


-7-Series AC Servo Drive
-7S SERVOPACK with
400V-Input Power and
EtherCAT (CoE) Communications References
Product Manual
Model: SGD7S-DA0
Basic Information on
SERVOPACKs
Selecting a SERVOPACK
SERVOPACK Installation
Wiring and Connecting
SERVOPACKs
Basic Functions That Require
Setting before Operation
Application Functions
Trial Operation and
Actual Operation
Tuning
Monitoring
Fully-Closed Loop Control
Safety Functions
EtherCAT Communications
1
2
3
4
5
6
7
8
9
10
11
12
MANUAL NO. SIEP S800001 80G
CiA402 Drive Profile
Object Dictionary
Maintenance
Parameter and Object Lists
Appendices
13
14
15
16
17

Copyright © 2015 YASKAWA ELECTRIC CORPORATION
All rights reserved. No part of this publication may be reproduced, stored in a
retrieval system, or transmitted, in any form, or by any means, mechanical, electronic, photocopying, recording, or otherwise, without the prior written permission
of Yaskawa. No patent liability is assumed with respect to the use of the information contained herein. Moreover, because Yaskawa is constantly striving to
improve its high-quality products, the information contained in this manual is subject to change without notice. Every precaution has been taken in the preparation
of this manual. Nevertheless, Yaskawa assumes no responsibility for errors or
omissions. Neither is any liability assumed for damages resulting from the use of
the information contained in this publication.

About this Manual
This manual provides information required to select Σ-7S SERVOPACKs with EtherCAT Communications References for Σ-7-Series AC Servo Drives, and to design, perform trial operation of, tune,
operate, and maintain the Servo Drives.
Read and understand this manual to ensure correct usage of the Σ-7-Series AC Servo Drives.
Keep this manual in a safe place so that it can be referred to whenever necessary.
Outline of Manual
The contents of the chapters of this manual are described in the following table.
Refer to these chapters as required.
Chapter Chapter Title Contents
Basic Information on
1
SERVOPACKs
2 Selecting a SERVOPACK
3 SERVOPACK Installation
Wiring and Connecting
4
SERVOPACKs
Basic Functions That Require Set-
5
ting before Operation
6 Application Functions
Trial Operation and Actual
7
Operation
8Tuning
9 Monitoring
10 Fully-Closed Loop Control
11 Safety Functions
12 EtherCAT Communications Provides basic information on EtherCAT communications.
13 CiA402 Drive Profile Provides detailed information on the CiA402 drive profile.
14 Object Dictionary Provides an overview and details on the object dictionary.
15 Maintenance
16 Parameter and Object Lists Provides information on parameters and objects.
17 Appendices
Provides information required to select SERVOPACKs, such as SERVOPACK models and combinations with Servomotors.
Provides information required to select SERVOPACKs, such as specifications, block diagrams, dimensional drawings, and connection examples.
Provides information on installing SERVOPACKs in the required locations.
Provides information on wiring and connecting SERVOPACKs to power
supplies and peripheral devices.
Describes the basic functions that must be set before you start Servo
System operation. It also describes the setting methods.
Describes the application functions that you can set before you start
Servo System operation. It also describes the setting methods.
Provides information on the flow and procedures for trial operation and
convenient functions to use during trial operation.
Provides information on the flow of tuning, details on tuning functions,
and related operating procedures.
Provides information on monitoring SERVOPACK product information
and SERVOPACK status.
Provides detailed information on performing fully-closed loop control
with the SERVOPACK.
Provides detailed information on the safety functions of the SERVOPAC K.
Provides information on the meaning of, causes of, and corrections for
alarms and warnings.
Provides information on interpreting panel displays and tables of corresponding SERVOPACK and SigmaWin+ function names.
iii

Servo Drives
Σ-7-Series
Catalog
Servo Drives
Manuals
Catalogs
Servomotors
Σ-7-Series
Rotary
Servomotor
Product
Manual
Σ-7-Series
Linear
Servomotor
Product
Manual
Σ-7-Series
Operation
Interface
Operating
Manuals
Enclosed
Documents
Enclosed
Document
SERVOPACKs
Σ-7-Series
Σ-7S/Σ-7W
SERVOPACK
Product
Manual
(this manual)
Related Documents
The relationships between the documents that are related to the Servo Drives are shown in the following
figure. The numbers in the figure correspond to the numbers in the table on the following pages. Refer
to these documents as required.
iv

Classification Document Name Document No. Description
Enclosed Document
Σ-7-Series AC Servo Drive
Σ-7S SERVOPACK with
400 V-Input Power
Safety Precautions
TOMP C710828 02
Provides detailed information for
the safe usage of Σ-7-Series
SERVOPACKs.
Σ-7-Series AC Servo Drive
Σ-7S SERVOPACK with
400 V-Input Power and
EtherCAT (CoE) Communications
This manual
(SIEP S800001 80)
References
Product Manual
Σ-7-Series AC Servo Drive
Σ-7S SERVOPACK with
400-V Input Power and
SIEP S8000002 14
SIEP S800002 19
Provide detailed information on
selecting
and information on installing, connecting, setting, performing trial
operation for, tuning, monitoring, and
maintaining the Servo Drives.
Σ
-7-Series SERVOPACKs
Σ-7-Series
Σ-7S/Σ-7W
SERVOPACK
Product Manual
MECHATROLINK-III
Communications References
RJ-45 Connectors
Product Manual
Σ-7-Series AC Servo Drive
Σ-7W SERVOPACK with
400-V Input Power and
EtherCAT (CoE) Communications
References
Product Manual
Σ-7-Series AC Servo Drive
Σ-7W SERVOPACK with
400-V Input Power and
MECHATROLINK-III
SIEP S800002 20
Communications References
RJ-45 Connectors
Product Manual
Enclosed Documents
Σ-7-Series
Rotary Servomotor
Product Manual
Σ-7-Series
Linear Servomotor
Product Manual
AC Servo Drive
Rotary Servomotor
Safety Precautions
AC Servomotor
Linear Σ Series
Safety Precautions
Σ-7-Series AC Servo Drive
Rotary Servomotor with
400 V-Input Power
Product Manual
Σ-7-Series AC Servo Drive
Linear Servomotor with
400 V-Input Power
Product Manual
TOBP C230260 00
TOBP C230800 00
SIEP S800001 86
SIEP S800001 81
Provides detailed information for
the safe usage of Σ
-7-Series
Rotary
Servomotors and Direct Drive Servomotors.
Provides detailed information for
the safe usage of Σ
-7-Series
Linear
Servomotors.
Provide detailed information on
selecting, installing, and connecting
the Σ-7-Series Servomotors.
Continued on next page.
v

Continued from previous page.
Classification Document Name Document No. Description
Σ-7-Series
Operation Interface
Operating Manuals
Σ-7-Series AC Servo Drive
Digital Operator
Operating Manual
AC Servo Drive
Engineering Tool
SigmaWin+
Operation Manual
SIEP S800001 33
SIET S800001 34
Describes the operating procedures for a Digital Operator for a
Σ-7-Series Servo System.
Provides detailed operating procedures for the SigmaWin+ Engineering Tool for a Σ-7-Series Servo
System.
vi

Using This Manual
Technical Terms Used in This Manual
The following terms are used in this manual.
Term Meaning
Servomotor A Σ-7-Series Rotary Servomotor or Linear Servomotor
Rotary Servomotor
Linear Servomotor
SERVOPACK
Servo Drive
Servo System
servo ON
servo OFF
Servo ON command
(Enable Operation
command)
Servo OFF command
(Disable Operation
command)
base block (BB)
servo lock
Main Circuit Cable
SigmaWin+
A Σ-7-Series Rotary Servomotor (SGM7J, SGM7A, or SGM7G).
A Σ-7-Series Linear Servomotor (SGLF or SGLT).
A Σ-7-Series Σ-7S servo amplifier with EtherCAT Communications References.
The combination of a Servomotor and SERVOPACK.
A servo control system that includes the combination of a Servo Drive with a host controller
and peripheral devices.
Supplying power to the motor.
Not supplying power to the motor.
A command that is used to turn ON the servo (i.e., supply power to the motor) when bit 3 of
controlword (6040 hex) is changed to 1 (ON) while the control power supply and main circuit
power supply are ON.
Refer to the following section for details.
13.1 Device Control (page 13-3)
A command that is used to turn OFF the servo (i.e., power not supplied to the motor) when
bit 3 of controlword (6040 hex) is changed to 0 (OFF) while the control power supply and
main circuit power supply are ON.
Refer to the following section for details.
13.1 Device Control (page 13-3)
Shutting OFF the power supply to the motor by shutting OFF the base current to the power
transistor in the SERVOPACK.
A state in which the motor is stopped and is in a position loop with a position reference of 0.
One of the cables that connect to the main circuit terminals, including the Main Circuit Power
Supply Cable, Control Power Supply Cable, and Servomotor Main Circuit Cable.
The Engineering Tool for setting up and tuning Servo Drives or a computer in which the Engi-
neering Tool is installed.
Differences in Terms for Rotary Servomotors and Linear Servomotors
There are differences in the terms that are used for Rotary Servomotors and Linear Servomotors.
This manual primarily describes Rotary Servomotors. If you are using a Linear Servomotor, you
need to interpret the terms as given in the following table.
Rotary Servomotors Linear Servomotors
torque force
moment of inertia mass
rotation movement
forward rotation and reverse rotation forward movement and reverse movement
CW and CCW pulse trains forward and reverse pulse trains
rotary encoder linear encoder
absolute rotary encoder absolute linear encoder
incremental rotary encoder incremental linear encoder
unit: min
unit: N·m unit: N
-1
unit: mm/s
vii

This column explains the
selections for the function.
The notation “n.
” indicates a parameter for
selecting functions.
Each
indicates the setting for one digit.
The notation shown here means that the third digit
from the right is set to 2.
Position
Torque
The control methods for which the parameters apply are given.
Speed
: Speed control : Position control : Torque control
Pn100
(2100 hex)
Pn002
(2002 hex)
Parameter number
This is the
parameter
setting before
shipment.
This is when any
change made to
the parameter will
become effective.
This is the parameter
classication.
This is the minimum
unit (setting increment)
that you can set for
the parameter.
This is the
setting range
for the
parameter.
Object index
number used to
access the
parameter with
EtherCAT (CoE)
communications
Object index number
used to access the
parameter with
EtherCAT (CoE)
communications
Position
Speed
Parameter number
Speed Loop Gain
Setting Range
10 to 20,000 0.1 Hz 400 Immediately
Setting Unit Default Setting When Enabled
Classication
Tuning
Parameter Meaning When Enabled Classication
n.0
After startup Setup
n.1
n.2
(default setting)
Use the encoder according to encoder specications.
Use the encoder as an incremental encoder.
Use the encoder as a single-turn absolute encoder.
•
Parameters for Selecting Functions
Notation Examples for Pn002
Pn002 =
n.
X
Indicates the rst digit from
the right in Pn002.
Pn002 =
n.
1
Indicates that the rst digit from
the right in Pn002 is set to 1.
Pn002 =
n.
X
Indicates the second digit
from the right in Pn002.
Pn002 =
n.
1
Indicates that the second digit from
the right in Pn002 is set to 1.
Pn002 =
n.
X
Indicates the third digit from
the right in Pn002.
Pn002 =
n.
1
Indicates that the third digit from
the right in Pn002 is set to 1.
Pn002 =
n.X
Indicates the fourth digit from
the right in Pn002.
Pn002 =
n.1
Indicates that the fourth digit from
the right in Pn002 is set to 1.
n.0 0 0 0
Notation
Digit Notation Numeric Value Notation
Meaning Notation Meaning
Notation Used in this Manual
Notation for Reverse Signals
The names of reverse signals (i.e., ones that are valid when low) are written with a forward slash (/)
before the signal abbreviation.
Notation Example
BK
is written as /BK.
Notation for Parameters
The notation depends on whether the parameter requires a numeric setting (parameter for numeric
setting) or requires the selection of a function (parameter for selecting functions).
•
Parameters for Numeric Settings
viii
Notation Example
Engineering Tools Used in This Manual
This manual uses the interfaces of the SigmaWin+ for descriptions.

Trademarks
Important
Term
Example
Information
• EtherCAT is a registered trademark of Beckhoff Automation GmbH, Germany.
• QR code is a trademark of Denso Wave Inc.
• Other product names and company names are the trademarks or registered trademarks of the
respective company. “TM” and the
® mark do not appear with product or company names in this
manual.
Visual Aids
The following aids are used to indicate certain types of information for easier reference.
Indicates precautions or restrictions that must be observed.
Also indicates alarm displays and other precautions that will not result in machine damage.
Indicates definitions of difficult terms or terms that have not been previously explained in this
manual.
Indicates operating or setting examples.
Indicates supplemental information to deepen understanding or useful information.
ix

DANGER
WARNING
CAUTION
NOTICE
Safety Precautions
Safety Information
To prevent personal injury and equipment damage in advance, the following signal words are used
to indicate safety precautions in this document. The signal words are used to classify the hazards
and the degree of damage or injury that may occur if a product is used incorrectly. Information
marked as shown below is important for safety. Always read this information and heed the precautions that are provided.
Indicates precautions that, if not heeded, are likely to result in loss of life, serious injury, or fire.
Indicates precautions that, if not heeded, could result in loss of life, serious injury, or fire.
Indicates precautions that, if not heeded, could result in relatively serious or minor injury, or in
fire.
Indicates precautions that, if not heeded, could result in property damage.
x

Safety Precautions That Must Always Be Observed
DANGER
WARNING
CAUTION
General Precautions
Read and understand this manual to ensure the safe usage of the product.
Keep this manual in a safe, convenient place so that it can be referred to whenever necessary.
Make sure that it is delivered to the final user of the product.
Do not remove covers, cables, connectors, or optional devices while power is being supplied to
the SERVOPACK.
There is a risk of electric shock, operational failure of the product, or burning.
Use a power supply with specifications (number of phases, voltage, frequency, and AC/DC
type) that are appropriate for the product.
There is a risk of burning, electric shock, or fire.
Connect the ground terminals on the SERVOPACK and Servomotor to ground poles according
to local electrical codes. (Connect to 10 Ω or less for the SERVOPACK.)
There is a risk of electric shock or fire.
Do not attempt to disassemble, repair, or modify the product.
There is a risk of fire or failure.
The warranty is void for the product if you disassemble, repair, or modify it.
The SERVOPACK heat sinks, Regenerative Resistors, Servomotors, and other components can
be very hot while power is ON or soon after the power is turned OFF. Implement safety measures, such as installing covers, so that hands and parts such as cables do not come into contact with hot components.
There is a risk of burn injury.
For a 24-VDC power supply, use a power supply device with double insulation or reinforced
insulation.
There is a risk of electric shock.
Do not damage, pull on, apply excessive force to, place heavy objects on, or pinch cables.
There is a risk of failure, damage, or electric shock.
The person who designs the system that uses the hard wire base block safety function must
have a complete knowledge of the related safety standards and a complete understanding of
the instructions in this document.
There is a risk of injury, product damage, or machine damage.
Do not use the product in an environment that is subject to water, corrosive gases, or flamma-
ble gases, or near flammable materials.
There is a risk of electric shock or fire.
xi

NOTICE
CAUTION
NOTICE
CAUTION
Do not attempt to use a SERVOPACK or Servomotor that is damaged or that has missing parts.
Install external emergency stop circuits that shut OFF the power supply and stops operation
immediately when an error occurs.
In locations with poor power supply conditions, install the necessary protective devices (such as
AC Reactors) to ensure that the input power is supplied within the specified voltage range.
There is a risk of damage to the SERVOPACK.
Use a Noise Filter to minimize the effects of electromagnetic interference.
Electronic devices used near the SERVOPACK may be affected by electromagnetic interference.
Always use a Servomotor and SERVOPACK in one of the specified combinations.
Do not touch a SERVOPACK or Servomotor with wet hands.
There is a risk of product failure.
Storage Precautions
Do not place an excessive load on the product during storage. (Follow all instructions on the
packages.)
There is a risk of injury or damage.
Do not install or store the product in any of the following locations.
• Locations that are subject to direct sunlight
• Locations that are subject to ambient temperatures that exceed product specifications
• Locations that are subject to relative humidities that exceed product specifications
• Locations that are subject to condensation as the result of extreme changes in temperature
• Locations that are subject to corrosive or flammable gases
• Locations that are near flammable materials
• Locations that are subject to dust, salts, or iron powder
• Locations that are subject to water, oil, or chemicals
• Locations that are subject to vibration or shock that exceeds product specifications
• Locations that are subject to radiation
If you store or install the product in any of the above locations, the product may fail or be damaged.
Transportation Precautions
Transport the product in a way that is suitable to the mass of the product.
Do not use the eyebolts on a SERVOPACK or Servomotor to move the machine.
There is a risk of damage or injury.
When you handle a SERVOPACK or Servomotor, be careful of sharp parts, such as the corners.
There is a risk of injury.
Do not place an excessive load on the product during transportation. (Follow all instructions on
the packages.)
There is a risk of injury or damage.
xii

NOTICE
Do not hold onto the front cover or connectors when you move a SERVOPACK.
CAUTION
There is a risk of the SERVOPACK falling.
A SERVOPACK or Servomotor is a precision device. Do not drop it or subject it to strong shock.
There is a risk of failure or damage.
Do not subject connectors to shock.
There is a risk of faulty connections or damage.
If disinfectants or insecticides must be used to treat packing materials such as wooden frames,
plywood, or pallets, the packing materials must be treated before the product is packaged, and
methods other than fumigation must be used.
Example: Heat treatment, where materials are kiln-dried to a core temperature of 56°C for 30
minutes or more.
If the electronic products, which include stand-alone products and products installed in machines,
are packed with fumigated wooden materials, the electrical components may be greatly damaged
by the gases or fumes resulting from the fumigation process. In particular, disinfectants containing
halogen, which includes chlorine, fluorine, bromine, or iodine can contribute to the erosion of the
capacitors.
Do not overtighten the eyebolts on a SERVOPACK or Servomotor.
If you use a tool to overtighten the eyebolts, the tapped holes may be damaged.
Installation Precautions
Install the Servomotor or SERVOPACK in a way that will support the mass given in technical
documents.
Install SERVOPACKs, Servomotors, and Regenerative Resistors on nonflammable materials.
Installation directly onto or near flammable materials may result in fire.
Provide the specified clearances between the SERVOPACK and the control panel as well as
with other devices.
There is a risk of fire or failure.
Install the SERVOPACK in the specified orientation.
There is a risk of fire or failure.
Do not step on or place a heavy object on the product.
There is a risk of failure, damage, or injury.
Do not allow any foreign matter to enter the SERVOPACK or Servomotor.
There is a risk of failure or fire.
xiii

NOTICE
DANGER
WARNING
Do not install or store the product in any of the following locations.
• Locations that are subject to direct sunlight
• Locations that are subject to ambient temperatures that exceed product specifications
• Locations that are subject to relative humidities that exceed product specifications
• Locations that are subject to condensation as the result of extreme changes in temperature
• Locations that are subject to corrosive or flammable gases
• Locations that are near flammable materials
• Locations that are subject to dust, salts, or iron powder
• Locations that are subject to water, oil, or chemicals
• Locations that are subject to vibration or shock that exceeds product specifications
• Locations that are subject to radiation
If you store or install the product in any of the above locations, the product may fail or be damaged.
Use the product in an environment that is appropriate for the product specifications.
If you use the product in an environment that exceeds product specifications, the product may fail
or be damaged.
A SERVOPACK or Servomotor is a precision device. Do not drop it or subject it to strong shock.
There is a risk of failure or damage.
Always install a SERVOPACK in a control panel.
Do not allow any foreign matter to enter a SERVOPACK or a Servomotor with a Cooling Fan and
do not cover the outlet from the Servomotor’s cooling fan.
There is a risk of failure.
Wiring Precautions
Do not change any wiring while power is being supplied.
There is a risk of electric shock or injury.
Wiring and inspections must be performed only by qualified engineers.
There is a risk of electric shock or product failure.
Check all wiring and power supplies carefully.
Incorrect wiring or incorrect voltage application to the output circuits may cause short-circuit failures. If a short-circuit failure occurs as a result of any of these causes, the holding brake will not
work. This could damage the machine or cause an accident that may result in death or injury.
Connect the AC and DC power supplies to the specified SERVOPACK terminals.
• Connect an AC power supply to the L1, L2, and L3 terminals on the SERVOPACK.
• Connect a DC power supply to the B1 and 2 terminals and the 24 V and 0 V terminals on the SER-
VOPACK.
There is a risk of failure or fire.
xiv

CAUTION
Wait for six minutes after turning OFF the power supply and then make sure that the CHARGE
NOTICE
indicator is not lit before starting wiring or inspection work. Do not touch the power supply terminals while the CHARGE lamp is lit after turning OFF the power supply because high voltage
may still remain in the SERVOPACK.
There is a risk of electric shock.
Observe the precautions and instructions for wiring and trial operation precisely as described in
this document.
Failures caused by incorrect wiring or incorrect voltage application in the brake circuit may cause
the SERVOPACK to fail, damage the equipment, or cause an accident resulting in death or injury.
Check the wiring to be sure it has been performed correctly.
Connectors and pin layouts are sometimes different for different models. Always confirm the pin
layouts in technical documents for your model before operation.
There is a risk of failure or malfunction.
Connect wires to power supply terminals and motor connection terminals securely with the
specified methods and tightening torque.
Insufficient tightening may cause wires and terminal blocks to generate heat due to faulty contact,
possibly resulting in fire.
Use shielded twisted-pair cables or screened unshielded multi-twisted-pair cables for I/O Sig-
nal Cables and Encoder Cables.
Observe the following precautions when wiring the SERVOPACK’s main circuit terminals.
• Turn ON the power supply to the SERVOPACK only after all wiring, including the main circuit terminals, has been completed.
• If a connector is used for the main circuit terminals, remove the main circuit connector from the SERVOPACK before you wire it.
• Insert only one wire per insertion hole in the main circuit terminals.
• When you insert a wire, make sure that the conductor wire (e.g., whiskers) does not come into con-
tact with adjacent wires.
Install molded-case circuit breakers and other safety measures to provide protection against
short circuits in external wiring.
There is a risk of fire or failure.
Whenever possible, use the Cables specified by Yaskawa.
If you use any other cables, confirm the rated current and application environment of your model
and use the wiring materials specified by Yaskawa or equivalent materials.
Securely tighten cable connector screws and lock mechanisms.
Insufficient tightening may result in cable connectors falling off during operation.
Do not bundle power lines (e.g., the Main Circuit Cable) and low-current lines (e.g., the I/O Sig-
nal Cables or Encoder Cables) together or run them through the same duct. If you do not place
power lines and low-current lines in separate ducts, separate them by at least 30 cm.
If the cables are too close to each other, malfunctions may occur due to noise affecting the low-current lines.
Install a battery at either the host controller or on the Encoder Cable.
If you install batteries both at the host controller and on the Encoder Cable at the same time, you
will create a loop circuit between the batteries, resulting in a risk of damage or burning.
When connecting a battery, connect the polarity correctly.
There is a risk of battery rupture or encoder failure.
If you use an External Regenerative Resistor or External Dynamic Brake Resistor, use cable ties,
clamps, or other means to secure the resistor so that the connectors or terminal blocks inside
the SERVOPACK will not be affected even if the resistor is subjected to vibration or shock.
There is a risk of SERVOPACK damage.
xv

WARNING
CAUTION
Operation Precautions
Before starting operation with a machine connected, change the settings of the switches and
parameters to match the machine.
Unexpected machine operation, failure, or personal injury may occur if operation is started before
appropriate settings are made.
Do not radically change the settings of the parameters.
There is a risk of unstable operation, machine damage, or injury.
Install limit switches or stoppers at the ends of the moving parts of the machine to prevent
unexpected accidents.
There is a risk of machine damage or injury.
For trial operation, securely mount the Servomotor and disconnect it from the machine.
There is a risk of injury.
Forcing the motor to stop for overtravel is disabled when the Jog (Fn002), Origin Search
(Fn003), or Easy FFT (Fn206) utility function is executed. Take necessary precautions.
There is a risk of machine damage or injury.
When an alarm occurs, the motor will coast to a stop or stop with the dynamic brake according
to a setting in the SERVOPACK. The coasting distance will change with the moment of inertia of
the load. Check the coasting distance during trial operation and implement suitable safety measures on the machine.
Do not enter the machine’s range of motion during operation.
There is a risk of injury.
Do not touch the moving parts of the Servomotor or machine during operation.
There is a risk of injury.
Design the system to ensure safety even when problems, such as broken signal lines, occur.
For example, the P-OT and N-OT signals are set in the default settings to operate on the safe
side if a signal line breaks. Do not change the polarity of this type of signal.
When overtravel occurs, the power supply to the motor is turned OFF and the brake is released.
If you use the Servomotor to drive a vertical load, set the Servomotor to enter a zero-clamped
state after the Servomotor stops. Also, install safety devices (such as an external brake or
counterweight) to prevent the moving parts of the machine from falling.
Always turn OFF the servo before you turn OFF the power supply. If you turn OFF the main cir-
cuit power supply or control power supply during operation before you turn OFF the servo, the
Servomotor will stop as follows:
• If you turn OFF the main circuit power supply during operation without turning OFF the servo, the
Servomotor will stop abruptly with the dynamic brake or it will coast to a stop.
• If you turn OFF the control power supply during operation without turning OFF the servo, the Servomotor will stop abruptly with the dynamic brake or it will coast to a stop. For details, refer to the manual for the SERVOPACK.
• If you use an External Dynamic Brake Resistor, the Servomotor stopping method will be different
from when the built-in dynamic brake resistor is used. For details, refer to the product manual for
your SERVOPACK.
Do not use the dynamic brake for any application other than an emergency stop.
There is a risk of failure due to rapid deterioration of elements in the SERVOPACK and the risk of
unexpected operation, machine damage, burning, or injury.
xvi

NOTICE
When you adjust the gain during system commissioning, use a measuring instrument to monitor
DANGER
WARNING
CAUTION
NOTICE
the torque waveform and speed waveform and confirm that there is no vibration.
If a high gain causes vibration, the Servomotor will be damaged quickly.
Do not frequently turn the power supply ON and OFF. After you have started actual operation,
allow at least one hour between turning the power supply ON and OFF (as a guideline).
Do not use the product in applications that require the power supply to be turned ON and OFF
frequently.
The elements in the SERVOPACK will deteriorate quickly.
An alarm or warning may occur if communications are performed with the host controller while
the SigmaWin+ or Digital Operator is operating.
If an alarm or warning occurs, it may interrupt the current process and stop the system.
After you complete trial operation of the machine and facilities, use the SigmaWin+ to back up
the settings of the SERVOPACK parameters. You can use them to reset the parameters after
SERVOPACK replacement.
If you do not copy backed up parameter settings, normal operation may not be possible after a
faulty SERVOPACK is replaced, possibly resulting in machine or equipment damage.
Maintenance and Inspection Precautions
Do not change any wiring while power is being supplied.
There is a risk of electric shock or injury.
Wiring and inspections must be performed only by qualified engineers.
There is a risk of electric shock or product failure.
Wait for six minutes after turning OFF the power supply and then make sure that the CHARGE
indicator is not lit before starting wiring or inspection work. Do not touch the power supply terminals while the CHARGE lamp is lit after turning OFF the power supply because high voltage
may still remain in the SERVOPACK.
There is a risk of electric shock.
Before you replace a SERVOPACK, back up the settings of the SERVOPACK parameters. Copy
the backed up parameter settings to the new SERVOPACK and confirm that they were copied
correctly.
If you do not copy backed up parameter settings or if the copy operation is not completed normally,
normal operation may not be possible, possibly resulting in machine or equipment damage.
Discharge all static electricity from your body before you operate any of the buttons or switches
inside the front cover of the SERVOPACK.
There is a risk of equipment damage.
xvii

DANGER
WARNING
CAUTION
Troubleshooting Precautions
If the safety device (molded-case circuit breaker or fuse) installed in the power supply line oper-
ates, remove the cause before you supply power to the SERVOPACK again. If necessary, repair
or replace the SERVOPACK, check the wiring, and remove the factor that caused the safety
device to operate.
There is a risk of fire, electric shock, or injury.
The product may suddenly start to operate when the power supply is recovered after a momen-
tary power interruption. Design the machine to ensure human safety when operation restarts.
There is a risk of injury.
When an alarm occurs, remove the cause of the alarm and ensure safety. Then reset the alarm
or turn the power supply OFF and ON again to restart operation.
There is a risk of injury or machine damage.
If the Servo ON signal is input to the SERVOPACK and an alarm is reset, the Servomotor may
suddenly restart operation. Confirm that the servo is OFF and ensure safety before you reset an
alarm.
There is a risk of injury or machine damage.
Always insert a Magnetic Contactor in the line between the main circuit power supply and the
main circuit power supply terminals on the SERVOPACK so that the power supply can be shut
OFF at the main circuit power supply.
If a Magnetic Contactor is not connected when the SERVOPACK fails, a large current may flow,
possibly resulting in fire.
If an alarm occurs, shut OFF the main circuit power supply.
There is a risk of fire due to a Regenerative Resistor overheating as the result of regenerative transistor failure.
Install a ground fault detector against overloads and short-circuiting or install a molded-case
circuit breaker combined with a ground fault detector.
There is a risk of SERVOPACK failure or fire if a ground fault occurs.
The holding brake on a Servomotor will not ensure safety if there is the possibility that an exter-
nal force (including gravity) may move the current position and create a hazardous situation
when power is interrupted or an error occurs. If an external force may cause movement, install
an external braking mechanism that ensures safety.
xviii
Disposal Precautions
When disposing of the product, treat it as ordinary industrial waste. However, local ordinances
and national laws must be observed. Implement all labeling and warnings as a final product as
required.

General Precautions
Figures provided in this document are typical examples or conceptual representations. There
may be differences between them and actual wiring, circuits, and products.
The products shown in illustrations in this document are sometimes shown without covers or
protective guards. Always replace all covers and protective guards before you use the product.
If you need a new copy of this document because it has been lost or damaged, contact your
nearest Yaskawa representative or one of the offices listed on the back of this document.
This document is subject to change without notice for product improvements, specifications
changes, and improvements to the manual itself.
We will update the document number of the document and issue revisions when changes are
made.
Any and all quality guarantees provided by Yaskawa are null and void if the customer modifies
the product in any way. Yaskawa disavows any responsibility for damages or losses that are
caused by modified products.
xix

Warranty
Details of Warranty
Warranty Period
The warranty period for a product that was purchased (hereinafter called the “delivered product”) is
one year from the time of delivery to the location specified by the customer or 18 months from the
time of shipment from the Yaskawa factory, whichever is sooner.
Warranty Scope
Yaskawa shall replace or repair a defective product free of charge if a defect attributable to
Yaskawa occurs during the above warranty period.
This warranty does not cover defects caused by the delivered product reaching the end of its service life and replacement of parts that require replacement or that have a limited service life.
This warranty does not cover failures that result from any of the following causes.
• Improper handling, abuse, or use in unsuitable conditions or in environments not described in
product catalogs or manuals, or in any separately agreed-upon specifications
• Causes not attributable to the delivered product itself
• Modifications or repairs not performed by Yaskawa
• Use of the delivered product in a manner in which it was not originally intended
• Causes that were not foreseeable with the scientific and technological understanding at the time
of shipment from Yaskawa
• Events for which Yaskawa is not responsible, such as natural or human-made disasters
Limitations of Liability
• Yaskawa shall in no event be responsible for any damage or loss of opportunity to the customer
that arises due to failure of the delivered product.
• Yaskawa shall not be responsible for any programs (including parameter settings) or the results of
program execution of the programs provided by the user or by a third party for use with programmable Yaskawa products.
• The information described in product catalogs or manuals is provided for the purpose of the customer purchasing the appropriate product for the intended application. The use thereof does not
guarantee that there are no infringements of intellectual property rights or other proprietary rights
of Yaskawa or third parties, nor does it construe a license.
• Yaskawa shall not be responsible for any damage arising from infringements of intellectual property rights or other proprietary rights of third parties as a result of using the information described
in catalogs or manuals.
xx

Suitability for Use
• It is the customer’s responsibility to confirm conformity with any standards, codes, or regulations
that apply if the Yaskawa product is used in combination with any other products.
• The customer must confirm that the Yaskawa product is suitable for the systems, machines, and
equipment used by the customer.
• Consult with Yaskawa to determine whether use in the following applications is acceptable. If use
in the application is acceptable, use the product with extra allowance in ratings and specifications, and provide safety measures to minimize hazards in the event of failure.
•Outdoor use, use involving potential chemical contamination or electrical interference, or use
in conditions or environments not described in product catalogs or manuals
•Nuclear energy control systems, combustion systems, railroad systems, aviation systems,
vehicle systems, medical equipment, amusement machines, and installations subject to separate industry or government regulations
•Systems, machines, and equipment that may present a risk to life or property
•Systems that require a high degree of reliability, such as systems that supply gas, water, or
electricity, or systems that operate continuously 24 hours a day
•Other systems that require a similar high degree of safety
• Never use the product for an application involving serious risk to life or property without first
ensuring that the system is designed to secure the required level of safety with risk warnings and
redundancy, and that the Yaskawa product is properly rated and installed.
• The circuit examples and other application examples described in product catalogs and manuals
are for reference. Check the functionality and safety of the actual devices and equipment to be
used before using the product.
• Read and understand all use prohibitions and precautions, and operate the Yaskawa product
correctly to prevent accidental harm to third parties.
Specifications Change
The names, specifications, appearance, and accessories of products in product catalogs and
manuals may be changed at any time based on improvements and other reasons. The next editions of the revised catalogs or manuals will be published with updated code numbers. Consult
with your Yaskawa representative to confirm the actual specifications before purchasing a product.
xxi

Compliance with UL Standards, EU Directives, and Other Safety Standards
Certification marks for the standards for which the product has been certified by certification bodies
are shown on nameplate. Products that do not have the marks are not certified for the standards.
North American Safety Standards (UL)
Product Model UL Standards (UL File No.)
SERVOPACKs
Rotary
Servomotors
Linear
Servomotors
*1. There are usage restrictions. Contact your Yaskawa representative for details.
*2. Certification is pending.
• SGD7S
• SGD7W
• SGM7A
• SGM7J
• SGM7G
• SGLFW
• SGLFW2
• SGLTW
*1
*2
*1
UL 61800-5-1 (E147823),
CSA C22.2 No.274
UL 1004-1
UL 1004-6
(E165827)
UL 1004
(E165827)
European Directives
Product Model European Directive Harmonized Standards
Machinery Directive
2006/42/EC
SERVOPACKs
Rotary
Servomotors
Linear
Servomotors
Note: We declared the CE Marking based on the harmonized standards in the above table.
• SGD7S
• SGD7W
• SGM7J
• SGM7A
• SGM7G
• SGLF
• SGLFW2
• SGLT
EMC Directive
2004/108/EC
Low Voltage Directive
2006/95/EC
EMC Directive
2004/108/EC
Low Voltage Directive
2006/95/EC
EMC Directive
2004/108/EC
Low Voltage Directive
2006/95/EC
EN ISO13849-1: 2015
EN 55011 group 1, class A
EN 61000-6-2
EN 61000-6-4
EN 61800-3
EN 50178
EN 61800-5-1
EN 55011 group 1, class A
EN 61000-6-2
EN 61000-6-4
EN 61800-3
EN 60034-1
EN 60034-5
EN 55011 group 1, class A
EN 61000-6-2
EN 61000-6-4
EN 60034-1
xxii

Safety Standards
Product Model Safety Standards Standards
EN ISO13849-1: 2015
IEC 60204-1
IEC 61508 series
IEC 62061
IEC 61800-5-2
SERVOPACKs
• SGD7S
• SGD7W
Safety of Machinery
Functional Safety
EMC IEC 61326-3-1
Safety Parameters
Item Standards Performance Level
Safety Integrity Level
Probability of Dangerous Failure per Hour
Performance Level EN ISO 13849-1 PLe (category 3)
Mean Time to Dangerous Failure of Each Channel EN ISO 13849-1 MTTFd: High
Average Diagnostic Coverage EN ISO 13849-1 DCavg: Medium
Stop Category IEC 60204-1 Stop category 0
Safety Function IEC 61800-5-2 STO
Mission Time IEC 61508 10 years
Hardware Fault Tolerance IEC 61508 HFT = 1
Subsystem IEC 61508 B
IEC 61508 SIL3
IEC 62061 SILCL3
IEC 61508
IEC 62061
PFH = 4.60 × 10
(4.60% of SIL3)
-9
[1/h]
xxiii

1
Contents
About this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Outline of Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Related Documents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
Using This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Safety Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .x
Warranty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xx
Compliance with UL Standards, EU Directives, and Other Safety Standards. . . xxii
Basic Information on SERVOPACKs
1.1
1.2
1.3
1.4
1.5
1.6
1.7
The Σ-7 Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Introduction to EtherCAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1.2.1 Introduction to CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-3
1.2.2 CANopen over EtherCAT OSI Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-3
1.2.3 Sending and Receiving Data in EtherCAT (CoE) Communications . . . . . . . .1-4
1.2.4 CoE Terminology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-4
1.2.5 Data Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-5
1.2.6 Data Ranges. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-5
Interpreting the Nameplate . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
Part Names. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
Model Designations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-9
1.5.1 Interpreting SERVOPACK Model Numbers . . . . . . . . . . . . . . . . . . . . . . . . . .1-9
1.5.2 Interpreting Servomotor Model Numbers . . . . . . . . . . . . . . . . . . . . . . . . . .1-10
Combinations of SERVOPACKs and Servomotors . . . . . . . . . . 1-11
1.6.1 Combinations of Rotary Servomotors and SERVOPACKs . . . . . . . . . . . . . .1-11
1.6.2 Combinations of Linear Servomotors and SERVOPACKs . . . . . . . . . . . . . .1-12
Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-13
xxiv
2
Selecting a SERVOPACK
2.1
2.2
2.3
2.4
Ratings and Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.1.1 Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-2
2.1.2 SERVOPACK Overload Protection Characteristics . . . . . . . . . . . . . . . . . . . .2-3
2.1.3 Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-4
Block Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
2.2.1 SERVOPACKs without Built-in Servomotor Brake Control . . . . . . . . . . . . . .2-8
2.2.2 SERVOPACKs with Built-in Servomotor Brake Control . . . . . . . . . . . . . . . .2-11
External Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
2.3.1 Front Cover Dimensions and Connector Specifications . . . . . . . . . . . . . . .2-14
2.3.2 SERVOPACK External Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-16
Examples of Standard Connections between SERVOPACKs and Peripheral Devices . . 2-18

3
SERVOPACK Installation
4
3.1
3.2
3.3
3.4
3.5
3.6
Installation Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Mounting Types and Orientation . . . . . . . . . . . . . . . . . . . . . . . . 3-3
Mounting Hole Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
Mounting Interval . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-5
3.4.1 Installing One SERVOPACK in a Control Panel . . . . . . . . . . . . . . . . . . . . . . 3-5
3.4.2 Installing More Than One SERVOPACK in a Control Panel . . . . . . . . . . . . . 3-5
Monitoring the Installation Environment . . . . . . . . . . . . . . . . . . 3-6
EMC Installation Conditions. . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-7
Wiring and Connecting SERVOPACKs
4.1
Wiring and Connecting SERVOPACKs . . . . . . . . . . . . . . . . . . . . 4-3
4.1.1 General Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
4.1.2 Countermeasures against Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
4.1.3 Grounding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
4.2
4.3
4.4
4.5
4.6
Basic Wiring Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
Wiring the Power Supply to the SERVOPACK . . . . . . . . . . . . . 4-11
4.3.1 Terminal Symbols and Terminal Names . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11
4.3.2 Connector Wiring Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-13
4.3.3 Power ON Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-14
4.3.4 Power Supply Wiring Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-15
4.3.5 Wiring Regenerative Resistors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-18
4.3.6 Wiring DC Reactors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-18
Wiring Servomotors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-19
4.4.1 Terminal Symbols and Terminal Names . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-19
4.4.2 Pin Arrangement of Encoder Connector (CN2) . . . . . . . . . . . . . . . . . . . . . 4-19
4.4.3 Wiring the SERVOPACK to the Encoder . . . . . . . . . . . . . . . . . . . . . . . . . . 4-20
4.4.4 Wiring the SERVOPACK to the Holding Brake . . . . . . . . . . . . . . . . . . . . . . 4-25
Connecting I/O Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-28
4.5.1 I/O Signal Connector (CN1) Names and Functions . . . . . . . . . . . . . . . . . . 4-28
4.5.2 I/O Signal Connector (CN1) Pin Arrangement . . . . . . . . . . . . . . . . . . . . . . 4-30
4.5.3 I/O Signal Wiring Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-31
4.5.4 I/O Circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-33
Connecting Safety Function Signals . . . . . . . . . . . . . . . . . . . . 4-35
4.6.1 Pin Arrangement of Safety Function Signals (CN8) . . . . . . . . . . . . . . . . . . 4-35
4.6.2 I/O Circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-35
4.7
Connecting Dynamic Brake Resistors . . . . . . . . . . . . . . . . . . . 4-37
4.7.1 Terminal Symbols and Terminal Names . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-37
4.7.2 Connecting a Dynamic Brake Resistor . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-37
xxv

5
4.8
4.9
Connecting EtherCAT Communications Cables. . . . . . . . . . . . 4-39
4.8.1 EtherCAT Connectors (RJ45) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-39
4.8.2 Ethernet Communications Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-40
Connecting the Other Connectors . . . . . . . . . . . . . . . . . . . . . . 4-41
4.9.1 Serial Communications Connector (CN3) . . . . . . . . . . . . . . . . . . . . . . . . . .4-41
4.9.2 Computer Connector (CN7) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-41
4.9.3 Analog Monitor Connector (CN5) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-41
Basic Functions That Require Setting before Operation
5.1
5.2
5.3
Manipulating SERVOPACK Parameters (Pn) . . . . . . . . . . . 5-3
5.1.1 Classifications of SERVOPACK Parameters . . . . . . . . . . . . . . . . . . . . . . . . .5-3
5.1.2 Notation for SERVOPACK Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-4
5.1.3 Setting Methods for SERVOPACK Parameters. . . . . . . . . . . . . . . . . . . . . . .5-5
5.1.4 Write Prohibition Setting for SERVOPACK Parameters . . . . . . . . . . . . . . . . .5-7
5.1.5 Initializing SERVOPACK Parameter Settings . . . . . . . . . . . . . . . . . . . . . . . .5-10
Power Supply Type Settings for the Main Circuit . . . . . . . . . . 5-12
Automatic Detection of Connected Motor . . . . . . . . . . . . . . . . 5-13
5.4
5.5
5.6
5.7
5.8
5.9
5.10
Motor Direction Setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-14
Setting the Linear Encoder Pitch . . . . . . . . . . . . . . . . . . . . . . . 5-15
Writing Linear Servomotor Parameters . . . . . . . . . . . . . . . . . . 5-16
Selecting the Phase Sequence for a Linear Servomotor . . . . . 5-20
Polarity Sensor Setting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-22
Polarity Detection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-23
5.9.1 Restrictions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-23
5.9.2 Using the Servo ON Command (Enable Operation Command)
to Perform Polarity Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-24
5.9.3 Using a Tool Function to Perform Polarity Detection. . . . . . . . . . . . . . . . . .5-25
Overtravel and Related Settings . . . . . . . . . . . . . . . . . . . . . . . 5-26
5.10.1 Overtravel Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-26
5.10.2 Setting to Enable/Disable Overtravel . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-27
5.10.3 Motor Stopping Method for Overtravel . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-27
5.10.4 Overtravel Warnings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-29
5.10.5 Overtravel Release Method Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-30
5.10.6 Overtravel Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-31
5.10.7 Overtravel Operation by Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-31
xxvi
5.11
Holding Brake. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-32
5.11.1 Brake Operating Sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-32
5.11.2 /BK (Brake) Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-33
5.11.3 Output Timing of /BK (Brake) Signal When the Servomotor Is Stopped . . .5-34
5.11.4 Output Timing of /BK (Brake) Signal When the Servomotor Is Operating . .5-35
5.11.5 Built-in Brake Relay Usage Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-36

5.12
5.13
5.14
5.15
5.16
5.17
Motor Stopping Methods for Servo OFF and Alarms. . . . . . . . 5-37
5.12.1 Stopping Method for Servo OFF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-38
5.12.2 Servomotor Stopping Method for Alarms . . . . . . . . . . . . . . . . . . . . . . . . . 5-38
Motor Overload Detection Level . . . . . . . . . . . . . . . . . . . . . . . 5-40
5.13.1 Detection Timing for Overload Warnings (A.910) . . . . . . . . . . . . . . . . . . . . 5-40
5.13.2 Detection Timing for Overload Alarms (A.720) . . . . . . . . . . . . . . . . . . . . . . 5-41
Setting Unit Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-42
5.14.1 Setting the Position Reference Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-42
5.14.2 Setting the Speed Reference Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-47
5.14.3 Setting the Acceleration Reference Unit . . . . . . . . . . . . . . . . . . . . . . . . . . 5-48
5.14.4 Setting the Torque Reference Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-48
Resetting the Absolute Encoder . . . . . . . . . . . . . . . . . . . . . . . 5-49
5.15.1 Precautions on Resetting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-49
5.15.2 Applicable Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-49
5.15.3 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-50
Setting the Origin of the Absolute Encoder . . . . . . . . . . . . . . . 5-52
5.16.1 Absolute Encoder Origin Offset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-52
5.16.2 Setting the Origin of the Absolute Linear Encoder . . . . . . . . . . . . . . . . . . . 5-52
Setting the Regenerative Resistor Capacity . . . . . . . . . . . . . . 5-55
6
5.18
Setting the Energy Consumption and Resistance of the Dynamic Brake Resistor . . 5-56
Application Functions
6.1
6.2
6.3
6.4
I/O Signal Allocations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-4
6.1.1 Input Signal Allocations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-4
6.1.2 Output Signal Allocations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-5
6.1.3 ALM (Servo Alarm) Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-7
6.1.4 /WARN (Warning) Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-7
6.1.5 /TGON (Rotation Detection) Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-8
6.1.6 /S-RDY (Servo Ready) Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-8
6.1.7 /V-CMP (Speed Coincidence Detection) Signal . . . . . . . . . . . . . . . . . . . . . . 6-9
6.1.8 /COIN (Positioning Completion) Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-10
6.1.9 /NEAR (Near) Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-11
6.1.10 Speed Limit during Torque Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-12
Operation for Momentary Power Interruptions . . . . . . . . . . . . 6-14
SEMI F47 Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-15
Setting the Motor Maximum Speed . . . . . . . . . . . . . . . . . . . . . 6-17
6.5
6.6
Encoder Divided Pulse Output . . . . . . . . . . . . . . . . . . . . . . . . . 6-18
6.5.1 Encoder Divided Pulse Output Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-18
6.5.2 Setting for the Encoder Divided Pulse Output . . . . . . . . . . . . . . . . . . . . . . 6-23
Software Limits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-25
xxvii

6.7
6.8
6.9
6.10
Selecting Torque Limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26
6.7.1 Internal Torque Limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-26
6.7.2 External Torque Limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-27
6.7.3 /CLT (Torque Limit Detection) Signal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-30
Absolute Encoders . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-31
6.8.1 Connecting an Absolute Encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-31
6.8.2 Structure of the Position Data of the Absolute Encoder . . . . . . . . . . . . . . .6-32
6.8.3 Output Ports for the Position Data from the Absolute Encoder. . . . . . . . . .6-32
6.8.4 Reading the Position Data from the Absolute Encoder . . . . . . . . . . . . . . . .6-33
6.8.5 Transmission Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-34
6.8.6 Calculating the Current Position in Machine Coordinates . . . . . . . . . . . . . . 6-35
6.8.7 Multiturn Limit Setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-36
6.8.8 Multiturn Limit Disagreement Alarm (A.CC0). . . . . . . . . . . . . . . . . . . . . . . .6-37
Absolute Linear Encoders . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-40
6.9.1 Connecting an Absolute Linear Encoder. . . . . . . . . . . . . . . . . . . . . . . . . . .6-40
6.9.2 Structure of the Position Data of the Absolute Linear Encoder . . . . . . . . . .6-40
6.9.3 Output Ports for the Position Data from the Absolute Linear Encoder . . . .6-41
6.9.4 Reading the Position Data from the Absolute Linear Encoder. . . . . . . . . . .6-42
6.9.5 Transmission Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-42
6.9.6 Calculating the Current Position in Machine Coordinates . . . . . . . . . . . . . . 6-43
Software Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-44
6.10.1 Preparations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-44
6.10.2 Applicable Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-44
6.10.3 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-45
6.11
6.12
6.13
6.14
Initializing the Vibration Detection Level . . . . . . . . . . . . . . . . . 6-46
6.11.1 Preparations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-46
6.11.2 Applicable Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-46
6.11.3 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-47
6.11.4 Related Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-49
Adjusting the Motor Current Detection Signal Offset . . . . . . . 6-50
6.12.1 Automatic Adjustment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-50
6.12.2 Manual Adjustment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-53
Forcing the Motor to Stop . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-55
6.13.1 FSTP (Forced Stop Input) Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-55
6.13.2 Stopping Method Selection for Forced Stops . . . . . . . . . . . . . . . . . . . . . . .6-55
6.13.3 Resetting Method for Forced Stops . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-57
ZONE Outputs (FT64 Specification) . . . . . . . . . . . . . . . . . . . . . 6-58
6.14.1 ZONE Table and ZONE Signals. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-58
6.14.2 ZONE Table Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-59
6.14.3 ZONE Signals 1 to 4 Outputs (/ZONE0 to /ZONE3). . . . . . . . . . . . . . . . . . .6-60
6.14.4 nZONE Signal Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-61
6.14.5 ZONE Output Application Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-62
xxviii

7
Trial Operation and Actual Operation
7.1
7.2
7.3
7.4
7.5
7.6
Flow of Trial Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-2
7.1.1 Flow of Trial Operation for Rotary Servomotors . . . . . . . . . . . . . . . . . . . . . . 7-2
7.1.2 Flow of Trial Operation for Linear Servomotors . . . . . . . . . . . . . . . . . . . . . . 7-4
Inspections and Confirmations before Trial Operation . . . . . . . 7-6
Trial Operation for the Servomotor without a Load . . . . . . . . . . 7-7
7.3.1 Preparations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-7
7.3.2 Applicable Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-7
7.3.3 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-8
Trial Operation with EtherCAT (CoE) Communications . . . . . . 7-10
Trial Operation with the Servomotor Connected to the Machine . . 7-11
7.5.1 Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-11
7.5.2 Preparations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-11
7.5.3 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-12
Convenient Function to Use during Trial Operation. . . . . . . . . 7-13
7.6.1 Program Jogging. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-13
7.6.2 Origin Search. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-19
7.6.3 Test without a Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-21
8
Tuning
8.1
8.2
8.3
8.4
Overview and Flow of Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-4
8.1.1 Tuning Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-5
8.1.2 Diagnostic Tool . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-6
Monitoring Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-7
Precautions to Ensure Safe Tuning . . . . . . . . . . . . . . . . . . . . . . 8-8
8.3.1 Overtravel Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-8
8.3.2 Torque Limit Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-8
8.3.3 Setting the Position Deviation Overflow Alarm Level . . . . . . . . . . . . . . . . . . 8-8
8.3.4 Vibration Detection Level Setting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-10
8.3.5 Setting the Position Deviation Overflow Alarm Level at Servo ON . . . . . . . 8-10
Tuning-less Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-12
8.4.1 Application Restrictions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-12
8.4.2 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-13
8.4.3 Troubleshooting Alarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-14
8.4.4 Parameters Disabled by Tuning-less Function . . . . . . . . . . . . . . . . . . . . . . 8-15
8.4.5 Automatically Adjusted Function Setting . . . . . . . . . . . . . . . . . . . . . . . . . . 8-15
8.4.6 Related Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-15
8.5
Estimating the Moment of Inertia . . . . . . . . . . . . . . . . . . . . . . . 8-16
8.5.1 Outline. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-16
8.5.2 Restrictions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-16
8.5.3 Applicable Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-17
8.5.4 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-17
xxix

8.6
8.7
8.8
Autotuning without Host Reference . . . . . . . . . . . . . . . . . . . . . 8-23
8.6.1 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-23
8.6.2 Restrictions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-24
8.6.3 Applicable Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-25
8.6.4 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-25
8.6.5 Troubleshooting Problems in Autotuning without a Host Reference . . . . . .8-29
8.6.6 Automatically Adjusted Function Settings . . . . . . . . . . . . . . . . . . . . . . . . . 8-31
8.6.7 Related Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-33
Autotuning with a Host Reference . . . . . . . . . . . . . . . . . . . . . . 8-34
8.7.1 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-34
8.7.2 Restrictions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-35
8.7.3 Applicable Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-35
8.7.4 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-36
8.7.5 Troubleshooting Problems in Autotuning with a Host Reference. . . . . . . . .8-39
8.7.6 Automatically Adjusted Function Settings . . . . . . . . . . . . . . . . . . . . . . . . . 8-39
8.7.7 Related Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-40
Custom Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-41
8.8.1 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-41
8.8.2 Preparations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-41
8.8.3 Applicable Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-42
8.8.4 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-42
8.8.5 Automatically Adjusted Function Settings . . . . . . . . . . . . . . . . . . . . . . . . . 8-48
8.8.6 Tuning Example for Tuning Mode 2 or 3 . . . . . . . . . . . . . . . . . . . . . . . . . . .8-48
8.8.7 Related Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-49
8.9
8.10
8.11
8.12
Anti-Resonance Control Adjustment . . . . . . . . . . . . . . . . . . . . 8-50
8.9.1 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-50
8.9.2 Preparations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-50
8.9.3 Applicable Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-51
8.9.4 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-51
8.9.5 Related Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-53
8.9.6 Suppressing Different Vibration Frequencies with
Anti-resonance Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-53
Vibration Suppression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-55
8.10.1 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-55
8.10.2 Preparations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-56
8.10.3 Applicable Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-56
8.10.4 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-56
8.10.5 Setting Combined Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-58
8.10.6 Related Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-58
Speed Ripple Compensation . . . . . . . . . . . . . . . . . . . . . . . . . . 8-59
8.11.1 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-59
8.11.2 Setting Up Speed Ripple Compensation . . . . . . . . . . . . . . . . . . . . . . . . . . 8-59
8.11.3 Setting Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-63
Additional Adjustment Functions . . . . . . . . . . . . . . . . . . . . . . . 8-65
8.12.1 Gain Switching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-65
8.12.2 Friction Compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-68
8.12.3 Current Control Mode Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-69
8.12.4 Current Gain Level Setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-70
8.12.5 Speed Detection Method Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-70
8.12.6 Speed Feedback Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-70
8.12.7 Backlash Compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-71
xxx

9
8.13
8.14
Manual Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-76
8.13.1 Tuning the Servo Gains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-76
8.13.2 Compatible Adjustment Functions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-86
Diagnostic Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-90
8.14.1 Mechanical Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-90
8.14.2 Easy FFT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-92
Monitoring
9.1
9.2
9.3
Monitoring Product Information . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
9.1.1 Items That You Can Monitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
9.1.2 Operating Procedures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
Monitoring SERVOPACK Status . . . . . . . . . . . . . . . . . . . . . . . . . 9-3
9.2.1 Servo Drive Status. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-3
9.2.2 Monitoring Status and Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-3
9.2.3 I/O Signal Monitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-5
Monitoring Machine Operation Status and Signal Waveforms . . 9-6
9.3.1 Items That You Can Monitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-6
9.3.2 Using the SigmaWin+ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-7
9.3.3 Using a Measuring Instrument . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-9
10
9.4
9.5
Monitoring Product Life . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-13
9.4.1 Items That You Can Monitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-13
9.4.2 Operating Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-14
9.4.3 Preventative Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-15
Alarm Tracing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-16
9.5.1 Data for Which Alarm Tracing Is Performed . . . . . . . . . . . . . . . . . . . . . . . . 9-16
9.5.2 Applicable Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-16
Fully-Closed Loop Control
10.1
10.2
10.3
Fully-Closed System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-2
SERVOPACK Commissioning Procedure . . . . . . . . . . . . . . . . . 10-3
Parameter and Object Settings for Fully-closed Loop Control . . 10-5
10.3.1 Control Block Diagram for Fully-Closed Loop Control . . . . . . . . . . . . . . . . 10-5
10.3.2 Setting the Motor Direction and the Machine Movement Direction . . . . . . 10-6
10.3.3 Setting the Number of External Encoder Scale Pitches . . . . . . . . . . . . . . . 10-6
10.3.4 Setting the PAO, PBO, and PCO (Encoder Divided Pulse Output)
Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-7
10.3.5 External Absolute Encoder Data Reception Sequence . . . . . . . . . . . . . . . 10-8
10.3.6 Setting Unit Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-8
10.3.7 Alarm Detection Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-8
10.3.8 Analog Monitor Signal Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-9
10.3.9 Setting to Use an External Encoder for Speed Feedback . . . . . . . . . . . . . 10-9
xxxi

11
10.4
Monitoring an External Encoder. . . . . . . . . . . . . . . . . . . . . . . 10-10
10.4.1 Option Module Required for Monitoring . . . . . . . . . . . . . . . . . . . . . . . . . .10-10
10.4.2 Related Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10-10
10.4.3 Block Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-10
Safety Functions
11.1
11.2
Introduction to the Safety Functions . . . . . . . . . . . . . . . . . . . . 11-2
11.1.1 Safety Functions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-2
11.1.2 Precautions for Safety Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-3
Hard Wire Base Block (HWBB and SBB) . . . . . . . . . . . . . . . . . 11-4
11.2.1 Risk Assessment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-4
11.2.2 Hard Wire Base Block (HWBB) State . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-5
11.2.3 Resetting the HWBB State . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-6
11.2.4 Recovery Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-7
11.2.5 Detecting Errors in HWBB Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-7
11.2.6 HWBB Input Signal Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-8
11.2.7 Operation without a Host Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-8
11.2.8 /S-RDY (Servo Ready Output) Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-9
11.2.9 /BK (Brake Output) Signal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-9
11.2.10 Stopping Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-10
11.2.11 ALM (Servo Alarm) Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-10
12
11.3
11.4
11.5
11.6
EDM1 (External Device Monitor) . . . . . . . . . . . . . . . . . . . . . . 11-11
11.3.1 EDM1 Output Signal Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-11
Applications Examples for Safety Functions . . . . . . . . . . . . . 11-12
11.4.1 Connection Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-12
11.4.2 Failure Detection Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-12
11.4.3 Procedure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-13
Validating Safety Functions . . . . . . . . . . . . . . . . . . . . . . . . . . 11-14
Connecting a Safety Function Device . . . . . . . . . . . . . . . . . . 11-15
EtherCAT Communications
12.1
12.2
12.3
EtherCAT Slave Information . . . . . . . . . . . . . . . . . . . . . . . . . . . 12-2
EtherCAT State Machine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12-3
EtherCAT (CoE) Communications Settings . . . . . . . . . . . . . . . 12-5
12.3.1 Normal Device Recognition Process at Startup . . . . . . . . . . . . . . . . . . . . .12-5
12.3.2 Application Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12-5
12.3.3 Device Recognition with Station Aliases . . . . . . . . . . . . . . . . . . . . . . . . . . .12-5
xxxii
12.4
PDO Mappings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12-6
12.4.1 Setting Procedure for PDO Mappings. . . . . . . . . . . . . . . . . . . . . . . . . . . . .12-7
12.4.2 Default PDO Mappings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12-7

13
12.5
12.6
Synchronization with Distributed Clocks . . . . . . . . . . . . . . . . . 12-8
Emergency Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12-11
CiA402 Drive Profile
13.1
13.2
13.3
13.4
Device Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-3
13.1.1 State Machine Control Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-4
13.1.2 Bits in Statusword (6041 Hex) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-4
13.1.3 Related Objects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-4
Modes of Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-5
13.2.1 Related Objects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-5
13.2.2 Dynamic Mode Changes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-5
Position Control Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-6
13.3.1 Profile Position Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-6
13.3.2 Interpolated Position Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-9
13.3.3 Cyclic Synchronous Position Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-12
Homing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-14
13.4.1 Related Objects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-14
13.4.2 Homing Method (6098 Hex) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-14
14
13.5
13.6
13.7
13.8
13.9
13.10
Velocity Control Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-17
13.5.1 Profile Velocity Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-17
13.5.2 Cyclic Synchronous Velocity Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-18
Torque Control Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-19
13.6.1 Profile Torque Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-19
13.6.2 Cyclic Sync Torque Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-20
Torque Limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-21
Digital I/O Signals. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-22
Touch Probe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-23
13.9.1 Related Objects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-23
13.9.2 Example of Execution Procedure for a Touch Probe . . . . . . . . . . . . . . . . 13-24
Fully-Closed Loop Control . . . . . . . . . . . . . . . . . . . . . . . . . . . 13-25
Object Dictionary
14.1
Object Dictionary List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14-3
14.2
14.3
14.4
General Objects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14-5
PDO Mapping Objects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14-9
Sync Manager Communications Objects. . . . . . . . . . . . . . . . 14-13
xxxiii

14.5
14.6
14.7
14.8
14.9
14.10
14.11
14.12
14.13
14.14
14.15
14.16
Manufacturer-Specific Objects . . . . . . . . . . . . . . . . . . . . . . . 14-17
Device Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14-21
Profile Position Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14-29
Homing Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14-31
Position Control Function . . . . . . . . . . . . . . . . . . . . . . . . . . . 14-33
Interpolated Position Mode . . . . . . . . . . . . . . . . . . . . . . . . . . 14-35
Cyclic Synchronous Position Mode . . . . . . . . . . . . . . . . . . . . 14-41
Profile Velocity/Cyclic Synchronous Velocity Mode. . . . . . . . 14-42
Profile Torque/Cyclic Synchronous Torque Mode . . . . . . . . . 14-43
Torque Limit Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14-44
Touch Probe Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14-45
Digital Inputs/Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14-47
15
14.17
Dual Encoder Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14-49
Maintenance
15.1
15.2
15.3
Inspections and Part Replacement . . . . . . . . . . . . . . . . . . . . . 15-2
15.1.1 Inspections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15-2
15.1.2 Guidelines for Part Replacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15-2
15.1.3 Replacing the Battery . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15-3
Alarm Displays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15-5
15.2.1 List of Alarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15-5
15.2.2 Troubleshooting Alarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15-11
15.2.3 Resetting Alarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15-39
15.2.4 Displaying the Alarm History. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15-40
15.2.5 Clearing the Alarm History . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15-41
15.2.6 Resetting Alarms Detected in Option Modules . . . . . . . . . . . . . . . . . . . . . 15-42
15.2.7 Resetting Motor Type Alarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15-43
Warning Displays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15-45
15.3.1 List of Warnings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15-45
15.3.2 Troubleshooting Warnings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15-46
xxxiv
15.4
Troubleshooting Based on the Operation and Conditions of the Servomotor . . 15-51

16
Parameter and Object Lists
17
16.1
16.2
16.3
16.4
List of Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16-2
16.1.1 Interpreting the Parameter Lists . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16-2
16.1.2 List of Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16-3
Object List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16-30
SDO Abort Code List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16-39
Parameter Recording Table . . . . . . . . . . . . . . . . . . . . . . . . . . 16-40
Appendices
17.1
17.2
Interpreting Panel Displays . . . . . . . . . . . . . . . . . . . . . . . . . . . 17-2
17.1.1 Interpreting Status Displays. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17-2
17.1.2 Alarm and Warning Displays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17-2
17.1.3 Hard Wire Base Block Active Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17-2
17.1.4 Overtravel Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17-2
17.1.5 Forced Stop Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17-2
17.1.6 EtherCAT Communications Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17-3
Corresponding SERVOPACK and SigmaWin+ Function Names. . .17-5
17.2.1 Corresponding SERVOPACK Utility Function Names . . . . . . . . . . . . . . . . . 17-5
17.2.2 Corresponding SERVOPACK Monitor Display Function Names . . . . . . . . . 17-6
Index
Revision History
xxxv

Basic Information on SERVOPACKs
This chapter provides information required to select
SERVOPACKs, such as SERVOPACK models and combinations with Servomotors.
1
1.1
1.2
1.3
1.4
1.5
1.6
The Σ-7 Series . . . . . . . . . . . . . . . . . . . . . . . 1-2
Introduction to EtherCAT . . . . . . . . . . . . . . . 1-3
1.2.1 Introduction to CANopen . . . . . . . . . . . . . . . . . . 1-3
1.2.2 CANopen over EtherCAT OSI Model . . . . . . . . . . 1-3
1.2.3 Sending and Receiving Data in EtherCAT (CoE)
Communications . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
1.2.4 CoE Terminology . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
1.2.5 Data Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
1.2.6 Data Ranges . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
Interpreting the Nameplate . . . . . . . . . . . . . 1-6
Part Names . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
Model Designations . . . . . . . . . . . . . . . . . . 1-9
1.5.1 Interpreting SERVOPACK Model Numbers . . . . . 1-9
1.5.2 Interpreting Servomotor Model Numbers . . . . . 1-10
Combinations of SERVOPACKs and Servomotors . . 1-11
1.6.1 Combinations of Rotary Servomotors and
SERVOPACKs . . . . . . . . . . . . . . . . . . . . . . . . . . 1-11
1.6.2 Combinations of Linear Servomotors and
SERVOPACKs . . . . . . . . . . . . . . . . . . . . . . . . . . 1-12
1.7
Functions . . . . . . . . . . . . . . . . . . . . . . . . . . 1-13

1.1 The Σ-7 Series
1.1
The Σ-7 Series
The Σ-7-series SERVOPACKs are designed for applications that require frequent high-speed
and high-precision positioning. The SERVOPACK will make the most of machine performance
in the shortest time possible, thus contributing to improving productivity.
These SERVOPACKs support ZONE outputs.
ZONE outputs are used to output signals during preset ranges of positions. You can use the
ZONE outputs as triggers for operations related to positioning.
Refer to the following chapter for details on ZONE outputs.
6.14 ZONE Outputs (FT64 Specification) on page 6-58
1-2

1.2 Introduction to EtherCAT
1
Basic Information on SERVOPACKs
SyncMan 3
CANopen service (CoE)
Service data object
(SDO)
PDO mappings
Object dictionary
Mailbox Process data
Ethernet physical layer
Servo application
EtherCAT data link layer
EtherCAT
state
machine
Registers
FMMU 0
FMMU 2 FMMU 1
SyncMan 2SyncMan 1SyncMan 0
Application layer
(CANopen DS402)
Data link layer
(EtherCAT)
Physical layer
(Ethernet)
1.2.1 Introduction to CANopen
1.2
1.2.1
1.2.2
Introduction to EtherCAT
The CANopen over EtherCAT (CoE) Communications Reference SERVOPACKs implement the
CiA 402 CANopen drive profile for EtherCAT communications (real-time Ethernet communications).
Basic position, speed, and torque control are supported along with synchronous position,
speed, and torque control. You can select the type of control to match your system from basic
positioning to high-speed, high-precision path control.
You can also use EtherCAT communications to control the high-level servo control performance, advanced turning functions, and many actuators of the Σ-7 Series.
Introduction to CANopen
The CiA 402 CANopen profile is based on the IEC 61800-7-1, IEC61800-7-201, and IEC
61800-7-301 standards for international standardization of drive control and operation control.
CANopen over EtherCAT OSI Model
The OSI model implemented by the SERVOPACKs consists of three layers: the application
layer (CANopen), the data link layer (EtherCAT), and the physical layer (Ethernet). The four layers other than the application layer, data link layer, and physical layer are not used. The data
link layer is implemented with EtherCAT communications and the application layer is implemented with the DS402 CANopen drive profile.
This manual describes mainly the specifications of the application layer implemented in the
SERVOPACKs. For detailed information on the data link layer (EtherCAT), refer to documentation provided by the EtherCAT Technology Group.
The object dictionary in the application layer includes parameters, application data, and PDO
mapping information between the master and slaves.
The process data objects (PDOs) consist of the objects in the object dictionary that can be
mapped to PDO mappings. The PDO mappings define the structure and contents of the process data.
1-3

1.2 Introduction to EtherCAT
1.2.3 Sending and Receiving Data in EtherCAT (CoE) Communications
1.2.3
1.2.4
Sending and Receiving Data in EtherCAT (CoE) Communications
Objects are used to send and receive data in EtherCAT (CoE) communications.
Reading and writing object data is performed in process data communications (PDO service),
which transfers data cyclically, and in mailbox communications (SDO service), which transfers
data non-cyclically.
Process data communications are used to read and write PDOs. Mailbox communications
(SDO) are used to read and write object dictionary data entries.
CoE Terminology
The EtherCAT and CANopen terms that are used in this manual are described in the following
table.
Te rm Abbreviation Description
A non-profit organization established in 1992 as a joint ven-
CAN in Automation CiA
Controller Area Network CAN
CANopen CANopen
CANopen over EtherCAT CoE
Distributed Clocks DC
Electrically Erasable
Programmable Read Only
Memory
EtherCAT Slave Controller ESC
EtherCAT State Machine ESM
EtherCAT Technology Group ETG
Ethernet for Control
Automation Technology
Fieldbus Memory
Management Unit
INIT INIT The Init state in the EtherCAT state machine.
OPERATIONAL OP The Operational state in the EtherCAT state machine.
Object Dictionary OD
Process Data Object PDO Objects that are sent and received in cyclic communications.
Process Data Object
Mapping
Service Data Object SDO
PRE-OPERATIONAL PREOP The Pre-operational state in the EtherCAT state machine.
Process data –
EEPROM A ROM that can be electrically overwritten.
EtherCAT An open network developed by Beckhoff Automation.
FMMU A unit that manages fieldbus memory.
PDO mapping
ture between companies to provide CAN technical information, product information, and marketing information.
Communications protocol for the physical layer and data link
layer established for automotive LANs. It was established as
an international standard as ISO 11898.
An upper-layer protocol based on the international CAN standard (EN 50325-4).
It consists of profile specifications for the application layer,
communications, applications, devices, and interfaces.
A network that uses Ethernet for the physical layer, EtherCAT
for the data link layer, and CANopen for the application layer
in a seven-layer OSI reference model.
A clock distribution mechanism that is used to synchronize
the EtherCAT slaves with the EtherCAT master.
A hardware chip that processes EtherCAT communications
(such as loopbacks) and manages the distributed clock.
A state machine in which the state of EtherCAT (the data link
layer) changes according to transition conditions.
An international organization established in 2003 to provide
support for developing EtherCAT technologies and to promote the spread of EtherCAT technologies.
A group of objects and structure supported by an EtherCAT
SERVOPACK.
Definitions of the applications objects that are sent with
PDOs.
Objects that are sent and received in mailbox communications.
The data contained in application objects that are periodically
transferred for measurements or controls.
Continued on next page.
1-4

1.2 Introduction to EtherCAT
1
Basic Information on SERVOPACKs
Continued from previous page.
Te rm Abbreviation Description
SyncManager –
Receive Process Data Object RXPDO The process data received by the ESC.
Transmit Process Data Object TXPDO The process data sent by the ESC.
The ESC unit that coordinates data exchange between the
master and slaves.
1.2.5 Data Types
1.2.5
1.2.6
Data Types
The following table lists the data types and ranges that are used in this manual.
Code Data Type Range
SINT Signed 8-bit integer -128 to 127
INT Signed 16-bit integer -32,768 to 32,767
DINT Signed 32-bit integer -2,147,483,648 to 2,147,483,627
USINT Unsigned 8-bit integer 0 to 255
UINT Unsigned 16-bit integer 0 to 65,535
UDINT Unsigned 32-bit integer 0 to 4,294,967,295
STRING Character string −
Data Ranges
The following table lists the data units and notations that are used in this manual.
Notation Description
Pos. unit
Vel. unit
Acc. unit
Trq . un it
inc
The user-defined position reference unit that is set in position user unit (2701 hex).
1 [Pos. unit] = 2701: 01 hex/2701: 02 hex [inc]
The user-defined speed reference unit that is set in velocity user unit (2702 hex).
1 [Vel. unit] = 2702: 01 hex/2702: 02 hex [inc/s]
The user-defined acceleration reference unit that is set in acceleration user unit (2703 hex).
1 [Acc. unit] = 2703: 01 hex/2703: 02 hex x 10
The user-defined torque reference unit that is set in torque user unit (2704 hex).
1 [Trq. unit] = 2704: 01 hex/2704: 02 hex [%]
This is the encoder pulse unit.
For a 24-bit encoder, the resolution is 16,777,216 × Pn210/Pn20E [inc] per rotation.
4
[inc/s2]
1-5

1.3 Interpreting the Nameplate
Order number
Serial number
Degree of protection
Surrounding air temperature
SERVOPACK model
1.3
Interpreting the Nameplate
The following basic information is provided on the nameplate.
1-6

1.4 Part Names
1
Basic Information on SERVOPACKs
11
121314
151617
18
1.4
Part Names
Main circuit terminals
DC power
supply terminals
Control power
supply terminals
11
11
12
13
14
Motor terminals
15
16
17
18
19
Dynamic brake
terminals
Servomotor
brake power
supply terminals*
No. Name Description Reference
Front Cover −−
Model The model of the SERVOPACK. page 1-9
QR Code The QR code that is used by the MechatroCloud service. −
Lit while the main circuit power is being supplied.
Note: Even if you turn OFF the main circuit power supply, this
CHARGE
Main Circuit Terminals
DC Power Supply Terminals − page 4-11
Control Power Supply Termi-
nals
Servomotor Terminals (U, V,
and W) and Ground Termi-
nal (PE)
Dynamic Brake Terminals The connection terminals for a Dynamic Brake Resistor. page 4-37
Ground Terminal ( )
indicator will be lit as long as the internal capacitor remains
charged. Do not touch the main circuit or motor terminals
while this indicator is lit. Doing so may result in electric
shock.
The terminals depend on the main circuit power supply
input specifications of the SERVOPACK.
The connection terminals for the control power supply. page 4-11
The connection terminals for the Servomotor Main Circuit
Cable (power line).
The ground terminals to prevent electric shock. Always
connect this terminal.
EtherCAT Communications
Connectors (Input: CN6A,
Connect to EtherCAT devices. page 4-39
Output: CN6B)
I/O Signal Connector (CN1) Connects to sequence I/O signals. page 4-28
Safety Connector (CN8) Connects to a safety function device. page 4-35
• Rotary Servomotor: Connects to the encoder in the Ser-
Encoder Connector (CN2)
vomotor.
• Linear Servomotor: Connects to a Serial Converter Unit
or linear encoder.
Computer Connector (CN7) A USB connector to connect a computer. page 4-41
Safety Option Module Con-
nector
Feedback Option Module
Connector
Communications Status
Indicators
Connects to a Safety Option Module. −
Connects to a Feedback Option Module. −
Indicate the status of EtherCAT communications. –
With Front Cover Open
20
21
22
28
–
page 4-11
page 4-19
–
page 4-19
Continued on next page.
23
24
25
26
27
1-7

1.4 Part Names
19
20
21
222324
252627
28
No. Name Description Reference
* SERVOPACKs without built-in Servomotor brake control do not have these terminals.
Continued from previous page.
Serial Communications Connector (CN3)
Connects to the Digital Operator. page 4-41
Serial Number – −
DIP Switch (S3) Not used.
EtherCAT secondary
address (S1 and S2)
Use these switches to set the device ID and address.
page 5-12
PWR Lights when the control power is being supplied. −
CN
L1 and L2 −
Analog Monitor Connector
(CN5)
Not used.
You can use a special cable (peripheral device) to monitor
the motor speed, torque reference, or other values.
page 4-41
Panel Display Displays the servo status with a seven-segment display. −
Servomotor Brake Power
Supply Terminals (CN117)*
Connect to the power supply for the Servomotor brake. −
−
1-8

1.5 Model Designations
1
Basic Information on SERVOPACKs
D 400 VAC
A0
1R9
3R5
5R4
8R4
120
170
210
260
280
370
0.5 kW
1.0 kW
1.5 kW
2.0 kW
3.0 kW
5.0 kW
6.0 kW
7.5 kW
11.0 kW
15.0 kW
SGD7S
-
1R9
D A0 B
000
F64
F64
ZONE outputs
FT/EX Specification
B
Interface
*
Code Specication
EtherCAT
communications reference
Design Revision Order
5th+6th digits
7th digit
Maximum Applicable
Motor Capacity
Voltage
Code Specication
Hardware Options
Specication
1st+2nd+3rd digits
4th digit
8th+9th+10th digits
Σ-7-Series
Σ-7S
SERVOPACKs
4th
digit
1st+2nd+3rd
digits
5th+6th
digits
8th+9th+10th
digits
7th
digit
000
Without options All models
Voltage Code Specication
ThreePhase,
400 VAC
Code
Specication
Applicable
Models
11th+12th+13th
digits
11th+12th+13th digits
Code Specication
026
Built-in Servomotor
brake control
All models
1.5.1 Interpreting SERVOPACK Model Numbers
1.5
1.5.1
Model Designations
Interpreting SERVOPACK Model Numbers
* The same SERVOPACKs are used for both Rotary Servomotors and Linear Servomotors.
1-9

1.5 Model Designations
Code
Specifications
Σ-7-Series Servomotors
Series
Series
SGM7J
SGM7A
SGM7G
Medium inertia, high speed
Low inertia, high speed
Medium inertia, low speed, high torque
Medium inertia, high speed, high torque
SGM7
-
02
D 7 F
21
1st+2nd
digits
1st+2nd digits
Rated Output
3rd digit
Power Supply Voltage
4th digit
Serial Encoder Specication
5th digit
Design Revision Order
7th digit
Options
6th digit
Shaft End Specication
3rd
digit
4th
digit
5th
digit
6th
digit
7th
digit
Code Specification
Servomotor Type
1st digit
3rd digit on
3rd digit on
F
T
Models with F-type iron core
Models with T-type iron core
Code
Specification
W
W2
M
M2
Moving Coil
Magnetic Way
The specifications for the 3rd digit on depend on the Servomotor type.
SGL - 30D120AP
1st
digit
2nd
digit
Series
Σ-7-Series Servomotors
Series
2nd digit
Moving Coil/Magnetic Way
1.5.2 Interpreting Servomotor Model Numbers
1.5.2
Interpreting Servomotor Model Numbers
This section outlines the model numbers of Σ-7-series Servomotors. Refer to the relevant manual in the following list for details.
Σ-7-Series Rotary Servomotor with 400 V-Input Power Product Manual (Manual No.: SIEP S800001 86)
Σ-7-Series Linear Servomotor with 400 V-Input Power Product Manual (Manual No.: SIEP S800001 81)
Rotary Servomotors
Linear Servomotors
1-10

1.6 Combinations of SERVOPACKs and Servomotors
1
Basic Information on SERVOPACKs
1.6.1 Combinations of Rotary Servomotors and SERVOPACKs
1.6
1.6.1
Combinations of SERVOPACKs and Servomotors
Combinations of Rotary Servomotors and SERVOPACKs
Rotary Servomotor Model Capacity
SGM7J Models
(Medium Inertia,
High Speed),
Rated motor speed:
3,000 min
SGM7A Models
(Low Inertia,
High Speed),
Rated motor speed:
3,000 min
SGM7G Models
Standard Models
(Medium Inertia,
Low Speed,
High Torque),
Rated motor speed:
1,500 min
SGM7G Models
High-speed Models
(Medium Inertia, High
Speed, High Torque)
Rated motor speed:
1,500 min
-1
-1
-1
-1
SGM7J-02DF 200 W
SGM7J-04DF 400 W
SGM7J-08DF 750 W 3R5D
SGM7J-15DF 1.5 kW 5R4D
SGM7A-02DF 200 W
SGM7A-04DF 400 W
SGM7A-08DF 750 W 3R5D
SGM7A-10DF 1.0 kW
SGM7A-15DF 1.5 kW
SGM7A-20DF 2.0 kW 8R4D
SGM7A-25DF 2.5 kW
SGM7A-30DF 3.0 kW
SGM7A-40DF 4.0 kW
SGM7A-50DF 5.0 kW
SGM7A-70DF 7.0 kW 260D
SGM7G-05DF 450 W 1R9D
SGM7G-09DF 850 W 3R5D
SGM7G-13DF 1.3 kW 5R4D
SGM7G-20DF 1.8 kW 8R4D
SGM7G-30DF 2.9 kW 120D
SGM7G-44DF 4.4 kW 170D
SGM7G-55DF 5.5 kW 210D
SGM7G-75DF 7.5 kW 260D
SGM7G-1ADF 11.0 kW 280D
SGM7G-1EDF 15.0 kW 370D
SGM7G-05DR 450 W 3R5D
SGM7G-09DR 850 W 5R4D
SGM7G-13DR 1.3 kW 8R4D
SGM7G-20DR 1.8 kW 120D
SGM7G-30DR 2.9 kW 170D
SGM7G-44DR 4.4 kW 210D
SERVOPACK Model
SGD7S-
1R9D
1R9D
5R4D
120D
170D
1-11

1.6 Combinations of SERVOPACKs and Servomotors
1.6.2 Combinations of Linear Servomotors and SERVOPACKs
1.6.2
Combinations of Linear Servomotors and SERVOPACKs
Linear Servomotor Model
SGLF
(Models with
F-type Iron Cores)
SGLT
(Models with
T- type Iro n C o r e s )
Rated Torque
[N]
SGLFW-35D120A 80 220 1R9D
SGLFW-35D230A 160 440 1R9D
SGLFW-50D200B 280 600 3R5D
SGLFW-50D380B
SGLFW-1ZD200B
SGLFW-1ZD380B 1120 2400 120D
SGLFW2-30D070A 45 135 1R9D
SGLFW2-30D120A 90 270 1R9D
SGLFW2-30D230A 180 540 1R9D
SGLFW2-45D200A 280 840 3R5D
SGLFW2-45D380A
SGLFW2-90D200A 5R4D
SGLFW2-90D380A 1120 3360 120D
SGLFW2-90D560A 1680 5040 170D
SGLFW2-1DD380A 1680 5040 170D
SGLFW2-1DD560A 2520 7560 260D
SGLTW-35D170H 300 600 3R5D
SGLTW-35D320H 600 1200 8R4D
SGLTW-40D400B 670 2600 120D
SGLTW-40D600B 1000 4000 170D
SGLTW-50D170H 450 900 3R5D
SGLTW-50D320H 900 1800 8R4D
SGLTW-80D400B 1300 5000 170D
SGLTW-80D600B 2000 7500 260D
560 1200 5R4D
560 1680
Instantaneous
Maximum Torque
[N]
SERVOPACK Model
SGD7S-
8R4D
1-12

1.7 Functions
1
Basic Information on SERVOPACKs
1.7
Functions
This section lists the functions provided by SERVOPACKs. Refer to the reference pages for
details on the functions.
•
Functions Related to the Machine
Function Reference
Power Supply Type Settings for the Main Circuit
and Control Circuit
Automatic Detection of Connected Motor
Motor Direction Setting
Linear Encoder Pitch Setting
Writing Linear Servomotor Parameters
Selecting the Phase Sequence for a Linear Ser-
vomotor
Polarity Sensor Setting
Polarity Detection
Overtravel Function and Settings
Holding Brake
Motor Stopping Methods for Servo OFF and
Alarms
Resetting the Absolute Encoder
Setting the Origin of the Absolute Encoder
Setting the Regenerative Resistor Capacity
Operation for Momentary Power Interruptions
SEMI F47 Function
Setting the Motor Maximum Speed
Software Limits
Multiturn Limit Setting
Adjustment of Motor Current Detection Signal
Offset
Forcing the Motor to Stop
Speed Ripple Compensation
Current Control Mode Selection
Current Gain Level Setting
Speed Detection Method Selection
Fully-Closed Loop Control
Safety Functions
Touch P robe
page 5-12
page 5-13
page 5-14
page 5-15
page 5-16
page 5-20
page 5-22
page 5-23
page 5-26
page 5-32
page 5-37
page 5-49
page 5-52
page 5-55
page 6-14
page 6-15
page 6-17
page 6-25
page 6-36
page 6-50
page 6-55
page 8-59
page 8-69
page 8-70
page 8-70
page 10-1
page 11-1
page 13-23
•
Functions Related to the Host Controller
Function Reference
Electronic Gear Settings
I/O Signal Allocations
Servo Alarm (ALM) Signal
Warning Output (/WARN) Signal
Rotation Detection (/TGON) Signal
Servo Ready (/S-RYD) Signal
Speed Coincidence Detection (/V-CMP) Signal
Positioning Completion (/COIN) Signal
Near (/NEAR) Signal
Speed Limit during Torque Control
Continued on next page.
page 5-42
page 6-4
page 6-7
page 6-7
page 6-8
page 6-8
page 6-9
page 6-10
page 6-11
page 6-12
1-13

1.7 Functions
Continued from previous page.
Function Reference
Speed Limit Detection (/VLT) Signal
Encoder Divided Pulse Output
Selecting Torque Limits
Vibration Detection Level Initialization
Alarm Reset
Replacing the Battery
Setting the Position Deviation Overflow Alarm
Level
•
Functions to Achieve Optimum Motions
Function Reference
Tuning-less Function
Automatic Adjustment without a Host Reference
Automatic Adjustment with a Host Reference
Custom Adjustment
Anti-Resonance Control Adjustment
Vibration Suppression
Gain Selection
Friction Compensation
Backlash Compensation
Model Following Control
Compatible Adjustment Functions
Mechanical Analysis
Easy FFT
page 6-12
page 6-18
page 6-26
page 6-46
page 15-39
page 15-3
page 8-8
page 8-12
page 8-23
page 8-34
page 8-41
page 8-50
page 8-55
page 8-65
page 8-68
page 8-71
page 8-83
page 8-86
page 8-90
page 8-92
• Functions for Trial Operation during Setup
Function Reference
Software Reset
Trial Operation of Servomotor without a Load
Program Jogging
Origin Search
Test without a Motor
Monitoring Machine Operation Status and Signal
Waveforms
•
Functions for Inspection and Maintenance
Function Reference
Write Prohibition Setting for Parameters
Initializing Parameter Settings
Automatic Detection of Connected Motor
Monitoring Product Information
Monitoring Product Life
Alarm History Display
Alarm Tracing
page 6-44
page 7-7
page 7-13
page 7-19
page 7-21
page 9-6
page 5-7
page 5-10
page 5-13
page 9-2
page 9-2
page 15-40
page 9-16
1-14

Selecting a SERVOPACK
This chapter provides information required to select
SERVOPACKs, such as specifications, block diagrams,
dimensional drawings, and connection examples.
2
2.1
2.2
2.3
2.4
Ratings and Specifications . . . . . . . . . . . . . 2-2
2.1.1 Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.1.2 SERVOPACK Overload Protection
Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2.1.3 Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
Block Diagrams . . . . . . . . . . . . . . . . . . . . . . 2-8
2.2.1 SERVOPACKs without Built-in Servomotor
Brake Control . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
2.2.2 SERVOPACKs with Built-in Servomotor
Brake Control . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
External Dimensions . . . . . . . . . . . . . . . . . 2-14
2.3.1 Front Cover Dimensions and Connector
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
2.3.2 SERVOPACK External Dimensions . . . . . . . . . . 2-16
Examples of Standard Connections between SERVOPACKs and Peripheral Devices . . 2-18

2.1 Ratings and Specifications
2.1.1 Ratings
2.1
2.1.1
Ratings and Specifications
This section gives the ratings and specifications of SERVOPACKs.
Ratings
Three-Phase, 400 VAC
Model SGD7S- 1R9D 3R5D 5R4D 8R4D 120D 170D 210D 260D 280D 370D
Maximum Applicable Motor Capacity
[kW]
Continuous Output Current [Arms] 1.9 3.5 5.4 8.4 11.9 16 20.8 25.7 28.1 37.2
Instantaneous Maximum Output Cur-
rent [Arms]
Main Circuit
Control
Power Supply
Power Supply Capacity [kVA]* 1.1 2.3 3.5 4.5 7.1 11.7 12.4 14.4 21.9 30.6
Power
Loss*
Regenerative Resistor
Overvoltage Category III
* This is the net value at the rated load.
Power Supply
Input Current [Arms]* 1.4 2.9 4.3 5.8 8.6 14.5 17.4 21.7 31.8 43.4
Power Supply 24 VDC ±15%
Input Current [Arms]* 1.2 1.4 1.5
Main Circuit Power Loss
[W]
Control Circuit Power Loss
[W]
Built-in Regenerative
Resistor Power Loss [W]
Total Power Loss [W] 54.4 65.3 111.8 139.1 186.7 246.7 216.4 256.5 310.2 389.8
Built-In
Regenerative Resistor
Minimum Allowable
External Resistance [Ω]
Resistance
[
Ω
]
Capacity
[W]
0.5 1 1.5 2 3 5 6 7.5 11 15
5.5 8.5 14 21 28 42 55 65 70 85
Three-phase, 380 VAC to 480 VAC, -15% to +10%,
50 Hz/60 Hz
19.4 30.3 62.8 90.1 137.7 188.7 188.4 228.5 278.2 389.8
21 22 28 32
14 14 28 28 28 36 (180)* (240)*
75 75 75 43 43 27 –
70 70 140 140 140 180 –
75 75 75 43 43 27 18 18 14.25 14.25
2-2
540 VDC
Model SGD7S- 1R9D 3R5D 5R4D 8R4D 120D 170D 210D 260D 280D 370D
Maximum Applicable Motor Capacity
[kW]
Continuous Output Current [Arms] 1.9 3.5 5.4 8.4 11.9 16 20.8 25.7 28.1 37.2
Instantaneous Maximum Output Cur-
rent [Arms]
Main Cir-
cuit
Control
Power
Supply
Power Supply Capacity [kVA]* 1.1 2.3 3.5 4.5 7.1 11.7 12.4 14.4 21.9 30.6
Power
Loss*
Overvoltage Category III
* This is the net value at the rated load.
Power Supply 513 VDC to 648 VDC, -15% to +10%
Input Current [Arms]* 2 3.3 5.5 6.8 11 18 19.6 26.2 38.3 47.6
Power Supply 24 VDC ±15%
Input Current [Arms]* 1.2 1.4 1.5
Main Circuit Power Loss
[W]
Control Circuit Power Loss
[W]
Total Power Loss [W] 37.4 45.4 69.5 94.7 131.4 166.5 216.4 228.5 310.2 389.8
0.511.52 3 5 67.51115
5.5 8.5 14 21 28 42 55 65 70 85
16.4 24.4 48.5 73.7 110.4 144.5 188.4 228.5 278.2 389.8
21 22 28 32
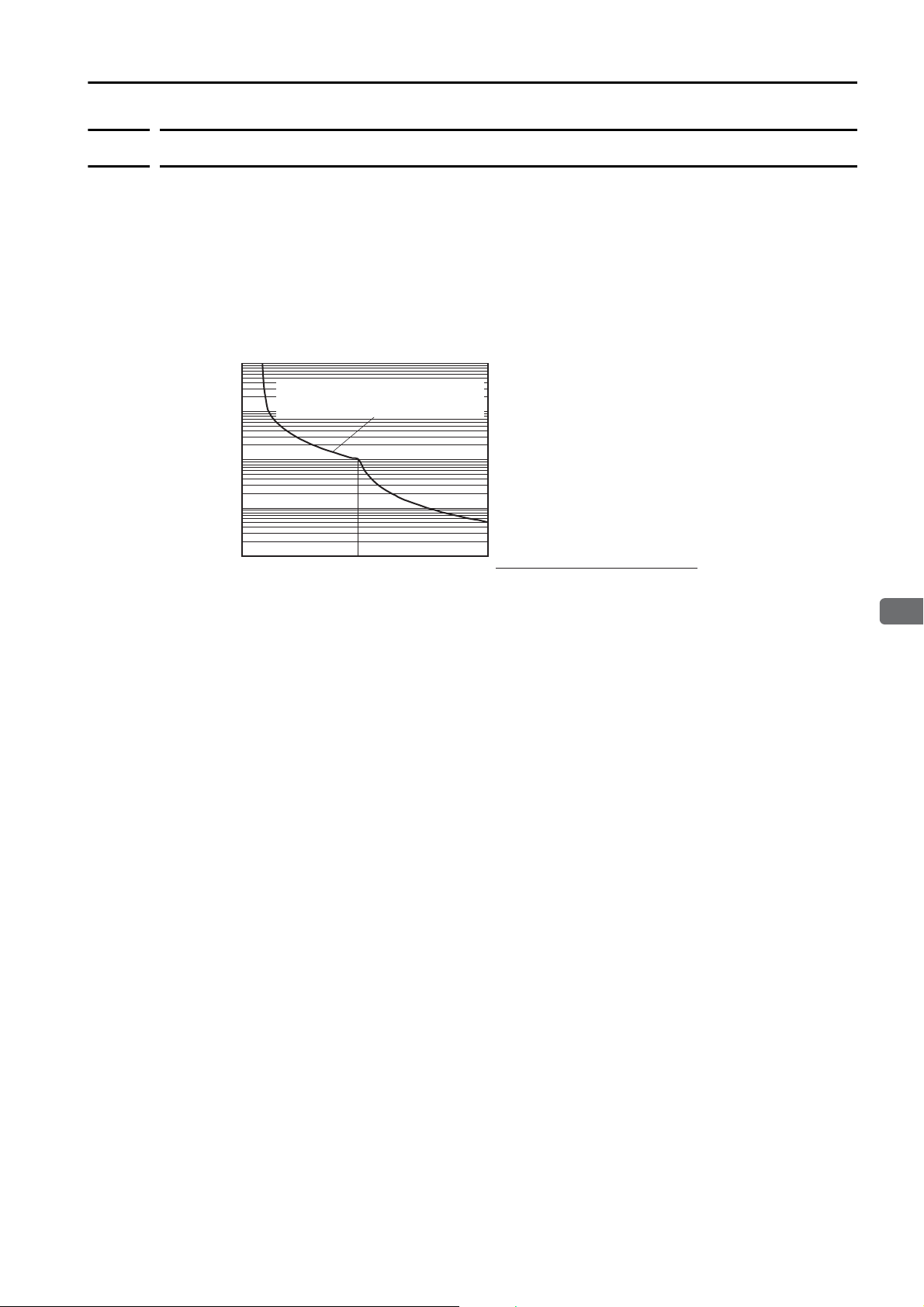
2.1 Ratings and Specifications
2
Selecting a SERVOPACK
100 200
10000
1000
100
10
1
SERVOPACK Model:
SGD7S-1R9D, -3R5D, -5R4D, -8R4D, -120D, -170D,
-210D, -260D, -280D, or -370D
Detection time (s)
SERVOPACK output current
(continuous output current ratio) (%)
Instantaneous maximum output current
(Instantaneous maximum output current)
Continuous output current
(Continuous output current)
× 100%
2.1.2 SERVOPACK Overload Protection Characteristics
2.1.2
SERVOPACK Overload Protection Characteristics
The overload detection level is set for hot start conditions with a SERVOPACK surrounding air temperature of 55°C.
An overload alarm (A.710 or A.720) will occur if overload operation that exceeds the overload protection characteristics shown in the following diagram (i.e., operation on the right side of the applicable line) is performed.
The actual overload detection level will be the detection level of the connected SERVOPACK or Servomotor that has the lower overload protection characteristics.
In most cases, that will be the overload protection characteristics of the Servomotor.
Note: The above overload protection characteristics do not mean that you can perform continuous duty operation
with an output of 100% or higher.
For a Yaskawa-specified combination of SERVOPACK and Servomotor, maintain the effective torque within
the continuous duty zone of the torque-motor speed characteristic of the Servomotor.
2-3

2.1 Ratings and Specifications
2.1.3 Specifications
2.1.3
Specifications
Item Specification
Control Method IGBT-based PWM control, sine wave current drive
With Rotary
Servomotor
Feedback
Environmen
tal Conditions
Applicable Standards
Mounting Base-mounted
Performance
With Linear
Servomotor
Surrounding Air
Temperature
Storage Temperature -20°C to 85°C
Surrounding Air
Humidity
Storage Humidity 95% relative humidity max. (with no freezing or condensation)
Vibration Resistance
Shock Resistance
Degree of Protection
Pollution Degree
Altitude 1,000 m or less.
Others
Speed Control Range
Coefficient of Speed
Fluctuation
Torque Control Precision (Repeatability)
Soft Start Time
Setting
*1
*2
Serial encoder: 24 bits
(incremental encoder/absolute encoder)
• Absolute linear encoder (The signal resolution depends on the absolute linear encoder.)
• Incremental linear encoder (The signal resolution depends on the
incremental linear encoder or Serial Converter Unit.)
-5°C to 55°C
However, the range for the SGD7S-370D is -5°C to 40°C.
95% relative humidity max. (with no freezing or condensation)
4.9 m/s
19.6 m/s
IP10
2
• Must be no corrosive or flammable gases.
• Must be no exposure to water, oil, or chemicals.
• Must be no dust, salts, or iron dust.
Do not use the SERVOPACK in the following locations: Locations subject to static electricity noise, strong electromagnetic/magnetic fields, or
radioactivity
Refer to the following section for details.
1:5000 (At the rated torque, the lower limit of the speed control range
must not cause the Servomotor to stop.)
±0.01% of rated speed max. (for a load fluctuation of 0% to 100%)
0% of rated speed max. (for a voltage fluctuation of ±10%)
±0.1% of rated speed max. (for a temperature fluctuation of 25°C
±25°C)
±1%
0 s to 10 s (Can be set separately for acceleration and deceleration.)
2
2
Compliance with UL Standards, EU Directives, and Other Safety Stan-
dards on page xxii
Continued on next page.
2-4

2
Selecting a SERVOPACK
I/O Signals
Communications
Item Specification
Encoder Divided
Pulse Output
Linear Servomotor
Overheat Protection
Signal Input
Input
Sequence
Input
Signals
Sequence
Output
Signals
RS-422A
Communications
(CN502)
USB Communications
(CN7)
Signals
That
Can Be
Allocated
Fixed
Output
Output
Signals
That Can
Be Allocated
Interfaces
1:N
Communications
Axis
Address
Setting
Interface
Communications
Standard
Phase A, phase B, phase C: Line-driver output
Number of divided output pulses: Any setting is allowed.
Number of input points: 1
Input voltage range: 0 V to +5 V
Allowable voltage range: 24 VDC ±20%
Number of input points: 7
Input method: Sink inputs or source inputs
Input Signals
• P-OT (Forward Drive Prohibit) and N-OT (Reverse Drive Prohibit) signals
• /Probe1 (Probe 1 Latch Input) signal
• /Probe2 (Probe 2 Latch Input) signal
• /Home (Home Switch Input) signal
• /P-CL (Forward External Torque Limit) and /N-CL (Reverse External
Torque Limit) signals
• /SI0 and /SI3 (General-Purpose Input) signals
A signal can be allocated and the positive and negative logic can be
changed.
Allowable voltage range: 5 VDC to 30 VDC
Number of output points: 1
Output signal: ALM (Servo Alarm) signal
Allowable voltage range: 5 VDC to 30 VDC
Number of output points: 5
(A photocoupler output (isolated) is used.)
Output Signals
• /COIN (Positioning Completion) signal
• /V-CMP (Speed Coincidence Detection) signal
• /TGON (Rotation Detection) signal
• /S-RDY (Servo Ready) signal
• /CLT (Torque Limit Detection) signal
• /VLT (Speed Limit Detection) signal
• /BK (Brake) signal
• /WARN (Warning) signal
• /NEAR (Near) signal
• /ZONE0 (ZONE Signal 1 Output) signal
• /ZONE1 (ZONE Signal 2 Output) signal
• /ZONE2 (ZONE Signal 3 Output) signal
• /ZONE3 (ZONE Signal 4 Output) signal
• /nZONE (nZONE Output) signal
A signal can be allocated and the positive and negative logic can be
changed.
(JUSP-OP05A-1-E).
Digital Operator
Up to N = 15 stations possible for RS-422A port
Set with parameters.
Personal computer (with SigmaWin+)
The software version of the SigmaWin+ must be version 7.11 or higher.
Conforms to USB2.0 standard (12 Mbps).
2.1 Ratings and Specifications
2.1.3 Specifications
Continued from previous page.
Continued on next page.
2-5

2.1 Ratings and Specifications
2.1.3 Specifications
Displays/Indicators
EtherCAT Communications Setting
Switches
Applicable Communications Standards
Physical Layer
Communications
Connectors
Cable
Sync Manager
FMMU
EtherCAT
Communications
EtherCAT
Commands
(Data Link Layer)
Process Data
Mailbox (CoE)
Distributed Clocks
Slave Information
Interface
Indicators
CiA402 Drive Profile
Analog Monitor (CN5)
Dynamic Brake (DB)
Regenerative Processing
Overtravel (OT) Prevention
Protective Functions Overcurrent, overvoltage, low voltage, overload, regeneration error, etc.
Utility Functions Gain adjustment, alarm history, jogging, origin search, etc.
Item Specification
CHARGE, PWR, RUN, ERR, and L/A (A and B) indicators, and one-digit
seven-segment display
EtherCAT secondary address (S1 and S2), 16 positions
IEC 61158 Type 12, IEC 61800-7 CiA402 Drive Profile
100BASE-TX (IEEE 802.3)
CN6A (RJ45): EtherCAT signal input connector
CN6B (RJ45): EtherCAT signal output connector
Category 5, 4 shielded twisted pairs
* The cable is automatically detected with AUTO MDIX.
SM0: Mailbox output, SM1: Mailbox input, SM2: Process data output,
and SM3: Process data input
FMMU 0: Mapped in process data output (RxPDO) area.
FMMU 1: Mapped in process data input (TxPDO) area.
FMMU 2: Mapped to mailbox status.
APRD, FPRD, BRD, LRD, APWR, FPWR, BWR, LWR, ARMW, and
FRMW (APRW, FPRW, BRW, and LRW commands are not supported.)
Assignments can be changed with PDO mapping.
Emergency messages, SDO requests, SDO responses, and SDO infor-
mation (TxPDO/RxPDO and remote TxPDO/RxPDO are not supported.)
Free-Run Mode and DC Mode (Can be switched.)
Applicable DC cycles: 125 μs to 4 ms in 125-μs increments
256 bytes (read-only)
EtherCAT communications in progress: Link/Activity x 2
EtherCAT communications status: RUN x 1
EtherCAT error status: ERR x 1
• Homing Mode
• Profile Position Mode
• Interpolated Position Mode
• Profile Velocity Mode
• Profile Torque Mode
• Cyclic Synchronous Position Mode
• Cyclic Synchronous Velocity Mode
• Cyclic Synchronous Torque Mode
• Touch Probe Function
• Torque Limit Function
Number of points: 2
Output voltage range: ±10 VDC (effective linearity range: ±8 V)
Resolution: 16 bits
Accuracy: ±20 mV (Typ)
Maximum output current: ±10 mA
Settling time (±1%): 1.2 ms (Typ)
*3
Activated when a servo alarm or overtravel (OT) occurs, or when the
power supply to the main circuit or servo is OFF.
Built-in
Refer to the catalog for details.
Stopping with dynamic brake, deceleration to a stop, or coasting to a
stop for the P-OT (Forward Drive Prohibit) or N-OT (Reverse Drive Prohibit) signal
Continued from previous page.
Continued on next page.
2-6

2.1 Ratings and Specifications
2
Selecting a SERVOPACK
2.1.3 Specifications
Continued from previous page.
Item Specification
Inputs /HWBB1 and /HWBB2: Base block signals for Power Modules
Safety
Functions
Output EDM1: Monitors the status of built-in safety circuit (fixed output).
Applicable
Standards
*4
ISO13849-1 PLe (category 3), IEC61508 SIL3
Applicable Option Modules Fully-closed Modules
*1. If you combine a Σ-7-Series SERVOPACK with a Σ-V-Series Option Module, the surrounding air temperature
specification of the Σ-V-Series SERVOPACKs must be used, i.e., 0°C to 55°C. Also, the applicable surrounding
range cannot be increased by derating.
*2. The coefficient of speed fluctuation for load fluctuation is defined as follows:
Coefcient of speed uctuation =
*3. The SGD7S-210D, -260D, -280D, and -370D do not have a dynamic brake (DB). If a dynamic brake is neces-
sary, create an external dynamic brake circuit.
*4. Always perform risk assessment for the system and confirm that the safety requirements are met.
No-load motor speed - Total-load motor speed
Rated motor speed
× 100%
2-7

2.2 Block Diagrams
Servomotor
Fan
L1
B1 B2 B3
L2
L3
24 V
24 V
0 V
0 V
1
2
U
V
W
D1
D2
D3
CN3CN11 CN12 CN7
CN2
ENC
CN5
M
CHARGE
-
+
+
-
-
-
Overheat protector
Overcurrent protector
CN8
±
12 V
I/O
I/F
CN1
CN6A
CN6B
Dynamic
brake circuit
Processor
(PWM control, position/
speed calculations, etc.)
Control
power
supply
Digital Operator Computer
Option Module Option Module
Current
sensor
Gate drive
Analog
voltage
converter
Encoder divided
pulse output
Analog monitor
output
Voltage
sensor
Voltage
sensor
Varistor
Relay
drive
Safety function signals
Main
circuit
power
supply
Control
power
supply
+
−
EtherCAT
communications
I/O signals
Status display
The DC power supply (24 VDC)
is not provided by Yaskawa.
+
−
+
−
CN101
CN101
CN103
CN102
CN115
CN201
*
2.2.1 SERVOPACKs without Built-in Servomotor Brake Control
2.2
2.2.1
Block Diagrams
This section provides a block diagram of the interior of the SERVOPACKs.
SERVOPACKs without Built-in Servomotor Brake Control
SGD7S-1R9D, -3R5D, -5R4D, -8R4D, -120D, and -170D
2-8
* If using these terminals, contact your YASKAWA representative.

2
Selecting a SERVOPACK
SGD7S-210D and -260D
Processor
(PWM control, position/
speed calculations, etc.)
Control
power
supply
L1
B1 B2
L2
L3
1
2
24 V
24 V
0 V
0 V
U
V
W
Digital Operator Computer
CN3
Option Module
CN11
Option Module
CN12 CN7
Current
sensor
CN2
Servomotor
ENC
Analog
voltage
converter
CN5
Analog monitor
output
Voltage
sensor
Voltage
sensor
Varistor
M
+
−
Relay
drive
+
−
+
−
CHARGE
-
-
Gate drive
Overheat protector
Overcurrent protector
Safety function signals
CN8
Main
circuit
power
supply
Control
power
supply
Fan
±
12 V
+
+
-
-
I/O
I/F
CN1
CN6A
CN6B
EtherCAT
communications
Encoder divided
pulse output
I/O signals
Status display
The DC power supply (24 VDC)
is not provided by Yaskawa.
CN101
CN101
CN102
CN201
CN103
*
2.2 Block Diagrams
2.2.1 SERVOPACKs without Built-in Servomotor Brake Control
* If using these terminals, contact your YASKAWA representative.
2-9

2.2 Block Diagrams
Processor
(PWM control, position/
speed calculations, etc.)
Control
power
supply
L1
B1 B2
L2
L3
1
2
24 V
24 V
0 V
0 V
V
W
Digital Operator Computer
CN3
Option Module
CN11
Option Module
CN12 CN7
Current
sensor
CN2
Servomotor
ENC
Analog
voltage
converter
CN5
Analog monitor
output
Voltage
sensor
Voltage
sensor
Varistor
M
+
−
Relay
drive
+
−
+
−
CHARGE
-
-
Gate drive
Overheat protector
Overcurrent protector
Safety function signals
CN8
Main
circuit
power
supply
Control
power
supply
+
+
-
-
Fan
±
12 V
±
12 V
±
12 V
±
12 V
U
I/O
I/F
CN1
CN6A
CN6B
EtherCAT
communications
Encoder divided
pulse output
I/O signals
Status display
The DC power supply (24 VDC)
is not provided by Yaskawa.
CN101
CN101
CN201
CN103
*
CN102
2.2.1 SERVOPACKs without Built-in Servomotor Brake Control
SGD7S-280D and -370D
2-10
* If using these terminals, contact your YASKAWA representative.

2.2 Block Diagrams
2
Selecting a SERVOPACK
Processor
(PWM control, position/
speed calculations, etc.)
L1
B1 B2 B3
L2
L3
1
2
CN3
Option Module Option Module Digital Operator Computer
CN11 CN12 CN7
Current
sensor
CN2
CN5
Analog monitor
output
Voltage
sensor
Voltage
sensor
Varistor
Relay
drive
+
−
+
−
CHARGE
-
-
Gate drive
Overheat protector
Overcurrent protector
Safety function signals
CN8
Fan
±
12 V
CN101
CN101
I/O
I/F
CN1
CN6A
CN6B
EtherCAT
communications
Encoder divided
pulse output
I/O signals
Status display
The DC power supply (24 VDC)
is not provided by Yaskawa.
U
V
W
D1
DC+
DC-
D2
D3
Servomotor
ENC
M
BK+
BK-
BK
Brake
control
circuit
CN117
CN115
CN102
Main
circuit
power
supply
Brake
power
supply
Analog
voltage
converter
+
+
-
-
CN103
24 V
24 V
0 V
0 V
Control
power
supply
Control
power
supply
+
−
CN201
Dynamic
brake circuit
*
2.2.2 SERVOPACKs with Built-in Servomotor Brake Control
2.2.2
SERVOPACKs with Built-in Servomotor Brake Control
SGD7S-1R9D, -3R5D, -5R4D, -8R4D, -120D, and -170D
* If using these terminals, contact your YASKAWA representative.
2-11

2.2 Block Diagrams
2.2.2 SERVOPACKs with Built-in Servomotor Brake Control
SGD7S-210D and -260D
CN101
Varistor
L1
Main
L2
circuit
power
L3
supply
B1 B2
Fan
CN101
CN102
±
12 V
+
−
+
CHARGE
−
Servomotor
U
V
W
M
-
1
2
-
*
CN103
+
+
-
-
The DC power supply (24 VDC)
is not provided by Yaskawa.
CN201
24 V
24 V
Control
power
supply
0 V
0 V
CN11
Option Module
Option Module
Voltage
sensor
Control
+
power
−
supply
Status display
CN12 CN7
Relay
drive
Voltage
sensor
CN3
Digital Operator Computer
Overheat protector
Overcurrent protector
Gate drive
Processor
(PWM control, position/
speed calculations, etc.)
Current
sensor
Safety function signals
Analog
voltage
converter
I/O
I/F
CN8
CN117
DC+
Brake
control
circuit
CN2
CN5
CN1
CN6A
CN6B
DC-
BK+
BK-
Brake
power
supply
ENC
Analog monitor
output
Encoder divided
pulse output
I/O signals
EtherCAT
communications
BK
* If using these terminals, contact your YASKAWA representative.
2-12

2
Selecting a SERVOPACK
SGD7S-280D and -370D
Processor
(PWM control, position/
speed calculations, etc.)
L1
B1 B2
L2
L3
1
2
Digital Operator Computer
CN3
Option Module
CN11
Option Module
CN12 CN7
Current
sensor
CN2
Analog
voltage
converter
CN5
Analog monitor
output
Voltage
sensor
Voltage
sensor
Varistor
Relay
drive
+
−
+
−
CHARGE
-
-
Gate drive
Overheat protector
Overcurrent protector
Safety function signals
CN8
Main
circuit
power
supply
Control
power
supply
U
V
W
DC+
DC-
Servomotor
ENC
M
BK+
BK-
BK
Brake
control
circuit
Brake
power
supply
CN117
Control
power
supply
24 V
24 V
0 V
0 V
+
−
Fan
±
12 V
±
12 V
±
12 V
±
12 V
I/O
I/F
CN1
CN6A
CN6B
EtherCAT
communications
Encoder divided
pulse output
I/O signals
Status display
The DC power supply (24 VDC)
is not provided by Yaskawa.
CN101
CN101
CN201
+
+
-
-
CN103
*
CN102
2.2 Block Diagrams
2.2.2 SERVOPACKs with Built-in Servomotor Brake Control
* If using these terminals, contact your YASKAWA representative.
2-13

2.3 External Dimensions
CN6B
CN1
CN8
CN2
CN7
CN6A
CN3
CN101
CN103
CN201
(16)
4
250
(20)
(120°)
Unit: mm
CN102
CN115
2.3.1 Front Cover Dimensions and Connector Specifications
2.3
2.3.1
External Dimensions
Front Cover Dimensions and Connector Specifications
The front cover dimensions and panel connector section are the same for all models. Refer to
the following figures and table.
•
Front Cover Dimensions and Connectors
•
Connector Specifications
Connector
No.
CN1 DMC 1.5/15-G1F-3.5-LR-BK 30 Phoenix Contact All models
CN2 3E106-0220KV 6 3M Japan Limited All models
CN3 HDR-EC14LFDTN-SLD+ 14
CN6A/B 1-1734579-4 8
CN7 2172034-1 5
CN8 1903815-1 8
Connector Model
Number
of Pins
Manufacturer
Honda Tsushin Kogyo
Co., Ltd.
Tyco Electronics Japan
G.K.
Tyco Electronics Japan
G.K.
Tyco Electronics Japan
G.K.
Continued on next page.
SERVOPACK
Model
All models
All models
All models
All models
2-14

2.3.1 Front Cover Dimensions and Connector Specifications
2
Selecting a SERVOPACK
Connector
No.
BLZ 7.62HP/08/180LR SN BK BX PRT
CN101
BUZ 10.16HP/07/180F AG BK BX LPR
BLZ 7.62IT/04/180MF4 SN BK BX PRT
CN102
BUZ 10.16IT/04/180MF4 AG BK BX LPR
BVZ 7.62IT/04/180MF3 SN BK BX PRT
CN103*
BUZ 10.16IT/04/180MF3 AG BK BX LPR
BLZ 7.62IT/03/180MF2 SN BK BX PRT 3
CN115
None −−
CN201 BLF 5.08HC/04/180LR SN OR BX SO 4
* If using these terminals, contact your YASKAWA representative.
Note: The above connectors or their equivalents are used for the SERVOPACKs.
Connector Model
Number
of Pins
Weidmüller Interface
8
GmbH & Co. KG
Weidmüller Interface
4
GmbH & Co. KG
Weidmüller Interface
4
GmbH & Co. KG
Weidmüller Interface
GmbH & Co. KG
Weidmüller Interface
GmbH & Co. KG
2.3 External Dimensions
Continued from previous page.
Manufacturer
SERVOPACK
SGD7S-1R9D
to -170D
SGD7S-210D
to -370D
SGD7S-1R9D
to -170D
SGD7S-210D
to -370D
SGD7S-1R9D
to -170D
SGD7S-210D
to -370D
SGD7S-1R9D
to -170D
SGD7S-210D
to -370D
All models
Model
2-15

2.3 External Dimensions
Approx. mass: SGD7S-1R9D, -3R5D, or -5R4D: 3.4 kg
SGD7S-8R4D or -120D: 3.7 kg
Unit: mm
(25)
(75)
(25)
315±0.5
(mounting pitch)
Exterior
Ground terminal, M4
60±0.5
(mounting pitch)
(27.5)
Mounting Hole Diagram
80
300 15
330
15.3
19
70
15
4×M5
330
7.5
10
80
Ground terminal, M4
300 15
330
100
(
25
)
15
70
(
75
)
21
(
27.5
)
(
25
)
15.3
4 × M5
315
±
0.5
(mounting pitch)
330
7.5
10 80±0.5
(mounting pitch)
100
Exterior
Mounting Hole Diagram
Approx. mass:
5.5 kg
Unit: mm
2.3.2 SERVOPACK External Dimensions
2.3.2
SERVOPACK External Dimensions
Base-mounted SERVOPACKs
• Three-Phase, 400 VAC: SGD7S-1R9D, -3R5D, -5R4D, -8R4D, and -120D
• Three-Phase, 400 VAC: SGD7S-170D
2-16

2
Selecting a SERVOPACK
• Three-Phase, 400 VAC: SGD7S-210D and -260D
Ground terminal, M4
(25)
15
33.7
20
(41.9)
2.3 External Dimensions
2.3.2 SERVOPACK External Dimensions
(75)
7.5
4 × M5
380
350
41.8
100
70
• Three-Phase, 400 VAC: SGD7S-280D and -370D
Ground terminal, M4
(25)
34
380
15
350
380
365±0.5
(mounting pitch)
10 80±0.5
Mounting Hole Diagram
Approx. mass: 7.0 kg
21
(75)
(42)
4 × M6
70
100
(mounting pitch)
Unit: mm
6.5
380
367±0.5
(mounting pitch)
180
42
12.5
180
Mounting Hole Diagram
Approx. mass: 13.5 kg
155±0.5
(mounting pitch)
Unit: mm
2-17

2.4 Examples of Standard Connections between SERVOPACKs and Peripheral Devices
I/O Signal Cable
Host controller
Bottom of SERVOPACK
Computer
Engineering
Tool
Computer Cable
Analog Monitor Cable
Holding Brake
Power Supply Unit
*
Magnetic
Contactor
(Wires required for a Servomotor with a Brake)(Wires required for a Servomotor with a Brake)
Noise Filter
Molded-case
circuit br
eaker
Magnetic Contactor
Power supply
Three-phase, 400 VAC
Control Power Supply
Cable
SERVOPACK
main circuit wires
RS T
To next EtherCAT station
EtherCAT Communications Cable
Safety Function Device Cable
→To Servomotor
AC/DC
power
supply
Digital
Operator
Digital Operator
cable
2.4
Examples of Standard Connections between SERVOPACKs and Peripheral Devices
•
Rotary Servomotors
* The power supply for the holding brake is not provided by Yaskawa. Select a power supply based on the holding
brake specifications.
If you use a 24-V brake, install a separate power supply for the 24-VDC power supply from other power supplies,
such as the one for the I/O signals of the CN1 connector.
If the power supply is shared, the I/O signals may malfunction.
2-18

2
Selecting a SERVOPACK
Linear encoder
Sensor Cable
Serial Converter Unit
Serial Converter Unit
Cable
Linear Servomotor
I/O Signal Cable
Host controller
Computer
Engineering
Tool
Computer Cable
Analog Monitor Cable
Noise Filter
Molded-case
circuit breaker
Magnetic Contactor
Power supply
Three-phase, 400 VAC
Control Power Supply
Cable
SERVOPACK
main circuit wires
RS T
To next EtherCAT station
EtherCAT Communications Cable
AC/DC
power
supply
Digital
Operator
Digital Operator
cable
Safety Function Device Cable
Linear
Encoder
Cable
Linear
Encoder
Cable
→To Servomotor
Bottom of SERVOPACK
•
Linear Servomotors
2.4 Examples of Standard Connections between SERVOPACKs and Peripheral Devices
2-19

SERVOPACK Installation
This chapter provides information on installing SERVOPACKs in the required locations.
3
3.1
3.2
3.3
3.4
3.5
3.6
Installation Precautions . . . . . . . . . . . . . . . . 3-2
Mounting Types and Orientation . . . . . . . . . 3-3
Mounting Hole Dimensions . . . . . . . . . . . . . 3-4
Mounting Interval . . . . . . . . . . . . . . . . . . . . 3-5
3.4.1 Installing One SERVOPACK in a Control Panel . . 3-5
3.4.2 Installing More Than One SERVOPACK
in a Control Panel . . . . . . . . . . . . . . . . . . . . . . . . 3-5
Monitoring the Installation Environment . . . 3-6
EMC Installation Conditions . . . . . . . . . . . . 3-7

3.1 Installation Precautions
3.1
Installation Precautions
Refer to the following section for the ambient installation conditions.
2.1.3 Specifications on page 2-4
Installation Near Sources of Heat
Implement measures to prevent temperature increases caused by radiant or convection heat
from heat sources so that the ambient temperature of the SERVOPACK meets the ambient
conditions.
Installation Near Sources of Vibration
Install a vibration absorber on the installation surface of the SERVOPACK so that the SERVOPACK will not be subjected to vibration.
Other Precautions
Do not install the SERVOPACK in a location subject to high temperatures, high humidity, water
drops, cutting oil, excessive dust, excessive dirt, excessive iron powder, corrosive gasses, or
radioactivity.
3-2

3.2 Mounting Types and Orientation
3
SERVOPACK Installation
Airow
SERVOPACK
Base
3.2
Mounting Types and Orientation
The SERVOPACKs are based mounted. Mount the SERVOPACK vertically, as shown in the following figures.
Also, mount the SERVOPACK so that the front panel is facing toward the operator.
Note: Prepare four mounting holes for the SERVOPACK and mount it securely in the mounting holes. (The number
of mounting holes depends on the capacity of the SERVOPACK.)
3-3

3.3 Mounting Hole Dimensions
D
EF
H
A
BC
G
3.3
Mounting Hole Dimensions
Use mounting holes to securely mount the SERVOPACK to the mounting surface.
Note: To mount the SERVOPACK, you will need to prepare a screwdriver that is longer than the depth of the SER-
VOPACK.
Mounting Hole Dimensions
Dimensions (mm)
SERVOPACK Model
1R9D, 3R5D,
5R4D, 8R4D,
SGD7S-
120D
170D 330 7.5 315 ±0.5 100 10 80 ±0.5 10 80 ±0.5 M5 4
210D, 260D 380 7.5 365±0.5 100 10 80±0.5 10 80±0.5 M5 4
280D, 370D 380 6.5 367±0.5 180 12.5 155±0.5 12.5 155±0.5 M6 4
A B C D E F G H
330 7.5 315 ±0.5 80 10 60 ±0.5 10 60 ±0.5 M5 4
Screw
Size
Number
of
Screws
3-4

3.4 Mounting Interval
3
SERVOPACK Installation
30 mm min.
30 mm min.
120 mm min.
*
120 mm min.
SERVOPACK
Important
Fan
30 mm min.
30 mm min.
Fan
120 mm min.
120 mm min.
SERVOPACK
SERVOPACK
SERVOPACK
SERVOPACK
3.4.1 Installing One SERVOPACK in a Control Panel
3.4
3.4.1
3.4.2
Mounting Interval
Installing One SERVOPACK in a Control Panel
Provide the following spaces around the SERVOPACK.
* For this dimension, ignore items protruding from the main body of the SERVOPACK.
Installing More Than One SERVOPACK in a Control Panel
Provide the following spaces around the SERVOPACK, and install a cooling fan in the control
panel.
Install cooling fans above the SERVOPACKs so that hot spots do not occur around the SERVOPAC Ks.
Cooling Fan Installation Conditions
10 mm above SERVOPACK’s Top Surface
Air speed: 1.0 m/s min.
SGD7S-
SERVOPACK model
1R9D, 3R5D, 5R4D,
8R4D, 120D, 170D,
210D, 260D, 280D, 370D
3-5

3.5 Monitoring the Installation Environment
Information
3.5
Monitoring the Installation Environment
You can use the SERVOPACK Installation Environment Monitor parameter to check the operating conditions of the SERVOPACK in the installation environment.
You can check the SERVOPACK installation environment monitor with either of the following
methods.
• Using the SigmaWin+: Life Monitor - Installation Environment Monitor - SERVOPACK
• Digital Operator: Un025 (Installation Environment Monitor [%])
Implement one or more of the following actions if the monitor value exceeds 100%.
• Lower the surrounding temperature.
• Decrease the load.
The value of the SERVOPACK Installation Environment Monitor parameter will increase by
about 10% for each 10°C increase in the ambient temperature.
Always observe the surrounding air temperature given in the SERVOPACK environment conditions. Even if the monitor value is 100% or lower, you cannot use a SERVOPACK in a location
Important
that exceeds the specified surrounding air temperature.
3-6

3.6 EMC Installation Conditions
3
SERVOPACK Installation
CN2
CN6A and CN6B
L1, L2, and L3
U, V, and W
Noise
Filter
Surge
Absorber
Clamp
Brake
Servomotor
Encoder
Brake power supply
SERVOPACK
Safety
function device
I/O
controller
PE
PE
Shield box
Power supply:
Three-phase, 400 VAC
ClampClamp
Clamp
Clamp
Clamp
Clamp
Host controller
Clamp
CN1
24 V, 0 V
Power supply:
24 VDC
CN8
3.6
EMC Installation Conditions
This section gives the installation conditions that were used for EMC certification testing.
The EMC installation conditions that are given here are the conditions that were used to pass
testing criteria at Yaskawa. The EMC level may change under other conditions, such as the
actual installation structure and wiring conditions. These Yaskawa products are designed to be
built into equipment. Therefore, you must implement EMC measures and confirm compliance
for the final equipment.
The applicable standards are EN 55011 group 1 class A, EN 61000-6-2, EN 61000-6-4, and
EN 61800-3 (category C2, second environment).
• Three-Phase, 400 VAC
Symbol Cable Name Specification
I/O Signal Cable Shielded cable
Safety Function Device Cable Shielded cable
Servomotor Main Circuit Cable Shielded cable
Encoder Cable Shielded cable
Main Circuit Power Supply Cable Shielded cable
EtherCAT Communications Cable Shielded cable
3-7

Wiring and Connecting SERVOPACKs
This chapter provides information on wiring and connecting
SERVOPACKs to power supplies and peripheral devices.
4
4.1
4.2
4.3
4.4
4.5
Wiring and Connecting SERVOPACKs . . . . 4-3
4.1.1 General Precautions . . . . . . . . . . . . . . . . . . . . . . 4-3
4.1.2 Countermeasures against Noise . . . . . . . . . . . . . 4-5
4.1.3 Grounding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
Basic Wiring Diagrams . . . . . . . . . . . . . . . . 4-9
Wiring the Power Supply to the SERVOPACK . . 4-11
4.3.1 Terminal Symbols and Terminal Names . . . . . . . 4-11
4.3.2 Connector Wiring Procedure . . . . . . . . . . . . . . . 4-13
4.3.3 Power ON Sequence . . . . . . . . . . . . . . . . . . . . . 4-14
4.3.4 Power Supply Wiring Diagrams . . . . . . . . . . . . . 4-15
4.3.5 Wiring Regenerative Resistors . . . . . . . . . . . . . 4-18
4.3.6 Wiring DC Reactors . . . . . . . . . . . . . . . . . . . . . 4-18
Wiring Servomotors . . . . . . . . . . . . . . . . . . 4-19
4.4.1 Terminal Symbols and Terminal Names . . . . . . . 4-19
4.4.2 Pin Arrangement of Encoder Connector (CN2) . 4-19
4.4.3 Wiring the SERVOPACK to the Encoder . . . . . . 4-20
4.4.4 Wiring the SERVOPACK to the Holding Brake . . 4-25
Connecting I/O Signals . . . . . . . . . . . . . . . 4-28
4.5.1 I/O Signal Connector (CN1) Names
and Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-28
4.5.2 I/O Signal Connector (CN1) Pin Arrangement . . 4-30
4.5.3 I/O Signal Wiring Examples . . . . . . . . . . . . . . . . 4-31
4.5.4 I/O Circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-33

4.6
Connecting Safety Function Signals . . . . . 4-35
4.6.1 Pin Arrangement of Safety Function Signals (CN8) . . 4-35
4.6.2 I/O Circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-35
4.7 Connecting Dynamic Brake Resistors . . . . . . . 4-37
4.7.1 Terminal Symbols and Terminal Names . . . . . . . . . . . 4-37
4.7.2 Connecting a Dynamic Brake Resistor . . . . . . . . . . . . . . 4-37
4.8
4.9
Connecting EtherCAT Communications Cables . . 4-39
4.8.1 EtherCAT Connectors (RJ45) . . . . . . . . . . . . . . . . . . . 4-39
4.8.2 Ethernet Communications Cables . . . . . . . . . . . . . . . 4-40
Connecting the Other Connectors . . . . . . . 4-41
4.9.1 Serial Communications Connector (CN3) . . . . . .4-41
4.9.2 Computer Connector (CN7) . . . . . . . . . . . . . . . .4-41
4.9.3 Analog Monitor Connector (CN5) . . . . . . . . . . . .4-41

4.1 Wiring and Connecting SERVOPACKs
4
Wiring and Connecting SERVOPACKs
DANGER
WARNING
CAUTION
4.1.1 General Precautions
4.1
4.1.1
Wiring and Connecting SERVOPACKs
General Precautions
Do not change any wiring while power is being supplied.
There is a risk of electric shock or injury.
Wiring and inspections must be performed only by qualified engineers.
There is a risk of electric shock or product failure.
Check all wiring and power supplies carefully.
Incorrect wiring or incorrect voltage application to the output circuits may cause short-circuit
failures. If a short-circuit failure occurs as a result of any of these causes, the holding brake will
not work. This could damage the machine or cause an accident that may result in death or
injury.
Connect the AC and DC power supplies to the specified SERVOPACK terminals.
• Connect an AC power supply to the L1, L2, and L3 terminals on the SERVOPACK.
• Connect a DC power supply to the B1 and 2 terminals and the 24 V and 0 V terminals on the
SERVOPACK.
There is a risk of failure or fire.
Wait for six minutes after turning OFF the power supply and then make sure that the
CHARGE indicator is not lit before starting wiring or inspection work. Do not touch the
power supply terminals while the CHARGE lamp is lit after turning OFF the power supply
because high voltage may still remain in the SERVOPACK.
There is a risk of electric shock.
Observe the precautions and instructions for wiring and trial operation precisely as
described in this document.
Failures caused by incorrect wiring or incorrect voltage application in the brake circuit may
cause the SERVOPACK to fail, damage the equipment, or cause an accident resulting in death
or injury.
Check the wiring to be sure it has been performed correctly.
Connectors and pin layouts are sometimes different for different models. Always confirm the
pin layouts in technical documents for your model before operation.
There is a risk of failure or malfunction.
Connect wires to power supply terminals and motor connection terminals securely with the
specified methods and tightening torque.
Insufficient tightening may cause wires and terminal blocks to generate heat due to faulty contact, possibly resulting in fire.
Use shielded twisted-pair cables or screened unshielded multi-twisted-pair cables for I/O
Signal Cables and Encoder Cables.
Observe the following precautions when wiring the SERVOPACK’s main circuit terminals.
• Turn ON the power supply to the SERVOPACK only after all wiring, including the main circuit terminals, has been completed.
• If a connector is used for the main circuit terminals, remove the main circuit connector from the
SERVOPACK before you wire it.
• Insert only one wire per insertion hole in the main circuit terminals.
• When you insert a wire, make sure that the conductor wire (e.g., whiskers) does not come into
contact with adjacent wires.
Install molded-case circuit breakers and other safety measures to provide protection
against short circuits in external wiring.
There is a risk of fire or failure.
4-3

4.1 Wiring and Connecting SERVOPACKs
NOTICE
Important
4.1.1 General Precautions
Whenever possible, use the Cables specified by Yaskawa.
If you use any other cables, confirm the rated current and application environment of your
model and use the wiring materials specified by Yaskawa or equivalent materials.
Securely tighten cable connector screws and lock mechanisms.
Insufficient tightening may result in cable connectors falling off during operation.
Do not bundle power lines (e.g., the Main Circuit Cable) and low-current lines (e.g., the I/O
Signal Cables or Encoder Cables) together or run them through the same duct. If you do not
place power lines and low-current lines in separate ducts, separate them by at least 30 cm.
If the cables are too close to each other, malfunctions may occur due to noise affecting the lowcurrent lines.
Install a battery at either the host controller or on the Encoder Cable.
If you install batteries both at the host controller and on the Encoder Cable at the same time,
you will create a loop circuit between the batteries, resulting in a risk of damage or burning.
When connecting a battery, connect the polarity correctly.
There is a risk of battery rupture or encoder failure.
If you use an External Regenerative Resistor or External Dynamic Brake Resistor, use cable
ties, clamps, or other means to secure the resistor so that the connectors or terminal blocks
inside the SERVOPACK will not be affected even if the resistor is subjected to vibration or
shock.
There is a risk of SERVOPACK damage.
• Use a molded-case circuit breaker (1QF) or fuse to protect the main circuit. The SERVOPACK
connects directly to a commercial power supply; it is not isolated through a transformer or
other device. Always use a molded-case circuit breaker (1QF) or fuse to protect the Servo System from accidents involving different power system voltages or other accidents.
• Install an earth leakage breaker. The SERVOPACK does not have a built-in ground fault protective circuit. To configure a safer system, install a ground fault detector against overloads and
short-circuiting, or install a ground fault detector combined with a molded-case circuit breaker.
• Do not turn the power supply ON and OFF more than necessary.
• Do not use the SERVOPACK for applications that require the power supply to turn ON and
OFF frequently. Such applications will cause elements in the SERVOPACK to deteriorate.
• After you have started actual operation, allow at least one hour between turning the power
supply ON and OFF (as a guideline).
To ensure safe, stable application of the Servo System, observe the following precautions when
wiring.
• Use the Cables specified by Yaskawa. Design and arrange the system so that each cable is
as short as possible.
Refer to the catalog for information on the specified cables.
• The signal cable conductors are as thin as 0.2 mm
2
or 0.3 mm2. Do not subject them to
excessive bending stress or tension.
4-4

4.1 Wiring and Connecting SERVOPACKs
4
Wiring and Connecting SERVOPACKs
4.1.2 Countermeasures against Noise
4.1.2
Countermeasures against Noise
The SERVOPACK is designed as an industrial device. It therefore provides no measures to prevent radio interference. The SERVOPACK uses high-speed switching elements in the main circuit.
Important
The SERVOPACK uses microprocessors. Therefore, it may be affected by switching noise from
peripheral devices.
To prevent the noise from the SERVOPACK or the peripheral devices from causing malfunctions of any devices, take the following countermeasures against noise as required.
• Install the input reference device and Noise Filter as close to the SERVOPACK as possible.
• Always install a Surge Absorber for relays, solenoids, and Magnetic Contactor coils.
• Do not place the following cables in the same duct or bundle them together. Also, separate
the cables from each other by at least 30 cm.
•Main Circuit Cables and I/O Signal Cables
•Main Circuit Cables and Encoder Cables
• Do not share the power supply with an electric welder or electrical discharge machine. If the
SERVOPACK is placed near a high-frequency generator, install Noise Filters on the input side
on the Main Circuit Power Supply Cable and Control Power Supply Cable even if the same
power supply is not shared with the high-frequency generator. Refer to the following section
for information on connecting Noise Filters.
• Implement suitable grounding measures. Refer to the following section for information on
grounding measures.
Therefore peripheral devices may be affected by switching noise.
If the equipment is to be used near private houses or if radio interference is a problem, take
countermeasures against noise.
Noise Filters on page 4-6
4.1.3 Grounding on page 4-8
4-5

4.1 Wiring and Connecting SERVOPACKs
SERVOPACK
Servomotor
Operation relay sequence
User signal generators
DC
power
supply
(Grounding plate)
External ground: Use a dedicated ground.
2.0 mm
2
min.
Noise Filter
2.0 mm
2
min.
2.0 mm
2
min.
Noise Filter
*3
*3 *2
U
W
V
L2
L1
L3
0 V
24 V
CN2
CN1
400 VAC
*1
ENC
(FG)
M
Noise Filter
*3
DC
power
supply
4.1.2 Countermeasures against Noise
Noise Filters
You must attach Noise Filters in appropriate places to protect the SERVOPACK from the
adverse effects of noise. The following is an example of wiring for countermeasures against
noise.
*1. For the ground wire, use a wire with a thickness of at least 2.0 mm
2
(preferably, flat braided copper wire).
*2. Whenever possible, use twisted-pair wires to wire all connections marked with .
*3. Refer to the following section for precautions when using Noise Filters.
Noise Filter Wiring and Connection Precautions on page 4-7
4-6

4.1 Wiring and Connecting SERVOPACKs
4
Wiring and Connecting SERVOPACKs
Noise
Filter
Noise
Filter
Noise
Filter
Noise
Filter
Separate the circuits.
Correct
Incorrect
Grounding plate
Grounding plate
Grounding
plate
Grounding plate
It is OK if the ground
wire is close to the
input lines.
Noise
Filter
Noise
Filter
Correct
Incorrect
Grounding plate
Grounding plate
Shielded ground wire
Noise
Filter
Noise
Filter
Grounding plate
Grounding plate
SERVOPACK SERVOPACK SERVOPACK SERVOPACK
CorrectIncorrect
4.1.2 Countermeasures against Noise
Noise Filter Wiring and Connection Precautions
Always observe the following precautions when wiring or connecting Noise Filters.
• Separate input lines from output lines. Do not place input lines and output lines in the same
duct or bundle them together.
• Separate the Noise Filter ground wire from the output lines. Do not place the Noise Filter
ground wire, output lines, and other signal lines in the same duct or bundle them together.
• Connect the Noise Filter ground wire directly to the grounding plate. Do not connect the
Noise Filter ground wire to other ground wires.
4-7

4.1 Wiring and Connecting SERVOPACKs
Control panel
Ground
Grounding plate
SERVOPACK
SERVOPACK
Noise
Filter
4.1.3 Grounding
• If a Noise Filter is located inside a control panel, first connect the Noise Filter ground wire and
the ground wires from other devices inside the control panel to the grounding plate for the
control panel, then ground the plate.
4.1.3
Grounding
Implement grounding measures as described in this section. Implementing suitable grounding
measures will also help prevent malfunctions, which can be caused by noise.
Observe the following precautions when wiring the ground cable.
• Ground the SERVOPACK to a resistance of 10 Ω or less.
• Be sure to ground at one point only.
• Ground the Servomotor directly if the Servomotor is insulated from the machine.
Motor Frame Ground or Motor Ground
If you ground the Servomotor through the machine, switching noise current can flow from the
main circuit of the SERVOPACK through the stray capacitance of the Servomotor. To prevent
this, always connect the motor frame terminal (FG) or ground terminal (FG) of the Servomotor
to the ground terminal on the SERVOPACK. Also be sure to ground the ground terminal .
Ground both the Moving Coil and Magnetic Way of a Linear Servomotor.
Noise on I/O Signal Cables
If noise enters the I/O Signal Cable, ground the shield of the I/O Signal Cable using a clamp or
other means. If the Servomotor Main Circuit Cable is placed in a metal conduit, ground the
conduit and its junction box. For all grounding, ground at one point only.
4-8

4.2 Basic Wiring Diagrams
4
Wiring and Connecting SERVOPACKs
SERVOPACK
Frame ground
General-purpose sequence output 1
(Brake output: ON to release brake)
General-purpose sequence
output 2
General-purpose sequence
output 3
*1
*3
*8
*5
*5
*5
Signal ground
Connector shell
Ground to
a resistance
of 10 Ω
or less.
Switch
Fuse
Safety
*4
Analog monitors
(For servo alarm
display)
Servo power ONServo power
OFF
Servo Alarm Output
(OFF for alarm)
Encoder Divided
Pulse Output,
Phase A
Encoder Divided
Pulse Output,
Phase B
Encoder Divided
Pulse Output,
Phase C
/SO1+ (/BK+)
/SO1- (/BK-)
ALM+
ALM-
1
2
3
4
/SO2+
/SO2-
23
24
/SO4+
/SO4-
27
28
/SO5+
/SO5-
29
30
/SO3+
/SO3-
25
26
16
SG
PBO
PCO
/PBO
PAO
/PAO
/PCO
21
17
18
19
20
22
General-purpose sequence
output 4
General-purpose sequence
output 5
EDM1+
EDM1-
FG
TH
5
/HWBB1+
/HWBB1-
/HWBB2+
/HWBB2-
24 V
0 V
6
3
4
5
8
7
*1
*1
CN1
CN8
1
2
5
6
ENC
PS
/PS
PG5V
PG0V
2
4
1
3
CN5
L1
B2
B3
L2
24 V
24 V
L3
0 V
0 V
1
2
B1
2KM
1KM
1QF
R
ST
1FLT
3SA
1PL
1KM
2KM
1SA
2SA
1KM
1Ry
1KM
1Ry
CN2
AC/DC
+24VIN
+24 V
4.7 k
W
6
8
10
9
11
12
/SI0
/SI1 (P-OT)
/SI2 (N-OT)
/SI3
/SI4 (/Probe1)
/SI5 (/Probe2)
/SI6 (/Home)
BAT(+)
BAT (-)
13
14
15
7
+
-
Main circuit
terminals
U
V
W
PE
M
Motor
terminals
General-purpose sequence input 1
(Forward Drive Prohibit input: OFF to prohibit drive)
Sequence input signal
power supply input
Battery for absolute
encoder
2.8 V to 4.5 V
General-purpose sequence input 0
General-purpose sequence input 2
(Reverse Drive Prohibit input: OFF to prohibit drive)
Linear Servomotor overheat
protection input
*2
General-purpose sequence input 4
(Probe 1 Latch Input: latch when ON)
General-purpose sequence input 3
General-purpose sequence input 5
(Probe 2 Latch Input: latch when ON)
General-purpose sequence input 6
(Home Switch Input: homing when ON)
*6
BK+
BKDC+
Brake power
supply
Dynamic Brake Resistor terminals
DC-
BK
CN117
CN102
D1
D2
D3
CN115
*7
Connect the shield to the connector shell
or ground it with a clamp or other means.
CN101
CN201
CN103
4.4 Wiring Servomotors
on page 4-19
4.9.3 Analog Monitor Connector
(CN5)
on page 4-41
4.3 Wiring the
Power Supply
to the SERVOPAC K on page
4-11
4.5 Connecting I/O Signals
on page 4-28
4.6 Connecting Safety Function Signals on page 4-35
4.4 Wiring Servomotors
on page 4-19
4.4 Wiring Servomotors
on page 4-19
4.7.2 Connecting a Dynamic
Brake Resistor on page 4-37
4.2
Basic Wiring Diagrams
This section provide the basic wiring diagrams. Refer to the reference sections given in the diagrams for details.
4-9

4.2 Basic Wiring Diagrams
*1. represents twisted-pair wires.
*2. Connect these when using an absolute encoder. If the Encoder Cable with a Battery Case is connected, do not
connect a backup battery.
*3. The 24-VDC power supply is not provided by Yaskawa. Use a 24-VDC power supply with double insulation or
reinforced insulation.
*4. Refer to the following chapter if you use a safety function device.
*5. Always use line receivers to receive the output signals.
*6. Use an SELV-compliant power supply according to EN/IEC 60950-1 to input 24 VDC to the control power sup-
*7. The CN117 connector is used for SERVOPACKs with built-in Servomotor brake control. SERVOPACKs without
*8. If using these terminals, contact your YASKAWA representative.
Note: 1. You can use parameters to change the functions allocated to the /SI0, /SI3, P-OT, N-OT, /Probe1, /Probe2,
Chapter 11 Safety Functions
If you do not use the safety function, insert the Safety Jumper Connector (provided as an accessory) into CN8
when you use the SERVOPACK.
ply input terminals.
built-in Servomotor brake control do not have the CN117 connector.
and /Home input signals and the /SO1, /SO2, /SO3, /SO4, and /SO5 output signals. Refer to the following
section for details.
6.1 I/O Signal Allocations on page 6-4
2. If you use a 24-V brake, install a separate power supply for the 24-VDC power supply from other power
supplies, such as the one for the I/O signals of the CN1 connector. If the power supply is shared, the I/O
signals may malfunction.
3. Default settings are given in parentheses.
4-10

4.3 Wiring the Power Supply to the SERVOPACK
4
Wiring and Connecting SERVOPACKs
CAUTION
4.3.1 Terminal Symbols and Terminal Names
4.3
4.3.1
Wiring the Power Supply to the SERVOPACK
Ter m i n al S y m b ol s a n d Ter m i n al N a m es
Use the main circuit connector on the SERVOPACK to wire the main circuit power supply and
control circuit power supply to the SERVOPACK.
Wire all connections correctly according to the following table and specified reference infor-
mation. There is a risk of SERVOPACK failure or fire if incorrect wiring is performed.
The SERVOPACKs have the following two types of main circuit power supply input specifications.
• Three-Phase, 400-VAC Power Supply Input
Te rm ina l
Symbols
L1, L2, L3
24 V
0 V 0 VDC
B1, B2, B3
1, 2
,
U, V, W, PE Servomotor terminals
D1, D2, D3
DC+
DC-
BK+, BK-
*1. Use an SELV-compliant power supply according to EN/IEC 60950-1 to input 24 VDC to the control power sup-
ply input terminals.
*2. With the SGD7S-210D, -260D, -280D, or -370D, connect a Regenerative Resistor Unit between B1 and B2.
*3. The SGD7S-210D, -260D, -280D, and -370D do not have the D1, D2, and D3 terminals.
*4. Make sure you check the brake specifications of the Servomotor for the 24-VDC power supply input to the Ser-
vomotor brake power supply terminals.
*5. SERVOPACKs without built-in Servomotor brake control do not have these terminals.
*2
*3
*5
*5
*5
Termi n a l Name Specifications and Reference
Main circuit power supply
input terminals for AC
power supply input
Control power supply termi-
*1
nals
Regenerative Resistor terminal
DC Reactor terminals for
power supply harmonic
suppression
− None. (Do not connect anything to this terminal.)
Dynamic Brake Resistor terminals
Servomotor brake power
supply terminals
Servomotor brake terminals
Ground terminal
*4
Three-phase, 380 VAC to 480 VAC, -15% to +10%, 50 Hz/60
Hz
24 VDC, -15% to +15%
4.3.5 Wiring Regenerative Resistors on page 4-18
If the internal regenerative resistor is insufficient, remove the
lead or short bar between B2 and B3 and connect an External Regenerative Resistor between B1 and B2.
The External Regenerative Resistor is not included. Obtain it
separately.
4.3.6 Wiring DC Reactors on page 4-18
These terminals are used to connect a DC Reactor for power
supply harmonic suppression or power factor improvement.
These are the Σ-7S connection terminals for the Servomotor
Main Circuit Cable (power line).
Note: Do not connect the PE terminal to anything other than a ground
terminal.
In the following cases, remove the lead or short bar between
D2 and D3 and connect a Dynamic Brake Resistor between
D1 and D2.
• To specify the brake torque when stopping with the
dynamic brake
• To use a larger load moment of inertia than in the standard
specifications
The Dynamic Brake Resistor is not included. Obtain it separately.
24 VDC
0 VDC
Connect these terminals to the Servomotor’s holding brake
terminals. The holding brake terminals on the Servomotor do
not have any polarity.
The ground terminals to prevent electric shock. Always connect this terminal.
4-11

4.3 Wiring the Power Supply to the SERVOPACK
4.3.1 Terminal Symbols and Terminal Names
• DC Power Supply Input
Te rm ina l
Symbols
24 V
0 V 0 VDC
*2
B1
*2
2
Termi n a l Name Specifications and Reference
Control power supply termi-
*1
nals
Main circuit power supply
input terminals for DC
power supply input
24 VDC, -15% to +15%
513 VDC to 648 VDC, -15% to +10%
0 VDC
L1, L2, L3,
B2, B3, 1, , − None. (Do not connect anything to these terminals.)
These are the Σ-7S connection terminals for the Servomotor
U, V, W, PE Servomotor terminals
Main Circuit Cable (power line).
Note: Do not connect the PE terminal to anything other than a ground
terminal.
In the following cases, remove the lead or short bar between
D2 and D3 and connect a Dynamic Brake Resistor between
D1 and D2.
• To specify the brake torque when stopping with the
dynamic brake
• To use a larger load moment of inertia than in the standard
D1, D2, D3
Dynamic Brake Resistor ter-
*3
minals
specifications
The Dynamic Brake Resistor is not included. Obtain it separately.
*5
DC+
*5
DC-
BK+, BK-
Servomotor brake power
supply terminals
*5
Servomotor brake terminals
*4
24 VDC
0 VDC
Connect these terminals to the Servomotor’s holding brake
terminals. The holding brake terminals on the Servomotor do
not have any polarity.
Ground terminal
*1. Use an SELV-compliant power supply according to EN/IEC 60950-1 to input 24 VDC to the control power sup-
ply input terminals.
*2. If using these terminals, contact your YASKAWA representative.
*3. The SGD7S-210D, -260D, -280D, and -370D do not have the D1, D2, and D3 terminals.
*4. Make sure you check the brake specifications of the Servomotor for the 24-VDC power supply input to the Ser-
vomotor brake power supply terminals.
*5. SERVOPACKs without built-in Servomotor brake control do not have these terminals.
This is the ground terminal to prevent electric shock. Always
connect this terminal.
If you use a DC power supply input to the SERVOPACK, make sure to set parameter Pn001
to n.1 (DC power supply input supported) before inputting the power supply. Refer to
the following section for details.
5.2 Power Supply Type Settings for the Main Circuit on page 5-12
4-12

4.3 Wiring the Power Supply to the SERVOPACK
4
Wiring and Connecting SERVOPACKs
Wire
Lock lever
4.3.2 Connector Wiring Procedure
4.3.2
Connector Wiring Procedure
• Required Items: Phillips or flat-blade screwdriver
Screwdriver End
SERVOPACK model
SGD7S-
1R9D, 3R5D, 5R4D,
8R4D, 120D, 170D
210D, 260D, 280D,
370D
1.
Prepare the connector that was provided with the SERVOPACK.
2.
Remove the sheath from the wire to connect.
3.
Open the wire insertion hole on the terminal connector with the screwdriver.
Termi n a l Symb o l s
L1, L2, L3, B1, B2, B3, -1, -2 Flat-blade
U, V, W, PE
24 V, 0 V Flat-blade 10
L1, L2, L3, B1, B2, B3, -1, -2
U, V, W, PE
24 V, 0 V Flat-blade 10
Screwdriver
Type
Phillips or
flat-blade
Phillips or
flat-blade
Phillips or
flat-blade
Dimensions
Thickness × Width
[mm]
0.6 × 3.5
1.0 × 5.5
Wire Stripping
Length [mm]
7
7
12
12
Main Circuit Terminals and Motor Terminals Control Power Supply Terminals
Insert the conductor of the wire into the wire insertion hole, insert the screwdriver into the screwdriver
insertion hole, and tighten the screw.
4.
Make all other connections in the same way.
5.
When you have completed wiring, attach the connector to the SERVOPACK.
6.
Press the connector all the way to the back and lock it with the lock lever.
Press the lever with a screwdriver or your fingertip
and insert the conductor of the wire into the wire
insertion hole.
After you insert conductor, release the screwdriver
or your fingertip.
Wire
4-13

4.3 Wiring the Power Supply to the SERVOPACK
WARNING
Important
4.3.3 Power ON Sequence
4.3.3
Power ON Sequence
Consider the following points when you design the power ON sequence.
• The ALM (Servo Alarm) signal is output for up to five seconds when the control power supply
is turned ON. Take this into consideration when you design the power ON sequence, and
turn ON the main circuit power supply to the SERVOPACK when the ALM signal is OFF (alarm
cleared).
Power ON
Control power supply
Main circuit power supply
Servo Alarm (ALM)
output signal
• Design the power ON sequence so that main circuit power supply is turned OFF when an
ALM (Servo Alarm) signal is output.
• Make sure that the power supply specifications of all parts are suitable for the input power
supply.
• Allow at least 1 s after the power supply is turned OFF before you turn it ON again.
Turn ON the control power supply and the main circuit power supply at the same time or turn ON
the control power supply before the main circuit power supply.
Turn OFF the main circuit power supply first, and then turn OFF the control power supply.
Alarm
Up to 5.0 s
Alarm cleared.
Even after you turn OFF the power supply, a high residual voltage may still remain in the
SERVOPACK. To prevent electric shock, do not touch the power supply terminals after you
turn OFF the power. When the voltage is discharged, the CHARGE indicator will turn OFF.
Make sure the CHARGE indicator is OFF before you start wiring or inspection work.
4-14

4.3 Wiring the Power Supply to the SERVOPACK
4
Wiring and Connecting SERVOPACKs
2KM
L1
SERVOPACK
0 V
1Ry
+
−
3
4
1D
B2
L2
CN1
1KM
24 V
L3
0 V
1QF
R
ST
1FLT
+24 V
1
2
3SA
B1
1QF: Molded-case circuit breaker
1FLT: Noise Filter
1KM: Magnetic Contactor
(for control power supply)
2KM: Magnetic Contactor
(for main circuit power supply)
1Ry: Relay
1PL: Indicator lamp
1SA: Surge Absorber
2SA: Surge Absorber
3SA: Surge Absorber
1D: Flywheel diode
(For servo alarm
display)
1PL
1KM
2KM
1SA
Servo power ONServo power
OFF
2SA
1KM
1Ry
1KM
ALM
ALM
1Ry
AC/DC
4.3.4 Power Supply Wiring Diagrams
4.3.4
Power Supply Wiring Diagrams
Using Only One SERVOPACK
• Wiring Example for Three-Phase, 400-VAC Power Supply Input: SGD7S-1R9D, -3R5D,
-5R4D, -8R4D, -120D, and -170D
ST
R
1QF
3SA
1FLT
Servo power ONServo power
1KM
1KM
2KM
(For servo alarm
1Ry
OFF
1Ry
1KM
AC/DC
display)
1PL
1KM
1SA
2KM
2SA
• Wiring Example for Three-Phase, 400-VAC Power Supply Input: SGD7S-210D, -260D,
-280D, and -370D
SERVOPACK
L1
L2
L3
24 V
0 V
B1
B2
CN1
B3
1QF: Molded-case circuit breaker
1FLT: Noise Filter
1KM: Magnetic Contactor
(for control power supply)
2KM: Magnetic Contactor
(for main circuit power supply)
3
1
2
4
ALM
ALM
1Ry
+
-
1D
+24 V
0 V
1Ry: Relay
1PL: Indicator lamp
1SA: Surge Absorber
2SA: Surge Absorber
3SA: Surge Absorber
1D: Flywheel diode
4-15

4.3 Wiring the Power Supply to the SERVOPACK
SERVOPACK
(For servo alarm
display)
Servo power ONServo power
OFF
1QF: Molded-case circuit breaker
1FLT: Noise Filter
1KM: Magnetic Contactor
(for control power supply)
2KM: Magnetic Contactor
(for main circuit power supply)
1FU: Fuse
2FU: Fuse
1Ry: Relay
1PL: Indicator lamp
1SA: Surge Absorber
2SA: Surge Absorber
3SA: Surge Absorber
1D: Flywheel diode
2FU
1PL
1KM
2KM
1SA
2SA
24 V
0 V
1FU
2KM
0 V
1Ry
1D
+24 V
1KM
AC/DC
1QF
R
ST
3SA
+
-
3
4
CN1
1Ry
1KM
1Ry
1KM
ALM
ALM
1FLT
B2
B3
1
2
L1
L2
L3
AC/DC
B1
2FU
(For servo alarm
display)
1PL
1KM
2KM
1SA
Servo power ONServo power
OFF
2SA
24 V
0 V
B1
SERVOPACK
2
1FU
2KM
0 V
1Ry
1D
+24 V
1KM
AC/DC
1QF
R
ST
3SA
1QF: Molded-case circuit breaker
1FLT: Noise Filter
1KM: Magnetic Contactor
(for control power supply)
2KM: Magnetic Contactor
(for main circuit power supply)
+
−
3
4
CN1
1Ry
1KM
1Ry
1KM
ALM
ALM
1FLT
1FU: Fuse
2FU: Fuse
1Ry: Relay
1PL: Indicator lamp
1SA: Surge Absorber
2SA: Surge Absorber
3SA: Surge Absorber
1D: Flywheel diode
B2
1
L1
L2
L3
AC/DC
4.3.4 Power Supply Wiring Diagrams
• Wiring Example for DC Power Supply Input: SGD7S-1R9D, -3R5D, -5R4D, -8R4D,
-120D, and -170D
• Wiring Example for DC Power Supply Input: SGD7S-210D, -260D, -280D, and -370D
4-16

4
Wiring and Connecting SERVOPACKs
RS T
1QF
2KM
1Ry
+24 V
L1
L2
L3
0 V
M
L1
L2
L3
L1
L2
L3
1D
M
M
3SA
1PL
1KM
2KM
1SA
2SA
3
4
CN1
1KM
1Ry
1KM
ALM+
ALM−
3
4
CN1
ALM−
3
4
CN1
ALM−
1Ry
ALM+
ALM+
2FLT
3FLT
4FLT
Power supply
SERVOPACK
Servomotor
Servomotor
Servomotor
SERVOPACK
SERVOPACK
Relay
terminal
Relay
terminal
Relay
terminal
Relay
terminal
(For servo alarm
display)
Servo power ONServo power
OFF
1QF: Molded-case circuit breaker
1FLT: Noise Filter
2FLT: Noise Filter
3FLT: Noise Filter
4FLT: Noise Filter
1KM: Magnetic Contactor
(for control power supply)
2KM: Magnetic Contactor
(for main circuit power supply)
1Ry: Relay
1PL: Indicator lamp
1SA: Surge Absorber
2SA: Surge Absorber
3SA: Surge Absorber
1D: Flywheel diode
1KM
1FLT
24 V
0 V
24 V
0 V
24 V
0 V
AC/DC
4.3 Wiring the Power Supply to the SERVOPACK
4.3.4 Power Supply Wiring Diagrams
Using More Than One SERVOPACK
Connect the ALM (Servo Alarm) output for these SERVOPACKs in series to operate the alarm
detection relay (1RY).
When a SERVOPACK alarm is activated, the ALM output signal transistor turns OFF.
The following diagram shows the wiring to stop all of the Servomotors when there is an alarm
for any one SERVOPACK.
More than one SERVOPACK can share a single Noise Filter. However, always select a Noise Fil-
ter that has a large enough capacity to handle the total power supply capacity of all the
SERVOPACKs. Be sure to consider the load conditions.
To comply with UL/cUL standards, you must install a branch circuit protective device at the
power supply input section to each SERVOPACK. Refer to the following document for details.
Σ-7-Series Σ-7S SERVOPACK with 400 V-Input Power Safety Precautions (Manual No.: TOMP C710828 02)
4-17

4.3 Wiring the Power Supply to the SERVOPACK
WARNING
Enlarged View
1
2
SERVOPACK
-
-
DC Reactor
4.3.5 Wiring Regenerative Resistors
4.3.5
Wiring Regenerative Resistors
This section describes how to connect External Regenerative Resistors.
Refer to the catalog to select External Regenerative Resistors.
Be sure to wire Regenerative Resistors correctly. Do not connect B1/⊕ and B2.
Doing so may result in fire or damage to the Regenerative Resistor or SERVOPACK.
Connecting Regenerative Resistors
1.
Remove the wire connected between the B2 and B3 terminals.
4.3.6
2.
Connect the External Regenerative Resistor between the B1 and B2 terminals on the
SERVOPACK.
3.
Set Pn600 (Regenerative Resistor Capacity) and Pn603 (Regenerative Resistor Resistance).
Refer to the following section for details on the settings.
5.17 Setting the Regenerative Resistor Capacity on page 5-55
Wiring DC Reactors
You can connect a DC Reactor to the SERVOPACK when power supply harmonic suppression is
required. Connection terminals 1 and 2 for a DC Reactor are connected when the SERVOPACK
is shipped. Remove the lead wire and connect a DC Reactor as shown in the following diagram.
4-18

4.4 Wiring Servomotors
4
Wiring and Connecting SERVOPACKs
4.4.1 Terminal Symbols and Terminal Names
4.4
4.4.1
4.4.2
Wiring Servomotors
Ter m i n al S y m b ol s a n d Ter m i n al N a m es
The SERVOPACK terminals or connectors that are required to connect the SERVOPACK to a
Servomotor are given below.
Terminal/Connector
Symbols
U, V, and W Servomotor terminals
PE Ground terminal
CN2 Encoder connector
Pin Arrangement of Encoder Connector (CN2)
• When Using a Rotary Servomotor
Pin No. Signal Function
1 PG5V Encoder power supply +5 V
2 PG0V Encoder power supply 0 V
3BAT (+)* Battery for absolute encoder (+)
4BAT (-)* Battery for absolute encoder (-)
5 PS Serial data (+)
6 /PS Serial data (-)
Shell Shield –
* You do not need to wire these pins for an incremental encoder.
• When Using a Linear Servomotor
Pin No. Signal Function
1 PG5V Linear encoder power supply +5 V
2 PG0V Linear encoder power supply 0 V
3– – (Do not use.)
4– – (Do not use.)
5 PS Serial data (+)
6 /PS Serial data (-)
Shell Shield –
Terminal/Connector Name Remarks
Refer to the following section for the wiring procedure.
4.3.2 Connector Wiring Procedure on page 4-13
–
–
4-19

4.4 Wiring Servomotors
ENC
3
4
21
22
BAT
BAT
(+)
(-)
CN2
CN1
*2
*2
*1
5
6
1
2
PG5V
PG0V
PS
/PS
BAT(+)
BAT(-)
U
V
W
M
+
-
Absolute encoder
(Shell)
SERVOPACK
Connector
shell
Battery
4.4.3 Wiring the SERVOPACK to the Encoder
4.4.3
Wiring the SERVOPACK to the Encoder
When Using an Absolute Encoder
If you use an absolute encoder, use an Encoder Cable with a JUSP-BA01-E Battery Case or
install a battery on the host controller.
Refer to the following section for the battery replacement procedure.
15.1.3 Replacing the Battery on page 15-3
• Wiring Example When Installing a Battery on the Host Controller
*1. The absolute encoder pin numbers for wiring the connector depend on the Servomotor that you use.
*2. represents a shielded twisted-pair cable.
• Wiring Example When Using an Encoder Cable with a Battery Case
SERVOPACK
Absolute encoder
*1
ENC
(Shell)
*1. The absolute encoder pin numbers for wiring the connector depend on the Servomotor that you use.
*2. represents a shielded twisted-pair cable.
*2
PS
/PS
PG5V
PG0V
BAT(+)
BAT(-)
+
-
Battery
Encoder Cable
with a Battery Case
CN2
5
6
1
2
3
4
Connector
shell
U
V
W
M
4-20

4.4.3 Wiring the SERVOPACK to the Encoder
4
Wiring and Connecting SERVOPACKs
Important
Circuit Example
Required Component Specifications
• Schottky Diode
Reverse Voltage: Vr ≥ 40 V
Forward Voltage: Vf ≤ 0.37 V
Reverse current: Ir ≤ 5 μA
Junction temperature: Tj ≥ 125℃
• Resistor
Resistance: 22
Ω
Tolerance: ±5% max.
Rated power: 0.25 W min.
1
2
5
6
CN2
ENC
*2
*1
PS
/PS
PG5V
PG0V
U
V
W
M
Incremental encoder
(Shell)
Connector
shell
SERVOPACK
Shield
• When Installing a Battery on the Encoder Cable
Use the Encoder Cable with a Battery Case that is specified by Yaskawa.
Refer to the catalog for details.
• When Installing a Battery on the Host Controller
Insert a diode near the battery to prevent reverse current flow.
+
Battery
-
When Using an Incremental Encoder
4.4 Wiring Servomotors
*1. The incremental encoder pin numbers for wiring the connector depend on the Servomotor that you use.
*2. represents a shielded twisted-pair cable.
4-21

4.4 Wiring Servomotors
*
PS
/PS
PG5V
PG0V
2
6
1
5
5
6
1
2
CN2
U
V
W
M
Absolute linear encoder
from Mitutoyo Corporation
Shield
Connector
shell
Connector
shell
SERVOPACK
Absolute linear
encoder from
Renishaw PLC
PS
*
/PS
PG5V
PG0V
Shield
Connector
shell
5
6
1
2
Connector
shell
SERVOPACK
CN2
U
V
W
M
PS
*
/PS
PG5V
PG0V
5
6
1
2
CN2
U
V
W
M
Absolute linear encoder
from Magnescale Co., Ltd.
Shield
Connector
shell
Connector
shell
SERVOPACK
4.4.3 Wiring the SERVOPACK to the Encoder
When Using an Absolute Linear Encoder
The wiring depends on the manufacturer of the linear encoder.
Connections to Linear Encoder from Mitutoyo Corporation
* represents a shielded twisted-pair cable.
Connections to Absolute Linear Encoder from Renishaw PLC
* represents a shielded twisted-pair cable.
Connections to Absolute Linear Encoder from Magnescale Co., Ltd.
SR77, SR87, SQ47, and SQ57
4-22
* represents a shielded twisted-pair cable.

4.4 Wiring Servomotors
4
Wiring and Connecting SERVOPACKs
*
*
Serial Converter Unit
Linear encoder from
Renishaw PLC
9
1
10
11
4
12
2
3
9
1
10
11
4
12
2
3
COS PS
/PS
PG5V
PG0V
SIN
REF
/REF
5V
0V
/SIN
/COS
2
6
1
5
CN2
Shield
Shield
Connector
shell
Connector
shell
Connector
shell
CN1
5
6
1
2
Connector
shell
SERVOPACK
CN2
U
V
W
M
4.4.3 Wiring the SERVOPACK to the Encoder
When Using an Incremental Linear Encoder
The wiring depends on the manufacturer of the linear encoder.
Connections to Linear Encoder from Heidenhain Corporation
Linear encoder from
Heidenhain Corporation
1
9
3
11
14
7
4
2
Connector
shell
*
Shield
Serial Converter Unit
CN2
1
COS
SIN
/SIN
REF
/REF
5V
0V
9
3
11
14
7
4
2
Connector
shell
/COS
2
6
1
5
Connector
shell
*
Shield
/PS
PG5V
PG0V
PS
SERVOPACK
CN2CN1
5
6
1
2
Connector
shell
U
V
W
M
* represents a shielded twisted-pair cable.
Connections to Linear Encoder from Renishaw PLC
* represents a shielded twisted-pair cable.
4-23

4.4 Wiring Servomotors
PS
*
/PS
PG5V
PG0V
5
6
1
2
CN2
U
V
W
M
Linear encoder from
Magnescale Co., Ltd.
Shield
Connector
shell
Connector
shell
SERVOPACK
*
PS
/PS
PG5V
PG0V
5
6
1
2
CN2
U
V
W
M
InterpolatorLinear encoder
Shield
Connector
shell
Head
Cable from
Magnescale Co., Ltd.
Connector
shell
SERVOPACK
4.4.3 Wiring the SERVOPACK to the Encoder
Connections to Linear Encoder from Magnescale Co., Ltd.
If you use a linear encoder from Magnescale Co., Ltd., the wiring will depend on the model of
the linear encoder.
SR75 and SR85
* represents a shielded twisted-pair cable.
SL700, SL710, SL720, SL730, and SQ10
• PL101-RY, MQ10-FLA, or MQ10-GLA Interpolator
The following table gives the Linear Encoder and Interpolator combinations.
Linear Encoder Model Interpolator Model
SL700, SL710, SL720, and SL730
SQ10
PL101-RY
MQ10-FLA
MQ10-GLA
*1. This is the model of the Head with Interpolator.
*2. This is the model of the Interpolator.
* represents a shielded twisted-pair cable.
*1
*2
*2
4-24

4
Wiring and Connecting SERVOPACKs
SL700, SL710, SL720, and SL730
*
PS
/PS
PG0V
5
6
5
6
2
2
1
12, 14, 16
CN2
+5 V0 V
U
V
W
M
External power supply
Interpolator
Linear encoder
Shield
Connector
shell
Head
Cable from
Magnescale Co., Ltd.
Connector
shell
SERVOPACK
Important
Relay Circuit Example
• MJ620-T13 Interpolator
* represents a shielded twisted-pair cable.
4.4 Wiring Servomotors
4.4.4 Wiring the SERVOPACK to the Holding Brake
4.4.4
Wiring the SERVOPACK to the Holding Brake
• If you use a Rotary Servomotor, select a Surge Absorber according to the brake current and
brake power supply. Refer to the catalog for details.
• After the Surge Absorber is connected, check the time required to brake in your application.
The Surge Absorber may affect the time required to brake.
Configure the relay circuit to activate the holding brake for an emergency stop.
SERVOPACK
Photocoupler
• You can change the output signal allocation of the /BK signal. Refer to the following section for
details.
Allocating the /BK (Brake) Signal
• If you use a 24-V brake, install a separate power supply for the 24-VDC power supply from
other power supplies, such as the one for the I/O signals of the CN1 connector. If the power
supply is shared, the I/O signals may malfunction.
5 VDC to 30 VDC
Emergency stop
0V
on page 5-34
4-25
 Loading...
Loading...