

Page 1
YASKAWA AC Drive - V1000 Option
1000 Hz High Frequency
Custom Software
Supplement
Software No. VSV90503X
To properly use the product, read this manual thoroughly
and retain for easy reference, inspection, and maintenance.
Ensure the end user receives this manual.
MANUAL NO. EZZ020793
Page 2

This Page Intentionally Blank
Copyright 2008 YASKAWA ELECTRIC CORPORATION. All rights reserved.
All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or tra nsmitted, in any form or by any
means, mechanical, electronic, photocopying, recording, or otherwise, without the prior written permission of Yaskawa. No patent liability
is assumed with respect to the use of the information contained herein. Moreover, because Yaskawa is constantly striving to improve its
high-quality products, the information contained in this manual is subject to change without notice. Every precaution has been taken in the
preparation of this manual. Yaskawa assumes no responsibility for errors or omissions. Neither is any liability assumed for damages
resulting from the use of the information contained in this publication
2 YASKAWA ELECTRIC EZZ020793 V1000 High Frequency Custom Software Supplement
Page 3
Table of Contents
1 PREFACE AND SAFETY . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
2 PRODUCT OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3 MODIFICATIONS FROM STANDARD SOFTWARE . . . . . . .9
4 MODIFIED PARAMETERS . . . . . . . . . . . . . . . . . . . . . . . . . .10
5 NEW AND MODIFIED SOFTWARE FUNCTIONS . . . . . . . . 13
6 APPLICATION NOTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
Refer to the V1000 Technical Manual for content not described in this document.
YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement 3
Page 4

This Page Intentionally Blank
4 YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement
Page 5

1 Preface and Safety
1 Preface and Safety
Yaskawa manufactures products used as components in a wide variety of industrial systems
and equipment. The selection and application of Yaskawa products remain the responsibility
of the equipment manufacturer or end user. Yaskawa accepts no responsibility for the way its
products are incorporated into the final system design. Under no circumstances should any
Yaskawa product be incorporated into any product or design as the exclusive or sole safety
control. Without exception, all controls should be designed to detect faults dynamically and
fail safely under all circumstances. All systems or equipment designed to incorporate a
product manufactured by Yaskawa must be supplied to the end user with appropriate
warnings and instructions as to the safe use and operation of that part. Any warnings
provided by Yaskawa must be promptly provided to the end user. Yaskawa offers an express
warranty only as to the quality of its products in conforming to standards and specifications
published in the Yaskawa manual. NO OTHER WARRANTY, EXPRESSED OR IMPLIED,
IS OFFERED. Yaskawa assumes no liability for any personal injury, property damage,
losses, or claims arising from misapplication of its products.
YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement 5
Page 6
1 Preface and Safety
◆ Applicable Documentation
The following manuals are available for the V1000 1000 Hz Drive:
Option Supplement
Yaskawa AC Drive -V1000 1000 Hz High Frequency Custom Software Supplement
SUPPLEMENT
Manual No: EZZ020793
Read this manual first.This supplement is an addendum to V1000 Quick Start Guide and
Technical
Manual. It lists the effect of this custom software on the parameters in the drive and function
descriptions in the manual.
To obtain the supplement access this site:
U.S.: http://www.yaskawa.com
Yaskawa Drive
To obtain instruction manuals for Yaskawa products
access these sites:
U.S.: http://www.yaskawa.com
Europe: http://www.yaskawa.eu.com
Japan: http://www.e-mechatronics.com
Other areas: contact a Yaskawa representative.
For questions, contact the local Yaskawa sales office or
the nearest Yaskawa representative.
STOP
V1000
ᵄᢙᜰ
ᱜォㅒォㆬᛯ
ജᵄᢙ
ജ㔚ᵹ
ജ㔚
ࡕ࠾࠲
ࡌࡈࠔࠗ
࠶࠻ࠕ࠶ࡊ
ࡄࡔ࠲⸳ቯ
ࠝ࠻࠴ࡘ࠾ࡦࠣ
ߌ߇㧚ᗵ㔚ߩ߅ߘࠇ߇ࠅ߹ߔޕ
ෂޓ㒾
ᝪ߃ઃߌޔㆇォߩ೨ߦߪᔅߕขᛒ⺑ᦠࠍ⺒ߎߣޕ
ಽએౝߪࡈࡠࡦ࠻ࠞࡃࠍ
ㅢ㔚߅ࠃ߮㔚Ḯㆤᢿᓟ
5
ᄖߐߥߎߣޕ
⚖ࠗࡦࡃ࠲ߩ႐วߪޔ㔚Ḯߩᕈὐ߇ធ
400V
ߐࠇߡࠆߎߣࠍ⏕ߔࠆߎߣޕ㧔ޓޓኻᔕ㧕
Yaskawa AC Drive-V1000
Quick Start Guide
(Hz)
(Hz)
(A)
(V)
Yaskawa AC Drive-V1000
Technical Manual
6 YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement
Page 7

1 Preface and Safety
◆ Supplemental Safety Information
Read and understand this manual and the V1000 Quick Start Guide before installing,
operating, or servicing this option unit. The drive must be installed according to the V1000
Quick Start Guide and local codes. Observe all cautions and warnings in this document and
the standard drive technical manuals.
Refer to the V1000 Quick Start Guide and the V1000 Technical Manual for safety
information and installation and start-up instructions.
This document is a supplement to the standard drive technical manual. It describes the
effects on the drive parameters and functions with the software installed.
• Custom software is provided to add functionality to a standard AC drive to enhance or
enable use in a specific application.
• The software is loaded to the flash ROM area of the control board, and replaces the
standard drive software.
◆ Obtaining Support
When seeking support for a drive with custom software, it is imperative to provide the
unique part number shown on the drive nameplate. The software is flashed to the control
board memory and the operation of parameters, functions, and monitors are different than
the standard drive software, as described herein.
Refer to Yaskawa office locations listed on the back cover of this supplement.
YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement 7
Page 8
2 Product Overview
2 Product Overview
◆ About This Product
This custom software is designed for high frequency motor applications. The drive's
maximum output frequency can be set up to 1000 Hz. Non-applicable drive functions are
deleted in order to optimize CPU processing time for this software.
◆ Applicable Models
The 1000 Hz Option is available in these drive models in Table 1.
Table 1 Applicable Models
Drive Software Version <1>
CIMR-VUBAA = 503
CIMR-VUBBA = 503
CIMR-VUBFA = 503
<1> See “PRG” on the drive nameplate for the software version number.
8 YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement
Page 9

3 Modifications from Standard Software
3 Modifications from Standard Software
Changed Item High Frequency Software Standard Software
Applicable Drive Models All All
Maximum Output Frequency 1000 Hz 400 Hz
Carrier Frequency
Drive Current Rating Fixed at Heavy Duty (HD) ratings Depends on C6-01
Drive Overload Rating Fixed at 150%/1 min. (C6-01 fixed) Depends on C6-01
Control Mode Fixed at V/f (A1-02 fixed) V/f, OLV, OLV for PM
DriveWorksEZ (DWEZ) No Available
Communication Option Kits No Available
Frequency Setting Resolution Fixed at 0.1 Hz
Frequency reference and output
frequency display units.
Torque Compensation
On-Delay Compensation
Stall Prevention Level During
Acceleration (L3-02)
Deleted Functions
<1> MEMOBUS/Modbus frequency reference can be set by 0.1 Hz. For 1000 Hz reference, 10000 (2710Hex) must be
set to 0002Hex MEMOBUS/Modbus register.
<2> Also applies to register data via MEMOBUS/Modbus RTU communication.
Max: 7 kHz
C6-02: 2, B, C, F
o1-03 parameter (same as b5-20)
0: 0.1 Hz
1: 0.01 (Max frequency 100%)
<1> <2>
2: Deleted
3: User Defined (o1-10 and o1-11)
Enabled only at low speeds.
Refer to New and Modified Software
Functions on page 13.
Enabled only at low speeds. Addition of OnDelay Compensation Selection parameter
S1-01
Refer to New and Modified Software
Functions on page 13.
Maximum setting: 170% Maximum setting: 150%
• All OLV and OLV for PM specific
parameters
• All OLV and OLV for PM specific
monitors
• Estimation type Speed Search
• High Slip Braking (HSB)
• Auto-Tuning
•KEB
• Overexcitation Deceleration
Refer to Modified Parameters on page 10.
Max: 15 kHz
C6-02: 1 ~ A, F
0.01 Hz (less than 100 Hz)
0.1 Hz (above 10 Hz)
o1-03 parameter (same as b5-20)
0: 0.1 Hz
1: 0.01 (Max frequency 100%)
2: RPM
3: User Defined (o1-10 and o1-11)
Constant throughout the entire
frequency range.
Enabled throughout the entire
frequency range.
-
YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement 9
Page 10

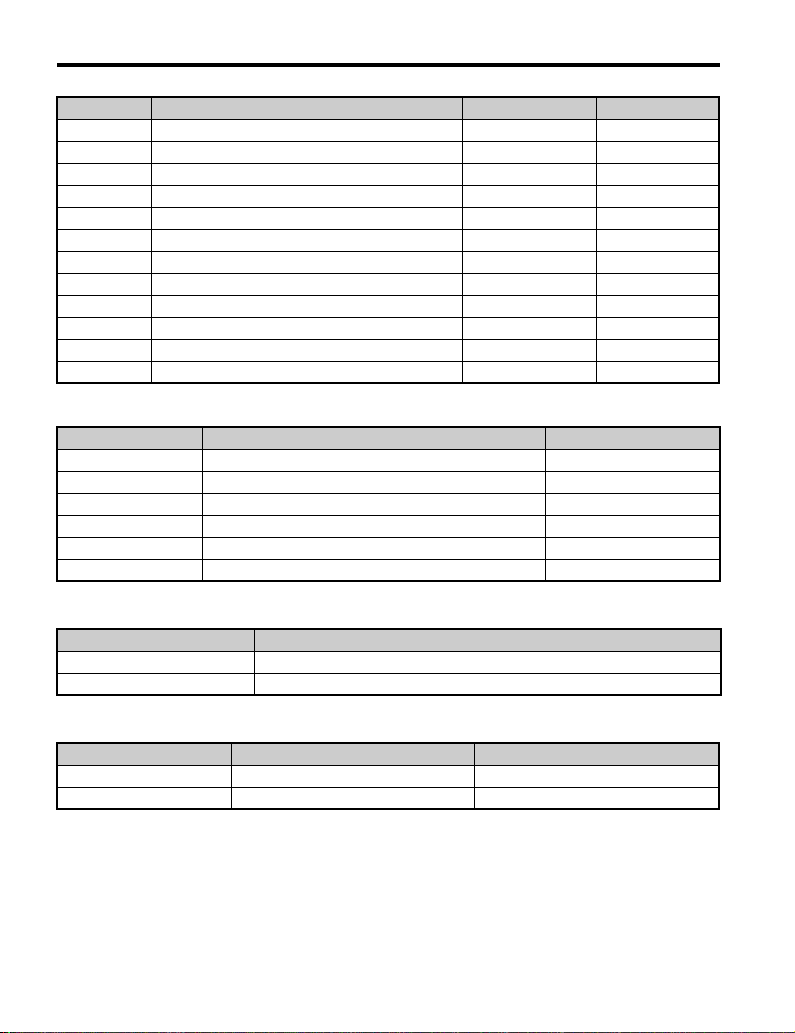
4 Modified Parameters
4 Modified Parameters
Table 2 Deleted Parameters from Standard Software
Parameter Name
A1-06 Application Preset
b3-06 Output Current 1 during Speed Search (Estimation Type)
b3-10 Speed Search Detection Compensation Gain (Estimation Type)
b3-24 Speed Search Method Selection
b8-01 ~ b8-19 Energy Saving Control Parameters
C6-01 Normal/Heavy Duty Selection
E3-01 Motor 2 Control Method Selection
L2-06 ~ L2-11 KEB Parameters
L3-11 ov Suppression Function Selection
n3-01 ~ n3-23 High Slip Braking/Overexcitation Deceleration Parameters
T1-01 ~ T1-08 Motor Tuning Parameters
Table 3 Deleted Multi-function Digital Inputs (H1 Group)
Setting Function
65 KEB Ride-thru 1 (N.C.)
66 KEB Ride-thru 1 (N.O.)
68 HSB (High Slip Braking)
7A KEB Ride-thru 2 (N.C.)
7B KEB Ride-thru 2 (N.O.)
Table 4 Deleted Multi-function Digital Outputs (H2 Group)
Setting Function
4A KEB Operation
Table 5 Modified Parameter Setting Ranges
Parameter Name Setting Range
A1-02 Control Method Selection 0
b4-01 Timer Function On-Delay Time 0.0 ~ 3000.0 s
b4-02 Timer Function Off-Delay Time 0.0 ~ 3000.0 s
b5-20 PID Setpoint Scaling 0, 1, 3
H6-01 Pulse Train Input Terminal RP Function Selection 0, 1, 2
L3-02 Stall Prevention Level during Acceleration 0 ~ 170%
10 YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement
Page 11

4 Modified Parameters
Parameter Name Setting Range
L3-04 Stall Prevention Selection during Deceleration 0 ~ 3
o1-03 Digital Operator Display Selection 0, 1, 3
Table 6 Parameters with Modified Defaults
Parameter Name Setting Range Default Note
b2-04 DC Injection Braking Time at Stop 0.0 ~ 10.0 0.0 s Previous default: 0.5
n1-01 Hunting Prevention Selection 0, 1 0 (off) Previous default: 1 (on)
Tab l e 7 N e w P aramet e r
Parameter Name Setting Range Default Note
S1-01 On-Delay Compensation Selection 0, 1 1 0: Disabled, 1: Enabled
Table 8 Parameters with Modified Upper Limits
Parameter Name Setting Range Default
b5-19 PID Setpoint Value 0.0 ~ 1000.0 0.0 Hz
C1-11 Accel/Decel Time Switching Frequency 0.0 ~ 1000.0 0.0 Hz
d1-01 Frequency Reference 1 0.0 ~ 1000.0 0.0 Hz
d1-02 Frequency Reference 2 0.0 ~ 1000.0 0.0 Hz
d1-03 Frequency Reference 3 0.0 ~ 1000.0 0.0 Hz
d1-04 Frequency Reference 4 0.0 ~ 1000.0 0.0 Hz
d1-05 Frequency Reference 5 0.0 ~ 1000.0 0.0 Hz
d1-06 Frequency Reference 6 0.0 ~ 1000.0 0.0 Hz
d1-07 Frequency Reference 7 0.0 ~ 1000.0 0.0 Hz
d1-08 Frequency Reference 8 0.0 ~ 1000.0 0.0 Hz
d1-09 Frequency Reference 9 0.0 ~ 1000.0 0.0 Hz
d1-10 Frequency Reference 10 0.0 ~ 1000.0 0.0 Hz
d1-11 Frequency Reference 11 0.0 ~ 1000.0 0.0 Hz
d1-12 Frequency Reference 12 0.0 ~ 1000.0 0.0 Hz
d1-13 Frequency Reference 13 0.0 ~ 1000.0 0.0 Hz
d1-14 Frequency Reference 14 0.0 ~ 1000.0 0.0 Hz
d1-15 Frequency Reference 15 0.0 ~ 1000.0 0.0 Hz
d1-16 Frequency Reference 16 0.0 ~ 1000.0 0.0 Hz
d1-17 Jog Frequency Reference 0.0 ~ 1000.0 0.0 Hz
d3-01 Jump Frequency 1 0.0 ~ 1000.0 0.0 Hz
d3-02 Jump Frequency 2 0.0 ~ 1000.0 0.0 Hz
d3-03 Jump Frequency 3 0.0 ~ 1000.0 0.0 Hz
YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement 11
Page 12
4 Modified Parameters
Parameter Name Setting Range Default
E1-04 Maximum Output Frequency 0.0 ~ 1000.0 60.0 Hz
E1-06 Base Frequency 0.0 ~ 1000.0 60.0 Hz
E1-07 Mid Output Frequency 0.0 ~ 1000.0 3.0 Hz
E1-09 Minimum Output Frequency 0.0 ~ 1000.0 1.5 Hz
E1-11 Mid Output Frequency 2 0.0 ~ 1000.0 0.0 Hz
E3-04 Motor 2 Maximum Output Frequency 0.0 ~ 1000.0 60.0 Hz
E3-06 Motor 2 Base Frequency 0.0 ~ 1000.0 60.0 Hz
E3-07 Motor 2 Mid Output Frequency 0.0 ~ 1000.0 3.0 Hz
E3-09 Motor 2 Minimum Output Frequency 0.0 ~ 1000.0 1.5 Hz
E3-11 Motor 2 Mid Output Frequency 2 0.0 ~ 1000.0 0.0 Hz
L4-01 Speed Agreement Detection Level 0.0 ~ 1000.0 0.0 Hz
L4-03 Speed Agreement Detection Level (+/-) -999.9 ~ 999.9 0.0 Hz
Table 9 Modified Monitors
Parameter Name Setting Range
U1-01 Frequency Reference 0.0 ~ 1000.0 Hz
U1-02 Output Frequency 0.0 ~ 1000.0 Hz
U1-16 Output Frequency after Soft Start 0.0 ~ 1000.0 Hz
U2-03 Frequency Reference at Previous Fault 0.0 ~ 1000.0 Hz
U2-04 Output Frequency at Previous Fault 0.0 ~ 1000.0 Hz
U4-14 Peak Hold Output Frequency 0.0 ~ 1000.0 Hz
Table 10 Deleted Monitors
Parameter Name
U1-05 Motor Speed
U1-09 Torque Reference
Table 11 MEMOBUS/Modbus Communication Data
Register Name Data
2H Frequency Reference Setting upper limit 40000 to FFFFH
3EH Output Frequency RPM Deleted
12 YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement
Page 13

5 New and Modified Software Functions
5 New and Modified Software Functions
◆ Carrier Frequency
• The carrier frequency upper limit changed from 15.0 kHz to 7.0 kHz and two new patterns
were added. See Figure 1.
• The carrier frequency selection parameter (C6-02) has been modified according to
Ta bl e 1 2.
• Refer to Application Notes on page 15 for more information.
Table 12 Carrier Frequency Selection Parameter (C6-02) Settings
C6-02
Carrier
Frequency
Selection
2 5.0 5.0 0 Same as standard
B 7.0 1.0 12 New setting
C 7.0 1.0 8 New setting
F 2.0 2.0 0 Same as standard
Figure 1
Carrier
Frequency
C6-03
Carrier
Frequency
Upper Limit
Parameter C6-02 = C
C6-04
Carrier
Frequency
Lower Limit
C6-05
Carrier Frequency
Proportional Gain
Carrier
Frequency
Note
Parameter C6-02 = B
7.0 kHz
1.0 kHz
62 Hz
437 Hz
E1-04
Figure 1 Additional Carrier Frequency Patterns
Output
Frequency
7.0 kHz
1.0 kHz
42 Hz
292 Hz
E1-04
Output
Frequency
◆ Torque Compensation
High speed motors typically have very low impedance compared to standard 60/120 Hz
motors. These high speed/low impedance motors saturate easily and may cause hunting and
oscillation when a high V/f pattern is applied, especially at high frequencies. Therefore,
Torque Compensation Gain (C4-01) is modified to limit voltage boost above 120 Hz and
eliminate voltage boost above 160 Hz as shown in Figure 2.
YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement 13
Page 14

5 New and Modified Software Functions
Figure 2
C4-01
Output
0
120 Hz
Figure 2 Torque Compensation Gain
160 Hz
Frequency
(Fout)
◆ On-Delay Compensation
High speed motors typically operate at low V/f ratios compared to standard 60/120 Hz
motors, and On-Delay Compensation settings may adversely affect the motor voltage and
cause hunting and oscillation. Therefore, On-Delay Compensation Gain is modified to
reduce its effectiveness above 120 Hz as shown in Figure 3.
Note: When S1-01 = 0, On-Delay Compensation is disabled at all frequencies.
Figure 3
1.00
Output
0
120 Hz
Figure 3 On-Delay Compensation Gain
14 YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement
160 Hz
Frequency
(Fout)
Page 15

6 Application Notes
6 Application Notes
◆ Using an Output Reactor
If drive oL2 faults occur and a typical drive overload is not suspected, an output reactor or a
larger drive may be required to eliminate oL2 faults. High-speed motors typically have very
low impedance, which may result in excessive peak motor current, increased motor
temperature, low speed cogging, or increased torque ripple.
It may be necessary to use an output reactor to add impedance to the system and reduce the
peak ripple current and eliminate nuisance oL2 faults. To confirm that excessive peak
current caused by low motor impedance is causing the oL2 fault, measure the output current
using an oscilloscope or chart recorder with a clamp-on amp meter.
Generally, the peak of the motor current waveform should not exceed 100% continuous
drive HD nameplate / 2.5. This value may vary slightly by drive model. Refer to Figure 4
for an example of peak current measurement.
When using a reactor to reduce peak current, consult with the reactor manufacturer to select
a reactor that will smooth out the current waveform and also prevent a large voltage drop.
Proper reactor selection is critical in high speed applications because the reactor impedance
is directly proportional to the output frequency, which is usually given at 60 Hz. Example; a
reactor operating at 600 Hz will have 10 times the impedance and result in 10 times the
voltage drop at rated load.
Using a larger capacity drive to allow for the additional peak current may also solve the oL2
overload trip problem. The decision to employ an output reactor or increase drive capacity is
made on a case-by-case basis.
Figure 4
Figure 4 Measuring Peak Current
YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement 15
Page 16

6 Application Notes
◆ Fine Tuning the Carrier Frequency
It is important to optimize the carrier frequency to improve the motor current waveform.
This will improve motor speed stability and torque performance and also limit hunting and
oscillation at higher speeds.
Use one of the following setting recommendations to fine tune the carrier frequency for
optimum motor performance:
1. For a flat 7.0 kHz across the speed range: Set C6-02 = “F” with C6-03 = “7.0”, C6-04 =
“7.0”, and C6-05 = “0”. The 7.0 kHz across the output frequency range keeps the carrier
frequency as high as possible.
2. To create a ramped carrier frequency pattern to keep the output frequency and
carrier frequency at a constant ratio:
• Set C6-02 = “F” to build a custom pattern.
• Set C6-03 = “7.0 kHz” so the motor will run at 7.0 kHz at top speed.
• Set C6-04 = “1.0 kHz” so the carrier frequency will be ramped for the greatest output
frequency range.
• Solve the following formula for C6-05:
C6-05 = [7000 Hz / (2 x E1-04)]
The C6-05 setting range is 7 ~ 99, however a setting lower than 7 disables the ramp
function and C6-03 is used across the output frequency range. For motors with output
frequencies greater than 500 Hz, use C6-05 = 7.
• Solve for corner output frequencies A and B
A Hz = [1000 Hz / (2 x C6-05)]
B Hz = [7000 Hz / (2 x C6-05)]
Figure 5
Carrier
Frequency
(Fc)
Parameter C6-02 = F
C6-03 =
7.0 kHz
C6-04 =
1.0 kHz
16 YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement
Fc = 2 x C6-05 x Fout
A Hz
Figure 5 Carrier Frequency
B Hz
E1-04
Output
Frequency
(Fout)
Page 17

6 Application Notes
◆ Precautions for High Frequency/Low Impedance Motors
High frequency motors exhibit different characteristics than standard 60/120 Hz maximum
frequency motors. The low impedance associated with these high frequency motors often
requires manually programming a custom V/f pattern into the E1 parameter group to obtain
proper performance and rated power from the drive-motor combination.
The low impedance may also cause excessive motor current. In addition to considering the
use of an output reactor, it may be advantageous to oversize the drive to accommodate the
high peak current that may result from the low impedance motor. Using a drive that is at
least one or two models larger than the motor FLA may also help eliminate the oL2 faults.
Compatibility between the drive, motor, and the reactor is best accomplished via testing and
observation of the motor current waveform with an oscilloscope. Refer to Using an Output
Reactor on page 15.
◆ Revision History
The revision dates and the numbers of the revised manuals appear on the bottom of the back
cover.
MANUAL NO.ޓTOBP C730600 28A
Published in Japan May 2008 07-12
Date of
publication
Revision No. Publication Date Software No. Revised Content
First Version 2007.11.09 VSV905030 -
<1> 2008.03.06 VSV905030 Cover addition
<2> 2008.05.06 VSV905030 English addition
<3> 2008.06.03 VSV905030 YEA revision, changed document number
1
Revision number
Date of original
publication
YASKAWA ELECTRIC EZZ020793 1000 Hz High Frequency Custom Software Supplement 17
Page 18

YASKAWA AC Drive - V1000 Option
1000 Hz High Frequency Custom Software
Supplement
IRUMA BUSINESS CENTER (SOLUTION CENTER)
480, Kamifujisawa, Iruma, S aitama 358–8555,Japan
Phone: 81-4-2962-5696 Fa x: 81-4-2962-6138
YASKAWA ELECTRIC AMERICA, INC.
2121 Norman Drive South, Waukegan, IL 60085, U.S.A.
Phone: 1-847-887-7000) Fax: 1-8 47-887-7370
http://www.yaskawa.com
YASKAWA ELÉTRICO DO BRASIL COMÉRCIO LTDA.
Avenda Fagundes Filho, 620 Bairro Saud e, São Paulo, SP 04304–000, Brasil
Phone: 55-11-3585-1100 Fax: 55-11-5581-8795
http://www.yaskawa.com.br
YASKAWA ELECTRIC EUROPE GmbH
Haupstrausse 185, 65760 Eschborn, Germany
Phone: 49-6196-569-300 Fax: 49- 6196-569-398
YASKAWA ELECTRIC UK LTD.
1 Hunt Hill Orchardton Woods, Cumbernauld, G68 9LF, United Kingdom
Phone: 44-1236-735000 Fax: 44-1236-458182
YASKAWA ELECTRIC KOREA CORPORATION
7F, Doore Bldg. 24, Yeoido-dong, Youngdungpo-Ku, Seoul, 150-877, Korea
Phone: 82-2-784-7844 Fax: 82-2- 784-8495
YASKAWA ELECTRIC (SINGAPORE) PTE. LTD.
151 Lorong Chuan, #04-01, New Tech Park, 556741, Singapore
Phone: 65-6282-3003 Fax: 65-6289-3003
YASKAWA ELECTRIC (SHANGHAI) CO., LTD.
No. 18 Xizang Zhong Road, Room 1702-1707, Harbour Ring Plaza, Shanghai, 200001,China
Phone: 86-21-5385-2200 Fax: 86- 21-5385-3299
YASKAWA ELECTRIC (SHANGHAI) CO., LTD. BEIJING OFFICE
Room 1011A, Tower W3 Oriental Plaza, No. 1 East Chang An Ave., Dong Cheng District, Beijing, 100738,China
Phone: 86-10-8518-4086 Fax: 86- 10-8518-4082
YASKAWA ELECTRIC TAIWAN CORPORATION
9F, 16, Nanking E. Rd., Sec. 3, Taipei, Taiwan
Phone: 886-2-2502-5003 Fax: 886- 2-2505-1280
YASKAWA ELECTRIC CORPORATION
In the event that the end user of this product is to be the military and said product is to be employed in any weapons systems
Foreign Trade Regulations. Therefore, be sure to follow all procedures and submit all relevant documentation according to any and all rules,
regulations and laws that may apply.
Specifications are subject to change without notice for ongoing product modifications and improvements.
© 2008 YASKAWA ELECTRIC CORPORATION. All rights reserved.
or the manufacture thereof, the export will fall under the relevant regulations as stipulated in the Foreign Exchange and
MANUAL NO. EZZ020793
Published in U.S.A. June 2008 08-06
08-06-YEA
3 -0
 Loading...
Loading...