

Features
• Internal Frequency-to-voltage Converter
• Externally Controlled Integrated Amplifier
• Overload Limitation with “Fold Back” Characteristic
• Optimized Soft-start Function
• Tacho Monitoring for Shorted and Open Loop
• Automatic Retriggering Switchable
• Triggering Pulse Typically 155 mA
• Voltage and Current Synchronization
• Internal Supply-voltage Monitoring
• Temperature Reference Source
• Current Requirement ≤ 3 mA
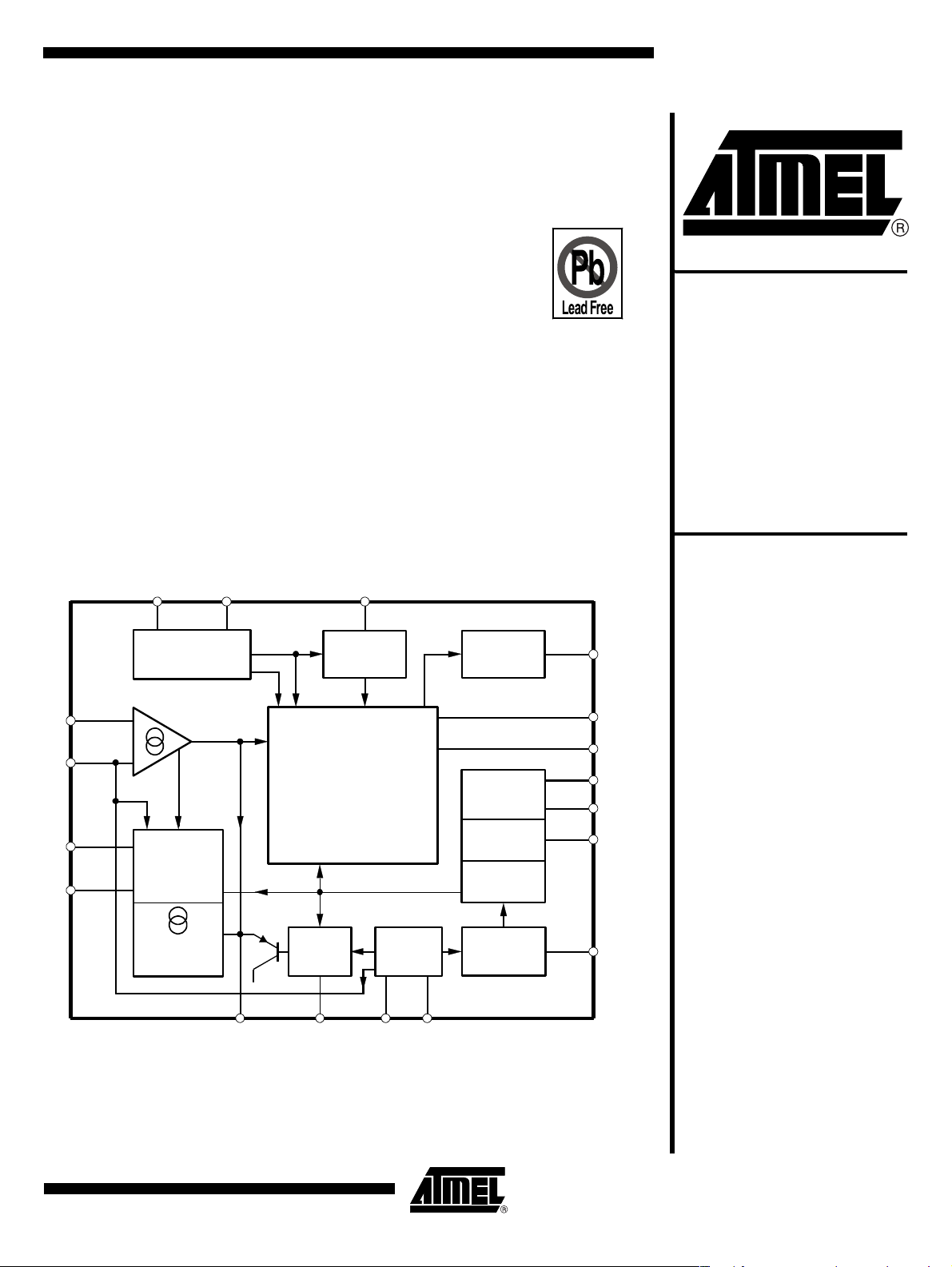
1. Description
The integrated circuit U211B is designed as a phase-control circuit in bipolar technology with an internal frequency-to-voltage converter. The device includes an internal
control amplifier which means it can be used for speed-regulated motor applications.
Amongst others, the device features integrated load limitation, tacho monitoring and
soft-start functions, to realize sophisticated motor control systems.
Phase Control
IC with
Overload
Limitation
for Tacho
Applications
Figure 1-1. Block Diagram
1(1)
11(10)
10(9)
14(13)
15(14)
17(16)
Voltage/current
detector
Control
amplifier
+
-
Load limitation
speed/time
controlled
Controlled
current sink
5*
Automatic
retriggering
Phase-
control unit
ϕ = f (V12)
Soft start
-V
Ref
12(11) 13(12) 9(8)
Frequency-
to-voltage
converter
limitation
Reference
monitoring
Pulse-blocking
monitoring
8(7)
Output
pulse
Supply
voltage
voltage
Voltage
tacho
4(4)
6(5)
7(6)
3(3)
2(2)
16(15)
18*
-V
S
GND
U211B
Pin numbers in brackets refer to SO16
* Pins 5 and 18 connected internally
Rev. 4752B–INDCO–09/05
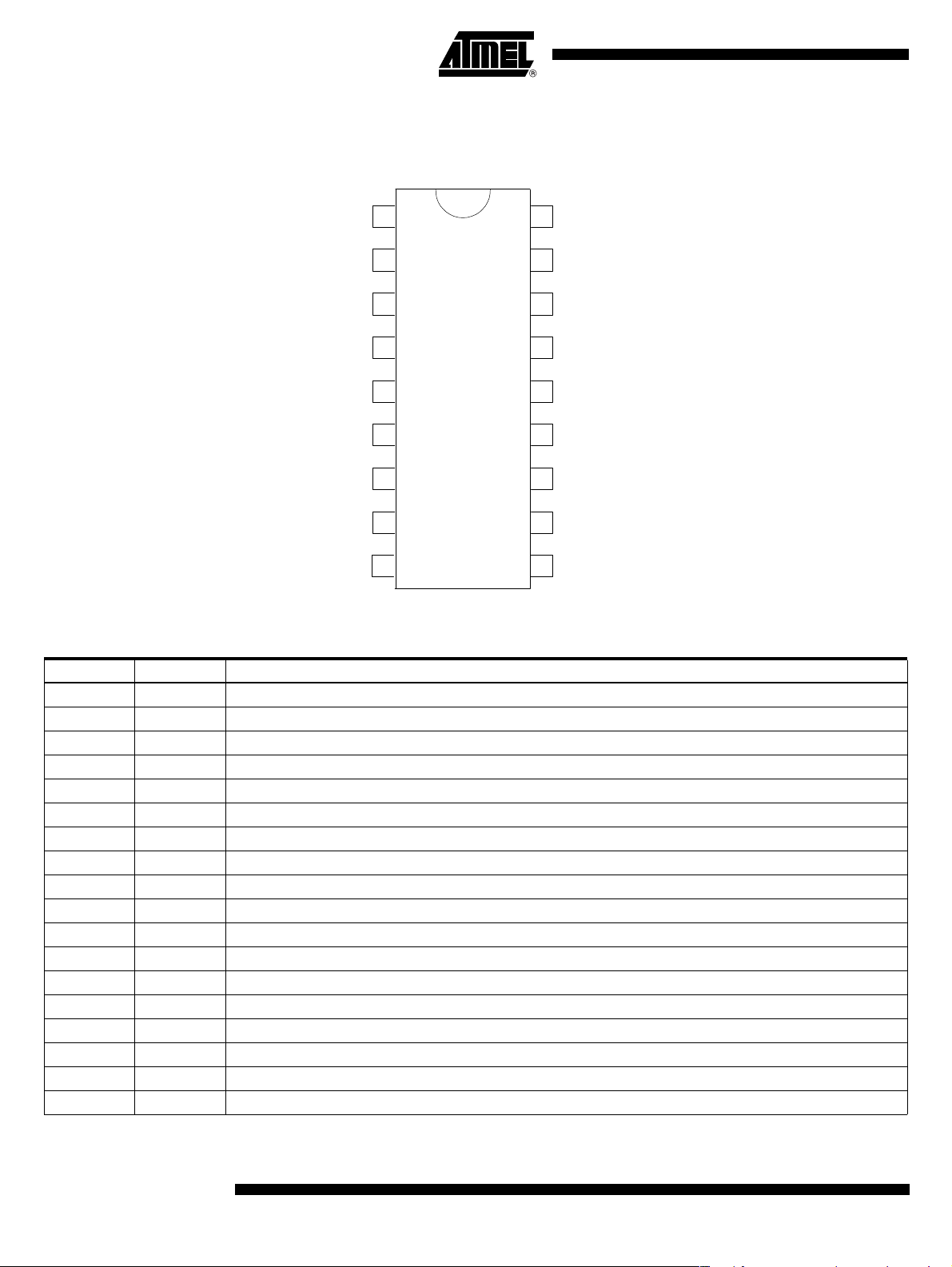
2. Pin Configuration
Figure 2-1. Pinning DIP18
I
sync
1
18
PB/TM
GND
Output
Retr
V
F/V
C
Table 2-1. Pin Description
Pin Symbol Function
1I
sync
2 GND Ground
3V
S
4 Output Trigger pulse output
5 Retr Retrigger programming
6V
7C
RP
P
8 F/V Frequency-to-voltage converter
9C
RV
10 OP- OP inverting input
11 OP+ OP non-inverting input
12 CTR/OPO Control input/OP output
13 C
14 I
soft
sense
15 OVL Overload adjust
16 V
17 V
Ref
sync
18 PB/TM Pulse blocking/tacho monitoring
Current synchronization
Supply voltage
Ramp current adjust
Ramp voltage
Charge pump
Soft start
Load-current sensing
Reference voltage
Voltage synchronization
2
V
3
S
4
5
6
RP
C
7
P
U211B
8
9
RV
V
17
V
16
OVL
15
I
14
C
13
CTR/OPO
12
OP+
11
OP-
10
sync
Ref
sense
soft
2
U211B
4752B–INDCO–09/05
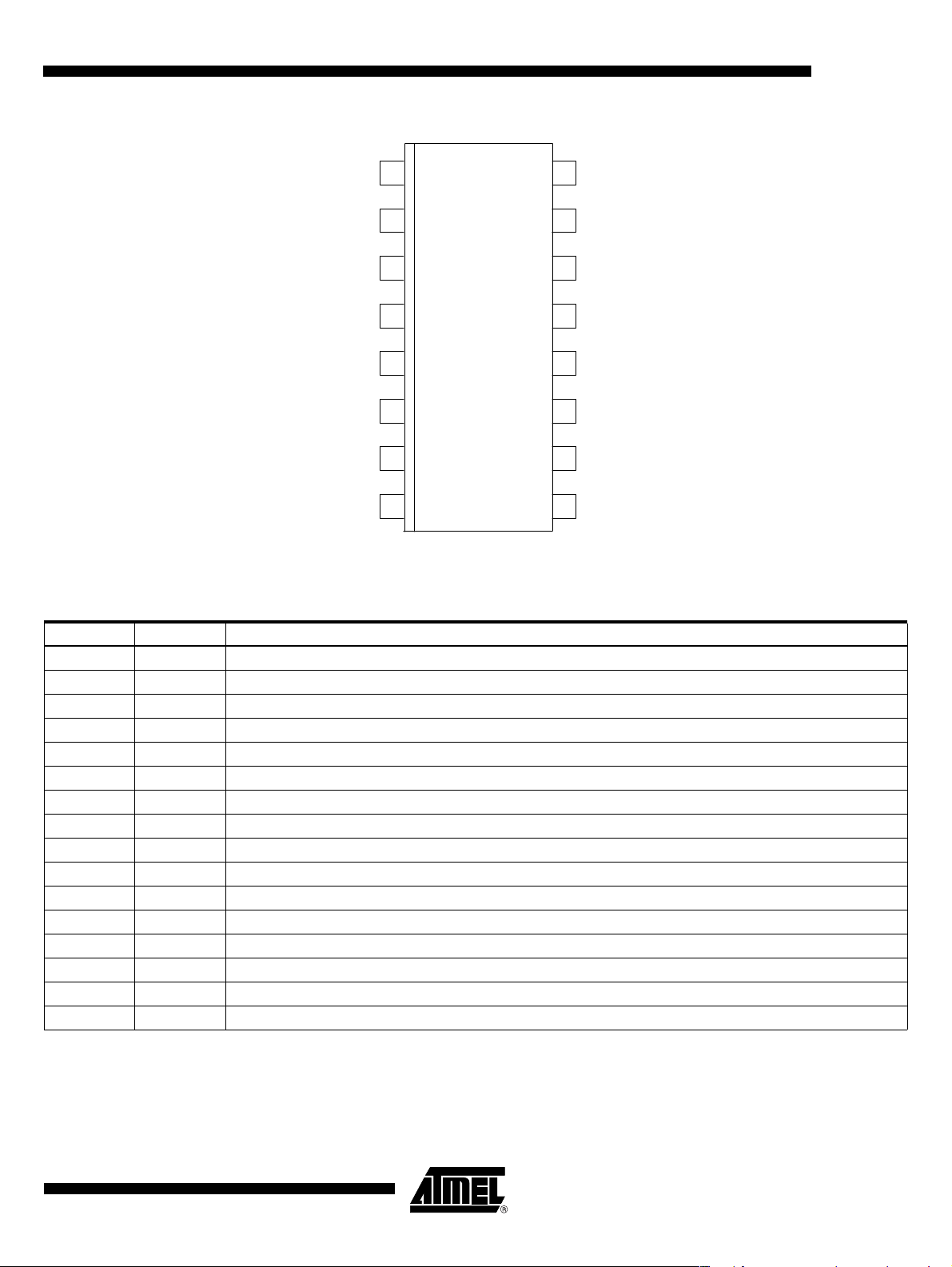
Figure 2-2. Pinning SO16
I
sync
U211B
1
16
V
sync
GND
Output
Table 2-2. Pin Description
Pin Symbol Function
1I
sync
2 GND Ground
3V
S
4 Output Trigger pulse output
5V
6C
RP
P
7 F/V Frequency-to-voltage converter
8C
RV
9 OP- OP inverting input
10 OP+ OP non-inverting input
11 CTR/OPO Control input/OP output
12 C
13 I
soft
sense
14 OVL Overload adjust
15 V
16 V
Ref
sync
Current synchronization
Supply voltage
Ramp current adjust
Ramp voltage
Charge pump
Soft start
Load-current sensing
Reference voltage
Voltage synchronization
V
V
C
F/V
C
RP
RV
2
3
S
4
15
14
13
V
Ref
OVL
I
sense
U211B
5
6
P
7
8
12
11
10
9
C
soft
CTR/OPO
OP+
OP-
4752B–INDCO–09/05
3
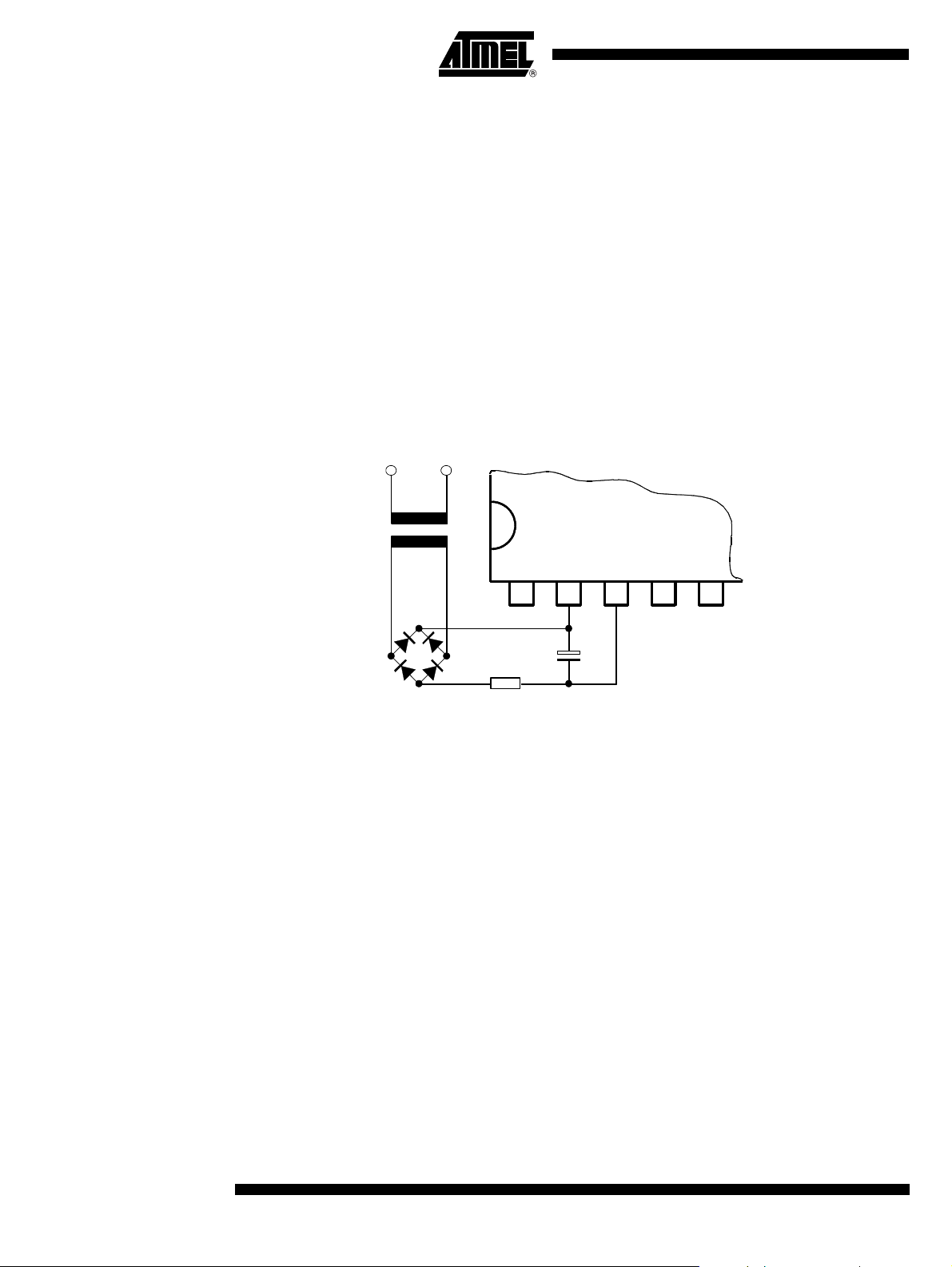
3. Mains Supply
The U211B is equipped with voltage limiting and can therefore be supplied directly from the
mains. The supply voltage between pin 2 (+ pol/_|_) and pin 3 builds up across D
smoothed by C
VMVS–
---------------------=
R
1
2 I
. The value of the series resistance can be approximated using:
1
S
and R1 and is
1
Further information regarding the design of the mains supply can be found in the section “Design
Hints” on page 9. The reference voltage source on pin 16 of typically -8.9 V is derived from the
supply voltage and is used for regulation.
Operation using an externally stabilized DC voltage is not recommended.
4. Phase Control
If the supply cannot be taken directly from the mains because the power dissipation in R
would
1
be too large, the circuit as shown in Figure 3-1 should be used.
Figure 3-1. Supply Voltage for High Current Requirements
~
24 V~
123
C
R
1
1
4
5
The phase angle of the trigger pulse is derived by comparing the ramp voltage (which is mains
synchronized by the voltage detector) with the set value on the control input pin 12. The slope of
the ramp is determined by C
R
on pin 6. The maximum phase angle α
2
and its charging current. The charging current can be varied using
2
can also be adjusted by using R
max
.
2
When the potential on pin 7 reaches the nominal value predetermined at pin 12, a trigger pulse
is generated whose width t
is determined by the value of C2 (the value of C2 and hence the
p
pulse width can be evaluated by assuming 8 µs/nF). At the same time, a latch is set, so that as
long as the automatic retriggering has not been activated, no more pulses can be generated in
that half cycle.
The current sensor on pin 1 ensures that, for operations with inductive loads, no pulse will be
generated in a new half cycle as long as a current from the previous half cycle is still flowing in
the opposite direction to the supply voltage at that instant. This makes sure that “gaps” in the
load current are prevented.
The control signal on pin 12 can be in the range of 0 V to -7 V (reference point pin 2).
If V
= -7 V, the phase angle is at maximum (α
12
The phase angle is minimum (
4
U211B
α
min
) when V
12
), i.e., the current flow angle, is at minimum.
max
= V2.
4752B–INDCO–09/05
5. Voltage Monitoring
As the voltage is built up, uncontrolled output pulses are avoided by internal voltage surveillance. At the same time, all latches in the circuit (phase control, load limit regulation, soft start)
are reset and the soft-start capacitor is short circuited. Used with a switching hysteresis of
300 mV, this system guarantees defined start-up behavior each time the supply voltage is
switched on or after short interruptions of the mains supply.
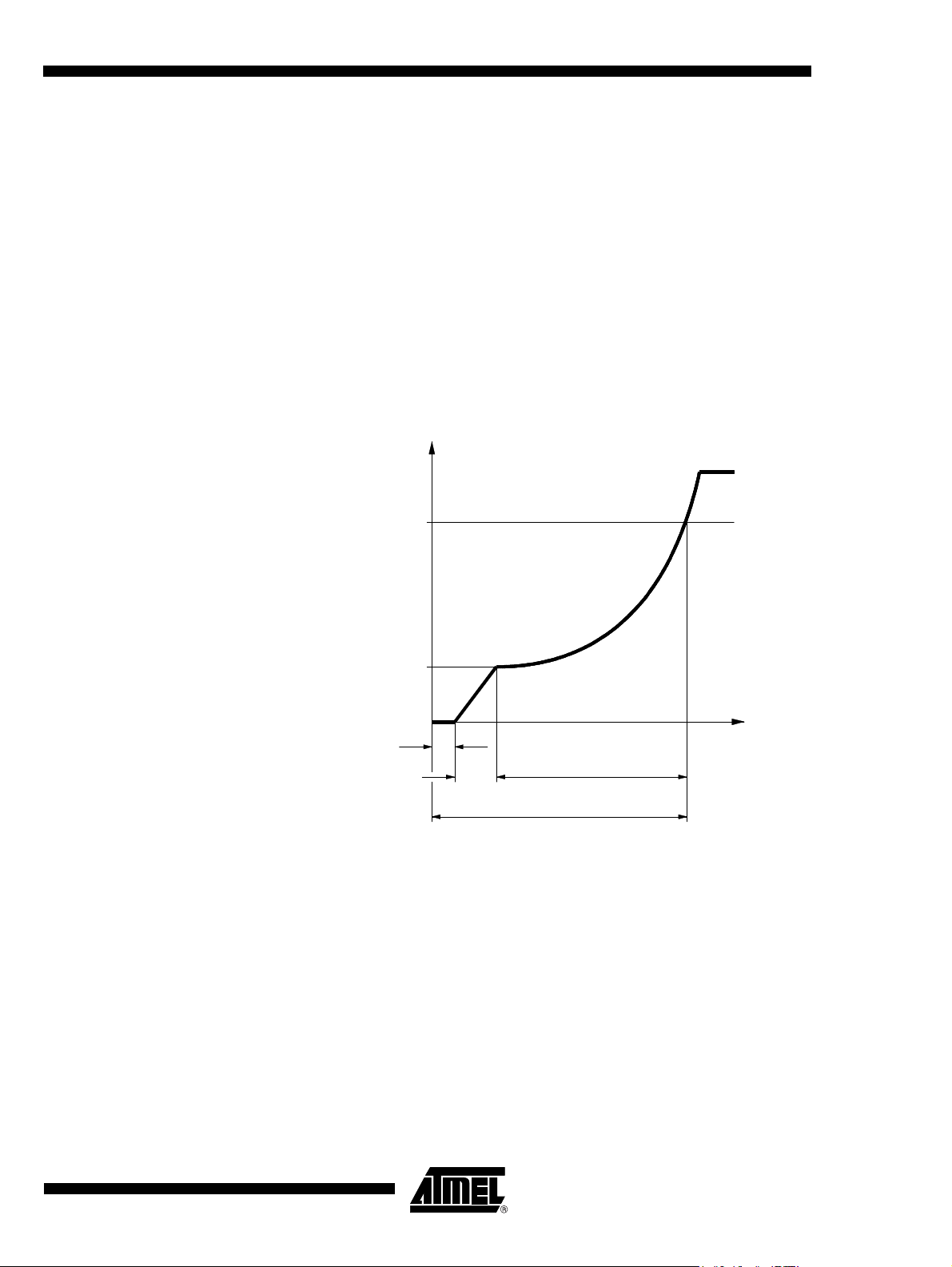
6. Soft Start
As soon as the supply voltage builds up (t1), the integrated soft start is initiated. Figure 6-1
shows the behavior of the voltage across the soft-start capacitor, which is identical with the voltage on the phase-control input on pin 12. This behavior guarantees a gentle start-up for the
motor and automatically ensures the optimum run-up time.
Figure 6-1. Soft Start
U211B
V
C3
V
12
V
0
t
1
t
2
t
3
t
tot
t
t1 = Build-up of supply voltage
t
= Charging of C3 to starting voltage
2
+ t2 = Dead time
t
1
= Run-up time
t
3
= Total start-up time to required speed
t
tot
C
is first charged up to the starting voltage V0 with a current of typically 45 µA (t2). By reducing
3
the charging current to approximately 4 µA, the slope of the charging function is also substantially reduced, so that the rotational speed of the motor only slowly increases. The charging
current then increases as the voltage across C
increases, resulting in a progressively rising
3
charging function which accelerates the motor more and more with increasing rotational speed.
The charging function determines the acceleration up to the set point. The charging current can
have a maximum value of 55 µA.
4752B–INDCO–09/05
5

7. Frequency-to-voltage Converter
∆
The internal frequency-to-voltage converter (f/V converter) generates a DC signal on pin 10
which is proportional to the rotational speed, using an AC signal from a tacho generator or a light
beam whose frequency is in turn dependent on the rotational speed. The high-impedance input
pin 8 compares the tacho voltage to a switch-on threshold of typically -100 mV. The switch-off
threshold is -50 mV. The hysteresis guarantees very reliable operation even when relatively simple tacho generators are used.
The tacho frequency is given by:
n
------
f
where: n = Revolutions per minute
The converter is based on the charge pumping principle. With each negative half-wave of the
input signal, a quantity of charge determined by C
C
6
transfer voltage of V
G
i
p (Hz)×=
60
p = Number of pulses per revolution
at the converter output on pin 10. The conversion constant is determined by C5, its charge
, R6 (pin 10) and the internally adjusted charge transfer gain.
ch
I
10
-------
I
8.3=
9
is internally amplified and then integrated by
5
k = G
× C5 × R6 × V
i
ch
The analog output voltage is given by
V
= k × f
O
The values of C
mum output voltage V
and C6 must be such that for the highest possible input frequency, the maxi-
5
does not exceed 6 V. While C5 is charging up, the Ri on pin 9 is
O
approximately 6.7 kΩ. To obtain good linearity of the f/V converter, the time constant resulting
from R
and C5 should be considerably less (1/5) than the time span of the negative half-cycle for
i
the highest possible input frequency. The amount of remaining ripple on the output voltage on
pin 10 is dependent on C
GiVch× C5×
V
-------------------------------------=
O
The ripple ∆V
C
6
can be reduced by using larger values of C6. However, the increasing speed will
O
, C6 and the internal charge amplification.
5
then also be reduced.
The value of this capacitor should be chosen to fit the particular control loop where it is going to
be used.
6
U211B
4752B–INDCO–09/05
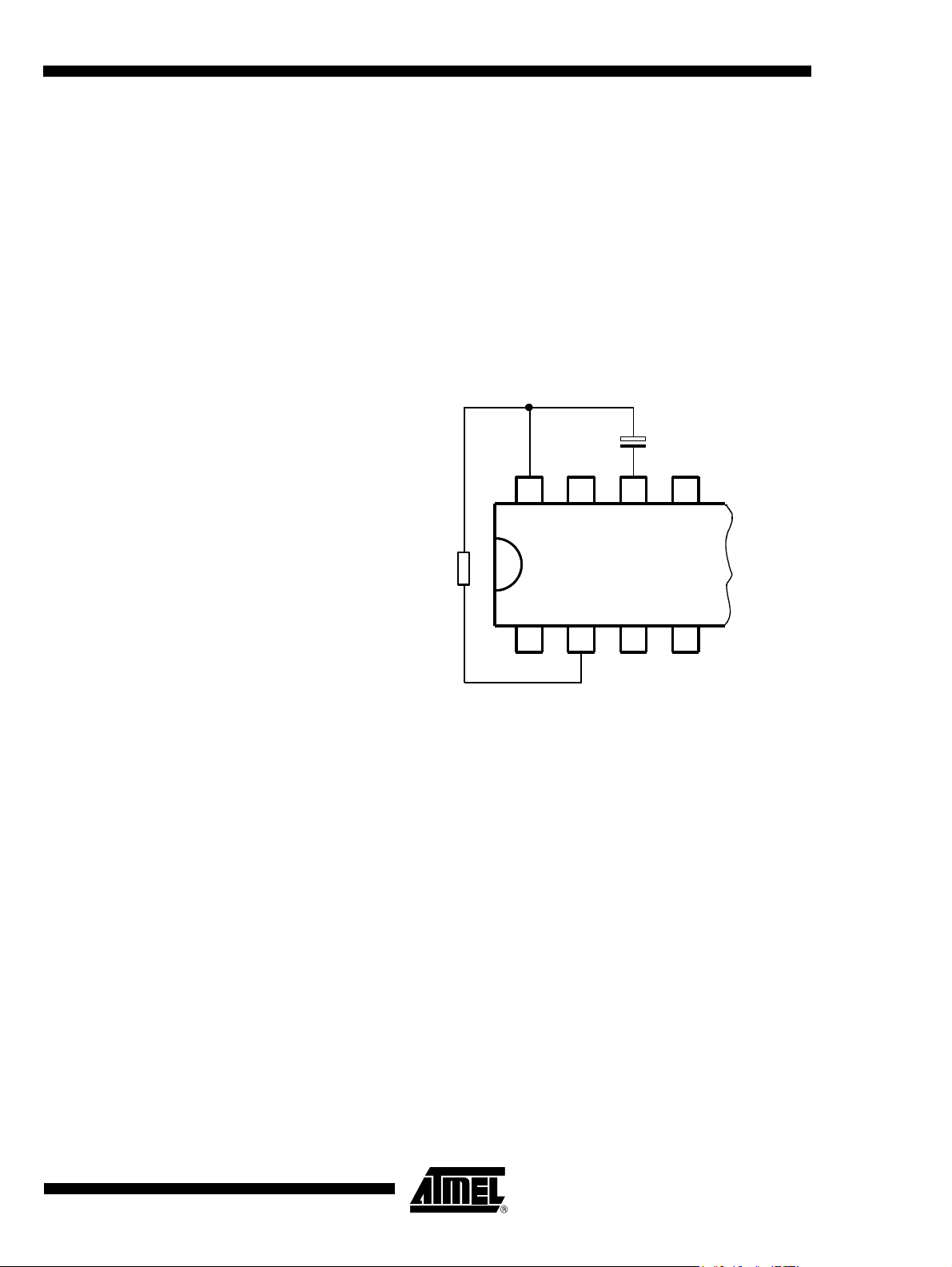
7.1 Pulse Blocking
U211B
The output of pulses can be blocked by using pin 18 (standby operation) and the system reset
via the voltage monitor if V
output is released when V
Monitoring of the rotation can be carried out by connecting an RC network to pin 18. In the event
of a short or open circuit, the triac triggering pulses are cut off by the time delay which is determined by R and C. The capacitor C is discharged via an internal resistance R
charge transfer process of the f/V converter. If there are no more charge transfer processes, C is
charged up via R until the switch-off threshold is exceeded and the triac triggering pulses are cut
off. For operation without trigger pulse blocking or monitoring of the rotation, pin 18 and pin 16
must be connected together.
Figure 7-1. Operation Delay
≥ -1.25 V. After cycling through the switching point hysteresis, the
18
≤ -1.5 V, followed by a soft start such as after turn-on.
18
= 2 kΩ with each
i
C = 1 µF
10 V
7.2 Control Amplifier
The integrated control amplifier (see Figure 10-17 on page 21) with differential input compares
the set value (pin 11) with the instantaneous value on pin 10, and generates a regulating voltage
on the output pin 12 (together with the external circuitry on pin 12). This pin always tries to keep
the actual voltage at the value of the set voltages. The amplifier has a transmittance of typically
1000 µA/V and a bipolar current source output on pin 12 which operates with typically ±110 µA.
The amplification and frequency response are determined by R
out). For open-loop operation, C
connected with pin 12 and pin 8 with pin 2. The phase angle of the triggering pulse can be
adjusted by using the voltage on pin 11. An internal limitation circuit prevents the voltage on
pin 12 from becoming more negative than V
R = 1 MΩ
18
, C5, R6, R7, C7, C8 and R11 can be omitted. Pin 10 should be
4
17 16 15
123
+ 1 V.
16
4
, C7, C8 and R11 (can be left
7
7.3 Load Limitation
The load limitation, with standard circuitry, provides full protection against overloading of the
motor. The function of load limiting takes account of the fact that motors operating at higher
speeds can safely withstand larger power dissipations than at lower speeds due to the increased
action of the cooling fan. Similarly, considerations have been made for short-term overloads for
the motor which are, in practice, often required. These behaviors are not damaging and can be
tolerated.
4752B–INDCO–09/05
7

In each positive half-cycle, the circuit measures, via R10, the load current on pin 14 as a potential
drop across R
available on pin 15 and is integrated by C
angle for current flow, the voltage on C
and produces a current proportional to the voltage on pin 14. This current is
8
. If, following high-current amplitudes or a large phase
9
exceeds an internally set threshold of approximately
9
7.3 V (reference voltage pin 16), a latch is set and load limiting is turned on. A current source
(sink) controlled by the control voltage on pin 15 now draws current from pin 12 and lowers the
control voltage on pin 12 so that the phase angle α is increased to α
max
.
The simultaneous reduction of the phase angle during which current flows causes firstly a reduction of the rotational speed of the motor which can even drop to zero if the angular momentum of
the motor is excessively large, and secondly a reduction of the potential on C
which in turn
9
reduces the influence of the current sink on pin 12. The control voltage can then increase again
and bring down the phase angle. This cycle of action sets up a “balanced condition” between the
“current integral” on pin 15 and the control voltage on pin 12.
Apart from the amplitude of the load current and the time during which current flows, the potential on pin 12 and hence the rotational speed also affects the function of load limiting. A current
proportional to the potential on pin 10 gives rise to a voltage drop across R
the current measured on pin 14 is smaller than the actual current through R
, via pin 14, so that
10
.
8
This means that higher rotational speeds and higher current amplitudes lead to the same current
integral. Therefore, at higher speeds, the power dissipation must be greater than that at lower
speeds before the internal threshold voltage on pin 15 is exceeded. The effect of speed on the
maximum power is determined by the resistor R
and can therefore be adjusted to suit each
10
individual application.
If, after load limiting has been turned on, the momentum of the load sinks below the “o-momentum” set using R
, V15 will be reduced. V12 can then increase again so that the phase angle is
10
reduced. A smaller phase angel corresponds to a larger momentum of the motor and hence the
motor runs up, as long as this is allowed by the load momentum. For an already rotating
machine, the effect of rotation on the measured “current integral” ensures that the power dissipation is able to increase with the rotational speed. The result is a current-controlled
acceleration run-up which ends in a small peak of acceleration when the set point is reached.
The load limiting latch is simultaneously reset. Then the speed of the motor is under control
again and is capable of carrying its full load. The above mentioned peak of acceleration depends
upon the ripple of actual speed voltage. A large amount of ripple also leads to a large peak of
acceleration.
The measuring resistor R
should have a value which ensures that the amplitude of the voltage
8
across it does not exceed 600 mV.
8
U211B
4752B–INDCO–09/05
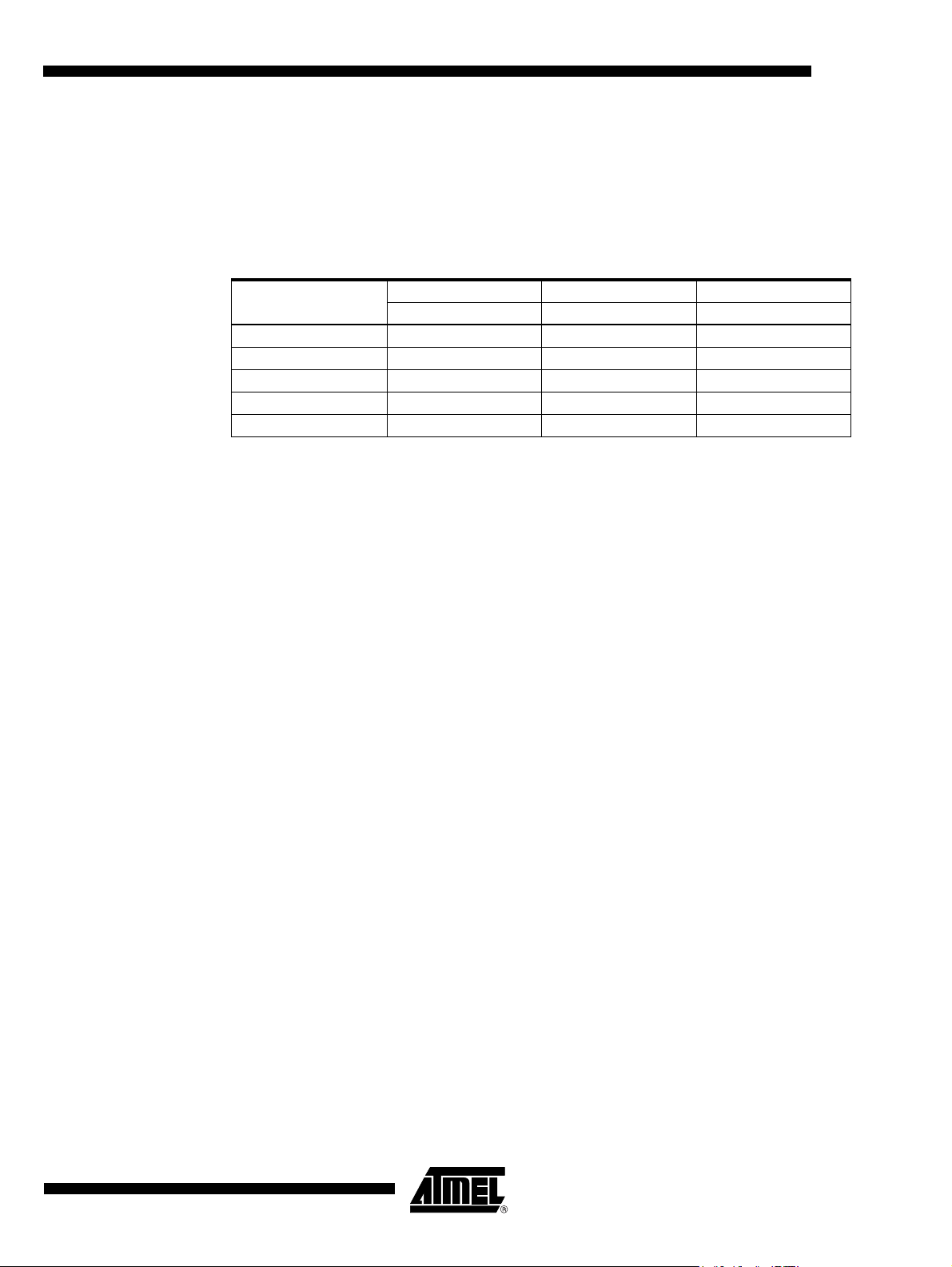
7.4 Design Hints
U211B
Practical trials are normally needed for the exact determination of the values of the relevant
components for load limiting. To make this evaluation easier, the following table shows the effect
of the circuitry on the important parameters for load limiting and summarizes the general
tendencies.
Table 7-1. Load Limiting Parameters
Component Component Component
Parameters
P
max
P
min
P
max/min
t
d
t
r
P
max
P
min
t
d
t
r
- Maximum continuous power dissipationP1 = f
- Power dissipation with no rotation P1 = f
- Operation delay time
- Recovery time
n.e. - No effect
R10 Increasing R9 Increasing C9 Increasing
Increases Decreases n.e.
Increases Decreases n.e.
Increases n.e. n.e.
n.e. Increases Increases
n.e. Increases Increases
n ≠ 0
(n)
n = 0
(n)
7.5 Pulse-output Stage
The pulse-output stage is short-circuit protected and can typically deliver currents of 125 mA.
For the design of smaller triggering currents, the function I
10-12 on page 18.
7.6 Automatic Retriggering
The variable automatic retriggering prevents half cycles without current flow, even if the triac has
been turned off earlier, e.g., due to a collector which is not exactly centered (brush lifter) or in the
event of unsuccessful triggering. If necessary, another triggering pulse is generated after a time
lapse which is determined by the repetition rate set by resistance between pin 5 and pin 3 (R
With the maximum repetition rate (pin 5 directly connected to pin 3), the next attempt to trigger
comes after a pause of 4.5 t
ishes. If pin 5 is not connected, only one trigger pulse per half cycle is generated. Since the
value of R
for a fixed value of C
= f(RGT) can be taken from Figure
GT
and this is repeated until either the triac fires or the half cycle fin-
p
determines the charging current of C2, any repetition rate set using R
5-3
.
2
is only valid
5-3
5-3
).
4752B–INDCO–09/05
9

7.7 General Hints and Explanation of Terms
To ensure safe and trouble-free operation, the following points should be taken into consideration when circuits are being constructed or in the design of printed circuit boards.
• The connecting lines from C
to pin 7 and pin 2 should be as short as possible. The
2
connection to pin 2 should not carry any additional high current such as the load current.
When selecting C
, a low temperature coefficient is desirable.
2
• The common (earth) connections of the set-point generator, the tacho generator and the final
interference suppression capacitor C
of the f/V converter should not carry load current.
4
• The tacho generator should be mounted without influence by strong stray fields from the
motor.
• The connections from R
and C5 should be as short as possible.
10
To achieve a high noise immunity, a maximum ramp voltage of 6 V should be used. The typical
resistance R
R
kΩ()
ϕ
can be calculated from Iϕ as follows:
ϕ
3
Tms()1.13 V()× 10
-------------------------------------------------------------=
CnF()6V()×
×
T = Period duration for mains frequency (10 ms at 50 Hz)
C
= Ramp capacitor, maximum ramp voltage 6 V and constant voltage drop at
ϕ
R
= 1.13 V
ϕ
A 10% lower value of R
(under worst case conditions) is recommended.
ϕ
Figure 7-2. Explanation of Terms in Phase Relationship
Mains
Supply
V
Trigger
Pulse
Load
Voltage
Load
Current
GT
V
I
L
V
π/2 π 3/2π 2π
t
p
L
tpp = 4.5 t
p
ϕ
Φ
10
U211B
4752B–INDCO–09/05

7.8 Design Calculations for Main Supply
The following equations can be used for the evaluation of the series resistor R1 for worst case
conditions:
–
V
MminVSmax
R
= R
1max
--------------------------------------
0.85
2 I
tot
1min
VMV
–
-----------------------------=
2 I
Smax
U211B
Smin
2
1
P
R1max()
V
----------------------------------------------=
–()
MmaxVSmin
2 R
where:
V
M
V
S
I
tot
I
Smax
I
p
I
x
R
can be easily evaluated from the Figure 10-14 on page 19, Figure 10-15 on page 19 and
1
= Mains voltage
= Supply voltage on pin 3
= Total DC current requirement of the circuit
+ Ip + I
= I
S
x
= Current requirement of the IC in mA
= Average current requirement of the triggering pulse
= Current requirement of other peripheral components
Figure 10-16 on page 20.
4752B–INDCO–09/05
11

8. Absolute Maximum Ratings
Reference point pin 2, unless otherwise specified
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. This is a stress rating
only and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of this
specification is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.
Parameters Pins Symbol Value Unit
Current requirement 3 -I
t ≤ 10 µs 3 -i
Synchronization current 1 I
17 I
syncI
syncV
t < 10 µs 1 ±i
t < 10 µs 17 ±i
f/V Converter
Input current 8 I
t < 10 µs 8 ±i
Load Limiting
Limiting current,
negative half wave
14 I
t < 10 µs 14 I
Input voltage
14 ±V
15 -V
Phase Control
Input voltage 12 -V
Input current
12 ±I
6-I
Soft Start
Input voltage 13 -V
Pulse Output
Reverse voltage 4 V
Pulse Blocking
Input voltage 18 -V
Amplifier
Input voltage 11 V
Pin 9 open 10 -V
Reference Voltage Source
Output current 16 I
Storage temperature range T
Junction temperature T
Ambient temperature range T
S
s
I
I
I
I
I
I
i
I
I
I
I
I
R
I
I
I
o
stg
j
amb
30 mA
100 mA
5mA
5mA
35 mA
35 mA
3mA
13 mA
5mA
35 mA
1V
|V16| to 0 V
0 to 7 V
500 µA
1mA
|V16| to 0 V
VS to 5 V
|V16| to 0 V
0 to V
S
V
|V16| to 0 V
7.5 mA
-40 to +125 °C
125 °C
-10 to +100 °C
12
U211B
4752B–INDCO–09/05

U211B
9. Thermal Resistance
Parameters Symbol Value Unit
Junction ambient DIP18
SO16 on p.c.
SO16 on ceramic
R
thJA
R
thJA
R
thJA
120
180
100
10. Electrical Characteristics
-VS = 13.0 V, T
Parameters Test Conditions Pins Symbol Min. Typ. Max. Unit
Supply voltage for mains operation 3 -V
Supply voltage limitation
DC current requirement -V
Reference voltage source
Temperature coefficient 16 -TC
Voltage Monitoring
Turn-on threshold 3 -V
Turn-off threshold 3 -V
Phase-control Currents
Synchronization current
Voltage limitation ±IL = 5 mA 1, 17 ±V
Reference Ramp (see Figure 10-1 on page 15)
Charge current
R
-reference voltage α ≥ 180° 6, 3 V
ϕ
Temperature coefficient 6 TC
Pulse Output (see Figure 10-12 on page 18, Pin 4)
Output pulse current R
Reverse current I
Output pulse width Cϕ = 10 nF t
Amplifier
Common-mode signal range 10, 11 V
Input bias current 11 I
Input offset voltage 10, 11 V
Output current 12
Short circuit forward, transmittance
= 25° C, reference point pin 2, unless otherwise specified
amb
-I
= 4 mA
S
-I
= 30 mA
S
= 13.0 V 3 I
S
= 10 µA
-I
L
-IL = 5 mA
3-V
16 -V
1
17
= f(R6)
I
7
R6 = 50 kΩ to 1 MΩ
= 0, VGT = 1.2 V I
GT
I
= f(V
12
10-11
), (see
Figure 10-7 on page 17)
7I
12 Y
±I
±I
10
-I
+I
S
S
S
Ref
VRef
SON
SOFF
syncI
syncV
I
7
ϕRef
VϕRef
o
or
p
, V
IO
10
O
O
f
13.0 V
14.6
14.7
1.2 2.5 3.0 mA
8.6
8.9 9.2
8.3
0.5 mV/K
11.2 13.0 V
9.9 10.9 V
0.35 2.0 mA
1.4 1.6 1.8 V
120 µA
1.06 1.13 1.18 V
0.5 mV/K
100 155 190 mA
0.01 3.0 µA
80 µs
11
V
16
0.01 1 µA
10 mV
75
88
110
120
1000 µA/V
K/W
K/W
K/W
Limit
16.6
16.8
9.1
-1 V
145
165
V
V
V
V
V
µA
µA
4752B–INDCO–09/05
13

10. Electrical Characteristics (Continued)
-VS = 13.0 V, T
Parameters Test Conditions Pins Symbol Min. Typ. Max. Unit
Pulse Blocking, Tacho Monitoring
Logic-on 18 -V
Logic-off 18 -V
Input current
Output resistance 18 R
Frequency-to-voltage Converter
Input bias current 8 I
Input voltage limitation
Turn-on threshold 8 -V
Turn-off threshold 8 -V
Charge Amplifier
Discharge current
Charge transfer voltage 9 to 16 V
Charge transfer gain I
Conversion factor
Output operating range 10 to 16 V
Linearity ±1 %
Soft Start, f/V Converter Non-active (see Figure 10-2 on page 15 and Figure 10-4 on page 16)
Starting current V
Final current V
f/V Converter Active (see Figure 10-3 on page 15, Figure 10-5 on page 16 and Figure 10-6 on page 16)
Starting current V
Final current V
Discharge current Restart pulse 13 I
Automatic Retriggering (see Figure 10-13 on page 19, Pin 5)
Repetition rate R
Load Limiting (see Figure 10-9 on page 17, Figure 10-10 on page 18 and Figure 10-11 on page 18)
Operating voltage range 14 V
Offset current
Input current V
Output current V
Overload ON 15-16 V
= 25° C, reference point pin 2, unless otherwise specified
amb
V
= V
18
V18 = V
= -1 mA
I
I
II = +1 mA
(see Figure 10-7 on
TOFF
16
= 1.25 V
18 I
8
page 17)
= 1 nF, (see Figure
C
5
10-17 on page 21)
10/I9
C
= 1 nF, R6 = 100 kΩ
5
9I
9, 10 G
(see Figure 10-17 on
page 21)
= V16, V8 = V
13
= 0.5 13 I
13
= V
13
16
= 0.5 I
13
= 0 t
5-3
R
= 15 kΩ t
5-3
= V
V
10
16
2
V14 = V2 via 1 kΩ
= 4.5 V 14 I
10
= 300 mV 15-16 I
14
13 I
13 I
14
15-16
TON
TOFF
IB
-V
+V
TON
TOFF
dis
I
O
I
I
ch
i
3.7 1.5 V
1.25 1.0 V
0.3 1 µA
14.5
1.5 6 10 kΩ
0.6 2 µA
660
7.25
750
8.05
100 150 mV
20 50 mV
0.5 mA
6.50 6.70 6.90 V
7.5 8.3 9.0
K 5.5 mV/Hz
O
O
O
O
O
O
pp
pp
I
I
O
I
O
I
O
TON
20 45 55 µA
50 85 130 µA
247µA
30 55 80 µA
0.5 3 10 mA
34.56 t
-1.0 +1.0 V
5
60 90 120 µA
110 140 µA
7.05 7.4 7.7 V
0-6 V
20 t
12
0.1
1.0
µA
mV
V
p
p
µA
µA
14
U211B
4752B–INDCO–09/05

Figure 10-1. Ramp Control
)
°
(
α
e
l
g
n
A
e
s
a
h
P
240
200
160
120
U211B
Reference Point Pin 2
10nF 4.7nF
2.2nF
80
0
0 0.2 0.4 0.6 0.8
Rϕ (MΩ)
C
=1.5nF
/t
ϕ/t
1.0
Figure 10-2. Soft-start Charge Current (f/V Converter Non-active)
100
80
)
60
A
µ
(
3
1
I
40
20
Reference Point Pin 16
0
02 4 6 8
V13(V)
10
Figure 10-3. Soft-start Charge Current (f/V Converter Active)
4752B–INDCO–09/05
100
80
Reference Point Pin 16
)
60
A
µ
(
3
1
I
40
20
0
02 4 6 8
V13 (V)
10
15

Figure 10-4. Soft-start Voltage (f/V Converter Non-active)
10
8
)
6
V
(
3
1
V
4
2
Reference Point Pin 16
0
t = f
(C3)
Figure 10-5. Soft-start Voltage (f/V Converter Active)
10
8
Reference Point Pin 16
)
6
V
(
3
1
V
4
2
0
t = f
(C3)
Figure 10-6. Soft-start Function
16
U211B
10
Reference Point Pin 16
8
6
)
V
(
3
1
V
4
2
0
t = f
(C3)
Motor Standstill (Dead Time)
Motor in Action
4752B–INDCO–09/05

Figure 10-7. f/V Converter Voltage Limitation
500
250
U211B
)
A
µ
(
8
I
Reference Point Pin 2
0
-250
-500
-10 -8 -6 -4 -2
Figure 10-8. Amplifier Output Characteristics
100
50
)
A
µ
(
0
2
1
I
-50
Reference Point
-100
-300 -200 -100 0 200
for I
= -4 V
12
V
V8 (V)
10-11
(V)
02
100
4
300
4752B–INDCO–09/05
Figure 10-9. Load Limit Control
200
150
)
A
µ
(
100
6
1
2
1
I
-
50
0
024 6
V
(V)
15-16
8
17

Figure 10-10. Load Limit Control f/V Dependency
200
150
)
A
µ
(
100
2
4
1
I
50
0
024 6
Figure 10-11. Load Current Detection
250
200
)
150
A
µ
(
6
1
5
1
I
100
50
0
0 100 200 300 400
Figure 10-12. Pulse Output
100
V
10-16
I15 = f(V
V
V
14-2
(V)
= V
10
(mV)
Shunt
16
)
500 600
8
700
18
U211B
80
60
(mA)
GT
I
40
1.4 V
VGT = 0.8 V
20
0
0 200 400 600 800
R
GT
1000
(Ω)
4752B–INDCO–09/05

Figure 10-13. Automatic Retriggering Repetition Rate
20
15
)
Ω
k
(
3
10
5
R
5
0
0 6 12 18 24
tpp/t
p
U211B
30
Figure 10-14. Determination of R
1
50
40
)
30
Ω
k
(
1
R
20
10
0
04812
Figure 10-15. Power Dissipation of R
6
5
4
)
W
(
)
1
3
R
(
P
2
Mains Supply
230 V
16
I
(mA)
tot
1
Mains Supply
230 V
4752B–INDCO–09/05
1
0
0102030
(kΩ)
R
1
40
19

Figure 10-16. Power Dissipation of R1 According to Current Consumption
6
5
Mains Supply
4
)
W
(
)
1
3
R
(
P
2
1
230 V
0
03 6 912
I
(mA)
tot
15
20
U211B
4752B–INDCO–09/05

Figure 10-17. Speed Control, Automatic Retriggering, Load Limiting, Soft Start
U211B
L
1
D
1N4007
=
M
V
230 V ~
N
M
8
Ω
R
1
R
Ω
2 W
18 k
TIC
226
Ω
Ω
12
R
1 M
180
R
4
pulse
Output
5
Automatic
retriggering
4
R
470 k Ω
1 W
33 m
2
3.3 nF
7
6
2
C
3
Phase-
22 µF/
-V
Supply
control unit
25 V
1
C
S
2
voltage
limitation
)
12
ϕ = f (V
2.2 µF
11
C
GND
Reference
16
voltage
Voltage
monitoring
18
tacho
Pulse blocking
to-voltage
Frequency-
Soft start
monitoring
converter
-V
Speed sensor
4
C
220 nF
Ref
12 13 9 8
5
C
8
C
7
C
Ω
1 k
1 nF
2.2 µF/
3
C
220 nF
7
R
5
R
16 V
22 kΩ
detector
Control
amplifier
3
Ω
R
Voltage/current
17 1
-
+
controlled
speed/time
Load limitation
Controlled
current sink
R
10 µF/16V
11
2 MΩ
6
R
100 kΩ
220 k
15
9
R
9
C
1 MΩ
4.7 µF/16V
Actual speed
6
C
100 nF
voltage
Set speed
voltage
R
19
Ω
100 k
11
10
C
10
2.2 µF/16V
14
10
R
1 kΩ
4752B–INDCO–09/05
13
R
31
R
47 kΩ
100 kΩ
Ω
14
R
56 k
21

Figure 10-18. Speed Control, Automatic Retriggering, Load Switch-off, Soft Start
F
µ
V
2
0
.
1
2
F
n
0
1
C
6
R
Ω
k
0
0
1
8
C
F
µ
V
7
.
0
4
1
9
C
Ω
k
0
9
7
R
4
0
0
1
6
C
1
1
R
F
n
0
2
2
F
µ
2
.
2
Ω
k
4
1
0
R
1
d
e
1
3
R
3
C
V
0
1
e
Ω
e
g
p
k
a
s
t
l
0
t
o
5
e
v
2
S
7
C
Ω
M
1
3
Ω
1
k
R
7
4
V
0
1
/
F
µ
2
.
2
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
Ω
k
7
5
R
1
B
1
1
2
U
5
F
C
p
0
8
6
9
8
7
ϕ
R
6
2
Ω
R
M
5
1
4
S
V
-
3
D
N
G
2
2
1
1
R
F
n
0
4
2
2
C
Ω
k
5
1
R
t
/
ϕ
C
F
n
2
2
C
.
2
Ω
0
8
1
r
o
s
n
e
s
d
e
e
p
S
22
1
F
1
µ
C
2
.
2
5
5
X
Z
B
U211B
Ω
k
4
0
R
7
4
F
V
µ
5
2
2
2
1
C
Ω
W
m
1
1
1
x
3
=
8
R
N
T1
Ω
k
3
2
T
Ω
k
7
4
5
1
R
6
1
R
0
R
2
2
4
1
0
0
D
4
N
Ω
k
7
4
1
Ω
k
0
2
1
.
R
2
L
Ω
W
k
5
.
8
1
1
1
R
M
~
V
0
3
2
The switch-off level at maximum load shows in principle the same speed dependency as the
original version (see Figure 10-17 on page 21), but when reaching the maximum load, the motor
is switched off completely. This function is effected by the thyristor (formed by T
and T2) which
1
ignites when the voltage at pin 15 reaches typically 7.4 V (reference point pin 16). The circuit is
thereby switched to standby mode over the release Pin 18.
4752B–INDCO–09/05

Figure 10-19. Speed Control, Automatic Retriggering, Load Switch-down, Soft Start
d
F
µ
V
2
.
0
2
1
0
1
C
6
R
Ω
k
0
0
F
1
n
0
2
2
8
C
F
µ
V
7
.
0
4
1
9
C
1
µF
1
2
C
.
2
Ω
k
9
0
R
7
4
Ω
5
k
1
3
R
3
1
T
5
5
X
Z
B
1
3
R
F
n
0
0
1
6
C
1
1
R
3
C
F
µ
V
2
.
0
2
1
Ω
k
4
1
0
R
1
2
T
6
1
R
e
e
g
Ω
e
a
k
t
p
l
0
s
o
t
5
v
e
2
S
7
C
Ω
M
1
Ω
k
7
4
3
1
Ω
k
R
7
4
V
0
1
F/
µ
2
.
2
0
1
1
1
2
1
3
1
4
1
Ω
k
7
5
1
R
5
F
C
p
0
8
6
9
8
7
ϕ
R
6
2
B
1
1
2
5
Ω
R
M
1
U
5
1
6
1
7
1
8
1
Ω
k
3
0
R
2
2
4
0
1
0
D
4
N
1
Ω
k
0
2
1
.
R
2
L
4
S
V
-
3
D
N
G
2
1
Ω
W
k
5
.
8
1
1
1
R
R
Ω
k
4
0
R
7
4
M
~
V
0
3
2
The maximum load regulation shows in principle the same speed dependency as the original
version (see Figure 10-17 on page 21). When reaching the maximum load, the control unit is
turned to α
formed by T
, adjustable with R2. Then, only IO flows. This function is effected by the thyristor,
max
and T2 which ignites as soon as the voltage at pin 15 reaches approximately 6.8 V
1
(reference point pin 16). The potential at pin 15 is lifted and kept by R
ing threshold whereby the maximum load regulation starts and adjusts the control unit constantly
to α
(IO), inspite of a reduced load current. The motor shows that the circuit is still in operation
max
by produceing a buzzing sound.
U211B
F
n
0
2
4
2
C
Ω
k
5
R
1
t
/
ϕ
C
F
n
2
2
C
.
2
Ω
2
1
0
8
1
F
µ
2
2
r
o
s
n
e
s
d
e
e
p
S
V
5
2
1
C
Ω
m
W
1
1
1
x
3
=
8
R
N
over the internal operat-
14
4752B–INDCO–09/05
23

Figure 10-20. Speed Control, Automatic Retriggering, Load Limiting, Soft Start, Tacho Control
d
F
µ
V
2
.
0
2
1
F
n
0
1
C
6
R
Ω
k
8
6
8
C
9
R
9
C
1
1
C
0
0
1
6
C
1
1
R
F
n
0
2
2
Ω
M
1
F
µ
7
.
4
F
n
2
2
F
µ
2
.
2
e
1
3
R
e
e
Ω
g
p
k
a
s
t
l
0
t
o
5
e
v
2
S
7
C
Ω
M
5
.
1
3
C
V
0
1
3
Ω
1
k
R
7
4
V
0
1
/
µF
2
.
2
0
1
1
1
2
1
3
1
4
1
5
1
6
1
V
0
1
/
F
m
1
7
1
8
1
Ω
k
7
2
R
2
B
1
1
2
5
C
F
n
1
9
8
7
ϕ
6
5
R
2
Ω
R
M
1
F
n
0
4
2
2
C
Ω
k
5
1
R
t
/
ϕ
C
F
n
2
2
C
.
2
r
o
s
n
e
s
d
e
e
p
S
U
4
S
V
-
3
D
N
G
2
Ω
2
1
0
2
1
R
2
24
U211B
W
W
k
3
M
1
R
0
2
2
4
1
0
0
D
4
N
1
Ω
W
k
5
8
.
1
1
1
R
M
Ω
0
k
1
R
1
~
V
0
L
3
2
W
k
4
0
R
7
4
F
µ
V
5
2
2
2
1
C
Ω
W
m
1
1
1
x
3
=
8
R
N
4752B–INDCO–09/05

Figure 10-21. Speed Control with Reflective Opto Coupler CNY70 as Emitter
d
e
e
.
p
n
i
s
m
t
8
1
e
S
R
1
Ω
3
k
R
0
3
1
C
F
µ
V
7
0
.
1
4
F
n
0
4
2
C
2
Ω
k
8
7
R
4
0
1
Ω
k
0
7
4
7
R
3
C
F
µ
V
2
0
.
1
2
C
d
e
.
e
x
p
a
s
3
t
m
1
e
R
S
Ω
k
1
1
6
R
V
0
1
F
µ
0
1
1
1
1
F
n
0
7
7
8
C
F
n
2
2
Ω
k
0
2
2
4
C
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
4
R
4
0
0
4
N
1
1
D
B
1
1
2
U
0
7
Y
N
C
9
F
p
6
0
C
8
6
8
7
ϕ
R
6
2
Ω
R
M
1
5
6
R
4
W
S
0
V
0
-
1
3
D
N
G
2
1
Ω
k
5
0
R
Ω
W
k
5
.
8
1
1
1
R
7
4
U211B
Ω
0
7
4
6
1
R
7
1
R
5
1
5
V
X
Ω
0
0
1
5
F
C
n
0
7
4
Ω
k
0
2
2
R
t
/
ϕ
C
2
C
3
R
A
m
0
5
=
T
G
I
Ω
k
9
5
.
1
F
0
n
1
3
R
.
3
Ω
k
7
.
4
F
µ
V
7
5
2
4
1
C
9
Z
C
B
3
Z
F
µ
V
0
0
0
1
1
0
1
C
W
8
/
5
1
Ω
R
k
5
.
3
2
4
D
0
0
4
N
1
n
o
i
t
u
l
o
v
e
R
/
s
e
s
l
u
P
0
2
2
.
a
c
4752B–INDCO–09/05
3
8
W
Y
B
s
e
d
o
i
d
l
l
a
1
L
2
L
M
4
Ω
1
0
0
R
1
~
V
0
3
2
~
F
n
V
0
0
5
5
1
2
2
1
C
25

Figure 10-22. Speed Control, Maximum Load Control with Reflective Opto Coupler CNY70 as Emitter
V
d
e
.
e
n
p
i
s
m
t
4
e
1
S
R
1
3
Ω
k
R
0
0
1
C
F
V
µ
7
0
4
1
F
n
0
6
7
C
4
Ω
k
6
2
R
8
C
µF
V
7
0
.
1
4
9
C
Ω
k
0
2
2
9
R
2
2
Ω
k
0
2
8
1
1
R
3
F
µ
V
2
.
0
2
1
1
F
1
n
C
2
2
d
e
.
e
x
p
a
s
t
3
m
e
1
S
R
Ω
k
7
6
R
1
F
F
µ
0
7
1
C
n
0
7
8
4
C
0
1
1
1
2
1
3
1
4
1
B
0
7
Y
N
C
5
C
9
8
7
6
1
1
2
2
R
5
U
5
1
6
1
7
1
8
1
Ω
k
3
0
R
1
1
4
0
0
4
N
1
1
D
4
S
V
-
3
D
N
G
2
1
4
R
Ω
W
k
1
.
0
1
1
1
R
9
8
1
Ω
0
R
7
4
7
Ω
1
k
R
3
3
3
1
C
F
µ
1
Ω
6
1
k
R
0
1
F
p
0
8
6
F
t
n
/
ϕ
3
.
C
3
2
ϕ
C
R
Ω
M
1
2
1
R
Ω
0
0
1
A
m
0
5
=
T
G
Ω
I
k
0
2
2
F
n
1
4
C
5
Ω
R
k
2
.
2
F
V
µ
2
5
2
2
1
C
26
U211B
M
Ω
0
0
1
~
0
Ω
1
k
R
1
.
1
~
V
0
3
2
F
V
n
0
5
1
2
0
1
5
2
C
Ω
1
.
0
x
3
=
8
R
4752B–INDCO–09/05

U211B
The schematic diagram (see Figure 10-22 on page 26) is designed as a speed control IC based
on the reflection-coupled principle with 4 periods per revolution and a maximum speed of
30000 rpm. The separation of the coupler from the rotating aperture should be about approximately 1 mm. In the schematic diagram, the power supply for the coupler was provided
externally because of the relatively high current consumption.
Instructions for adjusting:
1. In the initial adjustment of the phase-control circuit, R
R
= 0 and R
14
are in minimum position, the motor just turns.
31
2. The speed can now be adjusted as desired by means of R
mined by R
and R14.
13
should be adjusted so that when
2
between the limits deter-
31
3. The switch-off power of the limiting-load control can be set by R
higher the switch-off power.
. The lower R9, the
9
4752B–INDCO–09/05
27

11. Ordering Information
Extended Type Number Package Remarks
U211B-xY DIP18 Tube
U211B-xFPY SO16 Tube
U211B-xFPG3Y SO16 Taped and reeled
12. Package Information
Package DIP18
Dimensions in mm
23.3 max
4.8 max
7.77
7.47
1.64
1.44
18 10
19
Package SO16
Dimensions in mm
0.4
1.27
20.32
10.0
9.85
8.89
0.58
0.48
2.54
0.5 min
1.4
0.25
0.10
3.3
technical drawings
according to DIN
specifications
6.4 max
0.36 max
9.8
8.2
5.2
4.8
3.7
0.2
3.8
6.15
5.85
28
U211B
16 9
technical drawings
according to DIN
specificati ons
18
4752B–INDCO–09/05

13. Revision History
Please note that the following page numbers referred to in this section refer to the specific revision
mentioned, not to this document.
Revision No. History
4752B-INDCO-08/05
U211B
• Put datasheet in a new template
• First page: Pb-free logo added
• Page 28: Ordering Information changed
4752B–INDCO–09/05
29

Atmel Corporation Atmel Operations
2325 Orchard Parkway
San Jose, CA 95131, USA
Tel: 1(408) 441-0311
Fax: 1(408) 487-2600
Regional Headquarters
Europe
Atmel Sarl
Route des Arsenaux 41
Case Postale 80
CH-1705 Fribourg
Switzerland
Tel: (41) 26-426-5555
Fax: (41) 26-426-5500
Asia
Room 1219
Chinachem Golden Plaza
77 Mody Road Tsimshatsui
East Kowloon
Hong Kong
Tel: (852) 2721-9778
Fax: (852) 2722-1369
Japan
9F, Tonetsu Shinkawa Bldg.
1-24-8 Shinkawa
Chuo-ku, Tokyo 104-0033
Japan
Tel: (81) 3-3523-3551
Fax: (81) 3-3523-7581
Memory
2325 Orchard Parkway
San Jose, CA 95131, USA
Tel: 1(408) 441-0311
Fax: 1(408) 436-4314
Microcontrollers
2325 Orchard Parkway
San Jose, CA 95131, USA
Tel: 1(408) 441-0311
Fax: 1(408) 436-4314
La Chantrerie
BP 70602
44306 Nantes Cedex 3, France
Tel: (33) 2-40-18-18-18
Fax: (33) 2-40-18-19-60
ASIC/ASSP/Smart Cards
Zone Industrielle
13106 Rousset Cedex, France
Tel: (33) 4-42-53-60-00
Fax: (33) 4-42-53-60-01
1150 East Cheyenne Mtn. Blvd.
Colorado Springs, CO 80906, USA
Tel: 1(719) 576-3300
Fax: 1(719) 540-1759
Scottish Enterprise Technology Park
Maxwell Building
East Kilbride G75 0QR, Scotland
Tel: (44) 1355-803-000
Fax: (44) 1355-242-743
RF/Automotive
Theresienstrasse 2
Postfach 3535
74025 Heilbronn, Germany
Tel: (49) 71-31-67-0
Fax: (49) 71-31-67-2340
1150 East Cheyenne Mtn. Blvd.
Colorado Springs, CO 80906, USA
Tel: 1(719) 576-3300
Fax: 1(719) 540-1759
Biometrics/Imaging/Hi-Rel MPU/
High Speed Converters/RF Datacom
Avenue de Rochepleine
BP 123
38521 Saint-Egreve Cedex, France
Tel: (33) 4-76-58-30-00
Fax: (33) 4-76-58-34-80
Literature Requests
www.atmel.com/literature
Disclaimer: The information in this document is provided in connection with Atmel products. No license, express or implied, by estoppel or otherwise, to any
intellectual property right is granted by this document or in connection with the sale of Atmel products. EXCEPT AS SET FORTH IN ATMEL’S TERMS AND CONDI-
TIONS OF SALE LOCATED ON ATMEL’S WEB SITE, ATMEL ASSUMES NO LIABILITY WHATSOEVER AND DISCLAIMS ANY EXPRESS, IMPLIED OR STATUTORY
WARRANTY RELATING TO ITS PRODUCTS INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTY OF MERCHANTABILITY, FITNESS FOR A PARTICULAR
PURPOSE, OR NON-INFRINGEMENT. IN NO EVENT SHALL ATMEL BE LIABLE FOR ANY DIRECT, INDIRECT, CONSEQUENTIAL, PUNITIVE, SPECIAL OR INCIDENTAL DAMAGES (INCLUDING, WITHOUT LIMITATION, DAMAGES FOR LOSS OF PROFITS, BUSINESS INTERRUPTION, OR LOSS OF INFORMATION) ARISING OUT
OF THE USE OR INABILITY TO USE THIS DOCUMENT, EVEN IF ATMEL HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. Atmel makes no
representations or warranties with respect to the accuracy or completeness of the contents of this document and reserves the right to make changes to specifications
and product descriptions at any time without notice. Atmel does not make any commitment to update the information contained herein. Unless specifically provided
otherwise, Atmel products are not suitable for, and shall not be used in, automotive applications. Atmel’s products are not intended, authorized, or warranted for use
as components in applications intended to support or sustain life.
© Atmel Corporation 2005. All rights reserved. Atmel®, logo and combinations thereof, Everywhere You Are® and others, are registered trade-
marks or trademarks of Atmel Corporation or its subsidiaries. Other terms and product names may be trademarks of others.
Printed on recycled paper.
4752B–INDCO–09/05
 Loading...
Loading...