

Page 1

VARISPEED V7 IP65
Variador compacto con control vectorial sin sensores
MANUAL DE USUARIO
Cat No. I61E-ES-01
Page 2
PRÓLOGO
El V7 IP65 de Omron Yaskawa Motion Control (en adelante, OYMC)
es un compacto y sencillo variador para montaje directo en pared
con un elevado grado de protección (IP65), tan fácil de utilizar como
un contactor. El presente manual de instrucciones explica los
procedimientos de instalación, mantenimiento, inspección, solución
de problemas y especificaciones del V7 IP65. Recomendamos leer
detenidamente este manual de instrucciones antes de la puesta en
servicio del equipo.
OMRON YASKAWA MOTION CONTROL
Precauciones Generales
• En algunas ilustraciones de este manual los equipos se muestran sin
componentes de protección con el fin de mostrar los detalles de forma
más clara. Asegúrese de que todos los componentes de protección
estén montados en el producto antes de ponerlo en funcionamiento.
• Este manual puede sufrir modificaciones cuando sea necesario
debido a las mejoras o modificaciones del producto, así como a
cambios en las especificaciones.
Dichas modificaciones se indican mediante el número de revisión del
manual.
• Si desea pedir una copia de este manual, o si su copia se ha dañado
o perdido, póngase en contacto con el representante de OMRON.
• OMRON YASKAWA no se responsabiliza de las modificaciones que el
usuario realice en el producto, ya que ello invalidará la garantía.
1
Page 3
NOTACIÓN DE LAS PRECAUCIONES DE SEGURIDAD
Lea detenidamente este manual de instrucciones antes de la instalación,
funcionamiento, mantenimiento o inspección del V7 IP65. En el presente
manual, las precauciones de seguridad se clasifican en advertencias o
precauciones, que se indican como se muestra a continuación.
ADVERTENCIA
Indica una situación de peligro potencial que, de no evitarse, puede
ocasionar lesiones graves o mortales.
PRECAUCIÓN
Indica una situación de peligro potencial que, de no evitarse, puede
ocasionar lesiones físicas o daños materiales menores o moderados.
También puede emplearse como alerta contra métodos o prácticas no
seguros.
Incluso aquello clasificado como precaución puede, en algunas
situaciones, conllevar serios accidentes. Tenga siempre en cuenta estas
importantes precauciones.
: Indica información cuyo propósito es garantizar un
NOTA
funcionamiento adecuado.
PRECAUCIONES ESTIPULADAS PARA LA
MARCA CE
• Los terminales de circuitos de control disponen sólo del
aislamiento básico para cumplir los requisitos de la Clase de
protección 1 y de la Categoría de sobretensión II.
Es posible que sea necesario un aislamiento adicional en los
extremos de conexión del producto para cumplir con las
normativas CE.
• En el caso de los variadores clase 400 V, asegúrese de conectar a
tierra el neutro de alimentación para cumplir con las normativas
CE.
2
Page 4
RECEPCIÓN DEL PRODUCTO
PRECAUCIÓN
• No instale ni ponga en funcionamiento ningún
variador que tenga componentes dañados o al que
le falten componentes.
La omisión de esta precaución puede conllevar
lesiones o daños materiales.
MONTAJE
PRECAUCIÓN
• Monte el variador sobre material no inflamable
(por ejemplo, metal).
En caso contrario pueden producirse incendios.
• Al montar los variadores, asegúrese de que la
temperatura ambiente está por debajo de 40 °C
(105 °F).
La sobretemperatura puede provocar un incendio o
dañar el variador.
• El V7 IP65 genera calor. Para lograr una
refrigeración eficaz, móntelo en posición vertical.
Consulte la figura Selección de una ubicación de
montaje del variador de la página 24.
(Consulte la
página)
18
(Consulte la
página)
23
23
24
3
Page 5
CABLEADO
ADVERTENCIA
• No cablee el variador sin asegurarse de que la
fuente de alimentación esté desconectada (OFF).
De lo contrario podría producirse una descarga
eléctrica o un incendio.
• El cableado se confiará exclusivamente a personas
cualificadas.
De lo contrario podría producirse una descarga
eléctrica o un incendio.
• Cuando cablee el circuito de parada de emergencia,
compruebe exhaustivamente el cableado antes de
poner el equipo en funcionamiento.
De lo contrario, podrían producirse lesiones.
• Conecte siempre a tierra el terminal de tierra de
acuerdo a la normativa local respectiva pertinente.
De lo contrario podría producirse una descarga
eléctrica o un incendio.
• Si la fuente de alimentación está conectada (ON) al
ejecutar un comando RUN FWD (o REV), el motor
arrancará automáticamente.
Conecte la fuente de alimentación (ON) sólo tras
haber verificado que la señal RUN está en OFF.
De lo contrario podrían producirse lesiones.
• Cuando configure la secuencia de 3 hilos, no realice
el cableado del circuito de control si no está
configurado el parámetro del terminal de entrada
multifuncional.
De lo contrario podrían producirse lesiones.
(Consulte la
página)
27
27
27
32
35
113
4
Page 6
PRECAUCIÓN
• Asegúrese de que la tensión nominal del variador
coincide con la tensión de la fuente de alimentación
de c.a.
De lo contrario podrían producirse lesiones o un
incendio.
• No realice pruebas de resistencia a la tensión en el
variador.
Las pruebas de resistencia a la tensión pueden
dañar los elementos semiconductores.
• Para conectar una resistencia de freno, una unidad
de resistencia de freno o una unidad de freno,
efectúe el procedimiento descrito en este manual.
Una conexión incorrecta puede producir incendios.
• Apriete siempre los tornillos de los terminales del
circuito principal y de los circuitos de control.
De lo contrario podrían producirse desperfectos,
daños o incendios.
• Nunca conecte la fuente de alimentación principal
de c.a. a los terminales de salida U/T1, V/T2, W/T3,
B1, B2, -, +1 ó +2.
El variador puede sufrir daños, y la garantía
quedará nula y sin efecto.
• No conecte ni desconecte cables ni conectores
mientras haya alimentación eléctrica aplicada a los
circuitos.
De lo contrario podrían producirse lesiones.
• No realice comprobaciones de señales durante el
funcionamiento.
Ello podría dañar a la maquinaria o al variador.
• Para almacenar una constante con un comando
ENTER mediante comunicaciones, asegúrese de
adoptar las medidas necesarias para una parada
de emergencia utilizando los terminales externos.
Un retardo en la respuesta puede provocar lesiones
o dañar la maquinaria.
(Consulte la
página)
27
27
32
27
27
27
27
159
5
Page 7
FUNCIONAMIENTO
ADVERTENCIA
• Conecte la alimentación de entrada (ON) sólo
después de asegurarse de que el operador digital o la
tapa ciega (opcional) estén instalados.
No desmonte el operador digital ni las tapas mientras
circule corriente. De lo contrario podrían producirse
descargas eléctricas.
• Nunca accione el operador digital ni los interruptores
DIP con las manos húmedas. De lo contrario podrían
producirse descargas eléctricas.
• Nunca toque los terminales mientras circule corriente,
incluso si el variador se está deteniendo. De lo
contrario podrían producirse descargas eléctricas.
• Tras seleccionar la función de rearranque por fallo,
manténgase alejado del variador o de la carga.
El variador puede volver a ponerse en marcha
repentinamente después de detenerse.
(Diseñe el sistema de tal modo que la seguridad
quede garantizada, incluso en el caso de que el
variador tenga que volver a arrancar.) De lo contrario
podrían producirse lesiones.
• Si se selecciona el funcionamiento continuo después
de recuperar la alimentación, manténgase alejado del
variador o de la carga. El variador puede volver a
ponerse en marcha repentinamente después de
detenerse.
(Diseñe el sistema de tal modo que la seguridad
quede garantizada, incluso en el caso de que el
variador tenga que volver a arrancar.) De lo contrario
podrían producirse lesiones.
• El botón de parada del operador digital puede
inhabilitarse mediante una opción de configuración
del variador. Instale un interruptor de parada de
emergencia independiente.
De lo contrario, podrían producirse lesiones.
(Consulte
la página)
36
36
36
83
78
97
6
Page 8
ADVERTENCIA
• Si se resetea una alarma con la señal de operación
activada (ON), el variador rearrancará
automáticamente. Resetee las alarmas solamente
después de asegurarse de que la señal de operación
esté desactivada (OFF).
De lo contrario, podrían producirse lesiones.
• Cuando configure la secuencia de 3 hilos, no realice
el cableado del circuito de control si no está
configurado el parámetro del terminal de entrada
multifuncional.
De lo contrario podrían producirse lesiones.
• Si n001=5, puede recibirse un comando Run incluso
mientras se modifica una constante. Si se envía un
comando Run mientras se está modificando una
constante, como por ejemplo durante una ejecución
de prueba, asegúrese de observar todas las
precauciones de seguridad.
De lo contrario podrían producirse lesiones.
PRECAUCIÓN
• Nunca toque los disipadores de calor: éstos pueden
estar muy calientes.
De lo contrario podrían producirse graves
quemaduras.
• Es fácil cambiar la velocidad de operación de baja a
alta. Antes de esta operación, verifique el rango de
trabajo del motor y de la maquinaria.
De lo contrario podrían producirse lesiones y daños
en la maquinaria.
(Consulte
la página)
35
113
45, 51
(Consulte la
página)
36
36
7
Page 9
PRECAUCIÓN
• Si fuese necesario, instale un freno de retención
independiente.
De lo contrario podrían producirse lesiones.
• Si utiliza un variador en un dispositivo de elevación,
adopte las medidas de seguridad necesarias para
evitar que el elevador se caiga.
De lo contrario podrían producirse lesiones.
• No realice comprobaciones de señales durante el
funcionamiento.
Ello podría dañar a la maquinaria o al variador.
• Todas las constantes configuradas en el variador
han sido preconfiguradas en fábrica. No cambie
esta configuración innecesariamente.
De lo contrario, el variador podría sufrir daños.
(Consulte la
página)
36
191
36
36
8
Page 10
MANTENIMIENTO E INSPECCIÓN
ADVERTENCIA
• Nunca toque los terminales de alta tensión del
variador.
De lo contrario podrían producirse descargas
eléctricas.
• Desconecte la alimentación antes de realizar
trabajos de mantenimiento e inspección, y espere al
menos un minuto después de desconectar la
alimentación. En el caso de los variadores Clase
400 V, confirme que todos los indicadores estén
apagados antes de continuar.
Si los indicadores no están apagados, los
condensadores aún estarán cargados y pueden
resultar peligrosos.
• No efectúe pruebas de resistencia a la tensión en
ninguna pieza del V7 IP65.
El variador es un dispositivo electrónico que utiliza
semiconductores y, por ello, es vulnerable a las altas
tensiones.
• Las tareas de mantenimiento, inspección o
sustitución de componentes deberán confiarse
exclusivamente a personal autorizado.
(Quítese todos los objetos metálicos (relojes,
pulseras, etc.) antes de comenzar a trabajar).
(Utilice herramientas aisladas contra descargas
eléctricas.)
De lo contrario podrían producirse descargas
eléctricas.
(Consulte la
página)
196
196
196
196
9
Page 11
PRECAUCIÓN
• La PCB de control utiliza circuitos integrados (CI)
CMOS.
No toque los elementos CMOS.
La electricidad estática puede dañarlos fácilmente.
• No conecte ni desconecte cables, conectores ni el
ventilador de refrigeración mientras la alimentación
esté aplicada a los circuitos.
De lo contrario podrían producirse lesiones.
OTROS
ADVERTENCIA
• Nunca modifique el producto.
De lo contrario podrían producirse lesiones o descargas
eléctricas, y además la garantía quedará anulada.
PRECAUCIÓN
• No exponga el variador a gases halógenos, como flúor, cloro,
bromo o yodo, en ningún momento, incluso durante el transporte y
la instalación.
De lo contrario, el variador podría resultar dañado o pueden
quemarse sus componentes internos.
(Consulte la
página)
196
196
10
Page 12
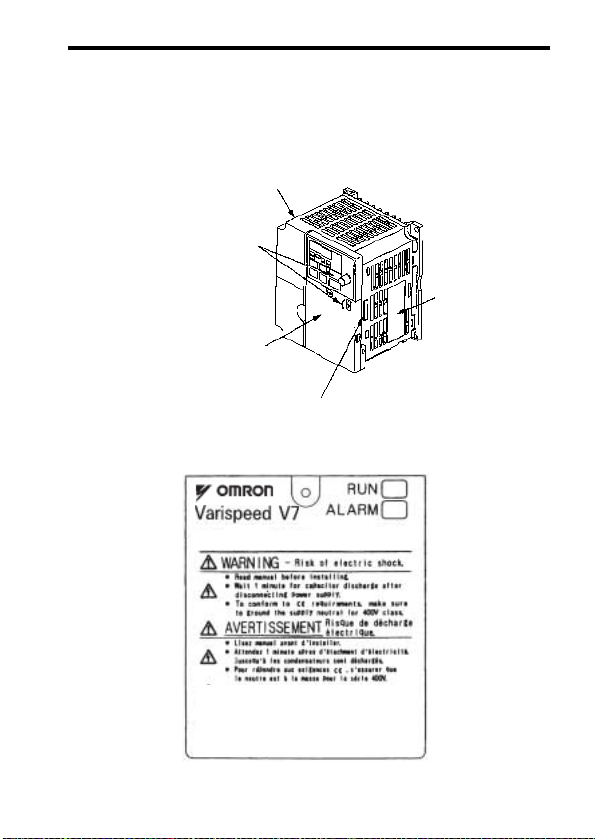
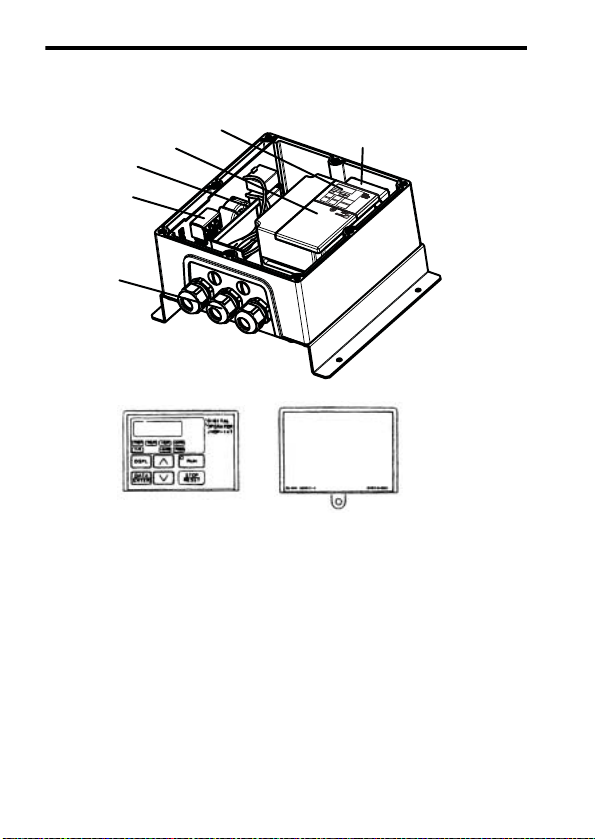
ETIQUETA DE ADVERTENCIA
FPST31042-74
8
7
En la tapa frontal del variador hay pegada una etiqueta de advertencia.
Al manipular el variador, esté atento a las advertencias.
Carcasa de plástico
Indicadores de estado
Placa
Ubicación de la etiqueta
de advertencia
Marca de homologación
Etiquetas de advertencia
FPST31042-
FPST31042-
11
Page 13

12
Page 14

CONTENIDO
NOTACIÓN DE LAS PRECAUCIONES DE
SEGURIDAD - - - - - - - - - - - - - - - - - - - - - - - - - - - - 2
Recepción del producto - - - - - - - - - - - - - - - - - - - 18
Comprobación de la placa - - - - - - - - - - - - - - - - - 19
Identificación de componentes - - - - - - - - - - - - - - - 20
Montaje - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 23
Selección de una ubicación de montaje del variador - - - - - - - - - 23
Dimensiones de instalación - - - - - - - - - - - - - - - - - 24
Cableado - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 27
Tamaños de cable y de tornillos de terminales - - - - - - - - - - - - - - 29
Cableado del circuito principal - - - - - - - - - - - - - - - - - - - - - - - - - 32
Cableado de los circuitos de control - - - - - - - - - - - - - - - - - - - - - 34
Inspección del cableado - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 35
Funcionamiento del variador - - - - - - - - - - - - - - - - 36
Prueba de funcionamiento - - - - - - - - - - - - - - - - - - - - - - - - - - - - 37
Selección de la dirección de rotación - - - - - - - - - - - - - - - - - - - - 40
Puntos de comprobación del funcionamiento - - - - - - - - - - - - - - - 40
Funcionamiento del operador digital - - - - - - - - - - - - - - - - - - - - - 41
Descripción de los indicadores de estado - - - - - - - - - - - - - - - - - 42
Descripción de los indicadores de función - - - - - - - - - - - - - - - - - 44
MNTR Monitorización multifunción - - - - - - - - - - - - - - - - - - - - - - 46
Estado de terminal de entrada/salida - - - - - - - - - - - - - - - - - - - - 48
Visualización del error de recepción de datos - - - - - - - - - - - - - - 48
Funciones de programación - - - - - - - - - - - - - - - - 50
Hardware - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 50
Software (constante) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 50
Configuración e inicialización de constantes - - - - - - - - - - - - - - - 51
Selección / inicialización de constante (n001) - - - - - - - - - - - - - - 51
13
Page 15

Uso del modo de control V/f - - - - - - - - - - - - - - - - - - - - - - - - - - - 53
Ajuste del par en función de la aplicación - - - - - - - - - - - - - - - - - - 53
Uso del modo de control vectorial - - - - - - - - - - - - - - - - - - - - - - - 56
Precauciones para la aplicación de control vectorial de tensión - - 56
Cálculo de la constante del motor - - - - - - - - - - - - - - - - - - - - - - - 57
Curva V/f durante el control vectorial - - - - - - - - - - - - - - - - - - - - -58
Conmutación entre modos LOCAL/REMOTO - - - - - - - - - - - - - - -59
Cómo seleccionar el modo LOCAL/REMOTO - - - - - - - - - - - - - - -60
Selección de los comandos RUN/STOP - - - - - - - - - - - - - - - - - - -60
Modo LOCAL - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -60
Modo REMOTO - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 61
Funcionamiento mediante comunicaciones
(comandos RUN/STOP) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 61
Selección de la referencia de frecuencia - - - - - - - - - - - - - - - - - - 62
Modo LOCAL - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -62
Modo REMOTO - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 63
Configuración de condiciones de funcionamiento - - - - - - - - - - - - 64
Selección de Autotuning (n139) - - - - - - - - - - - - - - - - - - - - - - - - -64
Prohibición de marcha inversa (n006) - - - - - - - - - - - - - - - - - - - -73
Selección de multivelocidad - - - - - - - - - - - - - - - - - - - - - - - - - - - 73
Funcionamiento a baja velocidad - - - - - - - - - - - - - - - - - - - - - - -74
Ajuste de la señal de configuración de velocidad - - - - - - - - - - - -75
Ajuste de los límites superior e inferior de la frecuencia - - - - - - - - 76
Uso de cuatro tiempos de aceleración/deceleración - - - - - - - - - - 76
Método de recuperación de pérdida momentánea de alimentación
(n081) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 78
Selección de la curva S (n023) - - - - - - - - - - - - - - - - - - - - - - - - - 79
Detección de par - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -80
Nivel de detección de frecuencia (n095) - - - - - - - - - - - - - - - - - - -82
Frecuencias de salto (n083 a n086) - - - - - - - - - - - - - - - - - - - - - - 83
Operación de arranque automático (n082) - - - - - - - - - - - - - - - - -83
Selección de desplazamiento de frecuencia (n146) - - - - - - - - - - - 84
Funcionamiento de un motor en marcha libre sin desconexión - - - 87
Retención temporal de aceleración/deceleración - - - - - - - - - - - -88
Monitorización analógica externa (n066) - - - - - - - - - - - - - - - - - - 89
Calibración del frecuencímetro o amperímetro (n067) - - - - - - - - -90
Uso de la salida analógica como salida de tren de pulsos (n065) -91
Selección de frecuencia de portadora (n080) 14 kHz máx. - - - - - 93
14
Page 16

Selección de la tecla STOP del operador (n007) - - - - - - - - - - - - 97
Selección de segundo motor - - - - - - - - - - - - - - - - - - - - - - - - - - 98
Selección del método de parada - - - - - - - - - - - - - - - - - - - - - - 106
Selección de método de detención (n005) - - - - - - - - - - - - - - - - 106
Aplicación del freno de inyección de c.c. - - - - - - - - - - - - - - - - - 107
Control de posicionamiento simple al detenerse - - - - - - - - - - - 108
Construcción de circuitos de interfaz con dispositivos
externos - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 110
Uso de señales de entrada - - - - - - - - - - - - - - - - - - - - - - - - - - 110
Uso de las entradas analógicas multifuncionales - - - - - - - - - - - 122
Señales de salida analógica - - - - - - - - - - - - - - - - - - - - - - - - - 125
Configuración de frecuencia mediante entrada de referencia de
corriente - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 127
Referencia de frecuencia utilizando entrada de tren de pulsos - 129
Secuencia de 2 hilos 2 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 130
Prevención de bloqueo del motor (límite de corriente) - - - - - - - 132
Prevención de bloqueo durante el funcionamiento - - - - - - - - - - 134
Disminución de la fluctuación de velocidad del motor - - - - - - - - 136
Compensación de deslizamiento (n002 = 0) - - - - - - - - - - - - - - 136
Protección del motor - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 137
Detección de sobrecarga del motor - - - - - - - - - - - - - - - - - - - - 137
Entrada de termistor PTC para protección de sobrecalentamiento
del motor - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 139
Selección de funcionamiento del ventilador de refrigeración - - - 142
Utilización de comunicaciones MEMOBUS (MODBUS) - - - - - - 142
Comunicaciones MEMOBUS (MODBUS) - - - - - - - - - - - - - - - - 142
Especificaciones de comunicaciones - - - - - - - - - - - - - - - - - - - 143
Terminal de conexión de comunicaciones - - - - - - - - - - - - - - - - 143
Configuración de las constantes necesarias para las
comunicaciones - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 144
Formato del mensaje - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 146
Almacenamiento de constantes [comando ENTER] - - - - - - - - - 159
Ejecución de la prueba de autodiagnóstico - - - - - - - - - - - - - - - 162
Utilización del modo de control PID - - - - - - - - - - - - - - - - - - - - 163
Selección de control PID (n128) - - - - - - - - - - - - - - - - - - - - - - - 163
Control de posición analógico con salida PID bidireccional - - - - 167
Control de referencia bidireccional - - - - - - - - - - - - - - - - - - - - - 168
15
Page 17

Uso de la función Copiar constante - - - - - - - - - - - - - - - - - - - - -172
Función Copiar constante - - - - - - - - - - - - - - - - - - - - - - - - - - - - 172
Función READ - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 174
Función COPY - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 176
Función VERIFY - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 178
Visualización de la capacidad del variador - - - - - - - - - - - - - - - -180
Visualización del nº de software - - - - - - - - - - - - - - - - - - - - - - - 182
Display de lista - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -183
Escala de display específica del cliente - - - - - - - - - - - - - - - - - - 185
Selección del proceso para Pérdida de referencia de frecuencia
(n064) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 187
Detección de fase abierta de entrada/salida - - - - - - - - - - - - - - - 188
Detección de subpar - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -189
Uso del variador para elevadores - - - - - - - - - - - - - - - - - - - - - - 191
Secuencia ON/OFF de freno - - - - - - - - - - - - - - - - - - - - - - - - - - 191
Prevención de bloqueo durante deceleración - - - - - - - - - - - - - - 193
Configuración de curva V/f y de constantes de motor - - - - - - - - 193
Reinicio tras pérdida momentánea de alimentación y Reinicio
de fallo - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 193
Detección de fase abierta de entrada/salida y de sobrepar - - - - 193
Frecuencia de portadora - - - - - - - - - - - - - - - - - - - - - - - - - - - - 193
Señal de baseblock externa - - - - - - - - - - - - - - - - - - - - - - - - - - 194
Tiempo de aceleración/deceleración - - - - - - - - - - - - - - - - - - - - 194
Contactor del lado de salida del variador - - - - - - - - - - - - - - - - - 194
Uso de comunicaciones MECHATROLINK-II - - - - - - - - - - - - - - - 195
Mantenimiento e inspecciones - - - - - - - - - - - - - 196
Inspección periódica - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 197
Sustitución de componentes - - - - - - - - - - - - - - - - - - - - - - - - - - 198
Sustitución del ventilador de refrigeración - - - - - - - - - - - - - - - -199
Diagnóstico de fallos - - - - - - - - - - - - - - - - - - - - 200
Funciones de protección y diagnóstico - - - - - - - - - - - - - - - - - - 200
Medidas correctivas en modelos con tapa ciega - - - - - - - - - - - - 200
Medidas correctivas en modelos con operador digital - - - - - - - - 201
Detección y corrección de errores - - - - - - - - - - - - - - - - - - - - - -214
16
Page 18

Especificaciones - - - - - - - - - - - - - - - - - - - - - - - 216
Especificaciones estándar (Clase 200 V) - - - - - - - - - - - - - - - - 216
Especificaciones estándar (Clase 400 V) - - - - - - - - - - - - - - - - 221
Cableado estándar (variador integrado) - - - - - - - - - - - - - - - - - 224
Conexión de entrada de secuencia con transistor NPN/PNP - - - 228
Dimensiones/Deriva térmica - - - - - - - - - - - - - - - - - - - - - - - - - 230
Dispositivos periféricos recomendados - - - - - - - - - - - - - - - - - - 232
Lista de constantes - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 234
Conformidad con la marca CE - - - - - - - - - - - - - - 246
Marca CE - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 246
Requisitos de conformidad de la marca CE - - - - - - - - - - - - - - - 246
Directivas sobre baja tensión - - - - - - - - - - - - - - - - - - - - - - - - - 246
Directiva de CEM - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 247
17
Page 19

1 Recepción del producto
PRECAUCIÓN
Una vez desembalado el V7 IP65, compruebe lo siguiente:
• Verifique que el número de modelo coincida con el especificado en
su pedido de compra o ficha de embalaje.
• Compruebe que el variador no presente daños que pudieran
haberse producido durante el transporte.
Si alguna pieza del V7 IP65 falta o está dañada, llame de inmediato
al servicio técnico.
No instale ni ponga en funcionamiento ningún
variador que tenga componentes dañados o al
que le falten componentes.
La omisión de esta precaución puede
conllevar lesiones o daños materiales.
18
Page 20
1 Recepción del producto
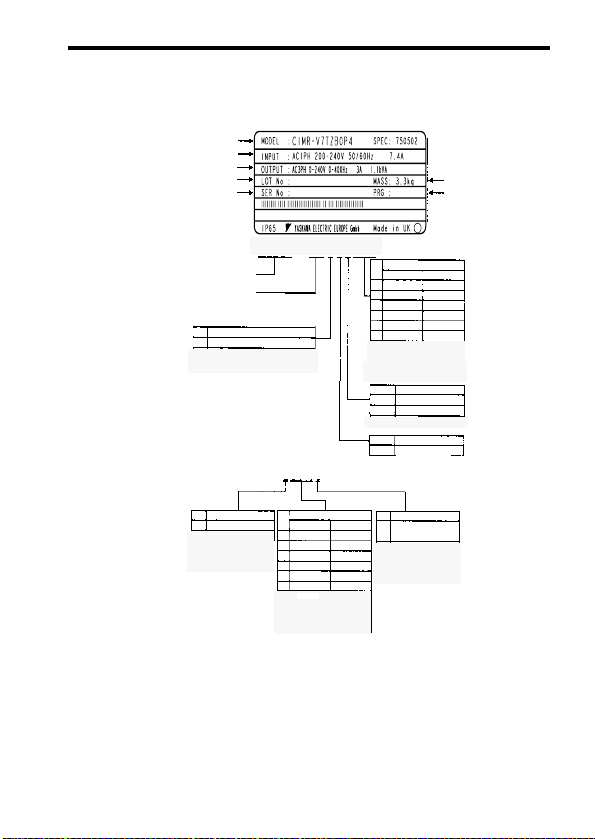
Comprobación de la placa
Ejemplo para variador monofásico 200 Vc.a. de 0,4 kW
(0,5 HP) compatible con las normas europeas
Modelo de convertidor
Especificaciones de entrada
Especificaciones de salida
Nº de lote
Nº de serie
Peso
Número de software
Modelo
Nº
Especificaciones
CIMR - V7 T Z B 0P4 - 05
Variador
Serie V7TZ
Tipo
T Con operador digital (sin potenciómetro)
Salida de motor máxima aplicable
Clase 200 V Clase 400 V
0P4
0,55 kW
0P7
1,1 kW
1P5
1,5 kW
2P2
2,2 kW
3P0
4P0
Nº
Clase de tensión
B
Monofásica de 200 Vc.a.
4
Trifásico, 400 VAC
Especificaciones
Nº
Normas europeas
Z
0,55 kW
1,1 kW
1,5 kW
2,2 kW
3,0 kW
4,0 kW
B0P4 - 05
B
Monofásica de 200 Vc.a.
4
Trifásico, 400 VAC
Salida de motor máxima aplicable
Clase 200 V Clase 400 V
0P4
0,55 kW
0P7
1,1 kW
1P5
1,5 kW
2P2
2,2 kW
3P0
4P0
0,55 kW
1,1 kW
1,5 kW
2,2 kW
3,0 kW
4,0 kW
Estructura protectora
Nº
05
IP65
Versión de software del variador
La versión de software del variador se puede consultar en el parámetro de
monitorización U-10 o el parámetro n179, donde aparecen los últimos cuatro
dígitos del número de software (por ejemplo, se mostrará “5740” para la versión
de software VSP015740).
El presente manual describe la funcionalidad del software de variador, versión
VSP015740 (0,4 a 4,0 kW).
19
Page 21
2 Identificación de componentes
variador
operador
ventilador de refrigeración
filtro de entrada
terminales de fuente
de alimentación
prensaestopas
de cable
Con operador digital
(sin potenciómetro)
JVOP-147
Se utiliza para
configurar o modificar
constantes.
Tapa ciega
En los modelos sin
operador digital, va
montada una tapa
ciega en lugar del
operador digital.
Variadores V7 IP65 con las tapas desmontadas
20
Page 22
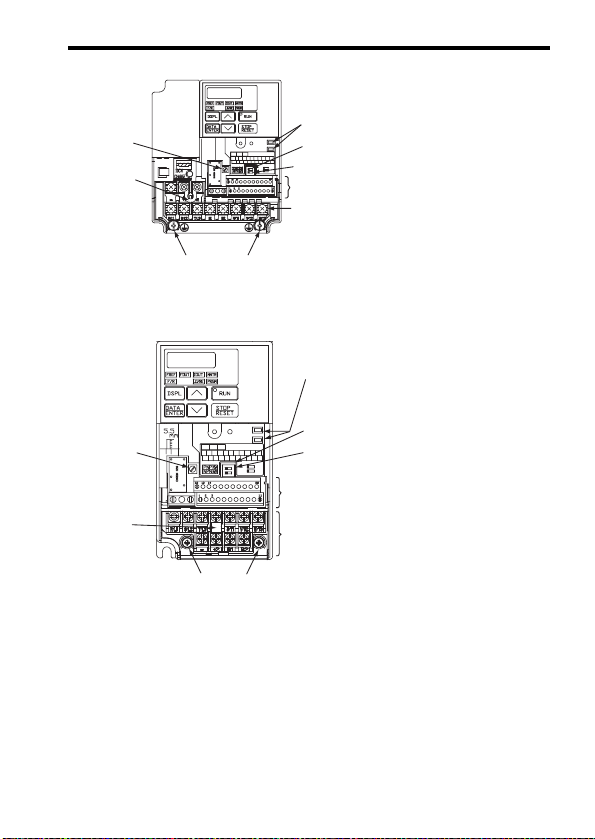
Conmutador
de polaridad
de entrada
Puente
de cortocircuito
Conmutador de
polaridad
de entrada
Puente
de cortocircuito
2 Identificación de componentes
OPERADOR
DIGITAL
JVOP-147
Indicadores de estado de funcionamiento del variador
Conmutador de la resistencia de terminales para
el circuito de comunicaciones
Conmutador de cambio de tensión/corriente para
la entrada de referencia de frecuencia analógica
Bloque de terminales del circuito de control
Bloque de terminales del circuito principal
Terminales de masa
Ejemplo para variador trifásico (clase 400 V, 1,5 kW)
OPERADOR
DIGITAL
JVOP-147
Indicadores de estado de funcionamiento del variador
Conmutador de la resistencia de terminales para
el circuito de comunicaciones
Conmutador de cambio de tensión/corriente para
la entrada de referencia de frecuencia analógica
Bloque de terminales del circuito de
control
Bloque de terminales del circuito principal
Terminales de masa
Ejemplo para variador monofásico (clase 200 V, 0,55 kW)
Disposición de los terminales del circuito principal
La disposición de terminales del circuito principal dependerá del
modelo de variador. Tenga en cuenta que la fuente de alimentación
de entrada debe conectarse al filtro de entrada.
21
Page 23
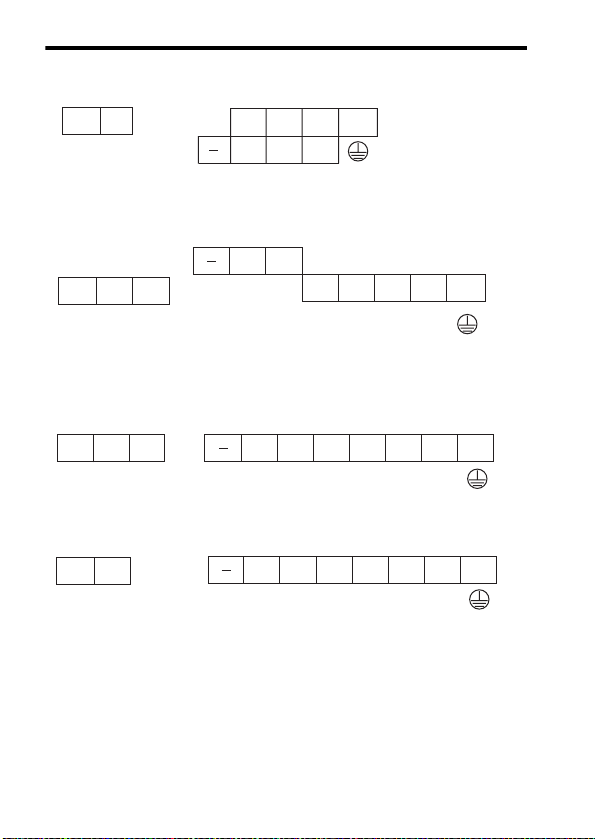
CIMR-V7TZB0P1 a B0P4
LN
conexión al filtro
+1
U/T1 V/T2 W/T3
+2 B1 B2
CIMR-V7TZB0P7, B1P5, 40P2 a 42P2
+1 +2
L1/L L2/N L3
conexión al filtro
CIMR-V7TZB2P2, 43P0, 44P0
L1/L L2/N L3
+1 +2 B1 B2 U/T1 V/T2 W/T3
conexión al filtro
CIMR-V7TZB4P0
LN
+1 +2 B1 B2 U/T1 V/T2 W/T3
conexión al filtro
conexión al variador
conexión al variador
B1 B2 U/T1 V/T2 W/T3
conexión al variador
conexión al variador
22
Page 24

3 Montaje
Selección de una ubicación de montaje del
variador
Asegúrese de que el variador esté protegido de las siguientes
condiciones.
• Frío y calor extremos. Utilícelo únicamente dentro del rango de
temperaturas ambiente especificadas:
-10 a 40 °C (14 a 105 °F)
• Lluvia directa
• Salpicaduras y pulverización de aceite
• Pulverización salina
• Luz solar directa (absténgase de utilizarlo en exteriores)
• Gases o líquidos corrosivos (por ejemplo, gas sulfuroso)
• Partículas metálicas en suspensión
• Sacudidas o vibraciones
• Ruido magnético
(Ejemplos: soldadoras, dispositivos eléctricos, etc.)
• Sustancias radiactivas
• Combustibles, como disolventes
3 Montaje
23
Page 25
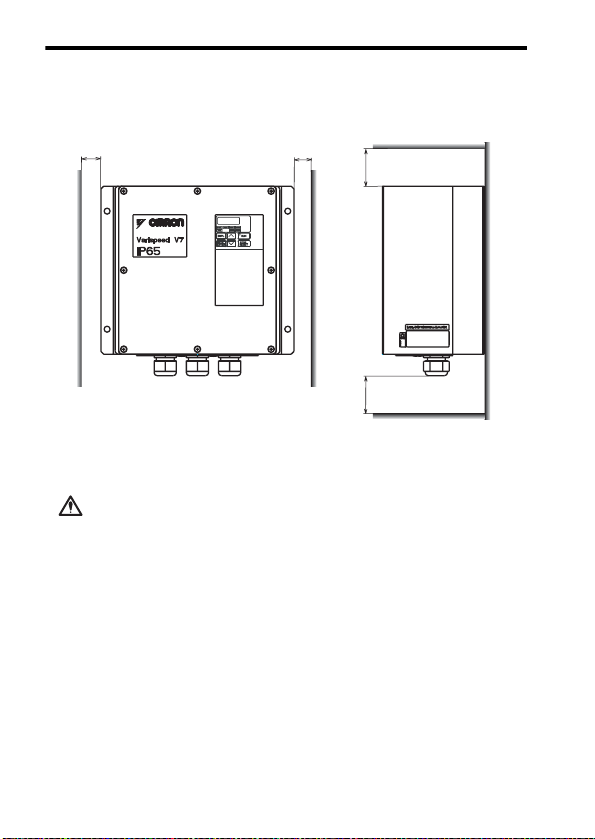
Dimensiones de instalación
Para el montaje del V7 IP65 se requieren las dimensiones que a
continuación se indican.
30
PRECAUCIÓN
30
120
OPERADOR
DIGITAL
JVOP-147
120
• El V7 IP65 genera calor. Para lograr una
refrigeración eficaz, móntelo en posición
vertical.
24
Page 26
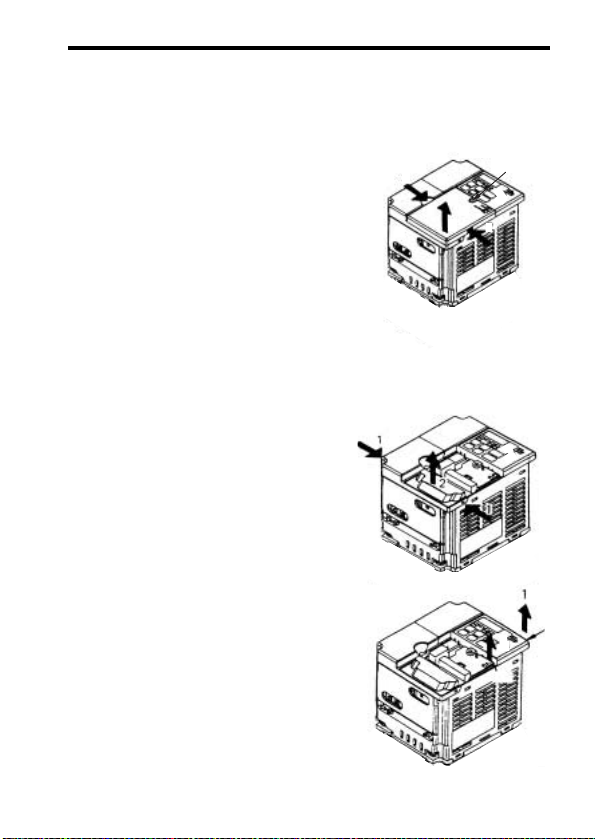
Montaje y desmontaje de componentes
Desmontaje y montaje del operador digital y las tapas (sólo se
muestra el variador integrado, no la unidad IP65 completa)
Desmontaje de la tapa frontal
Utilice un destornillador para aflojar
el tornillo (sección A) de la tapa
frontal. (Para evitar que se pierda,
este tornillo no puede extraerse.)
A continuación, empuje los laterales
derecho e izquierdo en la dirección
1, y levante la tapa frontal en la
dirección 2.
Montaje de la tapa frontal
Monte la tapa frontal invirtiendo el
orden del procedimiento de
desmontaje.
Desmontaje de la tapa de terminales
• Variadores de clase 200 V de
1,1 kW y más, y todos los
variadores de clase 400 V:
Una vez desmontada la tapa
frontal, empuje los laterales
derecho e izquierdo de la tapa de
terminales en la dirección 1, y
levante la tapa en la dirección 2.
Montaje de la tapa de terminales
Monte la tapa de terminales
invirtiendo el orden del
procedimiento de desmontaje.
Desmontaje del operador digital
Una vez retirada la tapa frontal
(siguiendo el procedimiento de la
página 25), levante los lados
superior e inferior (sección C) del
lado derecho del operador digital
en la dirección 1.
1
2
3 Montaje
A
1
C
25
Page 27
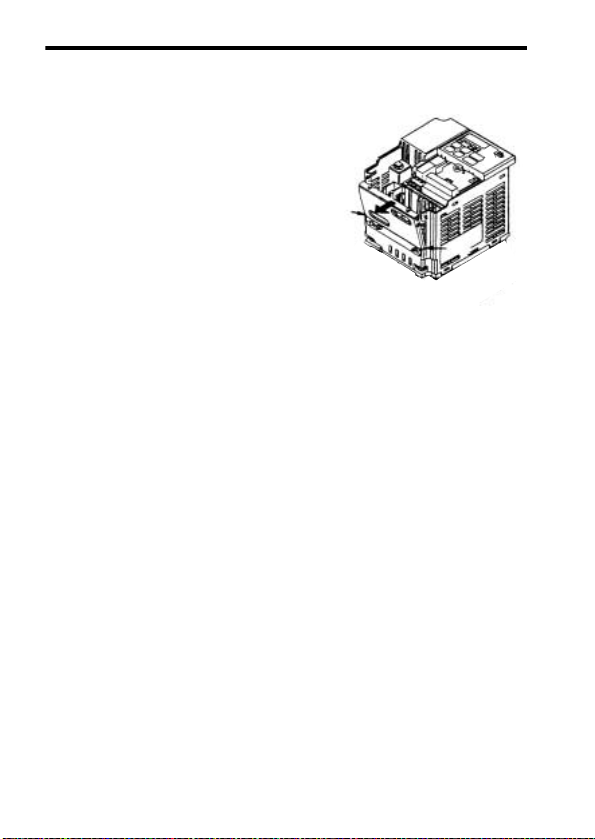
Montaje del operador digital
Monte el operador digital
invirtiendo el orden del
procedimiento de desmontaje.
Desmontaje de la tapa inferior
• Variadores de clase 200 V de
1,1 kW y más, y todos los
variadores de clase 400 V:
Una vez retirada la tapa frontal
y la tapa de terminales, incline
la tapa inferior en la dirección 1,
tomando la sección A como
punto de apoyo.
Montaje de la tapa inferior
Monte la tapa inferior invirtiendo el
orden del procedimiento de
desmontaje.
A
A
26
Page 28
4 Cableado
ADVERTENCIA
4 Cableado
• No cablee el variador sin asegurarse de que la
fuente de alimentación esté desconectada
(OFF). De lo contrario pueden producirse
descargas eléctricas o un incendio.
• El cableado se confiará exclusivamente a
personas cualificadas. De lo contrario pueden
producirse descargas eléctricas o un incendio.
• Cuando cablee el circuito de parada de
emergencia, compruebe exhaustivamente el
cableado antes de poner el equipo en
funcionamiento.
De lo contrario podrían producirse lesiones.
PRECAUCIÓN
• Asegúrese de que la tensión nominal del variador
coincide con la tensión de c.a. de la fuente de
alimentación. De lo contrario podrían producirse
lesiones o un incendio.
• No realice pruebas de resistencia a la tensión en
el variador.
Las pruebas de resistencia a la tensión pueden
dañar los elementos semiconductores.
• Apriete siempre los tornillos de los terminales del
circuito principal y de los circuitos de control.
De lo contrario pueden producirse desperfectos,
daños o un incendio.
• Nunca conecte la fuente de alimentación
principal de c.a. a los terminales de salida U/T1,
V/T2, W/T3, B1, B2, -, +1 ó +2.
El variador sufrirá daños y la garantía quedará
invalidada.
• No conecte ni desconecte cables ni conectores
mientras haya alimentación eléctrica aplicada a
los circuitos.
De lo contrario podrían producirse lesiones.
• No realice comprobaciones de señales durante el
funcionamiento. La maquinaria o el variador
podrían resultar dañados.
• Para almacenar una constante con un comando
ENTER mediante comunicaciones, asegúrese de
adoptar las medidas necesarias para una parada
de emergencia utilizando los terminales
externos.
27
Page 29
Instrucciones de cableado
NOTA
1. Conecte siempre la fuente de alimentación de las
Terminales de conexión de alimentación del variador
200-V Variadores de fuente de
alimentación monofásica
CIMR-V7B
Conectar a L y
N del filtro de entrada
2. Si la distancia de tendido del cableado entre el
3. El cableado de control deberá tener menos de 50 m
4. Los terminales de circuitos de control disponen sólo
28
Un retardo en la respuesta puede provocar
lesiones o dañar la maquinaria.
entradas del circuito principal a los terminales de
entrada de alimentación L1, L2 y L3 del filtro de
entrada a través de un interruptor automático de
estuche moldeado (MCCB) o de un fusible. Nunca
conecte la fuente de alimentación a los terminales
U/T1, V/T2, W/T3, B1, B2, −, +1 ó +2, ya que de lo
contrario el variador resultaría dañado.
En el caso de variadores monofásicos, utilice
siempre los terminales L y N del filtro de entrada.
Los fusibles deben ser RK5 con homologación UL o
equivalentes.
Consulte en la página 232 los dispositivos
periféricos recomendados.
400-V Variadores de fuente de
alimentación trifásica
CIMR-V74
Conectar a L1,
L2 y L3 del filtro de entrada
variador y el motor es demasiado larga, reduzca la
frecuencia portadora del variador. Consulte
información detallada en Selección de frecuencia de
portadora (n080) 14 kHz máx., en la página 93.
(164 pies de longitud), y estar alejado de los cables
eléctricos. Utilice un cable de par trenzado y
apantallado para la entrada de señal de frecuencia
externa.
del aislamiento básico para cumplir los requisitos de
la Clase de protección 1 y de la Categoría de
sobretensión II. Es posible que sea necesario un
Page 30
4 Cableado
aislamiento adicional en los extremos de conexión
del producto para cumplir con las normativas CE.
5. Para el cableado de los terminales del circuito
principal deben utilizarse conectores cerrados.
6. Deben considerarse las caídas de tensión a la hora
de determinar la sección del cable.
La caída de tensión puede calcularse aplicando la
siguiente ecuación:
Caída de tensión entre fases (V)
= × Resistencia del cable (Ω/km) × Distancia de
3
cableado (m) × Corriente
-3
(A) × 10
Seleccione una sección de cable de tal manera que
la caída de tensión sea inferior al 2% de la tensión
nominal normal.
7. Si el variador está conectado a un transformador de
más de 600 kVA, existe la posibilidad de que circule
una corriente de pico excesiva al circuito de
alimentación de entrada, lo que afectará a la sección
del convertidor. En tales casos, conecte una
reactancia de c.a. (opcional) al lado de entrada del
variador, o bien una reactancia de c.c. (opcional) al
terminal de conexión del reactor de c.c.
Tamaños de cable y de tornillos de terminales
1. Circuitos de control
Modelo Símbolos de
Igual
MA, MB, MC M3 0,5 a 0,6
para
todos
los
mode-
S1 a S7, P1,
los
P2, SC, PC,
R+, R-, S+, S-,
FS, FR, FC,
AM, AC, RP
2. Circuitos principales
terminal
Tor n i -
Par de apriete
llos
N•m (lb•pulg)
(4,44 a 5,33)
M2 De 0.22 a 0.25
(1,94 a 2,21)
Sección aplicable Sección
2
mm
Cables trenzados:
0,5 a 1,25,
Individual: 0,5 a 1,25
Cables trenzados:
0,5 a 0,75,
Individual: 0,5 a 1,25
AWG
20 a 16,
20 a 16
20 a 18,
20 a 16
Cables
recomen-
dada
2
mm
0,75 18 Apanta-
0,75 18
AWG
Tipo
llado o
equivalente
29
Page 31

Variadores de entrada monofásica Clase 200 V
Mo-
delo
CIMR-
V7ΤΖ
B0P4
CIMR-
V7ΤΖ
B0P7
CIMR-
V7ΤΖ
B1P5
CIMR-
V7ΤΖ
B2P2
Símbolos de
terminal
L, N, -, +1, +2, B1,
B2, U/T1, V/T2,
W/T3
L, N, -, +1, +2,
B1, B2, U/T1, V/
T2, W/T3
L, N, -, +1, +2, B1,
B2, U/T1, V/T2,
W/T3
L, N, -, +1, +2, B1,
B2, U/T1, V/T2,
W/T3
Tor -
Par de
nillos
apriete
N•m
(lb•pulg)
M3.5 0,8 a 1,0 (7,1
a 8,88)
M4 1,2 a 1,5
(10,65 a
13,31)
M4 1,2 a 1,5
(10,65 a
13,31)
M4 1,2 a 1,5
(10,65 a
13,31)
Cables
Sección aplicable Sección
2
mm
0,75 a 2 18 a 14 2 14 600-V
2 a 5,5 14 a 10 3,5 12
2 a 5,5 14 a 10 5,5 10
2 a 5,5 14 a 10 5,5 10
AWG
recomendada
2
mm
Nota: 1. Las secciones están especificadas para cables de cobre
a 75°C (160°F).
AWG
Tipo
Revesti-
miento de
vinilo o
equivalente
30
Page 32

4 Cableado
Variadores de entrada trifásica Clase 400 V
Modelo
CIMR-
V7ΤΖ
40P4
CIMR-
V7ΤΖ
40P7
CIMR-
V7ΤΖ
41P5
CIMR-
V7ΤΖ
42P2
CIMR-
V7ΤΖ
43P0
CIMR-
V7ΤΖ
44P0
Símbolos de
terminal
L1, L2, L3, -, +1,
+2, B1, B2, U/T1,
V/T2, W/T3
L1, L2, L3, -, +1,
+2, B1, B2, U/T1,
V/T2, W/T3
L1, L2, L3, -, +1,
+2, B1, B2, U/T1,
V/T2, W/T3
L1, L2, L3, -, +1,
+2, B1, B2, U/T1,
V/T2, W/T3
L1, L2, L3, -, +1,
+2, B1, B2, U/T1,
V/T2, W/T3
L1, L2, L3, -, +1,
+2, B1, B2, U/T1,
V/T2, W/T3
Tor -
Par de apriete
nillos
N•m (lb•pulg)
M4 1,2 a 1,5
(10,65 a
13,31)
M4 1,2 a 1,5
(10,65 a
13,31)
M4 1,2 a 1,5
(10,65 a
13,31)
M4 1,2 a 1,5
(10,65 a
13,31)
M4 1,2 a 1,5
(10,65 a
13,31)
M4 1,2 a 1,5
(10,65 a
13,31)
Cables
Sección aplicable Sección
2
mm
2 a 5,5 14 a 10 2 14 600-V
2 a 5,5 14 a 10 2 14
2 a 5,5 14 a 10 2 14
2 a 5,5 14 a 10 2 14
2 a 5,5 14 a 10 2 14
2 a 5,5 14 a 10 2 14
AWG
recomendada
2
mm
3,5 12
3,5 12
AWG
Nota: Las secciones están especificadas para cables de cobre a 75°C
(160°F).
Tipo
Revesti-
miento de
vinilo o
equivalente
31
Page 33

Cableado del circuito principal
Cableado del circuito principal
Ejemplo de variador trifásico de
400 V y 0,55 kW
Variador
Terminales del motor
Terminales del
filtro de entrada
Terminal
de masa
L1 L2 L3
L1
L2
L3
PE
M
3
• Alimentación de entrada del circuito principal
1. Conecte siempre la línea de alimentación a los terminales de entrada L1, L2 y L3 del filtro de entrada. Nunca la conecte a los terminales U/T1, V/T2, W/T3, B1, B2, −, +1 ó +2, ya que de conectarse los terminales equivocados, el variador resultaría dañado.
NOTA
En el caso de variadores monofásicos, utilice siempre los
terminales L y N del filtro de entrada. Nunca conecte los
terminales de entrada R/L1, S/L2 y T/L3 del variador.
• Puesta a tierra (utilice el terminal de puesta a tierra .)
ADVERTENCIA
Ponga siempre a tierra el terminal correspondiente
de acuerdo a la normativa local respectiva.
De lo contrario podrían producirse descargas eléctricas o un
incendio.
Nunca ponga a tierra el V7 IP65 a través de la misma puesta
a tierra que soldadoras, motores u otros equipos eléctricos.
Si se utilizan varios variadores
V7 IP65 en paralelo, ponga
cada uno de ellos a tierra tal y
como se indica en los
siguientes ejemplos. No cree
lazos con los cables de puesta
a tierra.
Correcto
Correcto
32
Incorrecto
Page 34

4 Cableado
• Conexión de la resistencia de freno (opcional)
ADVERTENCIA
Utilice el mismo procedimiento al conectar una unidad de resistencia
de freno.
Consulte la página 225.
• Salida del variador
Conecte los terminales del motor a U/T1, V/T2 y W/T3.
• Cableado de los terminales del circuito principal
Para conectar los cables, páselos a través del orificio de cableado.
Monte siempre la tapa en su posición original.
Para conectar la resistencia de freno, corte el
protector en los terminales B1 y B2.
Para proteger la resistencia de freno contra el
recalentamiento, instale un relé térmico de
sobrecarga entre la resistencia de freno y el
variador. Esto genera una secuencia que
desconecta (OFF) la fuente de alimentación
mediante los contactos de un relé térmico.
De no realizarse este procedimiento podrían
producirse incendios.
Conectar con un destornillador Phillips.
33
Page 35

Cableado de los circuitos de control
C
Los terminales de los circuitos de control tienen solamente un
aislamiento básico.
Puede que sea necesario un aislamiento adicional en el producto
final.
• Terminales del circuito de control (del variador integrado)
Para conectar el cable, páselo a través del orificio de
cableado. Monte siempre la tapa en su posición original.
Salida de contacto
SW1 puede cambiarse en función de la polaridad de la señal
de entrada de secuencia (S1 a S7).
0 V común: lado NPN (configuración de fábrica)
+24 V común: lado PNP
Consulte información sobre SW1. en las páginas 228 y 229.
Consulte información sobre SW2. en las páginas 127 y 143.
ableado de los terminales del circuito de control
Ancho de la hoja del
destornillador
0,4 mm máx
(0,016 pulg.)
2,5 mm máx
(0,098 pulg.)
Inserte el cable en la parte inferior del bloque de terminales y
conéctelo apretando con un destornillador.
34
Page 36

4 Cableado
NOTA
• Mantenga el destornillador en posición vertical con
respecto al variador.
• Consulte los pares de apriete en la página 29.
5,5 mm
(0,22 pulg.)
La longitud pelada del cable
debe ser de 5,5 mm (0,22 pulg.).
Abra la tapa frontal y verifique que la longitud del cable
desnudo sea de 5,5 mm (0,22 pulg.).
5,5 mm
Escala
SW1
SALIDA DE CONTACTO
SW2
Inspección del cableado
Una vez finalizado el cableado, compruebe lo siguiente.
• Que el cableado sea el adecuado.
• Que no hayan quedado fragmentos de cable ni tornillos en el
interior del variador.
• Que los tornillos estén firmemente apretados.
• Que los cables desnudos de los terminales no hagan contacto
con otros terminales.
ADVERTENCIA
NOTA
Si la fuente de alimentación está conectada (ON)
al ejecutar un comando RUN FWD (o REV),
el motor arrancará automáticamente.
Conecte la fuente de alimentación (ON) sólo tras
haber verificado que la señal RUN está en OFF.
De lo contrario podrían producirse lesiones.
1. Si se ejecuta el comando RUN FWD (o REV)
cuando está seleccionado el comando RUN del
terminal del circuito de control (n003 = 1), el motor
arrancará automáticamente una vez que se conecte
(ON) la alimentación de entrada del circuito
principal.
2. Para configurar la secuencia de tres hilos, configure
el terminal S3 (n052) como 0.
35
Page 37

5 Funcionamiento del variador
Inicialmente, la selección de modo de control (n002) está
configurada para el modo de control V/f.
ADVERTENCIA
PRECAUCIÓN
36
• Conecte la alimentación de entrada (ON) sólo
después de asegurarse de que el operador
digital o la tapa ciega (opcional) estén instalados. No desmonte el Operador digital o las
tapas mientras circule corriente. De lo contrario
podrían producirse descargas eléctricas.
• Nunca accione el operador digital ni los
interruptores DIP con las manos húmedas.
De lo contrario podrían producirse descargas
eléctricas.
• Nunca toque los terminales mientras circule
corriente, incluso si el variador se está
deteniendo. De lo contrario podrían producirse
descargas eléctricas.
• Nunca toque los disipadores térmicos, ya que
pueden estar muy calientes. De lo contrario
podría sufrir graves quemaduras.
• Resulta fácil cambiar la velocidad de
funcionamiento de baja a alta. Antes de esta
operación, verifique el rango de trabajo del
motor y de la maquinaria.
De lo contrario podrían producirse lesiones y
daños materiales.
• Si fuese necesario, instale un freno de
retención independiente.
De lo contrario podrían producirse lesiones.
• No realice comprobaciones de señales durante
el funcionamiento.
La maquinaria o el variador podrían resultar
dañados.
• Todas las constantes configuradas en el
variador han sido preconfiguradas de fábrica.
No cambie esta configuración
innecesariamente. De lo contrario, el variador
podría resultar dañado.
Page 38

5 Funcionamiento del variador
Prueba de funcionamiento
El variador funciona si se ha configurado una frecuencia
(velocidad).
El V7 IP65 tiene cuatro modos de funcionamiento:
1. comando RUN desde el operador digital (configuración digital)
2. comando RUN desde los terminales del circuito de control
3. comando RUN desde las comunicaciones MEMOBUS
4. comando RUN desde la tarjeta de comunicaciones (opcional)
Antes de salir de fábrica, el variador se configura para recibir el
comando RUN y la referencia de frecuencia desde el operador.
A continuación se exponen las instrucciones para el
funcionamiento del V7 IP65 utilizando el operador digital
JVOP-147 (sin potenciómetro).
Las constantes de referencia de funcionamiento o de referencia
de frecuencia pueden seleccionarse de manera independiente,
como se explica a continuación.
Nombre Constante
Selección
comando
RUN
n003= 0 --- Habilita los comandos RUN, STOP y
del
RESET desde el operador digital.
= 1 --- Habilita los comandos RUN y STOP desde
los terminales del circuito de control.
= 2 --- Habilita las comunicaciones MEMOBUS.
= 3 --- Habilita la tarjeta de comunicaciones
(opcional).
37
Page 39

Nombre Constante
Selección
referencia
frecuencia
n004= 0 --- Habilita la configuración de
de
potenciómetro del operador digital.
= 1 --- Habilita la referencia de frecuencia 1
de
(constante n024).
= 2 --- Habilita una referencia de tensión (0 a 10 V)
= 3 --- Habilita una referencia de corriente
= 4 --- Habilita una referencia de corriente
= 5 --- Habilita una referencia de tren de pulsos en
= 6 --- Habilita las comunicaciones MEMOBUS.
= 9 --- Habilita la tarjeta de comunicaciones
(opcional).
en el terminal del circuito
de control.
(4 a 20 mA) en el terminal del circuito
de control.
(0 a 20 mA) en el terminal del circuito
de control.
el terminal del circuito de control.
= 7 --- Habilita una referencia de tensión
(0 a 10 V) en el terminal del circuito del
operador digital.
= 8 --- Habilita una referencia de corriente
(4 a 20 mA) en el terminal del circuito del
operador digital.
38
Page 40

5 Funcionamiento del variador
A
A
A
A
A
Pasos de Operación Display del
1. Conecte (ON) la fuente de
alimentación.
2. Configure la constante n004
como 1.
3. Configure las siguientes
constantes.
n019: 15,0
(tiempo de aceleración)
n020: 5,0
(tiempo de deceleración)
4. Seleccione el comando de
Marcha directa (FWD) o inversa
(REV) pulsando la tecla o .
NOTA
Nunca seleccione REV
si está prohibida la
marcha inversa.
5. Configure la referencia pulsando
la tecla o .
6. Pulse .
7. Pulse para detener.
RUN
STOP
operador
6.00
1
15.0
5.0
(Avance)
o
(Inversa)
60.00
0,00→60,
00
60,00→0,
00
Indica-
dores de
función
FREF
PRGM
PRGM
F/R
FREF
FOUT
FOUT
Indicadores
de
estado
RUN
LARM
RUN
LARM
RUN
LARM
RUN
LARM
RUN
ALARM
RUN
LARM
RUN
ALARM
Indicadores de estado : ON : Parpadea (parpadeo largo) : Parpadea : OFF (desactivado)
39
Page 41

Selección de la dirección de rotación
Es posible seleccionar la dirección de rotación del motor cuando
se ejecute el comando marcha directa (RUN FWD).
El motor girará en la dirección opuesta al ejecutar el comando
Marcha inversa (RUN REV).
Confi-
guración
de n040
0 El motor girará en dirección contraria a las agujas del reloj
(desde el punto de vista de la carga) al seleccionar el
comando marcha directa (RUN FWD).
1 El motor girará en la dirección de las agujas del reloj
(desde el punto de vista de la carga) al seleccionar el
comando RUN FWD.
Descripción
Puntos de comprobación del funcionamiento
• El motor gira de manera uniforme.
• El motor gira en la dirección correcta.
• El motor no presenta vibraciones ni ruidos anómalos.
• La aceleración y deceleración no son bruscas.
• El consumo de corriente del motor es acorde a la condición de
carga.
• Los indicadores de estado y el display del operador digital
indican que todo funciona correctamente.
40
Page 42

5 Funcionamiento del variador
Funcionamiento del operador digital
Todas las funciones del V7 IP65 se configuran con el operador
digital. A continuación describimos el display y el teclado.
Sección de display de datos
Indicadores de función
Los indicadores cambian a otra
función cada vez.
está pulsado.
Es posible cambiar los
datos visualizados.
Pulse para alternar entre
funciones.
Pulse enter para introducir
los datos de constante.
(Muestra los datos de la
constante al seleccionar
un nº de constante
para el indicador PRGM.)
(Lado posterior del operador)
CN2-1: terminal del circuito del operador
(referencia de tensión)
* Consulte información detallada en Diagrama de referencia de velocidad analógica del operador, en la página 171.
Detalles de los indicadores (el color entre paréntesis indica el
color del indicador).
Monitorización/
configuración de
referencia de
frecuencia (VERDE)
Selección del
RUN FWD/REV
en el operador
El terminal CN2* del
operador
FREF
F/R
comando
(VERDE)
Pulse para
incrementar el
valor del nº de
constante/
datos.
FOUT
Monitorización
de frecuencia de
salida
(VERDE)
Pulse para disminuir
el valor del nº de
constante/datos.
CN2-2: terminal del circuito del operador
(referencia de corriente)
Sección de indicador/display
OPERADOR
DIGITAL
JVOP-147
Indicador de
estado (idéntica
función que el
indicador RUN)
CN2-3: tierra (GND) del terminal del circuito del
operador
IOUT
Monitorización
de corriente de
salida
(VERDE)
LO/RE
Selección de
LOCAL/REMOTO
(ROJO)
Pulse para poner en
marcha el motor.
Pulse para detener el motor.
(Pulse para reset de errores.)
MNTR
Monitorización
multifuncional
(VERDE)
PRGM
Nº Constante/datos
(ROJO)
Operador digital JVOP-147
41
Page 43

Descripción de los indicadores de estado
En la sección central derecha de la parte delantera del V7 IP65
hay dos indicadores del estado de funcionamiento del variador.
Las combinaciones de estos indicadores indican el estado del
variador (ON, parpadean y OFF). El indicador RUN y el indicador
de estado del botón tienen idéntica función.
: ON
RUN
: Parpadea (parpadeo largo)
: Parpadea : OFF
RUN
ALARM
(Verde)
(Rojo)
Listo para funcionar
(Durante la detención)
Marcha libre
hasta detención
La siguiente tabla muestra la relación entre los estados del
variador y el indicador del botón RUN del operador digital, así
como de los indicadores RUN y ALARM del frontal del V7 IP65.
Estos indicadores se iluminan, apagan o parpadean para reflejar
el orden de prioridad.
Priori-
dad
Operador
1
2
3
4
5
6
7
digital
RUN RUN ALAR M
Frontal del
V7 IP65
Condiciones
La alimentación está desconectada.
Hasta que el variador esté preparado después de
conectar (ON) la alimentación.
Fall o
Parada de emergencia (Se envía el comando STOP
desde el operador digital cuando se utilizan los
terminales del circuito de control para el funcionamiento
del variador.)
Parada de emergencia (Se envía la alarma de parada de
emergencia desde el terminal del circuito de control.)
Nota: los indicadores serán los mismos que cuando se
produce una alarma (detención) después de la parada
del variador.
Parada de emergencia (Se envía el fallo de parada de
emergencia desde el terminal del circuito de control.)
Nota: los indicadores serán los mismos que cuando se
produce un fallo después de la parada del variador.
Alarma (detención)
Alarma (funcionamiento)
El comando RUN se ejecuta cuando se envía el
comando de baseblock externo utilizando el terminal de
entrada multifuncional.
Detención (durante baseblock)
Funcionamiento
normal
42
Page 44

5 Funcionamiento del variador
Priori-
dad
8
9
Operador
digital
RUN RUN ALARM
Frontal del
V7 IP65
Condiciones
En funcionamiento (Incluye el estado en que el variador
está funcionando a una frecuencia inferior a la
frecuencia de salida mínima.)
Durante el freno dinámico al arrancar.
Durante una deceleración a la parada
Durante el freno dinámico en parada.
Para obtener información detallada sobre la función de los
indicadores de estado en caso de fallos del variador, consulte el
capítulo 8 Diagnóstico de fallos. En caso de producirse un fallo,
el indicador ALARM se iluminará.
El reset del fallo se realiza activando (ON) la señal
NOTA
Reset de fallo (o bien pulsando la tecla del
RESET
operador digital) con la señal de funcionamiento
desconectada (OFF), o bien desconectando (OFF) la
alimentación. Si la señal de funcionamiento está en
ON, no será posible utilizar la señal Reset de fallo para
ello.
STOP
43
Page 45

Descripción de los indicadores de función
u
s
e
Pulsando en el operador digital es posible seleccionar
cada uno de los indicadores de función.
La siguiente tabla describe cada indicador de función.
Monitorización/selección de frecuencia de
Monitorización/selección de frecuencia de
salida (Hz)
salida (Hz)
Configura la velocidad de funcionamiento
Configura la velocidad de funcionamiento
del V7TZ
del V7TZ
Monitorización de frecuencia de salida (Hz)
Monitorización de frecuencia de salida (Hz)
Muestra la frecuencia de salida actual
Muestra la frecuencia de salida actual
del V7TZ
del V7TZ
Configuración deshabilitada
Configuración deshabilitada
Monitorización de corriente de salida (A)
Monitorización de corriente de salida (A)
Muestra la corriente de salida actual
Muestra la corriente de salida actual
del V7 IP65.
del V7 IP65.
Configuración deshabilitada
Configuración deshabilitada
Monitorización multifunción
Monitorización multifunción
Muestra la descripción de la
Muestra la descripción de la
46
monitorización seleccionada.
monitorización seleccionada.
Selección de marcha directa/inversa (RUN FWD/REV)
Selección de marcha directa/inversa (RUN FWD/REV)
Configura la dirección de rotación del motor cuando se
Configura la dirección de rotación del motor cuando se
envía el comando RUN desde el operador digital.
envía el comando RUN desde el operador digital.
La configuración puede modificarse con
La configuración puede modificarse con
la tecla o .
la tecla o .
DSPL
Alimentación
Alimentación
conectada
conectada
(ON)
(ON)
(marcha directa) (marcha inversa)
(marcha directa) (marcha inversa)
Si el V7 IP65 se desconecta de
Si el V7 IP65 se desconecta de
la alimentación mientras está en
la alimentación mientras está en
alguno de estos modos, volverá
alguno de estos modos, volverá
al mismo modo una vez
al mismo modo una vez
restablecida la alimentación.
restablecida la alimentación.
Nº monitorización
Nº monitorización
U-01: Referencia de frecuencia (FREF)
U-01: Referencia de frecuencia (FREF)
U-02: Frecuencia de salida (FOUT)
U-02: Frecuencia de salida (FOUT)
U-03: Corriente de salida (IOUT)
U-03: Corriente de salida (IOUT)
U-04: Referencia de tensión de salida (unidad: 1 V)
U-04: Referencia de tensión de salida (
U-05: Tensión de c.c. (unidad: 1 V)
U-05: Tensión de c.c. (unidad: 1 V)
U-06: Estado de terminal de entrada
U-06: Estado de terminal de entrada
U-07: Estado de terminal de salida
U-07: Estado de terminal de salida
U-08: Monitorización de par
U-08: Monitorización de par
U-09: Histórico de fallos (últimos 4 fallos)
U-09: Histórico de fallos (últimos 4 fallo
U-10: Número de software
U-10: Número de software
U-11: Potencia de salida
U-11: Potencia de salida
U-12: Monitorización de offset de frecuencia
U-12: Monitorización de offset de frecu
U-14: Código ASCII desde el PLC
U-14: Código ASCII desde el PLC
U-15: Error de recepción de datos
U-15: Error de recepción de datos
U-16: Realimentación PID
U-16: Realimentación PID
U-17: Entrada PID
U-17: Entrada PID
U-18: Salida PID
U-18: Salida PID
U-19: Desviación de referencia de frecuencia
U-19: Desviación de referencia de frecu
44
Page 46

5 Funcionamiento del variador
Selección de LOCAL/REMOTO
Esta función cambia la operación: funcionamiento
utilizando el operador digital, incluyendo la configuración
de frecuencia con potenciómetro, funcionamiento
utilizando los terminales de entrada o funcionamiento a
través de las comunicaciones. La configuración
puede modificarse con la tecla
(Local)
Nº de Constante/datos
Configura y cambia los datos de
un nº de constante
(Consulte información detallada en la página 49.)
Vuelve a
ADVERTENCIA
o .
(Remoto)
Si n001=5, puede recibirse un comando RUN
incluso mientras se modifica una constante.
Si se envía un comando Run mientras se está
modificando una constante, como por ejemplo
durante una ejecución de prueba, asegúrese de
observar todas las precauciones de seguridad.
De lo contrario podrían producirse lesiones.
Si el V7 IP65 se para
después de haber
cambiado a alguno de estos
modos durante el
funcionamiento, pasará al
modo Program desde el
modo Drive.
Incluso si el comando RUN
vuelve a ponerse en ON,
el V7 IP65 no funcionará.
No obstante, si n001=5,
el comando V7 podrá ser
recibido y el V7 IP65
funcionará.
45
Page 47

MNTR Monitorización multifunción
Selección de la monitorización
Pulse la tecla. Si está en ON, los datos
podrán visualizarse seleccionando el número de monitorización.
Ejemplo: monitorización de la referencia de tensión de salida
Seleccione U-04
pulsando la tecla
o .
Muestra la referencia de la
tensión de salida.
o
Monitorización
Los siguientes elementos pueden monitorizarse utilizando las
constantes U.
Nº
constante
U-01 Referencia de
U-02 Frecuencia de salida
U-03 Corriente de salida
U-04 Tensión de salida V Puede monitorizarse la tensión de salida.
U-05 Tensión de c.c. V P uede monitorizarse la tensión de c.c. del circuito
U-06 Estado de terminal
U-07 Estado de terminal
U-08 Monitor ización de
Nombre Unit
frecuencia (FREF)*
1
(FOUT)*
1
(IOUT)*
2
de entrada*
2
de salida*
par
(Unidad)
Hz Puede monitorizarse la referencia de frecuencia.
1
(Idéntico a FREF)
Hz Puede monitorizarse la frecue ncia de salida.
(Idéntico a FOUT)
A P uede monitorizarse la corriente de salida.
(Idéntico a IOUT)
principal.
- Puede monitorizarse el estado del terminal de entrada
de los terminales del circuito de control.
- Puede monitorizarse el estado del terminal de salida de
los terminales del circuito de control.
% Puede monitorizarse el par de salida por par nominal
del motor. Cuando se selecciona el modo de control V/f
se visualiza “---”.
Descripción
46
Page 48

5 Funcionamiento del variador
Nº
constante
U-09 Histórico de fallos
U-10 Nº de software - Permite verificar el nº de software.
U-11
U-12
U-14
U-15 Error de recepción
U-16 PID
U-17 Entr PID % ±100(%)/± Frecuencia de salida máx.
U-18 Salida PID % ±100(%)/± Frecuencia de salida máx.
U-19 Monitorización de la
Nombre Unit
(últimos 4 fallos)
Potencia de salida*
4
de datos*
Retroalimentación
desviación de la
referencia de
5
frecuencia *
(Unidad)
- Muestra los últimos cuatro registros del histórico de
fallos.
3
kW Puede monitorizarse la potencia de salida.
- Es posible verificar el contenido de errores de
recepción de datos de las comunicaciones MEMOBUS.
(El contenido del registro de transmisión nº 003DH es
idéntico.)
% Entrada 100(%)/Frecuencia de salida máx. o
equivalente
% Es posible monitorizar la desviación cuando se utiliza el
comando UP/DOWN 2.
Descripción
* 1. El indicador de estado no está activado (ON).
* 2. Consulte en la página siguiente el estado de los terminales de
entrada/salida.
* 3. El rango de visualización es de −99,9 a 99,99 kW.
Durante regeneración, la potencia de salida se visualizará en
unidades de 0,01 kW si es de −9,99 kW como máximo,
y en unidades de 0,1 kW si es superior a −9,99 kW.
En modo de control vectorial se visualizará “---”.
* 4. Consulte en la página siguiente información acerca de los errores
de recepción de datos.
* 5. Se visualiza en unidades de 0,1% si es de 100% como máximo,
y en unidades de 1% si es superior a 100%. El rango de
visualización es de −999% a 999%.
47
Page 49

Estado de terminal de entrada/salida
Estado de terminal de entrada
1: Terminal S1 cerrado.
1: Terminal S2 cerrado.
1: Terminal S3 cerrado.
1: Terminal S4 cerrado.
1: Terminal S5 cerrado.
1: Terminal S6 cerrado.
1: Terminal S7 cerrado.
No utilizado
Estado de terminal de salida
1: Terminal MA-MC cerrado.
1: Terminal P1-PC cerrado.
1: Terminal P2-PC cerrado.
No utilizado
Visualización del error de recepción de datos
1: Error CRC
1: Error de longitud de datos
No utilizado
1: Error de paridad
1: Error de desbordamiento
1: Error de trama
1: Timeover
No utilizado
Método de visualización del histórico de fallos.
Al seleccionar U-09 aparece un cuadro de cuatro dígitos. Los
tres dígitos de la derecha muestran la descripción del fallo; el
dígito de la izquierda muestra el orden del fallo (de 1 hasta 4).
El número 1 representa el fallo más reciente, en tanto que los
números 2, 3 y 4 representan los demás fallos, en orden
ascendente de haberse producido.
Ejemplo:
yyyyyy número de 4 dígitos
48
Page 50

5 Funcionamiento del variador
: Orden del fallo (1 a 4)
: Si no se ha producido ningún fallo, en la descripción del
fallo se visualizará "---".
(Consulte información detallada en el capítulo 8 Diagnóstico de
fallos.)
Alternancia de los registros del histórico de fallos
El fallo visualizado puede cambiarse utilizando la tecla o .
Borrado del histórico de fallos
Para borrar el histórico de fallos, configure la constante n001
como 6. El display volverá a n001 una vez configurado 6.
Nota: También la inicialización de las constantes (n001=12, 13) borra
el histórico de fallos.
Configuración y modificación de constantes
El siguiente diagrama muestra cómo seleccionar y cambiar
constantes.
Selección de
LOCAL/REMOTO
• Configuración de n003 (selección del comando RUN)
Nº de constante/
datos
n003
Selección de
referencia de
operación
Configuración de
fábrica: 0
Referencia del
operador
Configurado a 1
Referencia del terminal
del circuito de control
(parpadea mientras se
está modificando)
Vuelve a mostrar el
nº de constante
transcurrido
1 segundo
Configuración
de datos
49
Page 51

6 Funciones de programación
La configuración de fábrica de las constantes aparece sombreada en
las tablas. Una vez finalizado el cableado, asegúrese de configurar
los siguientes parámetros antes de poner el sistema en
funcionamiento.
Hardware
Configure las siguientes opciones antes de conectar el variador.
Elemento Con-
Selección de polaridad de la señal de entrada de secuencia
(S1 a S7)
Selección de entrada de referencia de tensión / referencia de
corriente del terminal de circuito de control
Software (constante)
Elemento Con
Configuración del
entorno
Configuración de
las características
básicas y de la
referencia de
frecuencia
Protección del
motor
Contramedidas
para ruidos y
corrientes de fuga
Uso de una
resistencia de
freno opcional
Selección / inicialización de constante (n001) 51
Selección de modo de control (n002) 56
Selección de comando RUN (n003) 60
Selección de referencia de frecuencia (n004) 62
Selección de método de detención (n005) 106
Configuración de la curva V/f (n011 a n017) 53
Tiempo de aceleración 1 (n019),
Tiempo de deceleración 1 (n020)
Referencia de frecuencia 1 a 8 (n024 a n031) 73
Corriente nominal del motor (n036) 137
Selección de protección termoelectrónica
del motor (n037)
Referencia de frecuencia de portadora
(n080)
Prevención de bloqueo durante
deceleración (n092)
sulte la
página
228
127
sulte la
página
76
137
93
135
50
Page 52

6 Funciones de programación
Configuración e inicialización de constantes
Selección / inicialización de constante (n001)
ADVERTENCIA
Si n001 = 5, puede recibirse un comando RUN
incluso mientras se modifica una constante.
Si se envía un comando Run mientras se está
modificando una constante, como por ejemplo
durante una ejecución de prueba, asegúrese de
observar todas las precauciones de seguridad.
De lo contrario podrían producirse lesiones.
La siguiente tabla presenta los datos que pueden configurarse o
leerse cuando está seleccionado n001. Configurando esta
constante es posible borrar el histórico de fallos e inicializar las
constantes. Las constantes no utilizadas entre n001 y n179 no
se visualizan.
Configuración de n001
Constante que puede
configurarse
Constante que puede referenciarse
0 n001 n001 a n179
1
2
3
4
5
n001 a n049
n001 a n079
n001 a n119
n001 a n179
n001 a n179
*1
*1
*1
*1
*1
6 Histórico de fallos borrado
7 a 11 No utilizado
12 Inicializar
13
* 1. Excluyendo las constantes inhibidas mediante configuración.
* 2. Consulte la página 112.
NOTA
Inicializar (secuencia de 3 hilos)
aparecerá en el display durante 1 segundo, y los
datos configurados volverán a sus valores iniciales en
*2
los siguientes casos.
51
Page 53

1. Si los valores configurados de las selecciones de
entrada multifuncional 1 a 7 (n050 a n056) son
idénticos
2. Si no se satisfacen las siguientes condiciones en la
configuración de la curva V/f:
Frecuencia de salida máx. (n011)≥ Frecuencia de
salida de tension máx. (n013)
> Frecuencia de salida media
(n014)
≥ Frecuencia de salida mín.
(n016)
Nota: Frecuencia de salida media (n014) también se
usa para la configuración de motor 2, n014 tiene que
ser menor que n140 y n147.
Consulte información detallada en Ajuste del par en
función de la aplicación (Configuración de la curva
V/f), en la página 53.
3. Si no se satisfacen las siguientes condiciones en la
configuración de Salto de frecuencia:
Salto de frecuencia 3 (n085) ≤ Salto de frecuencia 2
(n084)
4. Si el límite inferior de referencia de frecuencia (n034)
≤ Límite superior de referencia de frecuencia (n033)
5. Si la corriente nominal del motor (n036) ≤ 150% de
la corriente nominal del variador
6. Si alguna de las configuraciones de tiempo de
aceleración/deceleración (n019 a n022) excede de
600,0 segundos y se intenta configurar n018 como 1
(unidad de tiempo de aceleración/deceleración de
0,01 segundo).
≤ Salto de frecuencia 1 (n083)
52
Page 54

6 Funciones de programación
Uso del modo de control V/f
El modo de control V/f está preconfigurado de fábrica.
Selección de modo de control (n002) =0: modo de control V/f
(configuración de fábrica)
1: Modo de control vectorial
Ajuste del par en función de la aplicación
Ajuste el par motor configurando la curva V/f y el incremento
automático integral del par.
Configuración de la curva V/f
Configure la curva V/f en n011 a n017 tal y como se describe a
continuación. Configure cada curva cuando se utilice un motor
especial (por ejemplo, un motor de alta velocidad) o cuando se
requiera un ajuste de par especial de la maquinaria.
V: (Tensión)
Asegúrese de satisfacer las siguientes
condiciones para la configuración de n011 a
n017.
n016 ≤ n014 < n013 ≤ n011
Si n016 = n014, la configuración de n015
quedará desactivada.
f
Nota: n014 también se utiliza para configuración
(Frecuencia)
del motor 2. (n014 < n140, n147)
Nº
constante
n011
n012
n013
n014
n015
n016
n017
Frecuencia máx. de salida
Tensión máx.
Frecuencia de salida de tensión máx. (frecuencia básica)
Frecuencia de salida media
Tensión de frecuencia de
salida media
Frecuencia mín. de salida
Tensión de frecuencia de
salida mín.
Nombre Unit
(Uni-
dad)
0,1 Hz 50,0 a 400,0 Hz 50,0 Hz
0,1 V
0,1 Hz 0,2 a 400,0 Hz 50,0 Hz
0,1 Hz 0,1 a 399,9 Hz 1,3 Hz
0,1 V
0,1 Hz 0,1 a 10,0 Hz 1,3 Hz
0,1 V 0.1 a 50.0 V
Rango de ajuste Configu-
0,1 a 255,0 V
(0,1 a 510,0 V)
0,1 a 255,0 V
(0,1 a 510,0 V)
(0,1 a 100,0 V)
ración de
(400,0 V)
Nota: Los valores entre paréntesis corresponden al variador Clase 400 V.
fábrica
200,0 V
12,0 V
(24,0 V)
12,0 V
(24,0 V)
53
Page 55

Configuración típica de la curva V/f
Configure la curva V/f en función de la aplicación, tal y como se
describe a continuación. En los variadores Clase 400 V, los
valores de tensión (n012, n015 y n017) deberían duplicarse.
Al funcionar a una frecuencia superior a 50/60 Hz, cambie la
frecuencia máx. de salida (n011).
Nota: Configure siempre la frecuencia máxima de salida en función de
las características del motor.
1. Para aplicaciones generales
Especificación del motor: 60 Hz
Especificación del motor: 50 Hz
(configuración de fábrica)
2. Para ventiladores/bombas
Especificación del motor: 60 Hz Especificación del motor: 50 Hz
200
V
200
V
50
10
1,5 30 60 f
50
10
1,3 25 50 f
3. Para aplicaciones que requieren un alto par de arranque
Especificación del motor: 60 Hz Especificación del motor: 50 Hz
200
V
24
18
1,5
360f
200
V
24
18
1,3 2.5
50 f
Incrementar la tensión de la curva V/f incrementará el par
motor, aunque un aumento excesivo puede provocar la
sobreexcitación, el recalentamiento o vibraciones del motor.
Nota: La constante n012 debe configurarse de acuerdo con la tensión
nominal del motor.
54
Page 56

6 Funciones de programación
Incremento automático integral del par (cuando está
seleccionado el modo V/f: n002 = 0)
Los requisitos de par motor cambian en función de las
condiciones de carga. El incremento automático integral del par
ajusta la tensión de la curva V/f en función de los requisitos.
El V7 IP65 ajusta automáticamente la tensión tanto durante el
funcionamiento a velocidad constante como durante la
aceleración.
El variador calcula el par necesario.
Esto garantiza un funcionamiento sin interrupciones, con el
consiguiente ahorro de energía.
Tensión de salida
Funcionamiento
(Tensión)
Ganancia de compensación de par (n103)
V
Par requerido
f (Frecuencia)
Par requerido
Incremente la tensión
Normalmente, no es necesario ajustar la ganancia de
compensación de par (n103, configuración de fábrica: 1.0).
Cuando la distancia de cableado entre el variador y el motor es
grande, o bien si el motor genera vibraciones, cambie la
ganancia de incremento automático de par. En tales casos,
configure la curva V/f (n011 a n017).
Normalmente no es necesario ajustar la constante de tiempo de
compensación de par (n104) ni la pérdida de entrehierro para
compensación de par (n105).
Ajuste la constante de tiempo de compensación de par si se
producen las siguientes condiciones:
• Incremente el valor si el motor genera vibraciones.
• Reduzca el valor si la respuesta es lenta.
55
Page 57

Uso del modo de control vectorial
Configure la selección de modo de control (n002) para utilizar el
modo de control vectorial.
n002 =0: modo de control V/f (configuración de fábrica)
1: Modo de control vectorial
Precauciones para la aplicación de control vectorial de
tensión
El control vectorial requiere las constantes del motor. Las
constantes por defecto han sido configuradas en fábrica antes
del envío. Por consiguiente, cuando se utiliza un motor diseñado
para un variador o cuando debe accionarse un motor de otro
fabricante, es posible que no se mantengan las características
de par o de control de velocidad requeridas porque dichas constantes no son adecuadas. Configure las siguientes constantes
para que coincidan con los requisitos de constantes de motor.
Nº
con-
stante
n106
n107
n036
n110
* La configuración dependerá de la capacidad del variador.
56
Nombre Unit (Unidad) Rango de ajuste Configu-
Deslizamiento
nominal del motor
Resistencia línea a
neutro del motor
Corriente nominal
del motor
Corriente en vacío
del motor
0,1 Hz 0,0 a 20,0 Hz *
0,001 Ω
(menos de 10 Ω)
0,01 Ω
(10 Ω o más)
0,1 A 0% a 150% de la
1% 0% a 99% (100%
0,000 a 65,50 Ω *
corriente nominal
del variador
= corriente nomi-
nal del motor)
(Consulte las páginas 245 y 245.)
Normalmente no se requiere ajustar la ganancia de
compensación de par (n103) ni la constante de tiempo de
compensación de par (n104).
Ajuste la constante de tiempo de compensación de par si se
producen las siguientes condiciones:
• Incremente el valor si el motor genera vibraciones.
• Reduzca el valor si la respuesta es lenta.
Ajuste la ganancia de compensación de deslizamiento (n111)
durante el accionamiento de la carga con el objeto de alcanzar la
velocidad de consigna. Aumente o disminuya el valor en
incrementos de 0,1.
ración de
fábrica
*
*
Page 58

6 Funciones de programación
• Si la velocidad es inferior al valor de consigna, incremente la
ganancia de compensación de deslizamiento.
• Si la velocidad es superior al valor de consigna, reduzca la
ganancia de compensación de deslizamiento.
Normalmente no es necesario ajustar la constante de tiempo de
compensación de deslizamiento (n112). Ajústela cuando se den
las siguientes circunstancias:
• Reduzca el valor si la respuesta es lenta.
• Aumente el valor si la velocidad es inestable.
Seleccione el estado de compensación de deslizamiento durante
la regeneración del siguiente modo:
Configuración
de n113
Corrección del deslizamiento durante una
operación de regeneración
0 Desactivada
1 Activada
Cálculo de la constante del motor
A continuación se presenta un ejemplo de cálculo de la
constante de motor.
1. Deslizamiento nominal del motor (n106)
120 × Frecuencia nominal del motor (Hz)*
Número de polos del motor
120/Número de polos del motor
1
Velocidad nominal del motor (mín.-1)*
2. Resistencia línea a neutro del motor (n107)
Los cálculos se basan en la resistencia de línea a línea y en el
grado de aislamiento del informe de prueba del motor.
Aislamiento tipo E: Informe de la prueba de resistencia línea a línea a 75°C (Ω) × 0,92 ×
Aislamiento tipo B: Informe de la prueba de resistencia línea a línea a 75°C (Ω) × 0,92 ×
Aislamiento tipo F: Informe de la prueba de resistencia línea a línea a 115°C (Ω) × 0,87 ×
3. Corriente nominal del motor (n036)
= corriente nominal a la frecuencia nominal del motor (Hz)*1 (A)
4. Corriente en vacío del motor (n110)
Corriente en vacío (A) a la frecuencia nominal del motor (Hz)*
Corriente nominal (A) a la frecuencia nominal del motor (Hz)*
1
1
100 (%)
2
57
Page 59

* 1. Frecuencia base (Hz) durante el control de salida constante
* 2. Velocidad nominal (rpm) a la frecuencia base durante el control de
salida constante
Configure n106 (Deslizamiento nominal del motor), n036
(Corriente nominal del motor), n107 (Resistencia línea a neutro
del motor) y n110 (Corriente en vacío del motor) según el informe
de prueba del motor.
Para conectar una reactancia entre el variador y el motor,
configure n108 como la suma del valor inicial de n108
(Inductancia de fuga del motor) y la inductancia de la reactancia
montada externamente. A menos que se conecte una reactancia,
n108 (Inductancia de fuga del motor) no tiene que configurarse
según el motor.
Curva V/f durante el control vectorial
Durante el control vectorial, configure la curva V/f del siguiente
modo:
Los siguientes ejemplos corresponden a motores Clase 200 V.
Si se utilizan motores Clase 400 V, duplique los valores de
configuración de tensión (n012, n015 y n017).
V/f estándar
(V)
[Especificación del motor: 60 Hz]
(V)
[Especificación del motor: 50 Hz]
58
,
V/f de alto par de arranque
(V)
[Especificación del motor: 60 Hz]
(Hz)
(Hz)
,,
(V)
[Especificación del motor: 50 Hz]
,
,
(Hz)
(Hz)
Page 60

6 Funciones de programación
Si se trabaja con una frecuencia mayor de 60/50 Hz, cambie sólo
la Frecuencia máx. de salida (n011).
Par constante
n012
= 200 V
Salida constante o
salida variable
Punto básico
n013
= 60 ó 50 Hz
n011
= 90 Hz
Conmutación entre modos LOCAL/REMOTO
Las siguientes funciones pueden seleccionarse conmutando el
modo LOCAL o REMOTO. Para seleccionar el comando RUN/
STOP o la referencia de frecuencia, cambie el modo con
antelación, en función de las siguientes aplicaciones.
• Modo LOCAL: Habilita el operador digital para los
• Modo REMOTO: Habilita la selección de comando RUN (n003)
comandos RUN/STOP y para los comandos
RUN FWD/REV. La referencia de frecuencia
puede configurarse utilizando la tecla
o .
La referencia de frecuencia puede
configurarse con la Selección de referencia
de frecuencia (n004).
59
Page 61

Cómo seleccionar el modo LOCAL/REMOTO
Cuando no se configura la
función de conmutación
LOCAL/REMOTO para la
selección de entrada
multifunción
(Cuando no se configura 17 para
ninguna de las constantes de
n050 a n056)
Cuando se configura la
función de conmutación
LOCAL/REMOTO para la
selección de entrada
multifuncional
(Cuando se configura 17 para
cualquiera de las constantes de
n050 a n056)
Seleccione Lo
para la selección
LO/RE
del operador.
Modo LOCAL
Seleccione rE
para la selección
LO/RE
del operador.
Ponga en ON el
terminal de
entrada
multifuncional.
Modo REMOTO
Ponga en OFF el
terminal de
entrada
multifuncional.
Selección de los comandos RUN/STOP
Consulte en Conmutación entre modos LOCAL/REMOTO
(página 59) cómo seleccionar el modo LOCAL o el modo
REMOTO.
El método de funcionamiento (comandos RUN/STOP, comandos
RUN FWD/REV) puede seleccionarse mediante el siguiente
procedimiento.
Modo LOCAL
Si se selecciona Lo (modo LOCAL) para el modo ON
del operador digital, o cuando se configura la función de
conmutación LOCAL/REMOTO y los terminales se ponen en ON,
la operación de RUN se activa con o del operador
digital, y FWD/REV se activa mediante el modo ON
(utilizando la tecla o ).
60
STOP
RUN
LO / RE
F / R
Page 62

6 Funciones de programación
Modo REMOTO
1. Seleccione el modo REMOTO.
Para seleccionar el modo REMOTO puede emplearse
cualquiera de los dos métodos siguientes.
• Seleccione rE (modo REMOTO) para la
LO / RE
selección.
• Cuando se selecciona la función de conmutación LOCAL/
REMOTO para la selección de entrada multifunción, ponga
en OFF el terminal de entrada para seleccionar el modo
REMOTO.
2. Seleccione el método de funcionamiento configurando la
constante n003.
n003= 0: Activa el operador digital (igual que en el modo
LOCAL).
=1: Activa el terminal de entrada multifuncional (véase la
figura a continuación).
=2: Activa la comunicaciones (consulte la página 142).
=3: Activa la tarjeta de comunicaciones (opcional).
• Ejemplo de uso del terminal de entrada multifunction como
referencia de funcionamiento (secuencia de dos hilos)
RUN/STOP FWD
RUN/STOP REV
n003: 1 (configuración de fábrica: 0)
n050: 1 (configuración de fábrica)
n051: 2 (configuración de fábrica)
• Consulte el ejemplo de la secuencia de tres hilos en la
página 113.
• Consulte información sobre el método de selección de
polaridad de frecuencia en la página 228.
Nota: Si el variador va a funcionar sin el operador digital, configure
siempre la constante n010 como 0.
n010 = 0: Detecta contacto de fallo del operador digital
(configuración de fábrica)
= 1: No detecta contacto de fallo del operador digital
Funcionamiento mediante comunicaciones (comandos
RUN/STOP)
La configuración de la constante n003 a 2 en modo REMOTO
habilita el uso de los comandos RUN/STOP a través de las
comunicaciones MEMOBUS. Consulte los comandos que utilizan
comunicaciones en la página 142.
61
Page 63

Selección de la referencia de frecuencia
Seleccione el modo REMOTO o LOCAL por adelantado.
Consulte el método de selección de modo en la página 60.
Modo LOCAL
Seleccione el método de comando con la constante n008.
n008 = 0: Activa el uso del potenciómetro en el operador digital.
= 1: Activa la configuración digital en el operador digital
(configuración de fábrica).
La configuración de fábrica para los modelos con el
operador digital sin potenciómetro (JVOP-147) es
n008=1.
• Configuración digital utilizando el operador digital
Especifique la frecuencia mientras esté iluminado (pulse
una vez configurado el valor numérico).
ENTER
La configuración de referencia de frecuencia surtirá efecto
cuando se establezca 1 (configuración de fábrica: 0) para la
constante n009 en lugar de pulsar .
n009 = 0: Activa la configuración de referencia de frecuencia
utilizando la tecla .
= 1: Desactiva la configuración de referencia de frecuencia
utilizando la tecla .
ENTER
ENTER
FREF
ENTER
62
Page 64

6 Funciones de programación
Modo REMOTO
Seleccione el método de comando con la constante n004.
n004 =0: Activa la configuración de referencia de frecuencia
utilizando el potenciómetro en el operador digital.
=1: Activa el uso de la referencia de frecuencia 1 (n024)
(configuración de fábrica)
La configuración de fábrica para los modelos con el
operador digital sin
potenciómetro (JVOP-147) es n004=1.
=2: Activa una referencia de tensión (0 a 10 V) (consulte la
figura en la página 63).
=3: Activa una referencia de corriente (4 a 20 mA)
(consulte la página 127).
=4: Activa una referencia de corriente (0 a 20 mA)
(consulte la página 127).
=5: Activa una referencia de tren de pulsos (consulte la
página 129).
=6: Activa la comunicaciones (consulte la página 142).
=7: Activa una referencia de tensión en el terminal CN2 del
circuito del operador digital (0 a 10 V)
=8: Activa una referencia de corriente en el terminal CN2
del circuito del operador digital (4 a 20 mA)
=9: Activa la tarjeta de comunicaciones (opcional).
Ejemplo de referencia de frecuencia mediante señal de tensión
n004 = 2
IM
(configuración de fábrica: 1)
Referencia de
frecuencia
maestra
(0 a +10 V)
2 kΩ
(Alimentación de configuración de frecuencia
FS
+12 V, 20 mA)
FR (Referencia de frecuencia maestra)
FC (0 V)
63
Page 65

Configuración de condiciones de funcionamiento
Selección de Autotuning (n139)
Los datos del motor necesarios para el control vectorial pueden
medirse y configurarse introduciendo los datos de la placa del
motor para utilizarlos en el Autotuning del motor. El autotuning
sólo es posible para el motor 1.
Nº
constante
n139 Selección de autoajuste - 0 a 2 0
Configuración de n139
Nota: No será posible la configuración si se ha seleccionado el motor
Utilice el siguiente procedimiento para ejecutar el autoajuste con
el objeto de configurar automáticamente las constantes del motor
cuando se emplee el método de control V/f, cuando la longitud
del cable es larga, etc.
Configuración del modo de autotuning
Se puede configurar cualquiera de los dos modos siguientes de
autotuning:
• Autotuning dinámico
• Autotuning estático sólo para la resistencia línea a neutro del
Confirme siempre las precauciones antes de especificar un
autotuning.
64
No es posible el funcionamiento en modo de autotuning
NOTA
cuando se ha seleccionado el motor 2 con el comando
conmutación de motor asignado a una entrada
multifunción (es decir, no es posible la configuración
Selección de Autotuning (n139)).
Nombre Unit (Unidad) Rango de
ajuste
Configuración
Configuración Función
0 Desactivada
1 Autotuning dinámico (motor 1)
2 Autotuning estático sólo para la resistencia
línea a neutro del motor (motor 1)
2 utilizando un comando Cambio de motor asignado a una entrada multifuncional. (En el operador digital aparecerá el mensaje "Err", y la configuración recuperará el valor que tenía antes
del cambio.)
motor
de fábrica
Page 66

6 Funciones de programación
• Autotuning dinámico (n139 = 1)
El autotuning dinámico se utiliza solamente para el control
vectorial de lazo abierto. Configure n139 como 1, introduzca los
datos de la placa del motor, y pulse la tecla RUN del operador
digital. El variador detendrá el motor durante aproximadamente
1 minuto y, a continuación, configurará automáticamente las
constantes de motor requeridas haciendo funcionar el motor
durante aproximadamente 1 minuto.
1. Al configurar el autoajuste dinámico, asegúrese de
NOTA
separar el motor de la maquinaria, confirmando
antes que es seguro que el motor rote.
2. En el caso de una máquina en la que no sea posible
que el motor rote, configure los valores a partir del
informe de prueba del motor.
3. Si la rotación automática no supone un problema,
ejecute un autotuning dinámico para verificar el
rendimiento.
• Autotuning estático sólo para la resistencia línea a neutro del
motor (n139 = 2)
El autotuning puede ser utilizado para evitar errores de control
cuando el cable del motor es largo, la longitud del cable ha
cambiado desde la instalación o el motor y el variador tienen
diferentes capacidades.
Configure n139 como 2 para el control vectorial de lazo abierto y,
a continuación, pulse la tecla RUN del operador digital. El variador suministrará potencia al motor estático durante aproximadamente 20 segundos y se medirá automáticamente la resistencia
línea a neutro del motor (n107) y la resistencia del cable.
1. El motor será alimentado cuando se ejecute el
NOTA
autotuning estático sólo para la resistencia línea a
neutro del motor, incluso aunque el motor no gire.
No toque el motor hasta que el autotuning haya
finalizado.
2. Al ejecutar el autotuning estático sólo para la
resistencia línea a neutro de un motor conectado a
una cinta transportadora u otra maquinaria,
asegúrese de que el freno de retención no se active
durante el autotuning.
65
Page 67

Precauciones antes de utilizar el autotuning
Lea las siguientes precauciones antes de utilizar el autotuning.
• El autotuning del variador es totalmente diferente del
autotuning del servosistema. El autotuning de un variador
ajusta automáticamente los parámetros en función de las
constantes de motor detectadas, en tanto que el autotuning de
un sservosistema ajusta los parámetros en función del
volumen de carga detectado.
• Cuando se requiere precisión a altas velocidades (por ejemplo,
al 90% de la velocidad nominal), utilice un motor con una
tensión nominal que sea 20 V menor que la tensión de entrada
de alimentación del variador (Clase 200 V), y 40 V menor
(Clase 400 V). Si la tensión nominal del motor es la misma que
la tensión de entrada de alimentación, la salida de tensión
desde el variador será inestable a altas velocidades y no será
posible alcanzar un rendimiento suficiente.
• Utilice el autotuning estático sólo para la resistencia línea a
neutro del motor cuando realice el autotuning de un motor
conectado a una carga. (Para garantizar el rendimiento, ajuste
el valor en función del informe de prueba del motor.)
• Es posible realizar el autotuning dinámico solamente si el
motor no está conectado a una carga.
• Si se realiza el autotuning dinámico de un motor conectado a
una carga, las constantes del motor no podrán ser detectadas
con precisión y el motor podría funcionar de manera anómala.
Nunca realice un autotuning dinámico de un motor conectado
a una carga.
• Los estados de las entradas y salidas multifuncionales durante
el autotuning serán los indicados en la siguiente tabla. Al
realizar un autotuning con el motor conectado a una carga,
asegúrese de que durante el proceso no se aplique el freno de
retención, en especial en cintas transportadoras o equipos
similares.
Modo de ajuste Entradas multifuncionales Salidas multifuncionales
Autotuning dinámico No funciona. Igual que durante el
Autotuning estático sólo
para la resistencia línea
a neutro del motor
No funciona. Mantiene el mismo
funcionamiento normal
estado que cuando se
inicia el autotuning.
• Para cancelar el autotuning, pulse la tecla del operador
STOP
digital.
66
Page 68

6 Funciones de programación
Precauciones de uso del autotuning (cuando la tensión del motor >
tensión de alimentación)
Efectúe el siguiente procedimiento para realizar el autotuning si se utiliza un
motor cuya tensión nominal es superior a la alimentación de entrada del variador.
1. Especifique como tensión máxima (n012) la tensión nominal indicada en la
placa del motor.
2. Configure la frecuencia máxima de salida de tensión (n013) con el mismo
valor que la frecuencia base indicada en la placa del motor.
3. Realice el autotuning.
4. Registre la corriente en vacío del motor (n110).
5. Calcule la corriente nominal secundaria del motor utilizando la siguiente
ecuación:
Corriente nominal secundaria (Corriente nominal)² – (Corriente en vacío)²=
6. Especifique como tensión máxima (n012) la tensión de alimentación.
7. Especifique el siguiente valor calculado para la frecuencia de salida de
tensión
máxima (n013):
Frecuencia máxima de salida de tensión =
Frecuencia básica en la placa del motor × Tensión de alimentación
8. Vuelva a realizar el autoajuste.
9. Vuelva a registrar la corriente en vacío del motor (n110).
10.Calcule la corriente nominal secundaria del motor utilizando la siguiente
ecuación:
Corriente nominal secundaria =
Corriente nominal secundaria calculada en el paso 5 × Tensión nominal en la placa del motor
11.Especifique el valor calculado como deslizamiento nominal del motor (n106)
Deslizamiento nominal del motor =
Frec. básica en la placa del motor – Velocidad nominal en la placa del motor ×
Corriente en vacío del paso 9 ×
NOTA
Tensión nominal en la placa del motor
Tensión de alimentación
Corriente en vacío del paso 4
Corriente nominal secundaria del paso 5
1. Cuando se requiera precisión a altas velocidades (por ejemplo,
el 90% de la velocidad nominal o mayor), configure n012 (tensión
máxima) como la tensión de entrada de alimentación × 0,9.
2. A altas velocidades (por ejemplo, el 90% de la velocidad nominal o
más), la corriente de salida se incrementará en tanto que la
alimentación de entrada se reducirá. Asegúrese de especificar un
margen suficiente en la corriente del variador.
Nº de polos
120
67
Page 69

Procedimiento
1. Confirme lo siguiente:
• Que el motor esté separado de la máquina.
• Que se ha retirado la llave de bloqueo del eje del motor.
• Que si existe un freno, no esté aplicado.
• Que el cableado sea correcto.
2. Que la alimentación del variador esté conectada (ON).
3. Que no exista ningún error.
4. Seleccione el modo de programa pulsando la tecla
correspondiente hasta que se ilumine.
5. Configure las siguientes constantes del motor seleccionado
especificando los valores que aparecen en la placa.
Nº
constante
n012 Tensión máxima 0,1 a
n013 Frecuencia de salida
n036 Corriente nominal del
n106 Deslizamiento
Nombre Rango de
de tensión máxima
motor
nominal del motor
ajuste
255,0
0,2 a
400,0
0,0 a
999,9
0,0 a
20,0 Hz
Observaciones
Configure la tensión nominal indicada
en la placa.
Configure la frecuencia básica
indicada en la placa.
Configure la corriente nominal
indicada en la placa.
Configure el valor resultante de la
siguiente ecuación utilizando los datos
de la placa:
Frecuencia base − Velocidad nominal
× Número de polos / 120
Al realizar una configuración de precisión (por ejemplo, al
efectuar un autotuning utilizando los datos de diseño o del
informe de prueba del motor), los datos de entrada a
configurar para el autotuning serán diferentes. Consulte la
tabla siguiente.
Nombre Configuración sencilla Configuración de precisión
Tensión máxima Tensión nominal del motor Tensión en condiciones de vacío a
Frecuencia de
salida de tensión
máxima
Deslizamiento
nominal del motor
Frecuencia base del motor Frecuencia en condiciones de vacío
Frecuencia base −
Velocidad nominal ×
Número de polos / 120
la velocidad nominal del motor
a la velocidad nominal
Deslizamiento al par nominal
68
Page 70

6 Funciones de programación
6. Configure la selección de autotuning (n139).
7. Pulse la tecla para seleccionar el modo de autotuning.
DSPL
• En el operador digital podrá visualizarse "TUn". indica
que se ha seleccionado el método de autotuning para
n139.
• Todos los indicadores de función se apagarán (OFF).
• Los indicadores de estado volverán al estado de preparado
para el funcionamiento.
• En modo de autotuning sólo se aceptarán las señales
procedentes de las teclas , y .
• El autotuning se iniciará al pulsar la tecla .
• El autotuning se cancelará al pulsar la tecla
• Al pulsar la tecla , el estado volverá al modo de
Programación, en el que será posible modificar las
constantes.
8. Pulse la tecla para realizar el autotuning. El motor será
DSPL
RUN
RUN
DSPL
STOP
RUN
STOP
alimentado con el método de autotuning seleccionado.
• Durante el autotuning, el mensaje "TUn" parpadeará.
• Todos los indicadores de función se apagarán (OFF).
• Los indicadores de estado pasarán al modo de
funcionamiento normal.
9. Ajuste finalizado
• Una vez que el autotuning haya finalizado correctamente,
aparecerá el mensaje "End" y las constantes serán
modificadas en función de los resultados del ajuste.
• Al finalizar el autotuning dinámico, se calcularán la Tensión
de frecuencia de salida media y la Tensión de frecuencia de
salida mínima, y se configurarán en función de la Tensión
máxima seleccionada, tal y como se indica en la siguiente
tabla.
Nº
constante
n015 Tensión de
Nombre Rango de
frecuencia de
salida media
ajuste
0,1 a
255,0
Observaciones
(Tensión de frecuencia de salida media
configurada en fábrica) × (Valor configurado
de tensión máxima) / (Tensión máxima
configurada en fábrica)
69
Page 71

Nº
constante
n017 Tensión de
Nombre Rango de
frecuencia de
salida mínima
10. Pulse la tecla para seleccionar el modo Drive.
ajuste
0,1 a 50,0 (Tensión de frecuencia de salida mínima
configurada en fábrica) × (Valor configurado
de tensión máxima) / (Tensión máxima
configurada en fábrica)
DSPL
Observaciones
De este modo concluye el autotuning.
Procesamiento de errores durante el autotuning
• Los errores y alarmas que se producen durante el
funcionamiento normal también se detectan durante el
autotuning.
• Si se produce un error o una alarma, el motor efectuará un
procedimiento de marcha libre hasta detenerse (baseblock) y
el autotuning se cancelará.
• Si durante el autotuning se produce un error de medición o se
pulsa la tecla , aparecerá un error EXX, el motor
efectuará un procedimiento de marcha libre hasta detenerse,
y el autotuning se cancelará. No obstante, este mensaje de
STOP
error no se mantendrá en el registro de errores. Consulte
información sobre errores en la página 213.
• Si el autotuning se cancela, las constantes modificadas por el
autotuning volverán automáticamente a los valores anteriores
al inicio del procedimiento.
• Si se produce un error durante la deceleración a la parada, al
final del autotuning, en el operador digital aparecerá un error,
pero el proceso de autotuning no se cancelará. Los resultados
del autotuning serán válidos.
70
Page 72

6 Funciones de programación
Precauciones después de utilizar el autotuning
Para una región de salida fija, deberá configurarse la curva V/f
para el punto máximo de la región de salida una vez finalizado el
autotuning. Para incrementar la velocidad del motor de 1 a 1,2
veces, o bien para utilizar un motor de salida fija, después del
autotuning efectúe los siguientes cambios. No modifique las
constantes n012 (Tensión máxima) ni n013 (Frecuencia de salida
de tensión máx.).
• Incremento de la velocidad nominal del motor de 1 a 1,2 veces
Para incrementar la velocidad nominal del motor de 1 a 1,2
veces, utilice la siguiente fórmula para cambiar la configuración
de Frecuencia máx. de salida (n011):
Frecuencia máx. de salida = (velocidad nominal del motor) x
(nº de polos del motor)/120 (Hz) x 1 a 1,2)
Si la velocidad del motor se incrementa por encima de la
velocidad nominal, a altas velocidades se utilizarán las
características de la salida fija y el par motor se reducirá.
• Aplicaciones a motores de salida constante, como motores de
máquinas herramientas
Utilice la siguiente fórmula para cambiar la configuración de n011
(Frecuencia máx. de salida) si utiliza un motor de salida fija,
como por ejemplo el de una máquina herramienta:
n011 = Frecuencia (Hz) a velocidad máxima en vacío (índice de
carga = 0)
No cambie las constantes del motor después de realizar el
autotuning.
71
Page 73

Display del operador digital durante el autotuning
Los indicadores de función del operador digital cambian durante
el autotuning, tal y como se indica en el siguiente diagrama.
Indicadores
de función
Configure las constantes para el autotuning.
PRGM
• Tensión máxima
• Frecuencia de tensión máxima
Iluminado
• Corriente nominal del motor
• Deslizamiento nominal del motor
Configure la selección de autotuning.
• Dinámico / Estático sólo para
resistencia
Display del ope-
Modo de autotuning (esperando
rador digital
comando RUN)
• Configure las constantes para
TUn
el ajuste.
Iluminado
Display del operador digital
Ajuste de resistencia
• Tensión de c.c. (20%, 40%,
TUn
Parpadeando
Display del operador digital
60%) aplicada.
Estático sólo
para resistencia
• Las constantes configuradas para el
ajuste vuelven a sus valores originales.
• Apunte las constantes ajustadas.
Autotuning finalizado.
End
Iluminado
DSPL
Indicadores
de función
Monitorización/configuración de
referencia de frecuencia
FREF
Iluminado
DSPLDSPL
RUN
Dinámico
Ajuste de corriente en vacío
• Aceleración
• Ajuste
• Deceleración
STOP
STOP
Display del
operador digital
E03
Iluminado
Display del
operador digital
E12
Iluminado
Display del
operador digital
E04
Iluminado
Display del
operador digital
E09
Iluminado
Display del
operador digital
E05
Iluminado
Display del
operador digital
XXX
Iluminado
Cancelado debido a
que se ha pulsado la
STOP
tecla STOP
Cancelado debido a error de
detección de corriente.
Cancelado debido a error de
resistencia.
Cancelado debido a error de
aceleración.
Cancelado debido a error de
corriente en vacío.
Cancelado debido a un error
detectado normalmente.
RESET
72
Page 74

6 Funciones de programación
Prohibición de marcha inversa (n006)
La configuración de Prohibición de marcha inversa desactiva la
aceptación de un comando RUN REV desde el terminal del
circuito de control o desde el operador digital. Esta configuración
se utiliza en aplicaciones en las que el comando RUN REV
puede provocar problemas.
Configuración Descripción
0 Marcha inversa activada.
1 Marcha inversa desactivada.
Selección de multivelocidad
Es posible configurar hasta 17 velocidades (incluyendo la
referencia de frecuencia de jog) utilizando las siguientes
combinaciones de referencias de frecuencia y selecciones de
terminales de entrada.
cambio de 8 velocidades
n003 = 1 (Selección de modo de funcionamiento)
n004 = 1 (Selección de frecuencia de referencia)
n024 = 25,0 Hz (Referencia de frecuencia 1)
n025 = 30,0 Hz (Referencia de frecuencia 2)
n026 = 35,0 Hz (Referencia de frecuencia 3)
n027 = 40,0 Hz (Referencia de frecuencia 4)
n028 = 45,0 Hz (Referencia de frecuencia 5)
n029 = 50,0 Hz (Referencia de frecuencia 6)
n030 = 55,0 Hz (Referencia de frecuencia 7)
n031 = 60,0 Hz (Referencia de frecuencia 8)
* Consulte información sobre el
método de selección de
entradas de secuencia de
Cuando todas las entradas de referencia
NOTA
multifuncionales están en OFF, la
referencia de frecuencia seleccionada
mediante la constante n004 (Selección
de referencia de frecuencia) será efectiva.
n054 = 6 (Terminal de entrada multifuncional S5)
n055 = 7 (Terminal de entrada multifuncional S6)
n056 = 8 (Terminal de entrada multifuncional S7)
n053 = 1
FWD
RUN/STOP
RUN/STOP REV
Referencia de
multivelocidad 1
Referencia de
multivelocidad 2
Referencia de
multivelocidad 3
Fallo externo
Reset de fallo
S1
S2
S5
S6
S7
S3
S4
SC
73
Page 75

(n031) 60,0 Hz
(n030) 55,0 Hz
(n029) 50,0 Hz
(n028) 45,0 Hz
(n027) 40,0 Hz
(n026) 35,0 Hz
Referencia
de frecuencia
RUN/STOP FWD (REV)
Referencia de multivelocidad 1 (terminal S5)
Referencia de multivelocidad 2 (terminal S6)
Referencia de multivelocidad 3 (terminal S7)
(n025) 30,0 Hz
(n024) 25,0 Hz
n050 = 1 (Terminal de entrada S1) (configuración de fábrica)
n051 = 2 (Terminal de entrada S2) (configuración de fábrica)
n052 = 3 (Terminal de entrada S3) (configuración de fábrica)
n053 = 5 (Terminal de entrada S4) (configuración de fábrica)
n054 = 6 (Terminal de entrada S5) (configuración de fábrica)
n055 = 7 (Terminal de entrada S6) (configuración de fábrica)
n056 = 8 (Terminal de entrada S7) (Cambie la configuración a 8.)
Funcionamiento en 16 velocidades
Configure las referencias de frecuencia 9 a 16 para n120 a n127.
Configure el terminal de entrada para la referencia de
multivelocidad utilizando la selección de entrada multifuncional.
Funcionamiento a baja velocidad
Introduciendo un comando JOG y luego un comando RUN FWD
(REV), se activa el funcionamiento a la frecuencia de jog
configurada en n032. Cuando se introducen las referencias de
multivelocidad 1, 2, 3 ó 4 simultáneamente con el comando JOG,
éste tendrá prioridad.
Nº constante Nombre Configuración
n032 Frecuencia
de jog
n050 a n056 Referencias
de jog
Configuración de fábrica:
6,00 Hz
Configure 10 en cualquier
constante.
74
Tiempo
Page 76

6 Funciones de programación
Ajuste de la señal de configuración de velocidad
Es posible configurar la relación entre las entradas analógicas y la
referencia de frecuencia para que ésta se transmita en forma de
entradas analógicas al terminal del circuito de control FR o FC.
Referencia de frecuencia
Frecuencia máx. de salida x GANANCIA
Frecuencia máx. de salida x DESVIACIÓN
100
100
( ) indica el valor cuando se selecciona una
entrada de referencia de corriente
0 V
(4 mA)
(0 mA)
10 V
(20 mA)
(20 mA)
1. Ganancia de referencia de frecuencia analógica (n060)
La referencia de frecuencia especificada cuando la entrada
analógica es de 10 V (ó 20 mA) puede configurarse en
unidades de 1%. (Frecuencia máx. de salida n011 = 100%)
* Configuración de fábrica: 100%
2. Bias de referencia de frecuencia analógica (n061)
La referencia de frecuencia proporcionada cuando la entrada
analógica es 0 V
(4 mA o 0 mA) se puede configurar en unidades de 1%.
(Frecuencia máx. de salida n011 = 100%)
* Configuración de fábrica: 0%
Configuración típica
• Para que el variador funcione con una referencia de
frecuencia de 0% a 100% con una tensión de entrada de
0 a 5 V
Frecuencia máx. (100%)
Ganancia n060 = 200
Desviación n061 = 0
75
Page 77

• Para que el variador funcione con una referencia de
frecuencia de 50% a 100% con una tensión de entrada de
0 a 10 V
Frecuencia máx. (100%)
Ganancia n060 = 100
Desviación n061 = 50
0 V 10 V
Ajuste de los límites superior e inferior de la frecuencia
• Límite superior de la referencia de
frecuencia (n033)
Permite configurar el límite superior de la
referencia de frecuencia en unidades de
1%.
(n011: Frecuencia máx. de salida = 100%)
Referencia
de frecuencia
interna
Límite inferior de
frecuencia
(n034)
Referencia de frecuencia configurada
Límite superior
de frecuencia
(n033)
Configuración de fábrica: 100%
• Límite inferior de la referencia de frecuencia (n034)
Permite configurar el límite inferior de la referencia de
frecuencia en unidades de 1%.
(n011: Frecuencia máx. de salida = 100%)
Al trabajar con una referencia de frecuencia de 0, la operación
continuará en el límite inferior de la referencia de frecuencia.
No obstante, si el límite inferior de referencia de frecuencia se
configura con un valor menor que la Frecuencia mínima de
salida (n016), la operación no se ejecutará.
Configuración de fábrica: 0%
Uso de cuatro tiempos de aceleración/deceleración
Tiempo
Frecuencia
de salida
Comando RUN
FWD (REV)
Referencia de
multivelocidad
Selección de tiempo
de acel/decel 1
Selección de tiempo
de acel/decel 2
Tiempo de
aceleración 2
(n021)
Tiempo
de aceleración 1
(n019)
de deceleración 2
(n022)
ON (activado)
Tiempo
de deceleración 1
(n020)
Tiempo de
aceleración 3
(n041)
ON (activado)
ON (activado)
Tiempo de
aceleración 4
(n043)
ON (activado)
ON (activado)
Tiempo
de deceleración 4*
(n044)
76
Tiempo
de deceleración 3*
(n042)
Tiempo
Page 78

6 Funciones de programación
* Cuando se ha seleccionado una deceleración hasta detenerse
(n005 = 0).
Configurando una selección de entrada multifuncional (cualquier
constante entre n050 a n056) como 11 (selección de tiempo de
aceleración/deceleración 1) ó 27 (selección de tiempo de aceleración/deceleración 2), el tiempo de aceleración/deceleración se
selecciona mediante combinaciones ON/OFF de la selección de
tiempo de aceleración/deceleración 1 y la selección de tiempo de
aceleración/deceleración 2 (terminales S1 a S7).
A continuación se indican las combinaciones de configuración de
selección de tiempo de aceleración/deceleración.
Selección de
tiempo de
aceleración/
deceleración 1
OFF
(desactivado)
ON (activado) OFF
OFF
(desactivado)
ON (activado) ON (activado) Tiempo de acele-
Selección de
tiempo de
aceleración/
deceleración 2
OFF
(desactivado)
(desactivado)
ON (activado) Tiempo de acele-
Tiempo de
aceleración
Tiempo de acele-
ración 1 (n019)
Tiempo de acele-
ración 2 (n021)
ración 3 (n041)
ración 4 (n043)
Tiempo de
deceleración
Tiempo de deceleración 1 (n020)
Tiempo de deceleración 2 (n022)
Tiempo de deceleración 3 (n042)
Tiempo de deceleración 4 (n044)
Nº Nombre Unidad Rango de
n019 Tiempo de aceleración 1 Según la
n020 Tiempo de deceleración 1 10,0 s
n021 Tiempo de aceleración 2 10,0 s
n022 Tiempo de deceleración 2 10,0 s
n041 Tiempo de aceleración 3 10,0 s
n042 Tiempo de deceleración 3 10,0 s
n043 Tiempo de aceleración 4 10,0 s
n044 Tiempo de deceleración 4 10,0 s
configuración
de n018.
(Véase la
siguiente
tabla.)
ajuste
Según la
configura-
ción de n018.
(Véase la
siguiente
tabla.)
Configu-
ración de
fábrica
10,0 s
77
Page 79

Configuración del n018
Nº Unidad Rango de ajuste
n018
Nota: La constante n018 puede configurarse durante una detención.
• Tiempo de aceleración
Configure el tiempo necesario para que la frecuencia de salida alcance
100% desde 0%.
• Tiempo de deceleración
Configure el tiempo necesario para que la frecuencia de salida alcance
0% desde 100%. (Frecuencia máx. de salida n011 = 100%)
Método de recuperación de pérdida momentánea de alimentación
(n081)
0 0,1 s 0,0 a 999,9 s (999,9 s o menos)
1 s 1000 a 6000 s (1000 s o más)
1 0,01 s 0,00 a 99,99 s (99,99 s o menos)
0,1 s 100,0 a 600,0 s (100 s o más)
Si se configura un valor superior a 600,0 s como tiempo de
aceleración/deceleración cuando n018 = 0 (en unidades de
0,1 s), no podrá configurarse n018 como 1.
ADVERTENCIA
Si la constante n081 se configura como 1 ó 2, el funcionamiento se
reiniciará automáticamente incluso si se produce una pérdida
momentánea de alimentación.
Configuración
0
*1
1
*1, *2
2
Si se selecciona el funcionamiento continuo después
de recuperar la alimentación, manténgase alejado
del variador o de la carga. El variador puede volver a
ponerse en marcha repentinamente después de
detenerse.
(Diseñe el sistema de tal modo que la seguridad
quede garantizada, incluso en el caso de que el
variador tenga que volver a arrancar.) De lo contrario
podrían producirse lesiones.
*3
La continuidad del funcionamiento después de una
pérdida momentánea de alimentación no está activada.
Continuidad del funcionamiento después de recuperar la
alimentación dentro del tiempo de recuperación de
pérdida momentánea de alimentación de 0,5 s
Continuidad del funcionamiento después de la recuperación de la alimentación (No se genera un error.)
Descripción
78
Page 80

6 Funciones de programación
* 1. Mantiene la señal de operación para continuar el funcionamiento
después de una recuperación de una pérdida momentánea de la
alimentación.
* 2. Si se selecciona 2, el variador volverá a ponerse en marcha si la tensión
de alimentación se recupera mientras se mantiene la alimentación de
control. No se genera una señal de error.
Selección de la curva S (n023)
Para evitar sacudidas al arrancar y detener la máquina, la ace-leración/
deceleración puede realizarse utilizando una curva S.
Configuración Selección de la curva S
0 No se ha especificado la característica de la curva S.
10,2 s
20,5 s
31,0 s
Nota: 1. Las características de la curva S no son compatibles con el control
de posicionamiento sencillo, por lo que debe utilizarse un valor de
configuración de 0.
2. El tiempo característico de la curva S es el tiempo transcurrido
desde una velocidad de aceleración/deceleración de 0 hasta
alcanzar la velocidad de aceleración/deceleración determinada
mediante la configuración del tiempo de aceleración/deceleración.
Referencia
de frecuencia
Frecuencia
de salida
Tiempo característico de la curva S (Ts)
La siguiente tabla muestra la conmutación entre RUN FWD/REV al
realizar una deceleración a la parada.
Comando Marcha directa
(RUN FWD)
Comando RUN REV
Frecuencia de salida
Características de la curva S en
Aceleración
Frecuencia de salida
mínima n016
Deceleración
Aceleración
Frecuencia
de salida
Frecuencia de
salida mínima
n016
Tiempo
Tiempo de freno de inyección
de c.c. a la parada
n090
Deceleración
79
Page 81

Detección de par
Si se aplica una carga excesiva a la máquina, será posible
detectar un incremento de la corriente de salida que genere una
señal de alarma y la envíe al terminal de salida multifuncional MA,
MB, P1 ó P2.
Para emitir una salida de señal de detección de sobrepar,
configure cualquiera de las selecciones de función de terminal de
salida n057 a n059 para la detección de sobrepar (configuración:
6 (contacto NA) ó 7 (contacto NC)).
Corriente del motor
Señal de salida multifuncional
(Señal de detección de sobrepar)
Terminal MA, MB, P1 ó P2
* La histéresis de detección de sobrepar se configura como
aproximadamente el 5% de la corriente nominal del variador.
Tiempo
Selección de función de detección de sobrepar 1 (n096)
Configuración Descripción
0 No se ha especificado la detección de sobrepar.
1 Detección durante funcionamiento a velocidad constan-
te. La operación continuará después de la detección.
2 Detección durante funcionamiento a velocidad
constante. La operación se interrumpirá durante la
detección.
3 Detección durante el funcionamiento. La operación
continuará después de la detección.
4 Detección durante el funcionamiento. La operación se
interrumpirá durante la detección.
1. Para detectar un sobrepar durante una aceleración/deceleración,
configure n096 como 3 ó 4.
2. Para continuar una operación tras la detección de un sobrepar,
configure n096 como 1 ó 3. Durante la detección, el operador
digital mostrará una alarma (parpadeante).
80
Page 82

6 Funciones de programación
3. Para detener el variador y generar un error al detectarse un
sobrepar, configure n096 como 2 ó 4. Al detectar un sobrepar,
el operador digital presentará un error (ON).
Nivel de detección de sobrepar (n098)
Configure el nivel de corriente de detección de sobrepar en
unidades de 1%. (Corriente nominal del variador = 100%)
Cuando se selecciona la detección por sobrepar, el par nominal
del motor pasa a ser 100%.
Configuración de fábrica: 160%
Tiempo de detección de sobrepar (n099)
Si el tiempo durante el cual la corriente del motor excede del
nivel de detección de sobrepar (n098) es mayor que el tiempo de
detección de sobrepar (n099), se activará la función de detección
de sobrepar.
Configuración de fábrica: 0,1 s
Selección de función de detección de sobrepar/subpar 2
(n097)
Si se ha seleccionado el modo de control vectorial, podrá
efectuarse una detección de sobrepar/subpar mediante la
detección de la corriente de salida o del par de salida.
Si se ha seleccionado el modo de control V/f, la configuración de
n097 no será válida, y el sobrepar/subpar será detectado por la
corriente de salida.
Configuración Descripción
0 Detección mediante el par de salida
1 Detección mediante la corriente de salida
81
Page 83

Nivel de detección de frecuencia (n095)
Efectiva si alguna de las selecciones de salida multifuncional
n057, n058 y n059 está configurada para la detección de
frecuencia (configuración: 4 ó 5). La detección de frecuencia se
activará (ON) cuando la frecuencia de salida sea mayor o menor
que el valor configurado como nivel de detección de frecuencia
(n095).
Detección de frecuencia 1
Frecuencia de salida ≥ Nivel de detección de frecuencia n095
(Configure n057, n058 ó n059 como 4.)
Histéresis
Nivel de detección de
frecuencia [Hz] (n095)
Frecuencia
de salida
Señal de
detección
de frecuencia
−2 Hz
Detección de frecuencia 2
Frecuencia de salida ≤ Nivel de detección de frecuencia n095
(Configure n057, n058 ó n059 como 5.)
Histéresis
Frecuencia
de salida
Señal de
detección
de frecuencia
+2 Hz
Nivel de
detección de
frecuencia (Hz)
(n095)
82
Page 84

6 Funciones de programación
Frecuencias de salto (n083 a n086)
Esta función permite la prohibición o “salto” de frecuencias críticas, de
modo que el motor pueda funcionar sin la resonancia generada por el
sistema de maquinaria. Esta función también se utiliza para el control
de banda muerta. La configuración de valores como 0,00 Hz
desactiva esta función.
Configure las frecuencias prohibidas 1, 2 y 3 efectuando el siguiente
procedimiento:
Frecuencia de salida
n083 ≥ n084 ≥ n085
Si esta condición no se cumple,
el variador mostrará durante
1 segundo, tras lo cual restablecerá los
El funcionamiento está prohibido dentro de los rangos de frecuencia
de salto. No obstante, el motor funcionará sin saltar durante la
aceleración/deceleración.
Referencia de frecuencia
datos a su configuración inicial.
Operación de arranque automático (n082)
ADVERTENCIA
El variador puede configurarse para rearrancar y ejecutar un reset de
fallo tras detectarse un fallo. El número de intentos de autodiagnóstico
y rearranque puede configurarse hasta 10 en n082. El variador
volverá a arrancar automáticamente tras producirse cualquiera de los
siguientes fallos:
OC (sobrecorriente)
OV (sobretensión)
El número de intentos de rearranque volverá a configurarse como 0
en los siguientes casos:
1. Si no se produce ningún otro fallo dentro de los 10 minutos
siguientes al reintento
2. Si la señal Reset de fallo está en ON después de detectarse el
fallo
Tras seleccionar la función de rearranque por fallo,
manténgase alejado del variador o de la carga.
El variador puede volver a ponerse en marcha
repentinamente después de detenerse.
(Diseñe el sistema de tal modo que la seguridad
quede garantizada, incluso en el caso de que el
variador tenga que volver a arrancar.) De lo contrario
podrían producirse lesiones.
3. Si se desconecta (OFF) la alimentación
83
Page 85

Selección de desplazamiento de frecuencia (n146)
Es posible sumar o restar una frecuencia de desplazamiento
(configurable con una constante) al o de la referencia de
frecuencia utilizando entradas multifuncionales.
Nº
constante
n083 Frecuencia de salto
n084 Frecuencia de salto
n085 Frecuencia de salto
Nombre Descripción Configu-
1 (Frecuencia de
desplazamiento 1)
2 (Frecuencia de
desplazamiento 2)
3 (Frecuencia de
desplazamiento 3)
El primer dígito de n146 es 0 ó 1:
Unidad de configuración: 0,01 Hz
Rango de configuración: 0,00 a 400,0 Hz
Primer dígito de n146 es 2:
Unidad de configuración: 0,01%
Rango de configuración: 0,00% a
100,0% (porcentaje de frecuencia
máxima de salida)
El primer dígito de n146 es 0 ó 1:
Unidad de configuración: 0,01 Hz
Rango de configuración: 0,00 a 400,0 Hz
Primer dígito de n146 es 2:
Unidad de configuración: 0.01%
Rango de configuración: 0,00% a
100,0% (porcentaje de frecuencia
máxima de salida)
El primer dígito de n146 es 0 ó 1:
Unidad de configuración: 0,01 Hz
Rango de configuración: 0,00 a 400,0 Hz
Primer dígito de n146 es 2:
Unidad de configuración: 0.01%
Rango de configuración: 0,00% a
100,0% (porcentaje de frecuencia
máxima de salida)
ración de
fábrica
0,00 Hz
0,00 Hz
0,00 Hz
84
Page 86

6 Funciones de programación
Nº
constante
n146 Desplazamiento de
Nombre Descripción Configu-
frecuencia
Selección
n146 se divide en 2 dígitos (n146 = xy).
El primer dígito, “x”, selecciona el uso de
los parámetros n083 a n085:
n146= 0y:
Desactivado (n083 a n085 son
frecuencias de salto)
n146= 1y:
Activado (n083 a n085 son
frecuencias de desplazamiento en Hz)
n146= 2y:
Activado (n083 a n085 son
frecuencias de desplazamiento en %)
El segundo dígito, “y”, selecciona el
signo de las frecuencias de
desplazamiento. Consulte las posibles
combinaciones en la siguiente tabla.
y n083n084n085
0+++
1 − ++
2+− +
3 −−+
4++−
5 − + −
6+−−
7 −−−
8 −−−
9 −−−
Nota: Si se cambia el segundo dígito de
n146 los valores de configuración
de n083 a n085 se inicializarán
a 0.
• Si el primer dígito “x” de la selección de desplazamiento de
frecuencia (n146) es 0 (desplazamientos de frecuencia
desactivados), los valores configurados de las constantes
n083 a n085 funcionarán como frecuencias de salto.
ración de
fábrica
0
85
Page 87

• Si el primer dígito “x” de la selección de desplazamiento de
frecuencia (n146) es 1 (desplazamientos de frecuencia
activados), los valores configurados de las constantes n083 a
n085 funcionarán como desplazamientos de frecuencia.
• Para activar las frecuencias de desplazamiento 1 a 3 de las
selecciones de entrada multifuncional (n050 a n056) deben
programarse como 30, 31 ó 33. Según el estado de entrada,
podrán utilizarse las siguientes combinaciones de frecuencias
de desplazamiento. Obsérvese que se utiliza el signo
especificado con “y”.
Estado de entrada de terminal Magnitud final de
Entrada de
frecuencia de
desplazamiento 3
OFF (desactivado) OFF (desactivado) OFF (desactivado) Ninguno
OFF (desactivado) OFF (desactivado) ON (activado) n083
OFF (desactivado) ON (activado) OFF (desactivado) n084
OFF (desactivado) ON (activado) ON (activado) n083 + n084
ON (activado) OFF (desactivado) OFF (desactivado) n085
ON (activado) OFF (desactivado) ON (activado) n083 + n085
ON (activado) ON (activado) OFF (desactivado) n084 + n085
ON (activado) ON (activado) ON (activado) n083 + n084 + n085
• La magnitud del desplazamiento puede observarse en el
display de U-12 del operador digital.
Nº
monitorización
U-12 Magnitud de
desplazamiento
Entrada de
frecuencia de
desplazamiento 2
Nombre Descripción
Entrada de
frecuencia de
desplazamiento 1
Primer dígito “x” de n146 = 0: se visualiza "----"
Primer dígito “x” de n146 = 1: Rango de
visualización:
−400 a 400,0 Hz
Primer dígito “x” de n146 = 2: Rango de
visualización:
−100% a 100,0%
desplazamiento
86
Page 88

6 Funciones de programación
El siguiente diagrama muestra la función de desplazamiento de
frecuencia.
Referencia
de frecuencia
seleccionada
n083
n084
n085
n146,
dígito
derecho
0
+
Entrada de desplaza-
miento de frecuencia 1
Entrada de desplaza-
miento de frecuencia 2
Entrada de desplaza-
miento de frecuencia 3
0
+
Límite superior
de la referencia
de frecuencia
n033 x n011
+
+
+
0
n146,
dígito
derecho
Volumen de
desplaza-
miento (U-12)
Frecuencias de salto
0
Límite inferior de
la referencia de
frecuencia
n034 x n011
n083
n084
n085
Funcionamiento de un motor en marcha libre sin
desconexión
Para el funcionamiento de un motor en marcha libre sin
desconexión, utilice el comando Búsqueda de velocidad o Freno
de inyección de c.c. al arranque.
Comando Búsqueda de velocidad
Rearranca un motor en marcha libre sin detenerlo. Esta función
permite una conmutación suave entre la operación del motor a la
alimentación comercial y la operación con el convertidor.
Configure una selección de entrada multifuncional (n050 a n056)
como 14 (comando de búsqueda desde frecuencia máxima de
salida) ó 15 (comando de búsqueda desde frecuencia
configurada).
Estructure una secuencia de tal modo que se envíe un comando
RUN FWD (REV) al mismo tiempo o después de un comando de
búsqueda. Si el comando RUN se envía antes del comando de
búsqueda, éste quedará desactivado.
400 Hz
Referencia
de frecuencia
(U-01)
87
Page 89

Cronograma al enviarse el comando de búsqueda
Comando RUN FWD (REV)
Comando Búsqueda
Frecuencia máx. de salida o
Referencia de frecuencia al
enviarse el comando RUN
Frecuencia de salida
Tiempo de baseblock
mín. (0,5 s)
0,5 s mín.
Detección de coincidencia
de velocidad
Operación de
búsqueda de
velocidad
El tiempo de deceleración de la operación de búsqueda de
velocidad puede configurarse en n101.
No obstante, si el valor configurado es 0, se utilizará un valor
inicial de 2,0 s.
La búsqueda de velocidad se iniciará cuando la corriente de
salida del variador sea igual o superior al nivel de operación de la
búsqueda de velocidad (n102).
Freno de inyección de c.c. al arranque (n089, n091)
Rearranca un motor en marcha libre después de detenerlo.
Configure el tiempo de freno de inyección de c.c. al arranque en
n091, en unidades de 0,1 s. Configure la corriente de freno de
inyección de c.c. en n089, en unidades de 1% (corriente nominal
del variador = 100%). Si el valor configurado en n091 es 0,
el freno de inyección de c.c. no se ejecutará, y la aceleración
comenzará a partir de la frecuencia mínima de salida.
Si n089 se configura como 0, la
aceleración se iniciará a partir de la
frecuencia mínima de salida después
de baseblock, durante el tiempo
Frecuencia de
salida mínima
n016
especificado en n091.
Tiempo de freno de inyección
de c.c. al arranque
Retención temporal de aceleración/deceleración
Para retener la aceleración o deceleración, especifique un
comando Retener aceleración/deceleración. La frecuencia de
salida se mantendrá al eaplicarse un comando Retener aceleración/deceleración durante una aceleración o deceleración.
Si se introduce un comando STOP mientras se está ejecutando
un comando Retener aceleración/deceleración, la retención
quedará cancelada y el motor continuará funcionando en marcha
libre hasta detenerse.
88
n091
Page 90

6 Funciones de programación
Configure una selección de entrada multifuncional (n050 a n056)
como 16 (retención de aceleración/deceleración).
Cronograma de la ejecución del comando Retener
aceleración/deceleración
Comando RUN
FWD (REV)
Comando
Retener aceleración/
deceleración
Referencia
de frecuencia
Frecuencia
de salida
Señal de
coincidencia
de frecuencia
Nota: Si se ejecuta un comando RUN FWD (REV) simultáneamente
con un comando Retener aceleración/deceleración, el motor no
funcionará. No obstante, si el límite inferior de referencia de
frecuencia (n034) se configura con un valor igual o superior que
la frecuencia mínima de salida (n016), el motor funcionará al
límite inferior de referencia de frecuencia (n034).
Monitorización analógica externa (n066)
Permite seleccionar la salida de una frecuencia o de una
corriente de salida a los terminales de salida analógica AM-AC
para monitorización.
Configuración Descripción
0 Frecuencia de salida
1 Corriente de salida
2 Tensión de c.c. del circuito principal
3 Monitorización de par
4 Potencia de salida
5 Referencia de tensión de salida
6 Monitorización de referencia de frecuencia
7 Magnitud de realimentación de PID
(10 V/frecuencia máxima de salida en n011)
89
Page 91

Configuración Descripción
8 Salida de datos a través de comunicaciones
(registro de MEMOBUS nº 0007H) (10 V/1000)
Nota: Se activa solamente si n065 está configurado como 0 (salida de
monitorización analógica).
En la configuración de fábrica, sale una tensión analógica de
aprox. 10 V cuando la frecuencia de salida (corriente de salida)
es del 100%.
Frecuencia de salida
Frecuencímetro
FMAM
c.a.
(Corriente de salida)
100 %
0
Salida analógica
La ganancia de monitorización analógica
puede configurarse con n067.
10 V
Calibración del frecuencímetro o amperímetro (n067)
Se utiliza para ajustar la ganancia de salida analógica.
Frecuencímetro/amperímetro
(3 V 1 mA a fondo de escala)
AM
n067
FM
c.a.
Frecuencia de salida
(Corriente de salida)
100 %
0
Salida analógica
n067 = 0,30
n067 = 1,00
Configuración de fábrica
10 V3 V
Configure la tensión de salida analógica al 100% de la frecuencia
de salida (corriente de salida). El frecuencímetro indicará de 0 a
60 Hz entre 0 y 3 V.
10 V x
Configuración
de n067 0.30
La frecuencia de salida pasa a ser del
= 3 V
100% con este valor.
90
Page 92

6 Funciones de programación
Uso de la salida analógica como salida de tren de pulsos
(n065)
La salida analógica AM-AC puede utilizarse como salida de tren
de pulsos (monitorización de frecuencia de salida, monitorización
de referencia de frecuencia).
Configure n065 como 1 al utilizar la salida de tren de pulsos.
Nº
constante
n065 Tipo de salida de
Nombre Unit
monitorización
(Unidad)
Rango de
ajuste
-0, 1 0
Configuración de n065
Configuración
de n065
0 Salida de monitorización analógica
1 Salida de monitorización de pulsos
La señal de tren de pulsos puede seleccionarse configurándola
en n150.
Configura-
ción de n150
0 Monitori1 1F: Frecuencia de salida × 1
6 6F: Frecuencia de salida × 6
12 12F: Frecuencia de salida × 12
24 24F: Frecuencia de salida × 24
36 36F: Frecuencia de salida × 36
(Monitorización de frecuencia de salida)
zación de
frecuencia de
salida
Descripción
Descripción
1440 Hz/frecuencia máx. (n011)
Ajuste de
fábrica
91
Page 93

Configura-
Descripción
ción de n150
40 Monitoriza41 1F: Frecuencia de salida × 1
42 6F: Frecuencia de salida × 6
ción
de referencia
de frecuencia
1440 Hz/frecuencia máx. (n011)
43 12F: Frecuencia de salida × 12
44 24F: Frecuencia de salida × 24
45 36F: Frecuencia de salida × 36
50 Salida de da-
tos a través
Salida de 0 a 14.400 Hz (registro
MEMOBUS nº 000AH) (1 Hz/1)
de comunicaciones
Nota: Se activa solamente si n065 está configurada como 1 (salida de
monitorización de pulsos).
En la configuración de fábrica, es posible la salida de un pulso de
1440 Hz cuando la frecuencia de salida es del 100%.
Frecuencia de salida
AM
AC (0 V)
Si se utiliza la salida de monitorización de pulsos, los
NOTA
dispositivos periféricos deben estar conectados según
las siguientes condiciones de carga. Si no se cumplen
las condiciones, la máquina podría resultar dañada.
Pulso
100 %
Salida de monitorización de pulsos
1440 Hz
Utilización como salida de abastecimiento
Tensión de
salida VRL (V)
Impedancia de la
carga (kΩ)
Impedancia
AM
de carga
+5 V 1,5 kΩ o más
+8 V 3,5 kΩ o más
AC (0 V)
VRL
+10 V 10 kΩ o más
92
Page 94

6 Funciones de programación
Uso como entrada PNP
Fuente de
alimentación
+12 Vc.c. ±5%
o menos
Fuente de alimentación externa
externa (V)
Corriente de
disipación (mA)
16 mA o
inferior
AM
AC (0 V)
Corriente
absorbida
Selección de frecuencia de portadora (n080) 14 kHz máx.
Permite configurar la frecuencia de conmutación del transistor de
salida del variador (frecuencia de portadora).
Configu-
ración
Frecuencia portadora
(kHz)
Ruido
metálico
corriente
del motor
7 12 Fout (Hz)
8 24 Fout (Hz)
9 36 Fout (Hz)
Superior
1 2,5 (kHz)
2 5,0 (kHz)
3 7,5 (kHz)
No
audible
4 10,0 (kHz)
12 14 (kHz)
Nota: Si la frecuencia portadora ha sido configurada a 14 kHz, utilice
una velocidad de transmisión de MEMOBUS de 4.800 bps o
inferior.
Impedancia
de carga
(0 V)
Ruido y
de fuga
Menor
Mayor
93
Page 95

Si el valor de configuración es 7, 8 ó 9, la frecuencia portadora se
multiplicará por el mismo factor que la frecuencia de salida.
n080 = 7
fc = 12 fout
fc = Frecuencia portadora
2,5 kHz
1,0 kHz
83,3 Hz 208,3 Hz
fout = Frecuencia de salida
94
n080 = 8
fc = 24 fout
n080 = 9
fc = 36 fout
fc = Frecuencia portadora
2,5 kHz
1,0 kHz
41,6 Hz 104,1 Hz
fc = Frecuencia portadora
2,5 kHz
1,0 kHz
27,7 Hz 69,4 Hz
fout = Frecuencia de salida
fout = Frecuencia de salida
Page 96

6 Funciones de programación
La configuración de fábrica dependerá de la capacidad del
variador (kVA).
Clase de
tensión (V)
Monofásico,
200 V
400 V
Trifásico
Capa-
cidad
(kW)
0,55 4 10 3,0 - 2,6 (87%)
0,55 3 7,5 1,8 1,6 1,28 (71%)
Configuración de
fábrica
Configu-
Frecuencia
ración
portadora
(kHz)
1,1 4 10 5,0 - 4,3 (86%)
1,5 3 7,5 8,0 7,0 6,0 (75%)
2,2 3 7,5 11,0 10,0 8,6 (78%)
1,1 3 7,5 3,4 3,0 2,2 (65%)
1,5 3 7,5 4,8 4,0 3,2 (67%)
2,2 3 7,5 5,5 4,8 3,84 (70%)
3,0 3 7,5 7,2 6,3 4,9 (68%)
4,0 3 7,5 9,2 8,1 6,4 (74%)
Corriente
máx. de
salida
continua (A)
Corriente
reducida
(A)
Corriente
de salida
continua
(Corriente
de salida
de
reducción)
(A)
FC =
14 kHz
95
Page 97

1. Reduzca la corriente de salida continua al cambiar la
NOTA
Distancia de
cableado entre el
variador y el
motor
Frecuencia
portadora
(configuración de
n080)
2. Configure la selección de frecuencia portadora
3. Si el variador se para y arranca repetidamente con
4. La frecuencia portadora se reducirá
frecuencia portadora a 4 (10 kHz) de los variadores
Clase 200 V (1,5 kW o más) y Clase 400 V. Consulte
en la tabla precedente la corriente reducida.
Condiciones de funcionamiento
• Tensión de alimentación de entrada:
Monofásica, 200 a 240 V (Clase 200 V)
Trifásica, 380 a 460 V (Clase 400 V)
• Temperatura ambiente:
−10 a 40°C (14 a 105°F)
Si la distancia de cableado es larga, reduzca la
frecuencia portadora del variador tal y como se
describe a continuación.
Hasta 50 m Hasta 100 m Más de 100 m
10 kHz o menos
(n080 = 1, 2, 3, 4,
7, 8, 9)
5 kHz o menos
(n080 = 1, 2, 7, 8,
9)
2,5 kHz o menos
(n080 =
1, 7, 8, 9)
(n080) como 1, 2, 3 ó 4 cuando utilice el modo de
control vectorial. No la configure como 7, 8 ó 9.
una carga superior al 120% de la carga nominal del
variador dentro de un ciclo de tiempo de 10 minutos
o menos, reduzca la frecuencia portadora a una
velocidad inferior. (Configure la constante n175
como 1.)
automáticamente a 2,5 kHz si la selección de
reducción de frecuencia portadora a baja velocidad
(n175) se configura como 1 y se cumplen las
siguientes condiciones:
Frecuencia de salida ≤ 5 Hz
Corriente de salida ≥ 110%
Configuración de fábrica: 0 (desactivada)
96
Page 98

6 Funciones de programación
5. Si se selecciona una frecuencia portadora de 14 kHz
(n080), la reducción automática de frecuencia
portadora a baja velocidad se activará
automáticamente, incluso si la Selección de
reducción de frecuencia portadora a baja velocidad
(n175) está configurada como 0 (desactivada).
6. Si la frecuencia portadora se configura a 14 kHz,
se desactivarán las siguientes funciones:
• Entrada digital rápida (START/STOP)
• UP 2/DOWN 2
• Protección de recalentamiento del motor utilizando
entrada de termistor PTC
Importante
• Salida PID bidireccional
• Desplazamientos de frecuencia
Selección de la tecla STOP del operador (n007)
ADVERTENCIA
El botón STOP del operador digital puede
desactivarse mediante una configuración del
variador. Instale un interruptor de parada de
emergencia independiente.
De lo contrario podrían producirse lesiones.
Configure el procesamiento al pulsar la tecla durante el
funcionamiento desde un terminal de entrada multifuncional o
STOP
por comunicaciones.
Configuración Descripción
0
1
La tecla STOP surte efecto desde un terminal de
entrada multifuncional o desde las
comunicaciones. Al pulsar la tecla STOP, el
variador se detendrá según la configuración de la
constante n005. En ese momento, el operador
digital mostrará una alarma (parpadeando).
Este comando STOP será retenido en el variador
hasta que se activen los comandos RUN FWD y
REV, o bien hasta que el comando RUN de
comunicaciones pase a cero.
La tecla STOP no surte efecto desde un terminal
de entrada multifuncional o desde las
comunicaciones.
97
Page 99

Selección de segundo motor
Esta función alterna entre dos motores para un variador. Para el
segundo motor debe utilizarse el control V/f. La conmutación es
posible desde una entrada multifuncional.
Las siguientes constantes se utilizan como constantes de control
del motor 2.
Nº con-
stante
− Selección de modo de
n140 Frecuencia máxima de
n158 Tensión máxima del
n147 Frecuencia máxima de
n159 Tensión de frecuencia
n014 Frecuencia media
n160 Tensión de frecuencia
n161 Corriente nominal de
n162 Deslizamiento nominal
Nota: No se inicializa cuando se inicializan las constantes.
* 1. El límite superior del rango de configuración y la preconfiguración
Nombre Unit (Unidad) Rango de ajuste Configu-
control
salida del motor 2
motor 2
salida de tensión de
motor 2
de salida media de
motor 2
de salida
de salida mínima de
motor 2
motor 2
de motor 2
− Debe utilizarse el
0,1 Hz 50,0 a 400,0 Hz 50,0 Hz
0,1 V
0,1 Hz 0,2 a 400,0 Hz 50,0 Hz
0,1 V
0,1 Hz 0,1 a 399,9 Hz 1,3 Hz
0,1 V
0,1 A 0,0% a 150% de la
0,1 Hz 0,0 a 20,0 Hz *2
control V/f.
0,1 a 255,0 V*1200,0 V
0,1 a 255,0 V
0,1 a 50,0 V
corriente nominal del
variador
*1
*1
de fábrica son el doble para los variadores de clase 400 V.
* 2. Depende de la capacidad del variador.
ración de
fábrica
−
12,0 V
*1*2
12,0 V
*1*2
*2
*1
98
Page 100

Nº con-
stante
n057 Selección de salida
n058 Selección de salida
n059 Selección de salida
Nombre Descripción Configu-
multifuncional 1
(Terminales de
salida de contacto
MA-MB-MC)
multifuncional 2
(Terminales de
salida de colector
abierto
PHC1-PHCC)
multifuncional 3
(Terminales de
salida de colector
abierto
PHC2-PHCC)
6 Funciones de programación
ración
fábrica
0: Fallo
1: En servicio
2: Coincidencia de frecuencia
3: Velocidad cero
4: Detección de frecuencia (≥ Nivel de
detección)
5: Detección de frecuencia (≤ Nivel de
detección)
6: Detección de sobrepar (salida de
contacto NA)
7: Detección de sobrepar (salida de
contacto NC)
8: Detección de infrapar (salida de contacto
NA)
9: Detección de infrapar (salida de contacto
NC)
10: Fallo menor (indicado mediante alarma)
11: Baseblock
12: Modo de funcionamiento
13: Variador listo para funcionar
14: Reintento de fallo
15: UV
16: Marcha inversa
17: Búsqueda de velocidad
18: Salida de datos desde comunicaciones
19: Pérdida de realimentación PID
20: Pérdida de referencia de frecuencia
21: Alerta de sobrecalentamiento de
variador (OH3)
22: Monitorización de selección de motor
Igual que la constante 57 1
Igual que la constante 57 2
de
0
99
 Loading...
Loading...