

Page 1
Plastic Molding Module
(Cat. No. 1771-QDC)
Inject, Clamp, and Eject Mode
Page 2
Important User Information
Because of the variety of uses for the products described in this publication,
those responsible for the application and use of this control equipment must
satisfy themselves that all necessary steps have been taken to assure that
each application and use meets all performance and safety requirements,
including any applicable laws, regulations, codes and standards.
The illustrations, charts, sample programs and layout examples shown in
this guide are intended solely for purposes of example. Since there are
many variables and requirements associated with any particular installation,
Allen-Bradley does not assume responsibility or liability (to include
intellectual property liability) for actual use based upon the examples shown
in this publication.
Allen-Bradley publication SGI-1.1, Safety Guidelines for the Application,
Installation, and Maintenance of Solid State Control (available from your
local Allen-Bradley office), describes some important differences between
solid-state equipment and electromechanical devices that should be taken
into consideration when applying products such as those described in this
publication.
Reproduction of the contents of this copyrighted publication, in whole or in
part,
without written permission of Allen-Bradley Company, Inc. is prohibited.
Throughout this manual we use ATTENTION and Important to alert you
to the following:
ATTENTION: Tells readers where people may be hurt,
machinery may be damaged, or economic loss may occur, if
procedures are not followed properly.
ATTENTION helps you:
- identify a hazard
- avoid the hazard
- recognize the consequences
Important: Identifies information that is especially important for successful
application and understanding of the product.
Important: We recommend that you frequently back up your application
programs on an appropriate storage medium to avoid possible data loss.
PLC is a registered trademark of Allen-Bradley Company, Inc.
PanelView, and PanelBuider are trademarks of Allen-Bradley Company, Inc
Page 3
Table of Contents
Important Information P1. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Manual
Objectives
Audience P2
Use
Related
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
of T
erms P2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Publications
Overview of Inject, Clamp, and Eject Mode 11. . . . . . . . . . . .
P1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
P5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter
Inject Control 11
Clamp Control 19
Ejector Control 113
System Pressure 115
Example
Summary
Objectives
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hydraulic Circuits for the Inject, Clamp, and Eject Mode
of Inject, Clamp, and Eject Mode of Operation
11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
116. .
120. . . . . . . .
Install the QDC Module 21. . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter
Record
Set Module Jumpers 22
Key
Install
Wire
Ground and Shield Your I/O Devices 29
Plan for ESTOPs and Machine Interlocks 211
Configure the QDC Module'
Chapter
Select Module Parameters and I/O Ranges 32
Determine Initial Sensorconfiguration Values 34
Download MCC Parameters to the QDC Module 35
Use Setoutput Operation to Move the Ram (screw),
Complete your Sensor Configuration 38
Select
Objectives
I/O Ranges
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
the I/O Chassis
the QDC Module
I/O Devices
. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
s I/O
Objectives
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . .
Clamp, and Ejector 37
Optional Configurations
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .
21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31. . . . . . . . . . . . . . . . . . . .
31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
314. . . . . . . . . . . . . . . . . . . . . . . . . .
Page 4
Table of Contentsii
Overview of Remaining Configuration Procedures 41. . . . . .
Chapter
Configuration Concepts 41
System Command and Status Blocks 42
Overview of Procedures 43
Enter Data Table Values and Download Data Blocks 44
Objectives
41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .
Jog Your Machine 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter
About Jogging 51
Use These Worksheets 51
Determine
Write Ladder Logic 55
Jog Your Ram (Screw), Clamp, and Ejector 57
Configure Screwrotate Jogs for Indirect Control 57
Write Ladder Logic to Assist with Screwrotate Jogs 58
Rotate the Screw 59
Objectives
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Initial Jog V
51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
alues 52. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Select Command and Status Bits to Sequence
Machine Operation 61. . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter
Assess Your Logic Requirements 61
Use
Chapter
Use These Worksheets 72
Procedure to Determine and Record Initial Values 719
Determine
Select the T
Determine Word Values:
Determine Unselected Valve Setoutput Values 722
Set Your Acceleration/Deceleration Ramp Rates 724
Determine Setoutput Values for End of Profiles 725
Set Pressure Control Limits 726
Set V
Set Profile Gain Constants, PressureAlarm Setpoints,
Enter and Download your Worksheet Values 731
Objectives
. . . . . . . . . . . . . . . . . . . . . . . .
Command and Status Bit T
Objectives
Bit Selections: Assign Module Outputs for
Your Control Valves 719. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ype of PID Algorithm
Select V
and Watchdog Timer Presets 729
alues for Expert Response Compensation (ERC) 722. . . . .
elocity Control Limits
ables 62. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . .
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
721. . . . . . . . . . . . . . . . . . . . . . . . .
728. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Page 5
Load
Initial Profile Setpoints
Table of Contents iii
81. . . . . . . . . . . . . . . . . . . . . . .
Chapter
Use These Worksheets 81
Determine and Record Setpoints for the Clamp Close Profile (CPC) 82
Determine Bit Selections for Worksheet 8A 85. . . . . . . . . . . . . . . . .
Determine Word Values for Worksheet 8A 87
Enter and Download Your Worksheet Values 89
Determine and Record Setpoints for the Injection Profile (IPC) 810
Determine Bit Selections for Worksheet 8B 813
Determine Word Values for Worksheet 8B 814
Enter and Download your Worksheet Values 818
Determine and Record Setpoints for the Pack/Hold Profile (HPC) 818
Determine Bit Selections for Worksheet 8C 821
Determine Word Values for Worksheet 8C 822
Enter and Download your Worksheet Values 823
Determine and Record Setpoints for the Plastication Profile (PPC) 824
Determine Bit Selections for Worksheet 8D 827
Determine Word Values for Worksheet 8D 828
Enter and Download your Worksheet Values 830
Determine and Record Setpoints for the Clamp Open Profile (OPC) 831
Determine Bit Selections for Worksheet 8E 834. . . . . . . . . . . . . . . . .
Determine Word Values for Worksheet 8E 836
Enter and Download Your Worksheet Values 838
Determine and Record Setpoints for the Ejector Profile (EPC) 839
Determine Bit Selections for Worksheet 8F 842
Determine Word Values for Worksheet 8F 845
Enter and Download Your Worksheet Values 849
Objectives
81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
. . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
.
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
.
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
. . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
Span Your V
Chapter
Choose Only Applicable ValveSpanning Procedures 91
Referenced Worksheets 93
LPC Profile - Low Pressure Valve 94
FCC, SCC, TCC Profiles - Pressure Valve(s) 910
FCC,
SCC, TCC Profiles - V
INC Profile - Pressure Valve 920
Profile - V
INC
PKC and HDC Profiles - Pressure Valves 931
PLC Profile - Pressure Valve 937
FOC,
SOC, T
FOC,
SOC, T
EAC, ERC Profiles - Pressure Valve(s) 953
EAC, ERC Profiles - Velocity (Flow) Valve(s) 958
alves 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Objectives
. . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
elocity (Flow) Valve(s) 915. . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
elocity V
OC, OSC Profiles - Pressure Valve(s) 942. . . . . . . . . . .
OC, OSC Profiles - V
alve 925. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . .
elocity (Flow) Valve(s) 948. . . . . . .
. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
91. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Page 6

Table of Contentsiv
Tune Your Machine 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter
Closedloop Tuning 102
Injection Tuning Considerations for Producing Parts 1010
Tuning Considerations for Clamp and Ejector Operations 1023
Objectives
101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .
. . . . . . .
Page 7
Table of Contents v
Troubleshoot with LEDs 111. . . . . . . . . . . . . . . . . . . . . . . . . .
Chapter
Use LEDs to Troubleshoot Your QDC Module 111
Objectives
111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
Blank Worksheets A1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Page 8
Preface
Important Information
Manual
Objectives
Use this preface to familiarize yourself with this manual so you can use it
effectively. This manual shows you how to apply the QDC module to your
molding machine in a reasonable length of time.
Since this manual is task oriented, we recommend that you perform these
tasks in the following order:
Perform this task: As discussed in this chapter:
Browse through the entire manual to become familiar with
its contents.
Learn about the inject, clamp, and eject process.
This describes how the QDC module controls your
injection molding system.
Install the QDC module.
This includes such tasks as wiring and setting jumpers.
Learn about the configuration process.
This describes procedures you perform using this
manual.
Configure the QDC module mode of operation to match
your specific application, and its communication with its
inputs and outputs.
Jog the ram (screw), clamp, and ejector.
This task requires that you configure jog setpoints and
pressure alarm setpoints.
Set up communications between your PLC5 processor
and the QDC module. You write ladder logic to handle
command bit interaction between the two devices.
Prepare to run your machine in open loop.
This task requires that you determine and enter initial
values into the ram (screw), clamp, and ejector
configuration blocks.
Prepare to run and tune your machine in open loop.
This task requires that you determine and enter initial
values into ram (screw), clamp, and ejector profile blocks.
Span your ram (screw), clamp, and ejector valves.
This is done using setoutput and openloop control.
Tune the machine for parts production. Chapter 10
Troubleshoot problems that may occur with QDC module. Chapter 11
Refer to this appendix for a blank copy of each worksheet
contained in this manual.
All chapters
Chapter 1
Chapter 2
Chapter 3
Chapter 4
Chapter 5
Chapter 6
Chapter 7
Chapter 8
Chapter 9
Appendix A
P-1
Page 9
Preface
Audience
of T
Use
erms
Before attempting to apply the QDC module to a molding machine we
assume that you are:
an injection molding professional
an experienced PLC programmer
(especially with the Allen-Bradley PLC-5 family of processors)
an hydraulics designer or technician
We use abbreviated catalog numbers when referring to Allen-Bradley
equipment:
Abbreviated Name: Title:
QDC module 1771QDC Plastic Molding Module
PLC5 processor PLC5 Programmable Controller
T45 or T47
T50 oe T53 terminal
ProSet 600 Software
PanelView Color display
ERC Expert Response Compensation
1784T45 or 47 Portable Programming Terminal
1784T50 or 53 Industrial Terminal
6500PS600
ProSet 600 Injection Molding Operator Interface Software
2711KC1 PanelView Operator Interface Terminal
The next table presents other terms we commonly use in this manual:
Term: Definition:
Selected Valve In multivalve systems, depending on the configured profile, the QDC
module controls one valve and presets the setting of the remaining
valves to produce moldingmachine profiles. We call the valve being
controlled by the QDC modules algorithms the selected valve.
Unselected Valves In multivalve systems, depending on the configured profile, the QDC
module controls one valve and presets the setting of the remaining
valves to produce moldingmachine profiles. We call the valves that are
preset with an openloop percentage setpoint the unselected valves.
Profile A group of mold/part setpoints which define a given machine operation
to the QDC module.
Command Block Data blocks downloaded from the PLC5 data table to the QDC module
to make configuration changes or to initiate machine actions.
Status Block Data blocks used by the QDC module to relay information to the PLC5
processor about the QDC module's current operating status.
Profile Block Command block containing mold/part setpoints.
Configuration Block Command block containing machine setpoints.
Direct Acting Valve An analog control valve that delivers increasing velocity or pressure with
increasing signal input.
Reverse Acting Valve An analog control valve that delivers increasing velocity or pressure with
decreasing signal input.
P-2
Page 10
Preface
Command Blocks
Command blocks provide the parameters that control machine operation.
They are transferred from the PLC-5 processor to the QDC module by
means of block transfer write (BTW) instructions in software ladder logic.
Command block abbreviations are:
Acronym: Description:
MCC Module Configuration Command Block
JGC Jog Configuration Command Block
FCC First Clamp Close Configuration Command Block
SCC Second Clamp Close Configuration Command Block
TCC Third Clamp Close Configuration Command Block
LPC Clamp Low Pressure Close Configuration Command Block
CFC Clamp Close Profile Command Block
INC Injection Configuration Command Block
IPC Injection Profile Command Block
PKC Pack Configuration Command Block
HDC Hold Configuration Command Block
HPC Pack/Hold Profile Command Block
PRC Predecompression Configuration Command Block
PLC Plastication Configuration Command Block
PPC Plastication Profile Command Block
PSC Postdecompression Configuration Command Block
FOC First Clamp Open Configuration Command Block
SOC Second Clamp Open Configuration Command Block
TOC Third Clamp Open Configuration Command Block
OSC Clamp Open Slow Configuration Command Block
OPC Clamp Open Profile Command Block
EAC Ejector Advance Command Block
ERC Ejector Retract Command Block
EPC Ejector Profile Command Block
DYC Dynamic Command Block
RLC Inject ERC Values Command Block
CLC Clamp and Eject ERC Values Command Block
P-3
Page 11
Preface
Status Blocks
Status blocks report current status of molding-machine operation. They
are returned from the QDC module to the PLC-5 processor by means of
block transfer read (BTR) instructions in software ladder logic. Status
block abbreviations are:
Acronym: Description:
SYS System Status Block
CPS Clamp Close Profile Status Block
IPS Injection Profile Status Block
HPS Pack/Hold Profile Status Block
PPS Plastication Profile Status Block
OPS Clamp Open Profile Status Block
EPS Ejector Profile Status block
RLS Inject ERC Values Status Block
CLS Clamp and Eject ERC Values Status Block
Word and bit Numbering
The QDC module stores data in command and status blocks. Each word
location in a command or status block is identified by an alphanumeric
code containing the block acronym and word number. For example, word
09 of the Module Configuration Command Block (MCC) is identified as
MCC09.
Identify bits in a word location by adding bit numbering to the abbreviated
word location. For example:
Specific: MCC09-B15 General: MCCxx-Byy
where:
MCC = Module Configuration Command Block
xx=word number (01-64)
B = bit identifier
yy = bit number (00-15)
P-4
Page 12

Preface
Related
Publications
The following table lists documentation necessary for the successful
application of the QDC Module:
Publication Use this documentation: To :
17856.6.1 PLC5 Family Programmable
Controller Installation Manual
6200N8.001 6200 PLC5 Programming
Software Documentation Set
17714.10 Plastic Molding Module
Application Guide
17716.5.85
17716.5.86
17716.5.87
17716.5.88 Plastic Molding Module
Plastic Molding Module User
Manuals for other modes.
Reference Manual
Install the PLC5 processor and I/O modules.
Select instructions and organize memory when
writing ladder logic to run your machine.
Help select the module mode and match your
QDC module to your hydraulic layout.
Configure, program, install, and operate your
QDC module to control molding operations.
Program block transfers between PLC5
processor and QDC module. Also, information on
PLC5 data transfer logic.
Take time now to familiarize yourself with the Reference Manual
(publication 1771-6.5.88). The four sections include:
a summary of each data block used by the QDC module
(abbreviated command and status blocks)
programming error codes returned by the QDC module for each data
block, and recommended procedures to correct these errors
detailed listing and explanation of each command word and bit used by,
and each status word and bit returned from, the QDC module
operational, electrical, and environmental specifications of your module
If you purchased the Pro-Set 600 software, you also need the following:
Publication Use this documentation: To :
65006.5.11 ProSet 600 Software
Designers Guide
65006.5.12 ProSet 600 Software
Assembly Manual
65006.5.13 ProSet 600 Software
Overlay Installation Manual
65006.5.14 ProSet 600 Software
Customization Manual
65006.5.15 ProSet 600 Software
Reference Manual
Select the ProSet 600 software that matches
the requirements of your molding machine.
Transfer your ProSet 600 software from a
floppy disk to your hard drive. Add Overlays into
your PLC5 and PanelView application files.
Install ProSet 600 overlays into your application
files.
Customize your ProSet 600 build for your
machine control requirements.
Support customizing your software control
system.
P-5
Page 13
Chapter
1
Overview of Inject, Clamp, and Eject Mode
Chapter
Objectives
Inject Control
This chapter presents an overview of the 1771-QDC Plastic Molding
Module in the inject, clamp, and eject mode. We present a summary of
operating features followed by sample applications.
Important: This chapter assumes you have already read your Plastic
Molding Module Application Guide (publication 1771-4.10) and have
chosen inject, clamp, and eject as your QDC module’s mode of operation.
Next we describe the control operations of this mode.
You can control the inject operation with these phases:
injection
transition
pack
hold
pre-decompression
plastication
post-decompression
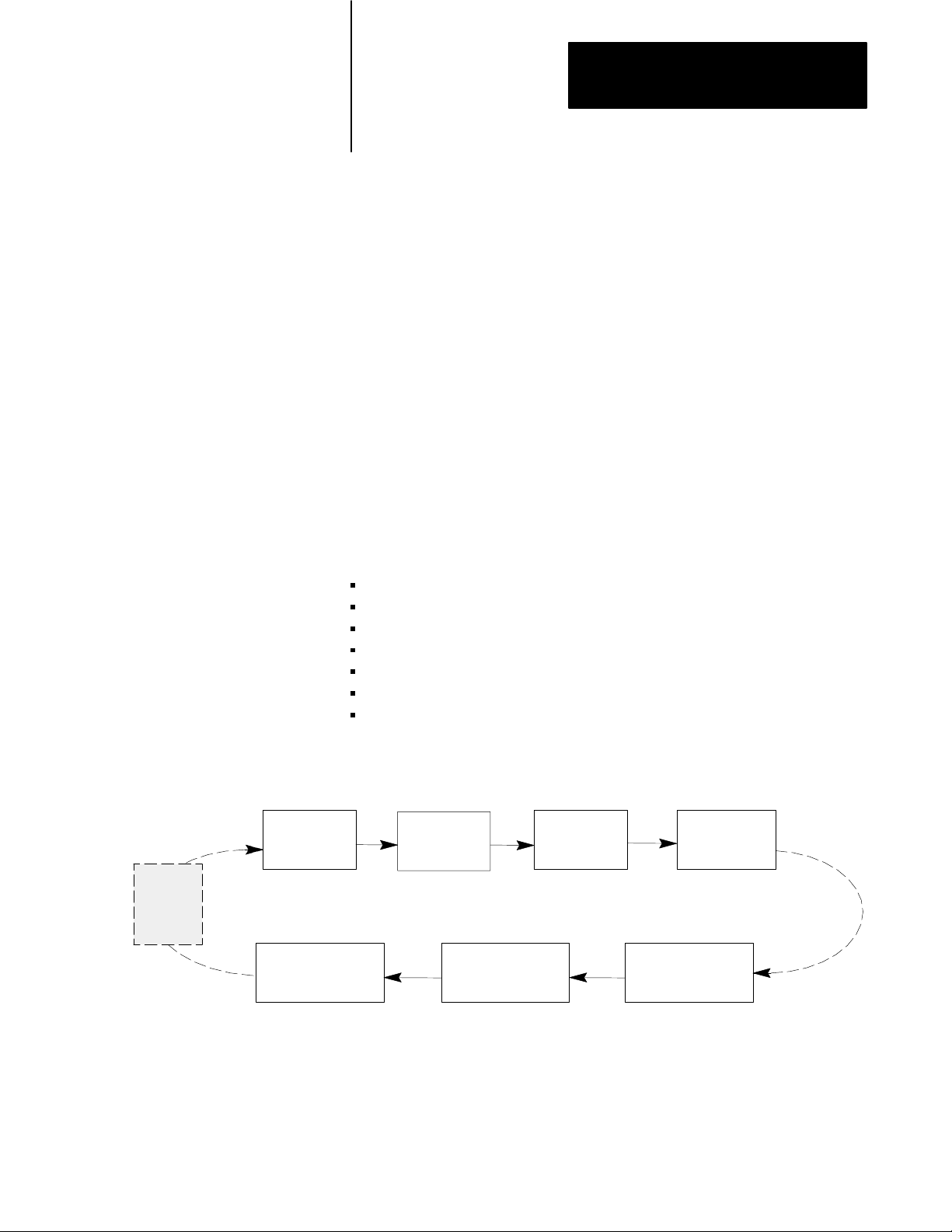
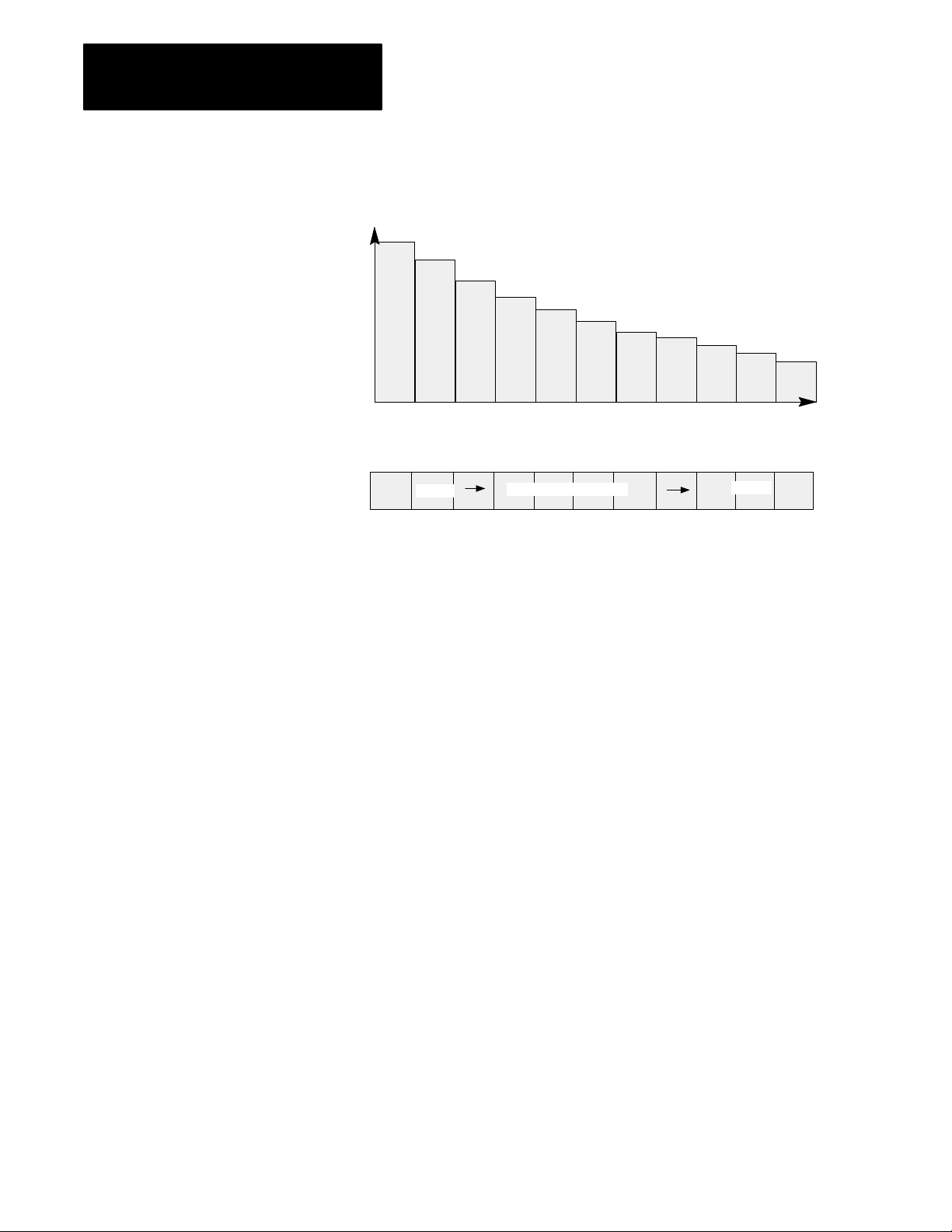
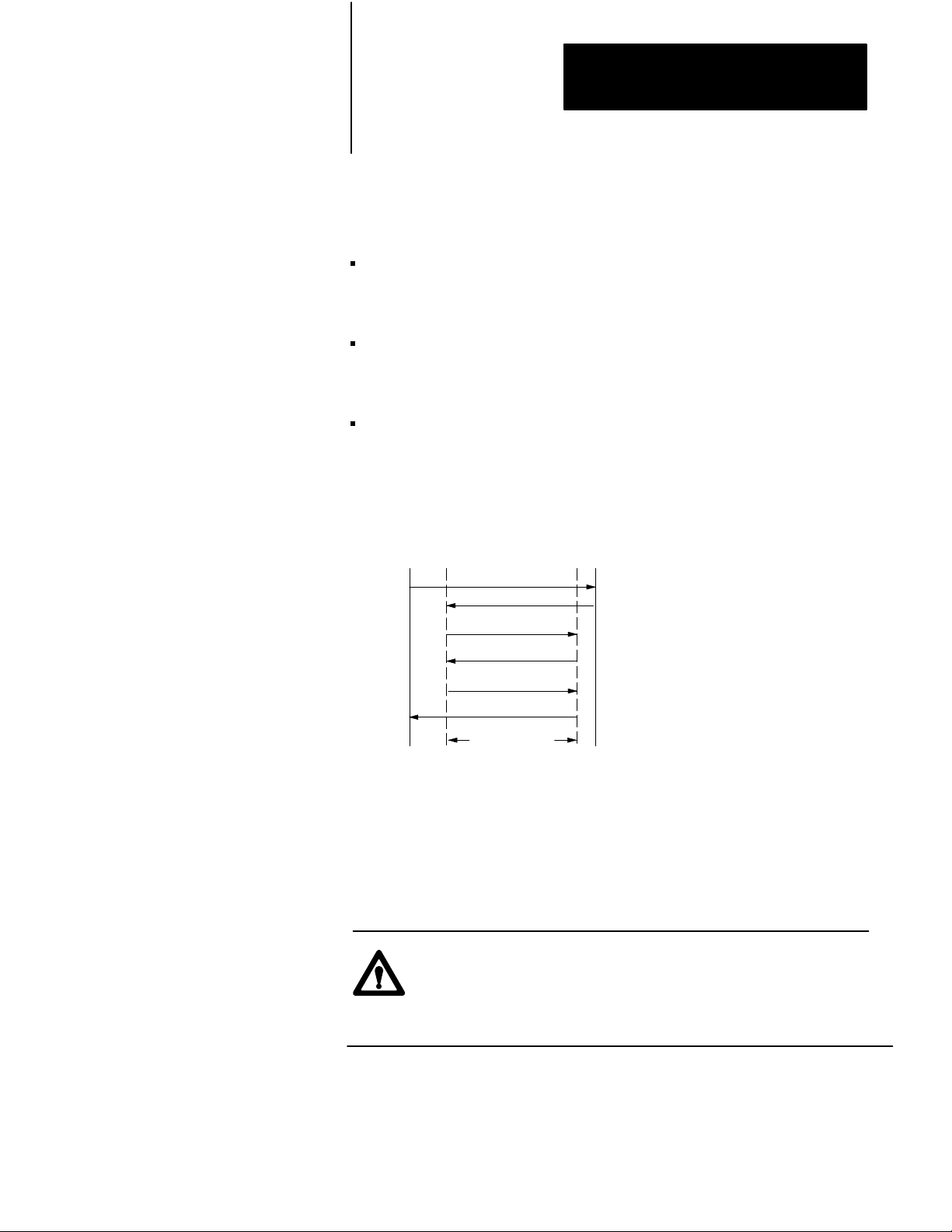
Figure 1.1
Operation of a T
Inject
ypical Machine Cycle
Clamp
& Eject
Operation
Injection Pack Hold
Post- PreDecompression Decompression
Transition to
Pack or Hold
Plastication
(Reload)
1-1
Page 14
Chapter 1
Overview of Inject, Clamp, and Eject Mode
Injection Phase
You can vary the velocity of the ram (screw), or the pressure driving it, so
the leading edge of the melt moves through the mold cavity at the desired
speed. The pattern of velocity or pressure variation during injection is
called the injection profile. The QDC module lets you chose from four
different injection profiles:
velocity vs. position
pressure-limited velocity vs. position
pressure vs. position
pressure vs. time
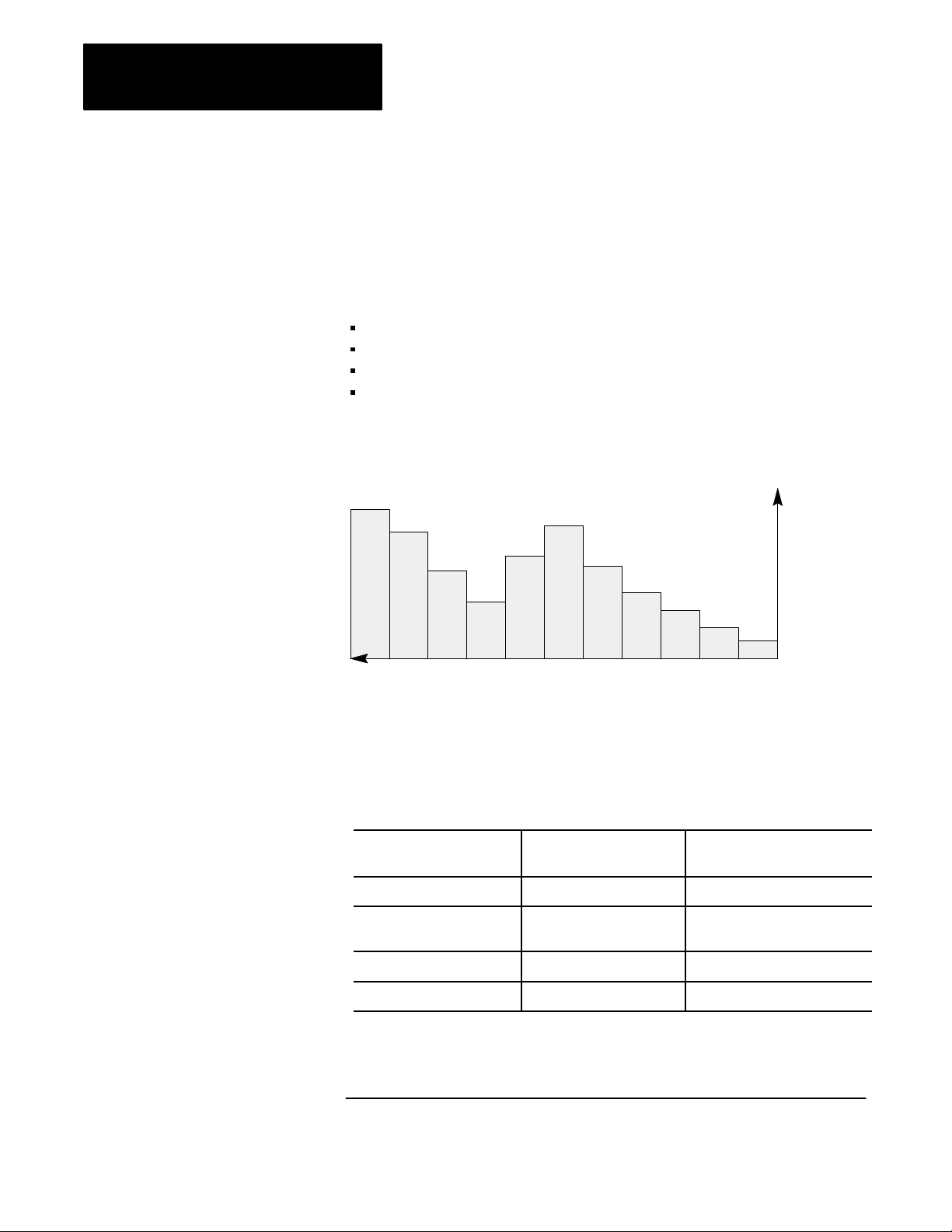
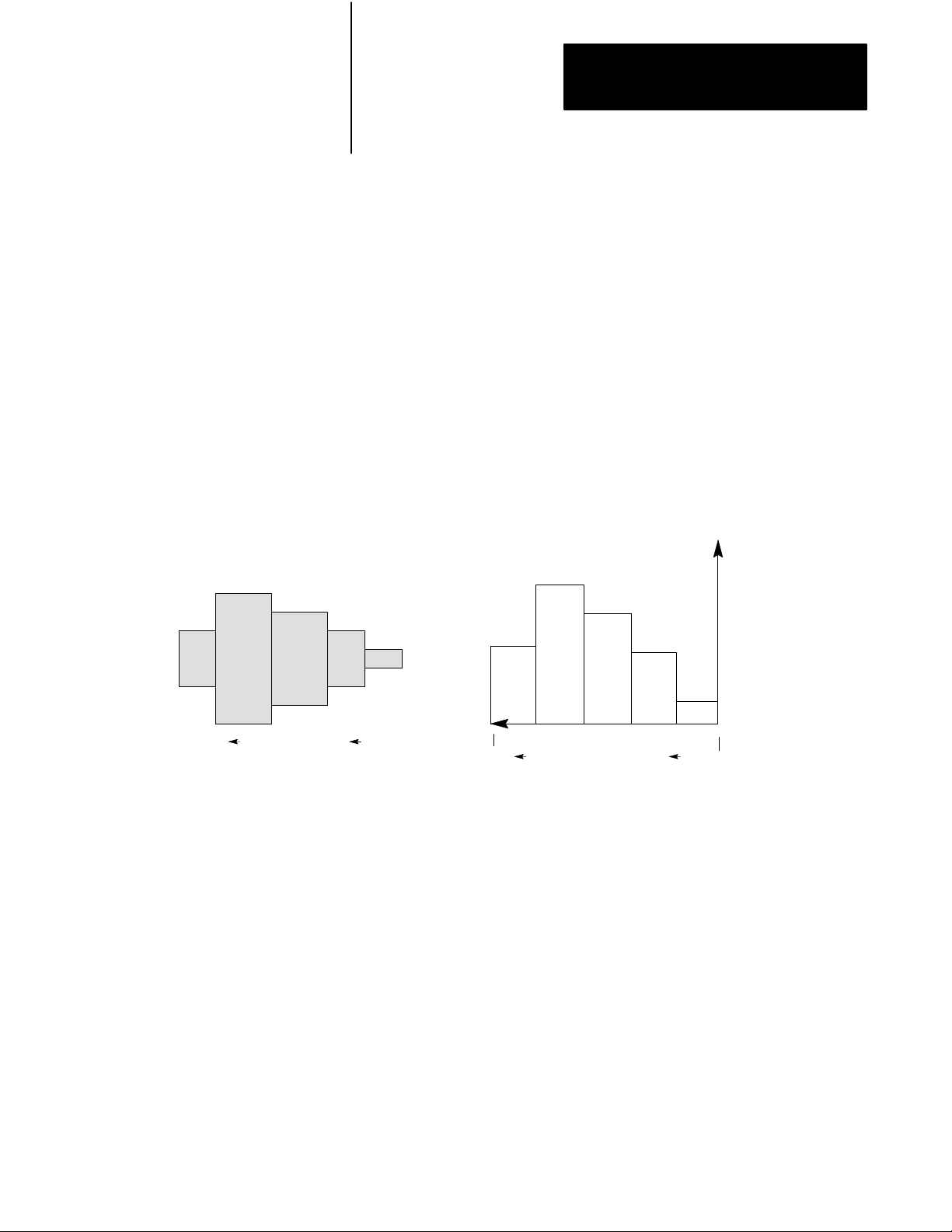
Figure 1.2
Example
Injection Profile
11 10 9
Velocity or Pressure
87654321
Position or Time
You enter setpoints to create a profile. You can select from 1 to 11
segments of position or time. Segment numbers represent the order of
operation. By convention the ram (screw) injects plastic by moving from
right to left.
With this Profile: You Control Injection: With up to 11 Segments
Velocity vs. Position Speed Length of the shot
Distributed over the:
1-2
Pressurelimited1
Velocity vs. position
Pressure vs. Position Pressure Length of the shot
Pressure vs. Time Pressure Time for a shot
1
Pressurelimited velocity vs. position profile differs from the velocity vs. position profile as follows:
During any segment, if the pressure exceeds a preset limit, the module switches to PID pressure
control with the pressure limit as the setpoint. Then if velocity exceeds the velocity setpoint, the
module returns to velocity control.
Speed with a
maximum pressure
Length of the shot
Page 15
Chapter 1
Overview of Inject, Clamp, and Eject Mode
Example Benefits of Profiling an Injection Phase
The injection phase should force the melt through the mold as fast as
possible without flashing the mold or burning the melt at a mold gate.
Here are two examples of how you can achieve this by profiling the
injection phase:
Velocity Example - As the leading edge of the melt enters different mold
cavities, the flow of plastic through the gate should increase or decrease
accordingly to keep the melt front at maximum desired speed without
flashing the mold. This reduces injection time and minimizes surface
stress due to surface cooling. You achieve this by shaping the injection
profile to suit the mold cavity (Figure 1.3).
Mold Cavity
54 3
Flow into mold
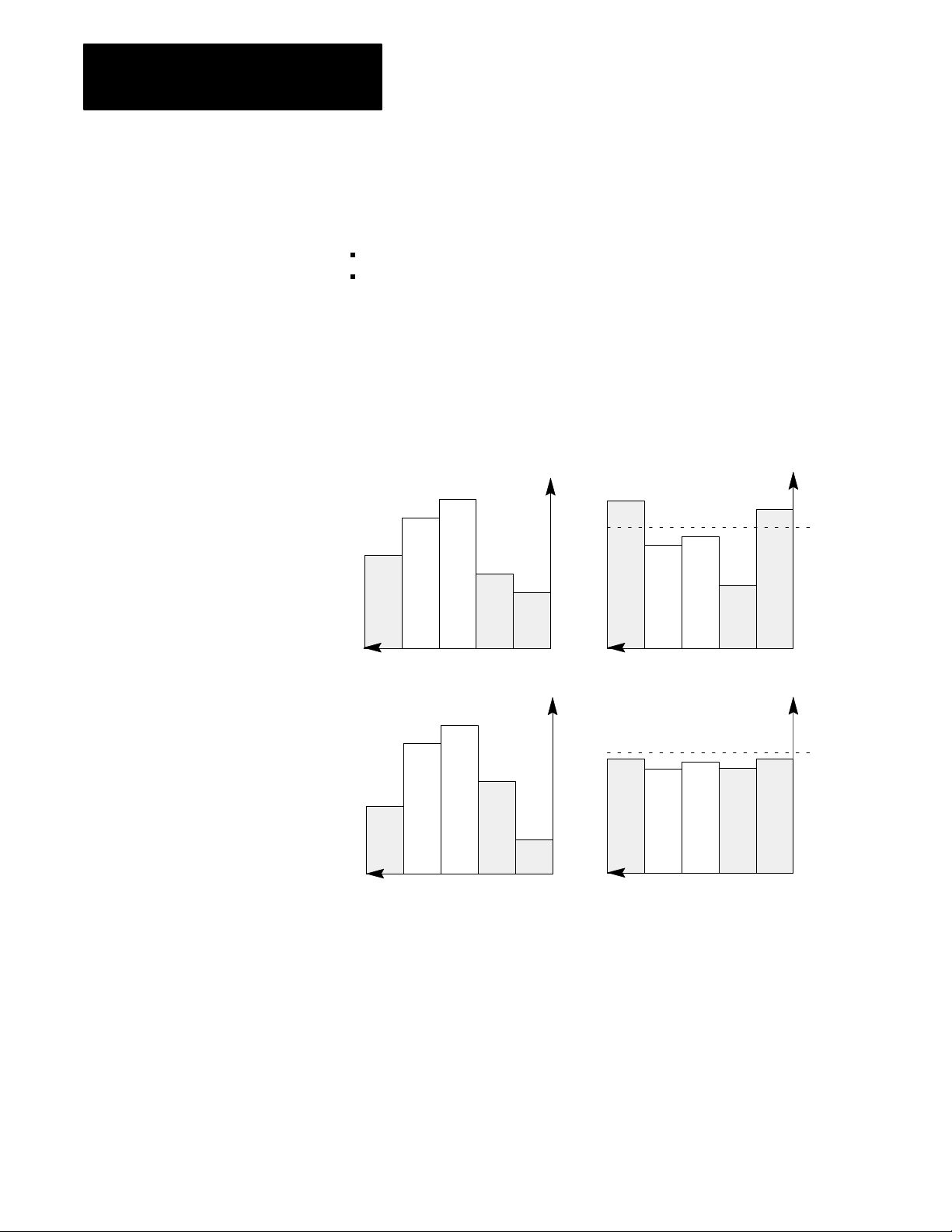
Figure 1.3
Velocity
1
2
Example
Gate
Mold
End
Injection Profile
5
4
Position
Sequence of execution
Velocity
23
1
Back
Point
1-3
Page 16
Chapter 1
Overview of Inject, Clamp, and Eject Mode
Flash Prevention Example - With a velocity profile (Figure 1.4 part 1),
the pressure may reach a peak and flash the mold at ram (screw) position
segments that correspond to events such as:
the initial surge (2.a)
when the melt front enters a constriction in the mold cavity (2.b)
You can remedy this (part 3) by decreasing the ram (screw) velocity at
segments (3.a) and (3.b) that correspond to flash points. Conversely, you
can boost velocity at segment (3.c) where the resulting pressure is well
below the flash point.
Figure 1.4
Flash
Prevention Example
1. Initial Velocity Profile
Velocity
bca
Position Position
3. Final Velocity Profile
Velocity
b ca
Position
2. Resulting Pressure Profile
ba
4. Resulting Pressure Profile
ba
Position
Flash
Point
Pressure
c
Flash
Point
c
Pressure
1-4
Optionally, you may select pressure limited velocity versus position as
your method of injection control. With your pressure limit setpoint just
below the flash point, the module switches over to pressure control prior to
flashing the mold.
Page 17
Chapter 1
Overview of Inject, Clamp, and Eject Mode
Injectiontopack Transition
The QDC module ends the injection phase and automatically starts the
pack or hold phase when it detects the first of up to three events occurred:
Ram (screw) position exceeds a preset limit
Ram (screw) pressure exceeds a preset limit
Injection phase elapsed time exceeds a preset limit
You select which of these events you want monitored for transition by
entering the appropriate setpoint, or zero for ignoring the event. You also
may specify the zone of ram (screw) travel over which the QDC module
inhibits or allows a pressure transition.
Pack Phase
The QDC module controls the pack phase with a pressure vs. time profile.
You create the profile based on controlling the hydraulic pressure against
the ram (screw). You can control pressure with up to five segments. By
convention, events occur from right to left on the time axis (Figure 1.5).
You determine the pressure setpoints and time durations for the pack
profile based on molding requirements. The pack phase is optional.
Figure 1.5
Phase Example
Pack
Pressure
4
5
Time
123
1-5
Page 18
Chapter 1
Overview of Inject, Clamp, and Eject Mode
Example Benefit of Profiling the Pack Phase
Molten plastic may cool unevenly in the mold causing variations in density
with the end result of warpage and distortion as shown in Figure 1.6.
Figure 1.6
Uneven
Lower density
(last zone filled)
Density in Mold Cavity
Cooling in Pack Phase
Pack Profile
Higher density
(gate zone,
greater pressure)
Pressure
Gate
You can remedy this by decreasing the pack pressure with time so plastic
can back out of the mold as shown in Figure 1.7. This is to alleviate
gradations in density as the plastic cools from the low-density end of the
mold (last zone filled) to the high-density end of the mold cavity (gate
zone where pressure is greater).
Figure 1.7
Cooling in Pack Phase
Even
Constant Pressure over entire Mold Cavity
Density in Mold Cavity
Gate
5
5
Pack Profile
Time
Time
234
1
Pressure
234
1
1-6
After completing the last segment of the pack phase, the QDC module
automatically starts the hold phase.
Page 19
Chapter 1
Overview of Inject, Clamp, and Eject Mode
Hold Phase
The QDC module controls the hold phase with a pressure vs. time profile.
You create the profile based on controlling the hydraulic pressure against
the ram (screw). The pressure can be controlled using up to five segments.
You determine the pressure setpoints and time durations for the hold
profile based on molding requirements.
After completing the last segment of the hold phase, the QDC module
either immediately starts the optional pre-decompression movement, skips
the pre-decompression movement if none is required and immediately
starts the plastication phase, or waits for a command from your PLC-5
program to continue.
Predecompression Movement
You select a length of pullback for the ram (screw) prior to the plastication
phase to separate plastic solidifying in the sprue from molten cushion
remaining in the barrel.
After completing the pre-decompression movement, the QDC module
either immediately starts the plastication phase or waits for a command
from your PLC-5 program to continue.
Plastication Phase
The plastication phase lets you achieve a melt temperature gradient in the
barrel containing the ram (screw). To program the desired temperatures,
you consult backup rate (backpressure) vs. temperature tables. You can
create the profile with up to 11 segments of position or time (figure 1.8).
You chose from two plastication profiles:
Backpressure vs. position
Backpressure vs. time
1-7
Page 20
Chapter 1
Overview of Inject, Clamp, and Eject Mode
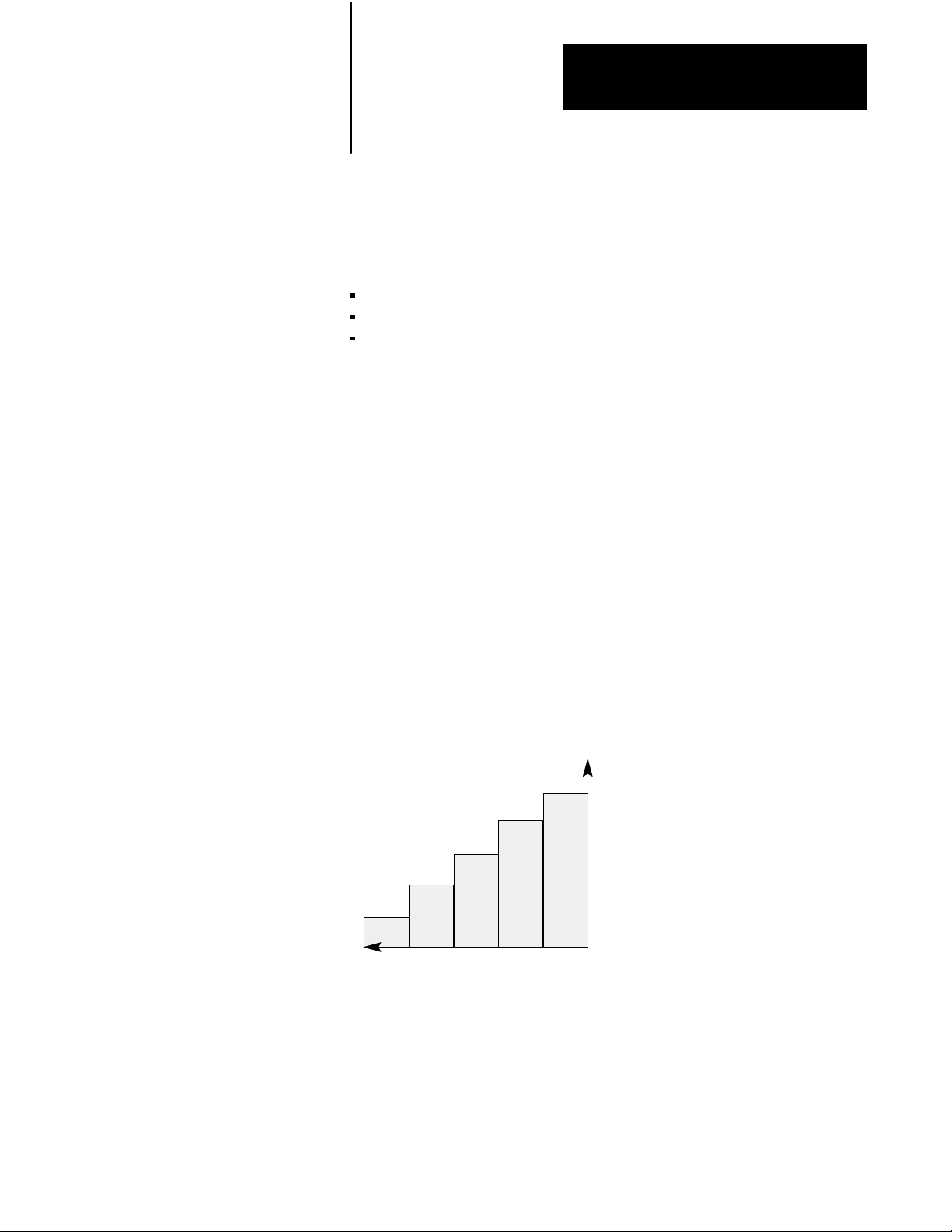
Figure 1.8
Plastication
BackPressure
Mold
End
Phase Example
12 34 5
Position or Time
hotter
Temperature Gradient
Barrel Containing the Melt
6
7891011
cooler
Back
Point
Example Benefits of Profiling a Plastication Phase
The higher the backpressure during plastication, the slower the backup rate
and higher the resultant temperature of the melt. You can achieve the
desired temperature gradient by lowering ram (screw) backpressure to
accelerate the backup rate and decrease the temperature of the melt along
the length of the barrel.
After completing the last segment of the plastication phase, the QDC
module either immediately starts the post-decompression movement or
waits for a command from your PLC-5 program to continue.
Postdecompression Movement
You select a length of pullback of the ram (screw) after the plastication
phase to guard against drooling molten plastic into the open mold during
ejection. The QDC module notifies your PLC-5 program when the
post-decompression movement is complete.
1-8
Page 21
Chapter 1
Overview of Inject, Clamp, and Eject Mode
Clamp Control
Ejector advance
Ejector retract
You control clamp operation with these phases:
clamp close
low pressure close
clamp open
open slow
Figure 1.9
Clamp
1st
Close
Open
Slow
Portion of a T
ypical Machine Cycle
2nd
Close
3rd
Open
3rd
Close
2nd
Open
Low Pressure
Close
1st
Open
Clamp Close
Inject
Clamp
Cylinder
You may configure three separate clamp close profiles:
first close
second close
third close
You may select from these control modes:
velocity vs. position
pressure vs. position
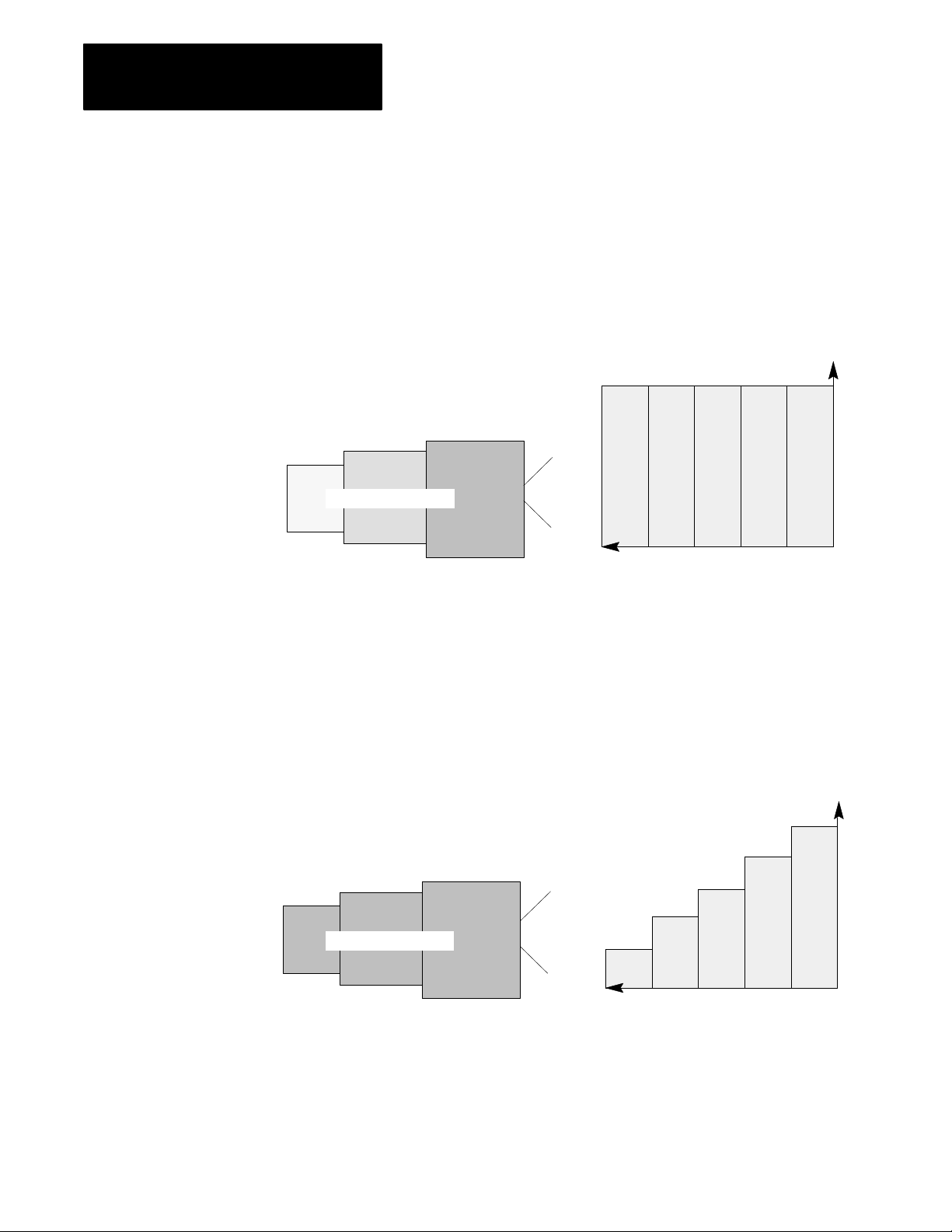
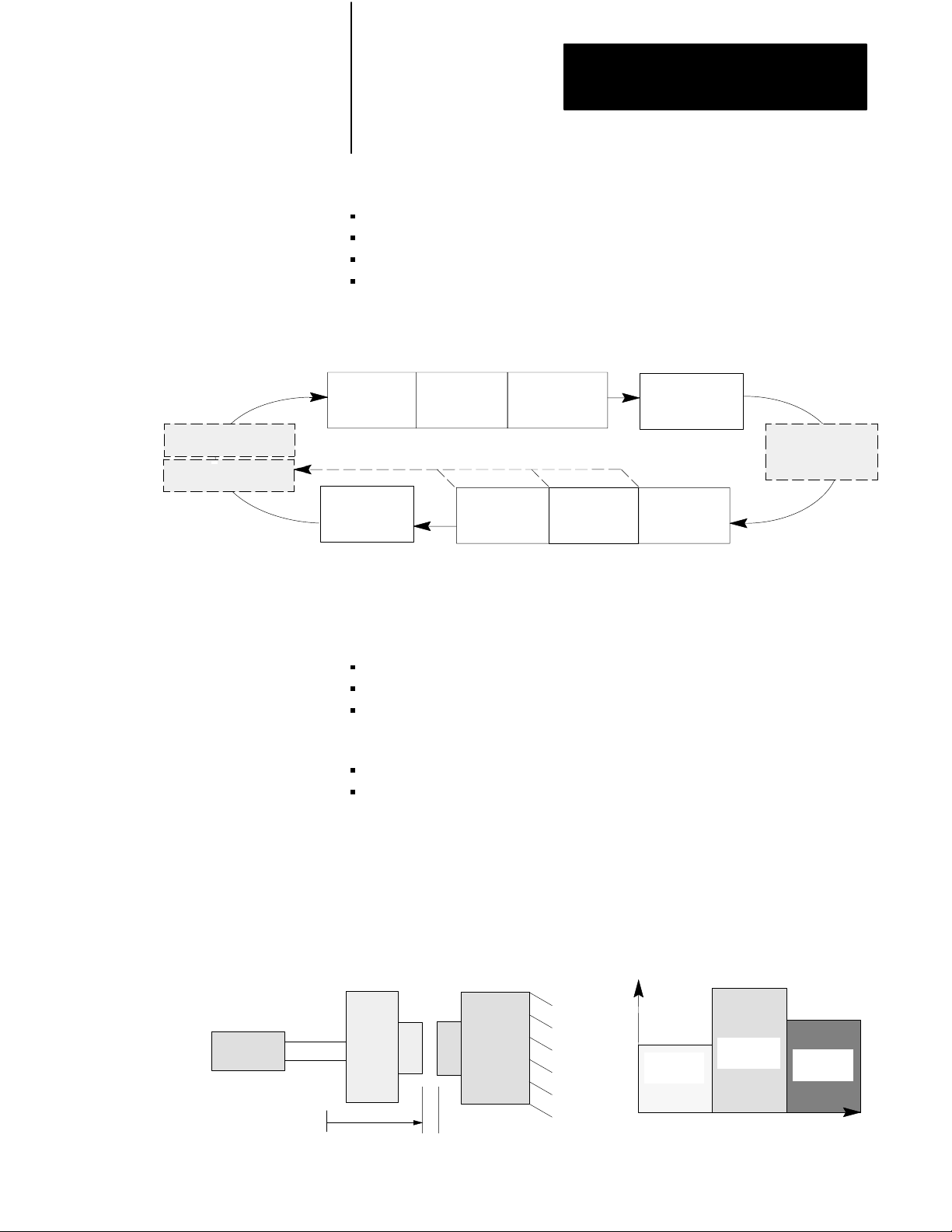
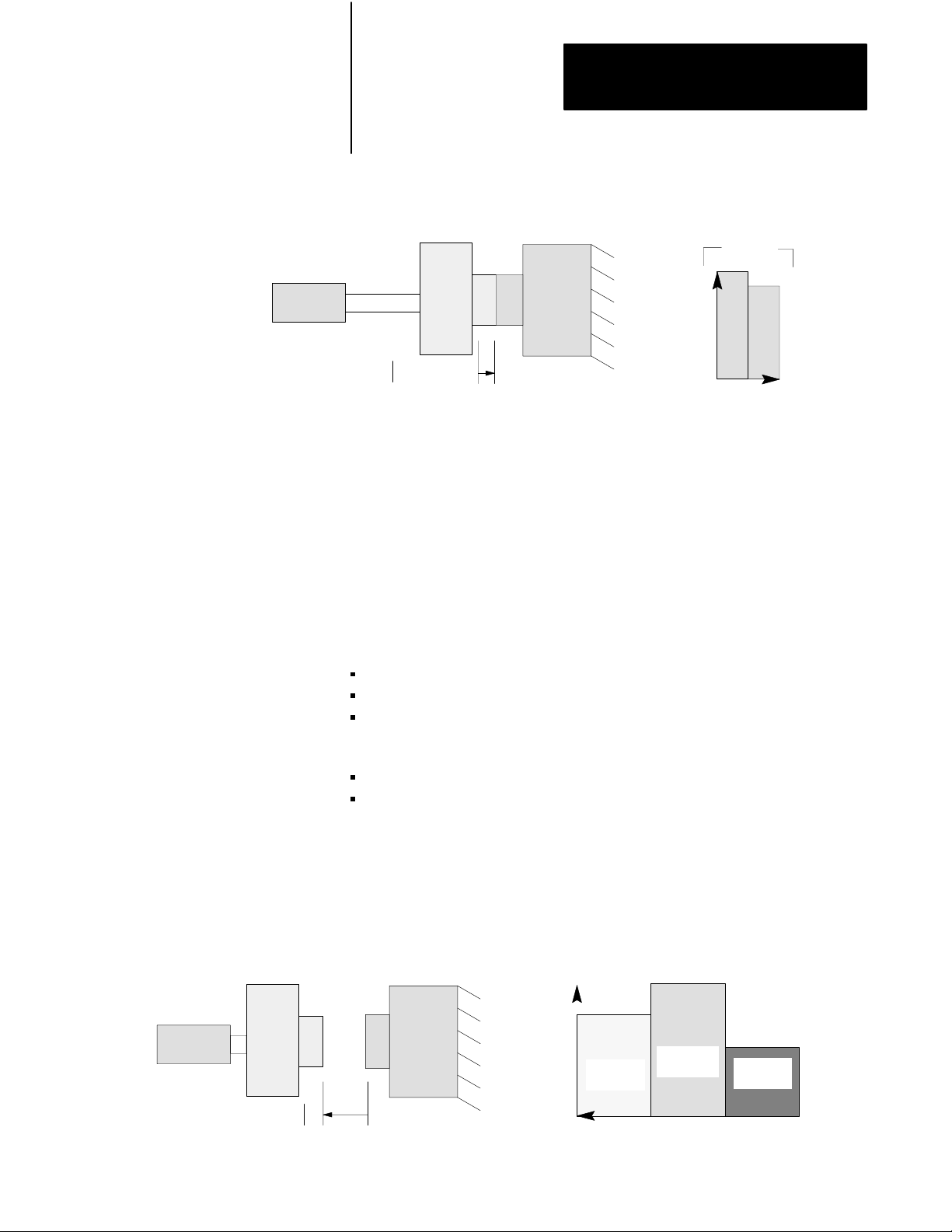
Use clamp close to move the platen from the fully open position (L) to
some position X at a relatively high velocity or pressure. X is a position
relatively close to the stationary platen yet far enough away to allow
deceleration into low pressure close. This prevents the platens from
coming together at a high velocity (Figure 1.10).
Figure 1.10
Example
Moving
Platen
Clamp Close
Stationary
Platen
Velocity
1st Close
Profile
2nd
Close
Profile
3rd
Close
Profile
L
Position
1-9
Page 22
Chapter 1
Overview of Inject, Clamp, and Eject Mode
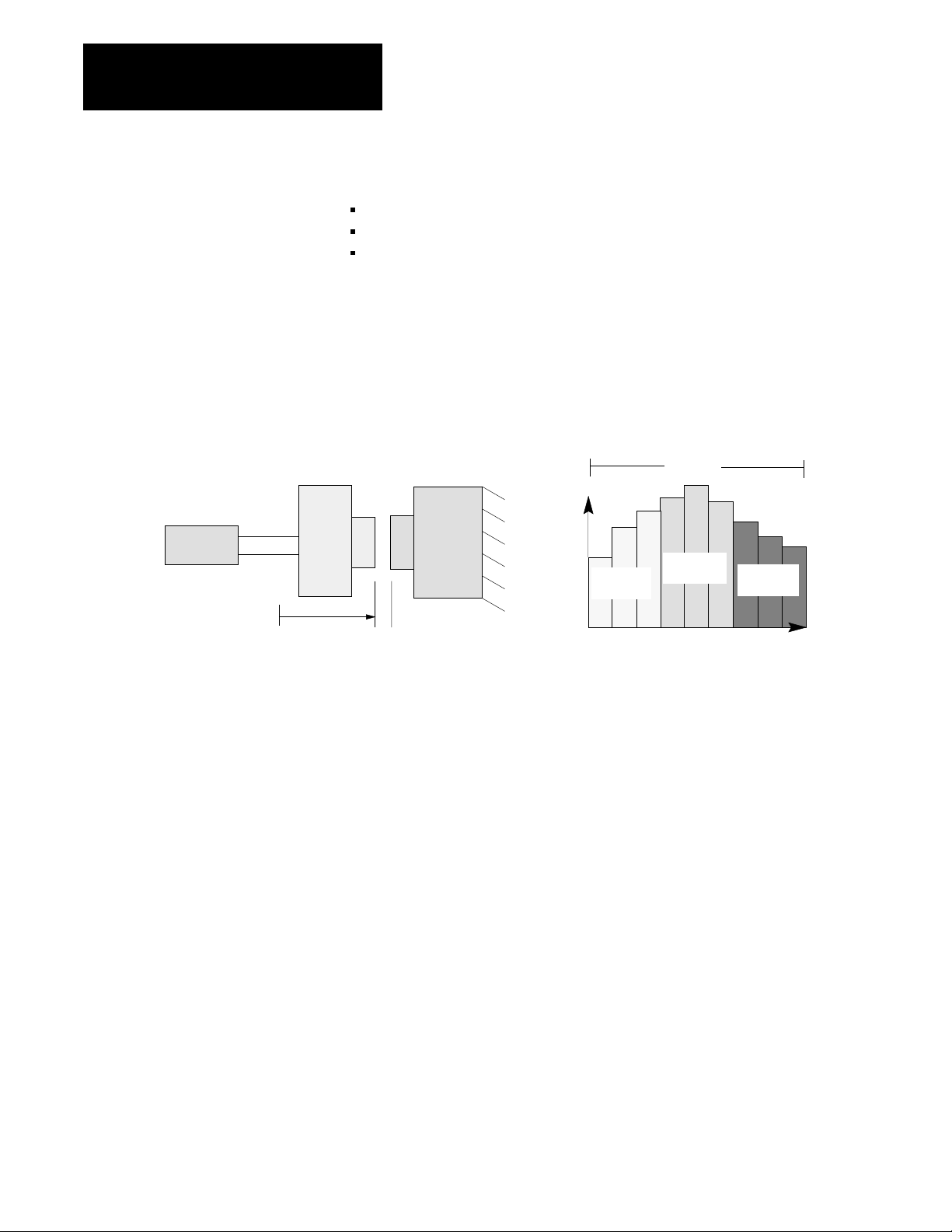
You may start these operations between the three clamp close profiles:
pick up the 3rd plate of a mold (on a floating 3-plate mold) or set cores
program other events for all valves
automatically bridge between profiles, or let ladder logic decide when to
begin the next profile
You can subdivide each clamp close profile into three position segments
(Figure 1.11). You can change clamp velocity or pressure up to three times
in each profile, or up to nine times for the entire clamp close phase.
Clamp
Cylinder
L
Moving
Platen
Figure 1.11
Example
Clamp Close Position Segments
Stationary
Platen
0
X
Velocity
2
1
1st Close
Profile
3
Segments
2
1
2nd
Close
Profile
Position
3
1
2
3
3rd
Close
Profile
Important: You may use as many or as few profiles and/or segments
within profiles as needed for your molding application. If using a single
close fast motion, use the first segment of the 1st close profile. The low
pressure close profile must follow.
After completing the last segment in each profile, the QDC module either
switches immediately to the next programmed segment of the next
programmed profile or waits for a command from your PLC-5 program to
continue.
1-10
After completing the last configured close profile, the QDC module either
switches immediately to the first programmed segment of low pressure
close, or waits for a command from your PLC-5 program to continue.
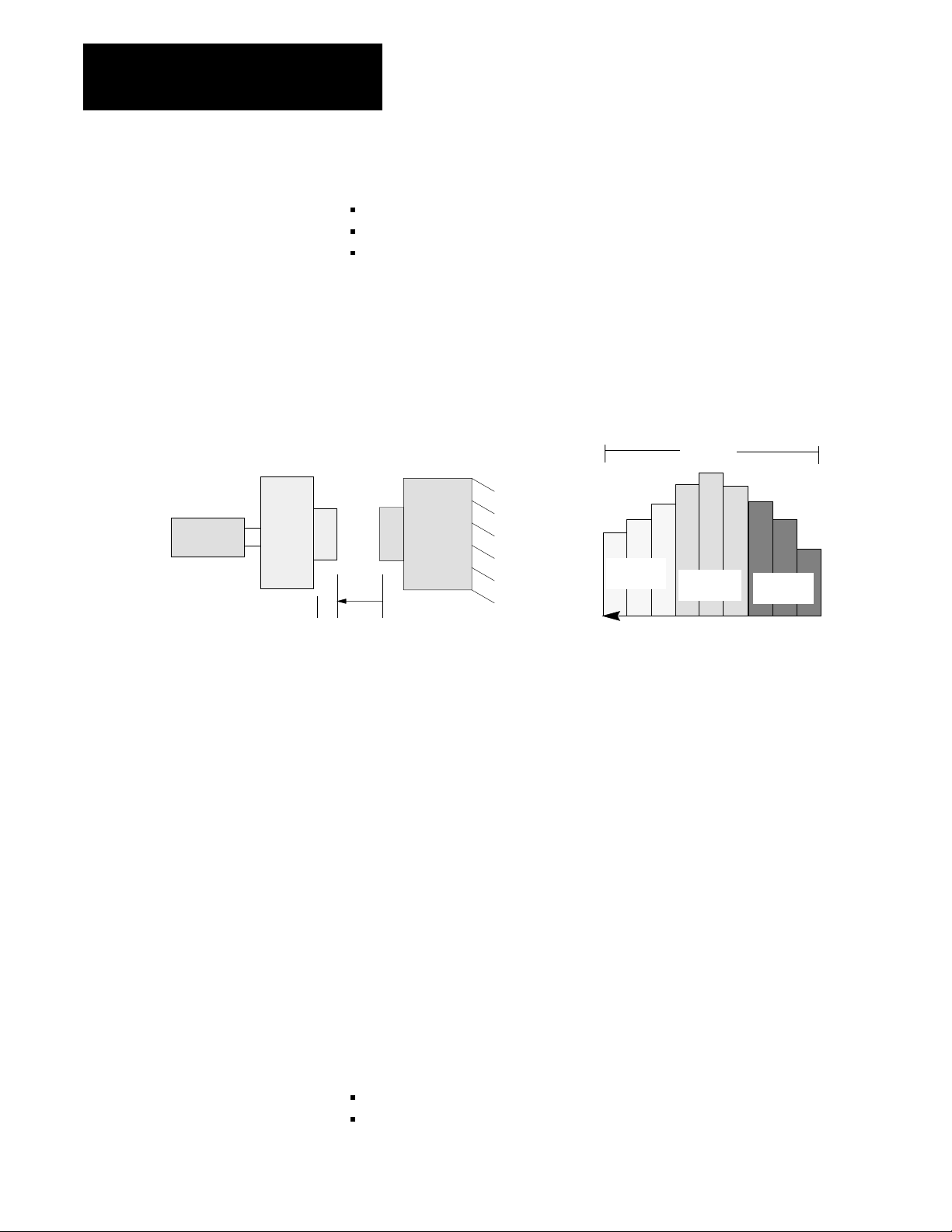
Low Pressure Close
Use the low pressure close profile to decelerate closing motion to guard
against damaging the mold halves and detect for part obstructions. The
pressure setpoint(s) that you select to control low pressure close should
prohibit the mold from fully closing if there is an obstruction. You may
use one or two low pressure close profile segments (Figure 1.12).
You must use pressure vs. position for low pressure close.
Page 23
Chapter 1
Overview of Inject, Clamp, and Eject Mode
Clamp
Cylinder
Figure 1.12
Example
Low Pressure Close
Moving
Platen
L
0
X
Stationary
Platen
Low Pressure Close
Segments
1
2
Pressure
Position
Important: If you need only one low pressure close segment, configure
the 1st segment of the low pressure close profile.
The QDC module notifies your PLC-5 program when this profile is
complete and automatically uses set-output values at the end of low
pressure close to build tonnage (hydraulic machine) or lockup your toggle
(toggle machine).
Clamp Open
Clamp
Cylinder
Moving
Platen
You can open the mold fast with three profiles of the clamp open phase:
first open
second open
third open
You may select from these control modes:
velocity vs. position
pressure vs. position
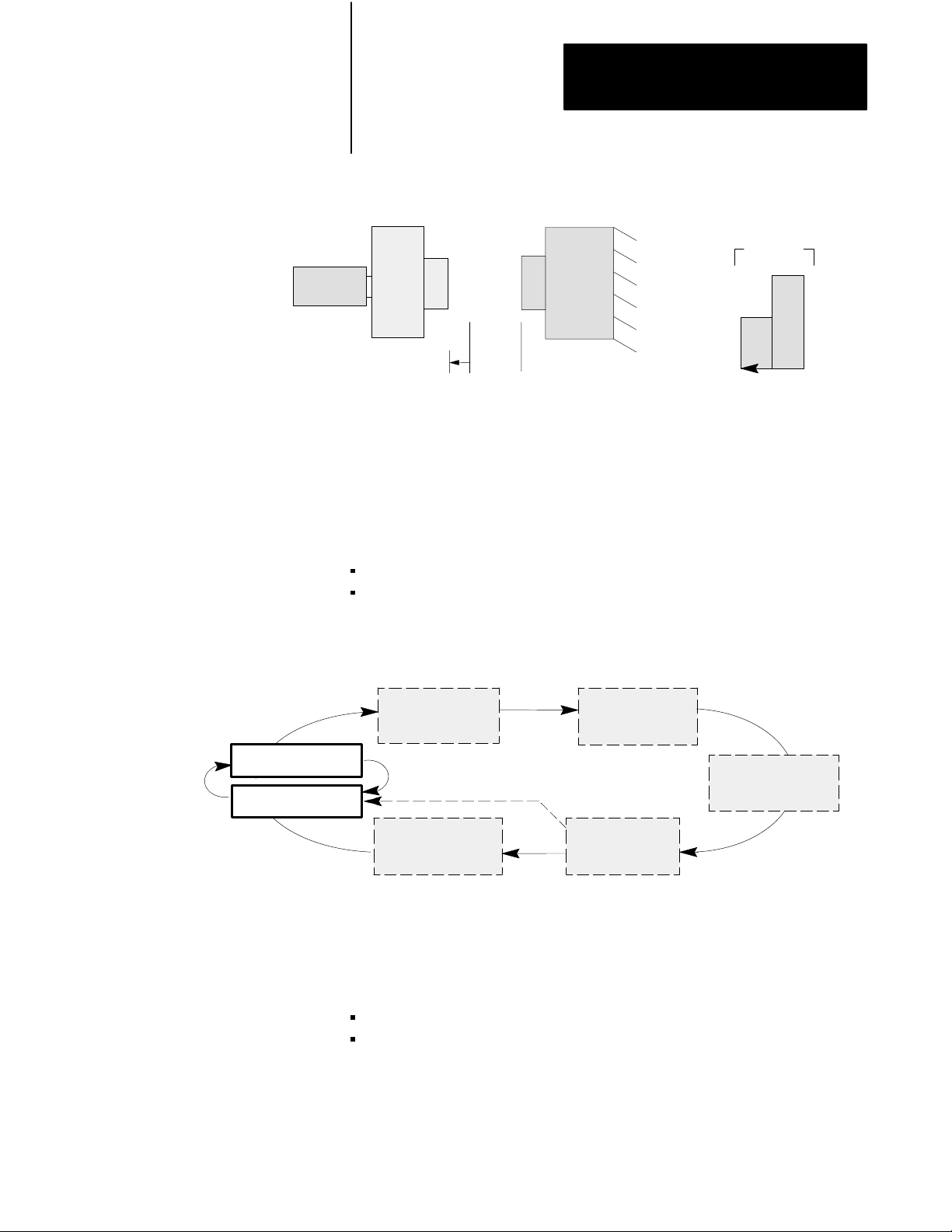
Use clamp open to move the platen from the fully closed position (0) to
some position Y at relatively high velocity or pressure (Figure 1.13). Y is
close to your fully open position (L), yet far enough away for deceleration
into the open slow profile. This aids positioning accuracy at position (L).
Figure 1.13
Example
Clamp Open
Stationary
Platen
Velocity
3rd
Open
Profile
2nd
Open
Profile
1st Open
Profile
L0
Y
Position
1-11
Page 24
Chapter 1
Overview of Inject, Clamp, and Eject Mode
You may start these operations between the three clamp open profiles:
drop the third plate of a mold (on a floating 3-plate mold) or pull cores
program other events for all valves
automatically bridge between profiles, or let ladder logic decide when to
begin the next profile.
Each clamp open profile can be subdivided into three position segments
(Figure 1.14). You can change clamp velocity or pressure up to three times
in each profile, or up to nine times for the entire clamp open phase.
Clamp
Cylinder
Moving
Platen
Figure 1.14
Example
L0
Y
Clamp Open Position Segments
Stationary
Platen
Velocity
2
3
3rd Open
Profile
1
Segments
2
3
2nd Open
Profile
Position
1
3
1st Open
Profile
Important: You may use as many or as few profiles and/or segments
within profiles as needed. If using a single open motion, use the first
segment of the 1st open profile. The open slow profile must follow.
After completing the last segment in each profile, the QDC module either
switches immediately to the next programmed segment of the next
programmed profile or waits for a command from your PLC-5 program to
continue.
2
1
1-12
After completing the last configured open profile, the QDC module either
switches immediately to the first programmed segment of the open slow
profile, or waits for a command from your PLC-5 program to continue.
Open Slow
Use the open slow profile to accurately position the clamp for ejecting the
part(s). You may decelerate clamp motion twice with this profile using up
to two profile segments (Figure 1.15).
You may select from these control modes:
velocity vs. position
pressure vs. position
Page 25
Chapter 1
Overview of Inject, Clamp, and Eject Mode
Ejector Control
Figure 1.15
Example
Clamp
Cylinder
Open Slow
Moving
Platen
L0Y
Open Slow
Segments
Stationary
Platen
2
Velocity
Position
Important: If you need only one open slow motion, configure only the 1st
segment of the open slow profile.
In this section, we describe the eject operation for expelling molded parts.
The operation consists of:
ejector advance
ejector retract
1
Ejector retract
Ejector advance
Figure 1.16
and Eject Portion of a T
Clamp
Clamp Close
Open Slow
ypical Machine Cycle
Low Pressure
Close
Inject
Clamp Open
Ejector Advance
The QDC module starts advancing the ejector after detecting either one of
these events that you configure/program:
clamp position reaching a pre-determined setpoint
command from your PLC program
You may advance the ejector while the clamp is still opening the mold, or
wait until the mold is fully open.
1-13
Page 26
Chapter 1
Overview of Inject, Clamp, and Eject Mode
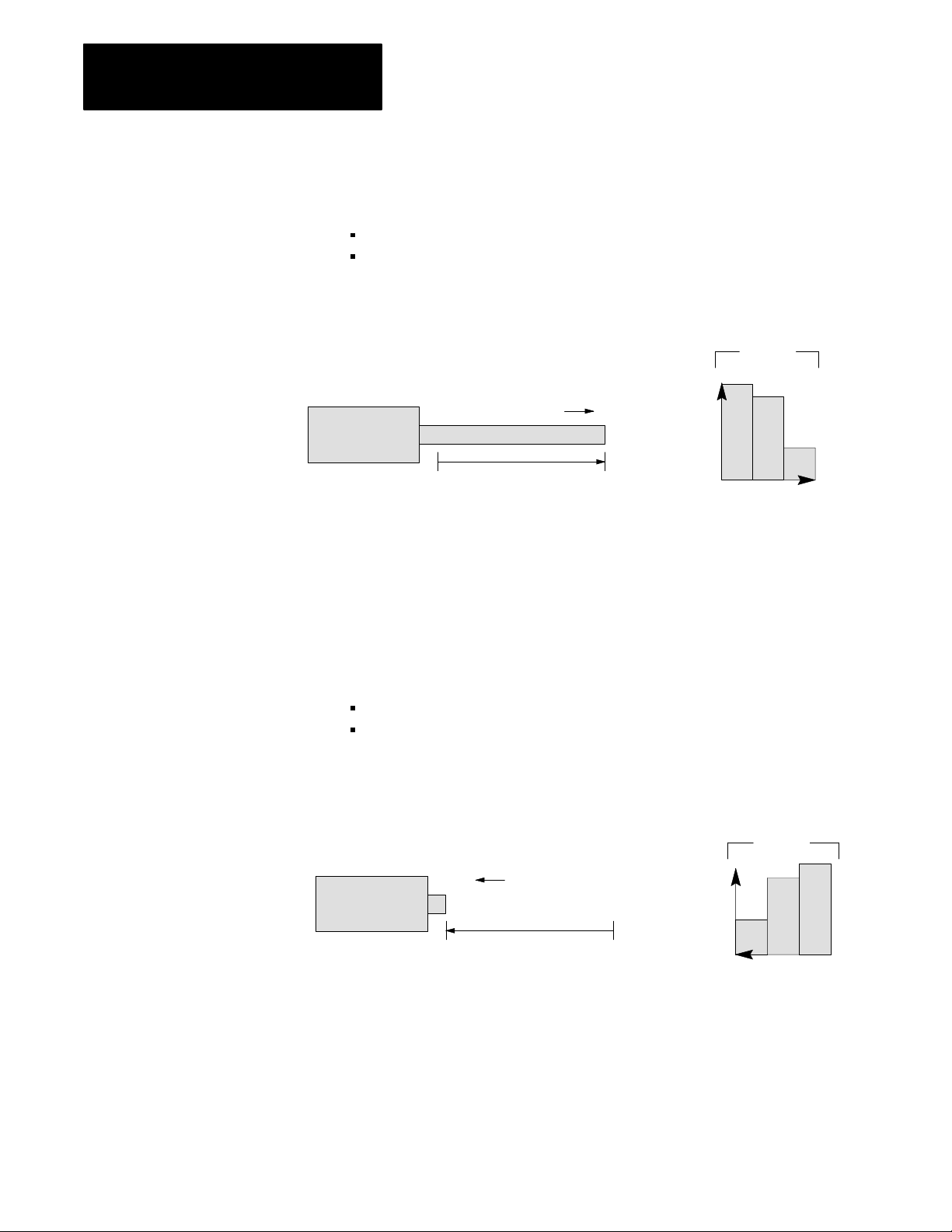
You may use up to three ejector-advance profile segments, and select from
these control modes:
velocity vs. position
pressure vs. position
Figure 1.17
Example
Ejector
Ejector Advance
0
Velocity
Fully Advanced Position
Ejector Advance
Segments
1
Velocity
Position
2
3
Important: If you need only one ejector-advance motion, configure only
the 1st advance segment.
Ejector Retract
After ejector advance is completed, the QDC module executes ejector
retract. Similar to ejector advance, you retract the ejector with up to three
profile segments. You may select from these control modes:
velocity vs. position
pressure vs. position
1-14
Figure 1.18
Example
Ejector
Ejector Retract
Ejector Retract
Segments
Velocity
3
Velocity
0
Fully Advanced Position
Position
1
2
Page 27
Chapter 1
Overview of Inject, Clamp, and Eject Mode
Other Eject Features
The QDC module gives you the following additional features:
Multiple Cycles – the ability to repeat the ejector cycle a number of
times, changing from advance to retract determined either automatically
or by command from your PLC program
Ejector Forward Dwell - the ability to pause after completing the first or
last advance stroke. Use this feature so a robot can pick off a part when
ejectors are fully extended
Ejector “Tip” Strokes - the ability to shake the part off the ejector. You
may program interim single-segment advance and retract tip strokes that
occur after the first advance stroke and before the last retract stroke
System
Pressure
Figure 1.19
Advance,
Retract and T
Full
Retract
ip Strokes
First Full Advance
Tip Retract
Tip Advance
Tip Retract
:
:
Last Retract
Tip Strokes
Ejector
Ejector
Full
Advance
Forward Dwell
Forward Dwell
We define system pressure for the Inject, Clamp, and Eject mode as the
pressure continuously detected by the single pressure sensor connected to
the QDC module at input 2. Depending on machine hydraulics, a single
pressure valve may control inject, clamp, and/or eject mode profiles.
ATTENTION: Your control system may not work as expected
with possibly machine damage if you attempt to control a
pressure profile of a phase (inject, clamp, or eject) not
hydraulically plumbed for pressure control.
1-15
Page 28
Chapter 1
Overview of Inject, Clamp, and Eject Mode
Because system pressure may change from one phase to the next, we
recommend that you:
assign pressure control to phases that require pressure profiles
(and are hydraulically plumbed to support it)
place the system pressure sensor accordingly in the hydraulic circuit
configure the remaining phases with velocity profiles
We define open-loop pressure control as when the QDC module controls
phase pressure without input from the system pressure sensor. For example:
when the system pressure sensor monitors the clamp for closed-loop pressure
control, the QDC module can control:
ram (screw) pressure for pack, hold, and plastication in open loop
ejector velocity in closed- or open-loop using a position sensor
For example:
Example Hydraulic Circuits
for the Inject, Clamp, and
Eject Mode
For this Phase The QDC Module Can Control it With
clamp close and open closedloop pressure
injection openloop pressurelimited velocity
pack/hold openloop pressure
plastication openloop pressure
ejector advance and retract velocity
In general:
If your system pressure sensor
reads pressure for only ONE of
these modes:
inject clamp, eject
clamp inject , eject
eject inject, clamp
Then you must control the other modes by either of:
1. closed or openloop velocity
2. openloop pressure
We illustrate three examples of hydraulic circuits compatible with the QDC
module in the inject, clamp, and eject mode:
4-valve system with system pressure sensor
3-valve system with ram (screw) pressure sensor
2-valve system for inject phase with clamp and ejector position inputs
(clamp and ejector direction solenoid valves controlled by ladder logic)
1-16
Page 29
Chapter 1
Overview of Inject, Clamp, and Eject Mode
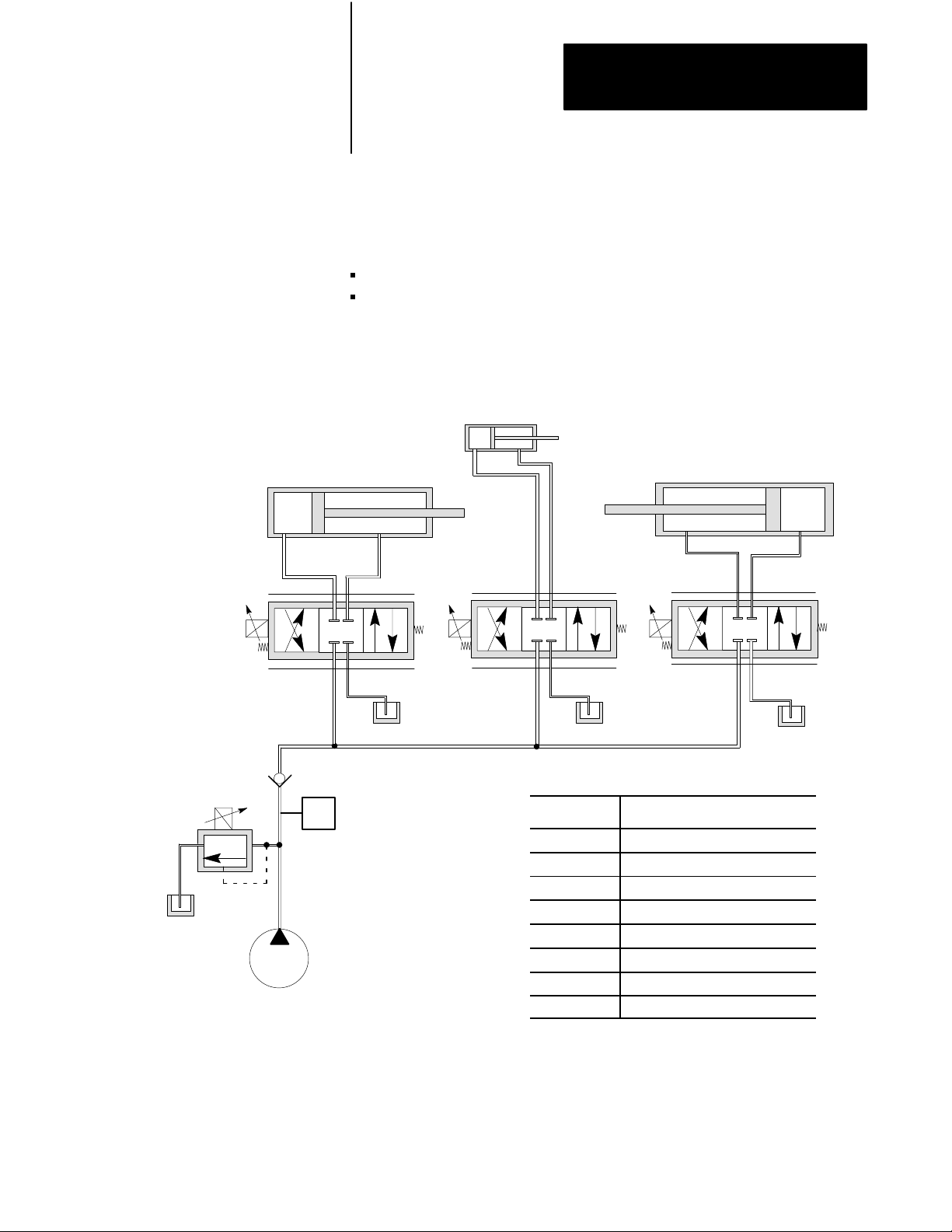
Example 4valve System with System Pressure Sensor
With this hydraulic system, a QDC module in the Inject, Clamp, and Eject
mode, has maximum control flexibility. It can control all profiles with:
pressure or velocity
open or closed loop
Clamp
Flow Valve
Figure 1.20
Example
Clamp
AB
PT
4valve System for Inject/Clamp/Eject Control
Ejector
Tank
Ejector
Flow Valve
AB
T
P
Ram (Screw)
Flow Valve
Tank
Ram (Screw)
AB
PT
Tank
System
Pressure Valve
Tank
Pump
P
System
Pressure
Sensor
QDC
I/O:
Input 1 Ram (screw) Position
Input 2 System Pressure
Input 3 Clamp Position
Input 4 Ejector Position
Output 1 Ram (screw) Flow
Output 2 System Pressure
Output 3 Clamp Flow
Output 4 Ejector Flow
Designation
12468I
1-17
Page 30
Chapter 1
Overview of Inject, Clamp, and Eject Mode
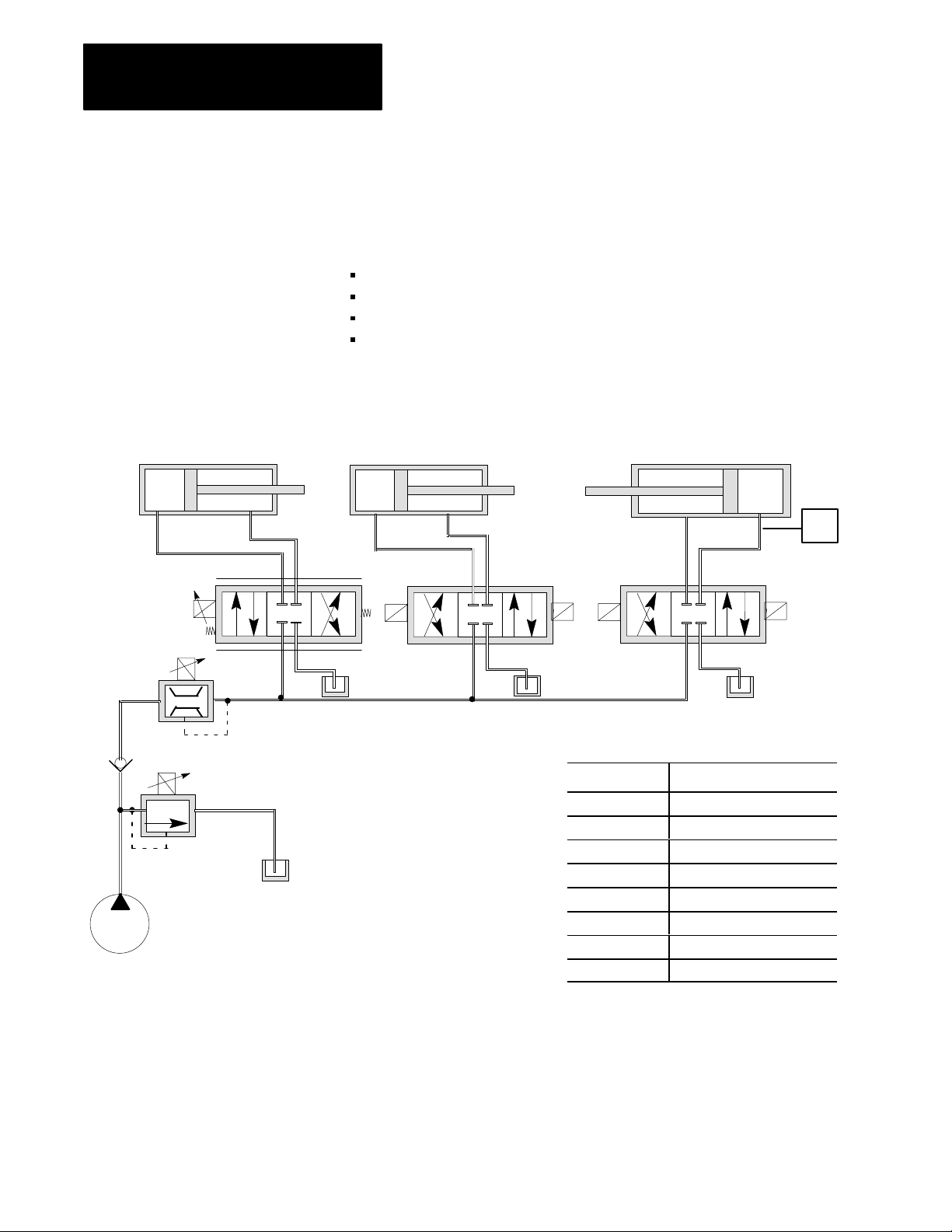
Example 3valve System with Ram (Screw) Pressure Sensor
With this hydraulic system, one QDC module in the Inject, Clamp, and
Eject mode, can control the following:
closed-loop pressure for injection, pack, hold, and plastication profiles
closed-loop velocity for injection profiles
open-loop pressure for clamp and ejector profiles
closed-loop velocity for clamp and ejector profiles
Figure 1.21
3Valve
System for Inject and Clamp Control Example
Clamp
Flow Valve
Pump
Clamp Ram (Screw)
AB
PT
Tank
System
Flow Valve
System
Pressure
Valve
Tank
Ejector
AB
P
T
Ejector
Directional
Valve
Tank
QDC
I/O:
Input 1 Ram (Screw) Position
Input 2 System Pressure
Input 3 Clamp Position
Input 4 Ejector Pressure
Output 1 System Flow
Output 2 System Pressure
Output 3 Clamp Flow
Output 4 Not Used
AB
P
Designation
P
Pressure
Sensor
Ram (Screw)
Directional
Valve
T
Tank
1-18
12469I
Page 31

Chapter 1
Overview of Inject, Clamp, and Eject Mode
Example 2valve System for Injection Control
with Clamp and Ejector Position Inputs
With this hydraulic system, the QDC module in the Inject, Clamp, and
Eject mode sends clamp and ejector position data to the PLC-5 processor.
The QDC module can control the following:
closed-loop pressure for injection, pack, hold, and plastication profiles
closed-loop velocity for injection profiles
The PLC-5 processor can control:
clamp and ejector hydraulic directional valves
other hydraulic and machine sequencing
Figure 1.22
System: Injection Control
2Valve
(Clamp and Ejector Valves Controlled by Ladder Logic)
Pressure
Control Valve
Flow
Control Valve
Tank
QDC I/O:
Input 1 Ram (Screw) Position
Input 2 System Pressure
Input 3 Clamp Position
Input 4 Ejector Position
Output 1 Injection Flow Control
Output 2 Injection Pressure Control
Output 3 Not Used
Output 4 Not Used
Pump
Designations
Ram (Screw)
AB
PT
Tank
12470I
1-19
Page 32

Chapter 1
Overview of Inject, Clamp, and Eject Mode
Summary of Inject, Clamp, and Eject Mode of Operation
Inject Phase: Description:
Injection The ram (screw) injects plastic into the mold. You can vary the velocity of the ram (screw), or the pressure
driving it, to fill areas of the mold cavity at different rates to achieve uniform quality of the molded part. This
phase can be critical to part quality. The pattern of velocity or pressure variation during injection is called the
injection profile.
Transition Detects when injection is complete.
Pack (optional) Packing pressurizes the plastic to a specified density which determines the flexibility of the molded part. To
achieve uniform density, you can release or increase pressure in steps according to cooling gradients across
the mold. Thus, as the plastic cools unevenly, the pack profile can compress the plastic uniformly.
Hold Holding lets the plastic cool and shrink slightly from the mold cavity in preparation for ejection. The effect is
similar to packing. You can hold at predetermined pressures for predetermined lengths of time throughout
the hold phase.
Predecompression (optional) This single, backward movement of the ram (screw) separates plastic solidifying in the mold from molten
cushion remaining in the barrel prior to plastication. This phase is also called sprue break or suckback.
Plastication Phase The machine reloads by drawing plastic beads into the barrel containing the ram (screw). The mechanical
action of the rotating ram (screw) grinds and melts the beads. The longer it grinds, the hotter it melts. You
can vary the backpressure on the ram (screw) causing it to remain longer in an area. Thus, you can induce
any desired temperature gradient along the length of the shot by controlling ram (screw) backpressure.
When you select this mode, you can use the following phases of operation:
Postdecompression
(optional)
1st Close
2nd Close
3rd Close
Low Pressure Close To guard against damaging the mold when the two mold surfaces make contact and to detect obstructions to
1st Open
2nd Open
3rd Open
Open Slow
Ejector Advance
Ejector Retract
Tip Strokes You can shake the part off the ejector tip by programming rapid singlestroke interim ejector cycles starting
Forward Dwell You can pause after the first advance stroke or before the last retract stroke to let a robot remove the part
This single, backward movement of the ram (screw) guards against drooling molten plastic into the open
mold during ejection prior to clamp close. This phase is also called melt pullback or suckback.
You can program a singlestep clampclose profile and not use a second or third profile. Or, you can program
up to three clampclose profiles that let you do the following at up to three different points in the clampclose
phase:
• pick up a third mold plate
• set cores
• pick up or drop out pumps to change clamp speed or pressure
mold closure, you close the mold slowly with low pressure and closedloop or openloop control. Low
Pressure Close can only be controlled through a pressure vs. position profile.
You can program a singlestep clampopen profile and not use a second or third profile. Or, you can
program up to three clampopen profiles that let you do the following at up to three different points in the
clampopen phase:
• drop out a third mold plate
• pull cores
• drop out or pick up pumps to change clamp speed or pressure
To decelerate the moving platen to accurately position it before ejecting the part.
You can advance and retract the ejector in a single stroke or in multiple strokes using closed or openloop
control.
after the first advance stroke and ending before the last retract stroke.
when the ejectors are extended.
1-20
Page 33

Chapter
Install the QDC Module
2
Chapter
Objectives
Record I/O Ranges
This chapter helps you install the QDC module with these procedures:
record I/O ranges
set module jumpers
key the I/O chassis
install the QDC module
wire I/O devices to the QDC module
ground and shield I/O devices
plan for E-STOPs and machine interlocks
To match your QDC module to your I/O devices, record the I/O ranges of
your I/O devices on Worksheet 2-A. You will use this information in this
chapter for hardware configuration (setting jumper plugs) and in chapter 4
to configure the module’s inputs and outputs with software.
Circle or check the I/O ranges on Worksheet 2-A. Cross off I/O not used.
Worksheet 2A
I/O Ranges
Record
I/O Connection: Voltage 1: Voltage 2: Current:
Input 1 (Screw position) 0 to 10V dc 1 to 5V dc 4 to 20 mA
Input 2 (System pressure) 0 to 10V dc 1 to 5V dc 4 to 20 mA
Input 3 (Clamp position) 0 to 10V dc 1 to 5V dc 4 to 20 mA
Input 4 (Ejector position) 0 to 10V dc 1 to 5V dc 4 to 20 mA
Output 1 10 to 10V dc 0 to 10V dc 4 to 20 mA
Output 2 10 to 10V dc 0 to 10V dc 4 to 20 mA
Output 3 10 to 10V dc 0 to 10V dc 4 to 20 mA
Output 4 10 to 10V dc 0 to 10V dc 4 to 20 mA
2-1
Page 34

Chapter 2
Install the QDC Module
Set Module Jumpers
Before installing the QDC module, you must select with jumper plugs the
I/O ranges that you recorded on Worksheet 2-A
Access and Position the Jumpers
Access the jumper plugs and set them as follows:
ATTENTION: To avoid damage to internal circuits, observe
handling precautions and rid yourself of any electrostatic
charge. Use an anti-static work station when setting jumpers.
1. Remove the label-side cover plate by removing the four screws.
2. Remove the circuit board from the module housing by removing the
two screws located center-front at the swingarm catch.
3. Carefully turn over the circuit board so it is oriented as in figure 2.1.
Handle it by the edges to avoid touching conductors or components.
4. Use figure 2.1 to locate the jumpers.
5. Set the jumpers according to Table 2.A (next page) using
your I/O ranges from Worksheet 2-A
needle-nose pliers.
6. After setting the jumpers, carefully re-assemble the module with steps
3, 2, and 1.
2-2
Page 35

Chapter 2
Install the QDC Module
Figure 2.1
Jumper
LEFT
Locations on the QDC Module'
TOP
E5
s Circuit Board
E1
E6
RIGHT
E7
E8
E9
E10
E11
E12
E15
E16
E14
E13
E17
BOTTOM
10908I
Important: We define jumper positions as left, right, top, and bottom.
This represents the position of the jumper on the 3-pin connector relative
to the orientation of the circuit board shown above.
2-3
Page 36

Chapter 2
Install the QDC Module
Table 2.A
Jumper
Settings
Jumper: Function: Setting:
E1 Run/Calibrate Run = left
E5 I/O Density Standard = top
E6
E7
E8
E9
E10
E14
E13
E17
E11
E12
E15
E16
1
Factory Defaults
Input 1 (Screw position)
Input 2 (System pressure)
Input 3 (Clamp position)
Input 4 (Ejector position)
Output 1 (Valve 1)
Output 2 (Valve 2)
Output 3 (Valve 3)
Output 4 (Valve 4)
Output 1 (Valve 1)
Output 2 (Valve 2)
Output 3 (Valve 3)
Output 4 (Valve 4)
1
Calibrate = right
Do not use bottom position
Current = left
Voltage = right
Current = top
Voltage = bottom
-10 to +10V dc = top
0 to +10V dc or
4 to 20mA = bottom
1
1
1
1
Important: If you select current output with jumpers E10, E14, E13, E17,
then you must select 4 to 20mA with jumpers E11, E12, E15, E16.
ATTENTION: If an output is not used, set its jumper (E11,
E12, E15, or E16) to 0 - 10V dc (bottom position). Otherwise,
setting the jumper for –10 to +10V dc could cause the QH
module to output –10V dc on that channel (a hazard): because
when the system is stopped or when a system reset occurs, all
outputs are forced to 0% but 0% output = –10V dc in this
example (see graph).
10
8
5
3
0
-3
-5
Output Voltage
-8
-10
0 102030405060708090100
%
Output Requested
2-4
Page 37

Chapter 2
Install the QDC Module
Key
the I/O Chassis
Use plastic keying bands, shipped with each I/O chassis, for keying the
backplane connector to accept only one type of module. Do this to prevent
inadvertent installation of the wrong module into the designated slot
location.
Important: You must use the following slot location in the I/O chassis for
the QDC module because this is the address used by your Pro-Set 600
software to communicate with the QDC module.
rack 0
module group 0
slot 0
The QDC module is slotted in two places on the rear edge of the circuit
board. The position of the keying bands on the backplane connector must
correspond to these slots to allow insertion of the module.
Place keying bands between the following terminal numbers labeled on the
backplane connector of your I/O chassis (see Figure 2.2):
between 20 and 22
between 26 and 28
Figure 2.2
Positions
Keying
Keying
Bands
1771QDC
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
12676
2-5
Page 38

Chapter 2
Install the QDC Module
Install the QDC Module
To install your QDC module in an I/O chassis, complete the following:
1. Turn off power to the I/O chassis.
ATTENTION: Remove power from the 1771 I/O chassis back-
plane and wiring arm before removing or installing a module.
Failure to remove power from the backplane could cause injury
or equipment damage due to possible unexpected operation.
Failure to remove power from the backplane or wiring arm
could cause injury, module damage, and/or degradation of
module performance.
2. Place the module in the plastic guides on the top and bottom of the
slot that slides the module into position.
Important: Pro-Set 600 software expects your QDC module (configured
for inject, clamp, and eject mode) to be placed in rack 0, module group 0,
slot 0. If you choose to install it in some other slot, you must modify your
PLC-5 application program accordingly (refer to your Pro-Set 600
documentation for details).
3. Do not force the module into its backplane connector. Apply firm,
even pressure on the module to seat it properly.
4. Snap the chassis latch over the top of the module to secure it.
5. Connect the wiring arm to the module.
2-6
Page 39

Chapter 2
Install the QDC Module
Wire
I/O Devices
+
Customer
PS
–
+
Screw
Position
Sensor
–
+
System
Pressure
Sensor
–
+
Clamp
Position
Sensor
–
+
Ejector
Position
Sensor
–
Use the wiring arm (1771-WF) supplied with the QDC module to wire I/O
devices (Figure 2.3). The wiring arm lets you install or remove the QDC
module from the I/O chassis without rewiring. Wiring arm terminals are
numbered in descending order, from the top down, starting with terminal
18 (Table 2.B).
Figure 2.3
I/O
W
iring and Grounding
Input 1
–
Customer
PS
Input 2
Input 3
Input 4
18
+
–
+
Amplifier
Valve 1
+
–
+
–
To Valve 1
+
–
Amplifier
Valve 2
Amplifier
Valve 3
+
–
To Valve 2
+
–
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
Output 1
Output 2
Output 3
Earth Ground
Wiring Arm
1771WF
Output 4
+
–
Amplifier
Valve 4
To Valve 3
+
–
To Valve 4
10909I
2-7
Page 40

Chapter 2
Install the QDC Module
Table 2.B
T
erminal Designations
I/O
Transducer: I/O Designation: Terminal:
Screw position
(see Important below)
System pressure
(see ATTENTION below)
N/A Input common 14
Clamp position
(see Important below)
Ejector position
(see Important below)
Valve 1 Output 1 (+)
Valve 2 Output 2 (+)
Valve 3 Output 3 (+)
Valve 4 Output 4 (+)
Not used 01
Input 1 (+)
(-)
Input 2 (+)
(-)
Input 3 (+)
(-)
Input 4 (+)
(-)
Output common
Output common
Output common
Output common
18
17
16
15
13
12
11
10
09
08
07
06
05
04
03
02
Important: For the QDC module to operate in the inject, clamp, and eject
mode, you must connect position sensors to these two inputs:
2-8
input 1 (screw position)
input 3 (clamp position)
ATTENTION: Your control system may not work as expected
with possibly machine damage if you attempt to control a
pressure profile of a phase (inject, clamp, or eject) not
hydraulically plumbed for pressure control.
Because system pressure may change from one phase to the next, we
recommend that you:
assign pressure control to phases that require pressure profiles
(and are hydraulically plumbed to support it)
place the system pressure sensor accordingly in the hydraulic circuit
configure the remaining phases with velocity profiles
Page 41

Chapter 2
Install the QDC Module
ATTENTION: The QDC module has ESD protection to 20kV,
but you can damage the module by accidental application of the
wrong voltage to the I/O terminals. Do not exceed:
This voltage: On these terminals: When in:
+12V dc input (18 thru 10) any mode
+12V dc output (09 thru 02) voltage mode
+24V dc output (09 thru 02) current mode
Ground and Shield
our I/O Devices
Y
Input Sensor
Analog inputs and outputs are sensitive to electrical noise interference.
Take care to ground and shield them properly.
Guidelines:
Use 22-gage (or larger) twisted-pair cable, 100% shielded with drain
wire, such as Belden 8761. For cable distances over 50 ft, use 18-gage
cable such as Belden 8760.
Ground the cable shield at one end only; generally at the sensor or
amplifier end, not at the I/O chassis (see Figure 2.4 and Figure 2.5).
Figure 2.4
Shielding
Differential Inputs
18
17
QDC Module Input
+
–
Connect the cable shield
and case ground to earth
ground at the Input Sensor
14
Input Module Common
(should float)
10910I
2-9
Page 42

Chapter 2
Install the QDC Module
Figure 2.5
Shielding
QDC Module Output
Singleended Outputs
Customer Valve Amplifier
+
–
9
8
Connect
the cable shield to earth ground at
the valve amplifier
Input
Ground
Chassis Ground
17182
Ground the cable shields to a low-impedance earth ground of less than
1/8 ohm
Do not connect any ground to input common (terminal 14) except as
specified in the Exceptions section, below.
Place high-voltage class A wiring and low-voltage class B wiring in
separate grounded conduits
In parallel runs, separate the class A and B conduit by at least 1 foot
Where conduit runs must cross, cross them at right angles
For additional grounding recommendations, refer to the Allen-Bradley
Programmable Controller Wiring and Grounding Guidelines (publication
1770-4.1).
Exceptions
If you experience unacceptable electrical noise interference, then try one or
both of the following alternative grounding connections:
connect the input cable shield to input common (terminal 14) after
disconnecting the shield from the transducer
connect the output cable shield to output common (terminal 8, 6, 4,
and/or 2) after disconnecting it from the valve amplifier
2-10
Page 43

Chapter 2
Install the QDC Module
Plan for ESTOPs and
Machine Interlocks
You must consider the installation of Emergency Stop switches and
machine interlocks when you:
design your system
assemble mechanical/hydraulic components
wire system components
develop system ladder logic
ATTENTION: The Electrical Standard for Industrial
Machinery (NFPA 79-1987) requires an emergency stop that,
when actuated, de-energizes all electrical power circuits which
provide electrical energy to sustain machine motion.
Maintained contact “Emergency Stop” push buttons are
recommended.
ATTENTION: The American National Standard for Plastics
Machinery — Horizontal Injection Molding Machines — for
Construction, Care, and Use (ANSI B151.1-1984) requires
hydraulic, mechanical, and electrical interlocks to prevent
inadvertent clamp closing with a safety gate in an open position.
In addition, we strongly recommend that the electrical
interlocks consist of redundant devices and that the control
circuit be so arranged that malfunction or improper sequencing
of either redundant device prevents further operation of the
machine.
ATTENTION: NEMA Standards Publication ICS1.1, Safety
guidelines for the Application, Installation, and Maintenance of
Solid State Control recommends that the emergency stop and
safety gate electrical interlocks should directly control their
appropriate functions through an electromechanical device
independent of the solid state logic.
The next page shows an illustration of a typical grounded PLC-5 power
distribution circuit. For ungrounded systems or for more information on
grounding and wiring guidelines, refer to Allen-Bradley Programmable
Controller Wiring and Grounding Guidelines (publication 1770-4.1).
2-11
Page 44

Chapter 2
Install the QDC Module
Disconnect
Figure 2.6
PLC5 Power Distribution with Interlocks
Typical
L1
L2
L3
Incoming
AC
Use any number
of E-Stop switches
in Series
CRM
Input
Device
1FU
2FU
3FU
H
H
1
H
3
4
H
2
Step-down
Transformer
4
FUSE
X
X
1
2
Start
CRM
I/O Chassis
Power Supply
1
LN
GND
3
** See WARNING for Interlock Wiring Instructions **
2
Output
Input
Device
Module
Wiring
Arm
Output
Module
Wiring
Arm
CRM
1
Back-Panel
Ground Bus
5
L1
L2
L3
To Motor
Starters
Equipment
Grounding
Conductors
User DC
Supply
CRM
To DC I/O
Devices
Enclosure
Wall
Grounding Electrode
Conductor to
Grounding Electrode
System
Connect
When
Applicable
+–
1
To minimize EMI generation, you should connect a suppression network: for 120V AC, use Allen-Bradley
cat. no. 700-N24; for 220/240V AC, use cat. no. 599-KA04.
2
To minimize EMI generation, you should connect a suppression network: for 120V AC, use Allen-Bradley
cat. no. 599-K04; for 220/240V AC, use cat. no. 599-KA04.
3
For a power supply with a groundable chassis, this represents connection to the chassis only. For a power supply
without a groundable chassis, this represents connection to both the chassis and the GND terminal.
In many applications, a second transformer provides power to the input circuits and power supplies for isolation from the
4
output circuits.
Reference the current NEC code and ANSI B151.1 for additional wiring guidelines.
•
5
To minimize EMI generation, suppression networks should be connected across coils of electromagnetic devices.
•
2-12
10907I
Page 45

Chapter
3
Configure the QDC Module's I/O
Chapter
Objectives
Your QDC module needs to know the characteristics of your ram (screw),
clamp, and ejector sensors. In this chapter, we describe how to determine
these characteristics and download them to the QDC module for the following:
signal ranges from pressure and position sensors
minimum and maximum sensor signals corresponding to
minimum and maximum pressures and positions
alarm values and travel limits
We describe how to configure the QDC module in these sections:
Select Module Parameters and I/O Ranges
Determine Initial Sensor-configuration Values
Download MCC Parameters to the QDC module
Use Set-output Mode to Move the Ram (screw), Clamp, and Ejector
Complete Your Sensor Configuration
Select Optional Configurations
Important: You must properly configure the QDC module using
procedures in this chapter before attempting further configurations.
Important: If you have not already done so, install Pro-Set 600 software.
The procedures in this and the next several chapters assume that you have
done so.
3-1
Page 46

Chapter 3
Configure the QDC Module's I/O
Select
Module Parameters
and I/O Ranges
You select module parameters and I/O ranges by setting configuration bits
in control words.
To Configure: In Control Word: Starting At
ProSet 600 Address:
Module Parameters MCC02 B34/528 Worksheet 3A
Input Range MCC03 B34/544 Worksheet 3B
Output Range MCC04 B34/560 Worksheet 3C
Use this Worksheet:
Select module parameters with Worksheet 3-A:
Operating mode of the QDC module to inject, clamp, and eject
Units of measure to English or metric
Select I/O ranges with Worksheets 3-B and 3-C.
Refer to Worksheet 2-A from chapter 2 which you filled out when setting
the QDC module’s jumper plugs. Apply this information to Worksheet 3-B
for input ranges and Worksheet 3-C for output ranges.
Important: Software input/output selections that you are about to make in
MCC03 and MCC04 must match the jumper plug settings for each
respective input and output that you configured in chapter 2.
Important: The QDC module detects loss of sensor at all four inputs
regardless of the input range you select. When detected, the QDC module:
sets status bits SYS08-B00, 01, 02, and 03 for inputs 1, 2, 3, and 4
E-stops the profile in progress
ignores any action execution commands in DYC02
Worksheet 3A
Module Parameters
Select
Control W
ProSet 600 Addr. B34/bit
Value 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0
ord MCC02Bxx
15 14 13 12
543 542 541 540 539 538 537 536 535 534 533 532 531 530 529 528
11 10
Select Inject , Clamp, and Eject Mode
With
bit 05 = 04 = 1
09 08 07 06 05 04 03 02 01 00
Required bit 03 = 1
(0 generates a programming error)
Select English = 0
metric = 1
Example: If you select Inject, Clamp, and Eject mode with English units:
MCC02 = 00000000 00111000
3-2
Page 47

Worksheet 3B
Input Ranges for your Sensors
Select
Chapter 3
Configure the QDC Module's I/O
Control W
ProSet 600 Addr. B34/bit
ord MCC03Bxx
15 14 13 12
11 10
09 08 07 06 05 04 03 02 01 00
559 558 557 556 555 554 553 552 551 550 549 548 547 546 545 544
Value 1 1 1 1 1 1 1 1
Select Input 4 (Ejector Position) Range with bits 07, 06
Select Input 3 (Clamp Position) Range with bits 05, 04
Select Input 2 (System Pressure) Range with bits 03, 02
Select
Input 1 (Ram Screw Position) Range with bits 01, 00
Example: If you select an input range of 4-20 mA for all four inputs:
MCC03 = 11111111 10101010.
Important: Software input selections must match the jumper settings for
each respective input.
Input Range
0 - 10V dc 0 0
1 - 5V dc 0 1
4 - 20 mA 1 0
Not connected 1 1
Worksheet 3C
Control W
ord MCC04Bxx
ProSet 600 Addr. B34/bit
Output Ranges for your V
Select
15 14 13 12
11 10
09 08 07 06 05 04 03 02 01 00
575 574 573 572 571 570 569 568 567 566 565 564 563 562 561 560
alves
Value 1 1 1 1 1 1 1 1
Select Output 4 Range with bits 07, 06
Select Output 3 Range with bits 05, 04
Select Output 2 Range with bits 03, 02
Select
Output 1 Range with bits 01, 00
Example: If you select 0-10V dc for all four output ranges:
MCC04 = 11111111 01010101.
Important: Software output selections must match the jumper settings for
each respective output.
Output
Range -10
to +10V dc0 0
0 to +10V dc 0 1
4 to 20 mA 1 0
Not connected 1 1
3-3
Page 48

Chapter 3
Configure the QDC Module's I/O
Determine
Initial
Sensorconfiguration Values
To determine initial sensor configuration values, refer to Table 3.A, and
specifications that accompanied your sensors, valves, and cylinders. Write
down applicable values on Worksheet 3-D.
Important: You must enter floating-point numbers and percentages as
integers, so we recommend that you write them in Worksheet 3-D in the
following format: Use an assumed decimal point position that depends on
the range value. For example:
If the Range is: And You Want to
0 099.99% 75% 07500
0 99.99 inch 7.32 inch 00732
0 0999.9 mm 432.6 mm 4326
4.00 020.00 mA 16 mA 01600
0 010.00V dc 5.6V dc 00560
0 009.99 sec 0.47 sec 00047
0 09999 psi 321 psi 00321
0 0999.9 Bar 222 Bar 2220
Enter this Value:
Table 3.A
Determine
Initial Sensorconfiguration V
alues for W
Use this
Format:
orksheet 3D
Category: If your: Then Use a Value Equal to:
Minimum Position (Lines 1, 9, and 13) N/A zero
Maximum Position (Lines 2, 10, and 14) Actuator is fully extended full travel of the sensor
Analog Signal @ Min Position sensor is forwardacting low end of your selected range
(Lines 3, 11, and 15) sensor is reverseacting high end of your selected range
Analog Signal @ Max Position sensor is forwardacting high end of your selected range
(Lines 4, 12, and 16) sensor is reverseacting low end of your selected range
Minimum System Pressure (Line 5) N/A min range value specified by manufacturer
Maximum System Pressure (Lines 6) N/A max range value specified by manufacturer
Analog Signal @ Min System Pressure sensors are forwardacting low end of your selected range
(Line 7) sensors are reverseacting high end of your selected range
Analog Signal @ Max System Pressure sensors are forwardacting high end of your selected range
(Line 8) sensors are reverseacting low end of your selected range
3-4
Page 49

Worksheet 3D
Determine Initial Sensorconfiguration V
Record Your Initial Values Here
Chapter 3
Configure the QDC Module's I/O
alues
Input Line Control Word ProSet
600 Addr
. Value Description
1 1 MCC09 N40:5 0 Minimum Screw Position
2 MCC10 N40:6 Maximum Screw Position
3 MCC11 N40:7 Analog Signal @ Min Screw Position
4 MCC12 N40:8 Analog Signal @ Max Screw Position
2 5 MCC57 N40:53 0 Minimum System Pressure
6 MCC58 N40:54 Maximum System Pressure
7 MCC59 N40:55 Analog Signal @ Min System Pressure
8 MCC60 N40:56 Analog Signal @ Max System Pressure
3 9 MCC23 N40:19 0 Minimum Clamp Position
10 MCC24 N40:20 Maximum Clamp Position
11 MCC25 N40:21 Analog Signal @ Min Clamp Position
12 MCC26 N40.22 Analog Signal @ Max Clamp Position
4 13 MCC31 N40:27 0 Minimum Ejector Position
14 MCC32 N40:28 Maximum Ejector Position
15 MCC33 N40:29 Analog Signal @ Min Ejector Position
16 MCC34 N40:30 Analog Signal @ Max Ejector Position
1
Incremental Distance
00.00
to 99.99in
000.0
to 999.9mm
2
Input Signal Range
00.00 to 10.00VDC or
01.00 to 05.00VDC or
04.00
to 20.00MADC
1
1
2
2
3
3
2
2
1
1
2
2
1
1
2
2
3
Pressure
0000
to 9999 PSI
000.0 to 999.9 Bar
Download
MCC Parameters
to the QDC Module
Use this download procedure now and later in this chapter. The procedure
requires you to complete the following general steps:
enter MCC parameters into the PLC-5 data table
download them to the QDC module (with PLC-5 processor in run mode)
correct any programming errors
Next, we describe the general steps.
Enter MCC Parameters into Your PLC5 Data Table
With your programming terminal, enter values from Worksheet 3-A thru
4-D into your PLC-5 data table as follows:
1. Switch the PLC-5 processor to
2. Display your PLC-5 data table.
PROGRAM mode.
3-5
Page 50

Chapter 3
Configure the QDC Module's I/O
3. Locate the data file for storing the MCC block. PLC-5 data table
word addresses are listed on the worksheets.
4. Enter the value for each word and bit.
When you enter bit selections in words prefixed with file identifier B
(example: B34), the PLC-5 processor automatically switches the radix to
binary format so you can conveniently enter binary data.
Download MCC Parameters
To download the MCC block to the QDC module, switch the PLC-5
processor from
downloads the MCC to the QDC module for you.
Important: You can verify that the MCC block was successfully downloaded or you made a programming error by evaluating the following
words that Pro-Set 600 software continuously reports to the PLC-5
processor.
PROGRAM mode to
RUN
mode. Pro-Set 600 software
If: And: Then:
SYS01B08 = 1
(B34/8)
SYS19B00 = 1
(B34/288)
N/A QDC module accepted a valid MCC.
SYS61 = 1
(ID code for MCC block
stored in N40:213)
You made a programming error in MCC.
Read the error code in SYS62 (N40:214), and
look up the error in Section 2 of the Plastic
Molding Module Reference Manual (pub. no.
17716.5.88).
Important: Pro-Set 600 software downloads all command blocks when
your PLC-5 processor enters run mode and after a valid MCC is accepted.
All programming errors reported in SYS62 (N40:214) are referenced to the
MCC until SYS01-B08 (B34/08) equals zero.
Correct Any Dataentry Errors
Upon receipt of MCC block, the QDC module tests data for data-entry
errors, such as a value out of range. When it detects an error, The QDC
module halts operation until you correct the error. For a complete list of
error codes to help you correct errors, refer to Section 2 of the Plastic
Molding Module Reference Manual, publication 1771-6.5.88.
3-6
You must correct errors by entering the changed configuration values into
your PLC-5 data table and downloading the new values to the QDC
module as outlined above. Pro-Set 600 software continues to attempt to
download the MCC block to the QDC module until an MCC is accepted
and the QDC module returns SYS01-B08 (B34/08) equal to 1.
Page 51

Chapter 3
Configure the QDC Module's I/O
Use Setoutput Operation to
Move the Ram (screw),
Clamp, and Ejector
To finish configuring the QDC module, you actuate the ram (screw),
clamp, and ejector axes with the QDC module’s set-output operation that
applies percentage values to your QDC module’s outputs to move the
actuator in a controllable fashion. To do this, you apply a %-output signal
to a module output so you can move the actuator over its intended range.
ATTENTION: Do not rely on pressure valves connected to the
QDC module for pressure relief. Use them only for pressure
control below the setting of the system pressure-relief valve.
ATTENTION: A value of zero in set-output words
N40:121-124 does not necessarily correspond to zero pressure
or flow. If you configured jumpers E11, E12, E15, or E16 for
bi-directional valve operation, an output of 0% gives –10V dc,
50% gives 0V dc (see chart). Amplifier electronics or
spool-null offsets may also allow pressure or flow at zero volts
signal input. Consult your valve and amplifier specifications.
10
8
5
3
0
-3
Output Voltage
-5
-8
-10
0 102030405060708090100
%
Output Requested
ATTENTION: As soon as you enable set-output operation, the
QDC module’s outputs drive the connected valves according to
the values you entered into DYC09-12 (N40:121-124). Be sure
these values RESULT IN NO MOVEMENT until you adjust
them one-at-a-time with your programming terminal in the
procedures that follow.
3-7
Page 52

Chapter 3
Configure the QDC Module's I/O
Follow this procedure to actuate the ram (screw), clamp, and ejector:
1. Enter values in words DYC09-12 that result in no motion.
Output: In Data Word: At ProSet 600 Address:
1 DYC09 N40:121
2 DYC10 N40:122
3 DYC11 N40:123
4 DYC12 N40:124
2. Enable set-output operation by entering a 1 in DYC01-B08
(B34/392). The QDC module sets outputs 1-4 to percentage values
that you entered in DYC09-12 respectively.
Important: The DYC is constantly transferred to the QDC module by
Pro-Set 600 software, so changes you make to %-output values are
immediately implemented.
Complete your Sensor Configuration
3. With your programming terminal, slowly change the %-output value
of each output, one at a time, as you observe the corresponding
actuator movement.
4. Increase the %-output value until you reach a safe actuator speed to
use in the next procedure.
Complete the procedure for configuring the QDC module to match its
sensors by spanning them over their intended range with the machine in
operation. Here we describe how you determine:
ram (screw) position sensor values
system pressure sensor values
clamp position sensor values
ejector position sensor values
In the procedures that follow, measure and record:
min/max positions and corresponding signal values
min/max system pressure and corresponding signal values
After determining these values from the procedures, write them down on
Worksheet 3-E.
3-8
Important: You must complete this configuration before proceeding to
any other chapters on module configuration.
Page 53

Worksheet 3E
Final Sensorconfiguration V
Chapter 3
Configure the QDC Module's I/O
alues
Record Your Final V
alues Here
Input Line Control Word ProSet 600 Addr. Value Description
1 1 MCC09 N40:5 0 Minimum Screw Position
2 MCC10 N40:6 Maximum Screw Position
3 MCC11 N40:7 Analog Signal @ Min Screw Position
4 MCC12 N40:8 Analog Signal @ Max Screw Position
2 5 MCC57 N40:53 0 Minimum System Pressure
6 MCC58 N40:54 Maximum System Pressure
7 MCC59 N40:55 Analog Signal @ Min System Pressure
8 MCC60 N40:56 Analog Signal @ Max System Pressure
3 9 MCC23 N40:19 0 Minimum Clamp Position
10 MCC24 N40:20 Maximum Clamp Position
11 MCC25 N40:21 Analog Signal @ Min Clamp Position
12 MCC26 N40:22 Analog Signal @ Max Clamp Position
4 13 MCC31 N40:27 0 Minimum Ejector Position
14 MCC32 N40:28 Maximum Ejector Position
15 MCC33 N40:29 Analog Signal @ Min Ejector Position
16 MCC34 N40:30 Analog Signal @ Max Ejector Position
1
Incremental Distance
00.00
to 99.99in
000.0 to 999.9mm
2
Input Signal Range
00.00 to 10.00VDC or
01.00 to 05.00VDC or
04.00 to 20.00MADC
1
1
3
3
1
1
1
1
3
Pressure
0000 to 9999 PSI
000.0 to 999.9 Bar
2
2
2
2
2
2
2
2
Determine Values for Ram (Screw) Position Sensor
ATTENTION: Incorrect values entered in DYC09-12 may
result in rapid ram (screw) motion and potential damage to your
barrel and seals of your injection cylinder.
To complete the configuration for your ram (screw) position sensor, do the
following and enter the results on Worksheet 3-E:
1. Move the ram (screw) forward until it reaches its mechanical stop at
the nozzle end. This is the zero position.
2. Remove ram (screw) pressure and/or flow to stop movement.
3-9
Page 54

Chapter 3
Configure the QDC Module's I/O
3. Record this position value (normally 0000) on line 1 for MCC09 on
Worksheet 3-E.
4. With your programming terminal, read the signal level returned in
SYS33 (N40:185) from your position sensor.
Important: If your position sensor has a potentiometer for setting the zero
reference, do so now.
5. Record this value on line 3 for MCC11 (should be at minimum signal
if you zeroed your position sensor in step 4).
6. Move the ram (screw) backward to the backpoint mechanical stop.
7. Remove ram (screw) pressure and/or flow to stop movement.
8. Measure the distance travelled.
9. Record this distance on line 2 for MCC10.
10. With your programming terminal, read the signal level returned in
SYS33 (N40:185) from your positioning sensor.
Important: If your position sensor has a potentiometer to set the span
(linear resolution), do so now.
11. Record this value on line 4 for MCC12.
You may now download your adjusted values to the QDC module using
the MCC download procedure presented earlier in this chapter.
Determine Values for the Clamp Position Sensor
Important: Use the following procedure and subsequent set-up
information for each different mold used on a hydraulic machine. On a
toggle clamp (with die height adjust), complete it only once.
ATTENTION: Incorrect values entered in DYC09-12 may
result in rapid clamp motion and potential damage to your mold
or cylinder seals. We strongly recommend using a “dummy”
mold on hydraulic machines and no mold on toggle machines.
3-10
1. Move the clamp forward until it reaches its mechanical close stop.
This is the zero position.
2. Remove clamp pressure and/or flow to stop clamp movement.
Page 55

Chapter 3
Configure the QDC Module's I/O
3. Record this position value (usually 0000) on line 9 for MCC23 on
Worksheet 3-E.
4. With your programming terminal, read the signal level returned in
SYS35 (N40:187) from your position sensor.
Important: If your position sensor has a potentiometer to set the zero
reference, do so now.
5. Record this value on line 11 for MCC25 (should be at minimum
signal if you zeroed your position sensor in step 4).
6. Move the clamp backward to the mechanical open stop.
7. Remove clamp pressure and/or flow to stop clamp movement.
8. Measure the distance travelled.
9. Record this distance on line 10 for MCC24.
10.With your programming terminal, read the signal level returned in
SYS35 (N40:187) from your positioning sensor.
Important: If your position sensor has a potentiometer to set the span
(linear resolution), do so now.
11. Record this value on line 12 for MCC26.
You may now download your adjusted values to the QDC module using
the MCC download procedure presented earlier in this chapter.
Determine Values for Ejector Position Sensor
ATTENTION: Be sure to open the clamp sufficiently to allow
full ejector travel before proceeding. Otherwise, you could
damage the ejectors and/or the mold.
To complete the configuration for your ejector position sensor, do the
following and enter the results on Worksheet 3-E:
1. Move the ejector backward until it reaches its mechanical retract stop.
This is the zero position.
2. Remove ejector pressure and/or flow to stop movement.
3. Record this position value (normally 0000) on line 13 for MCC31 on
Worksheet 3-E.
3-11
Page 56

Chapter 3
Configure the QDC Module's I/O
4. With your programming terminal, read the signal level returned in
SYS33 (N40:185) from your position sensor.
Important: If your position sensor has a potentiometer for setting the zero
reference, do so now
5. Record this value on line 15 for MCC33 (should be at minimum
signal if you zeroed your position sensor in step 4).
6. Move the ejector forward to the mechanical advance stop.
7. Remove ejector pressure and/or flow to stop movement.
8. Measure the distance travelled by the ejector.
9. Record this distance on line 14 for MCC32.
10. With your programming terminal, read the signal level returned in
SYS33 (N40:185) from your positioning sensor.
Important: If your position sensor has a potentiometer to set the span
(linear resolution), do so now.
11. Record this value on line 16 for MCC34.
You may now download your adjusted values to the QDC module using
the MCC download procedure presented earlier in this chapter.
Determine Values for the System Pressure Sensor
To complete the sensor configuration procedure, record minimum and
maximum system pressures and corresponding signal levels from the
sensor manufacturer’s specifications onto Worksheet 3-E, words
MCC57-60. Most applications require no further spanning. If your
application requires greater accuracy, follow the procedure below:
1. Release system pressure to a minimum.
2. Read the system pressure gauge.
3. Record minimum pressure (normally 0000) on line 5 for MCC57 on
Worksheet 4-E.
4. With your programming terminal, read the signal level returned in
SYS34 (N40:186) from your pressure sensor.
3-12
Important: If your pressure sensor has a potentiometer for setting the zero
reference, do so now
5. Record this signal level on line 7 for MCC59. It should be at
minimum signal if you zeroed your pressure sensor in step 4.
Page 57

Chapter 3
Configure the QDC Module's I/O
ATTENTION: Use extreme caution during the next steps
because you stress the hydraulic system to its maximum rated
pressure. Loose fittings or faulty components could fail, causing
possible damage to equipment and/or injury to personnel.
ATTENTION: If the ram (screw), clamp, and/or ejectors are
not disconnected from the hydraulic circuit, be sure that they are
fully retracted with their hydraulics aligned in the retract
position. This forces the cylinders to press against the
mechanical limits of travel and builds max system pressure.
Otherwise, they could suddenly move, causing possible damage
to equipment and/or injury to personnel.
6. Re-torque all hydraulic connections and joints before proceeding.
7. Boost system pressure to maximum.
8. Read the system pressure gauge. Do this while the ram (screw) is
mechanically bound from moving.
9. Record this maximum pressure on line 6 for MCC58.
10. With your programming terminal, read the signal level returned in
SYS34 (N40:186) from your pressure sensor.
Important: If your pressure sensor has a potentiometer to set the span
(linear resolution), do so now.
11. Record this signal level on line 8 for MCC60.
12. Release pressure.
You may now download your adjusted values to the QDC module using
the MCC download procedure presented earlier in this chapter.
3-13
Page 58

Chapter 3
Configure the QDC Module's I/O
Select Optional Configurations
You have the option of configuring the following QDC module features:
Use this Option: For this Benefit:
Software Travel Limits to guard against damaging the nozzle, mold, or ejectors
Pressure Alarm Time Delay to warn of excessive pressure without nuisance alarms
Digital Filter to compensate for electrical noise on position inputs
Configure Software Travel Limits
You may want to use software restrictions to stop the travel of your ram
(screw), clamp, and/or ejector before either reaches its maximum limits
(configured earlier in this chapter).
Figure 3.1
Software
Restrictions
Physical Travel Range
dd
Safe Zone
d = deadband
Max SWTL Min SWTL
Max Position Min Position
Important: With the orientation shown, clamp movement is from left to
right. By convention, ram (screw) and ejector movement is reversed.
During normal machine operation and whenever your cylinder travels
outside the safe zone (outside the specified software travel limits, SWTL),
the QDC module:
sets an alarm status bit
forces its outputs to zero
ignores all profile commands (except set-output and jogs) until you jog
the cylinder back through the deadband into the safe zone at either end
The deadband guards against sensor noise flickering the SWTL alarms and
requires that the operator jog the cylinder a set distance away from the
software overtravel limit. We recommend a value of 00.10 inch as a
starting deadband. Your sensor may require a greater deadband.
ATTENTION: When jogging or when performing a set-output
operation, the QDC module ignores SWTLs. In these modes, it
will not zero its outputs so equipment damage could occur.
3-14
Page 59

Chapter 3
Configure the QDC Module's I/O
Configure the QDC module for SWTL alarms as follows:
1. Determine these SWTL values for ram (screw), clamp, and/or ejector
travel with respect to the range of physical travel.
SWTL deadband
Maximum SWTL
Minimum SWTL
2. Record non-zero SWTL values on Worksheet 3-F. Zero values
disable the corresponding SWTLs.
ATTENTION: Leaving your SWTL settings at zero (MCC13,
14, 27, 28, 41, 42) inhibits the QDC module from performing
this safety function.
Worksheet 3F
Configuration V
SWTL
alues
Record Your SWTL Configuration Values Here
Control Word ProSet 600 Addr. Value Description
MCC13 N40:9 Screw Minimum SWTL
MCC14 N40:10 Screw Maximum SWTL
MCC15 N40:11 10 Screw SWTL Deadband
MCC27 N40:23 Clamp Minimum SWTL
MCC28 N40:24 Clamp Maximum SWTL
MCC29 N40:25 10 Clamp SWTL Deadband
MCC41 N40:37 Ejector Minimum SWTL
MCC42 N40:38 Ejector Maximum SWTL
MCC43 N40:39 10 Ejector SWTL Deadband
1
Incremental
00.00 to 99.99 Inches 00.00 to 99.99 Inches
000.0 to 999.9 Millimeters 000.0 to 999.9 Millimeters
distance measured from zero
2
Incremental distance measured as noted
You may now download your adjusted values to the QDC module using
the MCC download procedure presented earlier in this chapter.
1
1
2
1
1
2
1
1
2
3-15
Page 60

Chapter 3
Configure the QDC Module's I/O
Set Up Maximum Pressure Alarms and Time Delays
The QDC module continuously monitors the system pressure input. When
it detects that the process input equals or exceeds a preset alarm setpoint,
the QDC module sets an alarm bit. A setpoint of zero disables the
associated alarm.
To guard against nuisance alarms caused by noise spikes or pressure
transients, you can set a time delay so the QDC module must monitor
continuous excessive pressure for an amount of time before setting the
high pressure alarm. A setpoint of zero disables this delay.
Configure the QDC module for the system pressure alarm as follows:
1. Determine these values:
pressure-alarm setpoint
time-delay setpoint
2. Record non-zero setpoints on Worksheet 3-G for the pressure alarm
and time delay.
3. Download them to the QDC module using the procedures presented
earlier in this chapter.
Worksheet 3G
Pressurealarm
Enter Your Pressurealarm and T
Control Word ProSet 600 Addr. Value Description
MCC61 N40:57 System Pressurealarm Setpoint
MCC62 N40:58 System Pressure Timedelay Setpoint
1
and T
imedelay Values Here
Time
Measured in Seconds
00.00
to 00.99
imedelay Setpoints
2
Pressure
0000 to 9999 PSI
000.0 to 999.9 Bar
2
1
3-16
Page 61

Chapter 3
Configure the QDC Module's I/O
Configure Digital Filters for Position Inputs
You may enable an optional digital filter on position inputs to reduce
electrical noise from a potentiometer-type position sensors or picked up by
your input circuits.
To determine if you need a digital filter, move the ram (screw), clamp,
and/or ejector very slowly. With your programming terminal, look for
erratic position numbers reported for ram (screw), clamp, and/or ejector
position by examining these words:
For this Input: In Word: Look at this ProSet 600 Address:
Ram (Screw) SYS25 N40:177
Clamp SYS27 N40:179
Ejector SYS28 N40:180
To determine the time constant (00.10 sec max), start with a small value
such as 00.01. A value of zero disables the filter.
To Filter this Input: In Word: Enter a Filter Time Constant in:
Ram (Screw) MCC16 N40:12
Clamp MCC30 N40:26
Ejector MCC44 N40:40
ATTENTION: Increasing the value of the time constant
decreases the QDC module’s capability to respond quickly to
travel limits and/or to accurately locate programmed positions.
We recommend that you keep the time constant under 00.10.
For example, with a clamp velocity of 2 inches/sec, a 00.01 time constant
allows a 0.20 inch travel before the QDC module can react to a travel limit.
Important: If you have a noisy potentiometer-type position sensor and
digital filtering slows the QDC module’s response time too much, consider
replacing the sensor with a non-contact, linear-displacement type.
Download time constants to the QDC module using the procedures
presented earlier in this chapter.
3-17
Page 62

Chapter
Overview of Remaining
Configuration Procedures
4
Chapter
Objectives
Configuration Concepts
This chapter gives you and overview of the remaining configuration
procedures necessary to successfully configure your QDC module for the
inject, clamp, and eject mode
Important: You must follow the configuration procedures presented in
chapters 5-10 in given order. Please use this chapter as a guide.
The QDC module communicates with your PLC-5 processor through data
“blocks”. These blocks are made up of several 16-bit words stored in the
PLC-5 data table. The QDC module accesses these areas of data table
through the 1771 backplane. There are two types of data blocks:
Command Blocks - these blocks are downloaded from the PLC-5 data
table to the QDC module to make configuration changes or initiate
machine actions
Status Blocks - the QDC module uses these blocks to send information
to the PLC-5 processor about current operating status
The configuration procedure detailed over the next several chapters makes
extensive use of command and status blocks. You will:
enter important operating data into all applicable command blocks
read machine operating data in status blocks to assist you in the
configuration procedure
Command Blocks
You configure the QDC module with a series of command blocks.
Command blocks are an area of the PLC-5 data table containing machine
commands, set-up, and operating information for the QDC module. On
power-up, or when you initiate a download, command blocks are
downloaded from the PLC-5 data table to the QDC module.
4-1
Page 63

Chapter 4
Overview of Remaining
Configuration Procedures
There are two types of command blocks, presented in the following table:
Type of Command Block: Which Contains: Examples:
Configuration Information necessary to configure your
module to run a certain portion of a profile.
Profile Actual process setpoints necessary to
produce a desired part.
Valve spanning
information for the 1st
clamp close profile.
1st clamp close profile
operating setpoints.
Status Blocks
The QDC module returns critical operating status and values to the PLC-5
data table through status blocks. Like configuration blocks, status blocks
are areas of PLC-5 data table. Status blocks, however, contain actual
machine operation information rather than machine setpoints and action
commands.
Type of Block: Which Contains: Examples:
Status Information about machine operation and
QDC module operating status.
The molding machine is
currently performing an
injection operation.
System Command and Status Blocks
The Module Configuration Block (MCC), Dynamic Command Block
DYC), and the System Status Block (SYS) are system data blocks because
of functions they perform:
Type of Block: Description: Examples:
Module Configuration
(MCC)
Dynamic Command
(DYC)
System Status
(SYS)
Contains configuration information used
throughout all phases of machine
operation.
Includes all commands necessary to jog,
run, and stop any applicable machine
phase or operation.
Returns to the PLC5 processor
information relevant to common module
parameters.
Sensor spanning information
and global alarm setpoints.
Command to start the injection
phase.
Actual voltages and
engineering units read at the
four QDC module inputs.
4-2
Page 64

Chapter 4
Overview of Remaining
Configuration Procedures
Overview of Procedures
Step: Procedure: Description: Refer to:
1 Jog Your Machine You enter machine jog pressure and flow setpoints
2 Select Command and Status
3 Load Initial
4 Load Initial Profile Setpoints You load Initial setpoints for process control, such
Configuration procedures described in the next several chapters are
outlined below. They are sequential in nature: configuration information
determined in initial chapters is needed in later chapters.
Bits to Sequence Machine
Operation
Configuration Values
into the Jog Configuration (JGC) block.
You jog your ram (screw), clamp, and ejector
with commands in the DYC block to further refine
your jog configuration.
You enter jog pressure alarm setpoints into the JGC
block.
You write PLC5 ladder logic required to cycle the
machine in the desired manner.
You load initial values for controlling pressure or
flow, ramp rates, pressure alarms.
as pressure, velocity, position, and time setpoints.
Chapter 5
Chapter 6
Chapter 7
(Used in
Chapters 9 & 10)
Chapter 8
(Used in
Chapters 9 & 10)
5 Span your Valves You span your inject, clamp, and ejector valves.
and set profile pressure alarms.
6 Tune your Machine for
Producing Parts
7 Troubleshoot the QDC
Module with LEDs
We discuss topics to consider when tuning your
machine.
We present a troubleshooting table based on LED
indicator conditions
Important: Throughout the rest of this manual, we refer to system
pressure during profile or axis movement as corresponding to:
inject pressure, or
clamp pressure, or
ejector pressure
All three are the pressure measured at input 2 of the QDC module.
For additional information, refer to System Pressure in chapter 1.
Chapter 9
Chapter 10
Chapter 11
4-3
Page 65

Chapter 4
Overview of Remaining
Configuration Procedures
Enter Data T
able V
alues
and Download Data Blocks
We refer to these procedures throughout this manual whenever you must:
enter data table values
download data blocks
Enter Values into Your PLC Data Table
With your programming terminal, enter worksheet values into your PLC-5
data table as follows:
1. Switch the PLC-5 processor to
PROGRAM mode.
2. Display your PLC-5 data table
3. Locate the data files for storing the subject block as specified on
individual worksheets.
4. Enter the value for each word and bit.
When you set bits in words prefixed with file identifier B (example: B34),
the PLC-5 processor automatically switches the radix to binary format.
Download Data Blocks
We define the following data words and functions used in the procedure to
download data blocks.
This Word: At Address: Provides this Function:
DYC61 N40:173 Requests that the QDC module return an error if it
finds one in the designated data block. The QDC
module reports the error in SYS61 and SYS62.
SYS61 N40:213 The QDC module reports the ID of the data block
containing the error (identified in SYS62). This word
will match a nonzero DYC61.
SYS62 N40:214 The QDC module reports the error code in this
word. This error code relates to the data block
whose ID is reported in SYS61.
The following steps outline the procedure to download data blocks from
the PLC-5 data table to the QDC module.
Important: The exception to this procedure is the MCC block that has its
own download procedure already outlined in chapter 3. The QDC module
must store a valid MCC block before you can use the following procedure.
1. For the block you want to download (subject block), get its ID
number from Table 4.A and enter it into DYC61.
4-4
Page 66

Chapter 4
Overview of Remaining
Configuration Procedures
Table 4.A
Information
Block to
Download:
JGC 02 1
FCC 03 2 CPC
SCC 04 3 CPC
TCC 05 4 CPC
LPC 06 5 CPC
CPC 07 6
INC 08 7 IPC
IPC 09 8
PKC 10 9 HPC
HDC 11 10 HPC
HPC 12 11
PRC 13 12
PLC 14 13 PPC
PPC 15 14
PSC 16 15
FOC 17 16 OPC
SOC 18 17 OPC
TOC 19 18 OPC
OSC 20 19 OPC
OPC 21 20
EAC 22 21 EPC
ERC 23 22 EPC
EPC 24 23
Required to Download a Block
ProSet 600
Block ID.:
ProSet 600
Download Bit B21/
Companion
Block:
2. Confirm that the QDC module returns the ID in SYS61.
Important: If the value returned in SYS61 is NOT the ID number
you entered, you have an error in the MCC or DYC block:
If SYS61 has
this value:
1 MCC Refer to chapter 3 Correct Programming Errors in MCC"
25 DYC Go to steps 8 and 9 of this procedure.
This block
has errors:
Fix them as follows:
Fix MCC and DYC errors before starting the download procedure
MCC and DYC errors are corrected when SYS61≠ 1 or 25, but
when SYS61=DYC61=ID number of the subject block
When you have done all three: Then:
1. Corrected all errors in MCC and DYC blocks
2. Entered the ID of the subject block in DYC61
3. Downloaded the subject block
The QDC module immediately
reports any programming errors it
detected in the subject block
4-5
Page 67

Chapter 4
Overview of Remaining
Configuration Procedures
3. Start the download procedure by setting the corresponding download
bit (Table 4.A) in your PLC-5 data table.
4. Watch the bit you set in step 3 and wait for Pro-Set 600 software to
reset it to zero. This indicates the PLC-5 processor has transferred
the block to the QDC module.
5. Observe the value of SYS62 (N40:214) in your PLC-5 data table:
If SYS62 = 0, the QDC module detected no errors. Go to step 6.
If SYS62≠ 0, the QDC module detected an error. Go to step 8.
6. Since the QDC module did not detect a programming error, check
Table 4.A to see if the subject block has a required companion block.
Important: When downloading multiple subject blocks that share the
same companion block, you may download the companion block:
after each subject block
once after the last subject block
To simplify troubleshooting your data entry (programming) errors during
initial configuration procedures, we recommend that you download the
companion block after each subject block. Otherwise, the procedure to
correct multiple errors becomes too complex.
7. Complete the procedure as follows:
a. If the subject block has a required companion block, return to
step 2 and repeat the procedure for the next block or companion
block.
b. If the subject block is the companion block, download it.
Return to step 2 to download additional blocks if required.
8. The QDC module detected a programming error. Interpret the error
code returned by the QDC module in SYS62. The code identifies the
first detected programming error in the subject block whose ID is
reported in SYS61 (N40:213). Refer to Section 2 of the Plastic
Molding Module Reference Manual (publication 1771-6.5.88) for
how to interpret and correct the cause of programming errors.
9. Correct the error in the PLC-5 data table corresponding to the subject
block. Since you may have more than one programming error in the
subject block, return to step 4 and repeat the download procedure
until you have corrected all errors in this block. Then SYS62 = 0.
4-6
Important: Pro-Set 600 software forces the PLC-5 processor to download
all command blocks to the QDC module when you switch the processor
from
PROGRAM to RUN
or power it up.
Page 68

Jog Your Machine
Chapter
5
Chapter
Objectives
About Jogging
This chapter describes how to:
configure jog block values necessary to jog the
ram (screw), clamp, and ejector
test jog values and make changes, if necessary
configure values which indirectly affect screw-rotate jogs
Jogging your machine is similar to operating in set-output mode:
You apply percentage values to your QDC module’s outputs to obtain the
desired motion. The jog configuration block (JGC) lets you set up jog
parameters to control QDC module outputs to jog the:
ram (screw) forward and backward
clamp open and closed
ejector advance and retract
Although the QDC module (in the inject, clamp, and eject mode) may not
directly control your machine’s screw-rotate jogs, your hydraulics may
require that valves connected to QDC module outputs assume a certain
position to assure proper screw-rotate jog functions. The QDC jog
configuration block allows you to set up these indirect jog values.
Use These W
orksheets
The following table lists the worksheets for recording initial values in the
JGC block to configure the QDC module for jogging the ram (screw),
clamp, and ejector.
To configure the QDC module
for jogging the:
ram (screw), clamp, and ejector 5A 5-3
screwrotate (indirect control) 5B 5-8
Use this
WorksheetOnPage
5-1
Page 69

Chapter 5
Jog Your Machine
Determine
Initial Jog V
alues
Worksheet 5-A lists all words in which you must enter values to
successfully configure your QDC module for jogging the ram (screw),
clamp, and ejector in both directions. Use it to record:
initial values
Enter initial values just sufficient to jog in the desired direction.
Keep this information in mind:
The numbers you enter are %-signal output.
For a range of –10 to +10V dc, zero output occurs @ 50%
(See Warning on next page.)
Later in this chapter you modify these values to obtain desired results.
pressure alarm setpoints for ram (screw), clamp, and/or ejector jogs
The QDC module sets an alarm any time system pressure equals or
exceeds the corresponding alarm setpoints during a jog. A zero entry
inhibits alarm actuation.
Important: The system high pressure alarm that you set in chapter 4 is
also active during jog functions.
5-2
Page 70

Chapter 5
Jog Your Machine
Worksheet 5. A
Ram (screw), Clamp, and Ejector Jog Configuration V
Record Your Initial Values Here
Block Word ProSet 600 Addr. Value Description
Inject, Forward Jog
JGC17 N40:73 Setoutput Values Output #1
JGC18 N40:74 Output #2
JGC19 N40:75 Output #3
JGC20 N40:76 Output #4
Inject, Reverse Jog
JGC25 N40:81 Setoutput Values Output #1
JGC26 N40:82 Output #2
JGC27 N40:83 Output #3
JGC28 N40:84 Output #4
Clamp, Forward Jog
JGC33 N40:89 Setoutput Values Output #1
JGC34 N40:90 Output #2
JGC35 N40:91 Output #3
JGC36 N40:92 Output #4
Clamp, Reverse Jog
JGC41 N40:97 Setoutput Values Output #1
JGC42 N40:98 Output #2
JGC43 N40:99 Output #3
JGC44 N40:100 Output #4
Ejector, Advance Jog
JGC49 N40:105 Set Output Values Output #1
JGC50 N40:106 Output #2
JGC51 N40:107 Output #3
JGC52 N40:108 Output #4
Ejector, Retract Jog
JGC57 N40:113 Set Output Values Output #1
JGC58 N40:114 Output #2
JGC59 N40:115 Output #3
JGC60 N40:116 Output #4
Jog Pressure Alarms
JGC06 N40:62 Ram Jog Pressure, Alarm Setpoint
JGC07 N40:63 Clamp Jog Pressure, Alarm Setpoint
JGC08 N40:64 Ejector Jog Pressure, Alarm Setpoint
1
%
Signal Output
00.00 to 99.99 %
2
Pressure
0000 to 9999 PSI
000.0 to 999.9 Bar
alues
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2
2
2
5-3
Page 71

Chapter 5
Jog Your Machine
ATTENTION: You can connect up to four different valves to
your QDC module. Although all four may not directly jog the
ram (screw), clamp, and/or ejector, consider their indirect effect
when setting jog set-output values. Indirectly, they could cause
unexpected machine motion with possible damage to equipment
or injury to personnel.
ATTENTION: A value of 0 entered in your data table does not
necessarily correspond to zero pressure or flow. For an output
configured +
10V dc, an output of 50% corresponds to zero
volts signal output (see graph). Amplifier electronics or spool
offsets may also be designed such that zero volts signal input
does not result in no flow or pressure. Please consult your valve
and amplifier specifications for more details.
10
5
0
Output Voltage
-5
-10
0 102030405060708090100
%
Output Requested
Enter and Download Initial Jog Values
Enter values from Worksheet 5-A into PLC-5 data table and download the
JGC block to the QDC module with your programming terminal. Use the
procedures from chapter 4, Enter Data Table Values and Download Data
Blocks. We repeat the JGC block download data.
5-4
To download Set B21/
JGC 1
Page 72

Chapter 5
Jog Your Machine
Write Ladder Logic
Take time now to develop ladder logic (independent of Pro-Set 600
software) to jog the ram (screw), clamp, and ejector. You may need to
monitor switches on your operator control panel, and set corresponding
command bits.
Use word 1 in the dynamic command block (DYC01) to enable and disable
individual jogs. Use word 1 in the system status block (SYS01) to monitor
the QDC module’s reaction to jog commands. Tables 5.A and 5.B identify
command and status bits for jogging the ram (screw), clamp, and ejector.
Table 5.A
Enable
Bits for Ram (Screw), Clamp, and Ejector Jogs
Control Block Word: ProSet 600 Address: Description:
DYC01B10 B34/394 Execute Ram (Screw) Jog Forward
DYC01B11 B34/395 Execute Ram (Screw) Jog Reverse
DYC01B12 B34/396 Execute Clamp Jog Forward
DYC01B13 B34/397 Execute Clamp Jog Reverse
DYC01B14 B34/398 Execute Ejector Jog Advance
DYC01B15 B34/399 Execute Ejector Jog Retract
Table 5.B
Bits for Ram (Screw), Clamp, and Ejector Jogs
Status
Status Block Word: ProSet 600 Address: Description:
SYS01B10 B34/10 Ram (Screw) Jog Forward in Progress
SYS01B11 B34/11 Ram (Screw) Jog Reverse in Progress
SYS01B12 B34/12 Clamp Jog Forward in Progress
SYS01B13 B34/13 Clamp Jog Reverse in Progress
SYS01B14 B34/14 Ejector Jog Advance in Progress
SYS01B15 B34/15 Ejector Jog Retract in Progress
We provide a programming example (Figure 5.1) of jog control for
instructional purposes only. Your application-specific programming may
vary significantly from this example.
Important: You may also need to develop ladder logic that changes the
direction of ram (screw), clamp, and/or ejector travel hydraulically when
you command the QDC module to jog in reverse.
5-5
Page 73

Chapter 5
Jog Your Machine
Figure 5.1
Example
Rung 6:1 DYC02-B15
| EMERGENCY ********* |
| STOP EXECUTE |
| CONDITION ALL STOP |
| EXISTS COMMAND |
| B3 B34 |
+––––] [–––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––( )–––––+
| 0 415 |
Rung 6:2
| CYCLE | MANUAL |DIRECTION DYC01-B10 |
| CONTROL | SCREW |SOLENOIDS ********** |
| SELECTOR | FORWARD |ALIGNED TO EXECUTE |
| (A/S/M) IN| JOG |MOVE SCREW SCREW |
| “MANUAL” | ALLOWED |FORWARD FWD JOG |
| I:003 B11 B11 B34 |
+––––] [––––––––] [––––––––] [–––––––––––––––––––––––––––––––––––––––––( )–––––+
| 05 1 8 394 |
Rung 6:3
| CYCLE | MANUAL |DIRECTION DYC01-B11 |
| CONTROL | SCREW |SOLENOIDS ********** |
| SELECTOR | REVERSE |ALIGNED TO EXECUTE |
| (A/S/M) IN| JOG |MOVE SCREW SCREW |
| “MANUAL” | ALLOWED |REVERSE REV JOG |
| I:003 B11 B11 B34 |
+––––] [––––––––] [––––––––] [–––––––––––––––––––––––––––––––––––––––––( )–––––+
| 05 2 9 395 |
Rung 6:4 |
| CYCLE | |DIRECTION DYC01-B12 |
| CONTROL | MANUAL |SOLENOIDS ********** |
| SELECTOR |CLAMP JOG |ALIGNED TO EXECUTE |
| (A/S/M) IN| FORWARD |MOVE CLAMP CLAMP |
| “MANUAL” | ALLOWED |FORWARD FWD JOG |
| I:003 B11 B11 B34 |
+––––] [––––––––] [––––––––] [–––––––––––––––––––––––––––––––––––––––––( )–––––+
| 05 4 11 396 |
Rung 6:5
| CYCLE | |DIRECTION DYC01-B13 |
| CONTROL | MANUAL |SOLENOIDS ********** |
| SELECTOR |CLAMP JOG |ALIGNED TO EXECUTE |
| (A/S/M) IN| REVERSE |MOVE CLAMP CLAMP |
| “MANUAL” | ALLOWED |REVERSE REV JOG |
| I:003 B11 B11 B34 |
+––––] [––––––––] [––––––––] [–––––––––––––––––––––––––––––––––––––––––( )–––––+
| 05 5 12 397 |
Rung 6:6 |
| CYCLE | MANUAL |DIRECTION DYC01-B14 |
| CONTROL | EJECTOR |SOLENOIDS ********** |
| SELECTOR | JOG |ALIGNED TO EXECUTE |
| (A/S/M) IN| ADVANCE |ADVANCE EJECTOR |
| “MANUAL” | ALLOWED |EJECTOR ADV JOG |
| I:003 B11 B11 B34 |
+––––] [––––––––] [––––––––] [–––––––––––––––––––––––––––––––––––––––––( )–––––+
| 05 6 13 398 |
Rung 6:7
| CYCLE | MANUAL |DIRECTION DYC01-B15 |
| CONTROL | EJECTOR |SOLENOIDS ********** |
| SELECTOR | JOG |ALIGNED TO EXECUTE |
| (A/S/M) IN| RETRACT |RETRACT EJECTOR |
| “MANUAL” | ALLOWED |EJECTOR RET JOG |
| I:003 B11 B11 B34 |
+––––] [––––––––] [––––––––] [–––––––––––––––––––––––––––––––––––––––––( )–––––+
| 05 7 14 399 |
Programming for Ram (Screw), Clamp, and Ejector Jogs
5-6
Page 74

Chapter 5
Jog Your Machine
Jog Your Ram (Screw), Clamp, and Ejector
Configure Screwrotate Jogs
for Indirect Control
Jog your ram (screw), clamp, and ejector, one at a time, in forward and
reverse directions. Experiment with values you entered in the jog
configuration block (JGC) until you obtain the desired jog operation.
If You Observe This Condition: Then Make This Adjustment:
Rough jerky acceleration or deceleration
(hammering hydraulics)
Sluggish acceleration or deceleration 1) Boost jog pressure
1) Decrease jog pressure
2) Decrease jog flow
You must download the JGC block to the QDC module each time you
change one or more of its values to implement the new value(s). Use the
procedures in chapter 4 to change values in the JGC block and download it
to the QDC module. We repeat the JGC block download data.
To download Set B21/
JGC 1
Although the QDC module may not directly control your machine’s
screw-rotate jog, your hydraulics may require valves connected to this
QDC module’s outputs to go to a certain position to assure proper
screw-rotate jog functions. The jog configuration block lets you set up
these indirect jog values.
If your hydraulics require it, take time now to set your valves connected to
the QDC module to assist with the screw-rotate jog. Otherwise, omit the
rest of this chapter.
Whenever the appropriate screw-rotate jog bit is set in dynamic command
block DYC01, the jog configuration block (JGC) values corresponding to
the respective jog are applied to QDC module outputs.
1. In Worksheet 5-B, enter values which must be applied to the QDC
module to successfully execute the screw-rotate jog.
Important: Jog-specific high pressure alarms are NOT activated during
the screw-rotate jog.
2. Download the jog configuration block (JGC) with download bit
B21/1 using the download procedure outlined in chapter 4.
5-7
Page 75

Chapter 5
Jog Your Machine
Worksheet 5. B
Screwrotate Jog Configuration Values for Indirect Control
Enter Your Initial Values Here
Block Word ProSet 600 Addr. Value Description
Screw Rotate Jog
JGC09 N40:65 Set Output Values Output #1
JGC10 N40:66 Output #2
JGC11 N40:67 Output #3
JGC12 N40:68 Output #4
1
% Signal Output
00.00 to 99.99 %
1
1
1
1
Write Ladder Logic to Assist
with Screwrotate Jogs
If your hydraulics require it, take time now to develop ladder logic
(independent of Pro-Set 600 software) so the QDC module can assist in
screw-rotate jogs. Otherwise, omit the rest of this chapter.
Use word 1 in the dynamic command block (DYC01) to enable and disable
individual jogs. Use word 1 in the system status block (SYS01) to monitor
the QDC module’s reaction to jog commands. Tables 5.C and 5.D identify
command and status bits for jogging screw rotation.
Table 5.C
Bits for Screwrotate Jogs
Enable
Command Block Word: ProSet 600 Address: Description:
DYC01B09 B34/393 Execute Screwrotate Jog
Table 5.D
Bits for Screwrotate Jogs
Status
Status Block Word: ProSet 600
Address:
Description:
5-8
SYS01B09 B34/9 Screwrotate Jog in Progress
We provide a programming example (Figure 5.2) of assisted jog control for
instructional purposes only. Your application-specific programming may
vary significantly from this example.
Page 76

Chapter 5
Jog Your Machine
Rotate
the Screw
Figure 5.2
Example
Rung 6:6
| CYCLE | MANUAL |DIRECTION DYC01-B09 |
| CONTROL | SCREW |SOLENOIDS ********** |
| SELECTOR | ROTATE |ALIGNED TO EXECUTE |
| (A/S/M) IN| JOG | ROTATE SCREW ROTATE |
| “MANUAL” | ALLOWED | SCREW JOG |
| I:003 B11 B11 B34 |
+––––] [––––––––] [––––––––] [–––––––––––––––––––––––––––––––––––––––––( )–––––+
| 05 3 10 393 |
Programming for Assisting Screwrotate Jogs
Do this only after writing all direct and assisted ladder logic for controlling
screw-rotate jogs.
Rotate the ram (screw) by jogging. Experiment with values you entered in
the jog configuration block (JGC) until you obtain the desired jog
operation.
If You Observe This Condition: Then Make This Adjustment:
Rough jerky acceleration or deceleration
(hammering hydraulics)
Sluggish acceleration or deceleration 1) Boost jog pressure
1) Decrease jog pressure
2) Decrease jog flow
You must download the JGC block to the QDC module each time you
change one or more of its values to implement the new value(s). Use
download bit B21/1. If necessary, refer to the download procedure in
chapter 4.
5-9
Page 77

Chapter
6
Select Command and Status Bits to Sequence
Machine Operation
Chapter
Assess Y
Objectives
our
Logic Requirements
In this chapter, we provide you with tables of command and status bits that
you use to write ladder logic to:
implement manual functions such as jog, set outputs, and stop
step your QDC module through machine cycles
We suggest how to assess your logic requirements and based on those
requirements how to use bit tables to write your machine’s sequential
ladder logic.
Important: You must write your own ladder logic for machine sequencing
because it depends on your machine’s hydraulic configuration and your
application. It is not included in Pro-Set 600 software.
Assess your logic requirements according to how your machine must be
sequenced.
If you need to Refer to this table for required
Execute phases of the inject, clamp,
and eject mode without interruption
Jog your machine in manual mode,
set outputs, or stop
Start the next profile or movement 6.B and 6.C
Interrupt movement between profiles 6.D
Trigger new events 6.E
Review all available status bits 6.F
Review all available command
and configuration bits 6.G
command and/or status bits
no additional ladder logic required
6.A
Important: For a more thorough description of all command and status
bits presented in this chapter, refer to Section 3 of the Plastic Molding
Module Reference Manual (publication 1771-6.5.88).
6-1
Page 78

Chapter 6
Select Command and Status Bits to
Sequence Machine Operation
Use Command and Status Bit Tables
Use the following tables to select command and status bits when writing
ladder logic to control manual functions and machine sequencing.
Table 6.A
Command
To Initiate this action: Set this bit: ProSet
Direct Setoutput DYC01B08 392 SYS01B08 08
Unassigned #1 Jog DYC01B09 393 SYS01B09 09
Ram (screw) Forward Jog DYC01B10 394 SYS01B10 10
Ram (screw) Reverse Jog DYC01B11 395 SYS01B11 11
Clamp Forward Jog DYC01B12 396 SYS01B12 12
Clamp Reverse Jog DYC01B13 397 SYS01B13 13
Ejector Advance Jog DYC01B14 398 SYS01B14 14
Ejector Retract Jog DYC01B15 399 SYS01B15 15
Stop DYC02B15 415 SYS02B15 31
Table 6.B
Command
and Status Bits for Manual Control
B34/xx:
Bits for Starting Profiles
The QDC sets this bit
during execution:
ProSet
B34/xx:
To initiate this
Profile/Movement:
1st Clamp Close 00 400 --- --- ---
2nd Clamp Close 01 401 CPC03B08 B37/296 1st Clamp Close
3rd Clamp Close 02 402 CPC03B09 B37/297 2nd Clamp Close
Low Pressure Close 03 403 CPC03B10 B37/298 3rd Clamp Close
Injection 04 404
Pack 05 405
Hold 06 406
Predecompression 07 407 HPC03B08 B38/296 Hold
Plastication 08 408 HPC03B09 B38/297 Predecompression
Postdecompression 09 409 PPC03B08 B38/488 Plastication
1st Clamp Open 10 410 --- --- ---
2nd Clamp Open 11 411 OPC03B08 B37/616 1st Clamp Open
3rd Clamp Open 12 412 OPC03B09 B37/617 2nd Clamp Open
Clamp Open Slow 13 413 OPC03B10 B37/618 3rd Clamp Open
1st Ejector Advance 14 414 EPC03B08 B39/168 On Clamp Position During Open
Ejector Continue
1
Injection, Pack, and Hold are always linked as one profile.
Toggle this
bit in DYC02:
15 415 EPC03B12 B39/172 Previous Ejector Stroke
ProSet
B34/xx:
If this bit is
Reset:
1
--- --- ---
1
--- --- Injection
1
--- --- Pack
ProSet
Address:
The Profile/Movement in column 1
starts automatically after:
6-2
Page 79

Chapter 6
Select Command and Status Bits to
Sequence Machine Operation
Table 6.C
and Command Bit Interaction for Profile Execution
Status
For this
Profile/Movement:
1st Clamp Close SYS21B00 SYS02B00 SYS02B00 SYS21B00 CPC03B08 SYS22B00
2nd Clamp Close SYS21B01 SYS02B01 SYS02B01 SYS21B01 CPC03B09 SYS22B01
3rd Clamp Close SYS21B02 SYS02B02 SYS02B02 SYS21B02 CPC03B10 SYS22B02
Low Pressure Close SYS21B03 SYS02B03 SYS02B03 SYS21B03 --- SYS22B03
Injection SYS21B04 SYS02B04 SYS02B04 SYS21B04 --- ---
Pack SYS21B05 SYS02B05 SYS02B05 SYS21B05 --- ---
Hold SYS21B06 SYS02B06 SYS02B06 SYS21B06 HPC03B08 SYS22B06
Predecompression SYS21B07 SYS02B07 SYS02B07 SYS21B07 HPC03B09 SYS22B07
Plastication SYS21B08 SYS02B08 SYS02B08 SYS21B08 PPC03B08 SYS22B08
Postdecompression SYS21B09 SYS02B09 SYS02B09 SYS21B09 --- SYS22B09
1st Clamp Open SYS21B10 SYS02B10 SYS02B10 SYS21B10 OPC03B08 SYS22B10
2nd Clamp Open SYS21B11 SYS02B11 SYS02B11 SYS21B11 OPC03B09 SYS22B11
3rd Clamp Open SYS21B12 SYS02B12 SYS02B12 SYS21B12 OPC03B10 SYS22B12
During Execution
this bit in B34 is:
SET RESET SET RESET also SET also SET
At Completion
this bit in B34 is:
At completion
If this Then this
command bit is: status bit is:
Clamp Open Slow SYS21B13 SYS02B13 SYS02B13 SYS21B13 --- SYS22B13
Ejector Advance SYS21B14 SYS02B14 SYS21B14 SYS02B14 EPC03B12 SYS22B14
Ejector Retract
(tip strokes)
Final Ejector Retract SYS21B14 SYS02B14 SYS02B14 SYS21B14 --- SYS22B15
SYS21B14 SYS02B14 SYS21B14 SYS02B14 EPC03B12 SYS22B15
where:
These Bits: Report These Functions: or Command These Functions:
SYS21B00 thru B14 profile in progress
SYS02B00 thru B14 profile complete
SYS22B00 thru B03 and B06 thru B15 executing endofprofile %outputs
CPC03/HPC03/PPC03/OPC03/EPC03
Bits B08, 09, 10, 12
interrupt movement between profiles
(see tables 6.B and 6.D)
6-3
Page 80

Chapter 6
Select Command and Status Bits to
Sequence Machine Operation
Table 6.D
Bits T
Command
To Perform T his Function Use This Bit ProSet
Start 2nd clamp close profile @ endof 1st
Stop and setoutput @ endof 1st
Start 3rd clamp close profile @ endof 2nd
Stop and setoutput @ endof 2nd
Start LP close profile @ endof 3rd
Stop and setoutput @ endof 3rd
Start 2nd clamp open profile @ endof 1st
Stop and setoutput @ endof 1st
Start 3rd clamp open profile @ endof 2nd
Stop and setoutput @ endof 2nd
Start clamp open slow profile @ endof 3rd
Stop and setoutput @ endof 3rd
Start ejector profile on clamp position
Start ejector profile on command
Enable ejector profile
Disable ejector profile
Run ejector profile without interruption
Stop and notify @ end of ejector stroke
Start predecompression movement @ endof hold
Stop and set output @ endof hold
Start plastication profile @ endof predecompression
Stop and set output @ endof predecompression
Start postdecompression movement @ endof plastication
Stop and set output @ endof plastication
o Interrupt Movement Between Profiles
CPC03B08 = 0
CPC03B09 = 0
CPC03B10 = 0
OPC03B08 = 0
OPC03B09 = 0
OPC03B10 = 0
EPC03B08 = 0
EPC03B09 = 0
EPC03B12 = 0
HPC03B08 = 0
HPC03B09 = 0
PPC03B08 = 0
Address:
B37/296
= 1
B37/297
= 1
B37/298
= 1
B37/616
= 1
B37/617
= 1
B37/618
= 1
B39/168
= 1
B39/169
= 1
B39/172
= 1
B38/296
= 1
B38/297
= 1
B38/488
= 1
6-4
Important: In any of these bit tables, disregard bits not needed by your
application.
Page 81

Chapter 6
Select Command and Status Bits to
Sequence Machine Operation
Table 6.E
Miscellaneous
Reason for Using: Bit Description: QDC Block
To drop pump adders, or shift solenoids before
starting pack/hold profile
To drop pump adders, or shift solenoids Clamp in moldprotect zone SYS03B00 32
To add pump adders, or shift solenoids for tonnage
build or lockup
To start inject cycle Tonnage complete SYS03B02 34
To inhibit clamp from opening in auto mode Cure timer timing SYS03B03 35
To start clampopen phase Ram (screw) retracted, and
To drop pump adders, or shift solenoids Clamp in openslow zone SYS03B06 38
To idle the machine until starting next action Mold fully open SYS03B07 39
To shift solenoids before starting next ejector stroke
after the 1st advance strode
To prevent starting next cycle with machine in auto
mode
Status Bits T
o T
rigger New Action
Address:
Injection complete SYS02B04
Mold safe SYS03B01 33
SYS03B04,
Cure time complete
Ejector profile stopped at end of stroke SYS03B08 40
Opendwell timer is timing SYS03B09 41
and B05
ProSet
B34/xx:
36,
37
To prevent starting ejector retract
until valves have shifted
To start next cycle with machine in auto mode Cycle complete SYS03B11 43
To start ejector retract Ejector fully advanced SYS03B12 44
To start ejector retract when tip stroking is ON Ejector is beyond tip advance position SYS03B13 45
To start ejector advance when tip stroking is ON Ejector is within tip retract position SYS03B14 46
To start ejector advance Ejector fully retracted SYS03B15 47
To reopen the clamp when the part is stuck LP close watchdog timeout SYS04B03 51
To idle the machine and activate an alarm because
the hopper is running out of plastic
To shift solenoids for predecompression Setoutput in progress @ end of hold SYS22B06 342
To shift solenoids for plastication Setoutput in progress @ end of
To shift solenoids for postdecompression Setoutput in progress @ end of
To idle the machine until starting next action Setoutput in progress @ end of
Ejector forward dwell timer is timing SYS03B10 42
Watchdog for plastication phase SYS04B08 56
SYS22B07 343
predecompression
SYS22B08 344
plastication
SYS22B09 345
postdecompression
6-5
Page 82

Chapter 6
Select Command and Status Bits to
Sequence Machine Operation
Table 6.F
Bits
Status
Category: Bit Status
(when = 1):
Jog Status executing unassigned #1 jog SYS01B09 09
executing ram (screw) forward jog SYS01B10 10
executing ram (screw) reverse jog SYS01B11 11
executing clamp forward jog SYS01B12 12
executing clamp reverse jog SYS01B13 13
executing ejector advance jog SYS01B14 14
executing ejector retract jog SYS01B15 15
Profile Complete 1st clamp close profile complete SYS02B00 16
2nd clamp close profile complete SYS02B01 17
3rd clamp close profile complete SYS02B02 18
LP close profile complete SYS02B03 19
injection profile complete SYS02B04 20
pack profile complete SYS02B05 21
hold profile complete SYS02B06 22
predecompress movement complete SYS02B07 23
plastication profile complete SYS02B08 24
QDC Block
Address
ProSet
B34/xx:
postdecompress movement complete SYS02B09 25
1st clamp open profile complete SYS02B10 26
2nd clamp open profile complete SYS02B11 27
3rd clamp open profile complete SYS02B12 28
clamp open slow profile complete SYS02B13 29
ejector profile complete SYS02B14 30
Busy Status no action (outputs at zero) SYS02B15 31
Miscellaneous Status clamp in mold protection zone SYS03B00 32
mold safe SYS03B01 33
tonnage complete SYS03B02 34
cure timer timing SYS03B03 35
ram (screw) retracted SYS03B04 36
cure time complete SYS03B05 37
clamp in openslow zone SYS03B06 38
mold open SYS03B07 39
ejector stopped at end of stroke SYS03B08 40
mold opendwell timer is timing SYS03B09 41
6-6
Page 83

Table 6.F
Bits (continued)
Status
Chapter 6
Select Command and Status Bits to
Sequence Machine Operation
Category: Bit Status
(when = 1):
ejector forward dwell timer is timing SYS03B10 42
cycle complete SYS03B11 43
ejector fully advanced SYS03B12 44
ejector is beyond tip advance position SYS03B13 45
ejector is within tip retract position SYS03B14 46
ejector fully retracted SYS03B15 47
Watchdog Status 1st clamp close watchdog timed out SYS04B00 48
2nd clamp close watchdog timed out SYS04B01 49
3rd clamp close watchdog timed out SYS04B02 50
LP close watchdog timed out SYS04B03 51
predecompress watchdog timed out SYS04B07 55
plastication watchdog timed out SYS04B08 56
postdecompress watchdog timed out SYS04B09 57
1st clamp open watchdog timed out SYS04B10 58
2nd clamp open watchdog timed out SYS04B11 59
3rd clamp open watchdog timed out SYS04B12 60
clamp open slow watchdog timed out SYS04B13 61
ejector watchdog timed out SYS04B14 62
tonnage watchdog timed out SYS04B15 63
Profile Status executing 1st close profile SYS21B00 320
executing 2nd close profile SYS21B01 321
executing 3rd close profile SYS21B02 322
executing LP close profile SYS21B03 323
QDC Block
Address
ProSet
B34/xx:
executing injection profile SYS21B04 324
executing pack profile SYS21B05 325
executing hold profile SYS21B06 326
executing predecompress movement SYS21B07 327
executing plastication profile SYS21B08 328
executing postdecompress movement SYS21B09 329
executing 1st clamp open profile SYS21B10 330
executing 2nd clamp open profile SYS21B11 331
executing 3rd clamp open profile SYS21B12 332
6-7
Page 84

Chapter 6
Select Command and Status Bits to
Sequence Machine Operation
Table 6.F
Bits (continued)
Status
Category: Bit Status
executing clamp open slow profile SYS21B13 333
Endof Profile
Setoutput Status
(when = 1):
executing ejector profile SYS21B14 334
executing endof 1st clamp close
setoutput
executing endof 2nd clamp close
setoutput
executing endof 3rd clamp close
setoutput
executing endof LP close setoutput SYS22B03 339
executing end of hold setoutput SYS22B06 342
executing end of predecompression
setoutput
executing end of plastication setoutput SYS22B08 344
executing end of postdecompression
setoutput
executing endof 1st clamp open
setoutput
executing endof 2nd clamp open
setoutput
executing endof 3rd clamp open
setoutput
executing endof clamp open slow
setoutput
executing endof ejector advance
setoutput
executing endof ejector retract
setoutput
QDC Block
Address:
SYS22B00 336
SYS22B01 337
SYS22B02 338
SYS22B07 343
SYS22B09 345
SYS22B10 346
SYS22B11 347
SYS22B12 348
SYS22B13 349
SYS22B14 350
SYS22B15 351
ProSet
B34/xx:
6-8
Page 85

Chapter 6
Select Command and Status Bits to
Sequence Machine Operation
Table 6.G
Command
Operation: Function Enabled
Nonprofiled execute setoutput DYC01B08 392
Action Commands execute unassigned # 1 jog DYC01B09 393
execute ram (screw) forward jog DYC01B10 394
execute ram (screw) reverse jog DYC01B11 395
execute clamp forward jog DYC01B12 396
execute clamp reverse jog DYC01B13 397
Profile Action execute 1st clamp close profile DYC02B00 400
Commands execute 2nd clamp close profile DYC02B01 401
execute 3rd clamp close profile DYC02B02 402
execute LP clamp close profile DYC02B03 403
and Configuration Bits
(when = 1):
execute ejector advance jog DYC01B14 398
execute ejector retract jog DYC01B15 399
execute injection profile DYC02B04 404
execute pack profile DYC02B05 405
execute hold profile DYC02B06 406
QDC Block
Address:
ProSet
B34/xx:
execute predecompression movement DYC02B07 407
execute plastication profile DYC02B08 408
execute postdecompression movement DYC02B09 409
execute 1st clamp open profile DYC02B10 410
execute 2nd clamp open profile DYC02B11 411
execute 3rd clamp open profile DYC02B12 412
execute clamp open slow profile DYC02B13 413
execute ejector profile DYC02B14 414
Stop Command execute all stop (outputs = zero) DYC02B15 415
Miscellaneous reset tonnage watchdog timer DYC03B00 416
Commands reset cure timer DYC03B01 417
reset SYS01B08 DYC03B08 424
reset latched alarms DYC03B09 425
reset complete bits DYC03B10 426
continue ejector profile DYC03B15 431
6-9
Page 86

Chapter 6
Select Command and Status Bits to
Sequence Machine Operation
Table 6.G
(continued)
Command and Configuration Bits
Operation: Function Enabled
Logical Bridge set output @ end of 1st clamp close profile
Configured
Protection from
Clampzone
Overrun
Additional Ejector
Configuration
(when = 1):
(0 = start 2nd clamp close profile)
set output @ end of 2nd clamp close profile
(0 = start 3rd clamp close profile)
set output @ end of 3rd clamp close profile
(0 = start clamp LP close profile)
set output @ end of hold profile
(0 = start predecompress movement @ end of hold)
set output @ end of predecompress movement
(0 = start plastication profile @ end of predecompress)
set output at end of plastication profile
(0 = start postdecompression at end of plastication)
set output @ end of 1st clamp open profile
(0 = start 2nd clamp open profile)
set output @ end of 2nd clamp open profile
(0 = start 3rd clamp open profile)
set output @ end of 3rd clamp open profile
(0 = start clamp open slow profile)
set output @ end of all ejector strokes
(0 = start each new stroke at end of previous)
If a clamp close profile overruns the
mold protection zone:
0 = start LPclose profile
1 = stop and zero outputs
If a clamp open profile overruns the
clamp open slow zone
0 = start open slow profile
1 = stop and zero outputs
start ejector profile on command from PLC processor
(0 = start ejector profile on position during clamp open)
disable ejector profile
(0 = enable ejector profile)
change intermediate strokes to tip strokes
(0 = all ejector strokes are full strokes)
execute forward dwell after 1st advance stroke
(0 = execute forward dwell after last advance stroke)
QDC Block
Address:
CPC03B08 B37/296
CPC03B09 B37/297
CPC03B10 B37/298
HPC03B08 B38/296
HPC03B09 B38/297
PPC03B08 B38/488
OPC03B08 B37/616
OPC03B09 B37/617
OPC03B10 B37/618
EPC03B12 B39/172
CPC03B11 B37/299
OPC03B11 B37/619
EPC03B08 B39/168
EPC03B09 B39/169
EPC03B13 B39/173
EPC03B15 B39/175
ProSet
Address:
6-10
Page 87

Chapter
7
Load Initial Configuration Values
Chapter
Objectives
This chapter helps you load the QDC module with machine-specific
configuration values by performing four tasks:
Determine initial configuration values
Record them on worksheets
Enter them in PLC-5 data table
Download them to the QDC module
Initial values that you load include:
configuration bits
set-output values
acceleration and deceleration ramp rates
pressure or velocity control limits
pressure or velocity gain constants
pressure alarm setpoints
We already recorded many initial values on worksheets for you.
Important: Do not start this chapter until you have:
spanned your sensors, and moved hydraulic cylinders (chapter 3)
jogged the ram (screw), clamp, and ejector (chapter 5)
7-1
Page 88

Chapter 7
Load Initial Configuration Values
Use
These W
orksheets
The following table lists configuration blocks and corresponding
worksheets for recording your initial values to configure the QDC module.
To configure the QDC module with these configuration blocks: Use worksheet: On page:
Clamp Close Configuration Blocks (FCC, SCC, and TCC) 7A 73
Low Pressure Close Configuration Block (LPC) 7B 75
Injection Configuration Block (INC) 7C 77
Pack Configuration Block (PKC) 7D 79
Hold Configuration Block (HDC) 7E 711
Plastication Configuration Block (PLC) 7F 713
Clamp Open Configuration Blocks (FOC, SOC, TOC, and OSC) 7G 715
Ejector Configuration Blocks (EAC and ERC) 7H 717
Important: We omitted pre- and post-decompression blocks because you
do not use them when spanning valves in chapter 9. We discuss their
application in chapter 10.
Take a moment now to browse through the worksheets. Notice that we
grouped clamp close configuration blocks onto one worksheet, and clamp
open configuration blocks onto another because they are similar.
Otherwise, each configuration block has its own worksheet.
Each configuration block has two types of storage words:
control words for selecting parameters by setting bits
data words for recording initial values
Many parameters repeat from one configuration block to the next. Because
of this, we describe how you determine an initial value once for all
configuration blocks that require it. Then you enter that parameter in all
applicable configuration blocks. That is why we placed worksheets
together, followed by the text to describe how to determine initial values.
We give you the procedure immediately following the worksheets.
7-2
Page 89

Chapter 7
Load Initial Configuration Values
Worksheet 7A
Clamp Close Configuration Blocks (FCC, SCC, and TCC)
W
ord
FCC01
B15 thru 00
Bit Address B37/Bit
Value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1
W
ord
SCC01
B15 thru 00
Bit Address B37/Bit
Value 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0
W
ord
TCC01
B15 thru 00
Bit Address B37/Bit
Value 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
79 78 77 76 75 74 73 72 71 70 69 68 67 66 65 64
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
143 142 141 140 139 138 137 136 135 134 133 132 131 130 129 128
Important: Record values only in words used.
Record zeros in words not used.
You must configure at least FCC02
W
ord
FCC02
B15 thru 00
Bit Address B37/Bit
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
Block Identifier
Value 0 0 0 0 0 0 0 0 1 0
W
ord
SCC02
B15 thru 00
Bit Address B37/Bit
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
95 94 93 92 91 90 89 88 87 86 85 84 83 82 81 80
Value 0 0 0 0 0 0 0 0 1 0
Word
TCC02
B15 thru 00
Bit Address B37/Bit
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
159 158 157 156 155 154 153 152 151 150 149 148 147 146 145 144
Value 0 0 0 0 0 0 0 0 1 0
Code:
Your
0
Required initial value
or 1
loaded by ProSet 600
0V
value
alue not used
PID
0 = Dependent Gains (ISA)
1 = Independent Gains (AB)
Pressure Control Valve
000 = Output 1
001 = Output 2
010 = Output 3
011 = Output 4
Velocity Control Valve
000 = Output 1
001 = Output 2
010 = Output 3
011 = Output 4
Important: You must configure at least the FCC configuration block.
7-3
Page 90

Chapter 7
Load Initial Configuration Values
Worksheet 7A
(continued)
Clamp Close Configuration Blocks (FCC, SCC, and TCC)
Enter Your V
For these Parameters (footnote = units) Word FCC N43: FCC Value SCC N43: SCC Value TCC N43: TCC Value
Minimum ERC Percentage - Velocity
Minimum ERC Percentage - Pressure
Profile Watchdog Timer Preset
Output #1 Selected Valve %Output During Profile 4 09 5 * 65 * 125 *
Output #2 Selected Valve %Output During Profile 4 10 6 * 66 * 126 *
Output #3 Selected Valve %Output During Profile 4 11 7 * 67 * 127 *
Output #4 Selected Valve %Output During Profile 4 12 8 * 68 * 128 *
Output #1 Acceleration Ramp Rate During Profile
Output #2 Acceleration Ramp Rate During Profile
Output #3 Acceleration Ramp Rate During Profile
Output #4 Acceleration Ramp Rate During Profile
Output #1 Deceleration Ramp Rate During Profile
Output #2 Deceleration Ramp Rate During Profile
Output #3 Deceleration Ramp Rate During Profile
Output #4 Deceleration Ramp Rate During Profile
Output #1 Endofprofile Setoutput Value
Output #2 Endofprofile Setoutput Value
Output #3 Endofprofile Setoutput Value
Output #4 Endofprofile Setoutput Value
Pressure Minimum Control Limit
Pressure Maximum Control Limit
Selected Pressure Valve Output for Minimum
Selected Pressure Valve Output for Maximum
Velocity Minimum Control Limit
Velocity Maximum Control Limit
Selected Velocity Valve Output for Minimum
Selected Velocity Valve Output for Maximum
Proportional Gain for Pressure Control
Integral Gain for Pressure Control
Derivative Gain for Pressure Control
Proportional Gain for Velocity Control
Feed Forward Gain for Velocity Control
Profile High Pressure Alarm Setpoint
1
Time
00.00 to 99.99 Seconds 00.00 to 99.99 Inches per Second 0000 to 9999 PSI
5
Percent Signal Output per Second
0000 to 9999
*Important
: Refer to the appropriate section later in this chapter for information on this parameter
1
3
3
2
2
alues Here
8
8
(none)
6
7
6
(none)
3
05 1 1000 61 1000 121 1000
06 2 1000 62 1000 122 1000
08 4 0 64 0 124 0
5
17 13 0 73 0 133 0
5
18 14 0 74 0 134 0
5
19 15 0 75 0 135 0
5
20 16 0 76 0 136 0
5
25 21 0 81 0 141 0
5
26 22 0 82 0 142 0
5
27 23 0 83 0 143 0
5
28 24 0 84 0 144 0
4
4
4
4
33 29 * 89 * 149 *
34 30 * 90 * 150 *
35 31 * 91 * 151 *
36 32 * 92 * 152 *
41 37 0 97 0 157 0
42 38 Syst Press 98 Syst Press 158 Syst Press
4
4
43 39 * 99 * 159 *
44 40 * 100 * 160 *
45 41 0 101 0 161 0
46 42 per OEM * 102 per OEM * 162 per OEM *
4
4
47 43 * 103 * 163 *
48 44 * 104 * 164 *
49 45 100 105 100 165 100
50 46 400 106 400 166 400
51 47 0 107 0 167 0
52 48 200 108 200 168 200
53 49 0 109 0 169 0
57 53 0 113 0 173 0
2
Velocity along Axis
000.0 to 999.9 Millimeters per Sec
6
Inverse T
ime (Algorithm)
00.00 to 99.99 Minutes 00.00 to 99.99 Minutes
00.00 to 99.99 Seconds
3
Pressure
000.0 to 999.9 Bar
7
T
ime (Algorithm)
4
Percent Signal Output
00.00 to 99.99
8
Percent
00.00 to 99.99
7-4
Page 91

Chapter 7
Load Initial Configuration Values
Worksheet 7B
Low Pressure Close Configuration Block (LPC)
Word
LPC01
Bits 15 thru 00
Bit Addresses B37/Bxxx
Value 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0
Important:
Verify
W
ord
block identifier
LPC02
Bits 15 thru 00
.
Bit Addresses B37/Bxxx
Value 0 0 0 0 0 0 0 0 1 0 0 0 0
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
207 206 205 204 203 202 201 200 199 198 197 196 195 194 193 192
Block Identifier
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
223 222 221 220 219 218 217 216 215 214 213 212 211 210 209 208
Code:
0
or 1
0V
Your
value
Required initial value
loaded by ProSet 600
alue not used
PID
0 = Dependent Gains (ISA)
1 = Independent Gains (AB)
Pressure Control Valve
000 = Output 1
001 = Output 2
010 = Output 3
011 = Output 4
Important: You must configure the LPC configuration block.
7-5
Page 92

Chapter 7
Load Initial Configuration Values
Worksheet 7B
(continued)
Low Pressure Close Configuration Block (LPC)
Enter Your V
For these Parameters (footnote = units) Word LPC N43: LPC Value
Minimum ERC Percentage
Tonnage Watchdog Timer Preset
Profile Watchdog Timer Preset
#1 Selected Valve SetOutput During Profile
#2 Selected Valve SetOutput During Profile
#3 Selected Valve SetOutput During Profile
#4 Selected Valve SetOutput During Profile
Output #1 Acceleration Ramp Rate During Profile
Output #2 Acceleration Ramp Rate During Profile
Output #3 Acceleration Ramp Rate During Profile
Output #4 Acceleration Ramp Rate During Profile
Output #1 Deceleration Ramp Rate During Profile
Output #2 Deceleration Ramp Rate During Profile
Output #3 Deceleration Ramp Rate During Profile
Output #4 Deceleration Ramp Rate During Profile
#1 Endofprofile Setoutput Value
#2 Endofprofile Setoutput Value
#3 Endofprofile Setoutput Value
#4 Endofprofile Setoutput Value
Pressure Minimum Control Limit
Pressure Maximum Control Limit
Selected Pressure Valve Output for Minimum
Selected Pressure Valve Output for Maximum
Proportional Gain for Pressure Control
Integral Gain for Pressure Control
Derivative Gain for Pressure Control
Profile High Pressure Alarm Setpoint
1
Time
00.00 to 99.99 Sec 0000 to 9999 PSI
6
Inverse T
ime (Algorithm)
00.00 to 99.99 Minutes 00.00 to 99.99 Minutes
00.00 to 99.99 Sec
* Important
: Refer to the appropriate section later in this chapter for information on this parameter
8
1
1
4
4
4
4
3
3
6
7
3
Pressure
000.0 to 999.9 Bar
7
T
ime (Algorithm)
4
4
4
4
5
5
5
5
5
5
5
5
4
4
(none)
3
4
8
alues Here
06 182 1000
07 183 0
08 184 0
09 185 *
10 186 *
11 187 *
12 188 *
17 193 0
18 194 0
19 195 0
20 196 0
25 201 0
26 202 0
27 203 0
28 204 0
33 209 *
34 210 *
35 211 *
36 212 *
41 217 0
42 218 System Pressure
43 219 *
44 220 *
49 225 100
50 226 400
51 227 0
57 233 0
Percent
Signal Output
00.00 to 99.99
Percent
00.00 to 99.99
5
Percent Signal Output per Sec
0000 to 9999
7-6
Page 93

Worksheet 7C
Injection Configuration Block (INC)
Chapter 7
Load Initial Configuration Values
Control W
ProSet 600 Addr. B38/bit
ord INC01Bxx
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
Value 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0
INC
Block Identifier
Control W
ProSet 600 Addr. B38/bit
ord INC02Bxx
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
Value 0 0 0 0 0 0 0 0 1 0
Code:
Your
value
0
Required initial value
or 1
loaded by ProSet 600
0V
alue not used
Selected
Pressure Valve
000 = Output 1
001 = Output 2
010 = Output 3
011 = Output 4
Selected
Velocity Valve
000 = Output 1
001 = Output 2
010 = Output 3
011 = Output 4
PID Pressure Algorithm
0 = Dependent Gains
1 = Independent Gains
7-7
Page 94

Chapter 7
Load Initial Configuration Values
Worksheet 7C
(continued)
Injection Configuration Block (INC)
Enter Y
our V
alues Here
Control Word ProSet 600 Addr. Value Description
INC05 N44:1 1000 Minimum ERC PercentageVelocity
INC06 N44:2 1000 Minimum ERC PercentagePressure
INC09 N44:5 * Output #1 Setoutput Value During Profile
INC10 N44:6 * Output #2 Setoutput Value During Profile
INC11 N44:7 * Output #3 Setoutput Value During Profile
INC12 N44:8 * Output #4 Setoutput Value During Profile
INC17 N44:13 0 Output #1 Acceleration Ramp Rate During Profile
INC18 N44:14 0 Output #2 Acceleration Ramp Rate During Profile
INC19 N44:15 0 Output #3 Acceleration Ramp Rate During Profile
INC20 N44:16 0 Output #4 Acceleration Ramp Rate During Profile
INC25 N44:21 0 Output #1 Deceleration Ramp Rate During Profile
INC26 N44:22 0 Output #2 Deceleration Ramp Rate During Profile
INC27 N44:23 0 Output #3 Deceleration Ramp Rate During Profile
INC28 N44:24 0 Output #4 Deceleration Ramp Rate During Profile
INC41 N44:37 0 Pressure Minimum Control Limit
INC42 N44:38 * Pressure Maximum Control Limit
INC43 N44:39 * Selected Pressure Valve, Output for Minimum
INC44 N44:40 * Selected Pressure Valve, Output for Maximum
INC45 N44:41 0 Velocity Minimum Control Limit
INC46 N44:42 * Velocity Maximum Control Limit
INC47 N44:43 * Selected Velocity Valve, Output for Minimum
INC48 N44:44 * Selected Velocity Valve, Output for Maximum
INC49 N44:45 100 Proportional Gain for Pressure Control
INC50 N44:46 400 Integral Gain for Pressure Control
INC51 N44:47 0 Derivative Gain for Pressure Control
INC52 N44:48 200 Proportional Gain for Velocity Control
INC53 N44:49 0 Feed Forward Gain for Velocity Control
INC57 N44:53 0 Profile High Pressure Alarm Setpoint
2
Velocity along Axis
00.00 to 99.99 inches per second
000.0 to 999.9 millimeters per second
5
Percent Signal Output per Second
0000 to 9999
3
Pressure
0000 to 9999 PSI
000.0 to 999.9 Bar
6
Inverse T
ime (Algorithm)
00.00 to 99.99 Minutes (ISA) 00.00 to 99.99 Minutes (ISA)
00.00 to 99.99 Seconds (AB) 00.00 to 99.99 Seconds (AB)
4
Percent Signal Output
00.00 to 99.99
7
T
ime (Algorithm)
8
8
4
4
4
4
3
3
4
4
2
2
4
4
none
6
7
6
none
3
8
Percent
00.00 to 99.99
5
5
5
5
5
5
5
5
*
Refer to the appropriate section later in this chapter for information on this parameter
7-8
Page 95

Worksheet 7D
Pack Configuration Block (PKC)
Chapter 7
Load Initial Configuration Values
Control W
ProSet 600 Addr. B38/bit
ord PKC01Bxx
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
143 142 141 140 139 138 137 136 135 134 133 132 131 130 129 128
Value 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1 0
PKC
Block Identifier
Control Word PKC02Bxx
ProSet 600 Addr. B38/bit
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
159 158 157 156 155 154 153 152 151 150 149 148 147 146 145 144
Value 0 0 0 0 0 0 0 0 1 0 0 0 0
Code:
0
or 1
Your
value
Required initial value
loaded by ProSet 600
Selected
Pressure Valve
000 = Output 1
001 = Output 2
010 = Output 3
011 = Output 4
0V
alue not used
PID Pressure Algorithm
0 = Dependent Gains
1 = Independent Gains
7-9
Page 96

Chapter 7
Load Initial Configuration Values
Worksheet 7D
(continued)
Pack Configuration Block (PKC)
Enter Y
our V
alues Here
Control Word ProSet 600 Addr. Value Description Units
PKC06 N44:122 1000 Minimum ERC PercentagePressure Percent
PKC09 N44:125 * Output #1 Setoutput Value During Profile Percent Signal Output
PKC10 N44:126 * Output #2 Setoutput Value During Profile Percent Signal Output
PKC11 N44:127 * Output #3 Setoutput Value During Profile Percent Signal Output
PKC12 N44:128 * Output #4 Setoutput Value During Profile Percent Signal Output
PKC17 N44:133 0 Output #1 Acceleration Ramp Rate During Profile Percent Signal Output per Second
PKC18 N44:134 0 Output #2 Acceleration Ramp Rate During Profile Percent Signal Output per Second
PKC19 N44:135 0 Output #3 Acceleration Ramp Rate During Profile Percent Signal Output per Second
PKC20 N44:136 0 Output #4 Acceleration Ramp Rate During Profile Percent Signal Output per Second
PKC25 N44:141 0 Output #1 Deceleration Ramp Rate During Profile Percent Signal Output per Second
PKC26 N44:142 0 Output #2 Deceleration Ramp Rate During Profile Percent Signal Output per Second
PKC27 N44:143 0 Output #3 Deceleration Ramp Rate During Profile Percent Signal Output per Second
PKC28 N44:144 0 Output #4 Deceleration Ramp Rate During Profile Percent Signal Output per Second
PKC41 N44:157 0 Pressure Minimum Control Limit Pressure
PKC42 N44:158 * Pressure Maximum Control Limit Pressure
PKC43 N44:159 * Selected Pressure Valve, Output for Minimum Percent Signal Output
PKC44 N44:160 * Selected Pressure Valve, Output for Maximum Percent Signal Output
PKC49 N44:165 100 Proportional Gain for Pressure Control None
PKC50 N44:166 400 Integral Gain for Pressure Control Inverse Time (Algorithm)
PKC51 N44:167 0 Derivative Gain for Ram Pressure Control Time (Algorithm)
PKC57 N44:173 0 Profile High Pressure Alarm Setpoint Pressure
3
Pressure
0000 to 9999 PSI
000.0 to 999.9 Bar
5
Percent Signal Output per Second
0000 to 9999
4
Percent
Signal Output
00.00 to 99.99
6
Inverse T
ime (Algorithm)
00.00 to 99.99 Minutes (ISA)
00.00 to 99.99 Seconds (AB) 00.00 to 99.99 Seconds (AB)
7
T
ime (Algorithm)
00.00 to 99.99 Minutes (ISA)
8
3
3
3
8
Percent
00.00 to 99.99
4
4
4
4
4
4
6
7
5
5
5
5
5
5
5
5
*
Refer to the appropriate section later in this chapter for information on this parameter
7-10
Page 97

Worksheet 7E
Hold Configuration Block (HDC)
Chapter 7
Load Initial Configuration Values
Control W
ProSet 600 Addr. B38/bit
ord HDC01Bxx
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
207 206 205 204 203 202 201 200 199 198 197 196 195 194 193 192
Value 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1 1
HDC
Block Identifier
Control W
ProSet 600 Addr. B38/bit
ord HDC02Bxx
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
223 222 221 220 219 218 217 216 215 214 213 212 211 210 209 208
Value 0 0 0 0 0 0 0 0 1 0 0 0 0
Code:
0
or 1
Your
value
Required initial value
loaded by ProSet 600
Selected
Pressure Valve
000 = Output 1
001 = Output 2
010 = Output 3
011 = Output 4
0V
alue not used
PID Pressure Algorithm
0 = Dependent Gains
1 = Independent Gains
7-11
Page 98

Chapter 7
Load Initial Configuration Values
Worksheet 7E
(continued)
Hold Configuration Block (HDC)
Enter Y
our V
alues Here
Control Word ProSet 600 Addr. Value Description Units
HDC06 N44:182 1000 Minimum ERC PercentagePressure Percent
HDC09 N44:185 * Output #1 Setoutput Value During Profile Percent Signal Output
HDC10 N44:186 * Output #2 Setoutput Value During Profile Percent Signal Output
HDC11 N44:187 * Output #3 Setoutput Value During Profile Percent Signal Output
HDC12 N44:188 * Output #4 Setoutput Value During Profile Percent Signal Output
HDC17 N44:193 0 Output #1 Acceleration Ramp Rate During Profile Percent Signal Output per Second
HDC18 N44:194 0 Output #2 Acceleration Ramp Rate During Profile Percent Signal Output per Second
HDC19 N44:195 0 Output #3 Acceleration Ramp Rate During Profile Percent Signal Output per Second
HDC20 N44:196 0 Output #4 Acceleration Ramp Rate During Profile Percent Signal Output per Second
HDC25 N44:201 0 Output #1 Deceleration Ramp Rate During Profile Percent Signal Output per Second
HDC26 N44:202 0 Output #2 Deceleration Ramp Rate During Profile Percent Signal Output per Second
HDC27 N44:203 0 Output #3 Deceleration Ramp Rate During Profile Percent Signal Output per Second
HDC28 N44:204 0 Output #4 Deceleration Ramp Rate During Profile Percent Signal Output per Second
HDC33 N44:209 * Output #1 Setoutput Value at Endof Profile Percent Signal Output
HDC34 N44:210 * Output #2 Setoutput Value at Endof Profile Percent Signal Output
HDC35 N44:211 * Output #3 Setoutput Value at Endof Profile Percent Signal Output
HDC36 N44:212 * Output #4 Setoutput Value at Endof Profile Percent Signal Output
HDC41 N44:217 0 Pressure Minimum Control Limit Pressure
HDC42 N44:218 * Pressure Maximum Control Limit Pressure
HDC43 N44:219 * Selected Pressure Valve, Output for Minimum Percent Signal Output
HDC44 N44:220 * Selected Pressure Valve, Output for Maximum Percent Signal Output
HDC49 N44:225 100 Proportional Gain for Pressure Control None
HDC50 N44:226 400 Integral Gain for Pressure Control Inverse Time (algorithm)
HDC51 N44:227 0 Derivative Gain for Pressure Control Time (algorithm)
HDC57 N44:233 0 Profile High Pressure Alarm Setpoint Pressure
3
Pressure
0000 to 9999 PSI
000.0 to 999.9 Bar
5
Percent Signal Output per Second
0000 to 9999
4
Percent
Signal Output
00.00 to 99.99
6
Inverse T
ime (Algorithm)
00.00 to 99.99 Minutes (ISA) 00.00 to 99.99 Minutes (ISA)
00.00 to 99.99 Seconds (AB) 00.00 to 99.99 Seconds (AB)
7
T
ime (Algorithm)
8
3
3
3
8
Percent
00.00 to 99.99
4
4
4
4
4
4
4
4
4
4
6
7
5
5
5
5
5
5
5
5
*
Refer to the appropriate section later in this chapter for information on this parameter
7-12
Page 99

Worksheet 7F
Plastication Configuration Block (PLC)
Chapter 7
Load Initial Configuration Values
Control Word PLC01Bxx
ProSet 600 Addr. B38/bit
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
399 398 397 396 395 394 393 392 391 390 389 388 387 386 385 384
Value 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0
PLC
Block Identifier
Control Word PLC02Bxx
ProSet 600 Addr. B38/bit
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
415 414 413 412 411 410 409 408 407 406 405 404 403 402 401 400
Value 0 0 0 0 0 0 0 0 1 0 0 0 0
Code:
0
or 1
Your
value
Required initial value
loaded by ProSet 600
Selected
Pressure Valve
000 = Output 1
001 = Output 2
010 = Output 3
011 = Output 4
0V
alue not used
PID Pressure Algorithm
0 = Dependent Gains
1 = Independent Gains
7-13
Page 100

Chapter 7
Load Initial Configuration Values
Worksheet 7F
(continued)
Plastication Configuration Block (PLC)
Enter Y
our V
alues Here
Control Word ProSet 600 Addr. Value Description Units
PLC06 N44:362 1000 Minimum ERC PercentagePressure Percent
PLC08 N44:364 0 Profile Watchdog Timer Preset Time
PLC09 N44:365 * Output #1 Setoutput Value During Profile Percent Signal Output
PLC10 N44:366 * Output #2 Setoutput Value During Profile Percent Signal Output
PLC11 N44:367 * Output #3 Setoutput Value During Profile Percent Signal Output
PLC12 N44:368 * Output #4 Setoutput Value During Profile Percent Signal Output
PLC17 N44:373 0 Output #1 Acceleration Ramp Rate During Profile Percent Signal Output per Second
PLC18 N44:374 0 Output #2 Acceleration Ramp Rate During Profile Percent Signal Output per Second
PLC19 N44:375 0 Output #3 Acceleration Ramp Rate During Profile Percent Signal Output per Second
PLC20 N44:376 0 Output #4 Acceleration Ramp Rate During Profile Percent Signal Output per Second
PLC25 N44:381 0 Output #1 Deceleration Ramp Rate During Profile Percent Signal Output per Second
PLC26 N44:382 0 Output #2 Deceleration Ramp Rate During Profile Percent Signal Output per Second
PLC27 N44:383 0 Output #3 Deceleration Ramp Rate During Profile Percent Signal Output per Second
PLC28 N44:384 0 Output #4 Deceleration Ramp Rate During Profile Percent Signal Output per Second
PLC33 N44:389 * Output #1 Setoutput Value at Endof Profile Percent Signal Output
PLC34 N44:390 * Output #2 Setoutput Value at Endof Profile Percent Signal Output
PLC35 N44:391 * Output #3 Setoutput Value at Endof Profile Percent Signal Output
PLC36 N44:392 * Output #4 Setoutput Value at Endof Profile Percent Signal Output
PLC41 N44:397 0 Pressure Minimum Control Limit Pressure
PLC42 N44:398 * Pressure Maximum Control Limit Pressure
PLC43 N44:399 * Selected Pressure Valve, Output for Minimum Percent Signal Output
PLC44 N44:400 * Selected Pressure Valve, Output for Maximum Percent Signal Output
PLC49 N44:405 100 Proportional Gain for Pressure Control None
PLC50 N44:406 400 Integral Gain for Pressure Control Inverse Time (Algorithm)
PLC51 N44:407 0 Derivative Gain for Pressure Control Time (Algorithm)
PLC57 N44:413 0 Profile High Pressure Alarm Setpoint Pressure
1
Time
00.00 to 99.99 seconds
5
Percent Signal Output per Second
0000 to 9999
3
Pressure
0000 to 9999 PSI
000.0 to 999.9 Bar
6
Inverse T
ime (Algorithm)
00.00 to 99.99 Minutes (ISA) 00.00 to 99.99 Minutes (ISA)
00.00 to 99.99 Seconds (AB) 00.00 to 99.99 Seconds (AB)
4
Percent
00.00 to 99.99
7
T
ime (Algorithm)
Signal Output
8
1
8
Percent
00.00 to 99.99
4
4
4
4
4
4
4
4
3
3
4
4
6
7
3
5
5
5
5
5
5
5
5
*
Refer to the appropriate section later in this chapter for information on this parameter
7-14
 Loading...
Loading...