

Page 1

—
ABB HER AMACA UYGUN SÜRÜCÜLER
ACS580 standart kontrol programı
Yazılım kılavuzu
Page 2

—
İlgili belgeler 15. sayfada listelenmiştir.
Page 3
Yazılım kılavuzu
ACS580 standart kontrol programı
İçindekiler
1. El kitabına giriş
2. Devreye alma, G/Ç ile kontrol
ve ID run
3. Kontrol paneli
4. Kontrol panelinde ayarlar, G/Ç ve teşhis
5. Kontrol makroları
6. Program özellikleri
7. Parametreler
8. Ek parametre verileri
9. Hata izleme
10. Dahili haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü
11. Bir fieldbus adaptörü ile fieldbus kontrolü
12. Kontrol zinciri şemaları
Daha fazla bilgi
3AXD50000019827 Rev F
Orijinal el kitabından çevrilmiştir
3AXD50000016097 Rev F
GEÇERLİLİK TARİHİ: 2020-03-25
TR
Page 4

Page 5

İçindekiler 5
İçindekiler
1. El kitabına giriş
Bu bölümün içeriği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Geçerlilik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Güvenlik talimatları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Hedef kitle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Kılavuzun amacı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Kılavuz içeriği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
İlgili belgeler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Siber güvenlik sorumluluk reddi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2. Devreye alma, G/Ç ile kontrol ve ID run
Bu bölümün içeriği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Sürücünün devreye alınması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Gelişmiş kontrol panelinde İlk start asistanını kullanarak sürücünün devreye alınması . . . . . . 24
Sürücüyü G/Ç arabirimi ile kontrol etme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
ID run işlemi gerçekleştirme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
ID run prosedürü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3. Kontrol paneli
Bu bölümün içeriği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Kontrol panelini çıkarma ve tekrar takma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Kontrol panelinin yerleşimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Kontrol paneli ekranının yerleşimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Ana sayfa görünümleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Tuşlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Tuş kısayolları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Safety
4. Kontrol panelinde ayarlar, G/Ç ve teşhis
Bu bölümün içeriği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Birincil ayarlar menüsü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Makro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Başlatma, durdurma, referans . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Rampalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Limitler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Pompa ve fan kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Haberleşme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Gelişmiş fonksiyonlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Saat, bölge, ekran . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Varsayılanlara sıfırla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
G/Ç menüsü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Page 6
6 İçindekiler
Teşhis menüsü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Sistem bilgileri menüsü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Enerji verimliliği menüsü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Yedekler menüsü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Seçenekler menüsü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5. Kontrol makroları
Bu bölümün içeriği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Genel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
ABB standart makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
ABB standart makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . 80
ABB standart (vektör) makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
ABB standart (vektör) makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . 82
3 kablolu makro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3 kablolu makro için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Alternatif makro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Alternatif makro için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Motor potansiyometresi makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Motor potansiyometresi makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . 88
Man/Oto makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Man/Oto makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Man/PID makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Man/PID makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
PID makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
PID makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Panel PID makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Panel PID makrosu için varsayılan kontrol bağlantılar
PFC makro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
PFC makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Moment kontrol makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Tork kontrol makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . 100
Farklı makrolar için parametre değerleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
ı . . . . . . . . . . . . . . . . . . . . . . . . . . 96
6. Program özellikleri
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Lokal kontrol – harici kontrol karşılaştırması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Lokal kontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Harici kontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Sürücü çalışma modları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Hız kontrolü modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Moment kontrolü modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Frekans kontrolü modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Özel kontrol modları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Sürücü konfigürasyonu ve programlaması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Parametrelerle yapılandırma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Adaptif programlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Kontrol arabirimleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Programlanabilir analog girişler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Programlanabilir analog çıkışlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Page 7

İçindekiler 7
Programlanabilir dijital girişler ve çıkışlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Programlanabilir frekans girişi ve çıkışı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Programlanabilir röle çıkışları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Programlanabilir G/Ç genişletmeleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Fieldbus kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Uygulama kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Referans rampa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Sabit hızlar/frekanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Kritik hızlar/frekanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Hız kontrol cihazı otomatik ayarı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
Kullanıcı yük eğrisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Kontrol makroları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
Proses PID kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
PID trim fonksiyonu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Pompa ve fan kontrolü (PFC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
Zamanlamalı fonksiyonlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
Motor potansiyometresi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
Mekanik fren kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Motor kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Motor tipleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Motor tanımlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Skaler motor kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Vektör motor kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Hız kontrolü performans şekilleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Moment kontrolü performans değerleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
Güç kaybında çalışmaya devam etme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
U/f oranı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
Akı frenleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
DC m
ıknatıslanması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
Enerji optimizasyonu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
Anahtarlama frekansı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
Kontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
Joglama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
Hız kompanzasyonlu stop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
DC gerilim kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Yüksek gerilim kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Düşük gerilim kontrolü (güç kaybında çalışmaya devam etme) . . . . . . . . . . . . . . . . . . . 170
Gerilim kontrolü ve hata limitleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Fren kıyıcı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
Güvenlik ve korumalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Sabit/Standart korumalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Acil stop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Motor termik koruması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
Motor aşırı yük koruması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
Programlanabilir koruma fonksiyonları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
Otomatik hata resetlemeleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
Teşhis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Sinyal denetimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Enerji tasarrufu hesaplayıcıları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Yük analizörü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
Teşhis menüsü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
Page 8
8 İçindekiler
Diğer konular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
Yedekleme ve geri yükleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
Kullanıcı parametre grupları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
Veri depolama parametreleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
Parametre sağlama toplamı hesaplaması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
Kullanıcı kilidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
Sinüs filtresi desteği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
7. Parametreler
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
Terimler ve kısaltmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
Parametre grupları hakkında kısa bilgi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
Parametrelerin listesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
01 Gerçek değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
03 Giriş referansları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
04 Uyarı ve hatalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
05 Teşhis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
06 Kontrol ve durum word'leri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
07 Sistem bilgisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
10 Standart DI, RO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
11 Standart DIO, FI, FO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
12 Standart AI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
13 Standart AO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
15 G/Ç genişletme modülü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
19 Çalışma modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
20 Start/stop/yön . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248
21 Start/stop modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
22 Hız referansı seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
23 Hız referansı rampası . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
24 Hız referansı durumu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
25 Hız kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
26 Moment referans zinciri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
28 Frekans referans zinciri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
30 Limitler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
31 Hata fonksiyonları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
32 Denetim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
34 Zaman fonksiyonu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 328
35 Motor termik koruması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336
36 Yük analizörü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
37 Kull. Yük eğrisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 350
40 Proses PID grubu 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
41 Proses PID grubu 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 370
43 Fren kıyıcı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372
44 Mekanik fren kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374
45 Enerji verimliliği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
46 İzleme/ölçeklendirme ayarları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 380
47 Veri depolama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
49 Panel port iletişimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
50 Fieldbus adaptörü (FBA) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 387
51 FBA A ayarları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391
Page 9
İçindekiler 9
52 FBA A veri girişi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393
53 FBA A veri çıkışı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393
58 Dahili fieldbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394
71 Harici PID1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402
76 PFC yapılandırması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404
77 PFC bakımı ve izleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412
95 Donanım konfigürasyonu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413
96 Sistem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416
97 Motor kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427
98 Kullanıcı motor parametreleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431
99 Motor verileri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433
50 Hz ve 60 Hz besleme frekans ayarlarının varsayılan değerleri arasındaki değişiklikler . . . . . . 439
Modbus'ın 550 ile geriye dönük uyumluluğu tarafından desteklenen parametreler . . . . . . . 441
8. Ek parametre verileri
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445
Terimler ve kısaltmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445
Fieldbus adresleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446
Parametre grupları 1…9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 447
Parametre grupları 10…99 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 450
9. Hata izleme
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 481
Güvenlik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 481
Gösterimler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 481
Uyarılar ve hatalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 481
İşlenmemiş olaylar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482
Düzenlenebilir mesajlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482
Uyarı/hata geçmişi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482
Olay günlüğü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482
Uyarı/hata bilgilerini görüntüleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483
Mobil servis uygulaması için QR kodu oluşturma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483
Uyarı mesajları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484
Hata mesajları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 497
10. Dahili haberleşme arabirimi (EFB) aracılığıyla haberleşme kontrolü
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511
Sisteme genel bakış . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511
Sürücüyü haberleşmeye bağlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 513
Dahili fieldbus arayüzünü ayarlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514
Sürücü kontrol parametrelerini ayarlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515
Dahili fieldbus arabiriminin temelleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 517
Kontrol word’ü ve Durum word’ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 518
Referanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 518
Gerçek değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 518
Veri giriş/çıkışları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 518
Kayıt adresleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 518
Kontrol profilleri hakkında . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 520
Page 10
10 İçindekiler
Kontrol Word'ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 521
ABB Sürücüleri profili için Kontrol Word'ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 521
DCU profili için Kontrol Word'ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522
Durum word'ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 525
ABB Sürücüleri profili için Durum Word'ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 525
DCU profili için Durum Word'ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526
Durum geçiş şemaları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 528
ABB Sürücüleri profili için durum geçiş şeması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 528
Referanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 531
ABB Sürücüleri profili ve DCU Profili için referanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . 531
Gerçek değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 532
ABB Sürücüleri profili ve DCU Profili için gerçek değerler . . . . . . . . . . . . . . . . . . . . . . . 532
Modbus tutma kayıt adresleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533
ABB Sürücüleri profili ve DCU Profili için Modbus tutma kayıt adresleri . . . . . . . . . . . . 533
Modbus fonksiyon kodları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534
Özel durum kodları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535
Kontaklar (0xxxx referans ayarı) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 536
Ayrık Girişler (1xxxx referans ayarı) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 538
Hata kodu kayıtları (tutma kayıtları 400090…400100) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 540
11. Bir fieldbus adaptörü ile fieldbus kontrolü
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 541
Sisteme genel bakış . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 541
Fieldbus kontrol arabiriminin temelleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543
Kontrol word’ü ve Durum word’ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544
Referanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545
Gerçek değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 546
Haberleşme Kontrol word'ü içerikleri (ABB Sürücüleri profili) (ABB Drives profile) . . . . 547
Haberleşme Durum word'ü içerikleri (ABB Sürücüleri profili) (ABB Drives profile) . . . . 549
Durum şeması (ABB Sürücüleri profili) (ABB Drives profile) . . . . . . . . . . . . . . . . . . . . . 550
Sürücünün fieldbus kontrolü için ayarlanması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 551
Örnek parametre ayarı: FPBA (PROFIBUS DP) ABB Drives profili ile . . . . . . . . . . . . . 552
Haberleşme kontrolü için otomatik sürücü yapılandırması . . . . . . . . . . . . . . . . . . . . . . . . . . 554
12. Kontrol zinciri şemaları
Bu bölümün içeriği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 557
Frekans referansı seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 558
Frekans referansı değişimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 559
Hız referans kaynağı seçimi I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 560
Hız referansı kaynak seçimi II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 561
Hız referansı rampa ve şekillenmesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562
Hız hatası hesaplama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563
Hız geribildirimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564
Hız kontrolörü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565
Moment referansı kaynak seçimi ve değişimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 566
Moment kontrol cihazı için referans seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 567
Moment sınırlaması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 568
Proses PID ayar noktası ve geri bildirim kaynak seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 569
Proses PID kontrol cihazı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 570
Page 11

İçindekiler 11
Harici PID ayar noktası ve geri bildirim kaynağı seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 571
Harici PID kontrolörü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 572
Yön kilidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573
PID trim otomatik bağlantısı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574
Daha fazla bilgi
Page 12
12 İçindekiler
Page 13
El kitabına giriş 13
1
El kitabına giriş
Bu bölümün içeriği
Bu bölümde kılavuzun uyumluluğu, hedeflediği kitle ve amacı hakkında bilgi verir.
Ayrıca, bu kılavuzun içeriğini anlatır ve daha fazla bilgi için ilgili kılavuzlar listesine
referans verir.
Geçerlilik
Bu kılavuz, ACS580 standart kontrol programı ASCKX sürüm 2.11 için geçerlidir.
ASCK2 R1…R5 kasa boyutları için kullanılırken ASCK4 R6…R11 kasa boyutları
için kullanılır.
Kullanımdaki kontrol programının yazılım sürümünü kontrol etmek için, bkz.
sistem bilgileri (Menü - Sistem bilgileri - Sürücü öğesini seçin) veya kontrol
panelinde parametre 07.05 Yazılım sürümü (bkz. sayfa 213).
Güvenlik talimatları
Tüm güvenlik talimatlarını izleyin.
• Sürücüyü kurmadan, devreye almadan ve kullanmadan önce sürücünün
Donanım kılavuzu'ndaki tam güvenlik talimatlarını okuyun.
• Parametre değerlerini değiştirmeden önce, yazılım fonksiyonuna özgü uyarıları
ve notları okuyun. Bu uyarılar ve notlar, Parametreler bölümünde 195. sayfada
sunulan parametre açıklamalarına dahil edilmiştir.
Hedef kitle
Okuyucunun, elektrik, kablo bağlantısı, elektrikli bileşenleri ve elektrik şema
simgelerinin temellerini bildiği kabul edilmektedir.
Page 14
14 El kitabına giriş
Bu kılavuz dünyanın dört bir yanındaki okuyucular için hazırlanmıştır. Hem SI hem
de İngiliz ölçü birimleri kullanılmaktadır. Amerika'daki tesisler için özel ABD talimatları
sağlanmaktadır.
Kılavuzun amacı
Bu kılavuzda, sürücü sistemini tasarlamak, devreye almak veya çalıştırmak için
gereken bilgiler sağlanmaktadır.
Kılavuz içeriği
Kılavuz aşağıdaki bölümlerden oluşur:
• El kitabına giriş (bu bölüm, sayfa 13), bu manuelin uyumluluğu, hedef kitlesi,
amacı ve içeriğini açıklar. Sonunda, terimleri ve kısaltmaları listeler.
• Devreye alma, G/Ç ile kontrol ve ID run (sayfa 23), sürücünün nasıl
başlatılacağını, motorun nasıl başlatılacağını, durdurulacağını ve dönüş yönünün
nasıl değiştirileceğini ve G/Ç arabirimi üzerinden motor devrinin nasıl
ayarlanacağını anlatır.
• Kontrol paneli (sayfa 43), gelişmiş kontrol panelini çıkarma ve tekrar takma için
talimatlar içerir; ekranı, tuşlar
• Kontrol panelinde ayarlar, G/Ç ve teşhis (sayfa 51), gelişmiş kontrol panelinde
sağlanan basitleştirilmiş ayarlarla teşhis fonksiyonlarını açıklar.
• Kontrol makroları (sayfa 79), bir bağlantı şemasıyla birlikte her makronun kısa bir
açıklamasını içerir. Makrolar, sürücü yapılandırılırken kullanıcının zamandan
tasarruf etmesini sağlayacak olan önceden tanımlanmış uygulamalardır.
• Program özellikleri (sayfa 109), ilgili kullanıcı ayarlarının, gerçek sinyallerin
ve hata ve uyarı mesajlarının listeleriyle program özelliklerini açıklar.
• Parametreler bölümünde (sayfa 195), sürücüyü programlamak için kullanılan
parametreler açıklanır.
• Ek parametre verileri (sayfa 445), parametrelerle ilgili daha fazla bilgi içerir.
• Dahili haberleşme arabirimi (EFB) aracılığıyla haberleşme kontrolü (sayfa 511),
sürücünün dahili haberleşme arabirimini Modbus RTU protokolü ile birlikte
kullanarak bir haberleşme ağı oluşturulması ve bu ağ ile iletişim açıklanır.
• Bir fieldbus adaptörü ile fieldbus kontrolü bölümünde (sayfa 541), isteğe bağlı
haberleşme adaptör modülü kullanılarak bir haberleşme ağı ile iletişim açıklanır.
• Hata izleme bölümünde (sayfa 481), uyarı ve hata mesajları olası neden
ve çözüm önerileri ile birlikte listelenir.
• Kontrol zinciri şemaları (sayfa 557), sürücünün içindeki parametre yapısını
açıklar.
• Daha fazla bilgi (arka kapak içinde, sayfa 575), ürün ve servis sorgularının nasıl
yapılacağını, ürün eğitimi hakkında nasıl bilgi alınacağını, ABB Drives kılavuzları
hakkında nasıl geri bildirim sağlanacağını ve internette nasıl belge bulunacağını
anlatır.
ı ve tuş kısayollarını kısaca tanımlar.
Page 15
El kitabına giriş 15
İlgili belgeler
Kılavuzları ve diğer ürün belgelerini PDF formatında Internet'te bulabilirsiniz. Arka
kapağın iç kısmında bkz. bölüm İnternet'teki belge kütüphanesi. Belge kütüphanesinde
mevcut olmayan el kitapları için, yerel ABB temsilcinizle bağlantıya geçin
Sürücü kılavuzları Kod (İngilizce) Kod (Türkçe)
Sürücü/dönüştürücü/çevirici güvenlik talimatları
ACS580-01 (0.75 to 250 kW, 1.0 to 350 hp)
hardware manual
ACS580-01 frames R1 to R5 quick installation and
start-up guide
ACS580-01 frames R6 to R9 quick installation and
start-up guide
ACS580-04 drive modules (250 to 500 kW)
hardware manuel
ACS580-04 modules (250 to 500 kW) quick
installation guide
ACS580-07 drives (75 to 500 kW) hardware manuel
ACx-AP-x assistant control panels user’s manual
ACS-BP-S basic control panels user’s manual
Opsiyon el kitapları ve kılavuzları
ACS580, ACH580 and ACQ580 drive module frames
R3 and R5 to R9 for cabinet installation (options
+P940 and +P944) supplement
ACS580-01, ACH580-01 and ACQ580-01
installation guide for UK gland plate (option +H358)
CPTC-02 ATEX-certified thermistor protection
module, Ex II (2) GD (+L537+Q971) user's manual
CDPI-01 communication adapter module user's
manual
DPMP-01 mounting platform for control panels
DPMP-02/03 mounting platform for control panels 3AUA0000136205
DPMP-04 and DPMP-05 mounting platform for control
panels
FCAN-01 CANopen adapter module user's manual
FCNA-01 ControlNet adapter module user's manual
FDNA-01 DeviceNet™ adapter module user's
manual
FECA-01 EtherCAT adapter module user's manual
FEIP-21 Ethernet/IP adapter module user’s manual
FENA-01/-11/-21 Ethernet adapter module user's
manual
FEPL-02 Ethernet POWERLINK adapter module
user's manual
FMBT-21 Modbus/TCP adapter module user’s
manual
3AXD50000037978
3AXD50000044794 3AXD50000044836
3AXD50000044838
3AXD50000009286
3AXD50000015497
3AXD50000015469
3AXD50000045815
3AUA0000085685
3AXD50000032527
3AXD50000210305
3AXD50000034735
3AXD50000030058
3AXD50000009929
3AUA0000100140
3AXD50000308484
3AFE68615500
3AUA0000141650
3AFE68573360
3AUA0000068940
3AXD50000158621
3AUA0000093568
3AUA0000123527
3AXD50000158607
Page 16
16 El kitabına giriş
FPBA-01 PROFIBUS DP adapter module user's
manual
FPNO-21 PROFINET adapter module user’s manual
FSCA-01 RS-485 adapter module user's manual
FSPS-21 Safety functions fieldbus module user's
manual
ACS580-01…, ACH580-01… and ACQ580-01…+C135
drives with flange mounting kit supplement
ACS580-01…, ACH580-01… and ACQ580-01…
+C135 frames R1 to R3 flange mounting kit quick
installation guide
ACS580-01…, ACH580-01… and ACQ580-01…
+C135 frames R4 to R5 flange mounting kit quick
installation guide
ACS880-01…, ACS580-01…, ACH580-01… and
ACQ580-01…+C135 frames R6 to R9 flange
mounting kit quick installation guide
Main switch and EMC C1 filter options (+F278,
+F316, +E223) installation supplement for
ACS580-01, ACH580-01 and ACQ580-01 frames R1
to R5
UL Type 12 hood quick installation guide for ACS580-01,
ACH580-01 and ACQ580-01 frames R1 to R9
Alet ve bakım el kitapları ile kılavuzları
Drive composer PC tool user's manual
Converter module capacitor reforming instructions
NETA-21 remote monitoring tool user's manual
NETA-21 remote monitoring tool installation and
start-up guide
3AFE68573271
3AXD50000158614
3AUA0000109533
3AXD50000158638
3AXD50000019100
3AXD50000119172
3AXD50000287093
3AXD50000019099
3AXD50000155132
3AXD50000196067
3AUA0000094606
3BFE64059629
3AUA00000969391
3AUA0000096881
Page 17
El kitabına giriş 17
ACS580-01 kılavuzları
ACS580-04 kılavuzları
ACS580-07 kılavuzları
Aşağıdaki kod/kodlar bu ürün için geçerli olan çevrimiçi el kitapları listesini/listelerini
açar.
Page 18
18 El kitabına giriş
Terimler ve kısaltmalar
Ter im/ kısaltma Açıklama
ACS-BP-S Sürücü ile iletişim için temel kontrol paneli, temel operatör tuş takımı
ACX-AP-x Sürücü ile iletişim için gelişmiş kontrol paneli, gelişmiş operatör tuş
takımı.
ACS580 Bluetooth arabirimine sahip olan ACS-AP-W tipi ile ACS-AP-I
ve ACS-AP-S tiplerini destekler.
AI Analog giriş; analog giriş sinyalleri için arayüz
AO Analog çıkış; analog çıkış sinyalleri için arayüz
Fren kıyıcı Gerektiğinde, sürücünün ara devresinden frene fazla enerjiyi aktarır.
Fren direnci Fren kıyıcı tarafından iletilen fazla sürücü frenleme enerjisini ı
Kontrol kartı Kontrol programının çalıştığı kontrol kartıdır.
Kontrol ünitesi Kontrol kartı bir muhafaza içine entegre edilmiştir
CBAI-01 Çift kutuplu-tek kutuplu voltaj konvertörü opsiyon modülü
CDPI-01 İletişim adaptör modülü
CCA-01 Konfigürasyon adaptörü
CHDI-01 Opsiyonel 115/230 V dijital giriş genişletme modülü
CMOD-01 Opsiyonel çok fonksiyonlu genişletme modülü (harici 24 V AC/DC
CMOD-02 Opsiyonel çok fonksiyonlu genişletme modülü (harici 24 V AC/DC
CPTC-02 İsteğe bağlı çok fonksiyonlu genişletme modülü (harici 24 V ve ATEX
DC bara Doğrultucu ve invertör arasındaki DC devresi
DC bara
kondansatörleri
DI Dijital giriş; dijital giri
DO Dijital çıkış; dijital çıkış sinyalleri için arayüz
DPMP-01 ACX-AP kontrol paneli için montaj platformu (flanş tipi montaj)
DPMP-02/03 ACX-AP kontrol paneli için montaj platformu (yüzey tipi montaj)
Sürücü AC motorlarının kontrolü için frekans dönüştürücü
EFB Dahili fieldbus
FBA Fieldbus adaptörü
FCAN-01 Opsiyonel CANopen adaptör modülü
FCNA-01 ControlNet adaptör modülü
FDNA-01 Opsiyonel DeviceNet adaptör modülü
Kıyıcı, DC bara gerilimi, belirli bir maksimum limiti aştığında çalışır.
Gerilim artışı tipik olarak yüksek atalet momentli motorun yavaşlaması
(frenlemesi) ile oluşur.
sı olarak
atar. Fren devresinin temel parçasıdır. Sürücünün Donanım
kılavuzu'nda Fren kıyıcı bölümüne bakın.
ve dijital G/Ç genişletme)
ve yalıtılmış PTC arabirimi)
sertifikalı PTC arabirimi)
Ara devre DC gerilimini dengede tutan enerji depolama
ş sinyalleri için arayüz
Page 19
El kitabına giriş 19
Ter im/ kısaltma Açıklama
FECA-01 Opsiyonel EtherCAT adaptör modülü
FENA-21 EtherNet/IP, Modbus/TCP ve PROFINET G/Ç protokolleri için opsiyonel
Ethernet adaptör modülü
FEIP-21 Opsiyonel Ethernet/IP adaptör modülü
FEPL-02 Ethernet POWERLINK adaptör modülü
FMBT-21 Opsiyonel Modbus/TCP adaptör modülü
FPBA-01 Opsiyonel PROFIBUS DP adaptör modülü
FPNO-21 Opsiyonel PROFINET IO adaptör modülü
Kasa (tip) R1 ve R2 gibi fiziksel kasa boyutunu ifade eder. Sürücüye takılı tip
tanımlama etiketinde sürücünün kasası belirtilir; sürücünün Donanım
kılavuzunda Çalışma prensibi ve donanım tanımı bölümü,
Tip tanımlama etiketi kısmına bakın.
FSCA-01 Opsiyonel RSA-485 adaptör modülü (Modbus/RTU)
ID run Motor tanımlama çalıştırması. Tanımlama çalıştırması sırasında sürücü,
optimum motor kontrolü için motor karakteristiklerini tanımlar.
IGBT Yalıtımlı geçit iki kutuplu transistörü
Ara devre Bkz. DC bara.
Çevirici Doğru akımı ve gerilimi, alternatif akım ve gerilime çevirir.
G/Ç Giriş/Çıkış
LSW Least significant word
Makro Sürücü kontrol programında önceden tan
değerleri. Her bir makro belirli bir uygulama için tasarlanmıştır. Bkz.
Kontrol makroları bölümü, sayfa 79.
NETA-21 Uzaktan izleme aracı
Ağ kontrolü DeviceNet ve Ethernet/IP gibi Ortak Endüstriyel Protokol (CIP
tabanlı fieldbus protokollerinde, ODVA AC/DC Sürücü Profilinin Net Ctrl
ve Net Ref nesnelerini kullanarak sürücü kontrolünü ifade eder. Daha
ayrıntılı bilgi için, www.odva.org
adresine ve aşağıdaki el kitaplarına
bakın:
• FDNA-01 DeviceNet adapter module user’s manual (3AFE68573360
[İngilizce]), ve
• FENA-01/-11/-21 Ethernet adapter module user’s manual
(3AUA0000093568 [İngilizce]).
Parametre Sürücünün kullanıcı tarafından ayarlanabilir çalışma talimatı veya
sürücü tarafından ölçülen veya hesaplanan sinyal
PID kontrolörü Oransal-integral-türev kontrolör. Sürücü hız kontrolü PID algoritmasına
dayanır.
PLC Programlanabilir lojik kontrol cihazı
PROFIBUS,
PI - PROFIBUS & PROFINET International'ın tescilli ticari markaları
PROFIBUS DP,
PROFINET IO
PTC Pozitif sıcaklık katsayısı, direnci sıcaklığa bağlı olan termistör,
ımlanan varsayılan parametre
TM
)
Page 20
20 El kitabına giriş
Ter im/ kısaltma Açıklama
R1, R2, … Kasa (tip)
RO Röle çıkışı; dijital çıkış sinyali için arayüz. Bir röle ile uygulanır.
Doğrultucu Alternatif akımı ve gerilimi, doğru akım ve gerilime çevirir.
STO Güvenli moment kapatma. Sürücünün Donanım el kitabında Güvenli
moment kapatma bölümüne bakın.
Page 21

El kitabına giriş 21
Siber güvenlik sorumluluk reddi
Bu ürün bir ağ arabirimi aracılığıyla bağlanmak ve bilgilerle verileri iletmek için
tasarlanmıştır. Ürün ile Müşterinin ağı veya başka bir ağ (olması durumunda)
arasında güvenli bir bağlantı sağlamak ve bağlantıyı kurmak ve sürekli olarak
korumak tamamen Müşterinin sorumluluğundadır. Müşteri ürünü, ağı, sistemi
ve arabirimi her tür güvenlik ihlaline, yetkisiz erişime, müdahaleye, zorla girmeye,
sızmaya ve/veya verilerin ya da bilgilerin çalınmasına karşı korumak için tüm uygun
önlemleri (bunlarla sınırlı olmamak kaydıyla örneğin güvenlik duvarlarının kurulumu,
kimlik doğrulama önlemlerinin uygulanması, verilerin şifrelenmesi, virüs-önleyici
programların kurulumu, vb.) alacak ve sürdürecektir. ABB ve bağlı kuruluşlar bu
güvenlik ihlalleri, yetkisiz eriş
da bilgilerin çalınması ile ilgili hasarlardan ve/veya kayıplardan sorumlu değildir.
Ayrıca bkz. bölüm Kullanıcı kilidi, sayfa 193.
im, müdahale, zorla girme, sızma ve/veya verilerin ya
Page 22

22 El kitabına giriş
Page 23
Devreye alma, G/Ç ile kontrol ve ID run 23
2
Devreye alma, G/Ç ile kontrol ve ID run
Bu bölümün içeriği
Bu bölüm aşağıdakilerin nasıl yapılacağını anlatır:
• devreye alma
• start, stop, motor dönüş yönünü değiştirme ve G/Ç arayüzü ile motorun hız ayarı.
• sürücü için bir tanımlama çalıştırması (ID run) gerçekleştirme.
Page 24
24 Devreye alma, G/Ç ile kontrol ve ID run
?
Sürücünün devreye alınması
Gelişmiş kontrol panelinde İlk start asistanını kullanarak sürücünün
devreye alınması
Güvenlik
Kalifiye bir elektrikçi değilseniz, sürücüyü devreye almayın.
Sürücünün Donanım kılavuzu'nun başındaki Güvenlik talimatları bölümünde bulunan
talimatları okuyun ve uygulayın. Talimatlara uyulmaması, fiziksel yaralanmalara veya ölümlere
yol açabilir ya da ekipman hasar görebilir.
Montajı kontrol edin. Sürücünün Donanım kılavuzu'nda Kurulum kontrol listesi bölümüne
bakın.
Hiç bir etkin başlatmanın (ABB standart makro ise, fabrika ayarlarında DI1) açık
olmadığından emin olun. Harici çalıştırma komutunun açık olması ve sürücünün
uzaktan kontrol modunda olması durumunda sürücü, güç kaynağı sağlandığında
otomatik olarak devreye girer.
Motoru start etmenin bir tehlikeye yol açmayacağından emin olun.
Aşağıdaki durumlarda motor ile makine arasındaki mekanik bağlantıyı sökün
• yanlış yönde dönüş
• sürücü devreye alma sırasında bir Normal ID run gerekli, yük momenti %20'den daha
fazla veya ID run sırasında ekipman nominal momente dayanacak durumda değilse.
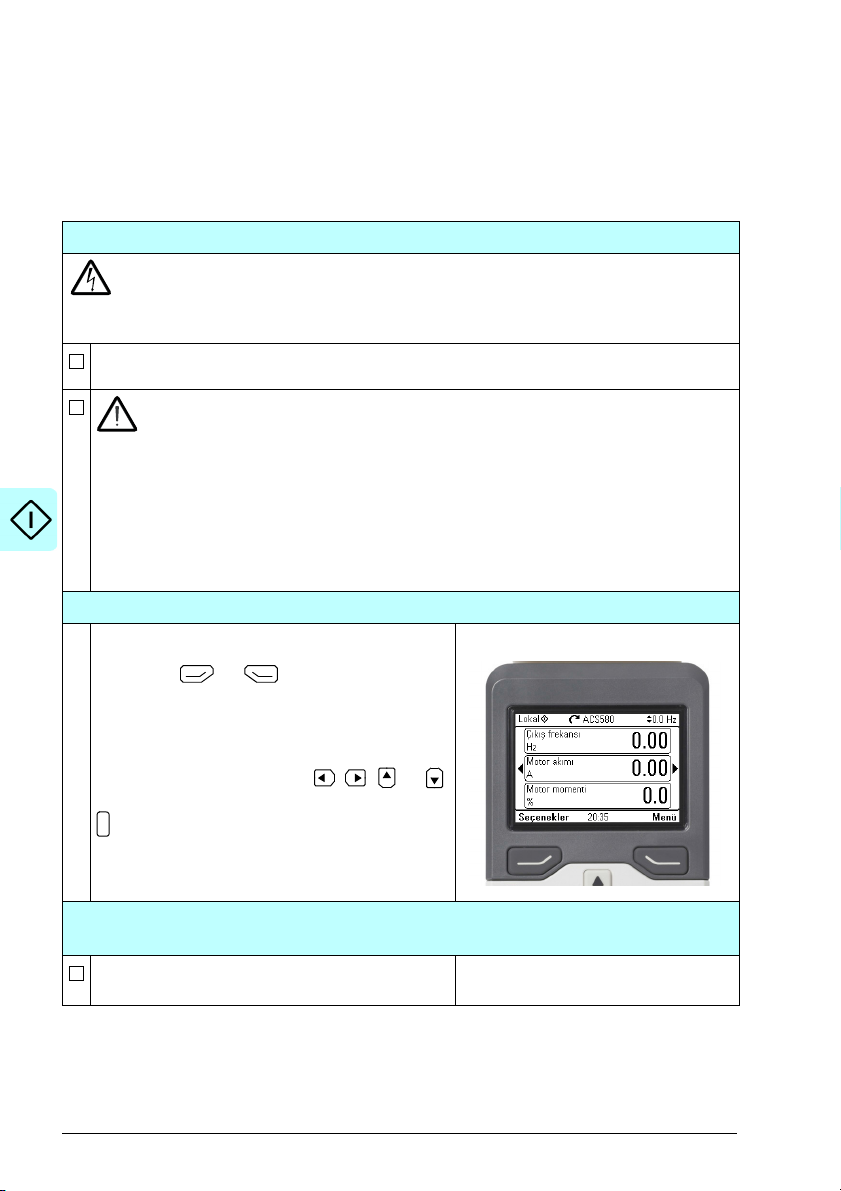
Gelişmiş kontrol panelini kullanma hakkında ipuçları
Ekranın alt kısmında iki komut bulunur (sağdaki
şekilde Seçenekler ve Menü) ve ekranın alt
kısmındaki ile olmak üzere iki
programlanabilir tuşun fonksiyonunu gösterir.
Programlanabilir tuşlara atanan komutlar bağlama
göre değişiklik gösterir.
İmleci hareket ettirmek ve/veya etkin görünüme
göre değerleri değiştirmek için , , ve
tuşlarını kullanın.
tuşu içeriğe duyarlı bir yardım sayfası gösterir.
Daha fazla bilgi için, bkz. ACx-AP-x assistant
control panels user’s manual (3AUA0000085685
[İngilizce]).
Motor plakası verilerini yakında tutun.
Sürücüye güç verin.
durumunda hasar tehlikesi varsa veya
1 – İlk start asistanı yönlendirmeli ayarlar:
Dil, tarih ve saat, motorun nominal değerleri
Page 25
Devreye alma, G/Ç ile kontrol ve ID run 25
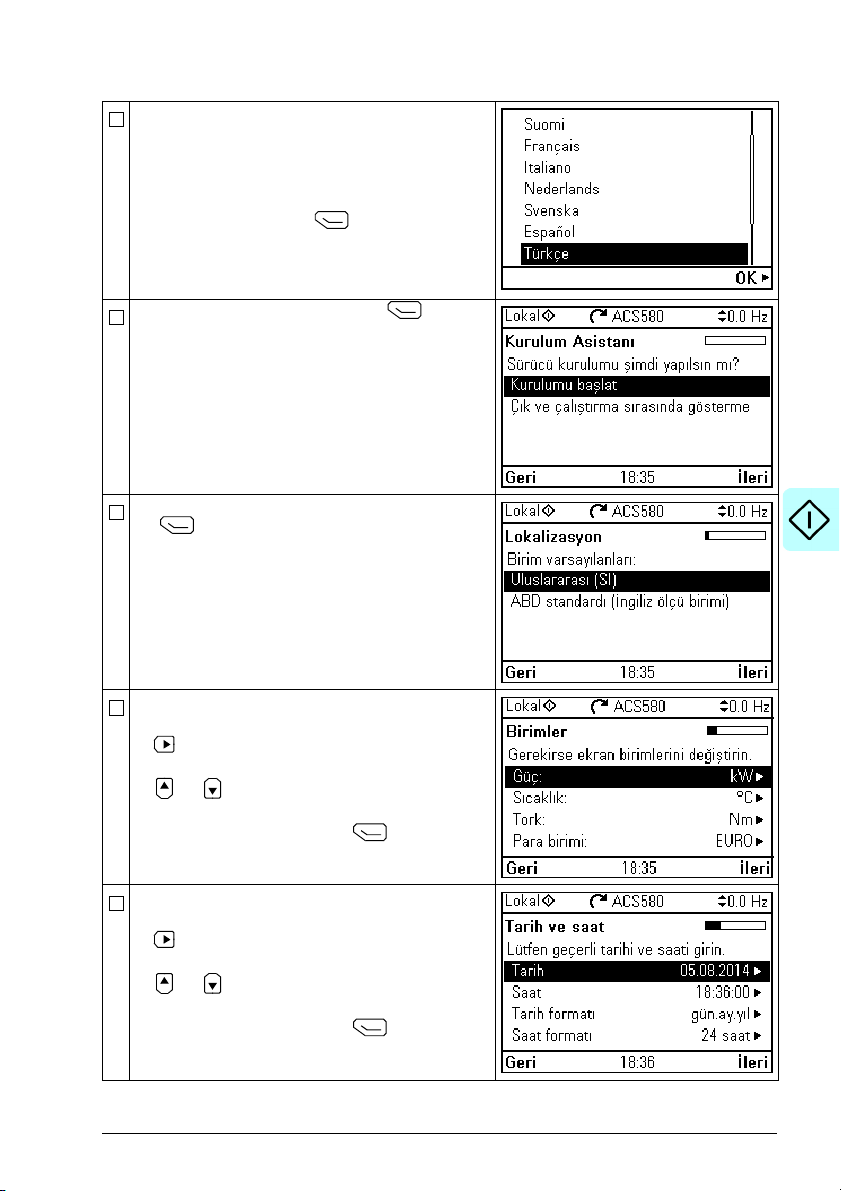
İlk start asistanı ilk başlatma sırasında sizi
yönlendirir.
Asistan otomatik olarak başlar. Sağda gösterilen
kontrol paneli görünümüne girene kadar bekleyin.
Kullanmak istediğiniz dili seçerek
(zaten seçilmemişse) ve (Tam am) tuşuna
basarak seçin.
Not: Dili seçtikten sonra, dil dosyasının kontrol
paneline indirilmesi bir kaç dakika sürer.
Kurulumu başlat öğesini seçin ve (İleri)
tuşuna basın.
Kullanmak istediğiniz ölçü birimini seçin
ve (İleri) tuşuna basın.
Panelde gösterilen birimleri gerektiğinde
değiştirin.
• tuşuna basarak seçili satırın düzenleme
görünümüne gidin.
• ve tuşlarına basarak görünümü
kaydırın.
Sonraki görünüme gitmek için (İleri) tuşuna
basın.
Tarih ve saatin yanı sıra tarih ve saat görüntüleme
biçimlerini de ayarlay
• tuşuna basarak seçili satırın düzenleme
görünümüne gidin.
• ve tuşlarına basarak görünümü
kaydırın.
Sonraki görünüme gitmek için (İleri) tuşuna
basın.
ın.
Page 26
26 Devreye alma, G/Ç ile kontrol ve ID run
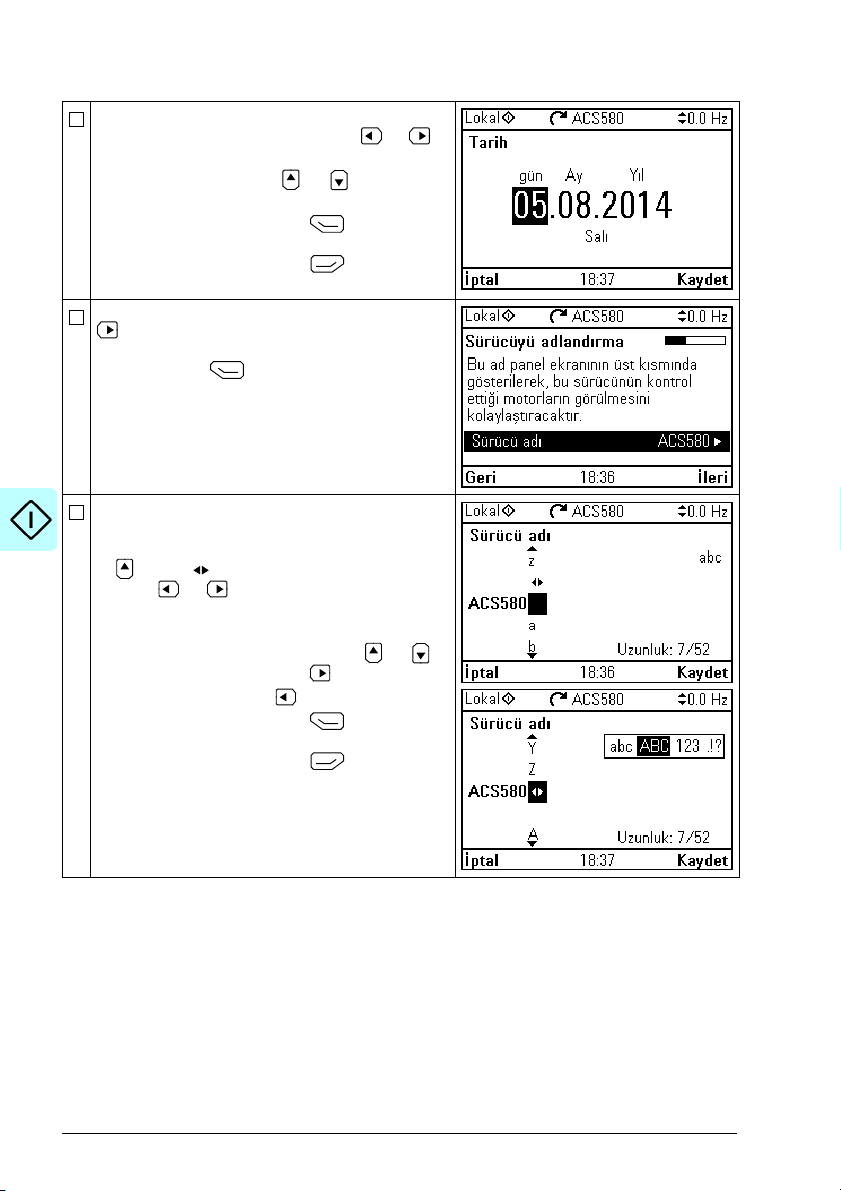
Düzenleme görünümünde:
• İmleci sola ve sağa kaydırmak için ve
tuşlarını kullanın.
•Değeri değiştirmek için ve tuşlarını
kullanın.
• Yeni ayarı kabul etmek için (Kaydet)
tuşuna basın veya değişiklik yapmadan önceki
görünüme geri dönmek için (İptal) tuşuna
basın.
Sürücüye üstte gösterilecek bir ad vermek için,
tuşuna basın.
Var sayılan adı (ACS580) değiştirmek
istemiyorsanız, (İleri) tuşuna basarak
doğrudan motor nominal değerlerinin
ayarlanmasına geçin.
Adı girin:
• Karakter modunu seçmek için (küçük
harf/büyük harf/sayılar/özel karakterler),
tuşuna sembolü vurgulanana dek basın,
sonra ve tu
karakter ekleyebilirsiniz. Mod, başkası seçilene
kadar seçili kalır.
• Bir karakter eklemek için, karakteri ile
tuşlarıyla vurgulayın, sonra tuşuna basın.
• Bir harfi kaldırmak için tuşuna basın.
• Yeni ayarı kabul etmek için (Kaydet)
tuşuna basın veya değişiklik yapmadan önceki
görünüme geri dönmek için (İptal) tuşuna
basın.
şlarıyla modu seçin. Artık
Page 27
Devreye alma, G/Ç ile kontrol ve ID run 27
M2AA 200 MLA 4
1475
1475
1470
1470
1475
1770
32.5
56
34
59
54
59
0.83
0.83
0.83
0.83
0.83
0.83
3GAA 202 001 - ADA
180
IEC 34-1
6210/C36312/C3
Cat. no
35
30
30
30
30
30
50
50
50
50
50
60
690 Y
400 D
660 Y
380 D
415 D
440 D
V
Hz kW
r/min A
cos
IA/IN
t
E/s
Ins.cl. F
IP 55
No
IEC 200 M/L 55
3
motor
ABB Motors
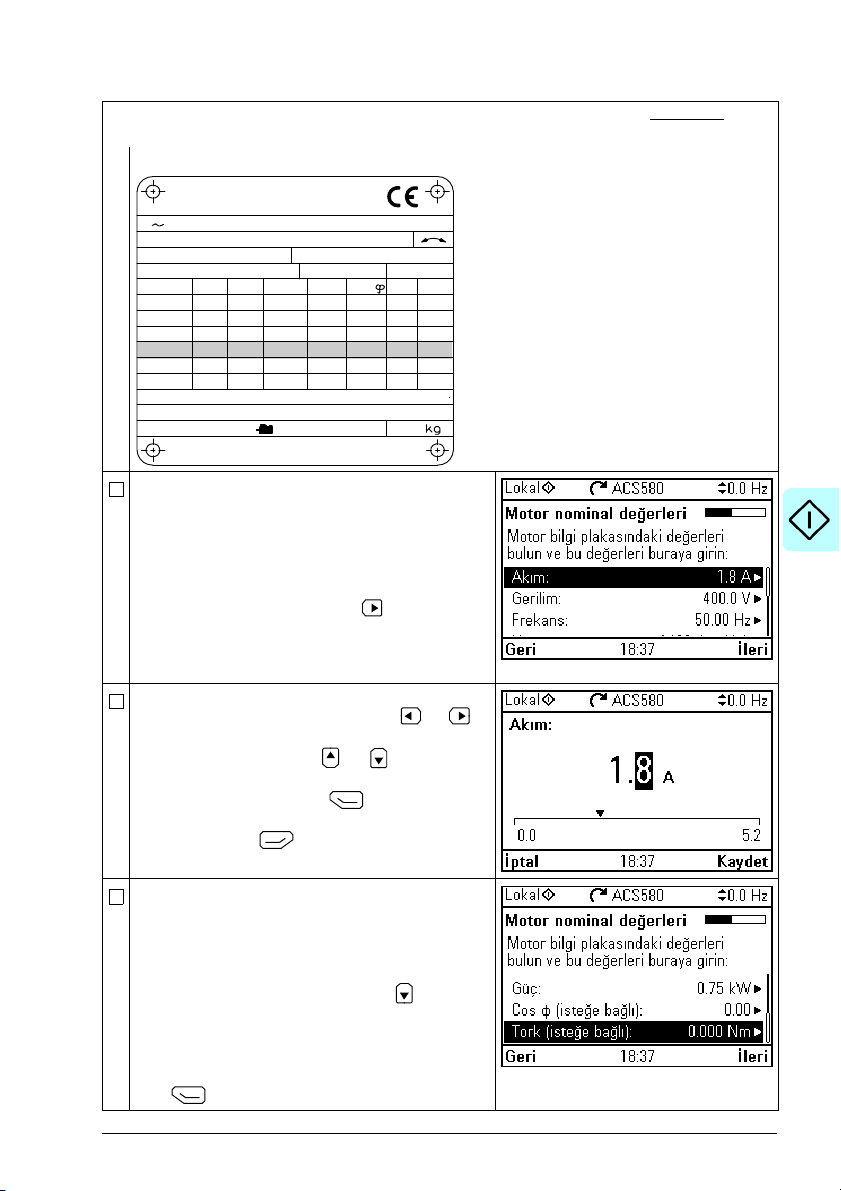
Aşağıdaki motor nominal değer ayarları için motor plakasına bakın. Değerleri tam olarak motor
plakasında gösterildiği gibi girin.
Bir endüksiyon (asenkron) motoru plakası örneği:
Motor tipini seçin.
Motor verilerinin doğru olduğunu kontrol edin.
Değerler sürücü boyutuna göre önceden
tanımlanır, ama motora karşılık geldiklerini
doğrulamalısınız.
Motor nominal akımıyla başlayın.
Değeri değiştirmeniz gerekirse, tuşuna
basarak (bu sembol satırın sonunda
gösterildiğinde) seçilen satırın düzenleme
görünümüne gidin.
Doğru değeri ayarlayın:
• İmleci sola ve sağa kaydırmak için ve
tuşlarını kullanın.
•Değeri değiştirmek için ve tuş
kullanın.
Yeni ayarı kabul etmek için (Kaydet) tuşuna
basın veya değişiklik yapmadan önceki görünüme
geri dönmek için (İptal) tuşuna basın.
larını
Nominal değerleri kontrol etmeye/düzenlemeye
devam edin ve skaler veya vektör kontrol modunu
seçin.
Motor nominal cos Φ değeri ve nominal moment
isteğe bağlıdır.
Görünümdeki son satırı görmek için tuşuyla
aşağı gidin.
Sonuncu satırı düzenledikten sonra, kontrol paneli
sonraki görünüme geçer.
Doğrudan sonraki görünüme geçmek
için, (İleri) tuşuna basın.
Page 28
28 Devreye alma, G/Ç ile kontrol ve ID run
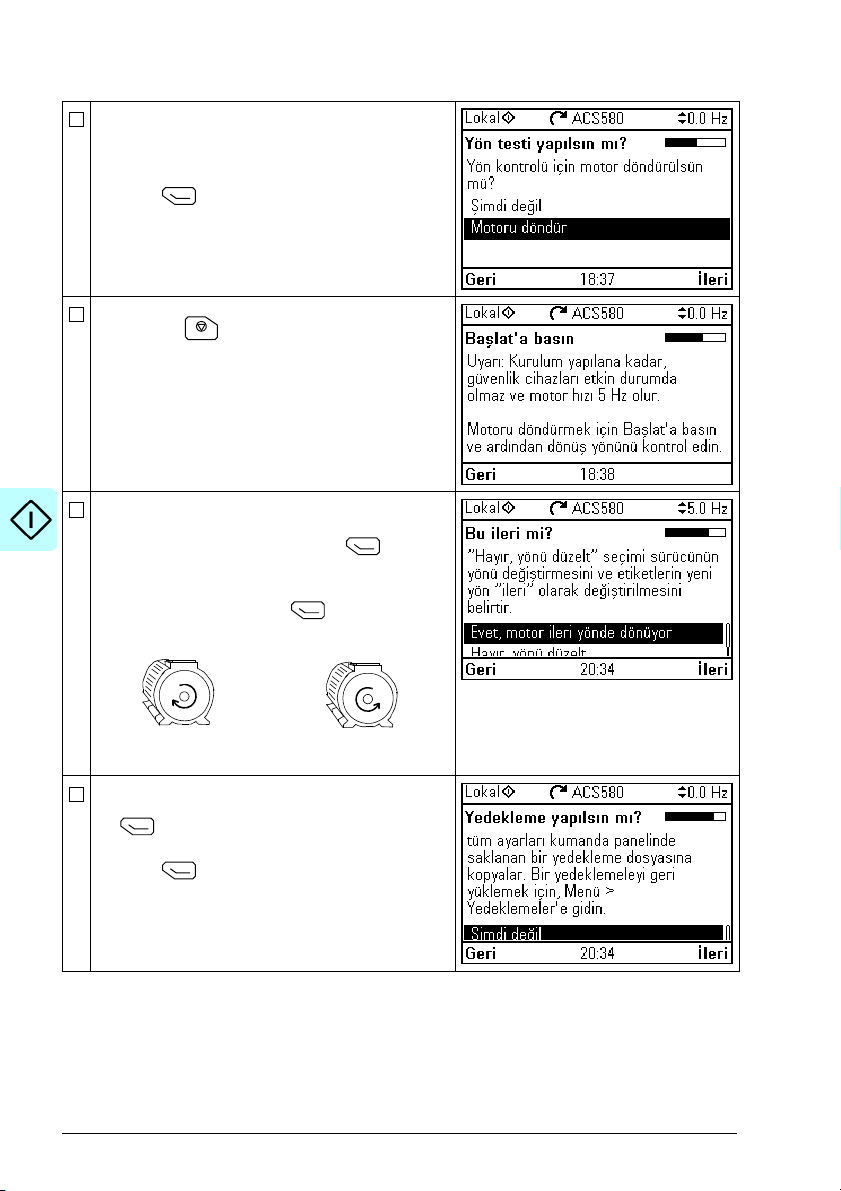
İleri yön Geri yön
Yön testi isteğe bağlıdır ve motorun dönmesini
gerektirir. Risk oluşturacaksa veya mekanik
kurulum buna izin vermiyorsa bunu yapmayın.
Yön testini yapmak için, Motoru döndür öğesini
seçin ve (İleri) tuşuna basın.
Sürücüyü başlatmak için kontrol
panelindeki Başlat tuşuna basın.
Motorun yönünü kontrol edin.
İleri yöndeyse, Evet, motor ileri yönde dönüyor
öğesini seçin ve devam etmek için (İleri)
tuşuna basın.
İleri yönde değilse, Hayır, yönü düzelt öğesini
seçin ve devam etmek için (İleri) tuşuna
basın.
Şu ana kadar yapılmış olan ayarların yedeğini
almak isterseniz, Yedekleme öğesini seçin
ve (İleri) tuşuna basın.
Yedek almak istemezseniz, Şimdi değil
seçin ve (İleri) tuşuna basın.
öğesini
Page 29
Devreye alma, G/Ç ile kontrol ve ID run 29
?
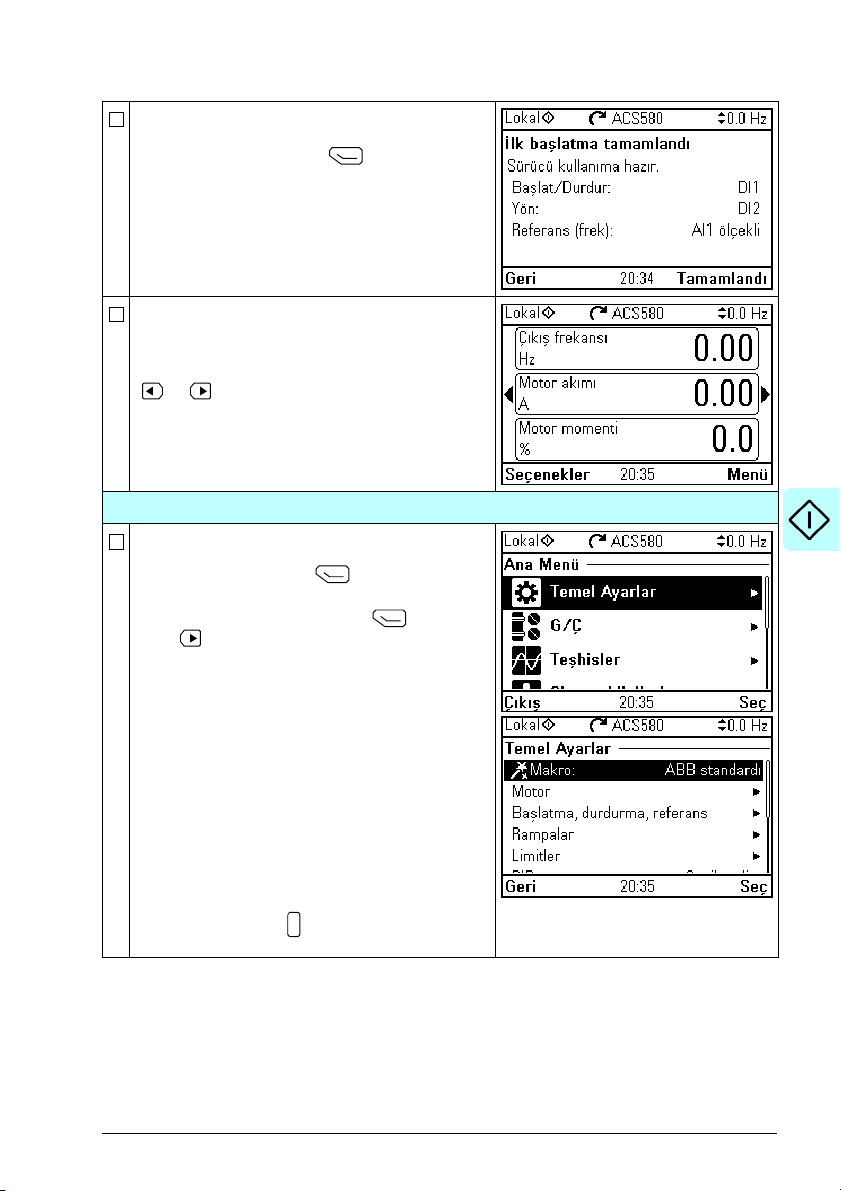
İlk başlatma artık tamamlanmıştır ve sürücü
kullanıma hazırdır.
Ana görünüme girmek için (Tam aml and ı)
tuşuna basın.
Seçilen sinyallerin değerlerini izleyebileceğiniz
Ana sayfa görünümü kontrol panelinde gösterilir.
Çok sayıda farklı Ana sayfa görünümü ekranı
vardır (bkz. sayfa 47). Bunlar arasında ok tuşlarını
( ve ) kullanarak gezinebilirsiniz.
2 – Birincil ayarlar menüsünde ek ayarlar
Makro, rampalar ve limitler gibi tüm ek
ayarlamaları, Ana menüden başlayarak yapın.
Ana menüye girmek için (Menü) tuşuna
basın.
Birincil ayarlar öğesini seçin ve (Seç)
(veya ) tuşuna basın.
ABB en azından şu ek ayarları yapmanızı tavsiye
eder:
• Bir makro seçin veya başlatma, durdurma
ve referans değerlerini ayrı ayrı ayarlayın.
• Rampalar
• Limitler
Birincil ayarlar menüsüyle motor, PID,
haberleşme, gelişmiş fonksiyonlar, saat, bölge ve
ekran ile ilgili ayarları da yapabilirsiniz. Ayrıca, bu
menü kontrol paneli Ana görünümünü sıfırlayacak
bir öğe içerir.
Birincil ayarlar menüsü öğeleri hakkında daha
fazla bilgi almak için, tuşuna basarak yardım
sayfasını açın.
Page 30
30 Devreye alma, G/Ç ile kontrol ve ID run
?
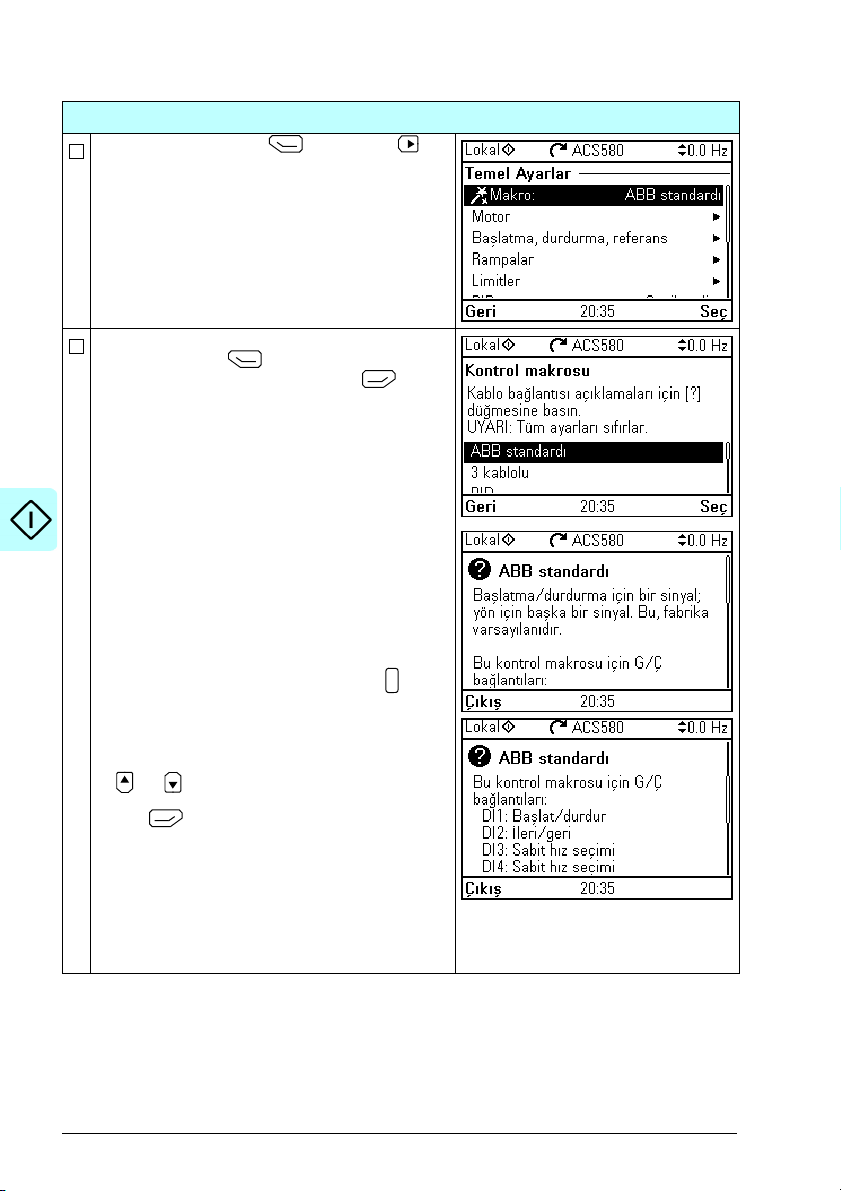
2 – Ek ayarlar: Makro
Makro öğesini seçin ve (Seç) (veya )
tuşuna basın.
Kullanımdaki makroyu değiştirmek için, yeni
makroyu seçin ve (Seç) tuşuna basın;
değişiklik yapmadan geri gitmek için, (Geri)
tuşuna basın
Notlar:
• Makroyu değiştirmek motor verileri hariç tüm
ayarları seçilen makronun varsayılan
değerlerine resetler.
• Makroyu değiştirirken, sürücüdeki G/Ç
sinyallerinin kullanımını da değiştirirsiniz.
Gerçek G/Ç kablolarıyla kontrol programındaki
G/Ç kullanımının birbiriyle eşleştiğinden emin
olun. Mevcut G/Ç kullanımını Ana menü
altındaki G/Ç menüsünden kontrol edebilirsiniz
(bkz. sayfa 32).
Seçili makro hakkında bilgi almak için
tuşuna basın. Yardım sayfası sinyallerin
kullanımını ve G/Ç bağlantılarını gösterir.
Ayrıntılı G/Ç bağlantı şemaları için, bkz. bölüm
Kontrol makroları (sayfa 79).
ve tuşlarına basarak sayfayı kaydırın.
Kontrol makrosu alt menüsüne geri dönmek
için, (Çıkış) tuşuna basın.
• ABB standart (vektör) makrosu dışındaki tüm
makrolar varsayılan olarak skaler motor
kontrolünü kullanır. İlk başlatmada skaler veya
vektör motor kontrolünü seçebilirsiniz.
Daha sonra seçimi değiştirmek isterseniz,
Menü - Birincil ayarlar - Motor - Kontrol
modu öğesini seçin ve talimatları uygulayın.
Page 31

Devreye alma, G/Ç ile kontrol ve ID run 31
2 – Ek ayarlar: Başlatma, durdurma ve referans değerleri
Makro kullanmak istemezseniz, başlatma,
durdurma ve referans ayarlarını belirleyin:
Başlatma, durdurma, referans öğesini seçin
ve (Seç) (veya ) tuşuna basın.
Parametreleri gereksinimlerinize göre ayarlayın.
Parametreyi seçin ve (Seç) tuşuna basın.
Ayarları değiştirirken, sürücüdeki G/Ç sinyallerinin
kullanımını da değiştirirsiniz. Gerçek G/Ç
kablolarıyla kontrol programındaki G/Ç
kullanımının birbiriyle eşleştiğinden emin olun.
Mevcut G/Ç kullanımını Ana menü altındaki G/Ç
menüsünden kontrol edebilirsiniz (bkz. sayfa 32).
Ayarlamaları yaptıktan sonra, Temel ayarlar
menüsüne dönmek için
basın.
(Geri) tuşuna
2 – Ek ayarlar: Rampalar
(motorun hızlanma ve yavaşlama süreleri)
Rampalar öğesini seçin ve (Seç) (veya )
tuşuna basın.
Parametreleri gereksinimlerinize göre ayarlayın.
Bir parametre seçin ve (Düzenle) tuşuna
basın.
Ayarlamaları yaptıktan sonra, Temel ayarlar
menüsüne dönmek için
basın.
(Geri) tuşuna
Page 32

32 Devreye alma, G/Ç ile kontrol ve ID run
2 – Ek ayarlar: Limitler
Limitler öğesini seçin ve (Seç) (veya )
tuşuna basın.
Parametreleri gereksinimlerinize göre ayarlayın.
Bir parametre seçin ve (Seç) tuşuna basın.
Ayarlamaları yaptıktan sonra, Temel ayarlar
menüsüne dönmek için
basın.
(Geri) tuşuna
3 – G/Ç menüsü
Ek ayarlamalardan sonra, gerçek G/Ç kablo
bağlantısının kontrol programındaki G/Ç
kullanımına uyduğundan emin olun.
Ana menüde, bir G/Ç seçin ve G/Ç menüsüne
girmek için (Seç) tuşuna basın.
Kontrol etmek istediğiniz bağlantıyı seçin
ve (Seç) (veya ) tuşuna basın.
Page 33

Devreye alma, G/Ç ile kontrol ve ID run 33
G/Ç menüsü üzerinden ayarlanamayacak bir
parametrenin ayrıntılarını görüntülemek için,
(Görüntüle) tuşuna basın.
Bir parametrenin değerini ayarlamak için,
(Düzenle) tuşuna basın, değeri , , ve
tuşlarını kullanarak ayarlayın ve (Kaydet)
tuşuna basın. Gerçek kablo bağlantısının yeni
değere uyması gerektiğini unutmayın.
(Geri) tuşuna arka arkaya basarak Ana
menüye geri gidin.
4 – Teşhis menüsü
Ek ayarlamaları yaptıktan ve G/Ç bağlantılarını
kontrol ettikten sonra, ayarlanmanın doğru
çalıştığından emin olmak için Teşhis menüsünü
kullanın.
Ana menüde, Teşhis öğesini seçin ve
(Seç) (veya ) tuşuna basın.
Görüntülemek istediğiniz teşhis öğesini seçin
ve (Seç) tuşuna basın.
(Geri) tuşuna basarak Teşhis menüsüne
geri dönün.
Page 34

34 Devreye alma, G/Ç ile kontrol ve ID run
5 – Yedekleme
Devreye almayı bitirdikten sonra ABB bir yedek
almanızı tavsiye eder.
Ana menüde, Yedeklemeler öğesini seçin
ve (Seç) (veya ) tuşuna basın.
Yedeklemeyi başlatmak için (Seç) tuşuna
basın.
Page 35

Devreye alma, G/Ç ile kontrol ve ID run 35
Lok/Uza
Sürücüyü G/Ç arabirimi ile kontrol etme
Aşağıdaki tablo belirtilen durumlarda sürücünün dijital ve analog girişlerle nasıl
çalıştırılacağını anlatır:
• motorun devreye alınması gerçekleştirildi ve
• ABB standart makrosunun varsayılan parametre ayarları kullanımda.
Ön ayarlar
Dönüş yönünü değiştirmeniz gerekirse, limitlerin dönüş
yönünü değiştirmenize izin verdiğini kontrol edin.
Birincil ayarlar - Limitler
negatif bir değeri olduğundan ve maksimum limitin
pozitif bir değeri olduğundan emin olun.
Kontrol bağlantılarının ABB standart makrosu için
verilmiş bağlantı şemasındaki gibi yapıldığına emin olun.
Sürücünün uzaktan kontrolde olduğundan emin olun.
Uzaktan ve lokal kontrol arasında geçiş için
tuşuna basın.
öğesine gidin; minimum limitin
Start Etme Ve Motorun Hızını Kontrol Etme
DI1 dijital girişini açarak start edin.
Ok dönmeye başlar. Set değerine erişilene kadar
noktalıdır.
AI1 analog girişinin gerilimini ayarlayarak sürücü çıkış
frekansını (motor hızı) ayarlayın.
Menü -
Bkz. bölüm ABB standart makrosu,
sayfa 80.
Uzaktan kontrolde, kontrol paneli
ekranının sol üstünde Uzaktan metni
gösterilir.
Motor dönme yönünü değiştirme
Geri yön: DI2 dijital girişini açın.
İleri yön: DI2 dijital girişini kapatın.
Page 36

36 Devreye alma, G/Ç ile kontrol ve ID run
Motoru stop etme
DI1 dijital girişi kapalı konuma getirin. Ok dönmeyi
durdurur.
Page 37

Devreye alma, G/Ç ile kontrol ve ID run 37
ID run işlemi gerçekleştirme
Sürücü vektör kontrolünde ilk kez çalıştırıldığında ve motor parametrelerinde (grup 99
Motor verileri) değişiklik yapıldığında Sabit ID run kullanarak otomatik olarak motor
özelliklerini tahmin eder. Bu durum
• 99.13 ID run talep edildi parametresi seçimi Sabit ve
• 99.04 Motor kontrol modu parametresi seçimi Vektör olduğunda geçerlidir.
Birçok uygulamada ayrı bir ID run gerçekleştirmeye gerek yoktur. ID run aşağıdaki
durumlarda seçilmelidir:
• vektör kontrol modu kullanıldıysa (99.04 Motor kontrol modu parametresi Vektör
olarak ayarlı) ve
• servo motor (PM) kullanıldıysa (99.03 Motor tipi parametresi Sabit mıknatıslı
motor olarak ayarlı) veya
• senkron relüktans motoru (SynRM) kullanıldıysa (99.03 Motor tipi parametresi
SynRM olarak ayarlı
• sürücü sıfıra yakın hız referanslarında çalışırsa veya
• motor nominal momentinin üzerinde, gerekli olan geniş hız aralığı içinde moment
aralığında çalıştığında.
ID run işlemini, Menü - Birincil ayarlar - Motor - ID run öğesini (bkz. sayfa 38) veya
99.13 ID run talep edildi parametresini (bkz. sayfa 40) seçerek ID run asistanıyla
gerçekleştirin.
Not: ID run işleminden sonra motor parametreleri (grup 99 Motor verileri)
değiştirildiğinde işlem tekrarlanmalıdır.
) veya
Not: Uygulamanızı skaler kontrol modunu kullanarak zaten parametrelendirdiyseniz
(99.04 Motor kontrol modu parametresi Skaler olarak ayarlı) ve motor kontrol modunu
Vektör olarak değiştirmeniz gerekirse,
• Kontrol modu asistan
Birincil ayarlar - Motor - Kontrol modu öğesine gidin) ve talimatlara uyun.
ID run asistanı, ID run boyunca kılavuzluk eder.
veya
• 99.04 Motor kontrol modu parametresini Vektör olarak ayarlayın ve
• G/Ç kontrollü sürücü için 22 Hız referansı seçimi, 23 Hız referansı rampası, 12
Standart AI, 30 Limitler ve 46 İzleme/ölçeklendirme ayarları gruplarındaki
parametreleri kontrol edin.
• moment kontrollü sürücü için, ayrıca 26 Moment referans zinciri grubundaki
parametreleri de kontrol edin.
ını kullanarak kontrol modunu vektöre değiştirin (Menü -
Page 38

38 Devreye alma, G/Ç ile kontrol ve ID run
Lok/Uza
ID run prosedürü
ID run asistanıyla
Ön kontrol
UYARI!
çalışır. Motor ileri yönde dönecektir. ID run gerçekleştirmeden önce motoru
çalıştırmanın güvenli olduğundan emin olun!
Dönen motorda ID run gerçekleştirmeyin. ID run gerçekleştirmeden önce
motorun durduğundan mutlaka emin olun.
Tahrik edilen ekipmandan motoru ayırın.
Motor veri parametrelerinin değerlerinin motor plakasındakilere eşdeğer olduğunu kontrol
edin.
STO devresinin kapalı olduğunu kontrol edin.
Asistan size geçici motor limitlerini kullanmak isteyip istemediğinizi sorar.
Aşağıdaki koşulları karşılamalıdır:
Minimum hız <
Maksimum hız = motor nominal hızı (Normal ID run prosedürü motorun %100 hızda
çalışmasını gerektirir.)
Maksimum akım > I
Maksimum moment > %50
Kontrol panelinin lokal kontrolde olduğundan emin olun (Lokal metni sol üst tarafta
görüntülenir). Lokal ve uzaktan kontrol arasında geçiş için tuşuna basın.
Ana görünümde (Menü) tuşuna basarak
Ana menüye gidin.
Birincil ayarlar öğesini seçin ve (Seç)
(veya ) tuşuna basın.
ID run sırasında motor nominal hızın yaklaşık %50…%80'i arasında
0 rpm
HD
ID run
Motor öğesini seçin ve (Seç) (veya )
tuşuna basın.
Page 39

Devreye alma, G/Ç ile kontrol ve ID run 39
ID run öğesini seçin ve (sadece sürücü vektör
kontrol modundayken gösterilir) (Seç)
(veya ) tuşuna basın.
Yapmak istediğiniz Kimlik çalışması tipini seçin
ve (Seç) (veya ) tuşuna basın.
Tan ımlama çalıştırması uyarı mesajı üst tarafta
bir kaç saniye için gösterilir.
Kontrol paneli LED'i etkin bir uyarıyı göstermek
için yeşil yanıp sönmeye başlar.
Kontrol panelinde gösterilen motor limitlerini
kontrol edin. ID run sırasında başka limitlere
gerek duyuyorsanız onları buradan girebilirsiniz.
Orijinal limitler ID run'dan sonra geri yüklenir.
(İleri) tuşuna basın.
ID run işlemini başlatmak için başlat tuşuna
()
basın.
Genelde ABB, motor tanımlama çalıştırması
esnasında hiçbir kontrol paneli tuşuna
basılmamasını tavsiye eder. Ancak durdur tuşuna
( ) basarak ID run işlemini istediğiniz zaman
durdurabilirsiniz.
ID run sırasında ilerleme görünümü gösterilir.
ID run işlemi tamamlandıktan sonra, ID run
tamamlandı metni gösterilir. LED yanıp sönmeyi
durdurur.
ID run başarısız olursa, FF61 ID run hatası
gösterilir. Daha fazla bilgi için, bkz. Hata izleme
bölümü, sayfa 481.
Page 40

40 Devreye alma, G/Ç ile kontrol ve ID run
Lok/Uza
99.13 ID run talep edildi parametresiyle
Ön kontrol
UYARI!
çalışır. Motor ileri yönde dönecektir. ID run gerçekleştirmeden önce motoru
çalıştırmanın güvenli olduğundan emin olun.
Dönen motorda ID run gerçekleştirmeyin. ID run gerçekleştirmeden önce
motorun durduğundan mutlaka emin olun.
Tahrik edilen ekipmandan motoru ayırın.
Motor veri parametrelerinin değerlerinin motor plakasındakilere eşdeğer olduğunu kontrol
edin.
STO devresinin kapalı olduğunu kontrol edin.
Eğer ID run öncesinde parametre değerleri (grup 10 Standart DI, RO - grup 99 Motor
verileri) değiştirilmişse, yeni ayarların aşağıdaki koşullara uyup uymadığını kontrol edin:
30.11 Minimum hız <
30.12 Maksimum hız = motor nominal hızı (Normal ID run prosedürü motorun %100
hızda çalışmasını gerektirir.)
30.17 Maksimum akım > I
30.20 Maksimum moment 1 > 50% ya da 30.24 Maksimum moment 2 > 50%, 30.18 To rk
lim sçm parametresine göre kullanımda olan moment limiti ayarına bağlı olarak.
Aşağıdaki sinyalleri kontrol edin
çalışma izni (20.12 Çalışma izni 1 kaynağı parametresi) etkin
start izni (20.19 Start etkinleştirme komutu parametresi) etkin
döndürme izni (20.22 Döndürme izni parametresi) etkin.
Kontrol panelinin lokal kontrolde olduğundan emin olun (Lokal metni sol üst tarafta
görüntülenir). Lokal ve uzaktan kontrol arasında geçiş için tuşuna basın.
ID run sırasında motor nominal hızın yaklaşık %50…%80'i arasında
0rpm
HD
ID run
Ana görünümde (Menü) tuşuna basarak
Ana menüye gidin.
tuşuna basın.
Page 41

Devreye alma, G/Ç ile kontrol ve ID run 41
Parametreler öğesini seçin ve (Seç)
(veya ) tuşuna basın.
Tüm Liste öğesini seçin ve (Seç)
(veya ) tuşuna basın.
Sayfayı ve tuşlarıyla kaydırın, 99 Motor
verileri parametre grubunu seçip
(veya ) tuşuna basın.
(Seç)
Sayfayı ve tuşlarıyla kaydırın, 99.13 ID
run talep edildi (99.13 ID run talep edildi)
parametresini seçip
tuşuna basın.
ID run türünü seçin ve (Kaydet) (veya )
tuşuna basın.
(Seç) (veya )
Page 42

42 Devreye alma, G/Ç ile kontrol ve ID run
Kontrol paneli önceki görüntüye döner ve Motor
tanımlama çalıştırması uyarı mesajı üst kısımda
birkaç saniye için gösterilir.
Kontrol paneli LED'i etkin bir uyarıyı göstermek
için yeşil yanıp sönmeye başlar (AFF6).
Bir dakika boyunca herhangi bir tuşa
basılmadığında AFF6 uyarı görünümü
görüntülenir. (Arıza giderme) tuşuna
basmak ID run'ın sonraki başlatmada
yapılacağını bildiren metni görüntüler. Uyarı
görünümünü (Gizle) tuşuna basarak
gizleyebilirsiniz.
ID run işlemini başlatmak için başlat tuşuna
()
basın.
Genel olarak ABB, ID run esnasında hiçbir
kontrol paneli tuşuna basılmamasını tavsiye eder.
Ancak durdur tuşuna ( ) basarak ID run
işlemini istediğiniz zaman durdurabilirsiniz.
ID run sırasında ok üst kısımda döner.
ID run işlemi tamamlandıktan sonra, ID run
tamamlandı metni gösterilir. LED yanıp
sönmeyi durdurur.
ID run başarısız olursa, FF61 ID run hatası
gösterilir. Daha fazla bilgi için, bkz. Hata izleme
bölümü, sayfa 481.
Page 43

Kontrol paneli 43
3
1a
1b
Kontrol paneli
Bu bölümün içeriği
Bu bölüm gelişmiş kontrol panelini çıkarma ve tekrar takma için talimatlar içerir;
ekranı, tuşları ve tuş kısayollarını kısaca tanımlar. Daha fazla bilgi için,
bkz. ACx-AP-x assistant control panels user’s manual (3AUA0000085685 [İngilizce]).
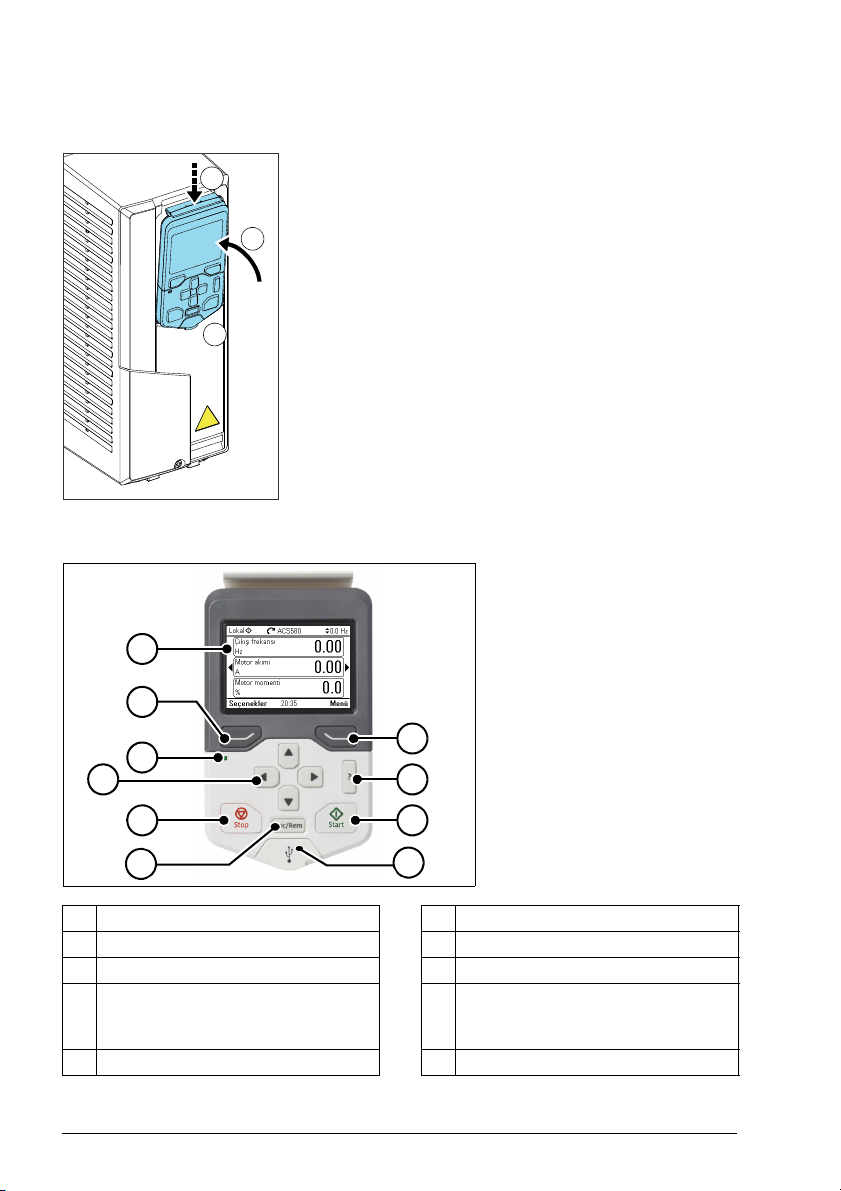
Kontrol panelini çıkarma ve tekrar takma
Kontrol panelini çıkarmak için, üst kısımdaki sabitleme klipsine (1a) bastırın ve üst
kenardan (1b) öne doğru çekin.
Page 44
44 Kontrol paneli
1a
1b
1c
4
3
6
7 8
5
10
2
9
1
Kontrol panelini tekrar takmak için, muhafazanın alt kısmını yerine yerleştirin (1a),
üstteki sabitleme klipsine bastırın (1b) ve kontrol panelini üst kenardan içeri itin (1c).
Kontrol panelinin yerleşimi
1 Kontrol paneli ekranının yerleşimi 6 Ok tuşları
2 Sol programlanabilir tuş 7 Stop (bkz. Start ve Stop)
3 Sağ programlanabilir tuş 8 Start (bkz. Start ve Stop)
4 Durum LED'i, sürücünün Donanım
kılavuzu'nda Bakım ve donanım teşhis
bölümü, LED'ler kısmına bakın.
5 Yar dım 10 USB konektörü
9 Lokal/Uzak (bkz. Lok/Uza)
Page 45

Kontrol paneli ekranının yerleşimi
1
51
2
4
6
7 78
13
Çoğu görünümde ekranda aşağıdaki elemanlar gösterilir:
Kontrol paneli 45
1. Kontrol konumu ve ilgili simgeler: Sürücünün nasıl kontrol edildiğini gösterir:
• Metin yok: Sürücü lokal kontroldedir, ancak başka bir cihaz tarafından kontrol
edilir. Üst bölmedeki simgeler hangi eylemlere izin verildiğini gösterir:
Metin/Simgeler Bu kontrol
• Lokal: Sürücü lokal kontroldedir ve bu kontrol panelinden kontrol edilir.
Üst bölmedeki simgeler hangi eylemlere izin verildiğini gösterir:
Metin/Simgeler Bu kontrol
Lokal
panelinden
başlatma
İzin verilmez İzin verilmez İzin verilmez
panelinden
başlatma
İzin verilir İzin verilir İzin verilir
Bu kontrol
panelinden
durdurma
Bu kontrol
panelinden
durdurma
Bu panelden
referans verme
Bu panelden
referans verme
Page 46

46 Kontrol paneli
• Uzak: Sürücü uzak kontroldedir, (ör. G/Ç veya haberleşme üzerinden kontrol
edilir). Üst bölmedeki simgeler kontrol panelinde hangi eylemlere izin
verildiğini gösterir:
Metin/Simgeler Bu kontrol
Uzak
Uzak
Uzak
Uzak
panelinden başlatma
İzin verilmez İzin verilmez İzin verilmez
İzin verilir İzin verilir İzin verilmez
İzin verilmez İzin verilir İzin verilir
İzin verilir İzin verilir İzin verilir
Bu kontrol panelinden
durdurma
Bu panelden
referans verme
2. Panel barası: Bu panele bağlı birden fazla sürücü olduğunu gösterir. Başka bir
sürücüye geçmek için, Seçenekler - Sürücü seç öğesine gidin
3. Durum simgesi: Sürücünün ve motorun durumunu gösterir. Okun yönü ileri yönü
(saat yönü) veya geri yönü (saatin tersi yön) gösterir.
Durum
simgesi
Animasyon Sürücü durumu
-
- Durduruldu, start yasaklandı.
Yan ıp sönüyor Durduruldu, start komutu verildi ancak start yasaklandı.
Yan ıp sönüyor Hatalı
Yan ıp sönüyor Çalışıyor, referansta, ancak referans değeri 0
Dönüyor Çalışıyor, referansta değil
Dönüyor Çalışıyor, referansta
Durduruldu
Bkz. kontrol panelinde Menü - Teşhis öğesi
-Ön ısıtma (motor ısıtması) aktif
- PID uyku modu aktif
4. Sürücü adı: Bir ad verilmişse, üst bölmede görüntülenir. Varsayılan olarak, bu ad
“ACS580” olur. Kontrol panelindeki adı Menü - Birincil ayarlar - Saat, bölge
ve ekran öğesini seçerek değiştirebilirsiniz (bkz. sayfa 68).
5. Referans değeri: Hız, frekans vb. bu birimle birlikte gösterilir. Birincil ayarlar
menüsünde (bkz. sayfa 52) veya Seçenekler menüsünde referans değerini
değiştirmek hakkında bilgi için (bkz. sayfa 77).
6. İçerik alanı: Bu görünümün gerçek içeriği bu alanda gösterilir. İçerik görünümden
görünüme değişiklik gösterir. 45. sayfadaki örnek görünüm, kontrol panelinin Ana
görünüm olarak adlandırılan ana görünümüdür.
Programlanabilir tuş seçimleri: Belirli bir içerikteki programlanabilir tuşların
7.
ve ) fonksiyonlarını gösterir.
(
8. Saat: Saat mevcut zamanı gösterir. Kontrol panelindeki saat ve saat biçimini
Menü - Birincil ayarlar - Saat, bölge ve ekran öğesini seçerek değiştirebilirsiniz
(bkz. sayfa 68).
Page 47

Kontrol paneli 47
Kontrol panelindeki ekran kontrastını ve arka ışık işlevselliğini Menü - Birincil
ayarlar - Saat, bölge ve ekran öğesini seçerek ayarlayabilirsiniz (bkz. sayfa 68).
Ana sayfa görünümleri
Yar dımcı panel için dört adet farklı önceden yapılandırılmış temel yapılandırılabilir
Ana sayfa görünümü vardır. Ana sayfa görünümü 1 varsayılan Ana sayfa
görünümüdür. Bunlar arasında ok tuşlarını ( ve ) kullanarak gezinebilirsiniz.
İlk önce alt satır Ana sayfa ekranının numarasını gösterir ve bir süre sonra bu saat
ile değiştirilir.
Ana sayfa görünümü 1 (varsayılan Ana sayfa
görünümü):
•Çıkış frekansı (Hz): 01.06 Çıkış frekansı
parametresi
• Motor akımı (A): 01.07 Motor akımı parametresi
• AI1 gerçek değeri (V veya mA): 12.11 AI1 gerçek
değeri parametresi
Ana sayfa görünümü 2:
• Motor akımı (A): 01.07 Motor akımı parametresi
•Çıkış gücü (kW): 01.14 Çıkış gücü parametresi
Ana sayfa görünümü 3:
• Son 60 dakika süresince grafik temsil olarak
gösterilen çıkış frekansı: 01.06 Çıkış frekansı
parametresi
Ana sayfa görünümü 4:
• Son 60 dakika için grafik olarak gösterilen motor
01.07 Motor akımı parametresi
akımı:
Page 48

48 Kontrol paneli
?
Ana sayfa ekranlarındaki parametreleri diğer parametrelerle değiştirebilir veya
seçilen parametreleri gösteren yeni Ana sayfa ekranları oluşturabilirsiniz.
• Düzenlemek istediğiniz Ana sayfa görünümüne gidin ve Seçenekler
programlanabilir tuşuna ( ) basın ve Ana sayfa görünümünü düzenle
(bkz. sayfa 77) öğesini seçin veya
• Ana menüye gidin ve Parametreler öğesini seçin. Parametreyi açın ve
Görünüme ekle programlanabilir tuşuna basın ve bir Ana sayfa ekranı seçin veya
yeni bir tane oluşturun.
Tuşlar
Kontrol panelinin tuşları aşağıda açıklanmıştır.
Sol programlanabilir tuş
Sol programlanabilir tuş ( ) genelde çıkmak ve iptal etmek için kullanılır.
Tuşun belirli bir durumdaki fonksiyonu ekranın sol alt köşesindeki programlanabilir
tuş seçimi ile gösterilir.
tuşuna basılı tutunca Ana görünüme dönene kadar sırayla her bir görünümden
çıkar. Bu fonksiyon özel ekranlarda çalışmaz.
Sağ programlanabilir tuş
Sağ programlanabilir tuş ( ) genelde seçmek, kabul etmek ve doğrulamakta
kullanılır. Sağ programlanabilir tuşun belirli bir durumdaki fonksiyonu ekranın sağ alt
köşesindeki programlanabilir tuş seçimi ile gösterilir.
Ok tuşları
Yukarı ve aşağı ok tuşları ( ve ) menülerde ve seçim listelerinde seçimleri
vurgulamakta, metin sayfalarında yukarı/aşağı kaydırmakta ve örneğin zamanı ayarlarken,
şifre girerken veya parametre değerini değiştirirken değerleri ayarlamakta kullanılır.
Sol ve sağ ok tuşları ( ve ) parametre düzenlerken imleci sağa ve sola hareket
ettirmede, asistanlarda ise ileri ve geri hareket etmede kullanılır. Menülerde ve
, sırasıyla
Yardım
Yard ım tuşu (
deyişle, sayfanın içeriği söz konusu menüyle veya görünümle ilgilidir.
Start ve Stop
Lokal kontrolde start tuşu ( ) ve stop tuşu ( ) sürücüyü sırasıyla start ve stop eder.
ve ile aynı şekilde işlev görür.
) bir yardım sayfası açar. Yardım sayfası içeriğe duyarlıdır; başka bir
Page 49

Kontrol paneli 49
Lok/Uza
Lok/Uza
Konum tuşu ( ) kontrolde kontrol paneli (Lokal) ile uzak bağlantılar (Uzak)
arasında geçiş yapmakta kullanılır. Sürücü çalıştığında Uzak durumundan Lokal
durumuna geçerken, sürücü aynı hızda çalışmayı sürdürür. Lokal durumundan Uzak
durumuna geçerken, uzak konumun durumu kullanılır.
Tuş kısayolları
Aşağıdaki tablo tuş kısayollarını ve bileşimlerini listeler. Tuşlara eşzamanlı basma,
artı (+) işaretiyle gösterilir.
Kısayol Bulunduğu yer Etkisi
+
+
+ ,
+
+ ,
+
veya Ana görünüm Referansı ayarlar.
+ parametre
+ bir parametre için
(basılı tutma)
herhangi bir
görünüm
herhangi bir
görünüm
herhangi bir
görünüm
düzenleme
görünümleri
seçenekler listesini
gösteren görünüm
herhangi bir
görünüm
Bir ekran görüntüsü kaydeder. Kontrol paneli belleğinde
en fazla on beş ekran görüntüsü kaydedilebilir.
Görüntüleri bilgisayara aktarmak için, gelişmiş kontrol
panelini bilgisayara bir USB kablosuyla bağlayın. Panel
kendini bir MTP (medya aktarım protokolü) olarak
bağlar. Resimler ekran görüntüleri klasöründe saklanır.
Daha fazla talimat için, bkz. ACx-AP-x assistant control
panels user’s manual (3AUA0000085685 [İngilizce]).
Arka ışık parlaklığını ayarlar.
Ekran kontrastını ayarlar.
Düzenlenebilir bir parametreyi varsayılan değerine
döndürür.
Seçenek dizin numaralarını göster/gizle.
Ana görünüm gösterilene kadar tuşa basılı
tutulduğunda Ana görünüme geri döner.
Page 50

50 Kontrol paneli
Page 51

Kontrol panelinde ayarlar, G/Ç ve teşhis 51
4
Kontrol panelinde ayarlar, G/Ç ve teşhis
Bu bölümün içeriği
Bu bölüm, kontrol panelindeki Birincil ayarlar, G/Ç, Teşhis, Sistem bilgisi,
Enerji verimliliği ve Yedekler menüleri hakkında ayrıntılı bilgiler verir.
Ana sayfa görünümden Birincil ayarlar, G/Ç, Teşhis, Sistem bilgisi, Enerji
verimliliği veya Yedekler menülerine gitmek için(bkz. bölüm Ana sayfa görünümleri,
sayfa 47), Ana menüye gitmek için önce Menü öğesini ve Ana menüde, gitmek
istediğiniz menüyü seçin.
Seçenekler programlanabilir tuşundan ( ) açılan Seçenekler menüsü hakkında
bilgi edinmek için, bkz. sayfa 77.
Page 52

52 Kontrol panelinde ayarlar, G/Ç ve teşhis
?
Birincil ayarlar menüsü
Ana görünümden Birincil ayarlar menüsüne gitmek için, Menü - Birincil ayarlar
öğesini seçin.
Temel ayarlar menüsü sürücüde kullanılan ek ayarları ayarlamanızı
ve tanımlamanıza izin verir.
İlk start asistanını kullanarak yönlendirmeli ayarları yaptıktan sonra, ABB en azından
aşağıdaki ilave ayarları yapmanızı önerir:
•Bir Makro seçin veya Başlatma, durdurma, referans değerlerini ayarlayın
• Rampalar
• Limitler
Birincil ayarlar menüsünden motor, PID, haberleşme, gelişmiş fonksiyonlar, saat,
bölge ve ekran ile ilgili ayarları da yapabilirsiniz. Ayrıca, hata ve olay günlüklerini,
kontrol paneli Ana ekran görüntüsünü, donanımla ilgili olmayan parametreleri,
haberleşme ayarlarını, motor verilerini ve ID run sonuçlarını, tüm parametreleri,
son kullanıcı metinlerini sıfırlamanın yanı
sıfırlayabilirsiniz.
Birincil ayarlar menüsünün yalnızca bazı ayarları değiştirmenize izin verdiğini
unutmayın: daha gelişmiş konfigürasyon parametreler aracılığıyla yapılır:
Menü - Parametreler öğesini seçin. Farklı parametreler hakkında daha fazla bilgi
için, bkz. bölüm Parametreler, sayfa 195.
Ayar menüsünde, sembolü birden fazla bağlı sinyali/parametreyi gösterir.
sembolü, parametreleri değiştirirken ayarın bir asistan sağladığını gösterir.
Temel ayarlar menüsü öğeleri hakkında daha fazla bilgi almak için, tuşuna
basarak yardım sayfasını açın.
sıra her şeyi fabrika varsayılanlarına
Page 53

Kontrol panelinde ayarlar, G/Ç ve teşhis 53
…
Aşağıdaki şekil Birincil ayarlar menüsünde nasıl gezinileceğini gösterir.
Page 54

54 Kontrol panelinde ayarlar, G/Ç ve teşhis
Aşağıdaki bölümlerde Temel ayarlar menüsünde bulunan farklı alt menülerin içeriği
hakkında ayrıntılı bilgiler verilmektedir.
Makro
Önceden tanımlanmış kablo bağlantısı konfigürasyonlarından birini seçerek sürücü
kontrolünü ve referans kaynağını hızla ayarlamak için Makro alt menüsünü kullanın.
Not:
Kullanılabilir makrolar hakkında ayrıntılı bilgi için, bkz. Kontrol makroları, (sayfa 79).
Makro kullanmak istemezseniz, Başlatma, durdurma ve referans ayarlarını manuel
olarak tanımlayın. Bir makro kullanmayı seçseniz bile, diğer ayarları ihtiyaçlarınıza
uyacak şekilde değiştirebileceğinizi unutmayın.
Motor
Nominal değerler, kontrol modu veya termik koruma gibi motorla ilgili ayarları
ayarlamak için Motor alt menüsünü kullanın.
Ayarların görünürlüğünün vektör veya skaler kontrol modu, kullanılan motor tipi ya da
seçilen start modu gibi başka seçimlere bağlı olduğunu unutmayın.
Üç yardımcı kullanılabilir: Kontrol modu, Nominal değer ve ID run (sadece vektör
kontrol modu için).
Page 55

Kontrol panelinde ayarlar, G/Ç ve teşhis 55
Aşağıdaki tablo Motor menüsündeki kullanılabilir ayar öğeleri hakkında ayrıntılı
bilgiler sağlar.
Menü öğesi Açıklama Karşılık gelen
Kontrol modu Skaler veya vektör kontrol modunun kullanılıp
kullanılmayacağını seçer.
Skaler kontrol modu hakkında daha fazla bilgi için,
bkz. bölüm Skaler motor kontrolü, sayfa 157.
Vektör kontrol modu hakkında daha fazla bilgi için,
bkz. bölüm Vektör motor kontrolü, sayfa 158.
Nominal değerler Motor plakasındaki motor nominal değerlerini girin.
Tahmin edilen termik
koruma
Bu alt menüdeki ayarların, belli bir sıcaklığın
üzerinde otomatik olarak bir hata veya uyarı
tetikleyerek motoru aşırı ısınmadan koruması
amaçlanmıştır.
Motorun termik tahmini koruması varsayılan olarak
açıktır. Korumanın düzgün çalışması için ABB
değerlerin kontrol edilmesini önerir.
Daha fazla bilgi için, bkz. bölüm Motor termik
koruması, sayfa 178.
Ölçülen termik
koruma
Bu alt menüdeki ayarların, sıcaklık ölçümü ile belli
bir sıcaklığın üzerinde otomatik olarak bir hata
veya uyarı tetikleyerek motoru aşırı ısınmadan
koruması amaçlanmıştır.
Daha fazla bilgi için, bkz. bölüm Motor termik
koruması, sayfa 178.
Start modu: Sürücünün motoru nasıl start edeceğini
(örn. ön mıknatıslamanın olup olmadığı) ayarlar.
Akı frenleme: Frenleme için ne kadar akım kullanılacağını,
(örn. motorun start etmeden önce nasıl
mıknatıslanacağını) ayarlar. Daha fazla bilgi için,
bkz. bölüm Akı frenleme, sayfa 161.
U/f oranı: Alan zayıflama noktasının altındaki gerilim/frekans
oranının formu.
IR kompanzasyonu: Sıfır hızda gerilimin ne kadar artırılacağını ayarlar.
Daha yüksek kırılma momenti için bunu artırır.
Daha fazla bilgi için, bkz. bölüm Skaler motor
kontrolü için IR kompanzasyonu, sayfa 158.
Ön ısıtma Ön ısıtmayı açar veya kapatır. Sürücü,
durdurulmuş bir motordaki yoğuşmayı sabit bir
akım besleyerek (motor nominal akımının yüzdesi)
önleyebilir. Yoğuşmayı önlemek için nemli veya
soğuk koşullarda kullanın.
Faz sırası: Motor yanlış yönde dönerse, yönü düzeltmek için
motor kablosundaki faz sırasını değiştirmek yerine
bu ayarı değiştirin.
parametre
99.04 Motor kontrol
modu
99.06 Motor nominal
akımı …
99.12 Nominal motor
momenti
35 Motor termik
koruması
35 Motor termik
koruması
21 Start/stop modu
97.05 Akı frenleme
97.20 U/F oranı
97.13 IR
kompanzasyonu
21.14 Ön ısıtma giriş
kaynağı
21.16 Ön ısıtma akımı.
99.16 Motor faz sırası
Page 56

56 Kontrol panelinde ayarlar, G/Ç ve teşhis
Başlatma, durdurma, referans
Start/stop komutlarını, referansı ve sabit hızlar veya çalıştırma izinleri gibi ilgili
özellikleri ayarlamak için Başlatma, durdurma, referans alt menüsünü kullanın.
Aşağıdaki tablo Başlatma, durdurma, referans menüsündeki kullanılabilir ayar
öğeleri hakkında ayrıntılı bilgiler sağlar.
Menü öğesi Açıklama Karşılık gelen
Referans kaynağı Uzaktan kontrol (EXT1) etkinken sürücünün
referansını nereden aldığını ayarlar.
Seçilen referansa
bağlı olarak
referansla ilgili
Girişe beslenen gerilim veya akım sürücünün
kullanabileceği bir değere (örn. referans)
dönüştürülür.
ayarlar (örn. AI
ölçeklendirme, AI2
ölçeklendirme, Motor
potansiyometresi
ayarları).
Start/stop/yön
kaynağı:
Uzaktan kontrol (EXT1) etkinken sürücünün start,
stop ve yön (opsiyonel) komutlarını nereden
aldığını ayarlar.
İkincil kontrol
konumu
İkincil uzaktan kontrol konumu EXT2 ayarları.
Bu ayarlar EXT2 için referans kaynağı, start, stop,
yön ve komut kaynaklarını içerir.
Var sayılan olarak, EXT2 Kapalı durumuna
ayarlanmıştır.
parametre
28.11 Ext1 frekans ref1
veya
22.11 Ext1 hız ref1
12.19 AI1 min'de
ölçeklendirilen AI1
12.20 AI1 maks'da
ölçeklendirilen AI1
20.01 Ext1 komutları
19.11 Ext1/Ext2 seçimi
28.15 Ext2 frekans ref1
veya
22.18 Ext2 hız ref1
12.17 AI1 min
12.18 AI1 maks
12.27 AI2 min
12.28 AI2 maks
20.06 Ext2 komutları
20.08 Ext2 in1 kaynağı
20.09 Ext2 in2 kaynağı
20.10 Ext2 in3 kaynağı
Page 57

Kontrol panelinde ayarlar, G/Ç ve teşhis 57
Menü öğesi Açıklama Karşılık gelen
parametre
Sabit hızlar /
Sabit frekanslar
Bu ayarlar, sabit bir değeri referans olarak
kullanmak içindir. Varsayılan olarak, bu Açık
durumuna ayarlanmıştır. Daha fazla bilgi için, bkz.
bölüm Sabit hızlar/frekanslar, sayfa 126.
Joglama Bu ayarlar, önceden tanımlanan hız ve
hızlanma/yavaşlama rampalarını kullanarak
motoru kısa süreli çalıştırmak için dijital bir girişi
kullanmanızı sağlar. Varsayılan olarak, joglama
devre dışıdır ve yalnızca Vektör kontrol modunda
kullanılabilir. Daha fazla bilgi için, bkz. bölüm
28.21 Sabit frekans
fonksiyonu veya
22.21 Sabit hız
fonksiyonu
28.26 Sabit frekans 1
28.27 Sabit frekans 2
28.28 Sabit frekans 3
22.26 Sabit hız 1
22.27 Sabit hız 2
22.28 Sabit hız 3
20.25 Joglama izni
22.42 Joglama 1 ref
22.43 Joglama 2 ref
23.20 Joglama hız
zamanı
23.21 Joglama yavşl
zamanı
Joglama, sayfa 166.
Çalıştırma izinleri Belli bir dijital giriş düşükken sürücünün
çalışmasını veya start etmesini önlemeye
yönelik ayarlar.
20.12 Çalışma izni 1
kaynağı
20.11 Çalışma izni stop
modu
20.19 Start etkinleş-
tirme komutu
20.22 Döndürme izni
21.05 Acil stop kaynağı
21.04 Acil stop modu
23.23 Acil stop süresi
Page 58

58 Kontrol panelinde ayarlar, G/Ç ve teşhis
Rampalar
Hızlanma ve yavaşlama ayarlarını yapmak için Rampalar alt menüsünü kullanın.
Not: Rampaları ayarlamak için, ayrıca 46.01 Hız ölçeklendirme parametresini
(hız kontrol modunda) veya 46.02 Frekans ölçeklendirme parametresini
(frekans kontrol modunda) belirtmelisiniz.
Aşağıdaki tablo Rampalar menüsündeki kullanılabilir ayar öğeleri hakkında ayrıntılı
bilgiler sağlar.
Menü öğesi Açıklama Karşılık gelen
Hızlanma süresi: Bu süre, varsayılan rampaları (grup 1) kullanırken
durma noktası ile “ölçeklendirme hızı” arasındaki
zamandır.
Yav aşlama süresi: Bu süre, varsayılan rampaları (grup 1) kullanırken
durma noktası ile “ölçeklendirme hızı” arasındaki
zamandır.
Rampalar için
frekans
ölçeklendirme:
Hızlanma rampası hızı için maksimum hız/frekans
değeri ve yavaşlama rampası hızı için ilk değerdir.
Her iki rampa ayarı için geçerlidir.
Şekil süresi: Varsayılan rampaların (grup 1) şeklini ayarlar.
Stop modu: Sürücünün motoru nasıl durduracağını ayarlar.
İki rampa grubu
kullanır
İkinci bir hızlanma/yavaşlama rampası grubu
kullanımını ayarlar. Seçili değilse, yalnızca bir
rampa grubu kullanılır.
Bu seçenek etkinleştirilmemişse, aşağıdaki
seçeneklerin kullanılamayacağını unutmayın.
Rampa grup 2'yi
etkinleştirme:
Rampa gruplarını değiştirmek için ya:
• dijital bir giriş kullanılır (düşük = grup 1; yüksek =
grup 2) ya da
• belli bir frekansın/hızın üzerinde grup 2'ye
otomatik olarak geçer.
Hızlanma süresi 2: Rampa grup 2'yi kullanırken durma noktası ile
“ölçeklendirme hızı” arasındaki zamanı ayarlar.
parametre
23.12 Hızlanma süresi 1
28.72 Frek hızlanma
süresi 1
23.13 Yav aşlama süresi
1
28.73 Frek yavaşlama
süresi 1
46.02 Frekans
ölçeklendirme
23.32 Şekil süresi 1
28.82 Şekil süresi 1
21.03 Stop modu
23.11 Rampa grubu
seçimi
28.71 Frek ramp grubu
seçimi
23.14 Hızlanma süresi 2
28.74 Frek hızlanma
süresi 2
Page 59

Kontrol panelinde ayarlar, G/Ç ve teşhis 59
Menü öğesi Açıklama Karşılık gelen
parametre
Yav aşlama süresi 2: Rampa grup 2'yi kullanırken durma noktası ile
“ölçeklendirme hızı” arasındaki zamanı ayarlar.
Şekil süresi 2: Grup 2'deki rampaların şeklini ayarlar.
23.15 Yava şlama süresi
2
28.75 Frek yavaşlama
süresi 2
23.33 Şekil süresi 2
28.83 Şekil süresi 2
Limitler
İzin verilen çalışma aralığını ayarlamak için Limitler alt menüsünü kullanın.
Bu fonksiyonun amacı motoru, bağlı olan donanımı ve mekanizmaları korumaktır.
Sürücü, hangi referans değerini alırsa alsın bu limitler içinde kalır.
Not:
Rampaları ayarlamak için, ayrıca 46.01 Hız ölçeklendirme parametresini
(hız kontrol modunda) veya 46.02 Frekans ölçeklendirme parametresini (frekans kontrol
modunda) belirtmelisiniz; bu limit parametrelerinin rampaya etkisi yoktur.
Aşağıdaki tablo Limitler menüsündeki kullanılabilir ayar öğeleri hakkında ayrıntılı
bilgiler sağlar.
Menü öğesi Açıklama Karşılık gelen
Minimum frekans Minimum çalışma frekansını ayarlar. Yalnızca
skaler kontrolü etkiler.
Maksimum frekans Maksimum çalışma frekansını ayarlar. Yalnızca
skaler kontrolü etkiler.
Minimum hızMinimum çalışma hızını ayarlar. Yalnızca vektör
kontrolü etkiler.
Maksimum hız Maksimum çalışma hızını ayarlar. Yalnızca vektör
kontrolü etkiler.
Minimum moment Minimum çalışma momentini ayarlar. Yalnızca
vektör kontrolü etkiler.
Maksimum moment Maksimum çalışma momentini ayarlar. Yalnızca
vektör kontrolü etkiler.
Maksimum akım Maksimum çıkış akımını ayarlar.
parametre
30.13 Minimum frekans
30.14 Maksimum
frekans
30.11 Minimum hız
30.12 Maksimum hız
30.19 Minimum moment
1
30.20 Maksimum
moment 1
30.17 Maksimum akım
Page 60

60 Kontrol panelinde ayarlar, G/Ç ve teşhis
PID
PID alt menüsü, sürücünün röle çıkışları üzerinden birden fazla pompayı veya fanı
kontrol etmek için proses PID kontrol cihazı ayarları ve gerçek değerleri içerir.
Aşağıdaki tablo PID menüsündeki kullanılabilir ayar öğeleri hakkında ayrıntılı bilgiler
sağlar.
Menü öğesi Açıklama Karşılık gelen
PID şunları kontrol
eder:
PID çıkışının ne için kullanılacağını ayarlar:
• Seçilmedi: PID kullanılmıyor.
• Frekans referansı (veya motor kontrol moduna
bağlı olarak Hız referansı): Uzaktan kontrol
(EXT1) etkinken PID çıkışını frekans (hız)
referansı olarak kullanır.
PID çıkışı:Proses PID çıkışını görüntüler veya aralığını
ayarlar.
Birim: PID müşteri birimi. Birim olarak gösterilen metni
ayar noktası, geri bildirim ve sapma için ayarlar.
Sapma: Proses PID sapmasını görüntüler veya tersine
çevirir.
Ayar noktası: Proses PID ayar noktasını (örn. hedef proses
değeri) görüntüler veya yapılandırır.
Harici bir ayar noktası kaynağı yerine
(veya ek olarak) sabit ayar noktası değeri de
kullanabilirsiniz. Sabit bir ayar noktası etkin
olduğunda, normal ayar noktasını geçersiz kılar.
Geri bildirim: Proses PID geri bildirimini (örn. ölçülen değer)
görüntüler veya yapılandırır.
parametre
40.07 Proses PID
çalışma modu
40.01 Proses PID çıkışı
gerçek
40.36 Ayar 1 çıkışı min
40.37 Ayar 1 çıkışı maks
40.04 Proses PID
sapması gerçek
40.31 Ayar 1 sapma
çevirme
40.03 Proses PID ayar
noktası gerçek
40.16 Ayar 1 ayar
noktası 1 kaynağı
40.02 Proses PID
geribildirimi gerçek
40.08 Ayar 1 geribildirim
1 kaynağı
40.11 Ayar 1 geribildirim
filtre süresi
Page 61

Kontrol panelinde ayarlar, G/Ç ve teşhis 61
Menü öğesi Açıklama Karşılık gelen
parametre
Ayarlama Ayarlama alt menüsü kazanç, integral süresi
ve türev süresi için ayarları içerir.
1. Motoru start etmenin ve gerçek prosesi
çalıştırmanın güvenli olduğundan emin olun.
2. Uzaktan kontrolde motoru start edin.
3. Ayar noktasını ufak bir miktar değiştirin.
40.32 Ayar 1 kazanç
40.33 Ayar 1 integral
süresi
40.34 Ayar 1 türev
süresi
40.35 Ayar 1 türev filtre
süresi
4. Geri bildirimin nasıl tepki verdiğini izleyin.
5. Kazancı/integrali/türevi ayarlayın.
6. Geri bildirim istenen şekilde tepki verene dek 3-5
adımlarını tekrarlayın.
Uyku fonksiyonu Uyku fonksiyonu, düşük talepte motoru durdurarak
enerji tasarrufu sağlamakta kullanılabilir.
Var sayılan olarak, uyku fonksiyonu devre dışıdır.
Etkinleştirildiğinde, talep düşük olduğu zaman
motor otomatik olarak durur ve sapma çok
büyüdüğünde tekrar çalışmaya başlar. Bu, motoru
düşük hızlarda döndürmek faydasız olduğunda
enerji tasarrufu sağlar.
Bkz. bölüm Proses PID kontrolü için uyku ve ek
süre fonksiyonları, sayfa 133.
40.43 Ayar 1 uyku
düzeyi
40.44 Ayar 1 uyku
gecikmesi
40.45 Ayar 1 uyku
uzatma zamanı
40.46 Ayar 1 uyku
uzatma adımı
40.47 Ayar 1 uyanma
sapması
40.48 Ayar 1 uyanma
gecikmesi
Page 62

62 Kontrol panelinde ayarlar, G/Ç ve teşhis
Pompa ve fan kontrolü
Pompa ve fan kontrolü alt menüsü Pompa ve fan kontrol lojiği ayarlarını içerir.
Pompa ve fan kontrolü sadece harici kontrol konumu EXT2'de desteklenir.
Aşağıdaki tablo Pompa ve fan kontrolü menüsündeki kullanılabilir ayar öğeleri
hakkında ayrıntılı bilgiler içerir.
Menü öğesi Açıklama Karşılık gelen
PFC modu: Bkz. bölüm Pompa ve fan kontrolü (PFC),
sayfa 143.
PFC veya SPFC kontrolünü seçer.
PFC G/Ç yapılandır PFC/SPFC G/Ç yapılandırır.
• Motor sayısı
•RO’lar
• İç kilitler
• G/Ç yapılandırmasını kontrol edin
(Bkz G/Ç menüsü sayfa 71.)
PFC kontrolünü
PFC/SPFC kontrolünü yapılandırır.
yapılandır
Otomatik
Otomatik Değiştirmeyi yapılandırır
Değiştirmeyi
yapılandır
parametre
76.21 Çoklu pompa
yapılandırması
76.25 Motor sayısı
76.27 İzin verilen maks motor
sayısı
76.59 PFC kontaktör
gecikmesi
10.24 RO1 kaynağı
10.27 RO2 kaynağı
10.30 RO3 kaynağı
76.81 PFC 1 kilidi
76.82 PFC 2 kilidi
76.83 PFC 3 kilidi
76.84 PFC 4 kilidi
76.85 PFC 5 kilidi
76.86 PFC 6 kilidi
76.30 Start noktası 1
76.31 Start noktası 2
76.32 Start noktası 3
76.33 Start noktası 4
76.34 Start noktası 5
76.41 Stop noktası 1
76.42 Stop noktası 2
76.43 Stop noktası 3
76.44 Stop noktası 4
76.45 Stop noktası 5
76.55 Start gecikmesi
76.56 Durma gecikme
76.70 PFC otomatik değişim
76.71 PFC otomatik değişim
aralığı
76.72 Maks yaşlanma
dengesizliği
76.73 Oto değişim seviyesi.
Page 63

Kontrol panelinde ayarlar, G/Ç ve teşhis 63
Haberleşme
Sürücüyü haberleşme ile kullanmak için Haberleşme alt menüsündeki ayarları
kullanın:
• CANopen
• ControlNet
• DeviceNet
• Ethernet POWERLINK
•EtherCAT
• Ethernet/IP
•RS-485
• Modbus (RTU veya TCP)
• PROFIBUS DP
• PROFINET IO
Haberleşme ile ilgili tüm ayarları parametreler (parametre grupları 50 Fieldbus
adaptörü (FBA), 51 FBA A ayarları, 52 FBA A veri girişi, 53 FBA A veri çıkışı,
58 Dahili fieldbus) aracılığıyla da konfigüre edebilirsiniz, ancak Haberleşme alt
menüsünün amacı protokol konfigürasyonlarını kolaylaştırmaktır.
Yal nızca Modbus RTU'nun dahili olduğunu ve diğer haberleşme modüllerinin isteğe
bağlı adaptörler olduklarını unutmayın. İsteğe bağlı modüller için, gereken
protokollerde aşağıdaki adaptörler gereklidir:
• CANopen: FCAN-01
• ControlNet: FCNA-01
• DeviceNetTM: FDNA-01
• Ethernet POWERLINK: FEPL-02
• EtherCAT: FECA-01
• Ethernet/IP
• Modbus/TCP: FMBT-21, FENA-21
• RS-485: FSCA-01
• PROFIBUS DP: FPBA-01
• PROFINET IO: FENA-21
TM
TM
TM
: FENA-21
Page 64

64 Kontrol panelinde ayarlar, G/Ç ve teşhis
Aşağıdaki tablo Haberleşme menüsündeki kullanılabilir ayar öğeleri hakkında
ayrıntılı bilgiler sağlar. Bazı öğelerin yalnızca haberleşme etkinleştirildiğinde aktif
olduğunu unutmayın.
Menü öğesi Açıklama Karşılık gelen
Haberleşme seçimi Sürücüyü bir haberleşme ile kullanmak istiyorsanız
bunu seçin.
İletişim ayarı Sürücü ile haberleşme master'ı arasındaki iletişimi
ayarlamak için bu ayarları tanımlayın ve sonra
Haberleşme modülüne ayarları uygula öğesini
seçin.
Sürücü kontrol ayarı Bir haberleşme master'ın bu sürücüyü nasıl kontrol
edebileceğini ve haberleşme iletişimi başarısız
olursa sürücünün nasıl tepki vereceğini ayarlar.
parametre
51.01 FBA A türü
58.01 Protokol
etkinleştir
51 FBA A ayarları
51.01 FBA A türü
51.02 FBA A Par2
51.27 FBA A par yenile
51.31 D2FBA A iletişim
durumu
50.13 FBA A kontrol
word'ü
50.16 FBA A durum
word'ü
58 Dahili fieldbus
58.01 Protokol
etkinleştir
58.03 Nod adresi
58.04 Haberleşme hızı
58.05 Parite
58.25 Kontrol profili
20.01 Ext1 komutları
19.11 Ext1/Ext2 seçimi
22.11 Ext1 hız ref1
28.11 Ext1 frekans ref1
22.41 Güvenli hız ref
28.41 Güvenli frekans
ref
50.03 FBA A iletişim
kaybı zmn aşımı
46.01 Hız ölçeklendirme
46.02 Frekans
ölçeklendirme
23.12 Hızlanma süresi 1
23.13
Yav aşlama süresi
1
28.72 Frek hızlanma
süresi 1
28.73 Frek yavaşlama
süresi 1
51.27 FBA A par yenile
58.14 İletişim kaybı
eylemi
58.15 İletişim kaybı
modu
58.16 İletişim kaybı
süresi
Page 65

Kontrol panelinde ayarlar, G/Ç ve teşhis 65
Menü öğesi Açıklama Karşılık gelen
parametre
Master'dan alınan
veri
Sürücünün haberleşme modülünün, haberleşme
master'ından (PLC) ne almayı beklediğini ayarlar.
Bu ayarları değiştirdikten sonra Haberleşme
modülüne ayarları uygula öğesini seçin.
Master'a veri gönder Sürücünün haberleşme modülünün, haberleşme
master'a (PLC) ne gönderdiğini ayarlar. Bu ayarları
değiştirdikten sonra Haberleşme modülüne
ayarları uygula öğesini seçin.
Haberleşme
Değiştirilen ayarları haberleşme modülüne uygular.
modülüne ayarları
50.13 FBA A kontrol
word'ü
53 FBA A veri çıkışı
51.27 FBA A par yenile
58.18 EFB kontrol
word'ü.
03.09 EFB referansı 1
50.16 FBA A durum
word'ü
52 FBA A veri girişi
51.27 FBA A par yenile
58.19 EFB durum
word'ü
51.27 FBA A par yenile
58.06 İletişim kontrolü
uygula
Gelişmiş fonksiyonlar
Gelişmiş fonksiyonlar alt menüsü hataları G/Ç üzerinden tetikleme veya resetleme,
sinyal denetimi, sürücüyü zamana bağlı fonksiyonlarla kullanma ya da çeşitli tam ayar
grupları arasında geçiş yapma gibi gelişmiş fonksiyonlar için ayarları içerir.
Aşağıdaki tablo Gelişmiş fonksiyonlar menüsündeki kullanılabilir ayar öğeleri
hakkında ayrıntılı bilgi sağlar.
Menü öğesi Açıklama Karşılık gelen
Harici olaylar Dijital giriş aracılığıyla tetikleyebileceğiniz özel
hataları veya uyarıları tanımlamanızı sağlar.
Bu mesajların metinleri özelleştirilebilir.
Ek hata sıfırlama Etkin bir hatayı G/Ç aracılığıyla sıfırlayabilirsiniz:
seçili girişteki yükselen pals sıfırlama anlamına gelir.
Hataları manuel olarak resetle seçilmemiş olsa
bile bir hata haberleşmeden resetlenebilir.
parametre
31.01 Harici olay 1
kaynağı
31.02 Harici olay 1 türü
31.03 Harici olay 2
kaynağı
31.04 Harici olay 2 türü
31.05 Harici olay 3
kaynağı
31.06 Harici olay 3 türü
31.11 Hata reset seçimi
Page 66

66 Kontrol panelinde ayarlar, G/Ç ve teşhis
Menü öğesi Açıklama Karşılık gelen
parametre
Tuş takımından
sıfırla ve...
Hataları manuel olarak nereden resetlemek
istediğinizi tanımlayın. Bu alt menünün yalnızca
31.11 Hata reset seçimi
hataları manuel olarak resetlemeyi seçtiyseniz
etkin olduğunu unutmayın.
Hataları otomatik
sıfırla
Hataları otomatik olarak resetler. Daha fazla bilgi
için, bkz. bölüm Otomatik hata resetlemeleri,
sayfa 186.
Denetim Denetleme için üç sinyal seçebilirsiniz. Sinyal,
önceden tanımlanan limitlerin dışındaysa bir hata
veya uyarı oluşturulur. Tam ayarlar için, bkz.
Grup 32 Denetim, sayfa 320.
Sıkışma koruması Sürücü bir motor sıkışmasını tespit edip otomatik
olarak hata verebilir veya bir uyarı mesajı
gösterebilir.
Sıkışma durumu:
•Akım yüksek olduğunda (motorun nominal
akımının belli bir yüzdesinin üzerinde) ve
•çıkış frekansı (skaler kontrol) veya motor hızı
31.12 Otomatik
resetleme seçimi
31.14 Hata sayısı
31.15 Toplam deneme
zamanı
31.16 Gecikme zamanı
32.01 Denetim durumu
32.05 Denetim 1
fonksiyonu
32.06 Denetim 1 eylemi
32.07 Denetim 1 sinyali
32.09 Denetim 1 düşük
32.10 Denetim 1 yüksek
32.11 Denetim 1
histerezis
…
32.25 Denetim 3
fonksiyonu
32.26 Denetim 3 eylemi
32.27 Denetim 3 sinyali
32.29 Denetim 3 düşük
32.30 Denetim 3 yüksek
32.31 Denetim 3
histerezis
31.24 Sıkışma
fonksiyonu
31.25 Sıkışma akım
limiti
31.26 Sıkışma hız limiti
31.27 Sıkışma frekans
limiti
31.28 Sıkışma zamanı
(vektör kontrolü) belli bir limitin altındaysa ve
•yukarıdaki koşullar belli bir minimum süre için
doğru ise tespit edilir.
Page 67

Kontrol panelinde ayarlar, G/Ç ve teşhis 67
Menü öğesi Açıklama Karşılık gelen
parametre
Zamanlamalı
fonksiyonlar
Kullanıcı ayar
grupları
Sürücüyü zamanlamalı fonksiyonlarla kullanmayı
sağlar. Tam ayarlar için, bkz. grup 34 Zaman
fonksiyonu, sayfa 328.
Bu alt menü, kolay değiştirme için birden fazla ayar
grubu kaydetmenizi sağlar. Kullanıcı ayar grupları
hakkında daha fazla bilgi için, bkz. Kullanıcı
parametre grupları sayfa 191.
34.100 Zamanlamalı
fonksiyon 1
34.101 Zamanlamalı
fonksiyon 2
34.102 Zamanlamalı
fonksiyon 3
34.11 Zamanlayıcı 1
konfigürasyonu
34.12 Zamanlayıcı 1
start zamanı
34.13 Zamanlayıcı 1
süresi …
34.44 Zamanlayıcı 12
konfigürasyonu
34.45 Zamanlayıcı 12
start zamanı
34.46 Zamanlayıcı 12
süresi
34.111 Yükseltme
zamanı etkinleştirme
kaynağı
34.112 Yükseltme
zamanı süresi
96.11 Kullanıcı grubu
kaydı/yükleme
96.10 Kullanıcı grubu
durumu
96.12 Kullanıcı grubu
G/Ç modu in1
96.13 Kullanıcı grubu
G/Ç modu in2
Page 68

68 Kontrol panelinde ayarlar, G/Ç ve teşhis
Saat, bölge, ekran
Saat, bölge ve ekran alt menüsü dil, saat ile tarih, ekran (parlaklık gibi) ayarlarını
ve bilgilerin ekranda nasıl görüntülendiğini değiştirmek için ayarları içerir.
Aşağıdaki tablo Başlatma, durdurma, referans menüsündeki kullanılabilir ayar
öğeleri hakkında ayrıntılı bilgiler sağlar.
Menü öğesi Açıklama Karşılık gelen
Dil Kontrol paneli ekranında kullanılan dili değiştirir.
Dil sürücüden yüklendiği için bunun biraz zaman
alacağını unutmayın.
Tarih ve saat Tarih ile saati ve formatlarını ayarlayın.
Birimler
Sürücü adı:
Hata görünümünde
iletişim bilgileri
Ekran ayarları Kontrol paneli ekranının parlaklığını, kontrastını
Liste olarak göster Aşağıdakilerin nümerik kimliklerini gizle veya
Engelleme
penceresini göster
Güç, sıcaklık ve moment için kullanılan birimleri seçin.
Bu ayarda tanımlanan sürücü adı, sürücüyü
kullanırken ekranın üstündeki durum çubuğunda
gösterilir. Kontrol paneline birden fazla sürücü
bağlanmışsa, sürücü adları her bir sürücüyü
tanımlamayı kolaylaştırır. Bu sürücü için
oluşturduğunuz herhangi bir yedeklemeyi de tanımlar.
Herhangi bir hata sırasında gösterilen sabit bir
metni (örneğin, bir hata durumunda kiminle irtibata
geçileceği) tanımlayın.
Bir hata oluşursa, bu bilgi kontrol paneli ekranında
(hataya özgü bilgilere ek olarak) görünür.
ve ekran enerji tasarrufu gecikmesini ayarlayın
veya siyah ile beyazı ters çevirin.
göster:
• parametreler ve gruplar
• seçenek liste öğeleri
•bitler
• Seçenekler > Sürücü seç > Engelleme açılır
penceresini göster
Engellemeler (örneğin, sürücüyü başlatmayı
denediğinizde ve önlendiğinde) hakkındaki bilgileri
gösteren açılır pencereleri etkinleştirir veya devre
dışı bırakır.
parametre
96.01 Dil
Page 69

Kontrol panelinde ayarlar, G/Ç ve teşhis 69
Varsayılanlara sıfırla
Varsayılanlara resetle alt menüsü, parametreleri ve diğer ayarları resetlemenizi
sağlar.
Menü öğesi Açıklama Karşılık gelen
Arızayı ve olay
günlüklerini sıfırla
Ana sayfa
görünümünü sıfırla
Donanım olmayan
parametreleri sıfırla
Sürücünün hata ve olay günlüklerindeki tüm
olayları siler.
Kullanımdaki kontrol makrosu tarafından tanımlanan
varsayılan parametrelerin değerlerini göstermek için
A
na sayfa görünüm düzenini geri yükler.
Aşağıdakiler hariç, tüm düzenlenebilir değerleri
varsayılan değerlere geri yükler:
• motor verileri ve ID run sonuçları
• G/Ç genişletme modülü ayarları
•özelleştirilmiş uyarılarla hatalar (harici hatalar
ve değiştirilmiş hatalar) ve sürücü adı gibi son
kullanıcı metinleri
• kontrol paneli/PC iletişimi ayarları
• haberleşme adaptörü ayarları
• kontrol makrosu seçimi ve parametre
varsayılanları
• parametre 95.01 Besleme gerilimi
• 95.20 HW opsiyonları word'ü 1 Ve 95.21 HW
opsiyonları word'ü 2 parametreleriyle uygulanan
farklılaştırılmış varsayılanlar
• 96.100…96.102 kullanıc
ı kilidi yapılandırma
parametreleri.
Tüm haberleşme
ayarlarını sıfırla
Haberleşme ve iletişim ile ilgili tüm ayarları
varsayılan değerlerine geri yükler.
Not: Haberleşme, kontrol paneli ve PC aracı
haberleşmesi geri yükleme sırasında kesintiye
uğradı.
Motor verilerini ve ID
run sonuçlarını sıfırla
Tüm motor nominal değerlerini ve motor ID run
sonuçlarını varsayılan değerlere geri yükler.
parametre
96.51 Sil arızası ve olay
günlüğü
96.06 Parametre geri
yükleme, Ana sayfa
görünümünü sıfırla
seçimi
96.06 Parametre geri
yükleme, Varsayılanları
geri yükle seçimi
96.06 Parametre geri
yükleme, Tüm
haberleşme ayarlarını
sıfırla seçimi
96.06 Parametre geri
yükleme, Motor verilerini
sıfırla seçimi
Page 70

70 Kontrol panelinde ayarlar, G/Ç ve teşhis
Menü öğesi Açıklama Karşılık gelen
parametre
Tüm parametreleri
sıfırla
Aşağıdakiler hariç, tüm düzenlenebilir değerleri
varsayılan değerlere geri yükler:
96.06 Parametre geri
yükleme, Hepsini sil
seçimi
•özelleştirilmiş uyarılarla hatalar (harici hatalar
ve değiştirilmiş hatalar) ve sürücü adı gibi son
kullanıcı metinleri
• kontrol paneli/bilgisayar iletişimi
•ayarları kontrol makrosu seçimi ve parametre
varsayılanları
• 95.01 Besleme gerilimi parametresi
• 95.20 HW opsiyonları word'ü 1 ve 95.21 HW
opsiyonları word'ü 2
•kullanıcı kilidi yapılandırma parametreleri
96.100…96.102
• 49 Panel port iletişimi grubu parametreleri.
Son kullanıcı
metinlerini sıfırla
Sürücü adı, iletişim bilgileri, özelleştirilmiş hata ve
uyarı metinleri, PID birimi ve para birimi de dahil
tüm son kullanıcı metinleri için varsayılan değerleri
96.06 Parametre geri
yükleme, Son kullanıcı
metinlerini sıfırla seçimi
geri yükler.
Tümünü fabrika
varsayılanlarına
sıfırla
Ayarları ve tüm düzenlenebilir parametreleri ilk
fabrika değerlerine döndürür, şunlar hariçtir
• 95.20 HW opsiyonları word'ü 1 ve 95.21 HW
96.06 Parametre geri
yükleme, Fabrika
varsayılanlarına sıfırla
seçimi
opsiyonları word'ü 2
Page 71

Kontrol panelinde ayarlar, G/Ç ve teşhis 71
G/Ç menüsü
Ana görünümden G/Ç menüsüne gitmek için, Menü - G/Ç öğesini seçin.
Gerçek G/Ç kablo bağlantılarının kontrol programındaki G/Ç kullanımına uyduğundan
emin olmak için, G/Ç menüsünü kullanın. Aşağıdaki soruları yanıtlar:
• Her bir giriş ne için kullanılıyor?
•Her bir çıkışın anlamı nedir?
G/Ç menüsünde, her bir satır aşağıdaki bilgileri sağlar:
• Terminal adı ve numarası
• Elektriksel durum
• Sürücünün mantıksal anlamı
Her bir satır ayrıca, menü öğesi hakkında daha fazla bilgi sağlayan ve G/Ç
bağlantılarında değişiklik yapmanıza izin veren bir alt menü sağlar.
Aşağıdaki tabloda G/Ç menüsünde bulunan farklı alt menülerin içeriği hakkında
ayrıntılı bilgiler sağlanır.
Menü öğesi Açıklama
DI1 Bu alt menü DI1'i giriş olarak kullanan fonksiyonları listeler.
DI2 Bu alt menü DI2'yi giriş olarak kullanan fonksiyonları listeler.
DI3 Bu alt menü DI3'ü giriş olarak kullanan fonksiyonları listeler.
DI4 Bu alt menü DI4'ü giriş olarak kullanan fonksiyonları listeler.
DI5 Bu alt menü DI5 veya FI'yı giriş olarak kullanan fonksiyonları listeler.
Konektör, dijital giriş ya da frekans girişi olarak kullanılabilir.
DI6 Bu alt menü DI6'yı giriş olarak kullanan fonksiyonları listeler. Konektör,
dijital giriş ya da termistör girişi olarak kullanılabilir.
AI1 Bu alt menü AI1'i giriş olarak kullanan fonksiyonları listeler.
AI2 Bu alt menü AI2'yi giriş olarak kullanan fonksiyonları listeler.
RO1 Bu alt menü röle çıkışı 1'e hangi bilgilerin gittiğini listeler.
RO2 Bu alt menü röle çıkışı 2'ye hangi bilgilerin gittiğini listeler.
RO3 Bu alt menü röle çıkışı 3'e hangi bilgilerin gittiğini listeler.
AO1 Bu alt menü AO1'e hangi bilgilerin gittiğini listeler.
AO2 Bu alt menü AO2'ye hangi bilgilerin gittiğini listeler.
Page 72

72 Kontrol panelinde ayarlar, G/Ç ve teşhis
Teşhis menüsü
Ana görünümden Teşhis menüsüne gitmek için, Menü - Teşhis öğesini seçin.
Teşhis menüsü size hatalar ve uyarılar gibi teşhis bilgileri sağlar ve olası sorunları
çözmenize yardımcı olur. Sürücü ayarının doğru çalıştığından emin olmak için
menüyü kullanın.
Aşağıdaki tabloda Teşhis menüsünde bulunan farklı görünümlerin içeriği hakkında
ayrıntılı bilgiler sağlanır.
Menü öğesi Açıklama
Start, stop, referans
özeti
Limit durumu Bu görünüm, mevcut durumda çalışmayı etkileyen herhangi bir limiti
Etkin hatalar Bu görünüm, mevcut durumda etkin olan hataları gösterir ve bu hataların
Etkin uyarılar Bu görünüm, mevcut durumda etkin olan uyarıları gösterir ve bu
Etkin engellemeler Bu görünüm, beş adede kadar eş zamanlı etkin start engellemesini
Hata ve olay günlüğü Bu görünüm, sürücüde meydana gelen hataları, uyarıları ve diğer olayları
Haberleşme Bu görünüm, durum bilgileriyle sorun giderme için haberleşmeye
Yük profili Bu görünüm, yük dağıtımına (yani, her bir yük seviyesinde sürücünün
Bu görünüm, sürücünün mevcut durumda start ile stop komutlarını ve
referansı nereden aldığını gösterir. Görünüm gerçek zamanlı güncellenir.
Sürücü beklendiği gibi start ve stop etmiyorsa veya istenmeyen hızda
çalışıyorsa, kontrolün nereden geldiğini bulmak için bu görünümü kullanın.
açıklar.
Sürücü istenmeyen hızda çalışıyorsa, sınırlamalardan herhangi birinin
etkin olup olmadığını bulmak için bu görünümü kullanın.
nasıl düzeltilip resetleneceği hakkında bilgi sağlar.
uyarıların nasıl düzeltileceği hakkında bilgi sağlar.
ve bunların nasıl düzeltileceğini gösterir.
listeler.
Saklanan her bir hata için, hata zamanında saklanan hata kodunu,
zamanı ve 05.80... 05.88 parametrelerinin (gerçek sinyaller ve durum
word’leri) değerlerini görmek için Ayrıntılar öğesine basın.
gönderilen ve haberleşmeden alınan verileri sağlar.
çalışma zamanının ne kadarının harcanacağına) ilişkin bilgileri ve tepe
yük seviyelerini sağlar.
Page 73

Kontrol panelinde ayarlar, G/Ç ve teşhis 73
Sistem bilgileri menüsü
Ana görünümden Sistem bilgileri menüsüne gitmek için, Menü - Sistem bilgileri
öğesini seçin.
Sistem bilgileri menüsü sürücü ve kontrol paneli hakkında bilgileri görüntüler. Sorun
olması durumunda, sürücünün ABB servisi için QR kodu üretmesini isteyebilirsiniz.
Böylece size daha iyi yardımcı olabiliriz.
Aşağıdaki tabloda Sistem bilgileri menüsündeki farklı görünümler gösterilmektedir.
Menü öğesi Açıklama Karşılık gelen
Sürücü Sürücü hakkında aşağıdaki bilgiler görüntülenir:
parametre
07.05 Yazılım sürümü
07.07 Yükleme paketi
sürümü
Kontrol paneli Kontrol paneli hakkında aşağıdaki bilgiler
görüntülenir:
Page 74

74 Kontrol panelinde ayarlar, G/Ç ve teşhis
Menü öğesi Açıklama Karşılık gelen
QR kodu
Seçenek yuvası x adı Yuvadaki seçenek hakkında aşağıdaki bilgiyi
Sürücü, sürücünün tanımlanma verilerini, son olaylar
hakkında bilgileri ve durum ile sayaç parametrelerinin
değerlerini içeren bir QR kodu (veya bir dizi QR kodu)
üretir. QR kodu, daha sonra analiz için QR kodunu
ABB'ye gönderen ABB servis uygulaması bulunan
mobil bir cihazla okunabilir.
gösterir:
parametre
Page 75

Kontrol panelinde ayarlar, G/Ç ve teşhis 75
Enerji verimliliği menüsü
Ana görünümden Enerji verimliliği menüsüne gitmek için, Menü - Enerji verimliliği
öğesini seçin.
Enerji verimliliği menüsü enerji tasarrufu ve enerji tüketimi gibi enerji verimliliği
bilgileri sağlar. Ayrıca enerji hesaplama ayarlarını yapılandırabilirsiniz.
Aşağıdaki tabloda Enerji verimliliği menüsünde gösterilen enerji verimliliği
değerlerinin yanı sıra yapılandırılabilir enerji hesaplama ayarları listelenir.
Menü öğesi Açıklama Karşılık gelen
Enerji tasarrufu Doğrudan motor bağlantısına kıyasla kWh
cinsinden tasarruf edilen enerji.
Para tasarrufu Doğrudan motor bağlantısına kıyasla karşılık gelen
para tasarrufu.
Yapılandırma alt menüsünde kullanmak istediğiniz
para birimini tanımlayabilirsiniz.
Tasarruf edilen
toplam CO2
Geçerli saat kWh Geçerli saat enerji tüketimi Bu, bir takvim saatinin
Önceki saat kWh Önceki saat enerji tüketimi 01.51 Önceki saat kWh
Geçerli gün kWh Mevcut gün enerji tüketimi. Bu, bir takvim gününün
Önceki gün kWh Önceki gün enerji tüketimi. 01.53 Önceki gün kWh
Yapılandırma Bu alt menüde enerji hesaplama ayarlarını
Doğrudan motor bağlantısına kıyasla, metrik ton
cinsinden CO2 emisyonlarında azalma.
değil, sürücünün çalıştığı son 60 dakikanın
(sürekli olmak zorunda değil) enerjisidir.
değeri, değerleri 60 dakika boyunca birikince
burada saklanır.
değil, sürücünün çalıştığı son 24 saatin (sürekli
olmak zorunda değil) enerjisidir.
değeri, değerleri 24 saat boyunca birikince burada
saklanır.
yapılandırabilirsiniz.
parametre
45.04 Enerji tasarrufu
45.07 Parasal tasarruf
45.10 Tasarruf edilen
toplam CO2
01.50 Geçerli saat kWh
01.51 Önceki saat kWh
01.52 Geçerli gün kWh
01.53 Önceki gün kWh
Page 76

76 Kontrol panelinde ayarlar, G/Ç ve teşhis
Menü öğesi Açıklama Karşılık gelen
parametre
Enerji optimize edici Enerji optimizasyon fonksiyonunu
etkinleştirir/devre dışı bırakır. Fonksiyon, sürücü
45.11 Enerji optimize
edici
nominal yükün altında çalışırken toplam enerji
tüketimini ve motor sesi düzeyini azaltacak şekilde
motor akısını optimize eder. Toplam verim (motor
ve sürücü), yük momentine ve hızına bağlı olarak
%1…20 arasında arttırılabilir.
Enerji tarifesi 1 Enerji tarifesi 1'i (enerji fiyatı/kWh) tanımlar. 45.14
45.12 Enerji tarifesi 1
Tarife seçimi parametresinin ayarına bağlı olarak,
parasal tasarruf hesaplanırken referans olarak bu
değer ya da 45.13 Enerji tarifesi 2 kullanılır.
Enerji tarifesi 1 Enerji tarifesi 2'i (enerji fiyatı/kWh) tanımlar.
Tarife seçimi Kullanılacak olan önceden tanımlı enerji tarifesini
45.13 Enerji tarifesi 2
45.14 Tarife seçimi
seçer (ya da bunu seçen bir kaynak tanımlar).
CO2 dönüştürme
faktörü
Tasarruf edilen enerjinin CO2 emisyonlarına
dönüştürülmesi için bir faktör tanımlar (kg/kWh
45.18 CO2 dönüştürme
faktörü
veya tn/MWh).
Güç karşılaştırma Motorun doğrudan hat üzerine bağlandığında
45.19 Güç karşılaştırma
ve uygulama çalışırken absorbe ettiği gerçek güç.
Bu değer enerji tasarrufları hesaplanırken referans
olarak kullanılır.
Enerji hesaplamaları
resetleme
45.04 Enerji tasarrufu…45.10 Tasarruf edilen
toplam CO2 gibi tasarruf sayacı parametrelerini
45.21 Enerji
hesaplamaları reset
sıfırlar.
Para birimi Enerji hesaplamalarında kullanmak istediğiniz para
birimini tanımlar.
Page 77

Kontrol panelinde ayarlar, G/Ç ve teşhis 77
Yedekler menüsü
Ana görünümden Yedekler menüsüne gitmek için, Menü - Yedekler öğesini seçin.
Yedekler ve geri yüklemeler için, bkz. bölüm Yedekleme ve geri yükleme, sayfa 190.
Seçenekler menüsü
Seçenekler menüsüne gitmek için herhangi bir Ana sayfa ekranındaki Seçenekler
programlanabilir tuşuna ( ) basın. Aşağıdaki tabloda Seçenekler menüsünde
bulunan farklı seçenekler hakkında bilgiler bulunmaktadır.
Menü öğesi Açıklama
Referans Panel ekranlarının sağ üst köşesinde görünen referansı değiştirebilirsiniz.
Yön değişimi Etkin referans işaretini pozitif ve negatif arasında değiştirir.
Mutlak referans değeri değiştirilmez.
Sürücü seç Panel barasına bağlı sürücüleri gösteren sürücü listesinden, izlemek
veya kontrol etmek istediğiniz bir sürücüyü seçebilirsiniz. Ayrıca sürücü
listesini de silebilirsiniz.
Page 78

78 Kontrol panelinde ayarlar, G/Ç ve teşhis
Menü öğesi Açıklama
Ana sayfayı düzenle Ana sayfa ekranlarını düzenleyebilirsiniz. Ok tuşlarını ( ve )
kullanarak düzenlemek istediğiniz Ana sayfa görünümüne gelin. Ekran
yuvasını, yani mevcut parametrelerden hangilerini düzenlemek
istediğinizi seçin (Ana sayfa görünümleri bir ila üç parametre gösterir).
Parametreyi ve parametreyi nasıl görüntülemek istediğinizi düzenleyin.
Etkin hatalar Etkin hataları görüntüler.
Etkin uyarılar Etkin uyarıları görüntüler.
Etkin engellemeler Etkin engellemeleri görüntüler.
Page 79

Kontrol makroları 79
5
Kontrol makroları
Bu bölümün içeriği
Bu bölümde uygulamaların kullanım amaçları, çalışması ve varsayılan kontrol
bağlantıları açıklanır. Bölümün sonunda, tüm makrolar için aynı olmayan parametre
varsayılan değerlerini gösteren tablolar bulunur.
Genel
Kontrol makroları, belli bir kontrol konfigürasyonu için uygun olan varsayılan
parametre değerleri grubudur. Kullanıcı, sürücüyü çalıştırırken, genellikle en uygun
kontrol makrosunu başlangıç noktası olarak seçer ve ardından ayarları amacına
uyarlamak için gerekli değişiklikleri yapar. Bu şekilde, geleneksel sürücü
programlama yöntemine kıyasla genellikle çok daha az sayıda kullanıcı
düzenlemesine ihtiyaç duyulur.
Kontrol makroları Birincil ayarlar menüsünde Menü - Birincil ayarlar - Makro
öğesiyle veya 96.04 Makro seçimi parametresiyle (sayfa 418) seçilebilir.
Not: İki sürümü bulunan ABB standardı hariç
tüm makrolar skaler kontrol için yapılmıştır.
Vektör kontrolü, kullanmak istiyorsanız
aşağıdakileri yapın:
• ABB standart (vektör) makrosunu seçin.
• Motorun nominal değerlerini kontrol edin:
Menü - Birincil ayarlar - Motor - Nominal
değerler.
• Motor kontrol modunu vektöre deği
Menü - Birincil ayarlar - Motor - Kontrol modu ve talimatları uygulayın
(sağdaki şekle bakın).
ştirin:
Page 80

80 Kontrol makroları
maks.
500 ohm
1…10 kohm
XI Referans gerilimi ve analog girişlerle çıkışlar
1 SCR Sinyal kablosu blendajı (ekran)
2 AI1 Harici frekans referansı 1: 0…10 V
6)
3 AGND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi 10 V DC
5 AI2 Yapılandırılmadı
6)
6 AGND Analog giriş devresi ortak ucu
7 AO1 Çıkış frekansı: 0…20 mA
6)
8 AO2 Motor akımı: 0…20 mA
9 AGND Analog çıkış devresi ortak ucu
X2 ve X3 Yrd. gerilim çıkışı ve programlanabilir dijital girişler
10 +24V Yardımcı gerilim çıkışı +24 V DC, maks. 250 mA
11 DGND Yardımcı gerilim çıkışı ortak ucu
12 DCOM Tümü için dijital giriş ortak ucu
13 DI1 Stop (0) / Start (1)
14 DI2 İleri (0) / Geri (1)
15 DI3 Sabit frekans seçimi
1)
16 DI4 Sabit frekans seçimi
1)
17 DI5
Rampa ayarı 1 (0) / Rampa ayarı 2 (1)
2)
18 DI6 Yapılandırılmadı
X6, X7, X8 Röle çıkışları
19 RO1C
Çalışmaya hazır
250 V AC / 30 V DC
2 A
20 RO1A
21 RO1B
22 RO2C
Çalışıyor
250 V AC / 30 V DC
2 A
23 RO2A
24 RO2B
25 RO3C
Hata (-1)
250 V AC / 30 V DC
2 A
26 RO3A
27 RO3B
X5 Dahili fieldbus
29 B+
Dahili Modbus RTU (EIA-485). Bkz. Dahili
haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü bölümü, sayfa 511.
30 A-
31 DGND
S4 TERM Seri veri bağlantısı sonlandırma anahtarı
S5 BIAS Seri veri bağlantısı bias dirençleri anahtarı
X4 Güvenli moment kapatma
34 OUT1
Güvenli moment kapatma. Fabrika bağlantısı.
Sürücünün başlaması için her iki devre
kapatılmalıdır. Sürücünün Donanım el kitabı'nda
Güvenli moment kapatma bölümüne bakın.
35 OUT2
36 SGND
37 IN1
38 IN2
X10 24 V AC/DC
40
24 V AC/DC+ in
sadece R6…R11: Harici 24 V AC/DC girişi, ana beslemenin
bağlantısı kesildiğinde kontrol ünitesine güç vermek için.
41
24 V AC/DC- in
4)
4)
4)
3)
Bir sonraki sayfadaki
notlara bakın.
5)
ABB standart makrosu
Bu, hazır değer makrodur. Üç sabit hızla genel amaçlı, 2 kablolu bir G/Ç konfigürasyonu sağlar.
Bir sinyal motoru başlatıp durdurmak için, başka bir sinyal de yönü seçmek için kullanılır. ABB
standart makrosu skaler kontrol kullanır, vektör kontrol için ABB standart (vektör) makrosunu
kullanın (sayfa 82).
ABB standart makrosu için varsayılan kontrol bağlantıları
Page 81

Kontrol makroları 81
DI3 DI4 Çalışma/Parametre
0 0 AI1 üzerinden frekans ayarı
1028.26 Sabit frekans 1
0128.27 Sabit frekans 2
1128.28 Sabit frekans 3
DI5 Rampa ayarı Parametreler
01 28.72 Frek hızlanma süresi 1
28.73 Frek yavaşlama süresi 1
12 28.74 Frek hızlanma süresi 2
28.75 Frek yavaşlama süresi 2
Terminal boyutları:
R1…R5: 0,2…2,5 mm
0,14…1,5 mm
R6…R11: 0,14…2,5 mm
2
(+24V, DGND, DCOM, B+, A-)
2
(DI, AI, AO, AGND, RO, STO terminalleri)
2
(tüm terminaller)
Sıkma momentleri: 0,5…0,6 N·m (0.4 lbf·ft)
Notlar:
1)
Bkz. Menü - Birincil ayarlar - Başlatma, durdurma, referans - Sabit frekanslar veya
28 Frekans referans zinciri parametre grubu.
2)
Bkz. Menü - Birincil ayarlar - Rampalar veya 28 Frekans referans zinciri parametre grubu.
3)
Kablonun dış blendajını kontrol kablolarının topraklama rafındaki topraklama kelepçesinin
altında 360 derece topraklayın.
4)
Fabrikada jumper'lara bağlanmıştır.
5)
Sadece R6…R11 kasaları harici 24 V AC/DC girişi için 40 ve 41 terminallerine sahiptir.
6)
AI1 ve AI2 girişleri ile AO1 çıkışı için gerilimi veya akımı sırasıyla 12.15, 12.25 ve 13.15
parametreleriyle seçin.
Giriş sinyalleri
• Analog frekans referansı (AI1)
• Start/stop seçimi (DI1)
• Yön seçimi (DI2)
• Sabit frekans seçimi (DI3, DI4)
• Rampa grubu (1 / 2) seçimi (DI5)
Çıkış sinyalleri
• Analog çıkış AO1: Çıkış frekansı
• Analog çıkış AO2: Motor akımı
• Röle çıkışı 1: Çalışmaya hazır
• Röle çıkışı 2: Çalışıyor
• Röle çıkışı 3: Hata (-1)
Page 82

82 Kontrol makroları
maks.
500 ohm
XI Referans gerilimi ve analog girişlerle çıkışlar
1 SCR Sinyal kablosu blendajı (ekran)
2 AI1 Harici hız referansı 1: 0…10 V
1,6)
3 AGND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi 10 V DC
5 AI2 Yapılandırılmadı
6)
6 AGND Analog giriş devresi ortak ucu
7 AO1 Çıkış frekansı: 0…20 mA
6)
8 AO2 Motor akımı: 0…20 mA
9 AGND Analog çıkış devresi ortak ucu
X2 ve X3 Yrd. gerilim çıkışı ve programlanabilir dijital girişler
10 +24V Yardımcı gerilim çıkışı +24 V DC, maks. 250 mA
11 DGND Yardımcı gerilim çıkışı ortak ucu
12 DCOM Tümü için dijital giriş ortak ucu
13 DI1 Stop (0) / Start (1)
14 DI2 İleri (0) / Geri (1)
15 DI3 Hız seçimi
1)
16 DI4 Hız seçimi
1)
17 DI5
Rampa ayarı 1 (0) / Rampa ayarı 2 (1)
2)
18 DI6 Yapılandırılmadı
X6, X7, X8 Röle çıkışları
19 RO1C
Çalışmaya hazır
250 V AC / 30 V DC
2 A
20 RO1A
21 RO1B
22 RO2C
Çalışıyor
250 V AC / 30 V DC
2 A
23 RO2A
24 RO2B
25 RO3C
Hata (-1)
250 V AC / 30 V DC
2 A
26 RO3A
27 RO3B
X5 Dahili fieldbus
29 B+
Dahili Modbus RTU (EIA-485). Bkz. Dahili
haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü bölümü, sayfa 511.
30 A-
31 DGND
S4 TERM Seri veri bağlantısı sonlandırma anahtarı
S5 BIAS Seri veri bağlantısı bias dirençleri anahtarı
X4 Güvenli moment kapatma
34 OUT1
Güvenli moment kapatma. Fabrika bağlantısı.
Sürücünün başlaması için her iki devre
kapatılmalıdır. Sürücünün Donanım el kitabı'nda
Güvenli moment kapatma bölümüne bakın.
35 OUT2
36 SGND
37 IN1
38 IN2
X10 24 V AC/DC
40
24 V AC/DC+ in
sadece R6…R11: Harici 24 V AC/DC girişi, ana beslemenin
bağlantısı kesildiğinde kontrol ünitesine güç vermek için.
41
24 V AC/DC- in
4)
4)
4)
3)
Bir sonraki sayfadaki
notlara bakın.
5)
ABB standart (vektör) makrosu
ABB standart (vektör) makrosu vektör kontrolü kullanır; bunun dışında ABB standart makrosuyla
benzerdir, üç sabit hıza sahip olan genel amaçlı 2 kablolu G/Ç yapılandırması sağlar. Bir sinyal
motoru başlatıp durdurmak için, başka bir sinyal de yönü seçmek için kullanılır. Makroyu
etkinleştirmek için, Birincil ayarlar menüsünde seçin veya 96.04 Makro seçimi parametresini
ABB standart (vektör) olarak ayarlayın.
ABB standart (vektör) makrosu için varsayılan kontrol bağlantıları
Page 83

Kontrol makroları 83
DI3 DI4 Çalışma/Parametre
0 0 AI1 üzerinden hız ayarı
1022.26 Sabit hız 1
0122.27 Sabit hız 2
1122.28 Sabit hız 3
DI5 Rampa ayarı Parametreler
01 23.12 Hızlanma süresi 1
23.13 Yav aşlama süresi 1
12 23.14 Hızlanma süresi 2
23.15 Yav aşlama süresi 2
Terminal boyutları:
R1…R5: 0,2…2,5 mm
0,14…1,5 mm
R6…R11: 0,14…2,5 mm
2
(+24V, DGND, DCOM, B+, A-)
2
(DI, AI, AO, AGND, RO, STO terminalleri)
2
(tüm terminaller)
Sıkma momentleri: 0,5…0,6 N·m (0.4 lbf·ft)
Notlar:
1)
Bkz. Menü - Birincil ayarlar - Başlatma, durdurma, referans - Sabit hızlar veya 22 Hız
referansı seçimi parametre grubu.
2)
Bkz. Menü - Birincil ayarlar - Rampalar veya 23 Hız referansı rampası parametre grubu.
3)
Kablonun dış blendajını kontrol kablolarının topraklama rafındaki topraklama kelepçesinin
altında 360 derece topraklayın.
4)
Fabrikada jumper'larla bağlanmıştır.
5)
Sadece R6…R11 kasaları harici 24 V AC/DC girişi için 40 ve 41 terminallerine sahiptir.
6)
AI1 ve AI2 girişleri ile AO1 çıkışı için gerilimi veya akımı sırasıyla 12.15, 12.25 ve 13.15
parametreleriyle seçin.
Giriş sinyalleri
• Analog hız referansı (AI1)
• Start/stop seçimi (DI1)
• Yön seçimi (DI2)
• Sabit hız seçimi (DI3, DI4)
• Rampa grubu (1 / 2) seçimi (DI5)
Çıkış sinyalleri
• Analog çıkış AO1: Çıkış frekansı
• Analog çıkış AO2: Motor akımı
• Röle çıkışı 1: Çalışmaya hazır
• Röle çıkışı 2: Çalışıyor
• Röle çıkışı 3: Hata (-1)
Page 84

84 Kontrol makroları
maks.
500 ohm
XI Referans gerilimi ve analog girişlerle çıkışlar
1 SCR Sinyal kablosu blendajı (ekran)
2 AI1 Harici hız/frekans referansı 1: 0…10 V
1,6)
3 AGND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi 10 V DC
5 AI2 Yapılandırılmadı6)
6 AGND Analog giriş devresi ortak ucu
7 AO1 Çıkış frekansı: 0…20 mA
6)
8 AO2 Motor akımı: 0…20 mA
9 AGND Analog çıkış devresi ortak ucu
X2 ve X3 Yrd. gerilim çıkışı ve programlanabilir dijital girişler
10 +24V Yardımcı gerilim çıkışı +24 V DC, maks. 250 mA
11 DGND Yardımcı gerilim çıkışı ortak ucu
12 DCOM Tümü için dijital giriş ortak ucu
13 DI1 Start (pulse )
14 DI2 Durdur (darbe )
15 DI3 İleri (0) / Geri (1)
16 DI4 Sabit hız/frekans seçimi
2)
17 DI5 Sabit hız/frekans seçimi
2)
18 DI6 Yapılandırılmadı
X6, X7, X8 Röle çıkışları
19 RO1C
Çalışmaya hazır
250 V AC / 30 V DC
2 A
20 RO1A
21 RO1B
22 RO2C
Çalışıyor
250 V AC / 30 V DC
2 A
23 RO2A
24 RO2B
25 RO3C
Hata (-1)
250 V AC / 30 V DC
2 A
26 RO3A
27 RO3B
X5 Dahili fieldbus
29 B+
Dahili Modbus RTU (EIA-485). Bkz. Dahili
haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü bölümü, sayfa 511.
30 A-
31 DGND
S4 TERM Seri veri bağlantısı sonlandırma anahtarı
S5 BIAS Seri veri bağlantısı bias dirençleri anahtarı
X4 Güvenli moment kapatma
34 OUT1
Güvenli moment kapatma. Fabrika bağlantısı.
Sürücünün başlaması için her iki devre
kapatılmalıdır. Sürücünün Donanım el kitabı'nda
Güvenli moment kapatma bölümüne bakın.
35 OUT2
36 SGND
37 IN1
38 IN2
X10 24 V AC/DC
40
24 V AC/DC+ in
sadece R6…R11: Harici 24 V AC/DC girişi, ana beslemenin
bağlantısı kesildiğinde kontrol ünitesine güç vermek için.
41
24 V AC/DC- in
4)
4)
4)
3)
Bir sonraki sayfadaki
notlara bakın.
5)
3 kablolu makro
Bu makro, sürücü geçici butonlar ile kontrol edildiğinde kullanılır. Üç sabit hız sağlar. Makroyu
etkinleştirmek için, Birincil ayarlar menüsünde seçin veya 96.04 Makro seçimi parametresini
3 kablo olarak ayarlayın.
3 kablolu makro için varsayılan kontrol bağlantıları
Page 85

Kontrol makroları 85
DI4 DI5 Çalışma/Parametre
Skaler kontrol (varsayılan) Vektör kontrolü
0 0 AI1 üzerinden frekans ayarı AI1 üzerinden hız ayarı
1028.26 Sabit frekans 1 22.26 Sabit hız 1
0128.27 Sabit frekans 2 22.27 Sabit hız 2
1128.28 Sabit frekans 3 22.28 Sabit hız 3
Terminal boyutları:
R1…R5: 0,2…2,5 mm
0,14…1,5 mm
R6…R11: 0,14…2,5 mm
2
(+24V, DGND, DCOM, B+, A-)
2
(DI, AI, AO, AGND, RO, STO terminalleri)
2
(tüm terminaller)
Sıkma momentleri: 0,5…0,6 N·m (0.4 lbf·ft)
Notlar:
1)
Vektör kontrolünün seçilmiş olması halinde hız referansı olarak AI1 kullanılır.
2)
Skaler kontrolde (varsayılan): Bkz. Menü - Birincil ayarlar - Başlatma, durdurma,
referans - Sabit frekanslar veya 28 Frekans referans zinciri parametre grubu.
Vektör kontrolde
: Bkz. Menü - Birincil ayarlar - Başlatma, durdurma, referans -
Sabit hızlar veya 22 Hız referansı seçimi parametre grubu.
3)
Kablonun dış blendajını kontrol kablolarının topraklama rafındaki topraklama kelepçesinin
altında 360 derece topraklayın.
4)
Fabrikada jumper'lara bağlanmıştır.
5)
Sadece R6…R11 kasaları harici 24 V AC/DC girişi için 40 ve 41 terminallerine sahiptir.
6)
AI1 ve AI2 girişleri ile AO1 çıkışı için gerilimi veya akımı sırasıyla 12.15, 12.25 ve 13.15
parametreleriyle seçin.
Giriş sinyalleri
• Analog hız/frekans referansı (AI1)
• Start, pulse (DI1)
• Stop, pulse (DI2)
• Yön seçimi (DI3)
• Sabit hız/frekans seçimi (DI4, DI5)
Çıkış sinyalleri
• Analog çıkış AO1: Çıkış frekansı
• Analog çıkış AO2: Motor akımı
• Röle çıkışı 1: Çalışmaya hazır
• Röle çıkışı 2: Çalışıyor
• Röle çıkışı 3: Hata (-1)
Page 86

86 Kontrol makroları
maks.
500 ohm
XI Referans gerilimi ve analog girişlerle çıkışlar
1 SCR Sinyal kablosu blendajı (ekran)
2 AI1 Harici hız/frekans referansı 1: 0…10 V
6)
3 AGND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi 10 V DC
5 AI2 Yapılandırılmadı6)
6 AGND Analog giriş devresi ortak ucu
7 AO1 Çıkış frekansı: 0…20 mA
6)
8 AO2 Motor akımı: 0…20 mA
9 AGND Analog çıkış devresi ortak ucu
X2 ve X3 Yrd. gerilim çıkışı ve programlanabilir dijital girişler
10 +24V Yardımcı gerilim çıkışı +24 V DC, maks. 250 mA
11 DGND Yardımcı gerilim çıkışı ortak ucu
12 DCOM Tümü için dijital giriş ortak ucu
13 DI1 İleri start; DI1 = DI2 ise: Stop
14 DI2 Geri start
15 DI3 Sabit hız/frekans seçimi
1)
16 DI4 Sabit hız/frekans seçimi
1)
17 DI5 Rampa ayarı 1 (0) / Rampa ayarı 2 (1)
2)
18 DI6 Çalışma izni; 0 ise, sürücü durur
X6, X7, X8 Röle çıkışları
19 RO1C
Çalışmaya hazır
250 V AC / 30 V DC
2 A
20 RO1A
21 RO1B
22 RO2C
Çalışıyor
250 V AC / 30 V DC
2 A
23 RO2A
24 RO2B
25 RO3C
Hata (-1)
250 V AC / 30 V DC
2 A
26 RO3A
27 RO3B
X5 Dahili fieldbus
29 B+
Dahili Modbus RTU (EIA-485). Bkz. Dahili
haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü bölümü, sayfa 511.
30 A-
31 DGND
S4 TERM Seri veri bağlantısı sonlandırma anahtarı
S5 BIAS Seri veri bağlantısı bias dirençleri anahtarı
X4 Güvenli moment kapatma
34 OUT1
Güvenli moment kapatma. Fabrika bağlantısı.
Sürücünün başlaması için her iki devre
kapatılmalıdır. Sürücünün Donanım el kitabı'nda
Güvenli moment kapatma bölümüne bakın.
35 OUT2
36 SGND
37 IN1
38 IN2
X10 24 V AC/DC
40
24 V AC/DC+ in
sadece R6…R11: Harici 24 V AC/DC girişi, ana beslemenin
bağlantısı kesildiğinde kontrol ünitesine güç vermek için.
41
24 V AC/DC- in
4)
4)
4)
3)
Bir sonraki sayfadaki
notlara bakın.
5)
Alternatif makro
Bu makro, bir sinyalin motoru ileri yönde ve bir başka sinyalin motoru geri yönde başlattığı bir
G/Ç konfigürasyonu sağlar. Makroyu etkinleştirmek için, Birincil ayarlar menüsünde seçin veya
96.04 Makro seçimi parametresini Alternatif olarak ayarlayın.
Alternatif makro için varsayılan kontrol bağlantıları
Page 87

Kontrol makroları 87
DI3 DI4 Çalışma/Parametre
Skaler kontrol (varsayılan) Vektör kontrolü
0 0 AI1 üzerinden frekans ayarı AI1 üzerinden hız ayarı
1028.26 Sabit frekans 1 22.26 Sabit hız 1
0128.27 Sabit frekans 2 22.27 Sabit hız 2
1128.28 Sabit frekans 3 22.28 Sabit hız 3
DI5 Rampa
ayarı
Parametreler
Skaler kontrol (varsayılan) Vektör kontrolü
01 28.72 Frek hızlanma süresi 1 23.12 Hızlanma süresi 1
28.73 Frek yavaşlama süresi 1 23.13 Yavaşlama süresi 1
12 28.74 Frek hızlanma süresi 2 23.14 Hızlanma süresi 2
28.75 Frek yavaşlama süresi 2 23.15 Yavaşlama süresi 2
Terminal boyutları:
R1…R5: 0,2…2,5 mm
0,14…1,5 mm
R6…R11: 0,14…2,5 mm
2
(+24V, DGND, DCOM, B+, A-)
2
(DI, AI, AO, AGND, RO, STO terminalleri)
2
(tüm terminaller)
Sıkma momentleri: 0,5…0,6 N·m (0.4 lbf·ft)
Notlar:
1)
Skaler kontrolde (varsayılan): Bkz. Menü - Birincil ayarlar - Başlatma, durdurma,
referans - Sabit frekanslar veya 28 Frekans referans zinciri parametre grubu.
Vektör kontrolde
: Bkz. Menü - Birincil ayarlar - Başlatma, durdurma, referans -
Sabit hızlar veya 22 Hız referansı seçimi parametre grubu.
2)
Skaler kontrolde (varsayılan): Bkz. Menü - Birincil ayarlar - Rampalar veya 28 Frekans
referans zinciri parametre grubu.
Vektör kontrolde
: Bkz. Menü - Birincil ayarlar - Rampalar veya 23 Hız referansı rampası
parametre grubu.
3)
Kablonun dış blendajını kontrol kablolarının topraklama rafındaki topraklama kelepçesinin
altında 360 derece topraklayın.
4)
Fabrikada jumper'lara bağlanmıştır.
5)
Sadece R6…R11 kasaları harici 24 V AC/DC girişi için 40 ve 41 terminallerine sahiptir.
6)
AI1 ve AI2 girişleri ile AO1 çıkışı için gerilimi veya akımı sırasıyla 12.15, 12.25 ve 13.15
parametreleriyle seçin.
Giriş sinyalleri
• Analog hız/frekans referansı (AI1)
• Motoru ileri yönde start et (DI1)
• Motoru geri yönde start et (DI2)
• Sabit hız/frekans seçimi (DI3, DI4)
• Rampa grubu (1 / 2) seçimi (DI5)
• Çalışma izni (DI6)
Çıkış sinyalleri
• Analog çıkış AO1: Çıkış frekansı
• Analog çıkış AO2: Motor akımı
• Röle çıkışı 1: Çalışmaya hazır
• Röle çıkışı 2: Çalışıyor
• Röle çıkışı 3: Hata (-1)
Page 88

88 Kontrol makroları
maks.
500 ohm
XI Referans gerilimi ve analog girişlerle çıkışlar
1 SCR Sinyal kablosu blendajı (ekran)
2 AI1 Yapılandırılmadı6)
3 AGND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi 10 V DC
5 AI2 Yapılandırılmadı6)
6 AGND Analog giriş devresi ortak ucu
7 AO1 Çıkış frekansı: 0…20 mA
6)
8 AO2 Motor akımı: 0…20 mA
9 AGND Analog çıkış devresi ortak ucu
X2 ve X3 Yrd. gerilim çıkışı ve programlanabilir dijital girişler
10 +24V Yardımcı gerilim çıkışı +24 V DC, maks. 250 mA
11 DGND Yardımcı gerilim çıkışı ortak ucu
12 DCOM Tümü için dijital giriş ortak ucu
13 DI1 Stop (0) / Start (1)
14 DI2 İleri (0) / Geri (1)
15 DI3 Referans yukarı
1)
16 DI4 Referans aşağı
1)
17 DI5 Sabit frekans/hız 1
2)
18 DI6 Çalışma izni; 0 ise, sürücü durur
X6, X7, X8 Röle çıkışları
19 RO1C
Çalışmaya hazır
250 V AC / 30 V DC
2 A
20 RO1A
21 RO1B
22 RO2C
Çalışıyor
250 V AC / 30 V DC
2 A
23 RO2A
24 RO2B
25 RO3C
Hata (-1)
250 V AC / 30 V DC
2 A
26 RO3A
27 RO3B
X5 Dahili fieldbus
29 B+
Dahili Modbus RTU (EIA-485). Bkz. Dahili
haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü bölümü, sayfa 511.
30 A-
31 DGND
S4 TERM Seri veri bağlantısı sonlandırma anahtarı
S5 BIAS Seri veri bağlantısı bias dirençleri anahtarı
X4 Güvenli moment kapatma
34 OUT1
Güvenli moment kapatma. Fabrika bağlantısı.
Sürücünün başlaması için her iki devre
kapatılmalıdır. Sürücünün Donanım el kitabı'nda
Güvenli moment kapatma bölümüne bakın.
35 OUT2
36 SGND
37 IN1
38 IN2
X10 24 V AC/DC
40
24 V AC/DC+ in
sadece R6…R11: Harici 24 V AC/DC girişi, ana beslemenin
bağlantısı kesildiğinde kontrol ünitesine güç vermek için.
41
24 V AC/DC- in
4)
4)
4)
3)
Bir sonraki sayfadaki
notlara bakın.
5)
Motor potansiyometresi makrosu
Bu makro, iki düğmenin yardımıyla hızı ayarlamak için bir yöntem veya motorun hızını sadece
dijital sinyalleri kullanarak değiştiren PLC’ler için düşük maliyetli bir arabirim sağlar. Makroyu
etkinleştirmek için Birincil ayarlar menüsünde seçin veya 96.04 Makro seçimi parametresini
Motor potansiyometresi OLARAK AYARLAYIN.
Motor potansiyometresi makrosu için varsayılan kontrol bağlantıları
Page 89

Kontrol makroları 89
Terminal boyutları:
R1…R5: 0,2…2,5 mm
0,14…1,5 mm
R6…R11: 0,14…2,5 mm
2
(+24V, DGND, DCOM, B+, A-)
2
(DI, AI, AO, AGND, RO, STO terminalleri)
2
(tüm terminaller)
Sıkma momentleri: 0,5…0,6 N·m (0.4 lbf·ft)
Notlar:
1)
Hem DI3 hem de DI4 aktif veya devre dışıysa frekans/hız referansı değişmez.
Mevcut frekans/hız referansı sürücü dururken ve besleme gerilimi kesildiğinde saklanır.
2)
Skaler kontrolde (varsayılan): Bkz. Menü - Birincil ayarlar - Başlatma, durdurma,
referans - Sabit frekanslar veya 28.26 Sabit frekans 1 parametresi.
Vektör kontrolde
: Bkz. Menü - Birincil ayarlar - Başlatma, durdurma, referans -
Sabit hızlar veya 22.26 Sabit hız 1 parametresi.
3)
Kablonun dış blendajını kontrol kablolarının topraklama rafındaki topraklama kelepçesinin
altında 360 derece topraklayın.
4)
Fabrikada jumper'lara bağlanmıştır.
5)
Sadece R6…R11 kasaları harici 24 V AC/DC girişi için 40 ve 41 terminallerine sahiptir.
6)
AI1 ve AI2 girişleri ile AO1 çıkışı için gerilimi veya akımı sırasıyla 12.15, 12.25 ve 13.15
parametreleriyle seçin.
Giriş sinyalleri
• Start/Stop seçimi (DI1)
• Yön seçimi (DI2)
• Referans yukarı (DI3)
• Referans aşağı (DI4)
• Sabit frekans/hız 1 (DI5)
• Çalışma izni (DI6)
Çıkış sinyalleri
• Analog çıkış AO1: Çıkış frekansı
• Analog çıkış AO2: Motor akımı
• Röle çıkışı 1: Çalışmaya hazır
• Röle çıkışı 2: Çalışıyor
• Röle çıkışı 3: Hata (-1)
Page 90

90 Kontrol makroları
maks.
500 ohm
XI Referans gerilimi ve analog girişlerle çıkışlar
1 SCR Sinyal kablosu blendajı (ekran)
2 AI1 Harici hız/frekans, referans (Hand): 0…10 V
5)
3 AGND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi 10 V DC
5 AI2 Harici hız/frekans, ref. (Auto): 4…20 mA
1,5)
6 AGND Analog giriş devresi ortak ucu
7 AO1 Çıkış frekansı: 0…20 mA
5)
8 AO2 Motor akımı: 0…20 mA
9 AGND Analog çıkış devresi ortak ucu
X2 ve X3 Yrd. gerilim çıkışı ve programlanabilir dijital girişler
10 +24V Yardımcı gerilim çıkışı +24 V DC, maks. 250 mA
11 DGND Yardımcı gerilim çıkışı ortak ucu
12 DCOM Tümü için dijital giriş ortak ucu
13 DI1 Stop (0) / Start (1) (Manuel)
14 DI2 İleri (0) / Geri (1) (Manuel)
15 DI3 Manuel kontrol (0) / Otomatik kontrol (1)
16 DI4 Çalışma izni; 0 ise, sürücü durur
17 DI5 İleri (0) / Geri (1) (Otomatik)
18 DI6 Stop (0) / Start (1) (Otomatik)
X6, X7, X8 Röle çıkışları
19 RO1C
Çalışmaya hazır
250 V AC / 30 V DC
2 A
20 RO1A
21 RO1B
22 RO2C
Çalışıyor
250 V AC / 30 V DC
2 A
23 RO2A
24 RO2B
25 RO3C
Hata (-1)
250 V AC / 30 V DC
2 A
26 RO3A
27 RO3B
X5 Dahili fieldbus
29 B+
Dahili Modbus RTU (EIA-485). Bkz. Dahili
haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü bölümü, sayfa 511.
30 A-
31 DGND
S4 TERM Seri veri bağlantısı sonlandırma anahtarı
S5 BIAS Seri veri bağlantısı bias dirençleri anahtarı
X4 Güvenli moment kapatma
34 OUT1
Güvenli moment kapatma. Fabrika bağlantısı.
Sürücünün başlaması için her iki devre
kapatılmalıdır. Sürücünün Donanım el kitabı'nda
Güvenli moment kapatma bölümüne bakın.
35 OUT2
36 SGND
37 IN1
38 IN2
X10 24 V AC/DC
40
24 V AC/DC+ in
sadece R6…R11: Harici 24 V AC/DC girişi, ana beslemenin
bağlantısı kesildiğinde kontrol ünitesine güç vermek için.
41
24 V AC/DC- in
3)
3)
3)
2)
Bir sonraki sayfadaki
notlara bakın.
4)
Man/Oto makrosu
Bu makro, iki harici kontrol cihazı arasında geçiş yapmak gerektiğinde kullanılabilir. Her ikisinin
de kendi kontrol ve referans sinyalleri vardır. Bir sinyal bu ikisi arasında geçiş yapmakta
kullanılır. Makroyu etkinleştirmek için, Birincil ayarlar menüsünde seçin veya 96.04 Makro
seçimi parametresini El/Oto olarak ayarlayın.
Man/Oto makrosu için varsayılan kontrol bağlantıları
Page 91

Kontrol makroları 91
Terminal boyutları:
R1…R5: 0,2…2,5 mm
R6…R11: 0,14…2,5 mm
Sıkma momentleri: 0,5…0,6 N·m (0.4 lbf·ft)
Notlar:
1)
Sinyal kaynağının güç kaynağı haricidir. İmalatçının talimatlarına bakın. Sürücü yardımcı
gerilim çıkışı tarafından beslenen sensörleri kullanmak için, sürücünün Donanım kılavuzu'nda
Elektrik kurulumu bölümü İki kablolu ve üç kablolu sensör bağlantı örnekleri kısmına bakın.
2)
Kablonun dış blendajını kontrol kablolarının topraklama rafındaki topraklama kelepçesinin
altında 360 derece topraklayın.
3)
Fabrikada jumper'lara bağlanmıştır.
4)
Sadece R6…R11 kasaları harici 24 V AC/DC girişi için 40 ve 41 terminallerine sahiptir.
5)
AI1 ve AI2 girişleri ile AO1 çıkışı için gerilimi veya akımı sırasıyla 12.15, 12.25 ve 13.15
parametreleriyle seçin.
Giriş sinyalleri
0,14…1,5 mm
2
(+24V, DGND, DCOM, B+, A-)
2
(DI, AI, AO, AGND, RO, STO terminalleri)
2
(tüm terminaller)
• İki hız/frekans analog referansı (AI1, AI2)
• Kontrol konumu (Manuel veya Otomatik) seçimi (DI3)
• Start/Stop seçimi, Manuel (DI1)
• Yön seçimi, Manuel (DI2)
• Start/Stop seçimi, Otomatik (DI6)
• Yön seçimi, Otomatik (DI5)
• Çalışma izni (DI4)
Çıkış sinyalleri
• Analog çıkış AO1: Çıkış frekansı
• Analog çıkış AO2: Motor akımı
• Röle çıkışı 1: Çalışmaya hazır
• Röle çıkışı 2: Çalışıyor
• Röle çıkışı 3: Hata (-1)
Page 92

92 Kontrol makroları
maks.
500 ohm
XI Referans gerilimi ve analog girişlerle çıkışlar
1 SCR Sinyal kablosu blendajı (ekran)
2 AI1
Harici Manuel referans veya Harici PID ref.: 0…10 V
1,7)
3 AGND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi 10 V DC
5 AI2 Gerçek PID geribildirimi: 4…20 mA
2,7)
6 AGND Analog giriş devresi ortak ucu
7 AO1 Çıkış frekansı: 0…20 mA
7)
8 AO2 Motor akımı: 0…20 mA
9 AGND Analog çıkış devresi ortak ucu
X2 ve X3 Yrd. gerilim çıkışı ve programlanabilir dijital girişler
10 +24V Yardımcı gerilim çıkışı +24 V DC, maks. 250 mA
11 DGND Yardımcı gerilim çıkışı ortak ucu
12 DCOM Tümü için dijital giriş ortak ucu
13 DI1 Stop (0) / Start (1) Manuel
14 DI2 Manuel (0) / PID (1) seçimi
15 DI3 Sabit frekans seçimi
3)
16 DI4 Sabit frekans seçimi
3)
17 DI5 Çalışma izni; 0 ise, sürücü durur
18 DI6 Stop (0) / Start (1) PID
X6, X7, X8 Röle çıkışları
19 RO1C
Çalışmaya hazır
250 V AC / 30 V DC
2 A
20 RO1A
21 RO1B
22 RO2C
Çalışıyor
250 V AC / 30 V DC
2 A
23 RO2A
24 RO2B
25 RO3C
Hata (-1)
250 V AC / 30 V DC
2 A
26 RO3A
27 RO3B
X5 Dahili fieldbus
29 B+
Dahili Modbus RTU (EIA-485). Bkz. Dahili
haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü bölümü, sayfa 511.
30 A-
31 DGND
S4 TERM Seri veri bağlantısı sonlandırma anahtarı
S5 BIAS Seri veri bağlantısı bias dirençleri anahtarı
X4 Güvenli moment kapatma
34 OUT1
Güvenli moment kapatma. Fabrika bağlantısı.
Sürücünün başlaması için her iki devre
kapatılmalıdır. Sürücünün Donanım el kitabı'nda
Güvenli moment kapatma bölümüne bakın.
35 OUT2
36 SGND
37 IN1
38 IN2
X10 24 V AC/DC
40
24 V AC/DC+ in
sadece R6…R11: Harici 24 V AC/DC girişi, ana beslemenin
bağlantısı kesildiğinde kontrol ünitesine güç vermek için.
41
24 V AC/DC- in
5)
5)
5)
4)
Bir sonraki sayfadaki
notlara bakın.
6)
Man/PID makrosu
Bu makro, sürücüyü dahili bir proses PID kontrol cihazıyla kontrol eder. Ayrıca, bu makronun
doğrudan hız/frekans kontrol modu için ikinci bir kontrol konumu vardır. Makroyu etkinleştirmek
için, Birincil ayarlar menüsünde seçin veya 96.04 Makro seçimi parametresini Manuel/PID
olarak ayarlayın.
Man/PID makrosu için varsayılan kontrol bağlantıları
Page 93

Kontrol makroları 93
DI3 DI4 Çalışma (parametre)
Skaler kontrol (varsayılan)
0 0 AI1 üzerinden frekans ayarı
1028.26 Sabit frekans 1
0128.27 Sabit frekans 2
1128.28 Sabit frekans 3
Terminal boyutları:
R1…R5: 0,2…2,5 mm
0,14…1,5 mm
R6…R11: 0,14…2,5 mm
2
(+24V, DGND, DCOM, B+, A-)
2
(DI, AI, AO, AGND, RO, STO terminalleri)
2
(tüm terminaller)
Sıkma momentleri: 0,5…0,6 N·m (0.4 lbf·ft)
Notlar:
1)
Manuel: 0…10 V -> frekans referansı.
PID: 0…10V - %0…%100 PID ayar noktası.
2)
Sinyal kaynağının güç kaynağı haricidir. İmalatçının talimatlarına bakın. Sürücü yardımcı
gerilim çıkışı tarafından beslenen sensörleri kullanmak için, sürücünün Donanım kılavuzu'nda
Elektrik kurulumu bölümü İki kablolu ve üç kablolu sensör bağlantı örnekleri kısmına bakın.
3)
Skaler kontrolde (varsayılan): Bkz. Menü - Birincil ayarlar - Başlatma, durdurma,
referans - Sabit frekanslar veya 28 Frekans referans zinciri parametre grubu.
4)
Kablonun dış blendajını kontrol kablolarının topraklama rafındaki topraklama kelepçesinin
altında 360 derece topraklayın.
5)
Fabrikada jumper'lara bağlanmıştır.
6)
Sadece R6…R11 kasaları harici 24 V AC/DC girişi için 40 ve 41 terminallerine sahiptir.
7)
AI1 ve AI2 girişleri ile AO1 çıkışı için gerilimi veya akımı sırasıyla 12.15, 12.25 ve 13.15
parametreleriyle seçin.
Giriş sinyalleri
• Analog referans (AI1)
• PID'den gerçek geribildirim (AI2)
• Kontrol konumu (Manuel veya PID) seçimi (DI2)
• Start/Stop seçimi, Manuel (DI1)
• Start/Stop seçimi, PID (DI6)
• Sabit frekans seçimi (DI3, DI4)
• Çalışma izni (DI5)
Çıkış sinyalleri
• Analog çıkış AO1: Çıkış frekansı
• Analog çıkış AO2: Motor akımı
• Röle çıkışı 1: Çalışmaya hazır
• Röle çıkışı 2: Çalışıyor
• Röle çıkışı 3: Hata (-1)
Page 94

94 Kontrol makroları
maks.
500 ohm
XI Referans gerilimi ve analog girişlerle çıkışlar
1 SCR Sinyal kablosu blendajı (ekran)
2 AI1 Harici PID referansı: 0…10 V
7)
3 AGND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi 10 V DC
5 AI2 Gerçek PID geribildirimi: 4…20 mA
1,7)
6 AGND Analog giriş devresi ortak ucu
7 AO1 Çıkış frekansı: 0…20 mA
7)
8 AO2 Motor akımı: 0…20 mA
9 AGND Analog çıkış devresi ortak ucu
X2 ve X3 Yrd. gerilim çıkışı ve programlanabilir dijital girişler
10 +24V Yardımcı gerilim çıkışı +24 V DC, maks. 250 mA
11 DGND Yardımcı gerilim çıkışı ortak ucu
12 DCOM Tümü için dijital giriş ortak ucu
13 DI1 Stop (0) / Start (1) PID
14 DI2 Dahili ayar noktası seç1
3)
15 DI3 Dahili ayar noktası seç2
3)
16 DI4 Sabit frekans 1: parametre 28.26
2)
17 DI5 Çalışma izni; 0 ise, sürücü durur
18 DI6 Yapılandırılmadı
X6, X7, X8 Röle çıkışları
19 RO1C
Çalışmaya hazır
250 V AC / 30 V DC
2 A
20 RO1A
21 RO1B
22 RO2C
Çalışıyor
250 V AC / 30 V DC
2 A
23 RO2A
24 RO2B
25 RO3C
Hata (-1)
250 V AC / 30 V DC
2 A
26 RO3A
27 RO3B
X5 Dahili fieldbus
29 B+
Dahili Modbus RTU (EIA-485). Bkz. Dahili
haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü bölümü, sayfa 511.
30 A-
31 DGND
S4 TERM Seri veri bağlantısı sonlandırma anahtarı
S5 BIAS Seri veri bağlantısı bias dirençleri anahtarı
X4 Güvenli moment kapatma
34 OUT1
Güvenli moment kapatma. Fabrika bağlantısı.
Sürücünün başlaması için her iki devre
kapatılmalıdır. Sürücünün Donanım el kitabı'nda
Güvenli moment kapatma bölümüne bakın.
35 OUT2
36 SGND
37 IN1
38 IN2
X10 24 V AC/DC
40
24 V AC/DC+ in
sadece R6…R11: Harici 24 V AC/DC girişi, ana beslemenin
bağlantısı kesildiğinde kontrol ünitesine güç vermek için.
41
24 V AC/DC- in
5)
5)
5)
4)
Bir sonraki sayfadaki
notlara bakın.
6)
PID makrosu
Bu makro, sürücünün her zaman PID tarafından kontrol edildiği ve referansın analog giriş
AI1'den geldiği uygulamalar için uygundur. Makroyu etkinleştirmek için, Birincil ayarlar
menüsünde seçin veya 96.04 Makro seçimi parametresini PID olarak ayarlayın.
PID makrosu için varsayılan kontrol bağlantıları
Page 95

Kontrol makroları 95
Kaynak 40.19 par.
ile tanımlanır.
Kaynak 40.20 par.
ile tanımlanır.
Dahili ayar noktası etkin
DI2 DI3
00
Ayar noktası kaynağı: AI1 (par.
40.16
)
1 0 1 (parametre 40.21)
0 1 2 (parametre
40.22)
1 1 3 (parametre
40.23)
Terminal boyutları:
R1…R5: 0,2…2,5 mm
0,14…1,5 mm
R6…R11: 0,14…2,5 mm
2
(+24V, DGND, DCOM, B+, A-)
2
(DI, AI, AO, AGND, RO, STO terminalleri)
2
(tüm terminaller)
Sıkma momentleri: 0,5…0,6 N·m (0.4 lbf·ft)
Notlar:
1)
Sinyal kaynağının güç kaynağı haricidir. İmalatçının talimatlarına bakın. Sürücü yardımcı
gerilim çıkışı tarafından beslenen sensörleri kullanmak için, sürücünün Donanım kılavuzu'nda
Elektrik kurulumu bölümü İki kablolu ve üç kablolu sensör bağlantı örnekleri kısmına bakın.
2)
Sabit frekans etkinleştirilirse, PID kontrol cihazı çıkışından gelen referansı geçersiz kılar.
3)
Bkz. parametreler 40.19 Ayar 1 dahili ayar noktası seç1 ve 40.20 Ayar 1 dahili ayar noktası
seç2
kaynak tablosu.
4)
Kablonun dış blendajını kontrol kablolarının topraklama rafındaki topraklama kelepçesinin
altında 360 derece topraklayın.
5)
Fabrikada jumper'lara bağlanmıştır.
6)
Sadece R6…R11 kasaları harici 24 V AC/DC girişi için 40 ve 41 terminallerine sahiptir.
7)
AI1 ve AI2 girişleri ile AO1 çıkışı için gerilimi veya akımı sırasıyla 12.15, 12.25 ve 13.15
parametreleriyle seçin.
Giriş sinyalleri
• Analog referans (AI1)
• PID'den gerçek geribildirim (AI2)
• Start/Stop seçimi, PID (DI1)
• Sabit ayar noktası 1 (DI2)
• Sabit ayar noktası 1 (DI3)
• Sabit frekans 1 (DI4)
• Çalışma izni (DI5)
Çıkış sinyalleri
• Analog çıkış AO1: Çıkış frekansı
• Analog çıkış AO2: Motor akımı
• Röle çıkışı 1: Çalışmaya hazır
• Röle çıkışı 2: Çalışıyor
• Röle çıkışı 3: Hata (-1)
Page 96

96 Kontrol makroları
maks.
500 ohm
XI Referans gerilimi ve analog girişlerle çıkışlar
1 SCR Sinyal kablosu blendajı (ekran)
2 AI1 Yapılandırılmadı
6)
3 AGND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi 10 V DC
5 AI2 Gerçek PID geribildirimi: 4…20 mA
1,6)
6 AGND Analog giriş devresi ortak ucu
7 AO1 Çıkış frekansı: 0…20 mA
6)
8 AO2 Motor akımı: 0…20 mA
9 AGND Analog çıkış devresi ortak ucu
X2 ve X3 Yrd. gerilim çıkışı ve programlanabilir dijital girişler
10 +24V Yardımcı gerilim çıkışı +24 V DC, maks. 250 mA
11 DGND Yardımcı gerilim çıkışı ortak ucu
12 DCOM Tümü için dijital giriş ortak ucu
13 DI1 Stop (0) / Start (1) PID
14 DI2 Yapılandırılmadı
15 DI3 Yapılandırılmadı
16 DI4 Sabit frekans 1: parametre 28.26
2)
17 DI5 Çalışma izni; 0 ise, sürücü durur
18 DI6 Yapılandırılmadı
X6, X7, X8 Röle çıkışları
19 RO1C
Çalışmaya hazır
250 V AC / 30 V DC
2 A
20 RO1A
21 RO1B
22 RO2C
Çalışıyor
250 V AC / 30 V DC
2 A
23 RO2A
24 RO2B
25 RO3C
Hata (-1)
250 V AC / 30 V DC
2 A
26 RO3A
27 RO3B
X5 Dahili fieldbus
29 B+
Dahili Modbus RTU (EIA-485). Bkz. Dahili
haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü bölümü, sayfa 511.
30 A-
31 DGND
S4 TERM Seri veri bağlantısı sonlandırma anahtarı
S5 BIAS Seri veri bağlantısı bias dirençleri anahtarı
X4 Güvenli moment kapatma
34 OUT1
Güvenli moment kapatma. Fabrika bağlantısı.
Sürücünün başlaması için her iki devre
kapatılmalıdır. Sürücünün Donanım el kitabı'nda
Güvenli moment kapatma bölümüne bakın.
35 OUT2
36 SGND
37 IN1
38 IN2
X10 24 V AC/DC
40
24 V AC/DC+ in
sadece R6…R11: Harici 24 V AC/DC girişi, ana beslemenin
bağlantısı kesildiğinde kontrol ünitesine güç vermek için.
41
24 V AC/DC- in
4)
4)
4)
3)
Bir sonraki sayfadaki
notlara bakın.
5)
Panel PID makrosu
Bu makro, sürücünün her zaman PID tarafından kontrol edildiği ve ayar noktasının kontrol paneli
tarafından tanımlandığı uygulamalar için uygundur. Makroyu etkinleştirmek için, Birincil ayarlar
menüsünde seçin veya 96.04 Makro seçimi parametresini Panel PID olarak ayarlayın.
Panel PID makrosu için varsayılan kontrol bağlantıları
Page 97

Kontrol makroları 97
Terminal boyutları:
R1…R5: 0,2…2,5 mm
0,14…1,5 mm
R6…R11: 0,14…2,5 mm
2
(+24V, DGND, DCOM, B+, A-)
2
(DI, AI, AO, AGND, RO, STO terminalleri)
2
(tüm terminaller)
Sıkma momentleri: 0,5…0,6 N·m (0.4 lbf·ft)
Notlar:
1)
Sinyal kaynağının güç kaynağı haricidir. İmalatçının talimatlarına bakın. Sürücü yardımcı
gerilim çıkışı tarafından beslenen sensörleri kullanmak için, sürücünün Donanım kılavuzu'nda
Elektrik kurulumu bölümü İki kablolu ve üç kablolu sensör bağlantı örnekleri kısmına bakın.
2)
Sabit frekans etkinleştirilirse, PID kontrol cihazı çıkışından gelen referansı geçersiz kılar.
3)
Kablonun dış blendajını kontrol kablolarının topraklama rafındaki topraklama kelepçesinin
altında 360 derece topraklayın.
4)
Fabrikada jumper'lara bağlanmıştır.
5)
Sadece R6…R11 kasaları harici 24 V AC/DC girişi için 40 ve 41 terminallerine sahiptir.
6)
AI1 ve AI2 girişleri ile AO1 çıkışı için gerilimi veya akımı sırasıyla 12.15, 12.25 ve 13.15
parametreleriyle seçin.
Giriş sinyalleri
• Kontrol panelinden verilen PID ayar noktası
• Ext1 hız referansı
• Moment referansı (AI2)
• Start/Stop seçimi, PID (DI1)
• Sabit frekans 1 (DI4)
• Çalışma izni (DI5)
Çıkış sinyalleri
• Analog çıkış AO1: Motor hızı
• Analog çıkış AO2: Motor akımı
• Röle çıkışı 1: Çalışmaya hazır
• Röle çıkışı 2: Çalışıyor
• Röle çıkışı 3: Hata (-1)
Page 98

98 Kontrol makroları
maks.
500 ohm
XI Referans gerilimi ve analog girişlerle çıkışlar
1 SCR Sinyal kablosu blendajı (ekran)
2 AI1 PID ayar noktası kaynağı: 0…10 V
5)
3 AGND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi 10 V DC
5 AI2 Gerçek PID geribildirimi: 4…20 mA
1,5)
6 AGND Analog giriş devresi ortak ucu
7 AO1 Çıkış frekansı: 0…20 mA
5)
8 AO2 Motor akımı: 0…20 mA
9 AGND Analog çıkış devresi ortak ucu
X2 ve X3 Yrd. gerilim çıkışı ve programlanabilir dijital girişler
10 +24V Yardımcı gerilim çıkışı +24 V DC, maks. 250 mA
11 DGND Yardımcı gerilim çıkışı ortak ucu
12 DCOM Tümü için dijital giriş ortak ucu
13 DI1 Yapılandırılmadı
14 DI2 Çalışma izni; 0 ise, sürücü durur
15 DI3 Yapılandırılmadı
16 DI4 Yapılandırılmadı
17 DI5 Yapılandırılmadı
18 DI6 Stop (0) / Start (1)
X6, X7, X8 Röle çıkışları
19 RO1C
Çalışıyor
250 V AC / 30 V DC
2 A
20 RO1A
21 RO1B
22 RO2C
Hata (-1)
250 V AC / 30 V DC
2 A
23 RO2A
24 RO2B
25 RO3C
PFC2 (2. motor=1. yrd. motor)
250 VAC / 30 VDC
2 A
26 RO3A
27 RO3B
X5 Dahili fieldbus
29 B+
Dahili Modbus RTU (EIA-485). Bkz. Dahili
haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü bölümü, sayfa 511.
30 A-
31 DGND
S4 TERM Seri veri bağlantısı sonlandırma anahtarı
S5 BIAS Seri veri bağlantısı bias dirençleri anahtarı
X4 Güvenli moment kapatma
34 OUT1
Güvenli moment kapatma. Fabrika bağlantısı.
Sürücünün başlaması için her iki devre
kapatılmalıdır. Sürücünün Donanım el kitabı'nda
Güvenli moment kapatma bölümüne bakın.
35 OUT2
36 SGND
37 IN1
38 IN2
X10 24 V AC/DC
40
24 V AC/DC+ in
sadece R6…R11: Harici 24 V AC/DC girişi, ana beslemenin
bağlantısı kesildiğinde kontrol ünitesine güç vermek için.
41
24 V AC/DC- in
3)
3)
3)
2)
Bir sonraki sayfadaki
notlara bakın.
4)
PFC makro
Sürücünün röle çıkışları üzerinden birden fazla pompayı veya fanı kontrol etmesi için pompa
ya da fan kontrol lojiği Makroyu etkinleştirmek için, Birincil ayarlar menüsünde seçin veya
96.04 Makro seçimi parametresini PFC olarak ayarlayın.
PFC makrosu için varsayılan kontrol bağlantıları
Page 99

Kontrol makroları 99
Terminal boyutları:
R1…R5: 0,2…2,5 mm
0,14…1,5 mm
R6…R11: 0,14…2,5 mm
2
(+24V, DGND, DCOM, B+, A-)
2
(DI, AI, AO, AGND, RO, STO terminalleri)
2
(tüm terminaller)
Sıkma momentleri: 0,5…0,6 N·m (0.4 lbf·ft)
Notlar:
1)
Sinyal kaynağının güç kaynağı haricidir. İmalatçının talimatlarına bakın. Sürücü yardımcı
gerilim çıkışı tarafından beslenen sensörleri kullanmak için, sürücünün Donanım kılavuzu'nda
Elektrik kurulumu bölümü İki kablolu ve üç kablolu sensör bağlantı örnekleri kısmına bakın.
2)
Kablonun dış blendajını kontrol kablolarının topraklama rafındaki topraklama kelepçesinin
altında 360 derece topraklayın.
3)
Fabrikada jumper'lara bağlanmıştır.
4)
Sadece R6…R11 kasaları harici 24 V AC/DC girişi için 40 ve 41 terminallerine sahiptir.
5)
AI1 ve AI2 girişleri ile AO1 çıkışı için gerilimi veya akımı sırasıyla 12.15, 12.25 ve 13.15
parametreleriyle seçin.
Giriş sinyalleri
• PID için ayar noktası (AI1)
• PID'den gerçek geribildirim (AI2)
• Çalışma izni (DI2)
• Start/Stop seçimi (DI6)
Çıkış sinyalleri
• Analog çıkış AO1: Çıkış frekansı
• Analog çıkış AO2: Motor akımı
• Röle çıkışı 1: Çalışıyor
• Röle çıkışı 2: Hata (-1)
• Röle çıkışı 3: PFC2 (birinci PFC yardımcı motoru)
Page 100

100 Kontrol makroları
maks.
500 ohm
XI Referans gerilimi ve analog girişlerle çıkışlar
1 SCR Sinyal kablosu blendajı (ekran)
2 AI1 EXT1 hız referansı: 0…10 V
5)
3 AGND Analog giriş devresi ortak ucu
4 +10V Referans gerilimi 10 V DC
5 AI2 Moment referansı: 4…20 mA
1,5)
6 AGND Analog giriş devresi ortak ucu
7 AO1 Motor hızı: 0…20 mA
5)
8 AO2 Motor akımı: 0…20 mA
9 AGND Analog çıkış devresi ortak ucu
X2 ve X3 Yrd. gerilim çıkışı ve programlanabilir dijital girişler
10 +24V Yardımcı gerilim çıkışı +24 V DC, maks. 250 mA
11 DGND Yardımcı gerilim çıkışı ortak ucu
12 DCOM Tümü için dijital giriş ortak ucu
13 DI1 Stop (0) / Start (1)
14 DI2 Hız kontrol: İleri (0) / Geri (1)
15 DI3 Hız kontrol (0) / Tork kontrolü (1)
16 DI4 Hız kontrol: Sabit devir
17 DI5 Rampa 1 (0) / Rampa 2 (1)
18 DI6 Çalışma izni; 0 ise, sürücü durur
X6, X7, X8 Röle çıkışları
19 RO1C
Çalışmaya hazır
250 V AC / 30 V DC
2 A
20 RO1A
21 RO1B
22 RO2C
Çalışıyor
250 V AC / 30 V DC
2 A
23 RO2A
24 RO2B
25 RO3C
Hata (-1)
250 V AC / 30 V DC
2 A
26 RO3A
27 RO3B
X5 Dahili fieldbus
29 B+
Dahili Modbus RTU (EIA-485). Bkz. Dahili
haberleşme arabirimi (EFB) aracılığıyla
haberleşme kontrolü bölümü, sayfa 511.
30 A-
31 DGND
S4 TERM Seri veri bağlantısı sonlandırma anahtarı
S5 BIAS Seri veri bağlantısı bias dirençleri anahtarı
X4 Güvenli moment kapatma
34 OUT1
Güvenli moment kapatma. Fabrika bağlantısı.
Sürücünün başlaması için her iki devre
kapatılmalıdır. Sürücünün Donanım el kitabı'nda
Güvenli moment kapatma bölümüne bakın.
35 OUT2
36 SGND
37 IN1
38 IN2
X10 24 V AC/DC
40
24 V AC/DC+ in
sadece R6…R11: Harici 24 V AC/DC girişi, ana beslemenin
bağlantısı kesildiğinde kontrol ünitesine güç vermek için.
41
24 V AC/DC- in
3)
3)
3)
2)
Bir sonraki sayfadaki
notlara bakın.
4)
Moment kontrol makrosu
Bu makro motorun tork kontrolünün yapılması gerektiği uygulamalarda kullanılır. Bunlar,
mekanik sistemde belirli bir gerilimin korunması gerektiği tipik gerilim uygulamalarıdır. Makroyu
etkinleştirmek, Birincil ayarlar menüsünde makroyu seçin (henüz orada değildir) veya 96.04
Makro seçimi parametresini Moment kontrolü olarak ayarlayın.
Tork kontrol makrosu için varsayılan kontrol bağlantıları
 Loading...
Loading...