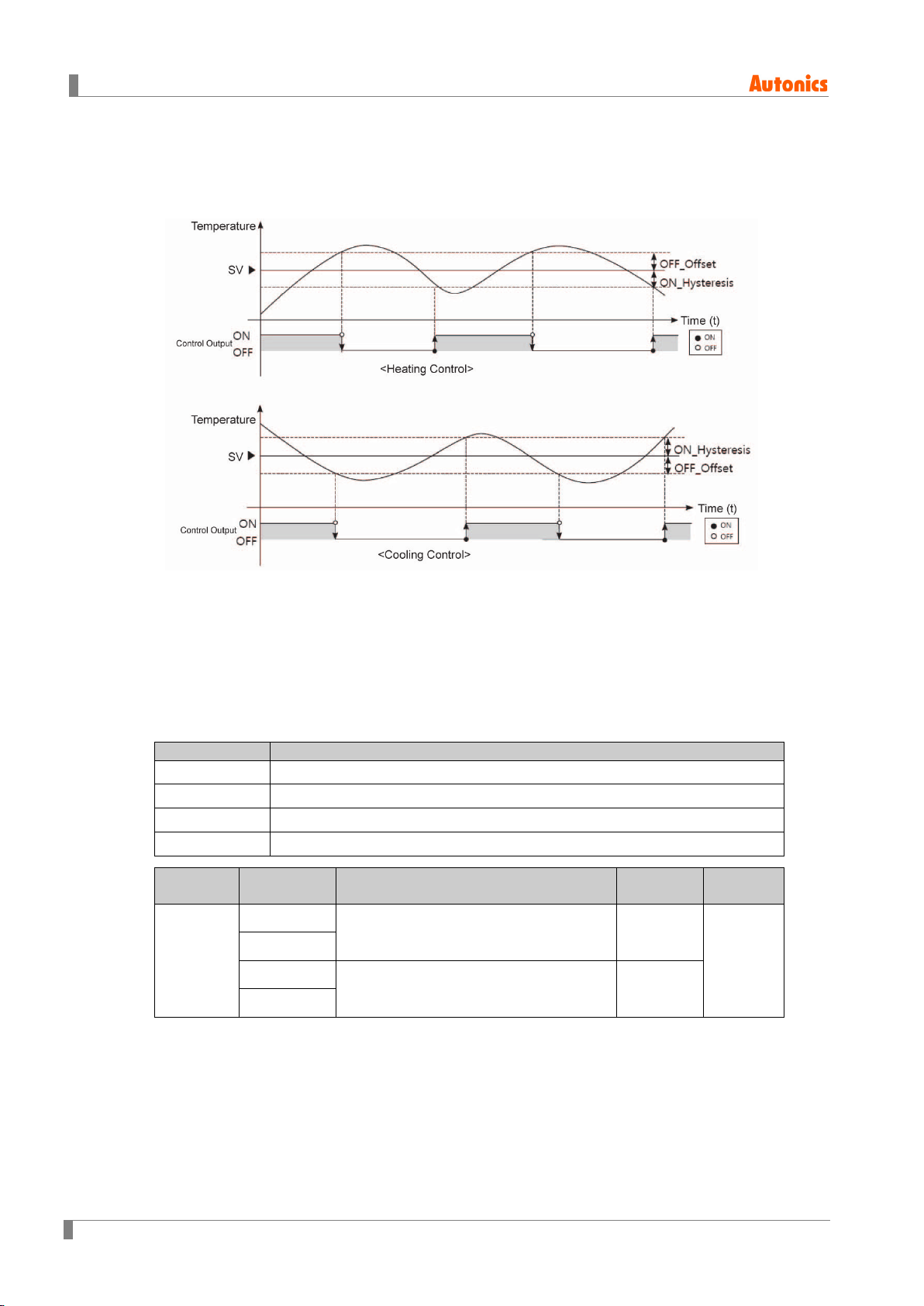
6.3.2.1 Hysteresis [PAR2 → hHYS/hOFT/cHYS/cOFT]
Hysteresis is to adjust control output ON/OFF point in ON/OFF control mode. ON_Hysteresis
sets the output on point and OFF_Offset sets the off point.
Setting hysteresis too low can result in hunting induced by disturbance (noise, chattering, etc.).
To minimize hunting, set ON_Hysteresis and OFF_Offset values with consideration to the heater
or cooler's capacity and thermal characteristics, the control subject's response characteristics,
the sensor's response characteristics and installation conditions, and other defining factors.
hHYS Configures ON_Hysteresis for heating control.
hOFT
cHYS Sets ON_Hysteresis for cooling control.
cOFT
Configures OFF_Offset for heating control.
Sets OFF_Offset for cooling control.
Parameter Setting range
hHYS
cHYS
PAR2
hOFT
cOFT
Temperature H, Analog: 001 to100
Temperature L: 0)1 to1)0
Temperature H, Analog: 001 to100
Temperature L: 0)1 to1)0
Unit
002
℃/℉/-
000
74 © Copyright Reserved Autonics Co., Ltd.
6 Parameter Settings and Functions
Parameter
Description
Setting
group
Factory
default
Analog: %
Parameter
Description
Setting
group
Factory
default
6.3.3 PID control [PAR3 → C-MD → PID]
PID control is a combination of proportional (P), integral (I), and derivative (D) controls and offers
superb control over the control subjects, even with a delay time.
Proportional control (P) implements smooth,
hunting-free control; integral control (I) automatically corrects offsets;
and derivative control (D) speeds up the response to disturbance. Through these actions, PID
control realizes ideal temperature control.
Applied PID Control Technique
Proportional Control (P): Select PID control and set the integral and derivative time to 0000.
Proportional Integral Control (PI): Select PID control and set the derivative time to 0000.
Proportional Derivative Control (PD): Select PID control and set the integral time to 0000.
Multi SV: Use the same PID time constant for the values of SV0 to SV3.
6.3.3.1 Proportional band settings [PAR2 → H-P/C-P]
When present value (PV) is within the Proportional Band (P), the ON/OFF ratio needs to be
adjusted during the proportional period (T). The defined proportional control (time proportional
control) section is called as the proportional band.
H-P
C-P
Heating proportional band
Cooling proportional band
Parameter Setting range
PAR2
H-P
C-P
00)1 to 99(9 01)0
6.3.3.2 Integral time settings [PAR2 → H-I/C-I]
MVs from integral and proportional operation become the same when deviation is consistent.
The time taken for the two MVs to match is called the integral time.
Unit
Temperature: ℃/℉
H-I
C-I Cooling integral time
Parameter Setting range
H-I
PAR2
C-I
© Copyright Reserved Autonics Co., Ltd. 75
Heating integral time
Unit
0000 to 9999 0000 Sec

6 Parameter Settings and Functions
Parameter
Description
Setting
group
Factory
default
Parameter
Description
Setting
group
Relay, SSR drive
to12)0
Integral control is not conducted if the integral time is set to 0.
Setting the integral time too short can intensify correction movements and cause hunting.
6.3.3.3 Derivative time settings [PAR2 → H-D/C-D]
In accordance with the deviation of the ramp, the time taken for the MV gained from derivative
operation to reach the MV gained from proportional control is called the derivative time.
H-D Heating derivative time
C-D
Cooling derivative time
Parameter Setting range
H-D
PAR2
0000 to 9999 0000 Sec
C-D
Derivative control is not conducted if the derivative time is set to 0.
6.3.3.4 Control period settings [PAR3 → H-T/C-T]
If relay or SSR is used to output MV under proportional control, the output is on for a fixed
amount of time (within the control period, as a percentage of the MV) and then remains off for
the rest of the time. The preset period when output ON/OFF takes place is called the
proportional control period.
Control with SSR drive output has a faster response than that of relay output. Therefore, by
configuring a shorter control period, more responsive temperature control is achieved.
H-T Heating control period
C-T
Cooling control period
Parameter Setting range Factory default Unit
Unit
76 © Copyright Reserved Autonics Co., Ltd.
H-T
PAR3
C-T
output(ON/OFF control,
phase control, cycle
control): 00)1 to12)0
Current output, SSR
drive output: 00)1
Relay output: 02)0
SSR drive output: 00@0
Sec
If using heating & cooling control, configure each control period separately for heating & cooling.
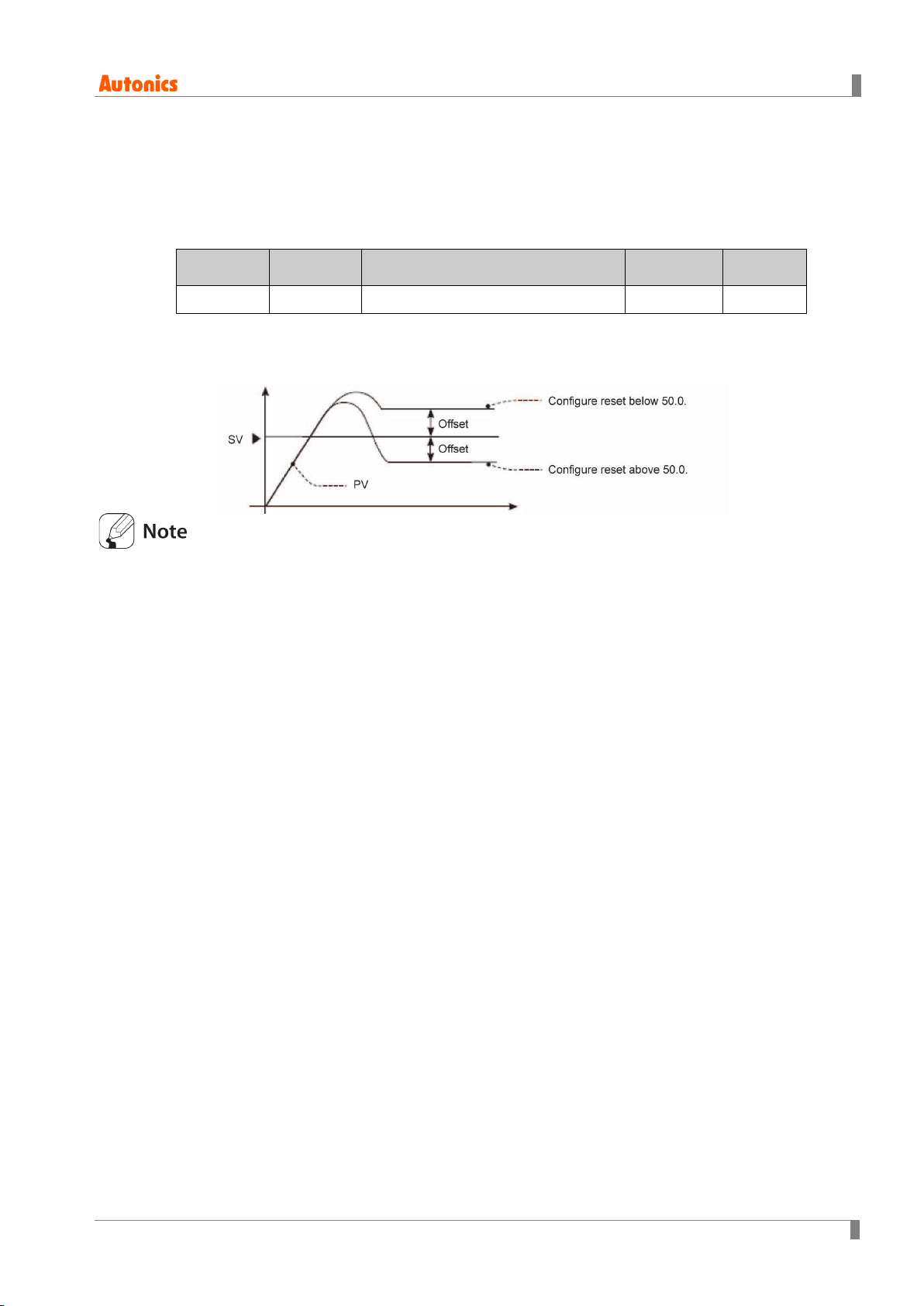
6 Parameter Settings and Functions
Setting
group
Factory
default
6.3.3.5 Offset correction/Manual reset settings [PAR2 → REST]
When selecting P / PD control mode, there are certain temperature differences even after PV
reaches stable status since heater’s rising and falling time is inconsistent due to thermal
characteristics of control objects, such as heat capacity and the heater capacity. This
temperature difference is called OFFSET. Offset can be corrected using manual reset.
Parameter Setting range
PAR2 REST 0)0 to 10)0 5)0 %
(1) Manual Reset Adjustments based on Control Results
Under stable control conditions, set the offset to 50% if PV and SV are identical, to over
50.0% if PV is lower than SV, and to below 50.0% if PV is higher than SV.
The offset correction feature can only be used when proportional control is in effect. If setting the
integral value to 0, the manual reset parameter will be displayed.
The user cannot configure the manual reset setting during heating & cooling control. Instead, the
setting is automatically set to 0% for both heating & cooling.
Applicable only when integral time is set to 0 under P control or PD control only.
Switching from heating & cooling control to standard control (P, PD control) automatically
configures the reset setting to 50%.
Unit
6.3.4 Auto-tuning
Auto tuning measures the control subject's thermal characteristics and thermal response rate,
and then determines the necessary PID time constant. (When control type [C-MD] is set as PID,
it is displayed.)
If error [OPEN] occurs during auto tuning, it stops this operation automatically.
To stop auto tuning, change the set as OFF. (It maintains P, I, D values of before auto tuning.)
6.3.4.1 Auto-tuning start/stop setting [PAR2 → AT]
Auto-tuning automatically stores PID time constants upon termination. These PID time
constants can then be modified by the user to suit their usage environment.
When auto-tuning is in progress, the AT indicator located on the front of the controller
flashes in 1 sec. intervals. When auto-tuning finishes, the AT indicator automatically goes off
and the auto-tuning parameter will return to OFF.
When auto-tuning is in progress and digital input key [DI-K] is STOP(switching
RUN/STOP) or AT(auto-tuning RUN/STOP) is set, and digital input terminal function [DI-1,
DI-2] is STOP (switching RUN/STOP) or MAN(AUTO/MANUAL control selection), autotuning will be automatically ended, if concerned DI is inputted or a sensor disconnection
error occurs. (Restored the PID used prior to the auto-tuning session)
© Copyright Reserved Autonics Co., Ltd. 77
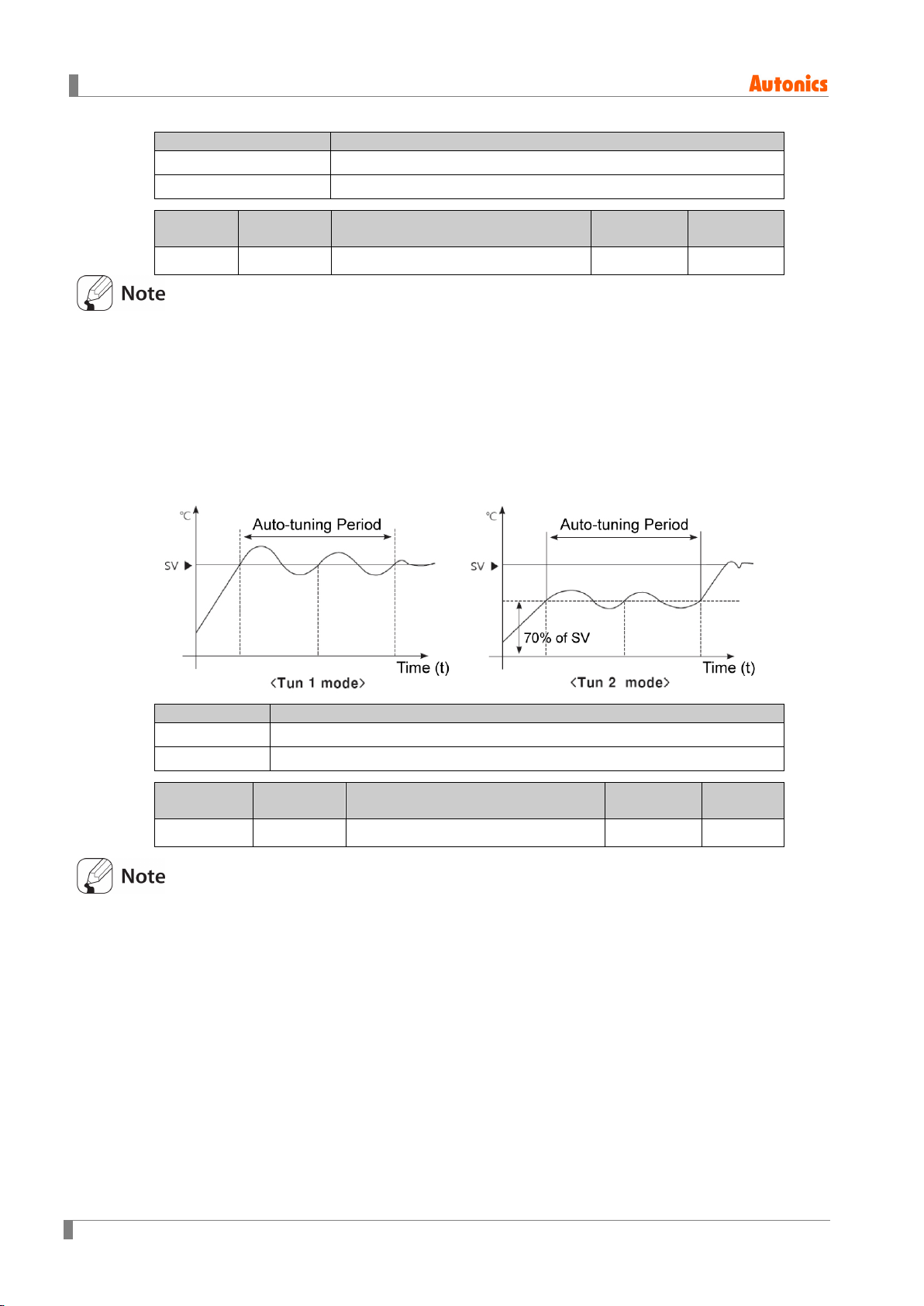
6 Parameter Settings and Functions
Setting
Description
Setting
group
Factory
default
Setting
Description
Setting
group
Factory
default
OFF
ON
Auto-tuning complete.
Auto-tuning in progress.
Parameter Setting range
PAR2 AT OFF/ON OFF -
Auto-tuning continues to run even if the temperature reading exceeds or falls below the input
range.
When auto-turning is in progress, parameters can only be referenced and not altered.
Auto-tuning is not available in manual control.
6.3.4.2 Auto-tuning mode settings [PAR3 → AtT]
Auto-tuning is available in [TUN1] mode (based on SV) or [TUN2] mode (based on 70% of SV),
depending on the baseline value used.
Unit
TUN1
Auto-tunes and derives a PID time constant based on set value(SV).
TUN2 Auto-tunes and derives a PID time constant based on 70% of set value(SV).
Parameter Setting range
Unit
PAR3 AtT TUN1 / TUN2 TUN1 -
In cooling control mode, [TUN2] mode calculates 70% based at 0.
When SV=-100, [TUN2] is performed at -70.
78 © Copyright Reserved Autonics Co., Ltd.
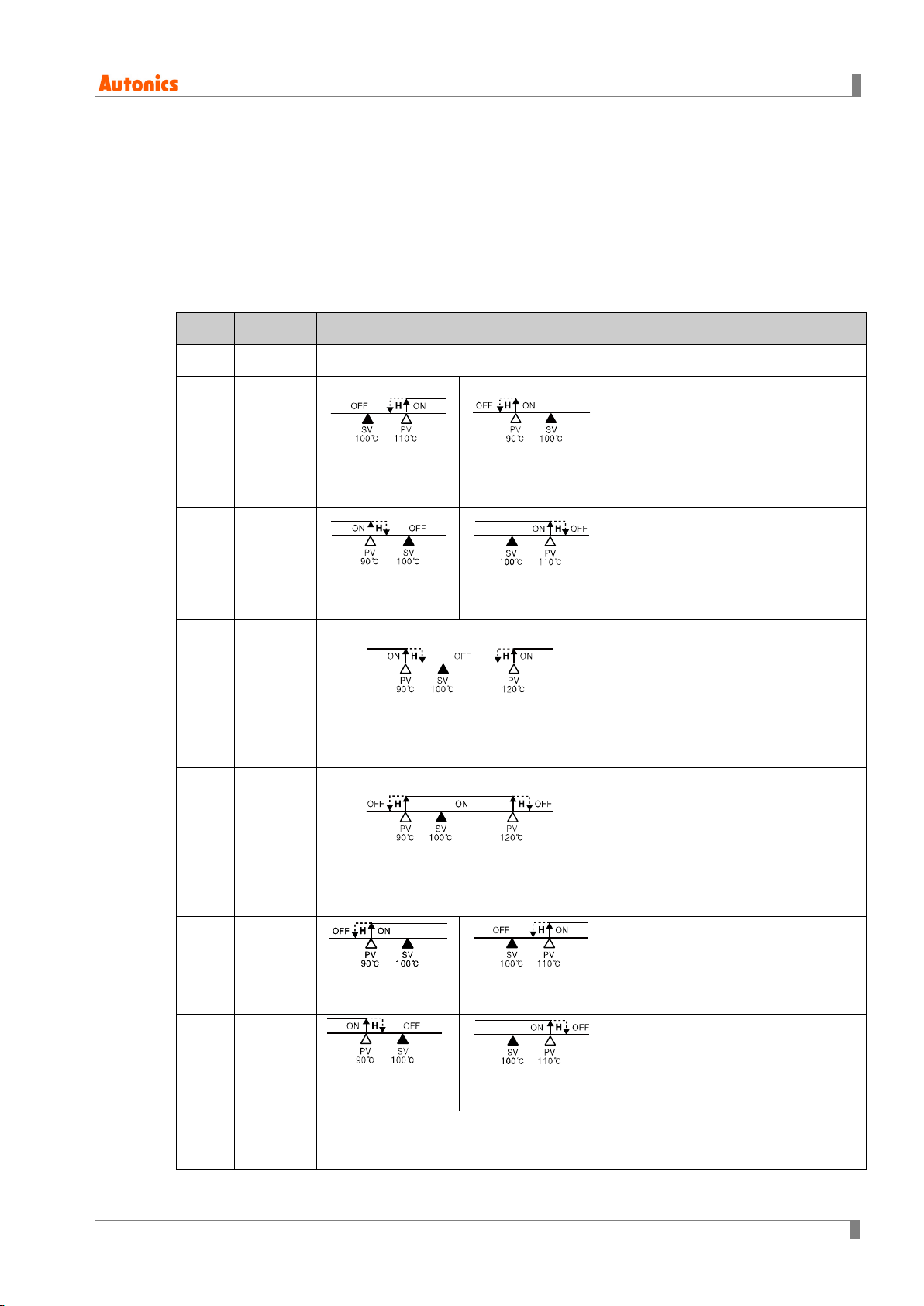
6 Parameter Settings and Functions
6.4 Alarm output
There are three alarms which operate individually. You can set combined qoralarm operation and
alarm option. Use digital input setting as [AlRE] or turn OFF power and re-start this unit to
release alarm operation.
6.4.1 Alarm operation [PAR4 → AL-1/AL-2/AL-3]
Select the desired alarm operation.
Mode Name Alarm operation Description (factory default)
OFF
DVCC
]]DV
]DV[
CDU]
-
Deviation
high-limit
alarm
Deviation
low-limit
alarm
Deviation
high/low-
limit
alarm
Deviation
high/low-
limit
reverse
alarm
-
High deviation:
Set as 10℃
Lower deviation: Set
as 10℃
Lower deviation: Set as 10℃,
High deviation: Set as 20℃
Lower deviation: Set as 10℃,
High deviation: Set as 20℃
High deviation:
Set as -10℃
Lower deviation: Set
as -10℃
No alarm output
If deviation between PV and SV as
high limit is higher than set value of
deviation
temperature, the alarm output will be
ON.
High-limit deviation temperature can
be set in AL!H/AL@H/AL#H.
If deviation between PV and SV as
low limit is higher than set value of
deviation temperature, the alarm
output will be ON.
Low limit can be set in AL!L/AL@L/
AL#H.
If deviation between PV and SV as
high/low limit is higher than set value
of deviation temperature, the alarm
output will be ON.
High-limit Deviation Temperature can
be set in AL!H/AL@H/AL#H.
Low limit can be set in AL!L/AL@L/
AL#H.
If deviation between PV and SV as
high/low-limit is higher than set value
of deviation temperature, the alarm
output will be OFF.
High-limit deviation can be set in
AL!H/AL@H/AL#H.
Low limit deviation can be set in
AL!L/AL@L/AL#H.
Absolute
PVCC
value
high limit
alarm
Alarm absolute value:
Set as 90℃
Alarm absolute value:
Set as 110℃
Absolute
]]PV
value low
limit
alarm
Alarm absolute value:
Set as 90℃
Alarm absolute value:
Set as 110℃
Loop
LBA
break
-
alarm
© Copyright Reserved Autonics Co., Ltd. 79
If PV is higher than the absolute
value, the output will be ON.
Alarm's absolute value can be set in
AL!H/AL@H/AL#H.
If PV is lower than the absolute value,
the output will be ON.
Alarm's absolute value can be set in
AL!L/AL@L/AL#H.
It will be ON when it detects loop
break.

6 Parameter Settings and Functions
Parameter
Description
Setting
group
Factory
default
Mode Name Alarm operation Description (factory default)
Sensor
SBA
break
alarm
Heater
HBA
break
alarm
-
-
It will be ON when it detects sensor
disconnection.
It will be ON when CT detects heater
break.
※H: Alarm output □ hysteresis [A□.HY]
AL-1
AL-2 Selects alarm output 2 operation mode.
AL-3
Parameter Setting range
AL-1
PAR4
AL-3 OFF
Selects alarm output 1 operation mode.
Selects alarm output 3 operation mode.
OFF / DV[[/ ]]DV / ]DVC / [DV] /
PVCC / ]]PV / SBA / LBA / HBA
Unit
DVCC
- AL-2 ]]DV
80 © Copyright Reserved Autonics Co., Ltd.
6 Parameter Settings and Functions
Setting
Mode
Description
Parameter
Description
Setting
group
Factory
default
6.4.2 Alarm output options [PAR4 → AL!T/AL@T]
Users can select the desired alarm output options.
AL-A
AL-B
Standard Alarm
Alarm latch
※
If it is an alarm condition, alarm output is ON. If it is a clear
alarm condition, alarm output is OFF.
If it is an alarm condition, alarm output is ON and maintains
1
ON status.
First alarm condition is ignored and from second alarm
condition, standard alarm operates.
When power is supplied and it is an alarm condition, this first
alarm condition is ignored and from the second alarm
AL-C
Standby
sequence1
2
※
condition, standard alarm operates.
If it is an alarm condition, it operates both alarm latch and
standby sequence. When power is supplied and it is an alarm
condition, this first alarm condition is ignored and from the
second alarm condition, alarm latch operates.
AL-D
Alarm latch and
standby
sequence1
First alarm condition is ignored and from second alarm
condition, standard alarm operates.
When re-applied standby sequence and if it is alarm condition,
alarm output does not turn ON.
AL-E
Standby
sequence2
After clearing alarm condition, standard alarm operates.
Basic operation is same as alarm latch and standby
sequence1. It operates not only by power ON/OFF,
but also alarm set value, or alarm option changing. When reapplied standby sequence and if it is alarm condition, alarm
output does not turn ON.
AL-F
Alarm latch and
standby
sequence2
After clearing alarm condition, alarm latch operates.
Condition of re-applied standby sequence for standby sequence 1, alarm latch and standby
sequence 1: Power ON
Condition of re-applied standby sequence for standby sequence 2, alarm latch and standby
sequence 2: Power ON, changing set temperature, alarm temperature[AL1, AL2, AL3] or
alarm operation[AL-1, AL-2, AL-3], switching STOP mode to RUN mode.
AL!T
Selects the operation mode of alarm output 1.
AL@T Selects the operation mode of alarm output 2.
AL#T
Parameter Setting range
Selects the operation mode of alarm output 3.
Unit
AL!T
PAR4
AL-A / AL-B / AL-C / AL-D / AL-E /
AL-F
AL-A - AL@T
AL#T
If alarm operation is set as loop break alarm [LBA], sensor break alarm [SBA], or heater break
alarm[HBA], only standard alarm [AL-A] and alarm latch [AL-C] of alarm option are displayed.
© Copyright Reserved Autonics Co., Ltd. 81

6 Parameter Settings and Functions
Parameter
Description
Setting
group
Factory
default
Parameter
Description
Setting
group
Factory
default
6.4.3 Alarm SV settings [PAR1 → AL!L/AL!H/AL@L/AL@H/AL#L/AL#H]
You can set alarm output activation values. According to the selected alarm operation,
configuration parameters [AL□.H/AL□.L] will be activated for each setting.
AL!L
Low limit value of alarm output 1. Reference value for determining
heater burnout.
AL!H High-limit value of alarm output 1.
AL@L
Low limit value of alarm output 2. Reference value for determining
heater burnout.
AL@H High-limit value of alarm output 2.
AL#L
AL#H
Parameter Setting range
AL!H
AL@H
AL#H
PAR1
AL!L
AL@L
Low limit value of alarm output 3. Reference value for determining
heater burnout.
High-limit value of alarm output 3.
Unit
(temperature) High/Low-limit
deviation: By individual input
specification -F. S . to F. S .
(temperature) Alarm absolute value:
By individual input specification within
displayed range.
(analog) High/Low-limit deviation:
~999 to 9999 Within -F. S . to F. S .
Temperature
:1550
Analog
:10)0
-
(analog) Alarm absolute value: By
individual input specification within
AL#L
displayed range.
Changing the alarm operation or options resets the settings to the highest or lowest values that
will not trigger output in the new mode.
6.4.4 Alarm output hysteresis [PAR4 → A!HY/A@HY/A#HY]
“6.4.1 Alarm operation [PAR4 → AL-1/AL-2/AL-3]. “H” from alarm operation represents the
alarm output hysteresis. It is used to set an interval between alarm outputs ON/OFF periods.
Hysteresis can be set for individual alarm outputs (Alarm 1 Hysteresis/Alarm2 Hysteresis).
A!HY
A@HY
A#HY
Parameter Setting range
A!HY
PAR4
A@HY
A#HY
Sets the ON/OFF interval for alarm output 1.
Sets the ON/OFF interval for alarm output 2.
Sets the ON/OFF interval for alarm output 3.
Temperature H, Analog: 001 to 100
Temperature L: 00)1 to 10)0
001
Unit
Temperature:
℃/℉,
Analog: Digit
82 © Copyright Reserved Autonics Co., Ltd.

6 Parameter Settings and Functions
Parameter
Description
Setting
group
Factory
default
Change
Alarm trigger
Alarm output
Front LED
Alarm output hysteresis applies to heater burnout alarm [HBA] in the same manner.
This parameter does not appear if Loop Break Alarm [LBA] or Sensor Break Alarm [SBA] is
selected.
6.4.5 Alarm N.O./N.C. [PAR4 → A!N/A@N/A#N]
You can set the relay contact method in the event of an alarm output.
Setting Description
NO
NC
Normally open
Stays open when normal and closes in the event of an alarm.
Normally closed
Stays closed when normal and opens in the event of an alarm.
A!N Select contact type for alarm output 1.
A@N
Select contact type for alarm output 2.
A#N Select contact type for alarm output 3.
Parameter Setting range
Unit
A!N
PAR4
NO / NC NO - A@M
A#M
Front LED Indicators
NO
(normally open)
NC
(normally closed)
OFF Open
ON Close ■ ON
OFF Close
ON Open ■ ON
□ OFF
□ OFF
© Copyright Reserved Autonics Co., Ltd. 83

6 Parameter Settings and Functions
Parameter
Description
Setting
group
Factory
default
6.4.6 Alarm output delay settings [PAR4 → A!ON / A!OF/ A@ON / A@OF/
A#ON / A#OF]
Alarm output delay can be set to prevent false alarms caused by erroneous input signals
resulting from disturbances or noise.
With a preset delay time, alarm output does not turn on for the preset duration. Instead, the
concerned alarm indicator on the front will flash in 0.5 sec. intervals.
Alarm output 1 on delay: Stands by for the preset duration upon an alarm event,
A!ON
A!OF
A@ON
A@OF
A#ON
A#OF
checks the alarm trigger conditions, and turns on the alarm output if the
conditions are still present.
Alarm output 1 off delay: Stands by for the preset duration following alarm output
off, checks the alarm trigger conditions, and turns off the alarm output if the
deactivation conditions are still present.
Alarm output 2 on delay: Stands by for the preset duration upon an alarm event,
checks the alarm trigger conditions, and turns on the alarm output if the
conditions are still present.
Alarm output 2 off delay: Stands by for the preset duration following alarm output
off, checks the alarm trigger conditions, and turns off the alarm output if the
deactivation conditions are still present.
Alarm output 3 on delay: Stands by for the preset duration upon an alarm event,
checks the alarm trigger conditions, and turns on the alarm output if the
conditions are still present.
Alarm output 3 off delay: Stands by for the preset duration following alarm output
off, checks the alarm trigger conditions, and turns off the alarm output if the
deactivation conditions are still present.
Parameter Setting range
A!ON
A!OF
Unit
84 © Copyright Reserved Autonics Co., Ltd.
PAR4
A@ON
0000 to 3600 0000 Sec.
A@OF
A@ON
A@OF

6 Parameter Settings and Functions
LB A
time
Alarm output
Initializing Alarm, changing control
monitoring time/band as 0
Changing input correction value, set
value
Maintains the
present alarm
Maintains the
present alarm
Changing MV, stopping control, running
auto-tuning
Maintains the
present alarm
Occurring sensor break alarm, HHHH,
LLLL
6.4.7 Loop break alarm(LBA) [PAR4 → AL-1/AL-2/AL-3 → LBA]
Diagnoses the control loop by monitoring the control subject's temperature changes and sends
out alarms if necessary.
Heating control: When control output MV is 100% or high limit [H-MV] and PV is not
increased over than LBA detection band [LBaB] during LBA monitoring time [LBaT], or
when control output MV is 0% or low limit [L-MV] and PV is not decreased below than LBA
detection band [LBaB] during LBA monitoring time [LBaT], alarm output turns ON.
Cooling control: When control output MV is 0% or low limit [L-MV] and PV is not increased
over than LBA detection band [LBaB] during LBA monitoring time [LBaT], or when control
output MV is 100% or high limit [H-MV] and PV is not decreased below than LBA detection
band [LBaB] during LBA monitoring time [LBaT], alarm output turns ON.
Common causes of LBA output ON
Sensor error (disconnection, short)
External controller error (magnet, auxiliary relay, etc.)
External load error (heater, cooler, etc.)
Misconnections and disconnections of external network.
If it is not as sensor break/HHHH/LLLL, during auto-tuning/manual control/control STOP/ramp
function operation, loop break alarm does not operate.
Type
output operation mode, setting LBA
monitoring
Initialize
Standard alarm Alarm latch
OFF OFF
OFF
ON ON
Set alarm operation[AL-□] as loop break alarm [LBA] and you can use loop break alarm.
When executing auto-tuning, LBA detection band [LBaB] and LBA monitoring time[LBaT] is
automatically set based on auto-tuning value.
In case of AT (auto-tuning)/manual control/stop control, loop break alarm [LBA] does not
operates. When alarm reset is input, it initializes LBA monitoring start time.
© Copyright Reserved Autonics Co., Ltd. 85

6 Parameter Settings and Functions
Setting
group
Factory
default
Setting
group
Factory
default
6.4.7.1 LBA monitoring time [PAR4 → LBaT]
You can set the LBA monitoring time to check changes in the control subject's temperature.
Automatically setting with auto-tunning.
Regardless of alarm operation [AL-□] (including LBA monitoring time as “0”), after running
auto-tuning, the integration time×2 value is saved automatically.
(If SV is out of the range of auto setting, it is set as max. or min. value of auto setting.)
Except input type changing, re-running auto-tuning, manual setting of LBA monitoring time,
it maintains the present SV.
Auto setting range: 0020 to 9999
Parameter Setting range
PAR4 LBaT 0000 to 9999 0000 Sec
6.4.7.2 LBA detection band [PAR4 → LBaB]
You can set the minimum value of deviation change to decrease during LBA monitoring time.
Automatically setting with auto-tunning.
Except input type changing, re-running auto-tuning, manual setting of LBA monitoring time,
it maintains the present SV.
Regardless of alarm operation [AL-□] (including LBA monitoring time as “0”), after running
auto-tuning, the integration time×2 value is saved automatically.
(If SV is out of the range of auto setting, it is set as max. or min. value of auto setting.)
Auto setting range
Temperature L: 00@0 to 10)0(unit: ℃/℉)
Temperature H: 0002 to 01)0(unit: ℃/℉)
Analog: 00)2 to 01)0(unit: %F.S.)
Parameter Setting range
Temperature H 000 to 999 002
PAR4 LBaB
Temperature L 00)0 to 99(9
00@0
Unit
Unit
℃/℉
℃/℉
Analog 0)00 to 10)0
00)2 %F. S.
86 © Copyright Reserved Autonics Co., Ltd.

6 Parameter Settings and Functions
It checks control loop and outputs alarm by temperature change of the subject.
For heating control(cooling control), when control output MV is 100%(0% for cooling control) and
PV is not increased over than LBA detection band [LBaB] during LBA monitoring time [LBaT], or
when control output MV is 0%(100% for cooling control) and PV is not decreased below than
LBA detection band [LBaB] during LBA monitoring time [LBaT], alarm output turns ON.
Start to ①
① to ②
② to ③
③ to ④
④ to ⑥
⑥ to ⑦
⑦ to ⑧
⑧ to ⑨
When control output MV is 100%, PV is increased over than LBA detection band
[LBaB] during LBA monitoring time [LBaT].
The status of changing control output MV (LBA monitoring time is reset.)
When control output MV is 0% and PV is not decreased below than LBA detection
band [LBaB] during LBA monitoring time [LBaT], loop break alarm (LBA) turns ON
after LBA monitoring time [LBaT].
Control output MV is 0% and loop break alarm (LBA) turns and maintains ON.
The status of changing control output MV (LBA monitoring time is reset.)
When control output MV is 100% and PV is not increased over than LBA detection
band [LBaB] during LBA monitoring time [LBaT], loop break alarm (LBA) turns ON
after LBA monitoring time [LBaT].
When control output MV is 100% and PV is increased over than LBA detection
band [LBaB] during LBA monitoring time [LBaT], loop break alarm (LBA) turns OFF
after LBA monitoring time [LBaT].
The status of changing control output MV (LBA monitoring time is reset.)
6.4.8 Sensor break alarm [PAR4 → AL-1/AL-2/AL-3 → SBA]
You can set the controller to send out an alarm when a sensor is not connected or disconnected
during temperature control.
Sensor break can be confirmed through an external alarm output contact, such as a buzzer or
similar means.
Setting alarm operation [AL-□] to SBA will activate Sensor Break Alarm.
Alarm output option can be set to standard alarm [AL-A] or alarm latch [AL-B].
© Copyright Reserved Autonics Co., Ltd. 87

6 Parameter Settings and Functions
Setting
group
Factory
default
6.4.9 Heater burnout alarm [PAR4 → AL-1/AL-2/AL-3 → HBA]
When using a heater to raise the temperature of the control subject, the temperature
controller can be set to detect heater disconnection and send out an alarm by monitoring
power supply to the heater.
Heater disconnection is detected by the controller using a current transformer (CT), which
converts the current to the heater to a specific ratio (CT ratio) for monitoring. If the heater
current value [CT-A] measured by the CT is less than the heater detection set value
[AL□.L], the heater burnout alarm will activate.
Heater burnout detection only takes place when the temperature controller's output is
turned on. Otherwise, heater burnout will not be detected by the controller.
Detection is only available in models with switching output (Relay output, SSR drive output).
Models with linear output (current, SSR drive cycle/phase output) are incapable of detection.
Current detection is not performed if OUT1's control output time is less than 250ms.
It is recommended to use Autonics designated current transformer (for 50A).
Alarm output option can be set to standard alarm [AL-A] or alarm latch [AL-B].
In the case of TK4SP models, heater burnout alarm [HBA] mode is not available.
6.4.9.1 Heater burnout detection settings [PAR1 → AL!L/ AL@L/ AL#L]
Set the alarm output value [AL□.L] as the reference value for heater burnout detection.
Parameter Setting range
AL!L
PAR1
AL#L
0)0 to 5)0 0)0 A AL@L
Unit
Set to 0)0 for OFF. Set to 5)0 for ON.
Setting Value Calculation
: Heater Burnout Setting Value = {(Normal Heater Current) + (Heater Burnout Current)}/2
88 © Copyright Reserved Autonics Co., Ltd.

6 Parameter Settings and Functions
If using a single output heater (Capacity: 200VAC, 1KW, 5A), normal heater current is 5A, and
burnout heater current is 0A, the set value is calculated as (5A + 0A)/2 = 2.5A. Therefore, heater
current values less than 2.5A will be deemed heater burnout and the alarm will activate.
When two output heaters (Capacity: 200VAC, 1KW, 5A) are used, normal heater current is 10A
(5A ×2). If a single heater burns out, the heater current becomes 5A. The set value is calculated
as (10A + 5A)/2 = 7.5A). Heater current values of less than 7.5A are deemed heater burnout and
the alarm activates.
6.4.10 Alarm output deactivation [PAR5 → DI-K→ AlRE]
Available only if alarm output option is set to alarm latch or alarm latch and standby sequence1,
alarm latch and standby sequence2. It can be set to turn OFF alarm output when alarm output is
ON, alarm output conditions have been removed, or an alarm output deactivation signal that is
greater than the minimal signal band is received. (However, alarm output deactivation is
unavailable when alarm conditions remain in effect.)
You can assign the front panel's digital input key or the digital input terminals (DI-1, DI-2) for the
alarm output deactivation feature.(regardless of parameter mask)
(1) Deactivating alarm output using digital input key
If the digital input key has been assigned for alarm output deactivation and the alarm output
option is set to alarm latch or alarm latch and standby sequence, press and hold the front
panel's keys when alarm output is on.
For detailed information on digital input key settings, see 6.7.4.2 Digital input key.
(2) Deactivation of alarm output using digital input (DI) terminal
When the digital input (DI) terminal is assigned to alarm (output) OFF, the alarm output will
deactivate when digital input (DI) terminal goes into the on state (close). (the MAN indicator
turns ON).
For detailed information on digital Input (DI) key configuration, see ‘6.7.4.2 Digital input key’.
For detailed information on digital Input (DI) terminal configuration, see ‘6.7.4.1
terminal settings [
After deactivating the alarm output, it will function normally for the next alarm output
occurrence.
PAR5 → DI-1/DI-2]’.
Digital input
© Copyright Reserved Autonics Co., Ltd. 89
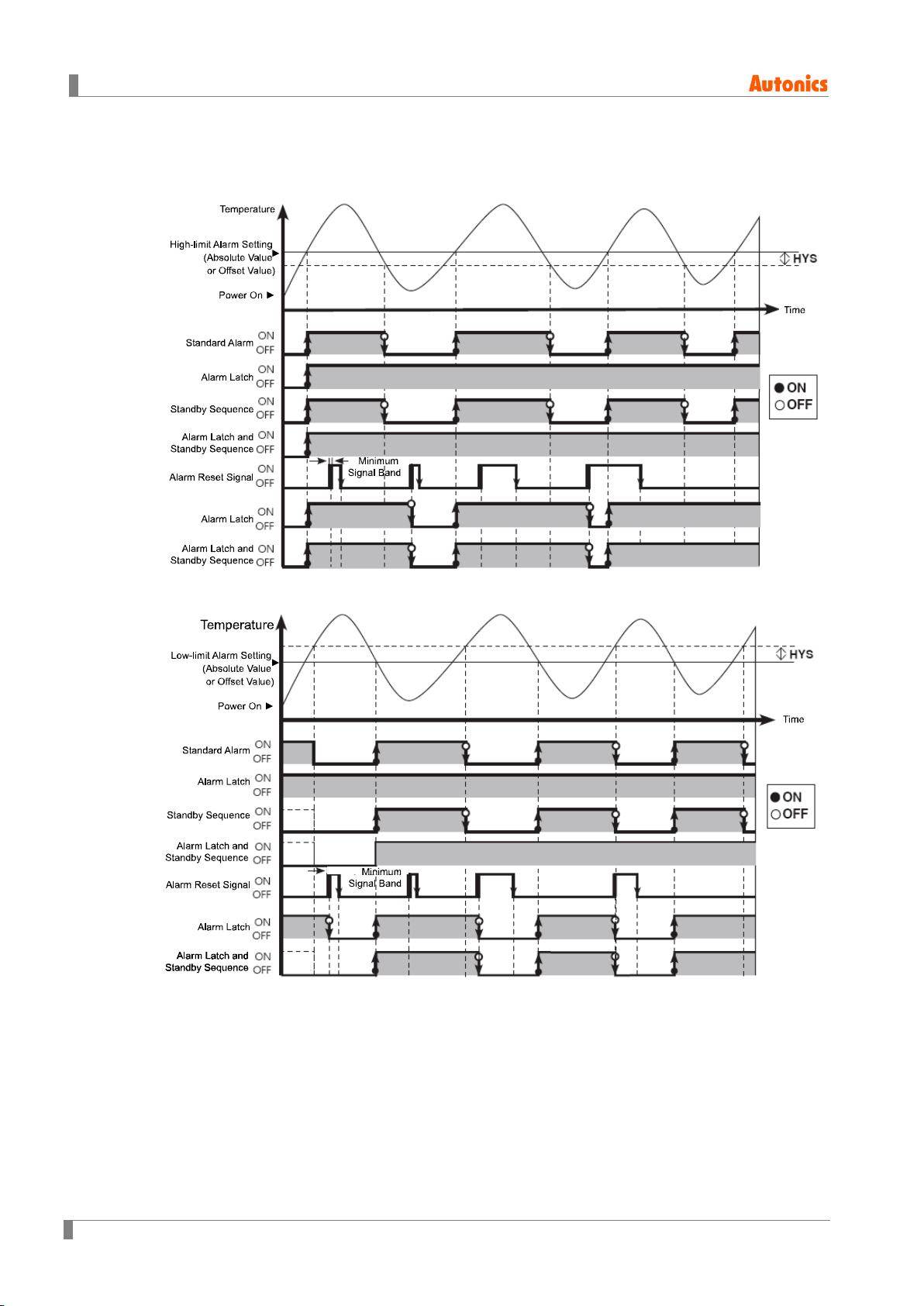
6 Parameter Settings and Functions
6.4.11 Alarm output examples
6.4.11.1 Absolute value high-limit alarm and deviation high-limit alarm
6.4.11.2 Absolute value low-limit alarm and deviation low-limit alarm
90 © Copyright Reserved Autonics Co., Ltd.
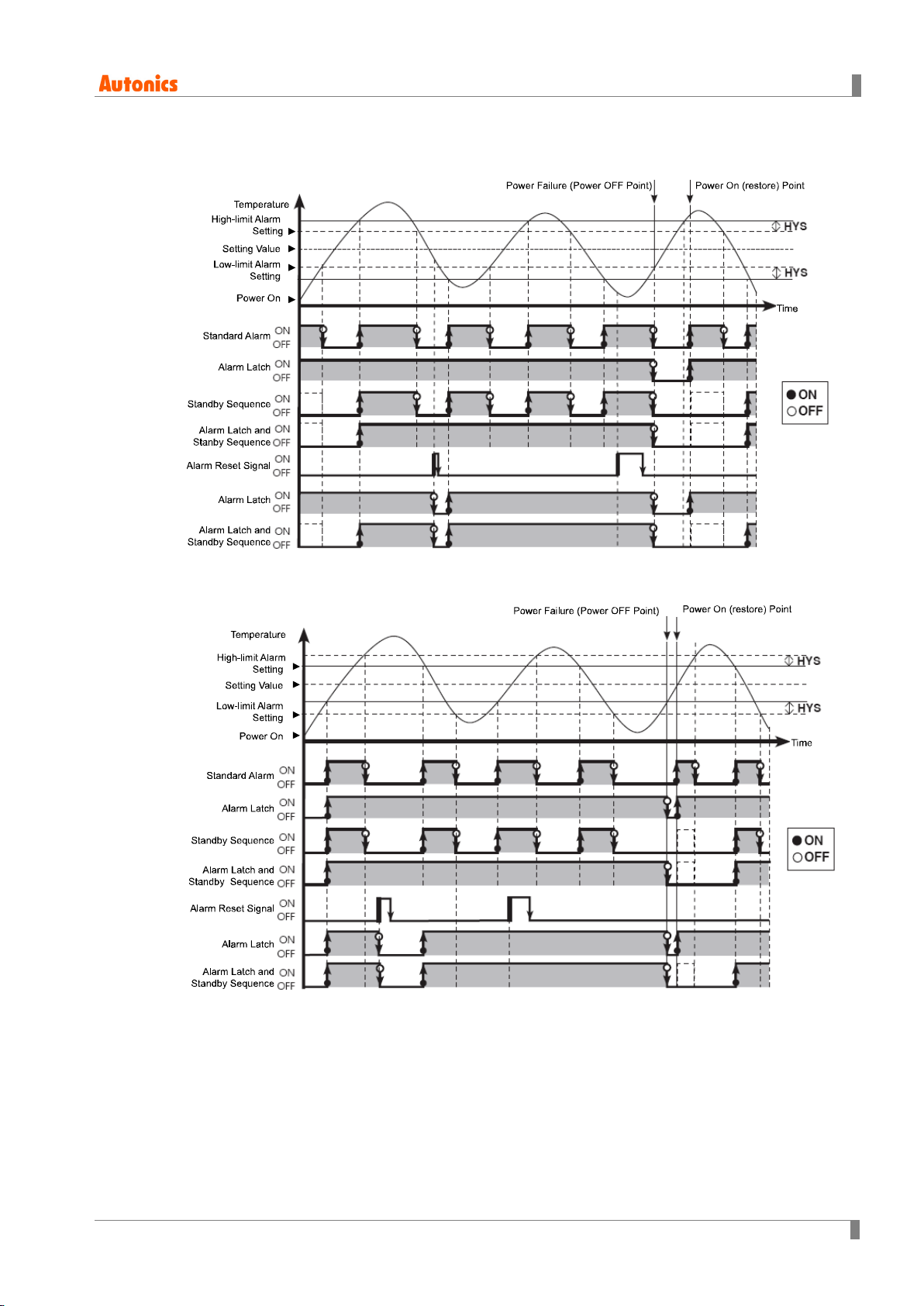
6 Parameter Settings and Functions
6.4.11.3 Deviation high/low-limit alarm
6.4.11.4 Deviation high/low-limit reverse alarm
© Copyright Reserved Autonics Co., Ltd. 91

6 Parameter Settings and Functions
6.4.11.5 Deviation high/low-limit alarm (hysteresis overlap)
92 © Copyright Reserved Autonics Co., Ltd.
6 Parameter Settings and Functions
Setting
Description
Setting
group
Factory
default
AoM1
AoM2
Setting
Description
FsL1
FsL2
FsH1
FsH2
Setting
group
Factory
default
6.5 Analog transmission
6.5.1 Analog transmission output value settings [PAR4 → AoM1/ AoM2]
Transmission output is a type of auxiliary output that converts the controller's present value, set
value, heating MV, cooling MV to analog current (DC 4 to 20mA) for external transmission.
PV
SV SV transmission output
H-MV
C-MV Cooling MV transmission output
PV transmission output
Heating MV transmission output
Parameter Setting range
PAR4
PV / SV / H-MV / C-MV PV -
When using standard control mode of OUT2 current output model , OUT2 current output is
available as transmission output 2. For transmission output model, [AoM1] is activated. For
standard control mode of OUT2 current output model, [AoM2] is activated.
This parameter is activated in transmission output models only. Transmission output is constant
current output. Too great a resistance from the load can cause the output value to change.There
is no optional output below 4mA or above 20mA.
6.5.2 Transmission output high/low-limit value settings
[PAR4 → FsL1/ FsH1→ FsL2/ FsH2]
If the transmission output value [AoM□] is below the transmission output low-limit [FsL□], 4mA
Unit
output will be provided. If the transmission output is between the low-limit [FsL□] and high-limit
[FsH□], a certain proportional output within the range 4mA and 20mA will be provided. If it is
above the high-limit [FsH□], 20mA output will be provided.
Sets the low-limit of transmission output (4mA).
Sets the high-limit of transmission output (20mA).
PAR4
Parameter Setting range
PV
FsL1
FsL2
FsH1
FsH2
SV
H-MV /C-MV
PV
SV
H-MV / C-MV 00)0 to 10)0
Temperature: usage range
Analog: high/low scale range
SV low-limit value [L-SV] to
SV high-limit value [H-SV]
00)0 to 10)0
Temperature: usage range
Analog: high/low scale range
SV low-limit value [L-SV] to
SV high-limit value [H-SV]
-200
1350
Unit
digit
© Copyright Reserved Autonics Co., Ltd. 93
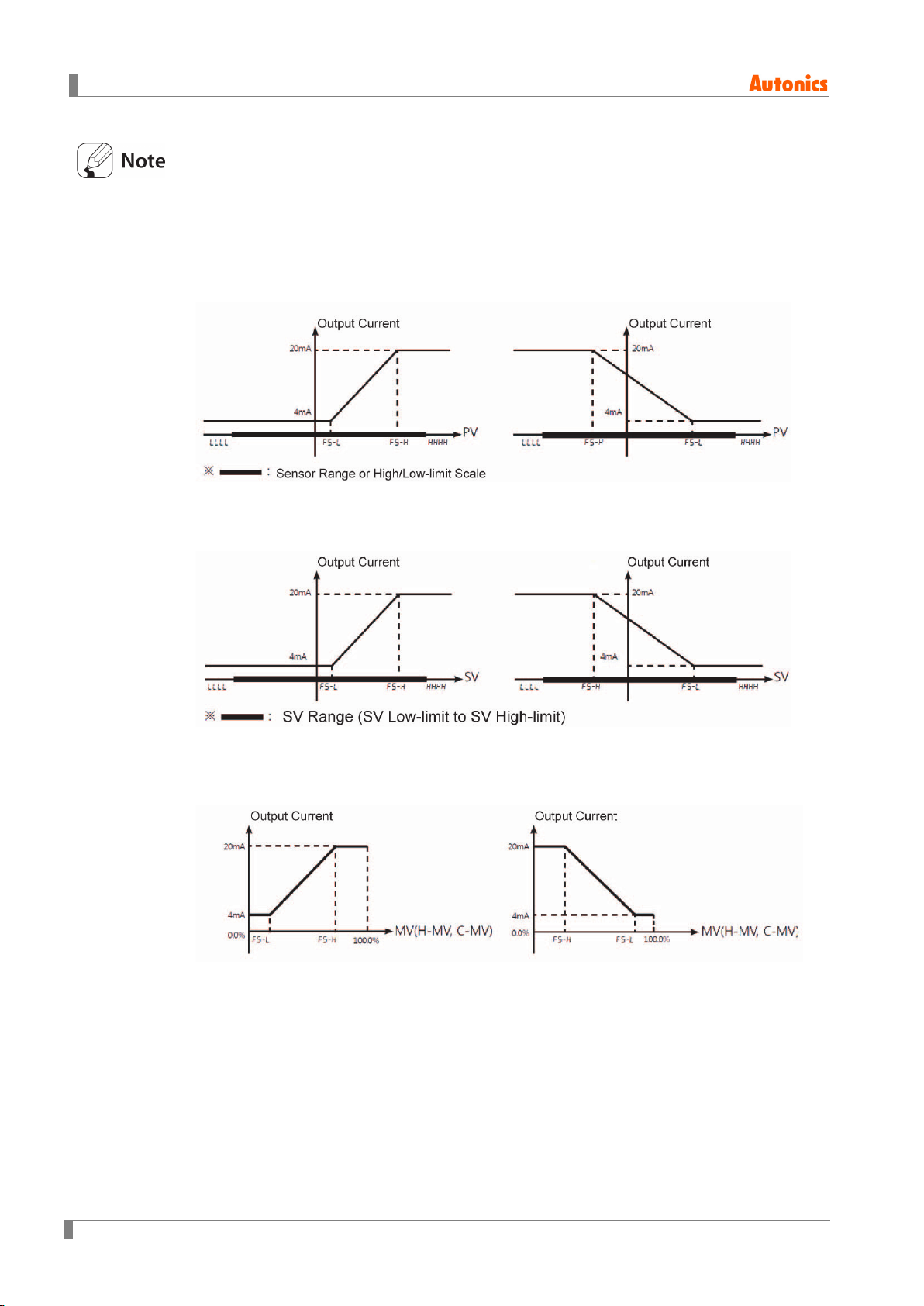
6 Parameter Settings and Functions
If transmission output high-limit [FsH□] is transmission output low-limit [FsL□], the
transmission output is 4 mA.
(1) Present value (PV) transmission output
PV within sensor range or upper/low-limit scale can be converted and transmitted as current
within the range of 4 to 20 mA.
(2) Set value (SV) transmission output
SV within sensor range or upper/low-limit scale can be converted and transmitted as current
within the range of 4 to 20 mA. When ramp is in effect, ramp SV is transmitted step by step.
(3) Heating MV/Cooling MV transmission output
You can convert 0 to 100% of heating [H-MV]/cooling MV [C-MV] into 4 to 20 mA current.
94 © Copyright Reserved Autonics Co., Ltd.
6 Parameter Settings and Functions
Category
Description
Setting
group
Factory
default
Setting
group
Factory
default
6.6 Communication settings
This feature is used for external higher systems (PC, GP, etc.) to set the controller's parameters
and to monitor the controller. It can also be used to transmit data to external devices.
No redundant unit addresses may exist along the same communication line. The communication
cable must be a twist pair that supports RS485.
Interface
Standards EIA RS485-compliant
Max. Connections 31 units (Addresses: 01 through 99)
Communication Two-wire, half duplex
Synchronization Asynchronous
Valid Communication
Distance
BPS (bits per second) 2400, 4800, 9600, 19200, 38400 bps
Response Standby 5 ms to 99 ms
Communication Start Bit 1 bit (fixed)
Data Bit 8 bit (fixed)
Communication Parity Bit None, Even, Odd
Communication Stop Bit 1, 2 bit
Protocol Modbus Remote Terminal Unit (Character = 11 bit as fixed)
Max. 800 m
You could modify the parameter (first in, first out) using keys during communication connection,
but this may lead to errors and malfunctions.
6.6.1 Unit address settings [PAR4 → ADRS]
You can assign individual addresses to data units.
Parameter Setting range
PAR4 ADRS 01 to 99
6.6.2 BPS (bits per second) settings [PAR4 → BPS]
You can set the rate of data transmission.
Parameter Setting range
PAR4
BPS
24(2400 bps) / 48(4800 bps) / 96(9600
bps) / 192(19200 bps) / 384(38400 bps)
Unit
01 -
Unit
96 bps
© Copyright Reserved Autonics Co., Ltd. 95

6 Parameter Settings and Functions
Setting
Description
Setting
group
Factory
default
Setting
Description
Setting
group
Factory
default
Setting
group
Factory
default
6.6.3 Communication parity bit [PAR4 → PRTY]
Parity bit is a data communication method that adds an additional bit to each character in
transmitted data as an indicator used to verify data loss and corruption. This parameter is used
to enable or disable the parity bit option.
NONE Disables parity bit.
EVEN
ODD Sets the total bits with signal value of 1 as odd numbers.
Sets the total bits with signal value of 1 as even numbers.
Parameter Setting range
PAR4
PRTY
NONE / EVEN / ODD
6.6.4 Communication stop bit settings [PAR4 → STP]
You can set the number of bits to mark the end of a transmitted data string.
1
2 Sets end of data string to 2 bits.
Sets end of data string to 1 bit.
Parameter Setting range
PAR4
STP
1 / 2
6.6.5 Response wait time settings [PAR4→ RSwT]
Set a standby time to mitigate communication errors when communicating with a slow master
device (PC, PLC, etc.). Once a standby time is set, the controller will respond after the defined
standby time.
Parameter Setting range
Unit
NONE -
Unit
2 bit
Unit
PAR4
RSwT
05 to 99
20 ms
Shorter standby times can cause communication errors in the master device.
96 © Copyright Reserved Autonics Co., Ltd.

6 Parameter Settings and Functions
Setting
Description
Setting
group
Factory
default
6.6.6 Enable/Disable communication write[PAR4→ COMW]
This feature can change parameter settings stored in memory through communication with PC,
GP, PLC, etc., in order to permit or prohibit writing.
EnA Parameter set/change enable via communication.
DIsA
Prohibit parameter setting or modification via communication.
Parameter Setting range
PAR4
COMW
EnA / DIsA
Reading parameter settings is available even though prohinit parameter setting.
6.6.7 USB to Serial communication connection
Data can be transmitted via a USB-to-serial connection. However, RS485 communication
through a USB-to-serial connection is blocked by hardware.
Unit
EnA -
© Copyright Reserved Autonics Co., Ltd. 97

6 Parameter Settings and Functions
Setting
Group
6.7 Additional features
6.7.1 Monitoring
Refer to ‘5.2.3 MV monitoring and manual control’.
6.7.1.1 Control output MV monitoring
Monitors and displays the current control output MV.
6.7.1.1.1. Heating MV monitoring
Displays the current heating MV during heating control or heating & cooling control.Users may
manually adjust the MV to control the temperature.
Measurement range: H )0 to H100 (Unit: %)
Capable of displaying MV with a moving decimal point (H9(9 → H100).
6.7.1.1.2. Cooling MV monitoring
Displays the current cooling MV during cooling control or heating & cooling control.Users may
manually adjust the MV to control the temperature.
Measurement Range: C )0 to C100 (Unit: %)
Capable of displaying MV with a moving decimal point (C9(9 → C100).
6.7.1.2 Heater current monitoring [PAR1 → CT-A]
A feature that monitors and displays the current of a heater (load) being controlled by control
output.
Parameter Measurement range Unit
PAR1
CT-A
)0 to 5)0 A
A current transformer (CT) is used to measure and display the heater's (load) current.
98 © Copyright Reserved Autonics Co., Ltd.

6 Parameter Settings and Functions
Setting
Description
Setting
group
Factory
default
Setting
group
Factory
default
6.7.2 RUN/STOP [PAR1 → R-S]
Users may run or stop control output by force while in RUN mode.
The stop command stops control output. Auxiliary output, however, is not affected by the
command. This feature can be enabled by configuring parameters. In addition, the front panel's
digital input keys ( for 3 sec.) and digital input terminals (DI-1 and DI-2) can be assigned
to the run/stop feature. (regardless of parameter mask)
RUN Forced control output run in STOP mode.
STOP
Forced control output stop in RUN mode.
Parameter Setting range
PAR1
R-S
RUN / STOP
With stop enabled, the front panel's SV display indicates STOP.
You can change the setting when in the stop state. The stop status will remain in effect after
shutting down the controller and powering it back on.
When stop is in effect, STOP MV[StMV] will be output. In case of a sensor break occurring while
in STOP, STOP MV[StMV] is output.
The run/stop setting remains in effect after turning power back on.
If the digital Input (DI-1, DI-2) feature has been set for RUN/STOP, RUN/STOP feature by
modifying front keys or parameter is unable.
6.7.2.1 Stop control output settings [PAR5 → StMV]
This parameter sets the control output value when in the stop state. With ON/OFF control, select
between 10)0 (ON) and 00)0 (OFF). With PID control, the user can adjust the MV between
00)0 and 10)0.
Parameter Setting range
ON/OFF
Standard
Control
Control
PID
Control
PAR5
StMV
Heating &
cooling
Control
ON/OFF
Control
PID
Control
00)0 (OFF) /
10)0 (ON)
00)0 to10)0
`0)0 (Cooling ON)
/ 00)0 (OFF) /
10)0 (Heating ON)
`0)0 (Cooling) to
10)0 (Heating)
Unit
RUN -
Unit
00)0
00)0
%
00)0
00)0
Ignores MV from ON/OFF control or PID control and sends out a control value based on the
defined MV.
© Copyright Reserved Autonics Co., Ltd. 99
6 Parameter Settings and Functions
Setting
Description
Setting
group
Factory
default
Setting
group
Factory
default
Number
of SVs
Setting
group
Factory
default
6.7.2.2 Stop alarm output [PAR5 → StAL]
Enable or disable alarm output upon a stop.
Alarm output ceases along with a stop under all conditions.
OFF
(However, reverting to RUN mode after a stop in alarm latch or
alarm latch and standby sequence restores the alarm output to
the previous state.)
CONT
Alarm output continues regardless of control operation.
Parameter Setting range
PAR1
R-S
CONT / OFF
6.7.3 Multi SV
Multi SV function allows users to set multiple SVs and save each setting in SV0 to SV3. Users
can change SV-N or select desired SV using external digital input terminal (digital input, DI-1,
DI-2) function.
This feature supports up to four SVs which can be independently configurable.
6.7.3.1 Number of Multi SVs [PAR5 → MtSV]
This parameter sets the number of Multi SVs. Select the number of Multi SVs required by the
control subject.
Number of SVs SV Assignment
1 EA
2 EA
4 EA
Parameter Setting range
PAR5
MtSV
SV-0
SV-0, SV-1
SV-0, SV-1, SV-2, SV-3,
1 / 2 / 4
Unit
CONT -
Unit
1
6.7.3.2 Multi SV No. selection [PAR1 → SV-N]
100 © Copyright Reserved Autonics Co., Ltd.
If the digital Input (DI-1, DI-2) feature has been set for multi SV [MtSV], the number of Multi SV
is not modified through pressing key or communication.(regardless of parameter mask)
Select the SV to control.
PAR1
Parameter Setting range
SV-N
SV-0 / SV-1 / SV-2 / SV-3
SV-0 -
Unit
The range of figures assigned to each SV (SV No.) varies depending on the number of Multi SVs
[MtSV] setting.
 Loading...
Loading...