

Philips TDA4853, TDA4854 Datasheet

INTEGRATED CIRCUITS
DATA SH EET
TDA4853; TDA4854
2
I
C-bus autosync deflection
controllers for PC/TV monitors
Product specification
Supersedes data of 1998 May 12
File under Integrated Circuits, IC02
1999 Jul 13

Philips Semiconductors Product specification
I2C-bus autosync deflection controllers for
PC/TV monitors
FEATURES
Concept features
• Full horizontal plus vertical autosync capability; TV and
VCR mode included
• Extended horizontal frequency range from
15 to 130 kHz
• Comprehensive set of I2C-bus driven geometry
adjustments and functions, including standby mode
• Very good vertical linearity
• Moire cancellation
• Start-up and switch-off sequence for safe operation of
all power components
• X-ray protection
• Flexible switched mode B+ supply function block for
feedback and feed forward converter
• Internally stabilized voltage reference
• Drive signal for focus amplifiers with combined
horizontal and vertical parabola waveforms (TDA4854)
• DC controllable inputs for Extremely High Tension
(EHT) compensation
• SDIP32 package.
Synchronization
• Can handle all sync signals (horizontal, vertical,
composite and sync-on-video)
• Output for video clamping (leading/trailing edge
selectable by I2C-bus), vertical blanking and protection
blanking
• Output for fast unlock status of horizontal
synchronization and blanking on grid 1 of picture tube.
Vertical section
• I2C-bus controllable vertical picture size, picture
position, linearity (S-correction) and linearity balance
• Output for I2C-bus controllable vertical sawtooth and
parabola (for pin unbalance and parallelogram)
• Vertical picture size independent of frequency
• Differential current outputs for DC coupling to vertical
booster
• 50 to 160 Hz vertical autosync range.
East-West (EW) section
• I2C-bus controllable output for horizontal pincushion,
horizontal size, corner and trapezium correction
• Optional tracking of EW drive waveform with line
frequency selectable by I2C-bus.
Focus section of TDA4854
• I2C-bus controllable output for horizontal and vertical
parabolas
• Verticalparabolaisindependentoffrequencyandtracks
with vertical adjustments
• Horizontal parabola independent of frequency
• Pre-correction of delay in focus output stage.
TDA4853; TDA4854
Horizontal section
• I2C-bus controllable wide range linear picture position,
pin unbalance and parallelogram correction via
horizontal phase
• Frequency-lockedloopforsmoothcatchingofhorizontal
frequency
• TV mode at 15.625 or 15.750 kHz selectable by I2C-bus
• Simple frequency preset of f
resistors
• Low jitter
• Soft start for horizontal and B+ control drive signals.
1999 Jul 13 2
min
and f
by external
max

Philips Semiconductors Product specification
I2C-bus autosync deflection controllers for
TDA4853; TDA4854
PC/TV monitors
GENERAL DESCRIPTION
The TDA4854 is a high performance and efficient solution
for autosync monitors. All functions are controllable by
I2C-bus.
The TDA4854 provides synchronization processing,
horizontal and vertical synchronization with full autosync
capability, a TV/VCR mode and very short settling times
after mode changes. External power components are
givenagreatdeal of protection. The IC generates the drive
waveforms for DC-coupled vertical boosters such as the
TDA486x and TDA835x.
QUICK REFERENCE DATA
SYMBOL PARAMETER MIN. TYP. MAX. UNIT
V
CC
I
CC
I
CC(stb)
supply voltage 9.2 − 16 V
supply current − 70 − mA
supply current during standby mode − 9 − mA
VSIZE vertical size 60 − 100 %
VGA VGA overscan for vertical size − 16.8 − %
VPOS vertical position −±11.5 − %
VLIN vertical linearity (S-correction) −2 −−46 %
VLINBAL vertical linearity balance −±2.5 − %
V
HSIZE
V
HPIN
V
HEHT
V
HTRAP
V
HCOR
horizontal size voltage 0.13 − 3.6 V
horizontal pincushion voltage (EW parabola) 0.04 − 1.42 V
horizontal size modulation voltage 0.02 − 0.69 V
horizontal trapezium correction voltage −±0.33 − V
horizontal corner correction voltage −0.64 − +0.08 V
HPOS horizontal position −±13 − %
HPARAL horizontal parallelogram −±1−%
HPINBAL EW pin unbalance −±1−%
T
amb
operating ambient temperature −20 − +70 °C
The TDA4854 provides extended functions e.g. as a
flexible B+ control, an extensive set of geometry control
facilities, and a combined output for horizontal and vertical
focus signals.
The TDA4853 is an economy version of the TDA4854,
especially designed for use in 14” and 15” monitors with
combined EHT generation. It provides the same features
as the TDA4854 except for the dynamic focus block.
Together with the I2C-bus driven Philips TDA488x video
processor family, a very advanced system solution is
offered.
ORDERING INFORMATION
TYPE
NUMBER
NAME DESCRIPTION VERSION
PACKAGE
TDA4853 SDIP32 plastic shrink dual in-line package; 32 leads (400 mil) SOT232-1
TDA4854 SDIP32 plastic shrink dual in-line package; 32 leads (400 mil) SOT232-1
1999 Jul 13 3

This text is here in white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here in
o
_white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here inThis text is here in
white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader. white to force landscape pages to be ...
1999 Jul 13 4
ok, full pagewidth
BLOCK DIAGRAMS
Philips Semiconductors Product specification
PC/TV monitors
I
2
C-bus autosync deflection controllers for
clamping
blanking
HUNLOCK
V
CC
9.2 to 16 V
(TTL level)
SDA
SCL
(TTL level)
VSYNC
CLBL
PGND
SGND
HSYNC
14
VIDEO CLAMPING
16
VERTICAL BLANK
17
HUNLOCK
OUTPUT
19
18
RECEIVER
10
7
25
H/C SYNC INPUT
15
VERTICAL
SYNC INPUT
AND POLARITY
CORRECTION
AND
I2C-BUS
SUPPLY
AND
REFERENCE
AND POLARITY
CORRECTION
VERTICAL
SYNC
INTEGRATOR
HORIZONTAL
VERTICAL POSITION
VERTICAL SIZE, VOVSCN
PROTECTION
AND SOFT START
I2C-BUS REGISTERS
COINCIDENCE DETECTOR
FREQUENCY DETECTOR
PLL1 AND
POSITION
EHT compensation
via vertical size
22
100
(5%)
24
150
nF
nF
kΩ
(1%)
23 22 21 31
VERTICAL
OSCILLATOR
AND AGC
EHT compensation
via horizontal size
VSMODVAGCVCAPVREF HSMOD
EHT COMPENSATION
HORIZONTAL SIZE
AND
VERTICAL SIZE
TDA4853
TV MODE
HORIZONTAL
OSCILLATOR
PROTECTION
PLL2, PARALLELOGRAM,
PIN UNBALANCE AND
HORIZONTAL PINCUSHION
HORIZONTAL CORNER
HORIZONTAL TRAPEZIUM
HORIZONTAL SIZE
X-RAY
SOFT START
EWDRV
11
EW-OUTPUT
7 V
1.2 V
VERTICAL OUTPUT
VERTICAL LINEARITY
VERTICAL LINEARITY
BALANCE
OUTPUT
ASYMMETRIC
EW-CORRECTION
B+
CONTROL
HORIZONTAL
OUTPUT
STAGE
12
13
20
6
4
3
5
8
ASCOR
BDRV
BSENS
BOP
BIN
HDRV
VOUT2
VOUT1
or
X-RAY
B+ CONTROL
APPLICATION
(2)
(video)
3.3 kΩ
100 nF
26
R
8.2
nF
HBUF
R
HREF
(1%)
28 29
(1)
27
(1) For the calculation of fH range see Section “Calculation of line frequency range”.
(2) See Figs 23 and 24.
Fig.1 Block diagram and application circuit of TDA4853.
10 nF
(2%)
30 1
HPLL2HCAPHREFHBUFHPLL1
8.2 nF
HFLB
29
XRAYXSEL
32
MGM101
i.c.
TDA4853; TDA4854

This text is here in white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here in
o
_white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here inThis text is here in
white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader. white to force landscape pages to be ...
1999 Jul 13 5
ok, full pagewidth
Philips Semiconductors Product specification
PC/TV monitors
I
2
C-bus autosync deflection controllers for
clamping
blanking
HUNLOCK
V
CC
9.2 to 16 V
(TTL level)
SDA
SCL
(TTL level)
VSYNC
CLBL
PGND
SGND
HSYNC
14
VIDEO CLAMPING
16
VERTICAL BLANK
17
HUNLOCK
19
18
RECEIVER
10
7
25
H/C SYNC INPUT
15
VERTICAL
SYNC INPUT
AND POLARITY
CORRECTION
AND
OUTPUT
I2C-BUS
SUPPLY
AND
REFERENCE
AND POLARITY
CORRECTION
VERTICAL
SYNC
INTEGRATOR
HORIZONTAL
VERTICAL POSITION
VERTICAL SIZE, VOVSCN
PROTECTION
AND SOFT START
I2C-BUS REGISTERS
COINCIDENCE DETECTOR
FREQUENCY DETECTOR
PLL1 AND
POSITION
22
100
kΩ
(1%)
(5%)
23 22 21 31
24
VERTICAL
OSCILLATOR
AND AGC
nF
EHT compensation
via vertical size
150
nF
EHT COMPENSATION
EHT compensation
via horizontal size
VSMODVAGCVCAPVREF HSMOD
HORIZONTAL SIZE
AND
VERTICAL SIZE
TDA4854
TV MODE
HORIZONTAL
OSCILLATOR
PROTECTION
PLL2, PARALLELOGRAM,
PIN UNBALANCE AND
HORIZONTAL PINCUSHION
HORIZONTAL CORNER
HORIZONTAL TRAPEZIUM
HORIZONTAL SIZE
X-RAY
SOFT START
EWDRV
11
EW-OUTPUT
7 V
1.2 V
VERTICAL OUTPUT
VERTICAL LINEARITY
VERTICAL LINEARITY
BALANCE
OUTPUT
ASYMMETRIC
EW-CORRECTION
FOCUS
HORIZONTAL
AND VERTICAL
B+
CONTROL
HORIZONTAL
OUTPUT
STAGE
12
13
ASCOR
20
32 FOCUS
6
BDRV
4
BSENS
3
BOP
5
BIN
HDRV
8
VOUT2
VOUT1
or
X-RAY
B+ CONTROL
APPLICATION
(2)
(video)
3.3 kΩ
100 nF
26
R
8.2
nF
HBUF
R
HREF
(1%)
28 29
(1)
27
(1) For the calculation of fH range see Section “Calculation of line frequency range”.
(2) See Figs 23 and 24.
Fig.2 Block diagram and application circuit of TDA4854.
10 nF
(2%)
30 1
HPLL2HCAPHREFHBUFHPLL1
8.2 nF
HFLB
XSEL XRAY
29
MGM065
TDA4853; TDA4854

Philips Semiconductors Product specification
I2C-busautosync deflection controllers for
TDA4853; TDA4854
PC/TV monitors
PINNING
SYMBOL PIN DESCRIPTION
HFLB 1 horizontal flyback input
XRAY 2 X-ray protection input
BOP 3 B+ control OTA output
BSENS 4 B+ control comparator input
BIN 5 B+ control OTA input
BDRV 6 B+ control driver output
PGND 7 power ground
HDRV 8 horizontal driver output
XSEL 9 select input for X-ray reset
V
CC
EWDRV 11 EW waveform output
VOUT2 12 vertical output 2 (ascending sawtooth)
VOUT1 13 vertical output 1 (descending sawtooth)
VSYNC 14 vertical synchronization input
HSYNC 15 horizontal/composite synchronization input
CLBL 16 video clamping pulse/vertical blanking output
HUNLOCK 17 horizontal synchronization unlock/protection/vertical blanking output
SCL 18 I
SDA 19 I
ASCOR 20 output for asymmetric EW corrections
VSMOD 21 input for EHT compensation (via vertical size)
VAGC 22 external capacitor for vertical amplitude control
VREF 23 external resistor for vertical oscillator
VCAP 24 external capacitor for vertical oscillator
SGND 25 signal ground
HPLL1 26 external filter for PLL1
HBUF 27 buffered f/v voltage output
HREF 28 reference current for horizontal oscillator
HCAP 29 external capacitor for horizontal oscillator
HPLL2 30 external filter for PLL2/soft start
HSMOD 31 input for EHT compensation (via horizontal size)
i.c. 32 internally connected; note 1: TDA4853
FOCUS 32 output for horizontal and vertical focus: TDA4854
10 supply voltage
2
C-bus clock input
2
C-bus data input/output
Note
1. External connections to this pin are not allowed.
1999 Jul 13 6

Philips Semiconductors Product specification
I2C-bus autosync deflection controllers for
PC/TV monitors
handbook, halfpage
HFLB
XRAY
BOP
BSENS
BIN
BDRV
PGND
HDRV
XSEL
V
CC
EWDRV
VOUT2
VOUT1
VSYNC
HSYNC
CLBL
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
TDA4853
i.c.
32
HSMOD
31
HPLL2
30
HCAP
29
HREF
28
HBUF
27
HPLL1
26
SGND
25
VCAP
24
VREF
23
VAGC
22
VSMOD
21
ASCOR
20
SDA
19
SCL
18
HUNLOCK
17
handbook, halfpage
HFLB
XRAY
BOP
BSENS
BIN
BDRV
PGND
HDRV
XSEL
V
CC
EWDRV
VOUT2
VOUT1
VSYNC
HSYNC
CLBL
TDA4853; TDA4854
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
TDA4854
FOCUS
32
HSMOD
31
HPLL2
30
HCAP
29
HREF
28
HBUF
27
HPLL1
26
SGND
25
VCAP
24
VREF
23
VAGC
22
VSMOD
21
ASCOR
20
SDA
19
SCL
18
HUNLOCK
17
MGM066
Fig.3 Pin configuration for TDA4853.
FUNCTIONAL DESCRIPTION
Horizontal sync separator and polarity correction
HSYNC (pin 15) is the input for horizontal synchronization
signals, which can be DC-coupled TTL signals (horizontal
or composite sync) and AC-coupled negative-going video
sync signals. Video syncs are clamped to 1.28 V and
sliced at 1.4 V. This results in a fixed absolute slicing level
of 120 mV related to top sync.
For DC-coupled TTL signals the input clamping current is
limited. The slicing level for TTL signals is 1.4 V.
The separated sync signal (either video or TTL) is
integrated on an internalcapacitor to detect and normalize
the sync polarity.
Normalized horizontal sync pulses are used as input
signals for the vertical sync integrator, the PLL1 phase
detector and the frequency-locked loop.
The presence of equalization pulses is allowed for correct
function of the PLL1 phase detector only in TV mode.
MGM067
Fig.4 Pin configuration for TDA4854.
Vertical sync integrator
Normalized composite sync signals from HSYNC are
integrated on an internal capacitor in order to extract
vertical sync pulses. The integration time is dependent on
the horizontal oscillator reference current at HREF
(pin 28). The integrator output directly triggers the vertical
oscillator.
Vertical sync slicer and polarity correction
Vertical sync signals (TTL) applied to VSYNC (pin 14) are
sliced at 1.4 V. The output signal of the sync slicer is
integrated on an internalcapacitor to detect and normalize
the sync polarity. The output signals of vertical sync
integrator and sync normalizer are disjuncted before they
are fed to the vertical oscillator.
1999 Jul 13 7

Philips Semiconductors Product specification
I2C-bus autosync deflection controllers for
PC/TV monitors
Video clamping/vertical blanking generator
The video clamping/vertical blanking signal at CLBL
(pin 16) is a two-level sandcastle pulse which is especially
suitableforvideoICs such as the TDA488x family, but also
for direct applications in video output stages.
The upper level is the video clamping pulse, which is
triggeredbythehorizontalsyncpulse.Either the leading or
trailing edge can be selected by setting control bit CLAMP
via the I2C-bus. The width of the video clamping pulse is
determined by an internal single-shot multivibrator.
The lower level of the sandcastle pulse is the vertical
blanking pulse, which is derived directly from the internal
oscillator waveform. It is started by the vertical sync and
stopped with the start of the vertical scan. This results in
optimum vertical blanking. Two different vertical blanking
times are accessible, by control bit VBLK, via the I2C-bus.
Blanking will be activated continuously if one of the
following conditions is true:
Soft start of horizontal and B+ drive [voltage at HPLL2
(pin 30) pulled down externally or by the I2C-bus]
PLL1 is unlocked while frequency-locked loop is in
search mode or if horizontal sync pulses are absent
No horizontal flyback pulses at HFLB (pin 1)
X-ray protection is activated
Supply voltage at VCC (pin 10) is low (see Fig.25).
Horizontal unlock blanking can be switched off, by control
bit BLKDIS, via the I2C-bus while vertical blanking and
protection blanking is maintained.
TDA4853; TDA4854
The internal frequency detector then starts tuning the
oscillator. Very small DC currents at HPLL1 (pin 26) are
usedtoperformthis tuning with a well defined change rate.
When coincidence between horizontal sync and oscillator
frequency is detected, thesearch mode is first replaced by
a soft-lock mode which lasts for the first part of the next
vertical period. The soft-lock mode is then replaced by a
normal PLL operation. This operation ensures smooth
tuning and avoids fast changes of horizontal frequency
during catching.
In this concept it is not allowed to load HPLL1.
The frequency dependent voltage at this pin is fed
internally to HBUF (pin 27) via a sample-and-hold and
buffer stage. The sample-and-hold stage removes all
disturbances caused by horizontal sync or composite
vertical sync from the buffered voltage. An external
resistorconnected between pins HBUF andHREF defines
the frequency range.
Out-of-lock indication (pin HUNLOCK)
Pin HUNLOCK is floating during search mode if no sync
pulses are applied, or if a protection condition is true.
All this can be detected by the microcontroller if a pull-up
resistor is connected to its own supply voltage.
For an additional fast vertical blanking at grid 1 of the
picture tube a 1 V signal referenced to ground is available
at this output. The continuous protection blanking
(see Section“Videoclamping/verticalblankinggenerator”)
is also available at this pin. Horizontal unlock blanking can
be switched off, by control bit BLKDIS via the I2C-bus
while vertical blanking is maintained.
Frequency-locked loop
The frequency-locked loop can lock the horizontal
oscillatorover a wide frequencyrange. This is achievedby
a combined search and PLL operation. The frequency
range is preset by two external resistors and the
recommended maximum ratio is
This can, for instance, be a range from 15.625 to 90 kHz
with all tolerances included.
Without a horizontal sync signal the oscillator will be
free-running at f
detected by the internal coincidence detector. A deviation
of more than 4% between horizontal sync and oscillator
frequency will switch the horizontal section into search
mode.This means that PLL1control currents are switched
off immediately.
1999 Jul 13 8
. Any change of sync conditions is
min
f
---------f
max
min
6.5
=
------- 1
TV mode
In applications with TV signals the standard
frequency-to-voltage converter operation will be disturbed
by equalizing sync pulses and phase jumps occurring in
VCR signals. To avoid this, a TV mode has been
implemented. It can be accessed by choosing the
horizontal TV sync frequencies of 15.625 or 15.75 kHz as
the minimum frequency for the horizontal oscillator.
Applying TV signals will cause the frequency-to-voltage
converter to scan down to this frequency in normal
operation. If the control bit TVMOD is sent by the I2C-bus,
the HBUF output is clamped to 2.5 V and an internally
defined PLL1 control range of ±10% is established.
To return to standard operation of the
frequency-to-voltage converter the bit TVMOD has to be
reset. For an optimal operation with VCR signals the RC
combination at pin HPLL1 has to be switched externally.

Philips Semiconductors Product specification
I2C-bus autosync deflection controllers for
PC/TV monitors
Horizontal oscillator
The horizontal oscillator is of the relaxation type and
requires a capacitor of 10 nF to be connected at HCAP
(pin 29).For optimum jitter performance the valueof10 nF
must not be changed.
The minimum oscillator frequency is determined by a
resistor connected between pin HREF and ground.
A resistor connected between pins HREF and HBUF
defines the frequency range.
The reference current at pin HREF also defines the
integration time constant of the vertical sync integration.
Calculation of line frequency range
The oscillator frequencies f
calculated. This is achieved by adding the spread of the
relevant components to the highest and lowest sync
frequencies f
sync(min)
by the currents in R
and f
HREF
The following example is a 31.45 to 90 kHz application:
Table 1 Calculation of total spread
spread of for f
IC ±3% ±5%
C
HCAP
R
, R
HREF
HBUF
Total ±7% ±9%
min
sync(max)
and R
and f
HBUF
max
must first be
max
. The oscillator is driven
.
±2% ±2%
±2% ±2%
for f
min
TDA4853; TDA4854
The resistor R
and R
in parallel. The formulae for R
HBUF
into account the voltage swing across this resistor
R
R
HBUF
HREFRHBUFpar
---------------------------------------------R
HREFRHBUFpar
PLL1 phase detector
The phase detector is a standard type using switched
current sources, which are independent of the horizontal
frequency. It compares the middle of the horizontal sync
with a fixed point on the oscillator sawtooth voltage.
The PLL1 loop filter is connected to HPLL1 (pin 26).
See also Section “Horizontal position adjustment and
corrections”.
Horizontal position adjustment and corrections
A linear adjustment of the relative phase between the
horizontal sync and the oscillator sawtooth (in PLL1 loop)
is achieved via register HPOS.Once adjusted, the relative
phase remains constant over the whole frequency range.
Correctionof pin unbalance and parallelogramis achieved
by modulating the phase between the oscillator sawtooth
and horizontal flyback (in loop PLL2) via registers
HPARAL and HPINBAL. If those asymmetric EW
corrections are performed in the deflection stage, both
registers can be disconnected from the horizontal phase
via control bit ACD. This does not change the output at
pin ASCOR.
is calculated as the value of R
HBUFpar
×
–
0.8×= 805 Ω=
HBUF
HREF
also takes
Thus the typical frequency range of the oscillator in this
example is:
f
maxfsync max()
f
min
sync min()
-----------------------
1.09
f
The TV mode is centred around f
1.07× 96.3 kHz==
28.9 kHz==
with a control range of
min
±10%. Activation of the TV mode is only allowed between
15.625 and 35 kHz.
The resistors R
HREF
and R
HBUFpar
can be calculated using
the following formulae:
R
HREF
R
HBUFpar
78 kHz k××Ω
----------------------------------------------------------------f
0.0012 f
min
78 kHz k××Ω
-------------------------------------------------------------------f
0.0012 f
max
2
×+ kHz[]
min
×+ kHz[]
2
max
2.61 kΩ==
726 Ω==
1999 Jul 13 9
Horizontal moire cancellation
To achieve a cancellation of horizontal moire (also known
as ‘video moire’), the horizontal frequency is
divided-by-two to achieve a modulation of the horizontal
phase via PLL2. The amplitude is controlled by
register HMOIRE. To avoid a visible structure on screen
the polarity changes with half of the vertical frequency.
Control bit MOD disables the moire cancellation function.

Philips Semiconductors Product specification
I2C-bus autosync deflection controllers for
PC/TV monitors
PLL2 phase detector
The PLL2 phase detector is similar to the PLL1 detector
and compares the line flyback pulse at HFLB (pin 1) with
the oscillator sawtooth voltage. The control currents are
independent of the horizontal frequency. The PLL2
detector thus compensates for the delay in the external
horizontal deflection circuit by adjusting the phase of the
HDRV (pin 8) output pulse.
For the TDA4854 external modulation of the PLL2 phase
is not allowed, because this would disturb the start
advance of the horizontal focus parabola.
Soft start and standby
If HPLL2 is pulled to ground by resetting the
register SOFTST, the horizontal output pulses, vertical
output currents and B+ control driver pulses will be
inhibited. This means that HDRV (pin 8), BDRV (pin 6),
VOUT1 (pin 13) and VOUT2 (pin 12) are floating in this
state. If HPLL2 is pulled to ground by an external DC
current, vertical output currents stay active while HDRV
(pin 8)andBDRV(pin 6)areinfloatingstate.Inbothcases
the PLL2 and the frequency-locked loop are disabled,
CLBL (pin 16) provides a continuous blanking signal and
HUNLOCK (pin 17) is floating.
This option can be used for soft start, protection and
power-down modes. When the HPLL2 pin is released
again, an automatic soft start sequence on the horizontal
drive as well as on the B+ drive output will be performed
(see Figs 26 and 27).
A soft start can only be performed if the supply voltage for
the IC is a minimum of 8.6 V.
The soft start timing is determined by the filter capacitor at
HPLL2 (pin 30), which is charged with a constant current
during soft start. If the voltage at pin 30 (HPLL2) reaches
1.1 V,thevertical output currents are enabled. At 1.7 Vthe
horizontaldriverstage generates very small output pulses.
The width of these pulses increases with the voltage at
HPLL2 until the final duty cycle is reached. The voltage at
HPLL2increasesfurtherandperformsa soft start at BDRV
(pin 6)as well. The voltage at HPLL2 continuestorise until
HPLL2 enters its normal operating range. The internal
charge current is now disabled. Finally PLL2 and the
frequency-locked loop are activated. If both functions
reachnormaloperation, HUNLOCK (pin 17) switches from
the floating status to normal vertical blanking, and
continuous blanking at CLBL (pin 16) is removed.
TDA4853; TDA4854
Output stage for line drive pulses [HDRV (pin 8)]
An open-collector output stage allows direct drive of an
inverting driver transistor because of a low saturation
voltage of 0.3 V at 20 mA. To protect the line deflection
transistor, the output stage is disabled (floating) for a low
supply voltage at VCC (see Fig.25).
The duty cycle of line drive pulses is slightly dependent on
the actual horizontal frequency. This ensures optimum
drive conditions over the whole frequency range.
X-ray protection
TheX-rayprotectioninputXRAY(pin 2)providesavoltage
detector with a precise threshold. If the input voltage at
XRAY exceeds this threshold for a certain time then
control bit SOFTST is reset, which switches the IC into
protection mode. In this mode several pins are forced into
defined states:
HUNLOCK (pin 17) is floating
The capacitor connected to HPLL2 (pin 30) is
discharged
Horizontal output stage (HDRV) is floating
B+ control driver stage (BDRV) is floating
Vertical output stages (VOUT1 and VOUT2) are floating
CLBL provides a continuous blanking signal.
There are two different methods of restarting the IC:
1. XSEL (pin 9) is open-circuit or connected to ground.
The control bit SOFTST must be set to logic 1 via the
I2C-bus. The IC then returns to normal operation via
soft start.
2. XSEL (pin 9) is connected to VCC via an external
resistor.Thesupplyvoltage of the IC must be switched
off for a certain period of time before the IC can be
restarted again using the standard power-on
procedure.
1999 Jul 13 10

Philips Semiconductors Product specification
I2C-bus autosync deflection controllers for
PC/TV monitors
Vertical oscillator and amplitude control
This stage is designed for fast stabilization of vertical size
after changes in sync frequency conditions.
The free-running frequency f
resistor R
C
connected to pin 24. The value of R
VCAP
connected to pin 23 and the capacitor
VREF
optimized for noise and linearity performance in the whole
vertical and EW section, but also influences several
internal references. Therefore the value of R
be changed.
Capacitor C
should be used to select the free-running
VCAP
frequency of the vertical oscillator in accordance with the
following formula:
f
fr V()
=
To achieve a stabilized amplitude the free-running
frequencyf
,withoutadjustment,shouldbe at least 10%
fr(V)
lower than the minimum trigger frequency.
The contributions shown in Table 2 can be assumed.
Table 2 Calculation of f
Contributing elements
Minimum frequency offset between f
lowest trigger frequency
Spread of IC ±3%
Spread of R
Spread of C
VREF
VCAP
Total 19%
Result for 50 to 160 Hz application:
f
fr V()
50 Hz
---------------
1.19
42 Hz==
The AGC of the vertical oscillator can be disabled by
setting control bit AGCDIS via the I
external current has to be injected into VCAP (pin 24) to
obtain the correct vertical size. This special application
mode can be used when the vertical sync pulses are
serrated (shifted); this condition is found in some display
modes, e.g. when using a 100 Hz up converter for video
signals.
is determined by the
fr(V)
VREF
-----------------------------------------------------------
10.8 R
total spread
fr(V)
1
× C
×
VREF
and
fr(V)
2
C-bus. A precise
is not only
VREF
VCAP
10%
±1%
±5%
must not
TDA4853; TDA4854
Adjustment of vertical size, VGA overscan and EHT
compensation
The amplitude of the differential output currents at VOUT1
and VOUT2 can be adjusted via register VSIZE.
Register VOVSCN can activate a +17% step in vertical
size for the VGA350 mode.
VSMOD (pin 21) can be used for a DC controlled EHT
compensation of vertical size by correcting the differential
output currents at VOUT1 and VOUT2. The EW
waveforms, (vertical focus), pin unbalance and
parallelogram corrections are not affected by VSMOD.
The adjustments for vertical size and vertical position also
affect the waveforms of the horizontal pincushion, vertical
linearity (S-correction), vertical linearity balance, focus
parabola, pin unbalance and parallelogram correction.
The result of this interaction is that no re-adjustment of
these parameters is necessary after an adjustment of
vertical picture size or position.
Adjustment of vertical position, vertical linearity and
vertical linearity balance
Register VPOS provides a DC shift at the sawtooth
outputs VOUT1 and VOUT2 (pins 13 and 12) and the EW
drive output EWDRV (pin 11) in such a way that the whole
picture moves vertically while maintaining the correct
geometry.
Register VLIN is used to adjust the amount of vertical
S-correction in the output signal. This function can be
switched off by control bit VSC.
Register VLINBAL is used to correct the unbalance of the
vertical S-correction in the output signal. This function can
be switched off by control bit VLC.
Adjustment of vertical moire cancellation
To achieve a cancellation of vertical moire (also known as
‘scanmoire’)theverticalpicturepositioncanbemodulated
by half the vertical frequency. The amplitude of the
modulation is controlled by register VMOIRE and can be
switched off via control bit MOD.
Application hint: VAGC (pin 22) has a high input
impedance during scan. Therefore, the pin must not be
loaded externally otherwise non-linearities in the vertical
output currents may occur due to the changing charge
current during scan.
1999 Jul 13 11

Philips Semiconductors Product specification
I2C-bus autosync deflection controllers for
PC/TV monitors
Horizontal pincushion (including horizontal size,
corner correction and trapezium correction)
EWDRV(pin 11) provides a complete EW drive waveform.
The components horizontal pincushion, horizontal size,
corner correction and trapezium correction are controlled
by the registers HPIN, HSIZE, HCOR and HTRAP.
HTRAP can be set to zero by control bit VPC.
The pincushion (EW parabola) amplitude, corner and
trapezium correction track with the vertical picture size
(VSIZE) and also with the adjustment for vertical picture
position(VPOS). The corner correctiondoes not track with
the horizontal pincushion (HPIN).
Further the horizontal pincushion amplitude, corner and
trapezium correction track with the horizontal picture size,
which is adjusted via register HSIZE and the analog
modulation input HSMOD.
If the DC component in the EWDRV output signal is
increasedviaHSIZEorI
trapezium component of the EWDRV output will be
reduced by a factor of
The value 14.4 V is a virtual voltage for calculation only.
The output pin can not reach this value, but the gain (and
DCbias)oftheexternalapplicationshouldbesuchthatthe
horizontal deflection is reduced to zero when EWDRV
reaches 14.4 V.
HSMOD can be used for a DC controlled EHT
compensation by correcting horizontal size, horizontal
pincushion, corner and trapezium. The control range at
this pin tracks with the actual value of HSIZE. For an
increasing DC component V
signal, the DC component V
reducedbyafactorof asshownintheequation
1
above.
The whole EWDRV voltage is calculated as follows:
V
V
= 1.2 V + [V
EWDRV
HCOR+VHTRAP
HSIZE+VHEHT
) × g(HSIZE, HSMOD)] × h(I
Where:
I
V
HEHT
f(HSIZE) 1
HSMOD
------------------- 120 µA
–=
0.69×=
V
HSIZE
-----------------
14.4 V
,thepincushion,cornerand
HSMOD
V
1
–
-------------------------------------------------------------------------
V
–
-----------------
14.4 V
+
HSIZEVHEHT
in the EWDRV output
HSIZE
caused by I
HEHT
HSIZE
–
1
14.4
HSMOD
× f(HSIZE) + (V
HREF
V
HSIZE
-----------------
14.4 V
will be
HPIN
)
+
TDA4853; TDA4854
V
HSIZE
V
+
g(HSIZE, HSMOD) 1
I
hI
()
HREF
HREF
=
-------------------------------I
HREF
f70kHz=
HSIZEVHEHT
–=
--------------------------------------------------------------------------
Two different modes of operation can be chosen for the
EW output waveform via control bit FHMULT:
1. Mode 1
Horizontal size is controlled via register HSIZE and
causesaDCshift at the EWDRV output. The complete
waveform is also multiplied internally by a signal
proportional to the line frequency [which is detected
via the current at HREF (pin 28)]. This mode is to be
used for driving EW diode modulator stages which
require a voltage proportional to the line frequency.
2. Mode 2
The EW drive waveform does not track with the line
frequency. This mode is to be used for driving EW
modulatorswhich require a voltage independent ofthe
line frequency.
Output stage for asymmetric correction waveforms
[ASCOR (pin 20)]
This output is designed as a voltage output for
superimposed waveforms of vertical parabola and
sawtooth. The amplitude and polarity of both signals can
be changed via registers HPARAL and HPINBAL.
Application hint: The TDA4854 offers two possibilities to
control registers HPINBAL and HPARAL.
1. Control bit ACD = 1
The two registers now control the horizontal phase by
means of internal modulation of the PLL2 horizontal
phase control. The ASCOR output (pin 20) can be left
unused, but it will always provide an output signal
because the ASCOR output stage is not influenced by
the control bit ACD.
2. Control bit ACD = 0
The internal modulation via PLL2 is disconnected.
In order to obtain the required effect on the screen,
pin ASCORmust now be fedtothe DC amplifier which
controls the DC shift of the horizontal deflection. This
option is useful for applications which already use a
DC shift transformer.
Ifthe tube does notneed HPINBAL and HPARAL,then pin
ASCOR can be used for other purposes, i.e. for a simple
dynamic convergence.
–
1
-----------------
14.4 V
14.4 V
1999 Jul 13 12

Philips Semiconductors Product specification
I2C-bus autosync deflection controllers for
PC/TV monitors
TDA4854: dynamic focus section [FOCUS (pin 32)]
Thissectiongeneratesacompletedrivesignalfordynamic
focus applications. The amplitude of the horizontal
parabola is internally stabilized, thus it is independent of
the horizontal frequency. The amplitude can be adjusted
via register HFOCUS. Changing horizontal size may
require a correction of HFOCUS. To compensate for the
delay in external focus amplifiers a ‘pre-correction’ for the
phase of the horizontal parabola has been implemented.
The amplitude of the vertical parabola is independent of
frequency and tracks with all vertical adjustments.
The amplitude can be adjusted via register VFOCUS.
FOCUS (pin 32) is designed as a voltage output for the
superimposed vertical and horizontal parabolas.
B+ control function block
The B+ control function block of the TDA4853; TDA4854
consists of an Operational Transconductance Amplifier
(OTA), a voltage comparator, a flip-flop and a discharge
circuit. This configuration allows easy applications for
different B+ control concepts. See also Application Note
AN96052:
Deflection and EHT with TDA4855/58”
GENERAL DESCRIPTION
The non-inverting input of the OTA is connected internally
toa high precision referencevoltage. The inverting inputis
connectedto BIN (pin 5). Aninternal clamping circuit limits
the maximum positive output voltage of the OTA.
The output itself is connected to BOP (pin 3) and to the
inverting input of the voltage comparator.
The non-inverting input of the voltage comparator can be
accessed via BSENS (pin 4).
“B+ converter Topologies for Horizontal
.
TDA4853; TDA4854
• Boost converter in feedback mode (see Fig.23)
In this application the OTA is used as an error amplifier
witha limited output voltagerange. The flip-flop isset on
the rising edge of the signal at HDRV. A reset will be
generated when the voltage at BSENS, taken from the
current sense resistor, exceeds the voltage at BOP.
If no reset is generated within a line period. The rising
edgeof the next HDRV pulseforces the flip-flop to reset.
The flip-flop is set immediately after the voltage at
BSENS has dropped below the threshold voltage
V
RESTART(BSENS)
• Buck converter in feed forward mode (see Fig.24)
This application uses an external RC combination at
BSENS to provide a pulse width which is independent
from the horizontal frequency. The capacitor is charged
via an external resistor and discharged by the internal
discharge circuit. For normal operation the discharge
circuit is activated when the flip-flop is reset by the
internal voltage comparator. The capacitor will now be
discharged with a constant current until the internally
controlled stop level V
willbe maintained until therising edge of thenext HDRV
pulse sets the flip-flop again and disables the discharge
circuit.
If no reset is generated within a line period, the rising
edge of the next HDRV pulse automatically starts the
discharge sequence and resets the flip-flop. When the
voltage at BSENS reaches the threshold voltage
V
RESTART(BSENS)
automatically and the flip-flop will be set immediately.
This behaviour allows a definition of the maximum duty
cycle of the B+ control drive pulse by the relationship of
charge current to discharge current.
.
STOP(BSENS)
, the discharge circuit will be disabled
is reached. This level
B+ drive pulses are generated by an internal flip-flop and
fed to BDRV (pin 6) via an open-collector output stage.
This flip-flop is set at the rising edge of the signal at HDRV
(pin 8). The falling edge of the output signal at BDRV has
a defined delay of t
pulse (see Fig.23). When the voltage at BSENS exceeds
the voltage at BOP, the voltage comparator output resets
the flip-flop and, therefore, the open-collector stage at
BDRV is floating again.
An internal discharge circuit allows a well defined
discharge of capacitors at BSENS. BDRV is active at a
LOW-level output voltage (see Figs 23 and 24), thus it
requires an external inverting driver stage.
The B+ function block can be used for B+ deflection
modulators in many different ways. Two popular
application combinations are as follows:
1999 Jul 13 13
d(BDRV)
to the rising edge of the HDRV
Supply voltage stabilizer, references, start-up
procedures and protection functions
The TDA4853; TDA4854 provides an internal supply
voltage stabilizer for excellent stabilization of all internal
references.Aninternalgap reference, especially designed
for low-noise, is the reference for the internal horizontal
andverticalsupplyvoltages.Allinternalreference currents
and drive current for the vertical output stage are derived
from this voltage via external resistors.
If either the supply voltage is below 8.3 V or no data from
the I2C-bus has been received after power-up, the internal
softstart and protection functions do not allowanyof those
outputs [HDRV, BDRV, VOUT1, VOUT2 and HUNLOCK
(see Fig.25)] to be active.

Philips Semiconductors Product specification
I2C-bus autosync deflection controllers for
PC/TV monitors
For supply voltages below 8.3 V the internal I2C-bus will
not generate an acknowledge and the IC is in standby
mode. This is because the internal protection circuit has
generated a reset signal for the soft start
register SOFTST. Above 8.3 V data is accepted and all
registers can be loaded. If the register SOFTST has
received a set from the I2C-bus, the internal soft start
procedure is released, which activates all mentioned
outputs.
If during normal operation the supply voltage has dropped
below 8.1 V, the protection mode is activated and
HUNLOCK(pin 17)changesto the protection status and is
floating. This can be detected by the microcontroller.
This protection mode has been implemented in order to
protect the deflection stages and the picture tube during
start-up, shut-down and fault conditions. This protection
mode can be activated as shown in Table 3.
Table 3 Activation of protection mode
TDA4853; TDA4854
When the protection mode is active, several pins of the
TDA4853; TDA4854 are forced into a defined state:
HDRV (horizontal driver output) is floating
BDRV (B+ control driver output) is floating
HUNLOCK (indicates, that the frequency-to-voltage
converter is out of lock) is floating (HIGH via external
pull-up resistor)
CLBL provides a continuous blanking signal
VOUT1 and VOUT2 (vertical outputs) are floating
The capacitor at HPLL2 is discharged.
If the soft start procedure is activated via the I2C-bus, all of
these actions will beperformed in a well defined sequence
(see Figs 25 and 26).
ACTIVATION RESET
Low supply voltage at
pin 10
Power dip, below 8.1 V reload registers;
X-ray protection (pin 2)
triggered, XSEL (pin 9) is
open-circuit or connected
to ground
X-ray protection (pin 2)
triggered, XSEL (pin 9)
connected to V
external resistor
HPLL2 (pin 30) externally
pulled to ground
CC
via an
increase supply voltage;
reload registers;
soft start via I
soft start via I
reload registers;
soft start via I
switch VCC off and on
again, reload registers;
soft start via I2C-bus
release pin 30
2
2
2
C-bus
C-bus
C-bus
1999 Jul 13 14

Philips Semiconductors Product specification
I2C-busautosync deflection controllers for
TDA4853; TDA4854
PC/TV monitors
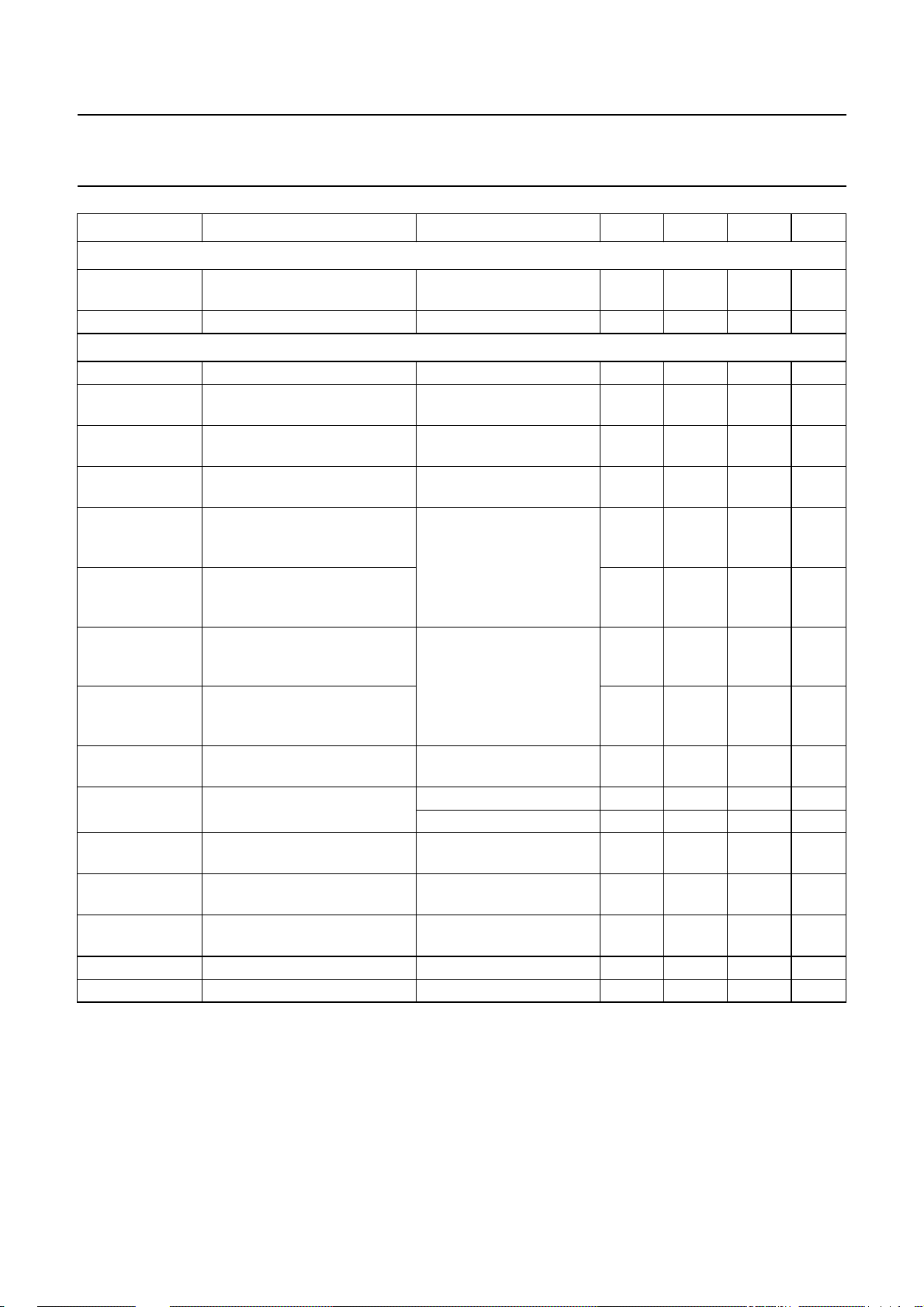
LIMITING VALUES
In accordance with the Absolute Maximum Rating System (IEC 134); all voltages measured with respect to ground.
SYMBOL PARAMETER CONDITIONS MIN. MAX. UNIT
V
CC
V
i(n)
V
o(n)
V
I/O(n)
I
o(HDRV)
I
i(HFLB)
I
o(CLBL)
I
o(BOP)
I
o(BDRV)
I
o(EWDRV)
I
o(FOCUS)
T
amb
T
j
T
stg
V
ESD
supply voltage −0.5 +16 V
input voltage for pins:
BIN −0.5 +6.0 V
HSYNC, VSYNC, VREF, HREF, VSMOD and HSMOD −0.5 +6.5 V
SDA and SCL −0.5 +8.0 V
XRAY −0.5 +8.0 V
output voltage for pins:
VOUT2, VOUT1 and HUNLOCK −0.5 +6.5 V
BDRV and HDRV −0.5 +16 V
input/output voltages at pins BOP and BSENS −0.5 +6.0 V
horizontal driver output current − 100 mA
horizontal flyback input current −10 +10 mA
video clamping pulse/vertical blanking output current −−10 mA
B+ control OTA output current − 1mA
B+ control driver output current − 50 mA
EW driver output current −−5mA
focus driver output current −−5mA
operating ambient temperature −20 +70 °C
junction temperature − 150 °C
storage temperature −55 +150 °C
electrostatic discharge for all pins note 1 −150 +150 V
note 2 −2000 +2000 V
Notes
1. Machine model: 200 pF; 0.75 µH; 10 Ω.
2. Human body model: 100 pF; 7.5 µH; 1500 Ω.
THERMAL CHARACTERISTICS
SYMBOL PARAMETER CONDITIONS VALUE UNIT
R
th(j-a)
thermal resistance from junction to ambient in free air 55 K/W
QUALITY SPECIFICATION
In accordance with
“URF-4-2-59/601”
; EMC emission/immunity test in accordance with
“DIS 1000 4.6”
(IEC 801.6).
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
EMC
emission test note 1 − 1.5 − mV
immunity test note 1 − 2.0 − V
Note
1. Tests are performed with application reference board. Tests with other boards will have different results.
1999 Jul 13 15

Philips Semiconductors Product specification
I2C-busautosync deflection controllers for
TDA4853; TDA4854
PC/TV monitors
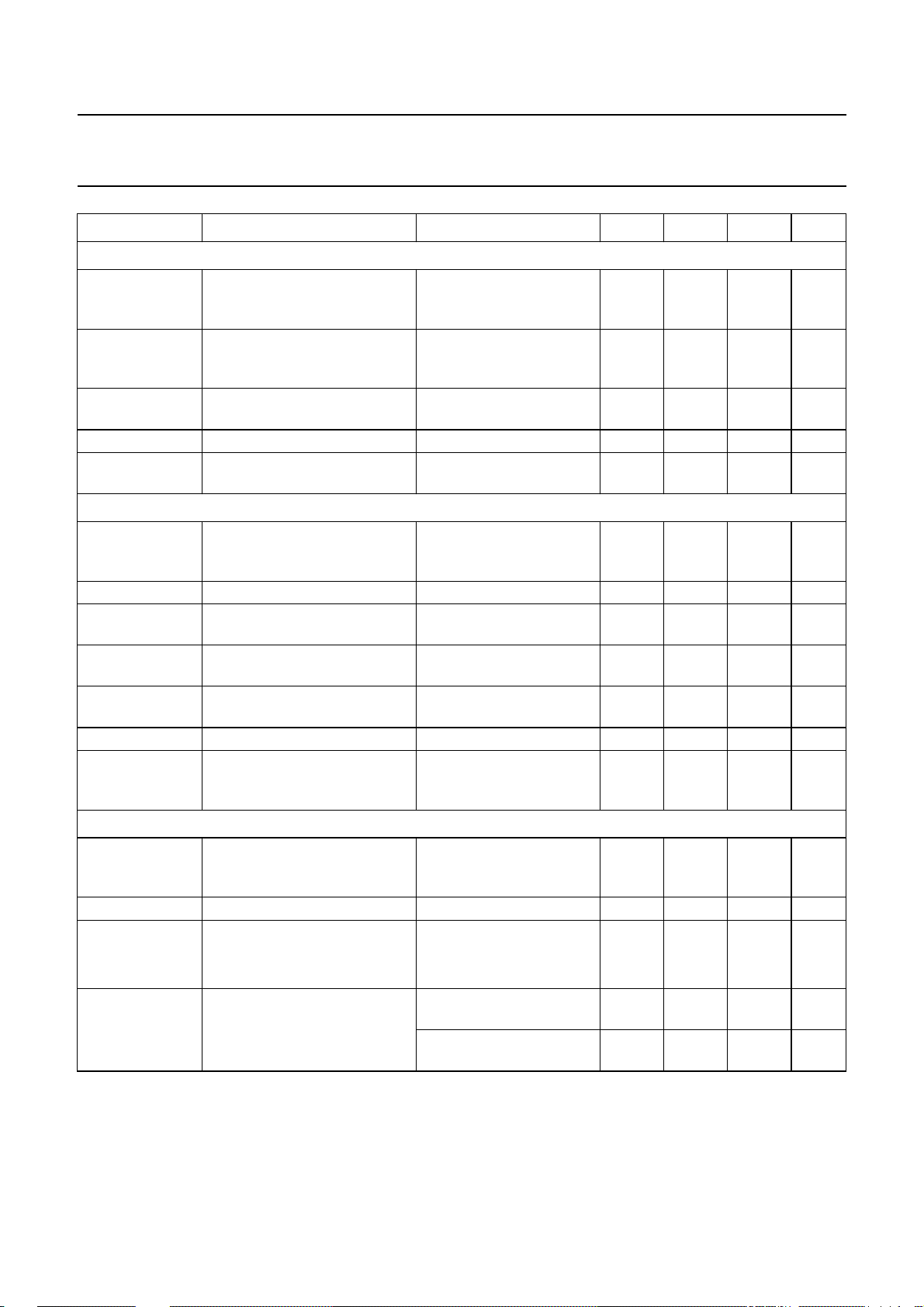
CHARACTERISTICS
VCC= 12 V; T
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Horizontal sync separator
I
NPUT CHARACTERISTICS FOR DC-COUPLED TTL SIGNALS: PIN HSYNC
V
i(HSYNC)
V
HSYNC(sl)
t
r(HSYNC)
t
f(HSYNC)
t
W(HSYNC)(min)
I
i(HSYNC)
INPUT CHARACTERISTICS FOR AC-COUPLED VIDEO SIGNALS (SYNC-ON-VIDEO, NEGATIVE SYNC POLARITY)
V
HSYNC
V
HSYNC(sl)
V
clamp(HSYNC)
I
ch(HSYNC)
t
W(HSYNC)(min)
R
source(max)
R
i(diff)(HSYNC)
Automatic polarity correction for horizontal sync
t
PH()
----------- t
H
t
d(HPOL)
Vertical sync integrator
t
int(V)
Vertical sync slicer (DC-coupled, TTL compatible): pin VSYNC
V
i(VSYNC)
V
VSYNC(sl)
I
i(VSYNC)
=25°C; peripheral components in accordance with Figs 1 and 2; unless otherwise specified.
amb
sync input signal voltage 1.7 −−V
slicing voltage level 1.2 1.4 1.6 V
rise time of sync pulse 10 − 500 ns
fall time of sync pulse 10 − 500 ns
minimum width of sync pulse 0.7 −−µs
input current V
sync amplitude of video input
V
R
= 0.8 V −−−200 µA
HSYNC
= 5.5 V −−10 µA
HSYNC
=50Ω−300 − mV
source
signal voltage
slicing voltage level
R
source
=50Ω 90 120 150 mV
(measured from top sync)
top sync clamping voltage level R
charge current for coupling
V
=50Ω 1.1 1.28 1.5 V
source
HSYNC>Vclamp(HSYNC)
1.7 2.4 3.4 µA
capacitor
minimum width of sync pulse 0.7 −−µs
maximum source resistance duty cycle = 7% −−1500 Ω
differential input resistance during sync − 80 −Ω
horizontal sync pulse width
−−25 %
related to line period
delay time for changing polarity 0.3 − 1.8 ms
integration time for generation
of a vertical trigger pulse
fH= 15.625 kHz;
I
= 0.52 mA
HREF
= 31.45 kHz;
f
H
I
= 1.052 mA
HREF
f
= 64 kHz;
H
I
= 2.141 mA
HREF
= 100 kHz;
f
H
I
= 3.345 mA
HREF
14 20 26 µs
71013µs
3.9 5.7 6.5 µs
2.5 3.8 4.5 µs
sync input signal voltage 1.7 −−V
slicing voltage level 1.2 1.4 1.6 V
input current 0 V < V
< 5.5 V −−±10 µA
SYNC
1999 Jul 13 16
Philips Semiconductors Product specification
I2C-busautosync deflection controllers for
TDA4853; TDA4854
PC/TV monitors
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Automatic polarity correction for vertical sync
t
W(VSYNC)(max)
maximum width of vertical sync
pulse
t
d(VPOL)
delay time for changing polarity 0.45 − 1.8 ms
Video clamping/vertical blanking output: pin CLBL
t
clamp(CLBL)
V
clamp(CLBL)
width of video clamping pulse measured at V
top voltage level of video
clamping pulse
TC
clamp
STPS
clamp
temperature coefficient of
V
clamp(CLBL)
steepness of slopes for
clamping pulse
t
d(HSYNCt-CLBL)
delay between trailing edge of
horizontal sync and start of
video clamping pulse
t
clamp1(max)
maximum duration of video
clamping pulse referenced to
end of horizontal sync
t
d(HSYNCl-CLBL)
delay between leading edge of
horizontal sync and start of
video clamping pulse
t
clamp2(max)
maximum duration of video
clamping pulse referenced to
end of horizontal sync
V
blank(CLBL)
top voltage level of vertical
blanking pulse
t
blank(CLBL)
width of vertical blanking pulse
at pins CLBL and HUNLOCK
TC
blank
V
scan(CLBL)
temperature coefficient of
V
blank(CLBL)
output voltage during vertical
scan
TC
scan
I
sink(CLBL)
I
L(CLBL)
temperature coefficient of
V
scan(CLBL)
internal sink current 2.4 −−mA
external load current −−−3.0 mA
= 3 V 0.6 0.7 0.8 µs
CLBL
RL=1MΩ; CL=20pF − 50 − ns/V
clamping pulse triggered
on trailing edge of
horizontal sync;
control bit CLAMP = 0;
measured at V
CLBL
=3V
clamping pulse triggered
on leading edge of
horizontal sync;
control bit CLAMP = 1;
measured at V
CLBL
=3V
notes 1 and 2 1.7 1.9 2.1 V
control bit VBLK = 0 220 260 300 µs
control bit VBLK = 1 305 350 395 µs
I
= 0 0.59 0.63 0.67 V
CLBL
−−400 µs
4.32 4.75 5.23 V
− 4 − mV/K
− 130 − ns
−−1.0 µs
− 300 − ns
−−0.15 µs
− 2 − mV/K
−−2−mV/K
1999 Jul 13 17
Philips Semiconductors Product specification
I2C-busautosync deflection controllers for
TDA4853; TDA4854
PC/TV monitors
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Horizontal oscillator: pins HCAP and HREF
f
fr(H)
free-running frequency without
PLL1 action (for testing only)
∆f
fr(H)
spread of free-running
frequency (excluding spread of
external components)
TC
fr
temperature coefficient of
free-running frequency
f
H(max)
V
HREF
maximum oscillator frequency −−130 kHz
voltage at input for reference
current
Unlock blanking detection: pin HUNLOCK
V
scan(HUNLOCK)
V
blank(HUNLOCK)
TC
blank
TC
sink
I
sink(int)
I
L(max)
I
L
low level voltage of HUNLOCK saturation voltage in case
blanking level of HUNLOCK external load current = 0 0.9 1 1.1 V
temperature coefficient of
V
blank(HUNLOCK)
temperature coefficient of
I
sink(HUNLOCK)
internal sink current for blanking pulses;
maximum external load current V
leakage current V
PLL1 phase comparator and frequency-locked loop: pins HPLL1 and HBUF
t
W(HSYNC)(max)
maximum width of horizontal
sync pulse (referenced to line
period)
t
lock(HPLL1)
I
ctrl(HPLL1)
V
HBUF
total lock-in time of PLL1 − 40 80 ms
control currents notes 4 and 5
buffered f/v voltage at HBUF
(pin 27)
R
R
C
HBUF
HREF
HCAP
= ∞;
= 2.4 kΩ;
= 10 nF; note 3
30.53 31.45 32.39 kHz
−−±3.0 %
−100 0 +100 10−6/K
2.43 2.55 2.68 V
−−250 mV
of locked PLL1; internal
sink current = 1 mA
−−0.9 − mV/K
− 0.15 − %/K
1.4 2.0 2.6 mA
PLL1 locked
HUNLOCK
HUNLOCK
=1V −−−2mA
= 5 V in case of
−−±5µA
unlocked PLL1 and/or
protection active
−−25 %
locked mode, level 1 − 15 −µA
locked mode, level 2 − 145 −µA
minimum horizontal
− 2.5 − V
frequency
maximum horizontal
− 0.5 − V
frequency
1999 Jul 13 18
 Loading...
Loading...