

Page 1
This manual links to KnowledgeBase Article SMC Flex Soft Starter
Parameters, which contains the parameters; download the spreadsheets
now to ensure offline access.
SMC Flex Soft Starters
Bulletin 150-F
User Manual
Original Instructions
Page 2
SMC Flex Soft Starters User Manual
Important User Information
Read this document and the documents listed in the additional resources section about installation, configuration, and
operation of this equipment before you install, configure, operate, or maintain this product. Users are required to familiarize
themselves with installation and wiring instructions in addition to requirements of all applicable codes, laws, and standards.
Activities including installation, adjustments, putting into service, use, assembly, disassembly, and maintenance are required to
be carried out by suitably trained personnel in accordance with applicable code of practice.
If this equipment is used in a manner not specified by the manufacturer, the protection provided by the equipment may be
impaired.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the use
or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or liability for
actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or software
described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation, Inc., is
prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous environment, which may
lead to personal injury or death, property damage, or economic loss.
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death, property damage, or
economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the consequence.
IMPORTANT
Identifies information that is critical for successful application and understanding of the product.
Labels may also be on or inside the equipment to provide specific precautions.
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that dangerous voltage may
be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that surfaces may reach
dangerous temperatures.
ARC FLASH HAZARD: Labels may be on or inside the equipment, for example, a motor control center, to alert people to potential Arc
Flash. Arc Flash will cause severe injury or death. Wear proper Personal Protective Equipment (PPE). Follow ALL Regulatory requirements
for safe work practices and for Personal Protective Equipment (PPE).
2 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 3

Table of Contents
Preface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
About This Publication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Terminology. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
View Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Summary of Changes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Chapter 1
Product Overview Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Starting Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Soft Start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Linear Speed Acceleration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Current Limit Start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Selectable Kickstart . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Pump Control Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Dual Ramp Start. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Full-voltage Start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Preset Slow Speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Stopping Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Coast . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Soft Stop. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Linear Speed Deceleration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Pump Stop
Braking Control Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Smart Motor Braking (SMB) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Slow Speed with Braking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Accu-Stop
Protection and Diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Overload. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Underload . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Undervoltage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Overvoltage
Unbalance
Stall Protection and Jam Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Ground Fault. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Ground Fault Trip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Ground Fault Alarm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Thermistor/PTC Protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Excessive Starts/Hour. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Overtemperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Open Gate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Line Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Metering. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
(a)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
(a)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
(a)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
(a)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 3
Page 4

Table of Contents
Status Indication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Chapter 2
Installation Receive the Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Unpack the Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Inspect the Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Storage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Lifting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
General Precautions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Degree of Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Heat Dissipation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Enclosures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Power Factor Correction Capacitors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Protective Modules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Motor Overload Protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Two-speed Motors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Multi-motor Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Electromagnetic Compatibility (EMC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Enclosure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Additional Requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
New EMC Compliance – Conducted Emissions . . . . . . . . . . . . . . . . . 36
Chapter 3
Wiring Wiring Terminal Locations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Power Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Power Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Line Connection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Delta Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Power Lugs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Control Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Control Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Controllers rated 5…480 A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Controllers rated 625…1250 A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Control Wire Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Fan Power. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Fan Terminations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Control Terminal Designations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Standard Controller Wiring Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Soft Stop, Pump Control, and SMB Smart Motor Braking . . . . . . . . . . . 59
Preset Slow Speed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Slow Speed with Braking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Sequence of Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Special Application Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Protective Modules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Multi-motor Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
SMC Flex Controller as a Bypass to an AC Drive . . . . . . . . . . . . . . . . 73
SMC Flex Controller with a Bulletin 1410 Motor Winding Heater . 74
4 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 5

Table of Contents
Dual-voltage Wiring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Low-voltage Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
High-voltage Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Chapter 4
Programming Keypad Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Programming Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Password. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Parameter Management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Random Access Memory (RAM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Read-only Memory (ROM). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Parameter Modification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Soft Start. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Current Limit Start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Dual Ramp Start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Full Voltage Start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Linear Speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Programming Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Basic Setup. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Motor Protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Chapter 5
Metering Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
View Metering Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Chapter 6
Optional HIM Operation Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Human Interface Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Chapter 7
Communication Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Communication Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Human Interface Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Keypad Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Connect the Human Interface Module to the Controller . . . . . . . . . 97
Control Enable. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
HIM and COMM Card Control Enable . . . . . . . . . . . . . . . . . . . . . . . . . 98
Loss of Communication and Network Faults. . . . . . . . . . . . . . . . . . . . . . . 99
SMC Flex Controller-specific Information. . . . . . . . . . . . . . . . . . . . . . . . . 99
Default Input/Output Configuration . . . . . . . . . . . . . . . . . . . . . . . . . 100
Variable Input/Output Configuration . . . . . . . . . . . . . . . . . . . . . . . . 100
Bit Identification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Reference/Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Parameter Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Scale Factors for PLC Communication. . . . . . . . . . . . . . . . . . . . . . . . 102
Display Text Unit Equivalents. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Configuring DataLink . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Criteria for Using DataLink. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 5
Page 6

Table of Contents
Updating Firmware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Chapter 8
Diagnostic Capabilities Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Protection Programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Fault Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Clear Fault . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Fault Buffer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Fault Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Fault and Alarm Auxiliary Indication. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Fault Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Chapter 9
Troubleshooting Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Power Module Check . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Shorted SCR Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Appendix A
Renewal Parts Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Appendix B
Renewal Parts Cross Reference Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Additional Resources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
6 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 7
Preface
About This Publication
Ter mi no logy
This user manual provides you with the information that is required to
program and operate your SMC™ Flex soft starter.
The SMC Flex controller is modular so that it can help simplify installation and
commissioning. A built-in LCD display, keypad, and flexible communications
provide optimized configuration, advanced performance, diagnostics, and
protection. Three-phase control, electronic overload, and integrated bypass
along with removable control module, power modules, and fan assembly are
combined in a cost-effective package for your demanding applications.
The user manual assumes that the installer is a qualified person with previous
experience and basic understanding of electrical terminology, configuration
procedures, required equipment, and safety precautions.
For safety of maintenance personnel and others who might be exposed to
electrical hazards associated with maintenance activities, follow all local
safety-related work practices (such as NFPA70E, Part II in the United States).
Maintenance personnel must be trained in the safety practices, procedures,
and requirements that pertain to their respective job assignments.
Throughout this publication, we also refer to the SMC Flex soft starter as the
SMC Flex controller. These terms are interchangeable.
View Parameters
Parameter definitions are listed in Excel® spreadsheets in KnowledgeBase. The
spreadsheets let you filter and sort parameters, and add your own setting
values and notes. Table 1
summarizes the information that is in the
spreadsheet.
Knowledgebase Answer ID 1125564, SMC Flex Soft Starter Parameters,
contains the parameters. Download the spreadsheet from this public
article.
You may be asked to log in to your Rockwell Automation web account or
create an account if you do not have one. You do not need a support
contract to access the article.
Table 1 - SMC Flex Parameter Categories
Parameter Group Description
Full Parameter List Full list of all SMC Flex Controller Parameters
Logic Mask Requirements Lists the Logic Mask Codes and Binary equivalents
Parameter Special Behavior
Describes codes that can appear under specific conditions and parameter
configurations
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 7
Page 8
Preface
Summary of Changes
This publication contains the following new or updated information. This list
includes substantive updates only and is not intended to reflect all changes.
Translated versions are not always available for each revision.
Top ic Page
Reformatted pages Throughout
Added information about conducted emissions compliance for EMC directive 35
Added parameter list for control module
Added enumerated binary bit pattern for the Logic Mask parameter 99
Removed Parameter List appendix. This information is contained in the spreadsheet that is attached to this
document.
Removed specifications and accessory appendices. This information is contained in the technical data,
publication 150-TD009
.
parameter
spreadsheet
8 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 9
Product Overview
Chapter 1
Description
The SMC™ Flex controller is modular so that it can help simplify installation
and commissioning. A built-in LCD display, keypad, and flexible
communications provide optimized configuration, advanced performance,
diagnostics, and protection. SMC Flex controllers combine three-phase
control, electronic overload, and integrated bypass along with removable
control module, power modules, and fan assembly in a cost-effective package
for your demanding applications.
• Modular for simplified installation and maintenance
• Built-in LCD and keypad or personal computer software setup
•Integrated bypass
• Nine start/stop modes and three slow-speed modes
• Full metering and diagnostics
Modes of operation include the following:
• Soft start • Full-voltage Start
• Current Limit Start • Dual Ramp Start
• Selectable Kickstart • Pump Start
• Coast-to-rest • Preset Slow Speed
•Soft stop •Pump Stop
• Smart Motor Braking (SMB™) • Accu-Stop™
• Slow Speed with Braking
• Linear Speed Acceleration
(Tachometer required)
Operation
IMPORTANT
The SMC Flex controller can operate standard squirrel-cage induction motors
rated 1…1250 A or Star-delta (wye-delta) type motors rated 1.8…1600 A up to
690V AC, 50/60 Hz. Depending upon the controller type ordered, the control
power input can range from 100…240V AC or 24V AC/DC. Verify voltage on the
product before you apply power.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 9
The three controller options are Standard Control, Pump Control, and
Brake Control. Some modes of operation are only available on certain
controllers, such as Smart Motor Braking on Brake Control. Consider the
available modes of operation for a controller when configuring a catalog
number to order. You can upgrade an existing controller to another
control option by replacing the control module. Consult your local
Rockwell Automation sales office or Allen-Bradley distributor.
Page 10
Chapter 1 Product Overview
Time (seconds)
Ramp Time
Start
Run
% Voltage
Initial
Tor que
100%
Starting Modes
The SMC Flex Smart Motor Controller provides the following starting modes
of operation as standard:
Starting Modes
Soft Start Pump Control Mode
Linear Speed Acceleration Dual Ramp Start
Current Limit Start Full-voltage Start
Selectable Kickstart Preset Slow Speed
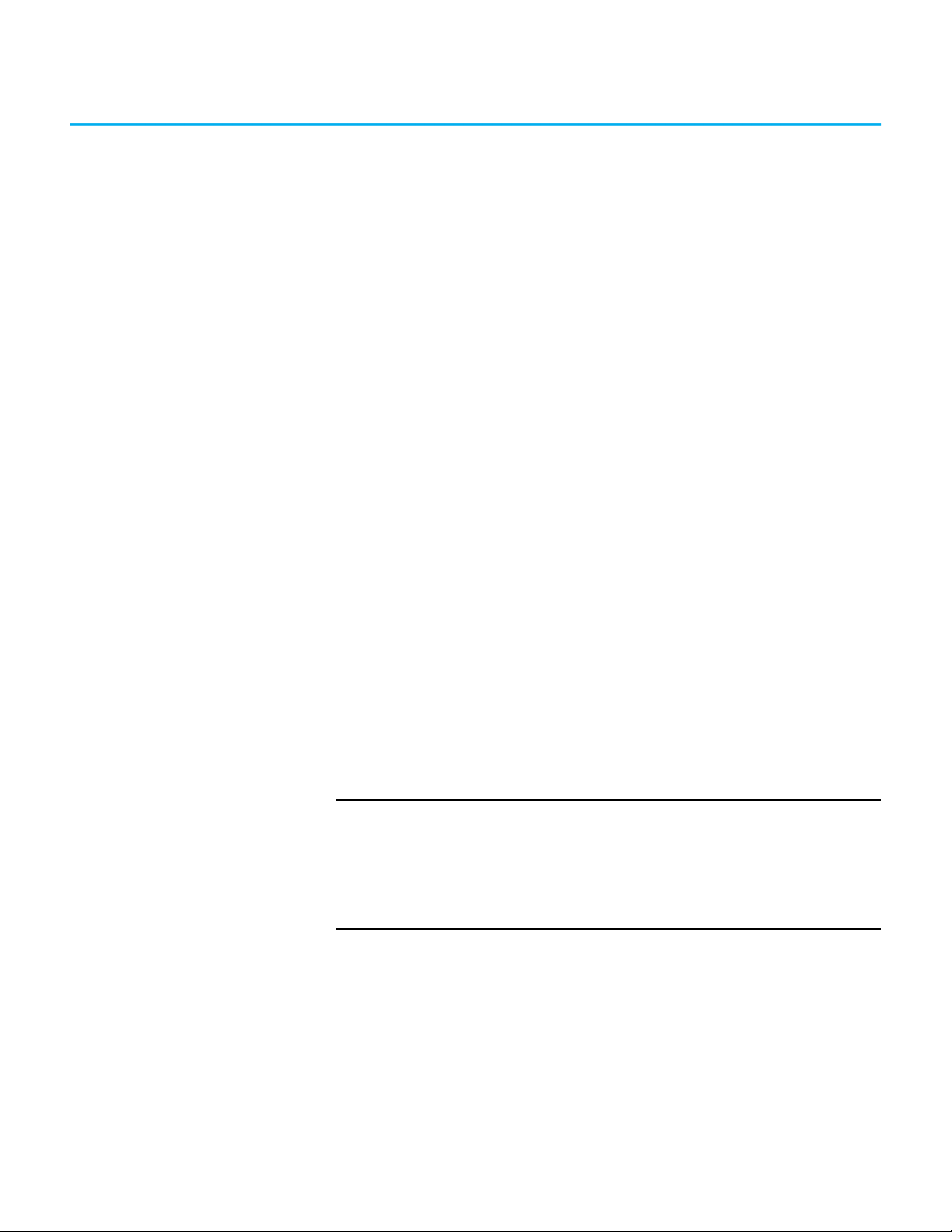
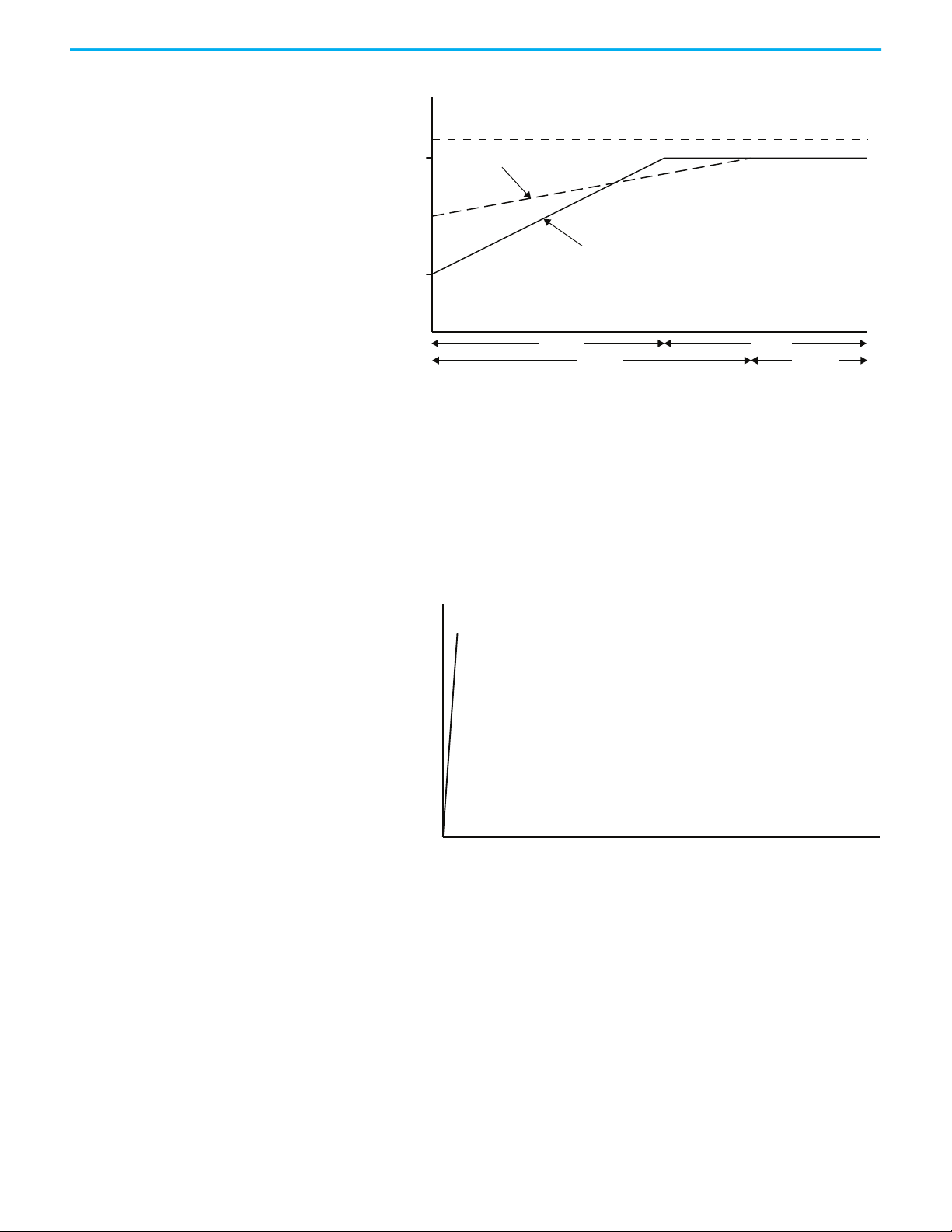
Soft Start
Soft Start limits the current throughout the soft start, and covers the largest
number of general applications. The motor is given an initial torque setting.
From the initial torque level, the output voltage to the motor is steplessly
increased (ramped) during the acceleration ramp time. Initial torque setting
and acceleration ramp time are user adjustable.
A motor’s torque curve is not a linear function and depends on both applied
voltage and current. If the soft starter ramped voltage that is applied to the
motor is sufficient for it to develop enough torque to overcome the inertia of the
load, the motor could quickly accelerate to full speed in less than the configured
ramp time when using the Soft Start mode.
Figure 1 - Soft Start Timing Diagram
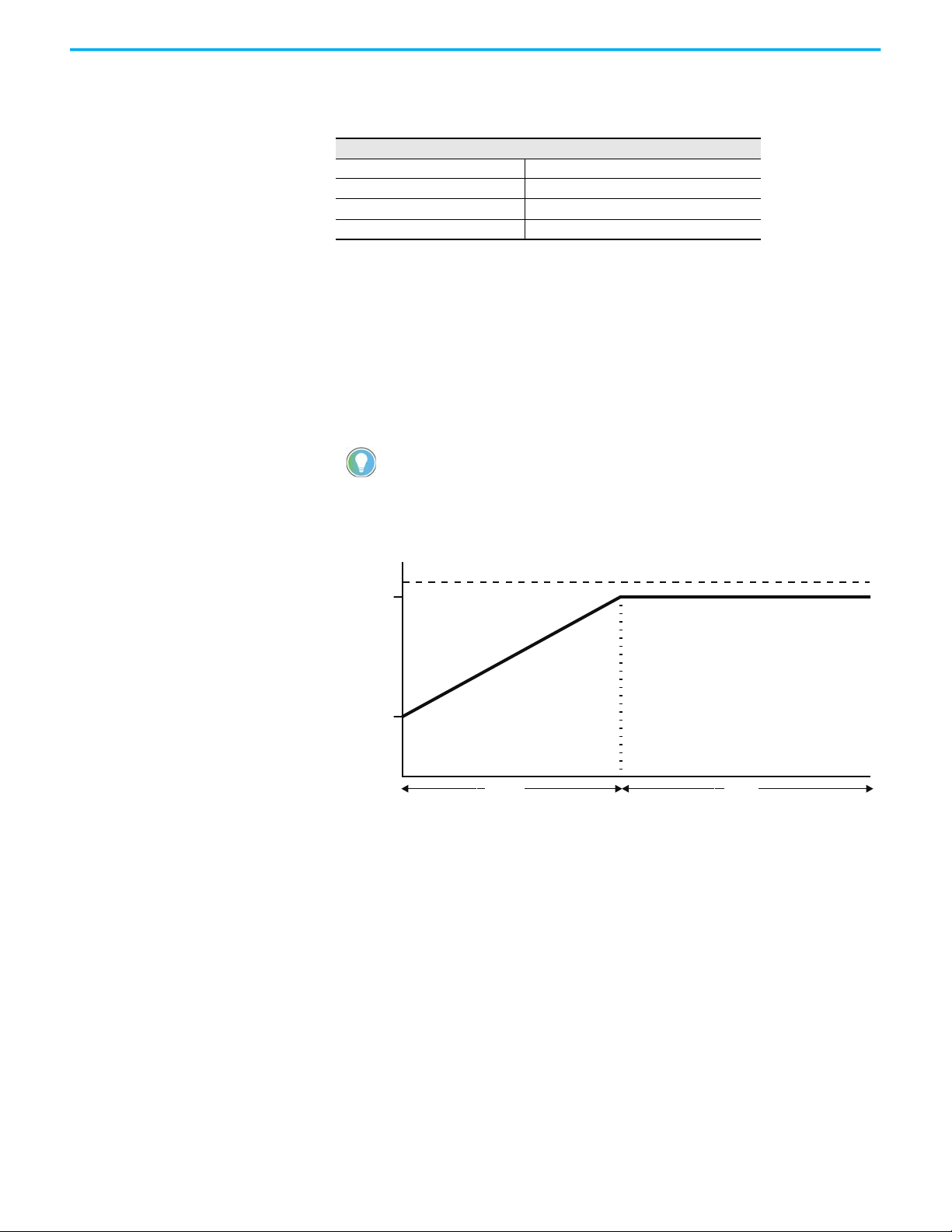
Linear Speed Acceleration
With this type of starting mode, the motor acceleration is at a constant rate.
The controller accelerates the motor in a linear fashion from the off (0 speed)
condition to full speed condition in the time configured in the user-defined
ramp time (0…30 seconds). Kickstart is available with this option.
A tachometer input (0…5V DC) is required to perform this start mode.
Linear Speed Acceleration presents the least amount of stress on mechanical
components. An initial torque value is configured to define a motor starting
10 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
value.
Page 11
Chapter 1 Product Overview
% Speed
Ramp Time
100%
Time (seconds)
Start Run
Stop
Stop Time
Linear Acceleration Linear Deceleration
% Full Load Current
50%
600%
Current Limit
Time (seconds)
Start
Figure 2 - Linear Speed Acceleration Timing Diagram
Current Limit Start
Current Limit Start provides a current limit-controlled start by maintaining a
constant current to the motor. Use this method when it is necessary to limit
the maximum starting current. You can adjust the starting current and
current limit starting ramp time.
Figure 3 - Current Limit Start Timing Diagram
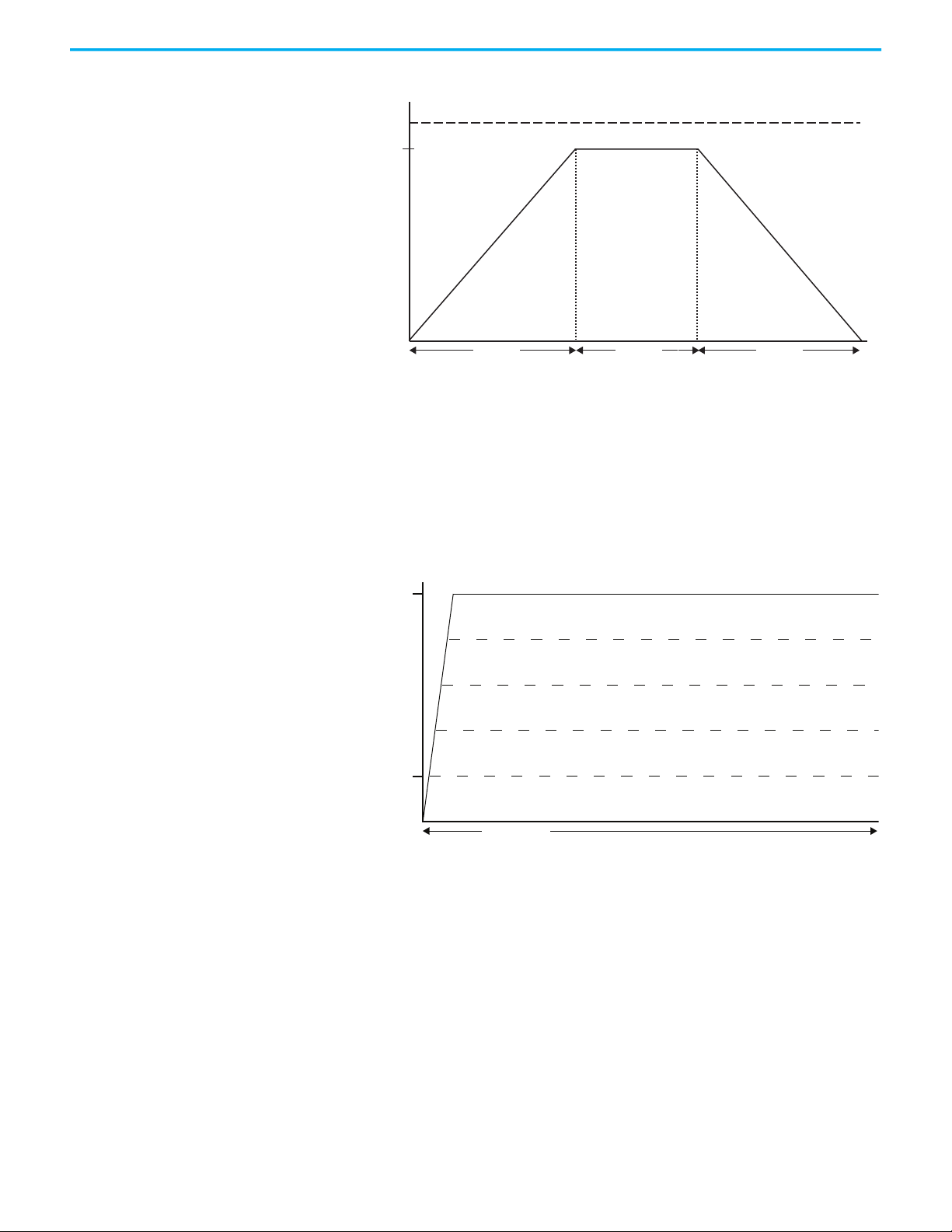
Selectable Kickstart
The kickstart feature provides a boost at startup to break away loads that can
require a pulse of current/torque to get started. It is intended to provide a
current/voltage pulse for a short time. Kickstart is available in Soft Start,
Current Limit, Linear Speed Acceleration, and Pump Control modes.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 11
Page 12
Chapter 1 Product Overview
% Voltage
Initial
Tor que
100%
Kickstart
Time
Time (seconds)
Start
Run
Kickstart
Level
Soft stop
Soft stop
Coast-to-Rest
100%
Time (seconds)
Run
Motor Speed
Pump Start
Ramp Time
Pump Stop
Stop Time
Figure 4 - Selectable Kickstart Timing Diagram
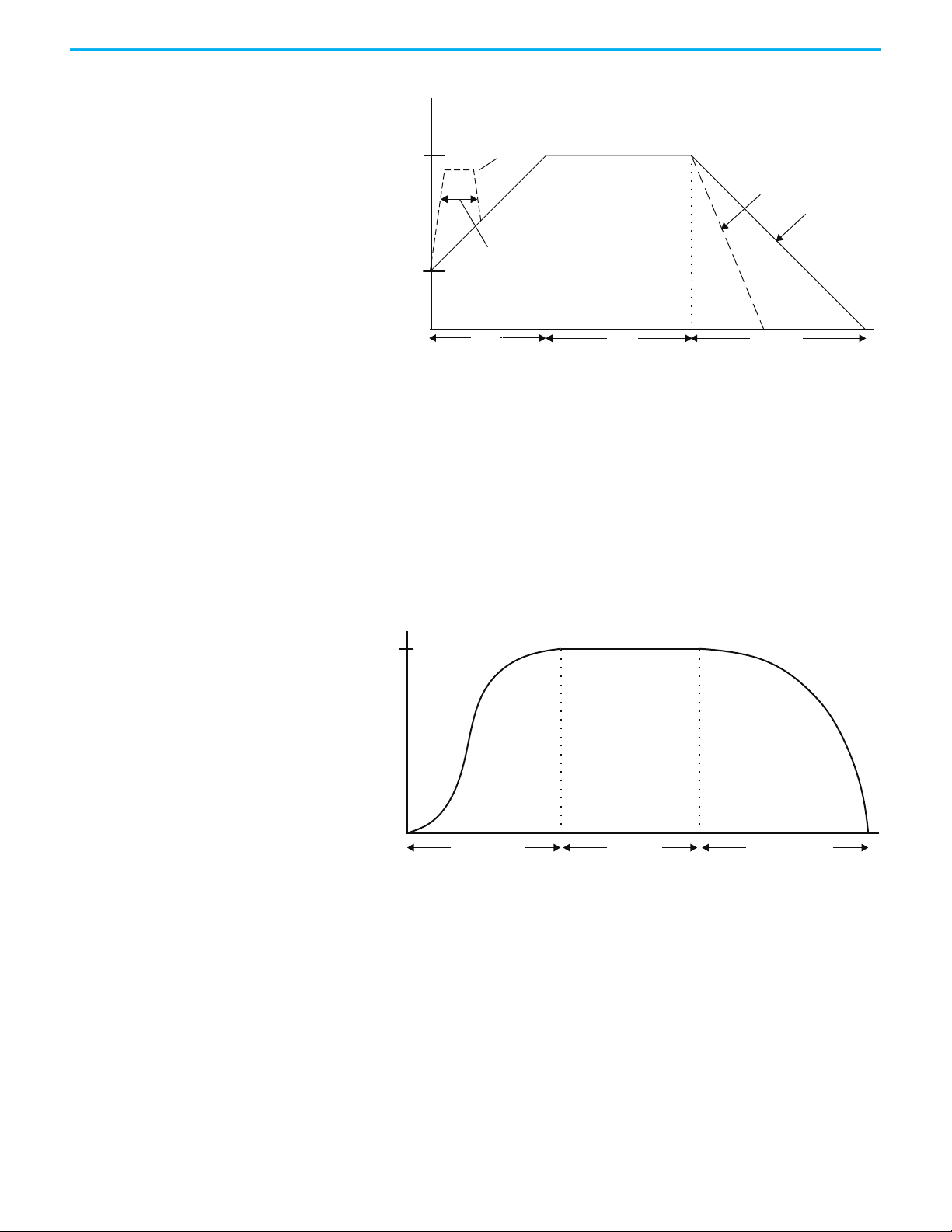
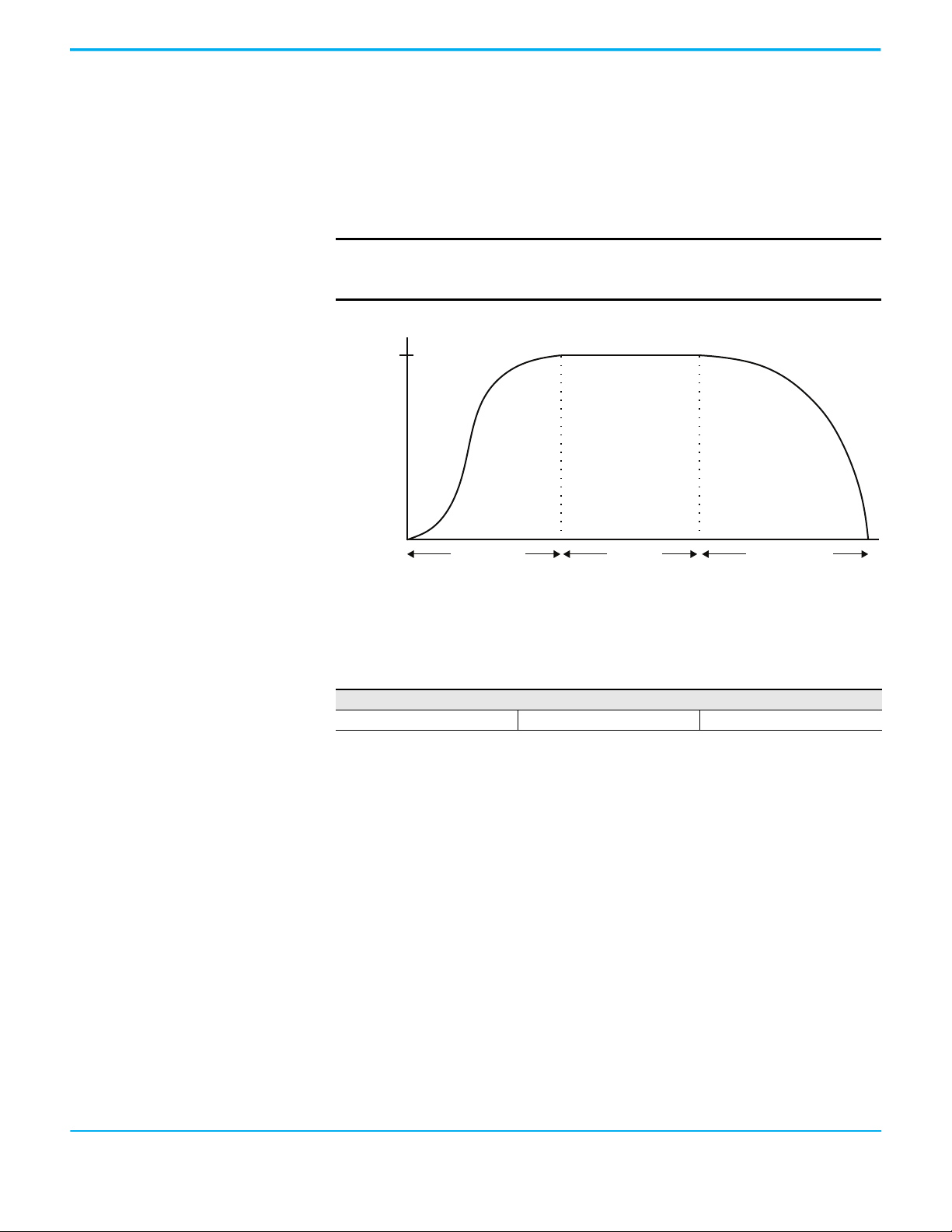
Pump Control Mode
Use Pump Control Mode to reduce surges in a fluid piping system and the
resulting fluid hammer or check valve slam that is caused by starting or
stopping a centrifugal pump at full voltage and full speed. This mode increases
pump life by reducing pump cavitations. To provide these benefits, the
microprocessor of the SMC Flex controller generates a motor start curve that
follows the starting characteristics of a centrifugal pump and monitors
operation during start to deliver reliable pump starts.
Figure 5 - Pump Control Mode Timing Diagram
Dual Ramp Start
Dual Ramp Start is useful on applications with variable loads, starting torque,
and start time requirements. Dual Ramp Start gives you the ability to select
between two separate start profiles via any programmable auxiliary input.
Each start profile can use any of the available starting modes.
12 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 13
Chapter 1 Product Overview
% Voltage
Time (seconds)
Current Limit 2
Current Limit 1
100%
Initial
Torque 2
Initial
Torque 1
Ramp Time 2
Ramp Time 1
Start 1
Run 1
Start 2
Run 2
100%
Time (seconds)
% Voltage
Figure 6 - Dual Ramp Start Timing Diagram
Full-voltage Start
Full-voltage Start is used in applications that require across-the-line starting.
The SMC Flex controller performs like a solid-state across-the-line contactor.
Full inrush current and locked-rotor torque are realized. You can program the
SMC Flex controller to provide a full-voltage start in which the output voltage
to the motor reaches full voltage in 250 ms.
Figure 7 - Full-voltage Start Timing Diagram
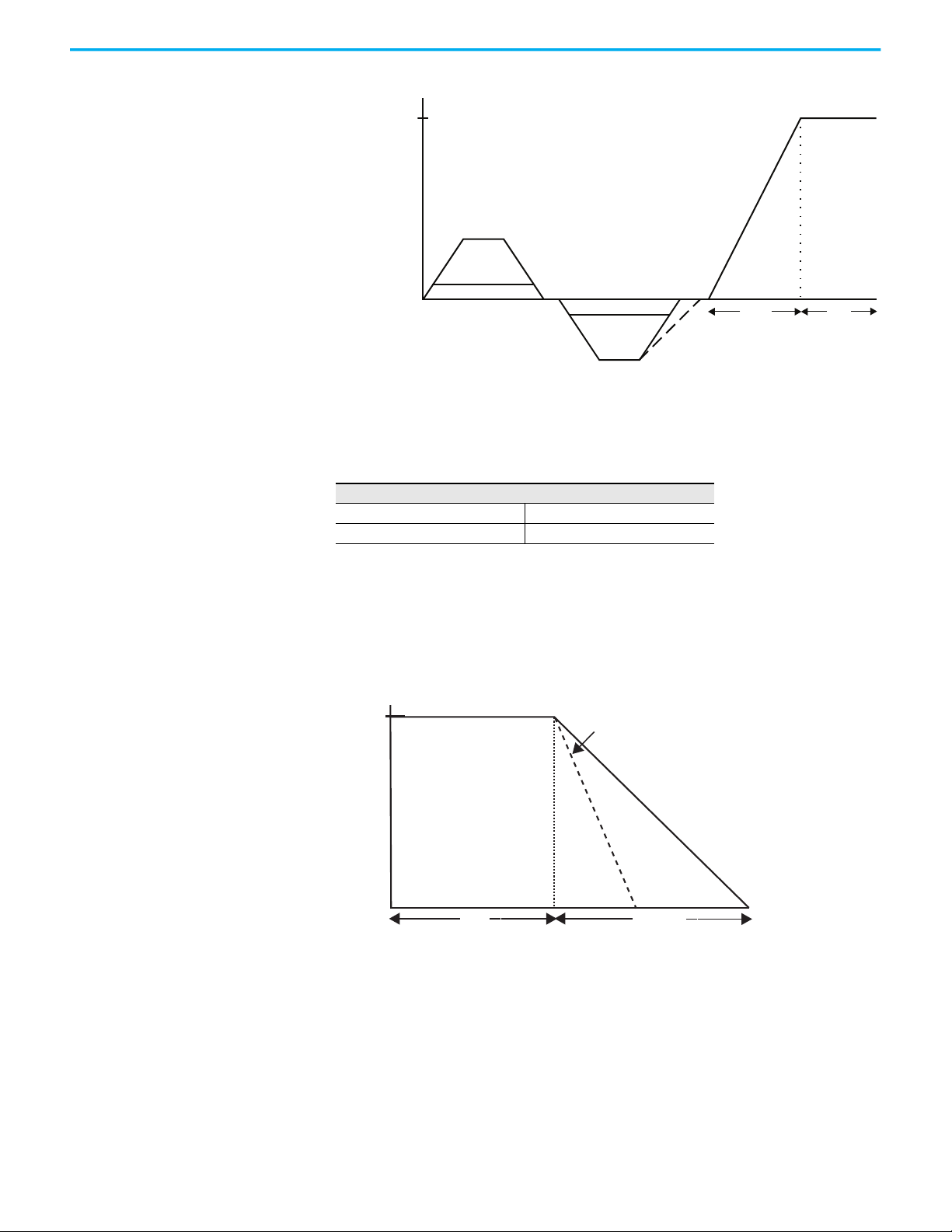
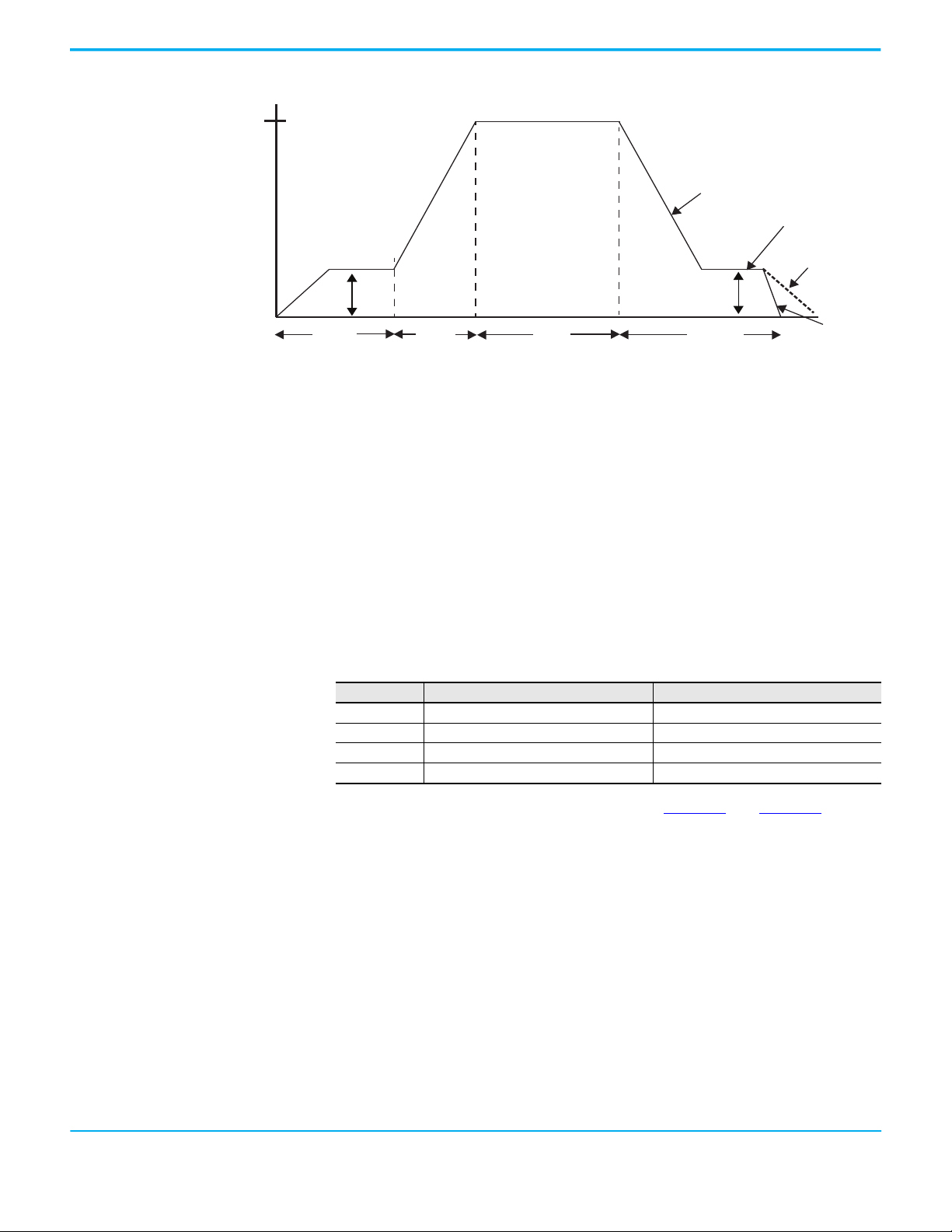
Preset Slow Speed
Use Preset Slow Speed on applications that require slow speed moves for
positioning material. You can set the Preset Slow Speed at either 7% (low) or
15% (high) in the forward direction. You can program reverse speed and 10%
(low) or 20% (high) of the base speed setting. No reversing contacts are
required. To help achieve more-accurate stops, braking is also a part of this
function. You can program two independent preset slow speed parameters for
both speed and direction.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 13
Page 14
Chapter 1 Product Overview
Motor Speed
100%
15% - High
Time (seconds)
Start
Run
Forward
Reverse
7% - Low
20% - High
10% - Low
% Voltage
100%
Time (seconds)
Stop Time
Run Soft stop
Coast-to-Rest
Figure 8 - Preset Slow Speed Timing Diagram
Stopping Modes
The SMC Flex Smart Motor Controller provides the following Stopping Modes
of operation as standard:
Stopping Modes
Coast Linear Speed Deceleration
Soft stop Pump Stop
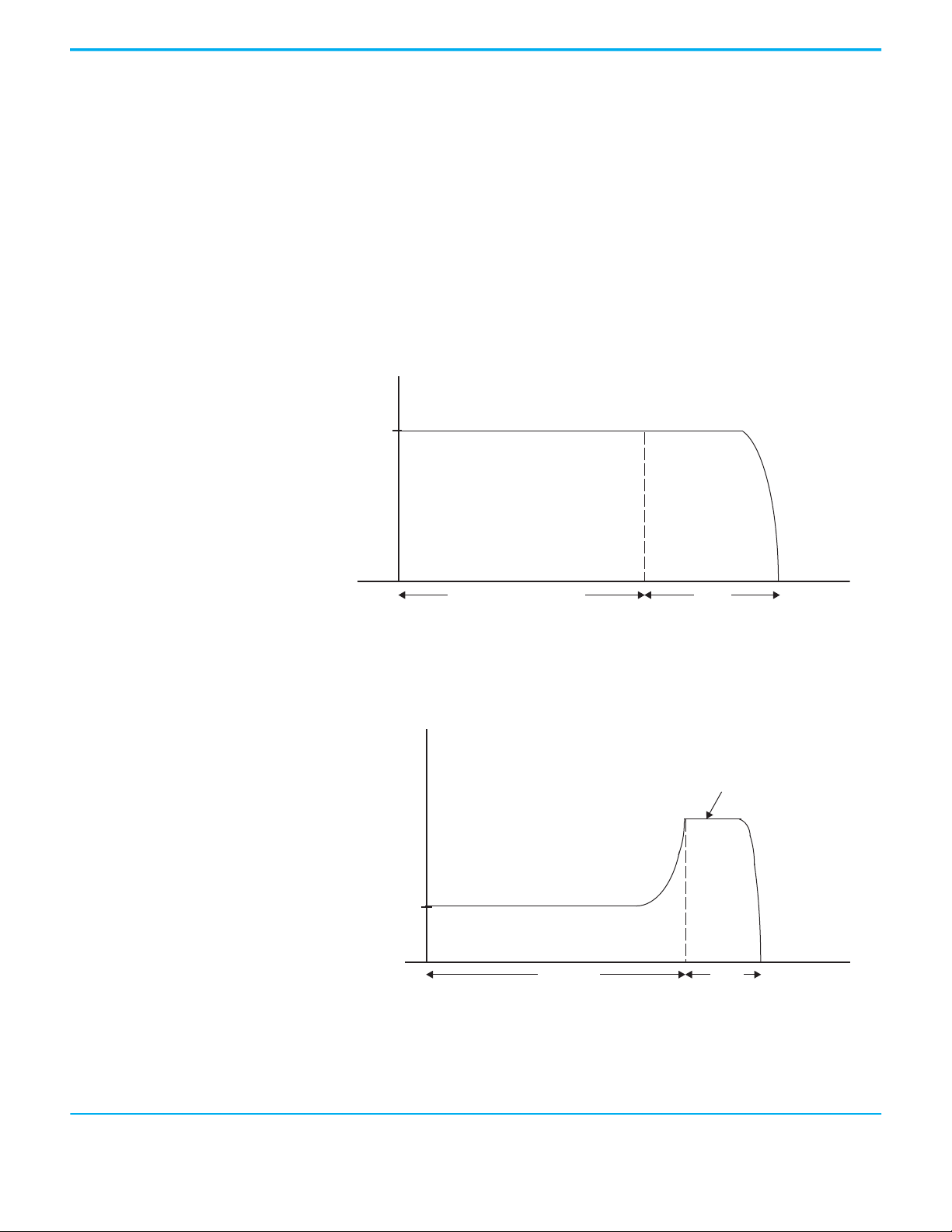
Coast
Configure the stop mode to Coast sets the controller to perform a motor coastto-stop maneuver.
Figure 9 - Coast-to-stop Timing Diagram
14 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 15
Chapter 1 Product Overview
% Voltage
100%
Time (seconds)
Stop Time
Run
Soft stop
% Speed
Ramp Time
100%
Time (seconds)
Start Run
Stop
Stop Time
Linear Acceleration Linear Deceleration
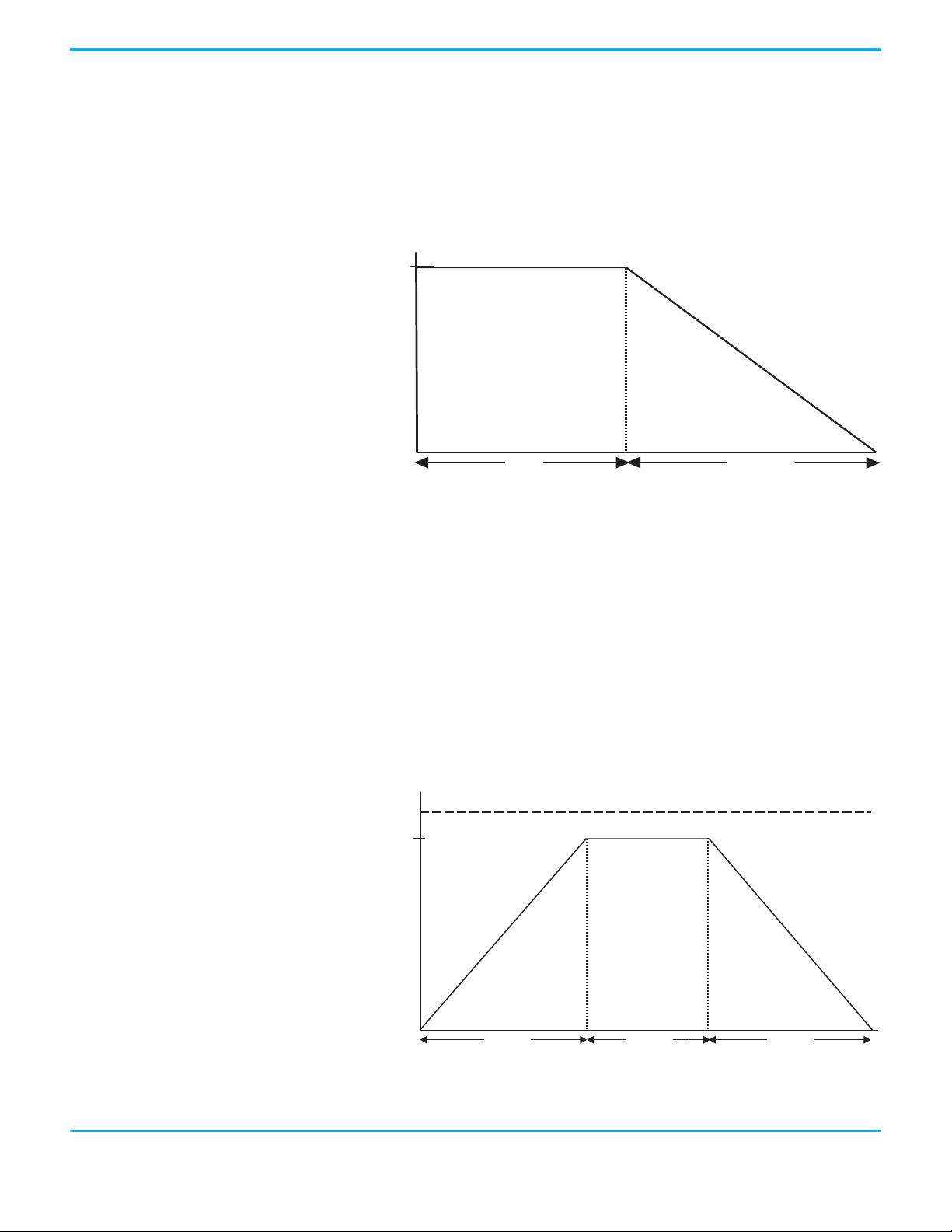
Soft Stop
(a)
The soft stop mode can be used in applications that require an extended stop
time. You can adjust the voltage ramp down time from 0...120 seconds. The
load stops when the programmed stop time has elapsed or the voltage ramp
drops to a point where the load torque is greater than the motor torque.
Figure 10 - Soft Stop Timing Diagram
Linear Speed Deceleration
(a)
Configuring the motor stop mode to Linear Speed Deceleration mode
commands the motor to stop from full speed to zero speed following a linear
ramp based on the user-configured stop time. This stopping mode requires a
tachometer input (0…5V DC).
You do not need to set up Linear Stop even if you have programmed a linear
start. The Linear Stop cannot brake the motor/load and reduce the stopping
time.
Figure 11 - Linear Speed Deceleration Timing Diagram
(a) Not intended to be used as an emergency stop. Consult the applicable standards for emergency stop requirements.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 15
Page 16
Chapter 1 Product Overview
100%
Time (seconds)
Run
Motor Speed
Pump Start
Ramp Time
Pump Stop
Stop Time
Pump Stop
(a)
Just as starting a centrifugal pump at full voltage causes fluid hammer and
check valve slam, stopping a centrifugal pump that is running at full speed can
also produce the same results. The Pump Stop mode of the SMC Flex generates
a motor stop curve, which follows the stop characteristics of a centrifugal
pump. The motor stop curve results in the gradual decrease in motor speed.
IMPORTANT
Pump stopping can cause motor heating, depending on the mechanical
dynamics of the pumping system. Select the lowest stopping time
setting that satisfactorily stops the pump.
Figure 12 - Pump Stop Timing Diagram
Braking Control Modes
(a)
The SMC Flex Smart Motor Controller provides the following braking control
modes of operation as standard:
Braking Control Modes
SMB—Smart Motor Braking Accu-Stop Slow Speed with Braking
Smart Motor Braking (SMB)
(a)
SMB provides motor braking for applications that require the motor to stop
faster than a coast-to-rest. Braking control with automatic zero speed shutoff
is fully integrated into the design of the SMC Flex controller. This design
facilitates a clean, straight-forward installation and eliminates the
requirement for additional hardware (for example, braking contactors,
resistors, timers, and speed sensors). The micro-processor based braking
system applies braking current to a standard squirrel-cage induction motor.
The strength of the braking current is programmable from 0…400% of full-load
current.
(a) Not intended to be used as an emergency stop. Consult the applicable standards for emergency stop requirements.
16 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 17
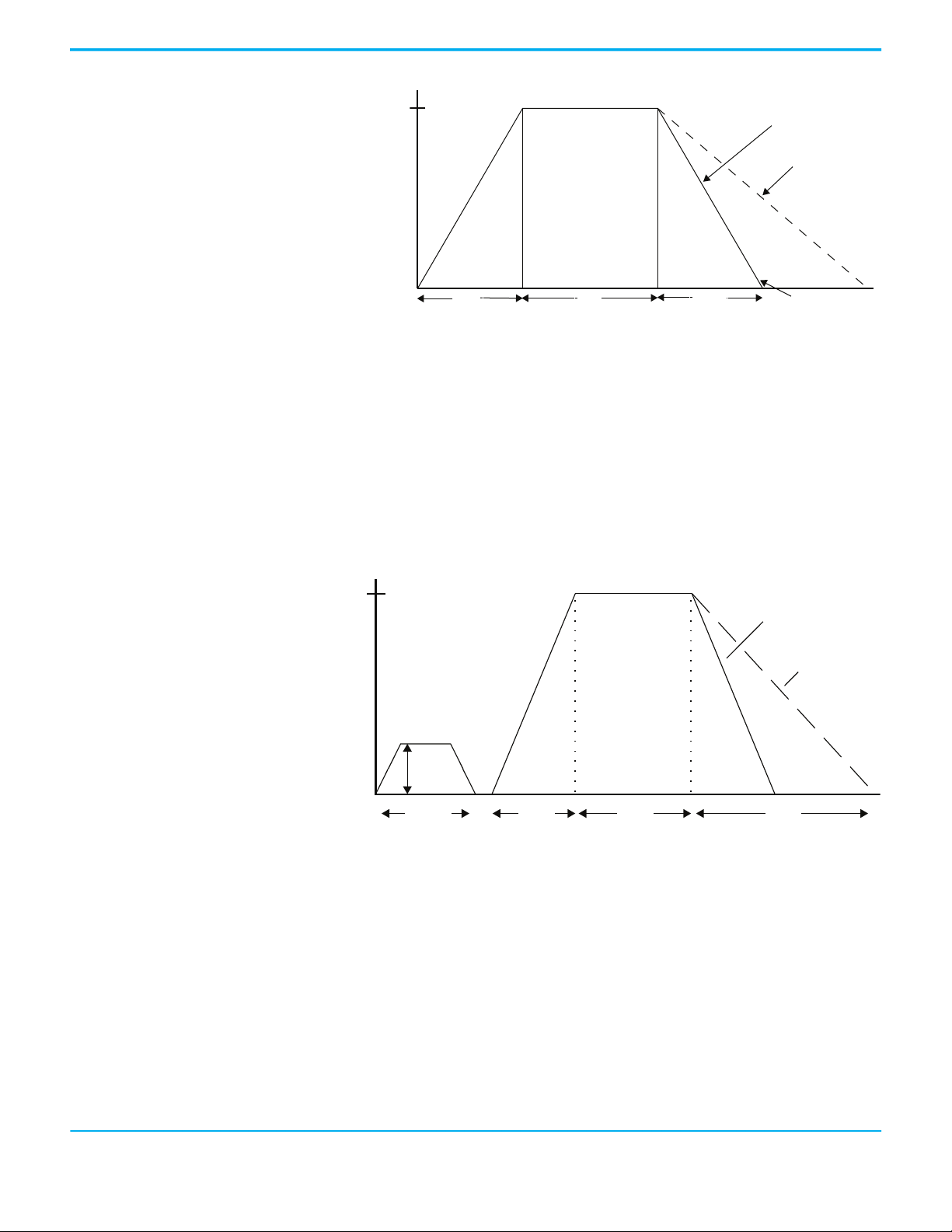
Figure 13 - SMB Timing Diagram
Motor Speed
Automatic Zerospeed Shutoff
100%
Time (seconds)
Start
Run Brake
Smart Motor Braking
Coast-to-Rest
Stop Time
Motor Speed
100%
Time (seconds)
Slow
Speed
Run
7 or 15%
Braking
Coast-to-Rest
StopStart
Chapter 1 Product Overview
Slow Speed with Braking
(a)
Slow Speed with Braking is used on applications that require slow speed (in
the forward or reverse direction) for positioning or alignment and also require
braking control to stop. Preset Slow Speed provides either 7% of base speed
(low) or 15% of base speed (high) settings in the forward direction. Braking
current is adjustable from 0…400%.
Figure 14 - Slow Speed with Braking Timing Diagram
Accu-Stop
(a)
Use Accu-Stop in applications that require controlled position stopping.
(a) Not intended to be used as an emergency stop. Consult the applicable standards for emergency stop requirements.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 17
During stopping, braking torque is applied to the motor until it reaches the
configured preset slow speed value (7% or 15%) and holds the motor at this
speed until a stop command is given. Braking torque is then applied until the
motor reaches zero speed. Braking current is programmable from 0…400% of
full-load current.
Page 18
Chapter 1 Product Overview
Motor Speed
100%
Time (seconds)
Slow
Speed
Run
7% or 15%
Braking
Coast-to-Rest
BrakeStart
Slow Speed
Slow Speed
Braking
7% or 15%
Figure 15 - Accu-Stop Timing Diagram
Protection and Diagnostics
This section describes the protection and diagnostic features that the SMC
Flex controller provides.
Overload
The SMC Flex controller meets applicable requirements as a motor overload
protective device. Thermal memory provides added protection and is
maintained even when control power is removed. The built-in overload
controls the value that is stored in Parameter 12, Motor Thermal Usage; an
Overload Fault occurs when this value reaches 100%. The programming
parameters in this section provide application flexibility and easy setup.
Parameter No. Parameter Range
44 Overload Class Off, 10, 15, 20, 30
47 Overload Reset Manual – Auto
46 Motor FLC 1.0…2200 A
45 Service Factor 0.01…1.99
The trip rating is 117% of the programmed FLC. Figure 16
the overload trip curves for the available trip classes.
and Figure 17 provide
Underload
(a)
Utilizing the underload protection of the SMC Flex controller, motor operation
can be halted if a sudden drop in current is sensed.
The SMC Flex controller provides an adjustable underload trip setting from
0…99% of the programmed motor full-load current rating. You can adjust the
Trip delay time from 0…99 seconds.
(a) Underload protection is disabled during slow speed and braking operations.
18 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 19
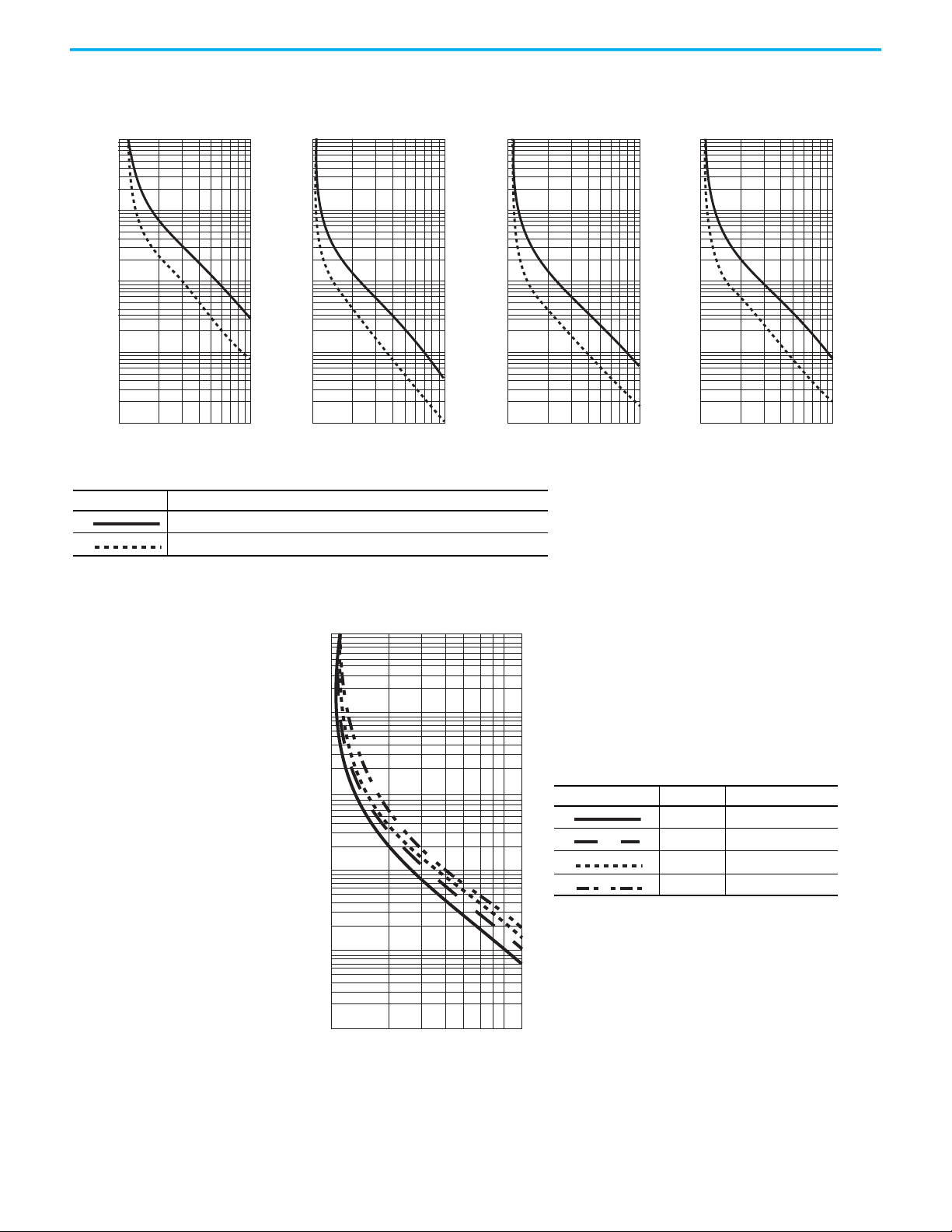
Figure 16 - Overload Trip Curves
1
10
100
1000
100000
1
01
4 5 6 7 832 9
1
10
100
1000
100000
1
01
4 5 6 7 832 9
1
10
100
1000
100000
1
01
4 5 6 7 832 9
1
01
4 5 6 7 832 9
0.1
1.0
10.0
100.0
1000.0
Graph Line Description
Approximate trip time for 3-phase balanced condition from COLD start
Approximate trip time for 3-phase balanced condition from HOT start
Approx. Trip Time [s]
Multiples of FLC
Class 10 Class 15 Class 20 Class 30
Multiples of FLC Multiples of FLC Multiples of FLC
Approx. Trip Time [s]
Approx. Trip Time [s]
Approx. Trip Time [s]
Graph Line Trip Class Auto Reset Time [s]
10 90
15 135
20 180
30 270
Seconds
Percent Full Load Current Setting
Chapter 1 Product Overview
Figure 17 - Restart Trip Curves after Auto Reset
100000
1000
100
10
1000%100% 1000%100%
1
0
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 19
Page 20

Chapter 1 Product Overview
Undervoltage
You can halt motor operation if a sudden drop in voltage is detected by
utilizing the undervoltage protection of the SMC Flex controller.
The SMC Flex controller provides an adjustable undervoltage trip setting from
0…99% of the programmed motor voltage. You can adjust the trip delay time
from 0…99 seconds.
You can program an alarm (pre-fault) indication level to indicate when the unit
is getting close to faulting. The alarm modification information is displayed
through the LCD, HIM, Communication (if applicable) and alarm contact
closing.
Overvoltage
You can halt motor operation if a sudden increase in voltage is detected by
utilizing the overvoltage protection of the SMC Flex controller.
The SMC Flex controller provides an adjustable overvoltage trip setting from
0…199% of the programmed motor voltage. Trip delay time can be adjusted
from 0…99 seconds.
(a)
(a)
You can program an alarm (pre-fault) indication level to indicate when the unit
is getting close to faulting. The alarm modification information is displayed
through the LCD, HIM, Communication (if applicable) and alarm contact
closing.
Unbalance
The SMC Flex controller can detect an unbalance in line voltages. You can halt
motor operation if the unbalance is greater than the desired range.
The SMC Flex controller provides an adjustable unbalance setting from 0…25%
of the line voltages. Trip delay time can be adjusted from 0…99 seconds.
You can program an alarm (pre-fault) indication level to indicate that the unit
is getting close to faulting. The alarm modification information is displayed
through the LCD, HIM, Communication (if applicable) and alarm contact
closing.
(a)
(a) Undervoltage, overvoltage, and voltage unbalance protection are disabled during braking operation.
20 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 21
Chapter 1 Product Overview
600%
% FLC
Time [s]
Programmed Start Time
Stall
% FLC
Time [s]
Running
Jam
User-defined Trip Level
Stall Protection and Jam Detection
Motors can experience locked-rotor currents and develop high torque levels if
a stall or a jam occurs. These conditions can result in breakdown of the
winding insulation or mechanical damage to the connected load. The
SMC Flex controller provides both stall protection and jam detection for
enhanced motor and system protection. A jam level (as a percent of motor FLC)
is configurable for both an alarm and motor shutdown (fault). In addition,
both stall and jam conditions let you set a delay time before initiating an alarm
(jam only) or motor shutdown (fault).
Stall protection is user adjustable from 0.0…10.0 seconds (in addition to the
ramp time programmed).
Figure 18 - Stall Protection
Jam detection lets you determine the jam level (up to 1000% of the motor’s FLC
rating) and the delay time (up to 99.0 seconds) for application flexibility.
Figure 19 - Jam Detection
100%
(a) (b)
You can program an alarm (pre-fault) indication level to indicate when the unit
is getting close to faulting. The alarm modification information is displayed
through the LCD, HIM, Communication (if applicable) and alarm contact
closing.
(a) Jam detection is disabled during slow speed and braking operation.
(b) Unit self-protects in a jam condition.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 21
Page 22
Chapter 1 Product Overview
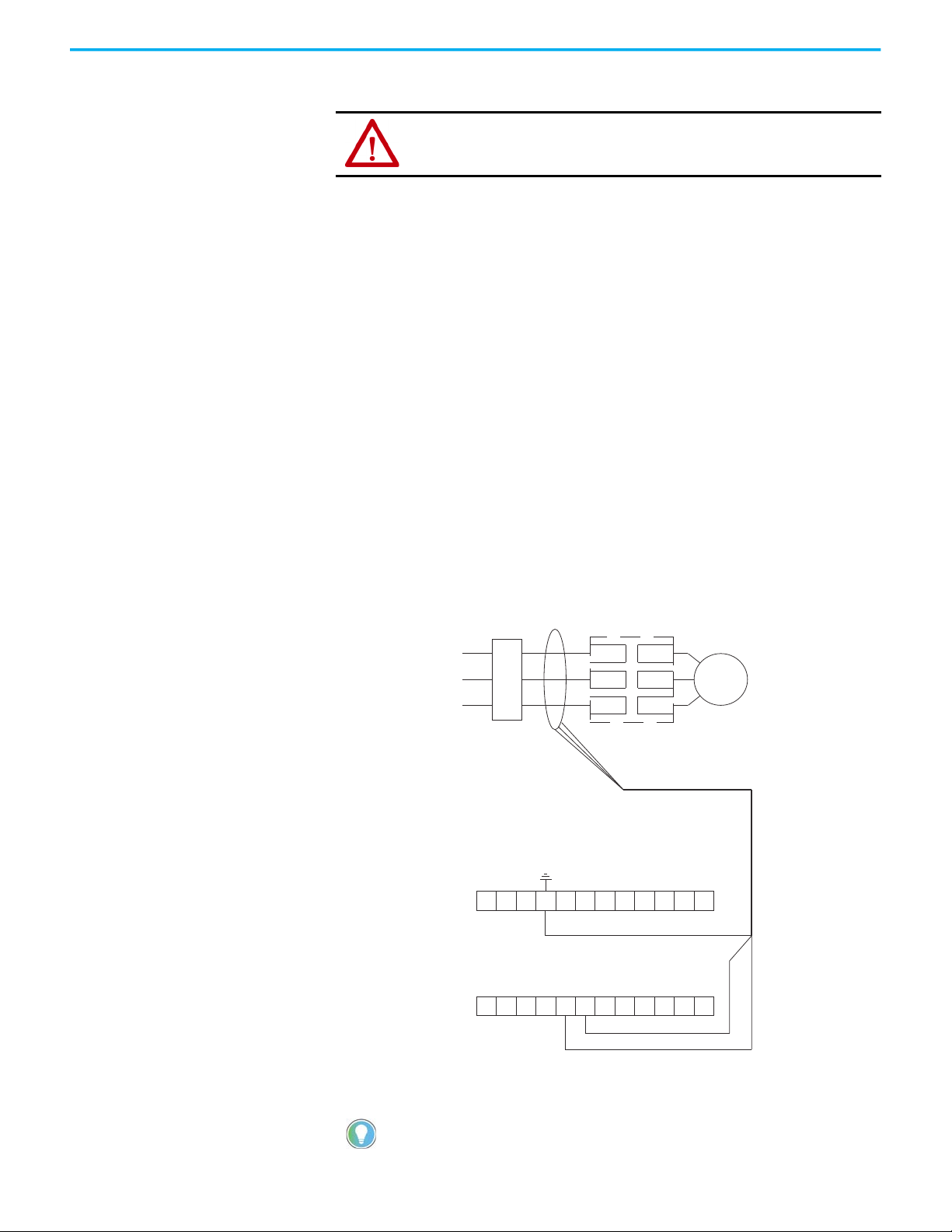
Branch Protection
(1)
(1) Customer supplied.
(2) Cat. No. 825-CBCT or Flex-Core Cat. No. 126-252
Motor
(1)
SMC Flex Controller
SMC Flex Control Terminals
3-Phase Input Power
Shield
Black
White
11
Black
White
Shield
(1)
(2)
L1/1
L2/3
L3/5
T1/2
T2/4
T3/6
12 13 14 15 16 17 18 19 20 21 22
23 24 25 26 27 28 29 30 31 32 33 34
Ground Fault
ATTENTION: The ground fault sensing feature of the SMC Flex controller is intended
for monitoring purposes only. It is not intended as a ground fault circuit interrupter
for personnel protection as defined in Article 100 of the National Electrical Code
(NEC) and has not been evaluated to UL 1053.
In isolated or high impedance-grounded systems, core-balanced current
sensors are typically used to detect low-level ground faults that are caused by
insulation breakdowns or entry of foreign objects. Detection of such ground
faults can be used to interrupt the system to help prevent further damage, or to
alert the appropriate personnel to perform timely maintenance.
The ground fault detection capabilities of the SMC Flex controller require the
use of an external sensor. The external sensor lets you enable Ground Fault
Trip, Ground Fault Alarm, or both.
For 5…480 A devices, the recommended sensor is a Cat. No. 825-CBCT core
balance current transformer for 1…5 A core-balanced ground fault protection.
For 625…1250 A devices, the recommended sensor is listed here and provides
5…25 A core-balanced ground fault protection.
• Manufacturer: Flex-Core
• Description: 600V Rated Current Transformer
• Catalog Number: 126-252
• CT Ratio:2500:5
Figure 20 - Core Balance Current Transformer
22 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
When you connect the ground fault sensors, the secondary of the CT should be
shorted until you complete the connection to the SMC Flex control module.
Page 23
Chapter 1 Product Overview
Ground Fault Trip
The SMC Flex controller trips with a ground fault (GF) indication if:
• No other fault currently exists
• Ground fault protection is enabled
• GF Inhibit Time (Parameter 75) has expired
• GF Current is equal to or greater than the GF Trip Level (Parameter 73)
for a time period greater than the GF Trip Delay (Parameter 74)
Table 2 - Ground Fault Trip Parameters
Parameter No. Parameter Name Description
73 Gnd Flt Level
74 Gnd Flt Delay
75 Gnd Flt Inh Time
IMPORTANT
The ground fault inhibit timer starts after the maximum phase of load
Defines the ground fault current at which the SMC
Flex controller trips
Defines the time period a ground fault condition
must be present before a trip occurs
Inhibits a ground fault trip from occurring during
the motor starting sequence
Adjustment
Range
1.0…5.0 A or
5.0…25 A
0.1…250 s
0…250 s
current transitions from 0 A to 30% of the device’s minimum FLA Setting
or the GF Current is greater than or equal to 0.5 A. The SMC Flex
controller does not begin monitoring for a ground fault condition until
the Gnd Flt Inh Time expires.
Ground Fault Alarm
The SMC Flex controller indicates a Ground Fault Alarm if:
• No warning currently exists
• Ground fault alarm is enabled
• GF Inhibit Time (Parameter 75) has expired
• GF Current is equal to or greater than the Gnd Flt A Lvl (Parameter 77)
Table 3 - Ground Fault Alarm Parameters
Parameter No. Parameter Name Description Adjustment Range
77 Gnd Flt A Lvl
78 Gnd Flt A Dly
Defines the ground fault current at which the SMC
Flex controller indicates a warning
Defines the time period a ground fault alarm
condition must be present before a trip occurs
1.0…5.0 A or
5.0…25 A
0…250 s
Thermistor/PTC Protection
The SMC Flex controller provides terminals 23 and 24 for the connection of
positive temperature coefficient (PTC) thermistor sensors. PTC sensors are
commonly embedded in motor stator windings to monitor the motor winding
temperature. When the motor winding temperature reaches the PTC sensor’s
temperature rating, the PTC sensor’s resistance transitions from a low to high
value. Because PTC sensors react to actual temperature, enhanced motor
protection can be provided to address such conditions as obstructed cooling
and high ambient temperatures.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 23
Page 24

Chapter 1 Product Overview
1330
550
250
100
20
10
-20 °C 0 °C
TNF -20K
TNF -5K
TNF
TNF +20K
TNF +5K
4000
Table 4 defines the SMC Flex PTC thermistor input and response ratings:
Table 4 - PTC Input Ratings
Description Value
Response resistance 3400 Ω ± 150 Ω
Reset resistance 1600 Ω ± 100 Ω
Short-circuit Trip Resistance 25 Ω ± 10 Ω
Maximum Voltage at PTC Terminals (RPTC = 4 kW) <7.5V
Maximum Voltage at PTC Terminals (RPTC = open) 30V
Maximum Number of Sensors 6
Maximum Cold Resistance of PTC Sensor Chain 1500 Ω
Response Time 800 ms
Figure 21
illustrates the required PTC sensor characteristics that are specified
in IEC-34-11-2.
Figure 21 - PTC Sensor Characteristics per IEC-34-11-2
PTC Trip
The SMC Flex controller trips with a PTC indication if:
• No other fault currently exists
• PTC protection is enabled
The resistance across terminals 23 and 24 is either greater than the relay’s
response resistance or less than the short-circuit trip resistance.
Excessive Starts/Hour
The SMC Flex controller lets you program the allowed number of starts per
hour (up to 99). This helps minimize motor stress caused by repeated starting
over a short time period.
24 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 25

Chapter 1 Product Overview
Overtemperature
The SMC Flex controller uses the value in Parameter 119 to monitor the
temperature of the SCRs and Bypass by using internal thermistors. When the
maximum rated temperature of the power poles is reached, the unit shuts
down and restart is inhibited.
An overtemperature condition can indicate inadequate ventilation, high
ambient temperature, overloading, or excessive cycling. After the temperature
is reduced to allowable levels, the fault can be cleared.
Open Gate
An open gate fault indicates that improper SCR firing, typically caused by an
open SCR gate, has been detected on one of the power poles. Before the
controller shuts down, it attempts to start the motor a total of three times.
Line Faults
The SMC Flex controller continually monitors line conditions for abnormal
factors. Pre-start protection includes:
• Line Fault (with phase indication)
- Line voltage loss
- Missing load connection
- Shorted SCR
Running protection includes:
• Line Fault (no phase indication)
- Line voltage loss
- Missing load connection
You can toggle Phase Reversal protection either On or Off. Phase Reversal
protection is functional only at pre-start.
Metering
Power monitoring parameters include:
• Three-phase current (Parameters 4, 5, and 6)
• Three-phase voltage (Parameters 1, 2, and 3)
• Power in kW (Parameter 7)
• Power usage in kWH (Parameter 8)
• Power factor (Parameter 11)
• Motor thermal capacity usage (Parameter 12)
• Elapsed time (Parameter 9)
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 25
Page 26
Chapter 1 Product Overview
DPI
Voltage measurement is not available during the braking operation of the
Smart Motor Braking, Accu-Stop, and Slow Speed with Braking control
options.
The elapsed time and kWH values are automatically saved to memory on
power down.
Motor thermal capacity usage is determined by the built-in electronic thermal
overload. An overload fault occurs when this value reaches 100%.
I/O
The SMC Flex controller can accept up to two inputs and four outputs that are
controlled over a network. The two inputs are controlled at terminal 16 (Option
Input #1, Parameter 132), and terminal 15 (Option Input #2, Parameter 29). For
these two inputs, see Table 26
Table 40
for the bit identification.
You can program the Stop Input to meet the desired stop functionality by
using these two terminals as inputs.
for the parameter settings and Table 39 and
The four outputs are Aux #1 (Parameter 107), Aux #2 (Parameter 110), Aux #3
(Parameter 108), and Aux #4 (Parameter 109). All auxiliary contacts are
programmable to the function found in Table 26
. If the outputs are
programmed to Network or Network NC, they can be controlled over a
Network. See Table 40
, which defines the Logic Command Word (Control).
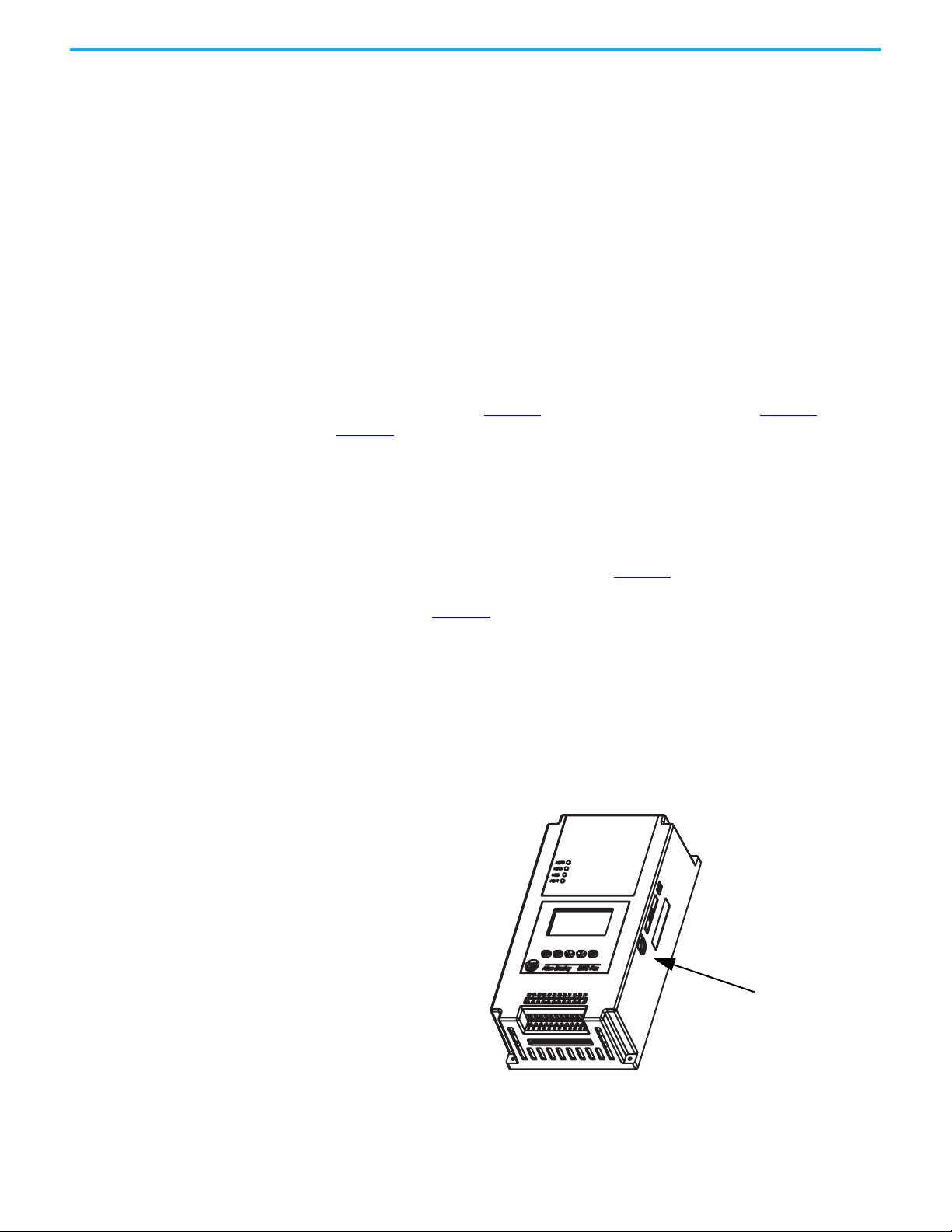
Communication
A serial interface port (DPI) is provided as standard, which lets you connect the
SMC Flex controller connection to the Bulletin 20-HIM LCD interface
modules.
Figure 22 - DPI Location
You can connect two peripheral devices to the DPI. The maximum output
current through the DPI is 280 mA.
26 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 27
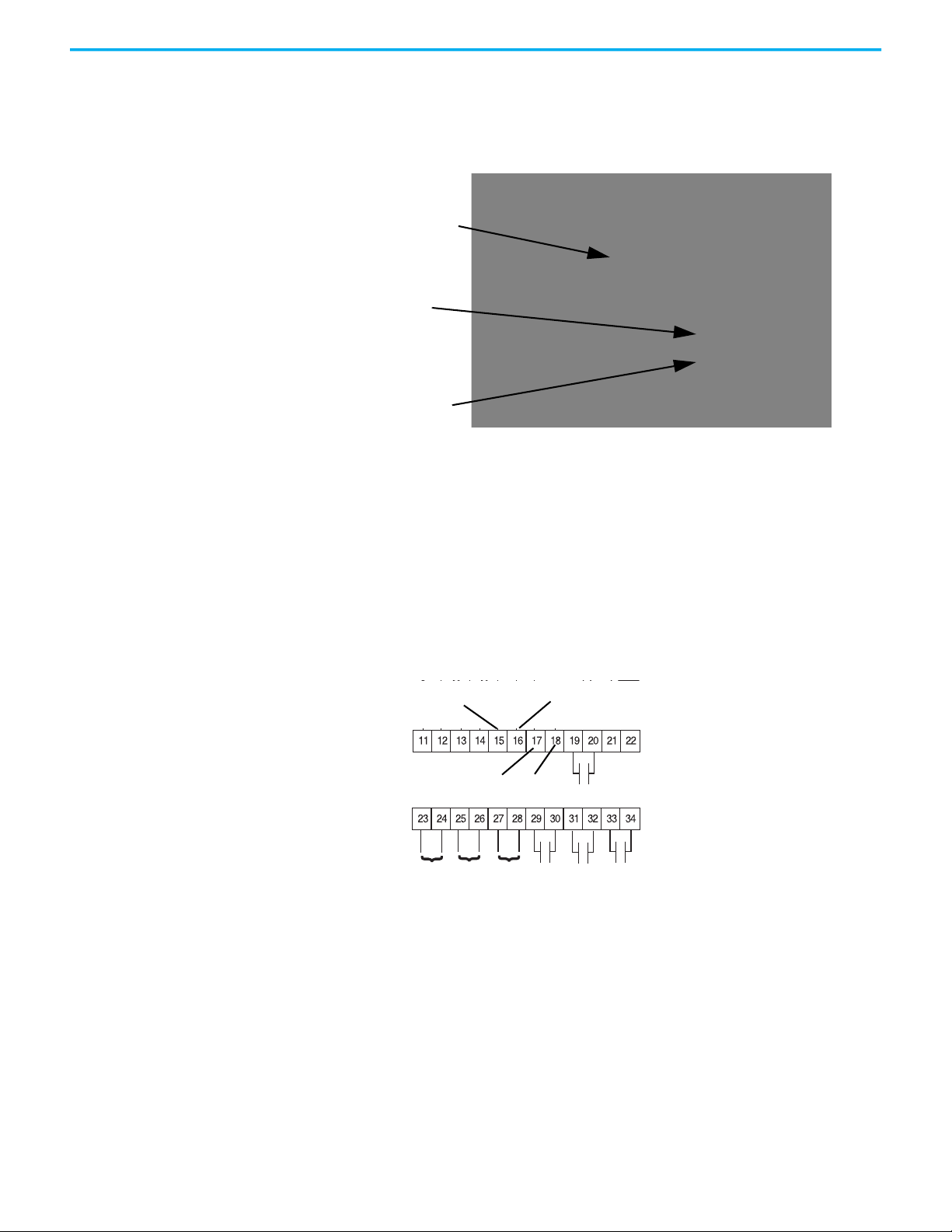
Chapter 1 Product Overview
Port 5 — DPI
Communications
Port 2
Ports 2 and 3 when two
HIMs are connected with a
splitter
Aux #1
Aux #2 Aux #3
Aux #4
PTC
TACH
Ground
Fault
Stop
Start
Option Input #1
Option Input #2
Programming
Status Indication
Setup is easy with the built-in keypad and three-line, 16 character backlit LCD.
Parameters are organized in a three-level menu structure that uses a text
format for straightforward programming.
Figure 23 - Built-in Keypad and LCD
• Four programmable hard contact outputs are provided as standard. All
auxiliary contacts are programmable for the following states:
• Normal (selectable N.O./N.C.)
• Up-to-Speed (selectable N.O./N.C.)
• Alarm (selectable N.O./N.C.)
• Fault (selectable N.O./N.C.)
• Network Control (selectable N.O./N.C.)
• External Bypass (N.O. only)
Figure 24 - Control Terminals
Network inputs can be obtained via proper programming of Option Input #1
(Parameter 132) and Option Input #2 (Parameter 24).
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 27
Page 28

Chapter 1 Product Overview
Notes:
28 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 29

Chapter 2
Installation
This chapter explains how to receive, unpack, and set up the SMC™ Flex
controller.
Receive the Controller
Unpack the Controller
Inspect the Controller
Storage
It is your responsibility to thoroughly inspect the equipment before accepting
the shipment from the freight company. Check the item(s) received against the
purchase order. If any items are damaged, it is your responsibility not to
accept delivery until the freight agent has noted the damage on the freight bill.
Should any concealed damage be found during unpacking, it is again your
responsibility to notify the freight agent. The shipping container must be left
intact and the freight agent should be requested to make a visual inspection of
the equipment.
Remove all packing material, wedges, or braces from within and around the
controller.
After you unpack the controller, check the item(s’) nameplate catalog number
against the purchase order.
Keep the controller in its shipping container prior to installation. If the
equipment is not to be used for an extended period, you must store it
according to the following instructions in order to maintain warranty
coverage.
Lifting
• Store in a clean, dry location.
• Maintain an ambient temperature range of –20… +75 °C (–4…+167 °F).
• Store within a relative humidity range of 0% to 95%, noncondensing.
• Do not store equipment where it could be exposed to a corrosive
atmosphere.
• Do not store equipment in a construction area.
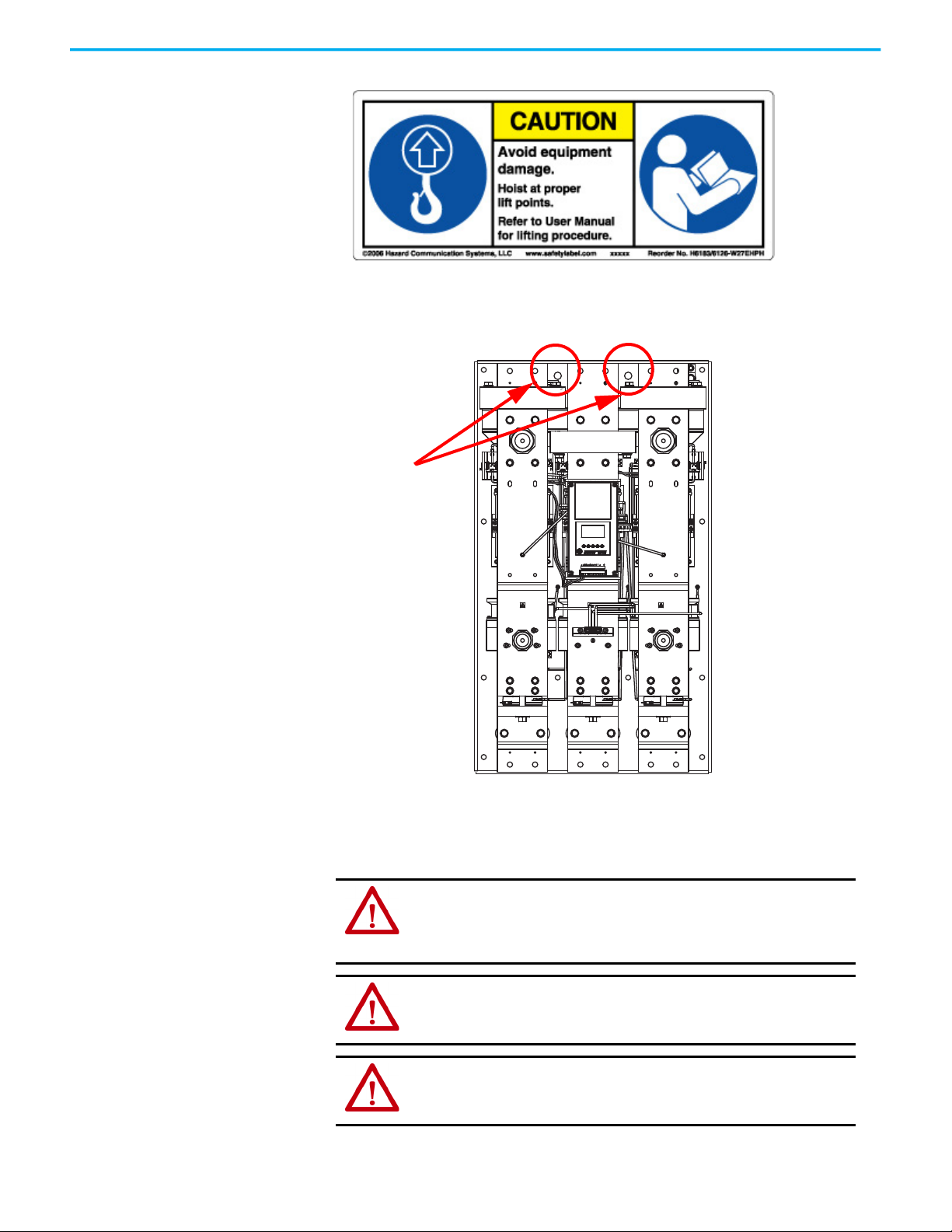
For controllers rated 625…1250 A, the device should only be lifted from
designated lifting points. The lifting points are designed to accept a 1/2…13
threaded hoist ring capable of lifting 2500 pounds. Figure 26
points.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 29
shows the lifting
Page 30
Chapter 2 Installation
Lifting Points
Figure 25 - Lifting Caution Label
Figure 26 - Lifting Points
General Precautions
In addition to the precautions listed throughout this manual, you must read
and understand the following statements, which are general to the system.
ATTENTION: The controller contains ESD- (electrostatic discharge) sensitive
parts and assemblies. Static control precautions are required when installing,
testing, servicing, or repairing the assembly. Component damage may result if
ESD control procedures are not followed. If you are not familiar with static
control procedures, refer to applicable ESD protection handbooks.
ATTENTION: An incorrectly applied or installed controller can damage
components or reduce product life. Wiring or application errors, such as
undersizing the motor, incorrect or inadequate AC supply, or excessive
ambient temperatures, may result in malfunction of the system.
ATTENTION: Only personnel familiar with the controller and associated
machinery should plan or implement the installation, start-up, and subsequent
maintenance of the system. Failure to do this may result in personal injury
and/or equipment damage.
30 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 31

Chapter 2 Installation
ATTENTION: Hazardous voltages that can cause shock, burn, or death are
present on L1, L2, L3, T1, T2, T3, T4, T5, and T6.
ATTENTION: Power terminal covers can be installed to prevent inadvertent
contact with terminals. Disconnect the main power before servicing the motor
controller or associated wiring.
Degree of Protection
Heat Dissipation
Enclosures
The SMC Flex soft starters have an IP00 or IP2X protection rating, depending
on the size. You must install the device in IP54 (Type 2) switchgear cabinets,
taking into account the ambient conditions. Make sure that no dust, liquids, or
conductive parts can enter the soft starter. Soft starter operation produces
waste heat (heat loss). See Table 5
Smart Motor Controllers Technical Data, publication 150-TD009
or the SMC-3™, SMC Flex, and SMC-50™
.
Table 5 provides the maximum heat dissipation at rated current for the
controllers. Heat dissipation is reduced for currents that are lower than rated
value.
Table 5 - Maximum Heat Dissipation
SMC Rating [A] 5 25 43 60 85 108 135 201 251 317 361 480 625 700 970 1250
Max. Watts 70 70 81 97 129 91 104 180 198 225 245 290 446 590 812 1222
The open-style design of the SMC Flex controller requires that it be installed in
an enclosure. The internal temperature of the enclosure must be kept within
the range of 0…50°C.
For Type 12 (IP54) enclosures, the guidelines that are shown in Table 6
are
recommended to limit the maximum controller ambient temperature.
There should be a clearance of at least 15 cm (6 in.) above and below the
controller. This area allows air to flow through the heatsink.
Table 6 - Minimum Enclosure Size
Controller Rating [A]
5 610 (24) 406 (16) 254 (10)
25 610 (24) 406 (16) 254 (10)
43 610 (24) 406 (16) 254 (10)
60 610 (24) 406 (16) 254 (10)
85 610 (24) 406 (16) 254 (10)
108 762 (30) 610 (24) 305 (12)
135 762 (30) 610 (24) 305 (12)
201 965 (38) 762 (30) 356 (14)
251 965 (38) 762 (30) 356 (14)
317 1295 (51) 914 (36) 356 (14)
361 1295 (51) 914 (36) 356 (14)
480 1295 (51) 914 (36) 356 (14)
625…780 2286 (90) 762 (30) 508 (20)
970…1250
(2)
B Height A Width C Depth
Non-Combination Controller [mm (in.)]
2286 (90) 762 (30) 508 (20)
IP65 (Type 4/12)
(1)
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 31
Page 32

Chapter 2 Installation
Table 6 - Minimum Enclosure Size (Continued)
Controller Rating [A]
5 610 (24) 406 (16) 254 (10)
25 610 (24) 406 (16) 254 (10)
43 610 (24) 406 (16) 254 (10)
60 610 (24) 406 (16) 254 (10)
85 610 (24) 406 (16) 254 (10)
108 965 (38) 762 (30) 356 (14)
135 965 (38) 762 (30) 356 (14)
201 965 (38) 762 (30) 356 (14)
251 965 (38) 762 (30) 356 (14)
317 1524 (60) 965 (38) 356 (14)
361 1524 (60) 965 (38) 356 (14)
(3)
480
(4)
480
625…780 2286 (90) 1397 (55) 508 (20)
970…1250
970…1250
(1) Larger enclosure may be required based on options selected. Consult your local Rockwell Automation Sales office or
Allen-Bradley distributor.
(2) 970 and 1250 A SMC Flex controllers require a door-mounted fan that is capable of delivering 240 cfm. Appropriate inlet and
outlet filtering is required.
(3) Use this row for 460V -58 and 575V -59.
(4) Use this row for 460V -59 and 575V -60 and -61
(2)
5 610 (24) 406 (16) 254 (10)
25 610 (24) 406 (16) 254 (10)
43 610 (24) 406 (16) 254 (10)
60 610 (24) 406 (16) 254 (10)
85 610 (24) 406 (16) 254 (10)
108 965 (38) 762 (30) 356 (14)
135 965 (38) 762 (30) 356 (14)
201 965 (38) 762 (30) 356 (14)
251 965 (38) 762 (30) 356 (14)
317 1295 (51) 914 (36) 356 (14)
361 1295 (51) 914 (36) 356 (14)
480 1295 (51) 914 (36) 356 (14)
625…780 2286 (90) 1397 (55) 508 (20)
(2)
B Height A Width C Depth
Combination Controllers with Fusible Disconnect
1524 (60) 965 (38) 356 (14)
2286 (90) 889 (35) 508 (20)
2286 (90) 1397 (55) 508 (20)
Combination Controllers with Circuit Breaker
2286 (90) 1397 (55) 508 (20)
IP65 (Type 4/12)
(1)
Mounting
All units are fan cooled. It is important to locate the controller in a position
that allows air to flow vertically through the power module. The controller
must be mounted in a vertical plane and have a minimum of 15 cm (6 in.) free
space above and below the controller.
When drilling or installing near the soft starter, make sure that adequate
measures are taken to protect the device from dust and debris. SeeFigure 27
32 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
.
Page 33

Figure 27 - SMC Flex Mounting Protection
3-Phase Input Power
Branch Protection (1)
Motor (1)
SMC Flex Controller (2)
L1/1
L2/3
L3/5
T1/2
T2/4
T3/6
Power Factor Correction Capacitors (1)
Chapter 2 Installation
Power Factor Correction Capacitors
The controller can be installed on a system with power factor correction
capacitors (PFCCs). The capacitors must be located on the line side of the
controller. This must be done to prevent damage to the SCRs in the SMC Flex
controller.
When it is discharged, a capacitor essentially has zero impedance. For
switching, sufficient impedance should be connected in series with the
capacitor bank to limit the inrush current. One method for limiting the surge
current is to add inductance in the capacitor’s conductors. This can be
accomplished by creating turns or coils in the power connections to the
capacitors.
• 250V — 15 cm (6 in.) diameter coil, 6 loops
• 480…690V — 15 cm (6 in.) diameter coil, 8 loops
Take care in mounting the coils so that they are not stacked directly on top of
each other; stacking causes a canceling effect. Mount the coils on insulated
supports away from metal parts so they will not act as induction heaters. If an
isolation contactor is used, put capacitors in front of contactor.
For further instructions, consult the PFCC vendor.
Figure 28 - Typical Wiring Diagram for Power Factor Correction Capacitors
Note Number Description
1 Customer supplied.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 33
2 Overload protection is included as a standard feature of the SMC Flex controller.
Page 34

Chapter 2 Installation
3-Phase Input Power
Branch Protection (1)
Motor (1)
SMC Flex Controller (2)
L1/1
L2/3
L3/5
T1/2
T2/4
T3/6
Power Factor Correction Capacitors
(1)
(3) (4)
Figure 29 - Typical Wiring Diagram for Power Factor Correction Capacitors and
Contactor
Note Number Description
1 Customer supplied.
2 Overload protection is included as a standard feature of the SMC Flex controller.
3 Energize 1/2 second before start command to the SMC Flex controller.
Alternate: Energize contactor after up-to-speed.
4 Open contactor after stopping method is complete.
Alternate: Open contactor before initiating a stop
Protective Modules
Motor Overload Protection
Protective modules containing metal oxide varistors (MOVs) can be installed
on controllers rated 5…1250 A and 200…600V, to protect the power
components from electrical transients. The protective modules clip voltage
transients generated on the lines to prevent such surges from damaging the
SCRs.
ATTENTION: When installing or inspecting the protective module, make sure that
the controller has been disconnected from the power source. The protective
module should be inspected periodically for damage or discoloration. Replace if
necessary.
Thermal motor overload protection is provided as standard with the SMC Flex
controller. If the overload trip class is less than the acceleration time of the
motor, nuisance tripping may occur.
ATTENTION: Overload protection should be properly coordinated with the motor.
Two applications require special consideration: two-speed motors, and multimotor protection.
34 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Two-speed Motors
The SMC Flex controller has overload protection available for single speed
motors. When the SMC Flex controller is applied to a two-speed motor, the
Overload Class parameter must be programmed to OFF and separate overload
relays must be provided for each speed.
Page 35

Chapter 2 Installation
Multi-motor Protection
If the SMC Flex controller is controlling more than one motor, individual
overload protection is required for each motor.
Electromagnetic Compatibility (EMC)
The following guidelines are provided for EMC installation compliance.
ATTENTION: This product has been designed for Class A equipment. Use of the
product in domestic environments may cause radio interference, in which case, the
installer may need to employ additional mitigation methods.
Enclosure
Install the product in a grounded metal enclosure.
Wiring
Wire in an industrial control application can be divided into three groups:
power, control, and signal. The following recommendations for physical
separation between these groups is provided to reduce the coupling effect.
• Different wire groups should cross at 90° inside an enclosure.
• Minimum spacing between different wire groups in the same tray
should be 16 cm (6 in.).
• Wire runs outside an enclosure should be run in conduit or have
shielding/armor with equivalent attenuation.
• Different wire groups should be run in separate conduits.
• Minimum spacing between conduits containing different wire groups
should be 8 cm (3 in.).
• For additional guidelines, please refer to Wiring and Grounding
guidelines, publication DRIVES-IN001
.
Additional Requirements
• If linear acceleration is used, a separate conduit or wire way should be
used for the tachometer leads.
• Wire earth ground to control terminal 14.
• Use shielded wire for PTC, Tachometer, and ground fault input.
• Terminate shielded wires to terminal 14.
• Ground fault CT must be inside or within 3 m of metal enclosure.
To meet product susceptibility requirements, ferrite cores need to be added to
the communication lines. When using an external HIM (or DPI interface), a
core should be added to the HIM cable near the SMC Flex control module. The
recommended core is Fair-Rite no. 0431167281 or equivalent. When you are
using a DeviceNet™ circuit, two cores need to be added to the DeviceNet cable
near the SMC Flex control module. The recommended cores are TDK
ZCAT2023 0930H and TDK ZCAT2035 0930 or equivalent. All cores specified
are the split type cores and can be added to existing connections.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 35
Page 36

Chapter 2 Installation
150-SMCAP
SMC Flex
Controller
100…240V AC control power
≤ 135 A Rating
Fair-Rite Products
2675102002
(5 turns)
Schaffner
FN2090-3-06
Line Load
New EMC Compliance – Conducted Emissions
There are new requirements for conducted emissions per IEC 60947-4-2
≤20kVA that require additional external components for SMC Flex units with
100…240V AC control power (code “D” in catalog string for control voltage) and
rated 135A and below:
• Use Schaffner part number FN2090-3-06 external power line filter for
the control power. Connect to SMC Flex controller terminals 11 and 12.
• Use Fair-Rite Products part number 2675102002 external ferrite core
with 5 turns for the control power earth ground. Connect to SMC Flex
controller terminal 14.
• Use Rockwell Automation Cat. No. 150-SMCAP capacitor module
connected to the incoming 3-phase power (terminals L1, L2, L3). Note:
This is an SMC-50 controller accessory that you can use with SMC Flex
units for this purpose.
Figure 30 - Cat. No. 150-SMCAP Capacitor Module Wiring Configuration
L1 L2 L3
11 12 14
P
N
PE
P’
N’
36 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 37

Chapter 3
(1)
(5)
(4)
(2), (3)
(3)
Wiring
This chapter illustrates basic wiring configurations for the SMC™ Flex
controller.
Wiring Terminal Locations
The SMC Flex controller wiring terminal locations are shown in Figure 31
through Figure 33
. Incoming three-phase power connections are made to
terminals L1/1, L2/3, and L3/5. Load connections to Line motors are made to T1/
2, T2/4, and T3/6; load connections to Wye-Delta motors are made to T1/2, T2/4,
T3/6, T4/8, T5/10, and T6/12.
Figure 31 - Wiring Terminal Locations—5…85 A Devices
Note Number Information
1 Incoming Line Termination
2 Line Motor Connections
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 37
(1)
Delta Motor Connections
3
4 Control Terminations
5 Fan Terminations
(1) IP20 protective covers on Delta termination must be removed when connecting in a Delta configuration.
Page 38

Chapter 3 Wiring
(1)
(5)
(4)
(2), (3)
(3)
Figure 32 - Wiring Terminal Locations—108…480 A Devices
Note Number Information
1 Incoming Line Termination
2 Line Motor Connections
3 Delta Motor Connections
4 Control Terminations
5 Fan Terminations
38 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 39

Figure 33 - Wiring Terminal Locations—625…1250 A Devices
(1)
(3)
(2)
Chapter 3 Wiring
Power Structure
Note Number Information
1 Incoming Line Termination
2 Line Motor Connections
3 Terminal Block CP1 - Common Control Power Connections (Fans, Contactors, and Control Modules)
The SMC Flex controller has an integrated mechanical run contactor on each
phase of the motor to minimize heat generation during run time. These
contacts are pulled in sequentially in the 108…1250 A units. In the 5…85 A units,
these contacts are pulled simultaneously. The SMC Flex controller also has a
built-in current transformer (CT) on each phase of the motor to provide
current readings.
Power Wiring
See the product nameplate or Table 7 for power lug termination information
including:
• Lug wire capacity
• Tightening torque requirements
• Lug kit catalog numbers (108…1250 A devices)
ATTENTION: Failure of solid state power switching components can cause overheating due to a single-phase condition in the
motor. Voltage could be present on output terminals when the SMC Flex controller has line voltage. To prevent injury or
equipment damage, the following is recommended:
ATTENTION: Use of an isolation contactor or shunt trip type circuit breaker on the line side of the SMC Flex controller. This
device should be capable of interrupting the motor’s locked rotor current.
ATTENTION: Connection of this isolation device to an auxiliary contact on the SMC Flex controller. The auxiliary contact should
be programmed for the fault condition. See Chapter 4
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 39
for additional information on programming.
Page 40

Chapter 3 Wiring
SMC Flex Controller
Motor
3~
Isolation Contactor
Isolation Contactor
Isolation Contactor
5/L3
3/L2
1/L1
10/T5
8/T4
12/T6
6/T3
4/T2
2/T1
SMC Flex controller
Motor
3~
Isolation Contactor
Isolation Contactor
Isolation Contactor
5/L3
3/L2
1/L1
10/T5
8/T4
12/T6
6/T3
4/T2
2/T1
Line Connection
The SMC Flex by default is programmed to be connected to a line controlled
motor, as shown in Figure 34
rated between 1…1250 A. An optional isolation contactor can be added to the
circuit to provide galvanic isolation of the motor and final electro-mechanical
removal of power.
Figure 34 - Line-connected Wiring
. These motors typically have 3 leads and must be
Power Lugs
Delta Connection
You can program the SMC Flex controller and connect it to a delta-controlled
motor as shown in Figure 35
must be rated between 1.8…1600 A. We recommend that you add an isolation
contactor to the circuit to provide galvanic isolation of the motor and final
electromechanical removal of power.
Figure 35 - Delta-connected Wiring
Devices that are rated 108…1250 A require power lugs. In some cases, these lugs
are sold in kits of three lugs. Table 7
lugs that are required.
. These motors typically have 6 or 12 leads and
and Table 8 list the number and type of
40 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 41

Table 7 lists the recommended lugs for the SMC Flex controller when it is
configured as a line connection. Table 8
using the SMC Flex controller with a delta connection. Note that devices rated
625…1250 A require the use of a power distribution block when they are used
with a delta connection.
ATTENTION: Terminal covers are available for units rated 108…480 A which
can make the product deadfront (IP2X) safe. See the SMC-3™, SMC Flex, and
SMC-50™ Smart Motor Controllers Technical Data, publication 150-TD009
the appropriate catalog numbers for ordering.
Table 7 - SMC Flex Controller Line Connection Lug Information—5…1250 A Devices
Chapter 3 Wiring
lists the recommended lugs when
for
Controller
Rating
5…85 A — 18…20 mm
108…135 A 199-LF1 18…20 mm
201…251 A 199-LF1 18…20 mm
317…480 A 199-LG1 18…25 mm
625…780 A 100-DL630 32 mm / 64 mm
970 A 100-DL860 26 mm / 48 mm
1250 A
(1) The 1250 A device requires one (1) each of Cat. No. 100-DL630 and 100-DL860.
(1)
Lug Kit Cat.
No.
100-DL630 32 mm / 64 mm
100-DL860 26 mm / 48 mm
Wire Strip Length Conductor Range
2.5…85 mm
16…120 mm
16…120 mm
25…240 mm
70…240 mm
120…240 mm
70…240 mm
120…240 mm
2
(#14…3/0 AWG)
2
(#6…250 MCM)
2
(#6…250 MCM)
2
(#4…500 MCM)
2
(2/0…500 MCM)
2
(4/0…500 MCM)
2
(2/0…500 MCM)
2
(4/0…500 MCM)
Max. No. Lugs/Pole Tightening Torque
Line Side Load Side Wire — Lug Lug — Busbar
— — 11.3 N•m (100 lb.-in.) —
1 1 31 N•m (275 lb.-in.) 17 N•m (150 lb.-in.)
2 2 31 N•m (275 lb.-in.) 23 N•m (200 lb.-in.)
2 2 42 N•m (375 lb.-in.) 28 N•m (250 lb.-in.)
2 2 45 N•m (400 lb.-in.) 68 N•m (600 lb.-in.)
1 1 45 N•m (400 lb.-in.) 68 N•m (600 lb.-in.)
11
11
45 N•m (400 lb.-in.) 68 N•m (600 lb.-in.)
Table 8 - SMC Flex Controller Delta Connection Lug Information (for Inside-the-Delta Applications)—108…1250 A Devices
Controller Rating Lug Kit Cat. No. Conductor Range
108…135 A 1494R-N15
201…251 A 1494R-N14
317…480 A 150-LG5MC
625…780 A
970…1250 A
(1) For 625…1250 A inside-the-delta connections, terminal blocks are required for line side connections. Required terminal blocks are as follows:
- Allen-Bradley Part# 1492-BG (625…780 A: 2 per phase, 970…1250 A: 4 per phase). Short-circuit Protection = Fuses
- Cooper Bussmann Part# 16504-2 (625…780 A: 1 per phase, 970…1250 A: 2 per phase). Short-circuit Protection = Circuit breaker
(1)
(1)
—
—
25…240 mm
50…120 mm
95…240 mm
25…240 mm
25…240 mm
2
(#4…500 MCM)
2
(1/0…250 MCM)
2
(3/0…500 MCM)
2
(#4…500 MCM)
2
(#4…500 MCM)
Max. No. Lugs/Pole Tightening Torque
Line Side Load Side Wire — Lug Lug — Busbar
1
2 31 N•m (275 lb.-in.) 23 N•m (200 lb.-in.)
1 33.9 N•m (300 lb.-in.) 28 N•m (250 lb.-in.)
See Table 7
2 42 N•m (375 lb.-in.) —
4 42 N•m (375 lb.-in.) —
42 N•m (375 lb.-in.) 17 N•m (150 lb.-in.)
Control Power
This section explains the control power requirements for the SMC Flex
controller.
Control Wiring
See the product nameplate for control terminal wire capacity and tightening
torque requirements. Each control terminal can accept a maximum of two
wires. See the product nameplate prior to applying control power. Depending
on the specific application, additional control circuit transformer VA capacity
may be required.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 41
Page 42

Chapter 3 Wiring
Controllers rated 5…480 A
SMC Flex controllers that are rated 5…480 A accept control power input of
100…240V AC or 24V AC/DC, (+10/–15%) single-phase, 50/60 Hz. A control
power source of 125 VA is required. The control power requirement for the
control module is 75 VA. The control power requirement for the fans is 20, 40,
or 60 VA. The control module and fans are separately wired. The control
module requirements are shown in Table 9
as shown in Table 11
Table 9 - Control Module Requirements
120…240V AC Transformer 75 VA
24V AC Transformer 130 VA
24V DC
.
Inrush Current 5 A
Inrush Time 250 ms
Transient Watts 60 W
Transient Time 500 ms
Steady State Watts 24 W
Minimum Allen-Bradley Power Supply 1606-XLP50E
. The fans require additional power
Controllers rated 625…1250 A
Controllers that are rated 625…1250 A require common control for proper
operation. Control power is connected to the product through terminal block
CP1, at terminals 1 and 4. This single connection point feeds the control
module, contactors, and fans. Control power must be supplied as 110/120V AC
or 230/240V AC, 50/60 Hz only. A control power source of at least 800 VA is
required. The control power requirements include the control module (75 VA),
bypass contactors (526 VA max), and fan power (150 VA).
Depending on the specific application, additional control circuit transformer
VA capacity may be required.
Units with a control power rating of 230/240V AC have an undervoltage relay
installed. Units built prior to 2014 may have potentiometers on the
undervoltage relay. If potentiometers are present, you must set them
according to Figure 36
potentiometers, because the settings are programmed internally to the
undervoltage relay and no adjustment is required.
. Units built later than 2014 may not have
42 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 43

Chapter 3 Wiring
115%
85%
240
220
208
95%
0%
10 sec
0.1 sec
LED
See nameplate for status
Pick-up %
Nominal
Voltage
Nominal
Voltage
Dropout
% Pick-up
Time-delay
Dropout
Time-delay
Pickup
10 sec
0.1 sec
Figure 36 - 230V Control Undervoltage Relay Settings for 625…1250 A Devices
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 43
Page 44

Chapter 3 Wiring
Undervoltage Relay
See Figure 36
SMC Flex Control Module
Contactor A Contactor B Contactor C
Fan A Fan B Fan C
CP1
Contactor/Fan Input
230V AC
Figure 37 - Internal Wiring and 230V Control Undervoltage Relay Connection Diagram—
625…1250 A Devices
6543
7812
C
A1 A2 A1 A2 A1 A2
13 21
14 22
FN
FL
C C
13 21
14 22
FN
FL
23 24 25 26 27 28 29 30 31 32 33 34
11 12 13 14 15 16 17 18 19 20 21 22
13 21
14 22
FN
FL
4321
44 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 45

Chapter 3 Wiring
C C C
A1 A2 A1 A2 A1 A2
13 21
14 22
13 21
14 22
13 21
14 22
FN
FL
FN
FL
FN
FL
4321
23 24 25 26 27 28 29 30 31 32 33 34
11 12 13 14 15 16 17 18 19 20 21 22
SMC Flex Control Module
Contactor A Contactor B Contactor C
Fan A Fan B
Fan C
CP1
Contactor/Fan Input
120V AC
Figure 38 - Internal Wiring and 120V Control Connection Diagram—625…1250 A Devices
Control Wire Specifications
Table 10 lists the control terminal wire capacity, the tightening torque
requirements, and the wire strip length. Each control terminal can accept a
maximum of two wires.
Table 10 - Control Wiring and Tightening Torque
Wire Size Torque Wire Strip Length
0.75…2.5 mm
2
(#18…14 AWG)
0.6 N•m (5 lb.-in.) 5.6…8.6 mm (0.22…0.34 in.)
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 45
Page 46

Chapter 3 Wiring
1
2
3
4
Jumpers
Jumpers
Jumper
To Supply
To Supply
To Supply
5…480 A Fan Terminations
625…1250 A Control Power/
Fan Terminations
Factory Set, 110/120V AC
CP1: 110/120V AC or
230/240V AC, 50/60 Hz ONLY
Optional, 220/240V AC
Fan Power
Controllers that are rated 5…1250 A have heatsink fan(s). See Table 11 for the
heatsink fan control power VA requirements.
Fan Terminations
See Figure 31, Figure 32, and Figure 33 for fan power connection locations.
ATTENTION: The fan jumpers have been factory installed for 110/120V AC
input. See Figure 39
Figure 39 - Power Terminations
1
2
3
4
for 220/240V AC fan wiring (5…480 A devices only).
1
2
3
4
Table 11 - Heatsink Fan Control Power
Controller Rating Heatsink Fan VA
5…135 A 20
201…251 A 40
317…480 A 60
625…780 A 150 (internally wired)
970…1250 A 150 (internally wired)
46 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 47

Chapter 3 Wiring
Control Terminal Designations
Figure 40 shows the 24 control terminals that are on the front of the controller.
Figure 40 - SMC Flex Controller Control Terminals
\
Table 12 - Control Terminal Designations
Terminal No. Description Terminal No. Description
11
Control Power Input
12
Control Power Common
13
Controller Enable Input
(1) (2)
(1) (2)
(3)
23
24
25 Tach Input
14 Control Module Ground 26 Tach Input
(1) (3)
(1) (3)
(1) (3)
(1) (3)
(1) (4)
(1) (4)
27
28
29
30
31
32
15
Option Input #2
16
Option Input #1
17
Start Input
18
Stop Input
19
Aux. Contact #1
20
Aux. Contact #1
21 Not Used 33
22 Not Used 34
(1) RC snubbers are required on loads connected to auxiliary.
(2) Control power on units rated 625…1250 A is pre-wired internally, from terminal block CP1.
(3) Do not connect any additional loads to these terminals. These “parasitic” loads may cause problems with operation,
which may result in false starting and stopping.
(4) External Bypass operates an external contactor and overload relay once the motor reaches full speed. The SMC Flex
overload functionality, diagnostics and metering are disabled when the external bypass is activated. Proper sizing of
the contactor and overload is required.
(3)
PTC Input
(3)
PTC Input
Ground Fault Transformer
(3)
Input
Ground Fault Transformer
(3)
Input
Aux. Contact #2
Aux. Contact #2
Aux. Contact #3
Aux. Contact #3
Aux. Contact #4
Aux. Contact #4
(1) (4)
(1) (4)
(1) (4)
(1) (4)
(1) (4)
(1) (4)
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 47
Page 48

Chapter 3 Wiring
Motor (1)
3-phase input power
SMC Flex Control Terminals
Aux 1
(1)
(1)
(1)
(1)
(1)
(1)
Circuit
Protective
Device
Stop
Start
(2)
Aux #2 Aux #3 Aux #4PTC Input TACH
Input
Ground
Fault
SMC Flex Controller
Standard Controller Wiring Diagrams
Figure 41 through Figure 51 show typical wiring for the SMC Flex controller.
Figure 41 - Typical Wiring Diagram for Standard Controllers
L1/1
L2/3
L3/5
T1/2
T2/4
T3/6
Note Number Information
1 Customer supplied
11 12
24
23
14
13
25 26
15 16
27
17
18 19 20
28 29 30 31 32 33
21
2 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
22
34
48 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 49

Chapter 3 Wiring
11 12
13
14
15 16
17
18 19 20
21
23
24
25 26
27
28 29 30 31 32 33
22
34
L2/3
L3/5
T1/2L1/1
T2/4
T3/6
Motor (1)
3-phase input power
SMC Flex Control Terminals
(1)
(1)
(1)(1)
(1)
Circuit
Protective
Device
Two-wire Device
(2)
Aux #2
Aux #3 Aux #4
PTC Input TACH
Input
Ground
Fault
Programmable controller interfacing in
this diagram refers to hard-wiring
between the PLC output contacts and the
SMC Flex controller’s control terminals.
The OFF state leakage current for a solidstate device must be less than 6 mA.
Aux #1
SMC Flex Controller
Figure 42 - Typical Wiring Diagram for Two-wire Control with Stopping Control (No DPI
Control)
Note Number Information
1 Customer supplied
2 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 49
Page 50

Chapter 3 Wiring
Motor (1)
3-phase input power
SMC Flex Control Terminals
Aux #1
(1)
(1)
(1)
(1)
(1)
(1)
Circuit
Protective
Device
Stop
Start
(2)
Aux #2 Aux #3 Aux #4PTC Input TACH
Input
Ground
Fault
SMC Flex Controller
(1)
Ramp 1 Ramp 2
Figure 43 - Typical Wiring Diagram for Dual Ramp Applications
11 12
L1/1
L2/3
L3/5
14
13
15 16
17
T1/2
T2/4
T3/6
18 19 20
21
22
23
Note Number Information
24
25 26
27
28 29 30 31 32 33
34
1 Customer supplied
2 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
50 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 51

Chapter 3 Wiring
11 12
13
14
15 16
17
18 19 20
21
23
24
25 26
27
28 29 30 31 32 33
22
34
L1/1
L3/5
L2/3
T3/6
T2/4
T1/2
Motor (1)
3-phase input power
SMC Flex Control Terminals
Aux #1
(1)
(1)
(1)
(1)
Circuit
Protective
Device
(2)
Aux #2 Aux #3 Aux #4PTC Input TACH
Input
Ground
Fault
SMC Flex Controller
Use Figure 44 when start-stop originates from either a Bulletin 20-HIM LCD
interface module or a Bulletin 20-COMM communication module that is
connected to the SMC Flex controller.
Logic mask must be properly configured. See page 98
.
Figure 44 - Typical Wiring Diagram for Start-Stop Control via DPI Communications
Note Number Information
1 Customer supplied
2 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 51
Page 52

Chapter 3 Wiring
Motor (1)
3-phase input power
SMC Flex Control Terminals
Aux #1
(1)
(1)
(1)
(1)
Circuit
Protective
Device
(3)
Aux #2 Aux #3 Aux #4PTC Input TACH
Input
Ground
Fault
SMC Flex Controller
Existing Motor Starter
(1)
Existing Motor Starter
(1) (2)
OL (1)
(1)
(1)
(1)
Stop
Start
(4)
Figure 45 - Typical Wiring Diagram for Retrofit Applications
T1/2L1/1
L2/3
L3/5
T2/4
T3/6
M
11 12
13
14
15 16
17
18 19 20
21
22
24
23
25 26
27
28 29 30 31 32 33
34
Note Number Information
1 Customer supplied
2 Overload protection should be disabled in the SMC Flex controller.
3 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
4 Aux #4 should be set for normal operation
52 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 53

Figure 46 - Typical Wiring Diagram for Isolation Applications (DPI also)
11 12
13
14
15 16
17
18 19 20
21
23
24
25 26
27
28 29 30 31 32 33
22
34
L1/1
L3/5
L2/3
T3/6
T2/4
T1/2
Motor (1)
3-phase input power
SMC Flex Control Terminals
Aux #1
(1)
(1)
(1)
(1)
Circuit
Protective
Device
(2)
Aux #2 Aux #3 Aux #4PTC Input TACH
Input
Ground
Fault
SMC Flex Controller
Isolation contactor (1)
(1)
(1)
Stop
Start
(3)
Isolation contactor (1)
Chapter 3 Wiring
Note Number Information
1 Customer supplied
2 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
3 Aux #4 should be set for normal operation
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 53
Page 54

Chapter 3 Wiring
11 12
13
14
15 16
17
18 19 20
21
23
24
25 26
27
28 29 30 31 32 33
22
34
L1/1
L3/5
L2/3
T3/6
T2/4
T1/2
Motor (1)
3-phase input power
SMC Flex Control Terminals
Aux #1
(1)
(1)
(1)
(1)
Circuit
Protective
Device
(2)
Aux #2 Aux #3 Aux #4PTC Input TACH
Input
Ground
Fault
SMC Flex Controller
(1)
(1)
Stop
Start
Shunt Trip
(1)
(3)
Figure 47 - Typical Wiring Diagram for Shunt Trip Applications
Note Number Information
1 Customer supplied
2 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
3 Aux #2 should be set for fault operation
54 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 55

Chapter 3 Wiring
Motor (1)
3-phase input power
SMC Flex Control Terminals
Aux #1
(1)
(1)
(1)
(1)
Circuit
Protective
Device
(2)
Aux #2 Aux #3
Aux #4PTC Input TACH
Input
Ground
Fault
SMC Flex Controller
(3)
E-Stop
Reversing Contactors (1)
• Minimum transition time for reversing
direction is 1/2 second.
• Phase Reversal protection must be disabled in
reversing applications.
F
R
F
R
F
R
(1)
(1)
(1)
F
R
(1)
(1)
OFF
REV
FOR
(1)
Figure 48 - Typical Wiring Diagram for Single-Speed Reversing Applications
L1/1
L2/3
L3/5
T1/2
T2/4
T3/6
11 12
23
24
13
25 26
14
15 16
27
17
18 19 20
28 29 30 31 32 33
Note Number Information
1 Customer supplied
2 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
3 Maintained push button.
21
22
34
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 55
Page 56

11 12
13
14
15 16
17
18 19 20
21 22
L1/1
L3/5
L2/3
T3/6
T2/4
T1/2
L
23
24
25 26
27
28 29 30 31 32 33 34
Motor (1)
3-phase
input power
SMC Flex Control Terminals
Aux #1
(1)
(1)
(1)
(1)
Circuit
Protective
Device
(3)
Aux #2 Aux #3
Aux #4PTC Input TACH
Input
Ground
Fault
SMC Flex Controller
Stop
Two-speed Motor Starter (1)
L
H
(2)
(2)
1 sec.
(1)
(1)
H
L
(1)
(1)
LOL
HOL
(1)
(4)
1 sec.
H
H
Low
High
Low
High
High
(1)
(1)
(1)
(1)
(1)
(1)
High
Low
(1)
(1)
Chapter 3 Wiring
Figure 49 - Typical Wiring Diagram for Two-speed Applications
Note Number Information
1 Customer supplied
2 Two-speed, consequent pole installations.
3 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
4 Overload must be disabled in SMC Flex controller.
56 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 57

Figure 50 - Typical Wiring Diagram for SMC-Off-Bypass Control
11 12
13
14
15 16
17
18 19 20
21
23
24
25 26
27
28 29 30 31 32 33
22
34
L1/1
L3/5
L2/3
T3/6
T2/4
T1/2
X
X
Motor (1)
3-phase input power
SMC Flex Control Terminals
Aux #1
(1)
(1)
(1)
(1)
Circuit
Protective
Device
(2)
Aux #2 Aux #3
Aux #4PTC Input TACH
Input
Ground
Fault
SMC Flex Controller
SMC
Bypass Contactor (1)
Start
(1)
(1)
(1)
OFF
Stop
Bypass Contactor
Bypass Overload
Bypass
(1)
Chapter 3 Wiring
Note Number Information
1 Customer supplied
2 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 57
Page 58

Chapter 3 Wiring
11 12
13
14
15 16
17
18 19 20
21
23
24
25 26
27
28 29 30 31 32 33
22
34
*
*
C (1)
Control power
SMC Flex Control Terminals
Aux #1
(2)
(1)
Aux #2
Aux #3 Aux #4
PTC Input TACH
Input
Ground
Fault
Hand
Start
(1)
(1)
OFF
Stop
Auto Device (1)
Auto
C (1)
C (1)
Figure 51 - Typical Wiring Diagram for Hand-Off-Auto Control with Stop Option and
Start/Stop Push Buttons
Note Number Information
1 Customer supplied
2 See the controller nameplate to verify the rating of the control power input voltage. For units rated
58 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
Page 59

Chapter 3 Wiring
11 12
13
14
15 16
17
18 19 20
21
23
24
25 26
27
28 29 30 31 32 33
22
34
Control power
SMC Flex Control Terminals
Aux #1
(3)
(1) (2)
Aux #2
Aux #3 Aux #4
PTC Input TACH
Input
Ground
Fault
Start
(1)
(1)
Stop
Option Stop
Soft Stop, Pump Control, and SMB Smart Motor Braking
Figure 52 through Figure 55 show typical wiring for the Soft Stop, Pump
Control, and SMB Smart Motor Braking options.
Figure 52 - Typical Wiring Diagram
Note Number Information
1 Customer supplied
2 Soft Stop, Pump Stop, or Brake.
3 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 59
Page 60

Chapter 3 Wiring
Control power
SMC Flex Control Terminals
Aux #1
(3)
(1) (4)
Aux #2
Aux #3 Aux #4
PTC Input TACH
Input
Ground
Fault
Start
(1)
(1)
Stop
Option Stop
(5)
(1) (2)
Overload
Existing Motor Starter (1)
Figure 53 - Typical Retrofit Wiring Diagram
11 12
23
24
13
25 26
14
15 16
27
28 29 30 31 32 33
Note Number Information
1 Customer supplied
2 Overload protection should be disabled in the SMC Flex controller.
3 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
4 Soft Stop, Pump Stop, or Brake.
5 Aux #4 should be set to normal operation.
17
18 19 20
21
22
34
60 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 61

Chapter 3 Wiring
Control power
SMC Flex Control Terminals
Aux #1
(2)
(1) (3)
Aux #2
Aux #3 Aux #4
PTC Input TACH
Input
Ground
Fault
Start
(1)
(1)
Stop
Option Stop
(4)
Isolation Contactor (1)
Figure 54 - Typical Wiring Diagram for Applications That Require an Isolation Contactor
11 12
24
23
14
13
25 26
15 16
27
17
28 29 30 31 32 33
Note Number Information
1 Customer supplied
2 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
3 Soft Stop, Pump Stop, or Brake.
4 Aux #4 should be set to normal operation.
18 19 20
21
22
34
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 61
Page 62

Chapter 3 Wiring
Control power
110…240V AC
SMC Flex Control Terminals
Aux #1
Aux #2 Aux #3 Aux #4
PTC Input
TACH
Input
Ground
Fault
Hand
(1)
OFF
X00
Auto
3-phase input power
(1)
(1)
(1)
(1)
Circuit
Protective
Device
Motor (1)
SMC Flex Controller
X00
00X
Figure 55 - Typical Wiring Diagram for Hand-Off-Auto (DPI) Control (Soft Stop, Braking,
and Pump Control Only)
L1/1
L2/3
L3/5
T1/2
T2/4
T3/6
11 12
23
24
14
13
25 26
15 16
27
17
28 29 30 31 32 33
Note Number Information
1 Customer supplied
18 19 20
21
22
34
62 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 63

Chapter 3 Wiring
Control power
SMC Flex Control Terminals
Aux #1
(3)
(1) (2)
Aux #2
Aux #3 Aux #4
PTC Input TACH
Input
Ground
Fault
Start
(1)
(1)
Stop
Option
Command
Preset Slow Speed
Figure 56 and Figure 57 show typical wiring examples for Preset Slow Speed.
Figure 56 - Typical Wiring Diagram for Preset Slow Speed
11 12
13
14
15 16
17
18 19 20
21
22
24
23
Note Number Information
1 Customer supplied
2 Slow Speed.
3 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
25 26
27
28 29 30 31 32 33
34
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 63
Page 64

Chapter 3 Wiring
SMC Flex Control Terminals
Aux #1
Aux #2 Aux #3 Aux #4
PTC Input
TACH
Input
Ground
Fault
Hand
(1)
OFF
(4)
Auto
3-phase input power
(1)
(1)
(1)
(1)
Circuit
Protective
Device
Motor (1)
SMC Flex Controller
(1) (2)
Start
(1)
(1)
Stop
Option
Command
(3)
Figure 57 - Typical Slow Speed Wiring Diagram for Hand-Off-Auto (DPI) Control
L1/1
L2/3
L3/5
T1/2
T2/4
T3/6
*
*
11 12
23
24
13
25 26
14
15 16
27
17
18 19 20
28 29 30 31 32 33
21
22
34
Note Number Information
1 Customer supplied
2 Slow Speed
3 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
4 Aux #4 should be set to normal operation.
64 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 65

Chapter 3 Wiring
Control power
SMC Flex Control Terminals
Aux #1
(2)
Aux #2
Aux #3 Aux #4
PTC Input TACH
Input
Ground
Fault
Start
(1)
(1)
Stop
Brake
(3)
Isolation Contactor (1)
Slow Speed
(1)
(1)
Slow Speed with Braking
Figure 58 shows the wiring for the Slow Speed with Braking option.
Figure 58 - Typical Wiring Diagram for Slow Speed with Braking with an Isolation
Contactor
11 12
24
23
Note Number Information
1 Customer supplied
2 See the controller nameplate to verify the rating of the control power input voltage. For units rated
625…1250 A, terminals 11 and 12 are factory pre-wired from terminal block CP1 - terminals 1 and 4.
3 Aux #4 should be set to normal operation.
14
13
25 26
15 16
27
28 29 30 31 32 33
17
18 19 20
21
22
34
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 65
Page 66

Chapter 3 Wiring
100%
Time (seconds)
Soft Stop
Run Soft StopStart
Coast to rest
Start
Soft Stop
Stop
Push Buttons
Auxiliary Contacts
(Stop Option) (1)
Normal
Up-to-speed
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Open
If Soft Stop is selected
If Coast-to-Rest is Selected
Motor Speed
Sequence of Operation
Figure 59 through Figure 64 show the different operation sequences for the
Soft Stop, Preset Slow Speed, Pump Control, SMB Smart Motor Braking, AccuStop, and Slow Speed with Braking options.
ATTENTION: You are responsible for determining which stopping mode is best
suited to the application and will meet applicable standards for operator safety on a
particular machine.
Figure 59 - Soft Stop Sequence of Operation
Note Number Information
With the Stop Mode, Parameter 32, configured for Soft Stop and with the Input push button
1
configured for the Stop Option.
66 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 67

(3)
Motor Speed
100%
7% or 15%
Time (seconds)
Start
RunSlow Speed
Coast
Soft Stop
Brake
Coast to rest
Soft Stop
Start
Soft Stop
Stop
Push Buttons
Auxiliary Contacts
(Stop Option)
Normal
Up-to-speed
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Slow Speed
Closed
Open
Coast
If Soft Stop is selected
If Coast-to-Rest is Selected
(2)
(1)
Chapter 3 Wiring
Figure 60 - Preset Slow Speed Sequence of Operation
Note Number Information
1 Coast if Stopping Current, Parameter 43, = 0.
2 Brake if Stopping Current, Parameter 43, > 0.
3 With the Stop Mode, Parameter 32, configured for Soft Stop and with the Input push button
configured for the Stop Option.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 67
Page 68

Chapter 3 Wiring
(1)
Motor Speed
100%
Time (seconds)
Pump Start
Run Pump Stop
Coast to rest
Start
Pump Stop
Stop
Push Buttons
Auxiliary Contacts
(Stop Option)
Normal
Up-to-speed
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Figure 61 - Pump Control Sequence of Operation
Note Number Information
1 With the Input push button configured for the Stop Option.
68 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 69

(1)
Motor Speed
Automatic Zerospeed Shutoff
100%
Time (seconds)
Start
Run Brake
Smart Motor Braking
Coast-to-Rest
Stop Time
Start
Smart Motor Braking
Stop
Push Buttons
Auxiliary Contacts
(Stop Option)
Normal
Up-to-speed
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Open
If Brake is selected
If Coast-to-Rest is Selected
Figure 62 - Smart Motor Braking (SMB) Sequence of Operation
Chapter 3 Wiring
Note Number Information
With the Stop Mode, Parameter 32, configured for SMB and with the Input push button configured
1
for the Stop Option.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 69
Page 70

Chapter 3 Wiring
Motor Speed
100%
Time (seconds)
Slow
Run
Braking
Coast-to-Rest
Brake
Start
Slow Speed
Slow Speed
Braking
Start
Stop
Push Buttons
Auxiliary Contacts
Slow Speed
Normal
Up-to-speed
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Coast Input Open Stopping Current = 0 = Coast
Coast From
Slow Speed
Figure 63 - Accu-Stop Sequence of Operation
Table 13 - Accu-Stop Parameter Selections
Parameter No. Parameter Name Required Setting
32 Stop Mode Accu-Stop
35 Braking Current User Value
39 Slow Speed Select User Value
43 Stopping Current User Value
70 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 71

(3)
Motor Speed
100%
Time (seconds)
Slow
Speed
Run
Braking
Coast-to-Rest
StopStart
Coast
Brake
Coast
Brake
If Coast-to-Rest is Selected
Start
Smart Motor Braking
Stop
Push Buttons
Auxiliary Contacts
(Stop Option)
Normal
Up-to-speed
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Closed
Open
Slow Speed
(1)
(2)
Chapter 3 Wiring
Figure 64 - Slow Speed with Braking Sequence of Operation
Note Number Information
1 Coast if Stopping Current, Parameter 43, = 0 (coast).
2 Brake if Stopping Current, Parameter 43, > 0.
3 With the Stop Mode, Parameter 32, configured for SMB and with the Input push button configured
for the Stop Option.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 71
Page 72

Chapter 3 Wiring
MADE IN U.S.A
PROTECTIVE MODULE
MAX. LINE VOLTAGE
Special Application Considerations
This section covers some considerations that you need to address, depending
on your application.
Protective Modules
You should install a protective module (see Figure 65) containing MOVs (Metal
Oxide Varistors) to protect the SMC Flex power components from electrical
transients and/or electrical noise.
You can install protective modules controllers rated from 200…600V to protect
the power components from electrical transients. The protective modules clip
voltage transients that are generated on the lines to prevent such surges from
damaging the SCRs. The use of MOVs is highly recommended, because 480V
and 600V MOVs offer maximum protection of 1400V and 1600V, respectively.
Figure 65 - Protective Module
ATTENTION: You can place protective modules on the line, load, or both sides of the
SMC Flex controller. However, protective modules must not be placed on the load
side of the SMC Flex controller when using inside-the-delta motor connections or
with pump, linear speed, or braking control.
ATTENTION: When you install or inspect the protective module, make sure that the
controller has been disconnected from the power source. You should inspect the
protective module periodically for damage or discoloration. Replace if necessary.
There are two general situations that may occur that could indicate the need
for using the protective modules.
1. Transient Spikes — Transient spikes will typically occur on the lines
feeding the SMC Flex controller or feeding the load from the SMC Flex
controller. Transient spikes are created on the line when devices are
attached with current- carrying inductances that are open-circuited.
The energy stored in the magnetic field is released when the contacts
open the circuit. Examples of these include lightly loaded motors,
transformers, solenoids, full voltage starters, and electromechanical
brakes. Lightning can also cause spikes.
2. Fast-rising Wavefronts — If the SMC Flex controller is installed on a
system that has fast-rising wavefronts present, although not
necessarily high peak voltages, protective modules may be needed.
Lightning can also cause this type of response. Additionally, if the
controller is on the same bus as other SCR devices (such as AC/DC
drives, induction heating equipment, or welding equipment), the firing
of the SCRs in those devices can cause noise.
72 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 73

Chapter 3 Wiring
Overload Relay (1)
SMC Flex Controller
Disable the overload function
using Parameter 44—
Overload Class
Motor 1 (1)
Overload Relay (1)
Motor 2 (1)
3-phase input power
(1)
Circuit
Protective
Device
Multi-motor Applications
The SMC Flex controller operates with more than one motor connected to it.
Motors should be mechanically coupled. To size the controller, add the total
nameplate amperes of all of the connected loads. You should turn off the stall
and jam features. Separate overloads are still required to meet the National
Electric Code (NEC) requirements.
Figure 66 - Multi-Motor Application
L1/1
L2/3
L3/5
Note Number Information
1 Customer Supplied
T1/2
T2/4
T3/6
You cannot use the built-in overload protection in multi-motor applications.
Disable the SMC Flex Overload function using Parameter 44—Overload Class.
SMC Flex Controller as a Bypass to an AC Drive
By using the controller as shown in Figure 67, a soft start characteristic can be
provided if a variable-frequency AC drive (VFD) is non-operational.
• You can achieve a controlled acceleration with this scheme, but speed
control is not available in the bypass mode.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 73
Page 74

Chapter 3 Wiring
L1/1
L3/5
L2/3
T1/2
T3/6
T2/4
SMC Flex Controller (4)
Motor (1)
3-phase input
power
(3)
VFD
Branch
Protection
VFD
Isolation
Contactor (1)
Isolation
Contactor (1)
(1)
Overload
(2)
(2)
L1/1
L3/5
L2/3
T1/2
T3/6
T2/4
SMC Flex Controller
(1)
(1)
(1)
(1)
Motor
Isolation Contactor
Bulletin 1410 Motor
Winding Heater
(1)
Overload Relay
Holding Coil
(2)
3-phase input power
Figure 67 - Typical Application Diagram of a Bypass Contactor for an AC Drive
Note Number Information
1 Customer Supplied
2 Mechanical interlock required.
3 Many VFDs are rated 150% FLA. Because the SMC Flex controller can be used for 600% FLA
starting, separate branch circuit protection may be required.
4 Overload protection is included as a standard feature of the SMC Flex controller.
SMC Flex Controller with a Bulletin 1410 Motor Winding Heater
Figure 68 - SMC Flex Controller with Bulletin 1410 Motor Winding Heater
Note Number Information
1 Customer Supplied
2 Overload protection is included as a standard feature of the SMC Flex controller.
74 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 75

Chapter 3 Wiring
SMC power pole
Dual-voltage Wiring
This section explains how to wire a 12-lead, dual-voltage Wye-delta motor
using an SMC Flex controller that is programmed for Delta starting.
See your motor manufacturer’s wring diagram for detailed instructions on
how to wire the motor. The examples in this section show typical motor
connections when you use a 12-lead, dual-voltage Wye-delta motor and the
SMC Flex controller.
IMPORTANT
Figure 69
perspective of the motor winding connections to the SMC Flex controller
power pole. Understanding this wiring helps you to understand how to wire
the 12-lead, dual-voltage motor.
Figure 69 - 6-Lead Single-voltage Configuration
The examples in this section show the motor wired for low and high
voltage.
shows a typical 6-lead, single-voltage configuration from the
L1 L2 L3
T4
T2
T1
T5
T6 T3
Figure 70 shows the line- and load-side terminal markings of the SMC Flex
controller. The controller has global markings. IEC markings are noted in
parentheses, while North American markings are preceded with the letter “T”.
The explanations in this section refer only to the North American markings
that are on the device.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 75
Page 76

Chapter 3 Wiring
L1 L3L2
M
T6 T5T4T1 T3T2
(12) (2) (8)
(4) (10) (6)
IEC marking
North American marking
T
Delta connections
Motor winding connections
Figure 70 - SMC Flex Controller Terminal Markings
12/T6
T7/T1
3/L21/L1 5/L3
T10/T4
T8/T2
Low-voltage Example
Figure 71 shows three different ways of illustrating the 12-lead connections to
run a delta-connected motor for low-voltage operation. Terminal numbers on
each drawing refer to the same connection on the device. For example,
Terminal T12 on each drawing is the terminal T12 on the same SMC Flex
Controller.
Figure 71 - 12-Lead Delta Connection for Low-voltage Run Mode
L1
T11/T5
T6
T12
T3
T9
T9/T3
T1
T7
T4
T10
76 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
M
3~
L3
T5
T8T11
T2
L2
Page 77

T
3/L21/L1 5/L3
Delta connections Motor winding connections
Chapter 3 Wiring
High-voltage Example
Figure 72 shows three different ways of illustrating the 12-lead connections to
run a delta-connected motor for high-voltage operation. Terminal numbers on
each drawing refer to the same connection on the device. For example,
Terminal T12 on each drawing is the terminal T12 on the same SMC Flex
Controller.
Figure 72 - 12-Lead Delta Connection for High-voltage Run Mode
L1
T1
T12
T9
12
T10
T1
T11
T2
T3
T6
T3
T4
T7
T10
M
3~
L3
T8T11
T5
T2
L2
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 77
Page 78

Chapter 3 Wiring
Notes:
78 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 79

Chapter 4
Lang
Programming
This chapter provides a basic understanding of the built-in programming
keypad. This chapter also describes how to program the SMC Flex™ controller
by modifying the parameters.
Keypad Description
Programming Menu
Table 14 describes the keys that are on the front of the SMC Flex controller.
Table 14 - SMC Flex Controller Keypad
Menu Button Name Function
Esc
Sel
Escape
Select
Up/Down
Arrows
Enter
Exit a menu, cancel a change to a parameter value, or acknowledge a fault/alarm.
Will clear a fault if held for 3 seconds. (Firmware version 6.001 or higher required)
Select a digit, select a bit, or enter edit mode in a parameter screen.
Will get to menu to change the language being displayed.
Scroll through options increase/decrease a value, or toggle a bit.
Enter a menu, enter edit mode in a parameter screen, or save a change to a
parameter value.
For ease of programming values, after using the Enter key to edit, use the Sel
key to jump to the digit that needs to be modified, then use the arrow keys to
scroll through the digits.
Parameters are organized in a three-level menu structure for straightforward
programming. Figure 73
details the programming menu structure and the
three-level hierarchy.
In order to change parameters, the controller must be in the STOP mode, and
the control voltage must be present.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 79
Page 80

Chapter 4 Programming
Parameter definitions are listed in Excel® spreadsheets in KnowledgeBase.
Table 15
Table 15 - SMC Flex Parameter Categories
Parameter Special Behavior
summarizes the information that is in the spreadsheet.
Knowledgebase Answer ID 1125564, SMC Flex Soft Starter Parameters,
contains the parameters. Download the spreadsheet from this public
article.
You may be asked to log in to your Rockwell Automation web account or
create an account if you do not have one. You do not need a support
contract to access the article.
Parameter Group Description
Full Parameter List Full list of all SMC Flex Controller Parameters
Logic Mask Requirements Lists the Logic Mask Codes and Binary equivalents
Describes codes that can appear under specific conditions and parameter
configurations
80 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 81

Figure 73 - Menu Structure Hierarchy
Esc
Esc
0
Monitoring
Set Up
Motor Protection
Communications
Utility
Linear List
0
SMC Flex
0
Reset to Defaults
0
Change Password
User Dspl Line
User Dspl Time
User Dspl Video
Reset User Display
0
Alarms
Faults
Device Revision
0
Enter Password
Power-up and
Status Display
Main Menu (1)
(2)
or
Select language that
is displayed
Operation Level
or or or
Choose Mode
or
(2)
Group Menu
Parameter Menu continued in
Figure 74
Parameter Device Select
Memory Storage
Preferences
Log-in
(3)
Diagnostics
Lang
Sel
0
Chapter 4 Programming
Esc
Note Information
1 The SMC Flex controller does not support EEPROM, Link, Process, or Start-up modes.
2 Steps back one level.
3 Only displayed if a password other than “0” is entered.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 81
Page 82

Chapter 4 Programming
Metering Basic Overload Jam Comm Masks Language Linear List
Volts Phase A-B SMC Option Overload Class Jam F Lvl Logic Mask Language All parameters
Volts Phase B-C Motor Connection Service Factor Jam F Dly
Parameter Mgt (4) Parameter Mgt (4) Parameter Mgt (4)
Volts Phase C-A Line Voltage Motor FLC Jam A Lvl
Current Phase A Starting Mode Overload Reset Jam A Dly
DataLinks Motor Data
Current Phase B Ramp Time Overload A Lvl
Parameter Mgt (4)
Current Phase C Initial Torque
Parameter Mgt (4)
Data In A1 MotorFLC
Watt Meter Cur Limit Lvl
Stall
Data In A2 Motor ID
Kilowatt Hours Kickstar t Time
Underload
Data In B1
Parameter Mgt (4)
Elapsed Time Kickstart Lvl Stall Dly Data In B2
Meter Reset Stop Input Underload F Lvl
Parameter Mgt (4)
Data In C1
Power Factor Option 1 Input Underload F Dly Data In C2
Mtr Therm Usage Option 2 Input Underload A Lvl
Ground Fault
Data In D1
Motor Speed Stop Mode Underload A Dly Data In D2
Stop Time
Parameter Mgt (4)
Gnd Flt Enable Data Out A1
Braking Current Gnd Flt Lvl Data Out A2
Overload Class
Undervoltage
Gnd Flt Dly Data Out B1
Service Factor Gnd Flt Inh Time Data Out B2
Motor FLC Undervolt F Lvl Gnd Flt A Enable Data Out C1
Overload Reset Undervolt F Dly Gnd Flt A Lvl Data Out C2
Aux1 Config Undervolt A Lvl Gnd Flt A Dly Data Out D1
Aux2 Config Undervolt A Dly
Parameter Mgt (4)
Data Out D2
Aux3 Config
Parameter Mgt (4) Parameter Mgt (4)
Aux4 Config
PTC
Backspin Timer
Overvoltage
Parameter Mgt
(4)
PTC Enable
Overvolt F Lvl
Parameter Mgt (4)
Dual Ramp (Option 2
Input = Dual Ramp)
Overvolt F Dly
Overvolt A Lvl
Phase Reversal
Overvolt A Dly
Starting Mode 2
Parameter Mgt (4)
Phase Reversal
Ramp Time 2
Parameter Mgt (4)
Initial Torque 2
Unbalance
Cur Limit Lvl 2
Restart
Kickstart Time 2 Unbalance F Lvl
Kickstart Lvl 2 Unbalance F Dly Starts Per Hour
Parameter Mgt (4)
Unbalance A Lvl Restart Attempts
Unbalance A Dly Restart Dly
Preset SS (Option 2
Input = Preset SS)
Parameter Mgt (4) Para meter Mgt (4)
Slow Speed Sel
Slow Speed Dir
Slow Accel Cur
Slow Running Cur
Parameter Mgt (4)
(Option 2 Input =
Accu-Stop)
Slow Speed Sel
Slow Accel Cur
Slow Running Cur
Braking Current
Stopping Current
Parameter Mgt (4)
Note Information
1 Depending upon the option that is selected, some parameters may not appear in product display..
2 Steps back one level.
3
For further information about parameters, see KnowledgeBase Article
SMC Flex Soft Starter Parameters
4
For further information on parameter management, see page 84..
5
See Table 16 for all SMC Flex parameters that are available by the Linear List.
Esc
(2)
Parameter
(1) (3)
Monitoring
Setup Motor Protection
Communications
Utility
Linear List
(5)
Figure 74 - Parameter Menu Structure
82 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 83

Table 16 - Parameter Linear List
0.0 Amps
0 Volt
0 %MTU
Main Menu
Preferences
Diagnostics
Chapter 4 Programming
Parameter
No.
Description
Parameter
No.
Description
Parameter
No.
Description
Parameter
No.
1 Volts Phase A-B 35 Braking Current 67 Jam F Lvl 101 Data Out C2
2 Volts Phase B-C 36 Braking Time 68 Jam F Dly 102 Data Out D1
3 Volts Phase C-A 37 Load Type 69 Jam A Lvl 103 Data Out D2
4 Current Phase A 38 High Eff Brake 70 Jam A Dly 104 Motor ID
5 Current Phase B 39 Slow Speed Sel 71 Stall Delay 105 CT Ratio
6 Current Phase C 40 Slow Speed Dir 72 Gnd Flt Enable 106 MV Ratio
7 Watt Meter 41 Slow Accel Cur 73 Gnd Flt Level 107 Aux1 Config
8 Kilowatt Hours 42 Slow Running Cur 74 Gnd Flt Delay 108 Aux3 Config
9 Elapsed Time 43 Stopping Current 75 Gnd Flt Inh time 109 Aux4 Config
10 Meter Reset 44 Overload Class 76 Gnd Flt A Enable 110 Aux2 Config
11 Power Factor 45 Service Factor 77 Gnd Flt A Level 111 Language
12 Mtr Therm Usage 46 Motor FLC 78 Gnd Flt A Delay 112 Timed Start
13 Motor Speed 47 Overload Reset 79 PTC Enable 113 I Shut Off Level
14 SMC Option 48 OL Shunt Time 80 Phase Reversal 114 UTS Level
15 Motor Connection
16 Line Voltage 82 Restart Attempts 116 Backspin Timer
49
OL Trip Enable/
Disable
81 Start Per Hour 115 Parameter Mgmt
17 Starting Mode 50 Overload A Lvl 83 Restart Delay 117 VShut Off Level
18 Ramp Time 51 Underload F Lvl 84 Line Fault Disable 118 OL Reset Level
19 Initial Torque 52 Underload F Dly 85 Emergency Run 119 Ambient Temp
20 Cur Limit Start 53 Underload A Lvl 86 Current Loss 120 Notch Position
21 Reserved 54 Underload A Dly 87 Logic Mask 121 Notch Maximum
22 Kickstart Time 55 Undervolt F Lvl 88 Data In A1 122 Start Delay
23 Kickstart Level 56 Undervolt F Dly 89 Data In A2 123 By-pass Delay
24 Option Input 2 57 Undervolt A Lvl 90 Data In B1 124 Fault 1
25 Starting Mode 2 58 Undervolt A Dly 91 Data In B2 125 Fault 2
26 Ramp Time 2 59 Overvolt F Lvl 92 Data In C1 126 Fault 3
27 Initial Torque 2 60 Overvolt F Dly 93 Data In C2 127 Fault 4
28 Cur Limit Level 2 61 Overvolt A Lvl 94 Data In D1 128 Fault 5
29 Reserved 62 Overvolt A Dly 95 Data In D2 129 Ramp Time E
30 Kickstart Time 2 63 Unbalance F Lvl 96 Data Out A1 130 Ramp Time 2E
31 Kickstart Level 2 64 Unbalance F Dly 97 Data Out A2 131 Stop Time E
32 Stop Mode 65 Unbalance A Lvl 98 Data Out B1 132 Option Input 1
33 Stop Time 66 Unbalance A Dly 99 Data Out B2 133 Stop Input
34 Pump Pedestal 100 Data Out C1 134 Elapsed Time 2
Description
Password
The SMC Flex controller lets you limit access to the programming system
through password protection. This feature is disabled with a factory-set
default of 0. To modify the password, complete the in Table 17
. If you lose or
forget the password, contact your local Rockwell Automation sales office or
Allen-Bradley distributor.
Table 17 - Modify the SMC Flex Controller Password
Description Action Display
——
1. Press the ESC key to go from the status display to the Main menu.
Esc
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 83
in
Page 84

Chapter 4 Programming
Main Menu
Preferences
Diagnostics
Main Menu
Preferences
Diagnostics
Preferences:
Change Passwor
d
User Dspy lines
Preferences:
Change Password
User Dspy lines
Prefs: Password
New Code:
83
Verify: 83
Preferences:
Change Password
User Dspy lines
Esc
Sel
RAM ROM
EEPROM
Table 17 - Modify the SMC Flex Controller Password (Continued)
2. Scroll with the Up/Down keys until the Preferences option is
highlighted.
3. Press the Enter key to access the Preferences menu.
4. Scroll with the Up/Down keys until the Change Password option is
highlighted.
5. Press the Enter key. —
6. Press the Up/Down keys to enter the desired number. If you are
modifying the password, make a note of it as displayed. Use the
Sel key to highlight a single digit.
7. Verification of the new password is required. Press the Enter key. —
Parameter Management
8. Press the Enter key after you have completed modifying the
password.
(1) To complete the programming process, re-enter the Main Menu mode to log out. This prevents unauthorized access to the
(1)
programming system.
Before you begin programming, it’s important to understand how the
controller memory is:
• structured within the SMC Flex controller
• used on power-up and during normal operation
Figure 75 - Memory Block Diagram
84 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Random Access Memory (RAM)
This is the work area of the controller after it is powered up. The SMC Flex
controller uses an Auto Store feature when you program parameters. When
you modify parameters in the program mode, the new values are stored
immediately in RAM and then in EEPROM, once the enter key has been
pressed. If control power is lost prior to the enter key being pressed, these
values are lost. When the device first powers up, the values from the EEPROM
area of memory are copied into RAM.
Read-only Memory (ROM)
The SMC Flex controller comes with factory default parameter values. These
settings are stored in non-volatile ROM and are displayed the first time you
Page 85

Chapter 4 Programming
Esc
FG :P#17
Starting M
ode
Current Lim
P
FG :P#18
Ramp Ti
me
10 Secs
P
enter the Program mode. You can restore defaults at any time by accessing the
memory storage menu.
Table 18 - Restore Factory Defaults
Command Description Action Display
Restore
Defaults
After parameter values have been modified, factory default
settings can still be re-initialized.
Memory Storage:
Reset to Defaults
Electrically Erasable Programmable Read-only Memory (EEPROM)
The SMC Flex controller provides a non-volatile area for storing user-modified
parameter values in the EEPROM.
Parameter Modification
All parameters are modified using the same method. Table 19 lists the basic
steps for modifying parameters.
Parameter values modified while the motor is operating are not valid until the
next time that operation occurs. If the password is set, you cannot adjust
parameters without logging in. Use the Sel key to highlight a single digit.
Table 19 - Modify Parameters
Description Action
——
1. Press the ESC key to go from the status display to the Main
menu.
2. Scroll with the Up/Down keys until the Parameter option is
highlighted.
3. Press the Enter key to access the Parameter menu.
4. Scroll with the Up/Down keys until the option you want to
use (Monitoring, Motor Protection, etc.) is highlighted. For
this example, Set Up will be used.
Main Menu
Parameter
Memory Storage
F
GP : File
Monitoring
Set Up
F
GP : File
Set Up
Motor Protection
5. Press Enter to select the Set Up group. —
F P: Group
6. Scroll to Basic Set Up and press Enter.
(2)
G
Basic Set Up
Display
0.0 Amps
0 Volt
0 %MTU
—
(1)
P
7. Scroll to the Starting Mode parameter by using the Up/
Down keys, and press Enter.
FG : Parameter
Starting Mode
Ramp Time
8. Press Enter to select the option. Scroll to the option of your
choice by using the Up/Down keys. For this example, we
will choose Current Limit.
9. Press the Enter key to accept the new setting. —
10.Scroll to the next parameter by using the Down key.
Continue the process until all desired settings are entered.
(1) The display indicates that the second line is now active by highlighting the first character. If the LCD display does not provide
a highlighted cursor, then the controller is in the Display mode.
(2) The SMC Option advises you if any control option (such as Pump Control) is resident. This parameter is factory set and you
cannot modify it.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 85
Page 86

Chapter 4 Programming
Soft Start
Current Limit Start
Use the parameters that are listed in Table 20 to adjust the voltage ramp
supplied to the motor.
Table 20 - Soft Start (Voltage Ramp) Parameters
Parameter
No.
17 Starting Mode This must be programmed for Soft Start. Soft Start
18
19 Initial Torque
22 Kickstart Time
23 Kickstart Level
(1) If the controller senses that the motor has reached full speed before it completes the Soft Start, it automatically switches to
providing full voltage to the motor.
Parameter
Name
Ramp Time
Description Value
This programs the time period that the controller will ramp the
(1)
output voltage up to full voltage from the Initial Torque level
programmed.
The initial reduced output voltage level for the voltage ramp to the
motor is established and adjusted with this parameter.
A boost of current is provided to the motor for the programmed
time period.
Adjusts the amount of current applied to the motor during the
kickstart time.
0…30 s
0…90% locked
rotor torque
0.0…2.0 s
0…90% locked
rotor torque
Use the parameters that are listed in Table 21 apply a current limit start to the
motor.
Table 21 - Current Limit Start Parameters
Dual Ramp Start
Parameter
No.
17 Starting Mode This must be programmed for Current Limit. Current Limit
18
20
22 Kickstart Time
23 Kickstart Level
(1) If the controller senses that the motor has reached full speed before it completes the Current Limit Start, it automatically
switches to providing full voltage to the motor.
Parameter
Name
Ramp Time
Current Limit
Level
(1)
Description Value
This programs the time period that the controller will ramp the
output voltage up to full voltage from the Initial Torque level
programmed.
This parameter provides adjustability for the reduced output
voltage level provided to the motor.
A boost of current is provided to the motor for the programmed
time period.
Adjusts the amount of current applied to the motor during the
kickstart time.
0…30 s
50…600% full
load current
0.0…2.0 s
0…90% locked
rotor torque
The SMC Flex controller lets you select between two Start profiles. The
parameters that are listed in Table 22
are available in the Set Up menu. Ramp
#1 parameters are in the "Basic Setup" menu. Ramp #2 parameters are in the
"Dual Ramp" menu. Option Input 2 must be set to "Dual Ramp" to enable the
second ramp parameters.
86 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 87

Chapter 4 Programming
The Ramp #2 parameters will be used if Option Input 2 is active at the time of
the start. To obtain Dual Ramp control, Ramp #1 is located in the Setup menu
Basic section and Ramp #2 is located in the Option Input 2 (Dual Ramp).
Table 22 - Dual Ramp Start Parameters
Full Voltage Start
Parameter
No.
24
17
18 Ramp Time
19 Initial Torque
20 Current Limit
25
26 Ramp Time 2
27 Initial Torque 2
28 Current Limit 2
(1) The Dual Ramp feature is available on the standard controller.
(2) You can program Kickstart for both start modes.
Parameter
Name
Option Input 2
(Dual Ramp)
Start Mode
Start Mode 2
(2)
Description Value
"Option input 2" must be set to "Dual Ramp" to enable the dual
(1)
ramp feature.
Selects the start mode for option #1. —
Programs the time period during which the controller will ramp
the output voltage up to full voltage for the first Soft Start setup.
Lets you adjust the initial torque level applied to the motor at
the beginning of the start maneuver for the first Soft Start
setup.
Lets you adjust the current level applied to the motor during the
start maneuver.
(2)
Selects the start mode for option #2. —
Programs the time period during which the controller will ramp
the output voltage up to full voltage for the second Soft Start
setup.
Lets you adjust the initial torque level applied to the motor at
the beginning of the start maneuver for the secondSoft Start
setup.
Lets you adjust the current level applied to the motor during the
start maneuver for option #2.
—
0…30 s
0…90% locked
rotor torque
50…600% FLC
0…30 s
0…90% locked
rotor torque
50…600% FLC
You can program the SMC Flex controller to provide a full-voltage start (output
voltage to the motor reaches full voltage within 1/4 second) with the
parameters that are listed in Table 23
.
Linear Speed
Programming Parameters
Table 23 - Full-voltage Start Parameters
Parameter No. Parameter Name Description Value
17 Starting Mode This must be programmed for Full Voltage. Full Voltage
The SMC Flex controller lets you control the motor speed during starting and
stopping maneuvers. A tachometer input is required. See
Table 24 - Linear Speed Acceleration and Deceleration Parameters
Parameter
No.
Parameter Name Description Value
17 Starting Mode This must be programmed for Linear Speed. Linear Speed
18 Ramp Time
22 Kickstart Time
23 Kickstart Level
This programs the time period that the controller will ramp
from 0 speed to full speed.
A boost of current is provided to the motor for the
programmed time period.
Adjusts the amount of current applied to the motor during the
kickstart time.
page 10.
0…30 s
0.0…2.0 s
0…90% locked
rotor torque
Table 25 lists the option-specific parameters that correlate to each control
option. These parameters are in addition to those already discussed in the
Basic Set Up and Metering groups.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 87
Page 88

Chapter 4 Programming
Table 25 - Option-specific Programming Parameters
Option
Parameter
No.
Parameter Name Description Value
Standard
Soft Stop
14 SMC Option Identifies the type of control present and is not user programmable. Standard
33 Stop Time Lets you set the time period for the soft stopping function. 0…120 s
14 SMC Option Identifies the type of control present and is not user programmable. Standard
39 Slow Speed Select Lets you program the slow speed that best fits the application.
Preset Slow
Speed
40
Slow Speed
Direction
Programs the slow speed motor rotational direction. Forward, Reverse
41 Slow Accel Current Lets you program the required current to accelerate the motor to slow speed operation. 0…450% FLA
Slow Running
42
Current
Lets you program the required current to operate the motor at the slow speed setting. 0…450% FLA
Pump Control
14 SMC Option Identifies the type of control present and is not user programmable. Pump Control
Pump Control
33 Stop Time Lets you set the time period for the pump stopping function. 0…120 s
17 Starting Mode Lets you program the SMC Flex controller for the type of starting that best fits the application.
Braking Control
SMB Smart
Motor Braking
14 SMC Option Identifies the type of control present and is not user programmable. Braking Control
(1)
35
Braking Current
Lets you program the intensity of the braking current applied to the motor. 0…400% FLA
14 SMC Option Identifies the type of control present and is not user programmable. Braking Control
39 Slow Speed Select Lets you program the slow speed that best fits the application.
41 Slow Accel Current Lets you program the required current to accelerate the motor to slow speed operation. 0…450% FLA
Accu-Stop
42
35
43
Slow Running
Current
Braking Current
Stopping Current
Lets you program the required current to operate the motor at the slow speed setting. 0…450% FLA
(1)
Lets you program the intensity of the braking current applied to the motor. 0…400% FLA
Lets you program the intensity of the braking current applied to the motor from slow speed
(1)
operation.
14 SMC Option Identifies the type of control present and is not user programmable. Braking Control
39 Slow Speed Select Lets you program the slow speed that best fits the application.
Slow Speed
with Braking
(1) All braking/stopping current settings in the range of 1…100% provide 100% braking current to the motor.
41 Slow Accel Current Lets you program the required current to accelerate the motor to slow speed operation. 0…450% FLA
Slow Running
42
35
Current
Braking Current
Lets you program the required current to operate the motor at the slow speed setting. 0…450% FLA
(1)
Lets you program the intensity of the braking current applied to the motor. 0…400% FLA
Low: 7% – forward,
10% – reverse
High: 15% – forward,
20% – reverse
Pump Start, Soft Start,
Current Limit Start
Low: 7%
High: 15%
0…400% FLA
Low: 7%
High: 15%
88 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 89

Chapter 4 Programming
Basic Setup
The Basic Setup programming group provides a limited parameter set,
allowing quick startup with minimal adjustment. If you plan to implement
some of the advanced features (such as Dual Ramp or Preset Slow Speed),
select the Setup programming group. It provides the complete Basic Setup
parameter set and the advanced set.
Table 26 - Basic Setup Parameters
Parameter
No.
133 Stop Input Lets you select the operation of terminal 18, Stop Input. Coast, Stop Option
132 Option Input 1 Lets you select the operation of terminal 16, Option Input #1.
107 Aux1 Config
108 Aux3 Config
109 Aux4 Config
(1) Starting Mode must be programmed to Soft Start to obtain access to the Initial Torque parameter.
(2) Starting Mode must be programmed to Current Limit to obtain access to the Current Limit Level parameter.
Parameter Name Description Value
14 SMC Option Displays the type of controller. This is factory set and not adjustable. Standard
15 Motor Connection Displays the motor type to which the device is being connected. Line or Delta
16 Line Voltage Displays the system line voltage to which the unit is connected.
17 Starting Mode
18 Ramp Time Sets the time period during which the controller will ramp the output voltage. 0…30 s
19
Initial Torque
Current Limit
20
22 Kickstart Time A boost current is provided to the motor for the programmed time period. 0.0…2.0 s
23 Kickstart Level Adjusts the amount of current applied to the motor during kickstart. 0…90% of locked rotor torque
24 Option Input 2 Lets you select the operation of terminal 15, Option Input #2.
32 Stop Mode
33 Stop Time
44 Overload Class Lets you select the Overload Trip Class. Disable, 10, 15, 20, 30
45 Service Factor Lets you program the service factor from the motor nameplate. 0.01…1.99
46 Motor FLC Lets you program the FLC from the motor nameplate. 1.0…2200
47 OL Reset Lets you select the type of overload reset. Auto, Manual
110 Aux2 Config
115 Parameter Mgmt Recall of factory default parameter values. Ready, Load Default
Level
(2)
Lets you program the SMC Flex controller for the type of starting that best fits the
application.
(1)
Establishes and adjusts the initial reduced voltage output level for the voltage ramp. 0…90% of locked rotor torque
The current limit level that is applied for the Ramp Time selected. 50…600% FLA
Lets you program the SMC Flex controller for the type of stopping that best fits the
application.
Sets the time period during which the controller will ramp the voltage during a stopping
maneuver.
Lets you configure the operation of the contacts that is located at terminals 19 and 20.
Contact is provided as standard with the SMC Flex controller.
Lets you configure the operation of the contacts that is located at terminals 29 and 30.
Contact is provided as standard with the SMC Flex controller.
Lets you configure the operation of the contacts that is located at terminals 31 and 32.
Contact is provided as standard with the SMC Flex controller.
Lets you configure the operation of the contacts that is located at terminals 33 and 34.
Contact is provided as standard with the SMC Flex controller.
Soft Start, Current Limit, Full Voltage, Linear
Speed
Disable, Coast, Stop Option, Fault, Fault NC,
Network
Disable, Slow Speed, Dual Ramp, Fault, Fault
NC, Network, Clear Fault
Disable, Soft Stop, Linear Speed
0.0…120 s
Normal, Up-to-speed, Fault, Alarm, Network
Control, External Bypass: (N.O.)
Normal, Up-to-speed, Fault, Alarm, Network
Control, External Bypass: (N.O.)
Normal, Up-to-speed, Fault, Alarm, Network
Control, External Bypass: (N.O.)
Normal, Up-to-speed, Fault, Alarm, Network
Control, External Bypass: (N.O.)
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 89
Page 90

Chapter 4 Programming
Motor Protection
While the Basic Setup group lets you get started with a minimum number of
parameters to modify, the Motor Protection group allows full access to the
SMC Flex controller parameter set. Table 27
lists the additional setup
parameters that are provided in this group.
The majority of parameters have a Fault and an Alarm setting.
ATTENTION: For overload protection, you must enter the data as it appears on the
motor nameplate.
Table 27 - Motor Protection Parameters
Protection
Type
Overload Lets you select the operation of the overload:
Determines the trip level as a percentage of the motor’s FLA, and the delay
Underload
Undervoltage
Overvoltage
Unbalance
Jam
(1)
period.
Determines the trip level as a percentage of the line voltage and the delay
(2)
period.
(2)
Determines the trip level as a percentage of line voltage and delay period.
(2)
Lets you set the voltage unbalance trip level and delay period.
(1)
Determines the trip level as a percentage of motor full load current and delay
period.
Stall Lets you set the stall delay time. 71 Stall Delay
(3)
Ground Fault
Motor PTC
Phase Reversal
Restarts
(1) For Jam and Underload detection to function, the Motor FLC must be programmed in the Motor Protection group. See Chapter 5.
(2) The delay time must be set to a value greater than zero when Undervoltage, Overvoltage, and Unbalance are enabled.
(3) See page 22
(4) See page 23
Lets you enable the ground fault level in amps, delay time, and inhibit time.
(4)
Lets you connect a PTC to the SMC and enable a fault when it becomes active. 79 PTC Enable
Determines the proper orientation of line connections to the SMC. If Enabled
and phases are out of sequence, a fault will be indicated.
Lets you determine the maximum number of restarts per hour the unit can
experience, and delay time between consecutive starts.
.
.
Description
No. Parameter Name No. Parameter Name
44 Overload Class, 48 OL Shunt Time
45 Service Factor 49 OL Trip Enable/Disable
46 Motor FLC 50 Overload A Lvl
47 Overload Reset
51 Underload Fault Level 53 Underload Alarm Level
52 Underload Fault Delay 54 Underload Alarm Delay
55 Undervoltage Fault Level 57 Undervoltage Alarm Level
56 Undervoltage Fault Delay 58 Undervoltage Alarm Delay
59 Overvoltage Fault Level 61 Overvoltage Alarm Level
60 Overvoltage Fault Delay 62 Overvoltage Alarm Delay
63 Unbalance Fault Level 65 Unbalance Alarm Level
64 Unbalance Fault Delay 66 Unbalance Alarm Delay
67 Jam Fault Level 69 Jam Alarm Level
68 Jam Fault Delay 70 Jam Alarm Delay
72 Ground Fault Enable 76 Ground Fault Alarm Enable
73 Ground Fault Level 77 Ground Fault Alarm Level
74 Ground Fault Delay 78 Ground Fault Alarm Delay
75 Ground Fault Inhibit Time
80 Phase Reversal
81 Starts Per Hour 83 Restart Delay
82 Restart Attempts
Setup Parameters
Table 28 - Example Settings
Protection Type Parameter No. Parameter Name Setting Value Trip Value
Undervoltage
Overvoltage
Jam
Underload
(1) The average value of the three phase-to-phase voltages is utilized.
(2) The largest value of the three-phase currents is utilized.
(3) The SMC Flex controller self protects.
(1)
(1)
(2) (3)
(2)
90 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
16 Line Voltage 480V
55 Undervoltage level 80%
16 Line Voltage 240V
59 Overvoltage level 115%
46 Motor FLC 150 A
67 Jam level 400%
46 Motor FLC 90 A
51 Underload level 60%
384V
276V
600 A
54 A
Page 91

Metering
Esc
Main Menu
Parameter
Memory Storage
Main Menu
Parameter
Memory Storage
GP : File
Monitoring
Set Up
F
Chapter 5
Overview
View Metering Data
While the SMC Flex™ controller operates your motor, it also monitors several
(a)
different parameters, providing a full-function metering
package.
To access the metering information, follow the procedure in Table 29.
Table 29 - Access the Metering Information
Description Action Display
——
1. Press any of the following keys to access the Main Menu.
2. Scroll with the Up/Down keys until the Parameter option is
shown.
3. Press the Enter key to select the Parameter option. —
4. Scroll with the Up/Down keys until the Monitoring option is
displayed.
##.# Amps
### Volt
## %MTU
(a) See page 25 or Figure 74 for details on the metering functions.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 91
Page 92

Chapter 5 Metering
F P: Group
Metering
G
FG :P#4
Current Phase A
##.# Amps
P
FG :P#5
Current Phase B
##.# Amps
P
FG :P#6
Current Phase C
##.# Amps
P
FG :P#7
Watt Meter
##.# KW
P
FG :P#8
Kilowatt Hours
##.# KWH
P
FG :P#9
Elapsed Time
##.# Hour
P
FG :P#10
Meter Reset
No
P
FG :P#11
Power Factor
##.#
P
FG :P#12
Mtr ThermUsage
## %MTU
P
FG :P#3
Volts Phase C-A
### Volt
P
FG :P#2
Volts Phase B-C
### Volt
P
FG :P#1
Volts Phase A-B
### Volt
P
Table 29 - Access the Metering Information (Continued)
Description Action Display
5. Press the Enter key to access the Monitoring group. —
6. Press the Enter key to access the Metering group.
7. Scroll through the Metering parameters with the Up/Down keys to
access the desired information. Press the Enter key to view that
parameter.
You can modify the metering values that are displayed on the SMC Flex
controller to show your desired values by accessing Main Menu/Preferences.
92 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 93

Optional HIM Operation
I
Chapter 6
Overview
Human Interface Module
The SMC Flex™ controller offers a variety of unique control options that
provide enhanced motor starting and stopping capabilities. (See Chapter 1
for
brief descriptions of each option.)
Only one option can reside in a controller.
The control buttons available with the Bulletin 20-HIM LCD Human interface
modules are compatible with the SMC-Flex controller’s control options.
Table 30
through Table 32 detail the functionality of each button.
IMPORTANT
The logic mask port must be enabled prior to initiating control
commands to the SMC Flex controller. See page 98.
IMPORTANT
Table 30 - Button Functions for Standard Operation Modes
Option Button Operation
Soft Stop
Current Limit
Full Voltage
Linear Speed
Preset Slow Speed
You must wire the control terminals according to Figure 44 or Figure 55.
I
O
Jog
O
Jog
The green start button, when pressed, commences motor acceleration to
full speed.
The red stop button, when pressed, provides a coast stop, and/or resets
a fault.
The jog button, when pressed, initiates the programmed maneuver.
The green start button, when pressed, commences motor acceleration to
full speed.
The red stop button, when pressed, provides a coast stop and/or resets
a fault.
The jog button is not active for Preset Slow Speed.
You cannot operate Slow Speed via the HIM.
Table 31 - Button Functions for Pump Control Mode
Option Button Operation
I
Pump Control
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 93
O
Jog
The green start button, when pressed, commences motor acceleration to
full speed.
The red stop button, when pressed, provides a coast stop, and/or resets
afault.
The jog button, when pressed, initiates a pump stop maneuver.
Page 94

Chapter 6 Optional HIM Operation
I
Table 32 - Button Functions for Braking Control Modes
Option Button Operation
The green start button, when pressed, commences motor acceleration to
full speed.
The red stop button, when pressed, provides a coast stop, and/or resets
afault.
Smart Motor Braking
I
O
Accu-Stop
Slow Speed with
Braking
Jog
O
Jog
I
O
Jog
he jog button, when pressed, initiates a brake stop.
The green start button, when pressed, commences motor acceleration to
full speed.
The red stop button, when pressed, will provide a coast stop, and/or
reset a fault.
With a “stopped” status, the jog button, when pressed, initiates slow
speed motor operation.
From an “at speed” condition, the jog button, when pressed, initiates
braking to slow speed operation. The controller maintains slow speed
operation as long as the jog button is pressed.
The green start button, when pressed, commences motor acceleration to
full speed.
The red stop button, when pressed, provides a coast stop, and/or resets
afault.
The jog button initiates a brake stop.
You cannot operate Slow Speed via the HIM.
ATTENTION: The Bulletin 20-HIM LCD Human interface module’s stop push button is
not intended to be used as an emergency stop. Refer to applicable standards for
emergency stop requirements.
94 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 95

Communication
Chapter 7
Overview
The SMC Flex™ controller provides advanced communication capabilities that
let you control, configure and monitor the product through multiple devices
and over multiple communication networks. The SMC Flex controller uses DPI
as an internal method of communication bus; therefore, you can use all
standard DPI communication devices that are used by other Rockwell
Automation products (for example, PowerFlex® Drives) in the SMC Flex
controller. SCANPort™ devices are not supported by the SMC Flex controller.
Standard DPI communication cards are available for various protocols,
including EtherNet/IP™, DeviceNet, ControlNet, ModBus™, Remote I/O, and
Profibus® DP. Other modules may be available in the future. For specific
programming examples, configuration, or programming information, see the
user manual for the communication module being used. Table 33
of available modules.
Table 33 - Communication Card Selection by Protocol Type
Protocol Type Cat. No. User Manual
DeviceNet 20-COMM-D 20COMM-UM002
ControlNet 20-COMM-C 20COMM-UM003
Remote I/O 20-COMM-R 20COMM-UM004
Profibus 20-COMM-P 20COMM-UM006
RS-485 20-COMM-S 20COMM-UM005
InterBus 20-COMM-I 20COMM-UM007
EtherNet/IP 20-COMM-E 20COMM-UM010
Dual Port EtherNet/IP 20-COMM-ER 20COMM-UM015
RS485 HVAC 20-COMM-H 20COMM-UM009
ControlNet (Fiber) 20-COMM-Q 20COMM-UM003
CANopen 20-COMM-K 20COMM-UM012
shows a list
Communication Ports
Human Interface Module
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 95
The SMC Flex controller supports three DPI ports for communication. Ports 2
and 3 are supported through the DPI connection on the side of the device and
are typically used to interface with a Human Interface Module (HIM). Port 2 is
the default connection; port 3 is available by installing a splitter on port 2. Port
5 is supported by connecting one of the communication cards listed in Table 33
to the internal DPI comm card connection.
You can program the SMC Flex controller with the built-in keypad and LCD
display or with our optional Bulletin 20-HIM LCD human interface modules.
You can install a maximum of two HIM modules. Parameters are organized in
a three-level menu structure and divided into programming groups.
Page 96

Chapter 7 Communication
The human interface modules have two sections: a display panel and a control
panel. The display panel dubplicates the 3-line, 16-character backlit LCD
display and programming keypad found on the front of the SMC Flex
controller.
You must use a Bulletin 20-HIM Rev3.002 or later with the SMC Flex
controller.
IMPORTANT
Node addressing of the DPI communication card can be programmed via
software or a hand-held DPI HIM. The on-board HIM cannot be used to
address the communication card.
Keypad Descriptions
Table 34 describes the keys that are on the front of the SMC Flex controller.
Table 34 - SMC Flex Controller Keypad
Menu Button Name Function
Esc
Sel
Escape
Select
Up/Down
Arrows
Enter
For ease of programming values, after using the Enter key to edit, use the Sel
key to jump to the digit that needs to be modified, then use the arrow keys to
scroll through the digits.
Exit a menu, cancel a change to a parameter value, or acknowledge a fault/
alarm.
Select a digit, select a bit, or enter edit mode in a parameter screen.
Will get to menu to change the language being displayed.
Scroll through options increase/decrease a value, or toggle a bit.
Enter a menu, enter edit mode in a parameter screen, or save a change to a
parameter value.
If a human interface module is disconnected from the SMC Flex controller
while the Logic Mask is set to 1, a “Coms Loss” fault occurs.
Extension cables are available up to a maximum of 10 m in total length.
96 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
Page 97

Chapter 7 Communication
I
O
Jog
Port 5 — DPI Communications
Port 2
Ports 2 and 3 when two HIMs are
connected with a splitter
The control panel of the 20-HIM module provides the operator interface to the
controller. Table 35
Table 35 - 20-HIM Control Panel Buttons
Button Name Description
describes the buttons on the control panel.
Start
Stop The red stop button, when pressed, will halt motor operation and/or reset a fault.
The green start button, when pressed, will begin motor operation.
(Proper setup of the HIM port is required.)
Jog
ATTENTION: The Bulletin 20-HIM interface module’s stop push button is not
intended to be used as an emergency stop. See the applicable standards for
emergency stop requirements.
ATTENTION: The external HIM has a similar programming operation to the built-in
programmer, but note that there are differences.
The jog button is active only when a control option is present. Pressing the jog
button will initiate the option maneuver (for example: Pump Stop).
All other controls available with the various human interface modules are nonfunctional with the SMC Flex controller.
Connect the Human Interface Module to the Controller
Figure 76 shows the connection of the SMC Flex controller to a human
interface module. Table 36
IMPORTANT
The SMC Flex controller only supports the use of DPI communication
modules and DPI HIM LCD Modules. ScanPort devices are not supported
by the SMC Flex controller.
provides a description of each port.
See Figure 44
for the control wiring diagram that enables start-stop control
from a human interface module.
Figure 76 - SMC Flex Controller with Human Interface Module
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 97
Page 98

Chapter 7 Communication
Table 36 - Description of Ports
Port # Description
1 Unused — not available for use
2 First 20-HIM module or 20-COMM card connected to SMC Flex controller
3 Second 20-HIM connected to SMC Flex controller
5 DPI Communication Board port
Control Enable
The Logic Mask parameter (Parameter 87) lets you configure whether a
communication device (HIM or network connection) can perform control
commands such as starting. you can enable or disable each communication
port as required.
When a given device is enabled through the logic mask, that device is allowed
to execute control commands. Disconnecting any device with the logic mask
enabled results in a communication fault unless the communication fault is
disabled.
When a given device is disabled through the logic mask, that device cannot
execute control commands, but can still be used for monitoring. A device that
is disabled through the logic mask can be disconnected without causing a
fault.
IMPORTANT
Stop commands override all start commands and can be initiated
from the hardwired inputs or any port regardless of the logic mask.
HIM and COMM Card Control Enable
To enable motor control from a connected human interface module or
20-COMM communication card, follow the procedure below with the
connected human interface module’s programming keys.
You can start and stop the SMC Flex controller with the control panels of the
Bulletin 20-HIM LCD human interface modules. However, the factory default
settings disable control commands other than Stop through the serial
communication port.
To enable motor control from a connected human interface module or
communication module, you must take the following programming steps:
1. Disconnect the HIM and allow to power down.
2. Reconnect the HIM. On Initializing screen, the bottom right corner of
LCD shows Port X
98 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
. Note this port number.
Page 99

Chapter 7 Communication
3. Go to Logic Mask, found as follows:
Main Menu: Parameter/Communications/Comm Mask/Logic Mask
(Parameter 87)
Loss of Communication and
Network Faults
4. Set b0X equal to 1 (where X is the port number noted in step 2
IMPORTANT
You must set the Logic Mask to 0 before you disconnect a HIM from the
).
SMC Flex controller. If you do not do this, the unit faults on a “Coms Loss”
If you are enabling control from the built-in SMC Flex controller programmer,
set the Logic Mask as shown in Table 37
Table 37 - Logic Mask (Parameter 87) Requirements
Mask Code
0 0000 0000 No external DPI devices are enabled
4 0000 0100 Only the 20-HIM on port 2 is enabled
8 0000 1000 Reserved for the 20-HIM-A3 Handheld HIM that is connected to Port 3
12 0000 1100 Two 20-HIMs are enabled on ports 2 and 3
32 0010 0000 Only the DPI communication card on port 5 is enabled
36 0010 0100 20-HIM on port 2 and the DPI communication card on port 5 are enabled
44 0010 1100 20-HIMs on ports 2 and 3 and the DPI communication card on port 5 are enabled
Mask Code
(Binary)
.
Description
The loss of communication fault will follow the functionality as defined in the
DPI specification. There are separate faults for each device. Because three DPI
ports are supported there will be three faults that can be generated.
SMC Flex Controllerspecific Information
DPI provides a separate network fault for each port. This fault can be
generated directly by the peripheral and is separate from the Communications
Loss fault (which is generated by the SMC Flex itself).
You can use the SMC Flex controller with all LCD-applicable DPI interfaces.
Regardless of the type of interface being used, you can use the information in
this section to configure the rest of the system.
Rockwell Automation Publication 150-UM008I-EN-P - October 2020 99
Page 100

Chapter 7 Communication
Default Input/Output Configuration
The default configuration for I/O is 4 bytes in and 4 bytes out (TX = 4 bytes,
RX = 4 bytes). The total size may very when used with a communication card.
The default configuration is arranged according to the following table.
Produced Data (Status) Consumed Data (Control)
Word 0 Logic Status Logic Command
Word 1
(1) The feedback word is always Current in Phase A (Parameter 4).
(2) The reference word is not used with the SMC Flex controller, however the space must be reser ved.
Feedback
(1)
Reference
(2)
IMPORTANT
The total size produced or consumed may vary, depending on the
communication card being used. For more information, refer to the User
Manual for the communication card.
Variable Input/Output Configuration
The SMC Flex controller supports 16-bit DataLink™, which means that you can
configure the device to return additional information. The I/O message size
depends on how many DataLinks are enabled. The following table summarizes
the I/O data sizes.
Table 38 - I/O Data Size
Tx Size [bytes]
4
(8 for Ethernet options)
8
(12 for Ethernet options)
12
(16 for Ethernet options)
16
(20 for Ethernet options)
20
(24 for Ethernet options)
Rx Size
[bytes]
4 x x
8 x x x
12 x x x x
16 x x x x x
20 x x x x x x
Logic Status/
Command (16-bit)
Reference/
Feedback (16-bit)
DataLinks
A B C D
The increased transmisison sizes for Ethernet (and ControlNet) option
modules is due to a required 2-word /4-byte overhead. To configure DataLink,
see page 103
100 Rockwell Automation Publication 150-UM008I-EN-P - October 2020
.
 Loading...
Loading...