

Page 1

Serial communication protocol
Modbus® for TC10
Document number: IM 05C01E81-03EN
Third edition: Feb. 2018
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 1
Page 2

Yokogawa Electric Corporation TC10 Communication Protocol
TC10 COMMUNICATION PROTOCOL
Index
1 Preface ...................................................................................................................3
2 Physical connection ..............................................................................................3
2.1 Interface ................................................................................................................................3
2.2 Line ........................................................................................................................................ 3
3 Communication protocol ...................................................................................... 3
3.1 Function code 3: read multiple registers (max. 16 registers for TC10) .................................. 4
3.2 Function code 6: write a single word (one location) ..............................................................5
3.3 Function code 16: preset multiple registers (maximum 16 registers for TC10) .....................5
3.4 The exception reply ...............................................................................................................6
3.5 Cyclic redundancy check (CRC) ...........................................................................................6
4 Data exchange ....................................................................................................... 8
4.1 Some definitions .................................................................................................................... 8
4.2 Memory zones ....................................................................................................................... 8
4.3 Variables zones .....................................................................................................................8
4.4 Most important changes ........................................................................................................ 8
2 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
Page 3

Yokogawa Electric Corporation TC10 Communication Protocol
1 PREFACE
TC10 uses Modbus® RTU communication protocol. Modbus is a royalty free protocol and is easy to be implemented. For Modbus RTU a
vast literature is available also in internet.
The Modbus protocol represent all data in hexadecimal format. All communication string finish with a check sum type CRC (cyclic
redundancy check).
Each device on a line must have different address. The protocol allows one master only and up to 255 slaves
Only the Master unit can start the transmission by sending the address of the unit and the command to be executed. Only the unit having
the correct address will answer to the master.
The transmission characteristics are usually programmable:
Device address: From 1 to 255.
Baud rate: bit per second.
byte format:
– 1 start bit;
– 8 data bitis;
– 2 final bits composed as follows:
1 parity bit (even or odd);
1 stop bit;
or
no parity bit;
2 stop bits.
The TC10 allows to configure:
– address (1 to 254);
– Baud rate (1200 – 2400 – 9600 – 19200 – 38400).
The byte format is fixed: 8 bits without parity and 1 stop bit.
This document is intended to describe the TC10 controllers using the Modbus protocol in their communication capability and is mainly
directed to technicians, system integrators and software developers.
2 PHYSICAL CONNECTION
2.1 Interface
TC10 controllers are provided with a RS485 serial communication interface, insulated so that any problem arising from ground potential is
removed.
While at rest, the instruments are in a receive condition and are revert to transmission after a correct message has been decoded that
matches the configured address.
2.2 Line
The instruments are equipped with 2 terminals named A and B.
The connection between TC10s has to be carried on in parallel, i.e. all A terminals have to be connected between them so as B terminals.
A termination resistor of 120W is required to maintain the quiescent condition on the line.
Adopted baud rates range 1200 to 38400 baud, that is very satisfactory for application performances, yet very slow for RS485 interface.
This fact allows the wiring of the line with a medium quality twisted pair cable: total capacity of the line should not exceed 200 nF.
The line can be up to 1000 meters in length.
3 COMMUNICATION PROTOCOL
The protocol adopted by
protocol, so that connections are easy for many commercial PLCs and supervisory programs.
For users needing to develop their own communication software, all information is available as well as implementation hints.
The Modbus RTU (JBUS) communication functions implemented in TC10 series are:
Function 3 Read n register;
Function 6 Preset one register;
Function 16 Preset multiple registers.
These functions allow the supervisory program to read and modify any data of the controller. The communication is based on messages
sent by the master station (host) to the slave stations (TC10) and viceversa. The slave station that recognises the message as sent to it,
analyses the content and, if it is formally and semantically correct, generates a reply message directed back to the master.
TC10
is a subset of the widely used Modbus RTU (JBUS, AEG Schneider Automation, Inc. registered trade mark)
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 3
Page 4

Yokogawa Electric Corporation TC10 Communication Protocol
The communication process involves five types of messages:
From master to slave From slave to master
Function 3: read n registers request Function 3: read n registers reply
Function 6: preset one register request Function 6: preset one register reply
Function 16: preset multiple registers request Function 16: preset multiple registers reply
Exception reply (as reply to all functions in abnormal conditions)
All messages contain four fields:
◊ Slave address (from 1 to 255): Modbus RTU (JBUS) reserves address 0 for broadcasting messagesand it is implemented in the TC10 series;
◊ Function code: contains 3, 6 or 16 for specified functions;
◊ Information field: contains data like word addresses and word values as required by function in use;
◊ Control word: a cyclic redundancy check (CRC) performed with particular rules for CRC16.
The characteristics of the asyncronous transmission are 8 bits, no parity, one stop bit.
3.1 Function code 3: read multiple registers (max. 16 registers for TC10)
This function code is used by the master to read a group of sequential registers present in the slave.
Master request Slave reply
Data Byte Data Byte
Slave address (1 to 255) 1 Slave address (1 to 255) 1
Function code (3) 1 Function code (3) 1
First register address (MSB = Most Significant Byte)
First register address (LSB = Less Significant Byte)
Number of requested registers (MSB) 1 CRC-16 (LSB) 1
Number of requested registers (LSB) 1 CRC-16 (MSB) 1
CRC-16 (LSB) 1
CRC-16 (MSB) 1
In the “Data(s)” fild the values of the requested registers are presented in word format [2 byte]: the first byte represent the MSB (Most
Significant Byte) while the second byte represent the LSB (Less Significant Byte). This mode will be the same for all requested locations.
Example: The master requires to the address 1 the value of the locations 25 and 26 (0x19 and 0x1A).
1 Byte number (n) 1
1 Data(s) n
Master request Slave reply
Data Byte (Hex) Data Byte (Hex)
Slave address 01 Slave address 01
Function code (3 = read) 03 Function code (3 = read) 03
First register address (MSB)
First register address (LSB)
Number of requested registers (MSB) 00 Value of the first register (LSB) 0A
Number of requested registers (LSB) 02 Value of the second register (MSB) 00
CRC-16 (LSB) 15 Value of the second register (LSB) 14
CRC-16 (MSB) CC CRC-16 (LSB) DA
The slave replay means:
The value of the location 25 = 10 (0x000A hexadecimal)
The value of the location 26 = 20 (0x0014 hexadecimal)
00 Byte number 04
19 Value of the first register (MSB) 00
CRC-16 (MSB) 3E
4 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
Page 5
Yokogawa Electric Corporation TC10 Communication Protocol
3.2 Function code 6: write a single word (one location)
Master request Slave reply
Data Byte (Hex) Data Byte (Hex)
Slave address 01 Slave address (1-255) 1
Function code (6) 06 Function code (6) 1
Register address (MSB)
Register address (LSB)
Value to write (MSB) 00 Written value (MSB) 1
Value to write (LSB) 0A Written value (LSB) 1
CRC-16 (MSB) A8 CRC-16 (MSB) 1
CRC-16 (LSB) 49 CRC-16 (LSB) 1
Example: The master unit asks to the slave 1 to write in the memory location 770 (0x302) the value 10 (0x0A).
Master request Slave reply
Data Byte (Hex) Data Byte (Hex)
Slave address 01 Slave address 01
Function code (6) 06 Function code (6) 06
Register address (MSB)
Register address (LSB)
Value to write (MSB) 00 Written value (MSB) 00
Value to write (LSB) 0A Written value (LSB) 0A
CRC-16 (MSB) A8 CRC-16 (MSB) A8
CRC-16 (LSB) 49 CRC-16 (LSB) 49
03 Register address (MSB) 1
02 Register address (LSB) 1
03 Register address (MSB) 03
02 Register address (LSB) 02
3.3 Function code 16: preset multiple registers (maximum 16 registers for TC10)
This function code allows to preset 16 registers at a time.
Master request Slave reply
Data Byte (Hex) Data Byte (Hex)
Slave address (1-254) 1 Slave address (1-254) 1
Function code (16) 1 Function code (16) 1
First register address (MSB)
First register address (LSB)
Number of requested registers (MSB) 1 Number of written registers (MSB) 1
Number of requested registers (LSB) 1 Number of written registers (LSB) 1
Byte count 1 CRC-16 (LSB) 1
Values n CRC-16 (MSB) 1
CRC-16 (LSB) 1
CRC-16 (MSB) 1
Example: The master unit requires to the slave 1 to write in the registers 10314 (0x284A) and 10315 (0x284B) the values 100 (0x64) and
200 (0xC8)
1 First register address (MSB) 1
1 First register address (LSB) 1
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 5
Page 6

Yokogawa Electric Corporation TC10 Communication Protocol
Master request Slave reply
Data Byte (Hex) Data Byte (Hex)
Slave address 01 Slave address 01
Function code (16) 10 Function code (16) 10
First register address (MSB) 28 First register address (MSB) 28
First register address (LSB) 4A First register address (LSB) 4A
Number of requested registers (MSB) 00 Number of written registers (MSB) 00
Number of requested registers (LSB) 02 Number of written registers (LSB) 02
Byte count 04 CRC-16 (LSB) 69
Value 1 (MSB) 00 CRC-16 (MSB) BE
Value 1 (LSB) 64
Value 2 (MSB) 00
Value 2 ((LSB) C8
CRC-16 (LSB) C9
CRC-16 (MSB) A8
3.4 The exception reply
TC10 replies with an exception when the request is formally correct, but cannot be satisfied standing particular situations; the reply
contains a code indicating the cause of the missing regular reply, the frame is:
Exception replay
Data Byte (Hex)
Slave address 1
Function code 1
Error code 1
CRC-16 (LSB) 1
CRC-16 (MSB) 1
TC10 adopts a subset of Modbus RTU (JBUS) exception code:
– unknown function code 1
– invalid memory address 2
– invalid data field 3
– controller not ready 6
3.5 Cyclic redundancy check (CRC)
CRC is a check word that permits to verify the integrity of a message. Every message, sent or received, has in the two last characters the
CRC check word.
After receiving a request, the controller checks the validity of the received message comparing the received CRC with the calculated one.
When a reply is ready the controller calculates the CRC word and adds two characters to the prepared message. CRC calculation is
performed on every character of the message, excluding the last two.
6 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
Page 7
Yokogawa Electric Corporation TC10 Communication Protocol
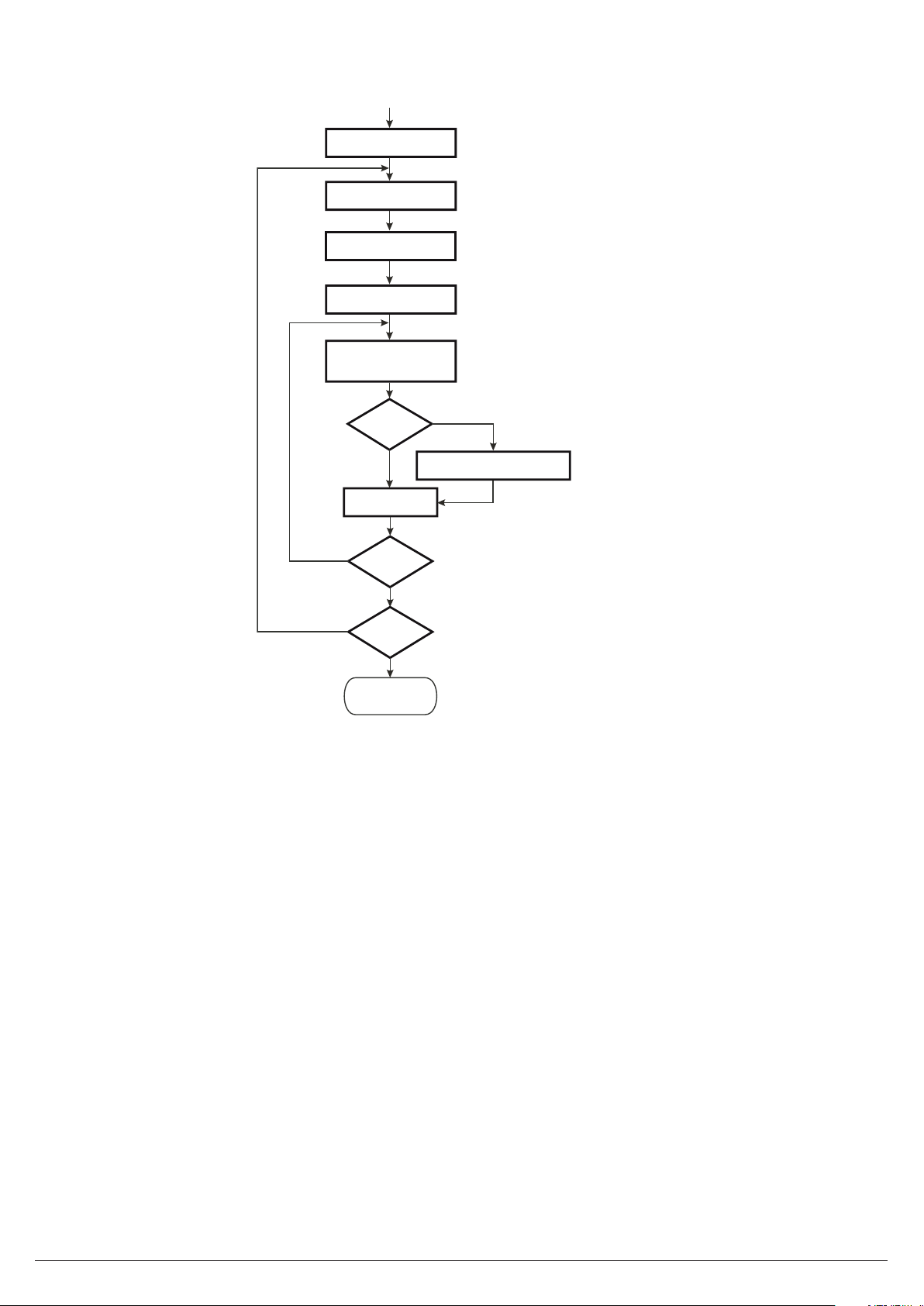
Being Modbus RTU (JBUS) compatible, TC10 controllers adopt an identical algorithm for CRC calculation, sketched in following diagram:
CRC = FFFF hex
next character
CRC = CRC exor char
n = 0
Shift on the left of
CRC in the carry
Carry = 1?
NO
n = n + 1
YES
N < 8?
YES
Other
character?
The CRC
calculation
is finished
YES
CRC = CRC exor POLY
NO
NO
The polinomial adopted by Modbus RTU (JBUS) is 1010 0000 0000 0001.
Note: The first transmitted character of the CRC word is the least significant between calculated bytes.
A subrutine made with “C” able to calculate the CRC-16 follows.
/* --------------------------------------------------------------crc_16 Calculation of CRC-16
Input parameters:
buffer: character string to compute the CRC-16
length: number of bytes in the string
This function returns the value of the CRC-16
--------------------------------------------------------------- */
unsigned int crc_16 (unsigned char *buffer, unsigned int length)
{
unsigned int i, j, temp_bit, temp_int, crc;
crc = 0xFFFF;
for (i = 0; i < length; i++){
temp_int = (unsigned char) *buffer++;
crc ^= temp_int;
for (j = 0; j < 8; j++) {
temp_bit = crc & 0x0001;
crc >>= 1;
if (temp_bit != 0)
crc ^= 0xA001;
}
}
return (crc);
}
Note: All numerical values in the format 0x.... are expressed in hexadecimal format.
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 7
Page 8

Yokogawa Electric Corporation TC10 Communication Protocol
4 DATA EXCHANGE
This section contains informations about data exchanged with TC10 series controllers concerning numerical and not numerical data, with
their formats and limits.
4.1 Some definitions
All exchanged data are in the form of 16 bit words.
Two types of data are distinguished: numerical and symbolic (or not numerical).
Numerical data represents the value of a quantity (e.g. the measured variable, the set point).
Symbolic data represents a particular value in a set of values (e.g. the thermocouple type in the set of available ones: J, K, S, etc.).
Both types are coded as integers number: signed numbers for numerical and unsigned numbers for symbolic.
A numerical data, coded as an integer, is coupled with appropriate number of decimal digits to represent a quantity with the same
engineering units adopted aboard the instrument.
Numerical data are in fixed point representation; however we make a distinction between two kind of data:
◊ The first kind has determined and unmodifiable decimal point position;
◊ The second has programmable decimal point position (dP parameter).
4.2 Memory zones
All readable and writable data appear to be allocated as 16 bit words in the memory of the instrument.
The memory map has three zones:
◊ Varaibles,
◊ Parameters,
◊ Instrument identification code.
Following parameters explore the characteristics of each zone.
4.3 Variables zones
In this zone there is a collection of main TC10 controller variables, it is a group of frequently computed or updated data residing in volatile
memory.
4.4 Most important changes
A) During parameter modification by push-button, the serial interface continue to operate without any “limit” (you can see
by serial link the value of all parameters and you can set it also).
B) When you write a value in a location the instrument will operate as follows:
B.1) If you write a value within parameter range, the instrument will accept it; the new value will be memorized and the
instrument will send back the standard answer.
B.2) If you try to write a value OUT of parameter range, the instrument will refuse the new value; the new value will NOT be
memorized and the instrument will send an exception message to the master.
8 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
Page 9

Yokogawa Electric Corporation TC10 Communication Protocol
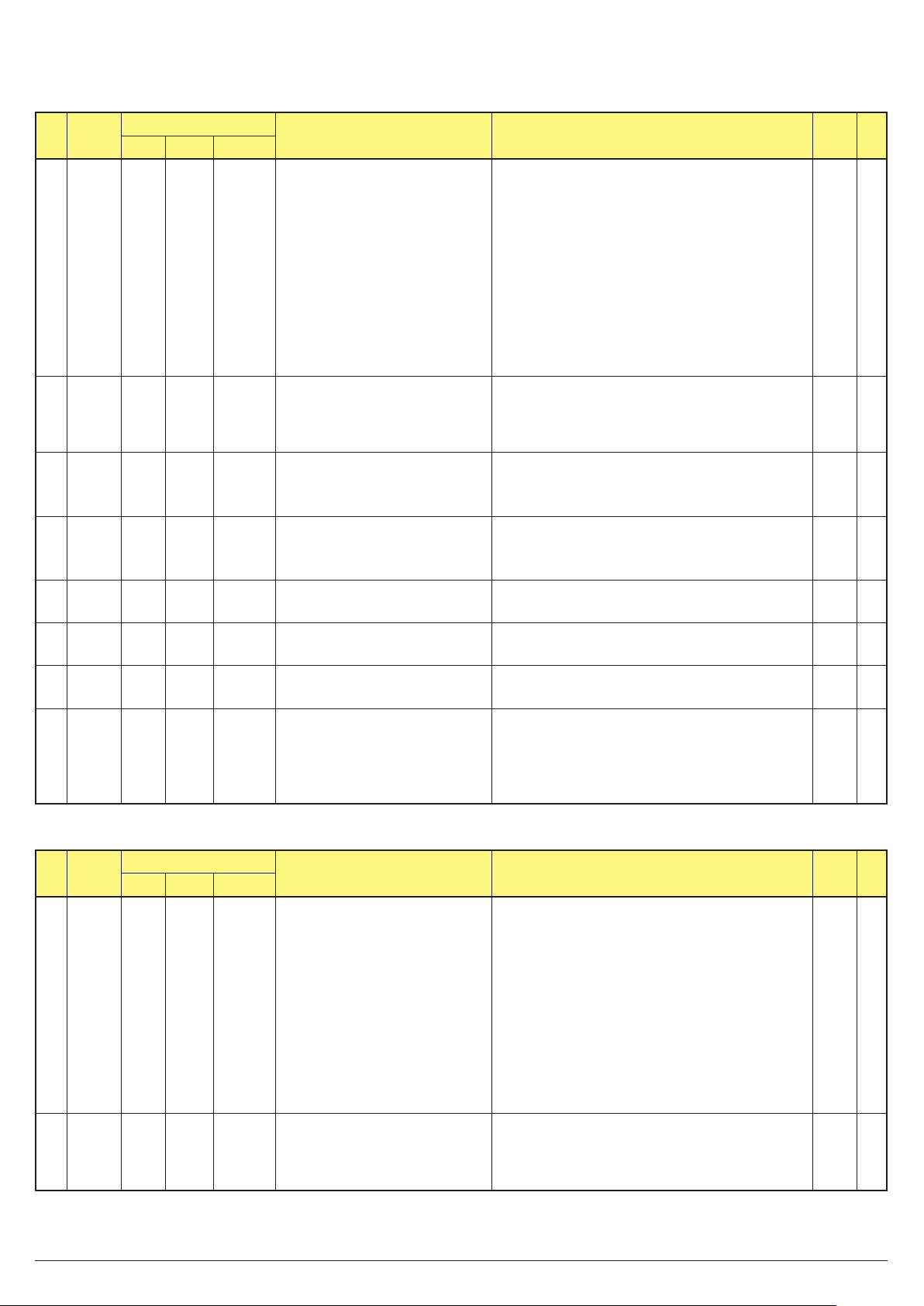
5 ADDRESS MAP
The instrument use only words:
Initial address Final address
Hex Dec Hex Dec
1 1 1D 29 Numeric values calculated and dinamically updated. Available in read and write operations
200 512 250 592 Numeric values calculated and dinamically updated. Available in read and write operations
280 640 31B 795 Configuration parameters: Numeric and symolic values. Available in read and write operations
Mining
2800 10240 289B 10395
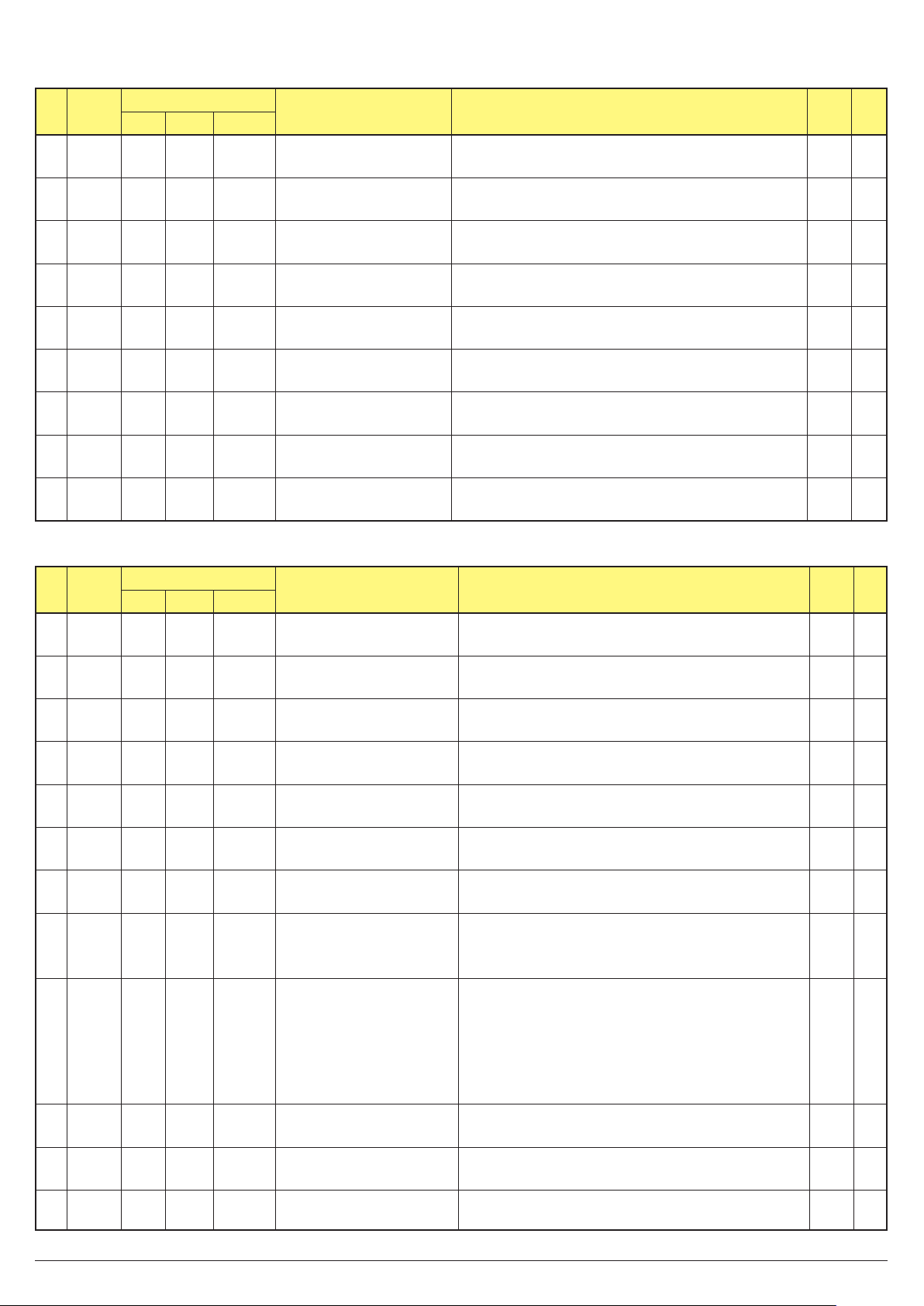
5.1 Common Variables
no.
1A 1 1 40002
2A 2 2 40003
3A 3 3 40004
4A 4 4 40005
5A 5 5 40006
6A 6 6 40007
7A 7 7 40008
8A 8 8 40009
9A 9 9 40010
10A A 10 40011
11A B 11 400412
Address
Hex Dec Ref. no.
PV: Measured value
Note: When a measuring error is detected the instrument sends:
Number of decimal figures of the measured value
Operative set point (value)
Power output
Range: -100.00 to 100.00 (%)
Note: This parameter is always writeable but it will be active only when the instrument
Active set point selection
0 = SP
1 = SP 2
2 = SP 3
3 = SP 4
SP
Range: SPLL to SPLH
SP 2
Range: SPLL to SPLH
SP 3
Range: SPLL to SPLH
SP 4
Range: SPLL to SPLH
Alarms status
bit 0 = Alarm 1 status
bit 1 = Alarm 2 status
bit 2 = Alarm 3 status
bit 3 to 8 = Reserved
bit 9 = LBA status
bit 10 = power feilure indicator
bit 11 = Generic error
bit 12 = Overload alarm
bit 13 to 15 = Reserved
Outputs status (physical outputs)
bit 0 = Output 1 status
bit 1 = Output 2 status
bit 3 = Output 3 status
bit 4 = Output 4 status
bit 5 = Output 5 status
bit 6 to 15 = Reserved
When an output is driven by serial link, the relative bit will remain equal to 0.
Repetition of the configuration parameters: Numeric and symolic values. Available in read and write
operations
Description
• 10000 = Underrange
• 10000 = Overrange
• 10001 = Overflow of the A/D converter
• 10003 = Variable not available
operates in Manual mode.
Dec.
Point
r
0 r
dP r
2 r/w
0 r/w
dP r/w
dP r/w
dP r/w
dP r/w
0 r
0 r
r/w
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 9
Page 10
Yokogawa Electric Corporation TC10 Communication Protocol
no.
12A C 12 40013
13A D 13 40014
14A E 14 40015
15A F 15 40016
16A 10 16 40017
17A 11 17 40018
18A 12 18 40019
19A 13 19 40020
20A 14 20 40021
21A 15 21 40022
22A 16 22 40023
23A 17 23 40024
24A 18 24 40025
Address
Hex Dec Ref. no.
Description
Instrument status
bit 0 = Automatic
bit 1 = manual
bit 2 = Standby
bit 3 = Remote Set point (temporary) used
bit 4 = Auto-tuning active
bit 5 = Self tuning active
bit 6 = Reserved
bit 7 = Reserved
bit 8 = Soft start running
bit 9 = Ramp for set point change (up or down) running
bit 10 = Delay at start up (od) running
bit 11 = Reserved
bit 12 = Measure status (0 = OK while 1 = error).
bit 13 to 15 = Reserved
Alarms reset
0 = Not resetted
1 = Resetted
Alarms acknowledge
0 = Not acknowledged
1 = Acknowledged
Control status
0 = Automatic
1 = Manual
2 = Stand-by
Remote set point (temporary) (from serial link)
Range: SPLL to SPLH
Note: the remote set point is stored in RAM
Auto tuning activation
0 = not active
1 = active
Power output used when a measuring error is detected.
Range: -100 to 100
Note: This value is stored in RAM
Default parameters loading.
481 = Default parameter loading
Parameters table identification code
Range: 0 to 65535
Note: The word is composed by two parts:
- Low byte – Version of the parameter table
- High byte – Version of the family protocoll
Instrument identification code
20 = TC10
First temporary code for speed configuration
The code is composed by two distinct 4 digits subcodes:
AABB where:
= Input type: 0 to 25
AA
BB = Control type and service functions 0 to 21
Note: 10000 = Temporary value not inserted
The programmed codes will be activated only after both have been correctly be programmed. The order has no importance.
Second temporary code for speed configuration
The code is composed by two distinct 4 digits subcodes:
CDEF where:
= Alarm type 1: 0 to 9
C
D = Alarm type 2: 0 to 9
E = Alarm type 3: 0 to 9
F = Enabling service functions: 0 to 4
Note: 10000 = Temporary value not inserted
The programmed codes will be activated only after both have been correctly be programmed. The order has no importance.
First final code for speed configuration
When programmed, the code is composed by two distinct 4 digits subcodes:
AABB where:
= Input type: 0 to 25
AA
BB = Control type and service functions: 0 to 21
If not programmed, the return value is -1 = Code not programmed.
Dec.
Point
0 r
0 r/w
0 r/w
0 r/w
dP r/w
0 r/w
0 r/w
0 r/w
0 r
0 r
0 r/w
0 r/w
0 r
r/w
10 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
Page 11
Yokogawa Electric Corporation TC10 Communication Protocol
no.
25A 19 25 40026
26A 1A 26 40027
27A 1B 27 40028
28A 1C 28 40029
29A 1D 29 40030
Address
Hex Dec Ref. no.
Second temporary code for speed configuration
When programmed, the code is composed by two distinct 4 digit subcodes:
CDEF where:
= Alarm type 1: 0 to 9
C
D = Alarm type 2: 0 to 9
E = Alarm type 3: 0 to 9
F = Enabling service functions: 0 to 4
If not programmed, the return value is -1 = Code not programmed.
Reserved
Manual autotuning start request pending for Od or Soft start
Range: 0 = No pending request waiting for the execution;
1 = Pending request waiting for the execution
Autotuning start request pending for setpoint change for Od or Soft start
Range: 0 = No pending request waiting for the execution;
1 = Pending request waiting for the execution
Value to be retransmitted on the analogue Output
Range: Ao1L to Ao1H
5.2 Common variables (continued)
no.
1B 0200 512 40513
2B 0201 513 40514
3B 0202 514 40515
4B 0203 515 40516
5B 0204 516 40517
6B 0205 517 40518
7B 0206 518 40519
8B 0207 519 40520
9B 0208 520 40521
10B 020A 522 40523
11B 020E 526 40527
12B 020F 527 40528
13B 0224 548 40549
14B 0225 549 40550
Address
Hex Dec Ref. no.
PV : Measured value
As address 1
Number of decimal figure of the measured value
As address 2
Power output
As address 4
Power output of the heating output
Range: 0 to 100.00 (%)
Power output of the cooling output
Range: 0 to 100.00 (%)
Alarm 1 status
0 = OFF
1 = ON
Alarm 2 status
0 = OFF
1 = ON
Alarm 3 status
0 = OFF
1 = ON
Operative set point
As address 3
LBA status
0 = OFF
1 = ON
Overload alarm status
0 = OFF
1 = ON
Controller status
0 = Stand-by
1 = Auto
2 = Tuning
3 = Manual
Status/remote control of the Output 1
0 = OFF
1 = ON
Note: This parameter is writeable when out 1 is “not used” by the controller (o1F output 1
function = nonE). This parameter is stored in RAM
Status/remote control of the Output 2
0 = OFF
1 = ON
Note: This parameter is writeable when out 2 is “not used” by the controller (o2F output 1
function = nonE). This parameter is stored in RAM
Description
Description
Dec.
Point
0 r
0 r
0 r
0 r
0 r/w
Dec.
Point
dP r
0 r
2 r
2 r
2 r
0 r
0 r
0 r
DP r
0 r
0 r
0 r/w
0 r/w
r/w
r/w
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 11
Page 12

Yokogawa Electric Corporation TC10 Communication Protocol
no.
15B 0226 550 40551
16B 0227 551 40552
17B 0240 576 40577
18B 0241 577 40578
19B 0244 580 40581
20B 0245 581 40582
21B 0246 582 40583
22B 0247 583 40584
23B 0248 584 40585
24B 0249 585 40586
25B 024A 586 40587
26B 024B 587 40588
27B 024C 588 40589
28B 0250 592 40593
Address
Hex Dec Ref. no.
Description
Status/remote control of the Output 3
0 = OFF
1 = ON
Note: This parameter is writeable when out 3 is “not used” by the controller (o3F output 1
function = nonE). This parameter is stored in RAM
Status/remote control of the Output 4
0 = OFF
1 = ON
Note: This parameter is writeable when out 4 is “not used” by the controller (o4F output 1
function = nonE). This parameter is stored in RAM
Digital input 1 status
0 = OFF
1 = ON
Note: Digital input 1status can be read from the serial port even if the input is not used by
the controller
Digital input 2 status
0 = OFF
1 = ON
Note: Digital input 2 status can be read from the serial port even if the input is not used by
the controller
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Wattmeter:
The meaning of this parameter is defined by the CO.ty parameter setting.
0 CO.ty = 0ff
kW CO.ty = 1
kWh CO.ty = 2
CO.ty = 3 Reserved
Worked days CO.ty = 4
Worked hours CO.ty = 5
Reserved
Days counted with the controller Powered ON
Range: 0 to 9999
Power output when the instrument is in manual mode
Range:-10000 to 10000 (%)
Dec.
Point
0 r/w
0 r/w
0 r/w
0 r/w
0 r
0 r
0 r
2 r/w
r/w
5.3 Parameters Setting: Addresses from 280 hex (640 dec) and 2800 hex (10240 dec)
5.3.1 inP GROUP - Main and auxiliary input configuration
no. Param.
1 SEnS
2 dp
Address
Hex Dec Ref. no.
280
2800
281
2801
640
10240
641
10241
40641
40642
Description Values
Input Type
Decimal Point Position (linear inputs)
Decimal Point Position (different
than linear inputs)
0 = J = TC J,
1 = crAL = TC K,
2 = S = TC S,
3 = r = TC R,
4 = t = TC T,
5 = Reserved,
6 = Reserved,
7 = Pt1 = RTD Pt100,
8 = Pt10 = RTD Pt1000,
9 = 0.60 = 0 to 60 mV,
10 = 12.60 = 12 to 60 mV,
11 = 0.20 = 0 to 20 mA,
12 = 4.20 = 4 to 20 mA,
13 = 0.5 = 0 to 5 V,
14 = 1.5 = 1 to 5 V,
15 = 0.10 = 0 to 10 V,
16 = 2.10 = 2 to 10 V
0 to 3
0/1
Dec.
Point
0 r/W
0 r/w
r/w
12 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
Page 13

Yokogawa Electric Corporation TC10 Communication Protocol
no. Param.
3 SSC
4 FSc
5 unit
6 Fil
7 inE
8 oPE
9 IO4.F
10 diF1
11 diF2
12 di.a
Address
Hex Dec Ref. no.
282
2802
283
2803
284
2804
285
2805
286
2806
287
2807
288
2808
289
2809
28A
280A
31C
289C
642
10242
643
10243
644
10244
645
10245
646
10246
647
10247
648
10248
649
10249
650
10250
796
10396
40643
40644
40645
40646
40647
40648
40649
40650
40651
40797
Description Values
Initial scale read-out for linear inputs
Full Scale Readout for linear inputs -1999 to 9999 dP r/w
Engineering unit
Digital filter on the measured value
Note: This filter affects the control
action, the PV retransmission
and the alarms action.
Sensor error used to enable the
safety output value
Safety output value (% of the output)
I/O 4 function
Digital Input 1 function
Digital Input 2 function
Digital Inputs Action
(DI2 only if configured)
-1999 to 9999 dP r/w
0 = C = °C
1 = F = °F
0 (OFF) to 200 (in seconds) 1 r/w
or = Over range
ou = Under range
our = Over and under range
-100 to 100 0 r/w
0 = on = Output used as PWS for TX,
1 = out4 = Output 4 (digital output 4),
2 = dG2c = Digital input 2 driven by contact,
3 = dG2U = Digital input 2 driven by voltage
0 = oFF = Not used,
1 = Alarm reset,
2 = Alarm acknowledge (ACK),
3 = Hold of the measured value,
4 = Stand by mode,
5 = Manual mode,
6 = HEAt with SP1 and CooL with SP2,
7 to 17 = Reserved,
18 = Sequential SP selection,
19 = SP1 - SP2 selection,
20 = SP1 to SP4 binary selection,
21 = Digital inputs in parallel to / keys
0 = oFF = Not used,
1 = Alarm reset,
2 = Alarm acknowledge (ACK),
3 = Hold of the measured value,
4 = Stand by mode,
5 = Manual mode,
6 = HEAt with SP1 and CooL with SP2,
7 to 17 = Reserved,
18 = Sequential SP selection,
19 = SP1 - SP2 selection,
20 = SP1 to SP4 binary selection,
21 = Digital inputs in parallel to / keys
0 = DI1 direct action, DI2 direct action
1 = DI1 reverse action, DI2 direct action
2 = DI1 direct action, DI2 reverse action
3 = DI1 reverse action, DI2 reverse action
Dec.
Point
0 r/w
0 r/w
0 r/w
0 r/w
0 r/w
0 r/w
r/w
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 13
Page 14

Yokogawa Electric Corporation TC10 Communication Protocol
5.3.2 Out group
no. Param.
13
14 o1F
15
16
17 o1AL
18 o1Ac
19 o2F
20 o2AL
21 o2Ac
22 o3F
23 o3AL
24 o3Ac
25 o4F
26 o4AL
27 o4Ac
Address
Hex Dec Ref. no.
28B
280B
28C
280C
28D
280D
28E
280E
28F
280F
290
2810
291
2811
292
2812
293
2813
294
2814
295
2815
296
2816
297
2817
298
2818
299
2819
651
10251
652
10252
653
10253
654
10254
655
10255
656
10256
657
10257
658
10258
659
10259
660
10260
661
10261
662
10262
664
10264
664
10264
665
10265
40652
40653
40654
40655
40656
40657
40658
40659
40660
40661
40662
40663
40664
40665
40666
Description Values
0 = 0-20 = 0 to 20 mA
Output 1 type
(when Out 1 is an analog output)
Out 1 function
(when Out 1 is an analog output)
Out 1 function
Initial scale value of the analog
retransmission
analog output)
Full scale value of the analog
retransmission
analog output)
Alarms linked up with the out 1
Out 1 action
Out 2 function See the values of 14 = o1F parameter 0 r/w
Alarms linked up with the out 2 See the values of 17 = o1AL parameter 0 r/w
Out 2 action See the values of 18 = o1Ac parameter 0 r/w
Out 3 function See the values of 14 = o1F parameter 0 r/w
Alarms linked up with the out 3 See the values of 17 = o1AL parameter 0 r/w
Out 3 action See the values of 18 = o1Ac parameter 0 r/w
Out 4 function See the values of 14 = o1F parameter 0 r/w
Alarms linked up with the out 4 See the values of 17 = o1AL parameter 0 r/w
Out 4 action See the values of 18 = o1Ac parameter 0 r/w
(when Out 1 is an
(when Out 1 is an
1 = 4-20 = 4 to 20 mA
2 = 0-10 = 0 to 10 V
3 = 2-10 = 2 to 10 V
0 = NonE = Output not used
1 = H.rEG = Heating output
2 = c.rEG = Cooling output
3 = r.inP = Measure retransmission
4 = r.Err = Error (sp - PV) retransmission
5 = r.SP = Set point retransmission
6 = r.SEr = Serial value retransmission
0 = NonE = Output not used
1 = H.rEG = Heating output
2 = c.rEG = Cooling output
3 = AL = Alarm output
4 to 11 = Reserved,
12 = or.bo = Out-of-range or burn out
indicator
13 = P.FAL = Power failure indicator
14 = bo.PF =
Power failure indicator
15 = St.bY = Stand by status indicator
16 = diF.1 =
input 1 status
17 = diF.2 =
input 2 status
18 = on = Out 1 always ON
-1999 ... Ao1H dp r/w
Ao1L ... 9999 dp r/w
0 to 63
+1 = Alarm 1
+2 = Alarm 2
+4 = Alarm 3
+8 = Loop break alarm
+16 = Sensor Break
+32 = Overload on output 4
0 = dir = Direct action
1 = rEU = Reverse action
2 = dir.r = Direct with reversed LED
3 = ReU.r = Reverse with reversed LED
Out-of-range, burn out and
The output repeats the digital
The output repeats the digital
Dec.
Point
0 r/w
0 r/w
0 r/w
0 r/w
r/w
14 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
Page 15
Yokogawa Electric Corporation TC10 Communication Protocol
5.3.3 AL1 group
no. Param.
28 AL1t
29 Ab1
30 AL1L
31 AL1H
32 AL1
33 HAL1
34 AL1d
35 AL1o
Address
Hex Dec Ref. no.
29A
281A
29B
281B
29C
281C
29D
281D
29E
281E
29F
281F
2A0
2820
2A1
2821
666
10266
667
10267
668
10268
669
10269
670
10270
671
10271
672
10272
673
10273
40667
40668
40669
40670
40671
40672
40673
40674
Description Values
0 = nonE = Alarm not used
1 = LoAb = Absolute low alarm
2 = HiAb = Absolute high alarm
3 = LHAo = Windows alarm in alarm outside the
windows
4 = LHAI = Windows alarm in alarm inside the
Alarm 1 type
Alarm 1 function
- For High and low alarms, it is the
low limit of the AL1 threshold;
- For band alarm, it is low alarm
threshold
- For High and low alarms, it is the
high limit of the AL1 threshold;
- For band alarm, it is high alarm
threshold
AL1 threshold From AL1L to AL1H (E.U.) dP r/w
AL1 hysteresis 1 to 9999 (E.U.) dP r/w
AL1 delay From 0 (oFF) to 9999 (s) 0 r/w
Alarm 1 enabling during Stand-by
mode and out of range conditions
windows
5 = SE.br = Sensor Break
6 = LodE = Deviation low alarm (relative)
7 = HidE = Deviation high alarm (relative)
8 = LHdo = Relative band alarm in alarm out of
the band
9 = LHdi = Relative band alarm in alarm inside
the band
0 to 15
+1 = Not active at power up
+2 = Latched alarm (manual reset)
+4 = Acknowledgeable alarm
+8 = Relative alarm not active at set point change
From -1999 to AL1H (E.U.) dP r/w
From AL1L to 9999 (E.U.) dP r/w
0 = Alarm 1 disabled during Stand by and out of
range
1 = Alarm 1 enabled in stand by mode
2 = Alarm 1 enabled in out of range condition
3 = Alarm 1 enabled in stand by mode and in
over range condition
Dec.
r/w
Point
0 r/w
0 r/w
0 r/w
5.3.4 AL2 group
no. Param.
36 AL2t
37 Ab2
Address
Hex Dec Ref. no.
2A2
2822
2A3
2823
674
10274
675
10275
40675
40676
Description Values
Alarm 2 type
Alarm 2 function
0 = nonE = Alarm not used
1 = LoAb = Absolute low alarm
2 = HiAb = Absolute high alarm
3 = LHAo = Windows alarm in alarm outside the
windows
4 = LHAI = Windows alarm in alarm inside the
windows
5 = SE.br = Sensor Break
6 = LodE = Deviation low alarm (relative)
7 = HidE = Deviation high alarm (relative)
8 = LHdo = Relative band alarm in alarm out of
the band
9 = LHdi = Relative band alarm in alarm inside
the band
0 to 15
+1 = Not active at power up
+2 = Latched alarm (manual reset)
+4 = Acknowledgeable alarm
+8 = Relative alarm not active at set point change
Dec.
r/w
Point
0 r/w
0 r/w
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 15
Page 16

Yokogawa Electric Corporation TC10 Communication Protocol
no. Param.
38 AL2L
39 AL2H
40 AL2
41 HAL2
42 AL2d
43 AL2o
Address
Hex Dec Ref. no.
2A4
2824
10276
2A5
2825
10277
2A6
2826
10278
2A7
2827
10279
2A8
2828
10280
2A9
2829
10281
5.3.5 AL3 group
no. Param.
44
AL3t
45
Ab3
46 AL3L
47 AL3H
48 AL3
49 HAL3
50 AL3d
51 AL3o
Address
Hex Dec Ref. no.
2AA
282A
10282
2AB
282B
10283
2AC
282C
10284
2AD
282D
10285
2AE
282E
10286
2AF
282F
10287
2B0
2830
10288
2B1
2831
10289
Description Values
676
40677
677
40678
678
40679
679
40680
680
40681
681
40682
682
40683
683
40684
684
40685
685
40686
686
40687 AL3 threshold From AL3L to AL3H (E.U.) dP r/w
687
40688
688
40689 AL3 delay From 0 (oFF) to 9999 (s) 0 r/w
689
- For High and low alarms, it is the
low limit of the AL2 threshold;
- For band alarm, it is low alarm
threshold
- For High and low alarms, it is the
high limit of the AL2 threshold;
- For band alarm, it is high alarm
threshold
AL2 threshold From AL2L to AL2H (E.U.) dP r/w
AL2 hysteresis 1 to 9999 (E.U.) dP r/w
AL2 delay From 0 (oFF) to 9999 (s) 0 r/w
Alarm 2 enabling during Stand-by
mode and out of range conditions
Description Values
Alarm 3 type
Alarm 3 function
- For High and low alarms, it is the
low limit of the AL3 threshold;
- For band alarm, it is low alarm
threshold
- For High and low alarms, it is the
high limit of the AL3 threshold;
- For band alarm, it is high alarm
threshold
AL3 hysteresis 1 to 9999 (E.U.) dP r/w
Alarm 3 enabling during Stand-by
mode and out of range conditions
From -1999 to AL2H (E.U.) dP r/w
From AL2L to 9999 (E.U.) dP r/w
0 = Alarm 2 disabled during Stand by and out of
range
1 = Alarm 2 enabled in stand by mode
2 = Alarm 2 enabled in out of range condition
3 = Alarm 2 enabled in stand by mode and in
over range condition
0 = nonE = Alarm not used
1 = LoAb = Absolute low alarm
2 = HiAb = Absolute high alarm
3 = LHAo = Windows alarm in alarm outside the
windows
4 = LHAI = Windows alarm in alarm inside the
windows
5 = SE.br = Sensor Break
6 = LodE = Deviation low alarm (relative)
7 = HidE = Deviation high alarm (relative)
8 = LHdo = Relative band alarm in alarm out of
the band
9 = LHdi = Relative band alarm in alarm inside
the band
0 to 15
+1 = Not active at power up
+2 = Latched alarm (manual reset)
+4 = Acknowledgeable alarm
+8 = Relative alarm not active at set point change
From -1999 to AL3H (E.U.) dP r/w
From AL3L to 9999 (E.U.) dP r/w
0 = Alarm 3 disabled during Stand by and out of
range
1 = Alarm 3 enabled in stand by mode
2 = Alarm 3 enabled in out of range condition
3 = Alarm 3 enabled in stand by mode and in
over range condition
Dec.
r/w
Point
0 r/w
Dec.
r/w
Point
0 r/w
0 r/w
0 r/w
16 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
Page 17

Yokogawa Electric Corporation TC10 Communication Protocol
5.3.6 LBA group - Loop Break Alarm Parameters
no. Param.
52 LbAt
53 LbSt
54 LbAS
55 LbcA
Address
Hex Dec Ref. no.
2B2
2832
2B3
2833
2B4
2834
2B5
2835
690
10290
691
10291
692
10292
693
10293
40691
40692
40693
40694
LBA time From 0 (oFF) to 9999 (s) 0
Delta measure used by LBA during Soft
start
Delta measure used by LBA 1 to 9999 (E.U.) dP
Condition for LBA enabling
5.3.7 rEG group - Control Parameters
no. Param.
56 cont
57 Auto
58 Aut.r
59 SELF
60 HSEt
61 cPdt
62 Pb
63 ti
64 td
65 Fuoc
66 tcH
Address
Hex Dec Ref. no.
2B6
2836
2B7
2837
2B8
2838
2B9
2839
2BA
283A
2BB
283B
2BC
283C
2BD
283D
2BE
283E
2BF
283F
2C0
2840
694
10294
695
10295
696
10296
697
10297
698
10298
699
10299
700
10300
701
10301
702
10302
703
10303
704
10304
40695
40696
40697
40698
40699
40700
40701
40702
40703 Derivative time From 0 (oFF) to 9999 (s) 0 r/w
40704
40705
Description Values
Control type
Autotuning selection
Manual start of the Autotuning
Self tuning enabling
Hysteresis of the ON/OFF
control
Time for compressor
protection
Proportional band 1 to 9999 (E.U.) dP
Integral time From 0 (oFF) to 9999 (s) 0 r/w
Fuzzy overshoot control 0 to 200 2 r/w
Heating output cycle time 10 to 1300 (s) 1 r/w
Description Values
From 0 (oFF) to 9999 (E.U.) dP
0 = uP = Active when Pout = 100%
1 = dn = Active when Pout = -100%
2 = both = Active in both cases
0 = Pid = PID (heat and/or)
1 = On.FA = ON/OFF asymmetric hysteresis
2 = On.FS = ON/OFF symmetric hysteresis
3 = nr = Heat/Cool ON/OFF control with neutral zone
4 = Reserved
Oscillating auto-tune with automaticrestart
-4 =
at power up and after all point change
-3 =
Oscillating auto-tune with manual start
-2 = Oscillating -tune with auto-matic start at the first
power up only
-1 =
Oscillating auto-tune with auto-matic restart
at every power up
0 = Not used
1 = Fast auto tuning with automatic restart at every
power up
2 = Fast auto-tune with automatic start the first
power up only
3 = FAST auto-tune with manual start
4 = FAST auto-tune with automatic restart
at power up and after a set point change
5 = Evo-tune with automatic restart at every power up
6 =
Evo-tune with automatic start the first power up only
7 = Evo-tune with manual start
8 = Evo-tune with automatic restart at power up
and after a set point change
0 = oFF = Autotuning Not active
1 = on = Autotuning Active
0 = no = The instrument does not perform the
self-tuning
1 = YES = The instrument is performing the self-tuning
0 to 9999 (E.U.) dP
From 0 (oFF) to 9999 (s) 0 r/w
Dec.
r/w
Point
0
Dec.
Point
0 r/w
0 r/w
0 r/w
0 r/w
r/w
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 17
Page 18
Yokogawa Electric Corporation TC10 Communication Protocol
no. Param.
67 rcG
68 tcc
69 rS
70
71
72 od
73 St.P
74 SSt
75 SS.tH
Address
Hex Dec Ref. no.
2C1
2841
2C2
2842
2C3
2843
2C4
2844
2C5
2845
2C6
2846
2C7
2847
2C8
2848
2C9
2849
705
10305
706
10306
707
10307
708
10308
709
10309
710
10310
711
10311
712
10312
713
10313
40706
40707
40708
40709
40710
40711
40712
40713
40714
Description Values
Power ratio between heating and cooling action
Cooling output cycle time 1 to 1300 (s) 1 r/w
Manual reset (Integral
pre-load)
Reserved
Reserved
Delay at power up From 0.00 (oFF) to 9959 (hh.mm) 2 r/w
Maximum power output
used during soft start
Soft start time 0 (oFF) to 800 = inF (h.mm) 2 r/w
Threshold for soft start
disabling
1 to 9999 2 r/w
-1000 to +1000 (%) 1 r/w
-100 to 100 (%) 0 r/w
-2000 (oFF) to 9999 (E.U.) dP r/w
Dec.
Point
r/w
5.3.8 SP group - Set point parameters
no. Param.
76 nSP
77 SPLL
78 SPHL
79 SP
80 SP 2
81 SP 3
82 SP 4
83 A.SP
84 SP.rt
85 SPLr
86 SP.u
87 SP.d
Address
Hex Dec Ref. no.
2CA
284A
2CB
284B
2CC
284C
2CD
284D
2CE
284E
2CF
284F
2D0
2850
2D1
2851
2D2
2852
2D3
2853
2D4
2854
2D5
2855
10314
10315
10316
10317
10318
10319
10320
10321
10322
10323
10324
10325
714
715
716
717
718
719
720
721
722
723
724
725
40715
40716
40717
40718
40719
40720
40721
40722
40723
40724
40725
Description Values
Number of used set points 1 to 4 0 r/w
Minimum set point value From -1999 to SPHL dP r/w
Maximum set point value From SPLL to 9999 dP r/w
Set point 1 From SPLL to SPLH dP r/w
Set point 2 From SPLL to SPLH dP r/w
Set point 3 From SPLL to SPLH dP r/w
Set point 4 From SPLL to SPLH dP r/w
Selection of the active set
point
Remote set point type
Local/remote set point selection
Rate of rise for POSITIVE
set point change (ramp UP)
Rate of rise for NEGATIVE set
point change (ramp DOWN)
Dec.
r/w
Point
0 = SP
1 = SP 2
2 = SP 3
3 = SP 4
0 = RSP =
1 = trin =
2 = PErc = The value coming from serial link will be
0 = Loc = local
1 = rEn = remote
0.01 to 99.99 (inF) engineering units per minute 2 r/w
0.01 to 99.99 (inF) engineering units per minute 2 r/w
The value coming from serial link is used as
remote set point
The value coming from serial link will be
added to the local set point selected by A.SP and
the sum becomes the operative set point
scaled on the input range and this value will be
used as remote SP
0 r/w
0 r/w
0 r/w
18 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
Page 19

Yokogawa Electric Corporation TC10 Communication Protocol
5.3.9 Reserved Parameters
no. Param.
88
to
117
Hex Dec Ref. no.
2D6 to 2F3
2856 to
2873
Address
726 to 755
10326 to 10355
40727 to 40756
5.3.10 PAn group - Operator HMI parameters
no. Param.
118 PAS2
119 PAS3
120 PAS4
121 uSrb
122 diSP
123 di.cL
124 AdE
125 di.St
126 fiLd
127
128 dSPu
Address
Hex Dec Ref. no.
2F4
2874
2F5
2875
2F6
2876
2F7
2877
2F8
2878
2F9
2879
2FA
287A
2FB
287B
2FC
287C
2FD
287D
2FE
287E
756
10356
757
10357
758
10358
759
10359
760
10360
761
10361
762
10362
763
10363
764
10364
765
10365
766
10366
40757
40758
40759
40760
40761
40762
40763
40764
40765
40766
40767
Description Values
Level 2 password
(limited access level)
Level 3 password
(complete configuration level)
Level 4 password
(CODE configuration
level)
button function
during RUN TIME
Display
management
Display colour
Deviation for display
colour management
Display
Timeout
Filter on the
displayed value
Reserved
Instrument status at
power ON
Description Values
Reserved
oFF (Level 2 not protected by password)
1 to 200
3 to 200 0 r/w
201 to 400 0 r/w
0 = nonE = No function
1 = tunE = Auto-tune/self-tune enabling. A single press
(longer than 1 second) starts the auto-tune
2 = oPLo =
instrument in manual mode (OPLO) while a second one
puts the instrument in Auto mode
3 = AAc = Alarm reset
4 = ASi = Alarm acknowledge
5 = chSP = Sequential set point selection
6 = St.by =
instrument in stand by mode while a second one puts
the instrument in Auto mode.
7 to 10 = Reserved
0 = nonE = Standard display
1 = Pou = Power output
2 = SPF = Final set point
3 = Spo = Operative set point
4 = AL1 = Alarm 1 threshold
5 = AL2 = Alarm 2 threshold
6 = AL3 = Alarm 3 threshold
7 to 12 = Reserved,
13 = PErc = Percent of the power output used during soft
start (when the soft start time is equal to infinite, the
limit is ever active and it can be used also when ON/
OFF control is selected)
14 = Reserved
0 = The display colour changes to point out the actual
deviation (PV - SP)
1 = Display red (fix)
2 = Display green (fix)
3 = Display orange (fix)
1 to 9999 Dp r/w
0 = oFF (display always ON) to 9959 (mm.ss) 2 r/w
0 = oFF (filter disabled) to 100 Dp r/w
0 = AS.Pr = Starts in the same way it was prior to the power
down
1 = Auto = Starts in Auto mode
2 = oP.0 = Starts in manual mode with a power output equal
to zero
3 = St.bY = Starts in stand-by mode
Manual mode. The first pressure puts the
Stand by mode. The first press puts the
Dec.
Point
Dec.
Point
0 r/w
0 r/w
0 r/w
r/w
r/w
r/w
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 19
Page 20

Yokogawa Electric Corporation TC10 Communication Protocol
no. Param.
129 oPr.E
130 oPEr
Address
Hex Dec Ref. no.
2FF
287F
300
2880
767
10367
768
10368
40768
40769
Description Values
Operative modes
enabling
Operative mode
selection
5.3.11 Ser group - Serial link parameters
no. Param.
131 Add
132 bAud
133 trSP
Address
Hex Dec Ref. no.
301
2881
302
2882
303
2883
769
10369
770
10370
771
10371
40770
40771
40772
Description Values
Instrument address 0 (oFF) to 254 0 r/w
baud rate
Selection of the
value to be retransmitted (Master)
0 = ALL = All modes will be selectable by the next
parameter
1 = Au.oP = Auto and manual (OPLO) mode only will be
selectable by the next parameter
2 = Au.Sb = Auto and Stand-by modes only will be selectable
by the next parameter
0 = Auto = Auto mode
1 = oPLo = Manual mode
2 = St.bY = Stand by mode
0 = 1200 = 1200 baud
1 = 2400 = 2400 baud
2 = 9600 = 9600 baud
3 = 19.2 = 19200 baud
4 = 38.4 = 38400 baud
0 = nonE = Retransmission not used (the instrument is a slave)
1 = rSP =
2 = PErc = The instrument become a Master and it
The instrument becomes a Master and retransmits
the operative set point
retransmits the power output
Dec.
Dec.
r/w
r/w
Point
0 r/w
0 r/w
Point
0 r/w
0 r/w
5.3.12 COn group - Consumption parameters
no. Param.
134 Co.tY
135 UoLt
136 cur
137 h.Job
Address
Hex Dec Ref. no.
304
2884
305
2885
306
2886
307
2887
772
10372
773
10373
774
10374
775
10375
40773
40774
40775
40776
Description Values
0 = oFF = Not used
1 = Instantaneous power (kW)
2 = Power consumption (kW/h)
3 = Reserved
4 = Total worked days with threshold. It is the number of
5 = Total worked hours with threshold. It is the number of
6 = Total worked days with threshold: number of hours the
7 = Total worked hours with threshold: number of hours that
Measurement type
8 = Totalizer of control relay worked days: number of hours the
9 = Totalizer of control relay worked hours: number of hours
10 = Totalizer of control relay worked days with threshold: num-
11 = Totalizer of control relay worked hours with threshold:
Nominal Voltage of
the load
Nominal current of
the load
Threshold of the
working period
1 to 9999 (V) 0 r/w
1 to 999 (A) 0 r/w
0 (oFF) to 999 0 r/w
hours that the instrument is turned ON divided for 24
hours that the instrument is turned ON
instrument is turned ON divided by 24, the controller
is forced in standby when Co.ty value reaches the
threshold set in [137] h.Job.
the instrument is turned ON, the controller is forced in
stand-by when Co.ty value reaches the threshold set in
[137] h.Job.
control relay has been in ON condition, divided by 24.
the control relay has been in ON condition.
ber of hours the control relay has been in ON condition
divided by 24, the controller is forced in stand-by when
Co.ty value reaches the threshold set in [137] h.Job.
number of hours the control relay has been in ON
condition, the controller is forced in stand-by when Co.ty
value reaches the threshold set in [137] h.Job.
Dec.
Point
0 r/w
r/w
20 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
Page 21

Yokogawa Electric Corporation TC10 Communication Protocol
no. Param.
138 t.Job
Address
Hex Dec Ref. no.
308
2888
776
10376
40777
Description Values
Worked time (not
resettable)
0 to 9999 0 r
5.3.13 CAl group - User calibration parameters
no. Param.
139 A.L.P
140 A.L.o
141 A.H.P
142 A.H.o
Address
Hex Dec Ref. no.
309
2889
30A
288A
30B
288B
30C
288C
777
10377
778
10378
779
10379
780
10380
40778
40779
40780
40781
Description Values
Adjust Low Point -1999 to (A.H.P - 10)(E.U.) dP r/w
Adjust Low Offset -300 to +300 (E.U.) dP r/w
Adjust High Point From (A.L.P + 10) to 9999 (E.U.) dP r/w
Adjust High Offset -300 to +300 (E.U.)
Dec.
Dec.
r/w
r/w
Point
Point
dP r/w
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 21
Page 22

Yokogawa Electric Corporation TC10 Communication Protocol
22 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
Page 23

Yokogawa Electric Corporation TC10 Communication Protocol
Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL 23
Page 24

Yokogawa Electric Corporation TC10 Communication Protocol
All rights reserved. No parts of this publication may be reproduced, in any form, without Yokogawa Electric Corporation written permission.
Every care has been taken preparing this manual; the document has been carefully reviewed for technical accuracy. In the event that technical or typographical errors exist Yokogawa Electric Corporation
reserves the right to make changes without any notice.
In no event shall Yokogawa Electric Corporation be liable for any damages arising out of or related to
this document or the information contained in it.
If errors are suspected, please contact Yokogawa Electric Corporation at the above address.
Yokogawa Electric Corporation
9-32, Nakacho 2-chome, Musashino-shi, Tokyo 180-8750, Japan
www.yokogawa.com
24 Yokogawa Electric Corporation - TC10 - PROTOCOL MANUAL
 Loading...
Loading...