

Page 1
r
USER'S GUIDE
Vaisala Ultrasonic Wind Senso
WS425 F/G
M210713EN-C
Page 2

PUBLISHED BY
Vaisala Oyj Phone (int.): +358 9 8949 1
P.O. Box 26 Fax: +358 9 8949 2227
FIN-00421 Helsinki
Finland
Visit our Internet pages at http://www.vaisala.com/
© Vaisala 2006
No part of this manual may be reproduced in any form or by any means,
electronic or mechanical (including photocopying), nor may its contents
be communicated to a third party without prior written permission of the
copyright holder.
The contents are subject to change without prior notice.
Please observe that this manual does not create any legally binding
obligations for Vaisala towards the customer or end user. All legally
binding commitments and agreements are included exclusively in the
applicable supply contract or Conditions of Sale.
Page 3

________________________________________________________________________________
Table of Contents
CHAPTER 1
GENERAL INFORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
About This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
Contents of This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . .9
Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10
Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10
General Safety Considerations . . . . . . . . . . . . . . . . . . . . .10
Product Related Safety Precautions . . . . . . . . . . . . . . . . .11
ESD Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
Recycling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
License Agreement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
Warranty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
CHAPTER 2
PRODUCT OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
Product History - ASOS Program . . . . . . . . . . . . . . . . . . . .15
Introduction to Ultrasonic Wind Sensor
WS425 F/G . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
Ultrasonic Wind Sensor WS425 F/G Components . . . . . . .17
Accessories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
CHAPTER 3
INSTALLATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
Required Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
Installation of Mounting Arm and Sensor Cable . . . . . . . .25
Installation of Wind Sensor . . . . . . . . . . . . . . . . . . . . . . . . .26
Installation of Power Supply . . . . . . . . . . . . . . . . . . . . . . . .26
Installation of Power Supply on Pole Mast . . . . . . . . . . . . .26
Connecting Lightning Ground . . . . . . . . . . . . . . . . . . . . . .27
Connecting Fiber Optic Cable . . . . . . . . . . . . . . . . . . . . . .28
Connecting Fiber Optic Modem FOM111 . . . . . . . . . . . . .28
Connecting AC Power . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
Connecting Sensor Interface Cable . . . . . . . . . . . . . . . . . .29
Power Supply Terminal Blocks . . . . . . . . . . . . . . . . . . . . .31
Conducting Off-Line Test . . . . . . . . . . . . . . . . . . . . . . . . . .31
Aligning the Wind Sensor . . . . . . . . . . . . . . . . . . . . . . . . . .32
Magnetic Declination Correction . . . . . . . . . . . . . . . . . . . .32
Compass Alignment with Mast Adapter . . . . . . . . . . . . . . .33
VAISALA________________________________________________________________________ 1
Page 4

________________________________________________________________________________
CHAPTER 4
OPERATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
Power On/Off . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
System Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
Diagnostic Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
RS-232 Data Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
Command Set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
WB Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
VFIRMWARE Command . . . . . . . . . . . . . . . . . . . . . . . . . .40
WA Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
Example of the WA Command Message. . . . . . . . . . . 42
WL Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
WM Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
WN Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
WS Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
WJ Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46
WD Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47
WF Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47
Example of the WF Command Message . . . . . . . . . . . 48
WR Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48
WATE Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49
WCAL Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
WH Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
WT Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54
WSST Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55
WSTK Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56
WCDV Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
CHAPTER 5
OPERATING PRINCIPLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59
Wind Measurement Principle . . . . . . . . . . . . . . . . . . . . . . . .59
Power Supply Operating Principle . . . . . . . . . . . . . . . . . . .61
Verifier Associated Operations . . . . . . . . . . . . . . . . . . . . . .63
CHAPTER 6
MAINTENANCE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65
Visual Inspection of Ultrasonic Wind Sensor WS425 F/G .65
Preventive Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . .67
Corrective Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . .69
Wind Sensor Removal and Installation . . . . . . . . . . . . . . .74
Removal Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Installation Procedure . . . . . . . . . . . . . . . . . . . . . . . . . 74
Power Supply Removal and Installation . . . . . . . . . . . . . . .75
Power Supply Module Removal and Installation . . . . . . . .77
Removal Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Installation Procedure . . . . . . . . . . . . . . . . . . . . . . . . . 78
FOM Assembly Removal and Installation . . . . . . . . . . . . .78
Removal Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Installation Procedure . . . . . . . . . . . . . . . . . . . . . . . . . 79
2 _______________________________________________________________________________
Page 5

________________________________________________________________________________
Sensor Interface Cable Removal and Installation . . . . . . .80
Firmware Download . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81
Download Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Recovery Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Technical Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .83
Vaisala Service Centers . . . . . . . . . . . . . . . . . . . . . . . . . . . .83
CHAPTER 7
TECHNICAL DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .85
Field Replaceable Units . . . . . . . . . . . . . . . . . . . . . . . . . . . .86
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .86
Accessories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
Drawings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .88
VAISALA________________________________________________________________________ 3
Page 6

________________________________________________________________________________
4 _______________________________________________________________________________
Page 7

________________________________________________________________________________
List of Figures
Figure 1 Ultrasonic Wind Sensor WS425 F/G . . . . . . . . . . . . . . . . . . . .16
Figure 2 Components Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
Figure 3 Schematic of Ultrasonic Wind Sensor WS425 F/G . . . . . . . . .18
Figure 4 Ultrasonic Wind Sensor Power Supply . . . . . . . . . . . . . . . . . .19
Figure 5 Power Supply and FOM Module Assembly . . . . . . . . . . . . . . .20
Figure 6 Cable Assembly, Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
Figure 7 Fiber Optic Modem FOM111 . . . . . . . . . . . . . . . . . . . . . . . . . .21
Figure 8 WS425 F/G Tower Assembly. . . . . . . . . . . . . . . . . . . . . . . . . .24
Figure 9 Sensor Cable Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
Figure 10 Power Supply and Mount. . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Figure 11 Power Supply Terminal Blocks . . . . . . . . . . . . . . . . . . . . . . . .30
Figure 12 Sketch of Magnetic Declination . . . . . . . . . . . . . . . . . . . . . . . .33
Figure 13 Correctly AlignedWS425 F/G Sensor. . . . . . . . . . . . . . . . . . . .34
Figure 14 Adjusting the N-S Heads . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
Figure 15 Ultrasonic Wind Sensor Block Diagram. . . . . . . . . . . . . . . . . .60
Figure 16 Power Supply Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . .62
Figure 17 Solder Spot and Sensor Handling . . . . . . . . . . . . . . . . . . . . . .67
Figure 18 Field Verifier. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68
Figure 19 Field Verifier with Cloth Bag. . . . . . . . . . . . . . . . . . . . . . . . . . .68
Figure 20 Fault Isolation Flow Chart: Sensor Not Responding Part 1 . . .70
Figure 21 Fault Isolation Flow Chart: Sensor Not Responding Part 2 . . .71
Figure 22 Fault Isolation Flow Chart: Sensor Responds with F Status . .72
Figure 23 Fault Isolation Flow Chart: Sensor Responds with H Status . .73
Figure 24 Sensor Cable Wiring Diagram . . . . . . . . . . . . . . . . . . . . . . . . .88
VAISALA________________________________________________________________________ 5
Page 8

________________________________________________________________________________
6 _______________________________________________________________________________
Page 9

________________________________________________________________________________
List of Tables
Table 1 Terminal Block 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
Table 2 Terminal Block 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
Table 3 Ultrasonic Wind Interrogation Requests. . . . . . . . . . . . . . . . . . . .39
Table 4 Explanation of the WA Command Message . . . . . . . . . . . . . . . .42
Table 5 Explanation of the WF Command Message. . . . . . . . . . . . . . . . .48
Table 6 Field Replaceable Units of Ultrasonic Wind Sensor WS425 F/G.86
Table 7 Wind Speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .86
Table 8 Wind Direction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .86
Table 11 Accessories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
Table 9 Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
Table 10 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .87
VAISALA________________________________________________________________________ 7
Page 10

________________________________________________________________________________
8 _______________________________________________________________________________
Page 11

Chapter 1 ________________________________________________________ General Information
CHAPTER 1
GENERAL INFORMATION
This chapter provides general notes for the product.
About This Manual
This manual provides information for installing, operating, and
maintaining the product.
Contents of This Manual
This manual consists of the following chapters:
- Chapter 1, General Information: This chapter provides general
notes for the product.
- Chapter 2, Product Overview: This chapter introduces the features
and advantages of Vaisala Ultrasonic Wind Sensor WS425 F/G.
- Chapter 3, Installation: This chapter provides you with information
on the installation and alignment procedures, and connections of
the power supply and fiber optic modem.
- Chapter 4, Operation: This chapter contains information needed to
operate Vaisala Ultrasonic Wind Sensor WS425 F/G.
- Chapter 5, Operating Principle: This chapter provides you with a
brief explanation of the operating principles of Vaisala Ultrasonic
Wind Sensor WS425 F/G and its power supply.
VAISALA________________________________________________________________________ 9
Page 12
User's Guide ______________________________________________________________________
- Chapter 6, Maintenance: This chapter contains instructions for the
basic maintenance, fault isolation and installation and removal of
the field replaceable units of the Vaisala Ultrasonic Wind Sensor
WS425 F/G.
- Chapter 7, Technical Data: This chapter provides the technical data
of the product and lists the field replaceable units, and the
accessories.
Feedback
Vaisala Customer Documentation Team welcomes your comments and
suggestions on the quality and usefulness of this publication. If you find
errors or have other suggestions for improvement, please indicate the
chapter, section, and page number. You can send comments to us by email: manuals@vaisala.com
.
Safety
WARNING
CAUTION
NOTE
General Safety Considerations
Throughout the manual, important safety considerations are highlighted
as follows:
Warning alerts you to a serious hazard. If you do not read and follow
instructions very carefully at this point, there is a risk of injury or even
death.
Caution warns you of a potential hazard. If you do not read and follow
instructions carefully at this point, the product could be damaged or
important data could be lost.
Note highlights important information on using the product.
10 ______________________________________________________________________________
Page 13

Chapter 1 ________________________________________________________ General Information
Product Related Safety Precautions
The Vaisala Ultrasonic Wind Sensor WS425 F/G delivered to you has
been tested for safety and approved as shipped from the factory. Note
the following precautions:
WARNING
CAUTION
Ground the product, and verify outdoor installation grounding
periodically to minimize shock hazard.
Do not modify the unit. Improper modification can damage the
product or lead to malfunction.
ESD Protection
Electrostatic Discharge (ESD) can cause immediate or latent damage to
electronic circuits. Vaisala products are adequately protected against
ESD for their intended use. However, it is possible to damage the
product by delivering electrostatic discharges when touching,
removing, or inserting any objects inside the equipment housing.
To make sure you are not delivering high static voltages yourself:
- Handle ESD sensitive components on a properly grounded and
protected ESD workbench. When this is not possible, ground
yourself with a wrist strap and a resistive connection cord to the
equipment chassis before touching the boards. When neither of the
above is possible, at least touch a conductive part of the equipment
chassis with your other hand before touching the boards.
- Always hold the boards by the edges and avoid touching the
component contacts.
Recycling
Recycle all applicable material.
VAISALA_______________________________________________________________________ 11
Page 14
User's Guide ______________________________________________________________________
Dispose of batteries and the unit according to statutory regulations.
Do not dispose of with regular household refuse.
License Agreement
All rights to any software are held by Vaisala or third parties. The
customer is allowed to use the software only to the extent that is
provided by the applicable supply contract or Software License
Agreement.
Warranty
Vaisala hereby represents and warrants all Products manufactured by
Vaisala and sold hereunder to be free from defects in workmanship or
material during a period of twelve (12) months from the date of delivery
save for products for which a special warranty is given. If any Product
proves however to be defective in workmanship or material within the
period herein provided Vaisala undertakes to the exclusion of any other
remedy to repair or at its own option replace the defective Product or
part thereof free of charge and otherwise on the same conditions as for
the original Product or part without extension to original warranty time.
Defective parts replaced in accordance with this clause shall be placed
at the disposal of Vaisala.
Vaisala also warrants the quality of all repair and service works
performed by its employees to products sold by it. In case the repair or
service works should appear inadequate or faulty and should this cause
malfunction or nonfunction of the product to which the service was
performed Vaisala shall at its free option either repair or have repaired
or replace the product in question. The working hours used by
employees of Vaisala for such repair or replacement shall be free of
charge to the client. This service warranty shall be valid for a period of
six (6) months from the date the service measures were completed.
This warranty is however subject to following conditions:
a)A substantiated written claim as to any alleged defects shall have been
received by Vaisala within thirty (30) days after the defect or fault
became known or occurred, and
12 ______________________________________________________________________________
Page 15

Chapter 1 ________________________________________________________ General Information
b)The allegedly defective Product or part shall, should Vaisala so
require, be sent to the works of Vaisala or to such other place as Vaisala
may indicate in writing, freight and insurance prepaid and properly
packed and labelled, unless Vaisala agrees to inspect and repair the
Product or replace it on site.
This warranty does not however apply when the defect has been caused
through
a)normal wear and tear or accident;
b)misuse or other unsuitable or unauthorized use of the Product or
negligence or error in storing, maintaining or in handling the Product or
any equipment thereof;
c)wrong installation or assembly or failure to service the Product or
otherwise follow Vaisala's service instructions including any repairs or
installation or assembly or service made by unauthorized personnel not
approved by Vaisala or replacements with parts not manufactured or
supplied by Vaisala;
d)modifications or changes of the Product as well as any adding to it
without Vaisala's prior authorization;
e)other factors depending on the Customer or a third party.
Notwithstanding the aforesaid Vaisala's liability under this clause shall
not apply to any defects arising out of materials, designs or instructions
provided by the Customer.
This warranty is expressly in lieu of and excludes all other conditions,
warranties and liabilities, express or implied, whether under law, statute
or otherwise, including without limitation any implied warranties of
merchantability or fitness for a particular purpose and all other
obligations and liabilities of Vaisala or its representatives with respect
to any defect or deficiency applicable to or resulting directly or
indirectly from the Products supplied hereunder, which obligations and
liabilities are hereby expressly cancelled and waived. Vaisala's liability
shall under no circumstances exceed the invoice price of any Product
for which a warranty claim is made, nor shall Vaisala in any
circumstances be liable for lost profits or other consequential loss
whether direct or indirect or for special damages.
VAISALA_______________________________________________________________________ 13
Page 16

User's Guide ______________________________________________________________________
14 ______________________________________________________________________________
Page 17

Chapter 2 __________________________________________________________ Product Overview
CHAPTER 2
PRODUCT OVERVIEW
This chapter introduces the features and advantages of Vaisala
Ultrasonic Wind Sensor WS425 F/G.
Product History - ASOS Program
Vaisala Ultrasonic Wind Sensor WS425 F/G was originally developed
for the Automated Surface Observing Systems (ASOS) program, and
due to this fact this document contains references to the ASOS.
The ASOS program is a joint effort of the US National Weather Service
(NWS), the Federal Aviation Administration (FAA), and the
Department of Defense (DOD). The ASOS serves as the primary
weather observing network of the United States. It is designed to
support weather forecast activities and aviation operations and, at the
same time, support the needs of the meteorological, hydrological, and
climatological research communities.
Introduction to Ultrasonic Wind Sensor
WS425 F/G
Thank you for choosing Vaisala Ultrasonic Wind Sensor WS425 F/G.
It measures wind speed and direction from the smallest breeze to
hurricane force gales, including gusts.
VAISALA_______________________________________________________________________ 15
Page 18
User's Guide ______________________________________________________________________
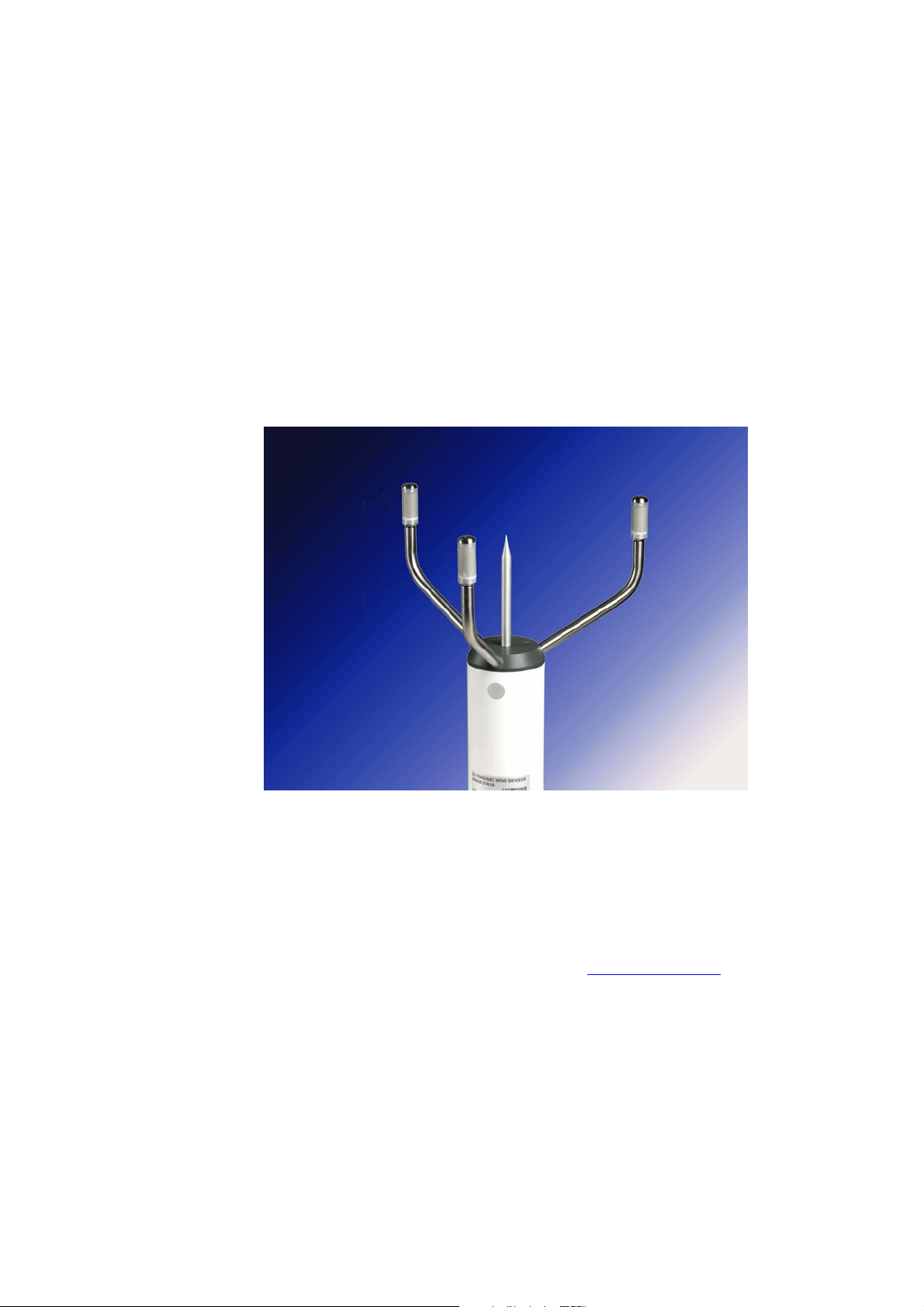
The patented three transducer layout provides superior data availability
and accuracy in all wind directions. The effects of temperature,
humidity, and pressure are fully compensated. The sensor
communicates to the system or data logger via an fiber optic
connection. The message format is ASOS compatible.
The device has no moving parts, so it is virtually maintenance free. The
stainless steel construction makes it resistant to contamination and
corrosion. The sensor heating function of the ice-free model prevents
freezing rain and snow build-ups and thus guarantees uninterrupted
operations throughout the year.
0506-047
Figure 1 Ultrasonic Wind Sensor WS425 F/G
Wind measurement and wind data is important in meteorology,
aviation, transport safety, in ships and harbors, and also in many
industrial applications. Vaisala manufactures wind sensors for all these
needs, from low cost combined units to sophisticated totally heated
sensors for extreme weather conditions. For more information, please
contact your Vaisala representative or visit www.vaisala.com.
16 ______________________________________________________________________________
Page 19

Chapter 2 __________________________________________________________ Product Overview
Ultrasonic Wind Sensor WS425 F/G
Components
0506-067
Figure 2 Components Overview
The following numbers refer to Figure 2 on page 17:
1 = Wind sensor
2 = Power supply
3 = Module assembly, power supply
4 = Fiber optic modem (FOM) assembly
The device consists of the following field replaceable units (FRU):
- Wind sensor, model WS425 F/G (item 1 in Figure 2 on page 17)
- Power supply,WS425PowerUS or WS425PowerEU (item 2)
- Module assembly, power supply (item 3)
- Fiber optic modem assembly (item 4)
- Cable assembly, sensor WS425 F/G (Figure 6 on page 21)
The FRUs are represented individually in Figures 3-6.
VAISALA_______________________________________________________________________ 17
Page 20

User's Guide ______________________________________________________________________
0506-010
Figure 3 Schematic of Ultrasonic Wind Sensor WS425 F/G
The following numbers refer to Figure 3 on page 18:
1 = Sensor body
2=Bird spike
3 = Transducer (3 pcs)
18 ______________________________________________________________________________
Page 21
Chapter 2 __________________________________________________________ Product Overview
0506-011
Figure 4 Ultrasonic Wind Sensor Power Supply
NOTE
Figure 4 on page 19 represents the WS425PowerUS power supply
made for 115 VAC - the European model WS425PowerEU has
different primary (internal) wiring and is made for 240 VAC. The
customer must check local regulations concerning the correct and safe
wiring of the power supply.
VAISALA_______________________________________________________________________ 19
Page 22

User's Guide ______________________________________________________________________
0506-012
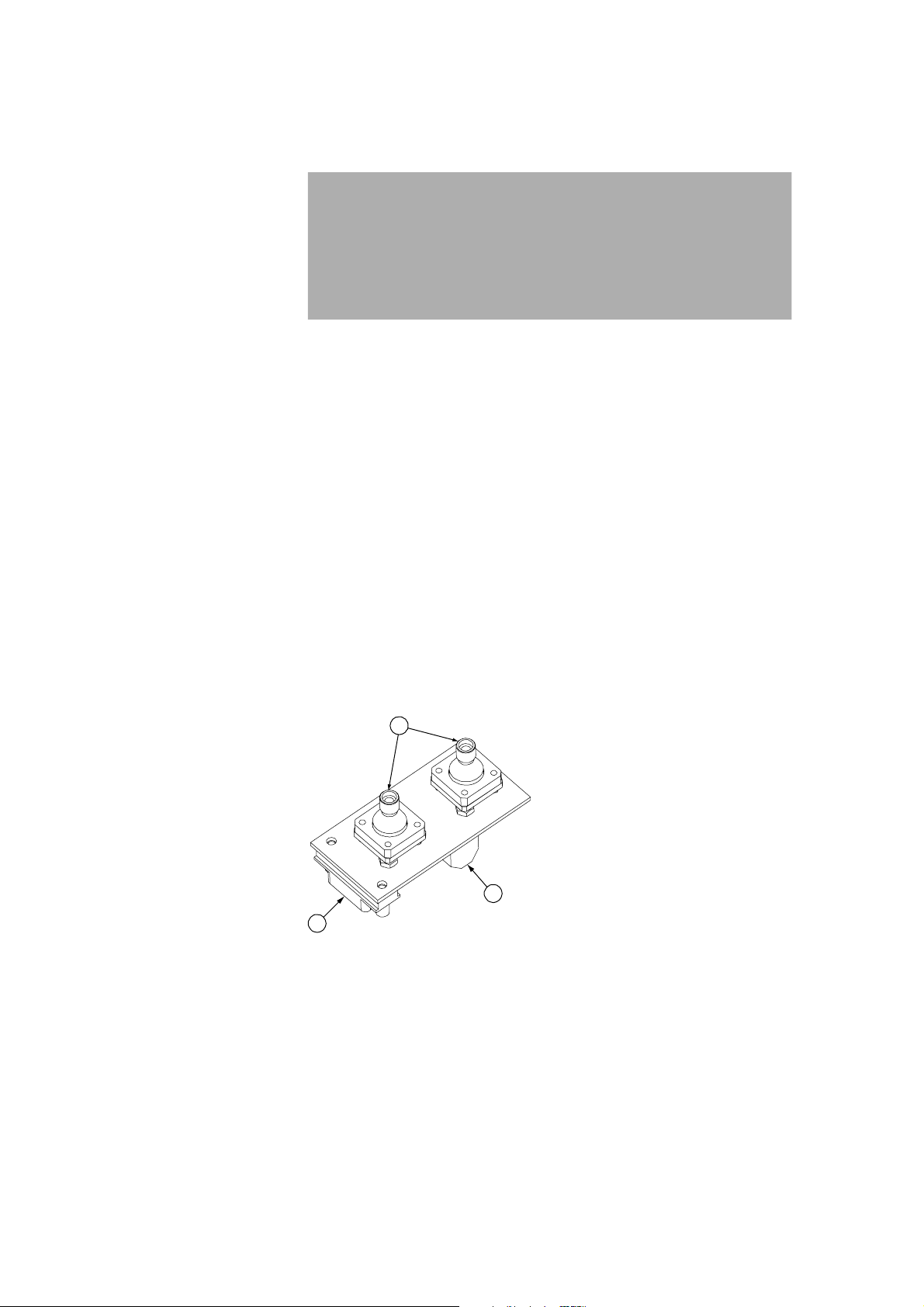
Figure 5 Power Supply and FOM Module Assembly
The following numbers refer to Figure 5 on page 20:
1 = Fiber optic connector TX
2 = Fiber optic connector RX
3 = 12-position terminal block (TB2, see also Figure 11 on page
30 and Table 2 on page 31)
20 ______________________________________________________________________________
Page 23
Chapter 2 __________________________________________________________ Product Overview
0506-014
Figure 6 Cable Assembly, Sensor
The sensor interface cable assembly is 11.2 m in length. The 12 ring
lugs (indicated by the arrow in Figure 6 on page 21) of the sensor
interface cable are each numbered 1-12. Connect them to the
correspondingly numbered terminal positions in the power supply
assembly terminal block 2; see Figure 5 on page 20, Figure 11 on page
30 and Table 2 on page 31.
Accessories
Ultrasonic Wind Sensor WS425 F/G also has the following optional
accessories:
- Fiber optic modem, FOM111
1
3
2
0506-055
Figure 7 Fiber Optic Modem FOM111
The following numbers refer to Figure 7 on page 21:
1 = Fiber optic connectors
2 = RS-232 connector for PC cable
3 = Screw wire terminals for operating voltage
VAISALA_______________________________________________________________________ 21
Page 24

User's Guide ______________________________________________________________________
When using the fiber optic connection between the Ultrasonic Wind
sensor and a personal computer, two fiber optic modems are needed.
One is supplied as standard with the Ultrasonic Wind sensor enclosed
in the power supply module housing. The other is available from
Vaisala as an optional accessory. Please note that FOM111 is supplied
without a housing. If needed, the customer must source a proper
housing locally.
The fiber optic cable is connected to the connectors of the fiber optic
modem located in the power supply module assembly and at the other
end to the connectors of the optional FOM111 fiber optic modem. The
FOM111 in turn is connected to the host system personal computer/data
logger via an RS-232 cable. Note that the RS-232 cable between the PC/
data logger and the fiber optic modem is different than the one used
between the PC and the TEST connector in the power supply module
(see Figure 5 on page 20).
A DC power supply for the fiber optic modem is also required. See
Connecting Fiber Optic Cable on page 28 and Connecting Fiber Optic
Modem FOM111 on page 28 for further instructions on how to make the
fiber optic connections.
22 ______________________________________________________________________________
Page 25
Chapter 3 _______________________________________________________________ Installation
CHAPTER 3
INSTALLATION
This chapter provides you with information on the installation and
alignment procedures, and connections of the power supply and fiber
optic modem.
Required Tools
- 3-millimeter Allen wrench
- 9/16-inch crescent wrench (2 each)
- Flat blade screwdriver for #6 screw
- Phillips screwdriver for ¼-inch x 20 flathead screw
- Electrical tape
- Verifier
- Laptop with a Diagnostics Program
- RS-232 cable
- Tape measure
NOTE
Packaging materials
The WS425 F/G sensors and power supplies are shipped in cardboard
containers with custom foam pieces to support these items during the
shipment. It is very important to keep all the original packing materials
in case the items need to be returned for repair service in the future.
VAISALA_______________________________________________________________________ 23
Page 26

User's Guide ______________________________________________________________________
0506-015
Figure 8 WS425 F/G Tower Assembly
The following numbers refer to Figure 8 on page 24:
1 = WS425 F/G
2 = Cable assembly
3 = Adapter for F/G models
4 = Mounting tube
5 = Lightning rod (not provided by Vaisala)
24 ______________________________________________________________________________
Page 27

Chapter 3 _______________________________________________________________ Installation
Installation of Mounting Arm and Sensor Cable
1. Tilt the tower to a horizontal position.
2. Remove the mounting tube from the shipping container.
3. Find the end of the mounting tube with the two cross holes.
4. Insert this end of the mounting tube on the pole.
5. Rotate the mounting arm in its hole until the two cross-holes in the
pole are aligned with the two cross-holes in the mounting tube.
6. Insert the bolts into the cross-holes and tighten them
7. Remove the adapter from the sensor shipping box and place it over
the mounting tube.
8. Tighten the three set screws of the clamp at the bottom of the
adapter only lightly (these will be tightened during the sensor
alignment procedure).
9. Remove the sensor cable from the shipping box.
10. At the end of the sensor cable with ring lugs, take about half of the
individual wire and fold it back. See Figure 9 on page 25.
11. Feed the cable through the adapter, mounting arm, tower, tower
pivot, and the conduit going to the power supply, starting with the
wrapped end of the cable into the open end of the adapter at the end
of the mounting arm.
0506-016
Figure 9 Sensor Cable Installation
Wrap electrical tape around the wires tightly so that later it can be easily
threaded through the ½" conduit.
VAISALA_______________________________________________________________________ 25
Page 28
User's Guide ______________________________________________________________________
Installation of Wind Sensor
1. Open the sensor shipping box and remove the sensor.
2. Take the wind sensor and connect the cable connector to it. Then
insert the sensor over the end of the adapter. The sensor needs to be
rotated until its alignment pin slides into the slot of the adapter.
Tighten the single set screw that secures the sensor to the adapter.
CAUTION
After removing the sensor from the box, do not impact the three
transducers against hard objects or damage to the sensor might result.
Installation of Power Supply
Installation of Power Supply on Pole
Mast
1. Take the mounting plate out of the mounting kit assembly
container.
2. Take the power supply out of its shipping container.
3. Attach the power supply to the mounting plate with four flathead
screws and four each flat washers, lock washers and ¼-20 nuts
found in the mounting kit assembly container.
4. After these four screws are tightened, mount the entire assembly on
the pole mast, using the four hex-head screws as shown in Figure
10 on page 27. The customer must provide the pole mast and the
pole mast installation plate.
26 ______________________________________________________________________________
Page 29

Chapter 3 _______________________________________________________________ Installation
0506-017
Figure 10 Power Supply and Mount
The following numbers refer to Figure 10 on page 27:
1 = WS425PowerUS or WS425PowerEU power supply
2 = Power supply mounting plate
3 = Pole mast installation plate (not provided by Vaisala)
4 = Pole mast (not provided by Vaisala)
Connecting Lightning Ground
Connect the existing ground wire to the threaded ground stud at the
bottom left of the power supply with the provided lock washer and nut
found in the mounting kit assembly.
VAISALA_______________________________________________________________________ 27
Page 30

User's Guide ______________________________________________________________________
Connecting Fiber Optic Cable
WARNING
The fiber optic cable and the power cable share the same conduit.
Before proceeding make absolutely sure that the AC power is turned
off at the host system power distribution system. Then take an AC
voltmeter and measure the AC voltage between the black wire and
each of the green white and yellow wires; and between the red wire and
each of the green white and yellow wires. All the readings must be zero
before proceeding.
1. Thread the two fiber optic cables and the five power wires through
the conduit hole at the bottom right of the power supply.
2. Use the conduit nut to secure the conduit at the bottom of the power
supply.
3. After removing the protective covers, connect the fiber cable
marked TX to the fiber optic connector on the left.
4. Connect the fiber optic cable marked RX to the fiber optic
connector on the right.
Connecting Fiber Optic Modem
FOM111
1. Remove the protective covers from the optic fiber cables.
2. Connect the fiber optic cable marked TX to the correspondingly
marked connector in the modem.
3. Connect the fiber optic cable marked RX to the correspondingly
marked connector in the modem.
4. Connect the DC power wires to the modem screw terminals.
5. Connect the modem to a PC using the RS-232 cable. The modem
is now ready for use.
28 ______________________________________________________________________________
Page 31

Chapter 3 _______________________________________________________________ Installation
Connecting AC Power
CAUTION
Make sure you have correct mains voltage power supply
(WS425PowerUS or WS425PowerEU).
1. Remove the protective cover plate over the AC power terminal
block.
2. Connect the AC power wires to the AC power terminal block as
shown in Figure 11 on page 30, starting with the green wire.
Double-check that each wire is connected as shown in Figure 11 on
page 30.
3. Restore the protective cover plate over the AC power terminal
block.
Connecting Sensor Interface Cable
1. Feed the sensor interface cable through the left hole at the bottom
of the power supply.
2. Use the conduit-nut to secure the conduit at the bottom wall of the
power supply box.
3. Connect the 12 ring lugs of the sensor interface cable to the 12position terminal block (see Figure 11 on page 30). Follow the
numbering scheme next to the terminal block and on the labels of
the individual wires.
VAISALA_______________________________________________________________________ 29
Page 32

User's Guide ______________________________________________________________________
0506-071
Figure 11 Power Supply Terminal Blocks
The following numbers refer to Figure 11 on page 30:
1 = AC power terminal block
2 = Terminal block 1 (TB1)
3 = Terminal block 2 (TB2)
30 ______________________________________________________________________________
Page 33
Chapter 3 _______________________________________________________________ Installation
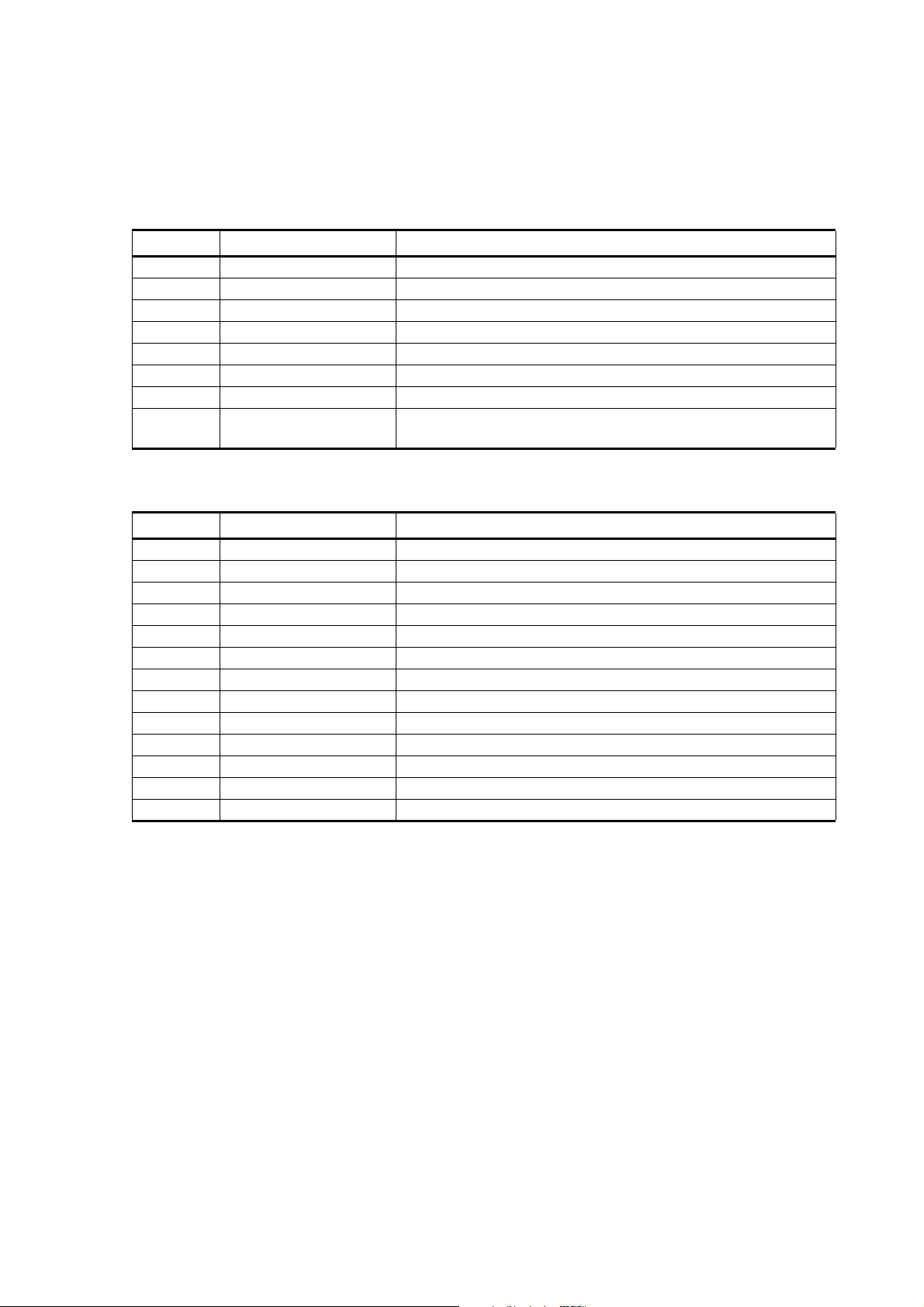
Power Supply Terminal Blocks
Table 1 Terminal Block 1
TB1
Terminal Name Description
1 12.6 V_H1 12.6 VAC transformer, line 1
2 12.6 V_CT 12.6 VAC transformer, center tap
3 12.6 V_H2 12.6 VAC transformer, line 2
4 36 V_H1A 24 VAC transformer, line A
5 36 V_H2A 24 VAC transformer, return A
6 36 V_H1B 24 VAC transformer, line B (internally connected to 36 V_H1A)
7 36 V_H2B 24 VAC t ansformer, return B (internally connected to 36
V_H2A)
Table 2 Terminal Block 2
TB2
Terminal Name Description
1 TOP_HEAT Top heater line, switched 24 VAC
2 ENCLOSUREHEATB Two of two enclosure heater lines, switched 24 VAC
3 ENCLOSUREHEATA One of two enclosure heater lines, switched 24 VAC
4 RETURN_36VAC_B Heater return, ground at sensor
5 RETURN_36VAC_A Heater return, ground at sensor
6 TOP_CTRL To heater control, >+3 V = ON
7 ENLOSURE_CTRL Enclosure heater control, >+3 V = ON
8 SENSOR+12V +12 VDC to sensor
9 SENSOR_TXD Connect to sensor TX data line
10 SENSOR_RXD Connect to sensor RX data line
11 GND (12V Common) Ground return from sensor
12 GND (RS232 Common) Connect to sensor cable shield
Conducting Off-Line Test
1. Turn on the AC power to the wind sensor in your system (system
power distribution).
2. Turn on the power switch in the power supply.
3. Connect a laptop to the TEST connector in the power supply with
an RS-232 cable. Run the Diagnostics Program on the laptop.
Choose the option that connects the sensor to the laptop with the
system disconnected.
4. Issue the WA command. The sensor must respond with a P status.
VAISALA_______________________________________________________________________ 31
Page 34

User's Guide ______________________________________________________________________
5. Place the verifier over the sensor and completely cover it with the
included bag. Pull the bag drawstrings to close it off at the sensor
alignment adapter.
6. Issue five WA commands spaced at least five seconds apart. All
five responses must have P status.
7. Turn off the power through the switch in the power supply before
performing the alignment procedure.
Aligning the Wind Sensor
Magnetic Declination Correction
One transducer arm is permanently marked with an N for north and
another with an S for south.
NOTE
Aligning might be easier if you mark the sensor body, for example,
with paint or colored tape, to indicate north and south so that it can be
seen from the ground.
Wind direction can be referenced to either the true north, which uses the
earth's geographic meridians, or to the magnetic north, which is read
with a magnetic compass. The magnetic declination is the difference in
degrees between the true north and magnetic north. See Figure 12 on
page 33.
32 ______________________________________________________________________________
Page 35

Chapter 3 _______________________________________________________________ Installation
NOTE
0003-011
Figure 12 Sketch of Magnetic Declination
The source for the magnetic declination must be current as the
declination changes over time.
Compass Alignment with Mast
Adapter
The following steps aim the wind sensor when using the 1-inch adapter
for mounting:
1. Use a compass to determine that the N-S transducer heads of the
ultrasonic wind sensor are exactly in line with the compass. Adjust
the heads by moving them to the left or right. For the correct
ground position of the installer, see Figure 14 on page 35.
2. If the alignment is not correct, lower the wind mast or tower.
3. Loosen the three set screws of the clamp at the bottom of the sensor
alignment adapter and rotate the sensor so that the heads marked
with the N and with the S are exactly aligned to north and south
when the tower is set up. Tighten the clamp screws.
VAISALA_______________________________________________________________________ 33
Page 36

User's Guide ______________________________________________________________________
4. Raise the tower to the vertical position. Figure 13 on page 34 shows
the correct alignment.
0506-072
Figure 13 Correctly AlignedWS425 F/G Sensor
34 ______________________________________________________________________________
Page 37

Chapter 3 _______________________________________________________________ Installation
0208-024
Figure 14 Adjusting the N-S Heads
The following letters refer to Figure 14 on page 35:
A = The installer is too far to the left.
B = The installer is in line with the sensor.
C = The appearance of the sensor is shown when the installer is in
the correct position. The sensor, however, is not correctly
aligned.
VAISALA_______________________________________________________________________ 35
Page 38

User's Guide ______________________________________________________________________
36 ______________________________________________________________________________
Page 39

Chapter 4 ________________________________________________________________ Operation
CHAPTER 4
OPERATION
This chapter contains information needed to operate Vaisala Ultrasonic
Wind Sensor WS425 F/G.
Power On/Off
The power switch is located in the power supply enclosure at the top
left. When turned on, the two LEDs labeled +5 V and +12 V will be
turned off if their respective supply is operational. If neither is turned
on, check the 0.25 A fuse and make sure that AC power is present.
System Operation
In normal system operation, the sensor communicates with the host
system system via two fiber optic cables. This normal state exists when
no cable is plugged into the RS-232 DB-9 connector labeled TEST in
the power supply.
VAISALA_______________________________________________________________________ 37
Page 40

User's Guide ______________________________________________________________________
Diagnostic Operation
When a laptop computer is plugged into the TEST connector via the
DB-9 connection in the power supply, the following states exist:
RTS DTR Description of States
LO LO Normal host system operation (TEST, connector
unplugged).
HI LO PC talks to the sensor, host system is disconnected
LO HI PC talks to the host system, Sensor is disconnected
HI HI Host system is connected to the Sensor with the PC
listening to both the transmit and receive lines
A special Diagnostics Program for the laptop PC is provided that allows
RS-232 communications and sets the RTS and DTR lines to the desired
states.
RS-232 Data Format
Ultrasonic Wind Sensor WS425 F/G communicates via an RS-232
serial interface. The host system sends American Standard Code for
Information Interchange (ASCII) characters to the Ultrasonic Wind
sensor and waits for the appropriate response. The sensor transmits an
ASCII response to various interrogation commands within 250
milliseconds at 2400 bits per second. The sensor is programmable to
operate at data rates 2400, 4800, or 9600 bits per second (bps). The
communication link is via an RS-232 serial port interfaced to a fiber
optic modem utilizing separate cables for transmitting and receiving
data. Control characters and control procedures are compatible with
ANSI x 3.28 and ANSI x 3.66 respectively. The data format consists of
the following:
- 1 start bit
- 8 data bits
- 1 stop bit
- No parity
- 2400 bits per second, programmable to 9600 bps
- Full duplex
- Serial asynchronous
- Configures as Data Terminal Equipment (DTE)
38 ______________________________________________________________________________
Page 41

Chapter 4 ________________________________________________________________ Operation
All user configuration parameters are stored in the non-volatile
memory.
Command Set
There are 18 interrogation requests that the host system and/or operator
can send to the Ultrasonic Wind sensor. They are listed below. The
sensor response to each command consists of a fixed-length message.
In each of the command descriptions below, CR is an ASCII carriage
return control character and LF is an ASCII line feed control character.
NOTE
The Ultrasonic Wind sensor only responds to upper case characters.
Table 3 Ultrasonic Wind Interrogation Requests
ASCII Request Description
WB Baud rate control
WFIRMWARE Downloading firmware
WA Average wind speed and direction message
WL Heater function automatically controlled by sensor
WM Heaters locked on
WN Heaters locked off
WS Verbose BIT results and status
WJ Set sp ee d an d dire ctio n av er ag in g tim e
WD Report BIT status
WF Send test data message
WR Execute system reset
WCAL Sensor self calibration
WH Display sensor command Help menu
WT Short response BIT results and status
WSST Return static speed of sound and sonic
temperature
WSTK Calibrate static speed of sound and sonic
temperature from ambient temperature
WCDV Return sensor self calibration data
WATE Return sensor measurement with reduced signal
amplitude
The WA command is executed by the ASOS at an interval of between
one and thirty seconds. For the WA command, the sensor responds to
the ASOS interrogation poll within 250 milliseconds of receiving the
VAISALA_______________________________________________________________________ 39
Page 42

User's Guide ______________________________________________________________________
request. The WD, WT, WF, and WR commands are executed by the
ASOS periodically to perform diagnostic checks.
The WH, WS, WSST, WSTK, WCDV, and WATE commands are
primarily initiated by an operator accessing the sensor via an external
laptop through the sensor's RS-232 port.
WB Command
This command is used to control the baud rate. The command format is:
WB9600 CR LF
where
9600 = In this case, represents 9600 bps, and would be replaced
with 2400 bps or 4800 bps as required to select those
values for a baud rate.
CR = Carriage return (ASCII control character)
LF = Line feed (ASCII control character)
When the command is received, the sensor will terminate
measurements and will respond with the following:
BAUD RATE 9600 after re-initialization CR LF
Please wait for the completion of configuration change save CR LF or
another value instead of 9600 as chosen.
The sensor will then resume normal operations after performing a
complete power up self-test. The next command character must be at the
new baud rate. The character framing will remain 8 data bits, no parity,
one start and stop bit. The new operating state will be maintained
through power cycles in the non-volatile memory.
VFIRMWARE Command
This command is used to invoke firmware downloads. The command
format is:
WFIRMWARE CR LF
40 ______________________________________________________________________________
Page 43

Chapter 4 ________________________________________________________________ Operation
The sensor will stop the current measurement activity when it receives
this command, and will respond with
PASSWORD? CR LF
At this time, the sensor will expect the password in capital letters and
CR LF in caps to be typed. If the password is not correct, the command
will be terminated unsuccessfully with the response string:
INVALID PASSWORD CR LF
and normal operation will resume.
If the password is entered correctly, the sensor will respond with:
READY FOR FIRMWARE CR LF
At this time, the host computer must send the firmware to the sensor in
a standard Intel hex format. Flow control must be accomplished by the
host holding off the next record until the echo of the current record is
completely and successfully received. The host may send complete
records without waiting character by character for the echo check. The
host will perform error recovery by checking each character in the
record echo against what was sent. The host must repeat records with
errors. The sensor will perform the power on a initialization sequence
once the firmware download completes.
For firmware v2.04 and above, downloading new firmware will not
modify any calibration information already saved in the sensor if this
calibration information is still meaningful to the new firmware. Observe
the power on initialization message following the firmware download.
If the new firmware requires the calibration operations to be repeated,
the following message will be displayed:
WARNING, SENSOR IS UNCALIBRATED. PERFORM CALIBRATION
BEFORE USE.
If this message does not appear prior to the ready indication, you may
assume the sensor calibration remains intact.
WA Command
This command requests the averaged wind speed and direction message
with peak winds. The command format is:
WA CR LF
VAISALA_______________________________________________________________________ 41
Page 44

User's Guide ______________________________________________________________________
The sensor response to the WA command consists of the averaged wind
speed and direction data, peak wind speed, and associated direction.
The average wind speed is a scalar running average of the fundamental
one second interval wind speed measurement made by the sensor. The
average direction is a unit vector running average over the same run
length set with the WJ command. The peak wind speed is the largest
scalar running average wind speed during the number of seconds before
the command set by the WJ command for average wind. The peak wind
run interval is also set in the WJ command. The peak wind direction is
the running unit vector average direction calculated at the same time the
peak speed was found.
The command also indicates the sensor status, the averaging time for
average and peak wind speed and wind direction and signal quality,
which shall be a numeric value from 0 to 99 representing the data
quality of processed data samples during the averaging interval. For
example, a value of 99 would signify that all data samples were
determined to be valid and were processed during the averaging
interval. If some samples were determined to be "missing", these
samples would not be processed and the reported signal quality would
be a proportional value less than 99.
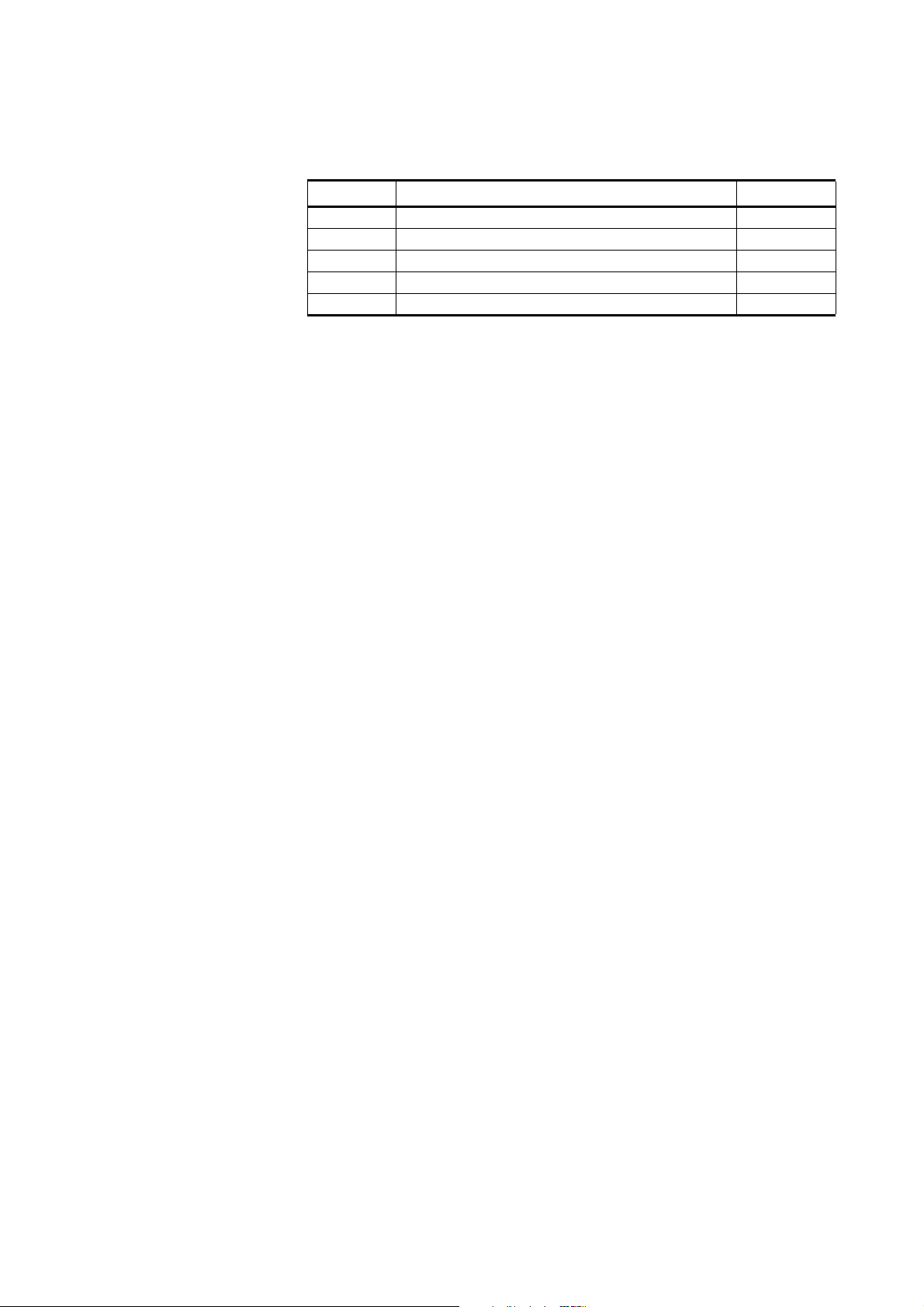
Example of the WA Command Message
The following is an example of the message from the wind sensor for
the WA command:
WAP2131870503012.6014.7K99xx
Table 4 Explanation of the WA Command Message
Byte Description Value
1 Start of text STX
2 Sensor ID W
3 Command identifier A
4 Sensor status (notes b, c) P/F/H
5-7 Averaged wind direction (degrees) 213
8-10 Wind direction (degrees) @ peak wind speed 187
11-12 Averaging time for wind speed an d direction
(seconds)
13-14 Averaging time for peak wind speed and
direction (seconds)
15-19 Averaged wind speed 012.6
20-24 Peak wind speed since last WA command 014.7
25 Wind speed units (knots) K
05
03
42 ______________________________________________________________________________
Page 45
Chapter 4 ________________________________________________________________ Operation
Table 4 Explanation of the WA Command Message
Byte Description Value
26-27 Signal quality 99
28-29 Hex checksum (note a) xx
30 End of text ETX
31 Carriage return CR
32 Line feed LF
Notes:
1. Bytes 28-29 are the modulo 256 hexadecimal checksum of the
ASCII values calculated for bytes 2 through 27.
2. Sensor response message status byte in all applicable messages
reporting a sensor status, the status byte (byte 4) indicates the
following: P (Pass) indicates that all diagnostic tests have passed
and the sensor is functioning normally. F (Fail) indicates that one
or more of the diagnostic tests have failed. The user can then
request diagnostics and extended tests (WD) to further isolate the
problem. H (Heater failure) indicates that the wind reading is valid
but one or more built-in heater diagnostic tests have failed.
3. When the status byte is F, the wind direction fields are set to 999
and the wind speed fields are set to 999.9 in the applicable sensor
response messages. This does not apply to the WF command
response.
WL Command
This command sets the heater function to be automatically controlled by
the sensor. The command format is:
WL CR LF
The sensor response to the WL command indicates the status of heater
control after execution. In this mode the sensor automatically controls
the operation of the transducer heaters, based on an internal sensor
algorithm.
The response to this command is the following:
Heaters on automatic control CR LF
VAISALA_______________________________________________________________________ 43
Page 46

User's Guide ______________________________________________________________________
WM Command
This command locks the heater function ON. The command format is:
WM CR LF
The sensor response to the WM command indicates the state of the
transducer heaters after execution. In this mode the heater has been
energized by the external command.
The response to this command is the following:
Heater control locked ON CR LF
The command will energize the array heater circuit. The heaters will
remain on until the power supply watch dog circuit disables them (three
seconds later) to prevent damage to the sensor from overheating. The
normal operation is reset by either the WM or WL command, or cycling
sensor power. Note that the watch dog circuit will lock the heaters off if
the command is not undone.
WN Command
This command locks the heater function OFF. The command format is:
WN CR LF
The sensor response to the WN command indicates the state of the
transducer heaters after execution. In this mode the heater has been deenergized by the external command.
Notes:
1. The WL, WM, or WN commands override the previously
executed heater control command.
2. On sensor power-up and after the WR command, the heater control
function is initialized in the automatic mode (WL).
The response to this command is the following:
Heater control locked off CR LF
The command will cause the sensor to turn all heating control circuits
off, disabling heating. This state will remain until either the WR or WM
command is issued, or the sensor power is cycled.
44 ______________________________________________________________________________
Page 47

Chapter 4 ________________________________________________________________ Operation
WS Command
This command requests the verbose Built-In Test (BIT) results. The
command format is:
WS CR LF
The command gives a textual run down of the results of all Built-In
Tests (BITs). In every line except the bad reading counter, the pass/fail
indication is given with the single character P or F. This is followed by
the description of the parameter measured, which is followed by the
actual measured value. The Bad 1 second readings counter is a running
total of the number of fundamental 1 second readings that were flagged
as bad by the sensor. This number rolls over to zero after reaching a
count value of 65535. It is initialized to zero on each power-up or any
other activity that performs a re-initialization of the sensor.
The time measurement quality indices are given for path numbers
defined as follows:
- Path 0 is from south transducer to north transducer
- Path 1 is from north transducer to south transducer
- Path 2 is from north transducer to east transducer
- Path 3 is from east transducer to north transducer
- Path 4 is from east transducer to south transducer
- Path 5 is from south transducer to east transducer
A listing for the command response is given below with representative
values.
CR LF
P Heater voltage 22.3 Volts CR LF
P Array heater resistance 4.9 Ohms CR LF
P Heaters off voltage 0.1 Volts CR LF
P Incoming supply voltage 12.2 Volts CR LF
P 5.0 volt supply 5.05 Volts CR LF
P 10 volt supply 10.2 Volts CR LF
- Bad 1 second reading counter 0 CR LF
P Path 0 signal quality index 99 CR LF
P Path 1 signal quality index 99 CR LF
P Path 2 signal quality index 99 CR LF
P Path 3 signal quality index 99 CR LF
P Path 4 signal quality index 99 CR LF
P Path 5 signal quality index 99 CR LF
VAISALA_______________________________________________________________________ 45
Page 48

User's Guide ______________________________________________________________________
The test limits for the various tests are as listed below:
- Heater voltage good in range 18.0 to 26.0 V
- Array heater resistance good in range 4.0 to 6.0 Ω
- Heaters off voltage good if below 0.5 V
- Incoming supply voltage good in range 10.5 to 13.5 V
- 5.0 V supply good in range 4.5 to 5.5 V
- 10 V supply good in range 9.0 to 11.0 V
- Signal Quality Index good above 50
WJ Command
This command sets the averaging time for wind speed and direction,
and peak wind speed and direction. The command format is:
WJ CR LF
The sensor prompts for averaging time of one to thirty seconds for wind
speed and direction and then for peak wind speed and direction.
Example:
Wind speed/direction averaging time = ?
At which time user enters selection in seconds followed by CR LF
Peak wind speed/direction averaging time = ?
At which time user enters selection in seconds followed by CR LF
The sensor will then respond with
Changes will start after re-initialization CR LF
Please wait for completion of configuration change save CR
LF
The sensor will perform an automatic re-initialization after saving
changes in non-volatile memory.
Any invalid parameter entry will result in a termination of the command
and resumption of normal operations after the response below is issued.
CR LF Command response error, operation terminated CR LF
46 ______________________________________________________________________________
Page 49

Chapter 4 ________________________________________________________________ Operation
WD Command
This command reports the status of the BITs. The command format is:
WD CR LF
The command is intended to be sent by the host system to get a concise
report on the pass/fail status of all Built-In Tests. The response is the
following:
STX WD PPPPPPPPPPPP CS ETX CR LF
where
STX = ASCII start of test control character (position 1)
WD = command identifier (positions 2,3)
P or F = Pass/Fail for 12 built in tests specified in WS command
above in the order shown in the WS command text
(positions 4-15).
CS modulo 256 hexadecimal checksum of all characters from
position 2 through the last P or F (positions 16,17)
ETX ASCII end of text control character (position 18)
CR ASCII carriage return control character (position 19)
LF ASCII line feed control character (position 20)
For a complete order, description and test limits for each pass/fail status
reported, see section WS Command on page 45.
WF Command
The command format is:
WF CR LF
The WF command returns a fixed pattern of data. This command is
typically used to verify the communications link. The data fields are
fixed at the following values:
Status = F
Wind direction = 678
VAISALA_______________________________________________________________________ 47
Page 50

User's Guide ______________________________________________________________________
Peak wind direction = 567
Wind averaging time = 21
Peak wind averaging time = 09
Wind speed = 876.5
Peak wind speed = 432.1
Example of the WF Command Message
The following is an example of the output from the sensor for the WF
command:
WFF6785672109876.5432.1K99xx
Table 5 Explanation of the WF Command Message
Byte Description Value
1 Start to text STX
2 Sensor ID W
3 Command identifier F
4 Sensor status F
5-7 Fixed wind direction 678
8-10 Fixed peak wind direction 567
1 1-12 Averaging time for wind speed and direction 21
13-14 Averaging time for peak wind speed and
direction
15-19 Fixed wind speed 876.5
20-24 Fixed peak wind speed 432.1
25 Wind speed units K
26-27 Signal quality 99
28-29 Hex checksum xx
30 End of text ETX
31 Carriage return CR
32 Line feed LF
09
WR Command
This is the system reset command. The command format is:
WR CR LF
48 ______________________________________________________________________________
Page 51

Chapter 4 ________________________________________________________________ Operation
The WR command initiates a system reinitialization. The processor
executes the initialization routine and returns the initialization message
(firmware revision, sensor status).
The response to the WR command contains the following:
ASOS Ice-Free Wind Sensor CR LF
Manufactured by Vaisala USA Inc. CR LF
Model number WAS 425NWS
Firmware version 2.01 CR LF
Initializing ….CR LF
Ready CR LF
Status = P/F/H CR LF (only the correct status will be
presented)
The sensor performs a system reset and issues the system reset
command message upon sensor power-up.
The user should hold off sending commands until the full response is
received. This may take up to 30 seconds.
WATE Command
This command invokes the sensor test with reduced excitation
amplitude. The command format is:
WATE CR LF
The purpose of the WATE command is to determine the sensor zero
offset and verify that a sufficient signal-to-noise margin exists during
high wind speeds.
The WATE command returns the sensor Signal Quality Index (SQI)
measurement with a reduced signal amplitude. This command exists in
sensor firmware versions v4.00 and above. The command is enhanced
in sensor firmware versions v4.50 and above.
This command is typically used to verify the sensor performance during
the preventive maintenance procedures. The sensor will stop the current
measuring when it receives this command. After this, the transducer
excitation amplitude is reduced followed by a time delay in order to
clear the measurement buffers. The sensor will perform 30 test
measurements in a loop with a reduced amplitude signal. To run
command takes about 5 minutes. At the end of the WATE test, the
sensor will perform a full reset when returning to normal operation.
VAISALA_______________________________________________________________________ 49
Page 52

User's Guide ______________________________________________________________________
The WATE command is used in conjunction with the zero wind speed
verifier. If the test is performed outdoors, the supplied cloth bag must
be placed over the verifier to eliminate the effect of any ambient wind.
See Figure 18 on page 68. It is extremely important that the WATE
command is performed only when the verifier is installed on the sensor.
Performing the test without the verifier (and bag if required) will
produce anomalous test results and it is not a valid test. After the verifier
is installed on the sensor, it is necessary to wait five minutes before
performing the test. The five-minute waiting period is needed for the
temperature of the verifier interior to equalize without thermal
gradients.
The response to the WATE command is the following:
Performing amplitude test...
Measuring at level 48% (1)
.
.
.
Measuring at level 48% (30)
WAXXXXXX0503XXX.XXXX.XXKXXXX
P Heater voltage XX.X Volts
P Array heater resistance X.X Ohms
P Heaters off voltage X.X Volts
P Incoming supply voltage XX.X Volts
P 5 volt supply X.XX Volts
P +10 volt supply XX.X Volts
- Bad 1 second reading counter = X
P Path 0 signal quality index XX
P Path 1 signal quality index XX
P Path 2 signal quality index XX
P Path 3 signal quality index XX
P Path 4 signal quality index XX
P Path 5 signal quality index XX
Wait for reset...
ASOS Ice-Free Wind Sensor
Manufactured by VAISALA USA INC.
Model number 425 NWS
Firmware version v4.50
Internal version v4.00
Initializing...
Ready
Status=P
To pass the WATE command, the sensor response must meet two
conditions:
50 ______________________________________________________________________________
Page 53

Chapter 4 ________________________________________________________________ Operation
1. The wind speed in this WA message must be equal or smaller than
1.0 knots.
2. The SQI value for each measurement path must be equal or higher
than 90. The average from the individual SQI values must be equal
or higher than 95.
Other parameter test limits are the same as with the WS command.
In typical operation, the WATE command is executed incorporation
with WA command via the WATE test of the Diagnostics Program as
explained in section Preventive Maintenance on page 67.
WCAL Command
This is the sensor self calibration command. The command format is:
WCAL CR LF
This command is to be used in conjunction with the zero wind speed
verifier and in addition, the provided bag if the operation is done
outdoors. It is extremely important that it will only be performed while
the verifier is installed on the sensor. Should it ever be performed
accidentally without the verifier, be sure to redo this command with the
verifier installed prior to the deployment. One of the command
functions is to determine the sensor zero offset and save parameters to
remove it. If the sensor is calibrated in the presence of ambient wind or
even air conditioning flow in the office environment, an invalid zero
offset compensation will result. The verifier by itself is able to keep
indoor air conditioning from affecting the calibration, but not outdoor
airflow. If the sensor is to be calibrated outdoors, you must cover the
verifier completely with the provided bag with drawstrings snug after
placing the verifier over the sensor. This command also performs
measurements that will improve sensor accuracy.
The sensor will stop the current measurement activity when it receives
this command, and will prompt for password. If the password is entered
correctly, the sensor will respond with the following:
CAUTION – Anemometer calibration MUST ONLY be performed
with Vaisala Verifier and bag in place on the anemometer.
Do you wish to proceed? (Y/N)
At this time, the operation may be aborted by responding with N. Do not
respond with Y unless the verifier and bag are already in place. If the
response is Y, the sensor will respond with the following:
VAISALA_______________________________________________________________________ 51
Page 54

User's Guide ______________________________________________________________________
Calibration in progress CR LF
When the calibrate function completes successfully, the sensor response
will be the following:
Calibration successful, saving parameters CR LF
The sensor will save the parameters calculated in the non-volatile
memory. After the save completion, the sensor will perform a complete
power on the initialization sequence.
If the sensor returns the following response
Calibration failed CR LF
either the sensor or the zero wind speed verifier is broken. Issue the WS
command to determine if any self tests have detected a sensor failure
after removing the verifier and then waiting for 30 seconds. If the tests
fail, the sensor must be repaired.
WH Command
This command displays the sensor command Help menu. The command
format is:
WH CR LF
The WH command provides a list of all commands available for the
sensor, with a brief description of syntax, arguments (if any), and
description. This message is intended for display to a terminal
connected to the RS-232 sensor port.
Command/Response Summary CR LF
CR LF
WA Return average wind speed and direction CR LF
Response format:
CR LF
Byte 1: STX CR LF
Byte: 2 Sensor ID = W CR LF
Byte: 3 Command identifier CR LF
Byte: 4 Sensor Status: P = PASS, F = Failed,
H = Bad heater CR LF
52 ______________________________________________________________________________
Page 55

Chapter 4 ________________________________________________________________ Operation
Byte 5-7: Average wind direction (degrees) CR
LF
Bytes 8-10: Wind direction at peak wind speed
(degrees) CR LF
Bytes 11-12: Averaging time for wind speed and
direction CR LF
Bytes 13-14: Averaging time for peak wind speed
and direction CR LF
Bytes 15-19: Average wind speed CR LF
Bytes 20-24: Peak wind speed CR LF
Byte 25: Wind speed units (K = knots) CR LF
Byte 26-27: Signal quality CR LF
Bytes 28-29: Hex checksum CR LF
Byte 30: ETX CR LF
Byte 31: Carriage return CR LF
Byte 32 Line feed CR LF
WL Enable automatic heater control CR LF
WM Lock heaters on CR LF
WN Lock heaters off CR LF
WS Description of BIT status CR LF
WJ Set averaging times for wind speed/direction and peak
wind speed/direction CR LF
Enter password when prompted, then selections to the
following prompts CR LF
Wind speed/direction averaging time = ? CR LF
Peak wind speed and direction averaging time = ? CR LF
WD Perform and report extended diagnostic tests CR LF
WF Return fixed data in WA command format CR LF
WR Reset sensor CR LF
WCAL Perform Sensor Self Calibration CR LF
WH Display this help menu CR LF
VAISALA_______________________________________________________________________ 53
Page 56

User's Guide ______________________________________________________________________
WT Command
This command requests the short response BIT results and status. The
command format is:
WT CR LF
This command is an abbreviated version of the verbose BIT results and
status command. Field descriptors are omitted and only pass/fail status
and measured value are reported. The command response is packed in
the standard STX – body – CSUM – ETX format. The response is
shown below.
Byte 1: STX start of text ASCII control character
Byte 2: W sensor ID
Byte 3: T command identifier
Byte 4: P or F for heater voltage pass or fail
Byte 5-8: XX.X format heater voltage (volts RMS)
Byte 9: P or F for array heater resistance pass or fail
Byte 10-12: X.X or XX. (format as required) for array heater
resistance (ohms)
Byte 13: P or F for pass or fail on heater off voltage
Byte 14-16: X.X format heater off voltage (volts RMS)
Byte 17: P or F for pass or fail thermistor temperature
Bytes 18-20: Thermistor temperature (degrees Celsius)
Byte 21: P or F for incoming supply voltage pass or fail
Byte 22-25: XX.X format incoming supply voltage (volts DC)
Byte 26: P or F for 5 volt supply pass or fail
Bytes 26-29: X.XX format 5 volt supply voltage (volts DC)
Byte 30: P or F for 10 volt supply pass or fail
Bytes 31-34: XX.X format 10 volt supply voltage (volts DC)
Byte 35: ASCII hyphen character (-)
Bytes 36-40: XXXXX format bad 1 second reading counter
Byte 41: P or F for path 0 Signal Quality Index pass or fail
Bytes 42-43: XX format path 0 Signal Quality Index
Byte 44: P or F for path 1 Signal Quality Index pass or fail
54 ______________________________________________________________________________
Page 57

Chapter 4 ________________________________________________________________ Operation
Bytes 45-46: XX format path 1 Signal Quality Index
Byte 47: P or F for path 2 Signal Quality Index pass or fail
Bytes 48-49: XX format path 2 Signal Quality Index
Byte 50: P or F for path 3 Signal Quality Index pass or fail
Bytes 51-52: XX format path 3 Signal Quality Index
Byte 53: P or F for path 4 Signal Quality Index pass or fail
Bytes 54-55: XX format path 4 Signal Quality Index
Byte 56: P or F for path 5 Signal Quality Index pass or fail
Bytes 57-58: XX format path 5 Signal Quality Index
Bytes 59-60: XX hexadecimal ASCII for modulo 256 checksum
for
Character positions 2 through 58
Byte 61: ETX end of text ASCII control character
Byte 62: ASCII carriage return control character
Byte 63: ASCII line feed control character
The array heater resistance value will be missing (99.) if either the
heater on voltage is below 10 V RMS or the array heater on current is
below 1 A RMS.
WSST Command
This command returns the static speed of sound and sonic temperature.
The command format is:
WSST CR LF
The command responds with a return string containing the measured
static speed of sound in knots with a tenth of a knot resolution, followed
by an ASCII TAB control character, then the corresponding sonic
temperature in degrees Fahrenheit with a tenth of a degree resolution.
The return string is terminated with an ASCII carriage return and then
line feed character. No descriptive text is included. The sonic
temperature is not compensated for the effects of humidity on the static
speed of sound. The static speed of sound output is a ten second running
average of individual static speed of sound measurements calculated
each second. The sensor calculates a new sonic temperature from this
running average of static speed of sound each second. The sensor
VAISALA_______________________________________________________________________ 55
Page 58

User's Guide ______________________________________________________________________
response can be calibrated to a known ambient temperature with the
WSTK command below.
The output is of a fixed character length with 5 characters for the static
speed of sound and 6 characters for the sonic temperature. Positive
temperatures at or under 99.9° F will be padded with a leading zero.
This leading zero will be replaced by a minus sign for negative
temperatures.
An example of the response:
670.5 023.0
If the sensor is unable to compute the values due to a problem with the
sensor, the missing data response will be the following:
999.9 099.9
WSTK Command
This command is used to calibrate the static speed of sound and sonic
temperature. The command format is:
WSTK CR LF
The command allows the static speed of sound and sonic temperature
output products to be refined by calibration to the known ambient
temperature. This calibration command does not impact the measured
wind speed and direction accuracy in any way.
The calibration function should be done indoors in a controlled
environment. The ambient temperature input to the sensor during the
calibration operation must be an accurate measurement of the air
temperature at the sensor position at time of input. There should be little
if any ambient airflow. Typical airflow from building HVAC will not
unduly disturb the reading as long as the sensor is not directly next to or
under a register. The zero wind verifier and/or bag must not be placed
on the sensor during this calibration function. The resulting calibration
constant will be stored in the non-volatile memory and will survive
future firmware downloads as long as it is still relevant to the new
firmware.
NOTE
56 ______________________________________________________________________________
Do not place the zero wind verifier and/or bag on the sensor during
calibration.
Page 59

Chapter 4 ________________________________________________________________ Operation
After the command is issued to the sensor, it will respond with the
following prompt:
Enter actual temperature in xx.x C
It is most important to enter the temperature to the tenth of degree
Celsius with a decimal point. A leading minus sign is allowed but is not
likely needed since this should be an indoor operation. After entry of the
known ambient temperature, the sensor will respond with the following:
Wait for new constant to be saved.
After a short delay, the sensor will respond with the following:
Configuration change saved, re-initializing.
The sensor will then go through the standard power on initialization
routine and output.
WCDV Command
This command returns data that is calculated during the WCAL self
calibration command. The command format is:
WCDV CR LF
The sensor response to this command is two rows of data.The first row
of data are three ASCII TAB delimited numbers representing the zero
wind speed sonic transit time average for each of the three measurement
paths between transducer pairs. The values returned will change with
changes in ambient temperature at the time the WCAL command that
created them was issued. For N, S, and E representing north, south and
east transducers, the side order for the three data values is S-N, N-E,
then E-S.
The second row of data are six ASCII TAB delimited signed numbers
representing the zero offsets the sensor will apply to each of the six raw
sonic transit times measured between pairs of transducers. The data
order is S to N, N to S, N to E, E to N, E to S, then S to E.
This command may be used to determine if the sensor has been self
calibrated already. If the command returns three 20000 values in the
first row and six 0 values in the second row, these are the default values
and the sensor is uncalibrated. Be sure to run the WCAL command
before deploying if this is the case.
VAISALA_______________________________________________________________________ 57
Page 60

User's Guide ______________________________________________________________________
58 ______________________________________________________________________________
Page 61

Chapter 5 _________________________________________________________ Operating Principle
CHAPTER 5
OPERATING PRINCIPLE
This chapter provides you with a brief explanation of the operating
principles of Vaisala Ultrasonic Wind Sensor WS425 F/G and its power
supply.
Wind Measurement Principle
The Ultrasonic Wind sensor uses ultrasonic technology. It has an onboard micro controller that captures and processes data and performs
serial communications.
The wind sensor has an array of three equally spaced ultrasonic
transducers in a horizontal plane. The sensor measures transit time, the
time that it takes the ultrasound to travel from one transducer to another.
The transit time is measured in both directions.
Transit time depends on the wind velocity along the ultrasonic path. For
zero wind velocity, both the forward and reverse transit times are the
same. With wind along the sound path, the up-wind transit time
increases and the down-wind transit time decreases.
The microprocessor of the micro controller computes the wind velocity
in a direction parallel to each possible transducer pair from the transit
times using the formula:
VAISALA_______________________________________________________________________ 59
Page 62

User's Guide ______________________________________________________________________
V
0505-216
0.5 L 1 tf1 tre–euu=
w
where
Vw = Wind velocity
L = Distance between two transducers
tf = Transit time in the positive direction
tr = Transit time in the negative direction
Measuring the six transmit times allows Vw to be computed for each of
the three ultrasonic paths, which are offset to each other by 120°. The
computed wind speeds are independent of altitude, temperature, and
humidity even though the velocity of sound affects individual transit
times because the algebra that produces the formula above cancels the
effect of the static speed of sound.
Bad readings, which can happen when a large raindrop or ice pellet hits
a transducer, are eliminated by a proprietary signal processing
technique. The one Vw that is most affected by turbulence error is
eliminated so wind speed and wind direction are calculated from the
best two vectors.
0506-018
Figure 15 Ultrasonic Wind Sensor Block Diagram
60 ______________________________________________________________________________
Page 63

Chapter 5 _________________________________________________________ Operating Principle
Power Supply Operating Principle
The 12 V linear regulator provides power to the sensor and some
internal circuits. The 5 V linear regulator powers the fiber optic modem
and the internal logic. The 24 VAC heater power is switched on or off
to the sensor enclosure heater and to the transducer and tube heater. The
switches are solid state relays that are controlled by two heater control
lines originating in the sensor.
The state of diagnostic logic is determined by the DTR and RTS lines
of the maintenance ports marked TEST. With the maintenance port
disconnected, the fiber optic modem is switched to the sensor (normal
system operating mode). When a personal computer is connected to the
maintenance port, the following states exist:
RTS DTR Description of States
LO LO Normal host system operation (TEST, connector
unplugged).
HI LO PC talks to the sensor, host syste m is disconnected
LO HI PC talks to the host system, sensor is disconnected
HI HI Host system is connected to the sensor with the PC
listening to both the transmit and receive lines
VAISALA_______________________________________________________________________ 61
Page 64

User's Guide ______________________________________________________________________
0506-019
Figure 16 Power Supply Block Diagram
CAUTION
US & European power supplies (WS425PowerUS and
WS425PowerEU) have different primary wiring. Do not attempt to
connect WS425PowerUS to 240VAC voltage or WS425PowerEU to
115 VAC voltage!
NOTE
The enclosure heat LED is always off for the model Ultrasonic Wind
Sensor WS425 F/G.
62 ______________________________________________________________________________
Page 65

Chapter 5 _________________________________________________________ Operating Principle
Verifier Associated Operations
The sensor measures elapsed time for sound to travel from one
transducer to the other. The only two parameters that affect the accuracy
of the sensor are time and distance. The distance that affects the
accuracy of the sensor is the distance between transducers. This
distance is mechanically validated by the verifier. The verifier has to
slide over the sensor without force. The zero-point calibration is
ensured if the wind speed is 0.4 knot or less with the WA command.
Together with the verifier the reduced acoustic signal can be applied to
emulate severe conditions. The reduced signal level is generated with
the combination of the sensor firmware and hardware. This tests any
deterioration in the following areas:
- Transmitter output power
- Transducers (transmitting and receiving)
- Receiver sensitivity
- Acoustic crosstalk
- Electrical crosstalk
- Automatic gain threshold detector
The timing reference for the time of flight measurement is controlled by
a quartz crystal. The same crystal controls the baud rate for serial
communications. If the crystal drifts more than a few percent, the sensor
will not communicate any more.
This test gives a very high confidence that the sensor will work over its
measurement range.
VAISALA_______________________________________________________________________ 63
Page 66

User's Guide ______________________________________________________________________
64 ______________________________________________________________________________
Page 67

Chapter 6 ______________________________________________________________ Maintenance
CHAPTER 6
MAINTENANCE
This chapter contains instructions for the basic maintenance, fault
isolation and installation and removal of the field replaceable units of
the Vaisala Ultrasonic Wind Sensor WS425 F/G.
Visual Inspection of Ultrasonic Wind Sensor
WS425 F/G
WS425 F/G anemometer is a very reliable and rugged sensor. It has
been wind tunnel tested to over 175 knots for mechanical integrity.
However, the transducers are constructed of ceramic material and can
be damaged by dropping or hitting the transducers. Likewise, applying
enough force to bend the transducer arms will render the anemometer
inoperative.
The anemometer should be kept in its protective foam shipping
container until the time for the installation on the wind mast or tower.
The verifier should be placed over the sensor when the sensor is
installed on the tower. This provides protection to the transducers,
validates that the mechanical spacing of the transducers is within
specifications, and is the first step for the WATE field validation test
which must be performed next before raising the wind mast or tower.
Some cautions and inspection criteria for the field personnel are listed
below:
1. Do not rotate the transducers. Rotating the transducers will destroy
the array of the ultrasonic anemometer. A soldering spot can be
VAISALA_______________________________________________________________________ 65
Page 68

User's Guide ______________________________________________________________________
seen on each ceramic transducer. The soldering spots on the
ceramic transducer must be oriented outside the array. For the
correct alignment, see Figure 17 on page 67. Do not rotate the
transducer if the soldering spot is not in the correct location.
Replace the anemometer.
2. Do not pull the transducers. Pulling the transducers will destroy the
array of the ultrasonic anemometer. The black RTV sealant can be
seen between the bottom of each transducer and the transducer
mounting arm. The RTV sealant must be free of damage and it
must provide a good seal between the transducer and the transducer
mounting arm. If this seal is damaged, water may enter the
anemometer.
3. Do not strike or bend the transducers. Striking or bending the
transducers will destroy the array of the ultrasonic anemometer.
All the transducers should be parallel to each other. For the correct
alignment, see Figure 17 on page 67.
4. The verifier should slide over the transducers without excessive
force. This validates that the mechanical spacing of the transducers
is within specifications.
5. Do not scrape or touch the transducers with sharp objects. Cutting
the silicon rubber sleeve on the transducer affects the acoustical
matching layer of the transducer and destroys the array of the
ultrasonic anemometer. The silicon rubber transducer sleeve must
not be damaged.
6. Do not attempt to remove the center bird spike. Attempting to
remove it will destroy the array heating circuit of the ultrasonic
anemometer.
66 ______________________________________________________________________________
Page 69

Chapter 6 ______________________________________________________________ Maintenance
0506-020
Figure 17 Solder Spot and Sensor Handling
NOTE
Orientation of the solder spot is indicated by the thick black arrow in
Figure 17 on page 67. Do not rotate, pull, strike, bend, scrape, or touch
the transducers with sharp objects.
Preventive Maintenance
It is recommended that preventive maintenance be performed every 12
months.
- Laptop computer
- RS-232 cable with DB9 connector
- Diagnostic Program (to run on laptop computer)
- Verifier and Cloth Bag
Equipment needed:
VAISALA_______________________________________________________________________ 67
Page 70

User's Guide ______________________________________________________________________
0506-021
Figure 18 Field Verifier
0506-021
Figure 19 Field Verifier with Cloth Bag
68 ______________________________________________________________________________
Page 71

Chapter 6 ______________________________________________________________ Maintenance
CAUTION
CAUTION
This procedure must be performed on a relatively calm day when it is
safe to lower the wind mast or tower.
It is very important that the wind sensor be taken off line during this
entire procedure or else erroneous wind speeds will be reported into
the your system.
1. Open the cover of the power supply.
2. Connect the laptop computer via the RS-232 cable to the TEST
port.
3. Run the Diagnostics Program after your system is disconnected.
Issue the WA command and verify that the sensor responds with a
data string starting with WA. If it does not respond at all, check all
the connections.
4. Lower the wind mast or tower and put the verifier over the sensor.
The verifier must be completely covered by the cloth bag, since
ambient airflow may effect the sensor readings.
5. Issue the WATE test in the Diagnostics Program. The sensor must
respond with:
WATE Test Passed.
6. Replace the sensor if it has failed this test.
7. Remove the verifier from the sensor and raise the wind mast or
tower.
8. Issue two more WA commands and make sure they have P status
and the reported wind speed and direction values are reasonable
when compared to the estimated actual condition.
9. Disconnect the laptop. This automatically returns the sensor into
the normal operating mode. Close the power supply door.
Corrective Maintenance
The following flow charts may be used to diagnose problems with the
wind system.
If the sensor is not responding to the system polls, start with the flow
chart in Figure 20 on page 70.
VAISALA_______________________________________________________________________ 69
Page 72

User's Guide ______________________________________________________________________
If the sensor is responding to the WA command but the status is F, start
with the flow chart in Figure 22 on page 72.
If the sensor is responding to the WA command but the status is H, start
with the flow chart in Figure 23 on page 73.
0506-022
Figure 20 Fault Isolation Flow Chart: Sensor Not Responding
Part 1
70 ______________________________________________________________________________
Page 73

Chapter 6 ______________________________________________________________ Maintenance
0506-023
Figure 21 Fault Isolation Flow Chart: Sensor Not Responding
Part 2
VAISALA_______________________________________________________________________ 71
Page 74

User's Guide ______________________________________________________________________
0506-024
Figure 22 Fault Isolation Flow Chart: Sensor Responds with F
Status
72 ______________________________________________________________________________
Page 75

Chapter 6 ______________________________________________________________ Maintenance
0506-025
Figure 23 Fault Isolation Flow Chart: Sensor Responds with H
Status
VAISALA_______________________________________________________________________ 73
Page 76

User's Guide ______________________________________________________________________
Wind Sensor Removal and
Installation
Removal Procedure
1. Open the power supply cover and turn off the power.
2. Tilt over the wind mast or tower to access the sensor.
3. On the adapter, loosen the single screw close to the sensor. Do not
loosen any of the three screws that are used to fasten the adapter to
the mounting tube (see Figure 3 on page 18). Loosening these
screws will make sensor alignment necessary.
4. Pull the sensor out of the adapter.
5. Disconnect the cable from the sensor.
Installation Procedure
1. Connect the cable to the sensor.
2. Slide the sensor into the adapter making sure pin on the sensor
slides into the slot on the alignment adapter.
3. Tighten the single screw close to the sensor.
4. Turn on the power switch in the power supply.
5. Connect a laptop to the TEST connector in the power supply via an
RS-232 cable.
6. Run the Diagnostics Program on the laptop. Choose the option that
connects the sensor to the laptop with the system disconnected.
7. Issue the WA command. The sensor must respond with a P status.
8. Place the verifier over the sensor. The verifier must be completely
covered by the included sack, since ambient airflow may effect the
sensor readings.
9. Issue five WA commands spaced at least 5 seconds apart. All five
responses must have a P status.
10. Remove the verifier.
11. Raise the wind mast or tower.
12. Unplug the laptop.
13. Close the power supply enclosure door.
74 ______________________________________________________________________________
Page 77

Chapter 6 ______________________________________________________________ Maintenance
Power Supply Removal and
Installation
CAUTION
WARNING
CAUTION
WARNING
Installation requires power supply with correct primary wiring
depending on mains voltage used (WS425PowerUS for 115VAC/
60Hz and WS425PowerEU for 240VAC/50Hz)
To make absolutely sure that the power is turned off, open the power
supply door and measure the AC voltage between the black wire and
each of the green white and yellow wires; and between the red wire and
each of the green, white and yellow wires. All readings must be zero.
Observe the 3 inch minimum bending radius limitation on the fibers.
Do not bend them more sharply than at a 3-inch radius.
The fiber optic cable and the power cable share the same conduit.
Before proceeding make absolutely sure that the AC power is turned
off at the your system power distribution. Then take an AC voltmeter
and measure the AC voltage between the black wire and each of the
green white and yellow wires; and between the red wire and each of
the green, white and yellow wires. All readings must be zero before
proceeding.
1. At your system power distribution, turn off the power to the wind
sensor.
2. Remove the protective cover over the AC input terminal block.
3. Disconnect the five power wires from the terminal block. Then
disconnect the two fiber optic cables.
4. Disconnect the 12 wires of the sensor interface cable from the
terminal block.
5. Loosen the two conduit nuts and pull the two conduits out of the
power supply bottom. Also remove the grounding wire from the
ground stud. Make sure not to pull the fiber optic cables.
6. Remove the power supply with its mounting plate from the tower
by removing the top screws and loosening the two bottom screws.
See Figure 4 on page 19.
VAISALA_______________________________________________________________________ 75
Page 78

User's Guide ______________________________________________________________________
7. Remove the power supply from the mounting plate by loosening
the four flat head screws.
8. Use the same four screws and mount the new power supply to the
mounting plate.
9. Tighten the four screws down.
10. Lift this assembly and slide the two slots at the bottom of the
mounting plate over the two mounting screws that were left on the
tower.
11. Re-install the two screws near the top of the mounting plate.
Tighten all four screws that secure the mounting plate to the wind
mast or tower.
12. Connecting ground wire
Using the existing ground wire, connect it to the threaded ground
stud at the bottom left of the power supply.
13. Connecting fiber optic cable
Feed the two fiber optic cables and the five power wires through
the conduit hole at the bottom right of the power supply. Then use
the conduit nut to secure the conduit at the bottom of the power
supply. After removing the protective covers, connect the fiber
cable marked TX to the fiber optic connector on the left. Then
connect the fiber optic cable marked RX to the fiber optic
connector on the right.
14. Connecting AC power
Connect the five power wires to the terminal block as shown in
Figure 11 on page 30 starting with the green wire. Double-check
that each wire is connected as shown in Figure 11 on page 30. Place
the protective cover plate back over the terminal block.
15. Connecting the sensor interface cable
First thread the sensor interface cable through the left hole at the
bottom of the power supply. Then use the conduit-nut to secure the
conduit at the bottom wall of the power supply box.
Connect the 12 ring lugs of the sensor interface cable to the 12position terminal block as shown in Figure 11 on page 30.
16. Conducting off-line test
Turn on the AC power to the wind sensor.
Turn on the power switch in the power supply. Connect a laptop to
the TEST connector in the power supply with an RS-232 cable.
76 ______________________________________________________________________________
Page 79

Chapter 6 ______________________________________________________________ Maintenance
Run the Diagnostics Program on the laptop. Choose the option that
connects the sensor to the laptop with the system disconnected.
Issue the WA command. The sensor must respond with a P status.
Now place the verifier over the sensor. Issue five WA commands
spaced at least five seconds a part. All five responses must have P
status.
Power Supply Module Removal and
Installation
WARNING
The fiber optic cable and the power cable share the same conduit.
Before proceeding make absolutely sure that the AC power is turned
off at the power distribution system. Then take an AC voltmeter and
measure the AC voltage between the black wire and each of the green
white and yellow wires; and between the red wire and each of the
green, white and yellow wires. All readings must be zero before
proceeding.
The removal and installation of the power supply electronic module
requires the following tools:
1. #2 Phillips screwdriver
2. ¼-inch width flat blade screwdriver
3. 5/16-inch open end wrench
Removal Procedure
1. Remove five wires from terminal block TB1. Tie the wires from
above, so that they are out of the way and protected from damage.
2. Remove the 12 sensor cable wires and the ground wire from
terminal block TB2. Tie the sensor cable off to one side, so that it
is out of the way and protected from damage.
3. Remove two optical fibers from the fiber optic modem TX and RX
connectors. Tie the optical fibers to one side, so that they are out of
the way and protected from damage. Observe the 3-inch minimum
bending radius limitation of the fibers, do not bend them more
sharply than at a 3-inch radius.
4. Remove 11 of the 12 Phillips head mounting screws that hold the
module in place. Leave the screw in between the fiber optic modem
VAISALA_______________________________________________________________________ 77
Page 80

User's Guide ______________________________________________________________________
TX and RX fiber connectors in place. Save the ground wire for use
when installing the new module.
5. While holding the module so that it will not fall, remove the last
Phillips head screw and remove the module.
Installation Procedure
1. While holding the module so that it will not fall, install the Phillips
head screw in between the fiber optic modem TX and RX fiber
connectors. Tighten it until it is almost snug, do not fully tighten it
at this time.
2. Install the Phillips head screw and ground wire, between the fiber
optic modem RX fiber connector and the corner of the module. Do
not tighten it at this time.
3. Connect the opposite end of the ground wire to terminal 12 of TB2.
The lug should be upside down under the terminal screw, to allow
room for the sensor wire #12. Do not tighten it at this time.
4. Install the remaining 10 Phillips head mounting screws that hold
the module in place.
5. Once all 12 screws are in place, tighten them.
6. Untie the optical fibers and connect them to the corresponding RX
and TX connectors on the fiber optic modem. Observe the 3-inch
minimum bending radius limitation of the fibers, do not bend them
more sharply than at a 3-inch radius. Tighten them gently.
7. Untie the sensor cable and connect the first 11 of the 12 sensor
wires to the terminals with the corresponding numbers 1 through
11.
8. Connect the #12 sensor wire to terminal 12 of TB2, along with the
ground wire.
9. Untie the wiring for TB1 and connect the gray wire to terminal 1,
brown to 2, violet to 3, orange to 4 and blue to terminal 5.
FOM Assembly Removal and
Installation
The removal and installation of the power supply fiber optic modem
assembly requires the following tools:
78 ______________________________________________________________________________
Page 81

Chapter 6 ______________________________________________________________ Maintenance
1. #1 Phillips screwdriver
2. ¼-inch width flat blade screwdriver
3. 5/16-inch open end wrench
Removal Procedure
1. Open the power supply door and turn off the power to the wind
sensor.
2. Remove the 12 sensor cable wires and the ground wire from
terminal block TB2. Tie the sensor cable off to one side, so that it
is out of the way and protected from damage.
3. Remove the two optical fibers from the fiber optic modem TX and
RX connectors. Tie the optical fibers to one side, so that they are
out of the way and protected from damage. Observe the 3-inch
minimum bending radius limitation of the fibers, do not bend them
more sharply than at a 3-inch radius.
4. Remove the four #4 Phillips head mounting screws that hold the
fiber optic modem assembly in place and remove the assembly.
5. Remove the two #4 Phillips head screws that retain the DB-9 cable
connector in the connector on the fiber optic modem assembly and
disconnect the cable from the fiber optic modem.
Installation Procedure
1. While holding the fiber optic modem, plug in the DB-9 cable and
install the 2 #4 Phillips head screws to retain the cable connector in
the connector on the fiber optic modem.
2. Install the four #4 Phillips head screws to secure the fiber optic
modem assembly to the power supply module assembly.
3. Untie the optical fibers and connect them to the corresponding RX
and TX connectors on the fiber optic modem. Observe the 3-inch
minimum bending radius limitation of the fibers, do not bend them
more sharply than at a 3-inch radius. Tighten them gently.
VAISALA_______________________________________________________________________ 79
Page 82

User's Guide ______________________________________________________________________
Sensor Interface Cable Removal
and Installation
1. Open the power supply door and turn off the power to the wind
sensor.
2. Lower the wind mast or tower.
3. On the adapter, loosen the single screw close to the sensor. Do not
loosen any of the three screws that are used to fasten the adapter to
the mounting tube (see Figure 3 on page 18). Loosening these three
screws would make a solar noon alignment necessary.
4. Pull the sensor out of the adapter.
5. Disconnect the cable from the sensor and gently put the sensor
some place where it can’t get hit accidentally.
6. Open the power supply door and disconnect the sensor interface
cable (12 ring lugs). Wrap electrical tape over wires tightly folding
half forward and half bent back on cable so it can be easily pulled
through the ½” conduit.
7. Remove the cable from the wind mast or tower. It has to be pulled
out of the conduit first and then pulled out of the top of the pole.
Tape up both tightly with electrical tape.
8. Remove the new sensor cable from the shipping container. One end
of the cable has ring lugs. On this end take about half of the
individual wires and fold them back.
9. Feed the cable through the adapter mounting arm, pole, pole pivot
and the conduit going to the power supply starting with the
wrapped end of the cable into the open end of the adapter as the end
of the mounting arm.
10. In the power supply, connect the 12 ring lugs of the sensor interface
cable to the 12 position terminal block.
11. Take the sensor and connect the top end of the sensor interface
cable to it. Insert the sensor into the adapter and tighten the set
screw that secures the sensor to the adapter.
12. Turn on the power switch in the power supply.
13. Connect a laptop to the TEST connector in the power supply via an
RS-232 cable.
14. Run the Diagnostics Program on the laptop. Choose the option that
connects the sensor to the laptop with system disconnected.
15. Issue a WA command. The sensor must respond with a P status.
80 ______________________________________________________________________________
Page 83

Chapter 6 ______________________________________________________________ Maintenance
16. Place the verifier over the sensor. The verifier must be completely
covered by the included sack, since ambient airflow may effect the
sensor readings.
17. Issue five WA commands spaced at least 5 seconds apart. All five
responses must have a P status.
18. Remove the verifier.
19. Raise the wind mast or tower. Disconnect the laptop and close the
power supply door.
Firmware Download
NOTE
Optional Diagnostics Program is required for firmware download.
Download Procedure
1. Open the cover of the power supply. Connect the laptop computer
via the RS-232 cable to the TEST port.
2. Run the Diagnostics Program after the host system system is
disconnected. Issue the START TEST Continuous Data button
and verify that the sensor responds with wind data. If it does not
respond at all, check all the connections and the Diagnostics
Program baud rate.
3. Issue the Download Firmware button in order to open a separate
window for the Download Module.
4. Issue the Begin Download button for a hex file selection of the
download. After selecting the hex file, a new window is opened.
5. Send WFIRMWARE command for the sensor if not performed
automatically. This step depends on the version of the Diagnostics
Program.
6. Enter the password. During the firmware download, the sensor
should not be disturbed or disconnected. After a successful
download, the sensor baud rate is given. You will need this value
later in step 9.
7. Issue the Close button to return to the Main window of the
Download Module.
8. Issue the Close button to return to the Main window of the
Diagnostics Program.
VAISALA_______________________________________________________________________ 81
Page 84

User's Guide ______________________________________________________________________
9. Select the sufficient Commport baud rate based on the value given
at step 6 by using one of the 2400, 4800, or 9600 and the Change
Commport Baudrate buttons.
10. Issue the START TEST Continuous Data button to get data from
the sensor.
11. Issue the STOP TEST Continuous Data button.
12. Select the desired sensor baud rate if not valid already by using of
the 2400, 4800, or 9600 and Change Sensor Baudrate buttons.
13. Issue the START TEST Continuous Data button to get data from
the sensor.
14. Issue the STOP TEST Continuous Data button.
15. Issue two more WA commands and make sure they have P status
and that the reported wind speed and direction values are
reasonable when compared to the estimated actual condition.
16. Disconnect the laptop. This automatically returns the sensor to the
normal operating mode with the sensor communicating to the host
system system. Close the power supply door.
If the operator of the laptop computer is not able to receive data from
the sensor after step 10, then step 9 should be repeated followed by the
procedure in the usual order.
Recovery Procedure
If the operator is not able to pass step 10 in the acceptable way, the
Diagnostics Program should be closed. Restart the Diagnostics Program
by running the following procedure:
1. Run the Diagnostics Program. Issue the START TEST
Continuous Data button and verify that the sensor responds with
wind data.
- If YES, then go to step 8.
- If NO, then continue from step 2.
2. Issue the STOP TEST Continuous Data button.
3. Select a new Diagnostics Program baud rate by using 9600 and
Change Commport Baudrate buttons.
4. Issue the START TEST Continuous Data button
- If YES, then go to step 8.
82 ______________________________________________________________________________
Page 85

Chapter 6 ______________________________________________________________ Maintenance
- If NO, then continue from step 5.
5. Issue the STOP TEST Continuous Data button.
6. Select a new Diagnostics Program baud rate by using 4800 and
Change Commport Baudrate buttons.
7. Issue the START TEST Continuous Data button and verify that
the sensor responds with wind data.
- If NO, then replace the sensor according to the instructions in
section Wind Sensor Removal and Installation on page 74.
8. Issue the STOP TEST Continuous Data button.
9. Select the desired sensor baud rate by using one of the 2400, 4800,
or 9600 and Change Sensor Baudrate buttons.
10. Issue the START TEST Continuous Data button and verify that
the sensor responds with wind data.
11. Issue the STOP TEST Continuous Data button.
12. Issue two more WA commands and make sure they have P status
and that the reported wind speed and direction values are
reasonable when compared to the estimated actual condition.
13. Disconnect the laptop. This automatically returns the sensor to the
normal operating mode. Close the power supply door.
Technical Support
For technical questions, contact the Vaisala technical support:
E-mail helpdesk@vaisala.com
Fax +358 9 8949 2790
Vaisala Service Centers
If the product needs repair, please contact the Vaisala Service Center in
your region or closest to you and then proceed as instructed. Contact
information for Vaisala Service Centers is given below.
VAISALA_______________________________________________________________________ 83
Page 86

User's Guide ______________________________________________________________________
NORTH AMERICAN SERVICE CENTER
Vaisala Inc., 10-D Gill Street, Woburn, MA 01801-1068, USA.
Phone: +1 781 933 4500, Fax: +1 781 933 8029
E-mail: us-customersupport@vaisala.com
EUROPEAN SERVICE CENTER
Vaisala Instruments Service, Vanha Nurmijärventie 21 FIN-01670 Vantaa, FINLAND.
Phone: +358 9 8949 2658, Fax: +358 9 8949 2295
E-mail: instruments.service@vaisala.com
TOKYO SERVICE CENTER
Vaisala KK, 42 Kagurazaka 6-Chome, Shinjuku-Ku, Tokyo 162-0825, JAPAN.
Phone: +81 3 3266 9617, Fax: +81 3 3266 9655
E-mail: aftersales.asia@vaisala.com
BEIJING SERVICE CENTER
Vaisala China Ltd., Floor 2 EAS Building, No. 21 Xiao Yun Road, Dongsanhuan Beilu,
Chaoyang District, Beijing, P.R. CHINA 100027.
Phone: +86 10 8526 1199, Fax: +86 10 8526 1155
E-mail: china.service@vaisala.com
www.vaisala.com
84 ______________________________________________________________________________
Page 87

Chapter 7 ____________________________________________________________ Technical Data
CHAPTER 7
TECHNICAL DATA
This chapter provides the technical data of the product and lists the field
replaceable units, and the accessories.
VAISALA_______________________________________________________________________ 85
Page 88

User's Guide ______________________________________________________________________
Field Replaceable Units
Table 6 Field Replaceable Units of Ultrasonic Wind Sensor
WS425 F/G
Item Name Order Code
US 60 Hz wind sensor, model
WS425 F/G (with adapter)
EU 50 Hz wind sensor, model
WS425 F/G (without adapter)
115 VAC power supply, WS425 F/G WS425PowerUS
240 V AC power supply, WS425 F/G WS425PowerEU
Module assembly, power supply
WS425 F/G
Fiber optic modem FOM111
Cable assembly, sensor WS425 F/G 4253100
Installation kit for ASOS, WS425 F/G 4257100
Field verifier assembly, WS425 F/G WS425VerifierB
WS425G7A4A
WS425F7A1A
4257023
Specifications
Table 7 Wind Speed
Property Description / Value
Measurement range 0 ... 165 knots
Starting threshold virtually zero
Delay distance virtually zero
Resolution 0.1 knots
Accuracy (range 0 ... 125 knots) ±0.26 knots or 3 % of reading,
Table 8 Wind Direction
Property Description / Value
Measurement range 0 ... 360°
Starting threshold virtually zero
Delay distance virtually zero
Resolution 1°
Accuracy
(wind speed 2 ... 125 knots)
whichever is greater
±2°
86 ______________________________________________________________________________
Page 89

Chapter 7 ____________________________________________________________ Technical Data
Table 9 Outputs
Property Description / Value
Communication media optical cable, RS-232 for service
mode
Message format NWS ASOS compatible
Baud rate 2400, 4800, and 9600
Available averages 1 ... 30 s
Response time (continuous
measurement)
1s
Table 10 General
Property Description / Value
Operating voltage 115 VAC / 60 Hz or 240 VAC / 50 Hz
Power consumption (max. heating) 150 W
Operating temperature -62 ... +55 °C (-80 ... +130 °F)
Material
body, arms, power
transducer heads
Dimensions (h×w×d)
sensor
power supply
Weight
sensor
power supply
Approvals CE
stainless steel
silicone rubber
350 × 250 × 286 mm
340 × 342 × 165 mm
1.7 kg
12.5 kg
Accessories
CAUTION
Table 11 Accessories
Description Order Code
Power supply
US power supply for 115 VAC
EU power supply for 240 VAC
Cable assembly, sensor 4253100
Installation kit for ASOS 4257100
Field verifier assembly WS425VerifierB
WS425PowerUS
WS425PowerEU
US and EU power supplies have different primary wiring, do not
connect US power supply to 240 VAC voltage or EU power supply to
115 VAC voltage!
VAISALA_______________________________________________________________________ 87
Page 90

User's Guide ______________________________________________________________________
Drawings
0607-008
Figure 24 Sensor Cable Wiring Diagram
88 ______________________________________________________________________________
Page 91

*M210713
EN
*
www.vaisala.com
 Loading...
Loading...