

Page 1
SERVICE MANUAL
CODE: 00ZARF16//A2E
DIGITAL COPIER/PRINTER/
MULTIFUNCTIONAL SYSTEM OPTION
FINISHER/PUNCH MODULE
AR-F15
AR-F16
AR-F15
AR-F16
AR-PN4
CONTENTS
CHAPTER 1 GENERAL DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
CHAPTER 2 FINISHER UNIT BASIC OPERATION . . . . . . . . . . . . . . . . . . . . . 2-1
CHAPTER 3 SADDLE STITCH UNIT BASIC OPERATION . . . . . . . . . . . . . . . 3-1
CHAPTER 4 PUNCHER UNIT (OPTION) BASIC OPERATION . . . . . . . . . . . . 4-1
CHAPTER 5 MECHANICAL CONSTRUCTION. . . . . . . . . . . . . . . . . . . . . . . . . 5-1
MODEL
AR-PN4
CHAPTER 6 MAINTENANCE AND INSPECTION . . . . . . . . . . . . . . . . . . . . . . 6-1
CHAPTER 7 TROUBLESHOOTING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
APPENDIX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-1
NOTE: This manual is based on the AR-F11/F12/PN3 manuals.
The sections marked with or are different sections from the
AR-F11/F12/PN3 manuals.
Parts marked with “ ” are important for maintaining the safety of the set. Be sure to replace these parts with
specified ones for maintaining the safety and performance of the set.
F15/F16
PN4
SHARP CORPORATION
This document has been published to be used
for after sales service only.
The contents are subject to change without notice.
Page 2
General Precautions for Installation/Servicing/Maintenance for the Finisher
AR-F15/F16, Hole punch unit AR-PN4
The installation and service should be done by a qualified service technician.
1.
When installing the Finisher AR-F15/F16, Hole punch unit AR-PN4 to the Plain Paper Copier,
be sure to follow the instructions described in the “Unpacking/Set-Up Procedure for the
AR-F15/F16/AR-PN4” booklet which comes with each unit of the AR-F15/F16/AR-PN4.
2. The AR-F15/F16, AR-PN4 should be installed by an authorized/qualified person.
3. Before starting installation, servicing or maintenance work, be sure to turn off and
unplug the copier first.
4. When selecting the installation site, avoid placing the AR-F15/F16 and copier on different levels or inclined floors.
5. When servicing or maintaining the AR-F15/F16/AR-PN4, be careful about the rotating
or operation sections such as gears, pulleys, sprockets, cams, belts, etc.
6.
When parts are disassembled, reassembly is the reverse of disassembly unless otherwise noted in this manual or other related materials. Be careful not to reassemble small
parts such as screws, washers, pins, E-rings, toothed washers to the wrong places.
7. Basically, the machine should not be operated with any parts removed or disassembled.
8.
Delicate parts for preventing safety hazard problems (such as breakers,
thermofuses, fuses, door switches, sensors, etc. if any) should be handled/installed/
adjusted correctly.
9. Use suitable measuring instruments and tools.
10. During servicing or maintenance work, be sure to check the serial No. plate and other
cautionary labels (if any) to see if they are clean and firmly fixed. If not, take appropriate actions.
11. The PC board must be stored in an anti-electrostatic bag and handled carefully using
a wristband, because the ICs on it may be damaged due to static electricity. Before
using the wrist band, pull out the power cord plug of the copier and make sure that
there is no uninsulated charged objects in the vicinity.
12. For the recovery and disposal of used AR-F15/F16/AR-PN4s, consumable parts, packing materials, used batteries, and RAM-ICs including lithium batteries, it is recommended that the relevant local regulations/rules.
13. After completing installation, servicing and maintenance of the AR-F15/F16/AR-PN4,
return the AR-F15/F16/AR-PN4 to its original state, and check operation.
14. When you move the finisher, do not move it in the direction of the arrow as shown in
the figure below otherwise it might fall down.
Page 3
i
INTRODUCTION
This Service Manual contains basic data and figures for the Finisher (AR-F15)/Saddle
Finisher (AR-F16) needed to service the machine in the field.
This manual comprises the following chapters:
Chapter 1 “General Description” introduces the finisher’s features, specifications, and
names of parts, and shows how to operate the finisher.
Chapter 2 “Finisher Unit Basic Operation” discusses the principles of operation used for
the finisher mechanical and electrical systems. It also explains the timing at
which these systems are operated.
Chapter 3 “Saddle Finisher Unit Basic Operation” discusses the principles of operation
used for the saddle stitch unit’s mechanical and electrical systems. It also
explains the timing at which these systems are operated.
Chapter 4 “Puncher (option) Unit Basic Operation” discusses the principles of operation
used for the puncher unit’s mechanical and electrical systems. It also explains
the timing at which these systems are operated.
Chapter 5 “Mechanical System” discusses how the finisher is constructed mechanically,
and shows how it may be disassembled/assembled and adjusted.
Chapter 6 “Maintenance and Inspection” provides tables of periodically replaced parts
and consumables and durables, together with a scheduled servicing chart.
Chapter 7 “Troubleshooting” shows how to troubleshoot possible faults and gives electri-
cal parts arrangement diagrams, LED/check pin diagrams by PCB, and self
diagnosis tables.
“Appendix” contains diagrams showing tables of signals, overall circuit diagrams and tables of solvents/oils.
Descriptions regarding installation are not mentioned in this Service Manual as the
Finisher (AR-F15)/Saddle Finisher (AR-F16)’s packing boxes contain Installation Procedures.
The descriptions in this Service Manual are subject to change without notice for product improvement or other purposes, and major changes will be communicated in the form
of Service Information bulletins.
All service persons are expected to have a good understanding of the contents of this
Service Manual and all relevant Service Information bulletins, and be able to identify and
isolate faults in the machine.
Page 4
ii
CHAPTER 1 GENERAL DESCRIPTION
CONTENTS
I. FEATURES ..................................1-1
II. SPECIFICATIONS .......................1-2
A. Finisher specifications
(AR-F15/F16) ...........................1-2
B. Punch unit specifications
(AR-PN4)..................................1-8
C. Engine specification
(AR-F15/F16/PN4) .................. 1-9
D. Cross Section......................... 1-11
III. Using the Machine.....................1-14
A. Removing Paper Jams from the
Finisher Unit ...........................1-14
B. Supplying the Finisher Unit with
Staples ...................................1-15
C. Removing Staple Jams from the
Finisher Unit ...........................1-17
D. Removing Paper Jams from the
Saddle Stitch Unit
(Saddle Finisher) .................... 1-18
E. Supplying the Saddle Stitch
Unit with Staples
(Saddle Finisher) .................... 1-20
F. Removing Staple Jams from the
Saddle Stitch Unit
(Saddle Finisher) .................... 1-21
G. Removing Paper Jams from the
Puncher Unit (option) .............1-23
H. Removing Punched Scrap from
the Puncher Unit (option) .......1-25
IV. MAINTENANCE BY THE
USER ........................................1-26
A. Maintenance by the User .......1-26
I. BASIC OPERATION ....................2-1
A. Outline......................................2-1
B. Outline of Electrical Circuitry .... 2-2
C. Inputs to and Outputs from the
Finisher Controller PCB ...........2-4
II. FEED/DRIVE SYSTEM .............2-10
A. Outline....................................2-10
B. Type of Delivery Paths............2-15
C. Feeding and Delivering ..........2-18
D. Job Offset...............................2-21
E. Staple Operation ....................2-24
F. Stapler Unit ............................ 2-32
G. Tray Operation ........................ 2-38
H. Detecting the Height of
Stack on the Tray ....................2-40
I. Shutter Operation...................2-42
J. Buffer Path Operation............. 2-46
K. Detecting Jams ......................2-51
III. POWER SUPPLY SYSTEM.......2-56
CHAPTER 2 FINISHER UNIT BASIC OPERATION
Page 5
iii
I. BASIC OPERATION ....................3-1
A. Outline ...................................... 3-1
B. Electrical Circuitry ....................3-2
C. Inputs to and Outputs from the
Saddle Stitch Controller PCB ...3-3
II. FEEDING/DRIVE SYSTEM ......... 3-8
A. Outline ...................................... 3-8
III. PAPER OUTPUT
MECHANISM.............................3-14
A. Outline .................................... 3-14
B. Controlling the Inlet
Flappers .................................3-17
C. Controlling the Movement of
Sheets .................................... 3-21
D. Aligning the Sheets ................3-23
E. Controlling the Phase of the
Crescent Roller ......................3-26
IV. STITCHING SYSTEM ............... 3-28
V. FOLDING/DELIVERY
SYSTEM....................................3-31
VI. CHECKING FOR A JAM ...........3-38
VII. POWER SUPPLY ......................3-43
CHAPTER 3 SADDLE STITCH UNIT
BASIC OPERATION
I. BASIC OPERATION ....................4-1
A. Outline...................................... 4-1
B. Inputs to and Outputs from
Punch Driver PCB ....................4-2
II. PUNCH OPERATION ..................4-5
A. Outline......................................4-5
B. PUNCH OPERATION...............4-7
C. Horizontal Registration
Operation ...............................4-11
III. POWER SUPPLY SYSTEM.......4-14
CHAPTER 4 PUNCHER UNIT (OPTION)
BASIC OPERATION
CHAPTER 5 MECHANICAL CONSTRUCTION
I. FINISHER UNIT ..........................5-1
A. Externals and Controls............. 5-1
B. FEEDING SYSTEM .................5-9
C. PCBs ...................................... 5-15
II. SADDLE STITCH UNIT .............5-16
A. Externals and Controls........... 5-16
B. SADDLE UNIT .......................5-19
C. PCBs ...................................... 5-29
D. Accessory ..............................5-30
III. PUNCHER UNIT (OPTION) ...... 5-31
A. Externals and Controls ...........5-31
B. Puncher Driver System ..........5-32
C. PCBs......................................5-43
Page 6
iv
I. PERIODICALLY REPLACED
PARTS .........................................6-1
A. Finisher Unit .............................6-1
B. Saddle Stitch Unit ....................6-1
C. Puncher Unit (option) ............... 6-1
II. CONSUMABLES AND
DURABLES .................................6-2
A. Finisher Unit .............................6-2
III. Consumable parts replacement
procedures ..................................6-3
A. Paddle replacement .................6-3
B. Knurled belt replacement .........6-4
IV. PERIODICAL SERVICING ........6-10
CHAPTER 7 TROUBLESHOOTING
I. ADJUSTMENTS ..........................7-1
A. Electrical System
(finisher unit) ............................ 7-1
B. Electrical System
(saddle stitch unit) ....................7-5
C. Electrical System
(puncher unit (option)) .............. 7-7
II. ARRANGEMENT OF
ELECTRICAL PARTS .................. 7-9
A. Finisher Unit .............................7-9
B. Saddle Stitch Unit ..................7-16
C. Puncher Unit (option) ............. 7-22
D. Light-Emitting Diodes (LED)
and Check Pins by PCB .........7-26
III. TROUBLESHOOTING...............7-28
A. Finisher Unit ...........................7-28
B. Saddle Stitch Unit ..................7-38
C. Puncher Unit (option) .............7-45
CHAPTER 6 MAINTENANCE AND INSPECTION
APPENDIX
A. FINISHER UNIT GENERAL
TIMING CHART.......................... A-1
B. SADDLE STITCH UNIT
GENERAL TIMING CHART........ A-2
C. PUNCHER UNIT (option)
GENERAL TIMING CHART........ A-3
D. SIGNAL AND
ABBREVIATIONS ....................... A-4
E. ACTUAL WIRING CHART .......... A-6
F. SOLVENTS AND OILS ............. A-13
Page 7
CHAPTER 1
GENERAL DESCRIPTION
I. FEATURES ..................................1-1
II. SPECIFICATIONS .......................1-2
A. Finisher specifications
(AR-F15/F16) ............................. 1-2
B.Punch unit specifications
(AR-PN4) ...................................1-8
C. Engine specification
(AR-F15/F16/PN4) .................... 1-9
D. Cross Section ..........................1-11
III. Using the Machine.....................1-14
A. Removing Paper Jams from the
Finisher Unit............................. 1-14
B. Supplying the Finisher Unit with
Staples ..................................... 1-15
C. Removing Staple Jams from the
Finisher Unit............................. 1-17
D. Removing Paper Jams from the
Saddle Stitch Unit
(Saddle Finisher) ..................... 1-18
E. Supplying the Saddle Stitch
Unit with Staples
(Saddle Finisher) ..................... 1-20
F. Removing Staple Jams from the
Saddle Stitch Unit
(Saddle Finisher) ..................... 1-21
G. Removing Paper Jams from the
Puncher Unit (option) ............... 1-23
H. Removing Punched Scrap from
the Puncher Unit (option) ......... 1-25
IV. MAINTENANCE BY THE
USER ........................................1-26
A. Maintenance by the User ......... 1-26
Page 8

Page 9
CHAPTER 1 GENERAL DESCRIPTION
1-1
I. FEATURES
1. Accommodates large quantities of sheets
• Normally, the finisher holds a stack of sheets 250 mm in height in its two bins (small-size
paper: equivalent to 2000 sheets)/140 mm in height (large-size paper: equivalent to 1000
sheets)
2. Has high paper transportation performance
• The finisher is capable of handling papers between 60 and 256 gm/m².
3. Offers a job offset function
• The finisher has a job offset function for sorting non-stapled stacks of copies.
4. Offers four types of auto stapling
• The finisher offers a choice of four stapling modes (1-point stapling at rear, diagonal stapling at front, diagonal stapling at rear, 2-point stapling).
5. Uses a buffer roller
• The use of a buffer roller enables the finisher to accept copies without interruption from
the host machine even during stapling or offset operation.
6. Has a saddle stitch function (Saddle Finisher AR-F16)
• The finisher can staple along the center of paper and fold it in two (up to 15 sheets).
7. Offers a punch function (option)
• The use of the puncher unit enables the finisher to punch sheets for binders before they are
output. (The puncher unit is capable of handling papers between 60 and 256 gm/m². It cannot handle special paper, postcards and transparencies.)
8. Insert function (option)
• Enable the use of special type of paper and printed paper in addition to the staple sorting or
the hole punching mode (Available when the optional staple sorting and the hole punching
mode units are installed.) This paper is not run through fuser (heat).
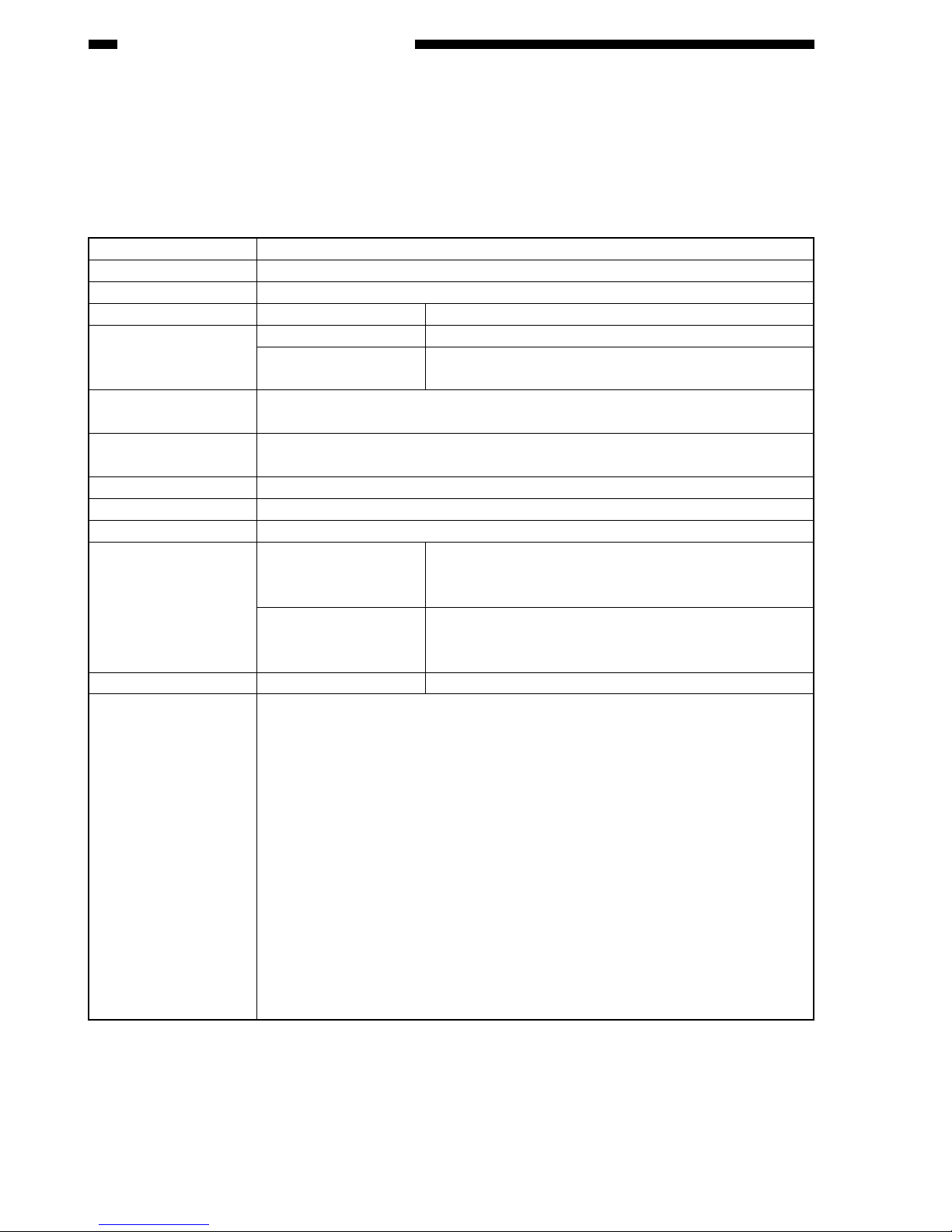
ITEM MODEL NOTE
Finisher
AR-F15
AR-F16 Saddle stitch finisher
Punch unit
AR-PN4A 2 holes (φ6.5) Europe
AR-PN4B 2 holes/3 holes automatic selection(φ8.0) North America
AR-PN4C 4 holes (φ6.5) (80mm pitch) France
AR-PN4D 4 holes (φ6.5) (70, 21mm pitch) Sweden
7 Stapler for Finisher
5000 staples
Staple cartridge x3
5000 x 3 SF-SC11 20
Cartridge for AR-F15/16
Common with S55,S55N,FN8/9
8 Stapler for Saddle
Stitch 2000 staples
Staple cartridge x3
2000 x 3 AR-SC3 40
For AR-F16 (Saddle Stitch Finisher)
Common with FN9
F15/F16
PN4
F15/F16
Page 10
CHAPTER 1 GENERAL DESCRIPTION
1-2
II. SPECIFICATIONS
A. Finisher specifications (AR-F15/F16)
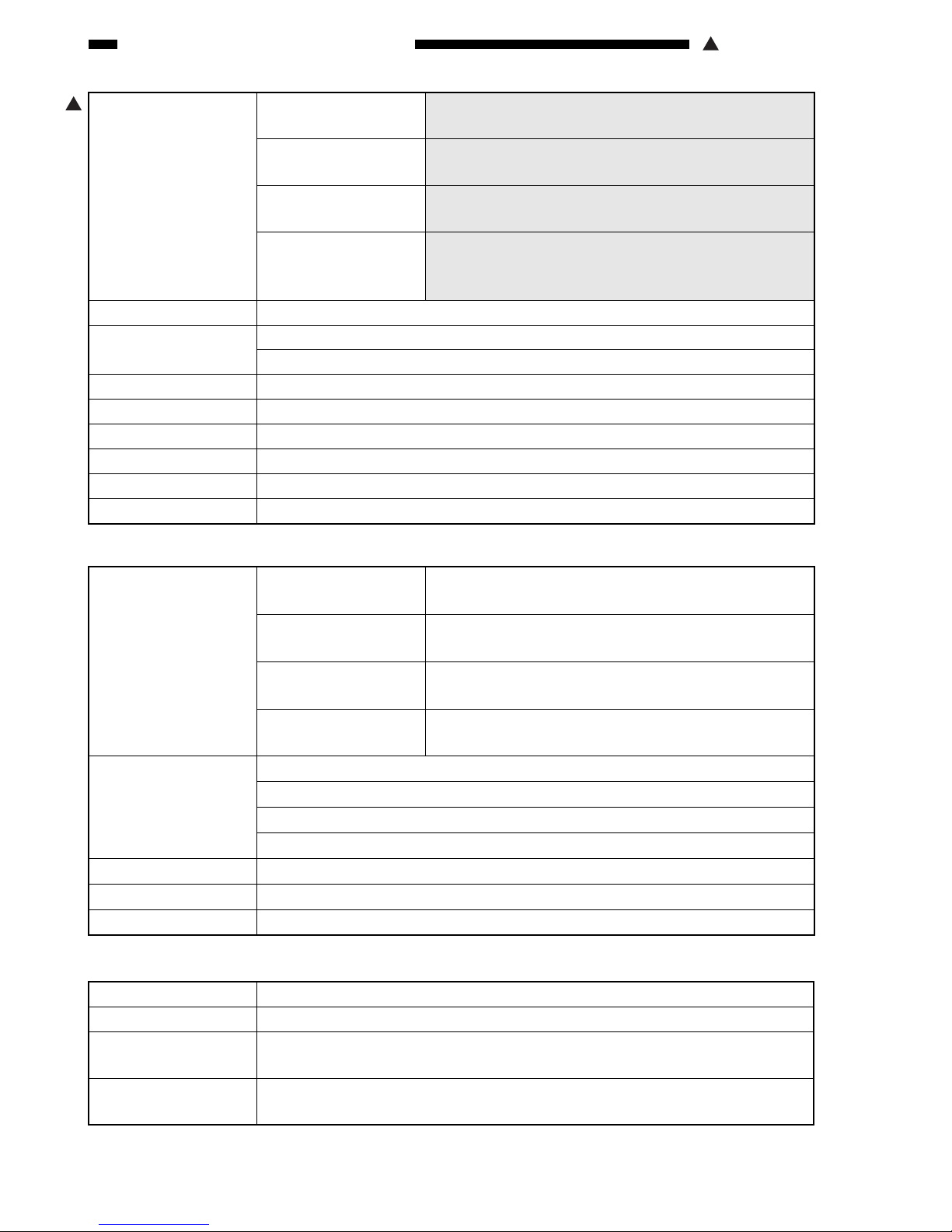
1. Finisher (AR-F15)
(1) Stack section
Type Floor installation
Stacking method Upper/Lower tray: Ascent/descent type offset tray
Transport speed 55 to 70 sheet/minute
Tray type Upper/Lower Tray Ascent/descent type offset tray
Output paper size AB series A4, B5, A5R, 16K, A3, B4, A4R, B5R, 8K, 16KR
Inch series 8.5 x 11, 5.5 x 8.5R, 11 x 17, 8.5 x 14, 8.5 x 13,
8.5 x 11R, 7.25 x 10.5R
Paper weight Plain paper: 60 to 105 g/m
2
Thick paper: 106 to 256 g/m
2
Paper transport
reference
Center reference
Mode type Non-staple, staple
Offset paper size A3, A4, A4R, B4, B5, 8K, 16K, 11 x 17, 8.5 x 14, 8.5 x 13, 8.5 x 11, 8.5 x 11R
Offset volume 30mm
Stacking performance Non-offset In horizontal direction: max. 30mm
In vertical direction: max. 50mm
(In the non-staple mode on the offset tray)
Offset In horizontal direction:
15mm or less for a same set,
15mm or more between different sets
Matching Max. deviation width 2.5mm
Output paper capacity <Tray1 / Tray2>
Non-staple:
2000 sheets (250mm ± 7mm)
A4, B5, A5R, 16K, 8.5 x 11, 5.5 x 8.5R: 80g/m
2
1000 sheets (140mm ± 7mm)
A3, B4, A4R, B5R, 8K, 16KR, 11 x 17, 8.5 x 14, 8.5 x 13,
8.5 x 11R, 7.25 x 10.5R: 80g/m
2
Stacking limit:
Tray1: Stack capacity from Tray1 & Tray2 = less than 2000 sheets
Tray2: Stack capacity from Tray2 = less than 2000 sheets
Staple:
110mm ± 7mm or 750 sheets or 100 sets
A4, B5, 8.5 x 11, 16K (S size)
74mm ± 7mm or 500 sheets or 100 sets
A3, B4, A4R, 11 x 17, 8.5 x 14, 8.5 x 13, 8.5 x 11R, 8K (L size)
Page 11
CHAPTER 1 GENERAL DESCRIPTION
1-3
(2) Staple section
Height of mixed load When power is turned
on. (When there is
paper on the tray.)
29mm ± 7mm
Equivalent to 150 sheets/50 sets
Size mixed load
(No bind, mixed load)
74mm ± 7mm
Equivalent to 500 sheets
Staple mixed load
(Bind, mixed load)
74mm ± 7mm
Equivalent to 500 sheets/100 sets
Mode mixed load
(No bind / Bind,
Mixed load)
29mm ± 7mm
Equivalent to 150 sheets
Paper detection Available
Reliability MCBJ: Based on the main unit
MCBF: Based on the main unit
Life Based on the main unit
Dimensions (W) 785 x (D) 630 x (H) 1150mm
Occupied dimensions 1165 x 630mm (shifted 380mm for removal of misfed paper)
Weight 51Kg
Power source Supplied from main unit (DC24V, 3.0A)
Power consumption 72W
Paper size to be
stapled
One-point staple in the
front (Slant staple)
A3, B4, A4, A4R, B5, 8K, 16K, 11 x 17, 8.5 x 14,
8.5 x 13, 8.5 x 11, 8.5 x 11R
One-pint staple at the
back (Slant staple)
A3, B4, A4, B5, 8K, 16K, 11 x 17, 8.5 x 11
One-pint staple at the
back
A4R, 8.5 x 14, 8.5 x 13, 8.5 x 11R
Two-point staple A3, B4, A4R, A4, B5, 8K, 16K, 11 x 17, 8.5 x 14,
8.5 x 13, 8.5 x 11, 8.5 x 11R
Stapling capacity S size: 50 sheets
L size: 30 sheets
Mixed stapling: 30 sheets
Max.: 2 sheets of 256g/ m²
paper + 48 sheets of 80g/ m² paper
Staple load system Staple cartridge (5,000 staples)
Staple empty detection Available
Manual stapling Not available
1
Page 12
CHAPTER 1 GENERAL DESCRIPTION
1-4
: Jan. 9 2004
1
(Stapling position)
Staple in the front
* Stapling position when viewed with the
copy surface up
One-point staple at the back
One-point staple in the front (Slant staple)
Two-point staple
4.4 ± 2.5 mm
4.4 ± 2.5 mm
Paper transport
direction
(30˚)
Paper width
A
A4 Long 204.0
LG Long, LT Long 210.0
(6.0 ± 2.5 mm)
5.0 ± 2.5 mm
Paper transport direction
Paper width
A
A
A3 Long, A4 Short 291.0
B4 Long, B5 Short 251.0
LD Long, LT Short 273.5
(6.0 ± 2.5mm)
4.0 ± 2.5 mm
Paper transport direction
Paper width
(30˚)
A
AB
A3 / A4 83 ± 4 203 ± 4
B4 / B5 63 ± 4 183 ± 4
LD / LT 74 ± 4 194 ± 4
A4R 62.5 ± 4 138.5 ± 4
LT-R / LG 62.5 ± 4 144.5 ± 4
8K / 16K
69.5 ± 4 189.5 ± 4
1
Paper transport
direction
5.0 ± 4 mm
Paper width
B
A
Page 13
CHAPTER 1 GENERAL DESCRIPTION
1-5
: Jan. 9 2004
1
2. Saddle stitch finisher (AR-F16)
(1) Stack section
Type Floor installation
Stacking method Upper/Lower tray: Ascent/descent type offset tray
Transport speed 55 to 70 sheets/minute
Tray type Upper/Middle Tray Ascent/descent type offset tray
Lower Tray Book tray for saddle stitch
Output paper size AB series A4, B5, A5R, 16K, A3, B4, A4R, B5R, 8K, 16KR
Inch series 8.5 x 11, 5.5 x 8.5R, 11 x 17, 8.5 x 14, 8.5 x 13,
8.5 x 11R, 7.25 x 10.5R
Paper weight Plain paper: 60 to 105 g/m
2
Thick paper: 106 to 256 g/m
2
Paper transport
reference
Center reference
Mode type Non-staple, staple
Offset paper size A3, A4, A4R, B4, B5, 8K, 16K, 11 x 17, 8.5 x 14, 8.5 x 13, 8.5 x 11, 8.5 x 11R
Offset volume 30mm
Stacking performance Non-offset In horizontal direction: max. 30mm
In vertical direction: max. 50mm
(In the non-staple mode on the offset tray)
Offset In horizontal direction:
15mm or less for a same set,
15mm or more between different sets
Matching Max. deviation width 2.5mm
Output paper capacity
<Tray1 / Tray2>
Non-staple:
Equivalent to 2000 sheets (250mm ± 7mm)
A4, B5, A5R, 16K, 8.5 x 11, 5.5 x 8.5R: 80g/m
2
Equivalent to 1000 sheets (140mm ± 7mm)
A3, B4, A4R, B5R, 8K, 16KR, 11 x 17, 8.5 x 14, 8.5 x 13,
8.5 x 11R, 7.25 x 10.5R: 80g/m
2
Stacking limit:
Tray1: Stack capacity from Tray1 & Tray2 = less than 2000 sheets
Tray2: Stack capacity from Tray2 = less than 2000 sheets
Staple:
110mm ± 7mm or equivalent to 750 sheets or 100 sets
A4, B5, 8.5 x 11, 16K
74mm ± 7mm or equivalent to 500 sheets or 100 sets
A3, B4, A4R, 11 x 17, 8.5 x 14, 8.5 x 13, 8.5 x 11R, 8K
1
Page 14
CHAPTER 1 GENERAL DESCRIPTION
1-6
: Jan. 9 2004
1
(2) Staple section
(3) Saddle stitch section (Non-printed area in the center of paper)
Height of mixed load When power is turned on29mm ± 7mm
Equivalent to 150 sheets/50 sets
Size mixed load
(No bind, mixed load)
74mm ± 7mm
Equivalent to 500 sheets
Staple mixed load
(Bind, mixed load)
74mm ± 7mm
Equivalent to 500 sheets/100 sets
Mode mixed load
(No bind / Bind,
Mixed load)
29mm ± 7mm
Equivalent to 150 sheets
Paper detection Available
Reliability MCBJ: Based on the main unit
MCBF: Based on the main unit
Life Based on the main unit
Dimensions (W) 785 x (D) 630 x (H) 1150mm
Occupied dimensions 1165 x 630mm (shifted 380mm for removal of misfed paper)
Weight Saddle available: 71Kg
Power source Supplied from main unit (DC24V, 3.0A)
Power consumption 72W
Paper size to be
stapled
One-point staple in the
front (Slant staple)
A3, B4, A4, A4R, B5, 8K, 16K, 11 x 17, 8.5 x 14,
8.5 x 13, 8.5 x 11, 8.5 x 11R
One-point staple at the
back (Slant staple)
A3, B4, A4, B5, 8K, 16K, 11 x 17, 8.5 x 11
One-point staple at the
back
A4R, 8.5x14, 8.5x13, 8.5x11R
Two-point staple A3, B4, A4R, A4, B5, 8K, 16K, 11 x 17, 8.5 x 14,
8.5 x 13, 8.5 x 11, 8.5 x 11R
Number of sheets
stapled
S size: 50 sheets
L size: 30 sheets
Mixed stapling: 30 sheets
Max.: 2 sheets of 256g/ m² paper + 48 sheets of 80g/ m² paper
Staple load type Staple cartridge type (5,000 staples)
Staple empty detection Available
Manual stapling Not available
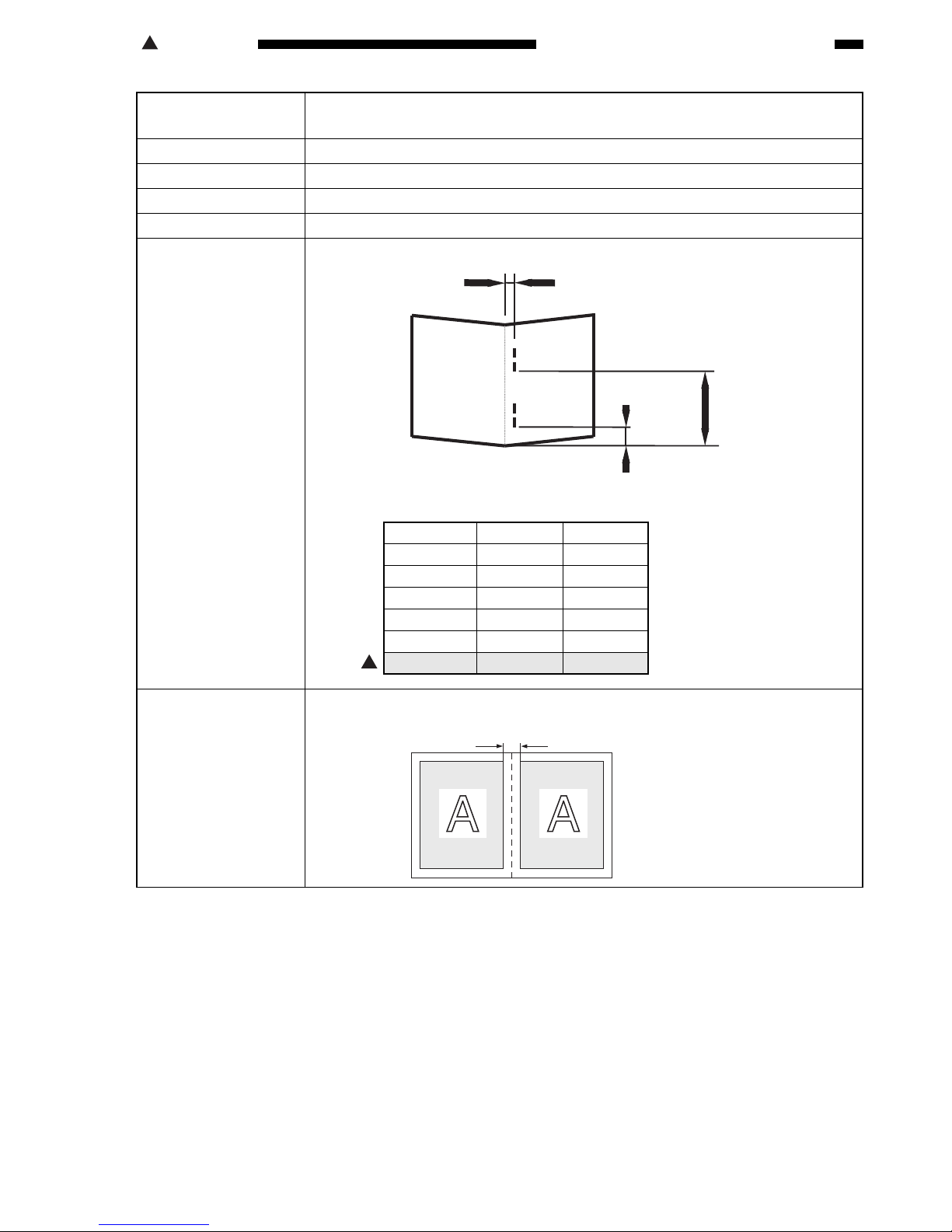
Stitch method Center 2-position binding, bundle 2-folding
Folding position Center folding (adjustment available)
Saddle stitching paper
size
A3, A4R, B4, 8K, 11x17, 8.5x11R
Weight allowed for
saddle stitching
60g/m
2
to 256g/m
2
One cover paper 1 sheet (Thick paper) 106 to 256 g/m
2
1
Page 15
CHAPTER 1 GENERAL DESCRIPTION
1-7
: Jan. 9 2004
1
Number of sheets
stapled
Max.: 15 sheets (256g/m2 1 sheet + 80g/m2 14 sheets)
Number of sets loaded 10 sets (11 to 15 sheets), 20 sets (6 to 10 sheets), 25 sets (1 to 5 sheets)
Staple load type Staple cartridge type (2,000 staples)
Staple empty detection Available
Paper empty detection Available
Binding position
* Binding position adjustment for paper center is available.
Image inhibit area The center margin of 4mm or more is required.
A
B
±1.0mm or less
AB
A3 long 83.0 203.0
B4 long 63.0 183.0
A4 long 39.5 159.5
LD long 74.0 194.0
LT long 42.0 162.0
8K long 69.5 189.5
1
4mm or more
Page 16
CHAPTER 1 GENERAL DESCRIPTION
1-8
: Jan. 9 2004
1
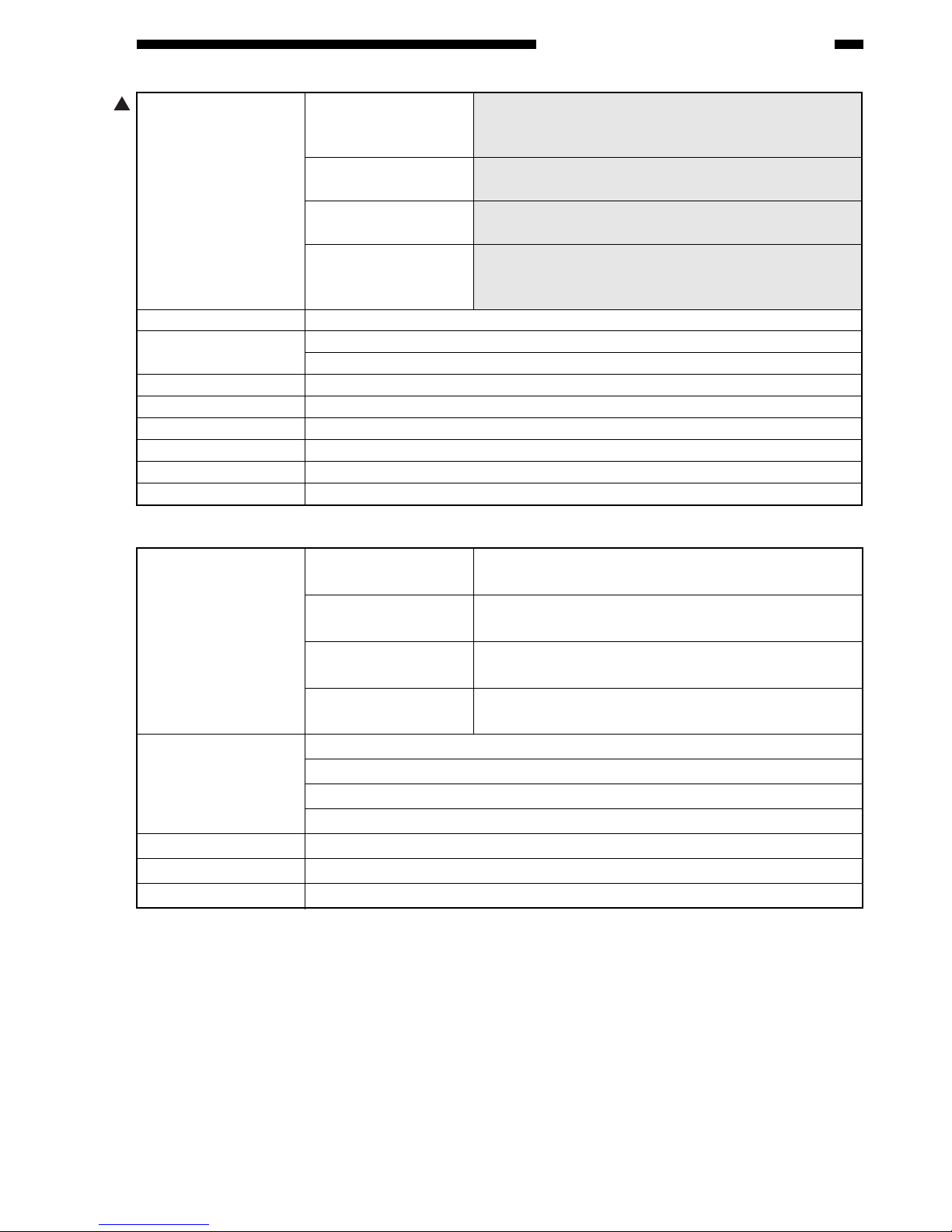
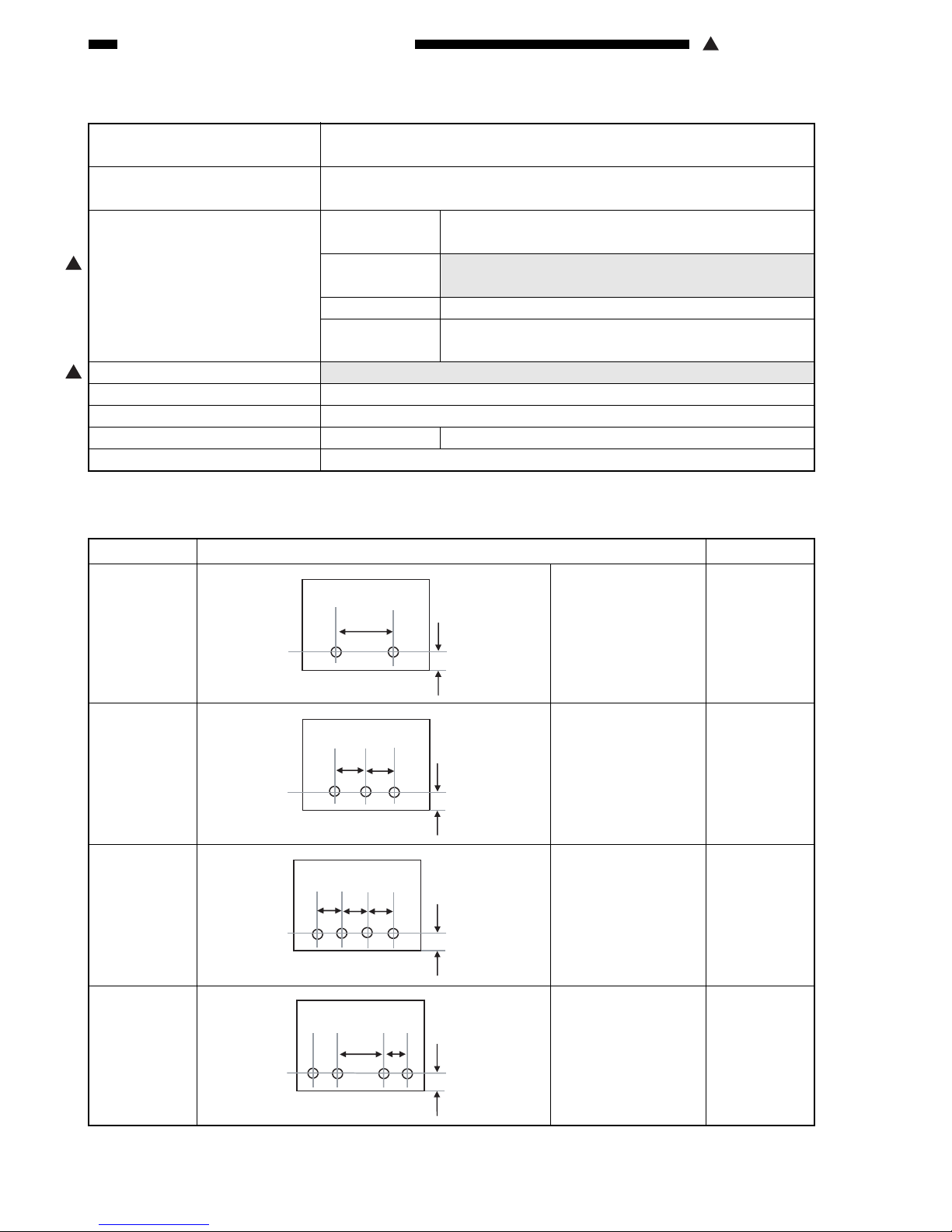
B. Punch unit specifications (AR-PN4)
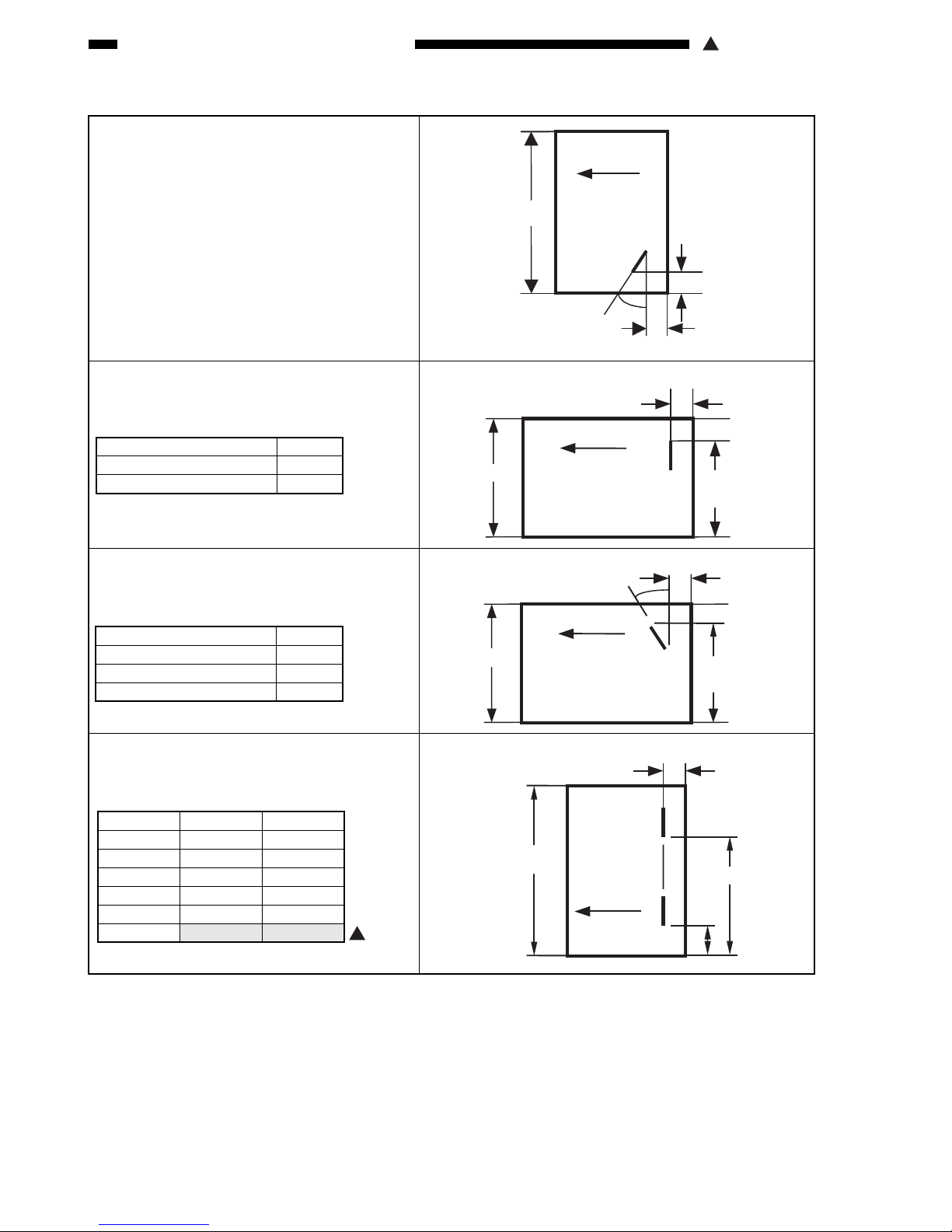
*1 : Hole punch changes from three holes to two holes automatically.
(Kind of hole punch)
Finisher available for
installation of the punch module
Finisher and saddle stitch finisher
Kind of hole punch 2-hole / 3-hole / 4-hole/ 4-hole (Broad space)
One of the above four punch unit can be attached.
Paper size to be punch 2-hole A3, A4, A4R, B4, B5, B5R, 11 x 17, 8.5 x 14,
8.5 x 13, 8.5 x 11, 8.5 x 11R, 8K, 16K, 16KR
3-hole *1
3-hole: A3, A4, 11 x 17, 8.5 x 11
2-hole: A4R, 8.5 x 11R
4-hole A3, A4
4-hole
(Broad space)
A3, A4, A4R, B4, B5, B5R, 11 x 17, 8.5 x 14,
8.5 x 13, 8.5 x 11, 8.5 x 11R
Paper weight
60 to 256g/m
2
Life 1000K (80g/m2)
Power consumption Supplied from finisher
External dimensions W x D x H 95 x 560 x 170mm
Weight About 3.5kg
Kind Hole position Hole size
2-hole A: 80 ± 1mm
B: 12 ± 3mm
φ6.5mm
3-hole A: 108 ± 1mm
B: 12 ± 3mm
φ8.0mm
4-hole A: 80 ± 1mm
B: 12 ± 3mm
φ6.5mm
4-hole
(Broad space)
A: 70 ± 1mm
B: 12 ± 3mm
C: 21 ± 1mm
φ6.5mm
1
1
A
B
A
B
A
ABAA
A
B
C
Page 17

CHAPTER 1 GENERAL DESCRIPTION
1-9
C
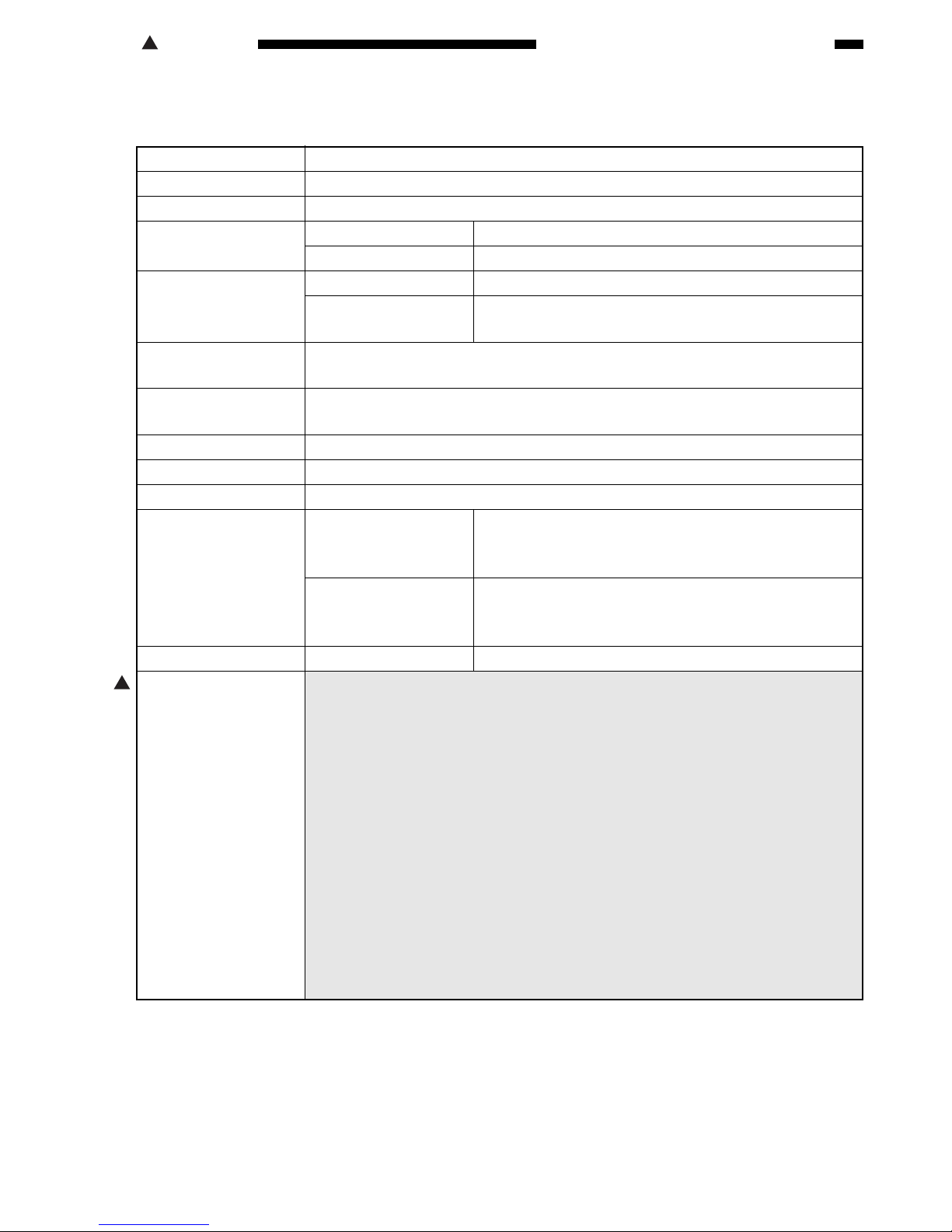
. Engine specification (AR-F15/F16/PN4)
Staple position
(Media supported)
*1. China destination only
*2. Only one sheet per one bundle.
Paper capacity 4000 sheets (small size), 2000 sheets (large size)
Tray1/Tray2 Lift type tray
2000 sheets (small size: 80 g/m²)
1000 sheets (large size: 80 g/m²)
Face-down
Job offsetting
Paper full detection
Multi-position stapler (1 edge 3 positions)
Stapling Time Less than 1.0 second (1 position)
Stapling sheet capacity 50 sheets (small size: 80 g/m²)
30 sheets (large size: 80 g/m²)
Staple quantity : 5000 staples
Stapler type : Flat clinch
Tray3 (Only saddle stitch
Finisher)
Saddle stitch tray
Saddle stitch sheet capacity 15 sheets (60 pages)
Staple position The basic output pattern and staple position are showed in the
followings.
Punch (OPTION) Available paper width 182mm to 297mm (2 holes/2 to 3 holes)
270mm to 297mm (4 holes)
Available paper length 182mm to 432mm
Tray # Mode Size Weight
Tray 1
Tray 2
Face-down
Non-staple mode
All supported sizes 60 to 256 g/m²
Offset mode 11 x 17, Legal, Letter, Letter-R,
Foolscap, B5, A4, A4R, B4, A3, 8K,
16K *1
60 to 256 g/m²
Staple mode 11 x 17, Legal, Letter, Letter-R,
Foolscap, B5, A4, A4R, B4, A3, 8K,
16K, 16KR *1
60 to 256 g/m²
Punch 11 x 17, Legal, Letter, Letter-R,
Executive-R, Foolscap, B5, B5R, A4,
A4R, B4, A3
60 to 256 g/m²
Tray 3 Saddle stitch mode only A3, A4R, B4
Letter-R, 11 x 17, 8K *1
60 to 90 g/m²
90 to 256 g/m² *2
Paper exit direction
Back side of the paper
Page 18
CHAPTER 1 GENERAL DESCRIPTION
1-10
: Jan. 9 2004
1
(Combination of functions)
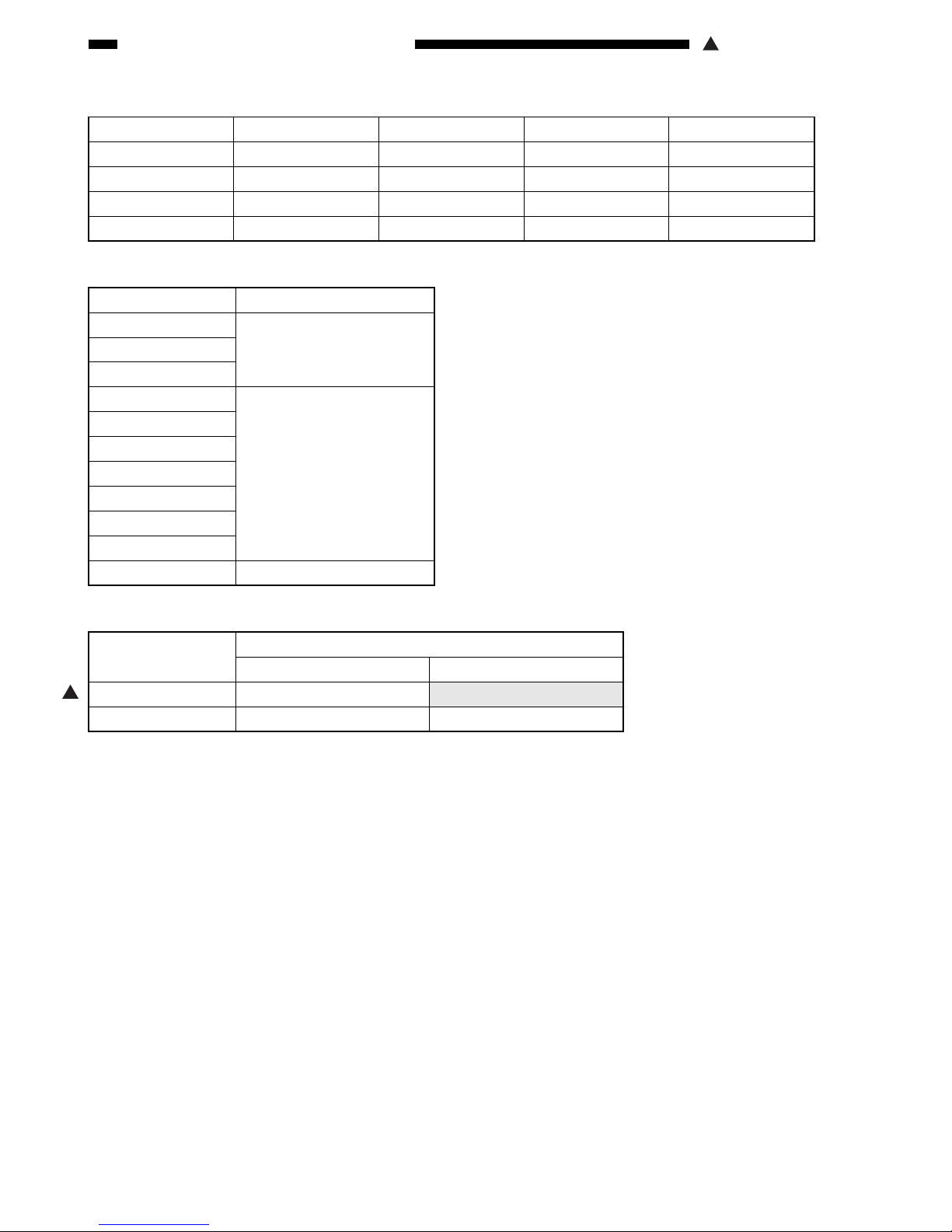
(Staple sheet capacity)
(Sheet capacity of stack trays)
*1. This mode is selected by key operator program
*2. N is a number of sheets stacked at tray 2
NOTE: 180 degrees image rotation should be needed for staple mode. So all of the mode (including staple
mode) executes 180 degrees image rotation.
– Offset Staple Punch Saddle stitch
Offset – ✕❍✕
Staple ✕ – ❍✕
Punch ❍❍ – ✕
Saddle stitch ✕✕✕–
Size Capacity
B5
50 sheetsA4
Letter
Letter-R
30 sheets
A4R
Legal
Foolscap
B4
A3
11 x 17
Saddle stitch 15 sheets (60 pages)
Select output mode *1
Cascade output mode Random output mode
Tray 1 2000 sheets (Max)
(2000 - N) sheets *2
Tray 2 2000 sheets 2000 sheets
1
Page 19
CHAPTER 1 GENERAL DESCRIPTION
1-11
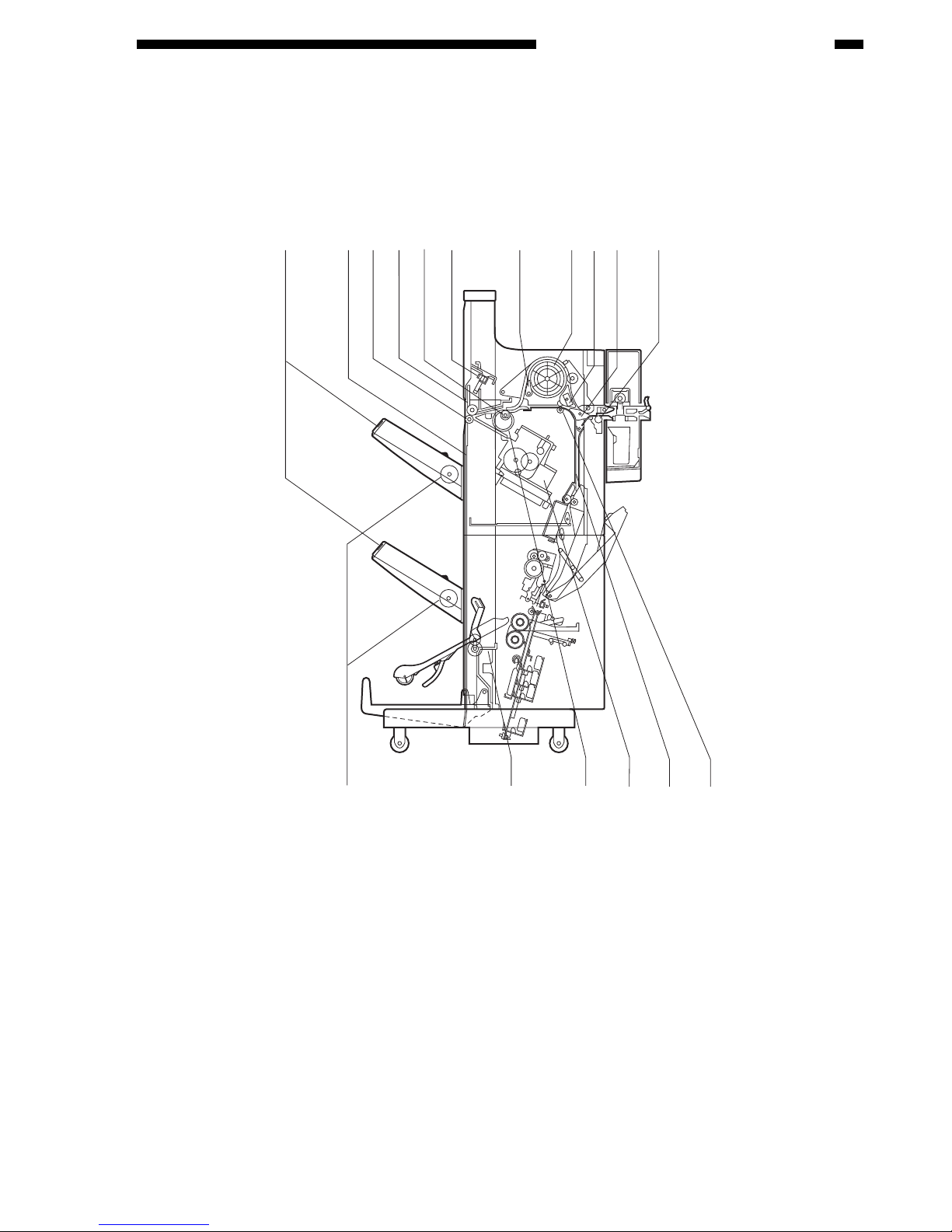
D. Cross Section
1. Finisher Unit
Figure 1-204
[1] Tray 1/2 [10] Saddle stitch flapper
[2] Shutter [11] Inlet feed roller
[3] Delivery roller [12] Feed roller 1
[4] Swing guide [13] Vertical path
[5] Feed roller 2 [14] Stapler
[6] Height sensor [15] Feed belt
[7] Wrap flapper [16] Tray lift motor
[8] Buffer roller [17] Saddle stitch unit
(saddle finisher AR-F12)
[9] Buffer inlet flapper
[15][17][16] [14] [13] [12]
[1] [2] [3] [4] [5] [6] [8]
[7] [10] [11][9]
Page 20

CHAPTER 1 GENERAL DESCRIPTION
1-12
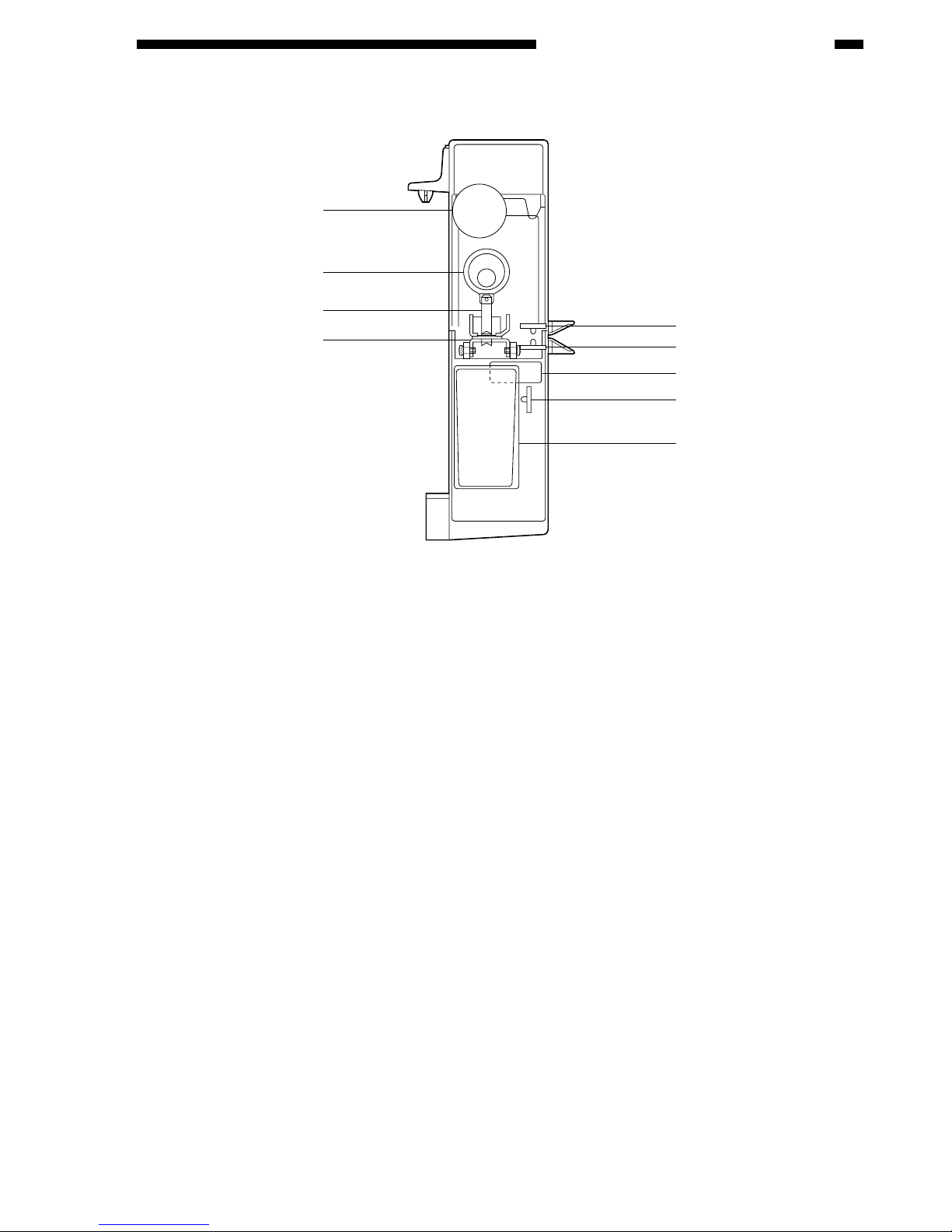
2. Saddle Stitch Unit
Figure 1-205
[1] Guide plate [7] No.1 flapper
[2] Paper folding roller [8] No. 2 flapper
[3] Delivery guide plate [9] Stitch mount
[4] Holding roller [10] Paper pushing plate
[5] Stitch (front, rear) [11] Crescent roller
[6] Inlet roller [12] Paper positioning plate
[5]
[6]
[4]
[3]
[2]
[1]
[12]
[11]
[10]
[9]
[8]
[7]
Page 21
CHAPTER 1 GENERAL DESCRIPTION
1-13
3. Puncher Unit (option)
Figure 1-206
[1] Punch motor [6] LED PCB
[2] Cam [7] Horizontal registration motor
[3] Hole puncher (Punch blade) [8] Scrap full detector PCB unit
[4] Die [9] Punched scrap container
[5] Photosensor PCB
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
Page 22
CHAPTER 1 GENERAL DESCRIPTION
1-14
III. Using the Machine
A. Removing Paper Jams
from the Finisher Unit
If the host machine indicates the finisher
paper jam message, perform the following to
remove the jam.
1) Holding the finisher unit as shown, move it to
detach it from the host machine.
Figure 1-301
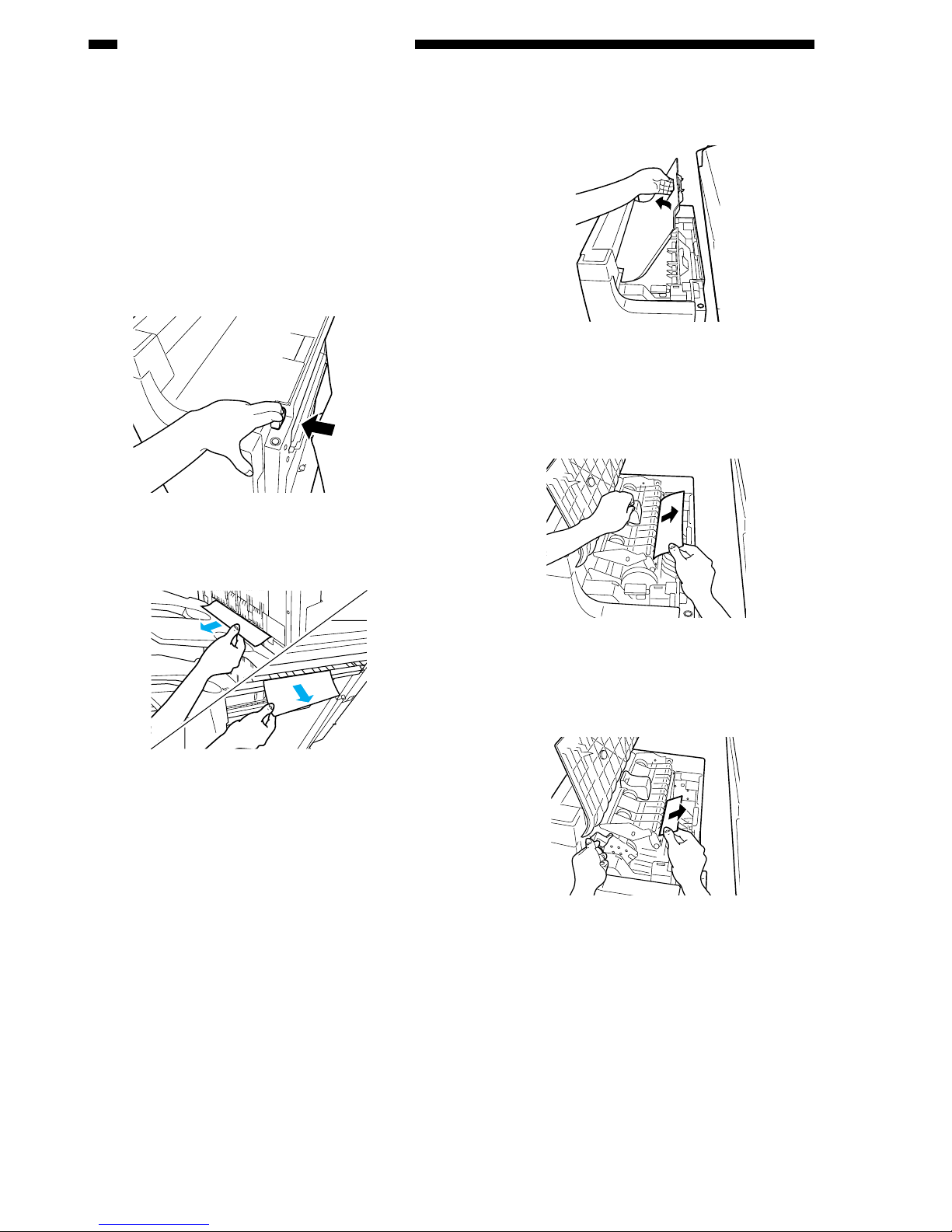
2) Remove any jam visible from the outside.
Figure 1-302
3) Open the upper cover, and check the inside of
the finisher.
Figure 1-303
4) Lift the buffer roller cover, and remove the
jam.
Figure 1-304
5) Lift the buffer roller, and remove the jam.
Figure 1-305
Page 23
CHAPTER 1 GENERAL DESCRIPTION
1-15
: Jan. 9 2004
1
6) Return the buffer roller and the buffer roller
cover to their original positions, and close the
upper cover.
Figure 1-306
7) Connect the finisher to the host machine.
Figure 1-307
8) Operate as instructed on the display.
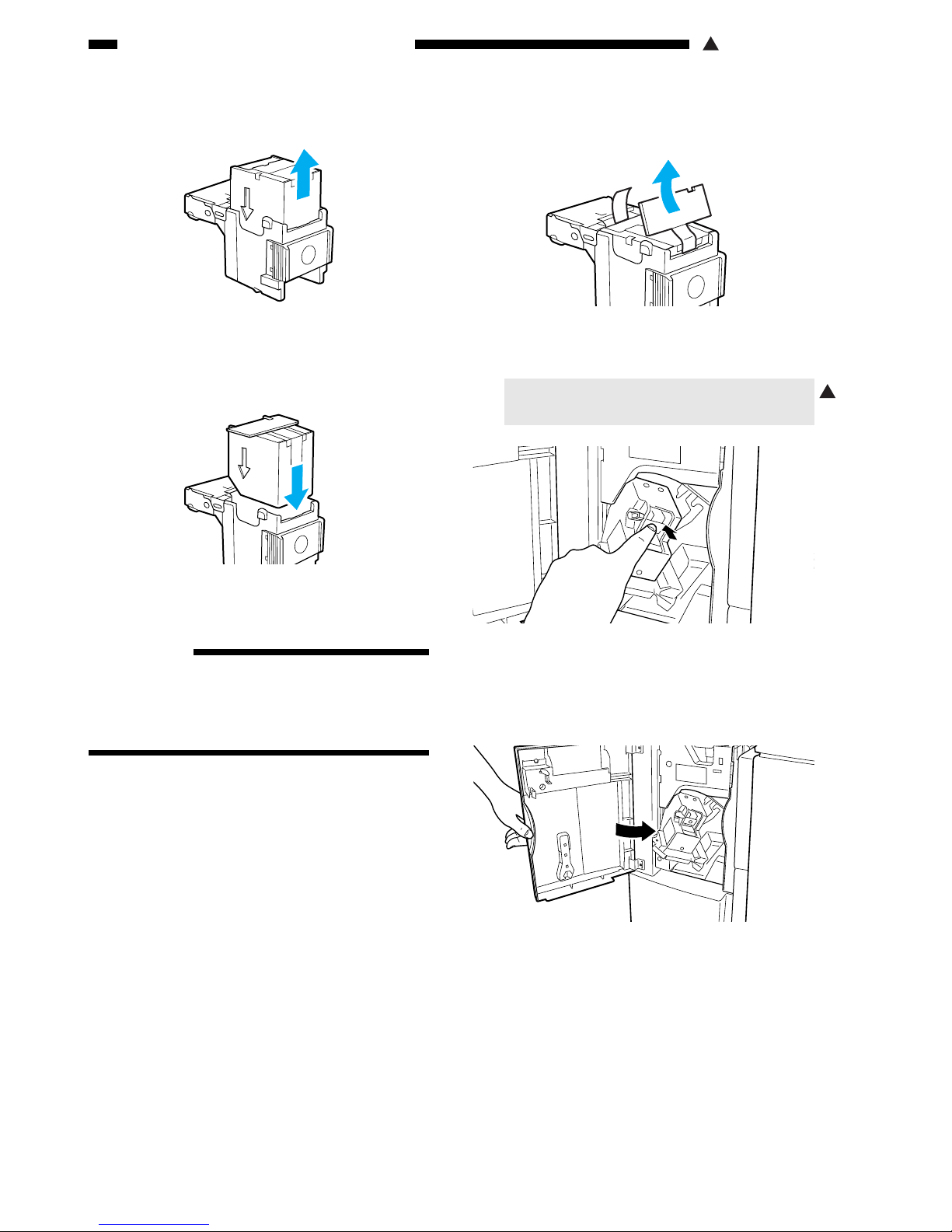
B. Supplying the Finisher
Unit with Staples
If the host machine indicates the finisher unit
staple supply message, perform the following to
supply it with staples.
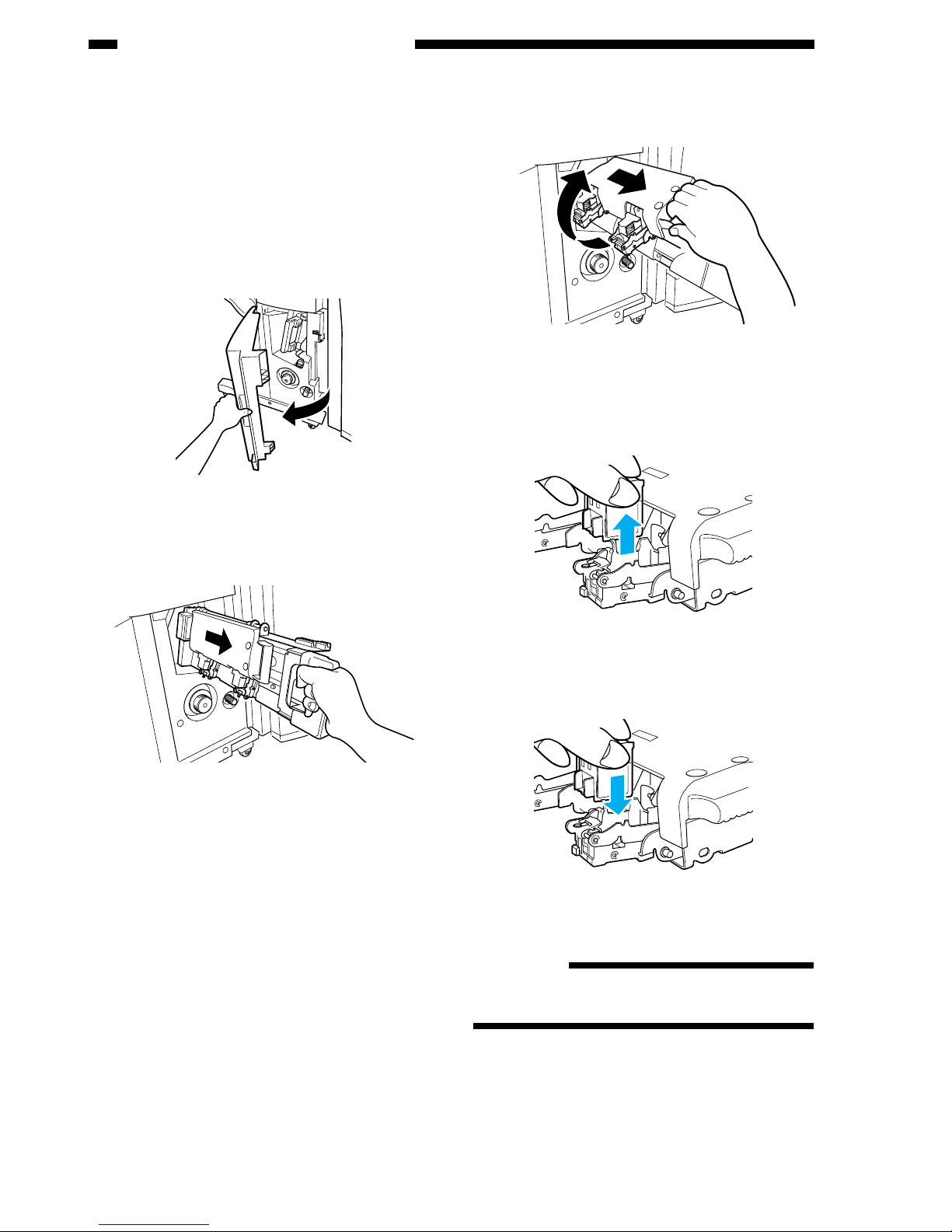
1) Open the front cover.
Figure 1-308
Figure 1-309
3) When the staple cartridge has slightly slid
out, hold and pull it out.
Figure 1-310
2) Shift down the green lever.
1
Page 24
CHAPTER 1 GENERAL DESCRIPTION
1-16
: Jan. 9 2004
1
4) Hold the empty staple case on its sides, and
slide it out.
Figure 1-311
5) Set a new staple case.
Figure 1-312
6) Pull the length of tape (used to hold the staples in place) straight out.
Figure 1-313
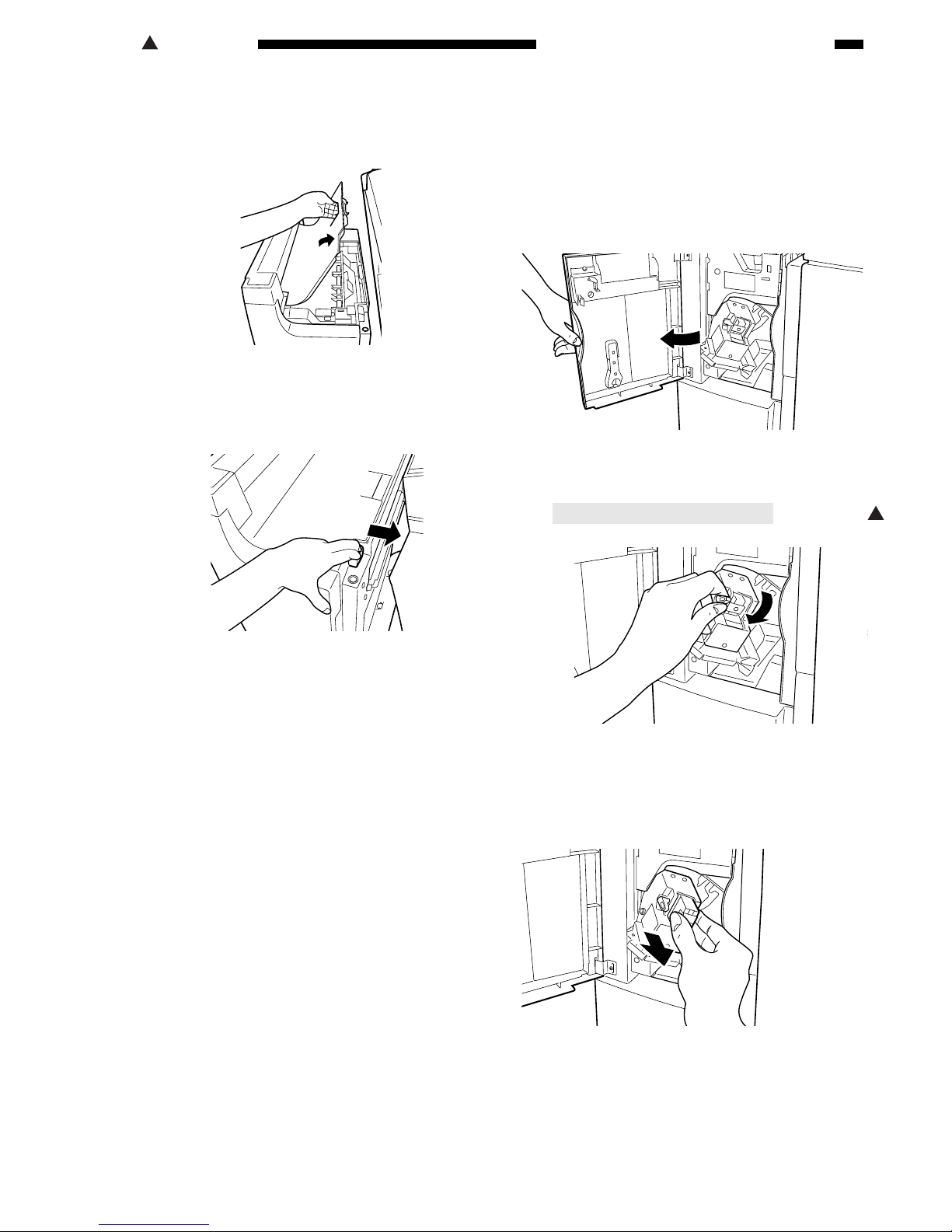
Figure 1-314
8) Check to make sure that the stapler has been
locked in place, and close the front cover.
Figure 1-315
Reference:
You may set no more than one staple cartridge at
a time.
Make sure that the new cartridge is one
specifically designed for the finisher unit.
7) Push in the stapler unit until the green lever
returns to its original position.
1
Page 25
CHAPTER 1 GENERAL DESCRIPTION
1-17
: Jan. 9 2004
1
C. Removing Staple Jams
from the Finisher Unit
If the host machine indicates the finisher unit
staple jam message, perform the following to
remove the jam.
1) Remove the stack waiting to be stapled from
the delivery tray.
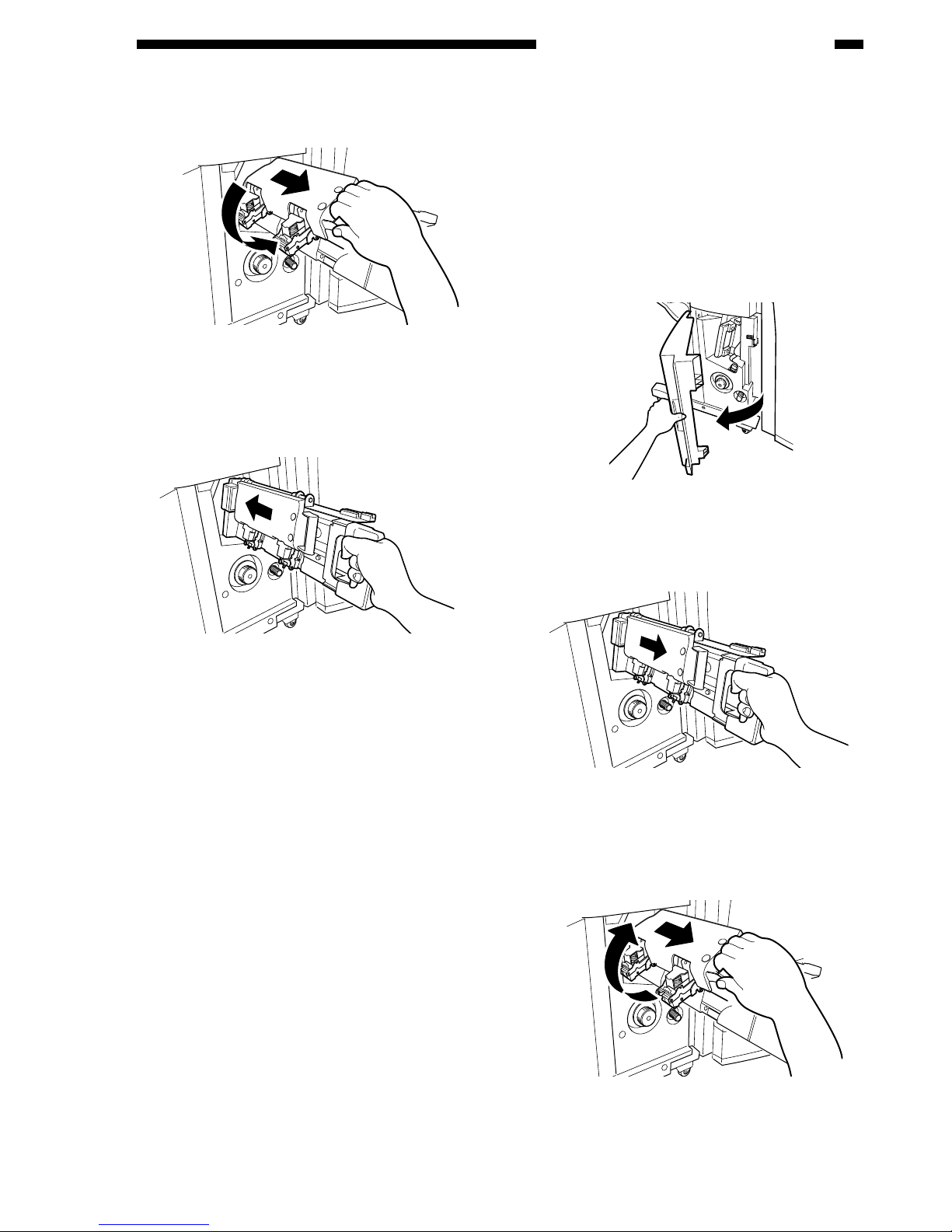
Figure 1-316
2) Open the front cover.
Figure 1-317
Figure 1-318
4) When the staple cartridge has slightly slid
out, hold and pull it out.
Figure 1-319
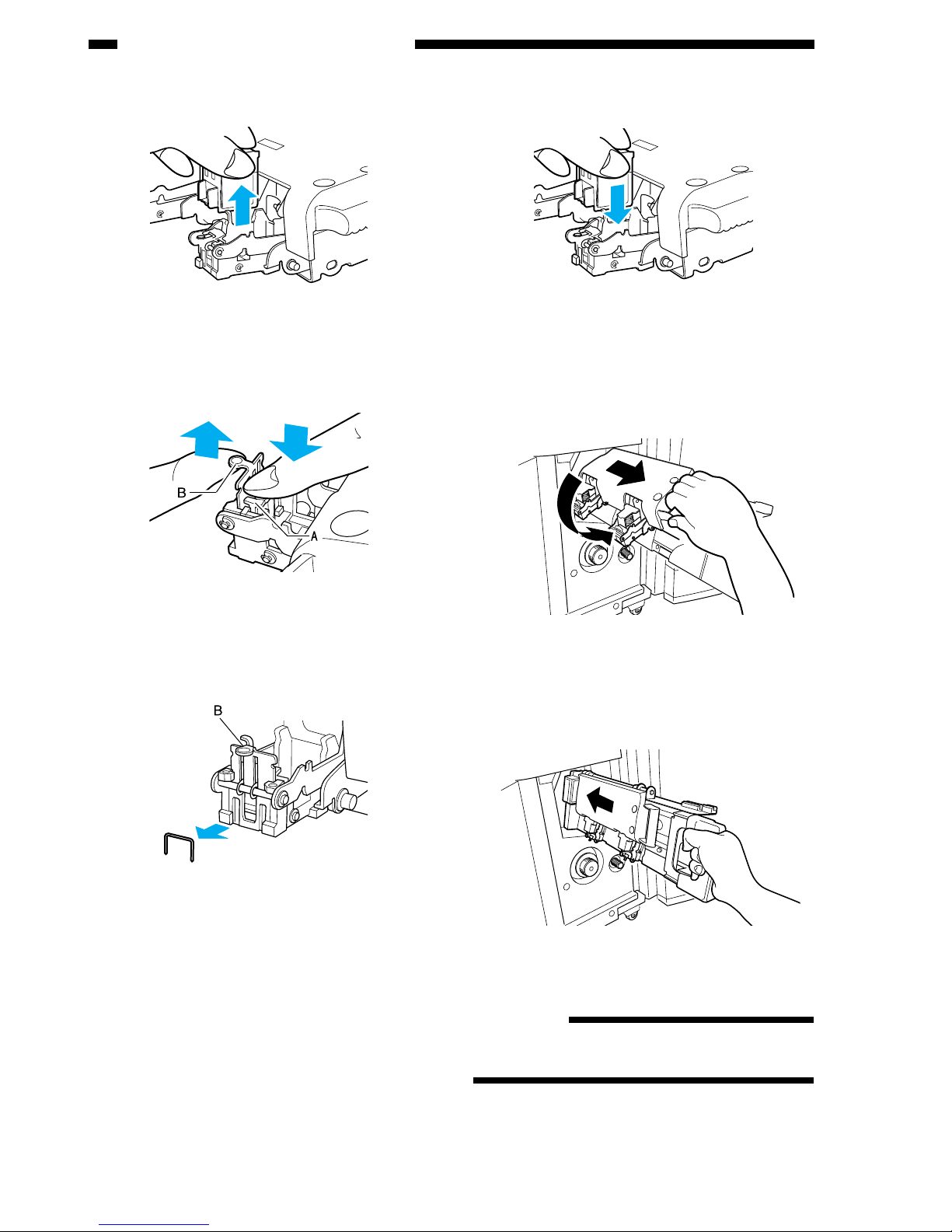
5) Shift down the tab on the staple cartridge.
Figure 1-320
6) Remove all staples that have slid out of the
staple case.
Figure 1-321
3) Shift down the green lever.
1
Page 26
CHAPTER 1 GENERAL DESCRIPTION
1-18
7) Return the tab on the staple cartridge to its
original position.
8) Return the staple cartridge to its original
position, and close the front cover.
Figure 1-322
D. Removing Paper Jams
from the Saddle Stitch
Unit (Saddle Finisher)
If the host machine indicates the saddle stitch
unit paper jam message, perform the following to
remove the jam.
1) Holding the saddle stitch unit as shown,
move it to detach it from the host machine.
Figure 1-323
2) Open the front lower cover.
Figure 1-324
Reference
When the cover has been closed, the stapler unit
will automatically execute idle punching several
times to advance the staples.
Page 27
CHAPTER 1 GENERAL DESCRIPTION
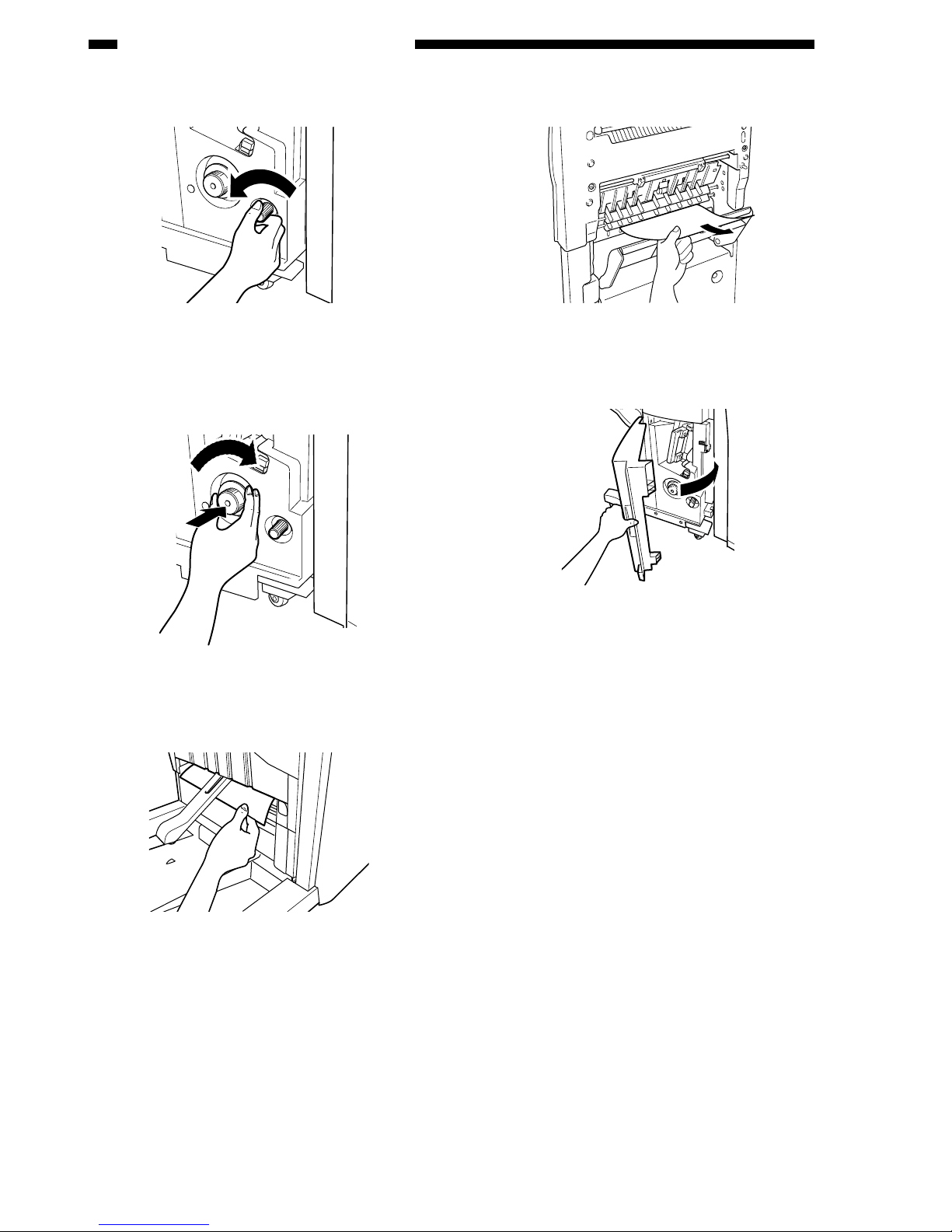
1-19
3) Turn the knob on the left side.
Figure 1-325
4) Turn the knob on the right side while pushing
it in.
Figure 1-326
5) Remove the jam.
Figure 1-327
6) Open the inlet cover, and remove the jam.
Figure 1-328
7) Close the front lower cover.
Figure 1-329
8) Connect the finisher unit.
9) Operate as instructed on the display.
Page 28
CHAPTER 1 GENERAL DESCRIPTION
1-20
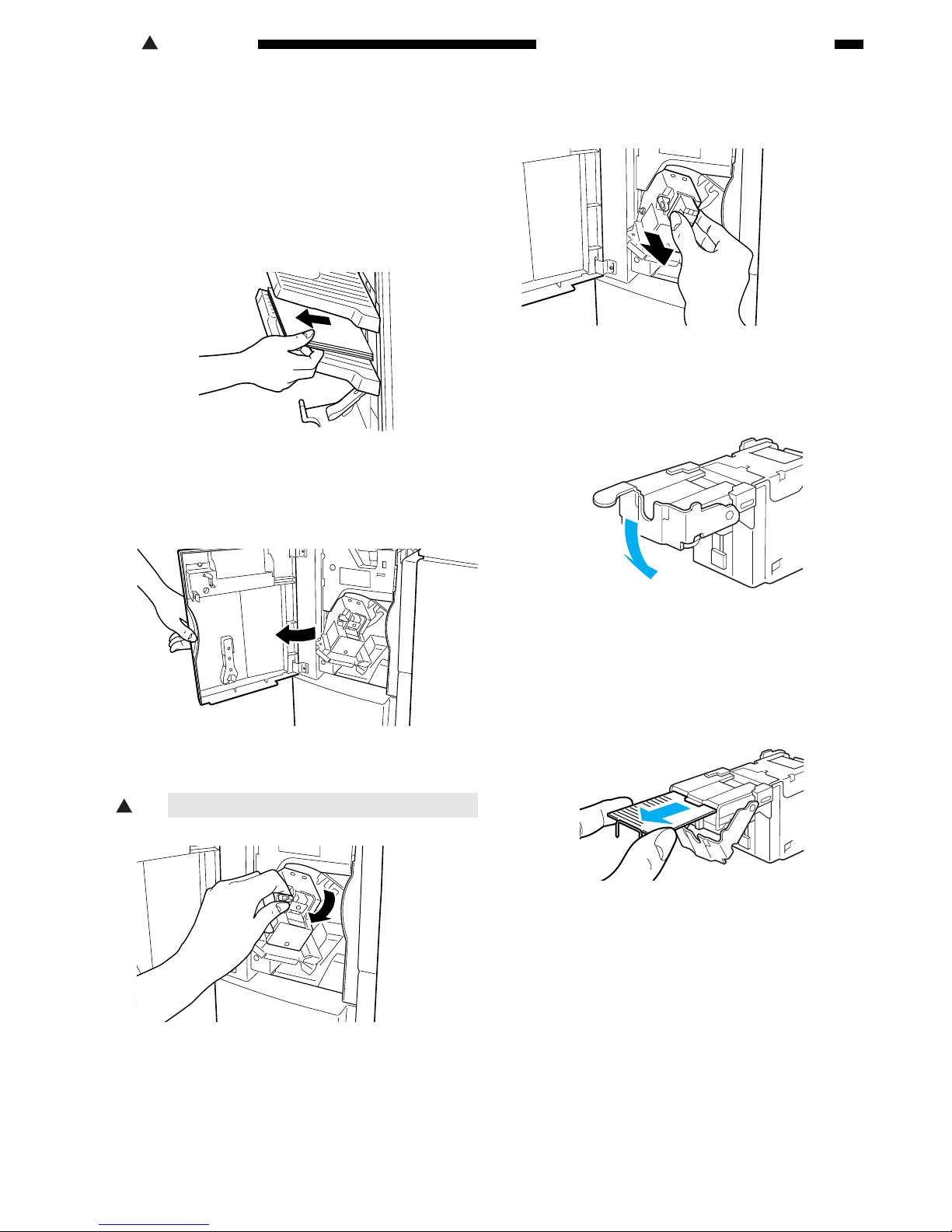
E. Supplying the Saddle
Stitch Unit with Staples
(Saddle Finisher)
If the host machine indicates the saddle stitch
unit staple supply message, perform the following
to supply it with staples.
1) Open the front lower cover.
Figure 1-330
2) Slide out the stitch unit.
Figure 1-331
3) Pull the stitch unit to the front once, and then
shift it up.
Figure 1-332
4) Hold the empty cartridge on its sides, and
remove it.
Figure 1-333
5) Set a new cartridge.
Figure 1-334
Reference
You must always replace both cartridges at the
same time.
Page 29
CHAPTER 1 GENERAL DESCRIPTION
1-21
6) Pull the stitch to the front once, and then
return it to its original position.
Figure 1-335
7) Push in the stitch unit, and close the front
cover.
Figure 1-336
F. Removing Staple Jams
from the Saddle Stitch
Unit (Saddle Finisher)
If the host machine indicates the saddle stitch
unit staple jam message, perform the following to
remove the jam.
1) Open the front lower cover.
Figure 1-337
2) Slide out the stitch unit.
Figure 1-338
3) Pull the stapler of the stitch unit to the front
once, and then shift it up.
Figure 1-339
Page 30
CHAPTER 1 GENERAL DESCRIPTION
1-22
4) Hold the cartridge on its sides, and remove it.
Figure 1-340
5) Push down on the area identified as A, and
pull up the tab identified as B.
Figure 1-341
6) Remove the staple jam, and return the tab B
to its original position.
Figure 1-342
7) Return the cartridge to its original position.
Figure 1-343
8) Pull the stitch of the stitch unit to the front
once, and then return it to its original position.
Figure 1-344
9) Push the stitch unit back to its original position, and close the front lower cover.
Figure 1-345
Reference
Whenever you have removed a staple jam, be sure
to execute staple edging.
Page 31

CHAPTER 1 GENERAL DESCRIPTION
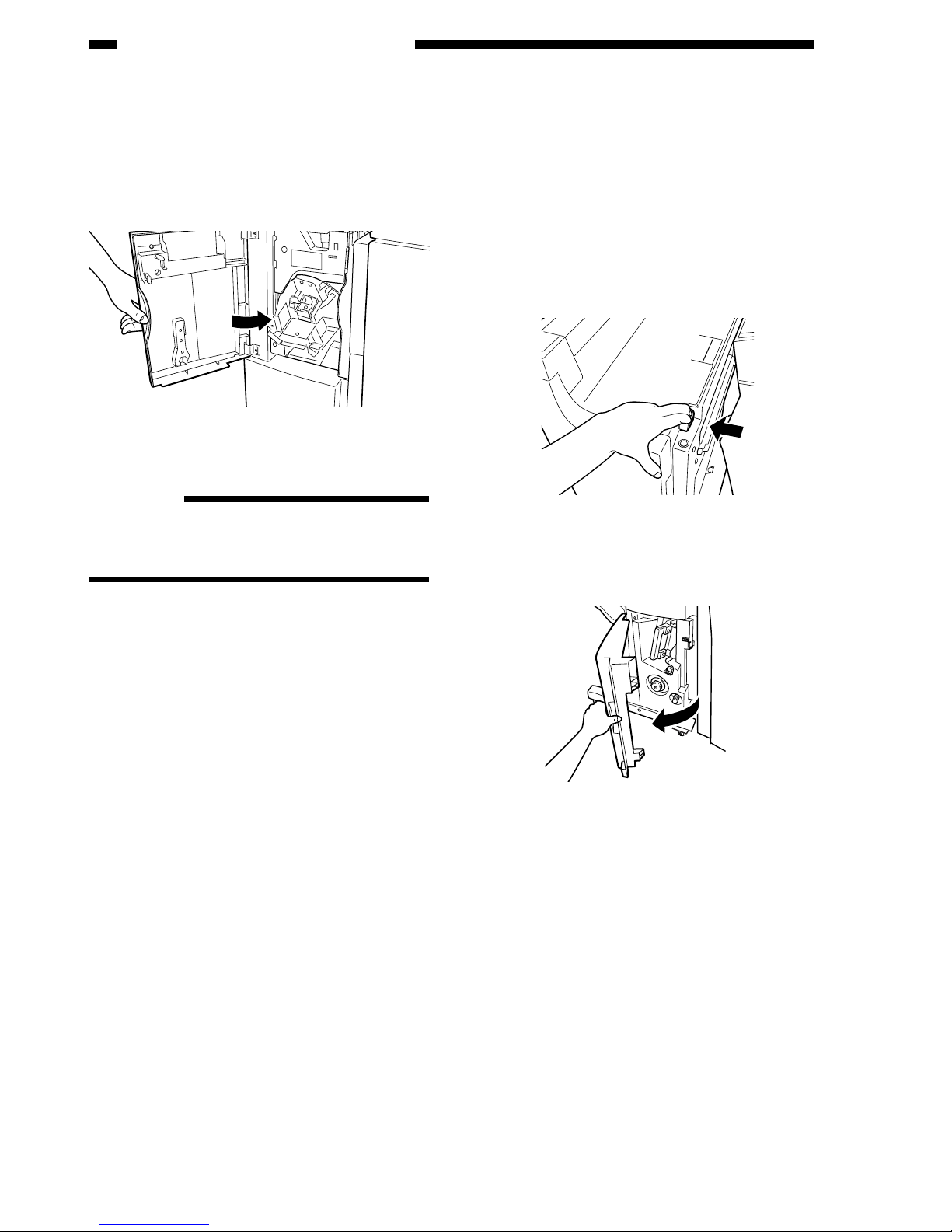
1-23
G. Removing Paper Jams
from the Puncher Unit
(option)
If the display indicates a paper jam on the
puncher unit, perform the following to remove the
jam:
1) Open the front cover of the puncher unit.
Figure 1-346
2) Align the triangle mark on the knob within
the range marked by .
Figure 1-347
3) Close the front cover of the puncher unit.
Figure 1-348
4) Holding the finisher unit as shown, move it to
detach it from the most machine.
Figure 1-349
5) Remove any jam visible from the outside.
Figure 1-350
6) Open the upper cover, and check the inside of
the finisher.
Figure 1-351
7) Lift the buffer roller cover, and remove the
jam.
Figure 1-352
Page 32

CHAPTER 1 GENERAL DESCRIPTION
1-24
8) Return the buffer roller and the buffer roller
cover to their original position, and close the
upper cover.
Figure 1-353
9) Connect the finisher to the host machine.
Figure 1-354
10) Operate as instructed on the display.
Page 33

CHAPTER 1 GENERAL DESCRIPTION
1-25
H. Removing Punched Scrap
from the Puncher Unit
(option)
If the display indicates a punched scrap full
state on the puncher unit, perform the following to
remove the punched scrap:
1) Open the front cover of the puncher unit.
Figure 1-355
2) Slide out the punched scrap container.
Figure 1-356
3) Discard the punched scrap.
Figure 1-357
4) Return the punched scrap container to its
original position.
Figure 1-358
Page 34

CHAPTER 1 GENERAL DESCRIPTION
1-26
IV. MAINTENANCE BY THE USER
A. Maintenance by the User
Table 1-401
No. Item Timing
1 Replacing the staple cartridge (finisher unit) When the appropriate indication is made on
the host machine’s display.
2
Replacing the staple cartridge (saddle stitch
unit)
Caution:
The finisher unit and the saddle stitch unit use different cartridge types. Be sure that the appropriate
type is used for each.
Page 35

CHAPTER 2
FINISHER UNIT BASIC OPERATION
I. BASIC OPERATION ....................2-1
A. Outline ....................................... 2-1
B. Outline of Electrical Circuitry...... 2-2
C. Inputs to and Outputs from the
Finisher Controller PCB .............2-4
II. FEED/DRIVE SYSTEM .............2-10
A. Outline ..................................... 2-10
B. Type of Delivery Paths .............2-15
C. Feeding and Delivering ............2-18
D. Job Offset ................................2-21
E. Staple Operation ......................2-24
F. Stapler Unit ..............................2-32
G. Tray Operation ..........................2-38
H. Detecting the Height of
Stack on the Tray......................2-40
I. Shutter Operation ....................2-42
J. Buffer Path Operation ..............2-46
K. Detecting Jams ........................2-51
III. POWER SUPPLY SYSTEM.......2-56
1. This chapter discusses the purpose and role of each of the finisher’s functions, and the principles of operation used for the finisher mechanical and electrical systems. It also explains the
timing at which these systems are operated. The symbol in drawings indicates transmission of mechanical drive, and signals marked by together with the signal name indicates
the flow of electrical signals.
2. In descriptions of digital circuits on the finisher, “1” indicates a high signal voltage level, while
“0” indicates a low signal voltage level. Voltage values differ according to circuit.
A microprocessor is used on the finisher. A description of microprocessor operation is omitted
in this chapter as it is practically impossible to check internal operation of the microprocessor.
Descriptions in this chapter also assume that PCBs will not be repaired at user sites. For this
reason, descriptions of circuits on PCBs is limited to block diagrams. Two types of block diagrams are provided for separate functions: diagrams indicating details from sensors up to input
sections of major PCBs, and diagrams indicating details from the output sections of major
PCBs up the loads.
Page 36

Page 37

2-1
CHAPTER 2 FINISHER UNIT BASIC OPERATION
I. BASIC OPERATION
A. Outline
The finisher is designed to deliver copies arriving from its host machine, and its modes of
delivery include simple stacking, job offset
(Note)
, and staple.
All operations involved in these modes are controlled by the finisher controller PCB, according
to the appropriate commands from the host machine.
In the case of the Saddle Finisher, copies from the host machine may be routed to the saddle
stitch unit.
Swing guide drive system
Alignment drive system
Stapler drive system
Delivery drive system
Feeder drive system
Shutter drive system
Tray drive system
Tray drive system
Saddle stitch unit control system
(Saddle Finisher)
Control system
Figure 2-101
Note:
The term job offset refers to shifting each sorting job, separating a single
stack into several stacks.
Page 38

2-2
CHAPTER 2 FINISHER UNIT BASIC OPERATION
B. Outline of Electrical Circuitry
The finisher’s sequence of operation is controlled by the finisher controller PCB. The finisher
controller PCB is a 16-bit microprocessor (CPU), and is used for communication with the host
machine (serial) in addition to controlling the finisher’s sequence of operations.
The finisher controller PCB responds to the various commands coming from the host machine
through a serial communications line to drive solenoids, motors, and other loads. In addition, it
communicates the finisher’s various states (information on sensors and switches) to the host machine through a serial communications circuit.
In the case of the Saddle Finisher, the finisher controller PCB not only communicates with the
saddle stitch controller PCB but also communicates the saddle stitch unit’s various states (informa-
tion on sensors and switches) to the host machine.
The ICs used on the finisher controller PCB are designed for the following:
●
IC1 (CPU)
Controls sequence of operations.
●
IC2 (EP-ROM)
Backs up adjustment values.
●
IC3
Contains sequence programs.
●
IC6/IC7 (RAM)
Backs up initial setting data.
●
IC4 (communications IC)
Communicates with the host machine and the saddle stitch unit.
●
IC9 (regulator IC)
Generates PWM.
Figure 2-102 shows the flow of signals between the finisher and the options controller.
Page 39

2-3
CHAPTER 2 FINISHER UNIT BASIC OPERATION
IC1
CPU
IC2
EEP-ROM
IC4
IC
IC3
EP-ROM
IC6/IC7
RAM
IC9
Saddle stitch
controller PCB
(Saddle Finisher)
Punch driver PCB
(Puncher unit (option))
Host machine
(DC controller PCB CPU)
Finisher controller
PCB communication
Regulator IC
Connecting with inserter
Motor
Solenoid
Switch
Sensor
IC1
CPU
IC2
EEP-ROM
IC4
IC
IC3
EP-ROM
IC6/IC7
RAM
IC9
Saddle stitch
controller PCB
(Saddle Finisher)
Punch driver PCB
(Puncher unit (option))
Inserter
driver PCB
(Inserter unit
(option)
)
Host machine
(DC controller PCB CPU)
Finisher controller
PCB communication
Regulator IC
Motor
Solenoid
Switch
Sensor
Figure 2-102
Page 40

2-4
CHAPTER 2 FINISHER UNIT BASIC OPERATION
C. Inputs to and Outputs from the Finisher Controller PCB
1. Inputs to the Finisher Controller PCB
Figure 2-103
Page 41

2-5
CHAPTER 2 FINISHER UNIT BASIC OPERATION
2. Inputs to the Finisher Controller PCB
Figure 2-104
Page 42

2-6
CHAPTER 2 FINISHER UNIT BASIC OPERATION
3. Inputs to the Finisher Controller PCB
Figure 2-105
Page 43

2-7
CHAPTER 2 FINISHER UNIT BASIC OPERATION
1
: Jan. 9 2004
4. Inputs to and Outputs from the Finisher Controller PCB
+24V
1
1
JS1-1
-2
-3
-4
-8
-9
-10
-5
J2-5
-7
-8
-3
-4
-9
Communication line
Figure 2-106
Page 44

2-8
CHAPTER 2 FINISHER UNIT BASIC OPERATION
5. Outputs from the Finisher Controller PCB
Figure 2-107
Page 45

2-9
CHAPTER 2 FINISHER UNIT BASIC OPERATION
6. Outputs from the Finisher Controller PCB
Stapler shift motor
Staple motor
Tray 1 lift motor
Tray 2 lift motor
Swing motor
Second feed motor
Inlet feed motor
Finisher controller PCB
According to rotation
direction/speed, changes
between + and - in sequence.
According to rotation
direction/speed, changes
between + and -.
According to rotation
direction/speed, changes
between + and -.
According to rotation
direction/speed, changes
between + and -.
According to rotation
direction/speed, changes
between + and -.
According to rotation
direction/speed, changes
between + and - in sequence.
According to rotation
direction/speed, changes
between + and -.
J115-1
-2
-1
-2
Figure 2-108
Page 46

2-10
CHAPTER 2 FINISHER UNIT BASIC OPERATION
II. FEED/DRIVE SYSTEM
A. Outline
The finisher is designed to operate according to the commands from its host machine to deliver
arriving copies to trays in the appropriate mode: simple stacking, job offset, stapling.
See Figure 2-201 for a diagram of the three modes of delivery (four for the Saddle Finisher).
Method of delivery
Normal
delivery
Simple stacking
Job offset
Staple
Front diagonal
Rear 1-point
Rear diagonal
2-point
Saddle stitch delivery (Saddle Finisher only)
Figure 2-201
Normal delivery tray
Normal delivery tray
To saddle stitch unit
(Saddle Finisher)
Figure 2-202
Page 47

2-11
CHAPTER 2 FINISHER UNIT BASIC OPERATION
1. Normal Delivery
a. Simple Stacking
The finisher delivers copies directly to the tray.
Tray Tray
CopiesCopies
Delivery roller
Feed roller 2
Feed roller 1
Figure 2-203
Page 48

2-12
CHAPTER 2 FINISHER UNIT BASIC OPERATION
b. Job Offset
The finisher forwards all copies of each sort job to the stapling tray. The first sort job on the
stapling tray is delivered with a shift to the front of about 30 mm, and the second sort job is delivered without being shifted. Whether the first copy or the last copy of a sort job should be shifted is
determined by the host machine.
Tray
Each sort job is stacked
alternately.
Figure 2-204
Swing guide
Stapling tray
Delivery roller
Stopper
Feed roller 1
Figure 2-205
Results of Delivering 4 Sets
Direction of delivery
Copies handled
by job offset
Figure 2-206
Page 49

2-13
CHAPTER 2 FINISHER UNIT BASIC OPERATION
c. Stapling
The finisher stacks copies arriving from its host machine on the stapling tray. Then, it staples
and delivers the copies to the appropriate tray.
Tray
Copies
Staple
Swing guide
Delivery roller
Stapling
tray
Stopper
Feed roller 1
Figure 2-207
Front diagonal stapling
Rear diagonal stapling
2-point stapling
Paper width/2
Rear 1-point stapling
Figure 2-208
Page 50

2-14
CHAPTER 2 FINISHER UNIT BASIC OPERATION
2. Saddle Stitch Delivery (Saddle Finisher)
A copy arriving in the finisher from the host machine is routed to the saddle stitch by the paper
deflecting plate. The saddle stitch executes stitching and saddling operations on the copy and then
delivers it to the saddle stitch tray.
For discussions of stacks in the saddle stitch, see Chapter 3.
To saddle stitch
Figure 2-209
Page 51

2-15
CHAPTER 2 FINISHER UNIT BASIC OPERATION
B. Type of Delivery Paths
The finisher has three different paper paths for delivery, each selected to suit paper size and
delivery mode.
1. Straight Path
When stacking copies shown in Table 2-201, the copies pass under the buffer roller.
Copy size The paper length is less than 182mm, or the paper width is less than
182mm, or the paper length is 251mm or more.
Typical copy examples
A3, A3-wide, B4, A4-R, B5-R, A5-R, LD, LG, LT-R, ST-R, Postcard, thick paper
Table 2-201
Delivery roller
Buffer roller
Figure 2-210
2. Buffer Paper Path 1
When stacking copies shown in Table 2-202, the copies pass over the buffer roller, increasing
the distance between copies.
Copy size The paper length is 182mm or more, and the paper width is 182mm or
more, and the paper length is 250mm or less.
Typical copy examples A4, B5, LT (excluding thick paper)
Table 2-202
Buffer roller
Feed roller 2
Delivery roller
Figure 2-211
F15/F16
F15/F16
Page 52

2-16
CHAPTER 2 FINISHER UNIT BASIC OPERATION
3. Buffer Paper Path 2
This is the paper path when copy sizes shown in Table 2-203 are stacked. A maximum of three
copies (three originals or more in the staple mode) are wrapped round the buffer roller, during
which job offset and stapling are performed on the stapling tray.
Copy size Length 182 to 232mm, and width 182 to 297mm
Typical copy examples A4, B5, LT, (excluding transparencies and thick stock)
Table 2-203
The following shows paper delivery operation in the case of three originals in the staple mode.
1) The first copy is moved in the direction of the buffer roller.
Buffer roller
First copy
Figure 2-212
2) The first copy wraps around the buffer roller and, at the same time, the second copy arrives
from the host machine.
First copy
Second copy
Figure 2-213
Page 53

2-17
CHAPTER 2 FINISHER UNIT BASIC OPERATION
3) The second copy is laid over the first copy and, at the same time, the third copy arrives from the
host machine.
First copy
Second copy
Third copy
Figure 2-214
4) The first, second and third copies are simultaneously pulled into the stapling tray.
Second copy
Third copy
First copy
Figure 2-215
Cauiton:
The third copy as explained here is moved through buffer paper path 1. This fact is omitted from the
discussion to avoid interrupting the sequence of operations.
Page 54

2-18
CHAPTER 2 FINISHER UNIT BASIC OPERATION
C. Feeding and Delivering
1. Outline
The finisher moves copies arriving from the host machine to the delivery tray, stapling tray, or
the saddle stitch unit (Saddle Finisher) according to the mode of delivery. On the stapling tray, the
copies are subjected to job offset or stapling as instructed by the host machine.
The first feed motor (M1), second feed motor (M8) and inlet feed motor (M9) are stepping
motors, and delivery motor (M2) is a DC motor. These motors are controlled by the microprocessor
(CPU) on the finisher controller PCB, and rotate either clockwise or counterclockwise.
The paper paths are equipped with the following four sensors for detection of paper (arrival,
passage):
●
Inlet sensor (PI1)
●
Delivery sensor (PI3)
●
Stapling tray sensor (PI4)
●
Buffer path paper sensor (PI14)
In addition, each delivery tray is equipped with a sensor designed to detect the presence/absence of paper on it.
●
No.1 tray paper sensor (PI11)
●
No.2 tray paper sensor (PI12)
If a copy fails to reach or move past each sensor within a specific period of time, the finisher
controller PCB identifies the condition as a jam, and stops the ongoing operation, and at the same
time, informs the host machine of the condition. When all doors are closed after the paper jam is
removed, the buffer path inlet paper sensor (PI17) checks whether or not copies are being detected
in addition to the above four sensors (inlet sensor, delivery sensor, stapling tray sensor and buffer
path paper sensor). If the sensors detect a copy, the finisher unit judges that paper jams have not
completely been removed, and sends the paper jam removal signal to the host machine again.
Page 55

2-19
CHAPTER 2 FINISHER UNIT BASIC OPERATION
SL3
SL2
SL1
SL7
M6
M2
M7
PI20
SL6
M4
PI10
PI24
PI23
PI9
PI19
M1M8 M9
M3
SL5
M5
M
10
Escape solenoid drive signal ESCPSL
Tray 2 lift motor drive signal
Shift motor clock signal 1 SFTCLK 21
Shift motor clock signal 2 SFTCLK 22
Alignment motor drive signal
Delivery motor drive signal
Delivery motor clock signal DELCLK
Swing motor drive signal
Swing motor clock signal SWGCLK
Shift motor clock detection signal 1 SFTCLK11
Shift motor clock detection signal 2 SFTCLK12
Paddle solenoid drive signal PDLSL
Second feed motor drive signal
First feed motor drive signal
Inlet feed motor drive signal
Buffer outlet solenoid drive signal EXITSL
Buffer inlet solenoid drive signal EXTSL
Flapper solenoid drive signal FLPSL
Belt escape solenoid drive signal BESCPSL
Stapler motor drive signal
Stapler shift motor drive signal
Finisher controller PCB
Tray 1 lift motor drive signal
Figure 2-216
Page 56

2-20
CHAPTER 2 FINISHER UNIT BASIC OPERATION
PI1
PI14
PI17
PI4
PI3
PI11
PI12
No. 2 tray paper detection signal SNDTRAY
No. 1 tray paper detection signal FSTTRAY
Stapling tray paper detection signal STPTY
Buffer path paper
detection signal BUFPASS
Delivery detection signal PDEL
Buffer path inlet paper
detection signal BUFENTR
Inlet paper detection signal PENT
Finisher controller PCB
Figure 2-217
Page 57

2-21
CHAPTER 2 FINISHER UNIT BASIC OPERATION
D. Job Offset
1. Outline
In the job offset mode, sort jobs and entire copy groups are shifted to the front for delivery to
the tray, and other copies are delivered to the tray without a shift.
The copies are shifted by the alignment plate. The alignment plate is checked by the alignment
plate home position sensor (PI6) to find out whether it is at the home position.
The finisher controller PCB drives the alignment motor (M3) at power-on to return the align-
ment plate to its home position.
The finisher controller PCB stops the delivery motor (M2) when the trailing edge of the copy
has moved past the feed roller 2. Then, the finisher controller PCB rotates the delivery motor counterclockwise, and drives the swing motor (M7). As a result, the drive of the delivery motor is transmitted to the swing guide to move up the guide. When the swing guide open sensor (PI18) detects
the swing guide, the delivery motor stops, and the swing guide is held at the up position.
When the swing guide has moved up, the feed belts attached to the feed roller 2 move the copy
to the stapling tray. The presence of paper on the stapling tray is monitored by the stapling tray
sensor (PI4). (The first sheet is fed to the stapling tray while the swing guide is moving up.)
The finisher controller PCB drives the alignment motor (M3) in advance, and keeps the alignment plate in wait at a point 10 mm behind the trailing edge of a sheet. Whenever one sheet is
moved to the stapling tray, each sheet is aligned, and when the 3rd or last sheet in a sort job/group
is fed to the stapling tray, the escape solenoid (SL6) moves the guide plate away and under the
stapling tray. From then on, the alignment motor shifts the sheets to the front by 30 mm.
When the copy has been shifted, the finisher controller PCB rotates the alignment motor counterclockwise to move the alignment plate to a point 10 mm behind the trailing edge of the sheet.
This alignment operation is repeated until alignment of the 3rd or last sheet in a sort job is completed. At this time, the swing guide is moved down and is closed, and the delivery motor rotates
clockwise to deliver the sheet.
F15/F16
F15/F16
Page 58

2-22
CHAPTER 2 FINISHER UNIT BASIC OPERATION
Guide plate
Escape solenoid
(SL6)
Paper
Alignment plate
Alignment plate
home position sensor (PI6)
Alignment motor (M3)
Figure 2-218
Sequence of Operation (job offset)
Delivery motor (M2)
First feed motor (M1)
Inlet sensor (PI1)
Start signal
Host machine delivery signal
Delivery sensor (PI3)
Staple tray sensor (PI4)
Second feed motor (M8)
Alignment motor (M3)
Alignment plate home
position sensor (PI6)
Swing guide open
sensor (PI18)
Swing guide closed
detecting switch 1 (MS2)
Swing motor (M7)
Inlet feed motor (M9)
Escape solenoid (SL6)
: Motor CW rotation : Motor CCW rotation
Figure 2-219
Page 59

2-23
CHAPTER 2 FINISHER UNIT BASIC OPERATION
2. Flow of Job Offset Operations
1) The swing guide moves up and, at the same time, the feed belts move the sheet to the stapling
tray.
Offset sheet
Swing guide
Tray 1/2
Delivery
roller
Stapling tray
Feed roller 2
Knurled belts
Stopper
Figure 2-220
2) The alignment plate shifts the sheet to the front.
Existing stack
Alignment plate
Offset sheet
Figure 2-221
3) The swing guide moves down and, at the same time, the delivery roller delivers the sheet.
Offset sheet
Swing guide
Feed roller 2
Knurled belts
Tray 1/2
Delivery
roller
Stapling tray
Stopper
Figure 2-222
Page 60

2-24
CHAPTER 2 FINISHER UNIT BASIC OPERATION
E. Staple Operation
1. Outline
The stapler unit staples a stack of as many sheets as specified.
The stapling position differs according to the selected staple mode and paper size.
The stapler unit is checked by the stapler shift home position sensor (PI7) to find out whether it
is at the home position.
When starting operation after power-on, the finisher controller PCB drives the stapler shift
motor (M4) to return the stapler unit to the home position. If the stapler is already at the home
position, it is kept as it is in wait.
Sheets
Stapler shift home
position sensor (PI7)
Stapler shift
motor (M4)
Stapler
Figure 2-223
Page 61

2-25
CHAPTER 2 FINISHER UNIT BASIC OPERATION
Front diagonal stapling
2-point stapling
Paper width/2
Rear diagonal stapling
Rear 1-point stapling
Figure 2-224
Page 62

2-26
CHAPTER 2 FINISHER UNIT BASIC OPERATION
2. First Sheet
The finisher controller PCB stops the delivery motor (M2) as soon as the trailing edge of the
first sheet has moved past the feed roller 2. Then, it rotates the delivery motor clockwise to switch
the gear drive to the swing motor (M7), causing the swing guide to move up. When the swing guide
open sensor (PI18) finds the swing guide at the up position, the swing motor stops, maintaining the
swing guide at the up position.
When the swing guide has moved up, the knurled belts of the feed roller 2 move the sheet to the
stapling tray. (The first sheet is fed to the stapling tray while the swing guide is moving up.) The
presence of paper on the stapling tray is detected by the stapling tray sensor (PI4).
The finisher controller PCB drives the alignment motor (M3) when the stapling tray paper
sensor has detected paper to put sheets in order. The alignment plate is kept in wait in advance at a
point 10 mm behind the trailing edge of the paper.
The swing guide is kept in wait at the up position until the last sheet is output onto the stapling
tray.
Swing guide
First sheet
Tray 1/2
Delivery roller
Stapling tray
Feed roller 2
Knurled belts
Stapler
Figure 2-225
Page 63

2-27
CHAPTER 2 FINISHER UNIT BASIC OPERATION
Swing guide
Swing guide open
sensor (PI18)
Swing guide closed
detecting switch 1,2
(MS2/MS6)
Delivery roller
Swing motor
clock sensor
(PI20)
Delivery motor
clock sensor
(PI10)
Delivery motor (M2)
Swing motor (M7)
Figure 2-226
Page 64

2-28
CHAPTER 2 FINISHER UNIT BASIC OPERATION
3. Second and Subsequent Sheets
The finisher controller PCB turns on the belt escape solenoid (SL7) before the trailing edge of
the second and subsequent sheets have moved past the feed roller 2 to make the knurled belt escape.
This operation is performed to reduce the time it takes for the trailing edge of the paper to fall on the
stapling tray, and to improve the product duty. The finisher controller PCB turns on the paddle
solenoid (SL5) as soon as the trailing edge of the second and subsequent sheets have moved past the
feed roller 2, causing the drive of the second feed motor (M8) to rotate the paddle. The sheets are
pushed by the paddle and moved to the stapling tray. Almost simultaneously with the trailing edge
of the sheet falling into the stapling tray, the belt escape solenoid turns off to return the knurled belts
that were in the escape position to its original position, and feed the sheet onto the stapling tray.
When the sheet has been output onto the stapling tray, the finisher controller PCB rotates the alignment motor (M3) to put the sheets in order.
SL7
Swing guide
Second and
subsequent
sheets
Paddles
Feed roller 2
Knurled belts
Belt escape solenoid
Tray 1/2
Delivery
roller
Stapling tray
Stapler
Figure 2-227
Page 65

2-29
CHAPTER 2 FINISHER UNIT BASIC OPERATION
Knurled belts
Escape direction
Belt escape
solenoid (SL7)
Figure 2-228
M8
Paddles
Paddles
Paddle
solenoid (SL5)
Second and
subsequent sheets
First sheet
Stapler
Stopper
Second feed motor
Figure 2-229
Page 66

2-30
CHAPTER 2 FINISHER UNIT BASIC OPERATION
4. Last Sheet
When the last sheet has been put in order, the finisher controller PCB turns on the alignment
motor (M3) to move the alignment plate to the alignment position (to butt the plate against the
stack). Then, the finisher controller PCB rotates the swing motor (M7) counterclockwise to move
down the swing guide.
The finisher controller PCB moves the stapler according to the staple mode for stapling.
From then on, it rotates the delivery motor (M2) clockwise to deliver the stack to the tray.
Swing guide
Sheets
Tray 1/2
Delivery
roller
Stapling tray
Feed roller 2
Knurled belts
Stapler
Figure 2-230
Page 67

2-31
CHAPTER 2 FINISHER UNIT BASIC OPERATION
Swing guide
Swing motor (M7)
Delivery motor (M2)
Delivery roller
Figure 2-231
Page 68

2-32
CHAPTER 2 FINISHER UNIT BASIC OPERATION
F. Stapler Unit
Stapling is executed by the staple motor (M6). A single rotation of the cam by the motor results
in one stapling operation.
The cam is checked by the staple home position sensor (PI22) to find out whether it is at the
home position.
The stapler motor is controlled by the microprocessor (IC1) on the finisher controller so that it
is rotated clockwise or counterclockwise.
When the stapling home position sensor is off, the finisher controller PCB rotates the stapler
motor clockwise until the sensor turns on so as to return the stapling cam to its initial state.
The presence/absence of the staple cartridge is detected by the staple switch (MS8). The presence/absence of staples inside the staple cartridge is detected by the staple detecting switch (MS9).
The staple edge sensor (PI21) is used to find out whether a staple has been edged out to the end of
the cartridge.
The finisher controller PCB does not drive the staple motor (M6) unless the swing guide closed
detecting switch 2 (MS6) is on (i.e., the swing guide is closed). This is to protect against injuries
that could occur when a finger is stuck inside the stapler.
Page 69

2-33
CHAPTER 2 FINISHER UNIT BASIC OPERATION
Figure 2-232
Staple edge detection signal
Staple motor drive
signal
Stapling home
position detection signal
Cartridge detection signal
Staple detection signal
Finisher controller PCB
M6
Figure 2-233
Page 70

2-34
CHAPTER 2 FINISHER UNIT BASIC OPERATION
Start signal
Host machine delivery signal
First sheet
Stacking
Second sheet
Stapling
Delivery
Delivery motor (M2)
First feed motor (M1)
Inlet feed motor (M9)
Second feed motor (M8)
Inlet sensor (PI1)
Delivery sensor (PI3)
Alignment motor (M3)
Alignment guide home
position sensor (PI6)
Swing guide open
sensor (PI18)
Stapling tray sensor (PI4)
Swing guide closed
detecting switch 1 (MS2)
Paddle solenoid (SL5)
Stapler shift motor (M4)
Staple motor (M6)
Belt escape solenoid
(SL7)
Staple home position
sensor (PI22)
: Motor CW rotation : Motor CCW rotation
Figure 2-234
Page 71

2-35
CHAPTER 2 FINISHER UNIT BASIC OPERATION
5. Shifting the Stapler Unit
The stapler unit is moved by the stapler shift motor (M4). Its home position is detected by the
stapler shift home position sensor (PI7). When the start signal arrives from the host machine, the
stapler moves to the center of its movement range. This movement occurs regardless of the selected
mode of delivery, as no specific mode is recognized at this point in time. When the command for
stapling arrives from the host machine after the first sheet has reached the host machine pre-registration sensor, the stapler moves to the staple wait position to suit the appropriate stapling position
and paper size.
See Figures 2-235 and later for an idea of the wait position according to the stapling mode.
a. Front Diagonal Stapling
The position is the same as the stapling position.
Stapling tray delivery
direction
Stopper
Stopper
Guide plate
Stapler
Figure 2-235
Page 72

2-36
CHAPTER 2 FINISHER UNIT BASIC OPERATION
b. Rear 1-Point Stapling
The stapler is kept in wait at the center position. The stapler is moved to and from the stapling
position for each stapling operation.
Stopper
Stapling position
Wait position
Stapler
Stopper
Guide plate
Stapling tray delivery
direction
Figure 2-236
c. Rear Diagonal Stapling
For A4, LT and B5 sizes, the stapler is kept in wait toward the rear away from the stapling
position. The stapler is moved to and from the stapling position for each stapling operation.
Stapler
Wait position
Stapling position
Stopper
Stopper
Guide plate
Stapling tray delivery
direction
Figure 2-237
Page 73

2-37
CHAPTER 2 FINISHER UNIT BASIC OPERATION
d. 2-Point Stapling
The stapler is kept in wait at the center of the paper. Stapling occurs at two points, first at the
rear and then at the front.
Stapling tray delivery
direction
Stopper
Stapling position
Wait position
Stapler
Stapling position
Stopper
Guide plate
Figure 2-238
Page 74

2-38
CHAPTER 2 FINISHER UNIT BASIC OPERATION
G. Tray Operation
The finisher has two delivery trays-upper tray 1 and lower tray 2. The upper and lower trays
move up and down independently.
Tray 1 is moved up and down by the tray 1 lift motor (M5), and tray 2 by the tray 2 lift motor
(M10).
The tray 1 position is detected by counting the clock pulses of tray 1 lift motor clock sensors 1
and 2 (PI9 and PI19) in relation to the tray 1 home position sensor (P18). The tray 2 position is
detected by counting the clock pulses of tray 2 lift motor clock sensors 1 and 2 (PI23 and PI24) in
relation to the tray 2 home position sensor (PI25).
When the tray is already at the home position, it is moved away from the home position once,
then returned to that position.
When both tray 1 and tray 2 are at the home position, the above operation is performed for tray
1 and tray 2 in this order.
The finisher controller PCB moves up and down the tray selected by the host machine so that it
is positioned at the delivery slot.
The upper limit of the tray is detected by the tray coming close detecting switch (MS9). The
finisher controller PCB stops the drive (up) of the tray 1 lift motor (M5) as soon as the tray upper
limit detecting switch turns on.
The height of the stack on the tray is identified by the height sensor (PS1), which measures its
distance from the top of the stack. The tray is moved down when the distance between the top of the
stack and the delivery assembly drops to a specific measurement.
The finisher controller PCB cuts off the +24V power of the tray 1 lift motor (M5) as soon as the
safety zone switch (MS3) turns on while the shutter and the swing guide are open, stopping the
operation of the finisher.
Page 75

2-39
CHAPTER 2 FINISHER UNIT BASIC OPERATION
Tray 1 lift
motor clock
sensor / and 2
Tray 1 lift
motor
Tray coming close
detection switch
Rack
One way
gear
Tray 2 lift motor
clock sensor / and 2
Tray 2 lift
motor
One way
gear
Figure 2-239
Page 76

2-40
CHAPTER 2 FINISHER UNIT BASIC OPERATION
1
: Jan. 9 2004
H. Detecting the Height of Stack on the Tray
1. Outline
The number of sheets delivered to the tray and the number of sets (number of stapling operations) are stored in memory by the finisher controller PCB. The height of the stack is checked by the
height sensor (PS1). See Table 2-204 for the maximum loading capacity of each tray.
The finisher controller PCB stops operation when the conditions in Table 2-204 occur, informing the host machine that the tray is full.
Stacking
mode
Height
Small-size
250 mm high
(equivalent to
2,000 sheets)
Large-size
140 mm high
(equivalent to
1000 sheets)
Small-size
110 mm high
(equivalent to
750 sheets/
100 sets)
Non-staple sort Staple sort
Mixed sizes
74 mm high
(equivalent to
500 sheets)
Large-size
74 mm high
(equivalent to
500 sheets/
100 sets)
Mixed sizes
22 mm high
(equivalent to
500 sheets/
100 sets)
Notes: 1. The capacity for the non-staple sort mode is approximate and computed based on 80 g/m2 paper.
2. Alignment for stacks containing 750 sheets or more is not guaranteed.
3. Stacking height precision is ±7 mm.
4. OHP and OHP mixed load: 100 sheets
Caution:
1. The term “small-size” stands for A4, LT, B5 and 16K.
2. The term “large-size” stands for A3, A4-R, B4, LG, LD, LT-R, Foolscap and 8K.
Table 2-204
F15/F16
1
1
Page 77

2-41
CHAPTER 2 FINISHER UNIT BASIC OPERATION
Height sensor (PS1)
Paper
Figure 2-240
Page 78

2-42
CHAPTER 2 FINISHER UNIT BASIC OPERATION
I. Shutter Operation
When the tray 1 passes the delivery slot, the finisher controller PCB closes the shutter mounted
on the delivery slot before moving the tray, preventing the existing stack on the tray by the delivery
slot and intrusion of the hands.
The shutter moves up (to close) when the second feed motor (M8) rotates counterclockwise,
and is held in position when the motor stops. When the second feed motor rotates counterclockwise
once again, it moves down (to open) to enable delivery.
When the shutter is held at the up position, claws slide out of the swing guide to engage the
back of the shutter. This way, the existing slack and the swing guide engage while the tray is moved,
preventing the guide from opening. The claws slide in when the shutter is moved down to release
the engagement.
The upward movement of the shutter is monitored by the shutter closed detecting switch (MS4),
and the downward movement is monitored by the shutter open sensor (PI5).
See the following diagrams for how these operations take place.
1) The second feed motor rotates counterclockwise to move the shutter up.
M8
Second feed motor
Figure 2-241
Page 79

2-43
CHAPTER 2 FINISHER UNIT BASIC OPERATION
2) The tray 1,2 lift motor rotates, and the new tray moves to the stacking lower limit. The distance
of movement is detected by the tray 1 lift motor clock sensor 1/2 (PI9/19) or tray 2 lift motor
clock sensor 1/2 (PI22/PI24).
Tray 2 lift motor
M1 0
M5
Tray 1 lift motor
Figure 2-242
3) The second feed motor rotates counterclockwise, and the shutter moves down.
M8
Second feed motor
Figure 2-243
Page 80

2-44
CHAPTER 2 FINISHER UNIT BASIC OPERATION
4) The tray lift motor rotates, and the tray moves to suit the height of the stack. The appropriate
height in relation to the existing stack is checked by the height sensor (PS1).
Tray 2 lift motor
Height sensor (PS1)
M10
Figure 2-244
M8
Claw
Shutter closed
detecting
switch (MS4)
Shutter open
sensor (PI5)
Shutter
Claw
One-way cam
Second feed motor
Figure 2-245
Page 81

2-45
CHAPTER 2 FINISHER UNIT BASIC OPERATION
Sequence Operations (shutter drive)
Move from Tray 1 to Tray 2
Second feed motor (M8)
Shutter
closed
Tray moved
Shutter
opened
Tray 1 lift motor (M5)
Tray 2 lift motor (M10)
Shutter closed detecting
switch (MS4)
Shutter open
sensor (PI5)
Height sensor (PS1)
Correct height detected
Motor CW rotation Motor CCW rotation
Figure 2-246
Page 82

2-46
CHAPTER 2 FINISHER UNIT BASIC OPERATION
J. Buffer Path Operation
1. Outline
This machine is provided with a buffer paper path for continuously receiving paper from the
host machine during stapling and job offset operation on the stapling tray. A maximum of three
copies (three originals or more in the staple mode) are wrapped around the buffer roller. During this
time, job offset and stapling are performed on the stapling tray.
The following shows operation on the buffer paper path.
1) When the first sheet arrives, the buffer inlet solenoid (SL2) remains off. The first sheet enters
the buffer path.
OFF
SL2
First sheet
Buffer inlet solenoid
Figure 2-247
2) When the leading edge of the sheet has moved past the buffer path inlet paper sensor (PI17), the
buffer outlet solenoid (SL3) turns on so as to cause the sheet to wrap around the buffer roller.
ON
SL3
Buffer outlet
solenoid
Buffer path inlet paper
sensor (PI17)
Figure 2-248
Page 83

2-47
CHAPTER 2 FINISHER UNIT BASIC OPERATION
3) When the leading edge of the sheet has moved past the buffer path paper sensor (PI14), the
buffer roller stops and waits for the second sheet.
First sheet
Second sheet
Buffer path paper
sensor (PI14)
Figure 2-249
4) When the second sheet arrives and its leading edge reaches the inlet sensor (PI1), the buffer
roller starts to operate once again.
Second sheet
Inlet sensor (PI1)
First sheet
Figure 2-250
Page 84

2-48
CHAPTER 2 FINISHER UNIT BASIC OPERATION
5) The buffer roller continues to rotate, and the second sheet overlaps the first sheet.
First sheet
Second sheet
Figure 2-251
6) When the trailing edge of the second sheet has moved past the buffer path paper sensor (PI14),
the buffer roller stops and waits for the third sheet.
First sheet
Second sheet
Third sheet
Buffer path paper
sensor (PI14)
Figure 2-252
Page 85

2-49
CHAPTER 2 FINISHER UNIT BASIC OPERATION
7) When the third sheet arrives and its leading edge reaches the inlet sensor (PI1), the buffer roller
starts to operate once again.
First sheet
Second sheet
Third sheet
Inlet sensor (PI1)
Figure 2-253
8) When the leading edge of the third sheet reaches the inlet sensor (PI1), the buffer outlet solenoid (SL3) turns off so that the path is directed in the direction of delivery. (The actual switchover will occur after the trailing edge of the first sheet has moved past the flapper.)
OFF
SL3
Buffer outlet
solenoid
First sheet
Second sheet
Third sheet
Inlet sensor (PI1)
Figure 2-254
Page 86

2-50
CHAPTER 2 FINISHER UNIT BASIC OPERATION
9) The buffer roller continues to rotate, the third sheet overlaps the first and second sheets, and the
three sheets are fed together towards the delivery roller.
Figure 2-255
Page 87

2-51
CHAPTER 2 FINISHER UNIT BASIC OPERATION
K. Detecting Jams
The following sensors are used to detect the presence/absence of paper and to make sure that
sheets are moved properly:
●
Inlet sensor (PI1)
●
Delivery sensor (PI3)
●
Stapling tray sensor (PI4)
●
Buffer path paper sensor (PI14)
A jam is identified with reference to the presence/absence of paper at each specific sensor at the
times programmed in the memory of the microprocessor (CPU) on the finisher controller PCB.
When the CPU identifies a jam, it suspends the finisher’s delivery operation and informs the
host machine DC controller of the presence of a jam. After the paper jam is removed, the buffer path
inlet paper sensor (PI17) checks whether or not copies are being detected in addition to the above
four sensors (inlet sensor, delivery sensor, stapling tray sensor and buffer path paper sensor). If the
sensors detect a copy when all doors are closed, the finisher unit judges that paper jams have not
completely been removed, and sends the paper jam removal signal to the host machine again.
The tray 1 paper sensor (PI11) and tray 2 paper sensor (PI12) are not used to detect jams.
PI1
PI14
PI4
PI3
Figure 2-256 Table 2-205
No. Sensor names
PI1 Inlet sensor
PI3 Delivery sensor
PI4 Stapling tray sensor
PI14 Buffer path paper sensor
Page 88

2-52
CHAPTER 2 FINISHER UNIT BASIC OPERATION
1. Inlet Sensor Delay Jam
The inlet sensor does not detect paper when feeding an equivalent of 400 mm from when the
host machine delivery signal has been issued.
Host machine delivery signal Host machine delivery signal
Jam check
Equivalent of 400 mm
Inlet sensor (PI1)
Normal
Inlet feed motor (M9)
Jam check
Inlet sensor (PI1)
Inlet feed motor (M9)
Jam
Equivalent of 400 mm
Figure 2-257
2. Inlet Sensor Stationary Jam
The sheet does not move past the inlet sensor when an equivalent of twice the feeding length of
the sheet has been fed after the sensor turned on.
Jam check
Equivalent of size x 2
Inlet sensor (PI1)
Normal
Inlet feed motor (M9)
Jam check
Equivalent of size x 2
Inlet sensor (PI1)
Jam
Inlet feed motor (M9)
Figure 2-258
3. Buffer Path Paper Sensor Delay Jam
The buffer path paper sensor does not detect paper when an equivalent of 550 mm has been fed
after the inlet sensor turned on.
Jam check
Equivalent of 550 mmEquivalent of 550 mm
Inlet sensor (PI1)
Buffer path paper
sensor (PI14)
Normal
First feed motor (M1)
Jam check
Inlet sensor (PI1)
Buffer path paper
sensor (PI14)
First feed motor (M1)
Jam
Figure 2-259
F15/F16
Page 89

2-53
CHAPTER 2 FINISHER UNIT BASIC OPERATION
4. Buffer Path Paper Sensor Stationary Jam
The sheet does not move past the buffer path paper sensor when an equivalent of twice the
feeding length of the sheet has been fed after the sensor turned on.
Jam check
Equivalent of size x 2
Buffer path paper
sensor (PI14)
Normal
First feed motor (M1)
Jam check
Equivalent of size x 2
Buffer path paper
sensor (PI14)
Jam
First feed motor (M1)
Figure 2-260
5. Delivery Sensor Delay Jam
a. Straight Path
The delivery sensor does not detect paper when an equivalent of 363 mm has been fed after the
inlet sensor turned on.
Jam check
Inlet sensor (PI1)
Normal
Delivery sensor (PI3)
First feed motor (M1)
Second feed motor
(M8)
Jam check
Inlet sensor (PI1)
Delivery sensor (PI3)
First feed motor (M1)
Second feed motor
(M8)
Jam
Equivalent of 363 mm Equivalent of 363 mm
Figure 2-261
F15/F16
F15/F16
F15/F16
Page 90

2-54
CHAPTER 2 FINISHER UNIT BASIC OPERATION
b. Buffer Path
The delivery sensor does not detect paper when an equivalent of 652 mm has been fed after the
inlet sensor turned on.
Jam check
Inlet sensor (PI1)
Normal
Delivery sensor (PI3)
First feed motor (M1)
Second feed motor
(M8)
Jam check
Inlet sensor (PI1)
Delivery sensor (PI3)
First feed motor (M1)
Second feed motor
(M8)
Jam
Equivalent of 652 mm Equivalent of 652 mm
Figure 2-262
6. Delivery Sensor Stationary Jam
The sheet does not move past the delivery sensor when an equivalent of twice the feeding
length of the sheet has been fed after the delivery sensor turned on.
Jam check
Equivalent of size x 2 Equivalent of size x 2
Delivery sensor (PI3)
Normal
Second feed motor
(M8)
Delivery motor (M2)
Jam check
Delivery sensor (PI3)
Second feed motor
(M8)
Delivery motor (M2)
Jam
Figure 2-263
F15/F16
F15/F16
Page 91

2-55
CHAPTER 2 FINISHER UNIT BASIC OPERATION
7. Stapling Tray Sensor Stationary Jam
The sheet does not move past the stapling tray sensor 1 sec after the delivery motor (M2) turned
on.
Jam check
1 sec 1 sec
Stapling tray
sensor (PI4)
Normal
Delivery motor (M2)
Jam check
Stapling tray
sensor (PI4)
Delivery motor (M2)
Jam
Figure 2-264
8. Staple Jam
When the staple motor (M6) is rotating clockwise, the staple home position sensor (PI22) does
not turn on within 0.5 sec. after it has turned off. However, the sensor turns on within 0.5 sec. after
the motor has been rotated counterclockwise.
9. Power-On Jam
One of the inlet sensor (PI1), delivery sensor (PI3), buffer path paper sensor (PI4) or buffer path
inlet paper sensor (PI17) detects paper at power-on.
10. Door Open Jam
One of the joint sensor (PI15), door open sensor (PI16) or door switches (MS1) detects the
cover open during operation (including front door switch (MS2P) when the optional puncher unit is
mounted).
11. Punch Jam
The punch home sensor (PI3P) does not turn on again within 200 msec after turning off.
F15/F16
Page 92

2-56
CHAPTER 2 FINISHER UNIT BASIC OPERATION
III. POWER SUPPLY SYSTEM
1. Outline
The finisher controller PCB is supplied with 24 VDC power when the host machine is turned
on. Power is also supplied from the finisher controller PCB to the saddle stitch controller PCB. In
addition, power is also supplied to the punch driver PCB when the optional puncher unit is mounted.
Some of the 24 VDC power used to drive motors is cut off when the door switch (MS1) is open.
The power to the saddle stitch controller PCB, however, will not be cut off.
Figure 2-301 is a block diagram showing the power supply system.
Power source
Figure 2-301
2. Protection Functions
The 24 VDC power line used to drive motors and solenoids is equipped with a circuit breaker
(CB1) for protection against overcurrent. The 24 V line used to drive the first feed motor (M1),
alignment motor (M3), and stapler shift motor (M4) are equipped with a fuse, which is designed to
blow when an overcurrent occurs.
F15/F16
F15/F16
Page 93

CHAPTER 3
SADDLE STITCH UNIT
BASIC OPERATION
I. BASIC OPERATION ....................3-1
A. Outline ....................................... 3-1
B. Electrical Circuitry ......................3-2
C. Inputs to and Outputs from the
Saddle Stitch Controller PCB.....3-3
II. FEEDING/DRIVE SYSTEM .........3-8
A. Outline ....................................... 3-8
III. PAPER OUTPUT
MECHANISM.............................3-14
A. Outline ..................................... 3-14
B. Controlling the Inlet
Flappers ...................................3-17
C. Controlling the Movement of
Sheets...................................... 3-21
D. Aligning the Sheets..................3-23
E. Controlling the Phase of the
Crescent Roller ........................3-26
IV. STITCHING SYSTEM ............... 3-28
V. FOLDING/DELIVERY
SYSTEM....................................3-31
VI. CHECKING FOR A JAM ...........3-38
VII. POWER SUPPLY ......................3-43
1. This chapter discusses the purpose and role of each of the saddle stitch functions, and the
principles of operation used for the stitch mechanical and electrical systems. It also explains
the timing at which these systems are operated.
The symbol in drawings indicates transmission of mechanical drive, and signals marked
by together with the signal name indicates the flow of electrical signals.
2. In descriptions of digital circuits on the stitch, “1” indicates a high signal voltage level, while
“0” indicates a low signal voltage level. Voltage values differ according to circuit.
A microprocessor is used on the stitch. A description of microprocessor operation is omitted in
this chapter as it is practically impossible to check internal operation of the microprocessor.
Descriptions in this chapter also assume that PCBs will not be repaired at user sites. For this
reason, descriptions of circuits on PCBs is limited to block diagrams. Two types of block diagrams are provided for separate functions: diagrams indicating details from sensors up to input
sections of major PCBs, and diagrams indicating details from the output sections of major
PCBs up the loads.
Page 94

Page 95

3-1
CHAPTER 3 SADDLE STITCH UNIT BASIC OPERATION
I. BASIC OPERATION
A. Outline
The unit “stitches” (2 points) a stack of sheets delivered by the finisher unit and folds it in two
for delivery. All these operations are controlled by the saddle stitch controller PCB in response to
commands from the host machine via the finisher unit.
Finisher unit control system
Control system
Guide plate drive system
Paper positioning plate
drive system
Alignment drive system
Saddle stitch drive system
Delivery drive system
Feed drive system
Paper pushing plate
drive system
Paper folding roller
drive system
Figure 3-101
Page 96

3-2
CHAPTER 3 SADDLE STITCH UNIT BASIC OPERATION
B. Electrical Circuitry
The sequence of operations used for the saddle stitch is controlled by the saddle stitch controller PCB. The saddle stitch controller PCB has a microprocessor. This microprocessor is used to
control the sequence of operations and to handle serial communications with the finisher controller
PCB, driving solenoids and motors in response to the various commands from the finisher controller PCB.
The saddle stitch controller PCB is also used to communicate the state of various sensors and
switches to the finisher controller PCB in serial.
The functions of the major ICs mounted on the saddle stitch controller PCB are as follows:
●
Q1
Controls the sequence of operations.
●
Q2
Contains the sequence program.
●
Q3
Controls the sequence of operations.
●
Q4
Handles IPC communications.
Electrical circuitry block diagram
Sensors
Switches
Q1 CPU
Q2
ROM
Q3
RAM
Q4
Communi-
cations IC
Saddle stitch
controller PCB
Motors
Solenoids
Host machine
Finisher controller
PCB
Figure 3-102
Page 97

3-3
CHAPTER 3 SADDLE STITCH UNIT BASIC OPERATION
C. Inputs to and Outputs from the Saddle Stitch Controller PCB
1. Inputs to the Saddle Stitch Controller PCB
Paper folding
motor clock
sensor
Alignment
plate home
position sensor
Paper
positioning
plate home
position sensor
Tray paper
sensor
PI7S
J402A
J402
J502
J106-3
-1
-2
PI6S
J100-3
-1
-2
J6-7
-9
-8
J6-4
-6
-5
-3
-1
-2
-1
-3
-2
J202A
J302
J202
-6
-4
-5
-1
-3
-2
-3
-1
-2
-4
-6
-5
PI5S
J101-3
-1
-2
J11-1
-3
-2
PI4S
J102-1
-2
-3
J11-6
-5
-4
PI3S
J103-3
-1
-2
J11-7
-9
-8
-3
J303-1
-2
-1
J203-3
-2
-3
J309-1
-2
-1
J209-3
-2
PI2S
J104-3
-1
-2
J11-10
-12
-11
PI1S
J107-1
-2
-3
J11-15
Saddle stitch controller PCB
When the paper pushing plate
motor is rotating, alternately
between “1” and “0”.
+5V
LUNGECLK
When the front door is open,
“0”.
+5V
FDR
When the paper folding motor
is rotating, alternately between
“1” and “0”.
+5V
FLDCLK
When the alignment plate is
at home position, “1”.
+5V
JOGHP
When paper is present on the
tray, “1”.
+5V
TRYPAR
When the paper positioning
plate is at the home position
sensor, “1”.
+5V
PAPPOS
When the delivery cover is
open, “0”.
+5V
EJCVR
-14
-13
Paper pushing
plate motor
clock sensor
Front door
open/closed
sensor
Delivery cover
sensor
Figure 3-103
Page 98

3-4
CHAPTER 3 SADDLE STITCH UNIT BASIC OPERATION
2. Inputs to the Saddle Stitch Controller PCB
PI8S
J105-3
-1
-2
-1
-3
-2
-3
-1
-2
J6-1
+5V
When paper is present at the
paper positioning plate, “1”.
PPOSPAR
-3
-2
J301A
J225
J425
J301
J201
PI9S
J124-3
-1
-2
J10-6
+5V
When the inlet cover is
closed, “1”.
INLTCVR
-8
-7
PI11S
J525-3
-1
-2
-2
-4
-3
-3
-1
-2
J9-1
+5V
When paper is present in
the delivery sensor unit, “1”.
DELV
-3
-2
J425
J325
-2
-4
-3
-3
-1
-2
J225
J125
PI12S
J126-3
-1
-2
J9-4
+5V
When the flag of the crescent
roller is at the sensor, “1”.
FDRLHP
-6
-5
PI13S
J127-3
-1
-2
J9-7
+5V
When the guide is at home
position, “1”.
GIDHP
-9
-8
PI14S
J128-3
-1
-2
J9-10
+5V
When the paper pushing plate
is at home position, “1”.
LUNGEHP
-12
-11
PI15S
J129-3
-1
-2
J9-13
+5V
When the paper pushing plate
is at the leading edge, “1”.
LUNGETOP
-15
-14
PI16S
J131-3
-1
-2
J13-1
+5V
When the stitch unit is
housed, “0”.
STPLHP*
-3
-2
PI17S
J132-3
-1
-2
-1
-3
-2
-4
-2
-3
J13-4
+5V
When paper is present in the
vertical path, “1”.
When the paper folding roller
is at home position, “0”.
VPJM
-6
-5
J308A
J308
J208
PI21S
J130-3
-2
-1
J18-1
+5V
PAFLDHP*
-3
-2
Saddle stitch controller PCB
Paper positioning
plate paper sensor
Inlet cover sensor
Delivery sensor
Crescent roller
phase sensor
Guide home
position sensor
Paper pushing
plate home
position sensor
Paper pushing
plate top position
sensor
Stitch unit IN
sensor
Vertical path
paper sensor
Paper folding
home position
sensor
Figure 3-104
Page 99

3-5
CHAPTER 3 SADDLE STITCH UNIT BASIC OPERATION
3. Inputs to the Saddle Stitch Controller PCB
Saddle stitch controller PCB
When paper is present at
the No.1 paper sensor, “1”.
When paper is present at
the No.2 paper sensor, “1”.
When paper is present at
the No.3 paper sensor, “1”.
When the stitch unit is at
the home position for
stitching, “0”.
When no staple is present,
“0”.
When the stitcher unit is
at the home position for
stitching, “0”.
When no staple is present,
“0”.
PI18S
Paper sensor PCB
Stitch unit (front)
PI19S
PI20S
MS6S
MS7S
-2
-3
-4
J123-5
-2
J109-3
-2
J110-3
-3
J111-2
+5V
1STPA
STCHHP1*
HKEMP1
2NDPA
3RDPA
-1
-4
-3
-2
J10-1
-5
-4
-3
-2
-1
-5
-2
-3
-4
-5
-1
J304A
J304
J204
-7
J315-5
-6
-1
J8-3
-2
-1
-3
-2
-7
-5
-6
No.1 paper sensor
No.2 paper sensor
No.3 paper sensor
Stitch home
position
sensor (front)
Staple
sensor (front)
Stitch home
position
sensor (rear)
Staple
sensor (rear)
When the inlet door is
closed, “1”.
When the front door is
closed, “1”.
When the delivery door
is closed, “1”.
Stitch unit (rear)
MS4S
MS5S
Inlet door switch
MS1S
N.O.
+24V
+24U
STCHHP2*
HKEMP2
INLTCVRMS
FDROPN
-7
J316-5
-6
-8
-2
J8-10
J4-1
Front door switch
MS2S
N.O.
-4
J4-3
-9
-1
-3
-2
-7
-5
-6
DELVMS
Delivery door switch
MS3S
N.O.
-6
J4-5
J305
J205
JD2
JD1
J306
J121
J305
J120
-1
-2
-1
-2
Figure 3-105
Page 100

3-6
CHAPTER 3 SADDLE STITCH UNIT BASIC OPERATION
4. Outputs from the Saddle Stitch Controller PCB
SL1S
J118
-1 -2
+24V
FLPSL1*
When “0”, the solenoid turns ON.
Saddle stitch controller PCB
-2
J15-1
-2-1
SL2S
J117
-1 -2
+24V
FLPSL2*
When “0”, the solenoid turns ON.
-2
J15-3
-4-1
SL4S
J116
-1 -2
+24V
RLNIPSL*
When “0”, the solenoid turns ON.
-2
J15-5
-6-1
-1 -4
-4 -1
-3 -2
-2 -3
+24V
The pulse signals change according
to the rotation of the motor.
J7-1
-2
A*
B*
-3
B
-4
A
-5
J113-5
-4
-3
-2
-1
M5S
The pulse signals change according
to the rotation of the motor.
J5-1
A*
A
-2
B
-3
B*
-4
M1S
+24V
The pulse signals change according
to the rotation of the motor.
J7-6
-7
A*
B*
-8
B
-9
A
-10
J114-5
-4
-3
-2
-1
M4S
+24V
The pulse signals change according
to the rotation of the motor.
J12-1
-2
A*
B*
-3
B
-4
A
-5
J119-5
-4
-3
-2
-1
M3S
The states (+ and -) change according
to the rotation of the motor.
J4-8
-7
J112-2
-1
M2S
J115A
No.1 paper deflecting solenoid
No.2 paper deflecting solenoid
Feed plate contact solenoid
Feed motor
Paper folding motor
Guide motor
Paper positioning plate motor
Alignment motor
Figure 3-106
 Loading...
Loading...