

Telemecanique Altivar 71 User Guide

Altivar 71
用户手册
通信参数


目录
目录
_______________________________________________________________________________________________________ 3
文档结构
介绍
符号
配置文件
I/O
DSP402
命令/给定切换
强制本地模式
优先停车
通信监测
从网络上进行
配置保存和切换
参数组切换
控制参数
Setpoint参数 _______________________________________________________________________________________________ 77
状态参数
__________________________________________________________________________________________________________ 79
输出值参数
___________________________________________________________________________________________________ 6
_______________________________________________________________________________________________________ 7
_______________________________________________________________________________________________________ 9
参数描述
变频器终端显示
什么是配置文件?
Altivar 71
配置文件
定义
控制字 -按状态运行[2线制
控制字- 按状态运行[3线制
状态字
例:使用传感器功能定位的
功能说明
DSP402
状态说明
控制字
状态字
启动时序
完全由动力电源供电的变频器的时序
带有独立控制电源的变频器的时序
带有线路接触器控制的变频器的时序
通道
组合模式
隔离模式
在组合模式中切换
在隔离模式中切换
通道切换
给定切换原则
命令切换原则
控制字的详细定义
例:使用传感器功能定位的
在切换时复制
定义
强制本地模式与给定切换
强制本地模式与命令切换
在图形显示终端上的优先停车
I/O
DSP402
原则
网络监测判据
运行细节
对通信故障的反应
Setpoint参数 _________________________________________________________________________________________ 59
无
有
保存配置
恢复配置
通过控制字进行配置切换
通过选择进行配置切换
输出值(速度
输出值(力矩
输出值(电机
_____________________________________________________________________________________________ 9
________________________________________________________________________________________ 9
__________________________________________________________________________________________________ 10
支持的功能配置文件
________________________________________________________________________________________________ 12
________________________________________________________________________________________________ 12
(ETA) _________________________________________________________________________________________ 16
配置文件
____________________________________________________________________________________________ 19
状态表
____________________________________________________________________________________________ 21
(CMD) ________________________________________________________________________________________ 23
(ETA) _________________________________________________________________________________________ 25
____________________________________________________________________________________________ 26
_____________________________________________________________________________________________ 35
________________________________________________________________________________________________ 35
____________________________________________________________________________________________ 36
____________________________________________________________________________________________ 36
____________________________________________________________________________________________ 38
_______________________________________________________________________________________________ 48
________________________________________________________________________________________________ 48
__________________________________________________________________________________________________ 52
配置文件
配置文件
__________________________________________________________________________________________________ 54
________________________________________________________________________________________________ 54
____________________________________________________________________________________________ 55
Setpoint定义 ____________________________________________________________________________________ 59
调节器
PID
调节器
PID
_____________________________________________________________________________________________ 62
____________________________________________________________________________________________ 62
____________________________________________________________________________________________ 64
_________________________________________________________________________________________________ 70
__________________________________________________________________________________________________ 74
_________________________________________________________________________________________________ 87
_____________________________________________________________________________________ 10
___________________________________________________________________________ 11
](2C) _________________________________________________________________________ 14
](3C) _________________________________________________________________________ 15
配置文件
I/O
___________________________________________________________________________________________ 19
_______________________________________________________________________________________ 20
_____________________________________________________________________________________ 37
_____________________________________________________________________________________ 37
_________________________________________________________________________________________ 40
_________________________________________________________________________________________ 41
_____________________________________________________________________________________ 42
_________________________________________________________________________________________ 47
__________________________________________________________________________________________ 52
_____________________________________________________________________________________ 53
_________________________________________________________________________________________ 54
_____________________________________________________________________________________ 58
_________________________________________________________________________________________ 60
_________________________________________________________________________________________ 61
__________________________________________________________________________________ 68
) ________________________________________________________________________________________ 87
) ________________________________________________________________________________________ 87
) ________________________________________________________________________________________ 88
配置文件
I/O
________________________________________________________________________________ 49
________________________________________________________________________________ 50
____________________________________________________________________________ 52
________________________________________________________________________________ 65
____________________________________________________________________ 17
_______________________________________________________________________ 27
_________________________________________________________________________ 29
_______________________________________________________________________ 32
____________________________________________________________________ 45
3

目录
给定参数
测量参数
输入/输出
故障参数
日志参数
标识参数
通信参数
“
DSP402
ODVA
[1.1 SIMPLY START]
[1.3 SETTINGS]
[1.4 MOTOR CONTROL]
[1.5 INPUTS / OUTPUTS CFG] 输入/
[1.6 COMMAND]
[1.7 APPLICATION FUNCT.]
__________________________________________________________________________________________________ 89
给定(速度
给定(力矩
给定(调节器
__________________________________________________________________________________________________ 92
输入测量
热状态
时间
__________________________________________________________________________________________________ 99
_________________________________________________________________________________________________ 105
_________________________________________________________________________________________________ 124
_________________________________________________________________________________________________ 126
Controller Inside”(
标准配置和调整参数
标准配置和调整参数
[LI1
[LIx 配置] (L--) _______________________________________________________________________________________ 167
[AI1
[AI2
[AI3
[AI4
[RP
[ENCODER
[R1
[R2
[R3
[R4
[LO1
[LO2
[LO3 配置] (LO3-) ____________________________________________________________________________________ 186
[LO4
[AO1
[AO2 配置] (AO2-) ____________________________________________________________________________________ 190
[AO3
逻辑输入和控制位的定义状态定义
给定切换
[
给定运算
[
斜坡
[
停车设置
[
自动直流注入
[
寸动
[
预设速度
[
加减速
[
给定附近加减速
[
给定记忆
[
逻辑输入控制预磁
[
限位开关
[
抱闸逻辑控制
[
负载测量
[
高速提升
[
[PID
预设
[
转矩控制
[
转矩限幅
[
第二电流限幅
[
输入接触器命令
[
输出接触器命令控制分配
[
传感器定位
[
参数组切换
[
多电机设置
[
逻辑输入控制自整定
[
) __________________________________________________________________________________________ 89
) __________________________________________________________________________________________ 90
) ________________________________________________________________________________________ 91
____________________________________________________________________________________________ 92
______________________________________________________________________________________________ 92
________________________________________________________________________________________________ 93
(I/O)参数 _________________________________________________________________________________________ 95
内置控制器)参数
_________________________________________________________________________________ 140
___________________________________________________________________________________ 143
简单起动菜单
设置菜单
配置
] (LI-) _______________________________________________________________________________________ 167
配置
] (AI1-) _____________________________________________________________________________________ 169
配置
] (AI2-) _____________________________________________________________________________________ 170
配置
] (AI3-) _____________________________________________________________________________________ 172
配置
] (AI4-) _____________________________________________________________________________________ 174
配置
] (PLI-) ______________________________________________________________________________________ 176
配置
] (RI-) _______________________________________________________________________________________ 179
配置
] (R2-) ______________________________________________________________________________________ 181
配置
] (r3-) _______________________________________________________________________________________ 182
配置
] (r4-) _______________________________________________________________________________________ 183
配置
配置
配置
配置
配置
命令菜单
] (rPt-) _________________________________________________________________________________________ 201
] (JOG-) _______________________________________________________________________________________ 209
] (UPd-) ______________________________________________________________________________________ 215
调节器
PID 给定] (PRI-) ________________________________________________________________________________ 236
(SEt-) _______________________________________________________________________________ 145
电机控制菜单
配置
] (IEn-) _______________________________________________________________________________ 177
] (LO1-) ____________________________________________________________________________________ 184
] (LO2-) ____________________________________________________________________________________ 185
] (LO4-) ____________________________________________________________________________________ 187
] (AO1-) ____________________________________________________________________________________ 188
] (AO3-) ____________________________________________________________________________________ 191
(CtL-) _______________________________________________________________________________ 192
应用功能菜单
.] (rEF-) ____________________________________________________________________________________ 198
] (OAI-) ____________________________________________________________________________________ 199
] (Stt-) _____________________________________________________________________________________ 205
] (AdC-) ________________________________________________________________________________ 208
] (PSS-) ____________________________________________________________________________________ 210
] (SrE-) _______________________________________________________________________________ 216
] (SPM-) ___________________________________________________________________________________ 218
] (FLI-) _____________________________________________________________________________ 219
] (LSt-) _____________________________________________________________________________________ 220
] (bLC-) ________________________________________________________________________________ 221
] (ELM-) ____________________________________________________________________________________ 226
] (HSH-) ___________________________________________________________________________________ 228
] (PId-) ___________________________________________________________________________________ 230
] (tOR-) ____________________________________________________________________________________ 238
] (tOL-) ____________________________________________________________________________________ 241
] (CLI-) _________________________________________________________________________________ 243
] (LLC-) _______________________________________________________________________________ 244
] (OCC-) _______________________________________________________________________ 245
] (LPO-) __________________________________________________________________________________ 247
] (MLP-) __________________________________________________________________________________ 250
] (MMC-) _________________________________________________________________________________ 251
] (tnL-) ____________________________________________________________________________ 253
_________________________________________________________________________ 131
(SIM-) _______________________________________________________________________ 144
(drC-) ____________________________________________________________________ 148
输出设置
(I-O-) ______________________________________________________________ 166
________________________________________________________________________ 192
(FUn-) _________________________________________________________________ 198
4

目录
摆频控制
[
撤离
[
[1.8 FAULT MANAGEMENT]
[PTC
故障复位
[
自动重起动
[
飞车起动
[
电机热保护
[
电机缺相
[
输入电压缺相
[
变频器过热
[
过热报警管理
[
外部故障
[
欠压管理
[
[IGBT
[4-20mA
故障禁止
[
通讯故障管理
[
编码器故障
[
转矩/电流限幅检测
[
直流制动电阻保护
[
自整定故障
[
[CARDS PAIRING] (PPI-) ______________________________________________________________________________ 279
回落速度
[
斜坡除数
[
直流注入
[
参数代码索引
参数名索引
参数逻辑地址索引
参数
CANopen
参数
parameter INTERBUS
参数
parameter DeviceNet
] (tr0-) _____________________________________________________________________________________ 254
] (rFt-) _________________________________________________________________________________________ 258
探头管理
] (rSt-) _____________________________________________________________________________________ 261
] (Atr-) ___________________________________________________________________________________ 262
] (FLr-) _____________________________________________________________________________________ 263
] (tHt-) ___________________________________________________________________________________ 264
] (OPL-) ____________________________________________________________________________________ 266
] (OHL-) __________________________________________________________________________________ 267
] (EtF-) ____________________________________________________________________________________ 269
] (USb-) ____________________________________________________________________________________ 270
测试
] (tIt-) _____________________________________________________________________________________ 272
信号丢失
] (InH-) ____________________________________________________________________________________ 274
] (Sdd-) __________________________________________________________________________________ 276
] (tnF-) ___________________________________________________________________________________ 279
] (LFF-) ____________________________________________________________________________________ 279
] (FSt-) ____________________________________________________________________________________ 280
] (dCI-)) ____________________________________________________________________________________ 281
______________________________________________________________________________________________ 282
________________________________________________________________________________________________ 310
___________________________________________________________________________________________ 338
地址索引
故障管理
] (PtC-) _________________________________________________________________________________ 260
] (IPL-) _________________________________________________________________________________ 266
] (SAt-) _________________________________________________________________________________ 268
] (LFL-) ______________________________________________________________________________ 273
] (CLL-) ________________________________________________________________________________ 275
] (tId-) _____________________________________________________________________________ 277
] (brP-) _____________________________________________________________________________ 278
______________________________________________________________________________________ 366
地址索引
地址索引
(FLt-) _____________________________________________________________________ 260
____________________________________________________________________________ 394
____________________________________________________________________________ 422
5
文档结构
安装手册
本手册将介绍:
• 如何组装变频器
• 如何连接变频器
编程手册
本手册将介绍:
• 功能
• 参数
• 如何使用变频器显示终端
通信参数手册
本手册将介绍:
• 变频器参数,带有针对通过总线或通信网络应用的特定信息
• 特定于通信
• 通信与本地控制之间的交互
状态表)的工作模式
(
Modbus、 CANopen、 Etherne、 Profibus、 INTERBUS、Uni-Telway、 FIPIO Modbus Plus, 和 DeviceNet
手册
这些手册将介绍:
• 装配
• 与总线或网络的连接
• 诊断
• 通过集成的显示终端或图形显示终端对通信专用参数进行配置
整体式显示终端和图形显示终端
(
)
手册中将详细介绍通信协议服务。
Altivar 58/58F
本手册将介绍
它将介绍如何替换
替换手册
Altivar 71与Altivar 58/58F
Altivar 58或58F
之间的差别。
,包括如何更换以总线或网络进行通信的变频器。
6
介绍
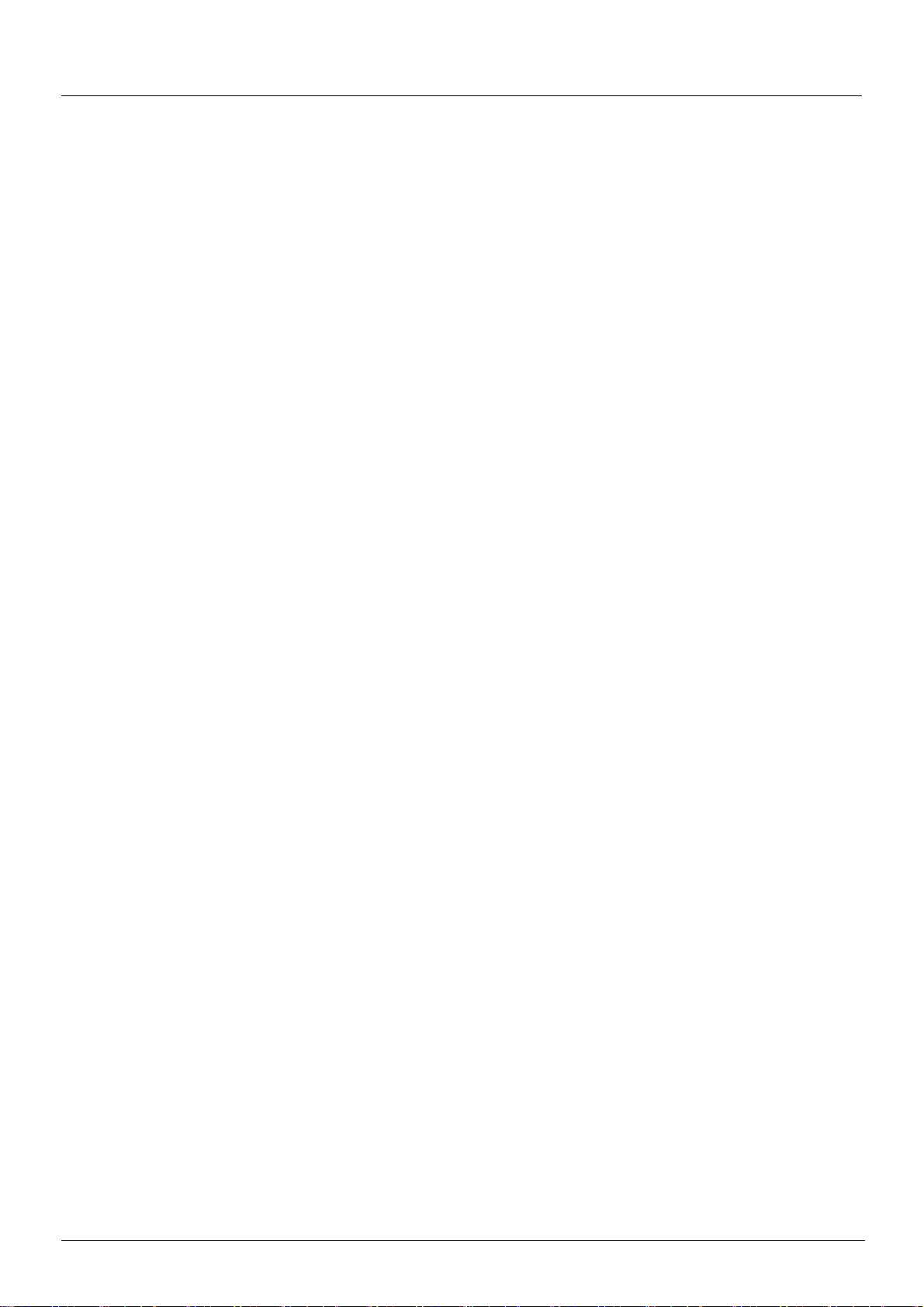
Magelis XBT Premium
FTM FTM
ATV 31
传感器 传感器
CANopen
总线配置举例
ATV 71
Altivar 71
它标配
集成的两个通信端口可以实现对
变频器已设计为能够满足工业通信设备环境中可能遇到的所有配置要求。
Modbus和CANopen
•
一个RJ45 Modbus
• 远程图形显示终端
•
Magelis
•
PowerSuite
•
一个RJ45 Modbus
工业用人机交互
通信协议。
Modbus
连接端口 ,位于变频器前面板上,用于连接:
协议的直接访问:
2
终端
(HMI)
软件包
网络端口 ,位于变频器的控制端子上,它专门用于
1
PLC
或
其他类型控制器的控制和信号传输。它也可以用来连接显示终端或
软件包。
TCP/IP
3
CANopen
适配器
(1)
来访问
CANopen
协议。
。该卡可实现对附加功能的使用,这些附加功能是对集
Modbus ASCII和4
线制
RS 485
由
Modbus
Altivar 71
PowerSuite
网络端口可通过
也可以通过使用以下一种通信用选件卡而被连接至其他网络和工业通信总线:
• 以太网
•
Modbus/Uni-Telway
成端口功能的补充:
•
Fipio
•
Modbus Plus
•
Profibus DP
•
DeviceNet
•
INTERBUS
控制部分可以被单独供电,从而使通信(检测、诊断)在动力电源部分故障时也可以得
到保持。
Altivar 58和Altivar 58F
连接
-
通信服务
-
变频器反应(配置
-
控制和检测参数
-
2
基本调整参数
-
PowerSuite
1
如果安装了
(1)
3
请参考
(2)
CANopen
CD-ROM
)
软件包支持从
适配器,
光盘上所提供的
变频器的主要通信功能与
Altivar 58和Altivar 58F
在网络端口 上将不可用。
Modbus
ATV 58(F)/ATV 71
1
替换手册。
Altivar 71
变频器向
兼容
(2)
Altivar 71
:
进行配置的传输。
7

介绍
变频器的所有功能均可通过网络访问:
• 控制
• 检测
• 调整
• 配置
如果变频器上安装有 “
Controller Inside
速度/力矩命令和给定可以来自不同的渠道:
•
端子
I/O
• 通信网络
Altivar 71
• “
Controller Inside
• 远程图形显示终端
•
PowerSuite
的高级功能允许根据应用要求对这些变频器控制源的切换进行管理。
”内置控制器卡
软件包(用于试运行和维护
”内置控制器卡,则可通过集成
)
Modbus
端口或以太网选件卡访问其变量
周期性通信变量的定义可通过以下方式选择:
除
DeviceNet
DeviceNet
• 网络配置软件
•
Altivar 71
之外,不管何种网络类型,对
• 根据
Drivecom配置 (CANopen CiA DSP 402)
• 根据
I/O
卡支持
(Sycon等)
的通信扫描器功能
Altivar 71
配置,这种情况下的控制与通过
标准配置。
ODVA
可通过以下方式控制:
端子控制一样直接而灵活。
I/O
对通信的检测根据不同的协议有不同的标准。不管协议类型如何,变频器对通信故障的反应均可配置:
• 变频器故障包括:自由停车、斜坡停车、快速停车或制动停车
• 无变频器故障停车
• 保持最近一次接收到的命令
• 以当前速度后退
• 忽略故障
来自
CANopen
总线的命令与来自变频器端子的输入具有相同的优先级。这样就可以通过
CANopen
适配器在网络端口上获得非常好的响应
时间。
(%MW等)
。
8

符号
参数描述
标识
一个参数由以下多种字符串来描述:
•
代码:最多4个字符。该代码可以从集成式七段显示数码管上直接读取(如:
• 名称:以普通文本给出的说明
• 终端名:以方括号标明的字符串,用于图形显示终端 [Gen. torque lim]
(由PowerSuite
地址
有4种用于指定参数地址的格式:
• 逻辑地址:以十进制或十六进制表示,用于
•
CANopen
•
Interbus-S
•
DeviceNet
索引号:十六进制的
索引号:十六进制的
路径:
Class / Instance / attribute
Index/subindex
Index/subindex格式
读/写类型
•
:只读
R
•
:可读可写
R/W
•
:可读可写,但只有当电机静止时才能写
R/WS
数据类型
•
WORD (
•
WORD (
•
INT
•
UINT
•
DINT
•
UDINT
位寄存器):每一位代表一项命令、检测或配置信息的字
列表):每个值代表一个可用的配置或状态选项的字
:有符号整型数
:无符号整型数
:有符号双精度整型数
:无符号双精度整型数
软件包使用
、以太网
Modbus
格式
格式,十六进制
)
TCI/IP、Fipio、Profibus DP
brt,tLIG)
协议
格式
十六进制数值书写如下:
16#
pppp。
变频器终端显示
出现在远程图形显示终端上的菜单以方括号表示。
例:
[1.9 COMMUNICATION]
出现在集成式七段显示终端上的菜单都以一个短线结束,包含在圆括号内。
例:
(COM-)
。
出现在远程图形显示终端上的参数名以方括号表示。
例:
[FALLBACK SPEED]
出现在集成式七段显示终端上的参数代码包含在圆括号内。
例:
(LFF)
。
。
。
9

配置文件
什么是配置文件?
有3种类型的配置文件:
• 通信配置文件
• 功能配置文件
• 应用配置文件
通信配置文件
通信配置文件用以描述总线或网络的特性:
• 电缆
• 连接器
• 电气特性
• 访问协议
• 寻址系统
• 周期交换服务
• 消息服务
•
...
通信配置文件对于某一类网络
功能配置文件
功能配置文件用以描述一类设备的行为。它会定义:
• 功能
• 参数
• 周期性
• 状态表
•
名称、格式、单位、类型等
(
变量
I/O
...
(Fipio、Profibus DP等)
)
是唯一的,并由多种类型的设备使用。
功能配置文件通用于一个设备族的所有成员(变频器、编码器、
模块、显示器等)。
I/O
理想情况下,功能配置文件应与网络无关,但现实中不是这样。它们可以标识通用或类似的组件。就变频器而言,主要的配置文件有:
•
DRIVECOM (INTERBUS)
•
DSP402 (CANopen)
•
PROFIDRIVE (Profibus)
•
ODVA (DeviceNet)
自
DSP402
年起已可以使用
1991
DRIVECOM
。
“用于变频器和运动控制的设备配置文件”代表着该类标准发展的未来,由
Can In Automation
发布。
应用配置文件
应用配置文件全文都在定义由某个机器上各种设备提供的服务。例如:“
control systems - virtual device definitions”(CiA DSP 417-2 V 1.01第2
CiA DSP 417-2 V 1.01 part 2 CANopen application profile for lift
部分用于提升控制系统的
CANopen
应用配置文件
虚拟设备定义)。
-
互换性
通信和功能配置文件的目的是实现网络连接设备的互换性。
尽管这一目的并不总能达到,配置文件还是促进了自由竞争。
10

配置文件
Altivar 71
输入/输出
使用
I/O
配置文件通常用于控制端子和显示终端。
I/O
运行命令发出后,变频器会立即启动。
控制字的16个位可被定义为某一项功能或端子输入。
本配置文件可被开发为通过以下方式对变频器进行实时控制:
• 端子
•
Modbus
•
CANopen
• 网卡控制字
• “
Controller Inside”(
配置文件由变频器自身支持,即而会被所有通信端口支持(包括集成式
I/O
Uni-Telway、Profibus DP、DeviceNet和INTERBUS
DSP402
变频器仅在某一组命令序列后启动。
控制字是标准的。
控制字中的5个位
DSP402
Modbus、Uni-Telway、Profibus DP、DeviceNet和INTERBUS
支持的功能配置文件
配置文件
(I/O)
配置文件简化
控制字
控制字
配置文件
(11至15位)
配置文件由变频器自身支持,即而会被所有通信端口支持(包括集成式
编程。
PLC
内置控制器)控制字
可以被定义为某一项功能或端子输入。
Altivar 71
还支持其用于网络控制。
通信卡)。
Modbus、CANopen
通信卡)。
和以太网、
Modbus、CANopen
Fipio、ModbusPlus、Modbus
和以太网、
Fipio、ModbusPlus
、
、
Altivar 71
在
ODVA(
运行命令发出后,变频器会立即启动。
控制字是标准的。
ODVA
支持
DSP402
• 隔离模式
• 组合模式
开放
配置文件由
DSP402
配置文件中,有2种专门针对
[Separate] (SEP)
[Not separ.] (SIM)
配置文件的 “速度模式”
DeviceNet
DeviceNet
厂商协会,
通信卡支持。
。
Altivar 71
(Velocity mode)
的模式,其特点在于对命令和给定的管理(见 “命令/给定切换”一节,35页):
Open DeviceNet Vendor Association)
配置文件
11
配置文件
I/O
定义
不管通过网络还是通过终端,变频器的行为都相同。
配置文件通过以下配置获得:
I/O
菜单 参数 值
[1.6 - COMMAND] (CtL-) [Profile] (CHCF) [I/O profile] (IO)
与对终端的逻辑输入一样,变频器功能可被指定为控制字位。一个功能输入可被指定至:
• 一个终端输入
• 一个
Modbus
• 一个
CANopen
• 一个网卡控制字位
• 一个
Controller Inside(
• 一个切换位
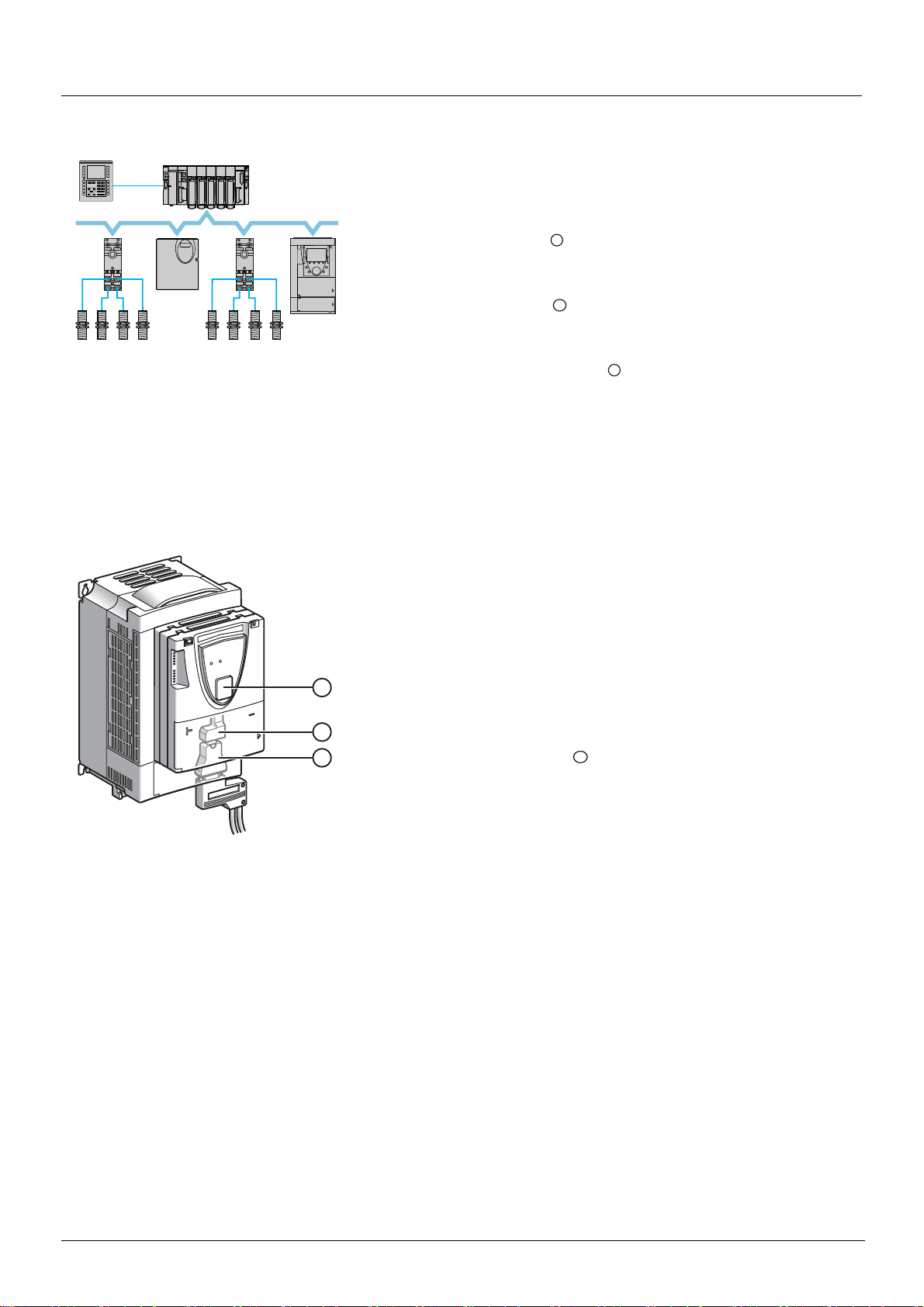
示意图:
CANopen
上的固定式定义:
bit 15
bit 14
(LI2至 LI14)
控制字位
控制字位
(Cd00至Cd15)
bit 13
bit 12
(C101至C115)
(C201至C215)
(C301至C315)
内置控制器)控制字位
:见 “命令/给定切换”一节。
CANopen
bit 9
bit 11
bit 10
bit 8
控制字
bit 7
(C401至C415)
bit 6
bit 5
bit 4
bit 3
bit 2
bit 2
bit 1
bit 1
bit 0
bit 0
功能
对终端和
bit 15
CANopen
bit 13
bit 14
上的固定式定义:
CANopen
bit 11
bit 12
bit 10
bit 9
bit 8
控制字
bit 7
端子
bit 6
bit 5
bit 4
bit 3
bit 2
bit 2
bit 1
bit 1
bit 0
bit 0
C201
C202
C201
C202
LI2
A
B
功能
A
B
C
LI10
LI9
LI8
LI7
LI6
LI5
LI4
LI3
LI2
LI12
LI14
LI13
12
LI11
LI1
配置文件
I/O
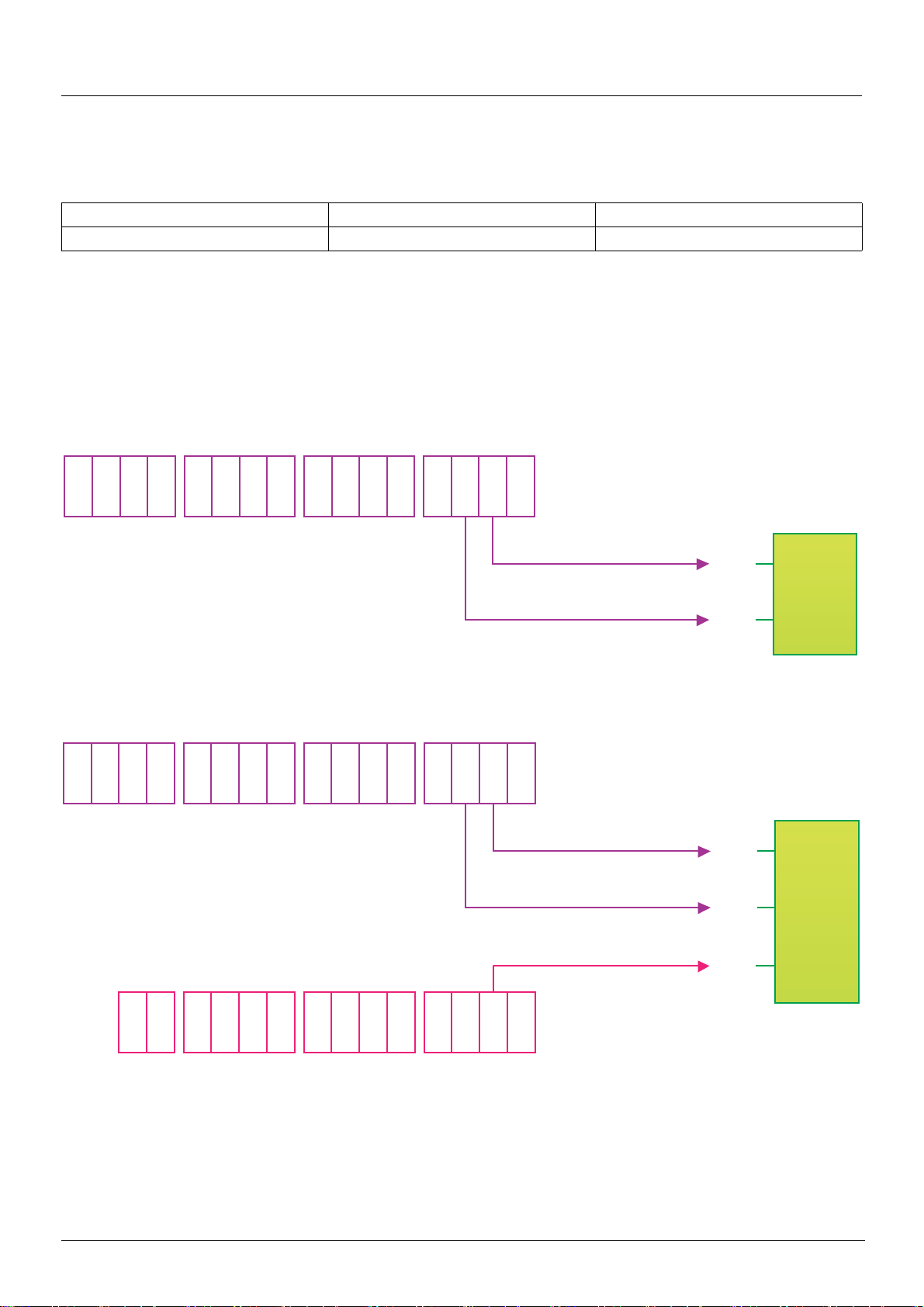
对
CANopen
上和 “
Controller Inside”(
CANopen
bit 11
bit 13
bit 15
bit 14
bit 12
bit 10
内置控制器)卡上端子的固定式定义:
控制字
bit 9
bit 8
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 2
bit 1
bit 1
bit 0
bit 0
函数
C201
C202
LI2
A
B
C
端子
LI10
LI9
LI8
LI7
LI6
LI5
LI4
LI3
LI2
LI12
LI14
LI13
LI11
LI1
快速停车
CANopen
控制字
C401
Stop
bit 15
对终端和在
bit 15
bit 13
bit 14
CANopen
bit 13
bit 14
bit 9
bit 8
bit 8
bit 7
控制字
bit 7
bit 11
bit 12
上带有命令切换的固定式定义:
bit 10
CANopen
bit 11
bit 12
bit 9
bit 10
终端
bit 6
bit 6
bit 5
bit 5
bit 4
bit 4
bit 3
bit 3
bit 2
bit 1
bit 2
bit 1
bit 2
bit 1
bit 2
bit 1
CANopen
bit 0
bit 0
bit 0
bit 0
CCS
终端
命令的切换
C201
Cd02
功能
A
B
LI2
LI10
LI9
LI8
LI7
LI6
LI5
LI4
LI3
LI2
LI12
LI14
LI13
LI11
LI1
LI5
C
13
配置文件
I/O
控制字 - 以两线制运行 (2C)
请参考编程手册的
正向运行命令被自动定义至输入
此定义不能修改。
运行命令在以下项为1时有效:
• 输入
• 控制字的位
控制字的位1至15可被定义给变频器功能。
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
可配置 可配置 可配置 可配置 可配置 可配置 可配置
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
可配置 可配置 可配置 可配置 可配置 可配置 可配置 可配置
在两线制模式
Bit
bit 0 Forward
bit 1 LI2 --C101 C201 C301 C401
bit 2 LI3 --C102 C202 C302 C402
bit 3 LI4 --C103 C203 C303 C403
bit 4 LI5 --C104 C204 C304 C404
bit 5 LI6 --C105 C205 C305 C405
bit 6 - LI7 - C106 C206 C306 C406
bit 7 - LI8 - C107 C207 C307 C407
bit 8 - LI9 - C108 C208 C308 C408
bit 9 - LI10 - C109 C209 C309 C409
bit 10 - - LI11 C110 C210 C310 C410
bit 11 - - LI12 C111 C211 C311 C411
bit 12 - - LI13 C112 C212 C312 C412
bit 13 - - LI14 C113 C213 C313 C413
bit14---C114 C214 C314 C414
bit15---C115 C215 C315 C415
[1.5 INPUTS / OUTPUTS CFG] (I-O-)
和控制字的位0。
LI1
,端子有效时
LI1
,网络有效时
0
按状态运行命令和
(2C)
变频器端子
逻辑输入/输出
(I/O)
I/O
卡
配置文件情况下,使用以下代码可以实现功能输入的固定式定义:
扩展输入/输出
(I/O)
节。
卡
固定式定义
Modbus CANopen
网卡
Forward
“
Controller
Inside
制器卡
”内置控
例如,要将运行方向命令定义至
14
CANopen
的位1,只需将
[Reverse assign.] (rrS)
配置为
[C201] (C201)
。
配置文件
I/O
控制字-以三线制运行
请参考编程手册的
停车命令被自动定义至输入
此定义不能修改。
此命令当以下项的状态为1时执行:
• 输入
• 控制字的位
正向运行命令被自动定义至输入
此定义不能修改。
若停车命令为状态1并且以下项检测到一个上升沿(0到1),则正向运行命令有效:
• 输入
• 控制字的位
控制字的位2至15可被定义给变频器功能。
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
可配置 可配置 可配置 可配置 可配置 可配置 正向 停车
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
可配置 可配置 可配置 可配置 可配置 可配置 可配置 可配置
在三线制
(3C)
[1.5 INPUTS / OUTPUTS CFG] (I-O-)
,端子有效时
LI1
,网络有效时
0
,端子有效时
LI2
,网络有效时
1
状态运行命令和
(3C)
节。
和控制字的位
LI1
和控制字的位1。
LI2
配置文件情况下,使用以下代码可以实现功能输入的固定式定义:
I/O
0
固定式定义
“
Bit
变频器端子
bit 0
bit 1
bit 2 LI3 --C102 C202 C302 C402
bit 3 LI4 --C103 C203 C303 C403
bit 4 LI5 --C104 C204 C304 C404
bit 5 LI6 --C105 C205 C305 C405
bit 6 - LI7 - C106 C206 C306 C406
bit 7 - LI8 - C107 C207 C307 C407
bit 8 - LI9 - C108 C208 C308 C408
bit 9 - LI10 - C109 C209 C309 C409
bit 10 - - LI11 C110 C210 C310 C410
bit 11 - - LI12 C111 C211 C311 C411
bit 12 - - LI13 C112 C212 C312 C412
bit 13 - - LI14 C113 C213 C313 C413
bit14---C114 C214 C314 C414
bit15---C115 C215 C315 C415
逻辑输入/输出
卡
(I/O)
扩展输入/输出
卡
( I/O)
Modbus CANopen
运行授权(停车
正向
)
网卡
Controller
Inside”(
控制器)卡
内置
例如,要将运行方向命令定义至
CANopen
的位2,只需将
[Reverse assign.] (rrS)
参数配置为
[C202] (C202)
。
15
配置文件
I/O
状态字
(ETA)
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
警告
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
转动方向
(= 0或1)
通过
保留
STOP
停车
键
保留
保留
(=1)
(=0)
电源有电 故障 运行 就绪
保留
(=0)
给定超出限制 给定到达
通过网络给出
命令或给定
保留
(= 0或1)
16
配置文件
I/O
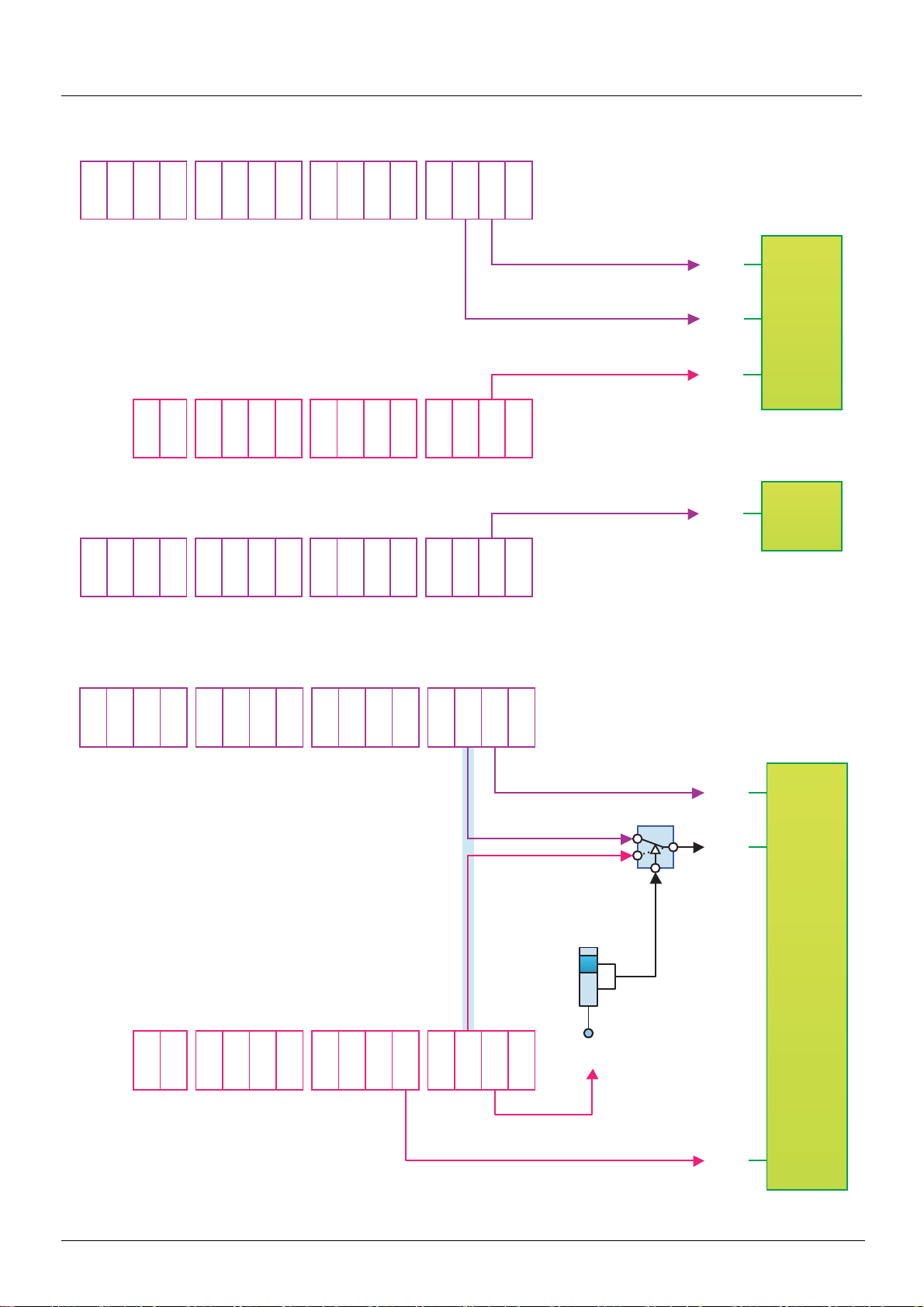
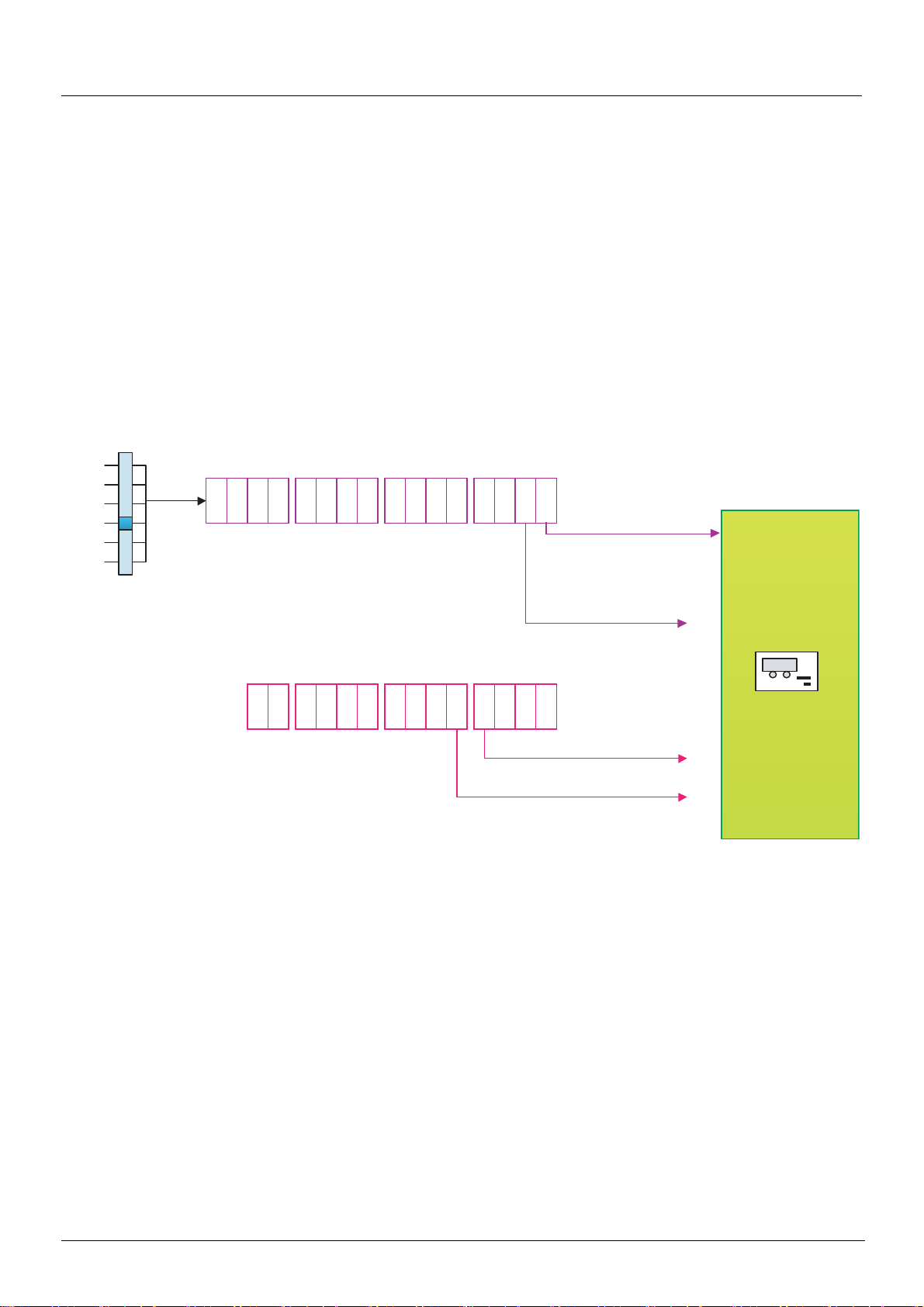
例:使用传感器功能定位的
请参考 《编程手册》的
在本例中,使用一个
[1.7 APPLICATION FUNCT.] (FUn-)
来控制输送机对零件的输送,输送机由转运台组成。每个转运台由一个变频器控制。
PLC
配置文件
I/O
一节,“传感器定位”部分。
网络连接。
PLC
会通过
CANopen
总线控制设备的运行。
如果下一个转运台不可用,变频器会使用停车传感器来禁止零件的输送。在此情况下,
如果下一个转运台空闲,变频器会在不停车条件下输送零件。在此情况下,
将禁用传感器。
PLC
停车传感器直接连接至变频器端子。
减速传感器也是直接连接(至变频器),以实现更为精确的停车。
配置示意图:
命令通道
1
Cd1
tEr
tEr
LCC
LCC
Mdb
Mdb
CAn
CAn
nEt
nEt
APP
APP
CANopen
bit 11
bit 13
bit 15
bit 12
bit 14
bit 10
控制字
bit 9
bit 8
bit 7
bit 6
bit 5
bit 4
bit 3
bit 2
bit 1
bit 2
bit 1
PLC
bit 0
bit 0
会启用传感器。
和变频器通过
PLC
CANopen
通过传感器定位
正向
反向
禁用传感器
C201
端子
LI10
LI9
LI8
LI7
LI6
LI5
LI4
LI3
LI2
LI12
LI14
LI13
LI11
LI1
正向停车传感器
LI4
反向停车传感器
LI6
正向减速传感器
LI5
反向减速传感器
LI8
17
配置文件
I/O
配置以下参数:
参数 值 备注
命令类型 按状态(2线制
配置文件
给定1配置
命令1配置
停车传感器定义 输入
减速传感器定义 输入
传感器禁用命令定义
配置文件
I/O
CANopen
CANopen
LI4
LI5
CANopen
)
控制字的位
1
运行命令通过
给定来自
命令来自
CANopen
CANopen
CANopen
卡。
卡。
控制字的位0获得。
通过远程图形显示终端配置:
菜单 参数 值
[1.5 INPUTS / OUTPUTS] (I-O-) [2/3 wire control] (tCC) [2 wire] (2C)
[1.6 - COMMAND] (CtL-) [Profile] (CHCF) [I/O profile] (IO)
[Ref. 1 channel] (Fr1) [CANopen] (CAn)
[Cmd channel 1] (Cd1) [CANopen] (CAn)
[1.7 APPLICATION FUNCT.] (FUn-)
[POSITIONING BY SENSORS] (LPO-)
[Stop FW limit sw.] (SAF) [LI4] (LI4)
[Slowdown forward] (dAF) [LI5] (LI5)
[Disable limit sw.] (CLS) [C201] (C201)
注意:正向运行命令被自动定义至
CANopen
控制字的位0。
18
DSP402
配置文件
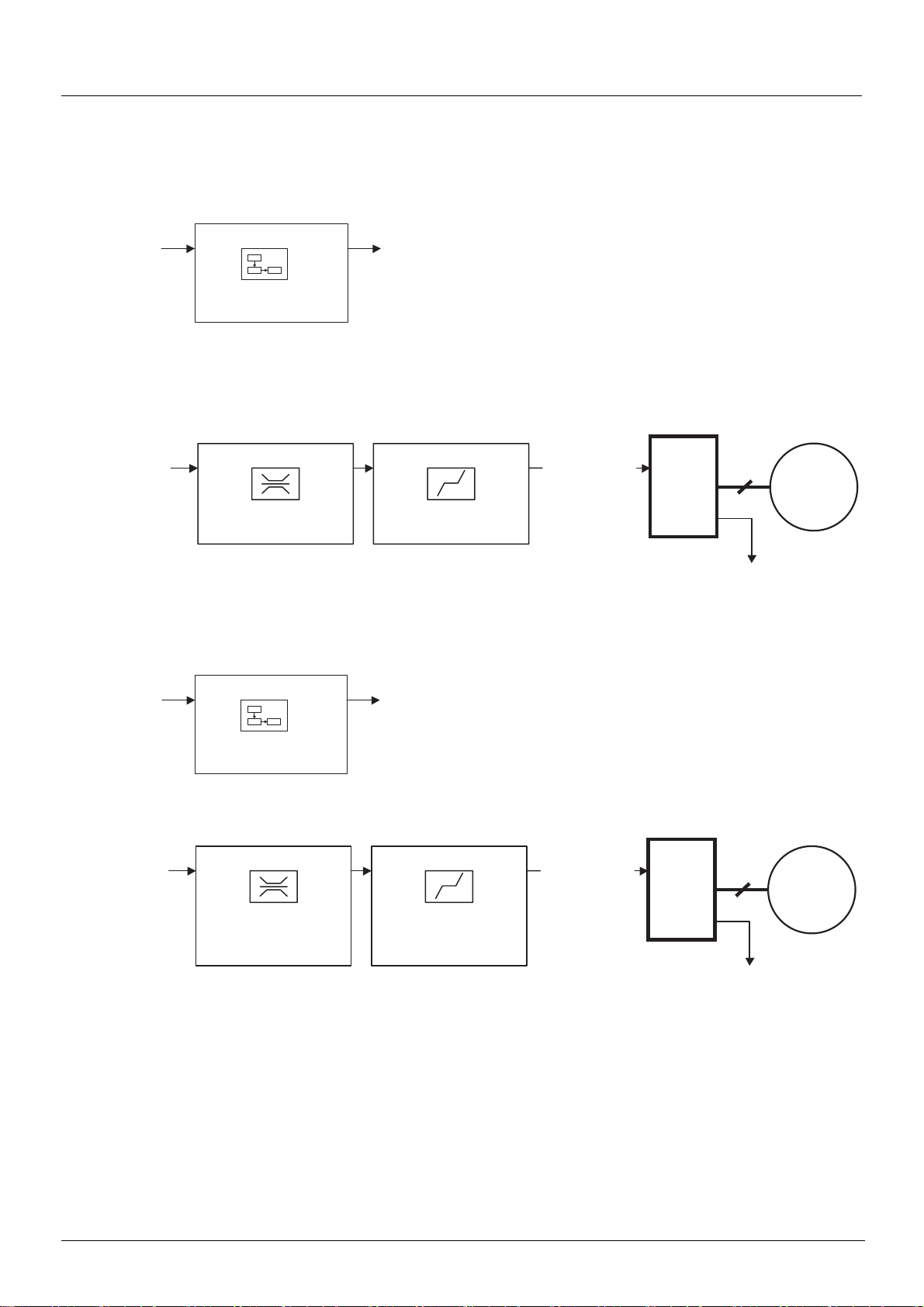
功能说明
变频器的运行集中在2个主要功能内,如下面两图所示:
• 控制图:
控制字
• 简化图,“
vl_target_velocity
主要参数与其
对于
Altivar
(6040)
(6042)
DSP402
状态机
Velocity”(
速度)模式下的速度给定:
限值 斜坡
vl_velocity_min_max 量 (6046)
名称和
DSP402/Drivecom
系统这些图将进行如下转换:
状态字
(6041)
vl_velocity_acceleration (6048)
vl_velocity_acceleration (6049)
索引号一起示出。
vl_velocity_demand
(6043)
动力模块
3
vl_control_effort
(6044)
M
控制字
速度给定
(CMD)
(LFRD)
状态机
给定限值 斜坡
加速-速度变化量
最小速度
最大速度
(SMIL)
(SMAL)
加速-时间变化量
减速-速度变化量
减速-时间变化量
状态字
(ETA)
(SPAL)
(SPAT)
(SPDL)
(SPDT)
斜坡后的速度给定
(FRHD)
动力模块
输出速度
3
M
(RFRD)
19
DSP402
配置文件
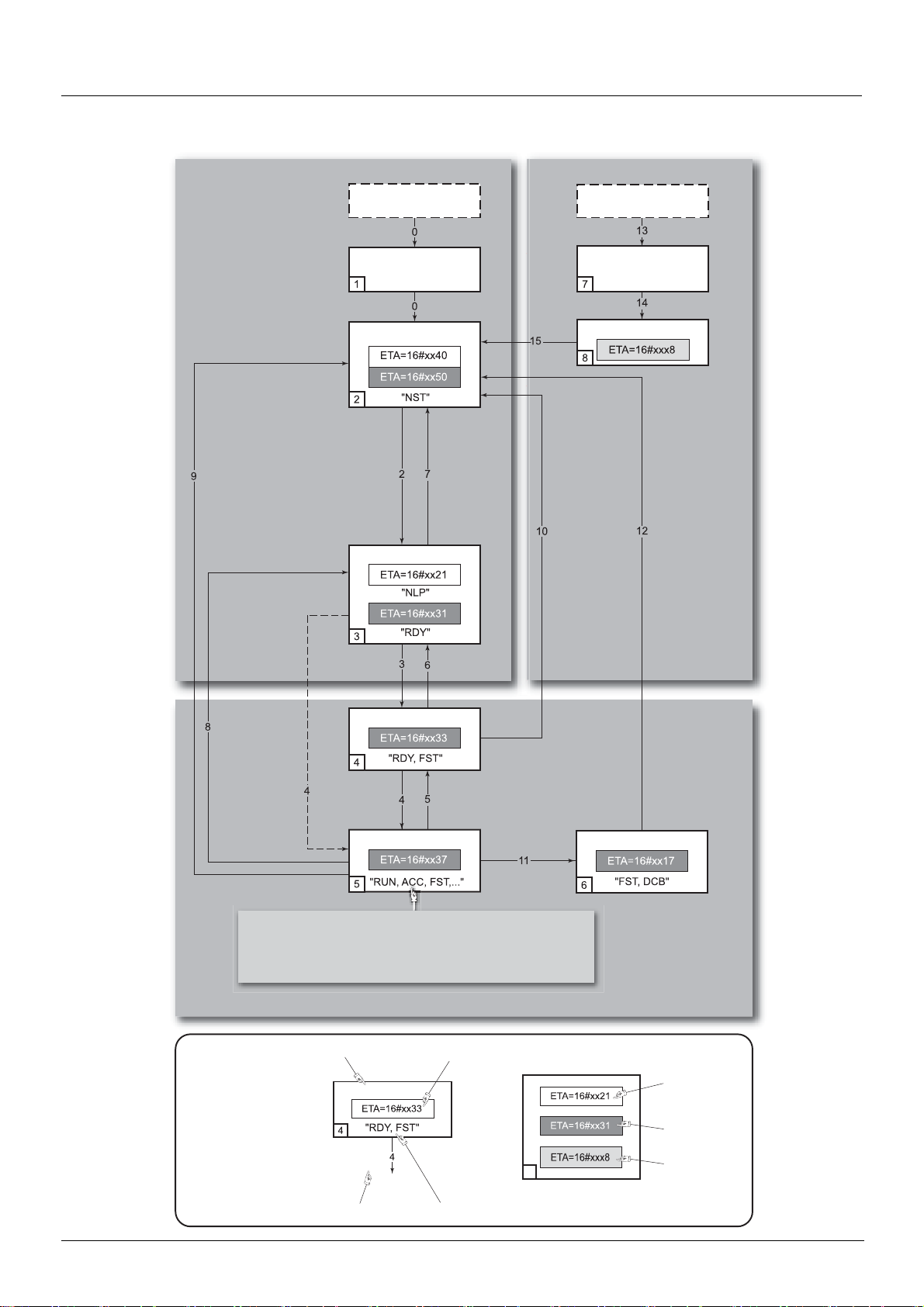
DSP402
状态表
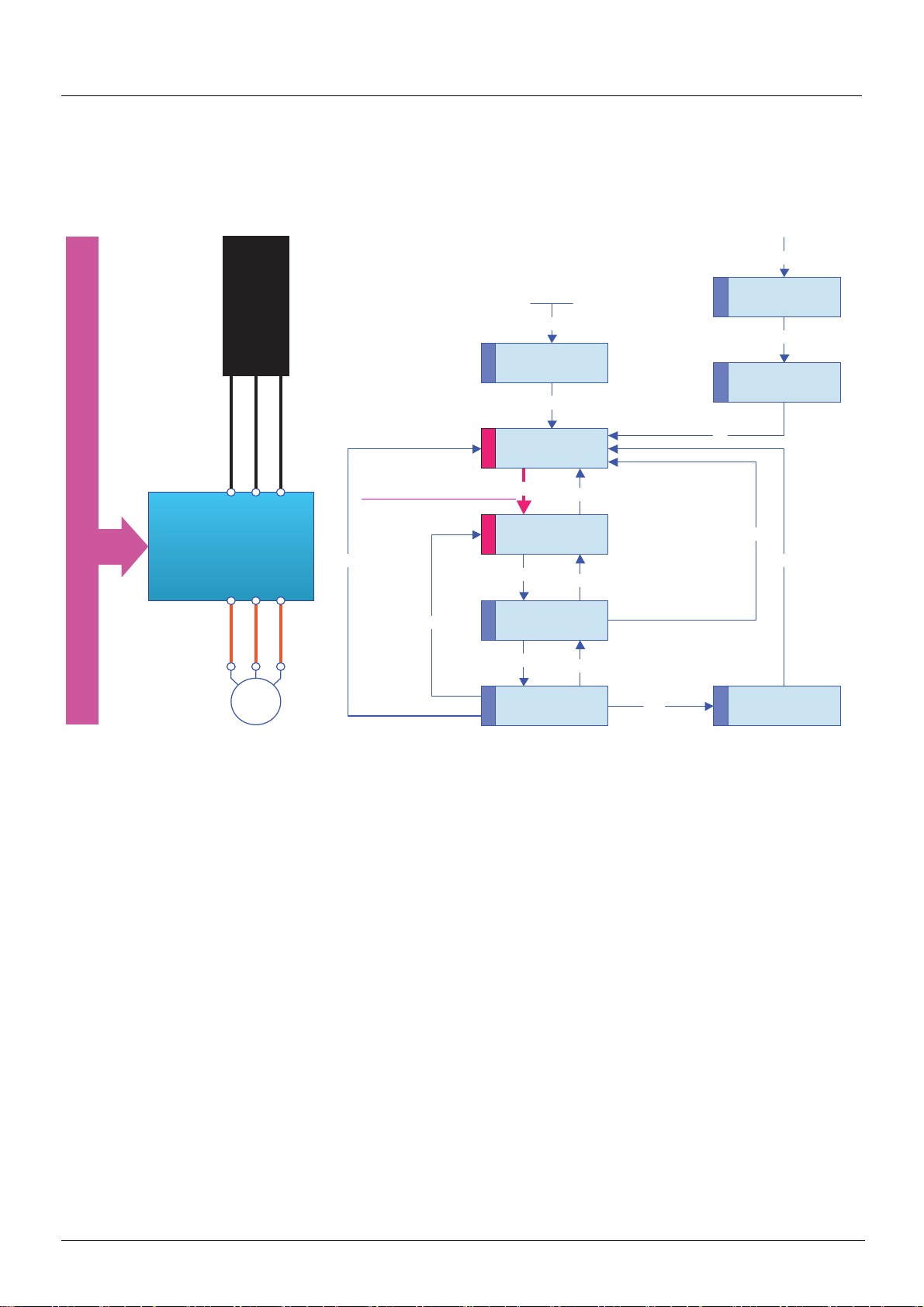
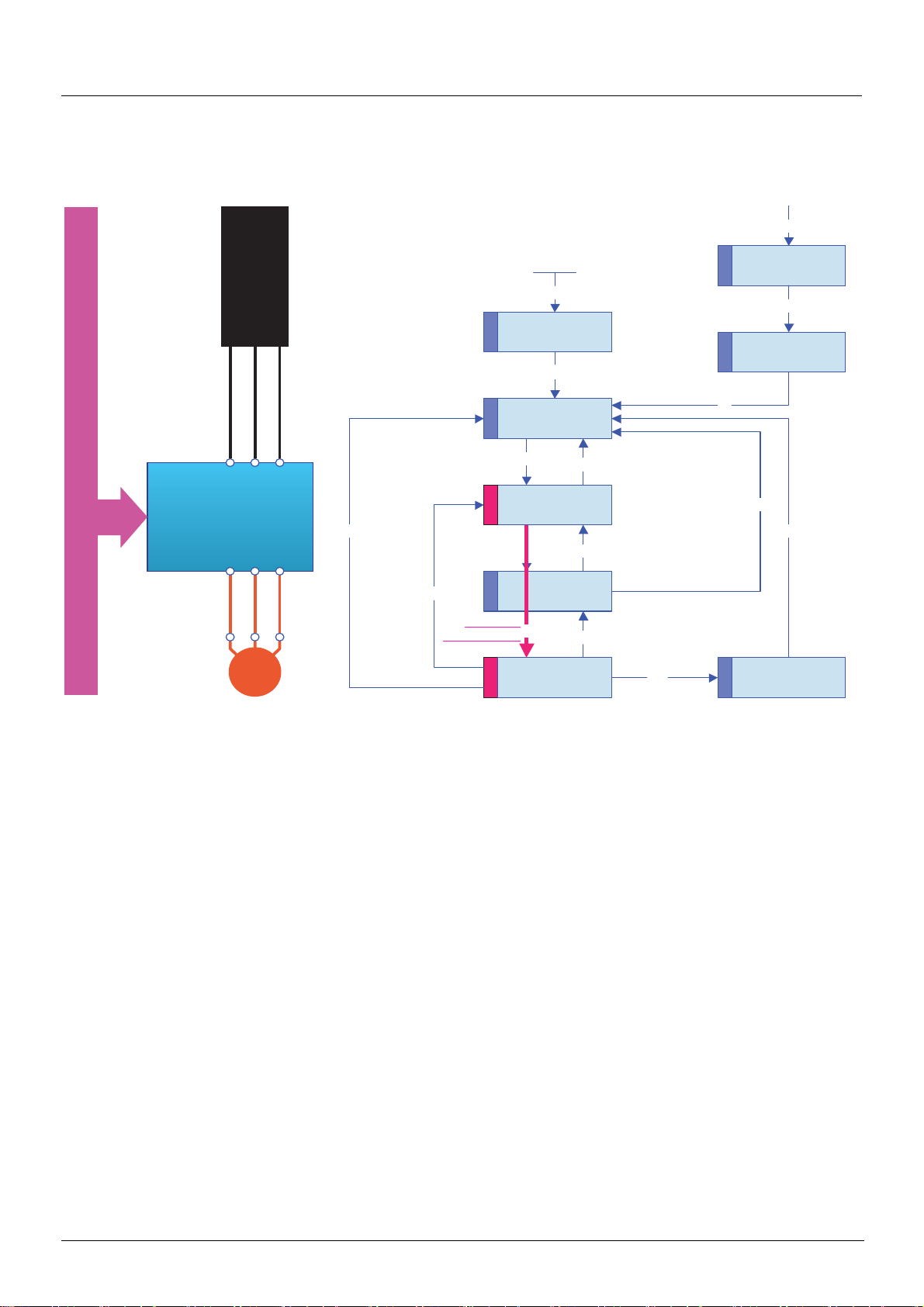
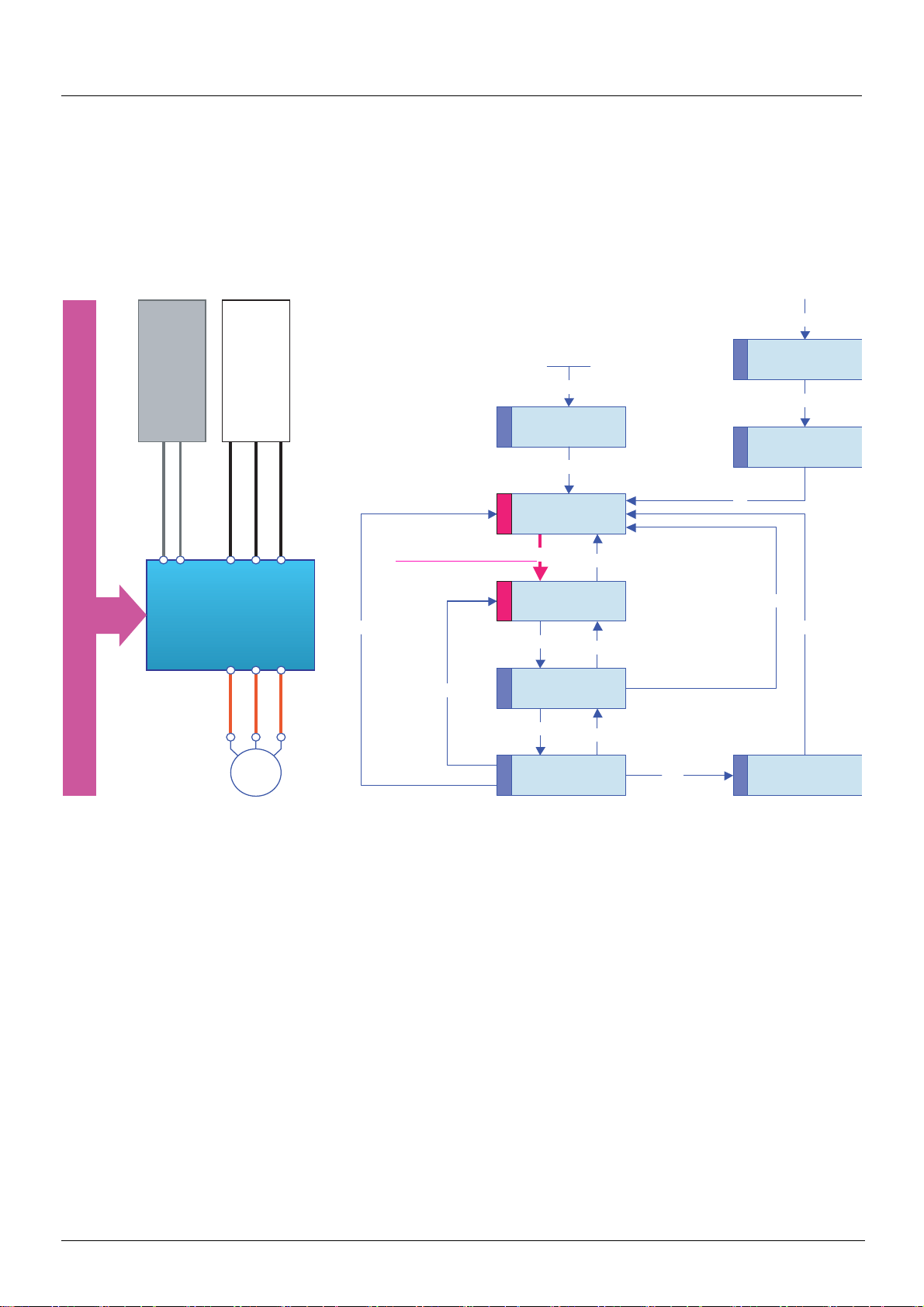
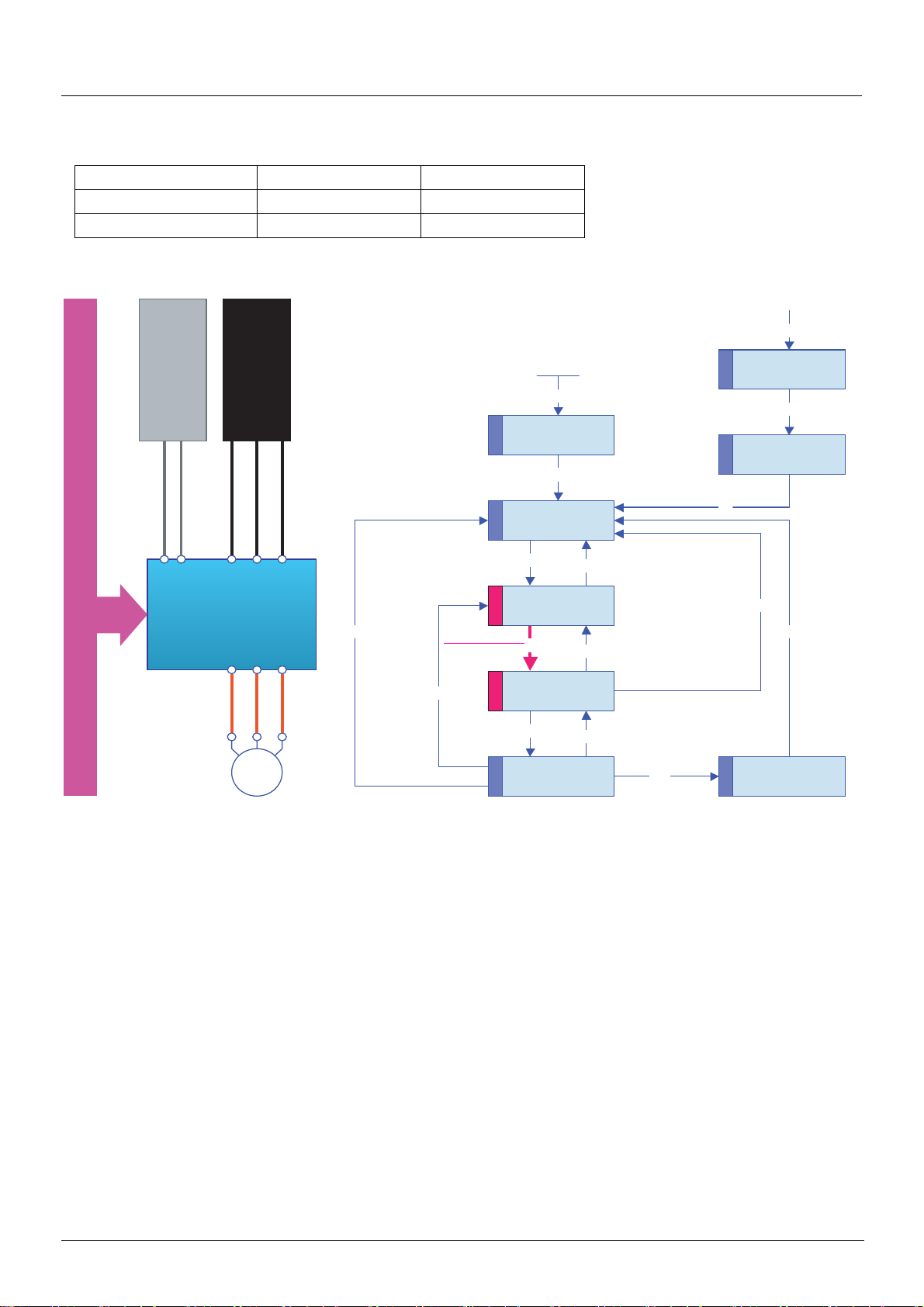
Drive power section line supply not necessarily present
变频器动力部分线电源
(
不一定有电
禁用电压
CMD=16#0000
终端处的
端子启动的自由停车
)
STOP
或
键或
Entry in
state chart (状态入口
Not ready to switch on
通电准备未就绪
(
Switch on disabled
通电被禁止
(
或
Shutdown(停车
CMD=16#0006
)
Ready to switch on
通电准备好
(
)
)
)
禁用电压
CMD=16#0000
或
快速停车
CMD=16#0002
或
键
STOP
)
故障消失和故障
复位
CMD=16#0080
禁用电压
CMD=16#0000
或
快速停车
CMD=16#0002
或终端处的
或端子起动的自由停
车,或修改配置参数
故障
(
Fault
)
For all states
适合所有状态
(
)
13
Fault
Fault reaction active
故障反应有效
(
Fault
STOP
键
)
14
故障
(
)
禁用电压
CMD=16#0000
或
终端处的
或
端子起动的自由停车
STOP
键
or
Shutdown(停车
CMD=16#0006
CMD=16#xxxF
)
允许运行
起动
CMD=16#0007
允许运行
CMD=16#xxxF
Operation enabled
(
起动
运行被允许
Shutdown(停车
CMD=16#0006
禁止运行
CMD=16#0007
或
快速停车
)
)
快速停车
CMD=16#0002
Examples:
ETA=16#0637:
ETA=16#8637:
ETA=16#0237:
ETA=16#8237:
停车或正向,达到速度
停车或正向,达到速度
正向、加速或减速
正向、加速或减速
Drive power section line supply present (变频器动力部分线电源有电
关键:
状态
Switched on (通电
状态字的值
)
快速停车有效
)
交流电源没电
交流电源有电
允许运行
CMD=16#xxxF
转变条件,以命令为例
图形显示终端上的状态显示
交流电源没电或
有电
20

DSP402
配置文件
状态说明
每个状态代表变频器的一种内部反应。
根据控制字
变频器的状态可由状态字
通电准备未就绪
初始化开始。这是一个在通信总线上不可见的瞬时状态。
通电被禁止
变频器未激活。
变频器锁定,没有功率提供给电机。
对于独立的控制部分,没有必要向动力部分提供交流功率。
对于带有线路接触器的独立控制部分,接触器不受控制。
配置和调整参数可被修改。
通电准备好
动力部分线电源挂起。
是否发送,或者出现某个事件(例如一个故障)是否出现,此表会发生变化。
(CMD)
(ETA)
的值来获得。
对于独立的控制部分,没有必要向动力部分提供交流功率,但系统有此功率方可改变到 “
对于带有线路接触器的独立控制部分,接触器不受控制。
变频器被锁定,没有功率提供给电机。
配置和调整参数可被修改。
通电
变频器由交流电源供电,但为静态。
对于独立的控制部分,动力部分线电源必须有电。
对于带有线路接触器的独立控制部分,接触器受控制。
变频器被锁定,没有功率提供给电机。
变频器的功率级运行准备就绪,但电压尚未施加到输出端。
配置和调整参数可被修改。
修改配置参数(电机停车)将会使变频器切换回 “
Switch on disabled”(
通电被禁止)状态。
运行被允许
变频器正在运行。
对于独立的控制部分,动力部分线电源必须有电。
对于带有线路接触器的独立控制部分,接触器受控制。
Switch on”(
通电)状态。
变频器被解锁,向电机提供功率。
变频器功能被启动,电压施加到电机端子上。
然而,在变频器为开环情况下,如果给定为零或施加了 “
自整定
配置和调整参数可被修改。
修改配置参数(电机停车)将会使变频器切换回 “
要求向电机中注入电流。因此对于此命令,变频器必须处于 “
(tUn)
Switch on disabled”(
Halt”(
暂停)命令,则没有功率提供给电机,且不施加力矩。
Operation enabled”(
通电被禁止)状态。
运行被允许)状态。
21
DSP402
快速停车有效
紧急停车
配置文件
变频器进行快速停车,之后只有在变频器已改变为 “
在快速停车中,变频器被解锁,并向电机提供功率。
Switch on disabled”(
通电被禁止)状态后方可重新启动。
故障反应有效
瞬时状态,在此状态下变频器会执行适用于该故障类型的操作。
变频器功能的启动或禁用取决于用于故障管理的故障管理参数中所配置的反应类型。
故障
变频器故障。
变频器被锁定,没有功率提供给电机。
汇总
状态 独立控制部分的动力部分线电源 提供给电机的功率 配置参数修改
Not ready to switch on
通电准备未就绪
(
Switch on disabled
通电被禁止
(
Ready to switch on
通电准备好
(
Switched on(
Operation enabled
运行被允许
(
Quick stop(快速停车
Fault reaction active
故障反应有效
(
Fault (故障
)
)
)
已通电
)
)
)
)
)
不需要 无 可以
不需要 无 可以
不需要 无 可以
需要 无
有,使用零给定的开环变频器及
需要
需要 有,在快速停车过程中 不可
取决于故障管理配置 取决于故障管理配置
不需要 无 可以
对开环变频器发出 “
暂停)命令的情况除外
(
Halt
”
可以,返回 “
disabled” (
2 - Switch on
通电被禁止)状态
不可
-
22
DSP402
配置文件
控制字
Disable voltage
(CMD)
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
故障复位
保留
确认故障 运行命令 紧急停车
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
可定义 可定义 可定义 可定义
命令 转移地址 最终状态
Shutdown
停车
(
)
Switch on
通电
(
)
Enable
operation
允许运行
(
Disable
operation
禁止运行
(
禁用电压
(
Quick stop
快速停车
(
Fault reset
故障复位
(
)
)
)
)
)
(=0)
2, 6, 8
3
4
5
7, 9, 10, 12
11
7, 10
15
保留
(=0)
3 - Ready to
switch on(
4 - Switched on
5 - Operation
(
4 - Switched on
2-Switch on
(
6 - Quick stop
快速停车有效
(
2-Switch on
(
2-Switch on
(
通电
通电
(
)
enabled
运行被允许
通电
(
)
disabled
通电被禁止
active
disabled
通电被禁止
disabled
通电被禁止
保留
(=0)
bit7 bit3 bit2 bit1 bit0
故障复位 允许运行 快速停车 允许电压 通电
)
)
)
)
)
)
x x 1 1 0 16#0006
x x 1 1 1 16#0007
x 1 1 1 1 16#000F
x 0 1 1 1 16#0007
x x x 0 x 16#0000
x x 0 1 x 16#0002
0 V 1 x x x x 16#0080
允许运行 快速停车 允许电压 通电
提供交流电源
的授权
缺省情况下为
转动方向命令
保留
(=0)
保留
(=0)
接触器控制
Halt (暂停
Halt (暂停
示例数值
)
)
:值对此命令无意义。
x
:命令为上升沿。快速停车有效
0V1
23
DSP402
配置文件
“
Halt”(
“
Halt”(
的设置决定。
在开环控制情况下,如果 “
在闭环控制情况下,如果 “
暂停)命令:
暂停)命令允许运动被中断,而不需要脱离“
”命令有效,则不向电机提供功率,不施加力矩。
Halt
”命令有效,则在停车过程中继续向电机提供功率,并继续施加力矩。
Halt
5 - Operation enabled”(
运行被允许)状态。停车类型由
定义控制字位
在
DSP402
bit 11 C111 C211 C311 C411
bit 12 C112 C212 C312 C412
bit 13 C113 C213 C313 C413
bit 14 C114 C214 C314 C414
bit 15 C115 C215 C315 C415
例如,要将直流注入制动定义至
默认情况下位11被定义为运行方向命令
配置文件中,使用以下代码可以实现某一功能输入的固定式定义:
Bit
集成式
Modbus
CANopen
的位13,只需要将
[Reverse assign.] (rrS)
CANopen
网卡
[DC injection assign.] (dCI)
。
参数的值定义为
“
Controller Inside
内置控制器卡
[C213] (C213)
[Type of stop] (Stt)
”
即可。
参数
24
DSP402
配置文件
状态字
1-Not ready to
2 - Switch on
3 - Ready to
(ETA)
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
警告 通电被禁止 快速停车 电压有效
通电
)
通电
)
通电
)
动力部分线电
源被禁止
通过
键停车
STOP
bit6 bit5 bit4 bit3 bit2 bit1 bit0
通电被禁止
0xx0000 -
1 x x 0 0 0 0 16#0040
0 1 x 0 0 0 1 16#0021
紧急停车
保留 (=0) 保留
快速停车 电压被允许 故障
报警
bit 15 bit 14 bit 13 bit 12 bit 11 bit 10 bit 9 bit 8
转动方向
状态
switch on(
准备未就绪
disabled(
被禁止
switch on(
准备就绪
动力部分线电
源有电
(=0)
故障
故障
内部限值有效 达到目标 远程
给定超出限制 达到给定
运行被允许
运行被允许 通电 通电准备就绪
运行 就绪
通过网络给出
的命令或给定
通电
通电准
备就绪
动力部分
线电源挂起
保留
(=0)
ETA (W3201)
掩码为
16#006F
(1)
4 - Switched on
通电
(
)
5 - Operation
enabled(
被允许
6 - Quick stop
active(
车有效
7 - Fault reaction
active(
有效
8 - Fault(
:在此状态下,该位的值可以是0或1。
x
(1)
此掩码可被
(2)
后面的故障状态 “
运行
)
快速停
)
故障反应
)
故障
)
PLC
0 1 1 0 0 1 1 16#0023
0 1 1 0 1 1 1 16#0027
0 0 1 0 1 1 1 16#0007
0xx1111 -
0xx1000
程序使用,以测试表状态。
6 - Quick stop active”(
快速停车有效)。
16#0008
或
16#0028
(2)
25
DSP402
配置文件
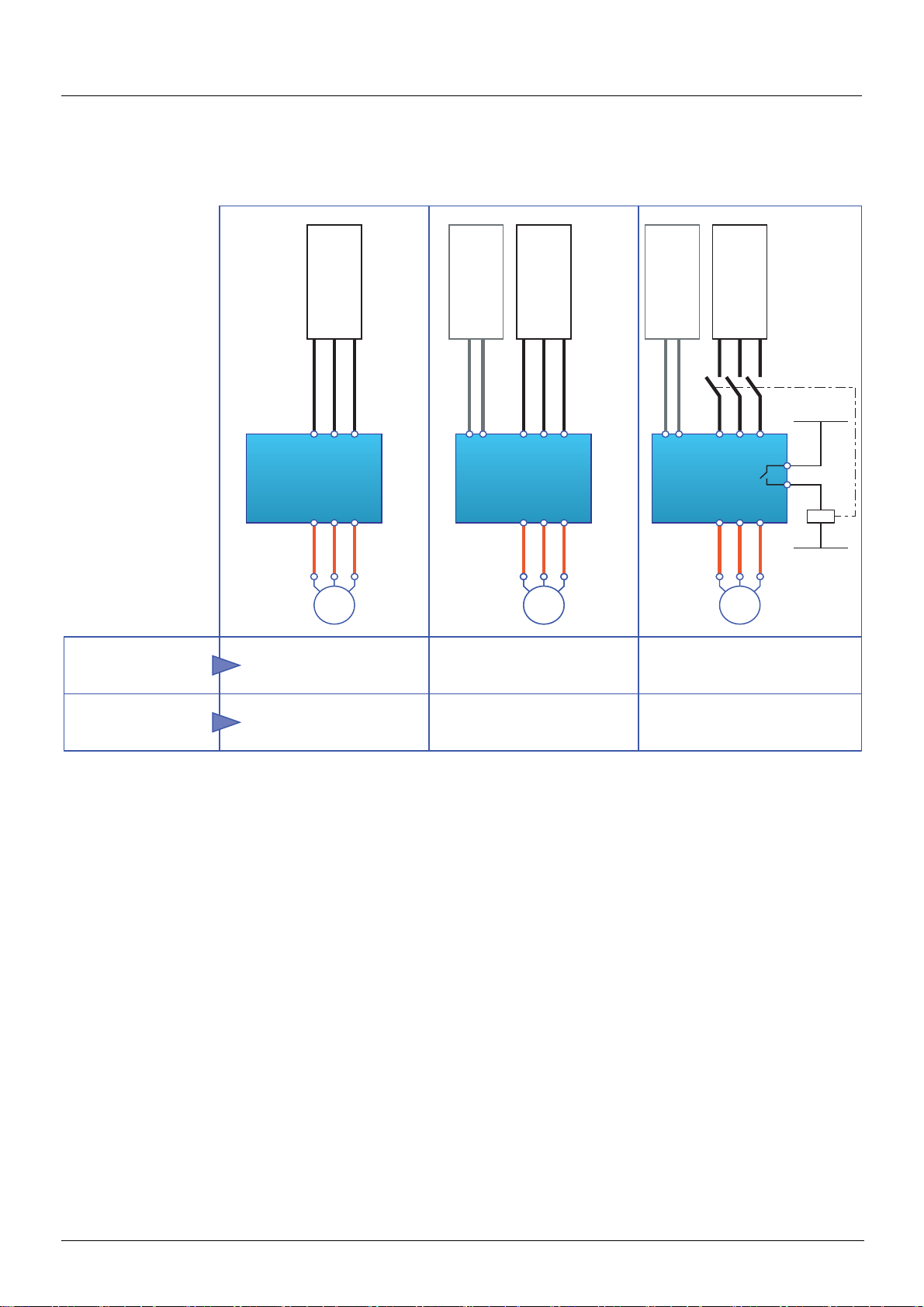
启动时序
状态表中的命令时序取决于向变频器提供功率的方式。
有3种可能的方案:
动力部分线电源
控制部分电源
动力部分线电源
控制部分电源
动力部分线电源
控制部分电源
变频器 变频器 变频器
M MM M
直接
通过动力部分
直接
独立
线路接触器由变频器控制
动力部分线电源
独立
26
DSP402
)
配置文件
由动力部分线电源供电的变频器的时序
动力和控制部分均由动力部分线电源供电。
如果向控制部分供电,则也必须向动力部分供电。必须应用以下时序:
• “
2 - Shutdown”(
总线或网络
停车)命令
变频器
M
动力部分线电源
Entry in state machine (状态机入口
Shutdown (停车
Disable
voltage
9
禁用电压
(
Shutdown
(
停车
)
8
)
Switch on
operation
允许运行
(
From all states (来自所有状态
)
0
Not ready to
switch on
1
通电准备未就绪
(
1
Switch on
disabled
2
通电被禁止
(
2
)
Ready to
switch on
3
通电准备就绪
(
3
通电
(
)
Switched on
4
Enable
5 6
通电
(
4
)
Operation
enabled
运行被允许
(
)
)
Disable voltage or Quick stop
7
禁用电压或快速停车
(
Disable voltage
)
Shutdown
6
(
)
Disable
operation
5
禁止运行
(
)
停车
or Quick stop
或快速)停车
)
)
11
Quick stop
快速停车
(
(
7
(
8
15
)
禁用电压
(
)
13
Fault reaction
active
故障反应有效
14
Fault(故障
10
12
Quick stop
active
快速停车有效
)
)
)
27
DSP402
配置文件
• 检查确认变频器处于 “
• 然后发送 “
• 电机可以被控制
4 - Enable operation”(
发送一个不等于零的给定值)。
(
总线或网络
3 - Ready to switch on”(
允许运行)命令。
动力部分线电源
变频器
通电准备就绪)状态。
Disable
voltage
9
禁用电压
(
)
From all states (来自所有状态
Entry in state machine (状态机入口
0
Not ready to
switch on
1
通电准备未就绪
(
2
Shutdown
停车
(
3
(
Switch on
通电
(
1
Switch on
disabled
通电被禁止
(
2
)
Ready to
switch on
通电准备就绪
3
)
)
)
Disable voltage or Quick stop
禁用电压或快速停车
(
7
Disable voltage
)
Shutdown
6
停车
(
)
)
or Quick stop
(
或快速)停车
Fault reaction
7
(
8
15
)
禁用电压
13
active
故障反应有效
14
Fault(故障
10
12
)
)
)
M
Shutdown
停车
(
8
)
Enable
operation
允许运行
(
Switched on
4
(
4
)
Operation
enabled
5
运行被允许
(
通电
)
Disable
operation
5
(
)
禁止运行
Quick stop
快速停车
(
11
)
Quick stop
6
)
active
快速停车有效
(
)
28
DSP402
配置文件
带有独立控制部分的变频器的时序
单独向动力和控制部分供电。
向控制部分供电时,不需要一定同时向动力部分供电。
必须应用以下时序:
• 动力部分线电源不一定有电。
• “
2 - Shutdown”(
停车)命令
控制部分电源
总线或网络
变频器
M
动力部分线电源
Shutdown (停车
Disable
9
voltage
禁用电压
(
Shutdown
停车
(
)
Entry in state machine (状态机入口
0
Not ready to
switch on
1
通电准备未就绪
8
)
(
1
Switch on
disabled
2
通电被禁止
(
2
)
Ready to
switch on
3
通电准备就绪
(
Switch on
operation
允许运行
(
3
通电
(
)
Switched on
4
Enable
5 6
通电
(
4
)
Operation
enabled
运行被允许
(
)
)
Disable voltage or Quick stop
禁用电压或快速停车
(
7
)
Shutdown
6
停车
(
)
Disable
operation
5
禁止运行
(
)
From all states (来自所有状态
13
7
(
8
15
)
禁用电压
(
Fault reaction
active
故障反应有效
14
Fault(故障
10
12
Quick stop
active
快速停车有效
Disable voltage
or Quick stop
或快速)停车
)
)
11
Quick stop
快速停车
(
)
(
)
)
)
)
)
29
DSP402
)
配置文件
• 检查确认变频器处于 “
• 检查确认动力部分线电源有电
动力部分线电源 终端显示 状态字
没电
有电
• 发送 “
3 - Switch on”(
3 - Ready to switch on”(
通电)命令
控制部分电源
总线或网络
变频器
状态字的 “
(
动力部分线电源
通电准备就绪)状态。
Voltage enabled”(
nLP 16#pp21
rdY 16#pp31
电压被允许))。
Entry in state machine (状态机入口
1
通电准备未就绪
(
2
Shutdown
停车
Disable
voltage
9
禁用电压
(
(
Switch on
)
通电
(
3
)
通电准备就绪
(
0
Not ready to
switch on
1
Switch on
disabled
通电被禁止
(
2
Ready to
switch on
3
)
From all states (来自所有状态
)
)
Fault reaction
7
(
8
15
)
Disable voltage or Quick stop
禁用电压或快速停车
(
7
)
Disable voltage
or Quick stop
禁用电压
)
Shutdown
6
停车
(
(
或快速)停车
)
13
active
故障反应有效
14
Fault(故障
10
12
)
)
M
Shutdown
停车
(
8
)
Switched on
4
Enable
operation
允许运行
(
5 6
通电
(
4
)
Operation
enabled
运行被允许
(
)
Disable
operation
5
(
禁止运行
)
Quick stop
(
快速停车
11
)
Quick stop
active
快速停车有效
(
)
)
30
 Loading...
Loading...