

Page 1
《 快 速 入 门 指 南 》
斯普瑞喷雾系统(上海)有限公司
书林路 21 号
(松江工业区东部新区)
上海松江区(邮编 201611)
中国
要查看完整的英文《用户手册》,请登录 www.teejet.com
或订购部件号 98-05239。
© TeeJet Technologies 2011 ● 98-01382 R0 Chinese-ZH
Page 2
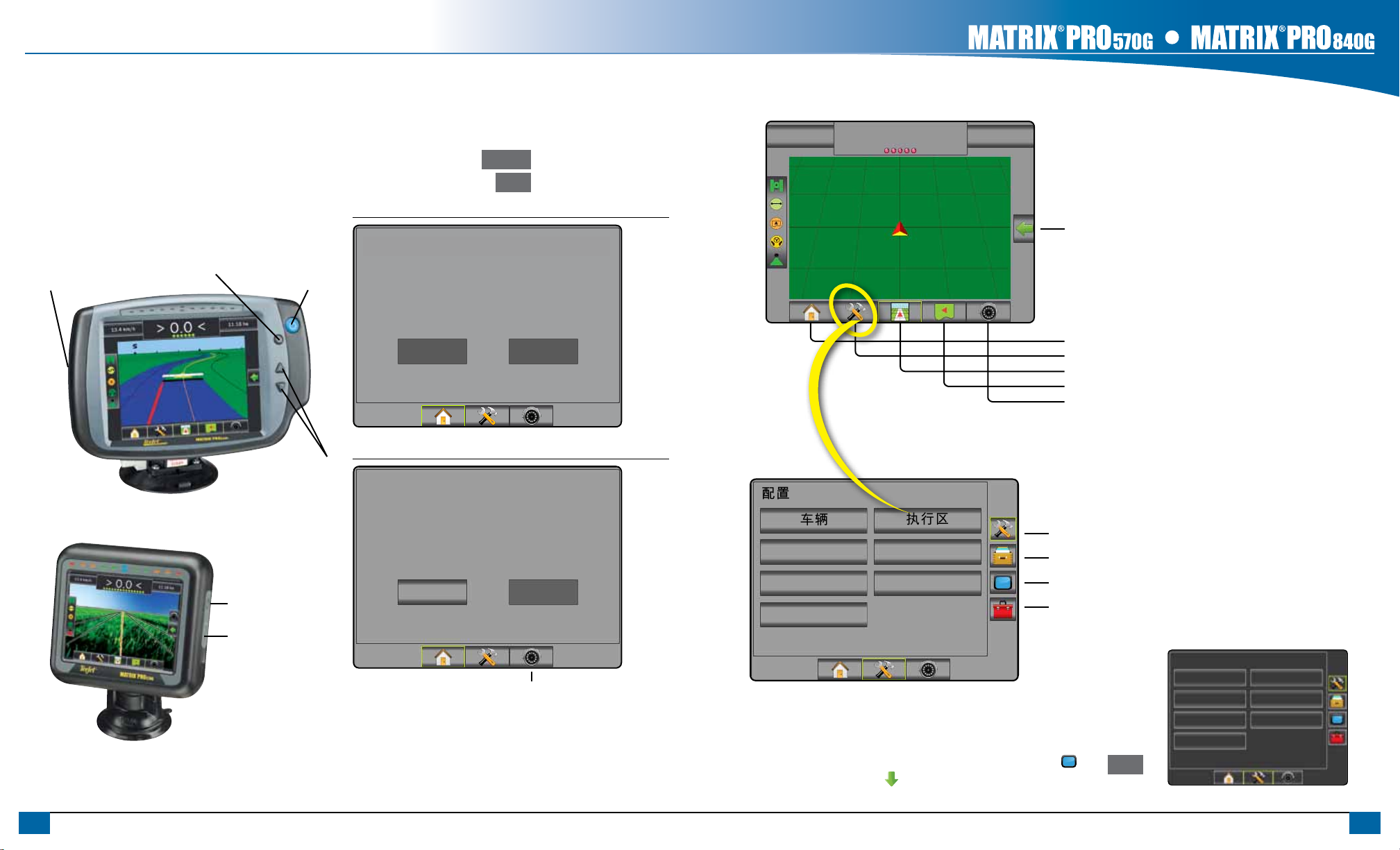
启动
#1 打开电源开关
按电源按钮打开控制台。
通电后,Matrix Pro 将开始启动顺序。
要关闭电源,请按下并短暂按住电源按钮,
直至确认屏幕确认为关闭模式。
警告!关闭电源后,需等候 30 秒才可重新
启动控制台。
主页按钮
USB 接口带橡胶盖
电源按钮
USB 接口
带橡胶盖
电源按钮
放大/缩小按钮
#2 开始新任务或继续任务
启动顺序完成后,主屏幕中将出现两个选项:开始
新任务或继续上一任务。
要开始新任务,请按 新任务 。
要继续上一任务,请按 继续 。
图 1-1: 必须有 GPS 信号才能开始任务
10-12-14 下午3:52
必须有有效的 GPS 信号才能开始任
务。
请稍候。
新任务
图 1-2: 收到 GPS 信号的主屏幕
10-12-14 下午 3:52
开始新任务还是继续上一任务?
开始新任务将清除上一任务的数据。
新任务
RealView 摄像头全屏视频视图
RealView 摄像头全屏视频视图
无有效 GPS 信号的情况下观看视频信息和设
置摄像头。该屏幕上没有 Realview 导航选项。
继续
继续
#3 导航屏幕
导航栏
0.0 km/h 0.00 ha
状态栏
标记 A 点
导航和导向选项
主屏幕/任务屏幕(或按主页按钮)
单位设置
车辆视图导航
地块视图导航
RealView 导航
#4 进入单位设置
首先将显示配置选项。侧标签键中包含数据管理、控制台设置和工具。
配置
车辆
自动驾驶
光靶
摄像头
要更改为“黑暗”,请按控制台侧标签 。按 显示 。
按“颜色模式”向下箭头
执行区
倾斜
GPS
明亮或黑暗控制台屏幕
并在“黑暗”和“明亮”颜色模式间进行选择。
侧标签键
配置侧标签
数据管理侧标签
控制台设置侧标签
工具侧标签
控制台有两种颜色模式
配置
自动驾驶
摄像头
车辆
光靶
执行区
倾斜
GPS
2
www.teejet.com
98-01382 R0
3
Page 3
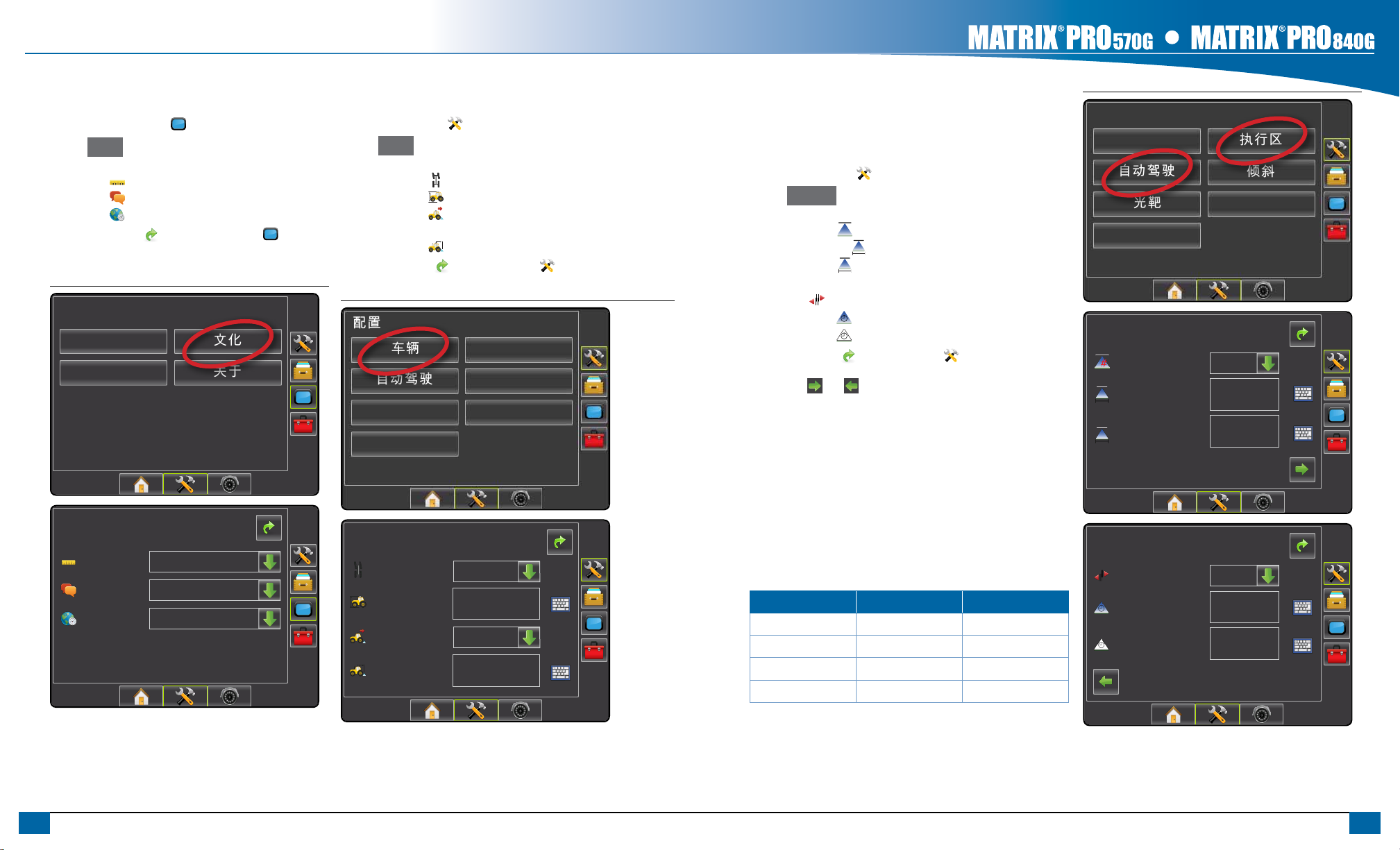
配置
#5 文化设置
1. 按控制台侧标签 。
2. 按 文化 。
3. 从下列项中进行选择:
►单位 -规定系统测量单位
►语言 -规定系统语言
►时区 -设定当地时区
4. 按返回箭头 或控制台侧标签 返回控
制台主屏幕。
图 1-3: 文化选项
控制台设置
显示
声音
文化
关于
#6 车辆设置
1. 按配置侧标签 。
2. 按 车辆 。
3. 从下列项中进行选择:
►车辆类型 -选择与您的车辆最接近的车辆类型
►天线高度 -设定天线到地面的高度
►喷杆方向 -设定喷杆置于 GPS 天线的后方或
前方
►喷杆距离 -规定 GPS 天线到喷杆的距离
4. 按返回箭头 或配置侧标签 返回配置主屏幕。
图 1-4: 车辆设置选项
配置
车辆
自动驾驶
光靶
摄像头
执行区
倾斜
GPS
#7 执行区设置
如果不存在 SmartCable 或段驱动程序模块 (SDM),
则仅可对一个喷杆进行设置。不可配置重叠、延迟开
启和延迟关闭,并且段数将设为 1。
1. 按设置侧标签 。
2. 按 执行区 。
3. 从下列项中进行选择:
►喷杆段数 #- 设定喷杆段数
►导航区宽度 - 设定导航线间的宽度
►喷洒宽度 - 设定每个喷杆段在整个喷洒宽
度中的喷洒宽度
►重叠 - 决定可重叠的面积
►延迟开启 - 设定喷杆段阀门开启的时间控制
►延迟关闭 - 设定喷杆段阀门关闭的时间控制
4. 按返回箭头 或配置侧标签 返回配置主屏幕。
注: 按 或 在执行区设置屏幕间切换。
#8 自动驾驶设置
如果存在驾驶控制模块 (SCM),则自动驾驶选项可用。
有关详细的设置说明,请参阅具体 FieldPilot 信息或
《自动驾驶安装手册》,或登录 www.teejet.com 查看
完整的《Matrix Pro 用户手册》(部件号 98-05239)。
图 1-5: 执行区设置选项
配置
配置
自动驾驶
光靶
摄像头
配置->执行区
喷杆段数
导航区宽度
喷洒宽度
15
24,50 米
25,00 米
执行区
倾斜
GPS
控制台->文化
4
www.teejet.com
单位 公制
语言
时区
中文
UTC
配置-> 车辆
车辆类型
天线高度
喷杆方向
喷杆距离
前轮式
3,50 米
后方
0,00 米
注: 您将旧版 Matrix 控制台更新为 Matrix Pro 时,
也需要更新自己的 SCM 软件。
所需 SCM 软件版本
SCM 软件版本 Matrix 1.x Matrix Pro 2.x
1.03 ●
1.04 ●
1.05 ●
10.0 ●
配置->执行区 (2)
重叠
延迟开启
延迟关闭
50%
1,00 秒
1,00 秒
98-01382 R0
5
Page 4

下午 1:14 7.2 km/h
> 0.0 <
2.73 ha 7.2 km/h
> 0.0 <
进入
6.0 km/h 7.6 ha
< 0.0 >
6.0 km/h 0 ha
标记 A 点
6.0 km/h 0 ha
< 0.0 >
下午12:32 7.2 km/h
标记 A 点
#9 进入导航屏幕
图 1-15: 车辆视图导航
图 1-16: 地块视图导航
#10 选择导航模式
1. 按“导航和导向选项”图标 显示导航选项。
2. 按“导航模式”图标 。
3. 从下列项中进行选择:
►直线 AB
►曲线 AB
►中心圆
►最终路线
►间隔
图 1-18: 选择导航模式
0.0 km/h 0 ha
0.0 km/h 0 ha
标记 A 点
标记 A 点
A
A
#11 标记 A 点和 B 点
要建立 AB 导航线,请执行以下操作:
1. 将车辆驾驶至 A 点的预定位置 。
2. 按“导航和导向选项”图标
3. 车辆行进过程中,按“标记 A 点”图标 A。
4. 将车辆开至 B 点的预定位置 。
5. 按“标记 B 点”图标 B 建立 AB 导航线。
6. “是否为此导航线命名?”
按
►是 - 输入名称并在控制台内保存该导航线。
►否 - 自动生成一个名称并在控制台内保存该
导航线。
控制台将开始提供导航信息。
注: 行进最短距离之前无法选择“标记 B 点”图标
B
(变灰)。
使用“取消标记” 图标 取消“标记 A 点”命令并恢
复上一条 AB 导航线(最初建立的)。
要建立更多导航线,请按照建立第一条导航线同样
的步骤进行操作。
图 1-19: 标记 A 点
显示导航选项。
图 1-20: 标记 B 点
下午 1:14 7.2 km/h
标记 B 点
B
图 1-21: 保存导航线
是否为此导航线命名?
是 否
图 1-17: RealView 导航
6
www.teejet.com
图 1-22: 按导航操作
98-01382 R0
7
Page 5

导航模式信息
直线 AB 导航
直线 AB 导航依据 A 和 B 两个参考点提供直线
导航。原始的 A 点和 B 点用于计算其他所有的
平行导航线。
曲线 AB 导航
曲线 AB 导航依据第一条 AB 参考线沿曲线提供
导航。该基准线用于计算其他所有的导航线。
中心圆导航
中心圆导航围绕中心位置向内外辐射提供导
航。它适合于圆形地块中的产品应用,沿与
中心圆灌溉系统半径相符的圆形导航线进行导
航。
最终路线导航
最终路线导航提供真正的最终路线导航。控制
台将自动检测到最短的“应用”导航线,并依据
导航线确定相邻路线。
间隔导航
间隔导航提示间隔行的位置所在,并在该行结
束时为下一相邻行提供导航。当操作人员标记
一行结束并开始转向下一行时,下一行中就会
提供直线 AB 导航线。车辆位于下一行时,导
航关闭。
无导航
无导航即导航关闭。
-13 7.2 km/h
导航线
GPS 状态
红色 = 无 GPS 信号
黄色 =仅 GPS 信号
绿色 = DGPS、
WAAS/RTK、
GLONASS 信号
粉色 = Glide/
ClearPath
导航模式
直线 AB 导航
曲线 AB 导航
中心圆导航
最终路线导航
间隔
无图标 = 无导航
界限区域状态
边界外部 = 当前在界
限区域外行进
边界内部 = 当前在界
限区域内行进
无图标 = 未划定边界
8.9 <
着色覆盖区
自动驾驶状态
绿色 = 使用中
黄色 = 启用
红色 = 禁用
无图标 = 系统中未
安装自动驾驶系统
BoomPilot 状态
红色 = 关闭/手动
绿色 = 自动
黄色 = 全部打开
无图标 = 单一喷
杆段(系统中未安
装 SmartCable 或
SDM)
状态栏
导航栏
水平指南针
安装了即时运作喷杆段数代表的车辆
导航和导向选项
-13 7.2 km/h
按状态栏图标获取更多信息。
-13 7.2 km/h
GGA 频率: 5 Hz
VTG 频率:5 Hz
卫星数量:10
HDOP:1
PR N: 135
GGA 质量:2
接收器:1
8.9 <
8.9 <
8
www.teejet.com
98-01382 R0
9
Page 6

导航功能概览
导航选项
导航线
A
B
A
A
返回标记点
标记 A 点 。标记导航线的起
始点。
标记 B 点 。标记导航线的终
B
点。变灰 = 尚未行进到最短距
离。
取消标记 A 点。取消标记 A 点的
过程。恢复上一条 AB 导航线(
最初建立的)。
间隔标记 B 点 。标记该行的
终点。
倾斜度 。测量朝北的基准线
顺时针转过的度数建立直线导航
线。北 = 0,东 = 90,南 = 180
,西 = 270。
A+ 推进。将现有的导航线转到
车辆当前的位置。
下一直线 AB 或倾斜导航线。显
示当前任务中保存的下一条直线
导航线。
下一曲线 AB 导航线。显示当前
任务中保存的下一条曲线 AB 导
航线。
下一中心圆导航线。显示当前任
务中保存的下一条中心圆 AB 导
航线。
弯曲预测前行。用指针作为导航
提示当前驾驶将把车辆开往何处
标记点
点。变灰 = 无 GPS 信号。
返回标记点。提供返回标记点的
路程。(切换到车辆视图,提供
返回标记点的导航。)
取消标记点。删除标记点。
。在车辆位置标记一个
边界
标记边界。划定可处理面积并确
定未处理区域。边界划在应用
路线的外部。变灰 = 无 GPS 信
号。
划定边界。结束边界划定过程。
通过行进至起始点的划幅内,也
可闭合边界。变灰 = 尚未行进到
最短距离。
取消边界。取消新标记边界过
程。恢复上一边界(最初建立
的)。
删除边界。删除当前任务中的所
有已划定的边界。
BoomPilot
BoomPilot。选择 BoomPilot 模
式。变灰 = 无 GPS 信号。
RealView 导航选项
视频摄像头选择。如安装了视频
选择模块 (VSM),可选择多达八
个摄像头视图之一。
切分摄像头视图。选择两套四个
摄像头输入中的一套(A/B/C/D
或 E/F/G/H)将屏幕分成四个单
独视频录像。
视频导航设置。可打开视频导航
或驾驶角度,并调整导航线。
视频导航在视频录像中提供三条
空间导航线,以辅助导航。
驾驶角度。显示方向盘要调整的
方向。
向上和向下图标。用于调增导航
线,
使其与摄像头视图相符。
下午1 2:32
速度
面积
时间
垄 #
标题
(或按主页按钮)
无 G PS 信号
主屏幕/任务屏幕
单位设置
车辆视图导航
地块视图导航
RealView 导航
屏幕选项
导航活动和喷杆
状态
1
-13 7.2 km/h
“车辆视图放大/缩小”。在水平方向
上调整车辆视图或比例的图标或按
钮,从车辆视图到鸟瞰视图。
地块视图放大/缩小。增大/减小屏
幕上所显示区域的图标或按钮。
平移。操作人员触摸屏幕即可着重
处理地图上具体的区域,无需移
动车辆。屏幕上的箭头在相应的方
向上 移动视图。
整体视图。将屏幕视图扩展到可看
到的最大面积。
GPS 状态
航迹偏差
当前活动
> 0.0 <
下午 12:32
无 G PS 信号
1 d eg
速度
面积
时间
垄 #
标题
A
A
A
B
10
www.teejet.com
98-01382 R0
11
Page 7

-13 7.2 km/h
> 0.0 <
-13 7.2 km/h
> 0.0 <
0 deg 7.2 km/h
> 0.0 <
-13 7.2 km/h
标记 A 点
-13 7.2 km/h
标记 A 点
-13 7.2 km/h
标记 A 点
导航功能详细信息
A
A+ 推进功能
要调整 AB 导航线至您的当前位置,请执行以下
操作:
1. 按“导航和导向选项”图标
2. 按“A+ 推进”图标 A 将导航线调至当前位
置。
A
倾斜度
要建立倾斜导航线,请执行以下操作:
1. 按“导航和导向选项”图标
2. 按“倾斜”图标 A 输入倾斜度。
3. 使用输入屏幕设定倾斜度。
4. 按
►接受 保存设置
►取消 退出键盘不保存
5. “是否为此导航线命名?”
按
►是 - 输入名称并保存导航线。
►否 - 自动生成一个名称。
控制台将开始提供导航信息。
要建立更多倾斜导航线,请按照建立第一条倾斜
导航线同样的步骤进行操作。
显示导航选项。
显示导航选项。
图 1-7: 保存导航线
是否命名此导航线?
是 否
图 1-8: 按导航操作
地块边界
要划定地块边界,请执行以下操作:
1. 将车辆开至地块/区域周边的预定位置。
2. 按“导航和导向选项”图标
3. 车辆运行时,按“边界”图标 。
4. 绕地块/区域周边移动。
5. 划定边界:
►行进路线距起始点有一划幅的宽度。边界
将自动闭合(白色导航线将变黑)。
►按“边界划定”图标 。在您当前位置与起
始点间将形成一条直线划定边界。
6. 按:
►是 - 保存边界。
►否 - 删除边界。
图 1-9: 边界划定正在进行
显示导航选项。
图 1-10: 保存边界 - 地块视图
划定的边界面积= 14.45
公顷
是否保存标记的边界?
是 否
图 1-11: 边界划定完成
图 1-6: 倾斜度
请输入方位 (度)
12
www.teejet.com
1 2 3 清除
4 5 6 <--
7 8 9
0 .
+/-
注: 在外部边界或第一条边界划定后,在行进
了最短距离(划幅的五倍)之前,无法选
择“边界划定”图标 (变灰)。
要划定内部边界,请按照划定第一条边界同样的
步骤进行操作。
如果在划定外部边界或第一条边界时设定了划
幅,那么该边界线将作为所设定划幅的外部边
界线。如果在划定内部边界或第二条边界时设
定划幅,那么该边界线将作为所设定划幅的内
部边界线。
使用“取消边界”图标 来取消新地块边界划定
过程,回到上一边界(最初划定的)。
使用“删除边界”图标 来删除当前任务中的所
有地块边界。
与您的当前位置相对应,边界划定后,“边界内”
图标
或“边界外”图标 会显示在状态栏中。
98-01382 R0
13
Page 8

返回标记点
上午 8:21 1.7 km/h
标记 A 点
上午 8:53 1.7 km/h
457 m
(可接收GLONASS信号)
要标记返回点,请执行以下操作:
1. 将车辆驾驶至返回点的预定位置 。
2. 按“导航和导向选项”图标
3. 按“添加点”图标 。
图 1-12: 返回点已标记 - 车辆视图
要显示到标记点的距离和导航,请执行以下操
作:
显示导航选项。
下一导航线
要显示其他保存的导航线,请执行以下操作:
1. 按“导航和导向选项”图标
2. 按“下一导航线”图标 。
图 1-13: 下一导航线
-13 7.2 km/h
要查看哪条导航线正在使用,请按状态栏中的“
导航模式”图标。
图 1-14: 查看哪条导航线正在使用
-13 7.2 km/h
模式:曲线 AB
名称:Stream Edge
总计:4
标记 A 点
标记 A 点
显示导航选项。
A A
A
Matrix
自动驾驶
喷杆控制
可选附件
45-05381
电源线:3米
(带有5安
培保险丝)
SCM电源输入/输出
Power
78-08072
稳压器
DC: xx/xx
45-05381
C
o
n
n
e
(
ct
+
1
o
2
t
v)
o
45-10103
转向线缆(A+B)
45-07703
SCM Power I/O
45-07703
DC: xx/xx
Valve Output
FieldPilot Interface
78-08072
DC: xx/xx
Steering Valve
91-07011
转换套件
45-10103
DC: xx/xx
78-50187 可选件:
RXA-30GPS天线
16-00022 RealView摄像头
78-08068:8通道
78-08067:4通道
视频选择模块,总线
45-07708
SCM线束
Wheel Sense
Engage/Disengage
Seat Sensor
Steering
Remote
方向盘
32-04040
遥控接合/
脱离开关
65-05226套件,
RXA-30天线支架
(可接收GLONASS信号)
78-08075
驾驶控制模块(SCM)
SCM COM 2
GPS In
COM 1
GPS Power
铰接陀螺模块(AGM)
32-04020
Engage / Disengage
78-08076
DC: xx/xx
32-04020
附件:
脚踏开关
45-05786:6米
45-05787:9米
天线线缆
GPS天线
78-50155
75-50190
78-00046
开关箱
用于换向开关
Camera
45-08117总线延长线缆(6米)
45-08117总线延长线缆(6米)
流量控制器
自动喷杆段控制驱动模块(15段)
Matrix Pro 570G
75-30082
(可接收GLONASS信号)
75-30083
8针
Work On-Off
78-00044 xx/xx
GPS
Speed
45-05617:6米
45-05618:18米
摄像头延长线缆
RS-232
连接RS-232接口
45-07716
倾斜陀螺模块
(TGM)线缆
Tilt Gyro Module
CAN Harness
45-07716
DC: xx/xx
CAN Tee
远程ABSC状
态开关连接件
78-05072
Matrix Pro 840G
75-30084
75-30090
5针
Matrix
CAN
8针
Power/DATA
45-05626
RAM支架(带吸盘)
(适用于Matrix Pro 570G)
(适用于Matrix Pro 840G)
CAN
TeeJet总线
(终端)
45-05626
电源/总线/数据线缆
(包含在FieldPilot和
BoomPilot工具包内)
安装包,
90-02349
90-02700
系统图解
POWER IN
3安培保险丝
BoomPilot线束
产品编号依据流
量控制器而定
1. 按“导航和导向选项”图标
2. 按“返回标记点”图标
显示导航选项。
。
使用“取消返回标记点”图标 删除标记的返回
点。
14
www.teejet.com
转向阀
控制器线束
阀
98-01382 R0
15
Page 9

 Loading...
Loading...