

Page 1

Z16C30
USC
User’s Manual
UM009402-0201
ZiLOG Worldwide Headquarters • 910 E. Hamilton Avenue • Campbell, CA 95008
Telephone: 408.558.8500 • Fax: 408.558.8300 • www.ZiLOG.com
Page 2
Z16C30
USC
This publication is subject to replacement by a later edition. To determine whether a later
edition exists, or to request copies of publications, contact:
ZiLOG Worldwide Headquarters
910 E. Hamilton Avenue
Campbell, CA 95008
Telephone: 408.558.8500
Fax: 408.558.8300
www.ZiLOG.com
Document Disclaimer
ZiLOG is a registered trademark of ZiLOG Inc. in the United States and in other countries. All other products
and/or service names mentioned herein may be trademarks of the companies with which they are associated.
©2001 by ZiLOG, Inc. All rights reserved. Information in this publication concerning the devices,
applications, or technology described is intended to suggest possible uses and may be superseded. ZiLOG,
INC. DOES NOT ASSUME LIABILITY FOR OR PROVIDE A REPRESENTATION OF ACCURACY OF
THE INFORMATION, DEVICES, OR TECHNOLOGY DESCRIBED IN THIS DOCUMENT. ZiLOG
ALSO DOES NOT ASSUME LIABILITY FOR INTELLECTUAL PROPERTY INFRINGEMENT
RELATED IN ANY MANNER TO USE OF INFORMATION, DEVICES, OR TECHNOLOGY
DESCRIBED HEREIN OR OTHERWISE. Except with the express written approval of ZiLOG, use of
information, devices, or technology as critical components of life support systems is not authorized. No
licenses are conveyed, implicitly or otherwise, by this document under any intellectual property rights.
UM009402-0201
Page 3
ZILOG
UM009402-0201
Z16C30 USC® USER'S MANUAL
Thank you for your interest in Zilog's high-speed Integrated Universal Serial Controller.
To aid the designer, the following support material is available when designing
a High Performance Serial Communication application based on Zilog's USC.
Z16C30 User's Manual
Zilog's USC® User's Manual is a comprehensive breakdown of the functions and features of the USC which will
aid in the development of your application. A good place
to start is the
manual, which provides a short description of each feature
Overview
section at the beginning of the
Z16C30 USC® USER'S MANUAL
SUPPLEMENTARY INFORMATION
and chapter. Then any chapter can be reviewed in more
detail as necessary. This User's Manual provides in-depth
descriptions of all functions and features of the USC as well
as supporting block diagrams, timing diagrams, and sample
applications.
Z16C30 Product Specification
The USC® Product Specification is a good resource to help
determine which of Zilog's High Performance Serial Controllers to use. This document provides an in-depth description of the USC, including descriptions of features,
block diagrams, pin assignments, pin descriptions, register bit functions, and AC and DC specifications. This
Application Notes
The following Application Notes are useful in demonstrating how the USC can be used in different applications.
Design a Serial Board to Handle Multiple Protocols
This Application Note details an approach to handling
multiple serial communication protocols using Zilog's
Z16C30 USC. This document is included in the High
Speed SCC Databook, DC-8314-01 mentioned above.
Demonstration/Evaluation Boards
By selecting the board that most closely resembles your
desired application, you may be able to use parts of the
design in your implementation. These boards can be used
as software platforms while the application hardware is
being developed.
Z8018600ZCO - This kit contains an assembled circuit
board, software, and documentation to support the evaluation and development of code for Zilog's Z16C30 USC,
Z16C32 IUSC, Z85C30 SCC, Z85230 ESCC, and Z16C35
specification can be found in the High Speed Serial Communication Controllers Databook, DC-8314-01, which also
includes a product specification on the Z16C30 USC as
well as related Application Notes, support products, and a
list of third party support vendors.
The Zilog Datacom Family with the 80186 CPU
This Application Note, DC-2560-03, explains and illustrates how Zilog's datacom family interfaces and communicates with the 80186 on an evaluation board.
ISCC. The purpose of the board is to illustrate how the
datacom family interfaces and communicates with the
80186 CPU. This will help potential customers evaluate
Zilog's datacommunications with the 80186 CPU. A boardresident monitor program allows code to be downloaded
and executed. A specification on this product is included
in the High Speed Serial Communication Controllers
Databook, DC-8314-01 mentioned above.
UM97USC0100
Page 4

ZILOG
UM009402-0201
Demonstration/Evaluation Boards (Continued)
Z16C30 USC® USER'S MANUAL
SUPPLEMENTARY INFORMATION
Z16C3001ZCO - This kit contains an assembled PC/XT/AT
circuit board with two high-speed serial connections, DB9
and DB25 connectors selectively driven by RS-232 or
RS422 line drivers.
The kit also contains software and documentation to support software and hardware development for Zilog's USC.
The board illustrates the use of Zilog's USC in communications applications such as ASYNC, SDLC/HDLC and highspeed ASYNC. (Please refer to the Product Specification
Databook for a detailed description.)
© 1997 by Zilog, Inc. All rights reserved. No part of this document
may be copied or reproduced in any form or by any means
without the prior written consent of Zilog, Inc. The information in
this document is subject to change without notice. Devices sold
by Zilog, Inc. are covered by warranty and patent indemnification
provisions appearing in Zilog, Inc. Terms and Conditions of Sale
only. Zilog, Inc. makes no warranty, express, statutory, implied or
by description, regarding the information set forth herein or
regarding the freedom of the described devices from intellectual
property infringement. Zilog, Inc. makes no warranty of merchantability or fitness for any purpose. Zilog, Inc. shall not be
responsible for any errors that may appear in this document.
Zilog, Inc. makes no commitment to update or keep current the
information contained in this document.
Zilog’s products are not authorized for use as critical components in life support devices or systems unless a specific written
agreement pertaining to such intended use is executed between
the customer and Zilog prior to use. Life support devices or
systems are those which are intended for surgical implantation
into the body, or which sustains life whose failure to perform,
when properly used in accordance with instructions for use
provided in the labeling, can be reasonably expected to result in
significant injury to the user.
Zilog, Inc. 210 East Hacienda Ave.
Campbell, CA 95008-6600
Telephone (408) 370-8000
Telex 910-338-7621
FAX 408 370-8056
Internet: http://www.zilog.com
UM97USC0100
Page 5
ZILOG
UM009402-0201
Z16C30 USC® USER'S MANUAL
TABLE OF CONTENTS
HAPTER TITLE AND SUBSECTIONS PAGE
C
Chapter 1 Introduction
1.1 Introduction ....................................................................................................... 1-1
1.2 Features............................................................................................................. 1-1
1.3 Logic Symbol..................................................................................................... 1-2
1.4 Packaging ......................................................................................................... 1-3
1.5 Overview of the USC and this Manual............................................................... 1-4
1.5.1 Bus Interfacing ....................................................................................... 1-4
1.5.2 Serial Interfacing..................................................................................... 1-4
1.5.3 Serial Modes and Protocols.................................................................... 1-4
1.5.4 DMA Operation ....................................................................................... 1-4
1.5.5 Interrupts ................................................................................................ 1-4
1.5.6 Software Summary.................................................................................. 1-4
1.6 Device Structure .............................................................................................. 1-12
1.6.1 The Transmit Data Path ........................................................................ 1-12
1.6.2 The Receive Data Path ......................................................................... 1-12
1.6.3 Clocking................................................................................................ 1-12
1.6.4 Interrupts .............................................................................................. 1-12
1.7 Document Structure ........................................................................................ 1-13
Z16C30 USC
USER'S MANUAL
®
Chapter 2 Bus Interfacing
2.1 Introduction ....................................................................................................... 2-1
2.2 Multiplexed/Non-Multiplexed Operation............................................................ 2-1
2.3 Read/Write Data Strobes ................................................................................... 2-3
2.4 Bus Width .......................................................................................................... 2-4
2.5 ACK vs. WAIT Handshaking.............................................................................. 2-4
2.6 Pin Descriptions ................................................................................................ 2-5
2.7 Pull-up Resistors and Unused Pins ................................................................... 2-7
2.8 The Bus Configuration Register (BCR).............................................................. 2-7
2.8.1 WAIT vs. Ready Selection ...................................................................... 2-7
2.8.2 Bits and Fields in the BCR ...................................................................... 2-7
2.9 Register Addressing.......................................................................................... 2-8
2.9.1 Implicit Data Register Addressing.......................................................... 2-8
2.9.2 Direct Register Addressing on AD13-AD8 ............................................. 2-8
2.9.3 Direct Register Addressing on AD6-AD0/7-1 ......................................... 2-9
2.9.4 Indirect Register Addressing in the CCAR ............................................. 2-9
2.9.5 About the Register Address Tables ..................................................... 2-10
2.9.6 Serial Data Registers TDR & RDR ........................................................ 2-14
2.9.7 Byte Ordering ....................................................................................... 2-14
2.9.8 Register Read & Write Cycles .............................................................. 2-14
UM97USC0100
i
Page 6

ZILOG
UM009402-0201
CHAPTER TITLE AND SUBSECTIONS PAGE
Chapter 3 A Sample Introduction
3.1 Introduction ....................................................................................................... 3-1
Chapter 4 Serial Interfacing
4.1 Introduction ....................................................................................................... 4-1
4.2 Serial Interface Pin Descriptions ....................................................................... 4-1
4.3 Transmit and Receive Clocking ........................................................................ 4-2
4.3.1 CTR0 and CTR1...................................................................................... 4-2
4.3.2 The Baud Rate Generators ..................................................................... 4-2
4.3.3 Introduction to the DPLL ......................................................................... 4-5
4.3.4 TxCLK and RxCLK Selection .................................................................. 4-5
4.3.5 Clocking for Asynchronous Mode .......................................................... 4-6
4.3.6 Synchronous Clocking............................................................................ 4-6
4.3.7 Stopping the Clocks ............................................................................... 4-6
4.4 Data Formats and Encoding ............................................................................. 4-7
4.5 More About the DPLL ........................................................................................ 4-8
4.6 The RxD and TxD Pins .................................................................................... 4-10
4.7 Edge Detection and Interrupts ........................................................................ 4-11
4.8 The /DCD Pin ................................................................................................... 4-13
4.9 The /CTS Pin .................................................................................................... 4-15
4.10 The /RxC and /TxC Pins .................................................................................. 4-16
4.11 The /RxReq and /TxReq Pins .......................................................................... 4-17
4.12 The /RxACK and /TxACK Pins ......................................................................... 4-17
Z16C30 USC
USER'S MANUAL
®
Chapter 5 Serial Modes and Protocols
5.1 Introduction ....................................................................................................... 5-1
5.2 Asynchronous Modes........................................................................................ 5-1
5.3 Character Oriented Synchronous Modes.......................................................... 5-3
5.4 Bit Oriented Synchronous Modes ..................................................................... 5-4
5.5 The Mode Registers (CMR,TMR & RMR) .......................................................... 5-5
5.5.1 Enabling and Disabling the Receiver and Transmitter ........................... 5-7
5.5.2 Character Length.................................................................................... 5-7
5.5.3 Parity, CRC, Serial Encoding .................................................................. 5-8
5.6 Asynchronous Mode ......................................................................................... 5-9
5.6.1 Break Conditions .................................................................................. 5-10
5.7 Isochronous Mode........................................................................................... 5-10
5.8 Nine-Bit Mode.................................................................................................. 5-11
5.9 External Sync Mode ........................................................................................ 5-12
5.10 Monosync and Bisync Modes ......................................................................... 5-12
5.11 Transparent Bisync Mode ............................................................................... 5-14
5.12 Slaved Monosync Mode .................................................................................. 5-15
5.13 IEEE 802.3 (Ethernet) Mode ............................................................................ 5-16
5.14 HDLC/SDLC Mode .......................................................................................... 5-18
5.14.1 Received Address and Control Field Handling .................................... 5-18
5.14.2 Frame Length Residuals ....................................................................... 5-20
5.14.3 Handling a Received Abort .................................................................. 5-20
ii
UM97USC0100
Page 7

ZILOG
UM009402-0201
CHAPTER TITLE AND SUBSECTIONS PAGE
5.15 HDLC/SDLC Loop Mode ................................................................................. 5-21
5.16 Cyclic Redundancy Checking......................................................................... 5-22
5.17 Parity Checking ............................................................................................... 5-25
5.18 Status Reporting .............................................................................................. 5-26
5.18.1 Detailed Status in the TCSR ................................................................. 5-28
5.18.2 Detailed Status in the RCSR ................................................................. 5-29
5.19 DMA Support Features .................................................................................... 5-31
5.19.1 The Character Counters ....................................................................... 5-31
5.19.2 The RCC FIFO ...................................................................................... 5-35
5.19.3 Transmit Control Blocks ........................................................................ 5-36
5.19.4 Receive Status Blocks .......................................................................... 5-38
5.19.5 Finding the End of a Received Frame .................................................. 5-39
5.20 Commands ...................................................................................................... 5-40
5.21 Resetting a USC Channel................................................................................ 5-44
5.22 The Data Registers and the FIFO's ................................................................. 5-45
5.22.1 Accessing the TDR & RDR ................................................................... 5-45
5.22.2 TxFIFO and RxFIFO Operation ............................................................. 5-45
5.22.3 Fill Levels .............................................................................................. 5-46
5.22.4 DMA & Interrupt Request Levels .......................................................... 5-46
5.23 Handling Overruns & Underruns ..................................................................... 5-47
5.23.1 Tx Underruns ........................................................................................ 5-47
5.23.2 Rx Overruns .......................................................................................... 5-47
5.23.3 Rx Overrun Scribbling .......................................................................... 5-48
5.23.4 Fill Level Correctness & Extra Bytes..................................................... 5-48
5.24 Between Frames, Messages, or Characters ................................................... 5-49
5.24.1 Synchronous Transmission ................................................................... 5-49
5.24.2 Async Transmission .............................................................................. 5-49
5.24.3 Synchronous Reception ....................................................................... 5-51
5.25 Synchronizing Frames/Messages with Software Response............................ 5-51
Z16C30 USC
USER'S MANUAL
®
Chapter 6 Direct Memory Access (DMA) Interfacing
6.1 Introduction ....................................................................................................... 6-1
6.2 Flyby vs. Flowthrough DMA Operation.............................................................. 6-1
6.3 DMA Requests by the Receiver & Transmitter .................................................. 6-6
6.3.1 Programming the DMA Request Levels ................................................. 6-7
6.4 DMA Acknowledge Signals ............................................................................... 6-8
6.5 Separating Received Frames in Memory .......................................................... 6-8
UM97USC0100
iii
Page 8

ZILOG
UM009402-0201
CHAPTER TITLE AND SUBSECTIONS PAGE
Chapter 7 Interrupts
7.1 Introduction ....................................................................................................... 7-1
7.2 Interrupt Acknowledge Daisy-Chains................................................................ 7-1
7.3 External Interrupt Control Logic ........................................................................ 7-2
7.4 Using /RxReq and /TxReq as Interrupt Requests ............................................. 7-3
7.5 Interrupt Types & Sources................................................................................. 7-4
7.6 Internal Interrupt Operation ............................................................................... 7-6
7.7 Details of the Model........................................................................................... 7-8
7.8 Interrupt Option in the BCR ............................................................................... 7-9
7.9 Interrupt Acknowledge Cycles .......................................................................... 7-9
7.10 Interrupt Acknowledge vs. Read Cycles ......................................................... 7-14
7.11 Interrupt Types ................................................................................................ 7-14
7.11.1 Receive Status Interrupt Sources and IA Bits ...................................... 7-14
7.11.2 Receive Data Interrupts ........................................................................ 7-15
7.11.3 Transmit Status Interrupt Sources and IA Bits...................................... 7-18
7.11.4 Transmit Data Interrupts ....................................................................... 7-19
7.11.5 I/O Pin Interrupt Sources and IA Bits .................................................... 7-20
7.11.6 Miscellaneous Interrupt Sources and IA Bits ....................................... 7-20
7.12 Interrupt Pending and Under Service Bits ...................................................... 7-21
7.13 Interrupt Enable Bits ........................................................................................ 7-22
7.14 Channel Interrupt Options ............................................................................... 7-22
7.15 Interrupt Vectors .............................................................................................. 7-23
7.16 Software Requirements ................................................................................... 7-24
7.16.1 Nested Interrupts .................................................................................. 7-24
7.16.2 Which Type(s) to Handle? .................................................................... 7-24
7.16.3 Handling a Type ................................................................................... 7-25
7.16.4 Exiting the ISR ...................................................................................... 7-27
Z16C30 USC
USER'S MANUAL
®
Chapter 8 Software Summary
8.1 Introduction ....................................................................................................... 8-1
8.2 About Resetting ................................................................................................. 8-1
8.3 Programming Order .......................................................................................... 8-2
8.4 Using DMA to Initialize a Channel ..................................................................... 8-2
8.5 Determining the Device Revision Level............................................................. 8-3
8.6 Tips & Techniques............................................................................................. 8-3
8.6.1 Common Hardware Problems ................................................................ 8-3
8.6.2 Common Software Problems .................................................................. 8-3
8.7 Test Modes ........................................................................................................ 8-6
8.8 Register Reference.......................................................................................... 8-10
8.8.1 Register Addresses .............................................................................. 8-10
8.8.2 Conditions/Context ............................................................................... 8-10
8.8.3 Description ........................................................................................... 8-10
8.8.4 RW Status ............................................................................................. 8-10
iv
UM97USC0100
Page 9

ZILOG
UM009402-0201
CHAPTER TITLE AND SUBSECTIONS PAGE
Appendix A Appendix Changes
A.1 Introduction ............................................................................................................ A-1
A.1.1 Transmit Status Blocks/Transmit Control Blocks .................................... A-1
A.1.2 Interrupt Enable (for Individual Sources) Interrupt Arm ......................... A-1
A.2 Commands ........................................................................................................ A-1
A.2.1 Reload RCC/TCC
Load RCC/TCC ....................................................................................... A-1
A.2.2 Select Straight/Swapped Memory ..........................................................A-1
A.2.3 Preset CRC Clear Tx/Rx CRC Generator................................................ A-1
A.3 Bit/Field Names ................................................................................................. A-1
Appendix B
Questions and Answers ...............................................................................................B-1
Z16C30 USC
USER'S MANUAL
®
UM97USC0100
v
Page 10

ZILOG
UM009402-0201
FIGURE TITLES PAGE
Chapter 1
Figure 1-1. USC Logic Symbol ................................................................................. 1-2
Figure 1-2. USC 68-pin PLCC Pinout ........................................................................ 1-3
Figure 1-3. USC Block Diagram.............................................................................. 1-11
Chapter 2
Figure 2-1. Simple Multiplexed System .................................................................... 2-1
Figure 2-2. Simple Interface to Non-Multiplexed Bus ............................................... 2-2
Figure 2-3. User-Friendly Interface to Non-Multiplexed Bus .................................... 2-2
Figure 2-4. /RD & /WR Signaling ............................................................................... 2-3
Figure 2-5. R//W and /DS Signaling .......................................................................... 2-3
Figure 2-6. A Fast and Slow Cycle with Three Kinds of Handshaking ..................... 2-5
Figure 2-7. The USC's Bus Configuration Register (BCR) ........................................ 2-7
Figure 2-8. The Channel Command/Address Register (CCAR) ............................. 2-10
Figure 2-9. USC Register Addressing .................................................................... 2-11
Figure 2-10. A Register Read Cycle with Multiplexed Addresses and Data ............ 2-15
Figure 2-11. A Register Write Cycle with Multiplexed Addresses and Data ............ 2-16
Figure 2-12. A Register Read Cycle with Non-Multiplexed Data Lines .................... 2-17
Figure 2-13. A Register Write Cycle with Non-Multiplexed Data Lines..................... 2-18
Z16C30 USC
USER'S MANUAL
®
Chapter 3
Figure 3-1. Sample Application ................................................................................ 3-2
Figure 3-2. Serial Interface for Sample Application .................................................. 3-3
Chapter 4
Figure 4-1. A Model of a USC Channel's Clocking Logic ......................................... 4-3
Figure 4-2. The Clock Mode Control Register (CMCR) ............................................ 4-4
Figure 4-3. The Hardware Configuration Register (HCR) ......................................... 4-4
Figure 4-4. Data Formats/Encoding .......................................................................... 4-7
Figure 4-5. The Channel Command/Status Register (CCSR) ................................... 4-9
Figure 4-6. The Input/Output Control Register (IOCR) ........................................... 4-10
Figure 4-7. The Status Interrupt Control Register (SICR)........................................ 4-12
Figure 4-8. The Miscellaneous Interrupt Status Register (MISR) ............................ 4-12
Figure 4-9. /DCD Auto-Enable Timing .................................................................... 4-14
Figure 4-10. /CTS Auto-Enable Timing ..................................................................... 4-15
vi
UM97USC0100
Page 11

ZILOG
UM009402-0201
FIGURE TITLES PAGE
Chapter 5
Figure 5-1. Asynchronous Data ................................................................................ 5-2
Figure 5-2. Character Oriented Synchronous Data .................................................. 5-2
Figure 5-3. HDLC/SDLC Data ................................................................................... 5-4
Figure 5-4. The Channel Mode Register (CMR) ....................................................... 5-6
Figure 5-5. The Transmit Mode Register (TMR)........................................................ 5-6
Figure 5-6. The Receive Mode Register (RMR) ........................................................ 5-6
Figure 5-7. Carrier Detection for a Received Ethernet Frame ................................ 5-16
Figure 5-8. The Channel Command/Status Register (CCSR) ................................. 5-21
Figure 5-9. A Model of the Receive Datapath......................................................... 5-24
Figure 5-10. How a USC Channel Provides the "Queued" Status Bits in the RCSR. 5-27
Figure 5-11. The Transmit Command/Status Register (TCSR) ................................. 5-28
Figure 5-12. The Receive Command/Status Register (RCSR).................................. 5-29
Figure 5-13. A Model of the Transmit Character Counter Feature............................ 5-33
Figure 5-14. A Model of the Receive Character Counter Feature ............................ 5-34
Figure 5-15. The Channel Command/Status Register (CCSR) ................................. 5-37
Figure 5-16. The Channel Control Register (CCR) ................................................... 5-37
Figure 5-17. A 32-Bit Transmit Control Block in a DMA Buffer ................................. 5-37
Figure 5-18. A 32-Bit Receive Status Block in a DMA Buffer.................................... 5-38
Figure 5-19. The Channel Command/Address Register (CCAR) ............................. 5-41
Z16C30 USC
USER'S MANUAL
®
Chapter 6
Figure 6-1. Flowthrough DMA Transfer Memory to Peripheral Device ..................... 6-2
Figure 6-2. Flowthrough DMA Transfer, Peripheral Device to Memory .................... 6-3
Figure 6-3. Flyby DMA Transfer, Memory to Peripheral Device ............................... 6-4
Figure 6-4. *Flyby DMA Transfer, Peripheral Device to Memory .............................. 6-5
UM97USC0100
vii
Page 12

ZILOG
UM009402-0201
FIGURE TITLES PAGE
Chapter 7
Figure 7-1. An Interrupt Daisy Chain ........................................................................ 7-2
Figure 7-2. External Interrupt Control........................................................................ 7-3
Figure 7-3. USC Interrupt Types & Sources ............................................................. 7-5
Figure 7-4. A Model of the Interrupt Logic for Source "s" and type "t" ...................... 7-7
Figure 7-5. An Interrupt Acknowledge Cycle Signaled by /SITACK, .............................
on a Multiplexed Bus ............................................................................ 7-10
Figure 7-6. An Interrupt Acknowledge Cycle Signaled by /SITACK, .............................
on a Non-Multiplexed Bus .................................................................... 7-11
Figure 7-7. A /PITACK Interrupt Acknowledge Cycle with 2PulseIACK=0 ............. 7-12
Figure 7-8. A /PITACK Interrupt Acknowledge Cycle with 2PulseIACK=1 ............. 7-13
Figure 7-9. The Receive Command/Status Register (RCSR).................................. 7-15
Figure 7-10. The Receive Interrupt Control Register (RICR) .................................... 7-15
Figure 7-11. A Sample Service Routine for Receive Data Interrupts........................ 7-17
Figure 7-12. The Transmit Command/Status Register (TCSR) ................................. 7-18
Figure 7-13. The Transmit Interrupt Control Register (TICR) .................................... 7-18
Figure 7-14. The Status Interrupt Control Register (SICR)........................................ 7-19
Figure 7-15. The Miscellaneous Interrupt Status Register (MISR)............................ 7-19
Figure 7-16. The Daisy-Chain Control Register (DCCR)........................................... 7-22
Figure 7-17. The Interrupt Control Register (ICR)..................................................... 7-22
Figure 7-18. The Interrupt Vector Register (IVR) ...................................................... 7-24
Z16C30 USC
USER'S MANUAL
®
Chapter 8
Figure 8-1. Test Mode Data Register with TMCR 4-0=00101 (Clock Mux Outputs) ... 8-7
Figure 8-2. Test Mode Data Register with TMCR 4-0=00111 (Clock Mux Inputs)...... 8-8
Figure 8-3. Test Mode Data Register with TMCR 4-0=01110 (I/O and Misc Status) .. 8-9
viii
UM97USC0100
Page 13

ZILOG
UM009402-0201
TABLE TITLES PAGE
Chapter 1
Table 1-1. Bus Interfacing Features of the USC ...................................................... 1-5
Table 1-2. Serial Interfacing Features of the USC ................................................... 1-6
Table 1-3. Serial Controller Features of the USC ..................................................... 1-7
Table 1-4. More Serial Controller Features of the USC............................................ 1-8
Table 1-5. DMA Features of the USC ...................................................................... 1-9
Table 1-6. Interrupt Features of the USC ............................................................... 1-10
Chapter 2
Table 2-1. USC Registers, in Address Order ........................................................ 2-12
Table 2-2. USC Registers, in Alphabetical Order .................................................. 2-13
Z16C30 USC
USER'S MANUAL
®
© 1997 by Zilog, Inc. All rights reserved. No part of this document
may be copied or reproduced in any form or by any means
without the prior written consent of Zilog, Inc. The information in
this document is subject to change without notice. Devices sold
by Zilog, Inc. are covered by warranty and patent indemnification
provisions appearing in Zilog, Inc. Terms and Conditions of Sale
only. Zilog, Inc. makes no warranty, express, statutory, implied or
by description, regarding the information set forth herein or
regarding the freedom of the described devices from intellectual
property infringement. Zilog, Inc. makes no warranty of merchantability or fitness for any purpose. Zilog, Inc. shall not be
responsible for any errors that may appear in this document.
Zilog, Inc. makes no commitment to update or keep current the
information contained in this document.
UM97USC0100
Zilog’s products are not authorized for use as critical components in life support devices or systems unless a specific written
agreement pertaining to such intended use is executed between
the customer and Zilog prior to use. Life support devices or
systems are those which are intended for surgical implantation
into the body, or which sustains life whose failure to perform,
when properly used in accordance with instructions for use
provided in the labeling, can be reasonably expected to result in
significant injury to the user.
Zilog, Inc. 210 East Hacienda Ave.
Campbell, CA 95008-6600
Telephone (408) 370-8000
Telex 910-338-7621
FAX 408 370-8056
Internet: http://www.zilog.com
ix
Page 14
ZILOG
UM009402-0201
1.1 INTRODUCTION
U
SER
’s M
ANUAL
CHAPTER 1
INTRODUCTION
Z16C30 USC
USER'S MANUAL
®
The Universal Serial Controller (USC®) is the next-generation successor to Zilog’s popular SCC family of multiprotocol serial controllers, and is recommended for new
designs. Compared to the SCC family and most competing devices, the USC features more serial protocols, a 16or 8-bit data bus, higher data rates, larger FIFOs, better
support for DMA operation, and more convenient software
1.2 FEATURES
■ Two Full-Duplex Multi-Protocol Serial Controllers
■ Supports External DMA Channels with two Request
and two Acknowledge Lines
■ Serial Data Rates to 10 Mbits/Second
■ 32-Character Transmit and Receive FIFOs for each
Channel
■ 8- or 16-Bit Transfers for both Serial Data and
Registers
handling. The USC can handle higher data rates because
it takes its timing reference from the software-selected
receive and transmit clocks and the host bus control
signals, rather than from a separate “bus clock” or “master
clock”.
■ Async Features Include False-Start Filtering, Stop Bit
Length Programmable by 1/16-bit steps, Parity
Generation/Checking, Break Generation/Detection
■ HDLC/SDLC Features Include 8-Bit Address Checking,
Extended Address Support, 16/32 bit CRC,
Programmable Idle State, Auto Preamble Option, Loop
Mode
■ Sync Features Include 2 to 16-Bit Sync Pattern, Sync
Strip Option, 16/32-bit CRC, Programmable Idle State,
Auto Preamble Option, X.21 XMIT/RCV Slaving
■ Flexible Adaptation to Various System Buses
■ Serial Modes Include Asynchronous, Bisync, SDLC,
HDLC, Ethernet, and Nine-Bit
■ Two Baud Rate Generators per Channel
■ Digital Phase Locked Loop for each Channel
■ Carrier Detect, Clear to Send, and Two Serial Clock
pins for each Channel
■ Transmit and Receive Frame-Length Counters for
each Channel
UM97USC0100
■ Improved Bus/Serial Interlocks Prevent extra Rx DMA
Characters and Ensure Correct FIFO Fill Level
Reporting
■ Flexible Interrupt Modes Including Interrupt
Acknowledge Daisy Chain
■ High-Speed, Low Power CMOS Technology
■ 68-Pin PLCC
1-1
Page 15
ZILOG
UM009402-0201
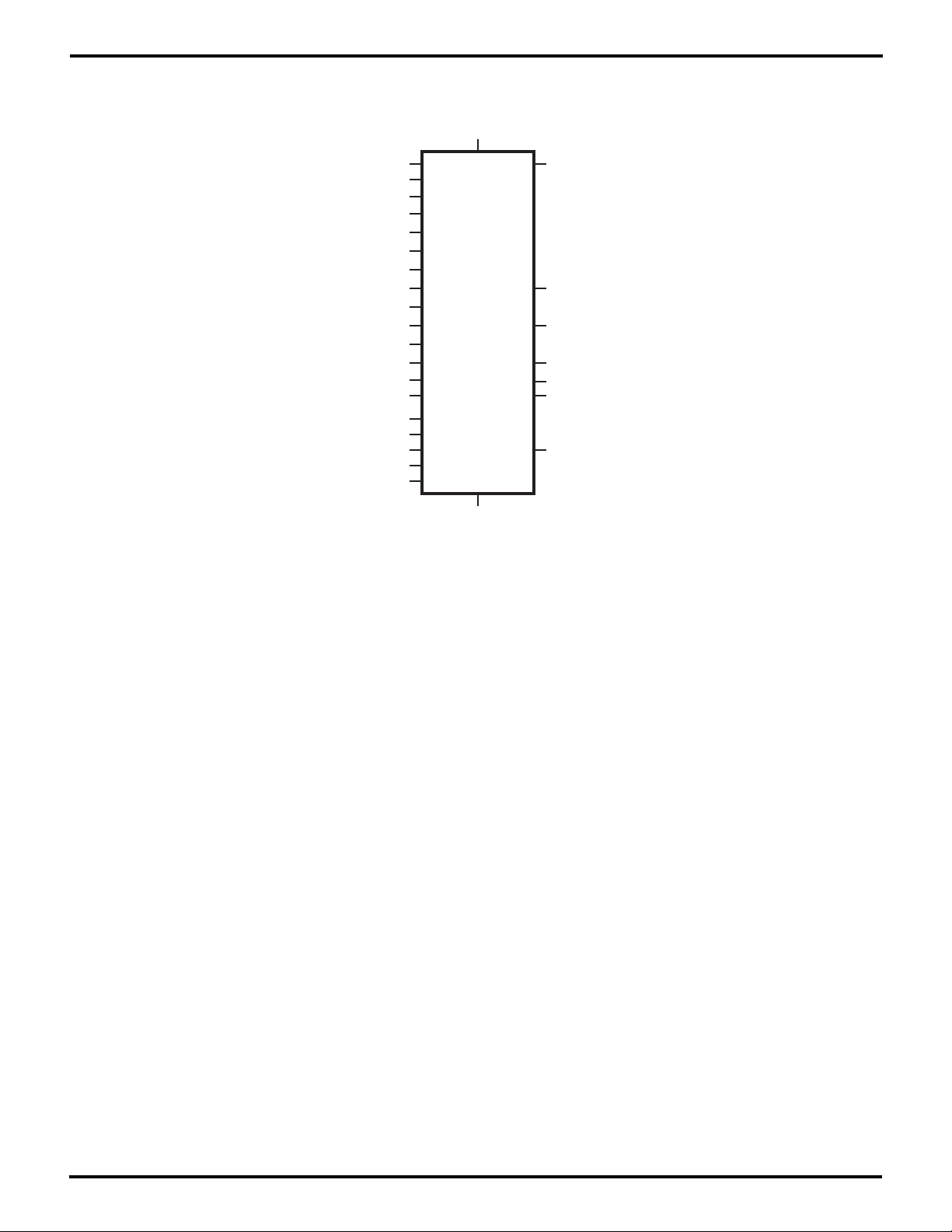
1.3 LOGIC SYMBOL
VDD
Z16C30 USC
USER'S MANUAL
®
/RESET
/CS
A//B
D//C
/AS
R//W
/DS
/RD
/WR
/SITACK
/PITACK
IEIA, B
/RxACKA,B
/TxACKA,B
/RxCA,B
/TxCA,B
RxDA,B
/CTSA,B
/DCDA,B
Figure 1-1. USC Logic Symbol
Z16C30
USC
VSS
AD15-AD0
/WAIT//RDY
/INTA,B
IEOA,B
/RxREQA,B
/TxREQA,B
/TxDA,B
1-2
UM97USC0100
Page 16
ZILOG
UM009402-0201
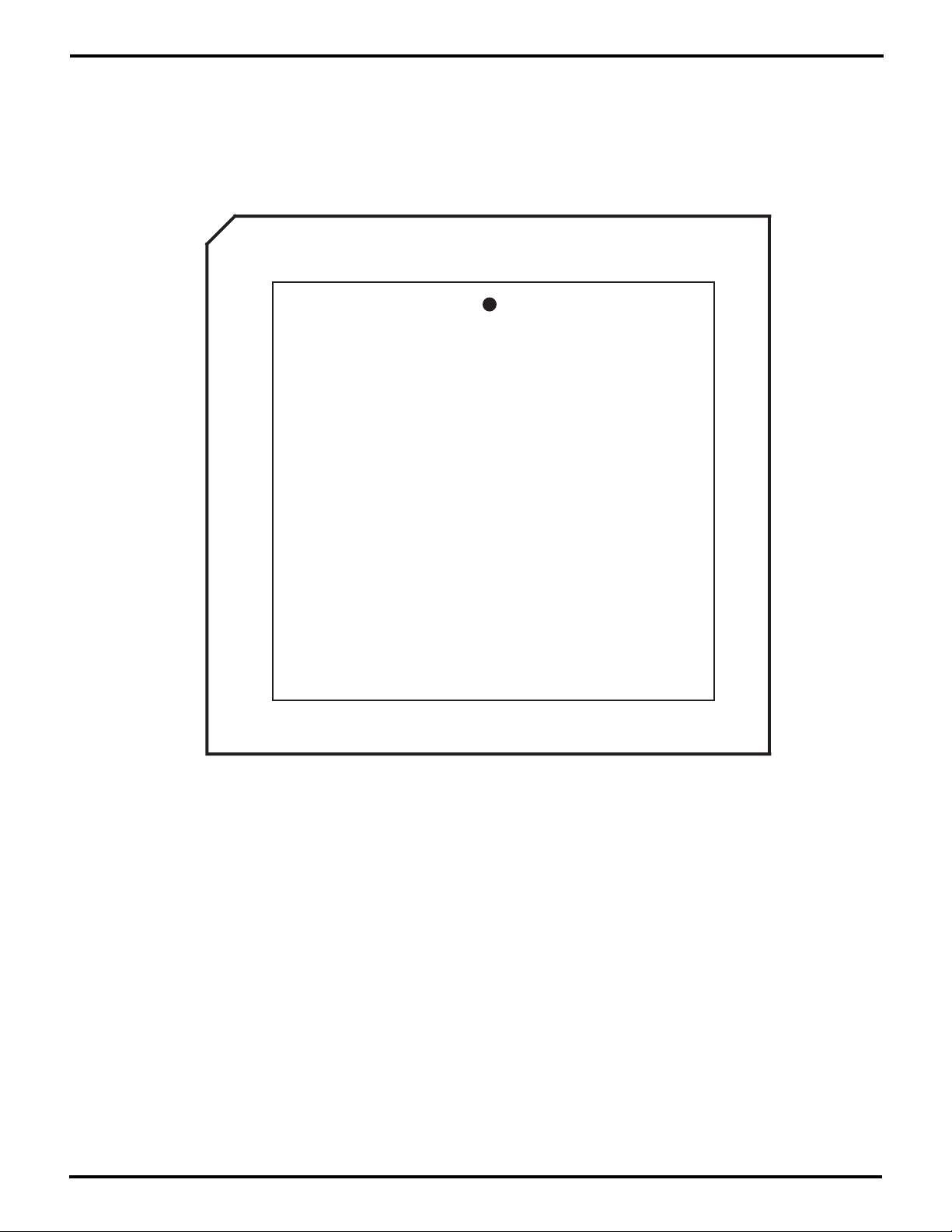
1.4 PACKAGING
/TxACKA
/WAIT//RDY
9
8
/SITACK6A//B5D//C4/CS3/RESET
7
2
VDD
1
VDD
68 67
VDD
/AS
66
/DS
65
/RD
64
/W/R
63
/PITACK61/TxACKB
R//W
62
Z16C30 USC
USER'S MANUAL
®
/RxACKA
/INTA
IEIA
IEOA
VSS
VDD
AD0
AD1
AD2
AD3
AD4
AD5
AD6
AD7
VSS
VDD
/RxREQA
10
11
12
13
14
15
16
17
Z16C30 USC
18
19
20
21
22
23
24
25
26
27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43
(Top View)
60
59
58
57
56
55
54
53
52
51
50
49
48
47
46
45
44
/RxACKB
/INTB
IEIB
/IEOB
VSS
VDD
AD8
AD9
AD10
AD11
AD12
AD13
AD14
AD15
VSS
VDD
/RxREQB
UM97USC0100
/RxCA
/TxREQA
VSS
VSS
RxDA
/DCDA
Figure 1-2. USC® 68-Pin PLCC Pinout
TxDA
/TxCA
/CTSA
VSS
TxDB
/CTSB
/TxCB
/DCDB
RxDB
/RxCB
/TxREQB
1-3
Page 17

ZILOG
UM009402-0201
1.5 OVERVIEW OF THE USC AND THIS MANUAL
Z16C30 USC
USER'S MANUAL
®
The following descriptions and Tables should be helpful in
initial evaluation of the USC® and in finding your way
around this document. Subjects in the Tables are arranged
in the same order they are covered in Chapters 2 and 4-8.
1.5.1 Bus Interfacing
Chapter 2 describes interfacing the USC to a processor or
backplane bus. The USC includes several flexible interfacing options as described in Table 1-1. Some of these
options are controlled by the Bus Configuration Register
(BCR), which is implicitly the destination of the first write to
the USC after a Reset, and is then no longer accessible to
software.
1.5.2 Serial Interfacing
Chapter 4 covers Serial Interfacing, the “other side” of
hardware design from Bus Interfacing. Table 1-2 summarizes the Serial Interfacing features of the USC, which
include Clock Selection, Baud Rate Generation, serial
data Encoding and Decoding, a Digital Phase Locked
Loop for reconstructing clocking from received data, and
“modem control” pins.
1.5.3 Serial Modes and Protocols
Chapter 5 covers how to program the Transmitter and
Receiver to handle many different protocols and applica-
tions. This Chapter focuses on software aspects of using
the USC while Chapter 4 is more hardware-oriented.
Tables 1-3 and 1-4 show the major subjects that you can
find in Chapter 5.
1.5.4 DMA Operation
Chapter 6 describes how to use the USC with DMA
channels, and is outlined in Table 1-5.
1.5.5 Interrupts
While Chapters 4-6 mention which conditions and events
can be enabled/armed to interrupt the processor, Chapter
7 pulls together all aspects of the USC’s extensive interrupt
capabilities, including interrupt acknowledge cycles, vectors, and use of Interrupt Under Service bits to implement
nested interrupts. Table 1-6 summarizes the subject.
1.5.6 Software Summary
Chapter 8 contains only a small amount of new material: a
few software-related matters that didn’t seem to fit in
anywhere else. The bulk of the Chapter is the Register
Reference tables that summarize the use and function of
each bit and field in each register in the USC.
1-4
UM97USC0100
Page 18
Z16C30 USC
UM009402-0201
ZILOG
Table 1-1 Bus Interfacing Features of the USC (Chapter 2)
Multiplexed or Separate Address and Data Bus(es) can be selected for processor access to USC registers.
Read/Write Control Signals Separate Read and Write strobes, or Data strobe and Direction
control can be used. Only one set of signals should be
connected to the host processor; the other should be pulled
up.
8- or 16-Bit Data Bus DMA efficiency and bandwidth are doubled by using a 16-bit
bus, and software size and tediousness is improved as well.
With an 8-bit data bus and non-multiplexed Address and Data,
the bus pins that would otherwise be unused can be used for
register addressing from the processor.
Ready, Wait, or Acknowledge Handshaking can be selected for processor cycles. If Wait signalling is
selected, the USC drives Wait for interrupt acknowledge cycles
but not for register accesses — its 60 nanosecond register
access time is fast enough for no-Wait operation in almost all
applications. If Acknowledge signaling is selected, the part
drives the Acknowledge line for both interrupt acknowledge
cycles and register accesses.
USER'S MANUAL
®
Interrupt Acknowledge Cycles Separate inputs are provided for “Status line” vs. “pulse”
signalling. In the latter case single-pulse or double-pulse
cycles can be selected. The USC can also be used on buses
that don’t include Interrupt Acknowledge cycles.
Direct or Indirect Register Addressing The board designer can conserve the address space occu-
pied by the USC by requiring software to write register addresses into the USC, or can maximize software efficiency by
presenting register addresses directly. On a non-multiplexed
16-bit data bus, the latter choice requires external components/logic to multiplex the low-order bits of the address onto
the AD pins.
Registers There are 32 16-bit registers in each channel of the USC,
including three selectable subregisters in the MSbyte of two of
them.
Big- or Little-Ending Byte Ordering Motorola or Intel style addressing can be selected for serial
data. Byte addressing within the USC’s 16-bit registers is
inherently Little-Endian/Intel style.
UM97USC0100
1-5
Page 19
ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
1.5.6 Software Summary (Continued)
Table 1-2. Serial Interfacing Features of the USC (Chapter 4)
Clock Selection Clocking for the Transmitter and Receiver can come from the
/RxC or /TxC pins, and can be used directly or can be divided by 4, 8,
16, or 32 by Counters 0 and 1, and/or by any value from 1 to 65,536 by
Baud Rate Generators 0 and 1. Or, clocking can come from the Digital
Phase Locked Loop (DPLL) module, which tracks transitions on the
RxD pin.
Clock Output Clocking can also be driven out on the /TxC or /RxC pin for use by on-
board logic, a modem or other interface.
CTR0, CTR1 These two 5-bit free-running counters can each divide /RxC or /TxC by
4, 8, 16, or 32. They can provide the Transmit or Receive bit clocks
directly, or can act as “prescalers” for the Baud Rate Generators.
Baud Rate Generators BRG0 and BRG1 are 16-bit counters, each of which can divide /RxC,
/TxC, or the output of CTR0 or CTR1 by any value from 1 to 65,536. They
can source the Transmit or Receive bit clocks, act as the reference
clock for the DPLL, or can be used as timers on either a polled or
interrupt-driven basis. They can be stopped and started by software,
and can run continuously or stop when they reach zero. Their period
(time constant) values can be reprogrammed dynamically, effective
immediately or when the BRG counts down to zero.
®
Digital-Phase Locked Loop The DPLL can divide /RxC, /TxC, or the output of BRG0 or BRG1 by 8,
16, or 32, while resynchronizing to transitions on RxD, to recover a
Receive clock from the Receive data signal. This can be done only
when the received data stream includes enough transitions to keep the
recovered clock synchronized to the data. NRZI-Space encoding of
HDLC/SDLC frames, or Biphase (FM) encoding with any protocol,
guarantees such data transitions.
Data Encoding The USC can encode transmitted data and decode received data in
NRZI-Mark, NRZI-Space, Biphase-Mark (FM1), Biphase-Space (FM0),
Biphase-Level (Manchester), or Differential-Biphase-Level modes.
These encodings are used in various applications to maintain synchronization between transmitting and receiving equipment.
Echoing and Looping Received data can be repeated onto TxD, or transmit data can be
looped back to the Receiver for testing.
Modem Controls and Interrupts Carrier Detect and Clear to Send inputs can auto-enable the
Receiver and Transmitter, respectively. Rising and/or falling edges on
these pins can cause interrupts, as can edges on the Transmit and
Receive Clock pins (if they’re not used for clocking), and/or the
Transmit and Receive Request pins if they’re not used for DMA
requests.
DMA Controller Interface Each channel of the USC provides Tx and Rx Request outputs for
connection to a DMA controller, and Tx and Rx Acknowledge inputs for
“flyby” (single-cycle) DMA operation. The Acknowledge pins can be
used for other purposes if “flowthrough” (two-cycle) DMA controller is
employed. Both Request and Acknowledge pins can be used for other
purposes if no DMA controller is used.
1-6
UM97USC0100
Page 20
Z16C30 USC
UM009402-0201
ZILOG
USER'S MANUAL
Table 1-3. Serial Controller Features of the USC
Major Protocol Categories Chapter 4 begins with a small tutorial on the differences between Asynchronous,
Character-Oriented Synchronous, and Bit-Oriented Synchronous (Packet)
protocols.
Asynchronous Protocols In addition to classic Async, the USC can handle the following variations:
■ Isochronous (1X rather than 16-64X clock)
■ Nine-Bit (Address Wake-up — an extra bit signifies Address/Data)
Character-Oriented
Synchronous Protocols ■ External Sync (Receive only: simple character assembly)
■ Monosync (1-character sync pattern, no hardware framing)
■ Bisync (2-character sync pattern, no hardware framing)
■ Transparent Bisync (Bisync + hardware support for Transparency)
■ Slaved Monosync (Xmit only; X.21 Tx character alignment to Rx)
■ IEEE 802.3 (Ethernet; requires external collision detect and backoff)
Bit-Oriented Synchronous
Protocols ■ HDLC/SDLC
■ HDLC/SDLC Loop (RxD is repeated on TxD except when Xmit is
enabled and triggered by a received Go Ahead/Abort sequence)
®
Character Length is programmable from 1 bit/character to:
■ 8 bits including Parity, if any, in synchronous modes
■ 8 bits plus Parity, if any, in Async mode
■ 8 bits plus Parity plus the Address/Data bit in Nine-Bit mode
CRC Generation/Checking In synchronous modes, the USC will generate and check CRC-CCITT, CRC-16, or
CRC-32 codes for each frame or message. For character-oriented modes other
than 802.3, software can selectively control which characters are included in the
CRC, for both transmitting and reception. For HDLC/SDLC and 802.3, CRC status
can be stored in memory for each received frame.
Parity Checking Asynchronous or Synchronous modes. Odd/Even/Mark/Space/None.
Transmit Status Reporting Optional interrupt on: Preamble Sent, Idle Sent, Abort Sent, End of Frame/
Message, CRC Sent, Underrun No interrupt: All Sent, Tx Empty
Receive Status Reporting Optional Interrupt on: Exited Hunt, Idle Received, Break, Abort (immediate or
synchronized with the RxFIFO), Rx Boundary (end of frame/message), Parity
Error, Overrun. No interrupt: Short Frame, Code Violation Type, CRC Error,
Framing Error, Rx Character Available
Character Counters These 16-bit counters decrement for each character received or fetched from
memory for transmission. The Tx CC can control the length of Tx frames in
synchronous modes using DMA. The Rx CC tracks the length of each Rx frame
in synchronous modes using DMA, and optionally interrupts in case an Rx frame
is too long.
RCC FIFO A four-deep store for ending Rx Character Counter values for each frame.
UM97USC0100
1-7
Page 21
ZILOG
UM009402-0201
USER'S MANUAL
Table 1-4. More Serial Controller Features of the USC
Transmit Control Blocks A Transmit DMA channel can fetch the Tx CC frame length and other control info
for each frame/message, before the frame in the memory buffer.
Receive Status Blocks The Rx DMA channel can provide the frame status (including CRC status) for
each frame/message after the frame. Optionally it can also provide the the Rx
CC frame length residual, although this is only useful in Rx DMA applications in
which software can read the number of bytes/words that were stored, from the
DMA channel.
Commands Software can write various command codes to 3 different register fields in each
channel, to control the operation of the channel. Commands can be divided into
those that select a long-term configuration of a channel (like selecting which
serial character in a 16-bit word comes first), those that make the part perform
a time-sequenced action (like sending an Abort sequence), and those that
change the state of the part immediately (like purging a FIFO).
Software Reset Software can reset a USC channel by writing a central register bit, similarly to
a hardware-signaled Reset.
Rx and Tx FIFO Storage 32-character FIFOs stand between the Transmit Data Register and the Trans-
mitter, and between the Receiver and the Rx Data Register. Fill level counters
track how many characters are in each FIFO, and independently programmable threshold values determine when DMA operation will be triggered to fill
or empty them, and/or when an interrupt will be requested.
Z16C30 USC
®
Between Frames/Messages In synchronous modes the Transmitter will do the following before the first
data character of each frame or message, and/or after the last one:
■ optionally send a 8-to 64-bit Preamble for PLL synchronization or mini-
mum inter-frame timing
■ send an "opening" sync sequence or Flag
■ After the last character from memory, sending the CRC accumulated by the
USC is optional. Thus, a CRC received with a frame can be sent back out
without being regenerated.
■ send a "closing" Flag or Sync
■ send a selected "idle" pattern unless/until the next frame is ready to be sent
Waiting for Software Response Software can select 3 optional interlocks between frames, to allow it to do
real-time processing on a frame-by-frame basis.
1-8
UM97USC0100
Page 22

Z16C30 USC
UM009402-0201
ZILOG
Table 1-5. DMA Features of the USC
Flowthrough or Flyby The USC can be used with DMA controllers in a “flowthrough” mode,
in which the REQ line from the USC tells the DMAC when to transfer data
by means of separate accesses to the USC and to memory. Alternatively, the USC and DMA can operate in a “flyby” mode, in which there’s
also an ACK line from the DMAC to tell the USC when to drive data to
the memory or when to capture data from the memory. Flyby operation
requires only one bus cycle per (pair of) character(s).
DMA Requests A USC can provide separate Transmit and Receive DMA Request
outputs from each of its two channels, that become active when the
relevant FIFO reaches a software-selected level of emptiness or
fullness, and stay active until the FIFO is filled or emptied. The Receive
Request for a channel operating in a synchronous block oriented mode
(e.g., HDLC) will also go active when the end of a message or frame is
received.
Separating Receive Frames Chapter 5 ends with a description of how the “Wait for Rx Trigger”
feature can be used to separate received frames into individual
memory buffers, by withholding the Rx DMA Request for the data in a
new frame until after software has read out the length of the frame and/
or programmed the DMA channel with the buffer address for the new
frame.
USER'S MANUAL
®
UM97USC0100
1-9
Page 23
ZILOG
UM009402-0201
Table 1-6. Interrupt Features of the USC
Interrupt Acknowledge
Daisy Chaining was one of Zilog’s original contributions to microprocessor architecture. On the USC
its use (to determine which of several interrupting devices to service first) is optional,
and performance is much improved compared to older devices.
External Interrupt Control can be used instead of a daisy chain to implement interrupt priority schemes other
than strict priority, such as “fairness”, rotating, or first-come first-served.
Types of interrupts that can be selectively enabled or disabled include Receive Status,
Receive Data, Transmit Status, Transmit Data, I/O Pin, and Miscellaneous.
Receive Status Interrupt sources that can be selectively armed or disarmed include Exited Hunt, Idle
Received, Break, Abort (immediate and/or synchronized to received data), End of
Frame/Message, Parity Error, and RxFIFO Overrun.
Receive Data Interrupt can occur when the RxFIFO reaches a programmed level of fullness.
Transmit Status Interrupt sources that can be selectively armed or disarmed include Preamble Sent, Idle
Sent, Abort Sent, End of Frame/Message Sent, CRC Sent, and Tx Underrun.
Transmit Data Interrupt can occur when the TxFIFO reaches a programmed level of emptiness.
Z16C30 USC
USER'S MANUAL
®
I/O Pin Interrupt sources that can be selectively armed or disarmed include rising and/or falling
edges on the /DCD, /CTS, /RxREQ, /TxREQ, /RxC, and /TxC pins.
Miscellaneous Interrupt sources that can be selectively armed or disarmed include Rx Character Counter
Underflow, DPLL Sync Loss, Baud Rate Generator 0 zero, and BRG1=0.
Nested Interrupts are fully supported in that the USC includes an Interrupt Pending and Interrupt
Under Service bit for each type of interrupt.
Interrupt Acknowledge Cycles The USC is compatible with a wide variety of processors in that the signal that
identifies an acknowledge cycle can be sampled like an address bit, or can carry
a single or double pulse similar to a read or write strobe.
Interrupt Vectors The USC can include identification of the highest priority requesting type of interrupt
in the vector that it returns during an interrupt acknowledge cycle.
Non-Acknowledging Buses Software can simulate the effects of interrupt acknowledge cycles if the USC is used
on a bus that doesn’t provide such cycles, like the ISA (AT) bus.
1-10
UM97USC0100
Page 24
ZILOG
UM009402-0201
Transmitter
DPLL
Counters
BRG0, BRG1
Serial Clock
Logic
Receiver
Z16C30 USC
®
USER'S MANUAL
Host
Processor
DMA
Controller,
System
Memory
Bus
Interface
Transmit
FIFO
Transmit
FIFO
Transmitter
Interrupt
Control
Interrupt
Control
Serial Clock
Logic
DPLL
Counters
BRG0, BRG1
Receive
FIFO
Channel A
16-Bit Internal
Data Bus
Channel B
Receive
FIFO
Receiver
UM97USC0100
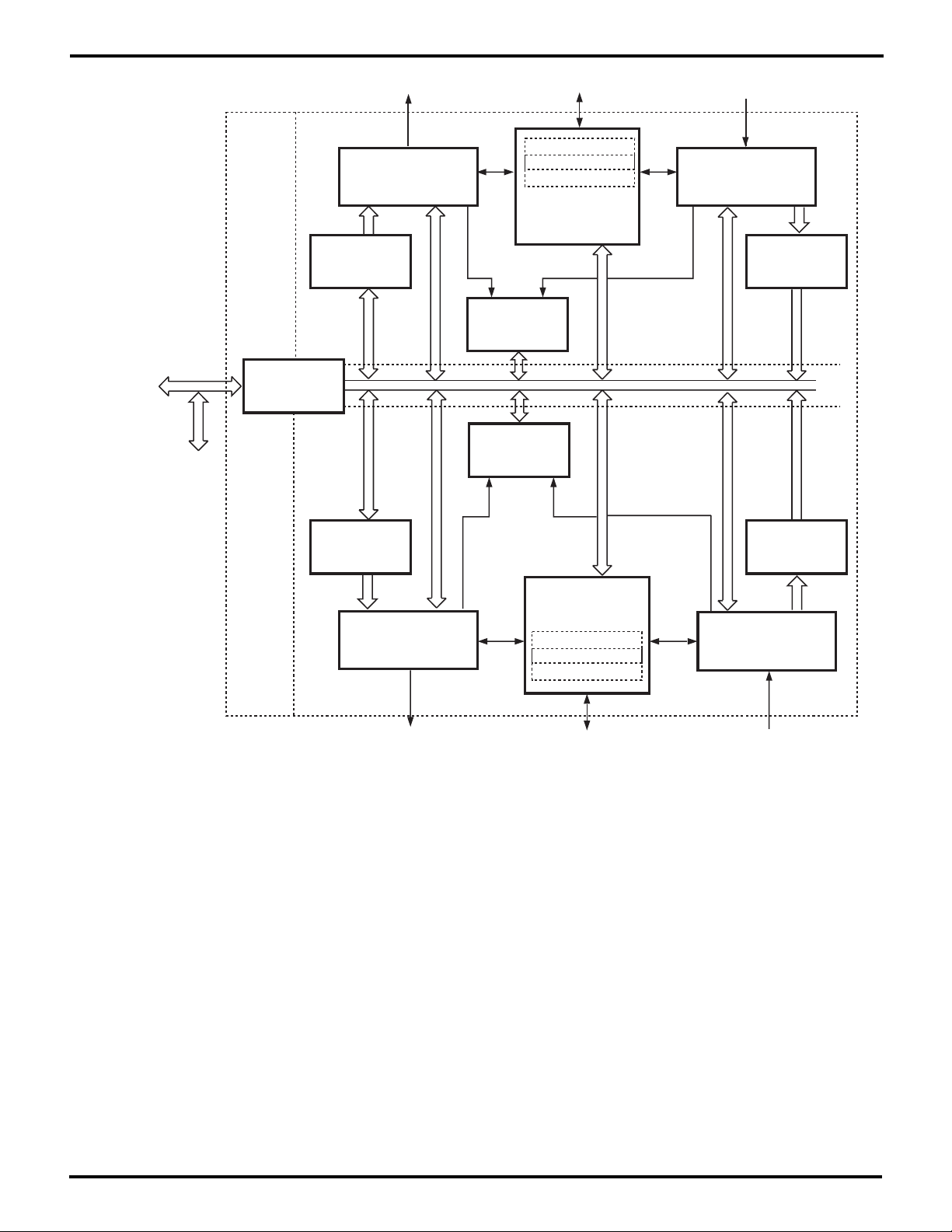
Figure 1-3. USC® Block Diagram
1-11
Page 25

ZILOG
UM009402-0201
1.6 DEVICE STRUCTURE
Z16C30 USC
USER'S MANUAL
®
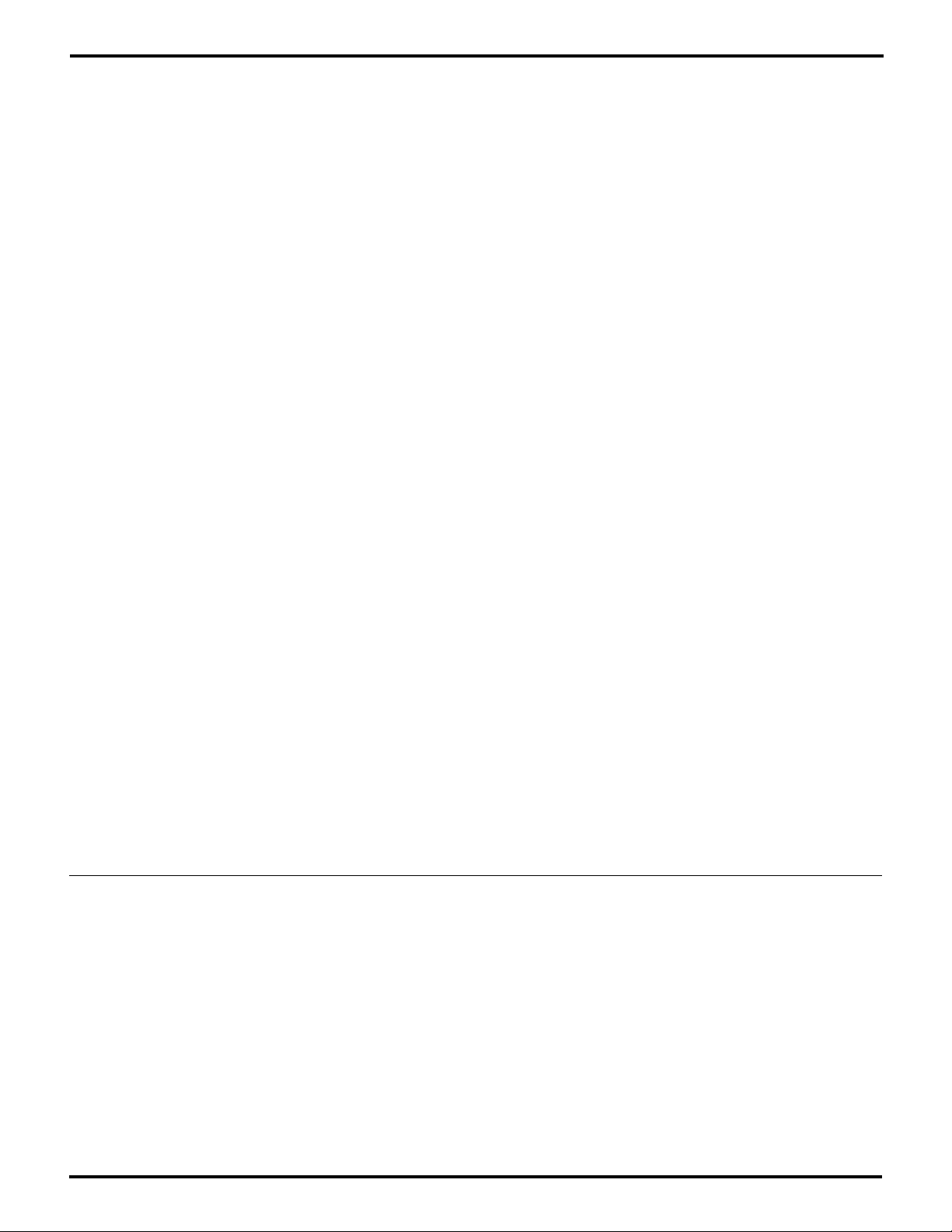
Figure 1-1 shows the basic structure of the USC. The Bus
Interface module stands between the external bus pins
and an on-chip 16-bit data bus that interconnects the other
functional modules. It includes several flexible bus interfacing options that are controlled by the Bus Configuration
Register (BCR). The BCR is automatically the destination
of the first write cycle from the host processor to the USC
after a Reset. After that it is no longer accessible to the host
software.
1.6.1 The Transmit Data Path
Either the host processor or an external DMA channel can
write transmit data into a channel’s Transmit First-In, FirstOut (FIFO) memory. At any time, a Transmit FIFO can be
empty or can contain from 1 to 32 characters to be
transmitted. Characters written into the TxFIFO become
available to the Transmitter in the order in which they were
written.
While the host processor can itself write data into the
Transmit FIFOs, it’s more efficient to use external Transmit
DMA channels to fetch the data. The host can program a
USC channel so that its Transmitter will trigger its DMA
controller to fill its FIFO at varying degrees of FIFO “emptiness”. Selecting this point involves balancing the probability and consequences of “underrunning” the transmitter, against the overhead for the DMA channel to acquire
control of the host bus more often.
have to detect and synchronize start bits, check parity and
stop bits, calculate and check CRCs, detect flag, abort
and idle sequences, recognize control characters including transparency considerations, decode the serial data
and clock extraction using any of several encoding
schemes, and/or enable and disable reception based on
the DCD input pin. The Receivers’ checking functions
generate several status bits associated with each character, that accompany the characters through the Receive
FIFOs.
The Receive FIFOs can hold up to 32 characters and their
associated status bits. As the receivers write entries into
their FIFOs, the entries become available to either the host
processor or external Receive DMA channels. As on the
transmit side, the Receive FIFOs include detection logic
for various degrees of “fullness”. Separate thresholds
control the point at which a channel starts requesting its
DMA channel starts to refill its FIFO, and at which a channel
requests an interrupt. Besides the main Receive FIFOs,
each channel has a 4-entry RCC FIFO that can hold values
indicating the length of up to four received frames.
While the host processor can access data from the Receive FIFOs, it’s more efficient to use external Receive
DMA channels to transfer the data directly into buffer areas
in memory. The USC can provide the status (and optionally
the RCC value at the end) of each frame in the serial data
stream, after the last character of the frame.
The serial Transmitters take characters from the Transmit
FIFOs and convert them to serial data on the TxD pins.
While this function is conceptually simple, the USC supports many complex serial protocols, which increases the
complexity of the Transmitters dramatically. Depending on
the serial mode selected, the Transmitters may do any of
the following in addition to parallel-serial conversion: start,
stop, and parity bit generation, calculating and sending
CRCs, automatic generation of opening and closing flags,
encoding the serial data into any of several formats that
guarantee transitions and carry clocking with the data,
and/or controlling transmission based on the CTS pin.
1.6.2 The Receive Data Path
In general, the functions of the Receivers are the inverse of
those of the Transmitters: they monitor the serial data on
the RxD pin, organize it according to the serial mode
selected by the software, and convert the data to parallel
characters that they place in the Receive FIFOs. Again,
there is more to the process than just serial-parallel conversion. Depending on the serial mode the Receivers may
1.6.3 Clocking
Each channel includes a Serial Clocking Logic section that
creates the clocking signals for the channel’s Transmitter
and Receiver. Software can program the clocking logic to
do this in various ways based on one or two external
clock(s) for each channel. Each channel also includes a
Digital Phase Locked Loop (DPLL) circuit that can recover
clocking from encoded data on RxD.
1.6.4 Interrupts
There’s also an Interrupt Control section in each channel,
that gathers the various “request” lines from the Transmitter and Receiver, and takes care of requesting host interrupts and responding to host interrupt-acknowledge cycles
or to software equivalents. Interrupt operation depends on
the data written to the Bus Configuration Register and on
several registers in the Receiver and Transmitter. There
are a separate set of interrupt pins for each channel so that
external logic can control their relative priority.
1-12
UM97USC0100
Page 26
ZILOG
UM009402-0201
1.7 DOCUMENT STRUCTURE
Z16C30 USC
®
USER'S MANUAL
The Chapters in this manual attempt to provide the firsttime reader with a staged and gradual introduction to the
USC. The manual is structured according to the USC’s
major internal blocks and various aspects of their operation, rather than as a list and description of each of its
registers. The various registers and fields are covered in
conjunction with the facilities that they report on and
control. Chapter 8 then reviews the general programming
model and includes a concise description of each register
bit and field for quick reference.
The actual timing parameters and electrical specifications
of the IUSC are given in the companion publication 'USC
Product Specification'.
We at Zilog hope that this newly structured manual will
make the USC more easily understandable and accessible. Naturally, it’s impossible to write at the right level for
all readers; newcomers will find some parts hard going,
while experts will undoubtedly tire of full explanations of
matters that “everyone knows”. Our target audience is
neither newcomers nor experts, but midway between:
working engineers with some datacom background.
© 1997 by Zilog, Inc. All rights reserved. No part of this document
may be copied or reproduced in any form or by any means
without the prior written consent of Zilog, Inc. The information in
this document is subject to change without notice. Devices sold
by Zilog, Inc. are covered by warranty and patent indemnification
provisions appearing in Zilog, Inc. Terms and Conditions of Sale
only. Zilog, Inc. makes no warranty, express, statutory, implied or
by description, regarding the information set forth herein or
regarding the freedom of the described devices from intellectual
property infringement. Zilog, Inc. makes no warranty of merchantability or fitness for any purpose. Zilog, Inc. shall not be
responsible for any errors that may appear in this document.
Zilog, Inc. makes no commitment to update or keep current the
information contained in this document.
UM97USC0100
Zilog’s products are not authorized for use as critical components in life support devices or systems unless a specific written
agreement pertaining to such intended use is executed between
the customer and Zilog prior to use. Life support devices or
systems are those which are intended for surgical implantation
into the body, or which sustains life whose failure to perform,
when properly used in accordance with instructions for use
provided in the labeling, can be reasonably expected to result in
significant injury to the user.
Zilog, Inc. 210 East Hacienda Ave.
Campbell, CA 95008-6600
Telephone (408) 370-8000
Telex 910-338-7621
FAX 408 370-8056
Internet: http://www.zilog.com
1-13
Page 27
ZILOG
UM009402-0201
2.1 INTRODUCTION
U
SER
’s M
ANUAL
CHAPTER 2
BUS INTERFACING
Z16C30 USC
USER'S MANUAL
®
The USC® can be used in systems with various microprocessor or backplane buses. Its flexibility with respect to
host bus interfacing derives from its Bus Configuration
Register (BCR), from on-chip logic that monitors bus
activity before software writes the BCR, and from certain
other registers in the serial channels. This section describes how to use these facilities to interface the USC to
a variety of host microprocessors and buses.
2.2 MULTIPLEXED/NON-MULTIPLEXED OPERATION
One important distinction among buses is whether they
include separate sets of lines for addresses and for data,
or whether the same set of lines carries multiplexed addresses and data. On a multiplexed bus, the USC captures
addressing at rising edges on /AS. If this signaling is the
same as that used on the host bus (as with a Zilog 16C0x),
then the USC’s /AS pin can be directly connected to the
corresponding bus signal. Figure 2-1 shows such a system.
AD15:AD0
/AS
16C01
UM97USC0100
AD15:AD0
/AS
USC
Figure 2-1. Simple Multiplexed System
2-1
Page 28
ZILOG
UM009402-0201
2.2 MULTIPLEXED/NON-MULTIPLEXED OPERATION (Continued)
Z16C30 USC
USER'S MANUAL
®
An 80x86-based system differs only in that the processor’s
ALE signal has to be inverted to produce /AS for the USC.
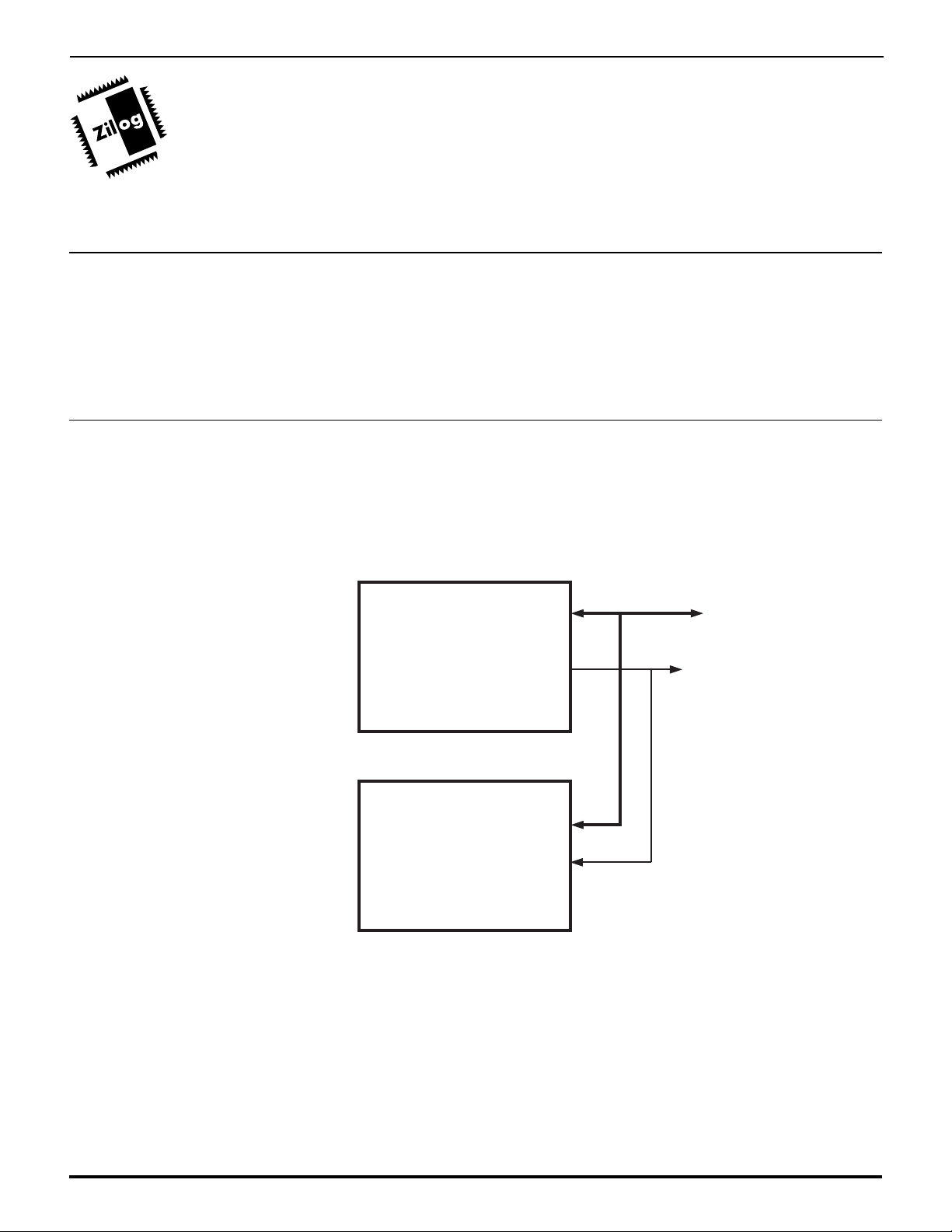
Figures 2-2 and 2-3 illustrate two ways to interface the USC
to a non-multiplexed host bus. Figure 2-2 includes minimum hardware but requires that software write the register
address into the USC each time it is going to access a
register. In this mode the USC’s /AS pin should be pulled
up to ensure a constant high logic level. Figure 2-3 includes drivers to sequence the low-order bits of the host
address onto the USC’s AD lines, and logic to synthesize
a pulse on the /AS pin. This interfacing method has the
advantage that software can directly address the USC’s
registers.
The USC monitors the /AS pin from the time the /RESET pin
goes high until the software writes the Bus Configuration
Register. If it sees /AS go low at any point in this period,
then after the software writes the BCR, the USC captures
the state of the low-order AD lines, A//B, C//D, and /CS, at
each rising edge of /AS. If /AS remains high, software may
have to write each register address into the Channel
Command/ Address Register (CCAR) before reading or
writing a register. (If the host bus only includes 8 data lines,
AD13-AD8 can carry register addresses.)
D15:D0
A15-A0
D15-D0
Cntrl Signals
Control
Logic
/AS
USC
Figure 2-3. User-Friendly Interface to
/RD, /WR
AD15-AD0
Non-Multiplexed Bus
/AS
68000
AD15:AD0
VCC
/AS
USC
Figure 2-2. Simple Interface to Non-Multiplexed Bus
2-2
UM97USC0100
Page 29

ZILOG
Read Operation:
Write Operation:
R//W
DS*
R//W
Data Bus (Slave)
Data Bus
DS*
UM009402-0201
2.3 READ/WRITE DATA STROBES
Another difference among host buses is the way in which
read and write cycles are signalled and differentiated.
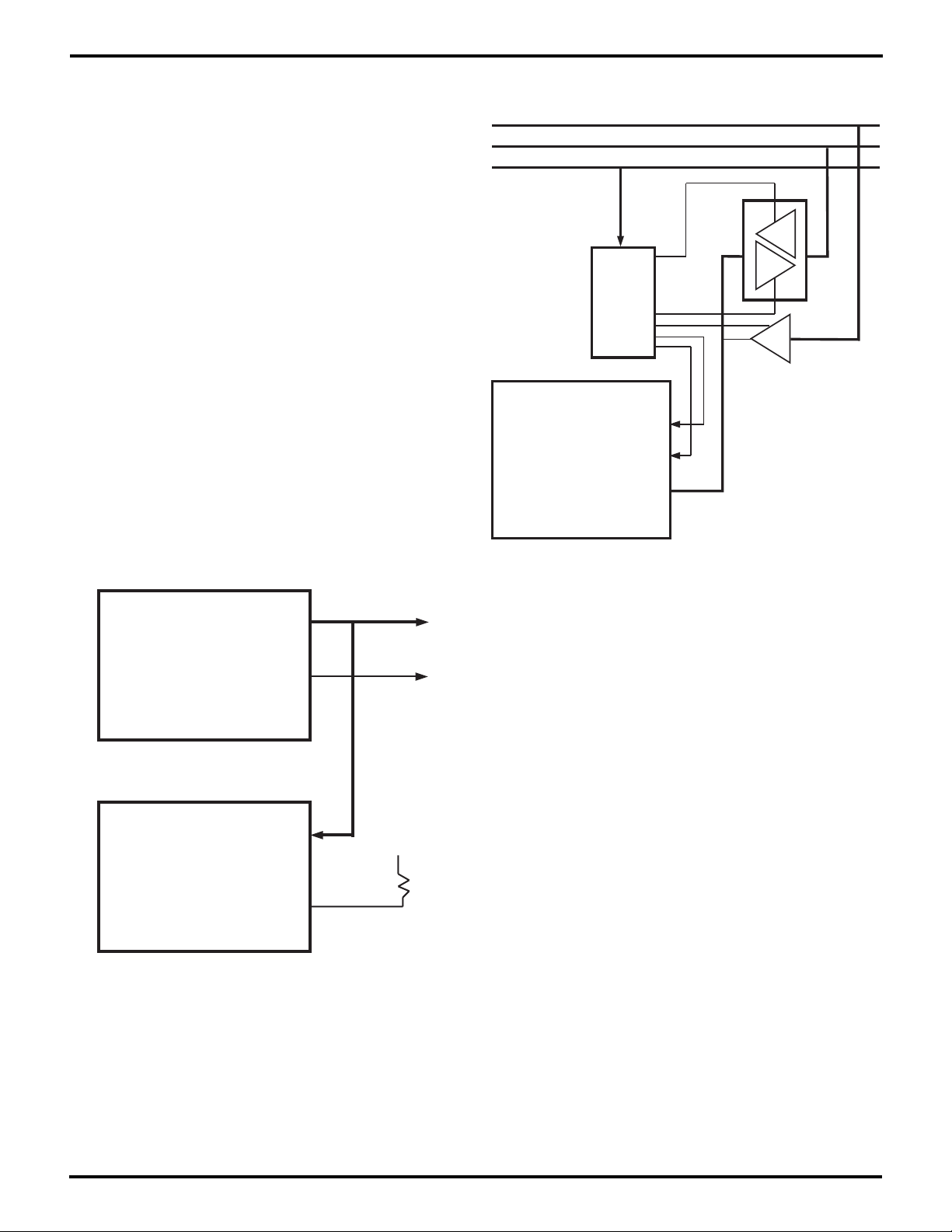
Figures 2-4 and 2-5 show two standard methods supported by the USC. In Figure 2-4, the bus includes separate strobe lines for read and write cycles, commonly
called /RD and /WR. In Figure 2-5, the bus includes a data
strobe line, /DS, that goes low for both read and write
cycles, and a R//W line that differentiates read cycles from
writes. The USC includes pins for all four of these signals.
The two that match up with host bus signals should be
connected to those signals. The two unused pins should
be pulled up to a high level.
Read Operation:
RD*
WR*
Z16C30 USC
®
USER'S MANUAL
Write Operation:
Data Bus
RD*
WR*
Data Bus
Figure 2-4. /RD and /WR Signaling
Figure 2-5. R//W and /DS Signaling
There is no programmable option for the distinction between /RD-/WR and R//W-/DS operation. The USC simply
responds to either pair of lines, which is why it’s important
to pull up the unused pair. Also, the USC doesn’t demand
that the R//W line remain valid throughout the assertion of
/DS. It captures the state of R//W at the leading/falling edge
of /DS, so that R//W need only satisfy setup and hold times
with respect to this edge.
Only one among the bus signals /DS, /RD, /WR, and
/PITACK may be active at a time. This prohibition also
includes /RxACKA, /RxACKB, /TxACKA, and /TxACKB
when these pins are used as DMA acknowledge signals.
(Chapter 5 covers DMA interfacing including the “ACK”
signals, and Chapter 6 describes the USC’s interrupt
features including /PITACK). If the USC detects more than
one of these inputs active simultaneously, it enters an
inactive state from which the only escape is via the /RESET
pin.
UM97USC0100
2-3
Page 30

ZILOG
UM009402-0201
2.4 BUS WIDTH
Z16C30 USC
USER'S MANUAL
®
Another major difference among host buses is the number
of data bits that can be transferred in one cycle. Software
can configure the USC to transfer 16 bits at a time, in which
case it is still possible to transfer 8 bits when this is
necessary or desirable. Or, software can restrict operation
to transferring only 8 bits at a time, on the AD7-AD0 pins.
2.5 ACK VS. WAIT HANDSHAKING
The final major difference among host buses involves the
nature of the handshaking signals that slave devices use
for speed-matching with masters. Figure 2-6 illustrates the
three variations in common use. In the first, which we’ll call
Wait signaling, if a master selects a slave and the slave
cannot capture write data or provide read data within the
time allowed to keep the master operating at full speed, it
quickly (combinatorially) drives a Wait output low, and then
returns it to high when it’s ready to complete the cycle.
Some peripheral devices have Wait outputs that are opencollector or open-drain, which can be tied together for a
negative logic wired-Or function. Because the USC drives
its /WAIT//RDY output high or low on a full-time basis, a
logic gate must be used to negative-logic OR (positivelogic AND) its /WAIT//RDY output with the /WAIT signal(s)
for other slaves, to produce the /WAIT input to the master
(e.g., to the processor).
In the second scheme, “Acknowledge” signaling, all slaves
must respond when the master directs a cycle to them, by
driving an Acknowledge signal (sometimes called /DTACK)
low to allow the master to complete the transfer, and
keeping it low until the master does so. As with the previous
scheme, some peripherals provide slave Ack outputs that
are open-collector or open-drain, which can be tied together for a negative logic wired-Or function. Because the
USC drives its /WAIT//RDY output high or low on a full-time
basis, a logic gate must be used to negative-logic OR its
/WAIT//RDY output with the /ACK signals for other slaves,
to produce the Acknowledge input to the master.
This leaves the AD15-AD8 pins unused: another BCR
option allows them to carry register addresses. The latter
option allows software to directly address USC registers
even on a non-multiplexed bus, without having to write an
address into the USC before it accesses a register.
In the third scheme, “Ready” signaling, all slaves must
respond when the master directs a cycle to them, by
driving a Ready signal high to allow the master to complete
the transfer, and keeping it high until the master does so.
This scheme differ from Wait signaling in the default state
of the handshaking signal between cycles (high for Wait
signaling, low for Ready). It has similar timing as Ack
signaling, but differs in the polarity of the handshaking
signal. With Ready signaling, the board designer must
include a logic gate to positive-logic OR the various slaves’
Ready lines to produce a composite Ready input for the
bus master(s).
The USC supports Acknowledge and Ready signaling for
all cycles, and Wait signaling for interrupt acknowledge
cycles. The USC register access times should be short
enough to avoid the need for Wait signaling on all but the
fastest processors. The board designer can combine the
USC’s /WAIT//RDY output with similar signals from other
slaves, by means of an external logic gate or (for Acknowledge and Wait) an external tri-state or open-collector
driver.
If software writes the Bus Configuration Register (BCR) at
an address that makes the A//B pin low, the USC drives
/WAIT//RDY low as an “Acknowledge” signal, while if
software writes the BCR with A//B high, the USC drives
/WAIT//RDY as a “wait” signal.
2-4
UM97USC0100
Page 31
ZILOG
UM009402-0201
RD* or WR*
or DS*
WAIT*
ACK*
Ready
Figure 2-6. A Fast and Slow Cycle, with Three Kinds of Handshaking
2.6 PIN DESCRIPTIONS
Z16C30 USC
USER'S MANUAL
®
/RESET. Reset (input, active low). A low on this line places
the USC in a known, inactive state, and conditions it so that
the data, from the next write operation that asserts the /CS
pin, goes into the Bus Configuration Register (BCR) regardless of register addressing. /RESET should be driven
low as soon as possible during power-up, and as needed
when restarting the overall system or the communications
subsystem.
AD15-AD0. Address/Data Bus (inputs/tri-state outputs).
These lines carry data between the controlling microprocessor and the USC, and may also carry multiplexed
addresses of registers within the USC. If the USC is used
with an external DMA controller, these lines also carry data
between the USC and system memory or the DMA controller. AD15-AD0 can be used in a variety of ways based on
whether the USC senses activity on /AS after Reset, and on
the data written to the Bus Configuration Register (BCR).
/CS. Chip Select (input, active low). A low on this line
indicates that the controlling microprocessor’s current bus
cycle refers to a register in the USC. The USC ignores /CS
when a low on /SITACK or /PITACK indicates that the
current bus operation is an interrupt acknowledge cycle.
On a multiplexed bus the USC latches the state of this pin
at rising edges on /AS, while on a non-multiplexed bus it
latches /CS at leading/falling edges on /DS, /RD, or /WR.
A//B. Channel Select (input, high indicates “channel A”).
Cycles with /CS low, and /SITACK, /PITACK, and this pin
both high, access registers for channel A. Cycles with
/SITACK and /PITACK high, and /CS and this pin both low,
access registers for channel B. The state of this line when
the Bus Configuration Register is written determines “wait
vs. acknowledge” operation, as described later in this
chapter. On a multiplexed bus the USC latches the state
of this pin at rising edges on /AS, while on a non-multiplexed bus it latches the state at leading/falling edges on
/DS, /RD, or /WR.
D//C. Data/Control (input, high indicates Data). A read
cycle with /CS low, and /SITACK, /PITACK, and this pin
high, fetches data from the receive FIFO of the channel
selected by A//B, via its Receive Data Register (RDR). A
write cycle with the same conditions writes data into that
channel’s transmit FIFO via its Transmit Data Register
(TDR). Cycles with /SITACK and /PITACK high and both
/CS and this pin low read or write a USC register. On a
multiplexed bus the USC determines which register to
access from the low-order AD lines at the rising edge of
/AS. On a non-multiplexed bus it typically selects the
register based on the LSBits of the serial controller’s
Channel Command/Address Register. On a multiplexed
bus the USC latches the state of this pin at rising edges on
/AS, while on a non-multiplexed bus it latches the state at
leading/falling edges on /DS, /RD, or /WR.
/AS. Address Strobe (input, active low). After a reset, the
USC’s bus interface logic monitors this signal to see if the
host bus multiplexes address and data on AD15-AD0. If
the logic sees activity on /AS before (or as) software writes
the Bus Configuration Register, then in subsequent cycles
directed to the USC, it captures register selection from the
AD lines, A//B, and D//C on rising edges of /AS.
For a non-multiplexed bus this pin should be pulled up to
+5V. If a processor uses a non-multiplexed bus, yet has an
output called Address Strobe (e.g., 680x0 devices), this
pin should not be tied to the output.
UM97USC0100
2-5
Page 32

ZILOG
UM009402-0201
2.6 PIN DESCRIPTIONS (Continued)
Z16C30 USC
USER'S MANUAL
®
R//W. Read/Write control (input, low signifies “write”).
R//W and /DS indicate read and write cycles on the bus, for
host processors/buses having this kind of signaling. The
USC samples R//W at each leading/falling edge on /DS.
/DS. Data Strobe (input, active low). R//W and /DS indicate
read and write cycles on the bus, for host processors/
buses having this kind of signaling. It is qualified by /CS low
or /SITACK low. The USC samples R//W at each leading/
falling edge on this line. For write cycles, the USC captures
data at the rising (trailing) edge on this line. In read cycles
the USC provides valid data on the AD lines within the
specified access time after this line goes low, and this data
remains valid until after the master drives this line back to
high.
/RD. Read Strobe (input, active low). This line indicates a
read cycle on the bus, for host processors/buses having
this kind of signaling. It is qualified by /CS low or /SITACK
low. In Read cycles the USC provides valid data on the AD
lines within the specified access time after this line goes
low, and this data remains valid until after the master drives
this line back to high.
/WR. Write Strobe (input, active low). This line indicates
write cycles on the bus, for host processors/buses having
this kind of signaling. It is qualified by /CS low. The USC
captures write data at the rising (trailing) edge of this line.
Only one of /DS, /RD, /WR, or /PITACK may be driven
low in each bus cycle. This restriction also includes
/TxACK and/or /RxACK if they’re used as “flyby” DMA
Acknowledge signals.
/WAIT//RDY. Wait, Ready, or Acknowledge handshaking
(output, active low). This line can carry “wait” or “acknowledge” signaling depending on the state of the A//B input
during the initial BCR write. If A//B is high when the BCR is
written, this line operates thereafter as a Ready/Wait line
for Zilog and some Intel processors. In this mode the USC
asserts this line low until it’s ready to complete an interrupt
acknowledge cycle, but it never asserts this line when the
host accesses one of the USC registers.
If A//B is low when the BCR is written, this line operates
thereafter as an Acknowledge line for Motorola and some
Intel processors. In this mode the USC asserts this line low
for register read and write cycles, and also when it is ready
to complete an interrupt acknowledge cycle.
/INTA,B. Interrupt Requests (outputs, active low). A channel drives its /INT pin low when (1) its IEI pin is high, (2) one
or more of its interrupt type(s) is (are) enabled and pending, and (3) the Interrupt Under Service flag isn’t set for its
highest priority enabled/pending type, nor for any higherpriority type within the channel. The USC drives these pins
high or low at all times — they are neither tri-state nor opendrain pins.
/SITACK, /PITACK. Interrupt Acknowledge (inputs, active
low). A low on one of these lines indicates that the host
processor is performing an interrupt acknowledge cycle.
In some systems a low on one of these lines may further
indicate that external logic has selected this USC as the
device to be acknowledged, or as a potential device to be
acknowledged. The two signals differ in that /SITACK
should be used for a level-sensitive “status” signal that the
USC should sample at the leading edge of /AS or /DS, while
/PITACK should be used for a single-pulse or double-pulse
protocol. The other, unused pin should be pulled up to a
high level. A channel will respond to an interrupt acknowledge cycle in a variety of ways depending on its /INT and
IEI lines, as described in Chapter 7.
IEIA,B. Interrupt Enable In (inputs, active high). These
signals and the IEO pins can be part of an interruptacknowledge daisy-chain with other devices that may
request interrupts. If a channel’s IEI pin is high outside of
an interrupt acknowledge cycle, and one or more interrupt
type (s) is (are) enabled and pending for that channel, and
the Interrupt Under Service flag isn’t set for the (highest
priority such) type nor for any higher-priority type within the
channel, then the channel requests an interrupt by driving
its /INT pin low. If a channel’s IEI pin is high during an IACK
cycle, one or more interrupt type(s) is (are) enabled and
pending in that channel, and the Interrupt Under Service
flag isn’t set for the (highest priority such) type nor for any
higher-priority one within the channel, then the channel
forces its IEO line low and responds to the cycle.
IEOA,B. Interrupt Enable Out (outputs, active high). These
signals and the IEI pins can be part of an interrupt acknowledge daisy chain with other devices that may request
interrupts. A channel drives its IEO pin low whenever its IEI
pin is low, and/or whenever the Interrupt Under Service
flag is set for any type of interrupt within the channel. These
signals operate slightly differently during an interrupt acknowledge cycle, in that a channel also forces its IEO pin
low if it is (has been) requesting an interrupt.
In any case this is a full time (totem pole) output. The
board designer can combine this signal with similar signals for other slaves, by means of an external logic gate or
a tri-state or open-collector driver.
2-6
VCC, VSS. Power and Ground. The inclusion of seven pins
for each power rail insures good signal integrity, prevents
transients on outputs, and improves noise margins on
inputs. The USC’s internal power distribution network
requires that all these pins be connected appropriately.
UM97USC0100
Page 33

ZILOG
UM009402-0201
2.7 PULL-UP RESISTORS AND UNUSED PINS
Z16C30 USC
USER'S MANUAL
®
All unused input pins should be pulled up, either by
connecting them directly to Vcc or with a resistor. This may
include /PITACK, /SITACK, IEI, and /ABORT.
Bi-directional pins should typically be pulled up with a
resistor of about 10K ohms, to allow the USC to drive them
as outputs. This may include /TxREQ, /RxREQ, /TxC, /RxC,
/CTS, and /DCD.
Tri-state output pins may need to be pulled up to protect
external logic from the effects of having a floating input.
Again, a resistor of about 10K ohms is recommended. This
may include /TxREQ, /RxREQ, TxD, and /INT.
2.8 THE BUS CONFIGURATION REGISTER (BCR)
The BCR is a 16-bit register having the format shown in
Figure 2-7. All the bits in the BCR reset to zero. Software's
first access to the USC™ after a hardware reset, must be a
write to the BCR. If the host processor handles 16-bit data,
and the data bus between it and the USC is at least 16 bits
wide, then the software’s initial access to the USC should
be a 16-bit write. This write can be to any address that
activates the /CS pin; the data will be placed in the BCR.
If the host can only write bytes to the USC, all data should
be transferred on the AD7-AD0 pins. In such a system,
pull-down resistors should be attached to the AD15-AD8
pins to ensure the state of these lines during the BCR write.
(AD15 may want to be pulled up instead of down, as
described in the section on the SepAd bit below.)
2.8.1 Wait vs. Ready Selection
The USC captures the state of the A//B pin when the
software writes the BCR. It uses this captured state after
the BCR write, such that if A//B was low, it drives the /WAIT
//RDY pin as an “acknowledge” (or inverted “ready”) signal
during register accesses and interrupt acknowledge cycles,
while if A//B was high, it drives the pin as a “wait” signal
during interrupt acknowledge cycles only. Therefore, software should program the BCR at an address that corresponds to the kind of slave-to-master handshaking used
on the host bus.
2.8.2 Bits and Fields in the BCR
SepAd (Separate Address; BCR15): this bit should only be
written as 1 with 16-bit=0. This combination conditions the
USC to use AD7-AD0 for data and to take register addressing from AD13-AD8. In this mode the USC takes the Upper/
Lower byte indication (U//L) from AD8 and the register
address from AD13-AD9
With this interfacing technique, the BCR must be written at
an address such that AD13-AD8 are low/zero. Further,
AD15 must be high/one and AD14 must be low/zero when
software writes the BCR. The designer can ensure this by
connecting AD15 and AD14 to more-significant address
lines and writing the BCR at an appropriate address.
Alternatively, the designer can ensure this by connecting
a pull-up resistor to AD15 and a pulldown resistor to AD14.
This mode is useful with a non-multiplexed bus, to avoid
making the software write a register address to CCAR
before each register access. In this mode the USC captures the state of AD13-AD8 on each leading/falling edge
on /DS, /RD, or /WR. But software can still program SepAd=1
(with 16-bit=0) when the USC has detected early activity
on /AS. In this case the USC captures addressing from
AD13-AD8 on each rising edge of /AS, rather than from the
low-order AD lines as would be true with SepAd=0.
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
UM97USC0100
ReservedSepAd 16-Bit
Figure 2-7. The USC’s Bus Configuration Register (BCR)
2Pulse
IACK
SRight
A
2-7
Page 34

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
2.8.2 Bits and Fields in the BCR (Continued)
16-Bit (BCR2): this bit should be written as 1 when the host
data bus is 16 bits wide (or wider). Writing this bit as 0 has
two effects: it restricts the host to using byte transfers on
AD7-AD0 when reading and writing the USC’s registers,
and it makes the USC ignore the state of the “B//W” signal
or bit for register accesses. This bit also controls whether
“implicit” accesses to the CCAR, TDR, and RDR are 8 or
16-bit wide.
2PulseIACK (Double-Pulse Interrupt Acknowledge; BCR1):
software should program this bit to 0 if the /PITACK pin isn’t
used or if it carries a single pulse when the host processor
acknowledges an interrupt, or to 1 if /PITACK carries two
pulses when the host processor acknowledges an interrupt. (The latter mode is compatible with certain Intel
processors.)
SRightA (Shift Right Addresses; BCR0): this bit is significant only for a multiplexed bus — the USC ignores it for a
non-multiplexed bus. If SRightA is 1, the USC captures
register addressing from the AD6-AD0 pins and ignores
the AD7 pin. In this mode, AD0 carries the Upper/Lower
byte indication (U//L), AD5-AD1 carry the actual register
address, and AD6 carries the Byte/Word indication (B//W).
If SRightA is 0, the USC captures addressing from AD7AD1 and ignores AD0. It takes U//L from AD1, the register
address from AD6-AD2, and B//W from AD7. This bit has
no effect on the use of the S//D and D//C pins.
SRightA would be 0 when using the USC as an 8-bit
peripheral on a 16-bit bus, which isn’t likely to be a
common application. Some sections of this manual
assume that SRightA is 1.
All other bits in the BCR are reserved and should be
programmed as 0. If the processor can only write bytes to
the USC, software can only write the 8 LSBits of the BCR,
on the AD7-AD0 lines. In this case, the state of AD15-AD8,
when software writes the BCR, must be ensured by connecting these pins to pulldown resistors, or, if SepAd=1, to
host address lines.
2.9 REGISTER ADDRESSING
The flowchart of Figure 2-9 shows how the USC determines
which register to access when a host processor cycle
asserts /CS and one of /RD, /WR, or /DS.
In all register accesses, the A//B pin selects between the
two serial channels in the USC. The USC samples A//B,
and other pins as described below, at the rising/trailing
edge of /AS, or, if /AS is pulled up so that it’s always High,
at the falling/leading edge of /DS, /RD, or /WR.
2.9.1 Implicit Data Register Addressing
If the USC samples the D//C pin high, a write operation
accesses the Transmit Data Register (TDR) and a read
operation selects the Receive Data Register (RDR). The
access is implicitly 16 bits wide if the 16-bit bit in the Bus
Configuration Register (BCR2) is 1 (indicating a 16-bit data
bus) or 8 bits wide if BCR2 is 0.
This means that, on a 16-bit bus, software can neither write
a byte to the TDR/TxFIFO nor read a byte from the
RDR/RxFIFO using an address that makes D//C high.
Instead, software must provide the explicit address of the
LS byte of the TDR/RDR, either directly or by writing it to the
CCAR.
2.9.2 Direct Register Addressing on
AD13-AD8
If the USC samples D//C low, and the SepAd bit in the Bus
Configuration Register (BCR15) is 1 (which should only be
the case with an 8-bit data bus) the USC samples the
AD13-AD9 pins as a RegAd to select which register to
access, and samples AD8 as U//L to select which byte of
the register to access. The USC always interprets a U//L bit
in the “little-Endian” fashion, with a 1 indicating the moresignificant 8 bits of the register.
If the USC samples AD13-AD8 as all zero in this mode,
indicating the Channel Command/Address Register
(CCAR), the USC uses the contents of the CCAR to select
which register to access, as described in ‘Indirect Register
Addressing’ below.
2-8
UM97USC0100
Page 35

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
2.9.3 Direct Register Addressing on
AD6-AD0/AD7-AD1
If the USC samples D//C low, SepAd (BCR15) is 0, and the
USC detected activity on /AS before or as the BCR was
written, the USC samples the low-order AD pins to determine which register to access. It takes the register selection (RegAd) from AD5-1 if SRightA (BCR0) is 1, or from
AD6-AD2 if SRightA is 0. If 16-bit (BCR2) is 1, the USC
samples AD6 (or AD7 if SRightA/BCR0 is 0) as B//W to
determine whether to access all 16 bits if the register (if B/
/W is 0) or just 8. If 16-bit is 0 or B//W is 1, it samples AD0
(or AD1 if SRightA is 0) as U//L to select which byte of the
register to access. The USC always interprets a U//L bit in
the “little-Endian” fashion, with a 1 indicating the moresignificant 8 bits of the register. U//L should be 0 for all 16bit accesses.
If the USC samples AD6-0 (or 7-1 if SRightA is 1) as all zero
in this mode, indicating the Channel Command/Address
Register (CCAR), the USC uses the contents of the CCAR
to select which register to access, as described in the next
section.
2.9.4 Indirect Register Addressing in the
CCAR
If the USC samples D//C low, and:
1. SepAd (BCR15) is 1 and the USC samples AD13-AD8
as all zero indicating the CCAR, or
2. SepAd is 0, the USC detected activity on /AS before or
as the BCR was written, and it samples AD6-AD0 as all
zero indicating the CCAR, or
3. SepAd is 0 and the USC did not detect activity on /AS
before nor as the BCR was written,
then it uses the less-significant byte of the CCAR to select
which register to access.
Figure 2-8 shows the CCAR. When the USC takes indirect
register addressing from it, the RegAd field (CCAR5-1)
selects which register to access. If 16-bit (BCR2) is 1, the
USC uses CCAR6 as B//W to determine whether to access
all 16 bits of the register (if B//W is 0) or just 8. If 16-bit is 0
or B//W is 1, it uses CCAR0 as U//L to select which byte of
the register to access.
Whenever it uses CCAR as an indirect address, the USC
thereafter clears CCAR6-0 to zero, so that the next access
to CCAR address again references all 16 bits of the CCAR
itself. Thus, after writing a register address to the CCAR,
reading or writing the CCAR address accesses the register selected by the address written, but another write to the
CCAR address thereafter again writes an address into the
CCAR.
CCAR can always be used to select a register for a
subsequent access to the CCAR address, even if the USC
detected activity on /AS after Reset, and regardless of the
state of SepAd (BCR15).
Typically when software uses indirect register addressing,
the CCAR address is the only one it reads and writes, every
other access being to write a register address. Note that
the CCAR itself can be accessed in a single read or write
operation: for example, on a 16-bit bus to write a command
to the RTCmd field, software doesn’t have to first write the
address of the CCAR (which is zero). Specifying a register
address for the next access to the CCAR can be done in
the same write operation with issuing a command in
RTCmd and/or changing the RTMode field.
‘The RxD and TxD Pins’ in Chapter 4 describes how the
RTMode field in the CCAR controls echoing and looping
between the Transmitter and Receiver. Typically this field
is zero, but in applications using indirect register addressing and non-zero RTMode values, software must take care
to preserve the current value of RTMode when it writes
register addresses to the CCAR.
When using indirect addressing, some hardware/software
mechanism has to prevent a USC interrupt, or any interrupt
that leads to a context switch away from an interrupted
USC task, from occurring between the time an address is
written into the CCAR and when the subsequent read or
write is done. This is because an address that has been
written into the CCAR is part of the interrupted task’s
context that would want to be saved, but there’s no way to
read such an address out of the USC — reading the CCAR
returns the contents of the addressed register.
The USC always interprets a U//L bit in the “little-Endian”
fashion, with a 1 indicating the more-significant 8 bits of the
register. U//L should be 0 for all 16-bit accesses.
UM97USC0100
2-9
Page 36

ZILOG
UM009402-0201
Z16C30 USC
®
USER'S MANUAL
2.9.5 About the Register Address Tables
Tables 2-1 and 2-2 show the names and addresses of the
addressable registers in the USC, in address and alphabetical order. The Tables assume that SRightA (BCR0) is
1. The RegAddr column in the Tables reflects the state of
AD5-AD1, AD13-AD9, or CCAR5-1 as applicable.
If “16-bit” (BCR2) is 1, the B//W bit from AD6, AD14, or
CCAR6 selects between a 16-bit transfer (if 0/low) and an
8-bit transfer (if 1). If “16-bit” is 0, the USC ignores AD6,
AD14, or CCAR6 (as applicable). Note that the values in
the “8-bit data” columns of Tables 2-1 and 2-2 include the
B//W bit 1 for both direct and indirect addressing, as is
required on a 16-bit bus. When 16-bit (BCR2) is 0 these
address values can be used as shown, or 64 lower like the
addresses shown in the “16-bit data” columns.
For 8-bit transfers on either an 8- or 16-bit bus, the state of
AD0, AD8, or CCAR0 selects the less-significant 8 bits of
the register (if 0/low) or the more-significant 8 bits if 1/high.
In this regard the USC is “little Endian” like Intel microprocessors. For 16-bit transfers, AD0, AD8, or CCAR0 must be
0/low.
The Direct Address columns of the Tables assume:
(1) SRightA (BCR0) is 1,
(2) the processor’s multiplexed AD6-AD0 lines are con-
nected to AD6-AD0, or its A5-A0 lines are connected
to AD13-AD8, depending on SepAd (BCR15),
(3) the D//C pin is grounded, and
(4) the processor’s A7 line is connected to A//B.
If your design differs from these assumptions, register
addressing will be different from that shown in the Direct
Address columns.
RT
Reset
14 13 12 1 1 10 9 8 7 6 5 4 3 2 1 015
Chan
Load
RegAddrRTMode
U//LRTCmd B//W
Figure 2-8. The Channel Command/Address Register (CCAR)
2-10
UM97USC0100
Page 37

ZILOG
UM009402-0201
Start: Host Cycle
with /CS Low -
which register to R/W?
Z16C30 USC
®
USER'S MANUAL
SEPAD
(BCR15)
(Separate Addr)1
Activity
on /AS after
Reset?
(Non-Mux'ed Bus)No
Capture iA//B:=A//B,
RegAd = AD13-AD8,
iD/C = D//C at fall
of /DS, /RD, or /WR
0
(No Separate
Ad)
Yes
(Mux'ed Bus)
Activity
on /AS after
Reset?
(Mux'ed Bus)
Yes
Capture iA/B:=A/B,
B//W:=AD6, RegAd:=
AD5-0, iD/C:=D//C
at rise of /AS
Capture iA//B:=A//B
RegAd = AD13-AD8,
iD/C = D//C
at rise of /AS
RegAd = 0?
No
(Non-Mux'ed
Bus)
Yes
Capture iA/B:=A//B,
iD/C:=D//C at fall
of /DS, /RD, or /WR
iD//C
Low/0
Using channel iA//B,
B//W:=CCAR6;
RegAd:=CCAR5-0;
then CCAR5-0:=0
(Control)
High/1
(Serial)
Force B//W
: = 1 (Byte)
iD/C
Low /0
RegAd
= 1x000?
No
(Control)
High/1
(Data)
Yes
No
0
16-Bit
(BCR2)
1
Read 1 or 2 cha-
racters from channel
(iA//B)'s RxFIFO,
depending on B//W
Access the register
in Channel (iA//B)
selected by RegAd,
8/16 bits per B//W
Read
B//W = Not 16-Bit
(BCR2)
Read
or
Write?
Write
Write 1 or 2 characters to channel
(iA//B)'s TxFIFO,
depending on B//W
UM97USC0100
Figure 2-9. USC Register Addressing
2-11
Page 38

Z16C30 USC
UM009402-0201
ZILOG
USER'S MANUAL
2.9 Register Addressing (Continued)
Table 2-1. USC Registers, in Address Order
CCAR6-0 Indirect Address Channel A
Reg or Channel B Direct Address Direct Address:
Register Name Acronym Addr 16-bit data 8-bit data 16-bit data 8-bit data
Channel Command/Address CCAR 00000 0/0 64,65/40,1 128/80 192,3/C0,1
Channel Mode CMR 00001 2/2 66,7/42,3 130/82 194.5/C2,3
Channel Command/Status CCSR 00010 4/4 68,9/44,5 132/84 196,7/C4,5
Channel Control CCR 00011 6/6 70,1/46,7 134/86 198,9/C6,7
Test Mode Data TMDR 00110 12/0C 76,7/4C,D 140/8C 204,5/CC,D
Test Mode Control TMCR 00111 14/0E 78,9/4E,F 142/8E 206,7/CE,F
Clock Mode Control CMCR 01000 16/10 80,1/50,1 144/90 208,9/D0,1
Hardware Configuration HCR 01001 18/12 82,3/52,3 146/92 210,1/D2,3
Interrupt Vector IVR 01010 20/14 84,5/54,5 148/94 212,3/D4,5
Input/Output Control IOCR 01011 22/16 86,7/56,7 150/96 214,5/D6,7
Interrupt Control ICR 01100 24/18 88,9/58,9 152/98 216,7/D8.9
Daisy-Chain Control DCCR 01101 26/1A 90,1/5A,B 154/9A 218,9/DA,B
®
Miscellaneous Interrupt Status MISR 01110 28/1C 92,3/5C,D 156/9C 220,1/DC,D
Status Interrupt Control SICR 01111 30/1E 94,5/5E,F 158/9E 222,3/DE,F
Receive Data RDR 1x000 32/20 96/60 or 97/61 160/A0 224/E0 or
(Read only; TDR for Write) 225/E1
Receive Mode RMR 10001 34/22 98,9/62,3 162/A2 226,7/E2,3
Receive Command/Status RCSR 10010 36/24 100,1/64,5 164/A4 228,9/E4,5
Receive Interrupt Control RICR 10011 38/26 102,3/66,7 166/A6 230,1/E6,7
Receive Sync RSR 10100 40/28 104,5/68,9 168/A8 232,3/E8,9
Receive Count Limit RCLR 10101 42/2A 106,7/6A,B 170/AA 234,5/EA,B
Receive Character Count RCCR 10110 44/2C 108,9/6C,D 172/AC 236,7/EC,D
Time Constant 0 TC0R 10111 46/2E 110,1/6E,F 174/AE 238.9/EE,F
Transmit Data TDR 1x000 48/30 112/70 or 113/71 176/B0 240/F0 or
(Write only; RDR for Read) 241/F1
Transmit Mode TMR 11001 50/32 114,5/72,3 178/B2 242,3/F2,3
Transmit Command/Status TCSR 11010 52/34 116,7/74,5 180/B4 244,5/F4,5
Transmit Interrupt Control TICR 11011 54/36 118,9/76,7 182/B6 246,7/F6,7
Transmit Sync TSR 11100 56/38 120,1/78,9 184/B8 248,9/F8,9
Transmit Count Limit TCLR 11101 5/3A 122,3/7A,B 186/B 250,1/FA,B
Transmit Character Count TCCR 11110 60/3C 124,5/7C,D 188/BC 252,3/FC,D
Time Constant 1 TC1R 11111 62/3E 126,7/7E,F 190/BE 254,5/FE,F
2-12
UM97USC0100
Page 39

Z16C30 USC
UM009402-0201
ZILOG
Table 2-2. USC Registers, in Alphabetical Order
CCAR6-0 Indirect Address Channel A
Reg or Channel B Direct Address Direct Address:
Register Name Acronym Addr 16-bit data 8-bit data 16-bit data 8-bit data
Channel Command/Address CCAR 00000 0/0 64,65/40,1 128/80 192,3/C0,1
Channel Command/Status CCSR 00010 4/4 68,9/44,5 132/84 196,7/C4,5
Channel Control CCR 00011 6/6 70,1/46,7 134/86 198,9/C6,7
Channel Mode CMR 00001 2/2 66,7/42,3 130/82 194.5/C2,3
Clock Mode Control CMCR 01000 16/10 80,1/50,1 144/90 208,9/D0,1
Daisy-Chain Control DCCR 01101 26/1A 90,1/5A,B 154/9A 218,9/DA,B
Hardware Configuration HCR 01001 18/12 82,3/52,3 146/92 210,1/D2,3
Input/Output Control IOCR 01011 22/16 86,7/56,7 150/96 214,5/D6,7
Interrupt Control ICR 01100 24/18 88,9/58,9 152/98 216,7/D8.9
Interrupt Vector IVR 01010 20/14 84,5/54,5 148/94 212,3/D4,5
Miscellaneous Interrupt Status MISR 01110 28/1C 92,3/5C,D 156/9C 220,1/DC,D
Receive Character Count RCCR 10110 44/2C 108,9/6C,D 172/AC 236,7/EC,D
Receive Command/Status RCSR 10010 36/24 100,1/64,5 164/A4 228,9/E4,5
Receive Count Limit RCLR 10101 42/2A 106,7/6A,B 170/AA 234,5/EA,B
Receive Data RDR 1x000 32/20 96/60 or 97/61 160/A0 224/E0 or
(Read only; TDR for Write) 225/E1
USER'S MANUAL
®
Receive Interrupt Control RICR 10011 38/26 102,3/66,7 166/A6 230,1/E6,7
Receive Mode RMR 10001 34/22 98,9/62,3 16 /A2 226,7/E2,3
Receive Sync RSR 10100 4 /28 104,5/68,9 168/A8 232,3/E8,9
Status Interrupt Control SICR 01111 30/1E 94,5/5E,F 158/9E 222,3/DE,F
Test Mode Control TMCR 00111 14/0E 78,9/4E,F 142/8E 206,7/CE,F
Test Mode Data TMDR 00110 12/0C 76,7/4C,D 140/8C 204,5/CC,D
Time Constant 0 TC0R 10111 46/2E 110,1/6E,F 174/AE 238.9/EE,F
Time Constant 1 TC1R 11111 62/3E 126,7/7E,F 190/BE 254,5/FE,F
Transmit Character Count TCCR 11110 60/3C 124,5/7C,D 188/BC 252,3/FC,D
Transmit Command/Status TCSR 11010 52/34 116,7/74,5 180/B4 244,5/F4,5
Transmit Count Limit TCLR 11101 58/3A 122,3/7A,B 186/BA 250,1/FA,B
Transmit Data TDR 1x000 48/30 112/70 or 113/71 176/B0 240/F0 or
(Write only; RDR for Read) 241/F1
Transmit Interrupt Control TICR 11011 54/36 118,9/76,7 182/B6 246,7/F6,7
Transmit Mode TMR 11001 50/32 114,5/72,3 178/B2 242,3/F2,3
Transmit Sync TSR 11100 56/38 120,1/78,9 184/B8 248,9/F8,9
UM97USC0100
2-13
Page 40

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
2.9.6 Serial Data Registers TDR and RDR
The RDR and TDR are actually “the read and write sides of”
the same register location. The USC ignores the state of
AD4, AD12, or CCAR4 (as applicable) whenever the rest
of the address indicates an access to TDR or RDR. For
simplicity Tables 2-1 and 2-2 show RDR at the lower
address and TDR at the higher one.
The MSBytes of RDR and TDR should never be read or
written alone, only as part of a 16-bit access. On a Zilog
16C0x or Motorola 680x0 system, use direct addresses 97
or 113 (61 or 71 hex) for channel B, and 225 or 241 (E1 or
F1 hex) for channel A, to select the LSByte for byte
transfers. On an Intel-based system, use the addresses
96, 112, 224, or 240 (60, 70, E0, F0 hex) correspondingly,
to select the LSByte for byte transfers.
2.9.7 Byte Ordering
Various microprocessors differ on the correspondence
between byte addresses and how bytes are arranged
within a 16- or 32-bit value. The Zilog Z80 and most Intel
processors use what’s sometimes called the “Little-Endian”
convention: the least significant byte of a word has the
smallest address, and the most significant byte has the
largest address.
The Zilog 16C0x and Motorola 680x0 processors are “BigEndian”: they store and fetch the MSByte in the lowestaddressed byte, and the LSByte in the highest address.
2.9.8 Register Read and Write Cycles
Figures 2-10 through 2-13 show the waveforms of the
signals involved when the host processor reads or writes
a USC register. Separate drawings are included for the
signaling on a bus with multiplexed addresses and data,
and for a bus with separate address and data lines. On the
other hand, since waveforms get pretty boring after the first
few, several things have been done to minimize the number of figures.
1. The cases of separate read and write strobes, vs. a
direction line and a common data strobe, have been
combined by labelling the strobe traces as “/DS or
/RD” and “/DS or /WR”. The direction line R//W is shown
in the figures, but a note reminds the reader that its
state doesn’t matter with /RD and /WR.
2. The difference between “wait” and “acknowledge”
signaling is handled by showing the /WAIT//RDY trace
as “maybe or maybe not” going low, with appropriate
labelling. (The USC never asserts a “Wait” indication
during a register access cycle.)
Chapter 6 covers details of DMA cycles initiated by an
external DMA controller, while Chapter 7 covers interrupt
acknowledge cycles.
The actual timing parameters and electrical specifications
of the USC are given in the companion publication USC
Product Specification.
Addressing of bytes within USC registers is inherently
"Little-Endian", such that the MSBytes of registers have
odd addresses.
For 16-bit serial data transfers only, two commands in the
RTCmd field of the Channel Command/Address Register
(CCAR15-11) allow the USC to be used with either kind of
processor. The “Select D15-8 First” and “Select D7-0 First”
commands control the byte ordering within a 16-bit transfer of serial data, and apply to DMA and processor accesses to RDR and TDR.
2-14
UM97USC0100
Page 41

ZILOG
UM009402-0201
Z16C30 USC
®
USER'S MANUAL
ADnn
A//B, D//C
/CS
/SITACK
/PITACK,/WR,(/RD OR /DS),
DMA Acknowledge signals
/AS
R//W
/DS or /RD
/WAIT//RDY
Address
Data
(Required with /DS, not with /RD.)
Wait Mode
Acknowledge Mode
Figure 2-10. A Register Read Cycle with Multiplexed Addresses and Data
UM97USC0100
2-15
Page 42

ZILOG
UM009402-0201
2.9.7 Register Read and Write Cycles (Continued)
Z16C30 USC
USER'S MANUAL
®
ADnn
A//B, D//C
/CS
/SITACK
/PITACK, /RD,(/WR or /DS),
DMA Acknowledge signals
/AS
R//W
/DS or /WR
Address Data
(Required with /DS, not with /WR.)
Wait Mode
/WAIT//RDY
Acknowledge Mode
Figure 2-11. A Register Write Cycle with Multiplexed Addresses and Data
2-16
UM97USC0100
Page 43
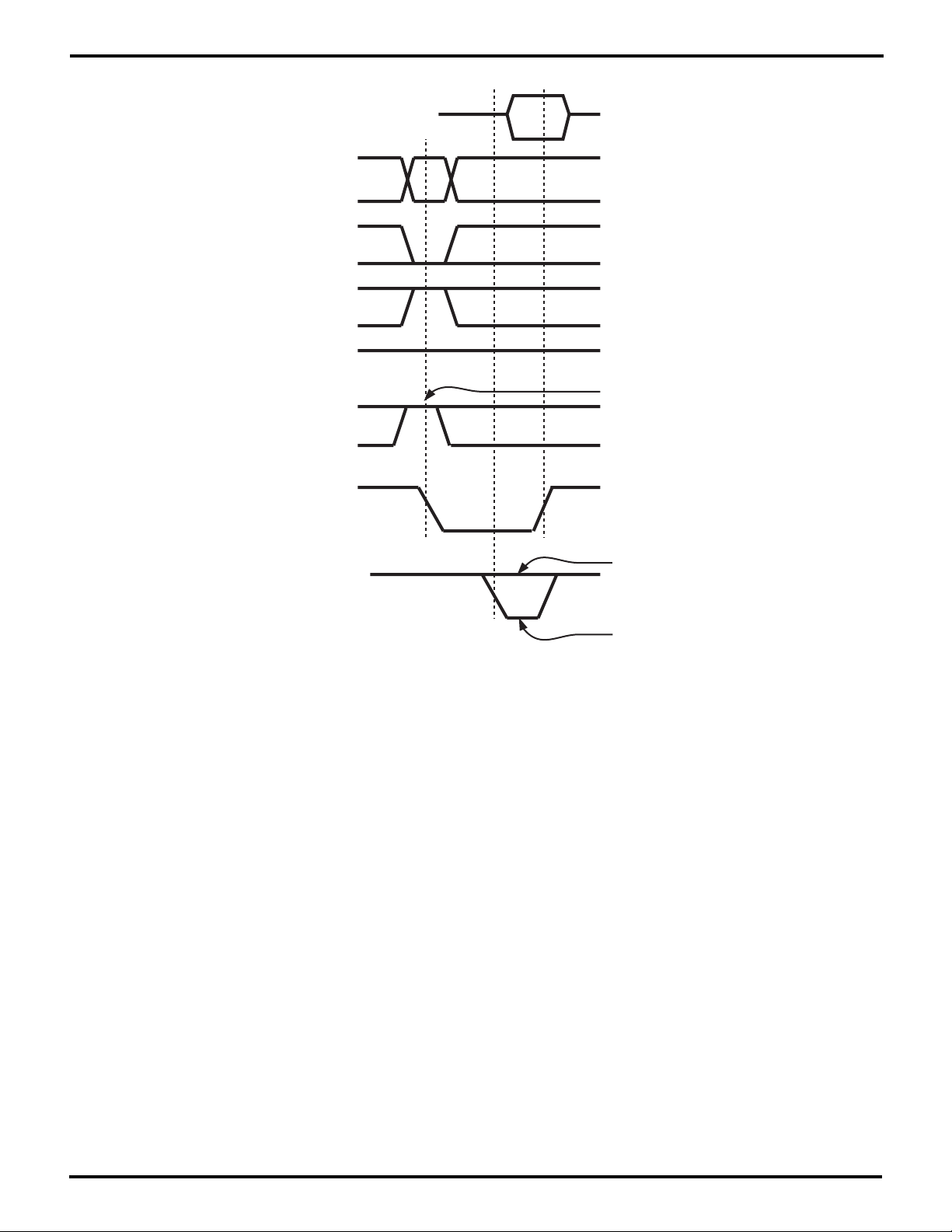
ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
ADnn
A//B, D//C
/CS
/SITACK
/PITACK, /WR, (/RD OR /DS),
DMA Acknowledge signals
R//W
/DS or /RD
/WAIT//RDY
Data
(Required with /DS, not with /RD.)
Wait Mode
Acknowledge Mode
Figure 2-12. A Register Read Cycle with Non-Multiplexed Data Lines
UM97USC0100
2-17
Page 44

ZILOG
UM009402-0201
2.9.7 Register Read and Write Cycles (Continued)
Z16C30 USC
®
USER'S MANUAL
ADnn
A//B,D//C
/CS
/SITACK
/PITACK,/AS,/RD,(/WR or /DS),
DMA Acknowledge signals
R//W
/DS or /WR
/WAIT//RDY
Data
(Required with /DS, not with /RD)
Wait Mode
Figure 2-13. A Register Write Cycle with Non-Multiplexed Data Lines
© 1997 by Zilog, Inc. All rights reserved. No part of this document
may be copied or reproduced in any form or by any means
without the prior written consent of Zilog, Inc. The information in
this document is subject to change without notice. Devices sold
by Zilog, Inc. are covered by warranty and patent indemnification
provisions appearing in Zilog, Inc. Terms and Conditions of Sale
only. Zilog, Inc. makes no warranty, express, statutory, implied or
by description, regarding the information set forth herein or
regarding the freedom of the described devices from intellectual
property infringement. Zilog, Inc. makes no warranty of merchantability or fitness for any purpose. Zilog, Inc. shall not be
responsible for any errors that may appear in this document.
Zilog, Inc. makes no commitment to update or keep current the
information contained in this document.
Acknowledge Mode
Zilog’s products are not authorized for use as critical components in life support devices or systems unless a specific written
agreement pertaining to such intended use is executed between
the customer and Zilog prior to use. Life support devices or
systems are those which are intended for surgical implantation
into the body, or which sustains life whose failure to perform,
when properly used in accordance with instructions for use
provided in the labeling, can be reasonably expected to result in
significant injury to the user.
Zilog, Inc. 210 East Hacienda Ave.
Campbell, CA 95008-6600
Telephone (408) 370-8000
Telex 910-338-7621
FAX 408 370-8056
Internet: http://www.zilog.com
2-18
UM97USC0100
Page 45

ZILOG
UM009402-0201
3.1 INTRODUCTION
U
SER
’s M
ANUAL
CHAPTER 3
A SAMPLE APPLICATION
Z16C30 USC
USER'S MANUAL
®
Figures 3-1 and 3-2 are schematics of a simple USC
application. It includes a USC, an 80186 integrated processor, two EPROMs, two static RAMs, and 3 serial interfaces.
Figure 3-1 includes everything but the serial interfaces.
The processor U2 and oscillator X1 et al typically operate
at 16 MHz, and provide a 16 MHz SYSCLK that’s included
in the jumper blocks on the right side of p.2, so that it can
be jumpered into the /TxC or /RxC pin and thus be used for
baud rate generation. The 80186' bus features multiplexed
address and data so that software doesn’t have to write
register addresses into CCAR.
U7-9 are octal latches that capture the address from the
186 and present the latched address to the RAMs and
EPROMs. The EPROMs are selected by the Upper Chip
Select (/UCS) output of the 186, while the RAMs are
selected by the Lower Chip Select (/LCS) output. The USC
®
resides in I/O space, one channel being selected by the
first of the 186' Peripheral Chip Select outputs (PCS0) and
the other channel being selected by the other (PCS1).
The 28-pin EPROM sockets are set up to accept 2764’s,
27128’s, 27256’s, or 27512’s. The 32-pin RAM sockets can
accept 32-pin 128Kx8 or 28-pin 32Kx8 static RAMs.
The U10 74FCT240 inverts signals between active-high
signals on the 186 and active-low signals on the USC. The
/TxREQ and /RxREQ pins of USC channel A are inverted to
make the DMA Request 0 and 1 inputs of the 80186'
integrated DMA channels. This means that USC channel A
can use DMA operation while USC channel B must be
interrupt-driven or polled. Since the 186' DMA channels
use flow-through (two cycle) operation, channel A’s
/TxACK and /RxACK pins are free for use in the serial
interfaces.
UM97USC0100
3-1
Page 46

ZILOG
UM009402-0201
3.1 INTRODUCTION (Continued)
Z16C30 USC
USER'S MANUAL
®
Figure 3-1. Sample Application
3-2
UM97USC0100
Page 47

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
UM97USC0100
Figure 3-2. Serial Interface for Sample Application
3-3
Page 48

ZILOG
UM009402-0201
3.1 INTRODUCTION (Continued)
Z16C30 USC
USER'S MANUAL
®
U7-9 are octal latches that capture the address from the
186 and present the latched address to the RAMs and
EPROMs. The EPROMs are selected by the Upper Chip
Select (/UCS) output of the 186, while the RAMs are
selected by the Lower Chip Select (/LCS) output. The USC
resides in I/O space, one channel being selected by the
first of the 186' Peripheral Chip Select outputs (PCS0) and
the other channel being selected by the other (PCS1).
The 28-pin EPROM sockets are set up to accept 2764’s,
27128’s, 27256’s, or 27512’s. The 32-pin RAM sockets can
accept 32-pin 128Kx8 or 28-pin 32Kx8 static RAMs.
The U10 74FCT240 inverts signals between active-high
signals on the 186 and active-low signals on the USC. The
/TxREQ and /RxREQ pins of USC channel A are inverted to
make the DMA Request 0 and 1 inputs of the 80186'
integrated DMA channels. This means that USC channel A
can use DMA operation while USC channel B must be
interrupt-driven or polled. Since the 186' DMA channels
use flow-through (two cycle) operation, channel A’s
/TxACK and /RxACK pins are free for use in the serial
interfaces.
The U11 PAL16L8 provides some glue logic, as follows:
/UCS =/PCS0 + /PCS1 ;active-low OR of chip selects
/NMI =/NO
+/NMI * NC ;debounce latch for NMI
pushbutton
/SWRE =/SWR * /A0 ;write strobe for even-ad-
dressed (LS) RAM
/SWRO =/SWR * /BHE ;write strobe for odd-ad-
dressed (MS) RAM
/INT0 =UAINT * UBINT ;OR two active-low interrupt
Requests to make high-active output
In these equations, “*” indicates a logical AND operation,
“+” indicates a logical OR, and “/” indicates negation or a
Low state.
All of the USC’s serial interface pins are shown on its right
side in Figure 3-1, and appear again on the J3 and J4
jumper headers at the upper right of Figure 3-2. From there
they can be connected in various ways, either jumpered
back among J3 and J4, or connected to the serial interfaces via the J5 and J6 jumper headers.
Similarly, J6 leads to 75ALS194 RS-422 differential drivers
and 75ALS195 RS-422 differential receivers, whose opposite sides are connected to the user’s choice of an RS-530
DB25 arranged “DTE” style or “DCE” style, or to a DIN
Circular-8 connector arranged as a LocalTalk (Appletalk)
interface. When using an RS-530 interface, jumper the J7
3-pin header between pins 2 and 3, for Appletalk jumper
it between 1 and 2 and connect a “Data Terminal Ready”
signal (typically Tx Acknowledge) to pin 5 of J6.
The following signals are typically jumpered straight across
between (J3 or J4) and (J5 or J6):
Pin Signal Serial Interface Signal
1 USC TXD —> DTE TxD or DCE RxD
2 USC RXD <— DTE Rx Data or DCE Tx Data
3 USC /RxACK —> DTE Request to Send or DCE
Clear to Send
4 USC /CTS <— DTE Clear to Send or DCE
Request to Send
5 USC /TxACK —> DTE Data Terminal Ready or
DCE Data Set Ready
The connection of other signals is more flexible and application-dependent. The possibilities include, but are not
limited to:
USC J3/4 J5/6
pin pin pin Serial interface Signal
/DCD 6 7 —> DCE Data Carrier Detect
/DCD 6 8 <— DTE Data Carrier Detect
/RxC 8 11 —> DCE Rx Clock
/RxC 8 12 <— DTE Rx Clock
/TxC 9 13 —> DTE Tx Clock (DTE source)
or DCE Tx Clock (DCE source)
/TxC 9 14 <— DTE Tx Clock (DCE source)
or DCE Tx Clock (DTE source)
/TxREQ 11 15 —> DCE Ring Indicator
(see note 1)
/TxREQ 11 16 <— DTE Ring Indicator
(see note 1)
/RxREQ 12 6 <— DTE Data Set Ready or
DCE Data Terminal Ready
(see note 1)
J5 leads to two MAX238 RS232 driver-receivers, whose
opposite sides are connected to the user’s choice of an
RS-232 DB25 arranged “DTE” style or “DCE” style.
3-4
Note 1: For channel A, these J3 pins should be connected
only if they are not used as DMA Requests.
UM97USC0100
Page 49

ZILOG
UM009402-0201
Z16C30 USC
®
USER'S MANUAL
© 1997 by Zilog, Inc. All rights reserved. No part of this document
may be copied or reproduced in any form or by any means
without the prior written consent of Zilog, Inc. The information in
this document is subject to change without notice. Devices sold
by Zilog, Inc. are covered by warranty and patent indemnification
provisions appearing in Zilog, Inc. Terms and Conditions of Sale
only. Zilog, Inc. makes no warranty, express, statutory, implied or
by description, regarding the information set forth herein or
regarding the freedom of the described devices from intellectual
property infringement. Zilog, Inc. makes no warranty of merchantability or fitness for any purpose. Zilog, Inc. shall not be
responsible for any errors that may appear in this document.
Zilog, Inc. makes no commitment to update or keep current the
information contained in this document.
Zilog’s products are not authorized for use as critical components in life support devices or systems unless a specific written
agreement pertaining to such intended use is executed between
the customer and Zilog prior to use. Life support devices or
systems are those which are intended for surgical implantation
into the body, or which sustains life whose failure to perform,
when properly used in accordance with instructions for use
provided in the labeling, can be reasonably expected to result in
significant injury to the user.
Zilog, Inc. 210 East Hacienda Ave.
Campbell, CA 95008-6600
Telephone (408) 370-8000
Telex 910-338-7621
FAX 408 370-8056
Internet: http://www.zilog.com
UM97USC0100
3-5
Page 50

ZILOG
UM009402-0201
4.1 INTRODUCTION
U
SER
’s M
ANUAL
CHAPTER 4
SERIAL INTERFACING
Z16C30 USC
USER'S MANUAL
®
The USC® includes several serial interface options and
features that promote its usefulness in various kinds of
applications. It allows a variety of clocking schemes, and
will do serial encoding and decoding for NRZI and Biphase
formats that carry clocking information with the serial data.
The USC further supports such decoding with an on-chip
4.2 SERIAL INTERFACE PIN DESCRIPTIONS
RxDA,B. Received Data (inputs, positive logic). The serial
inputs for each channel.
TxDA,B. Transmit Data (outputs, positive logic). The serial
outputs for each channel.
/RxCA,B. Receive Clock (inputs or outputs). These signals
can be used as a clock input for any of the functional blocks
within each channel. Or, software can program a channel
so that this pin is an output carrying any of several receiver
or internal clock signals, a general-purpose input or output, or an interrupt input.
/TxCA,B. Transmit Clock (inputs or outputs). These sig-
nals can be used as a clock input for any of the functional
blocks within each channel. Or, software can program a
channel so that this pin is an output carrying any of several
transmitter or internal clock signals, a general-purpose
input or output, or an interrupt input.
/RxREQA,B. Receive DMA Request (inputs or outputs).
These pins can carry a low-active DMA Request from each
channel’s receive FIFO. If DMA transfers aren’t used for a
channel’s receiver, its RxREQ pin can be used as a
general-purpose input or output, or as an interrupt input.
/TxREQA,B. Transmit DMA Request (inputs or outputs).
These pins can carry a low-active DMA Request from each
channel’s transmit FIFO. If DMA transfers aren’t used for a
channel’s transmitter, its TxREQ pin can be used as a
general-purpose input or output, or as an interrupt input.
Digital Phase Locked Loop circuit. Finally, it provides I/O
lines that can be connected to modem control and status
signals, to other control and status lines related to the serial
link, or even to input and/or output signals that aren’t
related to the serial link at all.
/RxACKA,B. Receive DMA Acknowledge (inputs or out-
puts). If an external “flyby” DMA controller is being used for
a channel’s received data, this pin carries the low-active
Acknowledge signal from the DMA controller. If DMA
transfers aren’t used for a channel’s receiver, or if the DMA
controller uses flow-through (two-cycle) rather than flyby
operation, that channel’s RxACK pin can be used as a
general-purpose input or output.
/TxACKA,B. Transmit DMA Acknowledge (inputs or out-
puts). If an external “flyby” DMA controller is being used for
a channel’s transmit data, this pin carries the low-active
Acknowledge signal from the DMA controller. If DMA
transfers aren’t used for a channel’s receiver, or if the DMA
controller uses flow-through (two-cycle) rather than flyby
operation, that channel’s TxACK pin can be used as a
general-purpose input or output.
/DCDA,B. Data Carrier Detect (inputs or outputs, active
low). Software can program a channel so that this signal
enables/disables its receiver. In addition or instead, software can program a channel to request interrupts in
response to transitions on this line. The pins can also be
used as simple inputs or outputs.
/CTSA,B. Clear to Send (inputs or outputs, active low).
Software can program a channel so that this signal enables/disables its transmitter. In addition or instead, software can program a channel to request interrupts in
response to transitions on this line. The pins can also be
used as simple inputs or outputs.
UM97USC0100
4-1
Page 51

ZILOG
UM009402-0201
4.3 TRANSMIT AND RECEIVE CLOCKING
Z16C30 USC
USER'S MANUAL
®
The USC’s Receiver and Transmitter logic have separate
internal clock signals that we’ll call RxCLK and TxCLK. In
most of the USC’s operating modes, the Receiver samples
a new bit on RxD once per cycle of RxCLK, and the
Transmitter presents a new bit on TxD for each cycle of
TxCLK. One exception is asynchronous mode, in which
RxCLK and TxCLK run at 16, 32, or 64 times the bit rate on
RxD and TxD respectively. The other exception involves
Biphase-encoded serial data, for which the Receiver
samples RxD on both edges of RxCLK, and the Transmitter
may change TxD on both edges of TxCLK.
Figure 4-1 shows how RxCLK and TxCLK can be derived
in several different ways. This flexibility is an important part
of the USC’s ability to adapt to a wide range of applications.
In the simplest case, external logic derives clocks indicating bit boundaries, and software programs the channel to
take RxCLK directly from the /RxC pin and TxCLK directly
from the /TxC pin. When a channel uses such external
clocking for synchronous operation with “NRZ” data, it
samples a new bit on the RxD pin on each rising edge on
/RxC, and presents each new bit on the TxD pin on the
falling edge of /TxC.
It is often desirable to vary the bit rates for transmission and
reception by programming the USC, rather than by means
of off-chip hardware. To provide for this, each channel
includes independent means by which high-speed clocking on /RxC or /TxC can be divided down to almost any
desired bit rate.
4.3.1 CTR0 and CTR1
There are two separate 5-bit counters called CTR0 and
CTR1 in each channel of a USC, comprising the “first
stage” of the channel’s clock-generation logic. Figure 4-2
shows the Clock Mode Control Register. Its CTR0Src and
CTR1Src fields (CMCR13-12 and CMCR15-14 respec-
tively) control whether each counter runs and whether it
takes its input from the /RxC or /TxC pin:
Figure 4-3 shows the Hardware Configuration Register. Its
CTR0Div field (HCR15-14) controls the factor by which
CTR0 divides its input to produce its output:
CTR0Div CTR0 operation
00 CTR0 output = input/32
01 CTR0 output = input/16
10 CTR0 output = input/8
11 CTR0 output = input/4
There were not enough register bits to allow a separate
2-bit “CTR1Div” field. If the CTR1DSel bit in the Hardware
Configuration Register (HCR13) is 0, the CTR0Div field
determines the factor by which both CTR1 and CTR0
divide their inputs to produce their outputs. If CTR1DSel is
1, the DPLLDiv field in the Hardware Configuration Register (HCR11-10) determines the factor by which both CTR1
and the DPLL divide their inputs to produce their outputs.
In either case, the channel interprets the selected 2-bit
field as shown above for CTR0Div.
The output of either counter can be used directly as RxCLK
and/or TxCLK. It can be used as the input to either of two
Baud Rate Generators called BRG0 and BRG1, and it can
be routed to the /RxC or /TxC pin.
4.3.2 The Baud Rate Generators
There are two 16-bit down counters called BRG0 and
BRG1 in each channel of a USC; they form the “second
stage” of the channel’s clock-generation logic. The
BRG0Src and BRG1Src fields in the Clock Mode Control
Register (CMCR9-8 and CMCR11-10 respectively) control
each BRG’s input:
BRGnSRC BRGn clock source
00 CTR0 output
01 CTR1 output
10 /RxC pin
11 /TxC pin
CTRnSRC CTRn clock source
00 CTRn disabled
01 Reserved (disabled)
10 CTRn input = /RxC pin
11 CTRn input = /TxC pin
4-2
UM97USC0100
Page 52

ZILOG
UM009402-0201
Z16C30 USC
®
USER'S MANUAL
0
1
CTR1/P1
TxCLK
2
3
R
Z
BRG1
LD
MUX
4
S
HALF
DN
5
6
7
D
MODE
CMCR5-3
TC1R
HCR5-4
RxCLK
MUX
0
1
2
3
4
5
6
Rx
DPLL
R
Z
HALF
CMCR2-0
7
S
CTR0/P0
D
TC0R
BRG0
MODE
LD
DN
HCR1-0
0
1
2
RxCHAR
RxC
MUX
3
4
5
CTR0/P0
RxSYNC
6
IOCR2-0
7
0
1
2
TxCHAR
TxC
MUX
3
4
5
CTR1/P1
T
TxCMPL
6
Tx
DPLL
IOCR5-3
7
MUX
0
1
2
3
CMCR9-8
MUX
0
1
2
3
HCR15-14
Q4
Q3
Q2
Q1
Q0
CTR0
MUX
0
1
2
3
CMCR13-12
MUX
0
1
MUX
0
1
2
Q4
Q3
Q2
MUX
0
1
2
2
3
Q1
3
Q0
3
1-10
CMCR1
CTR0
0
CMCR15-14
MUX
1
HRC13
BRG1
BRG0
Rx
DPLL
D
0
Tx
MODE
TE
RA
REFCLK
MUX
1
2
3
HCR9-8
1-10
HCR1
CMCR7-6
Figure 4-1. A Model of a USC Channel’s Clocking Logic
TxC
RxC
UM97USC0100
RxD
4-3
Page 53
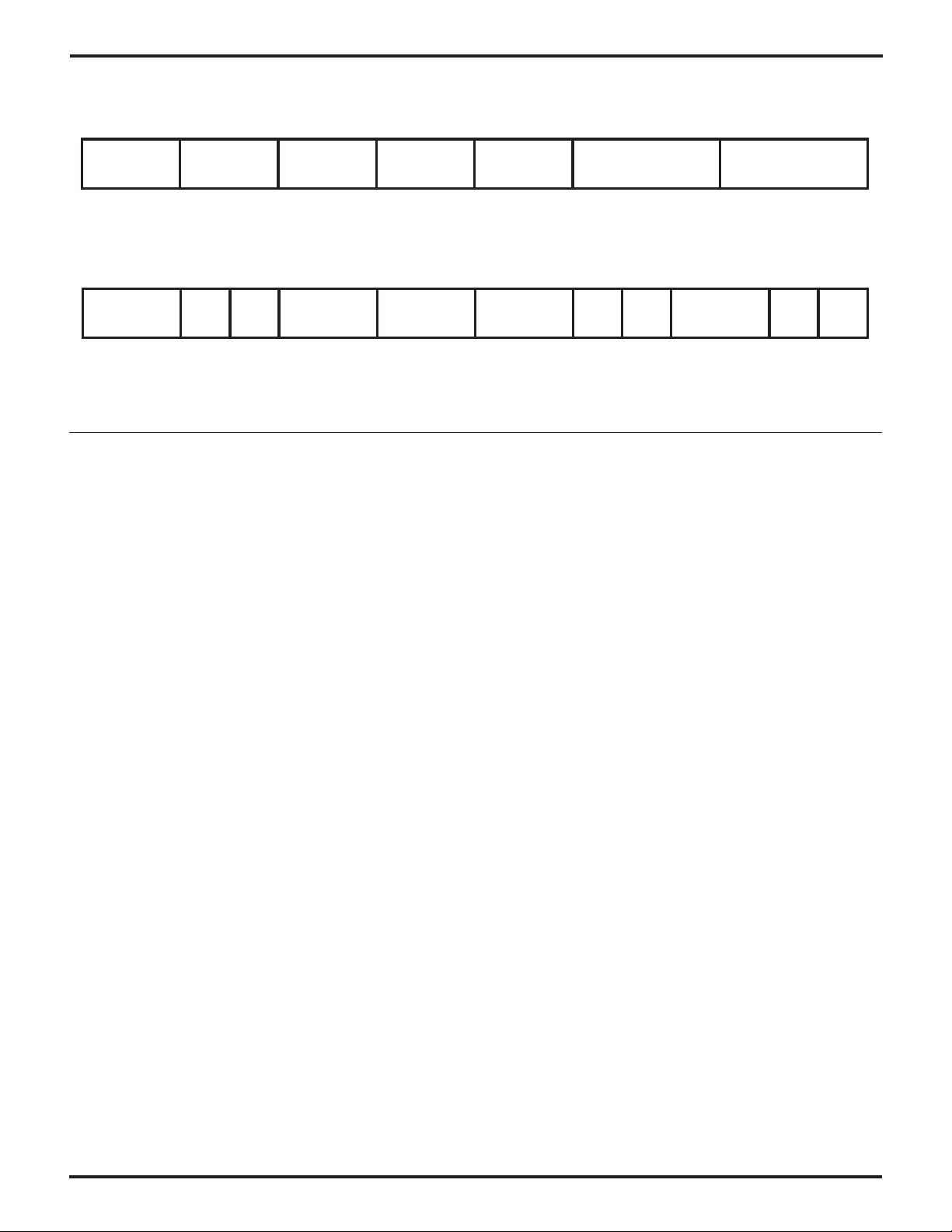
ZILOG
UM009402-0201
4.3.2 The Baud Rate Generators (Continued)
Z16C30 USC
®
USER'S MANUAL
CTR1Src
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
CTR0Src
Figure 4-2. The Clock Mode Control Register (CMCR)
CTR0Div
CTR1
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
CVOK DPLLDiv DPLLMode TxAMode BRG1S BRG1E RxAMode BRG0S BRG0E
DSel
Figure 4-3. The Hardware Configuration Register (HCR)
Each of the two Time Constant registers (TC0R and TC1R)
contains a 16-bit starting value for the corresponding BRG
down-counter. Zero in a Time Constant Register makes a
BRG’s output clock identical with its input clock; a value of
one makes a BRG divide its input clock by two, and so on
— the all-ones value makes a BRG divide its input clock by
65,536 to produce its output clock. This flexibility of dividing by any value means that a channel can derive almost
any baud rate from almost any input clock, unlike some
competing devices that constrain the system designer to
use specified crystal or oscillator values and constrain the
available speeds to certain commonly-used baud rates.
The BRG0E and BRG1E bits in the Hardware Configura-
tion Register (HCR0 and HCR4 respectively; the “E” in the
names is for “Enable”) control whether each Baud Rate
Generator runs or not. A 0 in one of these bits inhibits/
blocks down-counting by the corresponding BRG, keeping the current value in the down counter unchanged
despite transitions on the selected input clock. A 1 in one
of these bits enables the corresponding BRG to count
down in response to input clock transitions.
When a Baud Rate Generator counts down to zero, it sets
the BRG0L/U or BRG1L/U bit in the Miscellaneous Inter-
rupt Status Register (MISR1 or 0). Once one of these bits
is set, it stays set until software writes a 1 to the bit, to
“unlatch” it”.
TxCLKSrcDPLLSrcBRG0SrcBRG1Src
RxCLKSrc
A BRG may or may not continue to operate after counting
down to zero, depending on the BRG0S or BRG1S bit in
the Hardware Configuration Register (HCR1 or HCR5
respectively; the “S” stands for “Single cycle”). A 0 in
BRGnS causes BRGn to reload the TCn value automatically and continue operation, while BRGnS=1 makes BRGn
stop when it reaches 0.
Software can (re)load the value in the Time Constant
register(s) into one or both BRG counters by writing a
"Load TC0", "Load TC1", or "Load TC0 and TC1" command
to the RTCmd field of the Channel Command/Address
Register (CCAR15-11), as described in the Commands
section of Chapter 4. These commands also restart a BRG
that’s in Single Cycle mode and has counted down to zero
and stopped.
The TC0RSel bit in a channel’s Receive Interrupt Control
Register (RICR0) and the TC1RSel bit in its Transmit
Interrupt Control Register (TICR0) control what data the
channel provides when software reads the TC0R and
TC1R register addresses. If a TCnRSel bit is 0, the channel
returns the time constant value last written to TCn. When a
1 is written to a TCnRSel bit, the channel captures the
current value of the BRGn counter into a special latch, and
thereafter returns the captured value from this latch when
software reads the TCn address. Note that in order to
obtain a series of relatively current values of a running
BRGn, software has to write a 1 to the TCnRSel bit just
before each time it reads the TCn location.
4-4
UM97USC0100
Page 54

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
The output of either Baud Rate Generator can be used as
RxCLK and/or TxCLK. It can be used as the reference
clock input to the Digital Phase Locked Loop (DPLL)
circuit, and it can be output on the /RxC or /TxC pin.
When a Baud Rate Generator isn’t used to make a serial
clock, software can use it for other purposes such as
protocol timeouts, and can program the channel to request
an interrupt when it counts down to zero. Chapter 6 covers
interrupts in detail, but to use BRG interrupts software
should write 1’s to the BRG1 IA bit and/or BRG0 IA bit in the
Status Interrupt Control Register (SICR1 and/or SICR0), as
well as to the MIE and Misc IE bits in the Interrupt Control
Register (ICR15 and ICR0).
4.3.3 Introduction to the DPLL
There is one Digital Phase Locked Loop (DPLL) circuit in
each channel of a USC; it represents the “third stage” of the
channel’s clock-generation logic. The DPLL is a 5-bit
counter with control logic that monitors the serial data on
RxD. The DPLLSrc field of the Clock Mode Control Regis-
ter (CMCR7-6) controls which signal the DPLL uses as its
nominal or reference clock:
DPLLSrc DPLL Reference Clock
A later section describes the operation of the DPLL in
greater detail, but for now it’s sufficient to note that it
samples the (typically encoded) data stream on RxD to
produce separate receive and transmit outputs. These
outputs are synchronized to the bit boundaries on RxD,
and can be used as RxCLK and/or TxCLK and/or can be
routed to the /RxC or /TxC pin.
4.3.4 TxCLK and RxCLK Selection
The Transmitter can take its TxCLK from any of the sources
described in preceding sections, under control of the
TxCLKSrc field of the Clock Mode Control Register
(CMCR5-3):
TxCLKSrc Source of TxCLK
000 No clock (xmitter disabled)
001 /RxC pin
010 /TxC pin
011 Tx output of DPLL
100 BRG0 output
101 BRG1 output
110 CTR0 output
111 CTR1 output
00 BRG0 output
01 BRG1 output
10 /RxC pin
11 /TxC pin
The DPLLDiv field of the Hardware Configuration Register
(HCR11-10) determines whether the DPLL divides this
reference clock by 8, 16, or 32 to arrive at its nominal bit
rate, as follows:
DPLLDiv Nominal DPLL Clock
00 reference clock/32
01 reference clock/16
10 reference clock/8
11 Reserved (/4 for CTR1)
The 11 value cannot be used for DPLL operation, but if the
DPLL isn’t used, software can program this value, together
with a 1 in the CTR1DSel bit (HCR13), to operate CTR1 in
“divide by four” mode.
Similarly, the Receiver can take its RxCLK from various
sources, under control of the RxCLKSrc field of the Clock
Mode Control Register (CMCR2-0):
RxCLKSrc Source of RxCLK
000 No clock (receiver disabled)
001 /RxC pin
010 /TxC pin
011 Rx output of DPLL
100 BRG0 output
101 BRG1 output
110 CTR0 output
111 CTR1 output
UM97USC0100
4-5
Page 55

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
4.3.5 Clocking for Asynchronous Mode
For asynchronous reception, transitions on RxCLK don’t
have to have any relationship to transitions on RxD. When
the Receiver is searching for a start bit, it samples RxD in
each cycle of RxCLK, which it divides by 16, 32, or 64 to
determine the bit rate. After the Receiver finds the 1-to-0
transition at the beginning of each start bit, it counts off the
appropriate number of RxCLK cycles to the middle of the
bit cell (8, 16, or 32). At this point it samples RxD to validate
the start bit. If RxD has gone back to 1, the Receiver
ignores the prior transition as line noise and goes back to
searching for a start bit. If RxD is still 0, the Receiver
accepts the start bit. Then it counts off 16, 32, or 64 RxCLK
cycles to the middle of each subsequent bit of the character, and samples RxD at those times.
For asynchronous transmission, if a Transmitter has been
idle and software then provides it with data and enables it,
it drives TxD from 1 to 0 for the Start bit at the falling edge
on TxCLK that follows the latter of these two steps. It
applies each subsequent bit to TxD after counting off 16,
32, or 64 TxCLK cycles. When sending successive async
characters, the Transmitter waits for the stop bit length
programmed in the two MSBits of the TxSubMode field of
the Channel Mode Register (CMR15-14), before driving
TxD from 1 to 0 for a subsequent start bit. If these bits
specify “shaved” operation, the Transmitter adjusts the
stop bit length per the TxShaveL field of the Channel
Control Register (CCR11-8).
4.3.6 Synchronous Clocking
Except in asynchronous operation, one cycle on RxCLK
corresponds to one data bit on RxD, and one TxCLK cycle
corresponds to one bit on TxD. In any of the synchronous
modes, the clock used by the receiver to sample the data
must be similar to the one used by the remote transmitter
to send the data.
common practise to encode the data so that serial stream
also includes clocking information. For such applications,
the USC can encode transmitted data and decode received data in any of several popular formats.
In addition, each channel’s Digital Phase Locked Loop
(DPLL) module can recover a synchronized RxCLK from
the received data. While the DPLL can source TxCLK as
well, such operation propagates some of the clock jitter
from this station’s receive path onto its transmit path, which
may increase the error rate.
4.3.7 Stopping the Clocks
CMOS circuits like those in the USC don’t draw much
power compared to older technologies, but their power
requirements can be reduced still further if their clock
signals are stopped when the circuits don’t need to operate. Most of this power savings can be obtained by having
the software disable RxCLK and TxCLK by writing zeroes
to the RxCLKSrc and TxCLKSrc fields (CMCR2-0 and
CMCR5-3). If the Counters and Baud Rate Generators are
used, power consumption is reduced further if software
disables them by writing zeroes to as many as possible
among CTR0Src, CTR1Src, BRG0Src, and BRG1Src
(CMCR13-12, CMCR15-14, CMCR9-8, and CMCR11-10).
The ultimate in power savings is obtained by having
external logic stop the input clock(s) on the /RxC and/or
/TxC pins.
When RxCLK is stopped, previously-received data can be
read from the RxFIFO, but RxD is ignored so that no further
data will arrive. A final character will be available to the
software and/or the Receive DMA controller if RxCLK runs
for at least three cycles after its last bit is sampled from
RxD. For HDLC/SDLC this means at least 3 RxCLKs after
the receiver samples the last bit of a closing Flag. For
Async it means at least 3 RxCLKs after the receiver
samples the stop bit of the last character.
The simplest way to ensure this is to use a separate wire to
send the clock from one station’s transmitter to the other
station’s receiver. But often cost or the nature of the serial
medium prevents this — for example, you can’t send a
separate clock over a telephone line. In such cases it is
4-6
TxCLK can be stopped after the last desired bit has gone
out on TxD. This is 2 or 3 TxCLKs after the last bit has left
the Transmit shift register (because of the Transmit encoding logic), which in turn occurs 1 or 2 TxCLKs after the
Transmitter sets the TxUnder bit (TCSR1).
UM97USC0100
Page 56

ZILOG
UM009402-0201
4.4 DATA FORMATS AND ENCODING
Z16C30 USC
USER'S MANUAL
®
The USC’s Transmitter and Receiver can handle data in
any of the eight formats shown in Figure 4-4. The RxDecode
field in the Receive Mode Register (RMR15-13) controls
the format for the Receiver, and the TxEncode field in the
Transmit Mode Register (TMR15-13) controls it for the
Transmitter. The channel interprets both fields as follows:
xMR15-13 Data Format
000 NRZ
001 NRZB
010 NRZI-Mark
011 NRZI-Space
100 Bi-phase-Mark
101 Bi-phase-Space
110 Bi-phase-Level
111 Differential Biphase-Level
110010Data Bit:
NRZ
Non-Return-to-Zero (NRZ) mode doesn’t involve any en-
coding: at the start of each bit cell the transmitter makes
TxD low for a 0 or high for a 1. NRZB mode is similar except
that the transmitter and receiver invert the data: a low is a
1 and a high is a 0.
NRZB
NRZI-Mark
NRZI-Space
Biphase-Mark
Biphase-Space
Biphase-Level
Differential
Biphase-Level
DPLL TxCLK (All Modes)
DPLL RxCLK (NRZ Modes)
DPLL RxCLK
(Biphase Modes)
UM97USC0100
Note: No assumption is made about the starting state of the serial data in this figure.
As a result, those encoding schemes that operate in terms of transitions rather than
levels are shown with dual traces corresponding to their two possible starting states.
Figure 4-4. Data Formats/Encoding
4-7
Page 57
ZILOG
UM009402-0201
4.4 DATA FORMATS AND ENCODING (Continued)
Z16C30 USC
USER'S MANUAL
®
In NRZI-Mark mode, at the start of each bit cell the
transmitter inverts TxD for a 1 but leaves it unchanged for
a 0. In NRZI-Space mode, at the start of each bit cell the
transmitter inverts TxD for a 0 but leaves it unchanged for
a 1.
None of these NRZ-type modes, by itself, guarantees
transitions in the data stream. However, if the serial protocol can guarantee transitions often enough, then the DPLL
can use these transitions to recover a clock from the data
stream. By some method the protocol must eliminate long
bit sequences without transitions in the data: successive
zeroes for NRZ, NRZB, and NRZI-Mark and successive
ones for NRZ, NRZB, and NRZI-Space.
For example, NRZI-Space mode matches up well with
HDLC and SDLC protocols, because the Transmitter inserts a extra zero into the data stream whenever the
transmitted data would otherwise produce six ones in
succession. Thus, there is at least one transition every
seven bit times.
The reliability of clock recovery from any kind of NRZ data
stream depends on guaranteed transitions, on the
transmitter’s and receiver’s time bases being reasonably
similar/accurate, and on fairly low phase distortion in the
serial medium. Such schemes have the advantage that
bits can be sent at rates up to the maximum switching rate
(baud rate) of the medium.
The four Bi-phase modes, on the other hand, provide
highly reliable clock recovery and do not constrain the
content of the data, but they limit the data rate to half the
switching rate (baud rate) of the serial medium.
See the waveform for Bi-phase-Mark mode in Figure 4-4.
This encoding scheme is also known as FM1. The transmitter always inverts the data at the start of each bit cell. At the
midpoint of the cell it changes the data again to indicate a
1-bit, but leaves the data unchanged for a zero. In BiphaseSpace mode (FM0) the transmitter always inverts the data
at the start of each bit cell. In the middle of the cell it
changes the data again for a zero-bit but leaves the data
unchanged for a one-bit. In Biphase-Level mode (also
called Manchester encoding), at the start of the bit cell the
transmitter makes TxD high for a one-bit and low for a zero.
It always inverts TxD in the middle of the cell. In Differential
Biphase Level mode, at the start of each bit cell the
transmitter inverts TxD for a zero but leaves it unchanged
for a one. It always inverts TxD in the middle of the cell.
4.5 MORE ABOUT THE DPLL
While the Transmitter and Receiver must be programmed
for the particular serial format to be used, the DPLL only
needs to know the general category of encoding on RxD,
in the DPLLMode field of the Hardware Configuration
Register (HCR9-8):
DPLLMode DPLL Operation/Decoding
00 DPLL disabled
01 Any NRZ mode
10 Biphase-Mark or -Space
11 Either Biphase-Level mode
In any of the NRZ modes, transitions on RxD occur only at
the boundaries between bit cells. The DPLL synthesizes a
clock having falling edges at bit cell boundaries and rising
edges in the middle of the cells. The Transmitter changes
TxD on falling edges of TxCLK and the Receiver samples
data on rising edges of RxCLK.
In the Bi-phase-Mark and Bi-phase-Space encodings,
there is always a transition at the boundaries between
active data bits, and there may or may not be a transition
at the center of each bit cell. The DPLL generates a receive
clock having its falling edge 1/4 of the way through the bit
cell, and its rising edge at the 3/4 point. The Receiver
determines each data bit from the state of RxD at rising
edges of RxCLK and checks for “missing clocks” around
falling edges. The DPLL generates a Transmit clock that is
the same as in NRZ modes. The Transmitter complements
the state of TxD at each falling edge of TxCLK, and may or
may not change TxD at rising edges, depending on the
current data bit. The DPLL produces clock transitions only
when it is "in sync" as described on the next page.
4-8
UM97USC0100
Page 58
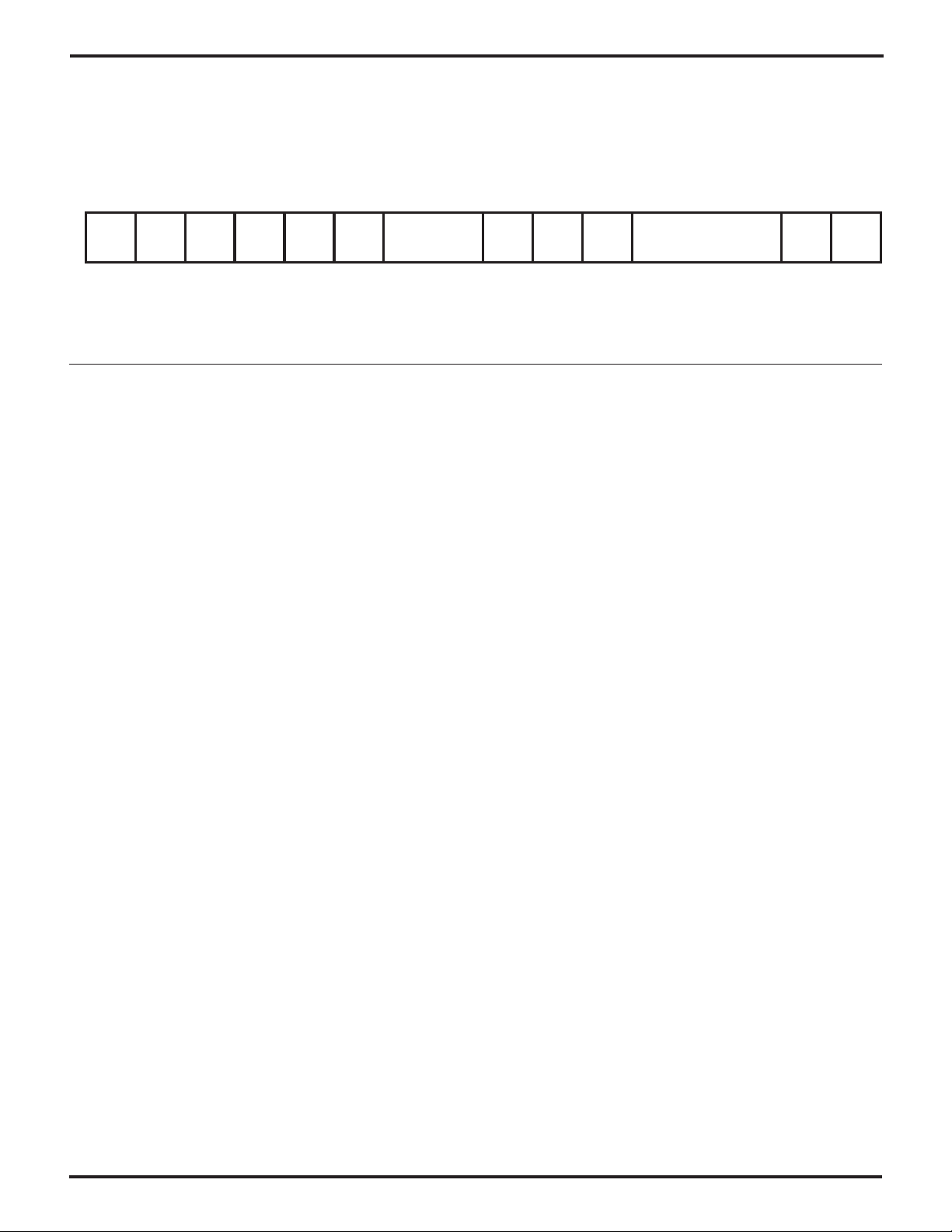
ZILOG
UM009402-0201
Z16C30 USC
®
USER'S MANUAL
In the Bi-phase-Level and Differential Bi-phase-Level
encodings, there is always a transition at the midpoint of
each active data bit, and there may or may not be transitions at the boundaries between bit cells. The DPLL generates clocks as for Bi-phase-Mark and -Space, but must
know the difference between those modes and these to do
RCCF
Ovflo
RCCF
Avail
Clear
RCCF
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
DPLL
Sync
DPLL
2Miss
DPLL
1Miss
DPLLEdge
Figure 4-5. The Channel Command/Status Register (CCSR)
The DPLL does not include logic to track the clock frequency of the remote end in a long-term manner. Rather it
is a counter that is affected by transitions on RxD, and uses
the reference clock to make bit clocking that is more or less
synchronized to these transitions. Figure 4-5 shows the
USC’s Channel Command/Status Register. Its DPLLEdge
field (CCSR9-8) provides further control over DPLL operation. For most applications, this field should be 00, in which
case the DPLL resynchronizes its counter on both rising
and falling edges on RxD.
For NRZ applications in which one kind of edge is significantly more precise than the other, software can program
the DPLLEdge field to 10 or 01, to make the DPLL ignore
one kind of transition. One example of such an application
is a serial bus with passive external pull-ups; in such a
application, falling edges are more accurate than rising
edges. If DPLLEdge is 11, the DPLL never resynchronizes
— that is, it runs freely like CTR0 and CTR1.
Because the blocking of edges by DPLLEdge affects
missing clock detection as well as resynchronization, for
Biphase operation DPLLEdge should always be programmed as 00.
In any NRZ mode, when the DPLL is in sync, it uses the
selected nominal value (8, 16, or 32 cycles of its input
clock) for counting off the next bit cell if a transition on RxD
falls near the bit cell boundary. If a transition comes early
it uses the nominal value minus 1 for the next cell, while if
a transition comes late it uses the nominal value plus one.
In /16 and /32 modes only, the DPLL uses the nominal
value plus two for the next bit cell if a transition comes very
late in a cell, and the nominal value minus two if a transition
comes very early.
so. The Receiver determines each data bit from the state
of RxD at falling edges of RxCLK and checks for “missing
clocks” around rising edges. The Transmitter may or may
not change TxD at falling edges of TxCLK, depending on
the current data bit. It always inverts TxD at rising edges.
On
Loop
Send
Loop
Rsrvd
TxResidue
/TxACK
/RxACK
“clock” transitions in the fourth and first quarters of the cell.
If a clock transition falls very close to the cell boundary, the
DPLL uses the nominal value (8, 16, or 32) as the length of
the next bit cell. Otherwise it uses the nominal value minus
one if a clock transition comes early, or the nominal value
plus one if a clock transition is late.
In Bi-phase-Level or Differential Bi-phase-Level modes,
when the DPLL is in sync it ignores “data” transitions in the
first and fourth quarters of the bit cell, and resynchronizes
to “clock” transitions in the second and third quarters of the
cell. If a clock transition falls close to the middle of the cell,
the DPLL uses the nominal value (8, 16, or 32) as the length
of the next bit cell. Otherwise it uses the nominal value
minus one if a clock transition comes early, or the nominal
value plus one if the clock transition is late.
In an NRZ mode, if there’s no transition in a bit cell the DPLL
uses the nominal value (8, 16, or 32 clocks) as the length
of the next bit cell. It also does this in Biphase modes, if
there is no clock transition in a bit cell when the DPLL is in
sync. In particular, in these cases the DPLL doesn’t reapply a correction from a previous bit cell.
In Bi-phase modes, the CVOK bit in the Hardware Control
Register (HCR12) controls whether the Receiver flags a
single code violation as an error. If CVOK=0, it sets the
DPLL1Miss bit for a single code violation as described
below. If CVOK=1, it doesn’t report a single code violation
in DPLL1Miss; use this setting when the protocol includes
single code violations as normal occurrences, as in the
1533B mode that’s described in Chapter 5. Regardless of
CVOK, code violations in two consecutive bit cells set the
DPLL2Miss and DPLLDSync L/U bits and de-synchronize
the DPLL.
In Bi-phase-Mark or Bi-phase-Space modes, when the
DPLL is in sync it ignores “data” transitions in the second
and third quarters of the bit cell, and resynchronizes to
UM97USC0100
4-9
Page 59
ZILOG
UM009402-0201
4.5 MORE ABOUT THE DPLL (Continued)
Z16C30 USC
USER'S MANUAL
®
After software sets up the DPLL, three bits in the Channel
Command/Status Register (CCSR) provide the operating
interface. The logic enters a “fast sync mode” when soft-
ware writes a 1 to the DPLLSync bit (CCSR12), or in a
Biphase mode when it detects two consecutive missing
clocks. In this mode, the next RxD transition (that’s allowed
by the DPLLEdge field) resynchronizes the DPLL counter
and puts the DPLL “back in sync”.
The DPLL watches the RxD line for transitions, and classifies them as either clock or data. Depending on the
position of transitions within each bit cell, the logic adjusts
the phase of the DPLL output clock to synchronize the
clock with the bit cell boundaries of the incoming data.
“Fast Sync” tells the DPLL that the NEXT edge it sees is the
one to synchronize to; otherwise the DPLL has to see “n”
correct edges before becoming “in sync.” “n” is about
three for X8 mode, six for X16, and 12 for X32.
The time required to get in sync in the worst case is thus a
function of the data encoding method, as well as the data
on the line. The key issue is the number of “edges” the
DPLL sees on RxD.
The DPLLSync bit in the Channel Command/Status Register (CCSR12) reads as 1 if the DPLL is in sync. The
DPLL2Miss bit (CCSR11) reads as 1 if the DPLL is in a
biphase mode and has detected missing clocks in two
consecutive bit cells. The DPLL1Miss bit (CCSR10) reads
as 1 if the DPLL is in a biphase mode, the CVOK bit
(HCR12) is 0, and the DPLL has detected a missing clock
in at least one cell. Once DPLL2Miss or DPLL1Miss is 1, it
continues to read that way until software writes a 1 to it.
Writing a 0 to any of DPLLSync, DPLL2Miss, or DPLL1Miss
has no effect on the DPLL logic.
The channel sets the DPLLDSync L/U bit when it loses
sync in a Biphase mode. This bit is similar to DPLL2Miss in
that once it’s set, it stays that way until software writes a 1
to the bit to “unlatch” it. Chapter 7 explains how to program
a channel so that it interrupts the host processor when it
sets DPLLDSync.
4.6 THE RXD AND TXD PINS
In some sense these are the most important pins on a USC.
Typically they carry the serial input to the Receiver and the
serial output of the Transmitter respectively. Figure 4-6
shows the I/O Control Register. Its TxDMode field (IOCR7-
6) allows software to control the function of TxD:
TxDMode Function of the TxD pin
00 Totem-pole Transmitter output
01 High-impedance state
10 Low output
11 High output
CTSMode RxRModeTxRMode TxCModeTxDMode RxCMode
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
DCDMode
Figure 4-6. The Input/Output Control Register (IOCR)
Software can use the ability to drive TxD low to generate a
Break condition in Asynchronous applications. The duration of such a Break is fully under software control.
The ability to put the TxD pin in a high-impedance state
allows software to use the USC in “serial bus” schemes that
include multiple senders on the same signal line. (But note
that the TxDMode field resets to 00, so that the channel
drives TxD after a Reset until the software programs
TxDMode to 01.) The ability for direct programmable
control over the TxD pin allows software to “bit-bang”
unusual/occasional serial protocol requirements, while
keeping the USC’s full power for more standard and
everyday communications.
4-10
UM97USC0100
Page 60

ZILOG
UM009402-0201
The RTMode field of the Channel Command/Address
register (CCAR9-8) controls the relationship between the
Transmitter and the Receiver and thus between the TxD
and RxD pins. It is encoded as follows:
RTMode Operation
00 Normal operation: the Transmitter and
Receiver are completely independent.
01 Echo mode: the state of the RxD pin is
copied directly onto the TxD pin. Data
from the Transmitter is ignored.
10 Pin Controlled Local Loop: the data from
the TxD pin, as determined by the
TxDMode field (IOCR7-6), is routed to the
Receiver rather than the data from RxD. If
TxDMode specs TxD as high impedance,
the Receiver can take its input from a
remote source via TxD rather than RxD.
11 Internal Local Loop: the data from the
Transmitter is routed to the Receiver rather
than the data from RxD, regardless of the
setting of the TxDMode field (IOCR7-6).
Z16C30 USC
USER'S MANUAL
®
4.7 EDGE DETECTION AND INTERRUPTS
Software can program each channel to detect rising and/
or falling edges on the /CTS, /DCD, /TxC, /RxC, /TxREQ,
and /RxREQ pins, and to interrupt when such events
occur. Figure 4-7 shows that the Status Interrupt Control
Register (SICR) includes separate Interrupt Arm (IA) bits
for rising and falling edges on each of these pins. (Chapter
7 describes the USC’s interrupt features in detail.) A 1 in
one of these bits makes the channel detect that kind of
edge, while a 0 makes it ignore such edges. This edge
detection and interrupt mechanism operates without regard for whether the various pins are programmed as
inputs or outputs in the I/O Control Register (IOCR).
When a channel detects an edge that’s enabled in the
SICR, it records the event in an internal “edge detection
latch” for that input. This latch is not directly accessible in
the USC’s register map. Instead, as shown in Figure 4-8,
the Miscellaneous Interrupt Status Register (MISR) in-
cludes two bits for each of these six pins, one called a
“Latched/Unlatch” or L/U bit, and the other being a “data
bit” that has the same name as the pin itself.
A hardware or software Reset sequence clears all the L/U
bits to zero. While the L/U bit for a pin is 0, the associated
data bit reports and tracks the state of the pin in a
“transparent” fashion, with a 1 indicating a low and a 0
indicating a high.
Whenever a pin’s L/U bit is 0 and its internal edgedetection latch is set, the channel sets the L/U bit to 1,
clears the detection latch, and sets the I/O Pin Interrupt
Pending (IOP IP) bit. IOP IP can be read and cleared (and
if necessary set) in the Daisy Chain Control Register
(DCCR1). Chapter 7 describes how the I/O Pin Enable and
Master Interrupt Enable bits determine whether the IP bit
actually results in an interrupt request to the processor.
UM97USC0100
4-11
Page 61

ZILOG
UM009402-0201
4.7 EDGE DETECTION AND INTERRUPTS (Continued)
Z16C30 USC
®
USER'S MANUAL
RxCDn
IA
RxCUp
IA
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
TxCDn
TxCUpIARxRDnIARxRUp
IA
TxRDn
IA
TxRUp
IA
IA
Figure 4-7. The Status Interrupt Control Register (SICR)
RxCL/U TxRL/UTxCL/U
/RxC
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
/TxC
RxRL/U /RxREQ /TxREQ
Figure 4-8. The Miscellaneous Interrupt Status Register (MISR)
While an L/U bit is 1, the state of the associated data bit is
frozen (latched). These two bits remain in this state, regardless of further transitions on the pin, until software
writes a 1 to the L/U bit. This clears the L/U bit to 0 and
“opens” the data latch to once again report and track the
state of the pin, at least for an “instant”. If one or more
enabled transitions occurred while the L/U bit was set, then
L/U is set again right after software writes the 1 to it.
IA
L/U
DPLL
DSync
IA
DPLL
DSync
L/U
BRG1IABRG0
BRG1
L/U
IA
BRG0
L/U
DCDDn
IA
DCDL/U
DCDUpIACTSDn
/DCD
IA
CTSL/U
CTSUp
IA
/CTS
RCC
Under
RCC
Under
One mode in which software can use this logic is to read
the MISR, then immediately write back what it has read.
The software should then look for 1’s in any and all
“interesting” L/U bits, and process/handle all such changes
without rereading the MISR. To obtain the current state of
one of these pins, regardless of the L/U bit, software can
write a 1 to the L/U bit and then immediately read back the
MISR.
Writing a 0 to an L/U bit has no effect, and the channel
ignores data written to the “data” bits.
4-12
UM97USC0100
Page 62
ZILOG
UM009402-0201
4.8 THE /DCD PIN
Z16C30 USC
USER'S MANUAL
®
The DCDMode field of the I/O Control Register (IOCR13-
12) controls the function of this pin:
DCDMode Function of the /DCD pin
00 Low-active Rx Carrier input
01 Low-active Rx Sync input
10 Low output
11 High output
When DCDMode is 00, software can handle the Carrier
indication all by itself. Or, the /DCD signal can enable and
disable the Receiver in hardware if software also programs
the RxEnable field of the Receive Mode Register (RMR1-
0) to 11. In the latter case, the Receiver starts assembling
a character only when /DCD is low; if /DCD goes high
during a received character, the Receiver aborts/discards
it. Figure 4-9 shows how the required relationship between
/DCD and RxD varies depends on the Receiver mode:
■ For isochronous mode, /DCD should set up low to the
rising edge of RxCLK at which the receiver samples
the start bit on RxD.
■ For monosync, bisync, and transparent bisync, /DCD
should set up low to the rising edge of RxCLK that
precedes the one at which the receiver samples the
first bit of the last sync pattern before the message.
■ For HDLC/SDLC mode, /DCD should set up low to the
rising edge of RxCLK at which the receiver samples
the ending 0 of the last Flag before the frame.
DCDMode=01 identifies the /DCD pin as an input from
external sync detection logic. Software typically programs
this value in conjunction with programming the RxMode
field of the Channel Mode Register (CMR3-0) with 0001 for
External Sync operation or 1001 for 802.3 (Ethernet) operation. For External Sync mode, external logic should
drive the /DCD pin low so that it sets up to the rising edge
of RxCLK before the one at which the Receiver should
capture the first data bit. For 802.3 /DCD should go low
when carrier is detected — a figure in Chapter 5 shows that
the timing relationship to RxD isn’t critical but /DCD should
go low no later than 6 bits into the 64 alternating bits that
precede the frame. The Receiver starts sampling RxD at
the same rising edge of RxCLK at which it first samples
/DCD low. If /DCD goes high during a received character,
the Receiver completes receiving the character and transfers it to the Receive FIFO before going inactive.
Sync conditions generated internal to the channel are not
output on this pin as on certain predecessor devices, but
can be output on the /RxC pin as described later.
The /DCD pin can alternatively be used as a generalpurpose output. To do this, simply program DCDMode to
10 to make the channel drive /DCD low, and to 11 to drive
the pin high. For such an application the designer may
want to connect a pull-up or pulldown resistor to the /DCD
pin, because the channel will not drive the pin from the time
/RESET goes low until the software programs DCDMode to
10 or 11.
UM97USC0100
4-13
Page 63
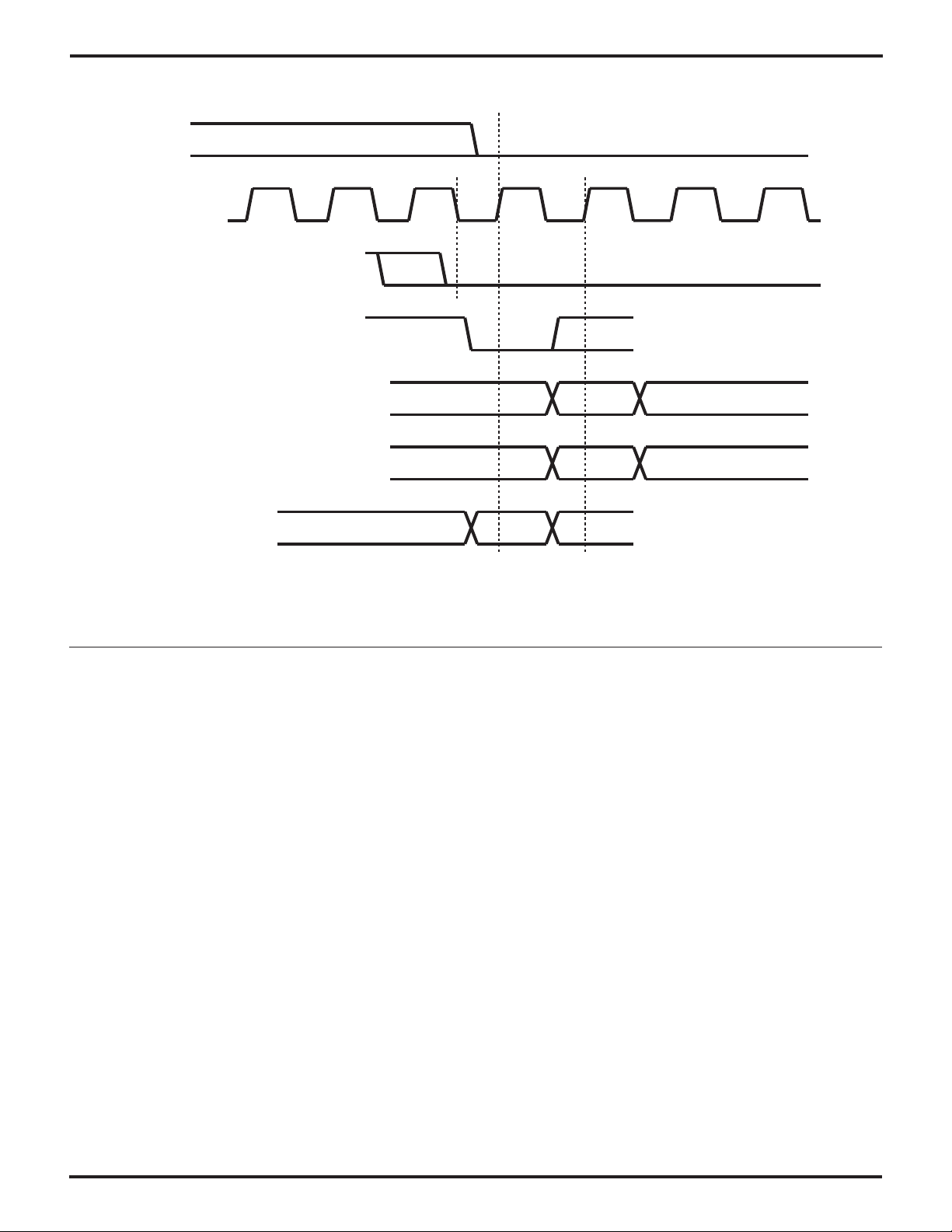
ZILOG
UM009402-0201
4.8 THE /DCD PIN (Continued)
/DCD
RxCLK
(/RxC)
Z16C30 USC
®
USER'S MANUAL
RxD (Async, 9-Bit
ACV/1553B
RxD (Isochronous)
RxD (External Sync)
RxD (Monosync, Bisync,
Transparent Bisync)
RxD (HDLC)
0111111
Figure 4-9. /DCD Auto-Enable Timing
Software can program a channel to interrupt the host
processor on either or both edges on /DCD, as described
in the preceding section. Typically such interrupts would
be used when /DCD is an input, that is, when DCDMode is
00 or 01. Software should write a 1 to the DCDDn IA bit in
the Status Interrupt Control Register (SICR7) to make a
channel detect falling edges on /DCD, and write a 1 to
DCDUp IA (SICR6) to make it detect rising edges.
Start Bit
Start
Bit
1st Bit
Received
Last 0
of Flag
1st Bit
of Sync
1st Bit
of Frame
Rest of Sync Character(s)
As described in the preceding section, the DCDL/U bit
(MISR7) is 1 if the channel has detected an enabled edge,
until software writes a 1 to the bit to clear it. The /DCD bit
(MISR6) reflects the state of the /DCD pin transparently
while DCDL/U is 0, but is frozen while DCDL/U is 1.
MISR6=0 indicates a high on the pin, and 1 indicates a low.
4-14
UM97USC0100
Page 64

ZILOG
UM009402-0201
4.9 THE /CTS PIN
Z16C30 USC
USER'S MANUAL
®
The CTSMode field of the I/O Control Register (IOCR15-
14) controls the function of this pin:
CTSMode Function of the /CTS pin
0x Low-active Clear to Send input
10 Low output
11 High output
/CTS
TxCLK
(/TxC)
TxD
When CTSMode is 00 or 01, software can handle the Clear
to Send input all by itself. Alternatively, the /CTS input can
enable and disable the Transmitter in hardware, if software
writes 11 to the TxEnable field of the Transmit Mode
Register (TMR1-0). In the latter case, the Transmitter will
start sending a character only when /CTS is low. As shown
in Figure 4-10, if the Transmitter is otherwise “ready to go”
when /CTS goes low, the first bit active bit on TxD will begin
at the falling edge of TxCLK that is 4.5 clock periods after
the rising edge of TxCLK at which the Transmitter first
samples /CTS low.
4.5 Clocks
1st Active Bit
Figure 4-10. /CTS Auto-Enable Timing
If /CTS goes high during a transmitted character in an
asynchronous mode, the Transmitter finishes sending the
character before going inactive. In the same situation in a
synchronous mode, the Transmitter terminates transmission immediately.
The /CTS pin can alternatively be used as a generalpurpose output. To do this, simply program CTSMode to
10 to make the channel drive /CTS low, and to 11 to make
it drive the pin high. For such applications the designer
may want to connect a pull-up or pulldown resistor to the
/CTS pin, because the channel won’t drive the pin from the
time /RESET goes low until the software programs CTSMode
to 10 or 11.
Software can program a channel to interrupt the host
processor on either or both edges on /CTS, as described
in the earlier section "Edge Detection and Interrupts".
Typically such interrupts would be used when /CTS is an
input, that is, when CTSMode is 00 or 01. Software should
write a 1 to the CTSDn IA bit in the Status Interrupt Control
Register (SICR5) to make a channel detect falling edges
on /CTS, and write a 1 to CTSUp IA (SICR4) to make it
detect rising edges.
As described in Edge Detection and Interrupts, the
CTSL/U bit (MISR5) is 1 if the channel has detected an
enabled edge, until software writes a 1 to the bit to clear it.
The /CTS bit (MISR4) reflects the state of the /CTS pin
transparently while CTSL/U is 0, but is frozen while
CTSL/U is 1. MISR4=0 indicates a high on the pin, and 1
indicates a low.
UM97USC0100
4-15
Page 65
ZILOG
UM009402-0201
4.10 THE /RXC AND /TXC PINS
Z16C30 USC
USER'S MANUAL
®
Figure 4-1 shows each channel’s options for the function of
its /RxC and /TxC pins. The RxCMode field in the Input/
Output Control Register (IOCR2-0) controls the function of
/RxC:
RxCMode Function of the /RxC pin
000 /RxC is an input
001 /RxC outputs RxCLK
010 /RxC outputs Rx Character Clock
011 /RxC outputs /RxSYNC
100 /RxC carries the BRG0 output
101 /RxC carries the BRG1 output
110 /RxC carries the CTR0 output
111 /RxC carries the DPLL Rx output
while the TxCMode field (IOCR5-3) controls the function of
the /TxC pin:
TxCMode Function of the /TxC pin
000 /TxC is an input
001 /TxC outputs TxCLK
010 /TxC outputs Tx Character Clock
011 /TxC outputs “Tx Complete”
100 /TxC carries the BRG0 output
101 /TxC carries the BRG1 output
110 /TxC carries the CTR1 output
111 /TxC carries the DPLL Tx output
Some of these possible outputs need further description.
A channel drives its Rx Character Clock high for one
RxCLK period as it transfers each character from the
Receive shift register to the Receive FIFO. Similarly, it
drives its Tx Character Clock high for one TxCLK period
each time it transfers a character from the Transmit FIFO to
the Transmit shift register. A channel’s /RxSYNC output
goes low for one RxCLK cycle each time its Receiver
recognizes a Sync or Flag sequence. The Tx Complete
output is suitable for controlling a driver on TxD. It is low
from the start of the first active bit of a sequence of one or
more consecutively-transmitted characters, through the
end of the last bit of the sequence. The BRG and CTR
outputs are square waves. The DPLL outputs were shown
earlier in this chapter.
While it’s not very useful to employ a high-speed freerunning clock as a source of interrupt events, for other uses
of /RxC and /TxC software can program a channel to
interrupt the host processor on either or both edges on
these pins, as described in the earlier section Edge Detection and Interrupts. Typically such interrupts would be
used for an input pin, that is, when RxCMode or TxCMode
is 00 or 01. Software should write a 1 to the RxCDn IA or
TxCDn IA bit in the Status Interrupt Control Register
(SICR15 or SICR13) to make a channel detect falling
edges on /RxC or /TxC, and write a 1 to RxCUp IA or
TxCUp IA (SICR14 or SICR13) to make it detect rising
edges.
As described in Edge Detection and Interrupts, the
RxCL/U or TxCL/U bit (MISR15 or MISR13) is 1 if the
channel has detected an enabled edge, until software
writes a 1 to the bit to clear it. The /RxC or /TxC bit (MISR14
or MISR12) reflects the state of the pin transparently while
the L/U bit is 0, but is frozen while the L/U bit is 1. A 0 in
MISR14 or MISR12 indicates a high on the pin, and 1
indicates a low.
4-16
UM97USC0100
Page 66
ZILOG
UM009402-0201
4.11 THE /RXREQ AND /TXREQ PINS
Z16C30 USC
USER'S MANUAL
®
The RxRMode and TxRMode fields of the I/O Control
Register (IOCR9-8 and IOCR11-10 respectively) control
the function of these pins:
XxRMode Function of /XxREQ pin
00 Input pin
01 DMA Request output
(or Interrupt Request)
10 Low output
11 High output
Chapter 6 describes the DMA Request function, whereby
a channel signals an off-chip DMA controller when its
TxFIFO or RxFIFO reaches a programmed degree of
“readiness” for DMA data transfer.
Chapter 7 suggests another use for these pins if they’re not
used as DMA requests, namely as interrupt request outputs that are separate from /INT. This is advantageous in
a system in which the host processor and bus provide
multiple interrupt request levels and the software uses
them for nested interrupts. See 'Using /RxREQ and /TxREQ
as Interrupt Requests' in Chapter 7 for more details.
Software can program a channel to interrupt the host
processor on either or both edges on these pins, as
described in the earlier section 'Edge Detection and Interrupts'. Typically such interrupts would be used for an input
pin, that is, when RxRMode or TxRMode is 00. Software
should write a 1 to the RxRDn IA or TxRDn IA bit in the
Status Interrupt Control Register (SICR11 or SICR9) to
make a channel detect falling edges on /RxREQ or
/TxREQ, and program RxRUp IA or TxRUp IA (SICR10 or
SICR8) to 1 to make it detect rising edges.
As described in Edge Detection and Interrupts, the
RxRL/U or TxRL/U bit (MISR11 or MISR9) is 1 if the
channel has detected an enabled edge, until software
writes a 1 to the bit to clear it. The /RxR or /TxR bit (MISR10
or MISR9) reflects the state of the pin transparently while
the L/U bit is 0, but is frozen while the L/U bit is 1. A 0 in
MISR10 or MISR9 indicates a high on the pin, and 1
indicates a low.
4.12 THE /RXACK AND /TXACK PINS
The RxAMode and TxAMode fields of the Hardware
Configuration Register (HCR3-2 and HCR7-6 respectively)
control the function of these pins:
XxAMode Function of /XxACK pin
00 General-purpose input
01 DMA Acknowledge input
10 Low output
11 High output
Chapter 6 describes the DMA Acknowledge function,
whereby an off-chip DMA controller signals a USC channel
that a “flyby” or single-cycle DMA operation is occurring in
response to the channel’s assertion of the corresponding
REQ pin, and that the channel should provide data on, or
capture data from, the AD pins.
The USC does not provide transition-detection, latching,
or interrupt capabilities for the /RxACK and /TxACK pins as
it does for most of the other signals described in this
chapter. Therefore, if these pins aren’t used as DMA
Acknowledge inputs, they can be used either for outputs
or for noncritical polled inputs.
The two LSBits of the Channel Command/Status Register
(CCSR1 and CCSR0) allow software to sense the state of
a channel’s ACK pins if they’re used as general-purpose
inputs. Figure 4-5 shows the CCSR. Its /TxACK and
/RxACK bits are forced to 0 unless the corresponding
TxAMode or RxAMode field in the HCR is 00, in which case
the bit reads back as a 0 when the /TxACK or /RxACK pin
is high and 1 when the pin is low.
UM97USC0100
4-17
Page 67

ZILOG
UM009402-0201
Z16C30 USC
®
USER'S MANUAL
© 1997 by Zilog, Inc. All rights reserved. No part of this document
may be copied or reproduced in any form or by any means
without the prior written consent of Zilog, Inc. The information in
this document is subject to change without notice. Devices sold
by Zilog, Inc. are covered by warranty and patent indemnification
provisions appearing in Zilog, Inc. Terms and Conditions of Sale
only. Zilog, Inc. makes no warranty, express, statutory, implied or
by description, regarding the information set forth herein or
regarding the freedom of the described devices from intellectual
property infringement. Zilog, Inc. makes no warranty of merchantability or fitness for any purpose. Zilog, Inc. shall not be
responsible for any errors that may appear in this document.
Zilog, Inc. makes no commitment to update or keep current the
information contained in this document.
Zilog’s products are not authorized for use as critical components in life support devices or systems unless a specific written
agreement pertaining to such intended use is executed between
the customer and Zilog prior to use. Life support devices or
systems are those which are intended for surgical implantation
into the body, or which sustains life whose failure to perform,
when properly used in accordance with instructions for use
provided in the labeling, can be reasonably expected to result in
significant injury to the user.
Zilog, Inc. 210 East Hacienda Ave.
Campbell, CA 95008-6600
Telephone (408) 370-8000
Telex 910-338-7621
FAX 408 370-8056
Internet: http://www.zilog.com
4-18
UM97USC0100
Page 68

ZILOG
UM009402-0201
5.1 INTRODUCTION
U
SER
’s M
ANUAL
CHAPTER 5
SERIAL MODES AND PROTOCOLS
Z16C30 USC
USER'S MANUAL
®
The main advantage of USC® family members is that they
can communicate in many different modes and serial
protocols. This, in turn, makes for more flexible and capable products for Zilog’s customers. This chapter de-
5.2 ASYNCHRONOUS MODES
Figure 5-1 shows how a "start bit" precedes each character
in async communications, and that so-called "stop bits"
separate characters. A start bit is a period of space/zero
that’s the same length as each following data bit. Each stop
bit is a period of mark/one that's more that half a bit time
long, with a typical minimum duration of one bit time. (The
USC and other devices offer the ability to “shave” stop bits
to less than a bit time.) In most forms of async, the falling
edge between a stop bit and the next start bit can come
any time after this minimum stop bit duration. In other
words, the length of the stop bit does not have to be any
particular multiple of the nominal bit time.
To handle this variability in the length of stop bits, asynchronous receivers “oversample” the received serial data
at some multiple of the nominal bit frequency. Software can
set up a USC Receiver to do this at 16, 32, or 64 samples/
bit. When a Receiver is waiting for a start bit and successive samples reveal a falling edge, it typically samples
again one-half bit time later, to validate the start bit. If the
serial data is still space/zero, the receiver then samples the
following data bits and stop bit at their nominal centers
after that. If the hardware samples the stop bit as space/
zero, the associated character is invalid or at least highly
suspect.
scribes how to set up and use the USC in its various modes
of serial operation. These modes can be classified into
three major categories: asynchronous, character-oriented
synchronous, and bit-oriented synchronous protocols.
Some async protocols check further for serial link errors by
including a parity bit with each character. The transmitter
generates such a bit so that the total number of 1 bits in the
character is odd or even. The receiving station checks
each parity bit. If it finds an incorrect one, it discards the
character and/or notifies the operator(s) of the receiving
and/or transmitting machine(s). But a single parity bit is not
a very reliable checking method — it can be easily deceived by errors that affect more than one bit. Few async
applications use parity checking nowadays, although they
may generate it, in case they find themselves talking to
equipment that does. Where protection against line errors
is important, some async applications may use blockoriented checking as described below for synchronous
protocols.
Each USC channel can handle a variety of options within
“classic” async operation, plus several unique variants. In
isochronous mode, the data format is similar to classic
async, but external hardware supplies a bit-synchronized
1x clock instead of a 16x, 32x, or 64x clock. In Nine-Bit
mode, an extra bit differentiates between “address” characters that select a particular destination on a multi-station
link, and subsequent data characters.
UM97USC0100
5-1
Page 69

ZILOG
UM009402-0201
5.2 ASYNCHRONOUS MODES (Continued)
Z16C30 USC
®
USER'S MANUAL
1/2 Bit Time
Receiver detects
Falling Edge
Receiver validates
Start Bit
Start
Bit
5 to 8 Data Bits,
Plus Optional Parity Bit
Receiver Samples Data
(and Parity?) Bits
Receiver checks
Figure 5-1. Asynchronous Data
Stop Bit
Stop
Bit
Minimum 1 Bit Time
(except for "Shaving")
All 1 Bit TIme
Start
Bit
SYN
(16)
STX
(16)
Message
STX
(02)
Data
ETX
(03)
CRC
May be SYNs, Mark,
Space, or Not Driven
Figure 5-2. Character Oriented Synchronous Data
SYN
(16)
SYN
(16)
5-2
UM97USC0100
Page 70

ZILOG
UM009402-0201
5.3 CHARACTER ORIENTED SYNCHRONOUS MODES
Z16C30 USC
USER'S MANUAL
®
These protocols came into use after async, in an effort to
get better line utilization by eliminating start and stop bits.
In sync modes, characters follow one another directly on
the serial link, each consisting of an agreed-upon number
of bits and each bit having the same nominal length. Since
bits and characters occur at regular intervals, the datacom
hardware can typically handle higher bit rates because it
doesn’t have to oversample as in typical async applications. This effect combines with having fewer bits per
character, to make synchronous operation substantially
faster than async.
In character oriented sync modes, “special” characters
divide the data into “messages”. Figure 5-2 shows how the
transmitter sends some minimum number of agreed-upon
“sync characters” between messages. When a synchronous receiver begins to receive a message, it typically
starts in a “search mode” in which it samples successive
bits into its serial-to-parallel shift register. It does this until
the last N bits match a defined sync pattern. Then the
Receiver enters a mode in which it simply captures each
succeeding group of bits as a character.
Most sync protocols require the receiving station to validate the sync pattern match. It can do this by checking
whether the next character is another sync, an agreedupon “start of message” character, or perhaps one of a
small set of such characters. This validation can be done
by software or by hardware.
Almost all character-oriented synchronous protocols also
define one or more characters, or sequences of characters, to mark the end of a message. Instead of (or sometimes besides) parity checking on each character, synchronous protocols will typically include a checking code
covering most or all the characters in each message. The
transmitter accumulates and sends this code before or
after the end-of-message character or sequence. Early
sync protocols used a Longitudinal Redundancy Character (LRC) that was simply the parallel Exclusive Or of the
characters in the message. Newer protocols use various
kinds of Cyclic Redundancy Checking (CRC) which offer
greater reliability in exchange for a somewhat more involved method of computation. Either kind of message
checking can be computed by either hardware or software
at the Transmitter and Receiver. The USC channels can
automatically generate and check various kinds of CRCs
in synchronous modes.
Synchronous applications vary considerably in terms of
the line state between messages. In half-duplex operation,
each station typically stops driving the line after the end of
a message. The other side then starts driving it to “turn the
line around”. In full-duplex point-to-point environments, a
transmitter may send a stream of repeated Sync or Idle
characters between messages. This maintains synchronization between itself and the remote receiver as to character boundaries. This avoids the need to send several sync
characters before the start of the next message, when it
becomes available for transmission. In other full-duplex
environments, the line may be maintained at a constant
Mark or Space between messages.
While many modes have several variants, the top level of
a USC channel’s control hierarchy includes the following
character-oriented synchronous modes. In Monosync
mode, the hardware transmits or matches a sync character of eight bits or less. Software must handle further
receive-sync validation. In Bisync mode the hardware
transmits or matches a minimum of two sync characters.
The two can be the same or different codes, each of eight
bits or less. Transparent Bisync mode is similar to Bisync
mode except that the prefix character Data Link Escape
(DLE) precedes control characters. This allows the transmission of arbitrary “binary” data without conflict with the
various control characters. Slaved Monosync mode applies only to the Transmitter, making it operate in conformance with the X.21 standard, such that it sends characters
in byte-synchronism with those received. External Sync
mode applies only to the Receiver, and leaves all syncdetection and framing control to external circuitry. An input
signal simply enables the Receiver to assemble characters from the RxD line.
The final character-oriented synchronous mode of the
USC channels provides basic facilities for IEEE 802.3
(Ethernet) operation. At the start of a frame, the Transmitter
generates, and the Receiver detects, a preamble consisting of alternating 0 and 1 bits ending with two 1’s in
succession. Bi-phase-level data encoding must be selected in the Transmit and Receiver Mode Registers (TMR
and RMR), as described in Chapter 4. External hardware
must be provided to detect collisions and to signal the
Transmitter when they occur. External hardware also must
signal the Receiver when a frame ends based on loss of
carrier. Upon collision detection, “back-off” timing must be
determined by external hardware or host processor software.
UM97USC0100
5-3
Page 71

ZILOG
UM009402-0201
5.4 BIT ORIENTED SYNCHRONOUS MODES
Z16C30 USC
®
USER'S MANUAL
As character-oriented synchronous protocols came into
wider use in the 1960’s and 70’s, the number of characters
having special significance for the hardware kept increasing. Hand in hand with this, the complexity of the required
hardware processing and state machines rose drastically.
Particularly troublesome was data “transparency”, the
ability to transmit any kind of “binary” data without conflict
with the various control characters used in these protocols.
These problems might be less severe were they occurring
today. But given the technology available in the 1960’s, the
proliferation of sync protocols was making it harder and
harder to build general-purpose datacom hardware. Instead, one had to build dedicated communications controllers for each protocol.
Bit oriented synchronous protocols were a response to
these problems. IBM’s SDLC was the first one widely used;
subsequent standardization efforts added several refinements in defining HDLC. These protocols simultaneously
minimized the amount of required hardware support, while
lifting all restrictions on the content of the data transmitted.
Figure 5-3 shows how in bit-oriented modes, a frame is a
group of sequential characters ending with a CRC code to
verify its correctness, as in character-oriented protocols.
The difference lies in the Flag sequences used to begin,
end, and separate frames.
When a bit-oriented synchronous Receiver starts to receive a frame, it looks for a Flag sequence (01111110) just
as a character-oriented synchronous Receiver looks for its
sync character. While sending a frame, a bit-oriented
synchronous Transmitter continually checks whether any
sequence of data bits could look like a Flag. It does this
without regard for character boundaries. Whenever the
data presented to a Transmitter includes a zero followed
by five ones, the Transmitter adds an extra zero-bit after
the fifth one-bit. Correspondingly, a bit-oriented synchronous Receiver monitors the serial data stream within a
frame; any time it sees 0111110, regardless of character
boundaries, it deletes the trailing zero.
Flag
(7E)
Frame
CRCData
Suppose that the Data presented to the Transmitter includes:
1110xxxx
yy100111
The Data actually sent will include:
x01111101001y
Extra 0-bit inserted by Transmitter,
deleted by Receiver
Flag
(7E)
May be Flags, Mark,
Space, or Not Driven
Figure 5-3. HDLC/SDLC Data
Flag
(7E)
Data
5-4
UM97USC0100
Page 72

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
This relatively simple technique allows transmission of any
kind of data and assures uniqueness of the Flag sequence
within the data stream. (Uniqueness is assured as long as
line errors don’t occur.) This makes for simpler hardware
than with some character-oriented synchronous protocols, in that the hardware only has to recognize a few bit
sequences. They include 0111111 for zero-bit-stuffing by
a Transmitter, 0111110 for bit removal by a Receiver, a
Flag sequence, and finally an Abort sequence. An Abort is
a zero followed by 7 or more ones.
As mentioned in the previous chapter, SDLC/HDLC protocols match up well with NRZI-Space encoding to ensure
data transitions for clock resynchronization. This is because the Transmitter inverts NRZI-space data for every 0bit and there are never more than five 1-bits in succession
within a frame.
Finally, since the Flag-matching hardware operates without regard for character boundaries, bit-oriented synchronous protocols can handle frames that are any number of
bits in length. (In character-oriented synchronous protocols, messages must be composed of an integer number
of characters.)
The USC can handle most variations of SDLC and HDLC
protocols, since it leaves the details of almost all such
variations to the host software. One variation with hardware
significance is Loop mode. In this mode, the Transmitter
can forward received data from the “preceding” station in
a loop of stations to the “next” one in the loop. When this
station has a frame to send, host software can load the start
of the frame into the TxFIFO and then enable the Transmitter. The Transmitter then waits until it detects the transmitpermission token called Go Ahead, which is the same as
the short-Abort sequence 01111111 in HDLC/ SDLC mode.
The Transmitter then changes this character to a Flag and
begins transmitting.
5.5 THE MODE REGISTERS (CMR, TMR AND RMR)
Three Mode registers in each channel of the USC control
the basic operation and serial protocol of the channel’s
Transmitter and Receiver.
The Channel Mode Register (CMR) selects among the
various communication protocols mentioned in the preceding sections. Figure 5-4 shows that the MSbyte controls the mode of the Transmitter, while the LSbyte controls
that of the Receiver. Software can select the modes of the
two modules independently by writing bytes to the CMR,
or, on a 16-bit bus, it can set both modes simultaneously
using a 16-bit write.
Within each byte, the four LSbits select the major communications protocol. The coding for these fields is similar but
not identical because some modes apply only to the
Transmitter while others apply only to the Receiver:
TxMode RxMode
Value (CMR11-8) (CMR3-0)
0000 Asynchronous Asynchronous
0001 — External Sync
0010 Isochronous Isochronous
0100 Monosync Monosync
0101 Bisync Bisync
0110 HDLC/SDLC HDLC/SDLC
0111 Transp. Bisync Transp. Bisync
1000 Nine-Bit Nine-Bit
1001 802.3 (Ethernet) 802.3 (Ethernet)
1010 — —
1011 — —
1100 Slaved Monosync —
1101 — —
1110 HDLC/SDLC Loop —
1111 — —
Zilog reserves values shown above as “—” for future use;
they should not be programmed in the indicated field.
UM97USC0100
5-5
Page 73

ZILOG
UM009402-0201
5.5 THE MODE REGISTERS (CMR, TMR AND RMR) (Continued)
Z16C30 USC
®
USER'S MANUAL
Later sections describe each of these modes and protocols individually, including the significance of the Tx and
RxSubMode bits (CMR15-12 and CMR7-4 respectively) in
each case. The various major modes use the SubMode
bits differently, to control protocol variations and options
that are specific to each mode. (Sometimes the same
SubMode option applies to two or more related major
modes.)
The TxMode field should be changed only while the
Transmitter is disabled in the TMR, as described in the next
section. Similarly, the RxMode field should be changed
TxSubMode TxRMode RxSubMode RxMode
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
Figure 5-4. The Channel Mode Register (CMR)
only while the Receiver is disabled in the RMR. While it’s
possible to change the TxSubMode or RxSubMode fields
while the Transmitter or Receiver is operating, the options
provided by these fields are typically static in nature and
the need to change them should seldom arise.
The Transmit and Receive Mode Registers (TMR and
RMR) contain basic control information for the Transmitter
and Receiver, including the serial format and data-integrity checking. Figures 5-5 and 5-6 show the TMR and RMR
respectively.
TxEncode
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
RxDecode
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
TxCRCType
RxCRCType
Start
TxCRC
Enab
TxCRC
atEnd
TxParType
TxPar
Enab
TxCRC
Figure 5-5. The Transmit Mode Register (TMR)
Start
RxCRC
Enab
QAbort
RxParType
RxPar
Enab
RxCRC
Figure 5-6. The Receive Mode Register (RMR)
TxLength
RxLength
TxEnable
RxEnable
5-6
UM97USC0100
Page 74

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
5.5.1 Enabling and Disabling the Receiver
and Transmitter
The TxEnable and RxEnable fields (TMR1-0 and RMR1-
0) enable and disable the Transmitter and Receiver to
send and receive serial data. 00 in TxEnable disables the
Transmitter, so that it keeps its output inactive and doesn’t
transfer characters from the TxFIFO to its shift register.
Assuming that the TxDMode field (IOCR7-6) is 00 to
propagate the Transmitter’s output onto TxD, the pin is a
constant Mark/high if the MSBit of the TxIdle field (TCSR10)
is 1 and/or the TxEncode field (TMR15-14) is 000 indicating NRZ data. If TxDMode is 00, TCSR10 is 0, and TxEncode
is non-zero, the TxD pin carries encoded ones.
If software changes TxEnable to 00 while the Transmitter is
sending a character, it discards the character and disables its output immediately. Similarly, 00 in RxEnable
disables the Receiver: it ignores the RxD pin and doesn’t
assemble characters. If software changes this field to 00
while the Receiver is assembling a character, it discards
the partial character.
01 in TxEnable or RxEnable disables the Transmitter or
Receiver in a more “graceful” way than 00. If software
changes TxEnable to 01 while the Transmitter is sending
asynchronous data, it finishes sending the current character before going inactive. If software changes TxEnable to
01 while the Transmitter is sending synchronous data, it
finishes sending the current frame or message before
going inactive. If software changes RxEnable to 01 while
the Receiver is receiving asynchronous data, it finishes
assembling the current character before going inactive. If
software changes RxEnable to 01 while the Receiver is
receiving synchronous data, it finishes receiving the current frame or message before going inactive.
10 in TxEnable or RxEnable enables the Transmitter or
Receiver unconditionally.
11 in TxEnable places the Transmitter under the control of
the /CTS pin. /CTS should be programmed as an input in
the CTSMode field of the Input/Output Control Register
(IOCR15-14). In this case, the Transmitter only starts
sending a character when /CTS is low. If /CTS goes high
while the Transmitter is sending a character in an async
mode, it finishes sending the character before going
inactive. In any synchronous mode, /CTS high summarily
disables the Transmitter. In either case, sooner or later,
/CTS high forces TxD to Mark or ones as described above
for TxEnable=00.
11 in RxEnable places the Receiver under the control of the
/DCD pin. /DCD should be programmed as an input in the
DCDMode field of the Input/Output Control Register
(IOCR13-12). The Receiver ignores the RxD pin and does
not assemble characters when /DCD is high. If /DCD goes
high while the Receiver is assembling a character in
External Sync mode or 802.3 (Ethernet) mode, it finishes
assembling the character and places it in the RxFIFO
before going inactive. In any other mode the Receiver
discards any partial character when /DCD goes high.
5.5.2 Character Length
The TxLength and RxLength fields (TMR4-2 and RMR4-
2) control how many bits the Transmitter sends and the
Receiver assembles in each character. The channel interprets both fields as follows:
xMR4-2 Character Length
000 8 bits
001 1-bit
010 2 bits
011 3 bits
100 4 bits
101 5 bits
110 6 bits
111 7 bits
When TxLength specifies less than 8 bits, the Transmitter
discards/ignores one or more of the more-significant bits
of each byte that it takes from the TxFIFO.
When RxLength specifies less than 8 bits, the Receiver
replicates the most significant received bit in the more
significant bits of each byte it places in the RxFIFO. For
Async mode, it includes a received Parity bit, if any, in each
data byte. If RxLength, plus the Parity bit if any, is less than
8 bits, the Receiver fills out the more-significant bits of each
byte with the Stop bit, which is 1 except when there’s a
Framing Error.
UM97USC0100
5-7
Page 75
ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
5.5.2 Character Length (Continued)
When RxLength is less than eight in synchronous modes
including HDLC/SDLC, the Receiver fills out the more
significant bits of each byte with the last received bit (the
parity bit if one is used), except in three cases:
1. In Monosync and Bisync modes, when CMR4 is 1 so
that sync characters are 8 or 16 bits long, but data
characters contain less than 8 bits, each data character is left-justified in its byte.
2. In HDLC/SDLC mode, when CMR5-4 are non-zero so
that address and control characters are 8 bits long but
subsequent characters are less than 8 bits long, each
subsequent character is left-justified in its byte.
3. In HDLC/SDLC mode, if the frame doesn’t end on a
character boundary, its final data bits are left-justified
within the (right-justified) number of bits specified by
RxLength, unless case 2 also applies, in which case
they’re left-justified in the last byte. (The number of bits
in the last character of each HDLC/SDLC frame is
always indicated in the RxResidue field of the RCSR.)
Software should reprogram RxLength only while the Receiver is either disabled, in Hunt state in a synchronous
mode, or between characters in an asynchronous mode.
Software can reprogram TxLength at any time, but a new
length takes effect only when the Transmitter loads the
next character into its shift register.
5.5.3 Parity, CRC, Serial Encoding
A later section of this chapter, 'Parity Checking', discusses
how bits 7-5 of both the TMR and RMR control parity
checking.
Similarly, a later section of this chapter, 'Cyclic Redundancy Checking', describes how bits 12-8 of the TMR and
RMR control CRC checking.
The TxEncode and RxDecode fields (TMR15-13 and
RMR15-13) specify how the Transmitter encodes serial
data on the TxD pin and how the Receiver decodes it on the
RxD pin. See Chapter 4 for a full description of the following
encodings:
xMR15-13 Data Format
In any of these three cases of left-justified data, the lesssignificant bits are left over from the previous character.
If software enables parity checking in an asynchronous
mode, the Transmitter and Receiver handle the parity bit
as an additional bit after the number of bits defined by
TxLength and RxLength. If software selects parity checking in a synchronous mode, the Transmitter and Receiver
handle the parity bit as the last of the number of bits
specified by TxLength and RxLength.
000 NRZ
001 NRZB
010 NRZI-Mark
011 NRZI-Space
100 Bi-phase-Mark
101 Bi-phase-Space
110 Bi-phase-Level
111 Differential Bi-phase-Level
5-8
UM97USC0100
Page 76

ZILOG
UM009402-0201
5.6 ASYNCHRONOUS MODE
Z16C30 USC
USER'S MANUAL
®
Software can select classic asynchronous operation for
both the Transmitter and the Receiver, by programming
the TxMode and RxMode fields (CMR11-8 and CMR3-0
respectively) to 0000. The earlier Figure 5-1 shows how a
“0” Start bit precedes each character and a “Stop bit”
follows each, the latter being a “1” condition that’s more
than 1/2 bit time long. The idle state of the line is 1, and the
Transmitter and Receiver divide their input clocks by 16,
32, or 64 to arrive at the nominal bit time.
Software can make the Transmitter calculate and send a
parity bit with each character and can make the Receiver
check such parity bits, as described in the later section
Parity Checking.
The two more significant TxSubMode bits (CMR15-14)
control the minimum number of Stop bits that the Transmitter sends between consecutive characters. The Transmitter interprets them as follows:
CMR15-14 Minimum Length of Tx Stop
00 One bit time
01 Two bit times
10 One, “shaved” per CCR11-8
11 Two, “shaved” per CCR11-8
The two LSbits of the Tx and RxSubMode fields (CMR1312 and 5-4) control the factors by which the Transmitter
and Receiver divide their TxCLK and RxCLK inputs to
arrive at the nominal bit length. A channel interprets both
fields as follows:
CMR13-12
& CMR5-4 Nominal Bit Length
00 TxClock or RxClock/16
01 TxClock or RxClock/32
10 TxClock or RxClock/64
11 Reserved, do not program
For the Receiver, choosing a larger divisor makes it sample
the data on RxD more often. This may result in a slightly
better error rate in marginal circumstances. For the Transmitter there is no significance to the divisor chosen, other
than the convenience of choosing the same value as for the
Receiver, so that the same source can be used for both
RxCLK and TxCLK. (See Chapter 4 for more information
about clock selection.)
Zilog reserves the two MSbits of the RxSubMode field
(CMR7-6) in Asynchronous mode for use in future products. They should always be programmed as 00.
When CMR15 is 1 in this mode, the TxShaveL field of the
Channel Control Register (CCR11-8) controls the exact
length of the minimum Stop bit(s). If the 4-bit value in
TxShaveL is “n”, then the length of the shaved stop bit is
(n+1)/16-bit times. The following table summarizes the
stop bit possibilities afforded by CMR15-14 and CCR11-8:
Minimum Length of
CMR15-14 CCR11-8 Tx Stop
00 xxxx 1 bit time
01 xxxx 2 bit times
10 0000-0111 1/2 or less: DO NOT USE
10 1000 9/16
10 1001 5/8
10 1010-1110 11/16 to 15/16
10 1111 1 (as with CMR15-14=00)
11 0000 17/16
11 0001 9/8
11 0010-1110 19/16 to 31/16
11 1111 2 (as with CMR15-14=01)
There is no such thing as a “received stop length” parameter: the Receiver does not expect or check for a particular
stop bit length. It simply samples the received data at the
nominal midpoint of a single Stop bit, and loads a corresponding Framing Error bit into the RxFIFO with each
character. This bit migrates through the FIFO with its
associated character and eventually appears as the
CRCE/FE bit in the Receive Command/Status Register
(RCSR3). Note that RCSR3 can represent the status at the
time that a character marked with RxBound status was
read from the RxFIFO, or the status of the oldest 1 or 2
characters that are still in the RxFIFO, as described in the
later section 'Status Reporting'.
UM97USC0100
5-9
Page 77
ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
5.6.1 Break Conditions
A Break condition is a period of Space (zero) state on an
Async line, that’s longer than the length of a character.
Such a sequence traditionally signals an exceptional condition or a desire to stop transmission in the opposite
direction. Alternatively, a Break may mean that the switched
or physical connection with the other station is broken. The
Receiver detects a Break condition when it samples a
supposed Stop bit as Space/zero (a Framing Error) and all
the data bits were also Space/zero. In this case the
Receiver doesn’t place the all-zero character in the RxFIFO,
but instead sets the Break/Abort bit in the Receive Command/Status Register (RCSR5). This bit can be enabled to
cause an interrupt at the start of a Break.
If it's necessary to have an interrupt at the end of a Break,
software can switch the Receiver to Monosync mode,
looking for an all-ones Sync character, and arm the Exited
Hunt condition to flag the end of the Break. After the
5.7 ISOCHRONOUS MODE
interrupt, software has to switch back to async mode and
purge the Rx FIFO. Alternatively, software can tell when the
Break ends by polling the Break/Abort bit. The bit doesn’t
go back to 0 until software has written a 1 to the bit to
“unlatch” it, and RxD has gone back to 1/High/Mark.
Software can send a Break by programming the TxDMode
field of the Input/Output Control Register (IOCR7-6) to 10
to force TxD to low/space. Then it can use whatever kind
of timing resources it has available to measure the desired
duration of the Break. After this, it can program TxDMode
back to 11 to force TxD to high/mark or to 00 to resume
normal operation. Chapter 4 describes a channel’s Counters
and Baud Rate Generators that may be useful in timing the
length of a transmitted Break. While most modern serial
controllers will detect a Break that’s only slightly longer
than a character, older conventions required a Break to be
much longer: 200 milliseconds or more.
Software can select Isochronous operation for the Transmitter and the Receiver, by programming the TxMode and
RxMode fields (CMR11-8 and CMR3-0 respectively) to
0010. This mode is similar to Asynchronous mode as
described above, except that the Transmitter and Receiver use 1X instead of 16x, 32x, or 64x clocking. This
typically means that an external bit clock must be provided. It’s possible to use the DPLL to recover a 1x clock,
but this is a lot like what the Receiver does in Async mode
anyway.
Of the options available in the Channel Mode Register for
Async mode, the only one that applies in Isochronous
mode is CMR14. This controls whether the Transmitter
sends one or two stop bits:
CMR14 Length of Tx Stop
0 1 bit time
1 2 bit times
The USC doesn’t use the other three bits of the TxSubMode
field in Isochronous mode, nor any of the RxSubMode bits,
but Zilog reserves these bits for functional extensions in
future products. Software should always program them
with zeroes in Isochronous mode on a USC.
5-10
UM97USC0100
Page 78
ZILOG
UM009402-0201
5.8 NINE-BIT MODE
Z16C30 USC
USER'S MANUAL
®
This mode is compatible with various equipment including
some Intel single-chip microcontrollers. In some contexts
it’s called “address wakeup mode”. Software can select it
for the Transmitter and the Receiver by programming the
TxMode and RxMode fields (CMR11-8 and CMR3-0 respectively) to 1000. Operation on the line is similar to
Async mode, using a single stop bit and either eight data
bits or seven data bits plus a parity bit. Following the eighth
(MS) data bit or the Parity bit, an additional bit differentiates
normal data characters from “destination address” characters. Address characters identify which of several stations on the link should receive the following data characters. In effect, Nine Bit mode is like a Local Area Network
using asynchronous hardware.
The Transmitter saves TxSubMode bit 3 (CMR15) with
each character as it goes into the TxFIFO, and sends this
bit as that character’s address/data bit. By convention a 0
signifies “data” and a 1 signifies “address”. As software or
an external Transmit DMA controller writes each character
into the TxFIFO, the channel saves the state of CMR15 with
it. This bit accompanies the character through the FIFO
and out onto the link.
TxSubMode bit 2 (CMR14) selects between eight data bits
or seven data bits plus parity:
RxSubMode bit 2 (CMR6) similarly controls parity checking of characters marked as Data, thus allowing 8-bit data,
while a 1 enables parity checking, thus limiting data
characters to 7 data bits. The Receiver always checks the
parity of address bytes. The RxParEnab bit in the Receive
Mode register (RMR5) must be set to the same value as this
bit.
As in Async mode, the two LSbits of the Tx and RxSubMode
fields (CMR13-12 and CMR5-4) control whether the Transmitter and Receiver divide their TxCLK and RxCLK inputs
by 16X, 32X, or 64x to arrive at the nominal bit length. See
the preceding Async section for the field encodings and a
discussion of the significance of this choice.
The Receiver sets the RxBound status bit for a received
address character, that is, a character that has its ninth bit
set to 1. This bit accompanies the character through the
RxFIFO and ends up in the Receive Command/Status
Register (RCSR4). Note that this mode uses the RxBound
indicator quite a bit differently from other modes, in that it
marks the start of each received block rather than the end.
Because of this, some of the mechanisms associated with
RxBound, that are described in later sections, aren’t of
much use in Nine-Bit mode. For example, you probably
wouldn’t want to store a Receive Status Block for an
address character.
CMR14 Data bits
0 Eight
1 Seven plus parity
The TxParEnab bit in the Transmit Mode Register (TMR5)
must be set to the same value as this bit.
Typically, Nine Bit receivers check the parity of received
address bytes. This means that when software selects
eight data bits, it must calculate its own parity bit in the MSB
of addresses.
The USC doesn’t use the MSBit of the RxSubMode field
(CMR7) in Nine Bit mode, but Zilog reserves this bit for
future enhancements, and software should program it as
0 in this mode.
UM97USC0100
5-11
Page 79
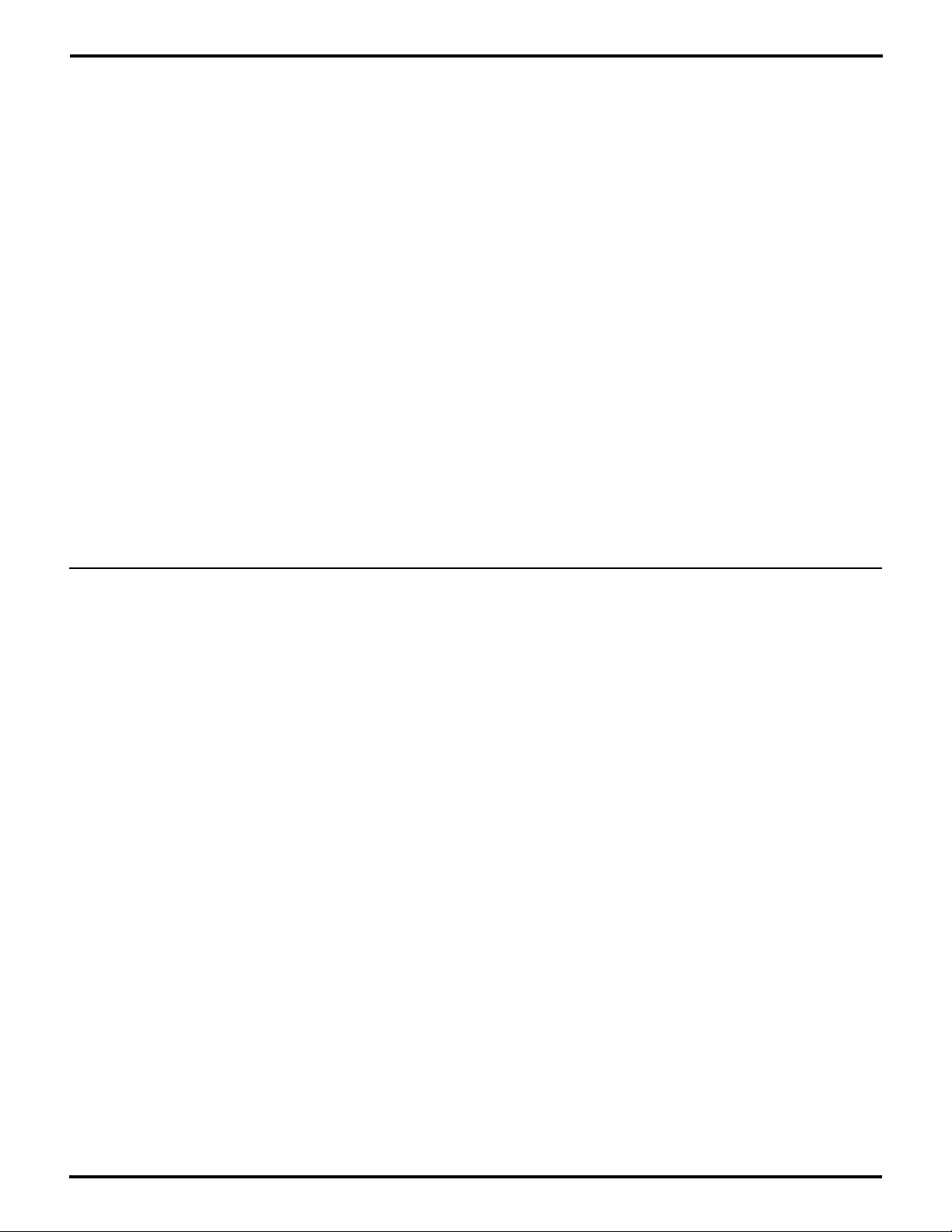
ZILOG
UM009402-0201
5.9 EXTERNAL SYNC MODE
Z16C30 USC
USER'S MANUAL
®
Software can select this mode only for the Receiver, by
programming the RxMode field of the Channel Mode
Register (CMR3-0) as 0001. This value is not defined for
the TxMode field (CMR11-8).
This is the most primitive synchronous mode. To use it,
software must program the DCDMode field of the Input/
Output Control Register (IOCR13-12) to 01, to specify that
the /DCD pin carries a Sync input. External hardware must
provide a low-active signal on this pin, that controls when
the Receiver should capture data. When the external
hardware establishes synchronization and/or data validity, it should drive /DCD low. The timing should be such that
the IUSC first samples /DCD low at the rising edge of
RxCLK before the one at which it should capture the first
data bit from RxD. (Typically, RxCLK comes directly from
the /RxC pin in this mode.)
While /DCD stays low the Receiver samples RxD on each
rising edge of RxCLK. Ideally, the external hardware
should negate /DCD such that the channel samples it high
on the rising RxCLK edge after the one on which it samples
the last bit of the last character. But if /DCD goes high while
the Receiver is in the midst of assembling a received
character, it continues on to sample the remaining bits of
the character and place the character in the RxFIFO.
Because of this, it’s OK for /DCD to go high during the last
character, at any time after a hold time after the RxCLK
edge at which the Receiver samples the first bit of the
character.
Software can make the Receiver check a parity bit in each
character as described in the following section 'Parity
Checking'. Besides or instead of character parity, software
can make the Receiver check a CRC code as described in
the 'Cyclic Redundancy Checking' section.
The USC doesn’t use the RxSubMode field (CMR7-4) in
External Sync mode, but Zilog reserves this field for future
enhancements and software should program it as 0000 in
this mode.
5.10 MONOSYNC AND BISYNC MODES
The Binary Synchronous Communications protocol put
forth by the IBM Corporation in the 1960’s is often abbreviated as “Bisync”. But we will use the latter term more
generally, to mean a mode of a USC channel in which the
Transmitter sends, and the Receiver searches or “hunts”
for, a Sync pattern composed of two characters totalling 16
bits or less. By contrast, we’ll use the term “Monosync” to
mean a mode in which the Transmitter sends, and the
Receiver matches, a sync pattern of eight bits or less. Use
of Bisync mode with the two sync characters equal represents a middle ground, having the advantage that the twocharacter pattern match by the Receiver is more reliable
and secure than the sync match in Monosync mode.
Software can select these modes for the Transmitter and/
or the Receiver, by programming the value 0100 (for
Monosync) or 0101 (for Bisync) into the TxMode and/or
RxMode fields of the Channel Mode Register (CMR11-8
and CMR3-0).
Software can make the Transmitter calculate and send a
parity bit with each character and can make the Receiver
check such parity bits, as described in the 'Parity Checking' section.
In such character-oriented synchronous modes, blocks of
consecutive characters are called 'messages'. Besides or
instead of character parity, software can make the Trans-
mitter calculate and send a Cyclic Redundancy Check
(CRC) code for each message and can make the Receiver
check a CRC in each message, as described later in
'Cyclic Redundancy Checking'.
On the transmit side, the Transmitter “concludes a message” in either of two situations: when it underruns or after
it sends a character marked with “EOF/EOM” status. The
Transmitter underruns when the TxFIFO is empty and the
transmit shift register needs a new character. Software can
mark a character as the last one of a message directly,
using a command in the Transmit Command/Status Register (TCSR), or more automatically by using the Transmit
Character Counter as described in a later section.
The MSBit of the TxSubMode field (CMR15) determines
whether the Transmitter sends a CRC when it concludes a
message because of an Underrun condition. The
TxCRCatEnd bit in the Transmit Mode Register (TMR8)
determines whether it does so when it concludes a message because of a character marked as End Of Message.
If CMR15 or TMR8 (as applicable) is 1, the Transmitter
sends the CRC code that it has accumulated while sending the message. If CMR15 or TMR8 is 0, it doesn’t send a
CRC code; if there’s any message-level checking, it must
be sent like normal data.
5-12
UM97USC0100
Page 80

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
After the CRC, or immediately if CMR15 or TMR8 is 0, in
Monosync mode the Transmitter sends the Sync character
in the LSByte of the Transmit Sync Register (TSR7-0). In
Bisync mode it sends the “SYN1” character in TSR15-8 if
CMR14 is 0, while if CMR14 is 1 it sends one or more
character pairs. The Transmitter takes the first character of
each such pair from TSR7-0; by convention it’s called
“SYN0”. The second character of each pair comes from
TSR15-8 and is called “SYN1”.
After sending this closing Sync character or pair, if/while
software doesn’t present another message, the Transmitter maintains the TxD signal in the “idle line state” defined
by the TxIdle field of the Transmit Command/Status Register (TCSR10-8). If this field is 000, it continues to send
more of the same Sync character or pair that it sent to
terminate the message. Other TxIdle values select constant or alternating-bit patterns, as described later in
'Between Frames, Messages, or Characters'.
If the CMR13 bit in the TxSubMode field is 1, the Transmitter sends a “Preamble” before the “opening” sync character that precedes each message. Software can select the
length and content of the Preamble in the Channel Control
Register (CCR11-8). A typical use of the Preamble is to
send a square-wave pattern for bit rate determination by a
phase locked loop.
The Transmitter always sends at least one “opening” Sync
pattern before the first data character of a message (after
the Preamble if any). In Monosync mode it sends one
character from TSR15-8, while in Bisync mode it sends the
“SYN0” character from TSR7-0 followed by “SYN1” from
TSR15-8. (In Bisync mode an opening Sync sequence is
always a character pair, regardless of CMR14.)
The LSBits of the TxSubMode and RxSubMode fields
(CMR12 and CMR4 respectively) specify the length of the
Sync characters that the Transmitter sends before and
after each message and between messages, and for
which the Receiver hunts. If CMR12 or CMR4 is 1, sync
characters have the same length as data characters,
namely the length specified by the TxLength field in the
Transmit Mode Register (TMR4-2) or the RxLength field of
the Receive Mode Register (RMR4-2). If sync characters
are less than 8 bits long, they must be programmed in the
least significant bits of TSR15-8, RSR7-0 and, for Bisync,
TSR7-0 and RSR15-8. Furthermore, to guarantee that the
Receiver matches such Sync characters, the “unused”
MSBits among RSR7-0 (and for Bisync RSR15-8) must be
programmed equal to the MS active bit.
If CMR12 or CMR4 is 0, Sync characters are 8 bits long
regardless of the length of data characters.
On the receive side, the CMR5 bit of the RxSubMode field
determines what the Receiver does with Sync characters.
In CMR5 is 1, the Receiver strips characters that match the
character in RSR15-8, and neither places them in the
RxFIFO nor includes them in its CRC calculation. (In Bisync
mode, aside from the initial sync match the Receiver treats
characters that match “SYN0” in RSR7-0, but don’t match
“SYN1” in RSR15-8, as normal data.) If CMR5 is 0, the
Receiver places all Sync characters inside a message in
the RxFIFO and includes them in the CRC calculation.
The USC doesn’t use the two MSBits of the RxSubMode
field (CMR7-5) in Monosync and Bisync modes, nor CMR14
in the TxSubMode field in Monosync mode. Zilog reserves
these bits for future enhancements, and software should
always program these bits with zeroes in these modes.
UM97USC0100
5-13
Page 81

ZILOG
UM009402-0201
5.11 TRANSPARENT BISYNC MODE
Z16C30 USC
®
USER'S MANUAL
This mode is more specific to the Transparent Mode option
of IBM Corp.’s Binary Synchronous Communications protocol than is the Bisync mode described above. Software
can select this mode for the Transmitter and the Receiver,
by programming the TxMode and RxMode fields of the
Channel Mode Register (CMR11-8 and CMR3-0) to 0111.
In Monosync and Bisync modes the Sync characters are
programmable, but in this mode a channel uses the fixed
characters “DLE” for the first of a sync pair, and “SYN” for
the second of a pair. (Software can make the Transmitter
send only SYNs for closing and idle Syncs.) The LSBits of
the TxSubMode and RxSubMode fields (CMR12 and CMR4)
control whether the Transmitter and Receiver use the
ASCII or EBCDIC codes for control characters, with a 1
specifying EBCDIC.
Besides using DLE before an opening and possibly a
closing SYN, the Transmitter can check whether each data
character coming out of the TxFIFO is a DLE and insert
another DLE if so. This feature allows any kind of data to be
sent “transparently”. The Transmitter doesn’t include such
an inserted DLE in its CRC calculation. Software can
selectively enable and disable this function using the
Enable DLE Insertion and Disable DLE Insertion commands, as described later in the 'Commands' section. In
general software should enable DLE insertion for sending
data and disable it for sending a control sequence that
starts with DLE. The channel routes the state controlled by
these commands through the TxFIFO with each character,
so that software can change the state as needed.
Similarly, in Transparent Bisync mode the Receiver checks
whether each character coming out of its shift register is a
DLE. If so, it sets a state bit. If the next character is also a
DLE, the Receiver doesn’t include it in the RxFIFO nor in the
CRC calculation.
If the character after a DLE is a SYN, the Receiver excludes
both the DLE and the SYN from the CRC calculation, but
places both characters in the FIFO so that they will appear
in the received data stream.
If the character after a DLE is any of the terminating codes
“ITB”, “ETX”, “ETB”, “EOT”, or “ENQ”, the Receiver places
the terminating character in the RxFIFO marked with
RxBound status. As described in later sections, this marking may set the channel’s Received Data Interrupt Pending
bit and thus force an interrupt request on its /INT pin, and/
or it may force a DMA request on the /RxREQ pin.
The first “DLE-SOH” or “DLE-STX” in a message makes the
Receiver enable its CRC generator for subsequent data.
Therefore, the CRC in Transparent Bisync mode covers all
the data after the first DLE-SOH or DLE-STX.
The Receiver doesn’t take any other special action based
on received DLE’s.
A Transmitter in Transparent Bisync mode sends a DLESYN pair at the start of a message, but a Receiver in this
mode syncs up to SYN-SYN. This is so that software can
determine “transparency” separately for each message,
by testing whether the first character of the message in the
RxFIFO is a DLE.
The following table shows the ASCII and EBCDIC codes
that a channel recognizes in this mode:
Character ASCII Code
16
EBCDIC Code
16
DLE 10 10
ENQ 05 2D
EOT 04 37
ETB 17 26
ETX 03 03
ITB 1F 1F
SOH 01 01
STX 02 02
SYN 16 32
Given the dedicated nature of the Sync characters, the
Transmitter interprets the three MSBits of the TxSubMode
field similarly to the way it does so in Bisync mode. If
CMR15 is 1, it sends a CRC when a Tx Underrun condition
occurs. If CMR14 is 1, the Transmitter sends one or more
DLE-SYN pairs after a message, else it just sends SYNs. If
CMR13 is 1, it sends a Preamble sequence before the
opening Sync at the start of each message.
The same data checking options apply to this mode as in
Monosync and Bisync, but since we’re quite protocolspecific here, we can say that character parity is not used
while CRC-16 checking is. While the Receiver can detect
the end of the frame in Transparent Bisync mode, the
Receive Status Block feature can’t be used to capture the
CRC Error status of the frame, for reasons discussed later
in the 'Cyclic Redundancy Checking' section. But the
selective inclusion/exclusion of received data in the CRC
calculation, that’s typical of this mode, precludes the kind
of automatic reception that the RSB feature allows in
modes like HDLC/SDLC anyway.
The USC doesn’t use the three MSBits of the RxSubMode
field (CMR7-5) in Transparent Bisync mode, but Zilog
reserves these bits for future enhancements and software
should always program them as 000 in this mode.
5-14
UM97USC0100
Page 82

ZILOG
UM009402-0201
5.12 SLAVED MONOSYNC MODE
Z16C30 USC
USER'S MANUAL
®
This mode applies only to the Transmitter. Software selects
it by programming 1100 in the TxMode field of the Channel
Mode Register (CMR11-8), while programming 0100 in the
RxMode field (CMR3-0) to select Monosync mode for the
Receiver.
The mode is intended to implement the X.21 standard and
similar schemes in which character boundaries on TxD
must align with those on RxD. For this to be meaningful,
RxCLK and TxCLK typically come from the same source,
as described in Chapter 4.
Most of the setup and operation in this mode is the same
as in Monosync mode, which was described in an earlier
section. CMR15 determines whether the Transmitter sends
a CRC in an Underrun condition. CMR12 selects whether
sync characters are the same length as data characters,
or are 8 bits long.
CMR13 controls the major operating option in Slaved
Monosync mode. (In regular Monosync mode this bit
controls whether the Transmitter sends a Preamble before
each message; in this mode it can’t send one.)
The Transmitter will not go from an inactive to an active
state while CMR13 is 0. If CMR13 is 1 when the Receiver
signals that it has matched a Sync character, the Transmitter sets the OnLoop bit in the Channel Command/Status
Register (CCSR7) and becomes active. That is to say, the
Transmitter can go active at any received Sync character,
not just one that makes the Receiver exit from “Hunt mode”.
Once the Transmitter starts, operation is identical with
Monosync mode. The Transmitter sends the Sync character from TSR7-0. Then it sends data from the TxFIFO, until
the TxFIFO underruns or until it sends a character marked
as End of Message. Then the Transmitter sends the CRC
if software has programmed that it should do so for this
kind of termination. Finally it sends a Sync character and
checks the CMR13 bit again.
If CMR13 is still 1, the Transmitter waits, sending the
programmed Idle line condition, until the software triggers
it to send another message. If, however, software cleared
CMR13 to 0 during the message just concluded, or if it
does so while the channel is sending the Idle condition, the
Transmitter goes inactive but it leaves OnLoop (CCSR7)
set. In the inactive state it sends continuous ones until
software programs CMR13 back to 1 again, and the
Receiver signals Sync detection.
If all the transmitted and received sync and data characters are the same length, and the same clock is used for
both the Transmitter and Receiver, this method of starting
transmission assures that transmitted characters start and
end simultaneously with received characters, as required
by X.21.
The USC doesn’t use CMR14 in the TxSubMode field in
Slaved Monosync mode, but Zilog reserves this bit for
future enhancements and software should always program it as zero in this mode.
UM97USC0100
5-15
Page 83

ZILOG
UM009402-0201
5.13 IEEE 802.3 (ETHERNET) MODE
Z16C30 USC
®
USER'S MANUAL
Software can select this mode for the Transmitter and the
Receiver, by programming 1001 into the TxMode and
RxMode fields of the Channel Mode Register (CMR11-8
and CMR3-0).
The USC’s capabilities for handling Ethernet communications are less comprehensive than those offered by various
dedicated Ethernet controllers. In particular, external hardware must detect collisions and generate the pseudorandom “backoff” timing when a collision occurs. In Ethernet
parlance, blocks of consecutive characters are called
"frames" rather than messages.
Since Ethernet is a relatively specific, well-defined protocol we can define the proper settings for many of the
channel’s register fields and options. We can specify the
exact values that software should program into the Transmit Mode Register (D70316) and Receive Mode Register
(D60316). These values specify Bi-phase-Level encoding,
a 32-bit CRC sent at End of Frame, no parity, and 8-bit
characters, all according to Ethernet practise and IEEE
802.3. In addition the 2 LSBits specify auto-enabling
based on signals from external hardware on /CTS and
/DCD.
On the transmit side, software should program the TxPreL
and TxPrePat fields of the Channel Control Register (CCR11-
8) to 1110. This value makes the Transmitter send the 64bit Preamble pattern 1010... before each frame. In 802.3
mode the Transmitter automatically changes the 64th bit
from 0 to 1 to act as the “start bit”.
Furthermore, software should program the TxIdle field of
the Transmit Command/Status Register (TCSR10-8) to 110
or 111. These values select an Idle line condition of
constant Space or Mark. This condition, in turn, allows
external logic to detect the missing clock transition in the
first bit after the end of the CRC, and turn off its transmit line
driver. (In a low-cost variant, such an Idle state can simply
disable an open-collector or similar unipolar driver.) Another alternative is to use the Tx Complete output on /TxC
to control the driver.
External logic must detect collisions that may occur while
the channel is sending, and signal the Transmitter by
driving the /CTS pin high when this occurs. Besides the
auto-enable already noted for TMR1-0, software should
write the CTSMode field of the Input/Output Control Register (IOCR15-14) as 0x to support this use of /CTS.
/DCD
RxD
Carrier
Detection
101010101 1
At least 58
Alternating Bits
Start Bit Carrier
Figure 5-7. Carrier Detection for a Received Ethernet Frame
16- or 48-Bit
Destination
Address
Source Address, Length,
Information
32-Bit
CRC
Loss
5-16
UM97USC0100
Page 84

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
As in other synchronous modes, the MSBit of the
TxSubMode field (CMR15) controls whether the Transmitter sends its accumulated CRC code if a Transmit Underrun
condition occurs.
On the receive side, external logic should monitor the link
and drive the /DCD pin low when it detects carrier. Figure
5-7 shows the relationship between an Ethernet frame on
RxD and the signal on /DCD. Besides the auto-enable
already noted for RMR1-0, software should program the
DCDMode field of the Input/Output Control Register
(IOCR13-12) as 01 to select the mode of the /DCD pin.
After /DCD goes low, the Receiver hardware hunts for 58
alternating bits of preamble, with the final 0 changed to a
1 as a “start bit”. When it finds this sequence it starts
assembling data and may check the Destination Address
in the frame as described below.
After a frame, the external hardware should drive /DCD
high so that it sets up to the rising RxCLK edge after the one
at which it samples the last bit of the CRC. In this mode and
External Sync mode only among synchronous modes, if
/DCD goes high while the Receiver is in the midst of
assembling a character, it continues on to sample the
remaining bits of the character and place the character in
the RxFIFO.
The receiver marks the character that was partially or
completely assembled when /DCD went high with RxBound
status in the RxFIFO. As described in later sections, this
marking may set the channel’s Received Data Interrupt
Pending bit and thus force an interrupt request on its /INT
pin, and/or it may force a DMA request on the /RxREQ pin.
The LSBit of the RxSubMode field (CMR4) controls whether
the Receiver checks an Address field at the start of each
frame. If CMR4 is 0, the Receiver places all received
frames in the RxFIFO and leaves address-checking to the
software. (Some contexts call this “promiscuous mode”.) If
CMR4 is 1, the Receiver compares the first two characters
(16 bits) of each frame to the contents of the Receive Sync
Register (RSR). It compares RSR0 to the first bit received,
and RSR15 to the last bit, regardless of any “Select Serial
Data MSB First” commands that the software may have
written to the RTCmd field (CCAR15-11). The Receiver
ignores the frame unless the address matches, or unless
the first 16 bits are all ones, which indicates a frame that
should be received by all stations. The Receiver places the
address in the RxFIFO so that the software can differentiate “locally addressed” frames from “global” ones.
Except in the CRC, characters (“octets”) are sent LSBit
first. The Length field that follows the Destination and
Source Address fields is sent MSByte-first. IEEE 802.3
doesn’t include any other byte ordering information.
The USC doesn’t use the three LSBits of the TxSubMode
field (CMR14-12) in 802.3 mode, nor the three MSBits of
RxSubMode (CMR7-5), but Zilog reserves these bits for
future enhancements. Software should always program
them with zeroes in this mode.
UM97USC0100
5-17
Page 85

ZILOG
UM009402-0201
5.14 HDLC/SDLC MODE
Z16C30 USC
USER'S MANUAL
®
Software can select this mode for both the Transmitter and
the Receiver, by writing 0110 to the TxMode and RxMode
in the Channel Mode Register (CMR11-8 and CMR3-0).
In some sense this is the most important mode of the USC,
at least for new designs. It is similar to character-oriented
synchronous modes in that data characters follow one
another on the serial medium without any extra/overhead
bits, and are organized into blocks of data with CRC
checking applied to the block as a whole.
For HDLC and SDLC, the blocks of data are called "frames".
Uniquely recognizable 8-bit sequences called "Flags",
consisting of 01111110, precede and follow each frame.
HDLC/SDLC protocols ensure the uniqueness of Flags,
without imposing any restrictions on the data that can be
transmitted, by having the Transmitter insert an extra 0 bit
whenever the last six bits it has sent are 011111. A
Receiver, in turn, removes such an inserted zero bit whenever it has sampled 0111110 in the last seven bit times.
Besides Flags, HDLC and SDLC define another uniquely
recognizable bit sequence called an "Abort", consisting of
a zero followed by seven or more consecutive ones.
Depending on the exact dialect of HDLC or SDLC, and the
security desired in communicating an Abort, software can
program the Transmitter to send Aborts consisting of a
zero followed by either 7 or 15 consecutive ones.
On the Transmit side, the two MSBits of the TxSubMode
field (CMR15-14) control what the Transmitter does if a
Transmit Underrun condition occurs, that is, if it needs
another character to send but the TxFIFO is empty:
Flag of the next, into a single 8-bit instance. The same
section also describes a feature whereby software can
ensure that USCs manufactured after June 1993 send a
programmable minimum number of Flags between frames.
Software can make the Transmitter send an Abort sequence at any time, by writing the “Send Abort” command
to the TCmd field of the Transmit Command/Status Register (TCSR15-12). If CMR 15-14 as described above is 01,
the Transmitter sends an extended Abort when software
issues this command; otherwise it sends the shorter Abort
sequence.
If CMR13 is 1, the Transmitter sends the Preamble sequence defined by the TxPreL and TxPrePat fields of the
Channel Control Register (CCR11-8), before it sends the
opening Flag of each frame.
If the TxIdle field (TCSR10-8) is 000 to select Flags as the
idle line condition, CMR12 selects whether consecutive
idle Flags share a single intervening 0. If CMR12 is 1, the
idle pattern is 011111101111110..., while if CMR12 is 0 it
is 0111111001111110... A Flag that opens or closes a
frame never shares a zero with an idle-line Flag, even if
CMR12 is 1.
On the Receive side, when the receiver detects the
closing Flag of a frame, it marks the preceding (partial or
complete) character with RxBound status in the RxFIFO.
As described in later sections, this marking may set the
channel’s Received Data Interrupt Pending bit and thus
force an interrupt request on its /INT pin, and/or it may force
a DMA request on the /RxREQ pin.
CMR15-14 Underrun Response
00 Send an Abort consisting of 01111111
01 Send an Abort consisting of a zero
followed by 15 consecutive ones
10 Send a Flag
11 Send the accumulated CRC followed
by a Flag, that is, make the data
transmitted so far into a proper frame.
After sending the sequence specified by this field, the
Transmitter sends the next frame if software or the external
Transmit DMA controller has placed new data in the
TxFIFO. Otherwise it sends the Idle line condition specified
by the TxIdle field of the Transmit Command/Status Register (TCSR10-8), as described later in 'Between Messages, Frames, or Characters'. That section also describes the conditions under which the Transmitter will
combine the closing Flag of one frame, and the opening
5-18
The receiver automatically copes with single Flags between frames, and with shared zeroes between Flags, as
described above for the transmit side.
5.14.1 Received Address and Control Field
Handling
The RxSubMode field in the Channel Mode Register (CMR7-
4) determines how the Receiver processes the start of
each frame, i.e., whether it handles Address and/or Control fields. To the extent that the Receiver handles Address
or Control field(s), it always does so in multiples of 8 bits.
Thereafter it divides data into characters of the length
specified by the RxLength field of the Receive Mode
Register (RMR4-2). The Receiver interprets this field as
described below. (An “x” in a bit position means the bit
doesn’t matter.)
UM97USC0100
Page 86

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
CMR7-4 Address/Control Processing
xx00 The Receiver doesn’t handle the Address or Control
field. It simply divides all the data in all received
frames into characters per RxLength and places it
in the RxFIFO.
xx01 The Receiver checks the first 8 bits of each frame
as an address. If they are all ones or if they match
the contents of the LSByte of the Receive Sync
Register RSR7-0, the Receiver receives the frame
into the RxFIFO, otherwise it ignores the frame
through the next Flag. After placing the first 16 bits
of the frame in the FIFO as two 8-bit bytes, it
divides the rest of the frame into characters per
RxLength.
x010 The Receiver checks an 8-bit address as described
above. If these bits are all ones or if they match
RSR7-0, the Receiver places the first 24 bits of the
frame in the RxFIFO as 3 8-bit bytes, before
shifting to dividing characters according to
RxLength.
x110 The Receiver checks an 8-bit address as described
above. If these bits are all ones or if they match
RSR7-0, the Receiver places the first 32 bits of the
frame in the RxFIFO as 4 8-bit bytes, before
shifting to dividing characters according to
RxLength.
CMR7-4 Address/Control Processing
1011 The Receiver processes an Extended Address as
described for 0011, and then an “Extended Control field”. If the first 8 bits of the address are all
ones or if they match RSR 7-0, the Receiver places
the next 8 bits after the extended address in the
RxFIFO without examination. Then, as it stores
each subsequent 8 bits in the RxFIFO, the Receiver checks the MSBit of the 8. If the MSBit is 1,
it continues to receive more 8-bit bytes, through
one that has its MSBit 0. Thereafter the Receiver
places one more 8-bit byte into the RxFIFO, before
shifting to dividing characters per RxLength.
1111 This mode differs from that described above for
1011 only in that the Receiver places the 16 bits
after the extended address in the RxFIFO without
examination, before starting to check MSBits for
the end of the “extended Control field”.
Note that even though the Receiver can scan through an
Extended Address, it will still only match its first byte. Note
also that it matches RSR0 against the first bit received, and
RSR7 against the last bit, regardless of whether software
has written a “Select Serial Data MSB First” command to
RTCmd (CCAR15-11).
0011 The Receiver processes an Extended Address at
the start of each frame. First it checks the first 8 bits
of the frame as described above. If these bits are
all ones or if they match RSR7-0, as the Receiver
places each 8 bits of the address into the RxFIFO,
it checks the LSBit of the 8. If the LSBit is 0, it goes
on to put the next 8 bits into the RxFIFO as part of
the address as well, through an address byte that
has its LSBit 1. Then, the Receiver places the next
16 bits of the frame into the RxFIFO as two 8-bit
bytes, before shifting to dividing characters
according to RxLength.
0111 The Receiver processes an Extended Address as
described for 0011. If the first 8 bits of the address
are all ones or if they match RSR7-0, the Receiver
places the 24 bits after the extended address into
the RxFIFO as 3 8-bit bytes, before shifting to
dividing characters per RxLength.
If the RxSubMode field specifies some degree of Address
and Control checking, that is, if it’s not xx00, and a frame
ends before the end of the Address and possibly the
Control field specified by the RxSubMode value, the Receiver sets a Short Frame bit in the status for the last
character of the frame. This bit migrates through the
RxFIFO with the last character, eventually appearing as
the ShortF/CVType bit in the Receive Command/Status
register (RCSR8). Note that this bit can represent the
status at the time that an RxBound character was read from
the RxFIFO, or the status of the oldest 1 or 2 characters that
are still in the RxFIFO, as described in a later section,
'Status Reporting'. Note, however, that this length checking doesn’t report a problem if a frame ends within a CRC
that follows an address and control field.
If RxLength (RMR4-2) is 000, specifying 8 bits per character, all RxSubMode (CMR7-4) values except xx00 are
equivalent aside from short-frame checking.
UM97USC0100
5-19
Page 87

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
5.14.2 Frame Length Residuals
The Receiver detects and strips inserted zeroes, Flags,
and Aborts before any other processing, and doesn’t
include these bits/sequences in the RxFIFO nor in CRC
calculations. If the Receiver has assembled a partial
character when it detects a Flag or Abort, it stores the
partial character left-justified in an RxFIFO entry. (That is,
in the MSBits of the byte regardless of RxLength.) The
Receiver saves the number of bits received in this last byte
in the RxResidue field of the Receive Command/Status
Register (RCSR11-9). RxResidue remains available until
the end of the next received frame. Software can use the
Receive Status Block feature as described in a later
section, to store the RCSR in memory after the frame. This
reduces processing requirements still further.
Conversely, to send a frame that doesn’t contain an integral number of characters, software must ensure that the
number of bits in the last character of the frame is written
into the TxResidue field of the Channel Command/Status
Register (CCSR4-2). This must happen before the Transmitter takes the last character out of the TxFIFO.
Figure 5-8 shows the CCSR. The Transmit Control Block
feature can be used to set the TxResidue value for each
block under DMA control, without the intervention of processor software. The active bits of a partial character must
be right-justified, that is, they must be the LSBits of the last
character. If the TxParEnab bit in the Transmit Command/
Status Register (TCSR5) is 1 specifying parity generation,
for a partial character the Transmitter sends the parity bit
after the number of bits specified by TxResidue, while in
other characters the parity bit is the last one of the character length specified by TxLength (TMR4-2).
The encoding of RxResidue and TxResidue is as for
RxLength and TxLength: 000 specifies that the last character contains eight bits, while 001-111 specify 1 to 7 bits
respectively.
5.14.3 Handling a Received Abort
A USC manufactured after June 1993 reports a received
Abort sequence in two different ways. The later section
'Status Handling' will note that a channel sets the Break/
Abort bit in the Receive Command/Status Register (RCSR5)
when it recognizes an Abort sequence. This notification is
not tied to a specific point in the received data stream.
The same section will also note that, if the QAbort bit in the
Receive Mode Register (RMR8) is 1, USCs manufactured
after June 1993 queue Abort conditions through the RxFIFO.
From there, they eventually appear as the Abort/PE bit
(RCSR2) of the last character of the frame — the one that
has RxBound (RCSR4) set to 1. (If QAbort is 0 and parity
checking is enabled, the channel uses this bit in the
RxFIFO and RCSR to indicate Parity Errors.)
With a USC manufactured before June 1993, software can
handle an Abort condition by enabling an interrupt when
one is detected, and at that point forcing the receiver into
Hunt mode for the next frame and ignoring/purging all
received data. Or it can try examining received data (in
memory for a DMA application or in the RxFIFO otherwise).
Both an Abort and a closing Flag will terminate a frame with
“RxBound” status; software can use the CRC error indication to differentiate Aborts from closing Flags.
With USCs manufactured after June 1993, software can
handle Aborts more efficiently/elegantly by setting QAbort
to 1 and using the Receive Status Block feature to store the
RCSR status in memory for each frame, as described in the
later section ‘Receive Status Blocks.’ Software can then
examine this status word for each “frame”; any one that has
Abort/PE set isn’t a proper frame in that it ended with an
Abort sequence rather than a Flag.
5-20
UM97USC0100
Page 88

ZILOG
UM009402-0201
5.15 HDLC/SDLC LOOP MODE
Z16C30 USC
®
USER'S MANUAL
This mode applies only to the Transmitter. Software can
select it by programming the TxMode field of the Channel
Mode Register (CMR11-8) as 1110 while programming the
RxMode field (CMR3-0) as 0110 to select HDLC/SDLC
mode.
Loop mode is useful in networks in which the nodes or
stations form a physical loop. Except for one station that
acts in a “Primary” or Supervisory role, each must pass the
data it receives from the “preceding” station to the “following” one. The only time that a secondary station can break
out of this echoing mode is when it receives a special
sequence called a “Go Ahead” and it has something to
send.
Again, this is a specific protocol and we can define how
certain other register fields should be programmed for its
intended application. For IBM SDLC Loop compatibility,
software should program the Transmit Mode Register
(TMR) as 670216. This enables the Transmitter with NRZISpace encoding, 16-bit CCITT CRC, no parity, and 8-bit
characters. Software also should program the TxIdle field
in the Transmit Command/Status Register (TCSR10-8) as
000 to select Flags as the idle line state.
The two MSBits of the TxSubMode field (CMR15-14) control what the Transmitter does if an Underrun condition
occurs, that is, if it needs a character to send but the
TxFIFO is empty. The available choices are similar to those
in normal HDLC/SDLC mode but the Transmitter has a
wider range of subsequent actions:
CMR15-14 Response to Underrun
00 The Transmitter sends an Abort (“Go
Ahead”) sequence consisting of a zero
followed by seven consecutive ones, and
then stops sending and reverts to echoing
the data it receives. Zilog doesn’t recommend this option in IBM SDLC Loop applications because only the Primary station
should issue a “Go Ahead” sequence (and
it should be in regular HDLC/SDLC mode).
01 Like 00 except that the Abort includes 15
ones.
10 The Transmitter sends Flags on an
Underrun, until another frame is ready or
until software clears CMR13 to 0.
11 The Transmitter sends its accumulated CRC
followed by Flags on an Underrun, until
another frame is ready to transmit or until
software clears CMR13 to 0. Zilog doesn’t
recommend this option either, because the
frame format probably hasn’t
been met when there’s an underrun.
The CMR13 bit plays a different role when the Transmitter
is first being enabled to “insert this station into the loop”, as
compared to normal operation after that. Before software
programs the Channel Mode Register for SDLC Loop
mode and enables the Transmitter, the TxD pin carries
continuous Ones. If software initially enables the Transmitter with CMR13 0, it continues to output Ones on TxD.
When CMR13 is 1 after software first enables the Transmitter, the channel sends Zeroes on TxD until the Receiver
detects a “Go Ahead” sequence (01111111). At this point
the channel starts passing data from RxD to TxD with a 4bit delay, and sets the OnLoop bit in the Channel Command/Status Register (CCSR7; see Figure 5-8).
RCCF
Ovflo
RCCF
Avail
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
Clear
RCCF
UM97USC0100
DPLL
Sync
DPLL
2Miss
DPLL
1Miss
DPLLEdge
On
Loop
Loop
Send
Resrvd
Figure 5-8. The Channel Command/Status Register (CCSR)
TxResidue
/TxACK /RxACK
5-21
Page 89

ZILOG
UM009402-0201
5.15 HDLC/SDLC LOOP MODE (Continued)
Z16C30 USC
USER'S MANUAL
®
OnLoop stays 1 unless the part is reset or software programs the TxMode field to a different value. Once OnLoop
is 1 and the channel is repeating data from RxD to TxD,
CMR13 controls what the Transmitter does when it receives a(nother) Go Ahead sequence. If CMR13 is 0, the
channel just keeps repeating data, including the “GA”. If
CMR13 is 1 when the Receiver detects another “Go Ahead”,
the Transmitter changes the last bit of the GA from 1 to 0
(making it a Flag), sets the LoopSend bit (CCSR6) and
proceeds to start sending data. (If there’s no data available
in the TxFIFO it keeps sending Flags, otherwise it sends the
data in the TxFIFO.)
5.16 CYCLIC REDUNDANCY CHECKING (CRC)
A USC channel will send and check CRC codes only in
synchronous modes, namely External Sync, Monosync,
Slaved Monosync, Bisync, Transparent Bisync, HDLC/
SDLC, HDLC/SDLC Loop, and 802.3 modes.
The TxCRCType and RxCRCType fields in the Transmit
and Receive Mode Registers (TMR12-11 and RMR12-11)
control how the Transmitter and Receiver accumulate
CRC codes.
00 in either field selects the 16-bit CRC-CCITT polynomial
x15+x12+x5+1. In HDLC, HDLC Loop, and 802.3 modes, the
Transmitter inverts each CRC before sending it, the Receiver checks for remainders of F0B816, and the TxCRCStart
and RxCRCStart bits should be programmed as 1 to start
the CRC generators with all ones. In other synchronous
modes the Transmitter sends accumulated CRCs normally
and the Receiver checks for all-zero remainders.
01 in either field selects the CRC-16 polynomial x16+
x15+x2+1. The Transmitter sends accumulated CRCs normally and the Receiver checks for all-zero remainders.
This choice is not compatible with HDLC, HDLC Loop, and
802.3 protocols, and in these modes CRC-16 will not
operate correctly even between USC family Transmitters
and Receivers.
10 in TxCRCType or RxCRCType selects the 32-bit Ethernet
polynomial x32+x26+x23+x22+x16+x12+x11+x10+x8+x7+x
+x4+x2+x+1. In HDLC, HDLC Loop, and 802.3 modes, the
Transmitter inverts each CRC before transmitting it, the
Receiver checks for remainders equal to C704DD7B16,
and the TxCRCStart and RxCRCStart bits should be programmed as 1 to start the CRC generators with all ones. In
other synchronous modes the Transmitter sends CRCs
normally and the Receiver checks for all-zero remainders.
5
When the Transmitter has been sending data and encounters either a character marked as “EOF/EOM”, or an
underrun condition when CMR15=1, CMR13 determines
how it proceeds. If CMR13 is 1 in either of these situations,
the Transmitter stays active and sends Flags or additional
frames as they become available in the TxFIFO. If CMR13
is 0 after the channel has sent a closing Flag or an idle Flag,
it clears the LoopSend (CCSR6) bit and returns to repeating data from RxD onto TxD.
CMR12 controls whether the Transmitter sends idle Flags
with shared zero bits, as described for normal HDLC/
SDLC mode.
Zilog reserves the value 11 in TxCRCType or RxCRCType
for future product enhancements; it should not be programmed.
The TxCRCStart and RxCRCStart bits (TMR10 and
RMR10) control the starting value of the Transmit and
Receive CRC generators for each frame or message. A 0
in this bit selects an all-zero starting value and a 1 selects
a value of all ones. In HDLC, HDLC Loop, and 802.3 modes
these bits should be 1.
The Transmitter and Receiver automatically clear their
CRC generators to the state selected by these CRCStart
bits at the start of each frame. The Transmitter does this
after it sends an opening Sync or Flag sequence. The
Receiver does so each time it recognizes a Sync or Flag
sequence (it may be the last one before the first character
of the frame or message). For special CRC requirements,
the Clear Rx CRC and Clear Tx CRC commands give
software the ability to clear the CRC generators at any time.
See the later section 'Commands' for a full description of
these operations.
The TMR10 and RMR10 bits (TMR9 and RMR9) control
whether the channel processes transmitted and received
characters through the respective CRC generators. A 0
excludes characters from the CRC while a 1 includes
them. The Transmitter captures the state of TxCRCEnab
with each character as it’s written into the TxFIFO, so that
software can change the bit dynamically for different
characters.
5-22
UM97USC0100
Page 90

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
If the TxCRCatEnd bit (TMR8) is 1 and the TxMode field
(CMR11-8) specifies a synchronous mode, the Transmitter
sends the contents of its CRC generator after sending a
character marked as EOF/EOM. If TxCRCatEnd is 0 the
Transmitter doesn’t send a CRC after such a character. (A
character can be marked as EOF/EOM if software writes a
command to the Transmit Command/Status Register
(TCSR), or when software or an external Transmit DMA
controller writes one or two characters to the TxFIFO so that
the Transmit Character Counter decrements to zero.)
Whether or not it sends a CRC, the Transmitter then sends
a Sync or Flag sequence, depending on the protocol.
In synchronous modes, the MS 1 or 2 bits of the TxSubMode
field (CMR15 and in some modes also CMR14) control
whether the Transmitter sends the contents of its CRC
generator if it encounters a Transmit Underrun condition,
namely if it needs a character to send but the TxFIFO is
empty. Whether or not it sends a CRC, the Transmitter then
sends a Sync or Flag sequence, depending on the protocol.
On the receive side, in synchronous modes other than
HDLC/SDLC, HDLC/SDLC Loop, and 802.3, there’s a two
character delay between the time a Receiver places each
received character in the RxFIFO and when it processes
(or doesn’t process) the character through the CRC generator. Therefore, software can examine each received
character and set RxCRCEnab appropriately to exclude
certain characters from CRC checking, if it can do so
before the next one arrives. A Receiver doesn’t introduce
this delay in HDLC/SDLC, HDLC/SDLC Loop, or 802.3
mode, because in these modes all characters in each
frame should be included in the CRC calculation.
Figure 5-9 shows how a Receiver routes data to the
Receive CRC generator differently in HDLC/SDLC, HDLC/
SDLC Loop, and 802.3 modes than in other synchronous
modes. In the former three modes, the Receiver shifts each
bit from RxD into the CRC generator when it shifts the bit
into its main shift register. In other sync modes, the Receiver passes the data through a second shift register
located between the main shift register and the CRC
generator. This second shift register is effectively
(RxLength) bits long, and gives the software time to decide
whether to include each received character in the CRC
calculation.
The Receive CRC generator constantly checks whether its
contents are “correct” according to the kind of CRC
specified by the RxCRCType field (RMR12-11). In some
modes this simply means whether it contains an all-zero
value. The CRC generator provides a corresponding Error
output that the Receiver captures in the RxFIFO with each
received character. This bit migrates through the RxFIFO
with each character and eventually appears as the CRCE/
FE bit in the Receive Command/Status Register (RCSR3).
Software should ignore this bit for all characters except the
one associated with the end of each message or frame (it’s
almost always 1).
The CRCE bit that’s important is the one that reflects the
output of the CRC generator after the Receiver has shifted
the last bit of the CRC into it. But the operating difference
described above affects which character this bit is associated with. The Receiver always places the CRC code
itself in the RxFIFO; if RxLength calls for 8-bit characters
the CRC represents either 2 or 4 characters. In HDLC/
SDLC or 802.3 mode, the CRCE bit associated with the last
character of the CRC is the one that shows the CRCcorrectness of the frame. But in the other synchronous
modes, the CRCE bit of interest is the one with the second
character after the last character of the CRC. This means
that the Receive Status Block feature can’t be used to
capture the CRC correctness of received messages in
Transparent Bisync mode.
Note that the CRCE/FE bit can represent the status at the
time that an RxBound character was read from the RxFIFO,
or the status of the oldest 1 or 2 characters that are still in
the RxFIFO, as described later in 'Status Reporting'.
Because the Receiver places all the bits of each received
CRC in the RxFIFO, a USC channel can be used for CRCpass-through applications. This is not true of all serial
controllers.
UM97USC0100
5-23
Page 91
ZILOG
UM009402-0201
5.16 CYCLIC REDUNDANCY CHECKING (Continued)
Data In
PO
RxFIFO
Z16C30 USC
USER'S MANUAL
®
SI SO
SI
M
U
X
Used in HDLC/SDLC
and 802.3 Modes
(RxLength)-bit
Shift Register
(RxLength)-bit
Shift Register
Rx CRC
SI
Generator
Used in all
other Sync modes
SO
Err
M
U
X
5-24
Flag/Abort
RxD
SI
Detect Logic,
Incl. Shift Register
Used in HDLC/
SDLC Mode
Figure 5-9. A Model of the Receive Datapath
SO
UM97USC0100
Page 92

ZILOG
UM009402-0201
5.17 PARITY CHECKING
Z16C30 USC
USER'S MANUAL
®
A USC channel can handle a Parity bit in each character in
either asynchronous or synchronous modes, although
many synchronous protocols use CRC checking only.
If the TxParEnab bit in the Transmit Mode Register (TMR5)
is 1, the Transmitter creates a parity bit as specified by the
TxParType field (TMR7-6) and sends it with each character. Similarly, if the RxParEnab bit (RMR5) is 1, the Receiver checks a parity bit in each received character,
according to the RxParType field (RMR7-6). A channel
interprets TxParType and RxParType as follows:
xMR7-6 Type of Parity
00 Even
01 Odd
10 Zero
11 One
For unencoded data, 10/Zero is the same as “Space
parity” and 11/One is the same as “Mark parity”.
TxParEnab and TxParType are “global states” in that a
channel doesn’t carry these bits through the TxFIFO with
each character.
In asynchronous modes, the Transmitter and Receiver
handle the parity bit as an additional bit after the number
of bits specified by the TxLength and RxLength fields
(TMR4-2 and RMR4-2). In synchronous modes they handle
the parity bit as the last (most significant) bit of that
number. The Receiver includes a parity bit in the data
characters in the RxFIFO and Receive Data Register
(RDR), except in asynchronous modes with 8-bit data.
In HDLC/SDLC protocols, a USC Receiver can queue
either a Parity Error or an Abort indication through the
RxFIFO, but not both. Regardless of the protocol, in order
to have the Receiver check parity, the QAbort bit in the
Receive Mode Register (RMR8) must be 0.
If QAbort is 0, RxParEnab is 1, and the Receiver finds that
the parity bit of a received character is not as specified by
RxParType, it sets a Parity Error bit. This bit accompanies
the character through the RxFIFO, eventually appearing
as the Abort/PE bit in the Receive Command/Status Register (RCSR2). The Abort/PE bit can represent a latched
interrupt bit, or the status at the time that an RxBound
character was read from the RxFIFO, or the status of the
oldest 1 or 2 characters that are still in the RxFIFO, as
described in the next section.
UM97USC0100
5-25
Page 93

ZILOG
UM009402-0201
5.18 STATUS REPORTING
Z16C30 USC
USER'S MANUAL
®
The most important status reported by the Transmitter and
Receiver is available in the LSBytes of the Transmit and
Receive Command/Status Registers (TCSR and RCSR).
Figures 5-11 and 5-12 show the format of these registers.
It will be helpful to describe some common characteristics
of these status bits before discussing each individually.
When software writes and reads transmit and received
data directly to and from a serial controller, it can read and
write status and control registers as needed to handle the
overall communications process. But with the USC, external DMA controllers often handle the data without software/
processor intervention. Because of this, software needs
other means of controlling the transmit and receive processes and tracking their status. These means include the
Transmit and Receive Character Counters and the Transmit Control Block and Receive Status Block features. Later
sections describe these features in considerable detail.
For now we just note that Receive Status Blocks allow the
Receive DMA controller to store a version of the RCSR in
memory with the received data. Such stored status differs
slightly from the status in the RCSR.
Software can program a channel to assert its Interrupt
Request output (/INTA or /INTB) based on certain bits in
the TCSR and RCSR. Chapter 7 covers interrupts in detail;
for now we’ll just note that a channel typically sets one of
these bits when a specified event occurs or a specified
condition starts. Such a bit typically remains 1 until host
software clears or “unlatches” it by writing a 1 to it. This
means that a channel won’t request another interrupt for
the same condition until software has written a 1 to the bit.
For the two interrupts that reflect the start of an ongoing
condition, IdleRcved and the “break” sense of Break/
Abort, the Receiver doesn’t clear the RCSR bit until the
software has written a 1 to unlatch the bit, and the condition
has ended.
Five of the bits in the RCSR (ShortF/CVType, RxBound,
CRCE/FE, Abort/PE, and RxOver) are associated with
particular received characters. The Receiver queues these
bits through the RxFIFO with the characters. The corresponding bits in the RCSR may reflect the status of the
oldest character(s) in the FIFO, or that of the character last
read out of the FIFO, as described in the next few paragraphs.
Note that it’s essential for software to keep WordStatus in
the right state, when changing the IA bits in the LSbyte of
the RICR, or when writing DMA or interrupt threshold
values to the MSbyte.
The RxBound, Abort/PE, and RxOver bits actually operate
differently in the RCSR depending on whether software
has enabled each to act as a source of interrupts. If the
Interrupt Arm (IA) bit in the Receive Interrupt Control
Register (RICR) for one of these bits is 1, the channel sets
the RCSR bit to 1 when a character having the subject
status becomes the oldest one in the RxFIFO, or the
second-oldest with WordStatus=1. Once one of these bits
is 1, it stays that way until software writes a 1 to it. (The
channel doesn’t actually set the Receive Status IP bit to
request an interrupt for one of these bits, until software or
the Receive DMA controller reads the associated character from RDR.)
For ShortF/CVType and CRCE/FE, and for RxBound, Abort/
PE, and RxOver when the associated IA bit is 0, if the last
time that software or an external Receive DMA controller
read this channel’s RxFIFO via the RDR, the channel
provided a character marked with RxBound status, then
these RCSR bits reflect the status of that character. This is
true only until software reads the (MSByte of the) RCSR, or
a Receive DMA controller stores it in the Receive Status
Block, or until software or the Receive DMA controller
reads RDR again.
For ShortF/CVType and CRCE/FE, and for RxBound,
Abort/PE, and RxOver when the associated IA bit is 0, if the
last time that software or the Receive DMA controller read
the RxFIFO via the RDR, the character returned (both of the
characters returned) had RxBound=0, or if software has
read the (MSByte of the) RCSR or the Receive DMA
controller has stored it in a Receive Status Block since the
last time either one read the RDR, then the RCSR bit
reflects the status of the oldest character(s) in the RxFIFO
(if any). In this latter case, if the RxFIFO is empty the status
bit is not defined. If the WordStatus bit is 1 in the Receive
Interrupt Control Register (RICR3) and there are two or
more characters in the FIFO, the status bit is the inclusive
OR of the status of the oldest two characters in the FIFO.
Otherwise the bit reflects the status of the oldest character
in the FIFO.
In order for these queued interrupt features to operate
properly, software should set the WordStatus bit in the
Receive Interrupt Control Register (RICR3) to 1 before it (or
the Rx DMA channel) reads data from the RxFIFO/RDR 16
bits at a time, and to 0 before it (or the RxDMA channel)
reads data 8 bits at a time.
5-26
Just in case that wasn’t perfectly clear, the flowchart of
Figure 5-10 presents the same information.
UM97USC0100
Page 94
ZILOG
UM009402-0201
Start for RxBound,
Abort/PE, or RxOver:
What's the
corresponding IA
bit in the RICR?
Z16C30 USC
®
USER'S MANUAL
Provide the state of a latch
that's set when a character
1
with this condition becomes
the oldest in the RxFIFO
(or the 2nd-oldest with
WordStatus=1), and is cleared
when SW writes a 1 to this bit
0
Did the last read
from the RDR have
RxBound=1?
No
(The bit is not
defined!)
Start for ShortFrame/
CVType or CRCE/FE:
Yes No
None
Has the (MSByte
of the) RCSR been
read since then?
Yes
How many
characters are in
the RxFIFO??
One
Two or
more
Provide the saved
status of the
RxBound character
What's the
WordStatus bit
(RICR3)?
0
1
Figure 5-10. How a USC Channel Provides the “Queued” Status Bits in the RCSR
UM97USC0100
Provide the status of
the oldest character
in the RxFIFO
Provide the inclusive
OR of the status of the
two oldest characters
in the RxFIFO
5-27
Page 95

ZILOG
UM009402-0201
5.18 STATUS REPORTING (Continued)
Z16C30 USC
®
USER'S MANUAL
TCmd
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
Under
Wait
Txidle
Figure 5-11. The Transmit Command/Status Register (TCSR)
5.18.1 Detailed Status in the TCSR
PreSent: The Transmitter sets this bit (TCSR7) in a syn-
chronous mode, when it has finished sending the Preamble specified in the TxPreL and TxPrePat fields of the
Channel Control Register (CCR). A channel can request an
interrupt when this bit goes from 0 to 1 if the PreSent IA bit
in the Transmit Interrupt Control Register (TICR7) is 1.
Software must write a 1 to PreSent to unlatch and clear it,
and to allow further interrupts if TICR7 is 1; writing a 0 to
PreSent has no effect. See the later section 'Between
Frames, Messages, or Characters' for more information on
Preambles.
IdleSent: The Transmitter sets this bit (TCSR6) in any
mode, when it has finished sending “one unit” of the Idle
line condition specified in the TxIdle field in the MSByte of
this TCSR. If the Idle condition is Syncs or Flags as
described later in 'Between Frames, Messages, or Characters', the unit is one character or sequence and the flag
and interrupt can recur for each one sent. For any other Idle
condition, the Transmitter sets the flag and interrupt only
once, when it has sent the first bit of the condition. The
channel can request an interrupt when this bit goes from 0
to 1 if the IdleSent IA bit in the Transmit Interrupt Control
Register (TICR6) is 1. Software must write a 1 to IdleSent
to unlatch and clear it, and to allow further interrupts if
TICR6 is 1; writing a 0 to IdleSent has no effect.
AbortSent: The Transmitter sets this bit (TCSR5) in
HDLC/SDLC or HDLC/SDLC Loop mode, when it has
finished sending an Abort sequence. A channel can request an interrupt when this bit goes from 0 to 1 if the
AbortSent IA bit in the Transmit Interrupt Control Register
(TICR5) is 1. Software must write a 1 to AbortSent to unlatch
and clear it, and to allow further interrupts if TICR5 is 1;
writing a 0 to AbortSent has no effect. See the earlier
sections 'HDLC/SDLC Mode' and 'HDLC/SDLC Loop Mode'
for more information on Abort sequences.
Pre
Sent
Idle
Sent
Abort
Sent
EOF/
EOM
Sent
CRC
Sent
All
SentTxUnderTxEmpty
EOF/EOM Sent: The Transmitter sets this bit (TCSR4) in a
synchronous mode, when it has finished sending a closing
Flag or Sync sequence. A channel can request an interrupt
when this bit goes from 0 to 1 if the EOF/EOM Sent IA bit in
the Transmit Interrupt Control Register (TICR4) is 1. Software must write a 1 to EOF/EOM Sent to unlatch and clear
it, and to allow further interrupts if TICR4 is 1; writing a 0 has
no effect. See the later section 'Between Frames, Messages, or Characters' for more information on closing
Flags and Syncs.
CRCSent: The Transmitter sets this bit (TCSR3) in a
synchronous mode, when it has finished sending a Cyclic
Redundancy Check sequence. A channel can request an
interrupt when this bit goes from 0 to 1 if the CRC Sent IA
bit in the Transmit Interrupt Control Register (TICR3) is 1.
Software must write a 1 to CRCSent to unlatch and clear it,
and to allow further interrupts if TICR3 is 1; writing a 0 to
CRCSent has no effect. See the section 'Cyclic Redundancy Checking' for more information on CRC’s.
AllSent: This read-only bit (TCSR2) is 0 in asynchronous
modes, while the Transmitter is sending a character.
Software can use this bit to figure out when the last
character of an async transmission has made it out onto
TxD, before changing the mode of the Transmitter.
TxUnder: The Transmitter sets this bit (TCSR1) in any
mode, when it needs another character to send but the
TxFIFO is empty. It does this even in asynchronous modes.
A channel can request an interrupt when this bit goes from
0 to 1 if the TxUnder IA bit in the Transmit Interrupt Control
Register (TICR1) is 1. The Transmitter sets TxUnder one or
two clocks before the current character is completely sent
on TxD. See 'Handling Overruns and Underruns' later in
this chapter for further details on how to handle this
condition.
TxEmpty: This read-only bit (TCSR0) is 1 when the TxFIFO
is empty, and 0 when it contains one or more characters.
5-28
UM97USC0100
Page 96

ZILOG
UM009402-0201
Z16C30 USC
®
USER'S MANUAL
RCmd(WO)
2ndBE 1stBE
14 13 12 11 10 9 8 7 6 5 4 3 2 1 015
RxResidue
ShortF/
CVType
Figure 5-12. The Receive Command/Status Register (RCSR)
5.18.2 Detailed Status in the RCSR
2ndBE: The USC sets this read-only bit (RCSR15) to 1
when software or an external Receive DMA controller
reads data from the RDR, there are two or more characters
in the RxFIFO, and the Receiver marked the second-oldest
one with one or more of RxBound, Abort/PE, or Rx Overrun
status. (The bit’s name stands for Second Byte Exception.)
A channel clears this bit to 0 when software or the Receive
DMA controller reads data from the RxFIFO/RDR, there are
two or more characters in the RxFIFO, and the Receiver
didn’t mark the second-oldest one with any of these three
conditions. If software or the Receive DMA controller reads
data from the RDR when there’s only one character in it,
this bit is undefined until the next time one of them reads
RDR.
1stBE: The USC sets the read-only bit (RCSR14) to 1 when
software or an external Receive DMA controller reads data
from the RDR, and the Receiver marked the oldest character read with one or more of RxBound, Abort/PE, or Rx
Overrun status. (The bit’s name stands for First Byte
Exception.) A channel clears this bit to 0 when software or
the Receive DMA controller reads data from the RDR, and
the Receiver didn’t mark the oldest character with any of
these three conditions.
ShortF/CVType: The Receiver queues this bit through the
RxFIFO with each character. RCSR8 may reflect the status
at the time that an RxBound character was read from the
RxFIFO, or the status associated with the oldest 1 or 2
character(s) still in the RxFIFO, as described earlier in this
Status Reporting section. In a stored Receive Status Block
it always represents the status of the preceding RxBound
character.
This bit will be 1 only in HDLC/SDLC and only for characters that the Receiver also marks with RxBound=1. When
the RxSubMode field (CMR7-4) specifies Address and
possibly Control field processing in HDLC/SDLC mode,
the Receiver sets this bit for the last character of a frame if
it hasn’t come to the end of the specified field(s) by the end
of the frame.
Exited
Hunt
Idle
Rcved
Break
/AbortRxBound
CRCE
/FE
Abort
/PERXOverRxAvail
ExitedHunt: The Receiver sets this bit (RCSR7) in any
mode, when it leaves its Hunt state. In Async modes this
happens right after software enables the Receiver. In
External Sync mode, the Receiver leaves Hunt state when
the Enable/Sync signal on /DCD goes from high to low. In
Monosync, Bisync, or Transparent Bisync mode the Receiver leaves Hunt state when it recognizes a Sync sequence. In HDLC/SDLC mode the Receiver leaves Hunt
state when it recognizes a Flag. In 802.3 (Ethernet) mode,
if software has enabled address checking the Receiver
leaves Hunt state when it matches the Address at the start
of a frame, otherwise it does so after detecting the start bit
at the end of the Preamble.
A channel can request an interrupt when this bit goes from
0 to 1 if the ExitedHunt IA bit in the Receive Interrupt Control
Register (RICR7) is 1. Software must write a 1 to ExitedHunt
to unlatch and clear it, and allow further interrupts if RICR7
is 1; writing a 0 to ExitedHunt has no effect.
IdleRcved: The Receiver sets this bit (RCSR6) when it
samples RxD as one for 15 consecutive RxCLKs in
HDLC/SDLC mode, or for 16 consecutive RxCLKs in any
other mode. A channel can request an interrupt when this
bit goes from 0 to 1 if the IdleRcved IA bit in the Receive
Interrupt Control Register (RICR6) is 1. Software must write
a 1 to IdleRcved to unlatch it, and to allow further interrupts
if RICR6 is 1; writing a 0 has no effect. A channel doesn’t
actually clear RCSR6 until software has written a 1 to
unlatch it, and RxD has gone to 0 to end the idle condition.
(IdleRcved isn’t useful in Async modes that use a 16x, 32x,
or 64x clock. In these cases keep RICR6=0 to avoid
interrupts, and ignore RCSR6.)
Break/Abort: The Receiver sets this bit (RCSR5) in an
asynchronous mode when it detects a Break condition,
that is, when it samples the Stop bit of a character as 0, and
all the preceding data bits (and the parity bit if any) have
also been 0. It sets the bit in HDLC/SDLC mode when it
detects seven consecutive ones, i.e., an Abort or Go
Ahead sequence.
UM97USC0100
5-29
Page 97

ZILOG
UM009402-0201
5.18 STATUS REPORTING (Continued)
Z16C30 USC
USER'S MANUAL
®
This bit is not associated with a particular point in the
received data stream, for either the Break or Abort condition. (But see the description of “Abort/PE” below for an
Abort indication that is queued with Receive data.)
A channel can request an interrupt when this bit goes from
0 to 1 if the Break/Abort IA bit in the Receive Interrupt
Control Register (RICR5) is 1. Software must write a 1 to
Break/Abort to unlatch it, and to allow further interrupts if
RICR5 is 1; writing a 0 has no effect. In async modes, a
channel doesn’t actually clear RCSR5 until software has
written a 1 to unlatch it, and RxD has gone to 1 to end the
break condition.
RxBound: The Receiver queues this bit through the RxFIFO
with each received character. It sets the bit with a character that represents the boundary of a logical grouping of
data, but this indication isn’t visible to software until the
character is the oldest one in the RxFIFO, or the secondoldest with WordStatus=1.
As described earlier in this Status Reporting section,
RCSR4 may represent an interrupt bit, or the status associated with the oldest 1 or 2 character(s) still in the RxFIFO;
or may be 1 if a RxBound character was just read from the
RxFIFO. Since the Receive Status Block feature stores the
RCSR in memory after each character that the Receiver
marks with this bit set, a Receive Status Block always
shows RxBound as 1.
In HDLC/SDLC mode the Receiver sets RxBound for the
last complete or partial character before an ending Flag or
Abort. In Transparent Bisync mode it sets this bit for an
ENQ, EOT, ETB, ETX, or ITB character that follows a DLE.
In External Sync or 802.3 (Ethernet) mode the Receiver
sets this bit for the character just completed or partially
assembled when the /DCD pin went High. In Nine-Bit
mode it sets this bit for an address character. Note that the
Receiver never sets this bit in other modes, including
Monosync and Bisync modes.
A channel can request an interrupt when software or a
DMA channel reads a character from the RDR that has this
bit set, if the RxBound IA bit in the Receive Interrupt Control
Register (RICR4) is 1. In this case software must write a 1
to RxBound to unlatch it and allow further interrupts; writing
a 0 has no effect.
CRCE/FE: The Receiver queues this bit through the RxFIFO
with each received character. RCSR3 may represent the
status at the time that a RxBound character was read from
the RxFIFO, or the status associated with the oldest 1 or 2
character(s) still in the RxFIFO, as described earlier in this
Status Reporting section. In a stored Receive Status Block
it represents the status of the previous character, which in
turn represents the CRC-correctness of the frame in 802.3
and HDLC/SDLC modes.
In synchronous modes the Receiver makes CRCE/FE 0 if
its CRC checker showed “correct” status when it stored the
character in the RxFIFO, or 1 if the CRC checker wasn’t
correct. See the earlier section Cyclic Redundancy Checking for more information. In asynchronous, isochronous, or
Nine-Bit mode, the Receiver makes this bit 1 to show a
Framing Error if it samples the associated character’s Stop
bit as 0.
Abort/PE: The Receiver queues this bit through the RxFIFO
with each received character. RCSR2 may represent an
interrupt bit, or the status at the time that a RxBound
character was read from the RxFIFO, or the status associated with the oldest 1 or 2 character(s) still in the RxFIFO,
as described earlier in this Status Reporting section. In a
stored Receive Status Block it may represent an interrupt
bit or the status of the previous 1 or 2 character(s).
If the QAbort bit in the Receive Mode Register (RMR8) is
0, the Receiver sets this bit to show a Parity Error for a
character if the RxParEnab bit (RMR5) is 1 and the
character’s parity bit doesn’t match the condition specified by the RxParType field. See the earlier section 'Parity
Checking' for more information.
In HDLC/SDLC mode with the QAbort bit 1, the Receiver
sets this bit (along with RxBound) for a character that was
followed by an Abort sequence.
A channel can request an interrupt when software or a
DMA channel reads a character from the RDR that has this
bit set, if the Abort/PE IA bit in the Receive Interrupt Control
Register (RICR2) is 1. In this case software must write a 1
to Abort/PE to unlatch it and allow further interrupts; writing
a 0 to RCSR2 has no effect.
5-30
UM97USC0100
Page 98

ZILOG
UM009402-0201
Z16C30 USC
USER'S MANUAL
®
RxOver: The Receiver queues this bit through the RxFIFO
with each received character. It sets the bit to indicate a
Receive FIFO overrun, but the overrun isn’t visible to
software until the character that caused it is the oldest one
in the RxFIFO, or the second-oldest with WordStatus=1.
As described earlier in this Status Reporting section,
RCSR1 may represent an interrupt bit, or the status at the
time a RxBound character was read from the RxFIFO, or
the status associated with the oldest 1 or 2 character(s) still
in the RxFIFO. In a stored Receive Status Block this bit may
represent an interrupt bit or the status of the previous
character.
5.19 DMA SUPPORT FEATURES
When software writes and reads all the data to and from a
serial controller, it can maintain its own counters and
length-tracking mechanisms, and can use them to tell
when to read status and issue commands. But in DMA
applications we would like to “decouple” the processor
and its software from such intimate and real-time involvement with the transmit and receive processes. This is only
possible if we include features in the serial and/or DMA
controllers, by which software can figure out the length and
correctness of frames or messages long after they’re
received, and by which the hardware can change parameters and save status information at appropriate points
with as little processor software involvement as possible.
The USC features that support such operation include the
Receive and Transmit Character Counters, the RCC FIFO
that stores the length of received frames, the Transmit
Control Block feature that allows software to include control information with transmit data in Transmit DMA buffers,
and the Receive Status Block feature that stores status with
received data in Receive DMA buffers. The following
subsections describe these features.
5.19.1 The Character Counters
The Transmitter includes a 16-bit Transmit Character
Counter (TCC) that software can use to control the length
of transmitted frames and messages in DMA applications.
The Receiver includes a similar Receive Character Counter
(RCC) that software can use to record and save the length
of frames and messages in DMA applications. Software
can also use the RCC to cause an interrupt if a frame
exceeds a certain length.
The Receiver sets this bit to 1 for the first character for
which there was no room, which is held in a holding register
between the shifter and the RxFIFO. Once this happens,
the Receiver doesn’t store any more received characters
in the RxFIFO, until software responds as described in
‘Handling Overruns and Underruns’ later in this chapter.
A channel can request an interrupt when software or a
DMA channel reads a character from the RDR that has this
bit set, if the RxOver IA bit in the Receive Interrupt Control
Register (RICR1) is 1. In this case, software must write a 1
to RxOver to unlatch it and allow further interrupts; writing
a 0 has no effect.
RxAvail: This read-only bit (RCSR0) is 1 if the RxFIFO
contains 1 or more characters, or 0 if it’s empty.
While most of this section describes these features in
terms of the length of frames and messages in synchronous protocols, they may be useful in asynchronous work
as well.
Figures 5-13 and 5-14 show the structure of the TCC and
RCC features, respectively. Software can write the 16-bit
Transmit Count Limit Register (TCLR) at any time, to define
the length of the next transmitted message(s) or frame(s).
Similarly, it can write the 16-bit Receive Count Limit Register (RCLR) at any time, to define the length of future
received messages and frames at which the Receiver will
interrupt. Software can also use the Transmit Control Block
feature to make a channel automatically fetch a new value
for the TCLR and TCC from memory before each block of
characters. The TCLR and RCLR can be read back at any
time. A channel never changes their values except to clear
them to zero at reset time, and when it loads TCLR from a
32-bit Transmit Control Block.
Writing the TCLR or RCLR doesn’t have any immediate
effect on the TCC or RCC feature. Only when one of several
events occurs does a channel load the value from TCLR or
RCLR into the actual 16-bit character counter. If the value
in TCLR or RCLR is zero at that time, the channel disables
the TCC or RCC feature, while if the value is nonzero it
enables the feature.
UM97USC0100
5-31
Page 99

ZILOG
UM009402-0201
5.19 DMA SUPPORT FEATURES (Continued)
Z16C30 USC
USER'S MANUAL
®
A channel loads the value from the TCLR into the Transmit
Character Counter, and enables or disables the TCC
accordingly, when one of the following occurs:
1. Software writes the Trigger Tx DMA (or Trigger Tx and
Rx DMA) command to the RTCmd field of the Channel
Command/Address Register (CCAR15-11), or
2. Software writes the Load TCC (or Load RCC and TCC)
command to RTCmd in the CCAR, or
3. Software writes the Purge Tx FIFO (or Purge Tx and Rx
FIFO) command to RTCmd in CCAR, or
4. The TxCtrlBlk field in the Channel Control Register
(CCR15-14) is 10, specifying a two-word Transmit
Control Block, and an external Transmit DMA controller fetches (the second byte of) the second word
containing the new character count. Which is to say,
the channel fetches the count “through” the TCLR.
A channel loads the value from the RCLR into the Receive
Character Counter, and enables or disables the RCC
feature, when any of the following occur:
1. Software writes the Trigger Rx DMA (or Trigger Tx and
Rx DMA) command to the RTCmd field of the Channel
Command/Address Register (CCAR15-11), or
2. Software writes the Load RCC (or Load RCC and TCC)
command to RTCmd in the CCAR, or
3. Software writes the Purge Rx FIFO (or Purge Tx and Rx
FIFO) command to RTCmd in CCAR, or
4. The Receiver detects an opening Flag or Sync charac-
ter.
Once a channel has loaded the TCC or RCC with a nonzero value (which enables the feature) it decrements the
counter for each character/byte written into the associated
FIFO. That is, the Transmitter decrements the TCC by 1 or
2 when software or an external Transmit DMA controller
loads transmit data into the TxFIFO. The Receiver decrements the RCC by 1 for each character/byte that it transfers
from its shift register into the RxFIFO.
A non-zero TCLR value should represent the number of
characters to send, not including any Transmit Control
Block information, nor a CRC that the Transmitter gener-
ates. A non-zero RCLR value can be either all ones, or the
number of characters/bytes in a message or frame above
which the Receiver should interrupt, including any CRC
but not including any Receive Status Block information. For
frame or message-oriented applications in which there’s
no particular maximum received frame or message length,
the all-ones value simplifies computing the length of each
frame or message slightly. This value allows software to
obtain the frame length by simply ones-complementing
the value read from RCCR or from a Receive Status Block
in memory, rather than by subtracting it from the starting
value.
On the Transmit side, software can read the value in the
TCC at any time from the Transmit Character Count Register (TCCR), but writing the TCCR address has no effect.
Figure 5-14 shows a decoder that detects when the counter
contains 0001. When software or an external Transmit
DMA controller writes enough data into the TxFIFO so that
the TCC counts down to 0, the channel marks the character
that corresponds to decrementing from 1 to 0 as End of
Frame/End of Message. When this character gets to the
other end of the FIFO, the marking makes the Transmitter
conclude the frame appropriately. (Typically, it sends a
CRC and a closing Flag or Sync character after the marked
character.)
If software or an external Transmit DMA controller writes 16
bits to the TDR while the counter contains 0001, the
channel only puts the character on the D7-0 lines into the
TxFIFO — it ignores the data on D15-8. In a system in which
even-addressed bytes fall on D7-0 (e.g., a system based
on an Intel processor) this isn’t a problem. On the other
hand, in systems in which even-addressed bytes reside on
D15-8 (e.g., a system based on the Zilog Z8000 or 16C0x
or a Motorola 680x0) it can cause problems. In such
systems, if the last character of a frame falls at an even
address, software must copy the last character into the
subsequent odd address as well, before presenting the
buffer to the Transmit DMA controller.
The Transmitter suppresses its DMA request from the time
an external Transmit DMA controller places the EOF/EOM
character in the TxFIFO until the Transmitter sends it. When
software uses the Transmit Control Block feature, this
procedure ensures that the Transmit DMA controller doesn’t
load the control information for the next frame or message,
while the Transmitter still needs the values for the current
one.
5-32
UM97USC0100
Page 100

ZILOG
UM009402-0201
D15-D0
(See
Text)
TCLR
LD
Counter (TCCR)
DN
Non-Zero
Detect
Enable TCC
USER'S MANUAL
(From
Command-
Driven
Logic)
Z16C30 USC
®
Write
TDR
LD
0001
Detect
Figure 5-13. A Model of the Transmit Character Counter Feature
EOF/
EOM
TxFIFO
UM97USC0100
5-33
 Loading...
Loading...