

Software de control integrado para F150-3
Vision Composer
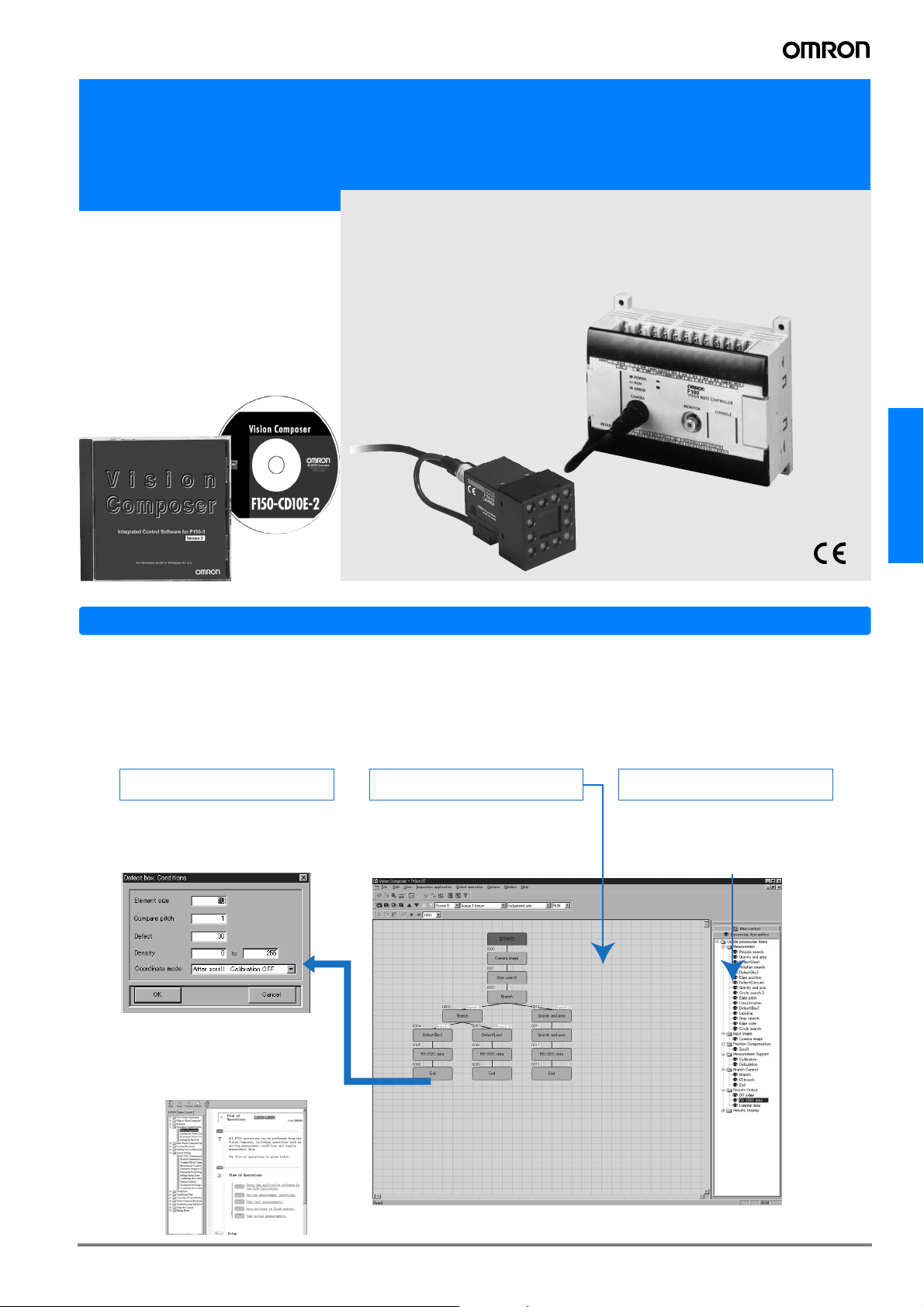
El software de control “Vision Composer”
facilita la inspección óptima del objeto
en forma de diagrama de flujo
Vision Composer
Características
Inspección innovadora basada en el procesamiento de imágenes
Aunque los sensores de visión se configuran fácilmente mediante menús simples, han tendido a perder funcionalidad. Por otro
lado, los completos dispositivos avanzados de procesamiento de imágenes pueden ofrecer una amplia variedad de funciones,
pero es necesario realizar una programación especial.
Vision Composer facilita la obtención de la inspección óptima en forma de diagrama de flujo.
Un cuadro de diálogo para
las condiciones del elemento
Haga doble clic en un cuadro del
diagrama de flujo para mostrar un
cuadro de diálogo de las condiciones
de dicho elemento.
Ventana de edición
de la aplicación de inspección
El contenido de la inspección se
muestra mediante el diagrama de flujo.
El flujo de procesamiento se ve a simple
vista.
Galería de elementos
de procesamiento
Se muestra la lista de elementos de
procesamiento. Los operadores pueden
crear diagramas de flujo mediante
arrastrar y colocar elementos de una
biblioteca de elementos de procesamiento.
A Arrastrar y colocar
Funcionamiento sencillo sin manual
El funcionamiento está guiado mediante
abundantes pantallas de ayuda
y asistencia. No es necesario hacerlo
funcionar con el manual en la mano.
B Doble clic
C-21Vision Composer
Características
En Windows se puede crear un diagrama de flujo flexible.
Correcciones de posición individuales en cada área
Admite correcciones de posición individuales en cada área
de inspección.
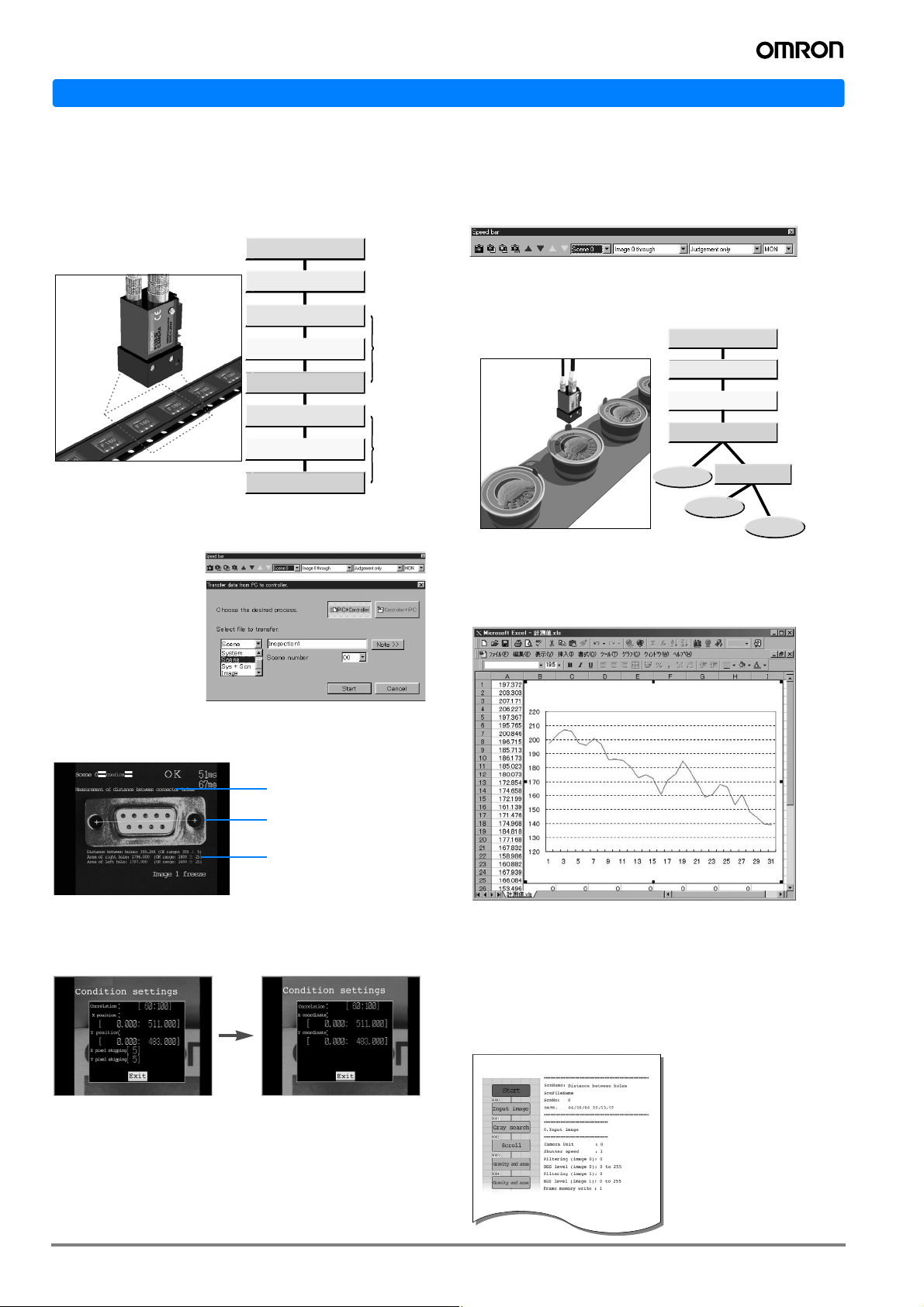
● Inspección de componentes de chip dentro
de encolado en relieve
Arranque
Imagen de entrada
Búsqueda de grises
Desplazamiento
Gravedad y eje
Búsqueda de grises
Desplazamiento
Gravedad y eje
Inspección
de pieza
de trabajo
a la derecha
Inspección
de pieza
de trabajo
a la izquierda
Barra de acceso rápido
Las tareas de procesamiento que se utilizan con frecuencia
se pueden mostrar como iconos en la barra de herramientas.
Operación más sencilla.
Ramificación de procesamiento
Después de clasificar los objetos a inspeccionar, el diagrama
de flujo se puede ramificar en otros dependiendo del objeto que
esté pasando por la línea de producción.
● Inspección de impresión
en envases de helados
Las funciones mejoradas de edición de pantalla
aumentan la facilidad de uso.
Edición de nombres
de escenas
Los datos de escena
se pueden guardar con
un nombre que describa
la inspección con el fin
de facilitar la búsqueda
y la administración. Los
datos de escena, las
imágenes “incorrectas”
y otros datos se pueden
intercambiar entre F150
y un ordenador.
Personalice la pantalla de medida.
Ejemplo de pantalla
Muestre cualquier cadena de
caracteres (descripción de medida, etc.) en cualquier posición.
Mostrar un segmento de línea
con diferentes medidas
Presentación reducida de los
resultados de medición
Visualización de los resultados de medida
en un ordenador.
Los resultados de medida se pueden transferir a un ordenador,
por lo que es posible visualizar y procesar los datos mediante
una hoja de cálculo u otro programa de software.
producto A
producto B
producto C
Arranque
Imagen de entrada
Clasificación
Ramificación
Inspección de producto A
Ramificación
Inspección de producto B
Inspección de producto C
Ejemplo:
También se puede editar la pantalla de menús.
Se puede utilizar un editor de textos para ocultar los nombres
y mostrar/ocultar los elementos de menú.
DespuésAntes
Registro diario de medidas realizadas
Registre la fecha y la hora de cuándo se ha producido una medida errónea.
Imprima los resultados de medida de cada día.
Transfiera los datos de inspección a través de una red.
Utilice una hoja de cálculo u otra herramienta de procesamiento estadístico.
Imprima archivos de diagrama de flujo y listas
de configuración de procesamiento.
La configuración se puede verificar a simple vista.
Estos datos se pueden utilizar para crear informes fácilmente.
C-22 Sensores de visión

Procedimiento de operación
1 Preparación
A Inserte el CD-ROM e instale el software
(Vision Composer versión 2).
Reservados todos los derechos.
Fabricado en Japón.
Instalación
Configurar2 Operación y ajuste3
B
A Un diagrama de flujo
de procesamiento
se crea arrastrando
y colocando elementos.
Arrastrar y colocar
Haga doble clic en un cuadro
del diagrama de flujo
para mostrar un cuadro
de diálogo de las condiciones
de dicho elemento.
B Conecte F150-3 a un ordenador
personal mediante el cable RS-232C.
RS-232C
Incluso si no hay ningún PC, el cambio
o ajuste de las condiciones se puede
realizar mediante una consola.
Vision Composer
Doble clic
Software de control integrado Vision Composer para F150-3
Lista de elementos de procesamiento
Entrada de imagen de cámara Entrada de imágenes desde la cámara
Entrada
de imagen
Compensación
de posición
Métodos
de medida
Entrada de imagen de memoria Entrada de una imagen desde la memoria de almacenamiento a la memoria de imágenes
Transferencia de imágenes
Compensación de posición Compensación de imagen para la corrección de posición
Compensación de una unidad Compensación de posición sencilla (con una unidad)
Compensación de dos unidades
Reinicialización de compensación
Área binaria Obtiene un área a alta velocidad
Centro de gravedad y área binarios Obtiene el centro de gravedad y el área (nº de píxeles blancos)
Centro de gravedad binario y ángulo del eje principal Obtiene el centro de gravedad, el área (nº de píxeles blancos) y el ángulo del eje principal
Búsqueda de patrón
Búsqueda de patrón de alta precisión
Defectos (lineal) Inspecciona si existe algún defecto (arañazos, suciedad...) en una línea
Defectos (circular) Inspecciona si existe algún defecto (arañazos, suciedad...) en un circulo
Defectos (arco circular) Inspecciona si existe algún defecto (arañazos, suciedad...) en un arco
Defectos (rectangular) Inspecciona si existe algún defecto (arañazos, suciedad...) en un rectángulo
Posición de borde Obtiene la posición de borde mediante procesamiento de cambio de color
Número de borde de nivel de grises Obtiene el número de objetos mediante procesamiento de detección de borde
Ancho entre bordes Obtiene la distancia entre dos bordes
Densidad media/desviación Obtiene la densidad media y la desviación de un área específica
Búsqueda de rotación Busca objetos que están girados.
Obtiene el ángulo de un objeto circular Obtiene el ángulo de un objeto circular a alta velocidad
Ordenación Clasifica hasta ocho patrones
Diccionario de patrones Se utiliza con “Clasificación 2”; se clasifican hasta 16 tipos
Transferencia de una imagen entre memorias de imágenes. Permite el preprocesamiento de varias
etapas y el recorte de fondo.
Compensación de posición sencilla (con dos unidades)
Reinicializa la memoria de imagen desplazada a la posición original
Busca el modelo que más se parece al patrón almacenado y obtiene las coordenadas de búsqueda
en unidades de píxeles
Busca el modelo que más se parece al patrón almacenado y obtiene las coordenadas de búsqueda
en unidades de subpíxeles
C-23Vision Composer

Clasificación 2 Se utiliza con “Diccionario de patrones”; se clasifican hasta 16 tipos
Labeling Obtiene el número de objetos (nº de grupos de píxeles blancos)
Ordenación de etiquetas Reorganización basada en el área de etiqueta y el centro de gravedad de cada objeto
Métodos
de medida
Complemento
de medición
Control
de ramificación
Salida
de resultado
Visualización de
resultado
Datos de etiqueta Obtiene el área y el centro de gravedad de cada etiqueta
Código de borde
Búsqueda de círculo Busca objetos circulares
Búsqueda de círculo estable Búsqueda de círculo estable sin importar el tamaño del círculo.
Búsqueda de círculo de alta precisión Busca objetos circulares y obtiene las coordenadas de búsqueda en subpíxeles.
Cálculo
Calibration Convierte las coordenadas de cámara en coordenadas reales
Obtiene datos de unidad de procesamiento Hace referencia a los ajustes de parámetros de la unidad de procesamiento
Configuración de datos de unidad de procesamie nto
Tiempo transcurrido
Esperar El procesamiento espera el tiempo especificado
Ramificación basada en condiciones El procesamiento se divide en ramas según las condiciones especificadas
Ramificación de entrada DI El procesamiento se divide en ramas según la entrada desde el bloque de terminales
End Finaliza el procesamiento
Salida de resultado DO Enviá el resultado de juicio al bloque de terminales
Salida de datos DO Enviá el dato de medida al bloque de terminales
Salida de datos RS-232C Envía el dato de medida al puerto RS232
Salida de datos RS-232C 2 Envía el dato de medida al puerto RS232 con formato libre
Salida de datos de vínculo superior Envía los datos utilizando el protocolo de vínculo superior
Salida de registro de datos Emite datos para el registro de datos en Vision Composer a RS-232C
Visualización de valor Muestra un valor en cualquier posición de la pantalla (para personalizar la pantalla de medición)
Visualización de valor (fuente pequeña) Muestra un valor en fuente pequeña en la pantalla (para personalizar la pantalla de medición)
Visualización de líneas
Visualización de rectángulo
Visualización de círculos
Visualización de cursor de retícula Muestra un cursor de retícula en cualquier posición de la pantalla (para personalizar la pantalla de medición)
Entorno de servicio
Sistema
operativo
Explorador
Web
CPU
Memoria 64 MB o más (recomendado)
Espacio libre
en disco duro
Visualización
de imagen
Unidad de
CD-ROM
Windows 95/98/NT 4.0 versión en japonés (no funciona en Windows 3.1/NT3.5/2.000)
Microsoft Internet Explorer 4.0 o posterior
Pentium II 266 MHz o superior
50 MB o más
1.024 x 768 puntos 256 colores o superior
4 x o superior
Genera una imagen con los bordes extraídos (filt ro de extracción de bordes) como paso de preprocesamiento
para la ejecución de una búsqueda de círculo o búsqueda de círculo de alta precisión.
Según la ecuación de cálculo seleccionada, los cálculos se realizan utilizando los resultados de medida
de cada elemento de procesamiento.
La configuración de parámetros de la unidad de procesamiento se puede cambiar como se desee
Obtiene el tiempo transcurrido desde que se ha realizado un disparo para comenzar la medida.
Muestra una línea de cualquier longitud en cualquier posición de la pantalla (para personalizar la pantalla
de medición)
Muestra un rectángulo de cualquier tamaño en cualquier posición de la pantalla (para personalizar la pantalla
de medición)
Muestra un círculo de cualquier tamaño en cualquier posición de la pantalla (para personalizar la pantalla
de medición)
TODAS LAS DIMENSIONES SE ESPECIFICAN EN MILÍMETROS.
Para convertir de milímetros a pulgadas, multiplique por 0,03937. Para convertir de gramos a onzas, multiplique por 0,03527.
Cat. No. Q07E-ES-01
C-24 Sensores de visión
 Loading...
Loading...