

Page 1

CP Series™
CP7000™, CP8000™
USER’S GUIDE
M210706SP-A
Abril 2005
Page 2
Publicado por
Vaisala Oyj Teléfono:. +358 9 8949 1
P.O. Box 26 FAX +358 9 8949 2227
FIN-00421 Helsinki
Finland
Favor de visitar nuestras páginas de internet en http://www.vaisala.com/
PARA INFORMACIÓN TÉCNICA
Vaisala Inc. Teléfono. +011 520 806 7300
Tucson Operations FAX: +011 520 741 2848
2705 E. Medina Rd. Llamadas Gratuitas 1 888 424 9899
Tucson, AZ 85706-7155
USA
© Vaisala 2004
Ninguna parte de éste manual puede ser duplicada en ninguna forma, ni por
método electrónico o mecánico (incluyendo por fotocopía), ni se puede comunicar
su información o contenidos a una tercera parte sin permiso escrito por el dueño de
los derechos.
Los contenidos pueden cambiar sin previa notificacíon.
Favor de observar que éste manual no vaya a crear obligaciones legales para
Vaisala hacia el cliente o con el usario final, ni sus contenidos deberán ser
comunicados a una tercera parte sin previo y escrito permiso del retenedor de sus
derechos de copia.
Los contenidos están sujetos a cambio sin previa notificación.
Por favor observe que éste manual no crea ningúna obligación para Vaisala hacía el
cliente o hacia el usuario final. Todos los compromisos y acuerdos están incluídos
en el contrato de suministros aplicables o Condiciónes de Venta.
Page 3

________________________________________________________________________________
Tabla de Contenidos
Capítulo1
INFORMACIÓN GENERAL ...........................................................................1
Acerca de Éste Manual............................................................ 1
Contenidos de Éste Manual.................................................. 1
Convenciones del Documento ..............................................2
Seguridad .................................................................................3
Marcas Registradas ................................................................. 3
Derechos de Propiedad........................................................... 4
Acuerdo de Licensia................................................................ 4
Garantía .................................................................................... 5
Apoyo Técnico .........................................................................5
Capítulo2
INTRODUCCIÓN............................................................................................ 7
Manuales Para Series CP ........................................................ 7
Modelos en la Series CP.......................................................... 7
Sistema de Información de Tormentas.................................. 8
Sistema de Información de Tormentas LF..........................10
LF/VHF TIS ......................................................................... 11
Información General del Funcionamiento ...........................12
Funciones CP7000 ............................................................. 15
Funciones CP8000 ............................................................. 15
Operación del Progama de CP..............................................16
Calculación de los Sitios de Relámpagos...........................16
Localidades LF .............................................................. 16
Posiciones VHF .............................................................17
Posiciones LF/VHF (Relámpago en Total) ....................18
Reportar los Relámpagos LF de Nube ..........................19
Interconexiones de Procesos.............................................. 20
Procesos de CP7000.....................................................21
Procesos de CP8000.....................................................24
Especifaciones Operativas ................................................... 28
Módulos Opcionales..............................................................30
Módulos de Procesar ..........................................................30
Módulos de Programas....................................................... 31
Capítulo3
OPERATIVO DEL CP ..................................................................................33
Información General .............................................................. 33
Procesos Centrales............................................................. 33
VAISALA ________________________________________________________________________ iii
Page 4

User’s Guide ______________________________________________________________________
Procesos de Utilidades .......................................................34
Procesos GUI...................................................................... 34
Arrancar y Parar el CP ...........................................................35
Comenzar la Sesion............................................................35
Comienzo de los Procesos Centrales.................................35
Comenzando el Proceso de Utilidades...............................36
Para comenzar los Procesos GUI.......................................37
Comenzando Todos los Procesos de CP ...........................38
Detener el CP...................................................................... 38
Usando el ApaControl GUI ....................................................39
Usar el Tablero Para los Procesos .....................................39
Usando el Tablero de los Sensores....................................40
Seleccionar Formatos para las Etiquetas y Clasificación
Sucesiva ........................................................................40
Para Determinar el Estado del Sensor ..........................43
Exhibir Información Adicional sobre los Sensores......... 45
Establecimiento de las Condiciones Audibles de las
Alarmas............................................................................... 48
Uso del Tablero del Sistema de Archivo .............................50
Usando el Tablero del Sistema de Exceso de Archivos ....51
Usando el LpaControl GUI ....................................................52
Capítulo4
CONFIGURACIÓN DE BASES DE DATOS CP .......................................... 55
Información General ..............................................................55
Definir un URL ........................................................................56
Uso el ApaConfig GUI............................................................ 58
Cambiando el Artefacto o Procesos de Configuración .......59
Agregar Una Tabla Nueva Para Configuración de
Artefacto..............................................................................60
Guardar los Parámetros de las Configuraciones ................61
Revertir Los Cambios en la Base de Datos ........................ 62
Configuración de la Base de Datos realtime .......................63
Asignación de Identificadores de Transporte..................... 63
Configuración de una Red Externa .....................................64
Configuración de los Sensores ...........................................66
Configuración de las Pantallas de Relámpagos .................71
Configuración del Proceso de pdad....................................74
Configuración del Proceso pandad .....................................76
Configuración de los Procesos Localizados .......................77
Capítulo5
MANEJO DE SENSORES ...........................................................................81
Información General ..............................................................81
Adjuntar a los Sensores LPATS o SAFIR ............................82
Usando el GUI Attach ............................................................82
Establecer las Opciones de Attach .....................................82
Adjuntar a Un Sensor IMPACT ...........................................83
Adjuntar Un Sensor VHF-ITF con Attachlt .......................... 86
iv ____________________________________________________________________M210706SP-A
Page 5

________________________________________________________________________________
Adjuntar a los Módulos LS LF Usando Telnet..................... 87
Capítulo6
ARCHIVANDO LOS DATOS DEL SENSOR............................................... 89
Información General .............................................................. 89
Función de Archive................................................................ 90
Función Normal Para Archivar............................................ 91
Solucionar los Problemas en las Operaciones de Archive .92
Archivar al CD Grabable........................................................ 92
Función Normal con un Escritor de CD .............................. 93
Solucionar los Problemas con las Funciónes CD-R
Archive................................................................................95
El Archivo de Hold (Retención) está Lleno ....................95
Área Spool Está Lleno ................................................... 95
CD en Blanco es Requerido .......................................... 96
Necesita Montar el CD................................................... 96
Fallo en el Archivo de Imagen ....................................... 96
Fallo en La Creación de un CD...................................... 97
CD No Verificó ............................................................... 97
Archivando en una Cinta.......................................................98
Función Normal con una Unidad de Cinta .......................... 98
Solucionar los Problemas de Funciones De Archivo en una
Cinta.................................................................................... 99
Archivando a los Medios Trasladables de Magneto-Óptico99
Funciones Normales con Los Medios Trasladables ...........99
Cambiando el Medio Trasladable .....................................100
Cambiando el Medio Después de Cambiarse a
Overflow....................................................................... 101
Cambiando el Medio antes de Cambiarse a Overflow.101
Recuperación cuando Archive y Overflow esten
Llenos ..........................................................................102
Formatear los Medios y la Creación de un Sistema de Archivo
UNIX ................................................................................. 102
Procedimiento para Solucionar el Medio Trasladable ......104
Capítulo7
REPROCESANDO DATOS HISTÓRICOS............................................... 107
Información General ............................................................ 107
Reprocesando los Archivos de Datos en Bruto................ 108
Reprocesando Datos de Relámpago LF...........................108
Reprocesando los Datos de Relámpagos VHF ................108
Capítulo8
SUPERVISANDO LA FUNCIÓN DEL SENSOR ....................................... 111
Información General ............................................................ 111
Comenzar los servicios de sensorqa................................. 112
Iniciación de sensorqa para los Sensores LF ...................112
Iniciación de sensorqa para Sensores VHF......................113
VAISALA _________________________________________________________________________v
Page 6

User’s Guide ______________________________________________________________________
Comandos para sensorqa ...................................................113
Estadísticas Medidas por sensorqa ...................................114
Acumular estadísticas del sensor para proceso located.116
Registro de Archivo Para sensorqa ...................................116
Restablecimiento de las Estadísticas del Sensor............. 117
Configurando sensorqa....................................................... 117
Uso del Proceso sensorqa .................................................. 118
Examinación en tiempo-real de los Datos de Posición y de
Sensor............................................................................... 118
Exhibición de los Ritmos de los Rayos Actuales ..............119
Interpretación del Reporte sensorqa................................. 120
Eficacia de la Detección............................................... 120
Calibración de Ganancia..............................................121
Porcentaje No Correlacionado.....................................122
Porcentaje Reciclado ................................................... 122
Desviación de Ángulo ..................................................122
Desviaciónes de Tiempo GPS .....................................123
Desviaciones de Señales.............................................123
Examinando Datos de Posición en Tiempo-Real y Datos
del Sensor.............................................................................124
Datos del Sensor Correlacionados ...................................125
Datos del Sensor Rechazados o no Correlacionados ......127
Reprocesando con sensorqa..............................................127
Reprocesando Datos LF ................................................... 127
Reprocesando Datos VHF ................................................128
Capítulo9
ANALIZANDO PRECISIÓN DE DETECCIÓN ...........................................129
Información General ............................................................129
Usando intersect ..................................................................130
Comenzar intersect usando el icono GUI .........................131
Usando el Ratón ............................................................... 132
Configurando intersect......................................................133
Establecer Los Modos de Datos .......................................135
Almacenando Datos a un Archivo.....................................136
Cargando los Datos de un Archivo ...................................136
Seleccionar Etiquetas para el Sensor ...............................137
Supervisando el Sensor.................................................... 138
Exhibición de la Información de Tiempo ...........................140
Usando Círculos de Tiempo del Sensor ......................140
Usando Cruces de Desviación de Tiempo...................141
Controles para el Área de Mapa .......................................142
Ver el Mapa Basado .................................................... 143
Hacer Zoom en el Mapa ..............................................144
Exhibiendo la Vista Previa del Mapa ...........................146
Exhibiendo la Próxima Vista del Mapa ........................146
Retrazando el Mapa..................................................... 146
Configurando los Mapas de intersect .......................... 147
Usando la Búsqueda de Rangos .................................147
vi ____________________________________________________________________M210706SP-A
Page 7

________________________________________________________________________________
Establecer la Exhibición del Mapa ..................................... 149
Definición de un Mapa Basado Nuevo..............................149
Configuración del Mapa Basado.......................................150
Establecer Unidades de Medida ....................................... 153
Configurando Capas de Mapa.......................................... 153
Exhibición de las Capas de Mapas................................... 156
Restablecer el Mapa Basado............................................ 157
Exhibiendo Datos de Relámpagos ASCII y del Sensor ....158
Usando el Observador de Relámpagos............................ 159
Comprendiendo los Datos ................................................ 159
Creación de Mapas para intersect...................................... 160
Restricciónes Para Convertir de MIF a MDB ....................160
Ejemplo de Convertir MIF a MDB .....................................161
Capítulo10
ANALIZANDO LA CALIDAD DE LA RED REGIONAL ............................ 163
Información General ............................................................ 163
Configuración de regionqc ................................................. 163
Establecer los Límites de la Región de regionqc ..............164
Establecimiento de la Frecuencia de regionqc ................. 165
Funcionamiento Manual de regionqc.................................165
Interpretación del Reporte regionqc ..................................165
Promedio de Chi-cuadrado ............................................... 166
Porcentaje Optimizado...................................................... 167
Conteo de Rayo................................................................ 167
Axis Semi-mayor Mediano ................................................ 167
Promedio del Número de Sensores.................................. 168
Capítulo11
CONFIGURACIÓN AVANZADA CP..........................................................169
Información General ............................................................ 169
Clasificación de Relámpagos de Nube Para Sensores
LF...........................................................................................170
Cambiando la Configuración de Puesta en
Funcionamiento ...................................................................171
Abrir el Archivo startup.cfg................................................ 172
Configuración de un Proceso Central ............................... 175
Agregando un Proceso Central Nuevo .............................176
Eliminando un Proceso Central ........................................ 176
Revertir al Archivo de Configuración Previa ..................... 177
Guardando un Archivo de Configuración al Disco............ 178
Salida del GUI StartupConfig:........................................... 179
Usando la Supervisión de Disco Automático.................... 179
Supervisando el Espacio usado por un Directorio............ 180
Manejo del Número de los Archivos de Directorios ..........181
Acceso al CP Remotamente................................................ 181
Usando el GUI ApaControl ............................................... 181
Funcionamiento de sensorqa Remotamente ....................182
Iniciando sensorqa para Sensores LF ......................... 182
VAISALA ________________________________________________________________________vii
Page 8

User’s Guide ______________________________________________________________________
Iniciar sensorqa para los Sensores VHF .....................183
Configurando El CP Remotamente...................................183
El Editor de Configuración de la Base de Datos.......... 183
El Shell de Comando de Configuración de la Base
de Datos.......................................................................184
Replicación de Configuración de Base de Datos.........184
Revisión de Sanidad de Configuración de Base
de Datos.......................................................................184
Usando el Formato ASCII Universal de Relámpagos .......185
Multidifusión.........................................................................187
Multidifusión en una Estación de Trabajo Local................ 187
Multidifusión a Traves de Estaciones de Trabajo
Múltiples............................................................................188
Usando TCP/IP ....................................................................188
Usando TCP/IP Para Comunicación con Sensores..........189
Estableciendo un TCP/IP Servidor de Enchufe para un
Exhibidor ........................................................................... 190
Compartiendo Datos de CP.................................................190
Capítulo12
ADMINISTRACIÓN DE SISTEMA UNIX ...................................................193
Información General ............................................................193
Cuentas del Usuario ............................................................193
Ambiente del Sistema.......................................................... 194
Nombre de Alias del Servidor del Sistema ........................194
Copia de Seguridad del Sistema ........................................195
Privilegios de Root...............................................................195
Procesos de Setuid del Root.............................................196
Privilegios de Sysadmin .................................................... 196
Apagando la Estación de Trabajo ...................................... 196
Comando Para Apagar .....................................................197
Volver a arrancar la Estación de Trabajo.......................... 197
Comenzar y Apagar el CP Automáticamente ....................198
Capítulo13
PROCEDIMIENTO PARA SOLUCIONAR .................................................199
Información General ............................................................199
Supervisando las Funciones del Sistema CP ...................199
Supervisando el Tiempo Sincronizado de GPS................199
Supervisando Los Mensajes de Errores del Sistema .......201
Procedimiento para Solucionar los Sensores con
sensorqa ...............................................................................201
Procedimiento para Solucionar la Configuración de
located..................................................................................202
Procedimiento para Solucionar con lpterm.......................202
Procedimiento para Solucionar los Relojs GPS ...............203
Reloj de Arbiter GPS.........................................................204
viii ___________________________________________________________________M210706SP-A
Page 9

________________________________________________________________________________
Reloj GPS de la Red.........................................................204
Procedimiento para Solucionar Problemas Comúnes .....205
Appendix A
EFICACIA EN LA DETECCIÓN DE NUBE ............................................... 213
Appendix B
INTRODUCCIÓN A DETECCIÓN DE RELÁMPAGO ...............................217
Fenómeno de los Relámpagos ...........................................217
Anatomía de Un Destello de Relámpago CG ...................217
Características de las Frecuencias de Radio de los
Relámpagos...................................................................... 218
Usos de los Datos de Relámpagos................................... 220
Métodos para Localizar Relámpagos LF/VLF.................... 221
Una História Breve............................................................ 221
Dirección Básica para Hallazgo ........................................ 222
Tiempo-de-Llegada Básico ............................................... 223
Precisión Mejorada de Tecnología Combinada ................226
Pico de Corriente del Rayo ............................................... 228
Detección de VHF................................................................. 229
Localizar la Dirección Basado en Interferométrica de
VHF................................................................................... 229
Métodos de TOA con Líneas de Base Largas Para
Funcionamiento en VHF ................................................... 230
Fuerza de la Señal VHF.................................................... 231
Rendimiento del Sistema de Localización de
Relámpagos.......................................................................... 231
Medida de Precisón de Localización ................................ 231
Consistencia de los Datos ................................................ 233
Eficiencia de Detección..................................................... 234
Uso de los Indicadores de Calidad de Posición ............... 234
References............................................................................ 235
Appendix C
GLOSARIO ................................................................................................239
INDEX ........................................................................................................ 251
VAISALA ________________________________________________________________________ ix
Page 10

User’s Guide ______________________________________________________________________
Esta página se dejó en blanco intencionalmente.
x ____________________________________________________________________M210706SP-A
Page 11

________________________________________________________________________________
Lista de Figuras
Figura 1 Sensores Para Relámpagos y Detección de la Frecuencia de
Radiación ................................................................................. 9
Figura 2 Ejemplo de un LF TIS ............................................................ 10
Figura 3 Ejemplo de un LF/VHF TIS .................................................... 11
Figura 4 Diagrama de Flujo del Proceso para Posicionar Relámpagos en
Total ....................................................................................... 19
Figura 5 Interconexiones de Procesos de CP7000..............................21
Figura 6 Interconexiones de los Procesos de CP8000 ........................25
Figura 7 Icono Controlador de terminales ............................................ 35
Figura 8 Ventana Típica Para Acceso al GUIs .................................... 37
Figura 9 Ventana de Contol APA ......................................................... 39
Figura 10 Manejar los Sensores con el ApaControl GUI .......................41
Figura 11 Menú de los Sensores ........................................................... 42
Figura 12 Ventana de APA Control........................................................ 43
Figura 13 Colores de los Indicadores de los estados de Sensores .......45
Figura 14 Botón de Información del Sensor........................................... 46
Figura 15 Establecimiento de Thresholds.............................................. 48
Figura 16 Botón Para Cambios en Data Archive ...................................51
Figura 17 Abertura del Control LP Archive ............................................53
Figura 18 Abertura de la Caja de Diálogo Devices ................................ 53
Figura 19 Tipos de Artefactos de Almacenamiento Para LpaControl.... 54
Figura 20 Ventana de APA Config .........................................................59
Figura 21 Agregar una Tabla Nueva de Configuración de Artefacto .....61
Figura 22 Verificación Para Consignar los Cambios de la Base de Datos
en el Disco ............................................................................. 62
Figura 23 Tablero para Editar la Tabla de las Configuraciones de
Transporte.............................................................................. 64
Figura 24 Tablero para Editar la Configuración de la Red..................... 65
Figura 25 Tablero para Editar la Configuración del Sensor ................... 66
Figura 26 Tablero para Editar la Tabla Para Configuración del
Sensor.................................................................................... 71
Figura 27 Tablero para Editar Tabla de Configuración de la
Pantalla .................................................................................. 72
Figura 28 Tablero para Editar la Tabla pdad ......................................... 75
Figura 29 Tablero para Editar la Tabla pandad ..................................... 76
Figura 30 Tablero para Editar Tabla Localizada .................................... 78
Figura 31 Caja de Diálogo Para las Opciones de Attach.......................83
Figura 32 Acceso al GUI Attach.............................................................84
Figura 33 Ventana AttachImpact............................................................85
Figura 34 Ventana AttachIt .................................................................... 87
Figura 35 Diagrama de las Funciones de LpaControl............................ 90
Figura 36 Ventana del Control LP Archive............................................. 94
Figura 37 Ventana de APA Control...................................................... 100
Figura 38 Examinación de Datos de Sensor, Posición, y ASCII.......... 119
Figura 39 Campos de Datos de Posición............................................. 125
Figura 40 Muestra de Datos Correlacionados del Sensor ...................126
VAISALA ________________________________________________________________________ xi
Page 12

User’s Guide ______________________________________________________________________
Figura 41 Campos de Datos Correlacionados de Sensor....................126
Figura 42 Campos de Datos Sin Correlación o Rechazados...............127
Figura 43 Ventana de intersect Típica ................................................. 131
Figura 44 Icono para el GUI de intersect .............................................132
Figura 45 Abrir la Caja de Diálogo de Intersect Configuration ............133
Figura 46 Caja de Diálogo de Intersect Configuration .........................133
Figura 47 Caja de Diágolo Save History Buffer....................................136
Figura 48 Caja de Diágolo Load File into History Buffer ......................137
Figura 49 Seleccionar un Formato de Etiqueta del Sensor.................. 138
Figura 50 Ventana de APA Control ......................................................139
Figura 51 Seleccionando un Sensor Activo .........................................139
Figura 52 Opciones de Supervisión .....................................................140
Figura 53 Exhibición del Mapa Basado por Omisión ...........................143
Figura 54 Hacer Zoom en el Área de Interés .......................................145
Figura 55 Caja de Diálogo para Buscar un Rango...............................147
Figura 56 Caja de Díalogo para Configurar el Mapa............................151
Figura 57 Caja de Diálogo para Configuración de Capas....................153
Figura 58 Caja de Diágolo Lightning Viewer ........................................158
Figura 59 Muestra de un Reporte regionqc..........................................166
Figura 60 La Ventana del Editor de Startup Configuration (Puesta en
Funcionamiento) ..................................................................173
Figura 61 Abriendo un Archivo.............................................................173
Figura 62 Abriendo el archivo startup.cfg.............................................174
Figura 63 Ventana del Editor de Startup Configuration........................174
Figura 64 Agregando un Proceso Nuevo............................................. 176
Figura 65 Caja de Diálogo de StartupConfig Message ........................177
Figura 66 Caja de Diálogo para Confirmar la Reversión...................... 178
Figura 67 Mensaje de Cambios del Archivo.........................................178
Figura 68 Confirme la Caja de Díalogo de Salida ................................179
Figura 69 Compartir Datos de un CP a Otro CP ..................................191
Figura 70 Destellos de Nube y Nube-Tierra en Varios Rangos de
Frecuencia ...........................................................................218
Figura 71 Relación, Frecuencia y Método de Detección de
Relámpago...........................................................................219
Figura 72 Algorítmo de Posición Optimal para Encontrar Dirección
Magnéticamente...................................................................223
Figura 73 Intersección Hiperbólica....................................................... 224
Figura 74 Localidad Ambigua, Intersección Hiperbólica de
3-Sensores...........................................................................225
Figura 75 Intersección Circular usando Tres Sensores .......................226
Figura 76 Intersección Circular usando Cuatro Sensores.................... 226
Figura 77 Método IMPACT en una Línea Basada entre Dos
Sensores ..............................................................................227
Figura 78 Método IMPACT: 3 Sensores LPATS TOA, 2 Sensores
IMPACT................................................................................228
Figura 79 Triángulación para Localidad por Interferométrica............... 230
Figura 80 Elipse de Confianza: Geometría de Sensor Desfavorable...232
Figura 81 Elipse de Confianza: Geometría de Sensor Favorable........232
Figura 82 Usando el Elipse de Confianza para Indentificar el Rayo Más
Probab
le .............................................................................................235
xii____________________________________________________________________M210706SP-A
Page 13
________________________________________________________________________________
Lista de Tablas
Tabla 1 Convenciónes del Documento ................................................. 2
Tabla 2 Guía de Información por Modelo CP ....................................... 8
Tabla 3 Módulos TIS Apoyados.......................................................... 13
Tabla 4 Sensores Apoyados...............................................................13
Tabla 5 Programas de los Exhibidores Apoyados ............................. 15
Tabla 6 Procesos Usados por CP7000...............................................22
Tabla 7 GUIs Usados por CP7000 ..................................................... 23
Tabla 8 Procesos Usados por CP8000...............................................26
Tabla 9 GUIs Usados por CP8000 ..................................................... 27
Tabla 10 Especificaciones Físicas........................................................ 28
Tabla 11 Capacidades de Procesar los Datos...................................... 29
Tabla 12 Interfases de Comunicación entre el CP y Senores ..............29
Tabla 13 Protocolos de Salida ..............................................................29
Tabla 14 Capacidad de Almacenaje para Datos de Relámpago ..........30
Tabla 15 GUIs....................................................................................... 34
Tabla 16 Opciones en la Pantalla del Sensor en Control APA ............. 41
Tabla 17 Cáracteres de los Estados y sus Significativos ..................... 44
Tabla 18 Indicadores del Estado del Sensor ........................................45
Tabla 19 Caja de Diálogo para Umbrales, Puestos por Omisión ......... 50
Tabla 20 Configuración de Sensor .......................................................68
Tabla 21 Pantalla de Formatos Apoyados............................................73
Tabla 22 Angulos y Tiempos para Procesos located............................78
Tabla 23 Términos y Definiciones Para los Archivos de Datos ............91
Tabla 24 Comandos para sensorqa....................................................113
Tabla 25 Estadísticas Medidas por sensorqa ..................................... 114
Tabla 26 Salida Posible Mostrada por sensorqa ................................118
Tabla 27 Eficacia Óptima de Detección por el Sensor .......................121
Tabla 28 Funciónes de Botónes del Ratón en la Ventana intersect... 132
Tabla 29 Opciones para Configurar intersect .....................................134
Tabla 30 Atributos para Configurar el Mapa Basado.......................... 152
Tabla 31 Capas de Mapa por Omisión ............................................... 154
Tabla 32 Opciones para Configurar Capas de Mapa ......................... 155
Tabla 33 Uso de los Valores de regionqc.ksh por el NLDN................ 164
Tabla 34 Método Para Clasificar Nube para Sensores LF ................. 170
Tabla 35 Registros de Campos UALF ................................................ 186
Tabla 36 Cuentas de Usario ............................................................... 193
Tabla 37 Archivos Requeridos............................................................ 194
Tabla 38 Nombre Alias del Servidor ................................................... 194
Tabla 39 Problemas Ordinarios y sus Soluciones ..............................205
Tabla 40 El Constante de Escala y Relación de Probabilidad............ 232
VAISALA _______________________________________________________________________ xiii
Page 14

User’s Guide ______________________________________________________________________
Esta página se dejó en blanco intencionalmente.
xiv ___________________________________________________________________M210706SP-A
Page 15

Capítulo 1 ________________________________________________________ Información General
CAPÍTULO 1
INFORMACIÓN GENERAL
Acerca de Éste Manual
Éste manual provee información para configurar, operar y mantener el
CP7000™ y CP8000™ modelos de la CP Series™ analizadores. El
CP (Procesador Central) hace controlar, manejar y supervisar un
sistema de localidad de relámpagos.
Contenidos de Éste Manual
Éste manual consiste de los capítulos siguientes:
- Capítulo 1, Información General, provee información de seguridad,
contacto y garantía para el producto.
- Capítulo 2, Introducción, provee una información general sobre la
Series CP procesadores centrales y sistemas de información de
tormentas de Vaisala.
- Capítulo 3, Operativo del CP, describe cómo operar el programa de
la Series CP.
- Capítulo 4, Configuración de Bases de Datos CP, describe cómo
configurar los parámetros de la base de datos CP.
- Capítulo 5, Manejo de Sensores, describe cómo adjuntar a un sensor
para el control, operaciones para diagnósticos.
- Capítulo 6, Archivando los Datos del Sensor, describe los
procedimientos para archivar los datos del sensor en un almacen de
medios.
VAISALA ________________________________________________________________________ 1
Page 16
User’s Guide ______________________________________________________________________
- Capítulo 7, Reprocesando Datos Históricos, describe cómo
reprocesar los rayos de relámpagos y los datos de los eventos
después de su almacenamiento.
- Capítulo 8, Supervisando la Función del Sensor, describe cómo usar
la utilidad sensorqa para supervisar el rendimiento del sensor.
- Capítulo 9, Analizando Precisión de Detección, describe cómo usar
el proceso intersect para analizar los datos de los relámpagos.
- Capítulo 10, Analizando la Calidad de la Red Regional, describe
cómo usar la utilidad regionqc para evaluar la calidad de los datos
de rayos LF detro el área de operación nominal del sistema de
posición relámpago.
- Capítulo 11, Configuración Avanzada CP, provee información
relacionada a las modificaciones de los programas de Serie CP para
acomodar configuraciones del sistema específicas.
- Capítulo 12, Administración de Sistema UNIX, ofrece una
información general de las tareas del sistema de administración.
- Capítulo 13, Procedimiento para Solucionar, provee guías para
diagnosticar problemas con la Serie CP.
- Apéndice A, Eficacia en la Detección de Nube, provee definiciones
breves de los parámetros ajustables utilizados en la detección de
relámpagos en las nubes.
- Apéndice B, Introducción a Detección de Relámpago, provee una
introducción básica para la detección de relámpagos y medidas.
- Apéndice C, Glosario, define los términos que se usan en éste
manual.
Convenciones del Documento
Diferentes tipografías, estilos de letra y sistemas para formar frases
indican interacción para usuario específica con el sistema cómo se
ilustra en la Tabla 1 abajo.
Tabla 1 Convenciónes del Documento
Artículo Ejemplo
Símbolo del sistema, códigos de la fuente, y
salidas del programa están en tipografía de
espacio iual
Entrada del usario está en tipografía de letra
negra.
La entrada opcional está encerrada en
paréntesis cuadrados (por ejémplo, /v).
c:\temp>
volcheck
format a: [/v]
2 ____________________________________________________________________M210706SP-A
Page 17
Capítulo 1 ________________________________________________________ Información General
Tabla 1 Convenciónes del Documento (Continued)
Artículo Ejemplo
Término descriptivo usado en lugar de un
nombre de usario especificado que está en
cursivas y encerrado en paréntesis en ángulo
(por ejémplo, tabla).
Nombres significantes están en letras
capitalizadas.
Nombres significantes están en letras
capitalizadas.
Combinaciones de llaves que están impresas
y simultáneas son letras capitalizadas, y
separadas por un símbolo de más (+)
Valores de ASCII están encerrados en
páréntesis y en ángulo.
Artículos de interfase del usario y palabras de
comandos estan en letra negra.
la <tabla>.map archivo
ENTRE
<ENTRE>
CTRL+X
<CR><LF>
Seleccionar Cancel con un
clic, o use el comando quit.
Seguridad
Advertencia
Precaución
Nota
A través de éste manual, importantes consideraciones de seguridad son
destacadas a continuación:
Advertencia le alerta a usted de un peligro serio. Si usted no lee y no
sigue las instrucciones cuidadosamente en éste punto, hay riesgo de
daño y aún de muerte.
Precaución le advierte de un peligro potencial. Si usted no lee y no
sigue las instrucciones cuidadosamente en éste punto, el producto
puede dañarse o se pueden perder datos muy importantes.
Nota destaca información importante de cómo usar el producto.
Marcas Registradas
Vaisala y el logo tipo de Vaisala son marcas registradas de Vaisala Oyj
en los Estados Unidos de América/o de otros paises.
VAISALA ________________________________________________________________________ 3
Page 18

User’s Guide ______________________________________________________________________
CP Series, CP7000, CP8000, AP5000, IMPACT ESP, TED, PLWS,
VIS, LPATS IV, FALLS, LTraX, NLDN, y la Red Nacional de
Detección de Relámpagos son marcas registradas o marcas de Vaisala
Inc.
MapInfo, MapInfo Professional, MapBasic, y el logo tipo de MapInfo
son marcas registradas de la Corporación MapInfo.
Sybse, es logo tipo de Sybase, Sybase SQL, Open Client, y
Open/Client/Server son marcas registradas de Sybcase Incorporada.
Sun, Sun Microsystems, el logo tipo de Sun, Sun Blade, Sun Ultra, Sun
SPARCstation, y Solaris son marcas registradas o servicios registrados
por Sun Microsystems, Incorporada en los Estados Unidos de América
y otros paises.
UNIX es marca registrada en los Estados Unidos de América, otros
paises y exclusivamente con licensia a través de X/Open Company
Limited.
Linux es marca registrada en los Estados Unidos de América y otros
paises por Linus Torvold.
Storm TraX es marca registrada de Sonalysts, Incorporada en los
Estados Unidos de América y otros paises.
Todas otras compañias, nombres de productos, marcas que se usen
aquí dentro, pueden ser marcas registradas de sus respectivas
compañías.
Derechos de Propiedad
Getline.c es Derechos de Propiedad © 1991, 1992, 1993 por Chris
Thewalt (thewalt@ce.berkeley.edu)
Permiso para usar, duplicar, modificar y distribuir éste programa para
cualquier propósito y sin una cuota es aquí concedida. Éste programa
se otorga "tal y somo es" sin expreso o garantía implicada.
Acuerdo de Licensia
Todos los derechos de cualquier programa son retenidos por Vaisala o
por partes terceras. Al cliente se le permite usar éste programa sólo en
4 ____________________________________________________________________M210706SP-A
Page 19

Capítulo 1 ________________________________________________________ Información General
la magnitud que se provee por medio de contrato aplicable o del
Acuerdo de la Licensia del Programa.
Garantía
Para ciertos productos, Vaisala normalmente da un Límite de un año de
garantía. Por favor observe que cualquiera y tal garantía tal vez no sea
válida en caso de daño o desgaste normal, condiciones excepcionales
de funcionamiento, negligencia durante el manejo e instalación, o de
modificacions no autorizadas. Por favor vea el suministro de contrato
aplicable o de las condiciones de venta para detalles de garantía para
cada producto.
Apoyo Técnico
Para apoyo técnico, autorización de devoluciones (RMA), estatus de
reparación, y partes de repuesto, comuníquese con el Centro de
Respuestas al Cliente.
Tel:1 888 424 9899 (dentro de E.U.A. y Canadá)
+011 520 294 21 45 (internacional)
Correo Eléctronico:thunderstorm.support@vaisala.com
thunderstorm.netsupport@vaisala.com
VAISALA ________________________________________________________________________ 5
Page 20

User’s Guide ______________________________________________________________________
Esta página se dejó en blanco intencionalmente.
6 ____________________________________________________________________M210706SP-A
Page 21

Capítulo 2 _______________________________________________________________Introducción
CAPÍTULO 2
INTRODUCCIÓN
Manuales Para CP Series
Éste manual provee instrucciones para el operativo de la CP Series a
CP y la interpretación de los datos del sensor. Use éste manual para
seguir paso-a-paso los procedimientos para ambas interfases gráficas
de usuario (GUI) y la operación de comando de línea de la CP Series.
La Series CP ™ Guía de Referencia provee información concisa
relacionada a todos los datos filtrados, tableros, menús, opciones y
botónes relacionados al GUIs de CP. Consulte el manual para
encontrar información relacionada a una función particular o opción de
interfases gráficas CP.
Modelos en la CP Series
La CP Series consiste en dos modelos, CP7000 y CP8000. Estos
modelos proveen funciones específicas relacionadas al tipo de sensor
de relámpagos que provee los datos de frecuencia baja (LF) o
frecuencia muy alta (VHF.)
Éste manual está organizado para tener acceso a la información de los
dos modelos CP fácilmente. Al principio de cada capítulo, una tabla
indica la localidad de información espécifica para cada modelo CP.
Información no apuntada en la tabla es común en todos los modelos
VAISALA ________________________________________________________________________ 7
Page 22
User’s Guide ______________________________________________________________________
CP. En éste capítulo, busque la información específica a CP7000 y
CP8000 en las siguientes secciones:
Tabla 2 Guía de Información por Modelo CP
Para Información
en:
Sistemas de
Localidades
Relámpago
Funciónes de CP Tabla 3 en la página 13,
Calculaciónes de
localidades de
relámpago
Interconexiones de
Procesos
Referencia Específicamente para
CP7000 CP8000
Sección Sistema de Información
de Tormentas LF en la página
10
Sección Funciones CP7000 en
la página 15
Sección Localidades LF en la
página 16
Sección Procesos de CP7000
en la página 21
Sección Sistema de Información
de Tormentas LF en la página 10,
Sección LF/VHF TIS en la página
11
Tabla 3 en la página 13,
Sección Funciones CP8000 en la
página 15
Sección Localidades LF en la
página 16,
Sección Posiciones VHF en la
página 17,
Sección Posiciones LF/VHF
(Relámpago en Total) en la
página 18
Sección Procesos de CP8000 en
la página 24
Sistema de Información de Tormentas
Un Sistema de Información de Tormentas de Vaisala (TIS) detecta la
existencia de descargas de relámpagos: relámpago-de-nube a tierra,
relámpago de nube, y eventos de descomposición (vea Apéndice C,
Glosario, en la página 239, para definiciones). El TIS entonces
determina las localidades en donde los relámpagos-nube-a-tierra cáen a
la tierra o en donde eventos han ocurrido.
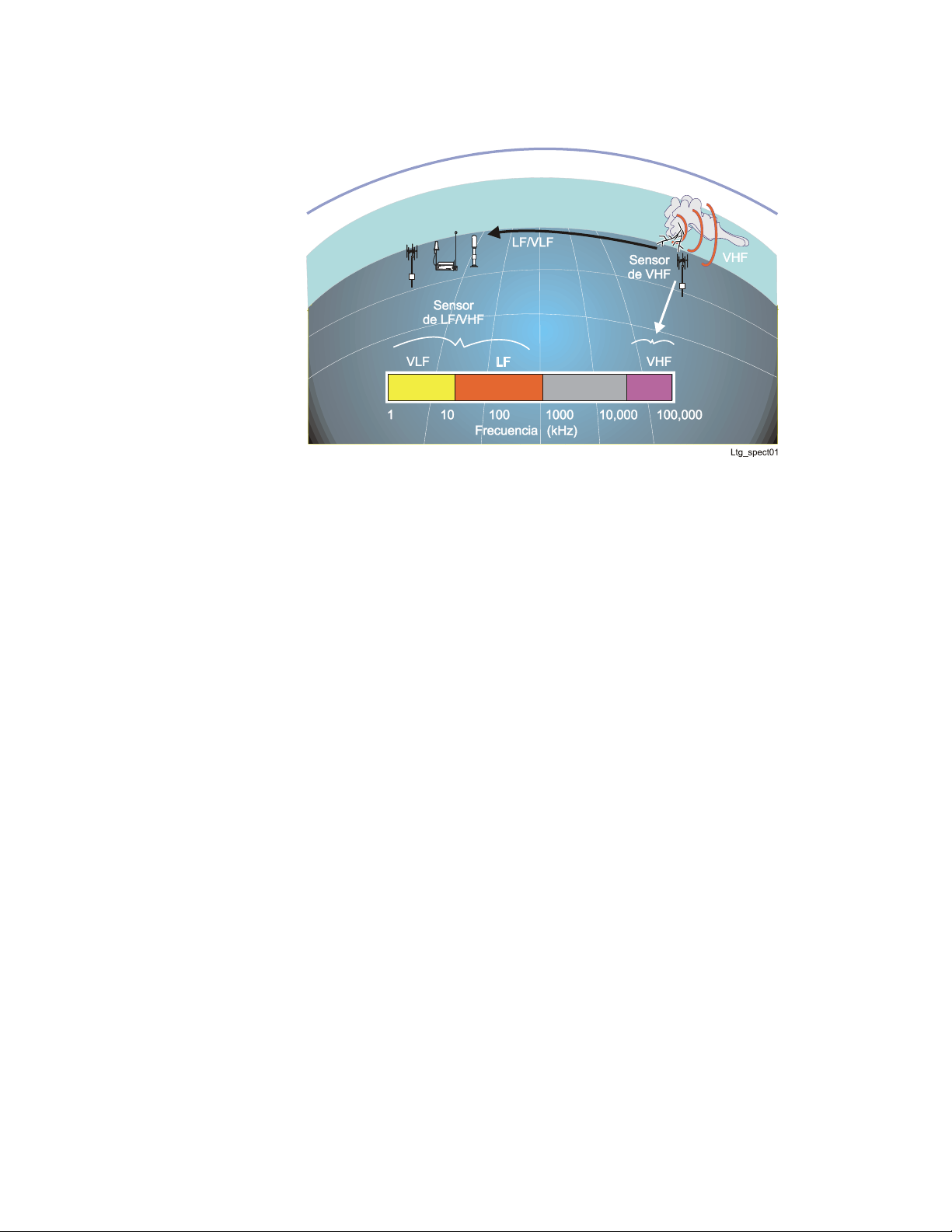
Detección es logrado a través del uso múltiple, sensores remotos los
cuales detectan las señales emitidas de las descargas de relámpagos y
filtran hacia afuera las señales de fuentes que no son de relámpagos
(Vea Figura 1 en la página 9). Cada sensor que esté detectando un
evento de relámpago, envia datos relacionados a ese evento al
Procesador Central (CP) lo que determina localidades de los eventos.
Para asegurar que el grupo de datos aplica al mismo evento, CP recoge
datos de relámpagos de cada sensor, compara el tiempo cuando el
evento fue grabado por cada sensor, después matemáticamente
computariza la localidad precisa del evento de relámpago. CP también
graba otras varias características descriptivas de cada evento de
relámpago. El CP procesa los datos para determinar las localidades de
relámpagos y supervisa el estatus del sensor. Salidas del CP pueden
8 ____________________________________________________________________M210706SP-A
Page 23
Capítulo 2 _______________________________________________________________Introducción
Figura 1 Sensores Para Relámpagos y Detección de la
Frecuencia de Radiación
ser enviadas a las impresoras, programas para exhibir los relámpagos,
controlador de terminales, y/o bases de datos archivadas. CP almacena
los datos y disemina los resultados a otros módulos TIS y usuarios en
una variedad de formatos.
La información dada por un TIS es útil para darle seguimiento al
movimiento de tormentas eléctricas, para mobilizar las tripulaciónes y
el equipo que se usa para reparar daños que sean causados por éstas
tormentas, y para analizar los efectos de relámpago en various sistemas
y tipos de equipo.
Los sistemas de información de tormentas ayuda a las industrias a
reducir los riesgos asociados con los efectos de destrucción de una de
los más poderosas fuerzas de la naturaleza. Estas industrias incluyen:
comunicaciones, servicios de corriente eléctrica, facilidades
industriales que dependen de una corriente de electricidad estable,
aeropuertos y compañías de aviación, organizaciones forestales y la
industriales de meteorología. El TIS está diseñado para aumentar el
entendimiento del usuario sobre los relámpagos y para beneficiar esas
organizaciones que son afectadas por estos sucesos.
Dependiendo del tipo de sensores que se empleen (vea Figura 1 arriba),
tres tipos de sistemas de información de tormentas son apoyados por
los modelos CP:
- Baja Frecuencia (LF) localidad de relámpagos, apoyado por
CP7000 o CP8000.
VAISALA ________________________________________________________________________ 9
Page 24
User’s Guide ______________________________________________________________________
- Muy Alta Frecuencia (VHF) localilzación de relámpago, apoyado
por CP8000.
- Localidad de Relámpago LF-VHF, apoyada por CP8000.
Sistema de Información de Tormentas LF
Un LF TIS típico provee localidades de rayos y destellos (latitud y
longitud) de CP7000 o CP8000. La red de sensores detecta
relámpagos en el rango de LF/VLF usando cualquier método de
localidad, encontrar dirección por el campo magnético, tiempo-dellegada, o una combinación de los dos métodos. Todos los sensores
detectan rayos de relámpagos LF que regresen, y algunos modelos de
sensores detectan destellos en las nubes.
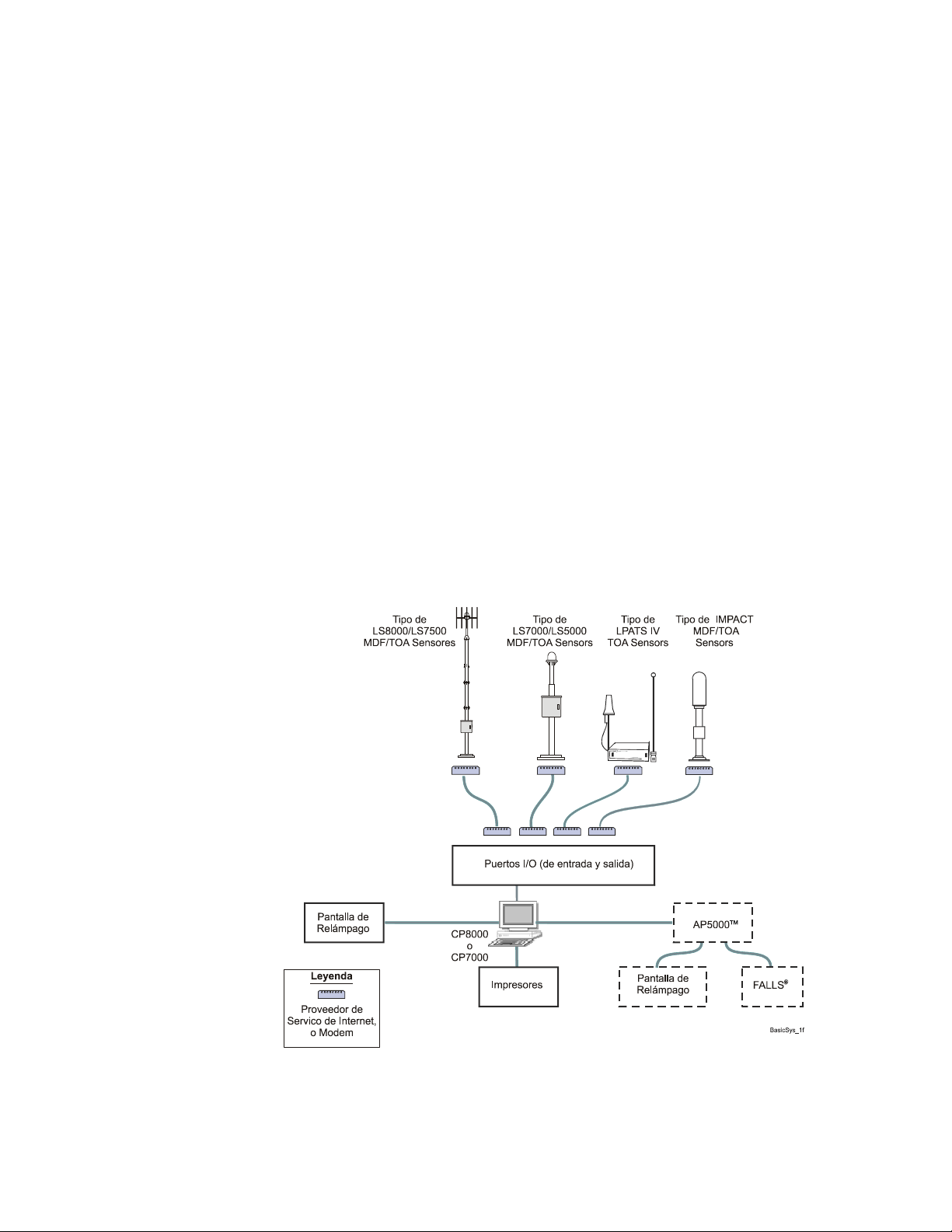
Figura 2 abajo ilustra una configuración para un sistema de localidad
de relámpagos lo cual usa varios sensores LF, el CP7000 o el CP8000
procesador central, y un aparato de salida para exhibir los datos de la
localidad de relámpagos LF.
Figura 2 Ejemplo de un LF TIS
10 ___________________________________________________________________M210706SP-A
Page 25
Capítulo 2 _______________________________________________________________Introducción
LF/VHF TIS
Un LF/VHF TIS típico provee localidades de destellos y rayos (latitud,
longitud y altitud) del CP8000. La red de sensores detecta relámpagos
en rangos de LF y VHF. La información de relámpagos LF combina
todos los aspectos del evento: puntos en tierra de los rayos que
regrezan, actividad de nube y la fuente de radiación entre medio.
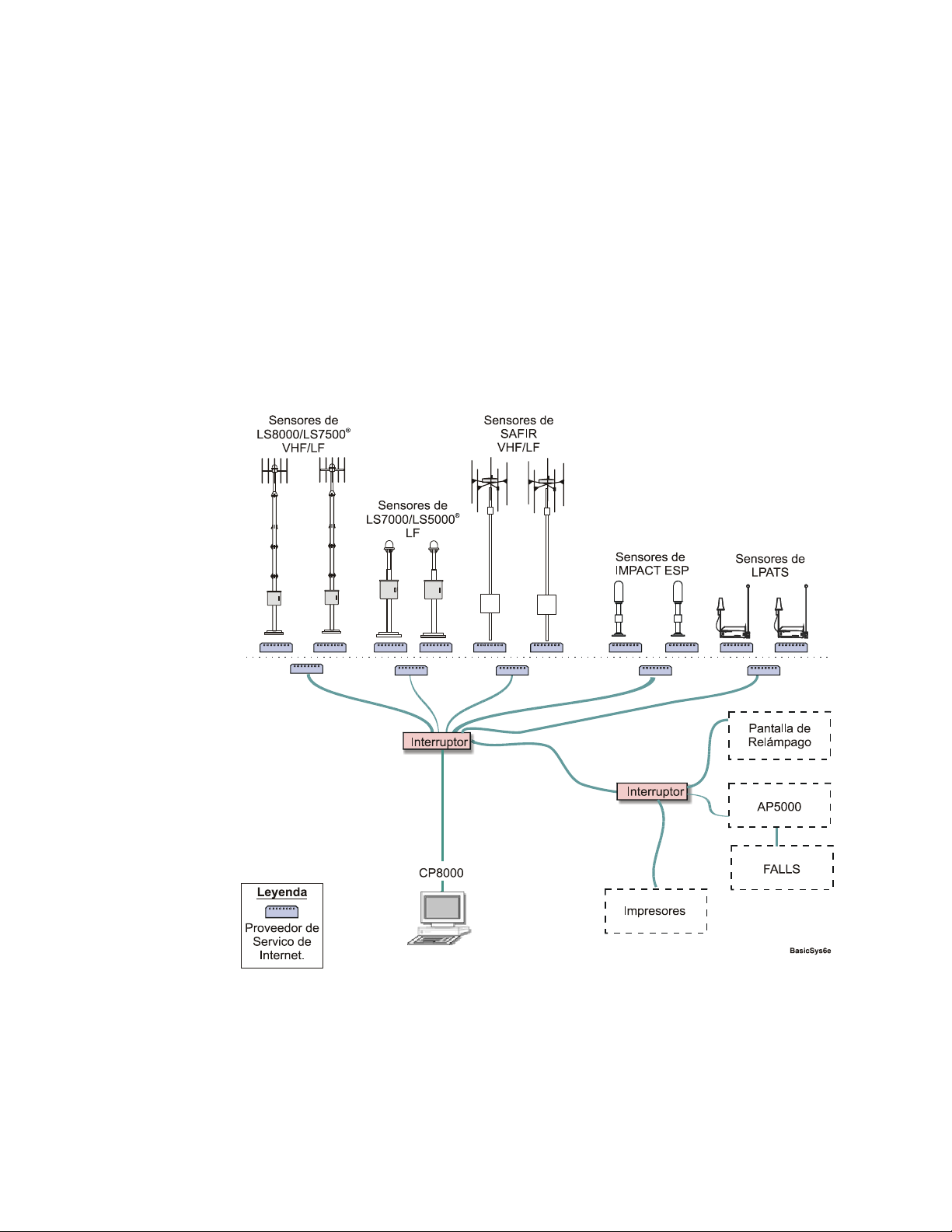
Figura 3 abajo abajo ilustra una configuración para un LF/VHF TIS
que utiliza sensores VHF/LF, sensores de interferomedad VHF,
sensores LF y comunicaciones de la red. Este sistema apoya una
variedad de exibidores.
Figura 3 Ejemplo de un LF/VHF TIS
VAISALA ________________________________________________________________________11
Page 26

User’s Guide ______________________________________________________________________
Información General del Funcionamiento
En un TIS, el CP provee las siguientes funciones:
- Colección de datos de los sensores y la calculación de las
localidades de los relámpagos (vea sección Calculación de los Sitios
de Relámpagos en la página 16)
- Configuración en módulos TIS (vea Capítulo 4, Configuración de
Bases de Datos CP, en la página 55)
- Comando y control de los sensores (vea Capítulo 5, Manejo de
Sensores, en la página 81)
- Almacenar y archivar los datos crudos (vea Capítulo 6, Archivando
los Datos del Sensor, en la página 89)
- Reprocesar simultaneamente los datos crudos de la localidad de
relámpagos (vea Capítulo 7, Reprocesando Datos Históricos, en la
página 107)
- Acceso a información de relámpagos almacenada (vea Capítulo 8,
Supervisando la Función del Sensor, en la página 111)
- Acumulación de las estadisticas de función de sensores y de la red
con la información disponible del tiempo-real o de los registros
periódicos archivados (vea Capítulo 8, Supervisando la Función del
Sensor, en la página 111 hasta el Capítulo 10, Analizando la
Calidad de la Red Regional, en la página 163)
Las diferencias en funciones de los modelos CP se describen en las
siguientes secciones. Tabla 3 en la página 13 provee información
general de los módulos TIS apoyados por modelos CP. Vea Tabla 4 en
la página 13 para detalles adicionales sobre los sensores apoyados.
Vea Tabla 5 en la página 15 para programas de los exbidores
apoyados.
12 ___________________________________________________________________M210706SP-A
Page 27
Capítulo 2 _______________________________________________________________Introducción
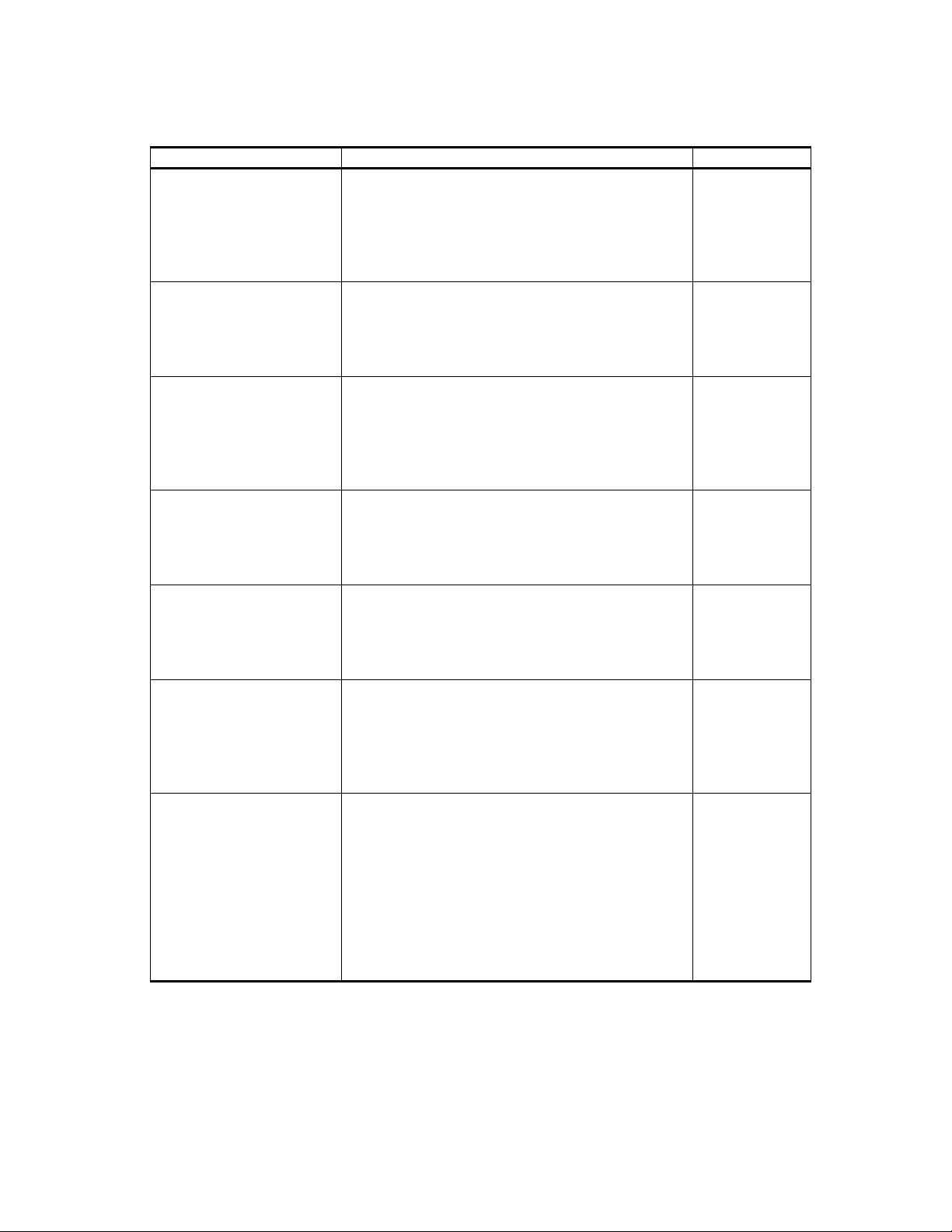
Tabla 3 Módulos TIS Apoyados
Modelo de CPTipo de
TIS
CP7000 LF
CP8000 LF/VHF CP Familia de IMPACT
1) Otra pantallas apoyadas: TED, TWXS, 24-Byte TIS, NDS, Storm TraX®, Thunder, VIS™
2) Puede conectar las estaciones de trabajo de CP por la función share y proceso lpbridge
3) Se muestra datos de tiempo-real en rayos de 2-D, y/o datos de destello
4) Se muestra datos de tiempo-real en rayos de 3-D VHF, y datos de 2-D destello
Redes
Externales
2)
CP
Sensores
Familia de IMPACT
Familia de LPATS
SAFIR 3000-2 LF
Familia de LS7000
LS5000
Familia de LPATS
SAFIR 3000-2 VHF/LF
Familia de LS8000
Pantallas
®
LTraX
PLWS
PDM
LTraX
PLWS
PDM
3)
™ 3)
4)
3)
4)
4)
1)
Opciones
AP2000
DAM
AP2000
DAM
Tabla 4 Sensores Apoyados
Sensores
1)
LS8000 LF TOA y LF MDF:
LS7500 LF TOA:
LS7200 LF TOA:
Parámetros Medidos Modelo de CP
Ángulo de rumbo al punto de rayo
El punto máximo de la señal
Tiempo de llegada de la señal del sensor
Tiempo de crecimiento de la señal
Tiempo desde la punta a cero de la señal
VHF-ITF:
Azimut
Tiempo de llegada de la señal del evento
Amplitud de Señal
Densidad de Señal
Tiempo de llegada al punto de la señal del sensor
El punto de valor del campo
Tiempo de crecimiento de la señal
Tiempo de caída de la señal
VHF-ITF:
Azimut
Tiempo de llegada de la señal del evento
Amplitud de Señal
Densidad de Señal
Azimut
Tiempo de llegada de la señal del evento
Amplitud de Señal
Densidad de Señal
CP8000
CP8000
CP8000
VAISALA _______________________________________________________________________ 13
Page 28
User’s Guide ______________________________________________________________________
Tabla 4 Sensores Apoyados (Continued)
Sensores
1)
LS7000 LF TOA y LF MDF:
LS5000 LF TOA:
Familia IMPACT
141-T
141-TES
Familia LPATS
Series III (con GPS)
LPATS IV
SAFIR 3000-2 LF TOA:
SAFIR 3000-2 VHF-ITF:
Parámetros Medidos Modelo de CP
CP7000
Ángulo de rumbo al punto de rayo
CP8000
El punto máxima de la señal
Tiempo de llegada de la señal del sensor
Tiempo de crecimiento de la señal
Tiempo desde la punta a cero de la señal
CP8000
Tiempo de llegada al punto de la señal del sensor
El punto del valor del campo
Tiempo de crecimiento de la señal
Tiempo de caída de la señal
LF TOA y LF MDF:
Ángulo de rumbo al punto de rayo
CP7000,
CP8000
El punto máximo de la señal
Tiempo de llegada de la señal del sensor
Tiempo de crecimiento de la señal
Tiempo desde la punta a cero de la señal
LF TOA:
El punto máximo de la señal
CP7000,
CP8000
Tiempo de llegada de la señal del sensor
Tiempo de crecimiento de la señal
Tiempo desde la punta a cero de la señal
CP7000,
Tiempo de llegada al punto de la señal del sensor
CP8000
El punto de valor del campo
Tiempo de crecimiento de la señal
Tiempo de caída de la señal
CP8000
Azimut
Tiempo de llegada de la señal del evento
Amplitud de Señal
Densidad de Señal
SAFIR 3000-2 (VHF/LF) LF TOA:
CP8000
Tiempo de llegada al punto de la señal del sensor
El punto de valor del campo
Tiempo de crecimiento de la señal
Tiempo de caída de la señal
VHF-ITF:
Azimut
Tiempo de llegada de la señal del evento
Amplitud de Señal
Densidad de Señal
1) El número máximo para un TIS es 512 sensores y 1024 transportes.
En redes con ambos sensores IMPACT y LPATS, la configuración mínima es de
un sensor IMPACT y tres sensores LPATS
14 ___________________________________________________________________M210706SP-A
Page 29
Capítulo 2 _______________________________________________________________Introducción
Tabla 5 Programas de los Exhibidores Apoyados
Pantalla
LTraX Latitud, Longitud Latitud, Longitud
PLWS Latitud, Longitud Latitud, Longitud
PDM Latitud, Longitud Latitud, Longitud
1) Otras pantallas apoyadas: TED, TWXS, 24-Byte TIS, NDS, Storm TraX, ,THUNDER, VIS.
1)
Tipo de Datos de Relámpago Mostrado
CP7000 CP8000
Relámpago en Total
Relámpago en Total
Relámpago en Total
Funciones CP7000
CP7000 procesa los datos de relámpagos de los sensores los cuales
detectan relámpagos en un rango LF. CP7000 calcula la localidad;
provee latitud, longitud y tiempo-de-llegada para cada evento de
relámpagos. Las localidades del tiempo-real son de nubes-a-tierra
(CG) golpes que regresan y/o los datos de los destillos. Cuando
configurado para posiciones de relámpagos de nubes, el CP7000 puede
calcular posiciones para relámpago de nube los cuales son detectados
por algunos modelos de sensores (vea sección Reportar los
Relámpagos LF de Nube en la página 19). Información de la posición
está exhibida como latitud y longitud. CP7000 también provee
diagnósticos remotos de las funciones del sensor.
El estado de funcionamiento del procesador de CP y de los sensores
relacionados pueden ser determinados, y se puede recoger estadísticas
de función de la red, registrado y analizado. Sobre tiempo, los
registros archivados pueden ser analizados y cambios en la función de
la red de relámpagos se pueden detectar.
Funciones CP8000
CP8000 procesa datos de la señal de relámpagos de los sensores que
pueden detecter eventos de relámpagos en rangos de LF y VHF.
CP8000 calcula la localidad del relámpago al momento-de-llegada
para cada uno de los eventos de relámpago. CP8000 deriva latitud,
longitud y los datos los sensores VHF. CP8000 también provee
diagnosticos remotos de las funciones del sensor.
CP8000 apoya todos los exhibidores de la red que son compatibles
con el CP , y puede unir los datos de los destellos de LF con los datos
VAISALA _______________________________________________________________________ 15
Page 30

User’s Guide ______________________________________________________________________
de los destellos LF y VHF para producir una salida total de relámpagos
compuesta de datos de nube de datos de nube-a-tierra.
El estado de funcionamiento del procesador de CP y de los sensores
relacionados pueden ser determinados, y se puede recoger estadísticas
de función de la red, registrado y analizado. Sobre tiempo, los
registros archivados pueden ser analizados y cambios en la función de
la red de relámpagos se pueden detectar.
Operación del Progama de CP
CP usa un Ambiente de Escritorio Común (CDE) para el usuario
gráfico de interfase (GUI). CDE elimina el requerimiento de siempre
tener que usar el interfase de una línea de comando y permite el uso del
interfase gráfico sobre la red.
El programa de CP camina en una estación de trabajo de Sun con un
sistema de operación basado en UNIX el cual apoya a una
configuración individual o a un multiprocesador. Todos los programas
en los modelos de CP estan basados en el mismo núcleo de códigos.
CP funciona como una unidad individual sin programas de otros
módulos TIS que esten corriendo en la misma estación de trabajo.
Vaisala configura todas las estaciones de trabajo que se embarca para
el manejo del programa CP apropiado.
Calculación de los Sitios de Relámpagos
CP recibe datos crudos del sensor a través de daemon de entradasalida. Daemones del sensor toman los datos crudos, descodifacar los
datos de relámpagos, y crear mensajes de los datos del sensor bién
definidos. Los datos recogidos de los sensores pueden ser procesados
cómo posiciones LF, posiciones VHF, y/o posiciones de relámpagos
total LF/VHF.
Localidades LF
Los datos recogidos por los sensores LF son usados para calcular los
datos de las posiciones de los rayos. Los datos del tiempo-real de los
rayos y destellos de relámpagos pueden ser distribuidos a los
16 ___________________________________________________________________M210706SP-A
Page 31

Capítulo 2 _______________________________________________________________Introducción
exhibidores o recogidos para procesarlos adicionalmente cómo
relámpago en total.
Los datos procesados incluyen:
- Fecha, tiempo en 100-nanosegundo resolución con el tiempo local
de la zona de apoyo (la presición del reloj del sensor varía por tipo
de sensor)
- Latitud, longitud (WGS-84)
- Fuerza de la señal y la polaridad, cómo el rango promedio de la
señal normalizada o el pico de corriente en kiloamperes.
- Multiplicidad de los datos de destellos, o zero por datos de rayos
- Número de sensores participando en la posición de los relámpagos.
- Grados de libertad cuando se esté optimizando la posición
- Axis semi-mayor del elipse posicional en kilometros con
confidencia de 50%
- Axis semi-menor del elipse posicional en kilometros con
confidencia de 50%
- Excentricidad del elipse posicional de confidencia
- Ángulo de orientacion del elipse posicional de confidencia
- Confidencia en la posición (chi-cuadrado)
- Tiempo de subir de la forma de onda en microsegundos
- Tiempo de Pico-a-cera de la forma de onda en microsegundos
- El ritmo de subir máximo de la forma de ondoa en kA/µS
- Clasificaciones de descargas de nube-a-tierra y nube.
Posiciones VHF
Los datos recogidos por los sensores VHF-ITF son usados para
calcular posiciones de los eventos de VHF relámpago. Los datos del
tiempo-real de los rayos y destellos de relámpagos pueden ser
distribuidos a los exhibidores o recogidos para procesarlos
adicionalmente cómo relámpago en total.
Los datos VHF-ITF procesados incluyen:
- Fecha, tiempo en 100-nanosegundo resolución con el tiempo local
de la zona de apoyo (la presición del reloj del sensor varía por tipo
de sensor)
VAISALA _______________________________________________________________________ 17
Page 32

User’s Guide ______________________________________________________________________
- Latitud, longitud (WGS-84, metros sobre/bajo el nivel del mar)
- Grados de libertad cuando se esté optimizando la posición
- Axis semi-mayor del elipse posicional en kilometros con
confidencia de 50%
- Axis semi-menor del elipse posicional en kilometros con
confidencia de 50%
- Excentricidad del elipse posicional de confidencia
- Ángulo de orientacion del elipse posicional de confidencia
- Número de los sensores participando en la posición de relámpago
- Confidencia en la posición (chi-cuadrado reducido)
Posiciones LF/VHF (Relámpago en Total)
Las posiciones de los relámpagos en total por el CP8000 combinan
ambos de LF y VHF datos para desarrollar información de la localidad
de relámpagos del desglose preliminar a los rayos a tierra. La adición
de los componentes de una frecuencia más alta de la descarga de
relámpagos (VHF) hace posible la reconstrucción de la senda (mapa)
de las descargas de nube. En los mapas de relámpagos VHF, la
estructura detallada del evento del relámpago se muestra claramente,
sino la cobertura de área amplia y la información sobre polaridad,
carga y magnitudes actuales son mínimos. Los sensores LF proveen la
información sobre la polaridad, carga y magnitudes actuales.
Los procesos de los los relámpagos totales de LF/VHF combinan los
datos de los destellos de los sensores LF y VHF (vea Figura 4 en la
página 19) dentro de una fuente de datos de relámpago en total
clasificada por tiempo para distribución en los exhibidores y otros
aparatos periféricos.
Los beneficios de combinar LF y VHF detección y exhibida:
- Vista de la actividad de relámpagos en total
- Advertencia temprana de relámpagos de nube-a-tierra
- Determinación de la intensidad y etapa de la tormenta
- Identificación de características únicas de relámpagos asociados con
clima severo:
- Precipitación extrema o granizo
- Daños por vientos muy fuertes, turbulencia o condiciones de
cizalladura del viento
18 ___________________________________________________________________M210706SP-A
Page 33

Capítulo 2 _______________________________________________________________Introducción
Figura 4 Diagrama de Flujo del Proceso para Posicionar
Relámpagos en Total
- Actividad de tornados
- Un mayor entendimiento de los procesos de la electrificación de las
nubes
Reportar los Relámpagos LF de Nube
Algunos sensores de modelos LF reportan relámpagos de nubes, a
parte de los relámpagos de nube-a-tierra. Un LF TIS principalmente
provee información de nube-a-tierra (CG) destellos y rayos de
relámpagos, sin embargo el CP7000 y CP8000 pueden clasificar
mensajes de relámpagos cómo relámpagos de nube independientes a la
clasificación por un sensor LF. Esto permite que el CP apoye
relámpagos de nube para LS7200, IMPACT CT, IMPACT ES, y
IMPACT ESP sensores, y la avanzada capacitad de procesar señales
digitales por el sensor LPATS IV. Vea sección Clasificación de
Relámpagos de Nube Para Sensores LF en la página 170 for para
detalles de cómo configurar su programa para relámpagos de nube.
VAISALA _______________________________________________________________________ 19
Page 34

User’s Guide ______________________________________________________________________
Interconexiones de Procesos
CP opera en una red que incluye sensores y otras unidades
funcionables. Las siguientes secciones describen los procesos que
funcionan dento de CP y de interconectar el CP con los módulos de la
red.
20 ___________________________________________________________________M210706SP-A
Page 35

Capítulo 2 _______________________________________________________________Introducción
Procesos de CP7000
Figura 5 abajo ilustra el proceso de interconexiones para CP7000.
Tabla 6 en la página 22 y la Tabla 7 en la página 23 define el tipo y el
propósito de los procesos y de los interfases gráficas de usario. Tabla
11 en la página 29 define la cola de espera de memoria compartida que
es usada por CP7000.
Figura 5 Interconexiones de Procesos de CP7000
VAISALA _______________________________________________________________________ 21
Page 36

User’s Guide ______________________________________________________________________
Tabla 6 Procesos Usados por CP7000
Tipo Nombre Función
Comenzar lpstart Para comenzar y parar todos los procesos configurados en
el archivo $APAHOME/etc/startup.cfg
Core cdbd Para manejar las bases de datos de:
- sensores independientes y múltiples
- pantallas
- procesos
- configuraciones de transportes
fcalcd Correlacionar rayos a un destello
fhosed Generar datos en formato para las pantallas de Vaisala
impactd Manejar información de tipos LF MDF y LF TOA de sensores
LS700, LS5000 LS8000 y IMPACT. Extraer datos crudos de
la cola de espera para formar objetos de datos IMPACT para
calcular posiciones por procesos cómo located. Además,
located muestra el estado de los sensores de la red de
relámpago en tiempo real.
located Calcular posiciones de rayos LF. Procesar datos LF en tiempo
real y re-calcular datos LF históricos.
pandad Guardar datos de sensor a medios trasladables
pdad Guardar datos de posiciónes al disco
rawiod Manejar todas entradas y salidas dentro de los sensores y el CP
safird Manejar información de VHF-ITF y LF TOA recibida de los
sensores SL7500, LS7200, LS8000 & SAFIR 3000-2. Extraer
datos crudos de la cola de espera para formar objetos de datos
LF, cuales son usados por procesos cómo located, para
calcular posiciónes. Además, safird anuncia el estado de los
sensores de la red de relámpago en tiempo real.
sdd Crear, guardar y transmitir datos binarios y secundarios
basados en posiciónes LF y nube-tierra, y posiciónes de ráfaga
por VHF interferomedad. Datos secundarios están guardados
en achivos diarios con una convención nombrado cómo:
T$yyyymmdd.lp2, en el directorio $HOME/secondary por
omisión de selecciónar.
series3d Manejar datos recibidos de sensores de LPATS Serie III con GPS.
Extraer datos crudos de la cola de espera para formar objetos de datos
de LPATS Serie III, usado por procesos cómo located para calcular
posiciónes. Además, series3d anuncia el estado de los sensores de la
red de relámpago en tiempo
real.
series4d Manejar datos recibidos de sensores de LPATS IV con GPS
Extraer datos crudos de la cola de espera para formar objetos de datos
de LPATS IV, usado por procesos cómo located
para calcular posiciónes. Además, series4d anuncia el estadode los
sensores de la red de relámpago en tiempo real.
Database cdbe Configurar la base de datos de la configuración de CP por entradas por
línea de comando.
22 ___________________________________________________________________M210706SP-A
Page 37

Capítulo 2 _______________________________________________________________Introducción
Tabla 6 Procesos Usados por CP7000 (Continued)
Tipo Nombre Función
Utiilidad amond Un formateador de ASCII, cual está programado para datos de
relámpago y estados.
attach Conectar a los sensores IMPACT, LPATS o SAFIR para enviar
comandos de diagnósticos y de configuraciónes.
bridged Duplicar datos pasando por memoria compartida a otro
estación de trabajo en la red.
lnstatd Determinar el estado de la red de relámpago para vigilar el
estado de los procesos core de CP, sensores configurados,
y sus transportes asociados. Después la información de
estado está colectado, está consolidado y está anunciado
cómo un mensaje de estado combinado para actualizarlo por
otros procesos.
lpbridged Conectar datos de sensores entre dos o más CPs.
lpmon Conducirse cómo un interfase de diagnóstico a la cola de espera
y usado por ApaControl para vigilar procesos.
regionqc Acumular estadísticas de ejecución de la red para una región
específica y guardar los resultados en un archivo diario.
Las estadísticas acumuladas incluyen: el chi-square promedio,
el axis semi-mayor mediano del elipse de confianza, el
porcentaje de relámpago con posiciónes óptimas, una cuenta
de relámpago, y el número promedio de los sensores
reportando cada evento de relámpago.
sensorqa Acumular estadísticas relaciónadas a la ejecución de sensores
dentro de la red.
Tabla 7 GUIs Usados por CP7000
Nombre Función
ApaConfig Proveer un interfase gráfico del usario a la base de datos para
configurar el CP. El GUI de ApaConfig use cdbe para comunicar con
una estación de trabajo de un CP remoto.
ApaControl Proveer un interfase gráfico del usario para vigilar y controlar el
CP7000. El GUI de ApaControl use lpmon cómo un interfase en la
cola de espera de mensajes.
Attach Proveer un interfase gráfico del usario para conectar con un sensor
selecciónado para hacer diagnósticos.
intersect Un GUI basado por el mapa para trazar datos de relámpago 2-D en
tiempo real. El proceso intersect provee la capacidad de zoom,
capa de mapa y configuración de colores, y la información detallada
por cada evento. Se puede cargar relámpago de archivo para
analizarlos sin impedir con los datos de relámpago de tiempo real.
LpaControl Control para enrollar datos a los archivos en un aparato periférico.
StartupConfig Proveer un interfase gráfico del usario para configurar el archivo
startup.cfg.
VAISALA _______________________________________________________________________ 23
Page 38

User’s Guide ______________________________________________________________________
Procesos de CP8000
CP8000 apoya a sensores LF y VHF y incluye todos las funciones del
CP7000. Figura 6 en la página 25 ilustra los interconexiones de
procesos para el CP8000.
Tabla 8 en la página 26 y Tabla 9 en la página 27 define el tipo y
propósito de los procesos y interfaces gráficos de usario. Tabla 11 en
la página 29 define las colas de espera de memoria compartida usado
por el CP8000.
24 ___________________________________________________________________M210706SP-A
Page 39

Capítulo 2 _______________________________________________________________Introducción
Figura 6 Interconexiones de los Procesos de CP8000
VAISALA _______________________________________________________________________ 25
Page 40

User’s Guide ______________________________________________________________________
Tabla 8 Procesos Usados por CP8000
Tipo Nombre Función
Comenzar lpstart Para comenzar y parar todos los procesos configurados en
el archivo $APAHOME/etc/startup.cfg
Core cdbd Para manejar las bases de datos de: - sensores independientes y
múltiples
- pantallas
- procesos
- configuraciones de transportes
fcalcvd Agrupar posiciónes de eventos VHF en destelloes. El proceso fcalcvd
recibe datos de eventos VHF del locatevid, y escribe datos de VHF
destello a la cola de espera de datos de destello, usando un método de
conexión por un interproceso normal. La salida está en orden de tiempo,
basada en el tiempo de evento más cerca del centro del destello, y
usado por el proceso ldmerged para crear destellos de relámpago en
total.
fcalcd Correlacionar rayos a un destello
fhosed Generar datos en formato para las pantallas de Vaisala
impactd Manejar información de tipos LF MDF y LF TOA de los sensores LS700,
LS5000 LS8000 y IMPACT. Extraer datos crudos de la cola de espera
para formar objetos de datos IMPACT para calcular posiciones por
procesos cómo located. Además, located muestra el estado de los
sensores de la red de relámpago en tiempo real.
located Calcular posiciónes de rayos LF. Procesar datos LF en tiempo
real y re-calcular datos LF históricos.
locatevid Calcular posiciónes de eventos VHF en campo, basado en datos de
VHF enviados por sensores VHF. Procesar datos de VHF en tiempo
real y re-calcular datos VHF históricos.
ldmerged Unir arroyos de datos de relámpago LF y VHF en un arroyo de datos
ordenado por tiempo. El daemone ldmerged puede procesar y reprocesar relámpago de LF y VHF en destellos de relámpago total.
pandad Guardar datos de sensor a medios trasladables
pdad Guardar datos de posiciónes al disco
rawiod Manejar todas entradas y salidas dentro de los sensores y el CP
safird Manejar información de VHF-ITF y LF TOA recibidos de los sensores
SL7500, LS7200, LS8000 & SAFIR 3000-2. Extraer datos crudos de la
cola de espera para formar objetos de datos LF, cuales son usados por
procesos cómo located, para calcular posiciónes. Además, safird
anuncia el estado de los sensores de la red de relámpago en tiempo
real.
sandad Guardar archivos diarios de datos de sensores VHF-ITF. Éstos
archivos son compatibles con los útiles de DAM para analizar. Los
archivos primarios contienen datos de todos los sensores, y los datos
no están en orden por tiempo.
sdd Crear, guardar y transmitir datos binarios y secundarios basadas en
posiciónes LF y nube-tierra, y posiciónes de ráfaga por VHF
interferomedad. Datos secundarios están guardados en achivos diarios
con una convención de nombre cómo: T$yyyymmdd.lp2, en el directorio
$HOME/secondary por omisión de selección.
26 ___________________________________________________________________M210706SP-A
Page 41

Capítulo 2 _______________________________________________________________Introducción
Tabla 8 Procesos Usados por CP8000 (Continued)
Tipo Nombre Función
Core series3d Manejar datos recibidos de sensores de LPATS Serie III con
GPS. Extraer datos crudos de la cola de espera para formar
objetos de datos de LPATS Serie III, usado por procesos cómo
located para calcular posiciónes. Además, series3d anuncia
el estado de los sensores de la red de relámpago en tiempo
real.
series4d Manejar datos recibidos de sensores de LPATS IV con GPS
Extraer datos crudos de la cola de espera para formar objetos
de datos de LPATS IV, usado por procesos cómo located
para calcular posiciónes. Además, series4d anuncia el estado
de los sensores de la red de relámpago en tiempo real.
Database cdbe Configurar la base de datos de la configuración de CP por
entradas por línea de comando.
Utility amond Un formateador de ASCII, cual está programado para datos de
relámpago y estados.
attach Conectar a los sensores IMPACT, LPATS o SAFIR para enviar
comandos de diagnósticos y de configuraciónes.
bridged Duplicar datos pasando por memoria compartida a otros
estaciónes de trabajo en la red.
lnstatd Determinar el estado de la red de relámpago para vigilar el
estado de los procesos core de CP, sensores configurados,
y sus transportes asociados. Después de a información de
estado está colectado, está consolidado y está anunciado
cómo un mensaje de estado combinado para acutalizarlo por
por otros procesos.
lpbridged Conectar datos de sensores entre de dos o más CPs.
lpmon Conducirse cómo un interfase diagnóstico a la cola de espera
y usado por ApaControl para vigilar procesos.
regionqc Acumular estadísticas de ejecución de la red para una región
específica y guardar los resultados en un archivo diario.
Las estadísticas acumuladas incluyen: el chi-square promedio,
el axis semi-mayor mediano del elipse de confianza, el
porcentaje de relámpago con posiciónes óptimas, un conteo
de relámpago, y el número promedio de los sensores
reportando cada evento de relámpago.
sensorqa Acumular estadísticas relaciónadas a la ejecución de sensores
dentro de la red.
Tabla 9 GUIs Usados por CP8000
Nombre Función
ApaConfig Proveer un interfase gráfico del usario a la base de datos para
configurar el CP. El GUI de ApaConfig use cdbe para comunicar con
una estación de trabajo de un CP remoto.
ApaControl Proveer un interfase gráfico del usario para vigilar y controlar el
CP8000. El GUI de ApaControl use lpmon cómo un interfase en la
cola de espera de mensajes.
VAISALA _______________________________________________________________________ 27
Page 42

User’s Guide ______________________________________________________________________
Tabla 9 GUIs Usados por CP8000 (Continued)
Nombre Función
Attach Proveer un interfase gráfico del usario para conectar con un sensor
selecciónado para hacer diagnósticos.
intersect Un GUI basada por mapa para trazar datos de relámpago 2-D en
tiempo real. El proceso intersect provee la capacidad de zoom,
capa de mapa y configuración de colores, y información detallada
por cada evento. Se puede cargar relámpago de archivo para
analizar sin impedir con datos de relámpago de tiempo real.
LpaControl Control para enrollar datos a los archivos en un aparato periférico.
StartupConfig Proveer un interfase gráfico del usario para configurar el archivo
startup.cfg.
Especifaciones Operativas
Las siguientes tablas proveen las especificaciones operativas para los
modelos CP.
Tabla 10 Especificaciones Físicas
Requisito Especificación
Ambiente Temperatura de
Servicio
Temperatura
Fuera de Servicio
Humedad Relativa 40% to 80%, noncondensing
Poder Eléctrico 100 to 240 VAC, 47 to 63 Hz, 400 VA
50 ºF to 95 ºF (10 ºC to 35 ºC)
–4 ºF to 158 ºF (–20 ºC to 70 ºC)
28 ___________________________________________________________________M210706SP-A
Page 43

Capítulo 2 _______________________________________________________________Introducción
Tabla 11 Capacidades de Procesar los Datos
Especificación CP7000 CP8000
Entrada por Mensajes
de Sensores
Posiciónes de
Relámpago
Procesadas
Hasta 100 mensajes LF
por sensor por segundo
Hasta 100 posiciónes
de rayo LF por segundo
Hasta 100 posiciónes
de destello LF por
segundo
Hasta 100 mensajes LF
por sensor por segundo
Hasta 10000 mensajes
VHF por sensor por
segundo
Hasta 100 posiciónes
de rayo LF por segundo
Hasta 100 posiciónes
de destello LF por
segundo
Hasta 1000 posiciónes
de eventos VHF por
segundo
Hasta 1100 posiciónes
de destello de
relámpago total
por segundo
Tabla 12 Interfases de Comunicación entre el CP y Senores
Tipo Interfase de Comunicación
Serie Serie en asícrono
16 o 32 puertos
conectores de 25 alfileres, tipo 'D'
control completo de modem
115200 bps
Red Ethernet o Ethernet Rápido
10Base-T o 100Base-T
Tabla 13 Protocolos de Salida
Tipo Protocolo de Salida
Serie Serie en asíncrono
Red TCP/IP
Enchufe
UDP (Protocolo de Datagrama de Usario
multidifusión
PPP (Protocolo de punto-a-punto)
VAISALA _______________________________________________________________________ 29
Page 44

User’s Guide ______________________________________________________________________
Tabla 14 Capacidad de Almacenaje para Datos de Relámpago
Modelo de
CP
CP7000 Rayos de LF a un rato de
CP8000 Eventos de relámpago VHF 180 días
1) Datos crudos de sensor es guardado al disco y almacenamiento en un periférico cómo
necesario.
Datos de Relámpago
100/segundo
destello de LF 180 días
destello de VHF 180 días
Datos Primarios 180 días
Datos Secundarios 180 días
1)
Mínimo
180 días (cerca de
45 miiones de rayos)
Módulos Opcionales
Módulos opcionales proveen para procesar archivos de datos,
exhibición de datos en tiempo-real, y análisis de información de
relámpagos históricos.
Módulos de Procesar
El Procesador opcional de Archivos AP5000 módulo de la red y
servidor FALLS.
AP5000 Provee una distribución mejorada de datos a los
usuarios de TIS en una base de tiempo-real o archivada.
Servidor
FALLS
Versión del servidor para actualizar múltiples
terminaleses de los clientes del FALLS.
30 ___________________________________________________________________M210706SP-A
Page 45

Capítulo 2 _______________________________________________________________Introducción
Módulos de Programas
Los módulos del programa opcionales le permiten exhibir y analizar
los datos del sensor.
PDM Programa para exhibir los relámpagos totales en
tiempo-real.
DAM Analizador de datos de sensores VHF/LF. Analiza las
densidades y tendensias históricas de los relámpagos.
FALLS
Client
Analiza las densidades y tendensias históricas en los
relámpagos, y correlaciona los rayos de relámpagos con
los daños que se sospechan sean ocacionados por
relámpago.
VAISALA _______________________________________________________________________ 31
Page 46

User’s Guide ______________________________________________________________________
Esta página se dejó en blanco intencionalmente.
32 ___________________________________________________________________M210706SP-A
Page 47

Capítulo 3 ___________________________________________________________Operativo del CP
CAPÍTULO 3
OPERATIVO DEL CP
Este capítulo aplica a todos los modelos CP.
Información General
Este capítulo se dirige a los procedimientos para el operativo del
programa CP. Entrenamiento es recomendado para los usuarios que no
estén familiar con los sistemas operativos de UNIX, ambiente de XWindows, o con el sistema de localidad de relámpagos de Vaisala. Se
supone que el equipo de CP está instalado y configurado, el programa
está instalado, la cuenta del usuario está establecida, y el sistema CP
solo está esperando para el usuario que comienze una sesión.
Antes de comenzar el proceso para iniciar una sesión, es muy útil
entender los tres tipos de procesos que son utilizados en el CP:
- Procesos Centrales (daemon)
- Procesos de utilidad
- Procesos gráficos de interfase para usario (GUI)
Procesos Centrales
Los procesos centrales son requeridos para ejecutar el sistema básico
de CP y para ejecutar los procesos daemon que empazarán
automáticamente cuando la estación de trabajo está iniciada. Excepto
para mensajes de estatus, los procesos daemones corren en el trasfondo
después que el proceso de iniciar una sesión de usario está completo, y
se para automáticamente cuando la estación de trabajo se apaga. Los
VAISALA _______________________________________________________________________ 33
Page 48

User’s Guide ______________________________________________________________________
procesos daemones proveen la función básica la cual incluye el
procesar relámpagos, apoyo a exhibidores, y registrar datos crudos al
disco. Todos los nombres de los procesos centrales terminan con la
letra d.
Por ejemplo, la d al final de pandad indica que es el proceso panda
(archivo de datos de posiciones por el analizador de la red) se ejecuta
como un proceso daemon.
Procesos de Utilidades
Procesos de utilidades son aplicaciones que proveen información
adicional sobre el operativo del CP o para extender sus funciones. Los
procesos de utilidades no son cruciales para el operativo del CP. Con
la diferencia a los procesos centrales, los procesos de utilidades
requieren de comienzo manualmente después del comienzo de la
sesión de usario. Un ejemplo de un proceso de utilidad es sensorqa, el
cual supervisa los datos de las localidades de los relámpagos
producidos por el CP y acumula las estadisticas que ayudan a
determinar que tan bién está funcionando la red de relámpagos.
Procesos GUI
Los procesos GUI requiren que el usario esté en una sesión y requiere
de un inicio manual. GUIs aparece como ventanas que le permiten al
usario configurar y supervisar las funciones CP. La Tabla 15 abajo
ofrece una lista del título de la ventana que se exhibe para cada GUI.
Tabla 15 GUIs
GUI Título de Ventana
ApaConfig APA Config
ApaControl APA Control
Attach AttachImpact
AttachIt
intersect Intersect
LpaControl LP Archive Control
StartupConfig Startup Configuration Editor
34 ___________________________________________________________________M210706SP-A
Page 49

Capítulo 3 ___________________________________________________________Operativo del CP
Arrancar y Parar el CP
Las siguientes secciones describen los procedimientos para iniciar un
sesión de arranque de los procesos CP, y parar los procesos CP.
Comenzar la Sesion
El ambiente común del deskstop (CDE) comienzo de la sesión será
exhibido en el console cuando la estación de trabajo se comienza.
Para comenzar la sesión en la estación de trabajo de la Series CP:
1. Introduzca el nombre del usuario apa y la contraseña 1996apa.
El nombre del usuario y la contraseña son case sensible y
deberán introducirse con la correcta capitalización para que el
sistema los acepte. La cuenta del usario apa es la cuanta que se
usa para estos. La cuenta del usuario apa es la cuenta que se usa
para configurar y supervisar el CP.
2. Abra la ventana en el controlador de terminales, si es que aún no
a sido abierta, al hacar clic el icono en la controlador de
terminales (vea Figura 7 abajo) en el tablero del control CDE.
Figura 7 Icono Controlador de terminales
Comienzo de los Procesos Centrales
Los procesos centrales definidos empiezan automáticamente cuando la
estación de trabajo arranca (comienza el sistema); sin embargo, pueden
apagarse manualmente. Después de que el sistema comienza, revise
cuál proceso está funcionando, si lo hay. El estatus de algunos
procesos centrales van a necesitar cambiarse para algunas funciones
CP8000; y pueden ser cambiados para funciones CP7000. Cambios
VAISALA _______________________________________________________________________ 35
Page 50

User’s Guide ______________________________________________________________________
son hechos para los procesos centrales usando el StartupConfig GUI
(vea Capítulo 11, Configuración Avanzada CP, para más información).
NOTA
Los carácteres que exhibe el sistema no son mecanografiados por un
usuario al introducir los comandos. Por eso, los siguientes ejemplos
de la línea de comandos sólo muestran el texto mecanografiado por el
usuario.
Para determinar cuáles procesos centrales estan funcionando:
- En una ventana Controlador de terminales, introduzca el siguiente
comando después del símbolo del sistema apa: { ~ } >
lpstart -core status
Este comando exhibe el nombre, etiqueta, estado, y identificación
de cada proceso central configurado.
Para comenzar el proceso central:
- En la ventana Controlador de terminales, introduzca el siguiente
comando después del símbolo del sistema apa: { ~ } >
lpstart -core start
Comenzando el Proceso de Utilidades
Ya que los procesos centrales esten funcionando, los procesos de
utilidades pueden comenzar.
Para comenzar los procesos de utilidades:
- En la ventana Controlador de terminales, introduzca el siguiente
comando después del símbolo del sistema apa: { ~ } >
lpstart -util start
Este comando exhibe el nombre, etiqueta, estado y la identificación
para cada proceso central configurado.
Por opción de omisión, se abra la ventana sensorqa. Esta ventena
presente el proceso usado para asegurar calidad. Referirse al
36 ___________________________________________________________________M210706SP-A
Page 51

Capítulo 3 ___________________________________________________________Operativo del CP
Capítulo 8, Supervisando la Función del Sensor, para más
información de sensorqa.
Para comenzar los Procesos GUI
Ya que los procesos centrales esten funcionando, los procesos de GUI
pueden comenzar.
To start the GUI processes:
1. En la ventana Controlador de terminales, introduzca el
siguiente comando después del símbolo del sistema apa: { ~ } >
lpstart -gui start
Para comenzar el LpaControl para CP8000, introduzca el
siguiente comando después del símbolo del sistema apa: { ~ } >
lpstart -gui start LpaControl
2. Si las ventanas de GUI se minimizan, las puede abrir cuando
haga clic dos veces en sus iconos.
3. Si los iconos de GUI no están visibles, abra el Apa Apps pop-up
menú y haga clic en el icono cerca del GUI deseado (vea Figura
8 abajo). Para abrir el Apa Apps pop-up menú, haga clic en up
en la flecha arriba del icono del tablero del Control Apa en el
tablero de control abajo del exhibidor..
CP_apa_apps_01
Figura 8 Ventana Típica Para Acceso al GUIs
VAISALA _______________________________________________________________________ 37
Page 52

User’s Guide ______________________________________________________________________
Comenzando Todos los Procesos de CP
Para conveniencia, todos los procesos pueden empezarse al mismo
tiempo con un comando.
Para comenzar todos los procesos centrales, de servicios y GUI:
- Después de apa: { ~}> símbolo del sistema, escriba en la máquina:
lpstart -all start
Haga referencia a la página de lpstart man para todas las opciones
disponibles.
Detener el CP
Cuando la estación de trabajo esté apagada, los procesos centrales se
paran cómo parte del procedimiento normal para apagarlo.
Para parar los procesos centrales manualmente:
- Después de apa: { ~}> símbolo del sistema, escriba en la máquina:
lpstart stop
Para parar los procesos GUI:
- Después de apa: { ~}> símbolo del sistema, escriba en la máquina:
lpstart -gui stop
Para parar los procesos de utilidades:
- Después de apa: { ~}> símbolo del sistema, escriba en la máquina:
lpstart -util stop
Para parar los procesos centrales, de servicios y GUI:
- Después de apa: { ~}> símbolo del sistema, escriba en la máquina:
lpstart -all stop
Haga referencia a la página de lpstart man para todas las opciones
disponibles.
38 ___________________________________________________________________M210706SP-A
Page 53

Capítulo 3 ___________________________________________________________Operativo del CP
Usando el ApaControl GUI
El ApaControl GUI supervisa y exhibe el estado actual del CP: El
estado de los procesos, los estados para archivar datos en bruto en el
disco, y los estados de los sensores. Figura 9 abajo muestra la ventana
del APA Control,sus menús, tableros y botónes.
Barra de Menú
Tablero de Procesos
Proceso Seleccionado
Tablero de Estado
Figura 9 Ventana de Contol APA
Tablero de
Sistema de
Archivos
Tablero de
Sensor
Tablero de
Inundación de
Archivos del
Sistema
Usar el Tablero Para los Procesos
Los tableros para los Procesos exhibe el nombre de cada uno de los
procesos centrales y de servicios en una caja indicadora. Una
estructura rodea la caja indicadora para mostrar los procesos
seleccionados. En el lado izquierdo, debajo de la ventana de APA
Control (vea Figura 9 arriba) se encuentran cuatro botónes que le
permiten al usuario controlar y obtener información de los procesos.
Los botónes comienzan, paran, restablecen y proveen información
VAISALA _______________________________________________________________________ 39
Page 54

User’s Guide ______________________________________________________________________
sobre los procesos seleccionados. Los nombres de los botónes y los
iconos son los siguientes;
Start button Reset button
Stop button Information
button
Para comenzar el proceso:
- Seleccione el proceso, después haga clic en el botón Start.
Para Parar el Proceso:
- Seleccione el proceso, después haga clic en el botón Stop..
Para restablecer (volver a poner en marcha) el proceso:
- Seleccione el proceso, después haga clic en el botón Reset.
Restablecer el proceso combina el comenzar y el parar las
funciones.
Para obtener información adicional sobre un proceso:
- Seleccione el proceso, después haga clic en el botón de
Information. La ventana se abre para el Process Info, exhibiendo
información sobre el proceso. El botón Dismiss cierra la ventana.
Usando el Tablero de los Sensores
Los tableros de los sensores (Sensors), localizadas en el lado derecho
de la ventana APA Control, exhibe una caja indicadora para cada
sensor apuntado en la ventana de las tablas del sensor. Una estructura
rodea la caja indicadora para mostrar un sensor seleccionado (vea
Figura 10 en la página 41).
Seleccionar Formatos para las Etiquetas y
Clasificación Sucesiva
Use los menús del Sensor (vea Figura 11 en la página 42) para
seleccionar la forma en que el tablero de los Sensores exhiben los
sensores. Tabla 16 en la página 41 describe cuál opción en el menú de
40 ___________________________________________________________________M210706SP-A
Page 55

Capítulo 3 ___________________________________________________________Operativo del CP
Menú de Sensores
Caja de Indicador
Sensor Selecciónado
Tablero de Sensor
Botón de Información de
Sensor
Figura 10 Manejar los Sensores con el ApaControl GUI
los Sensores lo hace. La sucesión para alistar los sensores está en
orden ascendente y basado en el criterio seleccionado de clasificación.
Tabla 16 Opciones en la Pantalla del Sensor en Control APA
Rótulo con En Orden por Use ...
ID en Decimal ID Valor decimal de número ID de sensor
ID en Hex --- Valor de hexadecimal de número ID de sensor
Abreviatura Abreviatura abreviatura entrada en la tabla de configuración el sensor
Nombre
completo
--- Tipo Tipo de sensor
--- Etiqueta Etiqueta del proceso que controla el sensor
Ordenado #1 Ordenado #1 Valor ordenado #1 puesto en la tabla de configuración de
Ordenado #2 Ordenado #2 Valor ordenado #2 puesto en la tabla de configuración de
Ordenado #3 Ordenado #3 Valor ordenado #3 puesto en la tabla de configuración de
Nombre
completo
Nombre completo entrado en la tabla de configuración
el sensor
sensor
sensor
sensor
Es común clasificar los sensores de acuerdo a la estiqueta; sin
embargo, otros criterios se puede usar.
VAISALA _______________________________________________________________________ 41
Page 56

User’s Guide ______________________________________________________________________
apactrl4
Figura 11 Menú de los Sensores
Para seleccionar el formato de la etiqueta para un sensor y para el
criterio de clasificación:
- En el menú de Sensores en la ventana de APA Control, seleccione
el formato deseado para la etiqueta y para las opciones del criterio
de clasificación.
Por ejemplo: Para mostrar el decimal ID para cada sensor en la caja
indicadora, seleccione Label w/Decimal ID. Suponiendo que usted
utilizo el campo Sort1 en las tablas de configuraciones del sensor
para mostrar el condado en donde cada sensor fue instalado. Para
alistar los sensores en orden alfabética y en forma ascendente por
nombre de condado, seleccione Sort By Sort #1.
La opción Fixed-Width Labels en el menú en Sensores limita el
número de caracteres a 4 para la etiqueta. Esto es útil para redes con
un gran número de sensores cómo se ilustra en la Figura 12 en la
página 43.
Para usar Fixed Width para las etiquetas del Sensor:
- En el menú de Sensores en la ventana de Apa Control, seleccione
Fixed-Width Labels.
42 ___________________________________________________________________M210706SP-A
Page 57

Capítulo 3 ___________________________________________________________Operativo del CP
Para Determinar el Estado del Sensor
El ApaControl GUI usa dos artículos para mostrar el estado del sensor:
- Un carácter para el estado después de la etiqueta del sensor (vea
Figura 12 abajo).
Un carácter de división (/) separa la etiqueta del sensor del carácter
del estado del sensor.
- Color del estado del sensor en la caja indicadora (vea Figura 13 en
la página 45)
ApaCntrl5c
Figura 12 Ventana de APA Control
Para mostrar el carácter del estado del sensor al final de la
etiqueta del sensor:
- En el menú de Sensores en la ventana de Apa Control, seleccione
Show Status Character (vea Figura 11 en la página 42).
Información del estado también aparece en la caja de diálogo en el
Sensor/Tranport Info. (vea la sección Exhibir Información Adicional
sobre los Sensores en la página 45). La porción de Sensor Info exhibe
carácteres de estado para el sensor y la sincronización en los campos
del Status Character y Clock Sync, respectivamente.
Tabla 17 en la página 44 describe cada carácter que indica la
sincronización GPS y estado de transporte. Mientras unos caracteres
son usados para los tres tipos de estados, los signifcados varían. El
VAISALA _______________________________________________________________________ 43
Page 58

User’s Guide ______________________________________________________________________
carácter (_) es un carácter subrayado. La abreviatura sync se refiere a
la sincronización del reloj GPS.
Tabla 17 Cáracteres de los Estados y sus Significativos
Estado de
Carácter
_ Estado desconocido No información
? Estado desconocido Posible que esté fuera de
0 Expiró el tiempo (no estado de
D Bajo (no mensaje del sensor) No está sincronizado Bajo
1)
U
B Re-iniciar el buffer
N Ruidoso
P Cargar el software
R No mensajes válidos del
S Sensor no está sincronizado
T Tiempo de sensor está
W Sensor esperando para
Estado de Sensor Estado de GPS Estado de Transporte
No transporte asociado
recibida y sincronizada
Estado desconocido
sincronización
Expiró el tiempo
daemon de sensor)
Arriba sincronizado Arriba
sensor para 10 minutos
inexacto
sincronizar inicialmente
de espera para el
estado de sincronización
Expiró el tiempo de
espera para el estado de
transporte
1) Carácter aparece en la caja de diálogo de Sensor / Transporte, solamente.
El resto del método para determinar el estado del sensor es por medio
del color del sensor en la caja indicadora (vea Figura 13 en la página
45). El color depende de las condiciones del estado las cuales aplican
al sensor, su sincronización GPS, y su transporte. La mayoría de las
condiciones de estado crean un indicador color amarillo, varios crean
un indicador color rojo y una sola combinación crean un indicador en
color verde.
Tabla 18 en la página 45 muestra las condiciones que determinan el
color de las cajas indicadoras del sensor. Para deterimar las razones
específicas de las cajas indicadoras rojas o amarillas, abra la caja de
diálogo Sensor/Transport Info. Vea la sección Exhibición de
Información Adicional sobre los Sensores en la página 40. En la
porción de Sensor Info, observe los campos de Reason, Clock Sync y
carácteres de estados de los sensores. El campo de Reason en la
porción del Sensor Info muestra las condiciones que afectan en estado
del sensor (vea Tabla 18 en la página 45). El texto, Data below is last
received, hace referencia a campos adicionales incluídos en la porción
del Sensor Info. Los campos de Status Character y Clock Sync
44 ___________________________________________________________________M210706SP-A
Page 59

Capítulo 3 ___________________________________________________________Operativo del CP
Color de Rótulo = verde, no carácter de estado = el sensor parese arriba
Color de Rótulo = amarillo, /W = esperando sincronizar inicialmente al
reloj GPS
Color de Rótulo = amarillo, /? = el estado del sensor está desconocido
Color de Rótulo = rojo, /R = no mensaje válido del sensor por 10 minutos
Color de Rótulo = rojo, /D = el sensor está bajo (no mensajes del sensor)
Color de Rótulo = amarillo, /S = el reloj de sensor no está sincronizado
Figura 13 Colores de los Indicadores de los estados de Sensores
muestran los códigos del estado del sensor y la sincronización,
respectivamente.
Tabla 18 Indicadores del Estado del Sensor
Color Carácter Campos de Razón Estado de: Significancia
Trasfondo _
_
Rojo 0 No estado del transporte. Datos
Rojo 0 No estado del daemon. Datos
Rojo D Transporte Bajo Transporte Bajo
Rojo D Estado de sensor es bajo Sensor Bajo
Rojo R No mensajes válidos del sensor
Verde U
U
Amarillo Varios Sensor tiene estado
No está disponible el estado del
sensor.
abajo es el último recibido
abajo es el último recibido
por más que 10 minutos
El sensor aparece arriba Sensor
y el reloj está sincronizado
Transporte
de sensor
Transporte Expiró el tiempo de
Sensor Expiró el tiempo de
Sensor No mensajes válidos
GPS
Sensor
GPS
No está disponible el
transporte asociado.
asociado
espera del estado de
transporte
espera del estado de
transporte
del para 10 minutos
Arriba
está sincronizado
Vea Tabla 17 en la
página 44
Exhibir Información Adicional sobre los Sensores
Use el botón de Information del sensor debajo de la pantalla de
Sensors para acceso adicional de información sobre los sensores
VAISALA _______________________________________________________________________ 45
Page 60

User’s Guide ______________________________________________________________________
seleccionados, la sincronización GPS y su transporte, junto con el
acceso al Attach GUI. Al hacer clic en la caja indicadora del sensor
selecciona ése sensor y hace que se active el botón de Information
(vea Figura 14 abajo).
Sensor Selecciónado
Para abrir la Caja de Información de
Transporte del Sensor Seleccionado
Figura 14 Botón de Información del Sensor
Para exhibir información adicional sobre los sensores
seleccionados y su transporte:
- Haga clic en el botón de Information para abrir el diálogo en la
caja de Sensor/Transport Info.
Los botones de Sensor Info y de Transport Info hacen conmutación
entre el mostrador del sensor y la información de transporte. El botón
seleccionado es resaltado para indicar la información exhibida.
Para exhibir los campos de información del sensor:
- Haga clic en Sensor Info.
46 ___________________________________________________________________M210706SP-A
Page 61

Capítulo 3 ___________________________________________________________Operativo del CP
Para exxhibir los campos de la información de transporte:
- Haga clic en el Transport Info.
Para adjuntar a un sensor LF seleccionado:
- Haga clic en Attach.
El botón Zero Sensor Stats y el botón Zero Transport Stats causa
que los campos que contienen estadísticas acumuladas se restablezcan
en cero.
Para estadísticas acumuladas en cero para un sensor seleccionado:
- Haga clic en Zero Sensor Stats.
Para poner estadísticas acumuladas al cero para el transporte del
sensor seleccionado:
- Haga clic en Zero Transport Stats.
El botón Reset Transport envía un mensaje que requiere que el
transporte del sensor sea restablecido. Restablecer el transporte
usualmente se hace al cerrarlo y abrirlo.
Para restablecer el transporte del sensor seleccionado:
- Haga clic en Reset Transport.
Seleccionar un sensor diferente y al hacer clic en el botón de
Information mientras la caja de diálogo de Sensor/Transport Info se
activa, esto activa la información asociada con el nuevo sensor
seleccionado.
Para cerrar la caja de diálogo de Sensor/Transport Info:
- Haga clic en Dismiss.
La información en la caja de diálogo del Sensor/Transport Info es útil
para diagnosticar las condiciones de errores que se indican en color
amarillo o rojo en la caja indicadora del sensor. Los campos que se
exhiben dependen del tipo de sensor seleccionado. Para detalles sobre
los campos de información de LS7000, LS75000, IMPACT, LPATS
Series III y LPATS IV, haga referencia a la Guía de Referencia de CP
Series ™.
VAISALA _______________________________________________________________________ 47
Page 62

User’s Guide ______________________________________________________________________
Establecimiento de las Condiciones Audibles de las Alarmas
Alarmas audibles pueden ser usadas cómo una alerta cuando las
condiciones de los procesos, los datos de archivo del sistema, o de los
sensores lleguen a un uso definido de umbral. Usted establece el valor
de los umbrales, selecciona el audio archivado para producir la alarma
y el volúmen de los Thresholds en la caja de diálogo (vea Figura 15
abajo).
Figura 15 Establecimiento de Thresholds
Para abrir Thresholds en la caja de diálogo:
- Desde el menú de File en la ventana de APA Control, seleccione
Set Thresholds Values
El valor introducido en cada campo determina cuando la alarma
sonará. Una lista a un lado de cada campo contiene un archivo de
audio disponible para crear el sonido de la alarma. El valor
introducido en el campo de Vol controla el volumen de la alarma.
48 ___________________________________________________________________M210706SP-A
Page 63

Capítulo 3 ___________________________________________________________Operativo del CP
Los valores para el campo de Vol tienen un rango entre 1 y 100 y
representan el porcentaje de la vocina disponible.
NOTA
Para que los cambios en la caja de diálogo Thresholds tomen efecto,
usted deber restablecer el ApaControl GUI.
En la pantalla de Process Thresholds se contola las condiciones de la
alarma para el proceso de los servicios. Los campos de umbral
establecen el número de procesos para cada tipo que no deben de estar
funcionando para que la alarma suene.
En la pantalla de Data Archive Thresholds se controla las
condiciones de la alarma del sistema de Archivos. Los umbrales
establecidos en la pantalla controlan el audio de las alarmas y cuando
deben de cambiar de colores en la ventana de APA Control. Vea la
sección Uso del Tablero del Sistema de Archivo en la página 50 y la
sección Usando el Tablero del Sistema de Exceso de Archivos en la
página 51 para más información sobre el sistema de archivos para
alarmas.
La pantalla de controles para Sensor Thresholds controla las
condiciones de la alarma para el estado del sensor. Un sensor se
encuentra en un estado caido cuando la caja indicadora se pone color
rojo. El sensor está en un estado de alerta cuando la caja indicadora se
pone color amarillo. Una combinación de factores relacionados al
estado del sensor, su estado de transporte y su estado de sincronización
determina el estado del sensor. Vea la sección Para Determinar el
Estado del Sensor en la página 43 para más detalles.
Para establecer una condición de alarma:
1. En el menú de Sensors en la ventana de APA Control,
seleccione Set Thresholds Values.
2. Introduzca un valor apropiado en el campo de thresholds.
3. Selecione el archivo de audio al hacer clic en el botón a un lado
del campo de threshold.
4. Establesca el nivel del volumen al introducir un valor en el
campo Vol .
5. Haga clic para guardar las configuraciones, o haga clic en
Dismiss para cerrar la caja de diálogo sin hacer cambios.
VAISALA _______________________________________________________________________ 49
Page 64

User’s Guide ______________________________________________________________________
6. Para que cualquier cambio tome efecto, vuelva a poner en
marcha el ApaControl GUI.
Para prevenir que el sistema controle la condición:
- Establezca el umbral en cero.
La Tabla 19 abajo muestra los valores alternativos en los campos
Thresholds en la caja de diálogo.
Tabla 19 Caja de Diálogo para Umbrales, Puestos por
Omisión
Condición
Proceso Núcleo está bajo 1 (No sonido) 0
Proceso de Útilidad está bajo 1 (No sonido) 0
Precaución de Archivo % 75 (No sonido) 0
Mal Archivo % 90 (No sonido) 0
Precaución de Inundación % 50 (No sonido) 0
Inundación % Malo 75 (No sonido) 0
Estado de Sensores es bajo 1 (No sonido) 0
Sensores en estado de
precaución
Umbral por
Omisión
1 (No sonido) 0
Archivo de
Audio
por Omisión
Volume
por
Omisión
Uso del Tablero del Sistema de Archivo
La ventana de APA Control muestra el estado actual del sistema de
Archivo e exceso de sistemas de archivo. Datos en bruto del sensor
son guardados por medio del proceso pandad en éste sistema de
archivos. El sistema de archivo el cuál es el sitio principal para los
datos en bruto, es un sistema e archivo UNIX localizado en los medios
trasladables.
El tablero de Archive File System (vea Figura 9 en la página 39)
muestra la cantidad de espacio utilizado en los medios si los datos son
escritos en el sistema de archivo. Un borde elevado en el tablero indica
que pandad está escribiendo en el sistema de archivo. El estado del
sistema de archivo indica visualmente por medio de colores (verde,
amarillo, o rojo) y por audio en un tono de alarma.
Establesca los tresholds para alarmas visuales y de audio en la caja de
diálogo Thresholds (vea Figura 15 en la página 48). Los valores en los
campos de Archive Warning % y Archive Bad % determinan la
50 ___________________________________________________________________M210706SP-A
Page 65

Capítulo 3 ___________________________________________________________Operativo del CP
medida cuando el ordenador analógico cambia de color y cuando la
alarma suena. Los archivos de audio seleccionados y el nivel
establecido en el campo Vol define los sonidos de la alarma.
Cuando el uso del sistema de archivos Archive es menos que el valor
del Archive Warning %, el indicador se pone color verde. El
indicador se pone color rojo cuando el uso es mayor o igual al valor de
Archive Bad %. El indicador se pone color amarillo cuando el uso es
entre dos valores de threshold. Vea Tabla 19 en la página 50 para esos
valores.
El proceso pandad se cambia automáticamente al sistema de exceso de
archivo cuando el sistema de Archive se llena al 100%. Cambie los
medios de comunicación que son trasladables cuando el CP le esté
escribiendo al sistema de Exceso de archivos.
Para cambiar manualmente los sistemas de archivo:
- Haga clic Data Archive Change (vea Figura 16 abajo) en la
ventana de APA Control.
arcvchng
Figura 16 Botón Para Cambios en Data Archive
Usando el Tablero del Sistema de Exceso de Archivos
El tablero del Overflow File System (vea Figura 9 en la página 39)
muestra la cantidad de espacio que se usa en los medios de
comunicación y avisa si los datos se están escribiendo en el sistema de
archivo. Un borde elevado en el tablero indica que pandad está
escribiendo en el sistema de archivo. El estado del sistema de archivo
se indica visualmente por medio del color del ordenador analógico
(verde, amarillo or rojo) y con audio por medio de un tono de la
alarma.
Establesca los umbrales para las alarmas visuales y de audio en la caja
de diálogo Thresholds (vea Figura 15 en la página 48). Valores en los
campos de Overflow Warning % y Overflow Bad determinan
cuando el ordendador analógico cambia de color y cuando suena la
VAISALA _______________________________________________________________________ 51
Page 66

User’s Guide ______________________________________________________________________
alarma. Los archivos de audio seleccionados y los niveles establecidos
en los campos de Vol definen los sonidos de la alarma.
Cuando el uso del sistema de archivo Overflow es menos que el valor
del Overflow Warning %, el indicador es color verde. El indicador es
rojo cuando el uso es mayor o igual al valor de Overflow Bad %. El
indicador es amarillo cuando es uso está entre los dos valores de los
umbrales. Vea la Tabla 19 en la página 50 para éstos valores.
Cuando el sistema de archivo Overflow se llena a un 100%,
almacenamiento de los datos deberán cambiarse al sistema de archivo
Archive o se perderan los datos de los relámpagos.
Para cambiar del sistema de archivo Overflow al sistema de
archivo Archive:
- Haga clic en Data Archive Change (vea Figura 16 en la página 51)
en la ventana de APA Control.
Usando el LpaControl GUI
LpaControl GUI controla la alimentación de los datos en el sistema
de archivo Archive y envía la alimentación de datos a un almacen de
datos opcional tal cómo un CD o cinta. CP escribe los datos de
relámpagos en el sistema de archivo Archive hasta que esté lleno.
Entonces, el proceso de pandad cambia datos entrantes y adicionales
al sistema de archivo de Overflow y si es así, los configura,
LpaControl automáticamente transfiere los datos del sistema de
Archive al sitio de alimentación. Cuando el sistema de Archive se
vacía, LpaControl le ordena al pandad que transfiera los datos de
Overflow al sistema de archivo Archive y empieza a escribir datos
nuevos ahí también. El artefacto para guardar los datos recibe la
alimentación de los datos ya sea automáticamente o manualmente. El
control manual de la alimentación y del artefacto para guardar datos le
permite transferir los datos en cualquier momento.
Iniciar el LpaControl GUI abre la ventana de LP Archive Control
(vea Figura 17 en la página 53). La ventana usa un artefacto para
alimentación de datos a para exhibir en forma gráfica el porcentaje del
espacio de alimentación de datos (/spool) que se estan usando. El texto
bajo el instrumento indica la cantidad de espacio en dos formatos: un
porcentaje y una proporción del espacio utilizado al espacio total
almacenado en megabits.
52 ___________________________________________________________________M210706SP-A
Page 67

Capítulo 3 ___________________________________________________________Operativo del CP
LpaCtrol_01
Figura 17 Abertura del Control LP Archive
Para configurar la alimentación y artefactos de almacenamiento
usando LpaControl GUI:
1. Empieze el LpaControl GUI al hacer uno de los siguientes:
- Haga un doble clic en el icono de LpaControl (vea Figura 17
arriba).
LpaCtrol_02
- En la ventana Controlador de terminales, introduzca el
siguiente comando después del símbolo:
lpstart -gui start LpaControl
2. Seleccione Setup Devices del menú File para abrir Devices en la
caja de diálogo (vea Figura 18 abajo).
Figura 18 Abertura de la Caja de Diálogo Devices
3. Configuración del artefacto de alimentación:
a. Introduzca la localidad del artefacto de alimentación de
datos en el campo Location (vea Figura 18 arriba).
VAISALA _______________________________________________________________________ 53
Page 68

User’s Guide ______________________________________________________________________
b. Para comprimir los archivos cuando se mueve del área de
alimentación a archive, seleccione Compress Files on
move to spool?.
4. Configuración del artefacto de almacenamiento:
a. Seleccione el tipo de artefacto de almacenamiento de la
lista de Device Type (vea Figura 19 abajo).
El guíon para mover los datos al artefacto de
almacenimiento de datos se muestra en el campo Device
Type.
Aparato para
Almacenamient
o de Lista
Lpa_control_04
Figura 19 Tipos de Artefactos de Almacenamiento Para
LpaControl
b. Para almacenamiento automático de datos, introduzca un
no-cero porcentaje para saber que tan lleno debe de estar el
artefacto para poder mover los datos al artefacto de
almacenamiento. Para almacenamiento manual de los
datos, ponga 0 (cero) en el campo de porcentaje
c. Seleccione el archivo de audio que sonará cuando el
almacenamiento automático comienza y establece el nivel
del volumen.
5. Para guardar la configuración, haga clic en Save, o haga clic en
Dismiss para ignorar los cambios.
6. Para salirse de LpaControl GUI, seleccione Exit del menú File.
54 ___________________________________________________________________M210706SP-A
Page 69

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
CAPÍTULO 4
CONFIGURACIÓN DE BASES DE DATOS CP
Este capítulo aplica a todos los modelos CP.
Información General
Vaisala provee la configuración del sistema inicial de CP. Bases de
datos compuestos de tablas múltiples almacenan los parámetros de
configuraciones del sistema. El ApaConfig GUI provee el interfase
para crear y modificar las bases de datos. Una vez que el sistema está
funcionando, usted raramente necesitará acceso a la tablas de
configuraciones (archivos). Después de una evaluación de la función
del sistema, usted necesita cambiar los parámetros de las
configuraciones para reforzar la eficiencia de las detecciónes. Agregar
sensores adicionales, pantallas de relámpagos, o para tener acceso a
otras redes de detección de relámpagos, son otras razones para el
acceso de la tablas de configuraciones.
Cambiar las configuraciones involucra el seleccionar tareas que
dependen de una naturaleza de cambio. Configurar el sistema
involucra todas las siguientes tareas:
- Defina Recursos Universales de Localizadores (URLs) para
conexiones físicas a módulos TIS.
- Creación de Tablas de Mapas para las redes de detección de
relámpagos. Si la configuración cambia, agregue o actualize las
Tablas del los Mapas.
VAISALA _______________________________________________________________________ 55
Page 70

User’s Guide ______________________________________________________________________
- Use el ApaConfig GUI para la configuración de las base de datos
realtime.
- Asigne la identificación de transporte
- Configure una red externa y asociada con las identificaciones
de los componentes de la red.
- Configure los sensores y las identificaciones de los sensores
asociados.
- Configure las pantallas de relámpagos y las identificaciones
asociadas a los sensores.
- Si requerido, configure la posición de los procesos de los datos
archivados (pdad)
- Si requerido, configure el proceso de la red de datos archivados
(pandad)
- Para procesos de sensores LF usados por CP7000 y CP8000,
configure cómo el proceso located determina las posiciones de los
relámpagos.
Definir un URL
CP usa los Recursos Universales de Localizadores (URLs) para
describer las conexiones físicas. Los URLs que son normalmente
usados son para artefactos en serie. El URL definen las conexiones de
los sensores y otra ferretería asociada con el CP.
Todos los nombres de URL tienen un identificador de protocolo de
comunicación y un colon seguido por dos barras. Por ejemplo,
serial:// indica que un transporte en serie será usado. Más parámetros
para configuraciones se especifican después del identificador (campo
de etiqueta).
No todos los procesos apoyan todos los URLs. Por ejemplo, rawiod,
el cuál es responsible para leer y escribir los datos de los sensores, no
apoya el artefacto ifile:// porque es solo-para-leer y rawiod necesita
escribir los datos.
Para determinar cuales procesos son apoyados por URL, ponga el
nombre del proceso seguido por el comando opcional -raw_ipc_list o
-data_ipc_list . La siguiente lista explica los nombres de los artefactos
y sus URLs asociados.
56 ___________________________________________________________________M210706SP-A
Page 71

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
serial://[path],bps,p,d,s,f,c
path representa el camino para el artefacto de serie. El camino
es requerido.
bps representa el ritmo del baudio: ponga el valor del ritmo
apropiado en el rango 300 a 38400. La opción para el ritmo
baudio es 19200.
p representa la paridad: use n para no paridad, e para paridad
uniforme, o o para paridad rara. La opción n es para no paridad.
d representa partes de los datos: use 7 o 8. La opción del valor
para los datos de bits es 8.
s representa los bits que ponen un alto: 1 y 2. La opción del
valor para parar los bits es 1.
f representa el flujo del equipo: use n para el flujo sin control o
f para el control del flujo. La opciión por omisión es n.
c representa el detector del portador asintomático: use y para
respetar el detector del portador asintomático o n para no
respetar el detector del portador asintomático.
tcp://[host:]port
Conexión al servidor en el número transporte de TCP/IP. Si el
servidor no está especificado, la aplicación se convierte en un
servidor de datos en éste número de transporte TCP/IP. Solo un
cliente puede conectarse a éste número de transporte TCP/IP.
tcps://port
La aplicación es de un servidor para clientes múltiples que se
estén conectando a los datos en éste número de transporte
TCP/IP.
udp://[port][,host:port[,host:port...]][,all]
Este método de IPC puede ser usado para comunicaciones
bidireccional (leer/escribir) entre dos procesos diferentes los
cuales pueden o no pueden estar corriendo en la misma
máquina. Apoya ambos capacidades de multidifusiónes y de
difunsiónes por máquines múltiples (usted se puede conectar a
dos o más procesos en una o más máquinas). El usar éste
método en multidifusión verdadera requiere consideraciones
especiales (haga referencia a la sección Multidifusión en la
página 187).
ifile://path
Lea el archivo especificado por path. Path
deberá comenzar
con una barra (/)
VAISALA _______________________________________________________________________ 57
Page 72

User’s Guide ______________________________________________________________________
ofile://path
Escribe al archivo especificado por path. Path deberá
comenzar con una barra (/).
afile://path
Se adjunta al archivo especificado por path. Path deberá
comenzar con una barra (/).
stdout://
Escribe a stdout.
stderr://
Escribe a stderr.
stdin://
Lee de stdin.
smq://path
Lee/escribe memoria compartida (SMQ) especificada por path.
Path deberá comenzar con la barra (/) cómo se muestra en el
siguiente ejemplo:
smq:///opt/GAIapa/var/spool/queues/Messages
Para buscar en los directorios que son especificados en el
ambiente variable de SMQPATH, haga omisión de la barra
cómo se muestra en el ejemplo abajo:
smq://Messages
Uso el ApaConfig GUI
El ApaConfig GUI le permite borrar, crear, guardar, editar y volver a
las tablas de las bases de datos (por ejemplo, las carpetas de Transport,
Network y Sensors). El ApaConfig GUI le permite manejar las tablas
de configuraciones para los procesos tales cómo la posición del archivo
de datos (pdad) y archivo de los datos de la red (pandad). Comenzar
con el ApaConfig abre la ventana de APA Config.
La ventana de APA Config (vea Figura 20 en la página 59) es editor
de bases de datos y usa dos tableros para exhibir los nombres de la
tablas y de los campos de entrada. El tablero izquierdo exhibe la base
de datos como un árbol jerárquico. El nivel en la parte superior del
árbol exhibe los nombres de la base de datos, y los siguientes niveles
exhiben las tablas configuradas cómo archivos. Las carpetas contienen
los índices de las tablas configuradas de información similar.
58 ___________________________________________________________________M210706SP-A
Page 73

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
El tablero derecho (tablero para editar) de la ventana APA Config
exhibe instrucciones y campos en la base de datos pertinentes a cada
tabla selecionada. Usted tal vez necesite usar la barra de
desplazamiento en la orilla derecha del tablero para ver todos los
campos.
Con la excepción de unos pocos campos, CP caminará y producirá
datos razonables con las configuraciones que se proveen en la ventana
APA Config.
Para explicaciones detalladas de los objetivos de la ventana APA
Config, haga referencia a la Guía de Referencia de la Series CP ™.
apaconfig_located1
Figura 20 Ventana de APA Config
Cambiando el Artefacto o Procesos de Configuración
Cuando los parámetros de configuración de un artefacto cambian, tal
cómo el sensor o proceso, use ApaConfig GUI para editar la tabla de
configuración apropiada.
VAISALA _______________________________________________________________________ 59
Page 74

User’s Guide ______________________________________________________________________
Para cambiar los datos en la tabla de configuraciones existente:
1. Seleccione el archivo en la tabla de índice en el tablero izquierdo
de la ventana APA Config.
2. En el tablero para editar la ventana de APA Config, haga los
cambios en los campos afectados. Usted tal vez necesite usar en
el tablero para editar la barra de desplazamiento para ver todos
los campos en la tabla.
3. Haga clic en Save.
4. Si no hay otros cambios en la base de datos, seleccione Commit
Databases del menú File.
Agregar Una Tabla Nueva Para Configuración de Artefacto
Cuando artefactos nuevos, tales cómo sensores o pantallas de
relámpagos, son agregados a la red de configuración, usted deberá
agregar una tabla de configuración nueva a la carpeta en la base de
datos de realtime. Use la ventana de APA Config para agregar tablas
de configuraciones a la base de datos. Figura 21 en la página 61 es un
ejemplo de cómo agregar una pantalla nueva de tablas de
configuraciones a la base de datos realtime.
Para agregar un archivo nuevo de tabla de configuración a la
carpeta del artefacto:
1. Seleccione el nombre apropiado de la carpeta en el lado
izquierdo del tablero en la ventana de APA Config.
2. Haga clic en New para abrir la caja de diálogo Add New
Indexed Table (vea Figura 21 en la página 61).
3. Acepte el valor exhibido en el campo de New Index, o cambielo
a índce que no esté usado entre 1 y 256. La Tablas con el mismo
número de índice deberán tener carpetas diferentes.
El campo de New Index exhibe automáticamente el valor más
bajo disponible entre 1 y 256. Para conveniencia, el número de
índice puede ser el mismo que la identificación del artefacto.
4. Haga clic en Add para aceptar el valor expuesto.
5. Cuando la nueva tabla de índice aparece en la carpeta del
artefacto, haga clic en Save y comienze a entrar los datos.
60 ___________________________________________________________________M210706SP-A
Page 75

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
1
3
4
2
5
NewDevice2
Figura 21 Agregar una Tabla Nueva de Configuración de
Artefacto
Guardar los Parámetros de las Configuraciones
Hay dos maneras para guardar los cambios en la base de datos de
configuraciones:
- Guardar cambios temporalmente a una tabla de configuración antes
de abrir una otra.
- Asigne los cambios en la base de datos para prevenir sus pérdidas
debido a un apagón inesperado en la estación de trabajo.
El botón Save en la ventana de APA Config temporalmente guarda los
cambios hechos en la tabla de configuración. Después de los cambios,
haga clic en Save antes de abrir otra tabla de configuración.
PRECAUCIÓN
VAISALA _______________________________________________________________________ 61
Los cambios deben guardarse antes de abrir otro tabla. De lo
contrario, los cambios que se le han hecho a la tabla, se perderán.
Page 76

User’s Guide ______________________________________________________________________
Para guardar temporalmente los cambios en la base de datos:
- Haga clic en Save en la ventana de APA Config.
Seleccionar Commit Databases del menú de File en la ventana APA
Config, hace los cambios a todos las bases de datos permanentemente.
El sistema sobrescribe el archivo de la base de datos original con una
copia que contiene todos los cambios guardados con el botón Save. La
función de Commit Databases notifica a todos los procesos de los
cambios. Después de hacer cambios en la base de datos, seleccione
Commit Databases del menú de File antes de cerrar la ventana de
APA Config. La única manera de deshacer la función de de Commit
Databases, es al restablecer la configuración del disco de de copia.
Para guardar permanentemente los cambios a una base de datos
abierta:
1. Seleccione Commit Databases del menú de File en la ventana
de APA Config (vea Figura 20 en la página 59).
El CDB Message en la caja de diálogo se abre (vea Figura 22
abajo) y se exhibe la pregunta, Commit All Open Databases to
Disk?
CDBmessage
Figura 22 Verificación Para Consignar los Cambios de la
Base de Datos en el Disco
2. Haga clic en OK para continuar, o haga clic en Cancel para
cerrar la caja de diálogo CDB Message y cancele la función (vea
Figura 22 arriba).
Revertir Los Cambios en la Base de Datos
Al seleccionar Revert Databases del menú File en la ventana APA
Config ésto reversa los cambios temporados en una base de datos.
Todos los cambios temporales hechos desde la última función, se
62 ___________________________________________________________________M210706SP-A
Page 77

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
pierden. La Base de datos se regresan a su condición igual que en la
última función de Commit Databases.
Para Revertir los cambios en la base de datos abierta:
1. Seleccione Revert Databases en el menú de File en la ventana
APA Config.
La caja de diálogo CDB Message se exhibe para verificar ésta
acción.
2. Haga clic en OK para continuar, o haga clic en Cancel para
cerrar la caja de diálogo y cancelar la función requerida.
Configuración de la Base de Datos realtime
La base de datos nombrado en realtime (tiempo real) es usado por
todos los procesos para su función de configuración en tiempo real. La
base de datos realtime no puede ser borrada, pero nuevas tablas
pueden agregarse y las tablas que ya existen pueden ser editadas.
Asignación de Identificadores de Transporte
La carpeta transport contiene tablas configuradas para identificadores
de Transport para cada transporte CP físico usado (vea Figura 23 en la
página 64). Se recomienda que asociar los identificadores Transport
sea la primera tarea durante la configuración de una nueva base de
datos o cuando agregue nuevos transportes al CP.
Para sistemas nuevos, Vaisala asocia y configura los identificadores de
Transport para todos los transportes de CP usados. Si usted agrega
transportes al sistema después de la configuración inicial, use el
siguiente procedimiento.
Para Asociar un Identificador Transport a un transporte en la
base de datos de tiempo real:
1. Agregar una tabla de índice nueva a la carpeta de transport (vea
la sección Agregar Una Tabla Nueva Para Configuración de
Artefacto en la página 60).
Usted ahora está listo para introducir los valores en los
campos de configuraciones.
VAISALA _______________________________________________________________________ 63
Page 78

User’s Guide ______________________________________________________________________
Tabla de
Transporte
Selecciónada
apaconfig_transport3
Figura 23 Tablero para Editar la Tabla de las Configuraciones
de Transporte
2. Introduzca el URL del artefacto en el campo de entrada URL.
3. Especifíque los parámetros para el transporte usando el
parámetro, rawiod, en el campo de entrada Tag .
4. Haga clic en Save.
Al hacer clic en Save ésto envia la información de transporte en
la base de datos En donde esté disponible para todos los
procesos CP.
5. Continúe agregando los nuevos identificadores de Transport
usando los pasos de arriba hasta que todos los nuevos transportes
físicos se hayan definido.
Configuración de una Red Externa
El folder de la red contiene la tabla de configuración para una red
externa (vea Figura 24 en la página 65).
Para sistemas nuevos, Vaisala configura una red externa si usted tiene
una. Si usted agrega una red externa después de la configuración
inicial, use los siguientes procedimientos.
64 ___________________________________________________________________M210706SP-A
Page 79

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
Tabla de Red
Seleccionada
network01
Figura 24 Tablero para Editar la Configuración de la Red
Para configurar una red externa en la base de datos de tiempo real
(realtime):
1. Agregue una tabla de índice en la carpeta de network (vea
sección Agregar Una Tabla Nueva Para Configuración de
Artefacto en la página 60).
2. Asociar un nombre con ésta red:
a. En el campo Full, ponga el nombre completo para el
sensor (el número máximo o de carácteres permitidos es
256).
b. En el campo de abreviatura, ponga la abreviatura para el
nombre completo (el número máximo de caracteres
permitido es 2).
3. Seleccione el tipo de red de la lista de Model.
4. Seleccione el identificador Transport para ésta red de la lista
TID.
5. Haga clic en Save.
VAISALA _______________________________________________________________________ 65
Page 80

User’s Guide ______________________________________________________________________
Configuración de los Sensores
La carpeta sensor (vea Figura 25 abajo) contiene las tablas de
configuraciones para cada sensor en la red. Solo los artículos que se
requieren entrar, se cubren aquí. Haga referencia al Manual de
Referencia CP Series ™ para información sobre todos los campos en
una tabla de configuración de sensor.
Usado para identificar
los sensores en el
tablero de Control
sensores del APA
Usado para organizar
los sensores en grupos
ordenados
Tabla de sensor
selecciónado. Indice es
el Identificador del
Sensor.
Usado para poner el
tiempo de respuesta
del sensor
apaconfig_sensor1
Figura 25 Tablero para Editar la Configuración del Sensor
Para sistemas nuevos, Vaisala configura cada sensor en la red. Si usted
agrega un sensor a la red después de la configuración inicial, use el
siguiente procedimiento.
Para configurar un sensor en tiempo real en la base de datos:
1. Agregue una tabla de índice nueva a la carpeta del sensor (vea
sección Agregar Una Tabla Nueva Para Configuración de
Artefacto en la página 60).
66 ___________________________________________________________________M210706SP-A
Page 81

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
2. Especifique el nombre completo y abreviado de éste sensor:
a. En el campo Full, ponga el nombre completo para el
sensor (Número máximo de caracteres permitidos es 256).
b. En el campo de Abbreviation, ponga la abreviatura para el
nombre completo. (Número máximo de caracteres
permitidos es 2.)
c. Ponga los valores apropiados para Sort1, Sort2, y Sort3 o
deje los campos vacíos.
El sistema le permite clasificar los sensores por nombre,
abreviatura del nombre, etiqueta, tipo (modelo), y
identificador del sensor ya sea en formato decimal o
hexadecimal. Los campos Sort1, Sort2, y Sort3 proveen
tres parámetros de clasificación. Los parámetros
clasificados afectan la secuencia en donde los sensores se
exhiben en la ventana de APA Control. Los valores para
Sort1, Sort2 y Sort3 son parámetros sugeridos. Por
ejemplo: Si usted quiere clasificar los sensores por el país
en donde se instalaron, ponga en nombre para cada sensor
en el campo Sort1.
3. Seleccione el tipo de sensor de la lista de Modelo (vea Tabla 20
en la página 68).
VAISALA _______________________________________________________________________ 67
Page 82

User’s Guide ______________________________________________________________________
Tabla 20 Configuración de Sensor
Modelo
LF/VHF Tipo de Sensor
Seleccionado
LF LPATS Serie III SerieIII
LPATS IV SeriesIV
LS8000
3)
(Modulo LF
LS7000 (ast) nada (...) nada (...) N/A BField6_Nldn
solo, MDF/TOA)
LS7000 (MDF/TOA) LS7000 (ast) nada (...) nada (...) N/A BField6_Nldn
4)
LS5000
(TOA)
IMPACT ALDF
LS7000 (.st) nada (...) nada (...) N/A BField6_Nldn
141T (ast) nada (...) nada (...) Bajo BField1_Low
Modelo 141-T
IMPACT ES ALDF
IMPACT ES (ast) nada (...) nada (...) Bajo BField1_Low
Modelo 141-TES
IMPACT ES ALDF
IMPACT ES (ast) nada (...) nada (...) Bajo BField1_Low
Modelo 141-TESCE
IMPACT ESP ALDF
IMPACT ES (ast) nada (...) nada (...) Bajo BField1_Low
Modelo 141-TESP
IMPACT ESP ALDF
IMPACT ES (ast) nada (...) nada (...) Bajo BField1_Low
Modelo 142-TESP
IMPACT ES ALDoF
IMPACT CT (ast) nada (...) nada (...) Bajo BField1_Low
con Nube Model 141CT
VHF
LS8000
3)
(Modelo
LS7500 none (...) (a..) nada (...) N/A N/A
VHF-ITF solo)
LF +
VHF
5)
LS7200
(VHF-ITF)
SAFIR Modelo 3000-2
(VHF-ITF LF TOA)
LS7500 (VHF-ITF LF
LS7500 none (...) (a..) nada (...) N/A N/A
SAFIR (.st)(a..) nada (...) N/A EField6_Lpats
LS7500 (.st)(a..) nada (...) N/A EField6_Lpats
TOA)
Medidas Utilizables
LF VHF-ITF VHF TOA Ganancia Catagoría
(.st)
(.st)
nada (...) nada (...)
nada (...) nada (...) N/A EField6_Lpats
1)
Ganancia de Sensor
N/A
2)
EField4_Lpats
Medio BField2_Med
Alto BField4_High
Medio BField2_Med
Alto BField4_High
Extra Alto BField6_Nldn
Medio BField2_Med
Alto BField4_High
Extra Alto BField6_Nldn
Medio BField2_Med
Alto BField4_High
Extra Alto BField6_Nldn
Medio BField2_Med
Alto BField4_High
Extra Alto BField6_Nldn
1) (ast) = ángulo, señal, tiempo; (.st) = señal, tiempo; (a..) = ángulo; (..t) = tiempo; (...) = nada o ninguno
2) N/A = no aplicable
3) LS8000 provee 2 fuentes de datos, una para datos LF, y la otra para datos VHF-ITF. Configurar el sensor LS8000 cómo
dos sensores separados e independientes con transportesseparados. Use el CP Modelo LS7500 para datos de VHF.
4) LS5000 provee información de LF TOA solamente.
5) LS7200 provee información de VHF-ITF solamente.
68 ___________________________________________________________________M210706SP-A
Page 83

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
NOTA
NOTA
Módulos de LS8000 VHF-ITF y de LF son configurados cómo sensores separados con identificadores de transporte separados.
4. Especifique el identificador de Tranporte para éste sensor:
a. Para un sensor conectado a una red externa, seleccione
None de la lista TID
b. Para todos otros sensores, seleccione el identificador de
transporte asignado de la lista de TID. Ayuda a prevenir la
confusión si el identificador de transporte y el identificador
del sensor coinciden.
Ponga los valores en los campos NID y Remote ID solo si una red
externa de sensores es conectada al CP. Haga referencia al Capítulo
11, Configuración Avanzada CP, en la página 169.
5. Especifique el identificador de red para éste Identificador de
transporte:
NOTA
a. Seleccione el identificador de la red para el LP compartido
de la lista NID.
b. En el campo de Remote ID, especifique el identificador
remoto del sensor. Este valor es el identificador del Sensor
de su LP compartido.
6. Para permitir que éste sensor participe en las soluciones de los
localizadores de relámpagos, seleccione Yes de la lista Allowed.
Para sensores nuevos, el permitir que el sensor sea usado en las
soluciones de las localidades de relámpagos le ayudará a determinar
que tan bién los sensores estan funcionando. Después, éste campo
puede establecerse en No si el sensor no está funcionando
adecuadamente.
7. Especifique la localidad geográfica del sensor:
VAISALA _______________________________________________________________________ 69
Page 84

User’s Guide ______________________________________________________________________
a. En el campo Latitude, ponga la latitud del sensor con un
mínimo de cuatro espacios decimales. Latitudes de sur son
negativas.
b. En el campo de Longitude, ponga la longitud con un
mínimo de cuatro espacios decimales. Longitudes
occidentales son negativas.
c. En el campo de Altitude, ponga la altitud en metros.
8. En el campo de Response Time, ponga el número en segundos,
o deje la opción del valor de cero.
Los daemons de los Sensores usan el valor de respuesta de
tiempo para determinar cuanto esperar para una mensaje del
estado del sensor antes de indicar que el sensor no está
funcionando. El rango de valores es de 0 a 86 400 segundos con
la opción comenzando en cero. Si la opción del valor de cero se
guarda, el sensor usa una respuesta hard-coded del valor de
tiempo para el sensor, Haga referencia a la página man para el
daemon de la opción del tiempo.
PRECAUCIÓN
Use la barra de desplazamiento para ver campo de entradas
adicionales del sensor cómo se muestra en la Figura 26 en la
página 71.
9. Seleccione cuales medidas son usadas para los sensores de la
lista de Angle Signal Time en los campos de LF, VHF-ITF y
VHF-TOA cómo se muestra en la Tabla 20 en la página 68.
10. Seleccione el aumento de categoría para el sensor en la lista de
Category (vea Tabla 20 en la página 68).
En el botón de Advanced Options (vea Figura 26 en la página 71) se
exhibe la ventana de Advanced Options. Esta ventana contiene los
parámetos de las configuraciones que afectan la eficiencia del detector
del sensor y probablemente de toda la red..
Los parámetros en la ventana de Advanced Options pueden tener
afectos serios y adversos en la calidad de los datos del sensor. Estos
parámetros no deben cambiarse sin instrucciones específicas de
Vaisala.
11. Para guardar la configuración de éste sensor, haga clic en Save.
12. Repita el procedimiento de arriba para cada sensor.
70 ___________________________________________________________________M210706SP-A
Page 85

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
Tabla de sensor
selecciónado
Botón de Opciones
Avanzados
apaconfig_sensor3
Figura 26 Tablero para Editar la Tabla Para
Configuración del Sensor
Configuración de las Pantallas de Relámpagos
La carpeta de display (vea Figura 27 en la página 72) contiene la tabla
de configuraciones para cada aparato en la pantalla de relámpagos
conectada al CP.
Para sistemas nuevos, Vaisala configura cada pantalla en la red. Si
usted agrega una pantalla a la red después de la configuración inicial,
use el siguiente procedimiento.
Para configurar una pantalla en nueva en la base de datos
realtime:
1. Agregue una tabla nueva de índice para exhibir la carpeta (vea la
sección Agregar Una Tabla Nueva Para Configuración de
Artefacto en la página 60).
VAISALA _______________________________________________________________________ 71
Page 86

User’s Guide ______________________________________________________________________
Tabla de Pantalla
Seleccionada
Figura 27 Tablero para Editar Tabla de Configuración
de la Pantalla
2. Déle un nombre a la pantalla:
a. En el campo Full, ponga el nombre completo de la
pantalla. (número Máximo de caracteres permitidos es
256).
b. En el campo de Abbreviation, ponga la abreviatura para el
nombre completo (número máximo de caracteres
permitidos es 2.)
c. En el campo Tag , ponga la etiqueta asociada con la
pantalla.
La etiqueta identifica cómo única el ejemplo de proceso
que enviará los datos a la pantalla. Haga referencia a la
sección Cambiando la Configuración de Puesta en
Funcionamiento en la página 171 para detalles sobre
definición de proceso de etiqueta.
apaconfig_display1
Para CP8000, configuración de las pantallas que apoyan
formatos de datos diferentes, tal cómo LtraX, involucra la
creación de una etiqueta única del proceso de fhosed para
72 ___________________________________________________________________M210706SP-A
Page 87

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
cada formato de datos apoyados. Esté seguro de usar una
etiqueta única para cada ejemplo del proceso de fhosed.
3. Seleccione el formato de datos apoyado por la pantalla de
relámpagos de la lista Type (vea Tabla 21 abajo).
Tabla 21 Pantalla de Formatos Apoyados
Formato de Dato Apoyado Ejemplo de Pantalla
GAI type 97 VIS 6.xxGx
LTraX
Storm TraX
PLWS
PDM
GAI type 96 THUNDER (U.S.A. solamente)
VIS (U.S.A. solamente)
PLWS
RD - ASCII NDS
ASCII Universal Ninguno, texto formato en ASCII
Binary DFF TED (Pantalla de Electrificación
en Total)
Binary 24-Byte TIS 24-byte binary
VIS 6.xxSx
4. Seleccione el identificador de Transport para ésta pantalla de la
lista TID.
5. De la lista Mode, seleccione el modo para exhibir una región de
relámpagos.
Usualmente, los exhibidores solo muestran los relámpagos que
suceden dentro de la región específica (recortando la región),
exclusiva a los límites de la región.
6. Si usted selecciona ya sea Inside Polygon o Outside Polygon,
ponga en nombre para la definición polígono en el campo de
Polygon Field.
Este archivo es un archivo de texto que identifica el número de
nodos en el polygon y la latitud y longitud de cada nodo. Los
archivos polígonos se guardan en el directorio
$APAHOME/etc/polygon. Por omisión, fhosed busca en el
directorio los archivos polígonos.
7. Si usted selecciono Inside Rectangle, ponga los límites de
latitud y longitud que definen los límites de la región. Latitudes
en el hemisferio del sur y longitudes en el hemisferio occidental
son valores negativos.
a. En el campo Min Latitude, ponga la latitud para el límite
de sur.
VAISALA _______________________________________________________________________ 73
Page 88

User’s Guide ______________________________________________________________________
b. En en campo Min Longitude, ponga la longitud para el
límite occidental.
c. En el campo Max Latitude, ponga la latitud para el límite
norteño.
d. En el campo de Max Longitude, ponga la latitud para el
límite de oriental.
Solo los relámpagos que ocurren dentro de los límites serán
exhibidos.
8. Para guardar la configuración para ésta pantalla, haga clic en
Save.
9. Repita los procedimientos arriba para cada uno de las pantallas
nuevas.
Configuración del Proceso de pdad
El proceso central pdad a diario guarda los archivos de los datos de
relámpagos al sistema /position/dff file. Cada posición de relámpagos
requiere de 44 octetos y los registros binarios son de una medida fija.
Un directorio de ruta de acceso y sistema de archivo deberá asignarse
para almacenamiento de los datos de las posiciones de los relámpagos.
La tabla de archivos de configuraciónes pdad determina el directorio
básico al cuál el proceso pdad escribe la posición de los datos de
relámpagos. Como configurado por Vaisala, el directorio básico es
afile://position/dff/lf (vea Figura 28 en la página 75). El proceso pdad
adjunta el archivo para relámpagos cómo se muestra a continuación:
- Para localidades LF, se adjuntará a lf/stroke o lf/flash.
- Para localidades VHF, se adjuntará a vhf/event o vhf/flash.
El sistema /position file provee los datos archivados para las pantallas.
Los /position files son compartidos a través del sistema de archivo de
la red.
74 ___________________________________________________________________M210706SP-A
Page 89

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
Tabla de Proceso
Seleccionado
apaconfig_pdad1
Figura 28 Tablero para Editar la Tabla pdad
VAISALA _______________________________________________________________________ 75
Page 90

User’s Guide ______________________________________________________________________
Configuración del Proceso pandad
El proceso archivo de datos pandad de la red guarda todos los datos
importantes de CP al los medios de comunicaciónes trasladables. Los
datos incluyen, pero no estan limitados a, todos los reportes de
sensores, estado de sensores, y estado de CP.
Para configurar el proceso de Archivos de Datos de Red (pandad):
1. Seleccione la tabla de configuración para el proceso pandad
(vea Figura 29 abajo).
Tabla de Proceso
Seleccionado
apaconfig_pandad1
Figura 29 Tablero para Editar la Tabla pandad
2. Especifique totalmente el camino para el sistema de archivos
Archive al poner /archive en el campo de File System.
El sistema de archivo Archive es donde pandad escribe los
datos. Es el directorio en donde residen los medios de
comunicación trasladables.
76 ___________________________________________________________________M210706SP-A
Page 91

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
.
NOTA
Para el sistema de archivo Archive, use el directorio opcional en
donde residen los medios de comunicación trasladables. Los sistemas
de Archive y Overflow son prefijados por Vaisala,
3. Especifique totalmente el camino al sistema de archivo Overflow
al poner /overflow en el campo File System.
El sistema de archivo Overflow es usado para prevenir la pérdida
de datos cuando el sistema de archivos Archive esté lleno.
Aunque es trasladable, el archivo de los medios de comunicación
se cambia. Overflow es usado temporalmente por pandad para
guardar los datos de CP.
Configuración de los Procesos Localizados
Los procesos located usan datos de un sensor LF para determinar las
localidades de los relámpagos. Casi todos los parámetros opcionales
en la tabla de configuración located (vea Figura 30 en la página 78)
son aceptables para una función normal. Algunos parámetros
opcionales deberán cambiarse, basado en el tipo de sensores que se
usan en la red.
VAISALA _______________________________________________________________________ 77
Page 92

User’s Guide ______________________________________________________________________
Tabla de
Proceso
apaconfig_located1
Figura 30 Tablero para Editar Tabla Localizada
Para configurar cómo el proceso located funciona:
1. Seleccione la tabla de configuración de proceso located (vea
Figura 30 arriba).
2. En los campos de Times y Angles, ponga la cantidad de cada
medida requerida para calcular una posición.
Los campos de Times y Angles establecen el número mínimo de
los sensores que se necesitan para verificar la localidad de rayos
cuando esté calculando una posición usando la información de
tiempo. El valor de cada campo representa un número mínimo
de sensores que se deben ofrecer éste tipo de informacón. Para
redes LPATS-solamente, no hay un ángulo de información para
ayudarle a verfificar las posiciones de los relámpagos, solo
información de tiempo.
Tabla 22 Angulos y Tiempos para Procesos
located
Tipo de Red Tiempo Angulos
LS8000, LS7000 (con MDF) 4 1
LS75000, LS5000 (sin MDF) 4 0
LPATS solamente 4 0
78 ___________________________________________________________________M210706SP-A
Page 93

Capítulo 4 ___________________________________________Configuración de Bases de Datos CP
Tabla 22 Angulos y Tiempos para Procesos
located (Continued)
Tipo de Red Tiempo Angulos
IMPACT solamente
SAFIR solamente 4 0
Mixed LPATS y IMPACT 4
Mixed SAFIR y IMPACT 4
1) Información de ángulo y tiempo ayuda verificar posiciónes de relámpago
2) Ponga 1 si el rango normal de servicio del sensor, IMPACT cubre el área de interés. De lo
contrario, ponga 0.
1)
41
2)
1 or 0
2)
1 or 0
3. Acepte los valores opcionales para los campos Chi Square,
Ellipse, Distance y Ratio.
Estos cuatro campos determinan la validez de la localidad de los
rayos. Si uno de éstos valores no son encontrados, la posición no
es enviada a la pantalla o no se guarda en el disco. Aunque el
control de calidad final es responsabilidad del gerente de la red,
durante la instalación y configuración inicial, se debe usar los
valores opcionales. Vea Apéndice B, Introducción al Detector
de Relámpagos, para más información sobre las medidas de
calidad.
4. En el campo de Time (seconds), acepte los parámetros
opcionales para especificar que tanto se detienen los datos en
located antes de procesarlos.
El parámetro opcional es de 15 segundos y es adecuado para
todas las redes conocidas. Si el retraso de la transmisión de un
sensor a un CP es más de 15 segundos, éste valor puede ser
ajustado. Si todos los sensores tienen retrasos más cortos en la
transmisión, éste número puede ser reducido, resultando en
retrasos más cortos entre la detección del relámpago y la
transmisión a la pantallla. No se recomienda que el tiempo se
establesca arriba de 25 segundos o menos de un segundo.
5. En el campo Window (milliseconds), acepte el parámetro
opcional para especificar la ventana de coincidencia del rayo en
el sensor.
6. Acepte el parámetro opcional a.t (ángulo y tiempo) en el campo
de Angle Signal Time, o seleccione la opción de la lista de
acuerdo a la información del sensor.
VAISALA _______________________________________________________________________ 79
Page 94

User’s Guide ______________________________________________________________________
Esta página se dejó en blanco intencionalmente.
80 ___________________________________________________________________M210706SP-A
Page 95

Capítulo 5 ________________________________________________________ Manejo de Sensores
CAPÍTULO 5
MANEJO DE SENSORES
Este capítulo aplica a todos los modelos CP.
Información General
Para usar CP7000 o CP8000 para manejar los sensores, un enlace de
comunicación de dos direcciones es necesario entre cada sensor y el
CP. El proceso attach provee éste enlace y un interfase por comandos
de línea. El GUI Attach provee ese enlace, usando el proceso attach, y
un interfase gráfico de usario. Unirse a un sensor es el proceso para
tomar control del URL en donde el sensor está conectado. Esto le
permite a usted ejecutar diagnósticos del sensor al CP.
El proceso de attach y GUI Attach forman lo siguiente:
- Un interfase terminal a un sensor IMPACT
- Un cable virtual entre un puerto serial de conexión entre el CP y un
sensor de LPATS, o de SAFIR, o de LS7500 y el puerto serial de
CP que conecta una computadora con la aplicación de de
diágnosticos del sensor.
- RDM30 para sensores Series III
- RSD para sensores LPATS IV
- SAF_ZAP para sensores LS7500 VHF-ITF, LS8000 (VHFITF) y SAFIR
VAISALA _______________________________________________________________________ 81
Page 96

User’s Guide ______________________________________________________________________
Adjuntar a los Sensores LPATS o SAFIR
El proceso attach puede proveer el enlace de cable virtual entre
cualquier sensor de LPATS o SAFIR y una computadora que ejecute el
programa apropiado de diagnósticos del sensor. La computadora tiene
que estar físicamente conectada al puerto serial de CP.
Las comunicaciones de los sensores LPATS III, LPATS IV, LS75000,
LS8000 VHF-ITF o SAFIR son orientadas hacia mensajes. Por eso, el
sensor se puede mentener activo en línea porque los daemones de
sensores series3d (LPATS Series III), series4d (LPATS IV), safird
(SAFIR, LS75000, LS8000 V HF-ITF) responden solamente a
mensajes que les interesa a ellos.
Es importante emparejar los parámetros del puerto serial de la
computardora con aquellos establecidos por el URL. Si usted usa la
opción -debug con el comando attach, la ventana Ter mi na l exhibe
comunicaciones por dos direcciones en formatos de hexadecimal y
ASCII.
Usando el GUI Attach
El GUI Attach le permite unir a un sensor LF usando el interfase
gráfico de usario. Para sensores IMPACT, el GUI le provee la misma
conexión al sensor y las capacidades diagnósticas cómo un interfase
por comandos de línea. Para los sensores LPATS o SAFIR, el GUI
provee verificación de la comunicación para el transporte y conexiones
seriales. La computadora para RSD, RDM30, o SAF_ZAP todavía
maneja el interfase de comando a los sensores LPATS IV, LPATS
Series III, LS7500, LS8000 (VHF-ITF) y SAFIR, respectivamente.
Establecer las Opciones de Attach
Antes de adjuntar a un sensor, el GUI Attach requiere el
establecimiento de opciones de comando en el proceso attach.
Para establecer opciones en el comando attach:
1. Abra la ventana de APA Control
2. Seleccione Set Attach Options del menú de File para abir la caja
de diálogo de Attach Options (vea Figura 31 en la página 83).
82 ___________________________________________________________________M210706SP-A
Page 97

Capítulo 5 ________________________________________________________ Manejo de Sensores
apacontrl_attachoptns1
Figura 31 Caja de Diálogo Para las Opciones de Attach
3. Seleccione las opciones apropiadas de comando para la sesión de
attach.
- Seleccione -online para que se mantenga el sensor adjunto al
sistema y para permitir el flujo de datos al daemon de sensor.
- Seleccione -reconnect para volver a conectar cuando la
conexión serial se pierde.
- Seleccione -echo para permitir que el flujo de datos aparezcen
en el terminal cómo un eco.
- Seleccione -hexterm es para configurar los datos de
entrada/salida en el formato hex.
- Seleccione -charterm es para configurar los datos de
entrada/salida en el formato ASCII, después ponga el valor
apropiado en el campo -charterm para determinar cómo se
traslada los datos entre los formatos hex y ASCII (0A, 0X0A).
- Solamente para los sensores LPATS y SAFIR, use el campo
-to (IPC) para definir el URL de la computadora de RSD,
RDM30, o SAF_ZAP que está contectada al CP.
4. Para guardar en el disco la opciones configuradas, haga clic en
Save o haga clic en Dismiss para cerrar la caja de diálogo Attach
Options sin tener que guardar los cambios.
Adjuntar a Un Sensor IMPACT
Cuando se adjunta a un sensor IMPACT, Attach GUI ofrece opciones
para entrar comandos por línea y por botónes al sensor. Una ventaja de
Attach GUI es se elimina la necesidad de teclear la combinación
CTRL+A* delante de cada comando.
VAISALA _______________________________________________________________________ 83
Page 98

User’s Guide ______________________________________________________________________
El juego de comandos disponible para un sensor IMPACT varía por el
modelo del sensor. La respuesta del sensor a un comando también
varía por el modelo del sensor. Para una lista de comandos
disponibles, el comando syntax, y para la descripción de los comandos,
haga referencia al manual apropiado de cada sensor.
Para Adjuntar a un Sensor IMPACT:
1. En la ventana APA Control, seleccione (haga clic) en un sensor
IMPACT específico.
2. Haga clic en Information en el tablero de Sensors para abrir la
caja de diálogo Sensor/Transport Info (vea Figura 32 abajo).
Hace clic para
tener acceso a
GUI de Attach del
sensor exhibido
SensorInfo
Figura 32 Acceso al GUI Attach
3. Haga clic en Attach para exhibir la ventana de AttachImpact
(vea Figura 33 en la página 85) y para establecer el proceso que
se adjunta al sensor.
Hay varias maneras para entrar un comando de sensor IMPACT:
- Con el campo Command
- Solamente con un botón de comando (argumentos no son
necesarios)
- Con ambos, en el campo Command y un botón de comando
(argumentos son necesarios).
Para entrar un comando en el campo Command:
1. Escriba las instrucciones con la palabra necesaria y seguida por
los argumentos con delimitos en medio.
84 ___________________________________________________________________M210706SP-A
Page 99

Capítulo 5 ________________________________________________________ Manejo de Sensores
Tablero de
Estado
Tablero de
Te rm i na l
Campo de
Comandos
Botónes de
Comandos
attach0
Figura 33 Ventana AttachImpact
La secuencia con la clave CTRL+A* no se usa en el GUI Attach.
2. Presione ENTER para enviar el comando al sensor. El tablero de
terminal hace eco con ésta orden seguido por la respuesta del
sensor.
Para poner un comando sin argumentos y usando los botónes de
comandos haga lo siguiente:
1. Haga clic en en la etiqueta del grupo que contiene el comando.
2. Haga clic en la botón apropiado para el comando.
3. El tablero del terminal hace eco con el comando seguido por la
respuesta del sensor.
VAISALA _______________________________________________________________________ 85
Page 100

User’s Guide ______________________________________________________________________
Para poner un comando con argumentos y usando los botónes de
comandos haga lo siguiente:
1. Escriba los argumentos del comando en el campo Command.
Evitar teclear ENTER después de escribir los argumentos.
2. Haga clic en la etiqueta para el grupo que contiene el comando.
3. Haga clic en el botón de comando apropriado.
4. El tablero de terminal hace eco después del comando seguido
por la respuesta del sensor.
Adjuntar Un Sensor VHF-ITF con Attachlt
La ventana AttachIt vigila la comunicación con el transporte y por la
conexión serial durante el proceso que se adjunta a un sensor LPATS,
LS7500 o SAFIR. Las computadoras de RSD y RDM30 proveen el
comando de interfase a un sensor LPATS IV LPATS Series III,
respectivamente. La computadora de SAF_ZAP provee un interfase
por comando para un sensor LS7500, LS8000 (VHF-ITF) o para un
sensor SAFIR 3000-2. La ventana de AttachIt no provee interfase de
comando.
El juego de comandos disponibles para sensores LPATS y SAFIR
varían dependiendo por el modelo del sensor. La respuesta del sensor
a el comando dada también varían por el modelo del sensor. Para una
lista de ordenes disponibles y las descripciones de las ordenes, haga
referencia al manual del sensor.
Para adjuntar a un sensor LPATS, LS7500 o SAFIR:
1. En la ventana de APA Control, seleccione (haga clic) en un
sensor específico LPATS, LS7500 o SAFIR.
2. Haga clic en Information en el tablero del Sensors para abrir la
caja de diálogo Sensor/Transport Info.
3. Haga clic en Attach para exhibir la ventana AttachIt (vea
Figura 34 en la página 87).
El tablero de From Serial no exhibirá los datos hasta que algo
está entrada con el programa de RSD, RDM30, o SAF_ZAP.
86 ___________________________________________________________________M210706SP-A
 Loading...
Loading...