

Siemens SINAMICS S120 Series Function Manual

___________________
___________________
___________________
___________________
SINAMICS
S120
Communication
Function Manual
Valid as of:
Firmware version 5.2
12/2018
6SL3097
Preface
Fundamental safety
instructions
1
General information
2
Communication according to
PROFIdrive
3
Communication via
PROFIBUS DP
4
Communication via
PROFINET IO
5
Communication via Modbus
TCP
6
Communication via
Ethernet/IP (EIP)
7
Communication via
SINAMICS Link
8
Appendix
A
-5BD00-0BP0
Siemens AG
Division Digital Factory
Postfach 48 48
90026 NÜRNBERG
GERMANY
Document order number: 6SL3097-5BD00-0BP0
Ⓟ
Copyright © Siemens AG 2018.
All rights reserved
DANGER
indicates that death or severe personal injury will result if proper precautions are not taken.
WARNING
indicates that death or severe personal injury may result if proper precautions are not taken.
CAUTION
indicates that minor personal injury can result if proper precautions are not taken.
NOTICE
indicates that property damage can result if proper precautions are not taken.
WARNING
Siemens products may only be used for the applications described in the catalog and in the relevant technical
maintenance are required to ensure that the products operate safely and without any problems. The permissible
ambient conditions must be complied with. The information in the relevant documentation must be observed.
Legal information
Warning notice system
This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent
damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert
symbol, notices referring only to property damage have no safety alert symbol. These notices shown below are
graded according to the degree of danger.
If more than one degree of danger is present, the warning notice representing the highest degree of danger will
be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to
property damage.
Qualified Personnel
The product/system described in this documentation may be operated only by personnel qualified for the specific
task in accordance with the relevant documentation, in particular its warning notices and safety instructions.
Qualified personnel are those who, based on their training and experience, are capable of identifying risks and
avoiding potential hazards when working with these products/systems.
Proper use of Siemens products
Note the following:
documentation. If products and components from other manufacturers are used, these must be recommended
or approved by Siemens. Proper transport, storage, installation, assembly, commissioning, operation and
Trademarks
All names identified by ® are registered trademarks of Siemens AG. The remaining trademarks in this publication
may be trademarks whose use by third parties for their own purposes could violate the rights of the owner.
Disclaimer of Liability
We have reviewed the contents of this publication to ensure consistency with the hardware and software
described. Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, the
information in this publication is reviewed regularly and any necessary corrections are included in subsequent
editions.
11/2018 Subject to change
Preface
SINAMICS documentation
The SINAMICS documentation is organized in the following categories:
● General documentation/catalogs
● User documentation
● Manufacturer/service documentation
Additional information
You can find information on the topics below at the following address
(https://support.industry.siemens.com/cs/de/en/view/108993276):
● Ordering documentation/overview of documentation
● Additional links to download documents
● Using documentation online (find and search in manuals/information)
Please send any questions about the technical documentation (e.g. suggestions for
improvement, corrections) to the following email address
(mailto:docu.motioncontrol@siemens.com).
Siemens MySupport/Documentation
At the following address (https://support.industry.siemens.com/My/ww/en/documentation),
you can find information on how to create your own individual documentation based on
Siemens' content, and adapt it for your own machine documentation.
Training
At the following address (http://www.siemens.com/sitrain), you can find information about
SITRAIN (Siemens training on products, systems and solutions for automation and drives).
FAQs
You can find Frequently Asked Questions in the Service&Support pages at Product Support
(https://support.industry.siemens.com/cs/de/en/ps/faq).
SINAMICS
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
You can find information about SINAMICS at the following address
(http://www.siemens.com/sinamics).
3

Preface
Usage phase
Document/tool
Orientation
SINAMICS S Sales Documentation
Usage phases and their documents/tools (as an example)
Planning/configuration
Deciding/ordering SINAMICS S120 catalogs
Installation/assembly
Commissioning
Usage/operation
Maintenance/servicing
References
• SIZER Engineering Tool
• Configuration Manuals, Motors
• SINAMICS S120 and SIMOTICS (Catalog D 21.4)
• SINAMICS Converters for Single-Axis Drives and SIMOTICS Motors (Cata-
log D 31)
• SINAMICS Converters for Single-Axis Drives – Built-In Units (D 31.1)
• SINAMICS Converters for Single-Axis Drives – Distributed Converters (D 31.2)
• SINUMERIK 840 Equipment for Machine Tools (Catalog NC 62)
• SINAMICS S120 Equipment Manual for Control Units and Additional System
Components
• SINAMICS S120 Equipment Manual for Booksize Power Units
• SINAMICS S120 Equipment Manual for Booksize Power Units C/D Type
• SINAMICS S120 Equipment Manual for Chassis Power Units
• SINAMICS S120 Equipment Manual for Chassis Power Units, Liquid-cooled
• SINAMICS S120 Equipment Manual water-cooled chassis power units for com-
mon cooling circuits
• SINAMICS S120 Equipment Manual for Chassis Power Units, Air-cooled
• SINAMICS S120 Equipment Manual for AC Drives
• SINAMICS S120 Equipment Manual Combi
• SINAMICS S120M Equipment Manual Distributed Drive Technology
• SINAMICS HLA System Manual Hydraulic Drives
• Startdrive Commissioning Tool
• SINAMICS S120 Getting Started
• SINAMICS S120 Commissioning Manual
• SINAMICS S120 Function Manual Drive Functions
• SINAMICS S120 Safety Integrated Function Manual
• SINAMICS S120 Function Manual Communication
• SINAMICS S120/S150 List Manual
• SINAMICS HLA System Manual Hydraulic Drives
• SINAMICS S120 Commissioning Manual
• SINAMICS S120/S150 List Manual
• SINAMICS HLA System Manual Hydraulic Drives
• SINAMICS S120 Commissioning Manual
• SINAMICS S120/S150 List Manual
• SINAMICS S120/S150 List Manual
Communication
4 Function Manual, 12/2018, 6SL3097-5BD00-0BP0
Preface
Software
Manual
Alarms
Described in order of ascending numbers
SINAMICS S120/S150 List Manual
Sorted according to topic
Described in order of ascending numbers
Drive functions
SINAMICS S120 Function Manual Drive Functions
firmware V5.2)
Basic and Extended Functions
SINAMICS S120 Safety Integrated Function Manual
Basic Functions
SINAMICS S120 Function Manual Drive Functions
STARTER
SINAMICS S120 Commissioning Manual (up to firmware
V5.1 SP1)
Startdrive
V5.2)
Web server
SINAMICS S120 Function Manual Drive Functions
Hardware
Manual
Units, Air-cooled or Liquid-cooled
AC drive components
SINAMICS S120 Equipment Manual for AC Drives
S120 Combi components
SINAMICS S120 Equipment Manual Combi
V5.1 SP1)
V5.2)
Meaning of the LEDs
Equipment Manuals
High Frequency Drive components
SINAMICS S120 System Manual High Frequency Drives
Where can the various topics be found?
Parameters Described in order of ascending numbers SINAMICS S120/S150 List Manual
Function block
diagrams
Communication topics SINAMICS S120 Function Manual Communication (from
Safety Integrated
SINAMICS S120/S150 List Manual
Commissioning Of a simple SINAMICS S120 drive with
Commissioning With STARTER
Commissioning Of a simple SINAMICS S120 drive with
Commissioning With Startdrive SINAMICS S120 Commissioning Manual (from firmware
Control Units And expansion com-
ponents:
• Control Units
• Option Boards
• Terminal Modules
Power units
booksize
Power units, booksize C/D type format SINAMICS S120 Equipment Manual for Booksize Power
Chassis power units SINAMICS S120 Equipment Manual for Chassis Power
• Line connection
• Line Modules
• Motor Modules
• HUB Modules
• VSM10
• Encoder system
connection
• DC link compo-
nents
• Braking resistors
• Control cabinet
design
Getting Started (up to Firmware V5.1 SP1)
Getting Started (from Firmware V5.2)
SINAMICS S120 Equipment Manual for Control Units
and Additional System Components
SINAMICS S120 Equipment Manual for Booksize
Power Units
Units
C/D Type
Diagnostics via
LEDs
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
STARTER SINAMICS S120 Commissioning Manual (up to firmware
Startdrive SINAMICS S120 Commissioning Manual (from firmware
5
Preface
Target group
This documentation is intended for machine manufacturers, commissioning engineers, and
service personnel who use the SINAMICS drive system.
Benefits
This manual provides all of the information, procedures and operator actions required for the
particular usage phase.
Standard scope
The scope of the functionality described in this document can differ from that of the drive
system that is actually supplied.
● Other functions not described in this documentation might be able to be executed in the
drive system. However, no claim can be made regarding the availability of these functions
when the equipment is first supplied or in the event of service.
● The documentation can also contain descriptions of functions that are not available in a
particular product version of the drive system. Please refer to the ordering documentation
only for the functionality of the supplied drive system.
● Extensions or changes made by the machine manufacturer must be documented by the
machine manufacturer.
For reasons of clarity, this documentation does not contain all of the detailed information on
all of the product types, and cannot take into consideration every conceivable type of
installation, operation and service/maintenance.
Technical Support
Country-specific telephone numbers for technical support are provided in the Internet at the
following address (https://support.industry.siemens.com/sc/ww/en/sc/2090) in the "Contact"
area.
Information about CANopen
Information about communication via CANopen is provided in the following Manual:
● SINAMICS S120 Commissioning Manual CANopen Interface
Compliance with the General Data Protection Regulation
Siemens respects the principles of data protection, in particular the data minimization rules
(privacy by design).
For this product, this means:
The product does not process neither store any person-related data, only technical function
data (e.g. time stamps). If the user links these data with other data (e.g. shift plans) or if he
stores person-related data on the same data medium (e.g. hard disk), thus personalizing
these data, he has to ensure compliance with the applicable data protection stipulations.
Communication
6 Function Manual, 12/2018, 6SL3097-5BD00-0BP0

Preface
•
Fault 12345
•
Alarm 67890
•
Safety message
•
Adjustable parameter 918
•
Display parameter 1024
•
Adjustable parameter 1
•
Adjustable parameter 2098, index 1 bit 3
•
Adjustable parameter 99, indices 0 to 3
•
Display parameter 945, index 2 of drive object 3
•
Adjustable parameter 795, bit 4
Notation
The following notation and abbreviations are used in this documentation:
Notation for faults and alarms (examples):
F12345
A67890
C23456
Notation for parameters (examples):
p0918
r1024
p1070[1]
p2098[1].3
p0099[0...3]
r0945[2](3)
p0795.4
070, index 1
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
7

Preface
Communication
8 Function Manual, 12/2018, 6SL3097-5BD00-0BP0

Table of contents
Preface ................................................................................................................................................... 3
1 Fundamental safety instructions ............................................................................................................ 13
1.1 General safety instructions ..................................................................................................... 13
1.2 Warranty and liability for application examples ...................................................................... 13
1.3 Industrial security .................................................................................................................... 14
2 General information .............................................................................................................................. 17
2.1 Field of application .................................................................................................................. 17
2.2 Platform Concept and Totally Integrated Automation ............................................................. 18
2.3 System overview ..................................................................................................................... 20
2.4 X127 LAN (Ethernet)............................................................................................................... 22
2.5 Communication services and used port numbers .................................................................. 23
2.6 Time synchronization between the control and converter ...................................................... 26
2.6.1 Setting SINAMICS time synchronization ................................................................................ 28
2.6.2 Set NTP time synchronization ................................................................................................ 29
2.6.3 Messages and parameters ..................................................................................................... 30
3 Communication according to PROFIdrive .............................................................................................. 31
3.1 PROFIdrive application classes .............................................................................................. 34
3.2 Cyclic communication ............................................................................................................. 37
3.2.1 Telegrams and process data .................................................................................................. 37
3.2.2 Information about control words and status words ................................................................. 41
3.2.3 Examples ................................................................................................................................ 42
3.2.4 Motion control with PROFIdrive .............................................................................................. 45
3.3 Parallel operation of communication interfaces ...................................................................... 48
3.4 Acyclic communication............................................................................................................ 51
3.4.1 General information about acyclic communication ................................................................. 51
3.4.2 Structure of requests and responses ...................................................................................... 53
3.4.3 Determining the drive object numbers .................................................................................... 59
3.4.4 Example 1: read parameters .................................................................................................. 60
3.4.5 Example 2: Writing parameters (multi-parameter request)..................................................... 62
3.5 Diagnostics channels .............................................................................................................. 66
3.5.1 PROFINET-based diagnostics ................................................................................................ 67
3.5.2 PROFIBUS-based diagnostics ............................................................................................... 70
3.5.2.1 Standard diagnostics .............................................................................................................. 71
3.5.2.2 Identifier-related diagnostics ................................................................................................... 71
3.5.2.3 Status messages/module status ............................................................................................. 72
3.5.2.4 Channel-related diagnostics ................................................................................................... 73
3.5.2.5 Data sets DS0/DS1 and diagnostics alarm............................................................................. 74
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
9

Table of contents
3.6 Configuring telegrams in Startdrive........................................................................................ 75
3.6.1 Displaying telegram configuration .......................................................................................... 75
3.6.2 Settings for SINAMICS S120, S150, G150, G130, MV ......................................................... 76
4 Communication via PROFIBUS DP ....................................................................................................... 79
4.1 General information about PROFIBUS .................................................................................. 79
4.1.1 General information about PROFIBUS for SINAMICS .......................................................... 79
4.1.2 Example: telegram structure for cyclic data transmission ..................................................... 82
4.2 Commissioning PROFIBUS ................................................................................................... 85
4.2.1 Setting the PROFIBUS interface ............................................................................................ 85
4.2.2 PROFIBUS interface in operation .......................................................................................... 88
4.2.3 Commissioning PROFIBUS ................................................................................................... 89
4.2.4 Diagnostics options ................................................................................................................ 90
4.2.5 SIMATIC HMI addressing ...................................................................................................... 90
4.2.6 Monitoring telegram failure .................................................................................................... 92
4.3 Motion Control with PROFIBUS ............................................................................................. 94
4.4 Slave-to-slave communication ............................................................................................... 98
4.4.1 Setpoint assignment in the subscriber ................................................................................. 100
4.4.2 Activating/parameterizing slave-to-slave communication .................................................... 100
4.4.3 Commissioning PROFIBUS slave-to-slave communication ................................................ 102
4.4.4 Diagnosing PROFIBUS slave-to-slave communication ....................................................... 108
4.5 Messages via diagnostics channels..................................................................................... 108
5 Communication via PROFINET IO ....................................................................................................... 111
5.1 General information about PROFINET IO ........................................................................... 111
5.1.1 Real-time (RT) and isochronous real-time (IRT) communication ........................................ 113
5.1.2 Addresses ............................................................................................................................ 114
5.1.3 Dynamic IP address assignment ......................................................................................... 116
5.1.4 DCP flashing ........................................................................................................................ 118
5.1.5 Data transfer ........................................................................................................................ 118
5.1.6 Communication channels for PROFINET ............................................................................ 120
5.1.7 References ........................................................................................................................... 121
5.1.8 Overview of important parameters ....................................................................................... 122
5.2 RT classes for PROFINET IO .............................................................................................. 124
5.3 PROFINET GSDML ............................................................................................................. 129
5.4 Motion Control with PROFINET ........................................................................................... 131
5.5 Communication with CBE20 ................................................................................................ 135
5.6 Communication via PROFINET Gate .................................................................................. 136
5.6.1 Functions supported by PN Gate ......................................................................................... 137
5.6.2 Preconditions for PN Gate ................................................................................................... 138
5.7 PROFINET with 2 controllers ............................................................................................... 139
5.7.1 Control Unit settings ............................................................................................................. 139
5.7.2 Configuring Shared Device .................................................................................................. 141
5.7.3 Overview of important parameters ....................................................................................... 150
5.8 PROFINET media redundancy ............................................................................................ 151
5.9 PROFINET system redundancy ........................................................................................... 152
Communication
10 Function Manual, 12/2018, 6SL3097-5BD00-0BP0

Table of contents
5.9.1 Overview ............................................................................................................................... 152
5.9.2 Design, configuring and diagnostics ..................................................................................... 153
5.9.3 Messages and parameters ................................................................................................... 154
5.10 PROFIenergy ........................................................................................................................ 155
5.10.1 Tasks of PROFIenergy ......................................................................................................... 157
5.10.2 PROFIenergy commands ..................................................................................................... 158
5.10.3 PROFIenergy measured values ........................................................................................... 159
5.10.4 PROFIenergy energy-saving mode ...................................................................................... 160
5.10.5 PROFIenergy inhibit and pause time .................................................................................... 160
5.10.6 Function diagrams and parameters ...................................................................................... 161
5.11 Messages via diagnostics channels ..................................................................................... 161
5.12 Support of I&M data sets 1...4 .............................................................................................. 163
6 Communication via Modbus TCP ........................................................................................................ 165
6.1 Overview ............................................................................................................................... 165
6.2 Configuring Modbus TCP via interface X150 ....................................................................... 167
6.3 Configuring Modbus TCP via interface X1400 ..................................................................... 168
6.4 Mapping tables ...................................................................................................................... 169
6.5 Write and read access using function codes ........................................................................ 172
6.6 Communication via data set 47 ............................................................................................ 175
6.6.1 Communication details.......................................................................................................... 176
6.6.2 Examples: Read parameter .................................................................................................. 176
6.6.3 Examples: Write parameter .................................................................................................. 178
6.7 Communication procedure .................................................................................................... 180
6.8 Messages and parameters ................................................................................................... 181
7 Communication via Ethernet/IP (EIP) .................................................................................................. 183
7.1 Overview ............................................................................................................................... 183
7.2 Connecting the drive device to EIP ....................................................................................... 184
7.3 Requirements for communication ......................................................................................... 185
7.4 Configuring EIP via the onboard PROFINET X150 interface ............................................... 186
7.5 Configuring EIP via the X1400 interface at the CBE20 ........................................................ 187
7.6 Supported objects ................................................................................................................. 188
7.7 Integrating the drive device into the EIP network via DHCP ................................................ 200
7.8 Messages and parameters ................................................................................................... 201
8 Communication via SINAMICS Link .................................................................................................... 203
8.1 Basic principles of SINAMICS Link ....................................................................................... 203
8.2 Topology ............................................................................................................................... 205
8.3 Configuring and commissioning ............................................................................................ 207
8.4 Example ................................................................................................................................ 211
8.5 Communication failure when booting or in cyclic operation.................................................. 214
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
11

Table of contents
8.6 Examples: Transmission times for SINAMICS Link ............................................................. 214
8.7 Function diagrams and parameters ..................................................................................... 215
A Appendix ............................................................................................................................................. 217
A.1 List of abbreviations ............................................................................................................. 217
A.2 Documentation overview ...................................................................................................... 227
Index ................................................................................................................................................... 229
Communication
12 Function Manual, 12/2018, 6SL3097-5BD00-0BP0
1
WARNING
Danger to life if the safety instructions and residual risks are not observed
WARNING
Malfunctions of the machine as a result of incorrect or changed parameter settings
1.1 General safety instructions
If the safety instructions and residual risks in the associated hardware documentation are
not observed, accidents involving severe injuries or death can occur.
• Observe the safety instructions given in the hardware documentation.
• Consider the residual risks for the risk evaluation.
As a result of incorrect or changed parameterization, machines can malfunction, which in
turn can lead to injuries or death.
• Protect the parameterization (parameter assignments) against unauthorized access.
• Handle possible malfunctions by taking suitable measures, e.g. emergency stop or
emergency off.
1.2 Warranty and liability for application examples
Application examples are not binding and do not claim to be complete regarding
configuration, equipment or any eventuality which may arise. Application examples do not
represent specific customer solutions, but are only intended to provide support for typical
tasks.
As the user you yourself are responsible for ensuring that the products described are
operated correctly. Application examples do not relieve you of your responsibility for safe
handling when using, installing, operating and maintaining the equipment.
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
13
Fundamental safety instructions
Note
Industrial security
Siemens provides products and solutions with industrial security functions that support the
secure operation of plants, systems, machines and net
In order to protect plants, systems, machines and networks against cyber threats, it is
necessary to implement
security concept. Siemens’ products and solutions constitute one ele
Customers are responsible for preventing unauthorized access to their plants, systems,
machines and networks. Such systems, machines and components should only be
connected to an enterprise network or the Internet if and to the exte
necessary and only when appropriate security measures (e.g. firewalls and/or network
segmentation) are in place.
For additional information on industrial security measures that may be implemented, please
visit:
Industrial security
Siemens’ products and solutions undergo continuous development to make them more
secure. Siemens strongly recommends that product updates are applied as soon as they are
available and that the latest product versions are used. Use of product versions that are no
longer supported, and failure to apply the latest updates may increase customer’s exposure
to cyber threats.
To stay informed about product upd
Feed at:
Industrial security (
1.3 Industrial security
1.3 Industrial security
works.
– and continuously maintain – a holistic, state-of-the-art industrial
ment of such a concept.
nt such a connection is
(http://www.siemens.com/industrialsecurity)
ates, subscribe to the Siemens Industrial Security RSS
http://www.siemens.com/industrialsecurity)
Further information is provided on the Internet:
Industrial Security Configuration Manual
(https://support.industry.siemens.com/cs/ww/en/view/108862708)
Communication
14 Function Manual, 12/2018, 6SL3097-5BD00-0BP0
Fundamental safety instructions
WARNING
Unsafe operating states resulting from software manipulation
1.3 Industrial security
Software manipulations (e.g. viruses, trojans, malware or worms) can cause unsafe
operating states in your system that may lead to death, serious injury, and property
damage.
• Keep the software up to date.
• Incorporate the automation and drive components into a holistic, state-of-the-art
industrial security concept for the installation or machine.
• Make sure that you include all installed products into the holistic industrial security
concept.
• Protect files stored on exchangeable storage media from malicious software by with
suitable protection measures, e.g. virus scanners.
• Protect the drive against unauthorized changes by activating the "know-how protection"
drive function.
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
15

Fundamental safety instructions
1.3 Industrial security
Communication
16 Function Manual, 12/2018, 6SL3097-5BD00-0BP0
2
2.1 Field of application
SINAMICS is the family of drives from Siemens designed for machine and plant engineering
applications. SINAMICS offers solutions for all drive tasks:
● Simple pump and fan applications in the process industry
● Complex single drives in centrifuges, presses, extruders, elevators, as well as conveyor
and transport systems
● Drive line-ups in textile, plastic film, and paper machines as well as in rolling mill plants
● High-precision servo drives in the manufacture of wind turbines
● Highly dynamic servo drives for machine tools, as well as packaging and printing
machines
Figure 2-1 SINAMICS applications
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
17

General information
2.2 Platform Concept and Totally Integrated Automation
Depending on the application, the SINAMICS range offers the ideal variant for any drive
task.
● SINAMICS S handles complex drive tasks with synchronous motors and induction motors
and fulfills stringent requirements regarding:
– the dynamic performance and accuracy
– the integration of extensive technological functions in the drive control system
● SINAMICS G is designed for standard applications with induction motors. These
applications have less stringent requirements regarding the dynamic performance of the
motor speed.
● SINAMICS V is designed to address applications where basic drive functions are
available quickly and at a favorable cost - and which are easy to handle.
2.2 Platform Concept and Totally Integrated Automation
All SINAMICS versions are based on a platform concept. Joint hardware and software
components, as well as standardized tools for design, configuration, and commissioning
tasks ensure high-level integration across all components. SINAMICS handles a wide variety
of drive tasks with no system gaps. The different SINAMICS versions can be easily
combined with each other.
Totally Integrated Automation (TIA) with SINAMICS S120
Apart from SIMATIC, SIMOTION and SINUMERIK, SINAMICS is one of the core
components of TIA. It is thus possible to parameterize, program and commission all
components in the automation system via the Startdrive commissioning tool using a
standardized engineering platform and without any system transitions (seamless
engineering). The system-wide data management functions ensure consistent data and
simplify archiving of the entire plant project.
From V14, the Startdrive commissioning tool is an integral element of the TIA platform.
SINAMICS S120 supports communication via PROFINET and PROFIBUS DP.
Communication via PROFINET
This Ethernet-based bus enables control data to be exchanged at high speed via
PROFINET IO with IRT or RT and makes SINAMICS S120 a suitable choice for integration
in high-performance multi-axis applications. At the same time, PROFINET also uses
standard IT mechanisms (TCP/IP) to transport information, e.g. operating and diagnostic
data, to higher-level systems. This makes it easy to integrate into an IT corporate network.
Communication via PROFIBUS DP
This bus provides a high-performance, system-wide and integrated communication network
which links all automation components of the automation solution:
● HMI (operator control and monitoring)
● Control
● Drives and I/O
Communication
18 Function Manual, 12/2018, 6SL3097-5BD00-0BP0

General information
2.2 Platform Concept and Totally Integrated Automation
Figure 2-2 SINAMICS as part of the Siemens modular automation system
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
19
General information
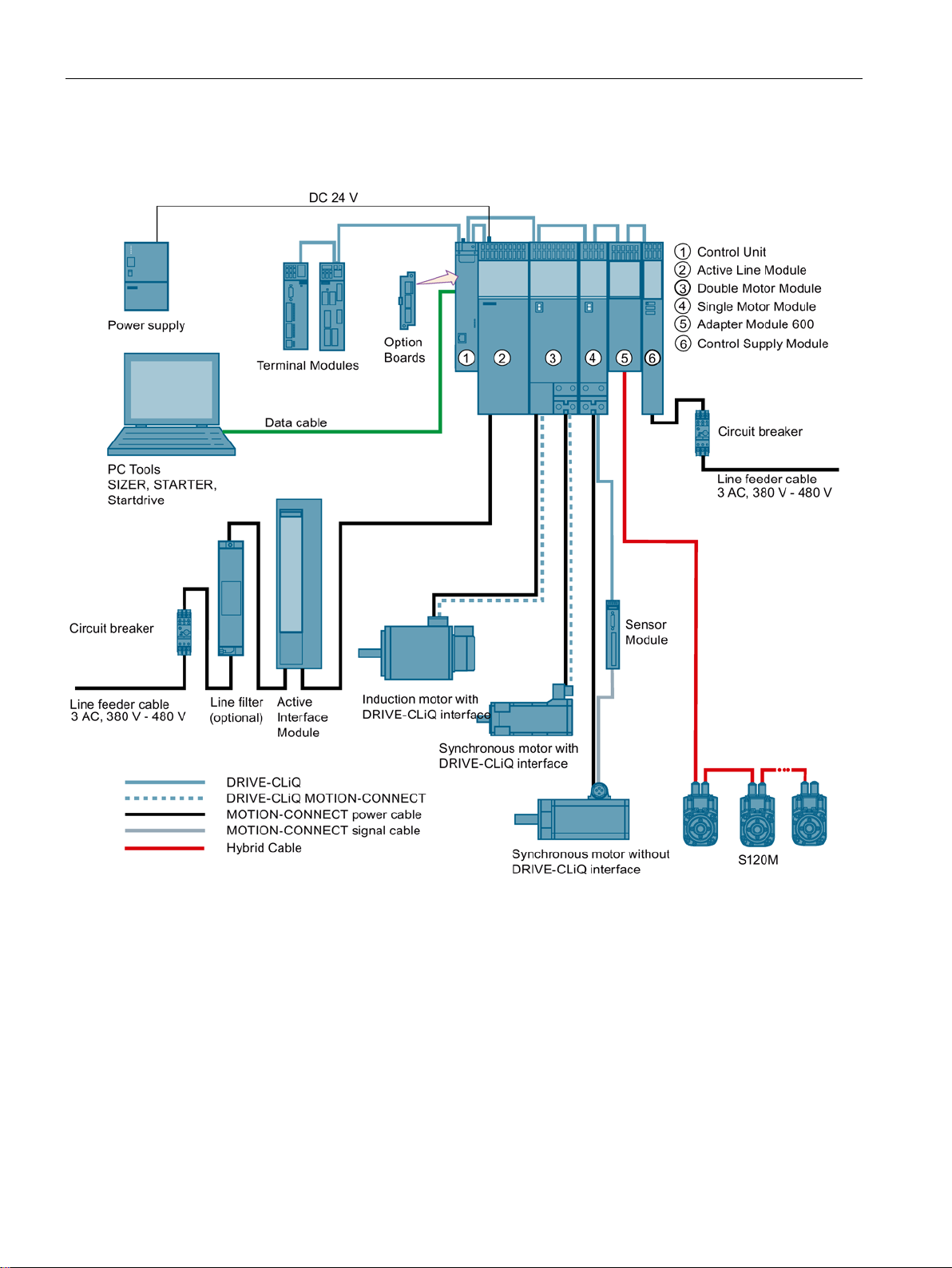
2.3 System overview
2.3 System overview
Figure 2-3 System overview, SINAMICS S120 with distributed servo drive technology S120M
Modular system for sophisticated drive tasks
SINAMICS S120 solves complex drive tasks for a wide range of industrial applications and
is, therefore, designed as a modular system. You can choose from many different
harmonized components and functions to create a solution that best meets your
requirements. SIZER, a high-performance engineering tool, makes it easier to select and
determine the optimum drive configuration.
Communication
20 Function Manual, 12/2018, 6SL3097-5BD00-0BP0

General information
2.3 System overview
SINAMICS S120 is supplemented by a wide range of motors. SINAMICS S120 optimally
supports:
● SINAMICS S120M
● Synchronous and induction motors
● Linear and torque motors
System architecture with a central Control Unit
On the SINAMICS S120, the drive intelligence is combined with closed-loop control functions
into Control Units. These units are capable of controlling drives in the vector, servo and V/f
control modes. They also perform the speed and torque control functions plus other
intelligent drive functions for all axes on the drive. Cross-axis couplings can be established
within a component and easily configured in the Startdrive commissioning tool using a
mouse.
Functions for higher efficiency
● Basic functions: Speed control, torque control, positioning functions
● Intelligent starting functions for independent restart after power supply interruption
● BICO technology with interconnection of drive-related I/Os for easy adaptation of the
drive system to its operating environment
● Integrated safety functions for rational implementation of safety concepts
● Regulated infeed/regenerative feedback functions for preventing undesirable reactions on
the supply, allowing recovery of braking energy and ensuring greater stability against line
fluctuations.
DRIVE-CLiQ – the digital interface between SINAMICS components
Most of the SINAMICS S120 components, including the motors and encoders, are
connected to each other via the common DRIVE-CLiQ serial interface. The standardized
cables and connectors reduce the variety of different parts and cut storage costs. Encoder
evaluations for converting standard encoder signals to DRIVE-CLiQ are available for thirdparty motors or retrofit applications.
Electronic rating plates in all components
An important digital linkage element of the SINAMICS S120 drive system are the electronic
type plates integrated in every component. They allow all drive components to be detected
automatically via a DRIVE-CLiQ link. As a result, data does not have to be entered manually
during commissioning or component replacement – helping to ensure that drives are
commissioned more reliably.
The rating plate contains all the relevant technical data about that particular component. For
motors, these are the parameters of the electrical equivalent circuit diagram and key values
of the integrated motor encoder, for example.
In addition to the technical data, the type plate includes logistical data (manufacturer ID,
article number and ID). Since this data can be called up electronically on site or remotely, all
the components used in a machine can always be individually identified, which helps simplify
servicing.
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
21
General information
Note
Use
Ethernet interface X127 is intended for commissioning and diagnostics, which means that it
must always be accessible (e.g. for service).
Further, the following restrictions apply to
•
•
2.4 X127 LAN (Ethernet)
2.4 X127 LAN (Ethernet)
X127:
Only local access is possible
No networking - or only local networking in a closed and locked electrical cabinet
permissible
If it is necessary to remotely access the electrical cabinet, then additional security measures
must be applied so that misuse through sabotage, unqualified data manipulation and
intercepting confidential data is completely ruled out (also see "Industrial security
(Page 14)").
Communication
22 Function Manual, 12/2018, 6SL3097-5BD00-0BP0
General information
Protocol
Port number
(2) Link layer
(4) Transport layer
Function
Description
PROFINET protocols
Unique Identifier
01-80-C2-00-00-0E
Identifier
2.5 Communication services and used port numbers
2.5 Communication services and used port numbers
SINAMICS converters support the communication protocols listed in the following table. The
address parameters, the relevant communication layer, as well as the communication role
and the communication direction are decisive for each protocol. You require this information
to match the security measures for the protection of the automation system to the used
protocols (e.g. firewall). The security measures are restricted to Ethernet and PROFINET
networks.
The following table shows the various layers and protocols that are used.
Layers and protocols
DCP
Discovery and Con-
figuration Protocol
LLDP
Link Layer Discovery
Protocol
MRP
Media Redundancy
Protocol
Not relevant (2) Ethernet II and
IEEE 802.1Q and
Ethertype 0x8892
(PROFINET)
Not relevant (2) Ethernet II and
IEEE 802.1Q and
Ethertype 0x88CC
(PROFINET)
Not relevant (2) Ethernet II and
IEEE 802.1Q and
Ethertype 0x88E3
(PROFINET)
Accessible nodes,
PROFINET Dis-
covery and configuration
PROFINET Link
Layer Discovery
protocol
PROFINET medium redundancy
DCP is used by PROFINET to
determine PROFINET devices
and to make basic settings.
DCP uses the special multicast MAC address:
xx-xx-xx-01-0E-CF,
xx-xx-xx = Organizationally
LLDP is used by PROFINET
to determine and manage
neighborhood relationships
between PROFINET devices.
LLDP uses the special multicast MAC address:
MRP enables the control of
redundant routes through a
ring topology.
MRP uses the special multicast MAC address:
xx-xx-xx-01-15-4E,
xx-xx-xx = Organizationally
Unique
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
23
General information
Protocol
Port number
(2) Link layer
(4) Transport layer
Function
Description
Unique Identifier
IO devices via Ethernet.
Connection-oriented communication protocols
ter p8908.
DHCP mode.
and can be deactivated.
and is always required.
2.5 Communication services and used port numbers
PTCP
Precision Transpar-
ent Clock Protocol
PROFINET IO data Not relevant (2) Ethernet II and
PROFINET Context
Manager
FTP
File Transfer Protocol
Not relevant (2) Ethernet II and
IEEE 802.1Q and
Ethertype 0x8892
(PROFINET)
IEEE 802.1Q and
Ethertype 0x8892
(PROFINET)
34964 (4) UDP PROFINET con-
21 (4) TCP Server/
PROFINET
send clock and
time synchronisation, based on
IEEE 1588
PROFINET Cyclic
IO data transfer
nection less RPC
incoming
PTC enables a time delay
measurement
between RJ45 ports and
therefore the send cycle synchronization and time synchronization.
PTCP uses the special multicast MAC address:
xx-xx-xx-01-0E-CF,
xx-xx-xx = Organizationally
The PROFINET IO telegrams
are used to cyclically transfer
IO data between the
PROFINET IO controller and
The PROFINET context manager provides an endpoint
mapper in order to establish
an application relationship
(PROFINET AR).
FTP can be used for the first
commissioning.
FTP can be activated/deactivated using parame-
DHCP
Dynamic Host Con-
figuration Protocol
http
Hypertext Transfer
Protocol
ISO on TCP
(according to
RFC 1006)
Communication
68 (4) UDP Dynamic Host
80 (4) TCP Hypertext transfer
102 (4) TCP ISO-on-TCP proto-
24 Function Manual, 12/2018, 6SL3097-5BD00-0BP0
Configuration Protocol
protocol
col
Is used to query an IP address.
Is closed when delivered, and
is opened when selecting the
http is used for the communication with the CU-internal
web server.
Is open in the delivery state
ISO on TCP (according to
RFC 1006) is used for the
message-oriented data exchange to a remote CPU,
WinAC, or devices of other
suppliers.
Communication with ES, HMI,
etc.
Is open in the delivery state
General information
Protocol
Port number
(2) Link layer
(4) Transport layer
Function
Description
SNMP enables the reading out
and is always required.
and can be deactivated.
project data.
not specify the local port.
EtherNet/IP protocols
EtherNet/IP.
EtherNet/IP.
Modbus TCP protocols (server)
Modbus TCP.
2.5 Communication services and used port numbers
SNMP
Simple Network
Management Protocol
https
Secure Hypertext
Transfer Protocol
Internal
protocol
Reserved 49152...65535 (4) TCP
Explicit messaging 44818 (4) TCP
161 (4) UDP Simple network
443 (4) TCP Secure Hypertext
5188 (4) TCP Server/
(4) UDP
(4) UDP
management protocol
transfer protocol
incoming
- Dynamic port area that is used
- Is used for parameter access,
and setting of network management data (SNMP managed Objects) by the SNMP
manager.
Is open in the delivery state
https is used for the communication with the CU-internal
web server via Transport Layer Security(TLS).
Is open in the delivery state
Communication with commissioning tools for downloading
for the active connection endpoint if the application does
etc.
Is closed when delivered, and
is opened when selecting
Implicit messaging 2222 (4) UDP - Is used for exchanging I/O
Request & Response 502 (4) TCP - Is used for exchanging data
data.
Is closed when delivered, and
is opened when selecting
packages.
Is closed when delivered, and
is opened when selecting
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
25
General information
Synchronization type
Accuracy
Basic synchronization
approx. 100ms
Synchronization using ping compensation for isochronous communication
approx. 1 ms
Synchronization with the Network Time Protocol via a PROFINET connection
approx. 10 ms
2.6 Time synchronization between the control and converter
2.6 Time synchronization between the control and converter
In the factory setting, SINAMICS S120 drives use an operating hours counter. Based on the
operating hours, SINAMICS S120 saves alarms and warnings that occur. Using this method,
it is not possible to have a comparable timestamp between various converters.
In order to obtain a comparable timestamp between several converters, you must change
over the operating hours counting to time in the UTC format and synchronize with the time
master (control system).
This means that the events of all bus nodes, which are synchronized with the control system
time, can be referenced with one another.
Benefits: Improved diagnostic options by having a comparable time stamp of the bus nodes
involved.
Converters provide the following options to synchronize the time:
Synchronization using ping compensation for non-isochronous communication approx. 10 ms
Principle of operation of time synchronization
Basic synchronization
The control system transfers the time to the converter at time intervals that you specify in the
control system. Transfer is realized acyclically in the UTC format. The converter accepts this
time as soon as transfer has been completed without correcting the transfer duration. The
converter logs alarms and warnings based on this time.
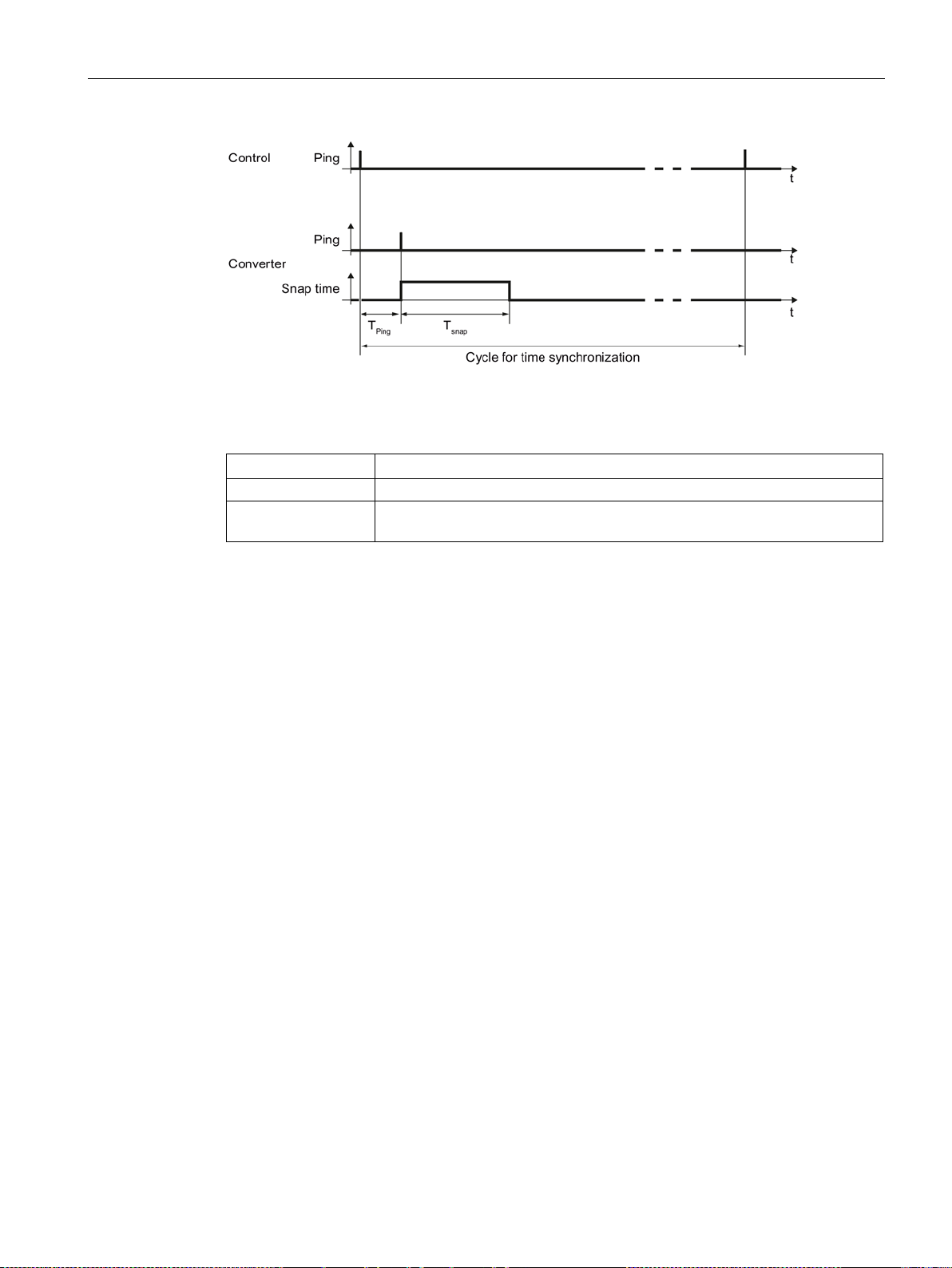
Time synchronization with ping compensation
At intervals that you specify in the control system, the control system sends a ping (a positive
signal edge) cyclically to the converter. Simultaneously, in acyclic operation, the device
sends the time in the UTC format in what is known as "snap".
As soon as the ping has been received in the drive, a timer starts which measures the time
until the snap has been completely transferred. The drive accepts the time that the snap
transfers. It then corrects it by the time that has expired between receiving the ping and the
complete transfer of the snap.
If the snap has not been transferred within 5 s after receiving the ping, then this
synchronization cycle is not used.
Communication
26 Function Manual, 12/2018, 6SL3097-5BD00-0BP0
General information
Communication
Description
sampling time (p2048).
2.6 Time synchronization between the control and converter
Figure 2-4 Ping snap
Differences for isochronous and non-isochronous communication:
Isochronous The ping compensation value is determined in the converter.
not isochronous You can influence the accuracy of the ping compensation using the PZD
Time synchronization via Network Time Protocol (NTP)
Through NTP, all computers worldwide can synchronize their time. An inverter configured as
an NTP client synchronizes the time via a PROFINET connection to an NTP server (a time
source).
As NTP server, the following constellations are possible:
● Local NTP server that receives the time via GPS or DCF77 (e.g. SICLOCK).
● Control as NTP server if the plant network is divided into a control level and a field level.
Communication
Function Manual, 12/2018, 6SL3097-5BD00-0BP0
27
General information
2.6 Time synchronization between the control and converter
2.6.1 Setting SINAMICS time synchronization
Setting time synchronization
1. Using p3100, changeover the time format from operating hours into the UTC format (see
"Changing the time format").
2. Set the synchronization technique:
– Basic synchronization (p3103 = 2)
– Time synchronization with ping compensation (p3103 = 0)
3. Using p3104, set the ping source:
– If you are working with one of the telegrams 390, 391 or 392, then the source of the
ping (p3104) is internally connected with bit 1 of the CU control word
(DO1:CU_STW.1). In this case, parameter p3104 is blocked.
– If you are using a free telegram (999), interconnect the ping source (p3104) via BICO
in the control word.
– If you are working with CANopen, interconnect a free bit in the CANopen control word
with p3104 via a BICO connection.
Result:
After time synchronization, the current time is obtained from the time transferred by the time
master plus the necessary delay time associated with the transfer (ping-snap time).
The actual UTC time is displayed in the drive system using r3102.
At certain intervals, synchronization (according to the same technique) is repeated
(depending on the setting in the time master).
If a previously defined tolerance window is exceeded, then alarm A01099 is output. Define
the tolerance window for time synchronization using p3109. If alarm A01099 occurs, then
generally the synchronization interval is too long.
In this case, reduce the synchronization interval in your control system.
Changing the time format
The time format is entered via parameter p3100. This parameter cannot be changed online
To change the value, proceed as follows:
1. Connect Startdrive ONLINE with the converter.
2. Carry out an upload using the "Load from device" function.
3. In Startdrive, exit the ONLINE mode.
4. Offline, make the setting p3100 = 1.
5. Reactivate the ONLINE mode.
6. Carry out a parameter download ("Load to device").
7. Save the settings in a non-volatile fashion on the memory card of the drive.
You have now changed over the converter time format to the UTC format.
Application example
You can find an application example for SINAMICS time synchronization in the SIEMENS
"Industry Online Support":
Example: Specific SINAMICS time synchronization
(https://support.industry.siemens.com/cs/de/en/view/88231134)
Communication
28 Function Manual, 12/2018, 6SL3097-5BD00-0BP0
 Loading...
Loading...