

Autonics EP58 Series Catalog Page
EP58 Series
Shaft Type/Blind Hollow Shaft Type Ø58mm Single-turn Absolute Rotary Encoder
Features
● Ø58mm ange type
● Applicable to various mounting environments
● Various output code: BCD, Binary, Gray code
(customizable)
● Various and high resolution (720, 1024-division)
Applications
● Precision machine tool, Fabric machinery, Robot, Parking system
Please read “Safety Considerations”
in the instruction manual before using.
Ordering Information
EP58SC 10 1024 1 P 24R
I I I
Series Ø58mm Shaft diameter
SC: Shaft clamping
SS: Shaft synchro 6 Ø6mm
HB: Blind hollow
shaft
10 Ø10mm
External
Inner 8 Ø8mm
Specifications
Type Shaft Type/Blind Hollow Shaft Type Ø58mm Single-turn Absolute Rotary Encoder
Resolu ion 720, 360, 180, 90, 45-division 1024, 512, 256, 128, 64-division
Output code
Output phase/
Output angle
Control
Electrical specication
Response time (rise/fall) Ton=800ns, To=Max. 800ns (cable: 2m, I sink = 32mA)
Max. response frequency 35kHz
Power supply • 5VDCᜡ ±5% (ripple P-P: max. 5%) • 12-24VDCᜡ ±5% (ripple P-P: max. 5%)
Current consumption Max. 100mA (disconnection of the load)
Insulation resistance Over 100MΩ (at 500VDC megger between all terminals and case)
Dielectric strength 750VAC 50/60Hz for 1 minute (between all terminals and case)
Connection Axial cable type (cable gland)
Mechanical
Vibration 1.5mm amplitude at frequency of 10 to 55Hz (for 1 min) in each X, Y, Z direction for 2 hours
Shock Approx. max. 50G
Environment
Protection structure IP50 (IEC standard)
Cable Ø7mm, 15-wire, 2m, Shield cable
Accessories Ø10mm (SC type)/Ø6mm (SS type) coupling, Fixing bracket
Approval
Weight
※
1: TS=Signal Pulse
※
Make sure that max. response revolution should be lower than or equal to max. allowable revolution when selecting the resolution.
2:
[Max. response revolution (rpm)=
※
3: The weight includes packaging. The weight in parenthesis is for unit only.
※
1
PNP open collector output Output voltage: min. (power supply-1 5)VDCᜡ, load current: max. 32mA
NPN open collector output Load current: max. 32mA, residual voltage: max. 1VDCᜡ
output
Starting torque • SC/SS type: max. 40gf·cm (0.004N·m) • HB type: max. 90gf·cm (0.009N·m)
Moment of inertia • SC/SS type: max. 15g·cm² (1.5×10
Shaft loading
specication
Max. allowable revolution
Ambient temp. -10 to 70
I
Ambient humi. 35 to 85%RH, storage: 35 to 90%RH
I
※
3
Resolution
1-1
Pulses/
revolution
Refer to
resolution
Division BCD code Binary code Gray code Division BCD code Binary code Gray code
TS: 0 5°±25'
720
TS: 1°±25'
360
TS: 2°±25'
180
TS: 4°±25'
90
TS: 8°±25'
45
• SC/SS type: radial: max. 10kgf, thrust: max. 2.5kgf
• HB type: radial: max. 2kgf, thrust: max. 1kgf
※
2
3,000rpm
℃, storage: -25 to 85℃
CE
• SC type: approx. 545g (approx. 435g) • SS type: approx. 525g (approx. 415g)
• HB type: approx. 520g (approx. 410g)
※
Max. response frequency
1-1
Output code Rotating direction Control output Power supply
1: BCD code
2: Binary code
3: Gray code
TS: 0 5°±25'
(11-bit)
(10-bit)
(9-bit)
(8-bit)
(7-bit)
Environment resistance is rated at no freezing or condensa ion.
(10-bit)
TS: 1°±25'
(9-bit)
TS: 2°±25'
(8-bit)
TS: 4°±25'
(7-bit)
TS: 8°±25'
(6-bit)
11
F: Output value increases
at CW direction
R: Output value increases
at CCW direction
TS: 1°±25'
(10-bit)
TS: 2°±25'
(9-bit)
TS: 4°±25'
(8-bit)
TS: 8°±25'
(7-bit)
TS: 16°±25'
(6-bit)
-6
kg·m²) • HB type: max. 20g·cm² (2.0×10-6kg·m²)
× 60 sec]
1024
512
256
128
64
TS: 0.3515°±15'
(13-bit)
TS: 0.703°±15'
(11-bit)
TS: 1.406°±15'
(10-bit)
TS: 2.8125°±15'
(9-bit)
TS: 5.625°±15'
(7-bit)
1-1
P: PNP open
collector output
N: NPN open
collector output
TS: 0.3515°±15'
(10-bit)
TS: 0.703°±15'
(9-bit)
TS: 1.406°±15'
(8-bit)
TS: 2.8125°±15'
(7-bit)
TS: 5.625°±15'
(6-bit)
1-1
TS: 0.703°±15'
TS: 1.406°±15'
TS: 2.8125°±15'
TS: 5.625°±15'
TS: 11.25°±15'
5: 5VDC ±5%
24: 12-24VDC
±5%
(10-bit)
(9-bit)
(8-bit)
(7-bit)
(6-bit)
SENSORS
CONTROLLERS
MOTION DEVICES
SOFTWARE
I
(A)
Photoelectric
Sensors
(B)
Fiber Optic
Sensors
(C)
LiDAR
(D)
Door/Area
Sensors
(E)
Vision
Sensors
(F)
Proximity
Sensors
(G)
Pressure
Sensors
(H)
Rotary
Encoders
(I)
Connectors/
Connector Cables/
Sensor Distribution
Boxes/ Sockets
Autonics
H-81
EP58 Series
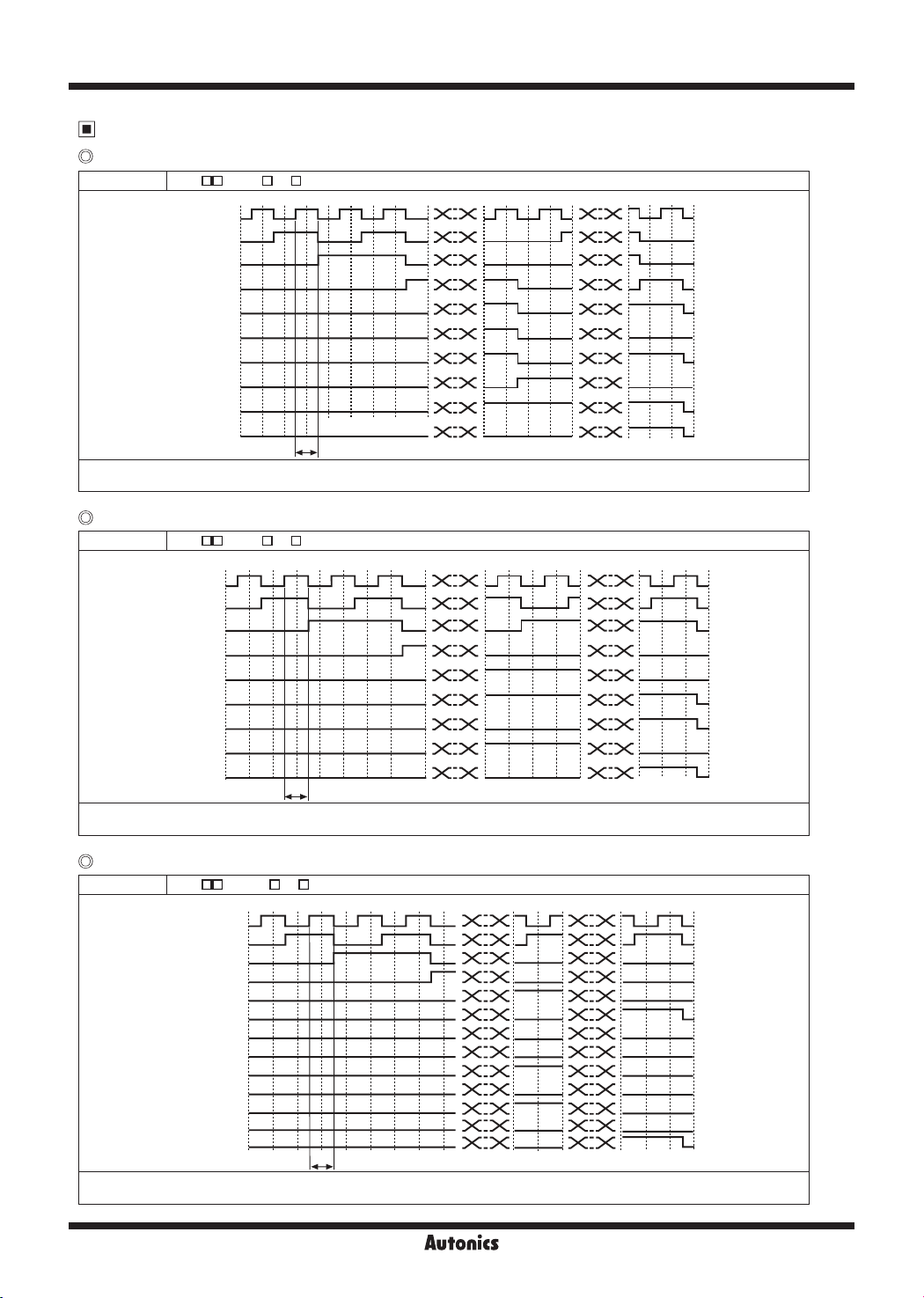
Output Waveform
360-division (BCD code output)
Model EP58
※
TS=1°±25'
※
Above waveform is based on the positive logic. (the output waveform of negative logic is opposite to the above waveform.)
360-division (Binary code output)
Model EP58
※
TS=1°±25'
※
Above waveform is based on the positive logic. (the output waveform of negative logic is opposite to the above waveform.)
I
I
-360-1 -P-
□□
10×2
10×2
10×2
10×2
100×2
100×2
□□
2
2
2
2
2
2
2
2
2
□ □
0 1 2 3 4 5 6 7 8
0
~
2
1
W-rtt~x:x!
2
2
: : : : · . . !
2
3
2
0
>-----<---+-+-t--+-+----+----+---+------<i
1
2
>-->--t-+-t-+-+--
3
___
0
,--,--,-+-,-+-+--.,__.,__.,__---;!
1
----------
-360-2 -P-
□ □
0 1 2 3 4 5 6 7 8 178 179180 181 182 357 358 359 0
0
~
1
LJ..r+-~W-Lr+--+u
2
. ! ! ! ; : ! ! !
3
4
-----.--..-1------+---------------------,
5
----+--+-+--+-i-'-----------------~:x:x,
6
----..---.-+--+-i-'--------+------~!
7
----+--+-1-+-+-<---+-t--+------i
8
----'!--'-----___,!
TS
...;...,-+-
TS
___
.....
------------.'
---;!
178 179 180 181 182 357 358 359
x:x
~
! ! !
x:x
: ,
~~~
i ! : ! ! i
~~~
i I : I I I
x_x
~
x:x
: ! ! ! :
x:x
: ,
x:x
l...rh.J...rh..
x-x
~
x:x
! ! I : : !
:
x:x
i i i i i
1
x:x:
:
x:x
~x:xr,
x:x
~~~
~~~
x_x
x:x
x:x
x:x
x-x
x:x:
x:x
:,x:xl,
lx:xl'--'--~L
x:x
x:x
x:x
i !
: :
i !
x:x
x:x
x:x;
~
h
.........
rtd
i
.... , __
i y
,
hJ..rh.j
u+--+iJ
i'--'--'--
,-------------,
:
!---------'
0
i i !
_,__
....
Y,
_
Ll
' '
LJ
~
L.J
1024-division (BCD code output)
Model EP58
※
TS=0.3515°±15'
※
Above waveform is based on the positive logic. (the output waveform of negative logic is opposite to the above waveform.)
H-82
I
-1024-1 -P-
□□
10×2
10×2
10×2
10×2
100×2
100×2
100×2
100×2
1000×2
□ □
0 1 2 3 4 5 6 7 8 511 512 513
0
L..rh.J_-t-w...rh.J___rh_L
2
1
2
2
Mt~~~~u i i~~~:~
2
3
2
0
,---,---t-,-+--,--,---,----,----,-
1
,--.---,...+--,..+--,...---,..---,-_,____,_
2
3
------t-,-----------------
0
1
>---+--+-+-+-+->---+--+---+-,-
2
______
_._+-<--+---------_.____.._._
3
0
>---+---+-+-+-+-+---+---+-+---+-
TS
Autonics
1021 1022
x-x
!7....L._rj
x-x
1023
!7..J....rhj
x:x:_,_:x:x_-----------x:x
x:x
x:
x:x
x:x
x:x
x:
x:
x:
X
X
x
X
i-1-!
!___j___j
!_!_!
!___j___J
!~
!___j_J
!~
!____j____J
!~
x:x
,..._=::=:::r:::;--,
x:x
x:
X
x:x
:-;....---;------
x:x
x:x
,_..,_ _ _,
x:
X
----+--------
x:x
x:
X
!=::::::::::::.:::;L.::,
0
w
 Loading...
Loading...