

Page 1

Manual Edition12/2006
Controller
SIPART DR22
6DR2210
sipart
Page 2

Page 3
SIPART DR22
6DR2210
Edition 12/2006
Manual
SIPART DR22 6DR2210
C79000-G7476-C154-03
1
Page 4
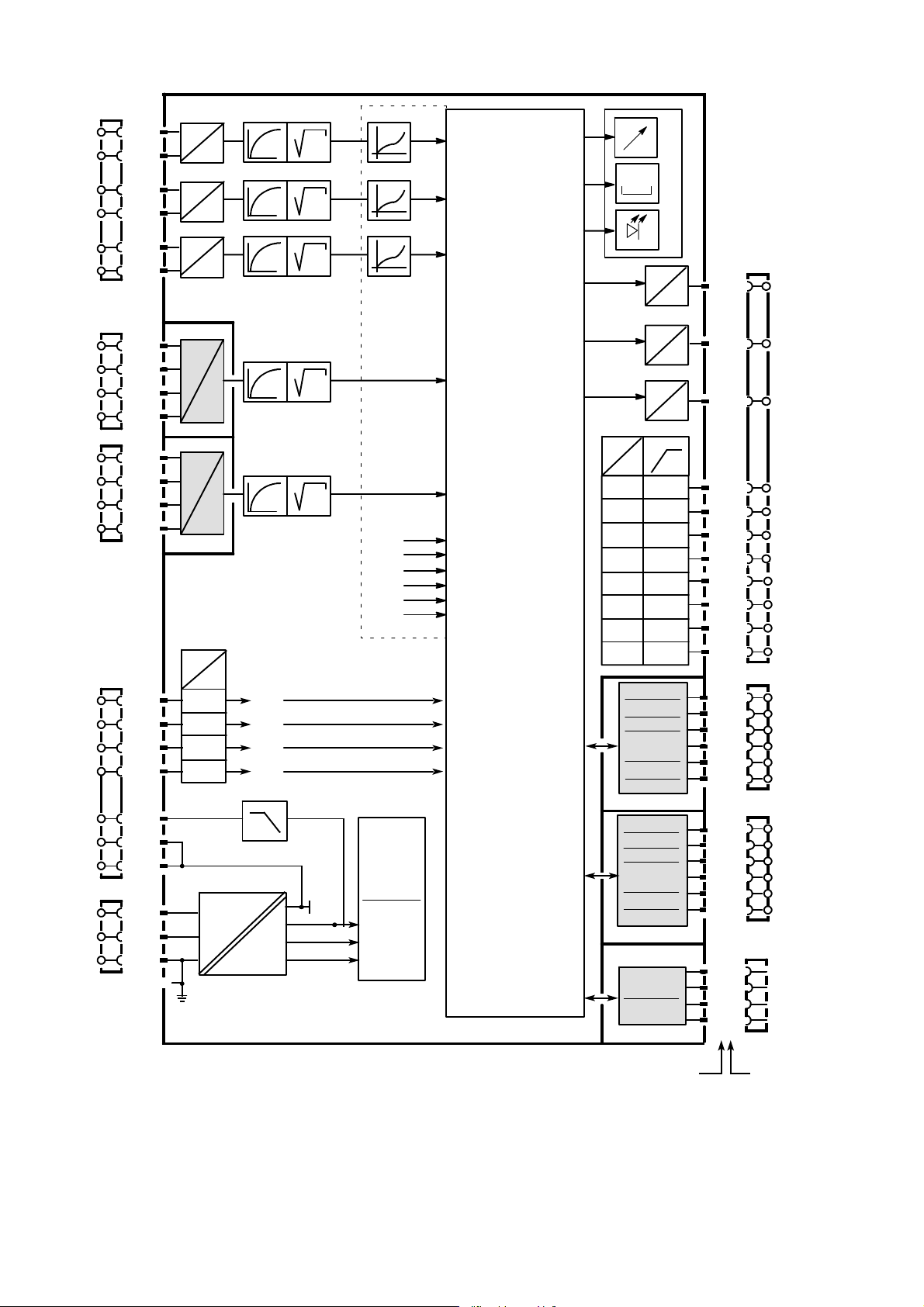
Block diagram
AE1
AE2
AE3
AE4
AE5
BE1
2
3
BE4
L+
+
-
+
-
+
-
Options
M
M
S5
1/20
1/19
1/22
1/21
1/24
1/23
2/4
2/3
2/2
2/1
3/4
3/3
3/2
3/1
1/15
1/16
1/17
1/18
1/3
1/2
1/1
N
PE
I,U
U
S6
I,U
U
S7
I,U
U
S8
I,U,R
UNI,
P,
T,
V
U
Slot 2
S9
I,U,R
UNI,
P,
T,
V
U
Slot 3
24 V
5V
S3
L
«
6DR2210-4 24 V UC
6DR2210-5 115/230 V AC switchable
bE01
bE02
bE03
bE04
I
–
S10
AE1A
t
S11
AE2A
t
S12
AE3A
t
S13
AE4A
t
S14
AE5A
t
M
+24V
+5V
U
REF
S20
S20
S20
drawn:
S4 = 0
at S4 = 1 freely
connectable
S212 to S217
FE7
FE8
FE9
FE10
FE11
FE12
User
program
memory for:
onPA on
AdAP line
oFPA
FdEF
FCon off
FPoS line
APSt
FPST
S15
Standard
FE1
settings
S16
Analog inputs
FE2
Assembly
S17
Slot 5 and 6
FE3
Digital inputs
Setpoint command
S18
Control algorithm
FE4
Y switching
Y display
S98
Analog outputs
FE5/6
Digital outputs
Limit value alarms
Restart
conditions
Serial interface
S0 to S4
S5 to S21,
S200 to S217
S22, S23
S24toS48,
S218 to S228
S49toS53
S54toS60
S61toS66
S67toS68
S69toS75,
S247 to S257
S76toS93,
S258 to S266
S94toS98,
S267 to S268
S99, S100
S101 to S107
F
r
o
n
t
0000
m
o
d
u
l
e
U
U
U
I
5V
24 V I
3AE
1AA y
hold
5BE
4BA24V
+2BE
2BA Rel.
3AO/3BE
Slot 6
3AE
1AA y
hold
5BE
4BA 24V
+2BE
2BA Rel.
3AO/3BE
Slot 5
RS 232
RS 485
PROFIBUS
Slot 4
Slot Terminal
1/12
1/13
1/14
1/4
1/5
1/6
1/7
1/8
1/9
1/10
1/11
6/6
6/5
6/4
6/3
6/2
6/1
Options
5/6
5/5
5/4
5/3
5/2
5/1
4/2
4/7
4/8
4/3
AA1
AA2
AA3
BA1
2
3
4
5
6
7
BA8
Options
2
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 5
Manual
Classification of safety--related notices
This manual contains notices which you shouldobserve toensure your own personalsafety, as well
as to protect the product and connected equipment. These notices are highlighted in the manual
by a warning triangle and are marked as follows according to the level of danger:
DANGER
!
!
!
indicates an immenently hazardous situation which, if not avoided, will result in
death or serious inury.
WARNING
indicates a potentially hazardous situation which, if not avoided, could result in
death or serious injury.
CAUTION
used with the safety alert symbol indicates a potentially hazardous situation which,
if not avoided, may result in minor or moderate injury.
CAUTION
used without the safety alert symbol indicates a potentially hazardous situation
which, if not avoided, may result in property damage.
NOTICE
indicates a potential situation which, if not avoided, may result in an undesirable
result or state.
.
Copyright e Siemens AG 2006 All rights reserved
The reproduction, transmission or use of this docu-
ment or its contents is not permitted without express written authority. Offenders will be liable for
damages. All rights, including rights created by patent grant or registration of a utility model or design,
are reserved.
Siemens AG
Automation and Drives
Postfach 48 48
90437 NÜRNBERG
DEUTSCHLAND
NOTE
highlights important information on the product, using the product, or part of the
documentation that is of particular importance and that will be of benefit to the
user.
Disclaimer of Liability
We have checked the contents of this manual for
agreement with the hardware and software described. Since deviations cannot be precluded entirely,
we cannot guarantee full agreement. However, the
data in this manual are reviewed regularly and any
necessary corrections included in subsequent editions. Suggestions for improvement are welcomed.
e Siemens AG 2006
Technical data subject to change.
SIPART DR22 6DR2210
C79000-G7476-C154--03
3
Page 6

Trademarks
SIMATICR,SIPARTR,SIRECR, SITRANSR registered trademarks of Siemens AG.
Third parties using for their own purposes any other names in this document which refer to trade-
marks might infringe upon the rights of the trademark owners.
4
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 7

Manual Contents
Conents
Page
1 Technical Description 7...................................................
1.1 Safety notes and scope of delivery 7..................................................
1.2 Range of Application 8..............................................................
1.3 Design (Hardware) 9...............................................................
1.4 Function principle 12................................................................
1.4.1 Standard controller 12.................................................................
1.4.2 Description of the option modules 13....................................................
1.4.3 CPU self-diagnostics 20...............................................................
1.4.4 Data storage, User program memory 21.................................................
1.5 Functional description of the structure switches 22.......................................
1.5.1 Analog input signal processing permanently connected 22..................................
1.5.2 Analog input signal processing freely connected (S4 = 1) 25.................................
1.5.2.1 Arithmetic Ar1 to Ar6 27...............................................................
1.5.2.2 Function transmitter Fu1 and Fu2 27....................................................
1.5.2.3 Maximum value selection MA1 to MA3 27................................................
1.5.2.4 Minimum value selection Mi1 to Mi3 28...................................................
1.5.2.5 Correction computer for ideal gases rE1 28...............................................
1.5.2.6 Switch for analog variables AS1 to AS5 33...............................................
1.5.2.7 Comparator with adjustable hysteresis Co1, Co2 33........................................
1.5.2.8 AND NOT function (NAND) nA1, nA2 33.................................................
1.5.2.9 OR NOT function (NOR) no1, no2 33....................................................
1.5.3 Digital input signal processing 34.......................................................
1.5.3.1 Digital inputs BE1 to BE14 34..........................................................
1.5.3.2 Assignment and direction of effect of the digital inputs 35....................................
1.5.3.3 Linking the digital inputs BE1 bis BE14 to the control signals via the SES 35...................
1.5.3.4 Functional explanation of the digital control signals 39......................................
1.5.4 Controller types (S1, S49 to S53) 40.....................................................
1.5.4.1 General, recurrent functions 40.........................................................
1.5.4.2 S1 = 0: Fixed setpoint controller with 2 independent setpoints 48...........................
1.5.4.3 S1= 1: Fixed setpoint controller with 2 dependent setpoints 51.............................
1.5.4.4 S1 = 2: DDC fixed setpoint controller 52................................................
1.5.4.5 S1 = 3: Follow-up controller, synchronized controller, SPC-controller 58.....................
1.5.4.6 S1 = 4: commanded ratio controller 64.................................................
1.5.4.7 S1 = 5: Cascade control 69..........................................................
1.5.4.8 S1 = 6: Ratio-cascade control 74......................................................
1.5.4.9 S1 = 7/8: Override control 77...........................................................
1.5.4.10 S1 = 9: Process display 83...........................................................
1.5.4.11 S1 = 10: Fixed setpoint controller with 1 setpoint (control system coupling) 84.................
1.5.4.12 S1 = 11: Follow-up controller without Int/Ext switching (control system coupling) 85.............
1.5.4.13 S1=12: Double fixed setpoint/follow-up controller 86......................................
1.5.5 Control algorithm, parameter control, adaptation 89........................................
1.5.5.1 Control algorithm 89..................................................................
1.5.6 Controller output structures (S2, S61 to S68) 99...........................................
1.5.6.1 S2 = 0: Continuous (K) controller 99...................................................
1.5.6.2 S2 = 1: Three-position step (S) -controller with internal feedback 104.........................
1.5.6.3 S2 = 2: Three-position step (S) -- controller with external feedback 107.......................
1.5.7 Analog output signal processing (S69 to S75, S247 to S257) 120..............................
1.5.8 Digital output signal processing (S76 to S93 and S258 to S266) 121...........................
1.5.9 Limit value alarms (S94 to S100, S267 to S268) 124........................................
1.5.10 Restart conditions (S99, S100) 126.......................................................
1.5.11 Serial interface and PROFIBUS-DP (S101 to S107) 126.....................................
1.6 Technical Data 127...................................................................
1.6.1 General data 127......................................................................
1.6.2 Standard Controller 129................................................................
1.6.3 Technical data of the options modules 133.................................................
SIPART DR22 6DR2210
C79000-G7476-C154-03
5
Page 8

2 Installation 143.............................................................
2.1 Mechanical Installation 143............................................................
2.2 Electrical Connection 143.............................................................
2.2.1 Connection standard controller 147.......................................................
2.2.2 Wiring of option modules 150............................................................
2.2.3 Alternative connection for I- and U-input 158...............................................
2.2.4 Connection of the interface 163..........................................................
3 Operation 167..............................................................
3.1 Process operation 167................................................................
3.2 Selection level 169...................................................................
3.3 Configuring level (parameterization and structuring mode) 172..............................
3.3.1 Paramterization 172...................................................................
3.3.2 Parameterization mode onPA (online parameters) 173.......................................
3.3.3 Parameterization mode AdAP (Adaptation) 175.............................................
3.3.4 Structuring mode oFPA (offline Parameters) 182............................................
3.3.5 Structuring mode PASt (parameter control) 184.............................................
3.3.6 Structuring mode StrS (structure switches) 186.............................................
3.3.7 Structuring mode FdEF (define functions) 201..............................................
3.3.8 Structuring mode FCon (connect functions, connection) 202..................................
3.3.9 Structuring mode FPoS (position functions) 205............................................
3.3.10 Structuring mode FPSt (Functions Preset, factory setting) 209................................
3.3.11 Structuring mode APSt (All Preset, factory setting) 210......................................
3.3.12 Set structuring mode CAE4/CAE5 -- UNI module(s) 211.....................................
3.3.12.1 Measuring range for mV (SEnS=Mv.) 212.................................................
3.3.12.2 Measuring range for U, I (SEnS=Mv.) 212.................................................
3.3.12.3 Measuring range for thermocouple with internal reference point (SEnS=tc.in) 213................
3.3.12.4 Measuring range for thermocouple with external reference point (SEnS=tc.EH) 213..............
3.3.12.5 Measuring range for PT100-4-wire and PT100-3-wire connection (SEnS=Pt.3L/PT.4L) 213........
3.3.12.6 Measuring range for PT100-2-wire connection (SEnS=Pt.2L) 214.............................
3.3.12.7 Measuring range for resistance potentiometer
(SEnS=r._ for R < 600 W, SEnS=r. for R< 2.8 kW) 214......................................
ManualContents
4 Commissioning 215........................................................
4.1 Adapting the controller direction of effect to the controlled system 215........................
4.2 Setting the split range outputs and the actuating time in K-controllers (S2 = 0) 217.............
4.3 Adaptation of the S-controller to the actuating drive 218....................................
4.4 Setting the filter and the response threshold 219..........................................
4.5 Automatic setting of control parameters 220..............................................
4.6 Manual setting of the control parameters 224.............................................
4.7 Manual setting of the control parameters 225.............................................
5 Maintenance 227...........................................................
5.1 General information and handling 227...................................................
5.2 Spare parts list 231...................................................................
6 Ordering data 233..........................................................
7 Application examples for configuring the controller 235.......................
8 Configuring tool 241........................................................
9 Explanation of abbreviations 253............................................
Index 259........................................................................
6
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 9
Manual 1 Technical Description
1.1 Safety notes and scope of delivery
1 Technical Description
1.1 Safety notes and sco p e of delivery
!
D Scope of delivery
When the controller is delivered the box contains:
1 Controller as ordered
1 three-pin plug at 115/230 V AC or special plug at 24 V UC
2 Clamps, pluggable
1 Assembly and installation instructions
Order number C79000-M7474-C38
WARNING
This device is electrically operated. When operating electrical
equipment, certain parts of this equipment automatically carry
dangerous voltages. Failure to observe these instructions could
therefore lead to serious injury or material damage. Only properly
trained and qualified personnel are allowed to work on this
equipment. This personnel must be fully conservant with all the
warnings and commissioning measures as described in this user’s
guide.
The perfect and safe operation of this equipment is conditional upon
proper transport, proper storage, installation and assembly as well as
on careful operation and commissioning.
D Basic equipment
The following variants of the SIPART DR22 are available:
Order number Power Supply
6DR2210-4
6DR2210-5
D Option modules
Signal convertors have separate ordering and delivery items. For handling reasons basic
equipment and signal convertors which were ordered at the same time may be delivered by
separate mail.
D Documentation
This user’s guide is available in the following languages:
English C79000-G7476-C154
German C79000-G7400-C154
SIPART DR22 6DR2210
C79000-G7476-C154-03
24 V UC
115/230 V AC, switchable
7
Page 10

1.2 Range of Application
Manual1 Technical Description
D Subject to change
The user’s guide has been compiled with great care. However, it may be necessary within
the scope of product care to make changes to the product and its operation without prior
notice which are not contained in this user’s guide. We are not liable for any costs ensuing
for this reason.
1.2 Range of Application
The SIPART DR22 is a digitally operating device in the top class range. Its program memory
contains a large number of prepared function blocks for calculating, controlling, regulating in
technical processes which the user can implement without programming knowledge and
additional tools.
In addition a robust adaptation procedure is available in this device which makes it much easier
to commission even critical controlled systems. The controller determines the optimized control
parameters independently on request without the user being expected to have any prior
knowledge of how the control loop may respond. The applied procedure is suitable for systems
with compensation and aperiodic transient behavior; even greater dead times are taken into
account.
For more complicated applications the fixed connection of the individual functions can be
canceled in the input range and replaced by a free structuring. The user can easily add extra
analog function blocks and connect them to each other and to the interfaces of the input range
with the software. This achieves optimum adaptation even to complex problems.
The named programming possibilities guarantee a great flexibility in the use of the controller
and allow fast, easy adapting of the device to the problem so that the SIPART DR22 can be
used universally for control jobs in processing engineering, e.g. as
-- fixed setpoint controller for one, two or three-component control, optionally with two
setpoints
-- DDC fixed setpoint controller for one-, two- or three-component control
-- follow-up controller (synchronized controller, SPC controller) with internal/external switching
-- fixed or commanded ratio controller with Internal/External switching
-- cascade controller (double controller)
-- ratio-cascade controller (double controller)
-- override controller with Min or Max selection of the manipulated variable (double controller)
-- double controller with two independent control channels
The extensive hardware equipment of the instrument by which numerous interfaces are
available for connecting the field cables is of advantage for the universal utilization. The
instrument can also be connected to master systems via a plug-in serial interface or operated
and monitored centrally by a Personal Computer.
The SIPART DR22 can be used alternatively as a continuous controller with a current output
signal or as a three-position step controller for controlling electric motor drives without changing
the hardware equipment.
8
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 11

Manual 1 Technical Description
1.3 Design (Hardware)
1.3 Design (Hardware)
The process controller SIPART DR22 has a modular structure and is therefore maintenance
friendly and easy to convert and retrofit. Other signal convertors can be installed in the generously equipped, fully functional standard controller to expand the range of application. These
modules are inserted in backplane slots of the enclosed instrument (Fig. 1-2, page 11).
The standard controller consists of
-- the front module with the control and display elements
-- the main board with CPU and terminal strips
-- the plastic casing with an interface board
-- the power supply unit.
The electrical connections between the modules are made by an interface board screwed into
the casing. The main board is pushed into rear slot 1 and locked. It holds a 10-pin and a 14-pin
terminal strip to which all inputs and outputs of the standard controller are connected. Five other
slots can be equipped with option modules if the number of terminals to the process available in
the standard controller are not sufficient for the planned task.
The standard controller always has three permanently installed analog inputs (AE) with electronic potential isolation which can be wired alternatively with standardized voltage signals
(0/0.2 to 1 V or 0/2 to 10 V) or current signals (0/4 to 20 mA). There are also four digital inputs
(BE, 0/24 V) and eight digital outputs (BA, 0/24 V, 50 mA) which can be used for different functions depending on the configuration.
The SIPART DR22 also has three analog outputs (AA) which can all supply a current signal
from 0 to 20 mA or 4 to 20 mA and be assigned to different variables.
A short-circuit-proof L+--output (DC 24 V, 100 mA) is available for supplying transmitters.
The power supply unit is located in a fully enclosed metal casing and is screwed tightly to the
plastic casing of the controller. This power supply is available in two different versions so that
two types of SIPART DR22 are available:
6DR2210-4 for power supply connection UC 24 V
6DR2210-5 for power supply connection AC 230 V, switchable to AC 115 V
Many applications can be implemented with the three permanently available analog inputs of
the standard controller alone. Two additional input modules can be inserted in slots 2 and 3 for
complex jobs or for the connection of other input signals. These input modules are available in
addition to for processing normalized current and voltage signals for the direct connection of
resistance thermometers Pt100 and all common thermocouples and resistance sensors or
potentiometers. In addition a module with 3 analog inputs (equipment as in the standard
controller) can be inserted in slots 5 and 6. This increases the number of inputs to a total of 11.
Slot 4 serves to accommodate an interface module (SES) with V.28-point-pointoutput or
SIPART bus interface for serial communication with a master system. A PROFIBUS interface
module can be equipped optionally here.
SIPART DR22 6DR2210
C79000-G7476-C154-03
9
Page 12

1.3 Design (Hardware)
The slots 5 and 6 can accommodate signal convertors of different functions and can be
equipped optionally with modules for expanding digital inputs or digital outputs.
The following assemblies are possible:
2 relays
4 digital outputs/2 digital inputs
5 digital inputs
3 analog outputs/3 digital inputs
1 analog output with digital fault output (y
function) with remote supply
hold
3 analog inputs
1
Manual1 Technical Description
3
Figure 1-1 Front view of the SIPART DR22
2
1 Power supply unit
2Casing
3 Front module
10
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 13

Manual 1 Technical Description
1
12
11
Legend:
10
2
9
8
3
1 PE conductor -- contact spring
2Slot6
3Slot5
4 Slot 1 (basic board)
5Slot2
6Slot3
7 Slot 4 (SES: RS 232/
RS 485, Profibus DP)
8 Grounding screw
9 DIN rail (delivered with the
interface relay)
10 Selector switch Mains voltage
11 Mains plug
12 Power supply unit
1.3 Design (Hardware)
7 6 5 4
Figure 1-2 Rear view of the SIPART DR22
SIPART DR22 6DR2210
C79000-G7476-C154-03
11
Page 14

1.4 Function principle
1.4.1 Standard controller
Manual1 Technical Description
1.4 Function principle
1.4.1 Standard controller
The standard controller consists of three function blocks:
-- Power supply unit
-- Front module
-- Main board
Power supply unit
Primary clocked power supply plug with high efficiency for AC 115/230 V (switchable) or for UC
24 V. It generates the secondary internal supply voltages +24 V and +5 V from the power
supply. The metal body is mounted on PE conductors (protection class I). The power supply
and internal supply voltages are isolated from each other by safe separation by a protective
shield. The internal supply voltages are functional extra-low voltages due to overvoltage cutoff
in the event of an error. Since no other voltages are generated in the instrument, these
statements apply for all field signal cables (used standards, see chapter 1.6, page 127). A total of
450 mA are available for the outputs L+, AA and BA due to the design for a high power output.
Front module
The front module contains the control and display elements and the appropriate trigger components for the displays.
All display elements are designed in LED technology which provides a longer service life and
higher light density as well as a good viewing angle. The control elements are short-stroke
switches with a tangible ”pressure point” and high return force.
Main board
The main board contains the field signal conditioning of the standard controller, the CPU
(Central Processing Unit) and the connections (through the interface board) to the module slots.
The field signals are fed through protective circuits for external static or dynamic overvoltages
and then adapted to the signal levels of the CPU by the appropriate circuits. This adaptation is
performed for the analog inputs, the analog outputs and the digital outputs by modern thick-film
circuits.
The microcontroller used has integrated AD- and DA converters and operates with 32k batterybacked RAM. The user-specific configuration is stored in an user program memory with a serial
4k EEPROM. When replacing the main board the user memory can be plugged from the old
onto the new module. The whole CPU is designed in C-MOS technology.
A process image is generated at the start of every routine. The analog and digital inputs and
actuation of the front buttons is included and the process variables received from the serial
interface are accepted. All calculations are made with these input signals according to the
configured functions. Then the data are output to the display elements, the analog outputs and
the digital outputs as well as storage of the calculated variables on standby for the serial
interface transmitter. The interface traffic runs in interrupt mode.
12
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 15

Manual 1 Technical Description
1.4.2 Description of the option modules
1.4 Function principle
A large number of prepared functions for controlling processing plants as well as machines and
apparatus is stored in the set value memory of the SIPART DR22. The user programs the
instrument himself by selecting the desired functions by setting structure switches. The total
functioning of the instrument is given by the combination of the individual structure switches.
Programming knowledge is not necessary for the settings. All settings are made without an
additional programming unit exclusively through the front panel of the SIPART DR22 or through
the serial interface. The job-specific program written in this way is saved in the non-volatile user
program memory.
1.4.2 Description of the option modules
The following option modules are described in this chapter
6DR2800-8A Module with 3 AE, U- or I-input
6DR2800-8J I/U module
6DR2800-8R R module
6DR2800-8V UNI module
6DR2805-8A Reference junction terminal
6DR2805-8J Measuring range for TC, internal connector
6DR2801-8D Module with 2 BA (relays)
6DR2801-8E Module with 2 BE and 4 BA
6DR2801-8C Module with 5 BE
6DR2802-8A Analog output module with y-hold function
6DR2802-8B Module with 3AA and 3BE
6DR2803-8P Serial interface PROFIBUS-DP
6DR2803-8C Serial interface RS 232 / RS 485
6DR2804-8A Module with 4 BA relays
6DR2804-8B Module with 2 BA relays
6DR2800-8A Module with 3 AE, U- or I-input
D Inputs for current and voltage
To expand the analog inputs.
For a description of the module and technical data, see chapter 1.6.2, page 129 (Inputs standard
controller).
SIPART DR22 6DR2210
C79000-G7476-C154-03
13
Page 16

1.4 Function principle
1.4.2 Description of the option modules
Manual1 Technical Description
6DR2800-8J I/U module
D Input variables current 0/4 to 20 mA or voltage 0/0.2 to 1 V or 0/2 to 10 V
The input amplifier of the module is designed as a differentiating amplifier with jumperable gain
for 0 to 1 V or 0 to 10 V input signal. For current input signals the 49.9 Ω 0.1 % impedance is
switched on by plug-in bridges on the module. The start value 0 mA or 4 mA or 0 V or 0.2 V
(2 V) is defined by configuration in the standard controller. The differentiating amplifier is
designed for common mode voltages up to 10 V and has a high common mode suppression.
As a result it is possible to connect the current inputs in series as for electrical isolation when
they have common ground. At voltage inputs this circuit technique makes it possible to
suppress the voltage dips on the ground rail by two--pole wiring on non floating voltage supplies.
We refer to an electronic potential isolation.
6DR2800-8R R module
D Input for resistance or current potentiometer
Potentiometers with rated values of 80 Ω to 1200 Ω can be connected as resistance
potentiometers. A constant current of Is = 5 mA is fed to the potentiometer wiper. The wiper
resistance is therefore not included in the measurement. Resistances are switched parallel to
the potentiometer by a slide switch on the module and a rough range selection made. Range
start and end are set with the two adjusting pots on the back of the module.
This fine adjustment can be made by the displays on the front module (with the appropriate
structuring). For adjustment with a remote measuring instrument, the analog output can be assigned to the appropriate input.
The external wiring must be changed for resistance potentiometers which cannot withstand the
5 mA wiper current or which have a rated resistance
> 1kΩ. The constant current is then not
fed through the wiper but through the whole resistance network of the potentiometer. A voltage
divider measurement is now made through the wiper. Coarse adjustment is made by a remote
parallel resistor to the resistance potentiometer.
This module can also be used as a current input with adjustable range start and full scale. The
load is 49.9 Ω and is referenced to ground.
6DR2800-8V UNI module
D Direct connection of thermocouple or Pt100 sensors, resistance of mV transmitters
Measured value sensors such as thermocouples (TC), resistance thermometers Pt100 (RTD),
resistance potentiometers (R) or voltage transmitters in the mV range can be connected directly. The measuring variable is selected by configuring the controller in the HdeF level
(AE4/AE5); the range and the other parameters are set in the CAE4/CAE5 menu. The sensorspecific characteristics (linearization) for thermocouples and Pt100 resistance thermometers are
stored in the contoller’s program memory and are automatically taken into account. No settings
need to be made on the module itself.
14
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 17

Manual 1 Technical Description
1.4.2 Description of the option modules
1.4 Function principle
The signal lines are connected by a plug terminal block with screw terminals. When using thermocouples with internal reference junction terminal, this terminal block must be replaced by the
terminal 6DR2805-8A. With the measuring for TC, internal connector 6DR2805-8J in place of
the terminal block, the measuring range of the direct input (0/20 to 100 mV) can be extended to
0/2upto10Vor0/4upto20mA.
The UNI module operates with an AD converter with 18 bit resolution. The measuring inputs
and ground of the standard controller are electrically isolated with a permissible common mode
voltage of 50 V UC.
6DR2805-8A reference junction terminal
D Terminal with internal reference junction terminal for thermocouples
This terminal is used in connection with the UNI module for temperature measuring with thermocouples at an internal reference junction terminal. It consists of a temperature sensor which
is preassembled on a terminal block and plated to avoid mechanical damage.
6DR2805-8J measuring for TC, internal connector
D measuring for TC, internal connector for current 0/4 to 20 mA or voltage 0/2 to 10 V
The measuring for TC, internal connector is used in connection with the UNI module to
measure current orvoltage. The input variable is reduced to 0/20 to 100 mV by a voltage divider
or shunt resistors in the measuring for TC, internal connector.
Wiper resistors with 250 Ω or 50 Ω are available optionally at 2 different terminals for 0/4 to
20 mA signals.
The electrical isolation of the UNI module is retained even when the measuring for TC, internal
connector is used.
6DR2801-8D Module with 2 BA relays
D Digital output module with 2 relay contacts
To convert 2 digital outputs to relay contacts up to 35 V UC.
This module is equipped with 2 relays whose switching contacts have potential free outputs.
The RC combinations of the spark quenching elements are respectively parallel to the rest and
working contacts.
In AC consumers with low power the current flowing through the capacitor of the spark
quenching element when the contact is open may interfere (e.g. the hold current of some
switching elements is not exceeded). In this case the capacitors (1 μF) must be removed and
replaced with low capacitance capacitors.
The 68 V suppressor diodes parallel to the capacitors act additionally to reduce the induced
voltage.
SIPART DR22 6DR2210
C79000-G7476-C154-03
15
Page 18
1.4 Function principle
1.4.2 Description of the option modules
Manual1 Technical Description
!
WARNING
The relays used on the digital output module are designed for a
maximum rating up to UC 35 V. The same applies for the air and creep
lines on the circuit board. Higher voltages may therefore only be
switched through appropriately approved series connected circuit
elements under observance of the technical data and the pertinent
safety regulations.
6DR2801-8E Module with 2 BE and 4 BA
D Digital signal module with 2 digital inputs and 4 digital outputs
The module serves to extend the digital inputs and digital outputs already existing in the standard controller.
The inputs are designed for the 24 V logic and are non-floating. The functions are assigned to
the inputs and outputs by the configuration of the controller.
The digital outputs are short-circuit-proof and can drive commercially available relays or the
interface relays 6DR2804--8A/8B directly.
6DR2801-8C Module with 5 BE
D Digital input module with 5 digital inputs
The module serves to extend the digital inputs already existing in the standard controller.
The inputs are designed for the 24 V logic and are non-floating. The function is assigned to the
input by the configuration of the controller.
6DR2802-8A Analog output module with y-hold function
For auxiliary control device function when servicing and for extending the analog outputs AA1 to
AA3 existing in the standard controller.
Can be inserted in slot 5/6, S22/S23=4 to be set in the structure mode StrS,
Start value of the outputs S72/S249 can be set in StrS.
The y
module contains a microprocessor which maintains serial data communication with the
hold
processor on the main board through the Rxd/Txd lines. The processor feeds the U/I converter
and the CPU fault message output St
through its analog output. The module can be externally
supplied through an auxiliary voltage input which is OR--linked with the controller power supply.
The analog output of the module is freely available.
-- y
-function
hold
If data communication to the y
processor is interrupted, the analog output receives its last
hold
value. The processor reads the current variable first when data traffic is recovered. The output current is maintained if:
16
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 19

Manual 1 Technical Description
1.4.2 Description of the option modules
1.4 Function principle
-- the self diagnostics of the CPU (see chapter 1.4.3, page 20) responds.
-- the supply voltage of the SIPART DR22 fails and the y
-- all modules except the power supply unit are removed (if the y
-module is powered externally.
hold
module is powered
hold
externally).
-- the y
module is removed (Attention: electrostatically sensitive module! Observe the
hold
safety precautions!), if it is powered externally (error message on the front module
oP. *.6 Err/oP.*.5, see chapter 5, page 227). *.6 Err/oP.*.5, see chapter 5).
In this way it is possible to perform all maintenance work right up to replacing the instrument
whilst maintaining the controller controlled variable.
Handling during module replacement, see chapter 5 ”Maintenance”.
Fault message output
-- S t
This digital output is always high when there is no error and becomes low in the event of an
error. It responds when:
-- the self diagnostics of the CPU (see chapter 1.4.3, page 20) responds.
-- the controller power supply fails,
-- the Y
module is removed,
hold
-- the main board is removed.
6DR2802-8B Module with 3AA and 3BE
To extend the analog outputs (0/4 to 20 mA) and digital inputs
can be inserted in slot 5: AA7, AA8, AA9 BE5, BE6, BE7
and in slot 6: AA4, AA5, AA6 BE10, BE11, BE12
6DR2803-8P Serial interface PROFIBUS-DP
The module 6DR2803-8P is a PROFIBUS-DP interface module with RS 485 driver and electrical isolation to the controller. It operates as an intelligent converter module and adapts the private SIPART to the open PROFIBUS-DP protocol.
This optional card can be inserted in all SIPART-DR controllers in slot 4. The following settings
must be made with the appropriate configurations for the serial interface:
-- Interface on
-- Even parity
-- LRC without
-- Baud rate 9600
-- Parameters/process values writable (as desired)
-- Station number according to selection 0 to 125
Make sure that the station number is not assigned double on the bus. The PROFIBUS module
serves to connect the SIPART controllers to a master system for control and monitoring.
In addition the parameters and configuring switches of the controller can be read and written.
Up to 32 process variables can be selected and read out cyclically by configuration of the
PROFIBUS module.
SIPART DR22 6DR2210
C79000-G7476-C154-03
17
Page 20
1.4 Function principle
1.4.2 Description of the option modules
Manual1 Technical Description
The process data are read out of the controller in a polling procedure with an update time <
300 ms. If the master writes process data to the slave, these become active after a maximum 1
controller cycle.
The description and the controller base file (*.GSD) can be downloaded from Internet under
www.fielddevices.com
.
A technical description including the controller base file (*.GSD) is available for creating a master-slave linking software for interpreting the identifications and useful data from and to the SIPART controller.
The programs SIPART S5 DP and S7 DP are offered for certain hardware configurations.
6DR2803-8C Serial interface RS 232 / RS 485
D Serial interface for RS 232 or RS 485 with electrical isolation
Canbeinsertedinslot4.
For connecting the controller SIPART DR22 to a master system for control and monitoring. All
process variables can be sent, the external setpoint, tracking variable, operating modes, parameters and configurations sent and received.
The interface traffic can take place as follows:
RS 232 as point-to-point connection
SIPART Bus
The SIPART bus is no longer available. Therefore please implement multipoint
connections via RS 485 or PROFIBUS DP.
RS 485 As a serial data bus with up to 32 users.
The interface module 6DR2803-8C offers electrical isolation between Rxd/Txd and the controller. Switching can be performed between RS 232, SIPART bus and RS 485 with a plug-in
bridge.
A detailed technical description of the telegram traffic is available for creating an interface software.
18
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 21
Manual 1 Technical Description
1.4.2 Description of the option modules
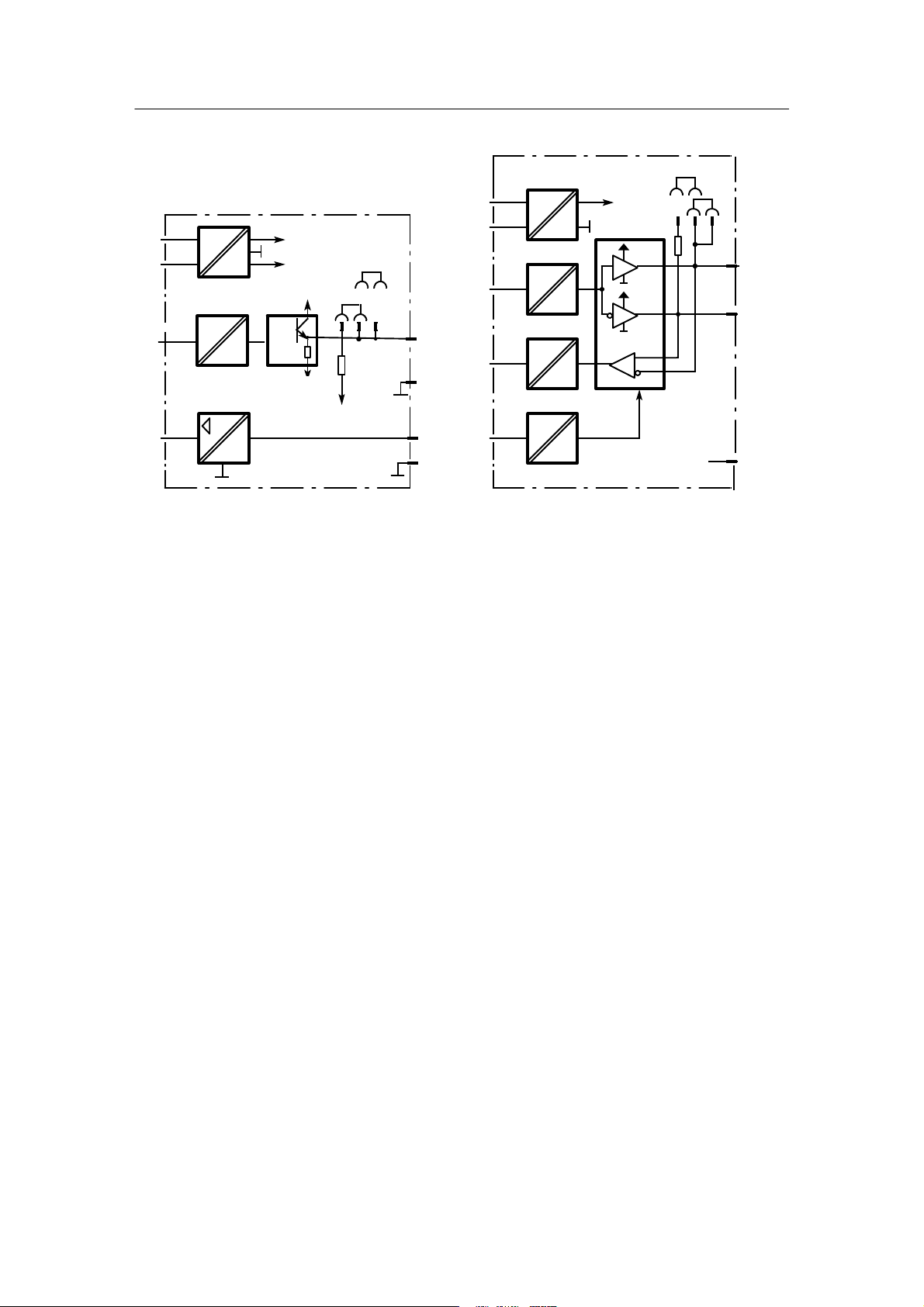
Txd
24 V
0V
+7.5 V
-7.5 V
+7.5V
+1
-7.5 V
RS 232
SIPART
bus
24 V
0V
Txd
2
Txd
7
Rxd
+7.5 V
1.4 Function principle
RS 485 + 150R
+7.5 V
+7.5 V
RS 485
8
3
Rxd/
Txd A
Rxd/
Txd B
Rxd
-1
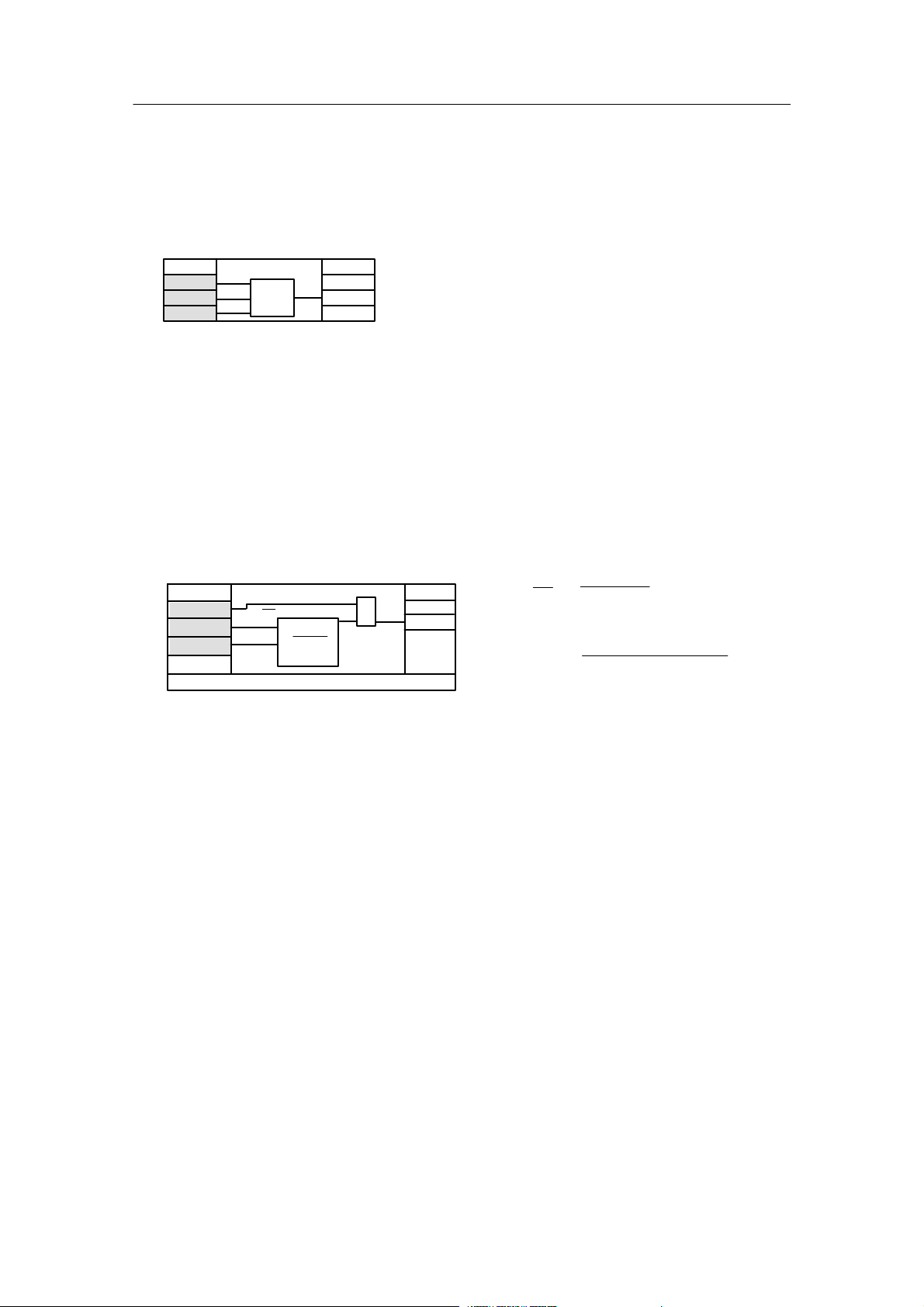
Figure 1-3 Block diagram serial interface
for RS 232 / SIPART BUS
-7.5 V
Other connections: NC
3
Rxd
8
Rxd/
Txd
NC2, 7
Other connections: NC
Figure 1-4 Block diagram serial interface for
RS 485
6DR2804-8A Module with 4 BA relays
6DR2804-8B Module with 2 BA relays
D Interface relay module with 2 or 4 relays
To convert 2 or 4 binary outputs to relay contacts up to 230 V UC.
The module can be snapped onto a mounting rail on the back of the controller. The mounting
rail is delivered with the interface relay module.
One or two relay modules with 2 relays each are installed depending on the version. Every relay
has a switching contact with spark quenching in both switching branches. In AC consumers with
a very low power, the current flowing (e.g. hold current in contactors) through the spark quenching capacitor (33nF) when the contact is open interferes. In this case they should be replaced
by capacitors of the same construction type, voltage strength and lower value.
The switching contact is fed to the plug terminals with 3 poles so that rest and working circuits
can be switched. The relays can be controlled directly from the controller’s digital outputs by
external wiring.
SIPART DR22 6DR2210
C79000-G7476-C154-03
19
Page 22
1.4 Function principle
1.4.3 CPU self-diagnostics
Manual1 Technical Description
!
WARNING
The relays used on the interface relay module are designed for a
maximum rating of AC 250 V in overvoltage class III and
contamination factor 2 according to DIN EN 61010 Part 1.
The same applies for the air and creep lines on the circuit board.
Resonance increases up to twice the rated operating voltage may
occur when phase shift motors are controlled. These voltages are
available at the open relay contact. Therefore such motors may only
be controlled under observance of the technical data and the
pertinent safety conditions via approved switching elements.
1.4.3 CPU self-diagnostics
The CPU runs safety diagnostics routines which either can only after a reset or cyclically. The
CPU is familiar with two different types of reset.
-- Power on reset
Power-On-Reset always takes place when the 5-V supply drops below 4.45 V, i.e. the power
supply is interrupted for longer than specified in the technical data.
All parameters and configurations are reloaded from the user program memory into the
RAM.
At S100 = 1 the digital x-display flashes as indication after a Power-On-Reset, it is
acknowledged by the Shift key (12).
Flashing is suppressed by S100 = 0.
-- Watch dog reset
When a watch-dog-reset occurs the parameters and configurations from the user program
memory are reloaded into the RAM. The current process variables and the status signals are
read out of the RAM for further processing.
There are no flashing signals on the front module.
CPU-tESt appears in the digital displays dd1 and dd2 for a maximum 5 s after every reset.
Every error detected by the self-diagnostics leads to a flashing error message on the digital displays dd1 and dd2 with defined states of the analog and digital outputs. The fault message output St
of the y
module becomes low. The reactions listed in the table are only possible of
hold
course (since this is a self-test) if the errors occur in such a way that the appropriate outputs or
the front module can still be controlled properly or the outputs themselves are still functioning.
There are other error messages for the input range which indicate defective structurings within
this range (see chapter 1.5.6 ”Error messages”, page 99).
In addition error messages are output in the adaptation (see chapter 3.3.2
”Parameterization mode AdAP”, page 173).
The digital displays flash in the case of error messages.
20
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 23
Manual 1 Technical Description
g
/
sages
gofg
Errorcause/
CPU
RAM
0last
0mA00
0
A
y
0mA00
0
memor
y
p
g
)
1
)
municatio
n
cyclic0
operatingwith
tin
g
matchtheplugged
1.4 Function principle
1.4.4 Data storage, User program memory
1.4.4 Data storage, User program memory
All data are written in the RAM first and then transfered to the user program memory
(EEPROM) when returning to the process operation mode (manually or via the SES).
Writing time
The writing time after leaving the parameterization and configuring modes is up to 30 s. Then
the data are stored in a non-volatile memory.
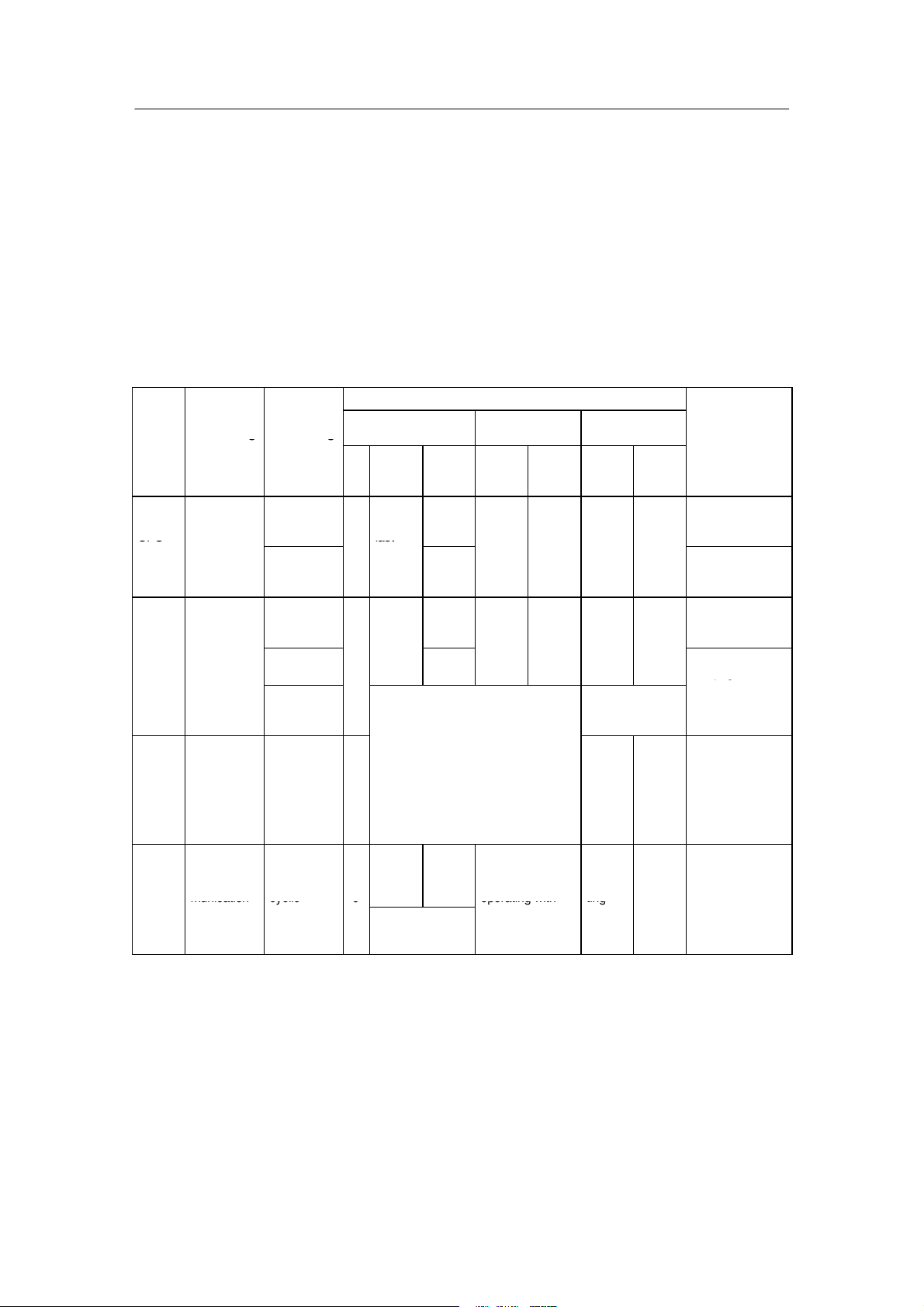
Error messages of the CPU
Reactions
Error
y
mes-
sa
dd1
dd2
CPU
Err
MEM
Err
es
Monitoring
EEPROM,
EPROM
User
program
memor
Monitoring
time
Power
On-Reset
Watch
Dog-Reset
Power
On-Reset
Watch
Dog-Reset
St
0
hold
AA4/7
with
U
last
value
last
value
-module
H
AA4/7
without
U
H
0mA
last
value
0mA
last
value
when
storing
continues operating with current
oP.5.*.
1)
oP.*.6.
1
Data communication
μP-slot 5
Data communication
μP-slot 6
cyclic 0
cyclic 0
pulled
last
value
defective,
pulled
0mA
undefined
1)
Also double error display oP.5.6 possible,
* means digit dark.
2)
At BE5 to 9 and BE10 to 14 the effect of the digital inputs (after inversion) are set to 0 in the event of an error.
Standard
controller
AA1
to 3
0m
data
continues
operating with
current data
Options
BA1
to 8
BA9
to 12
0 0 0
continues
operating with
current data
last
state
or undefined
continues
operating
with
current
data
2)
BA13
to 16
continues
operating
with
current
data
last
state
or undefined
Primary
Error cause
Remedy
Monitored components of the CPU
defective/change
main board
User program
memory not plugged
or defective/plug or
change
Monitored components of the CPU
defective/change
main board
User program
memory not plugged
or defective/plug or
change
Option not plugged,
defective or setting in
hdEF oP5 does not
match the plugged
option.
Plug option or replace
or correct oP5
Option not plugged,
defective or setting in
hdEF oP5 does not
match the plugged
option.
Plug option or replace
or correct oP6
3)
3)
Table 1-1 Error message of the CPU
SIPART DR22 6DR2210
C79000-G7476-C154-03
21
Page 24

1.5 Functional description of the structure switches
1.5.1 Analog input signal processing permanently connected
Manual1 Technical Description
1.5 Functional description of the structure switches
(S0 to S107, S200 to S268)
In the factory setting (setting when the device is delivered) most of the structure switches are
set to 0. This corresponds to the most usual setting of the individual functions so that only few
structure switches need to be set selectively during commissioning. However, it is recommendable to compare the individual structure switch settings with the task.
With structure switch S0 the user program can be identified by a number from 1 to 254 in the
structuring mode Strs. The setting 0 corresponds to the factory setting and is regenerated automatically in the APSt function (All Preset). All changes in parameters or structures in relation to
the factory setting automatically set S0 from 0 to 1.
The structure switches S1 and S2 are fundamentally significant. With S1 the controller type is
set and thus the processing of command variable, main controlled variable and auxiliary controlled variables up to control difference generation determined. With S2 the controller output
structure is set and thus the processing of the automatic-, manual-, safety- and follow--up variables as well as the manipulated variable output determined as a K- or S-output.
1.5.1 Analog input signal processing permanently connected
(S3 to S21, S200 to 205)
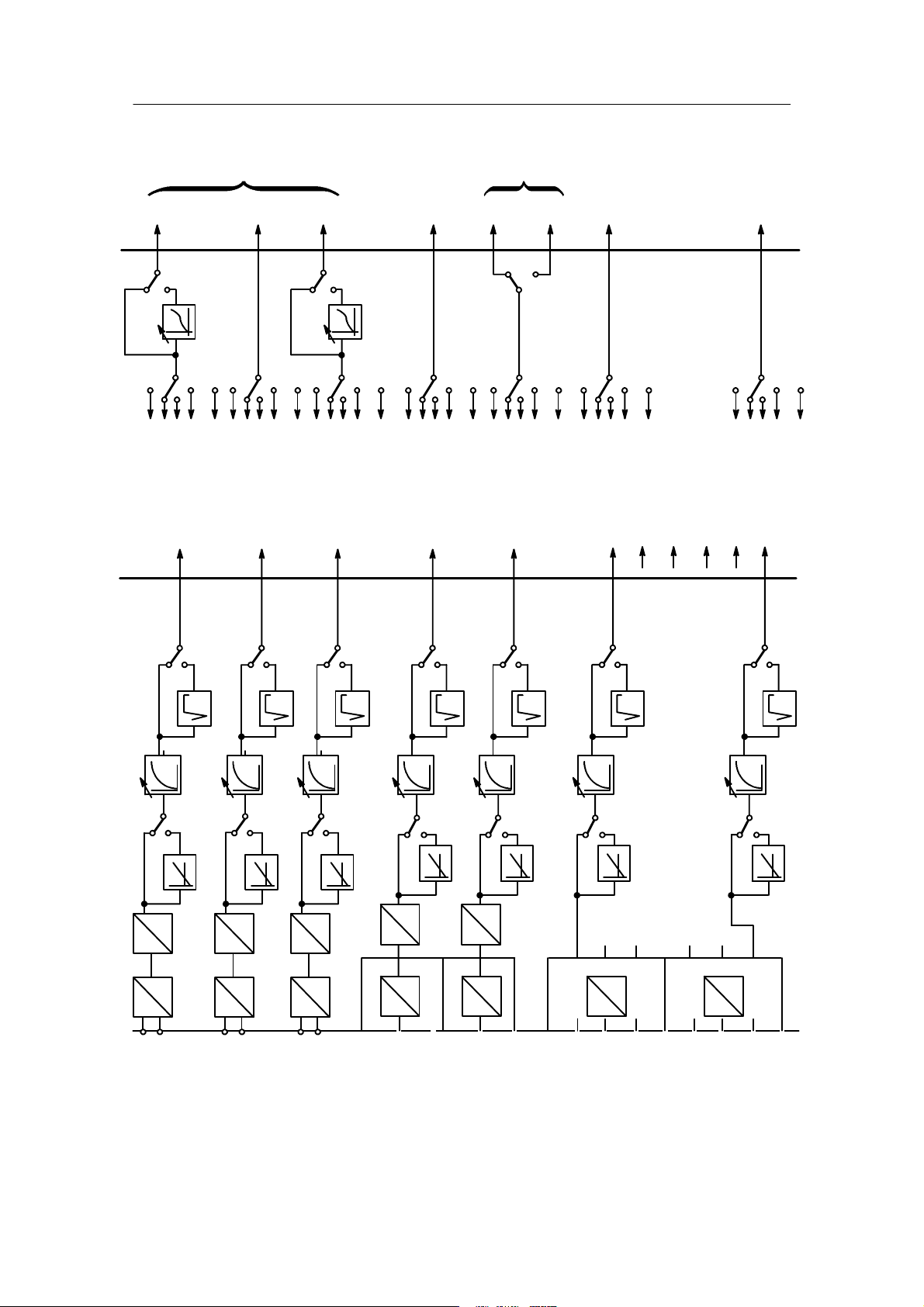
In the structure switch setting S4=0 the analog input range is permanently connected
(see figure 1-5, page 24). With S4=1 the permanent connection is canceled and converted into
a freely connectable input range (see chapter 1.5.2, page 25).
Every one of the maximum 11 analog inputs is fed through an AD converter which performs the
50 or 60 Hz interference suppression by averaging over 20 or 16 2/3 ms. After this the signal
range 0 to 20 mA or 4 to 20 mA is normalized to 0 to 100% calculated value per channel with
S5 to S9 or S200 to S205.
At the same time it is decided with S5 to S9 or S200 to S205 whether operation is to take place
with or without range monitoring (transmitter fault). The monitor signals per channel on dropping
below --2.5 % or exceeding +106.25 % with a hysteresis of 0.25 % to the digital x and w display.
By an OR link of all single messages the group transmitter fault MUF is formed which can be
assigned to the digital outputs and negated optionally (see chapter 1.5.8, page 121). Only the
analog inputs selected with the transmitter fault monitor are monitored, displayed on the front
panel (the appropriate position stays dark in the case of analog inputs not selected with transmitter fault) and signaled with the OR link. The error message is acknowledged with the Shift
key (12). The fault message signal via the OR link is available until the appropriate analog inputs are back in the working range.
After the range monitoring the 11 analog inputs are fed through a 1st order filter which can be
set by the parameters tF1 to tFb in the range of oFF, 0.1 to 1000 s in the parameterization
mode onPA. The factory setting is 1 s.
With S10 to S14 or S206 to S211 every channel can now be root extracted optionally. After root
extraction, the 11 analog inputs are available for further processing as AEA1 to AEbA.
22
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 25

Manual 1 Technical Description
1.5.1 Analog input signal processing permanently connected
1.5 Functional description of the structure switches
The function inputs FE1 and FE3 are preceded by a linearizer which enables non-linear process
variables to be displayed physically correctly (for operating method see chapter 1.5.2, page 25)
function block Fu, setting of the 13 vertex values, see chapter 1.5.4, figure 1-19, page 45 to
figure 1-23, page 46).
The outputs of the analog inputs AE1A to AEbA are now assigned to the function inputs FE1 to
FE12 by the structure switches S15 to S19 or S212 to S217. The outputs AE1A to AEbA and
the function inputs FE1 to FE12 are available for the assignment to analog outputs, the limit
value alarm and the parameter control and can be read through the SES. With this input
structure most control tasks can be solved in connection with the different controller types and
controller output structures.
SIPART DR22 6DR2210
C79000-G7476-C154-03
23
Page 26
1.5 Functional description of the structure switches
1.5.1 Analog input signal processing permanently connected
Manual1 Technical Description
see fig. 1-24 (pg. 48) to
fig. 1-44 (pg. 83)
FE1
FE2
see fig. 1-50
(pg. 90)
FE3
see fig. 1-58 (pg. 102) to
fig. 1-62 (pg. 109)
FE4
FE5Zy
N
FE6
R
y
FE7
FE12
function inputs
S20
1
0
--1 .1
to 11.1
S15
0
o%
1
2
AE1A
AE2A
0
3
11
1
2
...
o%
AE3A
AEbA
AE1A
AE2A
S21
1
0
--1 .3
to 11.3
S16
3
11
...
AE3A
AEbA
0
o%
S17
3
1
11
2
...
AE1A
AE2A
AE3A
AEbA
0
o%
S18
0
3
1
11
2
AE1A
AE2A
o%
AE3A
AEbA
1, 2
0
S2
...
S19
3
1
11
2
...
AE1A
AE2A
AE3A
AEbA
0
o%
S212
3
1
11
2
...
AE1A
AE2A
AE3A
AEbA
0
o%
S217
3
1
11
2
...
AE1A
AE2A
AE3A
AEbA
connectable
AE7A
AE8A
AE1A
S4 = 1 drawn
at S4 = 1 freely
AE2A
AE3A
AE4A
AE5A
AE6A
AE9A
AEAA (AE10A)
AEbA (AE11A)
Outputs of the
tF1
A
+
1/20
analog outputs
AE1
S5
0, 1
AE1A
S10
0
1
AE2A
S11
0
1
AE3A
S12
0
1
AE4A
S13
0
1
AE5A
S14
0
1
AE6A
S206
0
1
AEbA
(AE11A)
S211
0
1
...
tF2
S6
2, 3
0, 1
4bis20mA
D
D
A
U
--
1/19
I, U
+
1/22
AE1
U
--
1/21
I, U
tF3
S7
2, 3
0, 1
4to20mA
D
A
U
+
--
1/23
1/24
AE1
I, U
tF4
S8
2, 3
0, 1
4to20mA
D
A
U
Slot 2
AE4
I, U, R,
P, T
tF5
S9
2, 3
0, 1
4to20mA
D
A
U
Slot 3
AE5
I, U, R,
P, T
tF6
...
S200
2, 3
4to20mA
2, 3
0, 1
...
4bis20mA
D
Slot 6
AE6
I, U
AE7
I, UAAE8
Slot 5
I, U
AE9
tFb
S205
2, 3
0, 1
4to20mA
D
AE10
I, UAAE11
I, U
I, U
Figure 1-5 Analog input signal processing permanently connected (S4 = 0)
24
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 27

Manual 1 Technical Description
1.5.2 Analog input signal processing freely connected (S4 = 1)
1.5 Functional description of the structure switches
1.5.2 Analog input signal processing freely connected (S4 = 1)
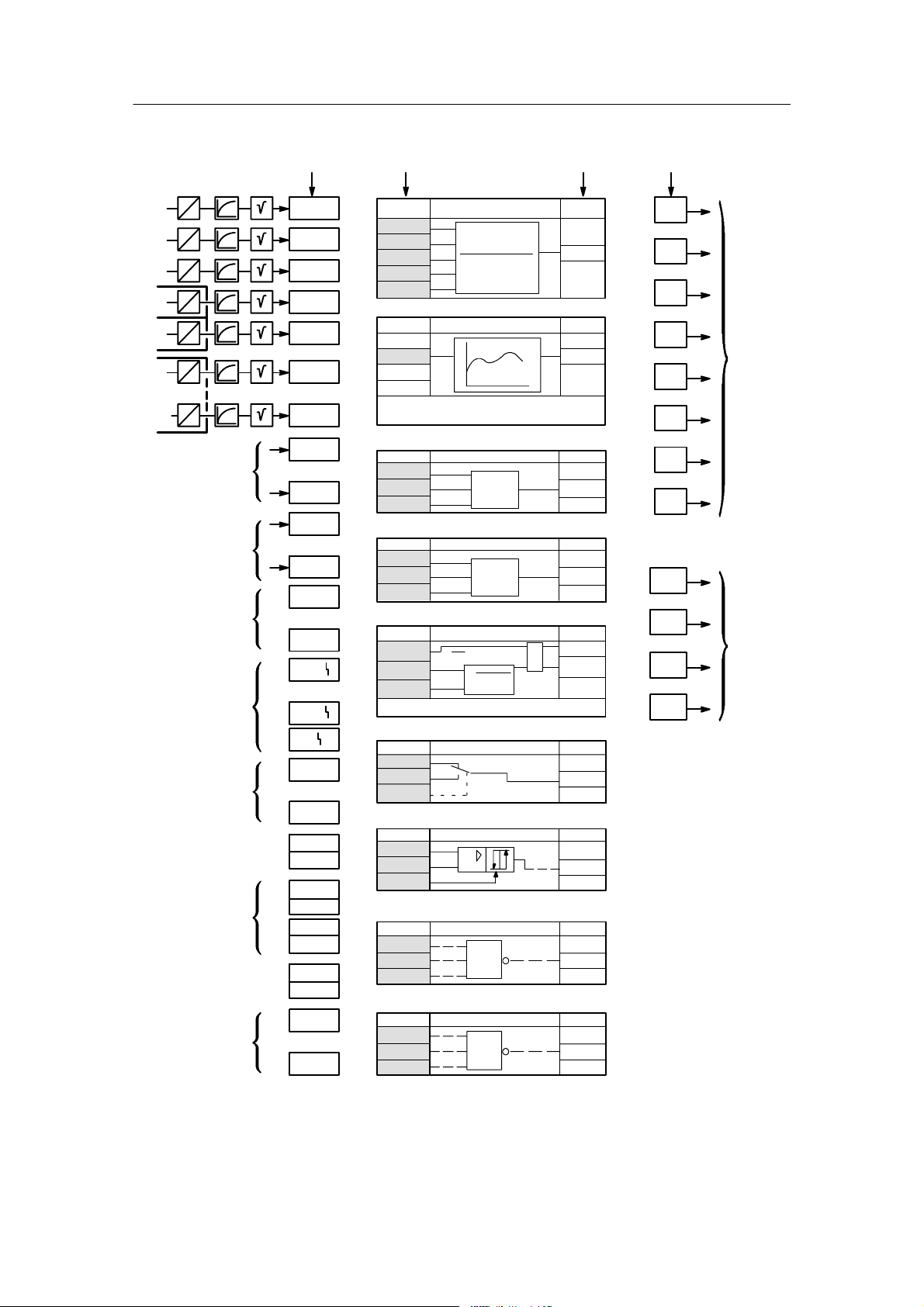
The structure switch setting S4=1 cancels the permanent connection at S4=0 in the analog input range and replaces it with a freely connectable input range. The freely connectable input
range basically represents a multifunctional unit, configuring takes place according to the same
rules.
Up to the outputs AE1A to AEbA (AE11A), the signal processing is identical to that described in
chapter 1.5.1, page 22. The function inputs FE1 to FE12 also operate in the same way with the
difference that FE5 (follow-up input) and FE6 (position feedback input) can be used in parallel
and with the difference that FE5 (follow--up input) and FE6 (position feedback input) can be
used in parallel and connected with different signals.
Nine different function blocks which occur with different frequency can now be connected
absolutely freely between the outputs AE1A to AEbA and the function inputs FE1 to FE12. The
outputs AE1A to AEbA represent data sources whilst the function inputs FE1 to FE12 are data
sources. Parallel to the outputs, 15 connectable linear parameters are arranged with a setting
range of -1.999 to 19.999 (corresponding to -199.9 % to 1999.9 %), a number of normal
constants as well as other variables gained from the controller as data source.
The function blocks have a different number of inputs (data sinks) and 1 output each (data
source) depending on the function depth.
The function blocks ”function transmitter” and ”correction computer” have assigned parameters
which can be set in the structuring mode oFPA. The connectable parameters P1 to P15 are set
in the parameterization mode onPA.
By structuring on the front module the necessary functions are selected or defined (structuring
mode FdEF), connected (structuring mode FCon) and correctly positioned in time in the cycle
(structuring mode FPoS), see chapter 3.3.7, page 201 to 3.3.9, page 205. Connection is absolutely free, i.e. any data source can be connected with any data sink. The operating effort is
minimized by fading the data sources and sinks from undefined function blocks. In addition the
data sinks which are not obliagatory for a function are pre--occupied by constants which can be
overwritten. The inputs pre--occupied with ncon (not connected) are absolutely essential for the
function and must be connected. This very variable connection facility in the analog input range
also enables complex control tasks to be solved.
No distinction is made between analog and digital signals. Digital inputs have a threshold value
of 0.5. Digital outputs supply a value of 0 % (0) or 100 % (1).
SIPART DR22 6DR2210
C79000-G7476-C154-03
25
Page 28
1.5 Functional description of the structure switches
1.5.2 Analog input signal processing freely connected (S4 = 1)
Data sources Data sinks Data sources Data sinks
Manual1 Technical Description
AE1
AE2
AE3
AE4
AE5
AE6
AE11
Connectable
parameters
Constants
Digital inputs
Fault message
AE1.A
AE2.A
AE3.A
AE4.A
AE5.A
AE6.A
AEb.A
P01
.
.
.
P15
--1,0
.
.
.
1.05
BE01
.
.
.
BE09
AE1
.
.
.
AE5
Ar .F
Ar .1
Ar .2
Ar .3
Ar .4
Ar .5
Fu .F
Fu .1
Parameter:
Vertex value at -10, 0, 10 to 90, 100, 110
MA .F
MA .1
MA .2
MA .3
Mi .F
Mi .1
Mi .2
Mi .3
rE1 .F
rE1 .1
rE1 .2
rE1 .3
Parameter. tA, tE, PA, PE
Ar1 to Ar6
E1
E2
E1 · E2+E3-E4
E3
E4
E5
Fu1, Fu2
E
A
MA1 to MA3
E1
E2
E3
Mi1 to Mi3
E1
E2
E3
rE1
ΔP
E2
f(E2·E3)
E3
E5
Max
Min.
A
A
E
A
A
x
A
nr
Ar .6
nr
Fu .2
nr
MA .4
nr
Mi .4
nr
rE .4
FE1
FE2
FE3
FE4
FE5
FE6
FE7
FE8
FE9
FE10
FE11
FE12
Analog
signals
Analog
or
digital
signals
Alarms A1 to A4
AE
A1
.
.
.
AS .F
AS .1
AS .2
AS .3
AS1 to AS5
E1
E2
E3
A
A4
Status message
Setpoints w1/w2
Manipulated
variable y *)
Serial analog value
Int1
Int2
SPI1
SPI2
SP1
SP2
yI
yII
SAA1
.
.
.
SAA4
Co .F
Co .1
Co .2
Co .3
nA .F
nA .1
nA .2
nA .3
no .F
no .1
no .2
no .3
Co1, Co2
E1
+
E2
-
E3
nA1, nA2
E1
E2
E3
no1, no2
E1
E2
E3
&
≥1
A
H
A
A
Figure 1-6 Analog input signal processing freely connectable (S4=1)
26
nr
AS .4
nr
Co .4
nr
nA .4
nr
no .4
SPI 1/2: internal setpoint
SP 1/2: active setpoint
*) y1: Manipulated value
*) y2: Manipulated value
controller 1/2
controller1/2
y controller 1
y controller 2
(for S1 = 12)
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 29
Manual 1 Technical Description
1.5.2 Analog input signal processing freely connected (S4 = 1)
1.5 Functional description of the structure switches
The individual function blocks are described below.
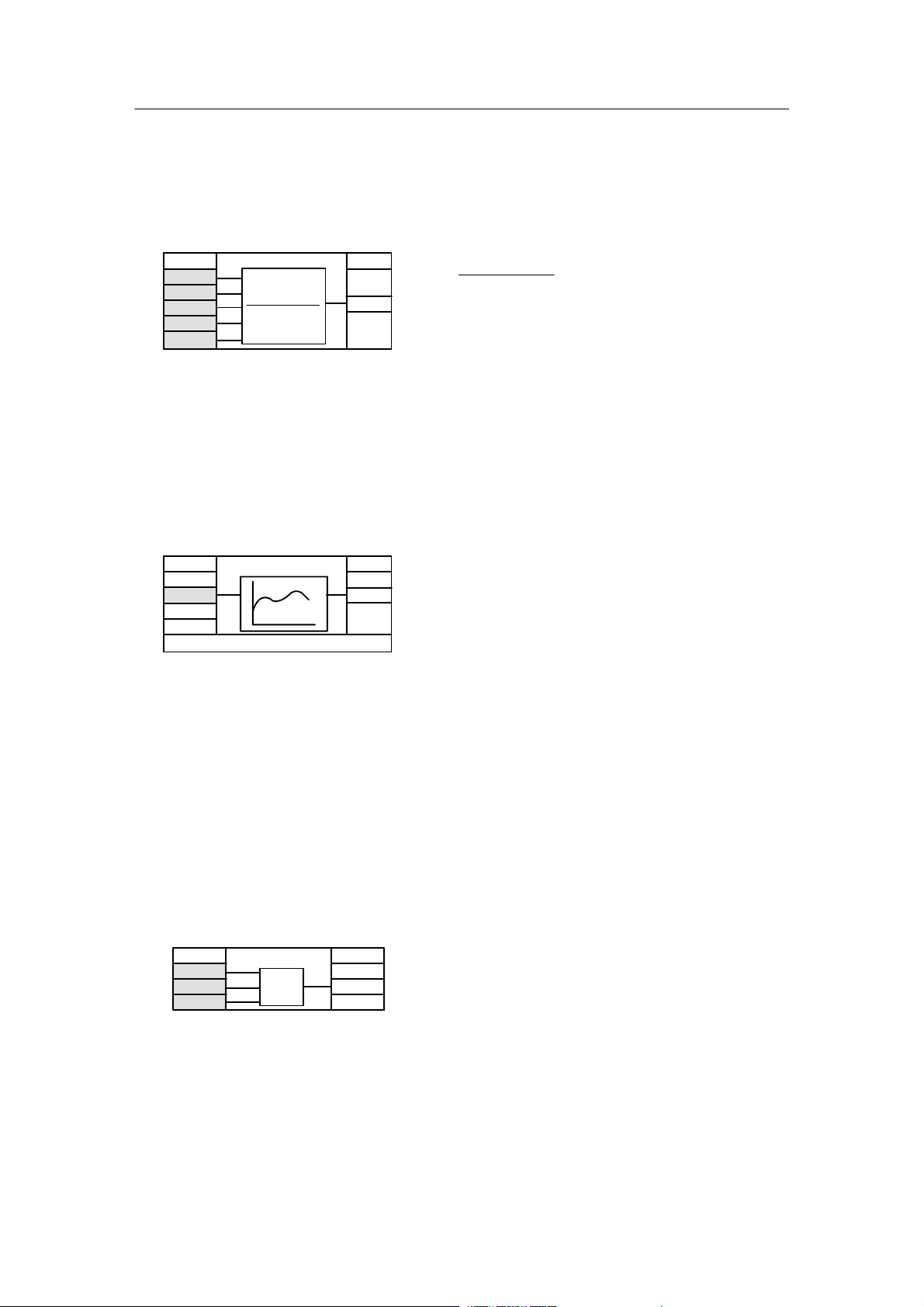
1.5.2.1 Arithmetic Ar1 to Ar6
Ar1toAr6
ncon
ncon
0.000
0.000
1.000
Ar .F
Ar .1
Ar .2
Ar .3
Ar .4
Ar .5
E1
E2
E1 · E2+E3-E4
E3
E4
E5
E5
Figure 1-7 Function block Arithmetic Ar1 to Ar6
-- With this function block the four basic arithmetic functions are implemented with appropriate
assignment of inputs 0 and 1 respectively. The preset E3=E4=0, E5=1 gives A = E1×E2.
-- Typical process-technical applications are dosing or evaluation (E1×E2), range fade-outs
(E1×E2+E3) or differentiations (E3 - E4).
nr
A
Ar .6
E1 · E2 + E3 - E4
A=
E5
E5 is limited to values ≥0.5 %.
1.5.2.2 Function transmitter Fu1 and Fu2
Fu1, Fu2
Fu .F
ncon
Fu .1
-10, 0, 10 bis 90, 100, 110oFPA
E
nr
AA
Fu .2
E
A=f(E)
Figure 1-8 Function block function transmitter
The function transmitter assigns every value of the input variable E in the range from -10 % to
+110 % an output variable A in the range from -199,9 % to +199,9 % with the function entered
by the user: A = f(E). The function is entered by the parameters ”vertex value 1 to 13” for -10 %
to +110 % of E in intervals of 10 %. Parabolae are set by the computing program between
these vertex values which interlink tangentially the vertex values so that a constant function is
produced. The vertex values at -10 % and +110 % of E are required for the overflow. The last
rise remains constant in the case of further overmodulation of E. When used as a linearizer for
the displays, the linearization function is entered by the 13 vertex values so that the series
circuiting of the sensor function gives a linear equation with the linearization function
(see chapter 1.5.4, figure 1-20 to figure 1-23, page 46).
1.5.2.3 Maximum value selection MA1 to MA3
MA1.F to MA3.F
ncon
ncon
0.050
MA .F
MA .1
MA .2
MA .3
E1
E2
E3
Max
nr
A
MA .4
A = max (E1,E2, E3)
The greatest of the three input values is
connected through to the output.
Figure 1-9 Function block maximum value selection
With the preset the greater value of E1 or E2 is connected through to A and at the same time
limited to the value of E3 (-5 %). Typical applications are maximum value selection circuits and
minimum value limitings.
SIPART DR22 6DR2210
C79000-G7476-C154-03
27
Page 30
1.5 Functional description of the structure switches
1.5.2 Analog input signal processing freely connected (S4 = 1)
Manual1 Technical Description
If only 2 inputs are required, the 3rd input must be set outside the working range of the two
inputs to a minimum value otherwise minimum value limiting takes place.
1.5.2.4 Minimum value selection Mi1 to Mi3
Mi1.F to Mi3.F
ncon
ncon
1.050
Mi .F
Mi .1
Mi .2
Mi .3
E1
E2
E3
Min.
Figure 1-10 Function block minimum value selection
With the preset the smaller value of E1 or E2 is connected through to A and at the same time
limited to the value of E3 (105%). Typical applications are minimum value selection circuits. If
only 2 inputs are required, the 3rd input must be set outside the working range to a maximum
value, otherwise a maximum value limiting takes place.
nr
A
Mi ..4
A = min (E1, E2, E3)
The smallest of the three input values is
connected through to the output.
1.5.2.5 Correction computer for ideal gases rE1
rE1
rE1 .F
1.000
ncon
ncon
rE1 .1
rE1 .2
rE1 .3
E2
E
3
ΔP
f(E2·E3)
x
Figure 1-11 Function block correction computer rE1 for ideal gases
The rooted signal of the active pressure must be applied at input c**.1. The measuring ranges
are normalized to the calculation state with the parameters PA, PE, tA, tE (correction quotients
start/end for pressure and temperature).
Range of Application
The correction computer is used to calculate the flow of gases from the active pressure Δp
depending on pressure and temperature. The medium must be in pure phase, i.e. so that no
liquid separations may take place. This should be noted particularly for gases close to the
saturation point.
nr
A
rE .4
A = Δp·f(E2,E3)
f(E2, E3) =
(oFPA)tA, tE, PA, PE
(PE – PA) E2 + PA
(tE – tA) E3 + tA
Errors due to fluctuating status variables of the medium (pressure, temperature) are corrected
by the flow correction computer here.
28
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 31

Manual 1 Technical Description
1.5.2 Analog input signal processing freely connected (S4 = 1)
1.5 Functional description of the structure switches
q
Pressure p Temperature t
2
Kp/cm
t
e
Figure 1-12 Active pressure measuring method, Principle
Active pressure Δp
Measured value
transmission
Δp
Calculation
Function block rE
q
Physical notes
The active pressure measuring method is based on the law of continuity and Bernoulli’s energy
equation.
According to the law of continuity the flow of a flowing liquid in a pipe is the same at all places.
If the cross-section is reduced at one point, the flow speed at this point should increase. According to Bernoulli’s energy equation the energy content of a flowing material is made up of the
sum of the kinetic energy (due to the speed) and the potential energy (of the pressure).
An increase in speed therefore causes a reduction in pressure.
This drop in pressure, the so-called ”active pressure” Δp is a measure of the flow q.
The following applies:
q = c· Δp
with c as a factor which depends on the dimensions of the pipe, the shape of the constriction,
the density of the flowing medium and some other influences.
The equation states that the active pressure generated by the constriction is in the same ratio
as the square of the flow.
SIPART DR22 6DR2210
C79000-G7476-C154-03
29
Page 32

1.5 Functional description of the structure switches
1.5.2 Analog input signal processing freely connected (S4 = 1)
Δp
1.00
0.81
0.49
0.25
0.09
Manual1 Technical Description
0
Figure 1-13 Relationship between flow q and active pressure Δp
0.3 0.70.5 0.9 1.0 q
To measure the flow, a choke is installed at the measuring point which constricts the pipe and
has two connections for tapping the active pressure.
If the properties of the choke and the measuring material are known to the extent that the
equation specified above can be calculated, the active pressure is a measure of the flow.
If you have chosen a certain choke, the flow can be described in the calculation state or
operation state.
= K· ρ
q
B
· Δpor q = K· ρ· Δp
B
Since the density is included in the measuring result according to the above equation,
measuring errors occur when the density in the operating state differs from the value based on
the calculation of the choke. Therefore a correction factor F is introduced for the density in
operating condition.
F=
V
=
B
B
V
with V=
1
as specific volume.
as specific volume.
In order to be able to perform the correction with the factor F, the current specific volume must
be determined first.
For the dry gases the densities change according to the laws for ideal gases:
T
T
1
=
ρ
p
The correction factor is then given as:V = R
F =
·p
B
p
·T
B
with p as absolute pressure and T as absolute temperature.
30
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 33

Manual 1 Technical Description
1.5.2 Analog input signal processing freely connected (S4 = 1)
1.5 Functional description of the structure switches
m3/kg
V
B
P
to P
abs.A
to Â
Â
A
Figure 1-14 Display of the correction range
abs.E
E
Correction range
Â
A
Â
B
Range of pressure of the transmitter
Range of temperature of the transmitter
Â
E _C
P
abs.A
P
abs.B
P
abs.E
P
abs.
bar
qFlow
ρ Density
Δp Active pressure
p Pressure
 Temperature (_C)
T Temperature (K)
V Specific volume
R Gas constant
F Correction factor f (p, T)
Indices:
Â
AStart
EEnd
B Calculation state
abs Absolute variable
m Ground
v Volume
This gives for the corrected flow
T
·p
q = F·K· ρ
· Δp= K· ρ
B
The factor contained in the formula
· Δp·
B
K· ρ
B
P
·T
B
is already taken into account in the measurement of
B
the active pressure and can therefore be ignored by the computer.
Related to the correction factor it follows:
A = Δp
·f(E2,E3)with F = f(E2, E3)=
(PE − PA) E2 + PA
(tE − tA) E3 + tA
The measuring ranges are normalized to the calculation state with the parameters PA, PE, tA,
tE (correction quotients start/end for pressure and temperature).
Mass flow computer, m
2
A=qm,E2=p,E3=Â
PA =
tA =
P
absA
,PE=
P
B
T
A
,tE=
T
B
P
T
T
absE
P
B
E
with T
B
,
[K]
A∕E∕B
SIPART DR22 6DR2210
C79000-G7476-C154-03
31
Page 34

1.5 Functional description of the structure switches
1.5.2 Analog input signal processing freely connected (S4 = 1)
Manual1 Technical Description
Volume flow computer related to the operating status q
V
Since the volume is reciprocally proportional to the density, a volume flow computer can be
made out of this mass flow computer by changing the inputs E2 and E3.
A=q
PA =
tA =
Volume flow computer related to the standard status q
,E2=Â,E3=p
v
T
A
,PE=
T
B
P
absA
,tE=
P
B
T
E
T
B
P
absE
P
B
with T
A∕E∕B
[K],
VN
Since the output signal is now related to the volume flow in the standard status, TN= 273. 15 K,
= 1.01325 bar
P
N
A=q
VN
T
tA =
PA =
A
T
B
P
,E2=p,E3=Â
,tE=
absA
,PE=
P
B
and no longer to the operating state, it must be corrected accordingly.
abs
T
E
T
P
with T
B
absE
P
B
A∕E∕B
[K],
The following applies for all computers:
p
T
absA
to T
A
to p
E
absE
Transmitter range absolute pressure (bar)
Transmitter range absolute temperature (K)
is formed from the transmitter range Â
to ÂEby conversion:
A
T(K) = 273, 15 + Â (_C)
p
B,TB
Pressure and temperature range of the calculation state of the measuring
panel (absolute values)
p
and TBmust be within the range of the transmitter; and may not be more than the factor 100
B
away from the range limits.
PA, tA = 0.01 to 1
PE, tE = 1 to 99.99
The input rE1.1 Δp is limited to values ≥0.
If the adjustable ranges for PA, PE, tA, tE are not sufficient a linear equation can be switched in
front of the appropriate input for adaptation (function block Ar).
32
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 35

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.2 Analog input signal processing freely connected (S4 = 1)
1.5.2.6 Switch for analog variables AS1 to AS5
E3 A
0(<0,5)
≥0,5)
1(
E1
E2
ncon
ncon
0.0
1.5.2.7 Comparator with adjustable hysteresis Co1, Co2
(two-position switch, e.g. limit value sensor)
Inputs Output A
E1≥(E2 + H/2)
E1<(E2 -- H/2)
1H=E3 = hysteresis)
0
ncon
ncon
0.050
1.5.2.8 AND NOT function (NAND) nA1, nA2
A=E1∧ E2 ∧ E3 =E1∨ E2 ∨ E3
with default: A = E1 (Negation of E1)
E1 E2 E3 A
0 0 0 1
100 1
010 1
110 1
0 0 1 1
101 1
011 1
111 0
nA1.F to nA2.F
ncon
1.0
1.0
AS1.F to AS5.F
AS .F
AS .1
AS .2
AS .3
E1
E2
E3
Co1.F to Co2.F
Co .F
Co .1
Co .2
Co .3
nA .F
nA .1
nA .2
nA .3
E1
E2
E3
E1
E2
E3
nr
A
AS .4
+
-
nr
A
Co .4
H
nr
A
&
nA .4
1.5.2.9 OR NOT function (NOR) no1, no2
A=E1∨ E2 ∨ E3 =E1∧ E2 ∧ E3
with default: A = E1 (Negation of E1)
E1 E2 E3 A
0 0 0 1
100 0
010 0
110 0
0 0 1 0
101 0
011 0
111 0
SIPART DR22 6DR2210
C79000-G7476-C154-03
no1.F to no2.F
ncon
0.0
0.0
no .F
no .1
no .2
no .3
E1
E2
E3
≥1
nr
A
no .4
33
Page 36

1.5 Functional description of the structure switches
1.5.3 Digital input signal processing
Manual1 Technical Description
1.5.3 Digital input signal processing
(S24 to S48, S219 to S230)
1.5.3.1 Digital inputs BE1 to BE14
The inputs BE1 to BE4 are located on the basic board. BE5 to 9 and 10 to 14 are connected to
the module 6DR2801-8C at the slots 5 or 6. The digital output modules 6DR2801-8E also contain another two digital inputs in addition to the outputs so that in this case the two digital inputs
BE5/BE6 or BE10/BE11 can be used.
24 V
Slot 5
3AA + 3BE
6DR2802--8B
BE5 BE5
5/1
5/2
5/3
6/1
6/2
6/3
24 V
BE6
BE7
S22 = 6
Slot 6
3AA + 3BE
6DR2802--8B
BE10
24 V
BE11
BE12
S23 = 6
5V
5V
5/1
5/6
6/1
6/6
Slot 5
4BA + 2BE
6DR2801-8E
BE6
S22 = 1
Slot 6
4BA + 2BE
6DR2801-8E
BE10
BE11
S23 = 1
24 V
24 V
24 V
24 V
5V
5V
5V
5V
1/15
1/16
1/17
1/18
5/1
5/2
5/3
5/4
5/5
6/1
6/2
6/3
6/4
6/5
BE1
BE2
BE3
BE4
Slot 5
6DR2801--8C
5BE
24 V
BE5
BE6
BE7
BE8
BE9
S22 = 2
Slot 6
6DR2801--8C
5BE
24 V
BE10
BE11
BE12
BE13
BE14
S23 = 2
5V
bE01
bE02
bE03
bE04
5V
bE05
bE06
bE07
bE08
bE09
5V
bE10
bE11
bE12
bE13
bE14
Figure 1-15 Input function digital inputs
34
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 37

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.3 Digital input signal processing
1.5.3.2 Assignment and direction of effect of the digital inputs
see fig. 1-16, page 37
The control signals CB, He ...+yBLII, -yBLII are assigned by the structure switches S24 to S38
and S219 to S228 to the digital inputs BE1 to BE14 or the status Lo. In the assignment of CB
(S24), CBII (S219), PI (S30), PII (S31), wSLI (S225) and wSLII (S226) the High status
(S** = --1) is also possible. The control signals can be negated optionally by the structure
switches S39 to S46 and S229 to S230.
The digital inputs BE1 to BE4 of the standard controller can be extended with the option
modules 6DR2801-8C, 6DR2801-8E, 6DR2802-8B in slot 5 and in slot 6.
When using option modules in slots 5 and 6 the structure switches S22 and S23 must be set
according to the assembly, otherwise it will lead to error messages (see chapter 1.4.3, page
20). All digital inputs can be read by the SES.
1.5.3.3 Linking the digital inputs BE1 bis BE14 to the control signals via the
SES
(S47 to S49, S101)
see fig. 1-17, page 38
The control signals CB and N may be available optionally as static signals or as a pulse (key
operation on consoles) at the digital inputs. The setting is made by S47 for CB and S48 for N.
On selecting the pulse input, every positive edge flips the flip-flop. In the following descriptions
the output status of the flip--flop is assumed as CB or N.
All control signals except
Δw and Δy can also be preset by the SES at S101 = 2, 3, 4, 5
and OR linked with the appropriate control signals through the digital inputs. The incremental
adjustment of w or y by the SES is not advisable on account of the bus run times. Since the top
operation hierarchy in a computer link should be with the autarcic single controller, the control
signals can be switched off by the SES by rounding with RC = Int
key (2) of the controller or via CB
(optionally time-monitored) or via CBBE(central Computer
ES
∧CB via the Internal/External
Fail line).
In addition the internal flip-flop can be activated at S101 = 2 to 5 parallel to pressing the keys
ES.
via Int
The CB signal is formed at S101 = 2, 4 as an OR function of CB
via a digital input so that operation can take place optionally with one signal.
CB
BE
via the serial interface and
ES
At S101 = 3, 5 the OR function is replaced by an AND function so that the CB set by the SES
can be reset via a central Computer Fail line.
The function RC = Int
∧CB (computer operation) also controls the command variable switching
in all controller types, i.e. also in SPC-mode or manipulated variable switching in DDC mode
(see chapter 1.5.4, page 40). The two controller types S1 = 10/11 operate without command
variable switching. The Internal key and the control signal CB are available with the link RC
Int∨CB
for locking operation through the serial interface (e. g. when coupling to control sys-
=
tems).
SIPART DR22 6DR2210
C79000-G7476-C154-03
35
Page 38

1.5 Functional description of the structure switches
1.5.3 Digital input signal processing
Manual1 Technical Description
At S47 = 0 static switching takes place due to the logic function RC = Int∧CB. In the case of
thepresettoInt
(Internal LED (1) off) you can switch statically with CB between controller
values and computer values (command and manipulated variables). The computer standby CB
is displayed negated by the C
the controller is signaled negated as a message signal RB
signaled negated as a message signal RC
-LED (3) (C =CB,CB=1=CLED off). The computer standby of
= Int. The computer mode is also
= Int∧CB .
At S47 = 1 static switching with acknowledgement takes place. Every time the computer is recovered (CB from 0 ! 1) the internal flip--flop is set to 1 (Internal LED on, C
the computer mode RC = Int∧CB
only becomes active after pressing the Internal key (Int=0).
LED off) so that
With S49 the Internal/External key can be switched out of function and only internal or external
operation preselected.
The control signal H is generated as an OR-function by the Manual-/Automatic key (9) with subsequent flip-flop (Hi) and the control signal He whereby He can be preset by the SES or the
digital inputs in the way described above.
With the structure switch S64 Automatic-/Manual switching can be blocked in the positions only
Automatic (H = 0) or only Manual (H = 1). The Manual LED (8) always indicates the active
status (see also chapter 1.5.6, page 99).
At S64 = 0 to 2, He is connected statically by both the SES and the digital inputs. At S64 = 3/4
the connection is made dynamically, i.e. every positive edge causes manual-automatic-manual
opeeration switching. Additionally interlocking of He
with RC =Int∨CB is canceled at
ES
structure switch S64 = 4.
36
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 39

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.3 Digital input signal processing
assignment with
S**
1
--1
0
BE01 1
BE02 2
BE03 3
BE04 4
BE05 5
BE06 6
BE07 7
BE08 8
BE09 9
BE10 10
BE11 11
BE12 12
BE13 13
BE14 14
FE09 15
FE10 16
FE11 17
FE12 18
S24
--1
S25
1)
S26
--1
--1
0
S27
--1
S28
S29
S30
--1
S31
--1
S32
S33
--1
S34
--1
S35
--1
S36
--1
S37
--1
S38
--1
S218
S219
--1
S220
--1
S221
--1
S222
--1
S223
--1
S224
--1
S225
--1
S226
--1
S227
--1
S228
--1
S39
0
1
S40
0
1
S41
0
1
S42
0
1
S43
0
1
S43
0
1
S44
0
1
S44
0
1
S45
0
1
S45
0
1
S46
0
1
S46
0
1
S39
0
1
S40
0
1
S41
0
1
S42
0
1
S229
0
1
S229
0
1
S230
0
1
S230
0
1
S46
0
1
S46
0
1
CB
BE
He
BE
N
BE
Si
BE
PI
BE
PII
BE
+Δw
--Δw
+Δy
BE
--Δy
+ybL
--ybL
CBII
HeII
NII
BE
SiII
BE
/tSI
/tSII
wSLI
wSLII
+ybLII
--ybLII
accordingtofig.1-17,
Page 38
bLS
BE
bLPS
BE
PAU
BE
BE
BE
according to fig. 1-17,
Page 38
BE
BE
BE
bLb
BE
BE
BE
BE
BE
BE
BE
BE
BE
accordingtofig.1-17,
Page 38
Figure 1-16 Assignment and direction of effect S24 to S38 and S218 to S228
SIPART DR22 6DR2210
C79000-G7476-C154-03
37
Page 40

1.5 Functional description of the structure switches
1.5.3 Digital input signal processing
Manual1 Technical Description
+Δw
BE
-Δw
BE
+Δy
BE
-Δy
BE
0
1
S64
from fig. 1-16, p. 37
1
0/2/3/4
4
HeBE(I/II)
SiBE(II)
bLb
BE
bLS
BE
bLPS
BE
P I
BE
PII
BE
PAU
BE
+ybLBE(II)
-ybL
BE
tSHI
BE
tSHII
BE
WSLI
BE
WSLII
(II)
N
BE
BE
(II)
**)
**)
He
Si
bLb
bLS
bLPS
tSHII
N
ES
ES
ES
ES
onlyactiveinCB∧Int
ES
CB∧Int
ES
ES
S48
0
3
3
2/3(4/5)
0/1 S101
S64
&
&
S64
0/1/2
S64 0/1/2
or
II
3/4
≥
2/3(4/5)
0/1
S101
2/3(4/5)
&
S101
0/1
2/3(4/5)
&
S101
0/1
2/3(4/5)
&
S101
0/1
1
S47
0
2
&
≥
S49
2/3/
4/5
CB
SES
CBBE(II)
ES
0/1
0/1
S101
2
ES
2/3/4/5
1
S101
0/1
2/3/4/5
ES
0/1
1
S101
≥
0/2
1
0
S
S47
1
Int
IntII
*) as of software version --D06 **) as of software version --C09
3/5
0/1
2/4
S271*)
S101
&
-1
2
1
0
1
C
ge
gn
Figure 1-17 Linking the digital inputs BE1 to BE14 with the control signals via the SES
(S47, S48, S49, S101)
+Δw
-Δw
+Δy
-Δy
ge
1
≥
2
0/1/3/4
S64
H
(II)
Si (II)
≥
bLb
bLS
bLPS
P I
PII
PAU
+ybL (II)
≥
-ybL (II)
tSHI
tSHII
WSLI
WSLII
≥
N(II)
active control signals for the switching functions in the controller
CB (II)
RC=Int∧CB
(single controller)
RC=Int II∧CB
(cascade)
RB=Int
(single controller)
or Int II
(cascade)
38
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 41

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.3 Digital input signal processing
1.5.3.4 Functional explanation of the digital control signals
bLb Blocking operation
Blocking the entire device operation and configuring.
Exception: Display of circuit
bLS Blocking structuring
With this signal the controller only allows switching to the online
parameterization levels outside process operation. In this way the parameters
for adapting the instrument to the process and the necessary settings for the
adaptation can be selected. Structuring is blocked.
bLPS Blocking parameterization and structuring
The entire configuring of the device is blocked, this means the parameterization
as well. Only the normal process operation according to the preselected
controller type is permitted.
CB Computer standby
Depending on the controller type this digital signal together with the
Internal/External key effects either switching in the setpoint range or DDC
operation begins. Central computer fail line in SPC and DDC operation.
He Manual external
This signal blocks the output of the controller and enables direct manual
adjustment of the manipulated variable on the front control panel.
N Follow-up
With this signal the output of the K--controller and the three-position step
controller with external position feedback is followed up to the follow-up signal
yN.
Si Safety operation
In K-controllers and three-position step controllers with external position
feedback, the manipulated variable adopts the parameterized safety value. In
three-position step controllers with internal position simulation, the manipulated
variable runs defined to 0 or 100 %.
tSHI/II Setpoint ramp/Setpoint changes
Setpoint changes via the setpoint ramp can be stopped by a binary input.
w
I/II External setpoint -- preselection
SL
Preselect whether external setpoint via analog input or SES/incremental.
PI P-operation controller I
With this signal the controller I (parameter set I) is switched to P-operation.
PII P-operation controller II
With this signal the controller II (parameter set II) is switched to P-operation.
PAU Parameter switching
The programmable controller types include single controllers and double
controllers (meshed controllers). Single controllers operate with the parameter
set I and can be switched by this digital signal to the parameter set II. Double
controllers are permanently assigned to the parameter sets I and II;the
switching possibility is then omitted.
SIPART DR22 6DR2210
C79000-G7476-C154-03
39
Page 42

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Δw Incremental setpoint adjustment
External setpoint or nominal ratio preset for incremental adjustment via digital
inputs
Δy Incremental manipulated variable adjustment
External manipulated variable default for incremental adjustment through digital
inputs in follow-up operation.
ybL Direction-dependent blocking of the manipulated variable
Direction-dependent limiting of the manipulated variable by external signals,
e.g. from the limit switches of the actuating drives. This limiting is effective in
every operating mode.
Signals with identification II relate logically to controller II at S1 = 12. Corresponding SES
signals are only effective when CBII=1 and IntII=0.
1.5.4 Controller types (S1, S49 to S53)
1.5.4.1 General, recurrent functions
Manual1 Technical Description
-- Manual setpoint preset wi or nominal ratio preset wvi on the control front panel.
The internal setpoint can always be adjusted with the
Δw-keys (6 Fig. 3-1) when the green
internal LED (1) lights up. The adjusting facility is marked by ↗ in the tables. Exceptions to
this rule are expressly mentioned in the individual controller types. The adjustment operates
incrementally, in the first step with a resolution of 1 digit and then an adjustment progression
so that major changes can also be performed fast enough. After every interruption in the
adjustment by releasing the keys, the progression starts again with the smallest adjustment
step.
-- Setpoint preset wi or nominal ratio preset wvi by the SES
Every time the internal setpoint can be adjusted by the keys (6) on the control front panel, it
is also possible to make a preset with the SES. Since only absolute and not incremental
adjustment is possible with the SES, it is advisable to use the setpoint ramp tS to avoid
steps.
In addition the control signal Int and the automatic/manual switching can be preset with the
manual manipulated variable adjustment with the SES so that a complete parallel process
operation is possible with the SES (see also chapter 1.5.6 ”Controller output structure”, section ”Control system coupling via the serial interface” on page 113).
-- Source for the external setpoint S53 and S101
The external setpoint w
E can come from a maximum of three different sources in the differ-
ent controller types:
external setpoint as an absolute value via the analog inputs (w
external setpoint incremental via the control signals
external setpoint as an absolute value via the SES (w
In double controllers (S1 = 12) you can switch between w
control signal w
SLI
or w
SLII
.
Δw(w
ES) SES (w
ES
)
EΔ
EA
)
Selection with S53
)selection with S101
ES
and wEArespectively with
-- Setpoint ramp tS
(accordingly tSII at S1 = 12)
With the parameter tS (oFPA) the adjusting speed of the effective setpoint w (in ratio control-
ler S1 = 4 the effective nominal ratio) can be set in the range of oFF, 0.1 to 9984 min over
40
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 43

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
0 to 100%. At the same time, tS presets the floating time for 0 to 100% change in incremental setpoint adjustment via the control signals
Δw. At tS = oFF the adjustment speed goes
to 1.
With the setpoint ramp, setpoint switchings can be effected to non-followed-up variables SH
and wi, w
EΔ,wES
at S52 = 1 and w
if the supplying controller has not been followed up
,
EA
not suddenly but with the set ramp.
w
w
E
Δw
S
H
external
Setpoint
Figure 1-18 Setpoint switching with ramp
μ
tw
safe
Setpoint
t
tan α =
tw=
100 %
tS
Δw·tS
100 %
Δw
=
tw
With the control signals tS and tSII the set setpoint ramps can be switched off.
-- Setpoint limits SA, SE
(accordingly SAII,SEII at S1 = 12)
With the parameters SA and SE (oFPA) the effective setpoint w can be limited to minimum
value (SA) and maximum value (SE) in the range from -10 to 110 %.
Exception: Ratio controller (S1 = 4) and ratio cascade, commanded ratio controller (S1 = 6)
-- Follow-up of the ineffective setpoint to the active setpoint (S52)
(accordingly S235 at S1 = 12)
Normally the ineffective setpoint is followed up to the effective setpoint so that the setpoint
switching is bumpless. The internal setpoint (wi), the external setpoint incrementally
adjustable via Δw(w
The safety setpoint SH cannot be followed up. The external setpoint w
) and the external setpoint via the SES (wES) can be followed up.
EΔ
via the analog
EA
inputs can only be followed up indirectly by following up the supplying device on the output
side. To do this the effective w is used as a follow-up variable, assigned to an analog output
and as a follow--up control signal the OR-operation H∨N∨Si, assigned to a digital output.
At S52 = 1 the follow-up is suppressed. This switch setting is always required especially in
follow-up controllers if the internal setpoint represents a kind of safety function or if multiple
setpoint operation is to be run in follow-up controller (S1 = 3).
-- x-tracking (S50)
(accordingly S233 at S1 = 12)
With the structure switch S50 = 1, x-tracking (ratio controller xv-tracking) can be switched
on. This means that the setpoint is followed up to the actual value or the nominal ratio is
followed up to the actual ratio and therefore a control difference xd is reset to 0. The follow
up always takes place when there is no automatic operation (A). This is the case in manual
mode (H), follow-up mode (N), DDC mode and in operation with safety manipulated variable
(Si): A
SIPART DR22 6DR2210
C79000-G7476-C154-03
=H∨N∨Si
41
Page 44

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
x-tracking in direction-dependent blocking operation is not possible because the P-step
produced by resetting the driving control error to blocking direction would immediately cancel
the blocking.
x-tracking takes place without the set setpoint ramp tS. By following up the setpoint to the
actual value (nominal ratio to actual ratio), the control difference xd = 0 and automatic operation starts absolutely bumplessly. Since one can usually assume in manual mode and DDC
mode that the actual value has been driven to the desired value, the followed up setpoint
corresponds to the rated value.
x-tracking only takes full effect if the follow-up of the inactive setpoint is locked onto the
active setpoint (S52 = 0) so that not only the active setpoint w but also the setpoint source
which is supplying after switching to automatic operation is followed up.
Manual1 Technical Description
At S52 = 1 (without follow-up) the control difference is 0 during the A
-operation but after
switching to the automatic mode the old non-followed up setpoint is immediately active
again. With the setpoint ramp tS this step-shaped setpoint change takes place via a time
ramp.
This combination is always useful when it is not guaranteed during A
-operation (especially in
safety mode) that the actual value will be driven to the desired rated value by the actuating
manipulation and the follow-up variable would not be correct in full x-tracking.
-- Constants c1 to c7
In the individual controller types the process variables are partially linked with each other
whereby the constants c1 to c3 are used for the controlled variable links and constants c4
and c5 for the command variable links. The constants are set in the parameterization mode
onPA in the range from -1.999 to 9.999.
The constants c6, c7 serve to dose the disturbance variable connection to the controller output yI or yII (see chapter 1.5.5.1, figure 1-50, page 90 and figure 1-51, page 91). They can
be set in the parameterization mode onPA in the range from -19.99 to 19.99.
-- Control signals for the setpoint switching
If available in the single controller types, the setpoint switching takes place depending on the
control signals Int (Internal/External key) and CB (Computer standby) as an AND function
RC = Int
indicated by the C
∧CB and its negation. The status of the control signal CB and the Internal key (2) is
LED (3) and the Internal LED (1).
With S49 the Internal/External key (2) can be set out of function and can block in the
positions Internal or External (see chapter 1.5.3, figure 1-17, page 38). The factory setting is
S49 = 0 only Internal. With S24 the CB signal can be set to Lo or Hi or a digital input
assigned, (see chapter 1.5.3, figure 1-16, page 37). The factory setting is S24 = -1, CB = 1.
42
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 45

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
The setpoint switching can be varied freely with these structuring possibilities:
Switching to Int S49 CB S24 active active
Dependence on setpoint w setpoint w
S1=3,4,5,6,7,8 S1=0/1
Int and CB 0∨12 0∨1 1 to 14 wi (SH) or w
only Int 0∨12 1 -1 wiorw
only CB 0 1 0∨1 1 to 14 wi (SH) or w
only external 0 1 1 -1 w
only internal 1 0 any any wi wi2
Table 1-2 Possibilities of setpoint switching depending on S24 and S49
no
Switching
E
E
E wi1 or wi2
E
wi1 or wi2
wi1 or wi2
wi1
-- Actual value and setpoint display
1
A red and a green analog display with 1.7% resolution and a red and a green 4
/2digit digital
display are arranged on the front panel. The green displays are assigned to the setpoint, the
red displays to the actual value. In addition there is a 3-digit yellow digital display for the
y-display. The corresponding adjustment keys and status-LED’s are assigned in color and
position to the displays.
The two analog displays always indicate the active actual value. The difference between the
two displays is the control difference xd or the control error xw = --xd. The digital actual value
display also indicates the current actual value except in the ratio controllers (ratio controller:
actual ratio). The digital setpoint display indicates the setpoint before the setpoint ramp
except in ratio controllers (ratio controller: nominal ratio before the setpoint ramp).
Depending on the controller type the displays, the Internal/External-key (2) and the
Δw-adjustment keys (6) are switched by the Shift key (12) controller I/controller II.
The following symbols are used in the block diagrams below to simplify the representation:
Adjustable display range (digital displays only)
d
I
*
I
Parameter set dP, dA, dE, I or II for setting the display
format
Display level I or II, no identification means only 1 level or
both levels the same
0000
x
Displayed variables x, w, xv or wv
Display type Digital display
0000
↗ Analog display
↗ Digital and analog display
0000
SIPART DR22 6DR2210
C79000-G7476-C154-03
43
Page 46

1.5 Functional description of the structure switches
g
1.5.4 Controller types (S1, S49 to S53)
-- Display range
The digital displays are four-digit 7-segment displays, the display range of which can be set
in double controllers and process displays (S1
>4) for the x- and w-display together, for the
two display levels I and II separately, with the parameter dP (decimal point), dA (start value)
and dE (full scale) in the structuring mode oFPA.
In single controllers (S1 ≤4) the parameters of the display level II arefolloweduptothe
parameters of the display level I and are not adjustable.
With dAI or dAII the numeric value is set which is to be displayed at arithmetic value 0
(corresponding to 0 % display in the analog displays). With dEI or dEII the numeric value is
set which is to be displayed at arithmetic value 1 (corresponding to 100 % display in the
analog displays). With dPI or dPII the decimal point is set as a fixed point. If the starting
point is set less than the full scale, a rising display is given with increasing arithmetic values
and vice versa. The numeric range for the start and end values goes from -1999 to 19999,
beyond these numbers -oFL and oFL is displayed in the case of overmodulation in the
process operation level. The factory setting is 0.0 to 100.0 %.
With the refresh rate parameter dr (onPA) the digital displays can be calmed down in the
case of restless process variables. Non-linear process variables can be represented physically correctly by the linearization.
Manual1 Technical Description
The display range set with dP, dA and dE is transferred depending on the controller type
(S1) to the parameters and setpoints which can be assigned to the displayed variable:
S1 Display format accordingly Parameter range
-1.1 to
11.1
0
1
2
3
4
5
6
7
8
9
10
11
12
Table 1-3 Display format of parameters and setpoints assigned to the displays
d*I
#
#
d*I
%
d*II
%
d*I
d*I
d*I
d*I
d*I
d*I
-1.3 to
11.3
d*I
#
#
d*I
%
d*I
%
d*II
d*II
d*II
--
--
d*II
SA, SE,
SH
d*I
#
#
#
d*I
d*II
d*II
d*I
d*I
-d*I
d*I
d*I
Sb wi/wiI wiII
--
--
--
--
--
--
-d*II
d*II
--
--
--
--
d*I
#
#
#
#
#
#
#
d*I
-d*I
d*I
d*I
d*II
d*II
d*II
--
--
--
--
--
--
--
--
--
--
referenced to
dE*-dA* = 100 %
-10%to110%
#
#
-10%to110%
-199.9 to 199.9 %
-10%to110%
-199.9 to 199.9 %
-10%to110%
#
-10%to110%
-10%to110%
With the appropriate asisgnment, this also applies to the limit value alarms A1 to A4, see
chapter 1.5.9, page 124.
The analog displays have a fixed display range of 0 to 100 %. The overshoot or undershoot
is displayed by the flashing 100 % or 0 %-LED. Display is by one or two alternately flashing
LEDs. The center of the illumination field represents the ”pointer”. This display technique
doubles the resolution. If a falling characteristic is set for the digital displays (d*E<d*A), the
analog displays are switched in direction of effect except for the ratio controllers.
44
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 47

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
-- Setting of the linearizer at S4 = 0
Set start and end of measuring with dA* and dE* and the decimal point dP* in the structuring
mode oFPA for the display.
Divide measuring range U
to UEincluding 10 % overflow in 10 % sections and determine
A
partial voltages.
U
E-UA
= n+UAwith n = -1 to 11
U
n
h10
Determine the respective physical value from the appropriate function tables for every Un or
graphically from the corresponding curve (interpolate if necessary) and enter the value for
the respective vertex value (-1* to 11*) in physical variables in the structuring mode oFPA.
U
E
[mV]
60
U
E
%
nUn[mV]Vertext[_C]
value
110
100
90
80
70
60
50
40
30
20
10
-10
11 52.732
50
UE=48,33 mV
40
30
20
10
0
UA=4,31 mV
0
t
A
0 100 200 300 400 500 600 700 800 900 1,000 1,200
t
E
10 48.33
9 43.928
8 39.526 ! 8*900
7 35.124
6 30.722
5 26.32
4 21.918
3 17.516
2 13.114
1 8.712
04.31
-1 -0.092
t[_C]
!11
! 10
! 9
! 7
! 6
! 5
! 4
! 3
! 2
! 1
! 0
! -1
1,048
*
1,000
*
951
*
846
*
790
*
729
*
664
*
593
*
514
*
420
*
300
*
0
*
dA
*
dE
*
Figure 1-19 Example of linearization of a thermocouple type B Pt30Rh/Pt6, measuring range 300 to
1000 _C
SIPART DR22 6DR2210
C79000-G7476-C154-03
45
Page 48

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
-- Setting the function transmitter for linearizing at S4 = 1
Manual1 Technical Description
w
x
Phys.
A
A
D
E
eIntInt
D
x
1
--1 0 t o 11 0
d**
0000 0000
x
x1(l)
w
+
w
x
xd
--
Figure 1-20 Using the function transmitter to
linearize non-linear process
variables for the display and control
The vertex values of the function transmitters are given in % and not physically here
because of their free utilization.
Setting takes place in the structure mode oFPA in the range from --199.9 to +199.9 %.
The vertex values 0 and 100 are set with 0 % or 100 % so that x
standard variable and the reference junction terminals for determining the display range of
the digital display are correct. The display range is set with the parameters dA*, dE* and dP*
according to the physical measuring range.
Vertex
values
W
i
110
100
y
--1 0
x1[%]
100
90
80
80
70
60
60
50
40
40
30
20
20
10
0
0
4020
60
1,0006002000 1,4001,600 1,800
10080
[%]
x
Phys.
˚C
Measuring range
200 to
1600 ˚C
Figure 1-21 Sensor function, e.g. from table
(l) is available again as a
1
To determine the vertex values, apply the sensor function as shown in fig. 1-21 and divide
the range into 10% steps (x
--10to110onthex
x1(l)
[%]
100
80
60
40
20
0 2040 6080100
0 2040 6080100
Figure 1-22 Linearization function
-axis and enter one after the other in the structuring mode oFPA.
phys
in %). Then read off the % values in the vertex positions
phys
x1(l)
[%]
100
80
60
40
20
x1[%]
Vertex
values
1000600200
1,400 1,600 1,800
Figure 1-23 Linearized controlled variable
x1(l)
x
˚C
Phys
46
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 49

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
-- Function inputs FE1 to FE12
S1
0 Fixed setpoint controller
2 independent setpoints
1 Fixed setpoint controller
2 dependent setpoints
2 DDC fixed setpoint
controller
3 Follow-up,
synchronized,
SPC controller
4 Ratio controller x1 commanded
5 Cascade control x1II main controlled
6 Ratio cascade control xII main controlled
7/8 Override control x1I main controlled
9 Process display xI process variable 1 -- xII process variable2
10 Fixed setpoint controller
(control system
coupling)
11 Follow-up controller
(control system
coupling)
x1 main controlled
x1 main controlled
x1 main controlled
FE1
(linearizable)
x2 auxiliary controlled
variable
” ” ”
” ” ”
” ” wEexternal command
x2 commanded
process variable
x2II auxiliary control
variable
master controller
x2I commanding
variable
master controller
x2I auxiliary controlled
variable
main controller
x2 auxiliary controlled
variable
variable
FE2 FE3 (linearizable)
variable
process variable
variable
master controller
process variable
slave controller
variable
Main controller
variable
” wEexternal command
x3 auxiliary controlled
variable
variable
wvEexternal command
variable for ratio factor
xI controlled variable slave
controller
x1I commanded process
variable
slave controller
xII controlled variable
limiting controller
x3 auxiliary controlled
variable
variable
12 Double controller x1I main controlled
variable
wEAI external setpoint x1II main controlled variable
Table 1-4 Control technical function of the inputs FE1 to FE3
Function inputs FE4 to FE12 have the following control-technical function:
FE4 disturbance variable connection (z) for the D-element or for the manipulated variable
y (selection by S55)
FE5 Follow-up input (y
) for the manipulated variable follow--up in K-controllers (S2 = 0)
N
and in S-controllers with external follow-up (S2 = 2)
FE6 Manipulated variable feedback supply (y
nal feedback (S2 = 1) or the manipulated variable feedback input (y
) for the y display in S-controllers with inter-
R
) in S-control-
R
lers with external feedback (S2 = 2); Process display (S1 = 9) with XIII
FE7 Manipulated variable connection (z) selection S57
FE8 External setpoint
wEII
FE9 Follow-up input yNII
FE10 Manipulated variable feedback supply y
II
R
FE11 manipulated variable connection setpoint
The function inputs FE1 to FE3 have different control-technical functions depending on the
controller type (S1).
SIPART DR22 6DR2210
C79000-G7476-C154-03
47
Page 50

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
1.5.4.2 S1 = 0: Fixed setpoint controller with 2 independent setpoints
Manual1 Technical Description
000
FE1
FE2
FE3
FE4
wi1
wi2
x1
x2
x3
0000 0000
W
INT∧CB
tS
x = x1+c1· (x2-c2·x3+c3)
z
x
yH
W
+
x
PID
--
ya+c6 · z
ya
Figure 1-24 Principle representation S1 = 0
This controller type can be used as a fixed setpoint controller with 2 independent setpoints (two
batch mode) or as a fixed setpoint controller with 1 setpoint, by blocking the Internal/External
switching (factory setting). By linking the inputs x1, x2, x3 with the constants c1, c2, c3, it can
be used as a three-component controller.
y
Switching between the two internal setpoints which are adjustable on the front separately as
one, two or three component takes place depending on the control signals Int and CB according
to table 1-5. Signaling of the active setpoint takes place on the LEDs Internal and C
. As soon as
a LED lights, wi2 is active.
Control commands Message signals Digital Effective w
Digital inputs Front Front LED outputs at S50= Explanations
H∨N∨Si CB internal internal C RB RC 01
01000 00 wi1wi1(n)
00001 01 wi2wi2(n)mit CB, Int=0 with Int,CB=1
01110 112)wi2 wi2 (n)
00111 11 wi2wi2(n)
11000 00 wi1x
10001 01 wi2x with CB,Int=0 with Int,CB=1
11110 112)wi2 x
10111 11 wi2x
1)
follow up takes place at S52 = 0 and S50 = 1 to the controlled variable x, follow--up does not apply for the switching
wi1/wi2
at S52 = 1automatic mode starts with wi=x (xd=0), theactive setpoint runs to the old set value via the possibly setsetpoint
ramp tS
2)
factory setting, fixed setpoint controller with 1 setpoint (S49 = 0: only Internal, Int = 1, S24 = -1: CB = 1) RB =Int
RC
=Int∧CB = Int∨CB
Table 1-5 Switching between wi1 and wi2
1)
switching switching
switching switching
48
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 51

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
With the Shift key (12) the digital w display can be switched in the display level II to the inactive
setpoint and the digital x display to the main controlled variable x1 (display range I must be set,
display range II is automatically set the same). The active setpoint and the active actual value x
are still shown on the analog displays.
Selection by
Shift key
effective wi
1)
LED
controller I
LED
controller II
displayed w
2)
displayed x
digital analog digital analog
I
II
I
II
5)
III
1)
via CB and Int accordingly 5
2)
only if there is no x-tracking
3)
0.5 = flashing rhythm 1:1
4)
↗ = adjustable
5)
only at C8 ≠0
wi1
wi1
wi2
wi2
wi1 or wi2 0 0 wI wI
1
0
1
0
0.5
0.5
0
3)
0
3)
wi1 ↗
wi2 ↗
wi2 ↗
wi1 ↗
4)
wi1
wi1
wi2
wi2
x1
x
x
x
x
x
x
x
x x
Table 1-6 Switching the display levels
The setpoint displayed with the digital w-displays can also be set with the Δw-adjustment
keys (6.1/6.2 Fig. 3-1, p. 168). The LEDs Controller I/ Controller II signal the display level.
Flashing light
signals that the displayed setpoint is not identical with the active setpoint.
Steady light signals that the displayed and active setpoints are identical.
If switching between wi1 and wi2 is blocked via S49 (Int) and S24 (CB), switching of the digital
w display to the display level II is omitted. Only the digital x-display is switched over. Signaling
of the display level II is with a steady light.
With the constants c8 and c9 a disturbance variable connection of FE11 can be made in the
setpoint branch.
SIPART DR22 6DR2210
C79000-G7476-C154-03
49
Page 52

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
1
Manual1 Technical Description
SES
see
Fig. 1-5,
page 24
wi1
wi2
ES
ES
wi1
n
o
0/1
S101
2/3/4/5
0/1
S101
2/3/4/5
wi2
n
o
FE11
FE1
FE2
FE3
Int
Int
Int
∧CB
∧CB
∧CB
w
ST
x1
x2
x3
S52
0
wI--c 8 · ( wST+c9)
d
I
*
II
0000
w=wi+c8⋅
(w
ST
c1, c2, c3
x =x1+c1 · (x2-c2 · x3+c3)
factory setting
c1=c2=c3=0
tFI
W
+c9)
0
Adaptation
d*I
0000
A
A
S50
1
I
0000
SA,SE
A=H∨N∨Si
H=Hi∨He
0000
x1
III
d
II
d*I
x
*
tS
wI
xdI
W
xI
I
d
*
I
I
0000
x
see
Fig.
1-50,
page
90
xI
Figure 1-25 Block diagram S1 = 0, fixed setpoint controller with 2 independent setpoints
50
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 53

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
1.5.4.3 S1= 1: Fixed setpoint controller with 2 dependent setpoints
0000
W
INT∧CB
wi1
tS
wi2=wi1 · c4+c5
FE1
FE2
FE3
FE4
Figure 1-26 Principle representation S1 = 1
x1
x2
x=x1+c1 · (x2 - c2·x3+c3)
x3
z
0000
x
y
H
W
+
PID
--
x
y
a
ya+c6⋅z
000
y
This controller type is always used when for example in two batch mode the second setpoint
needs to be in a specific ratio to the first. The ratio is set by the constants c4 and c5.
Factory setting is c4 = 1 and c5 = 0.
The switching and display functions are the same as at S1 = 0. Only the internal setpoint (wi1)
can be adjusted if it is displayed.
SIPART DR22 6DR2210
C79000-G7476-C154-03
51
Page 54

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Manual1 Technical Description
0
wi1
ES
SES
see
Fig. 1-5,
page 24
wi1
0/1
2/3/4/5
n
o
S101
FE1
FE2
FE3
c4, c5
wi1 · c4+c5
factory setting
c4=1, c5=0
x1
x2
x=x1+c1 · (x2 - c2 · x3+c3)
x3
Int∧CB
wi1
wi2
c1, c2, c3
factory setting
c1=c2=c3=0
tFI
Int∧CB
∧CB
Int
0
Adaptation
w-c5
c4
d*I d*I
II
0000
w
SA,SE
A
A
S50
1
x1
0000
I
=H∨N∨Si
A
H=Hi∨He
tS
x
I
d
*
II
0000
S5
2
1
wI
+
xdI
W
d
*
0000
--
xI
I
I
x
see
Fig.
1-50,
pg. 90
xI
Figure 1-27 Block diagram S1 = 1, fixed setpoint controller with 2 dependent setpoints
1.5.4.4 S1 = 2: DDC fixed setpoint controller
The DDC controller has the job of taking over the control circuit as bumpless as possible in the
case of a computer failure. During the DDC operation the process computer takes over the
control function, the controller is on standby, i.e. it is followed up to the computer manipulated
variable; the control difference is reset to zero for absolutely bumpless switching by x-tracking if
necessary.
In K-controller circuits, the actuating current can be output parallel by the computer periphery to
achieve full redundancy. In this case the actuating current of the K-controller is switched off
during computer operation (S66 = 1). If the actuating current of the computer is also to be
switched off during controller operation, the two currents simply need to be added by OR
diodes. This OR diode is integrated in the current outputs of the SIPART controllers.
If the UI-converter of the K-controller is to be used during computer operation to feed the final
control element, the actuating current cutoff must be canceled (S66 = 0).
The DDC mode corresponds to follow-up mode of the other controller types with the difference
that the switching to follow-up mode takes place not via the control signal N but as a function of
52
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 55

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
the control signal CB and the Internal/External key:
DDC operation ≙ RC=Int
∧CB = 1
0000 0000 000
w
wi
x-TRACKING
tS
x1
FE1
FE2
FE3
FE4
FE5
x2
x3
z
y
N
x=x1+c1 · (x2-c2·x3+c3)
Figure 1-28 Principle representation S1 = 2
x
y
H
W
+
PID
--
x
ya+c6 · z
y
a
y
N
INT∧CB
Y
YES
SES
The DDC mode is signaled like the follow-up mode in the other controller types by the lit y-External LED. The status of the control signal CB and the Internal/External key is displayed by the
LEDs C
and Internal. During the DDC mode the setpoint is prepared by follow-up to the computer failure. The setpoint is always displayed which would become active after the computer
failure.
With S50 a choice is made between x-tracking and wi, with S51 the safety setpoint is preset.
With S61 the priority between DDC-mode and manual mode is determined. If DDC-mode has
priority over manual mode, you can select with the manual-automatic switching whether operation is to continue after a computer failure in automatic or manual mode. If manual intervention
is necessary in computer operation, switching to Internal operation is necessary in addition to
switching to manual operation; the LEDs Internal (1) and Manual (8) light, the LED y-External
(10) goes out, the dark LED C
(3) stil indicates computer standby.
If manual mode has priority over DDC-mode you can switch directly from computer operation to
manual operation. Then the manual LED (8) lights, the y-External LED (10) goes out, the dark
LEDs Internal (1) and C
(3) still indicate computer standby of the controller or computer
standby.
Automatic mode is always switched to here in the event of a computer failure.
SIPART DR22 6DR2210
C79000-G7476-C154-03
53
Page 56

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Manual1 Technical Description
Table 1-7 DDC controller, S1 = 2, DDC operation has priority over manual operation S61 = 0
54
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 57

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Table 1-8 DDC controller, S1 = 2, manual operation has priority over DDC operation S61 = 1
SIPART DR22 6DR2210
C79000-G7476-C154-03
55
Page 58

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
1)
manual operation can be achieved by
Control signals
Message signals
Manual1 Technical Description
digital
input He
0
1
0
1
Table 1-9 Generation of the control signal H = Hi∨He
2)
In DDC mode the actuating current of the controller is switched off at S66 = 1. The source for yEat
S62=0isy
lated variable is followed up which is fed in via Δy(y
) the feeding controller must be followed up.
(y
N
3)
The table is shown for static computer switching without acknowledgement, S47 = 0.
4)
By OR linking of the digital output H with the control signal Si no computer standby or computer operation
can be signaled in manual or safety mode.
5)
0.5 = Flashing rhythm 1 : 1
6)
0,9 = Flashing rhythm 0.1 off, 0.9 on
Front
Hi
0
0
1
1
(FE5)oratS62=1y
N
Front
manual
LED
0
6)
0.9
1
1
(Δy),ifS101 < 2. At S101=2 yESis active (SES).The external manipu-
Δ
N
digital
output
H
1
1
2
2
) and via the SES (yES). When feeding in via FE5
Δ
N
(↗) = adjustable
(n) = is followed up to the value active before switching, therefore bumpless switching.
The control signal Follow up (N) has no function in DDC controllers. The tables apply for
S52 = 0 (with follow up of the inactive setpoint to the active setpoint). At S52 = 1 (without
follow-up) and x-tracking automatic operation starts with wi = x (xd = 0), the active setpoint runs
to the old set value wi via the possibly set setpoint ramp tS.
With the Shift key (12) the digital x display can be switched to the main controlled variable x1 in
the display level II. Signaling of the display levels takes place via the LEDs Control I/Control II
by a steady light.
56
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 59

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
see fig. 1-50, page 90
xdI
+
--
w
0000
Si
1
SA,SE
CB
ts
Int
Int
CB
Si
H
Si
H
H
d*I d*I
w
I
d*I
S61
0
H
H
S52
0
S50
1
0
1
x
wx
I
x
0000
II
x1
0000
H=Hi∨He
xI
X
S101
2/3/
ES
wi1
SES
S50
1
0
4/5
S51
1
0
SH
wi1
<>
wi1
Figure 1-29 Block diagram S1 = 2, DDC fixed setpoint controller
SIPART DR22 6DR2210
C79000-G7476-C154-03
c1, c2, c3
x=x1+c1⋅(x2-c2⋅x3+c3)
x1
x2
x3
FE1
FE2
see fig. 1-5, page 24
FE3
Factory setting
c1=c2=c3=0
Adaptation
I
tF
57
Page 60

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Manual1 Technical Description
1.5.4.5 S1 = 3: Follow-up controller, synchronized controller, SPC-controller
000
SES
Δw
FE3
FE1
FE2
FE4
x2
z
x1
wi
w
ES
w
EA
x=x1+c1 · x2+c3
we
w
SL
wE=c4 · wE+c5
0000 0000
w
wi
tS
INT
∧CB
w
E
x
x
y
H
w
+
PID
--
x
y
a
ya+c6 · z
Figure 1-30 Principle representation S1 = 3
In this controller type you can switch between the internal setpoint wi and the external setpoint
depending on the control signals CB and the Internal-/External key (2) (see table 1--11,
w
E
page 61 and table 1--12, page 62).
y
The external setpoint can be preset via the analog output FE3 (w
Δw as an incremental setpoint (w
) (selection via S53) or via the SES (wES) (selection by
EΔ
) or via the digital signals
EA
S101). The active setpoint w can be fed back by an appropriately assigned analog output to the
feeding controller for follow up when using w
EA or for displaying when using wEΔ .
This controller type is used for cascade controls with 2 separate controllers (master and follow-up controllers), for synchronized controls, fixed setpoint controls with external setpoint preset (e.g. under console conditions via the incremental Δw-inputs) and SPC-controls (setpoint
control). This controller type attains special importance when coupled with the SIPART software
for operation and monitoring. Here this controller type is used for fixed setpoint control with
external setpoint preset (w
the input y
(see chapter 1.5.6, page 99).
ES
) and Automatic/Manual switching via the follow-up signal NESand
ES
-- SPC controls
Here a process computer takes over the setpoint command during computer operation
RC = Int
∧CB = 1, in the event of a computer failure (CB from 1 ! 0) the controller takes
over either the last computer setpoint (followed up wi) or the safety setpoint SH (selection
via S51).
58
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 61

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
-- Cascade control
A command controller, e.g. a fixed setpoint controller (with the main controlled variable)
feeds the external setpoint of a slave controller with its manipulated variable (with the
auxiliary controlled variable, disturbance variable) and this the actuator. This gives faster
control of the main controlled variable in the event of changes in the auxiliary controlled
variable, e.g. furnace temperature control (furnace temperature, main controlled variable)
with different flow of the medium to be heated (auxiliary controlled variable).
-- Synchronized controls
A master controller feeds several synchronized controllers simultaneously whose individual
setpoints can be set in a ratio to each other by the constants c4 and c5 and then drag the
controlled variables accordingly (controlled variable synchronization).
-- Internal/External switching
The setpoint switching takes place via a logic link RC = Int
∧CB and its negation
(see table 1--11, page 61 and table 1--12, page 62). Both control signals can be set statically
to 1 or 0 (int via S49, CB via S24) in addition to their normal functions as Shift key or control
signal with the states 1 and 0, see chapter 1.5.3 fig. 1-16, page 37 and fig. 1-17, page 38.
The factory setting is Int = 1 (S49 = 0) and CB=1 (S24 = -1), so that in the factory setting
the internal setpoint wi is always active and cannot be switched!
With this setting facility it is possible to perform the switching only dependent on Int (S49=2,
S24= -1) or only dependent on CB (S49=1, S24=1 to 14) as a slave controller with Internal/
External-switching. If the switching facility is blocked in External position (S49=1, S24=-1),
the controller operates as a follow-up controller without Internal/External-switching (see table
1-2, page 43).
-- Display of the external setpoint w
E
With the Shift key (12) the digital w-display can be switched to the external setpoint wE and
the digital x-display to the main controlled variable x1 in the display level II (display range I
must be set, display range II is automatically set the same). The active setpoint and the
active actual value are still indicated on the analog displays.
The LEDs Controller I/Controller II signal the display level.
Flashing signals that the displayed external setpoint is not identical with the active setpoint.
Steady light signals that the displayed and active setpoints are identical.
SIPART DR22 6DR2210
C79000-G7476-C154-03
59
Page 62

1.5 Functional description of the structure switches
k
1.5.4 Controller types (S1, S49 to S53)
Manual1 Technical Description
Selection
by Shift
active
1)
w
LED
controller
ey
I
II
I
II
1)
via CB and Int according to table 1--11 and 1-- 12
2)
0.5 = flashing rhythm 1:1
3)
only if there is no x-tracking
wi/SH
wi/SH
w
E
w
E
I
1
0
1
0
LED
controller
II
0
2)
0.5
0
1
displayed w
3)
displayed x
digital analog digital analog
wi/SH
w
w
w
wi/SH
E
E
E
wi/SH
w
E
w
E
x
x1
x
x1
x
x
x
x
Table 1-10 Switching the display level
If the switching possibility between internal and external setpoint is blocked through S49 and
S24, switching of the digital w-display to the display level II is no longer used. Only the digital x-display is switched. The display level II is signaled by a steady light.
-- Operation with 2 or 3 setpoints
If follow-up of the inactive setpoint to the active setpoint is blocked with S52 = 1, a multiple
setpoint operation (switching between wi, w
and SH is achieved (see table 1--12, page 62).
E
-- Controlled variable processing
A 2-component control is implemented (disturbance variable connection). With factors c1
and c3 the main controlled variable x1 can connect the auxiliary controlled variable x2 with
weighting.
60
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 63

Manual 1 Technical Description
x
p
p
Explanation
s
puter
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Control signals Message signals
S50=1
S51=0
2)
x
active w at
S50=0
S51=1
w
E
2)
(n)
wE(n)
SH
or
wi(n,
3)
↗)
2)
S50=1
S51=1
x
E
lanations
Automatic mode,
SPC mode
Automatic mode,
computer switched
off, computer in
SPC standby
Automatic mode,
computer on
standby, controller
not in SPC
5)
standby
Automatic mode,
computer switched
off, controller not in
SPC standby
Com-
uter
fail
Digital
inputs
H
∨N
∨Si
Front Front
CB1)In-
ter-
nal
Inter-
nal
LED
LED
C
Digital
outputs
RB4)RC
S50=0
4)
S51=0
0 1 0 0 0 0 0 wE(n)
0 0 0 0 1 0 1 wi(n,↗)
0 1 1 1 0 1 1 wi(n,↗) wi(n,↗)
0 0 1 1 1 1 1 wi(n,↗) wi(n,↗)
w
1 1 0 0 0 0 0
(n)
E
2)
3)
1 0 0 0 1 0 1
1 1 1 1 0 1 1
1 0 1 1 1 1 1
1)
The table is shown for static computer switching without acknowledgement (S47 = 0).
2)
Source for wEatS53=0iswEA(FE3)oratS53=1w
The external setpoint fed in via Δw(w
via FE3 (w
3)
SH can only be reached after wEif Int = 0 and CB goes from 1 → to 0 (computer failure). If CB = 0 and Int is switched from
1 → 0, wi is still active. Since SH is not followed up, switching over to SH can take place with the setpoint ramp tS.
4)
By OR-linking with the digital outputs H, N and the control signal Si no computer standby or computer operation can be
signaled in manual, follow-up or safety operation.
5)
Factory setting
) the feeding controller must be followed up.
EA
wi
(n,
↗)
wi
(n,
↗)
wi
(n,
↗)
) and via the SES (wES) is followed up. When feeding in the external setpoint
Δ
E
x
x
x
Δ
E
SH
(n,
(n,
(n,
or
wi
↗)
wi
↗)
wi
↗)
x
Manual, follow up
or safety mode
5)
x
x
(Δw), when S101 < 2. At S101 = 2 wESis active (SES).
(n) followed up to the value active before switching, therefore bumpless switching
↗ adjustable
Table 1-11 Follow-up/synchronized/SPC controller with Internal/External switching S1 = 3 with follow up
of the inactive setpoint
SIPART DR22 6DR2210
C79000-G7476-C154-03
61
Page 64

1.5 Functional description of the structure switches
x
p
Explanation
s
1.5.4 Controller types (S1, S49 to S53)
Manual1 Technical Description
Control signals
Digital
inputs
H
∨N
Front Front
CB1)Inter-
nal
∨Si
0 1 0 0 0 0 0 w
0 0 0 0 1 0 1 wi(↗)
Message signals
Inter-
nal
C
LED
LED
Digital
outputs
RB4)RC
4)
S50=0
S51=0
S50=1
S51=0
2)
E
active w at
S50=0
S51=1
SH
wi(
E
lanations
S50=1
S51=1
2)
w
E
3)
or
↗)
Automatic mode
5)
0 1 1 1 0 1 1 wi(↗) wi(↗)
0 0 1 1 1 1 1 wi(↗) wi,↗)
1 1 0 0 0 0 0 w
2)
E
1 0 0 0 1 0 1 wi(↗) x
x w
SH
wi(
2)
E
3)
or
↗)
x
x
Manual, follow up or safety
5)
mode
1 1 1 1 0 1 1 wi(↗) x wi(↗) x
1 0 1 1 1 1 1 wi(↗) x wi(↗) x
1)
The table is shown for static computer switching without acknowledgement (S47 = 0).
2)
Source for wEatS53=0iswEA(FE3)oratS53=1w
The external setpoint fed in via
via FE3 (w
3)
SH can only be reached after wEif Int = 0 and CB goes from 1 → to 0 (computer failure). If CB = 0 and Int is switched from
1 → 0, wi is still active. Since SH is not followed up, switching over to SH can take place with the setpoint ramp tS.
4)
By OR--linking with the digital outputs H, N and the control signal Si no computer standby or computer operation can be
signaled in manual, follow-up or safety operation.
5)
Factory setting
) the feeding controller must be followed up.
EA
¦Δw(w
) and via the SES (wES) is followed up. When feeding in the external setpoint
Δ
E
( ¦Δw), when S101 < 2. At S101 = 2 wESis active (SES).
Δ
E
(n) followed up to the value active before switching, therefore bumpless switching
↗ adjustable
Table 1-12 Follow-up/synchronized/SPC controller with Internal/External switching (SPC controller),
S1 = 3 without follow-up of the active setpoint to the active setpoint S52 = 1, 2 or 3 setpoint
operation
62
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 65

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
see chapter 1.5.5, figure 1-50, page 90
xdI
--
+
xI
w
w
ts
w
wx
I
0000
=H∨N∨Si
A
1)
CB
H=Hi∨He
1
A
S50
0
+c9)
+c8⋅
ST
E
(w
w
E
w
c4, c5
=c4⋅we+c5
E
w
I
SL
w
c4=1, c5=0
Factory setting
I
SL
w
II
d*I d*I
SA,SE
0000
E
w
+c9)
ST
wI--c 8⋅
(w
wi1
A
+c9)
ST
w+c8⋅
(w
Int
Int
1)
CB
1
S52
0
S510
1
SH
x
w
I
x
0000
II
d*I d*I
0000
x1
factory setting
1)
S101
0/1
4/5
2/3
S53
Δ
E
0
1
w
tS
c1, c3
c1=c2=c3=0
Factory setting
x1
FE1
x=x1+c1⋅ x2+c3
x2
FE2
+Δw
w
FE3
FE11
EAwST
--Δw
wi1
<>
ES
w
c4
w- -c5
ES
S101
2/3
4/5
0/1
ES
w
wi1
SES
see chapter 1.5.1, figure 1-5, page 24
Figure 1-31 Block diagram S1 = 3 slave controller, synchronized controller, SPC controller
SIPART DR22 6DR2210
C79000-G7476-C154-03
Adaptation
I
tF
63
Page 66

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
1.5.4.6 S1 = 4: commanded ratio controller
Manual1 Technical Description
wv
wv
w=v⋅x2+c5
v = vA to vE
v=wv·(vE-vA)
+vA
v
=
ist
SES
Δw
FE3
FE2
FE1
FE4
wV
x2
wvi
x1
z
wV
ES
tS
w
SL
wV
E
EA
w
Int⋅CB
SL
T
s
x2
Figure 1-32 Principle representation S1 = 4
00000000
wx
xv
x1 - c5
x2
x w
W
X
000
y
H
y
+
PID
--
y
a
ya+c6⋅z
In a ratio control the commanding process variable x2 is evaluated with the adjustable ratio factor and a basic value c5 added if necessary and forms the setpoint w for the following controlled
process variable x1:
w=v⋅ x2 + c5
With xd = w - x1, xd = v ⋅ x2+c5--x1isgiven
In the controlled status (xd = 0), the following is given
x1
and at c5 = 0
behaves according to the set ratio factor v.
x2
v=
x1 -- c5
i.e. in the controlled status
x2
A typical application are combustion rules where a fuel volume x1 beongs to every air volume
x2 to guarantee optimum combustion.
The ratio factor range v = vA to vE is determined with the parameters vA and vE in the structuring mode oFPA in the range from 0.0 to 9.999 (factory setting vA = 0, vE = 1). In addition a basic value c5 (parameterization mode onPA) can be connected in the range from -1.999 to 9.999
(factory setting = 0.0).
The standardized nominal ratio wv (wvi or wv
) in the range from 0 to 1 is converted to the ratio
E
factor range.
v=wv(vE--vA)+vA
With w=v⋅ x2 + c5 , w = wv [(vE -- vA) + vA] x2 + c5 is given.
64
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 67

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
In the ratio controller the standardized nominal ratio wv and the standardized actual ratio xv are
displayed on the digital w and x displays respectively. Via d*I a physical display is possible. The
controlled variable x1 and the evaluated commanding procesan be switched to the external
nominal ratio (display level II) (display level I must be set, display level II is automatically set
the same). Signaling of the display levels, see S1 = 3, fos variable w are displayed on the analog x and w displays respectively so that a direct control difference monitoring is possible at all
times.
With the Shift key (12) the digital w-display cllow-up controller. The digital x-display shows the
actual ratio xv in both display levels.
The actual ratio is gained by back calculating the ratio formula with the current process
variables x1, x2:
is
v
ist
x2
= xv (vE -- vA) + vA gives for
xv =
--v A
v
is
vE--vA
or
xv =
x1--c5
x2
vE--vA
-vA
x1--c5
=
v
xv is displayed and is required for x-tracking mode. For the xv-display, x1 and x2 are limited to
+0,5 % so that the display does not become too restless for small x1 and x2 or flip from positive
to negative in the case of negative x2. The linearizers can be used for linearization of the commanding process variable x2 (via FE2 in the freely connectable input range) and the following
process variable x1 (via FE1 also in permanently connected input range).
The linearization then acts on the analog displays and the ratio formation and therefore indirectly on the digital displays for nominal and actual ratio. The ratio controller has no nominal
ratio limiting because the ratio factor range already marks the limit. The commanding process
variable x2 can be limited by the freely connectable range (S4 = 1) if necessary.
The ratio controller behaves like slave controller S1 = 3 in switching of the setpoint ratio wv so
that the information and tables there apply accordingly. The variables wi and w
replaced by wvi and wv
. This controller type can also be used as a ratio controller with fixed
E
must be
E
ratio (manually adjustable) or with commanded ratio factor.
A fixed ratio factor is used for example in simple combustion rules, (see example in figure 1-33)
where the ratio factor is reset manually if necessary for varying fuels. If it is possible to measure
the effects of the ratio factor (combustion quality, pollutants in the flue gas) a commanded ratio
controller is used. Here a master controller adjusts the ratio factor (ratio cascade) with the combustion quality as a control variable.
Another application for ratio cascades are concentration controls, e.g. pH-value controls. The
pH-value is the controlled variable of the master controller, the flow of alkali and acid the commanded process variable and the following (controlled) process variable of the ratio controller.
SIPART DR22 6DR2210
C79000-G7476-C154-03
65
Page 68

1.5 Functional description of the structure switches
«
1.5.4 Controller types (S1, S49 to S53)
-- Example of a ratio control
Manual1 Technical Description
v
x
2
Q
L
Figure 1-33 Control diagram ratio control
c
+
x
K
L
w
+
x
+
x
--
d
1
K
G
Q
G
y
GAS
AIR
In a combustion control the air-/gas flow should be in a constant ratio. The command
variable (commanding process variable) is the air flow Q
3
12,000 m
is the gas flow Q
/h as a signal 4 to 20 mA. The controlled variable (following process variable)
with a measuring range 0 to 3,000 m3/h which is also available as a
G
whichispresetintherange0to
L
4 to 20 mA signal. In an ideal combustion the air/gas ratio is
Q
L
« ideal
Q
L
Q
G
=L
L
==4.
Q
G
⋅ λ
«
The air factor λ is then 1 and should be adjustable in the range from 0.75
to 1.25 on the controller.
The ratio factor v (bei xd = 0) is determined partly by the transmission factors K of the transmitter (measuring ranges).
x
1=QG
x2=Q
⋅ K
with the values from the example
G
⋅ K
L
L
x
1
v= =
x
2
v=
L
«
1
⋅ λ
K
K
L
K
Q
G
G
⋅
Q
K
L
L
K
G
⋅
K
L
with
Q
G
Q
L
=
1
L
«
G
⋅ λ
=
=
100 %
3,000 m
100 %
12,000 m
3
/h
3
/h
With the values from the example
3
gives
K
K
1
1
v=
v=
G
=
L
⋅
λ
1
λ
1
.
L
100 % ⋅ h ⋅ 12,000 m
⋅
4
3,000 m3⋅ 100 % ⋅ h
i.e. the choice of the transmitter ranges has been made so that
66
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 69

Manual 1 Technical Description
2
A
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
The desired adjustment range of λ gives:
vA = =
1.
1
=0.8
5
1
λ
E
vE = =
1
λ
1
0.75
= 1.333
vA and vE are set in the structuring mode oFPA. By setting the nominal ratio wv from 0 to 1
the ratio factor v can now be adjusted from 0.8 to 1.33 or the air factor λ from 1.25 to 0.75.
v
λ
1.33
0.75
1,3
0.8
1.2
0.9
1.1
1
1.1
1.2
1.25
1
0.9
0.8
0.2 0.6
wv
1
0.80.40
Figure 1-34 Relationship ratio factor v and air factor λ to standardized nominal ratio wv
If the combustion is also to take place at small flow volumes with excess air, the constant c
must be set negative. Figure 1-35 shows the gas/air ratio in the controlled state at different
air factors λ andc=0aswellasatλ = 1 and c <0, i.e. with excess air.
Gas
m3/h
Q
G
V=1.33 λ=0,75
X
X
1
1
%mA
120
110
100
90
80
70
60
50
40
30
20
10
3,500
3,000
2,500
2,000
1,500
1,000
500
0
0
0 2,000 4,000 6,000 8,000 10,000 12,000 m
0102030405060708090100 %
4681012141618 20 mA
22
20
18
16
14
12
10
8
6
4
1)
constant gas/air ratio
2)
gas/air ratio with additional air excess
Figure 1-35 Display of gas/air ratio in controlled status
V=1 λ=1
V=0.8 λ=1.25
2)
V=1, c<0
3
/h air
1)
Q
L
X2
X2
SIPART DR22 6DR2210
C79000-G7476-C154-03
67
Page 70

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
w
I+II
0000
S236=1/2
x
I+II
0000
seefig. 1-50, page 90
xd I
+
Manual1 Technical Description
x I
--
wx
d*I
xv
w
0000
I
S236=0/2
d*I
0000
wv
E
wv
II
d*I
tS
0000
⋅
vA, vE, c5
w=v x2+c5
Factory setting
wv
vA=0, vE=1, c5=0
x2
A
A
1
S50
v=vA to vE
xv
When adjusting wvi the
setpoint ramp is not active
x2
x1--c5
=
actual
v
v=wv (vE- -vA)+vA
--vA
v
actual
vE--vA
v=
0
1)
wvi
S52
0
1
<>
wi1
Int
Int
1)
CB
CB
S51
1
0
ES
SH
S101
wv
ES
wv
wv
I
W
S101
2/3
Δ
wv
E
A=H∨N∨Si
H=Hi∨He
I
SL
SL
W
0/1
4/5
S53
E
0
1
Factory setting
1)
Adaptation
tF I
tS
2/3
4/5
0/1
EA
--Δw
ES
+Δw
wv
x2
x1
wvi
SES
Figure 1-36 Block diagram S1 = 4 commanded ratio controller
68
FE3
FE2
see fig. 1-5, page24
FE1
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 71

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
1.5.4.7 S1 = 5: Cascade control
y
000
H
y
yaI+c6⋅z
yaI
PID
wIxI
wI
+
xI
I
wI
SLAVE CONTROLLER = CONTROLLER I
0000 0000
wI
I
I
E
INT
wi I
yII=w
PID
I
wII
xII
+
wIΙ
wII
xIΙ
xII
tS
wII
0000 0000
II
⋅
INTII∧CB
II
II
SL
SL
w
w
Δ
E
MASTER CONTROLLER = CONTROLLER II
w
II II
x=x1+c1x2+c3
tS
wiII
x1II
x2II
xI
z
SES
±Δw
Figure 1-37 Principle representation S1 = 5
SIPART DR22 6DR2210
C79000-G7476-C154-03
FE8
FE1
FE2
FE3
FE4
69
Page 72

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
In this controller type a master controller (Controller II) and a follow-up controller
(Controller I) are interconnected in one controller in a cascade (application, see S1 = 3).
-- Master controller (controller II)
With respect to the setpoint switching the master controller has approximately the same
structure as the follow-up controller S1 = 3. It is therefore a fixed setpoint controller with the
possibility of external setpoint preset via analog signal, the serial interface or as an incremental setpoint via the control signals Δw. Selection is made with w
II and S101. In
SL
computer coupling it is also possible here, in the case of a computer failure (CB from 1 ! 0)
to continue working with the last computer setpoint (followed-up wi) or with the safety setpoint SH (selection by S51). The master controller cannot be switched to manual operation
but the slave controller can be switched to the internal setpoint.
Follow-up of the inactive setpoint to the active setpoint can be switched off with S52 = 1.
-- Follow-up controller (controller I)
The follow-up controller can be switched for disconnecting the cascade for startup procedures via the Internal/External key (2) (Int I) between the internal setpoint wiI and the external setpoint w
EI which is equal to the manipulated variable of the master controller (yaII).
The internal operation of the follow-up controller corresponds to manual operation of the
master controller.
Manual1 Technical Description
Setpoint limiting of the follow-up controller can be implemented by the y-limiting of the
master controller. The follow-up of the master controller in internal operation of the follow-up
controller and x-tracking (A
controller in external operation and x-tracking (A
) and the follow-up of the internal setpoint of the follow-up
) always takes place so that the switching
Internal/External is bumpless.
-- Display and operating level switching
With the Shift key (12) the digital and analog x- and w-displays and the function of the Internal/External key (2) including the Internal LED (1) and the Δw-adjustment keys (6) are
switched to the selected controller. The y-display (14), the Manual/Automatic key (9) and
the Δy-adjustment keys (13) are permanently assigned to the follow-up controller.
70
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 73

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
The LED’s Controller I/Controller II signal the display and operating level:
Selection by Controll. II Controll. I LED LED LED LED displayed adjustable
Shift key Master Slave C
controller controller Controll.
Internal Controll. IControll. II is wi
Int Int according 1 0 1 II wi II ↗
Controller II Ext Int to CB 0 0 0.5 II -Master contr. Int Ext 1 0 0.5
Ext Ext C=CB001II --
IntInt0110I wi I ↗
Controller I Ext Int 0 1 0.5 0 I wi I ↗
Slave contr. Int Ext 0 0 0.5
ExtExt0010 I
1)
only if there is no x-tracking
2)
0.5 = flashing rhythm 1:1
Table 1-13 Switching the display levels
2)
2)
0 I
II wi II ↗
Flashing light signals that the status displayed by the Internal LED is identical with that in the
unselected controller.
Steady light signals that the status displayed by the Internal LED is not identical with that in
the selected controller.
Normally the display level switch will be in the position Controller II (master controller) so
that the main controller variable xII can be monitored. The display level I is only used for
startup procedures. The Automatic/Manual switch for the slave controller is possible in both
display levels, depending on the selection of the display level the main controlled variable xII
or the auxiliary controlled variable xI can be monitored. The display range of the digital x and
w display can be adjusted separately for both controllers by the parameters d*I and d*II if
necessary in connection with the linearizers so that both controllers can be displayed
physically correctly.
1)
1)
1)
1)
-- x-tracking
With S50 =1, x-tracking is selected for both controllers together (S50). The slave controller
follows up the internal setpoint or the controller output to the auxiliary controlled variable xI
-operation. The master controller triggers this function in A-operation or Internal of the
in A
follow-up controller (Int I corresponds like A
SIPART DR22 6DR2210
C79000-G7476-C154-03
to disconnected cascade).
71
Page 74

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Manual1 Technical Description
via the SES.
ES
Δ (±Δw), at S101=2 w
Δ,ifIntII=0 and CB go from 1 to 0 (computer failure). If CB=0 and Int is switched from 1 to 0, wiIΙ is still active. Since SH is not
E
E
IΙ at S101< 2 ist w
E
followed up, you can switch to SH with the setpoint ramp tS.
The table is shown for static computer switching without acknowledgement (S47=0).2)Source for w
SH can only be reached after w
By OR-linking with the digital outputs H, N, IntI and the control signal Si no computer standby or computer operation can be signaled at disconnected cascade.5)When selecting controller I is C LED = 06)Manual operation or operation with external manipulated variable is always possible irrespective of the selection Controller I/ControllerΙI.7)Switching only possible in the respective selected controller. Operating states are retained.
At S52=1 (without follow-up of the inactive setpoint to the active setpoint) the (n) is omitted at wII. If x-tracking is switched on (S50=1) automatic operation of the master
controller begins with w=x (xd=0), via the set setpoint ramp tS, the active setpoint runs to the old set value of w.
1)
3)
4)
(n) followed up to the value active before switching, therefore bumpless switching
↗ adjustable
Table 1-14 Cascade control S1 = 5 with follow-up of the inactive setpoint to the active setpoint S52=0
72
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 75

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Controller I, see figure 1-50, page 90
xdI
xI
Adap-
tation
--
+
Follow-up controllerMaster controller
wI
A=H∨N∨Si
H=Hi∨He
I
0000
wIxI
I
0000
A
1)
IntI
wiI
<>
wiI
wII
wII
tS
d*II
II
1
A
S50
0
I
E
IntI
yaII=w
yn
ya
S101
PID
controller II
4/5
0/1
2/3/
ES
wiI
xdII
xII
--
+
, tv, AH, YA, YE
o
Controller II see
Fig. 1-51, page 91,
Control parameter II
vv,cP,tn,Y
xII
II
0000
d*II
I
I
1
S50
A∨IntI
A∧Int
1)
IntII
IntII
S52
0
1
CB
S51
1
0
SH
<>
0/1
wiII
ES
CB
S101
2/3
0
II
E
w
II
SL
w
0/1
S101
2/3
ES
w
tS
4/5
II
0000
xII wII
xII
II
SL
w
4/5
3
,c
1
c
xII=x1II+c1⋅x2II+c3
Adaptation
tFII
Factory setting c1=c3=0
--Δw
+Δw
x1ΙI
x2II
xI
wiII
FE1
FE2
FE8
FE3
SES
Figure 1-38 Block diagram S1 = 5 cascade control
SIPART DR22 6DR2210
C79000-G7476-C154-03
see fig. 1-5, page 24
Factory setting
1)
73
Page 76

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
1.5.4.8 S1 = 6: Ratio-cascade control
y
000
H
y
yaI=c6⋅z
PID
I
+
w Ix I
w I
Manual1 Technical Description
yaI
x I
0000 0000
0000 0000
xv
wv
wII xII wII
wI=v⋅x2+c5
wi I
IntI
+
w II
w II
tS
II
IntII∧CB
SL
II
SL
w
ES
w
wiII
SES
w
Δ
E
w
tS
wΔ
+l
v=wv(vA--vE)+vA
v=vA to vE
PID
I
x II
FE1
FE8
Follow-up controller = Controller I
Master controller= Controller II
x2I
x1I--c5
=
is
v
xII
x2I
FE2
x1I
FE3
z
FE4
Figure 1-39 Principle representation S1 = 6
74
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 77

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
In this controller type a master controller (Controller II) and a follow-up controller as a commanded ratio controller (Controller I) are interconnected in a ratio cascade.
(Applications see S1 = 4)
-- Master controller
The master controller has the same structure with respect to the setpoint switching as the
follow-up controller S1 = 3. It is therefore a fixed setpoint controller with the possibility of external setpoint preset via the analog signal, the serial interface or as an incremental setpoint
via the control signals
Δw. Selection is made with w
II and S101. In computer coupling it
SL
is also possible here, in the case of a computer failure (CB from 1 ! 0) to continue working
with the last computer setpoint (followed-up wi) or with the safety setpoint SH (selection by
S51). The master controller cannot be switched to manual operation but the follow-up controller can be switched to the internal setpoint. x-tracking in A
-operation is possible by selection with S50 = 1. The follow-up of the inactive setpoint to the active setpoint can be
switched off by S52 = 1.
-- Follow-up controller
The follow-up controller is a ratio controller as described under S1 = 4. To disconnect the
cascade the Internal/External key (2) (Int I) can be used to switch between the internal ratio
factor wvi and the external ratio factor wv
, which is equal to the manipulated variable of the
E
master controller (yaII). The internal operation of the follow-up controller corresponds to
manual operation of the master controller.
xv-tracking is possible in A
-operation by selection with S50 = 1. Setpoint limitings can be
performed via limiting of the manipulated variable of the master controller and possibly by
limiting the commanding process variable x2 I in the freely connectable input range (S4 = 1).
The follow-up of the master controller and xv-tracking in A
internal ratio factor wvi in external operation and in x-tracking (A
-operation and the follow-up of the
) always takes place so that
switching is bumpless.
Table 1-14, page 72 and the statements on x-tracking of the cascade controls apply accordingly when wi is replaced by wvi and w
by wvE.
E
SIPART DR22 6DR2210
C79000-G7476-C154-03
75
Page 78

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Controller I, see figure 1-50, page 90
xdI
Adaptation
xI
Manual1 Technical Description
w1
I+II
0000
wI
I+II
0000
x1
xvwv
I
d*I
S236=1/2
0000
0000
vA, vE, c5
wI=v⋅x2+c5
1
A
A
S50
1)
IntI
0
IntI
S236=0/2
II
d*I
Follow-up controllerMaster controller
--
+
I
I
wI
x2I
x1I--c5
=
is
v
x2I
E
tFI
xI
--vA
ist
vE--vA
v
xv=
Factory setting
vA=0, vE=1, c5=0
v=vA to vE
v=wv (vE--vA)+vA
x1I
yaII=wv
yn
A=H∨N∨Si
H=Hi∨He
<>
0/1
2/3/ S101
wvi
4/5
ES
wvi
wII
tS
II
d*II
0000
S101
d*II
II
SL
w
0/1
4/5
I
SA,
SE
1
S50
A∨IntI
A∧Int
1)
II
Int
IntII
CB
S52
0
1
S51
1
0
SH
1)
CB
0
II
E
w
II
SL
w
2/3
ya
PID
controller II
xdII
xII
--
+
, tv, AH, YA, YE
o
Controller II see
Fig. 1-51, page 91,
Control parameter II
vv,cP,tn,Y
xII
II
xII wII
II
0000
=H∨N∨Si
H=Hi∨He
A
Adaptation
tFII
ES
w
<>
wiII
S101
2/3
4/5
0/1
ES
wiII
SES
tS
+Δw
Figure 1-40 Block diagram S1 = 6 ratio cascade control
76
xII
--Δw
FE8
x2I
FE1
see fig. 1-5, page 24
FE2
x1I
FE3
SIPART DR22 6DR2210
C79000-G7476-C154-03
Factory setting
1)
Page 79

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
1.5.4.9 S1 = 7/8: Override control
SES
Δw
FE8
FE1
FE2
FE3
x1I
x2I
xII
wi
tS
Sb
w
ES
wSLI
wSLI
w
Δ
E
xI=x1I+c1⋅x2I+c3
0000 0000
wI
tS
∧CB
INT
wII
0000 0000
xII
000
YA
YEYEYA
y
H
y
yaI
yaII
xI
wI
Main controller
wI
wII
+
--
xI
xII
-+
wII
PID-controller I
Min
selection
Max
PID-controller II
Limiting controller
Figure 1-41 Principle representation S1 = 7/8
In the override control (limiting control, disconnecting control) two controllers are connected
parallel, the main controller (Controller I) and the limiting controller (Controller II) which act on a
common actuator. The manipulated variables of both controllers are mutually limited by the in
this case controlled parameters YA (S1=7) or YE (S1=8). This gives a controlled variable
limiting related to the setpoint set or active in both controllers.
One of the two controllers -- preferably the main controller -- is always intervening and controls
the process. The non-intervening controller then has a control difference which controls it to the
limited manipulated variable. In this case all further integration is prevented so that no integral
saturation takes place. Disconnection always takes place at the latest when the control diffrence
in the non-intervening controller reverses. Changes in the controlled variable in the direction of
the control difference reversal also lead to disconnection via the P-part (possibly also D-part).
This gives a particularly good dynamic behavior.
By the arrangement of two controllers, better adaptation to the different time behaviors of the
two controlled systems is achieved than with a Minimum- or Maximum selection of the control
differences. The possible implementation by Minimum or Maximum selection of the manipulated
variables can lead to dynamic problems due to integral saturation of the non-intervening
controller.
SIPART DR22 6DR2210
C79000-G7476-C154-03
77
Page 80

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
- Example: Core temperature control with maximum casing temperature limiting
The core temperature of a reactor is to be controlled without the cooled casing of the reactor
exceeding a specific temperature (limiting setpoint Sb).
In error-free operation the main controller (Controller I) controls the core temperature to the
set setpoint w
. Since the casing temperature is below the critical limiting setpoint Sb, the
core
limiting controller (Controller II) has a positive control difference. The manipulated variable of
the main controller is fed -- increased by 1% -- to the limiting controller as a maximum limiting
variable and forms its maximum manipulated variable. The limiting controller is driven to this
limit by the positive control difference.
Its manipulated variable is also fed to the main controller as a maximum manipulated
variable limit but remains ineffective because it is an increase of 1% above the manipulated
variable of the main controller.
In this situation the main controller can set its manipulated variable totally independently of
the limiting controller and control the core temperature of the reactor.
Sb=w
case
x
case
YE
+
+
--
Controller II
Casing temperature controller
(Limiting controller)
Manual1 Technical Description
w
core
+
+
--
x
core
Figure 1-42 Core temperature control with max. casing temperature limiting
Controller I
YE
S1=8
Core temperature controller
(Main controller)
y
If the casing temperature rises above the set limiting value Sb, e.g. due to failure of the
cooling water, the limiting controller gets a negative control difference. As a result its
manipulated variable is released from the forced limit and the heating performance is
reduced. The limiting controller then forces the reduced manipulated variable on the main
controller as a maximum manipulated variable limit. Due to the reduced heating performance
the main controller receives a positive control difference which drives it to the manipulated
variable limit. Now the limiting controller controls the process to constant casing
temperature.
When the cooling is reinstated, the casing temperature drops. The limiting controller will now
increase the heating performance and maintain the casing temperature. With increasing
heating performance the core temperature also increases and the control difference of the
main controller becomes negative.
78
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 81

Manual 1 Technical Description
S
b
l
t
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
As a result the main controller controls down its manipulated variable and with it the heating
performance and imposes the manipulated variable limit on the main controller. The case
temperature drops below the limiting setpoint and the limiting controller drives to the
manipulated variable limit via the now positive control difference. It is controlled to a constant
core temperature.
The disconnection therefore always takes place when the controlled variable of the
non-intervening controller becomes more positive than the set setpoint (xd negative), then
the manipulated variable limited to maximum is dropped below, i.e. a maximum value limiting
of the controlled variables takes place. The manipulated variable maximum value limiting
corresponds in this example to a minimum value selection of the manipulated variables.
Depending on the structure switch position (S1 = 7 or 8) and the set controller direction of
effect (normal: +Kp or reversed: -Kp) the limiting direction of the controlled variables is
reversed (Minimum- or Maximum value limits):
Manipu-
lated
varia
1
limiting
direction
7 yA Max
7 yA Max
8 yE Min
8 yE Min
7 yA Max
7 yA Max
8 yE Min
8 yE Min
Table 1-15 Limiting direction of the controlled variables depending on S1 = 7/8 and controller direction
corres-
ponds
e
selec-
of effect
Controller direction
of effect
oy-
tion
Main
control-
ler I
norm +Kp norm +Kp xdI >0, xI<wI xdII >0, xII <Sb
rev -Kp rev -Kp xdI <0, xI >wI xdII <0, xII >Sb
norm +Kp norm +Kp xdI <0, xI >wI xdII <0, xII >Sb
rev -Kp rev -Kp xdI >0, xI <wI xdII >0, xII <Sb
norm +Kp rev -Kp xdI >0, xI <wI xdII <0, xII >Sb
rev -Kp norm +Kp xdI <0, xI >wI xdII >0, xII <Sb
norm +Kp rev -Kp xdI <0, xI >wI xdII >0, xII <Sb
rev -Kp norm +Kp xdI >0, xI <wI xdII >0, xII >Sb
Limit ing
control-
ler II
Main controller
Disconnection at
I
Limiting
controller II
Limiting of the
controlled
variables to
xI xII
Min Min
Max Max
Max Max
Min Min
Min Max
Max Min
Max Min
Min Max
The direction of effect of the transmitter, actuator and controlled system are included in the
determining of the controller direction of effect (see chapter 4.1, page 215). As a rule,
limiting controllers and main controllers have the same direction of effect so that the second
part of the table is irrelevant.
SIPART DR22 6DR2210
C79000-G7476-C154-03
79
Page 82

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
-- Main controller I
The main controller has the same structure with respect to the setpoint switching as the follow-up controller (S1 = 3) with the difference that the external setpoint w
E cannot be preset
via the analog inputs as an absolute value. It is therefore a fixed setpoint controller with the
possibility of external sepoint preset via the SES or as an incremental setpoint via the control
signals Δw. Selection is made by S101. In computer coupling it is also possible here, in
the case of a computer failure (CB from 1 ! 0) to continue working with the last computer
setpoint (followed--up wi) or with the safety setpoint SH (selection by S51).
Manual1 Technical Description
x-tracking in A
-operation is posssible by selection with S50 = 1. The follow-up of the inactive
setpoint to the active setpoint can be switched off by S52 = 1.
-- Limiting controller II
The limiting controller has a normal fixed setpoint structure without x-tracking and setpoint
switching possibilities. The limiting setpoint Sb is set physically in the structuring mode oFPA
in the range from -10 to 110 % related to the display range dEII -dAII = 100 %.
-- Display and operating level switching
The display and operating level switching Controller I or Controller II takes place in all operating modes with the Shift key (12). The LEDs Controller I, Controller II signal which controller is displayed and which controller is intervening.
The digital and analog x- and w-displays are switched. In the operating level II the Internal
key (2) is inactive, the LED Internal (1) is off and the Δw adjusting keys (6) are inactive.
The y-display, the Manual/Automatic key (9) and the Δy-adjusting keys (13) are
always permanently assigned to the common controller output and active in both
display levels.
Selection by
Shift key
Main controller I
Limiting controller II
Main controller I
Limiting controller II
1)
only if there is no x-tracking
2)
0.5 flashing rhythm 1:1
↗ adjustable
active controller
Main controller I
Main controller I
Limiting controller II
Limiting controller II
LED con-
troller I
1
0
2)
0.5
0
LED con-
troller II
0
2)
0.5
0
1
displayedisadjustable
setpoint
I
II
I
II
wi ↗
wi ↗
--
--
1)
1)
Table 1-16 Display level switching
Flashing of the Controller I/Controller II-LEDs signals that the displayed controller is not
identical with the active controller. Steady light signals that the displayed controller is not
identical with the active controller.
80
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 83

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
The process can be monitored at any time by manual switching. As a rule the display level
switch is in position I (main controller) so that the main controller variable x1I canbemonitored. Flashing of the Controller LED I signals that the limiting setpoint has been reached
and requests switching to the display level II (limiting controller) with the controlled variable
of the limiting controller.
The display range must be set separately for the digital x and w display for both controllers
with the parameters d*I and d*II if necessary in connection with the linearizers so that both
controllers can be displayed correctly.
-- Automatic/Manual switching
Since both controllers only generate one common automatic manipulated variable y
,the
a
Automatic/Manual switching of both controllers is also common. In manual-, follow-up-,
safety- or blocking operation, both controllers are followed up to the active y. The
manipulated variable limit which is only active in automatic operation via the parameters YAI
and YEI represents an absolute manipulated variable limit in automatic operation. The
mutual follow-up of YA or YE can only take place up to the set limits. By setting YAI and
YEI,YAII and YEII are set to the same value automatically on leaving the parameterization
mode onPA.
SIPART DR22 6DR2210
C79000-G7476-C154-03
81
Page 84

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Controller I, see figure 1-50, page 90
yn
ya
Manual1 Technical Description
S1
S1
7
yn
ya
8
yE yA
PID controller I
see
chapter 1.5.5,
Figure 1-50,
xdI
xI
Main controller
Page 90
z
7
8
yE yA
yn
ya
PID controller II
see
chapter 1.5.5,
Figure 1-51,
Page 91
Limiting controller
xd*II
xII
Adaptation
tFII
n
+
Sb
l
wII
Sb
wII
d*II
II
0000
I
d*I
II
d*II
0000
xII
S52
0
1
0000
tS
=H∨N∨Si
A
SA,SE
A
1)
Int
CB
S51
0
S50
A
Int
1)
CB
1
H=Hi∨He
1
0
I
SL
w
n
+
l
I
wI
I
d*I
0000
xI
Factory setting
1)
I
SL
w
xI
SH
S101
<>
wiI
FE3
0/1
2/3
4/5
ES
wiI
SES
Figure 1-43 Block diagram S1 = 7/8, Override control
82
S101
0/1
2/3
4/5
ES
w
tS
--Δw
+Δw
FE8
see fig. 1-5, page 24
I +c3
⋅
c1, c3
x=x1+c1x2II
x1I
x2I
FE1
FE2
SIPART DR22 6DR2210
C79000-G7476-C154-03
Factory setting c1=c3=0
z
tFI
FE4
Adaptation
Page 85

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
1.5.4.10 S1 = 9: Process display
d*II
xI
xII
gn (w)
0000
d*I
rt (x)
0000
FE3
FE1
FE6
xIII
S67
2
1
ge (y)oFF,0,1
0
S68
000
Figure 1-44 Block diagram, process display
The process display provides the possibility of displaying three process variables (xI to xIII).
The process variables xI and xII are indicated on the x- and w-display whereby the digital and
analog displays are connected in parallel. With the parameters d*I and d*II, if necessary in connection with the linearizers, both process variables can be displayed separately physically correctly. The switching possibility of the display level is disabled. The LEDs Controller I/Controller
II are dark.
The process variable xIII is indicated by the y-display and can be switched off by the structure
switch S67 in the oFF position. The display range here is 0 to 100 %, according to the position
of S68 mit rising or falling characteristic. The display overrun is -10 to 110 %. Alarm messages
are possible by assigning the limit value alarms A1 to A4 to FE1, FE3 or FE6 (see chapter
1.5.9, page 124).
SIPART DR22 6DR2210
C79000-G7476-C154-03
83
Page 86

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
1.5.4.11 S1 = 10: Fixed setpoint controller with 1 setpoint
(control system coupling)
1
S52
0
wI--c8(wST+c9)
Manual1 Technical Description
SES
wi1
Int∨
ES
FE11
FE1
FE2
FE3
wi1
n
o
CB
0/1/3
0/1
2/3/4/5
S64
S101
w
x1
x2
x3
2/4
ST
x=x1+c1⋅
(x2-c2 · x3+c3)
factory setting
c1=c2=c3=0
w=wI1+c8⋅
(w
+c9)
ST
c1, c2, c3
tFI
d*I
0000
w
A
A
S50
0
1
x1
Adaptation
II
w
SA,SE
A =H∨N∨Si
H=Hi∨He
d
I
*
d*I
I
0000
tS
xw
xI
d
I
*
I
0000
+
--
x
xdI
see
Fig. 1-50,
page 90
xI
Note: S64 = 3 is recommended for this controller type
Figure 1-45 Block diagram S1 = 10, fixed setpoint controller for control system coupling
This fixed setpoint controller is designed specially for coupling to the control system.
The control interventions by the signals Int and CB which cannot be used otherwise in this controller type are available for locking the control system operation via the SES.
With Int∨CB
the setpoint signal wiESis separated and the manual intervention via HeESat
S64 = 3 suppressed.
S64 = 3 is expressly recommended for this connection.
The other connection of the input function is almost identical with the structure S1 = 0.
84
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 87

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
1.5.4.12 S1 = 11: Follow-up controller without Int/Ext switching
(control system coupling)
This follow-up controller is designed specially for the control system coupling. It differs from the
structureS1=3inthatthesetpointswitchingtow
control signals are available for locking the control system operation via the SES. With Int∨CB
the manual intervention via HeESat S64 = 3 is suppressed. S64 = 3 is expressly recommended
for this connection.
Disconnection of a cascade control is made by manual manipulation at the master controller.
The other functions are unchanged in relation to S1 = 3.
see fig. 1-50, page 90
via Int and CB is omitted and thus these
i
xdI
--
+
xI
w
0000
tS
SA,SE
c4
w-c5
w
d*I
I/II
S52
0
1
w
wx
E
w
+c5
E
c4. c5
=c4⋅w
E
w
Factory setting
c4=1, c5=0
E
w
I
SL
SL
w
w
S53
Δ
E
w
0
1
tS
x
d*I
I/II
xx1
0000
d*I
I/II
0000
Factory setting
1)
Adaptation
⋅
c1, c3
x=x1+c1 x2+c3
Factory setting c1=c3=0
tF I
EA
--Δw
+Δw
w
FE3
see fig. 1-5, page 24
x1
FE1
x2
FE2
Figure 1-46 Block diagram S1=11 Follow-up controller for control system coupling
SIPART DR22 6DR2210
C79000-G7476-C154-03
85
Page 88

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Manual1 Technical Description
1.5.4.13 S1=12: Double fixed setpoint/follow-up controller
At S1=12, 2 independently operating controllers with fixed setpoint/follow-up controller function
are available. With the Shift key the operating and display levels are switched completely
between the two controllers.
Controller 1
SES
FE2
FE1
FE4
SES
FE8
0000 0000
wiI
wesI
I
w
EA
xI
z
wSLI
w
SL
wiI
∧CB(I)
INT
w
I
E
I
tS
x
xIwI
y
H
w
+
PID
--
x
ya+c6 · z
000
yI
Controller 2
000
yII
w
wiII
EA
0000 0000
wiII
w
II
es
INT
∧CB(II)
II
w
wSLII
wSLII
II
E
tS
xIIwII
y
H
w
+
PID
--
x
ya+c7 · z
FE3
FE7
xII
z
x
Figure 1-47 Principle representation S1 = 12 double controller
86
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 89

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
see fig. 1-50, page 90
xdI
--
+
w
xI
x
w
w
dI
I
tS
x
I
d*I
0000
x
0000
=H∨N∨Si
A
SA,SE
A
H=Hi∨He
1
S50
A
0
Int
Int
wiI
CB
S52
0
1
S510
1
1)
CB
E
x
Adaptation
I
es
w
ES
w
ES
S101
2/3/
4/5
<>
wiI
wiI
SES
Figure 1-48 Block diagram controller I at S1=12
I w
I
SL
SL
w
w
0
1
w
see fig. 1-5, page 24
EA
FE2
tF I
FE1
SIPART DR22 6DR2210
C79000-G7476-C154-03
87
Page 90

1.5 Functional description of the structure switches
1.5.4 Controller types (S1, S49 to S53)
Manual1 Technical Description
see fig. 1-50, page 90
0
S235
xdII
--
+
wII
xII
xII
wII
wII
w
II
dII
tSII
xII
I
dII
0000
xII
0000
=HII∨NII∨SiII
A
SAII,SEII
II
A
AII
HII=HiII∨HeII
1
S233
0
II
IntII
Int
wiII
CBII
S2340
1
1
1)
CBII
II
E
Adaptation
wiII
ES
S101
2/3/
4/5
II
ES
w
<>
wiII
wiII
SES
Figure 1-49 Block diagram controller II at S1=12
II
II w
SL
SL
w
w
0
1
II
EA
w
FE8
see fig. 1-5, page 24
tF I
FE3
88
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 91

Manual 1 Technical Description
t
axd1
1.5 Functional description of the structure switches
1.5.5 Control algorithm, parameter control, adaptation
1.5.5 Control algorithm, parameter control, adaptation
(S54 to S60)
1.5.5.1 Control algorithm
The PiD control algorithm of controller I and II is implemented as an interaction-free parallel
structure and follows the ideal controller equations whilst neglecting the filter constants and the
cycle time.
-- P-controller
ya
ya = Kp ⋅ xd = yo or
-- Pi-controller
xd
= Kp
ya = Kp (xd + xd dt) +yo(t) or = Kp (1 + )
1
Tn
0
y
jω Tn
-- D-part (zD-part)
The D-part can be added optionally.
ya
E
= Kp
jω Tv
1+jω
Tv
vv
The input variable E for the D-part is xd, x, -z, or +z depending on the setting of S55 or S57.
-- zy-part
The z-part can be added optionally to the controller output ya.
SIPART DR22 6DR2210
C79000-G7476-C154-03
89
Page 92

1.5 Functional description of the structure switches
1.5.5 Control algorithm, parameter control, adaptation
see fig. 1-58, page 102 to fig. 1-63, page 110
n
y
see chapter 1.5.3,
figure 1-17, page 38
PII
n
+
i
Manual1 Technical Description
I
a
y
S231
1
YAI,YEI
0/2
+
p
+
d
P
--p
n
--(Kp⋅xd+c6⋅zy)
n
=y
o
=y
y
o
y
Controller structure I
I
o
y
Pi
P
n
+
+
tn I
c6⋅zy
c6
S54
0
1
--1
tF I
xdI
tv I
vv I
KpI
S54
0
1
--1
S55
0
3
1
2
--1
xI
--1
At S55=2.3, zy=0 %!
0/1
zΔ
zy
S55
2/3
z
Figure 1-50 Block diagram controller structure I
90
FE4
see fig. 1-25, page 50 to fig. 1-49, page 88
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 93

Manual 1 Technical Description
see fig. 1-64, page 115 to fig. 1-68, page 119 or
Fig. 1-38 page 73 and fig. 1-40, page 76
n
y
seefigure1-17
PII
YAII,YEII
1.5 Functional description of the structure switches
1.5.5 Control algorithm, parameter control, adaptation
II
a
y
S231
1
0/2
n
+
i
+
p
+
d
P
II--p
n
II--(kp⋅xd+c7⋅zy)
n
=y
o
=y
y
o
y
Controller structure II
II
o
y
P
P
n
+
+
tnII
c7⋅zyII
KpII
S56
0
1
AHII
tFII
xdII
c7
--1
tv II
vv II
KpII
S56
0
1
--1
S57
0
3
1
2
--1
xII
--1
At S57=2.3, zy=0 %!
zyII
0/1
zΔ
S57
2,3
z
Figure 1-51 Block diagram controller structure II
SIPART DR22 6DR2210
C79000-G7476-C154-03
see fig. 1-25, page 50 to fig. 1-49, page 88
FE7
91
Page 94

1.5 Functional description of the structure switches
1.5.5 Control algorithm, parameter control, adaptation
Manual1 Technical Description
Controller direction of effect
The controller direction of effect is set with S54 (controller I) or S56 (controller II), it must
always have an opposite behavior (reverse coupling) to the controlled system (including
actuator and transmitter)
S54/56= 0, normally acting controller (+Kp, rising x causes falling y) for normally acting systems
(rising y causes rising x)
S54/56=1, reversing controller (--Kp, rising x causes rising y) for reversing systems (rising y
causes falling x).
Operating point yo for P-controller
-- The operating point yo of the P-controller can be set either automatically or as a parameter
(onPA).
-- Automatic operating point (Yo = Auto)
Whenever there is no automatic operation (manual, follow-up, safety or blocking operation)
the operating point yo is followed up so that switching to automatic operation is bumpless.
This gives an automatic setting of the operating point yo in manual mode:
yo = y
yo = y
If the actual value in manual mode (x
ate manual manipulated variable (y
nipulated variable (y
yo = y
Kp(w--xH)c6⋅zyII in controller II or
H
Kp(w--xH)c6⋅zyin controller I
H
) is driven to the desired setpoint (w) by the appropri-
H
), the operating point (yo) is identical to the manual ma-
).
H
or yo = yHc6⋅zy.
H
H
-- Set operating point (Yo = 0 to 100 %)
-- The controller operates in all operating modes with the operating point set as a permanent
parameter.
Bumpless switching to automatic mode
If there is no automatic operation (manual, follow-up, safety or active blocking operation) the
I-part or the operating point yo (only at Yo = Auto) is followed up so that the switching to automatic operation is bumpless. Any still active D part is set to zero.
P-PI switching
With the control signal P*=1 the controller is switched from Pi to P-behavior, at Yo=Auto the
switching is bumpless.
92
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 95

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.5 Control algorithm, parameter control, adaptation
Manipulated variable limiting yA, yE (yAII,yEII at S1=12)
The manipulated variable limiting with the parameters YA and YE is active in automatic operation in any case. The limits of these parameters are at --10 and +110 %. However, it should be
taken into account that the controllers neither output negative actuating currents nor detect any
negative position feedback signals.
If the manipulated variable y
reaches one of the limits YA or YE in automatic mode, further in-
a
tegration is aborted to avoid integral saturation. This ensures that the manipulated variable can
be changed immediately after reversing the polarity.
In manual-, follow-up- (DDC) or safety operation the manipulated variable y can be driven out of
the limiting range (only at S245=0 or S246=0). When switching to automatic mode the last
manipulated variable is transfered bumplessly, then only changes in the manipulated variable in
direction of the range YA to YE are executed.
In controller I the manipulated variable limiting is only possible in K-controllers and
three-position step controllers with external position feedback (S2=0 and S2=3).
Adaptive filter
The control difference xd is fed through an adaptive filter. By adjusting tFI or tFII (onPA) from
oFF to 1 s the filter is switched on. By further increases to tF* the filter can be adapted to a lowfrequency disturbance frequency (seconds to hours time constant). Within a band in which
changes repeatedly take place, changes are seen as disturbances by the filter and are filtered
with the preset time constant tF*; Changes in a direction leading out of the band are passed
unfiltered to the Pi(D) algorithm to enable fast control. If the disturbance level changes in time,
the filter is automatically adapted to the new level.
E
A
Figure 1-52 Effect of the adaptive non-linear filter
The factory setting of tFI and tFII is 1 s. In controllers with D-part it should be set as great as
possible because of the input noise amplified by vv ·Kp and in the adaptation (see chapter 4.4,
page 219).
SIPART DR22 6DR2210
C79000-G7476-C154-03
t
t
93
Page 96

1.5 Functional description of the structure switches
1.5.5 Control algorithm, parameter control, adaptation
Manual1 Technical Description
Response threshold AH
The response threshold AH (dead zone element) is in the control difference connected after the
adaptive filter.
xdoutput
-AH
input
x
d
AH
Figure 1-53 Effect of the dead zone element
The dead zone element lends the controller a progressive behavior, at small control differences
the gain is low or even 0, at larger control differences the specified Kp is reached. It should be
taken into account that the remaining control difference can adopt the value of the set response
threshold AH. The factory setting of AH is 0 % and can be set up to 10 % in the parameterization mode onPA.
In S-controllers the minimum necessary setting of AH is given by the minimum Δx=ks⋅Δy (see
chapter 4.3, page 218) and can be increased for further calming of the controlled system. In
K-controllers a small threshold value is advisable for calming the control circuit and reducing
wear.
Parameter switching
The single controllers, i.e. fixed setpoint controllers with two independent setpoints, fixed
set-point controllers with two dependent setpoints, DDC-fixed setpoint controllers, follow-up
controllers (synchronized controllers, SPC-controllers) and ratio controllers operate with the
parameter set I and can be switched via the control signal PAU = 1 to the parameter set II .
Both parameter sets are separately adjustable in the parameter mode onPA. Every parameter
set contains the parameters vv, cP, tn tv, AH, Yo, YA and YE with the ID I or II. The switching
facility is conceived for 2-batch mode and should be performed manually since it cannot be
bumpless in automatic operation.
Double controllers (cascade control, ratio cascade control and override control) operate with the
separately adjustable parameter sets I and II for the controllers I and II. There is no longer a
possibility of parameter switching by the control signal PAU.
Parameter control
With the structure switch S59 the parameter sets I or II can be replaced by a controlled parameter set except for YA and YE. In double controllers one of the two controllers can operate with
controlled parameters. In single controllers the controlled parameter set can be used for operation and additionally it can be switched to a fixed parameter set by the control signal PAU. The
94
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 97

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.5 Control algorithm, parameter control, adaptation
parameters cP (Kp), tn, tv, AH and Yo are controlled by a straight line with 5 vertex points at 10
%, 30 %, 50 %, 70 % and 90 % of the controlling variable. The controlling variable is selected
by S60. All control-relevant, controller-internal variables are available.
S59 PAU active parameter set
0
0
1
1
2
2
Table 1-17 active parameter sets for single controllers
0
1
0
1
0
1
depending on S59 and control signal PAU
Parameter set I
Parameter set II
controlled parameter set
Parameter set II
Parameter set I
controlled parameter set
The parameters are set manually per vertex point (identified by the suffix 1, 3, 5, 7, 9 for 10 %,
30 %, 50 %, 70 %, 90 % of the controlling variable in structuring mode PAST. Beyond the marginal vertex points 10 and 90 % the set values remain constant. (Exception: Yo can be controlled over the whole range 0 to 100 %.)
For parameters which do not need to be controlled, same values are set for all vertex points.
The derivative action gain vvc is not controllable but can be set in the range from 0.1 to 10.
When controlling tv a supplementary condition must be satisfied: tv.1 to tv.9 must either be
all = oFF (Pi or P controller) or all ≠ oFF (PID or PD controller). Otherwise the error message
tv/Err appears when jumping out of the structuring mode PAST with the Exit key (see chapter
3.3.3, page 175).
Yo is controllable in the range from 0 to 100 % and then acts like a ”fixed set” operating point.
Yo = Auto can also be set, in this case no parameter control takes place but the operating point
is set automatically in non--automatic operation (see operating point in P-controller).
Yo.1 to Yo.9 must either be set all = Auto or all ≠ Auto. Otherwise the error message Yo/Err
appears when jumping out of the structuring mode PASt with the Exit key (see chapter 3.3.3,
page 175).
Typical controlling variables are the control difference xd (it acts as 10jxdj) for progressive
controls and x or y for operating point dependent controls (non-linear controlled systems).
If S60 = 17 is set, a controling variable of 10% is simulated in Pi operation and a controlling
variable of 30% in P operation. In this way you can work with large Kp (cP.3) for example in P
operation (control signal P=1) to reach the operating point quickly. After switching to Pi
operation (control signal P=0) a reduced Kp (cP.1) is active for a stable control.
The parameter values and the value of the controlling variable can be gained by adaptation (see
section ”Adaptation” on the next page).
SIPART DR22 6DR2210
C79000-G7476-C154-03
95
Page 98

1.5 Functional description of the structure switches
1.5.5 Control algorithm, parameter control, adaptation
cP=Kp
cP.9
10
8
6
cP.7
4
cP.5
2
cP.3
cP.1
Manual1 Technical Description
-9 -7 -5 -3 -1 +1 +3 +5 +7 +9 % xd
Figure 1-54 Example of a Kp control with 10jxdj as a controlling variable for progressive control
10 30 50 70 90 % SG=10
jxdj
Adaptation (S58)
The adaptation procedure represents a reliable and easy to operate commissioning tool. The
adaptation procedure is far superior to manual optimization especially in slow controlled
systems and in PIC controller types. It is activated by the operator and can be aborted at any
time in the event of danger. The parameters determined by the adaptation can be changed and
accepted specifically by the user. Non-linear control lines can also be mastered in connection
with the parameter control.
In the parameterization mode AdAP which is only accessible at S58 ≠0, the following presettings are made for the adaptation procedure:
tU Monitoring time
dPv Direction of step command
dY Amplitude of step command
With the structure switch S58 the choice of the control behavior (with or without overshoot) is
made.
The adaptation principle is divided into line identification and controller design.
-- Line identification
The controller is driven to the desired operating point manually. By pressing the Enter key
the set manual manipulated variable is changed by a step adjustable in the direction (dPv)
and amplitude (dY). The y-step is output at the end of 10 % of the set monitoring time (tU) if
there was a fixed state of the controlled variable during this time. Otherwise there is an error
message with abortion of the identification (see chapter 3.3.3, table 3--2, page 177).
The step response of the controlled system is then accepted with a max. 84 value pairs
(time and amplitude). The respective main controlled variable of the different control types is
96
SIPART DR22 6DR2210
C79000-G7476-C154-03
Page 99

Manual 1 Technical Description
1.5 Functional description of the structure switches
1.5.5 Control algorithm, parameter control, adaptation
filtered adaptively -- (see figures 1-25, page 50 to figure 1-43, page 82) to use for controlled
variable measurement. The measured values are read in with a scanning rate according to
the cycle time. The noise level is suppressed by the adaptive filter. The storage procedure
operates with cyclic data reduction and subsequent refilling so that slow controlled systems
can be entered.
After the start ID has been run through (the controlled variable x must have left the start ID
band within 50% of the set monitoring time tU), 95% of the full range must have been
2
reached at the latest at
/3of tU. The set monitoring time (tU) must be ≥ 2 T95 of the
controlled system with safety reserve. The remaining time is required for the full scale
identification. The full scale identification can also take place immediately after the start
1
identification, but
/3of the performed measurements are always required for the full scale
identification. Recording of the measured value pairs is ended on identifying the full scale.
A comparison with the recorded transient function is now made based on the stored Ptn
models with n = 1 to 8 and equal time constants T by variation of n and T. The determined
line gain ks is transfered to the line models. The comparison is made over the minimum error area F (n, T)
Additionally a special entry of real dead times is made which then shifts the identified control
line to higher orders.
Control lines with compensation and periodic transient of 1st to 8th order with a transient
time T95 of 5 s to 12 h can be identified. Dead time parts are permissible. In S-controllers
the transient time T95 should be twice the positioning time Ty.
SIPART DR22 6DR2210
C79000-G7476-C154-03
97
Page 100

1.5 Functional description of the structure switches
1.5.5 Control algorithm, parameter control, adaptation
y
x
x
M
Model curve x
M
F(n,T)=min
x measuring
process
Δy
Δx=ks⋅Δy
y
manual
Manual1 Technical Description
tU
67 %
Start ID
ID fixed state
Start of adaptation
Figure 1-55 Time curve of an adaptation without error messages in which tU = 2×T95
Full scale
ID
100500-10
Error checks are made during line identification in order to be able to prematurely abort the
identification. There are 13 control steps altogether which are displayed by flashing on the
digital x- and w- displays when errors occur. As soon as an error message appears, the line
identification is aborted and it must be restarted after correcting the presettings in the parameterization mode AdAP if necessary. Acknowledgement of the error messages,
see table 3-2 ”Error messages of the adaptation procedure”, page 177.
-- Controller design
The controller is designed according to the amount optimum method (S58=2). This setting
method is very robust and also allows variation of the line amplification. However, it generates an overshoot of approx. 5 % in the event of changes in the command variables. If this is
not wanted, you can also work with the controller design without overshoot (S58 = 1), Kp is
reduced here to 80 %.
%
tU
The controller is designed for PI and PID behavior, therefore kp, tn and for PID tv are calculated, whereby the derivative action gain is fixed at 5. A prerequisite is that the D-element is
connected with xd or x (S55 = 0 or 1).
In S-controllers the response threshold AH is calculated in addition to kp, tn, tv. The parameters tA, tE and tY must be set beforehand according to the actuating drives used (see chapter 4.3, page 218). If the transient time T95 is near to 2 tY (floating time) overshooting may
also occur in controller designs with D-part at S58=1.
98
SIPART DR22 6DR2210
C79000-G7476-C154-03
 Loading...
Loading...