

Page 1

System Design for
Control of
Electrical Noise
Reference Manual
Page 2

Important User Information
Because of the variety of uses for the products described in this
publication, those responsible for the application and use of this
control equipment must satisfy themselves that all necessary steps
have been taken to assure that each application and use meets all
performance and safety requirements, including any applicable laws,
regulations, codes and standards.
The illustrations, charts, sample programs and layout examples
shown in this guide are intended solely for purposes of example.
Since there are many variables and requirements associated with any
particular installation, Allen-Bradley
or liability (to include intellectual property liability) for actual use
based upon the examples shown in this publication.
Allen-Bradley publication SGI-1.1, Safety Guidelines for the
Application, Installation and Maintenance of Solid-State Control
(available from your local Allen-Bradley office), describes some
important differences between solid-state equipment and
electromechanical devices that should be taken into consideration
when applying products such as those described in this publication.
Reproduction of the contents of this copyrighted publication, in
whole or part, without written permission of Rockwell Automation,
is prohibited.
does not assume responsibility
Throughout this manual we use notes to make you aware of safety
considerations:
ATTENTION
Identifies information about practices or
circumstances that can lead to personal injury or
death, property damage or economic loss.
!
Attention statements help you to:
•
identify a hazard
•
avoid a hazard
•
recognize the consequences
IMPORTANT
Allen-Bradley is a registered trademark of Rockwell Automation.
Identifies information that is critical for successful
application and understanding of the product.
Page 3

Table of Contents
Preface
Electrical Noise Control Overview
Who Should Use this Manual . . . . . . . . . . . . . . . . . . . . . . . P-1
Purpose of this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . P-1
Contents of this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . P-2
Related Documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . P-3
Conventions Used in this Manual . . . . . . . . . . . . . . . . . . . . P-3
Chapter 1
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
What is Electrical Noise?. . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
Understanding the Need for Electrical Noise Control . . . . . . 1-1
CE Compliance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
Best Practices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Noise Control Basics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Noise Sources. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Noise Victims . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
Coupling Mechanisms . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
Conducted Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
Capacitance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
Mutual Inductance . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
Electromagnetic Radiation. . . . . . . . . . . . . . . . . . . . . . . 1-6
Solutions for Reducing Noise . . . . . . . . . . . . . . . . . . . . . . . 1-6
Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
Measuring Effectiveness . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
High Frequency (HF) Bonding
Chapter 2
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
Understanding the Source of Electrical Noise . . . . . . . . . . . 2-1
Noise Example 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Noise Example 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
The Ground Plane Principle . . . . . . . . . . . . . . . . . . . . . 2-3
Extending the Ground Plane Principle. . . . . . . . . . . . . . 2-5
Grounding a PCB to the Drive Chassis . . . . . . . . . . . . . 2-5
Noise Solutions Using the Ground Plane Principle . . . . . . . 2-6
Grounding to the Component Mounting Panel. . . . . . . . 2-6
Doors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
Adjacent Panels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
Grid and Raised Floor. . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
Mezzanine Floor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
Machine Structure. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
New Buildings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-12
Existing Buildings. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
Limits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
Grounding (Safety Earth) . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
iPublication GMC-RM001A-EN-P — July 2001
Page 4

ii Table of Contents
Segregating Sources and Victims
Shielding Wires, Cables, and
Components
Chapter 3
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Understanding the Segregation Concept . . . . . . . . . . . . . . . 3-1
Noise Zones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Ensuring CE Compliance at Build Time . . . . . . . . . . . . . 3-2
Zone Classification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Component Categories . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
Routing Wires and Cables Within a Panel . . . . . . . . . . . . . . 3-4
Wire and Cable Categories . . . . . . . . . . . . . . . . . . . . . . 3-6
Routing System Wires and Cables Between Panels. . . . . . . . 3-8
Chapter 4
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
Understanding the Shielding Concept . . . . . . . . . . . . . . . . . 4-1
Ferrite Sleeves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Ferrite Sleeve Limitations. . . . . . . . . . . . . . . . . . . . . . . . 4-4
Mixing Categories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
Filtering Noise
Contact Suppression
Chapter 5
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
Understanding the Filtering Concept . . . . . . . . . . . . . . . . . . 5-1
Commercial AC Line Filters for Low Voltage Circuits . . . 5-1
General Purpose 0-24V ac/dc Filters . . . . . . . . . . . . . . . 5-2
Filter Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-3
Performance Test Set-up . . . . . . . . . . . . . . . . . . . . . . . . 5-4
Test Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-4
Ultrasonic Transducers . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
Xenon Flashing Beacons (strobe lights). . . . . . . . . . . . . . . . 5-5
AC Line Filters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
Earth Leakage/Ground Fault . . . . . . . . . . . . . . . . . . . . . 5-6
Chapter 6
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
Understanding Contact Suppression for AC Circuits . . . . . . . 6-1
Methods of AC Contact Suppression . . . . . . . . . . . . . . . 6-2
Understanding Contact Suppression for 24V dc Circuits . . . . 6-3
Methods of DC Contact Suppression . . . . . . . . . . . . . . . 6-3
Contact Suppression Effects . . . . . . . . . . . . . . . . . . . . . . . . 6-4
Power Distribution
Publication GMC-RM001A-EN-P — July 2001
Chapter 7
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
Understanding Noise in Power Wiring . . . . . . . . . . . . . . . . 7-1
Three-Phase Power Supplies. . . . . . . . . . . . . . . . . . . . . . . . 7-1
Line Filters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
Transformers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-3
Single Phase Power Supplies . . . . . . . . . . . . . . . . . . . . . . . 7-4
Page 5

Motor Wiring
High Speed Registration Inputs
Table of Contents iii
24V dc Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-4
24V dc Distribution. . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5
24V dc PSU Zoning Methods. . . . . . . . . . . . . . . . . . . . . 7-5
Linear PSU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-9
Special Applications for 24V dc PSUs . . . . . . . . . . . . . 7-11
Chapter 8
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-1
Understanding Noise in Motor Power Wiring . . . . . . . . . . . 8-1
Shielding Motor Power Cables . . . . . . . . . . . . . . . . . . . . . . 8-2
Grounding Motor Power Cable Shields . . . . . . . . . . . . . . . . 8-2
Applying Ferrite Sleeves. . . . . . . . . . . . . . . . . . . . . . . . . . . 8-3
Splicing Motor Power Cables . . . . . . . . . . . . . . . . . . . . . . . 8-3
Handling Excess Cable. . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-4
Installing Long Motor Cables . . . . . . . . . . . . . . . . . . . . . . . 8-4
Chapter 9
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-1
Understanding Registration Inputs . . . . . . . . . . . . . . . . . . . 9-1
Noise Reduction Methods. . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
Shared Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
Dedicated Power Supply. . . . . . . . . . . . . . . . . . . . . . . . 9-4
Detection Device Mounting. . . . . . . . . . . . . . . . . . . . . . 9-4
Proximity Switches . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-5
Signal Noise Filter Options. . . . . . . . . . . . . . . . . . . . . . . . . 9-5
Single Voltage Input (24V or 5V). . . . . . . . . . . . . . . . . . 9-6
Dual Voltage Inputs (24V or 5V) . . . . . . . . . . . . . . . . . . 9-7
Registration Error. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-8
Error Compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-9
Software Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-9
Encoders
Measuring Noise Reduction
Effectiveness
Chapter 10
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-1
Understanding Encoders . . . . . . . . . . . . . . . . . . . . . . . . . 10-1
Noise Reduction Methods. . . . . . . . . . . . . . . . . . . . . . . . . 10-1
Driver Type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-1
Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-2
Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-2
Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-2
Power Supply Wiring Options . . . . . . . . . . . . . . . . . . . . . 10-3
Chapter 11
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-1
Understanding Noise Measurement. . . . . . . . . . . . . . . . . . 11-1
Publication GMC-RM001A-EN-P — July 2001
Page 6

iv Table of Contents
Methods for Measuring Noise . . . . . . . . . . . . . . . . . . . . . . 11-1
Measuring Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-2
Oscilloscope Specifications . . . . . . . . . . . . . . . . . . . . . 11-2
Oscilloscope Settings for Measuring Noise Peaks . . . . . 11-2
E-Field Sniffing Method. . . . . . . . . . . . . . . . . . . . . . . . 11-3
H-Field Sniffing Method . . . . . . . . . . . . . . . . . . . . . . . 11-4
Direct Voltage Measurement Method . . . . . . . . . . . . . . 11-4
Grounding Your Probe (reference ground) . . . . . . . . . 11-6
Ground Loops . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-7
Differential Measurements . . . . . . . . . . . . . . . . . . . . . . 11-7
Scope Probe Lead Extension . . . . . . . . . . . . . . . . . . . . 11-9
Checking Your Method for Effectiveness . . . . . . . . . . . 11-9
Identifying the Noise Source . . . . . . . . . . . . . . . . . . . 11-10
Intermittent Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-10
General Guidelines for Measuring Noise . . . . . . . . . . . . . 11-10
What are Acceptable Noise Levels? . . . . . . . . . . . . . . 11-10
Field Strength Meters . . . . . . . . . . . . . . . . . . . . . . . . 11-11
Monitoring for Noise. . . . . . . . . . . . . . . . . . . . . . . . . 11-11
Noise Control Supplement
Appendix A
Chapter Objectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
Grounding Cable Shields . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
Pigtails . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
Clamping at the Circular Section . . . . . . . . . . . . . . . . . . A-2
Wire Segregation Test Results . . . . . . . . . . . . . . . . . . . . . . . A-5
Test Set-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-5
Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-6
Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-7
Switch-Mode DC Power Supplies . . . . . . . . . . . . . . . . . . . . A-8
Background Information . . . . . . . . . . . . . . . . . . . . . . . . A-8
Grounding the Common . . . . . . . . . . . . . . . . . . . . . . . . A-9
DC Filtering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-11
Positioning the PSU within the Panel . . . . . . . . . . . . . . A-11
AC Line Filters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-12
Using Separate DC Power Supplies . . . . . . . . . . . . . . . A-12
Using a Dynamic Braking Contactor . . . . . . . . . . . . . . . . . A-13
Reducing Dynamic Braking Circuit Noise. . . . . . . . . . . A-14
Bonding Surfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-15
Wire Forms an Antenna . . . . . . . . . . . . . . . . . . . . . . . A-15
Inductance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-15
Noise Checklist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-16
EMC Product Suppliers
Publication GMC-RM001A-EN-P — July 2001
Appendix B
EMC Product Suppliers. . . . . . . . . . . . . . . . . . . . . . . . . . . . B-1
Page 7

Preface
Read this preface to familiarize yourself with the rest of the manual.
The preface covers the following topics:
• Who should use this manual
• The purpose of this manual
• Contents of this manual
• Related documentation
• Conventions used in this manual
• Allen-Bradley support
Who Should Use this Manual
Purpose of this Manual
Use this manual if you are responsible for the circuit design and
layout of wiring panels or the installation and mounting of
Allen-Bradley products. Specifically, the following disciplines should
be included:
• Circuit designers
• Panel layout designers
• Panel builders and electricians
• Electrical technicians
In addition, you should have an understanding of:
• Drive control and basic electronics
• Appropriate electrical codes
This manual outlines the practices which minimize the possibility of
noise-related failures and that comply with noise regulations. It gives
you an overview of how electrical noise is generated (sources), how
the noise interferes with routine operation of drive equipment
(victims), and examples of how to effectively control noise.
This manual applies in general to Allen-Bradley drives products. For
information on specific Allen-Bradley motion products refer to Noise
Control Supplement - Motion Products Reference Manual (publication
GMC-RM002x-EN-P).
Publication GMC-RM001A-EN-P — July 2001
Page 8

P-2 Preface
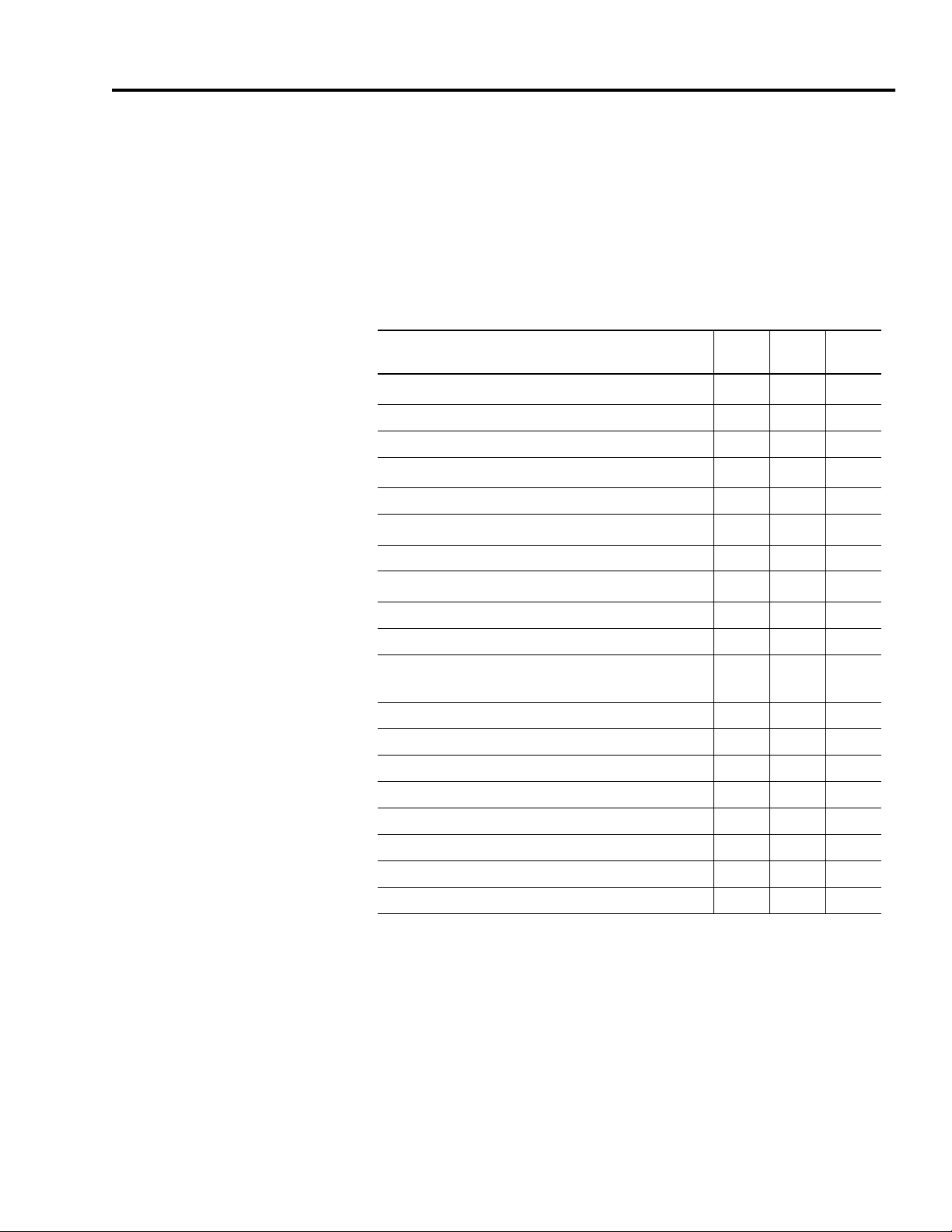
Contents of this Manual
The contents of this manual are described in the table below.
Chapter Title Contents
Preface Describes the purpose, background, and
scope of this manual. Also specifies the
audience for whom this manual is
intended.
1 Electrical Noise Control
Overview
2 High Frequency (HF) Bonding Describes the ground plane principle and
3 Segregating Sources and
Victims
4 Shielding Wires, Cables, and
Components
5 Filtering Noise Describes how low-pass filters and ferrite
Provides a brief understanding of the need
for electrical noise control, how noise
affects system performance, noise
coupling methods, and solutions.
provides techniques for bonding devices,
panels, machines, floors, doors, and
buildings.
Describes how establishing zones within
your system for noise sensitive or noise
generating components can reduce
electrical noise coupling.
Describes how using shielded cable or
steel shields can reduce electrical noise.
sleeves can reduce electrical noise.
6 Contact Suppression Describes how contact suppressors for
relays and various other switches can
reduce electrical noise.
7 Power Distribution Describes bonding, segregating, shielding,
and filtering techniques for use when
routing AC and DC power.
8 Motor Wiring Describes shielding, grounding, and
splicing techniques for use with motor
wiring.
9 High Speed Registration
Inputs
10 Encoders Describes bonding, segregating, shielding,
11 Measuring Noise Reduction
Effectiveness
Appendix A Noise Control Supplement Provides background information on
Appendix B EMC Product Suppliers Provides a list of EMC product suppliers,
Describes how wiring sensitive to
electrical noise benefits from proper noise
reduction strategies.
and filtering techniques for use with
encoders.
Describes the equipment, methods, and
various guidelines for measuring noise
levels and noise reduction effectiveness.
specific topics related to electrical noise
control.
the products they offer, and internet
website.
Publication GMC-RM001A-EN-P — July 2001
Page 9

Preface P-3
Related Documentation
The following documents contain additional information related to
electrical noise control. To obtain a copy, contact your local
Allen-Bradley office or distributor.
For: Read This Document: Document Number:
Specific advice on motion products Noise Control Supplement - Motion Products GMC-RM002x-EN-P
Advice specific to large systems Industrial Automation Wiring and Grounding Guidelines for Noise
Immunity
Advice specific to large systems Installing, Operating and Maintaining Engineered Drive Systems
(Reliance Electric)
Safety advice Safety Guidelines for the Application, Installation, and
Maintenance of Solid-State Control
IEEE industry standards for electrical
equipment installation
A text book on noise reduction techniques Noise Reduction Techniques in Electronic Systems
A text book on grounding techniques for the
control of EMI
IEEE Guide for the Installation of Electrical Equipment to
Minimize Electrical Noise Inputs to Controllers from External
Sources
Henry W. Ott
Published by Wiley-Interscience
Grounding for the Control of EMI
Hugh W. Denny
Published by Don White Consultants
1770-4.1
D2-3115-2
SGI-1.1
IEEE 518
N/A
N/A
1
A text book on solving interference problems Solving Interference Problems in Electronics
Ralph Morrison
Published by Wiley-Interscience
A technical paper on EMI emissions EMI Emissions of Modern PWM ac Drives
Gary L. Skibinski, Russel J. Kerkman, & Dave Schlegel
IEEE Industry Applications Magazine, Nov./Dec. 1999
A text book on EMC EMC for Product Designers
Tim Williams
Published by Newnes
1
Available in future. Check with The Automation Bookstore.com or your Allen-Bradley sales representative for
documentation availability.
Conventions Used in this Manual
The following conventions are used throughout this manual:
• Bulleted lists such as this one provide information, not procedural
steps.
• Numbered lists provide sequential steps or hierarchical
information.
• Words that you type or select appear in bold.
• When we refer you to another location, the section or chapter
name appears in italics.
N/A
N/A
N/A
Publication GMC-RM001A-EN-P — July 2001
Page 10

P-4 Preface
Publication GMC-RM001A-EN-P — July 2001
Page 11

Electrical Noise Control Overview
Chapter
1
Chapter Objectives
What is Electrical Noise?
This chapter provides a brief understanding of the need for electrical
noise control, how noise affects system performance, noise coupling
methods and solutions. This chapter covers the following topics:
• What is electrical noise
• Understanding the need for electrical noise control
• Noise control basics
• Coupling mechanisms
• Solutions for reducing noise
• Implementation
• Measuring effectiveness
Electrical noise is voltage spikes, generated by the routine operation
of selected system components (sources), that interfere (due to a
coupling mechanism) with the routine operation of other selected
system components (victims).
Understanding the Need for
In Europe, a system must satisfy EMC regulations. It must also work
reliably without suffering from noise-induced failures.
Electrical Noise Control
CE Compliance
Most equipment is CE marked. This means it is certified to be
compliant with European Directives which comprise two main
requirements:
• Potential noise sources must be limited in noise output to a
• Potential victims of noise must be hardened to withstand a higher
specified level.
noise level.
Publication GMC-RM001A-EN-P — July 2001
Page 12

1-2 Electrical Noise Control Overview
In both cases, equipment must be installed to manufacturers
recommendations to achieve compliance. The frequency range
covered is 150kHz to 1GHz, though the upper limit is likely to be
raised as operation frequencies increase.
Despite this, a CE compliant industrial drive system may still suffer
functional failures due to electrical noise. Additional measures are
often necessary to prevent noise from being coupled between source
and victim. The frequency range involved in system failures is
generally confined between 200kHz and 10MHz.
Best Practices
Most industrial control products do not utilize high frequencies
directly, but they can generate them in the form of noise. Logic
circuits are affected by this noise, so you need to be able to control it.
Noise Control Basics
Because it is far less expensive to apply noise control measures during
system installation than it is to redesign and fix a malfunctioning
system, we recommend you implement the best-practice procedures
described in this document.
If basic measures are implemented rigorously, a reliable system
should result. However, if just one wire is routed incorrectly or a filter
is missed, it may be enough to cause problems. Experience shows that
it is very difficult to ensure that these measures are applied 100% of
the time. If all possible measures are taken (incorporating
redundancy), the system is likely to be more tolerant of minor
mistakes in implementation.
A typical industrial control system will contain a mixture of noise
sources and potential victims. Problems are caused when a coupling
mechanism is introduced.
Noise Sources
Publication GMC-RM001A-EN-P — July 2001
Typical noise sources include:
• Mechanically switched inductive loads create intense intermittent
noise.
• PWM drive power outputs create intense continuous noise.
• Switch-mode DC power supplies can create continuous noise.
Page 13

Electrical Noise Control Overview 1-3
• Microprocessor clocks can generate high levels of noise at the
clock frequency and its harmonics.
• Contact switching.
Of the noise sources listed above, only contact switching noise can be
reduced at the source by the system builder.
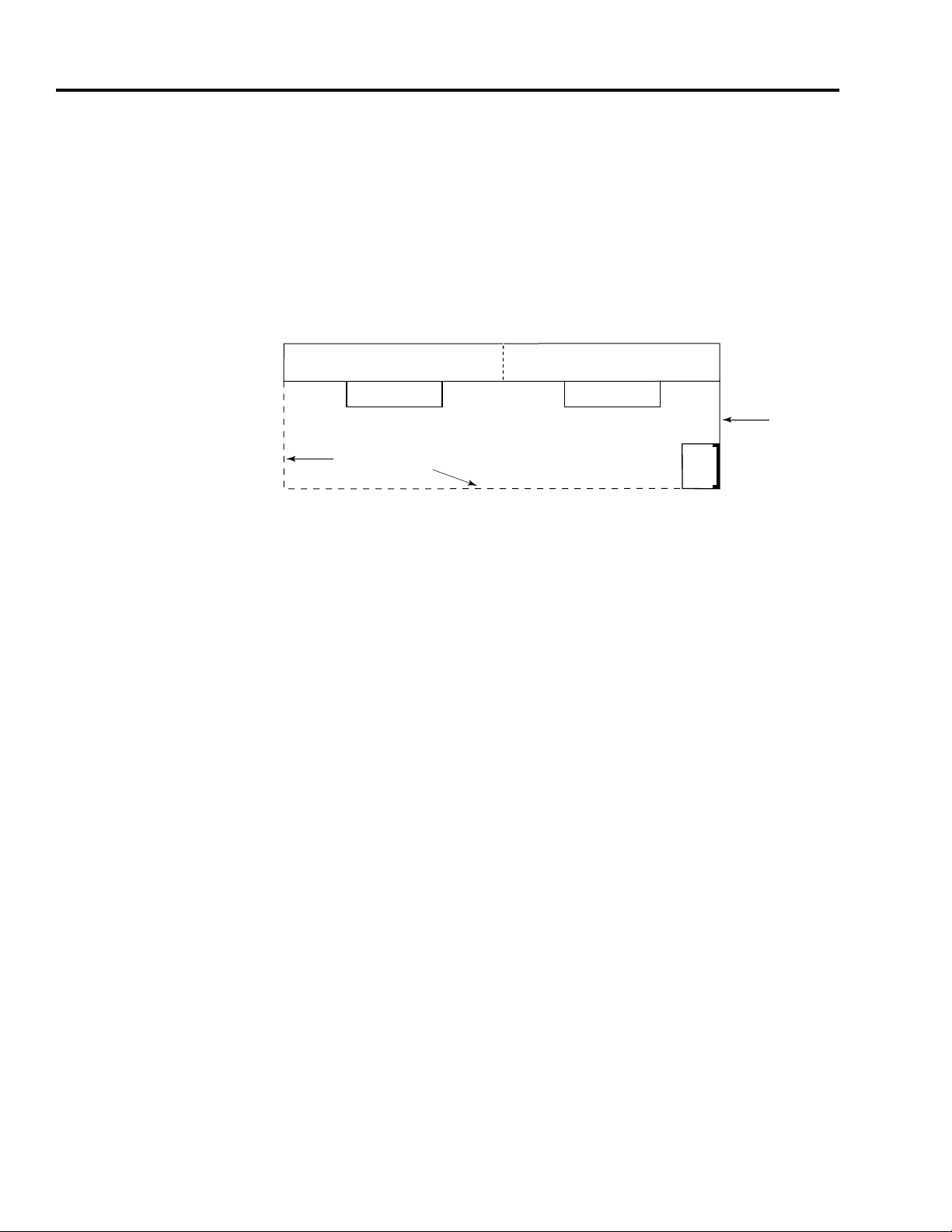
Refer to the figure below for an example of a typical noise source.
Figure 1.1
Switch-Mode Power Supply Noise Measurement
AC
Line
Filter
+24V
24V dc PSU
DC common
Ground Plane - conductive metal panel
No load connected
Noise voltage
measured here
Refer to Figure 1.2 for an example of six volt noise spikes from a
typical 24V dc power supply. The spikes usually contain frequencies
above 10 MHz.
Figure 1.2
Switch-Mode Power Supply Noise
10V
8
6
4
2
0
-2
-4
-6
6.0V pk
-8
-10V
-10123456789
Sitop Power 20 with 3 phase input - no load
Common Mode Noise +24 Volts to Backplane
ms
Publication GMC-RM001A-EN-P — July 2001
Page 14

1-4 Electrical Noise Control Overview
Noise Victims
Typical noise victims include the following:
• Microprocessor controlled devices
• Analog devices
• Encoder and registration interfaces
Refer to Figure 1.3 for an example of a typical victim.
Figure 1.3
A victim TTL gate is easily triggered
Noisy circuit carrying 6V spikes
comprising mainly 10 MHz
5V TTL gate
Coupling Mechanisms
100 pF = 200 Ω
50 Ω
Signal Source
(zero impedance)
1
Refer to the section Capacitance below for an explanation of the 200 ohm impedance. Generally, most potential
victims are better protected than this.
@ 10 MHz
Victim TTL gate receives 1.2V spikes
1
The source noise level and the victim’s sensitivity are normally outside
the control of the system designer so that it is necessary to concentrate
on the transmission of noise between them.
The coupling mechanism is the means by which electrical noise
interferes with the routine operation of equipment. This section
describes the four common coupling mechanisms for electrical noise
transmission.
Publication GMC-RM001A-EN-P — July 2001
Conducted Noise
Noise is conducted directly by system power wiring. A common route
for conducted noise is the 24V dc distribution wiring.
Page 15

Electrical Noise Control Overview 1-5
Capacitance
At radio frequencies (RF) the capacitance between two adjacent wires
is significant. Two insulated wires touching each other and only 1.0
meter (39.0 in.) long form a capacitance of approximately 100 pF
(Pico Farads). At 10 MHz the impedance is only 200 ohms.
Fortunately, the effect reduces as the square of the separation
distance. Refer to Figure 1.4 for an example of capacitive coupling.
Figure 1.4
Capacitive Coupling
Stray
capacitance
Circuit A
Separation distance
Circuit B
Mutual Inductance
At radio frequencies (RF) the inductance of a straight wire is
significant. A length of wire 1.0 meter (39 in.) has an inductance of
µ
approximately 1.0
ohms.
Two adjacent wires have mutual inductance forming a transformer.
Fortunately, the effect reduces as the square of the separation
distance. Refer to Figure 1.5 for an example of inductive coupling.
Figure 1.5
Inductive Coupling
H (Micro Henry). At 10 MHz the impedance is 60
Stray
inductance
Circuit A
Magnetic coupling
Circuit B
Separation distance
Publication GMC-RM001A-EN-P — July 2001
Page 16

1-6 Electrical Noise Control Overview
Electromagnetic Radiation
An example of electromagnetic radiation is radio transmission.
Industrial control wiring systems are large, wideband antenna which
radiate noise signals to the world. These signals (together with
conducted noise) are the primary target of the European regulations,
but rarely cause system malfunctions.
Solutions for Reducing Noise
This method: In this
category:
HF (high frequency)
Bonding
Segregation Coupling
Shielding Coupling
Filtering Coupling
Coupling
Reduction
Reduction
Reduction
Reduction
Noise reduction solutions are categorized as coupling reduction and
source reduction. There are four main methods used to reduce the
coupling of noise between source and victim. However, contact
suppression is the only source reduction technique that can be
directly applied by the system builder. Refer to the table below for a
summary.
Is defined as: For more
information refer to:
Maintaining all
metalwork at the same electrical potential. This
method is low cost and the basis for all other methods. It works by
ensuring all equipment chassis are at the same potential at all
The chapter High
Frequency (HF)
Bonding.
frequencies. If different potentials exist the voltage difference is
seen as common-mode noise on all interconnecting wiring.
Separating sources and victims of electrical noise into zones. Noise
coupling reduces with the square of separation distance. Zoning is
zero cost (within limits).
Using shielded cable and steel barriers (Faraday cage effect) to
reduce electrical noise. Because of its relatively high cost, shielding
is used with discretion.
Using low-pass filters to attenuate RF noise. Relatively low cost but
impractical for every wire.
The chapter
Segregating Sources
and Victims.
The chapter Shielding
Wires, Cables, and
Components.
The chapter Filtering
Noise.
Contact
Suppression
Source
Reduction
Adding contact suppression to mechanical switches to reduce noise.
Generally, the one noise source directly influenced by the system
builder.
Publication GMC-RM001A-EN-P — July 2001
The chapter Contact
Suppression.
Page 17

Electrical Noise Control Overview 1-7
Implementation
This application: Is defined as: For more
Routing AC and DC
power
Routing motor
power cables
Wiring high speed
registration inputs
Routing encoder
power cables
Applying bonding, segregating, shielding, and filtering techniques to
AC and DC power supplies and the associated wiring.
Applying shielding, grounding, and splicing techniques to motor
power cable installation.
Applying all the noise reduction methods available to improve the
performance of noise sensitive wiring.
Applying bonding, segregating, shielding, and filtering techniques to
encoder installation.
Measuring Effectiveness
Implementation involves applying the methods summarized in the
table on page 1-6 to the applications as shown in the table below.
information refer to:
The chapter Power
Distribution.
The chapter Motor
Wiring.
The chapter High
Speed Registration
Inputs.
The chapter Encoders.
Measuring noise reduction effectiveness involves using an
oscilloscope to test for noise during implementation. It also involves
monitoring for noise after implementation should updates to the
system affect system performance.
This application: Is defined as: For more
information refer to:
Measuring
effectiveness
Testing for electrical noise during implementation, identifying the
sources of noise, determining acceptable noise levels, and
monitoring for noise on an on-going basis.
The chapter
Measuring Noise
Reduction
Effectiveness.
Publication GMC-RM001A-EN-P — July 2001
Page 18

1-8 Electrical Noise Control Overview
Publication GMC-RM001A-EN-P — July 2001
Page 19

High Frequency (HF) Bonding
Chapter
2
Chapter Objectives
Understanding the Source of Electrical Noise
This chapter describes the ground plane principle and techniques to
extend the ground plane to devices, panels, machines, floors, doors,
and buildings. This chapter covers the following topics:
• Understanding the source of electrical noise
• Noise solutions using a ground plane
• Grounding (safety earth)
The most common source of electrical noise is due to switching of
PWM output stages.
Two examples of how noise is generated by a drive system are given
on the following pages.
Publication GMC-RM001A-EN-P — July 2001
Page 20

2-2 High Frequency (HF) Bonding
Noise Example 1
The transistors impose a 600V step change in the wire B (typically less
than 200nS). Stray capacitance A charges very rapidly causing a
current spike. This is the dominant noise source in PWM (Pulse Width
Modulated) drive systems.
The current circulates through stray capacitance C, bonding
impedance D, bonding impedance E, bonding impedance F, and back
to stray capacitance A. A voltage spike will appear between motor
frame and machine structure (Vd), between machine structure and the
panel (Ve) and between the panel and drive chassis (Vf).
The circuit of an encoder mounted on the motor will then have a
voltage spike of amplitude Vd + Ve relative to the panel and to any
input circuit on the panel, potentially a noise victim.
The noise voltages are proportional to the impedance of the bonds
(voltage = current x impedance). If these are reduced to zero, no
voltage will appear between encoder and panel.
Figure 2.1
Switching noise affecting encoder signal
Drive
Heatsink
(connected
to chassis)
F
IMPORTANT
Panel
The quality of bonding techniques applied during
installation directly affects the noise voltages
+600V dc
Stray
capacitance
A
B
Transistor block
DC common
Impedance due to
poor bonding
between system components.
Motor
Windings
C
Encoder
D
E
Machine Structure
Publication GMC-RM001A-EN-P — July 2001
Page 21

High Frequency (HF) Bonding 2-3
Noise Example 2
Stray capacitance I charges very rapidly. Current circulates via stray
capacitances H, bond G, bond F, and A. In this way, a voltage Vf + Vg
is developed between the drive chassis and true-ground.
Any remote equipment grounded to this true-ground and wired to the
drive will have this noise voltage imposed upon its incoming signal.
Figure 2.2
Switching noise affecting incoming power
AC line
Stray capacitance
to ground
H
G
F
Drive
Heatsink
(connected
to chassis)
Impedance due to
poor bonding
Panel
I
A
+600V dc
Stray
capacitance
Transistor
block
DC common
Many other noise sources exist in a typical system and the advantage
of good bonding holds true for all.
The Ground Plane Principle
The purpose of High Frequency (HF) bonding is to present a defined
low impedance path for HF noise currents returning to their source.
IMPORTANT
Most textbooks on radio frequency (RF) techniques describe the
ground plane (GP) as the ultimate ground reference and an absolute
requirement for controlling RF current paths.
Noise current must and will return to source. If a safe
path is not provided, it may return via victim wiring
and cause circuits to malfunction.
Publication GMC-RM001A-EN-P — July 2001
Page 22

2-4 High Frequency (HF) Bonding
The ground plane principle was originally developed by printed
circuit board (PCB) designers for high frequency circuits. In
multi-layer PCBs a minimum of two copper layers are used with one
being designated the ground or common. This layer covers as large an
area as possible and each IC common is tied directly to it. In addition,
each IC Vss (+5V) pin is decoupled by a 0.1
µ
F capacitor to the
ground plane as close as possible to the pin. The capacitor presents a
very low impedance at RF hence any induced noise current generates
minimal voltage.
The fundamental property of a ground plane is that every point on its
surface is at the same potential (and zero impedance) at all
frequencies. At high frequencies this is more effective than the use of
single point grounding schemes. This is because wire has significant
inductance at RF and just a few inches can create an unacceptable
voltage drop. Refer to the section Bonding Surfaces in Appendix A for
more information.
Figure 2.3
Ground plane layer in a double-sided printed circuit board
Vss pin
Vdd pin
(common)
Ground plane
layer
Insulation
layer
Integrated Circuit
Interconnect
layer
(+5V)
Decoupling Capacitor
(Vss to ground)
Ground plane construction has proved so successful that it is now
universal in PCB design for all but the most price-sensitive and low
frequency circuits. Single-sided PCBs are not generally used for RF or
TTL circuits.
Publication GMC-RM001A-EN-P — July 2001
Page 23

High Frequency (HF) Bonding 2-5
Extending the Ground Plane Principle
The same theory holds true regardless of scale, (the earth being the
ultimate and literal ground plane) and can be used at control cabinet
level or even building level, but requires rigorous implementation.
A ground plane does not have to be flat, but gentle curves prove more
effective than sharp corners. Area is what matters. Even the outer
surface of a machine structure can be used.
Grounding a PCB to the Drive Chassis
In the figure below, a PCB ground plane is extended by bonding it to
the drive chassis.
Figure 2.4
PCB ground plane extended to the drive chassis
Drive
chassis
Printed circuit
board (PCB)
Guidelines for the system builder include:
PCB copper
interconnection
layer
PCB copper
ground plane layer
bonded to drive chassis
• When permitted, the control circuit common should be grounded.
• Some products do not permit grounding of the control common,
µ
but may allow grounding to chassis via a 1.0
F, 50V ceramic
capacitor. Check your installation manual for details.
Publication GMC-RM001A-EN-P — July 2001
Page 24

2-6 High Frequency (HF) Bonding
Noise Solutions Using the Ground Plane Principle
In this section, examples of how to apply the ground plane principle
are described.
Grounding to the Component Mounting Panel
In the example below, the drive chassis ground plane is extended to
the mounting panel. The panel is made of zinc plated steel to ensure a
proper bond between chassis and panel.
Figure 2.5
Drive chassis ground plane extended to the panel
Drive ground plane (chassis)
bonded to panel
Publication GMC-RM001A-EN-P — July 2001
Note: Where TE and PE terminals are provided, ground each
separately to the nearest point on the panel using flat braid.
Plated vs. Painted Panels
In an industrial control cabinet, the equivalent to the copper ground
layer of a PCB is the mounting panel. To make use of the panel as a
ground plane it must be made of zinc plated mild steel or if painted,
the paint must be removed at each mounting point of every piece of
metal-clad equipment (including DIN rails).
Zinc plated steel is strongly recommended due to its inherent ability
to bond with the drive chassis and resist corrosion. The disadvantage
with painted panels, apart from the cost in labor time to remove the
Page 25

High Frequency (HF) Bonding 2-7
paint, is the difficulty in making quality control checks to verify if
paint has been properly removed, and any future corrosion of the
unprotected mild steel will compromise noise performance.
Plain stainless steel panels are also acceptable but are inferior to zinc
plated mild steel due to their higher ohms-per-square resistance.
Though not always available, a plated cabinet frame is also highly
desirable since it makes HF bonding between panel and cabinet
sections more reliable.
Painted Components
Mating surfaces must be cleaned of paint and the exposed surfaces
protected against corrosion with conductive paint or petroleum jelly.
Anodized Aluminum Components
Mating surfaces must be cleaned of anodizing and the exposed
surfaces protected against corrosion.
EMC Filters
Filter performance depends entirely on close coupling between the
filter case and the drive chassis (or other load chassis). They should
be mounted as close as possible to the load and on the same panel. If
a painted panel is used, short braid straps should be used to tie the
two chassis together. As a temporary remedy, an effective means of
coupling filter case and drive chassis is to lay a single piece of
aluminum foil beneath the two chassis.
Doors
For doors 2 m (78 in.) in height, bond with two or three (three is
preferred) braided straps (top, bottom, and center).
EMC seals are not normally required for industrial systems.
Publication GMC-RM001A-EN-P — July 2001
Page 26

2-8 High Frequency (HF) Bonding
Adjacent Panels
Bond adjacent panels by mounting multiple flat straps between the
panels. As an alternative, mount a filler plate between the panels
using multiple fasteners along the edges of the plate.
Figure 2.6
Panel ground plane extended to adjacent panels
Adjacent panels
bonded to extend
the ground plane
Cabinet ground plane
(component mounting panel)
Ground plane extended to side panel
by bonding to main panel
Publication GMC-RM001A-EN-P — July 2001
Page 27

High Frequency (HF) Bonding 2-9
Grid and Raised Floor
Bonding cabinet panels and machine chassis to a ground grid below a
raised floor is the best possible grounding scheme and commonly
used in computer mainframe installations, but rarely used in industrial
environments.
Ideally the grid squares should be 1 m (39 in.) or less.
Figure 2.7
Panel ground plane extended to a grid beneath a raised floor
Machine structure used as ground plane
Cabinet ground plane (panel)
bonded to floor ground plane
Copper strip laid on the floor,
(also bonded to machine structure).
Grid ground plane.
covered by a false floor
Publication GMC-RM001A-EN-P — July 2001
Page 28

2-10 High Frequency (HF) Bonding
Mezzanine Floor
A mezzanine floor makes a very effective ground plane if the floor
panels are aluminum or galvanized steel and bonded at their edges
every 1 m (39 in.) minimum. Machine structure, floor, and both panels
form one large ground plane.
Figure 2.8
Panel ground plane extended to a mezzanine floor
Mezzanine floor ground plane
Cabinet ground plane
(panel) bonded
to Mezzanine
floor ground plane
Machine structure
bonded to floor
Machine structure used as ground plane
Machine structure
bonded to floor
Publication GMC-RM001A-EN-P — July 2001
Page 29

High Frequency (HF) Bonding 2-11
Machine Structure
If the machine structure covers a large portion of the system area and
is constructed of a conductive material with all sections closely
bonded, then it too will form an excellent ground plane. Care should
be taken to ensure paint is removed at the bonds and the connections
protected against corrosion.
Figure 2.9
Panel ground plane extended to the machine structure
Machine structure used as ground plane
bonded to structure ground plane by
Panel ground plane
clean and dirty wireways
Bond the panel(s) to the machine structure as tight as possible, but if
this proves difficult, construct a low impedance path using the
following guidelines:
• Use a zinc-plated tray, as wide as practical, and join sections by
overlapping with several fasteners across the width. The
perforations will not reduce performance (refer to Figure 2.10).
• EMC trunking (plated at joint surfaces with conductive gaskets)
also makes a good bond.
• Short and wide is the requirement for any HF bonding material.
Panel(s) should be located as close to the machine structure as
practical and the bond should be firmly attached at both the
machine structure and the control panel (not the cabinet outer
panels).
• Multiple trays/trunking are better.
Note that copper wire safety earth bonding is still required. Refer to
the section Grounding (Safety Earth) at the end of this chapter for
more information.
Publication GMC-RM001A-EN-P — July 2001
Page 30

2-12 High Frequency (HF) Bonding
Figure 2.10
Extending the panel ground plane using cable tray
Multiple
fasteners
Zinc plated
steel main
panel
Same
width
Note: A ground plane does not have to be flat.
Must be directly bonded
here and at the
machine structure
Zinc plated
steel cable tray
(wider is better)
New Buildings
In new installations it is possible to specify that the structural steel
columns are bonded together beneath the floor. This is similar in
concept to the special floor grid shown earlier (refer to Figure 2.7),
but inferior due to the large grid squares.
Cabinet ground plane (panel)
Publication GMC-RM001A-EN-P — July 2001
The panels are bonded by a flat strip or braid to the nearest steel
column. The floor, machine structure, and panels form a large, but
relatively ill-defined ground plane.
Figure 2.11
Panel ground plane extended to the building
Machine structure used as ground plane
Steel
Column
Steel
Column
bonded to nearest
building steel
Building ground plane.
Copper strip laid into the floor
bonding columns together.
Page 31

High Frequency (HF) Bonding 2-13
Existing Buildings
The nearest building steel structures between the machine and control
cabinets may be used to bond to.
If there is more than 20 m (65 ft) between the building structural steel
closest to the motor and the building structural steel closest to the
control panel, the ground between these two structural points should
be checked and enhanced, if necessary, using at least 25 mm (1 in.)
wide wire braid.
Limits
A ground plane sub-panel may only be considered part of a larger
ground plane when bonded sufficiently well at RF. For this purpose
wide thin strips are more effective than wire. Refer to the section
Bonding Surfaces in Appendix A for more information.
≤
• Length
• Shorter = better
• Wider = better
• Thickness is not an issue. Thin is acceptable (even foil is very
effective, but fragile).
The building example shown in Figure 2.11 normally falls outside
these requirements.
In cases where the maximum 10:1 bonding aspect ratio limit cannot
be satisfied, a differential noise voltage must be assumed to exist
between each semi-isolated ground plane. All wiring entering a
ground plane will carry this noise voltage and must be dealt with at
the point of entry.
A ground plane is just as effective if it is perforated or made up of a
matrix of flat conductors, provided that the apertures are smaller than
one quarter of the wavelength of the highest troublesome frequency.
width x 10 is the generally accepted maximum ratio.
Publication GMC-RM001A-EN-P — July 2001
Page 32

2-14 High Frequency (HF) Bonding
Grounding (Safety Earth)
Grounding refers to safety grounding and although the safety ground
circuit and the noise current return circuit may sometimes share the
same path and components, they should be considered as totally
different circuits with different requirements. The object of safety
grounding/bonding is to ensure that all metalwork is at the same,
ground (or Earth) potential at power frequencies.
The copper wire typically specified by regulatory bodies has little
effect at the high frequencies involved in noise problems.
ATTENTION
Safety ground circuits are extremely important and
all relevant local and international regulations must
be adhered to and take precedence over any
guidance given in this document.
!
Generally, safety dictates that all metal parts are connected to safety
earth with separate copper wire of appropriate gauge.
Most equipment has specific provisions to connect a safety ground or
PE (protective earth) directly to it.
These ground wires should be terminated directly to a bonded PE
ground bar, but lengths are not important provided the ground plane
strategy is followed (refer to the section The Ground Plane Principle).
Publication GMC-RM001A-EN-P — July 2001
Page 33
Segregating Sources and Victims
Chapter
3
Chapter Objectives
Understanding the Segregation Concept
This chapter describes how establishing zones within your panel for
noise sensitive or noise generating components can reduce coupling
of electrical noise. This chapter covers the following topics:
• Understanding the segregation concept
• Zone classification
• Routing wires and cables within a panel
• Routing system wires and cables between panels
You can avoid many of the problems caused by noise by grouping
sources and victims (along with their associated wiring) in zones
according to their noise performance rather than arranging for
neatness, tradition, or convenience.
Noise Zones
The three noise zones are defined in the table below.
This noise zone: Has this relative noise level:
Very-Dirty High
Dirty Moderate
Clean Low
This descriptive terminology (very-dirty, dirty, and clean) is chosen for
maximum clarity. Most noise documents assign numbers to the zones,
but there is no consistent numbering scheme. The descriptive
approach allows you to see the true meaning of a zone at a glance,
without having to remember a code.
Publication GMC-RM001A-EN-P — July 2001
Page 34
3-2 Segregating Sources and Victims
Figure 3.1 shows how you can create three zones in a standard panel
or cabinet enclosure. The very-dirty items are placed in the right/front
section. The dirty items are placed behind them in the right/rear
section and the least noisy (clean) items are placed in the left/rear
section.
Figure 3.1
Relative position of noise zones on the panel
Main Panel or Cabinet
(top view)
Clean wireway and component
mounting section
Dirty wireway and component
mounting section
Right side
divider panel
Left side and front panels (if cabinet)
Very-Dirty
cable tray and
component mounting
A side panel is fitted on the right to support the power cable shield
clamps and any very-dirty wires, cables, or components. This leaves
the main panel free for the clean and dirty zones.
Note: It is preferable to mount PLC and motion control equipment in a
separate cabinet away from power control equipment (motor
starters, etc.).
Ensuring CE Compliance at Build Time
Ensuring CE compliance is aided by the use of detailed physical panel
layouts, together with wiring schedules to specify precise wire routing
and zone categories. Periodic checks during installation are
recommended to achieve full CE compliance.
As an aid to the technicians wiring the panel, the use of grey
wireways for the clean zone and black wireways for the dirty zone
helps ensure proper segregation of cables. For example, this makes a
communication cable running in a dirty wireway easier to see.
Zone Classification
Publication GMC-RM001A-EN-P — July 2001
You can classify each cable or device based on these two factors:
• How much noise does the cable/device generate/radiate?
• How sensitive is the device connected via the cable to electrical
noise?
Page 35
Segregating Sources and Victims 3-3
Component Categories
The table below indicates which noise zone components fall into as a
general reference for component segregation
Note: An X in multiple zones indicates that the component straddles
the two zones. Under these circumstances it is important to
position the component in the correct orientation.
Component Very-
Dirty Clean
Dirty
PWM Drives/Amplifiers
1
XXX
Dynamic braking components X
External Dump Resistor (unshielded) X
External Dump Resistor (shielded)
2
X
AC Line Filter X X
Dump Resistor module (metal-clad)
2
X
Switch-mode DC power supply X
Ultrasonic Transducer
3
X
Contactors X
MCB X
Switched 24V dc loads
4
X
(e.g., E-stop/Piltz circuit, solenoids, relays, etc.)
Encoder buffer board X
PLC X
Registration 24V dc supply filter X
Dirty to Clean filter X X
Linear DC power supply X
Other 24V dc none-switched loads X
Data/Communication devices X
Analog devices X
1
The connector/terminal block locations on the drive will normally dictate the zone geometry since it
normally has connections in all categories. Design zones around the drive(s).
2
Bond chassis to the main panel or drive chassis. Refer to the chapter High Frequency (HF) Bonding for more
information.
3
Refer to the chapter Filtering Noise for more information.
4
All inductive switched loads must be suppressed. Refer to the chapter Contact Suppression for more
information.
Publication GMC-RM001A-EN-P — July 2001
Page 36

3-4 Segregating Sources and Victims
Routing Wires and Cables Within a Panel
The following figures provide examples of how to route clean, dirty,
and very-dirty wireways or cable trays within a panel.
Figure 3.2
Routing clean and dirty cables
Main Panel
(front view)
Power
distribution
Barrier
Sensitive
equipment
PLC
C
C
A
PSU
Dirty Zone
(black wireway)
PWM
Drive
PWM
Drive
Clean Zone
(grey wireway)
Clean
B
Dirty
Relays
Observe the following guidelines when planning your panel layout
for clean and dirty cables:
• The plated steel barrier between clean and dirty wireways allow
them to run close together.
• If dirty power is required at A, then run it via wireway B using
shielded cable. Refer to the chapter Shielding Wires, Cables, and
Components for more information.
• The vertical wireway at C is not good practice as it encourages the
creation of loops. Refer to the section Minimizing Loops later in
this chapter.
• The use of different colored wireways (e.g., grey for clean and
black for dirty) encourages good segregation.
Publication GMC-RM001A-EN-P — July 2001
Page 37

Figure 3.3
Routing very-dirty cables
Segregating Sources and Victims 3-5
Dirty Zone
(black wireway)
Clean Zone
(grey wireway)
Main Panel
(front view)
PWM
Drive
PWM
Drive
Right Side Panel
(inside view)
PWM
Drive
PWM
Drive
Segregation from
clean/dirty zone
Zinc plated cable tray
Drive power connections
(forming bridge to cable tray)
Very-Dirty Zone
(white cable tray)
Divider panel
Divider panel bonded with braided strap
to main panel (three places)
Observe the following guidelines when planning your panel layout
for very-dirty cables:
• Power cables bridge across to the drive terminals from the cable
tray on the right.
• The cable tray is bonded to the divider panel using braided strap.
If no divider panel is used, then bond cable tray to main panel.
• A divider panel is used on the right to segregate very-dirty wiring
from the clean zone of the next panel to the right.
• The divider panel is bonded with braided straps to the main panel
at top, center, and bottom.
Clean and
Dirty Zone
Cable tray bonded with
braided strap to main/
divider panel
• Use 25.4 mm (1.0 in.) wide braided strap for bonding (preferred
method). Braided strap 12.7 mm (0.5 in.) wide is acceptable.
Publication GMC-RM001A-EN-P — July 2001
Page 38

3-6 Segregating Sources and Victims
Wire and Cable Categories
The table below indicates the best zone for running cables and wires.
The table also shows how the use of ferrite sleeves and shielded cable
can reduce the noise effects of dirty and very-dirty wires and cables.
Note: Some items have two entries (one shielded and one not
shielded).
Zone Method
Cable and Wire Category
VeryDirty
Dirty Clean Ferrite
Sleeve
1
Shielded
2
Cable
Three Phase between Line Filter and
Drive
Three Phase between Line Filter and
Drive
Extended DC bus X
Extended DC bus X X
PWM Drive/Inverter to Motor Power
PWM Drive/Inverter to Motor Power X X
PWM Drive/Inverter to Sine Wave
Filter
Sine Wave Filter to Motor X
CM Choke to Motor Power X
CM Choke to Motor Power X X
Line Terminator - Motor Power X
Line Terminator - Motor Power X X
External Dump Shunt Resistor X
External Dump Shunt Resistor X X
Contactor to AC Motor X
Contactor to AC Motor X X
X
XX
3
X
X
Publication GMC-RM001A-EN-P — July 2001
Three Phase Supply Power X
Single Phase Supply Power X
24V Hydraulic/Pneumatic - solenoids X
Motor Feedback Resolver X X
PLC digital I/O X
Dedicated Drive Inputs (except
registration)
Limit Switches X
Push buttons X
X
Page 39

Cable and Wire Category
Segregating Sources and Victims 3-7
Zone Method
VeryDirty
Dirty Clean Ferrite
Sleeve
1
Shielded
2
Cable
Proximity Switches (except
X
registration)
Photoelectric Cell X
24V dc Relay X
Transformer Indicator Lamp X
Data/Communications
4
XX X
Encoder/Resolver X X
Logic circuit power X X
High Speed Registration inputs
5
XX
PLC Analog I/O X X
PLC High Speed Counter input X X
1
An X in this column indicates a ferrite sleeve fitted to the wire is recommended.
2
An X in this column indicates a shielded cable is recommended.
3
Keep unshielded conductors as short as possible and separated from dirty and clean cables as far as possible.
4
Refer to the section Data/Communications Cables below for more information.
5
Refer to the chapter High Speed Registration Inputs for more information.
Note: Grounding power cable shields at entry to the cabinet is recommended.
Data/Communications Cables
Data and communication cables that come from a remote structure
(refer to the chapter High Frequency (HF) Bonding) will carry noise
on their shields. Follow the guidelines listed below when installing
data or communication cables.
• Follow the product manual recommendations for termination
resistors, minimum and maximum length, etc.
• Carefully segregate data and communication cables from dirty and
especially very-dirty cables.
• Ground shields to the panel at the point of entry when permitted.
Check your manual for the recommended procedure. Connecting
to the 360° shield is preferable to the use of pigtails. If pigtails
must be used, they should be kept short. Refer to the section
Grounding Cable Shields in Appendix A for more information on
grounding cable shields.
• Refer to the chapter Filtering Noise for more information.
Publication GMC-RM001A-EN-P — July 2001
Page 40

3-8 Segregating Sources and Victims
Minimizing Loops
Wires that form a loop make an efficient antennae. Run feed and
return wires together rather than allowing a loop to form. Twisting the
pair together further reduces the antennae effects. Refer to the figure
below for an illustration.
Note: This applies to potential victim wiring too. Antennae work
equally well in both receive and transmit modes.
Figure 3.4
Avoiding loops in wiring designs
Not Recommended
Routing System Wires and Cables Between Panels
Switch
Switch
Good Solution
Better Solution
Switch
Follow the same segregation guidelines when wiring between panels
and machine devices.
• Maintain clean, dirty, and very-dirty noise zones.
• Always use separate, grounded, metal wireways.
Publication GMC-RM001A-EN-P — July 2001
Page 41

Chapter
Shielding Wires, Cables, and Components
4
Chapter Objectives
Understanding the Shielding Concept
This chapter describes how using shielded cable or steel shields can
reduce electrical noise coupling. This chapter covers the following
topics:
• Understanding the shielding concept
• Ferrite sleeves
• Mixing categories
You can avoid many of the problems caused by noise by shielding
sources and victims (along with their associated wiring) with the use
of shielded cable or a supplementary steel shield.
If sources and victims cannot be sufficiently segregated it may be
possible to prevent noise coupling by shielding as shown in the figure
below.
Figure 4.1
Wire segregation vs. shield
Minimum segregation is
150 mm (6.0 in.) within a panel
Clean Zone
Dirty Zone
Grounded steel shield
allows minimal segregation
distance.
Publication GMC-RM001A-EN-P — July 2001
Page 42
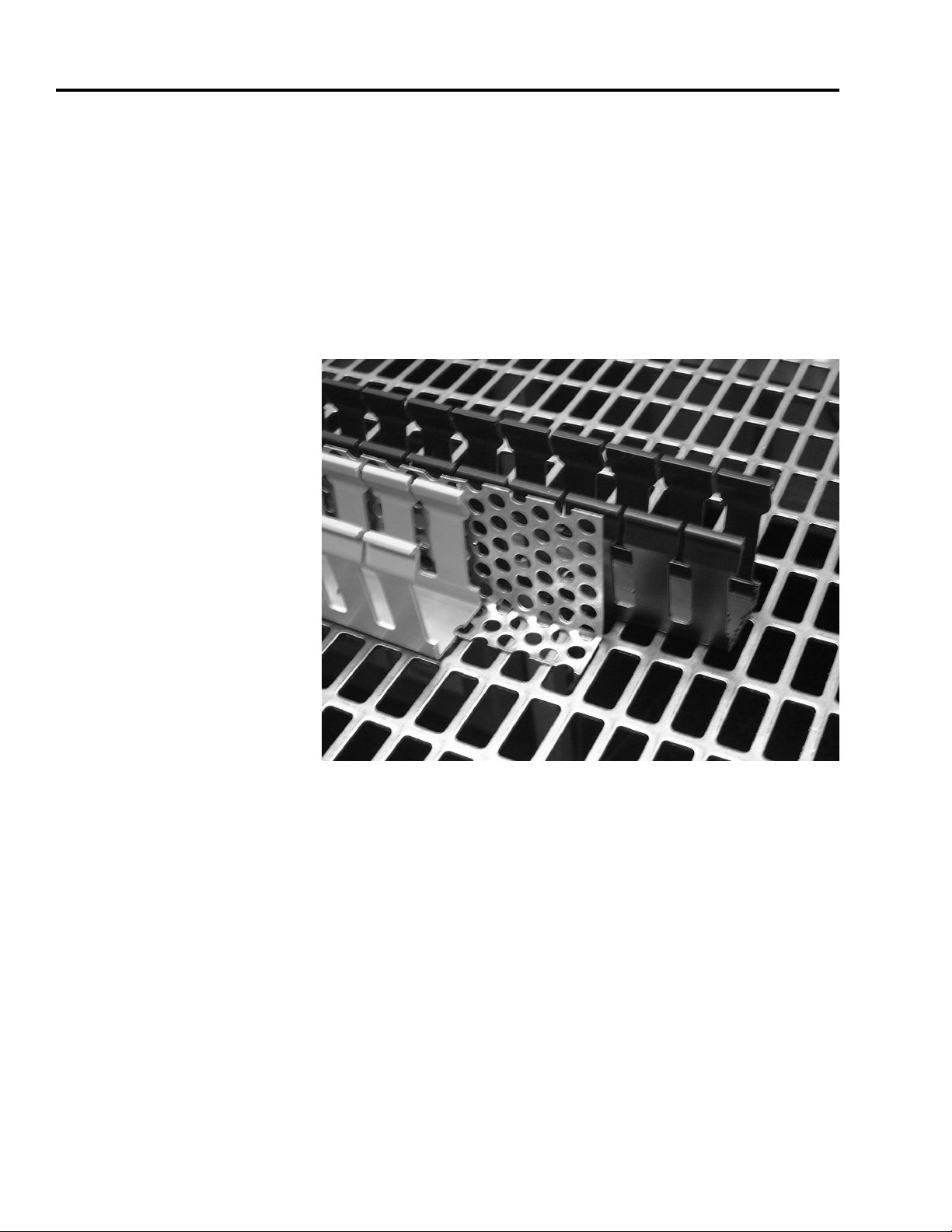
4-2 Shielding Wires, Cables, and Components
In the shielding example below the grey plastic wireway (front) is
shielded by 0.7 mm (0.03 in.) thick perforated and plated sheet steel.
The perforated steel is easy to cut and bend. You can safely route
very-dirty wires in the other (black) wireway behind the shield.
Note: By using grey colored wireway for clean zones and black for
dirty and very-dirty zones you will see more clearly when
shielding is necessary.
Figure 4.2
Shielding example
Ferrite Sleeves
’
Shielded data cables grounded at both ends (important at high
frequencies) may carry noise current due to voltage differences
between the two ends. Because the shields have a low impedance,
currents may be quite high even though voltage is low. These currents
can cause spurious data reception.
By installing ferrite sleeves, the common-mode impedance of the
cable is greatly increased at HF thus blocking the noise currents
without affecting the signal currents.
In Figure 4.3 the capacitor grounding is very effective and avoids
no-grounding rules, but it’s awkward to implement.
Publication GMC-RM001A-EN-P — July 2001
Page 43

Shielding Wires, Cables, and Components 4-3
Figure 4.3
Ferrite sleeves increase common mode impedance
Ferrite sleeve greatly
increases impedance at RF
Signal
Source
Optional capacitor
V
Panel A
Differential noise voltage
Figure 4.4
Common mode rejection in shielded cable
Panel B
In this physical circuit, the core and
shield are effectively connected
together at the transmit end.
Vn is the noise voltage.
In this equivalent circuit, the core
and shield form two windings of a
1:1 transformer.
The ferrite sleeve (more turns are
better) forms a core increasing the
magnetic coupling. The signal is
unaffected.
This is known as a common-mode
choke.
Tra n sm it
Core
Transmit Shield
Plane
Tra n sm it
Core
Transmit Shield
Plane
Vn
Vn
1:1
Vn
Receive Shield
Receive
0V
Receive Shield
Ferrite Sleeve
Receive
Plane
Core
Secondary voltage
matches the
primary voltage.
Plane
The following implementation guidelines apply to ferrite sleeves:
• Always install ferrite sleeves to data cables where specified.
• Always use ferrite sleeves when cable length is greater than 10 m
(30 ft).
Core
• If power frequency ground currents are expected, or measured by
current clamp, one shield/ground connection could be made via a
1uF, 50V capacitor.
Publication GMC-RM001A-EN-P — July 2001
Page 44

4-4 Shielding Wires, Cables, and Components
Ferrite Sleeve Limitations
After implementing all the guidelines presented in this manual, a
properly built system should perform well without ferrite sleeves.
However, by including sleeves in your installation, the system will
avoid problems caused during future modifications.
System installations can benefit from ferrite sleeves, but you should
also realize that ferrite sleeves alone are not a substitute for proper
noise coupling reduction techniques.
As a rule, include sleeves as standard to obtain the most effective
overall system.
For more information about ferrite sleeves, refer to Appendix B.
Mixing Categories
It is often difficult to segregate effectively in a confined space. When
strict segregation isn’t practical, minimize overlap and cross cables at
right angles. Test results in Appendix A show that even a close parallel
run of 0.5 m (20.0 in.) will allow significant noise coupling (refer to
the section Wire Segregation Test Results).
You can convert wiring designated dirty or very-dirty to the next
lower category by means of shielding using either shielded cable or
conduit where required. Figure 4.5 and Figure 4.6 show how this
technique may be used to mix categories without breaking the
segregation rules.
Publication GMC-RM001A-EN-P — July 2001
Page 45

EMC
filter to drive
Very-Dirty Zone
Shielding Wires, Cables, and Components 4-5
In Figure 4.5 the cable is locally shielded to cross another zone. Each
shield is grounded at each boundary and the cable is run close to the
panel. The outer shield A is a thick walled steel conduit.
Figure 4.5
Very-dirty cable in clean zone
Dirty Zone
24V dc I/O
cable
Dirty Zone
Clean
Zone
Dirty Zone
Very-Dirty Zone
Motor power
cable
Analog device
cable
Clean Zone
A
Minimum 150 mm (6.0 in.) segregation
The principle works both ways. In Figure 4.6 the clean cable passes
through a very-dirty zone.
Figure 4.6
Clean cable in very-dirty zone
Dirty Zone
24V dc I/O
cable
Dirty Zone
Very-Dirty
Zone
Dirty Zone
Clean Zone
Encoder
cable
A
Minimum 150 mm (6.0 in.) segregation
Publication GMC-RM001A-EN-P — July 2001
Page 46

4-6 Shielding Wires, Cables, and Components
Publication GMC-RM001A-EN-P — July 2001
Page 47

Filtering Noise
Chapter
5
Chapter Objectives
Understanding the Filtering Concept
This chapter describes how low-pass filters and ferrite sleeves can
reduce electrical noise coupling. This chapter covers the following
topics:
• Understanding the filtering concept
• Filter performance
• Ultrasonic transducers
• AC line filters
If sources and victims are connected by wiring, you can prevent noise
coupling by filtering. Low-pass filters attenuate high frequency noise
without affecting the low frequency signals.
Commercial AC Line Filters for Low Voltage Circuits
Provided that motor cable lengths are short, less than 20 m (60 ft),
commercial AC line filters work well in low voltage circuits. Two-stage
types are preferred.
If motor cable lengths are long, the natural ringing frequency is
typically at too low a frequency (below 300k Hz) to be attenuated by
commercial AC line filters. To determine if your cables are long, refer
to the section Installing Long Motor Cables in Appendix A.
Publication GMC-RM001A-EN-P — July 2001
Page 48

5-2 Filtering Noise
General Purpose 0-24V ac/dc Filters
The filter diagram shown below forms a classic LC low-pass filter.
Figure 5.1
Filter applied to 24V dc power circuit
Grounded
Common
+24V
Com/Neutral
IMPORTANT
The effectiveness of the LC low-pass filter depends
on a perfect bond between the DIN rail and the
ground plane panel.
Figure 5.2
Universal 0-24V ac/dc grounded common filter
Clean side
Floating
Common
Segregation
DIN rail
Publication GMC-RM001A-EN-P — July 2001
Capacitor
Ferrite Sleeve
(choke)
Dirty side
Page 49

Figure 5.3
Floating-Common filter
Filtering Noise 5-3
Clean side
Dirty side
Forming capacitor leads
DIN rail
Capacitors
Ferrite Sleeve
(choke)
The table below lists the part description and part numbers for the
filters shown in Figure 5.2 and Figure 5.3.
Part Description RS Components
Part Number
Newark
Part Number
Filter Performance
Ground Terminal (1 in, 2 out type) 225-4372 N/A
Insulated Terminal (1 in, 2 out type) 426-193 N/A
1 µF, 50V Ceramic Capacitor
Small Ferrite Sleeve
1
Capacitor value is not critical, but it must be a ceramic type.
2
The ferrite specification is not critical, but choose a low frequency type if possible.
3
Alternative ferrite sleeve part numbers: Palomar (FB-102-43) or Schafner (2644665702)
Note: For more information regarding part vendors refer to Appendix B.
1
2
211-5558 29F025
239-056
3
91F6484
The theoretical attenuation of one stage and two stage filters is shown
in the table below.
With this filter: Attenuation @ 1M Hz is:
1 stage (2.8k Hz) 55 dB
2 stage (1.2k Hz 110 dB
Publication GMC-RM001A-EN-P — July 2001
Page 50

5-4 Filtering Noise
M
Performance Test Set-up
The filter performance test included the following components:
• 24V dc power supply with grounded common filter
• Filter mounted to DIN rail
• Relay coil to simulate an inductive load
• 100M Hz sampling digital storage oscilloscope
• Test components mounted on a large zinc plated steel panel
Figure 5.4
Filter test block diagram
easurement point
1 m (39 in.) wire
Switched load
Filter
Filter under
test
24V dc
PSU
Ground Plane - conductive metal panel
Test Results
This test condition: With
No filter:
No Suppression 200V pk 5.5V pk 674mV pk
R/C
5.5V pk 932mV pk 168mV pk
Across coil
100R/0.1uF
R/C
2.5V pk 103mV pk 70mV pk
Across switch
100R/0.1uF
Transorb
14.9V pk 1.8V pk 658mV pk
Across coil
Transorb
8.1V pk 1.4V pk 1.2V pk
Across switch
With
Capacitor only:
With Capacitor
and ferrite sleeve:
Suppression
Publication GMC-RM001A-EN-P — July 2001
Diode 12V pk 63mV pk 63mV pk
Note: Voltages were measured between the measurement point and the ground plane (refer to Figure 5.4 for
exact location.
Page 51

Filtering Noise 5-5
Ultrasonic Transducers
Xenon Flashing Beacons (strobe lights)
Ultrasonic transducers often induce high noise levels onto their DC
supply and signal lines. To reduce noise using ultrasonic transducers:
1. Mount two DC filters close to the device with ferrite sleeves
between the capacitors and the sensor.
2. Feed the DC power supply through one sleeve.
3. Bring out the analog signal via the other sleeve.
Note: Use shielded cable for the analog signal.
The filter ground should be close coupled to the machine metalwork
close to the sensor.
Strobe lights can generate high voltage transients on their 24V dc
supply lines. To reduce this source of noise, try using one of these
two alternatives.
• Mount a DC filter close to the lamp (ferrite sleeve on the lamp
side) with its common attached to chassis ground.
AC Line Filters
• Use shielded cable between lamp and control panel, with DC filter
at the point where the cable leaves the panel.
AC line filters contain capacitors connected between phase and the
filter chassis. Line voltage is with respect to ground. The capacitor
allows a small but potentially dangerous amount of current to flow to
ground.
ATTENTION
To avoid personal injury and/or damage to
equipment, ensure AC line filter capacitors are
properly connected to safety (PE) ground.
!
Publication GMC-RM001A-EN-P — July 2001
Page 52

5-6 Filtering Noise
Figure 5.5
Line filter earth leakage path
L
Line
N
Leakage current
E
Load
Three phase filters are theoretically balanced so the net ground
current should be zero. However, a failure of any one capacitor or
severe unbalance would cause ground current to flow and trip a
circuit breaker.
Earth Leakage/Ground Fault
Earth Leakage Circuit Breakers (ELCB) and Ground Fault Interrupters
(GFI) are typical European and US terms for the same device.
The ground/earth current may cause nuisance tripping of Earth
Leakage Breakers. Uprated units may help in some cases.
Three phase filters, being balanced, are much less likely to give
problems than single phase types.
Publication GMC-RM001A-EN-P — July 2001
Page 53
Contact Suppression
Chapter
6
Chapter Objectives
Understanding Contact Suppression for AC Circuits
This chapter describes how contact suppressors for solenoids, relays,
and various other switches can reduce electrical noise. This chapter
covers the following topics:
• Understanding contact suppression for AC circuits
• Understanding contact suppression for 24V dc circuits
• Contact suppression effects
The one potential noise source that the you can reduce directly is a
contact switched load. Even circuits feeding resistive loads will
produce significant switching noise. This is because the wiring both
upstream and downstream of the contact is inductive. Thus, any
switch contact will benefit from suppression.
IMPORTANT
Examples of AC devices requiring contact suppression include:
All switched, inductive loads in the system must be
suppressed. This is standard practice in any PLC
based control system.
• Contactor controlled motors
• Solenoid coils
• Contactor coils
• Relay coils
• Transformer primaries
• Transformer driven indicator lamps
• Fluorescent cabinet lights (also require line filters close to the
lamp)
• Line filters (often present an inductive load)
The only exception is a load driven by a Zero-Crossing Detector
circuit such as Allen Bradley solid-state (Triac) output modules.
Zero-crossing switches reduce noise generation virtually to zero.
Preferred for frequent operation or close to clean zones.
Publication GMC-RM001A-EN-P — July 2001
Page 54

6-2 Contact Suppression
Note: Sometimes the supply to a group of zero-crossing Triac outputs
is switched by a mechanical contact for safety purposes.
Suppress at the contact in this case.
Methods of AC Contact Suppression
The typical RC suppressor circuit (shown below) consists of a 0.1 µF
capacitor in series with a 100 ohm resistor. These components are
readily available from many suppliers.
Figure 6.1
RC suppressor circuit
0.1 µF
100 ohms
The typical RC plus transient absorber circuit (shown below) consists
of the RC network shown in Figure 6.1 in parallel with a transient
absorber. These are used in high current, high energy applications
such as motor starters. A three-phase contactor requires three
suppressors.
Figure 6.2
RC plus transient absorber circuit
Transient absorber
0.1 µF
100 ohms
Publication GMC-RM001A-EN-P — July 2001
Page 55

Contact Suppression 6-3
The suppressor across the contact (as shown below, lower) reduces
the noise from the wiring inductance as well as the coil inductance.
Figure 6.3
RC suppressor in circuit
L
Good Solution
Line
Load
Understanding Contact Suppression for 24V dc Circuits
N
L
Line
N
RC suppressor
Better Solution
Load
Examples of DC devices requiring contact suppression include:
• Solenoid coils
• Contactor coils
• Relay coils
Methods of DC Contact Suppression
First choice for DC circuit suppression is a flywheel diode (shown in
the figure below), but this does increase the release time which may
not be acceptable in all applications. For the transient absorber
method, refer to Figure 6.5.
Figure 6.4
Flywheel diode
+24V dc
Common
+24V dc
Common
Good Solution
Flywheel diode
Better Solution
Flywheel diode
Publication GMC-RM001A-EN-P — July 2001
Page 56

6-4 Contact Suppression
Figure 6.5
Transient absorber
+24V dc
Good Solution
Contact Suppression Effects
Common
+24V dc
Common
Transient absorber
Better Solution
Transient absorber
The waveform below displays 7.2V peaks across the AC terminals of a
+24V dc power supply. Noise is due to load on the DC circuit being
switched.
Figure 6.6
Unsuppressed inductive load on the DC circuit
10V
8
7.2V pk
6
4
2
0
-2
-4
-6
-8
-10V
-10123456789
Source Omron PSU AC Neutral
DC floating, Unsuppressed Relay
µs
Publication GMC-RM001A-EN-P — July 2001
Page 57

Contact Suppression 6-5
The waveform below displays the effects of an RC suppressor added
across the coil on the noise shown in Figure 6.6. Peaks are reduced to
6.4V with significant reduction in duration. Refer to Figure 6.3 (upper)
for example of RC suppressor across a coil.
Figure 6.7
Effects of RC suppressor mounted at the load
10V
8
6.4 mV pk
6
4
2
0
-2
-4
-6
-8
-10V
-10123456789
Source Omron PSU AC Neutral
DC floating, RC suppressor at Relay coil
(No difference at contact)
µs
The waveform below displays the effects of a flywheel diode across
the coil (refer to Figure 6.4, upper). The peak voltage is reduced to
0.9V.
Figure 6.8
Effects of Flywheel Diode at the load
10V
8
6
4
2
930 mV pk
0
-2
-4
-6
-8
-10V
-10123456789
Source Omron PSU AC Neutral
DC floating, Diode at Relay coil
µs
Publication GMC-RM001A-EN-P — July 2001
Page 58

6-6 Contact Suppression
The waveform below displays the effects of a flywheel diode across
the switch (refer to Figure 6.4, lower). The peak voltage is reduced to
0.3V.
Figure 6.9
Effects of Flywheel Diode at the switch
10V
8
6
4
2
340 mV pk
0
-2
-4
-6
-8
-10V
-10123456789
Source Omron PSU AC Neutral
DC floating, Diode at Switch
µs
The small additional noise reduction, when the suppressor is fitted
across the switch, is because the wiring between switch and load is
also inductive and creates the same inductive spike.
Publication GMC-RM001A-EN-P — July 2001
Page 59

Power Distribution
Chapter
7
Chapter Objectives
Understanding Noise in Power Wiring
Three-Phase Power Supplies
This chapter describes bonding, segregating, shielding, and filtering
techniques when routing AC and DC power. This chapter covers the
following topics:
• Understanding noise in power wiring
• Three-phase power supplies
• Single-phase power supplies
• 24V dc power supplies
AC and DC power wiring usually extends to all parts of a system.
Without precautions, noise coupled into any power wiring conductor
is distributed throughout the entire system.
To avoid noise related problems caused by three-phase power
supplies, observe the following guidelines.
• Treat three-phase wiring as dirty.
• Include line filters for loads that create noise, such as PWM
devices.
Line Filters
Observe the following guidelines when installing line filters.
• Install an individual filter as close as possible to each PWM load
(this is the preferred configuration).
• Install the filter and PWM device on the same panel.
• Treat wiring between filter and drive as very-dirty (provide
shielding as required).
• Segregate input and output wiring as far as possible.
Publication GMC-RM001A-EN-P — July 2001
Page 60
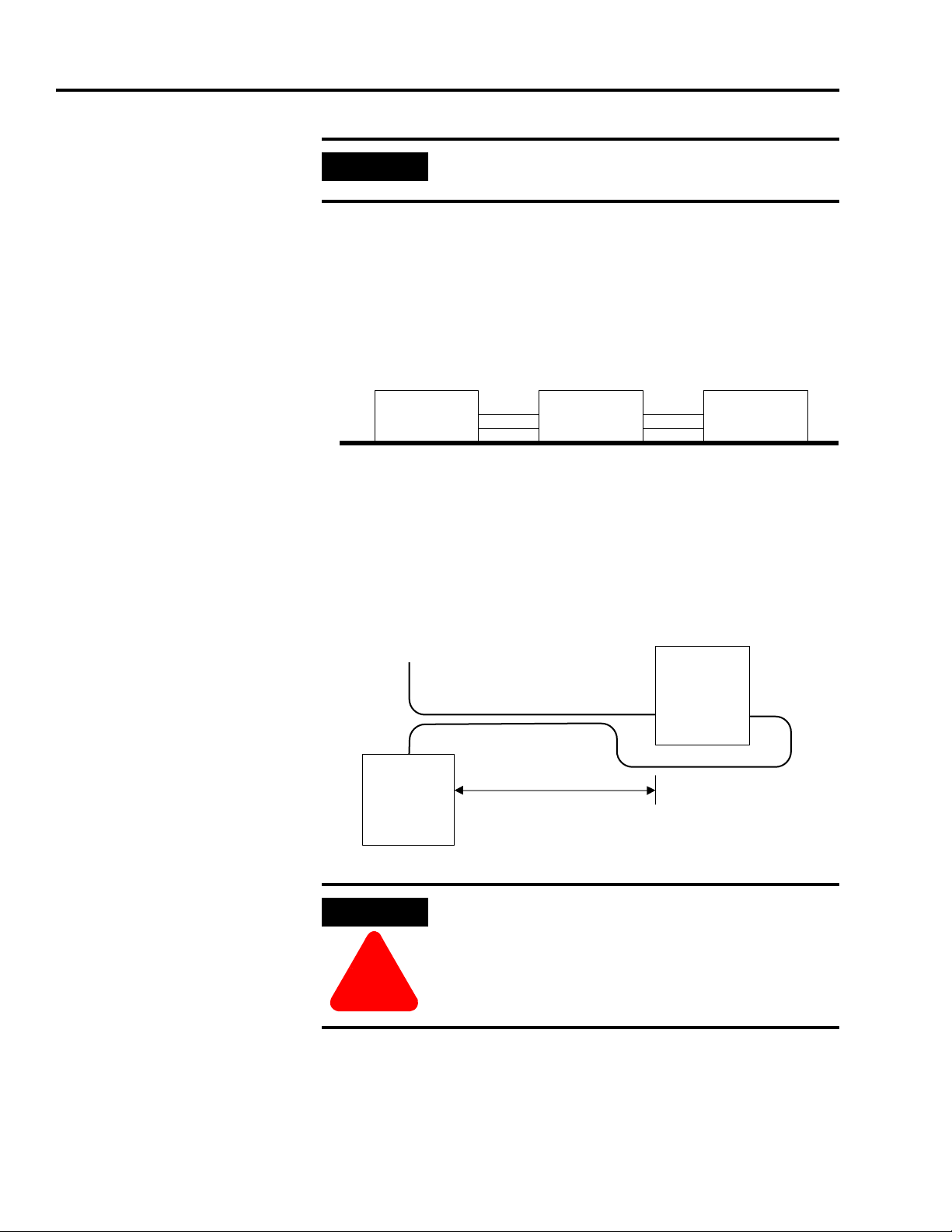
7-2 Power Distribution
IMPORTANT
The effectiveness of the line filter depends solely on
the HF bond between filter case and drive chassis.
Commercial filters are tested, as shown in the figure below, with all
devices properly bonded to a conductive metal ground plane. Proper
bonding techniques are essential to achieve the published attenuation
figures. Refer to the chapter High Frequency (HF) Bonding for more
information on bonding.
Figure 7.1
Filter test set-up
Signal
Generator
Filter under test
Ground Plane - conductive metal panel
Measuring
Instrument
In the example below, noise couples directly from the filter input
wires to the filter output wires and bypasses the filter. You can avoid
this common mistake by shielding and/or segregating the cables and
reducing the cable length.
Figure 7.2
Improper line filter installation example
AC Line
PWM Drive
ATTENTION
!
AC
Close spacing
Unshielded cable
Long distance
Line Filter
To avoid personal injury and/or damage to
equipment, ensure AC line filter capacitors are
properly connected to safety (PE) ground.
Publication GMC-RM001A-EN-P — July 2001
Page 61

Power Distribution 7-3
Transformers
An isolation transformer is frequently assumed to give good noise
isolation. In fact, this only applies if the transformer is equipped with
one or more electrostatic (ES) shields, as shown in the figure below.
Figure 7.3
Electrostatically shielded transformer
Primary
Ground Plane
Shield(s) bonded to
ground plane
Secondary
Frame bonded to
ground plane
This technique is very effective, though generally EMC filters are
required to meet European regulation standards. Observe the
following guidelines when installing transformers.
• Install the transformer to the same panel as the rest of your system
(or HF bond from panel-to-panel).
• Treat wiring between transformer and drive as very-dirty (provide
shielding as required).
• Bond shield, if used, with braid directly to the panel. The
transformer mounting bolts are useful for this purpose.
• Segregate input and output wiring as far as possible.
IMPORTANT
The effectiveness of the transformer depends solely
on the HF bond between shields and drive chassis.
Publication GMC-RM001A-EN-P — July 2001
Page 62

7-4 Power Distribution
Single Phase Power Supplies
24V dc Power Supplies
To avoid noise related problems caused by single-phase power
supplies, observe the following guidelines:
• Treat single-phase wiring as dirty.
• Include line filters for loads that create noise, such as PWM
devices with DC switch-mode power supplies and fluorescent
cabinet lights.
• Include line filters for potentially sensitive loads, such as PLC logic
power.
• Mount the line filter as close to the load as possible.
Switch-mode power supplies do not isolate noise and may generate
common-mode noise on both AC and DC lines. Refer to the section
Switch-Mode DC Power Supplies in Appendix A for more information.
Linear power supplies normally generate very little noise, but AC line
filters or DC output filters are required to attenuate incoming line
noise to achieve a clean category.
To avoid noise related problems caused by 24V dc power supplies,
observe the following guidelines.
• Connect the common through a ground terminal.
• Decouple the +24V dc line to the same ground terminal with a
1 µ
F, 50V ceramic capacitor to achieve the clean category.
The simplest method for making the ground connection is to use a
ground terminal installed on the DIN rail fastened to a zinc plated
panel. Refer to Figure 7.4 for an example of the symbol used in
diagrams.
Figure 7.4
Ground Plane Symbol
This symbol indicates direct
connection to a ground plane.
Publication GMC-RM001A-EN-P — July 2001
Page 63

Power Distribution 7-5
24V dc Distribution
Route power wiring according to clean/dirty zones. Segregate the
following load classifications:
• Clean loads that are potentially sensitive to noise and which do
not create significant noise, e.g. controller logic supplies.
• Dirty loads that are insensitive to noise but may emit moderate
levels of noise, e.g. relay circuits.
Note: Refer to the chapter Segregating Sources and Victims for a
detailed listing of categories.
Note: Refer to the chapter High Speed Registration Inputs for special
treatments of registration input devices.
24V dc PSU Zoning Methods
The following two methods of 24V dc power supply zoning are
described in this chapter.
• Single 24 volt power supply with filtering between zones.
• Dual 24 volt power supplies.
Publication GMC-RM001A-EN-P — July 2001
Page 64

7-6 Power Distribution
Single 24V dc Switch-Mode PSU Zoning Example
In the figure below, a 24V dc supply is mounted in the dirty zone,
because it may create noise. But, the noise is reduced by filtering
before the output enters the clean zone.
Figure 7.5
24V dc power distribution with single PSU
24V com
Dirty Load
Clean Load
AC
+24V
24V dc PSU
Filter
Dirty Zone
Segregation
Clean Zone
Filter
De-coupling
capacitor
Grounded, de-coupling capacitors are used at each clean load (refer
to the chapter High Frequency (HF) Bonding for details). Provided the
system is correctly bonded, the multiple common/ground connections
are not a problem. The copper becomes a backup conductor. No
segregation or filtering is necessary for the load in the dirty zone.
Publication GMC-RM001A-EN-P — July 2001
Page 65

Power Distribution 7-7
In the figure below, a filter is pictured between the clean zone (grey
wireway) and the dirty zone (black wireway). Refer to the chapter
Filtering Noise for details regarding filters.
Figure 7.6
Filter between zones
Publication GMC-RM001A-EN-P — July 2001
Page 66

7-8 Power Distribution
Dual Switch-Mode 24V dc PSU Example
In the figure below, dirty and clean zone loads have dedicated power
supplies. Segregation and filtering are used (as in Figure 7.5) to
reduce the noise in the power supply for clean zone needs.
Figure 7.7
24V dc power distribution with dual PSU
24V com
Dirty Load
Clean Load
24V com
AC
AC
Dirty Zone
Clean Zone
Filter
Filter
+24V
24V dc PSU
24V dc PSU
Segregation
Filter
De-coupling
capacitor
+24V
Note: Clean PSU is mounted in the dirty zone because it typically
generates noise in the switching process.
Publication GMC-RM001A-EN-P — July 2001
Page 67

Power Distribution 7-9
Linear PSU
The linear PSU does not generate noise on its AC terminals, as does a
switch-mode supply, however, some noise reduction provisions are
still recommended.
Linear PSU Mounted in Clean Zone
In the figure below, the linear power supply is mounted in the clean
zone, but the AC line feeding it requires filtering. The AC line filter is
positioned between zones and attenuates line noise which may
otherwise be passed through to the DC circuit.
Figure 7.8
Linear PSU mounted in Clean Zone
AC
Dirty Zone
Filter
24V dc Linear PSU
De-coupling
capacitor
+24V
Segregation
Clean Zone
Clean Load
24V com
Publication GMC-RM001A-EN-P — July 2001
Page 68

7-10 Power Distribution
Linear PSU Mounted in Dirty Zone
In the figure below no AC line filter is required because the linear PSU
does not generate noise and the AC line noise is filtered by the DC
filter.
Figure 7.9
PSU mounted in Dirty Zone
AC
Dirty Zone
Clean Zone
24V dc
Linear PSU
Segregation
Filter
De-coupling
capacitor
+24V
Clean Load
24V com
Publication GMC-RM001A-EN-P — July 2001
Page 69

Power Distribution 7-11
Special Applications for 24V dc PSUs
This section contains information considered application specific and
does not apply to all installations.
Floating Requirement
If it is necessary to maintain a floating common, a modified filter may
be used to ground the common at HF frequencies only. Refer to the
chapter Filtering Noise for details regarding filters.
Figure 7.10
Floating Common
AC
Dirty Zone
Clean Zone
24V dc PSU
Filter
Segregation
Filter
De-coupling
capacitor
+24V
24V com
Dirty Load
Clean Load
Publication GMC-RM001A-EN-P — July 2001
Page 70
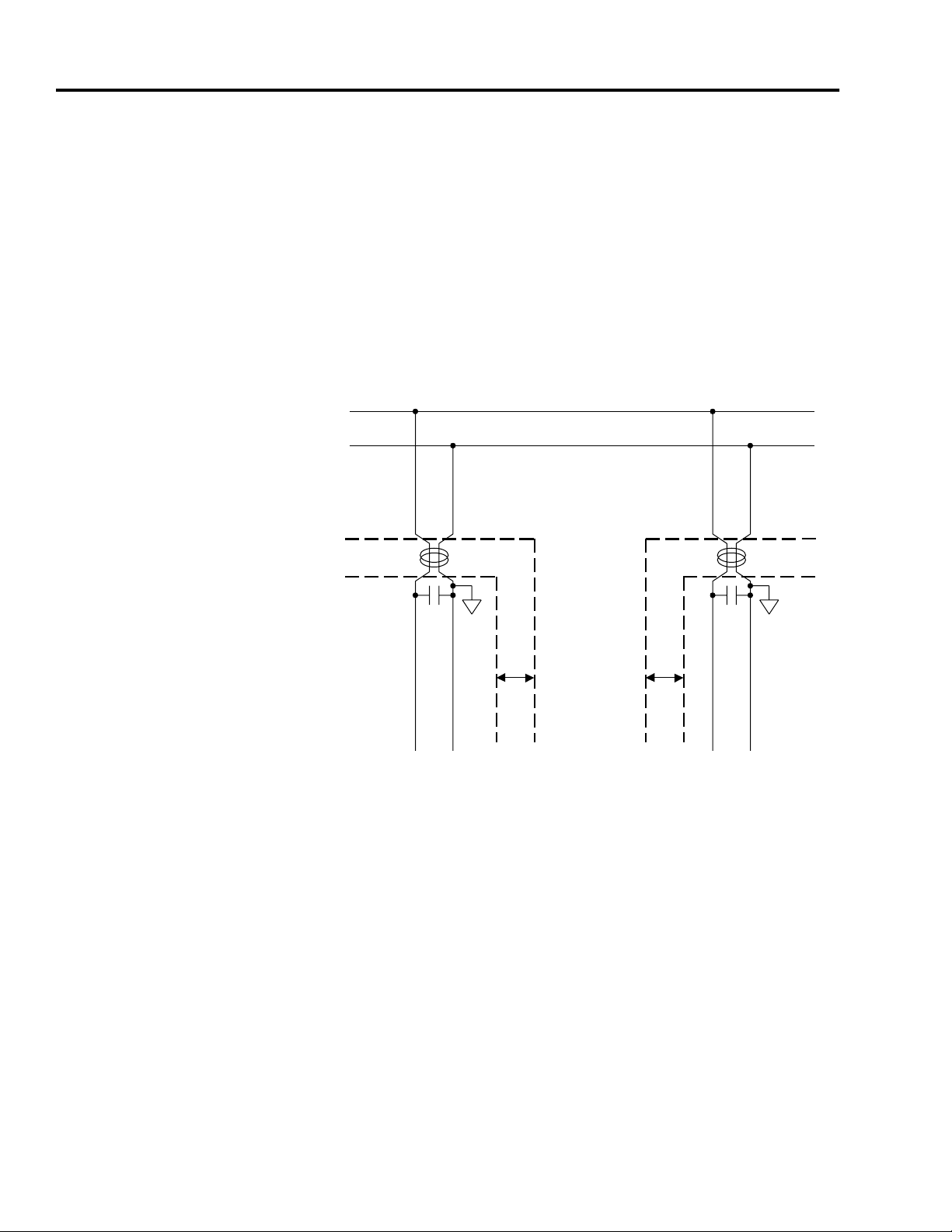
7-12 Power Distribution
Segregation and Filtering Variations
Once the principles of segregation and filtering are understood it is
possible to vary the strategy to suit special requirements.
For example, the clean zone does not have to be a single entity. As
shown in the figure below, you can create separate local clean zones.
Refer to the chapter Segregating Sources and Victims for guidelines on
crossing zones.
Figure 7.11
Separate Clean Zones
+24V
24V com
Dirty Zone
Filter
Clean Zone
A
Segregation
Filter
Clean Zone
B
Publication GMC-RM001A-EN-P — July 2001
Page 71

Power Distribution 7-13
Long Power Cable Runs
The 24V dc lines entering or leaving panels that cannot be bonded
together by flat strips (no longer than 10 times the width) should have
filters at the point of entry.
Figure 7.12
Long cable runs between panels
Panel A
+24V
24V com
Panel B
Note: If heavy circulating currents at power frequency are likely, the
floating filter technique or separate, local PSU’s, may be safer to
use.
Publication GMC-RM001A-EN-P — July 2001
Page 72

7-14 Power Distribution
Publication GMC-RM001A-EN-P — July 2001
Page 73

Motor Wiring
Chapter
8
Chapter Objectives
Understanding Noise in Motor Power Wiring
This chapter describes shielding, grounding, and splicing techniques
for use with motor wiring. This chapter covers the following topics:
• Understanding noise in motor power wiring
• Shielding motor power cables
• Grounding motor power cable shields
• Applying ferrite sleeves
• Splicing motor power cables
• Handling excess cable
• Installing long motor cables
The PWM Drive to motor power conductors are typically the most
intense noise source in a system. Proper implementation of shielding,
grounding, splicing, and treatment of excess cable is essential to
reducing noise in your system. In the figure below:
• The unshielded conductors radiate an electric noise field that
couples capacitively with adjacent wiring.
• Stray capacitance at A & C cause ground currents to flow creating
a magnetic noise field that couples inductively with adjacent
wiring.
Figure 8.1
Motor power cable noise
Drive
Heatsink
(connected
to chassis)
Panel
A
DC+
DC-
Radiation by E (electric) field
Unshielded motor cable
both conducts and
radiates noise
Publication GMC-RM001A-EN-P — July 2001
Windings
C
Radiation by
H (magnetic)
field from this
Machine Structure
Motor
loop
Page 74

8-2 Motor Wiring
Shielding Motor Power Cables
The benefits of using shielded cable are listed below (also refer to
Figure 8.2).
• The shield strongly attenuates the electric field (E field) noise.
• Core to shield capacitance is added to the stray capacitance at A &
C increasing ground currents in the loop A, C, D, E, and F.
• These currents generate a magnetic field (H field).
It is important to minimize the area of this loop as far as possible by
routing the cable close to grounded metalwork.
Figure 8.2
Shielded motor power cable
Drive Motor
Heatsink
(connected to
chassis)
DC+
A
Cable shield
introduces more stray
capacitance to ground
Windings
C
Grounding Motor Power Cable Shields
Cable shield
grounded both
ends
F
Panel
DC-
E
D
Machine Structure
Observe the following guidelines when bonding the motor power
cable shield to ground. Bond motor power cable shields:
• At the motor frame.
• To the panel at entry to the cabinet (optional).
• To the drive (amplifier) chassis. If a connection point is not
provided, bond to the adjacent panel.
These connections must be made at the circular section, not by
creating pigtails. Refer to the section Grounding Cable Shields in
Appendix A for examples of grounding at the circular section.
Publication GMC-RM001A-EN-P — July 2001
Page 75

Motor Wiring 8-3
Applying Ferrite Sleeves
Splicing Motor Power Cables
A ferrite sleeve around the three power conductors as they leave the
drive will help to reduce common-mode noise current. Take all three
conductors two or three times through the core. If it runs hot reduce
the number of turns.
Note: Not all drives allow the use of a ferrite sleeve around power
conductors. Refer to your manual for specific applications.
Avoid splicing motor power cables when ever possible. Ideally, motor
power cables should run continuous between the drive and motor
terminals. The most common reason for splicing is to incorporate
high-flex cable for continuous flexing applications.
If necessary, the preferred method of splicing is to use a fully shielded
bulkhead connector. Splicing can also be accomplished using a
grounded and shielded junction box, as shown in the figure below.
Figure 8.3
Spliced cable using junction box
Observe the following guidelines when installing a junction box:
• Shield drain wire must be spliced only to mating shield drain
wires and not grounded at the junction box.
• Feedback shields must be passed through pin for pin.
• Separate junction boxes for power and feedback are required.
Publication GMC-RM001A-EN-P — July 2001
Page 76
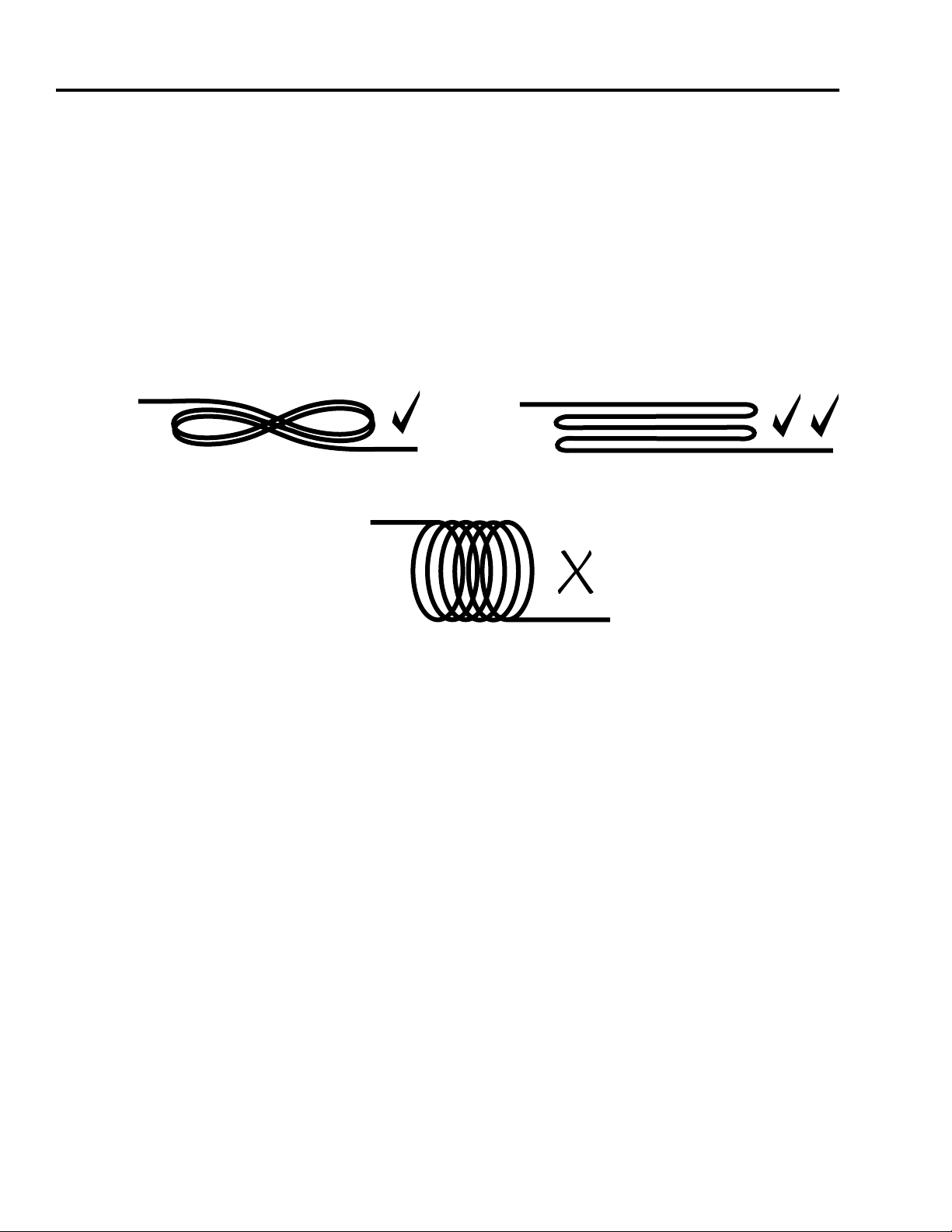
8-4 Motor Wiring
Handling Excess Cable
Observe the following guidelines when handling excess cable:
• Do not coil excess cable of different types (i.e. motor power and
feedback) together. An efficient transformer is formed at HF.
• Cable lengths should ideally be trimmed to fit the application.
• If excess cable cannot be trimmed, it should be laid in an 'S' or
figure eight pattern (refer to the figure below).
Figure 8.4
Excess cable treatment
Preferred Methods
Poor Method
Installing Long Motor Cables
Motor cables are defined as long when the motor frame is not bonded
close enough to the drive panel to be considered a single ground
plane. To be considered a single ground plane, the parts must be
connected by a surface which is no longer than ten times its width.
Refer to the chapter High Frequency (HF) Bonding for methods of
achieving a single ground plane.
Observe the following guidelines when installing long motor cables:
• Bonding should be by the widest practical means. Wide cable tray
is effective when it is made of zinc plated steel and carefully
bonded at the ends to control panel and motor frame.
• Zinc plated sheet steel channel is also effective. The fact that the
width is folded into a U shape does not matter. A closing lid helps.
• Solid steel conduit bonded at both ends is effective.
• The spiral construction of flexible conduit makes it less attractive
for RF shielding because the spiral shape forms an inductor, even
with partially shorted turns.
Publication GMC-RM001A-EN-P — July 2001
Page 77
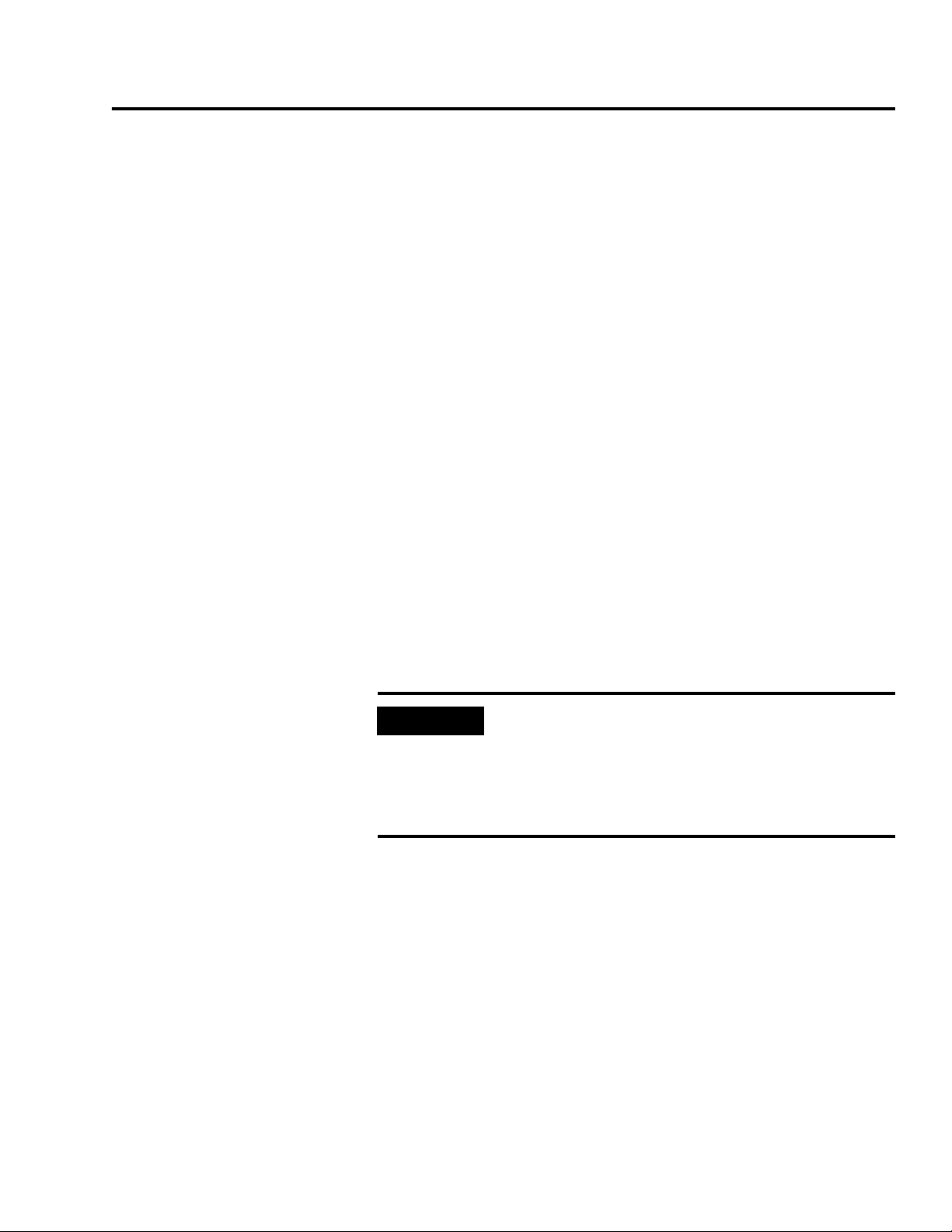
High Speed Registration Inputs
Chapter
9
Chapter Objectives
Understanding Registration Inputs
This chapter describes how wiring, sensitive to electrical noise,
benefits from proper noise reduction strategies. This chapter covers
the following topics:
• Understanding registration inputs
• Noise reduction methods
• Power supply wiring options
• Signal noise filter options
• Registration error
High speed registration inputs are potentially sensitive to noise by
design. Typically, the specification states that the input responds
within 1 microsecond of the signal going high, while in practice, the
response is often even faster. Noise pulses of this duration are
common in a typical drive system.
IMPORTANT
Coupling is usually capacitive if unshielded cable is
run near noisy cables or if voltage differentials exist
between the detector mounting and the equipment
carrying the registration input. For these reasons,
treat high speed registration input circuits with
special care.
Publication GMC-RM001A-EN-P — July 2001
Page 78

9-2 High Speed Registration Inputs
Noise Reduction Methods
This section provides installation guidelines for reducing noise
coupling into high speed registration inputs.
Wiring
Follow these guidelines to reduce noise coupling in wiring:
• Always use shielded cable.
• Connect shields at both ends and at the circular section.
• Always run the cable in a clean zone.
• Segregate the cable as far as practical from dirty and (especially)
very-dirty wiring.
• Always make cable runs as short as possible.
Power
Follow these guidelines to reduce noise coupling in power supplies:
• The power supply should be as clean as possible.
• Use a filter if a switch-mode supply is used (refer to the chapter
Filtering Noise for more information).
• Obtain +24V dc power from a clean supply and provide a filter
(refer to the chapter Filtering Noise for more information).
• Always ground the common.
Shared Power Supply
Observe the following guidelines when sharing power between the
registration input and other clean loads. Refer to Figure 9.1 for a
shared power wiring diagram.
• Provide a filter just prior to the registration input, even if the +24V
dc supply has a clean rating.
• Mount the filter on a separate DIN rail, especially if a painted
panel is used.
Publication GMC-RM001A-EN-P — July 2001
Page 79

Figure 9.1
Shared registration power supply
High Speed Registration Inputs 9-3
Dirty Zone
Segregation
Clean Zone
Insulated mounting (preferred)
Detector
+
com
+24V
+24V com
Clean Load
Registration Input
In figure below a pigtail shield connection is used for the short cable
run to the input and a clamp connection for the long run from the
sensor. Refer to Appendix A for more information on grounding cable
shields.
Figure 9.2
Registration power filter
From sensor
24V dc supply
To registration input
Publication GMC-RM001A-EN-P — July 2001
Page 80

9-4 High Speed Registration Inputs
Dedicated Power Supply
In the figure below, the registration input has a dedicated linear
power supply.
Figure 9.3
Dedicated registration power supply
AC
Dirty Zone
Filter
24V dc Linear PSU
Insulated mounting (preferred)
+
Detector
com
Segregation
Clean Zone
Keep short or shield
(ground shield on both ends)
Registration Input
Detection Device Mounting
A line driver or push-pull output is preferred, but not widely available
except in specialized photoelectric sensors for mark detection.
Publication GMC-RM001A-EN-P — July 2001
Ideally, the device body should be insulated from the machine
structure and connected to the cable shield.
If the sensor cannot be insulated, ground the shield to the structure or
sensor mounting.
Page 81

High Speed Registration Inputs 9-5
Proximity Switches
Proximity switches are especially vulnerable in the off state since the
signal line is disconnected at the switch, forming an efficient antenna.
Observe the following guidelines when using proximity switches:
• Insulate the mounting, if possible, and connect the body to the
cable shield.
• Arrange to be normally on (i.e. hole-operated instead of
target-operated).
• Register on the falling edge. With the line effectively disconnected
(off condition) stray capacitance causes the signal voltage to fall
slowly. Even low levels of noise may then cause false triggering of
inputs without hysteresis.
• When the proximity switch is supplied with unshielded cable,
keep the unshielded length to a minimum by joining to shielded
cable inside a shielded terminal box mounted close to the switch.
Bond the terminal box to the sensor body.
Signal Noise Filter Options
Most registration inputs have a response time of 1 microsecond or
less. In practice, such speed is rarely required. A simple, low-pass
filter will slow the response time but will increase the noise immunity.
Observe the following guidelines for best results in all configurations.
• Keep the length of cable between filter and control to a minimum.
• Bond the filter common securely to the controller chassis.
Publication GMC-RM001A-EN-P — July 2001
Page 82

9-6 High Speed Registration Inputs
Single Voltage Input (24V or 5V)
The figure below illustrates a typical registration filter circuit.
Figure 9.4
Registration filter circuit
R2
R1
C
• R1 lowers the circuit impedance which improves noise immunity.
It also ensures that the signal voltage falls rapidly when the
detector turns off. A lower R value is better, but is limited by the
drive capability of the detector and the dissipation in the resistor.
A 470 ohm resistor will dissipate 1.2W at 24V dc if on
continuously, hence it should be rated at 2W.
• The maximum value of R2 depends on the impedance of the
registration input (a volt drop to 10% of nominal is ideal). If input
impedance is less than 4.7k ohms, then R2 will require a lower
value (i.e., 10% of input impedance). If R2 is changed, use this
µ
formula for the on-delay: Delay (uS) = R2 (ohm) x C (
F). A value
of 470 ohms should be acceptable for most cases.
• Capacitor C, together with R2, determines the on-delay. Capacitor
C, together with R1 + R2, determines the off-delay (as shown in
the table below).
Publication GMC-RM001A-EN-P — July 2001
R1
k ohm
0.47 0.47 4.7 2 4 14 23
0.47 0.47 10 5 9 30 29
0.47 0.47 22 10 21 65 36
0.47 0.47 47 22 44 139 43
0.47 0.47 100 47 94 295 49
0.47 0.47 220 100 207 649 56
R2
k ohm
C
nF
Delay
On
µs
Delay
Off
µs
Noise
Attenuation
factor
@ 1MHz
Noise
Attenuation
@1MHz
dB
Page 83

High Speed Registration Inputs 9-7
Dual Voltage Inputs (24V or 5V)
Where the input is split into 5V and 24V, with inputs sharing the same
common, it is important that the 5V input is not left floating. In the
figure below, the 24V and 5V inputs are shorted together and fed at
5V.
Figure 9.5
Registration filter circuit (24V/5V)
+24V
From Detector
Common
+24V
R2
R1
C
+5V
To Registration Inputs
Common
The on-delay and off-delay times are shown in the table below.
R1
k ohmR2k ohm
0.100 0.390 220 22 2 14 23
0.100 0.390 220 22 5 30 29
0.100 0.390 220 22 10 65 36
0.100 0.390 220 22 22 139 43
0.100 0.390 470 47 47 295 49
C
nF
Delay
On
µs
Delay
Off
µs
Noise
Attenuation
factor
@ 1MHz
Noise
Attenuation
@1MHz
dB
0.100 0.390 1000 100 100 649 56
Publication GMC-RM001A-EN-P — July 2001
Page 84
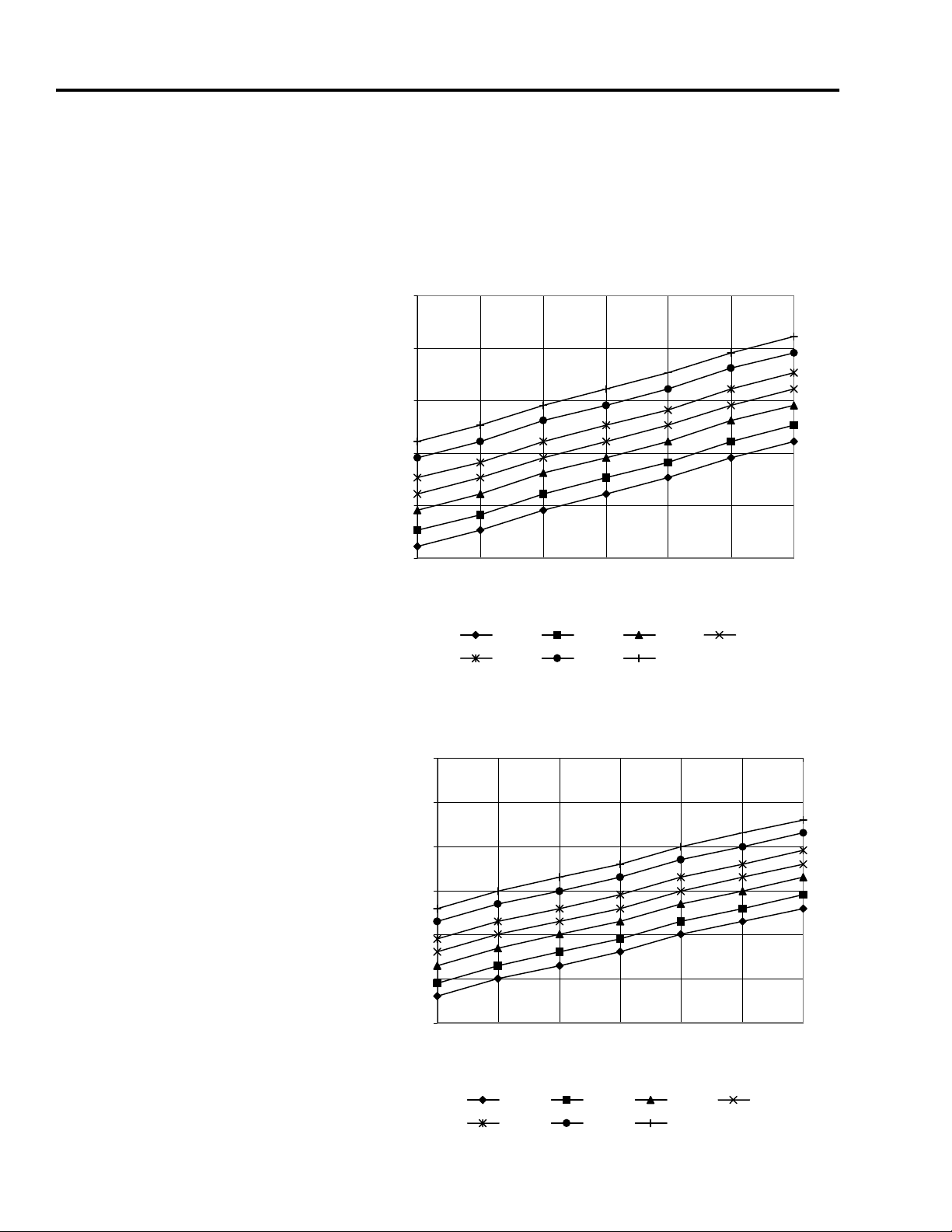
9-8 High Speed Registration Inputs
Registration Error
The following charts help to estimate the error due to time delays. The
detector delay may be much greater than the filter delay, so it is
important to add the two together.
Figure 9.6
Registration Error vs. Delay (metric units)
10
1
0.1
Error mm
0.01
0.001
0.0001
10 20 50 100 200 500 1000
Li near V elocit y m/ min
1 uS 2 uS 5 uS 10 uS
20 uS 50 uS 100 uS
Figure 9.7
Registration Error vs. Delay (British units)
1
0.1
0.01
0.001
Error ins
0.0001
0.00001
0.000001
20 50 100 200 500 1000 2000
Linear Velocity ft/min
Publication GMC-RM001A-EN-P — July 2001
1 uS 2 uS 5 uS 10 uS
20 uS 50 uS 100 uS
Page 85

Figure 9.8
g
Registration Error vs. Delay (rotary units)
10
1
0.1
Error de
0.01
0.001
0.0001
20 50 100 200 500 1000 2000
High Speed Registration Inputs 9-9
Velocity RPM
1 uS 2 uS 5 uS 10 uS
20 uS 50 uS 100 uS
Error Compensation
If the registration signal delay is constant, it will have the effect of
applying a position error proportional to velocity. In this case it may
be possible to apply a software correction.
Software Solutions
It is possible to increase noise resistance with your software,
especially if the problem is false triggering on the falling edge (which
is usually much slower than the rising edge).
Try one of the following techniques before re-arming or looking for
the next registration event.
• Add wait-for-registration-input-low.
• Add a timer after a registration event (to allow the switch signal to
go low).
• Add wait-for-position-greater-than-x (to allow the switch signal to
go low).
Publication GMC-RM001A-EN-P — July 2001
Page 86

9-10 High Speed Registration Inputs
Publication GMC-RM001A-EN-P — July 2001
Page 87

Encoders
Chapter
10
Chapter Objectives
Understanding Encoders
This chapter describes bonding, segregating, shielding, and filtering
techniques for use with encoders. This chapter covers the following
topics:
• Understanding encoders
• Noise reduction methods
• Power supply wiring options
Encoder input circuits are, by their nature, potentially sensitive to
noise. The signal is typically a square wave of about 500kHz at
maximum speed. In order to preserve a reasonable square pulse, the
circuit must handle at least ten times higher frequencies.
Unfortunately, a response of 5MHz is ideally suited to detecting the
noise spikes in a drive system.
The internal encoder circuitry should be relatively immune if it is well
designed but there is often a long cable run to the control input
circuitry. Coupling is usually due to voltage differentials between the
encoder mounting and the drive input.
Noise Reduction Methods
This section provides installation guidelines for reducing noise sources
near encoder input circuits.
Driver Type
IMPORTANT
Driver type is generally dictated by the drive product
but A quad B, differential, or line driver outputs are
preferred.
Publication GMC-RM001A-EN-P — July 2001
Page 88

10-2 Encoders
Wiring
• Always use shielded cable (manufacturers usually specify
appropriate cable).
• Segregate the cable as far as practical from dirty and especially
very-dirty wiring.
Power
• Always use the internal power supply when available.
• Ensure the power supply has a clean rating (refer to Figure 10.1
and Figure 10.2 for linear and switch-mode power supply
examples).
• Use a filter if a switch-mode supply is used (refer to the chapter
Filtering Noise for more information).
• Always ground the common.
Mounting
• Insulate the encoder body from the machine structure and connect
it to the cable shield.
Note: This strategy also requires an insulated shaft coupling.
• If the encoder cannot be insulated, connect the cable shield to
ground at the encoder case and drive chassis (or dedicated
termination).
Publication GMC-RM001A-EN-P — July 2001
Page 89
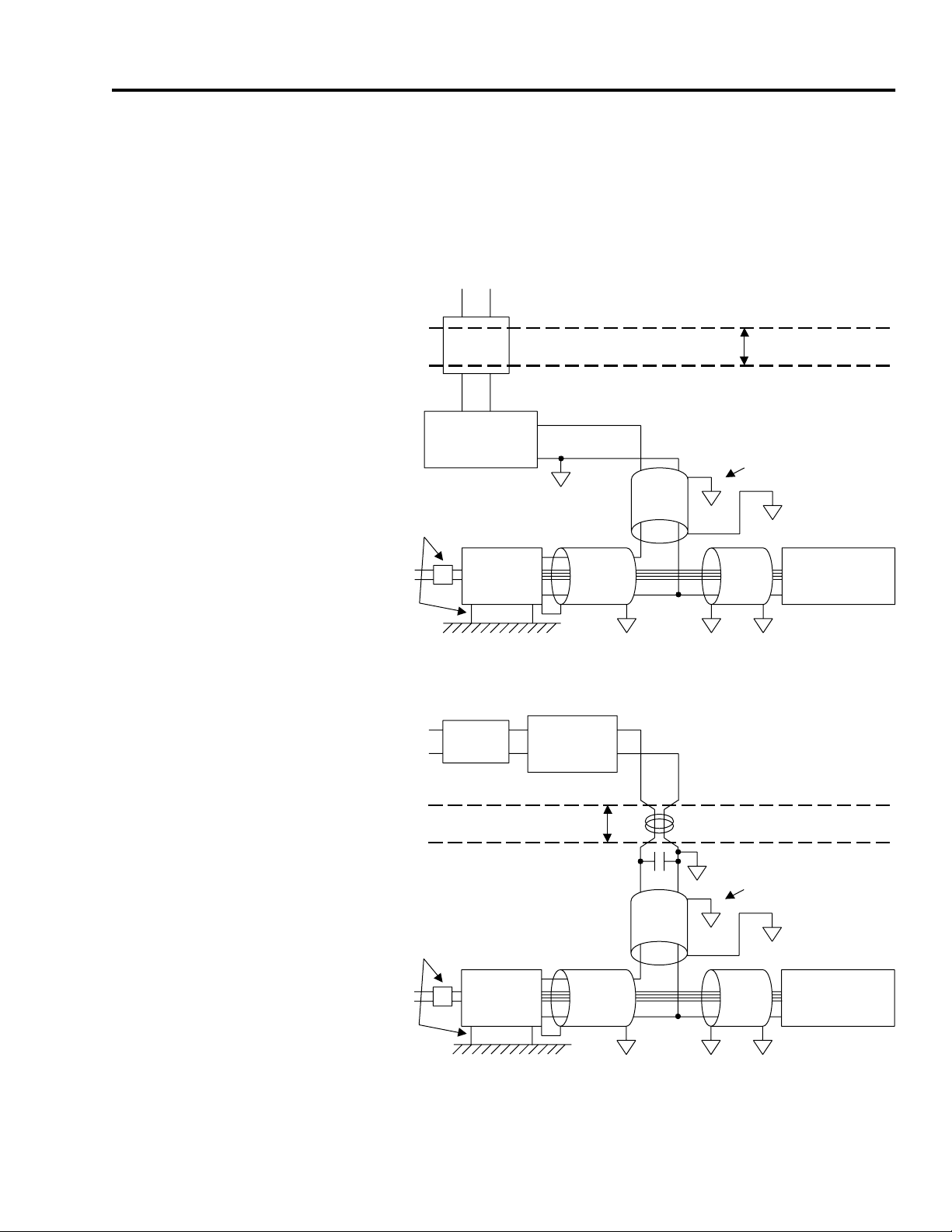
Encoders 10-3
Power Supply Wiring Options
This section provides filtering options of power supply configurations
for your encoder. For more information regarding filters, refer to the
chapter Filtering Noise.
Figure 10.1
Linear power supply example
AC
Dirty Zone
Filter
5/12V dc Linear PSU
Insulated mounting and coupling preferred
Encoder
+
com
Segregation
Clean Zone
Keep short or shield
(ground shield on both ends)
Encoder Input
Figure 10.2
Switch-mode power supply example
Filter
Dirty Zone
Clean Zone
Insulated mounting and coupling preferred
Encoder
5/12V dc PSU
Segregation
+
com
Keep short or shield
Encoder Input
Publication GMC-RM001A-EN-P — July 2001
Page 90

10-4 Encoders
Publication GMC-RM001A-EN-P — July 2001
Page 91

Chapter
11
Measuring Noise Reduction Effectiveness
Chapter Objectives
Understanding Noise Measurement
Methods for Measuring Noise
This chapter describes the equipment, methods, and various
guidelines for measuring noise reduction effectiveness. This chapter
covers the following topics:
• Understanding noise measurement
• Methods for measuring noise
• Measuring noise
• General guidelines for measuring noise
The ability to measure the effectiveness of noise reduction efforts and
to determine if a system is within tolerance is important. However, it
can be very difficult to obtain meaningful and repeatable results.
European EMC regulations are based on spectrum analysis (displaying
amplitude vs. frequency). An RF spectrum analyzer is an expensive
specialist tool, but necessary for pre-compliance testing if this is the
requirement. Usually, a specialist EMC testing company is hired to
perform such tests and the subject is beyond the scope of this
document.
For troubleshooting drive systems, an oscilloscope (displaying
amplitude vs. time) is more practical. You can determine the
effectiveness of your noise reduction efforts by measuring the
amplitude of the largest noise spikes at various points in the system.
There are three primary methods of measuring noise:
• E-field sniffing (electric field)
• H-field sniffing (magnetic field)
• Direct voltage measurements
The first two methods (E-field and H-field sniffing) are best used to
quickly check for intense noise sources, however direct voltage
measurements along the system wiring is the most reliable indicator of
noise performance. Conducted noise (via capacitance and system
wiring) is the most common cause of functional problems.
Publication GMC-RM001A-EN-P — July 2001
Page 92

11-2 Measuring Noise Reduction Effectiveness
Professional probes are available in each category and would be
mandatory for testing to EMC regulations but simple methods are
sufficient for this purpose and are described below (refer to Appendix
B for EMC suppliers).
Measuring Noise
This section describes the tools and methods used to measure noise.
Oscilloscope Specifications
When measuring noise, choose an oscilloscope with the following
features:
• Digital storage
• At least 100 MHz sampling rate
• Trigger that is easily set to a known voltage
• Standard voltage probes
• Differential-mode function (differential voltage probe is a good
alternative, but an additional cost)
• Probe bandwidth of at least 20 MHz.
• Battery power (optional)
Publication GMC-RM001A-EN-P — July 2001
Oscilloscope Settings for Measuring Noise Peaks
Measuring noise peaks is often difficult since PWM induced peaks are
short and typically vary in amplitude widely with time.
To set up your system and oscilloscope for measuring noise peaks:
1. Set the timebase to 1 microsecond per division.
2. Set the trigger so that peaks are captured.
3. Gradually increase the trigger level until triggering just stops.
4. Measure the maximum peak voltage displayed.
Page 93
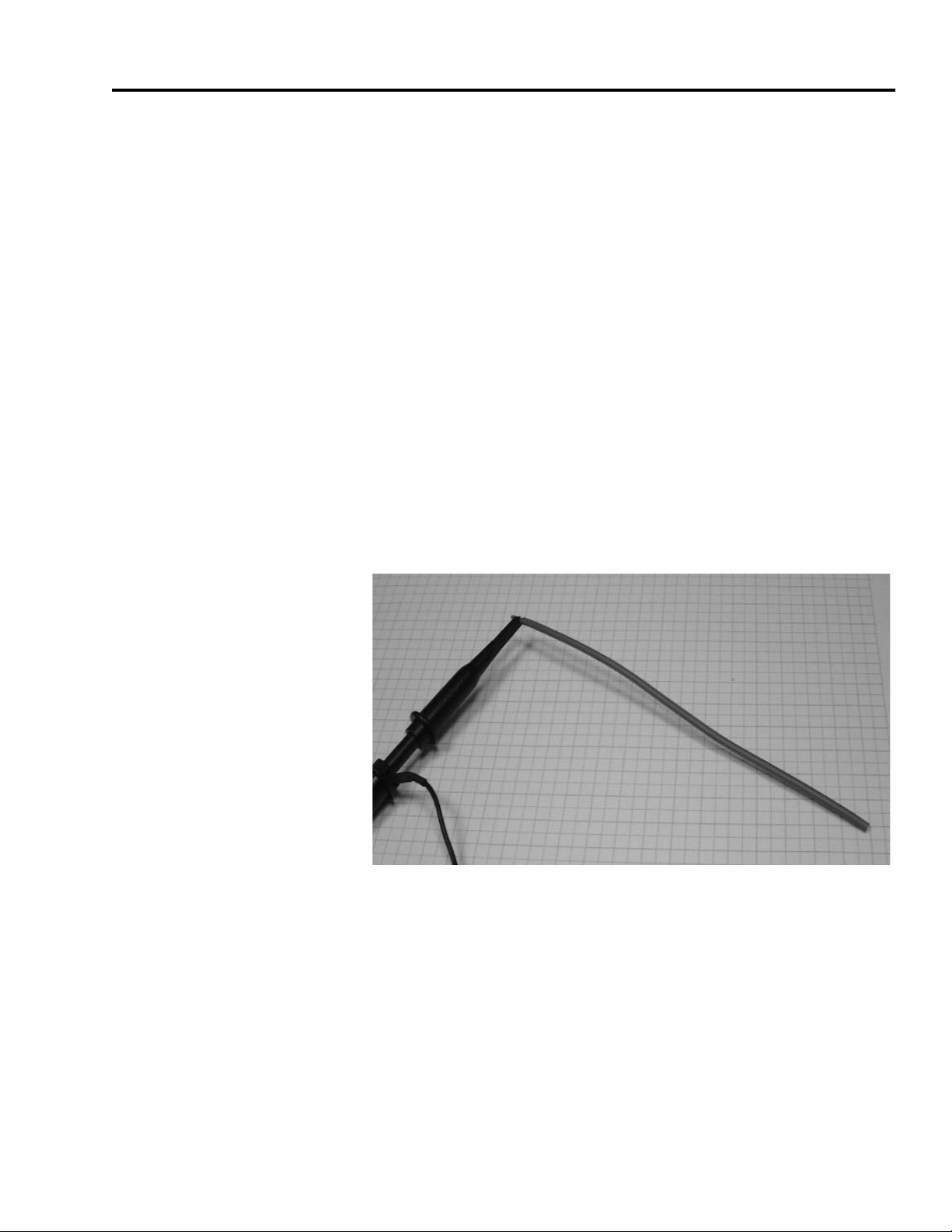
Measuring Noise Reduction Effectiveness 11-3
E-Field Sniffing Method
The E-field is the electric field capacitively coupled to the probe. To
use the E-field sniffing method:
1. Attach a 150 mm (6 in.) length of stiff insulated wire to the probe
tip to form an antenna.
2. Remove the probe ground clip or attach it to the scope cable to
ensure it does not contact anything.
3. Hold the wire parallel to and touching potential victim wiring and
measure the voltage spikes.
Note: The signal observed is with respect to the scope ground. Check
the method by holding the wire against the panel. There should
be little noise observed (refer to the section Ground Loops for
more information).
Figure 11.1
Simple E-field probe
Publication GMC-RM001A-EN-P — July 2001
Page 94

11-4 Measuring Noise Reduction Effectiveness
H-Field Sniffing Method
The H-field is the magnetic field inductively coupled to the probe.
Connect the scope probe ground clip to the probe tip forming a small
loop. Hold the loop close to potential victim wiring. The loop antenna
is sensitive to orientation, so test all three axes to determine the
maximum reading at each location.
Figure 11.2
Simple H-field probe
Publication GMC-RM001A-EN-P — July 2001
Direct Voltage Measurement Method
Direct voltage measurement methods exist for both AC and DC
circuits. Each category are described in the paragraphs below.
Measuring DC Circuits
Direct voltage measurements with respect to a known good ground
are made at chosen points in your DC circuit using a standard 1x
scope probe. Set signal coupling to AC.
Page 95

Measuring Noise Reduction Effectiveness 11-5
Measuring AC Circuits
Line voltage AC circuits are more difficult to measure since 50/60Hz
AC waveforms will swamp the noise signals if a standard 10x or 100x
scope probe is used.
Professional noise probes include a 150kHz high-pass filter to
attenuate power frequency signals, but such a filter is easily built
(refer to Figure 11.3).
Figure 11.3
High-pass filter circuit, 150kHz, 1 pole
Shielded enclosure
BNC socket
from probe
ATTENTION
1000 pF
2 kV
1000 Ω
0.25 W
To avoid personal injury or damage to equipment,
the capacitor must be rated at 2 kV or higher.
BNC plug to scope
!
With this filter installed between a 1x scope lead and the scope input,
AC lines may be examined for noise. The 50/60 Hz waveform will be
reduced to around 200 mV peak.
Note: Note that a 10x probe will attenuate far more than 10x in this
situation and should not be used.
Publication GMC-RM001A-EN-P — July 2001
Page 96

11-6 Measuring Noise Reduction Effectiveness
For BNC cases (as shown in Figure 11.4) refer to the following list of
suppliers:
• Pomona Electronics, Part # 3752
• RS Components, Part # 189-0258
For more information on these and other suppliers, refer to
Appendix B.
Figure 11.4
High-pass filter construction, 150 kHz, 1 pole (signal flow is left to right)
ATTENTION
To avoid personal injury or damage to equipment,
always connect the probe ground clip to reference
ground. Connecting the ground clip to line voltage
may cause the scope chassis and controls to reach
potentially lethal line voltage.
!
Grounding Your Probe (reference ground)
If the panel is plated and everything is bonded to it then the nearest
point on the panel is the best reference ground point. With proper
bonding the whole panel is a ground plane and the ideal reference.
With a painted panel it is almost impossible to define a good ground
because all the components are at different RF potentials. However,
because a properly bonded panel (even one that’s painted) maintains
the same electrical potential at all points, it is still the best reference
ground.
Publication GMC-RM001A-EN-P — July 2001
Page 97

Measuring Noise Reduction Effectiveness 11-7
Ground Loops
A line-powered oscilloscope may introduce noise via the ground loop
formed by the separate line supply and the connection of the probe to
system ground. Methods to reduce this type of noise are listed below.
• Connect a braided strap between the scope chassis and the panel.
Most scopes have a ground terminal provided for this purpose.
• Pass the scope lead through a ferrite sleeve several times.
• Use a battery powered scope and place it inside the control
cabinet close to the panel.
• Use a scope with differential inputs. Refer to the section
Differential Measurements for more information.
• Extend the scope probe lead. Refer to Figure 11.6 for an
illustration.
Differential Measurements
Differential measurements eliminate ground loops and allow the
scope to be grounded to its own supply ground. Two methods to
reduce this type of noise are given below.
Differential Voltage Probes
Differential voltage probes, as shown in Figure 11.5, use only one
scope input. Since they cancel common-mode voltage between the
measured circuit and the scope common, ground loop problems are
greatly reduced.
The main limitation is that of limited common-mode rejection. To
avoid saturating the amplifier when measuring noise at line voltage
the attenuation must be set to 1/100 or 1/200. This way the noise
signal of interest is attenuated by the same amount. Increasing the
scope sensitivity to compensate amplifies any internal probe or scope
noise. Tips for using differential scope probes are listed below.
• Connect both probe tips to the same point in the circuit under test.
No signal should be seen if the differential function is working
correctly. Refer to the section Checking Your Method for
Effectiveness for details. For best results, use the method as
described.
Publication GMC-RM001A-EN-P — July 2001
Page 98

11-8 Measuring Noise Reduction Effectiveness
• Use a high-pass filter between the probe and the scope input
when checking AC circuits. Refer to Figure 11.4 for filter
construction details.
Note: Before installing the high-pass filter, check that the signal
Figure 11.5
Typical differential voltage probe
does not overload the voltage probe at the chosen division
ratio.
Publication GMC-RM001A-EN-P — July 2001
Differential Scope Inputs
Refer to these guidelines using an oscilloscope with two inputs in
differential mode.
• The trigger must also operate in differential mode. Check your
user manual for compatibility and instructions.
• Use two matched high-pass filters (one for each probe) for AC line
checks as described above. Refer to Figure 11.4 for filter
construction details.
• Connect both probe tips to the same point in the circuit under test.
The residual noise signal should be much smaller than the
measured value if the differential function is working. Refer to the
section Checking Your Method for Effectiveness for details.
• Avoid forming large loops with your probes by twisting the two
leads together as far as possible.
Page 99

Measuring Noise Reduction Effectiveness 11-9
Scope Probe Lead Extension
Refer to these guidelines, and the figure below, when extending the
scope probe.
• Keep the extension cable as short as possible.
• Make several turns through the ferrite sleeve.
• Only use 1x probes (10x probes will attenuate HF signals by more
than ten times).
Figure 11.6
Extending the scope lead
Scope
BNC / BNC
extension
cable
BNC bulkhead
socket
Ferrite sleeve
Component mounting panel
1x Scope probe
Checking Your Method for Effectiveness
Connect the probe ground clip to the chosen ground reference and
then connect the probe to the same point. It would be reasonable to
expect zero signal, but it is common to see significant levels of noise.
The main sources of such noise are given below.
• Poor ground reference. Refer to the section Grounding Your Probe
(reference ground) for guidelines.
• Scope power supply introducing noise. Refer to the section
Ground Loops for guidelines.
• Local magnetic noise field. Refer to the section H-Field Sniffing
Method for details.
Note: It can be seen from this why extending the scope probe
ground wire is not recommended.
Without constant checking, it difficult to know when the observed
noise waveform is real or a measurement artifact.
Publication GMC-RM001A-EN-P — July 2001
Page 100

11-10 Measuring Noise Reduction Effectiveness
Identifying the Noise Source
Two methods for identifying the source of a noise spike are listed
below.
• Disable each potential source in turn until the spike disappears.
• Correlate the noise signal with PWM sources by displaying the
PWM waveform on a second channel. If the PWM source is the
culprit, the noise signal will remain synchronized to the edges of
the PWM waveform. Use a differential probe (phase to phase) or
high-pass filter (phase to ground), connected to the suspect drive
terminals, to display the PWM edges.
Intermittent Noise
If noise from mechanical contacts (e.g., a motor contactor) is
suspected, the technique is a little different. Because of the variable
nature of the peak amplitude, the best method is to operate the
suspect device (for example) ten times in quick succession by
overriding the control system. If this is not practical, monitor the
device long enough to observe a number of operations. Progressively
increase the trigger level as before.
General Guidelines for Measuring Noise
This section contains general guidelines for measuring noise. Tips on
understanding acceptable noise levels, noise measurement methods
that don’t work, and system monitoring methods are discussed.
What are Acceptable Noise Levels?
No national or international standards for instantaneous peak voltage
levels are known, but a very conservative approach would be to
assume that a TTL gate may be closely coupled to a nominally clean
circuit. Then, the noise immunity of a TTL gate (around 1.0V)
becomes the critical level. This implies an allowable maximum of (for
example) 500mV to allow for some margin of safety.
Publication GMC-RM001A-EN-P — July 2001
 Loading...
Loading...