

Vinten Radamec Free-d User Manual

Installation Manual V1.4.4

Vinten Broadcast Ltd
Vinten Broadcast Ltd Vinten Inc
Western Way 709 Executive Blvd.
Bury St Edmunds Valley Cottage
Suffolk NY 10989
IP33 3TB USA
United Kingdom
Tel: +44 1284 752121 Tel: (845) 268 0100
Fax: +44 1284 750560 Fax: (845) 268 0113
Compiled by: James Oliver - Product Manager
free-d™ Installation Manual V1.4.4
Email: info@vinten.com
Issue Date: April 2004
Copyright © Vinten Broadcast Limited 2004
The copyright in this document is vested in Vinten Broadcast Ltd, part of the Vitec Group. This document is issued in
confidence solely for the purpose for which it is supplied. Reproduction in whole or in part, or the use of this document
for tendering or manufacturing purposes is prohibited, except under an agreement or with the written consent of the
company of origin, and then only on the condition that this notice is included in any such reproduction.
'Vinten Radamec Broadcast Robotics' and 'free-d' are registered trademarks of Vinten Broadcast Limited.
Page 2 of 46
Vinten Broadcast Ltd
free-d™ Installation Manual V1.4.4
Table of contents
1 Introduction 4
1.1 Virtual sets 4
1.2 free-d™ 4
2 System components 5
3 Installation 6
3.1 Targets 6
3.2 Lens encoder 6
3.3 Target seeking camera 8
3.4 free-d™ Processor unit 8
4 Interconnection 10
5 Camera optimisation 11
6 Calibration procedure 13
6.1 Constructing a target database 14
6.2 Free-d calibration wizard 16
6.3 Additional free-d™ Processors 20
6.4 Additional free-d™ Target seeking cameras 21
6.2.1 Studio list 16
6.2.2 Camera list 17
6.2.3 Interfaces 18
7 System verification 22
7.1 RMS error 22
7.2 Levelling 22
7.3 Scale 22
7.4 Height and camera Z-offset 23
7.5 Camera x-offset 23
7.6 CCD centering 24
7.7 Video delay 24
7.8 Horizontal view angle 24
7.9 Vertical view angle and aspect ratio 25
7.10 Nodal shift and camera Y-offset 25
7.11 Pan adjustment 26
7.12 Tilt adjustment 26
7.13 Roll adjustment 27
Appendices 28
A - free-d™ Communications protocol v1.0 28
B - Camera positioning parameters 40
C - free-d™ processor card settings and warnings 43
D - free-d™ Target seeking camera ID settings 45
E - free-d™ Target seeking camera exposure settings 45
F - Typical system schematic and part numbers 45
G - Target array template diagram 46
Page 3 of 46

Vinten Broadcast Ltd
1 Introduction
1.1 Virtual sets
A key component of any virtual studio system is a means of measuring the
precise position and orientation of each studio camera. This data is used to
render the virtual scene from the appropriate viewpoint.
A camera tracking system must allow unrestricted movement of many studio
cameras while panning through 360 degrees, work with a wide variety of
camera mountings including manual pedestals, cranes, and hand-held
cameras. The measurement of position and orientation of the camera must
be to an accuracy that ensures precise matching of the real and virtual worlds.
It should place no significant constraints on either the scene content or the
studio environment. free-d™ satisfies all of these requirements.
1.2 free-d™
Developed by BBC R&D, this system uses a number of targets placed out of
shot above the studio lighting grid. The targets are composed of concentric
black and white retro-reflective rings forming a type of barcode. Each target
has a unique code number, and is mounted at one of two different heights for
optimum performance.
free-d™ Installation Manual V1.4.4
A small Target Seeking Camera (TSC) mounted on each studio camera views
these targets. The TSC is mounted rigidly with its optical axis at right angles to
the optical axis of the studio camera. A ring of LEDs surrounds the lens of the
TSC. They illuminate the retro-reflective ceiling mounted targets.
The data from the TSC is passed to a purpose-built hardware unit, (free-d™
processor) which calculates the precise position and orientation of the studio
camera in real time. free-d™ identifies the targets, measures their position to
sub-pixel accuracy, and reads their barcodes. The position and orientation of
the camera can then be computed.
The studio camera’s zoom and focus are measured using conventional
mechanical sensors. These data are multiplexed with the signal from the
auxiliary camera. free-d™ outputs an RS422 signal that contains camera X, Y,
height, pan, tilt, roll, zoom and focus data. Using this data output, the virtual
set system will then create a background very accurately matching the
position of the real camera, to within 1mm.
Page 4 of 46
Vinten Broadcast Ltd
2 System components
Supplied items:
Part Number Description
free-d™ Installation Manual V1.4.4
101-072-0002
free-d™ Target Seeking Camera (TSC)
Various Camera adapter bracket (to attach TSC to studio
camera)
012-037-0020 TSC power cable (standard length 20m)
195-112-0002 TSC power supply
177-072-0001
free-d™ Processor
Various Lens encoder
N/A Mains cables (2 per camera system)
Various Upper and lower targets (of roughly equal quantity)
N/A
3.5 inch floppy disk containing free-d™ lens calibration
Required items not supplied:
• Genlock source (if Free-d unit is not polled by VR system)
• Genlock video cable
• TSC video cable (length as required)
• Oscilloscope (for calibration purposes only)
• NTSC composite video monitor (for calibration purposes only)
• PC laptop* (for calibration purposes only)
• RS422/232 converter* (for calibration purposes only)
• 9 way pin-to-pin D-type serial cable* (for calibration purposes only)
Note: items marked with * will be provided by the Vinten Radamec Engineer
for the duration of the on-site system commissioning.
Page 5 of 46

Vinten Broadcast Ltd
3 Installation
3.1 Targets
The optimum pattern of high and low targets can be seen in Appendix G. This
is an optimum pattern only; it is designed so that the maximum number of
targets will be identified, with the minimum number of low targets obscuring
high targets. For ease of installation and calibration, this pattern should be
observed while installing the targets on the studio ceiling.
However, if there are any obstructions in the ceiling preventing the mounting of
a high target (eg, ducting, air-conditioning units) then a low target will suffice.
The major objective when installing targets is to ensure that a roughly equal
number of high and low targets can be seen by the Target Seeking Camera in
any position in the studio.
The optimum distance between each target is studio height dependent, and
will be advised by the Vinten Radamec Project Manager.
Whilst installing the targets, note the identification number located on the back
of the target on the target map. This will significantly expedite the calibration
process.
3.2 Lens encoder
Always fit the protective cap to the studio lens during installation of the
encoder. Remove the two screws that secure the cover of the drive module.
Lift the cover off.
free-d™ Installation Manual V1.4.4
The targets supplied will come with drop rods, but
not necessarily horizontal mounting bars. It is
normally required that the customer or system
integrator source and supply these bars and a
means to mount the bars to the ceiling. A dedicated
grid is the best method of securing the target bars.
It is essential that whatever method is employed,
the target array must be secure and vibration free.
Single module dimensions 136mm x 45mm x 70mm
Weight (pair) 1 kg approx.
Encoders to lens gearing 24 : 1
Output signals 1024 pulses / rev of encoder
Electrical connection
1m flying lead to 26 way 'D'
type.
Page 6 of 46
Vinten Broadcast Ltd
Remove the two hex-socket screws that secure the module to the mounting
block adapter plate. Take care not to damage any internal components when
removing the module. Slacken the two screws that fasten the focus section to
the zoom section.
Remove the two screws and lock washers from the mounting block, then fit the
block to the lens. Do not over tighten the mounting screws. Check that both
zoom and focus elements are not obstructed and move freely after fitting the
mounting block.
IT IS ESSENTIAL THAT ONLY THE SCREWS AND WASHERS SUPPLIED ARE USED.
Fit the module in position the mounting block with the zoom section in mesh
with the zoom gear ring of the lens and estimate how far its gear is out of
mesh with the zoom gear ring. Remove the module and extract the spacer
shim from between the adapter plate and the mounting block. Peel off an
amount from the spacer (each shim is 0.05 mm, 0.002 inch thick) that is equal
to, or less than, the amount estimated to bring the gears into mesh. Re-fit the
module and repeat the procedure until the gears mesh correctly.
CORRECT MESH IS VERY IMPORTANT AS TIGHT SPOTS WILL RESULT IN POOR PERFORMANCE.
Check the mesh at several points while rotating the lens gear ring from end to
end and ensure that a small amount of backlash can just be felt at the tightest
point.
Adjust the mesh of the focus section with the focus gear ring of the lens and
tighten the two screws that fix it to the zoom section. Check the mesh at
several points whilst rotating the focus gear ring from end to end and ensure
that a small amount of backlash can just be felt at the tightest point. Readjust
the focus mesh until this is satisfactory.
Do not lubricate the output gear/lens ring. Check end-to-end operation of both
zoom and focus. When satisfactory, re-fit the encoder module cover.
free-d™ Installation Manual V1.4.4
CAUTION
INCORRECT LENGTH SCREWS CAN PERMANENTLY DAMAGE THE LENS.
NOTE
Page 7 of 46
Vinten Broadcast Ltd
3.3 Target seeking camera
The Target Seeking Camera (TSC) is intended to mount rigidly to a studio
camera, perpendicular to the optical axis. It will normally mount in place of the
viewfinder, either above the lens at the front of the camera or at the rear if
hand-held operation is required. Custom-designed mounting brackets are
normally supplied to suit the cameras in the studio. The base of the TSC can
be adjusted to ensure that is as near as possible to perpendicular to the studio
camera optical axis.
The view of the targets should be unobstructed (for example by any part of the
camera operator’s body) and should not make operating the studio
cumbersome or make it difficult to balance. The offset between the two
cameras must be known so that the system can compensate during
calibration.
The TSC will need to be genlocked if the virtual set system software is not
polling the
3.4 free-d™ Processor unit
The free-d™ Processor Unit receives a serial digital video signal from the TSC
which contains both the image of the targets as viewed by the auxiliary camera
free-d™
free-d™ Installation Manual V1.4.4
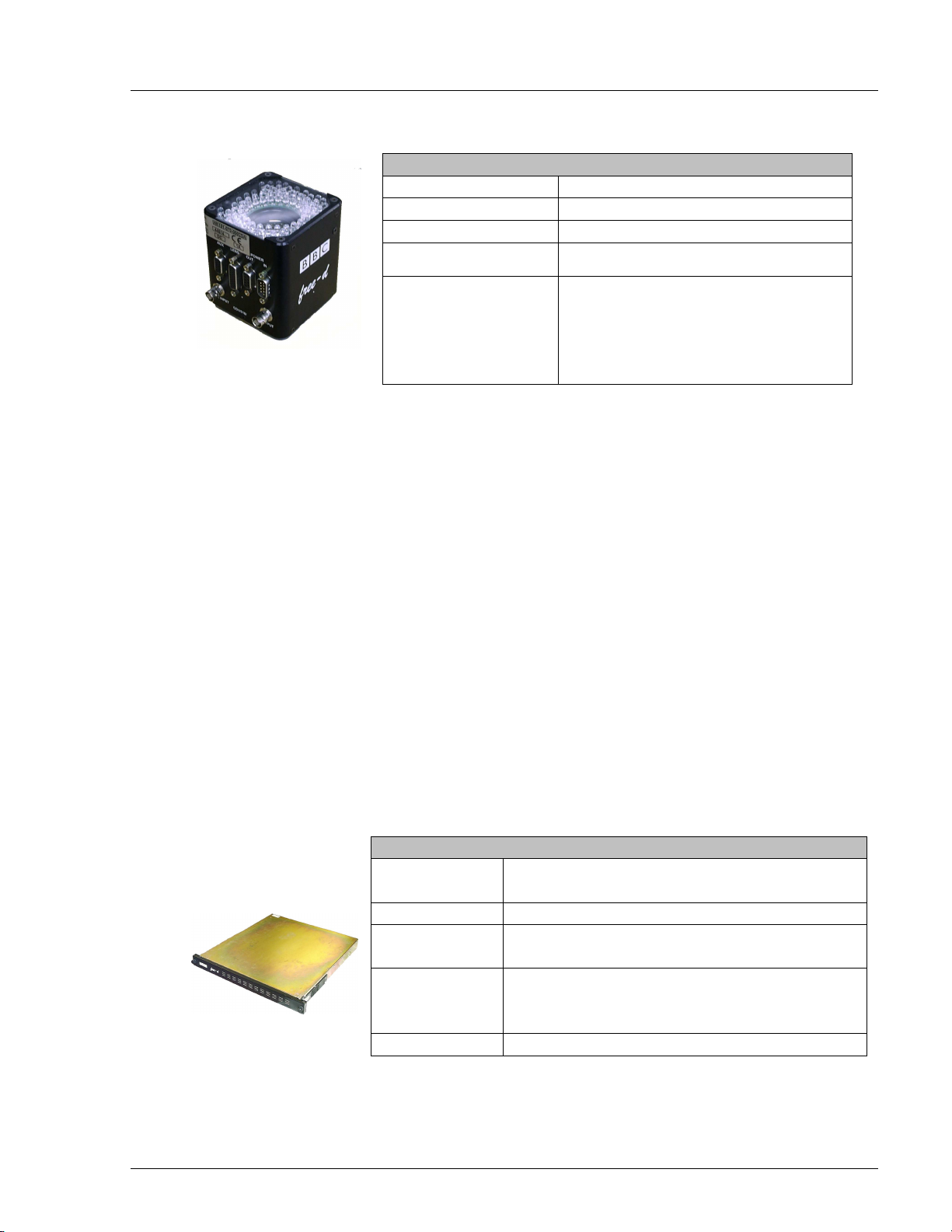
Dimensions 100mm x 82mm x 82mm
Weight 1.5 kg
Lens Pentax, Ref. C30811 (C-mount)
Output signals Serial digital video (NTSC)
Connectors BNC – video output
BNC – genlock input
26w ‘D’ – Lens encoder input
2x9w ‘D’ – Power Input
15w ‘D’ – RBU input
processor. Contact your virtual set vendor for verification.
Dimensions 483mm x 43mm x 500mm
(19inch, 1U, 500mm)
Weight 8.5 kg approx.
Input signals Serial digital video,
RS422/RS485 control data
Output
signals
Analogue video,
RS422/RS485 camera data
System normal relay
Power Supply 85 to 265 volts AC, 47 – 440 Hz, 5A
Page 8 of 46

Vinten Broadcast Ltd
and encoded values of the zoom and focus (which are measured by
conventional mechanical sensors). The 19 inch rack-mountable unit identifies
the targets in the image, measures their positions to sub-pixel accuracy and
reads their bar codes. Knowing the positions of each target in the studio,
which are stored in non-volatile memory, the position and orientation of the
camera can be computed.
The unit generates an RS422/RS485 serial data stream, which conveys the
position, orientation, zoom, and focus data to the virtual set system.
There is a BNC connection available to monitor the operation of the TSC.
Monitoring of this NTSC signal will be required during calibration.
On initial installation the default control parameters should be loaded into the
free-d™
Processor Unit. This can be achieved by operating the card switches
in the following sequence: Hold RESET (S1), hold STORE (S4), release
RESET, wait until self-tests are complete, release STORE. The default
parameters may then be stored in the unit's non-volatile memory by another
operation of the STORE switch.
free-d™ Installation Manual V1.4.4
Page 9 of 46
Vinten Broadcast Ltd
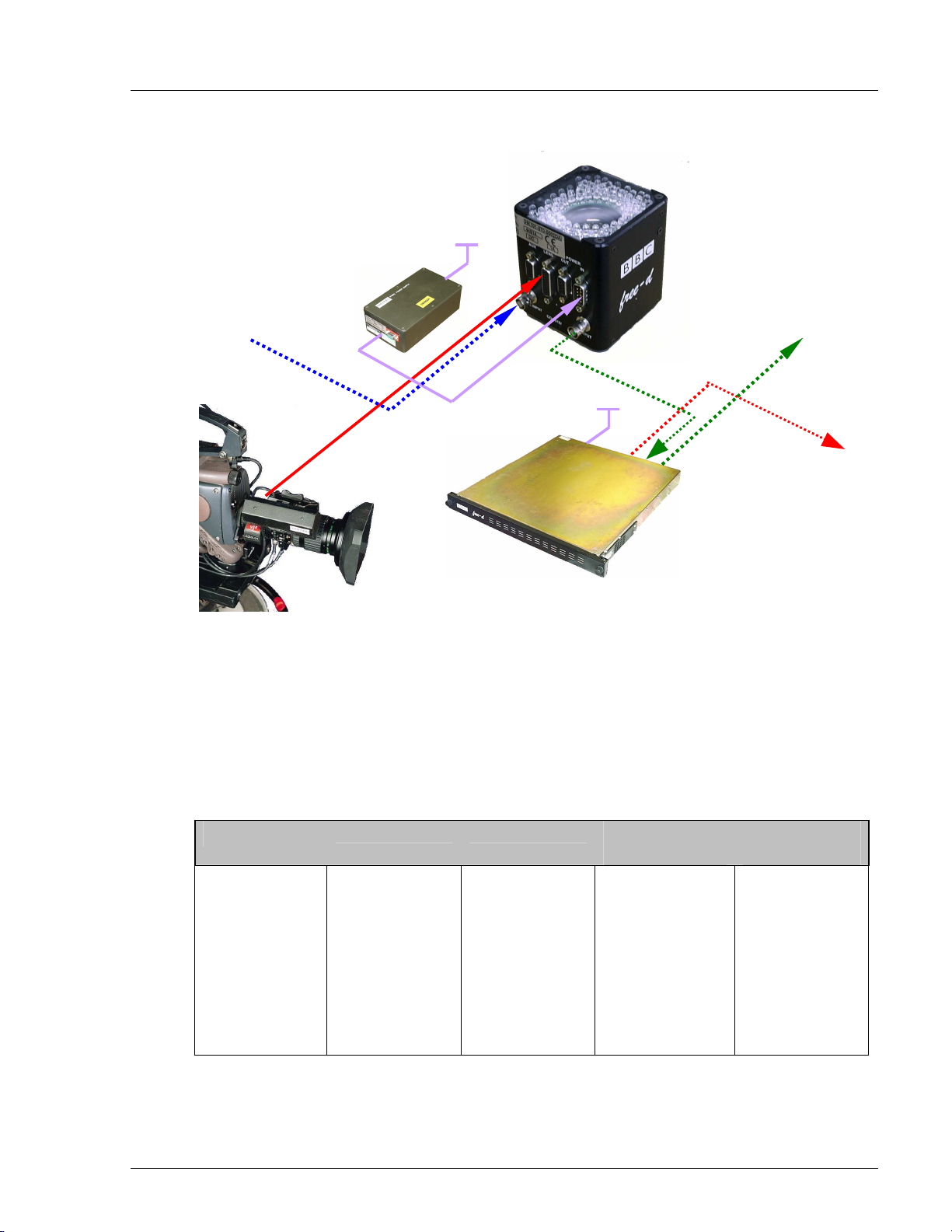
4 Interconnection
Genlock
Input
(if required)
TSC PSU
24Vdc
Lens encoder data
Cables indicated by a dotted line are not supplied with the Free-d
system.
When connecting the free-d™ processor to the calibration PC, an RS-422/232
converter will be required and a direct, pin-to-pin cable, 9-way male D-type to
9-way male D-type. The SDL cable to connect the free-d™ processor to an
Onyx, Onyx2, Xync interface or Virtual Scenario SCU should be made as
follows:
free-d™
9-way male
D-type
9-way female
free-d™ Installation Manual V1.4.4
Target Seeking Camera TSC
110/230Vac
TSC Video
110/230Vac
Free-d Processor Unit
Onyx Onyx2 Xync
Interface
D-type
9-way female
D-type
25-way female
D-type
NTSC Monitor Video
RS-422
To VR System
Virtual
Scenario
9-way male
D-type
2 Tx- 2 Rx- 2 Rx- 15 Rx- 5 Rx-
8 Rx- 3 Tx- 3 Tx- 14 Tx- 9 Tx3 Rx+ 7 Tx+ 4 Tx+ 2 Tx+ 8 Tx+
7 Tx+ 8 Rx+ 6 Rx+ 3 Rx+ 4 Rx+
Page 10 of 46
Vinten Broadcast Ltd
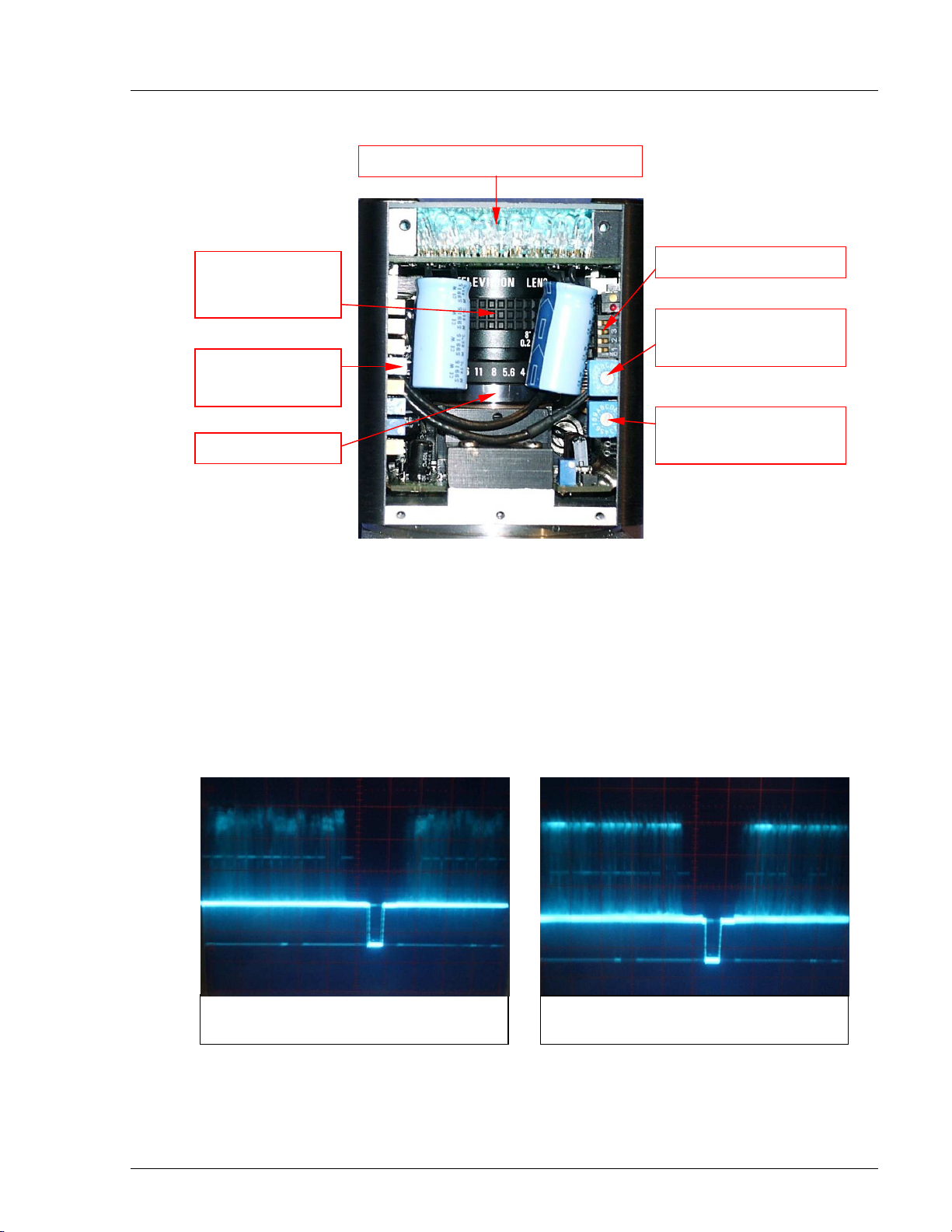
Iris
5 Camera optimisation
LED array
free-d™ Installation Manual V1.4.4
Focus – take
care not to
disturb
Gain levels –
factory set
S103 Test purposes
S102 Exposure time
control
S101 Camera ID
Number
Set the camera ID number using rotary switch S101 (see Appendix D). Place
the free-d™ TSC at its lowest operating height (in most cases this will be with
the studio camera on the floor) so that it has an unobstructed view of the
targets. Switch off any house lights in the field of view of the camera.
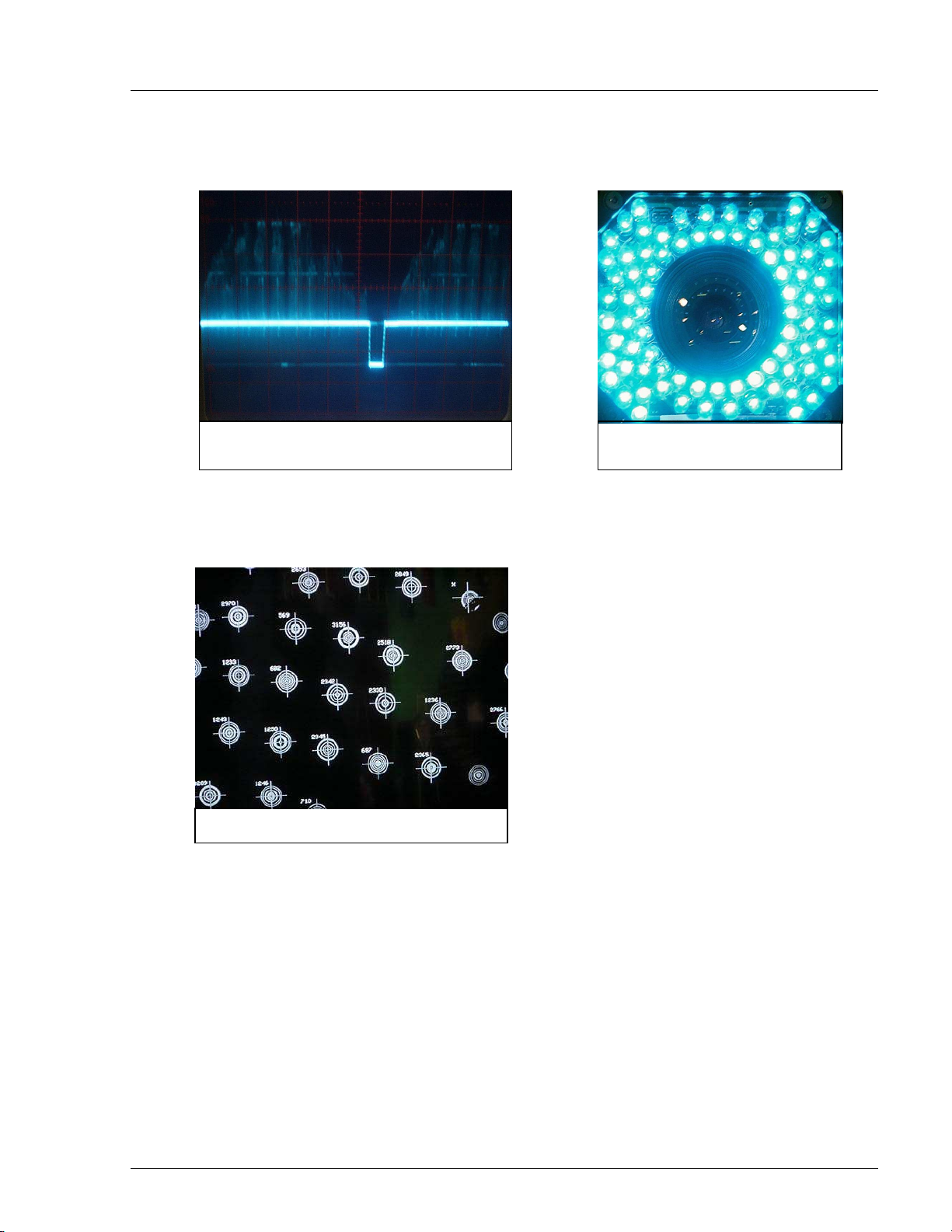
Observe the monitoring video output from the free-d™ Processor on both a
picture monitor and on an oscilloscope triggered at TV line rate. The video
level of the brightest targets should be close to peak white (0.7 Volt) but
without any clipping. If this is not the case, it will be necessary to adjust the
iris of the free-d™ TSC; take extreme care not to disturb the focus.
Optimised – uniform amplitude, no
clipping
Check on both the NTSC monitor and the oscilloscope that all the targets in
view have approximately the same video level (the dimmest target should
Clipping – bright peaks indicate video
level saturation
Page 11 of 46
Vinten Broadcast Ltd
free
free
have a video level no less than 70% that of the brightest target). If the
brightness is less uniform than this, it will be necessary to adjust the ‘aiming’
of the illuminating LEDs.
free-d™ Installation Manual V1.4.4
Badly aimed LEDs – centre targets
brighter than outer targets.
-d™ TSC top-view
LEDs after aiming.
Check that most of the targets that can be seen in the image are being
recognised by the system and are annotated with their barcode numbers.
If any target barcode values are
missing (or are replaced with a x or +
symbol), and there is no obvious
reason such as the target being
partially obscured or damaged,
suspect that the focus is not correctly
set for the studio height. If it is
necessary to change the focus, even
slightly, it is essential that the
free-d™
camera be re-calibrated afterwards.
-d™ Processor monitor output
To maximise the depth-of-field, ensure that the exposure-time control (S102)
is set to position ‘D’; this is the position where the LED array appears to be
brightest.
If high-speed camera movements are anticipated, it may be desirable to
reduce the exposure time. See appendix E.
Page 12 of 46
Vinten Broadcast Ltd
B
6 Calibration procedure
Before proceeding, ensure that all required targets have been mounted in the
studio ceiling and the identification number of each target number noted onto
the map (see Appendix G). If no target map is available, it will have to be
reconstructed by directing the Free-d camera at the target array, and reading
the target ID numbers from a monitor connected to the monitor output of the
processor.
Select a suitable studio reference point. This reference (or zero) is typically
the bottom left target on the target map (Row1, Column 1). In actuality the
reference point can be any permanent reference in the studio. If there is a 3D
virtual set system already in operation in the studio then it may be more
convenient to use the same reference as the VR set.
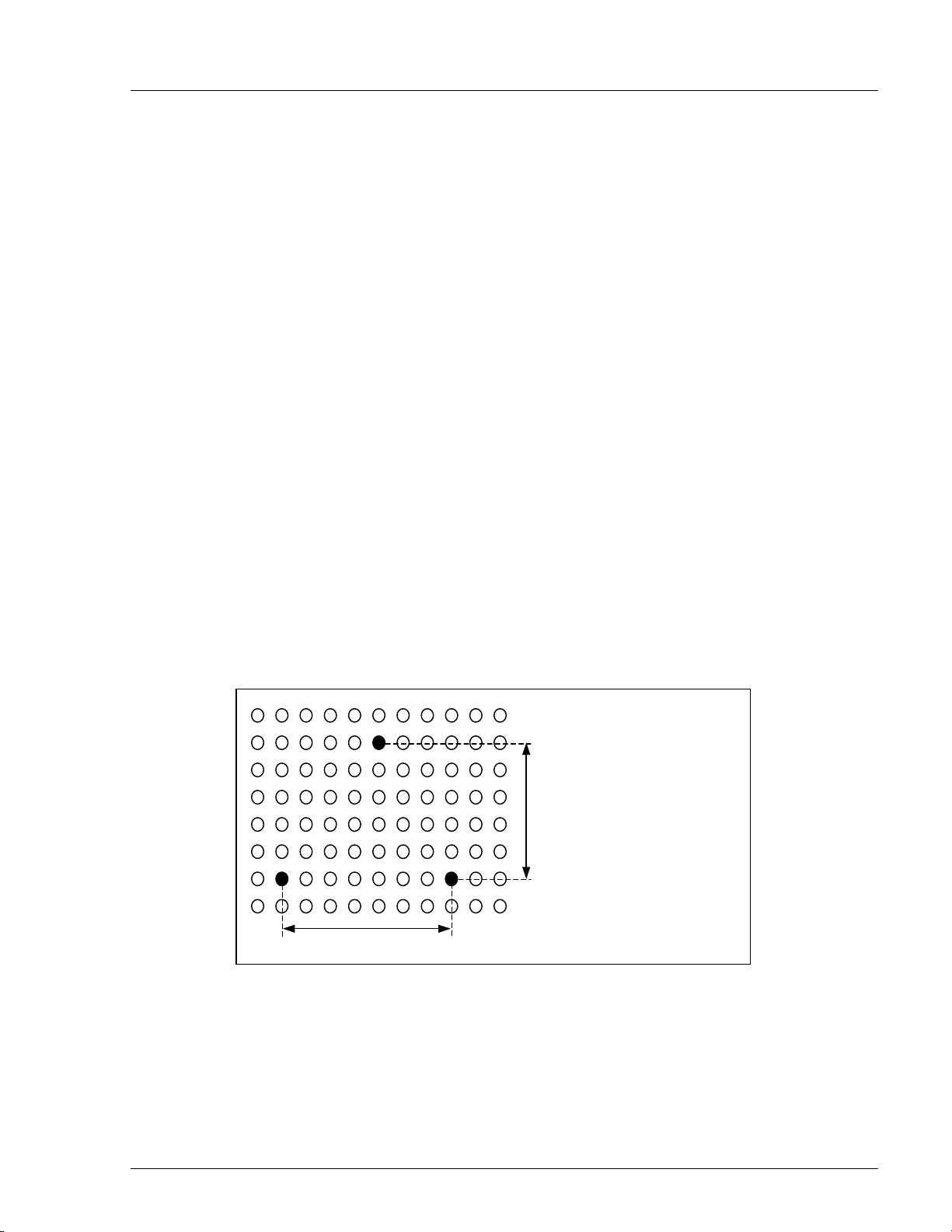
Measure three targets with respect to the reference. It is essential that these
targets be measured to the best accuracy possible, as the results have a huge
effect on the subsequent calibration. It is necessary to measure x, y, and
height of two targets (A and B) and height only of a third target (C). The
distance between targets A and B should be greater than 50% of the entire
target array in the x-axis. This determines a baseline from which all other
targets are measured. The distance from target C to the baseline should be
greater than 50% of the entire length of the y-axis. If these rules are not
adhered to, the Calibration Wizard will not proceed and the program will
display a warning. The measured targets do not have to be on different rows
or columns, and they do not have to be at different heights.
free-d™ Installation Manual V1.4.4
Note these measurements together with their ID number. These ID numbers
will be entered in the calibration program (freed_v14.exe).
C
Measure:
>50%
A
>50%
A = x, y and height
B = x, y and height
C = height only
Page 13 of 46
Vinten Broadcast Ltd
block above.
6.1 Constructing a target database
Once operational, the system must know the exact position of every target to
an accuracy of less than 1mm. To measure every single target to this level of
accuracy, while not impossible, would be difficult and time consuming. The
calibration process is able to refine the target positions provided an initial
accuracy of 100 mm is achieved.
Provided the precise position of the three measured targets is determined, the
system will refine the position of all the others.
Run the program makedef.exe. This creates a text file containing x,y,z values
based on the installed grid pattern. When prompted input the x, y spacing and
number of targets for each direction, height of upper and lower targets, min x
and y values from origin (an offset of x, y, normally 0.0 for each) and the
pattern of high and low targets used.
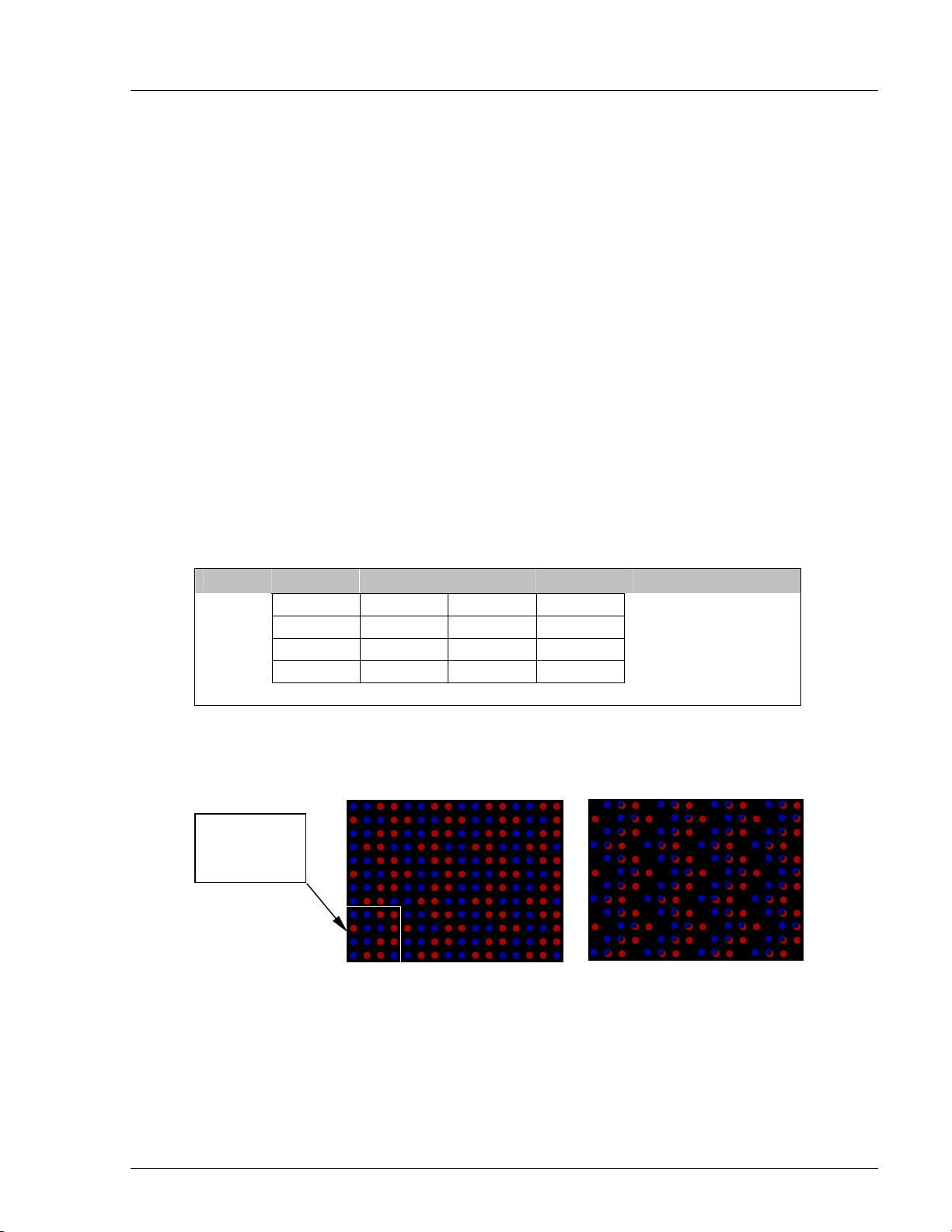
The pattern is defined by a hex word. The whole pattern can be calculated by
knowing the configuration of the first block of 16 targets (4x4) situated in the
bottom right-hand corner of the target map.
Row 4 Low = 0 Low = 0 High = 1 High = 1 = 3 in Hex
Row 3 High = 1 Low = 0 Low = 0 High = 1 = 9 in Hex
Row 2 Low = 0 Low = 0 High = 1 High = 1 = 3 in Hex
Row 1 Low = 0 High = 1 High = 1 Low = 0 = 6 in Hex
To view and check the pattern byte word, run the program seepatt.exe and
enter the pattern to be used in hex (in this case 6393). Blue = Low, Red =
High.
Col 1 Col 2 Col 3 Col 4
free-d™ Installation Manual V1.4.4
Byte Word = 6393
This portion
should match
the 16 target
Use the cursor keys to simulate tilt and roll of the camera to see the extent of
low targets obscuring high targets.
Target pattern hex “6393”
Tilt/roll simulation
Page 14 of 46
 Loading...
Loading...