


VARISPEED F7
Inverter per il controllo vettoriale
MANUALE DELL'OPERATORE
Manual No.
YEG-TOI-S616-55.1-OY

Indice
Avvertenze.................................................................................................... VII
Misure per la sicurezza e istruzioni d'uso.................................................... VIII
Compatibilità elettromagnetica ....................................................................... X
Filtri di linea .................................................................................................. XII
Marchi registrati ............................................................................................ XV
1 Impiego degli inverter ............................................................ 1-1
Introduzione all'inverter Varispeed F7 .........................................................1-2
Applicazioni dell'inverter Varispeed F7 ..........................................................................1-2
Modelli Varispeed F7 .....................................................................................................1-2
Conferme alla consegna ..............................................................................1-4
Controlli ..........................................................................................................................1-4
Dati sulla targhetta ......................................................................................................... 1-4
Nomi dei componenti .....................................................................................................1-6
Dimensioni esterne e di installazione ..........................................................1-8
Inverter a telaio aperto (IP00) ........................................................................................ 1-8
Inverter a telaio chiuso per installazione a parete (NEMA1) ..........................................1-9
Controllo del luogo di installazione ............................................................1-11
Luogo di installazione ..................................................................................................1-11
Controllo della temperatura ambiente ..........................................................................1-11
Protezione dell'inverter da sostanze estranee .............................................................1-11
Posizione corretta di installazione .............................................................1-12
Rimozione e installazione del copriterminali ..............................................1-13
Rimozione del copriterminali ........................................................................................1-13
Installazione del copriterminali .....................................................................................1-13
Rimozione/Installazione console di programmazione e
coperchio frontale ......................................................................................1-14
Inverter da 18,5 kW o inferiore ....................................................................................1-14
Inverter da 22 kW o superiore .....................................................................................1-17
2 Cablaggio ................................................................................ 2-1
Collegamenti a dispositivi periferici .............................................................2-2
Schema dei collegamenti ............................................................................2-3
Descrizione circuiti .........................................................................................................2-4
Configurazione della morsettiera .................................................................2-5
Cablaggio dei terminali del circuito principale .............................................2-6
Dimensioni dei cavi e dei connettori ad anello chiuso applicabili ..................................2-6
Funzioni dei terminali del circuito principale ................................................................2-11
Configurazioni per il circuito principale ........................................................................2-12
Schemi dei collegamenti standard ...............................................................................2-13
Cablaggio del circuito principale ..................................................................................2-14
Cablaggio dei terminali del circuito di controllo .........................................2-20
Dimensioni dei cavi ......................................................................................................2-20
Funzioni dei terminali del circuito di controllo ..............................................................2-22
Collegamenti dei terminali del circuito di controllo .......................................................2-25
Precauzioni per cablaggio del circuito di controllo .......................................................2-26
I

Verifica del cablaggio ................................................................................ 2-27
Controlli ....................................................................................................................... 2-27
Installazione e cablaggio delle schede accessorie ...................................2-28
Specifiche e modelli delle schede accessorie ............................................................. 2-28
Installazione ................................................................................................................ 2-28
Terminali e specifiche della scheda di controllo della velocità PG .............................. 2-30
PG-X2 ..........................................................................................................................2-30
Cablaggio .................................................................................................................... 2-31
Cablaggio delle morsettiere ......................................................................................... 2-33
3 Console di programmazione e modalità................................3-1
Console di programmazione ....................................................................... 3-2
Display della console di programmazione ..................................................................... 3-2
Tasti della console di programmazione ......................................................................... 3-2
Modalità .......................................................................................................3-4
Modalità dell'inverter ...................................................................................................... 3-4
Attivazione delle modalità .............................................................................................. 3-5
Modalità inverter ............................................................................................................ 3-6
Modalità di programmazione veloce .............................................................................. 3-7
Modalità di programmazione avanzata ......................................................................... 3-8
Modalità di verifica ....................................................................................................... 3-10
Modalità di autotuning ................................................................................................. 3-11
4 Test di funzionamento ............................................................4-1
Procedura per il test di funzionamento ........................................................4-2
Test di funzionamento ................................................................................. 4-3
Tipo di applicazione ....................................................................................................... 4-3
Installazione del cavo di accoppiamento
(inverter di classe 400 V da 75 kW o superiore) ........................................................... 4-3
Accensione .................................................................................................................... 4-4
Controllo dello stato del display ..................................................................................... 4-4
Impostazioni di base ...................................................................................................... 4-5
Impostazioni per i metodi di controllo ............................................................................ 4-7
Autotuning .....................................................................................................................4-8
Impostazioni per l'applicazione .................................................................................... 4-12
Funzionamento a vuoto ............................................................................................... 4-12
Funzionamento con carico .......................................................................................... 4-12
Verifica e registrazione dei parametri .......................................................................... 4-13
Suggerimenti di regolazione ...................................................................... 4-14
5 Parametri utente ......................................................................5-1
Descrizione parametri utente ...................................................................... 5-2
Descrizione delle tabelle dei parametri utente .............................................................. 5-2
II
Livelli e funzioni di visualizzazione della console di programmazione ........ 5-3
Parametri utente disponibili in modalità di programmazione rapida .............................. 5-4

Tabelle dei parametri utente ........................................................................5-7
A: Impostazioni di configurazione ..................................................................................5-7
Parametri applicativi: b ..................................................................................................5-9
Parametri di autotuning: C ...........................................................................................5-19
Parametri di riferimento: d ...........................................................................................5-25
Parametri motore: E .....................................................................................................5-30
Parametri opzioni: F .....................................................................................................5-35
Parametri per le funzioni dei terminali: H ..................................................................... 5-41
Parametri per le funzioni di protezione: L ....................................................................5-50
N: Regolazioni speciali ................................................................................................5-58
Parametri della console di programmazione: o ...........................................................5-60
U: Parametri di monitoraggio .......................................................................................5-64
Impostazioni di fabbrica che cambiano con il metodo di controllo (A1-02) ..................5-70
Impostazioni di fabbrica che cambiano con la capacità dell'inverter (o2-04) ...............5-72
Valori iniziali dei parametri che variano con l'impostazione di C6-01 .......................... 5-74
6 Impostazione dei parametri in base alla funzione............... 6-1
Applicazione e selezioni per il sovraccarico ................................................6-2
Selezione del sovraccarico in base all'applicazione ......................................................6-2
Frequenza di riferimento ..............................................................................6-7
Selezione dell'origine della frequenza di riferimento .....................................................6-7
Utilizzo del funzionamento a multivelocità ................................................................... 6-10
Metodi di ingresso del comando Run ........................................................6-12
Selezione della sorgente del comando Run ................................................................6-12
Metodi di arresto ........................................................................................6-14
Selezione del metodo di arresto all'immissione del comando di arresto .....................6-14
Utilizzo della frenatura ad iniezione c.c. ......................................................................6-17
Utilizzo dell'arresto di emergenza ................................................................................6-18
Caratteristiche di accelerazione e decelerazione ......................................6-19
Impostazione tempi di accelerazione e decelerazione ................................................6-19
Accelerazione e decelerazione per carichi pesanti (funzione di pausa) ......................6-22
Evitare lo stallo del motore durante l'accelerazione
(funzione di prevenzione dello stallo durante l'accelerazione) .....................................6-22
Prevenzione della sovratensione durante la decelerazione ........................................6-24
Regolazione delle frequenze di riferimento ...............................................6-26
Regolazione delle frequenze di riferimento analogiche ...............................................6-26
Funzionamento con prevenzione della risonanza (funzione frequenza di salto) .........6-28
Limite di velocità (limiti della frequenza di riferimento) ..............................6-30
Limitazione della frequenza di uscita massima ...........................................................6-30
Limitazione della frequenza di uscita minima ..............................................................6-30
Rilevamento della frequenza .....................................................................6-31
Funzione di raggiungimento velocità ...........................................................................6-31
Miglioramento delle prestazioni di funzionamento .....................................6-33
Riduzione della fluttuazione della velocità del motore
(funzione di compensazione scorrimento) ...................................................................6-33
Compensazione della coppia per ottenere una coppia sufficiente
in fase di avvio e di funzionamento a bassa velocità ...................................................6-35
Regolatore automatico di velocità (ASR, Automatic Speed Regulator) .......................6-36
Funzione di prevenzione delle vibrazioni ..................................................................... 6-41
Stabilizzazione della velocità (regolatore automatico di frequenza) ............................6-42
III

Protezione della macchina ........................................................................ 6-43
Limitazione coppia motore (funzione limite di coppia) ................................................. 6-43
Prevenzione dello stallo del motore durante il funzionamento .................................... 6-45
Rilevamento coppia del motore ................................................................................... 6-46
Protezione sovraccarico motore .................................................................................. 6-48
Protezione da surriscaldamento del motore mediante
gli ingressi termistore PTC ..........................................................................................6-50
Limitazione di direzione di rotazione del motore e di rotazione fase di uscita ............. 6-51
Riavvio automatico .................................................................................... 6-52
Riavvio automatico dopo una caduta di tensione momentanea .................................. 6-52
Ricerca della velocità .................................................................................................. 6-53
Continuazione del funzionamento a velocità costante in caso
di perdita della frequenza di riferimento ......................................................................6-57
Riavvio del funzionamento dopo un errore transitorio
(funzione di riavvio automatico) ................................................................................... 6-58
Protezione dell'inverter ..............................................................................6-59
Protezione da surriscaldamento per una resistenza di frenatura
installata sull'inverter ................................................................................................... 6-59
Protezione da surriscaldamento dell'inverter ............................................................... 6-60
Protezione fase aperta dell'ingresso ...........................................................................6-60
Protezione fase aperta dell'uscita ................................................................................ 6-61
Protezione massa a terra ............................................................................................ 6-61
Controllo ventola di raffreddamento ............................................................................ 6-61
Impostazione della temperatura ambiente .................................................................. 6-62
Caratteristiche OL2 a bassa velocità ........................................................................... 6-63
Funzioni terminale di ingresso ..................................................................6-64
Passaggio temporaneo tra console di programmazione e
terminali del circuito di controllo ..................................................................................6-64
Blocco dell'uscita dell'inverter (comandi blocco delle basi) ......................................... 6-64
Ingresso segnale di allarme OH2 (surriscaldamento) ................................................. 6-65
Abilitazione/Disabilitazione ingresso analogico multifunzione A2 ............................... 6-65
Abilitazione/Disabilitazione inverter ............................................................................. 6-66
Interruzione di accelerazione e decelerazione
(mantenimento rampa di accelerazione/decelerazione) .............................................. 6-66
Aumento e riduzione delle frequenze di riferimento mediante
segnali a contatto (UP/DOWN) ................................................................................... 6-67
Aggiunta/Sottrazione di una velocità fissa a una frequenza di
riferimento analogica (controllo ottimizzazione) .......................................................... 6-69
Mantenimento della frequenza di riferimento analogica
tramite tempistica impostata dall'utente ...................................................................... 6-71
Selezione della scheda accessoria di comunicazione come
sorgente di funzionamento .......................................................................................... 6-72
Frequenza di jog con comandi di direzione (FJOG/RJOG) ......................................... 6-72
Arresto dell'inverter in caso di errori su dispositivi esterni
(funzione errore esterno) ............................................................................................. 6-73
Funzioni del terminale di uscita .................................................................6-74
Parametri di monitoraggio ......................................................................... 6-77
Utilizzo delle uscite di monitoraggio analogico ............................................................ 6-77
Utilizzo dell'uscita di monitoraggio a treno di impulsi ..................................................6-78
IV

Funzioni singole .........................................................................................6-80
Utilizzo della comunicazione MEMOBUS .................................................................... 6-80
Uso della funzione di temporizzatore ...........................................................................6-95
Utilizzo del controllo PID .............................................................................................. 6-96
Risparmio di energia .................................................................................................. 6-106
Indebolimento di campo .............................................................................................6-107
Forzatura campo ........................................................................................................6-108
Impostazione dei parametri del motore 1 ..................................................................6-108
Impostazione della linea caratteristica V/f 1 ..............................................................6-110
Impostazione dei parametri del motore 2 ..................................................................6-116
Impostazione della linea caratteristica V/f 2 ..............................................................6-117
Controllo della coppia ................................................................................................6-118
Funzione di controllo caduta ...................................................................................... 6-124
Funzione di azzeramento servo .................................................................................6-125
Buffer di energia cinetica ...........................................................................................6-127
Frenatura ad alto scorrimento (HSB) ......................................................................... 6-128
Funzioni della console di programmazione .............................................6-130
Impostazione delle funzioni della console di programmazione ..................................6-130
Copia dei parametri ...................................................................................................6-132
Proibizione di sovrascrittura dei parametri .................................................................6-136
Impostazione di una password ..................................................................................6-136
Visualizzazione solo dei parametri impostati dall'utente ............................................6-137
Schede accessorie ..................................................................................6-138
Uso di schede accessorie di retroazione PG .............................................................6-138
Schede di riferimento analogico ................................................................................6-141
Schede di riferimento digitale ....................................................................................6-141
7 Soluzione dei problemi .......................................................... 7-1
Funzioni di diagnostica e protezione ...........................................................7-2
Rilevamento degli errori .................................................................................................7-2
Rilevamento degli allarmi ...............................................................................................7-9
Errori di programmazione della console ......................................................................7-12
Errore di autotuning ....................................................................................................7-14
Errori della funzione COPY della console di programmazione .................................... 7-15
Soluzione dei problemi ..............................................................................7-17
Se non è possibile impostare un parametro ................................................................7-17
Se il motore non funziona correttamente ..................................................................... 7-18
Se la direzione di rotazione del motore è dalla porta opposta .....................................7-19
Se il motore va in stallo o l'accelerazione è lenta ........................................................ 7-19
Se il motore funziona a una velocità maggiore rispetto alla
frequenza di riferimento ............................................................................................... 7-20
Bassa precisione di controllo della velocità oltre la velocità di base
in modalità di controllo vettoriale ad anello aperto .......................................................7-20
Se la decelerazione del motore è lenta .......................................................................7-20
Se il motore si surriscalda ............................................................................................7-21
Se i dispositivi periferici (PLC o altri) sono influenzati dall'avvio o
dal funzionamento dell'inverter ....................................................................................7-21
Se l'interruttore di dispersione a terra è in funzione durante
il funzionamento dell'inverter .......................................................................................7-21
Presenza di oscillazione meccanica ............................................................................ 7-22
Se il motore ruota anche con l'uscita dell'inverter bloccata .........................................7-23
Se la frequenza di uscita non raggiunge la frequenza di riferimento ...........................7-23
V

8 Manutenzione e ispezione ......................................................8-1
Manutenzione e ispezione ..........................................................................8-2
Ispezioni periodiche ....................................................................................................... 8-2
Manutenzione periodica dei componenti ....................................................................... 8-3
Sostituzione ventola di raffreddamento ......................................................................... 8-4
Rimozione e installazione della scheda dei terminali ....................................................8-6
9 Specifiche.................................................................................9-1
Specifiche standard dell'inverter ................................................................9-2
Specifiche in base al modello ........................................................................................ 9-2
Specifiche comuni ......................................................................................................... 9-4
10 Appendice ..............................................................................10-1
Precauzioni relative all'applicazione dell'inverter ......................................10-2
Selezione ..................................................................................................................... 10-2
Installazione ................................................................................................................ 10-3
Impostazioni ................................................................................................................ 10-3
Precauzioni di cablaggio o manutenzione ................................................................... 10-4
Precauzioni relative all'applicazione del motore ........................................ 10-5
Utilizzo dell'inverter per un motore standard esistente ................................................ 10-5
Utilizzo dell'inverter per motori speciali ....................................................................... 10-5
Meccanismi di trasmissione (riduttori di velocità, cinghie e catene) ............................ 10-6
Costanti utente .......................................................................................... 10-7
VI
Avvertenze
Non collegare o scollegare cavi e non eseguire test di segnale quando l'alimentazione è attivata.
Il condensatore del bus c. c. Varispeed F7 rimane carico anche dopo la disattivazione
dell'alimentazione. Per evitare il pericolo di scosse elettriche scollegare l'inverter di frequenza
dall'alimentazione principale prima di eseguire la manutenzione. Attendere quindi almeno 5 minuti
dopo lo spegnimento dei LED.
Non effettuare un test di tensione di resistenza su nessun componente dell'inverter in quanto sono
presenti semiconduttori che non supportano l'applicazione di tensioni così elevate.
Non scollegare la console di programmazione mentre l'alimentazione è attivata. Inoltre non toccare
la scheda di potenza mentre l'inverter è collegato all'alimentazione.
Non collegare mai filtri di soppressione interferenze generali LC/RC, condensatori o dispositivi di protezione
da sovratensione all'ingresso o all'uscita dell'inverter.
ATTENZIONE
Per evitare il rilevamento di errori di sovracorrente e simili, i contatti di segnale di ogni contattore o
commutatore posto tra l'inverter e il motore devono essere integrati nella logica di controllo
dell'inverter, ad esempio in un blocco delle basi.
Indispensabile!
Leggere attentamente e per intero il presente manuale prima di collegare e utilizzare l'inverter.
Attenersi a tutte le precauzioni sulla sicurezza e alle istruzioni d'uso.
L'inverter deve essere fatto funzionare con i filtri di linea appropriati, in conformità alle istruzioni di
installazione fornite nel presente manuale e con tutti i pannelli e i coperchi chiusi e i terminali
coperti.
Solo in questo modo viene garantita la protezione adeguata. Non collegare o far funzionare
dispositivi con danni visibili o parti mancanti. La società utente è responsabile di eventuali lesioni a
persone o danni alle apparecchiature derivanti dalla non osservanza delle avvertenze contenute nel
presente manuale.
VII

Misure per la sicurezza e istruzioni d'uso
Generali
Leggere per intero le seguenti misure per la sicurezza e le istruzioni d'uso prima di installare e far funzionare
l'inverter. Leggere anche tutte le etichette di avvertenza sull'inverter e assicurarsi che non vengano
danneggiate o asportate.
È possibile che componenti caldi e sotto tensione siano accessibili durante il funzionamento. Se si rimuovono
parti dell'alloggiamento, la console di programmazione o i copriterminali si corre il rischio di gravi lesioni o
serie danni in caso di installazione o funzionamento non corretto. Il fatto che gli inverter di frequenza
comandano componenti di apparecchiature rotanti potrebbe comportare altri pericoli.
Seguire le istruzioni fornite nel presente manuale. L'installazione, il funzionamento e la manutenzione
possono essere eseguiti solo da personale qualificato. A tale proposito, per personale qualificato si intendono
persone che hanno familiarità con l'installazione, l'avviamento, il funzionamento e la manutenzione di inverter
di frequenza e detengono qualificazioni adeguate per svolgere questo lavoro. Un funzionamento sicuro di
queste unità è possibile solo se vengono utilizzate correttamente per l'uso a cui sono designate.
I condensatori del bus c. c. possono mantenere la carica per circa 5 minuti dopo che l'inverter è stato scollegato
dall'alimentazione. È quindi necessario lasciar trascorrere questo periodo di tempo prima di aprire le
coperture, in quanto sui terminali del circuito principale potrebbero essere ancora presenti cariche di tensione
pericolose.
Non consentire l'accesso all'inverter a bambini o altro personale non autorizzato.
Tenere queste misure per la sicurezza e istruzioni d'uso a portata di mano e consegnarle a tutte le persone che
hanno accesso, per qualsiasi motivo, agli inverter.
Uso designato
Gli inverter di frequenza sono destinati all'installazione nell'ambito di sistemi o macchinari elettrici.
Tale installazione deve essere conforme agli standard di prodotto dettati dalla Direttiva sulle basse tensioni ed
elencati di seguito:
EN 50178, 1997-10,Apparecchiature elettroniche da utilizzare negli impianti di potenza
EN 60204-1, 1997-12Sicurezza del macchinario - Equipaggiamento elettrico delle macchine
Parte 1: Norme generali (IEC 60204-1:1997)/
Nota: comprende l'errata corrige del settembre 1998
EN 61010-1, A2, 1995Prescrizioni di sicurezza per apparecchi elettrici di misura,controllo e per utilizzo in
laboratorio
(IEC 950, 1991 + A1, 1992 + A2, 1993 + A3, 1995 + A4, 1996, modificata)
Il simbolo CE si riferisce alla normativa EN 50178, se si utilizzano i filtri di linea specificati in questo
manuale e ci si attiene alle istruzioni di installazione appropriate.
Trasporto e conservazione
VIII
Le istruzioni per il trasporto, la conservazione e un trattamento adeguato devono essere seguite in conformità
ai dati tecnici.
Installazione
Installare e raffreddare gli inverter come specificato nella documentazione. L'aria di raffreddamento deve
fluire nella direzione specificata. L'inverter potrà quindi funzionare solo nella posizione specificata, ad
esempio in verticale. Mantenere le distanze specificate. Proteggere gli inverter da carichi non consentiti. I
componenti non devono essere piegati e la distanza di isolamento non deve essere modificata. Per evitare
danni causati dall'elettricità statica non toccare nessun componente elettronico o contatto.

Collegamento elettrico
Svolgere tutti i lavori su apparecchiature sotto tensione conformemente alle norme nazionali sulla sicurezza e
per la prevenzione di incidenti sul lavoro. Effettuare tutte le installazioni elettriche in conformità con le
normative in materia. In particolare, seguire le istruzioni di installazione per il rispetto della compatibilità
elettromagnetica (EMC), ad esempio schermatura, messa a terra, disposizione filtri e stesura cavi. Ciò deve
essere applicato anche ad apparecchiature dotate del marchio CE. Il produttore del sistema o della macchina è
responsabile per la conformità ai limiti EMC.
Contattare il proprio fornitore o il rappresentante OYMC se si utilizzano interruttori di circuito di corrente di
dispersione insieme agli inverter di frequenza.
In alcuni sistemi può essere necessario impiegare dispositivi di monitoraggio e sicurezza aggiuntivi in
conformità con le normative relative alla sicurezza e alla prevenzione di incidenti. L'hardware degli inverter di
frequenza non deve essere alterato.
Nota
Gli inverter di frequenza VARISPEED F7 sono certificati CE, UL e c-UL.
IX

Compatibilità elettromagnetica
Introduzione
Il presente manuale è stato redatto per aiutare i produttori di sistema a utilizzare gli inverter di frequenza
YASKAWA per progettare e installare meccanismi elettrici di comando. Vengono inoltre descritte le misure da
adottare per garantire la conformità alle direttive di compatibilità elettromagnetica (EMC) Per questo motivo è
obbligatorio attenersi alle istruzioni di installazione e cablaggio contenute nel manuale.
I nostri prodotti vengono collaudati da enti autorizzati in base agli standard elencati di seguito.
Standard di prodotto: EN 61800-3:1996
EN 61800-3; A11:2000
Misure per garantire la conformità degli inverter di frequenza YASKAWA alle direttive
di compatibilità elettromagnetica (EMC)
Gli inverter di frequenza YASKAWA non devono essere necessariamente installati in un quadro.
Poiché non è possibile fornire informazioni dettagliate per tutti i tipi di installazione possibili, in questo
manuale verranno fornite solo direttive di carattere generale.
Tutti gli apparecchi elettrici producono interferenze radio e di linea a varie frequenze. I cavi trasmettono
queste interferenze all'ambiente circostante come un'antenna.
Pertanto, se si collega un apparecchio elettrico, ad esempio un driver, all'alimentazione senza un filtro di linea,
è possibile che vengano generate interferenze ad alta o bassa frequenza nelle linee di alimentazione principali.
Contromisure tipiche sono isolamento del cablaggio di componenti di comando e alimentazione, messa a terra
appropriata e schermatura dei cavi.
Per una messa a terra a bassa impedenza delle interferenze ad alta frequenza è necessaria un'ampia area di
contatto. È pertanto consigliabile l'uso di piattine di terra al posto di cavi.
Inoltre le schermature dei cavi devono essere collegate con dei fermi di messa a terra specifici.
Stesura dei cavi
Misure contro interferenze portate dalla linea
Il filtro di linea e l'inverter di frequenza devono essere montati sulla stessa piastra di metallo. Montare i due
componenti il più possibile vicini uno all'altro mantenendo i cavi il più corto possibile.
Utilizzare un cavo di alimentazione con una buona schermatura di messa a terra. Utilizzare un cavo motore
schermato che non superi i 20 metri di lunghezza. Disporre tutti i punti di messa a terra in modo da
massimizzare l'area all'estremità del conduttore isolato a contatto con il collegamento a terra, ad esempio una
piastra di metallo.
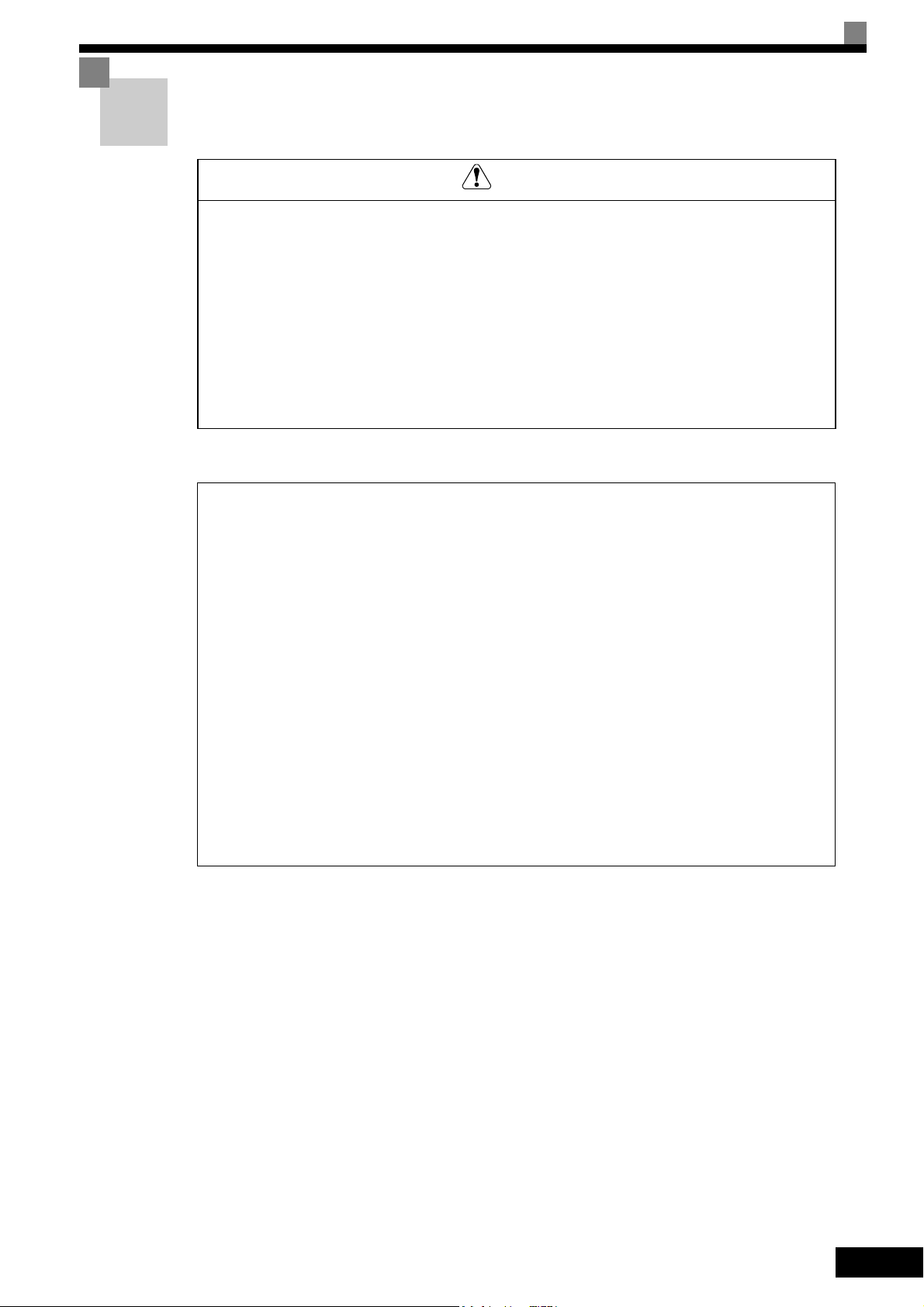
Cavo schermato
• Utilizzare un cavo con schermatura intrecciata.
• Mettere a terra l'area massima consentita della schermatura. È consigliabile mettere a terra la schermatura
collegando il cavo alla piastra di terra con fermi in metallo (vedere la figura seguente).
X
Fermo di messa a terra Piastra di messa a terra
Le superfici di terra devono essere in metallo non isolato altamente conduttivo. Asportare eventuali strati di
vernice o pellicole protettive.
• Mettere a terra le schermature dei cavi ad entrambe le estremità del circuito.
• Mettere a terra il motore della macchina.
Consultare il documento EZZ006543 su come garantire la conformità degli inverter Yaskawa alla direttiva
EMC. Contattare Omron Yaskawa Motion Control per ottenere questo documento.
XI

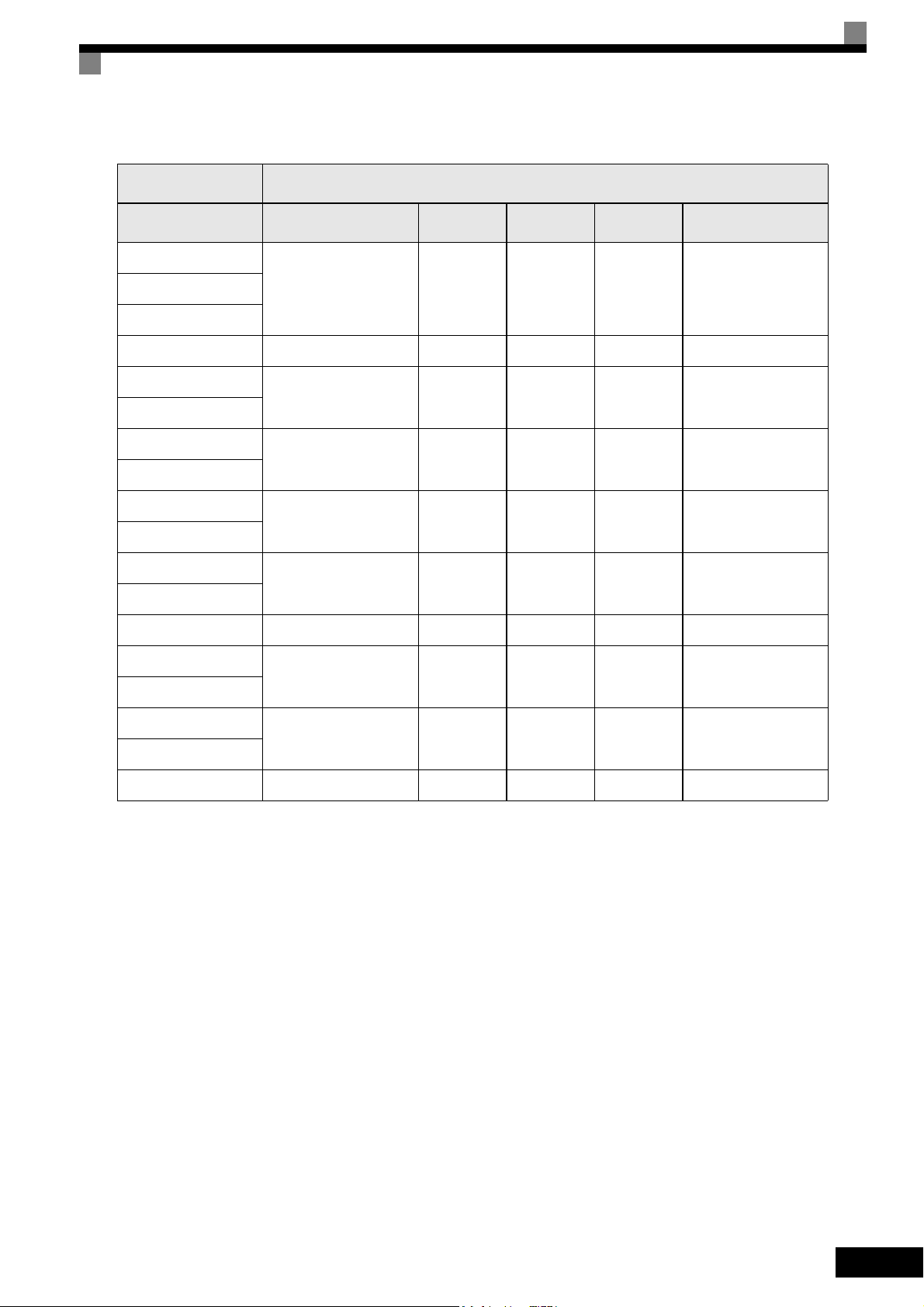
Filtri di linea
Filtri di linea raccomandati per Varispeed F7
Modello di
inverter
Varispeed F7 Modello
CIMR-F7Z40P4
CIMR-F7Z40P7
3G3RV-PFI3010-SE
CIMR-F7Z41P5
CIMR-F7Z42P2
CIMR-F7Z43P7
3G3RV-PFI3018-SE
CIMR-F7Z45P5
CIMR-F7Z47P5
3G3RV-PFI3035-SE
CIMR-F7Z4011
CIMR-F7Z4015
3G3RV-PFI3060-SE
CIMR-F7Z4018
CIMR-F7Z4022
3G3RV-PFI3070-SE
CIMR-F7Z4030
Filtro di linea
Classe EN
55011*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
A, 100 m
A, 100 m
Corrente
(A)
10 1,1 141 x 46 x 330
18 1,3 141 x 46 x 330CIMR-F7Z44P0
35 2,1 206 x 50 x 355
60 4,0 236 x 65 x 408
70 3,4 80 x 185 x 329
Peso
(kg)
Dimensioni
L x P x A
CIMR-F7Z4037
3G3RV-PFI3130-SE
CIMR-F7Z4055
CIMR-F7Z4075 3G3RV-PFI3170-SE A, 100 m 170 6,0 120 x 170 x 451
CIMR-F7Z4090
3G3RV-PFI3200-SE
CIMR-F7Z4110
CIMR-F7Z4132
3G3RV-PFI3400-SE
CIMR-F7Z4160
CIMR-F7Z4185
3G3RV-PFI3600-SE
CIMR-F7Z4220
CIMR-F7Z4300 3G3RV-PFI3800-SE A, 100 m 800 31,0 300 x 160 x 716
* Classe A, 100 m
Limiti di emissione consentiti per azionamenti elettrici consentita in ambienti commerciali e di industria
leggera (EN61800-3, A11) (disponibilità generale, 1° ambiente)
A, 100 m
A, 100 m
A, 100 m
A, 100 m
A, 100 m
A, 100 m
A, 100 m
A, 100 m
A, 100 m
130 4,7 90 x 180 x 366CIMR-F7Z4045
250 11 130 x 240 x 610
400 18,5 300 x 160 x 610
600 11,0 260 x 135 x 386
XII
Modello di
inverter
Varispeed F7 Tipo
Classe EN
55011
Filtri di linea
Corrente
(A)
Peso
(kg)
Dimensioni
L x P x A
CIMR-F7Z20P4
3G3RV-PFI3010-SE
CIMR-F7Z21P5
CIMR-F7Z22P2 3G3RV-PFI3018-SE B, 25 m* 18 1,3 141 x 46 x 330
CIMR-F7Z23P7
3G3RV-PFI2035-SE
CIMR-F7Z25P5
CIMR-F7Z27P5
3G3RV-PFI2060-SE
CIMR-F7Z2011
CIMR-F7Z2015
3G3RV-PFI2100-SE
CIMR-F7Z2018
CIMR-F7Z2022
3G3RV-PFI2130-SE
CIMR-F7Z2030
CIMR-F7Z2037 3G3RV-PFI2160-SE A, 100 m 160 6,0 120 x 170 x 451
CIMR-F7Z2045
3G3RV-PFI2200-SE
CIMR-F7Z2055
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
A, 100 m
A, 100 m
A, 100 m
A, 100 m
10 1,1 141 x 45 x 330CIMR-F7Z20P7
35 1,4 141 x 46 x 330
60 3 206 x 60 x 355
100 4,9 236 x 80 x 408
130 4,3 90 x 180 x 366
200 11,0 130 x 240 x 610
CIMR-F7Z2075
3G3RV-PFI3400-SE
CIMR-F7Z2090
CIMR-F7Z2110 3G3RV-PFI3600-SE A, 100 m 600 11,0 260 x 135 x 386
* Classe A, 100 m
A, 100 m
400 18,5 300 x 160 x 564
A, 100 m
XIII
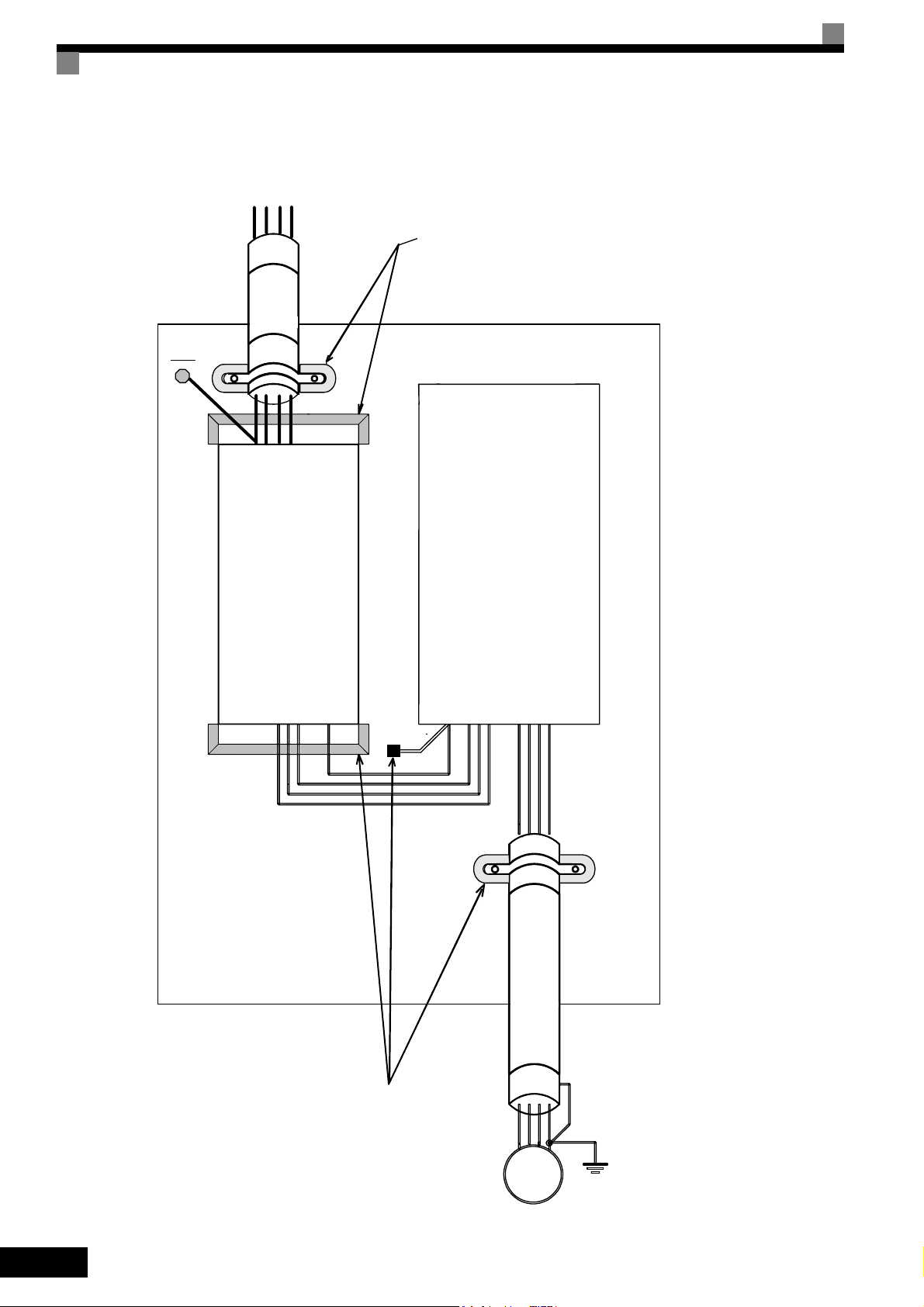
Installazione di inverter e filtri EMC
L1 L3
L2
PE
PE
Line
Linea
Filtro
Filter
Saldature di messa a terra
Ground Bonds
(rimozione dell'eventuale
( remove any paint )
vernice presente)
Inverter
Inverter
Carico
Load
Cavo il più corto
Cable Length
possibile
as short as possible
Piastra
metallica
Metal Plate
Saldature di messa a terra
(rimozione dell'eventuale
( remove any paint )
vernice presente)
Ground Bonds
PE
L1L2L3
U
W
V
M
3~
PE
Cavo motore
Motor cable
schermato
screened
XIV

Marchi registrati
In questo manuale vengono utilizzati i marchi registrati riportati di seguito.
• DeviceNet è un marchio registrato della Open DeviceNet Vendors Association, Inc. (ODVA).
• InterBus è un marchio registrato di Phoenix Contact Co.
• Profibus è un marchio registrato di Siemens AG.
XV

XVI
Impiego degli inverter
Questo capitolo descrive i controlli che è necessario eseguire quando si riceve o si installa un inverter.
Introduzione all'inverter Varispeed F7....................................1-2
Conferme alla consegna ........................................................1-4
Dimensioni esterne e di installazione.....................................1-8
Controllo del luogo di installazione ......................................1-11
Posizione corretta di installazione........................................1-12
Rimozione e installazione del copriterminali ........................1-13
Rimozione/Installazione console di
programmazione e coperchio frontale .................................1-14
1
Introduzione all'inverter Varispeed F7
Applicazioni dell'inverter Varispeed F7
L'inverter Varispeed F7 è ideale per le seguenti applicazioni:
• Ventole, compressori e pompe
• Nastri trasportatori, macchine di spinta e per la lavorazione dei materiali
Per un funzionamento ottimale, è necessario regolare le impostazioni in base all'applicazione. Fare riferimento
al Capitolo 4 Test di funzionamento.
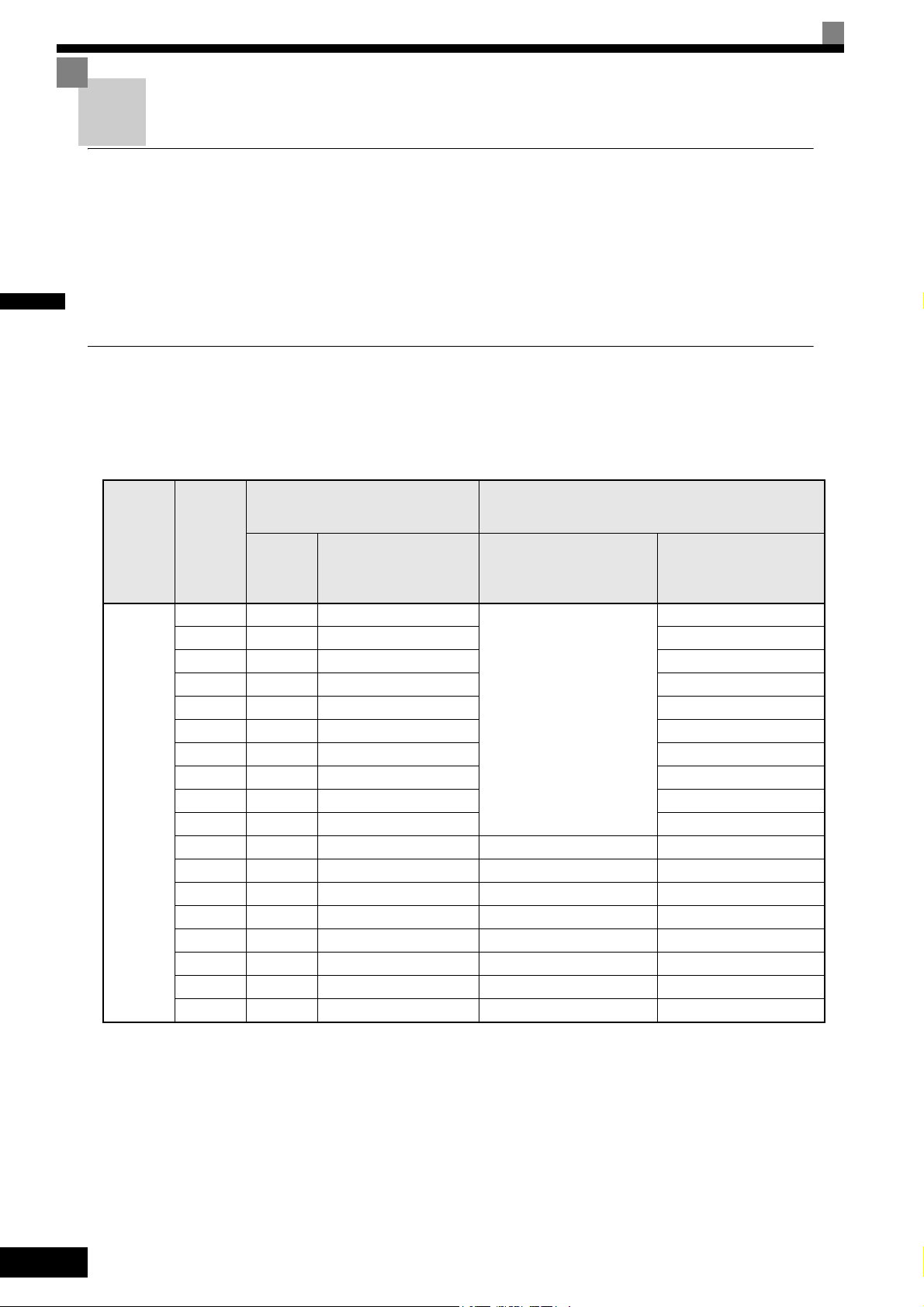
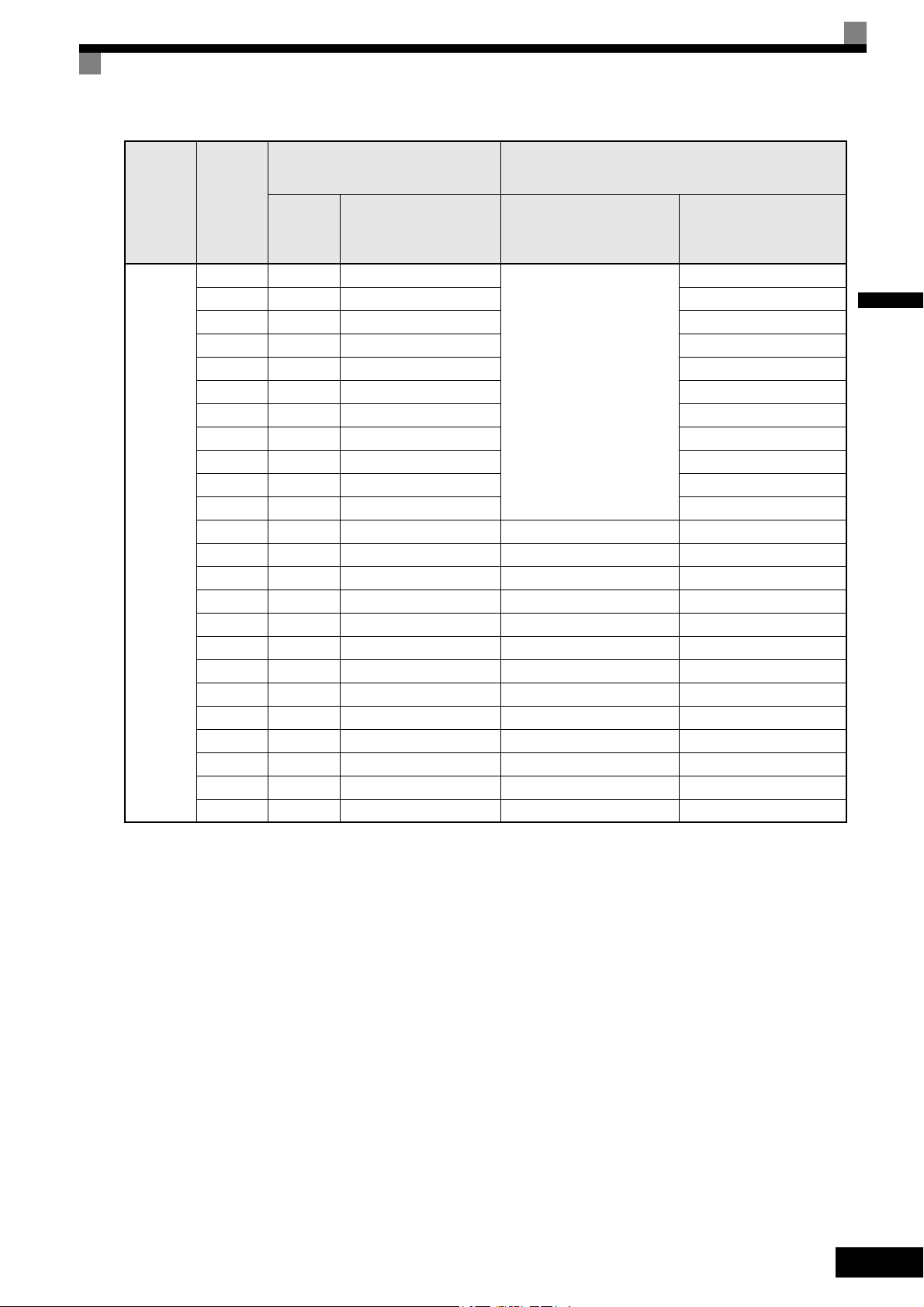
Modelli Varispeed F7
La serie di inverter Varispeed F7 comprende inverter in due classi di voltaggio: 200 V e 400 V. Le capacità di motore
massime variano da 0,55 a 300 kW (42 modelli).
Tabella 1.1 Modelli Varispeed F7
Specifiche
(specificare sempre indicando la struttura protettiva al
momento dell'ordine)
A telaio aperto
(IEC IP00)
CIMR-F7Z
Rimuovere i coperchi
superiore e inferiore dal
modello a telaio chiuso per
installazione a parete.
A telaio chiuso per
installazione a parete
(IEC IP20, NEMA 1)
CIMR-F7Z
Classe di
tensione
Classe
200 V
Capacità
massima
del
motore
(kW)
0,55 1,2 CIMR-F7Z20P4
0,75 1,6 CIMR-F7Z20P7 20P71
1,5 2,7 CIMR-F7Z21P5 21P51
2,2 3,7 CIMR-F7Z22P2 22P21
3,7 5,7 CIMR-F7Z23P7 23P71
5,5 8,8 CIMR-F7Z25P5 25P51
7,5 12 CIMR-F7Z27P5 27P51
11 17 CIMR-F7Z2011 20111
15 22 CIMR-F7Z2015 20151
18,5 27 CIMR-F7Z2018 20181
22 32 CIMR-F7Z2022 20220 20221
30 44 CIMR-F7Z2030 20300 20301
37 55 CIMR-F7Z2037 20370 20371
45 69 CIMR-F7Z2045 20450 20451
55 82 CIMR-F7Z2055 20550 20551
75 110 CIMR-F7Z2075 20750 20751
90 130 CIMR-F7Z2090 20900 –
110 160 CIMR-F7Z2110 21100 –
Potenza
di uscita
kVA
Varispeed F7
Numero modello base
20P41
1-2
Classe di
tensione
Classe
400 V
Specifiche
Capacità
massima
del
motore
(kW)
0,55 1,4 CIMR-F7Z40P4
0,75 1,6 CIMR-F7Z40P7 40P71
1,5 2,8 CIMR-F7Z41P5 41P51
2,2 4,0 CIMR-F7Z42P2 42P21
3,7 5,8 CIMR-F7Z43P7 43P71
4,0 6,6 CIMR-F7Z44P0 44P01
5,5 9,5 CIMR-F7Z45P5 45P51
7,5 13 CIMR-F7Z47P5 47P51
11 18 CIMR-F7Z4011 40111
15 24 CIMR-F7Z4015 40151
18,5 30 CIMR-F7Z4018 40181
22 34 CIMR-F7Z4022 40220 40221
30 46 CIMR-F7Z4030 40300 40301
37 57 CIMR-F7Z4037 40370 40371
45 69 CIMR-F7Z4045 40450 40451
55 85 CIMR-F7Z4055 40550 40551
75 110 CIMR-F7Z4075 40750 40751
90 140 CIMR-F7Z4090 40900 40901
110 160 CIMR-F7Z4110 41100 41101
132 200 CIMR-F7Z4132 41320 41321
160 230 CIMR-F7Z4160 41600 41601
185 280 CIMR-F7Z4185 41850 –
220 390 CIMR-F7Z4220 42200 –
300 510 CIMR-F7Z4300 43000 –
Potenza
di uscita
kVA
Varispeed F7
Numero modello base
(specificare sempre indicando la struttura protettiva al
momento dell'ordine)
A telaio aperto
(IEC IP00)
CIMR-F7Z
Rimuovere i coperchi
superiore e inferiore dal
modello a telaio chiuso per
installazione a parete.
A telaio chiuso per
installazione a parete
(IEC IP20, NEMA 1)
CIMR-F7Z
40P41
1
1-3
1
r
Conferme alla consegna
Controlli
Alla consegna dell'inverter effettuare le seguenti verifiche.
Verifica Metodo
È stato consegnato il modello di inverter
corretto?
L'inverter è danneggiato?
Si sono allentate viti o altri componenti? Utilizzare un cacciavite o altri attrezzi per controllare il serraggio.
Se durante le verifiche sopra riportate si riscontrano delle irregolarità, contattare immediatamente il
rivenditore presso il quale è stato acquistato l'inverter o il proprio rappresentate OYMC.
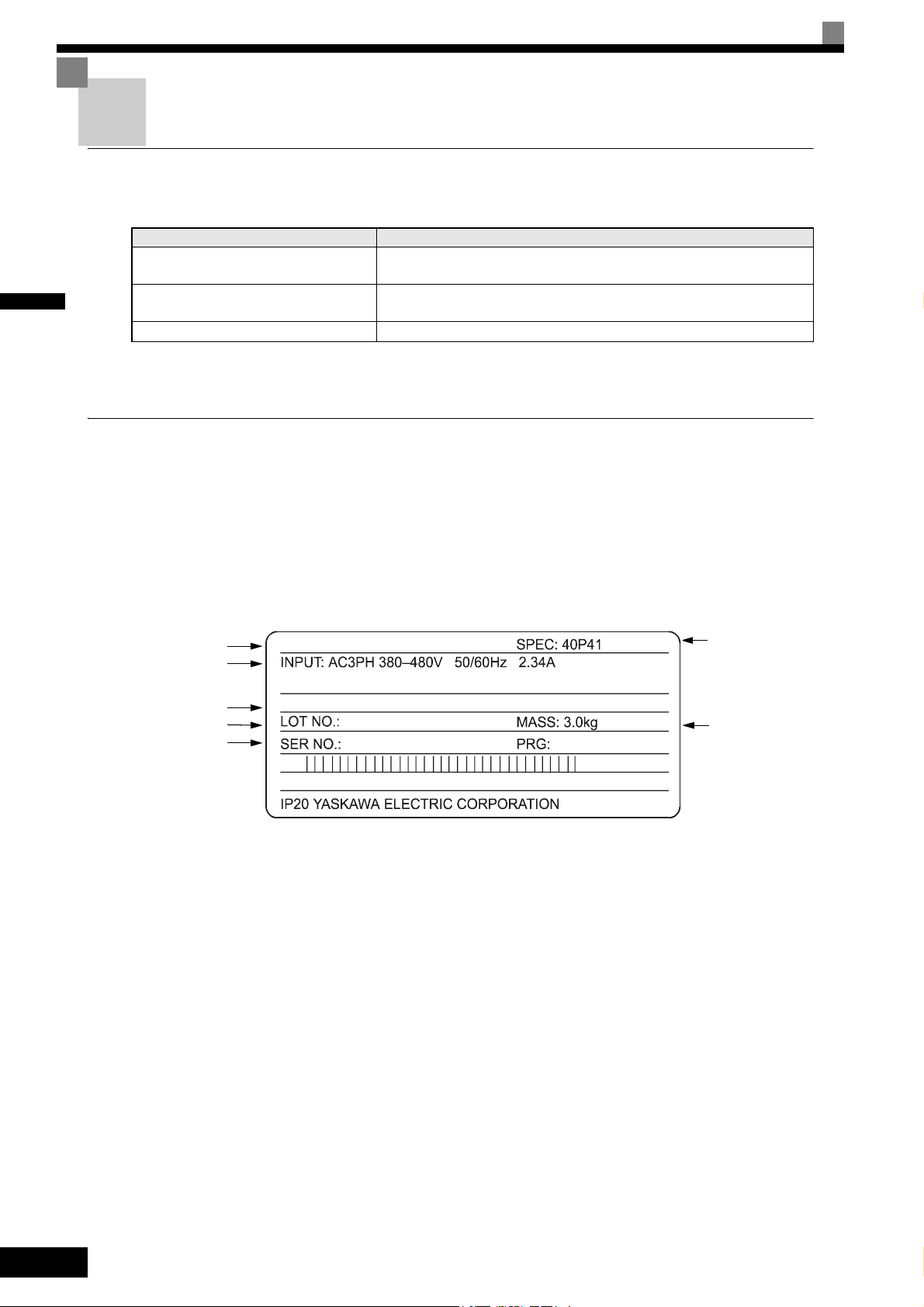
Dati sulla targhetta
Sul lato di ogni inverter è fissata una targhetta contenente il numero del modello, i dati tecnici, il numero di
lotto, il numero di serie e altre informazioni relative all'inverter.
Controllare il numero del modello sulla targhetta sul lato dell'inverter.
Esaminare la superficie esterna dell'inverter per verificare se sono presenti
graffi o altri danni dovuti alla spedizione.
Esempio di targhetta
Di seguito è riportato un esempio di targhetta per un inverter standard per il mercato europeo: trifase,
400 Vc.a., 0,55 kW, standard IEC IP20 e NEMA 1
Modello inverter
Specifiche degli
ingressi
Specifiche delle uscite
Numero lotto
Numero di serie
MODEL: CIMR-F7Z40P4
OUTPUT: AC3PH 0-480V 0-400Hz 1.8A 1.4kVA
Fig. 1.1 Targhetta
Dati tecnici inverte
Peso
1-4
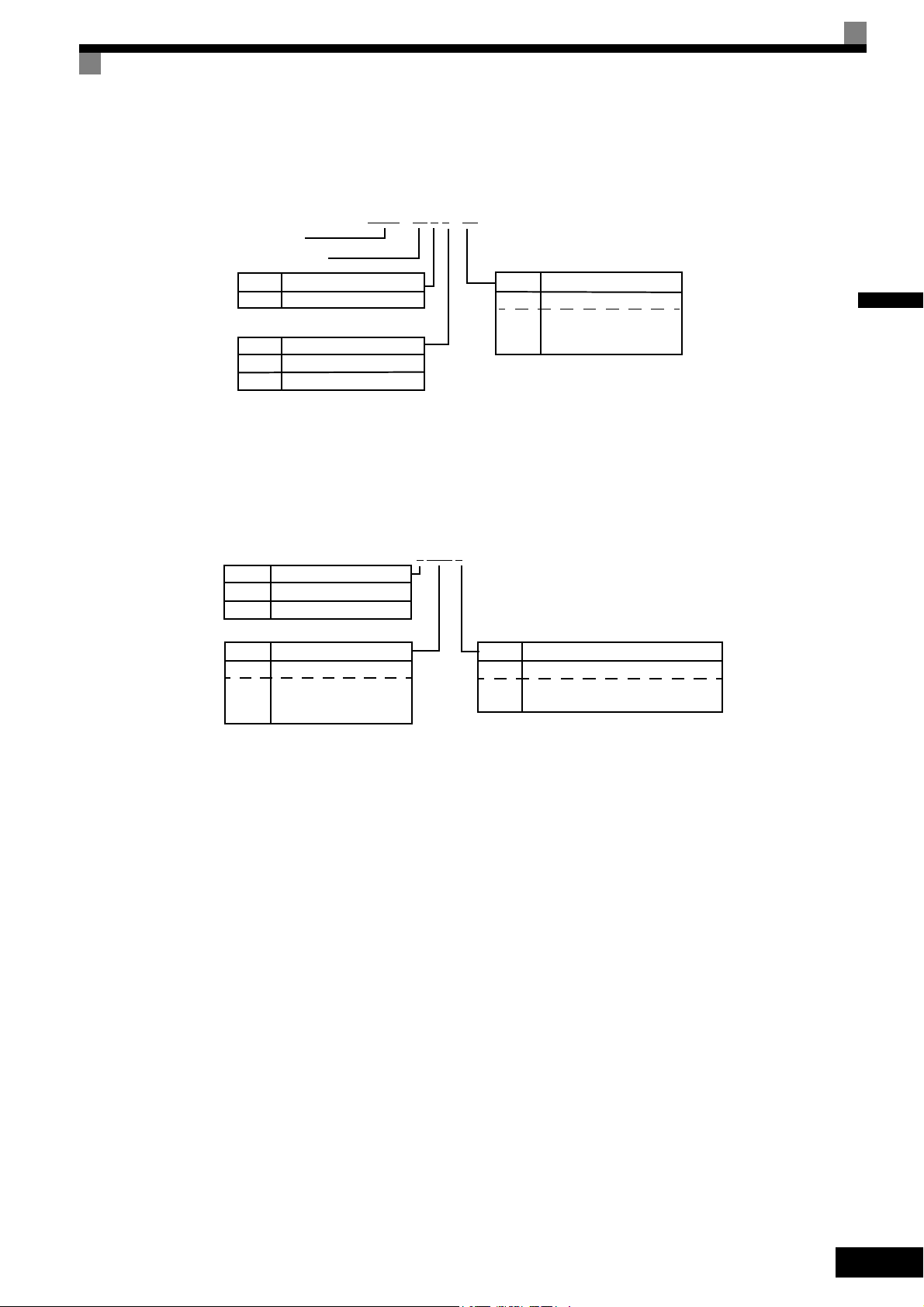
Modelli di inverter
Il numero di modello riportato sulla targhetta indica i dati tecnici, la classe di tensione e la capacità massima
del motore dell'inverter sotto forma di codice alfanumerico.
CIMR – F7 Z 2 0 P4
Inverter
Varispeed F7
N.
Z
N.
2
4
Specifiche
OYMC European. Std.
Classe di tensione
Ingresso c.a., trifase, 200 V
Ingresso c.a., trifase, 400 V
Fig. 1.2 Modelli di inverter
Capacità massima motore
N.
0P4
0P7
...
300
“P” indica la virgola decimale.
0,55 kW
0,75 kW
...
300 kW
Dati tecnici inverter
I dati tecnici dell'inverter (“SPEC”) riportati sulla targa indicano la classe di tensione, la capacità massima del
motore, la struttura protettiva e la revisione dell'inverter sotto forma di codice alfanumerico.
2 0P 4 1
N.
2
4
Classe di tensione
Ingresso c.a., trifase, 200 V
Ingresso c.a., trifase, 400 V
1
Capacità massima motore
N.
0P4
0P7
...
300
“P” indica la virgola decimale.
0,55 kW
0,75 kW
...
300 kW
N.
0
A telaio chiuso per installazione
1
a parete (IEC IP20, NEMA type 1)
Fig. 1.3 Dati tecnici inverter
Struttura di protezione
A telaio aperto (IEC IP00)
1-5
1
Nomi dei componenti
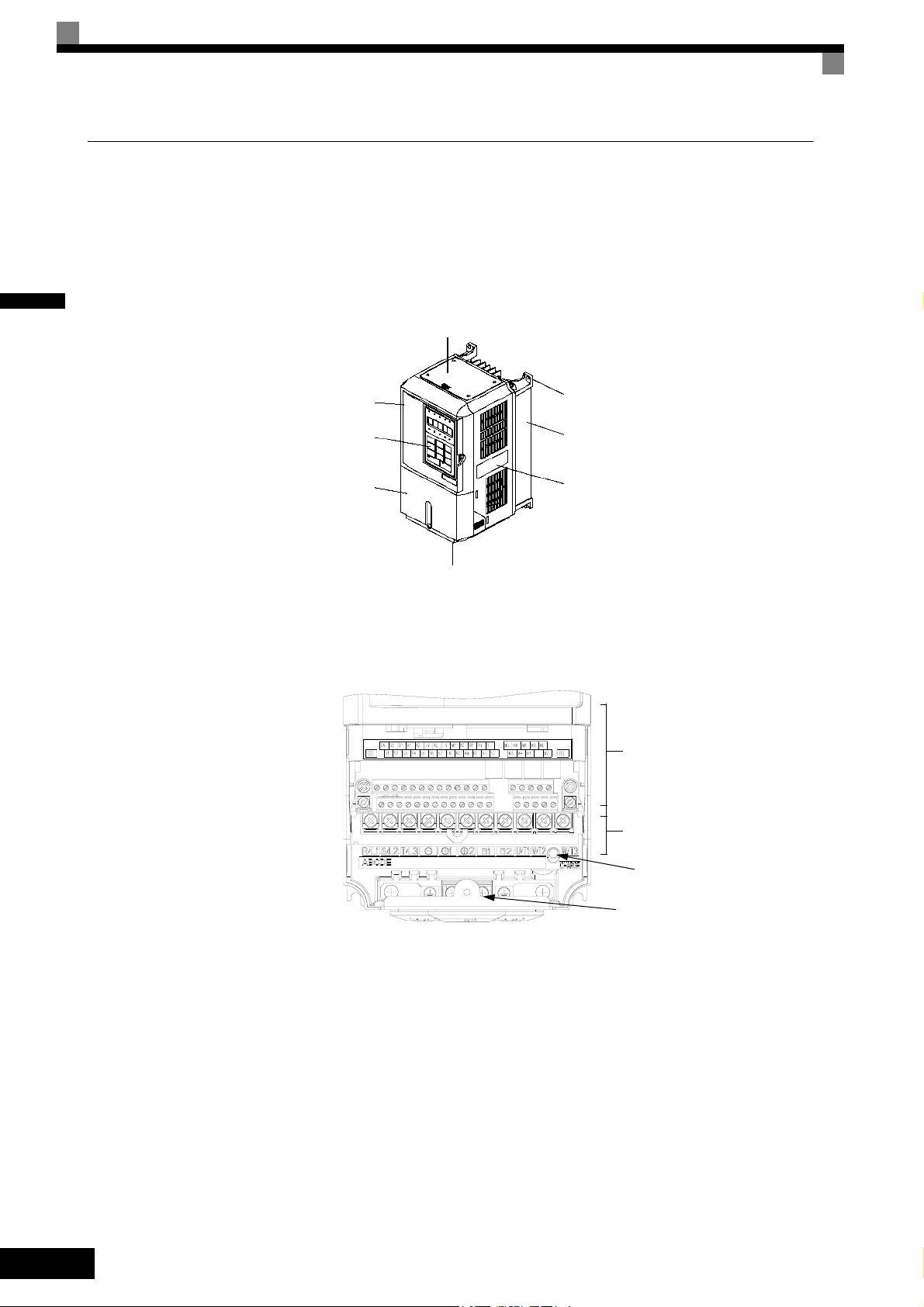
Inverter da 18,5 kW o inferiori
L'aspetto esterno e i nomi dei componenti dell'inverter sono illustrati nella Fig. 1.4. L'inverter senza copriterminali è
illustrato nella Fig. 1.5.
Coperchio protettivo superiore (parte del tipo a telaio
chiuso per installazione a parete (IEC IP20, NEMA Type 1)
Pannello frontale
Console di
programmazione
Copriterminali
Coperchio protettivo inferiore
Fig. 1.4 Aspetto inverter (da 18,5 kW o inferiore)
Foro di montaggio
Rivestimento esterno pressofuso
Targhetta
Terminali circuito di controllo
Terminali circuito principale
1-6
Spia di carica
Terminale di massa
Fig. 1.5 Disposizione dei terminali (da 18,5 kW o inferiore)
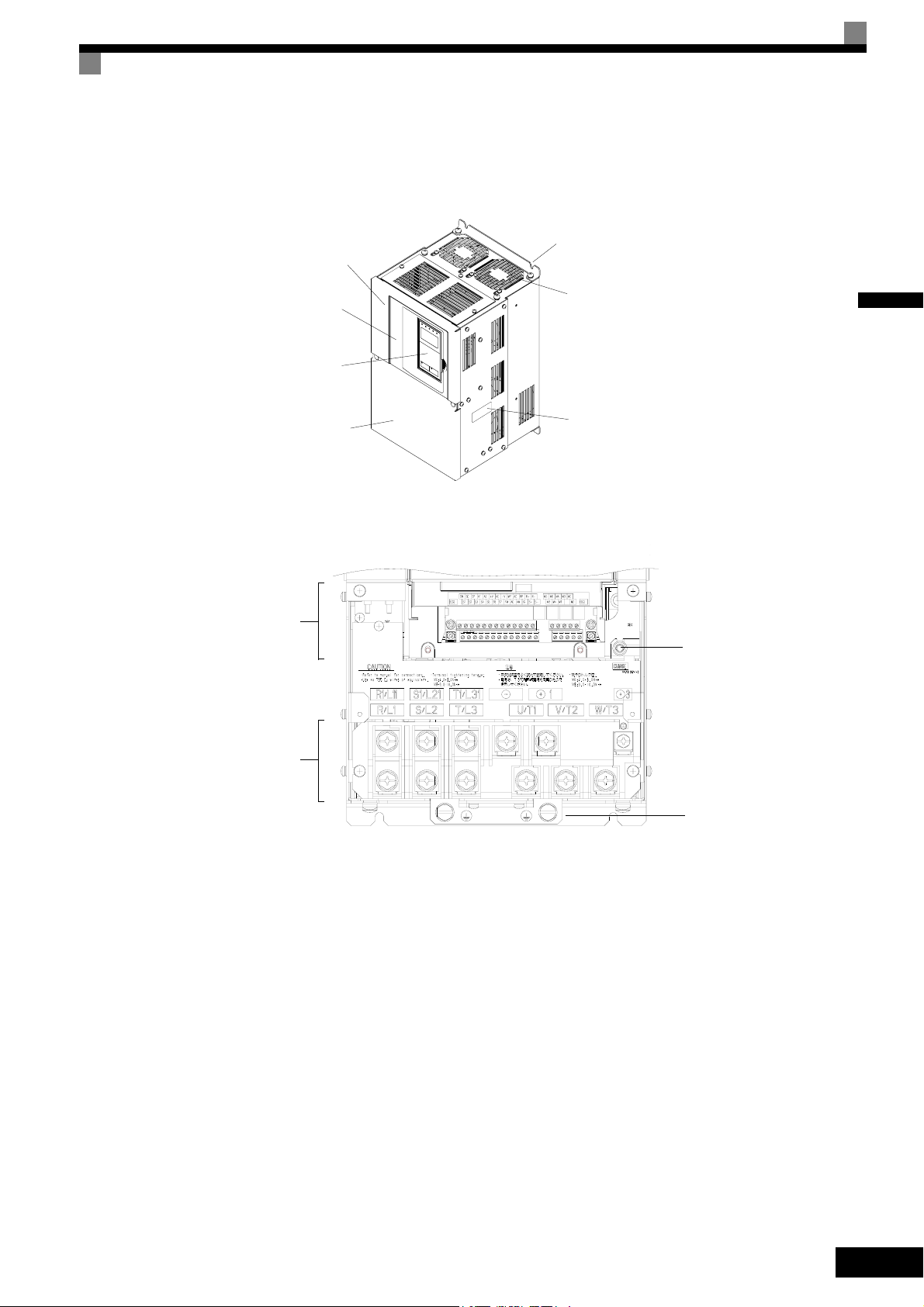
Inverter da 22 kW o superiore
L'aspetto esterno e i nomi dei componenti dell'inverter sono illustrati nella Fig. 1.6. L'inverter senza
copriterminali è illustrato nella Fig. 1.7.
Fori di montaggio
Coperchio inverter
Ventola di raffreddamento
Pannello frontale
Console di programmazione
1
Copriterminali
Terminali
circuito di
controllo
Terminali
circuito
principale
Targhetta
Fig. 1.6 Aspetto inverter (da 22 kW o superiore)
Spia di carica
Morsetto di massa
Fig. 1.7 Disposizione dei terminali (da 22 kW o superiore)
1-7
1
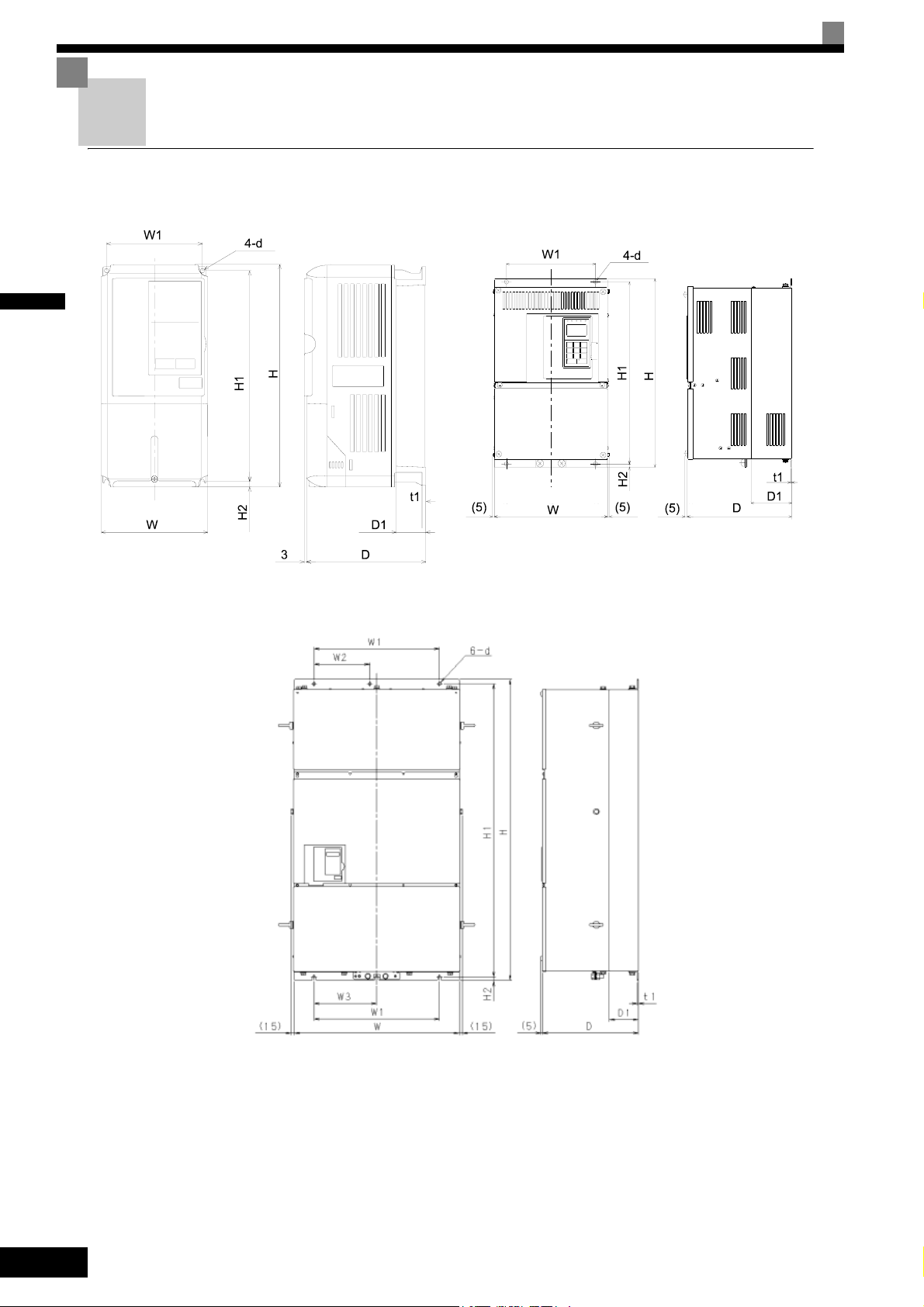
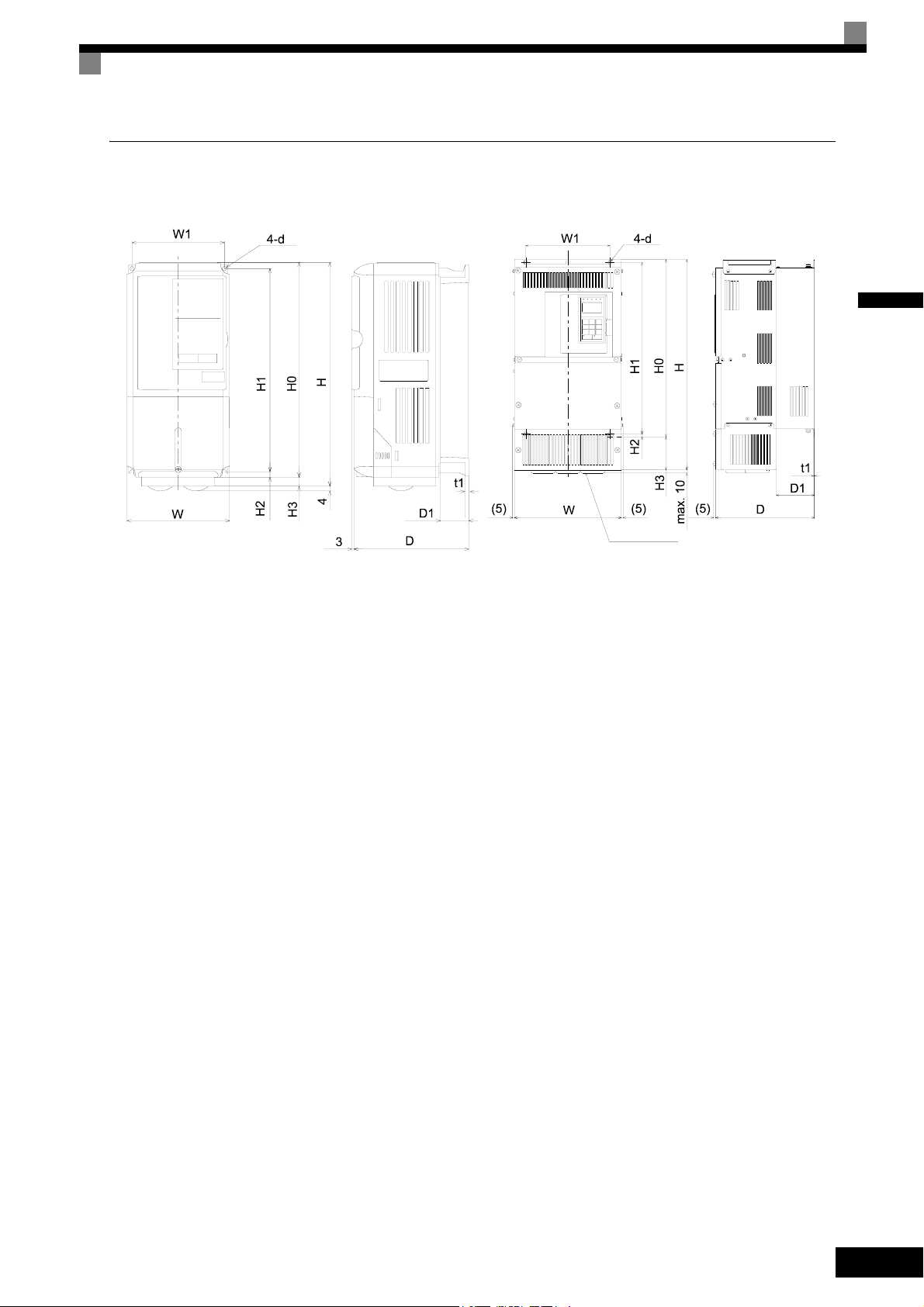
Dimensioni esterne e di installazione
Inverter a telaio aperto (IP00)
Di seguito sono riportati gli schemi esterni degli inverter a telaio aperto.
Inverter di classe 200 V/400 V da 0,55...18,5 kW
Inverter di classe 200 V da 22 o 110 kW
Inverter di classe 400 V da 22...160 kW
1-8
Inverter di classe 400 V da 185...300 kW
Fig. 1.8 Schemi esterni di inverter a telaio aperto
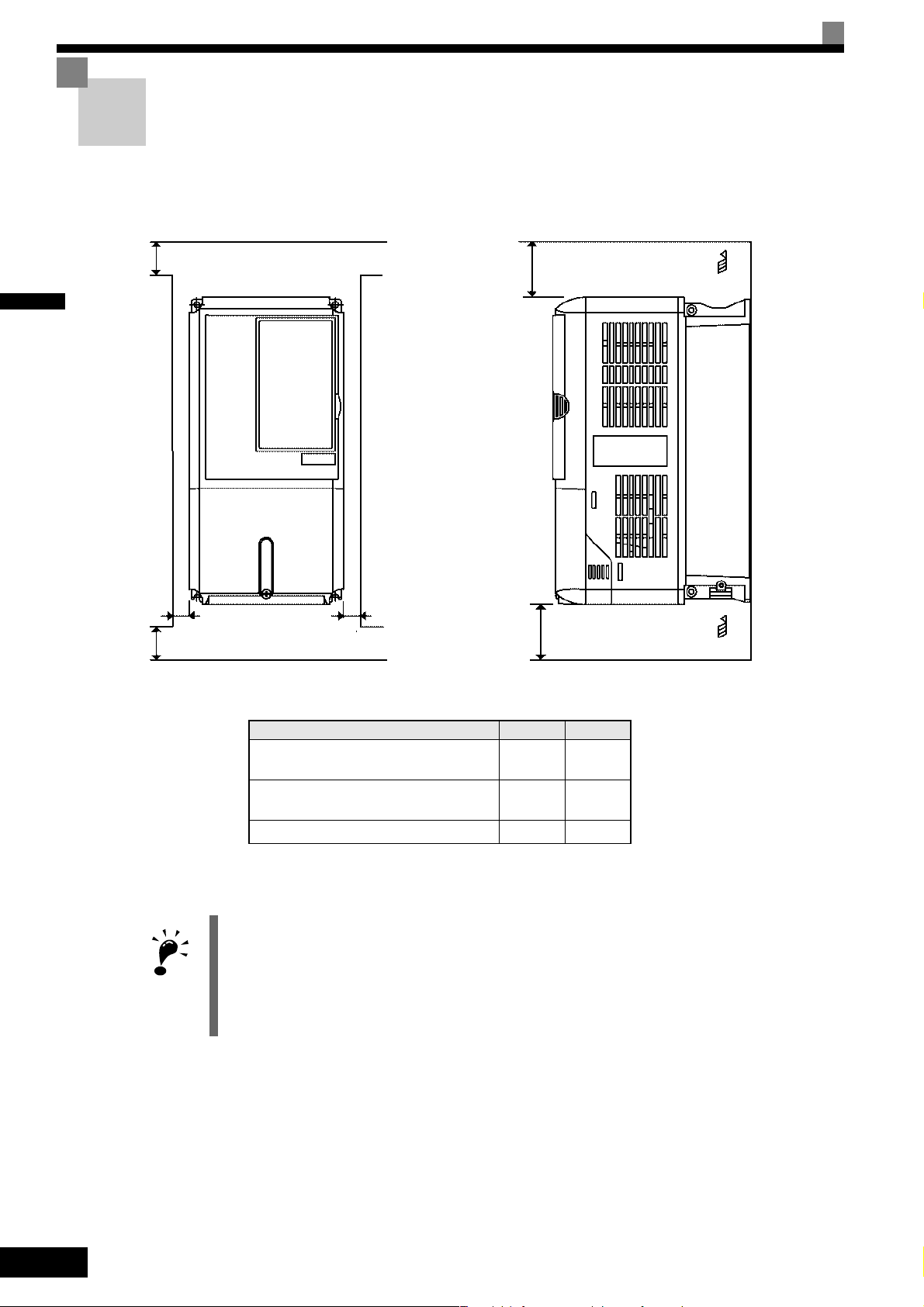
Inverter a telaio chiuso per installazione a parete (NEMA1)
Di seguito sono riportati gli schemi esterni degli inverter a telaio chiuso per installazione a parete (NEMA1).
Anello di tenuta
1
Inverter di classe 200 V/400 V da 0,55...18,5 kW
Fig. 1.9 Schemi esterni di inverter a telaio chiuso per installazione a parete
Inverter di classe 200 V da 22 o 75 kW
Inverter di classe 400 V da 22...160 kW
1-9
1
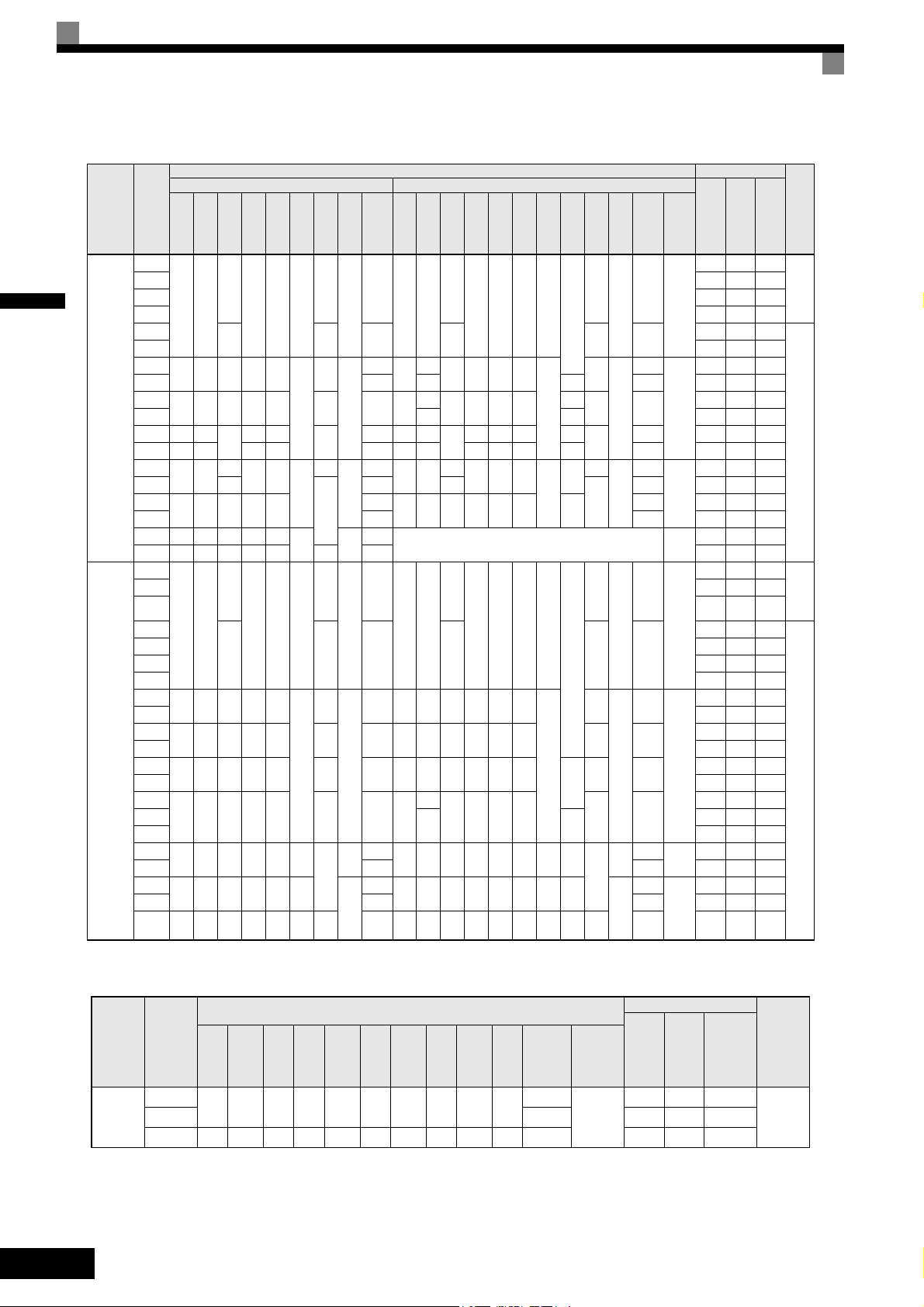
Tabella 1.2 Dimensioni (mm) e pesi (kg) degli inverter F7 da 0,4...160 kW
Poten-
Classe di
tensione
za di
uscita
motore
massi-
W H D W1 H1 H2 D1 t1
ma ap-
plicabile
[kW]
A telaio aperto (IP00) A telaio chiuso per installazione a parete (NEMA1)
0,55
200 V
(trifase)
0,75 27 42 69
1,5 50 50 100
140 280
2,2 70 59 129
3,7
5,5 16484248
7,5
200 300 197 186 285
11 7 310 10 7 374 170 544
15
240 350 207 216 335 78 11 240
18,5 380 30 501 211 712
22 250 400
30 275 450 220 435 24 275 615 220 450 435 165 27 865 352 1217
37
375 600
45 330
55
450 725 350 325 700
75 87 95 2019 838 2857
90 500 850 360 378 820
110 575 885 380 445 855 140 150 2733 1242 3975
157
126 266 7
39
5
177 594 177 594
65,5
258
300
7,5
195 385
250 575
13
2,3
100
100
3,2
130
15 4,5
0,55
0,75 17 41 58
157
39
1,5 36 48 84
140 280
2,2
3,7 80 68 148
4,0 70 91 161
126 266 7
5
177 594 177 594
5,5 12782209
7,5
400 V
(trifase)
200 300 197 186 285
11 252 158 410
15
240 350 207 216 335 78 10 240 350 207 216 350 335 78 10
18,5 426 208 634
22
275 450 258 220 435 100 21 275 535 258 220 450 435
30 678 317 995
7,5
65,5
2,3
37
325 550 283 260 535 105 36 325
45
55 1203 495 1698
75
450 725 350 325 700 13
90 89 97 1614 671 2285
110
500 850 360 370 820 14
132 120 130 2388 1002 3390
3,2
130
4,5
160 575 916 378 445 855 46 140 160 579
* Uguale sia per inverter a telaio aperto che a telaio chiuso per installazione a parete.
Dimensioni (mm) Potere calorifico (W)
Peso
ap-
W H D W1 H0 H1 H2 H3 D1 t1
prossimativo
3
140 280
6
200
21 250 535
57
380 890
63 330
86
455
108
3
140 280
6 200 300 197 186 300 285
88
455
102
505
Peso
Fori di
mon-
taggio
d*
Ester-noInter-
approssimativo
20 39 59
157
126 280 266 7
39
0
3
5
M5
112 74 1 86
300
197 186 300 285
350
207 216 350 335
195 400 385 135
258
300
250 600 575
110
350 325 725 700 305
0
65,5
0
7,5
78 11
100
100
210
13
130
--- M12
6
2,3
219 113 332
429 183 612
M6
24 586 274 860
62
68 1266 505 1771
3,2
94 1588 619 2207
1015 411 1426
M10
2437 997 3434
14 39 53
157
126 280 266 7
39
3
5
M5
59 56 115
0
65,5
6
193 114 307
326 172 498
7,5
85
635
283 260 550 535 105 40
715 165
110
350 325 725 700 13 305
0
124
360 370 850 820 15 395
5
132
378 445 916 855 46 408 140 170 2791 1147 3938
4
2,3
100 24
3,2
130
122
4,5
M6
466 259 725
784 360 1144
901 415 1316
96
1399 575 1974
M10
2097 853 2950
M12
Meto-
do di
Tot a l e
raf-
calore
gene-
rato
fred-
da-
mento
Ven t i -
lazio-
ne
natura-
le
Ven t o -
la di
raf-
fredda-
mento
Ven t i -
lazio-
ne
natura-
le
Ven t o -
la di
raf-
fredda-
mento
no
1-10
Classe
di
tensione
400V
(trifase)
Tabella 1.3 Dimensioni (mm) e pesi (kg) degli inverter di classe 400 V da 185...300 kW
Potenza
di uscita
motore
massima ap-
plicabile
[kW]
W H D W1 W2 W3 H1 H2 D1 t1
185
710 1305 413 540 240 270 1270 15 125,5 4,5
220 280 3740 1537 5277
300 916 1475 413 730 365 365 1440 15 125,5 4,5 405 5838 2320 8158
Dimensioni (mm)
A telaio aperto (IP00)
Peso
appros-
sima-
tivo
260
Fori di
montag-
gio d
M12
Potere calorifico (W)
Ester-noInter-
no
3237 1372 4609
To ta l e
calore
generato
Metodo
di raf-
fredda-
mento
Ve nt o l a
di raf-
fredda-
mento
Controllo del luogo di installazione
Installare l'inverter in un luogo con le caratteristiche riportate di seguito e mantenere delle condizioni ottimali.
Luogo di installazione
Installare l'inverter nelle seguenti condizioni e in un ambiente con un inquinamento di grado 2.
Tipo
A telaio chiuso per
installazione a parete
Telaio aperto -10…+45 °C 95% RH o inferiore (senza condensa)
I coperchi di protezione vengono installati sulla parte superiore e inferiore dell'inverter. Accertarsi di
rimuovere i coperchi di protezione prima di installare in un pannello un inverter di classe 200 o 400 V con
un'uscita da 18,5 kW o inferiore.
Per l'installazione dell'inverter osservare le precauzioni riportate di seguito.
• Installare l'inverter in un ambiente pulito privo di polvere e nebbia d'olio. È possibile installare l'inverter in
un pannello completamento chiuso protetto dalla polvere.
• Durante l'installazione o il funzionamento dell'inverter, proteggerlo sempre dal contatto con polveri
metalliche, olio, acqua o altre sostanze estranee.
• Non installare l'inverter su materiale combustibile, come il legno.
• Installare l'inverter in un ambiente privo di materiali radioattivi e combustibili.
• Installare l'inverter in un ambiente in cui non sono presenti liquidi e gas nocivi.
• Installare l'inverter in un ambiente senza troppe oscillazioni.
• Installare l'inverter in un ambiente in cui non è presente del cloruro.
• Installare l'inverter in un ambiente non esposto alla luce diretta del sole.
Temperatura ambiente di
funzionamento
-10…+40 °C 95% RH o inferiore (senza condensa)
Umidità
1
Controllo della temperatura ambiente
Per aumentarne l'affidabilità, è necessario installare l'inverter in un ambiente non soggetto ad eccessivi
aumenti di temperatura. Se l'inverter viene installato in un ambiente chiuso (ad esempio in una scatola),
utilizzare una ventola di raffreddamento o un condizionatore d'aria per mantenere la temperatura interna
inferiore a 45 °C.
Protezione dell'inverter da sostanze estranee
Coprire l'inverter durante l'installazione per proteggerlo dalla polvere metallica prodotta dalla foratura.
Rimuovere sempre il coperchio dall'inverter una volta terminata l'installazione. In caso contrario, la
ventilazione diminuirà provocando il surriscaldamento dell'inverter.
1-11
Posizione corretta di installazione
E
Installare l'inverter in posizione verticale in modo da non ridurre l'effetto di raffreddamento. Durante
l'installazione dell'inverter, accertarsi sempre che lo spazio di installazione sia sufficiente per consentire una
normale dispersione di calore.
1
A
30 mm min.
50 mm min.
Ingombro
orizzontale
30 mm min.
B
Aria
120 mm min.
Aria
Ingombro verticale
IMPORTANT
A B
Inverter di classe 200V, da 0,55...90 kW
Inverter di classe 400V da 0,55...132 kW
Inverter di classe 200V, da 110 kW
Inverter di classe 400V da 160...220 kW
Inverter di classe 400 V, 300 kW 300 mm 300 mm
Fig. 1.10 Posizione corretta di installazione dell'inverter
1. Per gli inverter a telaio aperto (IP00) e per quelli a telaio chiuso per installazione a parete (IP20,
NEMA 1), è richiesto lo stesso spazio sia orizzontale che verticale.
2. Rimuovere sempre i coperchi di protezione prima di installare in un pannello un inverter di classe 200 o
400 V con un'uscita da 18,5 kW o inferiore.
Quando si installa in un pannello un inverter di classe 200 o 400 V con un'uscita da 22 kW
(o superiore), accertarsi sempre che vi sia abbastanza spazio per i bulloni a occhiello di sospensione e
le linee del circuito principale.
50 mm 120 mm
120 mm 120 mm
1-12
Rimozione e installazione del copriterminali
Rimuovere il copriterminali per collegare i cavi ai terminali del circuito di controllo e del circuito principale.
Rimozione del copriterminali
Inverter da 18,5 kW o inferiore
Allentare la vite sulla parte inferiore del copriterminali, esercitare una pressione su entrambi i lati del
copriterminali in direzione della freccia 1 e sollevarlo in direzione della freccia 2.
1
2
1
Fig. 1.11 Rimozione del copriterminali (modello CIMR-F7Z25P5 illustrato sopra)
Inverter da 22 kW o superiore
1
Allentare le viti che si trovano sulla parte superiore del copriterminali a sinistra e a destra, estrarre il
copriterminali in direzione della freccia 1 e sollevarlo in direzione della freccia 2.
1
2
Fig. 1.12 Rimozione del copriterminali (modello CIMR-F7Z2022 illustrato sopra)
Installazione del copriterminali
Una volta terminato il cablaggio della morsettiera, installare il copriterminali eseguendo la procedura inversa a
quella di rimozione.
Per gli inverter con un'uscita da 18,5 kW o inferiore, inserire la linguetta che si trova sulla parte superiore del
copriterminali nella scanalatura dell'inverter e premere sulla parte inferiore del copriterminali fino ad incastrarlo.
1-13

1
Rimozione/Installazione console di programmazione e coperchio frontale
Inverter da 18,5 kW o inferiore
Per installare le schede accessorie o sostituire il connettore della scheda dei terminali, rimuovere la console di
programmazione e il coperchio frontale oltre al copriterminali. Rimuovere sempre la console di programmazione
dal coperchio frontale prima di rimuovere quest'ultimo.
Di seguito sono riportate le procedure di rimozione e installazione.
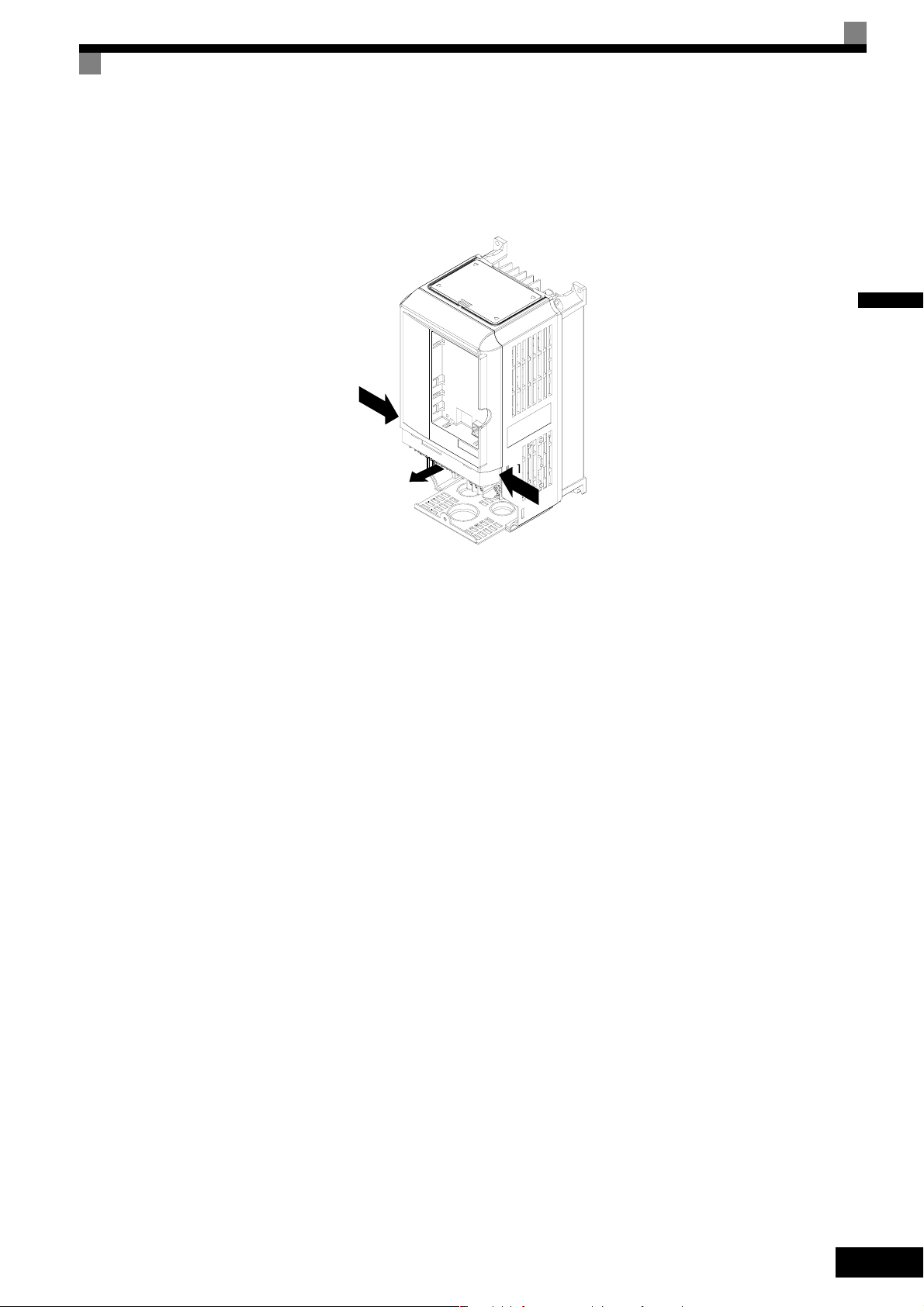
Rimozione della console di programmazione
Premere la leva che si trova sul lato della console di programmazione in direzione della freccia 1 per sbloccare
la console e sollevare quest'ultima in direzione della freccia 2 per rimuoverla, come mostrato nell'illustrazione
seguente
Fig. 1.13 Rimozione della console di programmazione (modello CIMR-F7Z45P5 illustrato sopra)
1-14
Rimozione del coperchio frontale
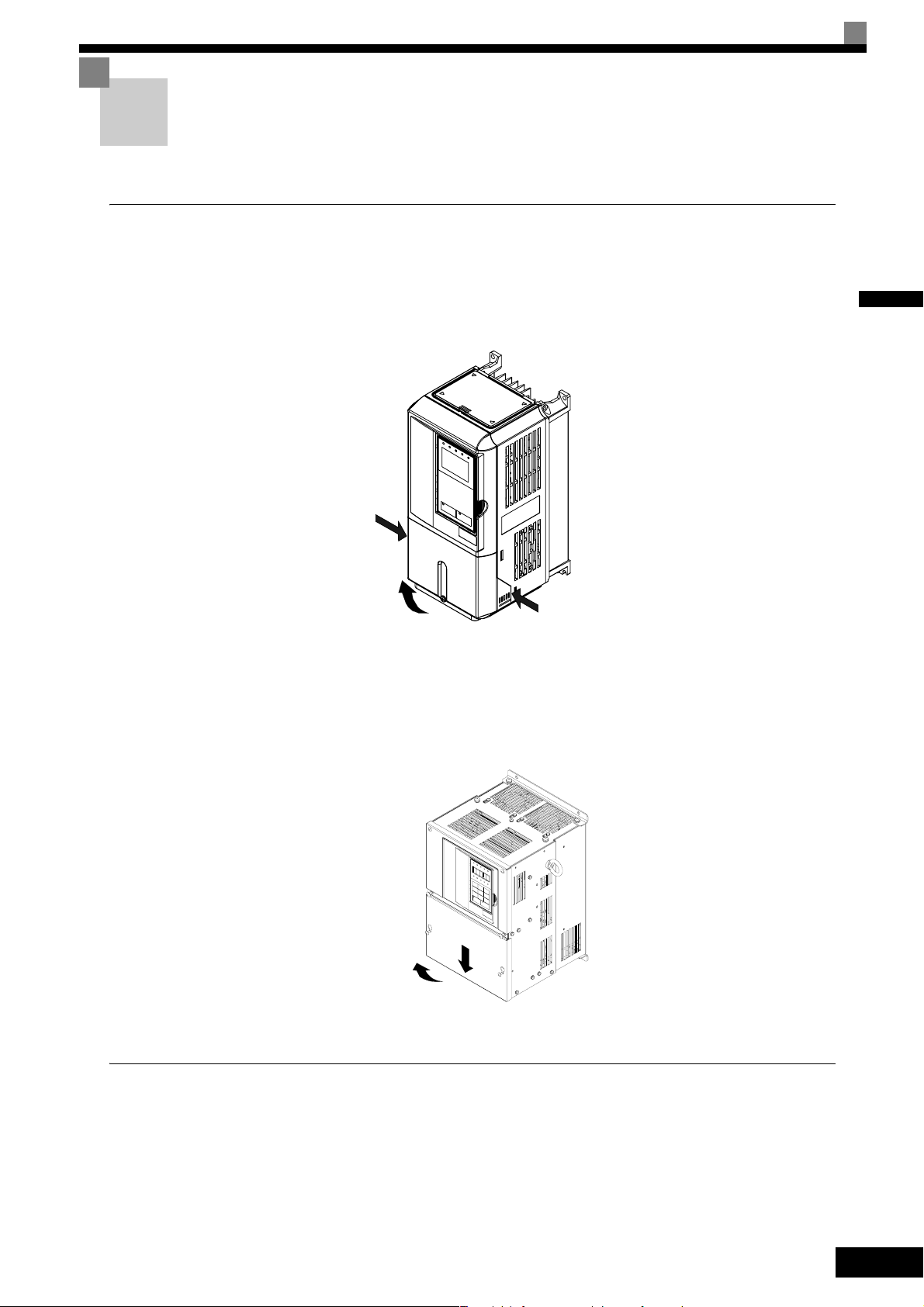
Esercitare una pressione sui lati sinistro e destro del coperchio frontale in direzione della freccia 1 e sollevare
la parte inferiore del coperchio in direzione della freccia 2 per rimuoverlo, come mostrato nell'illustrazione
seguente.
1
2
Fig. 1.14 Rimozione del coperchio frontale (modello CIMR-F7Z45P5 illustrato sopra)
1
Installazione del coperchio frontale
Una volta terminato il cablaggio dei terminali, installare il coperchio frontale sull'inverter eseguendo la
procedura inversa rispetto a quella di rimozione.
1. Non installare il coperchio frontale con la console di programmazione montata, in quanto potrebbe
verificarsi un malfunzionamento della console dovuto ad un contatto difettoso.
2. Inserire la linguetta che si trova sulla parte superiore del coperchio frontale nella scanalatura dell'inverter e
premere la parte inferiore del coperchio frontale sull'inverter fino a chiudere il coperchio in posizione.
1-15
1
E
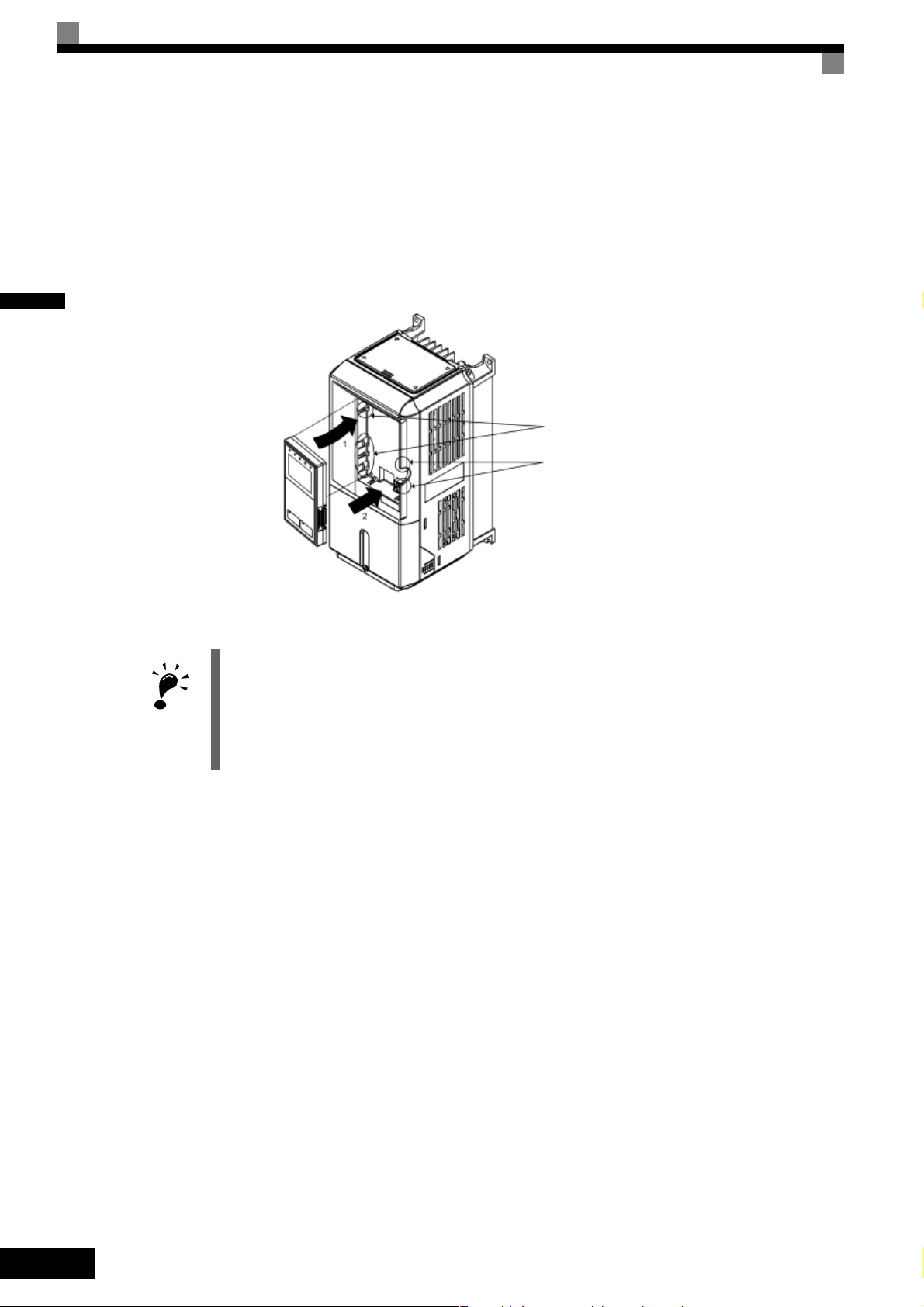
Montaggio della console di programmazione
Una volta installato il copriterminali, montare la console di programmazione sull'inverter seguendo la
procedura riportata di seguito.
1. Agganciare la console di programmazione in corrispondenza di A (due lati) sul coperchio frontale in
direzione della freccia 1, come mostrato nell'illustrazione seguente.
2. Premere la console di programmazione in direzione della freccia 2 finché non si aggancia in
corrispondenza di B (due lati).
A
B
IMPORTANT
Fig. 1.15 Installazione della console di programmazione
1. Non rimuovere o installare la console di programmazione o il coperchio frontale utilizzando metodi
differenti da quelli descritti in precedenza, altrimenti potrebbe verificarsi guasti o malfunzionamenti
dell'inverter dovuti ad un contatto difettoso.
2. Non installare mai il coperchio frontale sull'inverter con la console di programmazione montata, in
quanto potrebbe essere causa di un contatto difettoso.
Installare sempre prima il coperchio frontale sull'inverter, quindi montare su di esso la console di
programmazione.
1-16
Inverter da 22 kW o superiore
Per gli inverter con un'uscita da 22 kW o superiore, rimuovere il copriterminali e attenersi alle seguenti
procedure per rimuovere la console di programmazione e il coperchio frontale.
Rimozione della console di programmazione
Eseguire la stessa procedura utilizzata per gli inverter con un'uscita da 18,5 kW o inferiore.
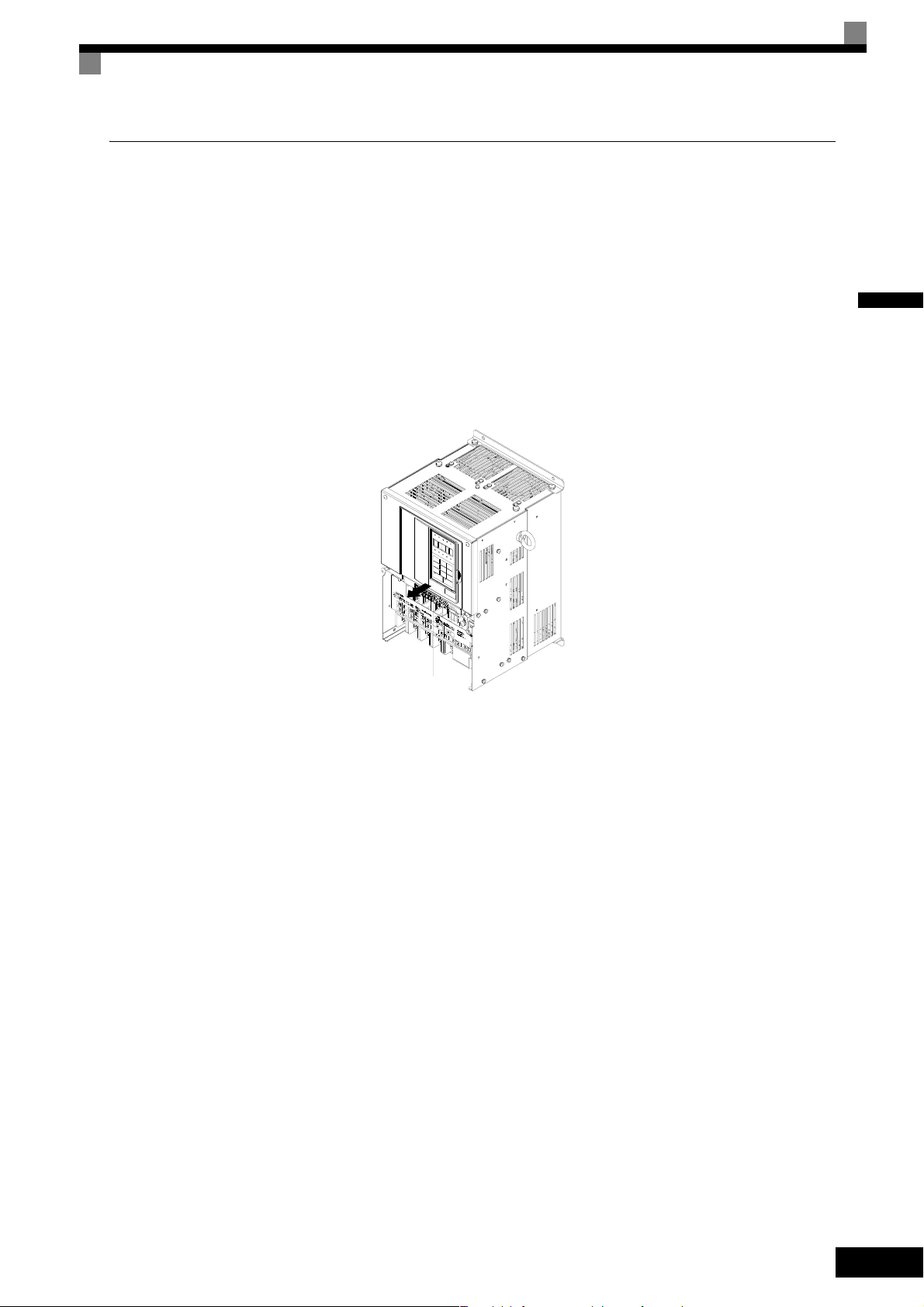
Rimozione del coperchio frontale
Sollevare in corrispondenza dell'etichetta 1 nella parte superiore della scheda dei terminali del circuito di
controllo in direzione della freccia 2.
2
1
Fig. 1.16 Rimozione del coperchio anteriore (modello CIMR-F7Z2022 illustrato sopra)
1
Installazione del coperchio frontale
Una volta terminate le operazioni necessarie, come l'installazione di una scheda accessoria o l'impostazione
della scheda dei terminali, installare il coperchio frontale seguendo la procedura inversa a quella di rimozione.
1. Verificare che la console di programmazione non sia montata sul coperchio frontale. Se si installa il
coperchio con la console di programmazione montata potrebbero verificarsi degli errori di contatto.
2. Inserire la linguetta che si trova sulla parte superiore del coperchio frontale nell'alloggiamento dell'inverter
e premere sul coperchio finché non si incastra nell'inverter.
Installazione della console di programmazione
Eseguire la stessa procedura utilizzata per gli inverter con un'uscita da 18,5 kW o inferiore.
1-17
1
1-18
Cablaggio
Questo capitolo descrive il cablaggio dei terminali, i collegamenti dei terminali del circuito
principale, le specifiche per il cablaggio dei terminali del circuito principale, i terminali del
circuito di controllo e le specifiche per il cablaggio del circuito di controllo.
Collegamenti a dispositivi periferici........................................2-2
Schema dei collegamenti.......................................................2-3
Configurazione della morsettiera ...........................................2-5
Cablaggio dei terminali del circuito principale........................2-6
Cablaggio dei terminali del circuito di controllo....................2-20
Verifica del cablaggio...........................................................2-27
Installazione e cablaggio delle schede accessorie ..............2-28
2
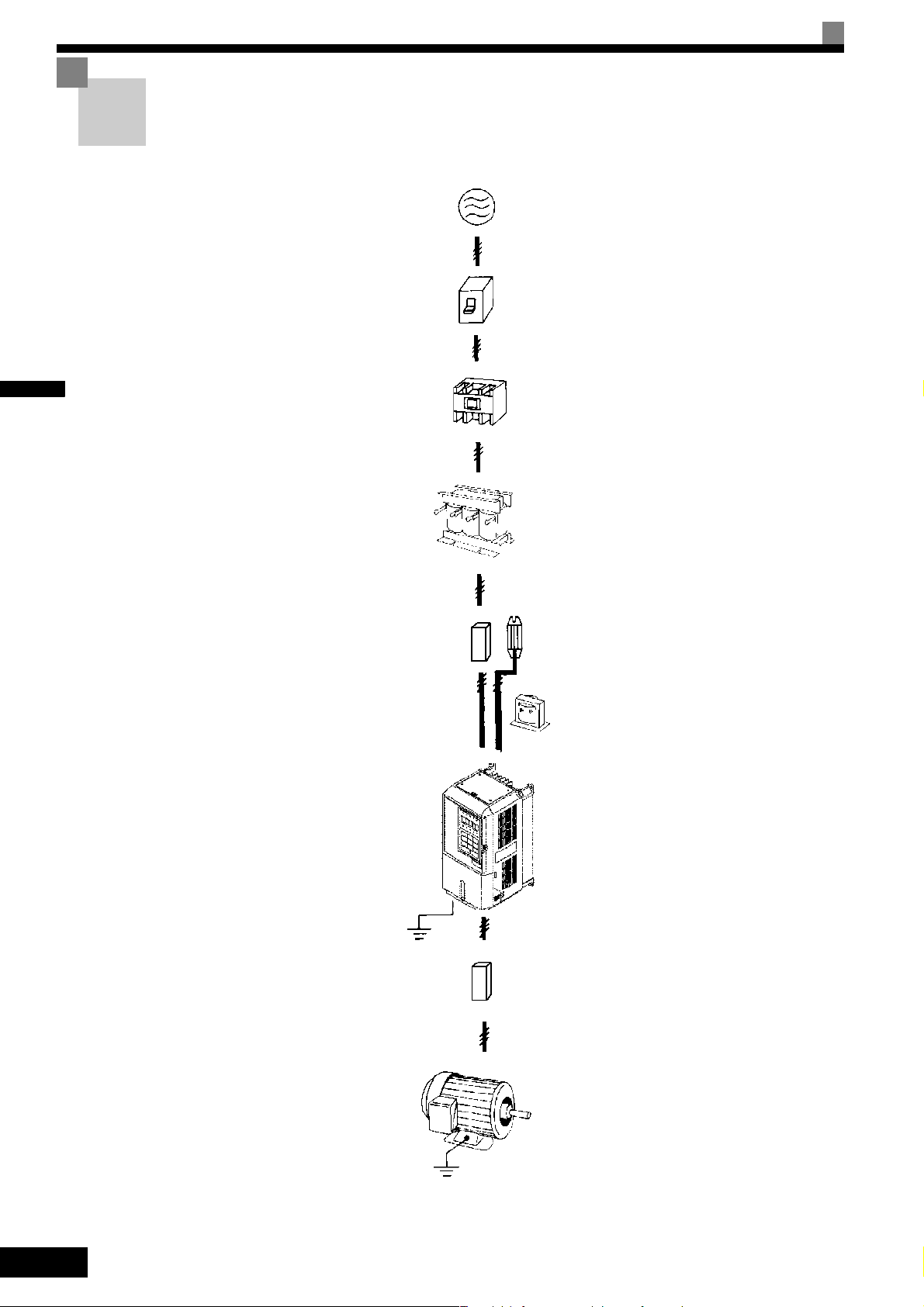
Collegamenti a dispositivi periferici
Nella Fig. 2.1 sono riportati esempi di collegamenti tra l'inverter e tipici dispositivi periferici.
Alimentatore
Interruttori di
circuito in scatole
stampate
Contattore
magnetico (MC)
Reattanza c.c. per il
miglioramento del fattore
di potenza
Filtro antidisturbo
(disturbi in ingresso)
Inverter
Terra
Filtro antidisturbo
(disturbi in uscita)
Resistenza di frenatura
Reattanza c.a. per il miglioramento del fattore di potenza
2-2
Motore
Terra
Fig. 2.1 Esempi di collegamento a dispositivi periferici
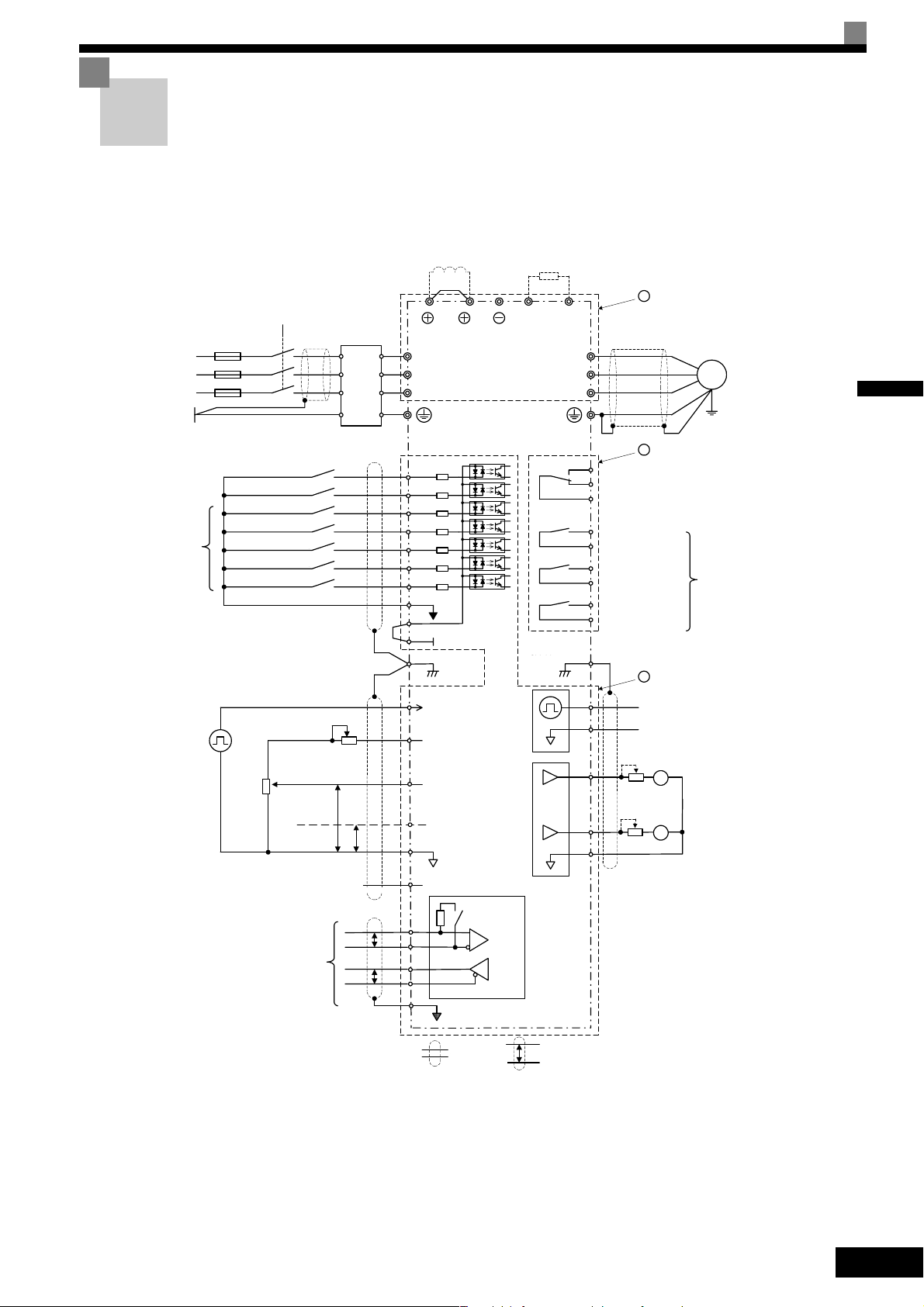
Schema dei collegamenti
Lo schema dei collegamenti per l'inverter è riportato nella Fig. 2.2.
Se si utilizza la console di programmazione, è possibile azionare il motore cablando solo i circuiti principali.
Reattanza c.c. per migliorare il
DC reactor to improve input
fattore di potenza in ingresso
power factor (optional)
(opzionale)
UX
R/L1
S/L2
T/L3
S3External fault
S4
S5
S6
S7
SN
SC
SP
E(G)
Ingresso a treno di impulsi
RP
Pulse train input [Default:
[Impostazione predefinita:
ingresso frequenza di
Frequency reference input]
riferimento] 0 … 32 kHz
0 to 32kHz
+V
Ingresso di alimentazione
Analog input power supply
analogico +15 V, 20 mA
+15V, 20mA
Ingresso analogico 1:
Analog input 1: Master
A1
frequenza di riferimento
frequency reference
master 0 ... +10V (20 kOhm)
0 to +10V (20 k )
Ingresso analogico
Multi-function analog input 2
multifunzione 2:
A2
[Default: Frequency bias
[Impostazione predefinita:
4 to 20mA (250 )]
polarizzazione frequenza
4 ... 20 mA (250 Ohm)]
AC
-V
Ingresso di alimentazione
Analog input power supply
analogico-15 V, 20 mA
-15V, 20mA
R+
P
R-
S+
P
S-
IG
1 2 B1 B2
24V
Terminale
Shield
di scherma-
terminal
tura
0V
Alimentazione
3-phase power
trifase380 …
380 to 480 V
480 V50/60 Hz
50/60 Hz
Ingressi a contatto
Multi-function
multifunzione
digital inputs
(impostazioni di
[Factory setting]
fabbrica
L1
L2
L3
PE
Barra di cortocircuito
Contattore principale
Main contactor
Short-circuit bar
T
Fusibili
Fuses
Filtro
Line
di
Filter
linea
Marcia avanti/Arresto
Forward Run/Stop S1
Marcia indietro/Arresto
Reverse Run/Stop S2
Errore esterno
Ripristino dopo errore
Fault reset
Impostazione
multivelocità 1
Multi-step speed setting 1
Impostazione
multivelocità 2
Multi-step speed setting 2
Selezione della
Jog frequency selection
frequenza di jog
Regolazione impostazione
Analog input setting
ingresso analogico
adjustment
Ω
2k
0 ... 10V
3
0 to 10V
Ω
2k
2
1
4 ... 20mA
4 to 20mA
PP
Comunicazione
MEMOBUS
MEMOBUS
communication
RS-485/422
RS-485/422
Braking resistor unit (optional)
Resistenza di frenatura (opzionale)
Varispeed F7
CIMR-
F7C47P5
Terminale
di schermatura
Ω
Ω
Resistenza di
Terminating
terminazione
resistance
Shield
terminal
U/T1
V/T2
W/T3
MA
Uscita a contatto di errore
Fault contact output
MB
250 Vc.a., 1 A max. 30 Vc.c.,
250 VAC, 1A max.
1 A max.
MC
30 VDC, 1A max.
M1
Uscita a contatto 1
Contact output 1
(Impostazione
M2
[Default : Running]
predefinita: in marcia)
M3
Uscita a contatto 2
Contact output 2
(Impostazione predefi-
M4
[Default : Zero speed]
nita: velocità zero)
M5
Uscita a contatto 3
Contact output 3
(Impostazione prede-
M6
[Default :
finita: raggiungimento
Frequency agree 1]
frequenza di riferimento)
E(G)
MP
AC
Regolazione
Adjustment,
a 20 kOhm
FM
AM
AC
20 k
Regolazione
Adjustment,
a 20 kOhm
20 k
1
M
2
Multi-function digital
Uscita a contatto
output
multifunzione250 Vc.a.,
250 VAC, 1A max.
1 A max. 30 Vc.c., 1 A max.
30 VDC, 1A max.
3
Uscita a treno di impulsi
Pulse train output
0 ... 32 kHz (2,2 kOhm)
0 to 32kHz (2.2 k )
(Impostazione predefinita:
corrente di uscita)
[Default: Output frequency]
Ω
+
FM
Ω
+
AM
Ω
Uscita analogica multifunzione 1
-
Multi-function analog output 1
(-10 ... +10 V, 2 mA/4 ... 20 mA)
(-10 to +10V 2mA / 4 to 20mA)
[Impostazione predefinita:
[Default: Output frequency 0 to +10V]
frequenza di uscita 0 ... +10 V]
Uscita analogica multifunzione 2
-
Multi-function analog output 2
(-10 ... +10 V, 2 mA/4 ... 20 mA)
(-10 to +10V 2mA / 4 to 20mA)
[Impostazione predefinita:
[Default: Output current 0 to +10V]
corrente di uscita 0 ... +10 V]
2
Cavi schermati
Shielded wires P
Fili schermati a doppini
Twisted-pair
intrecciati
Shielded wires
Fig. 2.2 Schema dei collegamenti (modello CIMR-F7Z47P5 illustrato sopra)
2-3
2
E
Descrizione circuiti
Fare riferimento ai numeri indicati nella Fig. 2.2.
1 Questi circuiti sono pericolosi e sono separati da superfici accessibili da pannelli di separazione
protettivi.
2 Questi circuiti sono separati da tutti gli altri circuiti da pannelli di separazione protettivi con
materiale isolante doppio e rinforzato. Questi circuiti possono essere collegati con circuiti SELV
(o equivalenti) o con circuiti non SELV*, ma non con entrambi.
3 Inverter alimentati da un sistema a 4 fili (neutro a terra)
Questi circuiti sono circuiti SELV
protettivi con materiale isolante doppio e rinforzato. Questi circuiti possono essere collegati solo
*
con altri circuiti SELV
(o equivalenti).
Inverter alimentati da un sistema a 3 fili (senza messa a terra o collegamento delta con messa
a terra di una fase)
Questi circuiti non sono separati da altri circuiti pericolosi mediante separazione di protezione, ma
solo dall'isolamento di base. Questi circuiti non devono essere collegati con altri circuiti accessibili,
a meno che non siano isolati da questi mediante materiale isolante aggiuntivo.
* SELV = Safety Extra Low Voltage (bassa tensione di sicurezza)
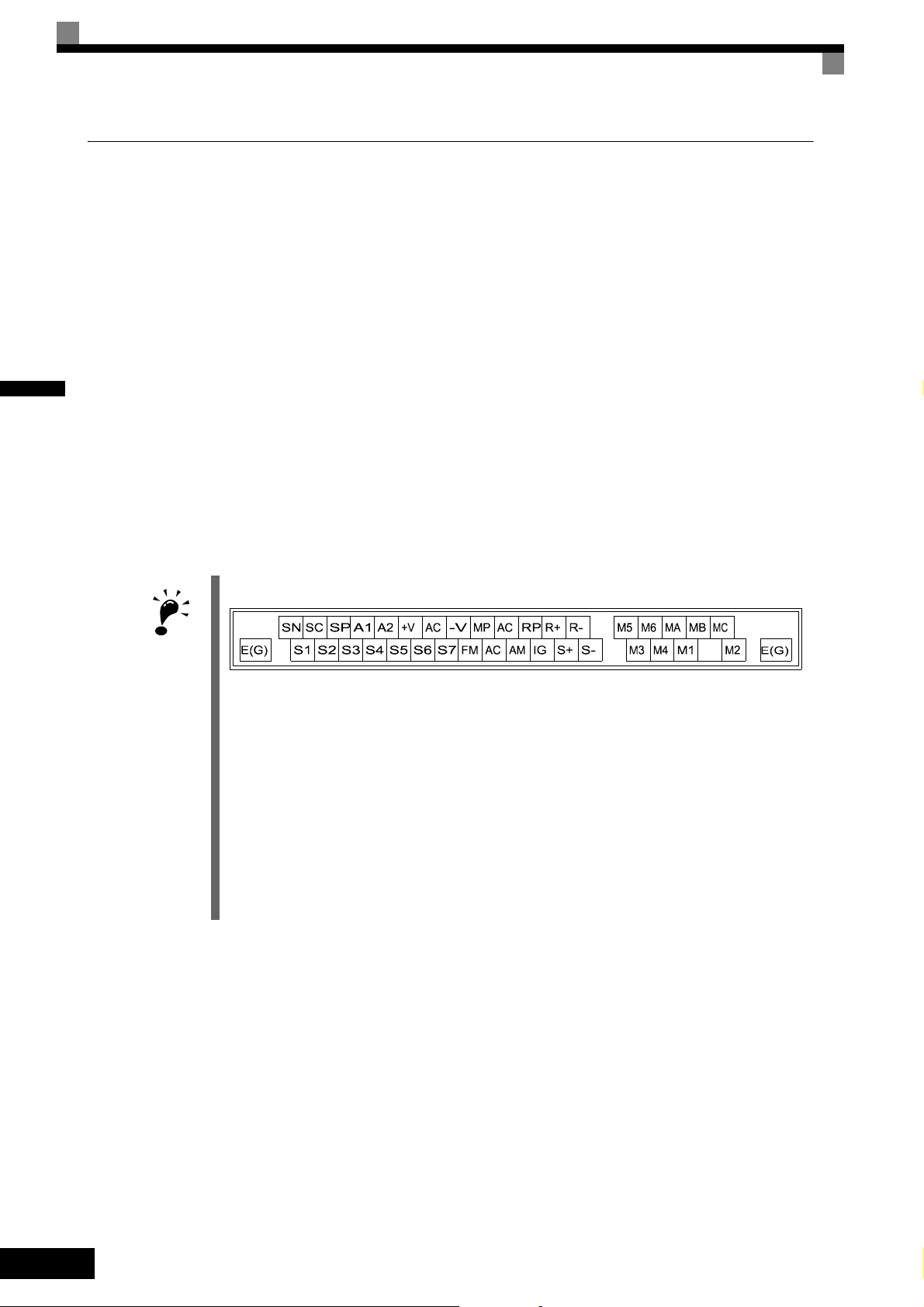
1. I terminali del circuito di controllo sono disposti come illustrato di seguito.
*
separati da tutti gli altri circuiti da pannelli di separazione
*
IMPORTANT
2. La capacità della corrente di uscita del terminale +V è 20 mA.
3. I terminali del circuito principale sono identificati da due cerchi, mentre quelli del circuito di controllo sono
identificati da un solo cerchio.
4. Viene illustrato il cablaggio degli ingressi digitali da S1 a S7 per il collegamento di contatti o transistor NPN
(0 V comune e NPN) in quanto questa è l'impostazione predefinita.
Per il collegamento di transistor PNP o per utilizzare un alimentazione esterna di 24 V, vedere pagina 2-24,
Modalità PNP/NPN.
5. La frequenza di riferimento della velocità master può essere immessa sul terminale A1 o sul terminale A2
modificando l'impostazione del parametro H3-13. L'impostazione predefinita è il terminale A1.
6. Le uscite analogiche multifunzione sono destinate all'uso con strumenti di misurazione di frequenza analogica,
wattmetri, voltmetri, amperometri e così via. Non utilizzare queste uscite per il controllo di retroazione o altro tipo
di controllo.
7. Negli inverter di classe 200 V da 22 a 110 kW e negli inverter di classe 400 V da 22 a 300 kW sono incorporate
reattanze c.c. al fine di migliorare il fattore di potenza in ingresso. La reattanza c.c. è opzionale solo per gli inverter
da 18,5 kW o meno. Rimuovere la barra di corto circuito prima di collegare una reattanza c.c.
2-4
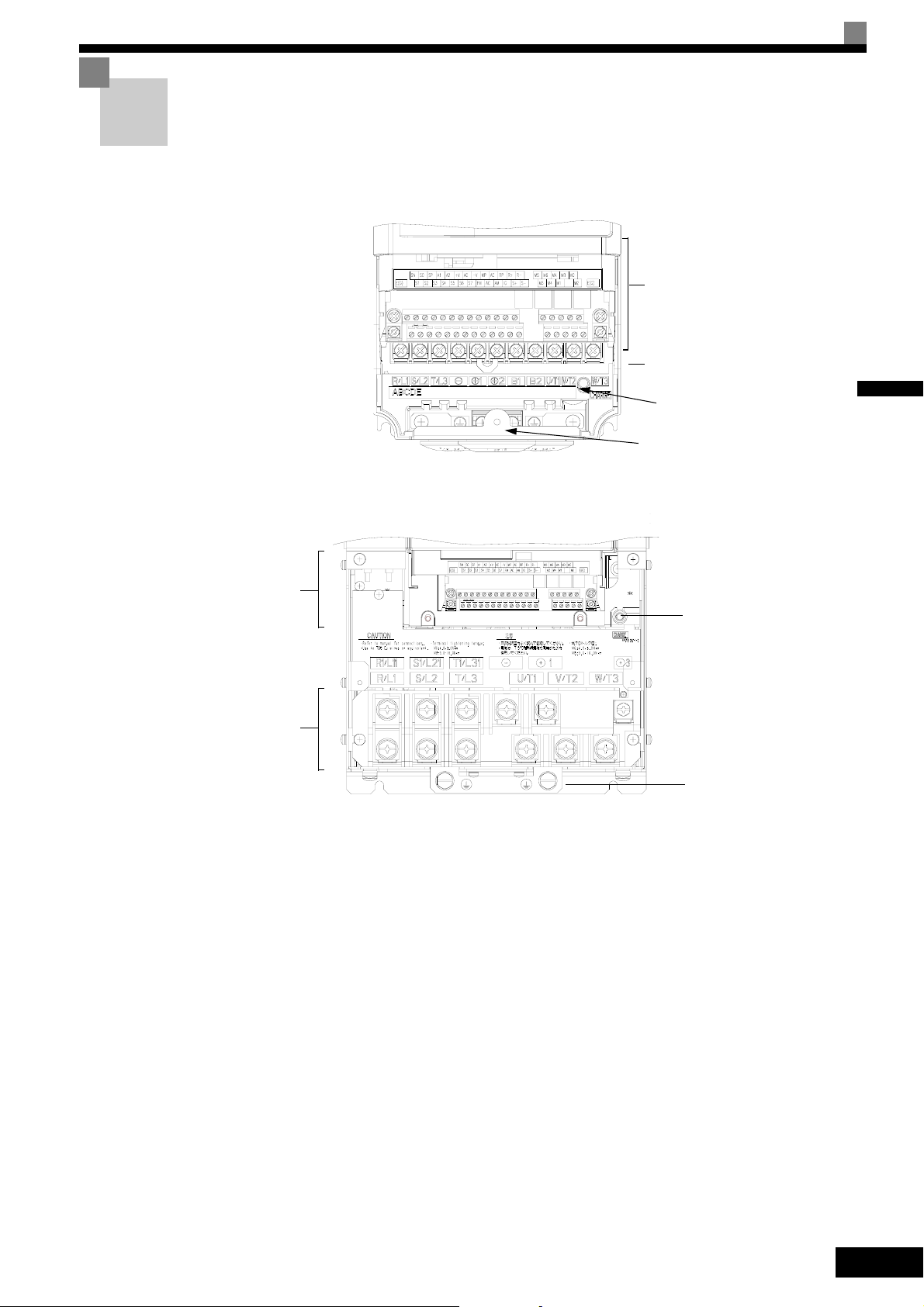
Configurazione della morsettiera
La disposizione dei terminali è illustrata nella Fig. 2.3 e Fig. 2.4.
Terminali circuito di controllo
Terminali circuito principale
Indicatore di carica
Terminale di massa
Fig. 2.3 Disposizione dei terminali (inverter di classe 200 V/400 V da 0,4 kW)
Terminali
circuito di
controllo
Terminali
circuito
principale
Indicatore di carica
Terminale di massa
2
Fig. 2.4 Disposizione dei terminali (inverter di classe 200 V/400 V da almeno 22 kW)
2-5
2
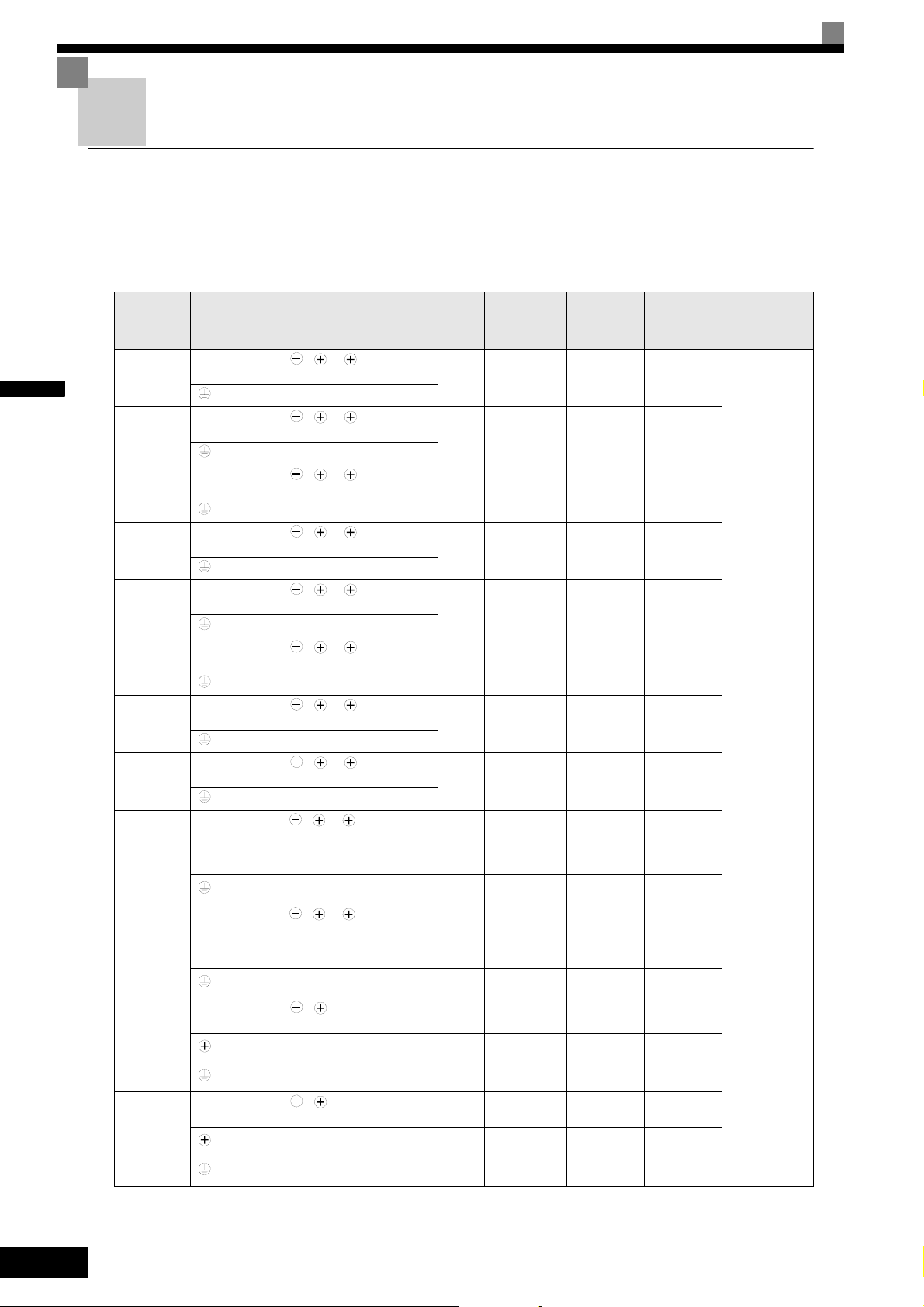
Cablaggio dei terminali del circuito principale
Dimensioni dei cavi e dei connettori ad anello chiuso applicabili
Selezionare i cavi e i terminali a crimpare appropriati in base ai valori riportati nella Tabella 2.1 e Tabella 2.2.
Per informazioni sulle dimensioni dei cavi per i moduli resistenza di frenatura e i moduli di frenatura,
consultare il manuale delle istruzioni TOE-C726-2.
Tabella 2.1 Dimensioni dei cavi per la classe 200 V
Modello di
inverter
CIMR-
F7Z20P4
Codice terminale
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
Viti dei
Coppia di ser-
mor-
setti
M4 1,2...1,5
raggio
(N•m)
Dimensioni
cavi consen-
tite
2
(AWG)
mm
1,5...4
(14...10)
Dimensione
cavo consigliata mm
(AWG)
2,5
(14)
2
Tipo di cavi
F7Z20P7
F7Z21P5
F7Z22P2
F7Z23P7
F7Z25P5
F7Z27P5
F7Z2011
F7Z2015
F7Z2018
F7Z2022
F7Z2030
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3
B1, B2 M5 2,5
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3
B1, B2 M5 2,5
R/L1, S/L2, T/L3, , 1, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31
3
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
M4 1,2...1,5
M4 1,2...1,5
M4 1,2...1,5
M4 1,2...1,5
M4 1,2...1,5
M5 2,5
M5 2,5
M6 4,0...5,0
M6 4,0...5,0
M8 9,0...10,0
M6 4,0...5,0
M8 9,0...10,0
M6 4,0...5,0
M8 9,0...10,0
M8 9,0...10,0
M6 4,0...5,0
M8 9,0...10,0
1,5...4
(14...10)
1,5...4
(14...10)
1,5...4
(14...10)
4
(12...10)
6
(10)
10
(8...6)
16
(6...4)
25
(4...2)
10
(8...6)
25
(4)
25...35
(3...2)
10
(8...6)
25
(4)
25...35
(3...1)
10...16
(8...4)
25...35
(4...2)
50
(1...1/0)
10...16
(8...4)
25...35
(4...2)
2,5
(14)
2,5
(14)
2
(14)
4
(12)
6
(10)
10
(8)
16
(6)
25
(4)
-
25
(4)
25
(3)
-
25
(4)
25
(3)
-
25
(4)
50
(1)
-
25
(4)
Cavi di
alimentazione,
ad esempio in
vinile da 600 V
2-6

Tabella 2.1 Dimensioni dei cavi per la classe 200 V
Modello di
inverter
CIMR-
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31
F7Z2037
F7Z2045
F7Z2055
F7Z2075
F7Z2090
F7Z2110
* Lo spessore dei cavi è per cavi in rame a una temperatura di 75 °C
3
r/l1, ∆/l2 M4 1,3...1,4
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
∆/l2 M4 1,3...1,4
r/l1,
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31 M10 17,6...22,5
3
∆/l2 M4 1,3...1,4
r/l1,
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31 M10 17,6...22,5
3
∆/l2 M4 1,3...1,4
r/l1,
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
∆/l2 M4 1,3...1,4
r/l1,
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
∆/l2 M4 1,3...1,4
r/l1,
Codice terminale
Viti dei
Coppia di ser-
mor-
setti
M10 17,6...22,5
M8 8,8...10,8
M10 17,6...22,5
M10 17,6...22,5
M8 8,8...10,8
M10 17,6...22,5
M12 31,4...39,2
M8 8,8...10,8
M10 17,6...22,5
M12 31,4...39,2
M8 8,8...10,8
M10 17,6...22,5
M12 31,4...39,2
M8 8,8...10,8
M12 31,4...39,2
M12 31,4...39,2
M8 8,8...10,8
M12 31,4...39,2
raggio
(N•m)
Dimensioni
cavi consen-
tite
2
(AWG)
mm
70...95
(2/0...4/0)
6...16
(10...4)
35...70
(1...2/0)
0,5...4
(20...10)
95
(3/0...4/0)
6...16
(10...4)
50...70
(1...2/0)
0,5...4
(20...10)
50...95
(1/0...4/0)
90
(4/0)
6...70
(10...2/0)
35...95
(3...4/0)
0,5...4
(20...10)
95...122
(3/0...250)
95
(3/0...4/0)
6...70
(10...2/0)
95...185
(3/0...400)
0,5...4
(20...10)
150...185
(250...400)
95...150
(4/0...300)
6...70
(10...2/0)
70...150
(2/0...300)
0,5...4
(20...10)
240...300
(350...600)
150...300
(300...600)
6...70
(10...2/0)
150
(300)
0,5...4
(20...10)
Dimensione
cavo consigliata mm
(AWG)
70
(2/0)
–
35
(2)
1,5
(16)
95
(3/0)
–
50
(1)
1,5
(16)
50 × 2P
(1/0 × 2P)
90
(4/0)
–
50
(1/0)
1,5
(16)
95 × 2P
(3/0 × 2P)
95 × 2P
(3/0 × 2P)
–
95
(3/0)
1,5
(16)
150 × 2P
(250 × 2P)
95 × 2P
(4/0 × 2P)
–
70 × 2P
(2/0 × 2P)
1,5
(16)
240 × 2P o
50 × 4P
(350 × 2P o
1/0 × 2P)
150 × 2P o
50 × 4P
(300 × 2P o
1/0 × 4P)
–
150 × 2P
(300 × 2P)
1,5
(16)
Tipo di cavi
2
alimentazione,
ad esempio in
vinile da 600 V
2
Cavi di
2-7

Modello di
inverter
CIMR-
F7Z40P4
Tabella 2.2 Dimensioni dei cavi per la classe 400 V
Codice terminale
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
Vit i
dei
mor-
setti
M4 1,2...1,5
Coppia di
serraggio
(N•m)
Dimensioni
cavi
consentite
2
(AWG)
mm
1,5...4
(14...10)
Dimensione
consigliata
2
cavi mm
(AWG)
2,5
(14)
Tipo di cavi
2
F7Z40P7
F7Z41P5
F7Z42P2
F7Z43P7
F7Z44P0
F7Z45P5
F7Z47P5
F7Z4011
F7Z4015
F7Z4018
F7Z4022
F7Z4030
F7Z4037
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3
B1, B2 M5 2,5
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/
T3, R1/L11, S1/L21, T1/L31
3
M4 1,2...1,5
M4 1,2...1,5
M4 1,2...1,5
M4 1,2...1,5
M4 1,2...1,5
M4 1,2...1,5
M4 1,2...1,5
M5 2,5
M5 2,5
M5
(M6)
M6 4,0...5,0
M6 4,0...5,0
M6 4,0...5,0
M8 9,0...10,0
M6 4,0...5,0
M8 9,0...10,0
M8 9,0...10,0
M6 4,0...5,0
M8 9,0...10,0
2,5
(4,0...5,0)
1,5...4
(14...10)
1,5...4
(14...10)
1,5...4
(14...10)
2,5...4
(14...10)
2,5...4
(14...10)
4
(12...10)
2,5...4
(14...10)
6
(10)
4
(12...10)
6...10
(10...6)
10
(8...6)
10...11
(10...6)
10...35
(8...2)
10
(8)
10...16
(8...4)
16
(6...4)
16...25
(6...2)
25
(4)
25...35
(4...2)
25...50
(4...1/0)
10...16
(8...4)
25...35
(4...2)
2,5
(14)
2,5
(14)
2,5
(14)
4
(12)
2,5
(14)
4
(12)
2,5
(14)
4
(12)
2,5
(14)
6
(10)
4
(12)
10
(8)
6
(10)
10
(8)
6
(10)
10
(8)
10
(8)
10
(8)
16
(6)
16
(6)
25
(4)
25
(4)
35
(2)
-
25
(4)
Cavi di
alimentazione,
ad esempio in
vinile da 600 V
2-8

Modello di
inverter
CIMR-
F7Z4045
F7Z4055
F7Z4075
F7Z4090
F7Z4110
F7Z4132
F7Z4160
Tabella 2.2 Dimensioni dei cavi per la classe 400 V
Viti
Codice terminale
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/
T3, R1/L11, S1/L21, T1/L31
3
R/L1, S/L2, T/L3, , 1, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31
3
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31 M10 17,6...22,5
3
r/l1, ∆200/
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31 M10 17,6...22,5
r/l1, ∆200/
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
r/l1, ∆200/
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
r/l1, ∆200/
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
r/l1, ∆200/
200, ∆400/l2400
l2
3
200, ∆400/l2400
l2
3
200, ∆400/l2400
l2
3
200, ∆400/l2400
l2
3
200, ∆400/l2400
l2
dei
morsetti
M8 9,0...10,0
M6 4,0...5,0
M8 9,0...10,0
M8 9,0...10,0
M6 4,0...5,0
M8 9,0...10,0
M10 31,4...39,2
M8 8,8...10,8
M10 31,4...39,2
M4 1,3...1,4
M10 31,4...39,2
M8 8,8...10,8
M10 31,4...39,2
M4 1,3...1,4
M10 31,4...39,2
M8 8,8...10,8
M12 31,4...39,2
M4 1,3...1,4
M10 31,4...39,2
M8 8,8...10,8
M12 31,4...39,2
M4 1,3...1,4
M12 31,4...39,2
M8 8,8...10,8
M12 31,4...39,2
M4 1,3...1,4
Coppia di
serraggio
(N•m)
Dimensioni
cavi
consentite
2
(AWG)
mm
35...50
(2...1/0)
10...16
(8...4)
25...35
(4...2)
50
(1...1/0)
10...16
(8...4)
25...35
(4...2)
70...95
(2/0...4/0)
50...100
(1/0...4/0)
6...16
(10...4)
35...70
(2...2/0)
0,5...4
(20...10)
95
(3/0...4/0)
95
(3/0...4/0)
10...16
(8...4)
50...95
(1...4/0)
0,5...4
(20...10)
50...95
(1/0...4/0)
10...70
(8...2/0)
70...150
(2/0...300)
0,5...4
(20...10)
95
(3/0...4/0)
70...95
(2/0...4/0)
10...70
(8...2/0)
95...150
(4/0...300)
0,5...4
(20...10)
95...185
(4/0...400)
95...185
(3/0...400)
10...70
(8...2/0)
50...150
(1/0...300)
0,5...4
(20...10)
Dimensione
consigliata
2
cavi mm
(AWG)
35
(2)
-
25
(4)
50
(1)
-
25
(4)
70
(2/0)
50
(1/0)
-
35
(2)
1,5
(16)
95
(4/0)
95
(4/0)
-
50
(1)
1,5
(16)
50 × 2P
(1/0 × 2P)
-
70
(2/0)
1,5
(16)
95 × 2P
(3/0 × 2P)
70 × 2P
(2/0 × 2P)
-
95
(4/0)
1,5
(16)
95 × 2P
(4/0 × 2P)
95 × 2P
(3/0 × 2P)
-
50 × 2P
(1/0 × 2P)
1,5
(16)
Tipo di cavi
Cavi di
alimentazione,
ad esempio in
vinile da 600 V
2
2-9

2
E
Tabella 2.2 Dimensioni dei cavi per la classe 400 V
Modello di
inverter
CIMR-
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L33
F7Z4185
F7Z4220
F7Z4300
* Lo spessore dei cavi è per cavi in rame a una temperatura di 75 °C.
, 1
3
r/l1, ∆200/
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L33
, 1
3
r/l1, ∆200/
R/L1, S/L2, T/L3
R1/L11, S1/L21, T1/L31
U/T1, V/T2, W/T3
, 1
3
r/l1, ∆200/
Codice terminale
200, ∆400/l2400
l2
200, ∆400/l2400
l2
200, ∆400/l2400
l2
Vit i
dei
mor-
setti
M16 78,4...98
M4 1,3...1,4
M16 78,4...98
M4 1,3...1,4
M16 78,4...98
M4 1,3...1,4
Coppia di
serraggio
(N•m)
Dimensioni
cavi
consentite
2
(AWG)
mm
95...300
(4/0...600)
0,5...4
(20...10)
95...300
(4/0...600)
0,5...4
(20...10)
95...300
(4/0...600)
0,5...4
(20...10)
Dimensione
consigliata
2
cavi mm
(AWG)
150 × 2P
(300 × 2P)
120 × 2P
(250 × 2P)
300 × 2P
(600 × 2P)
–
95 × 2P
(3/0 × 2P
1,5
(16)
240 × 2P
(500 × 2P)
240 × 2P
(400 × 2P)
120 × 4P
(250 × 4P)
–
120 × 2P
(250 × 2P)
1,5
(16)
120 × 4P
(250 × 4P)
120 × 4P
(4/0 × 4P)
240 × 4P
(400 × 4P)
–
120 × 2P
(250 × 2P
1,5
(16)
Tipo di cavi
Cavi di
alimentazione,
ad esempio in
vinile da 600 V
IMPORTANT
Determinare le dimensioni dei cavi per il circuito principale in modo che la caduta di tensione della linea
rientri nel 2% della tensione nominale. La caduta di tensione viene calcolata nel modo seguente:
Caduta tensione di linea (V) =
x resistenza cavo (W/km) x lunghezza cavo (m) x corrente (A) x 10
3
-3
2-10

Funzioni dei terminali del circuito principale
Le funzioni dei terminali del circuito principale sono riepilogate nella Tabella 2.3 in base ai relativi codici.
Cablare i terminali in base allo scopo desiderato.
Tabella 2.3 Funzioni dei terminali del circuito principale (classe 200 V e 400 V)
Scopo Codice terminale
Ingresso alimentazione
circuito principale
Uscite inverter U/T1, V/T2, W/T3 20P4...2110 40P4...4300
Terminali bus c.c.
Collegamento modulo
resistenza di frenatura
Collegamento reattanza c.c.
Collegamento modulo di
frenatura
Terra 20P4...2110 40P4...4300
R/L1, S/L2, T/L3 20P4...2110 40P4...4300
R1/L11, S1/L21, T1/L31 2022...2110 4022...4300
1,
B1, B2 20P4...2018 40P4...4018
1, 2
3,
Modello: CIMR-F7Z
Classe 200 V: Classe 400 V:
20P4...2110 40P4...4300
20P4...2018 40P4...4018
2022...2110 4022...4300
2
2-11

2
CIMR-F7Z20P4
2018
CIMR-F7Z40P4
4018
Configurazioni per il circuito principale
Le configurazioni per il circuito principale dell'inverter sono indicate nella Tabella 2.4.
Tabella 2.4 Configurazioni per il circuito principale dell'inverter
Classe 200 V: Classe 400 V:
...
...
Alimentatore
Circuiti di
controllo
CIMR-F7Z2022, 2030
Alimentatore
Circuiti di
controllo
CIMR-F7Z2037...2110
Alimentatore
Circuiti di
controllo
CIMR-F7Z4022...4055
Alimentatore
Circuiti di
controllo
CIMR-F7Z4075...4300
2-12
Nota: Prima di utilizzare un raddrizzamento a 12 fasi, consultare il rappresentante OYMC.
Alimentatore
Circuiti di
controllo
Alimentatore
Circuiti di
controllo
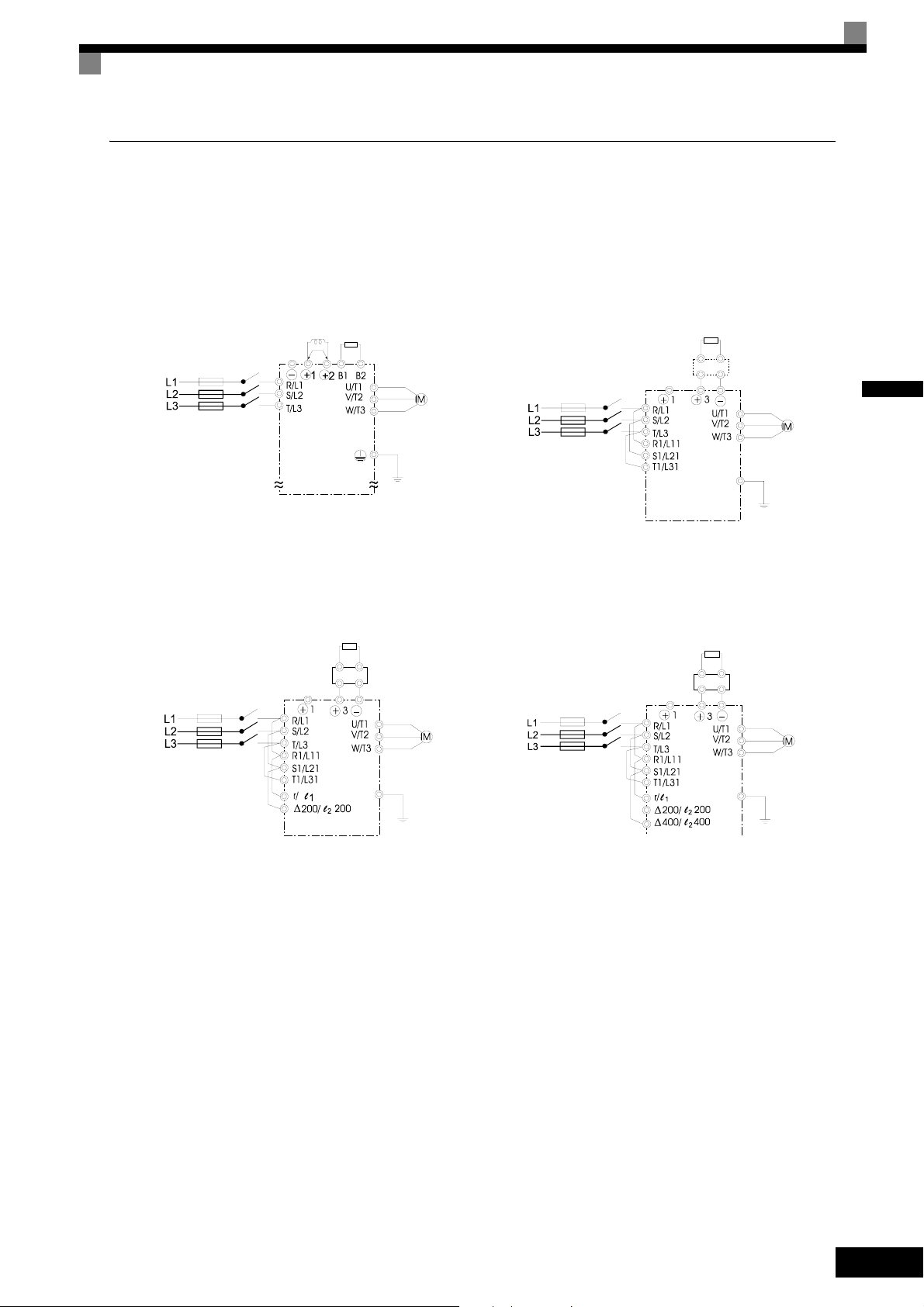
Schemi dei collegamenti standard
Gli schemi dei collegamenti standard per l'inverter sono riportati nellaFig. 2.5. Gli schemi sono identici per gli
inverter di classe 200 V e 400 V. I collegamenti dipendono dalla capacità dell'inverter.
CIMR-F7Z20P4...2018 e 40P4...4018
Reattanza c.c.
Trifase, 200
Vc.a. (400 Vc.a.)
(opzionale)
Modulo resistenza
di frenatura
(opzionale)
CIMR-F7Z2022, 2030 e 4022…4055
Trifase, 200 Vc.a.
(400 Vc.a.)
Accertarsi di rimuovere la barra di corto circuito prima di
collegare la reattanza c.c.
La reattanza c.c. è incorporata.
CIMR-F7Z2037...2110 CIMR-F7Z4075...4300
Modulo resistenza
di frenatura
(opzionale)
Modulo di
frenatura
(opzionale)
Modulo resistenza
di frenatura
(opzionale)
Modulo di
frenatura
(opzionale)
Modulo resistenza
di frenatura
(opzionale)
Modulo di
frenatura
(opzionale)
2
Trifase,
200 Vc.a.
Trifase,
400 Vc.a.
L'alimentazione di controllo viene fornita interamente mediante bus c.c. a tutti i modelli di inverter.
Fig. 2.5 Collegamenti dei terminali del circuito principale
2-13
Cablaggio del circuito principale
In questa sezione viene descritto il cablaggio per le uscite e gli ingressi del circuito principale.
Cablaggio degli ingressi del circuito principale
Per il cablaggio dell'ingresso di alimentazione del circuito principale è necessario osservare le precauzioni
riportate di seguito.
2
Installazione fusibili
Per proteggere l'inverter è consigliabile utilizzare dei fusibili semiconduttori del tipo indicato nella tabella
seguente.
Tabella 2.5 Fusibili di ingresso
Tipo di
inverter
20P4 240 10 12~25
20P7 240 10 12~25
21P5 240 15 23~55
22P2 240 20 34~98
23P7 240 30 82~220
25P5 240 40 220~610
27P5 240 60 290~1300
2011 240 80 450~5000
2015 240 100 1200~7200
2018 240 130 1800~7200
2022 240 150 870~16200
2030 240 180 1500~23000
2037 240 240 2100~19000
2045 240 300 2700~55000
2055 240 350 4000~55000
2075 240 450 7100~64000
2090 240 550 11000~64000
2110 240 600 13000~83000
Ten s io n e ( V) Corrente (A)
FUSIBILE
I2t (A2s)
40P4 480 5 6~55
40P7 480 5 6~55
41P5 480 10 10~55
42P2 480 10 18~55
43P7 480 15 34~72
44P0 480 20 50~570
45P5 480 25 100~570
47P5 480 30 100~640
4011 480 50 150~1300
4015 480 60 400~1800
4018 480 70 700~4100
4022 480 80 240~5800
4030 480 100 500~5800
4037 480 125 750~5800
4045 480 150 920~13000
4055 480 150 1500~13000
4075 480 250 3000~55000
4090 480 300 3800~55000
4110 480 350 5400~23000
4132 480 400 7900~64000
4160 480 450 14000~250000
4185 480 600 20000~250000
4220 480 700 34000~400000
4300 480 900 52000~920000
2-14
Installazione di un interruttore di circuito in scatola stampata
Accertarsi di collegare i terminali di ingresso dell'alimentazione (R/L1, S/L2 e T/L3) all'alimentatore
mediante un interruttore MCCB adeguato per l'inverter.
• Scegliere un interruttore MCCB con capacità da 1,5 a 2 volte la corrente nominale dell'inverter.
• Per le caratteristiche di tempistica dell'interruttore MCCB, è necessario considerare la protezione di
sovraccarico dell'inverter (un minuto al 150% della corrente di uscita nominale).
Installazione di un interruttore di dispersione a terra
Poiché le uscite dell'inverter utilizzano commutazioni veloci, viene generata una dispersione di corrente ad
alta frequenza. Se si utilizza un interruttore di corrente di dispersione a terra, sceglierne uno in grado di
rilevare solo la dispersione di corrente nella gamma di frequenze pericolose per l'utente ed escludere quelle ad
alta frequenza.
• Scegliere un interruttore di corrente di dispersione a terra apposito per inverter con amperaggio di
sensibilità pari ad almeno 30 mA per inverter.
•
Se si utilizza un interruttore di corrente di dispersione a terra ad uso generico, sceglierne uno con amperaggio
di sensibilità pari ad almeno 200 mA per inverter e con tempo di funzionamento di almeno 0,1 s.
Installazione di un contattore magnetico
Per disattivare l'alimentazione del circuito principale tramite un circuito di controllo, è possibile utilizzare un
contattore magnetico.
2
In questo caso tener conto di quanto segue:
• L'inverter può essere avviato e arrestato aprendo e chiudendo il contattore magnetico sul lato principale.
Tuttavia, apertura e chiusura frequenti del contattore magnetico possono causare un guasto nell'inverter.
Non eseguire l'accensione più di una volta all'ora.
• Quando l'inverter viene azionato con la console di programmazione, non è consentito il funzionamento
automatico dopo il ripristino in seguito ad un'interruzione dell'alimentazione.
Collegamento dell'alimentazione di ingresso sulla morsettiera
L'alimentazione di ingresso può essere collegata su uno dei terminali R, S e T della morsettiera poiché la
sequenza di fase dell'alimentazione di ingresso non incide sulla sequenza di fase in uscita.
Installazione di una reattanza c.a.
Se si collega l'inverter ad un trasformatore ad alta capacità (600 kW o superiore) o si commuta un
condensatore di rifasatura, è possibile che una corrente di punta eccessiva passi attraverso il circuito di
ingresso determinando un guasto nell'inverter.
Per evitare che si verifichi questo problema, installare una reattanza c.a. opzionale sul lato di ingresso
dell'inverter o una reattanza c.c. sui relativi terminali di collegamento.
In questo modo verrà inoltre aumentato il fattore di potenza sul lato dell'alimentazione.
Installazione di un assorbitore di sovratensioni
Utilizzare sempre assorbitori di sovratensioni o diodi per carichi induttivi che si trovano nei pressi
dell'inverter. I carichi induttivi comprendono contattori magnetici, relè elettromagnetici, valvole a solenoide,
solenoidi e freni magnetici.
2-15
Cablaggio del lato di uscita del circuito principale
Durante il cablaggio dei circuiti di uscita principali, è necessario osservare le precauzioni riportate di seguito.
Collegamento dell'inverter al motore
Collegare i terminali di uscita U/T1, V/T2 e W/T3 ai rispettivi cavi del conduttore motore U, V e W.
Accertarsi che quando si seleziona il comando Forward il motore ruoti effettivamente in avanti. Se il motore
ruota all'indietro, invertire la posizione di due terminali di uscita.
Evitare di collegare l'alimentazione ai terminali di uscita
2
Non collegare l'alimentazione ai terminali di uscita U/T1, V/T2 e W/T3 in nessun caso. Se si applica tensione
ai terminali di uscita, i circuiti interni dell'inverter verranno danneggiati.
Evitare corto circuiti o messa a terra dei terminali di uscita
Nel caso in cui i terminali di uscita vengano toccati senza alcuna protezione sulle mani o i cavi di uscita
entrino in contatto con l'involucro esterno dell'inverter, si verificheranno scosse elettriche o scariche a terra.
Poiché questa situazione è estremamente pericolosa, evitare di cortocircuitare i cavi di uscita.
Evitare l'uso di condensatori di rifasatura.
Non collegare in nessun caso condensatori di rifasatura a un circuito di uscita. I componenti ad alta frequenza
dell'uscita dell'inverter potrebbero surriscaldarsi o danneggiare l'uscita stessa oppure bruciare altri
componenti.
Evitare l'uso di un commutatore elettromagnetico
Evitare di collegare un commutatore elettromagnetico (MC) tra l'inverter e il motore e attivarlo o disattivarlo
durante il funzionamento. L'attivazione del commutatore MC durante il funzionamento dell'inverter genera
una corrente di spunta molto alta, attivando il meccanismo di protezione da sovracorrente dell'inverter.
Se si utilizza un MC per passare, ad esempio, tra due motori, è necessario arrestare l'uscita dell'inverter prima
di attivare il commutatore magnetico.
Installazione di un contatto a relè di protezione da sovraccarico termica elettronica per
proteggere il motore
2-16
L'inverter dispone di una funzione di protezione termica elettronica per proteggere il motore dal
surriscaldamento. Tuttavia, se con un inverter si attiva più di un motore o si utilizza un motore multipolare, è
necessario installare sempre un relè termico (THR) tra l'inverter e il motore ed impostare L1-01 su 0 (nessuna
protezione termica). Il circuito di controllo deve essere progettato in modo che il relè termico disattivi il
contattore magnetico sugli ingressi del circuito principale.
Lunghezza del cavo tra inverter e motore
Se il cavo che collega l'inverter e il motore è lungo, la dispersione di corrente ad alta frequenza tende ad
aumentare provocando anche l'aumento della corrente di uscita dell'inverter con possibile impatto sui
dispositivi periferici. Per evitare questa condizione, regolare la frequenza portante (impostata in C6-01,
C6-02) come illustrato nella Tabella 2.6. Per ulteriori informazioni, vedere Capitolo 5 Parametri utente.
Tabella 2.6 Lunghezza del cavo tra inverter e motore
Lunghezza cavo 50 m max. 100 m max. Più di 100 m
Frequenza portante 15 kHz max. 10 kHz max. 5 kHz max.
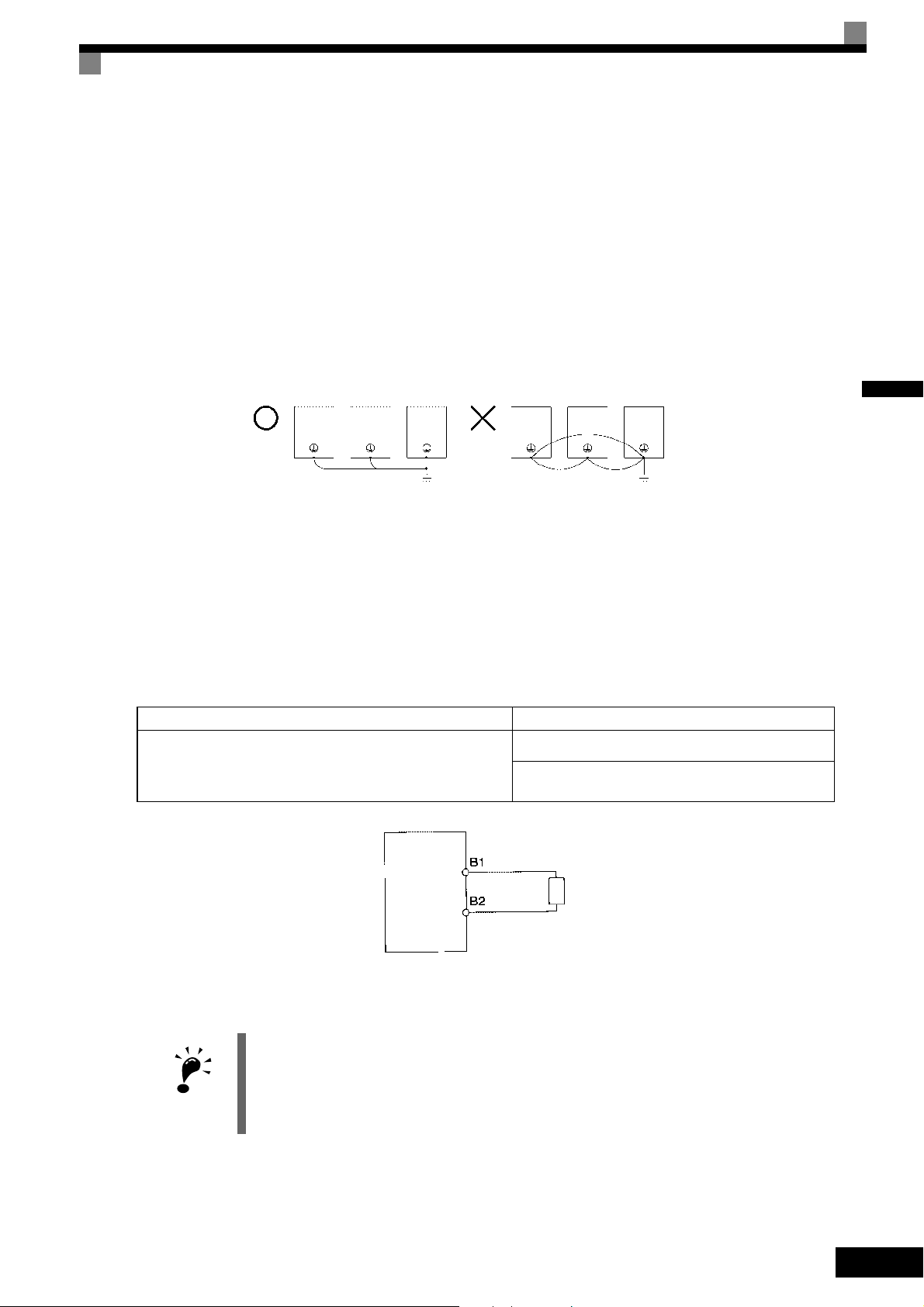
Cablaggio di terra
Per il cablaggio della linea di terra osservare le precauzioni riportate di seguito.
• Utilizzare sempre il terminale di terra dell'inverter di classe 200 V con una resistenza di massa inferiore a
100 Ω e quello dell'inverter di classe 400 V con una resistenza di massa inferiore a 10 Ω..
• Evitare che il cavo di terra venga condiviso con altri dispositivi quali saldatrici o attrezzi elettrici.
• Utilizzare sempre un cavo di terra conforme agli standard tecnici delle apparecchiature elettriche e il più
corto possibile.
Poiché la dispersione di corrente passa per l'inverter, il potenziale sul terminale di terra dell'inverter
diventa instabile se la distanza tra l'elettrodo e il terminale di terra è eccessiva.
• Quando si utilizza più di un inverter, verificare che il cavo di terra non formi un circuito.
2
OK
Fig. 2.6 Cablaggio di terra
NO
Collegamento di una resistenza di frenatura installata sull'inverter
È possibile utilizzare una resistenza di frenatura installata dietro un inverter di classe 200 V e 400 V con uscite
da 0,4 a 11 kW. Se si utilizza questo tipo di resistenza, è possibile abilitare la protezione da surriscaldamento
della resistenza di frenatura interna (vedere la tabella riportata di seguito).
Collegare la resistenza di frenatura come illustrato nella Fig. 2.7.
L8-01 (Selezione della protezione per la resistenza DB interna) 1 (Abilita la protezione da surriscaldamento)
L3-04 (Selezione prevenzione dello stallo durante la decelerazione)
(Scegliere uno dei valori)
Inverter
0 (Disabilita la funzione di prevenzione da stallo)
3 (Abilita la funzione di prevenzione da stallo con la
resistenza di frenatura)
Resistenza di frenatura
IMPORTANTE
Fig. 2.7 Collegamento della resistenza di frenatura
La resistenza di frenatura viene collegata ai terminali B1 e B2. Non collegare la resistenza a nessun altro
terminale, altrimenti la resistenza e altri componenti potrebbero danneggiarsi.
2-17
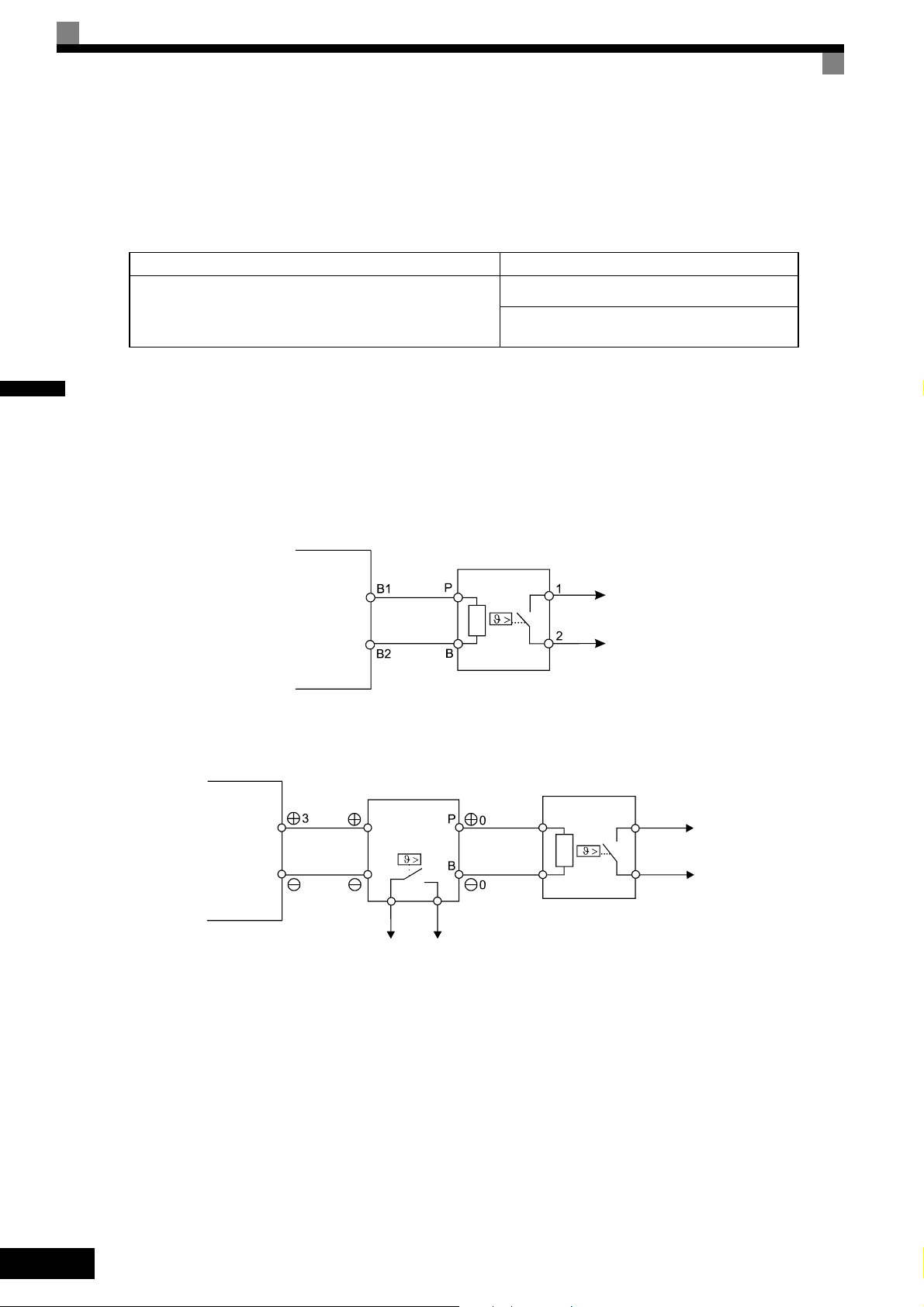
Collegamento di un modulo resistenza di frenatura (LKEB) e di un modulo di
frenatura (CDBR)
Collegare un modulo resistenza di frenatura e un modulo di frenatura all'inverter come illustrato nella Fig. 2.8.
La protezione da surriscaldamento della resistenza di frenatura interna deve essere disabilitata (vedere la
tabella riportata di seguito).
L8-01 (Selezione della protezione per la resistenza DB interna) 0 (Disabilita la protezione da surriscaldamento)
2
L3-04 (Selezione prevenzione dello stallo durante la decelerazione)
(Scegliere uno dei valori)
0 (Disabilita la funzione di prevenzione da stallo)
3 (Abilita la funzione di prevenzione da stallo con
la resistenza di frenatura)
Il modulo resistenza di frenatura non funziona correttamente se L3-04 è impostato su 1, ossia se la
prevenzione da stallo è abilitata per la decelerazione. Per questo motivo, il tempo di decelerazione potrebbe
essere più lungo del tempo impostato (C1-02/04/06/08).
Per prevenire il surriscaldamento del modulo/della resistenza di frenatura, progettare il circuito di controllo in
modo che l'alimentazione venga disattivata tramite i contatti a relè di sovraccarico termico dei moduli come
illustrato nella Fig. 2.8.
Inverter di classe 200 V e 400 V con uscita da 0,4 a 18,5 kW
Modulo resistenza di frenatura (LKEB)
Inverter
Relè di sovraccarico
termico
Inverter di classe 200 V e 400 V con uscita da 22 kW o superiore
Modulo di frenatura CDBR
Inverter
Relè di sovraccarico
termico
Fig. 2.8 Collegamento della resistenza e del modulo di frenatura
Modulo resistenza di frenatura (LKEB)
Relè di sovraccarico
termico
2-18
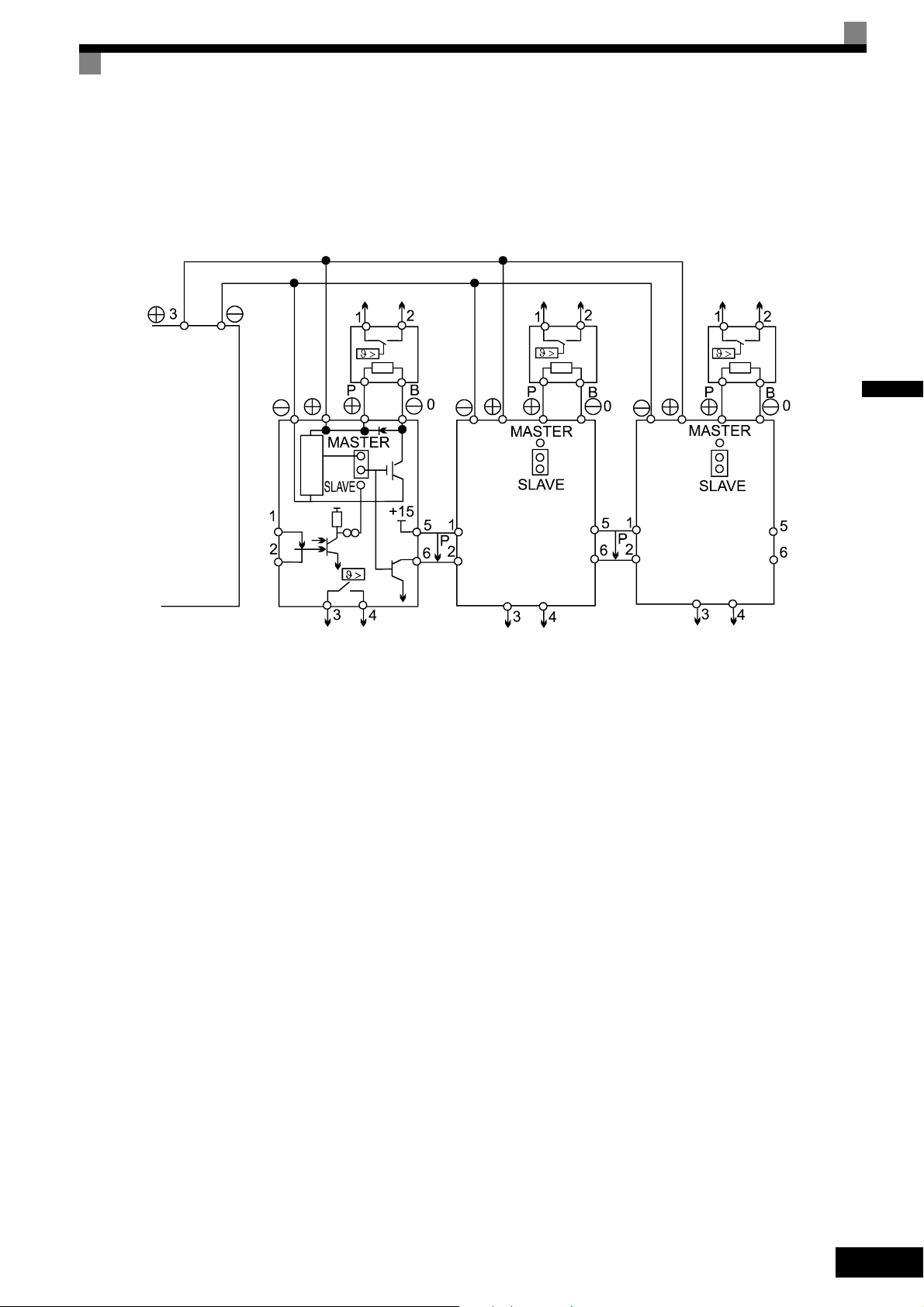
Collegamento dei moduli di frenatura in parallelo
Quando si collegano due o più moduli di frenatura in parallelo, utilizzare il cablaggio e le impostazioni dei
ponticelli illustrati nella Fig. 2.9. Sono disponibili ponticelli per determinare se ogni modulo di frenatura è
master o slave. Selezionare “Master” solo per il primo modulo di frenatura e “Slave” per tutti gli altri moduli,
ossia a partire dal secondo modulo.
Inverter
Modulo di frenatura 1
Relè di sovraccarico termico
Rilevatore
livello
Modulo
resistenza
di
frenatura
(LKEB)
Relè di sovraccarico termico
Modulo
resistenza
di
frenatura
(LKEB)
Modulo di frenatura 2
Contatto relè di
sovraccarico termico
Contatto relè di
sovraccarico termico
Fig. 2.9 Collegamento dei moduli di frenatura in parallelo
Relè di sovraccarico termico
Modulo di frenatura 3
Contatto relè di
sovraccarico termico
Modulo
resistenza
di
frenatura
(LKEB)
2
2-19
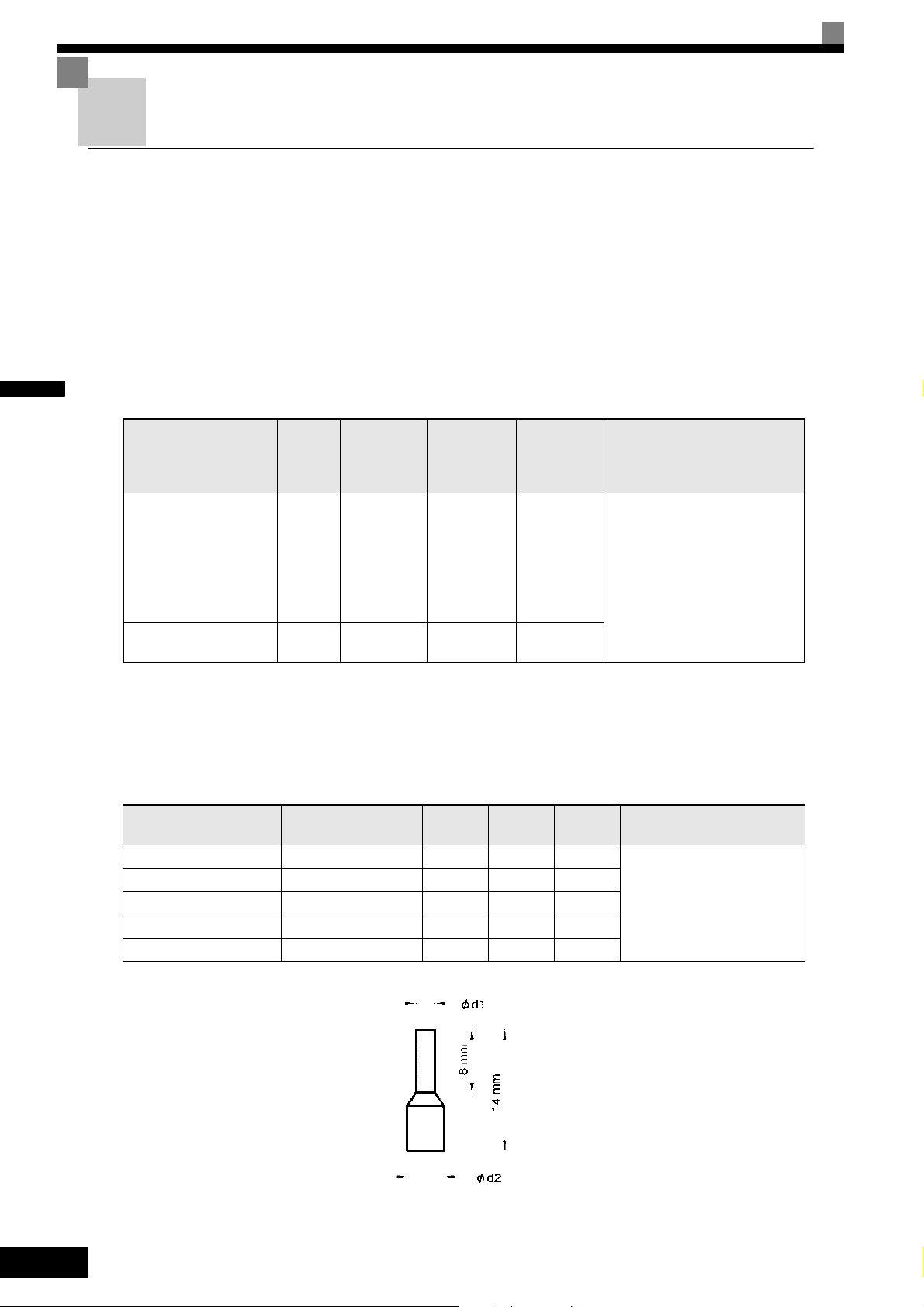
2
Cablaggio dei terminali del circuito di controllo
Dimensioni dei cavi
Per il funzionamento in modalità remota utilizzando segnali analogici, mantenere una lunghezza della linea di
controllo tra la console di programmazione o i segnali operativi e l'inverter inferiore a 50 m e separare tale
linea dalle linee di alimentazione principali o da altri circuiti di controllo per ridurre l'induzione generata dai
dispositivi periferici.
Quando si impostano le frequenze da un sorgente di frequenza esterna (e non dalla console di
programmazione), utilizzare cavi schermati a coppie intrecciate e mettere a terra la schermatura per l'area di
contatto maggiore tra schermatura e terra.
I numeri dei terminali e le dimensioni dei cavi appropriate sono riportati nella Tabella 2.7.
Tabella 2.7 Numeri dei terminali e dimensioni dei cavi (uguali per tutti i modelli)
Te rm i na l i
FM, AC, AM, SC, SP,
SN, A1, A2, +V, –V, S1,
S2, S3, S4, S5, S6, S7
MA, MB, MC, M1, M2,
M3, M4, M5, M6
MP, RP, R+, R-, S+, S-,
IG
E(G) M3,5 0,8...1,0
* 1. Utilizzare cavi schermati a coppie intrecciate per l'ingresso di una frequenza di riferimento esterna.
* 2. Si consiglia di utilizzare terminali senza saldatura sulle linee dei segnali per semplificare il cablaggio e migliorare l'affidabilità.
Viti dei
morsetti
Tipo
Phoenix
Coppia di
serraggio
(N•m)
0,5...0,6
Dimensioni
cavi
consentite
2
mm
(AWG)
Cavo
monofilo
0,5...2,5
Cavo a
treccia:
0,5...1,5
(26...14)
0,5...2,5
(20...14)
Dimensione
mm
*2
:
cavo
consigliata
2
(AWG)
0,75
(18)
1
(12)
• Cavo schermato a coppie
intrecciate
• Cavo schermato in vinile con
rivestimento di polietilene
Terminali senza saldatura per le linee dei segnali
Nella tabella seguente sono riportati i modelli e le dimensioni per i terminali senza saldatura.
Tabella 2.8 Dimensioni dei terminali senza saldatura
Dimensione cavo mm
(AWG)
0,25 (24) AI 0,25 - 8 YE 0,8 2 12,5
0,5 (20) AI 0,5 - 8 WH 1,1 2,5 14
0,75 (18) AI 0,75 - 8 GY 1,3 2,8 14
1,25 (16) AI 1,5 - 8 BK 1,8 3,4 14
2 (14) AI 2,5 - 8 BU 2,3 4,2 14
2
Modello d1 d2 L Produttore
Tipo di cavi
*1
Contatto Phoenix
2-20
L
Fig. 2.10 Dimensioni dei terminali senza saldatura
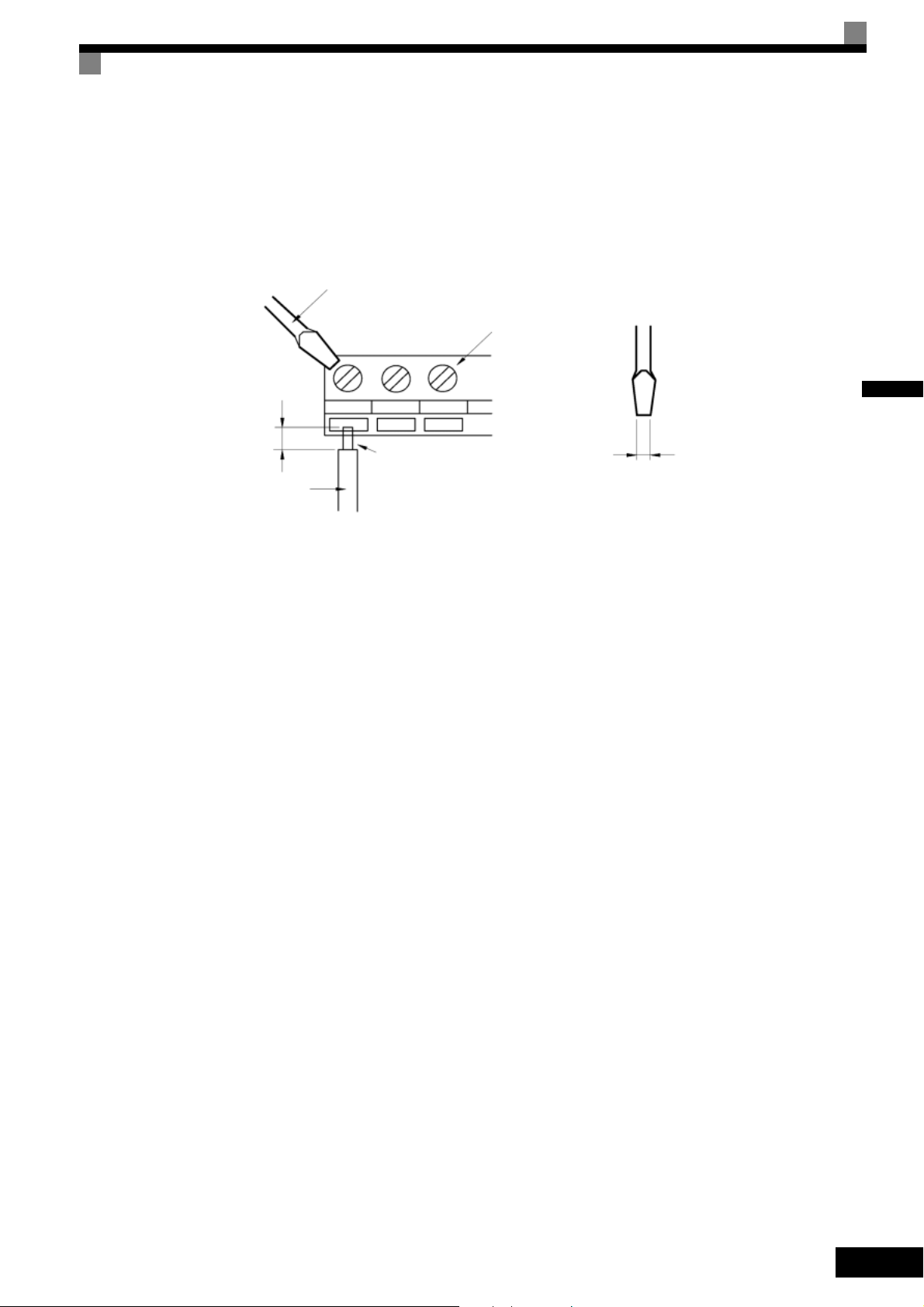
Metodo di cablaggio
Utilizzare la seguente procedura per collegare i cavi alla morsettiera.
1. Allentare le viti del terminale con un cacciavite a lama sottile.
2. Inserire i cavi sulla parte inferiore della morsettiera.
3. Stringere saldamente le viti dei terminali.
Spelare
l'estremità del
cavo di 7 mm se
non si utilizzano
terminali senza
saldatura.
Cavi
Cacciavite
Circuito di controllo
Morsettiera
Cavo o terminale senza saldatura
Fig. 2.11 Collegamento dei cavi alla morsettiera
Lama del cacciavite
Spessore lama: 0,6 mm max.
2
3,5 mm max.
2-21
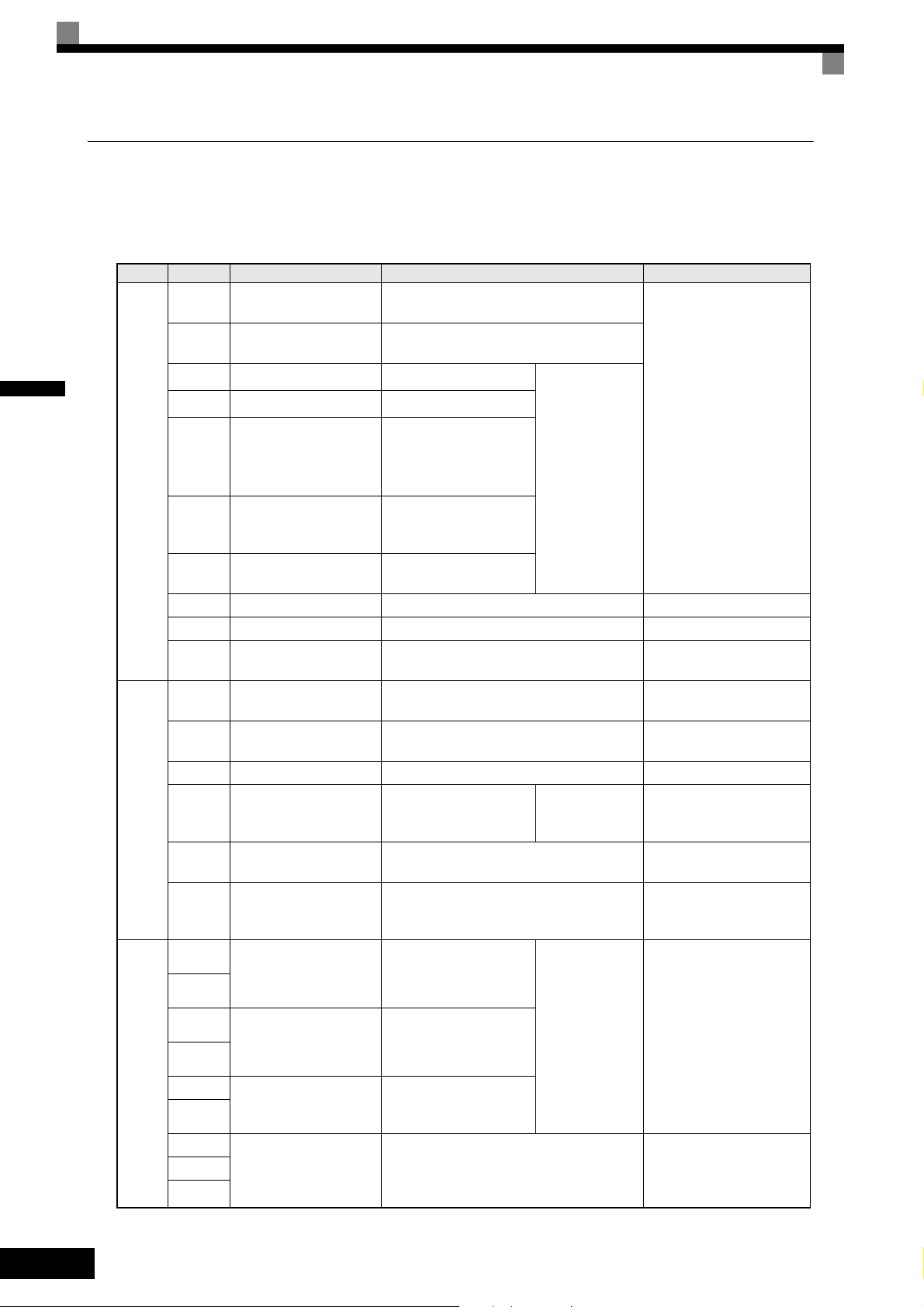
2
Funzioni dei terminali del circuito di controllo
Le funzioni dei terminali del circuito di controllo sono riportate nella Tabella 2.9. Utilizzare i terminali
appropriati al proprio scopo.
Tabella 2.9 Terminali del circuito di controllo con impostazioni predefinite
Tipo Numero Nome segnale Funzione Livello del segnale
Segnali
di
ingresso
digitale
Segnali
di
ingresso
analo-
gico
Comando di marcia
S1
avanti/arresto
Comando marcia
S2
indietro/arresto
S3
Ingresso errore esterno
S4
Ripristino dopo errore
Multivelocità di
*1
riferimento 1
S5
(commutatore master/
ausiliaria)
Multivelocità di
S6
riferimento 2
Frequenza di riferimento
S7
di jog*1
*1
SC Comune ingressi digitali – –
SN Neutro ingressi digitali – –
Alimentazione ingressi
SP
digitali
+V Uscita di potenza da 15 V
–V Uscita di potenza da -15 V
A1 Frequenza di riferimento -10...+10 V/100% -10…+10 V (20 kΩ)
Ingresso analogico
A2
multifunzione
Comune riferimenti
c.a.
analogici
Punto di collegamento
E(G)
opzionale linea di terra,
cavo schermato
Marcia avanti quando è ON e arresto quando
è OFF.
Marcia indietro quando è ON e arresto
quando è OFF.
*1
Errore quando è ON.
*1
Ripristino quando è ON.
Frequenza di riferimento
ausiliaria quando è ON.
Le funzioni
vengono
selezionate
impostando i
Impostazione
multivelocità 2 quando è
parametri da H101 a H1-05.
ON.
Frequenza di riferimento
di jog quando è ON.
Alimentazione da +24 Vc.c. per gli ingressi
digitali
Alimentazione da 15 V per i riferimenti
analogici
Alimentazione da -15 V per i riferimenti
analogici
4...20 mA/100%
–10 V...+10 V/100%
La funzione è
selezionata impostando H3-09.
––
––
24 Vc.c., 8 mA
Fotoaccoppiatore
24 Vc.c., 250 mA max.
15 V
(Corrente max: 20 mA)
-15 V
(Corrente max: 20 mA)
4...20 mA(250Ω)
–10 V...+10 V(20kΩ)
*2
2-22
Segnali
di uscita
sequenza
M1 Segnale di
funzionamento
M2
(1 contatto NO)
M3
Velocità zero
M4
M5
Rilevamento
raggiungimento velocità
M6
MA
MB
Segnale uscita errore
MC
In funzione quando è ON.
Livello zero (b2-01) o
inferiore quando è ON.
Uscite contatti
multifunzione
All'interno di ±2 Hz della
frequenza impostata
quando è ON.
Presenza di errore quando l'uscita è chiusa da
MA a MC
Presenza di errore quando l'uscita è aperta da
MB a MC
Contatti relè
Capacità contatto:
1 A max. a 250 Vc.a.
1 A max. a 30 Vc.c.*3
Contatti relè
Capacità contatto:
1 A max. a 250 Vc.a.
1 A max. a 30 Vc.c.*3

Tabella 2.9 Terminali del circuito di controllo con impostazioni predefinite
Tipo Numero Nome segnale Funzione Livello del segnale
Segnali
uscite
analogi-
che
I/O a
impulsi
RS-485/
422
Uscita analogica
FM
multifunzione (uscita
frequenza)
c.a. Comune analogico –
Uscita analogica
AM
multifunzione
(monitoraggio corrente)
RP
Ingresso a impulsi
Monitoraggio treno di
MP
impulsi
R+
Ingresso comunicazioni
MEMOBUS
R-
S+
Uscita comunicazioni
MEMOBUS
S-
*4
0...10 V, 10 V = 100%
frequenza di uscita
0...10 V, 10 V = 200%
corrente nominale
dell'inverter
Uscita analogica
multifunzione 1
Uscita analogica
multifunzione 2
H6-01 (ingresso frequenza di riferimento)
H6-06 (frequenza di uscita)
Per RS-485 a due fili e per S+, R+, R- e Sbrevi.
–10...+10 V max. ±5%
2 mA max.
Uscita di corrente 4...20 mA
0...32 kHz (3 kΩ)
Alta tensione 3,5...13,2 V
0...32 kHz
Uscita +15 V (2,2 kΩ)
Ingresso differenziale, isolamento con fotoaccoppiatore
Ingresso differenziale, isolamento con fotoaccoppiatore
IG Comune segnali – –
* 1. Per i terminali da S3 a S7 sono fornite le impostazioni predefinite. Per una sequenza a 3 fili, le impostazioni predefinite sono una sequenza a 3 fili per
S5, l'impostazione della multivelocità 1 per S6 e l'impostazione della multivelocità 2 per S7.
* 2. Non utilizzare questo alimentatore per alimentare altri apparecchi esterni.
* 3. Quando si aziona un carico reattivo, ad esempio la bobina di un relè con alimentazione c.c., inserire sempre un diodo volano come illustrato nella
* 4. Nella tabella seguente sono riportate le specifiche per l'ingresso a treno di impulsi.
Bassa tensione 0,0...0,8 V
Alta tensione 3,5...13,2 V
Duty H 30%...70%
Frequenza degli impulsi 0...32 kHz
Fig. 2.12.
2
Diodo volano
Alimentazione
esterna: 30 Vc.c. max.
Bobina
1 A max
Fig. 2.12 Collegamento del diodo volano
Ponticello CN15 e selettore DIP S1
In questa sezione sono descritti il ponticello CN 15 e il selettore DIP S1.
CN15
CN15
Selezione segnale corrente/tensione dell'uscita analogica FM
Canale 1
Canale 1
Canale 2
Canale 2
OFF ON
OFF ON
Selezione segnale corrente/tensione dell'uscita analogica FM
Selezione segnale corrente/tensione dell'uscita analogica AM
Selezione segnale corrente/tensione dell'uscita analogica AM
VI
VI
S1
S1
Resistenza di terminazione della porta RS422/485
Resistenza di terminazione della porta RS422/485
Selezione segnale corrente/tensione dell'ingresso analogico A2
Selezione segnale corrente/tensione dell'ingresso analogico A2
V I
V I
Il coefficiente del diodo volano
deve essere almeno pari alla
tensione del circuito.
Fig. 2.13 Ponticello CN15 e selettore DIP S1
2-23

2
Nella tabella seguente sono riportate le funzioni del selettore DIP S1 e del ponticello CN15.
Tabella 2.10 Selettore DIP S1 e ponticello CN15
Nome Funzione Impostazione
S1-1 Resistenza di terminazione RS-485 e RS-422
S1-2 Metodo per l'ingresso analogico A2
CN15-
CH1
CN15-
CH2
Commutatore tensione/corrente FM uscita
analogica multifunzione
Commutatore tensione/corrente AM uscita
analogica multifunzione
OFF: nessuna resistenza di terminazione
ON: resistenza di terminazione di 110 Ω
V: 0...10 V (resistenza interna: 20 kΩ)
I: 4...20 mA (resistenza interna: 250 Ω)
I: uscita di corrente
V: uscita di tensione
I: uscita di corrente
V: uscita di tensione
Modalità PNP/NPN
È possibile cambiare la logica del terminale di ingresso tra la modalità NPN (comune 0 V) e la modalità PNP
(comune + 24V) utilizzando i terminali SN, SC ed SP. È inoltre supportata un'alimentazione esterna che
garantisce maggiore libertà per i metodi di ingresso dei segnali.
Tabella 2.11 Modalità NPN/PNP e segnali di ingresso
Alimentazione interna – modalità NPN
Alimentazione interna – modalità PNP
Alimentazione esterna – modalità NPN
Esterna +24V
Alimentazione esterna – modalità PNP
2-24
Esterna +24V

Collegamenti dei terminali del circuito di controllo
I collegamenti ai terminali del circuito di controllo dell'inverter sono riportati nella Fig. 2.14.
Varispeed F7
CIMR-F7Z47P5
≈ ≈
Ingressi a contatto
Multi-function
multifunzione
digital inputs
(impostazioni di
[Factory setting]
fabbrica
Marcia avanti/Arresto
Forward Run/Stop S1
Marcia indietro/Arresto
Reverse Run/Stop S2
Errore esterno
Ripristino dopo errore
Fault reset
Impostazione
Multi-step speed setting 1
multivelocità 1
Impostazione
Multi-step speed setting 2
multivelocità 2
Selezione della
Jog frequency selection
frequenza di jog
Regolazione impostazione
Analog input setting
ingresso analogico
adjustment
Ω
2k
3
0 ... 10V
0 to 10V
Ω
2k
2
1
4 ... 20mA
4 to 20mA
PP
Comunicazione
MEMOBUS
MEMOBUS
communication
RS-485/422
RS-485/422
P
P
S3External fault
S4
S5
S6
S7
SN
SC
SP
24V
Terminale
E(G)
Shield
di scherma-
terminal
tura
Ingresso a treno di impulsi
RP
[Impostazione predefinita:
Pulse train input [Default:
ingresso frequenza di
Frequency reference input]
riferimento] 0 … 32 kHz
0 to 32kHz
+V
Analog input power supply
Ingresso di alimentazione
+15V, 20mA
analogico +15 V, 20 mA
Ingresso analogico 1:
Analog input 1: Master
A1
frequenza di riferimento
frequency reference
master 0 ... +10V
0 to +10V (20 k )
(20 kOhm)
Ingresso analogico
Multi-function analog input 2
multifunzione 2:
A2
[Default: Frequency bias
[Impostazione predefinita:
4 to 20mA (250 )]
polarizzazione frequenza
4 ... 20 mA (250 Ohm)]
AC
0V
Ingresso di alimentazione
-V
Analog input power suppl y
analogico-15 V, 20 mA
-15V, 20mA
Resistenza di
Terminating
terminazione
R+
R-
S+
S-
IG
resistance
MA
Uscita a contatto di errore
Fault contact output
MB
250 Vc.a., 1 A max. 30 Vc.c.,
250 VAC, 1A max.
1 A max.
MC
30 VDC, 1A max.
M1
Uscita a contatto 1
Contact output 1
(Impostazione
M2
[Default : Running]
predefinita: in marcia)
Uscita a contatto 2
M3
Contact output 2
(Impostazione predefi-
M4
[Default : Zero speed]
nita: velocità zero)
M5
Uscita a contatto 3
Contact output 3
(Impostazione prede-
M6
[Default :
finita: raggiungimento
Frequency agree 1]
frequenza di riferimento)
Terminale
di scher-
Shield
terminal
E(G)
MP
AM
Uscita a treno di impulsi
Pulse train output
0 ... 32 kHz (2,2 kOhm)
0 to 32kHz (2.2 k )
AC
FM
AC
(Impostazione predefinita:
[Default: Output frequency]
corrente di uscita)
Regolazione
Adjustment,
a 20 kOhm
20 k
Ω
+
Regolazione
Adjustment,
a 20 kOhm
Ω
20 k
+
matura
Ω
Ω
Multi-function digital
Uscita a contatto
output
multifunzione250 Vc.a.,
250 VAC, 1A max.
1 A max. 30 Vc.c., 1 A max.
30 VDC, 1A max.
Ω
Uscita analogica multifunzione 1
-
Multi-function analog output 1
(-10 ... +10 V, 2 mA/4 ... 20 mA)
FM
(-10 to +10V 2mA / 4 to 20mA)
[Impostazione predefinita:
[Default: Output frequency 0 to +10V]
frequenza di uscita 0 ... +10 V]
Uscita analogica multifunzione 2
-
Multi-function analog output 2
(-10 ... +10 V, 2 mA/4 ... 20 mA)
AM
(-10 to +10V 2mA / 4 to 20mA)
[Impostazione predefinita:
[Default: Output current 0 to +10V]
corrente di uscita 0 ... +10 V]
2
Twisted-pair
Shielded wires P
Cavi schermati
Fili schermati a doppini
Shielded wires
intrecciati
Fig. 2.14 Collegamenti dei terminali del circuito di controllo
2-25

2
Precauzioni per cablaggio del circuito di controllo
Per il cablaggio del circuito di controllo osservare le precauzioni riportate di seguito.
• Separare il cablaggio del circuito di controllo dal cablaggio del circuito principale (terminali R/L1, S/L2,
T/L3, B1, B2, U/T1, V/T2, W/T3, , 1, 2 e 3) e dalle altre linee ad alta potenza.
• Separare il cablaggio per i terminali del circuito di controllo MA, MB, MC, M1, M2 , M3, M4, M5 e M6
(uscite a contatto) dal cablaggio degli altri terminali del circuito di controllo.
• Se si utilizza un alimentatore esterno, deve essere un alimentatore di Classe 2 conforme allo standard UL.
• Utilizzare cavi a coppie intrecciate schermati o non schermati per i circuiti di controllo per evitare errori di
funzionamento.
• Collegare la messa a terra per le schermature del cavo con un'area di contatto molto ampia.
• Mettere a terra le schermature in corrispondenza di entrambe le estremità del cavo.
2-26

Verifica del cablaggio
Controlli
Accertarsi di aver collegato correttamente tutti i cavi. Evitare di effettuare il controllo di continuità sui circuiti
di controllo. Effettuare le seguenti verifiche sul cablaggio.
• I collegamenti sono corretti?
• Non sono state lasciate viti, pezzetti di cavo o altro materiale estraneo nel circuito?
• Le viti sono tutte ben strette?
• Sono presenti estremità di cavi che toccano altri terminali?
2
2-27

Installazione e cablaggio delle schede accessorie
Specifiche e modelli delle schede accessorie
È possibile installare un massimo di due schede accessorie nell'inverter. È possibile montare una scheda in
ciascuno dei due zoccoli sulla scheda controllore (A e C) come illustrato nella Fig. 2.15.
Nella Tabella 2.12 sono riportati i tipi di schede accessorie e i relativi dati tecnici.
Tabella 2.12 Schede accessorie
2
Scheda Modello Specifiche
Schede di controllo velocità
PG
Scheda di comunicazione
DeviceNet
Scheda di comunicazione
Profibus-DP
Scheda di comunicazione
Interbus-S
Scheda di comunicazione
CANOpen
Schede di ingresso analogico
Schede di ingresso digitale
Posizione di
installazione
PG-B2
PG-X2
SI-N1/
PDRT2
SI-P1 Scheda opzionale per fieldbus Profibus-DP C
SI-R1 Scheda opzionale per fieldbus Interbus-S C
SI-S1 Scheda opzionale fieldbus CANOpen C
AI-14U
AI-14B
DI-08 Scheda ingresso velocità di riferimento digitale a 8 bit C
DI-16H2 Scheda ingresso velocità di riferimento digitale a 16 bit C
Bifase (fase A e B), ingressi +12 V, frequenza di
risposta massima: 50 kHz
Trifase (fase A, B e Z), ingressi line driver (RS422),
frequenza di risposta massima: 300 kHz
Scheda opzionale per fieldbus DeviceNet C
Scheda di ingresso analogico ad alta risoluzione
a 2 canali
Canale 1: 0...10 V (20 kΩ)
Canale 2: 4...20 mA (250 Ω)
Risoluzione: 14 bit
Scheda di ingresso analogico ad alta risoluzione
a 3 canali
Livello segnale: -10...+10 V (20 kΩ)
4...20 mA (250 Ω)
Risoluzione: 13 bit + segno
A
A
C
C
2-28
Installazione
Prima di installare una scheda accessori, rimuovere il copriterminali ed accertarsi che la spia di carica
all'interno dell'inverter non sia accesa. Rimuovere quindi la console di programmazione e il pannello frontale
e infine installare la scheda accessoria.
Per informazioni sull'installazione negli slot A e C, consultare la documentazione fornita con la scheda
accessoria.
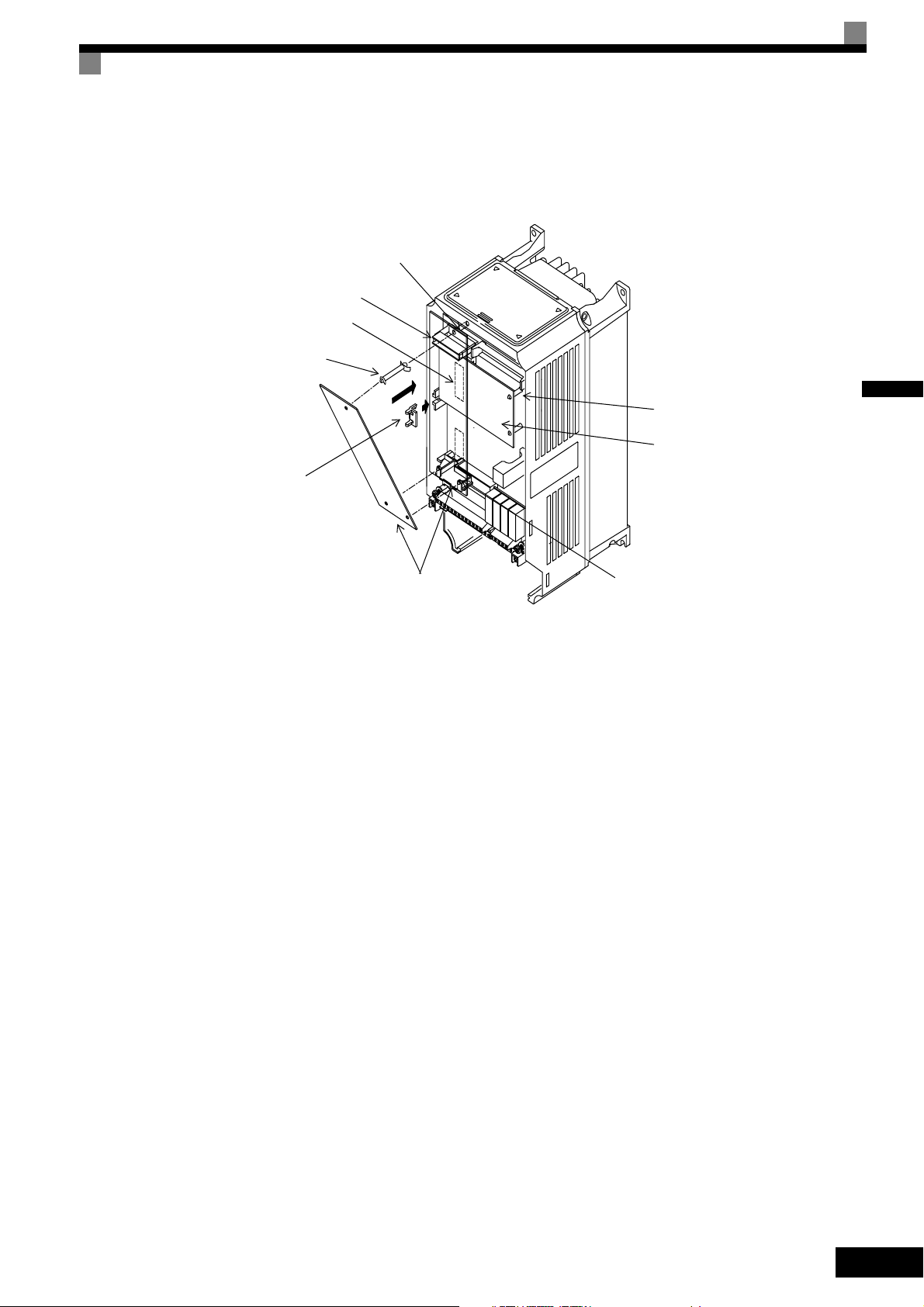
Fissaggio della scheda accessoria C nello slot
Dopo aver installato una scheda accessoria nello slot C, inserire un fermaglio per bloccare il lato con il
connettore e impedirne il sollevamento. Tale fermaglio è facilmente rimovibile tirandolo dopo averlo afferrato
per la parte sporgente.
Foro spaziatore per montaggio della
scheda accessoria A
CN4
Connettore scheda accessoria A
CN2
Connettore scheda accessoria C
Distanziale per montaggio della
scheda accessoria A
(fornito con la scheda accessoria A)
Clip opzionale
(per evitare il sollevarsi della
scheda accessoria C)
Scheda accessoria A
Fig. 2.15 Installazione di schede accessorie
2
Distanziale per montaggio
della scheda accessoria C
Scheda accessoria C
Distanziale per montaggio
della scheda accessoria A
2-29
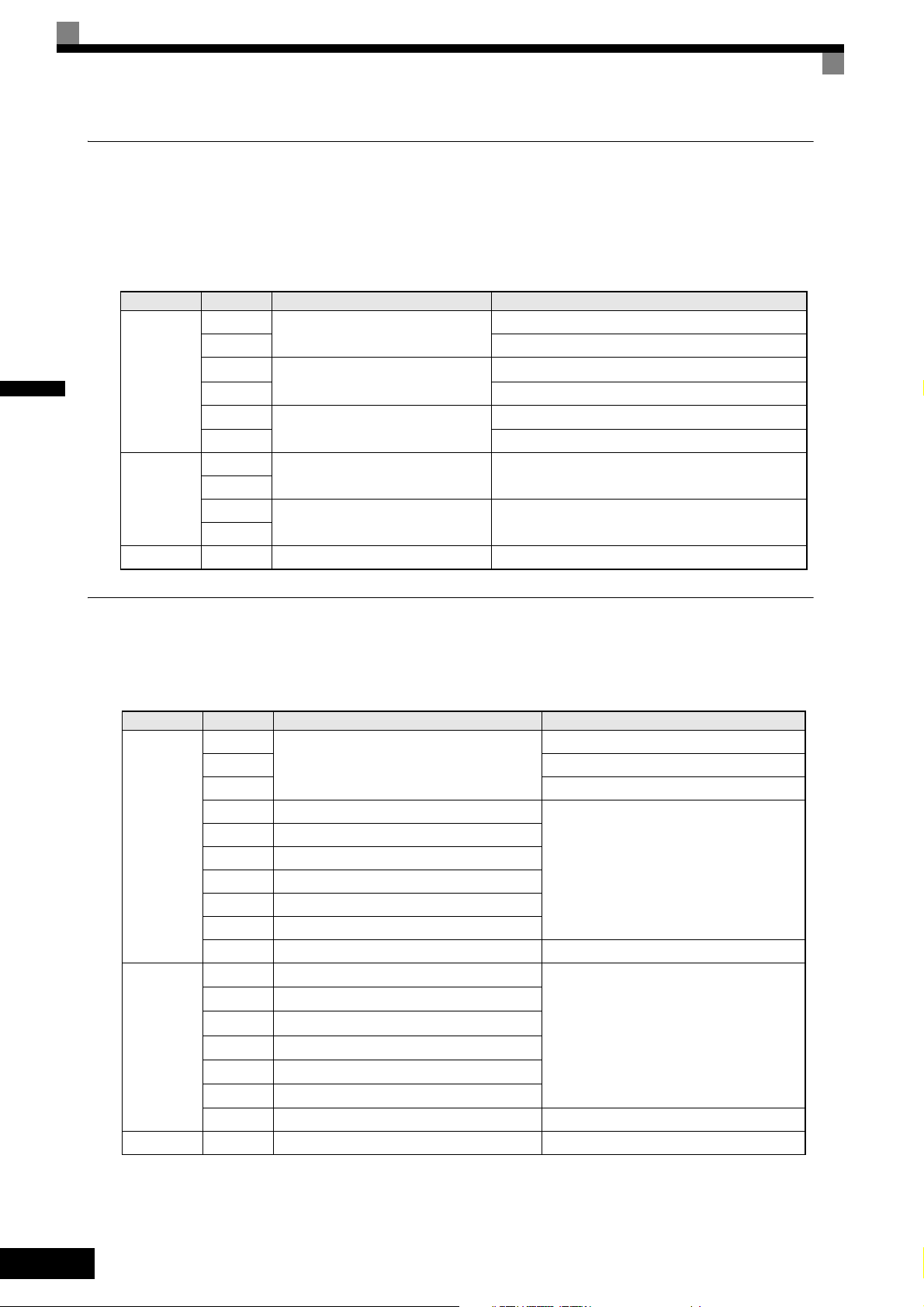
2
Terminali e specifiche della scheda di controllo della velocità PG
PG-B2
Nella seguente tabella sono riportate le specifiche dei terminali per la scheda PG-B2.
Tabella 2.13 Specifiche dei terminali della scheda PG-B2
Terminale Numero Descrizione Specifiche
TA1
TA2
TA3 (E )
1
Alimentazione per il generatore di
impulsi
2 0 Vc.c. (GND per l'alimentazione)
3
Fase A dei terminali di ingresso a
impulsi
4 Fase A dell'ingresso a impulsi GND
5
Fase B dei terminali di ingresso a
impulsi
6 Fase B dell'ingresso a impulsi GND
1
Fase A dei terminali di uscita
di monitoraggio a impulsi
2
3
Fase B dei terminali di uscita
di monitoraggio a impulsi
4
Terminale di collegamento
12 Vc.c. (±5%), 200 mA max.
H: +8…12 V (frequenza max. di ingresso: 50 kHz)
H: +8…12 V (frequenza max. d'ingresso: 50 kHz)
Uscita a collettore aperto, 24 Vc.c., 30 mA max.
Uscita a collettore aperto, 24 Vc.c., 30 mA max.
-
PG-X2
Nella seguente tabella sono riportate le specifiche dei terminali per la scheda PG-X2.
Tabella 2.14 Specifiche dei terminali della scheda PG-X2
Te rm i na l e Numero Descrizione Specifiche
1
Alimentazione per il generatore di impulsi
2 0 Vc.c. (GND per l'alimentazione)
3 5 Vc.c. (±5%), 200 mA max.*
4 Fase A (+) del terminale di ingresso a impulsi
TA1
TA2
TA3 (E) Terminale di collegamento schermatura –
* Non è possibile utilizzare contemporaneamente 5 Vc.c. e 12 Vc.c.
5 Fase A (–) del terminale di ingresso a impulsi
6 Fase B (+) del terminale di ingresso a impulsi
7 Fase B (–) del terminale di ingresso a impulsi
8 Fase Z (+) del terminale di ingresso a impulsi
9 Fase Z (–) del terminale di ingresso a impulsi
10 Ingressi terminale comune –
Fase A (+) del terminale uscita di
1
Fase A (–) del terminale uscita di
2
Fase B (+) del terminale uscita di
3
Fase B (–) del terminale uscita di
4
Fase Z (+) del terminale uscita di
5
Fase Z (–) del terminale uscita di
6
7 Uscite di monitoraggio terminale comune –
12 Vc.c. (±5%), 200 mA max.*
Ingresso line driver (livello RS422)
(frequenza di risposta massima: 300 kHz)
Uscita line driver (uscita livello RS422)
2-30
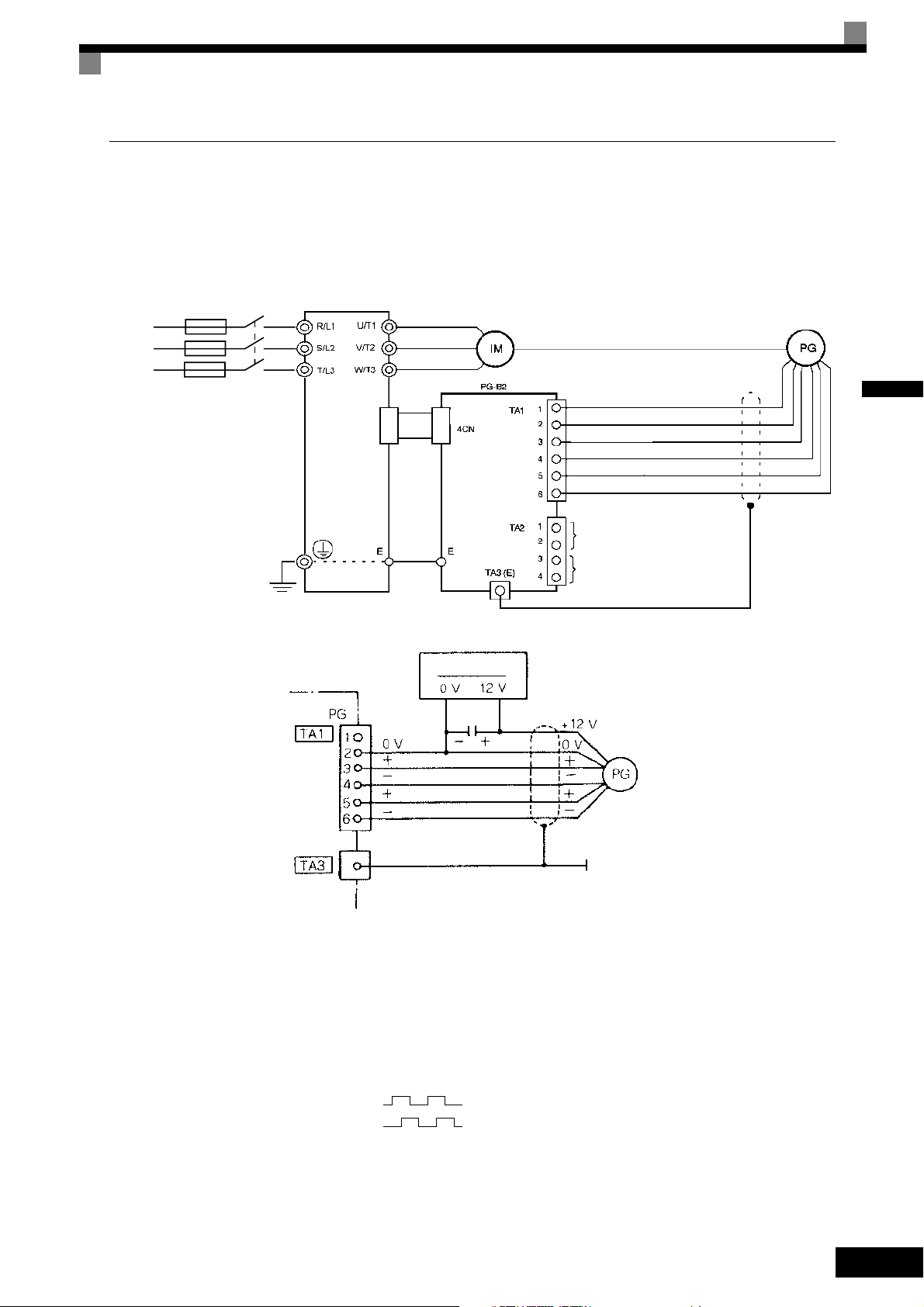
Cablaggio
Cablaggio della scheda PG-B2
Le figure seguenti mostrano esempi di cablaggio per la scheda PG-B2 utilizzando l'alimentazione delle schede
accessorie o una fonte di alimentazione esterna per il PG.
Trifase 200 Vc.a.
(400 Vc.a.)
R/L1
S/L2
T/L3
Inverter
CN4CN4
Alimentazione +12 V
Alimentazione 0 V
Fase A dell'ingresso a impulsi
Fase A dell'ingresso a impulsi GND
Fase B dell'ingresso a impulsi
Fase B dell'ingresso a impulsi GND
Fase A del terminale di uscita
di monitoraggio a impulsi
Fase B del terminale di uscita di
monitoraggio a impulsi
2
Fig. 2.16 Cablaggio della scheda PG-B2 utilizzando l'alimentazione delle schede accessorie
Fig. 2.17 Cablaggio della scheda PG-B2 utilizzando un'alimentazione esterna a 12 V
• Per le linee dei segnali è necessario utilizzare cavi a coppie intrecciate schermati.
• Utilizzare l'alimentazione del generatore di impulsi solo per il generatore di impulsi (encoder). In caso
contrario, potrebbero verificarsi dei guasti dovuti a disturbi.
• Il cavo per il collegamento del generatore di impulsi non deve essere più lungo di 100 metri.
• La direzione di rotazione del PG può essere impostata nel parametro utente F1-05. Di fabbrica viene
preimpostato per la rotazione in avanti con avanzamento della fase A.
Impulsi fase A
Impulsi fase B
• Se si collega un generatore di impulsi con uscita di tensione (encoder), l'impedenza di uscita deve essere di
almeno 12 mA di corrente sul fotoaccoppiatore (diodo)
• È possibile modificare il coefficiente di divisione del monitoraggio del treno di impulsi utilizzando il
parametro F1-06.
2-31
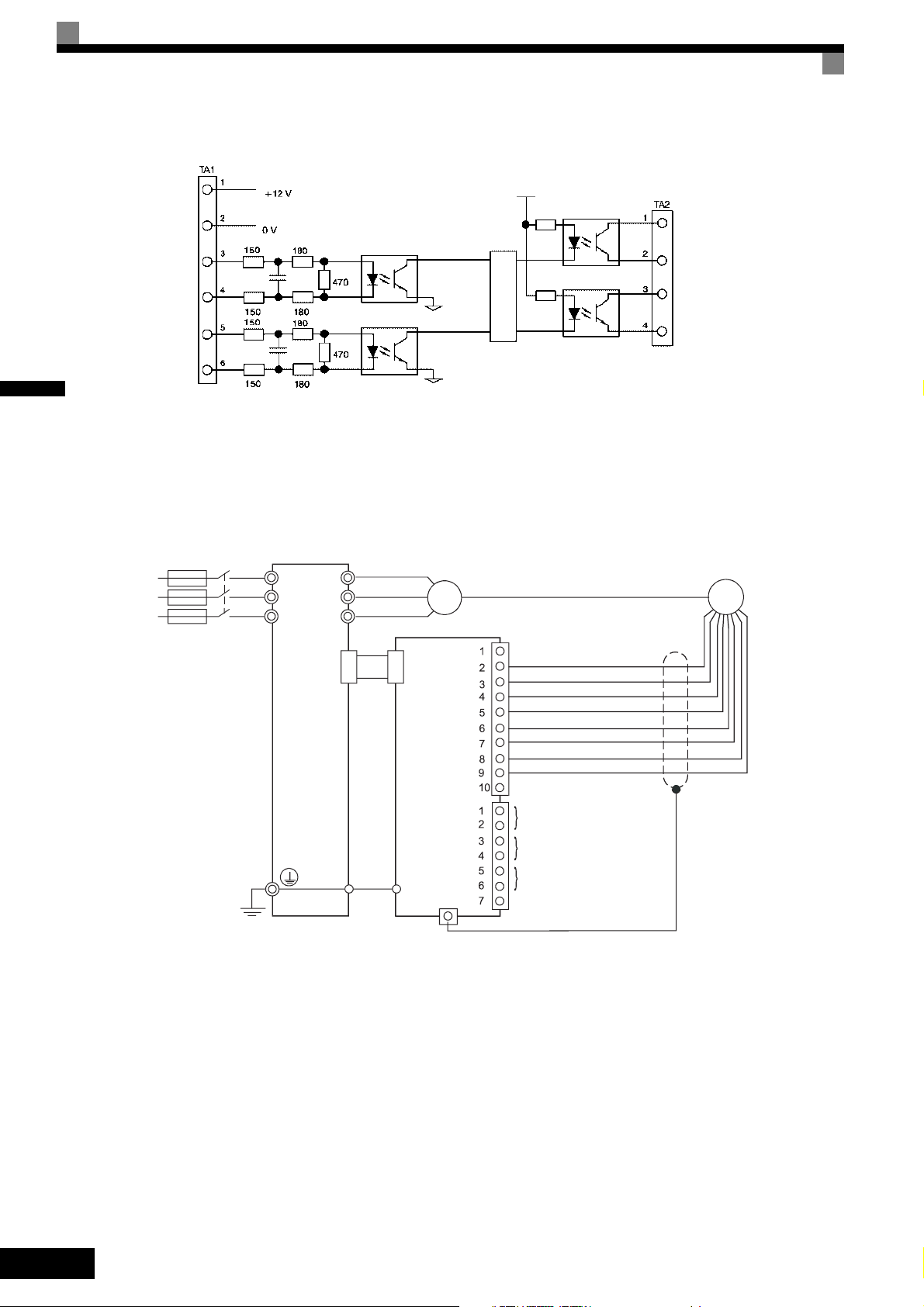
2
Alimentazion
e PG +12 V
Fase A del terminale di
uscita di monitoraggio
a impulsi
Fase B del terminale di
uscita di monitoraggio
a impulsi
Fase A
dell'ingresso
a impulsi
Fase B
dell'ingresso
a impulsi
Impulsi
fase A
Impulsi
fase B
Circuito del coeffi-
ciente di divisione
Fig. 2.18 Configurazione del circuito di I/O della scheda PG-B2
Cablaggio della scheda PG-X2
Le figure seguenti illustrano esempi di cablaggio per la scheda PG-X2 utilizzando l'alimentazione delle schede
accessorie o una fonte di alimentazione esterna per il PG.
Trifase a 200/400 Vc.a.
R/L1
S/L2
T/L3
Fig. 2.19 Cablaggio della scheda PG-X2 utilizzando l'alimentazione delle schede accessorie
Inverter
R/L1
S/L2
T/L3
U/T1
V/T2
W/T3
CN4
PG
PG-D2
PG-X2
4CN
TA 1
TA 2
E
E
+12 V
0 V
+5 V
Fase A (+) dell'ingresso a impulsi
Fase A (–) dell'ingresso a impulsi
Fase B (+) dell'ingresso a impulsi
Fase B (–) dell'ingresso a impulsi
Fase Z (+) dell'ingresso a impulsi
Fase Z (–) dell'ingresso a impulsi
Fase A dell'uscita di
monitoraggio a impulsi
Fase B dell'uscita di
monitoraggio a impulsi
Fase Z dell'uscita di
monitoraggio a impulsi
2-32
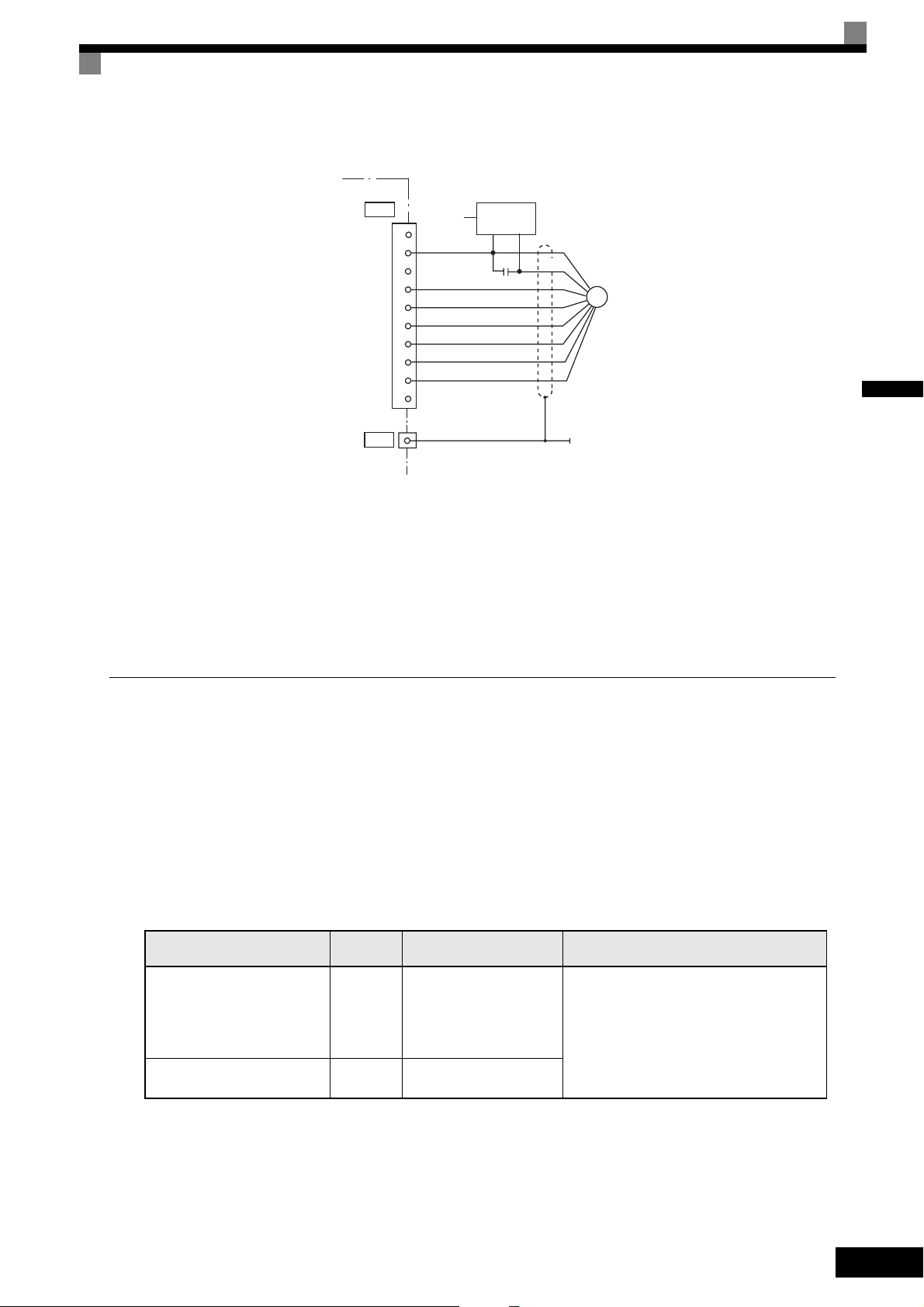
PG-X2
TA 1
IP12
IG
IP5
A (+)
A (-)
B (+)
B (-)
Z (+)
Z (-)
IG
TA 3
1
2
Condensatore per
caduta di tensione
3
momentanea
4
5
6
7
8
9
10
c.a.
Alimentazione
PG
0 V +12 V
+12 V
+
0 V
+
+
-
+
-
PG
-
Fig. 2.20 Cablaggio della scheda PG-X2 utilizzando l'alimentazione esterna a 5 V
Per le linee dei segnali è necessario utilizzare cavi a coppie intrecciate schermati.
•
• Utilizzare l'alimentazione del generatore di impulsi solo per il generatore di impulsi (encoder). In caso
contrario, potrebbero verificarsi dei guasti dovuti a disturbi.
• Il cavo per il collegamento del generatore di impulsi non deve essere più lungo di 100 metri.
• La direzione di rotazione del PG deve essere impostata nel parametro utente F1-05 (rotazione PG).
L'impostazione predefinita è la rotazione in avanti con avanzamento della fase A.
2
Cablaggio delle morsettiere
Non utilizzare cavi più lunghi di 100 metri per il cablaggio del PG (encoder) e tenerli separati dalle linee di
alimentazione.
Utilizzare cavi a coppie intrecciate schermati per il cablaggio relativo al monitoraggio delle uscite e degli
ingressi a impulsi e collegare la schermatura al relativo terminale.
Dimensioni dei cavi (uguali per tutti i modelli)
Le dimensioni dei cavi per i terminali sono riportate nella Tabella 2.15.
Tabella 2.15 Dimensioni dei cavi
Terminale
Alimentatore generatore di
impulsi
Terminale ingresso a impulsi
Terminale uscita monitoraggio
a impulsi
Terminale di collegamento
schermatura
Terminali senza saldatura
Viti dei
morsetti
-
Spessore cavi (mm2)
Cavo a treccia: 0,5...1,25
Cavo monofilo: 0,5...1,25
M3,5 0,5...2
Tipo di cavi
• Cavo a coppie intrecciate schermato
• Cavo schermato in vinile con di
rivestimento di polietilene
(KPEV-S di Hitachi Electric Wire o
equivalente)
Si consiglia di utilizzare terminali senza saldatura sulle linee dei segnali per semplificare il cablaggio e
migliorare l'affidabilità.
Ved er e l a Tabella 2.8 per i dati tecnici.
2-33
Dimensioni per capocorda cavi e coppie di serraggio
Le dimensioni dei capocorda cavi e le coppie di serraggio per cavi di diverse dimensioni sono indicate nella
Tabella 2.16.
Tabella 2.16 Capocorda cavi e coppia di serraggio
2
Spessore cavi [mm2]
0,5
0,75 1,25 - 3,5
1,25 1,25 - 3,5
2 2 - 3,5
Viti dei
morsetti
M3,5
Dimensione terminale a
crimpare
1,25 - 3,5
Coppia di serraggio (N • m)
0,8
Modalità d'uso
Il metodo di cablaggio è uguale a quello utilizzato per i terminali senza saldatura. Fare riferimento a
pagina 2-33. Per il cablaggio osservare le precauzioni riportate di seguito.
• Separare le linee dei segnali di controllo per la scheda di controllo della velocità PG dalle linee di
alimentazione principali e da altri circuiti di controllo.
• Collegare la schermatura per evitare il rischio di errori di funzionamento generati da disturbi. Inoltre, non
utilizzare linee più lunghe di 100 m.
• Collegare la schermatura (cavo di messa a terra verde della scheda accessoria) al terminale schermato (E).
• Non saldare le estremità dei cavi perché potrebbe essere causa di errori di contatto.
• Quando non si utilizzano terminali senza saldatura, spelare i cavi per circa 5,5 mm.
• Se l'assorbimento di corrente del PG è superiore a 200 mA, è necessaria un'alimentazione separata. Per
gestire una caduta di tensione momentanea, utilizzare un condensatore di backup o un altro metodo.
• Accertarsi di non superare la frequenza di ingresso delle schede PG. La frequenza di uscita del generatore
di impulsi può essere calcolata utilizzando la seguente formula.
f
PG
Velocità motore con frequenza di uscita massima (min
(Hz) =
60
–1
)
x valori nominali PG (impulsi/giro)
2-34
Console di
programmazione e
modalità
Questo capitolo, oltre a descrivere i display della console di programmazione e le relative funzioni,
fornisce informazioni generali sulle modalità operative e sui metodi per attivarle.
Console di programmazione ..................................................3-1
Modalità .................................................................................3-4
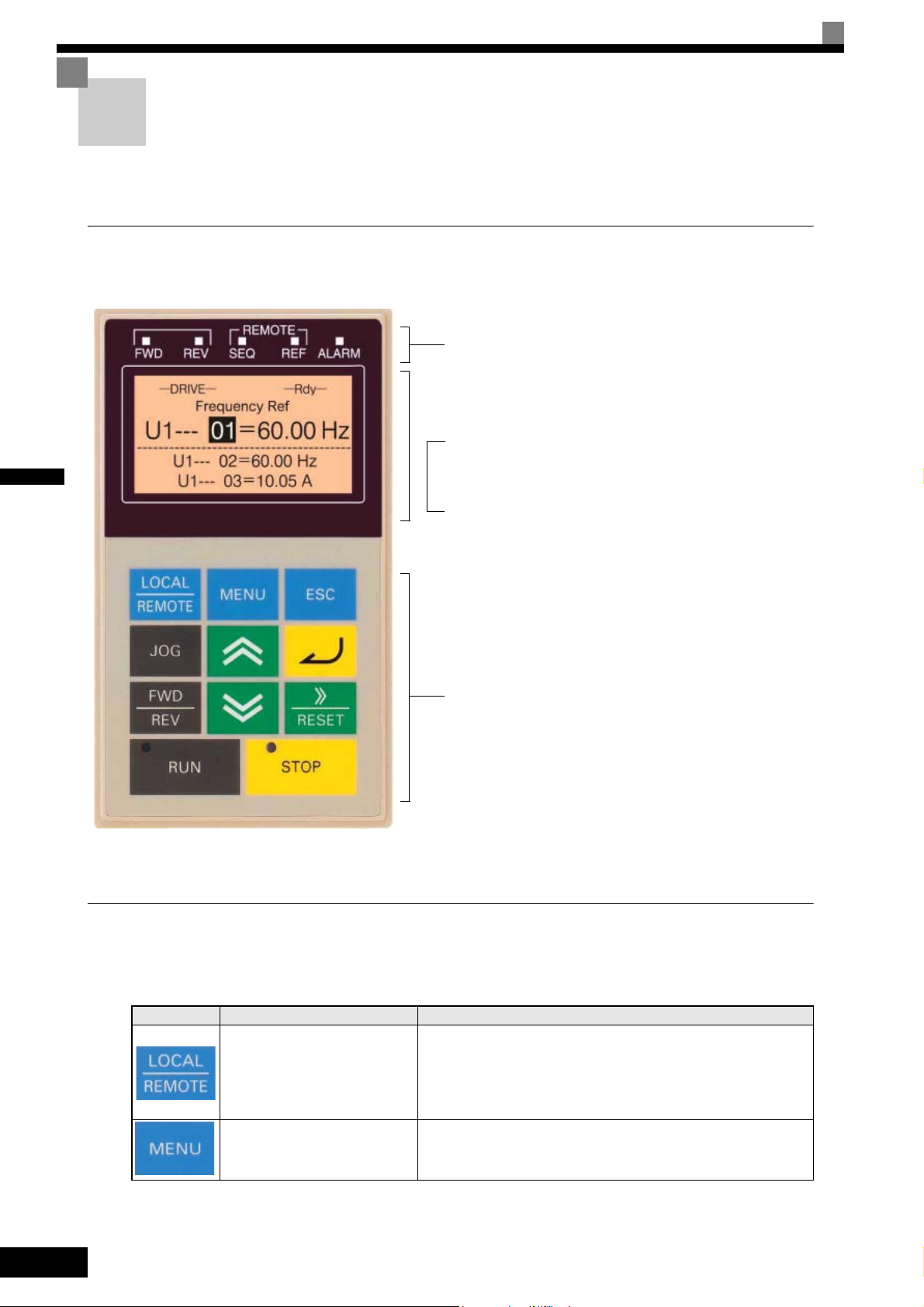
3
Console di programmazione
Questa sezione descrive i display e le funzioni della console di programmazione.
Display della console di programmazione
Di seguito sono elencati i nomi dei tasti della console di programmazione e le funzioni ad essi associate.
Spie stato di funzionamento
FWD: si accende quando viene immesso un comando di marcia
avanti.
REV: si accende quando viene immesso un comando di marcia
indietro.
SEQ: si accende quando viene selezionata una sorgente di
comando di marcia diversa dalla console di programmazione.
REF: si accende quando viene selezionata una sorgente di riferi-
mento della frequenza diversa dalla console di programmazione.
ALARM: si accende quando si verifica un errore o viene attivato un
allarme.
Display dati
Visualizza i dati di monitoraggio, i numeri dei parametri e le
impostazioni.
Modalità operativa (visualizzata nel parte superiore sinistra del display
di dati)
DRIVE: si accende in modalità inverter.
QUICK: si accende in modalità di programmazione rapida.
ADV: si accende in modalità di programmazione avanzata.
VERIFY: si accende in modalità di verifica.
A. TUNE:si accende in modalità di autotuning.
Tasti
Utilizzati per l'impostazione dei parametri, il monitoraggio,
la marcia a impulsi (jog) e l'autotuning.
Fig. 3.1 Nomi dei componenti della console di programmazione e relative funzioni
Tasti della console di programmazione
I nomi e le funzioni dei tasti della console di programmazione sono descritti nella Tabella 3.1.
Tabella 3.1 Funzioni dei tasti
Tasto Nome Funzione
Consente di attivare alternativamente la modalità di funzionamento
dalla console di programmazione (LOCAL) e dal terminale del
Tasto LOCAL/REMOTE
circuito di controllo (REMOTE).
Questo tasto può essere abilitato o disabilitato impostando il
parametro o2-01.
3-2
Tasto MENU Consente di selezionare le modalità.
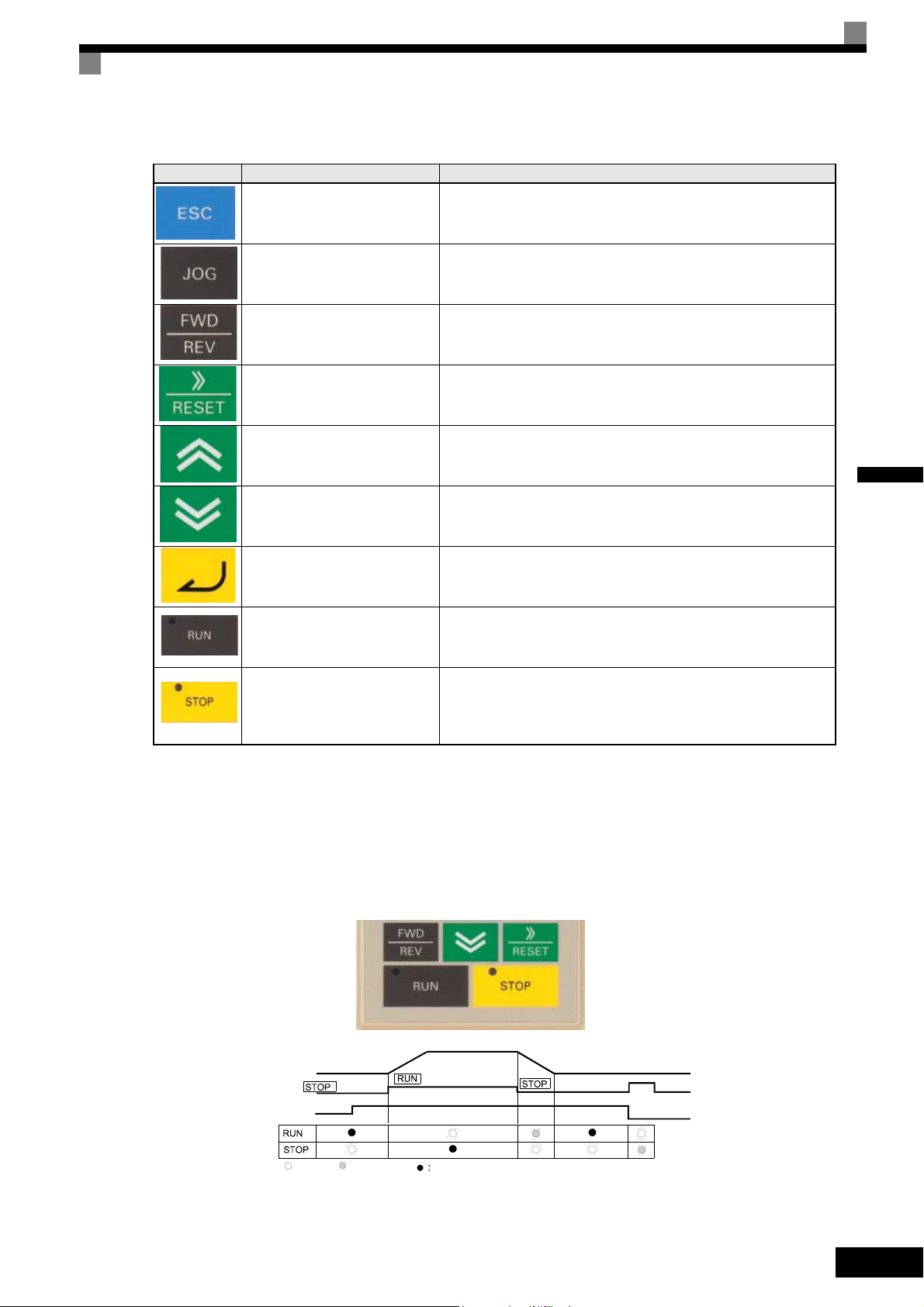
Tabella 3.1 Funzioni dei tasti (Continua)
Tasto Nome Funzione
Tasto ESC Ripristina lo stato precedente alla pressione del tasto ENTER.
Tasto JOG
Tas ti FWD/RE V
Tasto Shift/RESET
Tasto di incremento
Tasto di decremento
Tasto ENTER
Tasto RUN
Tas to STOP
* Tranne che negli schemi, con tasto si fa riferimento ai nomi riportati nella precedente tabella.
Attiva il funzionamento a impulsi (jog) quando l'inverter viene
azionato dalla console di programmazione.
Consentono di selezionare la direzione di rotazione del motore
quando l'inverter viene azionato dalla console di programmazione.
Definisce la cifra attiva durante la programmazione dei parametri.
Funziona inoltre come tasto RESET quando si verifica un errore.
Utilizzato per la seleziona delle voci di menu, l'impostazione dei
numeri dei parametri e l'incremento dei valori delle impostazioni.
Viene inoltre utilizzato per passare alla voce o ai dati successivi.
Utilizzato per la seleziona delle voci di menu, l'impostazione dei
numeri dei parametri e il decremento dei valori delle impostazioni.
Viene inoltre utilizzato per passare alla voce o ai dati precedenti.
Premere questo tasto per immettere voci di menu, parametri e valori
impostati.
Utilizzato anche per passare da uno schermo all'altro.
Avvia il funzionamento dell'inverter quando quest'ultimo viene
azionato dalla console di programmazione.
Interrompe il funzionamento dell'inverter.
Questo tasto può essere abilitato o disabilitato quando il
funzionamento è gestito dal terminale del circuito di controllo
impostando il parametro o2-02.
3
Sulla console di programmazione, nella parte superiore sinistra rispetto ai tasti RUN e STOP, sono presenti
delle spie che lampeggiano o si accendono a luce fissa per indicare i diversi stati operativi.
Ad esempio, durante l'eccitazione iniziale o la frenatura c.c., la spia del tasto RUN lampeggia e quella del tasto
STOP è accesa. Nella Fig. 3.2 è indicato il rapporto esistente tra le spie dei tasti RUN e STOP e lo stato
dell'inverter.
Frequenza uscita inverter
Impostazione frequenza
Accesa
Lampeggiante
Fig. 3.2 Spie dei tasti RUN e STOP
Spenta
3-3
3
Modalità
Questa sezione descrive le modalità dell'inverter e la procedura da seguire per attivarle.
Modalità dell'inverter
Una modalità raggruppa una serie di funzioni di monitoraggio e di parametri dell'inverter per semplificarne la
lettura e l'impostazione. Le modalità disponibili sull'inverter sono 5.
Le 5 modalità e le funzioni principali in essa incluse sono riportate nella Tabella 3.2.
Tabella 3.2 Modalità
Modalità Funzioni principali
Utilizzare questa modalità per avviare/arrestare l'inverter, per monitorare valori
Modalità inverter
Modalità di programmazione
veloce
Modalità di programmazione
avanzata
Modalità di verifica
Modalità di autotuning*
quali riferimenti di frequenza e corrente di uscita, nonché per visualizzare dati
relativi agli errori o allo storico degli errori.
Utilizzare questa modalità per leggere ed impostare i parametri di base.
Utilizzare questa modalità per accedere a e impostare tutti i parametri.
Utilizzare questa modalità per leggere/impostare i parametri modificati rispetto ai
valori predefiniti.
Utilizzare questa modalità per attivare un motore di cui non si conoscono i dati per
le modalità di controllo vettoriale affinché i dati del motore vengano misurati/
calcolati e impostati automaticamente.
Questa modalità può essere utilizzata anche per misurare solo la resistenza da linea a
linea del motore.
* Eseguire sempre l'autotuning con il motore prima di attivare le modalità di controllo vettoriale.
3-4

Attivazione delle modalità
Il display di selezione della modalità viene visualizzato alla pressione del tasto MENU. Utilizzare il tasto
MENU da tale display per passare da una modalità all'altra in sequenza.
Premere il tasto ENTER per attivare una modalità e passare dal display di monitoraggio a quello di
impostazione.
Display all'avvio
-DRIVE-
Frequency Ref
U1 - 01
U1-02=50.00Hz
U1-03=10.05A
Rdy
=50.00Hz
Display di
selezione
modalità
-DRIVE-
** Main Menu **
-QUICK-
** Main Menu **
-ADV-
** Main Menu **
-VERIFY-
** Main Menu **
Modified Consts
-A.TUNE-
** Main Menu **
MENU
Operation
MENU
Quick Setting
MENU
Programming
MENU
MENU
Auto-Tuning
Display di monitoraggio Display di impostazione
Monitor
"0"
Rdy
*2*
*0*
RESET
RESET
-DRIVE-
Frequency Ref
U1- 01=50.00Hz
U1-02=50.00Hz
U1-03=10.05A
-ADV-
Select Language
A1- 00 =0
-DRIVE-
U1 - 01=50.00Hz
U1-02=50.00Hz
ESC ESC ESC
ESC ESC
U1-03=10.05A
-QUICK-
Control Method
A1-02=2
Open Loop Vector
-ADV-
Initialization
A1 - 00=1
ESC ESC ESC
ESC
ESC ESC
Select Language
-VERIFY-
None Modified
-A.TUNE-
Tuning Mode Sel
T1 01=0 1
Standard Tuning
Rdy
*1*
English
Il numero della costante viene
visualizzato se la costante è stata
modificata. Premere il tasto ENTER
per confermare la modifica.
English
"0"
Rdy
*2*
*1*
*0*
-DRIVE-
Frequency Ref
U1 - 01 =050.00Hz
(0.00 ~ 50.00)
" 00.00Hz "
-QUICK-
Control Method
A1-02= 2
Open Loop Vector
-ADV-
Select Language
A1-00 = 0
-A.TUNE-
Tuning Mode Sel
T1 01= 0
Standard Tuning
3
IMPORTANTE
Fig. 3.3 Passaggi di modalità
Per azionare l'inverter dopo aver visualizzato/modificato dei parametri, premere il tasto MENU e il
tasto ENTER in sequenza per attivare la modalità inverter. Il comando di marcia non viene accettato
in nessun'altra modalità.
3-5

3
Modalità inverter
Si tratta della modalità in cui è possibile azionare l'inverter. In questa modalità è possibile visualizzare tutti i
parametri di monitoraggio (U1-), le informazioni sugli errori e lo storico degli errori.
Quando b1-01 (frequenza di riferimento) è impostato su 0, è possibile modificare la frequenza dal display di
impostazione della frequenza utilizzando i tasti di incremento, decremento e Shift/RESET. Il parametro viene
scritto e viene nuovamente visualizzato il display di monitoraggio.
Esempio di funzionamento
La figura seguente mostra un esempio relativo alle funzioni dei tasti in modalità inverter.
Display all'avvio
-DRIVE-
Frequency Ref
U1- 01 =50.00Hz
U1-02=50.00Hz
U1-03=10.05A
Rdy
Display di
selezione
modalità
-DRIVE-
** Main Menu **
-QUICK-
** Main Menu **
-ADV-
** Main Menu **
-VERIFY-
** Main Menu **
Modified Consts
-A.TUNE-
** Main Menu **
MENU
Operation
MENU
Quick Setting
MENU
Programming
MENU
MENU
Auto-Tuning
ESC
Display di monitoraggio Display di impostazione
della frequenza
A B
Monitor
Monitor
Monitor
Rdy
Rdy
Rdy
-DRIVE-
U1 -01=50.00Hz
U1-02=50.00Hz
U1-03=10.05A
-DRIVE-
U1 - 02 =50.00Hz
U1-03=10.05A
U1-04= 2
-DRIVE-
U1 - 40 = 10H
U1-01=50.00Hz
U1-02=50.00Hz
RESET
ESC
RESET
ESC
RESET
ESC
1 2
-DRIVE-
Frequency Ref
U1- 01 =50.00Hz
U1-02=50.00Hz
U1-03=10.05A
-DRIVE-
Output Freq
U1- 02 =50.00Hz
U1-03=10.05A
U1-04= 2
-DRIVE-
FAN Elapsed Time
U1- 40 = 10H
U1-01=50.00Hz
U1-02=50.00Hz
Rdy Rdy
Rdy
Rdy
1 2
ESC
Il display di impostazione della
frequenza non viene visualizzato
quando si utilizza un riferimento
analogico.
Verrà visualizzato il nome dell'errore
se si preme il tasto ENTER mentre
è visualizzata una costante per la
quale è stato emesso un codice
di errore.
3 4
-DRIVE-
Fault Trace
U2 -01= OC
U2-02= OV
U2-03=50.00Hz
-DRIVE-
Fault Trace
U2 -02 = OV
U3-03=50.00Hz
U3-04=50.00Hz
Rdy
Rdy
RESET
RESET
-DRIVE-
Current Fault
U2 - 01 = OC
U2-02=OV
ESC ESC
ESC ESC
U2-03=50.00Hz
-DRIVE-
Last Fault
U2 - 02 = OV
U3-03=50.00Hz
U3-04=50.00Hz
Rdy
Rdy
3 4
-DRIVE-
Frequency Ref
U1 - 01= 050.00Hz
(0.00 ~ 50.00)
" 00.00Hz "
U2 - 01 = OC
Over Current
U2 - 02 = OV
Rdy
DC Bus Overvolt
3-6
5 5
-DRIVE-
Fault History
U3 -01= OC
U3-02= OV
U3-03= OH
-DRIVE-
Fault Message 2
U3 -02= OV
U3-03= OH
U3-04= UV
Rdy
Rdy
-DRIVE-
RESET
ESC ESC
RESET
ESC ESC
Last Fault
U3 - 01 = OC
U3-02=OV
U3-03=OH
-DRIVE-
Fault Message 2
U3 - 02 = OV
U3-03= OH
U3-04= UV
Rdy
Rdy
5 5
A B
Fig. 3.4 Funzionamento in modalità inverter
U3 - 01 = OC
Over Current
U3 - 02 = OV
DC Bus Overvolt
Rdy
Rdy

Nota: 1. Quando si cambia display tramite i tasti di incremento/decremento, il display successivo a quello per l'ultimo numero di parametro sarà quello
relativo al primo numero di parametro e viceversa. Ad esempio, il display successivo a quello per U1-01 sarà U1-40, come indicato nella figura dalle
lettere A e B e dai numeri da 1 a 6.
2. All'accensione viene visualizzato il display per il primo parametro di monitoraggio (frequenza di riferimento). Il parametro di monitoraggio
visualizzato all'avvio può essere impostato in o1-02 (selezione monitoraggio dopo l'accensione). Il funzionamento non può essere avviato dal display
di selezione della modalità.
Modalità di programmazione veloce
In modalità di programmazione veloce è possibile monitorare e impostare i parametri di base necessari per il
funzionamento di prova dell'inverter.
I parametri possono essere modificati dai display delle impostazioni. Per modificare la frequenza, utilizzare i
tasti di incremento, decremento e Shift/RESET. Dopo aver confermato la modifica dell'impostazione
premendo il tasto ENTER, il parametro verrà scritto e verrà ripristinato il display di monitoraggio.
Per ulteriori informazioni sui parametri visualizzati in modalità di programmazione veloce, consultare il
Capitolo 5 Parametri utente.
Esempio di funzionamento
La figura seguente mostra un esempio relativo al funzionamento dei tasti in modalità di programmazione veloce.
Monitor Display Setting DisplayMode Selection Display
MENU
-DRIVE-
** Main Menu **
Operation
A B
MENU
3
-QUICK-
** Main Menu **
Quick Setting
-ADV-
** Main Menu **
Programming
-VERIFY-
** Main Menu **
Modified Consts
-A.TUNE-
** Main Menu **
Auto-Tuning
MENU
MENU
MENU
ESC
-QUICK-
Control Method
A1-02=2
Open Loop Vector
-QUICK-
Reference Source
b1-01=1
Terminals
-QUICK-
Run Source
b1-02=1
Terminals
-QUICK-
Terminal AM Gain
H4-05 = 50%
-QUICK-
MOL Fault Select
L1-01=1
Std Fan Cooled
-QUICK-
StallP Decel Sel
L3-04=1
*2*
*1*
*1*
(0.0 ~ 1000.0)
50.0%
*1*
*1*
Enabled
ESC
ESC
ESC
ESC
ESC
ESC
-QUICK-
Control Method
A1-02= 2
Open Loop Vector
-QUICK-
Reference Source
b1-01= 1
Terminals
-QUICK-
Run Source
b1-02= 1
Terminals
-QUICK-
Terminal AM Gain
H4-05 =
(0.0 ~ 1000.0)
-QUICK-
MOL Fault Select
L1-01= 1
Std Fan Cooled
-QUICK-
StallP Decel Sel
L3-04= 1
0050.0%
50.0%
Enabled
*1*
*1*
*1*
*1*
*2*
A B
Fig. 3.5 Funzionamento in modalità di programmazione veloce
3-7

Modalità di programmazione avanzata
In modalità di programmazione avanzata è possibile impostare e monitorare tutti i parametri dell'inverter.
I parametri possono essere modificati dai display delle impostazioni utilizzando i tasti di incremento,
decremento e Shift/RESET. Dopo aver confermato la modifica dell'impostazione premendo il tasto ENTER, il
parametro verrà memorizzato e verrà ripristinato il display di monitoraggio.
Per ulteriori informazioni sui parametri consultare il Capitolo 5 Parametri utente.
Esempio di funzionamento
La figura seguente mostra un esempio relativo al funzionamento dei tasti in modalità di programmazione
avanzata.
3
-ADV-
** Main Menu **
Programming
-VERIFY-
** Main Menu **
Modified Consts
-A.TUNE-
** Main Menu **
Auto-Tuning
-DRIVE-
** Main Menu **
Operation
-QUICK-
** Main Menu **
Quick Setting
MENU
MENU
MENU
MENU
ESC
Monitor Display Setting DisplayMode Selection Display
A B
-ADV-
Initialization
A1-00=1
Select Language
-ADV-
Initialization
A1-02=2
Control Method
-ADV-
PID Control
b5-01=0
PID Mode
-ADV-
PID Control
b5 - 14= 1.0Sec
Fb los Det Time
RESET
ESC
RESET
ESC
RESET
RESET
ESC
1 2
-ADV-
Select Language
A1- 00 =0
English
-ADV-
Control Method
A1- 02 =2
Open Loop Vector
*1*
*2*
1 2
3 4
-ADV-
PID Mode
b5- 01 =0
Disabled
-ADV-
Fb los Det Time
b5- 14=1.0Sec
(0.0 ~ 25.5)
1.0 sec
*0* *0*
3 4
5 6
ESC
ESC
ESCESC
ESC
-ADV-
Select Language
A1- 00= 0
English
-ADV-
Control Method
A1- 02= 2
Open Loop Vector
-ADV-
PID Mode
b5-01= 0
Disabled
-ADV-
Fb los Det Time
b5-14= 01.0Sec
(0.0 ~ 1000.0)
50.0%
*1*
*2*
3-8
MENU
-ADV-
Torque Limit
L7-01=200%
Fwd Torque Limit
-ADV-
Torque Limit
L7- 04= 200%
Fwd Torque Limit
A B
RESET
ESC ESC
RESET
ESC
-ADV-
Fwd Torque Limit
L7- 01= 200%
(0 ~ 300)
200%
-ADV-
Fwd Torque Limit
L7- 04=200%
(0 ~ 300)
200%
5 6
ESC
Fig. 3.6 Funzionamento in modalità di programmazione avanzata
-ADV-
Fwd Torque Limit
L7-01= 2
-ADV-
Torq Lmt Rev Rgn
L7-04= 2
(0 ~ 300)
200%
(0 ~ 300)
200%
00%
00%

Impostazione parametri
Di seguito è riportata la procedura per modificare il parametro C1-01 (tempo di accelerazione 1) da 10 s a 20 s.
Tabella 3.3 Impostazione di parametri in modalità di programmazione avanzata
N.
pass
o
1 Accensione.
2
3
4
5 Premere il tasto ENTER per accedere al display di monitoraggio.
6
Display della console di
programmazione
-DRIVE-
Frequency Ref
Rdy
U1 - 01=50.00Hz
U1-02=50.00Hz
U1-03=10.05A
-DRIVE-
** Main Menu **
Operation
-QUICK-
** Main Menu **
Quick Setting
-ADV-
** Main Menu **
Programming
-ADV-
Initialization
A1-00=1
Select Language
-ADV-
Accel / Decel
C1-00 = 10.0sec
Accel Time 1
Descrizione
Premere il tasto MENU tre volte per passare alla modalità di
programmazione avanzata.
Premere il tasto di incremento o decremento fino a visualizzare il
parametro C1-01 (tempo di accelerazione 1).
3
-ADV-
7
8
9 Premere il tasto di incremento per impostare il valore su 20,00 s.
10 Premere il tasto ENTER per memorizzare il valore impostato.
11
Accel Time 1
C1-01 =
C1-01 =
C1-01 =
C1-01 =
0 010.0sec
(0.0 ~ 6000.0)
"10.0 sec"
-ADV-
Accel Time 1
00 10.0sec
0
(0.0 ~ 6000.0)
"10.0 sec"
-ADV-
Accel Time 1
001 0.0sec
(0.0 ~ 6000.0)
-ADV-
(0.0 ~ 6000.0)
-ADV-
1
"10.0 sec"
Accel Time 1
001 0.0sec
2
"10.0 sec"
Entry Accepted
Premere il tasto ENTER per accedere al display di impostazione in
cui verrà visualizzato il valore di impostazione corrente del
parametro C1-01.
Premere il tasto Shift/RESET per spostare la cifra lampeggiante
verso destra.
Dopo la pressione del tasto ENTER, per circa 1 secondo
sul display appare un messaggio che conferma l'accettazione del
valore immesso.
-ADV-
12
Accel Time 1
C1-01 =
01
(0.0 ~ 6000.0)
"10.0 sec"
20.0sec
Viene quindi nuovamente visualizzato il display di monitoraggio
per il parametro C1-01.
3-9

Modalità di verifica
La modalità di verifica consente di visualizzare i parametri che sono stati modificati rispetto alle impostazioni
predefinite in una modalità di programmazione o mediante autotuning. Se non è stata modificata nessuna
impostazione, viene visualizzata l'indicazione “None”
Il parametro A1-02 è il solo parametro del gruppo A1- che viene visualizzato nell'elenco delle costanti
modificate se è stato alterato in precedenza. Gli altri parametri non verranno visualizzati, anche se sono diversi
dai valori predefiniti.
Per modificare le impostazioni in modalità di verifica è possibile utilizzare le stesse procedure descritte per le
modalità di programmazione. Per modificare un'impostazione, utilizzare i tasti di incremento, decremento e
Shift/RESET. Alla pressione del tasto ENTER l'impostazione del parametro viene scritta e viene nuovamente
visualizzato il display di monitoraggio.
3
Esempio di funzionamento
Nell'esempio riportato di seguito le impostazioni dei seguenti parametri vengono modificate rispetto a quelle
predefinite:
• b1-01 (selezione frequenza di riferimento)
• C1-01 (tempo di accelerazione 1)
• E1-01 (impostazione tensione di ingresso)
• E2-01 (corrente nominale del motore)
Monitor Display Setting DisplayMode Selection Display
MENU
-ADV-
** Main Menu **
Programming
A B
-VERIFY-
Reference Source
b1-01=0 *0*
Terminals
"1"
-VERIFY-
Accel Time 1
C1-01=200.0sec
(0.0 ~ 6000.0)
"10.0sec"
-VERIFY-
Input Voltage
E1-01=190VAC
(155~255)
"200VAC"
-VERIFY-
Motor Rated FLA
E2-01= 2.00A
(0.32~6.40)
"1.90A"
A B
ESC
ESC
ESC
ESC
-VERIFY-
Reference Source
b1-01= 0 *0*
Terminals
"1"
-VERIFY-
Accel Time 1
C1-01= 0
200.0sec
(0.0 ~ 6000.0)
"10.0sec"
-VERIFY-
Input Voltage
E1-01= 190VAC
(155~255)
"200VAC"
-VERIFY-
Motor Rated FLA
E2-01= 2.00A
(0.32~6.40)
"1.90A"
-VERIFY-
** Main Menu **
Modified Consts
-A.TUNE-
** Main Menu **
Auto-Tuning
-DRIVE-
** Main Menu **
Operation
-QUICK-
** Main Menu **
Quick Setting
MENU
ESC
MENU
MENU
MENU
3-10
MENU
Fig. 3.7 Funzionamento in modalità di verifica
Modalità di autotuning
L'autotuning misura e imposta automaticamente i dati del motore necessari per ottenere le massime
prestazioni. Eseguire sempre l'autotuning prima di attivare il funzionamento in modalità di controllo
vettoriale.
Se si seleziona la modalità di controllo V/f, è possibile attivare solo l'autotuning stazionario per la resistenza
da linea a linea.
Quando il motore non può essere scollegato dal carico e si deve utilizzare il metodo di controllo vettoriale ad
anello aperto o chiuso, eseguire l'autotuning stazionario.
Esempio di funzionamento
Immettere la potenza di uscita nominale del motore (in kW), la tensione nominale, la corrente nominale, la
frequenza nominale, la velocità nominale e il numero di poli specificati sulla targhetta del motore, quindi
premere il tasto RUN. Il motore viene azionato automaticamente e i dati del motore misurati vengono
impostati nei parametri E2-.
Impostare sempre i parametri sopra menzionati, altrimenti non sarà possibile attivare l'autotuning. Ad
esempio, l'autotuning non potrà essere attivato dal display della tensione nominale del motore.
I parametri possono essere modificati dai display delle impostazioni utilizzando i tasti di incremento,
decremento e Shift/RESET. Il parametro verrà memorizzato alla pressione del tasto ENTER.
3
3-11
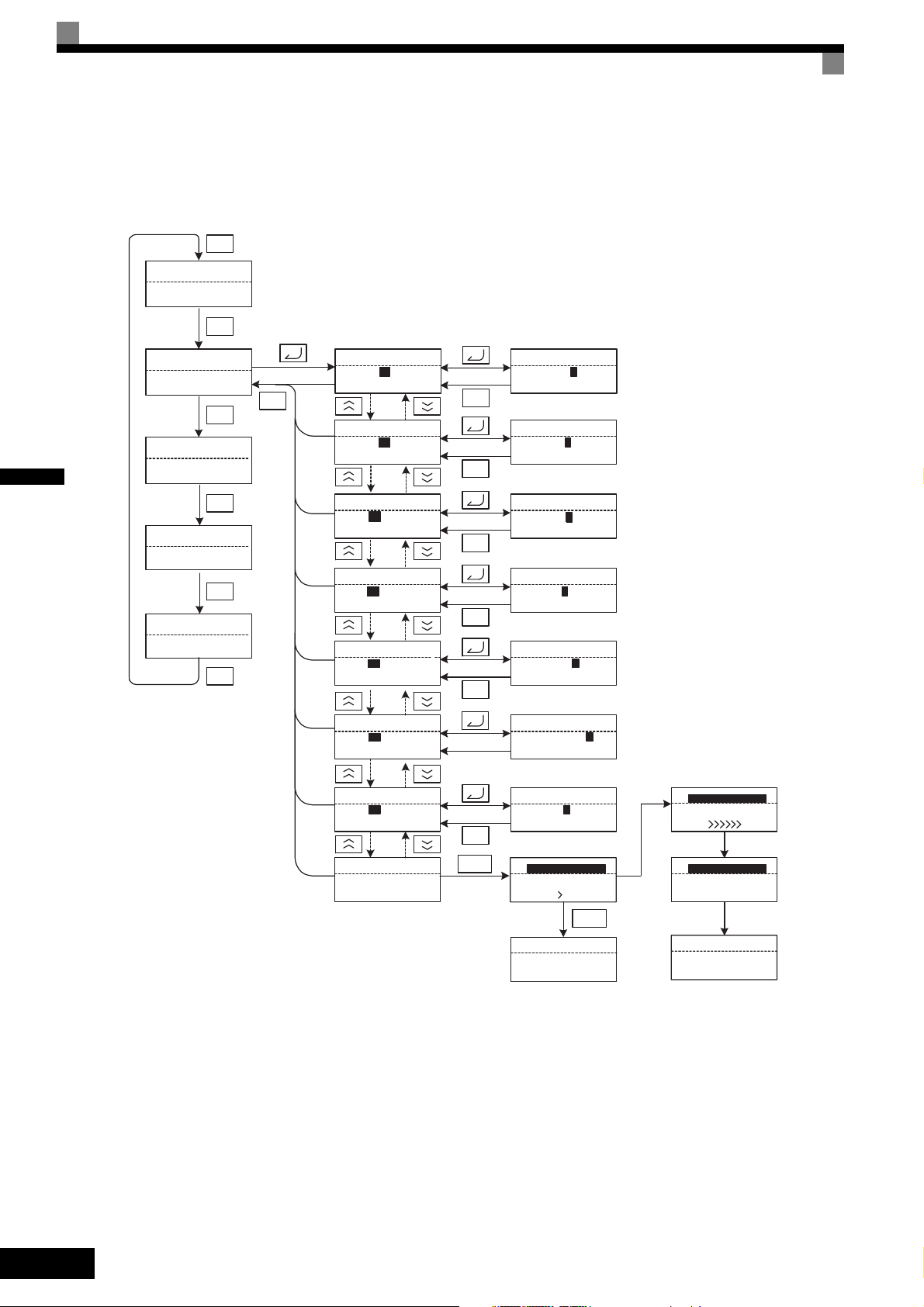
Il seguente esempio mostra la procedura di attivazione dell'autotuning rotante standard per il controllo
vettoriale ad anello aperto.
Display di monitoraggio Display di impostazioneDisplay di selezione modalità
MENU
-VERIFY-
** Main Menu **
Modified Consts
MENU
3
-A.TUNE-
** Main Menu **
Auto-Tuning
-DRIVE-
** Main Menu **
Operation
-QUICK-
** Main Menu **
Quick Setting
-ADV-
** Main Menu **
Programming
MENU
MENU
MENU
MENU
ESC
-A.TUNE-
Tuning Mode Sel
T1 - 01 =0 *0*
Standard Tuning
"0"
-A.TUNE-
Mtr Rated Power
T1 - 02
= 0.40kW
(0.00~650.00)
"0.40kW"
-A.TUNE-
Rated Voltage
T1 - 03 = 200.0VAC
(0.0~255.0)
"200.0VAC"
-A.TUNE-
Rated Current
T1 - 04 = 1.90A
(0.32~6.40)
"1.90A"
-A.TUNE-
Rated Frequency
T1 - 05 = 50.0Hz
(0.0~400.0)
"50.0Hz"
-A.TUNE-
Number of Poles
T1 - 06
= 4
(2~48)
"4"
-A.TUNE-
Rated Speed
T1 - 07 = 1750RPM
(0~24000)
"1750"
ESC
ESC
ESC
ESC
ESC
ESC
-A.TUNE-
Tuning Mode Sel
T1 - 01 = 0 *0*
Standard Tuning
"0"
-A.TUNE-
Mtr Rated Power
0 00.40kW
T1 - 01 =
(0.00~650.00)
"0.40kW"
-A.TUNE-
Rated Voltage
T1 - 03 = 200.0VAC
(0.0~255.0)
"200.0VAC"
-A.TUNE-
Rated Current
T1 - 04 = 001.90A
(0.32~6.40)
"1.90A"
-A.TUNE-
Rated Frequency
T1 - 05=050.0Hz
(0.0~400.0)
"50.0Hz"
-A.TUNE-
Number of Poles
T1 - 06 = 4
(2~48)
"4"
-A.TUNE-
Rated Speed
T1 - 07
= 01750RPM
(0~24000)
"1750"
-A.TUNE-
Tune Proceeding
40.0Hz/10.5A
START GOAL
3-12
-A.TUNE-
Auto-Tuning
0.0Hz/0.0A
Tuning Ready?
Press RUN key
Rdy
RUN
Il display cambierà
automaticamente
a seconda
dello stato
dell'autotuning.
-A.TUNE-
Tune Proceeding
40.0Hz/10.5A
START GOAL
STOP
-A.TUNE-
Tune Aborted
STOP key
Fig. 3.8 Funzionamento in modalità di autotuning
In caso di errore durante l'autotuning, consultare il Capitolo 7 Soluzione dei problemi.
-A.TUNE-
Tune Proceeding
Tune Successful
-A.TUNE-
Tune Successful
Test di funzionamento
Questo capitolo descrive le procedure da seguire per effettuare il test di funzionamento dell'inverter e ne fornisce un esempio.
Procedura per il test di funzionamento ..................................4-2
Test di funzionamento............................................................4-3
Suggerimenti di regolazione ................................................4-14
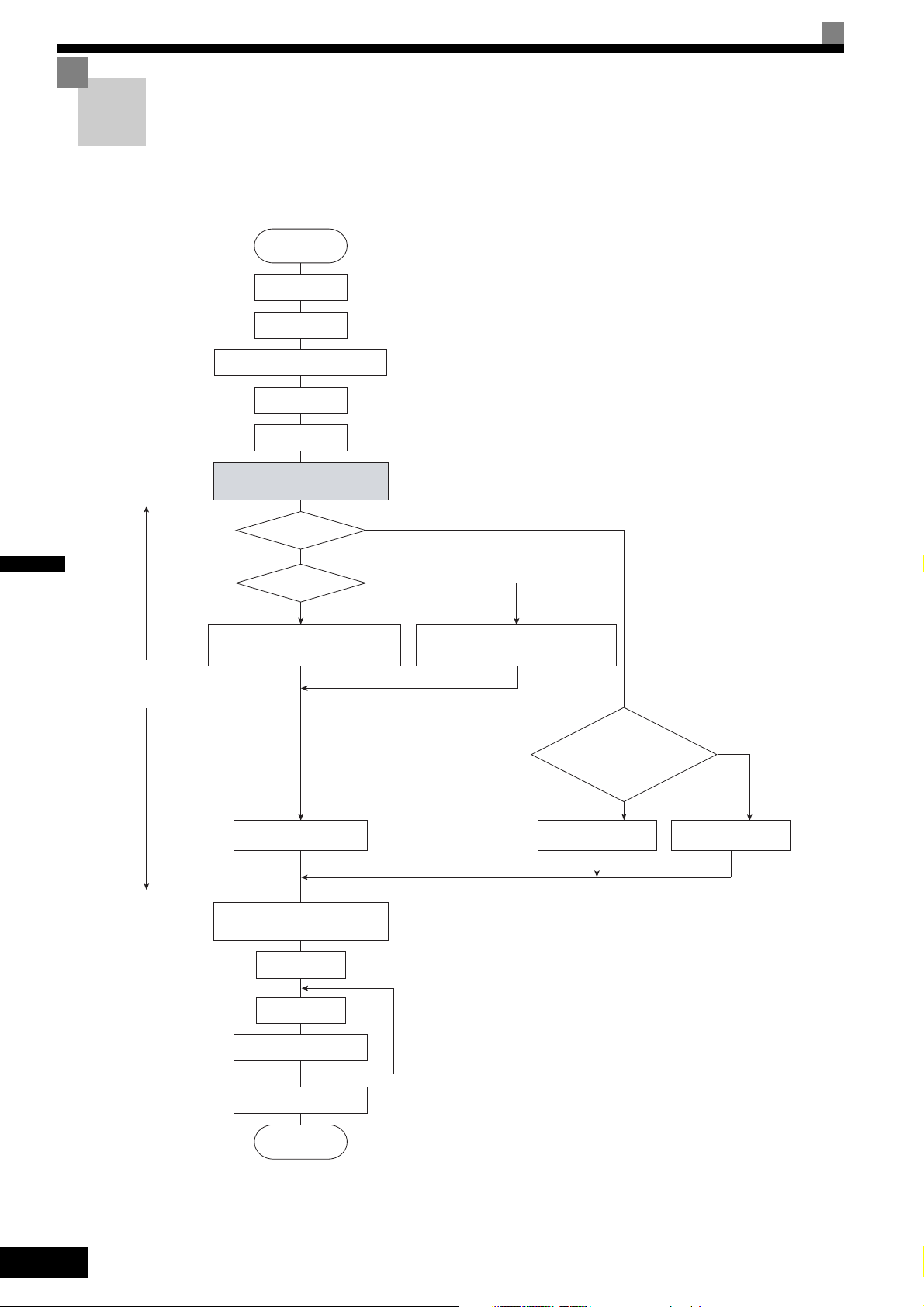
Procedura per il test di funzionamento
Eseguire il test di funzionamento in base a quanto indicato nel diagramma seguente. Al momento
dell'impostazione dei parametri di base, impostare sempre C6-01 (selezione carico di lavoro normale/pesante)
in base all'applicazione.
INIZIO
Installazione
Cablaggio
4
Selezionare il metodo
di funzionamento
Impostazioni in base
alla modalità di controllo
Posizionare il ponticello della
tensione di alimentazione
Accendere l'unità
Confermare stato
Impostazioni di base
(modalità di programmazione veloce)
Controllo V/f?
SÌ
PG?
NO
Controllo V/f
Impostare E1-03
Impostazione V/f predefinita: 200 V/50 Hz
(400 V/50 Hz)
Autotuning non rotante
per resistenza da linea a linea
*1
NO
SÌ
Controllo vettoriale (A1-02 = 2 o 3)*5
Controllo V/f con PG (A1-02=1)
Impostare E1-03, E2-04 ed F1-01
Impostazione V/f predefinita: 200 V/50 Hz
(400 V/50 Hz)
Funzionamento del motore
durante l'autotuning consentito?
*4
Autotuning
*2
SÌ
rotante
NO
*3
Autotuning
*6
non rotante
*6
4-2
Impostazioni per l'applicazione
(modalità di programmazione avanzata)
Funzionamento
a vuoto
Funzionamento
con carico
Regolazioni di ottimizzazione
e impostazioni dei parametri
Verificare/Memorizzare
i parametri
FINE
Fig. 4.1 Diagramma per il test di funzionamento
1. Impostazione per inverter di classe 400 V da 75 kW o superiori.
2. Se esiste un ingranaggio di riduzione tra il motore e il generatore
di impulsi, impostare il coefficiente di riduzione nei parametri
F1-12 ed F1-13 nella modalità di programmazione avanzata.
3. Utilizzare l'autotuning rotante per migliorare la precisione di
sintonizzazione ogni volta che il motore è pronto per essere
azionato.
4. Se per il motore si utilizza un cavo di lunghezza pari o superiore a
50 m per l'installazione corrente, eseguire l'autotuning non rotante
per resistenza da linea a linea solo sul sistema locale.
5. La modalità di controllo predefinita è Vettore ad anello aperto
(A1-02=2).
6. Se la frequenza di uscita massima e la frequenza base sono
differenti, impostare la frequenza di uscita massima (E1-04)
dopo l'autotuning.

Test di funzionamento
Tipo di applicazione
Per applicazioni con caratteristiche di coppia quadratica, quali pompe, ventole o compressori, impostare
C6-01 (selezione carico di lavoro normale/pesante) su 1 o 2, selezionando la modalità di carico di lavoro
normale (1 o 2) in base alla capacità di sovraccarico richiesta.
Per applicazioni con caratteristiche di coppia costante, quali nastri trasportatori, impostare sempre C6-01 su 0
(Carico di lavoro pesante). L'impostazione predefinita di C6-01 è 0 (Carico di lavoro pesante).
Per informazioni dettagliate sulla selezione di carico di lavoro normale/pesante, fare riferimento al Capitolo 6
Applicazione e selezioni per il sovraccarico.
Installazione del cavo di accoppiamento
(inverter di classe 400 V da 75 kW o superiore)
Il cavo di accoppiamento deve essere utilizzato per inverter di classe 400 V da 75 kW o superiori. Inserire il
cavo di accoppiamento nel connettore con il valore più vicino alla tensione effettiva di alimentazione.
Come impostazione di fabbrica il cavo viene inserito nella posizione 440 V. Se la tensione di alimentazione
non corrisponde a 440 V, è possibile modificare l'impostazione utilizzando la procedura riportata di seguito.
1. Disattivare l'alimentazione e attendere almeno 5 minuti.
2. Verificare che la spia CHARGE sia spenta.
3. Rimuovere il coperchio dei terminali.
4. Inserire il cavo di accoppiamento nel connettore appropriato per la tensione dell'inverter
(vedere la Fig. 4.2).
5. Reinstallare il coperchio dei terminali.
4
Alimentazione di classe 200 V
Alimentazione di classe 400 V
Terminali di ingresso
alimentazione
Fig. 4.2 Collegamenti per inverter ad alta capacità
Connettore
Cavo (posizione predefinita di
fabbrica)
Spia CHARGE
4-3
Accensione
Effettuare i controlli riportati di seguito, quindi accendere il sistema.
• Verificare che la tensione di alimentazione sia appropriata.
Classe 200 V: trifase, 200...240 Vc.c., 50/60 Hz
Classe 400 V: trifase, 380...480 Vc.c., 50/60 Hz
• Verificare che i terminali di uscita (U, V, W) siano collegati correttamente al motore.
• Verificare che il terminale del circuito di controllo e il dispositivo di controllo siano collegati
correttamente.
• Impostare tutti i terminali del circuito di controllo su OFF.
• Accertarsi di collegare correttamente la scheda di controllo della velocità PG, se installata.
Controllo dello stato del display
A seguito di una accensione normale e priva di problemi, il display appare come illustrato di seguito.
4
Rdy
Il monitoraggio della frequenza di
riferimento viene visualizzato sul display
dati.
Display per il funzionamento
standard
-DRIVE-
Frequency Ref
U1- 01=50.00Hz
U1-02=50.00Hz
U1-03=10.05A
Se invece si è verificato un errore, il display visualizzerà i dettagli relativi all'errore. In questo caso, fare
riferimento al Capitolo 7 Soluzione dei problemi. Di seguito è illustrato un esempio di display in caso di
errore.
Il messaggio visualizzato sul display
varierà in base al tipo di errore.
A sinistra è illustrato il display per un
Display in caso di errore
-DRIVE-
UV
DC Bus Undervolt
Sottotens.DC bus
allarme di bassa tensione.
4-4
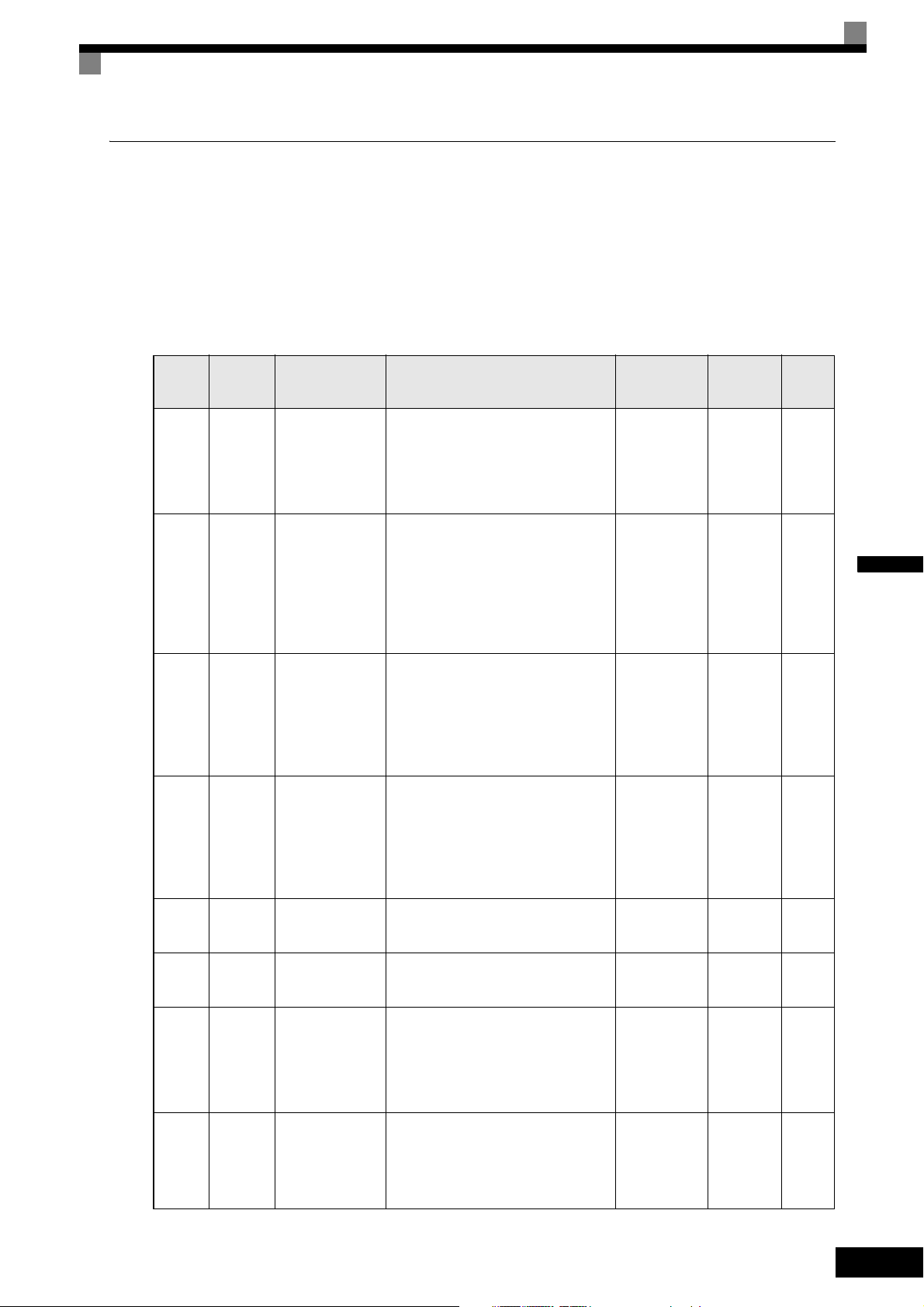
Impostazioni di base
Attivare la modalità di programmazione veloce (sul display LCD viene visualizzata la dicitura "QUICK"),
quindi impostare i parametri riportati di seguito.
Fare riferimento al Capitolo 3 Console di programmazione e modalità per le procedure relative al
funzionamento della console di programmazione e al Capitolo 5 Parametri utente e al Capitolo 6
Impostazione dei parametri in base alla funzione per informazioni dettagliate sui parametri.
Tabella 4.1 Impostazioni di base dei parametri
: deve essere impostato. : impostare secondo necessità.
Classe
Numero
del para-
metro
A1-02
b1-01
b1-02
b1-03
C1-01
C1-02
C6-01
Nome Descrizione
Imposta il metodo di controllo per
l'inverter.
Selezione metodo
di controllo
Selezione
frequenza di
riferimento
Selezione metodo
di funzionamento
Selezione metodo
di arresto
Tempo di
accelerazione 1
Tempo di
decelerazione 1
Selezione carico
di lavoro
normale/pesante
0: Controllo V/f
1: Controllo V/fcon PG
2: Controllo vettoriale ad anello aperto
3: Controllo vettore ad anello chiuso
Imposta il metodo di ingresso per la
frequenza di riferimento.
0: Console di programmazione
1: Terminale del circuito di controllo
(ingresso analogico)
2: Comunicazione MEMOBUS
3: Scheda accessoria
4: Ingresso a treno di impulsi
Imposta il metodo di ingresso del
comando di marcia.
0: Console di programmazione
1: Terminale del circuito di controllo
(ingresso digitale)
2: Comunicazione MEMOBUS
3: Scheda accessoria
Seleziona il metodo di arresto quando
viene inviato il comando di arresto.
0: Arresto per decelerazione
1: Arresto per inerzia
2: Arresto con frenatura c.c.
3: Arresto per inerzia con
temporizzatore
Imposta il tempo di accelerazione in
secondi affinché la frequenza di uscita
passi dallo 0% al 100%.
Imposta il tempo di decelerazione in
secondi affinché la frequenza di uscita
passi dal 100% allo 0%.
Imposta un carico di lavoro pesante o
normale in base al requisito
dell'applicazione.
0: Carico di lavoro pesante
1: Carico di lavoro normale 1
2: Carico di lavoro normale 2
Gamma di
impostazione
0...3 0 5-7
0...4 1
0...3 1
0...3 0
0,0...6000,0 10,0 s
0,0...6000,0 10,0 s
0 o 2 0
Imposta-
zione di
fabbrica
Pagina
4
5-9
6-7
6-64
6-82
5-9
6-12
6-64
6-82
5-9
6-14
5-19
6-19
5-19
6-19
5-24
6-2
C6-02
Selezione
frequenza
portante
Imposta la frequenza portante.
L'impostazione di fabbrica e la gamma
di impostazione dipendono
dall'impostazione del parametro C6-01.
0...F
Dipende
dall'impost
azione di
C6-01.
5-24
4-5
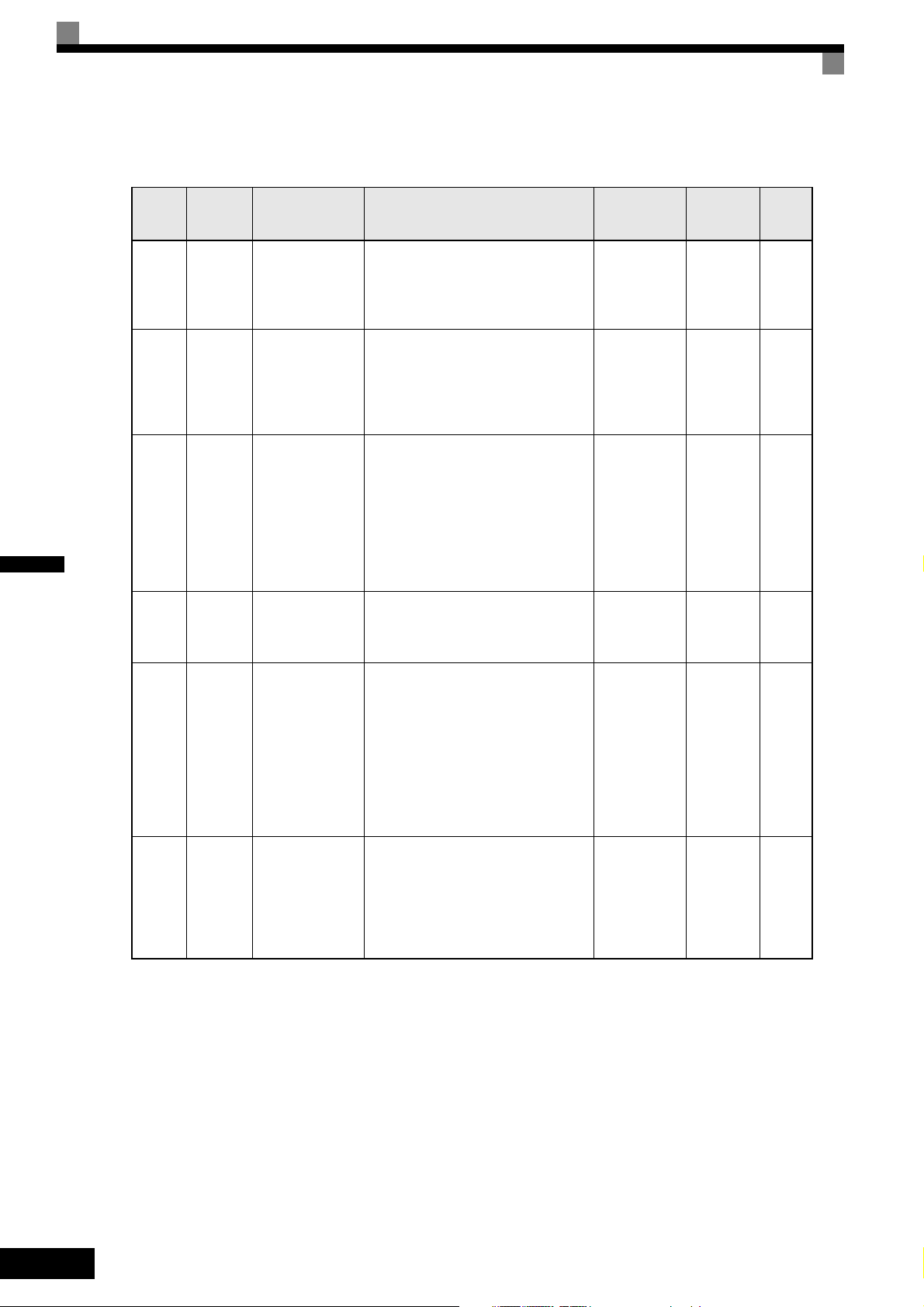
Tabella 4.1 Impostazioni di base dei parametri (Continua)
: deve essere impostato. : impostare secondo necessità.
4
Numero
del para-
metro
d1-
01...d116 e d1-
17
E1-01
E2-01
H4-02 e
H4-05
L1-01
L3-04
Nome Descrizione
Frequenze di
riferimento da 1 a
16 e frequenza di
riferimento di jog
Impostazione
tensione di
ingresso
Corrente
nominale del
motore
Guadagno uscita
AM e FM
Selezione
protezione del
motore
Selezione
prevenzione dello
stallo durante la
decelerazione
Imposta le velocità di riferimento
necessarie per il funzionamento a
velocità multipla o il jog.
Imposta la tensione di ingresso
nominale dell'inverter in volt.
Imposta la corrente nominale del
motore.
Può essere utilizzato per regolare
l'uscita analogica quando uno
strumento è collegato al terminale FM
o AM.
Utilizzato per abilitare o disabilitare la
funzione di protezione da sovraccarico
del motore.
0: Disabilitata
1: Protezione per motore ad uso
generico (ventilato)
2: Protezione per motore inverter
(raffreddato esternamente)
3: Protezione per motore speciale per il
controllo vettoriale
Quando si utilizza un'opzione di
frenatura dinamica (resistenza di
frenatura, moduli resistenza di
frenatura e moduli di frenatura),
accertarsi di impostare il parametro L304 su 0 (disabilitato) o su 3 (abilitato
con resistenza di frenatura).
Classe
* La gamma di impostazione è valida se è selezionato un carico di lavoro pesante (C6-01=0, impostazione predefinita). Se è selezionato un carico di lavoro
normale 1 o 2 (C6-01=1 o 2), la gamma di impostazione sarà compresa tra 0,0 e 400,0 Hz.
Gamma di
impostazione
0...150,00 Hz
*
155...255 V
(classe 200 V)
310...510 V
(classe 400 V)
10%...200%
della corrente
nominale
dell'inverter
0,0...1000,0%
0...3 1
0...3 1
Imposta-
zione di
fabbrica
d1-01...d1-
16: 0,00
Hz
d1-17: 6,00
Hz
200 V
(classe 200
V)
400 V
(classe 400
V)
Impostazio
ne per un
motore ad
uso
generico
della stessa
capacità
dell'inverte
r.
H4-02:
100%
H4-05:
50%
Pagina
5-25
6-10
5-30
6-110
5-31
6-48
6-108
5-47
5-50
6-48
5-53
6-24
4-6
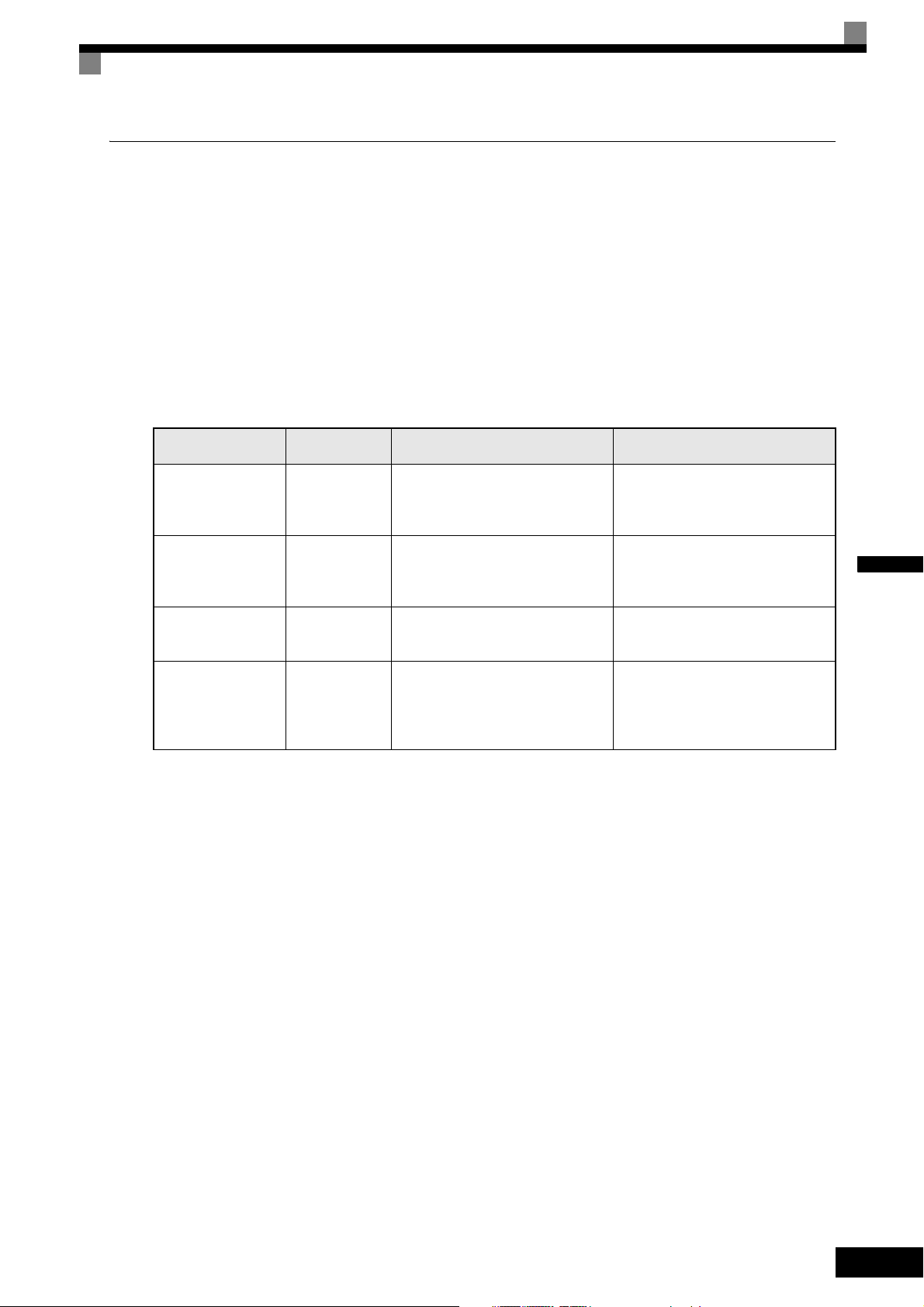
Impostazioni per i metodi di controllo
I metodi di autotuning disponibili dipendono dal metodo di controllo impostato per l'inverter.
Informazioni generali sulle impostazioni
Selezionare le impostazioni necessarie nella modalità di programmazione veloce e di autotuning in base alla
Impostazione del metodo di controllo
Selezionare la modalità di controllo appropriata per l'applicazione. La
ciascuna modalità di controllo.
Tabella 4.2 Proprietà delle modalità di controllo
Modalità di
controllo
Controllo V/f A1-02 = 0
Controllo V/f con PG A1-02 = 1
Comando vettore ad
anello aperto
Comando vettoriale
ad anello chiuso
Impostazione
parametro
Controllo del rapporto tensione/
frequenza fisso
Controllo del rapporto tensione/
frequenza con compensazione della
velocità utilizzando un generatore di
impulsi
A1-02 = 2
(impostazione di
fabbrica)
A1-02 = 3 Controllo vettoriale ad anello chiuso
Controllo vettoriale della corrente
senza un generatore di impulsi
Controllo di base Applicazioni principali
Tabella 4.2
mostra le proprietà principali di
Controllo di velocità variabile, in particolar modo il controllo di più motori
con un inverter e sostituendo inverter
esistenti
Applicazioni che richiedono controllo
della velocità ad alta precisione utilizzando un generatore di impulsi dal
lato macchina
Controllo variabile della velocità,
applicazioni che richiedono precisione di velocità e coppia
Controllo a elevatissime prestazioni
con un generatore di impulsi (semplici
servoazionamenti, controllo della velocità ad alta precisione, controllo della
coppia e limitazione della coppia)
Fig. 4.1
.
4
Nota Con controllo vettoriale ad anello aperto o chiuso, il motore e l'inverter devono essere collegati 1:1. Per garantire un controllo stabile la capacità del
motore deve essere compresa tra il 50% e il 100% della capacità degli inverter.
Controllo V/f senza PG (A1-02 = 0)
• Impostare una delle configurazioni V/f fisse (E1-03=0...E) oppure specificare una configurazione V/f
impostata dall'utente (E1-03=F) in base alle caratteristiche relative al carico e al motore utilizzando
l'intervallo da E1-04 a E1-13 nella modalità di programmazione avanzata.
Funzionamento standard di un motore ad
uso generico a 50 Hz:
Funzionamento standard di un motore ad
uso generico a 60 Hz:
• Se per il motore si utilizza un cavo di lunghezza pari o superiore a 50 m per l'installazione corrente oppure
E1-03 = 0 o F (predefinito)
Se E1-03 = F, l'impostazione predefinita nella configurazione utente nell'intervallo da E1-04 a E1-13 è per 00 Hz
E1-03 = 1
se il carico è talmente pesante da generare lo stallo del motore, eseguire l'autotuning non rotante per
resistenza da linea a linea. Per informazioni dettagliate sull'autotuning non rotante, fare riferimento alla
sezione Autotuning.
Controllo V/f con PG (A1-02=1)
In aggiunta alle impostazioni per il controllo V/f senza PG, è necessario eseguire le seguenti impostazioni:
• Impostare il numero di poli del motore in E2-04 (numero di poli del motore).
• Impostare il numero di impulsi per giro in F1-01 (generatore di impulsi costante). Se esiste un ingranaggio
di riduzione tra il motore e il generatore di impulsi, impostare il coefficiente di riduzione nei parametri
F1-12 ed F1-13 nella modalità di programmazione avanzata.
4-7
4
Controllo vettoriale ad anello aperto (A1-02 = 2)
Eseguire sempre l'autotuning. Se il motore può essere azionato, eseguire l'autotuning rotante. Se il motore non
può essere azionato, eseguire l'autotuning non rotante. Per informazioni dettagliate sull'autotuning, fare
riferimento alla sezione Autotuning.
Controllo vettoriale ad anello chiuso (A1-02=3)
Eseguire sempre l'autotuning. Se il motore può essere azionato, eseguire l'autotuning rotante. Se il motore non
può essere azionato, eseguire l'autotuning non rotante. Per informazioni dettagliate sull'autotuning, fare
riferimento alla sezione Autotuning.
Autotuning
Eseguire l'autotuning per impostare automaticamente i parametri del motore quando si utilizza il controllo
vettoriale ad anello aperto o chiuso, se il cavo del motore è lungo o quando sono state apportate modifiche
all'installazione.
Impostazione della modalità di autotuning
È possibile impostare una delle tre seguenti modalità di autotuning:
• Autotuning rotante
• Autotuning non rotante
• Autotuning non rotante solo per resistenza da linea a linea
Autotuning rotante (T1-01 = 0)
L'autotuning rotante è utilizzato solo per il controllo vettoriale ad anello aperto e chiuso. Impostare T1-01 su
0, immettere i dati dalla targhetta del motore, quindi premere il tasto RUN sulla console di programmazione.
L'inverter farà funzionare il motore per circa 1 minuto e imposterà automaticamente i parametri del motore
richiesti.
Autotuning non rotante (T1-01 = 1)
L'autotuning non rotante è utilizzato solo per il controllo vettoriale ad anello aperto e chiuso. Impostare T1-01
su 1, immettere i dati dalla targhetta del motore, quindi premere il tasto RUN sulla console di
programmazione. L'inverter fornirà potenza al motore non rotante per circa 1 minuto e imposterà
automaticamente alcuni dei parametri del motore. I restanti parametri del motore verranno impostati
automaticamente durante il funzionamento per la prima volta.
Autotuning non rotante per resistenza da linea a linea (T1-01 = 2)
L'autotuning non rotante per resistenza da linea a linea può essere utilizzato con qualsiasi modalità di
controllo. Questo è l'unico autotuning utilizzabile per il controllo V/f e il controllo V/f con PG.
L'autotuning non rotante per resistenza da linea a linea può essere utilizzato per migliorare le prestazioni
quando il cavo del motore è lungo, la lunghezza del cavo è stata modificata o il motore e l'inverter hanno
capacità differenti.
Per eseguire l'autotuning con il controllo V/f o il controllo V/f con PG, impostare T1-02 (potenza nominale
motore) e T1-04 (corrente nominale motore), quindi premere il tasto RUN sulla console di programmazione.
L'inverter fornirà potenza al motore non rotante per circa 20 secondi e misurerà automaticamente la resistenza
da linea a linea del motore e la resistenza del cavo.
4-8

Precauzioni da osservare prima di utilizzare l'autotuning
Accertarsi di rispettare le seguenti precauzioni prima di utilizzare la funzione di autotuning.
• L'autotuning di un inverter è completamente differente rispetto all'autotuning di un servosistema.
L'autotuning dell'inverter regola automaticamente i parametri in base ai dati del motore rilevati, mentre
l'autotuning del servosistema regola i parametri in base al carico rilevato.
• Quando è richiesta precisione per la velocità o la coppia ad alte velocità (pari o superiore al 90% della
velocità nominale), utilizzare un motore con una tensione nominale inferiore di circa 20 V rispetto alla
tensione di alimentazione di ingresso per gli inverter di classe 200 V e di circa 40 V per gli inverter di
classe 400 V. Se la tensione nominale del motore corrisponde alla tensione di alimentazione di ingresso,
l'uscita di tensione dall'inverter non sarà stabile ad alte velocità e non si otterranno prestazioni sufficienti.
• Utilizzare l'autotuning non rotante ogni qualvolta il carico non può essere scollegato dal motore.
• Utilizzare l'autotuning rotante ogniqualvolta è necessaria una precisione elevata oppure per un motore che
non è collegato a un carico.
• Se si esegue l'autotuning rotante per un motore collegato a un carico, i dati del motore rilevati non saranno
precisi e le prestazioni potrebbero risultare scarse. Non eseguire mai l'autotuning rotante per un motore
collegato a un carico.
• Se la lunghezza del cablaggio tra l'inverter e il motore viene modificata e risulta pari o superiore a 50 m,
eseguire un autotuning non rotante per resistenza da linea a linea.
• Se il cavo del motore è lungo (pari o superiore a 50 m), eseguire un autotuning non rotante per resistenza
da linea a linea.
• Se si utilizza una frenatura meccanica, accertarsi che non venga aperta per l'autotuning non rotante.
Verificare invece che venga aperta per l'autotuning rotante.
• Durante l'autotuning non rotante il motore viene alimentato, anche se non gira. Non toccare il motore fino
al completamento dell'autotuning.
• Nella tabella riportata di seguito è riportato lo stato degli ingressi e delle uscite multifunzione durante
l'autotuning.
Modalità di sintonizzazione Ingressi multifunzione Uscite multifunzione
Autotuning rotante Non funzionano
Autotuning non rotante Non funzionano
Autotuning non rotante per
resistenza da linea a linea
Non funzionano
Come durante il
funzionamento normale.
Mantengono lo stato che
avevano al momento
dell'avvio dell'autotuning.
Mantengono lo stato che
avevano al momento
dell'avvio dell'autotuning.
4
• Per cancellare l'autotuning premere il tasto STOP sulla console di programmazione.
4-9
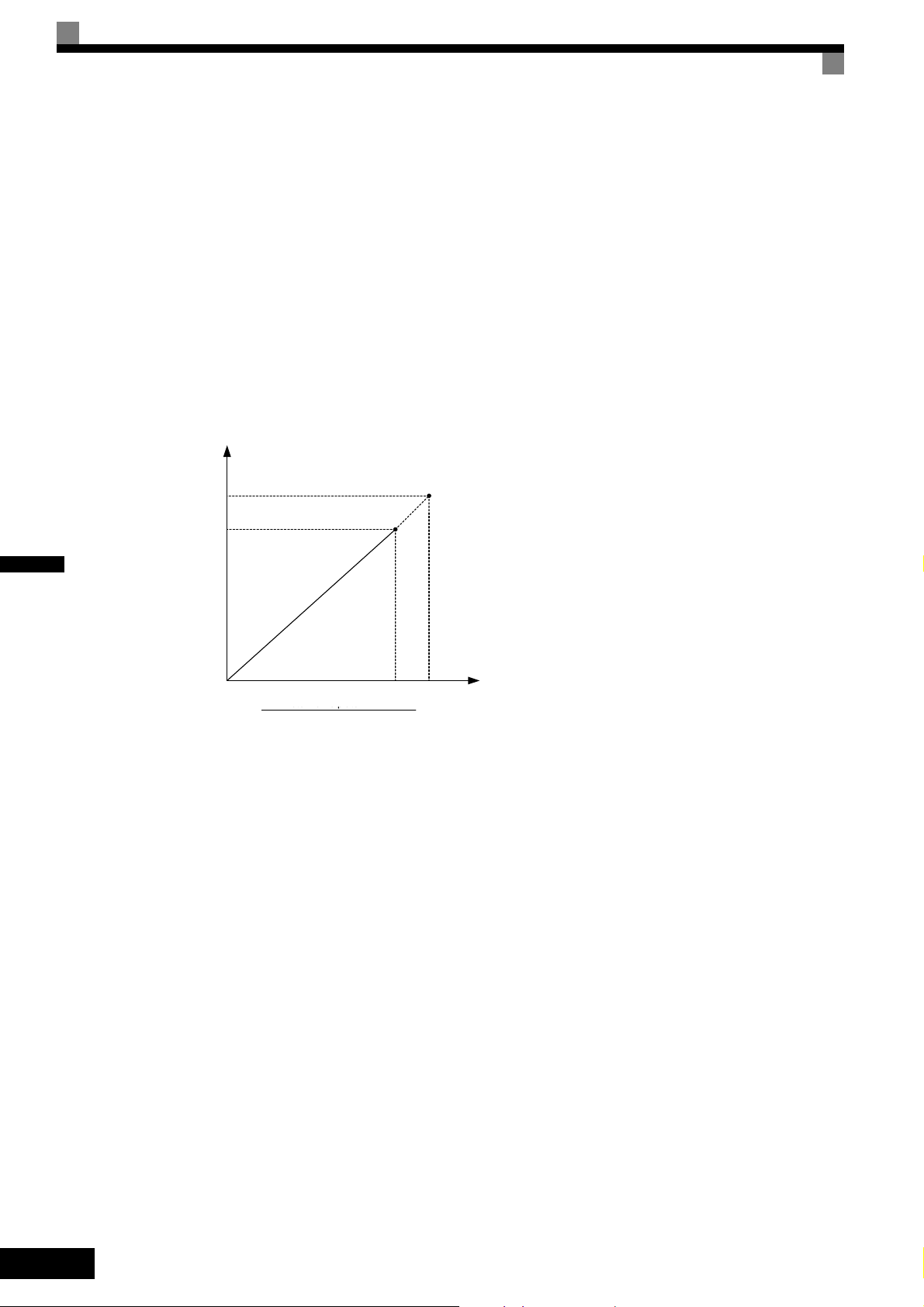
Precauzioni da osservare per l'autotuning rotante e non rotante
• Se la tensione nominale del motore è superiore alla tensione di alimentazione, ridurre il valore di tensione
di base come illustrato nella Fig. 4.3 per evitare la saturazione della tensione di uscita dell'inverter.
Attenersi alla seguente procedura per eseguire l'autotuning:
1. Immettere la tensione dei alimentazione in T1-03 (tensione nominale del motore).
2. Immettere i risultati della seguente formula in T1-05 (frequenza base del motore):
4
T1-05 Frequenza di base riportata sulla targhetta del motore
-------------------------------------------------------------------------
×=
Tensione nominale del motore
T1-03
3. Eseguire l'autotuning.
Dopo aver completato l'autotuning, impostare E1-04 (frequenza di uscita massima) sulla frequenza base
indicata sulla targhetta del motore.
Tensione di uscita
Output voltage
Tensione nominale
Rated voltage
riportata sulla
from motor
targhetta del motore
name plate
T1-03
Frequenza di uscita
0
Frequenza di base riportata
Base frequency from
sulla targhetta del motore
motor name plate
Tensione nominale riportata
Rated voltage from motor
sulla targhetta del motore
name plate
x T1-03
Base frequency
Frequenza di base riportata
from motor name
sulla targhetta del motore
plate
Fig. 4.3 Impostazione della frequenza base del motore e della tensione di ingresso dell'inverter
Output frequency
Quando è richiesta precisione per la velocità ad alte velocità (pari o superiore al 90% della velocità
•
nominale), impostare T1-03 (tensione nominale del motore) sulla tensione di alimentazione di ingresso
In questo caso la corrente in uscita aumenterà ad alte velocità nel momento in cui viene ridotta la tensione di
alimentazione in ingresso. Accertarsi di impostare la corrente dell'inverter con un certo margine.
Precauzioni da osservare dopo l'autotuning rotante e non rotante
Se la frequenza di uscita massima e la frequenza base sono differenti, impostare la frequenza di uscita
massima (E1-04) dopo l'autotuning.
×
0,9.
4-10

Impostazione dei parametri per l'autotuning
Prima di eseguire l'autotuning, è necessario impostare i seguenti parametri.
Tabella 4.3 Impostazioni dei parametri prima dell'autotuning
Numero
del
parame-
tro
T1-00
T1-01
T1-02
T1-03
T1-04
T1-05
T1-06
T1-07
T1-08
* 1. Visualizzato solo se è impostato un comando di commutazione del motore per un ingresso multifunzione digitale (uno dei parametri da H1-01 a H1-05
impostato su 16).
* 2. Per il controllo V/f e per il controllo V/f con PG è consentita solo l'impostazione 2 (autotuning non rotante solo per resistenza da linea a linea).
* 3. Per garantire un controllo vettoriale stabile l'impostazione deve essere compresa tra il 50% e il 100%.
* 4. La tensione e la frequenza per un motore di un inverter o di un controllo vettoriale possono essere inferiori rispetto a quelle per un motore ad uso
generico. Accertarsi sempre di utilizzare l'impostazione indicata sulla targhetta o nei report di verifica. Inoltre, se si conoscono i valori delle
impostazioni per il funzionamento a vuoto, impostare la tensione a vuoto in T1-03 e la frequenza a vuoto in T1-05 per una maggiore precisione.
* 5. La gamma di impostazione è valida se è selezionato un carico di lavoro pesante (C6-01=0, impostazione predefinita). Se è selezionato un carico di
lavoro normale 1 o 2 (C6-01=1 o 2), la gamma di impostazione sarà compresa tra 0,0 e 400,0 Hz.
Nome
Display
Display V/f
Selezione
motore 1/2
*1
Selezione
motore
Selezione
modalità
autotuning
Tuning Mode
Sel
Potenza
nominale
motore
Pot.Nom.
Motore
Tensione
nominale del
motore
Tensione
Nominale
Corrente
nominale del
motore
Corrente
Nominale
Frequenza
nominale
motore
Frequenz
Nominale
Numero di
poli del
motore
Numero di
poli
Velocità
nominale del
motore
Velocità
Nominale
Numero di
impulsi PG
per giro
Encoder IMP/
GIRO
Impostare la posizione in cui si desidera memorizzare i dati del motore sul
quale è stato eseguito l'autotuning.
1: Da E1 a E2 (motore 1)
2: Da E3 a E4 (motore 2)
Impostare la modalità di autotuning.
0: Autotuning rotante
1: Autotuningnon rotante
2: Autotuning non rotante solo per
resistenza da linea a linea
Impostare la potenza di uscita del
motore in kilowatt.
Impostare la tensione nominale del
*4
motore.
Impostare la corrente nominale del
motore in ampere.
Impostare la frequenza base del
*4
motore.
Impostare il numero di poli del motore. Da 2 a 48 poli 4 poli – – Sì Sì
Impostare la velocità di base del
motore in giri/min.
Imposta il numero di impulsi per il
generatore o encoder di impulsi per
ogni giro del motore senza un fattore
moltiplicativo
Gamma di
impostazione
1 o 2 1 Sì Sì Sì Sì
0...2
10%...200%
dell'uscita nomi-
nale dell'inver-
ter
0...255,0 V
(classe 200 V)
0...510,0 V
(classe 400 V)
10%...200%
della corrente
nominale
dell'inverter
0...150,0 Hz
0...24000
0...60000 1024 - Sì - Sì
*3
Impostazione
di fabbrica
2 (V/f e V/f
con PG)
0 (vettoriale ad
anello
aperto)
Uguale
all'uscita
nominale
dell'inverter
200,0 V
(classe 200 V)
400,0 V
(classe 400 V)
Uguale a
quella di un
motore ad uso
generico con
la stessa capa-
*3
cità dell'inver-
*5
50,0 Hz – – Sì Sì
giri/min
*2
ter.
1750
Dati visualizzati durante
l'autotuning
Vetto-
V/f
riale ad
con
anello
PG
aperto
Sì
Sì
(solo 2)
(solo 2)Sì Sì
Sì Sì Sì Sì
––SìSì
Sì Sì Sì Sì
––SìSì
Vetto-
riale ad
anello
chiuso
4
4-11

4
Impostazioni per l'applicazione
I parametri possono essere impostati in base alle necessità in modalità di programmazione avanzata, ossia con
la dicitura "ADV" presente sul display LCD. Tutti i parametri che possono essere impostati in modalità di
programmazione veloce vengono visualizzati e possono essere impostati anche in modalità di
programmazione avanzata.
Esempi di impostazioni
• Di seguito sono riportati esempi di impostazioni per le applicazioni.
• Quando si utilizza una resistenza di frenatura installata sull'inverter (ERF), impostare L8-01 su 1 per
abilitare la protezione da surriscaldamento per la resistenza di frenatura ERF.
• Per evitare che la macchina funzioni all'indietro, impostare b1-04 su 1 per disabilitare la rotazione indietro.
• Per aumentare del 10% la velocità di un motore a 50 Hz, impostare E1-04 su 55,0 Hz.
• Per utilizzare un segnale analogico nell'intervallo da 0 a 10 V per un motore a 50 Hz per il funzionamento
a velocità variabile tra 0 e 45 Hz (diminuzione della velocità dallo 0% al 90%), impostare H3-02 sul
90,0%.
• Per limitare la gamma di velocità tra il 20% e l'80%, impostare d2-01 su 80,0% e d2-02 su 20,0%.
Funzionamento a vuoto
Questa sezione descrive il test di funzionamento con il motore in assenza di carico, ossia la macchina non è
collegata al motore. Per evitare guasti causati dal cablaggio del circuito di controllo, si consiglia di utilizzare
la modalità LOCAL. Premere il tasto LOCAL/REMOTE sulla console di programmazione per impostare la
modalità LOCAL (le spie SEQ e REF sulla console di programmazione devono essere spente).
Prima di azionare l'inverter dalla console di programmazione, controllare sempre che siano state adottate le
misure di sicurezza appropriate per macchina e motore. Verificare che il motore funzioni normalmente e che
sull'inverter non sia visualizzato alcun messaggio di errore. Per le applicazioni in cui la macchina può essere
azionata solo in una direzione, controllare la direzione di rotazione del motore.
Il funzionamento con frequenza di riferimento di jog (d1-17, impostazione predefinita 6,00 Hz) può essere
avviato e interrotto premendo e rilasciando il tasto JOG sulla console di programmazione. Se il circuito di
controllo esterno non consente il funzionamento dalla console di programmazione, controllare che i circuiti
relativi all'arresto di emergenza e i meccanismi di sicurezza della macchina funzionino correttamente, quindi
avviare il funzionamento in modalità REMOTE, ovvero con un segnale dal terminale del circuito di controllo.
È necessario adottare sempre le opportune precauzioni di sicurezza prima di azionare l'inverter e il motore
collegato.
Per azionare l'inverter, è necessario inviare uno dei comandi di marcia (avanti o indietro) e una frequenza di
NOTA
riferimento (o comando multivelocità).
4-12
Funzionamento con carico
Collegamento del carico
• Dopo aver verificato l'arresto completo del motore, collegare il sistema meccanico.
• Quando si fissa l'albero del motore sul sistema meccanico, accertarsi di stringere a fondo tutte le viti.

Funzionamento mediante console di programmazione
• Utilizzare la console di programmazione per avviare il funzionamento in modalità LOCAL utilizzando la
stessa procedura descritta per il funzionamento a vuoto.
• Accertarsi che il tasto STOP della console di programmazione sia facilmente accessibile, in caso si
verifichino problemi durante il funzionamento.
• Impostare dapprima la frequenza di riferimento su una velocità bassa, ad esempio pari a un decimo della
velocità di funzionamento normale.
Controllo dello stato operativo
• Dopo aver controllato che la direzione di funzionamento sia corretta e che la macchina funzioni
regolarmente a velocità bassa, è possibile aumentare la frequenza di riferimento.
• Dopo aver modificato la frequenza di riferimento o la direzione di rotazione, controllare che il motore non
generi vibrazioni o rumori anomali. Verificare sul display di monitoraggio che il parametro U1-03
(corrente di uscita) non sia troppo alto.
• In caso di oscillazioni, vibrazioni o altri problemi originati dal sistema di controllo, fare riferimento alla
Tabella 4.4.
Verifica e registrazione dei parametri
Utilizzare la modalità di verifica (dicitura "VERIFY" presente sul display LCD) per controllare i parametri
modificati per il test di funzionamento e registrarli in un'apposita tabella.
In modalità di verifica verranno inoltre visualizzati tutti i parametri eventualmente modificati dall'autotuning.
Se necessario, è possibile copiare le impostazioni modificate dall'inverter in un'area di registrazione della
console di programmazione utilizzando la funzione di copia nei parametri o3-01 e o3-02 visualizzati in
modalità di programmazione avanzata. Le impostazioni salvate nella console di programmazione possono
essere copiate nuovamente sull'inverter per velocizzare il ripristino del sistema nel caso in cui sia necessario
sostituire l'inverter.
È inoltre possibile utilizzare le funzioni riportate di seguito per gestire i parametri.
• Salvataggio dei valori dei parametri utente iniziali
• Impostazione dei livelli di accesso ai parametri
• Impostazione di una password
Salvataggio dei valori dei parametri utente iniziali (o2-03)
• Se si imposta o2-03 su 1 dopo aver completato il test di funzionamento, le impostazioni dei parametri
verranno salvate in un'area di memoria separata nell'inverter. Se le impostazioni dell'inverter vengono
modificate per qualsiasi motivo, sarà possibile inizializzare i parametri utilizzando le impostazioni salvate
nell'area di memoria separata impostando A1-03 (Inizializzazione) su 1110.
4
Livelli di accesso ai parametri (A1-01)
• Per fare in modo che non sia possibile modificare i parametri, è possibile impostare A1-01 su 0 (solo
monitoraggio). È anche possibile impostare A1-01 su 1 (parametri definiti dall'utente) per visualizzare solo
i parametri richiesti dalla macchina o dall'applicazione in una modalità di programmazione. Tali parametri
possono essere determinati impostando i parametri A2-XX.
Password (A1-04 e A1-05)
• Quando è impostato il livello di accesso di solo monitoraggio (A1-01 = 0), è possibile impostare la
password che deve essere immessa per poter visualizzare i parametri.
4-13

4
Suggerimenti di regolazione
In caso di vibrazioni, oscillazioni o altri problemi nel sistema di controllo durante il test di funzionamento,
modificare i parametri riportati nella seguente tabella in base al metodo di controllo. Questa tabella contiene
solo i parametri generalmente più utilizzati.
Tabella 4.4 Regolazione parametri
Metodo di
controllo
Controllo
V/f
(A1-02 =
0 o 1)
Controllo
vettoriale ad
anello aperto
(A1-02 = 2)
Nome (numero del para-
metro)
Guadagno di prevenzione delle vibrazioni
(N1-02)
Selezione frequenza portante
(C6-02)
Costante di ritardo del
primo ordine della compensazione di coppia
(C4-02)
Guadagno compensazione di coppia (C4-01)
Tensione frequenza
intermedia di uscita
(E1-08)
Tensione frequenza
minima di uscita
(E1-10)
Guadagno controllo di
rilevamento della retroazione della velocità
(AFR)
(N2-01)
Costante di ritardo del
primo ordine della compensazione di coppia
(C4-02)
Ritardo del primo ordine
della compensazione
allo scorrimento
(C3-02)
Guadagno per la compensazione allo scorrimento (C3-01)
Effetto
Controllo delle oscillazioni e delle vibrazioni a
velocità media
(10...40 Hz)
• Riduzione dei disturbi
magnetici del motore
• Controllo delle oscillazioni e delle vibrazioni a bassa velocità
• Aumento della risposta della velocità e
della coppia
• Controllo delle oscillazioni e delle vibrazioni
• Miglioramento della
coppia a bassa velocità
(10 Hz o inferiore)
• Controllo delle oscillazioni e delle vibrazioni
• Miglioramento della
coppia a bassa velocità
• Controllo di scosse
all'avvio
• Aumento della risposta della velocità e
della coppia
• Controllo delle oscillazioni e delle vibrazioni a velocità media
(10...40 Hz)
• Aumento della risposta della velocità e
della coppia
• Controllo delle oscillazioni e delle vibrazioni
• Aumento della risposta della velocità
• Miglioramento della
stabilità della velocità
• Miglioramento della
stabilità della velocità
Imposta-
zione di
fabbrica
1,00 0,50...2,00
Dipendente dalla
capacità
Dipendente dalla
capacità
1,00 0,50...1,50
Dipende
dalla capacità e dalla
tensione
1,00 0,50...2,00
20 ms 20...100 ms
200 ms
1,0 0,5...1,5
Impostazione
consigliata
0...predefinito
200...1000 ms
Dal valore
predefinito al
valore prede-
finito + 5 V
100...500 ms
Metodo di modifica
• Ridurre il valore se la coppia
non è sufficiente per carichi
pesanti.
• Aumentare il valore se si
verificano oscillazioni o
vibrazioni con carichi leggeri.
• Aumentare il valore in caso
di eccessivi disturbi magnetici del motore.
• Ridurre il valore se si verificano oscillazioni o vibrazioni
a bassa o media velocità.
• Ridurre il valore se la risposta della velocità o della coppia è troppo lenta.
• Aumentare il valore se si
verificano oscillazioni o
vibrazioni.
• Aumentare il valore se la
coppia non è sufficiente a
bassa velocità.
• Ridurre il valore se si verificano oscillazioni o vibrazioni
con carichi leggeri.
• Aumentare il valore se la
coppia non è sufficiente a
bassa velocità.
• Ridurre il valore se l'entità
*
delle scosse all'avvio è elevata.
• Ridurre il valore se la risposta della velocità o della coppia è troppo lenta.
• Aumentare il valore se si
verificano oscillazioni o
vibrazioni.
• Ridurre il valore se la risposta della velocità o della coppia è troppo lenta.
• Aumentare il valore se si
verificano oscillazioni o
vibrazioni.
• Ridurre il valore se la risposta della velocità è bassa.
• Aumentare il valore se la
velocità non è stabile.
• Aumentare il valore se la
risposta della velocità è lenta.
• Ridurre il valore se la velocità è troppo alta.
4-14
Tabella 4.4 Regolazione parametri (Continua)
Metodo di
controllo
Controllo
vettoriale ad
anello aperto
(A1-02 = 2)
Controllo
vettoriale ad
anello chiuso
(A1-02 = 3)
* L'impostazione è disponibile per gli inverter di classe 200 V. Per gli inverter di classe 400 V è necessario raddoppiare la tensione.
Nome (numero del para-
metro)
Selezione della frequenza portante (C6-02)
Tensione frequenza
intermedia di uscita
(E1-08)
Tensione frequenza
minima di uscita
(E1-10)
Guadagno proporzionale ASR 1 (C5-01) e
Guadagno proporzionale ASR 2 (C5-03)
Tempo integrale ASR 1
(alta velocità) (C5-02) e
Tempo integrale ASR 2
(bassa velocità) (C5-04)
Frequenza di commutazione ASR (C5-07)
Ritardo del primo ordine
ASR (C5-06)
Selezione della frequenza portante (C6-02)
Effetto
• Riduzione dei disturbi
magnetici del motore
• Controllo delle oscillazioni e delle vibrazioni a bassa velocità
(10 Hz o inferiore)
• Miglioramento della
coppia a bassa velocità
• Controllo di scosse
all'avvio
• Risposta della velocità e della coppia
• Controllo delle oscillazioni e delle vibrazioni
• Risposta della velocità e della coppia
• Controllo delle oscillazioni e delle vibrazioni
Commutazione del
tempo integrale e del
guadagno proporzionale
ASR in base alla frequenza di uscita
• Controllo delle oscillazioni e delle vibrazioni
• Riduzione dei disturbi
magnetici del motore
• Controllo delle oscillazioni e delle vibrazioni a bassa velocità
(3 Hz o inferiore)
Imposta-
zione di
fabbrica
Dipendente dalla
capacità
Dipende
dalla capacità e dalla
tensione
20,00 10,00...50,00
0,500 s
0,0 Hz
0,004 s 0,004...0,020
Dipende
dalla capacità
Impostazione
consigliata
0...predefinito
Dal valore
predefinito al
valore prede-
finito + 5 V
0,300...
1,000 s
Frequenza di
uscita compresa tra 0,0 e
il valore massimo
2,0 kHz...predefinito
Metodo di modifica
• Aumentare il valore in caso
di eccessivi disturbi magnetici del motore.
• Ridurre il valore se si verificano oscillazioni o vibrazioni
a bassa velocità.
• Aumentare il valore se la
risposta della velocità o della
coppia è troppo lenta.
• Ridurre il valore se l'entità
*
delle scosse all'avvio è elevata.
• Aumentare il valore se la
risposta della velocità o della
coppia è troppo lenta.
• Ridurre il valore se si verificano oscillazioni o vibrazioni.
• Ridurre il valore se la risposta della velocità o della coppia è troppo lenta.
• Aumentare il valore se si
verificano oscillazioni o
vibrazioni.
Imposta la frequenza di uscita
in corrispondenza della quale
modificare il tempo integrale e
il guadagno proporzionale se
non è possibile utilizzare gli
stessi valori per il funzionamento ad alta e bassa velocità.
Aumentare il valore se la rigidità della macchina è bassa e il
sistema vibra facilmente.
• Aumentare il valore in caso
di eccessivi disturbi magnetici del motore.
• Ridurre il valore se si verificano oscillazioni o vibrazioni
a bassa o media velocità.
4
• Non modificare il valore predefinito di 1,00 per il guadagno della compensazione di coppia (C4-01)
quando si utilizza il controllo vettoriale ad anello aperto.
• Se le velocità non sono corrette durante la rigenerazione nel controllo vettoriale ad anello aperto, abilitare
la compensazione allo scorrimento durante la rigenerazione (C3-04 = 1).
• Utilizzare la compensazione allo scorrimento per migliorare il controllo della velocità durante il controllo
V/f (A1-02 = 0).
Impostare la corrente nominale del motore (E2-01), lo scorrimento nominale del motore (E2-02) e la
corrente a vuoto (E2-03), quindi impostare il guadagno di compensazione allo scorrimento (C3-01) su un
valore compreso tra 0,5 e 1,5. L'impostazione predefinita per il controllo V/f è C3-01 = 0,0
(compensazione allo scorrimento disabilitata).
• Per migliorare la stabilità e la risposta della velocità in modalità di controllo V/f con PG (A1-02 = 1), è
possibile impostare i parametri ASR (da C5-01 a C5-05) su un valore compreso tra 0,5 e 1,5 volte
l'impostazione predefinita (normalmente non è necessario modificare questa impostazione).
4-15
4
I parametri riportati di seguito incideranno indirettamente anche sul sistema di controllo.
Tabella 4.5 Parametri che incidono indirettamente sul controllo e relative funzioni
Nome (numero del parametro) Funzione
Selezione carico di lavoro normale/pesante
(C6-01)
Funzione DWELL (da b6-01 a b6-04) Utilizzato per i carichi pesanti o per macchine con ampio gioco.
Tempi di accelerazione/decelerazione
(da C1-01 a C1-11)
Caratteristiche della curva ad S (da C2-01 a
C2-04)
Frequenze di salto (da d3-01 a d3-04)
Costante di tempo del filtro per l'ingresso
analogico (H3-12)
Prevenzione dello stallo (da L3-01 a L3-06)
Limiti di coppia (da L7-01 a L7-04)
Controllo in avanti (da N5-01 a N5-03)
Imposta la coppia massima e la capacità di sovraccarico.
Regolando i tempi di accelerazione e decelerazione, la coppia ne viene
influenzata indirettamente.
Utilizzato per prevenire scosse all'inizio e alla fine di accelerazione/
decelerazione.
Utilizzato per evitare il funzionamento continuo a possibili frequenze di
risonanza della macchina.
Utilizzato per prevenire fluttuazioni nei segnali di ingresso analogico
generati da disturbi.
Utilizzato per prevenire OV (errori di sovratensione) e lo stallo del
motore per i carichi pesanti o la decelerazione/accelerazione rapida. La
prevenzione dello stallo è abilitata per impostazione predefinita e
generalmente non è necessario modificarla. Tuttavia, quando si utilizza
una resistenza di frenatura, disabilitare la prevenzione dello stallo durante
la decelerazione impostando L3-04 su 0 o su 3 (abilitato con resistenza di
frenatura).
Imposta la coppia massima durante il controllo vettoriale ad anello aperto
o chiuso. Se si imposta un valore troppo basso, potrebbe verificarsi lo
stallo in presenza di carichi pesanti.
Utilizzato per incrementare la risposta per accelerazione/decelerazione
oppure per ridurre la sovraelongazione quando la macchina ha bassa
rigidità e il guadagno dell'unità di controllo della velocità (ASR) non può
essere aumentato. È necessario impostare il rapporto di inerzia tra carico
e motore e il tempo di accelerazione del motore in assenza di carico.
4-16
Parametri utente
Questo capitolo descrive tutti i parametri utente che possono essere impostati nell'inverter.
Descrizione parametri utente .................................................5-2
Livelli e funzioni di visualizzazione della console
di programmazione ................................................................ 5-3
Tabelle dei parametri utente ..................................................5-7
Descrizione parametri utente
Questa sezione descrive i contenuti delle tabelle dei parametri utente.
Descrizione delle tabelle dei parametri utente
Le tabelle dei parametri utente sono strutturate come indicato di seguito. Nell'esempio viene preso in
considerazione il parametro b1-01 (selezione della frequenza di riferimento).
5
Numero
del para-
metro
b1-01
Nome
Visualizza-
zione
Selezione
frequenza di
riferimento
Descrizione
Imposta il metodo di ingresso
per la frequenza di
riferimento.
0: Console di
programmazione
1: Terminale del circuito di
controllo (ingresso
analogico)
2: Comunicazione
MEMOBUS
3: Scheda accessoria
4: Ingresso a treno di impulsi
sta-
Modifi-
cabile
durante
il funzionamento
Gamma
di impo-
stazione
0...4 1 No Q Q Q Q 180H -
Impo-
zione di
fabbrica
Metodi di controllo
V/f
con
V/f
PG
Vetto-
riale ad
anello
aperto
Vetto -
riale ad
anello
chiuso
• Numero del parametro Il numero del parametro utente.
• Nome Il nome del parametro utente.
• Descrizione Dettagli sulla funzione o sulle impostazioni del parametro utente.
• Gamma di impostazione La gamma di regolazione per i parametri utente.
L'impostazione di fabbrica (ciascun metodo di controllo ha una
propria impostazione di fabbrica; quindi, l'impostazione di fabbrica
• Impostazione di fabbrica
varia in base al metodo di controllo).
Ve d er e pagina 5-70, Impostazioni di fabbrica che cambiano con il
metodo di controllo (A1-02) per una descrizione delle impostazioni di
fabbrica che variano in base al metodo di controllo impostato.
• Modificabile durante il
funzionamento
Indica se il parametro può essere modificato mentre l'inverter è in
funzione.
Sì: modifiche possibili durante il funzionamento.
No: modifiche non possibili durante il funzionamento.
• Metodi di controllo
Indica i metodi di controllo in cui è possibile monitorare o impostare
il parametro utente.
Il parametro può essere monitorato e impostato sia in modalità
Q:
di programmazione veloce che in modalità di programmazione
avanzata.
Il parametro può essere monitorato e impostato solo in modalità
A:
di programmazione avanzata.
il parametro non può essere monitorato o impostato se si
No:
imposta questo metodo di controllo.
• Registro MEMOBUS Il numero di registro utilizzato per le comunicazioni MEMOBUS.
• Pagina
Pagina di riferimento contenente ulteriori informazioni dettagliate sul
parametro.
Registro
MEMO-
BUS
Pagina
5-2
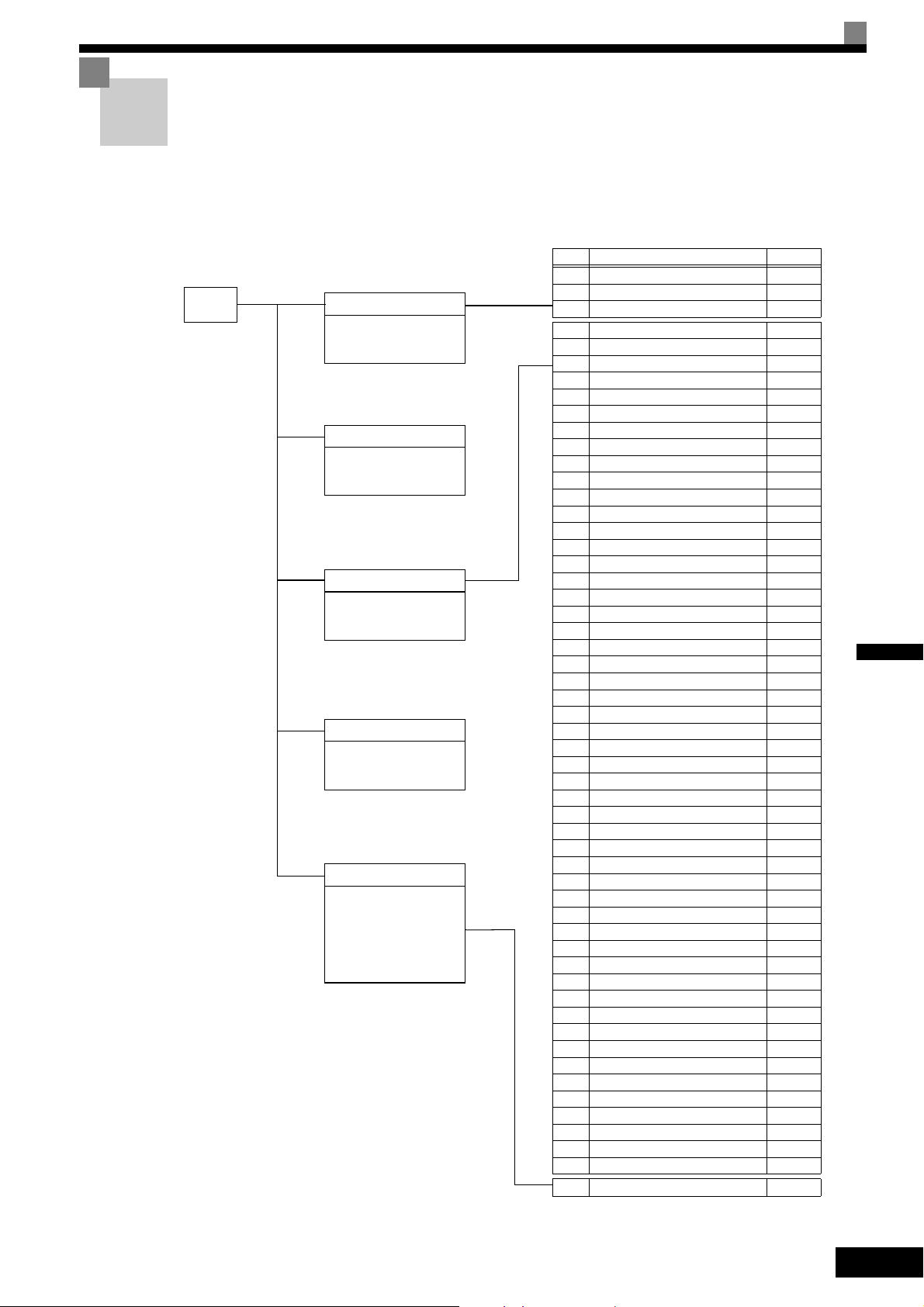
Livelli e funzioni di visualizzazione della console di programmazione
Nella figura seguente è riportata la gerarchia di visualizzazione della console di programmazione per
l'inverter.
N. Funzione Pagina
U1 Parametri monitoraggio stato 5-64
MENU
Modalità inverter
È possibile azionare l'inverter e
visualizzarne lo stato.
Modalità di programmazione
È possibile monitorare o
impostare i parametri
strettamente necessari per il
funzionamento.
Modalità di programmazione
È possibile monitorare o
impostare tutti i parametri.
È possibile monitorare o
impostare i parametri non
impostati sui valori predefiniti.
Imposta automaticamente i
parametri del motore per il
controllo vettoriale ad anello
aperto oppure misura la
resistenza da linea a linea per il
controllo V/f.
veloce
avanzata
Modalità di verifica
Modalità di autotuning
U2 Traccia errori
U3 Storico errori 5-68
A1 Modalità di inizializzazione 5-7
Modalità impostazioni definite
A2
b1 Selezioni delle modalità operative 5-9
b2 Frenatura ad iniezione c.c. 5-10
b3 Ricerca della velocità 5-11
b4 Funzione temporizzatore 5-12
b5 Controllo PID 5-13
b6 Funzioni di pausa 5-16
b7 Controllo caduta 5-16
b8 Risparmio di energia 5-17
b9 Controllo azzeramento servo 5-18
C1 Accelerazione/Decelerazione 5-19
C2 Accelerazione/decelerazione curva a S 5-20
Compensazione allo scorrimento del
C3
C4 Compensazione di coppia 5-22
C5 Controllo della velocità (ASR) 5-23
C6 Frequenza portante 5-24
d1 Frequenza di riferimento preimpostata 5-25
d2 Limiti di riferimento 5-26
d3 Frequenze di salto 5-27
d4 Blocco frequenza di riferimento 5-27
d5 Controllo della coppia 5-28
d6 Indebolimento di campo 5-29
E1 Linea caratteristica V/f 5-30
E2 Configurazione del motore 5-31
E3 Linea caratteristica V/f del motore 2 5-33
E4 Configurazione del motore 2 5-34
F1 Configurazione opzione PG 5-35
F2 Scheda di riferimento analogico 5-37
F3 Scheda di riferimento digitale 5-38
F6 Impostazioni comunicazione seriale 5-40
H1 Ingressi digitali multifunzione 5-41
H2 Uscite digitali multifunzione 5-43
H3 Ingressi analogici multifunzione 5-45
H4 Uscite analogiche multifunzione 5-47
H5 Comunicazione MEMOBUS 5-48
H6 Ingresso/uscita a treno di impulsi 5-49
L1 Sovraccarico motore 5-50
Funzionamento inerziale dopo perdita di
L2
L3 Prevenzione stallo 5-52
L4 Rilevamento riferimento 5-54
L5 Riavvio dopo errore 5-54
L6 Rilevamento coppia 5-55
L7 Limiti di coppia 5-56
L8 Protezione hardware 5-57
N1 Funzione di prevenzione vibrazioni 5-58
N2 Regolatore di frequenza automatica 5-59
N3 Frenatura ad alto scorrimento 5-59
o1 Selezione monitoraggio 5-60
o2
o3 Funzione di copia 5-62
T Autotuning motore 5-63
Funzioni della console di
5-65
5-8
5-21
5-51
5-61
5
5-3
 Loading...
Loading...