

Page 1
YASKAWA AC Drive-A1000
High Performance Vector Control Drive
Technical Manual
Type: CIMR-AUA
Models:
To properly use the product, read this manual thoroughly and retain
for easy reference, inspection, and maintenance. Ensure the end user
receives this manual.
600 V Class: 0.75 to 18.5 kW
Receiving
Mechanical Installation
Electrical Installation
Start-Up Programming &
Operation
Parameter Details
Troubleshooting
Periodic Inspection &
Maintenance
Peripheral Devices &
Options
Specifications
Parameter List
MEMOBUS/Modbus
Communications
1
2
3
4
5
6
7
8
A
B
C
MANUAL NO. SIEP C710616 31B
Standards Compliance
Quick Reference Sheet
D
E
Page 2

This Page Intentionally Blank
2
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 3
Quick Reference
u
Easily Set Parameters for Specific Applications
Preset parameter defaults are available for setting up applications. Refer to Application Selection on
page 97.
Run a Motor One Frame Larger
This drive can operate a motor one frame size larger when running variable torque loads such as fans and pumps. Refer to C6-01: Drive Duty Mode
Selection on page 166.
Drive a Synchronous PM Motor
A1000 can operate synchronous PM motors. Refer to Subchart A-3: Operation with Permanent
Magnet Motors on page 95.
<99>
PM motor control modes are not available on 600 V class drives, CIMR-Ao5oooooooo.
Automatic tuning sets motor parameters. Refer to Auto-Tuning on page 100.
Use drive monitors to check if fans, capacitors, or other components require maintenance. Refer to Performance Life Monitors Maintenance
Monitors on page 351.
Refer to Drive Alarms, Faults, and Errors on page 295 and Refer to Troubleshooting without Fault Display on page 336.
Refer to UL Standards on page 498.
<99>
Perform Auto-Tuning
Maintenance Check Using Drive Monitors
Fault Display and Troubleshooting
Standards Compliance
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
3
Page 4

This Page Intentionally Blank
4
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 5
Table of Contents
QUICK REFERENCE ....................................................................................... 3
i. PREFACE & GENERAL SAFETY.................................................................. 15
i.1 Preface ....................................................................................................................... 16
Applicable Documentation....................................................................................................... 16
Symbols................................................................................................................................... 16
Terms and Abbreviations ........................................................................................................ 17
i.2 General Safety ........................................................................................................... 18
Supplemental Safety Information ............................................................................................ 18
Safety Messages..................................................................................................................... 19
General Application Precautions ............................................................................................. 20
Motor Application Precautions................................................................................................. 22
Drive Label Warnings .............................................................................................................. 25
Warranty Information............................................................................................................... 25
1. RECEIVING .................................................................................................... 27
1.1 Section Safety............................................................................................................ 28
1.2 General Description .................................................................................................. 29
A1000 Model Selection ........................................................................................................... 29
Control Mode Selection ........................................................................................................... 30
1.3 Model Number and Nameplate Check ..................................................................... 32
Nameplate ............................................................................................................................... 32
1.4 Drive Models and Enclosure Types......................................................................... 34
1.5 Component Names.................................................................................................... 35
IP20/NEMA Type 1 Enclosure................................................................................................. 35
Front Views ............................................................................................................................. 36
2. MECHANICAL INSTALLATION..................................................................... 37
2.1 Section Safety............................................................................................................ 38
2.2 Mechanical Installation ............................................................................................. 40
Installation Environment .......................................................................................................... 40
Installation Orientation and Spacing........................................................................................ 40
Digital Operator Remote Usage .............................................................................................. 42
Exterior and Mounting Dimensions ......................................................................................... 45
3. ELECTRICAL INSTALLATION ...................................................................... 47
3.1 Section Safety............................................................................................................ 48
YASKAWA ELECTRIC
SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
5
Page 6

Table of Contents
3.2 Standard Connection Diagram...........................................................................................50
3.3 Main Circuit Connection Diagram......................................................................................53
Three-Phase 600 V Class ................................................................................................................. 53
3.4 Terminal Block Configuration ............................................................................................54
3.5 Terminal Cover ....................................................................................................................55
IP20/NEMA Type 1............................................................................................................................ 55
3.6 Digital Operator and Front Cover.......................................................................................56
Removing/Reattaching the Digital Operator...................................................................................... 56
Removing/Reattaching the Front Cover ............................................................................................ 56
3.7 Top Protective Cover ..........................................................................................................57
Removing the Top Protective Cover ................................................................................................. 57
Reattaching the Top Protective Cover .............................................................................................. 57
3.8 Main Circuit Wiring..............................................................................................................58
Main Circuit Terminal Functions........................................................................................................ 58
Protecting Main Circuit Terminals ..................................................................................................... 58
Wire Gauges and Tightening Torque ................................................................................................ 58
Main Circuit Terminal and Motor Wiring ............................................................................................ 59
3.9 Control Circuit Wiring .........................................................................................................61
Control Circuit Connection Diagram.................................................................................................. 61
Control Circuit Terminal Block Functions .......................................................................................... 61
Terminal Configuration ...................................................................................................................... 63
Wiring the Control Circuit Terminal ................................................................................................... 65
Switches and Jumpers on the Terminal Board.................................................................................. 67
3.10 Control I/O Connections .....................................................................................................68
Sinking/Sourcing Mode Switch for Digital Inputs............................................................................... 68
Sinking/Sourcing Mode Selection for Safe Disable Inputs ................................................................ 69
Using the Pulse Train Output ............................................................................................................ 69
Terminal A2 Input Signal Selection ................................................................................................... 70
Terminal A3 Analog/PTC Input Selection.......................................................................................... 70
Terminal AM/FM Signal Selection ..................................................................................................... 71
MEMOBUS/Modbus Termination ...................................................................................................... 71
3.11 Connect to a PC...................................................................................................................72
3.12 External Interlock ................................................................................................................73
Drive Ready....................................................................................................................................... 73
3.13 Wiring Checklist ..................................................................................................................74
4. START-UP PROGRAMMING & OPERATION....................................................... 77
4.1 Section Safety......................................................................................................................78
4.2 Using the Digital Operator..................................................................................................79
Keys and Displays............................................................................................................................. 79
LCD Display ...................................................................................................................................... 80
ALARM (ALM) LED Displays............................................................................................................. 81
LO/RE LED and RUN LED Indications.............................................................................................. 81
Menu Structure for Digital Operator .................................................................................................. 83
4.3 The Drive and Programming Modes..................................................................................84
Navigating the Drive and Programming Modes................................................................................. 84
Changing Parameter Settings or Values ........................................................................................... 85
Verifying Parameter Changes: Verify Menu ...................................................................................... 87
6
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 7

Table of Contents
Simplified Setup Using the Setup Group........................................................................................... 88
Switching Between LOCAL and REMOTE........................................................................................ 89
4.4 Start-Up Flowcharts ............................................................................................................91
Flowchart A: Basic Start-Up and Motor Tuning ................................................................................. 92
Subchart A-1: Simple Motor Setup Using V/f Control........................................................................ 93
Subchart A-2: High Performance Operation Using OLV or CLV ....................................................... 94
Subchart A-3: Operation with Permanent Magnet Motors................................................................. 95
4.5 Powering Up the Drive ........................................................................................................96
Powering Up the Drive and Operation Status Display....................................................................... 96
4.6 Application Selection..........................................................................................................97
Setting 1: Water Supply Pump Application........................................................................................ 97
Setting 2: Conveyor Application ........................................................................................................ 98
Setting 3: Exhaust Fan Application ................................................................................................... 98
Setting 4: HVAC Fan Application ...................................................................................................... 98
Setting 5: Compressor Application .................................................................................................... 99
4.7 Auto-Tuning .......................................................................................................................100
Types of Auto-Tuning ...................................................................................................................... 100
Before Auto-Tuning the Drive.......................................................................................................... 103
Auto-Tuning Interruption and Fault Codes ...................................................................................... 104
Auto-Tuning Operation Example ..................................................................................................... 104
Parameter Settings during Induction Motor Auto-Tuning: T1 .......................................................... 106
Parameter Settings during PM Motor Auto-Tuning: T2 ................................................................... 108
Parameter Settings during Inertia and Speed Control Loop Auto-Tuning: T3................................. 111
4.8 No-Load Operation Test Run............................................................................................112
No-Load Operation Test Run .......................................................................................................... 112
4.9 Test Run with Load Connected........................................................................................114
Test Run with the Load Connected ................................................................................................. 114
4.10 Verifying Parameter Settings and Backing Up Changes...............................................115
Backing Up Parameter Values: o2-03 ............................................................................................. 115
Parameter Access Level: A1-01...................................................................................................... 115
Password Settings: A1-04, A1-05 ................................................................................................... 115
Copy Function ................................................................................................................................. 116
4.11 Test Run Checklist ............................................................................................................117
5. PARAMETER DETAILS ....................................................................................... 119
5.1 A: Initialization...................................................................................................................120
A1: Initialization ............................................................................................................................... 120
A2: User Parameters....................................................................................................................... 125
5.2 b: Application.....................................................................................................................126
b1: Operation Mode Selection......................................................................................................... 126
b2: DC Injection Braking and Short Circuit Braking......................................................................... 133
b3: Speed Search............................................................................................................................ 135
b4: Delay Timers ............................................................................................................................. 140
b5: PID Control................................................................................................................................ 141
b6: Dwell Function........................................................................................................................... 150
b7: Droop Control (CLV, CLV/PM) .................................................................................................. 151
b8: Energy Saving ........................................................................................................................... 152
b9: Zero Servo................................................................................................................................. 153
5.3 C: Tuning............................................................................................................................154
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
7
Page 8

Table of Contents
C1: Acceleration and Deceleration Times ....................................................................................... 154
C2: S-Curve Characteristics............................................................................................................ 156
C3: Slip Compensation.................................................................................................................... 156
C4: Torque Compensation .............................................................................................................. 159
C5: Automatic Speed Regulator (ASR) ........................................................................................... 161
C6: Carrier Frequency..................................................................................................................... 166
5.4 d: Reference Settings .......................................................................................................169
d1: Frequency Reference................................................................................................................ 169
d2: Frequency Upper/Lower Limits ................................................................................................. 171
d3: Jump Frequency........................................................................................................................ 172
d4: Frequency Reference Hold and Up/Down 2 Function............................................................... 173
d5: Torque Control .......................................................................................................................... 178
d6: Field Weakening and Field Forcing........................................................................................... 182
d7: Offset Frequency....................................................................................................................... 183
5.5 E: Motor Parameters .........................................................................................................184
E1: V/f Pattern for Motor 1............................................................................................................... 184
E2: Motor 1 Parameters .................................................................................................................. 187
E3: V/f Pattern for Motor 2............................................................................................................... 190
E4: Motor 2 Parameters .................................................................................................................. 191
E5: PM Motor Settings .................................................................................................................... 193
5.6 F: Option Settings .............................................................................................................196
F1: PG Speed Control Card Settings .............................................................................................. 196
F2: Analog Input Card Settings ....................................................................................................... 199
F3: Digital Input Card Settings ........................................................................................................ 199
F4: Analog Monitor Card Settings ................................................................................................... 200
F5: Digital Output Card Settings...................................................................................................... 201
F6: Communication Option Card..................................................................................................... 201
CC-Link Parameters........................................................................................................................ 203
PROFIBUS-DP Parameters ............................................................................................................ 203
CANopen Parameters ..................................................................................................................... 204
DeviceNet Parameters .................................................................................................................... 204
5.7 H: Terminal Functions.......................................................................................................207
H1: Multi-Function Digital Inputs ..................................................................................................... 207
H2: Multi-Function Digital Outputs................................................................................................... 218
H3: Multi-Function Analog Inputs .................................................................................................... 228
H4: Multi-Function Analog Outputs ................................................................................................. 234
H5: MEMOBUS/Modbus Serial Communication ............................................................................. 235
H6: Pulse Train Input/Output........................................................................................................... 235
5.8 L: Protection Functions ....................................................................................................238
L1: Motor Protection ........................................................................................................................ 238
L2: Momentary Power Loss Ride-Thru............................................................................................ 243
L3: Stall Prevention ......................................................................................................................... 250
L4: Speed Detection........................................................................................................................ 256
L5: Fault Restart.............................................................................................................................. 257
L6: Torque Detection....................................................................................................................... 259
L7: Torque Limit .............................................................................................................................. 261
L8: Drive Protection......................................................................................................................... 263
5.9 n: Special Adjustments.....................................................................................................269
n1: Hunting Prevention.................................................................................................................... 269
n2: Speed Feedback Detection Control (AFR) Tuning.................................................................... 270
n3: High Slip Braking (HSB) and Overexcitation Braking................................................................ 270
8
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 9

Table of Contents
n5: Feed Forward Control ............................................................................................................... 272
n6: Online Tuning ............................................................................................................................ 274
n8: PM Motor Control Tuning .......................................................................................................... 275
5.10 o: Operator Related Settings............................................................................................278
o1: Digital Operator Display Selection............................................................................................. 278
o2: Digital Operator Keypad Functions ........................................................................................... 279
o3: Copy Function ........................................................................................................................... 281
o4: Maintenance Monitor Settings................................................................................................... 282
q: DriveWorksEZ Parameters.......................................................................................................... 283
r: DriveWorksEZ Connection Parameters ....................................................................................... 283
T: Motor Tuning ............................................................................................................................... 283
5.11 U: Monitor Parameters......................................................................................................284
U1: Operation Status Monitors ........................................................................................................ 284
U2: Fault Trace................................................................................................................................ 284
U3: Fault History.............................................................................................................................. 284
U4: Maintenance Monitors .............................................................................................................. 284
U5: PID Monitors ............................................................................................................................. 284
U6: Operation Status Monitors ........................................................................................................ 284
U8: DriveWorksEZ Monitors............................................................................................................ 285
6. TROUBLESHOOTING.......................................................................................... 287
6.1 Section Safety....................................................................................................................288
6.2 Motor Performance Fine-Tuning......................................................................................290
Fine-Tuning V/f Control and V/f Control with PG............................................................................. 290
Fine-Tuning Open Loop Vector Control .......................................................................................... 291
Fine-Tuning Closed Loop Vector Control ........................................................................................ 292
Fine-Tuning Open Loop Vector Control for PM Motors................................................................... 292
Fine-Tuning Advanced Open Loop Vector Control for PM Motors.................................................. 293
Fine-Tuning Closed Loop Vector Control for PM Motors ................................................................ 293
Parameters to Minimize Motor Hunting and Oscillation .................................................................. 294
6.3 Drive Alarms, Faults, and Errors .....................................................................................295
Types of Alarms, Faults, and Errors................................................................................................ 295
Alarm and Error Displays ................................................................................................................ 296
6.4 Fault Detection ..................................................................................................................300
Fault Displays, Causes, and Possible Solutions ............................................................................. 300
6.5 Alarm Detection.................................................................................................................316
Alarm Codes, Causes, and Possible Solutions ............................................................................... 316
6.6 Operator Programming Errors .........................................................................................324
Operator Programming Error Codes, Causes, and Possible Solutions........................................... 324
6.7 Auto-Tuning Fault Detection ............................................................................................328
Auto-Tuning Codes, Causes, and Possible Solutions..................................................................... 328
6.8 Copy Function Related Displays .....................................................................................332
Tasks, Errors, and Troubleshooting ................................................................................................ 332
6.9 Diagnosing and Resetting Faults.....................................................................................334
Fault Occurs Simultaneously with Power Loss ............................................................................... 334
If the Drive Still has Power After a Fault Occurs ............................................................................. 334
Viewing Fault Trace Data After Fault .............................................................................................. 334
Fault Reset Methods ....................................................................................................................... 335
6.10 Troubleshooting without Fault Display...........................................................................336
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
9
Page 10

Table of Contents
Common Problems.......................................................................................................................... 336
Cannot Change Parameter Settings ............................................................................................... 336
Motor Does Not Rotate Properly after Pressing RUN Button or after Entering External Run
Command ...................................................................................................................................... 337
Motor is Too Hot.............................................................................................................................. 338
Drive Does Not Allow Selection the Desired Auto-Tuning Mode..................................................... 339
oPE02 Error Occurs When Lowering the Motor Rated Current Setting .......................................... 339
Motor Stalls during Acceleration or Acceleration Time is Too Long................................................ 339
Drive Frequency Reference Differs from the Controller Frequency Reference Command ............. 340
Excessive Motor Oscillation and Erratic Rotation............................................................................ 340
Deceleration Takes Longer Than Expected with Dynamic Braking Enabled .................................. 340
Noise From Drive or Output Lines When the Drive is Powered On ................................................ 341
Ground Fault Circuit Interrupter (GFCI) Trips During Run .............................................................. 341
Connected Machinery Vibrates When Motor Rotates ..................................................................... 341
PID Output Fault.............................................................................................................................. 342
Insufficient Starting Torque ............................................................................................................. 342
Motor Rotates After the Drive Output is Shut Off (Motor Rotates During DC Injection Braking)..... 342
Output Frequency is not as High as Frequency Reference ............................................................ 342
Buzzing Sound from Motor at 2 kHz................................................................................................ 342
Unstable Motor Speed when Using PM .......................................................................................... 343
Motor Does Not Restart after Power Loss....................................................................................... 343
7. PERIODIC INSPECTION & MAINTENANCE ...................................................... 345
7.1 Section Safety....................................................................................................................346
7.2 Inspection ..........................................................................................................................348
Recommended Daily Inspection...................................................................................................... 348
Recommended Periodic Inspection................................................................................................. 349
7.3 Periodic Maintenance .......................................................................................................351
Replacement Parts.......................................................................................................................... 351
7.4 Drive Cooling Fans............................................................................................................353
Number of Cooling Fans ................................................................................................................. 353
Cooling Fan Component Names ..................................................................................................... 353
Cooling Fan Replacement............................................................................................................... 353
7.5 Drive Replacement ............................................................................................................356
Serviceable Parts ............................................................................................................................ 356
Terminal Board................................................................................................................................ 356
Replacing the Drive ......................................................................................................................... 356
8. PERIPHERAL DEVICES & OPTIONS ................................................................. 359
8.1 Section Safety....................................................................................................................360
8.2 Drive Options and Peripheral Devices ............................................................................361
8.3 Connecting Peripheral Devices .......................................................................................363
8.4 Option Card Installation....................................................................................................364
Installing Option Cards .................................................................................................................... 364
Installation Procedure...................................................................................................................... 364
8.5 Installing Peripheral Devices ...........................................................................................366
Dynamic Braking Options................................................................................................................ 366
Installing a Molded Case Circuit Breaker (MCCB) and Earth Leakage Circuit Breaker (ELCB) ..... 367
Installing a Ground Fault Circuit Interrupter (GFCI) ........................................................................ 367
Installing a Magnetic Contactor at the Power Supply Side.............................................................. 368
10
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 11

Table of Contents
Connecting an AC or DC Reactor ................................................................................................... 368
Installing Input Fuses ...................................................................................................................... 369
Attachment for External Heatsink Mounting .................................................................................... 369
Installing a Motor Thermal Overload (oL) Relay on the Drive Output ............................................. 369
A. SPECIFICATIONS ................................................................................................ 371
A.1 Heavy Duty and Normal Duty Ratings.............................................................................372
A.2 Power Ratings ...................................................................................................................373
Three-Phase 600 V Class Drives .................................................................................................... 373
A.3 Drive Specifications ..........................................................................................................374
A.4 Drive Watt Loss Data ........................................................................................................376
A.5 Drive Derating Data ...........................................................................................................377
Carrier Frequency Derating............................................................................................................. 377
Temperature Derating ..................................................................................................................... 377
Altitude Derating.............................................................................................................................. 378
B. PARAMETER LIST............................................................................................... 379
B.1 Understanding Parameter Descriptions..........................................................................380
Control Modes, Symbols, and Terms .............................................................................................. 380
B.2 Parameter Groups .............................................................................................................381
B.3 A: Initialization Parameters ..............................................................................................382
A1: Initialization ............................................................................................................................... 382
A2: User Parameters....................................................................................................................... 383
B.4 b: Application.....................................................................................................................384
b1: Operation Mode Selection......................................................................................................... 384
b2: DC Injection Braking and Short Circuit Braking......................................................................... 385
b3: Speed Search............................................................................................................................ 386
b4: Timer Function .......................................................................................................................... 387
b5: PID Control................................................................................................................................ 387
b6: Dwell Function........................................................................................................................... 389
b7: Droop Control ............................................................................................................................ 389
b8: Energy Saving ........................................................................................................................... 389
b9: Zero Servo................................................................................................................................. 390
B.5 C: Tuning............................................................................................................................391
C1: Acceleration and Deceleration Times ....................................................................................... 391
C2: S-Curve Characteristics............................................................................................................ 392
C3: Slip Compensation.................................................................................................................... 392
C4: Torque Compensation .............................................................................................................. 393
C5: Automatic Speed Regulator (ASR) ........................................................................................... 393
C6: Carrier Frequency..................................................................................................................... 395
B.6 d: References.....................................................................................................................397
d1: Frequency Reference................................................................................................................ 397
d2: Frequency Upper/Lower Limits ................................................................................................. 398
d3: Jump Frequency........................................................................................................................ 398
d4: Frequency Reference Hold and Up/Down 2 Function............................................................... 399
d5: Torque Control .......................................................................................................................... 400
d6: Field Weakening and Field Forcing........................................................................................... 400
d7: Offset Frequency....................................................................................................................... 401
B.7 E: Motor Parameters .........................................................................................................402
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
11
Page 12

Table of Contents
E1: V/f Pattern for Motor 1............................................................................................................... 402
E2: Motor 1 Parameters .................................................................................................................. 403
E3: V/f Pattern for Motor 2............................................................................................................... 404
E4: Motor 2 Parameters .................................................................................................................. 405
E5: PM Motor Settings .................................................................................................................... 406
B.8 F: Options...........................................................................................................................407
F1: PG Speed Control Card (PG-B3/PG-X3) .................................................................................. 407
F2: Analog Input Card (AI-A3)......................................................................................................... 409
F3: Digital Input Card (DI-A3).......................................................................................................... 409
F4: Analog Monitor Card (AO-A3) ................................................................................................... 410
F5: Digital Output Card (DO-A3) ..................................................................................................... 410
F6: Communication Option Card..................................................................................................... 411
B.9 H Parameters: Multi-Function Terminals ........................................................................414
H1: Multi-Function Digital Inputs ..................................................................................................... 414
H2: Multi-Function Digital Outputs................................................................................................... 419
H3: Multi-Function Analog Inputs .................................................................................................... 422
H4: Analog Outputs ......................................................................................................................... 424
H5: MEMOBUS/Modbus Serial Communication ............................................................................. 425
H6: Pulse Train Input/Output........................................................................................................... 426
B.10 L: Protection Function ......................................................................................................427
L1: Motor Protection ........................................................................................................................ 427
L2: Momentary Power Loss Ride-Thru............................................................................................ 427
L3: Stall Prevention ......................................................................................................................... 429
L4: Speed Detection........................................................................................................................ 430
L5: Fault Restart.............................................................................................................................. 431
L6: Torque Detection....................................................................................................................... 431
L7: Torque Limit .............................................................................................................................. 433
L8: Drive Protection......................................................................................................................... 433
B.11 n: Special Adjustment.......................................................................................................436
n1: Hunting Prevention.................................................................................................................... 436
n2: Speed Feedback Detection Control (AFR) Tuning.................................................................... 436
n3: High Slip Braking (HSB) and Overexcitation Braking................................................................ 436
n5: Feed Forward Control ............................................................................................................... 437
n6: Online Tuning ............................................................................................................................ 438
n8: PM Motor Control Tuning .......................................................................................................... 438
B.12 o: Operator-Related Settings ...........................................................................................440
o1: Digital Operator Display Selection............................................................................................. 440
o2: Digital Operator Keypad Functions ........................................................................................... 440
o3: Copy Function ........................................................................................................................... 441
o4: Maintenance Monitor Settings................................................................................................... 441
B.13 DriveWorksEZ Parameters ...............................................................................................443
q: DriveWorksEZ Parameters.......................................................................................................... 443
r: DriveWorksEZ Connection Parameters ....................................................................................... 443
B.14 T: Motor Tuning .................................................................................................................444
T1: Induction Motor Auto-Tuning..................................................................................................... 444
T2: PM Motor Auto-Tuning .............................................................................................................. 445
T3: ASR and Inertia Tuning............................................................................................................. 447
B.15 U: Monitors.........................................................................................................................448
U1: Operation Status Monitors ........................................................................................................ 448
U2: Fault Trace................................................................................................................................ 450
12
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 13

Table of Contents
U3: Fault History.............................................................................................................................. 451
U4: Maintenance Monitors .............................................................................................................. 452
U5: PID Monitors ............................................................................................................................. 453
U6: Operation Status Monitors ........................................................................................................ 454
U8: DriveWorksEZ Monitors............................................................................................................ 455
B.16 Control Mode Dependent Parameter Default Values .....................................................456
A1-02 (Motor 1 Control Mode) Dependent Parameters .................................................................. 456
E3-01 (Motor 2 Control Mode) Dependent Parameters .................................................................. 458
B.17 V/f Pattern Default Values.................................................................................................459
B.18 Defaults by Drive Model (o2-04) and ND/HD (C6-01)......................................................460
C. MEMOBUS/MODBUS COMMUNICATIONS........................................................ 463
C.1 MEMOBUS/Modbus Configuration ..................................................................................464
C.2 Communication Specifications........................................................................................465
C.3 Connecting to a Network ..................................................................................................466
Network Cable Connection.............................................................................................................. 466
Wiring Diagram for Multiple Connection.......................................................................................... 466
Network Termination ....................................................................................................................... 467
C.4 MEMOBUS/Modbus Setup Parameters ...........................................................................468
MEMOBUS/Modbus Serial Communication.................................................................................... 468
C.5 Drive Operations by MEMOBUS/Modbus........................................................................471
Observing the Drive Operation........................................................................................................ 471
Controlling the Drive........................................................................................................................ 471
C.6 Communications Timing...................................................................................................472
Command Messages from Master to Drive..................................................................................... 472
Response Messages from Drive to Master ..................................................................................... 472
C.7 Message Format ................................................................................................................473
Message Content ............................................................................................................................ 473
Slave Address ................................................................................................................................. 473
Function Code ................................................................................................................................. 473
Data................................................................................................................................................. 473
Error Check ..................................................................................................................................... 473
C.8 Message Examples ...........................................................................................................475
Reading Drive MEMOBUS/Modbus Register Contents .................................................................. 475
Loopback Test................................................................................................................................. 475
Writing to Multiple Registers............................................................................................................ 476
C.9 MEMOBUS/Modbus Data Table........................................................................................477
Command Data ............................................................................................................................... 477
Monitor Data.................................................................................................................................... 478
Broadcast Messages....................................................................................................................... 488
Fault Trace Contents....................................................................................................................... 489
Alarm Register Contents ................................................................................................................. 491
C.10 Enter Command.................................................................................................................492
Enter Command Types ................................................................................................................... 492
Enter Command Settings when Upgrading the Drive...................................................................... 492
C.11 Communication Errors .....................................................................................................493
MEMOBUS/Modbus Error Codes.................................................................................................... 493
Slave Not Responding..................................................................................................................... 493
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
13
Page 14

Table of Contents
C.12 Self-Diagnostics ................................................................................................................494
D. STANDARDS COMPLIANCE .............................................................................. 495
D.1 Section Safety....................................................................................................................496
D.2 UL Standards .....................................................................................................................498
UL Standards Compliance .............................................................................................................. 498
Drive Motor Overload Protection ..................................................................................................... 499
D.3 Safe Disable Input Function .............................................................................................501
Specifications .................................................................................................................................. 501
Precautions ..................................................................................................................................... 501
Using the Safe Disable Function ..................................................................................................... 501
E. QUICK REFERENCE SHEET .............................................................................. 505
E.1 Drive and Motor Specifications........................................................................................506
Drive Specifications......................................................................................................................... 506
Motor Specifications ........................................................................................................................ 506
E.2 Basic Parameter Settings .................................................................................................507
Basic Setup ..................................................................................................................................... 507
V/f Pattern Setup ............................................................................................................................. 507
Motor Setup..................................................................................................................................... 507
Multi-Function Digital Inputs ............................................................................................................ 507
Pulse Train Input/Analog Inputs ...................................................................................................... 508
Multi-Function Digital Outputs ......................................................................................................... 508
Monitor Outputs............................................................................................................................... 508
E.3 User Setting Table.............................................................................................................509
INDEX ................................................................................................................... 517
14
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 15
i
Preface & General Safety
This section provides safety messages pertinent to this product that, if not heeded, may result in fatality,
personal injury, or equipment damage. Yaskawa is not responsible for the consequences of ignoring
these instructions.
i.1 PREFACE...............................................................................................................16
i.2 GENERAL SAFETY...............................................................................................18
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
15
Page 16

TERMSTERMS
i.1 Preface
i.1 Preface
Yaskawa
manufactures products used as components in a wide variety of industrial systems and equipment. The selection and
application of Yaskawa products remain the responsibility of the equipment manufacturer or end user. Yaskawa accepts no
responsibility for the way its products are incorporated into the final system design. Under no circumstances should any
Yaskawa product be incorporated into any product or design as the exclusive or sole safety control. Without exception, all
controls should be designed to detect faults dynamically and fail safely under all circumstances. All systems or equipment
designed to incorporate a product manufactured by Yaskawa must be supplied to the end user with appropriate warnings and
instructions as to the safe use and operation of that part. Any warnings provided by Yaskawa must be promptly provided to
the end user. Yaskawa offers an express warranty only as to the quality of its products in conforming to standards and
specifications published in the Yaskawa manual. NO OTHER WARRANTY, EXPRESS OR IMPLIED, IS OFFERED.
Yaskawa assumes no liability for any personal injury, property damage, losses, or claims arising from misapplication of its
products.
This manual is designed to ensure correct and suitable application of A1000-Series Drives. Read this manual before attempting
to install, operate, maintain, or inspect a drive and keep it in a safe, convenient location for future reference. Be sure you
understand all precautions and safety information before attempting application.
u
Applicable Documentation
The following manuals are available for A1000 series drives:
A1000 Series AC Drive Technical Manual
A1000
0V
009
This manual provides detailed information on parameter settings, drive functions, and MEMOBUS/
Modbus specifications. Use this manual to expand drive functionality and to take advantage of higher
performance features. This manual is available for download on our documentation website,
www.yaskawa.com.
A1000 Series AC Drive Quick Start Guide
Read this guide first. This guide is packaged together with the product and contains basic information
required to install and wire the drive. It also gives an overview of fault diagnostics, maintenance, and
parameter settings. The purpose of this guide is to prepare the drive for a trial run with an application and
for basic operation. This manual is available for download on our documentation website,
www.yaskawa.com.
u
Symbols
Note: Indicates a supplement or precaution that does not cause drive damage.
Indicates a term or definition used in this manual.
16
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 17

u
TERMSTERMS
Terms and Abbreviations
• Drive: Yaskawa A1000-Series Drive
• BCD: Binary Coded Decimal
• H: Hexidecimal Number Format
• kbps: Kilobits per Second
• MAC: Media Access Control
• Mbps: Megabits per Second
• PG: Pulse Generator
• r/min: Revolutions per Minute
• V/f: V/f Control
• V/f w/PG: V/f Control with PG
• OLV: Open Loop Vector Control
• CLV: Closed Loop Vector Control
• OLV/PM: Open Loop Vector Control for PM
• AOLV/PM: Advanced Open Loop Vector Control for PM
• CLV/PM: Closed Loop Vector Control for PM
• PM motor: Permanent Magnet Synchronous motor (an abbreviation for IPM motor or SPM motor)
• IPM motor: Interior Permanent Magnet Motor (e.g., Yaskawa SSR1 Series and SST4 Series motors)
• SPM motor: Surface mounted Permanent Magnet Motor (e.g., Yaskawa SMRA Series motors)
i.1 Preface
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
17
Page 18
i.2 General Safety
i.2 General Safety
u
Supplemental Safety Information
General Precautions
• The diagrams in this manual may be indicated without covers or safety shields to show details. Replace the covers or shields before
operating the drive and run the drive according to the instructions described in this manual.
• Any illustrations, photographs, or examples used in this manual are provided as examples only and may not apply to all products to
which this manual is applicable.
• The products and specifications described in this manual or the content and presentation of the manual may be changed without notice
to improve the product and/or the manual.
• When ordering a new copy of the manual due to damage or loss, contact your Yaskawa representative or the nearest Yaskawa sales
office and provide the manual number shown on the front cover.
• If nameplate becomes worn or damaged, order a replacement from your Yaskawa representative or the nearest Yaskawa sales office.
WARNING
Read and understand this manual before installing, operating or servicing this drive. The drive must be installed according
to this manual and local codes.
The following conventions are used to indicate safety messages in this manual. Failure to heed these messages could result
in serious or fatal injury or damage to the products or to related equipment and systems.
DANGER
Indicates a hazardous situation, which, if not avoided, will result in death or serious injury.
WARNING
Indicates a hazardous situation, which, if not avoided, could result in death or serious injury.
WARNING! may also be indicated by a bold key word embedded in the text followed by an italicized safety message.
CAUTION
Indicates a hazardous situation, which, if not avoided, could result in minor or moderate injury.
CAUTION! may also be indicated by a bold key word embedded in the text followed by an italicized safety message.
NOTICE
Indicates a property damage message.
NOTICE: may also be indicated by a bold key word embedded in the text followed by an italicized safety message.
18
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 19
i.2 General Safety
u
Safety Messages
DANGER
Heed the safety messages in this manual.
Failure to comply will result in death or serious injury.
The operating company is responsible for any injuries or equipment damage resulting from failure to heed the warnings in
this manual.
Electrical Shock Hazard
Do not connect or disconnect wiring while the power is on.
Failure to comply will result in death or serious injury.
Before servicing, disconnect all power to the equipment. The internal capacitor remains charged even after the power supply
is turned off. After shutting off the power, wait for at least the amount of time specified on the drive before touching any
components.
WARNING
Sudden Movement Hazard
System may start unexpectedly upon application of power, resulting in death or serious injury.
Clear all personnel from the drive, motor and machine area before applying power. Secure covers, couplings, shaft keys and
machine loads before applying power to the drive.
When using DriveWorksEZ to create custom programming, the drive I/O terminal functions change from factory
settings and the drive will not perform as outlined in this manual.
Unpredictable equipment operation may result in death or serious injury.
Take special note of custom I/O programming in the drive before attempting to operate equipment.
Electrical Shock Hazard
Do not attempt to modify or alter the drive in any way not explained in this manual.
Failure to comply could result in death or serious injury.
Yaskawa is not responsible for any modification of the product made by the user. This product must not be modified.
Do not allow unqualified personnel to use equipment.
Failure to comply could result in death or serious injury.
Maintenance, inspection, and replacement of parts must be performed only by authorized personnel familiar with installation,
adjustment and maintenance of AC drives.
Do not remove covers or touch circuit boards while the power is on.
Failure to comply could result in death or serious injury.
Fire Hazard
Do not use an improper voltage source.
Failure to comply could result in death or serious injury by fire.
Verify that the rated voltage of the drive matches the voltage of the incoming power supply before applying power.
Crush Hazard
Do not use this drive in lifting applications without installing external safety circuitry to prevent accidental dropping
of the load.
The drive does not possess built-in load drop protection for lifting applications.
Failure to comply could result in death or serious injury from falling loads.
Install electrical and/or mechanical safety circuit mechanisms independent of drive circuitry.
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
19
Page 20
i.2 General Safety
CAUTION
Crush Hazard
Do not carry the drive by the front cover.
Failure to comply may result in minor or moderate injury from the main body of the drive falling.
NOTICE
Observe proper electrostatic discharge procedures (ESD) when handling the drive and circuit boards.
Failure to comply may result in ESD damage to the drive circuitry.
Do not perform a withstand voltage test on any part of the drive.
Failure to comply could result in damage to the sensitive devices within the drive.
Do not operate damaged equipment.
Failure to comply could result in further damage to the equipment.
Do not connect or operate any equipment with visible damage or missing parts.
Install adequate branch circuit short circuit protection per applicable codes.
Failure to comply could result in damage to the drive.
The drive is suitable for circuits capable of delivering not more than 100,000 RMS symmetrical Amperes, 600 Vac maximum
(600 V Class).
Do not expose the drive to halogen group disinfectants.
Failure to comply may cause damage to the electrical components in the drive.
Do not pack the drive in wooden materials that have been fumigated or sterilized.
Do not sterilize the entire package after the product is packed.
u
General Application Precautions
Selection
n
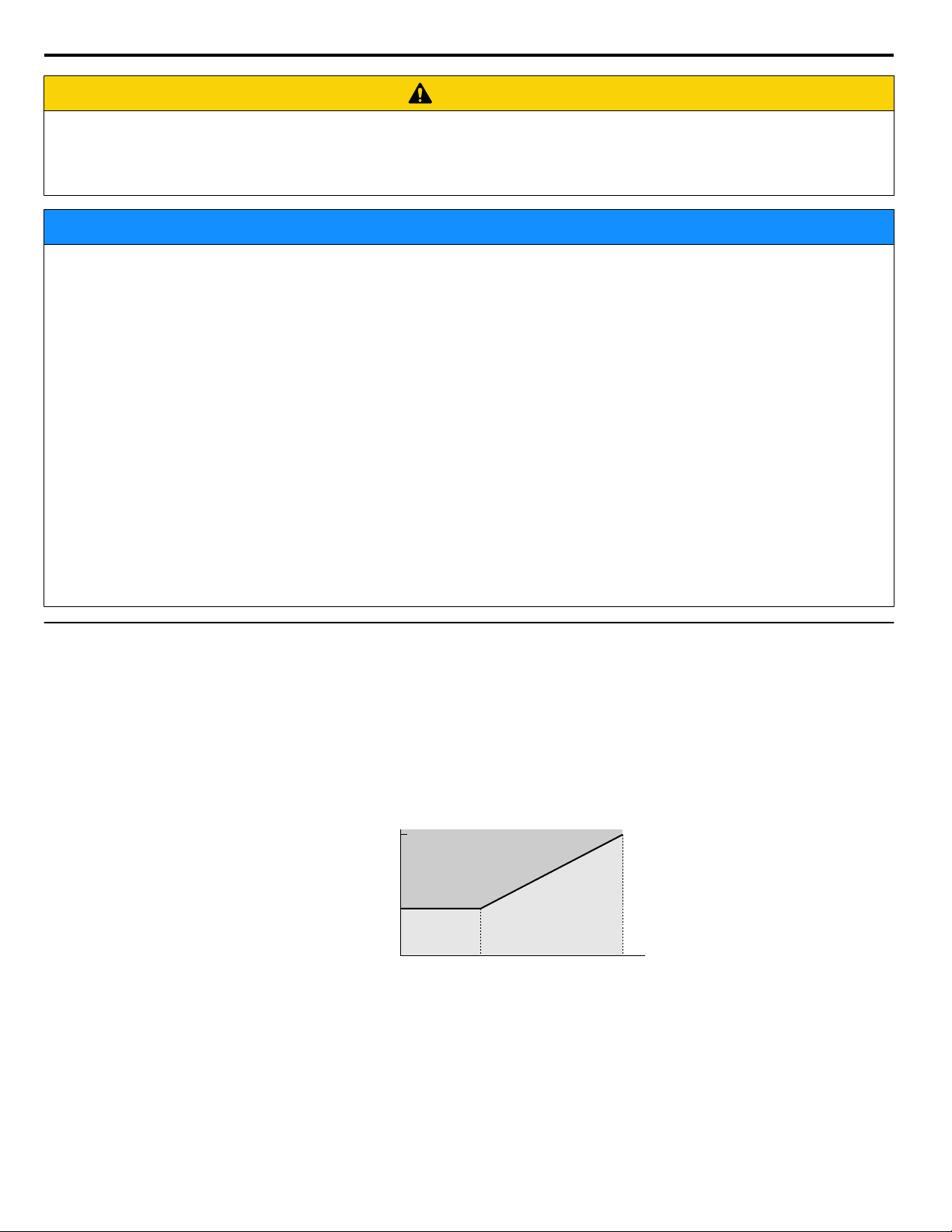
Installing a Reactor
Use an AC or DC reactor in the following situations:
• to suppress harmonic current.
• to smooth peak current resulting from capacitor switching.
• when the power supply is above 600 kVA.
• when the drive is running from a power supply system with thyristor converters.
4000
Power supply harmonics
reactor required
Power Supply
Capacity (kVA)
Drive Capacity
600
0
Drive Capacity (kVA)
Figure i.1 Installing a Reactor
Reactor
unnecessary
60 400
For specialized motors, make sure that the motor rated current is less than the rated output current for the drive.
When running more than one motor in parallel from a single drive, the capacity of the drive should be larger than [total motor
rated current × 1.1].
20
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 21

i.2 General Safety
Starting Torque
The overload rating for the drive determines the starting and accelerating characteristics of the motor. Expect lower torque
than when running from line power. To get more starting torque, use a larger drive or increase both the motor and drive capacity.
Emergency Stop
When the drive faults out, the output shuts off but the motor does not stop immediately. A mechanical brake may be required
when it is necessary to stop the motor faster than the ability of the Fast Stop function of the drive.
Options
NOTICE: The B1, B2, +1, +2, and +3 terminals are used to connect optional A1000-compatible devices only. Connecting non-Yaskawa-
approved devices to these terminals may damage the drive.
Repetitive Starting/Stopping
Elevators, punching presses, and other applications with frequent starts and stops often exceed 150% of their rated current
values. Heat stress generated from repetitive high current can shorten the life span of the IGBTs.
Yaskawa recommends lowering the carrier frequency, particularly when audible noise is not a concern. It may also be beneficial
to reduce the load, increase the acceleration and deceleration times, or switch to a larger drive to help keep peak current levels
under 150%. Be sure to check the peak current levels when starting and stopping repeatedly during the initial test run, and
make adjustments accordingly.
Installation
n
Enclosure Panels
Keep the drive in a clean environment by installing the drive in an enclosure panel or selecting an installation area free of
airborne dust, lint, and oil mist. Be sure to leave the required space between drives to provide for cooling, and take proper
measures so the ambient temperature remains within allowable limits and keep flammable materials away from the drive.
Yaskawa offers protective designs for drives that must be used in areas subjected to oil mist and excessive vibration. Contact
Yaskawa or your Yaskawa agent for details.
Installation Direction
NOTICE: Install the drive upright as specified in the manual. Refer to Mechanical Installation on page 40 for more information on
installation. Failure to comply may damage the drive due to improper cooling.
Settings
n
Motor Code
When using OLV/PM, set the proper motor code to parameter E5-01 before performing a trial run.
Upper Limits
NOTICE: The drive is capable of running the motor up to 400 Hz. Be sure to set the upper limit for the frequency of the drive to prevent the
possible danger of accidentally operating equipment at higher than rated speed. The default setting for the maximum output frequency is
60 Hz.
DC Injection Braking
NOTICE: Excessive current during DC Injection Braking and excessive duration of DC Injection Braking can cause motor overheat.
Acceleration/Deceleration Times
Acceleration and deceleration times are affected by the amount of torque generated by the motor, the load torque, and the
inertia moment. Set a longer accel/decel time when Stall Prevention is enabled. The accel/decel times are lengthened for as
long as the Stall Prevention function is in operation. Install one of the available braking options or increase the capacity of the
drive for faster acceleration and deceleration.
General Handling
n
Wiring Check
NOTICE: Do not connect power supply lines to output terminals U/T1, V/T2, or W/T3. Failure to comply will destroy the drive. Be sure to
perform a final check of all sequence wiring and other connections before turning on the power and also check for short circuits on the
control terminals, which may damage the drive.
Selecting a Circuit Breaker or Leakage Circuit Breaker
Yaskawa recommends installing a Ground Fault Circuit Interrupter (GFCI) to the power supply side. The GFCI should be
designed for use with AC drives (e.g., Type B according to IEC 60755).
Select a Molded Case Circuit Breaker (MCCB) or GFCI with a rated current 1.5 to 2 times higher than the drive rated current
to avoid nuisance trips caused by harmonics in the drive input current. Refer to Installing a Molded Case Circuit Breaker
(MCCB) and Earth Leakage Circuit Breaker (ELCB) on page 367 for more information.
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
21
Page 22
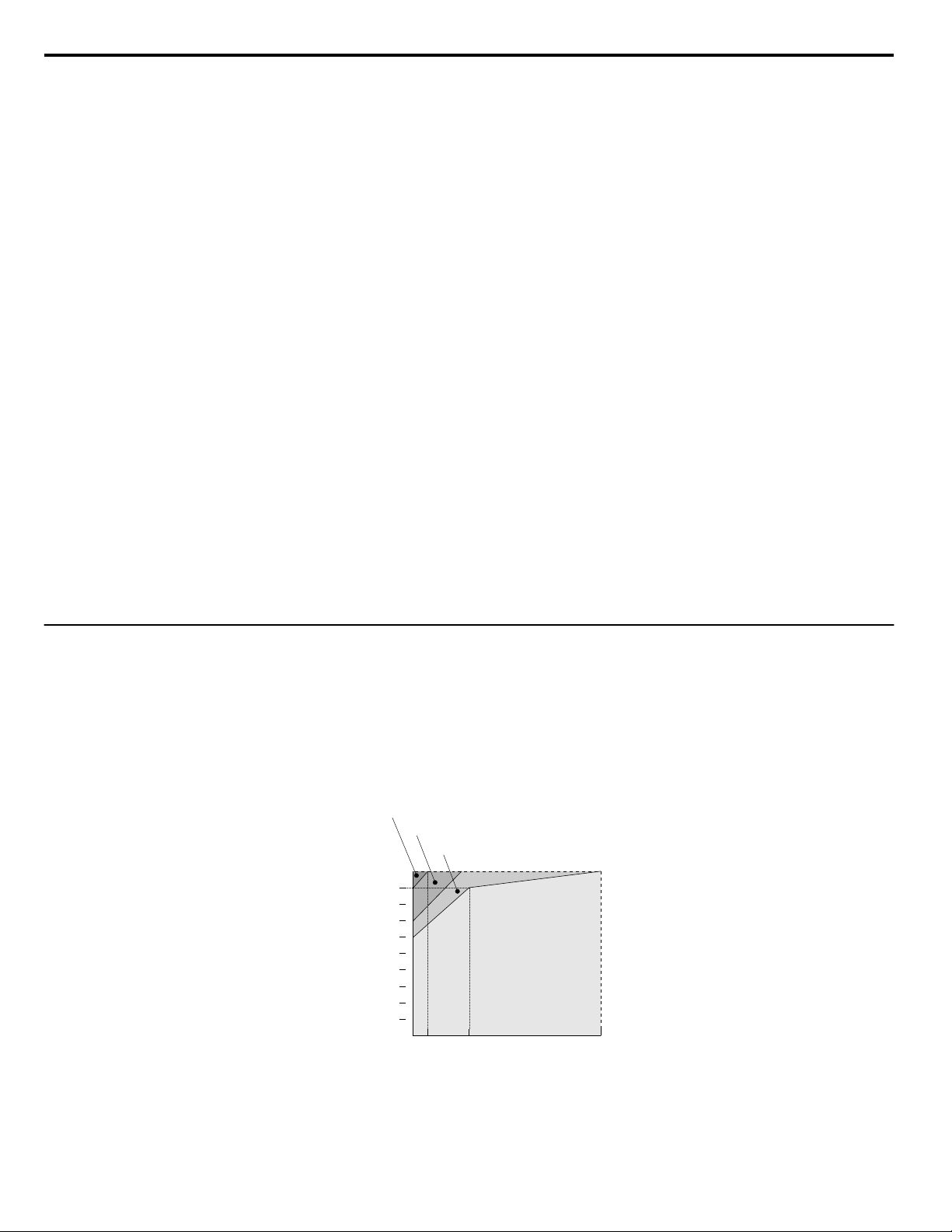
i.2 General Safety
Magnetic Contactor Installation
WARNING! Fire Hazard. Shut off the drive with a magnetic contactor (MC) when a fault occurs in any external equipment such as braking
resistors. Refer to Installing a Magnetic Contactor at the Power Supply Side on page 368. Failure to comply may cause resistor
overheating, fire, and injury to personnel.
NOTICE: To get the full performance life out of the electrolytic capacitors and circuit relays, refrain from switching the drive power supply
off and on more than once every 30 minutes. Frequent use can damage the drive. Use the drive to stop and start the motor.
Inspection and Maintenance
WARNING! Electrical Shock Hazard. Capacitors in the drive do not immediately discharge after shutting off the power. Wait for at least the
amount of time specified on the drive before touching any components after shutting off the power. Failure to comply may cause injury to
personnel from electrical shock.
WARNING! Electrical Shock Hazard. When a drive is running a PM motor, voltage continues to be generated at the motor terminals after
the drive is shut off while the motor coasts to stop. Take the precautions described below to prevent shock and injury:
• In applications where the machine can still rotate even though the drive has fully stopped a load, install a switch
to the drive output side to disconnect the motor and the drive.
• Do not allow an external force to rotate the motor beyond the maximum allowable speed or to rotate the motor
when the drive has been shut off.
• Wait for at least the time specified on the warning label after opening the load switch on the output side before
inspecting the drive or performing any maintenance.
• Do not open and close the load switch while the motor is running, as this can damage the drive.
• If the motor is coasting, make sure the power to the drive is turned on and the drive output has completely
stopped before closing the load switch.
WARNING! Burn Hazard. Because the heatsink can get very hot during operation, take proper precautions to prevent burns. When replacing
the cooling fan, shut off the power and wait at least 15 minutes to be sure that the heatsink has cooled down. Failure to comply may cause
burn injury to personnel.
Wiring
All wire ends should use ring terminals for UL/cUL compliance. Use only the tools recommended by the terminal manufacturer
for crimping.
Transporting the Drive
NOTICE: Never steam clean the drive. During transport, keep the drive from coming into contact with salts, fluorine, bromine, phthalate
ester, and other such harmful chemicals.
u
Motor Application Precautions
Standard Induction Motors
n
Low-Speed Range
The cooling fan of a standard motor should sufficiently cool the motor at the rated speed. As the self-cooling capability of
such a motor reduces with the speed, applying full torque at low speed will possibly damage the motor. Reduce the load torque
as the motor slows to prevent motor damage from overheat. Figure i.2 shows the allowable load characteristics for a Yaskawa
standard motor. Use a motor designed specifically for operation with a drive when 100% continuous torque is needed at low
speeds.
25% ED (or 15 min)
40% ED (or 20 min)
60% ED (or 40 min)
100
90
80
70
(%)
60
50
Continuous operation
Torque
22
3 6
Figure i.2 Allowable Load Characteristics for a Yaskawa Motor
20
Frequency (Hz)
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
60
Page 23

i.2 General Safety
Insulation Tolerance
NOTICE: Consider motor voltage tolerance levels and motor insulation in applications with an input voltage of over 440 V or particularly
long wiring distances.
High-Speed Operation
NOTICE: Problems may occur with the motor bearings and dynamic balance of the machine when operating a motor beyond its rated speed.
Contact the motor or machine manufacturer.
Torque Characteristics
Torque characteristics differ compared to operating the motor directly from line power. The user should have a full
understanding of the load torque characteristics for the application.
Vibration and Shock
The drive allows selection of high carrier PWM control and low carrier PWM. Selecting high carrier PWM can help reduce
motor oscillation.
Take particular caution when adding a variable speed drive to an application running a motor from line power at a constant
speed. If resonance occurs, install shock-absorbing rubber around the base of the motor and enable the Jump frequency selection
to prevent continuous operation in the resonant frequency range.
Audible Noise
Noise created during run varies by the carrier frequency setting. When using a high carrier frequency, audible noise from the
motor is comparable to the motor noise generated when running from line power. Operating above the rated motor speed can
create unpleasant motor noise.
Synchronous Motors
n
• Contact Yaskawa or a Yaskawa agent when planning to use a synchronous motor not endorsed by Yaskawa.
• Use a standard induction motor when running multiple synchronous motors simultaneously. A single drive does not have
this capability.
• A synchronous motor may rotate slightly in the opposite direction of the Run command at start depending on parameter
settings and rotor position.
• The amount of generated starting torque differs depending on the control mode and motor type. Set up the motor with the
drive after verifying the starting torque, allowable load characteristics, impact load tolerance, and speed control range.
Contact Yaskawa or a Yaskawa agent when planning to use a motor that does not fall within these specifications:
• In Open Loop Vector Control for PM motors, braking torque is less than 125% when running between 20% and 100% speed,
even with a braking resistor. Braking torque drops to less than 50% when running at less than 20% speed.
• In Open Loop Vector Control for PM motors, the allowable load inertia moment is approximately 50× higher than the motor
inertia moment.
Contact Yaskawa or a Yaskawa agent for questions concerning applications with a larger inertia moment.
• When using a holding brake in Open Loop Vector Control for PM motors, release the brake prior to starting the motor.
Failure to set the proper timing can cause speed loss.
• To restart a coasting motor rotating over 200 Hz while in V/f Control, first use the Short Circuit Braking function to bring
the motor to a stop. Short Circuit Braking requires a special braking resistor. Contact Yaskawa or a Yaskawa agent for
details.
• To restart a coasting motor rotating below 200 Hz, use the Speed Search function if the motor cable is not too long. If the
motor cable is relatively long, stop the motor using Short Circuit Braking.
Specialized Motors
n
Multi-Pole Motor
The rated current of a multi-pole motor differs from that of a standard motor, so be sure to check the maximum current when
selecting a drive. Always stop the motor before switching between the number of motor poles. The motor will coast to stop if
a regen overvoltage (ov) fault occurs or if overcurrent (oC) protection is triggered.
Submersible Motor
The rated current of a submersible motor is greater than that of a standard motor, so select the drive capacity accordingly. Use
a motor cable large enough to avoid decreasing the maximum torque level from voltage drop caused by a long motor cable.
Explosion-Proof Motor
The motor and the drive must be tested together to be certified as explosion-proof. The drive is not designed for explosionproof areas.
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
23
Page 24

i.2 General Safety
When attaching an encoder to an explosion-proof motor, make sure the encoder is also explosion-proof. Use an insulating
signal converter to connect the encoder signal lines to the speed feedback option card.
Geared Motor
Make sure that the gear and the lubricant are rated for the desired speed range to avoid gear damage when operating at low
speeds or very high speeds. Consult with the manufacturer for applications that require operation outside the rated speed range
of the motor or gear box.
Single-Phase Motor
Variable speed drives are not designed to operate with single phase motors. Using capacitors to start the motor causes excessive
current to flow and can damage drive components. A split-phase start or a repulsion start can burn out the starter coils because
the internal centrifugal switch is not activated. The drive is for use with three-phase motors only.
Motor with Brake
Take caution when using the drive to operate a motor with a built-in holding brake. If the brake is connected to the output side
of the drive, it may not release at start due to low voltage levels, so be sure to install a separate power supply for the motor
brake. Note that motors with built-in brakes tend to generate a fair amount of noise when running at low speeds.
Notes on Power Transmission Machinery
n
Installing an AC drive in machinery that was previously connected directly to the power supply will allow the machine to
operate at variable speeds. Continuous operation outside of the rated speeds can wear on lubrication material in gear boxes
and other power transmission parts. Make sure that lubrication is sufficient within the entire speed range to avoid machine
damage. Note that operation above the rated speed can increase the noise generated by the machine.
24
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 25
u
Drive Label Warnings
Always heed the warning information listed in Figure i.3 in the position shown in Figure i.4.
WARNING
Risk of electric shock.
●
Read manual before installing.
●
Wait 5 minutes for capacitor
discharge after disconnecting
power supply.
●
To conform to requirements,
make sure to ground the supply
neutral for 575V class.
●
After opening the manual switch
between the drive and motor,
please wait 5 minutes before
inspecting, performing
maintenance or wiring the drive.
Hot surfaces
●
Top and Side surfaces may
become hot. Do not touch.
Figure i.3 Warning Information
i.2 General Safety
A1000
CMR-AU5A0009 AA
0V 3 h se 5 5 W 3 7kW
Warning Label
Figure i.4 Warning Information Position
u
Warranty Information
Restrictions
n
A1000 was not designed or manufactured for use in devices or systems that may directly affect or threaten human lives or
health.
Customers who intend to use the product described in this manual for devices or systems relating to transportation, health
care, space aviation, atomic power, electric power, or in underwater applications must first contact their Yaskawa
representatives or the nearest Yaskawa sales office.
WARNING! Injury to Personnel. This product has been manufactured under strict quality-control guidelines. However, if this product is to
installed in any location where failure of this product could involve or result in a life-and-death situation or loss of human life or in a facility
be
where failure may cause a serious accident or physical injury, safety devices must be installed to minimize the likelihood of any accident.
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
25
Page 26
i.2 General Safety
This Page Intentionally Blank
26
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 27
1
Receiving
This chapter explains how to inspect the drive upon receipt, and gives an overview of the different
enclosure types and components.
1.1 SECTION SAFETY.................................................................................................28
1.2 GENERAL DESCRIPTION.....................................................................................29
1.3 MODEL NUMBER AND NAMEPLATE CHECK....................................................32
1.4 DRIVE MODELS AND ENCLOSURE TYPES........................................................34
1.5 COMPONENT NAMES...........................................................................................35
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
27
Page 28
1.1 Section Safety
1.1 Section Safety
CAUTION
Do not carry the drive by the front cover or the terminal cover.
Failure to comply may cause the main body of the drive to fall, resulting in minor or moderate injury.
NOTICE
Observe proper electrostatic discharge procedures (ESD) when handling the drive and circuit boards.
Failure to comply may result in ESD damage to the drive circuitry.
A motor connected to a PWM drive may operate at a higher temperature than a utility-fed motor and the operating
speed range may reduce motor cooling capacity.
Ensure that the motor is suitable for drive duty and/or the motor service factor is adequate to accommodate the additional
heating with the intended operating conditions.
28
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 29
1.2 General Description
1.2 General Description
u
A1000 Model Selection
Refer to Table 1.1 for drive selection depending on the motor power and Normal or Heavy Duty rating.
Note: The models and capacities in shown here are based on standard settings and operation conditions. Higher carrier frequencies and higher ambient
temperatures require derating.
Table 1.1 A1000 Models
Three-Phase 600 V Class
Motor Power (kW)
Model CIMR-Ao
0.75 5A0003 1.7 – –
1.5 5A0004 3.5 5A0003 2.7
2.2 5A0006 4.1 5A0004 3.9
3.7 5A0009 6.3 5A0006 6.1
5.5 5A0011 9.8 5A0009 9
7.5 5A0017 12.5 5A0011 11
11 5A0022 17 5A0017 17
15 5A0027 22 5A0022 22
18.5 5A0032 27 5A0027 27
22 – – 5A0032 32
<1> These values assume the carrier frequency is not set higher than 8 kHz.
<2> These values assume the carrier frequency is set to 2 kHz.
Note: Current derating is required when setting the carrier frequency higher. Refer to Carrier Frequency Derating on page 377 for details.
Heavy Duty Rating Normal Duty Rating
Rated Output
Current (A)
<1>
Model CIMR-Ao
Rated Output
Current (A)
<2>
Receiving
1
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
29
Page 30
1.2 General Description
u
Control Mode Selection
Table 1.2 gives an overview of the A1000 control modes and their various features.
Table 1.2 Control Modes and their Features
Motor Type Induction Motors
Control Mode V/f V/f w/PG OLV CLV OLV/PM AOLV/PM CLV/PM –
Parameter Setting A1-02 = 0 A1-02 = 1 A1-02 = 2 A1-02 = 3 A1-02 = 5 A1-02 = 6 A1-02 = 7
Basic Description V/f control
Motor Type IM IM IM IM PM IPM PM –
Multi Motor YES N/A N/A N/A N/A N/A N/A –
Motor data
unknown
High Speed
Accuracy
Type of
Applications
PG Option Card N/A
Control
Characteristics
High Speed
Response
Zero Speed
Control
Torque Control
Operation
Torque Limit
Operation
Speed Control
Range
Speed Accuracy ±2 to 3% ±0.03% ±0.2% ±0.02% ±0.2% ±0.2% ±0.02%
Speed Response 3 Hz (approx.) 3 Hz (approx.) 10 Hz 50 Hz 10 Hz 10 Hz 50 Hz
Starting Torque 150% at 3 Hz 150% at 3 Hz
V/f control
using motor
speed feedback
YES N/A N/A N/A N/A N/A N/A –
N/A YES YES YES YES YES YES –
N/A N/A YES YES N/A YES YES –
N/A N/A N/A YES N/A YES YES –
N/A N/A N/A YES N/A YES YES –
N/A N/A YES YES N/A N/A YES –
PG-B3 or
PG-X3
1:40 1:40 1:200 1:1500 1:20 1:100 1:1500
Open Loop
Vector control
N/A
200% at
0.3 Hz
Closed Loop
Vector control
PG-B3 or
PG-X3
200% at
0 r/min
Permanent Magnet Motors
Open Loop
Vector control
for PM motors
N/A N/A PG-X3 –
100% at
5% speed
Open Loop
Vector control
for IPM motors
200% at
0 r/min
<99>
Closed Loop
Vector control
for PM motors
200% at
0 r/min
Comments
Default Setting is
OLV control (A1-02
=2)
–
May fluctuate with
characteristics and
motor temperature.
Speed deviation
when operating at
constant speed may
fluctuate with
characteristics and
motor temperature.
Max. frequency of a
speed reference
signal that the drive
can follow may
fluctuate with
characteristics and
motor temperature.
Starting torque may
fluctuate with
characteristics and
motor temperature.
Performance may
differ by capacity.
30
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 31

1.2 General Description
Motor Type Induction Motors
• Rotational
• Stationary
• Line to line
resistance
• ASR
• Inertia
Application-
Specific
• Energy
Saving
Auto-Tuning
Torque Limit N/A N/A YES YES N/A YES YES
Torque Control N/A N/A N/A YES N/A N/A YES
Droop Function N/A N/A N/A YES N/A N/A YES –
Zero Servo
Control
Speed Search YES YES YES – YES YES YES
Energy-Saving
Control
High Slip
Braking
Feed Forward
Control
Tuning
• Line to line
resistance
N/A N/A N/A YES N/A N/A YES
YES YES YES YES N/A
YES YES N/A N/A N/A N/A N/A
N/A N/A N/A YES N/A N/A YES
• Energy
Saving
Tuning
• Line to line
resistance
• Rotational
• Stationary
• Line to line
resistance
Application-
Specific
Kinetic Energy
Buffering
Over-
excitation
Deceleration
Inertia Tuning,
ASR Tuning
Overvoltage
Suppression
High Frequency
Injection
<99>
PM motor control modes are not available on 600 V class drives, CIMR-Ao5oooooooo.
YES YES YES YES YES YES YES
YES YES YES YES N/A N/A N/A
N/A N/A N/A YES N/A N/A YES
YES YES YES YES YES YES YES
N/A N/A N/A N/A N/A YES N/A
Permanent Magnet Motors
• Stationary
• Line to line
resistance
• Stationary
• Line to line
resistance
YES
(IPM motors
only)
<99>
• Stationary
• Line to line
resistance
• ASR
• Inertia
• Encoder
offset
YES
(IPM motors
only)
Comments
Automatically
adjusts parameter
settings that concern
electrical
characteristics of the
motor.
Sets the maximum
torque for the motor
to protect the load
and connected
machinery.
Allows direct
control of motor
torque for tension
control and other
such applications.
Locks the rotor
position.
Bi-directional speed
detection of a
coasting motor to
restart it without
stopping.
Saves energy by
always operating the
motor at its
maximum
efficiency.
Increases motor loss
to allow for faster
deceleration than
normal without a
braking resistor.
Effectiveness may
vary based on motor
characteristics.
Improves speed
accuracy when the
load changes by
compensating
effects of the system
inertia.
Decelerates the
drive to allow it to
ride through a
momentary power
loss and continue
operation.
Provides fast
deceleration without
using a braking
resistor.
Provides automatic
Speed Control and
Feed Forward
function tuning.
Prevents
overvoltage by
increasing speed
during regeneration.
Never use this
function with hoist
or crane
applications.
Greatly increases the
speed control range
of an IPM motor.
Receiving
1
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
31
Page 32

1.3 Model Number and Nameplate Check
1.3 Model Number and Nameplate Check
Please perform the following tasks after receiving the drive:
• Inspect the drive for damage.
If the drive appears damaged upon receipt, contact the shipper immediately.
• Verify receipt of the correct model by checking the information on the nameplate.
• If you have received the wrong model or the drive does not function properly, contact your supplier.
u
Nameplate
AC drive model
Input specifications
Output specifications
Lot number
Serial number
Normal Duty Amps / Heavy Duty Amps
MODEL
INPUT
OUTPUT
MASS
O/N
S/N
FILE NO
TYPE 1 ENCLOSURE
Figure 1.1 Nameplate Information Example
CIMR-AU5A0009FAA
:
REV : A
: AC3PH 500-600V 50/60Hz 12.0A/8.3A
: AC3PH 0-600V 0-400Hz 9.0A/6.3A
: 3.7kg
:
:
: E131457 IP20
YASKAWA ELECTRIC CORPORATION
PRG : 504X
PASS
MADE IN JAPAN
IND.CONT.EQ.
7J48 B
Software version
Enclosure type
32
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 33

1.3 Model Number and Nameplate Check
CIMR
Drive
Three-Phase 600 V
n
Normal Duty Heavy Duty
No.
0003 1.5 2.7 0003 0.75 1.7
0004 2.2 3.9 0004 1.5 3.5
0006 3.7 6.1 0006 2.2 4.1
0009 5.5 9 0009 3.7 6.3
0011 7.5 11 0011 5.5 9.8
0017 11 17 0017 7.5 12.5
0022 15 22 0022 11 17
0027 18.5 27 0027 15 22
0032 22 32 0032 18.5 27
<1> Drives with these specifications do not guarantee complete protection from the environmental conditions indicated.
Note: Refer to Drive Models and Enclosure Types on page 34 for differences regarding enclosure protection types and component descriptions.
Max. Motor CapacitykWRated Output
-
A U 5 A
A1000
Series
Region
No.
Code
U USA
No. Voltage Class
3-phase, 500-600 Vac
5
Current A
Customized
No.
Specifications
A Standard model
0003 F
No.
A
F
Environmental
No.
Specification <1>
A
Standard
M
Humidity- and
dust-resistant
N
Oil-resistant
No.
A A
Enclosure
Type
IP00
NEMA
Type 1
Max. Motor CapacitykWRated Output
Design
Revision
Order
Current A
Receiving
1
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
33
Page 34

1.4 Drive Models and Enclosure Types
1.4 Drive Models and Enclosure Types
Two types of enclosures are offered for A1000 drives.
• IP00/Open-Chassis models are designed for installation in an enclosure panel that serves to protect personnel from injury
caused by accidentally touching live parts.
• IP20/NEMA Type 1 models mount to an indoor wall or in an enclosure panel.
Table 1.3 describes drive enclosures and models.
Table 1.3 Drive Models and Enclosure Types
Enclosure Type
Voltage Class
Three-Phase
600 V Class
<1> Removing the top protective cover or bottom conduit bracket from an IP20/NEMA Type 1 drive voids NEMA Type 1 protection while maintaining
IP20 conformity.
IP20/NEMA Type 1
CIMR-Ao
5A0003F
5A0004F
5A0006F
5A0009F
5A0011F
5A0017F
5A0022F
5A0027F
5A0032F
<1>
IP00/Open-Chassis
CIMR-Ao
<1>
<1>
<1>
<1>
<1>
<1>
<1>
<1>
<1>
34
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 35

1.5 Component Names
This section gives an overview of the drive components described in this manual.
Note: 1. Refer to Using the Digital Operator on page 79 for a description of the operator keypad.
2. The drive may have no cooling fans or only one cooling fan depending on the model.
u
IP20/NEMA Type 1 Enclosure
Three-Phase 600 V CIMR-Ao5A0003F to 0032F
n
A
1.5 Component Names
B
J
C
D
K
L
E
M
F
Receiving
1
N
I
O
G
H
A –
Fan cover
B –
Cooling fan
C – Mounting hole
D – Heatsink
E – Optional 24 V DC power supply
connector cover
F – Terminal board
G – Conduit bracket
H – Conduit bracket front cover
Figure 1.2 Exploded View of IP20/NEMA Type 1 Components (CIMR-Ao5A0011F)
<1> Drive models CIMR-Ao5A0006F and CIMR-Ao5A0009F have a single cooling fan. Drive models CIMR-Ao5A0003F and
CIMR-Ao5A0004F do not have a cooling fan or a cooling fan cover.
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
<1>
<1>
I – Rubber bushing
J – Top Protective cover
K – Front cover
L – USB port (type-B)
M – Digital operator
N – Terminal cover
O – Terminal cover screw
35
Page 36

1.5 Component Names
u
Front Views
CIMR-Ao5A0011F
I
J
A
B
K
C
D
E
L
F
M
G
H
A – Terminal board connector
B – DIP switch S1 (Refer to Terminal
A2 Input Signal Selection on page
70)
C – DIP switch S2 (Refer to MEMOBUS/
Modbus Termination on page 71)
D – Sink/source jumper S3 (Refer to
Sinking/Sourcing Mode Switch for
Digital Inputs on page 68)
E – Ground terminal
F – Terminal board (Refer to Control
Circuit Wiring on page 61)
G – Main circuit terminal (Refer to
Wiring the Main Circuit Terminal
on page 60)
Figure 1.3 Front View of Drives
H – Protective cover to prevent
miswiring
I – Option card connector (CN5-C)
J – Option card connector (CN5-B)
K – Option card connector (CN5-A)
L – Jumper S5 (Refer to Terminal AM/
FM Signal Selection on page 71)
M – DIP switch S4 (Refer to Terminal
A3 Analog/PTC Input Selection on
page 70)
36
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 37

2
Mechanical Installation
This chapter explains how to properly mount and install the drive.
2.1 SECTION SAFETY.................................................................................................38
2.2 MECHANICAL INSTALLATION.............................................................................40
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
37
Page 38

2.1 Section Safety
2.1 Section Safety
WARNING
Fire Hazard
Provide sufficient cooling when installing the drive inside an enclosed panel or cabinet.
Failure to comply could result in overheating and fire.
When multiple drives are placed inside the same enclosure panel, install proper cooling to ensure air entering the enclosure
does not exceed 40 °C.
CAUTION
Crush Hazard
Do not carry the drive by the front cover or the terminal cover.
Failure to comply may result in minor or moderate injury from the main body of the drive falling.
NOTICE
Equipment Hazard
Prevent foreign matter such as metal shavings or wire clippings from falling into the drive during drive installation
and project construction.
Failure to comply could result in damage to the drive. Place a temporary cover over the top during installation. Be sure to
remove the temporary cover before start-up, as the cover will reduce ventilation and cause the unit to overheat.
Observe proper electrostatic discharge (ESD) procedures when handling the drive.
Failure to comply could result in ESD damage to the drive circuitry.
Operating the motor in the low-speed range diminishes the cooling effects, increases motor temperature, and may
lead to motor damage by overheating.
Reduce the motor torque in the low-speed range whenever using a standard blower cooled motor. If 100% torque is required
continuously at low speed, consider using a special drive or vector-control motor. Select a motor that is compatible with the
required load torque and operating speed range.
The speed range for continuous operation differs according to the lubrication method and motor manufacturer.
If the motor is to be operated at a speed higher than the rated speed, consult with the manufacturer.
Continuously operating an oil-lubricated motor in the low-speed range may result in burning.
When the input voltage is 440 V or higher or the wiring distance is greater than 100 meters, pay special attention to
the motor insulation voltage or use a drive-rated motor with reinforced insulation.
Failure to comply could lead to motor winding failure.
Motor vibration may increase when operating a machine in variable-speed mode, if that machine previously operated
at a constant speed.
Install vibration-proof rubber on the motor base or use the frequency jump function to skip a frequency resonating the
machine.
The motor may require more acceleration torque with drive operation than with a commercial power supply.
Set a proper V/f pattern by checking the load torque characteristics of the machine to be used with the motor.
The rated input current of submersible motors is higher than the rated input current of standard motors.
Select an appropriate drive according to its rated output current. When the distance between the motor and drive is long, use
a cable thick enough to connect the motor to the drive to prevent motor torque reduction.
38
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 39

2.1 Section Safety
NOTICE
The current rating differs for a motor with variable pole pitches differs from a standard motor.
Check the maximum current of the motor before selecting the drive capacity. Only switch motor poles when the motor is
stopped. Switching between motor during run will trigger overcurrent protection circuitry or result in overvoltage from
regeneration, and the motor will simply coast to stop.
When using an explosion-proof motor, it must be subject to an explosion-proof test in conjunction with the drive.
This is also applicable when an existing explosion-proof motor is to be operated with the drive. Since the drive itself is not
explosion-proof, always install it in a safe place.
Never lift the drive up while the cover is removed.
This can damage the terminal board and other components.
Mechanical Installation
2
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
39
Page 40

2.2 Mechanical Installation
2.2 Mechanical Installation
This section outlines specifications, procedures, and the environment for proper mechanical installation of the drive.
u
Installation Environment
Install the drive in an environment matching the specifications below to help prolong the optimum performance life of the
drive.
Table 2.1 Installation Environment
Environment Conditions
Installation Area Indoors
-10 °C to +40 °C (IP20/NEMA Type 1)
-10 °C to +50 °C (IP00/Open-Chassis)
Ambient Temperature
Humidity 95% RH or less and free of condensation
Storage Temperature -20 to +60 °C
Surrounding Area
Altitude 1000 m or lower, up to 3000 m with derating. Refer to Drive Derating Data on page 377 for details.
Vibration
Orientation Install the drive vertically to maintain maximum cooling effects.
Drive reliability improves in environments without wide temperature fluctuations.
When using the drive in an enclosure panel, install a cooling fan or air conditioner in the area to ensure that the air
temperature inside the enclosure does not exceed the specified levels.
Do not allow ice to develop on the drive.
Install the drive in an area free from:
• oil mist and dust
• metal shavings, oil, water, or other foreign materials
• radioactive materials
• combustible materials (e.g., wood)
• harmful gases and liquids
• excessive vibration
• chlorides
• direct sunlight
10 to 20 Hz at 9.8 m/s2, 20 to 55 Hz at 5.9 m/s
2
NOTICE: Avoid placing drive peripheral devices, transformers, or other electronics near the drive as the noise created can lead to erroneous
operation. If such devices must be used in close proximity to the drive, take proper steps to shield the drive from noise.
NOTICE: Prevent foreign matter such as metal shavings and wire clippings from falling into the drive during installation. Failure to comply
could result in damage to the drive. Place a temporary cover over the top of the drive during installation. Remove the temporary cover before
drive start-up, as the cover will reduce ventilation and cause the drive to overheat.
u
Installation Orientation and Spacing
Install the drive upright as illustrated in Figure 2.1 to maintain proper cooling.
OK Not OK Not OK
Figure 2.1 Correct Installation Orientation
40
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 41

2.2 Mechanical Installation
Single Drive Installation
n
Figure 2.2 shows the installation distance required to maintain sufficient space for airflow and wiring. Install the heatsink
against a closed surface to avoid diverting cooling air around the heatsink.
Side Clearance Top/Bottom Clearance
A
B B
A
A – 50 mm minimum
B – 30 mm minimum
C
C
D
D
C – 120 mm minimum
D – Airflow direction
Figure 2.2 Correct Installation Spacing
Note: IP20/NEMA Type 1 and IP00/Open-Chassis models require the same amount of space above and below the drive for installation.
Multiple Drive Installation (Side-by-Side Installation)
n
Models CIMR-Ao5A0003 through 0011 can take advantage of Side-by-Side installation.
When installing multiple drives into the same enclosure panel, mount the drives according to Figure 2.2.
When mounting drives with the minimum clearance of 2 mm according to Figure 2.3, set parameter L8-35 to 1 while
considering derating. Refer to Temperature Derating on page 377.
Line up the tops of the drives.
Side Clearance
A
C
A
Top/Bottom Clearance
D
Mechanical Installation
2
B
A
A – 50 mm minimum
B – 30 mm minimum
B
C – 2 mm minimum
D – 120 mm minimum
D
A
Figure 2.3 Space Between Drives (Side-by-Side Mounting)
Note: Align the tops of the drives when installing drives of different heights in the same enclosure panel. Leave space between the tops and bottoms
of stacked drives for easier cooling fan replacement.
Remove the top protective covers of all drives as shown in Figure 2.4 when mounting IP20/NEMA Type 1 drives side-byside. Refer to Top Protective Cover on page 57 to remove and reattach the top protective cover.
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
41
Page 42

2.2 Mechanical Installation
Figure 2.4 IP20/NEMA 1 Side-by-Side Mounting in Enclosure
u
Digital Operator Remote Usage
Remote Operation
n
The
digital operator mounted on the drive can be removed and connected to the drive using an extension cable up to 3 m long
to facilitate operation when the drive is installed in a location where it can not be easily accessed.
The digital operator can also be permanently mounted remote locations such as panel doors using an extension cable and an
installation support set (depending on the installation type).
Note: Refer to Drive Options and Peripheral Devices on page 361 for information on extension cables and installation support sets.
OperatorDrive
Comm Port
Figure 2.5 Communication Cable Connection
S/N J007XE273710001
Communication Cable Connector
42
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 43

Digital Operator Remote Installation
n
Digital Operator Dimensions
12.2
1.6
2.2 Mechanical Installation
Installation holes (2-M3 screws, depth 5)
S/N J007XE273710001
90
60
Figure 2.6 Digital Operator Dimensions
7.9
minimum
50
Installation Types and Required Materials
The digital operator mounts to an enclosure two different ways:
• External/face-mount installs the operator outside the enclosure panel
• Internal/flush-mount installs the operator inside the enclosure panel
Digital Operator Installation Methods and Required Tools
Installation
Support Sets
– –
Installation Support Set A
(for mounting with screws
through holes in the panel)
Installation Support Set B
(for use with threaded studs
that are fixed to the panel)
Installation
Method
External/
Face-Mount
Internal/
Flush-Mount
Table 2.2
Description
Simplified installation with
the digital operator is
mounted on the outside of
the panel with two screws.
Encloses the digital
operator in the panel. The
front of the digital operator
is flush with the outside of
the panel.
15
EZZ020642A
EZZ020642B
78
44
Unit: mm
Model Required Tools
Phillips screwdriver
(#1)
Phillips screwdriver
(#1, #2)
Phillips screwdriver (#1)
Wrench (7 mm)
Mechanical Installation
2
NOTICE: Prevent foreign matter such as metal shavings or wire clippings from falling into the drive during installation and project
construction. Failure to comply could result in damage to the drive. Place a temporary cover over the top of the drive during installation.
Remove the temporary cover before drive start-up, as the cover will reduce ventilation and cause the drive to overheat.
External/Face-Mount
Cut an opening in the enclosure panel for the digital operator as shown in Figure 2.8.
1.
Position the digital operator so the display faces outwards, and mount it to the enclosure panel as shown in Figure
2.
2.7.
Digital Operator
Figure 2.7 External/Face-Mount Installation
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
M3 x 6
Phillips recessed
pan head machine screw x 2
Enclosure panel
Unit: mm
43
Page 44

2.2 Mechanical Installation
22
78
26
22
2
22
14
Unit: mm
Figure 2.8 Panel Cut-Out Dimensions (External/Face-Mount Installation)
Internal/Flush-Mount
An internal flush-mount requires an installation support set that must be purchased separately. Contact a Yaskawa
representative to order an installation support set and mounting hardware. Figure 2.9 illustrates how to attach the Installation
Support Set A.
Cut an opening in the enclosure panel for the digital operator as shown in Figure 2.10.
1.
Mount the digital operator to the installation support.
2.
Mount the installation support set and digital operator to the enclosure panel.
3.
Enclosure panel
Digital Operator
M4 × 10
Phillips truss head screw × 4
(for panel widths between 1 and 1.6)
Installation Support Set A
M3 × 6
Phillips recessed
pan head machine screw × 2
Unit: mm
Figure 2.9 Internal/Flush Mount Installation
Note: Use a gasket between the enclosure panel and the digital operator in environments with a significant amount of dust or other airborne debris.
0.5
0
89
120
44
45
0.5
59
0
Unit : mm
Figure 2.10 Panel Cut-Out Dimensions (Internal/Flush-Mount Installation)
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 45

2.2 Mechanical Installation
u
Exterior and Mounting Dimensions
Table 2.3 Drive Models and Types
Protective Design
IP20/NEMA Type 1
IP20/NEMA Type 1 Drives
n
Note: Removing the top protective cover or bottom conduit bracket from an IP20/NEMA Type 1 drive voids NEMA Type 1 protection while
maintaining IP20 conformity.
W1
Drive Model CIMR-Ao
Three-Phase 600 V Class
5o0003F
5o0004F
5o0006F
5o0009F
5o0011F
5o0017F
5o0022F
5o0027F
5o0032F
4-d
1.5
Page
45
H
H1
t1
W
H2
Figure 1
D
D1
Table 2.4 Dimensions for IP20/NEMA Type 1: 600 V Class
Drive Model
CIMR-Ao5A
0003
0004 5.5 11.8 5.8 4.8 – 9.8 1.8 – 1.5 0.2 – M5 7.5
0006 5.5 11.8 6.5 4.8 – 9.8 1.8 – 2.2 0.2 – M5 8.1
0009 5.5 11.8 6.5 4.8 – 9.8 1.8 – 2.2 0.2 – M5 8.1
0011 5.5 11.8 6.6 4.8 – 9.8 1.8 – 2.2 0.2 – M5 9.0
0017 7.1 13.4 7.4 6.3 – 11.2 1.9 – 3.0 0.2 – M5 13.2
0022 7.1 13.4 7.4 6.3 – 11.2 1.9 – 3.0 0.2 – M5 13.2
0027 8.7 15.7 7.8 7.6 – 13.2 2.3 – 3.1 0.2 – M6 19.2
0032 8.7 15.7 7.8 7.6 – 13.2 2.3 – 3.1 0.2 – M6 19.2
Figure W H D W1 H0 H1 H2 H3 D1 t1 t2 d Wt. (lb)
5.5 11.8 5.8 4.8 – 9.8 1.8 – 1.5 0.2 – M5 7.5
1
<1>
Dimensions (in)
<1> Removing the top protective cover or bottom conduit bracket from an IP20/NEMA Type 1 drive voids NEMA Type 1 protection while maintaining
IP20 conformity.
Mechanical Installation
2
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
45
Page 46

2.2 Mechanical Installation
0.9d
D
D2
Table 2.5 Conduit Bracket Dimensions for IP20/NEMA Type 1: 600 V Class
Drive Model
CIMR-Ao5A
0003
0004 1.7 3.1 1.5 1.5 1.6 2.8
0006 1.7 3.1 1.5 2.2 1.6 2.8
0009 1.7 3.1 1.5 2.2 1.6 2.8
0011 1.7 3.1 1.5 2.2 1.6 2.8
0017
0022 1.0 3.3 2.2 3.0 1.9 2.1
0027 1.1 3.4 2.5 3.1 2.0 2.2
0032 1.1 3.4 2.5 3.1 2.0 2.2
<1> Removing
IP20 conformity.
the top protective cover or bottom conduit bracket from an IP20/NEMA Type 1 drive voids NEMA Type 1 protection while maintaining
W
W
W W
W1 W1
1.4d
D1
D3
W1
0 9d
D
Figure 2Figure 1
W1
1.4d
1.7d
D3
D2
D1
Dimensions (in)
Figure W D W1 D1 D2 D3
1.7 3.1 1.5 1.5 1.6 2.8
1
<1>
1.0 3.3 2.2 3.0 1.9 2.1
2
<1>
46
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 47

3
Electrical Installation
This chapter explains proper procedures for wiring the control circuit terminals, motor, and power
supply.
3.1 SECTION SAFETY.................................................................................................48
3.2 STANDARD CONNECTION DIAGRAM.................................................................50
3.3 MAIN CIRCUIT CONNECTION DIAGRAM............................................................53
3.4 TERMINAL BLOCK CONFIGURATION................................................................54
3.5 TERMINAL COVER................................................................................................55
3.6 DIGITAL OPERATOR AND FRONT COVER........................................................56
3.7 TOP PROTECTIVE COVER...................................................................................57
3.8 MAIN CIRCUIT WIRING.........................................................................................58
3.9 CONTROL CIRCUIT WIRING................................................................................61
3.10 CONTROL I/O CONNECTIONS.............................................................................68
3.11 CONNECT TO A PC...............................................................................................72
3.12 EXTERNAL INTERLOCK.......................................................................................73
3.13 WIRING CHECKLIST.............................................................................................74
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
47
Page 48

3.1 Section Safety
3.1 Section Safety
DANGER
Electrical Shock Hazard
Do not connect or disconnect wiring while the power is on.
Failure to comply will result in death or serious injury.
WARNING
Electrical Shock Hazard
Do not operate equipment with covers removed.
Failure to comply could result in death or serious injury.
The diagrams in this section may show drives without covers or safety shields to show details. Be sure to reinstall covers or
shields before operating the drives and run the drives according to the instructions described in this manual.
Always ground the motor-side grounding terminal.
Improper equipment grounding could result in death or serious injury by contacting the motor case.
Do not perform work on the drive while wearing loose clothing, jewelry or without eye protection.
Failure to comply could result in death or serious injury.
Remove all metal objects such as watches and rings, secure loose clothing, and wear eye protection before beginning work
on the drive.
Do not remove covers or touch circuit boards while the power is on.
Failure to comply could result in death or serious injury.
Do not allow unqualified personnel to perform work on the drive.
Failure to comply could result in death or serious injury.
Installation, maintenance, inspection, and servicing must be performed only by authorized personnel familiar with
installation, adjustment, and maintenance of AC drives.
Do not touch any terminals before the capacitors have fully discharged.
Failure to comply could result in death or serious injury.
Before wiring terminals, disconnect all power to the equipment. The internal capacitor remains charged even after the power
supply is turned off. After shutting off the power, wait for at least the amount of time specified on the drive before touching
any components.
Fire Hazard
Tighten all terminal screws to the specified tightening torque.
Loose electrical connections could result in death or serious injury by fire due to overheating of electrical connections.
Do not use improper combustible materials.
Failure to comply could result in death or serious injury by fire.
Do not install the drive to a combustible surface. Never place combustible materials on the drive.
Do not use an improper voltage source.
Failure to comply could result in death or serious injury by fire.
Verify that the rated voltage of the drive matches the voltage of the incoming power supply before applying power.
When installing dynamic braking options, perform all wiring exactly as specified in the wiring diagrams provided.
Failure to do so can result in fire. Improper wiring may damage braking components.
48
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 49

3.1 Section Safety
CAUTION
Do not carry the drive by the front cover or the terminal cover.
Failure to comply may cause the main body of the drive to fall, resulting in minor or moderate injury.
NOTICE
Observe proper electrostatic discharge procedures (ESD) when handling the drive and circuit boards.
Failure to comply may result in ESD damage to the drive circuitry.
Never connect or disconnect the motor from the drive while the drive is outputting voltage.
Improper equipment sequencing could result in damage to the drive.
Do not use unshielded cable for control wiring.
Failure to comply may cause electrical interference resulting in poor system performance. Use shielded, twisted-pair wires
and ground the shield to the ground terminal of the drive.
Do not allow unqualified personnel to use the product.
Failure to comply could result in damage to the drive or braking circuit.
Carefully review instruction manual TOBPC72060000 when connecting a dynamic braking option to the drive.
Do not modify the drive circuitry.
Failure to comply could result in damage to the drive and will void warranty.
Yaskawa is not responsible for any modification of the product made by the user. This product must not be modified.
Check all the wiring to ensure that all connections are correct after installing the drive and connecting any other
devices.
Failure to comply could result in damage to the drive.
Electrical Installation
3
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
49
Page 50

3.2 Standard Connection Diagram
3.2 Standard Connection Diagram
Connect the drive and peripheral devices as shown in Figure 3.1. It is possible to set and run the drive via the digital operator
without connecting digital I/O wiring. This section does not discuss drive operation; Refer to Start-Up Programming &
Operation on page 77 for instructions on operating the drive.
NOTICE: Inadequate wiring could result in damage to the drive. Install adequate branch circuit short circuit protection per applicable codes.
The drive is suitable for circuits capable of delivering not more than 100,000 RMS symmetrical amperes, 600 Vac maximum (600 V Class).
NOTICE: When the input voltage is 440 V or higher or the wiring distance is greater than 100 meters, pay special attention to the motor
insulation voltage or use a drive duty motor. Failure to comply could lead to motor insulation breakdown.
NOTICE: Do not connect AC control circuit ground to drive enclosure. Improper drive grounding can cause control circuit malfunction.
NOTICE: The minimum load for the relay outputs M1-M2, M3-M4, M5-M6, and MA-MB-MC is 10 mA.
50
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 51

3.2 Standard Connection Diagram
Three-Phase
Power Supply
500 to 600 V
50/60 Hz
Multi-function
analog/pulse
train inputs
Main
Switch
R
S
T
Multi-function
digtial inputs
(default setting)
Safety
switch
S2
S1
Open
Safety relay /
controller
Terminals -, +1, +2, B1, B2 are
for connection options. Never
connect power supply lines to
these terminals
Fuse
EMC
Filter
Forward Run / Stop
Reverse Run / Stop
External fault
Fault reset
Multi-speed step 1
Multi-speed step 2
Jog speed
External Baseblock
Sink / Source mode
selection wire link
(default: Sink)
<5>
2 kΩ
MEMOBUS/Modbus
comm. RS485/422
max. 115.2 kBps
Safe Disable inputs
Wire
jumper
<12>
<7>
<7>
R/L1
S/L2
T/L3
S1
S2
S3
S4
S5
S6
DC reactor
(option)
U X
U X
Jumper
Control Circuit
++
++
Main Circuit
<1>
Thermal relay
-
B112
Drive
<4>
Option board
connectors
CN5-C
CN5-B
CN5-A
Terminal board
jumpers and switches
V
Off
S7
S8
SN
SC
PTC
AI
SP
<6>
+24 V
Shield ground terminal
RP
Pulse Train Input (max 32 kHz)
Power supply +10.5 Vdc, max. 20 mA
+V
Analog Input 1 (Frequency Reference Bias)
A1
-10 to +10 Vdc (20 k )
Analog Input 2 (Frequency Reference Bias)
A2
-10 to +10 Vdc (20 k )
0 or 4 to 20 mA (250 )
Analog Input 3 / PTC Input (Aux. frequency
A3
reference)
-10 to +10 Vdc (20 k )
AC
Ω
Ω
Ω
<8>
Ω
<9>
0 V
Power supply, -10.5 Vdc, max. 20 mA
-V
Termination resistor
(120 , 1/2 W)
Ω
DIP
+
+
R
-
-
R
+
+
S
Switch S2
<10>
S-
IG
H1
<11>
H2
HC
(option)
<2>
B2
DIP Switch S1
I
A2 Volt/Curr. Sel
DIP Switch S2
On
Term. Res. On/Off
Jumper S3
H1, H2
Sink/Source Sel.
D P Switch S4
A3 Analog/PTC
Input Sel
Jumper S5
V
AM/FM Volt /Curr.
I
Selection
AMFM
Braking resistor
(option)
<3>
PG- X3
(option)
<15>
<14>
<16>
FU
FV
FW
U/T1
V/T2
W/T
3
Ground
U
V
W
TB1
A+
AB+
BZ+
Z-
SD
FE
TB2
IP
IG
a+
ab+
b-
A track monitor
B track monitor
z+
z-
MA
Fault relay output
250 Vac, max. 1 A
MB
30 Vdc, max 1 A
MC
(min. 5 Vdc, 10 mA)
Multi-function relay output (During Run)
M1
250 Vac, max. 1 A
M2
30 Vdc, max 1 A
(min. 5 Vdc, 10 mA)
Multi-function relay output (Zero Speed)
M3
250 Vac, max. 1 A
M4
30 Vdc, max 1 A
(min. 5 Vdc, 10 mA)
Multi-function relay output (Speed Agree 1)
M5
250 Vac, max. 1 A
M6
30 Vdc, max 1 A
(min. 5 Vdc, 10 mA)
MP
Multi-function pulse train output
(Output frequency)
AC
0 to 32 kHz (2.2 k )
0 V
FM
-
AM
AC
-
0 V
E (G)
EDM (Safety Electronic Device Monitor)
+
+
DM
-
-
DM
M
Cooling fan
M
PG
Ω
Multi-function analog output 1
(Output frequency)
+
FM
-10 to +10 Vdc (2mA)
or 4 to 20 mA
Multi-function analog output 2
+
(Output current)
AM
-10 to +10 Vdc (2mA)
or 4 to 20 mA
Electrical Installation
3
<13>
<13>
shielded line
twisted-pair shielded line
control circuit terminal
Figure 3.1 Drive Standard Connection Diagram (example: CIMR-Ao5A0011)
<1> Remove the jumper when installing a DC reactor.
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
main circuit terminal
51
Page 52

3.2 Standard Connection Diagram
<2> Set up a thermal relay sequence to disconnect drive main power in the event of an overheat condition on the dynamic braking
option.
<3> Set L8-55 to 0 to disable the protection function of the built-in braking transistor of the drive when using an optional regenerative
converter or dynamic braking option. Leaving L8-55 enabled may cause a braking resistor fault (rF). Additionally, disable Stall
Prevention (L3-04 = 0) when using an optional regenerative converter, regenerative or braking units, or dynamic braking option.
Leaving If L3-04 enabled may prevent the drive from stopping within the specified deceleration time.
<4> Supplying power to the control circuit separately from the main circuit requires 24 V power supply (option).
<5> This figure illustrates an example of a sequence input to S1 through S8 using a non-powered relay or an NPN transistor. Install
the wire link between terminals SC-SP for Sink mode, between SC-SN for Source mode, or leave the link out for external power
supply. Never short terminals SP and SN, as it will damage the drive.
<6> The maximum current supplied by this voltage source is 150 mA when not using digital input option card DI-A3.
<7> The maximum output current capacity for the V+ and V- terminals on the control circuit is 20 mA. Never short terminals V+, V-,
and AC, as it can cause erroneous operation or damage the drive.
<8> Set DIP switch S1 to select between a voltage or current input signal to terminal A2. The default setting is for current input.
<9> Set DIP switch S4 to select between analog or PTC input for terminal A3.
<10> Set DIP switch S2 to the ON position to enable the termination resistor in the last drive in a MEMOBUS/Modbus network.
<11> Use jumper S3 to select between Sink mode, Source mode, and external power supply for the Safe Disable inputs.
NOTE: Terminals H1, H2, DM+, and DM- on 600 V class models are designed to the functionality, but are not certified to
EN61800-5-1, EN954-1/ISO13849 Cat. 3, IEC/EN61508 SIL2, Insulation coordination: class 1.
<12> Disconnect the wire jumper between H1 - HC and H2 - HC when utilizing the Safe Disable input.
NOTE: Terminals H1, H2, DM+, and DM- on 600 V class models are designed to the functionality, but are not certified to
EN61800-5-1, EN954-1/ISO13849 Cat. 3, IEC/EN61508 SIL2, Insulation coordination: class 1.
<13> Monitor outputs work with devices such as analog frequency meters, ammeters, voltmeters, and wattmeters. They are not
intended for use as a feedback-type signal.
<14> Use jumper S5 to select between voltage or current output signals at terminals AM and FM. Set parameters H4-07 and H4-08
accordingly.
<15> This voltage source supplies a maximum current of 150 mA when not using a digital input card DI-A3.
<16> Self-cooling motors do not require the same wiring necessary for motors with cooling fans.
WARNING! Sudden Movement Hazard. Do not close the wiring for the control circuit unless the multifunction input terminal parameters are
properly set. Improper sequencing of run/stop circuitry could result in death or serious injury from moving equipment.
WARNING! Sudden Movement Hazard. Ensure start/stop and safety circuits are wired properly and in the correct state before energizing
the drive. Failure to comply could result in death or serious injury from moving equipment. When programmed for 3-Wire control, a momentary
closure on terminal S1 may cause the drive to start.
WARNING! Sudden Movement Hazard. When using a 3-Wire sequence, set the drive to 3-Wire sequence prior to wiring the control terminals
and set parameter b1-17 to 0 so the drive will not accept a Run command at power up (default). If the drive is wired for a 3-Wire sequence
but set up for a 2-Wire sequence (default), and parameter b1-17 is set to 1 so the drive accepts a Run command at power up, the motor
will rotate in reverse direction at drive power up and may cause injury.
WARNING! Sudden Movement Hazard. Confirm the drive I/O signals and external sequence before executing the application preset
function. Executing the application preset function or setting A1-06 ≠ 0 will change the drive I/O terminal functions and may cause unexpected
equipment operation. Failure to comply may cause death or serious injury.
NOTICE: When using the automatic fault restart function with wiring designed to shut off the power supply upon drive fault, make sure the
drive does not trigger a fault output during fault restart (L5-02 = 0, default). Failure to comply will prevent the automatic fault restart function
from working properly.
52
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 53

3.3 Main Circuit Connection Diagram
3.3 Main Circuit Connection Diagram
Refer to diagrams in this section when wiring the main circuit of the drive. Connections may vary based on drive capacity.
The DC power supply for the main circuit also provides power to the control circuit.
NOTICE: Do not use the negative DC bus terminal “–” as a ground terminal. This terminal is at high DC voltage potential. Improper wiring
connections could damage the drive.
u
Three-Phase 600 V Class
Braking Resistor Unit
DC reactor
(option)
+1
B1
B2
(option)
Three-Phase power supply
500 to 600 Vac, 50 to 60 Hz
Figure 3.2 Connecting Main Circuit Terminals
Jumper
+2
−
R/L1
S/L2
T/L3
Drive
U/T1
V/T2
W/T3
Motor
Electrical Installation
3
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
53
Page 54

3.4 Terminal Block Configuration
3.4 Terminal Block Configuration
Figure 3.3 shows the different main circuit terminal arrangements for the drive capacities.
CIMR-A5A0003, 0004, 0006, 0009
R/L1
S/L2
T/L3
_
+1
+2
U/T1
B2
B1
V/T2
CIMR-Ao5A0017, 0022, 0027, 0032
–
B1 B2
W/T3
CIMR-A5A0011
B2
B1
R/L1
S/L2
T/L3
_
U/T1
1
2
V/T2
W/T3
R/L1 S/L2 T/L3 U/T1 V/T2 W/T3
+1 +2
Figure 3.3 Main Circuit Terminal Block Configuration
54
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 55

3.5 Terminal Cover
3.5 Terminal Cover
Follow the procedure below to remove the terminal cover for wiring and to reattach the terminal cover after wiring is complete.
u
IP20/NEMA Type 1
Removing the Terminal Cover
n
Loosen the terminal cover screw.
1.
Figure 3.4 Removing the Terminal Cover on an IP20/NEMA Type 1 Drive
Push in on the tab located on the bottom of the terminal cover and gently pull forward to remove the terminal cover.
2.
Figure 3.5 Removing the Terminal Cover on an IP20/NEMA Type 1 Drive
Reattaching the Terminal Cover
n
Power lines and signal wiring should pass through the opening provided. Refer to Wiring the Main Circuit Terminal on
page 60 and Wiring the Control Circuit Terminal on page 65 for details on wiring.
Reattach the terminal cover after completing the wiring to the drive and other devices.
Connect ground wiring first,
followed by the main circuit,
and then wire the control circuit.
Power lines and signal wiring
exit through the opening provided.
Figure 3.6 Reattaching the Terminal Cover on an IP20/NEMA Type 1 Drive
Electrical Installation
3
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
55
Page 56

3.6 Digital Operator and Front Cover
3.6 Digital Operator and Front Cover
Detach the digital operator from the drive for remote operation or when opening the front cover to install an option card.
NOTICE: Be sure to remove the digital operator prior to opening or reattaching the front cover. Leaving the digital operator plugged into the
drive when removing the front cover can result in erroneous operation caused by a poor connection. Firmly fasten the front cover back into
place before reattaching the digital operator.
u
Removing/Reattaching the Digital Operator
Removing the Digital Operator
n
While pressing on the tab located on the right side of the digital operator, pull the digital operator forward to remove it from
the drive.
Figure 3.7 Removing the Digital Operator
Reattaching the Digital Operator
n
Insert the digital operator into the opening in the top cover while aligning it with the notches on the left side of the opening.
Next, press gently on the right side of the operator until it clicks into place.
Figure 3.8 Reattaching the Digital Operator
u
Removing/Reattaching the Front Cover
Removing the Front Cover
n
5A0003 to 5A0032
After removing the terminal cover and the digital operator, loosen the screw that affixes the front cover (models 5A0022 and
5A0027 do not use a screw to affix the front cover) . Pinch in on the tabs found on each side of the front cover, then pull
forward to remove it from the drive.
Figure 3.9 Remove the Front Cover
Reattaching the Front Cover
n
Reverse the instructions given in above to reattach the front cover. Pinch inwards on the tabs found on each side of the front
cover while guiding it back into the drive. Make sure it clicks firmly into place.
56
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 57

3.7 Top Protective Cover
3.7 Top Protective Cover
The drive is designed to NEMA Type 1 specifications with a protective cover on the top. Removing this top protective cover
or the bottom conduit bracket from an IP20/NEMA Type 1 drive voids the NEMA Type 1 protection while maintaining IP20
conformity.
u
Removing the Top Protective Cover
Insert the tip of a straight-edge screwdriver into the small opening located on the front edge of the top protective cover. Gently
apply pressure as shown in the figure below to free the cover from the drive.
Note: Removing the top protective cover or the bottom conduit bracket from an IP20/NEMA Type 1 drive voids the NEMA Type 1 protection while
maintaining IP20 conformity.
Figure 3.10 Removing the Top Protective Cover
u
Reattaching the Top Protective Cover
Insert the two small protruding hooks on the rear side of the top protective cover into the provided mounting holes near the
back of the drive, then press down on the front side of the top protective cover to fasten the cover into place.
Protective Cover
Mounting Holes
Figure 3.11 Reattaching the Protective Cover
Electrical Installation
3
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
57
Page 58

3.8 Main Circuit Wiring
3.8 Main Circuit Wiring
This section describes the functions, specifications, and procedures required to safely and properly wire the main circuit in
the drive.
NOTICE: Do not solder the ends of wire connections to the drive. Soldered wiring connections can loosen over time. Improper wiring practices
could result in drive malfunction due to loose terminal connections.
NOTICE: Do not switch the drive input to start or stop the motor. Frequently switching the drive on and off shortens the life of the DC bus
charge circuit and the DC bus capacitors, and can cause premature drive failures. For the full performance life, refrain from switching the
drive on and off more than once every 30 minutes.
u
Main Circuit Terminal Functions
Table 3.1 Main Circuit Terminal Functions
Terminal Type
600 V
Class
Model CIMR-Ao
R/L1
T/L3
U/T1
W/T3
B1
B2
+2 • DC reactor connection (+1, +2)
+1
–
+3 Not available
5A0003 to 5A0032
Main circuit power supply input Connects line power to the drive 51S/L2
Drive output Connects to the motor 51V/T2
Braking resistor
(remove the shorting bar
between +1 and +2)
• DC power supply input (+1, –)
— Grounding terminal 60
Available for connecting a braking resistor or a braking
resistor unit option
For connecting:
• a DC power supply
(terminals +1 and – are not UL approved)
• dynamic braking options
• a DC reactor
Function Page
366
369
u
Protecting Main Circuit Terminals
Insulation Caps or Sleeves
n
Use insulation caps or sleeves when wiring the drive with crimp terminals. Take particular care to ensure that the wiring does
not touch nearby terminals or the surrounding case.
u
Wire Gauges and Tightening Torque
Select the appropriate wires and crimp terminals from Table 3.2.
Note: 1. Wire gauge recommendations based on drive continuous current ratings (ND) using 75 °C 600 Vac vinyl-sheathed wire assuming ambient
temperature within 40 °C and wiring distance less than 100 m.
2. Terminals +1, +2, +3, –, B1 and B2 are for connecting optional devices such as a DC reactor or braking resistor. Do not connect other
nonspecific devices to these terminals.
• Consider the amount of voltage drop when selecting wire gauges. Increase the wire gauge when the voltage drop is greater
than 2% of motor rated voltage. Ensure the wire gauge is suitable for the terminal block. Use the following formula to
calculate the amount of voltage drop:
Line drop voltage (V) = 3 × wire resistance (Ω/km) × wire length (m) × current (A) × 10
-3
• Refer to instruction manual TOBPC72060000 for braking unit or braking resistor unit wire gauges.
• Use terminal +1 and the negative terminal when connecting a braking transistor, regenerative converter, or a regen unit.
• Refer to UL Standards Compliance on page 498 for information on UL compliance.
58
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 59

Three-Phase 600 V Class
n
Table 3.2 Wire Gauge and Torque Specifications (Three-Phase 600 V Class)
Model CIMR-Ao
R/L1, S/L2, T/L3 14 14 to 10
5A0003
5A0004
5A0006
5A0009
5A0011
5A0017
5A0022
5A0027
5A0032
<1> Gauges listed in Table 3.2 are for use in the United States.
U/T1, V/T2, W/T3 14 14 to 10
–, +1, +2 – 14 to 10
B1, B2 – 14 to 10
R/L1, S/L2, T/L3 12 14 to 10
U/T1, V/T2, W/T3 14 14 to 10
–, +1, +2 – 14 to 10
B1, B2 – 14 to 10
R/L1, S/L2, T/L3 10 10 to 6
U/T1, V/T2, W/T3 10 10 to 6
–, +1, +2 – 12 to 6
B1, B2 – 12 to 10
R/L1, S/L2, T/L3 6 8 to 6
U/T1, V/T2, W/T3 8 8 to 6
–, +1, +2 – 6
B1, B2 – 10 to 8
R/L1, S/L2, T/L3 6 6 to 4
U/T1, V/T2, W/T3 6 6 to 4
–, +1, +2 – 6 to 4
B1, B2 – 10 to 8 M5
Terminal
Recomm. Gauge AWG,
<1>
kcmil
10 14 to 10
10 14 to 10
10 12 to 10 M5
6 10 to 6 M6
6 8 to 6 M6
Applicable Gauge
AWG, kcmil
<1>
3.8 Main Circuit Wiring
Size
M4
M4
M4
M5
M6
Tightening Torque
N·m (lb.in.)
1.2 to 1.5
(10.6 to
13.3)
1.2 to 1.5
(10.6 to
13.3)
1.2 to 1.5
(10.6 to
13.3)
2 to 2.5
(17.7 to
22.1)
2 to 2.5
(17.7 to
22.1)
4 to 6
(35.4 to
53.1)
2 to 2.5
(17.7 to
22.1)
4 to 6
(35.4 to
53.1)
Electrical Installation
3
u
Main Circuit Terminal and Motor Wiring
This section outlines the various steps, precautions, and checkpoints for wiring the main circuit terminals and motor terminals.
NOTICE: When connecting the motor to the drive output terminals U/T1, V/T2, and W/T3, the phase order for the drive and motor should
match. Failure to comply with proper wiring practices may cause the motor to run in reverse if the phase order is backward.
NOTICE: Do not connect phase-advancing capacitors or LC/RC noise filters to the output circuits. Failure to comply could result in damage
to the drive, phase-advancing capacitors, LC/RC noise filters or ground fault circuit interrupters.
NOTICE: Do not connect the AC power line to the output motor terminals of the drive. Failure to comply could result in death or serious
injury by fire as a result of drive damage from line voltage application to output terminals.
Cable Length Between Drive and Motor
n
Voltage drop along the motor cable may cause reduced motor torque when the wiring between the drive and the motor is too
long, especially at low frequency output. This can also be a problem when motors are connected in parallel with a fairly long
motor cable. Drive output current will increase as the leakage current from the cable increases. An increase in leakage current
may trigger an overcurrent situation and weaken the accuracy of the current detection.
Adjust the drive carrier frequency according to Table 3.3. If the motor wiring distance exceeds 100 m because of the system
configuration, reduce the ground currents. Refer to C6-02: Carrier Frequency Selection on page 167.
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
59
Page 60

3.8 Main Circuit Wiring
Table 3.3 Cable Length Between Drive and Motor
Cable Length 50 m or less 100 m or less Greater than 100 m
Carrier Frequency 15 kHz or less 5 kHz or less 2 kHz or less
Note: When setting carrier frequency in a drive running multiple motors, calculate the cable length as the total distance of wiring to all motors that
are connected.
Ground Wiring
n
Follow the precautions to wire the ground for one drive or a series of drives.
WARNING! Electrical
the length of the ground wire. Improper equipment grounding may cause dangerous electrical potentials on equipment chassis, which could
result in death or serious injury.
WARNING! Electrical Shock Hazard. Be sure to ground the drive ground terminal. Improper equipment grounding could result in death or
serious injury by contacting ungrounded electrical equipment.
NOTICE: Do not share the ground wire with other devices such as welding machines or large-current electrical equipment. Improper
equipment grounding could result in drive or equipment malfunction due to electrical interference.
NOTICE: When using more than one drive, ground multiple drives according to instructions. Improper equipment grounding could result in
abnormal operation of drive or equipment.
Shock Hazard. Always use a ground wire that complies with technical standards on electrical equipment and minimize
Refer to Figure 3.12 when using multiple drives. Do not loop the ground wire.
OK OK NOT OK
Figure 3.12 Multiple Drive Wiring
Wiring the Main Circuit Terminal
n
WARNING! Electrical
Shock Hazard. Shut off the power supply to the drive before wiring the main circuit terminals. Failure to comply may
result in death or serious injury.
Wire the main circuit terminals after the terminal board has been properly grounded.
The drive has a cover placed over the DC bus and braking circuit terminals prior to shipment to help prevent miswiring. Use
wire cutters to cut away covers as needed for terminals.
B2
B1
A
B
R/L1
A – Braking circuit protective cover B – DC bus protective cover
Figure 3.13 Protecting Cover to Prevent Miswiring (CIMR-Ao5A0011)
S/L2
T/L3
_
1
2
U/T1
V/T2
W/T3
Main Circuit Connection Diagram
n
Refer to Main Circuit Connection Diagram on page 53 when wiring terminals on the main power circuit of the drive.
WARNING! Fire
Improper wiring connections could cause the braking resistor to overheat and cause death or serious injury by fire. Failure to comply may
result in damage to the braking circuit or drive.
60
Hazard. The braking resistor connection terminals are B1 and B2. Do not connect braking resistors to any other terminals.
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 61

3.9 Control Circuit Wiring
3.9 Control Circuit Wiring
u
Control Circuit Connection Diagram
Refer to Figure 3.1 on page 51 when wiring terminals on the drive control circuit.
u
Control Circuit Terminal Block Functions
Drive parameters determine which functions apply to the multi-function digital inputs (S1 to S8), multi-function digital outputs
(M1 to M6), multi-function analog inputs (A1 to A3), and multi-function analog monitor output (FM, AM). The default setting
is listed next to each terminal in Figure 3.1 on page 51.
WARNING! Sudden Movement Hazard. Always check the operation and wiring of control circuits after being wired. Operating a drive with
untested control circuits could result in death or serious injury.
WARNING! Sudden Movement Hazard. Confirm the drive I/O signals and external sequence before starting test run. Setting parameter
A1-06 may change the I/O terminal function automatically from the factory setting. Refer to Application Selection on page 97. Failure
to comply may result in death or serious injury.
Input Terminals
n
Table 3.4 lists the input terminals on the drive. Text in parenthesis indicates the default setting for each multi-function input.
Table 3.4 Control Circuit Input Terminals
Type No. Terminal Name (Function) Function (Signal Level) Default Setting Page
Multi-function input 1 (Closed: Forward run,
S1
Open: Stop)
Multi-function input 2 (Closed: Reverse run,
S2
Open: Stop)
Multi-Function
Digital Inputs
S3 Multi-function input 3 (External fault, N.O.)
S4 Multi-function input 4 (Fault reset)
Multi-function input 5 (Multi-step speed
S5
reference 1)
Multi-function input 6 (Multi-step speed
S6
reference 2)
S7 Multi-function input 7 (Jog reference)
S8 Multi-function input 8 (External baseblock)
SC Multi-function input common Multi-function input common
SP Digital input power supply +24 Vdc 24 Vdc power supply for digital inputs, 150 mA max (only when not
SN Digital input power supply 0 V 68
Photocoupler
24 Vdc, 8 mA
Set the S3 jumper to select between sinking, sourcing mode, and the
power supply. Refer to Sinking/Sourcing Mode Switch for Digital
Inputs on page 68.
using digital input option DI-A3)
NOTICE: Do not jumper or short terminals SP and SN. Failure
to comply will damage the drive.
207
68
Electrical Installation
3
H1
Safe Disable input 1
Safe Disable
Inputs
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
H2
Safe Disable input 2
HC Safe Disable function common Safe disable function common
<1>
<1>
24 Vdc, 8 mA
One or both open: Output disabled
Both closed: Normal operation
Internal impedance: 3.3 kΩ
Off time of at least 1 ms
Disconnect the wire jumpers shorting terminals H1, H2, and HC to
use the Safe Disable inputs. Set the S5 jumper to select between
sinking, sourcing mode, and the power supply as explained on page
68.
501
61
Page 62

3.9 Control Circuit Wiring
Type No. Terminal Name (Function) Function (Signal Level) Default Setting Page
Input frequency range: 0 to 32 kHz
Multi-function pulse train input (Frequency
RP
reference)
Signal Duty Cycle: 30 to 70%
High level: 3.5 to 13.2 Vdc, low level: 0.0 to 0.8 Vdc
127
235
Input impedance: 3 kΩ
+V Power supply for analog inputs 10.5 Vdc (max allowable current 20 mA) 126
-V Power supply for analog inputs -10.5 Vdc (max allowable current 20 mA) –
Analog Inputs /
Pulse Train
Input
Multi-function analog input 1 (Frequency
A1
reference bias)
Multi-function analog input 2 (Frequency
A2
reference bias)
Multi-function analog input 3 (auxiliary
A3
frequency reference)/PTC Input
-10 to 10 Vdc, 0 to 10 Vdc (input impedance: 20 kΩ)
-10 to 10 Vdc, 0 to 10 Vdc (input impedance: 20 kΩ)
4 to 20 mA, 0 to 20 mA (input impedance: 250 Ω)
Voltage or current input must be selected by DIP switch S1 and H3-09
-10 to 10 Vdc, 0 to 10 Vdc (input impedance: 20 kΩ)
Use DIP switch S4 on the terminal board to select between analog and
PTC input.
126
228
126
126
230
126
AC Frequency reference common 0 V 126
E (G) Ground for shielded lines and option cards – –
<1> Terminals H1, H2, DM+, and DM- on 600 V class models are designed to the functionality, but are not certified to EN61800-5-1, EN954-1/ISO13849
Cat. 3, IEC/EN61508 SIL2, Insulation coordination: class 1.
Output Terminals
n
Table 3.5 lists the output terminals on the drive. Text in parenthesis indicates the default setting for each multi-function output.
Table 3.5 Control Circuit Output Terminals
Type No. Terminal Name (Function) Function (Signal Level) Default Setting Page
MA N.O.
Fault Relay
MC Fault output common
M1
Multi-function digital output (During run)
Multi-Function
Digital Output
<1>
M2
M3
Multi-function digital output (Zero speed)
M4
M5
Multi-function digital output (Speed Agree 1)
M6
MP Pulse train output (Output frequency) 32 kHz (max) 235
Monitor
Output
FM Analog monitor output 1 (Output frequency)
AM Analog monitor output 2 (Output current)
AC Monitor common 0 V –
Safety Monitor
<2>
Output
DM+ Safety monitor output
DM- Safety monitor output common
<1> Refrain from assigning functions to digital relay outputs that involve frequent switching, as doing so may shorten relay performance life. Switching
life is estimated at 200,000 times (assumes 1 A, resistive load).
<2> Terminals H1, H2, DM+, and DM- on 600 V class models are designed to the functionality, but are not certified to EN61800-5-1, EN954-1/ISO13849
Cat. 3, IEC/EN61508 SIL2, Insulation coordination: class 1.
30 Vdc, 10 mA to 1 A; 250 Vac, 10 mA to 1 A
Minimum load: 5 Vdc, 10 mA
30 Vdc, 10 mA to 1 A; 250 Vac, 10 mA to 1 A
Minimum load: 5 Vdc, 10 mA
-10 to +10 Vdc, or 0 to +10 Vdc 234
Outputs status of Safe Disable function. Closed when both Safe
Disable channels are closed. Up to +48 Vdc 50 mA
B
218MB N.C. output
218
503
62
A – External power, 48 V max.
B – Suppression diode
Figure 3.14 Connecting a Suppression Diode
A
C
D
C – Coil
D – 50 mA or less
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 63

3.9 Control Circuit Wiring
Serial Communication Terminals
n
Table 3.6 Control Circuit Terminals: Serial Communications
Type No. Signal Name Function (Signal Level)
R+ Communications input (+)
MEMOBUS/Modbus
Communication
<1> Enable the termination resistor in the last drive in a MEMOBUS/Modbus network by setting DIP switch S2 to the ON position. Refer to Control
I/O Connections on page 68 for more information on the termination resistor.
u
Terminal Configuration
<1>
R- Communications input (-)
S+ Communications output (+)
S- Communications output (-)
IG Shield ground 0 V
MEMOBUS/Modbus communication: Use an
RS-485 or RS-422 cable to connect the drive.
RS-485/422
MEMOBUS/Modbus
communication
protocol
115.2 kbps (max.)
The control circuit terminals are arranged as shown in Figure 3.15.
E(G)
HC H1 H2 DM+ DM- IG R+ R- S+ S-
M3 M6 M4
M1 M2 M5
MA MB MC
Figure 3.15 Control Circuit Terminal Arrangement
Wire Size and Torque Specifications
n
V+ AC V- A1 A2 A3 FM AM AC MP RP AC
S1 S2 S3 S4 S5 S6 S7 S8 SN SC SP
Select appropriate wire type and gauges from Table 3.7. For simpler and more reliable wiring, use crimp ferrules on the wire
ends. Refer to Table 3.8 for ferrule terminal types and sizes.
Table 3.7 Wire Gauges
Bare Wire Terminal Ferrule-Type Terminal
Applicable
wire size
mm2 (AWG)
Stranded wire:
0.2 to 1.0
(24 to 16)
Solid wire:
0.2 to 1.5
(24 to 16)
Recomm.
wire size
mm2 (AWG)
0.75 (18)
Applicable
wire size
mm2 (AWG)
0.25 to 0.5
(24 to 20)
Recomm.
wire size
mm2 (AWG)
0.5 (20)
Wire Type
Shielded wire,
etc.
Terminal
S1-S8, SC, SP, SN,
RP, V+, V-, A1, A2,
A3, AC, M1-M6,
MA, MB, MC, MP,
AM, FM, AC, S+,
S-, R+, R-, IG, HC,
H1, H2, DM+, DM-
Screw
Size
M3
Tightening
Torque
N•m
(lb. in)
0.5 to 0.6
(4.4 to 5.3)
Electrical Installation
3
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
63
Page 64

3.9 Control Circuit Wiring
Ferrule-Type Wire Terminals
n
Yaskawa recommends using CRIMPFOX ZA-3, a crimping tool manufactured by PHOENIX CONTACT, to prepare wire
ends with insulated sleeves before connecting to the drive. See Table 3.8 for dimensions.
d1
8 mm
L
d2
Figure 3.16 Ferrule Dimensions
Table 3.8 Ferrule Terminal Types and Sizes
Size mm
2
(AWG)
0.25 (24) AI 0.25-8YE 12.5 0.8 1.8
0.34 (22) AI 0.34-8TQ 10.5 0.8 1.8
0.5 (20)
Type L (mm) d1 (mm) d2 (mm) Manufacturer
PHOENIX CONTACT
AI 0.5-8WH or
AI 0.5-8OG
14 1.1 2.5
64
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 65

3.9 Control Circuit Wiring
u
Wiring the Control Circuit Terminal
This section describes the proper procedures and preparations for wiring the control terminals.
WARNING! Electrical Shock Hazard. Do not remove covers or touch the circuit boards while the power is on. Failure to comply could result
in death or serious injury.
NOTICE: Separate control circuit wiring from main circuit wiring (terminals R/L1, S/L2, T/L3, B1, B2, U/T1, V/T2, W/T3, -, +1, +2) and other
high-power lines. Improper wiring practices could result in drive malfunction due to electrical interference.
NOTICE: Separate wiring for digital output terminals MA, MB, MC, and M1 to M6 from wiring to other control circuit lines. Improper wiring
practices could result in drive or equipment malfunction or nuisance trips.
NOTICE: Use a class 2 power supply (UL standard) when connecting to the control terminals. Improper application of peripheral devices
could result in drive performance degradation due to improper power supply.
NOTICE: Insulate shields with tape or shrink tubing to prevent contact with other signal lines and equipment. Improper wiring practices could
result in drive or equipment malfunction due to short circuit.
NOTICE: Connect the shield of shielded cable to the appropriate ground terminal. Improper equipment grounding could result in drive or
equipment malfunction or nuisance trips.
Wire the control circuit only after terminals have been properly grounded and main circuit wiring is complete. Refer to
Terminal Board Wiring Guide on page 65 for details. Prepare the ends of the control circuit wiring as shown in Figure
3.19. Refer to Wire Gauges on page 63.
NOTICE: Do not tighten screws beyond the specified tightening torque. Failure to comply may result in erroneous operation, damage to the
terminal block, or cause a fire.
NOTICE: Use shielded twisted-pair cables as indicated to prevent operating faults. Improper wiring practices could result in drive or
equipment malfunction due to electrical interference.
Connect control wires as shown in Figure 3.17.
A
A – Loosen screw to remove wire.
B – Single wire or stranded wire
Figure 3.17 Terminal Board Wiring Guide
B
Preparing wire
terminal ends
C
C – Avoid fraying wire strands when
stripping insulation from wire. Strip
length 5.5 mm.
D – Blade depth of 0.4 mm or less
Blade width of 2.5 mm or less
D
Electrical Installation
3
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
65
Page 66

3.9 Control Circuit Wiring
Figure 3.18 Terminal Board Wiring
When setting the frequency by analog reference from an external potentiometer, use shielded twisted-pair wires (preparing
wire ends as shown in Figure 3.19) and connect the shield to the ground terminal of the drive.
F
A
B
A – Drive side
B – Connect shield to ground terminal
of drive.
C – Insulation
Figure 3.19 Preparing the Ends of Shielded Cables
NOTICE: The signal lines between the drive and the operator station or peripheral equipment should not exceed 50 meters when using an
analog signal from a remote source to supply the frequency reference. Failure to comply could result in poor system performance.
C
E
D – Control device side
E – Shield sheath (insulate with tape)
F – Shield
D
66
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 67

3.9 Control Circuit Wiring
u
Switches and Jumpers on the Terminal Board
The terminal board is equipped with several switches used to adapt the drive I/Os to the external control signals. Figure
3.20 shows the location of these switches. Refer to Control I/O Connections on page 68 for setting instructions.
DIP Switch S1
Terminal A2 Signal
Selection
V I
Jumper S5
Terminal AM/FM Signal
Selection
V
Jumper S3
Terminal H1/H2
Sink/Source Sel.
D P Switch S2
RS-422/485 Termination
Resistor
Off On
Terminal A3 Analog/
I
AM
FM
DIP Switch S4
PTC Input Sel.
PTC
AI
Figure 3.20 Locations of Jumpers and Switches on the Terminal Board
Electrical Installation
3
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
67
Page 68

3.10 Control I/O Connections
3.10 Control I/O Connections
u
Sinking/Sourcing Mode Switch for Digital Inputs
Use the wire link between terminals SC and SP or SC and SN to select between Sink mode, Source mode or external power
supply for the digital inputs S1 to S8 as shown in Table 3.9 (Default: Sink mode, internal power supply).
NOTICE: Do not short terminals SP and SN. Failure to comply will damage the drive.
Table 3.9 Digital Input Sink/Source/External Power Supply Selection
Mode
Drive Internal Power Supply
(Terminals SN and SP)
S7
External 24 Vdc Power Supply
S7
Sinking Mode (NPN)
Sourcing Mode (PNP)
S8
SN
SC
SP
S7
S8
SN
SC
SP
24 Vdc
24 Vdc
External
24 Vdc
External
24 Vdc
S8
SN
SC
24 Vdc
SP
S7
S8
SN
SC
24 Vdc
SP
68
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 69

3.10 Control I/O Connections
u
Sinking/Sourcing Mode Selection for Safe Disable Inputs
Note: Terminals H1, H2, DM+, and DM- on 600 V class models are designed to the functionality, but are not certified to EN61800-5-1, EN954-1/
ISO13849 Cat. 3, IEC/EN61508 SIL2, Insulation coordination: class 1.
Use jumper S3 on the terminal board to select between Sink mode, Source mode or external power supply for the Safe Disable
inputs H1 and H2 as shown in Table 3.9 (Default: Source mode, internal power supply). Refer to Switches and Jumpers on
the Terminal Board on page 67 for locating jumper S3.
Table 3.10 Safe Disable Input Sink/Source/External Power Supply Selection
Mode Drive Internal Power Supply External 24 Vdc Power Supply
Sinking Mode
HC
H1
Jumper S3
24 Vdc
External
24 Vdc
HC
H1
Jumper S3
24 Vdc
Sourcing Mode
u
Using the Pulse Train Output
H2
HC
H1
H2
Jumper S3
24 Vdc
External
24 Vdc
H2
HC
H1
H2
Jumper S3
24 Vdc
The pulse train output terminal MP can supply power or be used with an external power supply.
NOTICE: Connect peripheral devices in accordance with the specifications. Failure to comply may cause unexpected drive operation, and
can damage the drive or connected circuits.
Using Power from the Pulse Output Terminal (Source Mode)
n
The high voltage level of the pulse output terminal depends on the load impedance.
Load Impedance RL (kΩ) Output Voltage VMP (V) (insulated)
1.5 kΩ 5 V
4 kΩ 8 V
10 kΩ 10 V
Electrical Installation
3
Note:
The load resistance needed in order to get a certain high level voltage VMP can be calculated by: RL = VMP• 2 / (12 – VMP)
MP
Load Impedance
R
L
MP
V
AC
Figure 3.21 Pulse Output Connection Using Internal Voltage Supply
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
69
Page 70

3.10 Control I/O Connections
Using External Power Supply (Sink Mode)
n
The high voltage level of the pulse output signal depends on the external voltage applied. The voltage must be between 12
and 15 Vdc. The load resistance must be adjusted so that the current is lower than 16 mA.
External Power Supply (V) Load Impedance (kΩ)
12 to 15 Vdc ±10% 1.0 kΩ or higher
External Power Supply
Load Impedance
Figure 3.22 Pulse Output Connection Using External Voltage Supply
u
Terminal A2 Input Signal Selection
MP
AC
Sink Current
Terminal A2 can be used to input either a voltage or a current signal. Select the signal type using switch S1 as explained in
Table 3.11. Set parameter H3-09 accordingly as shown in Table 3.12. Refer to Switches and Jumpers on the Terminal
Board on page 67 for locating switch S1.
Note: If terminals A1 and A2 are both set for frequency bias (H3-02 = 0 and H3-10 = 0), both input values will be combined to create the frequency
reference.
Table 3.11 DIP Switch S1 Settings
Setting Description
V (left position) Voltage input (-10 to +10 V)
I (right position) Current input (4 to 20 mA or 0 to 20 mA): default setting
Table 3.12 Parameter H3-09 Details
No. Parameter Name Description
Selects the signal level for terminal A2.
H3-09 Terminal A2 signal level selection
u
Terminal A3 Analog/PTC Input Selection
0: 0 to 10 Vdc
1: -10 to 10 Vdc
2: 4 to 20 mA
3: 0 to 20 mA
Setting
Range
0 to 3 2
Default
Setting
Terminal A3 can be configured either as multi-function analog input or as PTC input for motor thermal overload protection.
Use switch S4 to select the input function as described in Table 3.13. Refer to Switches and Jumpers on the Terminal
Board on page 67 for locating switch S4.
Table 3.13 DIP Switch S4 Settings
Setting Description
AI (lower position) (default) Analog input for the function selected in parameter H3-06
PTC (upper position) PTC input. Parameter H3-06 must be set to E (PTC input)
70
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 71

3.10 Control I/O Connections
u
Terminal AM/FM Signal Selection
The signal type for terminals AM and FM can be set to either voltage or current output using jumper S5 on the terminal board
as explained in Table 3.14. When changing the setting of jumper S5, parameters H4-07 and H4-08 must be set accordingly.
The default selection is voltage output for both terminals. Refer to Switches and Jumpers on the Terminal Board on page
67 for locating jumper S5.
Table 3.14 Jumper S5 Settings
Terminal Voltage Output Current Output
Terminal AM
Terminal FM
V
I
AMFM
V
I
AMFM
V
I
AMFM
V
I
AMFM
Table 3.15 Parameter H4-07 and H4-08 Details
No. Parameter Name Description
Setting
Range
Default
Setting
H4-07 Terminal AM signal level selection 0: 0 to 10 Vdc
H4-08 Terminal FM signal level selection
u
MEMOBUS/Modbus Termination
1: -10 to 10 Vdc
2: 4 to 20 mA
0 to 2 0
This drive is equipped with a built-in termination resistor for the RS-422/485 communication port. DIP switch S2 enables or
disabled the termination resistor as shown in Table 3.16. The OFF position is the default. The termination resistor should be
placed to the ON position when the drive is the last in a series of slave drives. Refer to Switches and Jumpers on the Terminal
Board on page 67 to locate switch S2.
Table 3.16 MEMOBUS/Modbus Switch Settings
S2 Position Description
ON Internal termination resistor ON
OFF Internal termination resistor OFF (default setting)
Note: Refer to MEMOBUS/Modbus Communications on page 463 for details on MEMOBUS/Modbus.
Electrical Installation
3
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
71
Page 72

3.11 Connect to a PC
3.11 Connect to a PC
This drive is equipped with a USB port (type-B).
The drive can connect to a USB port on a PC using a USB 2.0, AB-type cable (sold separately). After connecting the drive to
a PC, DriveWizard Plus can be used to monitor drive performance and manage parameter settings. Contact Yaskawa for more
information on DriveWizard Plus.
USB Cable
(Type-AB)
(Type-B) (Type-A)
PC
Figure 3.23 Connecting to a PC (USB)
72
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 73

3.12 External Interlock
3.12 External Interlock
Systems that may be affected if the drive faults out should be interlocked with the drive’s fault output and ready signal.
u
Drive Ready
When the “Drive ready” signal has been set to one of the multi-function contact outputs, that output will close whenever the
drive is ready to accept a Run command or is already running. Under the following conditions the Drive ready signal will
switch off and remain off, even if a Run command is entered:
• when the power supply is shut off.
• during a fault.
• when there is problem with the control power supply.
• when a parameter setting error makes the drive unable to run even if a Run command has been entered.
• when a fault such as overvoltage or undervoltage is triggered as soon as the Run command is entered.
• when the drive is in the Programming mode and will not accept a Run command even when entered.
Interlock Circuit Example
n
Two drives running a single application might interlock with the controller using the Drive ready and Fault output signals as
shown below. The figure illustrates how the application would not be able to run if either drive experiences a fault or is unable
to supply a Drive ready signal.
Terminal Output Signal Parameter Setting
MA, MB, MC Fault –
M1-M2 Drive Ready H2-01 = 06
Ready1 Ready2 Fault1
Drive Ready
Fault2
Stop
Operation
Circuit
Drive Ready
Run
Run
Run
Drive 1
S1
SC
S1
SC
Fault
Output
Drive Ready
Drive 2
Fault
Output
Drive Ready
MA
MB
MC
M1
M2
MA
MB
MC
M1
M2
Relay 1
Relay 2
Relay 1
Relay 2
Figure 3.24 Interlock Circuit Example
Controller
SA
Max
250 Vac
SA
Controller
SA
Max
250 Vac
SA
Relay 1
Relay 2
Relay 1
Relay 2
Fault 1
Ready 1
Fault 2
Ready 2
Electrical Installation
3
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
73
Page 74

3.13 Wiring Checklist
3.13 Wiring Checklist
No. Item Page
1 Check drive model number to ensure receipt of correct model. 32
2 Make sure you have the correct braking resistors, DC reactors, noise filters, and other peripheral devices. 361
3 Check the option card model number. 361
4 Ensure that the area surrounding the drive complies with specifications. 40
5 The voltage from the power supply should be within the input voltage specification range of the drive. 184
6 The voltage rating for the motor should match the drive output specifications.
7 Verify that the drive is properly sized to run the motor.
8 Confirm proper branch circuit protection as specified by national and local codes. 50
9 Properly wire the power supply to drive terminals R/L1, S/L2, and T/L3. 53
Properly wire the drive and motor together.
10
The motor lines and drive output terminals R/T1, V/T2, and W/T3 should match in order to produce the desired phase
order. If the phase order is incorrect, the drive will rotate in the opposite direction.
11 Use 600 Vac vinyl-sheathed wire for the power supply and motor lines. 58
Use the correct wire gauges for the main circuit. Refer to Wire Gauges and Tightening Torque on page 58.
• Consider the amount of voltage drop when selecting wire gauges. Increase the wire gauge when the voltage drop is
12
13 Properly ground the drive. Review page 60. 60
14
15
greater than 2% of motor rated voltage. Ensure the wire gauge is suitable for the terminal block. Use the following
formula to calculate the amount of voltage drop:
Line drop voltage (V) = 3 × wire resistance (Ω/km) × wire length (m) × current (A) × 10
• If the cable between the drive and motor exceeds 50 m, adjust the carrier frequency set to C6-02 accordingly.
Tightly fasten all terminal screws (control circuit terminals, grounding terminals).
Refer to Wire Gauges and Tightening Torque on page 58.
Set up overload protection circuits when running multiple motors from a single drive.
Power supply
Drive, peripherals, option cards
Installation area and physical setup
Power supply voltage, output voltage
Main circuit wiring
Drive
MC1
MC2
MCn
OL1
M1
OL2
M2
OLn
Mn
MC1 - MCn
OL 1 - OLn
-3
... magnetic contactor
... thermal relay
32
283
32
283
59
58
58
60
58
–
74
Note: Close MC1 through MCn before operating the drive. MC1 through MCn cannot be switched off during
run.
Install a magnetic contactor when using a dynamic braking option. Properly install the resistor and ensure that overload
16
protection shuts off the power supply using the magnetic contactor.
Verify phase advancing capacitors, input noise filters, or ground fault circuit interrupters are NOT installed on the output
17
side of the drive.
366
Control circuit wiring
18 Use twisted-pair line for all drive control circuit wiring. 61
19
Ground the shields of shielded wiring to the GND terminal.
If using a 3-Wire sequence, properly set parameters for multi-function contact input terminals S1 through S8, and properly
20
wire control circuits.
60
21 Properly wire any option cards. 63
22 Check for any other wiring mistakes. Only use a multimeter to check wiring. –
Properly fasten the control circuit terminal screws in the drive. Refer to Wire Gauges and Tightening Torque on page
23
58.
58
24 Pick up all wire clippings. –
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
–
–
Page 75

3.13 Wiring Checklist
No. Item Page
25 Ensure that no frayed wires on the terminal block are touching other terminals or connections. –
26 Properly separate control circuit wiring and main circuit wiring. –
27 Analog signal line wiring should not exceed 50 m. –
28
Safe Disable input wiring should not exceed 30 m.
<1> Terminals H1, H2, DM+, and DM- on 600 V class models are designed to the functionality, but are not certified to EN61800-5-1, EN954-1/ISO13849
Cat. 3, IEC/EN61508 SIL2, Insulation coordination: class 1.
<1>
–
Electrical Installation
3
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
75
Page 76

3.13 Wiring Checklist
This Page Intentionally Blank
76
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 77

4
Start-Up Programming & Operation
This chapter explains the functions of the digital operator and how to program the drive for initial
operation.
4.1 SECTION SAFETY.................................................................................................78
4.2 USING THE DIGITAL OPERATOR........................................................................79
4.3 THE DRIVE AND PROGRAMMING MODES.........................................................84
4.4 START-UP FLOWCHARTS...................................................................................91
4.5 POWERING UP THE DRIVE..................................................................................96
4.6 APPLICATION SELECTION..................................................................................97
4.7 AUTO-TUNING.....................................................................................................100
4.8 NO-LOAD OPERATION TEST RUN....................................................................112
4.9 TEST RUN WITH LOAD CONNECTED...............................................................114
4.10 VERIFYING PARAMETER SETTINGS AND BACKING UP CHANGES............115
4.11 TEST RUN CHECKLIST.......................................................................................117
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
77
Page 78

4.1 Section Safety
4.1 Section Safety
DANGER
Electrical Shock Hazard
Do not connect or disconnect wiring while the power is on.
Failure to comply will result in death or serious injury.
WARNING
Electrical Shock Hazard
Do not operate equipment with covers removed.
Failure to comply could result in death or serious injury.
The diagrams in this section may include drives without covers or safety shields to illustrate details. Be sure to reinstall
covers or shields before operating the drives and run the drives according to the instructions described in this manual.
Do not remove covers or touch circuit boards while the power is on.
Failure to comply could result in death or serious injury.
A separate holding brake should be prepared by the user.
The holding brake should be wired so that it is activated by an external sequence when a fault occurs, the power is
shut off, or an emergency switch is triggered.
Failure to comply could result in death or serious injury.
Precautions should be taken on the machine side in crane and hoist applications to ensure that load does not fall or
slip.
Failure to take proper safety precautions can result in serious injury.
78
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 79

4.2 Using the Digital Operator
4.2 Using the Digital Operator
Use the digital operator to enter Run and Stop commands, edit parameters, and display data including fault and alarm
information.
u
Keys and Displays
DIGITAL OPERATOR JVOP-180
ALM
12
1
11
9
8
10
F2F1
2
ESC
3
RUN STOP
LO
RE
ENTERRESET
4 5 6 7
Figure 4.1 Keys and Displays on the Digital Operator
No. Display Name Function
1
F1
F2
Function Key
(F1, F2)
The functions assigned to F1 and F2 vary depending on the currently displayed menu. The
name of each function appears in the lower half of the display window.
• Returns to the previous display.
2
ESC
ESC Key
• Moves the cursor one space to the left.
• Pressing and holding this button will return to the Frequency Reference display.
3 RESET Key
4
RUN
RUN Key Starts the drive in LOCAL mode.
• Moves the cursor to the right.
• Resets the drive to clear a fault situation.
5 Up Arrow Key Scrolls up to display the next item, select parameter numbers, and increment setting values.
6 Down Arrow Key
7
STOP
STOP Key
<1>
8 ENTER Key
9
LO/RE Selection Key
<2>
Scrolls down to display the next item, select parameter numbers, and increment setting
values.
Stops drive operation.
• Enters parameter values and settings.
• Selects a menu item to move between displays
Switches drive control between the operator (LOCAL) and an external source (REMOTE)
for the Run command and frequency reference.
10 RUN Light Lit while the drive is operating the motor. Refer to page 81 for details.
11 LO/RE Light
Lit while the operator is selected to run the drive (LOCAL mode). Refer to page 81 for
details.
12 ALM LED Light Refer to ALARM (ALM) LED Displays on page 81.
<1> The STOP key has highest priority. Pressing the STOP key will always cause the drive to stop the motor, even if a Run command is active at any
external Run command source. To disable the STOP key priority, set parameter o2-06 to 0.
<2> The LO/RE key can only switch between LOCAL and REMOTE when the drive is stopped. To disable the LO/RE key to prohibit switching between
LOCAL and REMOTE, set parameter o2-01 to 0.
Start-Up Programming
& Operation
4
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
79
Page 80

4.2 Using the Digital Operator
u
LCD Display
1 2 3 4
8910
Figure 4.2 LCD Display
Table 4.1 Display and Contents
No. Name Display Content
MODE Displayed when in Mode Selection.
MONITR Displayed when in Monitor Mode.
1 Operation Mode Menus
2
DriveWorksEZ
Function Selection
3 Mode Display Area
4 Ready Rdy Indicates the drive is ready to run.
5 Data Display — Displays specific data and operation data.
Frequency
6
7
8
Reference
Assignment
Display
LO/RE
<1>
<2>
Function Key 1
(F1)
9 FWD/REV
VERIFY Indicates the Verify Menu.
PRMSET Displayed when in Parameter Setting Mode.
A.TUNE Displayed during Auto-Tuning.
SETUP Displayed when in Setup Mode.
DWEZ Displayed when DriveWorksEZ is set to enable. (A1-07 = 1 or 2)
DRV Displayed when in Drive Mode.
PRG Displayed when in Programming Mode.
OPR Displayed when the frequency reference is assigned to the LCD Operator Option.
AI Displayed when the frequency reference is assigned to the Analog Input of the drive.
COM
Displayed when the frequency reference is assigned to the MEMOBUS/Modbus Communication
Inputs of the drive.
OP Displayed when the frequency reference is assigned to an Option Unit of the drive.
RP Displayed when the frequency reference is assigned to the Pulse Train Input of the drive.
RSEQ Displayed when the run command is supplied from a remote source.
LSEQ Displayed when the run command is supplied from the operator keypad.
RREF Displayed when the run command is supplied from a remote source.
LREF Displayed when the run command is supplied from the operator keypad.
JOG
HELP
←
HOME
ESC
Pressing
Pressing
Pressing
Pressing
Pressing
F1
executes the Jog function.
F1
displays the Help menu.
F1
scrolls the cursor to the left.
F1
returns to the top menu (Frequency Reference).
F1
returns to the previous display.
FWD Indicates forward motor operation.
REV Indicates reverse motor operation.
5
6
7
80
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 81

No. Name Display Content
FWD/REV
10
<1> Displayed when in Frequency Reference Mode.
<2> Displayed when in Frequency Reference Mode and Monitor Mode
u
ALARM (ALM) LED Displays
Function Key 2
(F2)
State Content Display
Illuminated When the drive detects an alarm or error.
• When an alarm occurs.
Flashing
Off Normal operation (no fault or alarm).
• When an oPE is detected.
• When a fault or error occurs during Auto-Tuning.
DATA
→
RESET
Pressing
Pressing
Pressing
Pressing
Table 4.2 ALARM (ALM) LED Status and Contents
F2
switches between forward and reverse.
F2
scrolls to the next display.
F2
scrolls the cursor to the right.
F2
resets the existing drive fault error.
4.2 Using the Digital Operator
u
LO/RE LED and RUN LED Indications
Table 4.3 LO/RE LED and RUN LED Indications
<2>
<1>
Off
When a device other than the operator
is selected for Run command and
frequency reference control
(REMOTE)
During stop
LED Lit Flashing
When the operator is selected
for Run command and
frequency reference control
(LOCAL)
• During deceleration to
stop
During run
Examples
<1> Refer to Figure 4.3 for the difference between “flashing” and “flashing quickly”.
<2> Terminals H1, H2, DM+, and DM- on 600 V class models are designed to the functionality, but are not certified to EN61800-5-1, EN954-1/ISO13849
Cat. 3, IEC/EN61508 SIL2, Insulation coordination: class 1.
• When a Run command is
input and frequency
reference is 0 Hz
— —
Flashing Quickly
• While the drive was set to LOCAL,
a Run command was entered to the
input terminals then the drive was
switched to REMOTE
• A Run command was entered via
the input terminals while the drive
was not in Drive Mode
• During deceleration when a Fast
Stop command was entered
• The drive output is shut off by the
Safe Disable function.
• The STOP key was pressed while
the drive was running in REMOTE
mode
• The drive was powered up with
b1-17 = 0 (default) while the Run
command is active
Start-Up Programming
& Operation
4
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
81
Page 82

4.2 Using the Digital Operator
1 s
Flashing
Flashing
quickly
Drive output frequency
/
Frequency setting
RUN LED
ON
ON ON
ON
ON ON
Figure 4.3 RUN LED Status and Meaning
6 Hz
RUN
STOP
ON
during stop
0 Hz
OFF
Figure 4.4 RUN LED and Drive Operation
OFF
Flashing
RUN
STOP
OFF
82
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 83

u
Menu Structure for Digital Operator
4.2 Using the Digital Operator
- MODE -
U1-01= 0 00Hz
U1-02= 0 00Hz
U1-03= 0 00A
JOG FWD FWD/REV
- MODE -
U1-01= 0.00Hz
U1-02= 0.00Hz
U1-03= 0.00A
JOG FWD
- MODE - PRG
HELP
- MODE - PRG
HELP
- MODE - PRG
DRV
FREF (OPR)
LSEQ
LREF
DRV
Monitor Menu
LSEQ
LREF
FWD/REV
Modified Consts
Modified
X Parameters
FWD
DATA
Quick Setting
FWD
DATA
Programming
Rdy
Rdy
<4>
DRV
FWD
Monitor
DRV
DRV
Rdy
)
Rdy
LSEQ
LREF
Rdy
LSEQ
LREF
-MONITR-
FREF (d1-01)
U1-01= 000.00Hz
0.00~60 00
(
“0.00Hz”
← →
-MONITR-
U1 -01= 0 00Hz
U1-02= 0 00Hz
U1-03= 0 00A
JOG FWD FWD/REV
-MONITR-
Fault Trace
U2 -01= oC
U2-02= oPr
U2-03= 0 00Hz
JOG FWD FWD/REV
Initial Display <5>
A1000
YASKAWA
<3>
-MONITR-
U1- 01 = 0.00Hz
U1-02= 0.00Hz
U1-03= 0.00A
JOG FWD FWD/REV
-MONITR-
U1- 02 = 0.00Hz
U1-03= 0.00A
U1-04= 0
JOG FWD FWD/REV
DRV
Frequency Ref
LSEQ
LREF
DRV
Output Freq
LSEQ
LREF
A1000
XXXV, X.X/X.XkW
XX.XX/XX XXA
<XXXXXXXXX>
Rdy
Rdy
<6>
FWD
HELP
- MODE - PRG Rdy
Auto-Tuning
HELP
AUTO
FWD
DATA
DATA
Figure 4.5 Digital Operator Menu and Screen Structure
<1>
Pressing
Drive cannot operate motor.
<2>
RUN
will start the motor.
<3> Flashing characters are shown as 0.
<4> X characters are shown in this manual. The LCD Operator will display the actual setting values.
<5> The Frequency Reference appears after the initial display that shows the product name.
<6> The information that appears on the display will vary depending on the drive.
Start-Up Programming
& Operation
4
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
83
Page 84

4.3 The Drive and Programming Modes
4.3 The Drive and Programming Modes
The drive has a Drive Mode to operate the motor and a Programming Mode to edit parameter settings.
Drive Mode: In Drive Mode the user can operate the motor and observe U Monitor parameters. Parameter settings cannot be
edited or changed when in Drive Mode.
Programming Mode: In Programming Mode the user can edit and verify parameter settings and perform Auto-Tuning. When
the drive is in Programming Mode it will not accept a Run command unless b1-08 is set to 1.
Note: 1. If b1-08 is set to 0, the drive will only accept a Run command in Drive Mode. After editing parameters, the user must exit the Programming
u
Navigating the Drive and Programming Modes
The drive is set to operate in Drive Mode when it is first powered up. Switch between display screens by using the and
keys.
Power Up
Mode and enter Drive Mode before operating the motor.
2. Set b1-08 to 1 to allow motor operation from the drive while in Programming Mode.
Mode Contents Operator Display Description
Frequency
Reference
(default)
- MODE -
U1-01= 0.00Hz
U1-02= 0.00Hz
U1-03= 0.00A
JOG FWD FWD/REV
DRV
FREF (OPR)
Rdy
LSEQ
LREF
This display screen allows the user to monitor and change the frequency reference while
the drive is running. Refer to The Drive and Programming Modes on page 84.
Note: The user can select the data displayed when the drive is first powered up with
parameter o1-02.
Drive Mode
Programming
Mode
Monitor Display
- MODE -
U1-01= 0.00Hz
U1-02= 0.00Hz
U1-03= 0.00A
JOG FWD FWD/REV
DRV
Monitor Menu
Rdy
LSEQ
LREF
Lists the monitor parameters (Uo-oo parameters) available in the drive.
Press the Enter Key and then use the Up, Down, ESC, and Reset keys to navigate through
the drive monitors.
- MODE - PRG
Verify Menu
Modified Consts
Modified
X Parameters
FWD
HELP DATA
Lists all parameters that have been edited or changed from default settings. Refer to
Verifying Parameter Changes: Verify Menu on page 87.
Setup Group
- MODE - PRG
Quick Setting
HELP
FWD
DATA
A select list of parameters necessary to get the drive operating quickly. Refer to
Using the Setup Group on page 88.
Note: Parameters listed in the Setup Group differ depending the Application Preset
in parameter A1-06. Refer to Application Selection on page 97.
- MODE - PRG
Parameter
Setting Mode
Programming
HELP
FWD
Allows the user to access and edit all parameter settings. Refer to Parameter List on
page 379.
DATA
84
- MODE - PRG Rdy
Auto-Tuning
Mode
Auto-Tuning
HELP
AUTO
FWD
Motor parameters are calculated and set automatically. Refer to Auto-Tuning on
page 100.
DATA
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 85

4.3 The Drive and Programming Modes
Mode Contents Operator Display Description
Drive Mode
Drive Mode Details
n
Frequency
Reference
- MODE -
U1-01= 0.00Hz
U1-02= 0.00Hz
U1-03= 0.00A
JOG FWD FWD/REV
DRV
FREF (OPR)
Rdy
LSEQ
LREF
Returns to the frequency reference display screen.
The following actions are possible in the Drive Mode:
•
Run and stop the drive
• Monitor the operation status of the drive (frequency reference, output frequency, output current, output voltage, etc.)
• View information on an alarm
• View a history of alarms that have occurred
Figure 4.6 illustrates how to change the frequency reference from F 0.00 (0 Hz) to F 6.00 (6 Hz) while in the Drive Mode.
This example assumes the drive is set to LOCAL.
Frequency reference
display at power up
- MODE -
DRV
Rdy
FREF (OPR)
U1-01= 0.00Hz
U1-02= 0.00Hz
U1-03= 0.00A
JOG FWD FWD/REV
LSEQ
LREF
Press to select LOCAL
-MONITR-
DRV
FREF (d1-01)
U1-01= 000.00Hz
(0.00~60.00)
“0.00Hz”
FWD
← →
Rdy
F1
F2
left right
Press until the frequency
reference changes to 006 00 Hz
- MODE -
DRV
DRV
-MONITRFREF (d1-01)
U1-01= 006 00Hz
(0.00~60.00)
“0.00Hz”
FWD
← →
Rdy
Entry Accepted
DRV
-MONITRFREF (d1-01)
U1-01= 006 00Hz
(0.00~60.00)
“0.00Hz”
FWD
← →
Rdy
ESC
U1-01= 6.00Hz
U1-02= 0.00Hz
U1-03= 0.00A
JOG FWD FWD/REV
FREF (OPR)
Rdy
LSEQ
LREF
Figure 4.6 Setting the Frequency Reference while in the Drive Mode
Note: The drive will not accept a change to the frequency reference until the ENTER key is pressed after the frequency reference is entered. This
prevents accidental setting of the frequency reference. To have the drive accept changes to the frequency reference as soon as changes
feature
are made without requiring the ENTER key, set o2-05 to 1.
Programming Mode Details
n
The following actions are possible in the Programming Mode:
• Parameter Setting Mode: Access and edit all parameter settings.
• Verify Menu: View a list of parameters that have been changed from the default values.
• Setup Group: Access a list of commonly used parameters to simplify setup (Refer to Simplified Setup Using the Setup
Group on page 88).
• Auto-Tuning Mode: Automatically calculate and set motor parameters to optimize drive performance.
u
Changing Parameter Settings or Values
This example explains changing C1-02 (Deceleration Time 1) from 10.0 seconds (default) to 20.0 seconds.
Step Display/Result
DRV
FWD
LSEQ
LREF
DATA
Rdy
1. Turn on the power to the drive. The initial display appears.
2.
Press
or until the Parameter Setting Mode screen appears.
- MODE -
FREF (OPR)
U1-01= 0.00Hz
U1-02= 0.00Hz
U1-03= 0.00A
JOG FWD FWD/REV
- MODE - PRG
Programming
HELP
Start-Up Programming
& Operation
4
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
85
Page 86

4.3 The Drive and Programming Modes
Step Display/Result
3.
Press
4.
Press or to select the C parameter group.
5.
Press
6.
Press
7.
Press to view the current setting value (10.0 s). The leftmost digit flashes.
8.
Press
9.
Press
to enter the parameter menu tree.
two times.
or to select parameter C1-02.
F1
F2
,
, or
until the desired number is selected. “1” flashes.
and enter 0020.0.
-PRMSET-
A1-00= 0
-PRMSET-
C1-01= 10 0 sec
-PRMSETAccel/Decel
C1-01= 10.0 sec
Accel Time 1
FWD
← →
-PRMSET-
-PRMSET-
-PRMSET-
-PRMSET-
PRG
Initialization
Select Language
FWD
← →
PRG
Basic Setup
Accel Time 1
FWD
← →
PRG
PRG
Decel Time 1
C1-02= 10 0Sec
(0 0~6000 0)
“10.0 sec”
FWD
← →
PRG
Decel Time 1
C1-02= 0010 0Sec
(0 0~6000.0)
“10.0 sec”
FWD
← →
PRG
Decel Time 1
C1-02=0010.0Sec
(0 0~6000.0)
“10.0 sec”
FWD
← →
PRG
Decel Time 1
C1-02=0020 0Sec
(0.0~6000 0)
“10.0 sec”
FWD
← →
-PRMSETAccel Time 1
C1-01= 10.0Sec
(0.0~6000 0)
“10 0 sec”
FWD
← →
PRG
10.
Press
to confirm the change.
11. The display automatically returns to the screen shown in Step 4.
12.
Press
as many times as necessary to return to the initial display.
Entry Accepted
-PRMSET-
C1-02= 20.0Sec
← →
- MODE -
U1-01= 0 00Hz
U1-02= 0 00Hz
U1-03= 0 00A
JOG FWD FWD/REV
Decel Time 1
(0 0~6000.0)
“10.0 sec”
FWD
DRV
FREF (OPR)
PRG
LSEQ
LREF
Rdy
86
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 87

4.3 The Drive and Programming Modes
u
Verifying Parameter Changes: Verify Menu
The Verify Menu lists edited parameters from the Programming Mode or as a result of Auto-Tuning. The Verify Menu helps
determine which settings have been changed, and is particularly useful when replacing a drive. If no settings have been changed,
the Verify Menu will read “None”. The Verify Menu also allows users to quickly access and re-edit any parameter settings
that have been changed.
Note: The Verify Menu will not display parameters from the A1 group (except for A1-02) even if those parameters have been changed from their
default settings.
The following example is a continuation of the steps above. Here, parameter C1-02 is accessed using the Verify Menu, and
is changed again from 10.0 s to 20.0 s.
To check the list of edited parameters:
Step Display/Result
- MODE -
DRV
Modified
FWD
Rdy
LSEQ
LREF
1. Turn on the power to the drive. The initial display appears.
2.
Press
or until the display shows the top of the Verify Menu.
FREF (OPR)
U1-01= 0 00Hz
U1-02= 0 00Hz
U1-03= 0 00A
JOG FWD FWD/REV
- MODE - PRG
Modified Consts
X Parameters
HELP DATA
Press to enter the list of parameters that have been edited from their original default
settings.
3.
If parameters other than C1-02 have been changed, use or to scroll until C1-02
appears.
4.
Press
to access the setting value. Left digit flashes.
- VER FY - PRG
Accel Time 1
C1-02 = 20 0sec
(0.0~6000.0)
“10.0sec”
Home DATA
FWD
- VER FY - PRG
Accel Time 1
C1-01=0020.0sec
(0.0~6000.0)
“10 0sec”
FWD
Home DATA
Rdy
Rdy
Start-Up Programming
& Operation
4
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
87
Page 88

4.3 The Drive and Programming Modes
u
Simplified Setup Using the Setup Group
The Setup Group lists the basic parameters necessary to set up the drive for an application. This group expedites the startup
process for an application by showing only the most important parameters for the application.
Using the Setup Group
n
Figure 4.7 illustrates how to enter and how to change parameters in the Setup Group.
The first display shown when entering the Setup Group is the Application Selection menu. Skipping this display will keep the
current Setup Group parameter selection. The default setting for the Setup Group is a group of parameters most commonly
use in general-purpose applications. Pressing the ENTER key from the Application Selection menu and selecting an
Application Preset will change the Setup Group to parameters optimal for the application selected. Refer to Application
Selection on page 97.
In this example, the Setup Group is accessed to change b1-01 from 1 to 0. This changes the source of the frequency reference
from the control circuit terminals to the digital operator.
- MODE -
DRV
Rdy
FREF (OPR)
U1-01= 0.00Hz
U1-02= 0.00Hz
U1-03= 0.00A
JOG FWD FWD/REV
Frequency reference
appears when
powered up
LSEQ
LREF
- MODE - PRG
Quick Setting
HELP
FWD
DATA
- SETUP -
<1>
Application Sel
A1-06= 0 *0*
Home FWD DATA
Parameter Display
General
PRG
Rdy
- SETUP -
PRG
PRG
Ref Source 1
Analog Input
PRG
Run Source 1
Digital Inputs
PRG
Rdy
Rdy
Rdy
Rdy
Entry Accepted
- SETUP -
PRG
Ref Source 1
b1-01= 1 *1*
Analog Input
“1”
FWD
←
Control Circuit
Terminal
<2>
Rdy
→
- SETUP Ref Source 1
b1-01= 0 *1*
Operator
“1”
FWD
←
Operator
<2>
PRG
Rdy
→
Control Method
A1-02= 2 *2*
Open Loop Vector
Home FWD DATA
- SETUP -
b1-01= 1 *1*
Home FWD DATA
- SETUP -
b1-02= 1 *1*
Home FWD DATA
- SETUP StallP Decel Sel
L3-04= 1 *1*
General Purpose
Home FWD DATA
Figure 4.7 Setup Group Example
<1> Use the up and down arrow keys to scroll through the Setup Group. Press the ENTER key to view or change parameter settings.
<2> To return to the previous menu without saving changes, press the ESC key.
88
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 89

4.3 The Drive and Programming Modes
Setup Group Parameters
n
Table 4.4
lists the parameters available by default in the Setup Group. Selecting an Application Preset in parameter A1-06 or
from the Application Selection Menu of the Setup Group automatically changes the parameters selected for the Setup Group.
Refer to Application Selection on page 97.
If a parameter that needs to be edited is not displayed in the Setup Group, access the parameter through the Programming
Mode.
Table 4.4 Setup Group Parameters
Parameter Name
A1-02 Control Method Selection
b1-01 Frequency Reference Selection 1
b1-02 Run Command Selection 1
b1-03 Stopping Method Selection
C1-01 Acceleration Time 1
C1-02 Deceleration Time 1
C6-01 Drive Duty Mode
C6-02 Carrier Frequency Selection
d1-01 Frequency Reference 1
d1-02 Frequency Reference 2
d1-03 Frequency Reference 3
d1-04 Frequency Reference 4
d1-17 Jog Frequency Reference
E1-01 Input Voltage Setting
E1-04 Maximum Output Frequency
E1-05 Maximum Voltage
E1-06 Base Frequency
Note: Parameter
availability depends on the control mode set in A1-02; some of the parameters listed above may not be accessible in certain control
modes.
Parameter Name
E1-09 Minimum Output Frequency
E1-13 Base Voltage
E2-01 Motor Rated Current
E2-11 Motor Rated Power
E5-01 Motor Code Selection
E5-02 Motor Rated Power
E5-03 Motor Rated Current
E5-04 Number of Motor Poles
E5-05 Motor Stator Resistance
E5-06 Motor d-Axis Inductance
E5-07 Motor q-Axis Inductance
E5-09 Motor Induction Voltage Constant 1
E5-24 Motor Induction Voltage Constant 2
H4-02 Multi-Function Analog Output Terminal FM Gain
H4-05 Multi-Function Analog Output Terminal AM Gain
L1-01 Motor Overload Protection Function Selection
L3-04 Stall Prevention Selection during Deceleration
u
Switching Between LOCAL and REMOTE
LOCAL mode is when the drive is set to accept the Run command from the digital operator RUN key. REMOTE mode is
when the drive is set to accept the Run command from an external device (via the input terminals or serial communications,
etc.).
WARNING! Sudden Movement Hazard. The drive may start unexpectedly if the Run command is already applied when switching from
LOCAL
mode to REMOTE mode when b1-07 = 1, resulting in death or serious injury. Be sure all personnel are clear of rotating machinery.
Switch the operation between LOCAL and REMOTE using the LO/RE key on the digital operator or via a digital input.
Note: 1. After selecting LOCAL, the LO/RE light will remain lit.
2. The drive will not allow the user to switch between LOCAL and REMOTE during run.
Using the LO/RE Key on the Digital Operator
n
Step Display/Result
- MODE -
DRV
Rdy
FREF (A1/A2)
U1-01= 0.00Hz
U1-02= 0.00Hz
1. Turn on the power to the drive. The initial display appears.
Press
2.
. The LO/RE light will light up. The drive is now in LOCAL.
To set the drive for REMOTE operation, press the key again.
Using Input Terminals S1 through S8 to Switch between LOCAL and REMOTE
n
It
is possible to switch between LOCAL and REMOTE modes using one of the digital input terminals S1 through S8 (set the
U1-03= 0.00A
OG FWD FWD/REV
V 0
- MODE -
DRV
RE (O R)
U -0 = 0 00Hz
U -02= 0 00H
U -03= 0 0 A
WD W V
ESC
RESE
RUN
RSEQ
RREF
A M
Rdy
RE
2
O
S
corresponding parameter H1-oo to “1”).
Start-Up Programming
& Operation
4
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
89
Page 90

4.3 The Drive and Programming Modes
Refer to Parameter List on page 379 for a list of possible H1-oo digital input selections when setting the multi-function
input terminals.
Note:
Setting H1-oo to 1 disables the LO/RE key on the digital operator.
90
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 91

4.4 Start-Up Flowcharts
4.4 Start-Up Flowcharts
The flowcharts in this section summarize basic steps required to start the drive. Use the flowcharts to determine the most
appropriate start-up method for a given application. The charts are intended as a quick reference to help familiarize the user
with start-up procedures.
Flowchart Subchart Objective Page
A – Basic start-up procedure and motor tuning 92
A-1 Simple motor setup using V/f mode 93
A-2
–
A-3
Note: Refer to Application Selection on page 97 to set up the drive using one of the Application Presets.
High-performance operation using Open Loop Vector (OLV) or Closed Loop Vector (CLV) motor
control
Setting up the drive to run a permanent magnet (PM) motor
Note: PM motor control modes are not available on 600 V class drives,
CIMR-Ao5oooooooo.
94
95
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Start-Up Programming
& Operation
4
91
Page 92

4.4 Start-Up Flowcharts
u
Flowchart A: Basic Start-Up and Motor Tuning
Flowchart A in Figure 4.8 describes a basic start-up sequence that varies slightly depending on the application. Use the drive
default parameter settings in simple applications that do not require high precision.
START
Install and wire he drive as explained in Chapters 1, 2, and 3
Follow safety messages concerning applica ion of power
Apply main power on to the drive
Application Presets
A1-06 used?
NO
Set he control mode in parameter A1-02
C6-01 for heavy/normal duty mode selection
b1-01/02 for frequency reference and run command source selection
H1-
oo,H2-oo,H3-oo,H4-oo,H6-oofor I/O terminal setting
d1-
oo for using multi-speed references
C1-
oo and C2-oofor accel/decel and S-curve time settings
L3-04 if using dynamic braking options
L8-55 = 0 if using a regen converter
0: V/f
1: V/f w/PG
Set the basic parameters
Control Mode
A1-02 =
2: OLV
3: CLV
YES
Refer to
Application
Selec ion section
5: OLV/PM
6: AOLV/PM
7: CLV/PM
To
Flowchart A-1
To
Flowchart A-2
To
Flowchart A-3
From Flowchart A-1, A-2, or A-3
Fine tune parameters. Adjust application settings if necessary.
Check the machine operation and verify parameter settings.
Drive is ready to run the application.
Figure 4.8 Basic Start-Up
Note: 1. Execute
Stationary Auto-Tuning for Line-to-Line Resistance if the drive has been Auto-Tuned and then moved to a different location where
the motor cable length exceeds 50 m.
2. Perform Auto-Tuning again after installing an AC reactor or other such components to the output side of the drive.
92
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 93

4.4 Start-Up Flowcharts
u
Subchart A-1: Simple Motor Setup Using V/f Control
Flowchart A1 in Figure 4.9 describes simple motor setup for V/f Control, with or without PG feedback. V/f Control is suited
for more basic applications such as fans and pumps. This procedure illustrates Energy Savings and Speed Estimation Speed
Search.
From
Flowchart
A
Is there a
PG encoder
on the motor?
NO
Set or verify the V/f pattern
settings E1-oo.
Energy Savings
(b8-01 = 1) or
Speed Estimation Speed Search
(b3-24 = 1) enabled
when b3-01 = 1
or L2-01 = 1,2 ?
YES
Perform Rotational
Auto-Tuning for V/f Control
(T1-01 = 3)
YES
Set or verify the V/f pattern set ings E1-oo.
Enter the number of motor poles to E2-04 (or E4-04 for motor 2).
Set he PG speed feedback parameters (F1-).
NO
Is the motor cable longer than
50 meters?
YES
Run the motor wi hout load; check the rotation direction and operation.
Verify external signal commands to the drive work as desired.
Couple the load or machine to the motor.
Run the machine and check for desired operation.
Return to
Flowchart
A
Figure 4.9 Simple Motor Setup with Energy Savings or Speed Search
NO
Perform Stationary Auto-Tuning for
Stator Resistance (T1-01 = 2)
Start-Up Programming
& Operation
4
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
93
Page 94

4.4 Start-Up Flowcharts
u
Subchart A-2: High Performance Operation Using OLV or CLV
Flowchart A2 in Figure 4.10 describes the setup procedure for high-performance with Open Loop Vector Control or Closed
Loop Vector Control, which is appropriate for applications requiring high starting torque and torque limits.
Note: Although the drive sets parameters for the PG encoder during Auto-Tuning, sometimes the direction of the motor and direction of the PG get
reversed. Use parameter F1-05 to switch the direction of the PG so that it matches the motor direction.
From
Flowchart
A
Possible for motor to
rotate during tuning? <1>
NO
Motor test report/
data sheet available?
NO
Perform Stationary
Auto-Tuning 1 (T1-01 = 1)
Run the motor without load; check the rotation direction and operation.
Verify external signal commands to the drive work as desired.
Connect the load to the motor.
Is there a PG
encoder on the
motor?
YES
Should the
drive set ASR gain
automatically?
NO
YES
NO
YES
NO
YES
Is the load less than
30% of the rated load
for the motor?
Perform Stationary
Auto-Tuning 2 (T1-01 = 4)
YES
Perform Rotating
Auto-Tuning (T1-01 = 0)
<2>
Does the application require
any of the following drive functions?
Feed Forward
KEB 2
NO
Run the machine and check for desired
operation.
Return to
Flowchart
A
YES
Perform Inertia Tuning
(T1-01 = 8) <3>
Perform ASR gain tuning.
(T1-01 = 9) <4>
Figure 4.10 Flowchart A2: High Performance Operation Using OLV or CLV
<1> Decouple the load from the motor to properly perform Rotational Auto-Tuning.
<2> Rotational Auto-Tuning can still be performed if the load is 30% or less, though Stationary Auto-Tuning will probably yield better
control performance.
<3> Make sure the motor and load can run freely (i.e., if a brake is mounted, make sure it is released).
<4> ASR Gain Tuning automatically performs Inertia Tuning and sets parameters related to Feed Forward and the KEB Ride-Thru
function.
94
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 95

4.4 Start-Up Flowcharts
u
Subchart A-3: Operation with Permanent Magnet Motors
Note:
PM motor control modes are not available on 600 V class drives, CIMR-Ao5oooooooo.
Flowchart A3 in Figure 4.11 describes the setup procedure for running a PM motor in Open Loop Vector Control. PM motors
can be used for more energy-efficient operation in reduced or variable torque applications.
Note: 1. Although the drive sets parameters for the PG encoder during Auto-Tuning, sometimes the direction of the motor and direction of the PG
get reversed. Use parameter F1-05 to switch the direction of the PG so that it matches the motor direction.
2. Realign the Z Pulse if the PG encoder is replaced. Set T2-01 to 3 to recalibrate the drive for the new encoder.
From
Flowchart
A
<1>
YES
Input the motor data.
NO
YES
Perform PM Inertia Tuning
Motor test report/ data
sheet available?
NO
Perform PM Stationary
Auto-Tuning (T2-01 = 1)
Run the motor without load; check the rotation direction and
operation.Verify external signal commands to the drive work as desired.
Connect the load to the motor.
Is there a PG
encoder on the
motor?
YES
Should the drive set ASR gain
automatically?
NO
Does the application require
any of the following drive functions?
Feed Forward
KEB 2
NO
(T2-01 = 0)
Is the motor cable longer
than 50 meters?
NO
YES
(T2-01 = 8) <2>
<1>
YES
Perform PM Stationary
Auto-Tuning for Stator
Resistance (T2-01 = 2)
Perform ASR gain tuning.
(T2-01 = 9). <3>
Start-Up Programming
& Operation
4
Run the machine and check for desired
operation.
Return to
Flowchart
A
Figure 4.11 Operation with Permanent Magnet Motors
<1> Enter the motor code to E5-01 when using a Yaskawa PM motor (SMRA Series, SSR1 Series, and SST4 Series). If using a
motor from another manufacturer, enter FFFF.
<2> Make sure the motor and load can run freely (i.e., if a brake is mounted, make sure it is released).
<3> ASR Gain Tuning automatically performs Inertia Tuning and sets parameters related to Feed Forward and the KEB Ride-Thru
function.
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
95
Page 96

DGI A O ER A OR VO - 80
DGI A O ER A OR VO - 80
4.5 Powering Up the Drive
4.5 Powering Up the Drive
u
Powering Up the Drive and Operation Status Display
Powering Up the Drive
n
Review the following checklist before turning the power on.
Item to Check Description
600 V class: Three-phase 500 to 600 Vac 50/60 Hz
Power supply voltage
Drive output terminals and
motor terminals
Control circuit terminals Check control circuit terminal connections.
Drive control terminal status Open all control circuit terminals (off).
Status of the load and connected
machinery
Status Display
n
When the power supply to the drive is turned on, the digital operator lights will appear as follows:
Status Name Description
Normal
Operation
Properly wire the power supply input terminals (R/L1, S/L2, T/L3).
Check for proper grounding of drive and motor.
Properly wire drive output terminals U/T1, V/T2, and W/T3 with motor terminals U, V, and W.
Decouple the motor from the load.
ALARM
- MODE -
DRV
Rdy
FREF (OPR)
U1-01= 0.00Hz
U1-02= 0.00Hz
U1-03= 0.00A
OG FWD FWD/REV
LSEQ
LREF
The data display area displays the frequency reference.
is lit.
Fault
ALARM
- MODE -
DRV
EF3
Ext Fault S3
RESET
FWD
External fault (example)
Data displayed varies by the type of fault. Refer to Fault Displays, Causes, and Possible
Solutions on page 300 for more information.
and are lit.
96
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 97

4.6 Application Selection
4.6 Application Selection
Several Application Presets are available to facilitate drive setup for commonly used applications. Selecting one of these
Application Presets automatically assigns functions to the input and output terminals and sets a predefined group of parameters
to values appropriate for the selected application.
In addition, the parameters most likely to be changed are assigned to the group of User Parameters, A2-01 through A2-16.
User Parameters are part of the Setup Group, which provides quicker access by eliminating the need to scroll through multiple
menus.
An Application Preset can either be selected from the Application Selection menu in the Setup Group (Refer to Simplified
Setup Using the Setup Group on page 88) or in parameter A1-06. The following presets can be selected:
Note: 1. Application Presets can only be selected if all drive parameters are at their original default settings. It may be necessary to initialize the
WARNING! Sudden Movement Hazard. Confirm the drive I/O signals and external sequence before performing a test run. Setting parameter
A1-06 may automatically change the I/O terminal function from the default setting. Failure to comply may result in death or serious injury.
drive by setting A1-03 to “2220” or “3330” prior to selecting an Application Preset.
2. Entering a value to A1-06 to enable an Application Preset will fix that value to the parameter. The value cannot be changed without first
setting A1-03 to 2220 or 3330 to initialize the drive.
No. Parameter Name Setting Range Default
0: Disabled
1: Water supply pump
A1-06 Application Presets
2: Conveyor
3: Exhaust fan
4: HVAC
5: Compressor
0
u
Setting 1: Water Supply Pump Application
Table 4.5 Water Supply Pump: Parameter Settings
No. Name Default Setting
A1-02 Control Method Selection 0: V/f Control
b1-04 Reverse Operation Selection 1: Reverse Prohibited
C1-01 Acceleration Time 1 1.0 s
C1-02 Deceleration Time 1 1.0 s
C6-01 Duty Rating 1: Normal Duty
E1-03 V/f Pattern Selection 0FH
E1-07 Mid Output Frequency 30.0 Hz
E1-08 Mid Output Frequency Voltage 50.0 V
L2-01 Momentary Power Loss Operation Selection 1: Enabled
L3-04 Stall Prevention Selection during Deceleration 1: Enabled
Table 4.6 Water Supply Pump: User Parameters (A2-01 to A2-16)
No. Parameter Name No. Parameter Name
b1-01 Frequency Reference Selection E1-08 Mid Output Frequency Voltage
b1-02 Run Command Selection E2-01 Motor Rated Current
b1-04 Reverse Operation Selection H1-05
C1-01 Acceleration Time 1 H1-06
C1-02 Deceleration Time 1 H1-07
E1-03 V/f Pattern Selection L5-01 Number of Auto Restart Attempts
E1-07 Mid Output Frequency − −
Multi-Function Digital Input Terminal S5 Function
Selection
Multi-Function Digital Input Terminal S6 Function
Selection
Multi-Function Digital Input Terminal S7 Function
Selection
Start-Up Programming
& Operation
4
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
97
Page 98

4.6 Application Selection
u
Setting 2: Conveyor Application
Table 4.7 Conveyor: Parameter Settings
No. Parameter Name Default Setting
A1-02 Control Method Selection 0: V/f Control
C1-01 Acceleration Time 1 3.0 s
C1-02 Deceleration Time 1 3.0 s
C6-01 Duty Rating 0: Heavy Duty
L3-04 Stall Prevention Selection during Deceleration 1: Enabled
Table 4.8 Conveyor: User Parameters (A2-01 to A2-16)
No. Parameter Name No. Parameter Name
A1-02 Control Method Selection C1-02 Deceleration Time 1
b1-01 Frequency Reference Selection E2-01 Motor Rated Current
b1-02 Run Command Selection L3-04 Stall Prevention Selection during Deceleration
C1-01 Acceleration Time 1 − −
u
Setting 3: Exhaust Fan Application
Table 4.9 Exhaust Fan: Parameter Settings
No. Parameter Name Default Setting
A1-02 Control Method Selection 0: V/f Control
b1-04 Reverse Operation Selection 1: Reverse Prohibited
C6-01 Duty Selection 1: Normal Duty
E1-03 V/f Pattern Selection 0FH
E1-07 Mid Output Frequency 30.0 Hz
E1-08 Mid Output Frequency Voltage 50.0 V
L2-01 Momentary Power Loss Operation Selection 1: Enabled
L3-04 Stall Prevention Selection during Deceleration 1: Enabled
Table 4.10 Exhaust Fan: User Parameters (A2-01 to A2-16)
No. Parameter Name No. Parameter Name
b1-01 Frequency Reference Selection E1-07 Mid Output Frequency
b1-02 Run Command Selection E1-08 Mid Output Frequency Voltage
b1-04 Reverse Operation Selection E2-01 Motor Rated Current
b3-01 Speed Search Selection at Start H1-05
C1-01 Acceleration Time 1 H1-06
C1-02 Deceleration Time 1 H1-07
E1-03 V/f Pattern Selection L5-01 Number of Auto Restart Attempts
u
Setting 4: HVAC Fan Application
Table 4.11 HVAC Fan: Parameter Settings
No. Parameter Name Default Setting
A1-02 Control Method Selection 0: V/f Control
b1-04 Reverse Operation Selection 1: Reverse Prohibited
b1-17 Run Command at Power Up 1: Run command issued, motor operation start
C6-01 Duty Rating 1: Normal Duty
Multi-Function Digital Input Terminal S5 Function
Selection
Multi-Function Digital Input Terminal S6 Function
Selection
Multi-Function Digital Input Terminal S7 Function
Selection
98
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
Page 99

4.6 Application Selection
No. Parameter Name Default Setting
C6-02 Carrier Frequency Selection 3: 8.0 kHz
H2-03 Terminals P2 Function Selection 39: Watt Hour Pulse Output
L2-01 Momentary Power Loss Operation Selection
L8-03 Overheat Pre-Alarm Operation Selection 4: Operation at lower speed
L8-38 Carrier Frequency Reduction 2: Enabled across entire frequency range.
Table 4.12 HVAC Fan: User Parameters (A2-01 to A2-16)
No. Parameter Name No. Parameter Name
b1-01 Frequency Reference Selection d2-02 Frequency Reference Lower Limit
b1-02 Run Command Selection E1-03 V/f Pattern Selection
b1-03 Stopping Method Selection E1-04 Max Output Frequency
b1-04 Reverse Operation Selection E2-01 Motor Rated Current
C1-01 Acceleration Time 1 H3-11 Terminal A2 Gain Setting
C1-02 Deceleration Time 1 H3-12 Terminal A2 Input Bias
C6-02 Carrier Frequency Selection L2-01 Momentary Power Loss Operation Selection
d2-01 Frequency Reference Upper Limit o4-12 kWh Monitor Initial Value Selection
u
Setting 5: Compressor Application
2: CPU Power Active - Drive will restart if power returns prior
to control power supply shut down.
Table 4.13 Compressor: Parameter Settings
No. Parameter Name Default Setting
A1-02 Control Method Selection 0: V/f Control
b1-04 Reverse Operation Selection 1: Reverse Prohibited
C1-01 Acceleration Time 1 5.0 s
C1-02 Deceleration Time 1 5.0 s
C6-01 Duty Rating 0: Heavy Duty
E1-03 V/f Pattern Selection 0F Hex
L2-01 Momentary Power Loss Operation Selection 1: Enabled
L3-04 Stall Prevention Selection during Deceleration 1: Enabled
Table 4.14 Compressor: User Parameters (A2-01 to A2-16):
No. Parameter Name No. Parameter Name
b1-01 Frequency Reference Selection E1-03 V/f Pattern Selection
b1-02 Run Command Selection E1-07 Mid Output Frequency
b1-04 Reverse Operation Selection E1-08 Mid Output Frequency Voltage
C1-01 Acceleration Time 1 E2-01 Motor Rated Current
C1-02 Deceleration Time 1 – –
Start-Up Programming
& Operation
4
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
99
Page 100

4.7 Auto-Tuning
4.7 Auto-Tuning
u
Types of Auto-Tuning
The drive offers different types of Auto-Tuning for induction motors and permanent magnet motors. The type of Auto-Tuning
used differs further based on the control mode and other operating conditions. Refer to the tables below to select the type of
Auto-Tuning that bests suits the application. Refer to Start-Up Flowcharts on page 91 for directions on executing AutoTuning.
Note: The drive will only show Auto-Tuning parameters that are valid for the control mode that has been set in A1-02. If the control mode is for an
induction motor, the Auto-Tuning parameters for PM motors will not be available. If the control mode is for a PM motor, the Auto-Tuning
parameters for induction motors will not be available. Inertia Tuning and ASR Gain Tuning parameters and setting options will be visible only
when the drive is set for operation with CLV or CLV/PM.
Auto-Tuning for Induction Motors
n
This feature automatically sets the V/f pattern and motor parameters E1-oo and E2-oo (E3-oo, E4-oo for motor 2) for
an induction motor. Additionally, the feature also sets some F1-oo parameters for speed feedback detection in Closed Loop
Vector.
Table 4.15 Types of Auto-Tuning for Induction Motors
Type Setting Application Conditions and Benefits
Rotational Auto-Tuning T1-01 = 0
Stationary
Auto-Tuning 1
Stationary
Auto-Tuning 2
Stationary Auto-Tuning
for Line-to-Line
Resistance
Rotational Auto-Tuning
for V/f Control
T1-01 = 1
T1-01 = 4
T1-01 = 2
T1-01 = 3
• Motor can be decoupled from the load and rotate freely
while Auto-Tuning is performed.
• Motor and load cannot be decoupled but the motor load is
below 30%.
• Rotational Auto-Tuning gives the most accurate results,
and is recommended if possible.
• Motor and load cannot be decoupled and the load is higher
than 30%.
• A motor test report listing motor data is not available.
• Automatically calculates motor parameters needed for
vector control.
• Motor and load cannot be decoupled and the load is higher
than 30%.
• A motor test report is available. Once the no-load current
and the rated slip have been entered, the drive calculates
and sets all other motor-related parameters.
• The drive is used in V/f Control and other Auto-Tuning
selections are not possible.
• Drive and motor capacities differ.
• Tunes the drive after the cable between the drive and motor
has been replaced with a cable over 50 m long. Assumes
Auto-Tuning has already been performed.
• Should not be used for any vector control modes unless the
motor cable has changed.
• Recommended for applications using Speed Estimation
Speed Search or using the Energy Saving function in
V/f Control.
• Assumes motor can rotate while Auto-Tuning is executed.
Increases accuracy for certain functions like torque
compensation, slip compensation, Energy Saving, and
Speed Search.
V/f V/f w/PG OLV CLV
– – YES YES
– – YES YES
– – YES YES
YES YES YES YES
YES YES – –
Control Mode
Table 4.16 lists the data that must be entered for Auto-Tuning. Make sure this data is available before starting Auto-Tuning.
The necessary information is usually listed on the motor nameplate or in the motor test report provided by the motor
manufacturer. Also refer to pages 93 and 94 for details on Auto-Tuning processes and selections.
100
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
 Loading...
Loading...