

Autonics EPM50S Series Catalog Page
EPM50S Series
Shaft Type Ø50mm Multi-turn Absolute Rotary Encoder
Features
● Total 23-bit resolution (8388608-division) of 10-bit
single-turn (1024-division) and 13-bit multi-turn (8192-revolution)
● Compact size of Ø50mm
● Parallel data/SSI data transmission type
● Easy zero adjustment using single-turn/multi-turn data
separated reset function
● Memorizing revolution data up to ±90° after blackout without
memory back up function
● Possible CW/CCW direction setting with direction function
● Maximizing users convenience with clear, over ow alarm (OVF) function
● Protection structure IP64 (IEC standard) (dust-proof, oil-proof)
● Provides Latch function (parallel output model only)
Applications
● Precision machine tool, Fabric machinery, Robot, Parking system
Please read “Safety Considerations”
in the instruction manual before using.
Ordering Information
EPM50S 8 10 13 B PN 24
Series
Ø50mm
Shaft type
Shaft diameter
Ø8mm
Single-turn Multi-turn Output code Control output Power supply Cable
10-bit
(1024
-division)
13-bit
(8192
-revolution)
Binary
code
PN: Parallel NPN open
collector output
S: SSI Line driver output
Specifications
Type
Model
Resolution
Rotation limit when power o
Single-turn 1024-division (10-bit)
Multi-turn 8192-revolution (13-bit)
※
Output code 24-bit, Binary code Binary code
Control output
Output
Output signal Single-turn data, multi-turn count, over ow alarm (OVF)
Output logic
Response time (rise, fall)
Input signal
Input level 0-1VDC
Input logic Low Active, Open or High for common use
Input
Input time
Electrical specication
SSI clock
input
Input level 5VDCᜡ ±5%
Input frequency 100kHz to 1MHz
Max. response frequency
Power supply 12-24VDCᜡ ±5% (ripple P-P: max. 5%)
Current consumption Max. 150mA (disconnection of the load) Max. 100mA (disconnection of the load)
Insulation resistance Over 100MΩ (at 500VDC megger between all terminals and case)
Dielectric strength 750VAC 50/60Hz for 1 min (between all terminals and case)
Connection Axial/Radial cable type (cable gland)
※
1: It calibrates the multi-turn counts by comparing single-turn data before/after power o without counting multi-turn counts when power
is o. It shall be used on the condition that no overrated revolution occurred since proper multi-turn data may not be available if any
revolutions occurred over ±90° from the position when power is o.
※
2: OVF alarm is ON when multi-turn count is out of counting range (0 to 8191 revolutions).
※
3: Single-turn data will be reset as「0」when single-turn data reset is input.
※
4: Multi-turn count will be reset as「0 revolution」when multi-turn count reset is input.
Shaft Type Ø50mm Multi-turn Absolute Rotary Encoder
EPM50S8-1013-B-S-24- EPM50S8-1013-B-PN-24-
1
±90°
SSI (Synchronous Serial Interface) Line driver
[Low] - Sink current: max. 20mA,
Residual voltage: max. 0.5VDC
[High] - Sink current: max. -20mA,
Output voltage: min. 2.5VDC
-
-
Single-turn data reset
※
3
, Multi-turn count reset
-
ᜡ
ᜡ
Parallel NPN open collector output
Sink current: max. 32mA,
Residual voltage: max. 1VDC
Negative logic output
Max. 1
※
4
, Direction, Clear
Latch
ᜡ
Single-turn data reset
-
※
3
, Multi-turn count reset
※
4
, Direction, Clear: approx. over 100ms
Latch: approx. over 500
-
-
50kHz
Radial cable type
Axial cable type
12-24VDC±5%
※
2
cable: 2m, I sink = 32mA)
㎲ (
No mark: Axial cable type
S: Radial cable type
ᜡ
㎲
SENSORS
CONTROLLERS
MOTION DEVICES
SOFTWARE
(A)
Photoelectric
Sensors
(B)
Fiber Optic
Sensors
(C)
LiDAR
(D)
Door/Area
Sensors
(E)
Vision
Sensors
(F)
Proximity
Sensors
(G)
Pressure
Sensors
(H)
Rotary
Encoders
(I)
Connectors/
Connector Cables/
Sensor Distribution
Boxes/ Sockets
H-89
EPM50S Series
Specifications
Type
Model
Mechanical
specication
Vibration 1.5mm amplitude at frequency of 10 to 55Hz (for 1 min) in each X, Y, Z direction for 2 hours
Shock Approx. max. 50G
Environment
Protection structure Axial cable type: IP64 (IEC standard), Radial cable type: IP50 (IEC standard)
Cable
Accessory Bracket, coupling
Approval
Weight
※
5: In case of Parallel type model, Make sure that Max. response revolution should be lower than or equal to max. allowable revolution
※
6: The weight includes packaging. The weight in parenthesis is for unit only.
※
Environment resistance is rated at no freezing or condensation.
Starting torque Max. 70gf·cm (0.0069N·m)
Moment of inertia Max. 40g·cm² (4×10-6kg·m²)
Shaft loading Radial: max. 10kgf, Thrust: max. 2.5kgf
Max. allowable
revolution
Ambient temp. -10 to 70℃, storage: -25 to 85
Ambient humi. 35 to 85%RH, storage: 35 to 90%RH
※
6
when selecting the resolution.
[Max. response revolution (rpm)=
Resolution
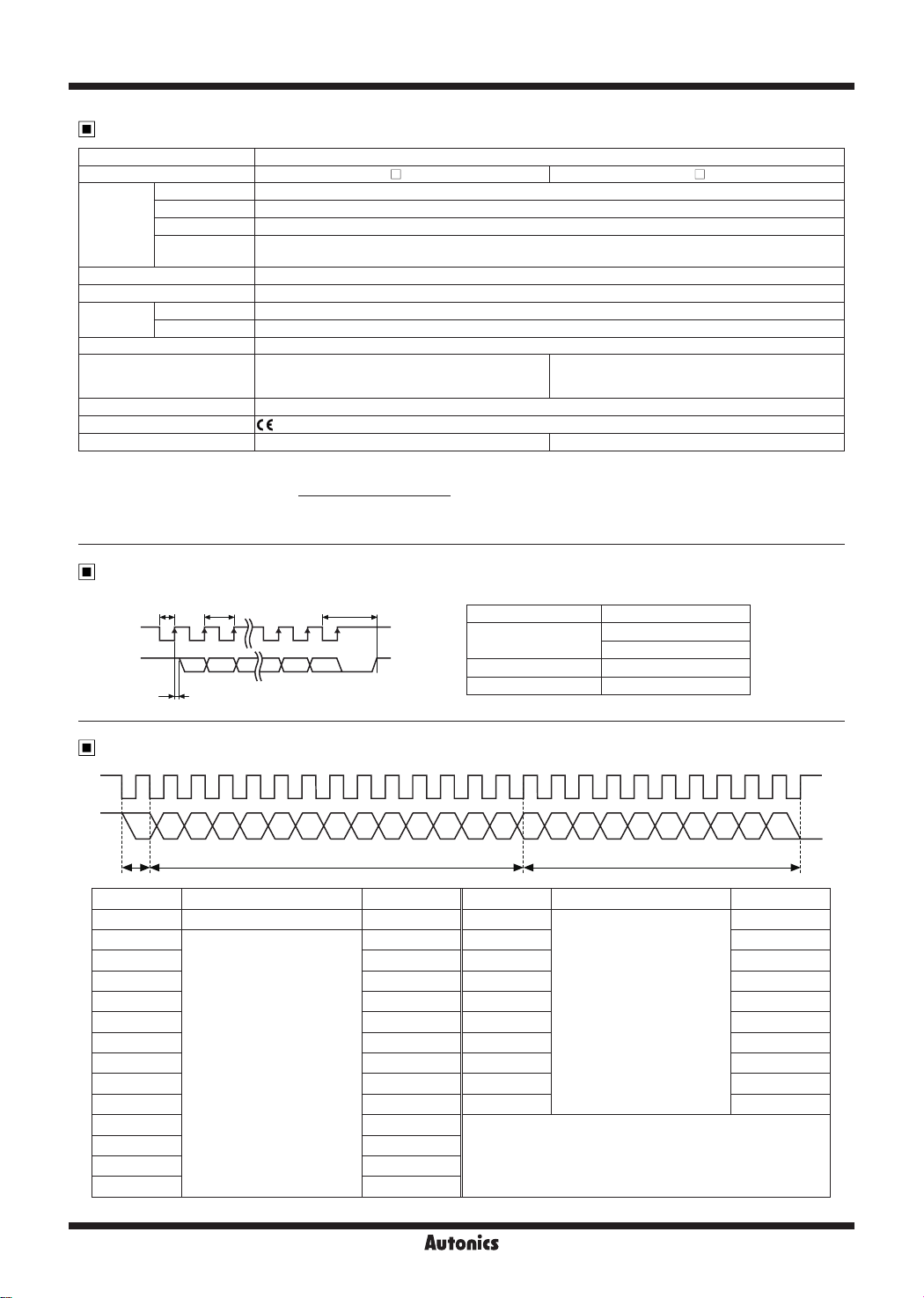
Synchronous Serial Interface (SSI) Output Timing Diagram
Shaft Type Ø50mm Multi-turn Absolute Rotary Encoder
EPM50S8-1013-B-S-24- EPM50S8-1013-B-PN-24-
3,000rpm
※
5
℃
Ø6mm, 10-wire, 2m, Shield cable
(AWG28, core diameter: 0.08mm,
number of cores: 19, insulation out diameter: Ø0.8mm)
Approx. 409g (approx. 324g) Approx. 560g (approx. 475g)
Max. response frequency
× 60 sec]
Ø6mm, 17-wire×2, 2m, Shield cable
(AWG28, core diameter: 0.08mm,
number of cores: 17, insulation out diameter: Ø0.8mm)
SSI_CLOCK
SSI_DATA
t3T=1/ft1
n-1
n
MSB
t2
1 0
LSB
Clock Frequency f
T
Time lag t2
Monoop Time t3
100kHz to 1MHz
T: 1 to 10
㎲
0.5
t1 < 5
㎲ <
t2 < 0.3
㎲
15
t3 < 30
㎲ <
㎲
㎲
Synchronous Serial Interface (SSI) Data Output
M12
OVF
OVF
Clock input bit Data output name Data output bit Clock input bit Data output name Data output bit
1 Over ow alarm bit 0-bit 15
2
3 11-bit 17 7-bit
4 10-bit 18 6-bit
5 9-bit 19 5-bit
6 8-bit 20 4-bit
7 7-bit 21 3-bit
8 6-bit 22 2-bit
9 5-bit 23 1-bit
10 4-bit 24 0-bit (LSB)
11 3-bit
12 2-bit
13 1-bit
14 0-bit (LSB)
M11 M10
Multi-turn count
M8 M6 M4 M2 M0 S8 S6 S4 S2M9 M7 M5 M3 M1 S9 S7 S5 S3 S1 S0
Multi-turn count Single-turn data
9-bit (MSB)
12-bit (MSB) 16 8-bit
Single-turn data
H-90
 Loading...
Loading...