

Page 1
STE 58760
INSTRUCTION MANUAL
INDUSTRIAL ROBOT SR SERIES
START-UP MANUAL
Notice
1.
Make sure that this Instruction Manual is delivered to the final user
of the Toshiba Industrial Robot.
2. Please read this manual before using the Toshiba Industrial
Robot.
3. Please read the “Safety Manual” also.
4. Keep the manual nearby for further reference during use of the
robot.
TOSHIBA MACHINE CO.,LTD.
1998- 3
Page 2

Copyright 1997 by Toshiba Machine Co., Ltd.
All rights reserved.
No part of this document may be reproduced in any form without obtaining prior written
permission from the Toshiba Machine Co., Ltd.
The information contained in this manual is subject to change without notice.
STE 58760
i
- -
Page 3

STE 58760
PREFACE
This manual describes how to start up the Toshiba SR series industrial robot.
Start-up as used in this manual refers to operations from turning on the robot controller to
operating the robot by manual guidance. Before operating the controller, make sure that all
the cables have been correctly connected among the robot, controller, and peripheral
equipment according to the “Transportation and Installation Manual”.
This manual is written for users who have not operated SR series robots before. Users who
have experience or want to know the details of the operations, see the Operating Manual.
This manual consists of the following chapters.
Chapter 1 "Before operating SR Series Robot"
This chapter outlines robot operational procedure, names of controls which should be used for
the start-up operation, and their functions.
A control panel and teach pendant are used to operate the robot. Be sure to learn where the
various switches are.
Chapter 2 "Power-ON to Manual Guidance"
This chapter describes how to turn on the power and how to manually guide the robot. The
last paragraph of this chapter also discusses how to turn off the power. Be sure to follow the
precautions which should be taken before turning off the power.
Chapter 3 "Setting Environmental Conditions for the SR7000 Controller"
This chapter describes items to be set before operating the controller such as date, time and
communication channel assignment.
Chapter 4 "Example of Simple Operation"
This chapter shows how to program and edit data and how to set automatic operations.
Because in the chapter you will actually operate the robot, be sure to follow the precautions.
Chapter 5 "File"
This chapter presents an outline of files used in the robot system and also formatting and
backup operations for floppy disks (option). Files which store programs and parameters
should be backed up on different disks.
ii
- -
Page 4

STE 58760
NOTE!
FOR EUPOREAN UNION (EU)
In European Union (EU), there are following limitations and notes to approve the
CE Marking EMC Direction. In other countries and areas, it
apply to these limitations and notes.
(1) Set up conditions
◆
The following type of power line transformer must be used.
Frequency: 50 or 60 Hz
Secondary voltage: 3 phase 200 ~ 230 VAC
power capacity: Min. 2.7 kVA
(2) Input power condition
◆
Core wires: 3.5 mm2 ~ 5.5 mm2
◆
Voltage short interruption: 0.5 cycle
(3) Ground
◆
Core wires: 0.08 mm2 ~ 0.5 mm
◆
Ground condition: Exclusive ground line for robot ground impedance
must be less than 100
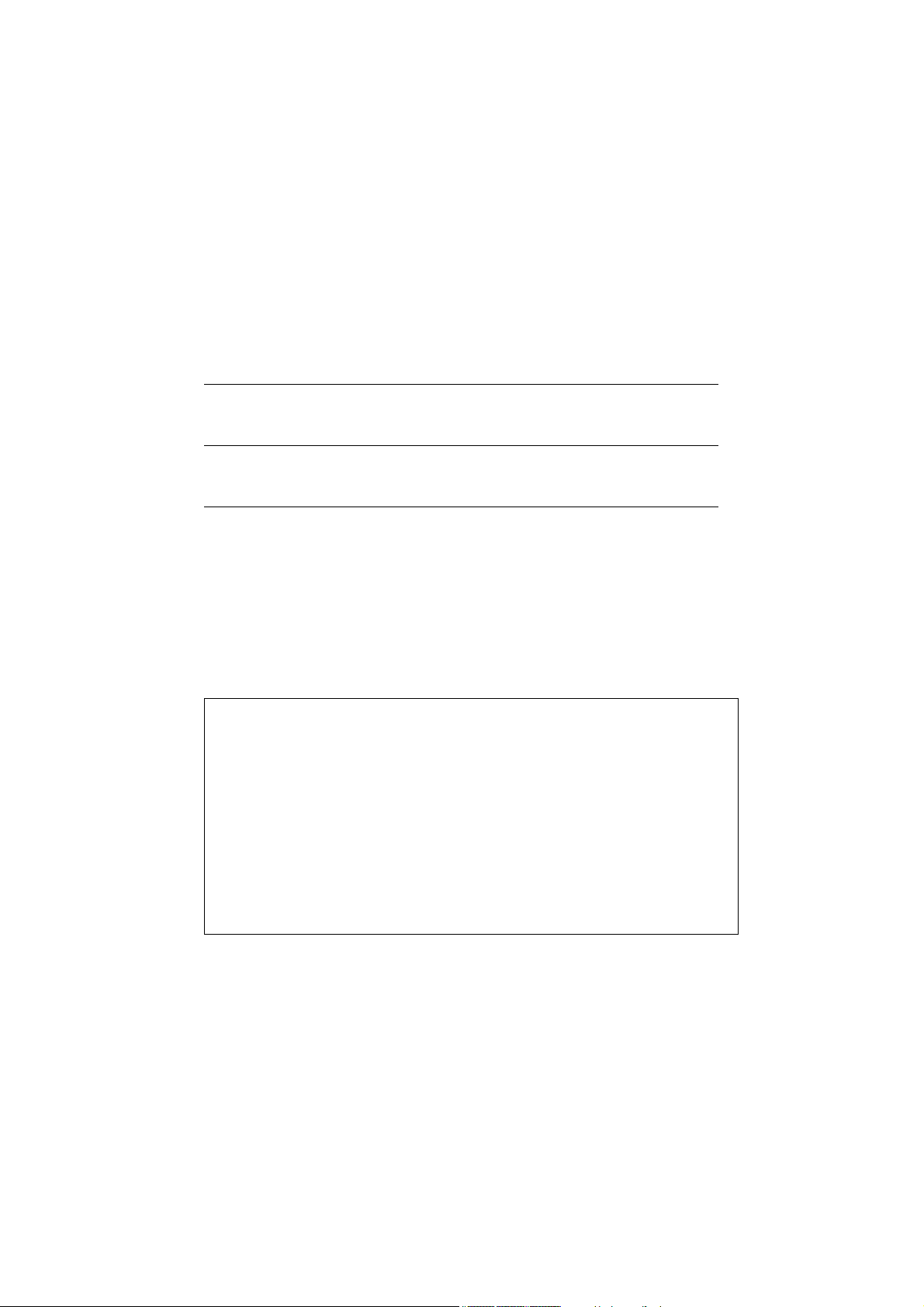
(4) External input and output line / Optional input and output line
◆
Core wires: 0.08 mm2 ~ 0.5 mm
◆
Shield: Ground shield
◆
Cable length: Max. 10 m
◆
Manufacturing method: Refer to figure A.
◆ S
ignal ground: Voltage potential between signal ground PGBA and
controller frame ground F.G. must be the same.
(5) Serial communication line
◆
Only 1 of 4 serial communication ports (connector name; J1 ~ J4) can be used at
the same time.
◆
Core wires: 0.08 mm2 ~ 0.5 mm
◆
Shield: Ground shield
◆
Cable length: Max. 10 m
◆
Twisted pair: Not required for RS-232C, required for RS-422.
◆
Manufacturing method: Refer to figure A.
is
not necessary to
2
.
Ω
2
2
iii
- -
Page 5
(6) Limitation of the robot specification
◆
Cable length from robot to controller: Max. 8 m
◆
Cable length of teach pendant: Max. 8 m
◆
Optional 5th axis: Cannot be used.
◆
Optional input output signals(type;SR7000IO): Only one optional board
◆
Optional relay output signals (type;SR7000RO): Cannot be used.
◆
Optional conveyer tracking system (type;SR7000CV): Cannot be used.
◆
Separated operation panel: Cannot be used.
STE 58760
can be used.
iv
- -
Page 6

TABLE OF CONTENTS
CHAPTER 1 BEFORE OPERATING SR SERIES ROBOT
1.1
1.1.1
1.1.2
1.2
1.3
1.4
1.5
1.6
1.6.1
1.6.2
CHAPTER 2 POWER ON TO MANUAL GUIDANCE
2.1
2.1.1
2.1.2
2.2
2.3
2.4
2.5
2.6
2.6.1
2.6.2
OVERVIEW・・・・・・・・・・・・・・・・・・・・・・・・・
Structure
Functions
OUTLINE OF OPERATIONAL PROCEDURE
SPECIFICATIONS
COORDINATE SYSTEM・・・・・・・・・・・・・・・・・・・・
SYSTEM CONFIGURATION
NAMES AND FUNCTIONS OF SR7000 CONTROLLER
Control Panel
Teach Pendant
TURNING ON MAIN POWER・・・・・・・・・・・・・・・・・
Cold Starting
Hot Starting
SETTING CONTROLLER ENVIRONMENTAL CONDITIONS
TURNING THE SERVO POWER ON
MANUAL GUIDANCE OF EACH AXIS・・・・・・・・・・・・・
MANUAL GUIDANCE OPERATION
MOTION RANGE LIMIT
Setting Joint Limit Values by Teaching
Setting Joint Limit by Numeric Value Entry
・・・・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・
STE 58760
・・・・・・・・・・
・・・・・
・・・
・・・・・・・・・・・・・・
・・・・・・・・・・・・・・
・・・・・・・・・・・・
・・・・・・・・・・
1-1
1-2
1-4
1-9
1-11
1-14
1-16
1-21
1-21
1-23
2-2
2-2
2-5
2-8
2-9
2-10
2-13
2-16
2-16
2-18
v
- -
Page 7

2.7
2.7.1
2.7.2
CHAPTER 3 SETTING ENVIRONMENTAL CONDITIONS FOR THE SR7000
3.1
3.1.1
3.1.2
3.2
3.3
3.3.1
3.3.2
3.3.3
3.4
3.4.1
3.4.2
3.5
3.5.1
3.5.2
3.5.3
3.6
3.6.1
3.6.2
3.6.3
3.7
3.7.1
3.7.2
3.7.3
3.7.4
3.7.5
3.7.6
TURNING OFF THE POWER・・・・・・・・・・・・・・・・・
Turning OFF Servo Power
Turning OFF the Main Power
CONTROLLER
SETTING DATE AND TIME・・・・・・・・・・・・・・・・・・
Setting Date
Setting Time
CHANGING FILE DATA
SETTING THE SYSTEM CONFIGURATION・・・・・・・・・・・
Outline of Data
File Format
Details of Data
SETTING EXTERNAL SELECTION FILES・・・・・・・・・・・
Signals Used for Selecting File
Contents of File
BATCH PROCESSING
Batch File
Automatic Execution File
Using Batch Processing Effectively
PROGRAM EXECUTION ENVIRONMENT
Program Execution Environment
Resetting Execution Environment
Reset Timing of Program Execution Environment
SETTING COORDINATE SYSTEM
Robot Coordinate Systems
Teaching Coordinate Data
Selecting Coordinate System in Data Editor Mode
Selecting Coordinate System in Utility Mode
Selecting Coordinate System Using Robot Language
Timing of Changing the Coordinate System
・・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・
・・・・・・・・・・・
・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・
・・・・・・・
・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・
・・・・・・・
・・・・・・・・・
・・・・・・・・・・
STE 58760
・・・・・
2-21
2-21
2-21
3-1
3-1
3-3
3-6
3-12
3-12
3-14
3-18
3-26
3-26
3-27
3-29
3-29
3-31
3-32
3-34
3-34
3-36
3-37
3-38
3-38
3-40
3-46
3-53
3-56
3-56
vi
- -
Page 8

CHAPTER 4 EXAMPLE OF SIMPLE OPERATION
4.1
4.2
4.2.1
4.2.2
4.2.3
4.3
4.3.1
4.3.2
4.3.3
4.3.4
4.4
CHAPTER 5 FILES
5.1
5.2
5.3
5.3.1
5.3.2
5.3.3
5.4
5.5
5.5.1
5.5.2
5.6
5.7
5.8
EXAMPLE OF ROBOT OPERATION
TEACHING THE PROGRAM AND POSITION DATA・・・・・・・
Inputting A Robot Language Program
Teaching Positional Data
Changing Positional Data
TEST RUN・・・・・・・・・・・・・・・・・・・・・・・・・・
Preparation before Conducting Test Run
Test Run in Step Operation Mode
Test Run in Cycle Operation Mode
Test Run in Continuous Operation Mode
AUTOMATIC OPERATION
TYPES OF FILES
CHECKING FILES・・・・・・・・・・・・・・・・・・・・・・
FILES REQUIRED TO START UP ROBOT
Files Required to Perform the Cold Start Operation
Files Required for the Hot Start Operation
Setting of Distribution I/O Function
FORMATTING FLOPPY DISKS
BACKING UP FILES
Saving Files
Loading Files
COPYING FILES・・・・・・・・・・・・・・・・・・・・・・・
RENAMING FILES
DELETING FILES・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・・・
STE 58760
・・・・・・・・・・・・・・
・・・・・・・・・・・・
・・・・・・・・・・・
・・・・・・・・・・・・・・
・・・・・・・・・・・・・・
・・・・・・・・・・・
・・・・・・・・・・・・
・・・・・・
・・・・・・・・・・
・・・・・・・・・・・・・・
・・・・・・・・・・・・・・・・
4-2
4-3
4-3
4-7
4-13
4-16
4-16
4-22
4-27
4-32
4-38
5-1
5-3
5-6
5-6
5-7
5-8
5-9
5-12
5-12
5-15
5-19
5-23
5-26
vii
- -
Page 9
STE 58760
CHAPTER 1
BEFORE OPERATING SR SERIES ROBOT
This chapter presents an outline of the robot operational procedure, specifications, coordinate
system, system configuration, and their functions.
1.1 OVERVIEW
This paragraph deals with an outline of the SR–HSP series Toshiba system robot. The SR–HSP
series signifies the horizontally articulated robot.
The robot and robot controller feature as follows:
(1) Robot
• High-speed and smooth motion
– Cycle time 0.8 sec. under load of 2 kgf, 0.9 sec. under load of 5 kgf (SR–654HS)
300mm
25mm 25mm
• Wide working range
– A bidirectional rotating type without dead space included in the horizontal zone.
(ST–HS series)
• High reliability
– Maintenance-free, employing AC servo motors and absolute encoders.
• Enough Ni loading capacity
– Max. 20 kgf (SR–1054HS)
• Easy wiring and piping
– As nine cables and two air pipes standardly run in the arm, wiring and piping to the
end effector are necessary.
1-1
- -
Page 10

STE 58760
(2) Robot controller (SR7000)
• Simple programming.
– A program can be created easily according to highly advanced robot language SCOL.
• Excellent operability
– Teaching of positions, programming, adjustment, etc can be performed according to
the menu selection on the teach pendant.
• Extensive interfaces
– As RS232C three ports, computer and printer interface software are standard-
equipped, a diversity of system structure is possible.
• Easy diagnosis of faults
– A number of self-diagnostic functions allow an operator to smoothly address faults.
Fig. 1.1 shows the SR–HSP series system robot.
1.1.1 Structure
The robot consists of the basic robot, controller and teach pendant connected with the controller,
which is intended for teaching positions and entering programs.
To make the robot do a job, programs and position data are necessary so that the robot can
execute the job.
Normally, such programs and position data should be created and stored in the controller memory
beforehand. When operating the robot, the controller interprets the contents of programs and
gives the robot the instructions on motions according to the program sequence to cause the robot to
do the job.
Programs and position data for one process which are put together are called the task program,
which can also be called the file when they are loaded to and saved in the controller.
As the control unit of the controller uses the SCOL language (symbolic code language for robot), a
task program can be easily created and entered as if you were creating a BASIC program.
Entry of position data is possible in the three manners; guiding by the robot and teach pendant,
entry of coordinates through the teach pendant and manual guiding of the robot by the operator
after turning off the servo control.
The teach pendant can be shared by many robots, and automatic operation is possible even when it
is disconnected from the controller.
Also, saving and management of files are very easy, using an optional FDD unit.
In addition to the above, a great number of options and functions including optical sensors for
position data compensation and interface software with a personal computer are also available.
Fig. 1.2 shows a system configuration of SR series Toshiba system robots.
1-2
- -
Page 11

STE 58760
SR–1054 HSP Robot
Robot controller SR7000 Teach pendant
Fig. 1.1 SR Series System Robot
1-3
- -
Page 12
Robot
Robot controller SR–7000
Teach pendant
Fig. 1.2 System Configuration of SR Series System Robot
1.1.2 Functions
Horizontally articulated robot
STE 58760
SR–504 HSP
SR–554 HSP
SR–654 HSP
SR–854 HSP
SR–1054 HSP
(1) Control method
A 32-bit microprocessor serves as the central processor.
A 16-bit microprocessor is used for communication control and a 32-bit microprocessor for
each axis servo control, thus servo control, robot language processing and editing are
possible. Also, an 8-bit microprocessor is employed for the teach pendant to realize a more
intelligent robot.
(2) Motion
The motion comes in three types; PTP (point-to-point) control, CP (continuous path) control
(linear interpolation, circular interpolation (option)) and short-cut.
PTP control: Dedicated SCOL language MOVE
This control is used to move each axis fast to a specified position, irrespective of a path.
Simultaneous operation is executed in which all axes start moving simultaneously and
finish simultaneously.
CP control (linear interpolation): Dedicated SCOL language MOVES
This is the path control in which all paths are predetermined. Each axis moves between
two taught points in the Cartesian coordinate system along the shortest distance. It is
used to move the end effector of the robot along a straight line.
CP control (circular interpolation): Dedicated SCOL language MOVEC
Each axis moves on an arc from the current point to the target point via specified midpoint.
1-4
- -
Page 13
STE 58760
Short-cut
Each axis passes the vicinity of a taught point without reaching and stopping at the same
point, then moves to the next point. The travel time can be reduced.
PNT2
PNT2
PNT2
・Specified mid-point
PNT1
PNT1
PNT1
PTP Linear interpolation Circular interpolation Short-cut
(3) Number of controlled axes
A maximum of five axes can be controlled simultaneously. Additionally, the air cylinder can
be driven.
PNT2
PNT3
PNT4
PNT1
PNT5
(4) Storage capacity
The storage capacity of the RAM drive is 512 K bytes.
To save files, a 1.44 M bytes FDD unit (option) is available.
The rate of file active area is displayed in units of byte on the teach pendant.
Storage capacity of program alone (approximation): 500 points for 1,000 lines
A floppy disk is initialized in the MS-DOS format. It should be noted that reading of the data
contained in floppy disks for the SR-5500 controller is not possible.
(5) Storing method
A file (programs and position data) is stored in the memory backed up by a battery. Check is
performed on battery voltage drop and destruction of memory contents, and if an abnormality
has generated, an alarm is output to inform the operator to that effect.
(6) Number of program files
Up to 256 program files can be registered.
(7) Position detection
Detected by an absolute encoder on the no-load side of the AC servo motor.
(8) External input/output signals
Standard external input
In all, 32 inputs insulated optically are open to the user. Branch of a program and
interlock by input signals can be programmed easily, using the robot language.
1-5
- -
Page 14

STE 58760
Standard external output
In all, 24 outputs of transistor and open collector are open to the user. Output signal
ON/OFF and pulse output can be programmed easily, using the robot language.
Extension external input/output
When an option board is added, addition of 24 inputs and 16 outputs is possible.
Furthermore, sixty-four each of input and output that can operate as the slave station of
our TC200 programmer are available.
(9) External operation signal
To facilitate construction of an FA system, servo ON, servo OFF, start, feed hold, cycle stop,
robot operating speed, program reset, etc. are possible by external signals in the externalautomatic mode.
In any other mode, these external signals are neglected, except for the servo OFF signal.
The low speed instruction becomes effective also in the internal-automatic mode, however.
Also, the signals of ready, automatic operation ON, external-automatic mode ON, fault, servo
ON, emergency stop ON, etc. necessary for external operations are output.
(10) Teaching method
A program can be entered easily through the teach pendant, using the robot language
(SCOL). Position data can be given in the following three manners.
Teaching by remote-guidance through teach pendant.
Entry of coordinates through teach pendant.
Manual guidance in servo-free status.
(11) File editing function
A file can be registered and deleted on the teach pendant. Program editing is also
possible on the display. When the FDD unit (option) is provided, reading and writing of
data contained in a floppy disk of 1.44 MB MS-DOS format are possible. Thus, a program
can be edited on the personal computer.
(12) Speed setting
Program
Robot travel speed can be programmed in the range of 1 to 100 % in 1 % increments.
Override
A programmed speed can be overridden in the range of 1 to 100 % in 1 % increments.
1-6
- -
Page 15

Acceleration/deceleration speed setting
Speed at acceleration can be programmed in the range of 1 to 100 % in 1 % increments,
using the ACCEL instruction.
Likewise, deceleration speed can be programmed in the range of 1 to 100 % in 1 %
increments by means of the DECEL instruction.
Speed limit
A limit can be set on the maximum speed so that the robot speed can always be slower
than this limit. It is convenient to use in the TEST RUN mode.
(13) Servo gain ON/OFF function (servo-free)
Servo control ON and OFF are possible for each axis, using the program instruction (GAIN).
The same operation is also possible through the teach pendant.
(14) Torque limiting function
A limit value for each joint motor torque can be set in the range of 0 to 300 %, using the
program instruction.
When transferring or inserting a workpiece, there are occasions in which the robot motion is
mechanically obstructed due to faulty workpiece, etc., or no excessive force should be
exerted on the workpiece. When this happens, it is possible to prevent damage of the
work hand or robot by limiting the motor torque.
STE 58760
(15) Interruptive function
When any external signal is input during robot motion, the motion can be stopped instantly
and required processing can be executed by means of external input signals.
(16) Coordinate system setting function
Coordinate systems of the robot and peripheral equipment can be established through the
teach pendant.
(17) Program function
When the robot language SCOL is used, jump, subroutine, loop, interruptive processing,
delay time, speed setting, interpolation, hand operation, vertical movement and rotation of
each axis by an air cylinder are possible.
For details, see the Robot Language Manual.
(18) Operation
In the internal-automatic operation mode, the five modes are available; step, motion step,
cycle, continue and machine lock. (The step and machine lock modes can be selected
only in the test operation.)
In the external-automatic operation mode, the continue or cycle mode can be selected.
1-7
- -
Page 16

Step
A program is executed step by step.
Motion step
A motion instruction given in a program is executed once.
Cycle
A program is executed until the END instruction of main task has been executed. That is,
a series of operation is executed only once.
Continue
A program is executed, neglecting motion instructions in the same man-machine lock
program (i.e., the robot will not move).
Machine lock
A program is executed, neglecting motion instructions programmed, as if the robot were
actually moving.
STE 58760
(19) Working range limitation
To detect the stroke end limit, soft limits are provided, which can be set by the user at his
discretion.
(20) Self-diagnosis function
The system performs check on the servo fault, overtravel, transmission error, battery
voltage drop, control power fault, parameter destruction, etc. If an error is detected, an
appropriate error number is displayed on the teach pendant, and the servo power is turned
off according to the error.
(21) FDD unit (option)
Files stored in the controller memory (programs and position data) can be stored in floppy
disks. It is also possible to load the data of the floppy disks into the controller. A floppy
disk is initialized in the MS-DOS format. It should be noted that reading of the data
contained in floppy disks for the SR-5500 controller is not possible.
(22) Personal computer and printer interface
The interface function of an personal computer and printer is standard-equipped. Thus,
management of the robot language and line management can be performed very easily,
using the personal computer. Additionally, management of a group of robots is possible by
the host computer, thus construction of a highly advanced FA system can be realized.
1-8
- -
Page 17

STE 58760
1.2 OUTLINE OF OPERATIONAL PROCEDURE
At the least, the following operations are required to start up the robot.
(1) Installing the robot and controller at the site and connect the cables in place.
Unpack the controller and robot and install them at the site. After the installation work is
complete, connect cables between the controller, robot and peripheral equipment. For details,
see the Transportation and Installation Manual.
(2) Starting up and manually guiding the robot.
After robot installation work is complete, turn on the robot power so that it can be manually
operated. The operation range of the robot should have been set before teaching the
operation. For the setting procedure, see Chapter 2, "Power ON to Manual Guidance".
(3) Teaching the contents of the operation to the robot.
To make the robot work, a robot language program and position data should be prepared.
After the robot has been started up, input the program and position data. An example of the
operation is described in Chapter 4, "Example of Simple Operation". For details, see the
Operating Manual and the Robot Language Manual.
(4) Checking the operation being taught with a test run.
Check that the robot correctly works as taught. An example of the operation is described in
Chapter 4, "Example of Simple Operation". For details, see the Operating Manual.
(5) Making the robot work in an automatic operation mode.
After checking that the robot correctly works as has been taught, make the robot work. An
example of the operation is described in Chapter 4, "Example of Simple Operation". For
details, see the Operating Manual.
After the robot has been installed, the following components are required to make the robot
work.
Robot main body
・
Robot controller
・
Teach pendant
・
1-9
- -
Page 18

STE 58760
Check that cables have been securely connected between the robot body and controller and
between the controller and teach pendant.
Note 1)
In the automatic operation mode, it is not necessary to connect the teach pendant to the robot
body. Even if the teach pendant is not to be used, it is necessary to connect a dummy
connector to the teach pendant connector on the controller. Otherwise, the servo power
cannot be turned on.
Note 2)
The low speed instruction signal, servo OFF signal, and emergency stop signal of the external
control signal cables should be short-circuited even if they are not used. For the connector
locations and terminal numbers to be short-circuited, see the Transportation and Installation
Manual. (For the connectors attached to the controller, such signal cables have already been
short-circuited.)
1-10
- -
Page 19
STE 58760
1.3 SPECIFICATIONS
The basic specifications of SR–HSP series horizontally articulated robots are shown in Table 1.1.
Table 1.1 Basic Specifications of SR–HSP Series Robots
Item Specification
Model SR–
504HSP
Controlled axes 4 axes 4 axes 4 axes 4 axes 4 axes
Arm length Full length 500 mm 550 mm 650 mm 850 mm 1050 mm
Arm 1 250 mm 250 mm 350 mm 550 mm 580 mm
Arm 2 250 mm 300 mm 300 mm 300 mm 470 mm
Working range Axis 1 ±110° ±115° ±115° ±115° ±115°
Axis 2 ±137° ±120° ±140° ±145° ±140°
Axis 3 150 mm 200 mm 200 mm 200 mm 200 mm
Axis 4 ±280° ±280° ±280° ±280° ±360°
Maxi. speed Axis 1 270°/S 255°/S 255°/S 204°/S 170°/S
Axis 2 432°/S 432°/S 432°/S 432°/S 270°/S
Axis 3 1000 mm/S 1000 mm/S 1000 mm/S 1000 mm/S 1000 mm/S
Axis 4 864°/S 864°/S 864°/S 864°/S 576°/S
Resultant 4.24 m/S 4.71 m/S 5.15 m/S 5.28 m/S 5.33 m/S
Load Workpiece
mass
Allowable inertia
moment at end
Repeatability X, Y (plane) ±0.02 mm ±0.02 mm ±0.02 mm ±0.03 mm ±0.03 mm
Axis 3 (vertical) ±0.01 mm ±0.01 mm ±0.01 mm ±0.01 mm ±0.02 mm
Axis 4 (wrist
rotation)
Drive system AC servo
User wiring Input 5 nos. 5 nos. 5 nos. 5 nos. 5 nos.
Output 4 nos. 4 nos. 4 nos. 4 nos. 4 nos.
User air piping 2 pcs. 2 pcs. 2 pcs. 2 pcs. 2 pcs.
Robot body Mass 38 kgf 55 kgf 60 kgf 70 kgf 90 kgf
Painting color Misty white Misty white Misty white Misty white Misty white
2 kgf
(max. 4 kgf)
0.0225
2
kgf·m
±0.03° ±0.03° ±0.03° ±0.03° ±0.03°
motor
SR–
554HSP
5 kgf
10
(max.
kgf)
0.0663
kgf·m2
AC servo
motor
SR–
654HSP
5 kgf
(max. 10 kgf)
0.0663
kgf·m2
AC servo
motor
SR–
854HSP
5 kgf
(max. 10 kgf)
0.0663
kgf·m2
AC servo
motor
SR–
1054HSP
10 kgf
(max. 20 kgf)
0.1 kgf·m
AC servo
motor
2
1-11
- -
Page 20
STE 58760
Table 1.2 Basic Specifications of SR7000 Robot Controller
No. Item Specification Remarks
1 No. of controlled axes Simultaneous control of max. 5 axes.
2 Operation mode PTP, CP (linear interpolation, circular
interpolation), short-cut
3 Servo system Digital servo
4 Storage capacity Approx. 6400 points + 12800 steps 512 K bytes
5 No. of registrable programs Max. 256
6 Auxiliary memory 3.5 inch FDD unit (MS-DOS format) (option) 1.44 M bytes
7 Storage Battery backed up RAM
8 Position detection Absolute encoders
(Battery backed up at power failure)
9 Teaching
method
Entry of
10 External I/O signal 32 inputs and 24 outputs
11 Hand control signal 9 lines (5 inputs and 4 outputs)
12 External operation
signal
Output Servo ON, ready, fault, cycle mode, etc.
13 Serial communication port RS232C or RS422 three ports (RS422 option)
14 Speed setting Override, speed limit, program instruction
15 Acceleration/deceleration
speed setting
16 Torque limit Program instruction 0 ~ 300 %
17 Teaching box Teach pendant
18 Coordinate system Base, work, tool (Setting of multiple work or
Point display Remote: To be guided through teach
pendant.
Coordinate value: Entry of X, Y, Z, C, T data
through teach pendant.
Servo-free: Manual movement of arm.
Editing through teach pendant.
program
Input Program selection, start, stop, reset, etc.
Software for personal computer and printer is
standard-equipped.
1 ~ 100 % for each
Program instruction 1 ~ 100 %
tool coordinate systems are possible.)
Among them,
one port is
used
exclusively for
the pendant.
1-12
- -
Page 21
STE 58760
No. Item Specification Remarks
19 Operation limit Soft limit
20 Self-diagnostic function Error detection
21 Interruptive function Start of interruptive program by input signal,
timer, etc.
22 Operation mode Internal-automatic, external-automatic,
external communication
23 Operation Internal Continue, cycle, step, motion step (segment),
machine lock
External Cycle, continue
24 Basic
controller
Mass 18 kgf
Painting color Ivory, gray
25 Power supply 200 ~ 230 VAC (3 phases), 50/60 Hz
Outer
dimensions
430 (W) 230 (H) 330 (D) mm
1-13
- -
Page 22

STE 58760
1.4 COORDINATE SYSTEM
A coordinate system comes in a world coordinate system, base coordinate system and tool
coordinate system. Once the coordinate system is established, positions where the robot has to
move can be set by coordinate values.
A function which offsets the coordinate system is also provided, and even if the robot position or tool
has been changed, the entire program need not be modified accordingly.
In addition to the above, a work coordinate system is also available, which is useful to create
position data for palletizing operation.
Positional relationship of respective coordinate systems is shown in Fig. 1.3.
Fig. 1.3
1-14
- -
Page 23

(1) World coordinate system
A coordinate system the user defines in a space at arranging equipment or workpieces is
called the "world coordinate system."
(2) Base coordinate system
A Cartesian coordinate system based on the robot center is called the "base coordinate
system." Normally, each axis is set based on the origin (0°) orientation.
The base coordinate system can be offset by entering a deviation of each axis of the world
coordinate system. Thus, each time the coordinate system is changed, operation points
need not be taught to the robot.
(3) Tool coordinate system
A Cartesian coordinate system based on the tool set surface (i.e., flange surface) of the
robot end effector is called the "tool coordinate system."
Like the base coordinate system, the tool coordinate system can also be offset so that the
robot can move on the basis of the tool edge. Thus, the operator can teach the robot
based on the tool edge.
STE 58760
(4) Work coordinate system
A coordinate system defined in an actual working space, such as workpiece layout and
pallet, is called the "work coordinate system. Thus, data can be created easily at
palletizing or offline teaching.
1-15
- -
Page 24

STE 58760
1.5 SYSTEM CONFIGURATION
Basically, the robot system is composed of the basic robot, basic controller and teach pendant.
The controller has comprehensive interface functions to allow construction of various systems.
Fig. 1.4 shows the maximum system configuration.
The basic controller consists of the control panel, CPU printed board serving as the control center,
relay printed boards relaying external output signals and other units (such as servo driver).
* An external control unit required for external-automatic operation is not provided, which
should be prepared by the user at job site.
* A system disk (used for cold-starting the system) is attached to the controller. Keep it in your
custody.
1-16
- -
Page 25

STE 58760
Fig. 1.4 Maximum System Configuration
1-17
- -
Page 26
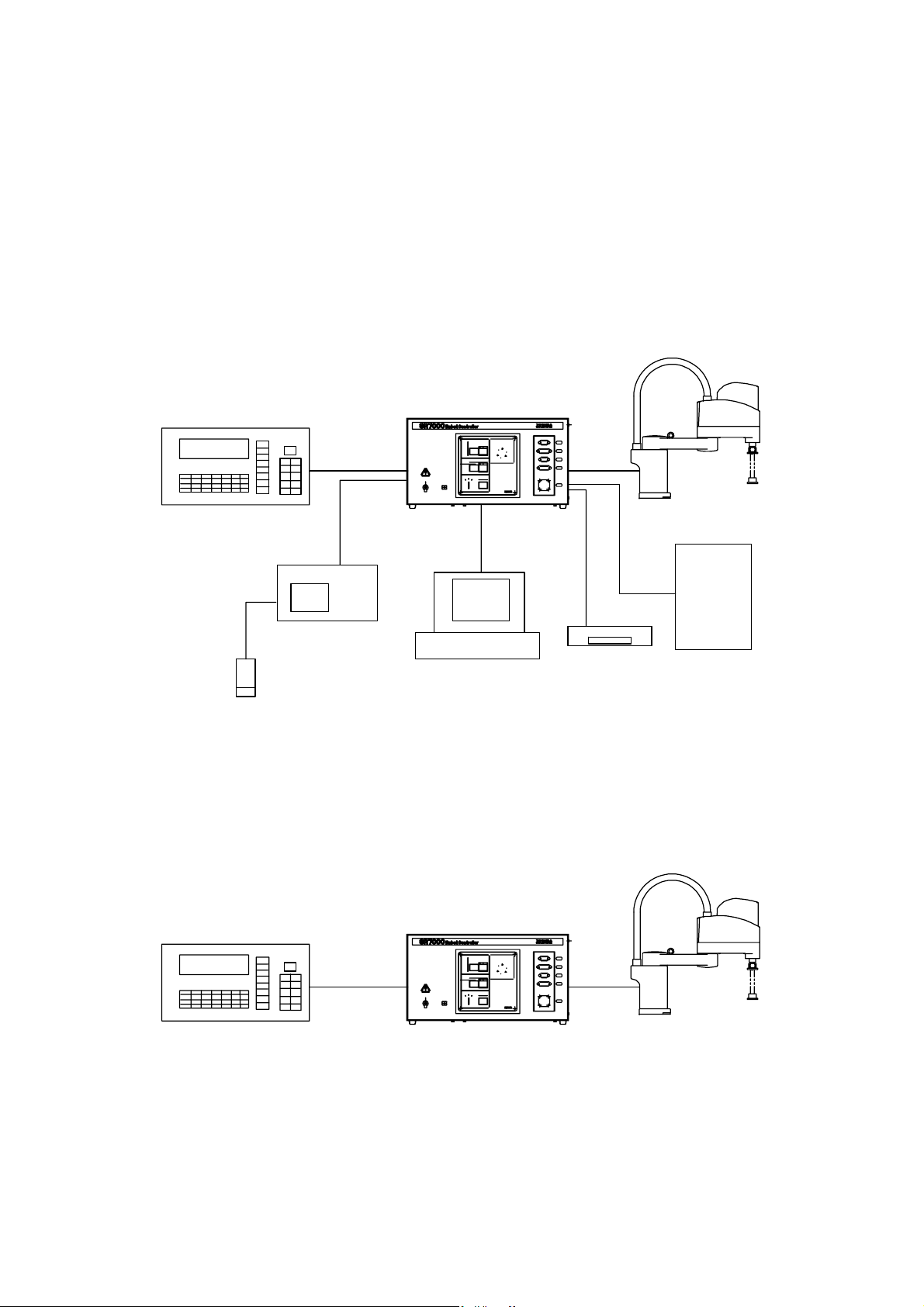
Equipment configuration by operation
Equipment configuration by operation is illustrated below.
(1) Maximum configuration
Maximum system configuration, including options.
STE 58760
Teach pendant
CCD camera
SR-5500
サーボ ON
Optical sensor
Basic controller
Personal computer
SR7000
FDD unit(option)
Robot
External control unit
(2) Manual guidance, teaching of positions by manual guidance and program editing
These operations can be executed, using the same equipment configuration.
It is possible to remote-control the robot through the teach pendant, which is called the
"manual guidance." This operation is used when the robot is only to be moved manually or
taught the operating positions by manual guidance.
Program editing is also possible by using this configuration.
Teach pendant
SR5500
Basic controller
1-18
- -
Robot
Page 27

STE 58760
(3) Internally controlled automatic operation
Operation of the robot according to files (programs and position data) loaded to the controller
is called the "automatic operation." The automatic operation can be controlled internally and
externally.
Start and stop of the robot through the control panel of the controller is called the "internally
controlled automatic operation."
Note: Automatic operation is possible by connecting or disconnecting the teach pendant to
or from the controller.
When the teach pendant is disconnected, connect a dummy plug to the teach
pendant connector. Unless the dummy plug is connected, the servo power cannot
be turned on.
(4) Externally controlled automatic operation
Automatic start and stop of the robot with external signals is called the "externally controlled
automatic operation."
(5) Floppy disk
Files (programs and position data) stored in the controller can be saved in floppy disks (3.5
inch), using an optional FDD unit. It is also possible to load the data in the floppy disks into
the controller.
(6) Automatic operation, using optical sensors (option)
Automatic operation is possible by using an optical sensor system while recognizing the items
subject to the operation and compensating position data.
1-19
- -
Page 28

STE 58760
1-20
- -
Page 29

STE 58760
1.6 NAMES AND FUNCTIONS OF SR7000 CONTROLLER
The start up operation is conducted using the control panel and teach pendant. The external
views of the control panel and teach pendant are shown in Figures 1.5 and 1.6.
1.6.1 Control Panel
The control panel is used to turn on and off the power and perform automatic operation. This
paragraph outlines names and functions of the controls. The numbers referenced accord with
those in Figure 1.5.
1. Main power switch:
Power switch for the controller.
2. Circuit protector:
Circuit protector for the controller control circuit.
3. J1 connector:
Connector for communication channel 1.
4. J2 connector:
Connector for communication channel 2.
5. TP connector:
Connector for connecting the teach pendant.
6. FDD connector:
Connector for floppy disk drive unit(optional).
7. EMERGENCY switch:
Switch which unconditionally stops the robot operation. When this switch is pressed, the
servo power is turned off and an emergency stop state signal is output. Once this switch
is pressed, it is locked in the pressed position. To unlock this switch, turn the switch in the
direction of the arrow.
8. SERVO POWER OFF switch:
A switch which turns off the servo power to stop robot operation. When the servo power is
turned off, the lamp on the "OFF" switch lights.
1-21
- -
Page 30

STE 58760
9. SERVO POWER ON switch:
A switch which turns on the servo power. When the servo power is turned on, the lamp on
the "ON" switch lights and a servo ON state signal is output. Unless the servo power is
turned on, the robot cannot be operated.
10. STOP switch:
A switch which stops automatic operation. When this switch is pressed in the automatic
operation mode, the lamp on the "STOP" switch lights and the robot stops automatic
operation after it completes the current operation. When the robot stops, the "START"
switch lamp turns off.
11. START switch:
A switch which starts automatic operation. When the robot starts automatic operation, the
lamp on the "START" switch lights.
12. CYCLE STOP switch:
A switch which selects the mode that performs one cycle of automatic operation. This
operation mode is called the cycle operation mode. In the cycle operation mode,
automatic operation stops after the robot has executed the program. When the cycle
operation mode is selected, the lamp on the "CYCLE STOP" switch lights.
13. PC connector:
Connector for connecting a personal computer substituting for a floppy disk unit.
14. MASTER MODE KEY switch:
A key switch which selects one of robot modes; external automatic mode (EXT), internal
automatic mode (INT), and manual mode (MANU). The modes selected with this switch
are called master modes.
15. POWER LED:
Power lamp for the controller. When the main power is turned on, the "POWER" lamp
lights.
16. FAULT LED:
Error lamp for the controller. When a fault is detected, the "FAULT" lamp blinks.
17. Buzzer:
When a fault is detected, the buzzer beeps. When the STOP switch is pressed, the buzzer
stops beeping.
1-22
- -
Page 31

STE 58760
1.6.2 Teach Pendant
The teach pendant is used to guide the robot, teach the robot, and check error messages.
This paragraph outlines names and functions of the controls. The numbers referenced accord
with those in Figure 1.6.
1. Emergency switch:
A switch which unconditionally stops robot operation. When this switch is pressed, the
power to the servo motors is turned off and an emergency stop state signal is output.
When this switch is pressed, it is locked in the pressed state. To unlock this switch, turn
the switch again.
2. Function keys:
Keys which select one of functions displayed at the bottom of the LCD screen. The
function to be selected depends on the mode being executed in the controller.
3. Alphanumeric keys:
Keys which enter alphabet characters, numeric characters, and symbols. To enter
characters marked on the upper key positions, press the keys while holding down the
"Shift" key. To enter characters marked on the lower key positions, simply press the keys.
4. Esc key:
A key which cancels characters and instruction being entered.
5. Ins key:
A key which inserts new characters between those which have been entered. After this
key is pressed, characters being entered are inserted at the position just preceding the
cursor. This mode is called the insert mode. When the insert key is pressed again while
the insert mode is in effect, the insert mode is canceled. After the insert mode is canceled,
characters newly entered will replace existing characters. This mode is called the replace
mode.
1-23
- -
Page 32

6. Del key:
The delete key deletes a character which has been entered. Whenever this key is pressed,
one character at the cursor is deleted. In the replace mode, the portion being deleted
becomes blank. In the insert mode, characters following those being deleted are pushed
right by one space every time a character is deleted.
7. Bs key:
The Bs key deletes a character which has been entered. Whenever this key is pressed, the
character just preceding the cursor is deleted. After a character is deleted, the cursor
moves left one position along with any characters that follow.
8. Ctrl key:
Used together with other key to mainly cancel an input command.
9. Shift key:
The shift key is used to enter characters marked on the upper positions of alphanumeric
keys. When any key is pressed while this key is held, the character marked on the top of
the key is entered.
10. Alt key:
The Alt key edits programs and data. This key is used along with other keys.
11. Exec key:
The execution key is used mainly to enter data.
12.
→←↑↓
Cursor keys move the cursor right, left, up, and down, respectively.
13. Error key:
The error indication key indicates the contents of an error being detected by the controller
on the LCD display. When this key is pressed, the contents of the error are indicated on
LCD display of the teach pendant.
14. Utility key:
A key which executes auxiliary controller functions.
15. Aux. signal key:
A key which operates the robot hand and air control axis. These signals are defined as
auxiliary signals in the system configuration file.
STE 58760
key (Cursor keys):
1-24
- -
Page 33

16. Move key:
A key which moves the robot to a previously taught position. When teaching positions,
specify the position to which you want to move the robot and press this key. The robot will
then move to the specified position. While pressing the move key, it is necessary to press
the Deadman Switch 23. On the other hand, if the move key is released while the robot is
moving, the robot will stop midway.
17. Coordinate key:
A key which selects a coordination system along which to guide the robot. The LED will
light up for the coordinate system currently selected.
18. Teach Speed keys:
Keys which select a robot travel speed to manually guide the robot. High, Med., and Low
represent high speed, medium speed, and low speed, respectively. The LED will light up
for the speed currently selected.
19. Control key:
A key which selects the guidance method for the robot in manual operation. The free
mode is used when moving the robot by hand. Inching is a mode where the robot is
moved a constant amount whenever the Guidance key (22) is pressed. The Jog is a mode
where the robot is moved while the Guidance key is pressed. The LED will light up for the
mode currently selected.
20. Feed hold key:
A key which temporarily stops the current robot operation. When this key is pressed while
the robot is moving, the robot stops moving temporarily. In this state, when this key is
pressed again, the robot resumes its operation. While the robot is in the temporarily stop
state, the LED will be lit.
21. Servo power ON switch:
A switch which turns on the servo power. When the servo power is turned on, the LED
lights up and a servo state ON signal is output. When the servo power is not turned on,
the robot cannot be operated.
22. XYZCT keys (Guidance keys):
Keys which manually guide the robot. The left-hand key and right-hand key of each axis
accord with the + direction and - direction, respectively. When one of these keys and the
Deadman Switch 23 are pressed, the robot can be guided. However, it is impossible to
operate more than one axis at a time.
STE 58760
1-25
- -
Page 34

23. Deadman switches:
Switches which are used to manually guide the robot. Unless one of these keys is
pressed, the robot cannot be manually guided. If this key is released while the robot is
guided, the robot stops. Although there are six Deadman switches on the rear side of the
teach pendant, to guide the robot, you only have to press at least one of them.
24. Liquid Crystal Display (LCD)
Display area is 8 lines × 42 columns.
STE 58760
POWER
10AT
① ②
DC24V
C.P.
⑮⑯
⑧⑨⑩⑪
SERVO POWER EMERGENCY
MANU
ONOFF
STARTSTOP
CYCLE STOP
POWER
FAULT
EXT
INT
BATTERY
ALARM
⑦
FDD
J1
J2
PC
③
④
⑬
⑥
TP
⑤
⑫⑭
⑰⑱
Fig. 1.5 External View of Controller Panel
1-26
- -
Page 35

STE 58760
1-27
- -
Page 36

STE 58760
Fig. 1.6 External View of Teach Pendant
1-28
- -
Page 37

STE 58760
CHAPTER 2
POWER ON TO MANUAL GUIDANCE
This chapter outlines how to turn on the power and how to manually guide the robot. For details of
how to create a robot language program, how to teach positions to the robot, and how to perform an
automatic operation, see Chapter 4, "Example of Simple Operation". Before actually operating the
robot, it is necessary to check that the cables have been correctly connected. For details of how to
install the robot, see the Transportation and Installation Manual.
The operation procedure from the power ON operation to manual guidance operation is as follows:
(1) Turn on the main power of the controller.
(2) Set the environmental conditions of the controller.
(3) Turn on the servo power.
(4) Manually guide each axis and check that the robot works correctly.
(5) Perform the manual guidance operation and check the robot operation.
(6) Set the operation range.
(7) Turn off the power supply.
Note)
When performing operations described in this chapter, be sure to place the MASTER MODE
KEY switch in the "MANU" (manual mode) position.
2-1
- -
Page 38

STE 58760
2.1 TURNING ON MAIN POWER
After checking that there are no problems with the controller and robot cable connections, turn on
the main power to start up the robot. There are two methods to turn on the main power; cold
starting and hot starting. Normally, only the hot starting is required. For details, see Para. 2.1.2.
2.1.1 Cold Starting
After cold starting has been conducted, programs and data necessary for operating the robot
are loaded from the floppy disk to the controller. Once the cold starting has been effected, it
need not be repeated unless the robot went wrong. If there is some problem with the robot,
perform hot starting.
Caution
If an abnormality has generated or the POWER LED lamp on the control panel remains off after the main
power switch of the controller was turned on, turn off the main power immediately and confirm the wiring.
Otherwise, you will be struck by an electric shock or a fire will break out.
Caution
When the cold start operation is conducted, the contents of the controller memory (including a robot
language program, position data, and user parameters) are initialized. To prevent user data from being
erased, be careful not to unintentionally conduct the cold start operation.
Be sure to back up the user programs. It is also recommended to always back up all user programs.
Conduct the cold start operation in the following manner.
(1) Insert the system disk into the FDD unit (option). (For the connections, see the Interface
Manual.)
(2) Hold the floppy disk in the manner that the label side is up and the disk shutter (metal
cover) enters the FDD first. Lightly insert the attached floppy disk (system disk) into the
FDD unit until a click is heard.
2-2
- -
Page 39

STE 58760
Note)
The disk provides a write-protection tab which prevents the user from mistakenly erasing the
contents. When using the system disk, prior to inserting it into the FDD, make sure to slide the
write-protection tab outward. When the tab is in the outward position (figure (a)), data cannot
be written on the floppy disk. On the other hand, when the tab is in the inward position (figure
(b)), data can be written on the floppy disk. In any case, slide the tab all the way until a click
sound is heard.
(3) Turn on the MAIN POWER switch on the control panel.
Turn on the MAIN POWER switch on the control panel. When the main power is turned on,
the POWER LED will light up.
Note)
Should the "POWER LED" not light even if the MAIN POWER switch is turned on, or should
any fault occur, immediately turn off the MAIN POWER switch and check the cables connected
to the controller.
2-3
- -
Page 40

STE 58760
(4) The contents of the system disk are read in by the controller.
The LED on the FDD blinks several times and the contents of the floppy disk are read to the
controller. When the controller is correctly started up, the following message appears on the
LCD screen on the teach pendant.
> ■
EDIT LOAD SAVE TESTRUN> RESET NEXT
F1 F2 F3 F4 F5 F6
When the cold start operation is conducted, the controller works as follows.
When the power is turned on, the controller reads in the system programs from the system disk.
While the system programs are read, the lamp on the "START" switch blinks. When the system
programs have been read in from the disk, the lamps on the "START", "STOP" and "CYCLE
STOP" switches light up for 0.5 sec. After that, the lamp on the "STOP" switch lights up and
the screen as shown above appears. After that, files of parameters and so forth are read to
the controller. After all the required files are read to the controller, the contents in the
automatic execution file are executed. In this state, the controller can be operated.
For details of the automatic execution file, see 3.5, "Batch Process".
When an error occurs during the cold start operation, take proper action corresponding to the
error message appearing on the screen.
(5) After the controller has been started up, remove the system disk from the FDD. When
pressing the FDD pushbutton, the floppy disk is slightly ejected from the disk entrance.
Hold the label portion of the disk and remove the disk.
2-4
- -
Page 41

STE 58760
Note)
While the LED on the FDD lights or blinks, be certain not to remove the floppy disk from the
entrance. Otherwise, the FDD, floppy disk, and/or controller may be damaged.
The cold start operation is now complete.
2.1.2 Hot Starting
While programs and data necessary to operate the controller are stored in memory of the
controller, the controller can be started up directly without performing the cold start operation,
which is called the “hot start”. Once the cold start operation has been conducted, unless any
fault occurs in the robot system, it is not necessary to conduct the cold start operation again.
Caution
!
If an abnormality has generated or the POWER LED lamp on the control panel remains off after the main
power switch of the controller was turned on, turn off the main power immediately and confirm the wiring.
Otherwise, you will be struck by an electric shock or a fire will break out.
When hot starting has been done, the controller enters a program reset status.
Conduct the hot start operation in the following manner.
(1) Turn on the MAIN POWER switch on the control panel.
Turn on the MAIN POWER switch on the control panel. When the MAIN POWER is turned on,
the "POWER LED" on the control panel will light up.
POWER
10AT
2-5
- -
Page 42

STE 58760
Note 1)
Should the "POWER LED" on the control panel not light even if the MAIN POWER switch is
turned on, or should any fault occur in the system, immediately turn off the Main Power switch
and check the cables connected to the controller.
Note 2)
If the system disk was in the FDD unit when the main power was turned on, the controller will
perform cold start. Before turning on the main power, check to see that the system disk has not
been inserted into the FDD unit.
Note 3)
If a floppy disk which contains any of the files CONSTRUC. SYS, SYSTEM. PAR, USER. PAR,
EXTRNSEL. SYS, SCOL. LIB, ALARM.MES, or AUTOSTR. BAT has been inserted into the
FDD unit, the contents of the files will be read to the controller when the main power is turned
on. For an outline of each file, see Chapter 5.
(2) The controller starts up.
When the controller has been correctly started up, the following message appears on the LCD
display on the teach pendant
> ■
EDIT LOAD SAVE TESTRUN> RESET NEXT
F1 F2 F3 F4 F5 F6
2-6
- -
Page 43

STE 58760
During hot start-up, the controller works as follows: When the main power is turned on, the
controller reads in the contents of the floppy disk in the FDD. Unless the system disk has not
been inserted, the system stored in the controller conducts hot starting. During the hot start
operation, the lamp on the "START" switch on the control panel blinks. When the controller is
started up, all the lamps on the "START", "STOP" and "CYCLE STOP" switches light for approx.
0.5 sec. After that, the lamp on the "STOP" switch lights and the screen as shown above
appears. After that, files for parameters and so forth are read in from the floppy disk to the
controller. Any required files are read to the controller.
After all the files have been read, the automatic execution file is executed. In this state, the
controller can be operated.
For details of the automatic execution file, see 3.5, "Batch Processing".
If an error occurs during the hot start operation, take proper action corresponding to the error
message which appears on the display. If the controller cannot be started up using the hot
start operation, conduct the cold start.
The hot start operation is now complete.
2-7
- -
Page 44

STE 58760
2.2 SETTING CONTROLLER ENVIRONMENTAL CONDITIONS
Before operating the robot system, it is necessary to set data for the controller. This data is stored
in the system configuration file (file name: CONSTRUC. SYS).
In addition, the controller requires the operator to set date and time.
This data setting is referred to as setting the environmental conditions of the controller. Details of
how to set individual data items are described in Chapter 3, "Setting Environmental Conditions for
the SR7000 Controller". This paragraph outlines setting environmental conditions for the controller.
Controller environmental conditions should be set only when the robot is installed. The included
system disk stores standard environmental condition values corresponding to the robot being
delivered. If the operator does not need to change the preset values, he or she can use them as
they are. (Date and time have been set at the factory.)
Set the environmental condition values of the controller in the following manner.
(1) Set the current date and time.
(2) Check the contents of the system configuration file.
(3) When selecting files to be executed with external input signals, create an external selection
file.
(4) When changing the contents of the system configuration file or when creating the external
selection file, the contents should be saved on a floppy disk.
(5) Turn off the power supply of the controller and then start up the controller using the hot
start operation.
For details of how to set environmental condition values of the controller, see Chapter 3,
"Setting Environmental Conditions for the SR7000 Controller
2-8
- -
Page 45

STE 58760
2.3 TURNING THE SERVO POWER ON
The power supplied to the servo motors of the robot is called servo power. Unless the servo power
is turned on, the robot will not work. Furthermore, before the operator enters the dangerous area
of the robot, make sure to turn off the servo power.
Turn on the servo power in the following manner.
Caution
• If the robot moves abnormally at servo power ON, press the EMERGENCY STOP switch
immediately to turn the servo power off.
• If anyone enters the robot working range, turn the servo power off beforehand.
(1) Open the transparent cover of the "SERVO POWER ON" switch on the control panel and
press the switch. When the servo power is turned on, the lamp on the "SERVO POWER
ON" switch will light up.
Note 1)
When the contacts of the emergency stop signal and servo OFF signal are open, or when no
cable is connected to the TP (Teach Pendant) connector on the control panel, the servo power
cannot be turned on. For controller cable connections, see the Transportation and Installation
manual. Connect the teach pendant or a dummy connector to the TP connector on the control
panel. In addition, when the emergency stop (EMERGENCY) switch is pressed on the teach
pendant or the control panel, the servo power will not turned on.
Note 2)
If the robot misoperates when the servo power is turned on, immediately press the emergency
stop switch and turn off the servo power.
2-9
- -
Page 46

STE 58760
2.4 MANUAL GUIDANCE OF EACH AXIS
The operation where the robot is operated using the teach pendant is called manual guidance.
When the servo power is turned on, conduct manual guidance for each axis and check to see that
the robot works correctly. When actually operating the robot, make absolutely sure that the robot
will not hit anybody or anything.
Conduct manual guidance in the following manner.
Caution
• If the guidance is performed manually, DO NOT enter the robot dangerous area.
• If the robot moves abnormally, immediately effect an emergency stop.
• If the robot will not move in the specified direction, consult Toshiba Machine.
(1) Select the joint coordinate mode as the coordinates.
Press the "Coordinate" key on the teach pendant several times until the "Joint" LED lights up.
(2) Set the guide speed to low.
Press the "Teach Speed" key on the teach pendant several times until the "Low" LED lights up.
2-10
- -
Page 47

STE 58760
(3) Press the deadman switch.
Press one of the six deadman switches on the rear side of the teach pendant. While guiding
the robot, press this switch inside. The robot will not work while the switch is released.
(4) Press one of the XYZCT keys.
At the time, the joint (axis) corresponding to the switch being pressed moves. The XYZCT
keys correspond to axes 1 to 5, respectively. Check that the robot works for all axes. In
addition, check that the right joint moves in the right direction in accordance with the guidance
key being pressed. The number and types of joints and the direction thereof depend on the
robot type. For details, see the Transportation and Installation Manual.
Note 1)
While the teach speed is set low speed, the robot will move at a very low speed. Thus, it
seems that the robot stops even while guided. This does not mean the robot is malfunctioning.
Note 2)
When two or more of the XYZCT keys are pressed, the robot will not work. In addition, when
any key other than the deadman switch and Servo ON switch on the teach pendant is pressed,
the robot will not work.
2-11
- -
Page 48

STE 58760
Note 3)
In the horizontally articulated type robots, there is an axial interference between the joint axes.
For example, when the axis 2 is moved, the servo motors of axes 3 and 4 also move to keep
axis Z in the same place. When an axis is operated and another axis also moves, it is
conceivable that set parameters are incorrect. In this case, contact us at the after-sale service
department or our agent in your territory.
(5) Check that the robot soft limit switches work correctly.
Guide each axis to the motion limit position and check that it works correctly. When the robot
detects a motion limit position, an error message appears on the teach pendant. The robot
cannot be guided out from the soft limit.
(6) Set the guide speed to the middle and high speed and guide the robot
Press the "Teach Speed" key on the teach pendant several times until the "Med." or "High" LED
lights. After that, press the desired XYZCT key and guide the robot. Check that the robot
moves smoothly.
2-12
- -
Page 49

STE 58760
2.5 MANUAL GUIDANCE OPERATION
The manual guidance operation can move the robot along various coordinate systems as well as
moving each joint (axis). The operation which guides each joint of the robot is named JOINT
guidance, while the operation which guides the robot along a coordinate system is named
coordinate guidance. The operator can select either the world, work, or tool coordinate system in
which to move the robot. The coordinate system in which the robot moves depends on the robot
type. For details of the robot's coordinate system, see the Introductory Manual.
When operating the robot, take care that the robot does not hit workers or anything else. Because
manual guidance is conducted in the manual mode, it is necessary to place the MASTER MODE
KEY switch on the control panel in the "MANU" (manual mode) position.
Conduct manual guidance for the robot in the following manner.
Caution
• If the guidance is performed manually, DO NOT enter the robot dangerous area.
• If the robot moves abnormally, immediately effect an emergency stop.
• If the robot will not move in the specified direction, consult Toshiba Machine.
(1) Select the desired coordinates system.
Press the "Coordinate" key on the teach pendant several times to select the desired coordinate
system.
2-13
- -
Page 50

STE 58760
When the "World" LED lights up, the robot will move along the world coordinate system.
When the "Work" LED lights up, the robot will move along the work coordinates system.
When the "Tool" LED lights up, the robot will move along the tool coordinate system.
When the "Joint" LED lights up, each joint of the robot will move separately.
(2) Set the guide speed to low speed.
Press the "Teach Speed" key on the teach pendant several times until the "Low" LED lights up.
(3) Press the deadman switch.
Press one of six deadman switches on the rear side of the teach pendant. While guiding the
robot, keep this switch held inside. While the switch is released, the robot will not work.
(4) Press one of the XYZCT keys.
The joint (axis) corresponding to the switch being pressed moves. The XYZCT keys
correspond to axes 1 to 5, respectively. Check that the robot works for all axes. In addition,
check that the right joint moves in the right direction in accordance with the guidance key being
pressed. The number and types of joints and the direction thereof depend on the robot type.
For details, see the Introductory Manual.
2-14
- -
Page 51

STE 58760
Note 1)
While the teach speed is set low speed, the robot will move at a very low speed. Thus, it
seems that the robot stops even while guided. This does not mean the robot is malfunctioning.
Note 2)
When two or more keys of the XYZCT keys are pressed, the robot will not work.
Note 3)
If the robot does not move in the direction being specified, it is conceivable that set parameters
are incorrect. In this case, call us at the after-sale service department.
(5) Set the teach speed to the middle speed and high speed and guide the robot.
Press the "Teach Speed" key on the teach pendant several times until the "Med." or "High" LED
lights up. After that, press the desired XYZCT key and guide the robot. Check that the robot
moves smoothly.
2-15
- -
Page 52

STE 58760
2.6 MOTION RANGE LIMIT
In executing the automatic operation or in teaching a position, the operation range and the teaching
range of the robot can be limited. When they are limited, the robot is not moved to a position out of
the operation range in the automatic operation, so that the position out of the operation range
cannot be taught. The limitation of the operation range is called the joint limit. The joint limit
should be set in two directions of + direction and - direction of each joint.
The joint limit can be set in the following two methods. 1st method: Guide the robot and teach
positions. 2nd method: Input the position of each joint with numeric values from the teach
pendant.
When a joint limit is changed, software which used to work may not work anymore. Thus, any joint
limit should not be unintentionally changed.
Each joint limit has been set to the maximum motion range at the factory. Unless there is
necessity to change a joint limit, use it as it has been set at the factory.
Note)
The joint limit values are stored in the user parameter file (USER. PAR). Before the operator
changes the joint limit values, it is recommended to back up the user parameter file. For an
instruction of how to back up the file, see 5.5, "Backing Up Files".
2.6.1 Setting Joint Limit Values by Teaching
The joint limit values are taught in the following manner.
(1) Check that controller monitor command menu appears at the bottom of the LCD display on
the teach pendant.
> ■
FORMAT VERIFY ZEROP> JLIMIT> CHANNEL N E XT
F1 F2 F3 F4 F5 F6
2-16
- -
Page 53

STE 58760
(2) Whenever you press the "F6" key on the teach pendant, the monitor command menu
accordingly changes. Repeat this key operation until the "JLIMIT>" command appears on
the LCD display.
NEXT
F6
(3) Press the function key which accords with the "JLIMIT>" command. After that, the LCD
display on the teach pendant shows the following screen.
JLIMIT
F4
TRAVEL JOINT <NEGATIVE> <POSITIVE>
[mm] <T1> -5.868 111.000
or <T2> -138.000 138.000
[deg] <T3> -0.500 200.500
<T4> -400.000 400.000
<T5> -5729.578 5729.578
> _
N1-mem P1-mem N2-mem P2-mem N3-mem < n ext >
F1 F2 F3 F4 F5 F6
(4) Guide each axis of the robot to the position where the joint limit has been set.
(5) Store the joint limit position value of each axis.
After guiding each axis of the robot to the position where the joint limit has been set, store the
position value by pressing the related function key on the teach pendant. Above the function
keys, a menu such as "Pi-mem", "N1-mem" corresponding to the controller axes appears. The
first letter "P" and "N" represent + direction and - direction of each joint axis. In addition, the
letter following "P" or "N" accords with the robot joint number. Press the key corresponding to
the axis and direction where the joint limit is taught.
2-17
- -
Page 54

STE 58760
If the corresponding axis and direction do not appear on the display, press the "F6" key.
Pressing the "F6" key causes the messages at the bottom of the display to change to those of
remaining axes.
(6) Last, press the "Esc" key to complete the joint limit setting.
2.6.2 Setting Joint Limit by Numeric Value Entry
Set the joint limit by entering numeric values in the following manner.
(1) Check that the controller monitor command menu appears at the bottom of the LCD
display on the teach pendant.
> ■
FORMAT VERIFY ZEROP> JLIMIT> CHANNEL N E XT
F1 F2 F3 F4 F5 F6
(2) When you press the "F6" key on the teach pendant, the monitor command menu changes
accordingly.
2-18
- -
Page 55

STE 58760
Repeat this key operation until the "JLIMIT>" command appears on the LCD display.
NEXT
F6
(3) Press the function key which corresponds with the "JLIMIT>" command. The LCD display
on the teach pendant should then show the following screen.
JLIMIT
F4
TRAVEL JOINT <NEGATIVE> <POSITIVE>
[mm] <T1> -5.868 111.000
or <T2> -138.000 138.000
[deg] <T3> -0.500 200.500
<T4> -400.000 400.000
<T5> -5729.578 5729.578
> _
N1-mem P1-mem N2-mem P2-mem N3-mem < n ext >
F1 F2 F3 F4 F5 F6
(4) Enter joint limit values with numeric keys.
The joint limit position value of the axis to be set should be entered in units of millimeters or
degrees.
(5) Store the joint limit position value of each axis.
After entering the joint limit position values, press the function key on the teach pendant to store
them. Above the function keys, a menu having "P1-mem" "N1-mem ...". corresponding to the
controller axes appears. The first letter "P" and "N" represent + direction and - direction of
each joint axis. In addition, the number following "P" or "N" accords with the robot joint number.
Press the key corresponding to the axis and direction for which the joint limit is to be set.
2-19
- -
Page 56

STE 58760
If the corresponding axis and direction do not appear on the display, press the "F6" key.
Pressing the "F6" key causes the messages at the bottom of the display to change to those of
remaining axes.
Example)
When setting the joint limit in the minus direction of axis 1 to -90 degrees, enter the following
keys in sequence.
[-] [9] [0] [Exec] [F1]
TRAVEL JOINT <NEGATIVE> <POSITIVE>
[mm] <T1> -5.868 111.000
Or <T2> -138.000 138.000
[deg] <T3> -0.500 200.500
<T4> -400.000 400.000
<T5> -5729.578 5729.578
> –90
N1-mem P1-mem N2-mem P2-mem N3-mem < n ext >
F1 F2 F3 F4 F5 F6
(6) Last, press the "Esc" key to complete the joint limit setting.
(7) Finally, turn off the controller power, then effect a hot-start. The joint limit setting
becomes effective. (For details of how to turn the power off, see Para. 2.7.)
2-20
- -
Page 57

STE 58760
2.7 TURNING OFF THE POWER
After the robot operation is complete, turn off the controller power (main power and servo power).
When the main power is turned off, the servo power also turns off at that time. Generally, one
turns off the servo power first and then turns off the main power. It is also possible to turn off the
power source at the controller connection.
2.7.1 Turning OFF Servo Power
Turn off the servo power in the following manner.
(1) Check that the robot is stopped.
Avoid turning off the power while the robot is moving if at all possible.
(2) Press the "SERVO OFF" switch on the control panel.
When the servo power is turned off, the lamp on the switch should light up.
2.7.2 Turning OFF the Main Power
Turn off the main power in the following manner.
(1) Check that the robot is stopped.
Avoid turning off the power if at all possible while the robot is moving.
If the robot is operating in the automatic operation mode, cancel the automatic operation mode.
If the main power is turned off while the robot is in the automatic operation mode, the contents
of the program may be lost.
2-21
- -
Page 58

STE 58760
(2) Turn off the servo power.
(3) Check that the FDD unit (option) is not in operation.
While the FDD is in operation, the LED on the FDD will be lit up. When the power is turned off
while the LED is still lit, the contents of the floppy disk in the FDD may be damaged. While the
FDD is in operation, do not turn off the main power. In addition, to protect the contents of the
floppy disk, it is necessary to remove the disk from the FDD, before turning off the main power.
Note)
If the main power is turned off and then turned on while the system disk is inserted in the FDD,
the controller will be cold started. To prevent this, be sure to turn off the main power after
removing the disk from the FDD.
(4) Check that no editing is being conducted with the controller.
If the main power is turned off while a robot language program is being edited, while position
data is being taught, or while parameters are being edited, data being edited or set may be
lost. (Moreover, other data may be also lost). Editing should be completed before turning off
the main power.
2-22
- -
Page 59

(5) Turn off the Main Power switch on the control panel.
When the main power is turned off, the "POWER LED" on the control panel turns off.
STE 58760
2-23
- -
Page 60

STE 58760
CHAPTER 3
SETTING ENVIRONMENTAL CONDITIONS
FOR THE SR7000 CONTROLLER
The operator should set items such as the robot configuration and the communication channel
modes before he or she operates the robot system. The operator should set the date and time for
the controller for file management and fault display information. The operation for setting such
data is called controller environmental condition setting. Except for the date and time, such data is
stored in a system configuration file (CONSTRUC. SYS).
In addition, to use external signals to select a file to be executed, it is necessary to first create an
external selection file (EXTRNSEL. SYS).
This chapter describes how to set individual data which defines the environmental conditions of the
controller.
3.1 SETTING DATE AND TIME
The controller provides a clock function which indicates the current date and time. When the robot
system detects an error, the function indicates the date and time when the error occurred along with
a related error message.
Date and time have been set at factory. However, when the controller power has been turned off
for a long time, the controller clock may become off. In this case, it is necessary to reset the
correct date and time.
Note)
The accuracy of the controller clock is within 15 sec per month. Thus, it is necessary to
periodically check and adjust the clock.
3.1.1 Setting Date
Set the current date in the following manner.
(1) Turn on the controller main power and place the MASTER MODE KEY switch on the
control panel in the "MANU" position. The following monitor command menu will appear
at the bottom on the teach pendant LCD display.
3-1
- -
Page 61

STE 58760
> ■
EDIT LOAD SAVE TESTRUN> RESET NEXT
F1 F2 F3 F4 F5 F6
(2) The command mode menu will change whenever you press the "F6" key. Repeat until the
"DATE" command appears.
NEXT
F6
(3) Press the function key corresponding to the "DATE" command. The following function key
menu will then appear.
DATE
F1
>DATE ■
DATE TIME NEXT
F1 F2 F3 F4 F5 F6
3-2
- -
Page 62

STE 58760
(4) Enter the current year, month, and day.
Example)
Let's assume that the current date is January 1, 1998. enter the current date values, enter the
following data.
[9] [8] [-] [0] [1] [-] [0] [1] [Exec]
If you press the "Exec" key without entering a new year, month, and day, the current year,
month, and day will appear.
>DATE 98-01-01
>DATE
Current date is Thu 1998-01-01
> ■
DATE TIME NEXT
F1 F2 F3 F4 F5 F6
Note)
If invalid data was entered, a message "Incorrect new date" appears on the display. At the
time, enter correct data.
3.1.2 Setting Time
Set the current time in the following manner.
(1) Turn on the controller main power and place the MASTER MODE KEY switch on the
control panel in the "MANU" position. The following monitor command menu appears at
the bottom of the teach pendant LCD display.
3-3
- -
Page 63

STE 58760
> ■
EDIT LOAD SAVE TESTRUN> RESET NEXT
F1 F2 F3 F4 F5 F6
(2) The command menu will change whenever you press the "F6" key on the teach pendant.
Repeat until the "TIME" command appears.
NEXT
F6
(3) Press the function key corresponding to the command. The following screen will appear.
F2
>TIME ■
DATE TIME NEXT
F1 F2 F3 F4 F5 F6
TIME
3-4
- -
Page 64

STE 58760
(4) Enter the current time. Example)
Assume that the current time is 2:50:45 p.m. To set correct time, enter the following data.
[1] [4] [: ] [5] [0] [ : ] [4] [5] [Exec]
If you press the "Exec" key without entering new hour, minute, and second values, the current
time values will appear on the display.
>TIME 14:50:45
>TIME
Current time is 11:18:45
> ■
DATE TIME NEXT
F1 F2 F3 F4 F5 F6
Note 1)
Time values should be entered in the 24 hour system rather than the 12 hour system.
Note 2)
If invalid time values are entered, a message "Incorrect new time" appears. At the time, enter
the correct time.
3-5
- -
Page 65

STE 58760
3.2 CHANGING FILE DATA
To edit files including the system configuration file, use the screen editor function. The basic
operation of the screen editor is as follows:
(1) Turn on the main power of the controller and place the MASTER MODE KEY switch on the
control panel in the "MANU" position. The following controller monitor command menu
appears at the bottom of the teach pendant LCD display.
> ■
EDIT LOAD SAVE TESTRUN> RESET NEXT
F1 F2 F3 F4 F5 F6
(2) Whenever you press the teach pendant "F6" key, the monitor command menu changes
accordingly. Repeat this key operation until the "EDIT" command appears.
NEXT
F6
3-6
- -
Page 66

STE 58760
(3) Press the function key corresponding to the "EDIT" command. The following command
menu will appear.
EDIT
F1
> ■
EDIT LOAD SAVE TESTRUN> RESET NEXT
F1 F2 F3 F4 F5 F6
(4) Enter a file name to be edited. To edit the system configuration file, enter the following.
[C] [O] [N] [S] [T] [R] [U] [C] [.] [S] [Y] [S]
To edit the external selection file, enter the following.
[E] [X] [T] [R] [N] [S] [E] [L] [.] [S] [Y] [S]
>EDIT CONSTRUC.SYS ■
EDIT LOAD SAVE TESTRUN> RESET NEXT
F1 F2 F3 F4 F5 F6
3-7
- -
Page 67

STE 58760
If incorrect data has been entered, press the "Bs" key to delete the immediately preceding
character.
(5) Press the "Exec" key on the teach pendant. The number of files being stored in the
RAM drive of the controller, the number of empty bytes of the memory, and the name of the
file to be edited appear on the LCD display. If an incorrect file name has been entered, by
using the "Bs" key, move the cursor to the incorrect character and correct the file name.
<< SR-X Screen Editor Ver. 2.00 >>
1. Number of RAM file : 1
2. Free Memory Size : 34998
-----[ ]
Edit file : CONSTRUC.SYS _
F1 F2 F3 F4 F5 F6
When the file name is correct, press the "Exec" key. The contents of the current file appear on
the LCD display.
(6) Change the contents of the file which appear on the LCD display. Using the screen editor,
move the cursor to a character to be changed and conduct the edit operation. The cursor
position is indicated with a character which blinks alternately in black and white or with a
underline which simply blinks.
The edit operation is conducted in the following methods.
(a) Selecting the insert or replace mode:
The mode where characters being entered are inserted just before the cursor position is named
the insert mode. In the insert mode, a character where the cursor is indicated with a blinking
underline. The mode where old characters are replaced with those being entered is the
replace mode. In the replace mode, the cursor is positioned blinks alternately in black and white.
3-8
- -
Page 68

The "Ins" key changes between the insert mode and replace mode.
(b) Moving the cursor position:
Press the "←","→","↑", and "↓" keys to move the cursor where you want.
STE 58760
(c) Deleting a character using the "BS" key:
When you press the "Bs" key, the character just preceding the cursor is deleted. After the
character is deleted, the cursor moves left one position. Each character following the cursor
also moves left by one position.
3-9
- -
Page 69

STE 58760
(d) Deleting a character using the "Del" key:
When you press the "Del" key, one character at the cursor is deleted. Each character following
the character being deleted moves left by one position.
(e) Entering characters:
Enter characters using the alphanumeric keys on the teach pendant. To enter a character
marked on the upper position of the key, press that key while also pressing the "Shift" key. To
enter a character marked on the lower position of the key, simply press that key. At the end of
each line, press the "Exec" key.
For other functions which are available in the screen editor, see the Operating Manual.
(7) Quitting the edit operation:
After editing the file, press the "X" key while pressing the "Alt" key.
3-10
- -
Page 70

STE 58760
Note)
Before exiting the edit function, check that the edited data is correct.
(8) Starting up the controller with the edited file. In order to validate (make effective) the
changes, first turn off the main power and then hot start the controller.
Note 1)
Before changing the contents of a file, it is recommended to back up the file with a floppy disk.
For details of how to back up a file, see 5.5, "Backing Up Files".
Note 2)
If the contents of the system configuration file were changed for the worse when they were
edited, read the CONSTRUC. SYS file from the attached system disk of the controller and
conduct the edit operation all over again. For details of how to load the file, see 5.5, "Backing
Up Files".
3-11
- -
Page 71

STE 58760
3.3 SETTING THE SYSTEM CONFIGURATION
The configuration of the robot system has been set in the robot configuration file. Thus, it is not
necessary for the user to change the system configuration. However, depending on the application
of the robot system, the contents of the system configuration file may have to be changed. This
paragraph describes the contents of the system configuration file. For details of how to set and
change data, see 3.2, "Changing File Data".
Caution
DO NOT change the data of system configuration files (0) ~ (5) without our prior permission.
3.3.1 Outline of Data
The following data has been set in the system configuration file.
(0) Robot type
Specifies whether the robot type is the horizontal rotating multi-joint type or the Cartesian
coordinate system type.
(1) Robot axis configuration
Specifies which of the 6 joint axis of the robot are to be used.
(2) Type of joint
Specifies whether the joint type of the robot is a directly moving joint or rotating joint.
(3) Construction of servo
Specifies the number of axis which the servo motors to be used.
(4) Gravity compensated axis
Specifies the axes for which gravity compensation is to be performed. For an axis where
gravity compensation is specified, in the servo free state, the arm is controlled so that it does
not drop under its own weight. The servo free state is a state where the position control
mechanism of the servo motor is turned off so that the robot can be manually moved. For a
horizontal multi-joint robot, only axis 3 can be set as a gravity compensated axis.
3-12
- -
Page 72

STE 58760
(5) Motor revolving direction
Specifies the basic direction in which the motor revolves (i.e., CW or CCW). SR–7000
can use only axis 1 to axis 4, and specify zero for axis 5 and axis 6.
(6) Not used (spare)
(7) Not used (spare)
(8) Not used (spare)
(9) Control method for external automatic mode
Specifies whether the system is to be controlled using I/O signals or data communication from a
host computer.
(10) Not used (spare)
(11) File selection signal line
Specifies an external input signal to be used to select a file which is to be externally executed.
(12) Speed in low speed instruction mode
Sets a speed at which the robot works when a low speed instruction signal is input.
(13) Communication mode
Sets a communication channel mode used for data communication.
(14) Auxiliary signal line
Sets auxiliary signals used for hand and air control axes of the robot.
(15) Storage
Sets the use of a floppy disk unit or a substitute personal computer.
(16) Not used (spare)
3-13
- -
Page 73

3.3.2 File Format
The system configuration file is created in the following format.
SYSTEM CONSTRUCTION PARAMETER FILE "CONSTRUC.SYS"
[0.] ROBOT SPECIFICATION (C)
="SR-HS"
[1.] CONSTRUCTION OF MANIPULATER. {=0:WITHOUT,=1:WITH} (I)
=1 1 1 1 0 0
[2.] TYPE OF JOINT{=0:LINEAR.=1:ROTATE, 1ST JOINT TO 5TH}
=1 1 0 1 0 0
[3.] CONSTRUCTION OF SERVO. {=0:WITHOUT,=1:WITH} (I)
=1 1 1 1 0 0
[4.] SPECIFY FOR GRAVITY COMPENSATION
IN SERVO FREE MODE. {=0:OFF,=1:ON} (I)
=0 0 1 0 0 0
[5.] NOT USE
=0 0 0 0 0 0
[6.] NOT USE
=0 0 0 0 0 0
[7.] NOT USE
=128
[8.] NOT USE
=255
STE 58760
3-14
- -
Page 74

STE 58760
[9.] SPECIFY FOR OPERATE MODE IN EXTERNAL AUTO.
{=0:EXT. SIGNAL, =1:COMPUTER} (I)
=0
[10.] NOT USE
=0
[11.] SPECIFY FOR EXTERNAL FILE SELECTION SIGNAL.
{1<=CH NO.<=24,1<= LENGTH <=8} (I)
=17 8
[12.] SLOW SPEED RATE {0< RATE <100} (C) [%]
[13.] MODE OF SERIAL CHANNEL. {2ND CH. TO 5TH CH.}
{LOGICAL CHANNEL NAME = PRT | HOST| COM1 | COM2 | COM3 | COM4} (C)
{NO USE. SPARE} (I)
{PROTOCOL SELECTION
, =0:FREE RUN CONTROL,
, =1:SIMPLE PROTOCOL WITH SUM CHECK,
, =2:SIMPLE WITHOUT SUM CHECK, } (I)
{TRANSMIT SPEED =9600 | 4800 | 2400 | 1200} (I) [BPS]
{CHARACTER BIT = 7 | 8} (I)
{PARITY BIT =0:W1THOUT,=1:ODD,=2:EVEN} (I)
{STOP BIT =1 | 2} (I)
= "PRT" 0 0 1200 7 2 1 {MODE OF CHANNEL COM1}
= "COM1" 0 0 2400 7 2 2 {MODE OF CHANNEL COM2}
= "HOST" 0 1 2400 8 1 1 {MODE OF CHANNEL COM3}
= "COM2" 0 0 4800 7 2 1 {Not used}
3-15
- -
Page 75

STE 58760
[14.] MODE OF AIR DRIVEN AXIS.
{SPECIFY FOR USE OR NOT USE. =0:NOT USE,=1:USE} (I)
{NO USE. SPARE.} (I)
{TYPE OF VALVE =0:SINGLE SOLENOID, =1:DOUBLE SOLENOID} (I)
{SPECIFY OF OPERATE CH. NO.} (I)
{NO USE. SPARE.} (I)
=1 0 0 208 0
=1 0 1 209 0
=1 0 1 211 0
=1 0 1 213 0
=0 0 0 0 0
=0 0 0 0 0
[15.] Option FD (0) & External computer (1) flag (I)
=0
[16.] NOT USE
=0 0 0
Specify data on lines which start with "=". This type of line is called a data line. All other lines are
comment lines. The controller interprets data in the order that the lines appear. The numbers in
[ ] of the above example accord with data numbers as described in 3.3.1, "Outline of Data".
Data types accord with data lines as follows.
3-16
- -
Page 76

Line No. contents Remarks
1 Robot type
2 Robot axis configuration For 6 axes
3 Type of joint For 6 axes
4 Construction of servo For 6 axes
5 Gravity compensation axis For 6 axes
6 Motor revolving direction For 6 axes
7 Not used
8 Not used
9 Not used
10 Control method in external
automatic mode
11 N o t used
12 File selection signal line
13 Speed in low speed
instruction mode
14 Communication mode Communication channel 1
15 Communication mode Communication channel 2
16 Communication mode Communication channel 3
17 Not used
~23 Auxiliary signal line For 6 points (1 point line)
24 Storage selection
25 Not used
For details of individual data, see the following paragraph.
0 ~ 100
STE 58760
3-17
- -
Page 77

STE 58760
3.3.3 Details of Data
This paragraph describes details of individual data of the system configuration file.
(0) Robot type
Specifies the robot type to be used.
For horizontally articulated types ... [= "SR-HS"]
For Cartesian coordinate system types ... [= "SR-L"]
(1) Robot axis configuration
Specifies which of the jointed axes 1 to 4 are to be used. The setting is to be changed when the
number of axes of the robot is less than four, or when a servo motor is to be used outside of the
robot. The data are to be specified for 4 axes separated with a space. To use an axis, set
that axis to "1". To not use an axis, set that axis to "0".
Example)
When the Z axis is not used for a horizontally articulated type robot, set the data to [= 1 1 0 1].
Note 1)
Robot axes vary by robot type. For details of the robot axes, see the Transportation and
Installation Manual.
Note 2)
This data should be set for all four axes.
(2) Type of joint
Specifies whether the joint type of the robot is a directly moving joint or rotating joint. The data
are to be specified for 5 axes separated with a space. To use the linear moving axis, set that
axis to "0." To use the rotating joint, set the axis to "1."
Example)
When axes 1, 2, and 4 use the rotating joint and axes 3 and 5 use the linear moving joint, set to
[= 1 1 0 1 0].
3-18
- -
Page 78

STE 58760
Note 1)
The number of joint axes depends on the robot type. For details, see the Transportation and
Installation Manual.
Note 2)
This data should be set for all five axes.
(3) Construction of servo
Specifies axes for which servo motors are used. Each setting for five axes should be
separated with a space. To use the servo motor for an axis, set that axis to "1"; to not use the
servo motor for an axis, set that axis to "0".
Example)
To use the servo motors for all five axes, set this data to [= 1 1 1 1 1].
Note)
This data should be set for all the five axes.
(4) Gravity compensated axis
Specifies an axis for which gravity compensation is performed. Each axis where gravity
compensation is performed is controlled so that the arm does not drop by its own weight when
the servo free state takes effect. In the servo free state, position control by the servo motor is
turned off and the robot can be manually moved. Each data for five axes should be separated
with a space. To perform gravity compensation for an axis, set that axis to "1". To not
perform the gravity compensation for an axis, set that axis to "0".
Example)
When performing the gravity compensation only for the axis Z (axis 3), set to [= 0 0 1 0 0].
3-19
- -
Page 79

STE 58760
Note 1)
This data should be set for all the five axes.
Note 2)
For a horizontally articulated robot, do not specify any axes other than the axis Z (axis 3) for
gravity compensation.
(5) Motor revolving direction
Specifies to coincide the robot operating direction with the motor revolving direction.
Example)
When moving all axes in the CW direction, set [0 0 0 0 0].
Note 1)
The motor revolving direction differs with each motor.
Note 2)
This data should be set for all five axes.
(6) Not used (spare)
(7) Not used (spare)
(8) Not used (spare)
(9) Control method in external automatic mode
Specifies whether to use I/O signals or data from a host computer to control the robot in the
external automatic mode. To use I/O signals, set to "0". To use data from a host computer,
set to "1".
Example)
To use I/O signals for controlling the robot in the external automatic mode, this should be set to
[=0].
3-20
- -
Page 80

STE 58760
(10) Control of host computer communication protocol
Specifies whether checksum should be included or not in the host computer
communication mode.
Example)
Host computer communication, without procedure ··· [= 0]
(11) File selection signal line
Specifies an input signal to select a file to be executed from the outside of the controller using
input signals. Specifies up to 8 consecutive signal points from among the 32 input signal points
ranging from point 1 to point 32. Data should be specified by assigning the signal number of
the beginning of the signal and the number of signal points.
Example)
To use the 8 signal points ranging from input signal point numbers 17 to 24, this line should be
set to [= 17 8].
(12) Speed in the low speed command
Specifies the speed at which the robot works when a low speed command signal is input.
Specifies the percent of the maximum speed at which the robot is to move when a low speed
command signal is input while in the automatic operation mode.
Example)
To specify 25% of the maximum speed, this data should be set to [= 25].
Note)
The speed should be specified with an integer in the range of 0 to 100.
(13) Communication mode
Sets the modes of the communication channels to be used for data communication.
Specifications should be made for communication channels 1 to 3. The communication
channels 1 to 3 accord with the connectors J1 to J3 of the SR7000 controller. Set each
channel in the following format.
[= (Name) (Spare) (Procedure)
(Speed) (Character length) (Parity) (Stop bit length)]
3-21
- -
Page 81

STE 58760
(Name)
Specifies the name of device to be connected. The name of the device is specified with one of
the following abbreviations. If it is not specified, the abbreviation of the communication
channel is specified.
Printer ... "PRT"
Host computer ... "HOST"
Communication channel 1 (default) ... '"COM1"
Communication channel 2 ... "COM2"
Communication channel 3 ... "COM3"
The name "HOST" can be used only for one communication channel.
(Spare)
This data should be always set to "0".
(Procedure)
When "HOST" is specified for (name), specify the procedure used for data communication.
For details, see the Communication Manual.
No procedure ... 0
Simple procedure (presence of check sum) ... 1
Simple procedure (absence of check sum) ... 2
Unless (name) is "HOST", data communication is done without any procedure.
(Rate)
Specifies the rate of data communication. Select one of the following rates.
9600 bps ... 9600
4800 bps ... 4800
2400 bps ... 2400
1200 bps ... 1200
(Character length)
Specifies the character length for communication.
8 bits .8
7 bits .7
3-22
- -
Page 82

STE 58760
(Parity)
Specifies whether to check the parity of each character to be communicated.
Absence of parity check ... 0
Odd parity ... 1
Even parity ... 2
(Stop bit length)
Specifies the stop bit length of each character to be communicated.
1 bit ... 1
2 bits ... 2
Data should be separated by commas and specified in sequence. The data of each channel
should be specified on four lines in sequence.
Example)
Assume that communication channel 1 is to be used for a printer and communication channel 2
is to be used for the host computer.
[="PRT" 0 0 1200 8 0 1
="HOST" 0 1 2400 7 1 2
="COM3" 0 0 2400 8 1 2
="COM2" 0 0 4800 7 2 2]
In this example, communication channel 1 is set to "printer, no procedure, 1200 bps, 8 bit
characters, no parity check, and 1 stop bit". Communication channel 2 is set to "host computer,
simple procedure (presence of check sum), 2400 bps, 7 bit characters, odd parity, 2 stop bits".
Communication channel 3 is not set to any port with no procedure, 2400 bps, 8 bit characters,
odd parity, 2 stop bits". Communication channel 2 is not set to any port with 4800 bps, 7 bit
characters, even parity, 2 stop bits".
Note 1)
Set all the four channels for the communication mode. (As channel 4 is unused, however, it
should be set as the dummy.)
Note 2)
The communication channel 0 (COM0) is a channel dedicated for the teach pendant. The
parameters for this channel cannot be changed.
3-23
- -
Page 83

STE 58760
(14) Auxiliary signal line
The auxiliary signal line is used to specify auxiliary signals used for the hand and air control
axes of the robot. Set the auxiliary signals for all six points. The parameters for each axis are
to be set in the following format.
[= (Use/Not use) (Spare) (Solenoid) (Signal number) (Spare)]
(Use/Not use)
Specifies whether to use the control axis. Six data lines are assigned for auxiliary signal lines,
and all of them should be specified as follows:
To not use the control axis, set to "0". To use the control axis, set to "1".
(Spare)
This should be always set to "0".
(Solenoid)
Specifies the type of a solenoid valve which drives the axis. When a double solenoid is used,
two consecutive output signals are sent out exclusively.
Single solenoid ... 0
Double solenoid ... 1
(Signal number)
Specifies an auxiliary signal number to be used. Signals with a signal number in the range of
200 to 299 can be used for auxiliary signals. For details of output signal numbers, see the
Interface Manual. When a double solenoid is used, specify the lower number of two
consecutive output signal numbers.
(Spare)
This should be always set to "0". Each data should be separated with a space.
Example)
Assume that the auxiliary signal 209 is used for a single solenoid. Set this to [= 1 0 0 209 0].
3-24
- -
Page 84

STE 58760
Note 1)
All the auxiliary signal lines should be set for all six points.
Note 2)
The parameters of this data are effective only for auxiliary signals which are operated by the
teach pendant. Even if a double solenoid is specified, signals are not exclusively output in the
automatic operation mode. In this case, create a program so that the signals are exclusively
output.
Note 3)
When the power is turned on, even if the double solenoid has been specified, the output signal
is in the off state.
(15) Selection of storage
Selects either a floppy disk unit or a personal computer substituting for the floppy disk unit.
Example)
When the floppy disk unit is used, set [0].
(16) Not used (spare)
3-25
- -
Page 85

STE 58760
3.4 SETTING EXTERNAL SELECTION FILES
To select a file to be executed using external input signals, the name of the file should have first
been registered in the external selection file (EXTRNSEL. SYS). This paragraph describes the
contents of the external selection file. For details of how to create and change this file, see 3.2,
"Changing File Data".
Note)
To select a file to be executed from outside of the controller, it is necessary to specify an input
signal line to be used for selecting the file as well as creating the external selection file. For
details of the system configuration file, see 3.3, "Setting System Configuration".
3.4.1 Signals Used for Selecting File
To select a file, use a signal having up to 8 consecutive signal points among 32 input signal
points. Signals used to select a file are specified in the system configuration file. Change
the data line corresponding to the file selection signal line in the system configuration file in
accordance with the signals to be used.
Example)
When using the 6 points (extending from points 10 to 15) of an input signal, change the data
line of the system configuration file as follows.
[9.]SPECIFY FOR EXTERNAL FILE SELECTION SIGNAL
[1<=CH.NO. <=24,1<=LENGTH<=8]
= 10 6
To actually select a file, take the timing using a strobe signal and acknowledge signal. For
details of the signal timing for selecting a file, see the Interface Manual.
Any signal used for selecting a file is read in as a file selection number. The file selection
number is one digit numeric value in binary notation representing the conversion of the state of
each input signal being specified. The smallest input signal number of the input signals being
specified is treated as bit 0, and, in order, each bit corresponds with its input signal number.
The ON and OFF states of each signal correspond with 1 and 0, respectively.
3-26
- -
Page 86

STE 58760
(Example)
File selection numbers when using 6 signal points (extending from signal points 10 to 15) are as
follows:
Input signal File selection number
15 14 13 12 11 10 Binary Decimal
OFF OFF OFF OFF OFF OFF 000000 0
OFF OFF OFF OFF OFF ON 000001 1
OFF OFF OFF OFF ON OFF 000010 2
・・
OFF ON OFF ON OFF ON 010101 21
・・
ON OFF ON OFF ON OFF 101010 42
・・
ON ON ON ON ON OFF 111110 62
ON ON ON ON ON ON 111111 63
3.4.2 Contents of File
The names of files written in robot language are registered on one line at a time in the external
selection file. Each file name corresponds with the file selection number, which is determined
by subtracting a 1 from the number on which the file is registered. The file on line 1 accords
with the file selection number 0; the file on line 2 accords with the file selection number 1; and
so on. The number of characters per line should be 12 characters. For an example of how to
create a robot language program file, see Chapter 4, "Example of Simple Operation
For a detailed description, see the Operating Manual. For details on robot language, see the
Robot Language Manual.
The following are examples of external selection files.
MAIN0. SRC
MAIN1. SRC
MAIN2. SRC
MAIN3. SRC
MAIN4. SRC
MAIN5. SRC
MAIN6. SRC
MAIN7. SRC
・・
・・
・・
12 characters
・・
・・
・・
・・
・・
・・
・・
・・
・・
・・
・・
・・
・・・・・・
・・・・・・
・・・・・・
・
・
・
3-27
- -
Page 87

STE 58760
In the above example, when the file selection number is 0, the file MAIN0. SRC is selected;
when it is 1, the file MAIN1. SRC is selected; and so on.
Note 1)
Files registered in the external selection file must be in the memory of the controller. Any file
which is not in the controller memory cannot be selected.
Note 2)
When a file to be executed is selected externally, the file corresponding to the line of the
external selection file is selected. Thus, be careful with the order of file names in the external
selection file.
Note 3)
When registering file names in the external selection file, do not place a blank line between any
file names.
Note 4)
If the file name to be registered consists of less than 12 characters, include a space or spaces
before the file name to make the total number of characters 12. DO NOT enter a space or
character at the 13th character and after.
3-28
- -
Page 88

STE 58760
3.5 BATCH PROCESSING
The SR7000 controller provides a function which sequentially executes a set of commands entered
from the teach pendant. This function is named a batch processing. To conduct a batch
processing, it is necessary to describe commands in the order of execution in a file. This type of
file is named a batch file. When a batch file name is used like a command, commands listed in
that batch file are executed in sequence.
3.5.1 Batch File
A file where commands are to be executed in a batch is called a batch file. The extension for
all batch files should be ".BAT".
The following table lists commands available for batch processing. For details of how to use
each command, see the Operating Manual.
Command
name
LOAD MANU , AUTO Reads a file from a floppy disk.
SAVE MANU Writes a file to a floppy disk.
RESET MANU , AUTO Resets the execution environmental
COPY MANU , AUTO Copies a file.
DEL MANU , AUTO Deletes a file.
FORMAT MANU Formats a floppy disk.
CHANNEL MANU , AUTO Enables a communication channel.
DATE MANU Displays and sets date.
TIME MANU Displays and sets time.
REN MANU Changes the name of a file.
MODE AUTO Specifies automatic operation as the
MSPEED AUTO Sets the speed override.
LSPEED AUTO Sets the speed limit.
SELECT AUTO Selects a file to be executed.
DO AUTO Directly executes a robot language
Available mode Function
conditions of the controller.
operation mode.
command.
3-29
- -
Page 89

STE 58760
Note 1)
"AUTO" in the "Available mode" column represents the internal automatic mode, the external
automatic mode, and the test operation mode. "MANU" represents the manual mode (all
modes beside the automatic modes listed above).
Note 2)
When any command which is not effective in the current mode is used, an error occurs and the
command will not be executed. In this case, any command where an error occurs is skipped
and the remaining commands are executed in sequence.
Note 3)
When a batch processing is specified in another batch processing, the former batch processing
is complete when the last command of the latter batch processing being called is complete.
Note 4)
In the automatic operation mode, batch processing cannot be executed.
Note 5)
Controller operation which are effective in a batch processing are as follows:
EMERGENCY STOP, SERVO ON, and SERVO OFF
Note 6)
Commands specified for batch processing are immediately processed without any prompt to the
operator such as "Press Y key to delete the file".
In a batch file, commands of the controller should be listed in the order of the execution. For
details of how to edit a file, see 3.2, "Changing File Data".
Any batch file is executed by entering its name (without the extension) from the teach pendant
just like with any command.
3-30
- -
Page 90

STE 58760
Example)
An example of a batch processing which reads files from a floppy disk.
File name: FLOAD. BAT
LOAD PRO1
LOAD PRO2
LOAD PRO3
LOAD PRO4
LOAD PROS
LOAD PRO6
To execute the above batch file, enter the following from the teach pendant.
[F] [L] [O] [A] [D] [Exec]
When the batch processing is executed, the controller reads the file PRO1 to PRO6 from a
floppy disk to the RAM drive in the controller.
Note 1)
In the external automatic mode, batch files cannot be executed from the teach pendant.
Note 2)
As opposed to selecting a program, batch files cannot be selected or executed using external
input signals.
Note 3)
Unless a batch file is in the controller RAM drive, it cannot be executed.
3.5.2 Automatic Execution File
A batch file which is executed just after the controller power is turned on is called an automatic
execution file. The contents of the automatic execution file are just like any other batch file,
although the file name of the automatic execution file is AUTOSTR. BAT.
The automatic execution file can be used to select a file in the external automatic mode. For
details of how to edit files, see 3.2, "Changing File Data".
3-31
- -
Page 91

STE 58760
Example)
To select a file which is to be executed just after the power is turned on in the external
automatic mode:
File name: AUTOSTR.BAT
SELECT PRO1
In order to execute the above automatic execution file, it must first have been stored in the RAM
drive of the controller and the MASTER MODE KEY switch on the control panel must have
been placed in either the "INT" or "EXT" position. In this situation, after the power of the
controller is turned on and the hot start operation is complete, file PRO1 is selected as a file to
be executed.
Note)
When the MASTER MODE KEY switch is in the "MANU" position, when the controller power is
turned on, a program will not be selected because an execution of the SELECT command
results in an error.
3.5.3 Using Batch Processing Effectively
Batch processing is effective for executing a predetermined process by pushing just a few keys.
For example, when a process which reads files stored on a floppy disk to the controller is
described as a batch file, all the required files can be read by just running the batch file.
Likewise, when replacing a file in the controller with another file to change system operation, a
prepared batch file corresponding to the system change can be readily executed.
Example)
When reading files stored on a floppy disk into the controller after a cold start, the files to be
read in and a batch file can be stored on the floppy disk in advance.
File name: ALOAD. BAT
LOAD CONSTRUC .SYS
LOAD SYSTEM. PAR
LOAD USER. PAR
LOAD *. PRO
3-32
- -
Page 92

STE 58760
Procedure:
(1) Start the controller using the cold start operation.
(2) Insert the floppy disk containing the files into the FDD unit.
(3) Read the batch file to the controller.
[C] [O] [P] [Y] [ ] [A] [:] [A] [L] [O] [A]
[D] [.] [B] [A] [T] [ ] [R] [:] [Exec]
(4) Execute the batch file.
[A] [L] [O] [A] [D] [Exec]
After that, batch processing is executed, which causes the system configuration file
(CONSTRUC. SYS), system parameter file (SYSTEM. PAR), user parameter file (USER. PAR),
and any program files whose extension is ".PRO" to be read to the RAM drive of the controller.
Note)
Save files on a floppy disk other than the system disk. To prevent the contents of the system
disk from being accidentally altered, it is strongly recommended to place the write protect tab of
the floppy disk in the write disable position.
3-33
- -
Page 93

STE 58760
3.6 PROGRAM EXECUTION ENVIRONMENT
3.6.1 Program Execution Environment
The following items are conditions for automatically operating a program.
Execution file
①
A file for automatically operating the robot. Normally, this file is selected by using the
"SELECT" command in the internal automatic mode.
In the external automatic mode, the execution file can be selected by using an external control
signal.
Execution step
②
A step for executing a program. Even if the automatic operation of the program is stopped, the
program can be executed from the subsequent step.
Variables
③
Variables used in the program.
Digital output signals
④
Output signals for synchronously operating a robot language program and peripheral units.
Basically, the output signals are specified by the robot language program.
Once the signal is output, it is kept on until the off command is executed.
When the power is turned off, the signal is turned off. When the power is turned on, all the
output signals are in the off state.
Auxiliary output signals
⑤
Signals for controlling an end effector such as a hand. Basically, the auxiliary output signals are
specified by the robot language program.
Once the signal is output, it is kept on until the off command is executed.
When the power is turned off, the signal is turned off. When the power is turned on, all the
output signals are in the off state.
3-34
- -
Page 94

STE 58760
Operation modes
⑥
There are three operation modes; step, cycle, and continue. The step operation mode can be
selected only in the test operation mode. In the internal operation mode, the operation mode
is selected by the "MODE" command or by the "CYCLE STOP" switch on the control panel.
In the external automatic mode, the operation mode is selected by an external control signal.
Speed override (MSPEED)
⑦
The speed of the automatic operation is decreased in the entire program.
The speed override is set by the "MSPEED" command in the internal automatic mode or in the
test operation mode. Even if the mode is changed, the setting value is stored.
When the power is turned on, the speed override is set to 100%.
Speed limit (LSPEED)
⑧
A speed limit in the automatic operation.
The speed limit is set by the "LSPEED" command in the internal automatic mode or in the test
operation mode. Even if the mode is changed, the setting value is stored.
In the test operation mode, the speed limit is limited to 25%. In addition, with the low speed
command signal, which is an external control signal, the speed limit is restricted to 25%.
When the power is turned on, the speed limit is set to 100%.
Machine lock
⑨
A function for executing the automatic operation without operating the robot. The machine lock
is available only in the test operation mode. It can be set by using the "MACHINE" command.
When the power is turned on, the robot is not in the machine lock state.
Coordinate system
⑩
A coordinate system for operating the robot is set. For details, see 3.7, "SETTING
COORDINATE SYSTEM."
Only ① to ③ above are stored as the program execution environmental data.
The coordinate system being set is not initialized even if the program is hot-started.
Other items are initialized when the program is hot-started.
3-35
- -
Page 95

STE 58760
3.6.2 Resetting Execution Environment
To reset the execution environmental data of the program, the "RESET" command can be used.
The "RESET" command can be used in the manual mode or in the internal automatic mode. In
the external automatic mode, an external control signal has the same function as the "RESET"
command. For details of the external control signal, see "INTERFACE MANUAL."
To execute the "RESET" command, select "RESET" by using the function key, specify a desired
data item by using the alphanumeric keys, and then press the "Exec" key.
The following are reset types.
Program reset (RESET PROG)
①
Initializes all execution environmental data of the program. The execution step of the program
is placed at the beginning of the program. All variables are initialized.
Step reset (RESET STEP)
②
Only the execution step of the program is placed at the beginning of the program. The
variables are not initialized.
Cycle reset (RESET CYCLE)
③
The execution step of the program becomes a step with label "RCYCLE." The variables are
not initialized.
Output signal reset (RESET SIG)
④
All digital output signals are turned off. The optional extension inputs/outputs are also turned
off. The auxiliary signals are not turned off.
3-36
- -
Page 96

STE 58760
3.6.3 Reset Timing of Program Execution Environment
The program execution environmental data are reset under the following conditions.
When the program is cold-started.
①
When a file other than the present file is selected as the execution file.
②
(When the same file as the present file is selected again, the program execution
environment is not reset.)
When the program reset operation is executed.
③
When the program is hot-started. (No global variable is initialized, however.)
④
When the power is turned off before the automatic operation is completed, the global variable
data may be lost.
To execute the program from the initial state, use the "RESET PROG" command.
To execute the program in the initial state when the power is turned on, specify the "RESET
PROG" command for the automatic execution file (file name: AUTOSTR, BAT).
3-37
- -
Page 97

STE 58760
3.7 SETTING COORDINATE SYSTEM
A coordinate system can be set according to the application of the robot.
When the robot is guided to an actual operation position and the position is taught to the robot, it is
not necessary to set a coordinate system.
When a coordinate system is set unintentionally, the teaching operation of the position becomes
complicated. Unless otherwise required, it is recommended to operate the robot in the initial state
without setting a coordinate system.
A coordinate system should be set in the following cases.
To manually guide the robot along a coordinate system other than the base coordinate
①
system.
To represent an operation position by means of a relative position of a workpiece when the
②
same operation is conducted for two or more workpieces.
To perform a linear interpolation/circular interpolation in accordance with the edge of the
③
tool.
When the installation position of the robot is changed, to use the position data which was
④
used in a previous operation.
3.7.1 Robot Coordinate Systems
The robot has five coordinate systems; world coordinate system, base coordinate system,
work coordinate system, mechanical interface coordinate system, and tool coordinate system.
World coordinate system (absolute coordinate system)
①
A coordinate system intrinsic to the operation place where the robot is installed. The world
coordinate system can be set regardless of the robot. Generally, a coordinate system where
the installation reference point of the robot is the zero point is selected (namely, the base
coordinate system is selected).
Base coordinate system (machine coordinate system)
②
A coordinate system intrinsic to the robot. This coordinate system is intrinsic to the structure of
the robot. Generally, the installation reference point of the robot becomes the zero point.
3-38
- -
Page 98

STE 58760
Work coordinate system (operation coordinate system)
③
A coordinate system intrinsic to work for which the robot is operated. The zero point of the
work coordinate system is set at the reference point of the work. It is also determined by the
operation of the robot.
Mechanical interface coordinate system
④
A coordinate system in which the position of an end effector of the robot is set to the zero point.
As the robot is moved, this coordinate system is accordingly moved.
Tool coordinate system
⑤
A coordinate system where the end of an end effector of the robot is set to the zero point.
As the robot is moved, this coordinate system is accordingly moved.
The base coordinate system and the work coordinate system are set in accordance with the
world coordinate system.
The tool coordinate system is set in accordance with the mechanical interface coordinate
system.
(The base coordinate system and the mechanical interface coordinate system are determined
only depending on the mechanism of the robot. The world coordinate system is relatively
determined by setting the base coordinate system.)
In the initial state where the coordinate system has not been set, the world coordinate system
and the work coordinate system accord with the base coordinate system, while the tool
coordinate system accords with the mechanical interface coordinate system.
3-39
- -
Page 99

STE 58760
3.7.2 Teaching Coordinate Data
When setting and using a coordinate system, it is necessary to teach coordinate data for giving
the coordinate system.
(1) Coordinate data
Coordinate data are data for giving a new coordinate system by means of an original coordinate
system.
Coordinate data are structured as follows.
(Coordinate data name) = X, Y, Z, C
Coordinate data name : A name representing coordinate data with up to 10 characters
starting with an alphanumeric character.
X, Y, Z : X, Y, and Z axis values of the zero position of the new coordinate
system viewed from the original coordinate system (unit: mm).
C : Amount of rotation around axis Z between the new coordinate
system and the original coordinate system (unit: deg).
The new coordinate system is that the original coordinate system is horizontally moved for axes
X, Y, and Z and then the original coordinate system is rotated for C around the new axis Z.
(2) Teaching coordinate data
Like position data, coordinate data are taught to individual files. There are three teaching
methods; ① numeric value input method, ② one-point teaching method and ③ two-point
teaching method.
The coordinate data are taught in the following manner.
3-40
- -
Page 100

STE 58760
a) Place the master key switch on the control panel in the "MANU" position.
The monitor command of the controller is displayed at the bottom of the LCD of the teach
pendant.
> ■
EDIT LOAD SAVE TESTRUN> RESET NEXT
b) By pressing the teach pendant [F6] key, the display of the monitor command is changed.
Press the [F6] key until the [EDIT] command appears.
c) Press the function key according to the [EDIT].
d) Input the file name of coordinate data to be taught and then press the [Exec] key. At that
time, the LCD displays the following screen.
<< SR-X Screen Editor Ver. 2.00 >>
1. Number of RAM file : 1
2. Free Memory Size : 34998
Edit file : SAMPLE _
3-41
- -
 Loading...
Loading...