

Page 1

ABB endüstriyel sürücüler
Yazılım el kitabı
ACS880 birincil kontrol programı
Page 2
İngilizce ilgili el kitapları listesi
Sürücü donanım el kitapları Kod (İngilizce) Kod (Türkçe)
ACS880-01 drives hardware manual 3AUA0000078093 3AUA0000126409
ACS880-07 drives (45 to 250 kW, 60 to 300 hp) hardware
manual
ACS880-104 inverter modules hardware manual 3AUA0000104271
ACS880-107 inverter units hardware manual 3AUA0000102519
Sürücü yazılım el kitapları ve kılavuzları
ACS880 primary control program firmware manual 3AUA0000085967 3AUA0000132497
ACS880 drives with primary control program, quick start-
up guide
Seçenek el kitapları ve kılavuzları
ACS-AP-x assistant control panels user’s manual 3AUA0000085685
Drive composer Start-up and maintenance PC tool User’s
manual
I/O genişletme modülleri, fieldbus adaptörleri, kodlayıcı
arabirimleri vb. için el kitapları ve hızlı kılavuzlar
3AUA0000105718
3AUA0000098062 3AUA0000098062
3AUA0000094606
El kitaplarını ve diğer ürün belgelerini PDF formatında Internet'te bulabilirsiniz. Arka kapağın iç
kısmında, bkz. bölüm Internet'teki Belge Kütüphanesi. Belge kütüphanesinde mevcut olmayan el
kitapları için, yerel ABB temsilcinizle bağlantıya geçin.
ACS880-01 el kitapları ACS880-07 el kitapları
Page 3
Yazılım el kitabı
ACS880 birincil kontrol programı
İçindekiler
© 2013 ABB Oy. Tüm Hakları Saklıdır.
3AUA0000132497 Rev F
TR
GEÇERLİLİK TARİHİ: 2013-03-15
Page 4

Page 5

İçindekiler 5
İçindekiler
İngilizce ilgili el kitapları listesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1. El kitabına giriş
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Geçerlilik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Güvenlik talimatları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Hedef kitle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
El kitabının içeriği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
İlgili belgeler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Terimler ve kısaltmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2. Kontrol panelinin kullanılması
Safety
3. Kontrol konumları ve çalışma modları
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Lokal kontrol – harici kontrol karşılaştırması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Lokal kontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Harici kontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Sürücü çalışma modları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Hız kontrolü modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Moment kontrolü modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Frekans kontrolü modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Özel kontrol modları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4. Program özellikleri
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Sürücü konfigürasyonu ve programlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Parametreler üzerinden programlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Uygulama programlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Denetleme arabirimleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Programlanabilir analog girişler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Programlanabilir analog çıkışlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Programlanabilir dijital girişler ve çıkışlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Programlanabilir röle çıkışları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Programlanabilir I/O genişletmeleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Fieldbus kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Master/follower işlevselliği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Harici kontrol cihazı arabirimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Motor kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Doğrudan moment kontrolü (DTC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Referans rampa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Sabit hızlar/frekanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Kritik hızlar/frekanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Akış kontrol kazancı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Page 6

6 İçindekiler
Kodlayıcı desteği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Joglama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Motor potansiyometresi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Skaler motor kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Otomatik fazlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Akı frenleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
DC manyetizasyonu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Uygulama kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Uygulama makroları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Proses PID kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Mekanik fren kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
DC gerilim kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Yüksek gerilim kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Düşük gerilim kontrolü (güç kaybında çalışmaya devam etme) . . . . . . . . . . . . . . . . . . . . 58
Gerilim kontrolü ve açma limitleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Fren kesici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Güvenlik ve korumalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Acil stop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Motor termal koruma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Programlanabilir koruma fonksiyonları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Otomatik hata resetlemeleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Teşhisler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Sinyal denetimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Bakım zamanlayıcıları ve sayaçları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Enerji tasarrufu hesaplayıcıları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Yük analizörü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Diğer konular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Kullanıcı parametre grupları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Veri depolama parametreleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5. Uygulama makroları
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Genel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Fabrika makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Fabrika makrosu için varsayılan parametre ayarları . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Fabrika makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Man/Oto makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Man/Oto makrosu için varsayılan parametre ayarları . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Man/Oto makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
PID kontrol makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
PID kontrol makrosu için varsayılan parametre ayarları . . . . . . . . . . . . . . . . . . . . . . . . . 77
PID kontrol makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . 78
PID kontrol makrosu için sensör bağlantısı örnekleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Moment kontrol makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Moment kontrol makrosu için varsayılan parametre ayarları . . . . . . . . . . . . . . . . . . . . . . 80
Moment kontrol makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . 81
Sıralı kontrol makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Çalışma şeması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Sabit hız seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Sıralı kontrol makrosu için varsayılan parametre ayarları . . . . . . . . . . . . . . . . . . . . . . . . 83
Page 7
İçindekiler 7
Sıralı kontrol makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . 84
Fieldbus kontrol makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
6. Parametreler
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Terimler ve kısaltmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Parametre grupları hakkında kısa bilgi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Parametrelerin listesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
01 Gerçek değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
03 Giriş referansları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
04 Uyarılar ve hatalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
05 Teşhis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
06 Kontrol ve Durum Word'ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
07 Sistem bilgisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
10 Standart DI, RO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
11 Standart DIO, FI, FO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
12 Standart AI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
13 Standart AO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
14 GÇ İlave modülü 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
15 GÇ ilave modülü 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
16 GÇ ilave modülü 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
19 Çalışma modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
20 Başlatma/durdurma/yön . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
21 Start / Stop modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
22 Hız referansı seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
23 Hız referansı rampası . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
24 Hız referansı koşulları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
25 Hız kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
26 Tork referans zinciri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
28 Frekans referans zinciri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
30 Limitler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
31 Hata fonksiyonları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
32 Denetim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
33 Bakı
35 Motor termal koruma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
36 Yük analizörü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
40 Proses PID ayarı 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
41 Proses PID set 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
43 Fren kıyıcı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
44 Mekanik fren kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
45 Enerji tasarrufu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
46 İzleme/skalalama ayarları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
47 Data depolama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
49 Panel port iletişimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252
50 Fieldbus adaptörü (FBA) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
51 FBA A ayarları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
52 FBA A data girişi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
53 FBA A data çıkışı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
54 FBA B ayarları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
55 FBA B data girişi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
m zamanlayıcı ve sayacı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
Page 8

8 İçindekiler
56 FBA B data çıkışı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
60 DDCS iletişimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
61 D2D ve DDCS aktarım datası . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
62 D2D ve DDCS alım datası . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
90 Geribildirim seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
91 Enkoder modülü ayarları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
92 Enkoder 1 yapılandırması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
93 Enkoder 2 yapılandırması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
95 Donanım konfig . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
96 Sistem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294
97 Motor kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298
98 Kullanıcı motor parametreleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
99 Motor datası . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
200 Güvenlik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
201 Güvenli bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
7. Ek parametre datası
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
Terimler ve kısaltmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
Fieldbus adresleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
Parametre grupları 1…9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
Parametre grupları 10…99 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314
8. Hata izleme
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351
Güvenlik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351
Gösterimler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351
Uyarılar ve arızalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351
İşlenmemiş olaylar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352
Düzenlenebilir mesajlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352
Uyarı/hata geçmişi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352
Olay günlüğü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352
Uyarı/hata bilgilerini içeren parametreler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352
Uyarı mesajları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
Hata mesajları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
9. Dahili fieldbus arabirimi (EFB) aracılığıyla fieldbus kontrolü
10. Bir fieldbus adaptörü ile fieldbus kontrolü
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
Sisteme genel bakış . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
Fieldbus kontrol arabiriminin temelleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
Kontrol word’ü ve Durum word’ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 378
Referanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 379
Gerçek değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 380
Fieldbus Kontrol word'ünün içeriği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381
Fieldbus Durum word'ünün içeriği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382
Durum şeması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
Page 9

İçindekiler 9
Sürücünün fieldbus kontrolü için ayarlanması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
Örnek parametre ayarı: FPBA (PROFIBUS DP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385
11. Sürücü - sürücü bağlantısı
12. Kontrol zinciri şemaları
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 389
Hız referansı kaynak seçimi I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 390
Hız referansı kaynak seçimi II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391
Hız referansı rampa ve şekillenmesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392
Motor geri bildirim konfigürasyonu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393
Hız hatası hesaplama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394
Hız kontrol cihazı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395
Moment referansı kaynak seçimi ve değişimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396
Moment kontrol cihazı için referans seçimi I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 397
Moment kontrol cihazı için referans seçimi II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 398
Moment sınırlaması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399
Moment kontrol cihazı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400
Frekans referansı seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401
Frekans referansı değişimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402
Proses PID ayar noktası ve geri bildirim kaynak seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
Proses PID kontrol cihazı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404
Master/Follower iletişimi I (Master) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 405
Master/Follower iletişimi II (Follower) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 406
Daha fazla bilgi
Ürün ve servis ile ilgili sorular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 407
Ürün eğitimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 407
ABB Sürücü el kitapları hakkında geri bildirimde bulunulması . . . . . . . . . . . . . . . . . . . . . . . 407
Internet'teki Belge Kütüphanesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 407
Page 10

10 İçindekiler
Page 11
El kitabına giriş
El kitabına giriş 11
1
Bu bölümün içindekiler
Bu bölümde, el kitabının içindekiler açıklanmaktadır. Bölüm ayrıca; uyumluluk,
güvenlik ve hedef kitle ile ilgili bilgiler içermektedir.
Geçerlilik
Bu el kitabı ACS880 birincil kontrol programı (sürüm 1.40 veya üzeri) için geçerlidir.
Kontrol programının yazılım sürümü kontrol panelinde ana menüdeki Sistem bilgileri
bölümünde ya da 07.05 Cihaz yazılım sürümü parametresinde görülebilir.
Güvenlik talimatları
Sürücüyle birlikte gönderilen tüm güvenlik talimatlarına uyun.
• Sürücünün montajını yapma, devreye alma ve kullanma işlemlerinden önce tüm
güvenlik talimatlarını okuyun. Tüm güvenlik talimatları sürücü ile birlikte
Donanım el kitabı 'nın bir bölümü olarak ya da ACS880 çoklu sürücü olması
durumunda ayrı bir belge olarak gönderilir.
• Parametre değerlerini değiştirmeden önce, yazılım fonksiyonu özel uyarı ve
notları'nı okuyun. Bu uyarılar ve notlar Parametreler bölümünde sunulan
parametre açıklamalarına dahil edilmiştir.
Hedef kitle
Bu el kitabı, sürücü sistemini tasarlayan, devreye alan ve kullanan kişiler için
hazırlanmıştır.
Page 12
12 El kitabına giriş
El kitabının içeriği
Bu el kitabı aşağıdaki bölümleri içerir:
• Kontrol panelinin kullanılması bölümünde kumanda panelinin kullanımı için temel
talimatlar sağlanır.
• Kontrol konumları ve çalışma modları bölümünde sürücünün kontrol konumları ve
çalışma modları açıklanır.
• Program özellikleri bölümünde, ACS880 birincil kontrol programı özelliklerinin
açıklamaları yer alır.
• Uygulama makroları bir bağlantı şemasıyla birlikte her makronun kısa bir
açıklamasını içerir. Makrolar, sürücü yapılandırılırken kullanıcının zamandan
tasarruf etmesini sağlayacak olan önceden tanımlanmış uygulamalardır.
• Parametreler bölümünde, sürücüyü programlamak için kullanılan parametreler
açıklanır.
• Ek parametre datası, parametrelerle ilgili daha fazla bilgi içerir.
• Hata izleme bölümünde uyarı ve hata mesajları olası neden ve çözüm önerileri ile
birlikte listelenir.
• Dahili fieldbus arabirimi (EFB) aracılığıyla fieldbus kontrolü bölümünde,
sürücünün dahili fieldbus arabirimi kullanılarak bir fieldbus ağı oluşturulması ve bu
ağ ile iletişim açıklanır.
•
Bir fieldbus adaptörü ile fieldbus kontrolü bölümünde, isteğe bağlı fieldbus adaptör
modülü kullanılarak bir fieldbus ağı oluşturulması ve bu ağ ile iletişim açıklanır.
• Sürücü - sürücü bağlantısı bölümünde, sürücü-sürücü (D2D) bağlantısı ile
birbirine bağlanmış sürücüler arasındaki iletişim açıklanır.
• Kontrol zinciri şemaları bölümünde, sürücünün parametre yapısı gösterilir.
İlgili belgeler
Not: Sürücü ile birlikte gönderilen Birincil kontrol programlı ACS880 sürücüleri, Hızlı
devreye alma kılavuzu (3AUA0000098062) ile bir hız kontrol uygulaması için hızlı
devreye alma sekansı sağlanır.
İlgili el kitaplarının listesi, ön kapağın iç kısmına basılmıştır.
Terimler ve kısaltmalar
Terim/kısaltma Tanımı
AC 800M ABB tarafından üretilen programlanabilir kontrol cihazı türü.
ACS-AP-I ACS880 sürücüleri ile kullanılan kontrol paneli türü
AI Analog giriş; analog giriş sinyalleri için arabirim
AO Analog çıkış; analog çıkış sinyalleri için arabirim
BCU ACS880 sürücülerinde kullanılan denetleme birimi türü.
Page 13
El kitabına giriş 13
Terim/kısaltma Tanımı
DC bağlantısı Doğrultucu ve çevirici arasındaki DC devresi
DDCS Dağıtılmış sürücü iletişim sistemi; isteğe bağlı fiber iletişimde
kullanılan bir protokol
DI Dijital giriş; dijital giriş sinyalleri için arabirim
DIO Dijital giriş/çıkış; bir dijital giriş ya da çıkış olarak kullanılabilen
arabirim
DO Dijital çıkış; dijital çıkış sinyalleri için arabirim
Sürücü
AC motorlarının kontrolü için frekans dönüştürücü. Sürücü, birbirine
DC bağlantısı ile bağlı olan bir bir doğrultucu ve bir çeviriciden
oluşur. Yaklaşık 500 kW güce kadar olan sürücülerde, bunlar tek bir
modüle (sürücü modülü) entegre edilmiştir. Daha büyük sürücüler
genellikle ayrı besleme ve çevirici birimlerinden oluşur.
ACS880 birincil kontrol programı sürücünün çevirici bölümünü
kontrol etmek için kullanılır.
DTC Doğrudan moment kontrolü
FBA Fieldbus adaptörü
FEN-01 İsteğe bağlı TTL enkoder arabirim modülü
FEN-11 İsteğe bağlı mutlak enkoder arabirim modülü
FEN-21 İsteğe bağlı çözücü arabirim modülü
FEN-31 İsteğe bağlı HTL enkoder arabirim modülü
FIO-01 İsteğe bağlı dijital G/Ç genişletme modülü
FIO-11 İsteğe bağlı analog G/Ç genişletme modülü
FCAN-0x İsteğe bağlı CANopen adaptörü
FDCO-0x İsteğe bağlı DDCS iletişimi modülü
FDNA-0x İsteğe bağlı DeviceNet adaptörü
FECA-01 İ
steğe bağlı EtherCAT® adaptörü
FENA-11 İsteğe bağlı Ethernet/IP adaptörü
FLON-0x İsteğe bağlı L
ONWORKS
®
adaptörü
FPBA-0x İsteğe bağlı PROFIBUS DP adaptörü
FSCA-0x İsteğe bağlı Modbus adaptörü
FSO-xx İsteğe bağlı güvenlik fonksiyonları modülü
HTL Üst eşik mantığı
ID run
Motor tanımlama çalıştırması. Tanımlama çalıştırması sırasında
sürücü, optimum motor kontrolü için motor karakteristiklerini tanımlar.
IGBT Yalıtımlı geçit iki kutuplu transistörü; kolay kontrol edilebilmeleri
ve yüksek anahtarlama frekansları nedeniyle yaygın şekilde
IGBT besleme birimlerinde ve çeviricilerle kullanılan gerilim
kontrollü yarı iletken tip
Çevirici birimi Büyük sürücülerde (yaklaşık > 500 kW), motor için DC'yi AC'ye
dönüştüren sürücü bölümü. Bir ya da birden fazla çevirici
modülünden ve bunların yardımcı bileşenlerinden oluşur.
Page 14
14 El kitabına giriş
Terim/kısaltma Tanımı
G/Ç Giriş/Çıkış
ISU Bir IGBT besleme birimi; rejeneratif ve düşük harmonik
sürücülerde kullanılan, IGBT anahtarlama bileşenleri
kullanılarak tamamlanmış besleme birimi tipi.
Hat tarafındaki dönüştürücü Bkz. besleme birimi.
LSB En önemsiz bit
LSW En önemsiz word
Motor tarafındaki
Bkz. çevirici birimi.
dönüştürücü
MSB En önemli bit
MSW En önemli word
Ağ kontrolü DeviceNet ve Ethernet/IP gibi Ortak Endüstriyel Protokol
TM
(CIP
) tabanlı fieldbus protokollerinde, ODVA AC/DC Sürücü
Profilinin Net Ctrl ve Net Ref nesnelerini kullanarak sürücünün
kontrolünü ifade eder. Daha ayrıntılı bilgi için, www.odva.org
adresine ve aşağıdaki el kitaplarına bakın:
• FDNA-01 DeviceNet adaptörü Kullanıcı el kitabı
(3AFE68573360 [İngilizce]) ve
• FENA-01/-11 Ethernet adaptörü Kullanıcı el kitabı
(3AUA0000093568 [İngilizce]).
Parametre Sürücünün kullanıcı tarafından ayarlanabilir çalışma talimatı ya
da sürücü tarafından ölçülen veya hesaplanan sinyal
PID kontrol cihazı Oransal-integral-türev kontrol cihazı. Sürücü hız kontrolü PID
algoritmasına dayanır.
PLC Programlanabilir mantık kontrol cihazı
Güç birimi Sürücünün (veya çevirici modülünün) güç elektroniği devrelerini
ve güç bağlantılarını içerir. Sürücü denetleme birimi güç birimine
bağlıdır.
PTC Pozitif sıcaklık katsayısı
RDCO-0x İsteğe bağlı DDCS iletişimi modülü
RFG Rampa fonksiyonu jeneratörü
RO Röle çıkışı; dijital çıkış sinyali için arabirim. Bir röle ile uygulanır.
SSI Senkron seri arabirim
STO Güvenli moment kapatma
Besleme birimi Büyük sürücülerde (yaklaşık > 500 kW), AC'yi DC'ye
dönüştüren sürücü bölümü. Bir ya da birden fazla besleme
modülünden ve bunların yardımcı bileşenlerinden oluşur. Bir
IGBT besleme birimi (ISU) besleme şebekesine geri rejeneratif
enerji de besleyebilir.
TTL Transistörler arası mantık
UPS Kesintisiz güç kaynağı; güç kesintisi esnasında çıkış gerilimini
korumak için pilli güç kaynağı ekipmanı
Page 15
El kitabına giriş 15
Terim/kısaltma Tanımı
ZCON ACS880 sürücülerinde kullanılan denetleme panosu türü. Pano
sürücü modülüne entegre edilmiştir ya da plastik bir
muhafazaya bağlanmıştır (bkz. ZCU).
ZCU Plastik bir muhafazaya yerleştirilmiş bir ZCON kartından oluşan
ACS880 sürücülerinde kullanılan denetleme birimi türü.
Denetleme birimi sürücü/çevirici modülü üzerine bağlanabilir ya
da ayrı olarak monte edilebilir.
Page 16

16 El kitabına giriş
Page 17
Kontrol panelinin kullanılması
Kontrol panelinin kullanılması 17
2
Bkz. ACS-AP-x gelişmiş kontrol panelleri kullanıcı el kitabı (3AUA0000085685 [İngilizce]).
Page 18

18 Kontrol panelinin kullanılması
Page 19
Kontrol konumları ve çalışma modları 19
3
Kontrol konumları ve çalışma modları
Bu bölümün içindekiler
Bu bölümde kontrol programı tarafından desteklenen kontrol konumları ve çalışma
modları açıklanır.
Page 20
20 Kontrol konumları ve çalışma modları
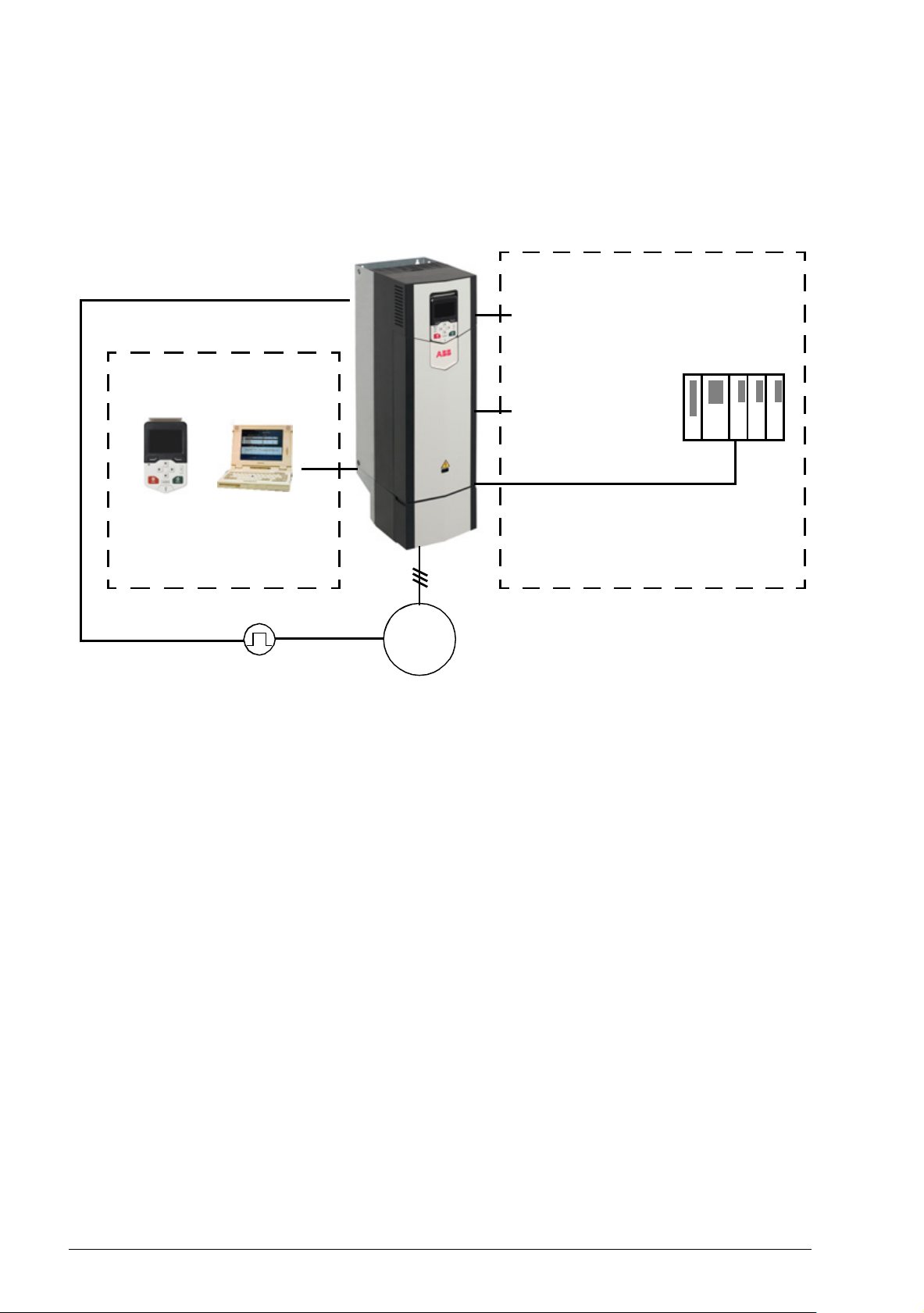
Lokal kontrol – harici kontrol karşılaştırması
ACS880'de iki temel kontrol konumu bulunur: harici ve lokal. Kontrol konumu, PC
aracındaki ya da kontrol panelindeki Loc/Rem tuşuyla seçilir.
ACS880
Harici kontrol
2)
1)
G/Ç
Lokal kontrol
Kontrol paneli veya Sürücü
düzenleyici PC aracı
(isteğe bağlı)
Sürücü - sürücü
(D2D) bağlantısı
veya mas ter/follower
bağlantısı
Fieldbus adaptörü (Fxxx)
veya DDCS iletişim modülü
PLC
M
3~
MOTOR
Enkoder
1) Sürücü yuvalarına isteğe bağlı G/Ç genişletme modülleri (FIO-xx) takılarak ekstra
giriş/çıkış eklenebilir.
2) Sürücü yuvalarına enkoder veya çözücü arabirimi modülü/modülleri (FEN-xx) takılır.
Lokal kontrol
Kontrol komutları, sürücü yerel kontroldeyken kumanda paneli tuş takımından veya
Sürücü düzenleyici bulunan bir PC'den verilir. Lokal kontrol için hız ve moment
kontrol modları bulunur; frekans modu, skaler motor kontrol modu kullanılırken
mevcuttur (bkz. parametre 19.16 Lokal kontrol modu).
Lokal kontrol genellikle devreye alma ve bakım sırasında kullanılır. Kontrol paneli,
lokal kontrolde kullanıldığında, her zaman için harici kontrol sinyal kaynaklarından
öncelikli konumdadır. Kontrol konumunun lokal olarak değiştirilmesi 19.17 Lkl kntrl d.
dışı brk parametresi ile engellenebilir.
Kullanıcı, bir parametre (49.05 Haberleşme kaybı fonk) ile sürücünün kontrol paneli
veya PC aracı ile iletişimin kesilmesine nasıl tepki vereceğini ayarlayabilir.
(Parametrenin harici kontrol üzerinde etkisi yoktur.)
Page 21

Kontrol konumları ve çalışma modları 21
Harici kontrol
Sürücü harici kontrol durumundayken, kontrol komutları
• G/Ç terminalleri (dijital ve analog girişler) veya isteğe bağlı G/Ç genişletme
modülleri
• isteğe bağlı bir fieldbus adaptör modülü
• harici (DDCS) kontrol cihazı arabirimi ve/veya
• master/follower bağlantısı ile verilir.
İki harici kontrol konumu bulunmaktadır; EXT1 ve EXT2. Kullanıcı start ve stop
komutlarının kaynağını 20.01…20.10 parametreleriyle her bir konum için bağımsız
olarak seçebilir. Çalışma modunun her bir konum için bağımsız olarak
seçilebilmesiyle, örneğin hız ve moment kontrolü gibi farklı çalışma modları arasında
hızlı anahtarlama sağlanır. EXT1 ve EXT2 seçimi bir dijital giriş veya fieldbus kontrol
word'ü gibi herhangi bir ikili kaynak aracılığıyla gerçekleştirilir (bkz. parametre
Ext1/Ext2 seçimi). Referans kaynağı her bir çalışma modu için bağımsız olarak
seçilebilir.
19.11
Page 22
22 Kontrol konumları ve çalışma modları
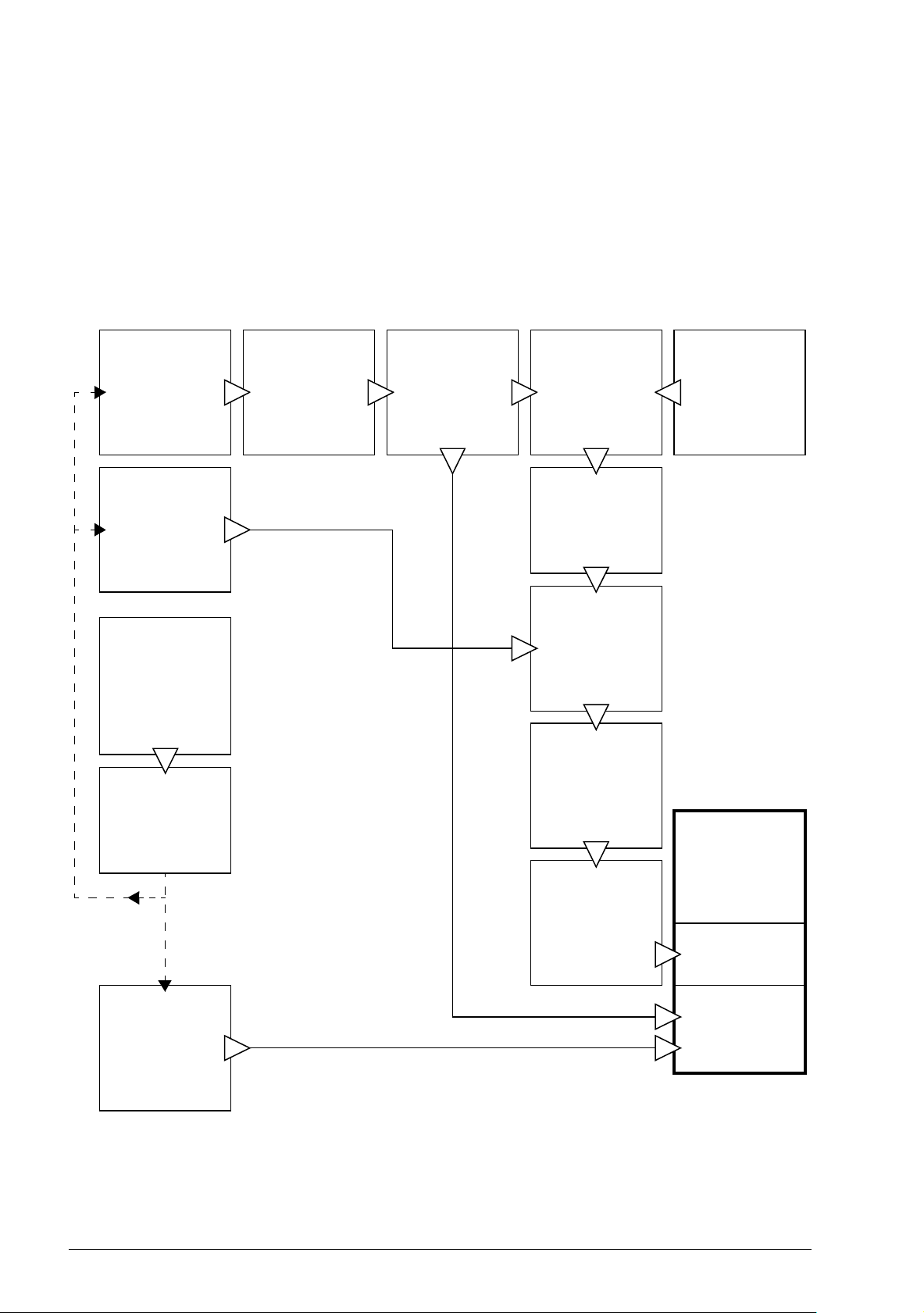
Sürücü çalışma modları
Sürücü, farklı referans türleri ile çeşitli çalışma modlarında çalışabilir. Mod, 19
Çalışma modu parametre grubunda her bir kontrol konumu (Lokal, EXT1 ve EXT2)
için seçilebilir.
Aşağıda, referans türleri ve kontrol zincirlerinin genel bir gösterimi sunulmaktadır.
Sayfa numaraları Kontrol zinciri şemaları bölümündeki ayrıntılı şemalara atıfta
bulunur.
Hız referansı
kaynak seçimi I
(s. 390)
Moment
referansı kaynak
seçimi ve
değişimi
(s. 396)
Proses PID ayar
noktası ve geri
bildirim kaynak
seçimi
(s. 403)
Proses PID
kontrol cihazı
(s. 404)
Hız referansı
kaynak seçimi II
(s. 391)
Hız referansı
rampa ve
şekillenmesi
(s. 392)
Hız hatası
hesaplama
(s. 394)
Hız kontrol cihazı
(s. 395)
Moment kontrol
cihazı için
referans seçimi I
(s. 397)
Moment kontrol
cihazı için
referans seçimi II
(s. 398)
Moment
sınırlaması
(s. 399)
Motor geri
bildirim
konfigürasyonu
(s. 393)
Moment kontrol
cihazı
(s. 400)
DTC motor
kontrol modu
Frekans
referansı kaynak
seçimi ve
değişimi
(s. 401…402)
Skaler motor
kontrol modu
Page 23

Kontrol konumları ve çalışma modları 23
Hız kontrolü modu
Motor sürücüye verilen bir hız referansını izler. Bu mod, geribesleme olarak tahmini
hız ile veya daha yüksek hız hassaslığı sağlamak amacıyla kodlayıcı veya çözücü ile
kullanılabilir.
Hız kontrolü modu hem lokal hem de harici kontrolde bulunmaktadır. DTC (Doğrudan
Moment Kontrolü) ve skaler motor kontrol modlarında da bulunur.
Moment kontrolü modu
Motor momenti sürücüye verilen bir moment referansını izler. Geri besleme olmadan
tork kontrolü mümkündür, ancak kodlayıcı ya da çözücü gibi bir geribesleme cihazı ile
birlikte kullanıldığında, çok daha dinamik ve hassastır. Vinç veya asansör
kontrollerinde bir geribesleme cihazı kullanılması tavsiye edilir.
Tork kontrolü modu, DTC motor kontrol modunda, hem yerel hem de harici kontrol
konumları için bulunmaktadır.
Frekans kontrolü modu
Motor sürücüye verilen bir frekans referansını izler. Frekans kontrolü sadece skaler
motor kontrol modunda bulunur.
Özel kontrol modları
Yukarıda bahsedilen kontrol modlarına ek olarak aşağıdaki özel kontrol modları da
bulunmaktadır:
•
Proses PID kontrolü. Daha fazla bilgi için, bkz. bölüm Proses PID kontrolü (sayfa 50).
• Acil stop modları Off1 ve Off3: Sürücü tanımlanan yavaşlama rampasında durur
ve sürücü modülasyonu durur.
• Joglama modu: Sürücü joglama sinyali etkinleştirildiğinde çalışır ve tanımlanan
değere kadar hızlanır. Daha fazla bilgi için, bkz. bölüm Joglama (sayfa 41).
• Güç kontrolü modu. Bu mod rüzgar türbini dönüştürücüsü uygulamalarında
kullanılır. Daha fazla bilgi için, rüzgar türbini dönüştürücüsü belgelerine bakın.
Page 24

24 Kontrol konumları ve çalışma modları
Page 25
Program özellikleri
Program özellikleri 25
4
Bu bölümün içindekiler
Kontrol programı, sürücüdeki parametrelerin tümünü (gerçek sinyaller dahil) içerir. Bu
bölümde, kontrol programındaki bazı daha önemli fonksiyonlar, bunların kullanılması
ve bunların çalıştırılmak üzere programlanması açıklanmaktadır.
Page 26
26 Program özellikleri
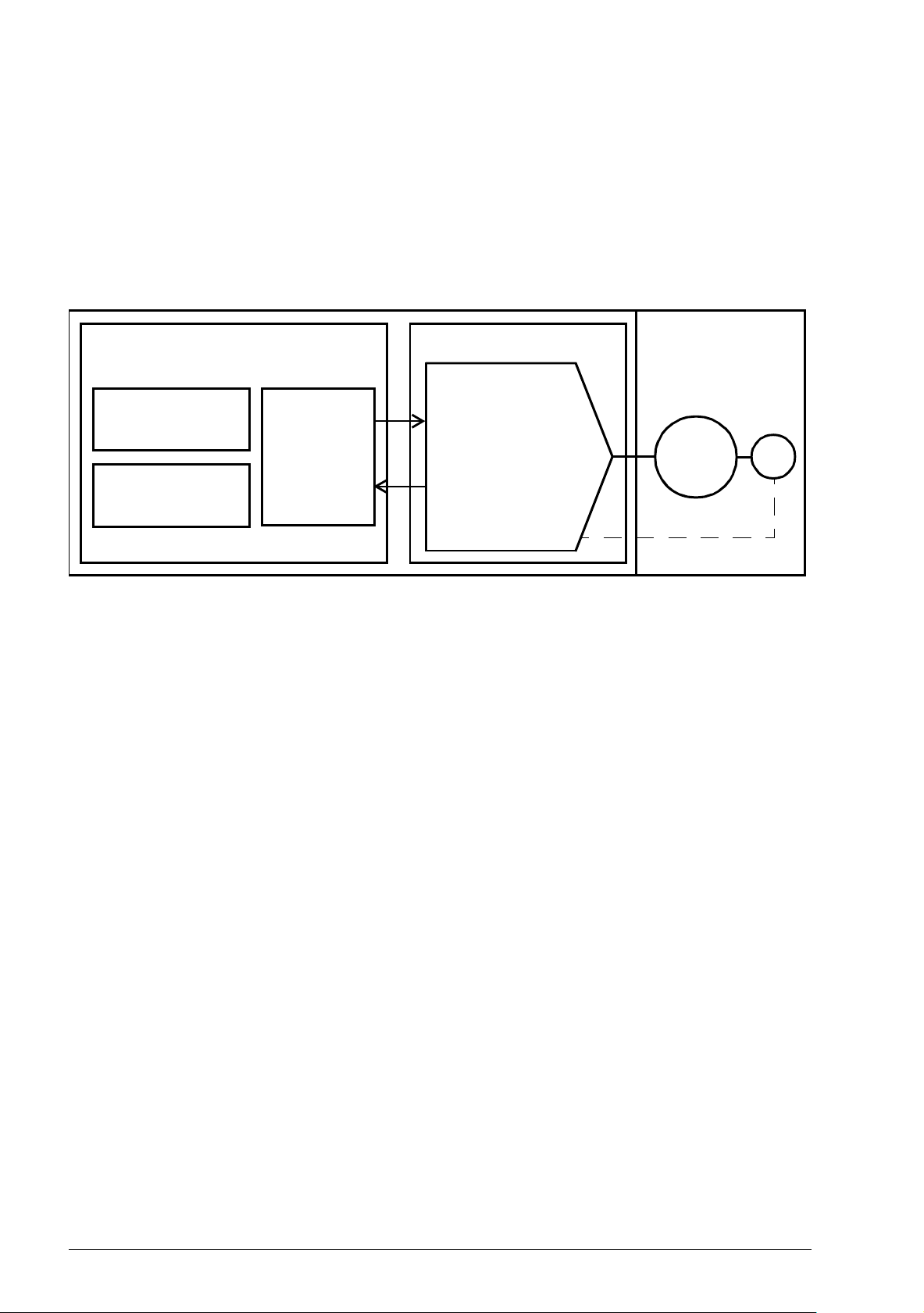
Sürücü konfigürasyonu ve programlama
Sürücü kontrol programı iki bölüme ayrılır:
•yazılım programı
• uygulama programı.
Sürücü kontrol programı
Uygulama programı
Hız kontrolü
Fonksiyon bloğu
programı
Parametre
arabirimi
Standart
blok kütüphanesi
Yazılım programı; hız ve moment kontrolü, sürücü mantığı (başlatma/durdurma),
G/Ç, geri bildirim, iletişim ve koruma fonksiyonları gibi ana kontrol fonksiyonlarını
gerçekleştirir. Yazılım fonksiyonları parametreler ile yapılandırılabilir, programlanabilir
ve uygulama programlama aracılığıyla genişletilebilir.
Moment kontrolü
Frekans kontrolü
Sürücü mantığı
G/Ç arabirimi
Fieldbus arabirimi
Korumalar
Geri Bildirim
Yazılım
M
E
Parametreler üzerinden programlama
Parametreler tüm standart sürücü çalışmalarını yapılandırabilir ve şunun aracılığıyla
ayarlanabilir:
• kontrol paneli (Kontrol panelinin kullanılması bölümünde açıklandığı gibi)
• Sürücü düzenleyici PC aracı, (Sürücü düzenleyici kullanıcı el kitabı 'nda
(3AUA0000094606 [İngilizce]) açıklandığı gibi) veya
• fieldbus arabirimi (Dahili fieldbus arabirimi (EFB) aracılığıyla fieldbus kontrolü ve
Bir fieldbus adaptörü ile fieldbus kontrolü bölümlerinde açıklandığı gibi).
Tüm parametre ayarları otomatik olarak sürücünün kalıcı belleğine depolanır. Yine
de, sürücü denetleme birimi için harici +24 V DC güç kaynağı kullanılıyorsa, herhangi
bir parametre değişikliği gerçekleştirildikten sonra, denetleme biriminin gücünü
kapatmadan önce 96.07 Manuel parametre kayd
işleminin zorlanması önemle tavsiye edilir.
Gerekirse, varsayılan parametre değerleri 96.06 Parametre geri yükleme parametresi
ile geri yüklenebilir.
ı parametresi kullanılarak kayıt
Page 27

Program özellikleri 27
Uygulama programlama
Yazılım programının fonksiyonları uygulama programlama aracılığıyla genişletilebilir.
(Standart koşullarda uygulama programı sürücü ile birlikte verilmemektedir.)
Uygulama programları, IEC 61131 standardına dayalı olarak fonksiyon bloklarından
oluşturulabilir.
Page 28

28 Program özellikleri
Denetleme arabirimleri
Programlanabilir analog girişler
Denetleme biriminin iki adet programlanabilir analog girişi bulunmaktadır. Her giriş
bağımsız şekilde, denetleme birimi üzerindeki bir jumper veya bir anahtar ile gerilim
(0/2…10 V veya -10…10 V) veya akım (0/4…20 mA) girişi olarak ayarlanabilir. Her
giriş filtrelenebilir, ters çevrilebilir ve ölçeklendirilebilir. Analog giriş sayısı, FIO-xx G/Ç
genişletmeleri kullanılarak artırılabilir.
Ayarlar
12 Standart AI parametre grubu (sayfa 112).
Programlanabilir analog çıkışlar
Denetleme biriminin iki adet akım (0…20 mA) analog çıkış bulunmaktadır. Her çıkış
filtrelenebilir, ters çevrilebilir ve ölçeklendirilebilir. Analog çıkış sayısı, FIO-xx G/Ç
genişletmeleri kullanılarak artırılabilir.
Ayarlar
13 Standart AO parametre grubu (sayfa 11 5).
Programlanabilir dijital girişler ve çıkışlar
Denetleme biriminde altı dijital giriş, bir dijital start kilidi girişi ve iki dijital giriş/çıkış
(giriş ya da çıkış olarak ayarlanabilen I/O) bulunmaktadır.
Bir dijital giriş (DI6), bir PTC termistör girişi olarak iki katına çıkar. Bkz. bölüm Motor
termal koruma (sayfa 61).
Dijital giriş/çıkış DIO1 frekans girişi, DIO2 frekans çıkışı olarak kullanılabilir.
Dijital giriş/çıkış sayısı, FIO-xx G/Ç genişletmeleri kullanılarak artırılabilir.
Ayarlar
Parametre grubu 10 Standart DI, RO (sayfa 101) ve 11 Standart DIO, FI, FO (sayfa 107).
Programlanabilir röle çıkışları
Denetleme biriminde üç adet röle çıkışı bulunmaktadır. Çıkışlar tarafından
gösterilecek olan sinyal, parametreler ile seçilebilir.
FIO-0x G/Ç genişletmeleri kullanılarak röle çıkışları eklenebilir.
Ayarlar
10 Standart DI, RO parametre grubu (sayfa 101).
Page 29
Program özellikleri 29
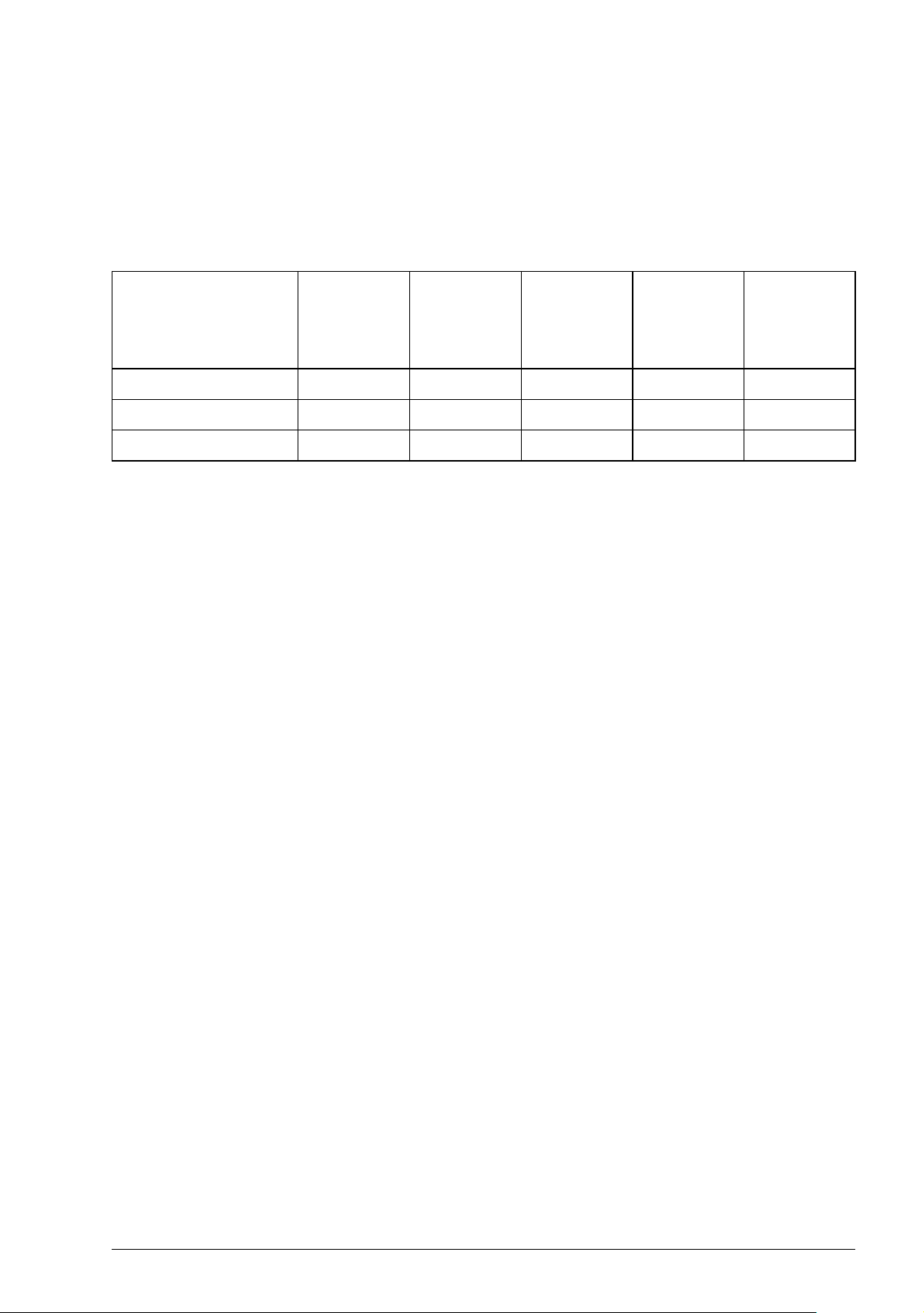
Programlanabilir I/O genişletmeleri
FIO-xx G/Ç genişletmeleri kullanılarak giriş ve çıkış eklenebilir. Denetleme biriminin
yuvalarına bir ila üç modül bağlanabilir.
Aşağıdaki tabloda isteğe bağlı FIO-xx G/Ç genişletme modülü ve denetleme birimi
üzerindeki G/Ç sayısı gösterilmektedir.
Dijital
Konum
Denetleme birimi 6 + DIIL 2223
FIO-01 - 4 - - 2
FIO-11 -231 -
girişler
(DI)
Dijital
I/O'lar
(DIO)
Analog
girişler
(AI)
Analog
çıkışlar
(AO)
Röle
çıkışları
(RO)
14…16 parametre grupları kullanılarak üç G/Ç genişletme modülü etkinleştirilebilir ve
konfigüre edilebilir.
Not: Her bir konfigürasyon parametresi grubunda, ilgili genişletme modülündeki giriş
değerini gösteren parametreler bulunur. Bu parametreler G/Ç genişletme
modüllerindeki girişlerin sinyal kaynağı olarak kullanılmasının tek yoludur. Bir giriş
bağlamak için, kaynak seçici parametresinde Diğer ayarını seçin ve ardından 14, 15
veya 16 grubunda ilgili değer parametresini (ve biti, dijital sinyaller için) belirtin.
Ayarlar
Parametre grubu 14 GÇ İlave modülü 1 (sayfa 119), 15 GÇ ilave modülü 2 (sayfa
135) ve 16 GÇ ilave modülü 3 (sayfa
138).
Fieldbus kontrolü
Sürücü, fieldbus arabirimleri aracılığıyla birçok farklı otomasyon sistemine
bağlanabilir. Bkz. bölüm Bir fieldbus adaptörü ile fieldbus kontrolü (sayfa 375).
Ayarlar
Parametre grubu 50 Fieldbus adaptörü (FBA) (sayfa 253), 51 FBA A ayarları (sayfa
261), 52 FBA A data girişi (sayfa 263), 53 FBA A data çıkışı (sayfa 263), 54 FBA B
ayarları (sayfa 264), 55 FBA B data girişi (sayfa 265) ve 56 FBA B data çıkışı
(sayfa 266).
Page 30
30 Program özellikleri
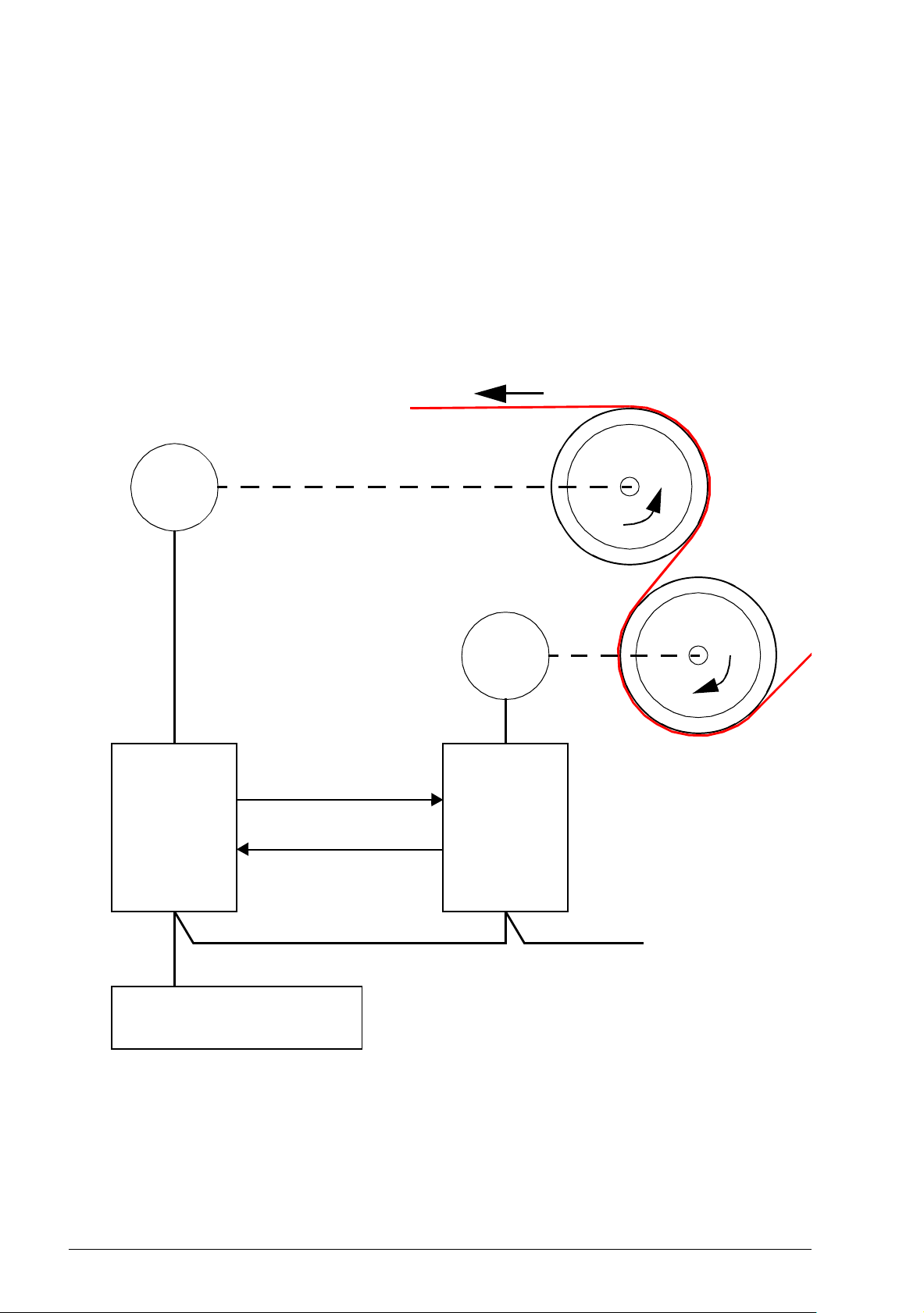
Master/follower işlevselliği
Genel
Master/follower işlevselliği birden fazla sürücüyü, yük sürücüler arasında eşit olarak
dağıtılacak şekilde birbirine bağlamak için kullanılabilir. Bu, motorların birbirine dişli,
zincir, kayış vb. yöntemlerle bağlandığı uygulamalarda idealdir.
Harici kontrol sinyalleri tipik olarak master olarak görev yapan bir sürücüye bağlanır.
Master bir fiber optik haberleşme bağlantısı üzerinden yayın mesajları göndererek
10'a kadar follower kontrol edebilir. Master maksimum 3 seçili follower'dan gelen geri
bildirim sinyallerini okuyabilir.
Hız kontrollü master
M
~
Master
Proses master'ı
Kontrol word'ü
Moment referansı
DDCS
Master/follower bağlantısı
Durum word'ü
01.01 Kullanılan motor hızı
01.10 Motor torku %
Fieldbus kontrolü
(Örnek)
Hız referansı
(Örnek)
Proses follower'ı
Follower
DDCS
M
~
Moment veya hız
kontrollü follower
Harici kontrol sistemi (örn. PLC)
60.03 M/F modu parametresi sürücünün haberleşme bağlantısında master ya da bir
follower olacağını belirler. Tipik olarak, hız kontrollü proses master sürücüsü de
iletişimde master olarak konfigüre edilebilir.
Page 31

Program özellikleri 31
Master sürücü tipik olarak hız kontrollüdür ve düğer sürücüler bu sürücünün moment
veya hız referansını izler. Genelde, bir follower
• master ve follower motor şaftları, sürücüler arasında hız farkı olmayacak şekilde
dişli, zincir vb. ile rijit olarak bağlandığında moment kontrollü,
• master ve follower motor şaftları, bir miktar hız farkı olacak şekilde esnek olarak
bağlandığında hız kontrollü olmalıdır. Hem master hem de follower hız kontrollü
olduğunda, sarkma da tipik olarak kullanılır (bkz. parametre 25.08 Düşme oranı).
Bazı uygulamalarda, follower için hem hız kontrolü hem de moment kontrolü
gereklidir. Bu tür durumlarda, follower'ın bir dijital girişi aracılığıyla hız ve moment
kontrolü arasında bir “acil” değiştirme işlemi gerçekle
26.15 Yük paylaşımı follower parametresi gelen tork referansı nı master ve follower
arasında optimum yük paylaşımı için ölçeklendirmek üzere kullanılabilir. Tüm moment
kontrollü follower'larda darbe enkoderlerinin kullanılması tavsiye edilir.
Bir sürücünün master ve follower durumları arasında hızlı bir şekilde geçiş yapması
gerekiyorsa, master ayarları ile bir kullanıcı parametresi grubu (bkz. sayfa 70),
follower ayarları ile başka bir parametre grubu kaydedilebilir. Ardından ilgili ayarlar
dijital girişler vb. kullanılarak etkinleştirilebilir.
ştirilebilir. Tork kontrolünde,
İletişim
Fiber optik bağlantıda iletişim veri gruplarının (özellikle, veri grubu 41) kullanıldığı
DDCS protokolüne dayanır. Bir veri grubunda üç adet 16 bit word bulunur. Veri
grubunun içeriği bağımsız olarak konfigüre edilebilir, ancak master tarafından veri
grubu yayınında tipik olarak kontrol word'ü, hız referansı, moment referansı
bulunurken, follower'lar iki gerçek değere sahip bir durum word'ü gönderir.
Her bir follower'dan ilave üç veri word'ü isteğe bağlı olarak okunabilir. Verilerin
okunduğu follower'lar master'daki 60.14 M/F follower seçimi parametresi ile
seçilebilir. Her bir follower sürücüde, gönderilecek veriler 61.01…61.03 parametreleri
ile seçilebilir. Veriler bağlantı üzerinde tamsayı formatında aktarılır ve master'daki
62.04…62.12 parametreleri ile görüntülenir.
Follower'lardaki hataları veya uyarıları görüntülemek için, harici olaylar (bkz.
parametre grubu 31 Hata fonksiyonları) kullanılabilir. Örneğin, bir harici olayı
tetiklemek için bir follower'dan (tipik olarak 62.04 Follower ağı 2 data 1 seç
parametresi) alınan durum word'ünün 3. bitini (Hata) kullanın.
405. ve 406. sayfalarda master/follower iletişiminin blok şemaları gösterilmektedir.
Fiber optik bağlantının yapısı
Master/follower ba
oluşur. Bir ZCU-11 veya ZCU-13 denetleme birimi bulunan sürücüler için bir ek FDCO
DDCS iletişim modülü; bir BCU-x2 denetleme birimi bulunan sürücüler için RDCO
modülü gerekir.
ğlantısı sürücülerin fiber optik kablolarla birbirine bağlanmasıyla
Page 32

32 Program özellikleri
Yıldız ve halka konfigürasyonu örnekleri aşağıda gösterilmiştir. Yıldız konfigürasyonu
için bir NDBU-95C DDCS dallandırma birimi gerekir.
Halka konfigürasyonu
Master
(ZCU) Denetleme birimi
FDCO
RT
T=Verici; R=Alıcı
Yıldız konfigürasyonu (1)
Master
(ZCU) Denetleme birimi
FDCO
RT
Follower 1
(BCU) Denetleme birimi
RDCO
CH2
RT
Follower 1
(ZCU) Denetleme birimi
FDCO
RT
Follower 2
(ZCU) Denetleme birimi
FDCO
RT
Follower 2
(BCU) Denetleme birimi
RDCO
CH2
RT
T=Verici
R=Alıcı
R T R T R T R T
MSTR CH0 CH1 CH2
NDBU
Follower 3
(ZCU) Denetleme birimi
FDCO
RT
Page 33

Yıldız konfigürasyonu (2)
Program özellikleri 33
Master
(ZCU) Denetleme birimi
FDCO
RT
T=Verici
R=Alıcı
Follower 1
(ZCU) Denetleme birimi
FDCO
RT
R T R T
CHx CHx
X13 = REGEN
R T R T
CHx CHx
NDBU
Follower 2
(BCU) Denetleme birimi
RDCO
CH2
RT
Follower 3
(ZCU) Denetleme birimi
FDCO
RT
Örnek parametre ayarları
Aşağıda, master/follower bağlantısı konfigüre edilirken ayarlanması gereken bir
parametre kontrol listesi verilmiştir. Bu örnekte, master kontrol word'ünü, bir hız
referansı ve bir moment referansı yayınlar. Follower bir durum word'ü ve iki gerçek
değer gönderir (bu zorunlu değildir, ancak açıkça belirlenmesi için gösterilmiştir).
Master ayarları
:
• Master/follower bağlantısı aktivasyonu
• 60.01 M/F iletişim portu (fiber optik kanal seçimi)
•(60.02 M/F ağ adresi = 1)
• 60.03 M/F modu = Master
• Follower'lar için yayınlanacak veriler
• 61.01 M/F data 1 seçimi = CW 16bit (kontrol word'ü)
• 61.02 M/F data 2 seçimi = Diğer - 24.01 Kullanılan hız referansı [16 bit
tamsayı] (hız referansı)
• 61.03 M/F data 3 seçimi = Diğer - 26.01 Tork referansı - TC [16 bit tamsayı]
(tork referansı)
• Follower'lardan okunacak veriler (isteğe bağlı)
• 60.14 M/F follower seçimi (verilerin okunacağı follower'ların seçilmesi)
62.04 Follower ağı 2 data 1 seç … 62.12 Follower ağı 4 data 3 seç
•
(follower'lardan alınan verilerin eşlenmesi)
Page 34

34 Program özellikleri
Follower ayarları:
• Master/follower bağlantısı aktivasyonu
• 60.01 M/F iletişim portu (fiber optik kanal seçimi)
• 60.02 M/F ağ adresi = 2…60
• 60.03 M/F modu = Follower
• Follower'lardan alınan verilerin eşlenmesi
• 62.01 M/F data 1 seçimi = CW 16bit
• 62.02 M/F data 2 seçimi = Ref1 16bit
• 62.03 M/F data 3 seçimi = Ref2 16bit
• Kontrol konumu seçimi
• 20.01 Ext1 komutları = D2D veya M/F bağlantısı
• 20.02 Ext1 bşltma tetikleyicisi tipi = Kalıcı
• Referans kaynak seçimi
• 22.11 Hız ref1 kaynağı = D2D ya da M/F referansı 1
• 26.11 Tork ref1 kaynağı = D2D ya da M/F referansı 2
• Master'a gönderilecek verilerin seçimi (isteğe ba
• 61.01 M/F data 1 seçimi = SW 16bit
• 61.02 M/F data 2 seçimi = Act1 16bit
• 61.03 M/F data 3 seçimi = Act2 16bit
Master/follower bağlantısının teknik özellikleri
• Maksimum fiber kablo uzunluğu:
• FDCO-01/02, POF (Plastik Optik Fiber) ile: 30 m
• FDCO-01/02, HCS (Sert Kaplamalı Silika Fiber) ile: 200 m
• RDCO-04 (sadece BCU-x2'li), POF (Plastik Optik Fiber) ile: 10 m
• 1000 m'ye kadar olan mesafeler için, iki adet cam optik kablolu (GOF, 6,25
mikrometre, Multi-Mod) NOCR-01 optik dönüştürücü/yineleyici kullanın
•Aktarım hızı: 4 Mbit/s
• Toplam bağlantı performansı: < 5 ms, master ve follower'lar arasında referansları
aktarmak için.
• Protokol: DDCS (Dağıtılmış Sürücü İletişim Sistemi)
ğlı)
Ayarlar ve teşhisler
Parametre grubu 60 DDCS iletişimi (sayfa 266), 61 D2D ve DDCS aktarım datası
(sayfa 273) ve 62 D2D ve DDCS alım datası (sayfa 275).
Harici kontrol cihazı arabirimi
Genel
Sürücü fiber optik kablolar kullanılarak bir harici kontrol cihazına (ABB AC 800M gibi)
bağlanabilir. Bir ZCU-xx denetleme birimi bulunan sürücüler için, bir ek FDCO DDCS
Page 35

Program özellikleri 35
iletişim modülü; bir BCU-x2 denetleme birimi bulunan sürücüler için RDCO modülü
gerekir.
Topoloji
Aşağıda ZCU tabanlı veya BCU tabanlı bir sürücü ile örnek bir bağlantı
gösterilmektedir. Halka ve yıldız yapılandırmaları master/follower bağlantısında
olduğu gibi aynı şekilde mümkündür (bkz. bölüm Master/follower işlevselliği,
sayfa 30); dikkate değer fark ise harici kontrol cihazının CH2 yerine RDCO kartındaki
CH0 kanalına bağlanmasıdır. ZCU tabanlı sürücülerde, FDCO iletişim modülündeki
kanal serbestçe seçilebilir.
ACS880
(BCU) Denetleme birimi
RDCO
CH0
RT
Kontrol cihazı
RT
T=Verici; R=Alıcı
ACS880
(ZCU) Denetleme birimi
FDCO
RT
İletişim
Kontrol cihazı ve sürücü arasındaki iletişim her biri üç adet 16 bit word veri grubundan
oluşur. Kontrol cihazı sürücüye bir veri grubu gönderir ve bu veri grubu kontrol
cihazına bir sonraki veri grubu olarak geri döner.
İletişimde 10…33 veri grupları kullanıl
ır. Çift numaralı veri grupları kontrol cihazından
sürücüye gönderilirken, tek numaralı veri grupları sürücüden kontrol cihazına
gönderilir. Veri gruplarının içeriği bağımsız olarak konfigüre edilebilir, ancak veri
grubu 10 tipik olarak kontrol word'ü ve bir veya iki referanstan oluşurken, veri grubu
11 durum word'ünü ve seçilen gerçek değerleri gönderir.
Kontrol word'ü olarak tanımlanan word dahili olarak sürücü mantığına bağlanır;
bitlerin kodlaması Fieldbus Kontrol word'ünün içeriği bölümünde (sayfa 381)
gösterildiği gibidir. Aynı şekilde, durum word'ünün kodlaması Fieldbus Durum
word'ünün içeriği bölümünde (sayfa 382) gösterildiği gibidir.
Varsayılan olarak, veri grupları 32 ve 33 posta kutusu hizmeti için ayrılmıştır; bunlar
parametre değerlerinin aşağıdaki şekilde ayarlanmasını veya sorgulanmasını sa
ğlar:
Page 36

36 Program özellikleri
Kontrol cihazı ACS880
Sürücüye parametre yazma
Gönderim adresi
Değer = 1901
Verileri gönder
Değer = 1234
Gönderim adresi
geri bildirim
Değer = 1901
Sürücüden parametre okuma
Sorgulama adresi
Değer = 2403
Sorgulanan veriler
Değer = 4300
Sorgulama adresi
geri bildirim
Değer = 2403
Veri
3 2 . 1
Veri
3 2 . 2
Veri
3 3 . 1
Veri
3 2 . 3
Veri
3 3 . 2
Veri
3 3 . 3
Par.
1 9 . 0 1
1
.
.
.
2 4 . 0 3 4 3 0 0
.
.
.
Değer
1 2 3 4
.
.
.
.
.
.
60.64 Posta kutusu data grubu seçimi parametresi ile, veri grupları 32 ve 33 yerine
veri grupları 24 ve 25 seçilebilir.
Ayarlar
Parametre grubu 60 DDCS iletişimi (sayfa 266), 61 D2D ve DDCS aktarım datası
(sayfa 273) ve 62 D2D ve DDCS alım datası (sayfa 275).
Page 37

Program özellikleri 37
Motor kontrolü
Doğrudan moment kontrolü (DTC)
ACS880 motor kontrolü, ABB premium motor kontrol platformu, direkt tork kontrolünü
(DTC) esas alır. Gerekli stator akısını ve motor momentini elde etmek için, çıkış yarı
iletkenleri arasındaki geçiş kontrol edilir. Anahtarlama frekansı sadece gerçek
moment ve stator akısı değerlerinin kendi referans değerlerinden izin verilen
gecikmeden daha uzun süre boyunca farklı olması durumunda değiştirilir. Moment
kontrol cihazı için referans değer, hız kontrol cihazından ya da doğrudan bir harici
moment referans kaynağından gelir.
Motor kontrolü için DC geriliminin ve iki motor faz akımının ölçülmesi gerekir. Stator
akısı, motor geriliminin vektör uzayında toplanmasıyla hesaplanır. Motor momenti,
stator akısı ve rotor akımının vektörel çarpımı ile hesaplanır. Tanımlanan motor
modelinden faydalanılarak, stator akısı tahmini geli
motor şaftı hızına gerek yoktur.
ştirilir. Motor kontrolü için gerçek
Geleneksel kontrol ile DTC arasındaki temel fark, tork kontrolünün güç anahtarı
kontrolü ile aynı zaman seviyesinde çalışmasıdır. Ayrı bir gerilim ve frekans kontrollü
PWM modülatörü yoktur; çıkış aşaması geçişi tamamen motorun elektromanyetik
durumuna bağlıdır.
En uygun motor kontrolü hassasiyeti ayrı bir motor tanımlama çalıştırmasının (ID run)
etkinleştirilmesiyle elde edilir.
Ayrıca bkz. bölüm Skaler motor kontrolü, (sayfa 44).
Ayarlar
Parametre 99.04 Motor kontrol modu (sayfa 303) ve 99.13 ID run çalışması talep
edildi (sayfa 305).
Referans rampa
Hızlanma ve yavaşlama rampa süreleri hız, moment ve frekans referansı için
bağımsız olarak ayarlanabilir.
Bir hız veya frekans referansı ile, rampalar sürücünün sıfır hız veya frekans ile 46.01
Hız skalalama veya 46.02 Frekans skalalama parametresi ile tanımlanan değer
arasında hızlanması ya da yavaşlaması için geçen süre olarak tanımlanır. Kullanıcı
dijital giriş gibi bir ikili kaynak kullanarak önceden ayarlanmış iki rampa ayarı arasında
geçiş yapabilir. Hız referansı için, rampanın şekli de kontrol edilebilir.
Bir tork referansı ile, rampalar referansın sıfır ve nominal motor torku (parametre
01.30 Nominal tork skalaması) arasında değişiklik göstermesi için geçen süre olarak
tanımlanır.
Page 38

38 Program özellikleri
Özel hızlanma/yavaşlama rampaları
Joglama fonksiyonu için hızlanma/yavaşlama zamanları bağımsız olarak
tanımlanabilir; bkz. bölüm Joglama (sayfa 41).
Motor potansiyometresi fonksiyonun değişim oranı (sayfa 44) ayarlanabilir. Aynı oran
her iki yönde de geçerlidir.
Acil stop (“Off3” modu) için bir yavaşlama rampası tanımlanabilir.
Ayarlar
•Hız referansı rampası: Parametre 23.11…23.19 ve 46.01 (sayfa 164 ve 247).
• Moment referansı rampası: Parametre 01.30, 26.18 ve 26.19 (sayfa 92 ve 179).
• Frekans referansı rampası: Parametre 28.71…28.75 ve 46.02
(sayfa 186 ve 248).
• Joglama: Parametre 23.20 ve 23.21 (sayfa 167).
• Motor potansiyometresi: Parametre 22.75 (sayfa 163).
• Acil stop (“Off3” modu): Parametre 23.23 Acil durdurma zamanı (sayfa 167).
Sabit hızlar/frekanslar
Sabit hızlar ve frekanslar, örneğin dijital girişler aracılığıyla hızlı bir şekilde
etkinleştirilebilen önceden tanımlanan referanslardır. Hız kontrolü için 7 sabit hıza,
frekans kontrolü için 7 sabit frekansa kadar tanımlama yapmak mümkündür.
UYARI: Sabit hızlar ve frekanslar, referansın nereden geldiğine bakılmaksızın
normal referansı geçersiz kılar.
Ayarlar
Parametre grubu 22 Hız referansı seçimi (sayfa 156) ve 28 Frekans referans zinciri
(sayfa 182).
Kritik hızlar/frekanslar
Kritik hızlar (bazen "atlama hızları" olarak adlandırılır), örneğin mekanik rezonans
sorunları sebebiyle belli motor hızlarından veya hız aralıklarından kaçınmanın
gerektiği uygulamalar için önceden tanımlanabilir.
Kritik hızlar fonksiyonu, referansın uzun süre boyunca kritik bir bant dahilinde
bulunmasını önler. Değiştirilen bir referans (22.87 Hız referansı 7 (gerçek)) kritik bir
aralığa girdiğinde, fonksiyonun çıkışı (22.01 Hız ref (limitsiz)), referans aralıktan
çıkıncaya kadar dondurulur. Çıkıştaki herhangi bir anlık değişim referans zincirinde
ileriki bir rampa fonksiyonu tarafından düzeltilir.
Page 39

Program özellikleri 39
Frekans referansı ile skaler motor kontrolü için de bu fonksiyon bulunur. Bu
fonksiyonun girişi 28.96 Frekans ref 7 (gerçek), çıkışı 28.97 Frekans ref (sınırsız) ile
gösterilir.
Örnek
Bir fan, 540 - 690 rpm ve 1380 - 1560 rpm aralıklarında olan titreşimlere sahiptir.
Sürücünün bu hız aralıklarından kaçınmasını sağlamak için:
• 22.51 Kritik hız fonksiyonu parametresinin 0. bitini açarak kritik hızlar
fonksiyonunu etkinleştirin ve
• kritik hız aralıklarını aşağıdaki şekilde gösterildiği gibi ayarlayın.
22.01 Hız ref (limitsiz) (rpm)
(fonksiyon çıkışı)
1Par. 22.52 = 540 rpm
1560
1380
690
540
1234
22.87 Hız referansı 7 (gerçek) (rpm)
(fonksiyon girişi)
2Par. 22.53 = 690 rpm
3Par. 22.54 = 1380 rpm
4Par. 22.55 = 1560 rpm
Ayarlar
• Kritik hızlar: parametre 22.51…22.57 (sayfa 161)
• Kritik frekanslar: parametre 28.51…28.57 (sayfa 186).
Page 40

40 Program özellikleri
Akış kontrol kazancı
Moment kontrolünde, yükün aniden kaybolması durumunda motor potansiyel olarak
hızlanabilir. Kontrol programında, motor hızı 30.11 Minimum hız veya 30.12
Maksimum hız değerini aştığında tork referansını düşüren bir kontrol fonksiyonu
bulunur.
Motor hızı
Aşırı hız açma seviyesi
31.30 Aşırı hız hata payı
30.12
0
Kontrol etkin
30.11
Zaman
31.30 Aşırı hız hata payı
Aşırı hız açma seviyesi
Fonksiyon bir PI kontrol cihazına dayanır. Oransal kazanç ve entegrasyon süresi
parametreler ile tanımlanabilir.
Ayarlar
Parametre 26.81 Akış kontrol P ve 26.82 Akış kntrl I (sayfa 181).
Kodlayıcı desteği
Program iki adet tek dönüşlü veya çok dönüşlü enkoderleri (veya çözücüleri)
destekler. Aşağı daki isteğe bağlı arabirim modülleri bulunur:
• TTL enkoder arabirimi FEN-01: iki TTL girişi, TTL çıkışı (enkoder emülasyonu ve
eko için) ve konum mandallama için iki adet dijital giriş
• Mutlak enkoder arabirimi FEN-11: mutlak enkoder girişi, TTL girişi, TTL çıkışı
(enkoder emülasyonu ve eko için) ve konum mandallama için iki adet dijital giriş
• Çözücü arabirimi FEN-21: çözücü girişi, TTL girişi, TTL çıkışı (enkoder
emülasyonu ve eko için) ve konum mandallama için iki adet dijital giriş
• HTL enkoder arabirimi FEN-31: HTL enkoder girişi, TTL çıkışı (enkoder
emülasyonu ve eko için) ve konum mandallama için iki adet dijital giriş
Arabirim modülü sürücü denetleme birimi üzerindeki herhangi bir yuvada veya bir
FEA-xx genişletme adaptörüne takılabilir.
Page 41

Program özellikleri 41
HTL enkoder geri bildiriminin hızlı konfigürasyonu
1. Kodlayıcı arabirim modülünün tipini (parametre 91.11 Modül 1 tipi = FEN-31) ve
modülün bağlandığı yuvayı (91.12 Modül 1 konumu) belirtin.
2. Kodlayıcı tipini (92.01 Enkoder 1 tipi = HTL) belirtin. Değer değiştirildikten sonra
parametre listesi sürücüden tekrar okunacaktır.
3. Kodlayıcının bağlandığı arabirim modülünü (Enkoder 1 kaynağı 92.02 = Modül 1)
belirtin.
4. Kodlayıcı plakasına göre darbelerin sayısını (92.10 Pals/tur) belirtin.
5. kodlayıcı motora göre farklı bir hızda dönüyorsa (yani doğrudan motor şaftına
bağlı değilse), 90.43 Motor dişli payı ve 90.44 Motor dişli paydası parametresine
dişli oranını girin.
6. Yeni parametre ayarlarını geçerli kılmak için, 91.10 Enkoder prmtrs yenlme
parametresini Yapılandır olarak ayarlayın. Parametre otomatik olarak Tamam
durumuna dönecektir.
7. 91.02 Modül 1 durumu durumunun doğru arabirim modülü tipini (FEN-31)
gösterdiğini kontrol edin. Ayrıca modülün durumunu kontrol edin; her iki LED'in de
yeşil yanması gerekir.
8. Motoru 400 rpm gibi bir referans ile başlatın.
9. Tahmini hızı (01.02 Tahmini motor hızı) ölçülen hız (01.04 Enkoder 1 hızı (filtreli))
ile karşılaştırın. Değerler ayn
(90.41 Motor geribildirim seçimi = Enkoder 1).
10. Geribildirim sinyalinin kaybolması (90.45 Motor geribildirim arızası) durumunda
gerçekleştirilecek eylemi belirtin.
Ayarlar
Parametre grubu 90 Geribildirim seçimi (sayfa 279), 91 Enkoder modülü ayarları
(sayfa 283), 92 Enkoder 1 yapılandırması (sayfa 285) ve 93 Enkoder 2
yapılandırması (sayfa 290).
ı ise, kodlayıcıyı geribildirim kaynağı olarak ayarlayın
Joglama
Joglama fonksiyonu motoru kısa süreyle döndürmek için bir geçici anahtar
kullanımını etkinleştirir. Joglama fonksiyonu genelde bir makineyi lokal olarak kontrol
etmek amacıyla servis işlemleri veya devreye alma için kullanılır.
Her biri kendi etkinleştirme kaynaklarına ve referanslarına sahip iki joglama
fonksiyonu (1 ve 2) bulunur. Sinyal kaynakları 20.26 Jog 1 başlatma kaynağı ve 20.27
Jog 2 başlatma kaynağı parametreleri ile seçilir. Joglama etkinleştirildiğinde, sürücü
başlatılır ve tanımlanan joglama hızlanma rampası boyunca (23.20 Jog hızlanma
zamanı) tanımlanan joglama hızına (22.42 Jog 1 ref veya 22.43 Jog 2 ref) kadar
hızlanır. Etkinleştirme sinyali kesildikten sonra, sürücü tanımlanan joglama
Page 42

42 Program özellikleri
yavaşlama rampası (23.21 Jog hızlanma zamanı ) boyunca stop edene kadar
yavaşlar.
Aşağıdaki şekilde ve tabloda sürücünün joglama sırasında çalışmasına ilişkin bir
örnek gösterilmektedir. Bu örnekte, rampa durdurma modu kullanılmaktadır (bkz.
parametre 21.03 Stop modu).
Yavaş hareket komutu = 20.26 Jog 1 başlatma kaynağı veya 20.27 Jog 2
başlatma kaynağı ile ayarlanan kaynak durumu
Yavaş hareket etkinleştirme = 20.25 Jog etkinleştirme ile ayarlanan kaynak
durumu
Start komutu = Sürücü start komutu durumu.
Jog komutu
Jog devrede
Start komutu
Hız
2314568 11 13141516
Faz
1-2 1 1 0 Sürücü, joglama fonksiyonunun hızlanma rampası
2-3 1 1 0 Sürücü jog referansını izler.
3-4 0 1 0 Sürücü joglama fonksiyonunun yavaşlama rampası
4-5 0 1 0 Sürücü durduruldu.
Jog
komutu
Jog
devrede
komutu
71891210 17
Start
boyunca joglama hızına çıkar.
boyunca sıfır hıza yavaşlar.
Açıklama
t
5-6 1 1 0 Sürücü, joglama fonksiyonunun hızlanma rampası
boyunca joglama hızına çıkar.
6-7 1 1 0 Sürücü jog referansını izler.
7-8 0 1 0 Sürücü joglama fonksiyonunun yavaşlama rampası
boyunca sıfır hıza yavaşlar.
8-9 0 1->0 0 Sürücü durduruldu. Jog devrede sinyali açık olduğu
sürece, start komutları yok sayılır. Jog devrede sinyali
kapandıktan sonra, yeni bir start komutu gerekir.
9-10 x 0 1 Sürücü seçilen hızlanma rampası (parametre
23.11…23.19) boyunca hız referansına çıkar.
Page 43

Program özellikleri 43
Faz
10-11 x 0 1 Sürücü hız referansını takip eder.
11-12 x 0 0 Sürücü seçilen yavaşlama rampası (parametre
12-13 x 0 0 Sürücü durduruldu.
13-14 x 0 1 Sürücü seçilen hızlanma rampası (parametre
14-15 x 0->1 1 Sürücü hız referansını takip eder. Start komutu açık
15-16 0->1 1 0 Start komutu kapanır. Sürücü seçilen yavaşlama rampası
16-17 1 1 0 Sürücü jog referansını izler.
17-18 0 1->0 0 Sürücü joglama fonksiyonunun yavaşlama rampası
Jog
komutu
Jog
devrede
Start
komutu
Açıklama
23.11…23.19) boyunca sıfır hıza yavaşlar.
23.11…23.19) boyunca hız referansına çıkar.
olduğu sürece, jog devrede sinyali yok sayılır. Start
komutu kapandığında jog devrede sinyali açık olursa,
joglama hemen etkinleştirilir.
(parametre 23.11…23.19) boyunca yavaşlamaya başlar.
Jog komutu açıldığında, yavaşlayan sürücü joglama
fonksiyonunun yavaşlama rampasını kullanır.
boyunca sıfır hıza yavaşlar.
Ayrıca 392. sayfadaki blok şemasına bakın.
Notlar:
• Sürücü lokal kontroldeyken, joglama kullanılamaz.
• Sürücü start komutu açık durumdayken joglama etkinleştirilemez veya joglama
etkinleştirildiğinde sürücü başlatılamaz. Joglama devrede durumu kapandıktan
sonra sürücünün başlatılması için yeni bir start komutu gerekir.
UYARI! Start komutu açık durumdayken joglama etkinleştirilirse, joglama start
komutu kapandığı anda devreye girecektir.
Her iki joglama fonksiyonu etkinleştirilirse, ilk etkinleştirilen fonksiyon önceliğe sahiptir.
•
• Joglamada hız kontrol modu kullanılır.
• Rampa şekli süreleri (parametre 23.16…23.19) joglama hızlanma/yavaşlama
rampaları için geçerli değildir.
• Fieldbus ile etkinleştirilen inçleme fonksiyonları (bkz. 06.01 Ana kontrol word'ü, bit
8…9) joglama için tanımlanan referansları ve rampa sürelerini kullanır, yavaş
hareket etkinleştirme sinyaline gerek duyulmaz.
Ayarlar
Parametre 20.25 Jog etkinleştirme (sayfa 150), 20.26 Jog 1 başlatma kaynağı (sayfa
150), 20.27 Jog 2 başlatma kaynağı (sayfa 151), 22.42 Jog 1 ref (sayfa 161), 22.43
Jog 2 ref (sayfa 161), 23.20 Jog hızlanma zamanı (sayfa 167) ve 23.21 Jog hızlanma
zaman
ı (sayfa 167).
Page 44

44 Program özellikleri
Motor potansiyometresi
Motor potansiyometresi aslında, değeri 22.73 Mtr ptnsymtrsi yksltme kynğı ve 22.74
Mtr ptnsymtrsi dşrme kynğı parametreleri ile seçilen iki dijital sinyal kullanılarak
yükseltilebilen veya düşürülebilen bir sayıcıdır.
22.71 Motor ptnsymtrsi fonksiyonu ile etkinleştirildiğinde, motor potansiyometresi
22.72 Motor ptnsymtrsi bşlngç dğri ile ayarlanan değeri kabul eder. 22.71'de seçilen
moda bağlı olarak, motor potansiyometresi değeri korunur ya da bir güç çevriminin
ardından sıfırlanır.
Değişim oranı 22.75 Mtr ptnsymtrsi rampa süresi parametresinde, değerin
minimumdan (22.76 Mtr ptnsymtrsi min değeri) maksimuma (22.77 Mtr ptnsymtrsi
maks değeri) ya da tam tersi değişiklik değeri için geçen süre olarak tanımlan
Yükseltme ve düşürme sinyalleri aynı anda açılırsa, motor potansiyometresi değeri
değişmez.
Ana seçici parametrelerinde doğrudan referans kaynağı olarak ayarlanabilen ya da
diğer kaynak seçici parametreleri tarafından giriş olarak kullanılabilen fonksiyon çıkışı
22.80 Motor ptnsymtrsi ref gerçek ile gösterilir.
ır.
Aşağıdaki örnekte motor potansiyometresi değerinin davranışı gösterilmektedir.
1
22.73
0
22.74
22.80
1
0
22.77
0
22.76
22.75
Ayarlar
Parametre 22.71…22.80 (sayfa 162).
Skaler motor kontrolü
DTC (Doğrudan Moment Kontrolü) yerine motor kontrol yöntemi olarak skaler
kontrolü seçmek de mümkündür. Skaler kontrol modunda, sürücü bir hız veya frekans
referansı ile kontrol edilir. Ancak, skaler kontrolde üstün DTC performansı elde
edilemez.
Page 45

Program özellikleri 45
Aşağıdaki durumlarda skaler motor kontrol modunun etkinleştirilmesi önerilir:
• Çoklu motor sürücülerinde: 1) eğer yük motorlar arasında eşit olarak
dağıtılmamışsa, 2) motorların boyutları farklıysa veya 3) motorlar motor
tanımlama (ID run) yapıldıktan sonra değiştirilecekse
• Motorun nominal akım değeri sürücünün nominal çıkış akımının 1/6’sından da
küçükse
•Eğer sürücü bir motora bağlanmadan kullanılıyorsa (örneğin, test amaçlı olarak)
• Sürücü, step-up transformatörü aracılığıyla orta gerilim motorunu çalıştırıyorsa.
Skaler kontrolde bazı standart özellikler kullanılamaz.
Ayrıca bkz. bölüm Sürücü çalışma modları, (sayfa
22).
Skaler motor kontrolü için IR telafisi
IR telafisi (gerilim yükseltme olarak da
bilinir), sadece motor kontrol modu
Motor gerilimi
skaler olduğunda kullanılabilir. IR
kompanzasyonu etkinleştirildiğinde,
IR kompanzasyon
sürücü düşük hızlarda motora ekstra
gerilim yüklemesi yapar. IR
kompanzasyonu, yüksek moment
gerektiren uygulamalarda faydalı dır.
Kompanzasyon yok
Direkt Tork Kontrolü’nde (DTC), IR
telafisi mümkün değildir veya otomatik
olarak uygulandığından gerekli değildir.
Ayarlar
• Parametre 19.20 Skaler kontrol referans birimi (sayfa 142), 97.13 IR
kompanzasyonu (sayfa 300) ve 99.04 Motor kontrol modu (sayfa 303)
f (Hz)
• 28 Frekans referans zinciri parametre grubu (sayfa 182).
Otomatik fazlama
Otomatik fazlama, sabit mıknatıslı senkron motorun manyetik akısının veya bir
senkron relüktans motorun manyetik ekseninin açısal konumunu belirlemek için
kullanılan otomatik bir ölçüm rutinidir. Motor kontrolü, motor momentini doğru bir
şekilde kontrol etmek için rotor akısının mutlak konumunu gerektirir.
Mutlak enkoder ve çözücü gibi sensörler, rotorun sıfır açısı ile sensörün sıfır açısı
arasında ofset tesis edildikten sonra her zaman rotor konumunu gösterirler. Diğer
taraftan, standart bir darbe enkoderi dönerken rotorun konumunu belirler, ancak ilk
konum bilinmemektedir. Bununla birlikte, darbe enkoderi Hall sensörleri ile
donatıldığında bir mutlak enkoder gibi kullanılabilse de, ilk konumu kabaca bir
doğrulukla belirler. Hall sensörleri bir devir sırasında konumlarını altı kez değiştiren
Page 46

46 Program özellikleri
sözde iletişim darbeleri oluşturduğundan, yalnızca ilk konumun tam bir devrin hangi
60°’lik sektöründe olduğu bilinebilir.
N
Rotor
S
Mutlak enkoder/çözücü
Sabit mıknatıslı senkron motorlarda veya senkron relüktans motorlarda otomatik
fazlama rutini aşağıdaki durumlarda gerçekleştirilir:
1. Mutlak enkoder, çözücü veya iletişim sinyalli enkoder kullanıldığında, rotor ve
enkoder konum farkının bir seferlik ölçümünde
2. Artımlı enkoder kullanıldığında her güç verilişinde
3. Açık çevrim motor kontrolünde, her çalıştırmada rotor konumunun tekrarlanan
ölçümünde.
Açık döngü modunda, start öncesinde sıfır rotor açısı belirlenir. Kapalı döngü
modunda, sensör sıfır açısını gösterirken, otomatik fazlama ile gerçek rotor açısı
belirlenir. Sensörün ve rotorun gerçek sıfır açıları genellikle aynı
olmadığından dolayı,
açının ofseti belirlenmelidir. Otomatik fazlama modu hem açık döngü hem de kapalı
döngü modlarında bu işlemin nasıl gerçekleştirileceğini belirler.
Not: Açık döngü modunda, motor şaft dönerken başlatı ldığında her zaman artık akıya
doğru döner.
Motor kontrolünde kullanılan bir rotor pozisyonu ofseti, kullanıcı tarafından da
verilebilir – bkz. parametre 98.15 Pozisyon ofset kullanıcısı.
Not: Ayrıca otomatik fazlama rutini sonucunu 98.15 Pozisyon ofset kullanıcısı
parametresine yazar. Kullanıcı ayarları 98.01 Kullanıcı motor modeli modu ile
etkinleştirilmese dahi, otomatik fazlama sonuçları güncellenir.
Birçok otomatik fazlama modu bulunmaktad
ır (bkz. 21.13 Otomatik fazlama modu
parametresi).
En sağlam ve doğru yöntem olduğundan, durum 1 (yukarıdaki listeye bakın) için
özellikle turning modu önerilir. Turning modunda, rotor konumunu belirlemek için
Page 47

Program özellikleri 47
motor şaftı geri ve ileri (±360/kutup çifti)° çevrilir. Durum 3'te (açık çevrim kontrolü),
şaft sadece bir yöne döndürülür ve açı daha küçüktür.
Standstill modları, motor döndürülemiyorsa kullanılabilir (örneğin, yük bağlıyken).
Motorların ve yüklerin özellikleri değişiklik gösterdiğinden, en uygun standstill modu
bulmak için test yapılmalıdır.
Sürücü, açık döngü veya kapalı döngü modlarında çalışan bir motorla devreye
alındığında rotor pozisyonunu belirleyebilir. Bu durumda, 21.13 Otomatik fazlama
modu ayarı etkisizdir.
Otomatik fazlama rutini başarısız olabilir ve bu nedenle rutinin birkaç kez
tekrarlanması ve 98.15 Pozisyon ofset kullanıcısı parametresi değerinin kontrol
edilmesi tavsiye edilir.
Tahmini motor açısı ölçülen açıdan çok farklı ise, motor çalışırken bir otomatik
fazlama hatası (3385
Otomatik fazlama) meydana gelebilir. Bu, aşağıdakilerden
kaynaklanabilir:
•Kodlayıcı motor şaftı üzerinde kayıyor
• 98.15 Pozisyon ofset kullanıcısı parametresine hatalı bir değer girilmiş
• Otomatik fazlama rutini başlatılmadan önce motor zaten dönmekte
• 21.13 Otomatik fazlama modu parametresinde Turning seçilmiş, ancak motor şaftı
kilitli
• 99.03 Motor tipi parametresinde yanlış motor tipi seçilmiş
• Motor tanımlama çalışması başarısız oldu.
Ayarlar
Parametreler 21.13 Otomatik fazlama modu (sayfa 155), 98.15 Pozisyon ofset
kullanıcısı (sayfa 302) ve 99.13 ID run çalı
şması talep edildi (sayfa 305).
Akı frenleme
Sürücü, motordaki mıknatıslama seviyesini arttırarak daha iyi bir yavaşlama sağlar.
Motor akısını arttırarak motorda frenleme sırasında üretilen enerji motor termik
enerjisine dönüştürülebilir.
Motor hızı
Akı frenleme
Akı frenleme yok
t (s)
T
Br
(%)
T
N
60
40
20
Akı frenleme yok
T
= Frenleme momenti
Br
T
= 100 Nm
N
Akı frenleme
f (Hz)
Page 48

48 Program özellikleri
Sürücü sürekli olarak, aynı zamanda akı frenleme sırasında da, motor durumunu
izler. Bu sebeple akı frenleme hem motoru stop ettirme hem de hız değiştirmede
kullanılabilir. Akı frenlemenin diğer faydaları şunlardır:
• Frenleme bir stop komutu verildikten hemen sonra başlar. Fonksiyon frenlemeyi
başlatmadan önce akının azalmasını beklemek zorunda değildir.
Endüksiyon motorunun soğutması verimlidir. Akı frenleme sırasında motorun rotor
•
akımı değil, stator akımı artar. Stator rotordan çok daha verimli bir şekilde soğur.
•Akı frenleme endüksiyon motorlarıyla ve sabit mıknatıslı senkron motorlarla
kullanılabilir.
İki frenleme gücü seviyesi bulunmaktadır:
• Orta frenleme akı frenlemenin devre dışı olduğu durumlara kıyasla daha hızlı
yavaşlama sağlar. Motorun aşırı derecede ısınmasını önlemek için motorun akı
seviyesi sınırlandırılmıştır.
• Tam frenleme, mekanik frenleme enerjisini motor termik enerjisine dönüştürmek
için neredeyse mevcut tüm akımı kullanır. Frenleme süresi orta frenlemeye göre
daha kısadır. Döngüsel kullanımda motor fazla ısınabilir.
UYARI: Motorun akı frenlemesi ile üretilen termik enerjiyi absorbe edecek
şekilde ayarlanması gerekir.
Ayarlar
Parametre 97.05 Akı frenleme (sayfa 299).
DC manyetizasyonu
DC mıknatıslanması rotoru sıfır ya da sıfıra yakın bir hızda kilitlemek için motora
uygulanabilir.
Ön mıknatıslanma
Ön mıknatıslanma motor start edilmeden motorun DC mıknatıslanmasını ifade eder.
Seçili başlatma moduna (21.01 Start modu veya 21.19 Skaler start modu) bağlı
olarak, motor nominal momentinin %200'üne kadar ulaşan olası en yüksek kırılma
torkunu garanti etmek için ön manyetizasyon uygulanabilir. Ön manyetizasyon
zamanı (21.02 Manyetizasyon zamanı) ayarlanarak, örneğin motor start işlemi ve bir
mekanik frenin serbest bırakılması senkronize edilebilir.
DC tutma
Bu fonksiyon normal çalışmanın ortasında rotorun sıfı r hızda (sıfır hı
kilitlenmesini mümkün kılar. DC tutma 21.08 DC akım kontrolü parametresi ile
etkinleştirilir. Hem referans ve hem de motor hızı belirli bir seviyenin (parametre 21.09
DC tutma hızı) altına düştüğünde, sürücü sünizodial akım üretmeyi durdurur ve
motora DC göndermeye başlar. Akım 21.10 DC akım referansı parametresi ile
za yakın)
Page 49

Program özellikleri 49
ayarlanır. Referans 21.09 DC tutma hızı parametresini aştığında, normal sürücü
çalışması devam eder.
Motor hızı
Referans
21.09 DC tutma hızı
DC tutma
t
t
Not: DC tutma sadece hız kontrolünde kullanılabilir.
Art manyetizasyon
Bu özellik durdurma sonrasında motoru belirli bir süre (parametre 21.11 Son
manyetizasyon zamanı) manyetize durumda tutar. Bu, bir mekanik frenin
uygulanmasından önce olduğu gibi, makinelerin yük altında hareket etmesini önler.
Art manyetizasyon 21.08 DC akım kontrolü parametresi ile etkinleştirilir.
Manyetizasyon akımı DC akım referansı 21.10 parametresi ile ayarlanır.
Not: Art manyetizasyon sadece seçili durdurma modu (bkz. parametre 21.03 Stop
modu) rampalama olduğunda kullanılabilir.
Ayarlar
Parametre 21.01 Start modu, 21.02 Manyetizasyon zamanı ve 21.08…21.11
(sayfa 155).
Page 50

50 Program özellikleri
Uygulama kontrolü
Uygulama makroları
Uygulama makroları önceden tanımlanan uygulama parametresi düzenlemeleri ve
I/O yapılandırmalarıdır. Bkz . bölüm Uygulama makroları (sayfa 71).
Proses PID kontrolü
Sürücüde dahili bir proses PID kontrol cihazı bulunur. Kontrol cihazı basınç, akış veya
sıvı seviyesi gibi proses değişkenlerini kontrol etmek için kullanılabilir.
Proses PID kontrolünde, sürücüye hız referansı yerine bir proses referansı (ayar
noktası) bağlanır. Aynı zamanda bir gerçek değer bilgisi (proses geri bildirimi) de
sürücüye geri verilir. Proses PID kontrolü, ölçülen proses miktarını (gerçek değer)
istenen seviyede (ayar noktası) tutabilmek için sürücü hızını ayarlar.
Aşağıdaki sadeleştirilmiş blok şeması, proses PID kontrolünü göstermektedir. Daha
ayrıntılı bir blok şeması için, bkz. sayfa 403.
Ayar noktası
Sınırlama
Hız, moment veya
frekans referansı
zinciri
AI1
AI2
• • •
D2D
FBA
Proses
gerçek
değerleri
Filtre
Proses
PID
Kontrol programında, gerektiğinde değiştirilebilen iki tam proses PID kontrol cihazları
ayarı grubu bulunur; bkz. parametre 40.57 PID set1/set2 seçimi.
Proses PID kontrolü sadece harici kontrolde kullanılabilir; bkz. bölüm Lokal
Not:
kontrol – harici kontrol karşılaştırması (sayfa 20).
Page 51

Program özellikleri 51
Proses PID kontrol cihazının hızlı konfigürasyonu
1. Proses PID kontrol cihazını etkinleştirin (parametre 40.07 Set 1 PID Çalışma
modu).
2. Bir geribildirim kaynağı seçin (parametre 40.08…40.11).
3. Bir set değeri kaynağı seçin (parametre 40.16…40.25).
4. Kazanç, integral süre, türev süresi ve PID çıkış seviyelerini ayarlayın (40.32 Set 1
kazanç, 40.33 Set 1 integral süresi, 40.34 Set 1 türev süresi, 40.36 Set 1 çıkış min
ve 40.37 Set 1 çıkış maks).
5. PID kontrol cihazı çıkışı Proses PID çıkışı gerçek 40.01 parametresi ile gösterilir.
Bunu, örneğin 22.11 Hız ref1 kaynağı kaynağı olarak seçin.
Proses PID kontrolü için Uyku fonksiyonu
Uyku fonksiyonu tüketim değerlerinin değiştiği PID kontrolü uygulamalarında
kullanılabilir. Kontrol edilmekte olan proses uzun sürebilecek (örneğin bir tank,
seviyesindeyken) sabit bir konuma girdiğinde, uyku fonksiyonu düşük talepte motoru,
pompanın verimli çalışma aralığının biraz altında çalıştırmak yerine tamamen
durdurarak enerji tasarrufu sağlar. Geribildirim değiştiğinde, PID kontrol cihazı
sürücüyü uyandı rır.
Örnek: Sürücü, bir basınç güçlendirme pompasını kontrol eder. Su tüketimi gece
boyunca düşer. Bunun sonucunda proses PID kontrol cihazı motor hızını düşürür.
Ancak, borulardaki doğal kayıplar ve düşük hızlarda santrifüjlü pompan
verimliliği dolayısıyla motor dönüşü kesinlikle durmaz. Uyku fonksiyonu yavaş
dönüşü tespit eder ve uyku gecikmesi geçtikten sonra oluşan gereksiz pompalamayı
durdurur. Sürücü uyku moduna geçer ancak basıncı izlemeye devam eder. Basınç
uyanma seviyesinin (set değeri - uyanma sapması) altına düşerse ve uyanma
gecikmesi sona ermişse pompalama devam eder.
ın düşük
Page 52

52 Program özellikleri
Ayar noktası
Uyku ek süre adımı (40.46)
Gerçek değer
Ters çevrilmemiş
(40.31 = Çevrilmedi (Ref - Fbk))
Uyanma seviyesi
(Set değeri - Uyanma sapması [40.47])
Gerçek değer
Uyanma seviyesi
(Set değeri + Uyanma sapması [40.47])
Ter s çe v r il m i ş (40.31 = Çevrildi (Fbk -
Ref))
Uyku ek süre zamanı (40.45)
Zaman
Uyanma gecikmesi
(40.48)
Zaman
Zaman
Motor hızı
t
Uyku seviyesi
(40.43)
= Uyku gecikmesi (40.44)
sd
t < t
sd
t
sd
STOP
Uyku modu
START
Zaman
İzleme
İzleme modunda, PID blok çıkışı doğrudan 40.50 (veya 41.50) Set 1 izleme ref seçimi
parametresinin değerine ayarlanır. PID kontrol cihazının dahili I payı, çıkış üzerine
geçmek için hiçbir geçişe izin verilmeyecek şekilde ayarlanır. Böylece izleme modu
bırakıldığında, normal proses kontrolü çalışması şiddetli bir vuruntu olmadan devam
edebilir.
Ayarlar
• Parametre 96.04 Makro seçimi (makro seçimi)
• Parametre grubu 40 Proses PID ayarı 1 (sayfa 225) ve 41 Proses PID set 2
(sayfa 237).
Page 53

Program özellikleri 53
Mekanik fren kontrolü
Sürücü stop ettiğinde veya güç olmadığında, motor ve çalıştırılan makineyi sıfır hızda
tutmak için bir mekanik fren kullanılabilir. Fren kontrol mantığı 44 Mekanik fren
kontrolü parametre grubunun ayarlarını ve çok sayıda harici sinyali izler ve 54.
sayfadaki şemada gösterilen durumlar arasında geçiş yapar. Durum şemasının
altındaki tablolarda, durumların ve geçişlerin ayrıntıları gösterilmektedir. 56. sayfadaki
zamanlama şemasında bir kapatma-açma-kapatma sekansı örneği gösterilmektedir.
Fren kontrol mantığı girişleri
Sürücünün start komutu (06.16 Sürücü durumu word'ü 1 5. biti) fren kontrol
mantığının ana kontrol kaynağıdır. Bir isteğe ba
Fren kapatma talebi parametresi ile seçilebilir. İki sinyal birbirini aşağıdaki şekilde
etkiler:
• Start komutu = 1 VE 44.12 Fren kapatma talebi ile seçilen sinyal = 0 →Fren
açma talebi
ğlı harici açma/kapatma sinyali 44.12
• Start komutu = 0 VEYA 44.12 Fren kapatma talebi ile seçilen sinyal = 1
→
Fren kapatma talebi
Frenin açılmasını önlemek için örneğin daha yüksek seviyeli bir kontrol sisteminden
gelen başka bir harici sinyal 44.11 Freni kapalı tut kaynağı parametresi aracılığıyla
bağlanabilir.
Kontrol mantığının durumunu etkileyen diğer sinyaller:
• fren durumu onayı (isteğe bağlı, 44.07 Fren onay seçimi ile tanımlanır),
• 06.11 Ana durum word'ü 2. biti (sürücünün belirtilen referansı
olmadığını gösterir),
• 06.16 Sürücü durumu word'ü 1 6. biti (sürücünün modülasyon yapıp yapmadığını
gösterir),
• isteğe bağlı FSO-xx güvenlik fonksiyonları modülü.
Fren kontrol mantığı çıkışları
Mekanik fren 44.01 Fren kontrol durumu parametresinin 0. biti ile kontrol edilmelidir.
Bu bit bir röle çıkışının (veya çıkış modunda bir dijital giriş/çıkış) kaynağı olarak
seçilmelidir. Daha sonra bir röle üzerinden fren aktüatörüne bağlanır. 57. sayfadaki
kablo bağlantısı örneğine bakın.
izlemeye hazır olup
Fren kontrol mantığı çeşitli durumlarda sürücü kontrol mantığı
momenti arttırmasını veya hızı düşürmesini talep eder. Bu talepler 44.01 Fren kontrol
durumu parametresinde görülebilir.
Ayarlar
44 Mekanik fren kontrolü parametre grubu (sayfa 241).
nın motoru tutmasını,
Page 54

54 Program özellikleri
Fren durum şeması
(herhangi bir durumdan)
1
FREN DEVRE DIŞI FREN AÇMA
10
(herhangi bir durumdan)
2
FREN KAPALI
8
FREN KAPATMA
GECİKMESİ
3
6
3
6
FREN AÇMA
BEKLEMESİ
4
FREN AÇMA
GECİKMESİ
5
FREN AÇIKFREN KAPATMA
7
FREN KAPATMA
BEKLEMESİ
6
9
Durum açıklamaları
Durum adı Açıklama
FREN DEVRE DIŞI Fren kontrolü devre dışı bırakıldı (parametre 44.06 Fren kontrolü etkinleştirme =
0 ve 44.01 Fren kontrol durumu b4 = 0). Açma sinyali etkin durumda (44.01
Fren kontrol durumu b0 = 1).
FREN AÇMA:
FREN AÇMA BEKLEMESİ Fren açma talebinde bulunuldu. Yükü yerinde tutmak için sürücü mantığından
torku açma torkuna çıkarması talep edildi (44.01 Fren kontrol durumu b1 = 1 ve
b2 = 1). 44.11 Freni kapalı tut kaynağı durumu kontrol edilir; uygun süre içinde 0
değilse, sürücü 71A5 Mknk fren açlmsn izin vrlmyr hatası* ile açılır.
FREN AÇMA GECİKMESİ Açma koşulları sağlandı ve açma sinyali etkinleştirildi (44.01 Fren kontrol
durumu b0 ayarlandı). Açma torku talebi kaldırıld
b1 → 0). 44.08 Fren açma gecikmesi sona erinceye kadar yük sürücü hız
kontrolü ile yerinde tutulur.
Bu noktada, 44.07 Fren onay seçimi, Onay yok olarak ayarlanırsa, mantık
FREN AÇIK durumuna geçer. Bir onay sinyali kaynağı seçilirse, durum kontrol
edilir; durum “fren açık” değilse, sürücü bir 71A3 Mekanik fren açılma arızası
hatası* ile açılır.
FREN AÇIK Fren açık (44.01 Fren kontrol durumu b0 = 1). Tutma talebi kaldırılır (44.01 Fren
kontrol durumu b2 = 0) ve sürücünün referansı izlemesine izin verilir.
ı (44.01 Fren kontrol durumu
Page 55

Program özellikleri 55
Durum adı Açıklama
FREN KAPATMA:
FREN KAPATMA
BEKLEMESİ
FREN KAPATMA
GECİKMESİ
FREN KAPALI Fren kapalı (44.01 Fren kontrol durumu b0 = 0). Sürücü modülasyon
*Alternatif olarak 44.17 Fren arıza fonksiyonu ile bir uyarı seçilebilir; bu durumda, sürücü modülasyona
devam edecek ve bu durumda kalacakt
Fren kapatma talebinde bulunuldu. Sürücü mantığından stop edene kadar hızı
düşürmesi talep edilir (44.01 Fren kontrol durumu b3 = 1). Açma sinyali etkin
durumda tutulur (44.01 Fren kontrol durumu b0 = 1). Motor hızı 44.15 Fren
kapatma hız geckms ile tanımlanan süre boyunca 44.14 Fren kapatma hızı
altında kalıncaya kadar fren mantığı bu durumda kalacaktır.
Kapatma koşulları sağlandı. Açma sinyali devre dışı bırakılır (44.01 Fren kontrol
durumu b0 → 0) ve kapatma torku 44.02 Fren tork hafızası'ne yazılır.
Yavaş
lama talebi sürdürülür (44.01 Fren kontrol durumu b3 = 1). 44.13 Fren
kapatma gecikmesi sona erinceye kadar fren mantığı bu durumda kalacaktır.
Bu noktada, 44.07 Fren onay seçimi, Onay yok olarak ayarlanırsa, mantık
FREN KAPALI durumuna geçer. Bir onay sinyali kaynağı seçilirse, durum
kontrol edilir; durum “fren kapalı” değilse, sürücü bir A7A1 Mekanik fren
kapanma arızası uyarısı oluşturur. 44.17 Fren arıza fonksiyonu = Hata ise,
sürücü 44.18 Fren arıza gecikmesi sonrasında bir 71A2 Mekanik fren kapanma
arızası hatası ile açılacaktır.
yapmayabilir.
ır.
Durum değişim koşulları ()
1 Fren kontrolü devre dışı (parametre 44.06 Fren kontrolü etkinleştirme → 0).
2 06.11 Ana durum word'ü, bit 2 = 0 ya da fren isteğe bağlı FSO-xx güvenlik fonksiyonları modülü
tarafından kapanmaya zorlanır.
3 Fren açma talebinde bulunuldu ve 44.16 Fren tekrar açma gecikmesi sona erdi.
4 Fren açma koşulları (44.10 Fren açma torku gibi) sağlandı ve 44.11 Freni kapalı tut kaynağı = 0.
5 44.08 Fren açma gecikmesi sona erdi ve fren açma onayı (44.07 Fren onay seçimi ile seçilmesi
durumunda) alındı.
6 Fren kapatma talebinde bulunuldu.
7Motor hızı 44.15 Fren kapatma hız geckms boyunca 44.14 Fren kapatma hızı kapatma hızının altı
kaldı.
8 44.13 Fren kapatma gecikmesi sona erdi ve fren kapatma onayı (44.07 Fren onay seçimi ile seçilmesi
durumunda) alındı.
9 Fren açma talebinde bulunuldu.
10 Fren kontrolü etkinleştirildi (parametre 44.06 Fren kontrolü etkinleştirme → 1).
n
nda
Page 56

56 Program özellikleri
Zamanlama şeması
Aşağıdaki sadeleştirilmiş zamanlama şeması, fren kontrol fonksiyonunun çalışmasını
görüntüler. Yukarı daki durum şemasına bakın.
Start komutu
(06.16 b5)
Modülasyonda
(06.16 b6)
Hazır ref (06.11 b2)
Moment referansı
Hız referansı
Fren kontrol sinyali
(44.01 b0)
Açma torku talebi
(44.01 b1)
Tutma durdurma
talebi (44.01 b2)
Durdurulacak rampa
talebi (44.01 b3)
t
md
T
s
n
cs
t
od
t
ccd
T
t
cd
mem
t
rod
t
cfd
Durum
FREN KAPALI
BOW BOD BCW BCD
FREN AÇMA FREN KAPATMA
1 2345 6 7 89
T
T
t
t
n
t
t
t
t
md
od
ccd
cd
cfd
rod
s
mem
cs
Fren açmada start torku (parametre 44.03 Fren açma torku referansı)
Fren kapanmasında saklanan tork değeri (44.02 Fren tork hafızası)
Motor mıknatıslama gecikmesi
Fren açma gecikmesi (44.08 Fren açma gecikmesi parametresi)
Fren kapatma hızı (44.14 Fren kapatma hızı parametresi)
Fren kapatma komutu gecikmesi (44.15 Fren kapatma hız geckms parametresi)
Fren kapatma gecikmesi (44.13 Fren kapatma gecikmesi parametresi)
Fren kapatma arızası gecikmesi (44.18 Fren arıza gecikmesi parametresi)
Fren tekrar açma gecikmesi (44.16 Fren tekrar açma gecikmesi parametresi)
BOW FREN AÇMA BEKLEMESİ
BOD FREN AÇMA GECİKMESİ
BCW FREN KAPATMA BEKLEMESİ
BCD FREN KAPATMA GECİKMESİ
FREN AÇIK
FREN
KAPALI
Page 57

Program özellikleri 57
Kablo bağlantısı örneği
Aşağıdaki şekilde bir fren kontrolü kablo bağlantısı örneği gösterilmektedir. Fren
kontrol donanımı ve kablo bağlantıları müşteri tarafından sağlanmalı ve kurulmalıdır.
UYARI! İçine fren kontrol fonksiyonlu bir sürücü entegre edilmiş olan
makinenin personel güvenlik düzenlemelerine uyduğundan emin olun.
Sürücünün (IEC 61800-2’de tanımlanan bir Tam Sürücü Modülü veya Temel Sürücü
Modülü) Avrupa Makine Yönergesi ve ilgili standartlarda bahsedilen bir güvenlik
cihazı olarak göz önünde bulundurulmayacağını unutmayın. Bu durumda tüm
makinenin personel güvenliği, belli bir sürücü özelliğine bağlı olmamalıdır (fren
kontrol fonksiyonu gibi) ancak uygulamaya özel düzenlemelerde tanımlandığı gibi
gerçekleştirilmelidir.
Fren 44.01 Fren kontrol durumu parametresinin 0. biti ile kontrol edilir. Fren onayı
kaynağı (durum denetimi) 44.07 Fren onay seçimi parametresi ile seçilir. Bu örnekte,
• 10.24 RO1 kaynağı parametresi Fren açma komutu olarak (yani 44.01 Fren
kontrol durumu 0. biti) ve
• 44.07 Fren onay seçimi parametresi DI5 olarak ayarlanmıştır.
Fren kontrol
donanımı
115/230 VAC
Acil fren
Sürücü denetleme birimi
XRO1
1 NC
2 COM
3 NO
XD24
4 +24VD
XDIO
5 DI5
M
Motor
Mekanik fren
Page 58

58 Program özellikleri
DC gerilim kontrolü
Yüksek gerilim kontrolü
Ara DC bağlantısının yüksek gerilim kontrolüne genellikle motor jeneratör
modundayken gerek duyulur. Motor yavaşlarken veya yük motor şaftını kontrol
ederken enerji üreterek şaftın uygulanan hızdan veya frekanstan daha hızlı
dönmesine neden olur. DC geriliminin yüksek gerilim kontrolü sınırını aşmasını
önlemek için, yüksek gerilim kontrol cihazı, sınıra ulaşıldığında otomatik olarak
oluşturulan momenti azaltır. Limite ulaşılırsa yüksek gerilim kontrol cihazı da
programlanan tüm yavaşlama zamanlarını artırır; daha kısa yavaşlama zamanları
elde etmek için, bir fren kesici ve direnç gerekebilir.
Düşük gerilim kontrolü (güç kaybında çalışmaya devam etme)
Gelen besleme gerilimi kesilirse, sürücü dönen motorun kinetik enerjisinden
faydalanarak çalışmaya devam edecektir. Motor döndüğü ve sürücüye enerji ürettiği
sürece, sürücü çalışmaya devam eder. Eğer ana kontaktör (mevcut ise) kapalı
kalmışsa, sürücü kesintiden sonra çalışmaya devam edebilir.
Not: Ana kontaktör bulunan ünitelerde, kısa süreli besleme kesintilerinde kontaktör
kontrol devresini kapalı tutan bir tutma devresi (örn. UPS) bulunmalıdır.
U
şebeke
T
(Nm)
160
120
80
40
f
out
M
(Hz)
80
60
40
20
U
DC
(V DC)
520
390
260
130
1,6 4,8 8 11,2 14,4
U
DC
f
out
T
M
t (s)
UDC= sürücünün ara devre gerilimi, f
Nominal yükte besleme gerilimi kaybı (f
cihazı şebeke kapalı olduğu sürece gerilimi sabit tutar. Sürücü motoru jeneratör modunda çalıştırır. Motor
hızı düşer, ancak motor yeterli kinetik enerjiye sahip olduğu sürece sürücü çalışabilir.
= sürücünün çıkış frekansı,TM = motor momenti
out
= 40 Hz). Ara devre DC gerilimi minimum sınırına düşer. Kontrol
out
Page 59

Program özellikleri 59
Otomatik yeniden start
Otomatik yeniden start fonksiyonu kullanılarak kısa (maks. 5 saniye) güç besleme
hatası sonrasında sürücü otomatik olarak yeniden start edilerek, sürücünün soğutma
fanları çalıştırılmadan 5 saniye süreyle çalışmasına izin verilir.
Fonksiyon etkinleştirildiğinde, başarılı bir yeniden start işlemi gerçekleştirmek için bir
besleme hatasına kadar aşağıdaki işlemleri gerçekleştirir:
•Düşük gerilim hatası bastırılır (ancak bir uyarı oluşturulur)
• Kalan enerjinin tümünü muhafaza etmek için modülasyon ve soğutma durdurulur
• DC devresi ön şarjı etkinleştirilir.
21.18 Oto yenidn başltma zmn parametresi ile tanımlanan süre dolmadan önce DC
gerilimi depolanırsa ve start sinyali hala açık durumdaysa, normal çalışma devam
edecektir. Ancak, DC gerilimi bu sırada çok düşük ise, sürücü bir
3280 Bekleme
zaman aşımı hatası ile açılır.
Gerilim kontrolü ve açma limitleri
Ara DC gerilimi regülatörünün kontrol ve açma limitleri besleme gerilimine ve
sürücü/çevirici tipine bağlıdır. DC gerilimi (U
yaklaşık 1,35 katıdır ve 01.11 DC gerilimi parametresi ile görüntülenir.
Aşağıdaki şemada, seçilen DC gerilim seviyeleri arasındaki ilişki gösterilmektedir.
Mutlak gerilimlerin sürücü/çevirici tipine ve AC besleme gerilimi aralığına göre
değiştiğini unutmayın.
Yüksek gerilim hata seviyesi (1,3 × U
Yüksek gerilim kontrol seviyesi (1,25 × U
Yüksek gerilim uyarı seviyesi (1,15 × U
U
DCmax
U
DCmin
Düşük gerilim kontrol/uyarı seviyesi (0,85 × U
Düşük gerilim hata seviyesi (0,6 × U
) hatlar arası besleme geriliminin
DC
)*
DCmax
)**
DCmax
)
DCmax
)
DCmin
)
DCmin
U
U
* 500 V AC besleme gerilimi aralığı için, 1,25 × U
** 500 V AC besleme gerilimi aralığı için, 1,20 × U
= maksimum AC besleme gerilimi aralığına karşılık gelen DC gerilimi
DCmax
= minimum AC besleme gerilimi aralığına karşılık gelen DC gerilimi
DCmin
DCmax
DCmax
.
.
Page 60

60 Program özellikleri
Ayarlar
Parametre 01.11 DC gerilimi (sayfa 91), 30.30 Yüksek gerilim kontrolü (sayfa 194),
30.31 Düşük gerilim kontrolü (sayfa 195) ve 95.01 Besleme ger (sayfa 291).
Fren kesici
Yavaşlayan bir motor tarafından oluşturulan enerjiden faydalanmak için bir fren kesici
kullanılabilir. DC gerilimi yeterince yükseldiğinde, kesici DC devresini bir harici fren
direncine bağlar. Kesici darbe genişliği modülasyon prensibi ile çalışır.
ACS880 sürücülerinin dahili fren kesicileri, DC bağlantı gerilimi U
DCmax
yaklaşık 1,15 katına ulaştığı nda iletime geçer. %100 darbe genişliğine U
değerinin yaklaşık 1,2 katında ulaşılır. (U
DCmax
, maksimum AC besleme gerilimi
değerinin
DCmax
aralığına karşılık gelen DC gerilimidir.) Harici fren kesiciler ile ilgili bilgi için, fren
kesicilerin belgelerine bakın.
Not: Kesicinin çalışması için yüksek gerilim kontrolünün devre dışı bırakılması
gerekir.
Ayarlar
Parametre 01.11 DC gerilimi (sayfa 91); parametre grubu 43 Fren kıyıcı (sayfa 239).
Page 61

Program özellikleri 61
Güvenlik ve korumalar
Acil stop
Acil stop sinyali 21.05 Acil durdurma kaynağı parametresi ile seçilen sinyale bağlanır.
Fieldbus aracı lığıyla da bir acil stop oluşturulabilir (parametre 06.01 Ana kontrol
word'ü, bit 0...2).
Acil durdurma modu 21.04 Acil durdurma modu parametresi ile seçilir. Aşağıdaki
modüller bulunmaktadır:
• Off1: Kullanımda olan belirli bir referans tipi için tanımlanan standart yavaşlama
rampası boyunca durma
• Off2: Serbest duruş
• Off3: 23.23 Acil durdurma zamanı parametresi ile tanımlanan acil stop rampası ile
durma.
Off1 veya Off3 acil durdurma modları ile, motor hızındaki düşme 31.32 Acil rampa
denetimi ve 31.33 Acil rampa denetimi gecikmesi parametreleri ile denetlenebilir.
Notlar:
• SIL 3 / PL e düzeyi acil stop fonksiyonları için, sürücüye bir TÜV sertifikalı FSO-xx
güvenlik seçenek modülü bağlanabilir. Böylece bu modül güvenlik sertifikalı
sistemlere dahil edilebilir.
• Gerekli acil stop kategorilerinin karşılanması amacıyla acil stop cihazların
ihtiyaç duyulan diğer tüm ek cihazların kurulumu ekipmanı kuran kişinin
sorumluluğundadır. Ayrıntılı bilgi için, yerel ABB temsilciniz ile irtibata geçin.
• Bir acil stop sinyali algılandığında, sinyal iptal edilse dahi acil stop fonksiyonu iptal
edilemez.
•Eğer minimum (veya maksimum) moment limiti %0 olarak ayarlanmışsa, acil stop
fonksiyonu sürücüyü durduramayabilir.
Ayarlar
Parametre 21.04 Acil durdurma modu (sayfa 152), 21.05 Acil durdurma kaynağı
(sayfa 152), 23.23 Acil durdurma zamanı (sayfa 167), 31.32 Acil rampa denetimi
(sayfa 201) ve 31.33 Acil rampa denetimi gecikmesi (sayfa 202).
ın ve
Motor termal koruma
Kontrol programında iki ayrı motor sıcaklığı izleme fonksiyonu bulunur. Sıcaklık verisi
kaynakları ve uyarı/açma limitleri her bir fonksiyon için bağımsız olarak ayarlanabilir.
Motor sıcaklığı
• motor termal koruma modeli (sürücünün içinde dahili olarak türetilen tahmini
sıcaklık) veya
•sargılarda bulunan sensörler kullanılarak izlenebilir. Bu, daha doğru bir motor
modeli sağlayacaktır.
Page 62

62 Program özellikleri
Motor termik koruma modeli
Sürücü motor sıcaklığını aşağıdaki varsayımlara dayanarak hesaplar:
1. Sürücüye ilk kez güç uygulandığında, motorun ortam sıcaklığında olduğu kabul
edilir (35.50 Motor ortam sıcaklığı parametresi ile tanımlanır). Bunun ardından,
sürücüye güç uygulandığında, motorun tahmini sıcaklıkta olduğu varsayılır.
2. Motor sıcaklığı, kullanıcı tarafından ayarlanabilen motor termik süresi ve motor
yük eğrisi kullanılarak hesaplanır. Yük eğrisi, ortam sıcaklığının 30°C’yi aştığı
durumda ayarlanmalıdı
r.
Not: Motor termik modeli çeviriciye yalnızca bir motor bağlı iken kullanılabilir.
PTC sensörleri kullanarak sıcaklık izleme
Dijital giriş DI6'ya bir PTC sensörü bağlanabilir. FEN-xx enkoder arabirimlerinde
(isteğe bağlı) de bir PTC sensörü bağlantısı bulunur.
+24VD
T
DI6
PTC sensörünün direnci, sıcaklığı arttığında artar. Sensörün artan direnci girişteki
gerilimin düşmesine neden olur ve böylece girişin durumu 1 değerinden 0 değerine
geçerek aşırı sıcaklığı gösterir.
Page 63

Program özellikleri 63
Aşağıdaki şekilde, sıcaklığın bir fonksiyonu olarak tipik PTC sensörü direnç değerleri
gösterilmektedir.
Ohm
4000
1330
550
100
T
Kablo bağlantısı ile ilgili ayrıntılı bilgi için, sürücünün Donanım El Kitabı'na ya da
FEN-xx enkoder arabiriminin Kullanıcı el kitabı'na bakın.
Pt100 sensörleri kullanarak sıcaklık izleme
1…3 Pt100 sensörleri bir analog girişe ve bir analog çıkışa seri olarak bağlanabilir.
Analog çıkış sensör üzerinden 9,1 mA değerinde sabit bir etkinleştirme akımı
gönderir. Motor sıcaklığı arttıkça, sensör üzerindeki gerilim gibi sensör direnci de
artar. Sıcaklık ölçüm fonksiyonu, gerilimi analog girişi üzerinden okur ve bunu Celcius
dereceye dönüştürür.
Motor sıcaklığı denetimi sınırları ayarlanabilir ve aşırı sıcaklık algılandığında
sürücünün nasıl tepki vereceği seçilebilir.
Sensörün kablo bağlantısı için, sürücünün Donanım El Kitabı'na bakın.
KTY84 sensörleri kullanarak sıcaklık izleme
Denetleme birimi üzerindeki bir analog girişe ve bir analog çıkışa bir KTY84 sensörü
bağlanabilir.
Analog çıkış sensör üzerinde 2,0 mA değerinde sabit bir etkinleştirme akımı gönderir.
Motor sıcaklığı arttıkça, sensör üzerindeki gerilim gibi sensör direnci de artar. Sıcaklık
ölçüm fonksiyonu, gerilimi analog girişi üzerinden okur ve bunu Celcius dereceye
dönüştürür.
FEN-xx enkoder arabirimlerinde (isteğe bağlı) de bir KTY84 sensörü bağlantısı
bulunur.
Page 64

64 Program özellikleri
Aşağıdaki şekilde ve tabloda, tipik KTY84 sensör direnci değerleri, motor çalışma
sıcaklığının bir fonksiyonu olarak gösterilmektedir.
Ohm
3000
2000
KTY84 ölçeklendirme
90°C = 936 ohm
110°C = 1063 ohm
130°C = 1197 ohm
150°C = 1340 ohm
1000
o
T
0
-100
0 100 200 300
C
Motor sıcaklığı denetimi sınırları ayarlanabilir ve aşırı sıcaklık algılandığında
sürücünün nasıl tepki vereceği seçilebilir.
Sensörün kablo bağlantısı için, sürücünün Donanım El Kitabı'na bakın.
Motor fanı kontrol mantığı (parametre 35.100…35.106)
Motorda bir harici soğutma fanı varsa, fan starterini bir röle veya dijital çıkış
aracılığıyla kontrol etmek için bir sürücü sinyali (örneğin çalış
ıyor/durduruldu)
kullanılabilir. Fan geribildirimi için bir dijital giriş seçilebilir. Bir geribildirim sinyali kaybı
isteğe bağlı olarak bir uyarıya veya bir hataya neden olacaktır.
Fan için başlatma ve duruş gecikmesi tanımlanabilir. Ayrıca, fan başladıktan sonra
geribildirimin alınması gerektiği zamanı tanı mlamak için bir geribildirim gecikmesi
ayarlanabilir.
Ayarlar
Parametre grubu 35 Motor termal koruma (sayfa 213) ve 91 Enkoder modülü ayarları
(sayfa 283).
Programlanabilir koruma fonksiyonları
Harici olaylar (parametre 31.01…31.10)
Tahrik edilen ekipman için hat veya uyarı oluşturmak üzere seçilebilir girişlere
prosesten gelen beş farklı olay sinyali bağlanabilir. Sinyal kaybolduğunda, bir harici
olay (hata, uyarı veya bir tek günlük girişi) oluşturulur. Mesajların içeriği kumanda
panelinde, Menü - Ayarlar - Metinleri düzenle öğesi seçilerek düzenlenebilir.
Page 65

Program özellikleri 65
Motor faz kaybı algılama (31.19 parametresi)
Parametre, motor faz kaybı algılandığında sürücünün nasıl tepki vereceğini seçer.
Topraklama hatası algılama (31.20 parametresi)
Topraklama hatası algılama fonksiyonu, toplam akım ölçümünü esas alır.
Aşağıdakilere dikkat edin
• besleme kablosundaki bir topraklama hatası korumayı etkinleştirmez
• topraklanmış bir beslemede, koruma 2 milisaniyede etkinleşir
• topraklanmamış bir beslemede, besleme kapasitansı 1 mikrofarad veya üzeri
olmalıdır
• 300 metreye kadar blendajlı motor kablolarının neden olduğu kapasitif akımlar
korumayı etkinleştirmez
• sürücü durdurulduğunda koruma devre dışı bırakılır.
Besleme fazı kaybı algı
Parametre, besleme faz kaybı algılandığında sürücünün nasıl tepki vereceğini seçer.
Güvenlik torku kapalı algılama (31.22 parametresi)
Sürücü Güvenli moment kapatma girişinin durumunu izler ve bu parametre ile
sinyaller kaybolduğunda verilecek gösterimler seçilir. (Bu parametrenin Güvenli
moment kapatma fonksiyonunun çalışması üzerinde etkisi yoktur). Güvenlik torku
kapalı fonksiyonu ile ilgili daha fazla bilgi için, bkz. Donanım el kitabı.
Değiştirilmiş besleme ve motor kabloları (parametre 31.23)
Sürücü, besleme ve motor kabloları kazara değiştirilmesini algılayabilir (örneğin
beslemenin sürücü motor bağlantısına bağlanması). Parametre, bir hata oluşturulup
oluşturulmayacağını seçer.
Sıkışma koruması (31.24…31.28 parametreleri)
ışma durumunda sürücü motoru korur. Denetim limitlerini (akım, frekans ve
Sık
zaman) ayarlamak ve sürücünün bir motor sıkışma durumuna nasıl tepki vereceğini
seçmek mümkündür.
lama (31.21 parametresi)
Aşırı hız koruması (parametre 31.30)
Kullanıcı, kullanılmakta olan maksimum ve minimum hız limitlerine eklenen bir marjin
belirleyerek aşırı hız limitlerini ayarlayabilir.
Yerel kontrol kaybı algılama (49.05 parametresi)
Parametre, sürücünün kumanda paneli veya PC aracı iletişim kesintisine nasıl tepki
vereceğini seçer.
Page 66

66 Program özellikleri
Otomatik hata resetlemeleri
Sürücü, aşırı akım, yüksek gerilim, düşük gerilim, harici hatalar sonrasında kendini
otomatik olarak resetler. Kullanıcı da otomatik olarak resetlenecek bir hata
belirleyebilir.
Vars ayılan olarak, otomatik resetler kapalıdır ve kullanıcı tarafından özel olarak
etkinleştirilmelidir.
Ayarlar
Parametre 31.12…31.16 (sayfa 197).
Page 67

Program özellikleri 67
Teşhisler
Sinyal denetimi
Bu fonksiyon tarafından denetlenecek üç sinyal seçilebilir. Denetlenen bir sinyal
önceden tanımlanan limitleri aşarsa veya bu limitlerin altına düşerse, 32.01 Denetim
durumu'da bir bit etkinleştirilir ve bir uyarı veya hata oluşturulur. Mesajların içeriği
kumanda panelinde, Menü - Ayarlar - Metinleri düzenle öğesi seçilerek
düzenlenebilir.
Denetlenen sinyal düşük geçişli olarak filtrelenir.
Ayarlar
32 Denetim parametre grubu (sayfa 202).
Bakım zamanlayıcıları ve sayaçları
Programda, önceden tanımlanan bir limite ulaşıldığında bir uyarı oluşturacak şekilde
konfigüre edilebilen altı farklı bakım zamanlayıcısı veya sayacı bulunmaktadır.
Mesajların içeriği kumanda panelinde, Menü - Ayarlar - Metinleri düzenle öğesi
seçilerek düzenlenebilir.
Zamanlayıcı/sayaç, herhangi bir parametreyi izlemek için ayarlanabilir. Bu özellik, bir
servis hatırlatıcısı olarak özellikle kullanışlıdır.
Üç sayaç tipi vardır:
•Açık süre zamanlayıcıları. İkili kaynağın (örneğin, durum word'ündeki bit) çalışma
süresini ölçer.
• Sinyal kenarı sayaçları. Bu sayaç, izlenen ikili kaynak durumunun her
değiştirilmesinde artar.
•Değ
Ayarlar
33 Bakım zamanlayıcı ve sayacı parametre grubu (sayfa 205).
er sayaçları. Bu sayaç, entegrasyon ile, izlenen parametreyi ölçer. Sinyal tepe
değeri altındaki hesaplanan alan, kullanıcı tanımlı bir limiti geçerse alarm verilir.
Enerji tasarrufu hesaplayıcıları
Bu özellik aşağıdaki fonksiyonlardan oluşur:
• Motor akısını, toplam sistem verimini maksimum düzeye çıkaracak şekilde
ayarlayan bir enerji iyileştirici
• Motor tarafından kullanılan ve tasarruf edilen enerjiyi izleyen ve bunları kWh, para
birimi veya CO
• Sürücünün yük profilini gösteren bir yük analizörü (68. sayfadaki ilgili bölüme
bakın).
emisyon hacmi olarak görüntüleyen bir sayaç ve
2
Page 68

68 Program özellikleri
Not: Enerji tasarrufları hesaplamasının doğruluğu, direkt olarak 45.19 Kıyaslama
gücü parametresinde verilen referans motor gücünün doğruluğuna bağlıdır.
Ayarlar
45 Enerji tasarrufu parametre grubu (sayfa 244).
Yük analizörü
Tepe değeri günlüğü
Kullanıcı, tepe değeri günlüğü ile izlenecek bir sinyal seçebilir. Günlük, tepe değerinin
meydana geldiği zaman ile birlikte sinyalin tepe değerini ve ayrıca tepe değeri
sırasındaki motor akımını, DC gerilimini ve motor hızını kaydeder. Tepe değeri, 2 ms
aralıklarla örneklenir.
Genlik günlükleri
Kontrol programında iki genlik günlüğü bulunmaktadır.
Genlik günlüğü 2 için kullanıcı, 200 ms aralıklarla örneklenmesi için bir sinyal seçebilir
ve %100'e karşılık gelen bir değer belirleyebilir. Toplanan örnekler, genliklerine bağlı
olarak 10 salt okunur parametre olarak sıralanır. Her parametre, yüzde 10'luk bir
genlik aralığını temsil eder ve bu aralığa denk düşen toplanmış örneklerin yüzdesini
gösterir.
Örneklerin yüzdesi
>90%
0…10%
Genlik günlüğü 1, motor akı
10…20%
20…30%
30…40%
( 36.40…36.49 parametreleri)
40…50%
Genlik aralıkları
50…60%
60…70%
70…80%
80…90%
mını izlemek üzere sabitlenmiştir ve resetlenemez. Genlik
günlüğü 1 ile, %100, sürücünün maksimum çıkış akımına karşılık gelir (I
Ölçülen akım sürekli olarak kaydedilir. Örneklerin dağılımı 36.20…36.29
parametreleri ile gösterilir.
maks
).
Page 69

Ayarlar
36 Yük analizörü parametre grubu (sayfa 222).
Program özellikleri 69
Page 70

70 Program özellikleri
Diğer konular
Kullanıcı parametre grupları
Sürücü, kalıcı belleğe kaydedilebilen ve sürücü parametreleri kullanılarak geri
çağrılabilen dört kullanıcı parametre grubunu destekler. Kullanıcı parametre grupları
arasında geçiş yapmak için dijital girişler kullanılması da mümkündür.
Bir kullanıcı parametre grubunda, aşağıdakiler hariç, 10…99 parametre gruplarındaki
düzenlenebilen değerlerin tümü bulunur:
• G/Ç genişletme modülü ayarları (grup 14…16)
• veri depolama parametreleri (grup 47)
• fieldbus iletişim ayarları (grup 51…56) ve
• enkoder konfigürasyonu ayarları (grup 92…93).
Motor ayarları kullanıcı parametre setlerine dahil olduğundan, bir kullanıcı setini geri
çağırmadan önce ayarların uygulamada kullanılan motora uyduğundan emin olun.
Sürücüyle farklı motorların kullanıldığı bir uygulamada, motor ID run uygulamasını
her bir motor için gerçekleştirilmesi ve sonuçların farklı kullanıcı gruplarına
kaydedilmesi gerekir. Daha sonra, motor değiştirildiğinde uygun grup geri çağrılabilir.
n
Ayarlar
Parametre 96.10…96.13 (sayfa 296).
Veri depolama parametreleri
Veri depolama için yirmi dört (on altı adet 32 bit, sekiz adet 16 bit) parametre
ayrılmıştır. Bu parametreler varsayılan olarak bağımsızdır ve bağlantı oluşturma, test
etme ve devreye alma amaçlarıyla kullanılabilirler. Diğer parametrelerin kaynak ve
hedef seçimleri yazılabilir ve okunabilirler.
Ayarlar
47 Data depolama parametre grubu (sayfa 250).
Page 71

Uygulama makroları
Uygulama makroları 71
5
Bu bölümün içindekiler
Bu bölümde uygulama makrolarının kullanım amaçları, çalışması ve varsayılan
kontrol bağlantıları açıklanır.
Denetleme birimi bağlantıları ile ilgili daha ayrıntılı bilgi, sürücünün Donanım el
kitabı'nda bulunmaktadır.
Genel
Uygulama makroları ilgili uygulama için uygun olan varsayılan parametre değerleri
grubudur. Kullanıcı, sürücüyü çalıştırırken, genellikle en uygun uygulama makrosunu
başlatma noktası olarak seçer ve ardından ayarları uygulamaya uyarlamak için
gerekli değişiklikleri yapar. Bu genellikle geleneksel sürücü programlama yöntemine
kıyasla çok daha az sayıda kullanıcı düzenlemesine neden olur.
Uygulama makroları 96.04 Makro seçimi parametresi ile seçilebilir. Kullanıcı
parametre grupları, 96 Sistem grubundaki parametreler ile yönetilir.
Page 72

72 Uygulama makroları
Fabrika makrosu
Fabrika makrosu; konveyörler, pompalar ve fanlar ve test düzenekleri gibi nispeten
kolay hız kontrol uygulamalarına uygundur.
Sürücü referans sinyali AI1 analog girişine bağlı durumdayken hız kontrollüdür.
Start/stop komutları, DI1 dijital girişi üzerinden verilir; çalışma yönü DI2 tarafından
belirlenir. Bu makro EXT1 kontrol konumunu kullanır.
DI1 dijital giriş aracılığıyla hatalar resetlenir.
DI4, 1 ve 2 hızlanma/yavaşlama zamanı grupları arasında geçiş yapar. Hızlanma ve
yavaşlama zamanları ile rampa şekilleri 23.12...23.19 parametreleri tarafından
tanımlanır.
DI5, sabit hız 1'i etkinleştirir.
Fabrika makrosu için varsayılan parametre ayarları
Fabrika makrosu için varsayılan parametre ayarları Parametrelerin listesi altında
(sayfa 91) listelenmiştir.
Page 73

Uygulama makroları 73
Fabrika makrosu için varsayılan kontrol bağlantıları
XPOW Harici güç girişi
Hata
1 +24VI
2 GND
XAI Referans gerilimi ve analog girişler
1 +VREF 10 V DC, RL 1…10 kohm
2 -VREF -10 V DC, RL 1…10 kohm
3 AGND Topraklama
4 AI1+ Hız referansı
5 AI1-
6 AI2+ Varsayılan olarak kullanımda değildir.
7 AI2-
XAO Analog çıkışlar
1 AO1 Motor hızı rpm
2 AGND
3 AO2 Motor akımı
4 AGND
XD2D Sürücü - sürücü bağlantısı
1 B
2 A
3 BGND
XRO1, XRO2, XRO3 Röle çıkışları
1 NC
2 COM
3 NO
1 NC
2 COM
3 NO
1 NC
2 COM
3 NO
XD24 Dijital kilit
1 DIIL Dijital kilit. Varsayılan olarak kullanımda değildir.
2 +24VD +24 V DC 200 mA
3 DICOM Dijital giriş topraklaması
4 +24VD +24 V DC 200 mA
5 DIOGND Dijital giriş/çıkış topraklaması
XDIO Dijital giriş/çıkışlar
1 DIO1 Çıkış: Hazır
2 DIO2 Çıkış: Çalışıyor
XDI Dijital girişler
1 DI1 Stop (0) / Start (1)
2 DI2 İleri (0) / Geri (1)
3 DI3 Reset
4 DI4 Hız./Yav. süresi grubu 1 (0) / grubu 2 (1)
5 DI5 Sabit hız 1 (1 = Açık)
6 DI6 Varsayılan olarak kullanımda değildir.
XSTO
Sürücünün start etmesi için güvenli moment kapatma devrelerinin
kapatılması gerekir. Sürücünün Donanım el kitabı'na bakın.
X12 Güvenlik seçenekleri bağlantısı
X13 Kontrol paneli bağlantısı
X205 Bellek ünitesi bağlantısı
24 V DC, 2 A
0(2)…10 V, R
0(4)…20 mA, R
0…20 mA, R
0…20 mA, R
> 200 kohm
in
> 100 ohm
in
< 500 ohm
L
< 500 ohm
L
Sürücü - sürücü bağlantısı
Hazır
250 V AC / 30 V DC
2 A
Çalışıyor
250 V AC / 30 V DC
2 A
Hatalı(-1)
250 V AC / 30 V DC
2 A
Page 74

74 Uygulama makroları
Man/Oto makrosu
Man/Oto makrosu, iki harici kontrol cihazının kullanıldığı hız kontrol uygulamaları için
uygundur.
Sürücü, EXT1 (Manuel kontrol) ve EXT2 (Otomatik kontrol) harici kontrol
konumlarından hız kontrollüdür. Kontrol konumları arasındaki seçim, DI3 dijital girişi
yoluyla yapılır.
EXT1 için start/stop sinyali, DI1'e bağlanırken, çalışma yönü DI2 tarafından belirlenir.
EXT2 için, start/stop komutları DI6 yoluyla, yön DI5 yoluyla verilir.
EXT1 ve EXT2 için referans sinyalleri, sırasıyla AI1 ve AI2 analog girişlerine bağlanır.
DI4 yoluyla bir sabit hız (varsayılan olarak, 300 rpm) etkinleştirilebilir.
Man/Oto makrosu için varsayılan parametre ayarları
Aşağıda, Parametrelerin listesi bölümünde (sayfa 91) Fabrika makrosu için
listelenenlerden farklı olan varsayılan parametre değerlerinin listesi bulunmaktadır.
Parametre
No. Adı
12.30 AI2 maksimumun skala değeri 1500.000
19.11 Ext1/Ext2 seçimi DI3
20.06 Ext2 komutları In1 Başlat; In2 Yön
20.08 Ext2 in1 kaynağı DI6
20.09 Ext2 in2 kaynağı DI5
22.12 Hız ref2 kaynağı AI2 skala
22.14 Hız ref1/2 seçimi Ext1/Ext2 seçimini izler
22.22 Sabit hız seç1 DI4
23.11 Rampa set seçimi Hız/Yav süresi 1
31.11 Hata reset seçimi Seçilmedi
Man/Oto makrosu
varsayılan
Page 75

Uygulama makroları 75
Man/Oto makrosu için varsayılan kontrol bağlantıları
XPOW Harici güç girişi
Hata
1 +24VI
2 GND
XAI Referans gerilimi ve analog girişler
1 +VREF 10 V DC, RL 1…10 kohm
2 -VREF -10 V DC, RL 1…10 kohm
3 AGND Topraklama
4 AI1+ Hız referansı (Manuel)
5 AI1-
6 AI2+ Hız referansı (Otomatik)
7 AI2-
XAO Analog çıkışlar
1 AO1 Motor hızı rpm
2 AGND
3 AO2 Motor akımı
4 AGND
XD2D Sürücü - sürücü bağlantısı
1 B
2 A
3 BGND
XRO1, XRO2, XRO3 Röle çıkışları
1 NC
2 COM
3 NO
1 NC
2 COM
3 NO
1 NC
2 COM
3 NO
XD24 Dijital kilit
1 DIIL Dijital kilit. Varsayılan olarak kullanımda değildir.
2 +24VD +24 V DC 200 mA
3 DICOM Dijital giriş topraklaması
4 +24VD +24 V DC 200 mA
5 DIOGND Dijital giriş/çıkış topraklaması
XDIO Dijital giriş/çıkışlar
1 DIO1 Çıkış: Hazır
2 DIO2 Çıkış: Çalışıyor
XDI Dijital girişler
1 DI1 Stop (0) / Start (1) – Manuel
2 DI2 İleri (0) / Geri (1) – Manuel
3 DI3 Manuel (0) / Otomatik (1)
4 DI4 Sabit hız 1 (1 = Açık)
5 DI5 İleri (0) / Geri (1) – Otomatik
6 DI6 Stop (0) / Start (1) – Otomatik
XSTO
Sürücünün start etmesi için güvenli moment kapatma devrelerinin
kapatılması gerekir. Sürücünün Donanım el kitabı'na bakın.
X12 Güvenlik seçenekleri bağlantısı
X13 Kontrol paneli bağlantısı
X205 Bellek ünitesi bağlantısı
24 V DC, 2 A
0(2)…10 V, R
0(4)…20 mA, R
0…20 mA, R
0…20 mA, R
> 200 kohm
in
> 100 ohm
in
< 500 ohm
L
< 500 ohm
L
Sürücü - sürücü bağlantısı
Hazır
250 V AC / 30 V DC
2 A
Çalışıyor
250 V AC / 30 V DC
2 A
Hatalı(-1)
250 V AC / 30 V DC
2 A
Page 76

76 Uygulama makroları
PID kontrol makrosu
PID kontrol makrosu, örneğin, kapalı çevrim basıncı, seviye veya akış kontrol
sistemleri proses kontrol uygulamaları için uygundur
• şehir su şebekesi sistemlerinde basınç yükseltme pompaları
• su rezervuarlarında seviye kontrol pompaları
• bölgesel ısıtma sitemlerinde basınç yükseltme pompaları
• bir konveyör hattında madde akış kontrolü.
Proses referans sinyali AI1 analog girişine ve proses geri bildirim sinyali AI2'ye
bağlanır. Alternatif olarak AI1 ile sürücüye doğrudan bir hız referansı da verilebilir.
Sonra PID hız kontrol cihazı baypaslanır ve sürücü artık proses değişkenini kontrol
etmez.
Doğrudan hız kontrolü (kontrol konumu EXT1) ve proses değişken kontrolü (EXT2)
arasındaki seçim DI3 dijital girişi ile yapılır.
EXT1 ve EXT2 için start/stop sinyalleri, sırasıyla DI1 ve DI6 analog çıkışlarına
lanır.
bağ
DI4 yoluyla bir sabit hız (varsayılan olarak, 300 rpm) etkinleştirilebilir.
Not: PID döngüsü devreye alınırken, motorun öncelikle EXT1 kullanılarak hız
kontrolünde çalıştırılması faydalı olacaktır; bu, PID geribildirim polaritesinin ve
ölçeklendirmesinin test edilmesine olanak sağlayacaktır. Geribildirim kanıtlandığında,
PID döngüsü EXT2'ye geçilerek "kapatılabilir".
Page 77

Uygulama makroları 77
PID kontrol makrosu için varsayılan parametre ayarları
Aşağıda, Parametrelerin listesi bölümünde (sayfa 91) Fabrika makrosu için
listelenenlerden farklı olan varsayılan parametre değerlerinin listesi bulunmaktadır.
Parametre
No. Adı
12.30 AI2 maksimumun skala değeri 1500.000
19.11 Ext1/Ext2 seçimi DI3
20.01 Ext1 komutları In1 Start
20.04 Ext1 in2 kaynağı Seçilmedi
20.06 Ext2 komutları In1 Başlat
20.08 Ext2 in1 kaynağı DI6
20.12 Çalıştırma izni 1 kaynağı DI5
22.12 Hız ref2 kaynağı PID
22.14 Hız ref1/2 seçimi Ext1/Ext2 seçimini izler
22.22 Sabit hız seç1 DI4
23.11 Rampa set seçimi Hız/Yav süresi 1
31.11 Hata reset seçimi Seçilmedi
40.07 Set 1 PID Çalışma modu Açık
40.08 Set 1 Geribildirim 1 kaynağı AI2 skala
PID kontrol makrosu
varsayılan
40.11 Set 1 grbldrm filtre süresi 0,040 s
40.16 Set 1 set değ. 1 kaynağı AI1 skala
40.35 Set 1 türev filtre süresi 1,0 s
Page 78

78 Uygulama makroları
PID kontrol makrosu için varsayılan kontrol bağlantıları
XPOW Harici güç girişi
1 +24VI
2 GND
XAI Referans gerilimi ve analog girişler
1 +VREF 10 V DC, RL 1…10 kohm
2 -VREF -10 V DC, RL 1…10 kohm
3 AGND Topraklama
4 AI1+ Proses veya Hız referansı
5 AI1-
P
I
6 AI2+ Proses geri bildirimi*
7 AI2-
XAO Analog çıkışlar
1 AO1 Motor hızı rpm
2 AGND
3 AO2 Motor akımı
4 AGND
XD2D Sürücü - sürücü bağlantısı
1 B
2 A
3 BGND
XRO1, XRO2, XRO3 Röle çıkışları
1 NC
2 COM
3 NO
1 NC
2 COM
Hata
3 NO
1 NC
2 COM
3 NO
XD24 Dijital kilit
1 DIIL Dijital kilit. Varsayılan olarak kullanımda değildir.
2 +24VD +24 V DC 200 mA
3 DICOM Dijital giriş topraklaması
4 +24VD +24 V DC 200 mA
5 DIOGND Dijital giriş/çıkış topraklaması
XDIO Dijital giriş/çıkışlar
1 DIO1 Çıkış: Hazır
2 DIO2 Çıkış: Çalışıyor
XDI Dijital girişler
1 DI1 Stop (0) / Start (1) – Hız kontrolü
2 DI2 Varsayılan olarak kullanımda değildir.
3 DI3 Hız kontrolü (0) / Proses kontrolü (1)
4 DI4 Sabit hız 1 (1 = Açık)
5 DI5 Çalışma izni (1 = Açık)
6 DI6 Stop (0) / Start (1) – Proses kontrolü
XSTO
Sürücünün start etmesi için güvenli moment kapatma devrelerinin
kapatılması gerekir. Sürücünün Donanım el kitabı'na bakın.
X12 Güvenlik seçenekleri bağlantısı
X13 Kontrol paneli bağlantısı
X205 Bellek ünitesi bağlantısı
24 V DC, 2 A
0(2)…10 V, R
0(4)…20 mA, R
0…20 mA, R
0…20 mA, R
> 200 kohm
in
> 100 ohm
in
< 500 ohm
L
< 500 ohm
L
Sürücü - sürücü bağlantısı
Hazır
250 V AC / 30 V DC
2 A
Çalışıyor
250 V AC / 30 V DC
2 A
Hatalı(-1)
250 V AC / 30 V DC
2 A
*Sensör bağlantısı örnekleri için, bkz. sayfa 79.
Page 79

Uygulama makroları 79
PID kontrol makrosu için sensör bağlantısı örnekleri
XAI
0/4…20 mA
P
Not: Sensörün gücü harici olarak sağlanmalıdır.
P
+
–
I
+
–
OUT
I
0/4…20 mA
+
P
–
I
0/4…20 mA
67AI2+
AI2-
XAI
1 +VREF
3AGND
67AI2+
AI2-
XAI
1 +VREF
3AGND
67AI2+
AI2-
Gerçek değer ölçümü
-20…20 mA. R
Referans gerilim çıkışı
Topraklama
Gerçek değer ölçümü
-20…20 mA. R
Referans gerilim çıkışı
Topraklama
Gerçek değer ölçümü
-20…20 mA. R
= 100 ohm
in
= 100 ohm
in
= 100 ohm
in
P
I
Güç
kaynağı
+
+24V
–
Sürücü 1 / XAI
0/4…20 mA–
67AI2+
AI2-
Sürücü 2 / XAI
67AI2+
AI2-
Sürücü 3 / XAI
67AI2+
AI2-
Gerçek değer ölçümü
-20…20 mA. R
Gerçek değer ölçümü. -20…20 mA. Rin =
100 ohm
Gerçek değer ölçümü. -20…20 mA. Rin =
100 ohm
= 100 ohm
in
Page 80

80 Uygulama makroları
Moment kontrol makrosu
Bu makro motorun moment kontrolünün yapılması gerektiği uygulamalarda kullanılır.
Bunlar, mekanik sistemde belirli bir gerilimin korunması gerektiği tipik gerilim
uygulamalarıdır.
Moment referansı AI2 analog girişi yoluyla, genellikle (nominal motor momentinin
%0…100'üne karşılık gelen) 0…20 mA aralığında akım sinyali olarak verilir.
Start/stop sinyali DI1 dijital girişine bağlanır. Yön DI2 tarafından belirlenir. DI3 dijital
girişi ile tork kontrolü (EXT2) yerine hız kontrolünü (EXT1) seçmek mümkündür. PID
kontrol makrosunda, sistemi devreye almak ve motor yönünü kontrol etmek için hız
kontrolü kullanılabilir.
Loc/Rem tuşuna basılarak da kontrol lokal (kontrol paneli veya PC aracı) olarak
değiştirilebilir. Varsayılan olarak, yerel referans hızdır; bir tork referansı gerekirse,
19.16 Lokal kontrol modu parametresi değerinin Tork olarak değiştirilmesi gerekir.
DI4 yoluyla bir sabit hız (varsayılan olarak, 300 rpm) etkinleştirilebilir. DI5, 1 ve 2
hızlanma/yavaş
lama zamanı grupları arasında geçiş yapar. Hızlanma ve yavaşlama
zamanları ile rampa şekilleri 23.12...23.19 parametreleri tarafından tanımlanır.
Moment kontrol makrosu için varsayılan parametre ayarları
Aşağıda, Parametrelerin listesi bölümünde (sayfa 91) Fabrika makrosu için
listelenenlerden farklı olan varsayılan parametre değerlerinin listesi bulunmaktadır.
Parametre
No. Adı
19.11 Ext1/Ext2 seçimi DI3
19.14 Ext2 kontrol modu Tork
20.02 Ext1 bşltma tetikleyicisi tipi Kalıcı
20.06 Ext2 komutları In1 Başlat; In2 Yön
20.07 Ext2 bşltma tetikleyicisi tipi Kalıcı
20.08 Ext2 in1 kaynağı DI1
20.09 Ext2 in2 kaynağı DI2
Moment kontrol makrosu
varsayılan
20.12 Çalıştırma izni 1 kaynağı DI6
22.22 Sabit hız seç1 DI4
23.11 Rampa set seçimi DI5
26.11 Tork ref1 kaynağı AI2 skala
31.11 Hata reset seçimi Seçilmedi
Page 81

Uygulama makroları 81
Moment kontrol makrosu için varsayılan kontrol bağlantıları
XPOW Harici güç girişi
Hata
1 +24VI
2 GND
XAI Referans gerilimi ve analog girişler
1 +VREF 10 V DC, RL 1…10 kohm
2 -VREF -10 V DC, RL 1…10 kohm
3 AGND Topraklama
4 AI1+ Hız referansı
5 AI1-
6 AI2+ Tork referansı
7 AI2-
XAO Analog çıkışlar
1 AO1 Motor hızı rpm
2 AGND
3 AO2 Motor akımı
4 AGND
XD2D Sürücü - sürücü bağlantısı
1 B
2 A
3 BGND
XRO1, XRO2, XRO3 Röle çıkışları
1 NC
2 COM
3 NO
1 NC
2 COM
3 NO
1 NC
2 COM
3 NO
XD24 Dijital kilit
1 DIIL Dijital kilit. Varsayılan olarak kullanımda değildir.
2 +24VD +24 V DC 200 mA
3 DICOM Dijital giriş topraklaması
4 +24VD +24 V DC 200 mA
5 DIOGND Dijital giriş/çıkış topraklaması
XDIO Dijital giriş/çıkışlar
1 DIO1 Çıkış: Hazır
2 DIO2 Çıkış: Çalışıyor
XDI Dijital girişler
1 DI1 Stop (0) / Start (1)
2 DI2 İleri (0) / Geri (1)
3 DI3 Hız kontrolü (0) / Moment kontrolü (1)
4 DI4 Sabit hız 1 (1 = Açık)
5 DI5 Hız./Yav. süresi grubu 1 (0) / grubu 2 (1)
6 DI6 Çalışma izni (1 = Açık)
XSTO
Sürücünün start etmesi için güvenli moment kapatma devrelerinin
kapatılması gerekir. Sürücünün Donanım el kitabı'na bakın.
X12 Güvenlik seçenekleri bağlantısı
X13 Kontrol paneli bağlantısı
X205 Bellek ünitesi bağlantısı
24 V DC, 2 A
0(2)…10 V, R
0(4)…20 mA, R
0…20 mA, R
0…20 mA, R
> 200 kohm
in
> 100 ohm
in
< 500 ohm
L
< 500 ohm
L
Sürücü - sürücü bağlantısı
Hazır
250 V AC / 30 V DC
2 A
Çalışıyor
250 V AC / 30 V DC
2 A
Hatalı(-1)
250 V AC / 30 V DC
2 A
Page 82

82 Uygulama makroları
Sıralı kontrol makrosu
Sıralı kontrol makrosu; bir hız referansı, birden fazla sabit hız ve iki hızlanma ve
yavaşlama rampasının kullanılabildiği hız kontrol uygulamaları için uygundur.
Bu makroda yalnı zca EXT1 kullanılır.
Makro, DI4…DI6 dijital girişleri tarafından aktifleştirilebilen yedi ön ayarlı sabit hız
önerir (bkz. 22.21 Sabit hız fonksiyonu parametresi). AI1 analog girişi üzerinden bir
harici hız referansı verilebilir. Referans sadece, sabit hız etkinleştirilmediğinde
(DI4…DI6 dijital girişlerinin tamamı kapalı) etkin durumdadır. Ayrıca kontrol
panelinden çalışma komutları verilebilir.
Start/stop komutları, DI1 dijital girişi üzerinden verilir; çalışma yönü DI2 tarafından
belirlenir.
İki hızlanma/yavaşlama rampası
, DI3 yoluyla seçilebilir. Hızlanma ve yavaşlama
süreleri ile rampa şekilleri 23.12...23.19 parametreleri tarafından belirlenir.
Çalışma şeması
Aşağıdaki şekil makro kullanımının bir örneğini göstermektedir.
Hız
Hız 3
Hız 2
Hız 1
Hız.1 Hız.1 Hız.2 Yav.2
Yavaşlama rampası
boyunca durma
Zaman
Start/Stop
Hız.1/Yav.1
Hız 1
Hız 2
Hız.2/Yav.2
Hız 3
Page 83

Uygulama makroları 83
Sabit hız seçimi
Varsayılan olarak, DI4…DI6 dijital girişleri kullanılarak 1…7 sabit hızları aşağıdaki
şekilde seçilir:
DI4 DI5 DI6 Sabit hız etkin
000
100 Sabit hız 1
010 Sabit hız 2
110 Sabit hız 3
001 Sabit hız 4
101 Sabit hız 5
011 Sabit hız 6
111 Sabit hız 7
Hiçbiri (Harici hız referansı
kullanıldı)
Sıralı kontrol makrosu için varsayılan parametre ayarları
Aşağıda, Parametrelerin listesi bölümünde (sayfa 91) Fabrika makrosu için
listelenenlerden farklı olan varsayılan parametre değerlerinin listesi bulunmaktadır.
Parametre
No. Adı
21.03 Stop modu Rampa
22.21 Sabit hız fonksiyonu 01b (Bit 0 = Birleşik)
22.22 Sabit hız seç1 DI4
22.23 Sabit hız seç2 DI5
22.24 Sabit hız seç3 DI6
22.27 Sabit hız 2 600,00 rpm
22.28 Sabit hız 3 900,00 rpm
22.29 Sabit hız 4 1200,00 rpm
22.30 Sabit hız 5 1500,00 rpm
22.31 Sabit hız 6 2400,00 rpm
22.32 Sabit hız 7 3000,00 rpm
23.11 Rampa set seçimi DI3
Sıralı kontrol makrosu
varsayılan
25.06 Kalkış komp türev süresi 0,12 s
31.11 Hata reset seçimi Seçilmedi
Page 84

84 Uygulama makroları
Sı ralı kontrol makrosu için varsayılan kontrol bağlantıları
XPOW Harici güç girişi
Hata
1 +24VI
2 GND
XAI Referans gerilimi ve analog girişler
1 +VREF 10 V DC, RL 1…10 kohm
2 -VREF -10 V DC, RL 1…10 kohm
3 AGND Topraklama
4 AI1+ Harici hız referansı
5 AI1-
6 AI2+ Varsayılan olarak kullanımda değildir.
7 AI2-
XAO Analog çıkışlar
1 AO1 Motor hızı rpm
2 AGND
3 AO2 Motor akımı
4 AGND
XD2D Sürücü - sürücü bağlantısı
1 B
2 A
3 BGND
XRO1, XRO2, XRO3 Röle çıkışları
1 NC
2 COM
3 NO
1 NC
2 COM
3 NO
1 NC
2 COM
3 NO
XD24 Dijital kilit
1 DIIL Dijital kilit. Varsayılan olarak kullanımda değildir.
2 +24VD +24 V DC 200 mA
3 DICOM Dijital giriş topraklaması
4 +24VD +24 V DC 200 mA
5 DIOGND Dijital giriş/çıkış topraklaması
XDIO Dijital giriş/çıkışlar
1 DIO1 Çıkış: Hazır
2 DIO2 Çıkış: Çalışıyor
XDI Dijital girişler
1 DI1 Stop (0) / Start (1)
2 DI2 İleri (0) / Geri (1)
3 DI3 Hız./Yav. süresi grubu 1 (0) / grubu 2 (1)
4 DI4
5 DI5
6 DI6
XSTO
Sürücünün start etmesi için güvenli moment kapatma devrelerinin
kapatılması gerekir. Sürücünün Donanım el kitabı'na bakın.
X12 Güvenlik seçenekleri bağlantısı
X13 Kontrol paneli bağlantısı
X205 Bellek ünitesi bağlantısı
24 V DC, 2 A
0(2)…10 V, R
0(4)…20 mA, R
0…20 mA, R
0…20 mA, R
> 200 kohm
in
> 100 ohm
in
< 500 ohm
L
< 500 ohm
L
Sürücü - sürücü bağlantısı
Hazır
250 V AC / 30 V DC
2 A
Çalışıyor
250 V AC / 30 V DC
2 A
Hatalı(-1)
250 V AC / 30 V DC
2 A
Sabit hız seçimi (bkz. sayfa 83)
Page 85

Uygulama makroları 85
Fieldbus kontrol makrosu
Bu uygulama makrosu mevcut yazılım sürümü tarafından desteklenmemektedir.
Page 86

86 Uygulama makroları
Page 87

Parametreler
Parametreler 87
6
Bu bölümün içindekiler
Bu bölümde, kontrol programının gerçek sinyalleri dahil olmak üzere, parametreler
açıklanmaktadır.
Page 88

88 Parametreler
Terimler ve kısaltmalar
Teri m Tan ımı
Gerçek sinyal Sürücü tarafından bir ölçüm veya hesaplamanın sonucu olan veya durum
bilgilerini içeren parametre tipi. Çoğu gerçek sinyal salt okunurdur, ancak
bazıları (özellikle sayaç tipi gerçek sinyaller) resetlenebilir.
Vars. (A şağıdaki tabloda, parametre adı ile aynı sırada gösterilmiştir)
Fabrika makrosunda kullanıldığında bir parametre fabrika değeri. Diğer
makroya özgü parametre değerleri ile ilgili bilgi için, bkz. bölüm Uygulama
makroları (sayfa 71).
Not: İsteğe bağlı ekipmanlar için belirtilenler için farklı fabrika değerleri
gerekebilir. Bkz. 95.20 HW opsiyon word'ü 1 parametresi.
FbEq16 (Aşağıdaki tabloda, her bir seçim için veya parametre aralığı ile aynı
sırada gösterilmiştir)
16 bit fieldbus eşdeğeri: Bir harici sisteme aktarım için 16 bit değer
seçildi
ğinde iletişimde kullanılan tamsayı ve panelde gösterilen değer
arasındaki skalalandırma.
Bir kısa çizgi (-) parametreye 16 bit formatta erişilemeyeceğini gösterir.
Karşılık gelen 32 bit skalalandırmalar Ek parametre datası bölümünde
(sayfa 309) listelenmektedir.
Diğer Değer başka bir parametreden alınır.
"Diğer" öğesi seçilerek kullanıcının kaynak parametresini
belirleyebileceği bir parametre listesi görüntülenir.
Diğer [bit] Değer başka bir parametredeki belirli bir bitten alınır.
"Diğer" öğesi seçilerek kullanıcının kaynak parametresini ve bitini
belirleyebileceği bir parametre listesi görüntülenir.
Parametre Sürücü için kullanıcı tarafından ayarlanabilir bir çalışma talimatı veya bir
gerçek sinyal.
p.u. Birim başına
Page 89

Parametreler 89
Parametre grupları hakkında kısa bilgi
01 Gerçek değerler Sürücünün izlenmesi için temel sinyaller. 91
03 Giriş referansları Çeşitli kaynaklardan alınan referans değerleri. 92
04 Uyarılar ve hatalar En son meydana gelen uyarılar ve hatalar ile ilgili bilgiler. 93
05 Teşhis Sürücü bakımına ilişkin çeşitli çalışma zamanı tipi sayaçlar ve
ölçümler.
06 Kontrol ve Durum Word'ü Sürücü kontrol ve durum Word'ü. 95
07 Sistem bilgisi Sürücü donanım ve yazılım bilgileri. 101
10 Standart DI, RO Dijital girişlerin ve röle çıkışlarının yapılandırması. 101
11 Standart DIO, FI, FO Dijital giriş/çıkışların ve frekans giriş/çıkışlarının yapılandırmas
12 Standart AI Standart analog girişlerin yapılandırması. 112
13 Standart AO Standart analog çıkışların yapılandırması. 115
14 GÇ İlave modülü 1 GÇ ilave modül 1 yapılandırması. 119
15 GÇ ilave modülü 2 GÇ ilave modülü 2 yapılandırması. 135
16 GÇ ilave modülü 3 GÇ ilave modülü 3 yapılandırması. 138
19 Çalışma modu Harici kontrol konumu kaynaklarının ve çalışma modlarının
seçilmesi.
ı. 107
94
141
20 Başlatma/durdurma/yön Start/stop/yön ve çalışma/start/jog etkinleştirme sinyali kaynak
seçimi; pozitif/negatif referans izni sinyali kaynak seçimi.
21 Start / Stop modu Start ve stop modları; acil durdurma modu ve sinyal kaynağı
seçimi; DC manyetizasyon ayarları; otomatik fazlama modu
seçimi.
22 H
ız referansı seçimi Hız referansı seçimi; motor potansiyometresi ayarları. 156
23 Hız referansı rampası Hız referansı rampası ayarları (sürücü için hızlanma ve yavaşlama
değerlerinin programlanması).
24 Hız referansı koşulları Hız hatası hesaplama; hız hatası penceresi kontrol
yapılandırması; hız hatası adımı.
25 Hız kontrolü Hız kontrol ayarları. 171
26 Tork referans zinciri Tork referansı zinciri ayarları. 177
28 Frekans referans zinciri Tork referansı zinciri ayarları. 182
30 Limitler Sürücü çalışma limitleri. 190
31 Hata fonksiyonları
32 Denetim 1...3 sinyal denetimi fonksiyonları yapılandırması. 202
33 Bakım zamanlayıcı ve
sayacı
35 Motor termal koruma Sıcaklık ölçümü yapılandırması, yük eğrisi tanımı ve motor fanı
36 Yük analizörü Tepe değeri ve genlik günlüğü ayarları. 222
Harici olay yapılandırması; hata durumları sonrasında sürücü
davranışı seçimi.
Bakım zamanlayıcıları/sayaçları yapılandırması. 205
kontrolü yapılandırması gibi motor termal koruma ayarları.
143
151
164
169
195
213
40 Proses PID ayarı 1 Proses PID kontrolü için parametre değerleri. 225
41 Proses PID set 2 Proses PID kontrolü için ikinci bir parametre değeri seti. 237
43 Fren kıyıcı Dahili fren kıyıcısı ayarları. 239
44 Mekanik fren kontrolü Mekanik fren kontrolü yapılandırması. 241
45 Enerji tasarrufu Enerji tasarrufu hesaplayıcı ayarları. 244
Page 90

90 Parametreler
46 İzleme/skalalama ayarları Hız denetimi ayarları; gerçek sinyal filtreleme; genel
skalalandırma ayarları.
47 Data depolama Diğer parametrelerin kaynak ve hedef ayarları kullanılarak
yazılabilen ve okunabilen data depolama parametreleri.
49 Panel port iletişimi Sürücü üzerindeki kumanda paneli portu iletişim ayarları. 252
50 Fieldbus adaptörü (FBA) Fieldbus iletişim yapılandırması. 253
51 FBA A ayarları Fieldbus adaptörü A yapılandırması. 261
52 FBA A data girişi Fieldbus adaptörü A aracılığıyla sürücüden fieldbus kontrol
cihazına aktarılacak olan datanın seçimi.
53 FBA A data çıkışı Fieldbus adaptörü A aracılığıyla fieldbus kontrol cihazından
sürücüye aktarılacak olan datanın seçimi.
54 FBA B ayarları Fieldbus adaptörü B yapıland
55 FBA B data girişi Fieldbus adaptörü B aracılığıyla sürücüden fieldbus kontrol
cihazına aktarılacak olan datanın seçimi.
56 FBA B data çıkışı Fieldbus adaptörü B aracılığıyla fieldbus kontrol cihazından
sürücüye aktarılacak olan datanın seçimi.
60 DDCS iletişimi DDCS (fiber optik) iletişim yapılandırması. 266
61 D2D ve DDCS aktarım
datası
62 D2D ve DDCS alım datası DDCS bağlantısı aracılığıyla alınan datanın eşlenmesi. 275
DDCS bağlantısına gönderilen datayı tanımlar. 273
ırması. 264
247
250
263
263
265
266
90 Geribildirim seçimi Motor ve yük geribildirim yapı
91 Enkoder modülü ayarları Enkoder arabirim modülleri yapılandırması. 283
92 Enkoder 1 yapılandırması Enkoder 1 ayarları. 285
93 Enkoder 2 yapılandırması Enkoder 2 ayarları. 290
95 Donanım konfig Donanımla ilgili çeşitli ayarlar. 291
96 Sistem Dil seçimi; erişim düzeyleri; makro seçimi; parametre kaydı ve geri
yükleme; kontrol ünitesini yeniden başlatma; kullanıcı parametre
setleri; birim seçimi.
97 Motor kontrolü Anahtarlama frekansı; kayma kazancı; gerilim rezervi; akı
frenleme; anti-cogging (sinyal enjeksiyonu); IR kompanzasyonu.
98 Kullanıcı motor
parametreleri
99 Motor datası Motor yapılandırma ayarları. 302
200 Güvenlik FSO-xx ayarları. 307
201 Güvenli bus Rezerve. 307
Motor modelinde kullanılan, kullanıcı tarafından sağlanan motor
değerleri.
landırması. 279
294
298
301
Page 91

Parametreler 91
Parametrelerin listesi
No. Ad/Değer Açıklama Def/FbEq16
01
01 Gerçek değerler
01.01 Kullanılan motor
hızı
-30000,00 …
30000,00 rpm
01.02 Tahmini motor hızı rpm olarak tahmini motor hızı. Bu sinyal için 46.11 Motor hızı
-30000,00 …
30000,00 rpm
01.04 Enkoder 1 hızı
(filtreli)
-30000,00 …
30000,00 rpm
01.05 Enkoder 2 hızı
(filtreli)
-30000,00 …
30000,00 rpm
01.06 Çıkış frekansı Hz cinsinden tahmini sürücü çıkış frekansı. Bu sinyal için
Sürücünün izlenmesi için temel sinyaller.
Bu gruptaki tüm parametreler aksi belirtilmediği sürece salt
okunurdur.
Geribildirim türüne bağlı olarak ölçülen veya tahmini motor
hızı kullanılır (bkz. parametre 90.41 Motor geribildirim
seçimi). Bu sinyal için 46.11 Motor hızı için filtre zm
parametresi ile bir filtre süresi sabiti tanımlanabilir.
Ölçülen veya tahmini motor hızı.Bkz. par.
için filtre zm parametresi ile bir filtre süresi sabiti
tanımlanabilir.
Tahm ini mo to r h ızı.Bkz. par.
rpm olarak enkoder 1 hızı. Bu sinyal için 46.11 Motor hızı için
filtre zm parametresi ile bir filtre süresi sabiti tanımlanabilir.
Enkoder 1 hızı.Bkz. par.
rpm olarak enkoder 2 hızı.Bu sinyal için 46.11 Motor hızı için
filtre zm parametresi ile bir filtre süresi sabiti tanımlanabilir.
Enkoder 2 hızı.Bkz. par.
46.12 Çıkış frekansı için filtre zm parametresi ile bir filtre
süresi sabiti tanımlanabilir.
-
46.01
-
46.01
-
46.01
-
46.01
-
-500,00 … 500,00 HzTahm ini ç ıkış frekansı.Bkz. par.
46.02
01.07 Motor akımı A cinsinden ölçülen (mutlak) motor akımı.-
0,00 … 30000,00 A Motor akımı.1 = 1 A
01.10 Motor torku % Nominal motor torkunun yüzdesi olarak motor torku. Ayrıca
bkz. parametre 01.30 Nominal tork skalaması
Bu sinyal için 46.13 Motor torku için filtre zm parametresi ile
bir filtre süresi sabiti tanımlanabilir.
-1600,0 … 1600,0% Motor torku. Bkz. par.
01.11 DC gerilimi Ölçülen DC bağlantısı gerilimi. -
0,00 … 2000,00 V DC bağlantısı gerilimi. 10 = 1 V
01.13 Çıkış gerilimi V AC cinsinden hesaplanan motor gerilimi. -
0…2000 V Motor gerilimi. 1 = 1 V
01.14 Çıkış gücü Sürücü çıkış gücü. Birim, 96.16 Birim seçimi parametresi ile
seçilir. Bu sinyal için 46.14 Çıkış gücü için filtre zm
parametresi ile bir filtre süresi sabiti tanımlanabilir.
-32768,00 …
32767,00 kW veya
hp
Çıkış gücü. 1 = 1 birim
.
-
46.03
-
Page 92

92 Parametreler
No. Ad/Değer Açıklama Def/FbEq16
01.18 SürücüGWsa
sayacı
0…65535 GWh GWh cinsinden enerji. 1 = 1 GWh
01.19 Sürücü MWsa
sayacı
0…999 MWh MWh cinsinden enerji. 1 = 1 MWh
01.20 Sürücü kWsa
sayacı
0…999 kWh kWh cinsinden enerji. 10 = 1 kWh
01.24 Gerçek akı % Motorun nominal akısının yüzdesi olarak kullanılan akı
0…200% Akı referansı.1 = 1%
01.29 Hız de
01.30 Nominal tork
ğişim oranı Hız rampası jeneratörü sonrasında hız referansı değişikliği
-15000 … 15000
rpm/s
skalaması
Gigawatt-saat cinsinden, sürücüden geçen enerji miktarı (her
iki yönde). Minimum değer sıfırdır.
Megawatt-saat cinsinden, sürücüden geçen enerji miktarı
(her iki yönde). Sayaç her döndüğünde, 01.18 SürücüGWsa
sayacı artışı olur.Minimum değer sıfırdır.
Tam kilowatt saat cinsinden, sürücüden geçen enerji miktarı
(her iki yönde). Sayaç her döndüğünde, 01.19 Sürücü MWsa
sayacı artışı olur.Minimum değer sıfırdır.
referansı.
oranı.
Ayrıca bkz. parametre 31.32 Acil rampa denetimi ve 31.33
Acil rampa denetimi gecikmesi.
Hız değişikliği oranı.1 = 1 rpm/s
Nominal motor torkunun %100'üne karşılık gelen tork. Birim,
96.16 Birim seçimi parametresi ile seçilir
Not: Bu değer, girilmişse 99.12 Nominal motor torku
parametresinden kopyalanır. Aksi halde, değer diğer motor
datasından hesaplanır.
-
-
-
-
-
-
0,000…
N·m veya lb·ft
01.31 Ortam sıcaklığı Giren soğutma havasını
-32768 … 32767°C
veya °F
03
03 Giriş referansları
03.01 Panel referansı Kumanda panelinden veya PC aracından verilen referans. -
-100000.00 …
100000.00
03.05 FB A referansı 1 Fieldbus adaptörü A yoluyla alınan referans 1.
-100000.00 …
100000.00
03.06 FB A referansı 2 Fieldbus adaptörü A yoluyla alınan referans 2. -
-100000.00 …
100000.00
03.07 FB B referansı 1 Fieldbus adaptörü B yoluyla alınan referans 1. -
Nominal tork. 1 = 100 birim
n ölçülen sıcaklığı. Birim, 96.16 Birim
seçimi parametresi ile seçilir.
Soğutma havası sıcaklığı.1 = 1°
Çeşitli kaynaklardan alınan referans değerleri.
Bu gruptaki tüm parametreler aksi belirtilmediği sürece salt
okunurdur.
Kontrol paneli veya PC aracı referansı.1 = 10
Ayrıca bkz. bölüm Bir fieldbus adaptörü ile fieldbus kontrolü
(sayfa 375).
Fieldbus adaptörü A'dan alınan referans 1. 1 = 10
Fieldbus adaptörü A'dan alınan referans 2. 1 = 10
-
-
-100000.00 …
100000.00
Fieldbus adaptörü B'den alınan referans 1. 1 = 10
Page 93

Parametreler 93
No. Ad/Değer Açıklama Def/FbEq16
03.08 FB B referansı 2 Fieldbus adaptörü B yoluyla alınan referans 2. -
-100000.00 …
100000.00
Fieldbus adaptörü B'den alınan referans 2. 1 = 10
03.11 DDCS kontrol
cihazı ref 1
-30000.00 …
30000.00
03.12 DDCS kontrol
cihazı ref 2
-30000.00 …
30000.00
03.13 M/F veya D2D ref1 Master'dan alınan master/follower referansı 1. Değ
-30000.00 …
30000.00
03.14 M/F veya D2D ref2 Master'dan alınan master/follower referansı 2. Değer 60.11
-30000.00 …
30000.00
04
04 Uyarılar ve hatalar
Harici (DDCS) kontrol cihazından alınan referans 1. Değer
60.60 DDCS kontrolörü ref1 tipi parametresine göre
skalalandırıldı.
Ayrıca bkz. bölüm Harici kontrol cihazı arabirimi, (sayfa 34).
Harici kontrol cihazından alınan skalalandırılmış referans 1. 1 = 10
Harici (DDCS) kontrol cihazından alınan referans 2. Değer
60.61 DDCS kontrolörü ref2 tipi parametresine göre
skalalandırıldı.
Harici kontrol cihazından alınan skalalandırılmış referans 2. 1 = 10
er 60.10
M/F ref1 tipi parametresine göre skalalandırıldı.
Ayrıca bkz. bölüm Master/follower işlevselliği, (sayfa 30).
Master'dan alınan skalalandırılmış referans 1. 1 = 10
M/F ref2 tipi parametresine göre skalalandırıldı.
Master'dan alınan skalalandırılmış referans 2. 1 = 10
En son meydana gelen uyarılar ve hatalar ile ilgili bilgiler.
Her bir uyarı ve hata kodunun açıklaması için, bkz. bölüm
Hata izleme.
Bu gruptaki tüm parametreler aksi belirtilmediği sürece salt
okunurdur.
1 = 10
1 = 10
1 = 10
1 = 10
04.01 Tetikleme hatası 1. etkin hatanın kodu (akım kesilmesine neden olan hata). -
0000h…FFFFh 1. etkin hata. 1 = 1
04.02 Aktif hata 2 2. etkin hatanın kodu. -
0000h…FFFFh 2. etkin hata. 1 = 1
04.03 Aktif hata 3 3. etkin hatanın kodu. -
0000h…FFFFh 3. etkin hata. 1 = 1
04.04 Aktif hata 4 4. etkin hatanın kodu. -
0000h…FFFFh 4. etkin hata. 1 = 1
04.05 Aktif hata 5 5. etkin hatanın kodu. -
0000h…FFFFh 5. etkin hata. 1 = 1
04.06 Aktif uyarı 1 1. aktif uyarının kodu. -
0000h…FFFFh 1. aktif uyarı.1 = 1
04.07 Aktif uyarı 2 2. aktif uyarının kodu. -
0000h…FFFFh 2. aktif uyarı.1 = 1
04.08 Aktif uyarı 3 3. aktif uyarının kodu. -
0000h…FFFFh 3. aktif uyarı.1 = 1
04.09 Aktif uyarı 4 4. aktif uyarının kodu. -
0000h…FFFFh 4. aktif uyarı.1 = 1
Page 94

94 Parametreler
No. Ad/Değer Açıklama Def/FbEq16
04.10 Aktif uyarı 5 5. aktif uyarının kodu. -
0000h…FFFFh 5. aktif uyarı.1 = 1
04.11 En son hata 1. kayıtlı (etkin olmayan) hatanın kodu. -
0000h…FFFFh 1. kayıtlı hata. 1 = 1
04.12 En son 2. hata 2. kayıtlı (etkin olmayan) hatanın kodu. -
0000h…FFFFh 2. kayıtlı hata. 1 = 1
04.13 En son 3. hata 3. kayıtlı (etkin olmayan) hatanın kodu. -
0000h…FFFFh 3. kayıtlı hata. 1 = 1
04.14 En son 4. hata 4. kayıtlı (etkin olmayan) hatanın kodu. -
0000h…FFFFh 4. kayıtlı hata. 1 = 1
04.15 En son 5. hata 5. kayıtlı (etkin olmayan) hatanın kodu. -
0000h…FFFFh 5. kayıtlı hata. 1 = 1
04.16 En son uyarı 1. kayıtlı (etkin olmayan) uyarının kodu. -
0000h…FFFFh 1. kayıtlı uyarı.1 = 1
04.17 En son 2. uyarı 2. kayıtlı (etkin olmayan) uyar
0000h…FFFFh 2. kayıtlı uyarı.1 = 1
04.18 En son 3. uyarı 3. kayıtlı (etkin olmayan) uyarının kodu. -
0000h…FFFFh 3. kayıtlı uyarı.1 = 1
04.19 En son 4. uyarı 4. kayıtlı (etkin olmayan) uyarının kodu. -
0000h…FFFFh 4. kayıtlı uyarı.1 = 1
04.20 En son 5. uyarı 5. kayıtlı (etkin olmayan) uyarının kodu. -
0000h…FFFFh 5. kayıtlı uyarı.1 = 1
05
05 Teşhis
05.01 Açık kalma süresi
sayacı
0…65535 d Açık kalma süresi sayacı.1 = 1 d
05.02 Çalışma sayıcı Motor çalışma süresi sayacı. Sayaç, çevirici modüle
0…65535 d Motor çalışma sayacı.1 = 1 d
05.04 Fan çalışma süresi
sayacı
Sürücü bakımına ilişkin çeşitli çalışma zamanı tipi sayaçlar ve
ölçümler.
Bu gruptaki tüm parametreler aksi belirtilmediği sürece salt
okunurdur.
Açık kalma süresi sayacı. Sayaç, sürücüye enerji verildiğinde
çalışır.
edildiğinde çalışır.
Sürücü soğutma fanının çalışma süresi. Reset tuşu 3
saniyeden uzun süre basılı tutularak kumanda panelinden
resetlenebilir.
ının kodu. -
-
-
-
0…65535 d Soğutma fanı çalışma süresi sayacı.1 = 1 d
05.11 Sürücü sıcaklığı Hata limitinin yüzdesi olarak tahmini sürücü sıcaklığı. Hata
limitleri sürücü tipine göre deği
0.0% = 0°C (32°F)
%100,0 = Hata limiti
-40,0 … 160,0% Yüzde olarak sürücü sıcaklığı.1 = 1%
şebilir.
-
Page 95

Parametreler 95
No. Ad/Değer Açıklama Def/FbEq16
05.22 Hata tespit word'ü 3 Hata tespit word'ü 3. -
Bit Adı Değer
0…10 Rezerve
11 Fan komutu 1 = Sürücü fanı rölanti hızı üzerinde dönüyor
12…15 Rezerve
0000h…FFFFh Hata tespit word'ü 3. 1 = 1
06
06 Kontrol ve Durum Word'ü
Sürücü kontrol ve durum Word'ü.
06.01 Ana kontrol word'ü Sürücünün temel kontrol word'ü. Bu parametre, kontrol
sinyallerini seçilen kaynaklardan (dijital girişler, fieldbus
arabirimi ve uygulama programı) alındığı gibi gösterir.
Word'ün bit atamaları 381. sayfada açıklandığı gibidir. İlgili
durum word'ü ve durum şeması sırasıyla 382. ve 383.
sayfalarda gösterilmiştir.
Not: 12…15 bitleri ilave kontrol datası taşımak için ve
herhangi bir ikili kaynak seçici parametresi tarafından bir
sinyal kaynağı olarak kullanılabilir.
Bu parametre salt okunurdur.
0000h…FFFFh Temel kontrol word'ü. 1 = 1
06.02 Uygulama kontrol
word'ü
0000h…FFFFh Uygulama programı kontrol word'ü. 1 = 1
06.03 FBA A şeffaf kontrol
word'ü
00000000h …
FFFFFFFFh
06.04 FBA B
word'ü
00000000h …
FFFFFFFFh
şeffaf kontrol
Uygulama programından (mevcut ise) alınan sürücü kontrol
word'ü. Bit atamaları 381. sayfada açıklanmaktadır.
Bu parametre salt okunurdur.
Fieldbus adaptörü A yoluyla PLC'den alınan sabit kontrol
word'ü.
Bu parametre salt okunurdur.
Fieldbus adaptörü A yoluyla alınan kontrol word'ü. -
Fieldbus adaptörü B yoluyla PLC'den alınan sabit kontrol
word'ü.
Bu parametre salt okunurdur.
Fieldbus adaptörü B yoluyla alınan kontrol word'ü. 1 = 1
-
-
-
-
06.11 Ana durum word'ü Sürücünün temel durum word'ü.
Bit atamaları 382. sayfada açıklanmaktadır. İlgili kontrol
word'ü ve durum şeması sırasıyla 381. ve 383. sayfalarda
gösterilmiştir.
Bu parametre salt okunurdur.
0000h…FFFFh Temel durum word'ü. 1 = 1
-
Page 96

96 Parametreler
No. Ad/Değer Açıklama Def/FbEq16
06.16 Sürücü durumu
word'ü 1
Bit Adı Açıklama
0 Devrede 1 = Hem çalışma izni (bkz. par. 20.12) hem de start izni (20.19) sinyalleri
1 Yasaklandı 1 = Start yasaklandı. Sürücüyü start etmek için, yasaklama sinyalinin (bkz.
2DC şarj oldu 1 = DC devresi şarj oldu
3 Start için
hazır
4 Referans
izleme
5 Start edildi 1 = Sürücü start edildi
6 Modülasyonda1 = Sürücü modülasyonda (çıkış aşaması kontrol ediliyor)
7 Limit
uygulanıyor
8 Lokal kontrol 1 = Sürücü lokal kontrolde
9Ağ kontrolü 1 = Sürücü ağ kontrolü modunda (bkz. sayfa 14)
10 Ext1 etkin 1 = Kontrol konumu EXT1 etkin
11 Ext2 etkin 1 = Kontrol konumu EXT2 etkin
12 Rezerve
13 Start talebi 1 = Start talep edildi
14…15 Rezerve
Sürücü durum word'ü 1.
Bu parametre salt okunurdur.
mevcut. Not: Bu bit oluşan bir hatadan etkilenmez.
par. 06.18) kaldırılması ve start sinyali çevrimi yapılması gerekir.
1 = Sürücü, bir start komutunu almaya hazır
1 = Sürücü, belirtilen referansı izlemeye hazır
1 = Herhangi bir çalışma limiti (hız, tork vb.) etkin
-
0000h…FFFFh Sürücü durum word'ü 1. 1 = 1
06.17 Sürücü durumu
word'ü 2
Bit Adı Açıklama
0 ID Run yapıldı 1 = Motor tanımlama (ID) çalıştırması gerçekleştirildi
1Mıknatıslandı 1 = Motor mıknatıslandı
2 Tork kontrolü 1 = Tork kontrol modu etkin
3Hız kontrol 1 = Hız kontrol modu etkin
4 Güç kontrolü 1 = Güç kontrol modu etkin
5 Güvenli referans etkin 1 = 49.05 ve 50.02 parametreleri gibi fonksiyonlar tarafından bir
6 Son hız etkin 1 = 49.05 ve 50.02 parametreleri gibi fonksiyonlar tarafından bir
7 Referans kaybı 1 = Referans sinyali kayıp
8 Acil stop başarısız 1 = Acil durdurma başarısız (bkz. parametre 31.32 ve 31.33)
9 Joglama etkin 1 = Joglama izni sinyali açık
10 Üst limitte 1 = Gerçek hız, frekans veya tork limite (46.31…46.33
11…15 Rezerve
Sürücü durum word'ü 2.
Bu parametre salt okunurdur.
"güvenli" referans uygulanır
"son hız" referansı uygulanır
parametreleri ile tanımlanı
dönme yönünde de geçerlidir.
-
r) eşit veya bu limitin üzerinde. Her iki
0000h…FFFFh Sürücü durum word'ü 2. 1 = 1
Page 97

Parametreler 97
No. Ad/Değer Açıklama Def/FbEq16
06.18 Bşltma ysğı durum
word'ü
Bit Adı Açıklama
0Çalışmaya hazır değil 1 = DC gerilimi yok ya da sürücü parametreleri doğru şekilde
1 Kontrol konumu değişti * 1 = Kontrol konumu değişti
2 SSW yasaklama 1 = Kontrol programı kendini yasaklanmış durumda tutuyor
3 Hata resetleme * 1 = Bir hata resetlendi
4 Start izni kayıp 1 = Start izni sinyali yok
5Çalışma izni kayıp1 = Çalışma izni sinyali yok
6 FSO yasaklama 1 = Çalışma FSO-xx güvenlik fonksiyonları modülü tarafından
7 STO 1 = Güvenli tork kapama etkin
8Akım kalibrasyonu
sona erdi
9 ID run sona erdi * 1 = Motor tanımlama çalıştırması tamamlandı
10 Otomatik faz sona erdi * 1 = Otomatik fazlama rutini tamamlandı
11 Em Off1 1 = Acil stop sinyali (off1 modu)
12 Em Off2 1 = Acil stop sinyali (off2 modu)
13 Em Off3 1 = Acil stop sinyali (off3 modu)
14 Otomatik resetleme
yasağı
15 Joglama etkin 1 = Joglama izni sinyali çalışmayı yasaklıyor
Start yasağı durum word'ü. Bu word, sürücünün start etmesini
önleyen yasaklama sinyalinin kaynağını belirler.
Yıldız işaretli (*) koşullar sadece start komutu çevrimi
gerektirir. Diğer tüm durumlarda, önce yasaklama koşulunun
kaldırılması gerekir.
Ayrıca bkz. parametre 06.16 Sürücü durumu word'ü 1, bit 1.
Bu parametre salt okunurdur.
girilmedi. 95 ve 99 gruplarındaki parametreleri kontrol edin.
engellendi
* 1 = Akım kalibrasyonu rutini tamamlandı
1 = Otomatik resetleme fonksiyonu çalışmayı yasaklıyor
-
0000h…FFFFh Start yasağı durum word'ü. 1 = 1
06.19 Hız kontrol durumu
word'ü
Bit Adı Açıklama
0Sıfır hız1 = Sürücü sıfır hızda çalışıyor
1 İleri
2Geri
3Aralık dışı 1 = Hız hatası penceresi kontrolü etkin (bkz. par. 24.41)
4 Dahili hız geri bildirimi 1 = Tahmini hız geribeslemesi kullanıldı (bkz. par. 90.41)
5 Enkoder 1 geri bildirimi 1 = Hız geribeslemesi için Enkoder 1 kullanıldı (bkz. par. 90.41)
6 Enkoder 2 geri bildirimi 1 = Hız geribeslemesi için Enkoder 2 kullanıldı (bkz. par. 90.41)
7
8…15 Rezerve
0000h…FFFFh Hız kontrol durumu word'ü. 1 = 1
Herhangi bir sabit hız
talebi
Hız kontrol durum word'ü.
Bu parametre salt okunurdur.
1 = Sürücü ileri yönde sıfır hız limitinin üzerinde çalışıyor (par.
21.06)
1 = Sürücü geri yönde sıfır hız limitinin üzerinde çalışıyor (par.
21.06)
1 = Bir sabit hı
-
z ya da frekans seçildi; bkz. par. 06.20.
Page 98

98 Parametreler
No. Ad/Değer Açıklama Def/FbEq16
06.20 Sabit hız durum
word'ü
Bit Adı Açıklama
0 Sabit hız 1 1 = Sabit hız ya da frekans 1 seçildi
1 Sabit hız 2 1 = Sabit hız ya da frekans 2 seçildi
2 Sabit hız 3 1 = Sabit hız ya da frekans 3 seçildi
3 Sabit hız 4 1 = Sabit hız ya da frekans 4 seçildi
4 Sabit hız 5 1 = Sabit hız ya da frekans 5 seçildi
5 Sabit hız 6 1 = Sabit hız ya da frekans 6 seçildi
6 Sabit hız 7 1 = Sabit hız ya da frekans 7 seçildi
7…15 Rezerve
0000h…FFFFh Sabit hız/frekans durum word'ü. 1 = 1
06.29 Kullanıcı 10. bit
seçimi
Yanlış 0. 0
Doğru 1. 1
Sabit hız/frekans durum word'ü. Sabit hız ya da frekansın
hangisinin etkin olduğunu gösterir (mevcut ise). Ayrıca bkz.
parametre 06.19 Hız kontrol durumu word'ü, bit 7 ve bölüm
Sabit hızlar/frekanslar (sayfa 38).
Bu parametre salt okunurdur.
Durumu 06.11 Ana durum word'ü'ün 10. biti olarak aktarılan
bir ikili kaynak seçer.
-
Üst limitte
Üst limitte 06.17 Sürücü durumu word'ü 2 10. biti (bkz. sayfa 96). 2
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
06.30 Kullanıcı 11. bit
seçimi
Yanlış 0. 0
Doğru 1. 1
Ext ctrl loc 06.16 Sürücü durumu word'ü 1 11. biti (bkz. sayfa 96
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
06.31 Kullanıcı 12. bit
seçimi
Yanlış 0. 0
Doğru 1. 1
Ext run enable Harici çalışma izni sinyalinin durumu (bkz. parametre 20.12
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
06.32 Kullanıcı 13. bit
seçimi
Yanlış 0. 0
Doğru 1. 1
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
Durumu 06.11 Ana durum word'ü'ün 11. biti olarak aktarılan
bir ikili kaynak seçer.
). 2
Durumu 06.11 Ana durum word'ü'ün 12. biti olarak aktarılan
bir ikili kaynak seçer.
Çalıştırma izni 1 kaynağı).
Durumu 06.11 Ana durum word'ü'ün 13. biti olarak aktarılan
bir ikili kaynak seçer.
Ext ctrl loc
Ext run
enable
2
Yanlış
06.33 Kullanıcı 14. bit
seçimi
Yanlış 0. 0
Doğru 1. 1
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
Durumu
bir ikili kaynak seçer.
06.11 Ana durum word'ü'ün 14. biti olarak aktarılan
Yanlış
Page 99

Parametreler 99
No. Ad/Değer Açıklama Def/FbEq16
06.50 Kullanıcı durum
word'ü 1.
Bit Adı Açıklama
0 Kullanıcı durum biti 0 06.60 ile seçilen kaynağın durumu
1 Kullanıcı durum biti 1 06.61 ile seçilen kaynağın durumu
…… …
15 Kullanıcı durum biti 15 06.75 ile seçilen kaynağın durumu
0000h…FFFFh Kullanıcı tanımlı durum word'ü. 1 = 1
06.60 Kullanıcı durum
word'ü 1'in 0. biti
Yanlış 0. 0
Doğru 1. 1
Diğer [bit] Kaynak seçimi (bkz. Ter im ler ve k ısaltmalar, sayfa 88). -
06.61 Kullanıcı durum
word'ü 1'in 1. biti
Yanlış 0. 0
Doğru 1. 1
Pencere dışı
Kullanıcı tanımlı durum word'ü. Bu word 06.60…06.75
parametreleri ile seçilen ikili kaynakların durumunu gösterir.
Bu parametre salt okunurdur.
Durumu 06.50 Kullanıcı durum word'ü 1.'in 0. biti olarak
gösterilen bir ikili kaynak seçer.
Durumu 06.50 Kullanıcı durum word'ü 1.'in 1. biti olarak
gösterilen bir ikili kaynak seçer.
06.19 Hız kontrol durumu word'ü 3. biti (bkz. sayfa 97). 2
-
Yanlış
Pencere dışı
Diğer [bit] Kaynak seçimi (bkz. Ter im ler ve k ısaltmalar, sayfa 88). -
06.62 Kullanıcı durum
word'ü 1'in 2. biti
Yanlış 0. 0
Doğru 1. 1
Acil durdurma
başarsz
Diğer [bit] Kaynak seçimi (bkz. Ter im ler ve k ısaltmalar, sayfa 88). -
06.63 Kullanıcı durum
word'ü 1'in 3. biti
Yanlış 0. 0
Doğru 1. 1
Manyetize 06.17 Sürücü durumu word'ü 2 1. biti (bkz. sayfa 96). 2
Diğer [bit] Kaynak seçimi (bkz. Ter im ler ve k
06.64 Kullanıcı durum
word'ü 1'in 4. biti
Yanlış 0. 0
Doğru 1. 1
Durumu 06.50 Kullanıcı durum word'ü 1.'in 2. biti olarak
gösterilen bir ikili kaynak seçer.
06.17 Sürücü durumu word'ü 2 8. biti (bkz. sayfa 96). 2
Durumu 06.50 Kullanıcı durum word'ü 1.'in 3. biti olarak
gösterilen bir ikili kaynak seçer.
ısaltmalar, sayfa 88). -
Durumu 06.50 Kullanıcı durum word'ü 1.'in 4. biti olarak
gösterilen bir ikili kaynak seçer.
Acil
durdurma
başarsz
Manyetize
Çalışma
devre dışı
Çalışma devre dışı 06.18 Bşltma ysğı durum word'ü 5. biti (bkz. sayfa 97). 2
Diğer [bit] Kaynak seçimi (bkz. Ter im ler ve k ısaltmalar, sayfa 88). -
06.65 Kullanıcı durum
word'ü 1'in 5. biti
Yanlış 0. 0
Durumu 06.50 Kullanıcı durum word'ü 1.'in 5. biti olarak
gösterilen bir ikili kaynak seçer.
Yanlış
Page 100

100 Parametreler
No. Ad/Değer Açıklama Def/FbEq16
Doğru 1. 1
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
06.66 Kullanıcı durum
word'ü 1'in 6. biti
Yanlış 0. 0
Doğru 1. 1
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
06.67 Kullanıcı durum
word'ü 1'in 7. biti
Yanlış 0. 0
Doğru 1. 1
ID run yapıldı 06.18 Bşltma ysğı durum word'ü 9. biti (bkz. sayfa 97). 2
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
06.68 Kullanıcı durum
word'ü 1'in 8. biti
Yanlış 0. 0
Doğru 1. 1
Start yasağı 06.16 Sürücü durumu word'ü 1 1. biti (bkz. sayfa 96). 2
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
06.69 Kullanıcı durum
word'ü 1'in 9. biti
Yanlış 0. 0
Durumu 06.50 Kullanıcı durum word'ü 1.'in 6. biti olarak
gösterilen bir ikili kaynak seçer.
Durumu 06.50 Kullanıcı durum word'ü 1.'in 7. biti olarak
gösterilen bir ikili kaynak seçer.
Durumu 06.50 Kullanıcı durum word'ü 1.'in 8. biti olarak
gösterilen bir ikili kaynak seçer.
Durumu 06.50 Kullanıcı durum word'ü 1.'in 9. biti olarak
gösterilen bir ikili kaynak seçer.
Yanlış
ID run yapıldı
Start yasağı
Sınırlama
Doğru 1. 1
Sınırlama 06.16 Sürücü durumu word'ü 1 7. biti (bkz. sayfa 96). 2
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
06.70 Kullanıcı durum
word'ü 1'in 10. biti
Yanlış 0. 0
Doğru 1. 1
Tork kontrolü 06.17 Sürücü durumu word'ü 2 2. biti (bkz. sayfa 96). 2
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
06.71 Kullanıcı durum
word'ü 1'in 11. biti
Yanlış 0. 0
Doğru 1. 1
Sıfır Hız 06.19 Hız kontrol durumu word'ü 1. biti (bkz. sayfa 97). 2
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
06.72 Kullanıcı durum
word'ü 1'in 12. biti
Yanlış 0. 0
Doğru 1. 1
Durumu
gösterilen bir ikili kaynak seçer.
Durumu 06.50 Kullanıcı durum word'ü 1.'in 11. biti olarak
gösterilen bir ikili kaynak seçer.
Durumu 06.50 Kullanıc
gösterilen bir ikili kaynak seçer.
06.50 Kullanıcı durum word'ü 1.'in 10. biti olarak
ı durum word'ü 1.'in 12. biti olarak
Tork kontrolü
Sıfır Hız
Dahili hız
gerbildirimi
Dahili hız
gerbildirimi
Diğer [bit] Kaynak seçimi (bkz. Ter iml er ve kısaltmalar, sayfa 88). -
06.19 Hız kontrol durumu word'ü 4 biti (bkz. sayfa 97). 2
 Loading...
Loading...