

Page 1

VARISPEED L7
El variador de frecuencia para ascensores
MANUAL DEL USUARIO
Manual No.
TOSPC71067605-03-OY
Page 2

Contenido
Advertencias ..................................................................................................VII
Precauciones de seguridad e instrucciones .................................................VIII
Compatibilidad EMC ...................................................................................... X
Filtros de línea ...............................................................................................XII
Marcas registradas ....................................................................................... XIII
1 Manipulación de los convertidores ...................................... 1-1
Modelos Varispeed L7 .................................................................................1-2
Comprobaciones a la recepción ..................................................................1-3
Comprobaciones ............................................................................................................1-3
Información de la placa ..................................................................................................1-3
Versión de software del convertidor ...............................................................................1-4
Nombres de componentes .............................................................................................1-5
Dimensiones externas y una vez montado ..................................................1-7
Convertidores IP00 ........................................................................................................ 1-7
Convertidores IP20 / NEMA 1 ........................................................................................1-7
Comprobación y control de la ubicación de
instalación ....................................................................................................1-9
Ubicación de instalación ................................................................................................1-9
Control de la temperatura ambiente .............................................................................. 1-9
Protección del convertidor de materiales extraños ........................................................ 1-9
Orientación y distancias de instalación ......................................................1-10
Desmontaje y montaje de la tapa de terminales ........................................1-11
Desmontaje de la tapa de terminales .......................................................................... 1-11
Montaje de la tapa de terminales .................................................................................1-12
Desmontaje y montaje del Operador
Digital/Monitor LED y tapa frontal ..............................................................1-13
Convertidores de 18,5 kW o menos ............................................................................1-13
Convertidores de 22 kW o más ...................................................................................1-15
2 Cableado ................................................................................. 2-1
Diagrama de conexión .................................................................................2-2
Descripciones de los circuitos .......................................................................................2-3
Configuración del bloque de terminales ......................................................2-4
I
Page 3

Cableado de los terminales del circuito principal ........................................2-5
Secciones de cable y terminales de crimpar aplicables ................................................ 2-5
Funciones de los terminales del circuito principal ......................................................... 2-9
Configuraciones del circuito principal .......................................................................... 2-10
Diagramas de conexión estándar ................................................................................ 2-11
Cableado del circuito principal .................................................................................... 2-12
Cableado de los terminales del circuito de control .................................... 2-17
Secciones de cable ..................................................................................................... 2-17
Funciones de los terminales del circuito de control ..................................................... 2-18
Conexiones de los terminales del circuito de control .................................................. 2-20
Cableado bajo cumplimiento de normativa
EN81-1 con un contactor de motor ........................................................... 2-21
Precauciones para el cableado del circuito de control ................................................ 2-22
Comprobación del cableado ..................................................................... 2-23
Comprobaciones ......................................................................................................... 2-23
Instalación y cableado de tarjetas opcionales ...........................................2-24
Modelos y especificaciones de tarjetas opcionales ..................................................... 2-24
Instalación ................................................................................................................... 2-24
Terminales y especificaciones de la tarjeta para el control de velocidad de
realimentación (PG) .................................................................................................... 2-25
Cableado de los bloques de terminales ...................................................................... 2-31
3 Monitor LED / Operador Digital y modos .............................3-1
Monitor LED JVOP-163 ............................................................................... 3-2
Monitor LED .................................................................................................................. 3-2
Ejemplos de display de LED ......................................................................................... 3-2
Operador Digital JVOP-160-OY ..................................................................3-3
Display del Operador Digital .......................................................................................... 3-3
Teclas del Operador Digital ........................................................................................... 3-3
Modos del convertidor ................................................................................................... 3-5
Alternancia de modos .................................................................................................... 3-6
Modo Drive .................................................................................................................... 3-7
Modo Quick Programming ............................................................................................. 3-8
Modo Advanced Programming ...................................................................................... 3-9
Modo Verify ................................................................................................................. 3-11
Modo Autotuning ......................................................................................................... 3-12
4 Procedimiento de arranque ...................................................4-1
Rutina de arranque general ........................................................................4-2
Arranque ........................................................................................................................ 4-2
II
Encendido ................................................................................................... 4-3
Antes del encendido ...................................................................................................... 4-3
Display después del encendido ..................................................................................... 4-3
Selección de modo de control ....................................................................................... 4-3
Page 4

Autotuning ...................................................................................................4-4
Selección de modo de autotuning .................................................................................4-4
Precauciones respecto al autotuning .............................................................................4-5
Procedimiento de autotuning con motores de inducción ...............................................4-6
Procedimiento de autotuning para motores de imán permanente ................................. 4-7
Ajuste de desplazamiento de encoder de motor de imán permanente ......................... 4-8
Precauciones respecto al autotuning con motores de inducción ...................................4-9
Alarmas y fallos de autotuning ..................................................................................... 4-10
Optimización del rendimiento ....................................................................4-11
5 Parámetros de usuario .......................................................... 5-1
Descripciones de los parámetros de usuario ..............................................5-2
Descripción de las tablas de parámetros de usuario .....................................................5-2
Funciones y niveles del display del Operador Digital ..................................5-3
Parámetros de usuario disponibles en el modo Quick Programming ............................5-4
Tablas de parámetros de usuario ................................................................5-8
Configuraciones de ajuste: A ......................................................................................... 5-8
Parámetros de aplicación: b ........................................................................................5-10
Parámetros de ajuste: C ..............................................................................................5-12
Parámetros de referencia: d ........................................................................................5-18
Parámetros del motor: E .............................................................................................. 5-21
Parámetros opcionales: F ............................................................................................ 5-26
Parámetros de función de terminal: H .........................................................................5-32
Parámetros de función de protección: L ...................................................................... 5-37
Ajustes especiales: n2 / n5 ..........................................................................................5-43
Ajustes del motor PM n8 / n9 .......................................................................................5-45
Parámetros del Operador Digital/monitor LED: o ........................................................5-46
Parámetros de función de elevación: S .......................................................................5-48
Autotuning del motor: T ............................................................................................... 5-54
Parámetros de monitorización: U ................................................................................ 5-56
Configuraciones que cambian con el modo de control (A1-02) .................................. 5-62
Configuraciones de fábrica que cambian con la capacidad del convertidor (o2-04) ...5-64
6 Configuraciones de parámetro según función ................... 6-1
Disminución de la frecuencia portadora y limitación de corriente ................6-2
Configuración de la frecuencia portadora ......................................................................6-2
Limitación del nivel de corriente a bajas velocidades .................................................... 6-2
Secuencia de control / freno ........................................................................6-3
Comandos UP y DOWN ................................................................................................6-3
Selección de fuente de referencia de velocidad ............................................................6-4
Secuencia de selección de velocidad utilizando entradas digitales .............................. 6-5
Parada de emergencia ................................................................................................ 6-10
Inspección RUN ........................................................................................................... 6-11
Secuencia de frenado .................................................................................................. 6-13
Operación Piso corto ...................................................................................................6-17
III
Page 5

Características de la aceleración y deceleración ...................................... 6-20
Configuración de tiempos de aceleración y deceleración .......................................... 6-20
Configuraciones de aceleración y de Curva S ............................................................ 6-22
Mantenimiento de la velocidad de salida (Función Dwell) .......................................... 6-22
Prevención de bloqueo durante aceleración ............................................................... 6-23
Ajuste de señales de entrada analógicas ................................................. 6-25
Ajuste de referencias de frecuencia analógicas .......................................................... 6-25
Detección de velocidad y limitación de velocidad .....................................6-26
Función de velocidad alcanzada ................................................................................. 6-26
Limitación de la velocidad del elevador a la velocidad de nivelación (d1-17) ............. 6-28
Mejora del rendimiento de operación ........................................................ 6-29
Reducción de la fluctuación de la velocidad del motor (Función de compensación del
deslizamiento) ............................................................................................................. 6-29
Ajustes de la función de compensación de par ........................................................... 6-30
Función de compensación de par de arranque (C4-03 a C4-05) ................................ 6-32
Regulador de velocidad automático (ASR) (sólo vectorial lazo cerrado) .................... 6-32
Velocidad de estabilización (Regulador de frecuencia automático)
(Vectorial lazo abierto) ................................................................................................. 6-34
Compensación de inercia (Sólo vectorial lazo cerrado) .............................................. 6-35
Ajuste del regulador de corriente automático (ACR) ................................................... 6-36
Ajuste del tiempo de retardo de conversión A/D ......................................................... 6-37
Mejora de la precisión de nivelación mediante compensación de deslizamiento de la
velocidad de nivelación ............................................................................................... 6-37
Sobreexcitación: .......................................................................................................... 6-38
Ajuste de la corriente de inyección de c.c. .................................................................. 6-39
Ajuste de los niveles de corriente de inyección de c.c. (S1-02/03) ............................. 6-39
Funciones de protección ...........................................................................6-40
Prevención del bloqueo del motor durante la operación ............................................. 6-40
Detección de par del motor / Detección de cabina atascada ...................................... 6-40
Limitación del par del motor (Función de limitación de par) ........................................ 6-43
Protección de sobrecarga del motor ........................................................................... 6-44
Monitorización de corriente de salida .......................................................................... 6-46
Detección de aceleración excesiva (“DV6” detección de fallo) ................................... 6-46
Protección del convertidor ......................................................................... 6-47
Protección contra sobrecalentamiento del convertidor ................................................ 6-47
Protección de fase abierta de entrada* ....................................................................... 6-47
Detección de fase abierta de salida ............................................................................ 6-48
Detección de fallo de tierra .......................................................................................... 6-48
Control del ventilador de refrigeración ........................................................................ 6-49
Configuración de la temperatura ambiente ................................................................. 6-49
Funciones de terminal de entrada ............................................................. 6-50
Deshabilitación de la salida de convertidor (Baseblock) ............................................. 6-50
Parada del convertidor por errores de dispositivos externos
(Función de error externo) ........................................................................................... 6-51
Utilización de la función de temporización .................................................................. 6-52
IV
Page 6

Detección de respuesta del contactor del motor ......................................................... 6-53
Cambio de la dirección del PG .................................................................................... 6-54
Selección motor 2 ........................................................................................................6-55
Funciones de terminal de salida ................................................................6-56
Configuración del motor y de la curva V/f ..................................................6-59
Configuración de los parámetros del motor para motores de inducción
(Motores 1 y 2) ............................................................................................................. 6-59
Configuración de los parámetros del motor para motores PM ....................................6-62
Cambio de dirección de rotación del motor ................................................................. 6-63
Funciones del Operador Digital/Monitor LED ............................................6-64
Configuración de las funciones del Operador Digital/Monitor LED .............................. 6-64
Copia de parámetros (solamente JVOP-160-OY) ....................................................... 6-66
Prohibición de sobreescritura de parámetros .............................................................. 6-70
Configuración de una contraseña ................................................................................ 6-70
Visualización de parámetros de usuario solamente .................................................... 6-71
Tarjetas opcionales de realimentación (PG) ..............................................6-72
Configuración del PG ................................................................................................... 6-72
Detección de fallos ...................................................................................................... 6-74
Función de copia de datos de máquina ....................................................................... 6-75
Sistema de rescate ....................................................................................6-77
Reset automático de fallo ..........................................................................6-81
Comunicaciones Memobus .......................................................................6-83
Configuración de las comunicaciones MEMOBUS ......................................................6-83
Contenido del mensaje ................................................................................................ 6-83
Códigos de error del convertidor ................................................................................. 6-92
Comando ENTER ........................................................................................................6-92
Códigos de error de comunicaciones ..........................................................................6-93
7 Detección y corrección de errores ....................................... 7-1
Funciones de protección y diagnóstico .......................................................7-2
Detección de fallos ........................................................................................................7-2
Detección de alarma ...................................................................................................... 7-9
Errores de programación del operador ........................................................................ 7-12
Fallos de autotuning .................................................................................................... 7-14
Fallos de función de copia del Operador Digital .......................................................... 7-16
Función de copia de datos de máquina ....................................................................... 7-17
Detección y corrección de errores .............................................................7-18
Si no puede configurarse un parámetro ......................................................................7-18
Si el motor no opera adecuadamente. .........................................................................7-19
Si el sentido de rotación es inverso ............................................................................. 7-19
Si el motor se bloquea o si la aceleración es lenta ......................................................7-19
Si la deceleración del motor es baja ............................................................................ 7-20
El par del motor es insuficiente. ...................................................................................7-20
Si el motor se sobrecalienta ........................................................................................ 7-20
V
Page 7

Si dispositivos periféricos se ven influenciados por el arranque o la marcha
del convertidor ............................................................................................................. 7-21
Si el seccionador diferencial opera cuando el convertidor está en marcha ................ 7-21
Si hay oscilación mecánica ......................................................................................... 7-21
8 Mantenimiento e inspecciones .............................................8-1
Mantenimiento e inspecciones .................................................................... 8-2
Inspección periódica ...................................................................................................... 8-2
Mantenimiento periódico de componentes .................................................................... 8-3
Sustitución ventilador de refrigeración .......................................................................... 8-4
Desmontaje y montaje de la tarjeta de terminales ........................................................ 8-6
9 Especificaciones ....................................................................9-1
Especificaciones del convertidor ................................................................. 9-2
Especificaciones según modelo .................................................................................... 9-2
Especificaciones comunes ............................................................................................ 9-4
Reducción (derating) ................................................................................... 9-6
Reducción por temperatura ambiente ........................................................................... 9-6
Reducción por frecuencia portadora ............................................................................. 9-6
Reducción por altitud ..................................................................................................... 9-7
Reactancias de c.a. para compatibilidad con EN 12015 ............................. 9-8
Certificado EN 954-1 / EN81-1 .................................................................... 9-9
10 Apéndice ...............................................................................10-1
Precauciones de aplicación del convertidor .............................................. 10-2
Selección ..................................................................................................................... 10-2
Instalación ................................................................................................................... 10-2
Configuraciones .......................................................................................................... 10-2
Manipulación ............................................................................................................... 10-3
Precauciones de aplicación del motor ...................................................... 10-4
Utilización del convertidor para un motor estándar existente ...................................... 10-4
Utilización del convertidor para motores especiales ................................................... 10-4
Constantes de usuario .............................................................................. 10-5
VI
Page 8

Advertencias
Mientras esté conectada la alimentación no deben ser conectados o desconectados cables, ni llevadas a cabo pruebas de señal.
El condensador de bus de c.c. del convertidor L7 permanece cargado incluso una vez que la alimentación se ha desconectado. Para evitar el riesgo de descarga eléctrica desconecte el convertidor de
frecuencia del circuito de alimentación antes de llevar a cabo trabajos de mantenimiento. Posteriormente espere al menos durante 5 minutos hasta que todos los LEDs se hayan apagado.
No realice pruebas de resistencia a la tensión en ninguna parte del convertidor. Contiene semiconductores que no están diseñados para soportar tan altas tensiones.
No quite el operador digital mientras la alimentación principal esté conectada. El panel de circuitos
impresos tampoco debe ser tocado mientras el convertidor esté conectado a la alimentación.
PRECAUCIÓN
Nunca conecte filtros de supresión de interferencias LC/RC, condensadores o dispositivos de protección contra
sobretensiones a la entrada o a la salida del convertidor.
Para evitar que se visualicen fallos innecesarios de sobrecorriente, etc., los contactos de señal de
cualquier contactor o conmutador instalado entre el convertidor y el motor deben estar integrados en
la lógica de control del convertidor (por ejemplo, baseblock).
¡Esto es absolutamente imprescindible!
Este manual debe ser leído a conciencia y completamente antes de conectar y operar el convertidor.
Deben seguirse todas las precauciones de seguridad e instrucciones de funcionamiento.
El convertidor debe ser operado con los filtros de línea apropiados siguiendo las instrucciones de
instalación de este manual y con todas las cubiertas cerradas y los terminales cubiertos.
Solamente entonces estará adecuadamente protegido. Por favor, no conecte u opere cualquier equipamiento que presente daños visibles o al que le falten componentes. La empresa operadora es responsable de las lesiones a personas y de los daños al equipamiento derivados de la no observancia
de las advertencias que contiene este manual.
VII
Page 9

Precauciones de seguridad e instrucciones
1. General
Por favor, lea detenidamente estas precauciones de seguridad e instrucciones de funcionamiento antes de instalar y operar este convertidor. Asimismo, lea todas las señales de advertencia que se encuentran en el convertidor y asegúrese de que nunca estén dañadas o falten.
Es posible que se pueda acceder a componentes activos y calientes durante la operación. Retirar componentes
de la carcasa, el operador digital o las cubiertas de los terminales conlleva el riesgo de sufrir lesiones graves o
de dañar el equipo en el caso de una instalación u operación incorrecta. El hecho de que los convertidores de
frecuencia son utilizados para controlar componentes mecánicos rotativos de máquinas puede ser la causa de
otros peligros.
Deben seguirse las instrucciones contenidas en este manual. La instalación, la operación y el mantenimiento
solamente deben ser llevados a cabo por personal cualificado. En lo que se refiere a las precauciones de seguridad, el personal cualificado se define como aquellos individuos que están familiarizados con la instalación,
el arranque, la operación y el mantenimiento de convertidores de frecuencia, y que cuentan con la cualificación profesional adecuada para llevar a cabo estos trabajos. La operación segura de estas unidades solamente
es posible si son utilizadas de manera apropiada y para aquel fin para el que fueron diseñadas.
Los condensadores de bus de c.c. pueden mantenerse activos durante aproximadamente 5 minutos una vez que
el convertidor es desconectado de la alimentación. Por lo tanto es necesario esperar este tiempo antes de abrir
sus cubiertas. Todos los terminales del circuito principal pueden estar sometidos aún a tensiones peligrosas.
No debe permitirse el acceso a estos convertidores a niños y personas no autorizadas.
Guarde estas Precauciones de seguridad e Instrucciones de funcionamiento en un lugar fácilmente accesible y
haga que todas las personas que tienen algún tipo de acceso a los convertidores puedan disponer de ellas.
2. Uso previsto
Los convertidores de frecuencia están previstos para su instalación en sistemas o máquinas eléctricas. Los sistemas y máquinas deben cumplir con las directivas y normativas relevantes. Las directrices importantes, como
por ejemplo las directrices de baja tensión, directrices de máquinas, directrices EMC, y otras, deben conservarse.
El convertidor puede ponerse en funcionamiento si los sistemas y máquinas en los que está instalado cumplen
con las directrices y leyes pertinentes.
El marcado CE se lleva a cabo de acuerdo a EN 50178 utilizando los filtros de línea especificados en este
manual y siguiendo las instrucciones de instalación apropiadas.
3. Transporte y almacenamiento
Las instrucciones para el transporte, el almacenamiento y la manipulación adecuada deben ser seguidas de
acuerdo a los datos técnicos.
4. Instalación
VIII
Instale y refrigere los convertidores como se especifica en la documentación. El aire de refrigeración debe circular en la dirección especificada. El convertidor, por lo tanto, solamente debe ser operado en la posición
especificada (es decir, en posición vertical). Mantenga las distancias especificadas. Proteja los convertidores
contra cargas no permitidas. Los componentes no deben ser doblados, y las distancias de aislamiento no deben
ser modificadas. Para evitar daños causados por electricidad estática no toque ningún componente electrónico
ni contacto.
5. Conexión eléctrica
Realice cualquier trabajo en el equipo activo de acuerdo a las regulaciones nacionales de seguridad y prevención de accidentes correspondientes. Lleve a cabo la instalación eléctrica de acuerdo a las regulaciones rele-
Page 10

vantes. En particular, siga las instrucciones de instalación asegurando la compatibilidad electromagnética
(EMC), p.ej. el apantallado, la conexión a tierra, la distribución de filtros y el tendido de cables. Esto también
es de aplicación para el equipamiento con marcado CE. Es responsabilidad del fabricante del sistema o
máquina asegurar la conformidad con las limitaciones EMC.
Póngase en contacto con su distribuidor o representante Omron-Yaskawa Motion Control cuando utilice interruptores automáticos diferenciales junto con convertidores de frecuencia.
En ciertos sistemas puede ser necesario utilizar dispositivos adicionales de control y seguridad de acuerdo a
las regulaciones pertinentes sobre seguridad y prevención de accidentes. El hardware del convertidor de frecuencia no debe ser modificado.
PRECAUCIÓN
Si un motor de imán permanente se activa por una fuerza externa, en los bobinados se genera alta tensión.
• Durante el cableado, mantenimiento o inspección asegúrese de que el motor está parado y de que no se
puede activar.
• Si el convertidor está desactivado y se tiene que activar el motor, asegúrese de que las salidas del motor y
del convertidor están desconectadas eléctricamente.
6. Configuración del convertidor
Este convertidor L7 puede accionar motores de inducción así como motores de imán permanente.
Seleccione siempre el modo de control adecuado:
• Para los motores de inducción utilice V/f, control vectorial lazo abierto o cerrado (A1-01 = 0, 2 ó 3).
• Para los motores de imán permanente no utilice otro modo de control que no sea el vectorial lazo cerrado
para imán permanente (A1-01 = 6).
Una selección errónea del modo de control puede dañar al convertidor y al motor.
Si se cambia un motor o se utiliza por primera, configure siempre los parámetros relevantes de control de
motor según los datos de la placa o realice un autotuning. No cambie estos parámetros imprudentemente. Para
garantizar una operación segura con motores de imán permanente, configure siempre:
• los datos de motor correctos
• los parámetros de detección de apertura de PG
• los parámetros de detección de la desviación de velocidad
• los parámetros de detección de aceleración excesiva
Una configuración incorrecta de los parámetros puede provocar un comportamiento peligroso o daños en el
motor y el convertidor.
PRECAUCIÓN
Si se utiliza un motor de imán permanente, la corriente punta máxima que el motor puede soportar siempre
tiene que ser mayor que la corriente de salida máxima del convertidor para así evitar una desmagnetización
del motor.
Consulte en página 4-2, Arranque los detalles del procedimiento de arranque correcto.
7. Notas
Los convertidores de frecuencia Varispeed L7 están certificados de acuerdo a CE, UL, y c-UL.
IX
Page 11

Compatibilidad EMC
1. Introducción
Este manual se ha compilado para ayudar a los fabricantes de sistemas que utilizan convertidores de frecuencia Omron-Yaskawa Motion Control a diseñar e instalar equipos eléctricos de conmutación. También describe
las medidas a tomar necesarias para adecuarse a la Directiva EMC. Por lo tanto, deben seguirse las instrucciones de instalación y cableado de este manual.
Nuestros productos son probados por organizaciones autorizadas utilizando la normativa listada a continuación.
EN 61800-3:2004
2. Medidas para asegurar la conformidad de los convertidores de frecuencia
Omron-Yaskawa Motion Control a la Directiva EMC
Los convertidores de frecuencia Omron-Yaskawa Motion Control no es necesario que sean instalados en un
armario de maniobra.
No es posible facilitar instrucciones detalladas para todos los tipos posibles de instalación. Por lo tanto, este
manual debe ser limitado a directrices generales.
Todo equipo eléctrico produce interferencias de radio y de línea en varias frecuencias. Los cables la transmiten
a la atmósfera como si fueran una antena.
La conexión de equipamiento eléctrico (p.ej. un drive) a una fuente de alimentación sin un filtro de línea
puede por lo tanto permitir que interferencias HF o LF se introduzcan en el circuito eléctrico.
Las contramedidas básicas son el aislamiento del cableado de los componentes de control y potencia, una
conexión a tierra adecuada y el apantallamiento de los cables.
Para la puesta a tierra de baja impedancia de interferencias HF es necesaria una amplia área de contacto La utilización de grapas de puesta a tierra en vez de cables es, por lo tanto, recomendada.
Además, los cables apantallados deben ser conectados mediante clips específicos para la puesta a tierra.
3. Tendido de cables
Medidas contra la interferencia de línea:
El filtro de línea y el convertidor de frecuencia deben ser montados sobre la misma placa metálica. Monte
ambos componentes tan cerca uno del otro como sea posible, manteniendo también el cableado lo más corto
posible.
Utilice un cable de potencia con apantallado con una buena puesta a tierra. Utilice un cable apantallado para el
motor cuya longitud no supere los 20 metros. Disponga todas las puestas a tierra de tal manera que sea maximizada el área del extremo del conductor en contacto con el terminal de tierra (p.ej. una placa metálica).
Cable apantallado:
– Utilice un cable con protección trenzada.
X
– Ponga a tierra la mayor superficie posible del apantallado. Es recomendable poner a tierra el apantallado
conectando el cable a la placa de tierra con clips metálicos (véase la siguiente figura).
Page 12

Clip de tierra
Placa de tierra
Las superficies de puesta a tierra deben ser de metal desnudo altamente conductor. Elimine las capas de barniz
y pintura que pudiera tener.
– Conecte a tierra el apantallado en ambos extremos.
– Conecte a tierra el motor de la máquina.
Instalación de convertidores y filtros EMC
Para una instalación compatible con las normas
EMC, tenga en cuenta los siguientes puntos:
• Utilice un filtro de línea.
• Utilice cables apantallados para el motor.
• Monte el convertidor y el filtro en una placa con-
ductora con toma de tierra.
• Quite la pintura o la suciedad antes de montar las
piezas con el fin de lograr la mínima impedancia
de tierra posible.
PEL1L2
L3
PE
Línea
Filtro
Carga
Longitud del cable
lo más corta posible
Placa metálica
con toma de tierra
Conexiones a masa
Quite la pintura
Convertidor
L2
GND
L1
L3
V
GND
W
U
Conexiones a masa
Quite la pintura
Cable de motor
apantallado
M
~3
XI
Page 13

Filtros de línea
Filtros de línea recomendados para el Varispeed L7
Modelo de convertidor Filtro de línea
Varispeed L7 Modelo
CIMR-L7Z43P77
3G3RV-PFI3018-SE 18 1.3 141 x 46 x 330CIMR-L7Z44P07
CIMR-L7Z45P57
CIMR-L7Z47P57
CIMR-L7Z40117
CIMR-L7Z40157
CIMR-L7Z40187
CIMR-L7Z40227
CIMR-L7Z40307
CIMR-L7Z40377
CIMR-L7Z40557
Tensión máxima: trifásica 480V c.a.
Temperatura ambiente: 45°C (máx.)
3G3RV-PFI3035-SE 35 2.1 206 x 50 x 355
3G3RV-PFI3060-SE 60 4.0 236 x 65 x 408
3G3RV-PFI3070-SE 70 3.4 80 x 185 x 329
3G3RV-PFI3130-SE 130 4.7 90 x 180 x 366CIMR-L7Z40457
Corriente
(A)
Peso
(kg)
Dimensiones
An x Al x F
*Emisiones permitidas para sistemas de accionamientos eléctricos de potencia de velocidad variable
(EN61800-3, A11)
(distribución general, primer ambiente)
Modelo de convertidor Filtro de línea
Varispeed L7 Modelo
CIMR-L7Z23P77
CIMR-L7Z25P57
CIMR-L7Z27P57 3G3RV-PFI2060-SE 60 3.0 206 x 60 x 355
CIMR-L7Z20117
CIMR-L7Z20157 3G3RV-PFI2100-SE 100 4.9 236 x 80 x 408
CIMR-L7Z20187
CIMR-L7Z20227 3G3RV-PFI2130-SE 130 4.3 90 x 180 x 366
CIMR-L7Z20307
CIMR-L7Z20377 3G3RV-PFI2160-SE 160 6.0 120 x 170 x 451
CIMR-L7Z20457 3G3RV-PFI2200-SE 200 11.0 130 x 240 x 610
CIMR-L7Z20557
Tensión máxima: trifásica 240V c.a.
Temperatura ambiente: 45°C (máx.)
3G3RV-PFI2035-SE 35 1.4 141 x 46 x 330
Corriente
(A)
Peso
(kg)
Dimensiones
An x Al x F
XII
* Longitud máx. del cable del motor: 10 m Clase B, 50 m Clase A
Tensión nominal: trifásica 240V c.a.
Temperatura ambiente: 45°C (máx.)
Page 14

Marcas registradas
En el presente manual se utilizan las siguientes marcas registradas.
• DeviceNet es una marca registrada de ODVA (Open DeviceNet Vendors Association, Inc.).
• InterBus es una marca registrada de Phoenix Contact Co.
• Profibus es una marca registrada de Siemens AG.
• Hiperface
• Klauke
y
es una marca registrada de Sick Stegmann GmbH.
y
es una marca registrada de Klauke Textron
XIII
Page 15

XIV
Page 16

Manipulación de los
convertidores
Este capítulo describe las comprobaciones necesarias que deben llevarse a cabo al recibir o instalar un
convertidor.
Modelos Varispeed L7 ..............................................................................................1-2
Comprobaciones a la recepción ...............................................................................1-3
Dimensiones externas y una vez montado ...............................................................1-7
Comprobación y control de la ubicación de instalación ............................................1-9
Orientación y distancias de instalación...................................................................1-10
Desmontaje y montaje de la tapa de terminales.....................................................1-11
Desmontaje y montaje del Operador Digital/Monitor LED y tapa frontal ................1-13
Page 17

1
Modelos Varispeed L7
La serie Varispeed L7 incluye convertidores de dos clases de tensión: 200 V y 400 V. Las capacidades máximas del motor varían entre 3,7 y 55 kW (23 modelos).
Tabla 1.1 Modelos Varispeed L7
Especificaciones
NEMA 1
CIMR-L7Z
20151
Clase de
tensión
Clase 200 V
Clase 400 V
Capacidad
máxima del
motor kW
3,7 7 CIMR-L7Z23P7 23P71 23P77
5,5 10 CIMR-L7Z25P5 25P51 25P57
7,5 14 CIMR-L7Z27P5 27P51 27P57
11 20 CIMR-L7Z2011 20111 20117
15 27 CIMR-L7Z2015
18,5 33 CIMR-L7Z2018 20181 20187
22 40 CIMR-L7Z2022 20220 20221 20227
30 54 CIMR-L7Z2030 20300 20301 20307
37 67 CIMR-L7Z2037 20370 20371 20377
45 76 CIMR-L7Z2045 20450 20451 20457
55 93 CIMR-L7Z2055 20550 20551 20557
3,7 7 CIMR-L7Z43P7 43P71 43P77
4,0 9 CIMR-L7Z44P0 44P01 43P77
5,5 12 CIMR-L7Z45P5 45P51 45P57
7,5 15 CIMR-L7Z47P5 47P51 47P57
11 22 CIMR-L7Z4011 40111 40117
15 28 CIMR-L7Z4015 40151 40157
18,5 34 CIMR-L7Z4018 40181 40187
22 40 CIMR-L7Z4022 40220 40221 40227
30 54 CIMR-L7Z4030 40300 40301 40307
37 67 CIMR-L7Z4037 40370 40371 40377
45 80 CIMR-L7Z4045 40450 40451 40457
55 106 CIMR-L7Z4055 40550 40551 40557
Capacidad de
salida kVA
Varispeed L7
Referencia de
modelo básico
(especifique siempre el grado de protección al hacer su pedido)
IEC IP00
CIMR-L7Z
IEC IP20
CIMR-L7Z
20157
1-2
Page 18

Comprobaciones a la recepción
Comprobaciones
Compruebe los siguientes elementos inmediatamente después de la entrega del convertidor.
Tabla 1.2 Comprobaciones
Elemento Método
¿Le ha sido suministrado el modelo de
convertidor correcto?
¿Presenta el convertidor algún tipo de
daños?
¿Hay tornillos o componentes flojos?
Compruebe el número de modelo en la placa del lateral del convertidor.
Inspeccione la totalidad del exterior del convertidor para comprobar la
existencia de arañazos u otro tipo de daños derivados del envío.
Compruebe la firmeza de las uniones y atornillamientos mediante un
destornillador u otras herramientas.
Si encuentra alguna irregularidad en los elementos anteriormente descritos, póngase en contacto con el distribuidor en el que ha adquirido el convertidor o con su representante Omron Yaskawa Motion Control inmediatamente.
Información de la placa
La placa instalada en el lateral de cada convertidor muestra el número de modelo, las especificaciones,
número de lote, número de serie y otras informaciones del convertidor.
Placa de ejemplo
La siguiente placa es un ejemplo de un convertidor estándar europeo: trifásica, 400 Vc.a.,
3,7 kW, normas IEC IP20
Modelo de convertidor
Especificación de entrada
Especificación de salida
Número de lote
Número de serie
MODELO
ENTRADA
SALIDA AC3PH 0-480V 0-120Hz 8,5A 3min. 50Hz%ED 8,5kVA
O/N
S/N
CIMR-L7Z43P7
AC3PH
380-480V
SPEC : 43P77A
50/60Hz
Peso: 4,0 kg
10,2A
PRG:
Especificaciones
del convertidor
Peso
1
Número doc. UL
DOCUMENTO No E 131457
YASKAWA ELECTRIC CORPORATION
FABRICADO EN JAPÓN
M
s
Fig. 1.1 Placa
Números de modelo de convertidor
El número de modelo del convertidor que se encuentra en la placa indica la especificación, la clase de tensión
y la capacidad máxima del motor en códigos alfanuméricos.
CIMR – L7 Z 2 3P7
Convertidor
Varispeed L7
Nº
Z
Nº
2
4
Especificación
OYMC Normas Europeas
Clase de tensión
Entrada trifásica, 200 Vc.a.
Entrada trifásica, 400 Vc.a.
Fig. 1.2 Números de modelo de convertidor
3P7
5P5
55
“P” Indica la coma decimal.
Capacidad máx. del motor
Nº
3,7 kW
a
5,5 kW
55 kW
a
1-3
Page 19

1
Especificaciones del convertidor
Las especificaciones del convertidor (“SPEC”) que se encuentran en la placa indican la clase de tensión, la
capacidad máxima del motor, la clase de protección y la revisión del convertidor en códigos alfanuméricos.
2
3P7 1 B
Registro de hardware
Nº
2
4
Clase de tensión
Entrada trifásica, 200 Vc.a.
Entrada trifásica, 400 Vc.a.
Nº
A
Spec A
Spec B
B
Capacidad máx. del motor
Nº
3P7
5P5
a
55
“P” Indica la coma decimal
3,7 kW
5,5 kW
a
55 kW
Nº
0
1
7
Grado de protección
IP00
NEMA 1
IP20
Fig. 1.3 Especificaciones del convertidor
Versión de software del convertidor
La versión de software del convertidor se puede consultar en el parámetro de monitorización U1-14, donde
aparecen los últimos cuatro dígitos del número de software (por ejemplo, se mostrará “2031” para la versión
de software VSL702031).
Este manual describe las funciones de la versión de software VSL702031 del convertidor.
Es posible que las versiones de software anteriores no sean compatibles con todas las funciones
IMPORTANTE
descritas. Compruebe la versión antes de empezar a utilizar este manual.
1-4
Page 20

Nombres de componentes
Convertidores de 18,5 kW o menos
La apariencia externa y los nombres de los componentes del convertidor se muestran en la Fig. 1.4. El convertidor con la tapa de terminales quitada se muestra en la Fig. 1.5.
Taladros de montaje
Tapa frontal
Disipador térmico
1
Operador Digital
Tapa de terminales
Fig. 1.4 Apariencia del convertidor (18,5 kW o menos)
Placa
Tapa protectora inferior
Terminales del circuito de control
Terminales del circuito principal
Indicador de carga
Terminal de tierra
Fig. 1.5 Disposición de los terminales (18,5 kW o menos)
1-5
Page 21

Convertidores de 22 kW o más
La apariencia externa y los nombres de los componentes del convertidor se muestran en la Fig. 1.6. El convertidor con la tapa de terminales quitada se muestra en la Fig. 1.7.
1
Tapa del convertidor
Tapa frontal
Operador Digital
Tapa de terminales
Taladros de montaje
Ventilador
Placa
Fig. 1.6 Apariencia del convertidor (22 kW o más)
del circuito de control
Terminales
Terminales
del circuito principal
Indicador de carga
Terminales de tierra
Fig. 1.7 Disposición de los terminales (22 kW o más)
1-6
Page 22

Dimensiones externas y una vez montado
Convertidores IP00
A continuación se muestran los diagramas exteriores de los convertidores IP00.
W1
4-d
W1
4-d
1
H1H2DH
t1
W
3
Convertidores de clase 200 V/400 V de 0,55 a 18,5 kW
D1
10
Máx.
Convertidores de clase 200 V de 22 ó 55 kW
Convertidores de clase 400 V de 22 a 55 kW
W
Fig. 1.8 Diagramas exteriores de convertidores IP00
Convertidores IP20 / NEMA 1
A continuación se muestran los diagramas exteriores de los convertidores IP20/NEMA1.
W1
4-d
W1
H1H2
H3 H0
10
Máx.
Pieza aislante
4-d
H10
Máx.
t1
D1
D5
H10
H1H2DH0
t1
4H
W
Convertidores de clase 200 V/400 V de 3,7 a 18,5 kW Convertidores de clase 200 V de 22 ó 55 kW
H3
D1
3
10
Máx.
Convertidores de clase 400 V de 22 ó 55 kW
W
H1H2
H3 H0
10
Máx.
Pieza aislante
Máx.
Fig. 1.9 Diagramas exteriores de convertidores IP20/NEMA1
t1
D1
D5
1-7
Page 23

1
gera-
Método
de refri-
calor
ción de
Genera-
Externo Interno
de
dros
mon-
Peso
aprox
W H D W1 H0 H1 H2 H3 D1 t1
Peso
aprox
Dimensiones (mm) Valor calórico (W)
ción
total
d*
taje
imado
imado
6
6 200 300 197 186 300 285 8 65,5
Ventila-
326 172 498
dor
784 360 1144
466 259 725
M6
2,3
78 10
2.3
78 10 240 350 207 216 350 335
901 415 1316
34
100 19
64
7,5
283 260 550 535 105
614
329
35
100 20 279 514.5 258 220 450 435
85
7,5
dor
Ventila-
209
62 1266 505 1771
3,2
12,5
130
80 68 148
193 114 307
59 5 4 M5
0
59 5 4 140 280 177 126 280 266 7
0
112 74 186
59 5 4 M5
0
59 5 4 140 280 177 126 280 266 7
0
219 113 332
6
300
6
197 186 300 285 8 65.5
200
429 183 612
M6
2,3
0
350
0
78 11
207 216 350 335
2.3
78 11 240
7,5
7,5
20 254 464 258 195 400 385 64 100 19 586 274 860
57 1015 411 1426
100
100
IP00 NEMA1 IP20 Tal a-
Salida
máxima
Peso
ble del
aplica-
tensión
Clase de
W H D W1 H0 H1 H2 H3 D1 t1
aprox
W H D W1 H1 H2 D1 t1
motor
imado
[kW]
195 400 385 135
250 600 575
258
298
380 809
17 254 535
52
57 328
3,2
100
100
130
12,5
6 200 300 197 186 300 285 8 65,5
2.3
78 10 240 350 207 216 350 335
283 260 550 535 105
635
329
30 715 165 34 629.5 79,5
31
7,5
300
6
197 186 300 285 8 65,5
200
65,5
207 216 350 335
350
2,3
7.5
Tabla 1.3 Dimensiones del convertidor (mm) y pesos (kg)
195 385
250 575
258
298
240 350 207 216 335 78 11 240
200 300 197 186 285
140 280 177 126 266 7 59 5 4 140 280 177 126 280 266 7
11 7 310 10 7 310 10 7 374 170 544
5,5 164 84 248
3,7
15
7,5
18,5 380 30 380 30 501 211 712
(trifá-
200 V
sico)
375 600
22 250 400
30 275 450 220 435 20 279 615 220 450 435 165 23 865 352 1217
37
45 328
55 450 725 348 325 700 78 453 1027 350 325 725 700 302 86 1588 619 2207
3,7
140 280 177 126 266 7 59 5 4 140 280 177 126 280 266 7
4.0 91 70 161
200 300 197 186 285 8 65,5
240 350 207 216 335
275 450 258 220 435 100 17 279 535 258 220 450 435
325 550 283 260 535 105
11 252 158 410
15
(trifá-
400 V
18,5 426 208 634
sico)
22
5,5 127 82 209
7,5
30 678 317 995
45
55 33 1203 495 1698
37
1-8
Page 24

Comprobación y control de la ubicación de instalación
Instale el convertidor en la ubicación descrita a continuación y mantenga unas condiciones óptimas.
Ubicación de instalación
Instale el convertidor de acuerdo a las siguientes condiciones en un ambiente con un grado de contaminación 2.
Tabla 1.4 Ubicación de instalación
Tipo Temperatura ambiente de servicio Humedad
NEMA1 / IP20 –10 a + 40 °C 95% de HR o menos (sin condensación)
IEC IP00 –10 a + 45 °C 95% de HR o menos (sin condensación)
Las tapas de protección están instaladas en la parte superior e inferior del convertidor. Asegúrese de retirar las
tapas protectoras antes de instalar un convertidor de clase 200 ó 400 V con una salida de 18,5 kW o menos en
un panel.
Observe las siguientes precauciones al montar el convertidor.
• Instale el convertidor en una ubicación limpia libre de vapores de grasa y polvo. Puede ser montado en un
panel totalmente cerrado que esté completamente protegido contra el polvo en suspensión.
• Cuando instale u opere el convertidor tenga siempre especial cuidado de que no entre en el dispositivo
polvo metálico, grasa, agua o cualquier otro elemento extraño.
• No instale el convertidor sobre materiales combustibles, como p.ej. madera.
• Instale el convertidor en una ubicación libre de materiales radioactivos y de materiales combustibles.
• Instale el convertidor en una ubicación libre de gases y fluidos dañinos.
• Instale el convertidor en una ubicación sin excesiva oscilación.
• Instale el convertidor en una ubicación libre de cloruros.
• Instale el convertidor en una ubicación protegida de la luz solar directa.
1
Control de la temperatura ambiente
Con el fin de aumentar la seguridad de operación, el convertidor debe ser instalado en un ambiente libre de
aumentos de temperatura extremos. Si el convertidor se instala en una ubicación cerrada, como p.ej. un armario, utilice un ventilador o un sistema de aire acondicionado para mantener la temperatura interna de funcionamiento por debajo de 45 °C.
Protección del convertidor de materiales extraños
Coloque una cubierta protectora sobre el convertidor durante la instalación para protegerlo del polvo metálico
producido al taladrar.
Después de finalizar la instalación, retire siempre la cubierta protectora del convertidor. En caso contrario se
verá reducida la ventilación, lo que causará un sobrecalentamiento del convertidor.
1-9
Page 25

Orientación y distancias de instalación
E
Instale el convertidor verticalmente con el fin de no reducir el efecto refrigerante. Al instalar el convertidor
tenga en cuenta siempre las siguientes distancias de instalación para permitir una disipación normal del calor.
1
A
30mm
mín.
30mm mín.
30mm mín.
Distancia horizontal
B
Aire
120mm mín.
Aire
Distancia vertical
IMPORTANT
A B
Convertidor de clase 200 V, de 3,7 a 55 kW
Convertidor de clase 400 V, de 3,7 a 55 kW
Fig. 1.10 Orientación y distancias de instalación
1. Se requiere la misma distancia horizontal y vertical para los convertidores IP00, IP20 y NEMA 1.
2. Extraiga siempre la cubierta de protección superior después de instalar un convertidor con una salida de
18,5 kW o menos en un panel.
Deje siempre suficiente espacio para los pernos de anilla de suspensión y las líneas del circuito principal
al instalar un convertidor con una salida de 22 kW o más en un panel.
50 mm 120 mm
1-10
Page 26

Desmontaje y montaje de la tapa de terminales
E
Retire la tapa de terminales para realizar el cableado al circuito de control y a los terminales del circuito principal.
Antes de abrir la tapa del terminal, desconecte la fuente de alimentación y espere al menos 5 minutos para
asegurarse de que el bus de c.c. esté descargado.
IMPORTANT
Desmontaje de la tapa de terminales
Convertidores de 18,5 kW o menos
Suelte el tornillo que se encuentra en la parte inferior de la tapa de terminales, presione los laterales en la
dirección de las flechas 1, y posteriormente bascule hacia arriba la tapa en la dirección de la flecha 2.
1
Fig. 1.11 Desmontaje de la tapa de terminales (se muestra el modelo CIMR-L7Z43P7)
Convertidores de 22 kW o más
Suelte los tornillos de la parte superior derecha e izquierda de la tapa de terminales, tire de la tapa en la dirección de la flecha 1 y posteriormente bascúlela hacia arriba en la dirección de la flecha 2.
Fig. 1.12 Desmontaje de la tapa de terminales (se muestra el modelo CIMR-L7Z4022)
1-11
Page 27

1
Montaje de la tapa de terminales
Cuando haya completado el cableado del bloque de terminales coloque la tapa de terminales siguiendo los
pasos del procedimiento de desmontaje en sentido inverso.
Para convertidores con una salida de 18,5 kW o menos, inserte la lengüeta de la parte superior de la tapa de
terminales en la ranura del convertidor y presione sobre la parte inferior de la tapa hasta que ésta encaje con un
chasquido.
1-12
Page 28

Desmontaje y montaje del Operador Digital/Monitor LED y tapa frontal
Convertidores de 18,5 kW o menos
Para instalar tarjetas opcionales o sustituir el conector de tarjeta de terminal, retire el Operador Digital/Monitor LED y la tapa frontal además de la tapa de terminales. Retire siempre el Operador Digital/Monitor LED de
la tapa frontal antes de retirar la tapa frontal.
A continuación se describen los procedimiento para el desmontaje y el montaje.
Desmontaje del Operador Digital/Monitor LED
Presione la palanca que se encuentra en el lateral del Operador Digital/Monitor LED en la dirección de la flecha 1 para desenclavarlo y levante el Operador Digital/Monitor LED en la dirección de la flecha 2 para retirarlo tal y como se muestra en la siguiente ilustración.
1
Fig. 1.13 Desmontaje del Operador Digital/Monitor LED (arriba se muestra el modelo CIMR-L7Z43P7)
1-13
Page 29

1
Desmontaje de la tapa frontal
Presione los laterales derecho e izquierdo de la tapa frontal en la dirección de las flechas 1 y levante la parte
inferior de la tapa en la dirección de la flecha 2 para retirar la tapa frontal tal y como se muestra en la siguiente
ilustración.
Fig. 1.14 Desmontaje de la tapa frontal (se muestra el modelo CIMR-L7Z43P7)
Montaje de la tapa frontal
Una vez haya cableado los terminales, monte la tapa frontal en el convertidor siguiendo los pasos de desmontaje en sentido inverso.
1. No monte la tapa frontal con el Operador Digital/Monitor LED instalado en ella, en caso contrario es posible que el Operador Digital/Monitor LED presente fallos en el funcionamiento debido a un contacto defectuoso.
2. Inserte la lengüeta de la parte superior de la tapa frontal en la ranura del convertidor y presione la parte
inferior de la tapa contra el convertidor hasta que ésta encaje con un chasquido.
Montaje del Operador Digital/Monitor LED
Una vez haya colocado la tapa de terminales, monte el Operador Digital/Monitor LED en el convertidor
siguiendo el siguiente procedimiento.
1. Enganche el Operador Digital/Monitor LED en A (dos puntos) a la tapa frontal en la dirección de la flecha
1 tal y como de muestra en la siguiente ilustración.
2. Presione el Operador Digital/Monitor LED en la dirección de la flecha 2 hasta que encaje en posición en B
(dos puntos).
1-14
Fig. 1.15 Montaje del Operador Digital/Monitor LED
Page 30

E
1. No desmonte o instale el Operador Digital/Monitor LED ni coloque o retire la tapa frontal mediante otros
métodos que no sean los anteriormente descritos, ya que en caso contrario el convertidor podría averiarse o presentar fallos en el funcionamiento debido a contactos defectuosos.
IMPORTANT
2. Nunca monte la tapa frontal en el convertidor con el Operador Digital/Monitor LED instalado en ella. Pueden producirse contactos defectuosos.
Monte siempre la tapa frontal en el convertidor en primer lugar, y posteriormente instale el Operador Digital/Monitor LED en la tapa frontal.
Convertidores de 22 kW o más
Para los convertidores con una salida de 22 kW o más, desmonte la tapa de terminales y posteriormente siga
los siguientes pasos para desmontar el Operador Digital/Monitor LED y la tapa frontal.
Desmontaje del Operador Digital/Monitor LED
Siga el mismo procedimiento que en el caso de los convertidores con una salida de 18,5 kW o menos.
Desmontaje de la tapa frontal
Levante la tapa por la parte superior de la tarjeta de terminales del circuito de control en la posición indicada 1
en la dirección de la flecha 2.
1
Fig. 1.16 Desmontaje de la tapa frontal (se muestra el modelo CIMR-L7Z4022)
Montaje de la tapa frontal
Tras finalizar los trabajos necesarios, como el montaje de una tarjeta opcional o la configuración de la tarjeta
de terminales, monte la tapa frontal siguiendo los pasos descritos en sentido inverso.
1. Asegúrese de que el Operador Digital/Monitor LED no esté instalado en la tapa frontal. Pueden tener lugar
contactos defectuosos si se monta la tapa frontal con el Operador Digital/Monitor LED instalado en ella.
2. Inserte la lengüeta de la parte superior de la tapa frontal en la ranura del convertidor y presione la tapa
hasta que encaje en el convertidor con un chasquido.
Montaje del Operador Digital/Monitor LED
Siga el mismo procedimiento que en el caso de los convertidores con una salida de 18,5 kW o menos.
1-15
Page 31

1
1-16
Page 32

Cableado
Este capítulo describe los terminales, las conexiones de los terminales del circuito principal, las especificaciones
del cableado de los terminales del circuito principal, los terminales del circuito de control y las especificaciones
del cableado del circuito de control.
Diagrama de conexión ..............................................................................................2-2
Configuración del bloque de terminales.................................................................... 2-4
Cableado de los terminales del circuito principal......................................................2-5
Cableado de los terminales del circuito de control .................................................2-17
Cableado bajo cumplimiento de normativa EN81-1 con un contactor de motor..........2-21
Comprobación del cableado ...................................................................................2-23
Instalación y cableado de tarjetas opcionales ........................................................2-24
Page 33

Diagrama de conexión
El diagrama de conexión del convertidor se muestra en la Fig. 2.1.
Al utilizar el Operador Digital, el motor puede ser operado cableando únicamente los circuitos principales.
2
Contactor
magnético
Fuente de
alimentación trifásica
380 a 480V
50/60Hz
Entradas
multifuncionales
(configuración de
fábrica)
Nota:
1. Los terminales del circuito principal están indicados con
círculos dobles y los terminales del circuito de control con
círculos sencillos.
2. La configuración de fábrica de CN5 es NPN.
3. Para activar el convertidor, ambas entradas, BB y BB1,
deben estar cerradas. Si sólo está cerrada una de las entrada,
se mostrará “BB” en el panel del operador y el convertidor no
arrancará.
L1
L2
L3
PE
Marcha directa/parada
Marcha inversa/parada
Velocidad nominal
Marcha de inspección
Velocidad intermedia
Velocidad de nivelación
No se utiliza
Baseblock de hardware
(nota 3)
Entrada analógica
(Referencia de velocidad)
2 kOhm
Entrada de fuente de
alimentación de control
opcional para operación
de rescate
Ajuste
de tensión
0 a 10 V
Tarjetas de
opcionales
Filtro
de línea
2 kOhm
P
entrada
a terminal B1
a terminal -
Reactancia c.c. para mejorar
factor de potencia (opcional)
Enlace
(+1) (+2)
L1(R)
L2(S)
L3(T)
S1
S2
S3
S4
S5
S6
S7
BB
BB1
+24 V, 8 mA
SC
CN5 (configuración NPN)
E(G)
+V
A1
c.a.
2CN
P0
N0
1
IP24V (24V)
Fuente de
alimentación
de entrada
analógica +15 V,
20 mA
Referencia de
velocidad
maestra 0 a 10 V
0 V
Entrada de
fuente de
alimentación de
control
Cables
apantallados
Unidad de resistencia
de frenado (opcional)
(-)
B1
U/T1
V/T2
W/T3
PG-X2
(opcional)
3CN
B2
TA1
TA3
TA2
Pulso A
Pulso B
Pulso Z
MA
MB
MC
Comando de
M1
freno
M2
(configuración
de fábrica)
Control de
M3
contactor
M4
(configuración
de fábrica)
Convertidor
M5
preparado
M6
(configuración
de fábrica)
Cables de par
trenzado
1
Motor
IM/PM
P
P
Salida de monitorización
de pulsos RS-422
(100m o menos)
2
3
Salida de contacto de fallo
250 Vc.a., máx. 1 A
30 Vc.c., máx. 1 A
Salida de contacto
multifuncional
250 Vc.a., máx. 1 A
30 Vc.c., máx. 1 A
Tarjetas de salida
opcionales
2
PG
2-2
Fig. 2.1 Diagrama de conexión (Se muestra el modelo CIMR-L7Z43P7)
Page 34

Descripciones de los circuitos
Consulte los números indicados en la Fig. 2.1.
1 Estos circuitos son peligrosos y están separados de las superficies accesibles mediante separaciones
de protección
2 Estos circuitos están separados del resto de los circuitos mediante separaciones de protección con-
sistentes en aislamiento doble y reforzado. Estos circuitos pueden ser interconectados con circuitos
*
(o equivalentes) o no SELV*, pero no con ambos.
SELV
3 Convertidores alimentados por fuente con sistema de cuatro hilos (conexión a tierra neutra)
Estos circuitos son circuitos SELV
nes de protección consistentes en aislamiento doble y reforzado. Estos circuitos solamente pueden
ser interconectados con otros circuitos
Convertidores alimentados por fuente con sistema de tres hilos (sin conexión a tierra o con
conexión de esquina)
Estos circuitos no están alejados de circuitos peligrosos mediante separaciones de protección, sino
solamente con aislamiento básico. Estos circuitos no deben ser interconectados con ningún circuito
que sea accesible, a menos que sean aislados de los circuitos accesibles con un aislamiento adicional.
* Los circuitos SELV (Safety Extra Low Voltage, tensión extra baja de seguridad) no tienen conexión directa con la alimentación principal y son alimen-
tados por un transformador o dispositivo de aislamiento equivalente. Los circuitos cuentan con un diseño y protección que les permite que, en condiciones normales y de fallo único, su tensión no exceda el valor de seguridad.
(Consulte IEC 61010)
*
y están alejados del resto de los circuitos mediante separacio-
*
(o equivalentes).
2
IMPORTANTE
1. Los terminales del circuito de control están dispuestos como sigue.
SC SC SC
E(G)
2. La capacidad de corriente de salida del terminal +V es de 20 mA.
3. Los terminales del circuito principal están indicados con círculos dobles y los terminales del circuito de
control con círculos sencillos.
4. Se muestra el cableado de las entradas digitales S1 a S7 y BB para la conexión de contactos o de transistores NPN (0V modo común y NPN). Esta es la configuración por defecto.
Para conectar transistores PNP o para utilizar una fuente de alimentación externa de 24 V consulte la
Tabla 2.9.
5. Una reactancia de c.c es una opción solamente para convertidores de 18,5 kW o menos. Retire el
puente al conectar una reactancia de c.c.
S1
S2
BB
S3 S4
+V
A1 c.a.
S5 S6 S7 BB1
M5
M6
M3
MA MB MC
M4
M1
M2
E(G)
2-3
Page 35

Configuración del bloque de terminales
Las disposiciones de los terminales se muestran en la Fig. 2.2 y en la Fig. 2.3.
Terminales del circuito de control
2
Fig. 2.2 Disposición de terminales (Convertidor de clase 200 V/400 V de 3,7 kW)
Terminales del circuito
de control
Terminales del
circuito principal
Terminales del circuito principal
Indicador de carga
Terminal de tierra
Indicador de carga
Terminales de tierra
2-4
Fig. 2.3 Disposición de terminales (Convertidor de clase 200 V/400 V de 22 kW o más)
Page 36

Cableado de los terminales del circuito principal
Secciones de cable y terminales de crimpar aplicables
Seleccione los cables apropiados y los terminales de crimpar con la ayuda de Tabla 2.1 a 1.. Consulte el
Manual de instrucciones TOE-C726-2 para secciones de cables para unidades de resistencia de frenado y unidades de frenado.
Secciones de cable
Tabla 2.1 Secciones de cable para clase 200 V
Modelo de
convertidor
CIMR-
L7Z23P7
Símbolo de terminal
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, PO, NO
Tornillos
terminal
Par de apriete
de
M4 1,2 a 1,5
(N•m)
Secciones
de cable
posibles
2
mm
(AWG)
(12 a 10)
Sección de
cable reco-
mendada
2
mm
4
(12)
(AWG)
4
Tipo de cable
*1
2
L7Z25P5
L7Z27P5
L7Z2011
L7Z2015
L7Z2018
L7Z2022
L7Z2030
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, PO, NO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, PO, NO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, PO, NO
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3, NO
B1, B2, PO M5 2,5
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3, NO
B1, B2, PO M5 2,5
R/L1, S/L2, T/L3, , 1, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31, NO
3, PO
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
3, PO
M4 1,2 a 1,5
M5 2,5
M5 2.5
M6 4,0 a 5,0
M6 4,0 a 5,0
M8 9,0 a 10,0
M6 4,0 a 5,0
M8 9,0 a 10,0
M6 4,0 a 5,0
M8 9,0 a 10,0
M8 9,0 a 10,0
M6 4,0 a 5,0
M8 9,0 a 10,0
6
(10)
10
(8 a 6)
16
(6 a 4)
25
(4 a 2)
10
(8 a 6)
25
(4)
25 a 35
(3 a 2)
10 a 16
(8 a 6)
25
(4)
25 a 35
(3 a 1)
10 a 16
(8 a 4)
25 a 35
(4 a 2)
50
(1 a 1/0)
10 a 16
(8 a 4)
25 a 35
(4 a 2)
6
(10)
10
(8)
16
(6)
25
(4)
25
(4)
25
(3)
25
(4)
25
(3)
25
(4)
50
(1)
25
(4)
-
-
-
-
Cables de
alimentación,
p.ej. Cables de
alimentación de
vinilo de 600 V
2-5
Page 37

2
Modelo de
convertidor
CIMR-
L7Z2037
Símbolo de terminal
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
3, PO
Tornillos
terminal
de
Par de apriete
(N•m)
M10 17,6 a 22,5
M8 8,8 a 10,8
M10 17,6 a 22,5
r/l1, ∆/l2 M4 1,3 a 1,4
L7Z2045
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
3, PO
M10 17,6 a 22,5
M8 8,8 a 10,8
M10 17,6 a 22,5
r/l1, ∆/l2 M4 1,3 a 1,4
R/L1, S/L2, T/L3, , 1, NO
M12 31,4 a 39,2
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31 M10 17,6 a 22,5
L7Z2055
3, PO
M8 8,8 a 10,8
M10 17,6 a 22,5
r/l1, ∆/l2 M4 1,3 a 1,4
*1. La sección de cable es válida para cables de cobre con aislamiento PVC (cloruro de polivinilo), temperatura ambiente de 30°.
Secciones
de cable
posibles
2
mm
70 a 95
(2/0 a 4/0)
6 a 16
(10 a 4)
35 a 70
(2 a 2/0)
0,5 a 4
(20 a 10)
95
(3/0 a 4/0)
6 a 16
(10 a 4)
50 a 70
(2 a 1/0)
0,5 a 4
(20 a 10)
50 a 95
(1/0 a 4/0)
90
(4/0)
6 a 70
(10 a 2/0)
35 a 95
(3 a 4/0)
0,5 a 4
(20 a 10)
(AWG)
Sección de
cable recomendada
mm
50 × 2P
(1/0 × 2P)
2
(AWG)
70
(2/0)
–
35
(2)
1,5
(16)
95
(3/0)
–
50
(1)
1,5
(16)
90
(4/0)
–
50
(1/0)
1,5
(16)
Tipo de cable
*1
Cables de
alimentación,
p.ej. cables de
alimentación de
vinilo de 600 V
Modelo de
convertidor
CIMR-
L7Z43P7
L7Z44P0
L7Z45P5
L7Z47P5
L7Z4011
Tabla 2.2 Secciones de cable para clase 400 V
Símbolo de terminal
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, NO, PO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, NO, PO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, NO, PO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, NO, PO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, NO, PO
Tornillos
de termi-
Par de apriete
nal
M4 1,2 a 1,5
M4 1,2 a 1,5
M4 1,2 a 1,5
M4 1,2 a 1,5
M5 2,5
(N•m)
Secciones
de cable
posibles
2
(AWG)
mm
2,5 a 4
(14 a 10)
2,5 a 4
(14 a 10)
4
(12 a 10)
2,5 a 4
(14 a 10)
6 a 10
(10 a 6)
6 a 10
(10 a 6)
Sección de
cable reco-
mendada
2
mm
(AWG)
4
(12)
2,5
(14)
4
(12)
2,5
(14)
4
(12)
2,5
(14)
6
(10)
4
(12)
10
(8)
6
(10)
Tipo de cable
*1
Cables de
alimentación,
p.ej. cables de
alimentación de
vinilo de 600 V
2-6
Page 38

Modelo de
convertidor
CIMR-
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
L7Z4015
L7Z4018
L7Z4022
L7Z4030
L7Z4037
L7Z4045
L7Z4055
*1. La sección de cable es válida para cables de cobre con aislamiento PVC (cloruro de polivinilo), temperatura ambiente de 30°.
U/T1, V/T2, W/T3, NO, PO
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3, NO
B1, B2, PO M5 2,5
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31, NO, PO
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31, NO, PO
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/T3,
R1/L11, S1/L21, T1/L31, NO
3, PO
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/T3,
R1/L11, S1/L21, T1/L31, NO
3, PO
R/L1, S/L2, T/L3, , 1, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31, NO
3, PO
Símbolo de terminal
Tornillos
de termi-
Par de apriete
nal
M5 2,5
M5
(M6)
M6 4,0 a 5,0
M6 4,0 a 5,0
M6 4,0 a 5,0
M8 9,0 a 10,0
M6 4,0 a 5,0
M8 9,0 a 10,0
M8 9,0 a 10,0
M6 4,0 a 5,0
M8 9,0 a 10,0
M8 9,0 a 10,0
M6 4,0 a 5,0
M8 9,0 a 10,0
M8 9,0 a 10,0
M6 4,0 a 5,0
M8 9,0 a 10,0
(N•m)
(4,0 a 5,0)
2,5
Secciones
de cable
posibles
2
mm
10
(8 a 6)
6 a 10
(10 a 6)
10 a 35
(8 a 2)
10
(8)
10 a 25
(8 a 4)
16
(6 a 4)
16 a 35
(6 a 2)
25
(4)
25 a 35
(4 a 2)
25 a 50
(4 a 1/0)
10 a 16
(8 a 4)
25 a 35
(4 a 2)
35 a 50
(2 a 1/0)
10 a 16
(8 a 4)
25 a 35
(4 a 2)
50
(1 a 1/0)
10 a 16
(8 a 4)
25 a 35
(4 a 2)
(AWG)
Sección de
cable reco-
mendada
mm
2
(AWG)
10
(8)
6
(10)
10
(8)
10
(8)
10
(8)
16
(6)
16
(6)
25
(4)
25
(4)
35
(2)
-
25
(4)
35
(2)
-
25
(4)
50
(1)
-
25
(4)
Tipo de cable
*1
Cables de
alimentación,
p.ej. cables de
alimentación de
vinilo de 600 V
2
2-7
Page 39

2
Dimensiones de terminales de crimpar (tipo anillo) recomendados
1. Dimensiones de terminales de crimpar
Sección transversal del
cable (mm
*1. No aplicable para L7Z2011
2
)
0,5 - 1,0 M4 620/4 1620/4 GS4-1
1,5 M4 630/4 1620/4 GS4-1
2,5 M4 630/4 1630/4 GS4-2.5
4 M4 650/4 1650/4 GS4-6
6
10
16
25
35
50
70
95
Tornillos de
terminal
M4 650/4 1650/4 GS4-6
M5 101 R/5 1650/5 GS5-6
M6 101 R/6 1650/6 GS6-6
M8 101 R/8 1650/8 GS6-8
M5 102 R/5 1652/5 GS5-10
M6 102 R/6 1652/6 GS6-10
M8 102 R/8 1652/8 GS8-10
M5
M6 103 R/6 1653/6 GS6-16
M8 103 R/8 1653/8 GS8-16
M6 104 R/6 1654/6 GS6-25
M8 104 R/8 1654/8 GS8-25
M6 105 R/6 1655/6 GS6-35
M8 105 R/8 1655/8 GS8-35
M10 105 R/10 1655/10 GS10-35
M8 106 R/8 1656/8 GS8-50
M10 106 R/10 1656/10 GS10-50
M12 106 R/12 1656/12 GS12-50
M8 107 R/8 1657/8 GS8-70
M10 107 R/10 1657/10 GS10-70
M12 107 R/12 1657/12 GS12-70
M10 108 R/10 1658/10 GS10-95
M12 108 R/12 1658/12 GS12-95
A B
103 R/5
Tipo de terminal de crimpar
y
Klauke
*1
1653/5 GS5-16
JST
2-8
IMPORTANTE
Seleccione la sección de cable para el circuito principal de tal manera que la caída de tensión de
la línea se encuentre dentro del 2% de la tensión nominal. La caída de tensión de la línea se calcula como sigue:
Caída de tensión de la línea (V) =
corriente (A) x 10
-3
x resistencia de cable (Ω/km) x longitud del cable (m) x
3
Page 40

Funciones de los terminales del circuito principal
Las funciones de los terminales del circuito principal se resumen de acuerdo a los símbolos de terminal en la
Tabla 2.3. Cablee los terminales adecuadamente para los usos deseados.
Tabla 2.3 Funciones de los terminales del circuito principal (Clase 200 V y Clase 400 V)
Empleo Símbolo de terminal
Entrada de alimentación del
circuito principal
Salidas del convertidor U/T1, V/T2, W/T3 23P7 a 2055 43P7 a 4055
Terminales de bus de c.c.
Conexión de la unidad de
resistencia de frenado
Conexión de la reactancia de c.c.
Conexión de la unidad de freno
Conexión a tierra 23P7 a 2055 43P7 a 4055
Fuente de alimentación PO, NO 23P7 a 2055 43P7 a 4055
R/L1, S/L2, T/L3 23P7 a 2055 43P7 a 4055
R1/L11, S1/L21, T1/L31 2022 a 2055 4022 a 4055
1,
B1, B2 23P7 a 2018 43P7 a 4018
1, 2
3,
Modelo: CIMR-L7Z
Clase 200 V Clase 400 V
23P7 a 2055 43P7 a 4055
23P7 a 2018 43P7 a 4018
2022 a 2055 4022 a 4055
2
2-9
Page 41

Configuraciones del circuito principal
Las configuraciones del circuito principal del convertidor se muestran en la Tabla 2.4.
Tabla 2.4 Configuraciones del circuito principal del convertidor
Clase 200 V Clase 400 V
2
+
+
R/L1
S/L2
T/L3
R/L1
S/L2
T/L3
R1/L11
S1/L21
T1/L3 1
CIMR - L7Z23P7 a 2018
R/L1
S/L2
T/L3
B2
B1
1
+
2
+
-
B2
B1
1
2
-
Fuente de
alimentación
N0
Circuito de
control
P0
U/T1
V/T2
W/T3
CIMR - L7Z2022,2030
3
+
+
1
U/T1
V/T2
W/T3
-
P
Circuito de
control
Fuente de
alimentación
N0
R/L1
S/L2
T/L3
R1/L11
S1/L21
T1/L3 1
+
1
-
CIMR-L7Z43P7 a 4018
Fuente de
alimentación
P0
N0
CIMR - L7Z4022,4055
3
+
Fuente de
alimentación
P
N0
Circuito de
control
Circuito de
control
U/T1
V/T2
W/T3
U/T1
V/T2
W/T3
CIMR - L7Z2037 a 2055
+
3
+1
R/L1
S/L2
T/L3
R1/L11
S1/L21
T1/L31
r/l1
∆200/
l200
alimentación
N0
Fuente de
Circuito de
control
P0
U/T1
V/T2
W/T3
Nota: Consulte con su representante Omron Yaskawa Motion Control antes de utilizar una rectificación de 12 pulsos.
2-10
Page 42

Diagramas de conexión estándar
Los diagramas de conexión estándar del convertidor se muestran en la Fig. 2.4. Son los mismos para los convertidores de clase 200 V y de clase 400 V. Las conexiones dependen de la capacidad del convertidor.
CIMR-L7Z23P7 a 2018 y 43P7 a 4018
Reactancia
(opcional)
R/L1
S/L2
trifásica; 200 ó 400 Vc.a.
T/L 3
Asegúrese de retirar el puente antes de conectar la
reactancia de c.c.
Resistencia
de c.c.
+1- + 2 B1 B2
de freno
(opcional)
U/T1
V/T2
W/T3
CIMR-L7Z2037 a 2055
Resistencia de freno
(opcional)
Unidad de freno
CDBR (opcional)
Trifásica
200 ó 400 Vc.a.
+1 -+3
R/L1
S/L2
T/L3
R1/L11
S1/L21
T1/L 31
r / l1
/ l2
U/T1
V/T2
W/T3
CIMR-L7Z2022, 2030 y 4022 a 4055
Resistencia de freno
(opcional)
Unidad de freno CDBR
(opcional)
+1 -+3
R/L1
M
(trifásica)
200 ó 400 Vc.a.
S/L2
T/L3
R1/L11
S1/L21
T1/L 31
U/T1
V/T2
W/T3
M
La reactancia de c.c. está integrada.
M
2
La alimentación de control se suministra internamente desde el bus de c.c. a todos los modelos de convertidor.
Fig. 2.4 Conexiones de los terminales del circuito principal
2-11
Page 43

2
Cableado del circuito principal
Esta sección describe las conexiones de cableado para las entradas y salidas del circuito principal.
Cableado de las entradas del circuito principal
Tenga en cuenta las siguientes precauciones para la entrada de la fuente de alimentación del circuito principal.
Instalación de fusibles
Para proteger el convertidor se recomienda utilizar fusibles semiconductores como los mostrados en la
siguiente tabla.
Tabla 2.5 Fusibles de entrada
Corriente
Tipo de
convertidor
23P7 21 240 30 82~220 A60Q30-2 600V / 30A 132
25P5 25 240 40 220~610 A50P50-4 500V / 50A 250
27P5 40 240 60 290~1300 A50P80-4 500V / 80A 640
2011 52 240 80 450~5000 A50P80-4 500V / 80A 640
2015 68 240 100 1200~7200 A50P125-4 500V / 125A 1600
2018 96 240 130 1800~7200 A50P150-4 500V / 150A 2200
2022 115 240 150 870~16200 A50P150-4 500V / 150A 2200
2030 156 240 180 1500~23000 A50P200-4 500V / 200A 4000
2037 176 240 240 2100~19000 A50P250-4 500V/ 250A 6200
2045 220 240 300 2700~55000 A50P300-4 500 V / 300 A 9000
2055 269 240 350 4000~55000 A50P350-4 500V / 350A 12000
nominal de
entrada del
convertidor
(A).
Tensión (V) Corriente (A)
Selección de fusible Ejemplo de selección (FERRAZ)
I2t (A2s)
Modelo Valor nominal I²t (A²s)
43P7 10,2 480 15 34~72 A60Q20-2 600V / 20A 41
44P0 13,2 480 20 50~570 A60Q30-2 600V / 30A 132
45P5 17 480 25 100~570 A60Q30-2 600V / 30A 132
47P5 22 480 30 100~640 A60Q30-2 600V / 30A 132
4011 32 480 50 150~1300 A70P50-4 700V / 50A 300
4015 41 480 60 400~1800 A70P70-4 700V / 70A 590
4018 49 480 70 700~4100 A70P80-4 700V / 80A 770
4022 58 480 80 240~5800 A70P80-4 700V / 80A 770
4030 78 480 100 500~5800 A70P100-4 700V / 100A 1200
4037 96 480 125 750~5800 A70P125-4 700V / 125A 1900
4045 115 480 150 920~13000 A70P150-4 700V / 150A 2700
4055 154 480 200 1500~13000 A70P200-4 700V / 200A 4800
2-12
Page 44
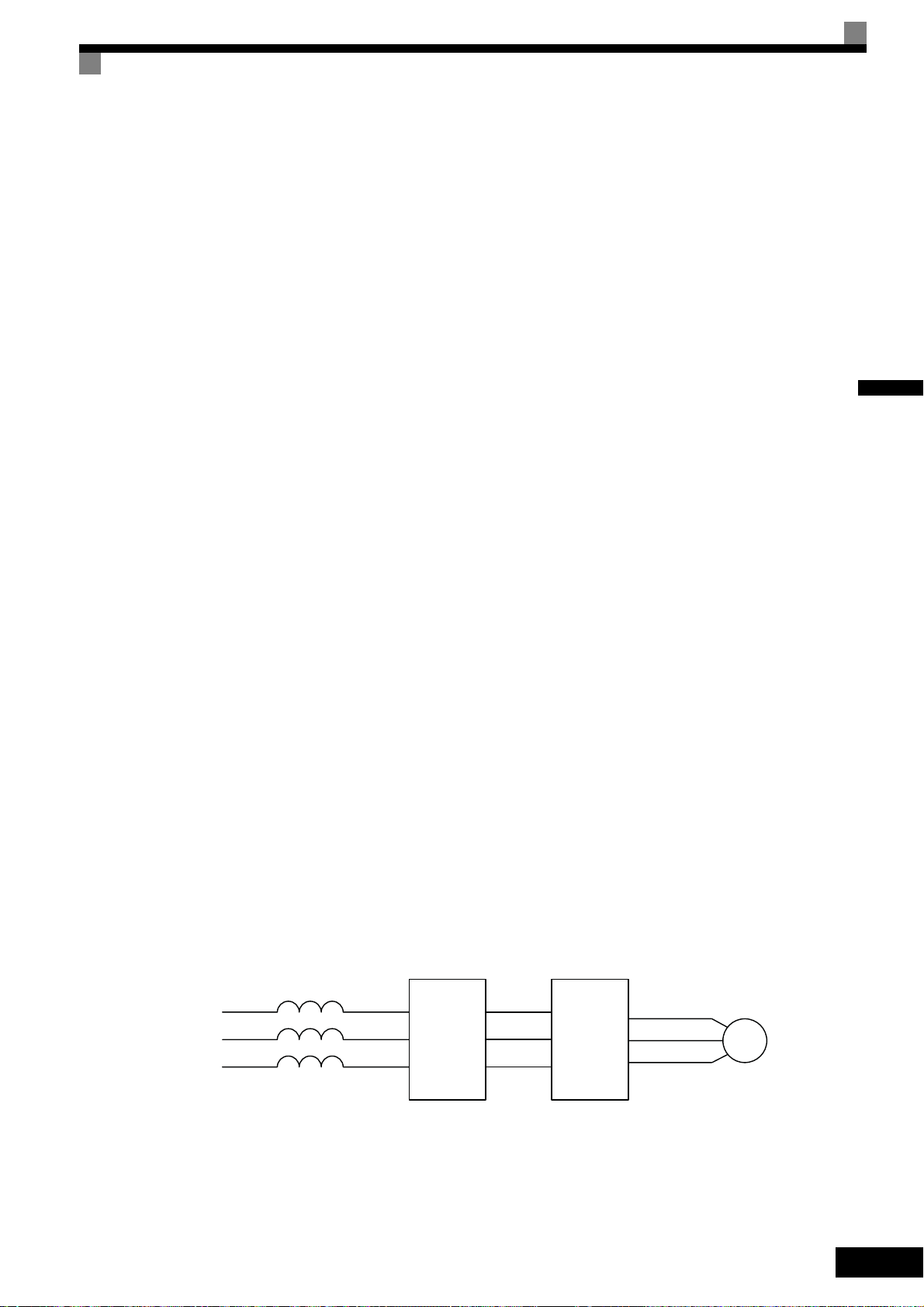
Instalación de un interruptor automático de estuche moldeado (MCCB)
Si se utiliza un interruptor automático de caja moldeada (MCCB) para la conexión de fuente de alimentación
(R/L1, S/L2 y T/L3), éste tiene que ser adecuado para el convertidor.
• El MCCB debe tener una capacidad de 1,5 a 2 veces la tensión nominal del convertidor.
• Para la selección de las características de tiempo del MCCB asegúrese de considerar la protección de
sobrecarga del convertidor (1 minuto al 150% de la corriente nominal de salida).
Instalación de un interruptor automático diferencial
Debe utilizarse un interruptor automático diferencial capaz de detectar todos los tipos de corriente para garantizar una detección segura de corriente de fuga a tierra.
• Si se utiliza un interruptor automático diferencial especial para convertidores, éste debe poseer una
corriente de accionamiento de al menos 30 mA por convertidor.
• Si se utiliza un interruptor automático diferencial estándar, éste debe poseer una corriente de acciona-
miento de 200 mA o más por convertidor y debe presentar un tiempo de accionamiento de 0,1 s o superior.
Instalación de un contactor magnético en la entrada
Si la alimentación para el circuito principal es cortada por un circuito de control, puede utilizarse un contactor
magnético.
Debe tenerse en cuenta lo siguiente:
• El convertidor puede ser arrancado y detenido abriendo y cerrando el contactor magnético en el lado pri-
mario. Abrir y cerrar frecuentemente el contactor magnético puede causar una avería del convertidor. No
sobrepase un encendido a la hora.
• Cuando el convertidor es operado utilizando el Operador Digital no puede realizarse la operación automá-
tica tras la recuperación de una interrupción de potencia.
2
Conexión de la entrada de alimentación al bloque de terminales
La fuente de alimentación puede ser conectada en cualquier secuencia a los terminales R, S o T del bloque de
terminales; la secuencia de fases de entrada es irrelevante para la secuencia de fases de salida.
Instalación de una reactancia de c.a. de entrada
Si el convertidor se conecta a un transformador de potencia de alta capacidad (600 kW o más) o se conmuta un
condensador de avance de fase en las proximidades, es posible que circule una corriente de pico excesiva por
el circuito de entrada de alimentación causando daños en el convertidor. Como contramedida, es posible instalar una reactancia de c.a. opcional en la entrada del convertidor o una reactancia de c.c a los terminales de
conexión de reactancia de c.c.
Para cumplir con la normativa EN12015 es necesario instalar una reactancia de c.a. Consulte Capítulo 9,
Reactancias de c.a. para compatibilidad con EN 12015 para obtener información respecto a las reactancias
disponibles. La reactancia de c.a. debe instalarse entre la fuente de alimentación y el filtro EMC (tal como se
muestra en Fig. 2.5)
Alimentación
L1
L2
L3
Reactancia
de c.a.
Filtro
L7Z
Conver-
tidor
M
Fig. 2.5 Instalación de una reactancia de c.a.
Instalación de un limitador de sobretensiones
Utilice siempre un limitador de sobretensiones o un diodo para cargas inductivas cerca del convertidor. Las
cargas inductivas incluyen contactores magnéticos, relés electromagnéticos, válvulas solenoides, solenoides y
frenos magnéticos.
2-13
Page 45

2
Cableado del lado de salida del circuito principal
Las siguientes precauciones se deben tener en cuenta para el cableado del circuito de salida.
Conexión del convertidor y el motor
Los terminales de salida U/T1, V/T2, y W/T3 deben conectarse según los cables de contacto del motor U,V y W.
El motor debe girar en el sentido del comando aplicado. De no ser este el caso, pueden conmutarse dos de los
cables del motor.
Nunca conecte una fuente de alimentación a los terminales de salida.
Nunca debe conectarse una fuente de alimentación a los terminales de salida U/T1, V/T2 y W/T3. De lo contrario, los circuitos internos del convertidor resultarían dañados.
Nunca cortocircuite o conecte a tierra los terminales de salida.
Si se tocan los terminales de salida con las manos desnudas o los cables de salida entran en contacto con la
carcasa del convertidor puede tener lugar una descarga eléctrica o un cortocircuito.
No utilice un condensador de avance de fase
Nunca conecte un condensador de avance de fase al circuito de salida del convertidor. Los componentes de
alta frecuencia de la salida del convertidor pueden sobrecalentarse y resultar dañados y causar el incendio de
otros componentes.
Utilización de un contactor magnético
No conecte/desconecte (ON/OFF) un contactor magnético (MC) entre el convertidor y el motor durante el
funcionamiento del convertidor. Si el contactor magnético está en ON durante su operación, se creará una elevada corriente de irrupción y es posible que se active la protección contra sobrecorriente del convertidor.
Cableado a tierra
Las siguientes precauciones se deben tener en cuenta para la conexión a tierra.
• Siempre utilice el terminal de tierra del convertidor de 200 V con una resistencia de tierra inferior a 100 Ω
y el del convertidor de 400 V con una resistencia de tierra inferior a 10 Ω
• No deben compartirse los cables de tierra con otros dispositivos como equipos de soldadura o herramientas
eléctricas.
• Debe utilizarse un cable de tierra que cumpla las normativas técnicas sobre equipamiento eléctrico.
Reduzca la longitud del cable de tierra lo máximo que sea posible.
Por el convertidor circula corriente de fuga. Por lo tanto, si la distancia entre el electrodo de tierra y el terminal de tierra es demasiado larga, el potencial en el terminal de tierra del convertidor se volverá inestable.
• Cuando utilice varios convertidores, no forme lazos en los cables de tierra.
OK
NO
.
2-14
Fig. 2.6 Cableado a tierra
Page 46

Conexión de una resistencia de freno y una unidad de freno (CDBR)
Se puede conectar una resistencia de freno y una unidad de freno al convertidor como se muestra en la Fig. 2.7.
Para evitar el sobrecalentamiento de la unidad de freno/resistencia de freno, el funcionamiento del convertidor
debe detenerse cuando se operen los contactos de sobrecarga.
Convertidores de clase 200 V y 400 V de 3,7 a 18,5 kW de capacidad de salida
Resistencia de freno
Convertidor
Convertidores de clase 200 V y 400 V de 22 o más kW de capacidad de salida
Unidad de freno CDBR
Convertidor
Contacto de relé térmico
de sobrecarga
Fig. 2.7 Conexión de la resistencia de freno y de la unidad de freno
Resistencia de freno
Contacto de relé térmico
de sobrecarga
Contacto de
relé térmico
de sobrecarga
2
2-15
Page 47

Conexión de unidades de freno en paralelo
Cuando conecte dos o más unidades de freno en paralelo, las configuraciones de cableado y puenteo deben
efectuarse como se muestra en la Fig. 2.8. Hay un puente para seleccionar si cada una de las unidades de freno
va a ser maestra o esclava. Debe seleccionarse “Master” (maestro) solamente para la primera unidad de freno,
y “Slave” (esclavo) para el resto de las unidades de freno (por ejemplo de la segunda unidad de freno en adelante).
2
Convertidor
Unidad de freno #1
Contacto de relé térmico
de sobrecarga
Unidad
de
resistencia
de freno
MAESTRA
ESCLAVA
Contacto de relé
térmico de sobrecarga
MAESTRA
ESCLAVA
Unidad de freno #2
Contacto de relé térmico
de sobrecarga
Contacto de relé térmico de
sobrecarga
Fig. 2.8 Conexión de unidades de freno en paralelo
Unidad
de
resistencia
de freno
Unidad de freno #3
Contacto de relé térmico
Contacto de relé
térmico de sobrecarga
Unidad
de
resistencia
de freno
MAESTRA
ESCLAVA
de sobrecarga
Conexión de la fuente de alimentación de control
El controlador del Varispeed L7 puede alimentarse mediante una fuente de tensión externa durante una operación de rescate a través del uso de cables trenzados marcados con P0 y N0. Una vez efectuado el envío, los
cables se conectan al terminal B1 del circuito principal (unidades de hasta 18,5 kW) o al terminal +3 (unidades
desde 22 kW y superiores) y al terminal -.
B1 /B2+ 3
U/T1
L1
L2
L3
Fig. 2.9 Conexión de la fuente de alimentación de control
R/L1
S/L2
T/L3
-
P0
N0
Fuente de
alimentación
Circuito de
control
V/T2
W/T3
2-16
Consulte página 6-77, Sistema de rescate para obtener detalles respecto a la operación de rescate.
Page 48

Cableado de los terminales del circuito de control
Secciones de cable
Para la operación remota utilizando señales analógicas, la longitud de la línea de control entre el operador analógico o las señales de operación y el convertidor deben ser de 30 m o menos. Los cables del controlador siempre deben separarse de las líneas de la fuente principal y de otros circuitos de control para evitar
perturbaciones.
Se recomienda utilizar cables de par trenzado apantallado y conectar a tierra el apantallado con la mayor
superficie de contacto posible entre el apantallado y tierra.
Los números de terminal y las secciones de cable apropiadas se muestran en la Tabla 2.6.
Tabla 2.6 Números de terminal y secciones de cable (iguales para todos los modelos)
Terminales
AC, SC, A1, +V, S1, S2, S3,
S4, S5, S6, S7, BB, MA,
MB, MC, M1, M2, M3, M4,
M5, M6
E (G) M3.5 0,8 a 1,0
*1. Deben utilizarse terminales rectos no soldados con manguitos de plástico en las líneas de señal para simplificar el cableado y mejorar la seguridad
de operación.
Tornillos
terminal
Tipo
Phoenix
de
Par de apriete
(N•m)
0,5 a 0,6
Secciones de
cable posibles
2
(AWG)
mm
Cable sólido
0,5 a 2,5
Cable trenzado:
0,5 a 1,5
(26 a 14)
0,5 a 2,5
(20 a
14)
Sección de
cable reco-
mendada en
mm
*1:
2
(AWG)
0,75
(18)
1,0
(12)
Tipo de cable
• Cable de par trenzado apantallado
• Cable trenzado de vinilo, recubierto
de polietileno, apantallado
Terminales rectos no soldados para las líneas de señal
Los modelos y tamaños de terminales rectos no soldados con manguitos plásticos para las líneas de señal se
muestran en la siguiente tabla.
Tabla 2.7 Tamaños de terminales rectos no soldados
Sección de cable en2
(AWG)
0,25 (24) AI 0.25 - 8YE 0,8 2 12,5
0,5 (20) AI 0.5 - 8WH 1,1 2,5 14
0,75 (18) AI 0.75 - 8GY 1,3 2,8 14
1,5 (16) AI 1.5 - 8BK 1,8 3,4 14
2 (14) AI 2.5 - 8BU 2,3 4,2 14
Modelo d1 d2 L Fabricante
Phoenix Contact
2
d1
8 mm
14 mm
d2
Fig. 2.10 Tamaños de terminales rectos no soldados
2-17
Page 49

2
Funciones de los terminales del circuito de control
Las funciones de los terminales del circuito de control se muestran en la Tabla 2.8. Utilice los terminales apro-
piados para los usos deseados.
Tabla 2.8 Terminales del circuito de control con configuraciones por defecto
Tipo Nº Nombre de la señal Función Nivel de la señal
Comando de marcha directa/
S1
parada
Comando de marcha inversa/
S2
parada
S3 Velocidad nominal Velocidad nominal en ON.
Señales
digitales
de
entrada
S4 Marcha de inspección
S5 Velocidad intermedia Velocidad intermedia en ON.
S6 Velocidad de nivelación
S7 No se utiliza –
BB Baseblock de hardware – –
*1
BB1
Baseblock de hardware 1 – –
SC Entrada digital común – –
Fuente de alimentación
Señales
analógi-
cas de
entrada
+V
de 15 V
*2
A1 Referencia de frecuencia 0 a +10 V/100% 0 a +10 V(20 kΩ)
c.a. Referencia analógica neutral – –
Cable apantallado, punto opcio-
E(G)
nal de conexión de línea a tierra
M1
Comando de freno
(Contacto 1NA)
M2
M3
Control de contactor
(Contacto 1NA)
Señales
digitales
de salida
M4
M5
M6
Convertidor listo
(Contacto 1NA)
MA
Señal de salida de error (SPDT)
MB
(1 contacto conmutado)
MC
*1. Este terminal está disponible solamente en convertidores con hardware SPEC B. (página 1-4, Especificaciones del convertidor describe
cómo encontrar la versión hardware del convertidor).
*2. No utilice esta fuente de alimentación para dispositivos externos.
*3. Cuando controle una carga reactiva, como una bobina de relé con alimentación de c.c., inserte siempre un diodo como se muestra en la Fig. 2.11.
Fig. 2.11 Conexión del diodo
Marcha directa en ON; parada en OFF.
Marcha inversa en ON; parada en OFF.
Marcha de inspección en
ON.
Las funciones se
24 Vc.c., 8 mA
Fotoacoplador
seleccionan configurando de H1-01 a
Velocidad de nivelación en
H1-05.
ON.
15 V potencia de alimentación para referencias
analógicas
15 V
(Corriente máx.: 20 mA)
––
Comando de freno en ON.
Control de contactor en ON.
Salidas de contacto
multifunción
Contactos de relé
Capacidad de los
contactos:
Convertidor listo en ON.
1 A máx. a 250 Vc.a.
1 A máx. a 30 Vc.c.
Error cuando CERRADO entre MA y MC
Error cuando ABIERTO entre MB y MC
*3
2-18
Fuente de
alimentación
externa:
30 Vc.c. máx.
Bobina
1A máx.
Diodo
La tensión del diodo
debe ser al menos tan alta
como la tensión del circuito.
Page 50

Modo NPN/PNP (selección NPN/PNP)
La lógica del terminal de entrada se puede conmutar entre el modo NPN (0 V común, NPN) y PNP (+24 V
común, PNP) mediante el puente CN5. También se admite una fuente de alimentación externa, lo que facilita
una mayor libertad de métodos de entrada de señal.
Tabla 2.9 Modo NPN/PNP y señales de entrada
Fuente de alimentación interna – Modo NPN
S1
S2
IP24V
CN5
SC
(+24V)
Fuente de alimentación interna – Modo PNP
S1
S2
CN5
SC
IP24V
(+24V)
Fuente de alimentación externa – Modo NPN
S1
S2
CN5
SC
24 Vc.c.
IP24V
(+24V)
Fuente de alimentación externa – Modo PNP
S1
S2
CN5
SC
24 Vc.c.
IP24V
(+24V)
2
2-19
Page 51

2
Conexiones de los terminales del circuito de control
Las conexiones a los terminales del circuito de control del convertidor se muestran en la Fig. 2.12.
S1
Entradas
multifuncionales
(configuración
de fábrica)
Marcha directa/parada
Marcha inversa/parada
Velocidad nominal
Marcha de inspección
Velocidad intermedia
Velocidad de nivelación
No se utiliza
Baseblock de hardware (nota 2)
S2
S3
S4
S5
S6
S7
BB
BB1
+24 V, 8 mA
Ajuste
de tensión
Entrada analógica
(Referencia de velocidad)
2 kOhm
Nota:
1. La configuración de fábrica de CN5 es NPN.
2. Para activar el convertidor, ambas entradas, BB y BB1, deben estar
cerradas. Si sólo está cerrada una de las entrada, se mostrará “BB”
en el panel del operador y el convertidor no arrancará.
2 kOhm
0 a 10 V
P
Fig. 2.12 Conexiones de los terminales del circuito de control
El circuito del base block es un circuito de dos canales; es decir, siempre deben estar habilitados los dos
canales (terminal BB y BB1) para habilitar la salida del convertidor.
INFO
Por lo general, los terminales BB y BB1 se pueden enlazar directamente a los terminales. Sin embargo,
si se requiere una solución para el contactor conforme a la normativa EN81-1, el cableado de los terminales BB y BB1 depende de la instalación:
1. Si el controlador y el convertidor se montan en el mismo armario, los terminales BB y BB1 pueden
enlazarse directamente a la placa de terminales del convertidor. Sólo es necesario un cable desde el
controlador al base block del convertidor.
2. Si el convertidor se monta de manera separada del armario del controlador, es necesario utilizar dos
cables separados físicamente para el terminal BB y BB1 con el fin de mantener la redundancia en caso
de fallo de una de las líneas de señal.
SC
E(G)
+V
A1
c.a.
IP24V (24V)
CN5 (configuración NPN)
Fuente de
alimentación
de entrada analógica
+15 V, 20 mA
Referencia de
velocidad
maestra 0 a 10 V
0 V
Cables
apantallados
MA
MB
MC
Comando de
M1
freno
M2
(configuración
de fábrica)
Control de
M3
contactor
M4
(configuración de
fábrica)
M5
Convertidor
preparado
M6
(configuración
de fábrica)
Cables de par
trenzado
Salida de contacto de fallo
250 Vc.a., máx. 1 A
30 Vc.c., máx. 1 A
Salida de contacto
multifuncional
250 Vc.a., máx. 1 A
30 Vc.c., máx. 1 A
2-20
Page 52

Cableado bajo cumplimiento de normativa EN81-1 con un contactor de motor
Para poder utilizar el L7Z con un solo contactor de motor en lugar de dos, y seguir cumpliendo con la normativa EN81-1:1998, deben aplicarse las siguientes reglas:
• Debe utilizarse la función baseblock del hardware mediante los terminales BB y BB1 para habilitar / des-
habilitar el controlador. La lógica de entrada debe estar en PNP.
• Si la cadena de seguridad del elevador es abierta, la salida del convertidor debe interrumpirse. Esto signi-
fica que las señales de baseblock en los terminales BB y BB1 deben abrirse, por ejemplo mediante un relé
de interposición.
• La función de monitorización de baseblock debe programarse para una de las salidas multifuncionales
(H2- = 46/47). El contacto de salida digital respectivo debe implementarse en el circuito de supervisión del contactor del controlador para evitar un reinicio en caso de un fallo del baseblock del convertidor
o del contactor del motor.
• Todos los contactores deben cumplir con la normativa EN81-1:1998, párrafo 13.2.
Fig. 2.13 muestra un ejemplo de cableado conforme con EN81-1:1998.
Circuito de cadena
de seguridad
Controlador del elevador
2
Comando de cierre
de contactor
K01
K1
K2
24Vc.c. *1
BB BB1
Yaskawa
CIMR-L7xxxx
Comprobación de contactores
(permiso de reinicio)
Arriba/Abajo;
Selección
de velocidad;...
Monitorización BB
(NC)
M
Fig. 2.13 cableado de acuerdo a EN81-1 con un contactor de motor (ejemplo)
Las directrices de cableado y los ejemplos de cableado se encuentran aprobados por TUEV Sued, Alemania.
Para obtener más detalles le rogamos que se ponga en contacto con su representante de ventas OYMC.
2-21
Page 53

2
Precauciones para el cableado del circuito de control
Tenga en cuenta las siguientes precauciones para el cableado de los circuitos de control.
• Separe el cableado del circuito de control del cableado del circuito principal (terminales R/L1, S/L2, T/L3,
B1, B2, U/T1, V/T2, W/T3, , 1, 2, y 3, PO, NO) y otras líneas de alta potencia.
• Debe separarse el cableado para los terminales del circuito de control MA, MB, MC, M1, M2, M3, M4,
M5 y M6 (salidas de contacto) del cableado a otros terminales del circuito de control.
• Si se utiliza una fuente de alimentación externa auxiliar, ésta deberá ser una fuente contenida en la lista UL
Clase 2.
• Debe utilizarse cable de par trenzado o cable de par trenzado apantallado para los circuitos de control para
prevenir fallos en el funcionamiento.
• Debe conectarse el blindaje (pantalla) de los cables a tierra con la mayor superficie de contacto posible.
• El apantallado del cable debe ser conectado a tierra en ambos extremos del cable.
2-22
Page 54

Comprobación del cableado
Comprobaciones
Compruebe todo el cableado una vez que esté totalmente instalado. No lleve a cabo pruebas de continuidad en
los circuitos de control. Realice las siguientes pruebas en el cableado.
• ¿Es todo el cableado correcto?
• ¿Han quedado fragmentos de cable, tornillos u otros materiales extraños?
• ¿Están todos los tornillos apretados?
• ¿Hay extremos de cable en contacto con otros terminales?
2
2-23
Page 55

2
Instalación y cableado de tarjetas opcionales
Modelos y especificaciones de tarjetas opcionales
Pueden montarse hasta tres tarjetas opcionales simultáneamente en el convertidor. En cada uno de los tres
zócalos de la placa opcional del controlador (A, C, y D) se puede instalar una tarjeta opcional, como se muestra en la Fig. 2.14.
La Tabla 2.10 muestra las tarjetas opcionales y sus especificaciones.
Tabla 2.10 Especificaciones de la tarjeta opcional
Ta rj e ta Modelo Especificaciones
PG-B2
Tarjetas para el control de
velocidad de realimentación
(PG)
Tarjetas de comunicaciones
Tarjeta opcional de PLC
Tarjeta de entrada analógica AI-14B
Tarjetas de salida analógica
Tarjetas de salida digital
PG-X2
PG-F2
3G3RV-PDRT2 Tarjeta opcional DeviceNet inteligente C
SI-P1 Tarjeta opcional para bus de campo Profibus-DP C
SI-R1 Tarjeta opcional para bus de campo InterBus-S C
SI-S1 Tarjeta opcional para bus de campo CANOpen C
S1-J Tarjeta opcional para LONworks C
3G3RV-P10ST8-E Tarjeta opcional de PLC C
3G3RV-P10ST8-DRT-E
AO-08
AO-12
DO-08
DO-02C Salida de contacto de relé de 2 canales D
Dos fases (fase A y B), entradas +12V, frecuencia máxima
de respuesta: 50 kHz
Tres fases (fases A, B, Z), entradas de driver de línea
(RS422), frecuencia máxima de respuesta: 300 kHz
Tarjeta de interfaz Hiperfacey o EnDat 2.1
Tarjeta opcional de PLC con puerto de comunicaciones
DeviceNet (esclavo)
Tarjeta de entrada analógica de 3 canales
Nivel de señal: -10 a 10 V ó 0 a 10V
Resolución: 13 Bits + signo
Tarjeta de salida analógica de 2 canales
Nivel de señal: 0 a 10 V
Resolución: 8 Bits
Tarjeta de salida analógica de alta resolución de 2 canales
Nivel de señal: -10 a +10 V
Resolución: 11 Bits + signo
Tarjeta de salida digital de 6 canales para el control del
estado del convertidor (error, velocidad cero, marcha, etc).
de montaje
Posición
A
A
A
C
C
D
D
D
2-24
Instalación
Antes de montar una tarjeta opcional, retire la tapa de terminales y asegúrese de que el indicador de carga que
está en el interior del convertidor esté en OFF. Posteriormente, retire el Operador Digital/Monitor LED y la
tapa frontal y a continuación instale la tarjeta opcional.
Remítase a la documentación facilitada con la tarjeta opcional para recibir instrucciones de instalación.
Page 56

Prevención de la elevación de los conectores de tarjeta opcional C y D
Tras instalar la tarjeta opcional en la ranura C o D, inserte un clip opcional para evitar que el lateral que dispone del conector se levante. El clip opcional puede retirarse fácilmente tirando de él por su parte saliente.
Orificio para el separador de
montaje de la tarjeta opcional A
Conector de la tarjeta
Conector de la tarjeta opcional
Separador de montaje
de la tarjeta opcional A
(suministrado con la
tarjeta opcional A)
C (CN2)
opcional A (CN4)
Separador de montaje de
la tarjeta opcional C
Tarjeta opcional C
2
(para prevenir que se eleve la
Clip opcional
tarjeta opcional C)
Tarjeta opcional A
Separador de montaje de la
tarjeta opcional A
Fig. 2.14 Montaje de las tarjetas opcionales
Terminales y especificaciones de la tarjeta para el control de velocidad
de realimentación (PG)
Tarjeta opcional PG-B2
Especificaciones de entrada/salida
Tabla 2.11 Especificaciones de E/S de la tarjeta PG-B2
Terminal Nº Contenido Especificaciones
1
Fuente de alimentación para el generador
de pulsos (encoder)
2 0 Vc.c. (GND para fuente de alimentación)
3
TA1
TA2
TA3 (E) Terminal de conexión de apantallado -
Terminales de entrada de pulsos de fase A
4 Común de entrada de pulsos de fase A
5
Terminales de entrada de pulsos de fase B
6 Común de entrada de pulsos de fase B
1
Terminales de salida de monitor de pulsos
fase A
2
3
Terminales de salida de monitor de pulsos
de fase B
4
12 Vc.c. (±5%), 200 mA máx.
H: +8 a 12 V (frecuencia máxima de entrada: 50 kHz)
H: +8 a 12 V (frecuencia máxima de entrada: 50 kHz)
Salida de colector abierta, 24Vc.c, 30 mA máx.
Salida de colector abierta, 24Vc.c, 30 mA máx.
2-25
Page 57

2
Cableado de la tarjeta PG-B2
Las siguientes figuras muestran ejemplos de cableado para la PG-B2 utilizando la alimentación de las tarjetas
opcionales o una fuente de alimentación externa para el encoder (PG)
200 Vc.a. trifásico
(400Vc.a.)
R/L1
S/L2
T/L3
Fig. 2.15 Cableado de la PG-B2 utilizando la alimentación de las tarjetas opcionales
Convertidor
Alimentación +12V
Alimentación 0V
Entrada de pulsos de fase A
Común de entrada de pulsos de fase B
Entrada de pulsos de fase B
Común de entrada de pulsos de fase B
Salida de monitorización de pulsos
de fase A
Salida de monitorización de pulsos
de fase B
PG
TA1
PG
TA3
Fig. 2.16 Cableado de la PG-B2 utilizando una fuente de alimentación externa de 12 V
Precauciones:
• La longitud del cableado del generador de pulsos (encoder) no debe exceder 100 metros.
• El sentido de rotación del PG (encoder) puede ser configurado en el parámetro de usuario F1-05. La
configuración de fábrica para rotación directa es avance de fase A (eje del motor rotando en sentido
antihorario visto desde el lado del eje).
Rotación directa del motor estándar (PG)
El eje de salida del motor gira en sentido
antihorario durante el comando de
rotación directa del convertidor (CCW).
Comando de
rotación directa
2-26
Fase A
Fase B
La fase A manda (CCW, sentido antihorario) cuando la rotación del motor es directa.
• El factor de salida del monitor de pulsos puede ser modificado utilizando el parámetro F1-05.
• Consulte en la página 2-31, Precauciones de cableado las precauciones generales.
Page 58

Tarjeta opcional PG-X2
Especificaciones de entrada/salida
Tabla 2.12 Especificaciones de E/S de PG-X2
Terminal Nº Contenido Especificaciones
1
Fuente de alimentación para el generador de pulsos
2 0 Vc.c. (GND para fuente de alimentación)
(encoder)
3
4 Terminal de entrada de pulsos de fase A (+)
TA1
TA2
TA3 (E) Terminal de conexión de apantallado –
*1. La fuente de alimentación de 5 V y de 12 V no deben ser utilizadas al mismo tiempo.
5 Terminal de entrada de pulsos de fase A (–)
6 Terminal de entrada de pulsos de fase B (+)
7 Terminal de entrada de pulsos de fase B (–)
8 Terminal de entrada de pulsos de fase Z (+)
9 Terminal de entrada de pulsos de fase Z (–)
10 Entradas de terminal común –
Terminal de salida de monitorización de pulsos de
1
fase A (+)
Terminal de salida de monitorización de pulsos de
2
fase A (–)
Terminal de salida de monitorización de pulsos de
3
fase B (+)
Terminal de salida de monitorización de pulsos de
4
fase B (–)
Terminal de salida de monitorización de pulsos de
5
fase Z (+)
Terminal de salida de monitorización de pulsos de
6
fase Z (–)
7 Terminal común de salidas de monitorización –
12 Vc.c. (±5%), 200 mA máx.
5 Vc.c. (±5%), 200 mA máx.
Entrada de driver de línea (nivel RS422)
(frecuencia máxima de entrada: 300 kHz)
Salida de driver de línea (salida de nivel RS422)
*1
*1
2
2-27
Page 59

Cableado de la tarjeta PG-X2
Las siguientes figuras muestran ejemplos de cableado para la PG-X2 utilizando la fuente de alimentación de
las tarjetas opcionales o una fuente de alimentación externa para el encoder (PG).
Trifásica
200 Vc.a.
(400 Vc.a.)
2
PG-X2
0V
+5 Vc.c.
Entrada de fase
A+
Entrada de fase
AB+
Entrada de fase
Entrada de fase
B-
Entrada de fase
Z+
Entrada de fase
Z-
Salida de fase A
Salida de fase B
Salida de fase Z
P
P
P
Fig. 2.17 Cableado de la PG-X2 utilizando la fuente de alimentación de las tarjetas opcionales
PG-X2
TA1
c.a.
+5 V
0V
0 V
+5 V
PG
2-28
TA3
Fig. 2.18 Cableado de la PG-X2 utilizando una fuente de alimentación externa de 5 V
Precauciones:
• La longitud del cableado del generador de pulsos (encoder) no debe exceder 100 metros.
• El sentido de rotación del PG (encoder) puede ser configurado en el parámetro de usuario F1-05. La
configuración de fábrica es avance de fase A para rotación directa (giro antihorario del eje del motor
visto desde el lado del eje).
• Consulte en la página 2-31, Precauciones de cableado las precauciones generales.
Page 60

Tarjeta opcional PG-F2
Encoders compatibles
La tarjeta opcional PG-F2 puede utilizarse en combinación con los siguientes tipos de encoders:
• Hiperface
• EnDat 2.1: ECN1313, ECN113, ECN413
La velocidad máxima del encoder no debe ser superior a 1200 rpm.
Especificaciones de entrada/salida
Terminal Nº
TB1
TB2
TB3
TB4 (E) Terminal de conexión con cubierta apantallada
y
:SRS60/70
Tabla 2.13 Especificaciones de E/S de PG-F2
Hiperface
1 Us 7-12V
2GND
3 REFSIN
4+SIN B+
5REFCOS A6+COS A+
7 DATA+ DATA
8 D ATA - / D ATA
1 - RELOJ
2 - /RELOJ
1 Monitorización de pulsos A+
2 Monitorización de pulsos A3 Monitorización de pulsos B+
4 Monitorización de pulsos B-
y
Contenido
5V U
0V U
B-
EnDat
y sensor UP
P
y sensor 0V
N
Especificaciones
EnDat: 5Vc.c. (±5%, máx. 250 mA)
Hiperface
0V
Entradas diferenciales
Canal de datos RS-485,
Resistencia de terminación: 130 ohmios
Salida diferencial, frecuencia de reloj: 100 kHz
Salidas de colector abierto
máx 24 Vc.c., 30 mA
y
: 8Vc.c. (±5%, máx. 150mA)
2
Selección de tensión de la fuente de alimentación del encoder
La tensión de la fuente de alimentación del encoder debe ajustarse según el tipo de encoder mediante el interruptor S1 en la tarjeta PG-F2. Mediante el potenciómetro RH1 es posible efectuar un ajuste fino de tensión de
la fuente de alimentación del encoder. El ajuste de fábrica del interruptor S1 es de OFF (EnDat está preseleccionado). La fuente de alimentación del encoder se encuentra preajustada a 5,0~5,25V con el envío.
I
S1
RH1
Fig. 2.19 Selección de tensión de la fuente de alimentación del encoder PG-F2
I: 8V (US = 7.5 ~ 10.5 V), for HIPERFACE
OFF: 5V (U
OFF
S1 = I: 7.5 ~ 10.5 V, for HIPERFACE
S1 = OFF: 4.85 ~ 6.5 V, for EnDat
= 5 V +-5%), for EnDat, (factory setting)
S
(factory setting: 5.0 to 5.25V)
2-29
Page 61

2
Cableado de la tarjeta PG-F2
La siguiente ilustración muestra el cableado de la tarjeta opcional con el encoder Hiperface
Trifásica
200 Vc.a.
(400 Vc.a.)
PG-X2
0V
+5 Vc.c.
Entrada de fase
A+
Entrada de fase
AB+
Entrada de fase
Entrada de fase
B-
Entrada de fase
Z+
Entrada de fase
Z-
Salida de fase A
Salida de fase B
Salida de fase Z
P
P
P
y
o EnDat 2.1.
Fig. 2.20 Cableado de PG-F2 (nombres de señal EnDat entre paréntesis)
Precauciones:
• La longitud del cableado del generador de pulsos (encoder) no debe ser superior a 50 m para las líneas
de señal, ni superior a 30 m para la salida de monitorización del terminal TB3.
• El sentido de rotación del PG puede ser configurado en el parámetro de usuario F1-05 (Rotación de
PG) El ajuste de fábrica es de avance de fase A/SIN en sentido de rotación directa (giro antihorario del
eje del motor visto desde el lado del eje).
SIN
COS
Pulso A
Pulso B
• Consulte en la página 2-31, Precauciones de cableado las precauciones generales.
• Los niveles de tensión de la señal deben estar dentro de los siguientes límites:
REFSIN (B-), REFCOS (A-) offset: 2,2 ~ 2,8 V
+SIN (B+), +COS (B-) tensión pico a pico 0,9 ~ 1,1 V
2-30
Page 62
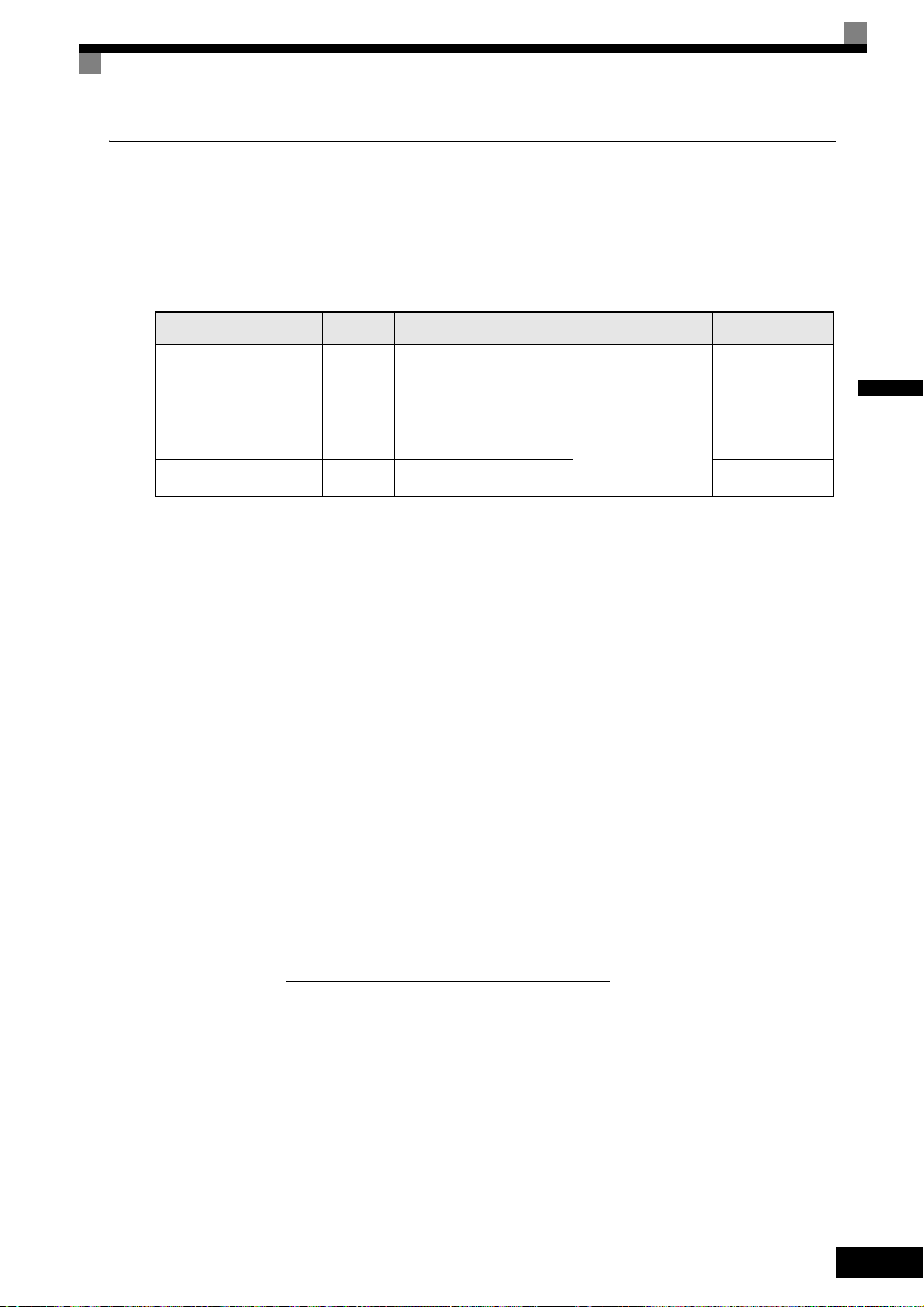
Cableado de los bloques de terminales
Secciones de cable (iguales para todos los modelos de tarjeta PG)
Las secciones de los cables de terminales se muestran en la Tabla 2.14. Consultar Tabla 2.7 para los tipos de
terminales rectos no soldados.
Tabla 2.14 Secciones de cable
Terminal
Fuente de alimentación del
generador de pulsos (encoder)
Terminal de entrada de pulsos
Terminal de salida de monitorización de pulsos
Terminal de conexión de
apantallado
Precauciones de cableado
Tenga en cuenta las siguientes precauciones al realizar el cableado.
• Para las líneas de señal debe utilizarse cable de par trenzado apantallado. Solamente utilice cables reco-
mendados por el fabricante del encoder.
• Para la conexión de cables hacia el encoder deben utilizarse los conectores recomendados por el fabricante
del encoder.
• Deben utilizarse terminales rectos no soldados (consulte Tabla 2.7).
• Deben separarse las líneas de señales de la tarjeta para control de velocidad de realimentación (PG) de las
líneas de alimentación principales y de otros circuitos de control.
• Debe conectarse el apantallado (cable de tierra verde de la tarjeta opcional) al terminal de tierra para preve-
nir fallos de funcionamiento debidos a ruido.
• No deben soldarse los extremos de los cables. En caso contrario podría causar fallos de contacto.
• No debe utilizarse la fuente de alimentación de las tarjetas PG para otro fin que el de alimentar el genera-
dor de pulsos (encoder). Si se utilizara para otro fin podrían causarse fallos en el funcionamiento debido al
ruido.
• Se requiere una fuente de alimentación separada si el consumo de potencia del PG es superior a 200 mA.
(En caso de una pérdida de potencia momentánea utilice un condensador de apoyo u otro método).
• No debe excederse la frecuencia de entrada máxima de las tarjetas PG. La frecuencia de salida del genera-
dor de pulsos (encoder) puede ser calculada mediante la fórmula siguiente.
Tornillos de
terminal
-
M3.5 0,5 a 2,5 mm² -
Grosor de cable Tipo de cable Par de apriete
• máx. 1,0 mm² para cables
flexibles
• máx. 0,5 mm² para cables
flexibles con terminales rectos
no soldados
• máx. 1,5 mm² para cables
sólidos
Cable de par trenzado
apantallado
Cable trenzado de vinilo,
recubierto de polietileno,
apantallado
2
0,22 Nm
f
PG
Velocidad del motor a frecuencia máxima de salida (rpm)
(Hz) =
60
x Índice PG (p/rev)
2-31
Page 63

2
2-32
Page 64

Monitor LED /
Operador Digital y
modos
El Varispeed L7 está equipado con el Monitor LED JVOP-163 que muestra el estado de funcionamiento. El Operador Digital JVOP-160-OY opcional puede utilizarse para ajustar los parámetros requeridos.
Este capítulo describe los displays y funciones del Operador Digital y facilita un resumen de los modos de operación y de la conmutación entre modos.
Monitor LED JVOP-163 ........................................................................................... 3-2
Operador Digital JVOP-160-OY............................................................................... 3-3
Page 65

Monitor LED JVOP-163
Monitor LED
El monitor LED indica el estado de operación combinando los displays LED (iluminado, parpadea, apagado)
para RUN, DS1 y DS2.
El patrón LED es como sigue para cada modo.
Indicadores del modo de operación
RUN: Iluminado mientras el convertidor está en funcionamiento
apagado mientras el convertidor está detenido
DS1: Estado Drive 1
DS2: Estado Drive 2
La combinación de los tres LEDs, Run, DS1 y DS2, indica el
estado de funcionamiento.
3
Indicaciones del estado de funcionamiento (Drive)
Indicaciones de alarma
Indicaciones de fallo
Fig. 3.1 Nombres y funciones de los componentes del Operador Digital
Ejemplos de display de LED
Funcionamiento normal: La siguiente figura muestra el display LED cuando está listo para el funcionamiento
y no hay ninguna señal para FWD/REV (marcha directa/inversa) activa.
RUN DS1 DS2 POWER
3-2
Alarma: La figura muestra un ejemplo del display LED cuando tiene lugar un fallo menor.
Consulte el capítulo 6 y tome las contramedidas apropiadas.
RUN DS1 DS2 POWER
Fallo: La figura muestra un ejemplo del display LED cuando ha tenido lugar un fallo OV o UV.
RUN DS1 DS2 POWER
Page 66

Operador Digital JVOP-160-OY
Display del Operador Digital
Los nombres y funciones de las teclas del Operador Digital se describen más adelante
Indicaciones del estado de funcionamiento (Drive)
FWD: Se ilumina cuando es introducido un comando de
marcha directa.
REV: Se ilumina cuando es introducido un comando de
marcha inversa.
SEQ: Se ilumina cuando se selecciona una fuente de
comandos de marcha que no sea el Operador Digital.
REF: Se ilumina cuando se selecciona una fuente de
referencia de frecuencia que no sea el Operador Digital.
ALARM:Se ilumina cuando ha tenido lugar un fallo
o una alarma.
Display de datos
Muestra los datos de monitorización, números de parámetros
y configuración de parámetros.
Display de modo (se visualiza en la parte superior
izquierda del display de datos)
DRIVE: Se ilumina en el modo Drive (Funcionamiento).
QUICK: Se ilumina en el modo Quick Programming
(Programación rápida).
ADV: Se ilumina en el modo Advanced Programming
(Programación avanzada).
VERIFY: Se ilumina en el modo Verify (Verificación).
A. TUNE:Se ilumina en el modo Autotuning (Autoajuste).
Teclas
Ejecutan operaciones tales como la configuración de parámetros,
la monitorización, la operación jog y el autoajuste.
3
Fig. 3.2 Nombres y funciones de los componentes del Operador Digital
Teclas del Operador Digital
Los nombres y las funciones de las teclas del Operador Digital se describen en la Tabla 3.1..
Tabla 3.1 Funciones de las teclas
Te cl a Nombre Función
Alterna entre la operación mediante el Operador Digital (LOCAL) y
Tecla LOCAL/REMOTE
Tecla MENU Selecciona los elementos de menú (modos).
Tecla ESC
Tecla JOG
las configuraciones en b1-01 y b1-02 (REMOTE).
Esta tecla puede ser habilitada o deshabilitada configurando el
parámetro o2-01.
Retorna al estado que existía antes de presionar la tecla
DATA/ENTER.
Inicia la operación jog cuando el convertidor se utiliza mediante el
Operador Digital y d1-18 está configurado en 0.
3-3
Page 67

Tecla Nombre Función
3
Tecla FWD/REV
Selecciona el sentido de rotación del motor cuando el convertidor se
utiliza mediante el Operador Digital.
Ajusta el dígito activo cuando se programan parámetros.
Tecla Shift/RESET
También funciona como tecla de reset cuando ha tenido lugar un
fallo.
Selecciona elementos del menú, ajusta números de parámetros e
Tecla Más
incrementa los valores de configuración.
Se utiliza para desplazarse al siguiente elemento o dato.
Selecciona elementos del menú, ajusta números de parámetros y
Tecla Menos
disminuye los valores de configuración.
Se utiliza para desplazarse al elemento o dato anterior.
Tecla DATA/ENTER
Tecla RUN
Accede a los menús e introduce parámetros, además de establecer y
validar los cambios de parámetro.
Inicia la operación del convertidor cuando éste se controla mediante
el Operador Digital.
Detiene la operación del convertidor.
Tecla STOP
Esta tecla se puede activar o desactivar mediante el parámetro o2-02
cuando se opera desde una fuente diferente al operador.
Nota: Excepto en los diagramas, las teclas se refieren a los nombres de teclas de la lista anterior.
Hay indicadores en la parte superior izquierda de las teclas RUN y STOP en el Operador Digital. Estos indicadores se iluminarán o parpadearán para indicar el estado de operación del convertidor.
El indicador de la tecla RUN parpadeará y el indicador de la tecla STOP se iluminará durante la excitación inicial o el frenado de c.c. La relación entre los indicadores de las teclas RUN y STOP y el estado del convertidor
se muestra en la Fig. 3.3.
Frecuencia de salida
del convertidor
Stop
Referencia de frecuencia
RUN
STOP
Iluminado
Parpadea
Apagado
Fig. 3.3 Indicadores RUN y STOP
RUN
STOP
3-4
Page 68

Modos del convertidor
Los parámetros del convertidor y las funciones de monitorización están organizados en cinco grupos que
hacen más fácil leer y ajustar los parámetros.
Los 5 modos y sus funciones primarias se muestran en la Tabla 3.2.
Tabla 3.2 Modos
Modo Función(es) primaria(s)
Utilice este modo para arrancar/detener el convertidor, para monitorizar valores
Modo Drive
Modo Quick programming
(Programación rápida)
Modo Advanced programming
(Programación avanzada)
Modo Verify (Verificación)
Modo Autotuning (Autoajuste)
*1. Lleve siempre a cabo el autoajuste con el motor antes de operar en los modos de control vectorial.
como la referencia de frecuencia o la corriente de salida y para leer información de
fallos o el histórico de fallos.
Utilice este modo para leer y configurar los parámetros básicos.
Utilice este modo para leer y configurar todos los parámetros.
Utilice este modo para leer y configurar parámetros cuyos valores de configuración
de fábrica han sido modificados.
Utilice este modo cuando emplee un motor cuyos datos son desconocidos en los
modos de control vectorial. Los datos de motor son medidos/calculados y
*1
configurados automáticamente.
Este modo también puede ser utilizado para medir únicamente la resistencia línea a
línea del motor.
3
3-5
Page 69

Alternancia de modos
El display de selección del modo aparecerá al presionar la tecla MENU. Presione la tecla MENU desde el display de selección de modo para alternar por los modos sucesivamente.
Pulse la tecla DATA/ENTER para introducir un modo y para alternar de un display de monitorización al display de configuración.
Display durante Run
3
Display Selecc.
Modo
Display Monitoriz.
Display Config.
Se visualizará el número de la constante si se ha
modificado una constante. Pulse la tecla
DATA/ENTER para habilitar el cambio.
3-6
INFO
Fig. 3.4 Transiciones de modo
Para hacer funcionar el convertidor tras haber revisado/modificado parámetros pulse la tecla MENU y la
tecla DATA/ENTER sucesivamente para introducir el modo Drive. No serán aceptados comandos de
marcha (Run) mientras el drive esté en otro modo.
Para habilitar comandos de marcha desde los terminales durante la programación configure el parámetro
b1-08 como “1”.
Page 70

Modo Drive
El convertidor puede ser operado en el modo Drive. Todos los parámetros de monitorización (U1-), así
como las informaciones y el historial de fallos pueden ser visualizados con este modo.
Cuando se configura b1-01 (Selección de referencia) como 0, 1 ó 3 el valor de la referencia de frecuencia
seleccionado (d1-) puede ser modificado en el display de configuración de frecuencia utilizando las teclas
Más, Menos, Shift/RESET y Enter. Después de confirmar el cambio pulsando la tecla ENTER, la pantalla
vuelve al display de monitorización.
Ejemplos de operación
La siguiente figura muestra ejemplos de operaciones con teclas en el modo Drive.
Display durante Operac.
3
Display Selecc.
Modo
Display Monitoriz.
Display Config. Frecuencia
El display de configuración
de frecuencia no se
visualizará cuando se utilice
una referencia analógica.
El nombre del fallo se visualizará
si se pulsa la tecla DATA/ENTER mientras se
visualiza una constante para la que se
visualiza un código de fallo.
Fig. 3.5 Operaciones en el Modo Drive
Nota: Cuando se cambia el display con las teclas Más / Menos, después del último parámetro de monitorización, el display saltará de regreso al primer pará-
metro de monitorización y viceversa (p. ej. U1-55 irá seguido de U1-01).
El display para el primer parámetro de monitorización (referencia de frecuencia) será visualizado cuando la alimentación de potencia se conecte
(ON). El elemento de monitorización visualizado durante el arranque puede ajustarse en o1-02 (selección de monitorización después del encendido).
3-7
Page 71

3
Modo Quick Programming
En el modo de programación rápida (quick programming) pueden ser monitorizados y configurados los parámetros básicos requeridos para la operación de elevadores como velocidades, tiempos de aceleración/desaceleración, etc.
Los parámetros pueden ser modificados desde los displays de configuración. Utilice las teclas Más, Menos, y
Shift/RESET para modificar la frecuencia. Cuando se pulsa la tecla DATA/ENTER los parámetros son escritos y la pantalla vuelve al display de monitorización.
Consulte la página 5-4, Parámetros de usuario disponibles en el modo Quick Programming para obtener
información detallada.
Ejemplos de operación
La siguiente figura muestra ejemplos de operaciones con teclas en el modo de programación rápida.
Display Selecc.Modo
Display Monitoriz.
Display Config.
3-8
Fig. 3.6 Operaciones en el Modo Quick Programming
Page 72

Modo Advanced Programming
En el modo de programación avanzada (advanced programming) pueden ser monitorizados y configurados
todos los parámetros del convertidor.
Utilizando las teclas Más, Menos y Shift/RESET pueden modificarse los parámetros desde los displays de
configuración. Cuando se pulsa la tecla DATA/ENTER los parámetros son guardados y la pantalla vuelve al
display de monitorización.
Consulte el página 5-1, Parámetros de usuario para obtener detalles sobre los parámetros.
Ejemplos de operación
La siguiente figura muestra ejemplos de operaciones con teclas en el modo de programación avanzada.
Display Selecc.Modo
Display Monitoriz.
Display Config.
3
Fig. 3.7 Operaciones en el Modo Advanced Programming
3-9
Page 73
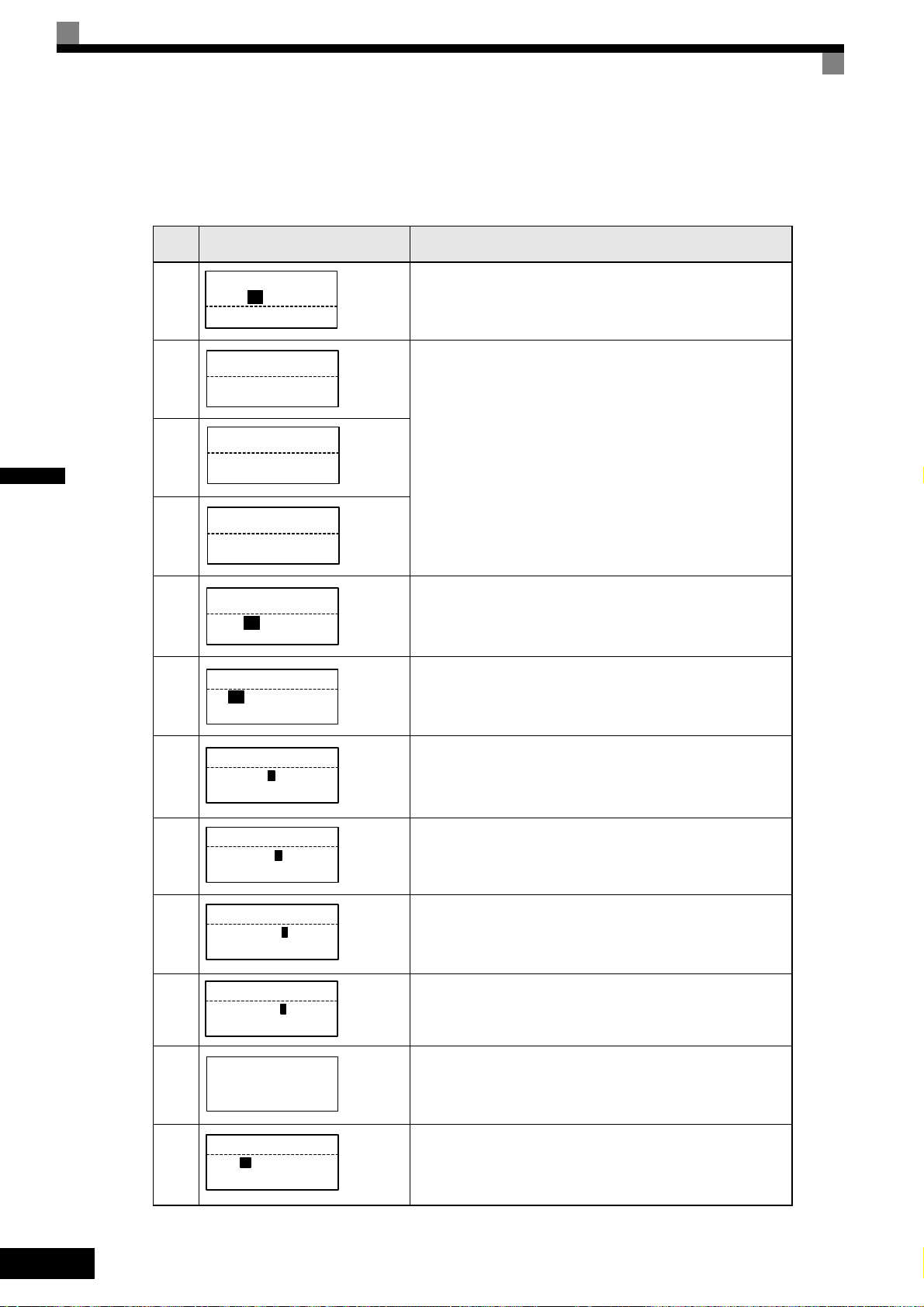
3
Configuración de parámetros
Aquí se muestra el procedimiento para cambiar C1-01 (Tiempo de aceleración 1) de 1,5 s a 2,5 s.
Tabla 3.3 Configuración de parámetros en el Modo Advanced Programming
Paso
Nº
Display del Operador Digital Descripción
-DRIVE-
Frequency Ref
U1- 01=50.00Hz
1 Alimentación de potencia conectada (ON)
2
3
4
5 Pulse DATA/ENTER para acceder al display de monitorización.
U1-02=50.00Hz
U1-03=10.05A
-DRIVE-
** Main Menu **
Operation
-QUICK-
** Main Menu **
Quick Setting
-ADV-
** Main Menu **
Programming
-ADV-
Initialization
A1-00=1
Select Language
Rdy
Pulse la tecla MENU 3 veces para introducir el modo de
programación avanzada.
-ADV-
6
7
8
9
10 Pulse la tecla DATA/ENTER para memorizar el dato configurado.
11
Accel / Decel
C1
-01 = 1.50sec
Accel Time 1
-ADV-
Accel Time 1
C1-01 =
0 01.50sec
(0.00 ~ 600.0)
"1.50sec"
-ADV-
Accel Time 1
C1-01 =
0 01.50sec
(0.00 ~ 600.0)
"1.50sec"
-ADV-
Accel Time 1
C1-01 =
0 0 1.50sec
(0.00 ~ 600.0)
"1.50sec"
-ADV-
Accel Time 1
C1-01 =
0 0 2.50sec
(0.00 ~ 600.0)
"1.50sec"
-ADV-
Entry Accepted
Pulse la tecla Más o Menos para visualizar el parámetro C1-01
(Tiempo de aceleración 1).
Pulse la tecla DATA/ENTER para acceder al display de
configuración. Se visualizará el valor de configuración actual de
C1-01.
Pulse la tecla Shift/RESET para desplazar el dígito que parpadea
hacia la derecha.
Pulse la tecla Más para modificar el valor de configuración
a 2,50 s.
Se visualizará “Entrada aceptada” durante 1 s. tras pulsar la tecla
DATA/ENTER.
3-10
-ADV-
Accel Time 1
12 El display vuelve al display de monitorización para C1-01.
C1-01 =
2.50sec
(0.00 ~ 600.0)
"1.50sec"
Page 74

Modo Verify
El modo de verificación (Verify mode) se utiliza para visualizar cualquier parámetro cuya configuración por
defecto haya sido modificada en un modo de programación o mediante autoajuste. Se visualizará “NONE” si
no se ha modificado ninguna configuración.
El parámetro A1-02 es el único parámetro del grupo A1- que será visualizado en la lista de constantes
modificadas si ha sido anteriormente modificado. Los otros parámetros no serán visualizados, incluso si son
diferentes de su configuración por defecto.
En el modo de verificación pueden utilizarse los mismos procedimientos utilizados en el modo de programación para modificar configuraciones. Utilice las teclas Más, Menos, y Shift/RESET para modificar una configuración. Cuando se pulsa la tecla DATA/ENTER las configuraciones de parámetros son escritas y el display
vuelve al display de monitorización.
Ejemplos de operación
En el siguiente ejemplo han sido modificadas las siguientes configuraciones por defecto:
• C1-01 (Tiempo de aceleración 1)
• C1-02 (Tiempo de aceleración 2)
• E1-01 (Configuración de tensión de entrada)
• E2-01 (Corriente nominal del motor).
Display Selecc. Modo
Display Monitoriz.
Display Config. Frecuencia
3
Fig. 3.8 Operaciones en el modo de verificación
3-11
Page 75

3
Modo Autotuning
El autoajuste (autotuning) mide y configura automáticamente los datos necesarios del motor con el fin de
lograr un rendimiento máximo. Lleve siempre a cabo el autoajuste antes de iniciar la operación cuando utilice
los modos de control vectorial.
Cuando ha sido seleccionado el control V/f, solamente puede seleccionarse el autoajuste estacionario para la
resistencia línea a línea.
Realice un autoajuste estacionario cuando el motor no puede ser operado (p.ej. si los cables no pueden ser retirados de la polea de tracción), o si debe utilizarse un control vectorial lazo abierto o de lazo cerrado.
Ejemplo de operación para el control V/f
El método de ajuste para el control V/f está fijado según la medida de la resistencia de terminal (T1-01=1).
Introduzca la potencia nominal de salida y la corriente nominal especificadas en la placa del motor y pulse la
tecla RUN. Los datos del motor son medidos automáticamente.
Configure siempre los elementos a los que se hace referencia anteriormente. En caso contrario el autoajuste no
puede ser iniciado, p.ej. no puede ser iniciado desde el display de entrada de tensión nominal del motor.
Utilizando las teclas Más, Menos y Shift/RESET pueden modificarse los parámetros desde los displays de
configuración. El parámetro será guardado cuando se pulse la tecla DATA/ENTER.
El siguiente diagrama muestra un ejemplo de autoajuste de control V/f.
Display Selecc. Modo
Display Monitoriz.
El display cambiará
automáticamente
dependiendo del estado del
autoajuste.
Display Config. Frecuencia
3-12
Fig. 3.9 Operación en Modo Autotuning
Si tiene lugar un fallo durante el autoajuste, consulte página 7-14, Fallos de autotuning.
Page 76
Procedimiento de
arranque
Este capítulo describe el procedimiento de arranque básico, el autotuning de los datos del motor para cada modo
de control y le ofrece un asesoramiento en caso de que se presenten problemas.
Rutina de arranque general ......................................................................................4-2
Encendido ................................................................................................................. 4-3
Autotuning.................................................................................................................4-4
Precauciones respecto al autotuning........................................................................4-5
Procedimiento de autotuning con motores de inducción ..........................................4-6
Procedimiento de autotuning para motores de imán permanente ............................4-7
Ajuste de desplazamiento de encoder de motor de imán permanente.....................4-8
Optimización del rendimiento..................................................................................4-11
Page 77

Rutina de arranque general
Arranque
El siguiente diagrama muestra la secuencia de arranque básico.
INICIO
Instalación mecánica
Cableado del circuito principal y de control
4
Comprobar la selección de fuente de
alimentación del encoder
Conectar la fuente de alimentación
Seleccionar el modo de control en el parámetro
Realizar autotuning de datos de motor/desplazamiento de encoder
* Control V/f
* Control vectorial lazo abierto
* Control vectorial lazo cerrado
* Control vectorial lazo cerrado para imán permanente
Fuente de referencia
de velocidad
Entrada analógica
Configurar las E/S analógicas/digitales en los
parámetros H1-xx, H2-xx y H3-xx
A1-02
página 4-6, Procedimiento de autotuning con motores de inducción
Operador digital (b1-02 = 0)
* (Sólo lazo cerrado)
página 4-7, Procedimiento de autotuning para motores de
imán permanente
Seleccionar la secuencia de control en
el parámetro d1-18
Configurar las E/S digitales en los
parámetros H1-xx y H2-xx
4-2
* Tiempos de aceleración/deceleración (C1-xx)
Configurar
* Curvas S (sacudidas) (C2-x)
Realizar ejecuciones de prueba
Ajuste preciso
* Ajuste de secuencia de freno
* Configuración de funciones especiales
FIN
Fig. 4.1 Secuencia de arranque básico
* Valores de velocidad preconfigurados (d1-xx)
Configurar
* Tiempos de aceleración/deceleración (C1-xx)
* Curvas S (sacudidas) (C2-xx)
Page 78
Encendido
Antes del encendido
Se deben comprobar atentamente los siguientes puntos antes de conectar la alimentación.
• La fuente de alimentación debe cumplir con las especificaciones del convertidor (consulte página 9-2,
Especificaciones según modelo).
• Compruebe que los cables de la fuente de alimentación están conectados firmemente a los terminales
correctos (L1, L2, L3).
• Los cables del motor deben estar conectados firmemente a los terminales adecuados en el lado del conver-
tidor (U, V, W) así como en el lado del motor.
• La unidad/resistencia de freno debe estar conectada correctamente.
• El terminal del circuito de control del convertidor y el dispositivo de control deben estar cableados correc-
tamente.
• Todos los terminales del circuito de control deben estar desconectados.
• Si se utiliza una tarjeta PG, compruebe que esté cableada correctamente.
Display después del encendido
Tras un encendido normal sin problemas el display del operador muestra los siguientes mensajes:
BB
UV
o
Rdy
El mensaje Baseblock parpadea.
En el display se muestra un fallo o un
mensaje de alarma.
En el ejemplo se muestra una alarma de
tensión baja.
Configuración
de A1-02
Control V/f 0 -
Control vectorial lazo abierto 2 -
Control vectorial lazo cerrado
para motores de imán
permanente
Control vectorial lazo cerrado
para motores de imán
permanente
6PG-F2
6PG-X2
-DRIVE-
Display para operación
normal
Base Block
Cuando se produce un error o una alarma está activa, aparecerá un mensaje de error o alarma. En tal caso,
consulte Capítulo 7, Detección y corrección de errores.
Display para operación de
-DRIVE-
fallo
Main Power Loss
Selección de modo de control
Lo primero después del encendido es seleccionar uno de los cuatro modos de control según el tipo de máquina.
Tabla 4.1 Selección de modo de control
Tipo de máquina Modo de control
Motor de inducción sin encoder
Motor de inducción con encoder incremental Control vectorial lazo cerrado 3 PG-B2 / PG-X2
Motor de imán permanente con encoder Hiperface
EnDat 2.1
Motor de imán permanente interno de Yaskawa con encoder
incremental
y
4
Tarjeta PG
PRECAUCIÓN
• Para los motores de imán permanente no utilice otro modo de control que no sea el vectorial lazo
cerrado para imán permanente (A1-02 = 6). El uso de otro modo de control puede provocar daños en el
equipo o un comportamiento peligroso.
4-3
Page 79

4
E
Autotuning
La función de autotuning de los datos de motor establece automáticamente los parámetros de la curva V/f
(E1-), los parámetros de los datos del motor (E2-, E5-) y los datos del encoder (F1-01). Los pasos
que se tengan que realizar durante el autotuning dependen de la selección de modo de ajuste. Consulte página
5-54, Autotuning del motor: T para obtener una vista general de los parámetros de autotuning.
Selección de modo de autotuning
El modo de autotuning se tiene que seleccionar según el modo de control y el sistema mecánico elegido (hay
posibilidad o no de rotación del motor sin carga). Tabla 4.1 muestra el modo de ajuste seleccionable para cada
modo de control.
Tabla 4.2 Modos de autotuning de datos del motor
Modo Autotuning Función
Ajuste estándar dinámico
(con rotación de motor)
Ajuste IM estático (sin rotación del
motor)
Ajuste de resistencia línea a línea IMAjusta sólo la resistencia línea a
Ajuste del desplazamiento de
encoder
Ajusta todos los parámetros del
motor.
Ajusta los parámetros básicos
del motor.
línea
Ajusta el desplazamiento entre
el encoder y la posición de cero
magnético.
Selección
de modo
de autotu-
ning
(T1-01)
0NoSíSíSí
1NoSíSíNo
2 SíSíSíNo
4 NoNoNo Sí
V/f
Modo de control
Vector ial
lazo
abierto
Vectorial
cerrado
lazo
Vectorial
lazo
cerrado
(PM)
Modos de autotuning
Autotuning dinámico del motor (T1-01 = 0)
Este modo de autotuning se puede utilizar en cualquier modo de control vectorial. Después de haber introducido los datos de la placa del motor, el convertidor accionará el motor durante 1 a 2 minutos aproximadamente y establecerá los parámetros de motor necesarios automáticamente.
Utilice este modo de ajuste solamente si el motor puede girar libremente, lo que significa que los
cables deben estar retirados y el freno debe estar abierto. La caja de engranajes (reductora) puede
IMPORTANT
Autotuning estático de motor (T1-01 = 1)
Este modo de autotuning solamente se puede utilizar para el control vectorial lazo abierto y lazo cerrado para
IM. El convertidor suministra alimentación al motor durante 1 minuto aproximadamente y parte de los parámetros del motor se establecen automáticamente mientras el motor no gira. La corriente en vacío del motor y
el valor de deslizamiento nominal se ajustarán automáticamente durante la primera operación.
Verifique el valor de deslizamiento nominal (E2-02) y la corriente en vacío (E2-03) después de la primera ejecución con velocidad nominal.
Autotuning para resistencia de línea a línea (T1-01 = 2)
permanecer conectada al motor.
4-4
El autotuning estático para la resistencia de línea a línea se puede usar en control V/f, control vectorial lazo
abierto y control vectorial lazo cerrado. El convertidor suministra alimentación al motor durante aproximadamente 20 segundos para medir la resistencia de línea a línea del motor y la resistencia del cable. El motor no
gira durante este procedimiento de ajuste.
Page 80

Ajuste del desplazamiento del encoder (T1-01=4)
E
Este modo de ajuste está disponible solamente en el modo de control vectorial lazo cerrado para motores de
imán permanente. Establece automáticamente el desplazamiento entre el polo magnético y la posición de cero
magnético. Se puede utilizar para volver a ajustar el desplazamiento después de un cambio de encoder sin
cambiar la configuración de datos del motor.
Precauciones respecto al autotuning
Precauciones generales:
1. Utilice autotuning dinámico siempre que se requiera alta precisión o para un motor que no esté
conectado a una carga.
IMPORTANT
2. Utilice autotuning estático siempre que la carga no se pueda desconectar del motor (por ejemplo, si
no pueden retirarse los cables).
3. Asegúrese de que el freno mecánico no esté abierto para el autotuning estático.
4. Durante el autotuning, los contactores del motor tienen que estar cerrados.
5. Para el autotuning, las señales BB y BB1 deben estar en ON (el convertidor no debe estar en condición de baseblock).
6. Confirme que el motor esté mecánicamente fijo y que no se puede mover.
7. Durante el autotuning, se suministra alimentación aunque el motor no gire. No toque el motor hasta
que el autotuning haya finalizado.
8. Retire la chaveta del eje del motor antes de realizar un ajuste dinámico con un motor (sin polea de
tracción o montado en engranaje).
9. Para cancelar el autotuning pulse la tecla STOP del Operador Digital.
Precauciones para autotuning dinámico y desplazamiento de encoder:
1. La carga se debe desconectar, lo que significa que los cables se tienen que retirar y el freno debe
estar abierto.
2. Si la carga no se puede retirar, el ajuste se puede realizar con una cabina equilibrada. La precisión
del resultado del ajuste puede ser menor, lo que puede provocar una pérdida de rendimiento.
3. Asegúrese de que el freno esté abierto durante el autotuning.
4. Durante el autotuning, el motor puede arrancar y parar varias veces. Cuando termine el ajuste, se
mostrará “END” en el panel del operador. No toque el motor hasta que se muestre este display y el
motor se haya detenido por completo.
4
4-5
Page 81

Procedimiento de autotuning con motores de inducción
En la Fig. 4.2 se muestra el procedimiento de autotuning para un motor de inducción con encoder, o sin él, en
control V/f, vectorial lazo abierto y vectorial lazo cerrado.
INICIO
Configurar las entradas de base-
block, BB y BB1
4
¿Control V/f?
(A1-02 = 0)
Sí
Acceder al modo de autotuning y
configurar el parámetro T1-01 = 2
T1-02: potencia nominal del motor
T1-04: corriente nominal del motor
Configurar:
Pulsar el botón UP hasta que
aparezca “Ajuste listo"
No
(A1-02 = 2/3)
¿El motor puede
girar libremente?
No
Acceder al modo de autotuning y
configurar el parámetro T1-01 = 1
T1-02: potencia nominal del motor
T1-04: corriente nominal del motor
T1-05: frecuencia nominal del motor
T1-06: número de polos del motor
T1-07: velocidad nominal del motor
Cerrar el o los contactores de motor
Configurar:
T1-03: tensión nominal del motor
T1-08: número de pulsos del
encoder (PG)*
(*Sólo CLV)
Pulsar el botón UP hasta
que aparezca "Ajuste listo"
Sí
(¿cables retirados?)
Acceder al modo de autotuning y
configurar el parámetro T1-01 = 0
T1-02: potencia nominal del motor
T1-03: tensión nominal del motor
T1-04: corriente nominal del motor
T1-05: frecuencia nominal del motor
T1-06: número de polos del motor
T1-07: velocidad nominal del motor
T1-08: número de pulsos del encoder
Configurar:
(PG)*
(*Sólo CLV)
Pulsar el botón UP hasta
que aparezca “Ajuste listo"
Abrir el freno
4-6
Consulte
página 7-14, Fallos de autotuning
y elimine el origen del fallo.
Pulsar el botón RUN
¿Ajuste
No
(Se muestra el
código de fallo)
Abrir los contactores, abrir las entradas
baseblock y cerrar el freno si se ha realizado
el autotuning dinámico (con rotación de motor)
correcto?
Sí
(*Se muestra
“Ajuste correcto”)
FIN
Fig. 4.2 Autotuning para motores de inducción
Page 82

Procedimiento de autotuning para motores de imán permanente
La Fig. 4.3 muestra el procedimiento de autotuning para motores de imán permanente. Antes del ajuste, asegúrese de que el modo de control está configurado en vectorial lazo cerrado de imán permanente (A1-02 = 6).
INICIO
* Quitar los cables para que el motor pueda girar libremente
* Configurar las entradas de baseblock, BB y BB1
Conectar la fuente de alimentación si está
S3-13: diámetr o de polea
de tracci ón S3-14: cabl es
Abrir el freno, cerrar el contactor del motor,
girar el motor lentamente en dirección directa*1 y comprobar la
desconectada
¿Se ha producido un
fallo OPE06?
No
¿Se ha producido un
fallo CPF24?
No
¿Se ha producido un
fallo OPE02?
No
Configurar las constantes mecánicas:
monitorización de U1-05.
¿Se ha producido PGO
(sin realimentación de
encoder)?
No
S3-15: relac ión de
engranaj e
Comprobar el parámetro
Sí
Sí
Sí
* Comprobar el cableado
Sí
* Comprobar/reajustar la fuente de
ali mentaci ón del encoder
Desconectar la fuente de
* F1-01
* n8-35
* Comprobar el parámetro n8-35
* Si se utiliza EnDat / Hiperface
- comprobar la fuente de alimentación del encoder
- comprobar el cableado de la señal CLOCK y DATA
* Desconectar la fuente de alimentación.
* Comprobar si se ha configurado la constante PG
correcta (F1-01) y la resolución del encoder absoluto
(F1-21).
* Consulte:
página 7-12, Errores de programación del operador
y elimine el origen del fallo.
alimentación y comprobar si la
tarjeta PG adecuada está
instalada correctamente
4
¿El signo del valor
U1-05 es positivo
(distinto de -)?
Sí
T1- 01 = 0: ajuste dinám ico
T2- 01: potencia nom inal del motor
T2- 02: frec uencia base del motor
T2- 03: tensión nom inal del motor
(Se muestra “Ajuste correcto”)
Confi gurar los par ámetros de autotuning:
Puls ar el botón U P hasta que aparezca “ Ajuste l isto"
Cer rar el o los c ontactores del motor y pulsar el botón RU N
Esper ar a que acabe el ajuste
Abri r l os contactor es, abr ir l as entradas de
basebl ock y cer rar el freno
T2- 04: corr iente nom inal del motor
T2- 05: númer o de polos del m otor
T2- 09: resol ución del encoder
T2- 10: constante de t ensión del m otor
¿Ajuste correcto?
Sí
FIN
Fig. 4.3 Autotuning para motores de imán permanente
No
No
(Se m uestra el códi go de fallo)
* 1. Dirección directa significa:
La dirección en la que gira el motor con un comando UP en el terminal S1 (es decir, con una rotación en el sentido de las agujas del reloj,
alimentación trifásica y cableado U-U, V-V, W-W entre el convertidor
y el motor). Normalmente, la dirección es el sentido de las agujas del
reloj visto desde el lado del eje del motor (polea de tracción).
Consulte el manual de instrucciones del motor o consulte al fabricante
los detalles sobre la dirección de rotación.
* Comprobar el cableado del encoder.
* Cambiar el par ámetr o F1-05
Consulte
página 7-14, Fallos de autotuning
y elimine el origen del fallo.
4-7
Page 83

Ajuste de desplazamiento de encoder de motor de imán permanente
La Fig. 4.4 muestra el procedimiento de autotuning para un ajuste de desplazamiento de encoder. Este procedimiento se debe realizar si se ha cambiado el encoder o no se ha alineado correctamente. Antes del ajuste,
asegúrese que está seleccionado el modo control vectorial lazo cerrado de imán permanente (A1-02 = 6) y que
los parámetros E1- y E5- están configurados correctamente.
INICIO
4
¿Se pueden quitar
los cables?
Sí
Quitar los cables.
Configurar las entradas de baseblock,
Conectar la fuente de alimentación si está
Abrir el freno, cerrar el contactor del motor,
girar el motor lentamente en dirección directa*
comprobar la monitorización de U1-05.
BB y BB1
desconectada
¿Se ha producido un
fallo OPE06?
No
¿Se ha producido un
fallo CPF24?
No
¿Se ha producido un
fallo OPE02?
No
No
Comprobar el parámetro
* F1-01
Sí
* n8-35
Sí
Sí
1
y
Equilibrar la cabina de modo que no se mueva
* Si se utiliza EnDat / Hiperface
- comprobar el parámetro n8-35
- Compruebe la fuente de alimentación del encoder.
Comprobar el cableado de la señal de CLOCK y DATA
-
* Desconectar la fuente de alimentación.
* Comprobar si se ha configurado la constante PG correcta
(F1-01) y la resolución del encoder absoluto (F1-21).
* Consulte:
página 7-12, Errores de programación del
y elimine el origen del fallo.
con los frenos abiertos.
Nota: la precisión será menor en este
modo de ajuste
Desconectar la fuente de
alimentación y comprobar si
la tarjeta PG está instalada
correctamente
T1-01 = 4: ajuste de desplazamiento de
Pulsar el botón UP hasta que aparezca
Cerrar el o los contactores del motor y
(Se muestra
“Ajuste correcto”)
Abrir los contactores, abrir las entradas
* Com probar el cabl eado
¿Se ha producido PGO
(sin realimentación de
encoder)?
No
¿El signo del valor
U1-05 es positivo
(distinto de -)?
Sí
Configurar:
encoder
“Ajuste listo”.
pulsar el botón RUN
Esperar a que acabe el ajuste.
¿Ajuste correcto?
Sí
de baseblock y cerrar el freno
FIN
Sí
* Com probar /reaj ustar l a fuente de
ali mentaci ón del encoder
No
No
(Se muestra el
código de fallo)
* Com probar el cabl eado del encoder .
* Cam biar el parám etro F 1-05
Consulte
página 7-14, Fallos de autotuning
y elimine el origen del fallo.
* 1. Dirección directa significa:
La dirección en la que gira el motor con un comando UP en el terminal
S1 (es decir, con una rotación en el sentido de las agujas del reloj, alimentación trifásica y cableado U-U, V-V, W-W entre el convertidor y
el motor). Normalmente, la dirección es el sentido de las agujas del
reloj visto desde el lado del eje del motor (polea de tracción).
Consulte el manual de instrucciones del motor o consulte al fabricante
los detalles sobre la dirección de rotación.
Fig. 4.4 Autotuning de desplazamiento del encoder
4-8
Page 84

Precauciones respecto al autotuning con motores de inducción
Si la tensión nominal del motor es superior a la tensión de alimentación.
Si la tensión nominal del motor es mayor que la tensión de alimentación, reduzca el valor de la tensión base
como se muestra en la Fig. 4.5 para prevenir la saturación de la tensión de salida del convertidor. Utilice el
procedimiento siguiente para realizar el autotuning:
1. Introduzca la tension de la entrada de alimentación de potencia en T1-03 (Tensión nominal del motor).
2. Introduzca los resultados de la siguiente fórmula en T1-05 (Frecuencia base del motor)
T1-03
T1-05 Base frequency from motor nameplate
3. Realice el autotuning.
Una vez completado el autotuning, configure E1-04 (frecuencia de salida máxima) como la frecuencia base de
la placa del motor.
Tensión de salida
Tensión nominal
de la placa
del motor
-----------------------------------------------
×=
Motor rated voltage
4
Frecuencia base de la
placa del motor
------------------------------------Tensión nominal de
la placa del motor
Frecuencia base
de la placa
del motor
Frecuencia de salida
Fig. 4.5 Configuración de la frecuencia base del motor y de la tensión de entrada del convertidor
Cuando se requiera precisión a altas velocidades (p.ej., 90% de la velocidad nominal o mayor), configure
T1-03 (Tensión nominal del motor) como la tensión de entrada de alimentación × 0,9. En este caso a altas
velocidades, la corriente de salida se incrementará según se reduce la tensión de la entrada de alimentación.
Asegúrese de proveer suficiente margen en la corriente del convertidor.
Si la frecuencia máxima es superior a la frecuencia base del motor.
Configure la frecuencia máxima de salida en el parámetro E1-04 después de haber efectuado el autotuning.
4-9
Page 85

4
Alarmas y fallos de autotuning
Errores de entrada de datos
El convertidor mostrará un mensaje de “dato no válido” y no realizará el autotuning si:
• la velocidad del motor, la frecuencia nominal y el número de pares de polos no se corresponden.
Base Frequency 60⋅
Motor Speed
• la corriente nominal no se corresponde con el valor de potencia nominal
El convertidor calcula la potencia del motor mediante el valor de corriente de entrada y los datos de la tabla
interna de datos del motor. El valor calculado debe estar entre el 50% y el 150% del valor de entrada para
la potencia nominal.
Otras alarmas y fallos durante autotuning
Para ver un resumen de las posibles alarmas o fallos de autotuning y las medidas correctivas, consulte
página 7-14, Fallos de autotuning.
-------------------------------------------------
<
2 Motor pole⋅
4-10
Page 86

Optimización del rendimiento
La siguiente tabla le ofrece consejos respecto al ajuste para mejorar el rendimiento después de haber efectuado
la configuración básica.
Tabla 4.3 Optimización del rendimiento
Problema Razón probable Contramedida
• Incremente la corriente de inyección de la
c.c. en el parámetro S1-02.
• Ajuste el tiempo de inyección de la c.c. al
inicio en S1-04 de la manera más reducida posible, pero asegúrese de que el
freno se abra completamente antes de que
el motor comience a girar.
• Aumente la tensión de la curva V/f
mínima (E1-10) y media (E1-08).
Asegúrese de que la corriente de inicio y
de nivelación no aumente en exceso.
• Incremente la ganancia de ASR al inicio
(C5-03) y reduzca el tiempo I de ASR
también al inicio (C5-04). Si se produce
vibración ajuste los valores hacia atrás
mediante pasos pequeños.
• Incremente la ganancia de servo cero en
el parámetro S1-20.
Retroceso
durante el
arranque
• Par demasiado reducido cuando se abre el
V/f y
OLV
CLV
freno
• Respuesta del ASR demasiado lenta
cuando se abre el freno.
4
Sacudidas
durante el
arranque
Vibraciones en el
área de velocidad
baja y media
• El par motor no está establecido por
completo cuando se abre el freno.
Común
• Cierre de los contactores de motor
demasiado tarde
• El motor comienza a girar cuando el freno
no está completamente abierto o marcha
Común
V/f
OLV
CLV
contra el freno
• Cambio demasiado rápido de la relación de
aceleración
• Tensión de salida demasiado alta
• Compensación de par demasiado rápida
• Tensión de salida demasiado alta
• Ajustes de ASR demasiado altos
• Valor de deslizamiento de motor erróneo
• Alargue el tiempo de retardo de liberación
del freno S1-06 y el tiempo de inyección
de c.c./servo cero al inicio S1-04.
• Asegúrese de que los contactores estén
cerrados antes de ejecutar el comando
Up/Down.
• Incremente el tiempo de inyección de la
c.c. al inicio en S1-04.
• Incremente la curva S al inicio en C2-01.
• Reduzca los ajustes de la curva V/f
(E1-08 / E1-10)
• Aumente el tiempo de retardo de la compensación de par (C4-02)
• Reduzca los ajustes de la curva V/f
(E1-08 / E1-10)
• Reduzca C5-01 / C5-03 e incremente
C5-02 / C5-04
• Compruebe el valor de deslizamiento de
motor en el parámetro E2-02. Auméntelo
o disminúyalo en pasos de 0,2 Hz.
Vibraciones en el
área de velocidad
alta y velocidad
máxima
OLV
• Compensación de par demasiado rápida
CLV
• Ajustes de ASR demasiado altos
• Aumente el tiempo de retardo de la
compensación de par (C4-02)
• Reduzca C5-01 / C5-03 e incremente
C5-02 / C5-04
4-11
Page 87

4
Problema Razón probable Contramedida
• Aumente el tiempo de retardo de la com-
Sacudidas
producidas por
sobresaturación
cuando se alcanza
la velocidad
máxima
El motor se
detiene
brevemente
cuando se alcanza
la velocidad de
nivelación
(subsaturación)
OLV
CLV
Común
V/f
OLV
CLV
• Compensación de par o de deslizamiento
demasiado rápida
• Parámetros del controlador ASR
demasiado suaves o demasiado duros
• Datos de motor incorrectos
• Modificación de la aceleración demasiado
brusca.
• Par demasiado bajo a velocidad baja
• Par demasiado bajo a velocidad baja
• Datos de motor incorrectos
• Sobrecompensación de deslizamiento
• Datos de motor incorrectos
• Controlador ASR demasiado lento
pensación de par C4-02
• Aumente el tiempo de retardo de la compensación de deslizamiento C3-02
• Reajuste la ganancia de ASR P (C5-01) y
el tiempo de integral de ASR (C5-02).
• Reajuste los datos de motor (E2-),
especialmente el deslizamiento (E2-02) y
los valores de corriente en vacío (E2-03)
o bien efectúe un autotuning.
• Incremente la curva S al final de la
aceleración C2-02.
• Aumente la tensión de la curva V/f
mínima (E1-10) y media (E1-08).
Asegúrese que la corriente de inicio y de
nivelación no aumente en exceso.
• Aumente la tensión de la curva V/f
mínima (E1-10) y media (E1-08).
Asegúrese que la corriente de inicio y de
nivelación no aumente en exceso.
• Reajuste los datos de motor (E2-),
especialmente el deslizamiento (E2-02) y
los valores de corriente en vacío (E2-03)
o bien efectúe un autotuning.
• Reajuste los datos de motor (E2-),
especialmente el deslizamiento (E2-02) y
los valores de corriente en vacío (E2-03)
o bien efectúe un autotuning.
• Aumente la ganancia P de ASR (C5-09) y
disminuya el tiempo de integral de ASR
(C5-10).
Sacudidas
durante la parada
Ruido de alta
frecuencia del
motor
Vibración que
aumenta con la
velocidad
Común
Común
Común
CLV
Común
• Cambio demasiado rápido de la relación de
desaceleración
• Cierre de freno demasiado pronto, de
manera que el motor marcha contra el
freno
• El contactor de motor se abre cuando el
freno no se ha cerrado por completo.
• La frecuencia portadora es demasiado baja.
• El encoder vibra
• Problemas mecánicos
• Partes dinámicas (inducido del motor,
rueda de mano, disco/tambor de freno)
están desequilibradas
• Incremente la curva S al final de la
desaceleración C2-04.
• Aumente el tiempo de retardo de cierre
del freno S1-07 y, de ser necesario,
el tiempo de inyección de c.c. durante la
parada S1-05.
• Compruebe la secuencia del contactor de
motor.
• Incremente la frecuencia portadora en el
parámetro C6-02 ó C6-11. Si la
frecuencia portadora aumenta en un grado
mayor que la configuración de fábrica,
debe considerarse una disminución de la
corriente (consulte página 9-6, Reducción
por frecuencia portadora)
• Compruebe el montaje del encoder y la
orientación del eje del motor
• Comprobar los cojinetes y la caja de
engranajes
• Equilibre las partes dinámicas
4-12
Page 88

Parámetros de
usuario
Este capítulo describe todos los parámetros de usuario que pueden ser configurados en el convertidor.
Descripciones de los parámetros de usuario ................................................................5-2
Funciones y niveles del display del Operador Digital....................................................5-3
Tablas de parámetros de usuario..................................................................................5-8
Configuraciones de ajuste: A ........................................................................................5-8
Parámetros de aplicación: b........................................................................................5-10
Parámetros de ajuste: C..............................................................................................5-12
Parámetros de referencia: d........................................................................................5-18
Parámetros del motor: E .............................................................................................5-21
Parámetros opcionales: F ...........................................................................................5-26
Parámetros de función de terminal: H.........................................................................5-32
Parámetros de función de protección: L......................................................................5-37
Ajustes especiales: n2 / n5..........................................................................................5-43
Ajustes del motor PM n8 / n9 ......................................................................................5-45
Parámetros de función de elevación: S.......................................................................5-48
Autotuning del motor: T ...............................................................................................5-54
Parámetros de monitorización: U ................................................................................5-56
Configuraciones que cambian con el modo de control (A1-02) ..................................5-62
Configuraciones de fábrica que cambian con la capacidad del convertidor (o2-04)...5-64
Page 89

5
Descripciones de los parámetros de usuario
Descripción de las tablas de parámetros de usuario
Las tablas de parámetros de usuario están estructuradas como se detalla a continuación. Se utiliza b1-01
(Selección de referencia de frecuencia) como ejemplo.
Métodos de control
Vecto-
rial
V/f
lazo
abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado
(PM)
Registro
MEMO-
Número
de pará-
metro
b1-01
Nombre
Display
Selección de
referencia
Descripción
Configura el método de entrada
de la referencia de frecuencia.
0:Operador Digital
1:Terminal de circuito de control
(entrada analógica)
2:Comunicaciones MEMOBUS
3:Tarjeta opcional
Rango
de con-
figura-
0 a 3 0 No Q Q Q Q 180H -
ción
Confi-
ción de
fábrica
gura-
Modificación
durante
la ope-
ración
• Número de parámetro: El número del parámetro de usuario.
• Nombre El nombre del parámetro de usuario.
• Display El display visualizado en el Operador Digital JVOP-160-OY
• Descripción:
Detalles sobre la función o las configuraciones del parámetro de
usuario.
• Rango de configuración: El rango de configuración del parámetro de usuario.
La configuración de fábrica (cada método de control tiene su propia
configuración de fábrica, por lo tanto la configuración de fábrica cam-
• Configuración de fábrica:
bia al cambiar el método de control).
Consulte en la página página 5-62, Configuraciones que cambian con
el modo de control (A1-02) las configuraciones de fábrica que
cambian al ajustar el método de control.
• Modificación durante la
operación:
Indica si el parámetro puede ser cambiado o no mientras el
convertidor se encuentra en operación.
Sí: Pueden realizarse cambios durante la operación.
No: No pueden realizarse cambios durante la operación.
• Métodos de control:
Indica los métodos de control en los que el parámetro de usuario
puede ser monitorizado o configurado.
El elemento puede ser monitorizado y configurado tanto
Q:
en el modo Quick programming (programación rápida)
como en el modo Advanced programming (programación avanzada).
el elemento puede ser monitorizado y configurado
A:
únicamente en el modo Advanced programming
(programación avanzada).
No:
el elemento no puede ser monitorizado o configurado en
este método de control.
• Registro MEMOBUS: El número de registro utilizado para comunicaciones MEMOBUS.
• Página:
La página de referencia para una información más detallada sobre el
parámetro.
BUS
Pá-
gina
5-2
Page 90

Funciones y niveles del display del Operador Digital
La siguiente figura muestra la jerarquía de displays del Operador Digital para el convertidor.
Nº Función Página
U1 Parámetros de estado de monitorización
MENU
Modo Drive
El convertidor puede ser
operado y su estado puede
ser visualizado.
Modo Quick Programming
Pueden monitorizarse o
configurarse los parámetros
mínimos requeridos para la
operación.
Modo Advanced Programming
Pueden monitorizarse o confi-
gurarse todos los parámetros.
Modo Verify
Pueden monitorizarse o
configurarse los parámetros
cuya configuración por defecto
ha sido modificada.
Modo Autotuning
Configura automáticamente
los parámetros del motor para
el control vectorial o mide la
resistencia línea a línea para
el control V/f.
U2 Seguimiento de fallo
U3 Histórico de fallos
A1 Modo Inicializar
Modo de configuración específico de usuario
A2
b1 Selecciones de modo de operación
b2 Freno de inyección de c.c.
b4 Función de temporización
b6 Funciones de retención (Dwell)
C1 Aceleración/Deceleración
C2 Aceleración/Deceleración de la curva S
C3 Compensación de deslizamiento del motor
C4 Compensación de par
C5 Control de velocidad (ASR)
C6 Frecuencia portadora
d1 Referencias de velocidad
d6 Sobreexcitación
E1 Curva V/f 1
E2 Ajuste Motor 1
E3 Curva V/f 2
E4 Ajuste Motor 2
E5 Ajuste del motor PM
F1 Ajuste de la opción PG
F4 Tarjeta de monitorización analógica
F5 Tarjeta de salida digital
F6 Configuración de comunicaciones serie
H1 Entradas digitales multifuncionales
H2 Salidas digitales multifuncionales
H3 Entradas analógicas multifuncionales
L1 Sobrecarga del motor
L2 Recuperación tras pérdida de alimentación
L3 Prevención de bloqueo
L4 Detección de referencia
L5 Reinicio por fallo
L6 Detección de par
L7 Límites de par
L8 Protección hardware
n2 Regulador automático de frecuencia
Control de realimentación positiva (feed
n5
n8 Ajuste del motor PM
o1 Selección de monitorización
o2 Operador Digital
o3 Función de copia
S1 Secuencia de frenado
S2 Compensación de deslizamiento
S3 Funciones de secuencia especiales
T1 Autotuning del motor 1
T2 Autotuning del motor 2
5-56
5-60
5-61
5-8
5-9
5-10
5-10
5-11
5-11
5-12
5-13
5-14
5-15
5-16
5-16
5-18
5-20
5-21
5-22
5-23
5-24
5-25
5-26
5-29
5-30
5-31
5-32
5-33
5-35
5-37
5-37
5-38
5-38
5-39
5-40
5-41
5-41
5-43
5-43
5-45
5-46
5-47
5-48
5-48
5-51
5-52
5-54
5-55
5
5-3
Page 91

5
Parámetros de usuario disponibles en el modo Quick Programming
En el modo de programación rápida pueden ser monitorizados y configurados los parámetros de usuario mínimos requeridos para la operación del convertidor. La siguiente tabla contiene una lista de los parámetros de
usuario visualizados en el modo de programación rápida. El resto de los parámetros de usuario, además de
éstos, se visualizan también en el modo de programación avanzada.
Número
de pará-
metro
A1-01
A1-02
C1-01
C1-02
C2-01
C2-02
C2-03
C2-04
C2-05
Nombre
Display
Nivel de acceso a
parámetros
Nivel de acceso
Selección del
método de control
Método de control
Tiempo de
aceleración 1
Tiempo Acel 1
Tiempo de
deceleración 1
Tiempo Decel 1
Tiempo
característico de la
curva S al inicio de
la aceleración
Crv S Ace @ Inicio
Tiempo
característico de la
curva S al final de la
aceleración
Crv S Ace @ Final
Tiempo
característico de la
curva S al inicio de
la deceleración
Crv S Dec @ Inicio
Tiempo
característico de la
curva S al final de la
deceleración
Crv S Dec @ Final
Tiempo
característico de la
curva S por debajo
de la velocidad de
nivelación
CurvaS @ nivelac.
Descripción
Se utiliza para configurar el nivel de
acceso a los parámetros (configurar/
leer).
0:Sólo monitorización (monitoriza-
ción del modo drive y configuración
de A1-01 y A1-04)
1:Se utiliza para seleccionar paráme-
tros de usuario (solamente pueden
leerse y configurarse parámetros
configurados de A2-01 a A2-32)
2:Avanzado
(pueden leerse y configurarse parámetros tanto en el modo de programación rápida (Q) como en el modo
de programación avanzada (A))
Configura el método de control para el
convertidor.
0:Control V/f
2:Control vectorial lazo abierto
3:Control vectorial lazo cerrado
6:Vectorial lazo cerrado para motores
de imán permanente (PM)
Configura el tiempo de aceleración
para acelerar de 0 Hz a la frecuencia de
salida máxima.
Configura el tiempo de deceleración
para decelerar de la frecuencia de
salida máxima a 0 Hz.
Cuando se configura el tiempo
característico de la curva S los tiempos
de acel/decel se incrementarán
solamente en la mitad de los tiempos
característicos de la curva S al inicio y
al final.
de
Modificación
durante
la opera-
ción
Configu-
Rango
de configuración
600,00
0,00 a
0,00 a
0,00 a
0,00 a
0,00 a
ración
fábrica
0 a 2 2 Sí Sí Sí Sí Sí 101H
0 a 6 0 No Sí Sí Sí Sí 102H
0,0 a
1,50 s Sí Sí Sí Sí Sí
*1
0,50 s No Sí Sí Sí Sí 20BH
2,50
0,50 s No Sí Sí Sí Sí 20CH
2,50
0,50 s No Sí Sí Sí Sí 20DH
2,50
0,50 s No Sí Sí Sí Sí 20EH
2,50
0,50 s No Sí Sí Sí Sí 232H
2,50
Métodos de control
Vecto-
V/f
rial lazo
abierto
Vecto-
rial lazo
cerrado
Vectorial lazo
cerrado
(PM)
Regis-
tro
MEMO-
BUS
200H
201H
5-4
Page 92

Número
de pará-
metro
C5-01
C5-02
C5-03
C5-04
C5-06
C5-07
C5-09
C5-10
d1-09
d1-14
d1-17
E1-01
Métodos de control
Vecto-
V/f
rial lazo
abierto
50,0
0 Hz
-- -
25,0
0 Hz
- - - 50,00%
4,00 Hz4,00
- - - 8,00%
Vectorial lazo
cerrado
40,00 -
0,500 s -
20,00 -
0,0 Hz -
40,00 -
0,500s
50,00 Hz50,00
25,00 Hz25,00
4,00 Hz -
Hz
Vectorial lazo
cerrado
(PM)
- 2,0 %
Hz
100,00
Hz
Regis-
MEMO-
21BH
21CH
21DH
221H
22EH
231H
288H
%
28FH
292H
i
i
i
i
i
i
i
i
i
de
*2
Modificación
durante
la opera-
ción
Sí - -
Sí - -
Sí - -
No - -
Sí - -
Sí - -
Sí
No Sí Sí Sí Sí 300H
Nombre
Display
Ganancia
proporcional (P) 1
del ASR
Gan.P 1 ASR - 12,00
Tiempo integral 1
del ASR
Tiempo I 1 ASR -0,300 s
Ganancia
proporcional (P) 2
del ASR
Gan.P 2 ASR -6,00
Tiempo integral (I)
2 del ASR
Tiempo I 2 ASR
Tiempo de retardo
del ASR
Tiempo retardo
ASR
Frecuencia de
cambio de ASR
Frec Cambio Gan
ASR
Ganancia
proporcional (P) 3
del ASR
Gan.P 3 ASR - 12,00
Tiempo integral (I)
3 del ASR
Tiempo I 3 ASR - 0,300s
Referencia de
velocidad nominal
Veloc. Nomin. vn
Referencia de
velocidad de
inspección
Veloc. Inspecc. vi
Referencia de
velocidad de
nivelación
Veloc. Nivel. vl
Configuración de la
tensión de entrada
Tensión
de entrada
Configura la ganancia proporcional 1 y
el tiempo integral 1 del lazo de control
de la velocidad (ASR) para la
frecuencia mínima.
La configuración solamente se activa
para la aceleración.
Configura la ganancia proporcional 2 y
el tiempo integral 2 del lazo de control
de la velocidad (ASR) para la
frecuencia máxima.
Configura la constante de tiempo de
filtro; el tiempo desde el lazo de
velocidad a la salida de comando de
par. Normalmente no es necesario
modificar esta configuración.
Configura la frecuencia para el cambio
entre la ganancia proporcional 1, 2, 3 y
el tiempo de integral 1, 2, 3.
Configura la ganancia proporcional 3 y
el tiempo integral 3 del lazo de control
de la velocidad (ASR) para la
frecuencia mínima.
La configuración solamente se activa
para la deceleración.
Configura la referencia de frecuencia
cuando la velocidad nominal es
seleccionada por una entrada digital.
Configura la referencia de frecuencia
cuando la velocidad de inspección es
seleccionada por una entrada digital.
Configura la referencia de frecuencia
cuando la velocidad de nivelación es
seleccionada por una entrada digital.
Configura la tensión de entrada del
convertidor. El valor aquí configurado
será la base para las funciones de
protección.
Descripción
de configuración
300,00
0,000 a
10,000
300,00
0,000 a
10,000
0,000 a
50,0 Hz
100,0 %
300,00
0,000 a
10,000
120,00
100,00
120,00
100,00
120,00
100,00
Rango
0,00 a
0,00 a
0,500
0,0 a
0,0 a
0,00 a
0 a
0 a
0 a
0 a
0 a
0 a
310 a
510
*2
Configu-
ración
fábrica
0,500 s Sí - - Sí Sí 21EH
0,020 s No - - - Sí 220H
400 V
tro
BUS
5
5-5
Page 93

5
Número
de pará-
metro
E1-04
E1-05
E1-06
E1-08
E1-09
E1-10
E1-13
E2-01
E2-02
E2-03
E2-04
E2-05
E2-11
Nombre
Display
Frecuencia de salida
máx. (FMÁX)
Descripción
Rango
de configuración
De 40,0
a 120,0
Configu-
ración
de
fábrica
Modificación
durante
la opera-
ción
Métodos de control
Vecto-
V/f
rial lazo
abierto
50,0 Hz50,0
Hz
Vecto-
rial lazo
cerrado
Vectorial lazo
cerrado
(PM)
50,0 Hz -
(con
Frecuencia máx.
PG-F2)
0 a 1200
(con
i
No
- - - 150 rpm
PG-X2)
0 a 3600
Tensión máx.
(VMÁX)
Tensión máx.
Frecuencia base
(FA)
Frecuencia base
Tensión de frecuencia media de salida
(VB)
Tensión media A
Frecuencia de salida
mín. (FMÍN)
Frecuencia mín.
Tensión mín. de fre-
cuencia de salida
(VMÍN)
Tensión de salida (V)
V MÁX
E1-05
V BASE
E1-13
VC
E1-08
V MÍN
E1-10
F MÍN
E1-09
FB
E1-07FAE1-08
F MÁX
E1-04
Frecuencia (Hz)
Configura la tensión de salida de la frecuencia base (E1-06).
0,0 a
510,0
*2
0,0 a
120,0
(con
PG-F2)
0 a 1200
(con
PG-X2)
0 a 3600
0,0 a
510
*2
0,0 a
120,0
0,0 a
510,0
*2
380,0 V
*2
i
i
i
i
No Sí Sí Sí No 304H
50,0 Hz50,0
Hz
50,0 Hz -
No
- - - 150 rpm
25,0 V
37,3
No
No
No
*2
*2
V
0,5
0,3 Hz - - 308H
Hz
19,4
5,0 V
*2
*2
V
- - 307H
- - 309H
Tensión mín.
Tensión base
(VBASE)
Ten sión Base - - 400 V
Corriente nominal
del motor
Corriente nominal
motor
Deslizamiento
nominal del motor
Configura la corriente nominal de
motor en Amperios.
El valor aquí configurado será el valor
base para la protección del motor y el
límite de par. Es un dato de
introducción para el autotuning.
Configura el deslizamiento nominal del
motor.
El valor aquí configurado será el valor
de referencia para la compensación del
Desliz. nom. motor
deslizamiento.
Este parámetro se configura
0,0 a
510,0
*2
0,85 a
17,00
*3
0,00 a
20,00
i
7,00 A
*4
2,70 Hz
*4
0,0
No
0,0 V
V
-
-
No Sí Sí Sí - 30EH
No Sí Sí Sí - 30FH
automáticamente durante el autotuning.
Corriente en vacío
del motor
Corriente en vacío
Número de polos
del motor
Número de polos
Resistencia línea a
línea del motor
Resistencia Term.
Potencia de salida
nominal del motor
Pot. Nom. Motor
Configura la corriente en vacío del
motor.
Este parámetro se configura
automáticamente durante el autotuning.
Configura el número de polos del
motor. Es un dato de introducción para
el autotuning.
Configura la resistencia fase a fase del
motor.
Este parámetro se configura
automáticamente durante el autotuning.
Configura la potencia nominal de
salida del motor.
Este parámetro es un dato de
introducción para el autotuning.
6,99
2,30 A
*4
No Sí Sí Sí - 310H
0,00 a
2 a 48 4 No - - Sí - 311H
0,000
3,333 Ω
a
65,000
0,00 a
650,00
*4
3,70 kW
*4
No Sí Sí Sí - 312H
No Sí Sí Sí No 318H
Regis-
tro
MEMO-
BUS
303H
305H
30CH
5-6
Page 94

Número
de pará-
metro
E5-02
E5-03
E5-04
E5-05
E5-06
E5-07
E5-09
F1-01
F1-05
L1-01
Nombre
Display
Potencia de salida
nominal del motor
Potencia nominal
Corriente nominal
del motor
Corriente Nom.
Número de polos
del motor
Número de polos
Resistencia terminal
de motor
Resistencia term.
Inductancia del eje
d
Inductancia del eje
Descripción
Configura la potencia nominal de
salida del motor.
Configura la corriente nominal del
motor.
Configura el número de polos del
motor.
Configuración de resistencia línea a
línea del motor
Configura la inductancia del eje d.
de
*4
Modificación
durante
la opera-
ción
No - - - Sí 0C2H
No - - - Sí 0C3H
*4
Rango
de configuración
0,00 a
300,00
0,00 a
200,00
Configu-
ración
fábrica
3,70 kW
7,31 A
4 a 48 4 No - - - Sí 0C4H
0,000 a
65,000
0,00 a
300,00
1,326
Ohm
19,11
mH
*4
No - - - Sí 0C5H
*4
No - - - Sí 0C6H
Métodos de control
Vecto-
V/f
rial lazo
abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado
(PM)
Regis-
MEMO-
d
Inductancia del eje
q
Inductancia del eje
Configura la inductancia del eje q.
0,00 a
600,00
26,08
mH
*4
No - - - Sí 0C7H
q
Constante de
tensión de motor
Constante de
Configura la constante de tensión del
motor.
50,0 a
4000,0
478,6
mV
*4
No - - - Sí 0C9H
tensión
Constante PG
Pulsos/Rev del PG -
Rotación del PG
Sel Rotación PG -1
Configura el número de pulsos de
encoder (PG) por revolución
0:Fase A para comando de marcha
directa (Fase B para comando de
marcha inversa).
1:Fase B para comando de marcha
directa. (Fase A para comando de
marcha inversa).
0 a
60000
0 ó 1
i
i
No - -
No - -
Sí
1024
-
Sí
2048
0-
380H
384H
Configurable para habilitar o
Selección de
protección del
motor
deshabilitar la función de protección
contra sobrecarga del motor utilizando
el relé termoelectrónico.
0:Deshabilitada
0 a 3 1
Sí Sí Sí -
1:Protección para motor de uso general
(refrigeración por ventilador)
2:Protección para motor para
No
480H
convertidor de frecuencia
(refrigeración externa)
Selec. MOL 0 ó 5 5 Sí
3:Protección para motor con control
vectorial especial
5:Motor de imán permanente de par
constante
tro
BUS
5
Detección de
posición de polo
magnético
n8-35
Sel det mag
Establece el método de detección para
la posición del polo magnético de un
motor PM (de imán permanente).
0:Detección automática (aplicable sólo
para motores IPM de Yaskawa)
4:Datosy Hiperface
0, 4 ó 5 5 No - - - Sí 192H
5:Datos EnDat
*1. Los rangos de configuración para los tiempos de aceleración/desaceleración dependen de la configuración de C1-10 (Unidad de configuración de tiempo de
aceleración/desaceleración). Si C1-10 está configurado como 0, el rango de configuración es de 0,00 a 600,00 (s).
*2. Los valores indicados son para un convertidor de clase 400 V.
*3. El rango de configuración es desde el 10% al 200% de la corriente nominal de salida del convertidor Los valores dados son para un convertidor de clase
400 V, de 3,7 kW.
*4. La configuración de fábrica depende de la capacidad del convertidor Se da el valor para un convertidor de clase 400 V, de 3,7 kW.
5-7
Page 95

Tablas de parámetros de usuario
Configuraciones de ajuste: A
Modo Inicializar: A1
Número
de pará-
metro
Nombre
Display
Descripción
Rango
de configuración
Configu-
ración
fábrica
de
Modifi-
cación
durante
la opera-
ción
Métodos de control
Vecto-
rial
V/f
lazo
abierto
Vecto-
rial
lazo
cerrado
Vecto-
rial
lazo
cerrado
(PM)
Registro
MEMO-
BUS
Página
5
A1-00
A1-01
A1-02
Selección de
idioma para el
display del
Operador
Digital
Seleccione
idioma
Nivel de acceso
a parámetros
Nivel de acceso
Selección del
método de
control
Método de
control
Se utiliza para seleccionar el
idioma visualizado en el Operador
Digital (solamente
JVOP-160-OY).
0:Inglés
1:Japonés
2:Alemán
3:Francés
4:Italiano
5:Español
6:Portugués
Este parámetro no es modificado
por la operación de inicialización.
Se utiliza para configurar el nivel
de acceso a los parámetros
(configurar/leer).
0:Sólo monitorización
(monitorización del modo drive
y configuración de A1-01 y
A1-04)
1:Se utiliza para seleccionar
parámetros de usuario
(solamente pueden leerse y
configurarse parámetros
configurados de A2-01 a A2-
32)
2:Avanzado
(pueden leerse y configurarse
parámetros tanto en el modo de
programación rápida (Q) como
en el modo de programación
avanzada (A))
Selecciona el método de control
para el convertidor.
0: Control V/f
2: Vectorial lazo abierto
3: Vectorial lazo cerrado
6: Vectorial lazo cerrado para
motores PM (de imán
permanente)
Este parámetro no es modificado
por la operación de inicialización.
0 a 6 0 Sí A A A A 100H –
0 a 2 2 Sí Q Q Q Q 101H
0 a 6 0 No Q Q Q Q 102H -
6-70
6-71
5-8
A1-03
A1-04
Inicializar
Inic. Parámetros
Contraseña
Intro.
Contraseña
Se utiliza para inicializar los
parámetros utilizando el método
especificado.
0: Sin inicialización
1110: Inicializa con los
parámetros de usuario
2220: Inicializa utilizando una
secuencia de dos hilos.
(inicializa según la
configuración de fábrica).
Introducción de contraseña
cuando ha sido configurada una
contraseña en A1-05.
Esta función protege algunos
parámetros del modo de
inicialización contra escritura.
Si se cambia la contraseña ya no
podrán ser modificados los
parámetros A1-01 a A1-03 y A201 a A2-32. (pueden modificarse
los parámetros del modo de
programación).
0 a
2220
0 a
9999
0 No A A A A 103H -
0 No A A A A 104H 6-70
Page 96

Número
de pará-
metro
Nombre
Display
Descripción
Rango
de configuración
Configu-
ración
fábrica
de
Modifi-
cación
durante
la opera-
Se utiliza para configurar un
número de cuatro dígitos como
contraseña.
Normalmente este parámetro no
es visualizado. Cuando se muestre
la contraseña (A1-04), mientras
mantiene pulsada la tecla RESET,
pulse la tecla MENU. Se
0 a
9999
0NoAAAA105H6-70
A1-05
Configuración
de contraseña
Selec.
Contraseña
visualizará la contraseña.
Parámetros a configurar por el usuario A2
Los parámetros a configurar por el usuario se muestran en la siguiente tabla.
Número
de
pará-
metro
A2-01
a
A2-32
Nombre
Display
Parámetros
específicos de
usuario
Parám.
Usu. 1 a 32
Descripción
Se utilizan para seleccionar la
función para cada uno de los
parámetros específicos de usuario. Los parámetros de usuario
son los únicos parámetros accesibles si el nivel de acceso a parámetros está configurado en
Parámetros de usuario (A1-01=1)
Rango
de configuración
b1-01 a
S3-24
Configu-
ración
fábrica
Modifi-
durante
de
la opera-
– NoAAAA
ción
cación
ción
Métodos de control
Vecto-
rial
V/f
lazo
abierto
Métodos de control
Vecto-
rial lazo
V/f
abierto
Vecto-
rial
lazo
cerrado
Vectorial lazo
cerrado
Vecto-
rial
lazo
cerrado
(PM)
Vecto-
rial lazo
cerrado
(PM)
Registro
MEMO-
BUS
Registro
MEMO-
BUS
106H a
125H
Página
Página
6-71
5
5-9
Page 97

Parámetros de aplicación: b
Selecciones del modo de operación: b1
Número
de
pará-
metro
b1-01
Nombre
Display
Selección de
fuente de
referencia
Fuente de
referencia
Descripción
Configura el método de entrada
de la referencia de frecuencia.
0:Operador Digital
1:Terminal de circuito de control
(entrada analógica)
3:Tarjeta opcional
Rango
de configuración
Configu-
ración
de
fábrica
Modificación
durante
la opera-
ción
Métodos de control
Vecto-
rial lazo
V/f
abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado
(PM)
Registro
MEMO-
BUS
Página
0, 1 ó 3 0 No A A A A 180H 6-4
5
Selección de la
fuente del
comando RUN
b1-02
Configura el método de
introducción del comando RUN.
0:Operador Digital
1:Terminal de circuito de control
(entradas digitales
Fuente Run
multifunción)
3:Tarjeta opcional
Escaneado de
las entradas de
control
b1-06
Escan. Entr.
Ctrl
Se utiliza para configurar la
respuesta de las entradas de
control (directa/inversa y entradas
multifuncionales).
0:Lectura rápida
1:Lectura normal (puede
utilizarse en caso de posible
mal funcionamiento debido al
ruido).
b1-08
Selección de
comando Run
en los modos
de
programación
Com. RUN en
MPG
Se utiliza para configurar una
prohibición de operación en los
modos de programación.
0:Operación prohibida.
1:Operación permitida
(deshabilitada cuando el
Operador Digital es la fuente
seleccionada de comando Run
(b1-02 = 0)).
Freno de inyección de c.c.: b2
Número
de
parámetro
b2-08
Nombre
Display
Volumen de
compensación
de flujo
magnético
Comp. Campo
Descripción
Configura la compensación del
flujo magnético como un
porcentaje de la corriente en
vacío.
0, 1 ó 3 1 No A A A A 181H 6-3
0 ó 1 1 No A A A A 185H -
0 ó 1 1 No A A A A 187H -
Rango
de configuración
0 a
1000
de
Modificación
durante
la opera-
ción
Configu-
ración
fábrica
0% No - A - - 190H -
Métodos de control
Vecto-
rial
V/f
lazo
abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado
(PM)
Registro
MEMO-
BUS
Página
5-10
Page 98
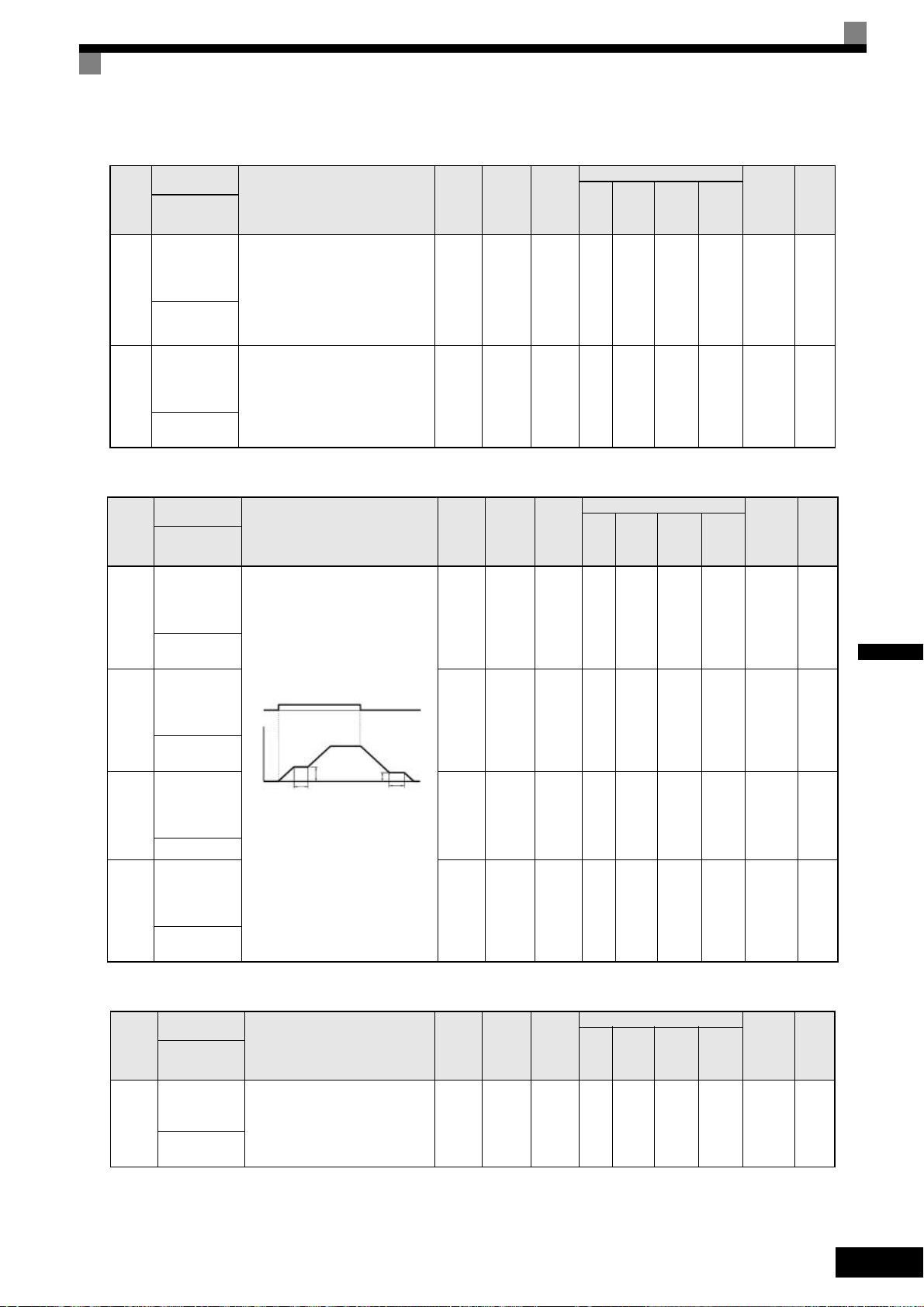
Función temporización: b4
Númer
o de
pará-
metro
b4-01
b4-02
Nombre
Display
Función de
temporización
Tiempo de
retardo ON
Retardo ON Tem p
Función de
temporización
Tiempo de
retardo OFF
Retardo-Temp
OFF
Descripción
Configura el tiempo de retardo a ON
(banda muerta) de la salida, en
unidades de 1 segundo.
Habilitada cuando está configurada
una función de temporización en
H1- ó H2-.
Configura el tiempo de retardo a OFF
(banda muerta) de la salida, en
unidades de 1 segundo.
Habilitada cuando está configurada
una función de temporización en
H1- ó H2-.
Funciones de retención (Dwell): b6
Número
de pará-
metro
b6-01
b6-02
b6-03
b6-04
Nombre
Display
Frecuencia de
retención
(Dwell) al
inicio
Ret Ref @
Inicio
Tiempo de
retención
(Dwell) al
inicio
Tiempo Ret
@ Inicio
Frecuencia de
retención
(Dwell) a la
parada
Ret Ref @ Stop
Tiempo de
retención
(Dwell) a la
parada
Tiempo Ret
@ Stop
Descripción
Comando Run
Frecuencia de salida
ON
b6-01 b6-03
b6-02
La función de retención (Dwell)
puede ser utilizada para retener la
frecuencia de salida temporalmente.
Rango
Configu-
de con-
figura-
ción
ración
fábrica
0,0 a
300,0
0,0 a
300,0
Rango
Configu-
de con-
figura-
ción
0,0 a
120,0
OFF
0,0 a
10,0
Tiempo
b6-04
0,0 a
120,0
0,0 a
10,0
Modifi-
cación
durante
de
la ope-
ración
0,0 s No A A A A 1A3H 6-52
0,0 s No A A A A 1A4H 6-52
Modifi-
de
cación
durante
la ope-
ración
ración
fábrica
0,0 Hz No A A A A 1B6H 6-22
0,0 s No A A A A 1B7H 6-22
0,0 Hz No A A A A 1B8H 6-22
0,0 s No A A A A 1B9H 6-22
Métodos de control
Vecto-
rial
V/f
lazo
abierto
Métodos de control
Vecto-
rial
V/f
lazo
abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado
Vectorial lazo
cerrado
(PM)
Vectorial lazo
cerrado
(PM)
Registro
MEMO-
BUS
Registro
MEMO-
BUS
Página
Página
5
Monitorización del par: b8
Número
de pará-
metro
b8-17
Nombre
Display
Ganancia de
monitorización
del par
Ganancia
monitor de par
Descripción
Rango
de con-
figura-
ción
Configu-
ración
de
fábrica
Modifi-
cación
durante
la ope-
ración
Métodos de control
Vecto-
rial
V/f
lazo
abierto
Vectorial lazo
cerrado
Vecto-
rial lazo
cerrado
(PM)
Registro
MEMO-
BUS
Página
0 a 2,00 1,00 No - - - A 1F9H 6-22
5-11
Page 99

5
Parámetros de ajuste: C
Aceleración/Deceleración: C1
Número
de
pará-
metro
C1-01
C1-02
C1-03
C1-04
C1-05
C1-06
C1-07
C1-08
C1-09
C1-10
Nombre
Display
Tiempo de
aceleración 1
Tiempo Acel 1
Tiempo de
deceleración 1
Tiempo Decel 1
Tiempo de
aceleración 2
Tiempo Acel 2
Tiempo de
deceleración 2
Tiempo Decel 2
Tiempo de
aceleración 3
Tiempo Acel 3
Tiempo de
deceleración 3
Tiempo Decel 3
Tiempo de
aceleración 4
Tiempo Acel 4
Tiempo de
deceleración 4
Tiempo Decel 4
Tiempo de parada
de emergencia
Tmpo. parada
rápida
Unidad de
configuración de
tiempo de
Acel/Decel
Uds. Ace/Dec
Descripción
Configura el tiempo de
aceleración para acelerar
de 0 Hz a la frecuencia de salida
máxima.
Configura el tiempo de deceleración para decelerar de la frecuencia de salida máxima a 0 Hz.
Configura el tiempo de
aceleración cuando la entrada
multifuncional “tiempo acel/decel
1” está configurada como ON.
Configura el tiempo de
deceleración cuando la entrada
multifuncional “tiempo acel/decel
1” está configurada como ON.
Configura el tiempo de
aceleración cuando la entrada
multifuncional “tiempo acel/decel
2” está configurada como ON.
Configura el tiempo de
deceleración cuando la entrada
multifuncional “tiempo acel/decel
2” está configurada como ON.
Configura el tiempo de
aceleración cuando la referencia
de frecuencia está por debajo del
valor configurado en C1-11.
Configura el tiempo de
deceleración cuando la referencia
de frecuencia está por debajo del
valor configurado en C1-11.
Configura el tiempo de
deceleración cuando la referencia
de frecuencia está por debajo del
valor configurado en C1-11.
Establece el número de decimales
para los parámetros de tiempo de
aceleración / deceleración.
0:unidades de 0,01 segundo
1:unidades de 0,1 segundo
Rango
de configuración
Configu-
ración
de
fábrica
Modifi-
cación
durante
la opera-
ción
Métodos de control
Vecto-
rial
V/f
lazo
abierto
Vectorial lazo
cerrado
Vectorial lazo
cerrado
(PM)
Registro
MEMO-
BUS
Sí Q Q Q Q 200H 6-20
Sí Q Q Q Q 201H 6-20
Sí A A A A 202H 6-20
Sí A A A A 203H 6-20
0,00 a
600,00
*1
1,50 s
Sí A A A A 204H 6-20
No A A A A 205H 6-20
No A A A A 206H 6-20
No A A A A 207H 6-20
No A A A A 208H 6-10
0 ó 1 0 No A A A A 209H -
Página
5-12
Frecuencia de
cambio de tiempo
de decel.
C1-11
Configura la frecuencia para el
cambio automático de la
aceleración/deceleración.
Si la frecuencia de salida está por
debajo de la frecuencia
0,0 a
120,0
0,0 Hz No A A A -
20AH
configurada: Tiempo Acel/decel 4
Frec Cambio
Ace/Dec
Si la frecuencia de salida está por
encima de la frecuencia
0,0 a
100,0
0,0 % No - - - A
configurada: Tiempo Acel/decel 1.
*1. El rango de configuración para los tiempos de aceleración/deceleración depende de la configuración de C1-10. Si C1-10 está configurado como 1, el rango
de configuración para los tiempos de aceleración/deceleración será de 0,0 a 6000,0 segundos.
6-20
6-21
Page 100

Aceleración/Deceleración de la curva S: C2
Número
de pará-
metro
C2-01
C2-02
C2-03
C2-04
C2-05
Nombre
Display
Tiempo
característico
de la curva S
al inicio de la
aceleración
Crv S Ace @
Inicio
Tiempo
característico
de la curva S
al final de la
aceleración
Crv S Ace @
Final
Tiempo
característico
de la curva S
al inicio de la
deceleración
Crv S Dec @
Inicio
Tiempo
característico
de la curva S
al final de la
deceleración
Crv S Dec @
Final
Tiempo
característico
de la curva S
por debajo de
la velocidad
de nivelación
CurvaS @
nivelac.
Descripción
Configura los tiempos de la curva S a los
cambios de velocidad para reducir el
tirón. Las curvas S pueden ser
configuradas separadamente para cada
clase de cambio de velocidad.
Tiempo
acel
decel
Cuando se configura el tiempo
característico de la curva S los tiempos
de acel/decel se incrementarán solamente
en la mitad de los tiempos característicos
de la curva S al inicio y al final.
Rango
de con-
figura-
ción
0,00 a
2,50
0,00 a
2,50
0,00 a
2,50
0,00 a
2,50
0,00 a
2,50
Modifica-
Confi-
gura-
ción de
fábrica
ción
durante
la opera-
ción
0,50 s No Q Q Q Q 20BH 6-22
0,50 s No Q Q Q Q 20CH 6-22
0,50 s No Q Q Q Q 20DH 6-22
0,50 s No Q Q Q Q 20EH 6-22
0,50 s No Q Q Q Q 232H 6-22
Métodos de control
Vecto-
rial
V/f
lazo
abierto
Vectorial lazo
cerrado
Vecto-
rial lazo
cerrado
(PM)
Registro
MEMO-
BUS
Página
5
5-13
 Loading...
Loading...