

Wesley BC-620-4CA User Manual
1234/36/38 Manual
12 3 4
M O D E L S
12 3 6
CURTIS INSTRUMENTS, INC.
200 Kisco Avenue
Mt. Kisco, New York 10549 USA
Tel. 914.666.2971
Fax 914.666.2188
www.curtisinstruments.com
&
MOTOR CONTROLLERS
© 2008 CURTIS INSTRUMENTS, INC.
DESIGN OF CURTIS PMC 1200 SERIES
CONTROLLERS PROTECTED BY U.S.
PATENT NO. 4626750.
1238
AC INDUCTION
OS 11 with VCL
1234/36/38 Manual, p/n 37022
4 August 2008
» Software version OS 11.0 «

CONTENTS
1. OVERVIEW ..............................................................................1
CONTENTS
2. INSTALLATION AND WIRING .............................................
Mounting the Controller .....................................................3
High Current Connections and Wiring Guidelines ..............6
Low Current Connections and Wiring Guidelines ...............8
Controller Wiring: Basic Configuration ............................
Switch Input Wiring ..........................................................
Throttle Wiring .................................................................13
Input/Output Specifications ...............................................
3. PROGRAMMABLE PARAMETERS .....................................
Program Menu ..................................................................
4a. MONITOR MENU ................................................................
4b. CONTROLLER INFORMATION MENU ...........................
5. INITIAL SETUP .....................................................................
6. TUNING GUIDE ...................................................................
12
13
18
23
24
64
74
75
80
3
7. VEHICLE CONTROL LANGUAGE .....................................
8. DIAGNOSTICS AND TROUBLESHOOTING ..................
MAINTENANCE .................................................................120
9.
APPENDIX A Theory of Operation
APPENDIX B Vehicle Design Considerations
APPENDIX C Programmer Operation
APPENDIX D Specifications, 1234/36/38 Controllers
84
110
Curtis 1234/36/38 Manual, OS 11 iii

FIGURES / TABLES
FIGURES
FIG. 1: Curtis 1234, 1236, and 1238 controllers ................................. 1
FIG. 2a: Mounting dimensions, Curtis 1234 controller ........................ 3
FIG. 2b: Mounting dimensions, Curtis 1236/38 controllers ................. 4
FIG. 3: Basic wiring diagram .............................................................. 12
FIG. 4: Wiring for Type 1 throttles .................................................... 14
FIG. 5: Wiring for Type 2 throttles .................................................... 15
FIG. 6: Wiring for Type 3 throttles .................................................... 16
FIG. 7: Response rate diagram ............................................................ 32
FIG. 8: Throttle mapping, torque control mode ................................ 37
FIG. 9: Effect of gear soften parameter, torque control mode ............. 37
FIG. 10: Effect of brake taper speed parameter, torque control mode ... 37
FIG. 11: Drive current limiting map .................................................... 40
FIG. 12: Regen current limiting map ................................................... 41
FIG. 13: Throttle adjustment ............................................................... 43
FIG. 14: VCL motor command diagram .............................................. 92
FIG. 15: VCL control mode processing ................................................ 96
FIG. 16: VCL proportional driver processing ....................................... 97
FIG. A-1: IFO diagram .........................................................................A-2
FIG. A-2: Power section topology ..........................................................A-3
FIG. C-1: Curtis 1311 handheld programmer ...................................... C-1
TABLES
TABLE 1: High current connections ....................................................... 6
TABLE 2: Low current connections ........................................................ 9
TABLE 3: Programmable parameter menus .......................................... 24
TABLE 4: Types of LED display ........................................................ 111
TABLE 5: Troubleshooting chart ......................................................... 112
TABLE D-1: Specifications, 1234/36/38 controllers ............................... D-1
iv
Curtis 1234/36/38 Manual, OS 11

1
1 — OVERVIEW
OVERVIEW
Curtis 1234, 1236, and 1238 AC induction motor controllers deliver smooth
power unlike any previous vehicle control system. They provide unprecedented
flexibility and power through inclusion of a field-programmable logic controller
embedded in a state-of-the-art motor controller.
The embedded logic controller runs a fully functional field-oriented AC
motor control operating system (OS) that can be user-tailored via parameter
modification; see Section 3. The OS also contains logic to execute OEMdeveloped software, called VCL, that can be used to enhance the controller
capabilities beyond the basics; see Section 7.
VCL (Vehicle Control Language) is an innovative software programming
language developed by Curtis. Many electric vehicle functions are uniquely
built into the VCL code, and additional functions can be OEM-controlled using
VCL code. VCL opens new avenues of customization, product differentiation,
and responsiveness to the market.
The CAN bus communications included in the 1234/36/38, as well as
in many other Curtis products, allow these AC induction motor controllers to
be part of an efficient distributed system. Inputs and outputs can be optimally
shared throughout the system, minimizing wiring and creating integrated
functions that often reduce the cost of the system.
Curtis 1234/36/38 controllers are the ideal solution for traction, hoist,
dual drive, and other motor drive and vehicle control needs.
Fig. 1 Curtis 1234 (left), 1236 (middle), and 1238 (right) AC induction motor controllers.
All three models have the same standard features.
Like all Curtis controllers, the 1234/36/38 offers superior operator control of
motor drive performance. Features include:
✓ High efficiency, field-oriented motor control algorithms
✓ Advanced Pulse Width Modulation technology for efficient use
of battery voltage, low motor harmonics, low torque ripple, and
minimized switching losses
✓ Extremely wide torque/speed range including full regeneration capability
✓ Smooth low speed control, including zero speed
Curtis 1234/36/38 Manual, OS 11
More Features
☞
1

1 — OVERVIEW
✓ Adaptation of control algorithm to motor temperature variation so
optimal performance is maintained under widely varying conditions
✓ Real-time battery current, motor torque, and power estimates available
✓ Power limiting maps allow performance customization for reduced motor
heating and consistent performance over varying battery state-of-charge
✓ Powerful operating system allows parallel processing of vehicle control
tasks, motor control tasks, and user configurable programmable logic
✓ A wide range of I/O can be applied wherever needed, for maximum
distributed system control
✓ Internal battery-state-of-charge, hourmeter, and maintenance timers
✓ Easily programmable through the Curtis 1311 handheld programmer
and 1314 PC Programming Station
✓ CAN bus connection allows communication with other CAN bus
enabled system components; protocol meets CANopen standards;
other 11-bit identifier field CAN protocols can be custom configured
through VCL
☞
✓ Field-programmable, with flash downloadable main operating code
✓ Thermal cutback, warning, and automatic shutdown provide protection
to motor and controller
✓ Rugged sealed housing and connectors meet IP65 environmental sealing
standards for use in harsh environments
✓ Insulated metal substrate power base provides superior heat transfer for
increased reliability
✓ Built-in Dual Drive software allows easy setup and control of typical
dual-drive vehicles, without VCL.
Note: If you have a dual-drive application, see the Dual Drive
Addendum to the 1234/36/38 manual, part number 37022-
Familiarity with your Curtis controller will help you install and operate it prop
erly. We encourage you to read this manual carefully. If you have questions,
please contact the Curtis office nearest you.
Using the 1311 handheld programmer, you can set up the controller to per
form all the basic operations. In this manual, we first show you how to wire
your system and adjust its performance characteristics without the use of VCL.
Then, in Section 7, we show you how to adjust the system using VCL, which
interacts with a second, independent software realm resident in a powerful logic
controller embedded within the 1234/36/38 controller.
DD.
-
-
2
Curtis 1234/36/38 Manual, OS 11
2
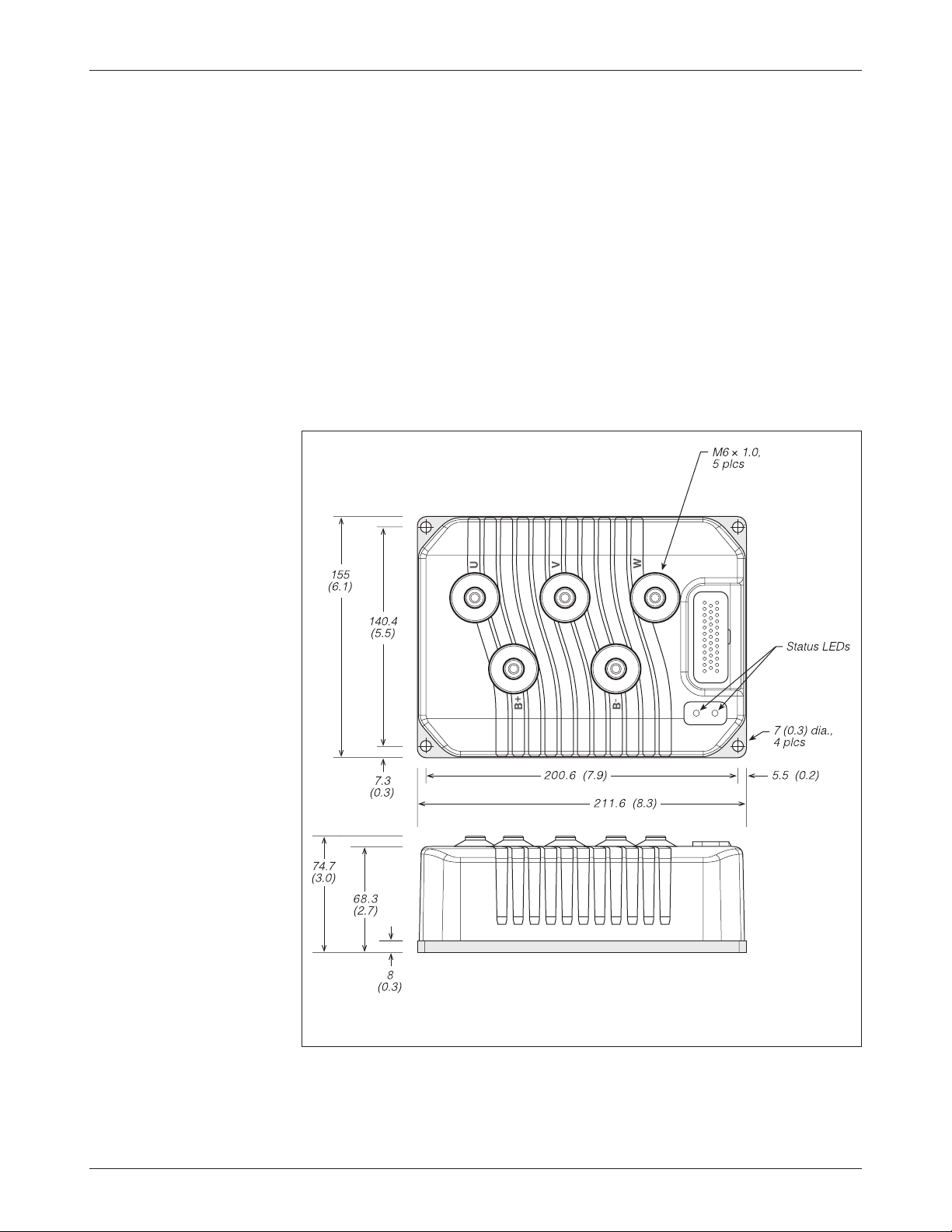
Fig. 2a Mounting
dimensions, Curtis 1234
motor controller.
2 — INSTALLATION & WIRING
INSTALLATION AND WIRING
MOUNTING THE CONTROLLER
The outline and mounting hole dimensions for the 1234 controller are shown in
Figure 2a, and for the 1236 and 1238 controllers in Figure 2b. These controllers meet the IP65 requirements for environmental protection against dust and
water. Nevertheless, in order to prevent external corrosion and leakage paths
from developing, the mounting location should be carefully chosen to keep
the controller as clean and dry as possible.
It is recommended that the controller be fastened to a clean, flat metal
surface with four 6mm (1/4") diameter bolts, using the holes provided. A thermal
joint compound can be used to improve heat conduction from the controller
Curtis 1234/36/38 Manual, OS 11
Dimensions in millimeters (and inches)
3
2 — INSTALLATION & WIRING
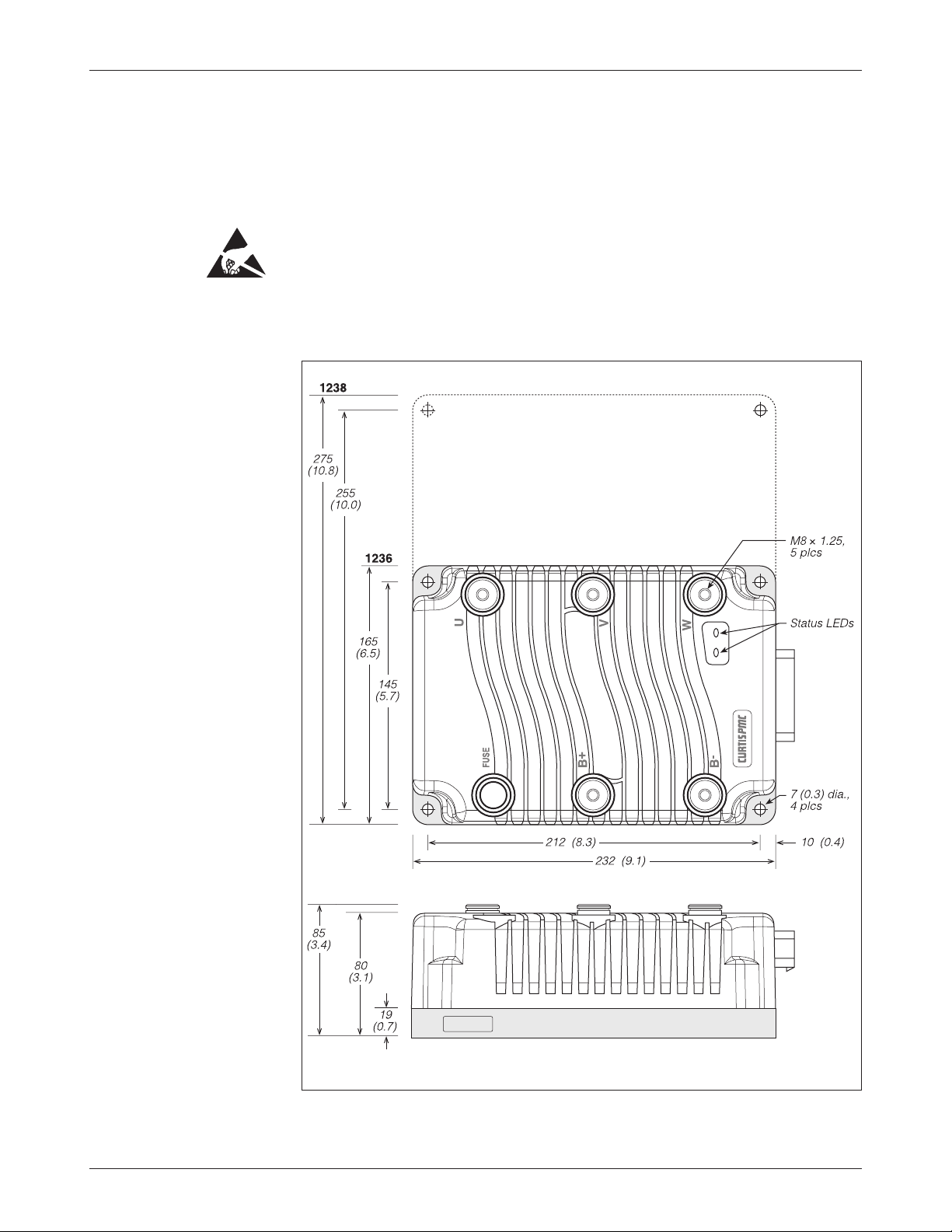
Fig. 2b Mounting
dimensions, Curtis 1236
and 1238 motor controllers.
heatsink to the mounting surface. Additional heatsinking or fan cooling may
be necessary to meet the desired continuous ratings.
You will need to take steps during the design and development of your
end product to ensure that its EMC performance complies with applicable
regulations; suggestions are presented in Appendix B.
The1234/36/38 controllers contain ESD-sensitive components. Use
appropriate precautions in connecting, disconnecting, and handling the controller. See installation suggestions in Appendix B for protecting the controller
from ESD damage.
4
Dimensions in millimeters (and inches)
Curtis 1234/36/38 Manual, OS 11
2 — INSTALLATION & WIRING
C AU T I O N
☞
Working on electrical systems is potentially dangerous. You should
protect yourself against uncontrolled operation, high current arcs, and
outgassing from lead acid batteries:
UNCONTROLLED OPERATION — Some conditions could cause the motor to
run out of control. Disconnect the motor or jack up the vehicle and get
the drive wheels off the ground before attempting any work on the motor
control circuitry.
HIGH CURRENT ARCS — Batteries can supply very high power, and arcing can
occur if they are short circuited. Always open the battery circuit before
working on the motor control circuit. Wear safety glasses, and use properly
insulated tools to prevent shorts.
LEAD ACID BATTERIES — Charging or discharging generates hydrogen gas,
which can build up in and around the batteries. Follow the battery man
ufacturer’s safety recommendations. Wear safety glasses
.
-
Curtis 1234/36/38 Manual, OS 11
5
2 — INSTALLATION & WIRING: High Current Connections
HIGH CURRENT CONNECTIONS
There are five high-current terminals, identified on the controller housing as
B+, B-, U, V, and W.
TERMINAL FUNCTION
B+ Positive battery to controller.
B- Negative battery to controller.
U Motor phase U.
V Motor phase V.
W Motor phase W.
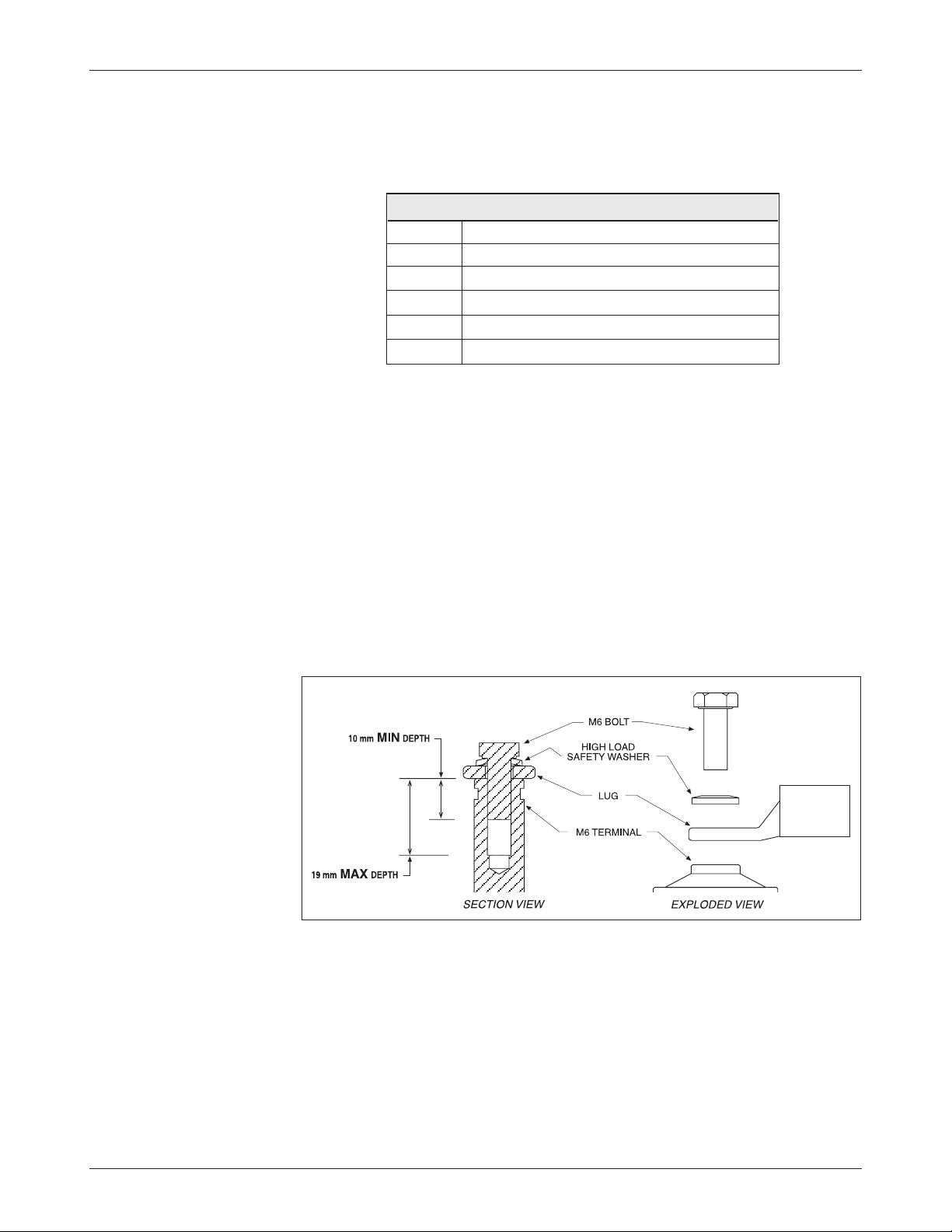
Lug assembly: 1234 models
Five aluminum M6 terminals are provided. Lugs should be installed as follows,
using M6 bolts sized to provide proper engagement (see diagram):
Table 1 High Current Connections
• Place the lug on top of the aluminum
terminal, followed by
a high-load safety washer with its convex side on top. The
washer should be a
• If two lugs are used on the same
SCHNORR 416320, or equivalent.
terminal, stack them so the
lug carrying the least current is on top.
• Tighten the assembly to 10.2 ±1.1 N·m (90 ±10 in-lbs).
6
Curtis 1234/36/38 Manual, OS 11
2 — INSTALLATION & WIRING: High Current Connections
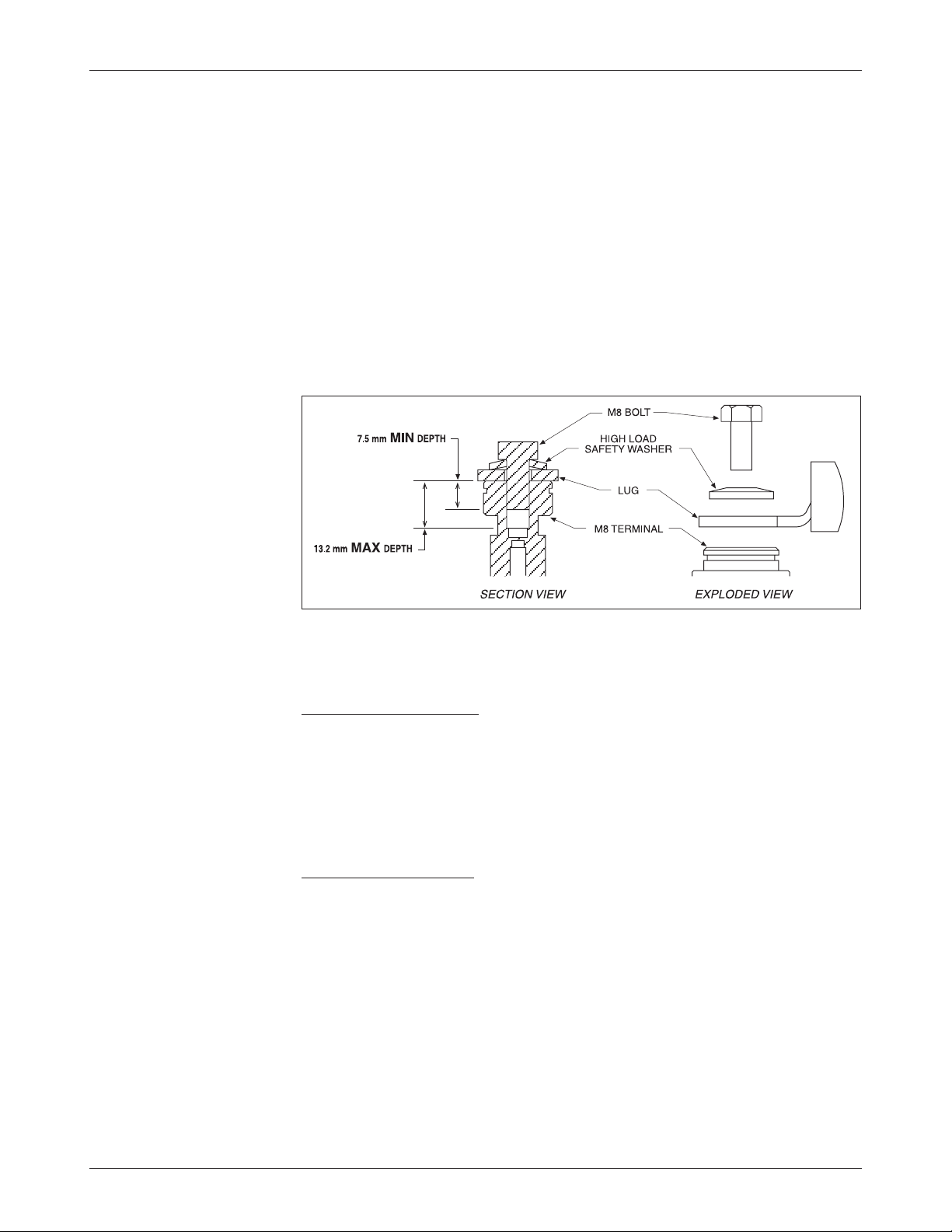
Lug assembly: 1236 and 1238 models
Five brass M8 terminals are provided. Lugs should be installed as follows, using
M8 bolts sized to provide proper engagement (see diagram):
• Place the lug on top of the brass
terminal, followed by a
high-load safety washer with its convex side on top. The
washer should be a
• If two lugs are used on the same
SCHNORR 700800, or equivalent.
terminal, stack them so the
lug carrying the least current is on top.
• Tighten the assembly to 9.6 ±0.9 N·m (85 ±8 in-lbs).
Note: The
terminals may rotate up to ±5° in the cover.
High current wiring recommendations: all models
Battery cables (B+, B-)
These two cables should be run close to each other between the controller
and the battery. Use high quality copper lugs and observe the recommended
torque ratings. For best noise immunity the cables should not run across the
center section of the controller. With multiple high current controllers, use a
star ground from the battery
Motor wiring (U, V, W)
B- terminal.
The three phase wires should be close to the same length and bundled together
as they run between the controller and the motor. The cable lengths should be
kept as short as possible. Use high quality copper lugs and observe the recom
mended torque ratings. For best noise immunity the motor cables should not
run across the center section of the controller. In applications that seek the
lowest possible emissions, a shield can be placed around the bundled motor
cables and connected to the
B- terminal at the controller. Typical installations
will readily pass the emissions standards without a shield. Low current signal
wires should not be run next to the motor cables. When necessary they should
cross the motor cables at a right angle to minimize noise coupling.
-
Curtis 1234/36/38 Manual, OS 11
7
2 — INSTALLATION & WIRING: Low Current Connections
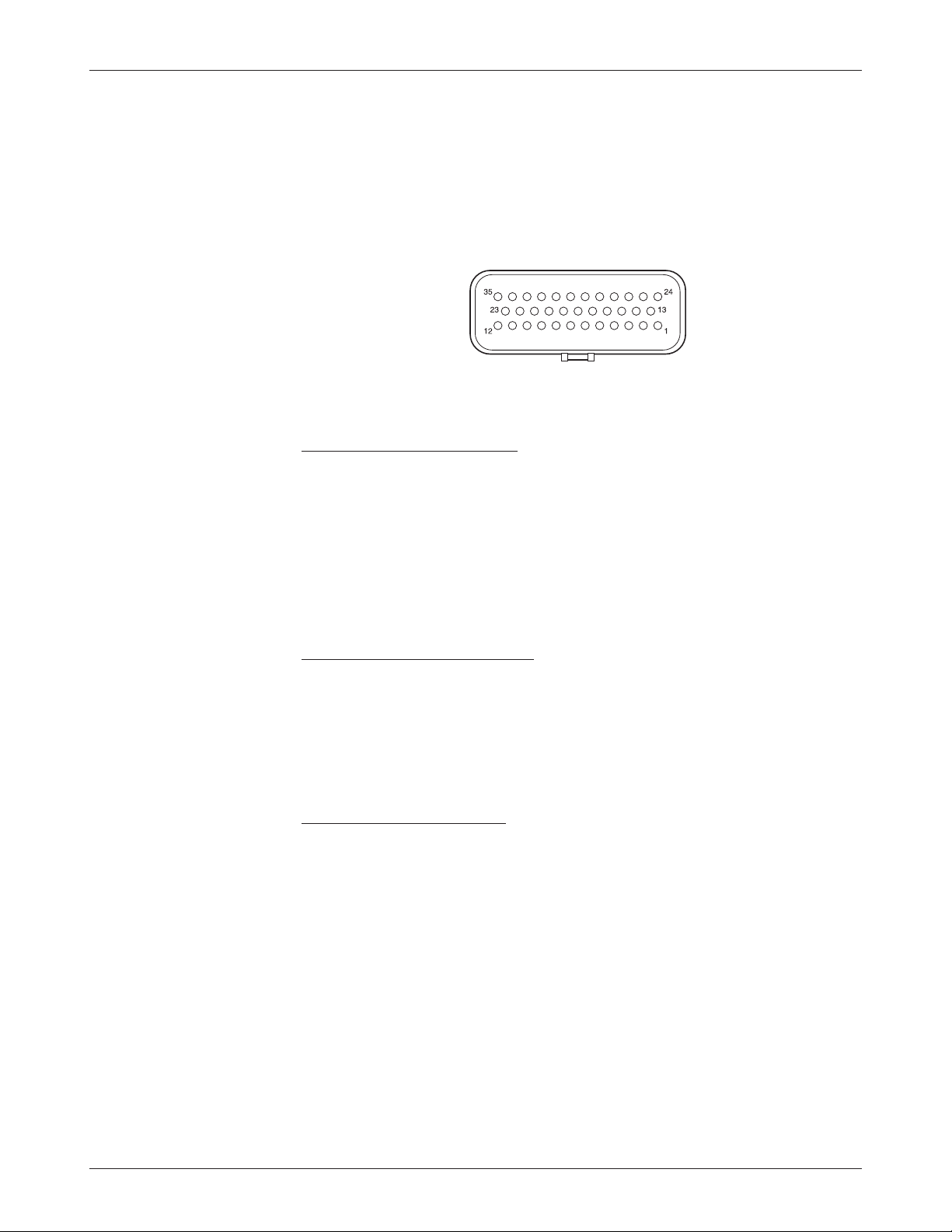
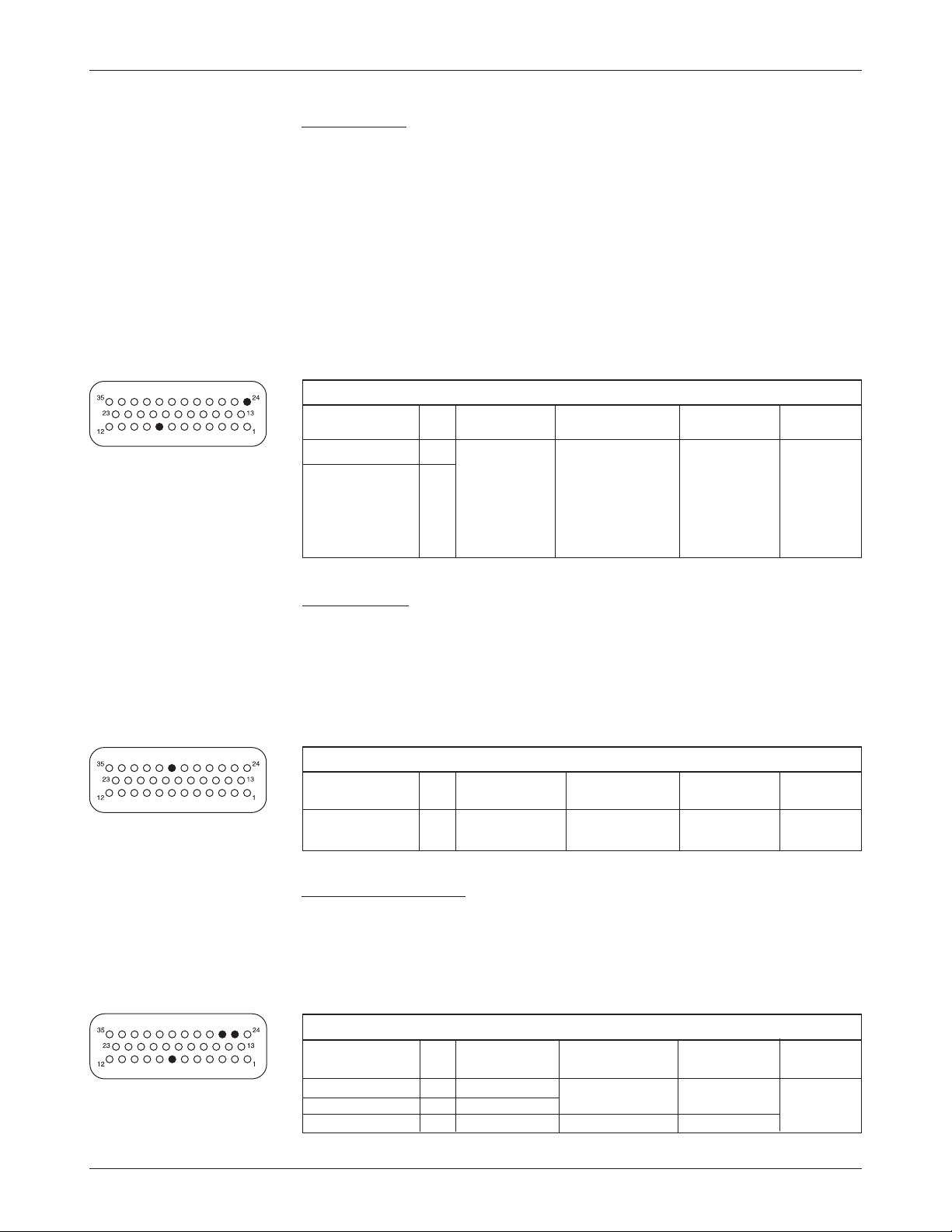
LOW CURRENT CONNECTIONS
All low power connections are made through a single 35-pin AMPSEAL con
nector. The mating plug housing is AMP p/n 776164-1 and the contact pins
are AMP p/n 770520-3. The connector will accept 20 to 16 AWG wire with
a 1.7 to 2.7mm diameter thin-wall insulation.
The 35 individual pins are characterized in Table 2.
J1
Low current wiring recommendations
Motor encoder (Pins 31, 32)
All four encoder wires should be bundled together as they run between the
motor and controller logic connector. These can often be run with the rest of
the low current wiring harness. The encoder cables should not be run near
the motor cables. In applications where this is necessary, shielded cable should
be used with the ground shield connected to the I/O ground (pin 7) at only
the controller side. In extreme applications, common mode filters (e.g. ferrite
beads) could be used.
-
CAN bus (Pins 21, 23, 34, 35)
It is recommended that the CAN wires be run as a twisted pair. However,
many successful applications at 125 kBaud are run without twisting, simply
using two lines bundled in with the rest of the low current wiring. CAN wiring
should be kept away from the high current cables and cross it at right angles
when necessary.
All other low current wiring
The remaining low current wiring should be run according to standard practices.
Running low current wiring next to the high current wiring should always be
avoided.
8
Curtis 1234/36/38 Manual, OS 11
2 — INSTALLATION & WIRING: Low Current Connections
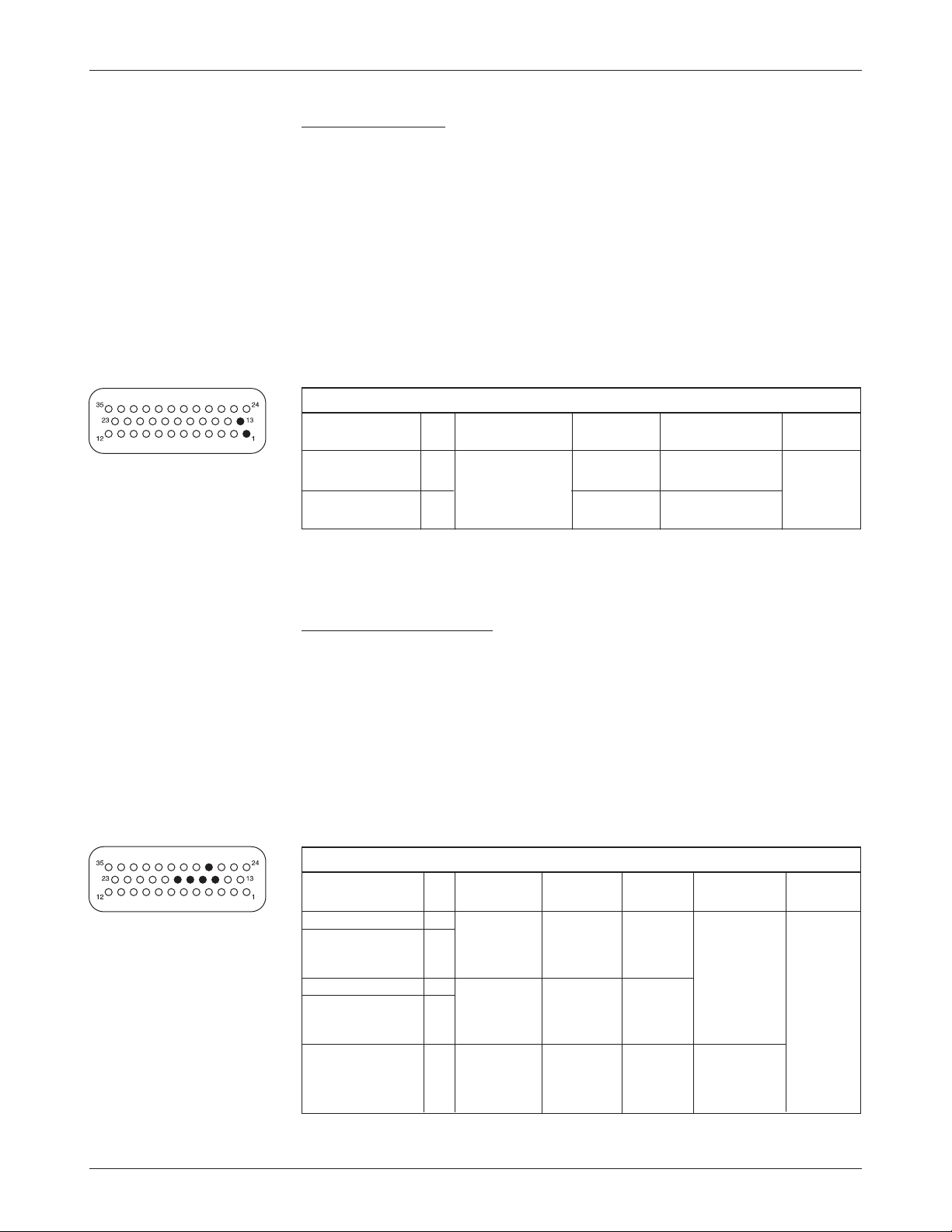
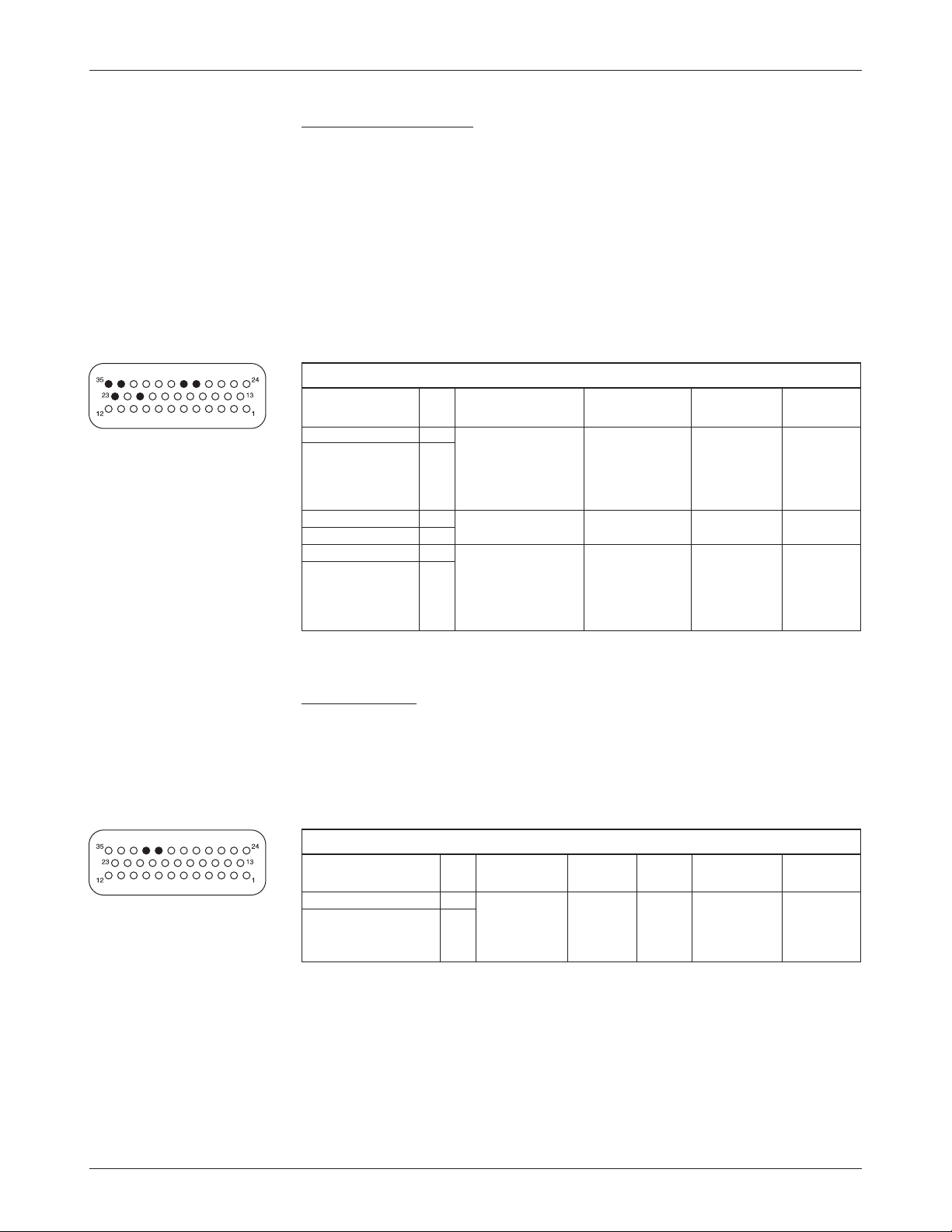
Table 2 Low Current Connections
PIN NAME DESCRIPTION
1 KSI Keyswitch input. Setup_BDI Keyswitch_Voltage
Provides logic power for
the controller and power
for the coil drivers.
2 Prop. Driver Proportional driver. Automate_PWM Sw_13
This is a coil driver with Put_PWM PWM5
current control capability PD_Current
typically used for a PD_Output
proportional valve on a PD_Throttle
hydraulic manifold. VCL_PD_Throttle
Can also be used as a
digital input.
3 Driver 4 Generic driver #4; can Automate_PWM Sw_12
also be used as a digital Put_PWM PWM4
input. Has low frequency PWM4_Output
PWM capabilities.
4 Driver 3 Generic driver #3; can Automate_PWM Sw_11
also be used as a digital Put_PWM PWM3
input. Has low frequency PWM3_Output
PWM capabilities. Typically
used for pump contactor.
FUNCTIONS REFERENCES
RELATED VCL
*
5 Driver 2 Generic driver #2; can Automate_PWM Sw_10
also be used as a digital Put_PWM PWM2
input. Has low frequency PWM2_Output
PWM capabilities and a
slightly higher current
rating.Typically used for
electromagnetic brake.
6 Driver 1 Generic driver #1; can Automate_PWM Sw_9
also be used as a digital Put_PWM PWM1
input. Has low frequency Set_Interlock PWM1_Output
PWM capabilities. Clear_Interlock Interlock_State
Typically used for main Main_State
contactor.
7 I/O Ground Input and output ground
reference.
8 Switch 2 Can be used as generic Sw_2
Analog 2 switch input #2 or as Analog2_Input
generic analog input #2.
Typically used as the
motor temperature
analog input.
9 Switch 3 Generic switch input #3. Sw_3
Typically used as the
interlock switch.
10 Switch 4 Generic switch input #4. Sw_4
11 Switch 5 Generic switch input #5. Sw_5
Curtis 1234/36/38 Manual, OS 11
* The related VCL columns are vital when writing VCL code (see Section 7).
VCL “functions” are used to access the various I/Os; VCL “references” are
predefined names for specific pins.
9
2 — INSTALLATION & WIRING: Low Current Connections
Table 2 Low Current Connections, cont’d
RELATED VCL
PIN NAME DESCRIPTION
12 Switch 6 Generic switch input #6. Sw_6
13 Coil Return This is the coil return pin
for all the contactor coils.
14 Switch 16 / DNC In the 1234, this is Sw_16
generic switch input #16.
In the 1236 and 1238,
Do Not Connect.
15 Throttle Pot High Pot high connection for
a 3-wire throttle pot.
16 Throttle Pot Wiper Pot wiper connection for Setup_Pot Throttle_Pot
the throttle pot. Setup_Pot_Faults Throttle_Pot_Output
17 Pot2 Wiper Pot wiper connection for Setup_Pot Brake_Pot
the brake pot. Setup_Pot_Faults Brake_Pot_Output
18 Pot Low Common pot low Pot_Low_Output
connection for the throttle
and brake pots.
FUNCTIONS REFERENCES
Yes, this
remains
Brake_Pot
in VCL.
19 Digital Out 6 An open collector digital Set_DigOut Sw_14
output. Can also be used Clear_DigOut DigOut6
as a digital input. Dig6_Output
20 Digital Out 7 An open collector digital Set_DigOut Sw_15
output. Can also be used Clear_DigOut DigOut7
as a digital input. Dig7_Output
21 CAN Term H High connection for the
CAN termination jumper.
22 Switch 7 Generic switch input #7. Sw_7
Typically used as the
Forward switch.
23 CANH CAN bus high. Setup_CAN
Setup_Mailbox
Send_Mailbox
etc.
24 Switch 1 Can be used as generic Sw_1
Analog 1 switch input #1 or as Analog1_Input
generic analog input #1.
Typically used for
emergency reverse switch
(if applicable).
25 +12V Out Unregulated low power Ext_Supply_Current
+12V output.
10
26 +5V Out Regulated low power 5_Volts_Output
+5V output. Ext_Supply_Current
27 Pot2 High Pot high connection for
a 3-wire brake pot.
Curtis 1234/36/38 Manual, OS 11
2 — INSTALLATION & WIRING: Low Current Connections
Table 2 Low Current Connections, cont’d
RELATED VCL
PIN NAME DESCRIPTION
28 Serial TX Serial transmit line for Setup_Serial
display or flash update.
29 Serial RX Serial receive line for Setup_Serial
flash update.
30 Analog Output Low power, low frequency Automate_PWM PWM6
0–10V analog output. Put_PWM Analog_Output
31 Encoder A Quadrature encoder Motor_RPM
input phase A. MotorspeedA
32 Encoder B Quadrature encoder Motor_RPM
input phase B. MotorspeedB
33 Switch 8 Generic switch input #8. Sw_8
Typically used as the
Reverse switch.
34 CAN Term L Low connection for the
CAN bus termination
jumper.
FUNCTIONS REFERENCES
35 CANL CAN bus low. Setup_CAN
Setup_Mailbox
Send_Mailbox
etc.
Curtis 1234/36/38 Manual, OS 11
11
2 — INSTALLATION & WIRING: Standard Wiring Diagram
CONTROLLER WIRING: BASIC CONFIGURATION
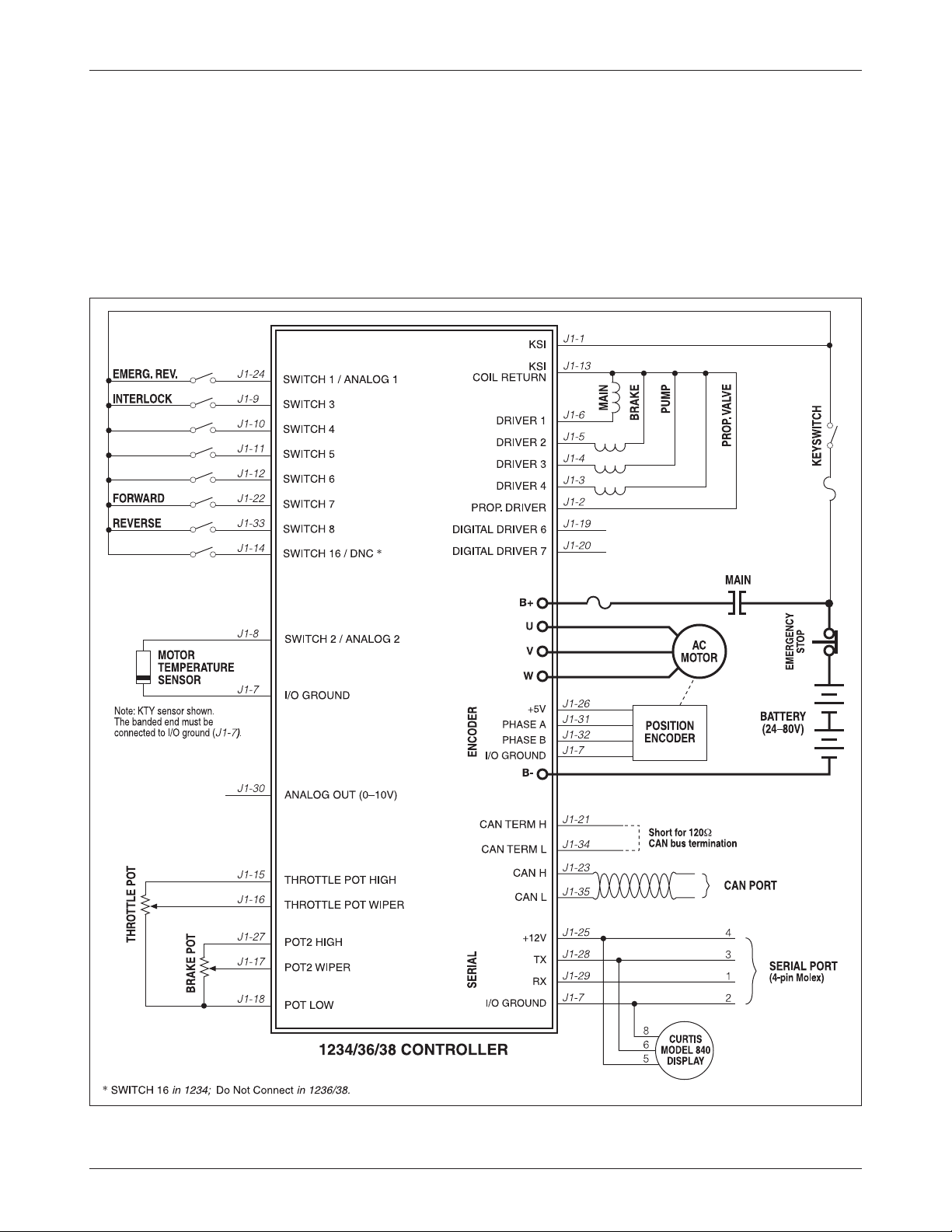
A basic wiring diagram is shown in Figure 3. Throttle and brake are shown in
the diagram as 3-wire potentiometers; other types of throttle and brake inputs
are easily accommodated, and are discussed in the following throttle wiring
section.
The main contactor coil must be wired directly to the controller as shown
in Figure 3 to meet EEC safety requirements. The controller can be programmed
Fig. 3 Basic wiring diagram, Curtis 1234/36/38 motor controller.
12
Curtis 1234/36/38 Manual, OS 11

2 — INSTALLATION & WIRING: Throttle Wiring
to check for welded or missing contactor faults and uses the main contactor
coil driver output to remove power from the controller and motor in the event
of various other faults. If the main contactor coil is not wired to Pin 6 of
the 35-pin connector as shown, the controller will not be able to open the
main contactor in serious fault conditions and the system will therefore
not meet EEC safety requirements.
Note that the basic wiring diagram is designed for generic applications
and may not fully meet the requirements of your system. These controllers have
very flexible I/O and wiring configurations; you may wish to contact your local
Curtis representative to discuss your particular application.
SWITCH INPUT WIRING
The following inputs are dedicated to specific functions when the parameter
settings are as shown:
Switch 1: Emergency Reverse input if the EMR Enable = On
and EMR Type = 0 (see page 59).
Switch 3: Interlock input if Interlock Type = 0 (see page 48).
Switch 5: Lift input (depends on VCL program).
Switch 6: Lower input (depends on VCL program).
Switch 7: Forward input if Throttle Type = 1–3 (see page 42).
Switch 8: Reverse input if Throttle Type = 1–3 (see page 42).
THROTTLE WIRING
In this manual, the term throttle is used in two senses: as another name for the
drive throttle, and as a generic term covering both the drive throttle and the
brake throttle. Wiring is the same, whether the throttle in question is used for
braking or for acceleration.
Various throttles can be used with the 1234/36/38 controller. They
are characterized as one of five types in the programming menu of the 1311
programmer.
Type 1: 2-wire 5kΩ–0 potentiometers
Type 2: single-ended 0–5V throttles, current source throttles,
3-wire potentiometers, and electronic throttles
Curtis 1234/36/38 Manual, OS 11
Type 3: 2-wire 0–5k
Type 4: wigwag 0–5V throttles and 3-wire potentiometers
Type 5: VCL input (VCL_Throttle or VCL_Brake)
Ω potentiometers
The two throttle inputs (drive throttle and brake throttle) are programmed
independently.
13
2 — INSTALLATION & WIRING: Throttle Wiring
For potentiometers, the controller provides complete throttle fault
protection that meets all applicable EEC regulations. For voltage throttles, the
controller protects against out-of-range wiper values, but does not detect wiring
faults; it is therefore the responsibility of the OEM to provide full throttle fault
protection in vehicles using voltage throttles.
Throttle types 1–3 use the forward and reverse inputs (switches 7 and 8) in
addition to the throttle pot input to define the throttle command (see Figure 13).
Throttle types 4 and 5 do not use the forward and reverse inputs.
Wiring for the most common throttles is described in the following text
and shown in the accompanying illustrations. If a throttle you are planning to
use is not covered, contact the Curtis office nearest you.
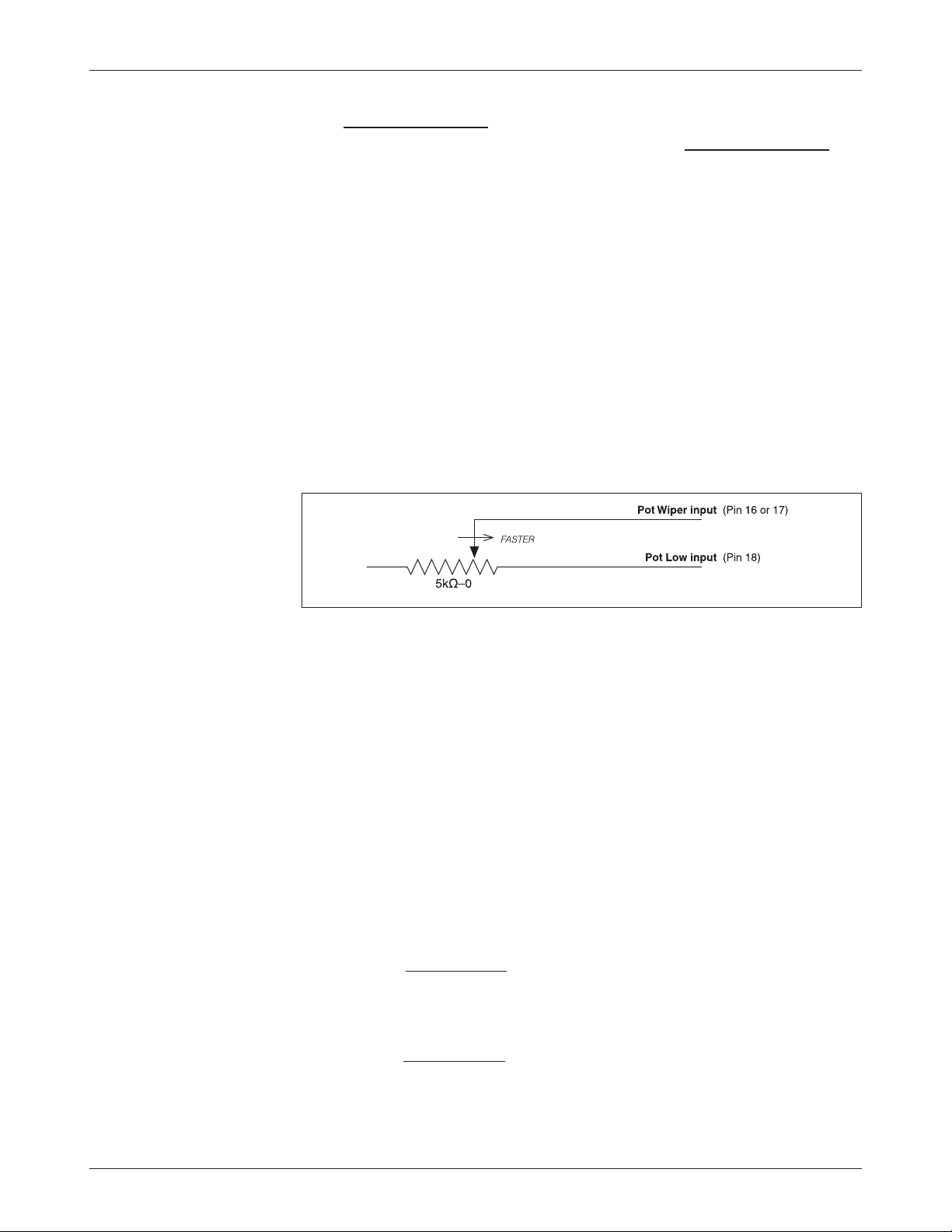
Throttle Type 1
For these 2-wire resistive potentiometers, shown in Figure 4, full throttle request
corresponds to 0
Fig. 4 Wiring for Type 1
throttles.
Ω measured between the pot wiper pin and the Pot Low pin.
Broken wire protection is provided by the controller sensing the current flow
from the pot wiper input (pin 16 or 17) through the potentiometer and into
Pot Low (pin 18). If the Pot Low input current falls below 0.65 mA, a throttle
fault is generated and the throttle request is zeroed. Note: Pot Low (pin 18)
must not be tied to ground (B-).
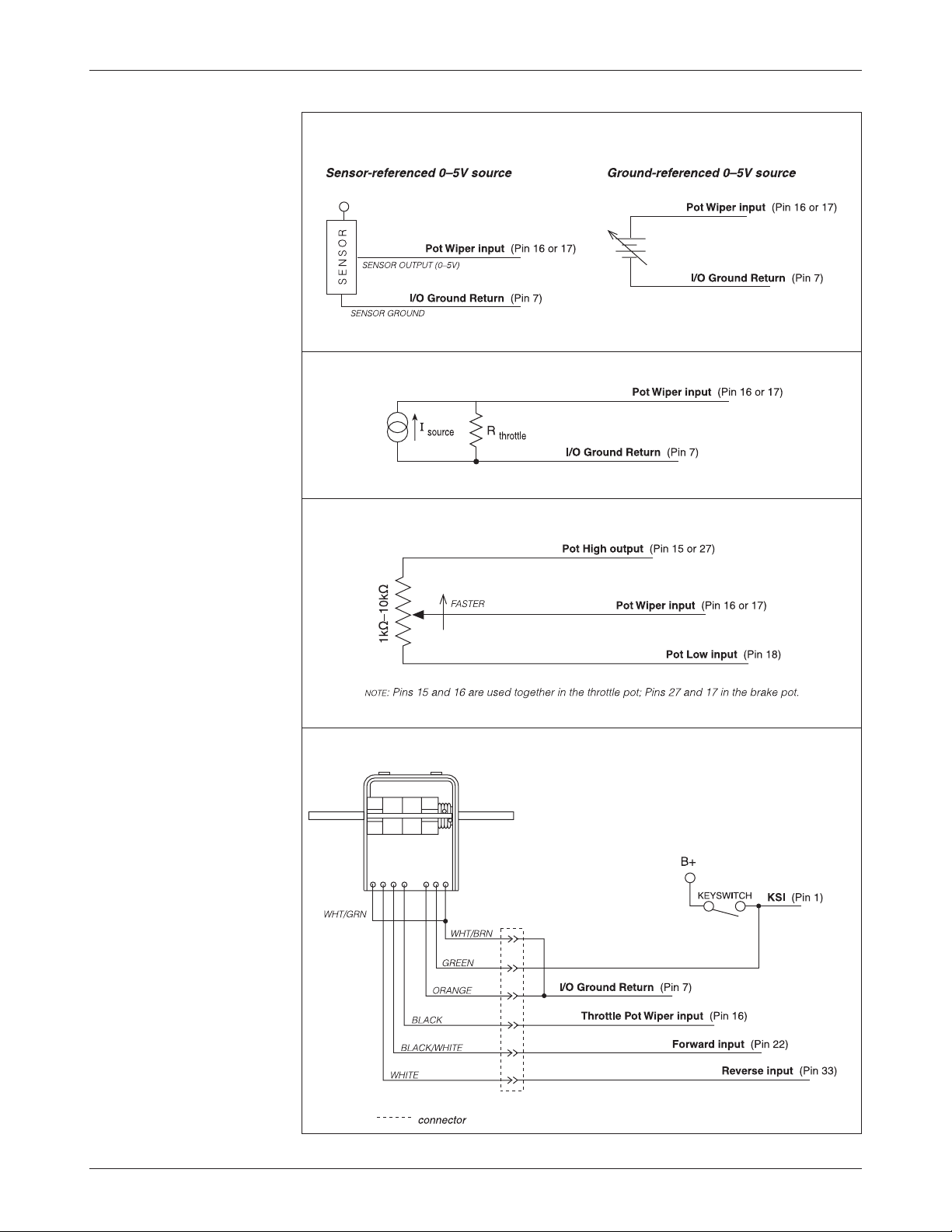
Throttle Type 2
With these throttles, the controller looks for a voltage signal at the wiper input.
Zero throttle request corresponds to 0 V and full throttle request to 5 V. A variety
of devices can be used with this throttle input type, including voltage sources,
current sources, 3-wire pots, and electronic throttles. The wiring for each is
slightly different, as shown in Figure 5, and they have varying levels of throttle
fault protection.
When a voltage source is used as a throttle, it is the responsibility of the
OEM to provide appropriate throttle fault detection. For ground-referenced
0–5V throttles, the controller will detect open breaks in the wiper input but
cannot provide full throttle fault protection.
To use a current source as a throttle, a resistor must be added to the circuit
to convert the current source value to a voltage; the resistor should be sized to
provide a 0–5V signal variation over the full current range. It is the responsibil
ity of the OEM to provide appropriate throttle fault detection.
-
14
Curtis 1234/36/38 Manual, OS 11
2 — INSTALLATION & WIRING: Throttle Wiring
+
+
-
Fig. 5 Wiring for Type 2
throttles.
Voltage Source
Current Source
3-wire Potentiometer
Curtis ET-XXX Electronic Throttle
Curtis 1234/36/38 Manual, OS 11
15

2 — INSTALLATION & WIRING: Throttle Wiring
When a 3-wire potentiometer is used, the controller provides full fault
protection in accordance with EEC requirements. The pot is used in its voltage
divider mode, with the controller providing the voltage source and return. Pot
High provides a current limited 5V source to the pot, and Pot Low provides
the return path. This is the throttle shown in the basic wiring diagram (Figure 3)
for the drive throttle and for the brake throttle.
The ET-XXX electronic throttle is typically used only as a drive throttle.
The ET-XXX contains no built-in fault detection, and the controller will detect
only open wiper faults. It is the responsibility of the OEM to provide any ad
ditional throttle fault detection necessary.
Throttle Type 3
For these 2-wire resistive potentiometers, shown in Figure 6, full throttle request
corresponds to 5 k
Fig. 6 Wiring for Type 3
throttles.
-
Ω measured between the pot wiper pin and the Pot Low pin.
Broken wire protection is provided by the controller sensing the current flow
from the wiper input (pin 16 or 17) through the potentiometer and into Pot
Low (pin 18). If the Pot Low input current falls below 0.65 mA, a throttle
fault is generated and the throttle request is zeroed. Note: Pot Low (pin 18)
must not be tied to ground (B-).
Throttle Type 4
Type 4 throttles operate in wigwag style. No signals to the controller’s forward
and reverse inputs are required; the direction is determined by the wiper input
value. Only 0–5V voltage sources and 3-wire potentiometers can be used as
Type 4 throttles. The controller interface for Type 4 throttles is the same as for
Type 2 throttles; see Figure 5. The neutral point will be with the wiper at 2.5
V, measured between pot wiper input (pin 16) and I/O ground return (pin 7).
The controller will provide increasing forward speed as the wiper input value is
increased, and increasing reverse speed as the wiper input value is decreased.
When a 3-wire pot is used, the controller provides full fault protection.
When a voltage throttle is used, the controller will detect open breaks in the
wiper input but cannot provide full throttle fault protection.
16
Curtis 1234/36/38 Manual, OS 11

2 — INSTALLATION & WIRING: Throttle Wiring
Throttle Type 5
Throttle Type 5 provides a different way of sending the throttle command to
the controller. This throttle type uses VCL to define the throttle signal that
will be “input” into the throttle signal chain (see Figure 14). This throttle
type can be used for either the drive throttle or the brake throttle by using
the VCL variables VCL_Throttle and VCL_Brake. How the VCL program is
written will determine where the throttle signal originates from, making this
a very flexible throttle input method. VCL can be written to use the throttle
pot inputs, switch inputs, or CAN communication messages as the source of
the throttle signals. If you have questions regarding this throttle type, contact
the Curtis office nearest you.
Setting the Throttle Type to Type 5 also allows the throttle and brake
pot inputs to be redefined by a VCL program for uses other than throttle or
brake input. The variable names that VCL can use to interface with these two
inputs are Throttle_Pot_Output (see page 93) and Brake_Pot_Output (see
page 95).
Curtis 1234/36/38 Manual, OS 11
17
2 — INSTALLATION & WIRING: I/O Signal Specifications
INPUT/OUTPUT SIGNAL SPECIFICATIONS
The input/output signals wired to the 35-pin connector can be grouped by
type as follows; their electrical characteristics are discussed below.
Digital inputs
These control lines can be used as digital (on/off) inputs. Normal “on” connection
is direct to B+; “off” is direct to B-. Input will pull low (off) if no connection
is made. All digital inputs are protected against shorts to B+ or B-.
Nine of these lines (Switches 1–8, 16) are designed to pull current to keep
switch contacts clean and prevent leakage paths from causing false signals.
The remaining lines are digital inputs associated with driver outputs; note
that they have much higher input impedances. The two digital output lines can
also be read as inputs, and are therefore included in this group.
The lines at pins 24 and 8 can also be used as analog inputs, and are
included in that group as well.
— digital inputs
— low power outputs
— high power outputs
— analog inputs
— analog output
— power supply outputs
— KSI and coil return inputs
— throttle and brake inputs
— communications port inputs/outputs
— encoder inputs.
1234 only (DNC in 1236/38) →
1236/38 →
1234 →
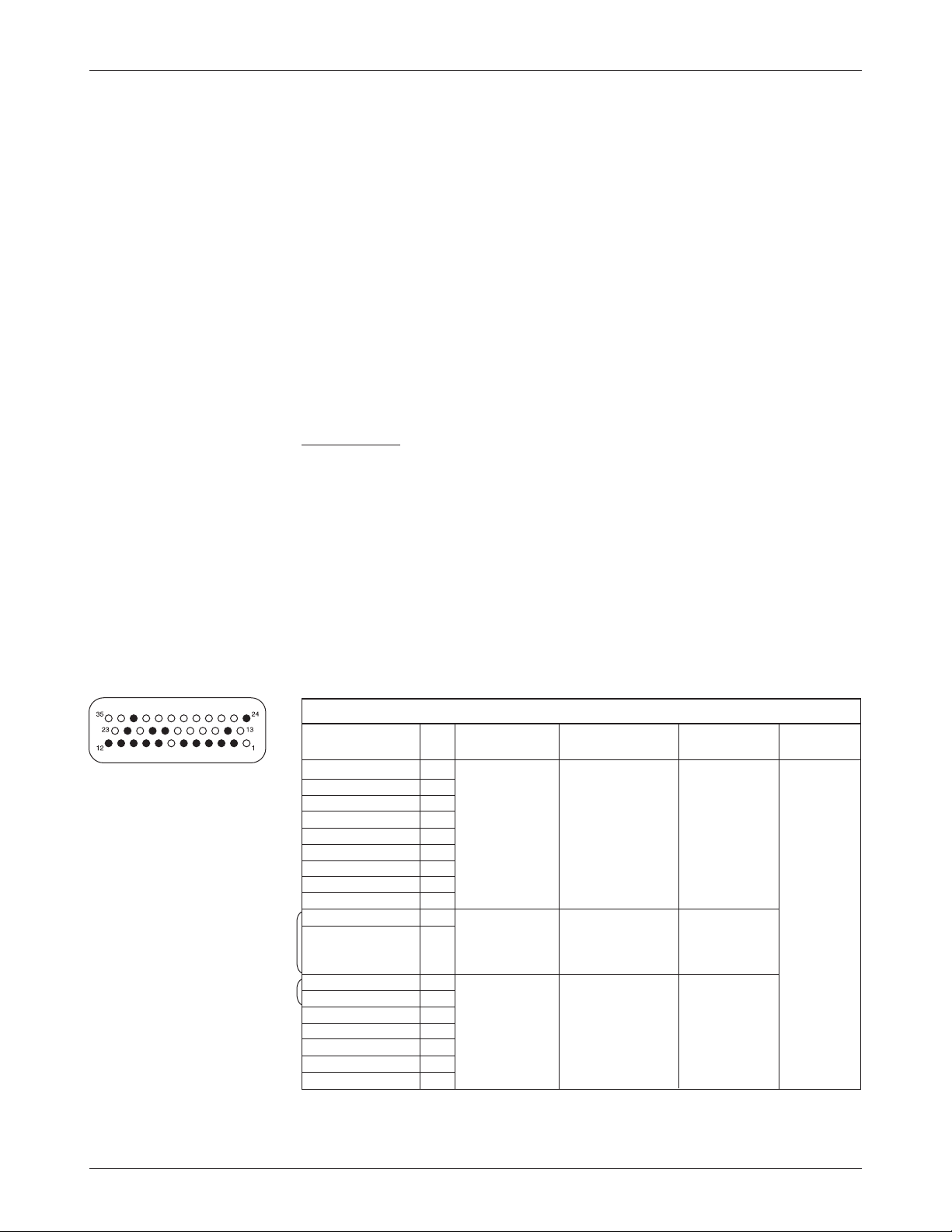
DIGITAL INPUT SPECIFICATIONS
LOGIC
SIGNAL NAME PIN THRESHOLDS
Switch 1 24 Rising edge= 24-36V models: -10 V to ± 8 kV (air
Switch 2 8 4.4 V max
Switch 3 9 Falling edge= 36-48V models:
Switch 4 10 1.5 V min about 11.0 k
Switch 5 11 48-80V models:
Switch 6 12 about 26.0 k
Switch 7 22
Switch 8 33
Switch 16 14
Digital Out 6 19 Rising edge= Below 5.5 V= - 5 V to
Digital Out 7 20 29.5 V max 134 k
Falling edge= Above 5.5 V=
10.1 V min 124 k
Digital Out 6 19 Rising edge= Below 10 V= - 0.5 V to
Digital Out 7 20 4.4 V max 300 k
Driver 1 6 Falling edge= Above 10 V=
Driver 2 5 1.5 V min 150 k
Driver 3 4
Driver 4 3
Prop Driver 2
“MaxV” in this and the following tables is the controller’s maximum voltage: 30 V for 24V models;
*
45 V for 24–36V models; 60 V for 36–48V models; and 105 V for 48–80V models.
INPUT VOLTAGE ESD
IMPEDANCE RANGE
about 7.1 kΩ (MaxV + 10 V) discharge)
Ω
Ω
Ω (MaxV + 10 V)
Ω
Ω (MaxV + 10 V)
Ω
*
TOLERANCE
18
Curtis 1234/36/38 Manual, OS 11
1236/38 * →
2 — INSTALLATION & WIRING: I/O Signal Specifications
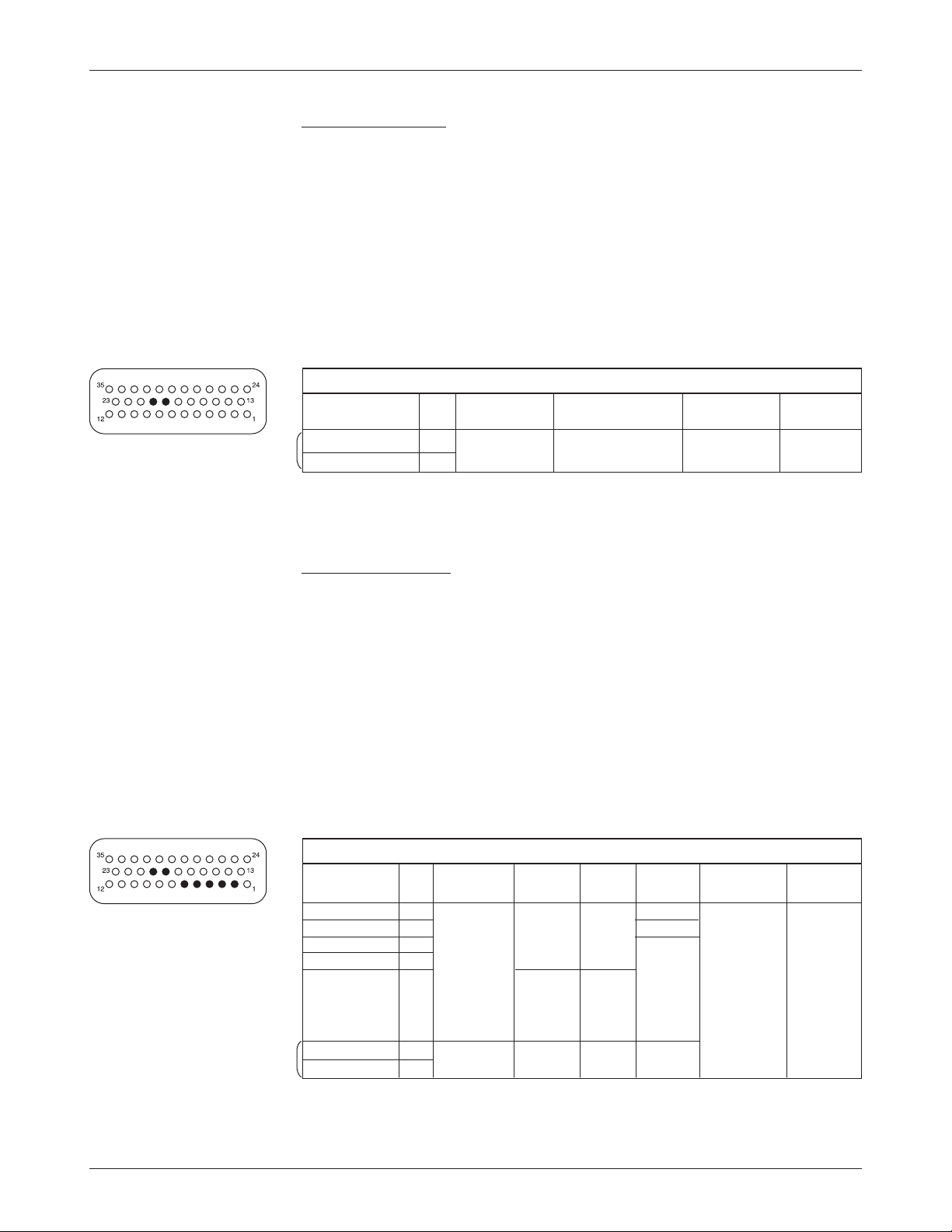
Low power outputs
Two control lines on the 1236/38 are available as low power digital outputs.
These are open collector drivers that can only sink current, not source it, and
are intended to drive LEDs or other low current loads connected to the +5V
or +12V external power supplies; see power supply output group specs. Fault
protection will turn off these outputs if output voltage exceeds about 15 V
when the output is On (low output). Both outputs are protected against shorts
to B+ or B-.
These lines can also be used as digital inputs, and are included in that
group as well.
LOW POWER OUTPUT SPECIFICATIONS
ALLOWED
SIGNAL NAME PIN VOLTAGE
Digital Out 6 19 0 to 15 V On: 1 kΩ to B- - 5 V to ± 8 kV (air
Digital Out 7 20 Off: 134 k
* The digital outputs for the 1234 are below, with the high power outputs.
OUTPUT PROTECTED ESD
IMPEDANCE VOLTAGE TOLERANCE
Ω (MaxV + 10 V) discharge)
1234 * →
High power outputs
Seven control lines on the 1234 and five on the 1236/38 can be used as high
power output drivers. One of these, the proportional driver, can be operated in
a current control mode for driving a proportional valve or similar load. Each
output can be independently turned on continuously (low level) or pulse width
modulated to set the average output voltage. These outputs are intended to
drive inductive loads such as contactors and electromagnetic brakes but could
also be used to drive resistive loads if peak current ratings are not exceeded. All
these outputs are protected against shorts to B+ or B-.
These lines can also be used as digital inputs, and are included in that
group as well.
HIGH POWER OUTPUT SPECIFICATIONS
SIGNAL NAME PIN PWM
Driver 1 6 0 to 100% n/a 200 Hz 2 A max - 0.5 V to ± 8 kV (air
Driver 2 5 duty cycle 3 A max keyswitch discharge)
Driver 3 4 2 A max voltage
Driver 4 3
Prop Driver 2 0 to 2 A 18 kHz
in 607
nominal
steps
Digital Out 6 19 on/off n/a n/a 1 A max
Digital Out 7 20
PV FREQ- OUTPUT PROTECTED ESD
CURRENT UENCY CURRENT VOLTAGE TOLERANCE
Curtis 1234/36/38 Manual, OS 11
* On the 1234, the combined current supplied
by all seven output drivers should not exceed 10 A.
19
2 — INSTALLATION & WIRING: I/O Signal Specifications
Analog inputs
Two control lines can be used as analog inputs. Both inputs are protected
against shorts to B+ or B-.
Typically Analog 2 is used as the input for the motor temperature sensor.
This input provides a constant current appropriate for a thermistor sensor. Some
standard predefined motor temperature sensors are supported in software (see
Sensor Type parameter, page 50). Note: The industry standard KTY tempera
ture sensors are silicon temperature sensors with a polarity band; the polarity
band of a KTY sensor must be the end connected to I/O Ground (pin 7).
These lines can also be used as digital inputs, and are included in that
group as well.
OPERATING
SIGNAL NAME PIN VOLTAGE
Analog 1 24 0 to 10 V in 24-36V models: - 10 V to ± 8 kV (air
Analog 2 8 1024 steps
36-48V models:
48-80V models:
ANALOG INPUT SPECIFICATIONS
INPUT PROTECTED ESD
IMPEDANCE VOLTAGE TOLERANCE
about 7.1 kΩ (MaxV + 10 V) discharge)
about 11.0 kΩ
about 26.0 kΩ
-
Analog output
A single line is available as a low power analog output and is intended to drive
instrumentation such as a battery discharge indicator. This output is generated
from a filtered PWM signal and has about 1% ripple. The 2% settling time
is <25ms for a 0–5V step and <30 ms for a 0–10V step. This output line is
protected against shorts to B+ or B-.
ANALOG OUTPUT SPECIFICATIONS
OUTPUT
SIGNAL NAME PIN VOLTAGE
Analog Out 30 0 to 10 V Source: 100 Ω - 1 V to ± 8 kV (air
Sink: 66 k
OUTPUT PROTECTED ESD
IMPEDANCE VOLTAGE TOLERANCE
Ω (MaxV + 10 V) discharge)
Power supply outputs
Two lines provide auxiliary output power for low power circuits such as electronic throttles, LED indicators, displays, position encoder, and remote I/O
boards. I/O Ground (at pin 7) is the return line for these low power devices.
Both power supply outputs are protected against shorts to B+ or B-.
POWER SUPPLY OUTPUT SPECIFICATIONS
OUTPUT
SIGNAL NAME PIN VOLTAGE
+12V Out 25 11.5 to 14.5 V 200 mA max - 1 V to ± 8 kV (air
+5V Out 26 5 V ±5% (combined total) (MaxV + 10 V) discharge)
I/O Ground 7 n/a 500 mA max not protected
OUTPUT PROTECTED ESD
CURRENT VOLTAGE TOLERANCE
20
Curtis 1234/36/38 Manual, OS 11
2 — INSTALLATION & WIRING: I/O Signal Specifications
KSI and coil return
KSI input provides power for all low power control circuits, power capacitor
precharge (before main contactor turn on), power supply outputs, and high
power output drivers. Battery voltage is sensed on the input for the VCL bat
tery discharge function.
Coil Return should be wired to the positive battery side of the contactors
being driven so that switching noise associated with PWM operation of the
contactors is localized to the contactor wiring only.
It is important to maintain the division between KSI and coil return
in order to ensure reverse polarity protection (vehicle wiring correct, battery
terminals reversed).
KSI AND COIL RETURN INPUT SPECIFICATIONS
OPERATING
SIGNAL NAME PIN VOLTAGE
KSI 1 Between under- 1.0 A max * ± (MaxV + 10 V) ± 8 kV (air
and overvoltage discharge)
Coil Return 13
(MaxV + 10 V)
cutbacks
INPUT PROTECTED ESD
CURRENT VOLTAGE TOLERANCE
12 A max
(KSI - 0.3 V) to
**
* Additionally must carry the current supplied to the driver loads by the coil return (pin 13).
** On the 1234, the combined current supplied by all seven output drivers should not exceed 10 A.
-
Throttle and brake inputs
The two pot inputs are independently programmable to allow use of a voltage
throttle or a 2-wire or 3-wire resistance throttle. Voltage throttles require only
the Pot Wiper input (with I/O Ground for the return line). Resistance throttles
require Pot Wiper and Pot Low (2-wire) or Pot High, Pot Wiper, and Pot Low
(3-wire). All throttle I/O is protected against shorts to B+ or B-.
Alternatively, these two inputs can be used for analog signals other than
the throttle and brake pot inputs. Configuring the inputs for use with other
signals requires VCL programming; see Section 7.
THROTTLE INPUT SPECIFICATIONS
OPERATING
SIGNAL NAME PIN VOLTAGE
Throttle Pot High 15 0 V (shorted n/a 7 mA - 50 V to ± 8 kV (air
Pot2 High 27 to Pot Low) nominal (MaxV + 10 V) discharge)
5 V (open (source)
circuit)
Throttle Pot Wiper 16 0 to 6.25 V 290 kΩ 0.76 mA
Pot2 Wiper 17 (voltage nominal
and 3-wire) (source,
2-wire)
Pot Low 18 0 to 10 V 20 Ω nom. Faults if -1 V to
above (MaxV + 10 V)
11 mA
(sink)
INPUT S/SINK PROTECTED ESD
IMPEDANCE CURRENT VOLTAGE TOLERANCE
Curtis 1234/36/38 Manual, OS 11
21
2 — INSTALLATION & WIRING: I/O Signal Specifications
Communications ports
Separate CAN and serial ports provide complete communications and programming capability for all user available controller information.
The Curtis 1311 handheld programmer plugs into a connector wired to
pins 28 and 29, along with ground (pin 7) and the +12V power supply (pin
25); see wiring diagram, Figure 3. The Curtis Model 840 display can plug into
the same 4-pin connector.
Wiring the CAN Term H and CAN Term L pins together provides a local
CAN termination of 120
Term H and CAN Term L should never be connected to any external wiring.
SUPPORTED
SIGNAL NAME PIN PROTOCOL/DEVICES
CANH 23 CANopen, up to 500 kbps Continuous= ± 8 kV (air
CANL 35 NODES 2.0, - 36 V to discharge)
other 11-bit (MaxV + 10 V)
identifier field Transient=
CAN protocols ± 200 V
CAN Term H 21
CAN Term L 34
Serial TX 28
Serial RX 29 1311 Handheld 9.6 to 56 kbps discharge)
1314 PC Program-
ming Station
Ω, 0.5 W; keep the length of these wires short. CAN
COMMUNICATIONS PORT SPECIFICATIONS
DATA RATE VOLTAGE TOLERANCE
Curtis 840 Display, as required, -0.3 to 12 V ± 8 kV (air
Programmer,
PROTECTED ESD
(no connection ± 8 kV (air
to external wiring)
discharge)
Encoder inputs
Two control lines are internally configured to read a quadrature type position
encoder. The encoder is typically powered from the 5V supply (pin 26) or 12V
supply (pin 25), but can be powered from any external supply (from 5 V up
to B+) as long as the logic threshold requirements are met.
ENCODER INPUT SPECIFICATIONS
LOGIC
SIGNAL NAME PIN THRESHOLDS
Encoder A 31 Rising edge= 720 Ω 10 kHz - 5 V to ± 8 kV (air
Encoder B 32 2.8 V max (internal (MaxV + 10 V) discharge)
Falling edge= pull-up
2.2 V min to +4V)
INPUT MAX PROTECTED ESD
IMPEDANCE FREQ. VOLTAGE TOLERANCE
22
Curtis 1234/36/38 Manual, OS 11

3
3 — PROGRAMMABLE PARAMETERS
PROGRAMMABLE PARAMETERS
These controllers have a number of parameters that can be programmed using
a Curtis 1311 handheld programmer or 1314 Programming Station. The pro
grammable parameters allow the vehicle’s performance to be customized to fit the
needs of specific applications. For programmer operation, see Appendix C.
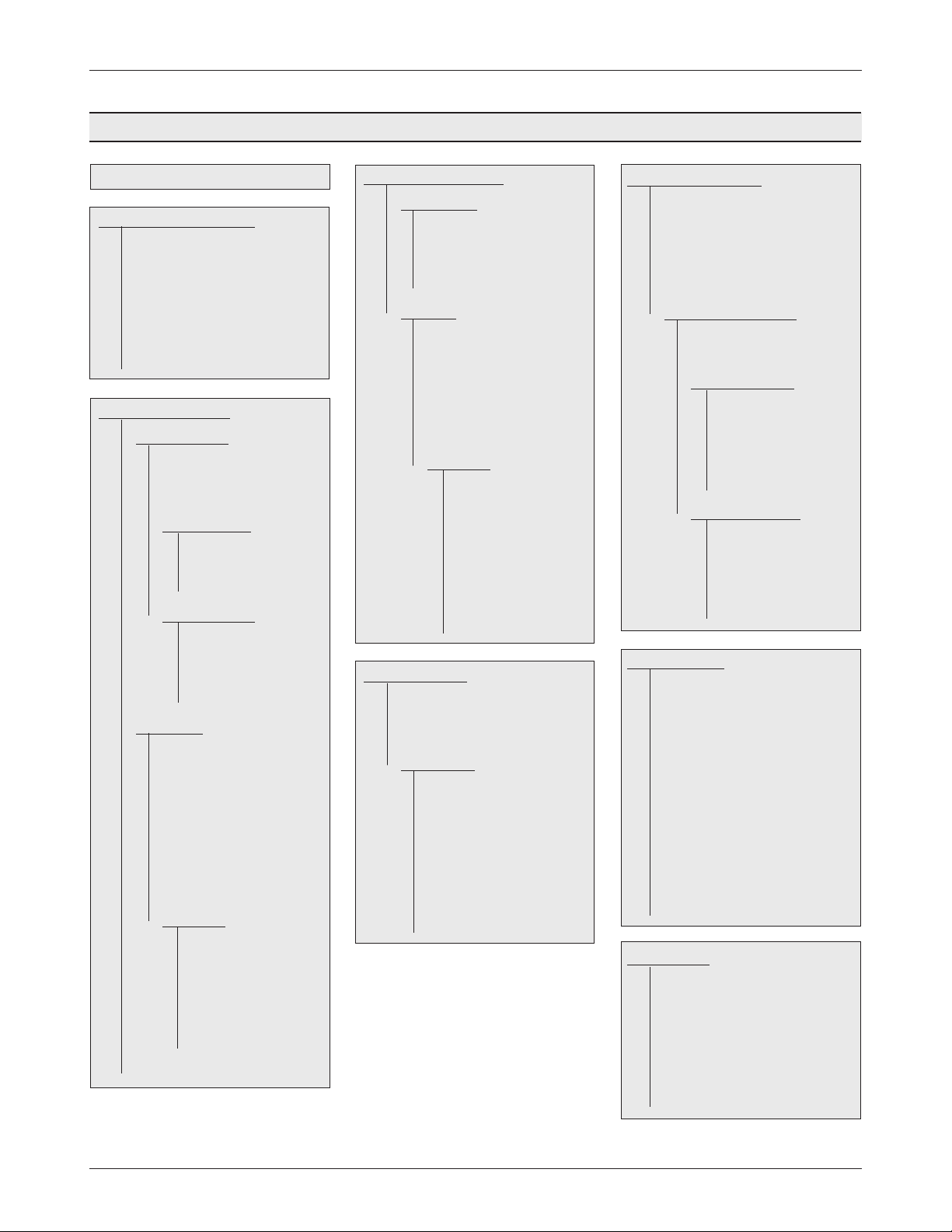
PROGRAMMING MENUS
The programmable parameters are grouped into nested hierarchical menus, as
shown in Table 3.
Motor response tuning
Motor response characteristics can be tuned through speed control or through
torque control, depending on the application. Use the Control Mode Select
parameter (page 27) to select which tuning mode you will use:
• Speed Mode Express
-
C AU T I O N
☞
• Speed Mode
• Torque Mode.
Speed Mode Express is a simplified version of Speed Mode with a reduced set
of parameters that is adequate for most speed-controlled applications.
Use Speed Mode or Speed Mode Express for applications where throttle
input corresponds to motor speed output.
Use Torque Mode for applications where throttle input corresponds to
motor torque output.
Note: You can tune using torque control or speed control, but not both.
For example, if you adjust a torque control parameter while Speed Mode or
Speed Mode Express has been selected as your tuning mode, the programmer
will show the new setting but it will have no effect.
We strongly urge you to read Section 5, Initial Setup, before adjusting any of
the parameters.
Even if you opt to leave most of the parameters at their default settings,
is imperative that you perform the procedures outlined in Section 5, which
set up the basic system characteristics for your application
.
it
Curtis 1234/36/38 Manual, OS 11
23
3 — PROGRAMMABLE PARAMETERS
Table 3 Programmable Parameter Menus: 1311 Programmer
CONTROL MODE SELECT ........... p. 27
0 - SPEED MODE EXPRESS
—Max Speed
—Kp
—Ki
—Accel Rate
—Decel Rate
—Brake Rate
—Pump Enable
1 - SPEED MODE MENU
—Speed Controller
—Max Speed
—Kp
—Ki
—Vel Feedforward
....... p. 28
............... p. 29
......... p. 29
—Kvff
—Build Rate
—Release Rate
—Acc Feedforward ........ p. 30
—Kaff
—Kbff
—Build Rate
—Release Rate
—Response ..................... p. 31
—Full Accel Rate HS
—Full Accel Rate LS
—Low Accel Rate
—Neutral Decel Rate HS
—Neutral Decel Rate LS
—Full Brake Rate HS
—Full Brake Rate LS
—Low Brake Rate
—Fine Tuning
—Partial Decel Rate
—HS (High Speed)
—LS (Low Speed)
—Reversal Soften
—Max Speed Accel
—Max Speed Decel
—Pump Enable ................. p. 33
............... p. 32
2 - TORQUE MODE MENU
—Speed Limiter ................... p. 34
—Max Speed
—Kp
—Ki
—Kd
—Response ....................... p. 35
—Accel Rate
—Accel Release Rate
—Brake Rate
—Brake Release Rate
—Neutral Braking
—Neutral Taper Speed
—Creep Torque
—Brake Full Creep Cancel
—Creep Build Rate
—Creep Release Rate
—Gear Soften
—Brake Taper Speed
—Reversal Soften
—Max Speed Decel
RESTRAINT MENU ..................... p. 38
—Restraint Forward
—Restraint Back
—Soft Stop Speed
—Position Hold
—Position Hold Enable
—Kp
—Kp Deadband (Motor Deg)
—Kd
—Set Speed Settling Time
—Set Speed Threshold
—Entry Rate
—Exit Rollback Reduction
—Fine Tuning ............... p. 36
................... p. 38
CURRENT LIMITS MENU ............. p. 39
—Drive Current Limit
—Regen Current Limit
—Brake Current Limit
—EMR Current Limit
—Interlock Brake Current Limit
—Power Limiting Map
.... p. 40
—PL Nominal Speed
—Delta Speed
—Drive Limiting Map ..... p. 40
—Nominal
—Plus Delta
—Plus 2xDelta
—Plus 4xDelta
—Plus 8xDelta
—Regen Limiting Map
—Nominal
—Plus Delta
—Plus 2xDelta
—Plus 4xDelta
—Plus 8xDelta
THROTTLE MENU
—Throttle Type
—Forward Deadband
—Forward Map
—Forward Max
—Forward Offset
—Reverse Deadband
—Reverse Map
—Reverse Max
—Reverse Offset
—HPD/SRO Type
—Sequencing Delay
—VCL Throttle Enable
BRAKE MENU
—Brake Pedal Enable
—Brake Type
—Brake Deadband
—Brake Map
—Brake Max
—Brake Offset
—VCL Brake Enable
.......................... p. 45
.... p. 44
....................... p. 42
24
Curtis 1234/36/38 Manual, OS 11
3 — PROGRAMMABLE PARAMETERS
Table 3 Programmable Parameter Menus: 1311 Programmer, cont’d
EM BRAKE CONTROL MENU ........ p. 46
—Brake Type
—Pull In Voltage
—Holding Voltage
—Battery Voltage Comp
—Set EM Brake On Fault
—Set Speed Threshold
—Release Delay
—Set Speed Settling Time
—Torque Preload Delay
—Torque Preload Enable
—Torque Preload Cancel Delay
DRIVERS MENU
—Main Contactor
—Main Enable
—Pull In Voltage
—Holding Voltage
—Battery Voltage Comp
—Interlock Type
—Open Delay
—Checks Enable
—Main DNC Threshold
—Precharge Enable
—Proportional Driver
—PD Enable
—Hyd Lower Enable
—PD Max Current
—PD Min Current
—PD Dither %
—PD Dither Period
—PD Kp
—PD Ki
Hydraulic Contactor .......... p. 51
—
—Contactor Enable
—Pull In Voltage
—Holding Voltage
—Fault Checking
—Driver1 Checks Enable
—Driver2 Checks Enable
—Driver3 Checks Enable
—Driver4 Checks Enable
—PD Checks Enable
—External Supply Max
—External Supply Min
................ p. 48
........... p. 50
................. p. 52
MOTOR MENU ............................ p. 53
—Typical Max Speed
—Swap Encoder Direction
—Swap Two Phases
—Encoder Steps
—Temperature Control
.......... p. 54
—Sensor Enable
—Sensor Type
—Sensor Offset
—Temperature Hot
—Temperature Max
—MotorTemp LOS Max Speed
BATTERY MENU
—Nominal Voltage
—Undervoltage Cutback Range
—User Overvoltage
—User Undervoltage
—Reset Volts Per Cell
—Full Volts Per Cell
—Empty Volts Per Cell
—Discharge Time
—BDI Reset Percent
DUAL DRIVE MENU
VEHICLE MENU .......................... p. 58
—Metric Units
—Speed to RPM
—Capture Speed 1
—Capture Speed 2
—Capture Distance 1
—Capture Distance 2
—Capture Distance 3
......................... p. 55
........ see Sec. 4 of
of the Dual Drive
addendum, p/n 37022-DD.
EMERGENCY REVERSE MENU ..... p. 59
—EMR Enable
—EMR Type
—EMR Dir Interlock
—EMR Time Limit
—EMR Speed
—EMR Accel Rate
—EMR Decel Rate
INTERLOCK BRAKING MENU
—Enable
—Decel Rate HS
—Decel Rate LS
—Interlock Brake Timeout
CAN INTERFACE MENU
—CANopen Interlock
—CAN Node ID
—Baud Rate
—Heartbeat Rate
—PDO Timeout Period
—Emergency Message Rate
—Suppress CANopen Init
MOTOR CONTROL TUNING MENU
—Motor Characterization Tests
—Field Weakening Control
—FW Base Speed
—Field Weakening
—Weakening Rate
—Motor Type ..................... p. 62
....... p. 60
............... p. 61
. p. 62
.... p. 62
Curtis 1234/36/38 Manual, OS 11
25

3 — PROGRAMMABLE PARAMETERS
Individual parameters are presented as follows in the menu charts:
Parameter name Allowable range Description of the parameter’s
as it appears in the in the function and, where applicable,
programmer display programmer’s units suggestions for setting it
⇓ ⇓ ⇓
Max Speed 100–8000 rpm Defines the maximum allowed motor rpm at full throttle.
Max_Speed_SpdM 100–8000
⇑ ⇑
Parameter name Allowable range
in VCL in VCL units
Note: All bit variables have two VCL parameter names. The first is the name
of the bit, and the second is the name of the byte containing the bit. The bit
position within the byte is indicated in brackets after the byte name.
Examples:
BIT NAME: Metric_Units
BYTE NAME: OptionBits3 [Bit 5]
BIT NAME: EMR_Dir_Interlock
BYTE NAME: EMR_Dir_Interlock_Bit0 [Bit 0]
In the second example, “_Bit0” is part of the byte name, and does not indicate
the bit position; this byte, like all bytes, has 8 available bits.
Within the menu charts, each pair of bit variable names is shown as a
grouped set, with the bit name appearing first and then the byte name:
Metric Units On/Off
Metric_Units On/Off
OptionBits3 [Bit 5]
26
Curtis 1234/36/38 Manual, OS 11
 Loading...
Loading...