

Page 1

1672604 01/2009
Altivar 32
Variable Speed Drives
for Synchronous and Asynchronous Motors
®
PROFINET
VW3A3627
10/2013
Communication Manual
HRB25668
www.schneider-electric.com
Page 2

The information provided in this documentation contains general descriptions and/or technical characteristics
of the performance of the products contained herein. This documentation is not intended as a substitute for
and is not to be used for determining suitability or reliability of these products for specific user applications. It
is the duty of any such user or integrator to perform the appropriate and complete risk analysis, evaluation and
testing of the products with respect to the relevant specific application or use thereof. Neither Schneider
Electric nor any of its affiliates or subsidiaries shall be responsible or liable for misuse of the information
contained herein. If you have any suggestions for improvements or amendments or have found errors in this
publication, please notify us.
No part of this document may be reproduced in any form or by any means, electronic or mechanical, including
photocopying, without express written permission of Schneider Electric. All pertinent state, regional, and local
safety regulations must be observed when installing and using this product. For reasons of safety and to help
ensure compliance with documented system data, only the manufacturer should perform repairs to
components.
When devices are used for applications with technical safety requirements, the relevant instructions must be
followed.
Failure to use Schneider Electric software or approved software with our hardware products may result in
injury, harm, or improper operating results.
Failure to observe this information can result in injury or equipment damage.
© 2013 Schneider Electric. All rights reserved.
2 HRB25668 10/2013
Page 3

Table of Contents
Table of Contents
Safety Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
About the Book. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Chapter 1 Altivar PROFINET Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
PROFINET Fieldbus Module Features Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
PROFINET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Modbus TCP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
PROFINET and Ethernet Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Web server . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Notation rules in this manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Chapter 2 Hardware Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Hardware Presentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Firmware and GSDML Version Compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Installation Topology. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Chapter 3 Configuration and Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Network Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
iPar Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Modbus TCP Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Chapter 4 Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Configuring the Control Channel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Configuring Monitor Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Configuring Communication Interruption Management . . . . . . . . . . . . . . . . . . . . . . . . 30
Chapter 5 Diagnostics and monitoring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
LED Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Communication Diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Monitoring of Communication Channels. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Control-Signal Diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Chapter 6 Telegram 100, 101, 102. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Configuring an ATV32 With a Siemens© S7-300. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Configuration of the Altivar 32 With the Telegram 100. . . . . . . . . . . . . . . . . . . . . . . . . 47
Configuring an ATV32 With the Telegram 101 or 102 . . . . . . . . . . . . . . . . . . . . . . . . . 48
Parameters Management With the telegram 100, 101, 102. . . . . . . . . . . . . . . . . . . . . 49
Chapter 7 Telegram 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
State Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Command Word and Status Word . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Speed Setpoint . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
PROFIdrive / Acyclic Messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Chapter 8 Embedded Web server. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
HRB25668 10/2013 3
Page 4

Table of Contents
Connection to the Web server . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Pages Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
FTP SERVER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Chapter 9 Common Additional Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Identification and Maintenance Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
I&M Records Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Chapter 10 Annexes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Annex A - Simple CONT Language FC (Controlling the Drive in CiA 402 Mode) . . . . 72
Annex B - The PROFIdrive Parameters Channel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Annex C - iPar Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Glossary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4
HRB25668 10/2013
Page 5

§
Safety Information
Important Information
NOTICE
Read these instructions carefully, and look at the equipment to become familiar with the device before trying
to install, operate, or maintain it. The following special messages may appear throughout this documentation
or on the equipment to warn of potential hazards or to call attention to information that clarifies or simplifies a
procedure.
Safety Information
The addition of this symbol to a Danger or Warning safety label indicates that an electrical hazard
exists, which will result in personal injury if the instructions are not followed.
This is the safety alert symbol. It is used to alert you to potential personal injury hazards. Obey all
safety messages that follow this symbol to avoid possible injury or death.
DANGER
DANGER indicates an imminently hazardous situation, which, if not avoided, will result in death or serious
injury.
WARNING
WARNING indicates a potentially hazardous situation, which, if not avoided, can result in death, serious
injury or equipment damage.
CAUTION
CAUTION indicates a potentially hazardous situation, which, if not avoided, can result in injury or equipment
damage.
NOTICE
NOTICE, used without the safety alert symbol, indicates a potentially hazardous situation which, if not
avoided, can result in equipment damage.
PLEASE NOTE
The word "drive" as used in this manual refers to the controller portion of the adjustable speed drive as defined
by NEC.
Electrical equipment should be installed, operated, serviced, and maintained only by qualified personnel. No
responsibility is assumed by Schneider Electric for any consequences arising out of the use of this product.
© 2013 Schneider Electric. All Rights Reserved.
HRB25668 10/2013 5
Page 6

About the Book
Document Scope
Validity Note
Related Documents
About the Book
The purpose of this document is to:
• show you how to install the PROFINET communication module on your Altivar,
• show you how to configure the Altivar to use PROFINET fieldbus
NOTE: Read and understand this document and all related documents (see below) before installing,
operating, or maintaining your ATV32.
This documentation is valid for the Altivar 32 PROFINET fieldbus.
User Comments
Title of Documentation Catalog Number
ATV32 Quick Start guide S1A41715
ATV32 Quick Start Annex S1B39941
ATV32 Installation manual S1A28686
ATV32 Programming manual S1A28692
ATV32 Atex manual S1A45605
ATV32 Safety manual S1A45606
ATV32 Modbus manual S1A28698
ATV32 CANopen manual S1A28699
ATV32 PROFIBUS DP manual S1A28700
ATV32 Modbus TCP - EtherNet/IP manual S1A28701
ATV32 DeviceNet manual S1A28702
ATV32 EtherCAT manual S1A28703
ATV32 communication parameters manual S1A44568
ATV32 Safety integrated functions manual S1A45606
ATV32 certificates and other module manuals: see www.schneider-electric.com
You can download the latest versions of these technical publications and other technical information from
www.schneider-electric.com.
We welcome your comments about this document.
You can reach us by e-mail at techpub.drives@schneider-electric.com.
6 HRB25668 10/2013
Page 7

About the Book
Before You Begin
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
• Only appropriately trained persons who are familiar with and understand the contents of this manual and all
other pertinent product documentation and who have received safety training to recognize and avoid hazards
involved are authorized to work on and with this drive system. Installation, adjustment, repair, and maintenance
must be performed by qualified personnel.
• The system integrator is responsible for compliance with all local and national electrical code requirements as
well as all other applicable regulations with respect to grounding of all equipment.
• Many components of the product, including the printed circuit boards, operate with mains voltage. Do not touch.
Use only electrically insulated tools.
• Do not touch unshielded components or terminals with voltage present.
• Motors can generate voltage when the shaft is rotated. Prior to performing any type of work on the drive system,
block the motor shaft to prevent rotation.
• AC voltage can couple voltage to unused conductors in the motor cable. Insulate both ends of unused
conductors of the motor cable.
• Do not short across the DC bus terminals or the DC bus capacitors or the braking resistor terminals.
• Before performing work on the drive system:
- Disconnect all power, including external control power that may be present.
- Place a "Do Not Turn On" label on all power switches.
- Lock all power switches in the open position.
- Wait 15 minutes to allow the DC bus capacitors to discharge. The DC bus LED is not an indicator of the
absence of DC bus voltage that can exceed 800 Vdc.
- Measure the voltage on the DC bus between the DC bus terminals using a properly rated voltmeter to verify
that the voltage is < 42 Vdc.
- If the DC bus capacitors do not discharge properly, contact your local Schneider Electric representative.
• Install and close all covers before applying voltage.
Failture to follow these instructions will result in death or serious injury.
WARNING
DAMAGE DRIVE EQUIPMENT
Do not operate or install any drive or drive accessory that appears damaged.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
WARNING
LOSS OF CONTROL
• The designer of any control scheme must consider the potential failure modes of control paths and, for
critical control functions, provide a means to achieve a safe state during and after a path failure. Examples
of critical control functions are emergency stop, overtravel stop, power outage, and restart.
• Separate or redundant control paths must be provided for critical control functions.
• System control paths may include communication links. Consideration must be given to the implications
of unanticipated transmission delays or failures of the link.
• Observe all accident prevention regulations and local safety guidelines.
• Each implementation of the product must be individually and thoroughly tested for proper operation before
being placed into service.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
1. For additional information, refer to NEMA ICS 1.1 (latest edition), Safety Guidelines for the Application, Installation, and
Maintenance of Solid State Control” and to NEMA ICS 7.1 (latest edition), “Safety Standards for Construction and Guide
for Selection, Installation and Operation of Adjustable-Speed Drive Systems.”
1
HRB25668 10/2013 7
Page 8

About the Book
8
HRB25668 10/2013
Page 9

Altivar PROFINET Overview
Altivar PROFINET Overview
What Is in this Chapter?
This chapter contains the following topics:
Overview 10
PROFINET Fieldbus Module Features Overview 10
PROFINET 11
Modbus TCP 11
PROFINET and Ethernet Features 11
Web server 11
Notation rules in this manual 11
1
Topic Page
HRB25668 10/2013 9
Page 10

Altivar PROFINET Overview
PROFINET
Controller
I/O
Scanner
PROFINET
Explicit
Messaging
Modbus
TCP
Standard
Web
browser
Ie, Mozilla
Modbus
Messaging
(func: 3, 6, 8,
16, 43)
iPar server
DCP
MRP
Embedded
Web server,
Java applets
Modbus TCP
TCP/UDP/IP
messaging
ProfiDrive profile
CiA 402 native drive profile
Parameters
management
Drive setup
PROFINET RT
exchanges
Available
telegrams
1,100,101,102
Overview
The VW3A3627 is a dual port PROFINET fieldbus module that can be used in a PROFINET industrial fieldbus. The VW3A3627 also
offers an embedded Web server (5 languages) which offers comfortable monitoring and commissioning functions directly from a
standard web browser.
Basic Overview According to the Simplified TCP/IP Model
Application PROFINET / IP Services PROFINET RT
Transport TCP/UDP –
Network IP –
Link Ethernet Ethernet
PROFINET Fieldbus Module Features Overview
10
HRB25668 10/2013
Page 11

Altivar PROFINET Overview
PROFINET
PROFINET RT extends Ethernet by an advanced industrial protocol management as an application layer for
automation applications in this way, Ethernet is excellently suited for industrial control. PROFINET relies on
TCP and UDP for non-RT information. Products from different manufacturers can be networked by using a
PROFINET-compliant switch.
Modbus TCP
The Modbus application layer is standard. Thousands of manufacturers are already implementing this
protocol. Many have already developed a Modbus TCP/IP connection and numerous products are currently
available. With the simplicity of its protocol and the fast Ethernet throughput data rate of 100 Mbit/s, Modbus
TCP/IP achieves excellent performance.
PROFINET and Ethernet Features
The product supports the following functions:
• Automatic IP address assignment via DHCP and DCP
• Support of MRP (Media Redundancy Protocol)
• Automatic configuration data via iPar-Server
• Commissioning via commissioning SoMove Lite software
• Support of LLDP (Link Layer Discovery Protocol)
• Diagnostics and configuration via integrated Web server
Web server
The standard Web server provides access to the following pages:
• Drive monitor
• Data viewer/editor
• Save and restore configuration
• Network parameters
• iPar client settings
• Administration
• TCP/UIP statistics
• Modbus statistics
Notation rules in this manual
Drive Terminal Displays
The graphic display terminal (to be ordered separately - catalog number VW3A1101) menus are shown in
square brackets.
Example: [COMMUNICATION CARD]
The integrated 7-segment display terminal menus are shown in round brackets.
Example: (Cbd-)
Parameter names are displayed on the graphic display terminal in square brackets.
Example: [fallback spd]
Parameter codes are displayed on the integrated 7-segment display terminal in round brackets.
Example: (LFF)
Formats
In this manual, hexadecimal values are written as follows: 16#
Binary values are written as follow: 2#
HRB25668 10/2013 11
Page 12

Altivar PROFINET Overview
12
HRB25668 10/2013
Page 13
Hardware Setup
Hardware Setup
What Is in this Chapter?
This chapter contains the following topics:
Hardware Presentation 14
Firmware and GSDML Version Compatibility 14
Installation 14
Wiring 17
Installation Topology 18
2
Topic Page
HRB25668 10/2013 13
Page 14

Hardware Presentation
2 RJ45 female sockets
for the PROFINET
connection
The following figure shows the dual RJ45 connector, PROFINET module:
Hardware Setup
Firmware and GSDML Version Compatibility
VW3A3627 option module is compliant with Altivar 32 V1.8 IE11 minimum versions.
Check the firmware version, on the packaging label (on the right part of the label).
The associated GSDML are named as the following example:
GSDML-V2.25-Schneider-ATV32-20130128.xml
The files are available on www.schneider-electric.com.
Installation
Check that the module catalog number marked on the label is the same as that on the delivery note
corresponding to the purchase order.
Remove the communication module from its packaging and check that it has not been damaged in transit.
RISK OF DAMAGE TO THE DRIVE
Install only communication modules designed for ATV32. See catalog numbers in the catalog.
Failure to follow these instructions can result in equipment damage.
NOTICE
14
HRB25668 10/2013
Page 15
Hardware Setup
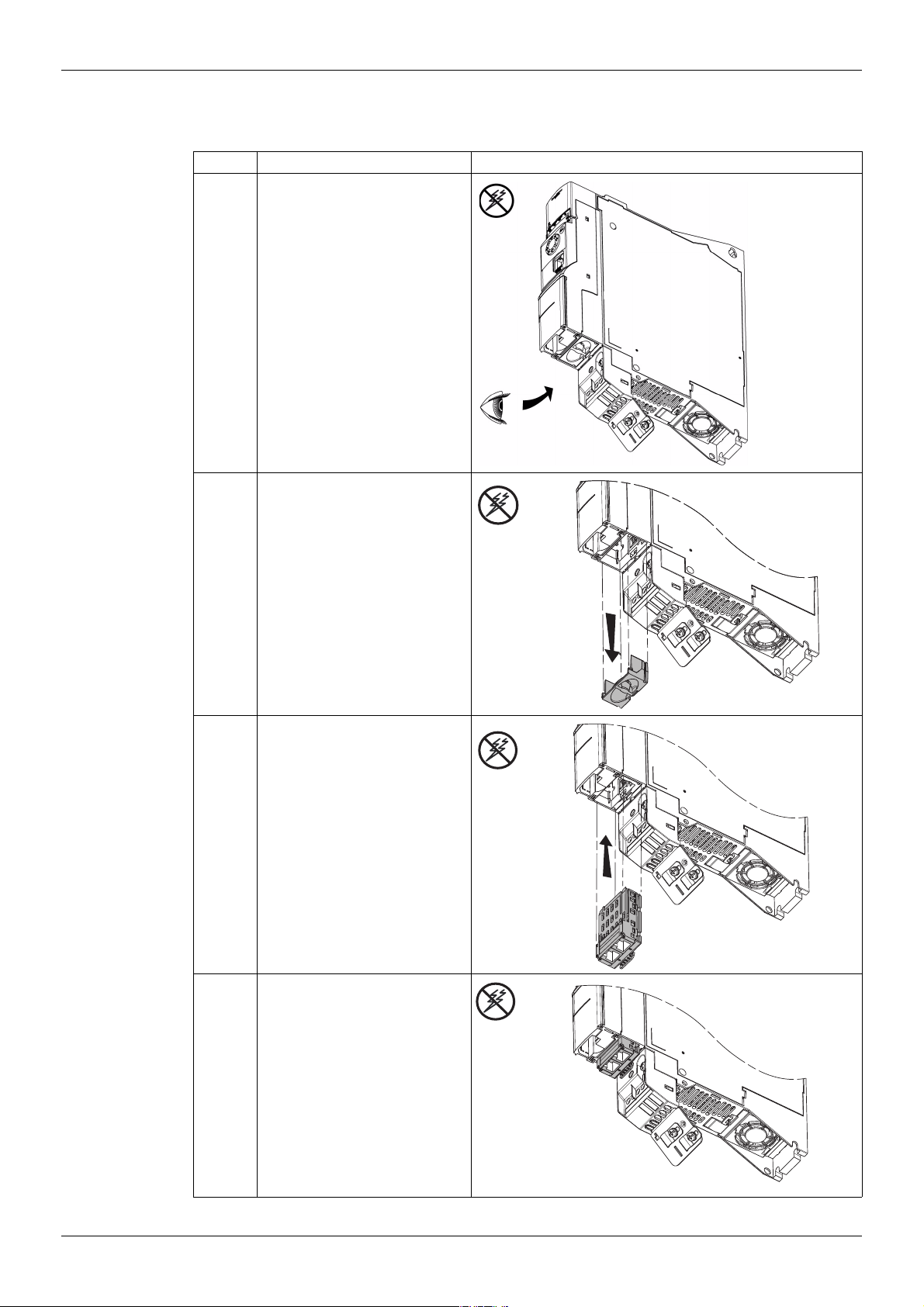
Install the PROFINET module in ATV32
Refer to the installation manual (S1A28686). Install the PROFINET module in ATV32 as follows:Install the
communication module in ATV32 as follows:
Step Action Comment
1 Ensure that the power is off.
Locate the option module port on the
bottom of the ATV32.
2 Extract the cover.
3 Insert the module
4 Check that the module is correctly
inserted and locked mechanically in
the drive.
HRB25668 10/2013 15
Page 16

Extract the communication module as follows:
Step Action Comment
1 Ensure that the power is off.
Press the strip.
2 Extract the module while maintaining
the strip pressed,
Hardware Setup
16
HRB25668 10/2013
Page 17

Hardware Setup
Wiring
Cable specifications
The VW3A3627 option module is equipped with 2 RJ45 female sockets for the PROFINET connection.
• Minimum Cat 5e,
• Use equipotential bonding conductors (100 BASE-TX, Category 5e or Industrial Ethernet fast connect)
• Connector RJ45, no crossover cable
• Shield: both ends grounded
• Twisted-pair cable
• Verify that wiring, cables, and connected interfaces meet the PELV requirements.
• Maximum cable length per segment = 100 m (328 ft) / 6 plugs
The following table describes the pin out of each RJ45:
Pin Signal Meaning
1 Tx+ Ethernet transmit line +
2 Tx– Ethernet transmit line –
3 Rx+ Ethernet receive line +
4––
5––
6 Rx– Ethernet receive line –
7––
8––
HRB25668 10/2013 17
Page 18

Installation Topology
MRP
manager
The VW3A3627 option module, with its 2 RJ45 connector, enables several wiring solutions:
Daisy Chain and/or Star topology
Ring topology
Hardware Setup
PROFINET
SWITCH
The ring topology can only be used with a Media Redundancy Protocol (MRP) capable managed device.
The bus watchdog shall be increased when using MRP function in order to avoid untimely [Com. network]
(CnF) trip.
18
HRB25668 10/2013
Page 19

Configuration and Parameters
Configuration and Parameters
Overview
This chapter describes the parameters of the VW3A3627 module. These parameters are described here
according to the local HMI or the Graphic keypad. These settings are also possible from SoMove or from the
embedded Web server.
What Is in this Chapter?
This chapter contains the following topics:
Network Settings 20
iPar Settings 22
Modbus TCP Settings 23
3
Topic Page
HRB25668 10/2013 19
Page 20

Network Settings
Configuration and Parameters
The parameters are accessible in the [CONFIGURATION] (COnF), [FULL] (FULL),
[COMMUNICATION] (COM-) menu and [COMMUNICATION CARD] (Cbd-) submenu.
Parameter Description
(HMI mnemonic)
[DEVICE NAME] (PAn) 16 characters maxi. – [–] - R/W 3340
[IP mode] (IpM)
Use this parameter to select the IP
address assignment method.
[IP card] (IPC- )
(IPC1) (IPC2) (IPC3) (IPC4)
These fields are editable when IP
mode is set to Fixed address
[IP Mask] (IPM-)
(IPM1) (IPM2) (IPM3) (IPM4)
These fields are editable when IP
mode is set to Fixed address
[IP Gate] (IPG-)
(IPG1) (IPG2) (IPG3) (IPG4)
These fields are editable when IP
mode is set to Fixed address
[Network error] (Err)
Ethernet Error Code
[SERVICES] (EWE-)
Enable web services
[PPO profile used] (PrFL)
Actual profile
[MAC @] (MAC)
MAC ad
Displays MAC addresses of the
device.
dress d
isplay
Range or Listed Values Default Long
Name
0: Man
2: DHCP
3: DCP
0 to 255 for each of the 4 fields 0.0.0.0 [0.0.0.0] 0
0 to 255 for each of the 4 fields 0.0.0.0 [255.255.254.0] 255
0 to 255 for each of the 4 fields 0.0.0.0 [0.0.0.0] 0
0: No error
1: PROFINET I/O timeout
2: Network overload
3: Loss of Ethernet Carrier
9: Duplicated IP address.
10: No valid IP.
12: IPAR unconfigured state
13: IPAR unrecoverable error
17: Application I/O configuration error
0: No web services
1: Web server enabled
0: UNCFG
1: Profidrive
100: Device specif
[xx-xx-xx-XX-XX-XX] – [xx-xx-xx-XX-
Man [fixed]
[DHCP]
[DCP]
0 – – R 64270
1– – R/W–
0 [0] 0 R/W 6665
XX-XX]
Short
Name
MAnU
dHCP
dCP
0
0
0
255
254
0
0
0
0
–––
Access Parameter
Number
to
3347
R/W 64250
R/W 64212
64213
64214
64215
R/W 64216
64217
64218
64219
R/W 64220
64221
64222
64223
Left port MAC address is +1.
Right port MAC address is + 2.
If the IP address is not set to a valid value at first power-on, the drive will trip in EPF2.
Assigning IP parameters
The drive needs 3 IP parameters:
• The drive IP address.
• The subnet mask.
• The gateway IP address.
These IP addresses can be entered directly:
If [IP mode] (IpM) is set to [fixed] (MAnU). Using the integrated display terminal, using the graphic display
terminal, or using the SoMove software.
They can be provided by either:
• A DHCP server (correspondence between the Device name and the IP addresses).
• A DCP (Discovery Control Protocol) protocol to discover PROFINET devices.
20
HRB25668 10/2013
Page 21

Configuration and Parameters
Entering IP parameters in the Terminal
In the [CONFIGURATION] (COnF), [FULL] (FULL), [COMMUNICATION] (COM-) menu and
[COMMUNICATION CARD] (Cbd-) submenu, enter the following IP parameters:
• [IP card] (IPC1) (IPC2) (IPC3) (IPC4),
• [IP Mask] (IPM1) (IPM2) (IPM3) (IPM4),
• [IP Gate] (IPG1) (IPG2) (IPG3) (IPG4).
Turn off the drive and then back on again (control voltage if a separate power supply is being used), otherwise
the IP parameters are not taken into account.
If this address is modified, the new IP address entered is displayed. This IP address will be effective the next
time the drive is turned on.
Case of manual switching of [IP mode] (IPMode)
1. When switching [IP mode] (IPMode) to [DCP] (dCP)
- IP Settings are no longer editable
- Turn off the drive supply and then back on again, including control voltage if a separate power supply
is being used
- The new configuration is applied, the device is waiting for IP settings from PROFINET controller
2. When switching [IP mode] (IPMode) to [Manual] (Manu)
- IP Settings becomes editable
- Set IP settings with valid values
- Turn off the drive and then back on again, including control voltage if a separate power supply is being
used
- The new configuration is applied
Note: If IP settings are not valid, the drive will trip in EPF2 after next power-on.
3. When switching [IP mode] (IPMode) to [DHCP] (dHCP)
- IP Settings are no longer editable.
- Set the Device Name with a valid value.
- Turn off the drive and then back on again, including control voltage if a separate power supply is being
used.
- The new configuration is applied, the device is waiting for IP settings from DHCP Server.
Note: If the Device Name is not valid, the drive will trip in EPF2 after next power-on.
Case of automatic switching of [IP mode] (IPMode) to [DCP] (dCP)
Needed conditions:
- The device has a Station Name configured and validated
- The device is connected to a PROFINET controller
- The PROFINET controller has the Station Name in its own configuration
- The settings are in local configuration of the PROFINET controller
If all of these conditions are fulfilled:
- [IP mode] (IPMode) is automatically set to [DCP] (dCP)
- IP settings are replaced by the one set in local PROFINET controller
- The new configuration is applied immediately
HRB25668 10/2013 21
Page 22

iPar Settings
Configuration and Parameters
These parameters are accessible in the [CONFIGURATION] (COnF), [FULL] (FULL),
[COMMUNICATION] (COM-) menu and [COMMUNICATION CARD] (Cbd-) submenu.
The following table describes the parameters related to the iPar settings server function
Parameter Description
(HMI mnemonic)
[iPar Validation] (IPAU)
Enable iPar service
[iPar Autosave] (IPAS)
Enable iPar autosave service
[iPar timer] (IPAt)
Interval for periodic saving of the
iPar service
[iPar Error Mgt] (IPAF)
Enable iPar detected error
management
[iPar Local Conf] (ICFG)
Selection of local or server
configuration
[iPar Status] (IPAE)
iPar service status
[iPar Error Cod] (IPAd)
Detected error code
Range or Listed Values Default Long
Name
0: no
1: yes
0: no
1: yes
0: no autosave
1 to 9999 (minutes)
0: no
1: yes
0: The drive configuration is downloaded
from the iPar server at Power-onof the drive.
1: The drive configuration is local.
0: idle state
1: initialization
2: configuration
3: ready
4: operational
5: not configured
6: Unrecoverable detected fault state
0: No detected error
1: Stored configuration is not ok
2: No configuration file on the IPAR server or
configuration is not compatible. (Served
configuration is not ok)
3: Detected error connection to the IPAR
configuration file on the server.
4: Detected error writing the configuration file
to the server.
0 [No]
[Yes]
0 [No]
[Yes]
10 – – R/W 64278
1 [No]
[Yes]
0 [No]
[Yes]
[IDLE]
[INIT]
[CONF]
[RDY]
[OPE]
[UCF
[UNR
0 [0]
[1]
[2]
[3]
[4]
G]
EC]
Short
Name
(nO)
(YES)
(nO)
(YES)
(nO)
(YES)
(nO)
(YES)
(IdLE)
(INIt)
(CONF)
(rdY)
(OPE)
(UCFG)
(UrEC)
(0)
(1)
(2)
(3)
(4)
Access Parameter
Number
R/W 64274
R/W 64275
R/W 64277
R/W 64276
R 64279
R 64280
22
HRB25668 10/2013
Page 23

Configuration and Parameters
Modbus TCP Settings
The Modbus channel is only used for commissioning tools and for embedded Web server
(UnitID 251: Fieldbus module, Unit ID 248: Variable Speed Drive).
Function Name Code Description Remarks
Read Multiple Register 03
Write Single Register 06
Diagnostic 08
Write multiple register 16
Read device Identification 43
Identification
Byte(s) Meaning With the VW3 A3627 PROFINET module
24…23+B Value of object 2 (B ASCII characters) (1) Example: “ATV32HU15M3”
26+B…29+B Value of object 3 (C ASCII characters) Example: “0201” for version 2.1
32+B…31+B+D Value of object 4 (D ASCII characters) (1) Example: “MACHINE 4”
Read Multiple Register Maximum PDU length: 63 words
16#03
Write Single Register –
16#06
Diagnostic –
16#08
Write Multiple Register Maximum PDU length: 63 words
16#10
Schneider Identification (subfunction 14/16#0E)
16#2B
See the table below
0 Function code = 16#2B 16#2B
1 Type of MEI 16#0E
2 ReadDeviceId code 16#01
3 Degree of conformity 16#02
4 Number of additional frames 16#00 (a single frame)
5 Next object ID 16#00
6 Number of objects
3 for Basic
4 for Regular or Extended
7 Object 1 ID 16#00 = Vendor Name
8 Length of object 1 (A) 13
9…21 Value of object 1 (A ASCII characters) “SchneiderElectric”
22 Object 2 ID 16#01 = Product Code
23 Length of object 2 (B) 11 (for the following example only)
24+B Object 3 ID 16#02 = Major.Minor Revision
25+B Length of object 3 (C) 4
30+B Object 4 ID 16#06 = Application Name (2)
31+B Length of object 4 (D) 8 (for the following example only)
For Regular
And
Extended
(1)The length of this field is variable. Use the “Length of object X” field associated with it to determine the length.
(2)In the case of the drive, this data item corresponds to [DEVICE NAME].
The response to a “drive identification” request does not cause an exception response.
HRB25668 10/2013 23
Page 24

Configuration and Parameters
24
HRB25668 10/2013
Page 25

Configuration
Configuration
What Is in this Chapter?
This chapter contains the following topics:
Configuring the Control Channel 26
Configuring Monitor Parameters 29
Configuring Communication Interruption Management 30
4
Topic Page
HRB25668 10/2013 25
Page 26
Configuring the Control Channel
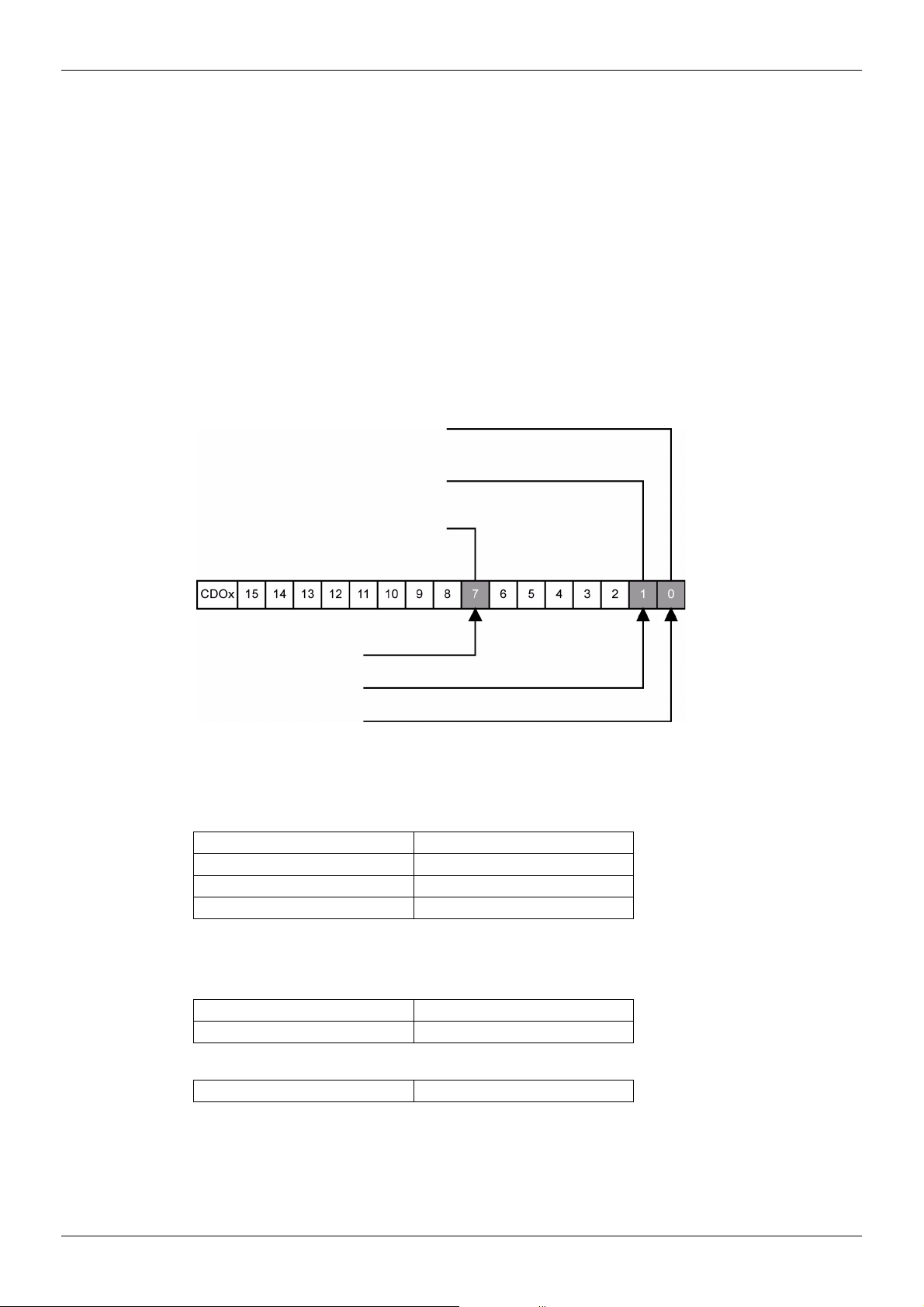
Reset
Run reverse
Run forward
[INPUTS / OUTPUTS CFG] /
[Forward] is assigned to CMd bit 0
[INPUTS / OUTPUTS CFG] /
[Reverse assign.] is assigned to
CMd bit 1
[FAULT MANAGEMENT] /
[FAULT RESET] / [Fault reset] is
assigned to CMd bit 7
This chapter explains through 3 examples how to configure the drive for operation from communication
network. Several other combinations are possible. The whole coverage of these possibilities is not in the scope
of this document. For more information, refer to the programming manual.
• I/O Mode - a simple command word (based on forward, reverse, and reset binary commands).
• Combined Mode (with native profile CiA 402) - Both reference and command word come from the
communication network.
• Separate (with native profile CiA 402) - reference and command come from separate sources: for example,
the command (in CiA 402) comes from the communication network and the reference from the HMI.
Configuration of the Drive for Operation in I/O Profile
To illustrate the I/O Profile, here is a simple example, which can be extended with additional features. The
command word is made of Run forward (bit 0 of CMd), run reverse (bit 1 of CMd), and a detected fault reset
(bit 7 of CMd).
Configuration
NOTE: This operating mode is not applicable when the drive is configured from the controller to operate with
the telegram 1 (PROFIdrive).
The settings will be the following:
[Ref.1 channel] (Fr1) [Com. card] (nEt)
[Profile] (CHCF) [I/O profile] (IO)
[Cmd switching] (CCS) Default value
[Cmd channel 1] (Cd1) [Com. card] (nEt)
The bits of the command word can now be configured.
In the [INPUTS / OUTPUTS CFG] menu, configure:
[Forward] (Frd) [Cd00] (Cd00)
[Reverse assign.] (rrS) [Cd01] (Cd01)
In the [FAULT MANAGEMENT] menu, [FAULT RESET] submenu, configure:
[Fault reset] (rSF) [Cd07] (Cd07)
26
HRB25668 10/2013
Page 27

Configuration
Configuration of the Drive for Operation With CiA 402 Profile in Combined Mode
This chapter describes how to configure the settings of the drive if it is controlled in CiA 402 Mode. The
example focuses on the Not separate mode. Additional modes combined mode are detailed in the Altivar 32
Programming manual.
In the Command Menu [COMMAND] (CtL-):
• [Ref.1 Channel] (Fr1): is set on according to the communication source you can choose in the following
table:
Origin of the control Ref1 Channel setting
PROFINET [Com. card] (nEt)
• [Ref. 2 switching] (rFC) is set to default value ([Ref.1 Channel] (Fr1)).
• [Profile] (CHCF): defines if the drive operates in combined mode (reference and command from the same
channel).
For the current example, [Profile] (CHCF) will be adjusted to [Not separ.] (SIM) as reference and control
are originated from the communication network:
Profile Ref1 Channel setting
CiA 402 combined mode [Not separ.] (SIM)
CiA 402 separate mode [Separate] (SEp)
I/O Profile [I/O profile] (IO)
HRB25668 10/2013 27
Page 28

Configuration of the Drive for Operation with CiA 402 Profile in Separate Mode
PROFINET Controller
+10 v
AI1+
AI1-
COM
2.2kΩ
(Fr1 = AI1)
Control
Word
Alternate combinations are possible, see the ATV32 programming manual for the list of possible settings.
Example:
The drive is controlled from the communication (PROFINET) but the reference is adjusted on controller
terminal. The control word comes from the controller and is written according to CiA 402 profile.
Configuration
The settings will be the following:
[Ref.1 channel] (Fr1) [AI1] (AI1)
[Profile] (CHCF) [Separate] (SEp)
[Cmd channel 1] (Cd1) [Com. card] (nEt)
[Ref. 2 switching] (rFC) Factory setting
28
HRB25668 10/2013
Page 29

Configuration
Configuring Monitor Parameters
It is possible to select up to 4 parameters to display their values in the [1.2 MONITORING] menu on the graphic
display terminal (to be ordered separately - catalog number VW3 A1 101).
The selection is made via the [6 MONITORING CONFIG.] menu ([6.3 COM. MAP CONFIG.] submenu).
Each parameter in the range [Word 1 add. select.] ... [Word 4 add. select.] can be used to select the
parameter logic address. An address at zero is used to disable the function.
Example
In the example given here, the monitored words are:
• Parameter 1 = Motor current (LCr): logic address 3204, signed decimal format.
• Parameter 2 = Motor torque (Otr): logic address 3205, signed decimal format.
• Parameter 3 = Last detected fault occurred (LFt): logic address 7121, hexadecimal format.
• Disabled parameter: 0; default format: Hexadecimal format
RDY NET +0.00Hz 0A
COM. MAP CONFIG.
Word 1 add. select. : 3204
Format word 1 : Signed
Word 2 add. select. : 3205
Format word 2 : Signed
Word 3 add. select. : 7121
Code Quick
Format word 33 : Hex
Word 4 add. select. : 0
Format word 4 : Hex
One of the 3 display formats below can be assigned to each monitored word:
Format Range Terminal display
Hexadecimal 0000 ... FFFF [Hex]
Signed decimal -32 767 ... 32 767 [Signed]
Unsigned decimal 0 ... 65 535 [Unsigned]
NOTE: If a monitored parameter:
• has been assigned to an unknown address,
• has not been assigned,
the value displayed in the [COMMUNICATION MAP] screen is: “••••” (see “Diagnostics and monitoring” on
page 31).
HRB25668 10/2013 29
Page 30

Configuring Communication Interruption Management
The response of the drive in the event of a PROFINET communication interruption can be configured.
Configuration can be performed using the graphic display terminal or the integrated display terminal via the
[Network fault mgt] (CLL) in the [CONFIGURATION] (COnF), [FULL] (FULL),
[FAULT MANAGEMENT] (FLt-) menu, [COM. FAULT MANAGEMENT] (CLL-) submenu,
RDY NET +0.00Hz 0A
COM. FAULT MANAGEMENT
Network fault mgt : Freewheel
CANopen fault mgt : Freewheel
Modbus fault mgt : Freewheel
Code Quick
The values of the [Network fault mgt] (CLL) parameter, which trigger a drive detected fault [Com. network]
(CnF), are:
Value Meaning
[Freewheel] (YES) Freewheel stop (factory setting)
[Ramp stop] (rMP) Stop on ramp
[Fast stop] (FSt) Fast stop
[DC injection] (dCI) DC injection stop
Configuration
The values of the [Network fault mgt] (CLL) parameter, which do not trigger a drive detected fault, are:
Value Meaning
[Ignore] (nO) Detected fault ignored
[Per STT] (Stt) Stop according to configuration of [Type of stop] (Stt)
[fallback spd] (LFF) Change to fallback speed, maintained as long as the detected fault persists and the run
command has not been removed
[Spd maint.] (rLS) The drive maintains the speed at the time the detected fault occurred, as long as the
detected fault persists, and the run command has not been removed
The fallback speed can be configured in the [FAULT MANAGEMENT] (FLt-),
[FALLBACK SPEED] (LFF-) menu using the [Fallback speed]
(LFF) parameter.
WARNING
LOSS OF CONTROL
If PROFINET fault detection management [Network fault mgt] (CLL) is set to [Ignore] (nO), communication
control will be inhibited.
For safety reasons, inhibiting the communication interruption detection must be restricted to the debug phase
or to special applications.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
30
HRB25668 10/2013
Page 31

Diagnostics and monitoring
Diagnostics and monitoring
What Is in this Chapter?
This chapter contains the following topics:
LED Indicators 32
Communication Diagnostics 34
Monitoring of Communication Channels 36
Control-Signal Diagnostics 38
5
Topic Page
HRB25668 10/2013 31
Page 32

LED Indicators
2
4
1
3
A
B
LED Description
Diagnostics and monitoring
The following figure describes the LEDs status module:
LED Description
1: RUN/BF Module status
2: STS/SF Network status
3 LNK Port A activity
4: LNK Port B activity
LED 1: Module Status
This LED indicates the module status:
Color & Status Description
OFF The device is powered off
Red ON
Green ON The device is ready and operational
Red flickering The device has detected a communication interruption / bad configuration or a PROFINET
Green flickering In combination with other LEDs: DCP manual identification phase / DCP flash mode
Green/Red blinking Power up testing
Red Single flash No connection to the PROFINET controller
LED 2: Network ERRor Status
Color & Status Description
OFF The device does not have an IP address or powered off
RED ON General error detected on the module
Green ON At least a port is connected and has a valid IP address.
Green flickering In combination with other LEDs: DCP manual identification phase / DCP flash mode or as long as
Green/Red blinking Power-up testing
Green flashing 3
times
Green flashing 4
times
Green flashing 5
times
Note: If the fieldbus module operates as a Modbus TCP server only, LED 1 and 2 have another behavior. For
more details, see Modbus TCP manual S1A28701.
The device has detected an ILF detected fault state
controller at Stop state.
the iPar-Client did not accomplish transfer (backup or restore) its Parameters
All ports are unplugged, but the module has an IP address
Error detected: duplicate IP address
The module is performing a DHCP sequence
32
HRB25668 10/2013
Page 33

Diagnostics and monitoring
Flickering
Blinking
Single
flash
Double
flash
Triple
flash
Quadruple
flash
Quintuple
flash
LED Behavior Detail
LEDs 3 and 4: Link Activity
These LEDs indicate the status of the Ethernet port A (3) and Ethernet port B (4):
Color & Status Description
OFF No link
Green ON Link established at 100 Mbps
Green Blinking Network Activity at 100 Mbps
Yellow ON Link established at 10 Mbps
Yellow Blinking Network Activity at 10 Mbps
HRB25668 10/2013 33
Page 34

Communication Diagnostics
A properly operating fieldbus is required for evaluating operating and detected faults messages.
Connections for Fieldbus Mode
If the product cannot be addressed via the fieldbus, first check the connections. The product manual contains
the technical data of the device and information on network and device installation. Check the following:
• Power connections to the device
• Fieldbus cable and fieldbus wiring
• Network connection to the device
Fieldbus Function Test
If the connections are correct, check the settings for the fieldbus addresses. After correct configuration of the
transmission data, test the fieldbus mode.
In addition to the controller that knows the product via the data in the GSDML file and the address, a bus
monitor should be installed. As a passive device, it can display messages.
• Switch off or on the supply voltage of the drive system.
• Observe the network messages shortly after switching on the drive system. A bus monitor can be used to
record the elapsed time between telegrams and the relevant information in the telegram.
Possible Errors: Addressing, Parameterization, Configuration
If it is impossible to connect to a device, check the following:
• Addressing: The address of the network device must be a valid IP address. Each network device must have
a unique address.
• Parameterization: The parameterized Ident number and the user parameters must match the values stored
in the GSDML file.
Diagnostics and monitoring
Communication interruption
The drive trips in [internal com. link] (ILF) when the following events occur:
- Hardware detected fault on the PROFINET module
- Communication interruption between the PROFINET module and the drive
The response of the drive in the event of an [internal com. link] (ILF) detected fault cannot be configured, and the
drive trips with a freewheel stop. This detected fault cannot be cleared except by switching off the drive.
The diagnostic parameter can be used to obtain more detailed information about the origin of the [internal com. link]
(ILF) detected fault [Internal link fault 1] (ILF1) if the detected fault has occurred on option module.
The [Internal link fault 1] (ILF1) parameter can only be accessed on the graphic display terminal by selecting
[1 DRIVE MENU] V [1.2 MONITORING] V [DIAGNOSTICS] V [MORE FAULT INFO] submenu.
Value Description of the values of the [Internal link fault 1] (ILF1) parameter
101 Unknown module
102 Exchange fault detected on the drive internal bus
103 Time out on the drive internal bus (500 ms)
0 No detected fault
1 Internal communication interruption with the drive
2 Hardware fault detected
3 Error found in the EEPROM checksum
4EEPROM
5 Flash memory
6 RAM memory
7 NVRAM memory
Diagnostic (PROFINET Service)
PROFINET diagnostic is associated with specific data which can be helpful during maintenance:
• The detected fault code, if a detected fault is present,
• The value of ETA,
• The value of the speed.
This data report and gives an indication on the drive status when the diagnostic event was triggered
34
HRB25668 10/2013
Page 35

Diagnostics and monitoring
Diagnostic information Read:
byte Description
1...28 Reserved
29 Ext_Diag_Data External diagnostic data length = 6
30 IF ETA.bit 3 = 1: ADL LFT LSB
31 ADL ETA LSB
32 ADL ETA MSB
33 LSB of the last value of the output speed
34 MSB of the last value of the output speed
Enabling Diagnostics
By default, Alarm Diagnostics are enabled. It can be activated/deactivated during the configuration phase as
shown below:
Otherwise: 0
HRB25668 10/2013 35
Page 36

Monitoring of Communication Channels
Command and Reference Channels
All the drive's command and reference parameters are managed on a channel-by-channel basis.
It is possible to identify the last value written for each channel and each command or reference parameter:
Parameter name Parameter code
Control word (CMd)(CMd1)(CMd2)(CMd3)
Extended control word (CMI)(CMI1)(CMI2)(CMI3)
Speed reference (rpm) (LFrd)(LFd1)(LFd2)(LFd3)
Frequency reference (0.1 Hz) (LFr)(LFr1)(LFr2)(LFr3)
PI regulator reference (PISP)(PIr1)(PIr2)(PIr3)
Analog multiplier reference (MFr)(MFr1)(MFr2)(MFr3)
Network Monitoring Criteria
The network is monitored according to the protocol-specific criteria.
Protocol Criteria Related detected fault
PROFINET
module
10: No valid IP [EXTERNAL FAULT COM.]
9: Duplicated IP address
12: iPar unconfigured
13: iPar unrecoverable error detected
0:No
detected fault
1: Network timeout (configurable timeout) for received requests
destined for the drive
2: Network overload
3: Loss of Ethernet Carrier
17: Application I/O configuration error detected
EEPROM detected error [internal com. link]
Taken into account by
the drive
Diagnostics and monitoring
Modbus CANopen Fieldbus
module
(EPF2)
[Com. network]
(CnF)
(ILF)
36
HRB25668 10/2013
Page 37

Diagnostics and monitoring
Monitoring of Communication Channels
Communication channels are monitored if they are involved in one of the following parameters:
• The control word [Cmd value] (CMd) from the active command channel
• The control word containing the command switch (bit configured on [Cmd switching] (CCS))
• The control word containing the switch for reference 1'1B (bit configured on [Ref 1B switching] (rCb))
• The control word containing the switch for reference 1'2 (bit configured on [Ref. 2 switching] (rFC))
• The frequency or speed reference ([HMI Frequency ref.] (LFr) or LFRD: Nominal speed value) from the
active reference channel
• Summing frequency or speed reference ([HMI Frequency ref.] (LFr) or LFRD: Nominal speed value) 2
(assigned to [Summing ref. 2] (SA2))
• Summing frequency or speed reference ([HMI Frequency ref.] (LFr) or LFRD: Nominal speed value) 3
(assigned to [Summing ref. 3] (SA2))
• Subtracting frequency or speed reference ([HMI Frequency ref.] (LFr) or LFRD: Nominal speed value) 2
(assigned to [Subtract ref. 2] (dA2))
• Subtracting frequency or speed reference ([HMI Frequency ref.] (LFr) or LFRD: Nominal speed value) 3
(assigned to [Subtract ref. 3] (dA3))
• The PID regulator reference (PISP)
• The PID regulator feedback ([AI Virtual 2] (AIU2))
• The reference multiplication coefficient ([Multiplying coeff.] (MFr)) 2 (assigned to [Multiplier ref. 2] (MA2))
• The reference multiplication coefficient ([Multiplying coeff.] (MFr)) 3 (assigned to [Multiplier ref. 3] (MA3))
As soon as one of these parameters has been written once to a communication channel, it activates monitoring
for that channel.
If a communication alarm signal is sent (in accordance with the protocol criteria) by a monitored port or fieldbus
module, the drive will trigger a communication interruption.
The drive reacts according to the communication interruption configuration (detected fault, maintenance,
fallback, and so on.)
If a communication alarm signal occurs on a channel that is not being monitored, the drive will not trigger a
communication interruption.
Enabling of Communication Channels
A communication channel is enabled once all the parameters involved have been written at least one time.
The drive is only able to start if all channels involved in command and reference are enabled.
Example:
A drive in DSP402 profile is connected to an active communication channel.
It is mandatory to write at least one time the reference and the command in order to switch from “4-Switched
on” to “5-Operation enabled” state.
A communication channel is disabled:
• In the event of a communication alarm signal
• In “forced local“ mode.
Note: On exiting “forced local” mode:
• The drive copies the run commands, the direction and the forced local reference to the active channel
(maintained).
• Monitoring of the active command and reference channels resumes following a time delay
[Time-out forc. local] (FLOt).
• Drive control only takes effect once the drive has received the reference and the command from the active
channel.
HRB25668 10/2013 37
Page 38

Control-Signal Diagnostics
On the terminal, the [1 DRIVE MENU] (drI-) V [1.2 MONITORING] V (MOn) V [COMMUNICATION MAP]
(CMM-) submenu can be used to display control-signal diagnostic information between the Altivar drive and
the controller:
• Active command channel [Command channel] (CMdC)
• Value of the control word (CMD) from the active command channel [Cmd value] (CMd)
• Active target channel [Active ref. channel] (rFCC)
• Value of the target from the active target channel [Frequency ref.] (FrH)
• Value of the status word [ETA state word] (EtA)
• Values of the 4 parameters selected by you (W---)
• In the [CMD. WORD IMAGE] submenu: control words from all channels
• In the [FREQ. REF. WORD MAP] submenu: frequency targets produced by all channels
Example
Example of the display of communication diagnostic information:
RUN nEt +50.00Hz 80A
COMMUNICATION MAP
Command Channel : Com.Card
Cmd value : 000FHex
Active ref. channel : Com.Card
Frequency ref. : 500.0Hz
ETA state word : 8627Hex
Code Quick
W3204 : 73
W3205 : 725
W7132 : 0000Hex
W0 : -----
CMD. WORD IMAGE
FREQ. REF. WORD MAP
MODBUS NETWORK DIAG
MODBUS HMI DIAG
Diagnostics and monitoring
Control Word Display
The [Command Channel] (CMdC) parameter indicates the active command channel.
The [Cmd value] (CMd) parameter indicates the hexadecimal value of the control word (CMD) used to control
the drive.
The [CMD. WORD IMAGE] (CI-) submenu ([CANopen cmd.] (CMd3) parameter) is used to display the
hexadecimal value of the control word sent by CANopen.
Frequency Target Display
The [Active ref. channel] (rFCC) parameter indicates the active target channel.
The [Frequency ref] parameter indicates the value (in 0.1 Hz units) of the frequency target (LFR) used to
control the drive.
The [FREQ. REF. WORD MAP] submenu ([COM. card cmd] parameter) is used to display the value (in 0.1 Hz
units) of the speed target sent by the network.
Status Word Display
The [ETA state word] (EtA) parameter gives the value of the status word (ETA).
38
HRB25668 10/2013
Page 39

Diagnostics and monitoring
Display of the Parameters Selected by the User
The 4 [W•••] parameters give the value of the 4 monitored words you selected.
The address and display format of these parameters can be configured in the [3 INTERFACE] (ItF-)
V [3.3 MONITORING CONFIG.] (MCF-) V [COM. MAP CONFIG.] (AdL-) submenu.
The value of a monitored word equals “••••” if:
• Monitoring has not been activated (address equals W0),
• The parameter is not known (example: W3200).
HRB25668 10/2013 39
Page 40

Diagnostics and monitoring
40
HRB25668 10/2013
Page 41

Telegram 100, 101, 102
Telegram 100, 101, 102
What Is in this Chapter?
This chapter contains the following topics:
Overview 42
Configuring an ATV32 With a Siemens© S7-300 46
Configuration of the Altivar 32 With the Telegram 100 47
Parameters Management With the telegram 100, 101, 102 49
6
Topic Page
HRB25668 10/2013 41
Page 42

Overview
ATV32
State machine
VSD
Parameters
Database
PROFidrive
Compliant
FUNCTION
BLOCKS
RT Channel
ATV32
PKW
Parameters
Management
CMD
PROFINET
Parameter channel
database
I/O
Supervisor
LFRD
ETA
RFRD
PROFINET
Messaging
Modbus TCP
Client
(1)
I/O
Supervisor
/TCP UDP Clients
Non-RT
Channel
ATV32 PROFINET
“telegram 100“
Telegram 100, 101, 102
The following diagram shows the native modes for telegram 100:
(1) 4 additional parameters can be configured in the communication scanner.
The native mode of the PROFINET VW3A3627 is used when telegram 100 is used.
Native mode of the ATV32 is compliant with IEC 61800-7 (CiA 402).
The PKW area of telegram 100, which is used for a simple parameter management, is compliant with the PKW
mechanism used with the PROFINET option module of the ATV32.
Note: After switching from one telegram to another, the drive shall be restarted to validate the new
configuration.
42
HRB25668 10/2013
Page 43

Telegram 100, 101, 102
ATV32
State machine
ATV32
Parameter
Database
RT Channel
ATV32
I/O
Supervisor
I/O
Supervisor
/TCP UDP Clients
Non-RT
Channel
ATV32 PROFINET
“telegram 101“
CMD LFR OCA3
OCA4 OCA5 OCA6
ETA RFR OMA3
OMA4 OMA5 OMA6
PKW parameters
Management
Profidrive
Parameter channel
database
PROFidrive
Compliant
FUNCTION
BLOCKS
PROFINET
Messaging
Modbus TCP
Client
The following diagram shows the native modes for telegram 101:
HRB25668 10/2013 43
Page 44

The following diagram shows the native modes for telegram 102:
ATV32
State machine
ATV32
Parameter
Database
RT Channel
ATV32
I/O
Supervisor
I/O
Supervisor
/TCP UDP Clients
Non-RT
Channel
ATV32 PROFINET
“telegram 102“
CMD LFR OCA3
OCA4 OCA5 OCA6
ETA RFR OMA3
OMA4 OMA5 OMA6
Profidrive
Parameter channel
Database
PROFidrive
Compliant
FUNCTION
BLOCKS
PROFINET
messaging
Modbus TCP
Client
Telegram 100, 101, 102
Periodic Exchanges
44
The following table lists the mapping process of the periodic data according to the chosen telegram:
PKW 1 PKE PKE PKE PKE
PKW 2 R/W R/W R/W R/W
PKW 3 PWE PWE PWE PWE
PKW 4 PWE PWE PWE PWE
Cyclic data 1 OCA1
Cyclic data 2 OCA2
Cyclic data 3 OCA3
Cyclic data 4 OCA4
Cyclic data 5 OCA5
Cyclic data 6 OCA6
*:default Modbus address.
Telegram 100 Telegram 101 Telegram 102
PLC>VSD VSD>PLC PLC>VSD VSD>PLC PLC>VSD VSD>PLC
Address of
CMD =8501*
Address of
LFRD =8602*
OMA1
Address of
ETA =3201*
OMA2
Address of
RFRD =8604*
OCA1
Address of
CMD =8501*
OCA2
Address of
LFRD =8602*
Default =0
Default =0
Default =0
Default =0
OMA1
Address of
ETA =3201*
OMA2
Address of
RFRD =8604*
OMA3
Default =0
OMA4
Default =0
OMA5
Default =0
OMA6
Default =0
OCA1
Address of
CMD =8501*
OCA2
Address of
LFRD =8602*
OCA3
Default =0
OCA4
Default =0
OCA5
Default =0
OCA6
Default =0
OMA1
Address of
ETA =3201*
OMA2
Address of
RFRD =8604*
OMA3
Default =0
OMA4
Default =0
OMA5
Default =0
OMA6
Default =0
HRB25668 10/2013
Page 45

Telegram 100, 101, 102
The Modbus
address is entered
in this field
The configuration of the cyclic data is made with the PROFINET IO-Controller configuration tool. The Modbus
address of the parameter linked to each cyclic data must be defined as in the following example with the HW
configuration software:
Input cyclic data 1/2 and output cyclic data 1/2 are already preconfigured to (CMd) (8501) and
(LFrd) (8602); (EtA) (3201) and (rFrd) (8604).
If a null address Modbus is entered, no link between the related cyclic data and the drive will be established.
In any case the 6 cyclic data are not disabled and the 6 cyclic data will take place in the I/O memory image of
the controller.
HRB25668 10/2013 45
Page 46

Configuring an ATV32 With a Siemens© S7-300
GSDML Installation
First download, and install the GSDML file of the Altivar in the Hardware configuration tool of The SIMATIC
STEP7® software.
You can find the GSDML file and its associated picture on www.schneider-electric.com
From the menu > Options > Install GSD File... as follows:
Telegram 100, 101, 102
Once installed you will see the Altivar 32, in the library, as follow:
46
HRB25668 10/2013
Page 47

Telegram 100, 101, 102
Configuration of the Altivar 32 With the Telegram 100
With this telegram, the Altivar 32 is controlled with 2 process data. In addition, 8 read and 8 write cyclic data
can be used to read or write Altivar 32 parameters.
Configure the PLC and its PROFINET network. Then, drag and drop the Altivar 32 from the library to the Bus:
Define the addresses of the cyclic data and PKW data in the PLC periphery:
By default, the process data are linked to (CMd), (LFrd), (EtA) and (rFrd) (native CiA 402 profile of
the drive). You can check that the exchanges are working properly by the Monitor / Modify function of the
configuration tool:
HRB25668 10/2013 47
Page 48

Configuring an ATV32 With the Telegram 101 or 102
New parameters are added or
modified by typing their internal
Modbus address.
In the example here (OMA3) is
configured to read the value of
(ACC), which Modbus Address is
9001.
Configuring the Drive Communication Scanner
The configuration of the fieldbus module is defined by the master, by default the 2 first read and write are linked
to the default parameters: (CMd), (LFrd), (EtA) and (rFrd). The 4 next read or write parameters are
not configured. To add new parameters or modify the default configuration of the communication scanner,
open the properties dialog box of the slave device and configure the OCA/OMA values in the parameter
assignment tab.
Telegram 100, 101, 102
48
HRB25668 10/2013
Page 49

Telegram 100, 101, 102
Parameters Management With the telegram 100, 101, 102
In native modes several accesses to the Drive parameters are possible:
• The standard acyclic requests from PROFIdrive (described in the “Annex B - The PROFIdrive Parameters
Channel” on page 77)
• PKW mechanisms – consistent with Altivar 32.
Parameter Management Through the PKW Area
With telegram 100, you can read or write any drive parameter by using this PKW area. (This addressing
scheme is identical to the PKW mechanism of the Altivar 32).
NOTE: The management of the parameters (compatibility with series 1 product) is Schneider Electric specific.
Actually, previous versions of PROFIdrive also specified parameters management thought PKW, are not
compatible with Schneider Electric method. In recent versions, parameters are managed with acyclic
messages, and the PNO PKW method is obsolete.
The PKW area is made of 4 input words and 4 output words.
The following table lists the controller-to-drive parameters in the input PKW area:
PKW nr PKW1 PKW2 PKW3 PKW4
PKE Name PKE R/W PWE PWE
Description
The Modbus address
of the parameter is
detailed here.
Request code:
0: no request
1: read
2: write
Not used Parameter value in
case of write request.
The following table lists the drive-to-controller parameters in the output PKW area:
PKW nr PKW1 PKW2 PKW3 PKW4
PKE Name PKE R/W PWE PWE
Not used If the request is
successful, the
parameter value is
copied here.
Description
Copy of the input PKE Request code:
0: no request
1: read done
2: write done
3: request in progress
7: read or write
detected error
HRB25668 10/2013 49
Page 50

Telegram 100, 101, 102
50
HRB25668 10/2013
Page 51

Telegram 1
Telegram 1
What Is in this Chapter?
This chapter contains the following topics:
Overview 52
State Diagram 53
Command Word and Status Word 54
Speed Setpoint 57
PROFIdrive / Acyclic Messaging 57
7
Topic Page
HRB25668 10/2013 51
Page 52

Overview
PROFIdrive
Translator
PROFIdrive
Parameter channel
database
I/O
Supervisor
RT Channel
ATV32
(Command word)
STW1
(
Speed reference)
NSOLL_A
(status word)
ZSW1
(actual speed)
NIST_A
PROFIdrive
Compliant
FUNCTION
BLOCKS
PROFINET
Messaging
Modbus TCP
Client
Telegram 1
The following diagram shows the operating modes:
ATV32 PROFIdrive
“telegram 1”
ATV32
State machine
Non-RT
Channel
I/O Supervisor
/TCP UDP
Clients
Parameters
Database
The following section describes how the VW3A3627 is operated when configured in PROFIdrive mode
(telegram 1).
The selection of this mode is done while configuring the device with the PROFINET network configuration tool.
It is out of the scope of this document to describe how to use such tool. However, you can find in the examples
(see “Configuring an ATV32 With a Siemens© S7-300” on page 46) how to configure the module for the
Schneider PLCs and for the SIMATIC® S7 PLCs.
Periodic Exchanges
The periodic exchanges, with PROFIdrive application class 1 profile consists of:
• 16-bit command word (STW1) and 16-bit reference word (NSOLL_A),
• 16-bit status word (ZSW1) and 16-bit actual velocity word (NIST_A).
The mapping of these words is automatically done when you select Telegram 1 during the configuration of the
device.
Note: After switching from one telegram to another, restart the drive to validate the new configuration.
ATV32
52
HRB25668 10/2013
Page 53

Telegram 1
Power ON
Standstill
detected OR
disable
operation
Not STW1.3
OR not
STW1.1
Switch on Inhibited
ZSW1.6 = 1
ZSW1.0,1,2, pulses enabled = 0
Ready for switching on
ZSW1.0 = 1
ZSW1.1,2,6, pulses enabled = 0
Switched on
ZSW1.0,1 = 1
ZSW1.2,6, pulses enabled = 0
Operation
ZSW1.0,1,2 pulses enabled = 1
ZSW1.6 = 0
Ramp stop
ZSW1.0,1, pulses
enabled = 1
ZSW1.2,6= 0
OFF AND no coast
stop AND no quick
stop
Not STW1.0 AND
STW1.1 AND STW1.2
Coast stop
OR quick stop
Not STW1.1 OR
not STW1.2
Coast stop
OR quick
stop
Not STW1.1
OR not
STW1.2
ON
STW1.0
OFF
Not STW1.0
Standstill
detected OR
disable
operation
Not STW1.3
Quick stop
Not
STW1.2
Enable
operation
STW1.3
Disable
operation
Not
STW1.3
OFF
Not
STW1.0
Quick stop
Not
STW1.2
Quick stop
ON
STW1.0
Coast stop
Not STW1.1
State Diagram
The following state diagram shows the PROFIdrive state machine for the application class 1. The diagram also
describes the command word and status word.
S1
S2
S3
S4
S5
HRB25668 10/2013 53
Page 54

Command Word and Status Word
Overview
The following table lists the command wording from PROFIdrive application profile class 1:
STW1
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Detected
fault
Acknowledge
Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8
– – – – – Control and
The following table lists the status from PROFIdrive application profile class 1:
ZSW1
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Warning Switching
– ––Enable
inhibited
Quick stop
Not activated
Coast stop
Not activated
operation
Detected
fault present
Telegram 1
Quick stop Coast stop ON/OFF
––
reference by
PLC
Operation
enabled
Ready to
operate
Ready to
switch ON
Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8
– Reserved Reserved Reserved Reserved F or n
reached or
exceeded
Control
requested
Speed error
found within
tolerance
range
54
HRB25668 10/2013
Page 55

Telegram 1
Command Word Details
The following table lists the command wording from PROFIdrive application profile class 1
STW1
Bit 0 ON 1 “Switched on” condition; voltage at the power converter, indicating the main contact is
Bit 1 No coast stop 1 All “Coast Stop (OFF2)” commands are withdrawn.
Bit 2 No quick stop 1 All “Quick Stop (OFF3)” commands are withdrawn.
Bit 3 Enable operation 1 Enable electronics and pulses.
Bit 4 Reserved
Bit 5 Reserved
Bit 6 Not used
Bit 7 Detected fault ac-
Bit 8 Not used
Bit 9 Not used
Bit 10 Control by PLC 1 Setpoint and control from the bus are active.
Bit 11 Reserved
Bit 12 Reserved
Bit 13 Reserved
Bit 14 Reserved
Bit 15 Reserved
closed (if present).
OFF
(OFF 1)
Coast stop
(OFF 2)
Quick stop
(OFF 3)
Disable operation 0 The drive coasts down to a standstill (ramp-function generator to 0 or tracking) and goes
knowledge
No Control by
PLC
0 Power-down (the drive returns to the “ready for switching on “ condition); the drive is
ramped-down along the ramp (RFG) or along the current limit or along the voltage limit of
the d.c. link; if standstill is detected, the voltage is isolated; the main contact is opened (if
present).During deceleration bit 1 of ZSW1 is still set. An OFF command is interruptible.
0 Voltage is isolated.
The main contact is then opened (if present) and the drive goes into the “Switching On
Inhibited” condition; the motor coasts down to a standstill.
0 Quick stop; if required, withdraw the operating enable, the drive is decelerated as fast as
possible. For example, along the current limit or at the voltage limit of the d.c. link, at
n / f = 0; if the rectifier pulses are disabled, the voltage is isolated (the contact is opened)
and the drive goes into the “Switching On Inhibited” condition.
A Quick Stop command is not interruptible.
The drive then runs-up to the setpoint.
into the “Switched on” condition (refer to control word 1, bit 0).
1 The group signal is acknowledged with a positive edge; the drive reaction to a detected
fault depends on the type of detected fault. If the detected fault reaction has isolated the
voltage, the drive then goes into the “Switching On Inhibited “ condition.
0 Setpoint and control from the bus are NOT active.
HRB25668 10/2013 55
Page 56

Status Word
Telegram 1
The following table gives the detailed status defined by the ZSW1 command words:
ZSW1
Bit 0 Ready to Switch ON1 Power supply is switched on, electronics initialized, main contact, if available, has
dropped out, pulses are inhibited.
Not ready to
Switch ON
Bit 1 Ready to operate 1 Refer to control word 1, bit 0.
Not ready to
operate
Bit 2 Operation
enabled
0–
0–
1 Drive follows setpoint. This means that:
• the electronic and pulses are enabled (Refer to control word 1, bit 3),
• the closed loop control is active and controls the motor,
• the output of the setpoint channel is the input for the closed loop control.
0 Either the pulses are disabled or the drive does not follow the setpoint.
Bit 3 Detected fault
present
No detected fault
present
Bit 4 Coast stop
not activated
Coast stop
activated
Bit 5 Quick stop
not activated
Quick stop
activated
Bit 6 Switching
inhibited
Switching
not inhibited
Bit 7 Warning present 1 Warning information present in the service/maintenance parameter; no acknowledge-
No warning 0 –
Bit 8 Speed detected
error within
tolerance range
Speed detected
error out of
tolerance range
Bit 9 Control requested 1 The automation system is requested to assume control.
No Control requested
Bit 10 F or n reached or
exceeded
F or n not reached 0 –
Bit 11 Reserved
Bit 12 Reserved
Bit 13 Reserved
Bit 14 Reserved
Bit 15 Reserved
1 Unacknowledged detected faults or currently not acknowledgeable detected faults (fault
messages) are present (in the fault buffer). The detected fault reaction is fault-specific
and device-specific. The acknowledging of a detected fault may only be successful if the
detected fault cause has disappeared or has been removed before. If the detected fault
has isolated the voltage, the drive goes into the “Switching On Inhibited” condition, otherwise the drive returns to operation. The related detected fault numbers are in the detected fault buffer.
0–
1–
0 Coast Stop (OFF 2) command is present.
1–
0 Quick Stop (OFF 3) command is present.
1 The drive goes only again in the “Switched On” condition with “No Coast Stop AND No
Quick Stop” followed by “ON”. This means that the “Switching On Inhibited” bit is only set
back to zero if the OFF command is set after “No Coast Stop AND No Quick Stop “.
0–
ment.
1 Actual value is within a tolerance band; dynamic violations are permissible.
0–
0 Control by the automation system is not possible, only possible at the device level, by
another interface or the drive is controlled from a supervisor (Master class 2).
1
Actual value
≥ comparison value (setpoint) which may be set via the parameter number.
56
HRB25668 10/2013
Page 57

Telegram 1
Speed Setpoint
Speed Setpoint Channel
The speed setpoint, written in NSOLL_A, gives a frequency output defined by the following formula:
Speed setpoint in Hz = (NSOLL_A x [Max frequency] (tFr)) / 16#4000
[Max frequency] (tFr): Normalized frequency of the ATV32 (typically 50 Hz).
Speed Setpoint Range
The following table lists the different values for the speed references and the correspondence for ATV32:
Setpoint value Setpoint used by the Altivar 32
0x0000 0
0x4000 100% of normalized frequency
0xC000 –100% of normalized frequency
PROFIdrive / Acyclic Messaging
See “Annex B - The PROFIdrive Parameters Channel” on page 77.
HRB25668 10/2013 57
Page 58

Telegram 1
58
HRB25668 10/2013
Page 59

Embedded Web server
Embedded Web server
What Is in this Chapter?
This chapter contains the following topics:
Overview 60
Connection to the Web server 60
Pages Description 61
FTP SERVER 67
8
Topic Page
HRB25668 10/2013 59
Page 60

Overview
The VW3A3627 provides an integrated Web server which allows several functions like: monitoring, parameter
settings, and diagnostics. This chapter describes the services provided by this Web server.
The Web server can be accessed from standard Browsers like Internet Explorer or Firefox.
Connection to the Web server
The Web server can be accessed from standard browsers like Internet Explorer or Firefox.
In the following example, the ATV32 has received the IP address 10.0.0.5:
Embedded Web server
First connect the computer to the ATV32 by typing http:// followed by the ATV32 IP address.
You will be asked to first enter a User Name and a password.
By default the user name is USER and the password is also USER.
Once connected, the Web server home page is displayed.
Access Rights - Password and User Names
• “Web read password”: Access to the different pages requires a User access level. This is the first level of
password, you can monitor and access to all the pages of the Web server, but not modify data.
- User name: USER (default value)
- Password: USER (default value)
• “Web write password”: Access to data or settings change, an administrator access level is required.
- Password: USER (default value).
The user names and the password of both level can be modified from the administration section (> home >
Network Setup > Administration).
Web Server Site Map
It contains:
Home Monitoring Drive monitor (page 62)
Network setup Network Parameters (page 65)
Diagnostics TCP/IP statistics (page 66)
Data Viewer/Editor (page 63)
Save and restore (page 64)
iPar client settings (page 65)
Administration (page 65)
Modbus Statistics (page 66)
60
HRB25668 10/2013
Page 61

Embedded Web server
Pages Description
Home Page
The home page or “Home” menu includes a “Languages” submenu that contains a link to the different
available languages page.
Each link in the “Languages” submenu sends the user to the home page in the chosen language and
configures the web browser to open the HTML pages located in the corresponding directory.
(example: the “http://139.160.69.241/html/english/” directory becomes the standard directory in the case of
English).
Note About Java Applets
The Web server downloads Java programs called “applets” to your computer. These applets communicate
with the drive using Modbus services (on port 502), thus establishing one or more connections between the
computer and the drive. Until an applet has been fully transmitted from the drive to the browser, a gray
rectangle appears in the place reserved for it in the page.
The applets associated with the web pages monitor communication with the drive. When the drive no longer
responds to requests to update the data, the message “Link down” is displayed in one field and all the other
field contents are emptied.
The description of each page indicates the data refresh period requested by the applet loaded on the
computer. The refresh period actually observed depends on:
• The performance of the computer on which the web browser is running,
• The communication system response time,
• The amount of data to be refreshed on the page.
HRB25668 10/2013 61
Page 62

Monitoring Menu
Embedded Web server
The “Monitoring” menu contains the following items:
• A link to the “Drive Monitor” page:
The state displayed in the “Altivar State” field corresponds to the display on the drive integrated display
terminal. A delay may be noticed between the displays on the Web server and the display terminal. This delay
depends on the performance of the computer used to display the pages using a web browser and the
communication system performance.
The motor speed displayed on the “Motor Speed” gauge is calibrated according to the maximum frequency
[Max frequency] (tFr) and the number of pairs of poles [Pr] (PPn).
The LI… area gives the state of the drive terminals (logic inputs LI1 to LI6, logic outputs LO1, relay outputs R1
to R2, analog inputs AI1 to AI3 and analog output AO1. When a logic input is active, the LED is green. When
a logic output is active, the LED is red.
62
HRB25668 10/2013
Page 63

Embedded Web server
• A link to the "Data viewer/ editor" page:
This page is used to display the drive parameters and to modify their values.
The parameters are arranged in groups, and are consistent with the keypad and user manuals.
The display mode for each value depends on the nature of the parameter:
• The unit for the physical values is displayed in the “Unit” column.
• The registers (bit fields) are displayed in hexadecimal format (16#xxxx).
• Signed values are displayed as such.
To begin the monitoring, click the “Start animation” button:
To modify the parameter value, click the “Write value of selected row” button then select the parameter to
modify.
It is only possible to modify the parameter values after entering the “Write password” (see “Access Rights Password and User Names” on page 60). Click the “Password” button to enter this password. An entry field
then appears in the parameter table, and also a “Cancel” button, for canceling the password entry. After
entering the password, press the Enter key so that it is taken into account by the web browser.
When the value of a parameter cannot be modified, the following window appears: “This parameter can't be
written!”.
HRB25668 10/2013 63
Page 64

Save and restore configuration
Restore
Save as
• A link to the "Save and restore configuration" page:
This page is used to save on the local computer (save ”Backup.cfg” file) and restore from the local computer
the drive parameters by using the embedded Web server. Restore operation is possible when the motor is
stopped.
Embedded Web server
64
HRB25668 10/2013
Page 65

Embedded Web server
Network Setup menu
The “Network setup” menu contains the following items:
• A link to the "Network Parameters" page:
• A link to the "iPar client settings" page:
This page displays the main parameters used by the VW3A3627 PROFINET module iPar function and is used
to configure these parameters. See the "iPar Service" chapter in this section for more information.
• A link to the "Administration" page:
This page is used to modify the Web read and the web write password. See Access Rights - Password and
User Names on page 60.
HRB25668 10/2013 65
Page 66

Diagnostics menu
Embedded Web server
The “Network setup” menu contains the following items:
• A link to the "TCP/IP Statistics" page:
This page gives detailed information about the Ethernet status and settings.
• A link to the "Modbus Statistics" page:
This page gives detailed information about the Modbus server.
66
HRB25668 10/2013
Page 67

Embedded Web server
FTP SERVER
An FTP server gives access to the resources of the Web server files:
-The access is restricted by username and password.
-Login default values are: username = USER; password= USER. The write password can be changed on the
default Web server.
-The FTP server allows up to 2 simultaneous connections.
-The FTP server contents cannot be modified if the motor is running.
The FTP server has a DOS type file system.
The FTP server allows the following operations
FTP function
User name control. Allows or refuse connection OK
Password control. Allows or refuse connection OK
User logout OK
File system type: OK; "DOS"
Creation of a volume Not managed
Rename file OK
Open file OK read/write
Read file OK
Write file OK
Open folder OK
Close folder OK
Change folder OK
Current folder = parent folder OK
Delete folder OK
Create folder OK
Recuperation of the current folder OK
Read next folder entry OK
HRB25668 10/2013 67
Page 68

Embedded Web server
68
HRB25668 10/2013
Page 69

Common Additional Features
Common Additional Features
What Is in this Chapter?
This chapter contains the following topics:
Identification and Maintenance Data 70
I&M Records Description 70
9
Topic Page
HRB25668 10/2013 69
Page 70

Identification and Maintenance Data
Identification & maintenance (I&M) has been established to the PNO. “Support the end user during various
scenarios of the device lifecycle”:
• Configuration
• Commissioning
• Repair and update
• Operation and visualization
NOTE: These fields are read only (index 16#AFF0).
The access to the I&M records is achieved by the use of the PROFINET mechanisms (IEC 611458-6).
I&M Records Description
Common Additional Features
Champ Number
of bytes
HEADER_MANUF_SPEC 10 (string) Manufacturer-specific field
MANUFACTURER_ID 2 16#01, 16#29 16#129: Schneider Electric
ORDER_ID 20 Identification object ID 1 Commercial catalog number of the drive
SERIAL_NUMBER 16 Serial number C1P1, C1P2, C1P3, C1P4
HARDWARE_REVISION 2 16#10, 16#00 –
SOFTWARE_REVISION 4 'V', A, B, C A = MSB of software version
REVISION_COUNTER 2 16#xx, 16#yy Rev xy
PROFILE_ID 2 – Defined by the PNO (3A00..3AFF, PROFIdrive)
PROFILE_SPECIFIC_TYPE 2 – Profile specific number
IM_VERSION 2 16#01, 16#01 Version I&M: 1.1
IM_SUPPORTED 2 16#00, 16#01 Managed Index I&M V I&M0
Value Meaning
B = LSB of software version
C = MSB of software revision
The ORDER_ID contains the commercial catalog number of the drive.
70
HRB25668 10/2013
Page 71

Annexes
Annexes
What Is in this Chapter?
This chapter contains the following topics:
Annex A - Simple CONT Language FC (Controlling the Drive in CiA 402 Mode) 72
Annex B - The PROFIdrive Parameters Channel 77
Glossary 84
10
Topic Page
HRB25668 10/2013 71
Page 72

Annex A - Simple CONT Language FC (Controlling the Drive in CiA 402 Mode)
Annexes
72
HRB25668 10/2013
Page 73

Annexes
HRB25668 10/2013 73
Page 74

Annexes
74
HRB25668 10/2013
Page 75

Annexes
HRB25668 10/2013 75
Page 76

Annexes
76
HRB25668 10/2013
Page 77

Annexes
Each item of the PNU 1000 array
represents an ATV32 Modbus
address
PROFINET
Controller
PNU 900 to 999
PNU 1000[0 .. 65535]
PROFIdrive standardized
parameters
ATV32
+
PROFINET
Option
Module
PROFINET
Controller
Typically a PLC
PROFINET
Supervisor
Typically a PC
PROFINET device
Altivar pp PROFINET device
PROFINET cyclic data
PROFINET acyclic messages
Annex B - The PROFIdrive Parameters Channel
When operated with the PROFIdrive profile, the Altivar 32 parameters are organized as defined by PNU
numbering and addressing modes. However, for people who are familiar with the ATV parameters, this
addressing mode keeps the native structure of the device (based on Modbus addressing). PNU are numbered
from 0 to 65535 and each PNU represents a parameter (from single type as words to complex data structure
or arrays). PROFIdrive parameters from PNU 900 to PNU 999 are standardized, they are described below. All
others PNUs are manufacturer-specific.
In the case of the Altivar 32, parameters can be separated in 2 groups:
• Standardized PNUs (900 to 999)
• ATV32 parameters which are gathered in a single PNU entry point: PNU1000.
PROFIdrive Based on PROFINET
When the Altivar 32 is operated in PROFIdrive profile, the parameter management takes benefit of the
PROFINET acyclic messaging features: With PROFINET, it is possible to exchange messages of variable
length between the controller and the supervisor. These messages come in addition of the periodic data
exchange.
HRB25668 10/2013 77
Page 78

PROFIdrive Telegram:
Meaning
Sub index
ID
Number of arrays
Standardization factor
Complete description
(46 bytes)
Data type
Standardization factor
Not writable
16 bytes
16 bytes
16 bytes
(size of)
Additional characteristics.
Exists if bit=1
The following table describes the Profidrive header:
DU Byte
Function code 0
Slot_num 1 0: global parameters
Index 2 47: Reserved for PROFIdrive
Length 3 Length of PROFIdrive parameter channel frame
Data 4-5 PROFIdrive parameter channel frame: check
PROFIdrive Parameters Structure
A parameter is defined with its PNU number from 1 to 65535.
Each parameter is made of 3 main areas: PWE — the value —, PBE — which describes the parameter
attributes —, and a text area. The access to the 3 different areas of a parameter is specified by the “attribute
field” of the parameter request. The following diagram summarizes the parameter model (For more
information, refer to the Profile drive technology V4 standard).
The parameters and their sub parts are identified as follows:
PNU number + Attribute 16#20 PBE + Sub_index
Annexes
Request
nr
16#10 PWE + Sub_index
16#30 Text + Sub_index
Detail of the PBE Attribute
The following diagram describes the PBE attribute:
Altivar 32 Parameters
Each Altivar 32 parameter can be represented according to the PNU standard structure. The following table
gives the possible values of a parameter according to the PNU properties. Altivar 32 parameters are part of
the PNU 1000. PNU 900 to 999 are described in the “PROFIdrive Standard Parameters” on page 79.
Parameter property Altivar 32 implementation Example
PNU number 1000 –
Sub index Modbus address [CMD address] (8501)
PWE Value of the parameter 0...65535 –
PBE Describes an array of 65535 Words Constant
Text – “Altivar 32 parameter”
78
HRB25668 10/2013
Page 79

Annexes
PROFIdrive Standard Parameters
Parameters 900 to 999 are defined in accordance with the PROFIdrive profile.
The following table describes the required parameters.
PNU Sub ID Definition Type R/W Comment
900 – Controller > DO
PNU900 contains the cyclical
frame if Supervisor handles the
DO
907 – Controller < DO
PNU900 contains the cyclical
frame if Supervisor handles the
DO
922 – Telegram selection UINT R 1,100, 101, 102
927 – Operation priority UINT R/W Enables control
928 – Control priority UINT R = 1
930 – Operating mode UINT R = 1
944 – Detected fault message
counter
947 – Detected fault number UINT R If a detected fault has been triggered by the Altivar, this parameter
963 – Actual baud rate UNIT R Current baud rate
964 – Drive unit identification
0 Manufacturer ID – R Defined by PNO (PROFINET Organization)
1 Drive unit String R This UNIT contains the value xx commercial catalog number
2 Version (drive) – R This parameter contains the firmware version of the host drive XXyy
3 Firmware date (year) INT R –
4 Firmware date (day/month) INT R This parameter contains the firmware date (day/month)
PNO also defines SubID 5 and 6, but they shall not be implemented.
965 – Profile identification number UINT R Profile identification numbers:
– R Control telegram.
Image of PZD
– R Status telegram.
Image of PZD
UINT R The value of PNU944 is incremented each time a detected fault
occurs.(+1 for each new detected fault)
contains the detected fault code value.
(detected fault code = detected fault number)
(character string)
version, IE
Byte 1 = 03: PROFIdrive
Byte 2 = 40: V4.01
Parameters Requests
There are 2 kinds of requests:
• Request parameter (parameters are PNU number, attribute, and Sub_index)
• Change parameter (parameters are PNU number, attribute, and Sub_index)
These requests are able to manage one or more parameters or several attributes of one parameter. In order
to access to a specific attribute of a parameter, the request header contains: the PNU, the sub-ID, and an
attribute. This attribute defines whether the request mentions the value, the description area, or the Text area.
HRB25668 10/2013 79
Page 80

Parameter Reading
• Request:
Byte n+1 Byte n
Request reference = 01 Request ID = 01
Request data
(first parameter)
*Refers to field “value” (PWE), 16#20 refers to the description field (PBE) and 16#30 to the text field.
Axis = 16#01 Number of parameters = 01
Attribute = 16#10 * Number of elements = 01
PNU number = 16#3E8
Sub index = 16#C81 (3201) ETA Modbus Address
• Response:
Byte n+1 Byte n
Response Header Request reference = 01 Request ID = 01
Axis = 16#01 Number of parameters = 01
Response data Format = 16#42 * Number of elements = 01
PNU value = 16#xxxx (value of ETA)
*Format 16#42 specified that the returned value is a WORD.
Note: Byte 16#41, Word 16#42, standard integer 16#03, Double word 16#43.
Annexes
Parameter Writing
• Request:
Byte n+1 Byte n
Request Header Request reference = 01 Request ID = 02
Axis = 16#01 Number of parameters = 01
Parameter number Attribute = 16#10 * Number of elements = 01
PNU number = 16#3E8
Sub index = 16#2329 (9001) ACC Modbus Address
Parameter value Format = 16#42 Amount values = 01
Value = 50 (ACC is set to 5 s)
* Refers to field “value”, 16#20 refers to the description field and 16#30 to the text field.
• Response (if OK):
Byte n+1 Byte n
Response Header Request reference = 01 Request ID = 02
Axis = 16#01 Number of parameters = 01
80
HRB25668 10/2013
Page 81

Annexes
Request: Negative Response
The following table lists the items of a negative response:
Response Header Request reference = 01 Response ID = 82 *
Parameter number Format = Error 16#44 Number of values
Value Error Value Meaning 16#xxxx
Byte n+1 Byte n
Axis = 16#01 Number of parameters = 01
0x00 Impermissible PNU
0x01 cannot change value + Subindex
0x02 Low or high limit exceeded + Subindex
0x03 Subindex detected fault + Subindex
0x04 No array
0x05 Incorrect data type
0x06 Setting not permitted + Subindex
0x07 Cannot change description + Subindex
0x09 No description
0x0B No operation priority
0x0F No text array available
0x11 Cannot execute the request. Reason not specified
0x14 Value impermissible
0x15 Response too long
0x16 Parameter address impermissible
0x17 Illegal format
0x18 Number of values inconsistent
0x19 Axis/DO nonexistent
0x20 Cannot change text
0x65 Invalid Request Reference
0x66 Invalid Request ID
0x67 Invalid Axis number / DO-ID
0x68 Invalid number of parameters
0x69 Invalid attribute
0x6B Request too short
* For all negative responses the ID equals to response code or 16#80.
With the Subindex in addition to the error value, the total length of the answer is 10 bytes.
HRB25668 10/2013 81
Page 82

Annex C - iPar Service
The PROFINET fieldbus module is compliant with iPar server function.
This is managed by the function block FB24 "IPARSERV".
The purpose of this function is to save (upload) the parameters (iParameter) of any PROFIBUS DP slave,
PROFINET I/O device, or module within the same host controller that is maintaining the GSD-based
parameters and diagnosis messages.
This allows, for example, fast device replacement due to maintenance or repair.
The function block can restore (download) the iParameter set to the component upon its request.
The principle is shown on the figure below; circled numbers are presenting the actions.
Annexes
Per upload request, the function block reads the data record with the iParameter out of the drive, creates a
data block, and stores the data record therein.
Per download request, the function block uses the data block and writes down a data record to the drive.
The FB is instantiated once per component. It must be invoked within OB1 and additionally in OB 100 (the
start-up OB).
With PROFINET I/O, a device sends a request to save or restore iParameter set to the host controller via a
new "ALARM", called "Upload&Retrieval" (UserStructureIdentifier = 0x8201).
With a PROFINET I/O device, the function block FB 24 must additionally be invoked within OB 56 (the "Update
Alarm" OB).
To configure iPar function, the Diagnostic address of Slot 0 of the device shall be used.
82
HRB25668 10/2013
Page 83

Annexes
iPar function activation is done in the hardware configuration by checking "Support device replacement without
exchangeable medium":
The answer of the iPar request is stored in a data block. The size of the array shall be set to 8192.
HRB25668 10/2013 83
Page 84

Glossary
The table below provides explanations of the acronyms used in this document.
Term Definition
ADL Logical address
DCP
GSDML
LLDP Link Layer Discovery Protocol
MRP Media Redundancy Protocol
PKE Parameter identifier
PKW Parameter - Parameter Index - value
PNO
OB The PROFINET option module
Discovery Control Protocol - A communications protocol with PROFINET I/O that allows an I/O controller
or Supervisor to find and configure every PROFINET I/O device on a subnet.
Generic Station Description Markup Language - The file containing the XML description of the
PROFINET I/O device.
PROFINET Organization
Annexes
84
HRB25668 10/2013
Page 85

page blanche
Page 86

ATV32_PROFINET_Manual_HRB25668_01
10/2013
 Loading...
Loading...