

Page 1
GR-3
Руководство пользователя
Номер по каталогу 7010-0736
Редакция “А”
© Авторские права принадлежат Topcon Positioning Systems, Inc.
Июнь 2006 г.
Авторское право Topcon Positioning Systems, Inc. распространяется на все
содержание данного руководства и защищено по закону. Запрещается
использовать, предоставлять, копировать, записывать в запоминающих
устройствах, отображать, продавать, изменять, распространять и любым
другим способом воспроизводить содержимое этого руководства без
письменного разрешения Topcon.
Topcon поставляет изделия с GPS только для рынка высокоточных измерений.
Подробное определение этого рынка приводится на интернет-сайте
www.topcongps.com.
Page 2

Оглавление
Оглавление
Предисловие.................................................................v
Условия и положения...................................................................................v
Соглашения, принятые в руководстве .....................................................viii
Глава 1 Введение......................................................1-1
Принцип действия.....................................................................................1-2
Обзор ГНСС .........................................................................................1-2
Вычисление местоположения.......................................................1-3
Определение относительного (дифференциального)
местоположения.............................................................................
Получение точного и надежного местоопределения..................1-5
Выводы ...........................................................................................1-6
Описание приемника...........................................................................1-6
Ознакомление ...........................................................................................1-8
Батареи.................................................................................................1-8
Приемник GR-3 ..................................................................................1-10
MINTER .........................................................................................1-11
GSM/GPRS.........................................................................................1-13
Файл авторизации опций (OAF).............................................................1-23
1-4
Глава 2 Подготовительные операции ..................2-1
Установка программ Topcon.....................................................................2-2
Установка программы PC-CDU ..........................................................2-2
Установка программы Modem TPS ....................................................2-3
Установка программы BTCONF..........................................................2-4
Установка программы FLoader...........................................................2-6
Установка SD и SIM карт ..........................................................................2-7
Зарядка батарей........................................................................................2-9
Управление питанием.............................................................................2-10
Питание приемника.................................................................................2-14
P/N 7010-0736
i
Page 3

Оглавление
Использование съемных батарей....................................................2-14
Использование дополнительных источников питания...................2-17
Включение/выключение приемника.................................................2-19
Подключение приемника к компьютеру ................................................2-19
Беспроводное соединение ...............................................................2-20
Соединение кабелем RS232 ............................................................2-21
Соединение кабелем USB................................................................2-21
Настройка модуля Bluetooth...................................................................2-22
Сбор альманахов и эфемерид...............................................................2-26
Глава 3 Настройка GR-3........................................... 3-1
Настройка радиомодема ..........................................................................3-3
Настройка GSM радиомодема ...........................................................3-6
Настройка приемника .............................................................................3-10
Настройка MINTER .................................................................................3-20
Глава 4 Установка и съемка ...................................4-1
Установка приемника................................................................................4-1
Шаг 1: Установка приемника...............................................................4-1
Шаг 2: Измерение высоты антенны ...................................................4-4
Шаг 3. Сбор данных.............................................................................4-6
Использование MINTER...........................................................................4-7
Статическая съемка................................................................................4-10
Кинематическая съемка .........................................................................4-11
Кинематическая съемка в реальном времени......................................4-12
Глава 5 Обслуживание приемника и операции с
файлами .....................................................................
Копирование файлов в компьютер..........................................................5-1
Копирование файлов с помощью Topcon Link..................................5-2
5-1
…через Проводник Windows.........................................................5-2
…через Topcon Link.......................................................................5-4
Копирование файлов с помощью PC-CDU........................................5-6
Удаление файлов с SD карты приемника...............................................5-8
Организация памяти приемника ..............................................................5-9
ii
GR-3. Руководство пользователя
Page 4

Оглавление
Управление опциями приемника ...........................................................5-10
Проверка OAF приемника.................................................................5-10
Загрузка OAF......................................................................................5-12
Очистка энергонезависимой памяти (NVRAM).....................................5-13
Использование MINTER для очистки NVRAM.................................5-13
Использование PC-CDU для очистки NVRAM ................................5-14
Изменение режима работы приемника.................................................5-14
Вход в расширенный режим отображения......................................5-14
Режим низкого энергопотребления..................................................5-16
Загрузка нового встроенного программного обеспечения ..................5-16
Загрузка встроенного программного обеспечения приемника и
платы питания....................................................................................
5-18
Глава 6 Устранение неисправностей ....................6-1
Проверьте прежде всего! .........................................................................6-1
Список отказов приемника .......................................................................6-2
Отказы системы питания..........................................................................6-3
Отказы спутникового приемника..............................................................6-4
Отказы канала связи Bluetooth.................................................................6-9
Отказы программы Modem-TPS.............................................................6-12
Индикация отказов светодиодом TX RX...............................................6-13
Получение технической поддержки.......................................................6-14
Телефон .............................................................................................6-14
Электронная почта ............................................................................6-15
Интернет-сайт....................................................................................6-16
Приложение A Технические характеристики...... A-1
Характеристики приемника .....................................................................A-3
Общие характеристики.......................................................................A-3
Технические характеристики платы спутникового приемника........A-8
Технические характеристики модуля Bluetooth. ..............................A-9
Технические характеристики встроенного широкополосного
радиомодема ....................................................................................
Технические характеристики опционального модуля GSM/GPRSA-11
Технические характеристики разъемов ...............................................A-13
P/N 7010-0736
A-10
iii
Page 5

Оглавление
ВЧ разъем радиомодема .................................................................A-13
Порт питания..................................................................................... A-13
Разъем последовательного порта RS-232.....................................A-14
Разъем USB......................................................................................A-15
Приложение B Меры безопасности ......................B-1
Предупреждения общего характера....................................................... B-1
Безопасное использование батарей ...................................................... B-3
Предупреждения по применению...........................................................B-4
Приложение C Нормативные сведения ...............C-1
Соответствие требованиям FCC............................................................C-1
Соответствие требованиям стран Европейского содружества............C-2
Директива WEEE......................................................................................C-2
Приложение D Гарантийные обязательства .......D-1
iv
GR-3. Руководство пользователя
Page 6
Предисловие
Благодарим Вас за приобретение этого изделия производства фирмы
Topcon. Сведения, содержащиеся в этом руководстве (далее
«руководстве») подготовлены фирмой Topcon Positioning Systems (далее
«TPS») для владельцев изделий производства фирмы Topcon. Это
руководство по эксплуатации было составлено для того, чтобы помочь
использовать приемник при приведенных ниже условиях и положениях.
Пожалуйста, внимательно ознакомьтесь с разделом
“Условия и положения”.
Условия и положения
ПРОФЕССИОНАЛЬНОЕ ИСПОЛЬЗОВАНИЕ - Это изделие
предназначено для профессионального использования. Пользователь
должен иметь твердые навыки безопасной эксплуатации и соблюдать все
меры безопасности, установленные органами охраны труда для частного
использования и промышленности.
АВТОРСКИЕ ПРАВА - Все содержимое этого руководства является
интеллектуальной собственностью фирмы TPS и защищено авторским
правом. Все права сохранены. Запрещается использовать, получать
доступ,
составительских работ, продавать, изменять, публиковать,
распространять, либо позволять третьей стороне получать доступ к
любым рисункам, содержимому, информации либо данным из этого
руководства без письменного разрешения TPS. Перечисленное выше
содержимое может использоваться только для обеспечения
использования приобретенного изделия. Информация и данные,
содержащиеся в этом руководстве, являются ценным
создании которого были понесены существенные затраты труда, времени
и денежных средств и являются плодом собственных усилий TPS по
подборке, выбору и систематизации.
копировать, хранить, отображать, использовать для создания
активом TPS, при
P/N 7010-0736
v
Page 7

Условия и положения
Пользователю предоставляется персональное, неисключительное, не
подлежащее передаче другому лицу разрешение использовать (лицензия)
это ПО на указанных здесь условиях для одного изделия или одном
компьютере. Вы не можете передавать или переуступать ПО или это
разрешение без специального письменного разрешения TPS. Разрешение
действует до его окончания. Вы можете прекратить действие лицензии в
любой момент
действие лицензии в том случае, если Вы не выполняете любое из этих
условий или положений. Вы должны уничтожить ПО и это руководство
после того, как Вы прекратите использовать приемник. Все права
собственности, авторские права и права на интеллектуальную
собственность в ПО принадлежат TPS. Если
вышеперечисленными условиями, предлагаем Вам вернуть не бывшие в
употреблении руководство и ПО.
КОНФИДЕНЦИАЛЬНОСТЬ - Это руководство, его содержимое и ПО
(далее упоминаемые как «конфиденциальная информация») являются
конфиденциальными, а информация является собственностью TPS.
Принимая условия этого соглашения, Вы берете на себя обязательства
сохранять эту информацию таким же образом, как
коммерческие секреты своей организации. Тем не менее, этот параграф
не ограничивает Вас в предоставлении информации, нужной по роду
деятельности Вашим работникам, занимающимся использованием и
обслуживанием изделия. Таковые работники также обязаны не
разглашать конфиденциальную информацию. В том случае, если вы
будете вынуждены по закону раскрыть конфиденциальную информацию,
Вы должны немедленно
ходатайствовать об охранном судебном приказе или соответствующих
средствах правовой защиты.
, уничтожив ПО и это руководство. TPS может прекратить
Вы не согласны с
наиболее ценные
известить TPS с тем, чтобы мы могли
ИНТЕРНЕТ-САЙТ И ПРОЧИЕ ЗАЯВЛЕНИЯ - Данные условия и
положения (в том числе лицензионное соглашение на ПО, ограничение
гарантии и ограничения ответственности) не могут быть изменены
заявлениями, опубликованными на Интернет сайте TPS (равно как и на
любом другом Интернет сайте), в рекламных материалах и изданиях TPS,
либо сделанные работником TPS или независимым подрядчиком TPS.
МЕРЫ БЕЗОПАСНОСТИ - Неправильная эксплуатация изделия Topcon
может быть причиной телесных повреждений, порчи собственности и/или
отказа изделия. Ремонт изделия должен производиться исключительно в
центрах гарантийного ремонта, авторизованных Topcon. Пользователям
следует ознакомиться с предупреждениями о технике безопасности,
приведенными в
следовать.
P/N 7010-0736
руководствах, приложенных к изделию, и строго им
vii
Page 8
Предисловие
РАЗНОЕ - упомянутые выше условия и положения могут быть в любой
момент времени исправлены, изменены, заменены на другие, либо
отменены фирмой TPS. Вышеупомянутые условия и положения
соответствуют и должны толковаться в соответствии с законами штата
Калифорния без использования других юридических норм.
Соглашения, принятые в
руководстве
В этом руководстве использованы следующие обозначения:
Обозначение Описание
File > Exit Выберите пункт меню File (Файл), затем Exit
(Выход).
Connection Полужирным курсивным шрифтом выделено
название заголовков окон, в том числе диалоговых.
Frequency Курсивным шрифтом выделено название поля,
области или вкладки в диалоговом окне.
Enter Нажмите клавишу Enter (Ввод) клавиатуры.
Примечание переводчика: названия отображаемых на английском языке
элементов пользовательского интерфейса (названия пунктов меню, заголовков
окон, кнопок, элементов списка и пр.) приведены в оригинальном виде, в скобках
сразу за ними дан поясняющий перевод, пример см. выше.
Дополнительные сведения о настройке и
обслуживании системы
Дополнительная информация, которая может помочь
Вам при обслуживании и настройке системы.
viii
Дополнительная информация о факторах, которые
могут оказать влияние на работу системы, ее
технические характеристики, результаты измерений
или личную безопасность.
GR-3. Руководство пользователя
Page 9

Соглашения, принятые в руководстве
Уведомление о том, что операция может оказать
неблагоприятное воздействие на работу системы, ее
технические характеристики, целостность данных
или личное здоровье.
Предупреждение о том, что операция повредит
систему, вызовет потерю данных, потерю гарантии
или вред здоровью.
Предупреждение о том, что это действие нельзя
выполнять ни при каких обстоятельствах.
P/N 7010-0736
ix
Page 10
Предисловие
Для заметок:
x
GR-3. Руководство пользователя
Page 11
Глава 1
Введение
Спутниковый приемник GR-3 обеспечивает прием сигналов спутниковых
навигационных систем и является наиболее современным и компактным
устройством, предлагаемым для геодезических применений. Этот
приемник многофункционален, универсален и предназначен для рынков
высокоточных измерений. Под последним понимается рынок
оборудования, систем, компонентов и программного обеспечения для
съемки, строительства, коммерческого картографии, инженерного дела,
высокоточного сельского хозяйства, контроля сельскохозяйственных
строительных машин, фотограмметрии, гидрографии и приложений,
связанных с перечисленными выше.
Приемник GR-3 может принимать и обрабатывать разнообразные типы
сигналов, включая разработанные в последнее время GPS L2C, GPS L5,
ГЛОНАСС ПТ L2 и GALILEO, повышая точность и надежность
местоопределения
Прием сигналов в нескольких диапазонах от нескольких спутниковых
систем позволяют обеспечивать точность определения координат для
всех типов съемки. Дополнительные возможности, в том числе
подавление влияния многолучевого распространения, обеспечивают
прием слабых сигналов, даже под кронами деревьев. Приемник
обеспечивает функциональность, точность, доступность и целостность,
необходимые для быстрого и эффективного сбора данных.
, особенно в неблагоприятных условиях наблюдения.
и
P/N 7010-0736
Рисунок 1-1. Приемник GR-3
1-1
Page 12

Подготовительные операции
Принцип действия
Съемка, выполненная с помощью приемника GPS, может обеспечить
точное и надежное местоопределение, что является обязательным
условием для проведения всех видов геодезических работ.
В этом разделе дается краткое описание функционирующих и
планируемых к развертыванию Глобальных Навигационных Спутниковых
Систем (GNSS-ГНСС) и работе приемника, что поможет понять и
правильно применять эти знания на практике и
приемник максимально эффективно.
Обзор ГНСС
В настоящее время услуги определения местоположения, скорости и
времени предоставляют три глобальные навигационные спутниковые
системы (ГНСС). Все эти системы всепогодные, работают круглосуточно и
доступны в любой точке на поверхности Земли и в околоземном
пространстве любому пользователю, имеющему приемник сигналов ГНСС.
позволит использовать
• GPS (Global Positioning System) – финансируется и управляется
министерством обороны Соединенных Штатов Америки. Для
получения
интернет-сайты обсерватории ВМФ США <
и службы береговой охраны США (
• ГЛОНАСС (Глобальная Навигационная Спутниковая Система) –
финансируется и управляется министерством обороны Российской
Федерации. Для получения информации о текущем состоянии
системы посетите интернет-сайт Координационного Научного
Информационного Центра (http://www.glonass-center.ru/frame_e.html).
• GALILEO – система определения местоположения, развертываемая
в настоящее время, финансируется и управляется Galileo Industries
(Галилео Индастриз), совместным предприятием космических
агентств нескольких европейских стран, тесно сотрудничающих с
европейским космическим агентством. В отличие от GPS и
ГЛОНАСС, эта система изначально предназначена для
гражданского использования. В настоящий момент она находится на
этапе проектирования и прототипирования. Для получения
информации о текущем состоянии системы посетите интернет-сайт
Galileo Индастриз (http://www.galileo-industries.net).
информации о текущем состоянии системы посетите
http://tycho.usno.navy.mil/>
http://www.navcen.uscg.gov/).
1-2
GR-3. Руководство пользователя
Page 13

Ознакомление
Несмотря на многочисленные различия технологического характера, все
системы определения местоположения состоят из трех компонентов:
• Космический сегмент – спутники GPS, ГЛОНАСС и Galileo
обращаются по околокруговым орбитам высотой около 20 000 км
над поверхностью Земли, снабжены радиопередатчиками и
высокоточными хранителями времени. Каждый из этих спутников
передает свои орбитальные параметры (эфемериды), альманах
системы (параметры орбиты всех остальных
коррекции времени бортовых часов и другую информацию.
• Сегмент управления – наземные измерительные пункты,
расположенные в различных частях Земли, отслеживающие
спутники и закладывающие в них данные о поправках бортовых
часов и обновленные эфемериды для обеспечения достоверности
передаваемой со спутников информации.
• Пользовательский сегмент – гражданские и военные пользователи,
оснащенные приемниками
выполненные по этим сигналам, для вычисления своего
местоположения.
ГНСС, используют измерения,
спутников), параметры
Вычисление местоположения
При вычислении местоположения движущийся или неподвижный
приемник определяет пространственные координаты в трехмерной
системе координат, связанной с центром масс Земли и неподвижной
относительно нее. Чтобы определить свои координаты, приемник
измеряет расстояния (называемые псевдодальностями в связи с тем, что
хранитель времени приемника изначально не синхронизирован с
общесистемной шкалой времени) до четырех или более
измеренные псевдодальности вносятся поправки за разность шкал
времени спутника и общесистемной шкалы, предсказанные задержки из-за
распространения сигнала в атмосфере и др. Положения спутников
вычисляются по эфемеридам, передаваемым ими в навигационных
сообщениях. При использовании одной спутниковой системы для
определения координат необходимо не менее четырех спутников. При
использовании нескольких
получения местоположения должен принимать сигналы как минимум пяти
спутников в связи с различиями временных шкал, используемых в этих
системах.
систем (GPS, ГЛОНАСС, Galileo) приемник для
спутников. В
P/N 7010-0736
1-3
Page 14

Подготовительные операции
Определение относительного
(дифференциального) местоположения
DGPS, или дифференциальная GPS – это методика определения
относительного местоположения, в которой измерения, одновременно
производимые двумя или более разнесенными в пространстве
приемниками, обрабатываются совместно с помощью сложных
алгоритмов, что позволяет определить относительные координаты
фазовых центров антенн этих приемников с высокой точностью.
DGPS реализуется разными способами, которые могут быть
классифицированы по следующим параметрам:
• По
• Определяются ли результаты в реальном времени или при
При работе в режиме DGPS один приемник, называемый опорным
приемником или базовой станцией, размещается на пункте с известными
координатами. Другой приемник, называемый удаленным или подвижным
приемником, размещается на пункте,
определить. Опорная станция производит измерения дальностей до всех
доступных спутников и рассчитывает разности (поправки) между
результатами этих измерений и дальностями, вычисляемыми по
известным координатам точки стояния.
• Для приложений реального времени эти поправки и координаты
типу основных используемых измерений GNSS – задержка
кодовой последовательности или отсчету фазы несущей.
камеральной обработке.
координаты которого требуется
опорной станции затем приводятся к стандарту RTCM (или
фирменным форматам передачи данных) - и передаются на
удаленный приемник(и) с использованием канала передачи данных.
Удаленный приемник использует собственные измерения и
корректирует их принятыми поправками.
• Для приложений с камеральной обработкой синхронные измерения,
произведенные на опорных и подвижных станциях, обычно
записываются на внутреннюю память приемника и не пересылаются
по каналу передачи данных. После окончания сеанса измерений
данные копируются в компьютер и обрабатываются совместно.
При применении этой методики влияние искажающих измерения
пространственно коррелированных факторов (например, погрешностей
предсказания
ионосфере и тропосфере) могут быть существенно снижены, что
позволяет определить точное относительное местоположение.
Существует несколько реализаций дифференциального способа
определения координат, в том числе съемка с камеральной обработкой,
1-4
положений спутников, задержек при прохождении сигнала в
GR-3. Руководство пользователя
Page 15

Ознакомление
съемка в кинематическом режиме в реальном времени, съемка с
использованием сигналов береговых радиомаяков, геостационарных
спутников (например, сети OmniSTAR), а также системы спутникового
дополнения (WAAS, EGNOS, MSAS).
Наиболее точным методом съемки в реальном времени является метод
RTK (кинематическая съемка в реальном времени). В этом методе
используются, по крайней мере, два приемника и канал передачи данных
между
точкой с известными координатами, другой (подвижный) – над
определяемой точкой. Базовый приемник производит измерения по фазе
несущей частоты, вычисляет RTK-поправки и передает эти данные на
подвижный приемник. Последний обрабатывает полученные данные
вместе со своими собственными измерениями фазы несущей и
определяет свое положение относительно
плане и 1.5 см по высоте (для разных типов приемников эти показатели
могут отличаться).
ними. Как правило, один из приемников (база) устанавливается над
базы с точностью до 1 см в
Получение точного и надежного
местоопределения
Получение надежного и точного местоопределения возможно при
соблюдении приведенных ниже условий:
• Точность - точность местоположения зависит, прежде всего, от
геометрии спутников (характеризуется геометрическим фактором
ухудшения точности – GDOP) и погрешностей измерения дальности
до спутников.
- Дифференциальный режим GPS (DGPS и RTK) в значительной
степени позволяет скомпенсировать погрешности, вызванные
прохождением сигналов в атмосфере и неточностью
предсказания орбит
загрубение спутниковых сигналов, применяемое министерством
обороны США.
- Чем больше спутников в поле зрения и чем меньше величина
геометрического фактора, тем выше точность
местоопределения.
спутников и устраняет искусственное
• Доступность – доступность спутников влияет на достоверность
вычисленного местоположения. Чем больше видимых спутников,
тем выше точность и достоверность вычисления местоположения.
Естественные и искусственные
прерывать и ослаблять сигналы, снижая число видимых спутников и
ухудшая условия приема сигналов.
• Целостность – отказоустойчивость позволяет полагать, что
местоопределение определяется надежно и точно.
P/N 7010-0736
объекты могут блокировать,
1-5
Page 16

Подготовительные операции
Отказоустойчивость обеспечивается сочетанием перечисленных
ниже факторов и методов:
- Автономный контроль целостности приемником (RAIM)
позволяет определить отказавшие спутники GNSS и исключает
данные этих спутников из вычислений местоположения.
- Наличие не менее пяти видимых спутников при работе по
одному из созвездий GPS или ГЛОНАСС; не менее шести
спутников при работе по обоим созвездиям.
- Широкозонная дифференциальная
и др.) вырабатывает и передает наряду с дифференциальными
поправками (DGPS), данные о целостности информации
(например, сообщения о состоянии спутников).
- Достоверные данные эфемерид и альманаха.
подсистема (WAAS, EGNOS
Выводы
В данном кратком обзоре приведены только основы местоопределения по
спутниковым навигационным системам. Более подробную информацию
можно найти на интернет-сайте TPS.
Описание приемника
После окончания процесса самотестирования при подаче напряжения
питания все 72 канала приемника инициализируются и начинают
отслеживать сигналы видимых над горизонтом навигационных спутников.
Каждый из каналов приемника может быть использован для слежения за
любым сигналом спутниковых навигационных систем GPS, ГЛОНАСС или
GALILEO. Большое число каналов приемника позволяет вести слежение
одновременно за всеми видимыми спутниками
любое время
ГНСС в любом месте и в
Встроенная антенна GPS, оборудованная малошумящим усилителем, и
высокочастотный тракт приемника соединяются с помощью коаксиального
кабеля. Широкополосный сигнал преобразуется с понижением частоты,
фильтруется, оцифровывается и распределяется по каналам слежения.
Процесс приема сигнала контролируется процессором приемника.
После распределения сигналов по каналам каждый сигнал
демодулируется, и производится
несущей частоты). Из сигнала выделяется передаваемый спутником поток
данных.
После приема сигналов от четырех или большего количества спутников
определяются координаты приемника в системе WGS-84 и уход
задающего генератора приемника от системной шкалы времени GPS. Все
1-6
измерение его параметров (фаз кода и
GR-3. Руководство пользователя
Page 17

Ознакомление
данные измерений можно сохранить на (поставляемой дополнительно)
карте памяти MMC (Multi-media Card) или SD (Secure Digital) и позже
загрузить в компьютер для камеральной обработки с использованием
соответствующего пакета программ. Когда приемник находится в режиме
RTK, данные измерений также могут быть записаны на карту памяти
приемника, что позволяет произвести контрольную камеральную
обработку полевых измерений.
Приемник обладает следующими функциями (некоторые следует
заказывать специально):
• Подавление многолучевости;
• Прием сигналов спутников широкозонной системы улучшения
местоположения (WAAS, EGNOS, и т.д.);
• Настройка параметров петель слежения за фазой несущей (PLL) и
кодовой задержки (DLL)
• Одно- и многочастотные режимы съемки, включая статический,
кинематический, кинематический в реальном времени (RTK) и
дифференциальная GPS (DGPS) (режимы DGPS включают в
себя
статический, кинематический и RTK)
• Автоматическая запись информации
• Установка минимальных углов возвышения
• Установка различных параметров съемки
• Статические или динамические режимы
P/N 7010-0736
1-7
Page 18
Подготовительные операции
Ознакомление
GR-3 - это 72-х канальный приемник GPS с внешними съемными
батареями, двумя интерфейсными портами, пользовательским
интерфейсом, с помощью которого отображается процесс записи данных
и осуществляется управление им, разъемом для подключения внешней
карты памяти, внутренним радиомодемом, модулем беспроводной связи
Bluetooth® и устанавливаемом по заказу модулем GSM/GPRS.
Батареи
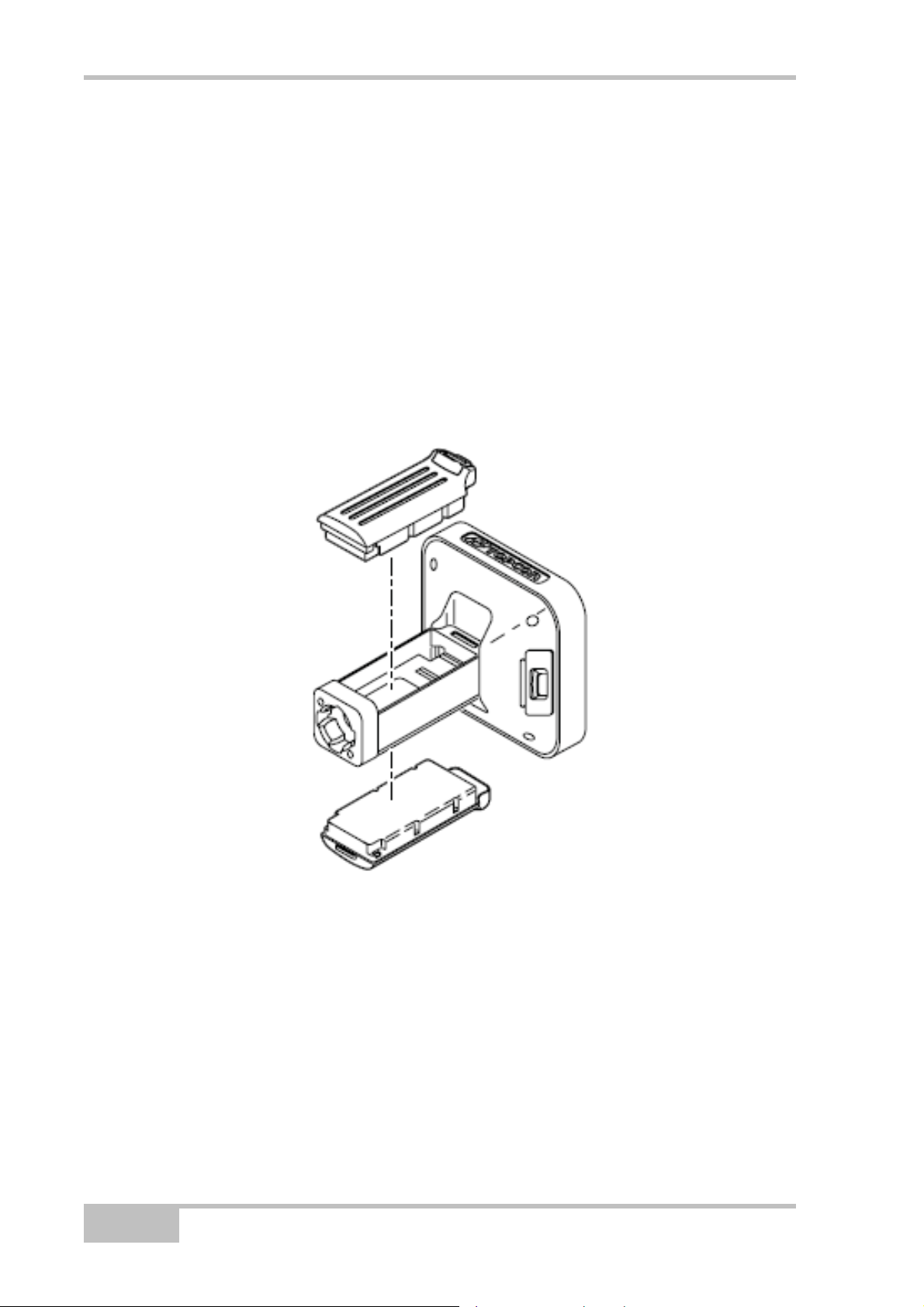
Приемник GR-3 оборудован двумя съемными перезаряжаемыми
батареями (см. рис. 1-2), с помощью которых осуществляется
электропитание устройства.
Рисунок 1-2. Батареи приемника GR-3
Приемник питается от одной из батарей, после чего переключается на
использование другой. Каждая съемная батарея обеспечивает
(приблизительно) от четырех с половиной до восьми с половиной часов
работы, в зависимости от текущего режима работы приемника.
Блок подзарядки аккумуляторной батареи (см. рис. 1-3) подключается к
стандартной розетке с помощью соединительного кабеля и блока
После подключения к сети переменного тока батареи заряжаются за
шесть часов (приблизительно). После 500 циклов заряд-разряд батареи
сохраняют не менее 80% начальной емкости. Эти батареи не следует
предварительно полностью разряжать до очередной зарядки.
1-8
GR-3. Руководство пользователя
питания.
Page 19
Ознакомление
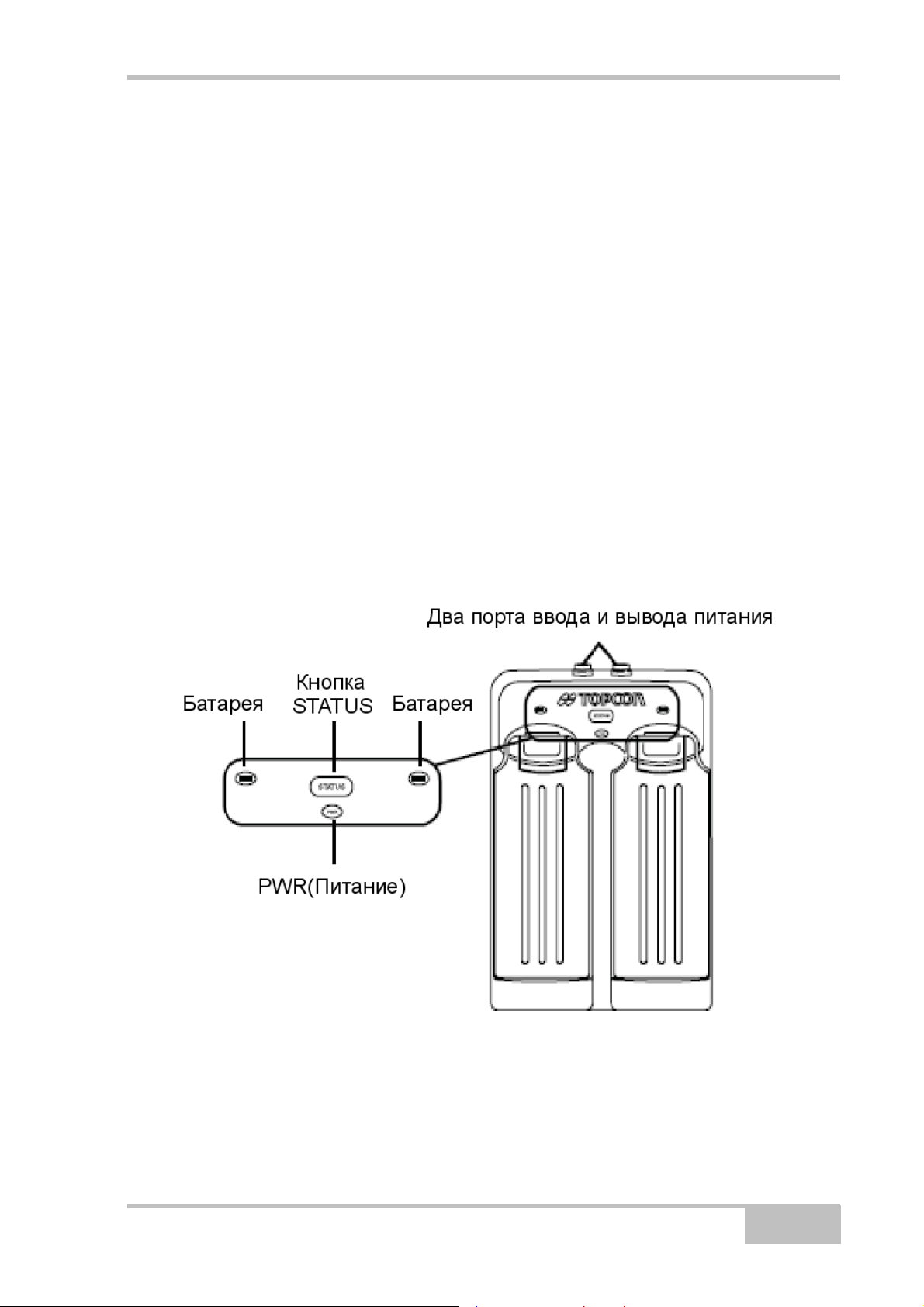
Блок подзарядки оснащен двумя портами, одной кнопкой и тремя
светодиодами.
• Два порта используются для подключения блока подзарядки либо к
приемнику, либо к внешнему источнику питания. Порты заряжают
или разряжают батареи одновременно.
• Кнопка STATUS (СОСТОЯНИЕ) активирует светодиоды.
Нажмите кнопку STATUS (СОСТОЯНИЕ), чтобы узнать уровень заряда
батарей.
• Два светодиода “Батарея” цветом отображают
уровень заряда
соответствующей батареи.
- Зеленый - батарея заряжена более чем на 85%.
- Желтый - у батареи средний заряд.
- Красный - батарея заряжена менее чем на 15%.
• Светодиод PWR (Питание) светится, если блок подзарядки
подключен к внешнему источнику питания, например к блоку
питания переменного тока или другому источнику питания
(например, батарея на12 Вольт).
Рисунок 1-3. Блок подзарядки со вставленными батареями
Блок подзарядки батарей также можно прикрепить к штативу, поясу или
вешке RTK для обеспечения внешнего источника питания для
передвижной или базовой станции.
P/N 7010-0736
1-9
Page 20
Подготовительные операции
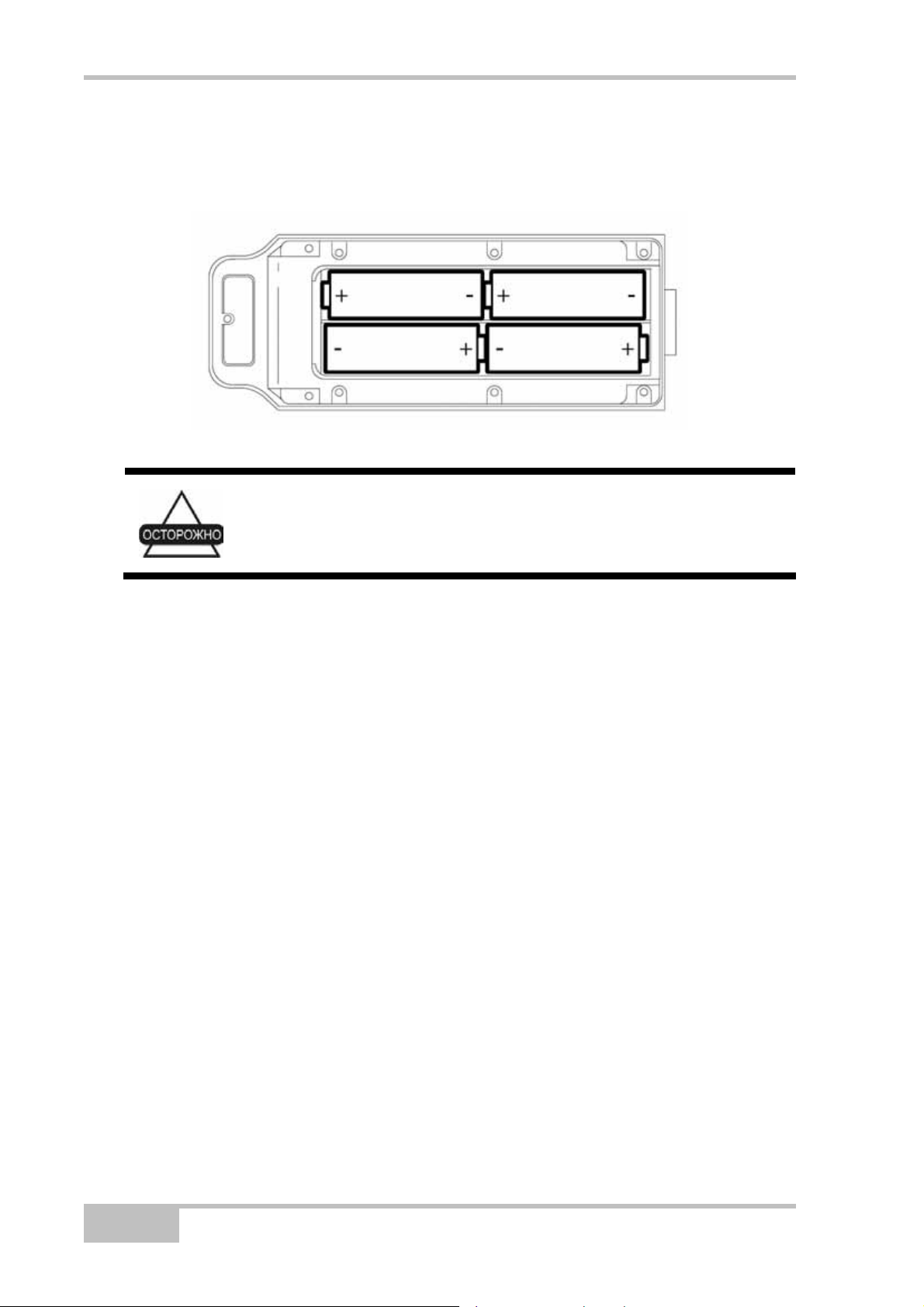
Отсек для батарей типа АА (см. рис. 1-4) содержит четыре батареи АА,
что обеспечивает простое резервирование источника питания приемника.
Время работы приемника зависит от емкости батареи АА, режима
приемника и типа модема.
Рисунок 1-4. Отсек для батарей типа АА в открытом положении
Не используйте аккумуляторные батареи типа АА.
Не используйте батареи типа АА, если радиомодем
находится в режиме передатчика.
Приемник GR-3
Улучшенный дизайн приемника GR-3 уменьшает количество кабелей,
необходимых для работы, позволяя вам проводить съемку более надежно
и эффективно. В корпусе обеспечено место для подключения двух
съемных аккумуляторных батарей, карт SD/MMC и SIM, а также
содержится модуль беспроводной связи Bluetooth, плата многосистемного
спутникового навигационного приемника и плата радиомодема.
GR-3 выпускается в одной из следующих конфигураций:
•
с радиомодемом FH915 Plus TX/RX/RP (Прием/Передача/Репитер).
• с радиомодемом FH915 Plus TX/RX/RP и модулем GSM/GPRS.
• без радиомодема.
Также в состав прибора входят два интерфейсных порта, порт питания и
пользовательский интерфейс MINTER для отображения состояния
приемника и контроля ввода/вывода данных.
1-10
GR-3. Руководство пользователя
Page 21
Ознакомление
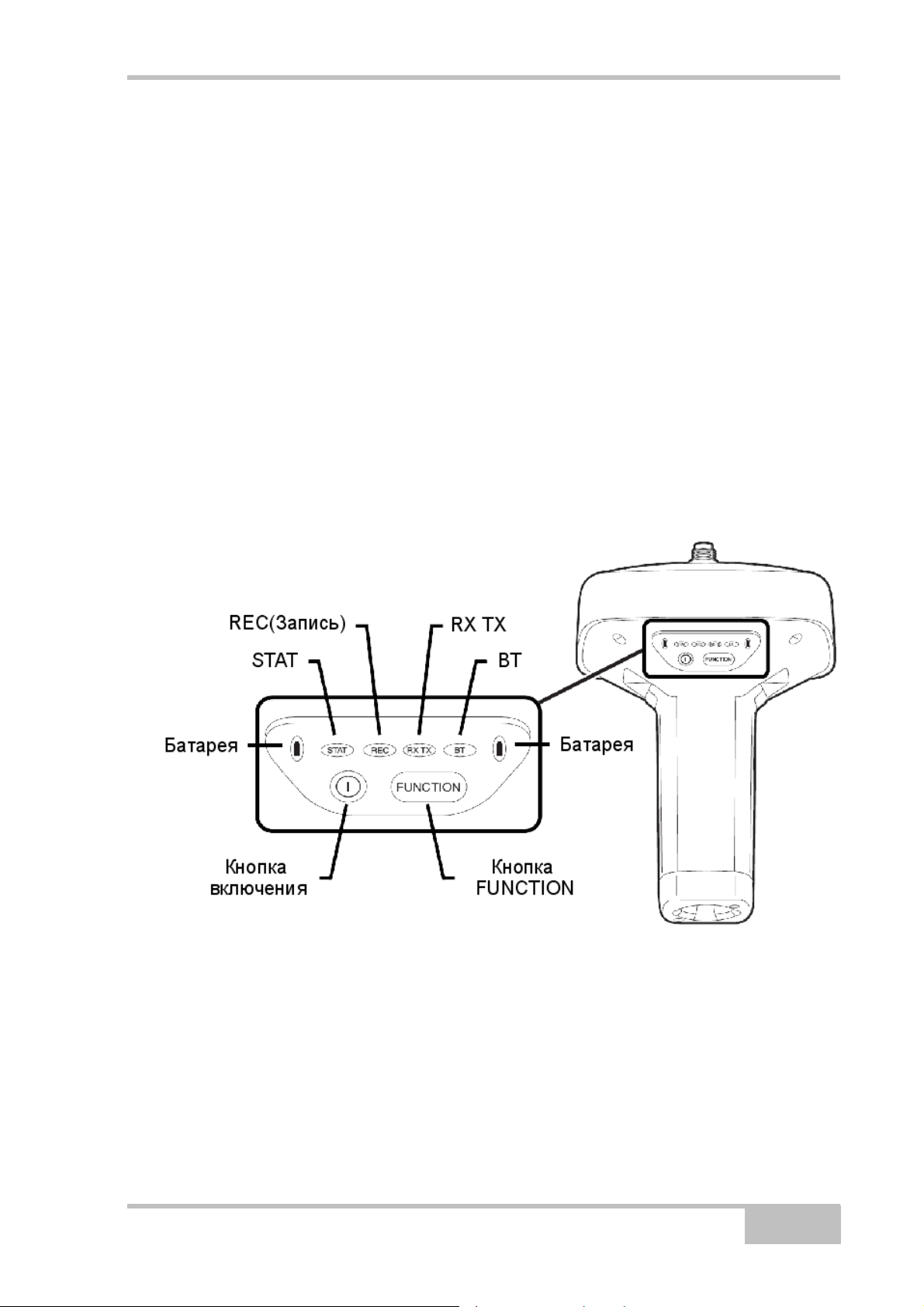
MINTER
MINTER-это пользовательский интерфейс приемника, предназначенный
для отображения состояния и контроля ввода/вывода (см. рис. 1-5).
Светодиоды батарей цветом отображают уровень заряда каждой
батареи:
• Зеленый - батарея заряжена более чем на 85%.
• Желтый - у батарей средний заряд.
• Красным - батарея заряжена менее чем на 15%.
Светодиод STAT отображает состояние обнаруженных спутников.
• Мерцает красным
• Мерцает зеленым – приемник включен и обнаруживает спутники:
одна вспышка на один спутник GPS
• Мерцает оранжевым – приемник включен и обнаруживает спутники:
одна вспышка на один спутник ГЛОНАСС
- приемник включен, но спутники не обнаружены.
P/N 7010-0736
Рисунок 1-5. MINTER приемника GR-3
1-11
Page 22

Подготовительные операции
Светодиод REC (Запись) отображает состояние записи данных.
Подробное описание поведения этого светодиода при использовании
кнопки FUNCTION см. в разделе “Кнопка FUNCTION” на стр. 1-13.
• Вспыхивает зеленым цветом – каждое вспышка соответствует
моменту записи на карту памяти SD/MMC.
• Непрерывно светится оранжевым цветом – приемник изменяет
режим работы.
• Вспыхивает оранжевым цветом – показывает, что приемник
проверяет свою внутреннюю
файловую систему (после очищения
NVRAM или загрузки нового программного обеспечения). Во время
этой операции файловая система недоступна для программ
дистанционного управления или для записи информации. Эта
операция может потребовать от доли секунды до нескольких минут,
в зависимости от условий и размера внутренней памяти.
• Непрерывно светится красным цветом – отображает неисправность
приемника
(нехватка памяти, не вставлена SD/MMC карта,
аппаратный отказ или неправильный OAF).
Таблица 1-2 на стр. 1-14 описывает состояние светодиода REC (Запись)
при использовании кнопки FUNCTION.
Светодиод RX TX отображает состояние модема. Таблица 1-1 описывает
цвета светодиода и тип свечения для модемов, которыми может
комплектоваться GR-3
Таблица 1-1. Индикация светодиода RX TX
Модем
FH915 Plus
• Не светится – модем выключен.
• Зеленые вспышки - модем находится в режиме приема.
• Непрерывное свечение зеленым цветом – сеанс
радиосвязи открыт, приемник готов к приему данных.
• Непрерывное свечение зеленым цветом и
кратковременные красные вспышки – прием данных
модемом.
• Непрерывное свечение красным цветом – модем
находится в режиме передачи.
•
Красные вспышки – обнаружен отказ модема.
Проверьте состояние антенны радиомодема и
убедитесь, что она не повреждена и подключена
правильно и надежно. Также удостоверьтесь в том, что
отсутствуют помехи.
1-12
• Красные и зеленые вспышки - модем находится в
режиме настройки.
GR-3. Руководство пользователя
Page 23
Ознакомление
• Непрерывное свечение оранжевым цветом (сочетание
красного и зеленого) – модем запускается.
• Зеленые вспышки – модем включен, зарегистрирован в
сети и ждет входящий запрос (звонок) (подчиненный
режим).
GSM/GPRS
• Непрерывное свечение красным – соединение
установлено.
• Зеленые вспышки - модем в режиме прямого
управления.
• Оранжевые вспышки – произошла ошибка (ошибка
инициализации, неверный PIN код, и т. д.)
Светодиод BT отображает состояние модуля беспроводной связи
Bluetooth:
• Синие вспышки – модуль Bluetooth включен, но соединение не
установлено.
• Непрерывное свечение синим цветом – модуль Bluetooth включен и
соединение установлено.
• Не светится - модуль Bluetooth выключен.
Кнопка включения включает и выключает приемник.
Кнопка FUNCTION (ФУНКЦИЯ) переключает приемник между режимами
информации и записи данных, позволяет начать и
остановить запись
данных и установить скорость передачи данных по последовательному
порту на стандартное значение 9600 Бод. Подробное описание см. в
разделе “
Использование MINTER” на стр. 4-7.
Таблица 1-2 на стр. 1-14 описывает работу светодиода REC при
использовании кнопки FUNCTION.
P/N 7010-0736
1-13
Page 24
Подготовительные операции
Таблица 1-2. Операции кнопки FUNCTION и состояние светодиода REC.
Кнопка FUNCTION Светодиод REC Состояние
Когда данные не записываются, и кнопка FUNCTION…
Красный Нет свободной памяти, аппаратный
отказ при записи данных.
Режим кнопки FUNCTION – переключение режима
светодиода
Зеленый Запись данных началась (режим
камеральной обработки не
Не нажата
Нажата менее одной
секунды
Нажата от одной до
пяти секунд
Нажата от пяти до
восьми секунд
Нажата более
восьми секунд
Режим кнопки FUNCTION – изменение режима съемки
Зеленый Запись данных началась (режим
Оранжевый Запись данных началась (режим
Режим кнопки FUNCTION – переключение режима
светодиода
Оранжевый Режим сменится при отпускании
Режим кнопки FUNCTION – изменение режима съемки
Оранжевый При отпускании кнопки происходит
Не светится При отпускании кнопки запись
Красный При отпускании кнопки для порта A
Не светится Действие не производится (данные
определен).
камеральной обработки -
кинематический).
камеральной обработки -
статический).
кнопки.
смена режима со статического на
кинематический и обратно.
данных прекращается.
устанавливается скорость обмена
9600 Бод.
записываются).
1-14
GR-3. Руководство пользователя
Page 25
Таблица 1-2. Операции кнопки FUNCTION и состояние светодиода REC
(продолжение).
Кнопка FUNCTION Светодиод REC Состояние
Когда данные записываются, и кнопка FUNCTION…
Красный Нет свободной памяти, аппаратный
отказ при записи данных.
Режим кнопки FUNCTION – переключение режима
светодиода
Зеленый Запись данных началась (режим
камеральной обработки не
Не нажата
Нажата менее одной
секунды
Нажата от одной до
пяти секунд
Нажата от пяти до
восьми секунд
Нажата более
восьми секунд
Режим кнопки FUNCTION – изменение режима съемки
Зеленый Запись данных началась (режим
Оранжевый Запись данных начата (режим
Режим кнопки FUNCTION – переключение режима
светодиода
Оранжевый Режим сменится при отпускании
Режим кнопки FUNCTION – изменение режима съемки
Оранжевый При отпускании кнопки происходит
Не светится При отпускании кнопки запись
Красный При отпускании кнопки для порта A
Не светится Действие не производится (данные
определен).
камеральной обработки -
кинематический).
камеральной обработки -
статический).
кнопки.
смена режима со статического на
кинематический и обратно.
данных прекращается.
устанавливается скорость обмена
9600 Бод.
записываются).
Ознакомление
P/N 7010-0736
1-15
Page 26
Подготовительные операции
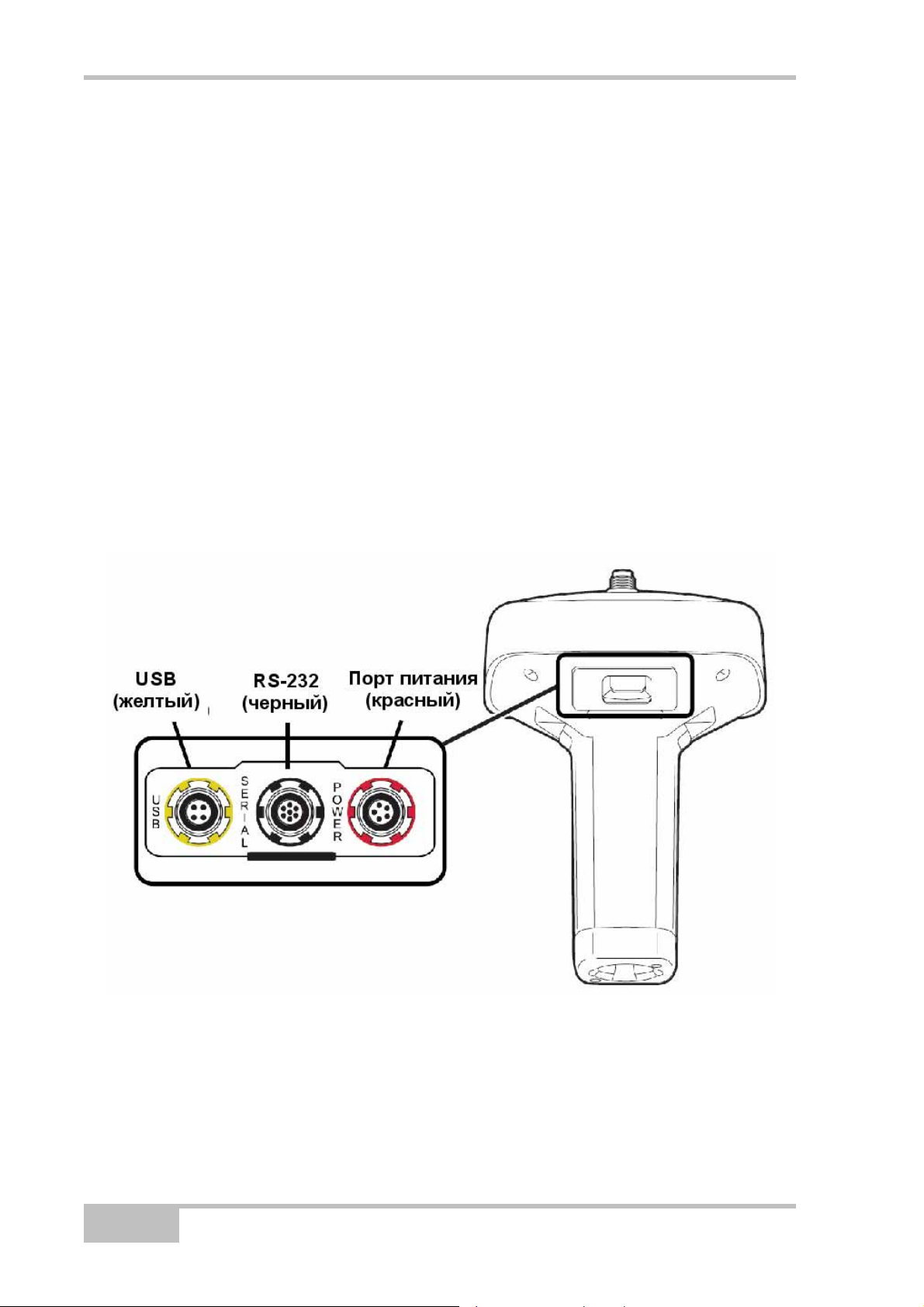
Интерфейсные порты и порт
питания
GR-3 оснащен тремя портами (см. рис. 1-6):
• USB – (желтый ободок); предназначен для высокоскоростной
передачи информации и соединения между приемником и внешним
устройством.
Корпус разъема на соответствующем кабеле желтый.
• Последовательный (RS-232) – (черный ободок); предназначен для
соединения между приемником и внешним устройством.
Корпус разъема на соответствующем кабеле черный.
• Порт питания – (красный ободок); предназначен
приемника к внешнему источнику питания. Этот порт также можно
использовать для подзарядки батарей.
Корпус разъема на соответствующем кабеле красный.
для подсоединения
1-16
Рисунок 1-6. Порты приемника GR-3
GR-3. Руководство пользователя
Page 27
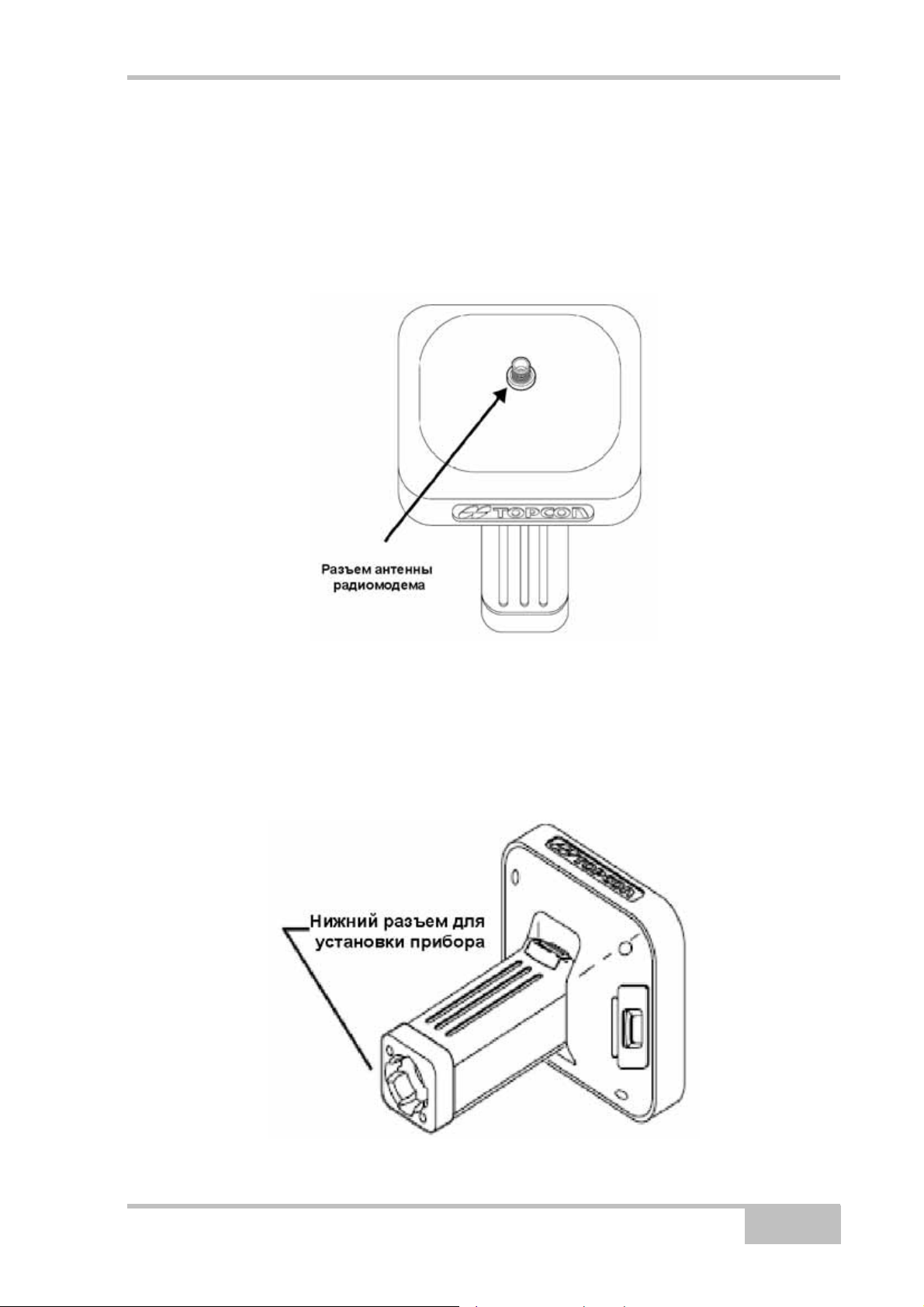
Ознакомление
Разъем для подключения антенны
радиомодема
Антенна радиомодема подсоединяется к разъему, расположенному на
обтекателе антенны GNSS в верхней части прибора (см. рис. 1-7). Тип
разъема – reverse polarity TNC.
Рисунок 1-7. Разъем антенны радиомодема, расположенный на обтекателе
Разъем
Нижний разъем (см. рис. 1-8) позволяет закрепить приемник на
стандартном адаптере с резьбой 5/8” или к разъему быстрого
подключения (подробнее см. «адаптер разъема быстрой установки» на
стр. 1-21).
P/N 7010-0736
Рисунок 1-8. Разъем быстрой установки GR-3
1-17
Page 28
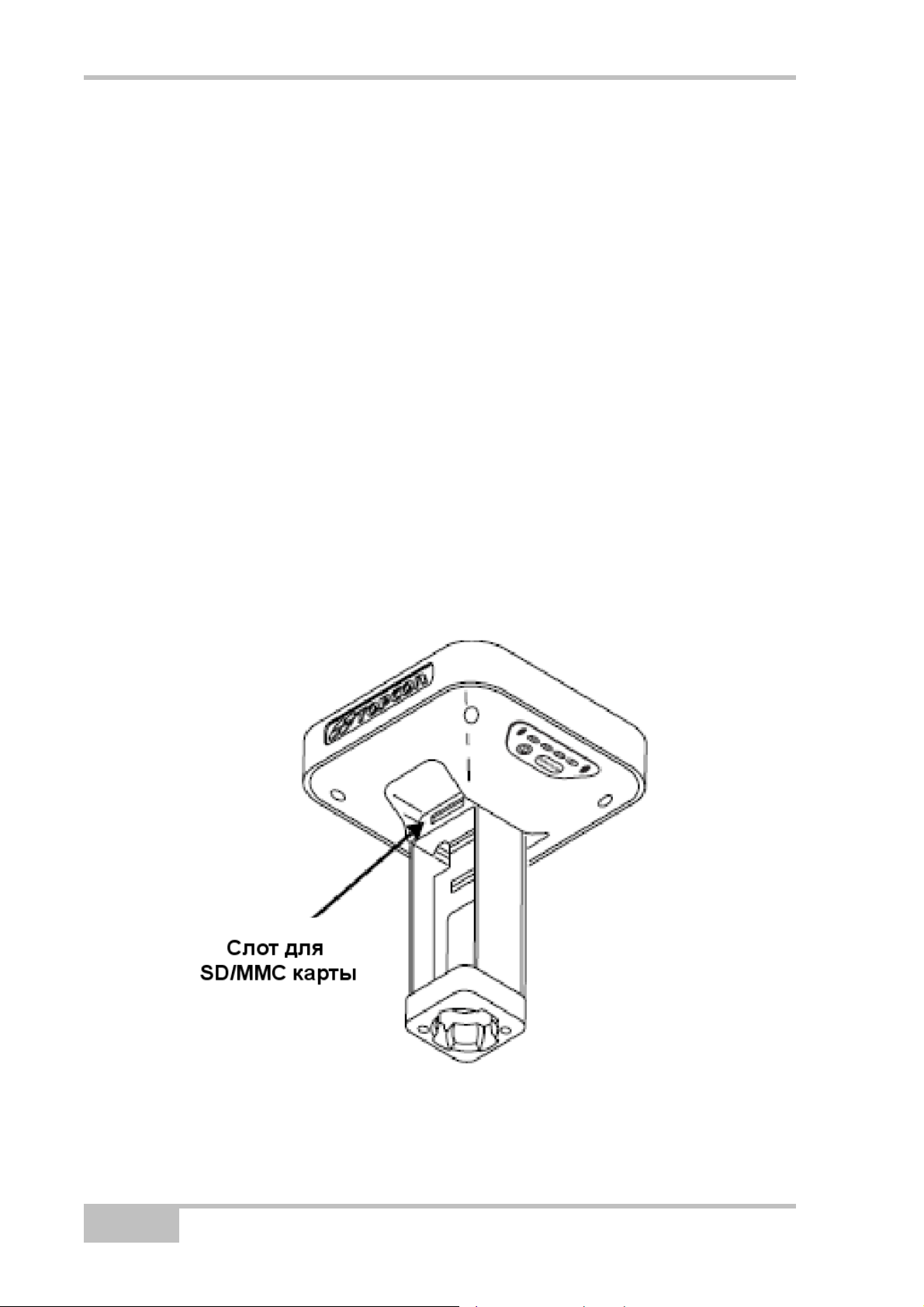
Подготовительные операции
Слоты для SD/MMC и SIM карт
Слоты для карт памяти MMC (multi-media card) / SD (secure digital) и SIM
карт располагаются под батареями, рядом с основанием антенного
обтекателя.
Слот для SD/MMC карт расположен слева от MINTER, внутри выемки для
батареи (см. рис. 1-9) и позволяет подключить карту к плате приемника
для обеспечения дополнительной памяти. Установленная SD/MMC карта
обычно остается внутри приемника. Информация, находящаяся на такой
карте, доступна через USB
беспроводной связи Bluetooth. Карта памяти может быть приобретена в
вашем местном магазине компьютерных товаров.
Слот для SIM карты расположен справа от MINTER, внутри выемки для
батареи и через него в приемник может быть вставлена стандартная SIM
карта. Вставленная SIM карта обеспечивает уникальный телефонный
номер в сети сотовой связи стандарта
пользоваться услугами этой сотовой сети (плата приемника обменивается
данными с модулем GSM, а тот, в свою очередь, работает с SIM картой).
SIM карта обычно остается внутри приемника. Модуль GSM со
вставленной SIM картой настраивается с помощью программного
обеспечения Modem-TPS. SIM карта приобретается (вместе с подпиской
на услуги связи) у вашего местного оператора сотовой связи
или последовательный порт, а также по каналу
GSM и позволяет приемнику
.
1-18
Рисунок 1-9. Слот карты памяти приемника GR-3
GR-3. Руководство пользователя
Page 29
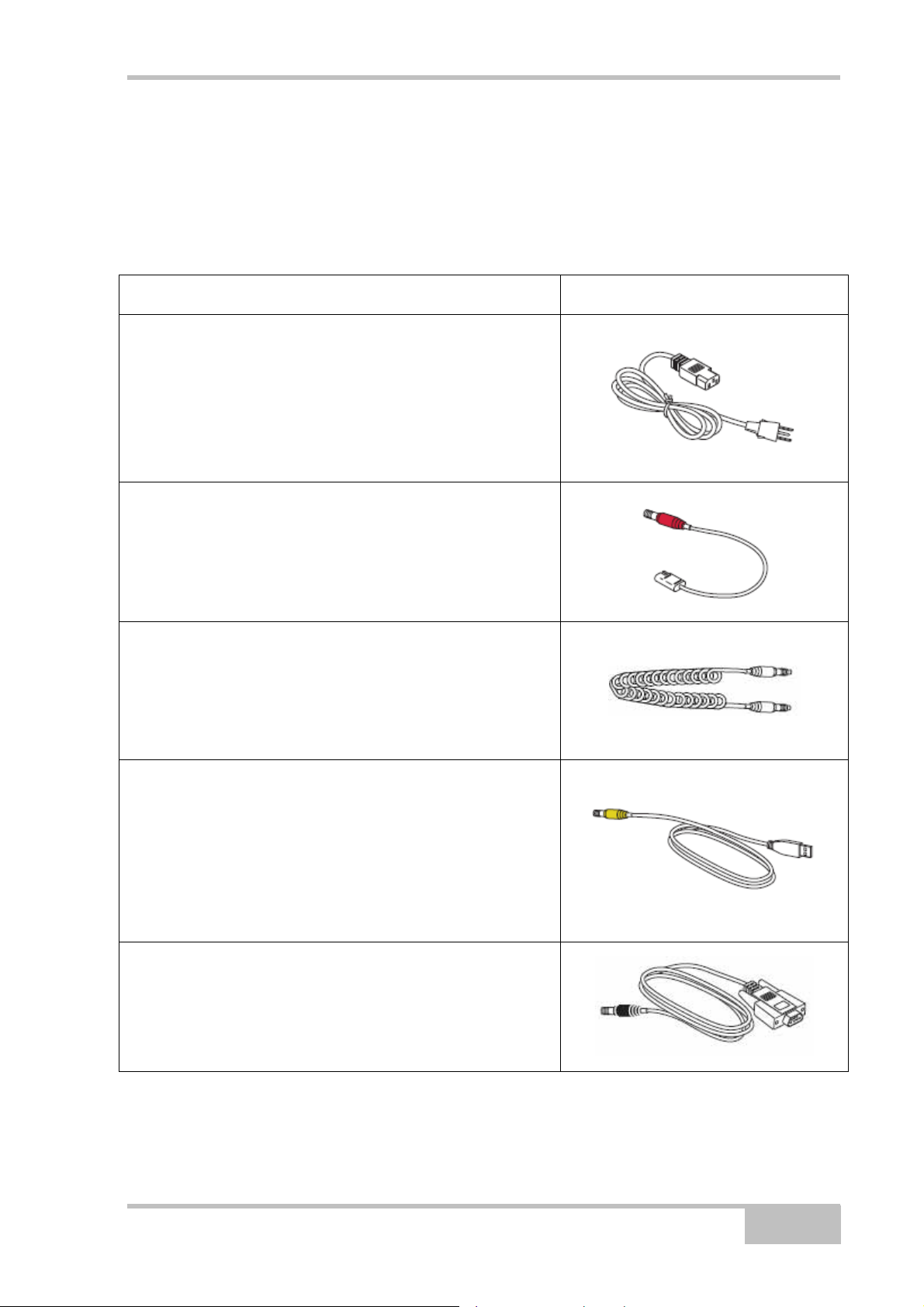
Ознакомление
Кабели
Комплект GR-3 включает стандартные интерфейсные кабели и кабели
питания, позволяющие настроить приемник и обеспечить его питанием.
Таблица 1-3 перечисляет кабели, включенные в комплект GR-3.
Таблица 1-3. Кабели, включенные в комплект GR-3
Описание кабеля Внешний вид кабеля
Кабель питания
Подсоединяет блок питания к заземленной
розетке.
Для США p/n 14-008052-01
Для Европы p/n 14-008054-01
Для Австралии p/n 14-008053-01
Кабель зарядки и питания приемника
Подключает приемник и блок питания через
соединителя SAE для зарядки батарей.
Корпус разъема красный.
p/n 14-008016-03
Кабель блока подзарядки
Подключает приемник к блоку подзарядки.
p/n 14-008072-01 (длина 1.5 метра)
p/n 14-008072-02 (длина 0.5 метра)
Кабель USB
Соединяет приемник с внешним устройством
(контроллером или компьютером) для
высокоскоростной передачи информации и
настройки приемника. Корпус разъема желтый.
p/n 14-008070-01
Кабель последовательного порта
Соединяет приемник с внешним устройством
(контроллером или компьютером) для передачи
информации и настройки приемника. Корпус
разъема черный.
p/n 14-008005-02
P/N 7010-0736
1-19
Page 30
Подготовительные операции
Прочие принадлежности
Наряду с перечисленными ниже принадлежностями в комплект GR-3
включаются дополнительно заказываемые: карта памяти SD емкостью 128
мегабайт, трехметровая измерительная рулетка, регулируемая по длине
вешка и сумка для переноски кабелей.
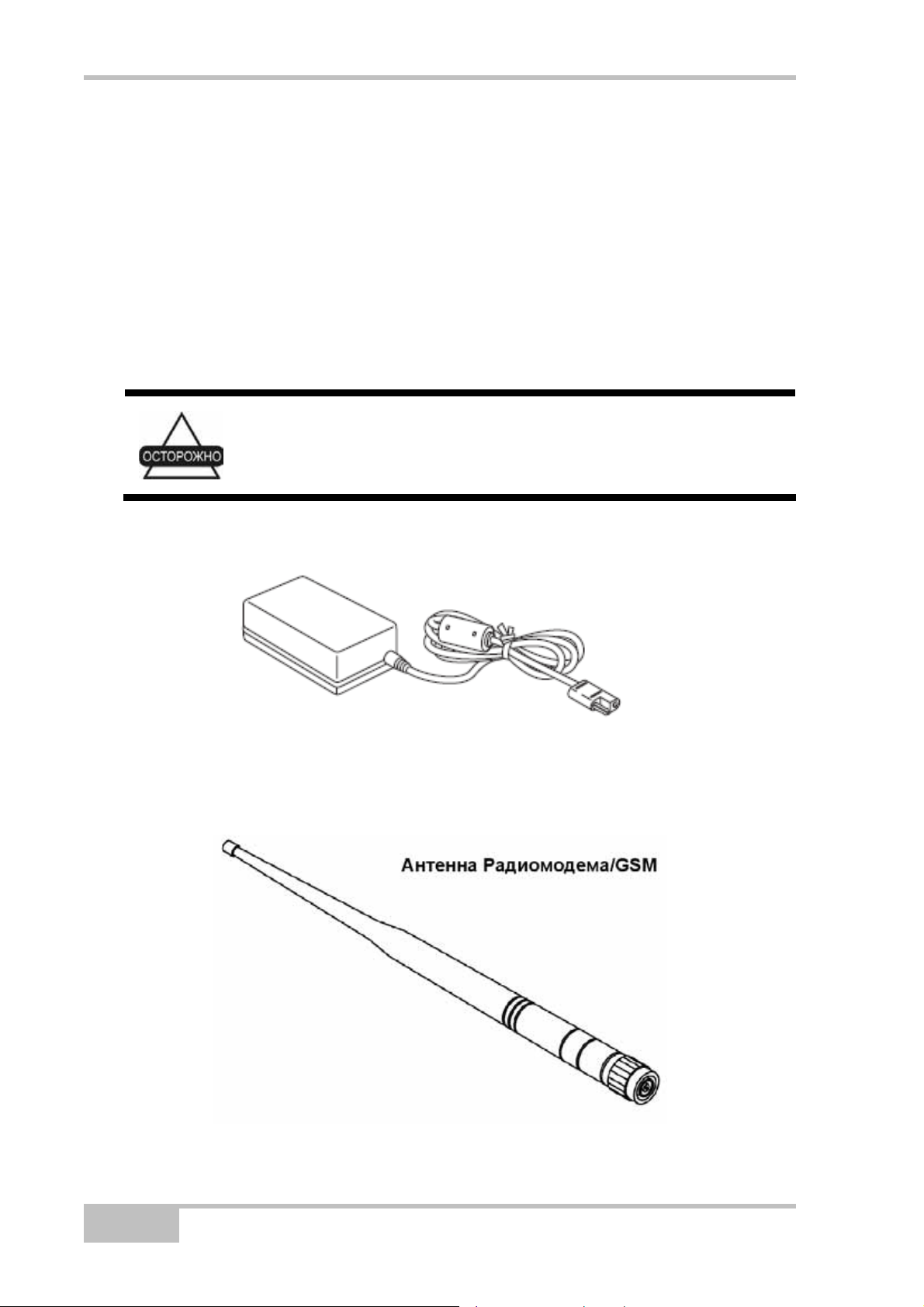
Блок питания (p/n 22-034101-01) заряжает внутренние батареи при
подсоединении к заземленной розетке (см. рис. 1-10). Это устройство
преобразует переменный ток сети электропитания в постоянный ток,
используемый для зарядки
Блок питания нужно использовать только для
зарядки батарей. Не используйте как источник
питания во время съемки.
Блок питания может быть подсоединен к блоку подзарядки или напрямую
к приемнику. Подробнее см. разделы, посвященные вопросам питания, в
Главе 2.
батарей и питания приемника.
Рисунок 1-10. Блок питания
Антенна радиомодема (p/n 30-030012-01) (заказывается дополнительно)
приемопередатчика сигналов с расширенным спектром поддерживает
также рабочий диапазон модема GSM (см. рис. 1-11). Тип примененного на
антенне разъема – reverse polarity TNC.
Рисунок 1-11. Антенна модема
1-20
GR-3. Руководство пользователя
Page 31
Ознакомление
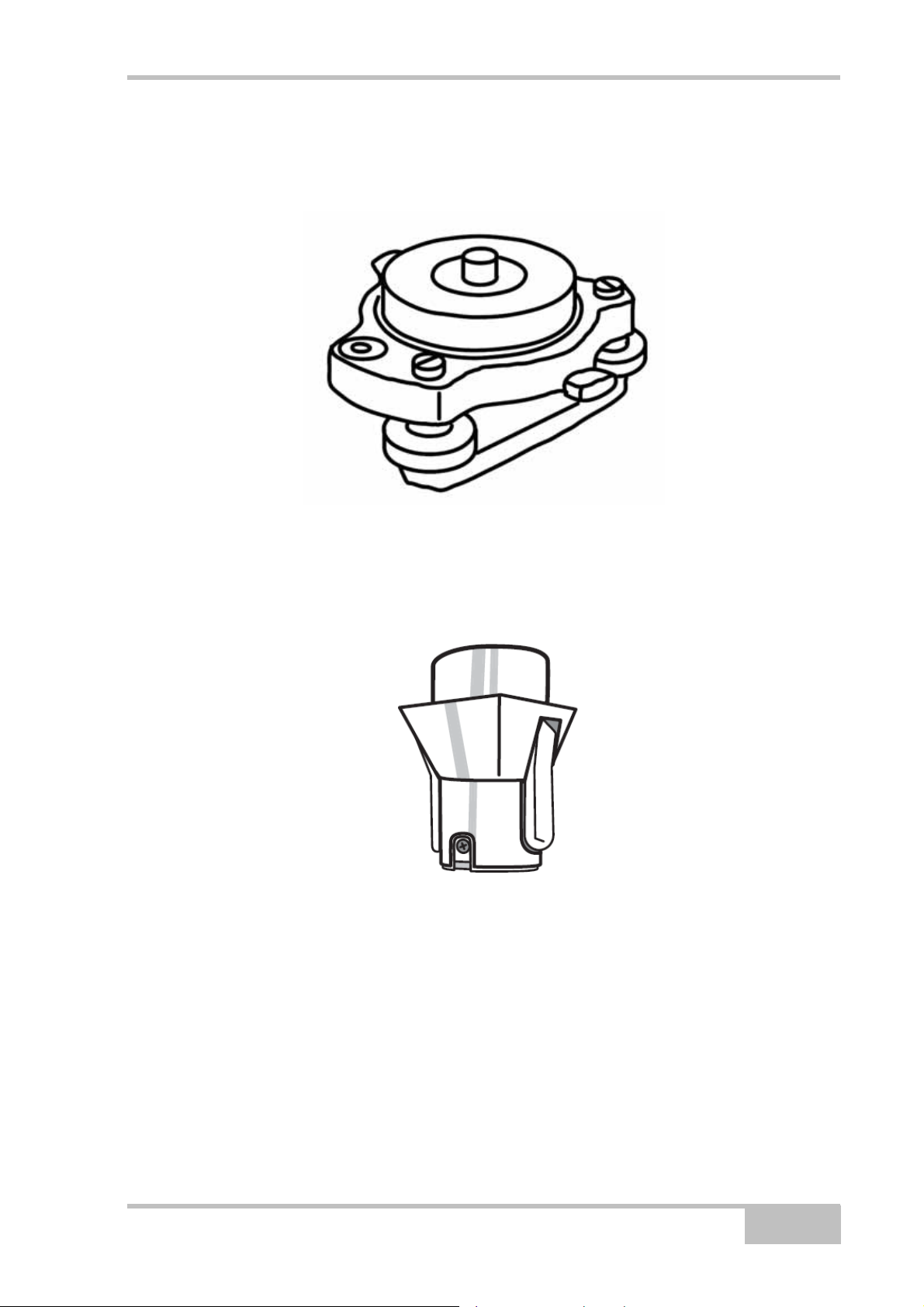
Стандартный трегер и адаптер трегера (p/n 22-006008-01 и p/n
22-006009-011) (заказывается дополнительно) используются для
нивелирования головки штатива и крепления к нему приемника или
антенны (см. рис. 1-12)
Рисунок 1-12. Стандартный трегер с адаптером
Адаптер быстрой установки (p/n 02-850905-01) (заказывается
дополнительно) устанавливается на вешку для обеспечения быстрого
размещения на ней приемника. Используя боковые зажимы, приемник
можно быстро установить на вешку и снять с нее (см. рис. 1-13).
Рисунок 1-13. Адаптер быстрой установки
Более подробную информацию о принадлежностях и вариантах
комплектования, доступных для GR-3 Вы можете узнать,
проконсультировавшись с вашим дилером Topcon.
P/N 7010-0736
1-21
Page 32

Подготовительные операции
Специально заказываемые
принадлежности
Topcon предлагает широкий выбор принадлежностей, предназначенных
для повышения надежности и увеличения эффективности Вашей работы.
Обратитесь к вашему дилеру Topcon за подробной информацией о
принадлежностях, доступных для приемника GR-3.
Адаптер точной установки трегера (см. рис. 1-14) предназначен для
точного центрирования, нивелирования и установки штатива над точкой.
Втулка (p/n 60419) вставляется в адаптер точной установки трегера и
позволяет
надежно закрепить приемник.
Рисунок 1-14. Адаптер точной установки трегера и втулка
Портативный контроллер (см. рис. 1-15) позволяет настраивать и
управлять непосредственно в поле базовыми и подвижными приемниками
GR-3. TopSURV (программное обеспечение полевого сбора данных) и CECDU (программное обеспечение настройки и управления приемника) могут
быть использованы на контроллерах Topcon для настройки и управления
приемником.
Рисунок 1-15. Портативные контроллеры
1-22
GR-3. Руководство пользователя
Page 33

Соглашения, принятые в руководстве
Кабель “ODU на зажимы” (p/n 14-008097-01LF) позволяет подключить
приемник или блок подзарядки к вспомогательной батарее для питания
приемника при проведении съемки (см. рис. 1-13).
Рисунок 1-16. Вспомогательный кабель питания “ODU на зажимы”
Файл авторизации опций (OAF)
Topcon Positioning Systems выпускает файлы авторизации опций (OAF)
для того, чтобы пользователь получил возможность использовать
приобретенные им опции. Файл авторизации опций (OAF) позволяет
покупателям настраивать и конфигурировать приемник под выполнение
конкретных задач, так что остается лишь приобрести необходимые опции.
Обычно в поставляемый с завода приемник вносится временный OAF,
который можно использовать только в установленный период времени.
После поставки приемника заказчику новый OAF включает заказанные и
оплаченные опции на постоянной основе. Возможности приемника
остаются без изменений после очистки энергонезависимого ОЗУ или
перезагрузке приемника.
OAF предоставляет возможность воспользоваться следующими видами
функций. Для получения полного списка возможных опций и их описания
посетите сайт TPS или проконсультируйтесь с Вашим дилером Topcon.
• Тип сигнала (
ГЛОНАСС, GALILEO).
• Внешняя карта памяти SD.
• Темп обновления данных (стандартно 1 Гц, дополнительно 5, 10 или
20 Гц).
• RTK в 1, 5, 10 и 20 Гц.
• RTCM/CMR вход/выход.
• Усовершенствованное подавление многолучевости.
стандартный – L1, дополнительные – L2, L5 GPS,
• Широкозонная дифференциальная подсистема (WAAS).
• Контроль целостности автономным приемником (RAIM).
P/N 7010-0736
1-23
Page 34

Подготовительные операции
Для заметок:
1-24
GR-3. Руководство пользователя
Page 35

Глава 2
Подготовительные
операции
Перед началом съемки с помощью приемника GR-3 нужно установить
следующие программы и произвести перечисленные ниже настройки:
• Установите программу настройки приемника
См. "Установка программ Topcon" на стр. 2-2.
• Необязательная процедура: установка SD и/или SIM карты
См. "Установка SD и SIM карт" на стр. 2-7.
• Зарядите батареи
См. "Зарядка батарей" на стр. 2-9.
• Настройте использование источников питания
внешнего)
См. "Управление питанием" на стр. 2-10 и "Питание приемника" на
стр. 2-14.
• Настройте модуль беспроводной связи Bluetooth
См. "Настройка модуля Bluetooth" на стр. 2-22.
• Соберите альманахи и эфемериды (действия после проведения
первой настройки описаны в главе 3).
См. "Сбор альманахов и эфемерид" на стр. 2-26.
В этой главе также описывается подключение батарей
соединение приемника с компьютером и питание приемника с помощью
различных источников.
(встроенного или
к приемнику,
P/N 7010-0736
2-1
Page 36

Подготовительные операции
Установка программ Topcon
CD диск Topcon GPS+ включает следующие программы, используемые
для настройки и управления приемником. Эти программы также доступны
для зарегистрированных пользователей на сайте TPS.
• PC-CDU Lite, версия 2.1.15 или более новая
• Modem TPS, версия 2.0 или более новая
• BTCONF, версия 1.2 или более новая
• FLoader, версия 1.0.07 или более новая
Для установки программ с CD диска GPS+ вставьте диск в привод
ROM компьютера. При загрузке программ с Интернет сайта извлеките
файлы программ в папку на жестком диске Вашего компьютера.
Следующие разделы описывают установку этих программ, а их
использование описывается в других разделах руководства.
CD-
Установка программы PC-CDU
PC-CDU™ - это программный продукт, работающий под управлением ОС
Windows®, разработанный для управления приемниками производства
фирмы Topcon. PC-CDU использует специализированный язык
интерфейса приемника GPS (GRIL) для настойки разнообразных
параметров приемника и контроля за его функционированием.
Программа PC-CDU существует в двух версиях: полной - PC-CDU MS, и
упрощенной - PC-CDU Lite. PC-CDU Lite доступна бесплатно на Интернет -
сайте Topcon и CD диске GPS+.
Минимальные системные требования: Windows®98 или более новая, RS-
232C
используйте версию PC-CDU 2.1.15 или более новую.
или USB порт, либо Bluetooth. Для правильной настройки приемника
2-2
Обратитесь к справочному руководству PC-CDU для
полной информации об установке и использовании
PC-CDU.
GR-3. Руководство пользователя
Page 37

Установка программного обеспечения Topcon
1. Создайте папку PC-CDU на жестком диске и скопируйте в нее файл
zip архива PC-CDU (полученный с Интернет сайта или CD диска
GPS+).
2. Перейдите в папку PC-CDU и дважды щелкните по файлу PC-
CDU.Zip.
3. Извлеките PCCDU.EXE и присоединенный файл *.dll в папку PCCDU (см. рис. 2-1).
4. Создайте ярлык на рабочем столе вашего компьютера для быстрого
доступа к PC-CDU (см. рис
. 2-1).
Рисунок 2-1. Извлеките программу и создайте ярлык
Для удаления PC-CDU откройте папку, содержащую файл *.exe. Выберите
этот файл и нажмите кнопку Del клавиатуры.
Установка программы Modem TPS
Modem TPS – это программа, предназначенная для настройки для модуля
радиомодема, смонтированного внутри приемника. Modem TPS доступен
либо с сайта TPS, либо с CD диска GPS+.
Минимальные системные требования: Windows®98 или более новая, RS232C или USB порт, либо Bluetooth. Для правильной настройки приемника
используйте версию Modem-TPS 2.0 или более новую.
1. Откройте папку, содержащую программу установки Modem TPS и
два раза щелкните по иконке Setup.exe.
2. Выберите
кнопке Finish.(см. рис. 2-2)
место установки по умолчанию или новое. Щелкните на
P/N 7010-0736
2-3
Page 38

Подготовительные операции
Рисунок 2-2. Выбор папки размещения и установка Modem TPS
3. Щелкните на кнопке OK для завершения установки (см. рис. 2-3).
4. Создайте ярлык на вашем рабочем столе (необязательно) для
быстрого доступа к Modem TPS (см. рис. 2-3).
Рисунок 2-3. Завершение установки и ярлык программы
Для удаления Modem TPS используйте меню Пуск вашего компьютера:
Щелкните Пуск > Все программы > Modem TPS > Удалить Modem TPS и
нажмите Yes в появившемся сообщении. Затем щелкните на кнопке OK
после окончания удаления программы.
Установка программы BTCONF
BTCONF – программа настройки модуля беспроводной связи Bluetooth,
смонтированного внутри приемника. BTCONF доступен либо с Интернет
сайта TPS, либо с CD диска GPS+.
Минимальные системные требования: Windows®98 или более новая, RS232C или USB порт, либо Bluetooth. Для правильной настройки приемника
используйте версию BTCONF 1.2 или более новую.
2-4
GR-3. Руководство пользователя
Page 39

Установка программного обеспечения Topcon
1. Создайте папку BTCONF на жестком диске и скопируйте в нее
файл zip архива BTCONF, полученный с Интернет сайта или CD
диска GPS+.
2. Откройте папку BTCONF и дважды щелкните по файлу
BTCONF.zip.
3. Извлеките btconf.exe в папку BTCONF.
4. Создайте ярлык на рабочем столе вашего компьютера для
быстрого доступа к BTCONF (см. рис. 2-4).
Рисунок 2-4.Извлечение программы и создание ярлыка
Для удаления BTCONF откройте папку, содержащую файл *.exe.
Выберите этот файл и нажмите Delete.
При каждом запуске BTCONF и настройке модуля Bluetooth BTCONF
сохраняет настройки в файле (btconf.ini). BTCONF автоматически
обновляет файл каждый раз, когда вы изменяете настройки модуля
Bluetooth.
Чтобы сохранить уникальные настройки модуля
Bluetooth для разных целей, сохраните копии
BTCONF в отдельных папках.
P/N 7010-0736
2-5
Page 40

Подготовительные операции
Установка программы FLoader
FLoader – утилита для перепрограммирования встроенного ПО платы
питания, модуля GPS и платы радиомодема, размещенных внутри
приемника. FLoader поставляется на CD диске GPS+.
Минимальные системные требования: Windows®98 или более новая, RS232C или USB порт, либо Bluetooth. Для правильной настройки приемника
используйте версию FLoader 1.0.07 или более новую.
1. Создайте папку FLoader на жестком диске и скопируйте в нее файл
zip архива FLoader, полученный с Интернет
GPS+.
2. Откройте папку FLoader и дважды щелкните по файлу FLoader.Zip.
3. Извлеките FLoader.exe в папку FLoader (см. рис. 2-5).
4. Создайте ярлык на рабочем столе вашего компьютера для быстрого
доступа к FLoader (см. рис. 2-5).
сайта или CD диска
Рисунок 2-5. Извлечение программы и создание ярлыка
Для удаления FLoader откройте папку, содержащую файл *.exe. Выберите
этот файл и нажмите Delete.
2-6
GR-3. Руководство пользователя
Page 41

Установка SD и SIM карт
Установка SD и SIM карт
Под съемными батареями расположены слоты для SD и SIM карт. SD
карта используется в качестве носителя для сохранения измерительных
данных; SIM карта обеспечивает возможность установления телефонной
связи между двумя приемниками, оборудованными модулями GSM. SD
карта может быть приобретена в вашем местном магазине компьютерных
товаров; SIM следует приобрести у местного оператора сотовой связи. В
настоящий момент приемник поддерживает SD карты
одного гигабайта.
Вставленные карты обычно не вынимаются. Данные на карте доступны
через USB или последовательный порт, либо с помощью канала
беспроводной связи Bluetooth.
Для установки SD карты (см. рис. 2-6):
1. Удостоверьтесь в том, что приемник выключен.
вместимостью до
2. Выньте батарею, расположенную слева от MINTER.
3. Осторожно вставьте SD карту наклейкой вниз в разъем для SD
карты, расположенный
в самом верху батарейной ниши.
P/N 7010-0736
Рисунок 2-6. Установка карты SD
Не вынимайте карту, если приемник включен. В
результате неправильного извлечения карты
данные, записанные на ней, могут быть утеряны.
2-7
Page 42
Подготовительные операции
После включения прибора плата приемника обнаружит SD карту и она
будет готова к использованию.
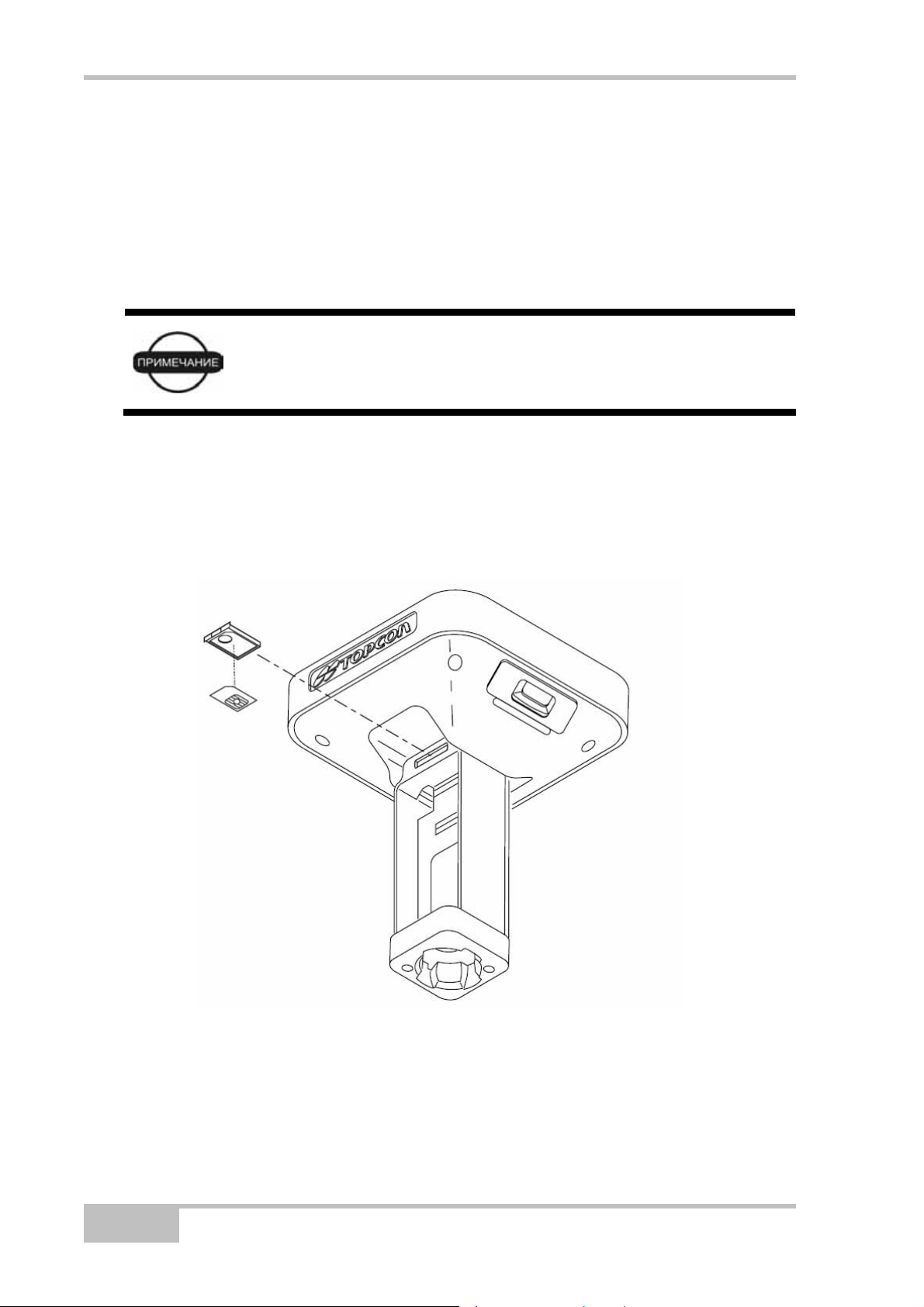
Для установки SIM карты (см. рис. 2-7):
Для прямого соединения между двумя приемниками SIM карта должна
поддерживать Circuit Switched Data (модемное соединение). Для
соединения с IP-адресами сетевых GPS услуг SIM карта должна
поддерживать GPRS.
Для должного соединения SIM карту с поддержкой
Circuit Switched Data и на базовом, и на подвижном
приемниках следует подключить к услугам одного и
того же оператора сотовой связи.
1. Удостоверьтесь в том, что приемник выключен.
2. Выньте батарею справа от MINTER.
3. Вставите SIM карту в держатель.
4. Осторожно вставьте держатель этикеткой вниз в разъем для SIM
карты, расположенный в самом верху батарейной ниши.
Рисунок 2-7. Установка SIM карты.
После включения прибора плата приемника обнаружит SIM карту, и она
будет готова к использованию.
2-8
GR-3. Руководство пользователя
Page 43

Зарядка батарей
Зарядка батарей
Для обеспечения максимальной продолжительности работы батареи
перед началом работы следует зарядить полностью (см. рис. 2-8 на стр. 2-
10).
• Если батареи вставлены в блок подзарядки, то они будут заряжены
в течение шести часов; обе батареи.
• Если батареи вставлены в приемник GR-3, то они будут заряжены в
течение шести часов; обе батареи заряжаются
Эти батареи не подвержены перезаряду.
Батареи поступают с завода в разряженном
состоянии. Полностью зарядите их перед началом
съемки.
одновременно.
Каждая съемная батарея может обеспечить от 4,5 до 8,5 часов работы
(оценочное значение при комнатной температуре) в зависимости от
режима работы приемника.
Если батареи подключены к приемнику, для зарядки
батарей подключите кабель блока питания к порту
1. Выньте батареи из приемника и вставьте их в блок подзарядки.
2. Подключите силовой кабель к блоку питания.
3. Подключите соединители SAE к силовому кабелю и к блоку питания.
4. Подключите кабель блока питания к одному из портов блока
подзарядки (любой из портов обеспечит заряд обеих/каждой батарей).
5. Подключите блок питания к розетке
зарядка батарей занимает примерно шесть часов.
питания приемника. Батареи будут заряжаться
одновременно.
питания переменного тока. Полная
P/N 7010-0736
2-9
Page 44

Подготовительные операции
Рисунок 2-8. Вставка батареи в блок подзарядки и подключение его к розетке
После 500 циклов заряд-разряд у литий-ионных батарей, использованных
в комплекте, должно оставаться не менее 80% от начальной емкости. Эти
батареи не следует разряжать полностью до очередной подзарядки.
Управление питанием
Программа Topcon PC-CDU предоставляет возможность настройки,
слежения за функционированием и управления приемником.
Управление питанием приемника с помощью PC-CDU включает в себя
выбор источника питания и режим заряда, а также отображение текущего
заряда батарей.
1. Подключите приемник к компьютеру. См. раздел "Подключение
приемника к компьютеру" на стр. 2-19 для выполнения этой
процедуры.
2. После подключения выберите пункт
(Настройка > Приемник).
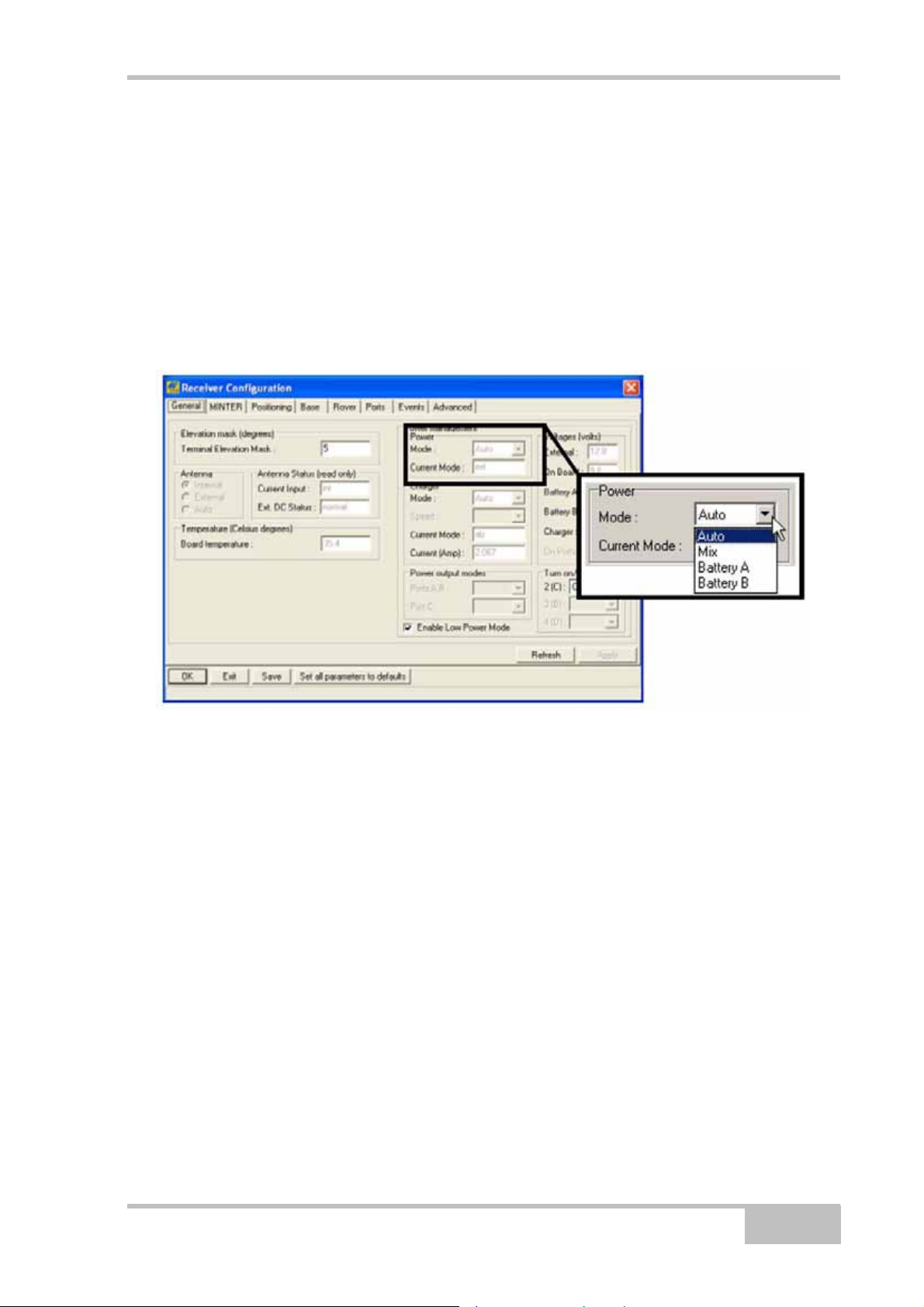
3. В области Power (Питание) щелкните на выпадающем списке Mode
(Режим) и выберите в нем нужный Вам источник питания (см. рис. 2-
9). Поле Current Mode (Текущий режим) указывает источник питания,
используемый в настоящий момент; при использовании блока
подзарядки там будет написано "extbat" (внешняя батарея).
меню Configuration > Receiver
2-10
GR-3. Руководство пользователя
Page 45
Управление питанием
• Auto – выбор источника питания производится автоматически.
• Mix (смешанный)– батареи разряжаются практически
одновременно.
• Battery A – обе батареи будут разряжаться в последовательности:
сначала А, затем В, А, В и так далее. Таким образом, батарея В
будет использоваться дольше на 1-2 часа.
• Battery В – обе батареи будут разряжаться в последовательности:
сначала В, затем А,В,А
и так далее. Таким образом, батарея А
будет использоваться дольше на 1-2 часа.
Рисунок 2-9. Выбор режима питания
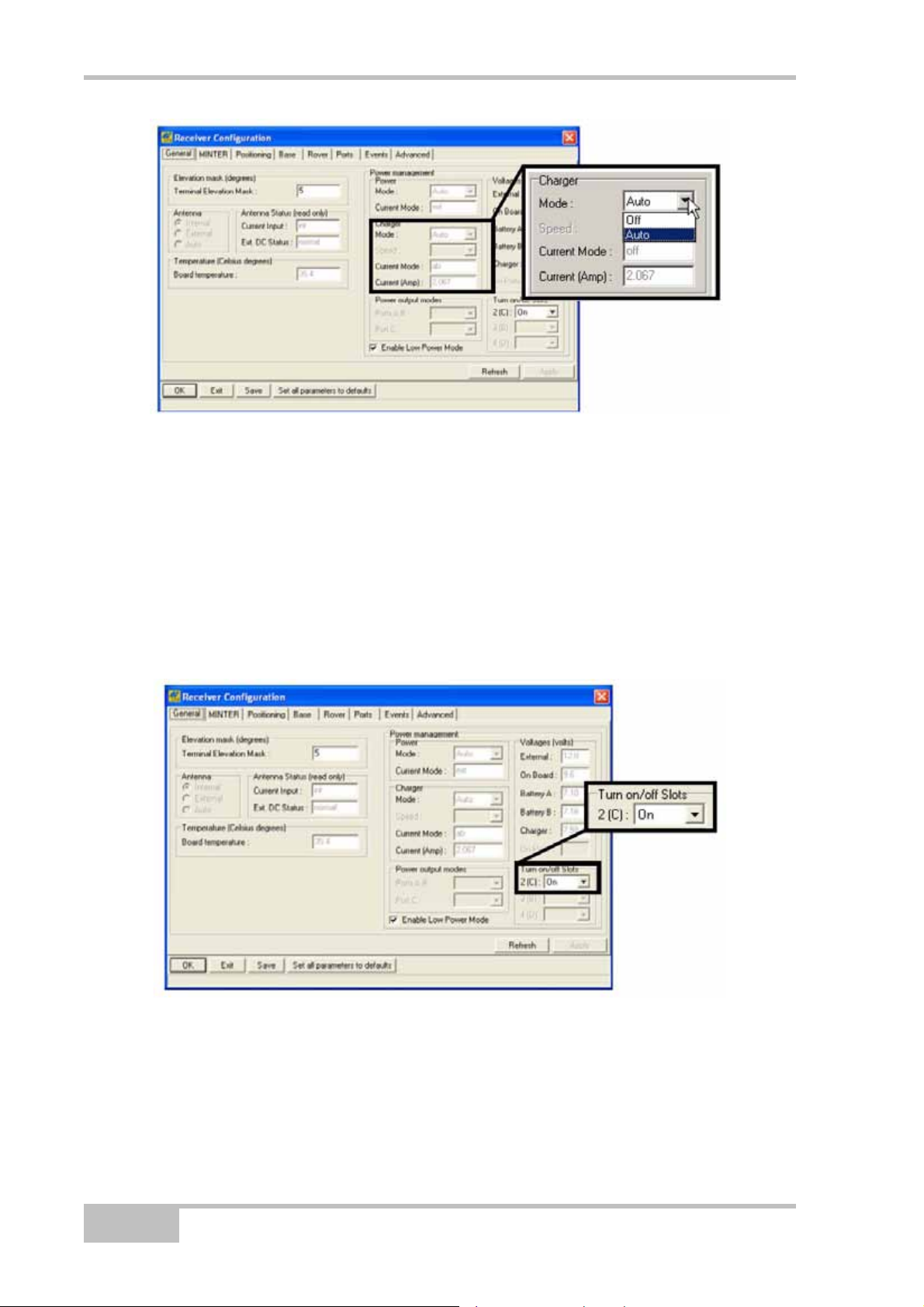
4. В области Charger (Зарядное устройство) щелкните на
выпадающем списке Mode (Режим) и выберите в нем нужный режим
зарядки (см. рис. 2-10). Поле Current Mode (Текущий режим)
указывает на заряжающуюся батарею: a, b или off (батареи не
заряжаются).
• Off – приемник не заряжает батареи
• Auto - приемник автоматически обнаруживает необходимость
подзарядки и заряжает обе батареи.
P/N 7010-0736
2-11
Page 46
Подготовительные операции
Рисунок 2-10. Выбор режима зарядного устройства
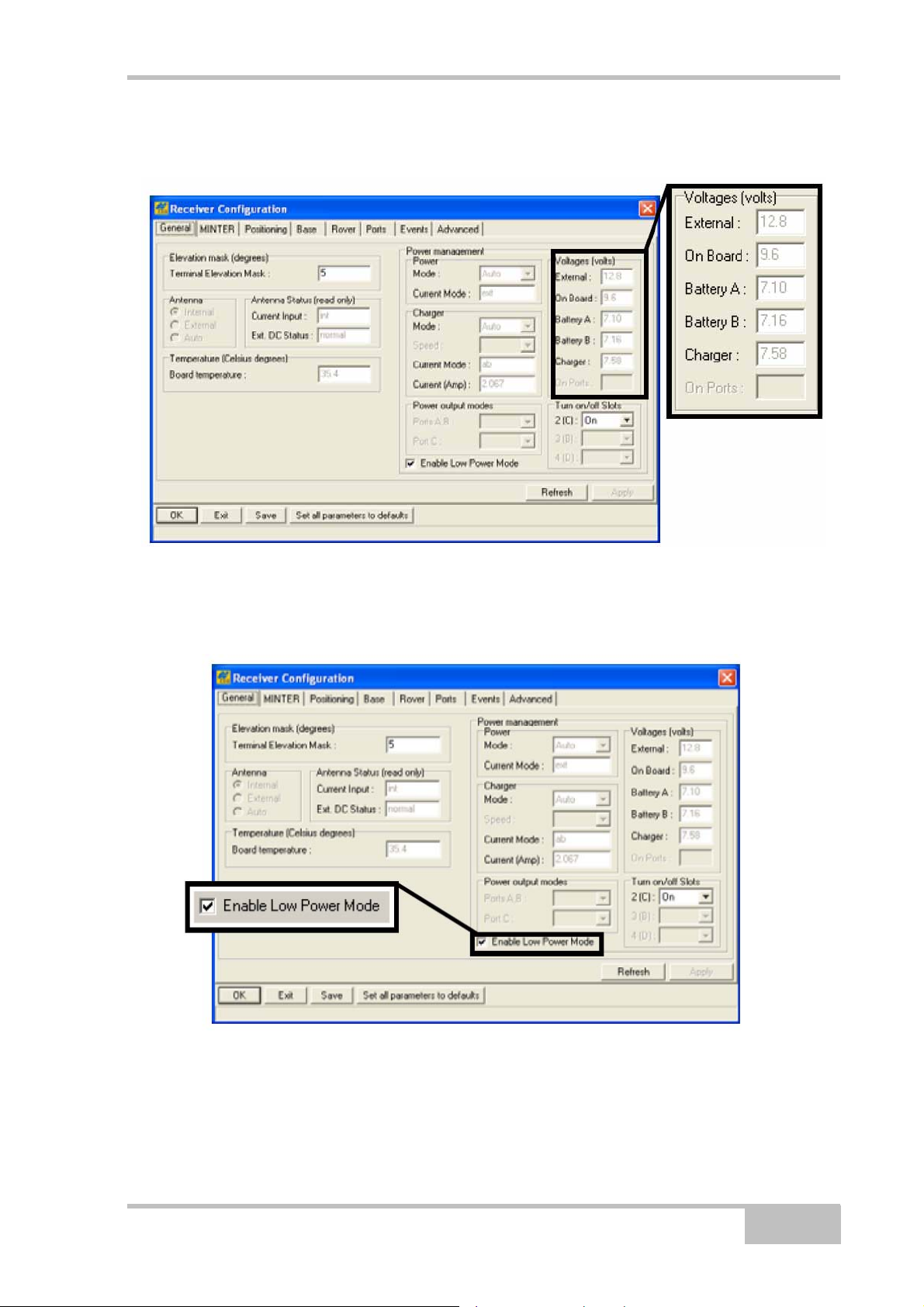
5. В области Turn on/off (включение/выключение) щелкните на
выпадающем списке Slots (Слоты, т.е. гнезда для внутренних
плат) и выберите в нем нужный способ питания внутренних слотов
(см. рис. 2-11).
• On – слот С питается, лишь когда приемник включен
• Off – внутренний слот не будет питаться, даже если включен
приемник
• Always – внутренний слот будет
питаться, даже если приемник
выключен
Рисунок 2-11. Выбор подачи питания – слоты и порты
6. В области Voltages (Вольтметры) (см. рис. 2-12) отображаются
текущие значения напряжений:
2-12
• External – внешнего источника питания.
• On Board – выдаваемого платой питания.
• Battery A – на батарее А.
GR-3. Руководство пользователя
Page 47
Управление питанием
• Battery В – на батарее В.
• Charger – на зарядном устройстве при зарядке батарей.
Рисунок 2-12. Отображение показаний вольтметров
7. Флажок Enable Low Power Mode (Включить режим малого
энергопотребления) позволяет перевести процессор приемника в
режим малого потребления энергии (см. рис. 2-13).
Рисунок 2-13. Установки режима питания
8. Щелкните на кнопке Apply (Применить)
P/N 7010-0736
2-13
Page 48

Подготовительные операции
Питание приемника
При питании от внутренних батарей приемник будет непрерывно
переключаться с одной батареи на другую, поддерживая разницу в 0.4
Вольт между батареями.
Для проверки состояния внутренних батарей проконтролируйте
светодиод BATT или воспользуйтесь программой Topcon.
• Состояние светодиода BATT:
− Зеленый цвет: заряд более 85%.
− Оранжевый цвет: заряд менее 85% и более 15%
− Красный цвет: заряд менее 15%.
•
Проделайте одно из перечисленных ниже действий в программе
PC-CDU:
− Выберите пункт меню Configuration > Receiver (Настройка >
Приемник) для отображения напряжений на батареях в окне
Receiver Configuration (Настройка приемника)
− Выберите пункт меню Help > About (Помощь >О программе)
для отображения показаний вольтметров в окне About PC-
CDU (о PC-CDU)
Использование съемных батарей
В комплект GR-3 входят две съемные перезаряжаемые батареи и
дополнительно заказываемый отсек для батарей типа АА. Каждая батарея
может обеспечить от 4.5 до 8.5 часов работы при комнатной температуре
в зависимости от текущего режима приемника и емкости батареи.
Таблица 2-1. Приблизительное время работы при использовании двух полностью
заряженных батарей.
С использованием съемных батарей
Состояние приемника: Bluetooth включен; обнаружено 10-12 спутников;
комнатная температура
Модем выключен 17 часов
Модем 915+ только в режиме приема 13 часов
Модем 915+ в режиме передачи 250
милливатт
11 часов
Модем 915+ в режиме передачи 1 ватт 9 часов
С использованием отсека для батарей и батарей типа АА
Состояние приемника: Bluetooth включен; обнаружено 10-12 спутников;
Модем выключен 2.5 часа
2-14
GR-3. Руководство пользователя
Page 49

Питание приемника
Для установки батарей (см. рис. 2-14):
1. Поместите низ батареи в низ батарейной ниши, придерживая
батарею.
2. Осторожно дошлите верхнюю часть батареи в батарейную нишу, до
тех пор, пока она не окажется в нужном положении, о чем
свидетельствует характерный щелчок. Удостоверьтесь в том, что
зажим, расположенный вверху батареи, полностью занимает
предназначенное для него
место.
Рисунок 2-14. Установка батарей в приемник GR-3
Для извлечения батарей:
Осторожно сдвиньте вниз зажим, расположенный вверху батареи, и
выньте ее из ниши (см. рис. 2-15).
Рисунок 2-15. Извлечение батарей из приемника GR-3
P/N 7010-0736
2-15
Page 50

Подготовительные операции
Для сборки отсека для батарей типа АА (см. рис. 2-16):
Не используйте аккумуляторные батареи АА.
Не используйте отсек для батарей типа АА для
работы радиомодема в режиме передачи
1. Сдвиньте заднюю крышку отсека для батарей типа АА вниз и выньте
ее.
2. Вставьте четыре батареи АА как показано внутри отсека (и на
рисунке 2-16 ниже).
• Батареи слева должны располагаться положительным
полюсом к дну отсека.
• Батареи справа должны располагаться положительным
полюсом к верхней части отсека.
3. Вставьте заднюю крышку отсека
Рисунок 2-16. Снятие крышки и установка батарей типа АА
обратно.
4. Вставьте отсек для батарей типа АА в батарейную нишу приемника
согласно раздела "Для установки батарей" на стр. 2-15.
2-16
GR-3. Руководство пользователя
Page 51

Питание приемника
Использование дополнительных
источников питания
В дополнение к съемным батареям приемник можно подключить к
внешним батареям. Последние позволяют продолжить использование
приемника после разрядки первых.
Съемные батареи не заряжаются при питании от
батарей, размещенные в блоке подзарядки.
Энергия, поступающая из блока подзарядки, будет
Для соединения приемника и блока подзарядки (см. рис. 2-17):
Блок подзарядки с дополнительными батареями крепится на штатив или
пояс для удобного питания приемника. Артикул кабеля соединения
приемника с зарядным устройством – 14-008072-01 или 14-008072-02.
1. Подсоедините один конец кабеля приемник-блок подзарядки к блоку
подзарядки.
2. Подсоедините другой конец к порту питания приемника.
расходоваться исключительно на питание
приемника.
Рисунок 2-17. Соединение блока подзарядки и приемника
P/N 7010-0736
2-17
Page 52

Подготовительные операции
Для подключения приемника к запасной батарее (см. рис. 2-18):
Используйте кабель “ODU на зажимы” (p/n 14-008097-01LF) для прямого
подключения запасной батареи к порту питания приемника (без
применения разъема SAE).
При питании приемника от внешней батареи
установите режим зарядного устройства Off, иначе
съемные батареи также будут заряжаться, уменьшая
время работы. Подробно установка режима
зарядного устройства описывается в разделе
“
Управление питанием” на стр. 2-10.
1. Подключите кабель “ODU на зажимы” к батарее на 12В.
2. Подключите кабель“ODU на зажимы” к порту питания приемника.
3. Включите приемник.
Рисунок 2-18. Подключение дополнительной батареи к приемнику
Одна внешняя батарея с напряжением в 12В, 2,3 А-час будет питать
приемник с модемом 4,5 часа, а без модема – 6 часов.
2-18
GR-3. Руководство пользователя
Page 53

Подключение приемника к компьютеру
Включение/выключение приемника
Для включения приемника нажмите и удерживайте кнопку питания до
кратковременной вспышки светодиодов.
Для выключения приемника нажмите и удерживайте кнопку питания более
одной и менее четырех секунд (до тех пор, пока не погаснут светодиоды
STAT и REC). Упомянутая выше односекундная задержка препятствует
случайному выключению приемника.
Подключение приемника к
компьютеру
Программа Topcon PC-CDU предоставляет возможность настройки,
слежения за функционированием и управления приемником.
Настройки приемника, манипуляция с файлами и обслуживания
приемника соедините приемник и компьютер с помощью одного из
перечисленных ниже способов и запустите программу PC-CDU:
• С помощью внешнего устройства, поддерживающего Bluetooth
(компьютер/контроллер)
• С помощью кабеля RS232 и компьютера/контроллера
• С помощью
Когда между приемником и компьютером/контроллером установлено
соединение, вы сможете настраивать приемник и его компоненты,
посылать команды приемнику, загружать файлы из памяти приемника;
также вы сможете загружать новое программное обеспечение с помощью
FLoader ™, загрузить OAF и загрузить в приемник файлы настройки.
кабеля USB и компьютера/контроллера
P/N 7010-0736
2-19
Page 54

Подготовительные операции
Беспроводное соединение
Приемник GR-3 использует беспроводной канал связи Bluetooth,
позволяющий передавать данные (файлы) между приемником и
произвольным внешним устройством, поддерживающим Bluetooth –
например, полевым контроллером FC-100 или компьютером с адаптером
USB-Bluetooth либо адаптером PCMCIA-Bluetooth.
Изменение настроек порта D приемника, принятых
по умолчанию, повлияет на канал связи Bluetooth.
Настройки порта D по умолчанию: 115200, 8, N, 1,
квитирование не используется.
Процедура соединения приемника с внешним устройством незначительно
меняется в зависимости от типа используемого внешнего устройства.
Общая процедура установления связи описана ниже.
Обратитесь к справочному руководству вашего
устройства, оснащенного Bluetooth, для получения
подробной информации об установлении
соединения.
1. Включите поддерживающее Bluetooth внешнее устройство и
приемник. Режим внешнего устройства по умолчанию – Ведущий
(Master), режим Bluetooth приемника – Ведомый (Slave).
2. Включите на внешнем устройстве (ведущем) поиск приемника
(ведомого).
3. После того, как ведущее устройство обнаружит приемник,
проделайте действия, описанные в справочном руководстве
внешнего устройства, чтобы подключить его к приемнику.
4. Подключитесь к необходимой программе настройки
Modem-TPS, и т.д.) следуя процедуре, описанной в разделах о
настройке.
Если вы не можете создать соединение, убедитесь в том, что разрешено
использование третьего слота (внутреннего разъема) приемника.
(PC-CDU,
1. Подключите приемник к компьютеру с помощью кабеля RS232 или
кабеля USB и воспользуйтесь программой PC-CDU (см. ниже).
2. Выберите пункт меню Configuration > Receiver > General
(Настройка > Приемник > Общие установки
3. В области Turn on/off (включение/выключение) выставьте флажок
Slots 2 (С).
2-20
GR-3. Руководство пользователя
).
Page 55

Подключение приемника к компьютеру
Соединение кабелем RS232
1. Соедините последовательный порт компьютера (обычно COM1) с
последовательным портом приемника.
2. Нажмите кнопки питания на компьютере и приемнике, чтобы
включить их.
3. Подключитесь к необходимой программе настройки (PC-CDU,
Modem-TPS, и т.д.) следуя процедуре, описанной в разделах о
настройке.
Соединение кабелем USB
Убедитесь в том, что на компьютер установлен драйвер TPS USB, и что
опция USB разрешена.
1. Соедините порт USB вашего компьютера с USB портом вашего
приемника с помощью USB кабеля.
2. Нажмите кнопки питания на компьютере и приемнике, чтобы
включить их.
3. Подключитесь к необходимой программе настройки (PC-CDU)
следуя процедуре, описанной в разделах о настройке.
P/N 7010-0736
2-21
Page 56

Подготовительные операции
Настройка модуля Bluetooth
Программа BTCONF производства фирмы Topcon предназначена для
настройки модуля Bluetooth и позволяет:
• получить доступ к модулю Bluetooth.
• настроить модуль Bluetooth.
• проверить или изменить настройки модуля.
Для доступа к модулю Bluetooth установите программу BTCONF на
компьютер, затем установите соединение между компьютером и
приемником и запустите программу настройки. Подробнее см. раздел
Установка программы BTCONF" на стр. 2-4.
"
После того, как программа BTCONF установлена, для настройки модуля
Bluetooth проделайте следующие шаги:
1. Соедините последовательный порт компьютера (обычно COM1) с
последовательным портом приемника с помощью кабеля RS232.
Включите приемник и компьютер.
2. Запустите программу настройки модуля Bluetooth (см. рис. 2-19).
Чтобы узнать версию BTCONF и данные об авторском праве,
щелкните на кнопке About (О программе).
Рисунок 2-19. Главное окно настройки модуля Bluetooth
2-22
GR-3. Руководство пользователя
Page 57

Подключение приемника к компьютеру
3. С помощью выпадающего списка в верхнем левом углу выберите
последовательный порт компьютера, используемый для связи (см.
рис. 2-20).
4. Для соединения компьютера и модуля Bluetooth щелкните на кнопке
Connect (Соединить).
Рисунок 2-20 Выберите порт для связи и щелкните на кнопке Connect (Соединить)
После того, как будет установлено соединение приемника и компьютера,
во вкладке Identification (Идентификация), см. рис. 2-21, появятся
следующие данные:
• Bluetooth name – название модуля Bluetooth.
• Bluetooth address – уникальный электронный адрес модуля.
• Firmware version – текущая версия встроенного программного
обеспечения модуля Bluetooth.
Рисунок 2-21. Программа BTCONF. Вкладка Identification (Идентификация)
Номер последовательного (COM) порта и скорость передачи данных
отображаются в левом нижнем углу.
P/N 7010-0736
2-23
Page 58

Подготовительные операции
5. Выберите вкладку Parameters (Параметры) (см. рис. 2-22). В ней
можно установить идентификатор (название) модуля. В области
Security (Безопасность) устанавливаются параметры защиты от
несанкционированного доступа.
6. Введите уникальное название модуля Bluetooth длиной до 14
символов (см. рис. 2-22) и щелкните на кнопке Apply (Применить).
Рисунок 2-22. Программа BTCONF. Вкладка Parameters (Параметры)
7. Установите перечисленные ниже параметры безопасности (см. рис.
2-23 на стр. 2-25) и щелкните на кнопке Apply (Применить):
• Bluetooth PIN (персональный идентификационный код Bluetooth)
– введите для установления персонального идентификационного
кода модуля Bluetooth (до 16 символов).
• Encryption (шифрование) – если это поле выбрано, то по
беспроводному каналу Bluetooth данные будут передаваться в
зашифрованном виде.
• Authentication (аутентификация, проверка
подлинности) – если
это поле выбрано, то соединение будет установлено только после
предоставления вторым устройством PIN кода, введенного в поле
Bluetooth PIN.
Если Вы не хотите использовать защиту канала
данных, оставьте перечисленные выше поля
незаполненными.
2-24
GR-3. Руководство пользователя
Page 59

Подключение приемника к компьютеру
Рисунок 2-23. Параметры защиты BTCONF
8. Выберите вкладку Serial Inte rface ( Последовательный интерфейс)
(см. рис. 2-24). Выставьте флажок Echo (Эхо) если хотите, чтобы
модуль Bluetooth посылал принятые символы обратно (полезно при
доступе через терминальную программу). При необходимости
щелкните на кнопке Apply (Применить)
9. Для выхода из программы BTCONF щелкните на кнопке Disconnect
(Отсоединить), затем Exit (Выход).
Рисунок 2-24. BTCONF. Вкладка Serial Interface (Последовательный интерфейс)
P/N 7010-0736
2-25
Page 60
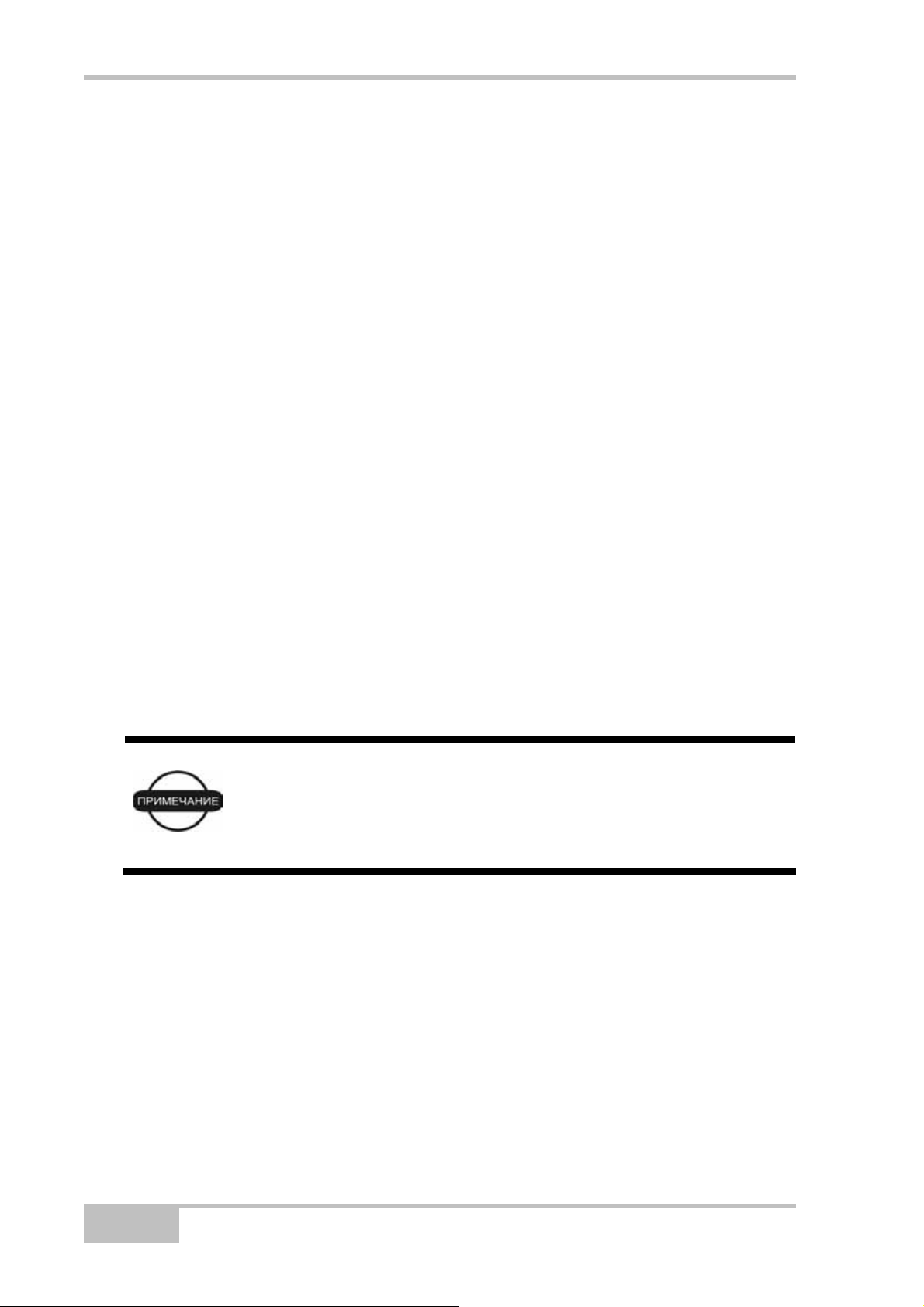
Подготовительные операции
Сбор альманахов и эфемерид
Каждый спутник передает навигационное сообщение, которое содержит
эфемериды спутника, альманах и другую информацию. Эфемериды
описывают положение спутника как функцию времени. По данным
альманаха можно рассчитать грубое положение спутника, передавшего
информацию, и всех спутников этой же системы.
• Спутники систем GPS и ГЛОНАСС передают эфемериды
циклически, с периодом 30 секунд.
• Спутники системы GPS передают
циклически с периодом 12,5 минут; спутники системы ГЛОНАСС
передают информацию альманаха циклически с периодом 2,5
минуты.
Если приемник обладает альманахом, то время, необходимое для поиска
и захвата сигнала спутника, существенно уменьшается.
Приемник регулярно обновляет альманах и эфемериды, сохраняя самые
новые данные в своей энергонезависимой памяти (NVRAM).
1. Установите приемник (соедините с
необходимо) в месте хорошего обзора небосвода.
2. Включите приемник.
3. Подождите примерно 15 минут, пока спутник собирает данные
альманаха от спутников.
Если 15 минут прошло, а приемник не захватил
спутниковые сигналы, очистите энергонезависимую
память (NVRAM). Эта процедура описана в разделе
"Очистка энергонезависимой памяти (NVRAM)" на
стр. 5-13.
информацию альманаха
внешней антенной, если это
Следует собрать или обновить альманах и эфемериды при следующих
условиях:
• Если приемник был выключен в течение продолжительного
периода времени.
• Если последнее известное для приемника местоположение,
сохраненное в энергонезависимой памяти (NVRAM), отличается от
текущего местоположения на несколько сотен километров.
• После загрузки нового OAF.
• После загрузки нового программного обеспечения.
2-26
GR-3. Руководство пользователя
Page 61

Сбор альманахов и эфемерид
• После очистки энергонезависимой памяти (NVRAM).
• Перед проведением съемки.
P/N 7010-0736
2-27
Page 62

Подготовительные операции
Для заметок:
2-28
GR-3. Руководство пользователя
Page 63

Глава 3
Настройка GR-3
И базовый, и подвижный приемники следует настроить в зависимости от
требуемого метода съемки.
• В приложениях, где требуется получение данных о местоположении
в реальном времени, базовый приемник вырабатывает поправки,
необходимые для расчета точного положения подвижного
приемника.
Базовая станция обычно устанавливается на пункте с известными
координатами и производит измерение параметров сигналов
спутников
спутников, он измеряет фазу несущей частоту и задержку кода для
вычисления и проверки собственного местоположения. Потом
приемник передает данные измерений через радиоканал
(радиомодем с расширенным спектром передачи или GSM) на
подвижный приемник.
GPS/ГЛОНАСС. Когда приемник собирает информацию со
• Подвижный приемник вносит поправки, полученные с базовой
станции, в собственные измерения и
относительное местоположение.
Подвижные приемники – это приемники GPS, монтируемые на
съемочной вехе или двуногом штативе, которые сравнивают
информацию с базовой станции с данными измерений со спутников,
и применяют сложные алгоритмы для расчета собственного точного
местоположения.
• В приложениях, предназначенных для камеральной обработки,
приемники обычно записывают сдвиг кода и отсчет
частоты на общие моменты времени. Эта информация потом
обрабатывается с помощью программ камеральной обработки
(например, Topcon Tools)
определяет свое точное
фазы несущей
P/N 7010-0736
3-1
Page 64

Настройка GR-3
При настройке приемников для съемки RTK сверьтесь с приведенным
ниже перечнем для того, чтобы удостовериться в том, что приемники
настроены правильно.
□ Выполните подготовительные операции, описанные в главе
□ Настройте один приемник как базовую станцию RTK, а другой - как
подвижный приемник RTK. См. "Настройка приемника" на стр. 3-10.
□ Настройте канал передачи данных для передачи и приема поправок.
• Для радиомодемов с расширенным спектром передачи см. раздел
"Настройка радиомодема с расширенным спектром" на стр. 3-3.
• Для модема GSM/GPRS см. раздел "Настройка радиомодема
GSM" на стр. 3-7.
□ Установите базовый приемник на известную точку для начала сбора
информации статического сеанса измерений и передачи поправок.
Используйте подвижный приемник для определения RTK
местоположений. Подробнее см. раздел "Установка приемника" на стр.
4-1.
При настройке приемников для съемки с последующей камеральной
обработкой сеансов измерений сверьтесь с приведенным ниже перечнем
для
того, чтобы удостовериться в том, что приемники настроены правильно.
□ Выполните подготовительные операции, описанные в главе
2.
2.
□ Настройте один приемник как базовый, а другой - как подвижный. См.
"Настройка приемника" на стр. 3-10.
□ Установите базовый приемник на известную точку для начала сбора
данных статического сеанса измерений. Используйте подвижный
приемник для сбора данных статических или кинематических сеансов
измерений. Подробнее см. раздел "Установка приемника" на стр. 4-1.
3-2
GR-3. Руководство пользователя
Page 65
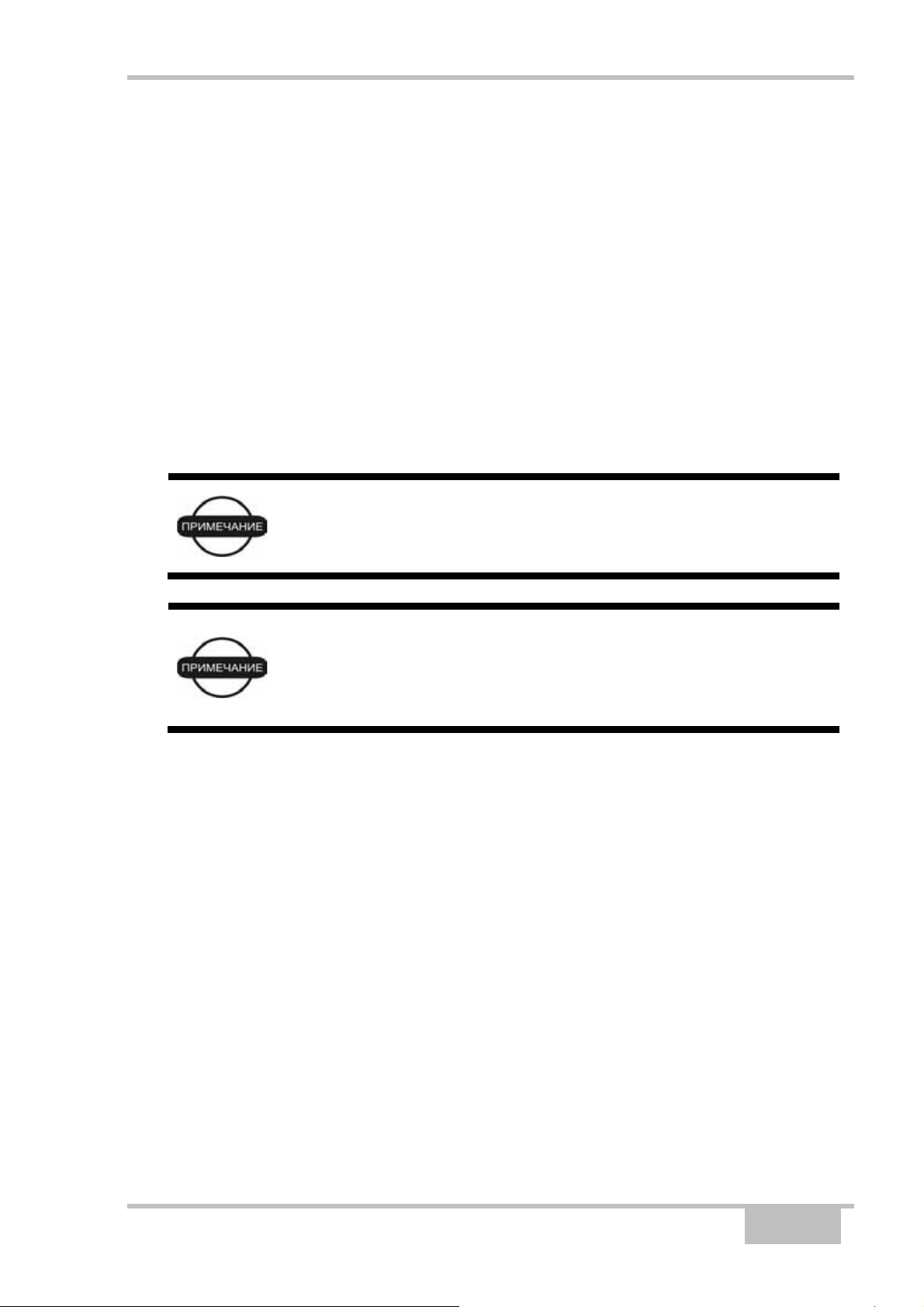
Настройка радиомодема
Настройка радиомодема
Modem-TPS – это программа настройки радиомодемов, встроенных в
приемники Topcon Modem-TPS обеспечивает следующие возможности:
• Подключение компьютера к интегрированному радиомодему
через последовательный порт или беспроводной канал связи
Bluetooth.
• Отображение информации о радиомодеме, установленном в
приемнике.
• Программирование настроек радиомодема.
Настройка приемника, оснащенного радиомодемом с расширенным
спектром или GSM модулем с использованием Modem-TPS, описывается
ниже.
Обратите внимание на то, что одновременная
работа SS радиомодема и модема GSM не
допускается. В каждый момент времени можно
использовать только один.
Обязательно разорвите соединение до завершения
работы программы Modem-TPS для предупреждения
возможных конфликтов в доступе к
последовательному порту после завершения
настройки радиомодема.
В программы Topcon для настройки и съемки TopSURV и Pocket 3D также
обладают возможностями настройки приемников Topcon. Обратитесь к
справочным руководствам TopSURV или Pocket 3D для более подробной
информации.
Настройка радиомодема с
расширенным спектром
Встроенный TPS радиомодем FH915+ реализует канал связи расширенным
спектром (SS, spread spectrum) между базовым и подвижным приемниками.
Для настройки SS радиомодема необходимо следующее оборудование:
• Компьютер под управлением ОС Windows® 98 или более новой.
• Установленная на компьютер программа Modem-TPS версии 2.0.
• Кабель RS-232 (или поддержка беспроводной технологии
Bluetooth).
Настройка модуля GSM описана в разделе "Настройка радиомодема GSM".
P/N 7010-0736
3-3
Page 66

Настройка GR-3
1. Подключите приемник к компьютеру. Включите приемник.
2. Запустите программу Modem-TPS и выберите последовательный
(СОМ) порт подключения приемника (см. рис. 3-1). Щелкните на кнопке
Connect (Соединить).
Рисунок 3-1. Подключение Modem-TPS
3. Во вкладке Radio Link (Радиоканал) установите перечисленные ниже
параметры (см. таблицу 3-1) и щелкните на кнопке Apply (Применить)
(см. рис. 3-2 на стр. 3-6).
Таблица 3-1.Параметры приемника для вкладки радиосвязи
Параметр Базовый приемник Подвижный приемник
Выберите тип радио FH915 или FH915+
• Радиомодем FH915 может быть настроен как
Protocol (Протокол)
Location (Страна)
Operation mode
(Режим работы)
Output power
(Выходная мощность)
Выберите страну, в которой будет использован
приемник.
При выборе Австралии будут применяться два
поддиапазона для соответствия местным требованиям.
Эта функция автоматическая и будет невидима для
пользователя.
Выберите Off (Выключен), если радио выключено;
выберите Repeater (Репитер), если радиомодем
способен выступать в этом качестве.
Выберите Transmitter
(Передатчик).
Выберите режим передачи
для радиомодема.
Выберите скорость передачи информации
радиоканала.
В отличие от скорости передачи по последовательному
приемник или передатчик
• Радиомодем FH915+ может быть настроен как
приемник, передатчик или репитер.
Выберите Receiver
(Приемник).
Недоступно
3-4
GR-3. Руководство пользователя
Page 67

Настройка радиомодема
Link Rate (Скорость
передачи данных по
радиоканалу).
Для радиомодема
FH915+ этот параметр
устанавливается
автоматически.
Channel (Канал)
кабелю, параметр “скорость передачи данных по
радиоканалу” устанавливает темп передачи данных по
эфиру.
• 9600 –информационный пакет повторяется 3 раза;
пакеты закодированы для уменьшения влияния
помех. Это обеспечивает максимальную
надежность передачи данных, но уменьшает
пропускную способность.
• 12000 –информационный пакет повторяется 5
кодировка не применяется.
• 17000 – информационный пакет повторяется 3 раза;
кодировка не применяется.
• 24000 – применяется только кодировка.
• 51000 – не применяет повтора или кодировки. Это
обеспечивает максимальную пропускную
способность, но уменьшает надежность передачи
данных.
Для обеспечения максимальной эффективности размер
блока данных, передаваемых радиомодему за единицу
времени, не должен превышать скорость передачи
данных по радиоканалу. При выборе скорости передачи
данных по радиоканалу руководствуйтесь таблицей 3-2.
Установите канал, который будет использоваться для
передачи и приема данных. Каждый канал использует
уникальную частоту, и это позволяет одновременно
использовать до пяти радиосистем на одном участке.
• Для обоих приемников в одной сети используйте тот
же самый канал.
• Для других сетей выберите другие каналы.
раз;
Таблица 3-2. Скорость передачи данных по радиоканалу и последовательному
порту
Размер
информационного
пакета (в битах)
Скорость
передачи по
RS-232
(бит/с)
Скорость
передачи
данных по
радиоканалу
Скорость приема по
RS-232 (бит/с)
(бит/с)
0-9600 9600;19200 9600а;12000 9600;19200;38400;57600
9600-12000 19200;38400 12000а;24000 19200;38400;57600
12000-17000 19200;38400 17000а;24000 19200;38400;57600
17000-24000 38400;57600 24000 38400;57600
24000-51000 57600 51000 57600
а) – рекомендованная скорость передачи данных для этого размера
информационного пакета.
P/N 7010-0736
3-5
Page 68

Настройка GR-3
4. Во вкладке Serial Interface (Последовательный интерфейс) выберите
перечисленные ниже параметры скорости передачи и щелкните на
кнопке Apply (Применить) (см. рис. 3-2).
• Baud Rate (Скорость передачи) – выберите скорость передачи
последовательного порта модема. Для приемника и модема
следует установить одинаковую скорость обмена.
• Поле RTS/CTS устанавливает способ квитирования потока
данных между приемником и
("Включено") разрешает применение аппаратного квитирования.
Если скорость передачи данных по
последовательному порту выше скорости передачи
данных по радиоканалу, следует разрешить
аппаратное квитирование для предотвращения
потерь данных.
модемом. Состояние "On"
Рисунок 3-2. Подтверждение параметров радиосвязи и скорости передачи
5. По окончании выберите пункт меню File > Disconnect (Файл >
Отсоединить).
Настройка GSM радиомодема
Санитарно-гигиенические нормы эксплуатации
радиосредств выполняются на удалении более 25 см
от антенны GSM модуля.
Плата встроенного в приемник GR-3 SS радиомодема, оборудованная
модулем GSM, позволяет установить прямое соединение по сети сотовой
3-6
GR-3. Руководство пользователя
Page 69

Настройка радиомодема
связи между базовым и подвижным приемниками или соединение по
протоколу IP (Internet Protocol). Для настройки GSM радиомодема
необходимо следующее:
• Компьютер под управлением ОС Windows® 98 или более новой.
• Установленная на компьютер программа Modem-TPS версии 2.0.
• Кабель RS-232 (или поддержка беспроводной технологии
Bluetooth).
• Номер телефона базовой станции.
1. Подключите приемник к компьютеру. Включите приемник.
2. Запустите программу Modem-TPS и
выберите последовательный
(СОМ) порт подключения приемника (см. рис. 3-3). Щелкните на кнопке
Connect (Соединить).
Рисунок 3-3. Подключение Modem-TPS
3. На вкладке GSM установите следующие параметры (см. таблицу 3-3) и
щелкните на кнопке Apply (Применить) (см. рис. 3-4).
Если некоторые поля отображают “N/A” ("Недоступно"), щелкните на
кнопке Refresh (Обновить).
Таблица 3-3. Параметры приемника для вкладки FCS
Параметр Базовый приемник Подвижный приемник
Mode (Режим) Выберите Slave (Ведомый). Выберите Master (Ведущий).
PIN код Если требуется, введите Персональный Идентификационный
Номер (PIN код).
Dial (Номер) Оставьте незаполненным Введите телефонный номер
P/N 7010-0736
3-7
Page 70

Настройка GR-3
базового GSM модема
Send time
(Время
отправки)
Введите период времени (в секундах), во время которого
базовый/подвижный GSM модем должен передать сервисное
слово на подвижный удаленный/базовый GSM модем.
• Этот параметр используется для поддержания
надежного соединения между двумя модемами и для
предотвращения ненужной перезагрузки модема.
• Чтобы гарантировать надежное модемное соединение,
этот параметр должен быть больше периода передачи
дифференциальных поправок.
Установите время отправки на ноль, если и базовый, и
подвижный приемники – GR-3 со встроенными GSM
модемами.
Рисунок 3-4. Выбор GSM параметров для базового и подвижного приемников
4. Для отображения данных информацию о модеме GSM щелкните на
кнопке GSM info (Данные GSM) (см. рис. 3-5). Выбор кнопки Quit
(Выход) осуществляет возврат к вкладке GSM.
Поле Signal Quality (Качество сигнала) является отсчетом уровня
сигнала GSM. Чем меньше число по абсолютному значению (обратите
внимание на то, что отсчет уровня сигнала отрицателен) – тем лучше
качество сигнала. Минимальный сигнал
3-8
(отсечка) -111 дБ.
GR-3. Руководство пользователя
Page 71

Настройка радиомодема
Рисунок 3-5. Отображение информации о модеме GSM
5. Во вкладке Serial Interface (Последовательный интерфейс) выберите
скорость обмена с модемом. Для приемника и модема следует
установить одинаковую скорость обмена.
6. По окончании выберите пункт меню File > Disconnect (Файл >
Отсоединить).
7. При необходимости запустите программу PC-CDU и настройте
приемник в качестве базовой станции RTK.
P/N 7010-0736
3-9
Page 72

Настройка GR-3
Настройка приемника
Приемник GR-3 можно настроить для работы в режиме RTK или сбора
данных для камеральной обработки.
• Статическая (неподвижная) базовая станция производит
спутниковые измерения и сохраняет их во встроенной памяти.
• Базовая станция RTK производит спутниковые измерения,
вычисляет дифференциальные поправки и передает их на
подвижные приемники.
• Подвижная станция, работающая в режиме с последующей
камеральной
тому же созвездию и с тем же временным интервалом, что и
статическая базовая станция и сохраняет их во встроенной
памяти.
• Подвижная станция RTK производит спутниковые измерения и
использует принятые от базовой станции дифференциальные
поправки для вычисления своего точного относительного
местоположения.
обработкой, производит спутниковые измерения по
• Подвижная станция, выступающая в
в эфир принятые от базовой станции RTK поправки, и тем самым
увеличивает зону покрытия базовой станции.
Для настройки и обслуживания приемника, а также управления файлами,
установите соединение между приемником и компьютером по одному из
перечисленным ниже каналов связи и запустите программу PC-CDU.
• Беспроводной канал Bluetooth.
• Кабель последовательного интерфейса RS-232.
•
Кабель USB (заранее следует установить драйвер TPS USB,
который предоставит поставщик оборудования).
Программа PC-CDU (Personal Computer - Control Display Unit, терминал
управления на ПК) предназначена для управления приемником. Полное
описание возможностей этой программы выходит за рамки данного
руководства. Более подробные разъяснения о порядке работы с
программой PC-CDU приводятся в “Руководстве пользователя PC-CDU”,
предоставляемом поставщиком оборудования.
Программа PC-CDU позволяет настраивать разные узлы
настройки сохраняются в энергонезависимой памяти устройства. Установки
влияют на интерфейс MINTER. Полное описание возможностей этой
программы выходит за рамки данного руководства.
роли репитера, переизлучает
прибора, при этом
3-10
GR-3. Руководство пользователя
Page 73

Настройка приемника
После установления связи между компьютером и приемником доступны
следующие возможности:
• Настройка приемника и его отдельных узлов.
• Передача команд на приемник.
• Выгрузка файлов из памяти приемника.
• Загрузка нового OAF и прочих файлов настроек в приемник.
Описанные ниже наборы настроек для базового и подвижного приемника
рекомендуются для типовых применений. Однако
, Вы можете вносить
необходимые изменения в соответствии с конкретной обстановкой при
выполнении работ.
Любое изменение следует производить после
тщательного изучения описания соответствующего
параметра в “Руководстве пользователя PC-CDU”.
1. Установите соединение между компьютером и приемником, действуя
согласно указаниям раздела “
стр.
2-19.
Подключение приемника к компьютеру” на
2. Запустите программу PC-CDU на компьютере. Внешний вид основного
окна программы представлен на рис. 3-6.
Рисунок 3-6. Основное окно программы PC-CDU
Обратите внимание на то, что в нижнем левом углу исходное состояние
приемника отображается как Disconnected (Не подключен).
3. Выберите пункт меню File > Connect (Файл > Соединить).
P/N 7010-0736
3-11
Page 74
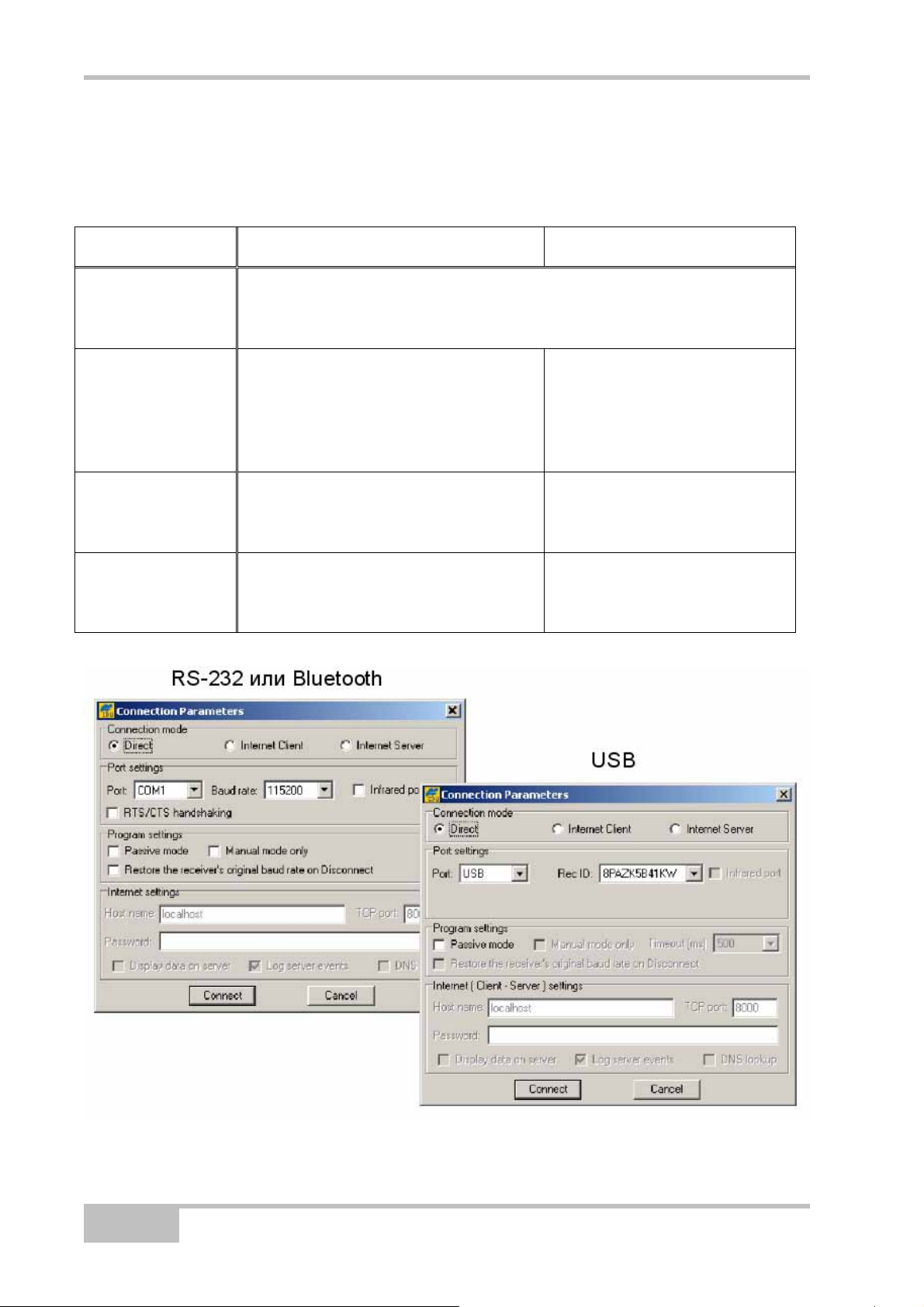
Настройка GR-3
4. В диалоговом окне Connection Parameters (Параметры
интерфейсов) выберите указанные ниже параметры и щелкните на
кнопке Connect (Соединить):
Таблица 3-4. Параметры интерфейсов.
Параметр RS-232 или Bluetooth USB
Connection
Mode (Режим
Соединения)
Port (Порт) Выберите компьютерный порт,
Baud Rate
(Скорость)
Rec ID (Номер) Не указывается Введите телефонный
Выберите Direct (Прямое).
используемый для соединения
(обычно COM1 или COM2 для
интерфейса RS-232, COM3,
COM4 и т.д. для Bluetooth)
Выберите скорость обмена
данными между приемником и
компьютером (обычно 115200)
Выберите значение USB
Не указывается
номер базового GSM
модема
3-12
Рисунок 3-7. Параметры соединения
GR-3. Руководство пользователя
Page 75

Настройка приемника
После того, как программа PC-CDU установила соединение с
приемником, текущие параметры соединения (название порта, скорость
передачи данных (если применима для этого типа порта), способ
квитирования) отображаются в левом нижнем углу основного окна
программы. В правом нижнем углу размещен счетчик времени
выполнения программы (см. рис. 3-8).
Рисунок 3-8. Соединение программой PC-CDU установлено
5. Выберите пункт меню Configuration > Receiver (Настройка >
Приемник).
Следует использовать кнопку Apply (Применить)
после любого изменения параметров, в противном
случае новые значения параметров в приемник не
передаются.
6. Щелкните на кнопке Set all parameters to defaults (Принять начальные
значения для всех параметров), см. рис. 3-9.
Рисунок 3-9. Принять начальные значения для всех параметров
P/N 7010-0736
3-13
Page 76
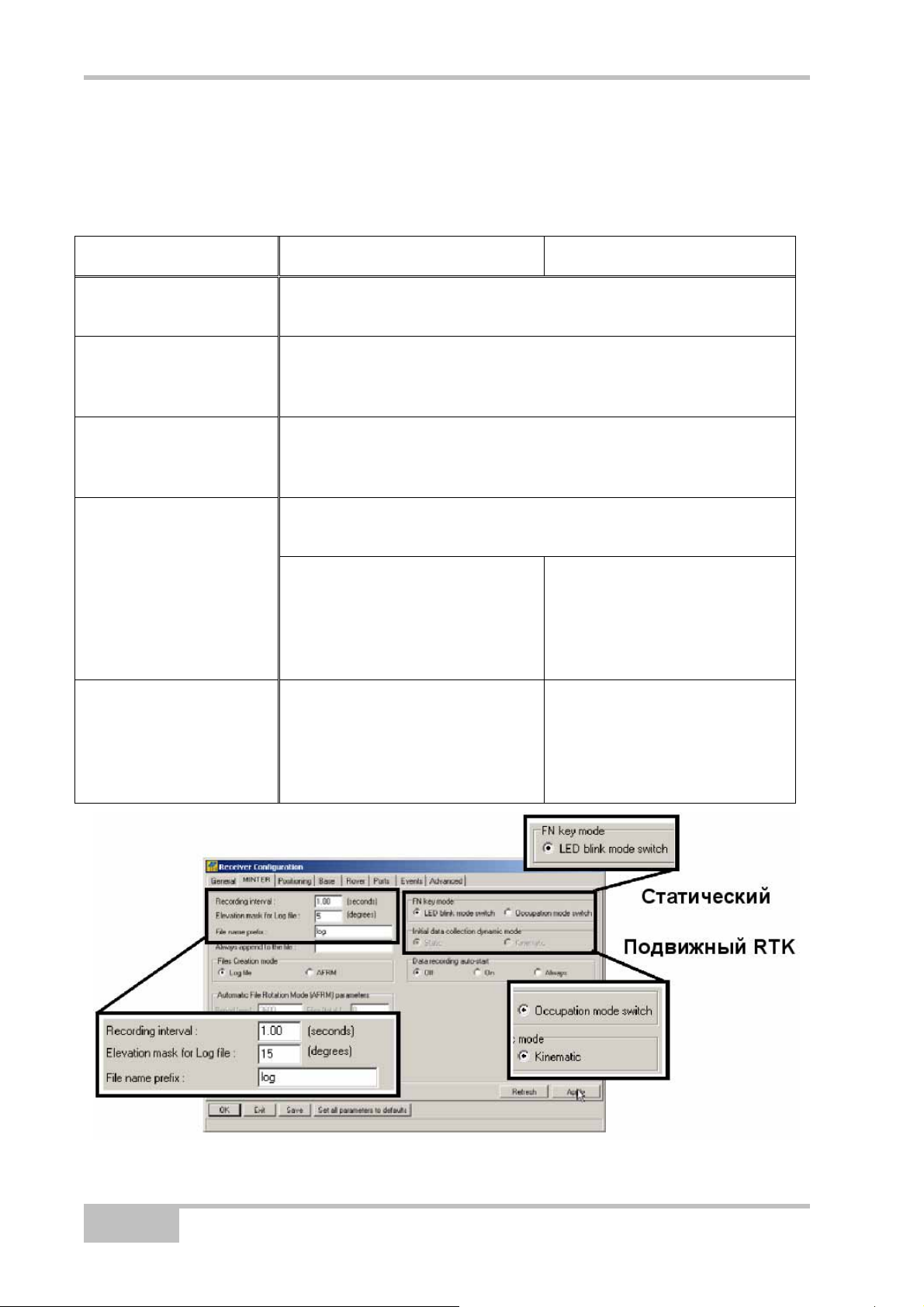
Настройка GR-3
7. Выберите вкладку MINTER и произведите установку параметров,
перечисленных в таблице 3-5, после чего щелкните на кнопке Apply
(Применить), см. рис. 3-10.
Таблица 3-5. Параметры приемника, устанавливаемые во вкладке MINTER.
Параметр Базовый приемник Подвижный приемник
Recording interval
(Период записи)
Elevation Mask Angle
(Минимальный угол
места)
File name prefix
(Префикс названия
файла)
FN key mode (режим
клавиши FN)
Initial data collection
dynamic mode
(Исходная
динамическая
модель)
Введите значение 15 секунд.
Введите значение 15 градусов.
Введите уникальный идентификатор, например, три
последние цифры серийного номера приемника.
(начало/окончание записи данных по нажатию клавиши
FN)
Для записи в статическом
режиме выберите значение
LED blink mode switch
(Переключатель режима
светодиода)
Не указывается Выберите значение
Для записи данных RTK
выберите значение
Occupation mode switch
(Переключатель режима
съемки)
Kinematic
(Кинематический),
установка для
траекторных измерений.
3-14
Рисунок 3-10. Настройка записи данных MINTER
GR-3. Руководство пользователя
Page 77
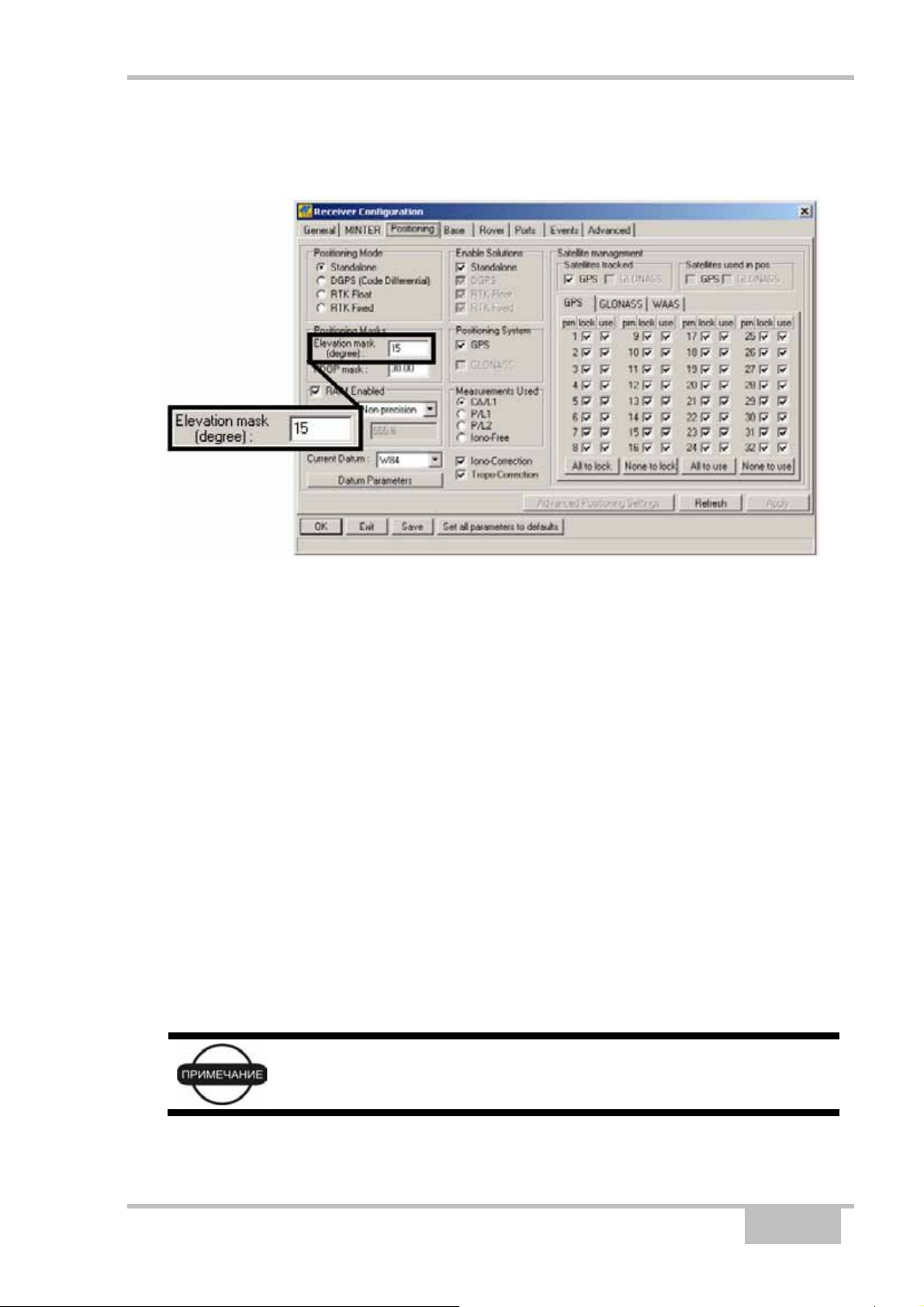
Настройка приемника
8. Выберите вкладку Positioning (Местоопределение) и установите
значение поля Elevation Mask (Минимальный угол места) – 15 градусов
(см. рис. 3-11), после чего щелкните на кнопке Apply (Применить).
Рисунок 3-11. Установка минимального угла места
9. Для базового приемника выберите вкладку Base (Базовый),
произведите установку перечисленных ниже параметров (см. рис. 3-12
на стр. 3-16), после чего щелкните на кнопке Apply (Применить).
• Установите флаг GPS/GLO at one time (GPS и ГЛОНАСС
одновременно).
• Введите координаты антенны, Lat - широту, Lon – долготу и Alt –
высоту одним из следующих способов:
- Если они известны заранее, введите соответствующие
значения.
- Установите флажок Averaged (Осредненные) и введите
значение Averaged Span (Интервал Осреднения), выраженный
в секундах, после чего щелкните на кнопке Apply (Применить).
Выберите пункт меню Tools > Reset receiver (Инструменты >
Перезапуск приемника) и подождите, пока не пройдет
заданный интервал времени. После этого координаты станции
на вкладке Base должны соответствовать координатам,
полученным после осреднения. Если координаты отображаются
как нулевые, щелкните на кнопке Refresh (Обновить).
- Щелкните на кнопке Get from receiver (Получить из приемника).
Координаты антенны, задаваемые на этой вкладке,
относятся к фазовому центру антенны в
поддиапазоне L1.
Для RTK съемок продолжите с шага 11 на стр. 3-17, а для съемок с
камеральной обработкой – с шага 12 на стр. 3-18.
P/N 7010-0736
3-15
Page 78
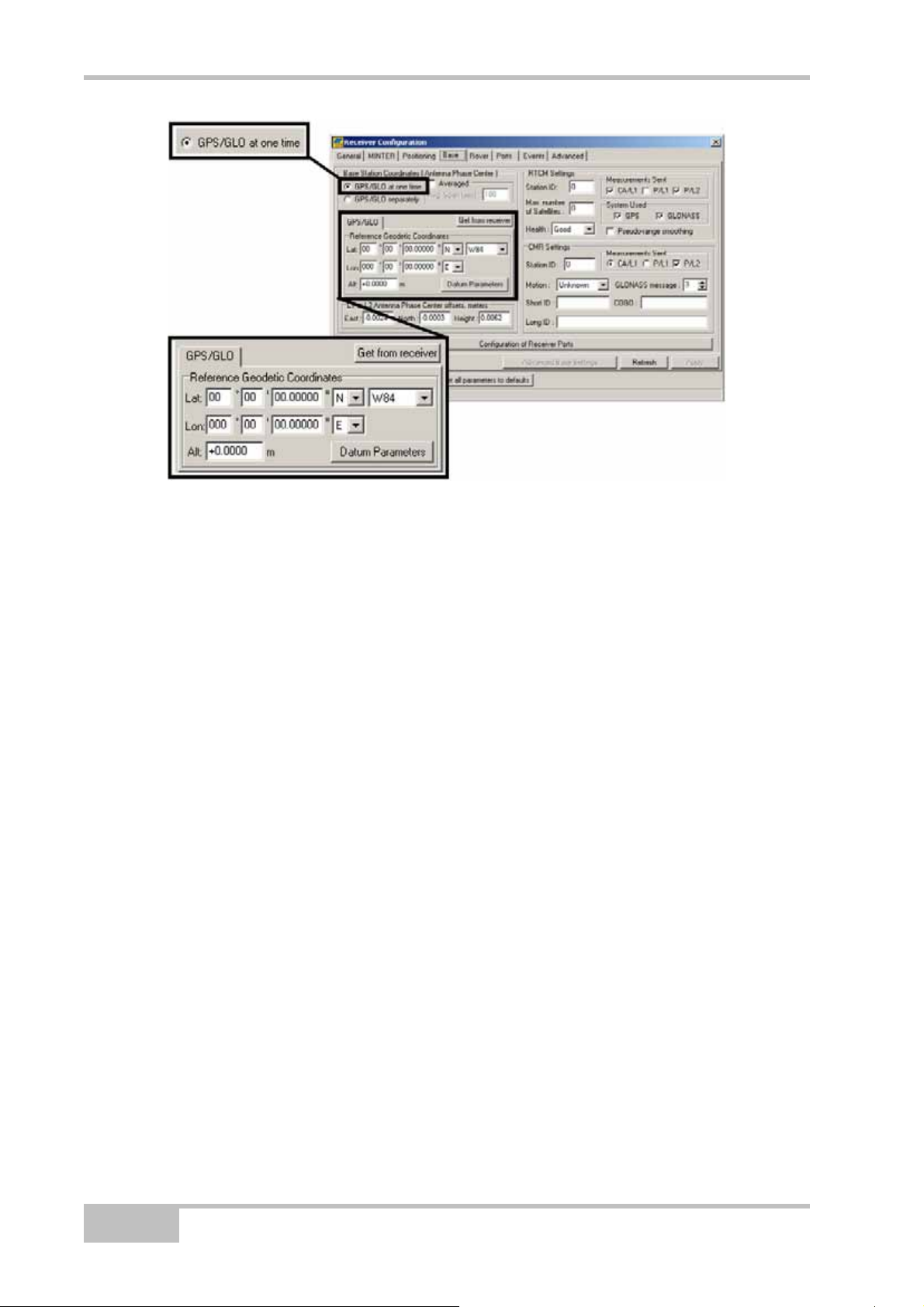
Настройка GR-3
Рисунок 3-12. Настройка базовой станции
10. При настройке подвижной станции (приемника) выберите вкладку Rover
(Подвижный), произведите установку перечисленных ниже параметров
(см. рис. 3-13 на стр. 3-17), после чего щелкните на кнопке Apply
(Применить).
• Positioning Mode (Режим местоопределения) для съемок с
камеральной обработкой выберите значение Standalone
(Автономный); для съемок RTK выберите RTK float (фазовая
неоднозначность не разрешается до целых величин) или RTK fixed
(разрешать неоднозначность измерения фазы до целой величины).
• В области RTK Parameters (параметры RTK), поле RTK mode
(режим RTK), выберите значение Extrapolation (Экстраполяция) для
RTK float (кинематический режим) или Delay (задержка) для RTK
fixed (статический режим).
- Extrapolation (Экстраполяция) используется для RTK приложений
с малой задержкой и высоким темпом (>= 5 Гц) выдачи данных.
Подвижная станция будет экстраполировать поправки базовой
станции по фазе несущей при вычислении своего текущего
местоположения.
- Delay (Задержка) применяется для высокоточных RTK
приложений с периодом обновления места 1 раз в секунду.
Вычислитель подвижной RTK станции будет вычислять либо RTK
местоположение с задержкой (на эпоху, к которой относится
последнее полученное сообщение RTCM/CMR), либо текущее
автономное местоположение (в процессе ожидания новых
RTCM/CMR сообщений, приходящих от базовой станции).
• В области RTK Parameters (параметры RTK), поле Dynamics
(Динамика объекта), выберите значение Static (Неподвижный) или
Kinematic (Движущийся).
3-16
GR-3. Руководство пользователя
Page 79
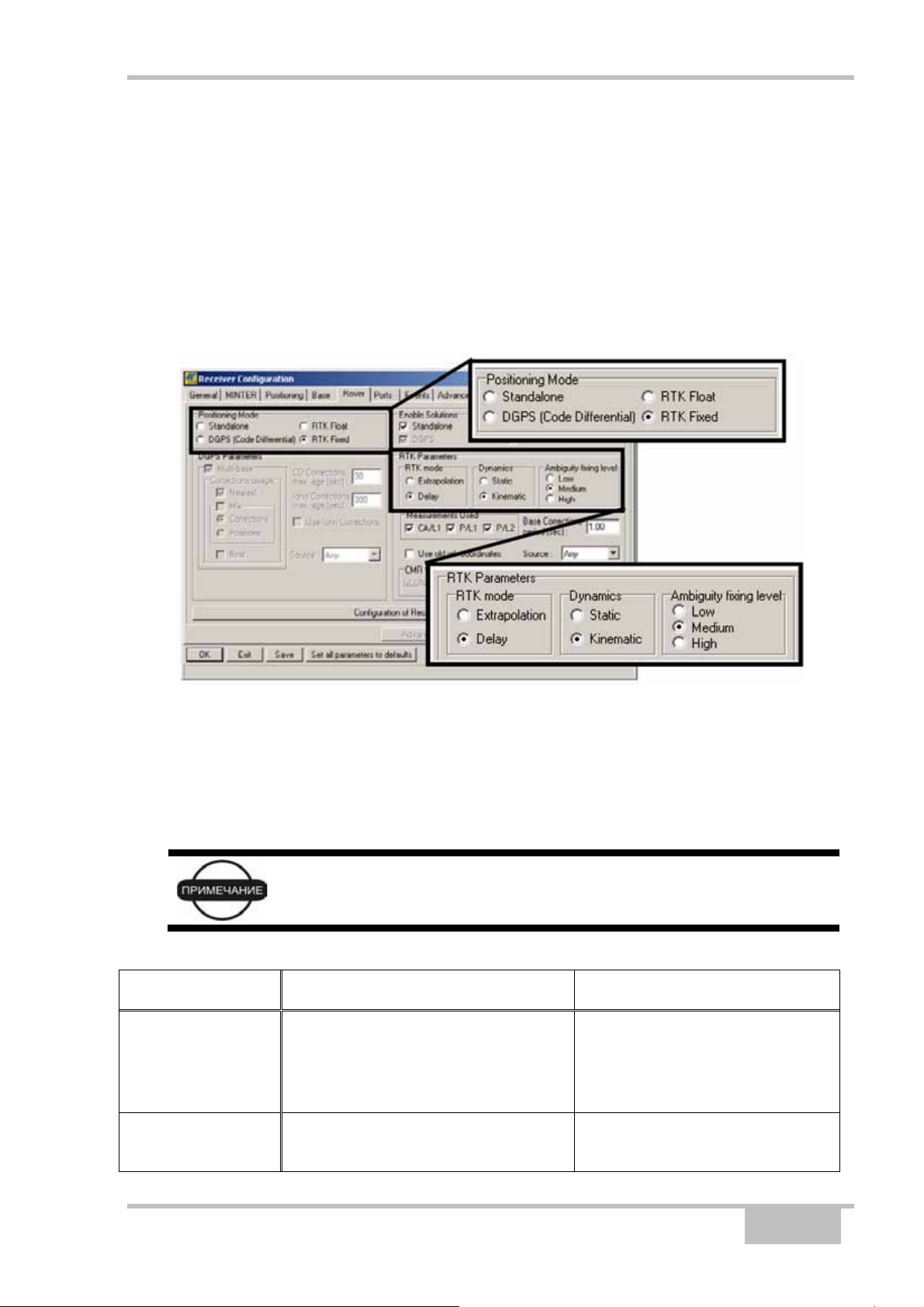
Настройка приемника
• В области RTK Parameters (параметры RTK), поле Ambiguity fixing
level (Управление процессом разрешения неоднозначности
измерения по фазе несущей), для режима RTK Float этот параметр
не используется. Выбор этого параметра определяет величину
доверительного интервала, который служит критерием для принятия
решения о правильности разрешения неоднозначности по фазе.
Значение Low (Низкий) соответствует 95%, Medium (Средний) -
99,5% и High (Высокий) - 99,9%. Чем выше
интервала, тем больше время разрешения целочисленной
неопределенности (и надежнее полученное местоопределение).
уровень доверительного
Рисунок 3-13. Настройка подвижного приемника
Для RTK съемок продолжите с шага 11, а для съемок с камеральной
обработкой – с шага 12 на стр. 3-18.
11. Для RTK съемок выберите вкладку Ports (Порты) и установите
параметры последовательного порта (см. Табл. 3-6), после чего
щелкните на кнопке Apply (Применить), см. рис. 3-14 на стр. 3-18.
Для съемок с камеральной обработкой оставьте
значения этих параметров заданными по умолчанию.
Таблица 3-5. Параметры приемника, устанавливаемые во вкладке Ports.
Параметр Базовый приемник Подвижный приемник
Input (Вход) Не применимо (оставьте
значение по умолчанию).
Выберите тот же формат
дифференциальных
поправок, что и на базовой
станции.
Output (Выход) Выберите формат и типы
дифференциальных поправок
P/N 7010-0736
Выберите значение “None”
("Отсутствует”).
3-17
Page 80

Настройка GR-3
Таблица 3-5. Параметры приемника, устанавливаемые во вкладке Ports
(продолжение).
Параметр Базовый приемник Подвижный приемник
Period (sec)
(Период выдачи
поправок [c])
Baud Rate
(Скорость
передачи)
RTS/CTS Выставьте флажок для разрешения аппаратного
Задайте период выдачи
дифференциальных поправок.
Выберите скорость последовательного порта, по которому
плата приемника выдает дифференциальные поправки на
плату модема.
Скорость следует установить равной скорости
последовательного порта модема.
квитирования.
Не применимо (оставьте
значение по умолчанию).
Рисунок 3-14. Настройки портов для базового и подвижного приемников при RTK
съемке
12. Выберите вкладку Advanced (Расширенные функции), затем вкладку
Multipath Reduction (Подавление многолучевости), выставьте
перечисленные ниже флажки и щелкните на кнопке Apply (Применить)
(см. рис. 3-15 на стр. 3-19).
3-18
GR-3. Руководство пользователя
Page 81

Настройка приемника
• Code multipath reduction (подавление многолучевости в измерении
по коду).
• Carrier multipath reduction (подавление многолучевости в измерении
по фазе несущей).
Рисунок 3-15. Настройка параметров подавления многолучевости
13. Щелкните OK для сохранения изменений и закройте окно.
После настройки приемника установки сохраняются до тех пор, пока вы не
измените их с помощью PC-CDU/TopSURV/Pocket-3D или очистите NVRAM.
Для получения подробной информации о доступных настройках для
Базовых и Удаленных приемников, обратитесь к справочному руководству
PC-CDU.
14. Продолжите выполнение других действий настройки или щелкните File
> Disconnect (Файл
> Отсоединить), а затем File > Exit (Файл >
Выход), чтобы покинуть PC-CDU. Разъединение перед выходом
гарантирует надлежащее управление портом.
Перед окончанием работы программы следует
разорвать соединение между приемником и PC-CDU.
Это поможет избежать конфликтов в управлении
последовательными портами компьютера.
P/N 7010-0736
3-19
Page 82

Настройка GR-3
Настройка MINTER
MINTER (Minimum INTERface - минимальный интерфейс) состоит из двух
кнопок, Питание и FUNCTION (Функция), управляющих работой приемника,
четырех светодиодов (STAT, REC, BATT и RX) отображающих состояние
приемника и двух светодиодов, отображающих состояние батарей (см. рис.
3-16).
Рисунок 3-16. Интерфейс MINTER
С помощью MINTER можно осуществить перечисленные ниже действия
(подробнее см. раздел “
• Включение и выключение приемника, перевод его в режим низкого
энергопотребления (Sleep mode).
• Включение и выключение записи данных (кнопка FUNCTION).
• Изменение режима отображения.
• Отображение светодиодом STAT числа отслеживаемых спутников
GPS (зеленый цвет) и ГЛОНАСС (оранжевый).
• Отображение состояния записи данных (светодиод REC).
• Индикация цикла записи данных (светодиод REC).
• Индикация состава записываемых данных
статический или динамический при выполнении кинематической
съемки c камеральной обработкой (производится кнопкой FUNCTION).
• Индикация состояния батарей (полный, средний и низкий заряд)
(светодиоды Батарея).
Использование MINTER” на стр. 4-7):
(светодиод REC),
• Индикация состояния питания приемника (светодиоды Батарея).
3-20
GR-3. Руководство пользователя
Page 83

Настройка MINTER
• Индикация состояния модема и приема им данных (светодиод RX TX).
• Индикация состояния канала Bluetooth (светодиод BT).
Для настройки параметров MINTER используйте программу PC-CDU.
Полное описание всех возможностей PC-CDU приводится в “Руководстве
пользователя PC-CDU”.
1. Подключите приемник к компьютеру. Эта процедура описана в разделе
“
Подключение приемника к компьютеру“ на стр. 2-19.
2. В основном окне программы PC-CDU выберите пункт меню File >
Connect (Файл > Соединить).
3. В диалоговом окне Connection Parameters (Параметры
интерфейсов) выставьте флажок RTS/CTS handshaking (квитирование
сигналами RTS/CTS) (см. рис. 3-17).
Описание остальных параметров в этом окне приводится в разделе
“
Подключение приемника к компьютеру“ на стр. 2-19.
4. Щелкните на кнопке Connect (Соединить).
Рисунок 3-17. Диалоговое окно Connection Parameters (Параметры интерфейсов)
5. Выберите пункт меню Configuration > Receiver (Настройка >
Приемник), затем вкладку MINTER, установите перечисленные ниже
значения параметров настроек и щелкните на кнопке Apply (см. рис.
3-18). Описание этих параметров приводится на указанных страницах:
• Recording interval (Интервал записи) – стр. 3-22.
• Elevation mask for log file (Минимальный угол места для записи
данных) -стр. 3-22.
• File name prefix (Префикс имени файла) – стр. 3-22.
•
Always append to the file (Всегда добавлять к файлу) – стр. 3-23.
• Files creation mode (Режим создания файлов) – стр. 3-23.
P/N 7010-0736
3-21
Page 84

Настройка GR-3
• Automatic File Rotation Mode (AFRM) (Режим автоматического
создания файлов) – стр. 3-23.
• FN key mode (Функция кнопки FN) - на стр. 3-24.
• Initial data collection dynamic mode (Исходная динамическая модель
при сборе данных) - на стр. 3-25.
• Data recording auto-start (Восстановление записи данных) – на стр.
3-25.
Рисунок 3-18. Вкладка MINTER диалогового окна Connection Parameters (Параметры
интерфейсов)
Параметр Recording interval (Интервал записи).
Устанавливает интервал записи блоков измерений в файл измерений.
Файл измерений создается после нажатия кнопки FUNCTION
(продолжительность нажатия от 1 до 5 секунд). Эта настройка
используется как для сохранения единственного файла, так и в режиме
AFRM (Режим автоматического создания файлов). Диапазон
допустимых значений – от 1 до 86400 сек. Начальное значение этого
параметра - 1 секунда.
Параметр Elevation mask for log file (Минимальный угол места для
записи данных).
Устанавливает минимальный угол возвышения для спутников, данные
измерений для которых записываются в файл, создаваемый после
нажатия кнопки FUNCTION. Начальное значение - пять градусов.
Параметр File name prefix (Префикс имени файла).
Устанавливает начало названия файлов измерений, создаваемых
приемником после нажатия кнопки FUNCTION. Длина префикса
может
достигать 20 символов. Начальная установка для префикса - “log”
(“архив”).
Название файла измерений образуется следующим образом:
<префикс><месяц><день><очередная буква алфавита>
3-22
GR-3. Руководство пользователя
Page 85

Настройка MINTER
Название файлов формируется из времени создания (месяц и день)
файла и дополнительных буквенных суффиксов, которые позволяют
различить файлы, созданные в один день.
Параметр Always append to the file (Всегда добавлять к файлу).
Если Вы хотите, чтобы измерения добавлялись в один файл (новые
файлы создаваться не будут), задайте название такого файла в этом
параметре. Допустимая
Параметр Files creation mode (Режим создания файлов).
Этот параметр задает один из двух возможных рабочих режимов:
• Log file (файл измерений) - если выбран этот режим, то нажатие на
кнопку FUNCTION закрывает открытый в настоящий момент файл
измерений. Если файл измерений не был открыт, то нажатие кнопки
FUNCTION открывает новый файл
• AFRM - если выбран этот режим, то нажатие на кнопку FUNCTION
включает его. Если режим AFRM уже действует, нажатие кнопки
FUNCTION отключает его.
Параметры Automatic File Rotation Mode (AFRM) (Режим
автоматического создания файлов).
В приемниках TPS предусмотрен режим автоматического создания
файлов. В этом режиме по определенному пользователем расписанию
приемник закрывает текущий и открывает новый файл измерений.
Расписание
Переход на новый файл производится в тот момент, когда остаток от
деления текущего времени приемника на Period равен Phase.
Переключение текущего файла измерений производится таким
образом, что момент относимости первого блока измерений в файле
соответствует моменту времени, задаваемому в расписании.
После того, как
сохраняет в этом файле набор типов записей с определенным
периодом. Набор и период задаются пользователем.
определяется параметрами Period(Период) и Phase(Фаза).
очередной файл измерений будет открыт, приемник
длина названия - до 20 символов.
измерений.
• Period (Период) - в этом поле указывается продолжительность записи
каждого из файлов в режиме AFRM.
Допустимые значения периода – от 60 до 86400 секунд; начальная
установка – 3600 сек.
• Phase (Фаза) - устанавливает “фазу” (временной сдвиг
для создания файла в режиме AFRM.
Допустимые значения фазы – от 0 до 86400 сек; начальная установка –
0 сек.
• Files(total) (Файлов, всего) - параметр, устанавливающий предельное
количество файлов измерений, создаваемых в режиме AFRM (при
достижении этого предела режим AFRM отключится).
Обратите внимание на то, что первый файл измерений создается сразу
после включения режима AFRM. Этот файл
P/N 7010-0736
не рассматривается как
внутри периода)
3-23
Page 86

Настройка GR-3
очередной файл и не увеличивает счетчик, предельное значение
которого определяется этим параметром.
Допустимые значения находятся в диапазоне от 0 до (2
31
–1);
начальная установка – 0. Значение параметра, равное 0,
устанавливает отмену ограничения на количество записываемых в
режиме AFRM файлов.
Максимальное количество файлов во встроенной
памяти приемника – 512.
• Files(remain) (Файлов, осталось) – поле отображает количество
файлов, которое еще можно создать в режиме ARFM.
Допустимые значения находятся в диапазоне от 0 до (2
31
–1);
начальная установка – 0.
• Automatically remove old files (автоматическое удаление устаревших
файлов) - этот параметр анализируется, если при записи данных
свободное пространство во встроенной памяти закончилось. Если
флажок установлен, то в такой ситуации приемник сотрет наиболее
ранний файл. Затирание устаревших файлов работает только в режиме
ARFM.
Начальная установка – не использовать.
Параметр FN key mode (Функция кнопки FN).
Этот параметр
определяет поведение приемника при нажатии кнопки
FUNCTION.
• LED blink mode switch (Переключатель режима светодиода) –
нажатие клавиши FN осуществляет выбор между режимами
нормального или расширенного отображения и начинает или
останавливает запись данных статической съемки.
− кнопка FUNCTION, нажатая менее чем 1 секунду: выбор между
режимами нормального или расширенного отображения.
− кнопка FUNCTION, нажатая от 1 до
5 секунд: запускает или
останавливает запись данных (режим сбора данных для
камеральной обработки статической съемки).
• Occupation mode switch (Переключатель режима съемки) -
нажатие кнопки FUNCTION (продолжительностью менее 1
секунды) инициирует добавление в файл измерений сообщения о
том, что тип съемки был изменен со статического на
кинематический или наоборот. Если светодиод REC вспыхивает
зеленым цветом, то
текущий режим – кинематическая съемка, если
оранжевым – статическая съемка. Более подробная информация
представлена в таблице 1-2 на стр. 1-14, а также в Руководстве
пользователя PC-CDU.
Параметр Initial data collection dynamic mode (Исходная динамическая
модель при сборе данных).
3-24
GR-3. Руководство пользователя
Page 87

Настройка MINTER
В этом поле осуществляется выбор сообщения с признаком типа
съемки, которое записывается в начало файла измерений. При выборе
кнопки Static (Статическая) происходит запись сообщения STOP, при
выборе кнопки Kinematic (Кинематическая) – сообщения GO,Trajectory.
Параметр Data recording auto-start (Восстановление записи данных).
В этом поле осуществляется выбор способа, которым будет
продолжена запись файла измерений при восстановлении после сбоя
напряжения питания.
В таблице 3-7 приводятся возможные сценарии и результаты при
восстановлении после сбоя питания приемника. Под термином
Заданный файл следует понимать название файла, определенное в
параметре Always append to the file (Всегда добавлять в файл).
Автоматический файл – файл, название которого создано в режиме
AFRM.
Таблица 3-5. Алгоритм, устанавливаемый параметром Data recording autostart
Перед сбоем
питания
Измерения
сохранялись в
заданном
файле.
Данные в
приемнике
сохранялись в
автоматическ
ом файле
Название
файла задано,
но приемник
еще не начал
запись данных
Файл не
установлен;
запись данных
приемником
выключена
Результат при выбранном значении параметра
Off (Выкл.) On (Вкл.) Always (Всегда)
После
восстановления
питания запись
данных не
возобновится.
После
восстановления
питания запись
данных не
возобновится.
После
восстановления
питания запись
данных не
начнется.
После
восстановления
питания запись
данных не
начнется
После
восстановления
питания приемник
возобновит запись
данных в тот же
файл.
После
восстановления
питания откроется
новый файл, и
данные будут
записываться в
него.
Заданный файл не
откроется. После
восстановления
питания запись
данных не
начнется
После
восстановления
питания запись
данных не
начнется
После
восстановления
питания приемник
возобновит запись
данных в тот же
файл.
После
восстановления
питания откроется
новый файл, и
данные будут
записываться в
него.
Откроется
заданный файл и
после
восстановления
питания начнется
запись данных
Откроется
автоматический
файл и после
восстановления
питания начнется
запись данных
P/N 7010-0736
3-25
Page 88

Настройка GR-3
Помимо этого, если выбрано поле Always, приемник автоматически начнет
запись данных (во вновь созданный или уже существующий файл) в
следующих трех случаях:
• После включения приемника с помощью кнопки POWER (питание)
• После перезапуска приемника с помощью PC-CDU.
• После выведения приемника из режима пониженного
энергопотребления.
Рисунок 3-19. Вкладка MINTER
3-26
GR-3. Руководство пользователя
Page 89

Глава 4
Установка и съемка
После того, как приемник настроен, для проведения съемки его следует
установить над пунктом, измерить высоту антенны над центром. MINTER
обеспечивает простое начало записи данных, изменение режима работы
приемника и контроль за процессом проведения съемки, в т.ч. просмотр
данных о наблюдаемом созвездии.
Установка приемника
Обычно спутниковую съемку производят, установив базовую станцию на
пункте с известными координатами, а подвижный приемник используют для
определения пикетов. После установки приемника над пунктом следует
измерить высоту антенны над центром.
До начала сбора данных следует убедиться в том, что и базовый, и
подвижный приемник обладают текущими альманахом и эфемеридными
данными (подробнее
26).
см. раздел “Сбор альманахов и эфемерид” на стр. 2-
Шаг 1: Установка приемника
Базовую станцию следует установить, запустить на ней процесс накопления
данных и передачи дифференциальных поправок до включения подвижного
приемника. Устанавливаются приемники для RTK или камеральной
обработки измерений одинаково.
□ Установите базовый приемник и прочие компоненты базовой станции.
Подробнее см. раздел "Установка базового приемника" на стр. 4-2.
□ Установите подвижный приемник. Подробнее см. раздел "Установка
подвижного приемника" на стр. 4-3.
P/N 7010-0736
4-1
Page 90

Установка и съемка
Установка базового приемника (см. рис. 4-1):
1. Установите штатив над центром с известными координатами.
2. Закрепите стандартный трегер на штативе. Закрепите адаптер трегера
(стандартный, либо адаптер точной установки) на трегере и затяните
винты.
3. В адаптер точной установки вставьте втулку.
4. Закрепите приемник на адаптере трегера. К антенному разъему
радиомодема, расположенному в верхней
части приемника,
подсоедините антенну.
5. Отнивелируйте прибор и затяните винты.
6. При необходимости подсоедините дополнительные принадлежности
(например, дополнительный источник питания).
Рисунок 4-1. Установите штатив и приемник над исходным пунктом
4-2
GR-3. Руководство пользователя
Page 91

Установка приемника
Установка подвижного приемника (см. рис. 4-2):
1. При необходимости закрепите адаптер быстрой установки на двуногом
штативе или вехе.
При сборе данных для последующей статической
обработки используйте двуногий штатив,
обеспечивающий неподвижность антенны
относительно земли в процессе съемки.
2. Закрепите приемник GR-3 на адаптере быстрой установки. Убедитесь в
том, что защелки замкнулись.
3. К антенному разъему радиомодема, расположенному в верхней части
приемника, подсоедините антенну.
Рисунок 4-2. Установите штатив и приемник над исходным пунктом
P/N 7010-0736
4-3
Page 92

Установка и съемка
Шаг 2: Измерение высоты антенны
Определение превышения антенны над центром пункта чрезвычайно важно
при использовании спутниковых методов съемки. Даже если определению
подлежат только плановые координаты, обработка данных спутниковой
съемки всегда производится с определением полного (трехмерного)
местоположения фазового центра приемной антенны.
Поскольку при обработке спутниковых измерений определяются
координаты фазового центра антенны, для их редукции на центр пункта
производимой при обработке измерений, следует указать следующее:
• Измеренную высоту антенны над центром пункта.
• Метод измерения высоты антенны.
• Модель используемой антенны.
Измерять высоту антенны можно двумя способами:
,
• Вертикальный – измеряется длина отрезка от центра (марки) пункта
до базовой точки антенны (antenna reference point, ARP)
расположенной на нижнем основании втулки под становой винт.
• Наклонный - измеряется длина отрезка от центра (марки) пункта до
одной из точек относимости наклонной высоты (slant height measure
mark, SHMM), нанесенных на лицевой и задней панелях приемника.
Точка, координаты которой определяются в процессе съемки с помощью
GPS/ГЛОНАСС, называется фазовым центром антенны. Можно провести
аналогию с триппель-призмой, при измерении расстояний до которой
измерение производится
поэтому следует учитывать в обработке измерений постоянную призмы. В
случае GPS/ГЛОНАСС антенны порядок учета смещения фазового центра
зависит от использованного способа измерения высоты антенны.
• Для вертикального измерения (измерение до ARP) смещение просто
добавляется к измеренной высоте и получается «истинное»
превышение.
• Для наклонной высоты (
производится редукция этого измерения на вертикального (с учетом
известного радиуса антенны), после чего порядок действий
аналогичен приведенному выше.
до точки, расположенной внутри призмы, и
измерение до SHMM), прежде всего
Смещения вычисляются разными способами из-за несовпадения точек ARP
и SHMM.
4-4
GR-3. Руководство пользователя
Page 93
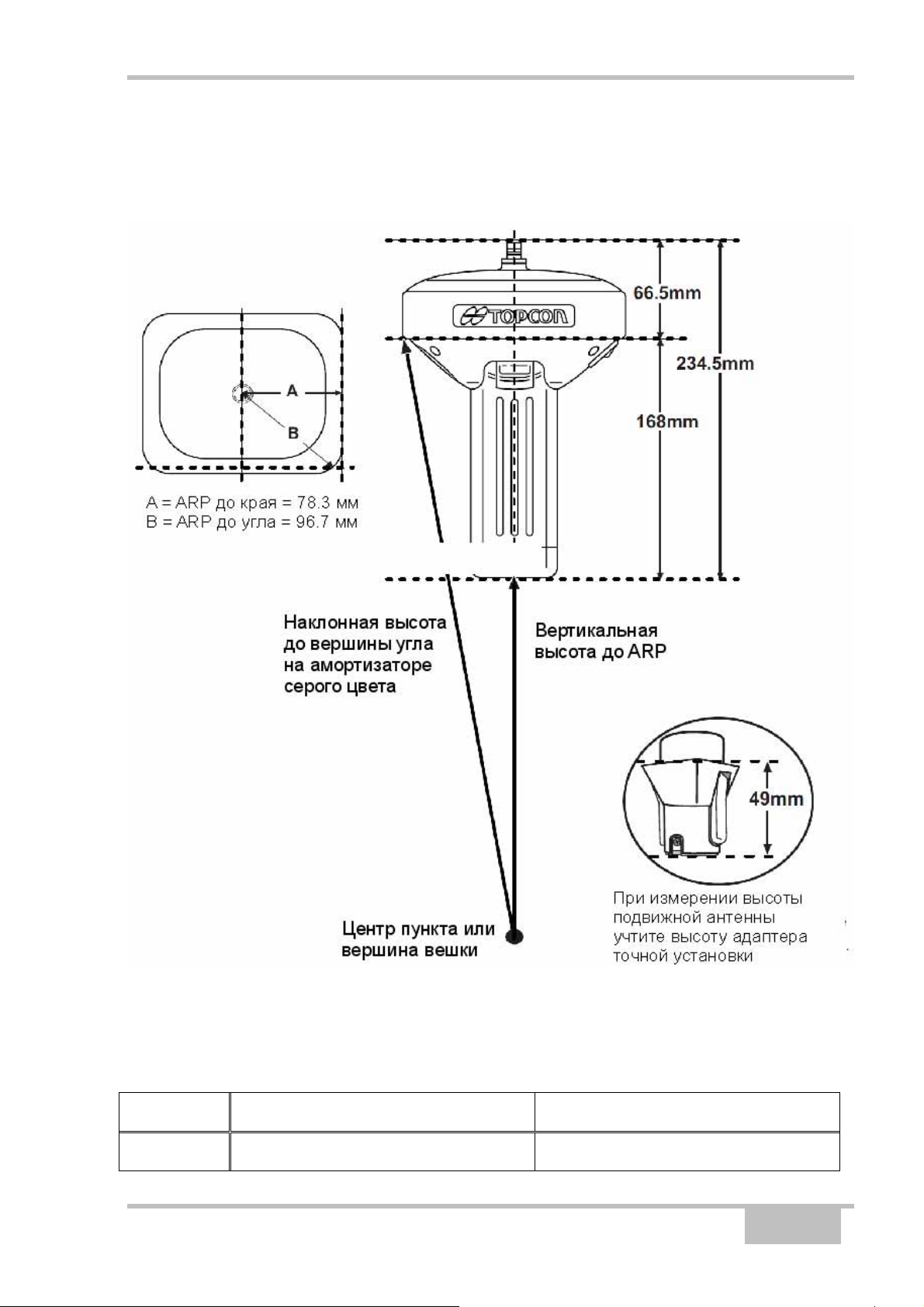
Установка приемника
1. Измерьте высоту антенны над центром (маркой) пункта методом
наклонного или вертикального измерений (см. рис. 4-3).
2. В полевой журнал занесите название пункта, высоту антенны над
центром и способ ее измерения, укажите время начала работы
Рисунок 4-3. Измерение смещения антенны
• Вертикальное расстояние от SHMM до ARP равно 168 мм.
• Радиус от SHMM до ARP 78.3 мм до стороны; 95.8 мм до угла.
В таблице 4-1 приводятся величины смещений для приемника GR-3.
Таблица 3-5. Величины смещений для приемника GR-3
ARP до фазового центр L1 ARP до фазового центр L2
Вверх 228.8 мм 216.3 мм
P/N 7010-0736
4-5
Page 94

Установка и съемка
Шаг 3. Сбор данных
Помимо этого раздела данному вопросу посвящены также и все оставшиеся
разделы этой главы.
1. Включите приемник. Светодиод STAT должен кратковременно
вспыхнуть красным цветом.
2. Как только приемник установит слежение за сигналом одного или
нескольких спутников, светодиод STAT будет подсвечиваться зеленым
цветом для спутников GPS и оранжевым – ГЛОНАСС (количество
вспышек соответствует количеству отслеживаемых спутников каждой
системы
навигационной задачи. Местоопределение может обеспечиваться при
слежении за четырьмя и более спутниками.
3. Окончание коротких красных вспышек свидетельствует о том, что,
приемник определил местоположение и можно начинать съемку. Перед
началом сбора данных следует дождаться появления зеленых и
оранжевых вспышек. Это гарантирует то, что приемник определил
правильные дату и время, а также отслеживает достаточное количество
спутников, что позволит собрать измерительные данные надлежащего
качества.
Процесс захвата спутниковых сигналов обычно занимает менее одной
минуты. На новом месте, под густой кроной деревьев или после
перезапуска приемника это может занять несколько минут
). Короткая красная вспышка обозначает отсутствие решения
4. Для начала сбора данных нажмите и удерживайте в
кнопку FUNCTION более одной секунды, но менее пяти секунд.
5. Отпустите кнопку FUNCTION, когда светодиод REC (recording – запись)
станет светиться зеленым цветом. Это указывает на то, что файл
открылся, и запись данных началась. Светодиод вспыхивает каждый
раз, когда происходит сохранение данных во внутреннюю память.
Для настройки процесса сохранения данных
используйте программу PC-CDU, см. раздел
“
6. По окончании сеанса наблюдений нажмите и удерживайте кнопку
FUNCTION до тех пор, пока светодиод REC не погаснет.
7. Для выключения приемника нажмите и удерживайте в нажатом
состоянии кнопку питания до тех пор, пока все светодиоды не погаснут,
после чего отпустите ее.
Настройка MINTER”на стр. 3-20 или обратитесь к
Руководству пользователя PC-CDU.
нажатом состоянии
4-6
GR-3. Руководство пользователя
Page 95
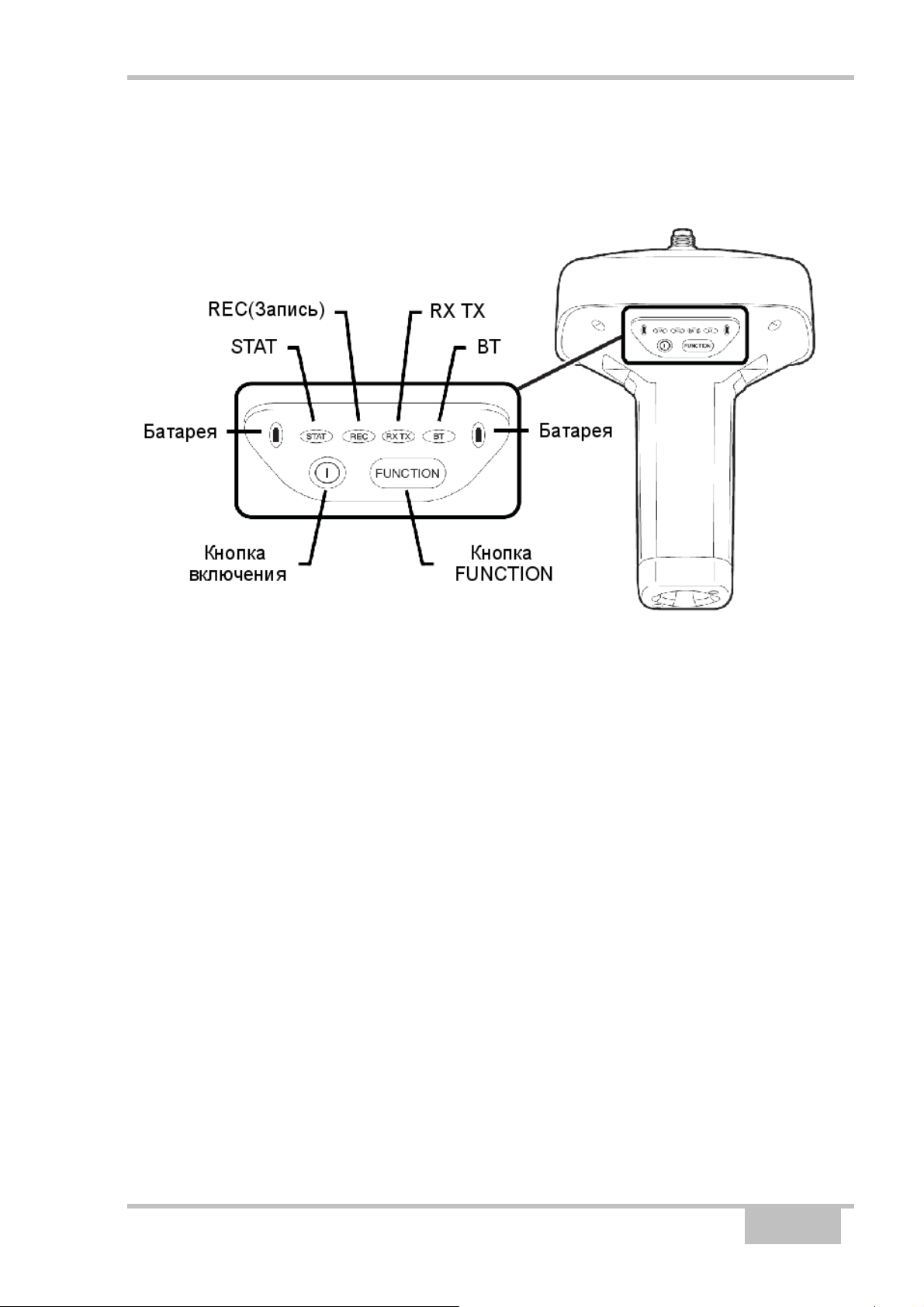
Использование MINTER
Использование MINTER
Пользовательский интерфейс MINTER служит для отображения состояния
приемника и контроля ввода/вывода данных (см. рис. 4-4).
Рисунок 4-4. MINTER приемника GR-3
С помощью MINTER можно осуществлять разнообразные операции, в том
числе:
• Включение и выключение приемника.
• Включение или выключение записи данных (кнопка FUNCTION).
• Изменение режима отображения.
• Отображение светодиодом STAT числа отслеживаемых спутников
GPS (зеленый цвет) и ГЛОНАСС (оранжевый).
• Отображение состояния записи данных (светодиод REC).
• Индикация цикла записи данных (светодиод REC).
• Индикация
статический или динамический, при выполнении кинематической
съемки c камеральной обработкой.
• Индикация состояния батарей (полный, средний и низкий заряд)
(светодиоды Батарея).
• Индикация состояния питания приемника (светодиоды Батарея).
состава записываемых данных (светодиод REC),
• Индикация состояния модема и приема им данных (светодиод RX TX).
• Индикация состояния канала Bluetooth (светодиод BT).
P/N 7010-0736
4-7
Page 96

Установка и съемка
Полное описание пользовательского интерфейса приводится в разделе
“
MINTER” на стр. 1-11.
Включение и выключение приемника производится нажатием на кнопку
Питание (см. рис. 4-5).
• Для включения приемника нажмите и удерживайте в нажатом
состоянии кнопку Питание до тех пор, пока все светодиоды не
засветятся.
• Для выключения приемника нажмите и удерживайте в нажатом
состоянии кнопку Питание до тех пор, пока все светодиоды не
погаснут.
Рисунок 4-5. Использование кнопки Питание
Начало и окончание записи данных производится нажатием на кнопку
FUNCTION в течение 1-5 секунд (см. рис. 4-6).
• Во время записи данных светодиод REC светится зеленым цветом.
Интервал (период) записи устанавливается с помощью программы
PC-CDU, подробнее см. раздел “Параметр Recording interval
(Интервал записи)” на стр. 3-22.
• Всякий раз, когда производится запись данных на SD/MMC карту
памяти,
светодиод REC вспыхивает зеленым цветом.
• Если светодиод REC светится красным цветом, это означает
переполнение памяти приемника, или возникновение аппаратного
отказа, или отсутствие карты памяти SD/MMC или то, что в приемнике
установлен неправильный OAF (подробнее см. раздел “
авторизации опций (OAF)”, стр.
4-8
1-23).
GR-3. Руководство пользователя
Файл
Page 97

Использование MINTER
С помощью программы PC-CDU устанавливается режим работы кнопки
FUNCTION - LED blink mode switch (Переключатель режима светодиода)
для статической съемки, или Occupation mode switch (Переключатель
режима съемки) для кинематической съемки. Подробнее см. раздел
“Параметр FN key mode (Функция кнопки FN)” на стр. 3-24.
При каждом начале или окончании записи открывается новый файл, или
данные записываются в специально указанный файл. Подробно настройка
поведения приемника описывается
в разделах “Параметр Always append to
the file (Всегда добавлять к файлу)” на стр. 3-23 и “Параметр Files creation
mode (Режим создания файлов)” на стр. 3-23.
Рисунок 4-6. Использование кнопки FUNCTION
Переключение между режимами обработки производится нажатием
кнопки FUNCTION на время менее 1 секунды (если с помощью PC-CDU был
разрешен режим Occupation mode switch (Переключатель режима съемки)).
Изменение информационного режима приемника производится
нажатием кнопки FUNCTION на время менее 1 секунды (если с помощью
PC-CDU был разрешен режим LED blink mode switch (Переключатель
режима светодиода)).
Изменение скорости обмена по последовательному порту приемника
производится
нажатием кнопки FUNCTION на время от 5 до 8 секунд. Эта
функция полезна, если подсоединенное к приемнику устройство не
поддерживает установленную для порта скорость обмена.
После удержания в нажатом состоянии кнопки FUNCTION в течение 5
секунд индикатор REC подсвечивается красным цветом. Отпустите клавишу
в течение следующих 3 секунд.
P/N 7010-0736
4-9
Page 98

Установка и съемка
Статическая съемка
Статическая съемка является классическим методом съемки, хорошо
подходящим для всех размеров базисов (коротких, средних и длинных). По
крайней мере, две антенны приемников, центрированные над пунктами,
одновременно собирают измерительные данные на концах базиса в
течение некоторого периода времени. Эти два приемника должны
одновременно отслеживать четыре (или более) спутника, записывать
данные с одинаковым
предельного возвышения. Продолжительность сеанса измерений может
варьироваться от нескольких минут до нескольких часов. Оптимальная
продолжительность сеанса измерений определяется опытным путем и
зависит от следующих факторов:
• Длины измеряемой базовой линии.
• Количества спутников в поле зрения.
периодом и иметь одинаковые значения угла
• Геометрического фактора (Dilution of Precision, DOP).
• Расположения антенны.
• Уровня
• Типа используемых приемников.
• Требований по точности.
• Необходимости разрешения неоднозначности фазы несущей.
В общем случае одночастотные приемники используются для определения
базовых линий длиной до 15 км. Для определения базовых линий длиной
свыше 15 км следует применять двухчастотные приемники.
Двухчастотные приемники имеют два больших преимущества. Во-первых,
измерения по двум
ионосферные погрешности в измерениях фазы кода и несущей,
обеспечивая большую точность, чем одночастотные приемники при
определении длинных базисов и во время повышенной активности
ионосферы (ионосферных штормов). Во-вторых, двухчастотным
приемникам требуется значительно более короткие сеансы измерений для
получения определений заданной точности.
активности ионосферы.
частотам позволяют практически полностью устранить
После окончания съемки данные,
загружены в компьютер и обработаны с помощью программного
обеспечения камеральной обработки (например, Topcon Tools).
4-10
собранные приемниками, могут быть
GR-3. Руководство пользователя
Page 99

Кинематическая съемка
Кинематическая съемка
При кинематической съемке стационарный приемник (базовая станция)
устанавливается на точку c известными координатами (например,
геодезический пункт). Приемник непрерывно отслеживает спутники и
сохраняет данные измерений в своем запоминающем устройстве.
Подвижный приемник устанавливается в неизвестной точке и собирает
данные в статическом режиме в течение от 2 до 10 минут. После окончания
съемки на точке подвижную станцию
режим и переместить в новую точку съемки. В этой точке и во всех
последующих приемник переводится в режим статической съемки для
сбора данных. Таким образом, при движении подвижная станция работает в
кинематическом режиме, а во время сбора данных - в статическом режиме.
следует перевести в кинематический
1. Установите подвижную станцию в определяемой
Питание. Собирайте данные в течение 2-10 минут. Светодиод REC
будет светиться оранжевым цветом.
2. Проверьте индикацию светодиода STAT для отслеживаемых спутников.
3. После завершения сеанса наблюдений нажмите кнопку FUNCTION
более чем на секунду для перевода подвижной станции в
кинематический режим.
Если светодиод REC мерцает зеленым цветом –
текущий режим сбора данных статический,
4. Переместите подвижную станцию на следующую точку съемки и
нажмите кнопку FUNCTION менее чем на секунду для того, чтобы
перевести ее в статический режим. Собирайте данные в течение 2-10
минут.
5. Повторяйте шаги 3 и 4 до тех пор, пока не будет проведена съемка во
всех точках. Время работы на точке зависит от факторов, указанных
статического метода съемки.
оранжевый - динамический.
точке и нажмите кнопку
для
6. Для завершения работы нажмите и удерживайте кнопку FUNCTION от 1
до 5 секунд для прекращения записи данных. Если это необходимо,
выключите подвижную станцию.
Этот метод GPS-съемки позволяет оператору сократить время пребывания
на точке, предоставляя полевой бригаде возможность провести съемку
значительно большего количества пунктов по сравнению со статическим
методом
P/N 7010-0736
.
4-11
Page 100

Установка и съемка
Кинематическая съемка в
реальном времени
При съемке методом RTK, как и при описанной выше кинематической
съемке, один из приемников является базовой станцией и производит
измерения сигналов, принимаемых антенной, закрепленной на штативе
(или другим способом) над центром с известными координатами. Второй
приемник используется в качестве подвижного и производит измерения
положения фазового центра подключенной к нему антенны, размещаемой
над определяемыми пунктами.
В отличие от кинематической съемки, результаты которой вычисляются в
процессе камеральной обработки измерений, в методе RTK используется
телеметрический канал связи между базовым и подвижным приемниками.
Базовая станция, используя радиомодемный канал связи, передает
производимые ей измерения и собственные координаты подвижному
приемнику. Последний, используя собственные измерения и принятые по
каналу связи
базиса и выдает их потребителю. Настройка RTK режима рассматривается
в разделах “
на стр.
3-10.
данные, немедленно вычисляет элементы определяемого
Настройка радиомодема” на стр. 3-3 и “Настройка приемника”
При использовании программы PC-CDU для контроля подвижного
приемника RTK проконтролируйте показания в поле LQ (Link Quality –
качество канала связи) в главном окне программы (см. рис 4-7 на стр. 4-13),
чтобы убедиться в том, что приемник принимает дифференциальные
поправки. Обычно приемник начнет выдавать координаты фазового центра
антенны вместе с типом решения в пределах 10-30 секунд. Однако при
использовании радиосредств
установление связи может понадобиться до 60 секунд
Определяемые приемником геодезические координаты фазового центра
антенны, отображаемые на вкладке Geo, всегда вычисляются в системе
координат WGS-84 и могут иметь 4 типа решения:
• Standalone (автономное) – приемник вычисляет трехмерное
положение в автономном режиме, без использования
дифференциальных поправок.
• Code Differential (Дифференциальное по измерениям фазы
подвижный приемник вычисляет текущие координаты в
дифференциальном режиме с использованием измерений кодовой
задержки.
• RTK float (RTK без целочисленного разрешения неоднозначности)-
подвижный приемник вычисляет текущие относительные координаты
в дифференциальном режиме с использованием кодовой задержки и
с расширением спектра только на
кода) –
4-12
GR-3. Руководство пользователя
 Loading...
Loading...