

Page 1

TOSVERT VF-AS1/PS1
Option Function Manual
DEV002Z-1
E6581281 f
* The data given in this manual are subject to change without notice.
© Toshiba Schneider Inverter Corporation
All rights reserved.
2006
Page 2

E6581281 f
Contents
1. INTRODUCTION .....................................................................................................................................3
2. CONNECTION INFORMATION.............................................................................................................4
2.1. C
2.2. E
2.3. S
2.4. D
2.5. C
3. OBJECT SPECIFICATIONS ..................................................................................................................8
3.1. I
3.2. M
3.3. D
3.4. A
3.5. CONNECTION OBJECT .......................................................................................................................27
3.6. M
ONNECTION SIZES ............................................................................................................................4
XTERIOR OVERVIEW ..........................................................................................................................4
ETTING A MAC ID NUMBER AND A NETWORK BAUD RATE.....................................................................5
EVICENET LED INDICATOR................................................................................................................6
OMMUNICATIONS-RELATED PARAMETERS ...........................................................................................7
DENTITY OBJECT................................................................................................................................9
3.1.1. Identity Object Class Attributes...................................................................................................9
3.1.2. Identity Object Instance Attributes ..............................................................................................9
3.1.3. Identity Object Common Services...............................................................................................9
3.1.4. Identity Object Specific Services.................................................................................................9
ESSAGE ROUTER ...........................................................................................................................10
3.2.1. Message Router Class Attributes .............................................................................................10
3.2.2. Message Router Instance Attributes.........................................................................................10
3.2.3. Message Router Common Services .........................................................................................10
3.2.4. Message Router Specific Services ...........................................................................................10
EVICENET OBJECT .........................................................................................................................11
3.3.1. DeviceNet Object Class Attributes............................................................................................11
3.3.2. DeviceNet Object Instance Attributes .......................................................................................11
3.3.3. DeviceNet Object Common Services........................................................................................11
3.3.4. DeviceNet Object Specific Services..........................................................................................11
SSEMBLY OBJECT ...........................................................................................................................12
3.4.1. Assembly Object Class Attributes.............................................................................................12
3.4.2. Assembly Object Instance Attributes ........................................................................................12
3.4.3. Assembly Object Common Services.........................................................................................12
3.4.4. Assembly Object Specific Services...........................................................................................12
3.4.5. Assembly Instance Details (f830)........................................................................................13
3.4.5.1. Instance 20/70 - DeviceNet Standard (4 bytes, parameter f830 = 0) ..........................................13
3.4.5.2. Instance 21/71 - DeviceNet Standard (4 bytes, parameter f830 = 1) ..........................................14
3.4.5.3. Instance 100/150 - Toshiba Specific (4 bytes, parameter f830 = 2) ............................................16
3.4.5.4. Instance 101/151 - Toshiba Specific (8 bytes, parameter f830 = 3) ............................................18
3.4.5.5. Instance 102/152 - Toshiba Specific (12 bytes, parameter f830 = 4) ..........................................20
3.4.5.6. How to use Instance 102/152............................................................................................................21
3.4.6. The outline of the parameter f831 - f836, f841 - f846 setup value.....................22
3.4.6.1. FA06 (command word 1 from internal option PCB)...........................................................................22
3.4.6.2. FA23 (command word 2 from internal option PCB)...........................................................................22
3.4.6.3. FA07 (frequency reference from internal option PCB) ......................................................................23
3.4.6.4. FA33 (torque reference from internal option PCB)............................................................................23
3.4.6.5. FA50 (Terminal output data from comm.) .........................................................................................23
3.4.6.6. FA51 (Analog output (FM) data from comm.) ...................................................................................23
3.4.6.7. FA52 (Analog output (AM) data from comm.) ...................................................................................23
3.4.6.8. FD01 (Inverter status (real time))......................................................................................................24
3.4.6.9. FD00 (Output frequency (real time)) .................................................................................................24
3.4.6.10. FD03 (Output current (real time))......................................................................................................24
3.4.6.11. FE36 (Analog input value VI/II) .........................................................................................................25
3.4.6.12. FE37 (RX Input)................................................................................................................................25
3.4.6.13. FE60 - FE63 (My Monitor) ................................................................................................................25
3.4.6.14. FE14 (Cumulative run time) ..............................................................................................................25
3.4.6.15. FE40 (Analog output (FM)) ...............................................................................................................25
3.4.6.16. FC91 (Alarm code)............................................................................................................................26
3.4.6.17. FD06 (Input TB Status) .....................................................................................................................26
3.4.6.18. FD07 (Output TB Status) ..................................................................................................................26
3.5.1. Connection Object Attributes ....................................................................................................27
3.5.2. Connection Object Instance Attributes......................................................................................27
3.5.2.1. Explicit Messaging Connection Object Instance Attributes (Instance 1) ...........................................28
3.5.3. Connection Class Common Services .......................................................................................28
3.5.3.1. Poll Connection Object Instance Attributes (Instance 2)...................................................................29
3.5.4. Connection Class Common Services .......................................................................................29
3.5.5. Connection Class Specific Services .........................................................................................29
OTOR DATA OBJECT.......................................................................................................................30
3.6.1. Motor Data Object Class Attributes...........................................................................................30
3.6.2. Motor Data Object Instance Attributes ......................................................................................30
3.6.3. Motor Data Object Common Services ......................................................................................30
3.6.4. Motor Data Object Specific Services ........................................................................................30
- 1 -
Page 3
E6581281 f
3.7. C
ONTROL SUPERVISOR OBJECT ........................................................................................................31
3.7.1. Control Supervisor Object Class Attributes ..............................................................................31
3.7.2. Control Supervisor Object Instance Attributes..........................................................................32
3.7.3. Control Supervisor Object Common Services ..........................................................................33
3.7.4. Control Supervisor Object Specific Services ............................................................................33
3.7.5. Run/Stop Event Matrix ..............................................................................................................33
3.7.6. Control Supervisor State Transition Diagram ...........................................................................33
3.8. AC/DC D
RIVE OBJECT .....................................................................................................................34
3.8.1. AC/DC Drive Object Class Attributes........................................................................................34
3.8.2. AC/DC Drive Object Instance Attributes ...................................................................................35
3.8.3. AC/DC Drive Object Common Services....................................................................................35
3.8.4. AC/DC Drive Object Specific Services......................................................................................35
3.9. V
3.10. A
ENDER SPECIFIC DEVICE PROFILES .................................................................................................36
BOUT EDS-FILE ..............................................................................................................................36
- 2 -
Page 4

1. Introduction
Thank you for purchasing the DeviceNet option “DEV002Z” for the VF-AS1/PS1. Before
using the DeviceNet option, please familiarize yourself with the product and be sure to
thoroughly read the instructions and precautions contained in this manual.
In addition, please make sure that this manual and “Instruction Manual” is delivered to the
end user, and keep this function manual in a safe place for future reference or
drive/interface inspection.
This manual describes the supported functions for the “DEV002Z”.
In conjunction with this manual, the following manuals are supplied by Toshiba, and are
essential both for ensuring a safe, reliable system installation as well as for realizing the
full potential of the “DEV002Z”:
- TOSVERT VF-AS1 Instruction Manual......................................E6581301
- TOSVERT VF-PS1 Instruction Manual......................................E6581386
- DEV002Z Instruction Manual (Installation, Wiring, etc.)............E6581295
E6581281 f
- 3 -
Page 5
E6581281 f
2. Connection Information
2.1. Connection Sizes
Connection Instance Produced Consumed
I/O Messaging
Explicit Messaging
Notes
- For the Polled I/O connection, if the actual consumed data size is less than the connection instance’s
consumed_connection_size attribute, the consumed data will be ignored, but the connection will otherwise
produce normally. If the actual consumed data size is larger than the connection instance’s
consumed_connection_size attribute, the consumed data will be ignored and the connection will not
produce.
- For the Explicit Messaging connection, this is the maximum message length: shorter messages are also
acceptable.
4, 8, or 12 bytes 4, 8, or 12 bytes
55 bytes 55 bytes
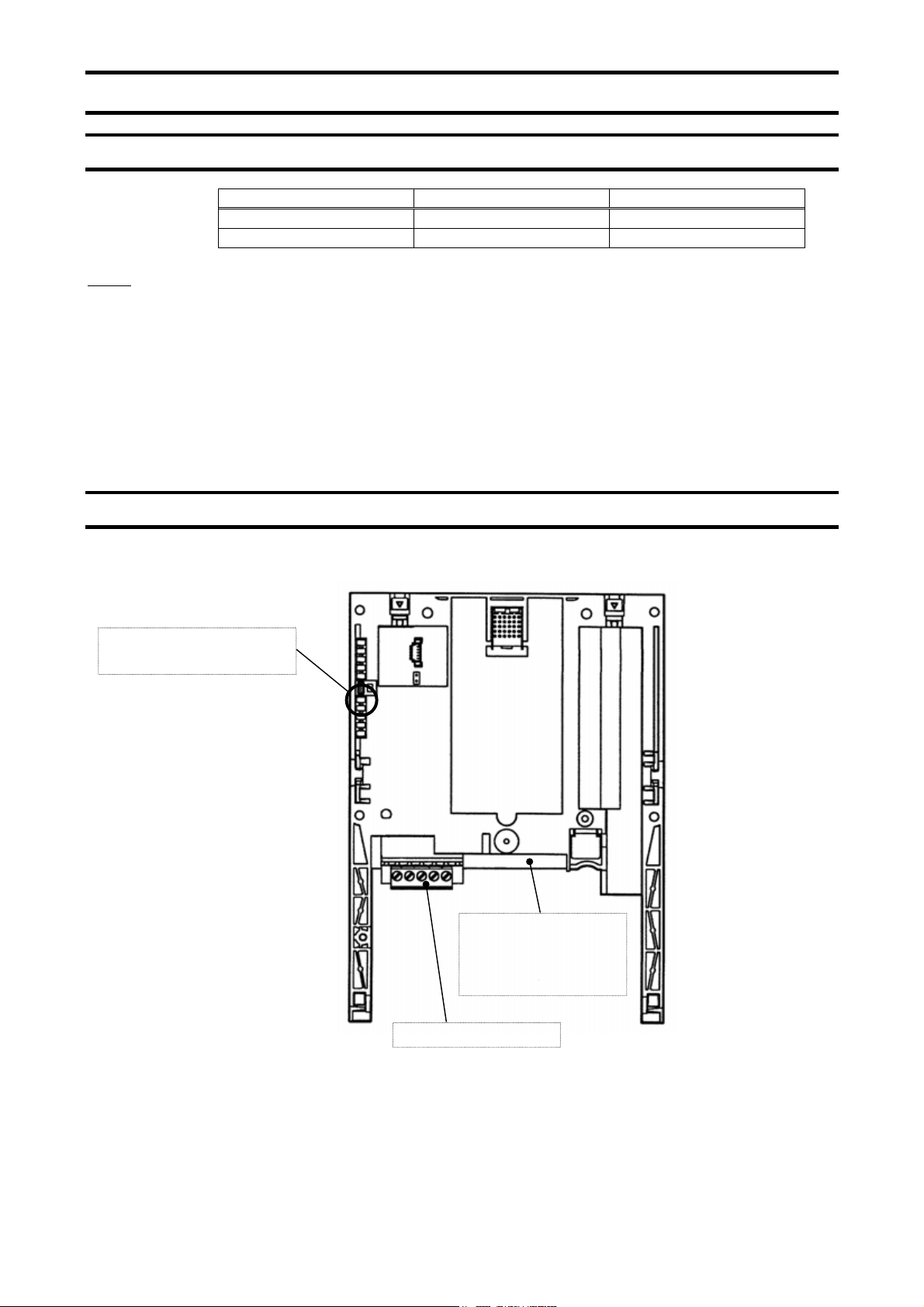
2.2. Exterior overview
DeviceNet LED indicator
(Refer to Section 2.4)
MAC ID and
Baud rate
setting Dip switch
(Refer to Section 2.3)
DeviceNet connector
- 4 -
Page 6
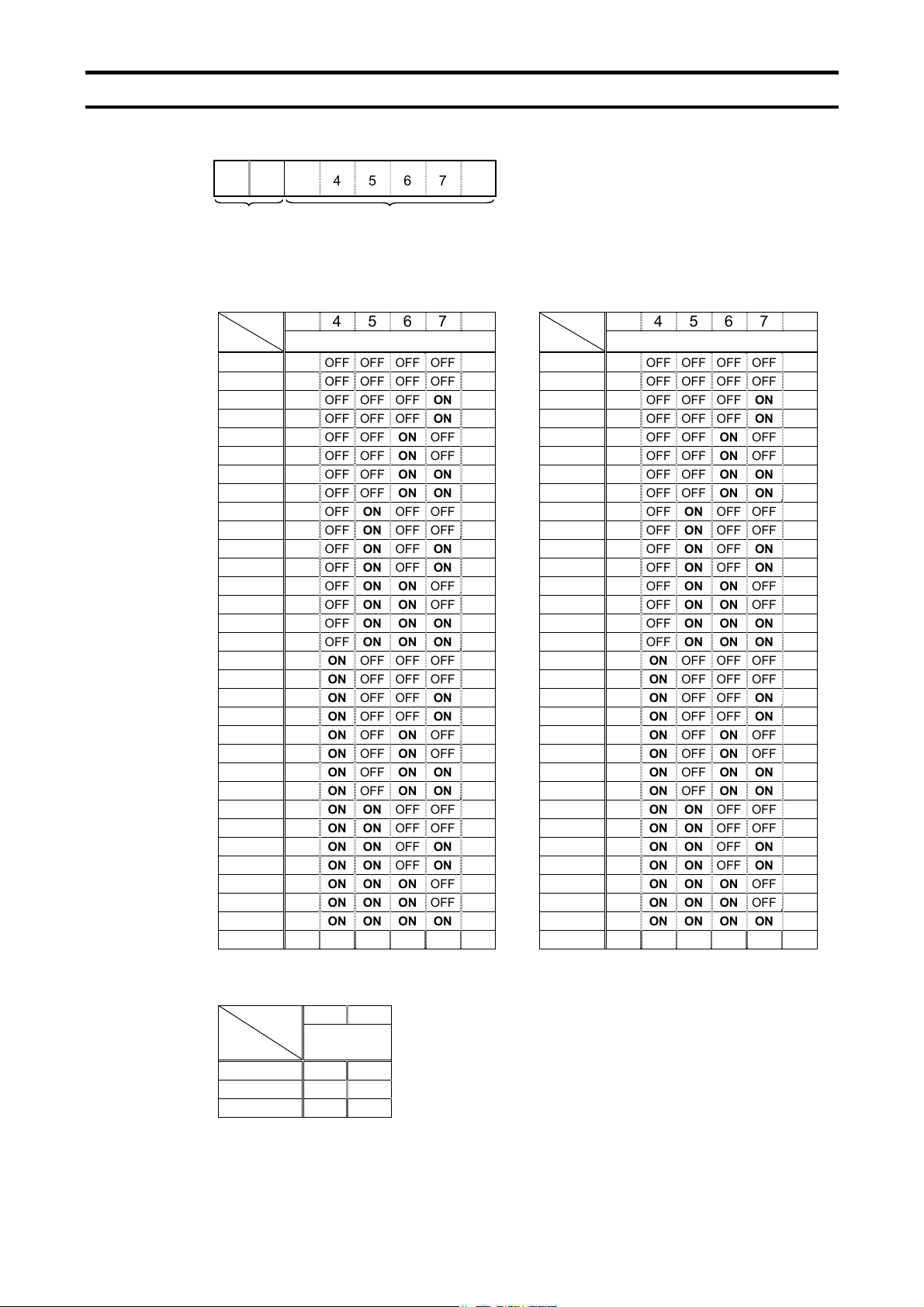
2.3. Setting a MAC ID number and a network baud rate
Configure MAC ID and network baud rate by the Dip switch on the DeviceNet option.
<Default setting>
12345678
Baud
rate
• MAC ID configuration
The MAC ID must be unique and not match any other device on the network.
MAC ID
MAC ID = 1
Baud rate = 125kbps
E6581281 f
SW
345678 345678
ID
0 OFF OFF OFF OFF OFF OFF 32 ON OFF OFF OFF OFF OFF
1 OFF OFF OFF OFF OFF ON 33 ON OFF OFF OFF OFF ON
2 OFF OFF OFF OFF ON OFF 34 ON OFF OFF OFF ON OFF
3 OFF OFF OFF OFF ON ON 35 ON OFF OFF OFF ON ON
4 OFF OFF OFF ON OFF OFF 36 ON OFF OFF ON OFF OFF
5 OFF OFF OFF ON OFF ON 37 ON OFF OFF ON OFF ON
6 OFF OFF OFF ON ON OFF 38 ON OFF OFF ON ON OFF
7 OFF OFF OFF ON ON ON 39 ON OFF OFF ON ON ON
8 OFF OFF ON OFF OFF OFF 40 ON OFF ON OFF OFF OFF
9 OFF OFF ON OFF OFF ON 41 ON OFF ON OFF OFF ON
10 OFF OFF ON OFF ON OFF 42 ON OFF ON OFF ON OFF
11 OFF OFF ON OFF ON ON 43 ON OFF ON OFF ON ON
12 OFF OFF ON ON OFF OFF 44 ON OFF ON ON OFF OFF
13 OFF OFF ON ON OFF ON 45 ON OFF ON ON OFF ON
14 OFF OFF ON ON ON OFF 46 ON OFF ON ON ON OFF
15 OFF OFF ON ON ON ON 47 ON OFF ON ON ON ON
16 OFF ON OFF OFF OFF OFF 48 ON ON OFF OFF OFF OFF
17 OFF ON OFF OFF OFF ON 49 ON ON OFF OFF OFF ON
18 OFF ON OFF OFF ON OFF 50 ON ON OFF OFF ON OFF
19 OFF ON OFF OFF ON ON 51 ON ON OFF OFF ON ON
20 OFF ON OFF ON OFF OFF 52 ON ON OFF ON OFF OFF
21 OFF ON OFF ON OFF ON 53 ON ON OFF ON OFF ON
22 OFF ON OFF ON ON OFF 54 ON ON OFF ON ON OFF
23 OFF ON OFF ON ON ON 55 ON ON OFF ON ON ON
24 OFF ON ON OFF OFF OFF 56 ON ON ON OFF OFF OFF
25 OFF ON ON OFF OFF ON 57 ON ON ON OFF OFF ON
26 OFF ON ON OFF ON OFF 58 ON ON ON OFF ON OFF
27 OFF ON ON OFF ON ON 59 ON ON ON OFF ON ON
28 OFF ON ON ON OFF OFF 60 ON ON ON ON OFF OFF
29 OFF ON ON ON OFF ON 61 ON ON ON ON OFF ON
30 OFF ON ON ON ON OFF 62 ON ON ON ON ON OFF
31 OFF ON ON ON ON ON 63 ON ON ON ON ON ON
MAC ID
ID
SW
MAC ID
• Baud rate configuration
SW
kbps
125 OFF OFF ・・・・・ 500m (1640 ft.)
250 OFF ON ・・・・・ 250m (820 ft.)
500 ON OFF ・・・・・ 100m (328 ft.)
12
Baud rate Maximum length of main line
- 5 -
Page 7
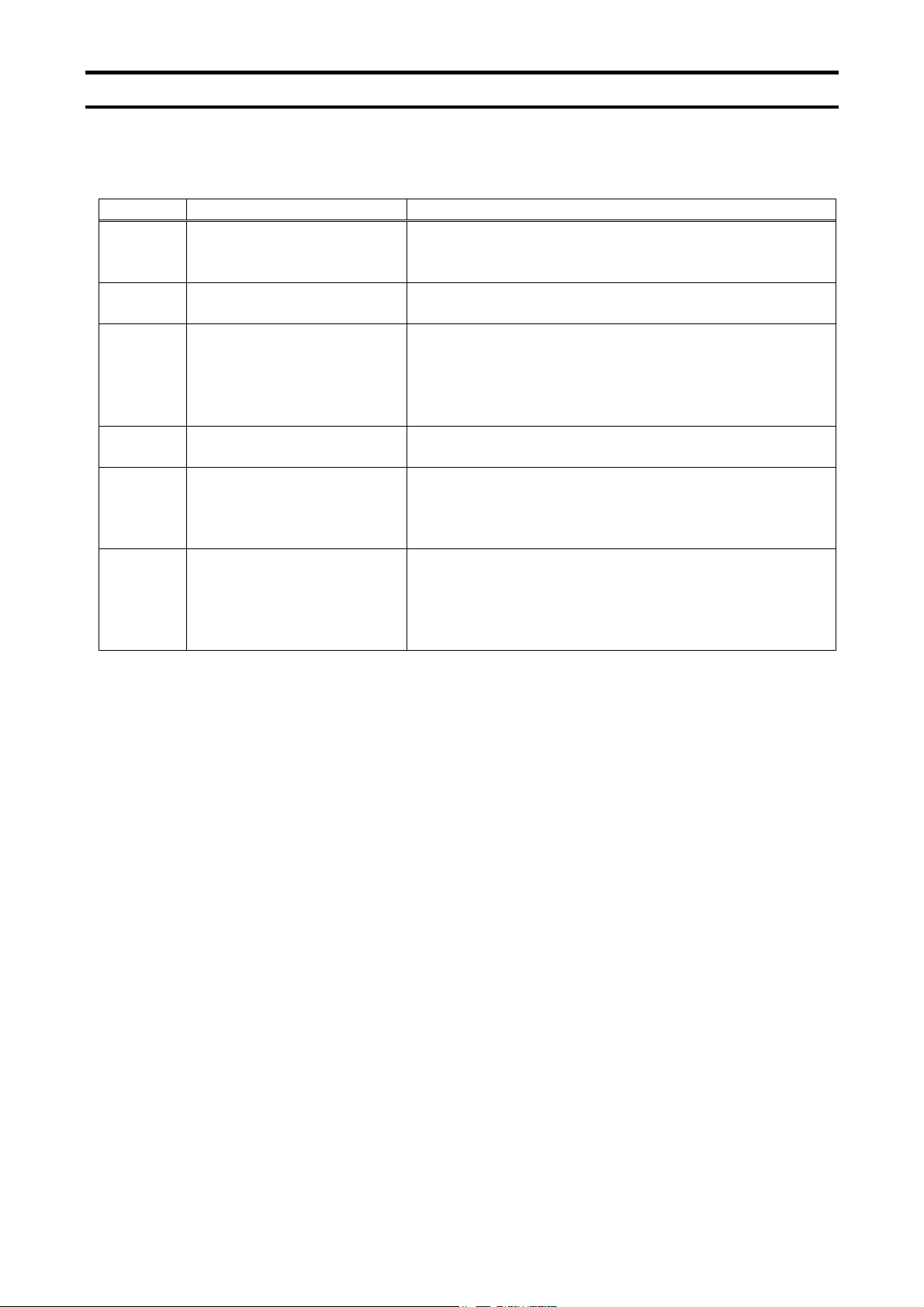
2.4. DeviceNet LED indicator
The DEV002Z option has a two-color (red and green) LED as a means of indicating the
MNS (module/network status), which works basically in accordance with DeviceNet
specifications.
LED Status Item displayed
Device is not on-line.
Off Not Powered/Not On–line
Lights
green.
Flashes
green.
Flashes
red.
Lights red.
Flashes red
and green
alternately.
Device Operational AND
On–line, Connected
Device Operational AND
On–line, Not Connected
or
Device On–line AND
Device needs commissioning
Minor Fault and/or
Connection Time–Out
Critical Fault or
Critical Link Failure
Communication Faulted and
Received an Identify Comm
Fault Request - Long Protocol
- The DEV002Z has not completed the Dup_MAC_ID test yet.
- The DEV002Z may not be powered.
The DEV002Z is operating in a normal condition and the DEV002Z
is on-line with connections in the established state.
The DEV002Z is operating in a normal condition and the DEV002Z
is on-line with no connections in the established state.
- The DEV002Z has passed the Dup_MAC_ID test, is on-line, but
has no established connections to other nodes.
- Configuration missing, incomplete or incorrect.
Recoverable fault and/or one or more I/O Connections are in the
Timed-Out state.
The DEV002Z has an unrecoverable fault; may need replacing.
Failed communication device. The DEV002Z has detected an error
that has rendered it incapable of communicating on the network
(Duplicate MAC ID, or Bus-off).
A specific Communication Faulted device. The DEV002Z has
detected a Network Access error and is in the Communication
Faulted state.
The DEV002Z has subsequently received and accepted an Identify
Communication Faulted Request - Long Protocol message.
E6581281 f
- 6 -
Page 8
E6581281 f
2.5. Communications-related parameters
In a network, VF-AS1/PS1 (DEV002Z) serves as a DeviceNet slave device. The
DEV002Z configuration is set by the following parameters.
The supported parameters for each drive and their allowable adjustment ranges are
defined in the appropriate Electronic Data Sheet (EDS) files. EDS files can be downloaded
via the internet from
http://www.inverter.co.jp/product/inv/vfas1/dev/index_i.htm
Parameter Function Adjustment range Default setting
f830 * Communication option
setting 1
Assembly
Object
f831
f846
f851 Inverter operation at the
Communication option
setting 2 - 13
communications
loss action
(Network wire breaks)
f852 Preset speed operation
selection
f853 Monitoring of
communication device
station address
f854 Monitoring of
communications
device’s baud rate
f899 Network option
reset setting
* When the parameter is changed, the power must be cycled (or set f899 to 1) to the
VF-AS1/PS1 for the changes to take effect.
** When fmod or cmod is set to “Communication Input”, VF-AS1/PS1 drives without
Net Ref (Frequency link) or Net Ctrl (command link) at each Instance.
0: Instance 20/70
1: Instance 21/71
2: Instance 100/150
3: Instance 101/151
4: Instance 102/152
Refer to section 3.4.5.6. -
0: Stop and Communication release
1: None
2: Deceleration stop
3: Coast stop
4: Emergency stop
5: Preset speed operation command
(Operating at the preset speed operation
frequency set with f852)
0: None
1 to 15:Preset speed
Displays the MAC ID number assigned using the DIP
switch.
0 to 63
Displays the network communication speed set
with the DIP switch.
0: 125kbps
1: 250kbps
2: 500kbps
0: None
1: Resetting the DEV002Z and the inverter
0
0
0
1
0
0
- 7 -
Page 9
3. Object Specifications
This section contains the object specifications for all DeviceNet objects currently
supported by the “DEV002Z”. Table 1 outlines those objects covered:
Class Code Object Class Page
0x01
0x02
0x03
0x04
0x05
0x28
0x29
0x2A
0x64
For definitions of all data types referred to in these object specifications, refer to the ODVA
DeviceNet Specifications. In general, however, the following are some of the most
prevalent types:
Identity Object
Message Router Object
DeviceNet Object
Assembly Object
Connection Object
Motor Data Object
Control Supervisor Object
AC/DC Drive Object
Parameter Object
Table 1: Supported Objects
E6581281 f
9
10
11
12
27
30
31
34
36
SINT................. Signed 8-bit integer value
USINT ..............Unsigned 8-bit integer value
BYTE................ Bit string - 8-bits
INT ...................Signed 16-bit integer value
UINT................. Unsigned 16-bit integer value
WORD.............. Bit string - 16-bits
UDINT .............. Unsigned 32-bit integer value
- 8 -
Page 10
3.1. Identity Object
Class code 0x01. This object provides identification of and general information about the device.
3.1.1. Identity Object Class Attributes
E6581281 f
Attribute
ID
1 Revision UINT Get Revision of this object 1
2 Max instance UINT Get
Name
Data
Type
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
3.1.2. Identity Object Instance Attributes
Attribute
ID
1 Vendor ID UINT Get Identification of vendor by number 377
2 Device type UINT Get Indication of general type of product
3 Product code UINT Get
Revision
(Major)
4
Revision
(Minor)
5 Status (bits supported) WORD Get Summary status of device 6 Serial number UDINT Get Serial number of device -
7 Product name
8 State USINT Get
10 Heartbeat Interval USINT Get/Set
Name
Data
Type
USINT
(ARRAY)
USINT
(ARRAY)
SHORT_
STRING
Access
Rules
Identification of a particular product of
an individual vendor
Get (1) **
Get
Get Human-readable identification “DEV002Z”
Revision of the item the Identity Object
represents
Present state of the device
0 = Non-existent
1 = Device Self Testing
2 = Standby
3 = Operational
4 = Major Recoverable Fault
5 = Major Unrecoverable Fault
The nominal interval between heartbeat
messages in seconds.
Description
Default
Value
1
Default
Value
2
(AC Drive)
(2134) *
(34) **
-
0
* Triple figures are the same value as VF-AS1/PS1 software version under Product code.
** Revision (Major) is the same value as the single figure on the VF-AS1/PS1 software version.
Revision (Major) is the same value as double figures under the VF-AS1/PS1 software version.
3.1.3. Identity Object Common Services
Service
Code
0x05 Reset N/A Yes Invokes the Reset service for the device
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
Service Name
Supported
Class Instance
Description of Service
3.1.4. Identity Object Specific Services
The Identity Object provides no object specific services.
- 9 -
Page 11
3.2. Message Router
Class code 0x02. The Message Router Object provides a messaging connection point through which
a Client may address a service to any object class or instance residing in the DeviceNet interface
unit.
3.2.1. Message Router Class Attributes
E6581281 f
Attribute
ID
1 Revision UINT Get Revision of this object 1
2 Max instance UINT Get
Name
Data
Type
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
3.2.2. Message Router Instance Attributes
Attribute
ID
1 Object List
2
Number Available
3
Number Active
4
Active Connections
Name
Data
Type
USINT
(ARRAY)
UINT Get
UINT Get
UINT
(ARRAY)
Access
Rules
Get A list of supported objects -
Maximum number of connections
supported
Number of connections currently used
by system components
Get
A list of the connection IDs of the
currently active connections
Description
3.2.3. Message Router Common Services
Service
Code
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
Service Name
Supported
Class Instance
Description of Service
Default
Value
1
Default
Value
1
1
1
3.2.4. Message Router Specific Services
The Message Router provides no object specific services.
- 10 -
Page 12
3.3. DeviceNet Object
Class Code 0x03. The DeviceNet Object provides for the configuration and status of a DeviceNet
port.
3.3.1. DeviceNet Object Class Attributes
E6581281 f
Attribute
ID
1 Revision UINT Get Revision of this object. 2
2 Max instance UINT Get
Name
Data
Type
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
3.3.2. DeviceNet Object Instance Attributes
Attribute
ID
1 MAC ID USINT Get Node address 1 *
2 Baud Rate USINT Get
3 Bus-off Interrupt BOOL Get/Set Bus–Off Interrupt 0
4 Bus-off counter USINT Get/Set
Allocation information
(Allocation Choice Byte)
5
Allocation information
(Master’s MAC ID)
6 MAC ID Switch Changed BOOL Get
7 Baud Rate Switch Changed BOOL Get
8 MAC ID Switch Value USINT Get
9 Baud Rate Switch Value USINT Get Actual value of Baud Rate switch(es) 0*
Name
Data
Type
BYTE
USINT
Access
Rules
Baud rate
0 = 125kbps
1 = 250kbps
2 = 500kbs
Number of times CAN went to
the bus-off state
Get Master/Slave allocation state -
Get
MAC ID of Master
(from Allocate)
The Node Address Switch(es) have
changed since last power–up/reset.
The Baud Rate Switch(es) have
changed since last power–up/reset.
Actual value of Node Address
switch(es)
Description
* The MAC ID and Baud Rate are settable by DIP SW.
Default
Value
1
Default
Value
0*
0
-
0
0
1*
3.3.3. DeviceNet Object Common Services
Service
Code
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
Service Name
Supported
Class
Instance
Description of Service
3.3.4. DeviceNet Object Specific Services
Service
Code
0x4B
0x4C
Service Name
Allocate_Master/Slave
_Connection_Set
Release_Group_2
_Identifier_Set
Supported
Class
N/A Yes
N/A Yes
Instance
Description of Service
Requests the use of the Predefined Master/Slave
Connection Set.
Indicates that the specified connections within the
Predefined Master/Slave Connection Set are
no longer desired.
These connections are to be released (deleted).
- 11 -
Page 13

3.4. Assembly Object
Class code 0x04. The Assembly Object binds attributes of multiple objects, which allows data to or
from each object to be sent or received over a single connection.
3.4.1. Assembly Object Class Attributes
E6581281 f
Attribute
ID
1 Revision UINT Get Revision of this object. 2
2 Max instance UINT Get
Name
Data
Type
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
3.4.2. Assembly Object Instance Attributes
Attribute
ID
3Data
Name
Data
Type
BYTE
(ARRAY)
Access
Rules
Get/Set
Description
The data contained in the assembly
object. (Refer to section 3.4.5.)
3.4.3. Assembly Object Common Services
Service
Code
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
Service Name
Supported
Class Instance
Description of Service
3.4.4. Assembly Object Specific Services
The Assembly Object for static assemblies provides no object specific services.
Default
Value
10
Default
Value
-
- 12 -
Page 14

E6581281 f
3.4.5. Assembly Instance Details (f830)
3.4.5.1. Instance 20/70 - DeviceNet Standard (4 bytes, parameter f830 = 0)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0-----Fault reset-
12
3
Drive Reference Speed min
Drive Reference Speed min
-1
(Low byte) *
-1
(High byte) *
Run
forward
Fig. 1 Output Instance 20 Layout
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0-----
12
3
Drive Actual Speed min
Drive Actual Speed min
-1
(Low byte)
-1
(High byte)
Running
Forward
-
Faulted/
tripped
Fig. 2 Input Instance 70 Layout
Examples of Instance 20/70
① Stop
Instance Byte 1514131211109876543210 Hex.
Output Instance 20
Input Instance 70
1, 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
3, 2 ---------------- 1, 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
3, 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
② Forward running 1800min-1
Instance Byte 1514131211109876543210 Hex.
Output Instance 20
Input Instance 70
1, 0 0000000000000001 0x0001
3, 2 0000011100001 0 0 0 0x0708
1, 0 00000000000001 0 0 0x0004
3, 2 0000011100001 0 0 0 0x0708
③ Fault reset **
Instance Byte 1514131211109876543210 Hex.
Output Instance 20
* Drive Reference Speed is set up number of rotations by the hexadecimal number.
For example, when "Frequency reference" is set up to 1800min
1, 0 00000000000001 0 0 0x0004
3, 2 ---------------- -
-1
:
1800 = 0x0708 (Hex.)
** Fault reset works only 1 time when 0 -> 1.
- 13 -
Page 15

E6581281 f
3.4.5.2. Instance 21/71 - DeviceNet Standard (4 bytes, parameter f830 = 1)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 - Net Ref * Net Ctrl * - - Fault reset
12
3
Drive Reference Speed min
Drive Reference Speed min
-1
(Low byte)
-1
(High byte)
Run
reverse
Run
forward
Fig. 3 Output Instance 21 Layout
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1 Drive Status ***
2
3
At
reference **
Ref from
Net **
Ctrl from
Net **
Drive Reference Speed min
Drive Reference Speed min
Ready
Running
Reverse
-1
(Low byte)
-1
(High byte)
Running
Forward
Warning
Faulted/
tripped
Fig. 4 Input Instance 71 Layout
* Bit 5 and 6 of the instance 21 byte 0 are defined as follows.
Bit 5 (Net Ctrl)................. When “1” is set, bits 0 (Run forward) and 1 (Run reverse) of byte 0 are enabled.
When “0” is set, Run/Stop is according to setup of the parameter cmod.
Bit 6 (Net Ref)................. When “1” is set, bytes 2 and 3 are enabled. When “0” is set, Drive Reference
Speed is according to setup of the parameter fmod.
** Bit 5, 6, and 7 of the instance 71 byte 0 are defined as follows.
Bit 5 (Ctrl from Net)......... When RUN/STOP command from DeviceNet is enabled, “1” is set.
Bit 6 (Ref from Net)......... When frequency command from DeviceNet is enabled, “1” is set.
Bit 7 (At reference) ......... When output frequency becomes the same as frequency command, “1” is set.
*** Drive Status is same as the Control Supervisor class State attribute (refer to section 3.7.2).
1 (= BN: 00000001): Startup
2 (= BN: 00000010): Not Ready
3 (= BN: 00000011): Ready
4 (= BN: 00000100): Enabled
5 (= BN: 00000101): Stopping
6 (= BN: 00000110): Fault Stop
7 (= BN: 00000111): Faulted
- 14 -
Page 16

Examples of Instance 21/71
① Stop
Instance Byte 1514131211109876543210 Hex.
Output Instance 21
Input Instance 71
1, 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
3, 2 ---------------- 1, 0 000000110001 0 0 0 0 0x0310
3, 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
② Forward running 1800min-1
Instance Byte 1514131211109876543210 Hex.
Output Instance 21
Input Instance 71
1, 0 0000000001100001 0x0061
3, 2 0000011100001 0 0 0 0x0708
1, 0 000001 0011110 110 0x04F6
3, 2 0000011100001 0 0 0 0x0708
③ Reverse running 1800min-1
Instance Byte 1514131211109876543210 Hex.
Output Instance 21
Input Instance 71
1, 0 000000000110001 0 0x0062
3, 2 0000011100001 0 0 0 0x0708
1, 0 000001 00111110 1 0 0x04FA
3, 2 0000011100001 0 0 0 0x0708
E6581281 f
④ Fault reset *
Instance Byte 1514131211109876543210 Hex.
Output Instance 21
1, 0 00000000000001 0 0 0x0004
3, 2 ---------------- -
* Fault reset works only 1 time when 0 -> 1.
- 15 -
Page 17

E6581281 f
3.4.5.3. Instance 100/150 - Toshiba Specific (4 bytes, parameter f830 = 2)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
2
3
DC braking
Command
link *
ACC1/
ACC2
Frequency
link *
PI off THR2
Reset trip
Drive Reference Speed Hz (High byte) **
Emergency
stop
Drive Reference Speed Hz (Low byte) **
Preset
Speed4
Free run (ST) Run/stop
Preset
Speed3
Preset
Speed2
Forward/
Reverse
Preset
Speed1
Jog
Fig. 5 Output Instance 100 Layout
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
DC braking ACC2 PI
READY
1
2
3
-
without
ST/RUN
READY
with
ST/ RUN
THR 2
(VF2+tH2)
Emergency
stop
Drive Actual Speed Hz (Low byte)
Drive Actual Speed Hz (High byte)
-
Free run (ST) Run/Stop
ALARM
(fc91)
EMG FL
Forward /
Reverse
Jog
Fig. 6 Input Instance 150 Layout
* Bit 14 and 15 of the instance 100 byte 0 are defined as follows.
Bit 15 (Command link) .... When “0” is set, the other command does not work except bit 12 and 13,
Run/Stop is according to setup of the parameter cmod.
Bit 14 (Frequency link) ... When “1” is set, bytes 2 and 3 are enabled. When “0” is set, Drive Reference
Speed is according to setup of the parameter fmod.
**
Drive Reference Speed is set up by 0.01Hz unit and the hexadecimal number.
For example, when "Frequency reference" is set up to 60Hz, since the minimum unit is 0.01Hz,
60 / 0.01 = 6000 = 0x1770 (Hex.)
- 16 -
Page 18

Examples of Instance 100/150
① Stop
Instance Byte 1514131211109876543210 Hex.
Output Instance 100
Input Instance 150
1, 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
3, 2 ---------------- 1, 0 0 1 001 0 0 0 0 0 0 0 0 0 0 0 0x4800
3, 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
② Forward running 60Hz
Instance Byte 1514131211109876543210 Hex.
Output Instance 100
Input Instance 150
1, 0 110001 0000000000 0xC400
3, 2 0001 0 1110 1110 0 0 0 0x1770
1, 0 0 11001 0 0 0 0 0 0 0 0 0 0 0x6400
3, 2 0001 0 1110 1110 0 0 0 0x1770
③ Reverse running 60Hz
Instance Byte 1514131211109876543210 Hex.
Output Instance 100
Input Instance 150
1, 0 1100011000000000 0xC600
3, 2 0001 0 1110 1110 0 0 0 0x1770
1, 0 0 1100110 0 0 0 0 0 0 0 0 0x6600
3, 2 0001 0 1110 1110 0 0 0 0x1770
E6581281 f
④ Preset speed 1 with forward running (sr1)
Instance Byte 1514131211109876543210 Hex.
Output Instance 100
1, 0 1 00001 0000000001 0x8401
3, 2 ---------------- -
Input Instance 150 1, 0 0 11001 0 0 0 0 0 0 0 0 0 0 0x6400
(sr1 is set 5Hz.) 3, 2 0 0 0 0 0 0 0 111110 1 0 0 0x01F4
⑤ Fault reset *
Instance Byte 1514131211109876543210 Hex.
Output Instance 100
1, 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0x2000
3, 2 ---------------- -
About the other command, refer to section 3.4.6.1.
* Fault reset works only 1 time when 0 -> 1.
- 17 -
Page 19

E6581281 f
3.4.5.4. Instance 101/151 - Toshiba Specific (8 bytes, parameter f830 = 3)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
12
3
4
5
6
7
- Net Ref Net Ctrl - - Fault reset
Drive Reference Speed min
Drive Reference Speed min
Index (Low byte)
Write Index (High byte)
Data (Low byte)
Data (High byte)
-1
(Low byte)
-1
(High byte)
Run
reverse
Run
forward
Fig. 7 Output Instance 101 Layout
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1
2
3
4
5
6
7
At
reference
Write Error Index (High byte)
Ref from
Net
Ctrl from
Net
Drive Actual Speed min
Drive Actual Speed min
Ready
Drive Status *
Index (Low byte)
Data (Low byte)
Data (High byte)
Running
Reverse
-1
(Low byte)
-1
(High byte)
Running
Forward
Warning
Faulted/
tripped
Fig. 8 Input Instance 151 Layout
* Drive Status is same as the ControlSupervisor class State attribute (refer to 3.7.2).
1 (= BN: 00000001): Startup
2 (= BN: 00000010): Not Ready
3 (= BN: 00000011): Ready
4 (= BN: 00000100): Enabled
5 (= BN: 00000101): Stopping
6 (= BN: 00000110): Fault Stop
7 (= BN: 00000111): Faulted
- 18 -
Page 20

E6581281 f
Examples of Instance 101/151
Access the inverter parameter is enabled using byte 4 to 6 of this Instance.
Set the communication number of the parameter to byte 4, 5 (Index), and the value to byte 6, 7 (Data).
In case of the monitor parameter “FE**”, the value becomes "communication number - 0x7000 (same as bit14, 15
set to 0)".
① Read the parameter cmod (Command mode selection, communication number is 0003).
Instance Byte 1514131211109876543210 Hex.
Output Instance 101
5, 4 0000000000000011 0x0003
7, 6 ---------------- -
Input Instance 151 5, 4 0 0 0 0 0 0 0 0 0 0 0 0 0 0 11 0x0003
(cmod is set 0.) 7, 6 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
② Read the parameter f268 (Initial value of UP/DOWN frequency).
Instance Byte 1514131211109876543210 Hex.
Output Instance 101
5, 4 0000001 00110 1 0 0 0 0x0268
7, 6 ---------------- -
Input Instance 151 5, 4 0 0 0 0 0 0 1 00110 1 0 0 0 0x0268
(f268 is set 60.0Hz.) 7, 6 0 0 0 1 0 1110 1110 0 0 0 0x1770
③ Read the parameter fe04 (Voltage of DC bus).
Instance Byte 1514131211109876543210 Hex.
Output Instance 101
5, 4 0 0 111110000001 0 0 0x3E04
7, 6 ---------------- -
Input Instance 151 5, 4 0 0 111110000001 0 0 0x3E04
(fe04 is 94.49%.) 7, 6 0 0 1 001 001110 1 001 0x24E9
④ Write “60 (Hz)” to the parameter sr1 (Preset speed 1, communication number is 0018).
Instance Byte 1514131211109876543210 Hex.
Output Instance 101
Input Instance 151 (OK)
5, 4 1 0000000000110 0 0 0x8018
7, 6 0001 0 1110 1110 0 0 0 0x1770
5, 4 1 0000000000110 0 0 0x8018
7, 6 0001 0 1110 1110 0 0 0 0x1770
Input Instance 151 (NG) 5, 4 11000000000110 0 0 0xC018
(Error code *) 7, 6 0000000000000001 0x0001
About byte 0 - 3, refer to section 3.4.5.2.
* Refer to following about the error code.
1
(= BN: 00000001):: Data out of range
2
(= BN: 00000010):: Bad address
3
(= BN: 00000011):: Read only
4
(= BN: 00000100):: Stop to modify or permission error
5
(= BN: 00000101):: All other
- 19 -
Page 21

E6581281 f
3.4.5.5. Instance 102/152 - Toshiba Specific (12 bytes, parameter f830 = 4)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 f831 Command data (Low byte)
1 f831 Command data (High byte)
2 f832 Command data (Low byte)
3 f832 Command data (High byte)
4 f833 Command data (Low byte)
5 f833 Command data (High byte)
6 f834 Command data (Low byte)
7 f834 Command data (High byte)
8 f835 Command data (Low byte)
9 f835 Command data (High byte)
10 f836 Command data (Low byte)
11 f836 Command data (High byte)
Fig. 9 Output Instance 102 Layout
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 f841 Monitor data (Low byte)
1 f841 Monitor data (High byte)
2 f842 Monitor data (Low byte)
3 f842 Monitor data (High byte)
4 f843 Monitor data (Low byte)
5 f843 Monitor data (High byte)
6 f844 Monitor data (Low byte)
7 f844 Monitor data (High byte)
8 f845 Monitor data (Low byte)
9 f845 Monitor data (High byte)
10 f846 Monitor data (Low byte)
11 f846 Monitor data (High byte)
Fig. 10 Input Instance 152 Layout
- 20 -
Page 22

E6581281 f
3.4.5.6. How to use Instance 102/152
The purposes of instances 102/152 are adjustment by real time command transmission, and the monitor of an
operation state by using cyclic communication of DeviceNet.
Example 1: Command transmitting by output Instance 102
When you want to set "0xC400" to parameter fa06, set “1 (FA06)” to parameter f831.
And Since 0 and 1 byte of the output instance 102 supports the parameter f831, if "0xC400" is set up
here, "0xC400" will be set as fa06.
VF-AS1/PS1
Parameter Value
f831 1 (FA06)
f832 ...
f833 ...
... ...
"C400" is set as parameter fa06
DEV002Z
DeviceNet Master
Output Instance102
Byte Value
000
1C4
2 ...
3 ...
... ...
Example 2: State monitoring by the input instance 152.
When you want to monitor the output current, set “3 (FD03)” to parameter f841.
The value of the parameter fd03 specified as 0 and1 byte of the input instance 152 with the parameter
f841 is inputted.
VF-AS1/PS1
Parameter Value
f841 3 (FD03)
f842 ...
f843 ...
... ...
The value of a parameter fd03 is outputted.
DEV002Z
DeviceNet Master
Input Instance152
Byte Value
0xx
1xx
2 ...
3 ...
... ...
f831 - f836 setup value f841 - f846 setup value
0: No action
1: FA06 (ALCAN2 command 1)
2: FA23 (ALCAN2 command 2)
3: FA07 (ALCAN2 frequency command, 0.01Hz)
4: FA33 (Torque command, 0.01%)
5: FA50 (Terminal output)
6: FA51 (Analog output (FM) data from comm.)
7: FA52 (Analog output (AM) data from comm.)
8: F601 (Stall prevention level, %)
9: F441 (Power running torque limit 1 level, 0.01%)
10: F443 (Regenerative braking torque limit 1 level, 0.01%)
11: F460 (Speed loop proportional gain)
12: F461 (Speed loop stabilization coefficient)
0: No action
1: FD01 (Inverter status 1)
2: FD00 (Output frequency, 0.01Hz)
3: FD03 (Output current, 0.01%)
4: FD05 (Output voltage, 0.01%)
5: FC91 (Inverter alarm)
6: FD22 (PID feedback value, 0.01Hz)
7: FD06 (Input terminal status)
8: FD07 (Output terminal status)
9: FE36 (VI/II input)
10: FE35 (RR/S4 input)
11: FE37 (RX input)
12: FD04 (Input voltage (DC detection), 0.01%)
13: FD16 (Speed feedback (real-time value)
14: FD18 (Torque, 0.01%)
15: FE60 (My monitor)
16: FE61 (My monitor)
17: FE62 (My monitor)
18: FE63 (My monitor)
19: F880 (Free notes)
20: FD29 (Input power, 0.01kW)
21: FD30 (Output power, 0.01kW)
22: FE14 (Cumulative operation time, 0.01=1 hour)
23: FE40 (FM terminal output monitor)
24: FE41 (AM terminal output monitor)
- 21 -
Page 23

E6581281 f
3.4.6. The outline of the parameter f831 - f836, f841 - f846 setup value
The outline is indicated about the setting item of parameter f831 - f836 and f841 - f846 in
Instance 102/152 of use.
Please refer to a communication functional description (VF-AS1: E6581315/VF-PS1: E6581413) for details.
3.4.6.1. FA06 (command word 1 from internal option PCB)
bit Function 0 1 Note
0 Preset Speed1
1 Preset Speed2
2 Preset Speed3
OFF ....................0000,
1 - 15 .................. 0001 - 1111
Combination of 4 bits.
3 Preset Speed4
4 THR1/2
Motor 1
(THR1)
Motor 2
(THR2)
THR1: thr
THR2: f173
5 PI off Normal PI off -
6 ACC1/ACC2
ACC 1
(AD1)
ACC 2
(AD2)
AD1: acc, dec
AD2: f500, f501
7 DC braking OFF DC braking 8 Jog OFF JOG RUN -
9 Fw/Reverse Fw. Rev. 10 Run/stop STOP RUN 11 Free run (ST) Free run 12 Emergency stop OFF EMG./ Stop Always enable
13 Reset trip OFF Reset 14 Frequency link OFF Priority Enable in spite of the parameter fmod
15 Command link OFF Priority Enable in spite of the parameter cmod
3.4.6.2. FA23 (command word 2 from internal option PCB)
bit Function 0 1 Note
0 Speed/Torque Speed Ctrl. Torque Ctrl. -
1 Clear kwh OFF Clear Clear the value of fe76, fe77
2 (Reserved) - - -
3 * Brake Close (BC) Normal Forced Close 4 * Pre magnetic Normal ON 5 * Brake Open (B) Brake Close Brake Open 6 * Brake Answer (BA) Brake Close Brake Open -
7 Fast Stop Normal ON -
8 ACC1/ACC2
9 ACC3/ACC4 *
10 THR 1/2
11 THR 3/4 *
00: Acc. / Dec. 1
01: Acc. / Dec. 2
10: Acc. / Dec. 3 *
11: Acc. / Dec. 4 *
00: V/f 1
01: V/f 2
10: V/f 3 *
Combination of 2 bits.
AD1: acc, dec
AD2: f500, f501
AD3: f510, f511 *
AD3: f514, f515 *
Combination of 2 bits.
11: V/f 4 *
12 * Torque Limit 1/2
13 * Torque Limit 3/4
00: Torque limit 1
01: Torque limit 2
10: Torque limit 3
Combination of 2 bits.
11: Torque limit 4
14 * Speed Gain 1/2 Gain 1 Gain 2
Gain 1: f460, f461
Gain 2: f462, f463
15 (Reserved) - - -
* These functions are reserved in VF-PS1.
- 22 -
Page 24

E6581281 f
3.4.6.3. FA07 (frequency reference from internal option PCB)
Frequency reference is set up by 0.01Hz unit and the hexadecimal number.
For example, when "Frequency reference" is set up to 80Hz, since the minimum unit is 0.01Hz,
80 / 0.01 = 8000 = 0x1F40 (Hex.)
3.4.6.4. FA33 (torque reference from internal option PCB)
Torque reference is set up by 0.01% unit and the hexadecimal number.
For example, when "torque reference" is set up to 50%, since the minimum unit is 0.01%,
50 / 0.01 = 5000 = 0x1388 (Hex.)
3.4.6.5. FA50 (Terminal output data from comm.)
By setting up the data of the bit 0 - 6 of terminal output data (FA50) from communication, setting data (0 or
1) can be outputted to the output terminal.
Please select the functional number 92 - 105 as the selection (f130 - f138, f168, f169) of the
output terminal function before using it.
bit Output TB function name 0 1
0 Communication data 1 (Output TB select No.: 92, 93)
1 Communication data 2 (Output TB select No.: 94, 95)
2 Communication data 3 (Output TB select No.: 96, 97)
3 Communication data 4 (Output TB select No.: 98, 99)
4 Communication data 5 (Output TB select No.: 100, 101)
5 Communication data 6 (Output TB select No.: 102, 103)
6 Communication data 7 (Output TB select No.: 104, 105)
7- --
OFF ON
3.4.6.6. FA51 (Analog output (FM) data from comm.)
The data set as the parameter FA51 can output to FM terminal.
The data adjustment range is 0 - 2047 (resolution: 11 bits).
Please select 31 (analog output for communication) as FM terminal meter selection parameter (fmsl)
before using it.
Please refer to "Meter setting and adjustment" Section of the VF-AS1/PS1 instruction manual for details.
3.4.6.7. FA52 (Analog output (AM) data from comm.)
The data set as the parameter FA52 can output to AM terminal.
The data adjustment range is 0 - 2047 (resolution: 11 bits).
Please choose 31 (analog output for communication) as AM terminal meter selection parameter (amsl)
before using it.
Please refer to "Meter setting and adjustment" Section of the VF-AS1/PS1 instruction manual for details.
- 23 -
Page 25

E6581281 f
3.4.6.8. FD01 (Inverter status (real time))
bit Function 0 1 Note
0 FL No output Under output -
The rtry status and the trip
1 EMG No fault Under fault
retention status are also
regarded as tripped statuses.
2 ALARM No alarm Under alarm 3 (Reserved) - - -
4 tHr2(VF2+tH2)
Motor 1
(THR1)
Motor 2
(THR2)
THR1: thr
THR2: f173
5 PI PI enable PI off -
6 ACC1/ACC2
Acc./Dec. 1
(AD1)
Acc./Dec. 2
(AD2)
AD1: acc, dec
AD2: f500, f501
7 DC braking OFF DC braking 8 Jog OFF JOG RUN 9 Fw/Reverse Fwd. RUN Rev. RUN -
10 Run/stop STOP RUN 11 Free run (ST) ST=ON ST=OFF 12 Emergency stop No EMG. Stop Under EMG. Stop -
13 READY with ST/RUN
ST = ON and RUN = ON in
addition to “ready for operation”*
14 READY without ST/RUN -
15** Local/Remote Remote Local -
* Ready for operation: Initialization completed, not a stop due to a failure, no alarm issued, not moff,
not a forced stop due to ll, not a forced stop due to a momentary power failure.
** This function is reserved in VF-AS1.
3.4.6.9. FD00 (Output frequency (real time))
The current output frequency is read into 0.01Hz of units and by the hexadecimal number.
For example, when the output frequency is 80Hz, 0x1F40 (hexadecimal number) are read.
Since the minimum unit is 0.01%,
0x1F40 (Hex.) = 8000(Dec.) * 0.01 = 80 (Hz)
Also about the following parameters, these are the same as this.
- FD22 (Feedback value of PID (real time)) ................................. Unit: 0.01Hz
- FD16 (PG feedback or Estimated speed (real time))................. Unit: 0.01Hz
- FD29 (Input power (real time))................................................... Unit: 0.01kW
- FD30 (Output power (real time)) ................................................ Unit: 0.01kW
3.4.6.10. FD03 (Output current (real time))
The output current is read into 0.01% of units and by the hexadecimal number.
For example, when the output current of the rated current 4.8A inverter is 50% (2.4A), 0x1388
(hexadecimal number) is read.
Since the minimum unit is 0.01%,
0x1388 (Hex.) = 5000 (Dec.) * 0.01 = 50 (%)
Also about the following parameters, these are the same as this.
- FD05 (Output voltage(real time) ................................................... Unit: 0.01% (V)
- FD04 (Voltage at DC bus (real time) ............................................ Unit: 0.01%(V)
- FD18 (Torque ............................................................................... Unit: 0.01% (Nm)*
* When the motor information connected to the inverter set to the parameter (f405 - f415), torque
monitor value "100%" is same as the rated torque of a motor in general.
- 24 -
Page 26

3.4.6.11. FE36 (Analog input value VI/II)
The value inputted into the VI/II terminal is read.
The value range is 0x0 to 0x2710 (0 to 100.00 %).
- Also about FE35 (RR Input), it is the same as this parameter.
3.4.6.12. FE37 (RX Input)
The value inputted into the RX terminal is read.
The value range is 0xD8F0 to 0x2710 (-100.00 to +100.00 %).
3.4.6.13. FE60 - FE63 (My Monitor)
Refer to the function Manual (E6581335).
3.4.6.14. FE14 (Cumulative run time)
The operated cumulative time is read by the hexadecimal number.
For example, when cumulative operation time is 18 hours, 0x12 (16 hours) is read.
0x12 (Hex.) = 18 (Dec., hour)
E6581281 f
3.4.6.15. FE40 (Analog output (FM))
The output value of FM terminal is read.
The value range is set to 0 to 65535 (0xFFFF).
- Also about FE41 (AM terminal output monitor), it is the same as this parameter.
- 25 -
Page 27

E6581281 f
3.4.6.16. FC91 (Alarm code)
bit Function 01 Note
0 Over current alarm Normal Under alarm “c” blinking
1 Inverter over load alarm Normal Under alarm “l” blinking
2 Motor over load alarm Normal Under alarm “l” blinking
3 Over heat alarm Normal Under alarm “h” blinking
4 Over voltage alarm Normal Under alarm “p” blinking
5 Under voltage of main power Normal Under alarm 6 (Reserved) -- 7 Under current alarm Normal Under alarm 8 Over torque alarm Normal Under alarm 9 OLr alarm Normal Under alarm -
10 Cumulative run-time alarm Normal Under alarm 11 (Reserved) -- 12 (Reserved) -- 13 (Reserved) -- 14 Stop after instantaneous power off - Dec., Under stop Refer to f256 value
15 Stop after LL continuance time - Dec., Under stop Refer to uvc value
3.4.6.17. FD06 (Input TB Status)
bit TB Name Function (Parameter) 0 1
0 F Input TB Function select 1 (f111)
1 R Input TB Function select 2 (f112)
2* ST Input TB Function select 3 (f113)
3 RES Input TB Function select 4 (f114)
4 S1 Input TB Function select 5 (f115)
5 S2 Input TB Function select 6 (f116)
6 S3 Input TB Function select 7 (f117)
7 S4 Input TB Function select 8 (f118)
8 L1 Input TB Function select 9 (f119)
9 L2 Input TB Function select 10 (f120)
10 L3 Input TB Function select 11 (f121)
11 L4 Input TB Function select 12 (f122)
12 L5 Input TB Function select 13 (f123)
13 L6 Input TB Function select 14 (f124)
14 L7 Input TB Function select 15 (f125)
15 L8 Input TB Function select 16 (f126)
* This function is reserved in VF-PS1.
OFF ON
3.4.6.18. FD07 (Output TB Status)
bit TB Name Function (Parameter) 0 1
0 OUT1 Output TB Function select 1 (f130)
1 OUT2 Output TB Function select 2 (f131)
2 FL Output TB Function select 3 (f132)
3 OUT3 Output TB Function select 4 (f133)
4 OUT4 Output TB Function select 5 (f134)
5 R1 Output TB Function select 6 (f135)
6 OUT5 Output TB Function select 7 (f136)
7 OUT6 Output TB Function select 8 (f137)
8 R2 Output TB Function select 9 (f138)
9 R3 Output TB Function select 10 (f168)
10 R4 Output TB Function select 11 (f169)
11 - 15 - - - -
OFF ON
- 26 -
Page 28

3.5. Connection Object
Class code 0x05. The Connection Class allocates and manages the internal resources associated
with both I/O and Explicit Messaging Connections.
3.5.1. Connection Object Attributes
E6581281 f
Attribute
ID
1 Revision UINT Get Revision of this object. 2
2 Max instance UINT Get
Name
Data
Type
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
3.5.2. Connection Object Instance Attributes
Connection Instance ID # Description
1 References the Explicit Messaging Connection (refer to 3.5.2.1).
2 Reference the Polled I/O Connection(refer to3.5.3.1).
Default
Value
2
- 27 -
Page 29

3.5.2.1. Explicit Messaging Connection Object Instance Attributes (Instance 1)
Attribute
ID
1 state USINT Get
2 instance_type USINT Get Indicates connection type
3 transportClass_trigger USINT Get Connection behavior
4 produced_connection_id UINT Get
5 consumed_connection_id UINT Get
6 initial_comm_characteristics USINT Get
7 produced_connection_size UINT Get
8 consumed_connection_size UINT Get
9 expected_packet_rate UINT Get/Set
12 watchdog_timeout_action USINT Get/Set Inactivity/watchdog timeout action
13
14 produced_connection_path
15
16 consumed_connection_path
produced_connection_path
_length
consumed_connection_path
_length
Name
Data
Type
UINT Get
USINT
(ARRAY)
UINT Get
USINT
(ARRAY)
Access
Rules
Get
Get
Description
State of the object
00 = Non-existent
01 = Configuring
02 = Waiting for connection ID
03 = Established
04 = Timed Out
05 = Deferred Delete
Placed in CAN ID field when
transmitting
CAN ID field value denoting received
messages
Defines producing / consuming
message groups
Max number of bytes transmitted across
this connection
Max number of bytes received across
this connection
Defines timing associated with this
connection
Number of bytes in
produced_connection_path
attribute
Specifies Application Object(s)
whose data is to be produced by
this connection
Number of bytes in
consumed_connection_path
attribute
Specifies Application Object(s) whose
data is to be consumed
by this connection
E6581281 f
Default
Value
-
0
Explicit
Message
0x83
Server
Transport
Class 3
0x700*
0x602*
0x21
Send: Gr. 3
Resp: Gr. 3
55
55
2500
(ms)
1
(Auto Delete)
0
Empty
0
Empty
* connection id dependant on device Mac ID
3.5.3. Connection Class Common Services
Service
Code
0x05 Reset N/A Yes Used to reset all resetable connection objects.
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
Service Name
Supported
Class Instance
Description of Service
- 28 -
Page 30

3.5.3.1. Poll Connection Object Instance Attributes (Instance 2)
Attribute
ID
1 state USINT Get
2 instance_type USINT Get Indicates connection type
3 transportClass_trigger USINT Get Connection behavior
4 produced_connection_id UINT Get
5 consumed_connection_id UINT Get
6 initial_comm_characteristics USINT Get
7 produced_connection_size UINT Get
8 consumed_connection_size UINT Get
9 expected_packet_rate UINT Get/Set
12 watchdog_timeout_action USINT Get Inactivity/watchdog timeout action
13
14 produced_connection_path
15
16 consumed_connection_path
17 production_inhibit_time UINT Get
produced_connection_path_l
ength
consumed_connection_path
_length
Name
Data
Type
UINT Get
USINT
(ARRAY)
UINT Get
USINT
(ARRAY)
Access
Rules
Get
Get
Description
State of the object
00 = Non-existent
01 = Configuring
02 = Waiting for connection ID
03 = Established
04 = Timed Out
05 = Deferred Delete
Placed in CAN ID field when
transmitting
CAN ID field value denoting received
messages
Defines producing / consuming
message groups
Max number of bytes transmitted across
this connection
Max number of bytes received across
this connection
Defines timing associated with this
connection
Number of bytes in
produced_connection_path
attribute
Specifies Application Object(s)
whose data is to be produced by
this connection
Number of bytes in
consumed_connection_path
attribute
Specifies Application Object(s) whose
data is to be consumed
by this connection
Defines minimum time between new
data production
E6581281 f
Default
Value
-
1
(I/O)
0x83
Server
Transport
Class 3
0x3C0*
0x405*
0x1
Send: Gr. 1
Resp: Gr. 2
4
4
250
0
(Timed Out)
6
0x20 0x04
0x24 0x46
0x30 0x03
Instance
70
6
0x20 0x04
0x24 0x14
0x30 0x03
Instance
20
0
* connection id dependant on device Mac ID
3.5.4. Connection Class Common Services
Service
Code
0x05 Reset Yes Yes Used to reset all resetable connection objects.
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
Service Name
Supported
Class Instance
Description of Service
3.5.5. Connection Class Specific Services
The Connection Class provides no object specific services.
- 29 -
Page 31

3.6. Motor Data Object
Class code 0x28. This object serves as a database for motor parameters.
3.6.1. Motor Data Object Class Attributes
E6581281 f
Attribute
ID
1 Revision UINT Get Revision of this object 1
2 Max instance UINT Get
Max ID of
6
class attributes
Max ID of
7
instance attributes
Name
Data
Type
UNIT Get
UNIT Get
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
The attribute ID number of the last class
attribute of the class definition
implemented in the device.
The attribute ID number of the last
instance attribute of the class definition
implemented in the device.
3.6.2. Motor Data Object Instance Attributes
Attribute
ID
1 Number of Attributes USINT Get Number of Attributes supported 7
2 Attributes List
3 Motor Type USINT Get
6 Rated Current UINT Get/Set Rated Current [100mA] 7 Rated Voltage UINT Get/Set Rated Voltage [V] 8 Rated Power UDINT Get/Set Power at rated frequency [W] -
9 Rated Frequency UINT Get/Set Rated Electrical Frequency [Hz] -
12 Pole Count UINT Get Number of poles in the motor -
15 Base Speed UINT Get/Set
Name
Data
Type
USINT
(ARRAY)
Access
Rules
Get List of attributes supported -
0 - Non-standard motor
1 - PM DC Motor
2 - FC DC Motor
3 - PM Synchronous Motor
4 - FC Synchronous Motor
5 - Switched Reluctance Motor
6 - Wound Rotor Induction Motor
7 - Squirrel Cage Induction Motor
8 - Stepper Motor
9 - Sinusoidal PM BL Motor
10 - Trapezoidal PM BL Motor
Nominal speed at rated frequency from
nameplate [min-1]
Description
Default
Value
1
7
15
Default
Value
7
-
3.6.3. Motor Data Object Common Services
Service
Code
0x0E Get_Attribute_Single N/A Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
Service Name
Supported
Class
Instance
Description of Service
3.6.4. Motor Data Object Specific Services
The Motor Data Object provides no object specific services.
- 30 -
Page 32

3.7. Control Supervisor Object
Class code 0x29. This object models all the management functions for devices within the DeviceNet
“Hierarchy of Motor Control Devices”. The behavior of motor control devices is described by the
State Transition Diagram.
3.7.1. Control Supervisor Object Class Attributes
E6581281 f
Attribute
ID
1 Revision UINT Get Revision of this object 1
2 Max instance UINT Get
Max ID of
6
class attributes
Max ID of
7
instance attributes
Name
Data
Type
UNIT Get
UNIT Get
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
The attribute ID number of the last class
attribute of the class definition
implemented in the device.
The attribute ID number of the last
instance attribute of the class definition
implemented in the device.
Default
Value
1
7
15
- 31 -
Page 33

3.7.2. Control Supervisor Object Instance Attributes
E6581281 f
Attribute
ID
1 Number of Attributes USINT Get Number of Attributes supported 11
2 Attribute List
3 Run 1 BOOL Get/Set
4 Run 2 BOOL Get/Set
5 Net Control BOOL Get/Set
6 State USINT Get
7 Running 1 BOOL Get
8 Running 2 BOOL Get
9 Ready BOOL Get
10 Faulted BOOL Get
11 Warning BOOL Get
12 Fault Reset BOOL Get/Set
15 Control From Net USINT Get
Name
Data
Type
USINT
(ARRAY)
Access
Rules
Get List of attributes supported -
See Run/Stop Event Matrix
00 = Stop
01 = Run
See Run/Stop Event Matrix
00 = Stop
01 = Run
Requests Run/Stop control to be local
or from network.
0 = Local Control
1 = Network Control
Note that the actual status of Run/Stop
control is reflected in attribute 15,
CtrlFromNet.
0 = Vendor Specific
1 = Startup
2 = Not_Ready
3 = Ready
4 = Enabled
5 = Stopping
6 = Fault_Stop
7 = Faulted
1 = (Enabled and Run1) or
(Stopping and Running1) or
(Fault_Stop and Running1)
0 = Other state
1 = (Enabled and Run2) or
(Stopping and Running2) or
(Fault_Stop and Running2)
0 = Other state
1 = Ready or Enabled or Stopping
0 = Other state
1 = Fault Occurred (latched)
0 = No Faults present
1 = Warning (not latched)
0 = No Warnings present
0->1 = Fault Reset
0 = No action
Status of Run/Stop control source.
0 = Control is local
1 = Control is from network
Description
Default
Value
-
-
-
-
-
-
-
-
-
-
-
- 32 -
Page 34

3.7.3. Control Supervisor Object Common Services
E6581281 f
Service
Code
0x05 Reset N/A Yes Used to reset all resettable connection objects.
0x0E Get_Attribute_Single N/A Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
3.7.4. Control Supervisor Object Specific Services
3.7.5. Run/Stop Event Matrix
Run1 Run2 Trigger Event Run Type
0 0 Stop No Action
0 -> 1 0 Run Run1
0 0 -> 1 Run Run2
0 -> 1 0 -> 1 No Action No Action
1 1 No Action No Action
1 -> 0 1 Run Run2
1 1 -> 0 Run Run1
3.7.6. Control Supervisor State Transition Diagram
Service Name
The Control Supervisor Object provides no object specific services.
Supported
Class
Instance
Description of Service
Non-Existant
Switch On
Reset
Initialization Complete
Not_Ready
Main Power On
Run
Startup
Ready
Enabled
Switch Off
Fault Detected
Main Power Off
Fault Reset
Stop
Complete
Stopping
Stop
Fault Detected
Main Power Off
Faulted
Fault_Stop
Complete
Fault_Stop
Fault
Detected
- 33 -
Page 35

3.8. AC/DC Drive Object
Class code 0x2A. This object models the functions specific to an AC or DC Drive. e.g. speed ramp,
torque control etc.
3.8.1. AC/DC Drive Object Class Attributes
E6581281 f
Attribute
ID
1 Revision UINT Get Revision of this object 1
2 Max instance UINT Get
Max ID of
6
class attributes
Max ID of
7
instance attributes
Name
Data
Type
UNIT Get
UNIT Get
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
The attribute ID number of the last class
attribute of the class definition
implemented in the device.
The attribute ID number of the last
instance attribute of the class definition
implemented in the device.
Default
Value
1
7
46
- 34 -
Page 36

3.8.2. AC/DC Drive Object Instance Attributes
A
E6581281 f
Attribute
ID
Name
Data
Type
ccess
Rules
Description
1 Number of Attributes USINT Get Number of Attributes supported
2 Attribute List
3 At Reference BOOL Get
USINT
(ARRAY)
Get List of Attributes supported
1 = Drive actual at reference (speed or
torque reference) based on mode
Requests torque or speed reference to
be local or from network.
0 = Set Reference not DN Control
4 Net Reference BOOL Get/Set
1 = Set Reference at DN Control
Note that the actual status of torque or
speed reference is reflected in atrribute
29, RefFromNet.
0 = Vendor specific mode
1 = Open loop speed (Frequency)
6 Drive Mode USINT Get
2 = Closed loop speed control
3 = Torque control
4 = Process control (e.g. PI)
5 = Position control
7 Speed Actual INT Get
8 Speed Reference INT Get/Set
9 Current Actual INT Get
10 Current Limit INT Get/Set
11 Torque Actual INT Get
15 Power Actual INT Get
Actual drive speed (best approximation)
Units: min
Speed reference
Units: min
-1
-1
Actual motor phase current
Units: 100mA
Motor phase current limit
Units: 100mA
Actual torque
Units: Nm
Torque reference
Units: Nm
Acceleration time
18 Accel Time UINT Get/Set
Time from 0 to High Speed Limit
Units: ms
Acceleration time
19 Decel Time UINT Get/Set
Time from 0 to High Speed Limit
Units: ms
20 Low Speed Limit UINT Get/Set
21 High Speed Limit UINT Get/Set
Minimum speed limit
Units: min
Maximum speed limit
Units: min
-1
-1
26 Power Scale SINT Get Power scaling factor.
Status of torque/speed reference
29 Ref From Net BOOL Get
0 = Local torque/speed reference
1 = DeviceNet torque/speed reference
46 Drive on Hours DINT Get
Number of hours
Units: h
Default
Value
16
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
3.8.3. AC/DC Drive Object Common Services
Service
Code
Service Name
Supported
Class
Instance
Description of Service
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single
N/A
Yes
Modifies the value of the specified attribute.
3.8.4. AC/DC Drive Object Specific Services
The AC/DC Drive Object provides no object specific services.
- 35 -
Page 37

3.9. Vender Specific Device Profiles
Class code 0x64. This object provides VF-AS1/PS1’s Parameter access.
All parameter’s Attribute ID is 3.
Refer to the following about each parameter’s Instance ID.
Attribute ID of all parameters are 3. Moreover, about the instance ID of each parameter, it
becomes "parameter communication number + 0x4000".
In the case of the parameter from which a communication number begins in "F", it
becomes "parameter communication number - 0x8000 (same as bit15 set to 0)".
About the details of the contents of a parameter, please refer to a VF-AS1/PS1
instructions manual.
Example 1.
In case of Basic parameter “CMOd - Command mode selection”,
Communication No: 0003 -> Instance ID: 4003
Example 2.
In case of Extended parameter “F268 - Updown frequency default value”,
Communication No: 0268 -> Instance ID: 4268
E6581281 f
Example 3.
In case of Monitor parameter “FE03 - Output current”,
Communication No: FE03 -> Instance ID: 7E03
* Monitor parameter can access "Get" only.
For example, when "Acc. time" is set to 5 sec., since the minimum unit is 0.1s,
5 / 0.1 = 50 = 0x0032 (Hex.)
Since the communication number of " Acc. time" is "0009", it writes "0x0032" in instance ID
"4009."
Moreover, when the "highest frequency" is read, "0x1F40" is read.
0x1F40 = 8000 (Dec.)
Since the minimum unit is 0.01Hz,
8000 * 0.01 = 80Hz
3.10. About EDS-file
Even if access to each parameter of VF-AS1/PS1 uses a configuration tool and an EDS
file, it is possible. As for acquisition of an EDS file, it is possible to download from
homepage of our company.
Please use what was in agreement with the software version of usage's VF-AS1/PS1.
http://www.inverter.co.jp/product/inv/vfas1/dev/index_i.htm
- 36 -
 Loading...
Loading...