

Autonics ENH Series Catalog Page
ENH Series
Manual Handle Type Incremental Rotary Encoder
Features
Suitable for manual pulse input type such as numerically
●
controlled or milling machinery
Terminal connection type
●
Power supply: 5VDC ±5%, 12-24VDC ±5%
●
Applications
00
Industrial tooling machinery
●
Please read “Safety Considerations”
in the instruction manual before using.
I&
Ordering Information
00
ENH 100 1 T 24
I
Series Pulses/revolution Clickstopper position Control output Power supply
Handle type 25, 100
I I I I I I
Specifications
00
Item Manual Handle Type Incremental Rotary Encoder
Resolution (PPR)
Output phase A, B phase (line driver output
Phase dierence of output
Control
output
Response
time
(rise/fall)
Electrical specication
Power supply
Current consumption Max. 40mA (disconnection of the load), Line driver output: max. 50mA (disconnection of the load)
Max. response frequency 10kHz
Insulation resistance Over 100MΩ (at 500VDC megger between all terminals and case)
Dielectric strength 750VAC 50/60Hz for 1 minute (between all terminals and case)
Connection Terminal block type
Starting torque Max. 1kgf.cm (0.098N.m)
Mechanical
specication
Vibration 1.5mm amplitude at frequency of 10 to 55Hz (for 1 min) in each X, Y, Z direction for 2 hours
Shock Approx. max. 50G
Environment
Protection structure
Approval
Weight
※
1: Not indicated resolutions are customizable.
※
2: Make sure that max. response revolution should be lower than or equal to max. allowable revolution when selecting the resolution.
※
3: The weight includes packaging. The weight in parenthesis is for unit only.
※
Environment resistance is rated at no freezing or condensa ion.
Shaft loading Radial: max. 2kgf, Thrust: max. 1kgf
Max. allowable
revolution
Ambient temperature -10 to 70
Ambient humidity 35 to 85%RH, storage: 35 to 90℃
※
3
[Max. response revolution (rpm)=
1-1
※
1
Totem pole output
Voltage output Load current: max. 10mA, Residual voltage: max. 0.4VDC
Line driver output
Totem pole output
Voltage output
Line driver output Max. 0 2
※
2
Resolution
25,100
Phase dierence between A and B:
• [
Low] - Load current: max. 30mA, Residual voltage: max. 0.4VDC
• [
High] - Load current: max. 10mA
Output voltage (power voltage 5VDCᜡ): min. (power voltage-2.0)VDCᜡ,
Output voltage (power voltage 12-24VDCᜡ): min. (power voltage-3.0) VDC
• [
Low] - Load current: max. 20mA, Residual voltage: max. 0.5VDC
• [
High] - Load current: max. -20mA, Output voltage: min. 2.5VDC
Max. 1
㎲ (
㎲ (
•
5VDCᜡ ±5% (ripple P-P: max.5%) • 12-24VDCᜡ ±5% (ripple P-P: max.5%)
Max. 200rpm (normal), 600rpm (peak)
℃, storage: -25 to 85℃
IP50 (IEC standard)
(except for line driver output)
CE
Approx. 330g (approx. 260g)
Max. response frequency
CE:
I
1-1
1: Normal "H"
2: Normal "L"
_
A, A_, B, B
T
- -
± T (T= 1 cycle of A phase)
4 8
cable length: 1m, I sink = 20mA)
cable leng h: 1m, I sink = 20mA)
× 60 sec]
I I I I
T: Totem pole output
V: Voltage output
L: Line driver output (※)
※
The power of Line driver is
only for 5VDC.
phase)
ᜡ
5: 5VDC ±5%
24: 12-24VDC ±5%
ᜡ
ᜡ
ᜡ
ᜡ
SENSORS
CONTROLLERS
MOTION DEVICES
SOFTWARE
(A)
Photoelectric
Sensors
(B)
Fiber Optic
Sensors
(C)
LiDAR
(D)
Door/Area
Sensors
(E)
Vision
Sensors
(F)
Proximity
Sensors
(G)
Pressure
Sensors
(H)
Rotary
Encoders
(I)
Connectors/
Connector Cables/
Sensor Distribution
Boxes/ Sockets
Autonics
H-61
ENH Series
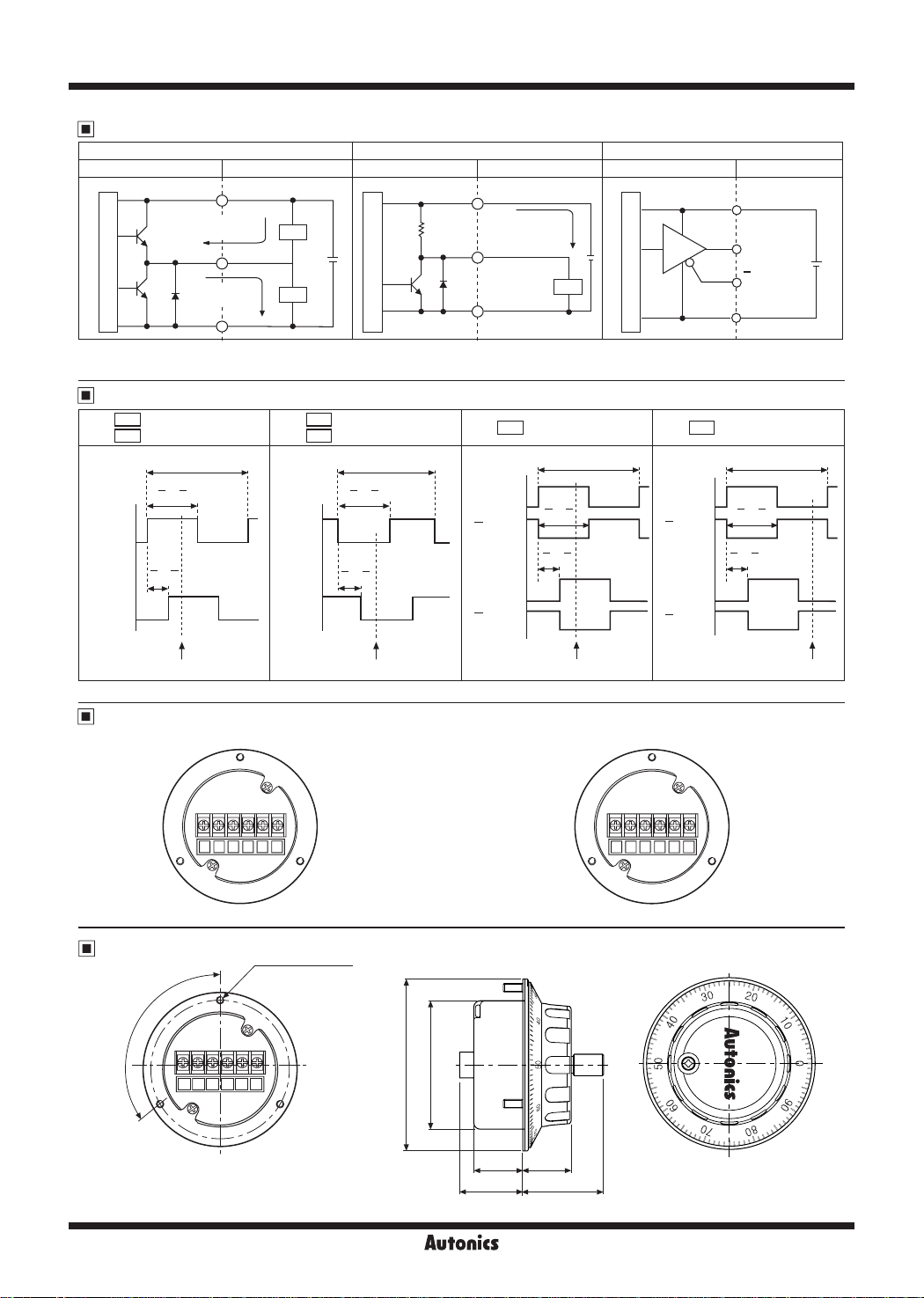
Control Output Diagram
Totem pole output Voltage output Line driver output
Rotary encoder circuit Load connection Rotary encoder circuit Load connection Rotary encoder circuit Load connection
+V +V
※
Load
Load
1
+
-
※
2
R
Main circuit
Source current
: max. 10mA
7
Output
0V
Load
+
-
Main circuit
Main circuit
Sink current
: max. 30mA
Output
Source current
: max. 10mA
0V
● The output circuits for A, B phase (line driver output is A, A_, B, B_ phase) are same.
● Totem pole output can be used for NPN open collector type (※1) or voltage output type (※2).
Output Waveform
ENH- -1-T-5, 24
D
D
-1-V-5, 24
T T
T ± T
2 4
~
T ± T
4 8
ENH-
A phase A phase
B phase
ENHENH-
B phase
D
D
-2-T-5, 24
-2-V-5, 24
T ± T
2 4
T ± T
4 8
ENH-
-1-L-5 ENH- -2-L-5
D D
T T
A phase
A phase
B phase B phase
B phase
T ± T
2 4
T ± T
4 8
A phase
A phase
B phase
+V
A phase
output
A phase
output
0V
T ± T
2 4
T ± T
4 8
+
-
t
t
t
Clickstopper position (normal "H") Clickstopper position (normal "L") Clickstopper position (normal "H") Clickstopper position (normal "L")
※
Clickstopper position Normal "H" or Normal "L": It shows the waveform when the handle is stopped.
Connections
●Totem pole output / Voltage output ●Line driver output
1
2 3 4 5 6
+V 0V A
※
Do not use terminal No. 5, 6.
Dimensions
3-120°
※
Ø70mm P.C.D mounting hole type is customizable.
※
Fix the unit or a coupling by a wrench under 0.15N.m of torque.
1
2 3 4 5 6
+V 0V A
NCNCB
×0.7 DP 10
3-M4
P.C.D 72
0
-0.2
Ø80
NC
NC
B
Ø59.8
23
22.7
29 37.7
1 2 3 4 5 6
+V 0V A AB B
- -
(unit: mm)
H-62
Autonics
 Loading...
Loading...