


Smart Motor
Manager
Bulletin 825
User Manual

Important User Information
Because of the variety of uses for the products described in this publication, those responsible
for the application and use of this control equipment must satisfy themselves that all
necessary steps have been taken to assure that each application and use meets all performance
and safety requirements, including any applicable laws, regulations, codes and standards.
The illustrations, charts, sample programs and layout examples shown in this guide are
intended solely for purposes of example. Since there are many variables and requirements
associated with any particular installation, Allen-Bradley does not assume responsibility or
liability (to include intellectual property liability) for actual use based upon the examples
shown in this publication.
Allen-Bradley publication SGI-1.1, Safety Guidelines for the Application, Installation and Maintenance
of Solid-State Control (available from your local Allen-Bradley office), describes some important
differences between solid-state equipment and electromechanical devices that should be taken
into consideration when applying products such as those described in this publication.
Reproduction of the contents of this copyrighted publication, in whole or part, without
written permission of Rockwell Automation, is prohibited.
Throughout this manual we use notes to make you aware of safety considerations:
ATTENTION
Identifies information about practices or circumstances that can lead
to personal injury or death, property damage or economic loss
!
Attention statements help you to:
• identify a hazard
• avoid a hazard
• recognize the consequences
IMPORTANT
Allen-Bradley is a trademark of Rockwell Automation
European Communities (EC) Directive Compliance
If this product has the CE mark it is approved for installation within the European Union and
EEA regions. It has been designed and tested to meet the following directives.
EMC Directive
Identifies information that is critical for successful application and
understanding of the product.
This product is tested to meet the Council Directive 89/336/EC Electromagnetic
Compatibility (EMC) by applying the following standards, in whole or in part, documented in
a technical construction file:
• EN 50081-2 EMC — Generic Emission Standard, Part 2 — Industrial Environment
• EN 50082-2 EMC — Generic Immunity Standard, Part 2 — Industrial Environment
This product is intended for use in an industrial environment.
Low Voltage Directive
This product is tested to meet Council Directive 73/23/EEC Low Voltage, by applying the
safety requirements of EN 61131-2 Programmable Controllers, Part 2 - Equipment
Requirements and Tests. For specific information required by EN 61131-2, refer to the
appropriate sections in this publication, as well as the Allen-Bradley publication Industrial
Automation Wiring and Grounding Guidelines For Noise Immunity, publication 1770-4.1.
This equipment is classified as open equipment and must be mounted in an enclosure during
operation to provide safety protection.
ATTENTION
!
In order to achieve maximum performance from this product, correct
transport, proper and competent storage and installation, and careful
operation and maintenance must be observed.
• The power supply must be switched off prior to any intervention
in the electrical or mechanical part of the equipment!
• In accordance with applicable rules, work on electrical equipment
or means of production may only be carried out by competent
electricians or suitably trained persons guided and supervised by
a competent electrician.
• The electrical equipment of a machine/plant must be inspected/
tested. Deficiencies, such as loose connections or scorched
cables, must be eliminated immediately.
• The Bulletin 825 Smart Motor Manager features supervision and
protection functions that can automatically switch devices off,
bringing motors to a standstill. Motors can also be stopped by
mechanical blockage, as well as mains failures and voltage
fluctuations.
• In case of functional disturbances, the machine/plant must be
switched off and protected and the disturbance eliminated
immediately.
• The elimination of a disturbance may cause the motor to restart.
This may endanger persons or damage equipment. The user must
take the necessary safety measures to avoid this type of
occurrence.
• Sufficient safety distance must be maintained where wireless
equipment (walkie-talkies, cordless and mobile phones) is used.

Table of Contents
Chapter 1 —
Why Have an Electronic Control and Protection System? . . . . . . . . . . . . 1-1
Operational Demands of the Motor/Drive . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Temperature Rise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Motor Operating Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Current and Temperature Curves. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
Limiting Temperatures, Insulation Classes . . . . . . . . . . . . . . . . . . . . . 1-4
Operational Requirements for Installation. . . . . . . . . . . . . . . . . . . . . . . . . 1-5
Personnel and Installation Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
Bulletin 825 Smart Motor Manager
as an Automation Component . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
Chapter 2 —
System Structure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
System Components. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
Modular Design. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Block Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
Operating Elements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
Specifications— Basic Unit and Converter Module . . . . . . . . . . . . . . . . . 2-5
Standards. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
Main Current Transformers for the Motor Circuit. . . . . . . . . . . . . . 2-10
Core Balance Current Transformer . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
Short-Circuit Protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
Response Supply Voltage Failure. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-12
Automatic Recognition of Converter Module . . . . . . . . . . . . . . . . . . . . . 2-13
Introduction
Equipment Description
Chapter 3 —
Menu Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Actual Values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Set Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Recorded Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
Functions
Publication 825-UM001B-EN-P January 2001

ii Table of Contents
Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
Selecting the Setting/Display Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
Setting the Operation Parameters (Set Values) . . . . . . . . . . . . . . . . . . 3-5
Indications of Actual Values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-7
Indications of Recorded Values (Statistics) . . . . . . . . . . . . . . . . . . . . . 3-8
Test Button. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-9
Function Summary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
Functions of the Basic Unit (Cat. No. 825-M…). . . . . . . . . . . . . . . . . . . 3-16
Thermal Overload. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-16
Adjustable Ratio of Cooling Constants . . . . . . . . . . . . . . . . . . . . . . . 3-17
Indication of the Time to Tripping . . . . . . . . . . . . . . . . . . . . . . . . . . 3-18
Indication of the Time until the Thermal Trip can be Reset . . . . . . 3-18
Adjustable Setting Characteristic . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-18
Asymmetry (Phase Unbalance) and Phase Failure . . . . . . . . . . . . . . 3-22
High Overload and Jam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-23
Underload . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-25
Earth (Ground) Fault . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-27
Limiting the Number of Starts per Hour (Start Lockout). . . . . . . . . 3-33
Monitoring the Starting Time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-34
Warm Start. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-35
Emergency Override of Thermal Trip (Emergency Start) . . . . . . . . 3-38
LED Alarm and Trip Indicator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-39
Connection of the Main Relay (MR) . . . . . . . . . . . . . . . . . . . . . . . . . 3-40
Connection of the Alarm Relay (AL). . . . . . . . . . . . . . . . . . . . . . . . . 3-40
Alarm Relay AL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-41
Reset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-42
Function of the Cat. No. 825-MST Option Card. . . . . . . . . . . . . . . . . . . 3-42
Short-Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-42
Earth (Ground) Fault Protection with a Core Balance Current
Transformer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-44
Stalling During Start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-44
PTC Thermistor Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-46
Analog Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-48
Analog Output for Thermal Load or
Motor Temperature (PT100 Max.). . . . . . . . . . . . . . . . . . . . . . . . . . . 3-48
Analog Output for Motor Current. . . . . . . . . . . . . . . . . . . . . . . . . . . 3-50
Control Inputs #1 and #2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-51
Switching to a Second Rated Current . . . . . . . . . . . . . . . . . . . . . . . . 3-53
Publication 825-UM001B-EN-P January 2001

Table of Contents iii
Functions of the Cat. No. 825-MLV Option Card . . . . . . . . . . . . . . . . . 3-53
Phase Sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-53
Phase Failure (Based on Voltage Measurement). . . . . . . . . . . . . . . . 3-54
Star-Delta (Wye-Delta) Starting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-55
Functions of the Cat. No. 825-MMV Option Card. . . . . . . . . . . . . . . . . 3-56
PT100 (100Ω Platinum) Temperature Sensor (RTD) . . . . . . . . . . . 3-56
PT100 #7 Temperature Sensor (RTD) . . . . . . . . . . . . . . . . . . . . . . . 3-57
Chapter 4 —
Assembly. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
Flush Mounting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
Mounting Position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Surface Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Converter Modules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
Thermal Utilization Indicator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
Installation and Wiring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
Main Circuits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
Control Circuits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
Chapter 5 —
Menu Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
Main Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
Special Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Operating Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-4
Chapter 6 —
Checking the Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
Checking the Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Checking the Installation with the Control Voltage Applied. . . . . . . . . . . 6-2
Switching on the Control Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Checking the Set Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Motor Current. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
Locked Rotor or Starting Current . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-4
Locked Rotor Time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-4
Assembly and Installation
Setting the Operational Parameters
Commissioning and Operation
Publication 825-UM001B-EN-P January 2001

iv Table of Contents
Programming, Setup, and Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-5
Starting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-5
Operating. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-6
Chapter 7 —
General. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
Checking without Test Equipment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
Functional Check with the Test Button . . . . . . . . . . . . . . . . . . . . . . . . 7-1
Indication of Recorded Values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-2
Checking with Test Equipment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5
Test Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5
Chapter 8 —
Alarm, Warning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-1
Procedure when Alarm/Warning Picks Up. . . . . . . . . . . . . . . . . . . . . 8-1
Trip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-2
Fault Codes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-3
Procedure if “ALARM” does not Reset . . . . . . . . . . . . . . . . . . . . . . . 8-8
Procedure if “TRIP” cannot be Reset . . . . . . . . . . . . . . . . . . . . . . . . . 8-8
Chapter 9 —
Bulletin 825 Smart Motor Manager with Contactors. . . . . . . . . . . . . . . . . 9-1
Main Circuit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-1
Control Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
Star-Delta Starter with Bulletin 825 Smart Motor Manager. . . . . . . . . . . . 9-3
Main Circuit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-3
Control Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-3
Short-Circuit Protection of Medium/High-Voltage Motors. . . . . . . . . . . 9-4
Main Circuit (with Cat. No. 825-MST Option Card) . . . . . . . . . . . . . 9-4
Control Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-5
Two-Speed Motors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-5
Main Circuit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-6
Two-Speed Motor: 0.5 A < Speed I < 20 A < Speed II < 180 A. . . . . . . 9-7
Main Circuit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-7
Two-Speed Motors with Primary Current Transformer . . . . . . . . . . . . . . 9-8
Primary Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-8
Separately Ventilated Motors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-8
Testing and Maintenance
Error Diagnosis and Troubleshooting
Applications/Wiring
Publication 825-UM001B-EN-P January 2001

Table of Contents v
Basic Unit and Converter Module with Primary Current Transformer
and Core Balance Current Transformer. . . . . . . . . . . . . . . . . . . . . . . . . . . 9-9
Main Circuit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-9
Basic Unit and Converter Module with Core Balance Current
Transformer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-10
Main Circuit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-10
Motors with Low Idling Current (< 20%
Main Circuit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-11
Connecting the PT100 Temperature Sensors Using the
2/3/4-Conductor Technique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-12
Basic Unit and Converter Module with Primary Current Transformer,
2-Phase Current Evaluation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-13
Time/Current Characteristic of Bulletin825 Smart Motor Manager . . . 9-14
) . . . . . . . . . . . . . . . . . . . . . . 9-11
e
Chapter 10 —
References
Figures
Figure 1.1Bulletin 825 Smart Motor Manager. . . . . . . . . . . . . . . . . 1-1
Figure 1.2Operating Characteristics of an AC Motor. . . . . . . . . . . 1-3
Figure 1.3 AC Current Profile of a Motor Starting
Direct-on-Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
Figure 1.4 Temperature Rise Characteristics
of Motor Windings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
Figure 1.5 Reduction in Average Life (EM) of a Motor
when Winding is Continuously Overheated. . . . . . . . . . 1-5
Figure 2.1 Modular Design of the Bulletin 825
Smart Motor Manager . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Figure 2.2Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
Figure 2.3Front View with Operating Elements. . . . . . . . . . . . . . . 2-4
Figure3.1Setting Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-5
Figure3.2Menu Selection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-5
Figure3.3Entering a Data Value . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
Figure3.4Selecting the Actual Values . . . . . . . . . . . . . . . . . . . . . . . 3-7
Figure3.5Selecting Recorded Data . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
Figure3.6Basic Unit Test Button . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-9
Figure 3.7 Two-Body Simulation of the Heating Up
of a Motor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-17
Figure3.8Trip Characteristic (10…30s). . . . . . . . . . . . . . . . . . . . 3-19
Publication 825-UM001B-EN-P January 2001

vi Table of Contents
Figure3.9Trip Characteristics (40…100 s) . . . . . . . . . . . . . . . . . . 3-20
Figure 3.10 Reduction in Permissible Motor Output
Due to Voltage Asymmetry per IEC and NEMA . . . . 3-23
Figure3.11Function of High Overload and Jam Protection . . . . . 3-24
Figure3.12Function of Underload Protection . . . . . . . . . . . . . . . . 3-26
Figure3.133-Phase Current Detection . . . . . . . . . . . . . . . . . . . . . . 3-27
Figure3.14Example of 2-Phase Current Sensing . . . . . . . . . . . . . . 3-28
Figure 3.15 Isolated Network: Earth Fault
on the Network Side . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-31
Figure 3.16 Network Earthed through a High Impedance
Earth Fault on the Network Side . . . . . . . . . . . . . . . . . 3-31
Figure 3.17 Isolated network: Earth (Ground) Fault on the Leads
on the Motor Side . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-32
Figure 3.18 Network Earthed through a High Impedance:
Earth (Ground) Fault on the Motor Leads. . . . . . . . . . 3-32
Figure 3.19 Isolated Network: Earth (Ground) Fault
in the Motor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-32
Figure 3.20 Network Earthed through a High Impedance:
Earth (Ground) Fault on the Motor. . . . . . . . . . . . . . . 3-32
Figure3.21Limiting the Number of Starts per Hour . . . . . . . . . . . 3-33
Figure3.22Monitoring Starting Time . . . . . . . . . . . . . . . . . . . . . . . 3-34
Figure 3.23 Current and Temperature Curves for Warm and
Cold Motor Starts and the Smart Motor Manager
Tripping Limits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-36
Figure 3.24 Example for t6x
= 10 s and
e
Warm Trip Time= 70% . . . . . . . . . . . . . . . . . . . . . . . . 3-37
Figure3.25Interruption of a Short-Circuit . . . . . . . . . . . . . . . . . . . 3-43
Figure3.26Stalling During Starting . . . . . . . . . . . . . . . . . . . . . . . . . 3-45
Figure3.27Characteristic of PTC Sensors as per IEC 34-11-2 . . . 3-48
Figure3.28Analog Output for Motor Temperature Rise. . . . . . . . 3-49
Figure3.29Analog Output for Motor Temperature. . . . . . . . . . . . 3-50
Figure3.30Analog Output for Motor Current . . . . . . . . . . . . . . . . 3-50
Figure3.31Operating Diagram for Timer Functions . . . . . . . . . . . 3-52
Figure3.32Diagram of Star-Delta (Wye-Delta) Starting. . . . . . . . . 3-55
Figure 4.1Basic Unit Mounted in an Enclosure . . . . . . . . . . . . . . . 4-1
Figure 4.2Mounting Position. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Figure 4.3 Basic Unit Mounted into Panel Mounting Frame
(Cat. No. 825-FPM). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Publication 825-UM001B-EN-P January 2001

Table of Contents vii
Figure 4.4Cat. Nos. 825 MCM2, 825-MCM-20, 825-MCM180. . . 4-3
Figure 4.5Cat. Nos. 825-MCM630, 825-MCM630N . . . . . . . . . . . 4-3
Figure 4.6Cat. No. 825-MTUM Thermal Utilization Indicator . . . 4-4
Figure 4.7Basic Unit Housing with Option Cards . . . . . . . . . . . . . 4-5
Figure 4.8Basic Unit with Converter Module . . . . . . . . . . . . . . . . . 4-6
Figure 4.93-Phase Current Evaluation. . . . . . . . . . . . . . . . . . . . . . . 4-6
Figure 4.102-Phase Current Evaluation. . . . . . . . . . . . . . . . . . . . . . . 4-7
Figure 4.11Smart Motor Manager Basic Unit . . . . . . . . . . . . . . . . . . 4-8
Figure 4.12Cat. No. 825-MST Option Card . . . . . . . . . . . . . . . . . . . 4-9
Figure 4.13Cat. No. 825-MLV Option Card. . . . . . . . . . . . . . . . . . 4-10
Figure 4.14Cat. No. 825-MMV Option Card . . . . . . . . . . . . . . . . . 4-11
Figure 6.1 Range of Starting Currents of Standard Motors
Expressed as Multiple of the Rated Service
Current . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-4
Figure 7.1Test with a 3-Phase Current Source . . . . . . . . . . . . . . . . 7-5
Figure 7.2Test with a Single-Phase Current Source . . . . . . . . . . . . 7-6
Figure 9.1Basic Unit and Converter Module. . . . . . . . . . . . . . . . . . 9-1
Figure 9.2Control by Momentary Contact . . . . . . . . . . . . . . . . . . . 9-2
Figure 9.3Basic Unit and Converter Module. . . . . . . . . . . . . . . . . . 9-3
Figure 9.4Control by Momentary Contact . . . . . . . . . . . . . . . . . . . 9-3
Figure 9.5Basic Unit for Short-Circuit Protection . . . . . . . . . . . . . 9-4
Figure 9.6Control by Momentary Contact . . . . . . . . . . . . . . . . . . . 9-5
Figure 9.7Two-Speed Application Utilizing One 825-MCM* . . . . 9-6
Figure 9.8Two-Speed Application Utilizing 825-MCM180 . . . . . . 9-7
Figure 9.9 Two-Speed Application Utilizing Primary Current
Transformer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-8
Figure 9.10 Typical Application Utilizing Primary Current
Transformers and Core Balance Current
Transformer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-9
Figure 9.11 Typical Application Utilizing Core Balance Current
Transformer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-10
Figure 9.12Application with Low Idling Current . . . . . . . . . . . . . . 9-11
Figure 9.132/3/4 Conductor Technique for PT100 Wiring . . . . . 9-12
Figure 9.14 Typical Application Utilizing 2-Phase Current
Evaluation with Primary Current Transformers. . . . . . 9-13
Figure 9.15Trip Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-14
Publication 825-UM001B-EN-P January 2001

viii Table of Contents
Tables
Table 2.AEnvironmental Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
Table 2.B Nominal Rated Voltages Ue . . . . . . . . . . . . . . . . . . . . . . 2-6
Table 2.CElectrical Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
Table 2.DSupply Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
Table 2.ERelay Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
Table 2.FTerminals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
Table 2.GMain Current Transformer Ratings. . . . . . . . . . . . . . . . 2-10
Table 2.H Recommended Data for Core Balance Current
Transformer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
Table 2.IConverter Module — Related Error Messages. . . . . . . 2-13
Table 3.AActual Values Overview. . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Table 3.BSet Values Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Table 3.CRecorded Values Overview. . . . . . . . . . . . . . . . . . . . . . . 3-3
Table 3.DDisplay Example of Set Values Menu. . . . . . . . . . . . . . . 3-6
Table 3.EDisplay Example of Actual Values Menu. . . . . . . . . . . . 3-7
Table 3.FDisplay Example of Recorded Values. . . . . . . . . . . . . . . 3-9
Table 3.GProtective Functions Summary. . . . . . . . . . . . . . . . . . . 3-13
Table 3.HWarning Functions Summary . . . . . . . . . . . . . . . . . . . . 3-14
Table 3.IControl Functions Summary. . . . . . . . . . . . . . . . . . . . . 3-15
Table 3.JThermal Overload Setting Parameters . . . . . . . . . . . . . 3-21
Table 3.KProtection Against Thermal Overload . . . . . . . . . . . . . 3-22
Table 3.L Asymmetry (Phase Unbalance)
Setting Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-23
Table 3.MHigh Overload and Jam Setting Parameters. . . . . . . . . 3-24
Table 3.NUnderload Setting Parameters. . . . . . . . . . . . . . . . . . . . 3-26
Table 3.O Earth (Ground) Fault — Holmgreen/Residual
Setting Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-28
Table 3.P Core Balance Current Transformer
Setting Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-29
Table 3.Q Earth (Ground) Fault Core Balance
Setting Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-29
Table 3.RStarts per Hour Setting Parameters. . . . . . . . . . . . . . . . 3-33
Table 3.SMonitoring Start Time Setting Parameters. . . . . . . . . . 3-35
Table 3.TWarm Start Setting Parameters . . . . . . . . . . . . . . . . . . . 3-38
Table 3.UAlarm Examples. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-41
Table 3.VReset Setting Parameters . . . . . . . . . . . . . . . . . . . . . . . . 3-42
Table 3.WShort Circuit Setting Parameters. . . . . . . . . . . . . . . . . . 3-44
Publication 825-UM001B-EN-P January 2001

Table of Contents ix
Table 3.XStalling during Start Setting Parameters . . . . . . . . . . . . 3-45
Table 3.YPTC Setting Parameters. . . . . . . . . . . . . . . . . . . . . . . . . 3-46
Table 3.ZSensor Measuring Circuit Specifications. . . . . . . . . . . . 3-47
Table 3.AAPhase Sequence Setting Parameters. . . . . . . . . . . . . . . . 3-54
Table 3.ABPhase Failure Setting Parameters. . . . . . . . . . . . . . . . . . 3-54
Table 3.AC Star-Delta (Wye-Delta) Starting
Setting Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-55
Table 3.AD PT100 Temperature Detector Resistance
per IEC 751 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-56
Table 3.AEPT100 (RTD) Setting Parameters . . . . . . . . . . . . . . . . . 3-57
Table 3.AFMotor Insulation Class Setting Parameters. . . . . . . . . . 3-58
Table 4.ACat. Nos. 825 MCM2, 825-MCM-20, 825-MCM180. . . 4-3
Table 4.BCat. Nos. 825-MCM630, 825-MCM630N . . . . . . . . . . . 4-4
Table 4.CSpecifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
Table 5.AMain Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
Table 5.BSpecial Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Table 5.CCommunication Settings . . . . . . . . . . . . . . . . . . . . . . . . . 5-3
Table 5.DCat. No. 825-M… Operating Parameters. . . . . . . . . . . . 5-4
Table 6.AChecking the Actual Values. . . . . . . . . . . . . . . . . . . . . . . 6-6
Table 7.AList of Recorded Values. . . . . . . . . . . . . . . . . . . . . . . . . . 7-2
Table 8.APossible Causes and Actions. . . . . . . . . . . . . . . . . . . . . . 8-3
Publication 825-UM001B-EN-P January 2001

x Table of Contents
Notes:
Publication 825-UM001B-EN-P January 2001

Chapter
1
Introduction
Why Have an Electronic Control and Protection System?
The need to optimize production facilities requires enhanced control, monitoring, and
protection systems.
Motor and installation use must be maximized while minimizing both the downtime required
for maintenance and that caused by motor failures; these requirements are easily met by the
microprocessor-based Bulletin 825 Smart Motor Manager.
The Bulletin 825 Smart Motor Manager has a modular design and is easily programmed. Its
attributes enable an optimum fit to a wide variety of motor and installation requirements.
The Bulletin 825 Smart Motor Manager provides continuous monitoring of motor operating
data in one of two ways. The data can be viewed directly on the unit or it can be monitored
remotely via a network by using a PC or process computer. The main statistical data can also
be accessed at any time.
Figure 1.1 Bulletin 825 Smart Motor Manager
Publication 825-UM001B-EN-P January 2001

1-2 Introduction
Operational Demands of the Motor/Drive
Temperature Rise
Motor designs and applicable standards require that, when a motor is operated under
specified loads and ambient conditions, the critical parts of the motor will remain within an
allowable temperature range and short-term overloads will not harm the motor.
The device protecting the motor must permit full use of the motor and its economical
operation. At the same time, the protective device must switch off rapidly if an overload
occurs.
Motor Operating Characteristics
Electric motors absorb electrical energy and supply mechanical energy. During this energy
conversion, losses are produced in the form of heat. The total loss consists of the following
separate losses:
• Losses independent of the current (these losses are virtually constant i.e., they also
occur at no load)
• Iron losses caused by remagnetization and eddy currents
• Mechanical losses caused by friction and ventilation
• Losses dependent on the current (these losses increase with load i.e., with the current
consumed by the motor)
• Heat losses caused by the current in the stator
• Heat losses caused by the current in the rotor
• Increased temperature rise caused by poor cooling (e.g., cooling fins are dusty or
damaged, coolant temperature is too high)
Publication 825-UM001B-EN-P January 2001
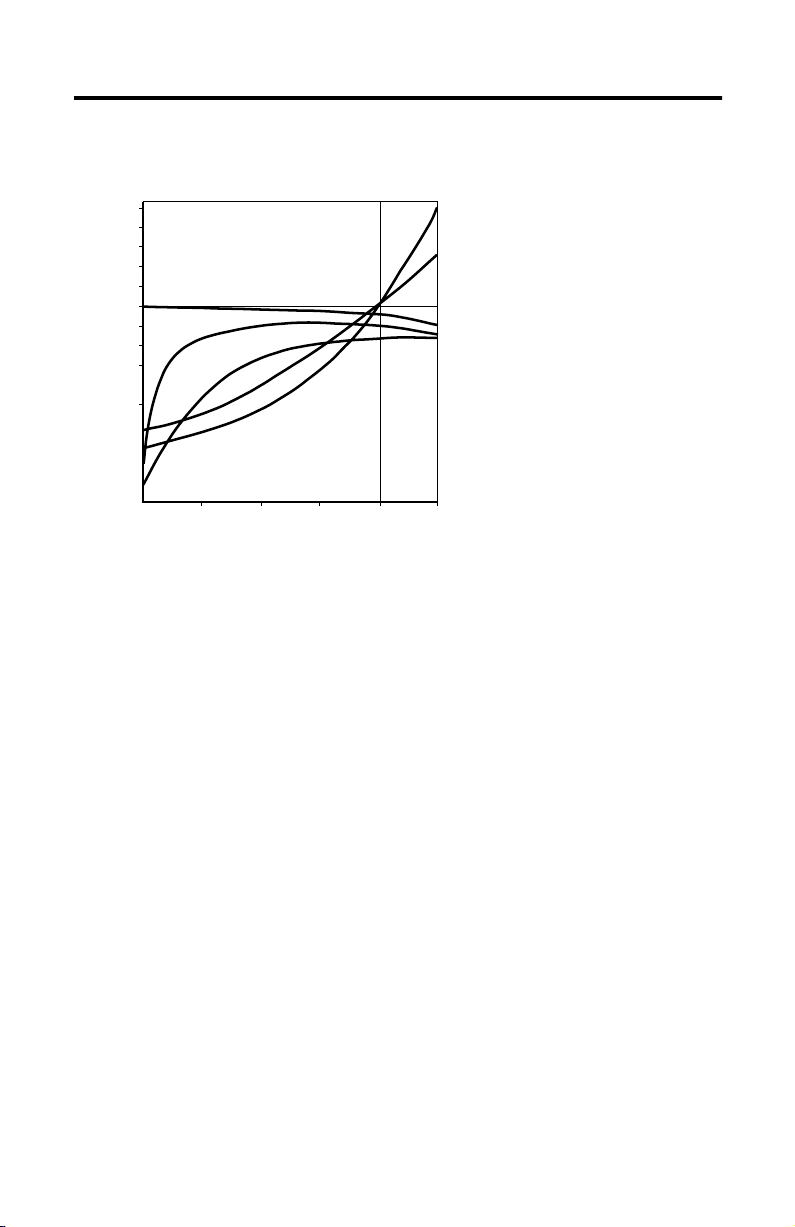
Figure 1.2 Operating Characteristics of an AC Motor
s
Introduction 1-3
ve
1.5
Pv
P
1.4
e,
I
I
1.3
e,
n
n
1.2
1.1
1.0
cos ϕ, η,
0.9
0.8
0.7
0.5
Operating characteristics of an AC motor as a function of load. Between no load and half load, the losses increase only slightly
with rising load. Between half load and rated load, the change in efficiency is minimal, and the power factor approaches its
maximum. The losses increase approximately proportional to the load. Above rated load, the losses increase more rapidly than
the load.
n
η
cos ϕ
I
P
v
25 50 75 100 125
n
I
s
e
P Power
Pe Rated operational power
Pv Power losses
Pve Power losses under rated condition
Operational current
Rated service current
e
n Speed
n
Rated operational speed
e
n
Synchronous speed
s
cos ϕ Power factor
η Efficiency
P
[%]
P
e
Current and Temperature Curves
Power loss is approximately proportional to the square of the motor current. The potential
for motor hazards exists mainly during starting and in a locked rotor condition. When a
locked rotor condition exists, the maximum value of the starting current flows (approximately
4…8 times the rated service current I
As the motor speed increases, the power converted into heat decreases. But if the rotor
remains locked, the temperature of the stator and rotor windings rises considerably, caused by
the high losses and the short time that heat can flow into the laminated core. If the motor is
not switched off quickly, the stator or rotor winding can burn out.
After startup, the temperature of the winding rises according to the load and cooling of the
motor. In time, the winding reaches its steady-state value.
A high current results in a correspondingly high operating temperature.
), and all of the power absorbed is converted into heat.
e
Publication 825-UM001B-EN-P January 2001
1-4 Introduction
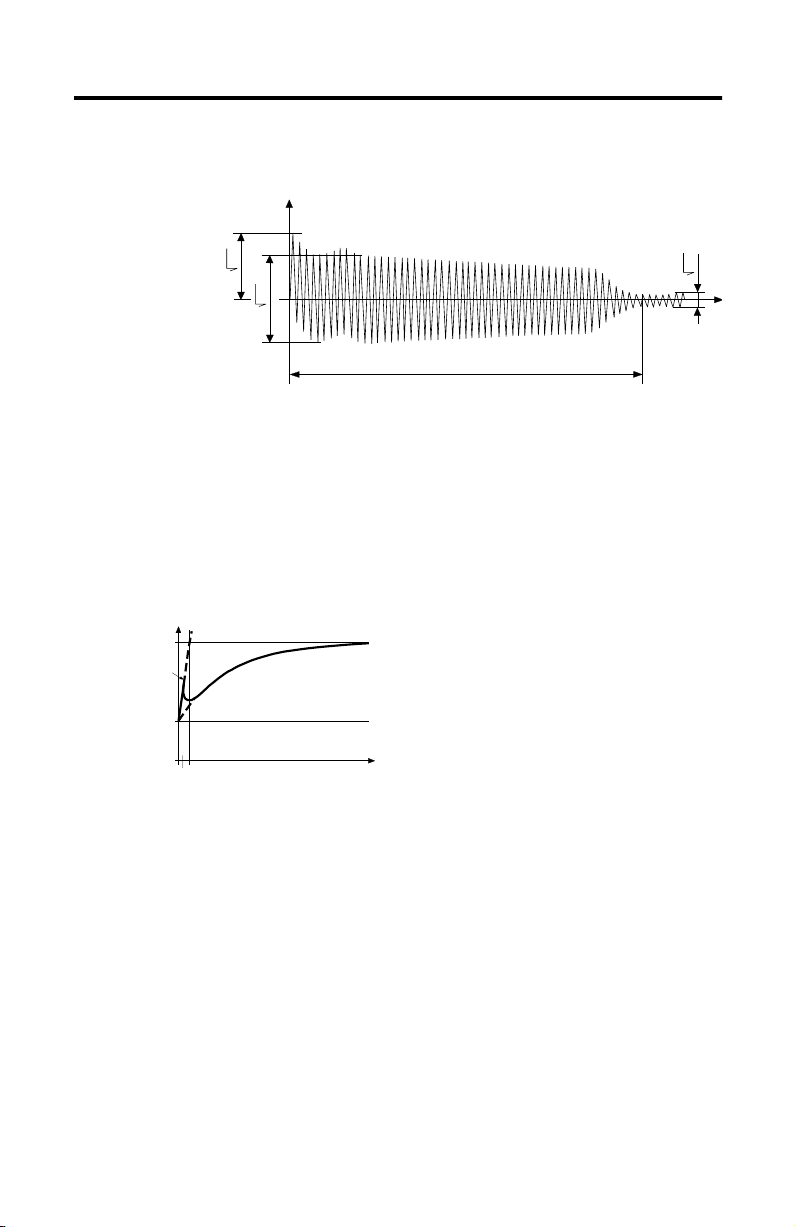
Figure 1.3 AC Current Profile of a Motor Starting Direct-on-Line
Starting current
A
Starting time
t
A
Rated service
e
current
t Time
Oscillogram of switching on a squirrel-cage induction motor by direct-on-line starting. The high motor starting current A flows
during the starting time (t
cause an excessive temperature rise. The brief, asymmetrical peak when switching on can be ignored.
). If this is less than the limit specified by the manufacturer (usually 10 s), the starting current does not
A
I
A
1.6 2 I
A
2 2 I
t
A
e
2 2 I
Motors are not thermally homogeneous. The winding, stator iron, and rotor have different
heat capacities and conductivities. Following unduly heavy loads, e.g., during starting,
temperature equalization occurs between the various parts of the machine (heat flows from
the warmer winding into the cooler iron until the temperature difference is minimal).
Figure 1.4 Temperature Rise Characteristics of Motor Windings
ϑ
ϑ
G
ϑ
ϑ
K
ϑ
s
0
e
t
t
B
A
ϑ
Temperature limit of the insulation
G
ϑ
Coolant temperature
K
ϑ
Temperature rise at start
s
ϑ
Temperature rise when operated
e
continuously at rated current
t
Starting time
A
t
Permitted stalling time
t
B
Temperature rise in a motor winding. During the starting time (tA), the temperature of the winding rises very rapidly; at the end of
startup, the temperature drops temporarily because heat is transferred to the laminated core.
Limiting Temperatures, Insulation Classes
The permissible temperature limit for a winding — and thus the load-bearing capacity — of
the motor is primarily a function of the motor's insulation. Applicable standards (UL, CSA,
IEC, and NEMA) distinguish between different classes of insulation and corresponding
temperature limits.
Publication 825-UM001B-EN-P January 2001
Introduction 1-5
Insulation Aging
The aging of insulation material is a chemical process that is accelerated by continuous
overtemperature. It may be assumed that a winding temperature that is constantly 10 K
higher than the temperature limit reduces the motor life by half. This “life law” shows that
particular attention must be paid to adhering to the permitted operating temperature for long
periods of time. (Note that overtemperatures of short duration and infrequent occurrence do
not seriously affect the life of the machine.)
The Bulletin 825 Smart Motor Manager's ability to accurately limit excessive current
conditions greatly aids in extending motor life. In practice, it may be expected that there will
be reduced loads and pauses, so that when the temperature limit is reached, the motor life will
not be impaired.
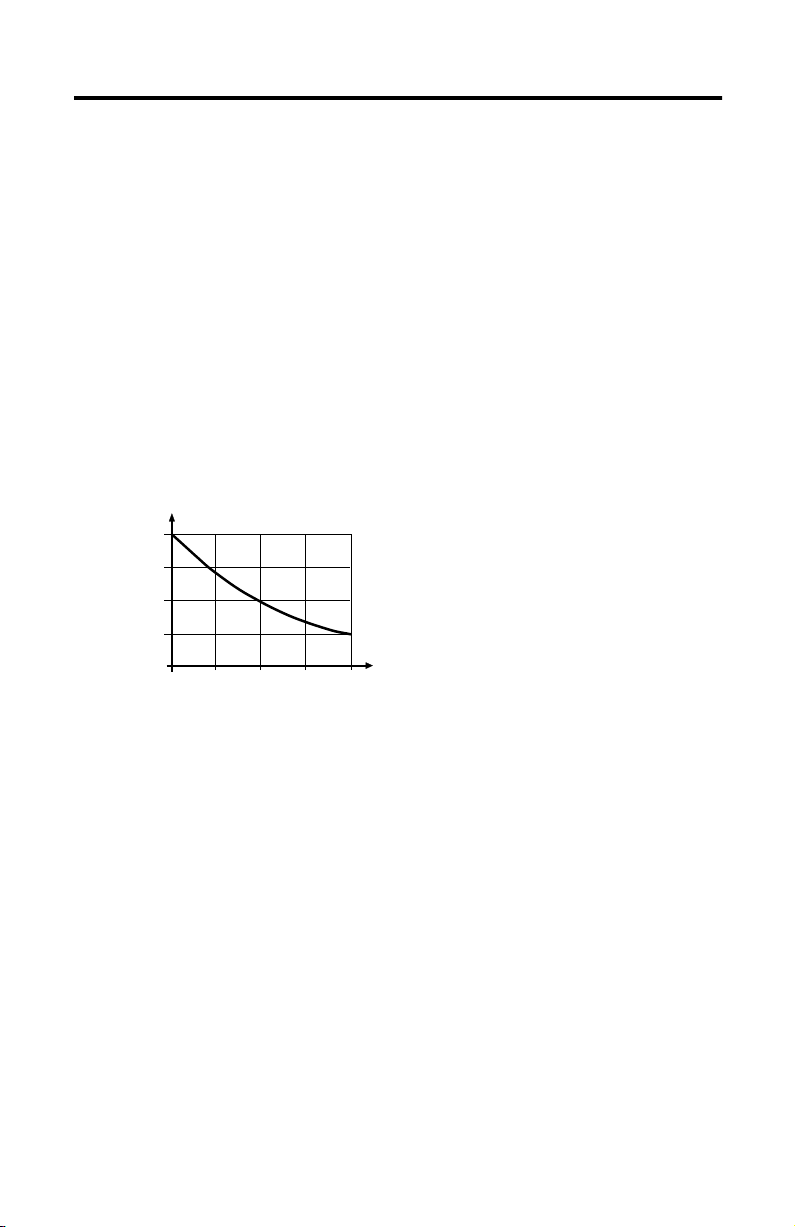
Figure 1.5 Reduction in Average Life (EM) of a Motor when Winding is
Continuously Overheated
E
Average motor life
M
ϑ
Temperature limit of the insulation
G
100
E
M
%
70
50
25
0
+5K +10K +15K +20K
ϑ
G
Rotor Temperature
The rotors of squirrel-cage induction motors with simple construction (no insulation) may
continuously attain higher temperatures than rotors in motors with insulated windings.
However, in larger motors, the concentration of the rotor losses during starting is higher than
the concentrations of losses in other parts of the motor. The starting time of such motors is
therefore limited by the thermal capacity of the rotor. These types of motors are commonly
referred to as “rotor-critical” motors. Critical to the rotor are the mechanical stresses caused
by the temperature rise, unsoldering of the rotor bars, and, for EExe motors (motors for use
in the chemical industry), the high temperature as a source of ignition.
Operational Requirements for Installation
Monitoring the application parameters and process data of an installation can be very
important. Even a slight change in the starting and operating behavior of the motor can
indicate an impending fault. The Smart Motor Manager helps eliminate potential trouble
before major repairs are necessary and loss of production occurs.
Publication 825-UM001B-EN-P January 2001

1-6 Introduction
The Smart Motor Manager fulfils these requirements by providing protection against the
following:
• high overload, stalling and jam
• underload
• phase sequence
Personnel and Installation Safety
Personnel protection in the vicinity of control equipment is of primary importance. The
corresponding requirements of regulatory agencies are therefore becoming increasingly
severe. The Smart Motor Manager reflects this by providing the following protection:
• equipment construction
• touch protection
• insulated housing
• motor protective functions:
• Earth (ground) fault
• High overload, stalling and jam
• Wrong direction of rotation
Bulletin 825 Smart Motor Manager as an Automation Component
The Bulletin 825 Smart Motor Manager detects abnormal operating conditions and faults in
motor branch circuits. The data made available by the Smart Motor Manager can be used for
operational control and optimization of the installation.
A large number of supervisory, protective, and control functions improve operational control
and avoid unnecessary downtime. This maximizes your motor investment, making the Smart
Motor Manager a valuable component in modern automation systems.
Publication 825-UM001B-EN-P January 2001

Chapter
2
Equipment Description
System Structure
The Bulletin 825 Smart Motor Manager is a microprocessor-based protection and control
system for motors. For the AC motor and the operated installation this means:
• Maximum utilization
• Continuous supervision
• Reliable protection
The modular structure of the system and all of its possible functions enable the Bulletin 825
Smart Motor Manager to be economically and optimally adapted to any installation.
System Components
The motor protection system consists of:
• The basic control and protection unit
• Current converter modules for 0.5…630 A
• Cable for connecting between the basic unit and the current converter module
• Optional plug-in printed circuit boards
• Thermal utilization meter to indicate the thermal load
Installation
The Smart Motor Manager can be either flush mounted in an enclosure door, or surface
mounted to the enclosure mounting plate using a panel mounting frame.
Current converter modules can be surface mounted.
Publication 825-UM001B-EN-P January 2001
2-2 Equipment Description
Modular Design
The Cat. No. 825-M basic unit can be fitted with additional option (function) cards to suit the
requirements.
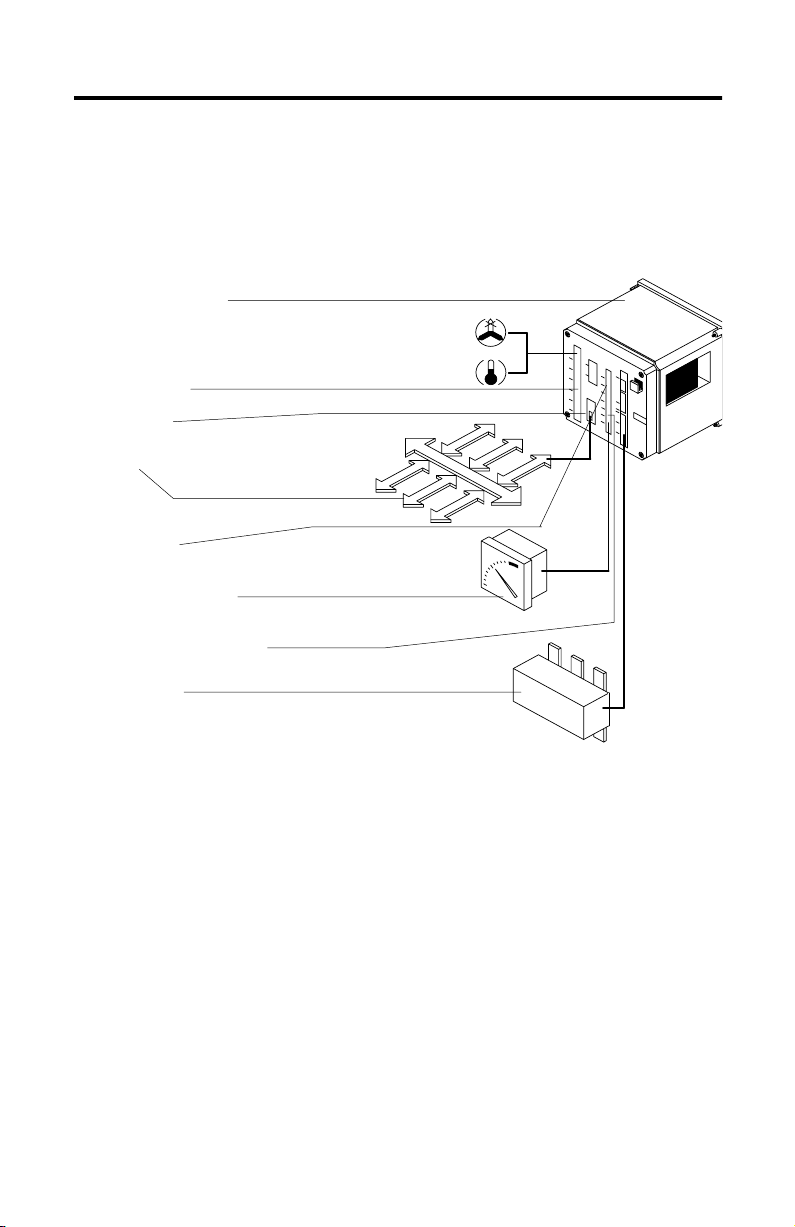
Figure 2.1 Modular Design of the Bulletin 825 Smart Motor Manager
Basic unit, Cat. No. 825-M…
Option:
Cat. No. 825-MLV
Cat. No. 825-MMV
Communication
Communication
Network
Cat. No. 825-MST
Thermal utilization module
Core Balance Current Transformer
PT100
4...20 mA
Converter module
Available Communications Cards
Cat. No. 825-MDN: DeviceNet
Cat. No. 3600-RIO: Remote I/O ➊
Cat. No. 3600-MBS: Modbus ➊
Cat. No. 825-MPB: PROFIBUS FMS
➊ Available from Prosoft Technology, Inc. (not an Allen-Bradley product). References to third-part products are
provided for informational purposes only. Prosoft Technology, Inc., is solely responsible for the accuracy of
information, supply, and support of this product. For further information regarding this particular referenced
product, please contact Prosoft Technology, Inc., in the U.S. at (661) 664-7208 or your local Prosoft
Technology, Inc. distributor.
Publication 825-UM001B-EN-P January 2001
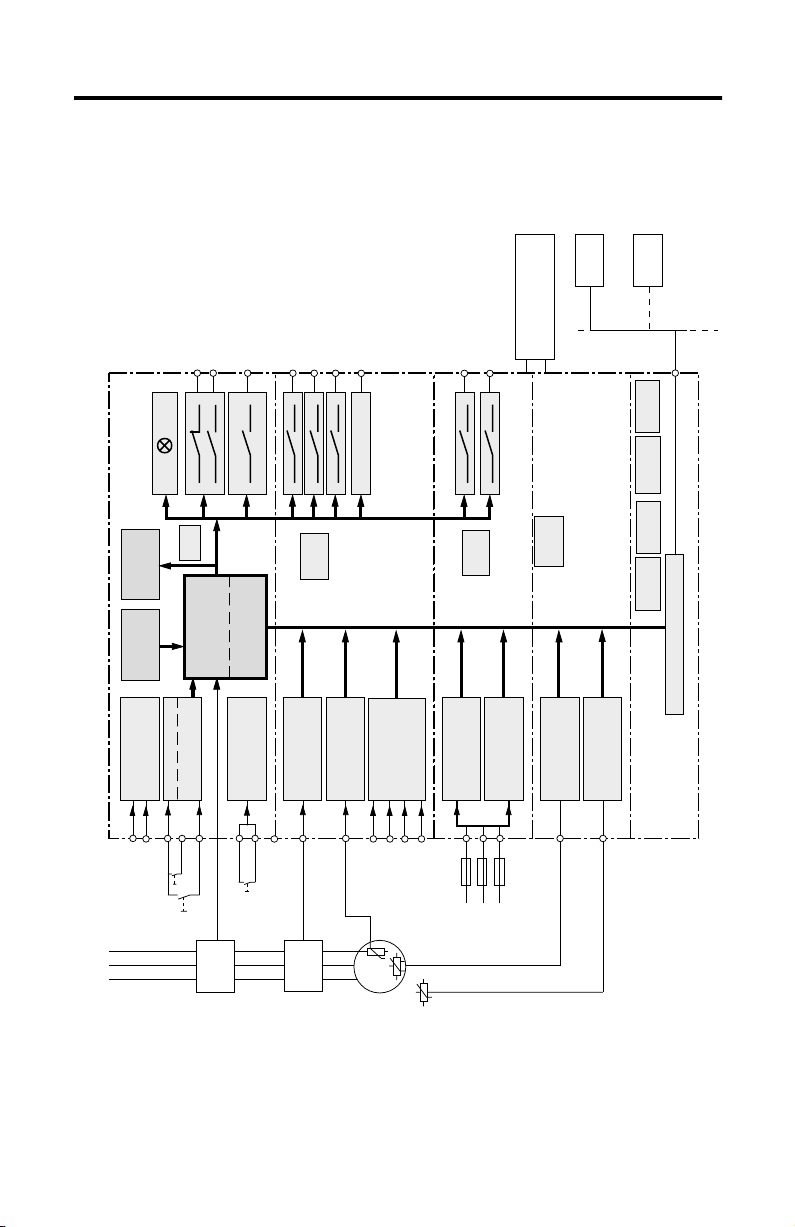
Block Diagram
Figure 2.2 Block Diagram
Equipment Description 2-3
PC
PLC
LCD
Operation
Supply
-
+
Y11
A1 (-)
A2 (+)
Warning/Trip
Main relay MR
Alarm relay AL
95/96
97/98
13/14
825-M
Basic unit
Controller
Y13
Remote reset
Y22
Y21
Disable settings
Emergency start
Y12
Auxiliary relay #1
23/24
825-M
k, l
Auxiliary relay #2
Auxiliary relay #3
Analog output
33/34
43/44
I+ / I-
4…20 mA
825-MST
overload
Earth fault
Thermistor
T1, T2
Y31
#1
24 V AC/DC
Control
Y32
inputs
#2
Y41
Y42
24 V AC/DC
Auxiliary relay #4
Auxiliary relay #5
53/54
63/64
825-MLV
Phase
sequence
Phase failure
L1
L3
L2
F
L1L3L2
Choice
825-MLV or 825-MMV
825-MMV
Stator /
Ambient temperature
bearing temperature
PT100 #7
(RTD)
PT100 #1…#6
(RTD)
1T1/1T2/1T3
7T1/7T2/7T3
…6T1/6T2/6T3
Network
825-MPB
3600-MBS
3600-RIO
825-MDN
Communication Interface
825-
L1 L2 L3
MCM
∑
M
3 ~
amb
ϑ
Publication 825-UM001B-EN-P January 2001

2-4 Equipment Description
Operating Elements
The Smart Motor Manager is very easy to operate. All functions, data, and tests can be
entered, executed, or displayed using the six membrane keys and the single-line LCD, which
displays all available data and functions.
Figure 2.3 Front View with Operating Elements
➊
➋
➏
➎
➍
➌
➊ Fault indicator (LED)
Flashing: warning
Steady state: trip
➋ LCD: Single line (two lines of text are displayed alternately)
➌ Values: Selection of mode
Actual: Indication of actual operational data
Set: Setting mode (set/modify, store parameters)
Recorded: Indication of statistical data
➍ Select: Select function and enter/change operating parameter
➎ Settings: Enable entry (Change) and memorize (Enter)
➏ Test: Verifies operation of Smart Motor Manager.
➐ Reset: Enables the Smart Motor Manager after a trip.
Publication 825-UM001B-EN-P January 2001
➐
Equipment Description 2-5
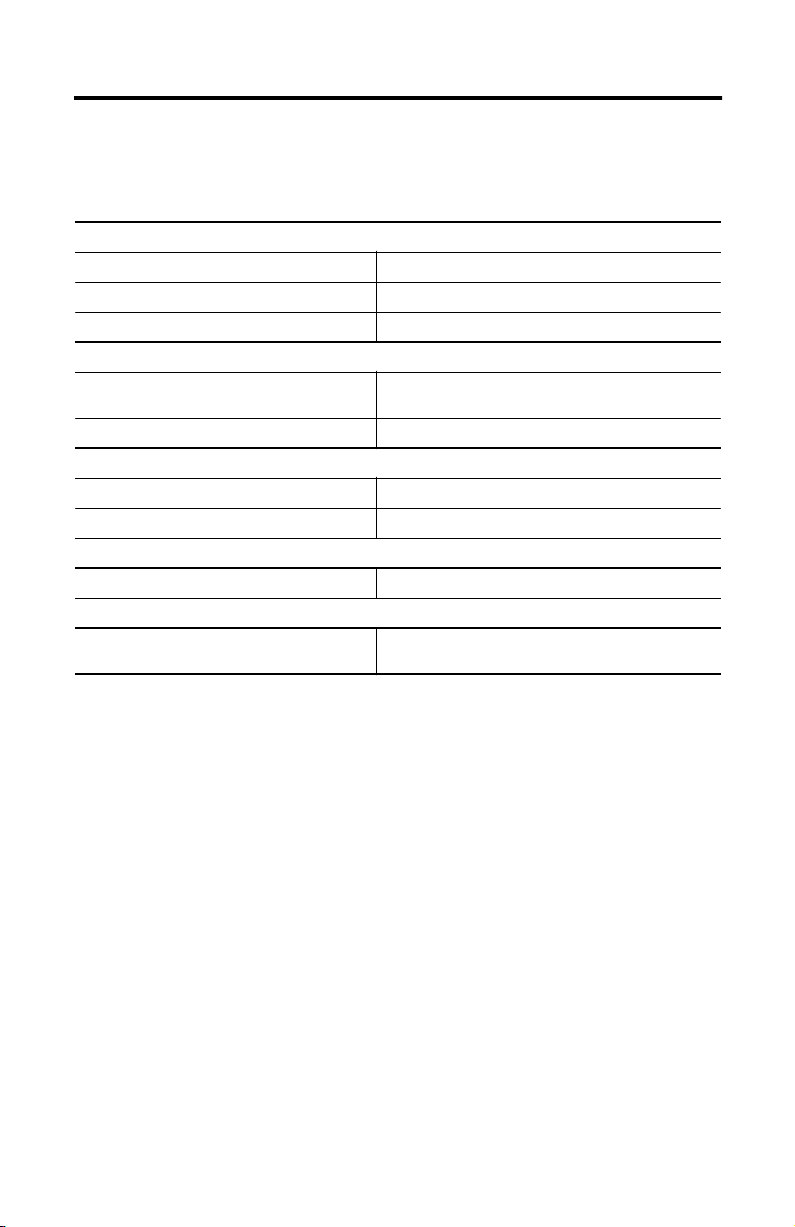
Specifications — Basic Unit and Converter Module
Table 2.A Environmental Ratings
Temperature
Operation -5…+ 60 °C (23…140 °F)
Storage -40…+ 60 °C (-40…140 °F)
Transport -40…+ 85 °C (-40…185 °F)
Climatic Withstand
Damp heat IEC 68-2-3
Climatic cycling IEC 68-2-30 25/40 °C (77/104 °F), 21 cycles
Enclosure Protection Class
825-M, enclosed in panel IP65
Terminals IP20
as per IEC 68-2-6 10…150 Hz, 3 G
as per IEC 68-2-27
40 °C (104 °F), 92%
relative humidity, 56 days
Resistance to Vibration
Resistance to Shock
30 G, shock duration 18 ms, half a sine wave in x, y, z
directions
Publication 825-UM001B-EN-P January 2001
2-6 Equipment Description
Table 2.B Nominal Rated Voltages U
Primary Detection Circuit
as per IEC, SEV, VDE 0660 400V AC 660V AC 1 000V AC
as per CSA, UL 240V AC 600V AC 600V AC
Main relay (MR) 95…98, supply A1, A2
Phase sequence protection L1, L2, L3
as per IEC 947 400V AC
as per SEV 380V AC
as per UL, CSA 240V AC
Alarm relay (AL) 13/14
Auxiliary relay #1, #4, #5
as per IEC 947 400V AC
as per SEV 250V AC
as per UL, CSA 240V AC
Auxiliary relays #2, #3 50V AC/30V AC
Control inputs #1, #2 24V AC/DC
e
Motor Circuit
Control Circuit
825-
MCM2
825-
MCM20
825MCM180
MCM630
MCM630N
Table 2.C Electrical Ratings
Test V olt age
as per IEC 947-1
Control Circuit
Between control circuits and to all other circuits ➊
Main relay (MR) 95…98,
supply A1, A2
Phase sequence protection
L1, L2, L3
Alarm relay (AL), auxiliary relay
#1, #4, #5 as per IEC 947-4
Core balance current transformer k, I
Control inputs #1, #2
Auxiliary relays #2, #3
as per IEC 947-4
825-
MCM2
Motor Circuit
U
imp
2.5 kV
825-
MCM20
U
imp
6 kV
MCM180
MCM630
U
imp
4 kV
U
imp
2.5 kV
825-
U
imp
8 kV
825-MCM630N
12 kV
U
imp
➊ The measuring inputs for PT100 and PTC, the 4…20 mA output, and the communication interface are not
isolated from one another.
Publication 825-UM001B-EN-P January 2001
Equipment Description 2-7
Standards
EMC
Noise emission as per EN 50 081-1 and as per EN 50 081-2
Noise proof as per EN 50 082-1 and as per EN 50 082-2
Standards: IEC 947-4, CSA C22.2 No. 14, UL 508
Approvals: CE, UL-Listed, CSA, PTB: Physkalisch-Technische Bundesanstalt (Germany):
Certification required for motor protection in explosion hazard area (e.g., Chemical,
Petrochemical Installations).
Table 2.D Supply Ratings
50/60 Hz, 22…24, 33…36, 44…48, 110…120, 220…240,
Nominal supply voltage U
Permissible voltage fluctuation
Power consumption AC 13 VA, DC 10 W max.
Short-circuit protection
s
380…415, 440V AC
24…48, 72…120, 220V DC
AC 0.85…1.10 U
DC 0.80…1.10 US for 24…48V DC
DC 0.80…1.20 U
DC 0.80…1.15 U
With the appropriate supply cable rating, the supply module is
short-circuit proof.
S
for 72…120V DC
S
for 220V DC
S
Publication 825-UM001B-EN-P January 2001
2-8 Equipment Description
Table 2.E Relay Ratings
Contact Data of Output Relays
Main Relay (MR) 95…96
Contacts fitted 1 N/C and 1 N/O contact, galvanically separated
Nominal operating voltage
as per UL, CSA: pilot duty 240 V
Continuous thermal current [A] 4
Rated operating current for AC-15 [A] 3 3 1.2
Max. permissible switching current
(cos ϕ = 0.3) AC-15
Rated operating current for DC-13
without prot. network,
L/R = 300 ms
Max. rated current of back-up fuse: [A] 10 A, 500V AC, Type gG
Contacts fitted 1 N/O contact each
Continuous thermal current 4 A
Max. permissible switching voltage 400V AC, 125 VDC
cos ϕ = 1 4 A at 250V AC or 30V DC
cos ϕ = 0.4, L/R = 7 ms 2 A at 250 VAC or 30V DC
cos ϕ = 1 1 250 VA, 150 W
cos ϕ = 0.4, L/R = 7 ms 500 VA, 60 W
as per UL/CSA 240 V, 1 A pilot duty
Contacts fitted 1 N/O contact each
Continuous thermal current 4 A
Max. permissible switching voltage 48 VAC, 30 VDC
cos ϕ = 1 150 W
cos ϕ = 0.4, L/R = 7 ms 60 W
[V] 24 110…125 220…250 380…440
[A] 30 30 12
[A] 2 0.3 0.2 –
Alarm Relay (AL), Auxiliary Relays #1, #4, #5
Nominal Operating Current
Max. Switching Power
Auxiliary Relays #2, #3
Max. Switching Power
Publication 825-UM001B-EN-P January 2001
Equipment Description 2-9
Table 2.F Terminals
Range of gauges:
Cat. No. 825-M plug-in terminals
as per UL AWG No. 22…14
as per VDE
Main circuit
825-MCM2/
825-MCM20
825-MCM180
825-MCM630(N) Bus bars: 25 x 8 mm
0.5…2.5 m2, single wire (AWG No. 20…14)
0.5…1.5 m
2
double wire (AWG No. 20…16)
nominal gauge 1.5 mm
Terminals: 2 x 2.5 mm
(2 x 0.0039 in
2 x AWG No. 20…14/1 x AWG No. 20…12
Aperture or busbars:
Wire ∅ 19 mm max. 20/16 x 4 mm
2
/1 x 4 mm2
2
/1 x 0.006 in2)
2
Publication 825-UM001B-EN-P January 2001
2-10 Equipment Description
Main Current Transformers for the Motor Circuit
When the Cat. No. 825-M Control and Protection Unit is used as a secondary relay with Cat.
Nos. 825-MCM2 and 825-MCM20, the following specifications apply:
Table 2.G Main Current Transformer Ratings
Minimum nominal operating voltage Nominal operating voltage of motor
Minimum rated primary current
Rated secondary current 1 A or 5 A
Class and nominal
overcurrent factor
Power rating
Rated frequency 50/60 Hz
Burden:
Power consumption at max. rated current
Continuous thermal current 3 A 24 A
Thermal current, 1 s duration 250 A 600A
Frequency of input current 50/60 Hz 50/60 Hz
No-load
➊ Designation according to IEC 60044 part 2:
5 Total measurement error (percentage):
±5% within range up to rated nominal overcurrent (10X)
±1% at rated nominal primary current
P For protection purposes
10 Rated nominal overcurrent factor: 10X rated nominal primary current
ext.
Extended rated thermal current: 120% of rated nominal primary current (if
120%
rated nominal transformer current)
With starting current 10
The current transformer error in addition to the basic unit error
➋ 2.5 A with Cat. No. 825-MCM2, 20 A with Cat. No. 825-MCM20
1n
➋
General Notes on 825-MCM…
: class 5 P 20
e
Nominal operating current of motor
5 P 10 ext. 120% ➊
According to power consumption in leads
and measuring circuits
825-M +
825-MCM2
0.1 VA/phase 0.4 VA/phase
An open-circuit secondary is permitted, as the burden is
installed in the detection module
825-M +
825-MCM20
motor > 87% of
e
Publication 825-UM001B-EN-P January 2001
Equipment Description 2-11
Core Balance Current Transformer
Table 2.H Recommended Data for Core Balance Current Transformer
Nominal ratio Kn =
Burden: Measuring circuit 825-M…
Power consumption at max. rated current 0.4 VA
Continuous thermal current 0.5 A
Thermal current, 1 s duration 25 A
Frequency of input current 50/60 Hz
A core balance current transformer, current ratio = 100:1, is available, and might suit most
applications. (Max. earth (ground) fault current = 30 A.
minimum detectable earth (ground) fault
Pickup current of basic unit earth (ground) fault protection
Short-Circuit Protection
Choosing a Circuit Breaker or Fuse and Associated Contactor
The branch circuit short-circuit protective device series (circuit breaker or fuse) must assure
that the motor can start while interrupting short-circuit currents rapidly enough to prevent
damage to the installation. To aid in the latter, the fuse rating should be as low as possible.
The lowest possible fuse rating depends on the starting current of the motor and the tripping
time set on the Smart Motor Manager.
The Short-Circuit Coordination of the Starter Must Always be Taken into Account
The contactor receives its tripping signal when the Smart Motor Manager basic unit trips. The
basic unit interrupts all current up to the point of intersection with the time/current
characteristics of the circuit breaker or fuse.
When starting large motors, the main contacts on the contactor are subjected to high thermal
loads. If the motor starting time exceeds a certain limit, the maximum permissible current has
to be reduced.
The rating of the fuse or contactor must also allow for the prospective short-circuit current.
The Bulletin 825 converter modules are short-circuit proof.
The coordination (grading) diagrams for contactors are available on request.
Publication 825-UM001B-EN-P January 2001

2-12 Equipment Description
Response Supply Voltage Failure
If the supply voltage fails, the setting data are retained.
Failure of Supply Voltage > 30 ms
• All energized output relays drop out
• The LED extinguishes
• The timer for “duration of supply failure” starts (maximum 8 h)
• The instantaneous set and statistical data are recorded
• The LCD extinguishes
Recovery of the Supply Voltage
• Initialization routine is started
• The time of occurrence and the duration of the supply failure are entered into
memory
• The thermal image is calculated and updated
• All output relays return to the state before the supply failure, except for relay #2 and
#3, when control is executed via communication
• LCD and LED activate
Publication 825-UM001B-EN-P January 2001

Equipment Description 2-13
Automatic Recognition of Converter Module
The Bulletin 825 regularly checks:
• The link between the basic unit and the converter module
• Verifies that the full load current set on the basic unit is within the range of the
converter module
• The supervisory circuits
In the event of a fault, the output relay MR trips and the type of fault is displayed on the LCD.
Table 2.I Converter Module — Related Error Messages
Verify Sequence Display
• After switching on supply
• Supervision while motor is stationary
• When running, as soon as the link is
Link between basic unit and
converter module
Verification that FLC on basic
unit is within range of converter
module
Supervisory circuits
interrupted the basic unit will trip and
display one or more of the following
causes:
• short circuit, thermal, earth fault
(Holmgreen = residual),
asymmetry, overcurrent
• After switching on supply
• After each change in setting of rated
current
• Continuous monitoring (hardware
errors, supply, etc.)
825-MCM NOT CON
Ie OUT OF RANGE
ERROR 825-MCM
Publication 825-UM001B-EN-P January 2001

Chapter
Functions
Menu Overview
Actual Values
In “Actual Values” mode, all operating parameters can be selected and read from the LCD.
Table 3.A Actual Values Overview
3
%
e
%
e
%
e
%
e
Option Card
Cat. No.
— 6-5 I earth - C mA — 6-7
— 6-6 Tambient ºC 825-MMV 6-7
— 6-6 PT100 #1(…6) ºC 825-MMV 6-7
— 6-6 PROBUS — 825-MPB 6-7
Page Display List
Display List
I MOTOR A — 6-6 I earth - H %I — 6-7
I MOTOR
I 1
I 2
I 3
TRIP IN s — 6-6 RIO — 3600-RIO 6-7
RESET IN s — 6-7 MODBUS — 3600-MBS 6-7
ASYM % — 6-7 DevNet — 825-MDN 6-7
Option Card
Cat. No.
Page
Publication 825-UM001B-EN-P January 2001

Functions 3-2
Set Values
The parameters “Main Settings” and “Special Settings” must be programmed for every
application. The other parameters (e.g., “High Overload”, “Asymmetry”) have factory-set
values, which are correct for most applications.
Table 3.B Set Values Overview
Parameter List
THERMAL TRIP — 5-4 THERMAL RESET LEVEL — 5-10
THERMAL WARNING — 5-4 COOLING CONSTANT RATIO — 5-10
ASYMMETRY TRIP — 5-5 PTC TRIP 825-MST 5-10
ASYMMETRY WARNING — 5-5 PTC RESET 825-MST 5-10
OVERCURRENT TRIP — 5-5 CONTROL INPUT #1 5-10
OVERCURRENT WARNING — 5-5 DELAY AUX REL # 2
EARTH FAULT PROTECTION — 5-6 SPEED SWITCH 5-11
EARTH FAULT HOLMGREEN TRIP — 5-6 DISABLE FUNCTION 5-11
EARTH FAULT CORE TRIP 825-MST 5-7 CONTROL INPUT #2 5-12
EARTH FAULT CORE WARNING 825-MST 5-7 DELAY AUX REL #3 825-MST 5-12
SHORT CIRCUIT PROTECTION 825-MST 5-7 NEW FULL LOAD CURRENT 5-12
UNDERLOAD TRIP — 5-8 PHASE REVERSAL TRIP
UNDERLOAD WARNING — 5-8 PHASE LOSS TRIP 5-13
STAR DELTA STARTING 825-MLV 5-8 PT100 PROTECTION
WARM STARTING — 5-9 PT100 RESET/WARNING
START INHIBIT — 5-11 OUTPUT 4…20 mA 825-MST 5-15
START CONTROL — 5-9 STATION NUMBER — 5-16
MAIN RELAY CONNECTION — 5-10 REL #2-3 VIA COM — 5-16
ALARM RELAY CONNECTION — 5-10 CLEAR RECORDED VALUES — 5-16
THERMAL RESET — 5-10 FACTORY SETTINGS — 5-16
Option
Card
Cat. No.
Page Parameter List
Option
Card
Cat. No.
825-MST
825-MLV
825-MMV 5-13
Page
5-10
5-13
ATTENTION
!
All parameters can be set, including those functions associated with
option boards that have not been mounted in the device. However,
these warning and trip functions are not operational unless the
corresponding option board is installed.
Publication 825-UM001B-EN-P January 2001

3-3 Functions
Recorded Values
In “Recorded values” mode, all recorded data can be selected and read from the LCD.
Table 3.C Recorded Values Overview
Display List
825-M MAIN TIME h min. — 7-2 CAUSE 2PRV TRIP — — 7-3
MOTOR RUNNING HR h min. — 7-2 CAUSE 3PRV TRIP — — 7-3
SINCE LAST START h min. — 7-2 CAUSE 4PRV TRIP — — 7-3
SINCE 1PRV START h min. — 7-2 SINCE EMG START h min. — 7-3
SINCE 2PRV START h min. — 7-2 SINCE POWER OFF h min. — 7-3
SINCE 3PRV START h min. — 7-2 DURATION POW OFF h min. — 7-3
SINCE 4PRV START h min. — 7-2 I BEF LAST TRIP
SINCE LAST TRIP h min. — 7-2 AS BEF LAST TRIP % — 7-3
SINCE 1PRV TRIP h min. — 7-3 EF BEF LAST TRIP
SINCE 2PRV TRIP h min. — 7-3 MAX T BEF LAST TRIP ºC 825-MMV 7-4
SINCE 3PRV TRIP h min. — 7-3 TH BEF LAST TRIP % — 7-4
SINCE 4PRV TRIP h min. — 7-3 NUMBER START — — 7-4
CAUSE LAST TRIP — — 7-3 NUMBER TRIP (TH,
CAUSE 1PRV TRIP — — 7-3
Option
Card
Cat. No.
Page Display List
AS, OC, EF, SC, UL,
PTC, PR, PL, PT100)
Option
Card
Cat. No.
%
e
mA,
%
e
——7-4
Page
—7-3
—7-3
Publication 825-UM001B-EN-P January 2001

Operation
Selecting the Setting/Display Mode
Actual
Change mode by
pressing
Recorded
Functions 3-4
SET
Set
Values
ACTUAL VALUES
Indication of actual
operational data
SET VALUES
ChangeActual
Setting mode
(set/vary, store parameters)
ChangeActual
RECORDED VALUES
ChangeActual
Indication of
statistical data
Publication 825-UM001B-EN-P January 2001

3-5 Functions
Setting the Operation Parameters (Set Values)
Text and data are indicated alternately (approximately 2 s text and 1 s data). On the “second
line,” the data that is factory set or subsequently modified is displayed. Functions not
activated (OFF) are not indicated.
1. To set the operation parameters, repeatedly press the Va lu es button until “SET
VALUES” appears on the display.
Figure 3.1 Setting Mode
SET VALUES
Actual
Recorded
Values
Set
Select Settings
Change
Enter
2. Press Select (Up or Down) until the desired parameter (e.g., “FULL LOAD CURR”
and “35 Amp”) appears (display alternates between text and data).
Figure 3.2 Menu Selection
35 AMP
FULL LOAD CURR
Actual
Set
Recorded
Values
Select Settings
3. Press the Settings (Change) button once. The set value begins to flash. A new set value
can now be entered by means of the Select keys (Up or Down). The entry is completed
by pressing Settings (Enter).
Change
Enter
Publication 825-UM001B-EN-P January 2001

Figure3.3 Entering a Data Value
Functions 3-6
35 AMP
Actual
Recorded
Values
Set
Select Settings
Change
Enter
Note: Hold down the Select button to change the values more quickly.
Table 3.D Display Example of Set Values Menu
LCD Range Description
SET VALUES
FULL LOAD CURR
20 A
PRIMARY C.T.
NO
PRIMARY C.T. RATIO
1
LOCKED ROT CURR
6 x Ie
LOCKED ROT TIME
10 sec
— Mode: setting parameters
0.5…2 000 Rated motor current in A
No/Yes Primary current transformer in use
1…2 000 Primary current transformer ratio
2.5…12
1…600
Maximum permitted time for the rotor to be stalled
Locked rotor current as
___
from cold
e
Note:For a complete list of parameters, refer to Chapter5.
Publication 825-UM001B-EN-P January 2001

3-7 Functions
Indications of Actual Values
In “Actual Values” mode, all operating parameters can be selected and read from the LCD.
1. Press Values until “ACTUAL VALUES” appears on the display.
2. Press Select (Up or Down) until the desired information is displayed.
Figure 3.4 Selecting the Actual Values
ACTUAL VALUES
Actual
Recorded
Values
Set
Select Settings
Change
Enter
I MOTOR 00 %Ie
Actual
Set
Recorded
Values
Select Settings
Table 3.E Display Example of Actual Values Menu
LCD Range Description
ACTUAL VALUES
I MOTOR…A
TH UTILIZ…%
I MOTOR…% Ie
—
0.00… 49.99
50…24 000
0…100 Thermal utilization
0/20…999 Motor current as percent of rated current
Change
Enter
Display of the actual
values
Motor current in A
Note:For a complete list of parameters, refer to Chapter6.
Publication 825-UM001B-EN-P January 2001

Functions 3-8
Applications
The “Actual Values” mode provides:
• Assistance during programming and setup
• Verification after maintenance or production change
• Continuous operational supervision
Indications of Recorded Values (Statistics)
In “Recorded Values” mode, all recorded data can be selected and read from the LCD.
1. Press Values until “RECORDED VALUES” appears on the display.
2. Press Select (Up or Down) until the desired statistical information is displayed.
Figure 3.5 Selecting Recorded Data
RECORDED VAL
Actual
Set
Recorded
Values
Select Settings
2 h 28 min
SINCE LAST TRIP
Actual
Recorded
Values
Set
Select Settings
Change
Enter
Publication 825-UM001B-EN-P January 2001
Change
Enter

3-9 Functions
Table 3.F Display Example of Recorded Values
LCD Description
RECORDED VALUES
825-M MAIN TIME
_ _ _ H_ _ _MIN
MOTOR RUNNING TIME
_ _ _h_ _ _min
Bulletin 825-M* running time (including interruption ≤ 8 hour of control
Display of the statistical data
voltage in hours, minutes)
Total motor running time in hours, minutes
Note:For a complete list of parameters, refer to Chapter7.
Applications
The “Recorded Values” mode provides:
• Analysis of motor faults and production interruptions
• Analysis of premature motor failures
• A means of determining maintenance jobs on the switchgear, motor, and installation
Tes t Button
When the motor is at standstill, the alarms, trips, and tripping times of the protective
functions can be checked without external aids by pressing the Test button.
Figure 3.6 Basic Unit Test Button
Change
Enter
Settings
Publication 825-UM001B-EN-P January 2001
SMART MOTOR
MANAGER
Test
Reset

Testing the Thermal Trip
1. Press the Test button.
LCD:
TEST THERMAL ON
2. After the set blocking time has expired, the basic unit must trip.
LCD:
LOCK ROT TIME
_ _ _sec
3. The LED lights.
4. The selected output relay picks up (MR, main relay, on trip).
LCD:
THERMAL TRIP
Resetting
Functions 3-10
Automatic: The trip becomes inactive when the Test button is no longer pressed.
Manual: Reset the trip with the Reset button.
Note: After the test, the thermal image resumes its correct state. Simulation of the motor
cooling is not affected by the test.
Testing the Trips (Asymmetry/Unbalance, Underload, etc.)
Example: Asymmetry
1. When in “Set Values mode”, access the selected output relay:
LCD:
ASYMMETR Y TRIP
AUX RELAY #2
Publication 825-UM001B-EN-P January 2001

3-11 Functions
2. If no output is assigned the following readout appears:
LCD:
ASYMMETR Y TRIP
NO OUTPUT RELAY
3. Press the Test button.
LCD:
TEST
4. After the set trip delay expires, the basic unit must trip.
LCD:
AS TRIP TIME
_ _ _sec
5. The LED lights.
6. The selected output relay picks up.
LCD:
ASYMMETR Y TRIP
Resetting
Cancel the trip by pressing Reset.
Testing the Warning Functions
Example: Asymmetry warning
1. When in “Set Values” mode, access the selected output relay:
LCD:
AS WARNING
ALARM R ELAY
Publication 825-UM001B-EN-P January 2001
Functions 3-12
2. Press the Test button.
LCD:
TEST
3. The LED flashes and the selected output relay picks up immediately.
4. LCD flashes
LCD:
TEST
AS WARNING
Resetting
As soon as the Test button is no longer pressed, the unit will automatically reset.
Publication 825-UM001B-EN-P January 2001

3-13 Functions
Function Summary
Table 3.G Protective Functions Summary
Functions
Factory
Setting
Thermal overload On 100% — — MR, No MR
Asymmetry (phase failure) On 5…80% 35% 1…25 s 2.5 s All MR
High overloading/jam On
Underload Off 25…100% 75% 1…60 s 10 s All MR
Underload delayed enable On — — 0…240 s 0 s — —
Earth (ground) fault (residual) On 10…100% 50% 0.1…5 s 0.5 s All MR
Starting time monitor Off — — 1…240 s 10 s All MR
Limited starts per hour Off 1…10 2 — — All MR
Short-circuit Off
Earth (ground) fault
(core balance c.t.)
Stalling during start Off — ➊➊—All ➊ MR ➊
Thermistor input (PTC) Off — — — 800 ms All MR
Phase sequence (motor supply) Off — — — 1 s All MR
Phase failure (motor supply) Off — — — 2 s All MR
PT100 input #1…#6 (RTD)
(stator, bearings)
PT100 input #7 (RTD) ➋ Off——————
➊ Via external speedometer (control input #1), output and trip relays as for high overload.
➋ Allowing for the ambient temperature in the thermal image.
➌ Only one relay per function can be selected: MR = main relay, AL = alarm relay, auxiliary relay #1…#5 (if
auxiliary relays #2 and #3 are assigned to the communication [refer to page 5-16] they cannot be selected
here).
Setting
Range
Bulletin 825-M… Basic Unit
1…6
Bulletin 825-MST Option Card
4…12
Off 5 mA…50 A 1 A 0.1…5 s 0.5 s All MR
Bulletin 825-MLV Option Card
Bulletin 825-MMV Option Card
Off 50…200 °C 50 °C— <8 s
e
e
Factory
Setting
Tr ip pi ng
Delay
Range
2.4
0.1…5 s 0.5 s All MR
e
10
20…990 ms 50 ms #1, No #1
e
Factory
Setting
Relays ➌
Selection
MR, AL
#1…#3
Factory
Setting
MR
ATTENTION
Warning function settings must be such that associated alarms are
actuated before a trip occurs.
!
Publication 825-UM001B-EN-P January 2001

Table 3.H Warning Functions Summary
Functions 3-14
Functions
Factory
Setting
Thermal utilization
(%∆ϑ load)
Asymmetry (%
High overloading (x
Underload Off 25…100%➋ 75%➋ — — AL, #1…5 AL
Earth (ground) fault
(core balance c.t.)
PT100 input #1…#6 (RTD)
(stator, bearings)
➊ Only one relay per function can be selected: MR = main relay, AL = alarm relay, auxiliary relay #1…#5 (if
auxiliary relays #2 and #3 are assigned to the communication [refer to page 5-16] they cannot be selected
here).
➋ Same setting as for the Underload Trip function.
)
e
e
Off 50…99% 75% — — AL, #1…5 AL
Off 5…80% 20% — — AL, #1…5 AL
)
Off
Off 5 mA…50 A 500 mA — — AL, #1…5 AL
Off 50…200 °C 50 °C — — AL, #1…3 AL
Setting
Range
Bulletin 825-M… Basic Unit
1…6
Bulletin 825-MST Option Card
Bulletin 825-MMV Option Card
Factory
Setting
e
Tri p pi ng
Delay
Range
2
e
Factory
Setting
— — AL, #1…5 AL
Relays ➊
Selection
Factory
Setting
Publication 825-UM001B-EN-P January 2001

3-15 Functions
Table 3.I Control Functions Summary
Functions
Factory
Setting
Warm start (% of “cold”
trip)
Emergency override of
thermal trip ➊
Analog output assigned
to:
thermal utilization
PT100 max.
temperature
Motor
Bulletin 825-MST Option Card, Control Input #1: (24V AC/DC; 8 mA)
One of 3 functions can be selected:
1) Pickup delay, relay #2 Off — — 0…240 s 1 s — #2
1) Dropout delay, relay #2 — — — 0…240 s 2 s — #2
2) Speed switch Off — — — — —
3) Disable protective functions:
Asymmetry/phase failure Off — — — — — —
High overload/jam Off — — — — — —
Earth (ground) fault Off — — — — — —
Short-circuit Off — — — — — —
Underload Off — — — — — —
Limiting starts/hour Off — — — — — —
PTC Off — — — — — —
PT100 (RTD) Off — — — — — —
➊ Terminals Y11…Y12 must be jumpered.
➋ Minimum waiting time between two warm starts.
Setting
Range
Bulletin 825-M… Basic Unit
Off 50…100% 70% 4…60 min. ➋
—— — — ———
Bulletin 825-MST Option Card
4…20 mA
0…100%
On
50…200 °C
0…200%
Factory
Setting
—————
e
Tri p pi ng
Delay
Range
Factory
Setting
60 min.
➋
Relays
Selection
Factory
Setting
——
high overload relay
Publication 825-UM001B-EN-P January 2001

Table 3.I Control Functions Summary (Continued)
Functions 3-16
Functions
Factory
Setting
Bulletin 825-MST Option Card, Control Input #2: (24V AC/DC; 8 mA)
One of three functions can be selected:
1) Pickup delay, relay
#3
1) Dropout delay, relay
#3
2) Set second rated
current ➊
3) Disable protective functions:
Asymmetry/phase
failure
High overload/jam Off — — — — — —
Earth (ground) fault Off — — — — — —
Short-circuit Off — — — — — —
Underload Off — — — — — —
Limiting starts/hour Off — — — — — —
PTC Off — — — — — —
PT100 (RTD) Off — — — — — —
Star-delta starting Off —
➊ For example, when used with two-speed motors
Setting
Range
Off — — 0…240 s 1 s — #3
—— —0…240 s2 s—#3
Off
Off — — — — — —
0.5…
2 000 A
Bulletin 825-MLV Option Card
Factory
Setting
20 A — — — —
Y-∆ at 1.1
Tri p pi ng
Delay
Range
Y-∆ at 1…240 s 10 s — Y: #4/∆:#5
e
Factory
Setting
Relays
Selection
Functions of the Basic Unit (Cat. No. 825-M…)
Factory
Setting
Thermal Overload
The Smart Motor Manager accurately simulates thermal conditions in the motor for all
operating modes. This permits maximum utilization of an installation and assures safe
protection of the motor.
The basic unit uses a two-body simulation to calculate a more precise representation of a
motor’s thermal condition during all modes of operation. A two-body simulation incorporates
the temperature rise characteristics of both the stator windings and the iron mass of the
motor into the thermal image.
The simulation of the Smart Motor Manager accurately represents the conditions in the
motor at all times.
Publication 825-UM001B-EN-P January 2001

3-17 Functions
While the motor is running, the iron losses as well as losses caused by asymmetry are fed to
the simulation model. Allowance for the ambient temperature of the motor, as an option,
enhances the maximum utilization of the installation even with considerable variation of the
temperature. Without the optional inclusion of the ambient temperature of the motor, the
thermal model bases the thermal calculation on an ambient temperature of 40° C. The
different cooling conditions of a self-ventilated motor when running and at standstill are
taken into account by two different time constants. After switching off, the rapid cooling of
the winding to the iron temperature and the subsequent slow cooling of the motor as a whole
are simulated.
The two-body simulation can be represented as a capacitance-resistance network. See
Figure 3.7.
Figure 3.7 Two-Body Simulation of the Heating Up of a Motor
P
2
Cu
≈ (I
2
+ kI
)
M
G
P
Fe
R1
C1
S1
C2
R2
ϑ
amb
C1 Capacitance representing the heat capacity of the winding (adjustable)
C2 Capacitance representing the heat capacity of the iron an other masses of the machine
R1 Resistance representing resistance to heat transfer between winding and iron
R2 Resistance representing heat dissipation to the surroundings when stationary
R3 Resistance representing heat dissipation to the surroundings when running
P
Input of a current proportional to the copper losses
Cu
P
Input of a current proportional to the iron losses
Fe
S1 Changeover from stationary to running
Motor current
M
Opposing component caused by asymmetry
G
Allowance for the temperature of the environment coolant (optional PT100 #7)
ϑ
amb
k Constant factor according to IEC and NEMA
R3
Adjustable Ratio of Cooling Constants
The ratio of the cooling constant when the motor is at standstill to the cooling constant when
it is running allows for the difference in cooling in these states. The cooling constant ratio is
set to 2.5 in the factory. This value is correct for the majority of self-cooled AC motors.
For separately ventilated and special motors, and those which respond very quickly or very
slowly, you may have to modify the cooling factor.
Publication 825-UM001B-EN-P January 2001
Functions 3-18
Indication of the Time to Tripping
LCD:
TRIP IN…sec
This feature provides continuous indication of the time remaining before tripping when in an
overload condition. This enables you to intervene before tripping occurs. (Blank display
means: Time > 9 999 s)
Indication of the Time until the Thermal Trip can be Reset
LCD:
RESET IN …sec
Following a thermal trip, the basic unit may not be reset until the reset threshold has been
reached. This is set to a temperature rise of 50% in the factory.
Adjustable Setting Characteristic
The degree of inertia can be set to match the properties of the motor. A suitable reference
value, among others, is the admissible locked-rotor time of the cold motor in conjunction
with the associated current. This makes it possible to protect motors that are thermally very
fast or very slow. See Figure 3.8, Figure 3.9, and Figure 9.15.
The thermal capacity of the iron is particularly important at small overloads. Allowing for this
in the simulation enables the overload reserves of the motor to be utilized without risking a
premature protective trip.
Publication 825-UM001B-EN-P January 2001

3-19 Functions
Figure 3.8 Trip Characteristic (10…30 s)
10000.0
1000.0
100.0
Trip time [s]
10.0
From cold, without pre-load
10s 20s
30s
10s 20s 30s
1.0
0.1
1.0 2.0 3.0 4 98765101.1
From warm, pre-load 1xI
Load current as multiple of full load current
Publication 825-UM001B-EN-P January 2001
e
nxI
e

Figure 3.9 Trip Characteristics (40…100 s)
100000.0
10000.0
1000.0
Trip time [s]
100.0
From cold, without pre-load
40s 60s
100s
Functions 3-20
10.0
1.0
1.0 2.0 3.0 4 98765101.1
40s 60s 100s
From warm, pre-load 1xI
Load current as multiple of full load current
For UL/CSA applications refer to page 9-14.
e
nxI
.
e
Publication 825-UM001B-EN-P January 2001

3-21 Functions
Table 3.J Thermal Overload Setting Parameters
Detection Module ➋
825-MCM2 825-MCM20 825-MCM180 825-MCM630 825-MCM630N
Rated Current
Setting range 0.5…2.5 A ➊ 2.5…20 A ➊ 20…180 A 160…630 A ➌ 160…630 A
Factory setting 20 A 20 A 20 A 20 A 20 A
Setting increments 0.01…2 A 0.1…2 A 1 A 2 A 2 A
Locked-Rotor Current (Multiple of Rated Current)
Setting range
Factory setting
Setting increments
Locked-Rotor Time (Admissible Locked-Rotor Time of Cold Motor)
Setting range 1…600 s
Factory setting 10 s
Setting increments 1 s
Cooling Factor of Motor Off/On ➍
Setting range 1…10
Factory setting 2.5
Setting increments 0.5
Resetting the Thermal Trip
Setting range 10…100% of thermal utilization
Factory setting 50%
Setting increments 1%
Ultimate Release Current
Incl. setting tolerance
➊ Up to 2 000 A, if primary current transformers are used.
➋ –5…60 °C (23…140 °F)
➌ UL/CSA 160…434 A
➍ The cooling factor can be modified to reflect different motor cooling with running motor and at standstill.
2.5…12
6
e
0.1
e
1.05…1.15
e
e
Publication 825-UM001B-EN-P January 2001

Functions 3-22
Table 3.K Protection Against Thermal Overload
Warning Trip
Function
Factory setting Off On
Response Level ➊
Setting range 55…99% —
Factory setting 75% 100%
Setting increments 1% —
Output Relay ➋
Selection AL, #1…#5 MR, No output relay
Factory setting AL MR
➊ Thermal utilization %
➋ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
Asymmetry (Phase Unbalance) and Phase Failure
Asymmetrical phase voltages usually occur when the leads closest to the motor are too long.
The resulting current asymmetry in the motor windings may then be 6…10 times the voltage
asymmetry. The Smart Motor Manager takes into account the additional temperature rise and
thus prevents the life of the motor from being reduced. Higher asymmetry or the failure of a
phase can be caused by defective contacts in circuit breakers or contactors, loose terminals,
blown fuses, and faults in the motor itself. Rapid detection and interruption of these factors
help to prevent damage caused by overheating in such equipment. The stress on the
installation and the motor bearings is reduced. The Smart Motor Manager measures the phase
currents and calculates the total copper losses according to the definition of voltage
asymmetry per IEC and NEMA.
2
P
Cu
Definition of voltage asymmetry per IEC and NEMA:
∆U%()
2
k
+()≈
M
G
Max. deviation from the average of the phase voltages 100×
=
-----------------------------------------------------------------------------------------------------------------------------
Average of the phase voltages
Publication 825-UM001B-EN-P January 2001

3-23 Functions
Figure 3.10 Reduction in Permissible Motor Output Due to Voltage Asymmetry
per IEC and NEMA
f
R
1.0
0.9
0.8
0.7
012345
fRReduction factor for
∆U Voltage asymmetry
∆
U
[%]
motor output
in percent
Table 3.L Asymmetry (Phase Unbalance) Setting Parameters
Warning ➊
(Current Asymmetry)
Function
Factory setting Off On
Response Level
Setting range 5…80% 5…80%
Factory setting 20% 35%
Setting increments 5% 5%
Tripping Delay
Setting range — 1…25 s ± 0.2 s
Factory setting — 2.5 s ± 0.2 s
Setting increments — 0.5 s
Output Relay ➋
Selection (relays) AL, #1…#5 MR, AL, #1…#5
Factory setting AL MR
➊ –5…60 °C (2…140 °F)
➋ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
Tr ip ➊
High Overload and Jam
When an overload is excessively high and the motor jams, unnecessary mechanical and
thermal loading of the motor and transmission elements can be avoided by switching the
motor off immediately. This reduces consequences of accident and loss of production. A
gradual increase in overload can be detected early and reported (e.g., bearing damage). The
protective function activates as soon as the motor has started.
Publication 825-UM001B-EN-P January 2001

Functions 3-24
Application
• Conveying systems
• Mills
• Mixers
• Crushers
• Saws, etc.
Figure 3.11 Function of High Overload and Jam Protection
I
I
e
≥ 1.2
2.4
1.1
1 M otor sta rt ≥ 1.2
2 Nominal operation 4 Jam protection not active
3 High overload or jam 5 Jam protection active (tripping threshold)
e
1
3
2
t
v
4
5
tVTripping delay
t
Table 3.M High Overload and Jam Setting Parameters
Warning ➊ Tr ip ➊
Function
Factory setting Off On
Response Level
Setting range
Factory setting
Setting increments
1…6
2
0.2
e
e
e
Tripping Delay
Setting range — 0.1…5 s ± 0.04 s
Factory setting — 0.5 s ± 0.04 s
Setting increments — 0.1 s
Output Relay ➋
Selection (relays) AL, #1…#5 MR, AL, #1…#5
Factory setting AL MR
➊ –5…60 °C (23…140 °F)
➋ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
Publication 825-UM001B-EN-P January 2001
1…6
2.4
0.2
e
e
e

3-25 Functions
ATTENTION
It is essential to set the “Warning” response level to a value less than
the “Trip” response level.
!
Note: If the starting current is below 1.2 FLC, then the “Monitoring the Start Time”
function must be activated. After the set max. starting Time has elapsed, the “High
Overload/Stall” function will become active.
Applications:
• Slip ring motors
• Soft starters
• Motor protection with “non-fail-safe mode”, after a control voltage failure
Underload
Motors that are cooled by the medium handled (e.g., fans, submersible pumps) can become
overheated despite being underloaded. This can be a result of the absence of the medium or
insufficient medium (due to clogged filters, closed valves, etc.). Often these motors are
installed in inaccessible places, so repair is lengthy and expensive.
The consumption of less than a preset, application-specific amount of current may indicate a
mechanical defect in the installation (e.g., torn conveyor belt, damaged fan blades, broken
shafts or worn tools). Such conditions do not harm the motor, but they do lead to loss of
production. Rapid fault detection helps to minimize damage.
The underload protection trip time can be delayed following each start to prevent tripping.
The warning is actuated as soon as the underload threshold is reached.
Application
• Submersible pumps
• Fans
• Conveyor systems
• Detection of fractures in mechanical transmission system
Publication 825-UM001B-EN-P January 2001

Figure 3.12 Function of Underload Protection
I
I
I
e
1
Functions 3-26
I
e
I
T
t
A
33
t
p
t
s
2
t
v
t
p
t
1 Start rTripping threshold
2 Nominal operation t
3 Underload operation protection not active)
t
Starting time tvTripping delay
A
Rated current tpWarning
e
Delayed activation (underload
s
Table 3.N Underload Setting Parameters
Warning ➊ Tri p ➊
Function
Factory setting Off On
Response Level
Setting range ➋
Factory setting ➋ 75%
Setting increments ➋ 5%
Tripping Delay
Setting range — 1…60 s -0.2 s/+0.4 s
Factory setting — 10 s
Setting increments — 1 s
Delayed Activation of Underload Protection
Setting range — 0…240 s +0.4 s/+0.8 s
Factory setting — 0 s
Setting increments — 1 s
Output Relay ➌
Selection (relays) AL, #1…#5 MR, AL, #1…#5
Factory setting AL MR
➊ –5…60 °C (23…140 °F)
➋ For warning, the set Response Level is the same as the level set for tripping. If the starting current is below
1.2 FLC, then the “Monitoring the Start Time” function must be activated. After the set max. starting Time
has elapsed, the “High Overload/Stall” function will become active.
➌ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
25…100%
e
Publication 825-UM001B-EN-P January 2001

3-27 Functions
Earth (Ground) Fault
The insulation in motors is often damaged by high-voltage surges, which may be caused by
lightning strikes, switching operations in the network, capacitor discharges and power
electronics equipment. Other causes are aging and sustained or cyclic overloading, as well as
mechanical vibration and the entry of foreign objects. Most insulation faults result in leakage
to the grounded parts of the machine. In earthed (grounded) networks, the fault current can
rapidly rise to a very high value. Depending on the type of network and its requirements,
monitoring of earth (ground) faults is performed either by the residual method or by using a
core balance current transformer.
Earth (Ground) Fault Protection by the Holmgreen Method = Residual Method (Solidly
Earthed Networks)
To detect an earth (ground) fault current in either a solidly earthed (grounded) network or
one that is earthed through a low impedance, the currents in each of the three pole
conductors are measured. In a “healthy” motor, this sum is zero. If a current is flowing to the
frame of the motor, and thus to earth, a neutral current
produced at the neutral of the current transformer. This neutral current is detected by the
earth (ground) fault detector and causes a trip. A brief delay helps to avoid nuisance trips
caused by transient current transformer saturation, which can be caused by switching
operations. The sensitivity has to be such that neither transformation errors in the current
transformer nor disturbance signals in star-delta (wye-delta) connections caused by the third
harmonic cause nuisance tripping.
Figure 3.13 3-Phase Current Detection
Measurement of the neutral current 0 in the neutral connection of the current transformer to detect an earth (ground) fault
(residual circuit)
, proportional to the fault current, is
0
L1
L2
L3
P1
S1
P1
S1
P1
P2
S2
P2
S2
P2
3 ~
M1
Publication 825-UM001B-EN-P January 2001
1
3
5
S1
S2
I
0
825-MCM
2
4
6
825-M

Functions 3-28
Table 3.O Earth (Ground) Fault — Holmgreen/Residual Setting Parameters
Tri p ➊
Function
Factory setting On
Response Level
Setting range 10…100%
Factory setting 50%
Setting increments 10%
Tripping Delay
Setting range 0.1…5 s ± 0.4 s
Factory setting 0.5 s
Setting increments 0.1 s
Output Relay ➋
Selection (relays) MR, AL, #1…#5
Factory setting MR
➊ –5…60 °C (23…140 °F)
➋ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
Earth (Ground) Fault Protection with a Core Balance Current Transformer
This function can be provided by the Cat. No. 825-MST option card.
In isolated, high impedance-earthed or compensated networks, the necessary high sensitivity
is obtained by using a core balance current transformer, whose core surrounds all three of the
phase leads to the motor.
According to the principle of the residual current protection circuit breaker, sensitive
protection against earth (ground) faults is possible. With a low response threshold, quite a
minor insulation fault can lead to a warning or trip at an early stage.
Figure 3.14 Example of 2-Phase Current Sensing
Example of 2-phase current detection and core balance current transformer for sensitive earth (ground) fault protection (3-phase
current detection is also possible)
L2
L1
L3
1
2
5
P1
S1
P2
S2
M1
3 ~
P1
S1
P2
S2
S1
·
S2
825-MCM
3
6
825-M
4
Publication 825-UM001B-EN-P January 2001
3-29 Functions
Application
• High-voltage motors
• Installations in a difficult environment, with moisture, dust, etc. (e.g., mines, gravel
pits, cement factory, mills, woodworking shops, water pumping stations, waste water
treatment)
Table 3.P Core Balance Current Transformer Setting Parameters
Current Ratio
Setting range 1…2 000
Factory setting 100
Setting steps 1
Table 3.Q Earth (Ground) Fault Core Balance Setting Parameters
Warning ➊ Tr ip ➊
Function
Factory setting Off On
Response Level
Setting range 5 mA…50 A 5 mA…50 A
Factory setting 500 mA 1.0 mA
Setting increments 5 mA 0.25 A
Tripping Delay
Setting range — 0.1…5 s ± 0.04 s
Factory setting — 0.5 s
Setting increm ents — 0.1 s
Output Relay ➋
Selection (relays) AL, #1…#5 MR, AL, #1…#5
Factory setting AL MR
➊ –5…60 °C (23…140 °F)
➋ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
Earth (Ground) Fault Protection in High-Voltage Systems
This section provides an overview of earth (ground) faults in isolated, high-impedance earth,
or compensated networks.
With earth neutral point-type networks, the magnitude of the earth (ground) fault (leak)
current is determined by the earth capacitance of the network and the earth resistance or the
compensating reactor. Because the size of industrial networks is limited, earth fault currents
are very small. To a great extent, earth capacitances are determined by the cables and the
motors.
The capacitance values for cables are given in cable tables and range from approximately
0.2…1.2 µF/km. A value between 0.02…0.05 µF per MW of motor rating can be assumed
for high-voltage motors.
Publication 825-UM001B-EN-P January 2001

Functions 3-30
A rule of thumb for industrial medium voltage networks is to allow about 1 A of capacitive
earth current for every 1 000…1 500 kVA of system power. Usually, the displacement voltage
is measured at a single neutral point and is assumed to be representative of the entire network.
The earth (ground) fault is localized by using an earth (ground) fault current detector, such as
the Smart Motor Manager with earth (ground) fault protection, in the motor feeders. Often,
operation can continue since the earth currents are comparatively insignificant and the
insulation of the non-faulty phases can be operated at a higher voltage for a short period of
time.
Isolated or High-Impedance Earth Networks
In the case of earth capacitances, the neutral point of the network assumes earth potential and
the sum of the currents flowing through the earth capacitances is zero. Also, no current flows
in normal operation in the high-value earth resistor (Figure 3.16, Figure 3.18, and Figure 3.20)
in the case of transformer with neutral point. It avoids extreme overvoltages in the event of
intermittent earth faults, such as can occur in isolated networks.
If, for example, phase conductor 3 (Figure 3.15 and Figure 3.17) becomes connected to earth
due to an earth fault, the two other phase conductors carry a line-to-line voltage with respect
to earth. Through their earth capacitances, C
Smart Motor Manager) and C
(on motor side), a capacitive current flows toward earth and
M
back to phase conductor 3 through the fault location. In the case of high-impedance earthing
(Figure 3.16, Figure 3.18, and Figure 3.20), the neutral point voltage, now at a high value,
causes an additional current that is limited by the earthing resistor through the fault location.
In the event of an earth fault on the power supply side of the measuring location (current
transformer installation location), the basic unit measures the component of the earth current
flowing via C
. The response sensitivity must be selected such that in this case, the Smart
M
Motor Manager does not trip. On the other hand, earth fault detection by the Smart Motor
Manager should be as sensitive as possible since, in the case of earth faults in the motor
windings, the displacement voltage becomes smaller the closer the fault location is to the
neutral point. The fault current decreases proportionally. Normally, a response threshold is
selected that is greater than 5…10% of the current that flows in the event of a dead earth
fault at the motor terminals.
(on the power supply side as seen from the
N
Neutralized Networks
Systems with earth fault neutralizers, resonant-earth system, Petersen coil. Although
compensated industrial networks are rare, their main features are shown in Figure 3.16,
Figure 3.18, and Figure 3.20. Under fully compensated conditions, the compensation reactor
supplies a current of the same magnitude as that of the capacitive fault current but phase
shifted by 180° so that only a small ohmic residual current flows via the fault location.
Publication 825-UM001B-EN-P January 2001
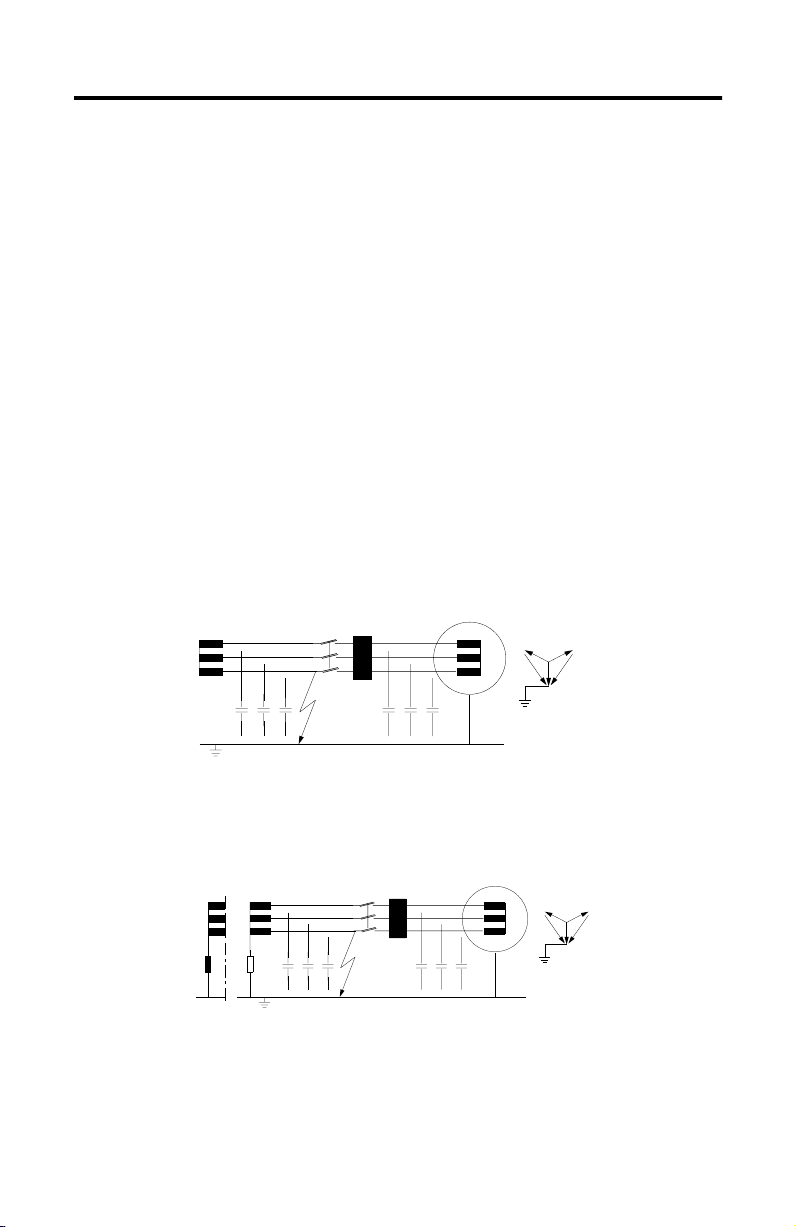
3-31 Functions
Schematic Representation of Various Network Configurations and Earth (Ground) Fault
Locations
The earth (ground) fault current measured by the Smart Motor Manager with the aid of a core
balance current transformer is dependent on the power supply network configuration and on
the location of the earth fault. The following diagrams indicate the relationships in the various
applications.
The symbols used have the following meanings:
C
Earth capacitance of phase conductor on power supply system side
N
Earth capacitance of motor including supply conductors between current transformer
C
M
and motor
L Compensating coil
R High earthing resistance
TTransformer
Earth (ground) fault current
E
Figure 3.15 Isolated Network: Earth Fault on the Network Side
The basic unit measures the earth current component through CM.
M1
T
1
2
3
C
N
825-M
K1
I
E
3 AC
U
U
C
M
1
2
U
3
Figure 3.16 Network Earthed through a High Impedance: Earth Fault on the
Network Side
The basic unit measures the earth current component through CM. Compensated network: Through the fault a small current
flows, given by the vector sum of the earth currents.
M1
T
1
2
3
C
RL
N
K1
Publication 825-UM001B-EN-P January 2001
825-M
I
E
3 AC
U
U
1
2
U
C
M
3

Functions 3-32
Figure 3.17 Isolated network: Earth (Ground) Fault on the Leads on the Motor
Side
The basic unit measures the earth current component through CM.
M1
T
1
2
3
C
N
825-M
K1
I
E
3 AC
U
U
C
M
1
2
U
3
Figure 3.18 Network Earthed through a High Impedance: Earth (Ground) Fault on
the Motor Leads
The basic unit measures the vector sum of the earth currents through CN and the earthing resistance R.
Compensated network: The basic unit measures the vector sum of the earth currents through C
T
1
2
3
C
RL
N
825-M
K1
I
E
M1
C
M
and the compensating coil L.
N
3 AC
U
U
1
2
U
3
Figure 3.19 Isolated Network: Earth (Ground) Fault in the Motor
The nearer the fault is to the motor star-point, the smaller the fault current.
M1
T
1
2
3
C
N
825-M
K1
3 AC
U
I
E
C
M
U
1
2
U
3
Figure 3.20 Network Earthed through a High Impedance: Earth (Ground) Fault on
the Motor
The basic unit measures vector sum of the earth currents through CN and the earthing resistance R.
Compensated network: The basic unit measures the vector sum of the earth currents through C
The nearer the fault is to the motor star-point, the smaller the fault current.
T
1
2
3
C
RL
N
825-M
K1
M1
C
M
Publication 825-UM001B-EN-P January 2001
and the compensating coil L.
N
3 AC
U
2
I
E
U
3
U
1

3-33 Functions
Limiting the Number of Starts per Hour (Start Lockout)
Function
When the set number of starts is reached and the motor is switched off, a new start is
prevented. Depending on its setting, either the main relay changes to “Fault”, or the selected
auxiliary is activated.
As soon as a new start is permissible, the start lockout is automatically reset.
Figure 3.21 Limiting the Number of Starts per Hour
I
I
I
e
I
e
I
First start
Second start
t
The selected relay (MR, or #1…#5) remains in the tripped position until 60 min. have expired. If an additional start is
w
allowed, the number of starts can be increased by one.
Table 3.R Starts per Hour Setting Parameters
II
t
60 min.
t
w
Function
Factory setting Off
Setting
Setting range 1…10 starts/hour
Factory setting 2 starts/hour
Setting increments 1
Output Relay ➊
Selection (relays) MR, AL, #1…#5
Factory setting MR
➊ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
ATTENTION
The motor manufacturer's instructions regarding the permissible
number of starts per hour and the minimum waiting time between
individual starts must be complied with.
!
Note: The thermal protection of the motor is independent of this function. Each start
depends on the thermal reserve of the motor.
Publication 825-UM001B-EN-P January 2001

Functions 3-34
Monitoring the Starting Time
Function
The starting time of the motor is monitored. If starting has not finished by the set time, the
installation can be switched off. This monitoring is independent of the thermal state of the
motor.
The beginning of a start is recognized by the Smart Motor Manager when the motor current
reaches 1.2
1.1
e
Applications
Figure 3.22 Monitoring Starting Time
. Starting is deemed to have been completed when the motor current is less than
e
.
• Installations in which an elevated load or stalling of the drive have to be detected
during the starting stage, in order to avoid serious damage. Possible causes:
overloaded installation, defective bearings, or transmission elements.
I
≥1.2 I
e
1
3
≤1.1 I
e
1 Motor starting current ≥ 1.2
2 Rated conditions
t
Max. st ar ting time
V
3 Tripping if starting lasts too long
2
t
t
v
e
Publication 825-UM001B-EN-P January 2001

3-35 Functions
Table 3.S Monitoring Start Time Setting Parameters
Function
Factory setting Off
Max. Starting Time ➊
Setting range 1…240 s ± 0.04 s
Factory setting 10 s ± 0.04 s
Setting increments 1 s
Output Relay ➋
Selection (relays) MR, AL, #1…#5
Factory setting MR
➊ –5…60 °C (23…140 °F)
➋ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
Note: With Star-Delta (Wye-Delta) starting, the total starting time (Star and Delta) is
monitored. If immediate switch off is demanded in the event of stalling, monitoring must be
provided by a zero speed switch (function “stalling during starting”).
Note: If the starting current is below 1.2 FLC, then the “Monitoring the Start Time”
function must be activated. After the set max. starting Time has elapsed, the “High
Overload/Stall” function will become active.
Applications:
• Slip ring motors
• Soft starters
• Motor protection with “non-fail-safe mode”, after a control voltage failure
Warm Start
Function
The motor windings may be heated for a short time above the permissible temperature limit.
This applies particularly to rotor-critical motors. The temperature that is permitted for this
short period is approximately 250 °C and is thus appreciably higher than the continuous
operating temperature of 100…150 °C. This means that a motor warm from running has a
relatively long permissible starting time. This property of the motor can be used with the
Smart Motor Manager, which is factory-set for one warm start per hour. The tripping time is
then 70% of that from cold. The warm start function is switched off in the factory. As
additional protection for the motor, too many warm starts can be prevented by the “limiting
the number of starts per hour” function.
Publication 825-UM001B-EN-P January 2001

Functions 3-36
Figure 3.23 Current and Temperature Curves for Warm and Cold Motor Starts and
the Smart Motor Manager Tripping Limits
I
I
A
12 3 4
I
e
ϑ
ϑ
1
ϑ
e
t
1
t
w
Starting current 1 First start (cool)
A
Rated current 2 First warm start
e
Permissible temperature 3 Second warm start
ϑ
e
of the motor in conti- 4 Cold start (after the motor
nuous operation and has cooled down)
normal tripping limit t
of 825-M for continuous start is possible
operation (t1 > 10t
ϑ1 Motor temperature t
permissible for a short warm starts (4…60 min.)
time and tripping limit
of 825-M with modified
characteristic for warm start
t
w
Minimum time before first
1
6e)
Minimum waiting time
w
t
w
t
t
ATTENTION
The motor manufacturer's instructions must be complied with,
especially regarding the minimum wait between two starts
!
An attempt to start may be made before the time has elapsed. The Smart Motor Manager will
trip during starting if the thermal capacity available is not sufficient.
Publication 825-UM001B-EN-P January 2001

3-37 Functions
Applications
• The Warm Start function can be used in any installation that may have to be re-started
immediately after a voltage interruption.
• Chemical process and production plants (e.g., mixers, centrifuges, pumps, conveyor
systems)
• Mines and tunnels (fresh air fans, water pumps)
Figure 3.24 Example for t6x
4
10
3
10
2
10
,
= 10 s and Warm Trip Time = 70%
e
a
c
Trip Time [s]
10.0
7.3
1.6
1.0
0.1
1.0
b
5 10.0987643.02.01.1
d
nx
I
e
Load Current as Multiple of Full Load Current
a) Time/current characteristic from cold when setting the trip time t6xe= 10 s.
b) Time/current characteristic after preloading with 1x
disabled.
c) Time/current characteristic after pr eloading with 1x
from cold t6x
(The WARM TRIP TIME 7.3 s for 6x
which are not at their highest value.)
d) If the thermal utilization (winding temperature) is higher than 82%, the WARM START function is automatically disabled. If
lower than 82% the WARM TRIP TIME depends on the winding and iron temperature and its range is 7.3…10 s.
= 10 s and WARM START function is enabled, setting: WARM TRIP TIME = 70% of the trip time from cold.
e
is higher than (70% x 10) = 7 s because it depends on the winding and iron temperature
e
when the trip time from cold t6xe= 10 s and WARM START function is
e
(thermal utilization or winding temperature = 82%) when the trip time
e
Publication 825-UM001B-EN-P January 2001

Functions 3-38
Table 3.T Warm Start Setting Parameters
Function
Factory setting Off
Tripping Time from Warm State as a Percentage of Tripping Time from Cold State
Setting
Setting range 50…100%
Factory setting 70%
Setting steps 10%
Minimum Time Between Two Warm Starts
Setting
Setting range 4…60 min.
Factory setting 60 min.
Setting steps 1 min.
Emergency Override of Thermal Trip (Emergency Start)
Suggested Procedure
Procedure when PT100 and PTC are not used:
1. Momentarily bridge terminals Y11-Y12 (voltage-free contact). A spring return key
switch is recommended.
2. LCD flashes “EMERGENCY START”.
3. If the thermal release has tripped, it can now be reset.
4. If the maximum number of starts per hour has been reached, the counter has one
start deducted.
5. Start the motor.
6. As soon as the motor starts, the stator winding memory will be set to zero (copper
losses only).
ATTENTION
Do not leave Y11-Y12 bridged, because each start will reset the
copper memory
!
Publication 825-UM001B-EN-P January 2001

3-39 Functions
Additional procedure when PT100 and/or PTC are installed:
1. Disable PTC and/or PT100.
SET VAL UES
PTC TRIP
OFF
PT100 #1…6 TRIP
OFF
2. Alternatively, the Smart Motor Manager can be set up such that inputs #1 and #2
deactivate the PTC and/or PT100 tripping. (This can be achieved with a separate
switch or a separate set of contacts on the key switch, refer to page 3-52.)
3. The input should remain activated until the temperatures return to normal.
LED Alarm and Trip Indicator
The LED indicator on the front of the Smart Motor Manager differentiates between two
kinds of indication:
• LED flashing, indicates an alarm
• LED continuously lit, indicates a tripped condition
Publication 825-UM001B-EN-P January 2001

Connection of the Main Relay (MR)
S
S
The main output relay can be operated as electrically held or non-fail-safe.
Electrically Held Mode
Functions 3-40
Supply Off
95
96
97
98
upply On
upply On and Trip
Non-Fail-Safe Mode
Note: Terminal markings should be changed from those used in electrically held mode when
switching to this mode.
Supply Off
97
98
95
96
Supply On Supply On and Trip
Applications of the Non-Fail-Safe Connection
The non-fail-safe connection is suitable for use in situations where the failure of the control
voltage must not interrupt the process:
• Chemical processes
• Kneaders and mixers in which the mass would solidify
• Fresh air fans
• Cooling pumps, etc.
Connection of the Alarm Relay (AL)
In firmware versions before 2.18 the alarm relay was connected in the non-fail-safe mode.
Since V2.18 (and later) it can also be connected in the electrically held mode.
Publication 825-UM001B-EN-P January 2001

3-41 Functions
Electrically Held Mode
Supply Off
13
14
Supply On Supply On and Warning
13
14
13
14
Non-Fail-Safe Mode
Supply Off
13
14
Supply On Supply On and Warning
13
14
13
14
Applications of the Electrically Held Connection
Monitoring the supply voltage as well as operation of the communication option when the
main relay is in non-fail-safe mode.
Alarm Relay AL
Aside from the thermal overload, short-circuit, and thermistor PTC protective functions, all
alarm and tripping functions may be assigned to the alarm relay (AL).
Table 3.U Alarm Examples
Warning Factory Setting
Thermal Utilization 75%
Asymmetry 20%
High Overload
2
Underload 75%
All these functions Off
Publication 825-UM001B-EN-P January 2001
e

Reset
When the motor is at standstill, a trip condition can be reset.
Kinds of Reset
• Manual reset — Press the reset button on the Bulletin 825 for at least 200 ms
• Remote reset — Short circuit terminals Y2l/Y22
• Automatic reset — In the mode “set values”, set automatic reset for:
• Thermal trip
• PTC trip
• PT100 trip
Reset Conditions
• Thermal — As soon as the temperature rise has dropped to the preset reset
threshold.
• PTC detector — As soon as the temperature is below the reset threshold
• PT100 detector — As soon as the temperature is below the tripping threshold.
• Asymmetry/Phase failure — Manual or remote reset possible
• All other trips — Can be reset immediately.
Table 3.V Reset Setting Parameters
Functions 3-42
Setting range Manual/Automatic
Factory setting Manual
Reset Threshold of the Thermal Trip
Setting range 10…100%
Factory setting 70%
Setting increments 5%
Function of the Cat. No. 825-MST Option Card
Short-Circuit
Heavy phase currents caused by short circuits between phases and from phase to earth are
detected by the Cat. No. 825-MST option card. The supply can be interrupted immediately by
controlling the power switching device (e.g., circuit-breaker).
Short-circuit protection is always active. Therefore, the response level must be set somewhat
higher than the maximum starting current.
Publication 825-UM001B-EN-P January 2001

3-43 Functions
t
Q1M
825-M
e
e
3
tvt
Q
t
1
t
R
Tripping is delayed by 50 ms. This enables the circuit breaker to be actuated rapidly while
preventing unnecessary tripping by current peaks. In the event of a short-circuit, the separate
output relay #1 trips, regardless of the other protective functions. The output relay #1
actuates a circuit breaker with adequate breaking capacity. To prevent the contactor from
opening under short-circuit conditions, relay MR remains blocked at currents ≥ 12 I
. If a
e
thermal trip occurred shortly before the short circuit, relay MR assumes the tripped position
as soon as the current has dropped to < 12 I
.
e
Figure 3.25 Interruption of a Short-Circuit
Q1M Circuit-breaker (tripping relay)
Current curve
Pickup value
A
Rated service current
e
t
Tripping delay 50 ms
v
t
Operating time of the breaker
Q
t
Arc duration
LB
1 Short-circuit
2 Contact separation
3 Short-circuit interruption
t
Relay MR blocked at ≥ 12
BL
e
Relais #
Relais M
e
A
e
Q
LB
BL
Application
• Medium/high-voltage motors
ATTENTION
The short-circuit protection function must not be used for switching
off the contactor.
!
Publication 825-UM001B-EN-P January 2001

Functions 3-44
Table 3.W Short Circuit Setting Parameters
Tri p ➊
Function
Factory setting Off
Response Level
Setting range
Factory setting
Setting increments
Tripping Delay
Setting range 20…990 ms
Factory setting 50 ms
Setting increments 10 ms
Output Relay
Selection (relays) #1, No output relay
Factory setting #1
➊ –5…60 °C (23…140 °F)
4…12
10
0.5
e
e
e
Earth (Ground) Fault Protection with a Core Balance Current Transformer
This function is integrated into the Cat. No. 825-MST option card. Refer to page 3-28.
Stalling During Start
Function
If the motor stalls during the starting phase, the motor heats up very rapidly reaching the
temperature limit of the insulation after the permissible stalling time. Large, low-voltage
motors, and especially medium- to high-voltage motors often have short, permissible stalling
times, although their starts may be considerably longer. Accordingly, the permissible stalling
time must be set higher on the basic unit in these instances. With an external speedometer or
zero speed switch, the Smart Motor Manager recognizes that stalling has occurred during
starting, and it switches the motor off immediately. Thus, the motor and the driven
installation are not exposed to unnecessary or unacceptable stress from stalling.
Publication 825-UM001B-EN-P January 2001

3-45 Functions
1N
Applications
• Large low-voltage motors
• Medium- and high-voltage motors
• Conveyor systems
• Mills
• Mixers
• Crushers
• Saws
• Cranes
• Hoists, etc.
Figure 3.26 Stalling During Starting
I
I
2
I
e
I
e
t
v
2 Stalling during standing
1
t
v
ormal start without
hindrance by high
overload or stalling
Tripping delay
t
Table 3.X Stalling during Start Setting Parameters
Trip
Function
Factory setting Off
Tripping Delay
Factory setting
Message from zero speed switch to control input #1
Motor running 24V AC/DC at control input #1
The trip time t
follows: t
Motor standstill 0V AC/DC at control input #1
Selection (relays)
Publication 825-UM001B-EN-P January 2001
depends on the trip time tov chosen for the overcurrent as
sp
<400 ms, tsp = 600 ms.; t
ov
≥ 400 ms, t
ov
Actuation
Output Relay
Same relay as for function “High Overload and Jam”
(settable only there)
= tov + 400 ms.
sp

Functions 3-46
PTC Thermistor Input
Function
The thermistor detectors (PTCs) are embedded in the stator winding of the motor. They
monitor the actual temperature of the winding. Influences independent of the motor current,
such as ambient temperature, obstructed cooling, etc., are taken into account.
The detectors and their leads are monitored for short-circuit and open circuit.
Applications
As additional protection for:
• Motors above 7.5 kW (10 HP)
• High ambient temperatures, dusty environment
• Var ying loads
• Plugging, etc.
Table 3.Y PTC Setting Parameters
Function
Factory setting Off
Output Relay ➊
Selection (relays) MR, AL, #1…#5
Factory setting MR
➊ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
Publication 825-UM001B-EN-P January 2001

3-47 Functions
Table 3.Z Sensor Measuring Circuit Specifications
Function
Factory setting Off
Sensor Measuring Circuit
Max. resistance of the PTC chain when cold 1.5 kΩ
Max. number of sensors as per IEC 34-11-2 6
Pickup value at δ
Dropout value at δ
Delay on pickup 800 ms ± 200 ms
Pickup value when short-circuit in sensors circuit
= –5…+60 °C
at δ
A
Measuring voltage as per IEC 34-11-2 < 2.5V DC
Minimum cross-section [mm
Maximum length [m]
Method of installation ➊ up to 100 m (328 ft) twisted, unscreened
➊ Twisted lead: 25 times twisted per m
Screened lead: Screen connected to T2
= –5…+60 °C
A
= –5…+60 °C
A
Measuring Lead
[AWG No.]
[ft]
2
]
3.3 kΩ ±0.3kΩ
1.8 kΩ ±0.3kΩ
≤ 15 Ω
0.5200.75181.0
200
300
656
984
1 312
17
400
1.5
16
600
1 968
2.5
14
1 000
3 280
Publication 825-UM001B-EN-P January 2001

Functions 3-48
Figure 3.27 Characteristic of PTC Sensors as per IEC 34-11-2
4000
1330
550
250
100
R [Ω]
20
10
-20°C
TNF Nominal pickup temperature
R [Ω] Resistance to sensors
0°C
TNF-20K
TNF- 5K
TNF
TNF+15K
TNF+ 5K
Analog Output
This output supplies a current of 4…20 mA proportional to one of the following selectable
actual values:
• Thermal utilization (calculated temperature rise of the motor)
• Motor temperature (max. PT100 temperature)
• Motor current (% I
)
e
Specifications
Output 4…20 mA (IEC 381-1) at -5…+60 °C (23…140 °F)
Load 0…300 Ω
Analog Output for Thermal Load or Motor Temperature (PT100 Max.)
This output supplies a current of 4…20 mA either proportional to the calculated temperature
rise of the motor or the motor temperature (max. temperature of the operating PT100
Sensors). The thermal load in percentage is also indicated on the LCD of the Smart Motor
Manager.
Publication 825-UM001B-EN-P January 2001

3-49 Functions
015
5
A
ϑ
ϑ
ϑ
G
ϑ
ax
Application
• Local indication for continuous supervision of the load on motor and installation.
• Load control: With the indication of the momentary temperature rise of the machine,
the load on the installation can be continuously controlled to the maximum
permissible temperature rise of the motor. The result is optimal utilization of the
motor with full protection and maximum productivity of the driven installation.
• Automatic load control by a controller or inverter drive (e.g., for charging mills and
crushers; the Smart Motor Manager itself is unable to protect inverter-driven motors).
Figure 3.28 Analog Output for Motor Temperature Rise
m
ϑ Temperature rise of motor
ϑ
max
ϑ
G
ϑ
K
Thermal utilization calculation:
…mA 4 mA()
Therm utiliz (%)
-------------------------------
16 mA
1
Permissible temperature limit (tripping threshold)
Nominal temperature (load e)
Coolant temperature (40 °C or via PT100 #7)
20 m
100%•=
Publication 825-UM001B-EN-P January 2001
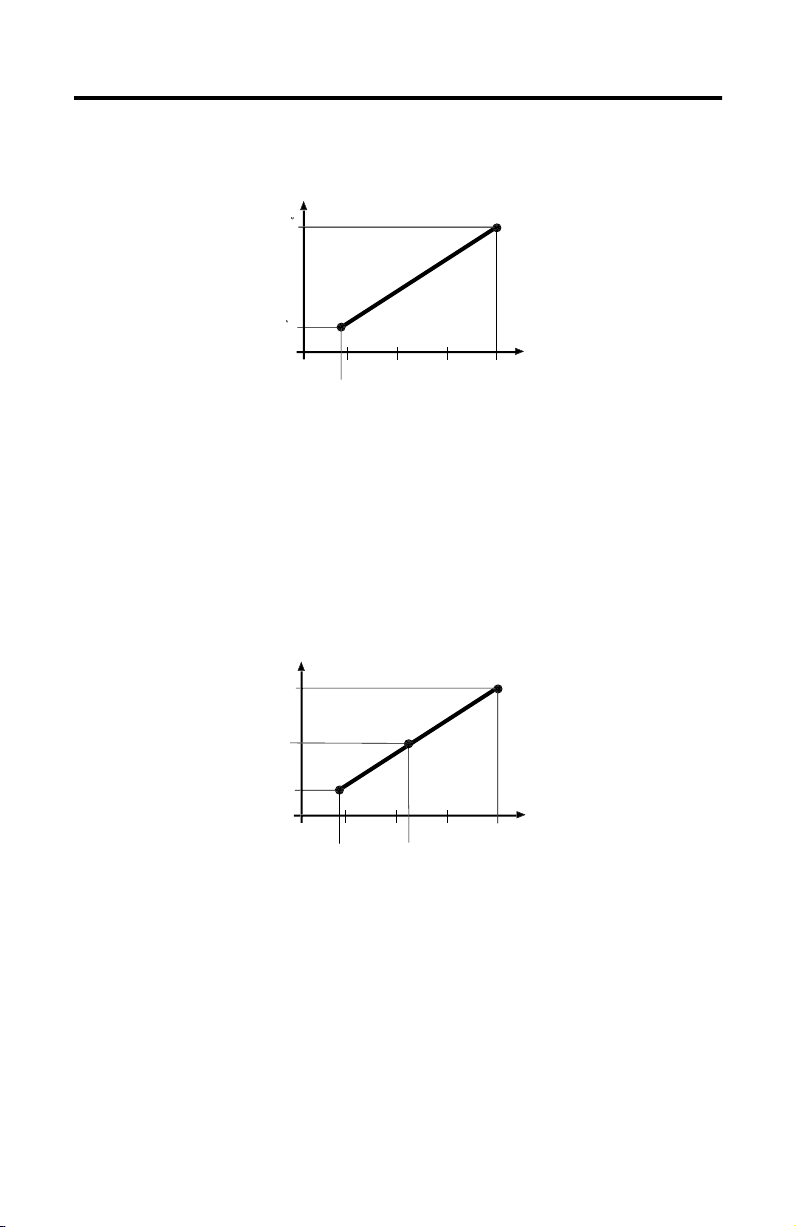
Figure 3.29 Analog Output for Motor Temperature
015
5
A
ϑ
50
C
00
C
015
5
A
% I
e
0
00
00
2
Functions 3-50
1
20 m
Motor Temperature calculation:
…mA 4 mA()
Motor temp. (°C )
-------------------------------
16 mA
150 °C•=
Analog Output for Motor Current
The output supplies a current of 4…20 mA proportional to the motor current.
Figure 3.30 Analog Output for Motor Current
2
1
Motor current calculation:
…mA 4 mA()
Motor current %
()
-------------------------------
e
16 mA
•=
200%
1
e
20 m
Publication 825-UM001B-EN-P January 2001
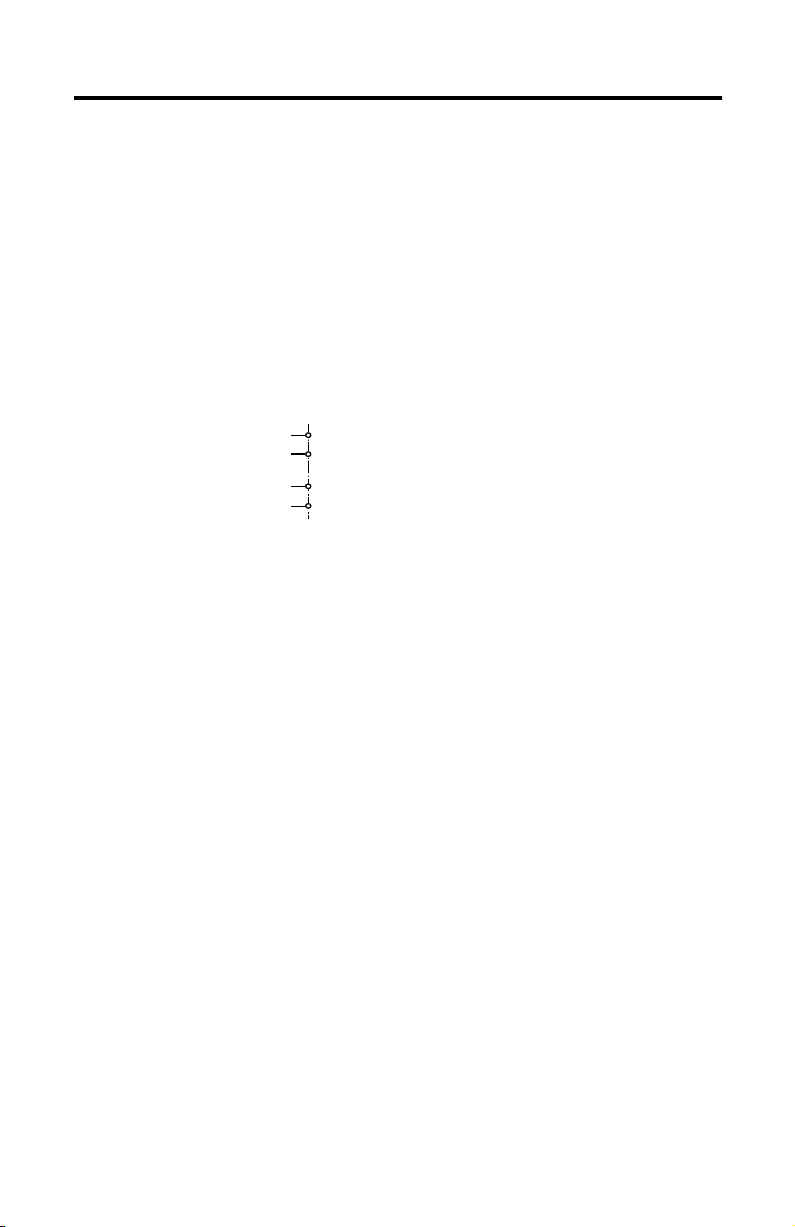
3-51 Functions
Control Inputs #1 and #2
With control inputs #1 and #2, the following control and protection functions are available:
• Timer functions
• Disabling of protection functions
• Protection against stalling during starting with an external speedometer (refer to page
3-44)
• Changing over to a second rated current (two-speed motor)
Actuation
Input #1
Input #2
Y31 (+)
Y32 (-)
Y41 (+)
Y42 (-)
24V AC or 24V DC; 8 mA
Pick values:
On: 12…36 V
Off: < 2 V
The control inputs are galvanically separated from the electronic circuits by optocouplers.
The control inputs are activated by applying 24V AC or DC to Y31/Y32 or Y42/Y42.
For further information refer to Chapter9.
Timer Functions
The following functions can be programmed:
• On Delay (t
• Off Delay (t
) 0…240 s
on
) 0…240 s
off
• On and off delay 0…240 s
Assignment of the Output Relays
• Control input #1 to output relay #2
• Control input #2 to output relay #3
Publication 825-UM001B-EN-P January 2001

Figure 3.31 Operating Diagram for Timer Functions
Functions 3-52
Control input
Output relay
On-delay
Off-delay
On-off-delay
On-off-delay
> 0.5 s
t
t
on
t
= 0
on
t
on
= 0
off
t
off
t
off
t
on
t
off
Applications
• Time-graded switching on and off
• Delaying the transfer of alarm and trip messages
Lock-Out of Protection Functions
With control inputs #1 and #2, one or more protective functions can be locked out as
desired.
• Asymmetry (phase unbalance)
• High overload/jam
• Earth (ground) fault
• Short-circuit
• Underload
• Limiting the number of starts/hour
• PTC
• PT100
Applications
Lock-out of protection functions
During certain operational phases when the level differs from the normal values, such as:
• during starting: earth fault and short-circuit protection
• at no-load: protection against asymmetry and underload
• during brief overload phases: high overload/jam
• during commissioning and fault location (localizing the source of the trouble)
Publication 825-UM001B-EN-P January 2001

3-53 Functions
The selected functions are completely disabled as long as the control input is “on”
(24V AC/DC).
• No alarm
• No trip, no reset
• Tripping delays begin to run only after the function is re-enabled.
Switching to a Second Rated Current
In the Smart Motor Manager, a second value can be selected for the rated current Ie. The
change to the second rated value is controlled by activating control input #2 with 24V
AC/DC.
Make sure the second rated current is compatible with the current range of the Cat.
No. 825-MCM current converter module.
Application
• Two-speed mo tors
• Briefly increased loading of the motor and installation
• Maximum loading when the ambient temperature varies appreciably. Examples:
Exposed water pumps, different conveying capacities during, daytime and at night
Functions of the Cat. No. 825-MLV Option Card
Phase Sequence
Function
If a motor is switched on in the wrong direction of rotation, the installation can be adversely
affected. The Smart Motor Manager monitors the phase sequence when voltage is applied,
and prevents the motor starting in the wrong direction.
Applications
• Mobile installations (e.g., refrigerated transporters, construction machines)
• Installations that can be displaced as enclosed units (e.g., mobile crushers, conveyor
belts, saws)
• If a reversed phase sequence must be expected after a repair.
Publication 825-UM001B-EN-P January 2001

Functions 3-54
Table 3.AA Phase Sequence Setting Parameters
Function
Factory setting Off
Tripping Delay
Factory setting 1 s
Output Relay ➊
Selection (relays) MR, AL, #1…#5
Factory setting MR
➊ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
ATTENTION
The phase sequence of the motor supply can be monitored only at the
point of measurement (usually before the contactor). Exchanged leads
between this point and the motor cannot be recognized.
!
Phase Failure (Based on Voltage Measurement)
Function
A phase failure is recognized by measuring the voltages before the switchgear and thus with
the motor at standstill. (With phase failure protection where the phase currents are measured,
the motor first has to be switched on, although it cannot start with only two phases.)
Table 3.AB Phase Failure Setting Parameters
Function
Factory setting Off
Tripping Delay
Factory setting 2 s
Output Relay ➊
Selection (relays) MR, AL, #1…#5
Factory setting MR
➊ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
Publication 825-UM001B-EN-P January 2001

3-55 Functions
Star-Delta (Wye-Delta) Starting
The Smart Motor Manager issues the command to switch from star to delta (wye to delta) as
soon as the starting current has dropped to the rated value and thus the motor has reached its
normal speed in star (wye). If starting has not been completed within the normal time for this
application [max. star (wye) operation], a change to delta will be made, regardless of the speed
attained.
The permissible time for star (wye) operation can be switched on or off as desired. If it is off,
the change to delta is made solely with reference to the motor current.
If the motor has to be switched off when the normal starting time in star (wye) is exceeded,
the “monitoring starting time” function must also be activated (refer to page3-34).
Figure 3.32 Diagram of Star-Delta (Wye-Delta) Starting
Motor on
Motor current
Star operation,
relay #4
Delta operation,
relay #5 Changeover delay
off
I
I
e
Ι
e
t
80 ms
80 ms
Table 3.AC Star-Delta (Wye-Delta) Starting Setting Parameters
Setting Star (Wye) Relay Delta Relay
Function
Factory setting — Off Off
Setting
Setting range ——1…240 s
Factory setting Relay #4 Relay #5 10 s
Setting steps —— 1 s
Max. Star (Wye)
Operation
Publication 825-UM001B-EN-P January 2001

Functions of the Cat. No. 825-MMV Option Card
Functions 3-56
PT100 (100
The PT100 temperature detectors are often embedded in the stator winding and/or the
bearings, especially in large motors. The Smart Motor Manager monitors the actual stator,
bearing, and coolant temperature. The resistance from a PT100 temperature detector is
dependent on the temperature and has a positive temperature coefficient (0.4 Ω/°C).
ΩΩΩΩ
Platinum) Temperature Sensor (RTD)
Table 3.AD PT100 Temperature Detector Resistance per IEC 751
Temperature (°C
100 138.50
150 157.31
200 175.84
Sensors that are not connected must be switched off. Temperature sensors #1…#6 monitor
the actual stator or bearing temperatures.
• The temperature is continuously indicated in °C
• The alarm and tripping temperatures can be set as desired
)
0100.00
50 119.40
Resistance (ΩΩΩΩ)
Applications
• Large low voltage motors
• Medium- and high-voltage motors
• At high ambient temperatures
• When cooling is obstructed.
Publication 825-UM001B-EN-P January 2001

3-57 Functions
Table 3.AE PT100 (RTD) Setting Parameters
Warning Trip
Function
Factory setting Off Off
Response Level
Setting range 50…200 °C50…200 °C
Factory setting — 50 °C
Setting steps — 1 °C
Tripping Delay
Factory setting < 8 s < 8 s
Output Relay ➊
Selection (relays) AL, #1…#3 MR, AL, #1…#3
Factory setting AL MR
➊ If auxiliary relays #2 and #3 are assigned to the communication (refer to page 5-16) they cannot be selected
here.
ATTENTION
It is essential to set the “Warning” response level to a value less than
the “Trip” response level.
!
PT100 #7 Temperature Sensor (RTD)
The PT100 #7 temperature sensor measures the ambient temperature or the coolant in the
motor and indicates it in °C. The Smart Motor Manager takes into account the temperature of
the coolant in the thermal image. The motor and the installation can be better used with
deviating coolant temperatures.
PT100 PROT
ON
The temperature of the coolant/ambient temperature is indicated as soon as the function is
activated and PT100 #7 is connected.
LCD of 825-M:
Tambient…°C
Publication 825-UM001B-EN-P January 2001

Functions 3-58
This function must be activated so that the coolant temperature may be taken into account in
the thermal image:
Tamb IN TH IMAGE
ON
Ambient temperature in the thermal image is taken into account.
MOTOR INSULATION CLASS
B
Insulation class of winding
Table 3.AF Motor Insulation Class Setting Parameters
Function
Factory setting Off
Insulation Class
Selection B, E, F
Factory setting B
Limiting winding temperatures of the three insulations classes: E = 120 °C, B = 130 °C, F =
155°C.
When the ambient temperature is taken into consideration, the insulation class needs to be
programmed for correction of the thermal model. Without using PT100 #7 as the ambient
temperature input, the thermal model bases the thermal calculation on an ambient
temperature of 40°C.
Application
• With large temperature variation (day/night)
• Outdoor installations:
• Pumps
• Conveyors
• Crushers
• Saws
Publication 825-UM001B-EN-P January 2001

Chapter
Assembly and Installation
Assembly
Flush Mounting
To mount the Smart Motor Manager in a front panel, cut a rectangular hole with the
following dimensions.
Figure 4.1 Basic Unit Mounted in an Enclosure
4
➊
➋
)
"
/8
3
(
m
m
0
1
1
3
8
m
+
m
1
(
5
-
-
0
7
/
1
6
"
+
1
/1
-
6
0
)
max. 6 mm
(1/4")
➌
Alarm
Trip
A
c
t
u
a
l
S
e
t
R
e
c
o
r
d
e
t
C
h
a
Values
n
g
e
Select
E
n
t
e
r
Settings
1
4
(
4
5
m
-
1
m
1
/
1
6
"
Dimensions in mm (inches) ➊ Front panel with cutout
Dimensions: ➋ Rubber gasket
Panel cutout: 138 x 138 mm ➌ Fixing nuts
(-0 mm, +1 mm)
Mounting depth: min. 140 mm
Test
Reset
144 mm
)
(5-11/16")
+ 1
- 0
138 mm
+ 1/16
- 0
(5-7/16" )
Publication 825-UM001B-EN-P January 2001

Assembly and Installation 4-2
Mounting Position
Figure 4.2 Mounting Position
2
˚
2
.5
.5
2
2
˚
9
0
˚
SMART MOTOR
MANAGER
˚
5
.
2
2
Surface Mounting
Figure 4.3 Basic Unit Mounted into Panel Mounting Frame (Cat. No. 825-FPM)
170 mm
Hinge
90˚
(6- 11/16")
Ø 6.5 mm (1/4")
150 mm (5- 7/8")
170 mm (6- 11/16")
170 mm
(6- 11/16")
A
l
a
r
m
T
r
i
p
A
c
t
u
a
l
S
e
t
R
e
c
o
r
d
e
t
C
h
V
a
n
a
g
l
e
u
e
s
S
e
l
e
c
t
E
n
t
e
r
S
e
t
T
t
i
e
n
s
g
t
s
R
e
s
e
t
165 mm (6- 1/2")
Dimensions in mm (inches)
Publication 825-UM001B-EN-P January 2001

4-3 Assembly and Installation
Converter Modules
Figure 4.4 Cat. Nos. 825 MCM2, 825-MCM-20, 825-MCM180
ø e
ø d
b
b
d1
d3
➌
➊
e2
e2
d2
a
Table 4.A Cat. Nos. 825 MCM2, 825-MCM-20, 825-MCM180
Dimensions in millimeters (inches)
Cat. No.
825-
MCM2
MCM20
MCM180
➊ Mounted on DIN Rail EN 50 022-35
➋ Bus bar or opening for conductor max. ∅ 19 mm
➌ With Cat. No. 825-MVM
➍ With Cat. No. 825-MVM2
abcc1∅
120
(4-45/64)85(3-23/64)
120
(4-45/64)85(3-23/64)
120
(4-45/64)
—
102
(4)66(2-39/64)
102
(4)66(2-39/64)
102
(4)72(2-13/16)
∅ dd1 d2 d3 ∅
∅ ∅
5.3
5.3
(3/16)
5.3
(3/16)
5.3
(3/16)
100
(3-7/8)55(2-3/16)
100
(3-7/8)55(2-3/16)
100
(3-7/8)55(2-3/16)
2.5 mm
2.5 mm
(3/16)
5.3
(3/16)
5.3
(3/16)
∅ e ∅
∅ ∅
2 x
2 x
M8 M8
Figure 4.5 Cat. Nos. 825-MCM630, 825-MCM630N
ø e
ø d
b
d3
c1
c
∅ e1 e2 b1 b2
∅ ∅
38.5
—
2
—
2
——
(1-1/2)
38.5
——
(1-1/2)
38.5
(1-1/2)75(2-61/64)➌➍100/117
➋
d1
e2
Publication 825-UM001B-EN-P January 2001
e2
d2
a
ø e1
c1
c

Table 4.B Cat. Nos. 825-MCM630, 825-MCM630N
Dimensions in millimeters (inches)
Assembly and Installation 4-4
Cat. No. a b c c1 ∅∅∅∅ dd1 d2 d3 ∅
825-MCM630
825-MCM630N
155
(6-7/64)
155
(6-7/64)
145
(5-11/16)
145
(5-11/16)
156
(6-1/8)
177
(6-31/32)
118
(4-5/8)
118
(4-5/8)
6.3
(1/4)
6.3
(1/4)
6.3
(1/4)
6.3
(1/4)
135
(5-5/16)88(3-7/16)
135
(5-5/16)88(3-7/16)
Thermal Utilization Indicator
Figure 4.6 Cat. No. 825-MTUM Thermal Utilization Indicator
Panel cutout: 91.5 x 91.5 mm (3-39/64" x 3-39/64")
(–1 mm [–1/16"] + 0.5 mm [+1/32"])
Mounting depth: 55 mm (2-3/16")
2
(14 AWG)
ATTENTION
Wire size: 2 x 2.5 mm
To retrofit or replace options, the assembly and testing instructions
supplied with the option must be followed exactly.
!
∅ e1 e2
∅ ∅
M10
(1-7/8)
M10
(1-7/8)
48
48
Publication 825-UM001B-EN-P January 2001

4-5 Assembly and Installation
Figure 4.7 Basic Unit Housing with Option Cards
Normally the basic unit will be ordered and shipped with the required option cards.
➊
➊ Basic Unit housing
➋ Cat. No. 825-MMV or 825-MLV
option card
➌ Communication board
➍ Cat. No. 825-MST option card
➎ Board with basic unit
➏ Rear cover
➐ Screws
CM
V4/CLV
4
CS
T4
Basic
C
P
B4
➏
➐
➋➌➍➎
Installation and Wiring
General
The Smart Motor Manager fulfills the stringent requirements imposed by global standards
requirements regarding electromagnetic compatibility (EMC). This means that there is no
need to observe any special stipulations when wiring the unit.
Nevertheless, control leads should be laid separately from power leads. In the circuit diagrams
throughout this section, any special wiring requirements are specifically noted.
The data of the output circuits and control inputs are dealt with in Chapter2, Specifications—
Basic Unit and Converter Module. Throughout this manual, the contacts of the output relays are
shown in their normal working position (i.e., the Smart Motor Manager control voltage is
switched on, no warning, no trip).
ATTENTION
All assembly and installation work must be performed by qualified
personnel, taking local codes into account.
!
Publication 825-UM001B-EN-P January 2001

Assembly and Installation 4-6
Main Circuits
Basic Unit and Converter Module without Main Current Transformer
Figure 4.8 Basic Unit with Converter Module
L1 L2 L3
Converter module cat. nos.
825-M
825-MCM2
825-MCM20
825-MCM180
825-MCM630
825-MCM630N
135
825-MCM
246
M
3 ~
Cable with plugs
Basic Unit and Converter Module with Main Current Transformer
Figure 4.9 3-Phase Current Evaluation
L1 L2 L3
Converter module
825-MCM2
135
825-MCM
2 4 6
M
3~
825-M
825-MCM20
Main current transformer
…A/5 or …A/1 A
For selection, refer to
Chapter 2.
Publication 825-UM001B-EN-P January 2001

4-7 Assembly and Installation
Basic Unit and Converter Module with Main and Core Balance Current Transformer
Figure 4.10 2-Phase Current Evaluation
L1 L2 L3
Converter module cat. nos.
825-MCM2
825-MCM20
135
T1
825-MCM
246
825-M
kl
T2
Σ
M
3~
Table 4.C Specifications
Main current transformer
(refer to Chapter 2 for selection information)
Core Balance Current Transformer
Earth-/ground current 5 mA…50 A
Current ratio of core balance current transformer 1…2 000:1
Output from core balance current transformer 0…500 mA
Additional circuit diagrams can be found in Chapter9.
A/5 A or A/1 A
Publication 825-UM001B-EN-P January 2001

Control Circuits
Figure 4.11 Smart Motor Manager Basic Unit
Assembly and Installation 4-8
Supply: A1 -
Emerg.
Start
Disable
Settings
Remote
Reset
13
14
13
14
95
96
97
98
97
98
95
A1 +
Y11
Y12
Y13
Y21
Y22
Supply AC or DC
No fuse needed
Emergency override of thermal trip
(Emergency start):
Push button, key-switch
Disable settings and keys: ➊
Wire jumper, switch, key-switch
Remote reset: ➋
Push button, key-switch
Alarm relay AL, non-fail- safe
connection (Factory setting)
IEC 400V AC/125V DC
UL/CSA 240V AC/125V DC
Alarm relay AL, electrically held
connection (from V2.18, selectable)
IEC 400 VA/125V DC
UL/CSA 240V AC/125V DC
Output relay MR in electrically held
connection (Factory setting)
IEC 400V AC/125V DC
UL/CSA 240V AC/125V DC
Output relay MR in non-fail-safe
connection
IEC 400V AC/125V DC
UL/CSA 240V AC/125V DC
96
External Internal
➊ Setting via communication is also disabled, as well as Test and Reset
➋ The remote reset is always active
Publication 825-UM001B-EN-P January 2001
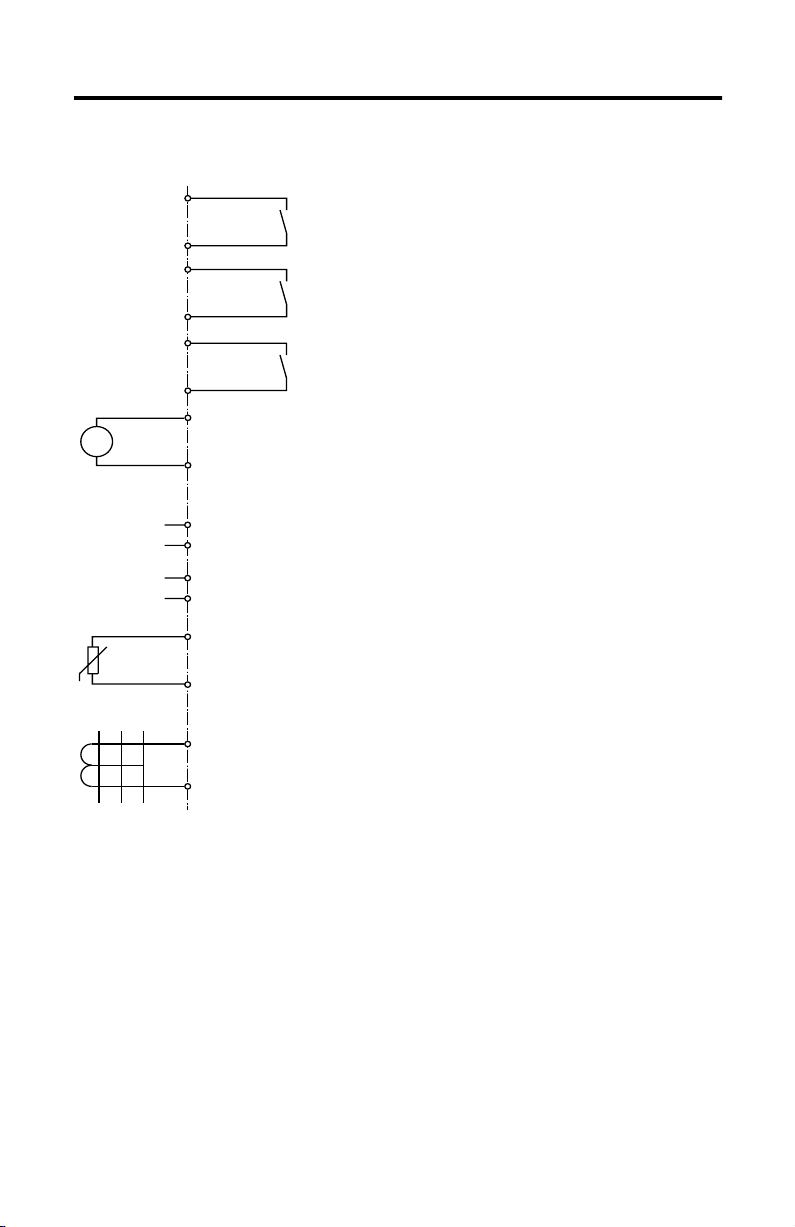
4-9 Assembly and Installation
Figure 4.12 Cat. No. 825-MST Option Card
4...20 mA
A
(0...300 W)
Control
Input #1
Control
Input #2
PTC
L1 L2 L3
23
Aux
Relay #1
24
33
Aux
Relay #2
34
43
Aux
Relay #3
44
I +
I -
Y31
Y32
Y41
Y42
Auxiliary relay #1
IEC 400V AC/125V DC
UL/CSA 240V AC/125V DC
Auxiliary relay #2
50V AC/30V DC
Auxiliary relay #3
50V AC/30V DC
Analog output indicates the thermal utilization of the motor, the
motor temperature, or the motor current
Indicating instrument
PLC input
Recorder
Control input #1: 24V DC or 24V AC ➊
Control input #2: 24V DC or 24V AC ➊
Thermistor overtemperature protection max. 6 PTC wired in series
T1
T2
k
Measuring lead ➋
Min. cross-section [mm
Max. length [m] 200 300 400 600 1 000
2
] 0.5 0.75 1 1.5 2.5
[AWG No.] 20 18 17 16 14
[ft] 656 984 1 312 1 968 3 280
Core balance trans former 5…500 mA at k-l
l
External Internal
➊ For information regarding methods of actuation, refer to Chapter 9.
➋ Method of installation: up to 100 m (328 ft) twisted, more than 100 m additional unscreened
Publication 825-UM001B-EN-P January 2001
 Loading...
Loading...