

Page 1

Medium &
Heavy Payload Series
Hardware Installation Manual
Corresponding models: TM12/14 Series
Original Instruction
I624-E-09
Page 2

This Manual contains information of the Techman Robot product series (hereinafter referred to as the TM Robot).The
information contained herein is the property of Techman Robot Inc. (hereinafter referred to as the Corporation). No part
of this publication may be reproduced or copied in any way, shape or form without prior authorization from the
Corporation. No information contained herein shall be considered an offer or commitment. It may be subject to change
without notice. This Manual will be reviewed periodically. The Corporation will not be liable for any error or omission.
logo is registered trademark of TECHMAN ROBOT INC. in Taiwan and other countries and the company
reserves the ownership of this manual and its copy and its copyrights.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 2
Page 3

Contents
Revision History Table ....................................................................................................................................................... 9
1. Product Dscription ....................................................................................................................................................... 10
1.1 Product Description ............................................................................................................................................ 10
1.2 How Can I Get Help? ......................................................................................................................................... 10
2. Safety Information ....................................................................................................................................................... 11
2.1 Overview ............................................................................................................................................................ 11
2.2 Warning and Caution Symbols .......................................................................................................................... 11
2.3 Safety Precautions ............................................................................................................................................. 11
2.4 Validation and Liability ....................................................................................................................................... 12
2.5 Limitations on Liability ........................................................................................................................................ 12
2.6 General Safety Warning ..................................................................................................................................... 12
2.7 Risk Assessment ................................................................................................................................................ 13
2.8 Emergency Stop ................................................................................................................................................ 13
2.9 Movement without Drive Power ......................................................................................................................... 13
2.10 Labels .............................................................................................................................................................. 15
3. Transportation and Storage......................................................................................................................................... 17
4. System Hardware ........................................................................................................................................................ 18
4.1 Overview ............................................................................................................................................................ 18
4.2 System Overview ............................................................................................................................................... 18
4.2.1 Robot Arm ................................................................................................................................................... 19
4.2.1.1 Dimension Drawings of Robot .............................................................................................................. 19
4.2.1.2 Robot Assembly Diagram ..................................................................................................................... 22
4.2.1.3 Range of Motion ................................................................................................................................... 27
4.2.1.4 Robot Hazard Zone Diagram and Operator Position Diagram ............................................................. 30
4.2.1.5 Payload and Torque .............................................................................................................................. 32
4.2.1.6 Robot Arm Installation .......................................................................................................................... 34
4.2.2 Robot End Module....................................................................................................................................... 36
4.2.2.1 End Module Components ..................................................................................................................... 36
4.2.2.2 End Flange Surface .............................................................................................................................. 38
4.2.2.3 End Mounting Caution .......................................................................................................................... 39
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 3
4.2.2.4 End Indication Light Ring Table ............................................................................................................ 39
4.2.3 Control Box .................................................................................................................................................. 39
4.2.3.1 Robot Stick ........................................................................................................................................... 40
4.2.4 Robot Light Module ..................................................................................................................................... 42
4.2.4.1 Light Module Surface ............................................................................................................................ 42
Page 4

4.2.4.2 Install Light Module ............................................................................................................................... 42
4.3 Operating Position of TM Robot with AGV/AIV .................................................................................................. 44
4.4 Working distance and field of view of TM Robot’s EIH camera ......................................................................... 45
5. Electrical Interface ....................................................................................................................................................... 47
5.1 Overview ............................................................................................................................................................ 47
5.2 Electrical Warnings and Cautions ...................................................................................................................... 47
5.3 Control Box ........................................................................................................................................................ 47
5.3.1 Safety Connector ......................................................................................................................................... 49
5.3.1.1 Safety Input Connector ......................................................................................................................... 49
5.3.1.2 Safety Output Connector ...................................................................................................................... 51
5.3.2 Power Connector ......................................................................................................................................... 53
5.3.3 Digital In/Out ................................................................................................................................................ 53
5.3.3.1 Digital Input ........................................................................................................................................... 53
5.3.3.2 Digital Output ........................................................................................................................................ 55
5.3.4 Analog In ..................................................................................................................................................... 57
5.3.5 Analog Out ................................................................................................................................................... 58
5.3.6 System Remote Power ON/OFF ................................................................................................................. 58
5.3.7 EtherCAT: For EtherCAT Slave I/O Expansion ........................................................................................... 59
5.3.8 USB Port ..................................................................................................................................................... 59
5.4 Tool End I/O Interface ........................................................................................................................................ 59
5.4.1 I/O Terminals ............................................................................................................................................... 59
5.4.2 Connecting Tool End Digital Output ............................................................................................................ 61
5.4.3 Connecting Tool End Digital Input ............................................................................................................... 62
5.4.4 Connecting Tool End Analog Input .............................................................................................................. 62
5.5 Control Box Interfaces ....................................................................................................................................... 63
5.6 Control Box Power Interface and Robot Interface ............................................................................................. 65
5.6.1 Control Box Power Interface ....................................................................................................................... 65
5.6.2 Robot Interface ............................................................................................................................................ 66
5.6.3 SEMI Emergency Off Interfaces (SEMI series exclusive) ........................................................................... 67
5.6.3.1 TM12M SEMI / TM14M SEMI Series ................................................................................................... 67
5.6.4 Detachable I/O Panel .................................................................................................................................. 67
6. Unboxing & Installation ............................................................................................................................................... 69
6.1 Overview ............................................................................................................................................................ 69
6.2 Inspecting the Equipment .................................................................................................................................. 69
6.2.1 Before Unpacking ........................................................................................................................................ 69
6.2.2 Upon Unpacking .......................................................................................................................................... 69
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 4
Page 5

6.3 Unboxing ............................................................................................................................................................ 70
6.3.1 Carton Types ............................................................................................................................................... 70
6.3.2 Contents of Each Carton ............................................................................................................................. 70
6.4 Installing Your Robot .......................................................................................................................................... 73
6.4.1 Remove the Control Box ............................................................................................................................. 74
6.4.2 Verification Before Removal of the Robot Arm ............................................................................................ 75
6.4.3 Removal of the Robot Arm and Tightening ................................................................................................. 75
6.4.4 Connect the Robot and the Control Box ..................................................................................................... 77
7. Maintenance and Repair ............................................................................................................................................. 78
Appendix A. Technical Specifications .............................................................................................................................. 80
Tables
Table 1: Manual Title & Description .................................................................................................................. 10
Table 2: Danger, Warning, and Caution Symbols ............................................................................................. 11
Table 3: Denotation of Labels ........................................................................................................................... 16
Table 4: Rated Torque and Limit for Repeated Peak Torque of Regular Payload Robot Series ...................... 34
Table 5: Robot Stick Basic Functions ............................................................................................................... 41
Table 6: Robot Stick Advanced Functions ........................................................................................................ 41
Table 7: Reference of the Symbol and Unit in Calculation the Torque Load of the Light Module .................... 42
Table 8: Electrical Specification of the Light Module ........................................................................................ 43
Table 9: The Relation between the Working Distance and the Field of View ................................................... 46
Table 10: Definitions of Safety Connectors....................................................................................................... 48
Table 11: Analog In & Analog Out ..................................................................................................................... 58
Table 12: 8-pin Digital I/O Connectors of Cable ............................................................................................... 60
Table 13: 8-pin Digital I/O Connector of Robot ................................................................................................. 60
Table 14: 5-pin Analog I/O Connector of Cable ................................................................................................ 61
Table 15: 5-pin Analog I/O connector of Robot ................................................................................................. 61
Table 16: Analog Input Range .......................................................................................................................... 62
Table 17: TM12 / TM14 / TM12X / TM14X Series Electrical Specifications ..................................................... 66
Table 18: TM12M / TM14M Series Electrical Specifications............................................................................. 66
Table 19: The Robot Arm Carton Contents ....................................................................................................... 71
Table 20: The Control Box Carton Contents ..................................................................................................... 73
Table 21: The SEMI Emergency OFF Switch Carton Contents ........................................................................ 73
Table 22: Summary of the Preventive Maintenance Procedures and Guidelines ............................................ 78
Table 23: Technical Specifications .................................................................................................................... 80
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 5
Page 6

Figures
Figure 1: References of Joints by Models ........................................................................................................ 14
Figure 2: Reference of Brake Solenoid by Joints ............................................................................................. 15
Figure 3: Locations of Labels ........................................................................................................................... 16
Figure 4: System Overview............................................................................................................................... 18
Figure 5: Dimension of TM12 / TM12M ............................................................................................................ 19
Figure 6: Dimension of TM14 / TM14M ............................................................................................................ 20
Figure 7: Dimension of TM12X ......................................................................................................................... 21
Figure 8: Dimension of TM14X ......................................................................................................................... 22
Figure 9: Assembly of TM12 / TM12M .............................................................................................................. 23
Figure 10: Assembly of TM14 / TM14M ............................................................................................................ 24
Figure 11: Assembly of TM12X ......................................................................................................................... 25
Figure 12: Assembly of TM14X......................................................................................................................... 26
Figure 13: Side View of TM12 / TM12M / TM12X Movement Range Diagram ................................................ 27
Figure 14: Pictorial view of TM12 / TM12M / TM12X Movement Range Diagram ........................................... 28
Figure 15: Top view of TM12 / TM12M / TM12X Movement Range Diagram .................................................. 28
Figure 16: Side view of TM14 / TM14M / TM14X Movement Range Diagram ................................................. 29
Figure 17: Pictorial view of TM14 / TM14M / TM14X Movement Range Diagram ........................................... 29
Figure 18: Top View of TM14 / TM14M / TM14X Movement Range Diagram .................................................. 30
Figure 19: Robot Hazard Zone Diagram and Operator Position Diagram of TM12 / TM12M / TM12X ........... 31
Figure 20: Robot Hazard Zone Diagram and Operator Position Diagram of TM14 / TM14M / TM14X ........... 32
Figure 21: Relationship between Payload and the Center of Gravity Offset in TM12 / TM12M / TM12X ........ 33
Figure 22: Relationship between Payload and the Center of Gravity Offset in TM14 / TM14M / TM14X ........ 33
Figure 23: Bottom View of Robot Base ............................................................................................................ 35
Figure 24: Securing the ground wire with the robot .......................................................................................... 35
Figure 25: References of TM12 / TM12M / TM14 / TM14M End Module Components ................................... 36
Figure 26: References of TM12X / TM14X End Module Components ............................................................. 37
Figure 27: References of End Flange Surface ................................................................................................. 38
Figure 28: The Exterior and Diagram of the Control Box ................................................................................. 39
Figure 29: Securing the ground wire with control box ...................................................................................... 40
Figure 30: Robot Stick ...................................................................................................................................... 40
Figure 31: Light Module Surface ...................................................................................................................... 42
Figure 32: Calculation the Torque Load of the Light Module ............................................................................ 43
Figure 33: Electrical Polarity of Fill Light Cable ................................................................................................ 44
Figure 34: Top View of TM Robot Placed on the AGV/AIV ............................................................................... 45
Figure 35: Working Distance and Field of View of TM Robot’s EIH camera .................................................... 46
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 6
Page 7

Figure 36: Control Box I/O Configuration (1/2) ................................................................................................. 47
Figure 37: Control Box I/O Configuration (2/2) ................................................................................................. 48
Figure 38: Safety Input Connector .................................................................................................................... 49
Figure 39: The Wiring Diagram Example of Switch Type Safety Device. ......................................................... 50
Figure 40: The Wiring Diagram Example of PNP Output Type Safety Device ................................................. 50
Figure 41: The Wiring Diagram Example of PNP Output Type Safety Device ................................................. 51
Figure 42: Safety Output Connector ................................................................................................................. 52
Figure 43: Safety Output Connector Wiring Diagram ....................................................................................... 52
Figure 44: Power Connector ............................................................................................................................. 53
Figure 45: Digital Input ...................................................................................................................................... 54
Figure 46: Set to Sink Input Type ..................................................................................................................... 54
Figure 47: Set to Source Input Type ................................................................................................................. 55
Figure 48: Digital Output ................................................................................................................................... 55
Figure 49: Set to Sink Output Type .................................................................................................................. 56
Figure 50: Set to Source Output Type .............................................................................................................. 57
Figure 51: Analog In .......................................................................................................................................... 57
Figure 52: Analog Out ....................................................................................................................................... 58
Figure 53: System Remote Power ON/OFF ..................................................................................................... 58
Figure 54: EtherCAT ......................................................................................................................................... 59
Figure 55: Connecting Tool End Digital Output ................................................................................................ 61
Figure 56: Connecting Tool End Digital Input ................................................................................................... 62
Figure 57: Connecting Tool End Analog Input .................................................................................................. 62
Figure 58: Front View of the Control Box ......................................................................................................... 63
Figure 59: Interfaces of the TM12 / TM14 / TM12X / TM14X Series ................................................................ 63
Figure 60: Interfaces of the TM12M / TM14M Series ....................................................................................... 64
Figure 61: Interfaces of the TM12M SEMI / TM14M SEMI Series ................................................................... 64
Figure 62: Control Box Power Interfaces .......................................................................................................... 65
Figure 63: Robot Interface ................................................................................................................................ 66
Figure 64: The TM12M SEMI / TM14M SEMI SEMI Emergency Off Interface .............................................. 67
Figure 65: Detachable I/O Panel ...................................................................................................................... 68
Figure 66: Robot Arm Carton ............................................................................................................................ 70
Figure 67: Control Box Carton .......................................................................................................................... 70
Figure 68: Moving the Control Box (1/2) ........................................................................................................... 74
Figure 69: Moving the Control Box (2/2) ........................................................................................................... 75
Figure 70: Moving the Robot Arm (1/2) ............................................................................................................ 76
Figure 71: Moving the Robot Arm (2/2) ............................................................................................................ 76
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 7
Page 8

Figure 72: Connecting the Robot and the Control Box ..................................................................................... 77
Figure 73: Air Filter Tray ................................................................................................................................... 79
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 8
Page 9
Revision History Table
Revision Date Revised Content
01 October 2018 Original release
02 December 2018 Updated cover page, minor test fixes
03 August 2019 Minor text fixes. Added cables length
04 August 2019
05 December 2019 Added Hardware 3.2 changes
06 January 2020 Updated Chapter 6.3
07 April 2020 Minor text fixes. Added product brief information
08 August 2020 Added Warning Indications
09 February 2021 Added Omron Landmark
Updated Table of Rated Torque and Limit for Repeated Peak Torque.
Added X Model information.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 9
Page 10
1. Product Dscription
1.1 Product Description
The TM Robot is a six-axis robot with power and force limiting function featuring simple programming, innovative
integrated vision capabilities together with the latest safety functionality to run at full speed with barriers and
operate in collaborative workspace.
1.2 How Can I Get Help?
You can access information sources on the corporate website:
http://www.ia.omron.com/
Related Manuals
This manual covers the hardware installation, operation and user maintenance of TM Robot. See the following
table for additional available manuals.
Manual Title Description
Safety Manual Contains safety information for TM Robots.
TMflow Instructions for use of TMflow software.
TMvision Instructions for use of TMvision software.
Table 1: Manual Title & Description
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 10
Page 11
serious injury, and might result in death or severe property damage.
moderate injury, and might result in serious injury, death, or significant property damage.
injury, moderate injury, or property damage.
Read Manual and Impact Warning Labels
2. Safety Information
2.1 Overview
Users should read, understand and abide by the safety information provided in this manual before using the TM
Robot.
2.2 Warning and Caution Symbols
The Table below shows the definitions of the warning and caution levels used in this manual. Pay close attention
to them when reading the manual, and observe them to avoid personal injuries or equipment damage.
DANGER:
Identifies an imminently hazardous situation which, if not avoided, is likely to result in
WARNING:
Identifies a potentially hazardous situation which, if not avoided, will result in minor or
CAUTION:
Identifies a potentially hazardous situation which, if not avoided, might result in minor
Table 2: Danger, Warning, and Caution Symbols
2.3 Safety Precautions
DANGER:
This product can cause serious injury or death, or damage to itself and other equipment, if the
following safety precautions are not observed.
All personnel who install, operate, teach, program, or maintain the system must read the Hardware
installation Manual, Software Manual, and Safety Manual according to the software and hardware version of
this product, and complete a training course for their responsibilities in regard to the robot.
All personnel who design the robot system must read the Hardware installation Manual, Software Manual,
and Safety Manual according to the software and hardware version of this product, and must comply with all
local and national safety regulations for the location in which the robot is installed.
The TM Robot must be used according to its intended use.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 11
Page 12
This product is a partly complete machine. The design and installation of the complete system
and prevent major hazards from occurring in the complete system.
Results of the risk assessment may require the use of additional risk reduction measures.
Power to the robot and its power supply must be locked out and tagged out or have means to control
hazardous energy or implement energy isolation before any maintenance is performed.
Dispose of the product in accordance with the relevant rules and regulations of the country or area
where the product is used.
2.4 Validation and Liability
The information contained herein neither includes how to design, install, and operate a complete robotic arm
system, nor involves the peripherals that may affect the safety of the complete system. The integrators of the robot
should understand the safety laws and regulations in their countries and prevent hazards from occurring in the
complete system.
This includes but is not limited to:
Risk assessment of the whole system
Adding other machines and additional risk reduction measures based on the results of the risk assessment
Using appropriate software safety features
Ensuring Users will not modify any safety measures
Ensuring all systems are correctly designed and installed
Clearly labeling user instructions
Clearly marking the contact information for the integrator
Making relevant documents accessible, including the risk assessment, and this manual
CAUTION:
must comply with the safety standards and regulations in the country of use. Users and
integrators of the robot should understand the safety laws and regulations in their countries
2.5 Limitations on Liability
Even if the safety instructions are followed, any safety information in the manual shall not be considered as a
guarantee that the product will not cause any personal injury or property damage.
2.6 General Safety Warning
1. The noise measured in a factory setting is about 49.3 dB (A) without production. (Measured 1m from the robot
and 1.6m above the floor, at 80% of maximum speed). If the sound pressure is over 80 dB(A) while operating,
wear proper ear protection.
2. Environmental Conditions:
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 12
Page 13
Ambient air temperature: 0˚C ~ +50˚C
Ambient relative humidity: < 85%
Transportation & Storage condition: -20˚C ~ +60˚C
Transportation & Storage humidity: < 75%
The robot needs to be protected from shock or vibration
Observe ESD precautions when installing or removing robot
2.7 Risk Assessment
Before installing or using this product, Users must first carry out the necessary risk assessment based on the
conditions of use, and pay attention to the potential remaining risk addressed by the Corporation. Refer to and
abide by the relevant chapters in Safety Manual in accordance with its software and hardware version.
2.8 Emergency Stop
If any accidents occur during the operation of the robot, Users can stop all movement by pressing the Emergency
Stop switch. When the robot stops, Users must ensure that all hazards are eliminated before manually restarting
the robot. The Emergency Stop switch is only for use in critical conditions. To stop the robot during normal
operations use the Stop Button on the system controller. When Users presses the Emergency Stop switch, the TM
Robot will disconnect power from the robot and activate the brakes after the robot motion is stopped. The
indication light ring of the robot will not display light, and the three lights from the robot stick will be constantly
blinking.
Once the risk assessment has been conducted, if an Emergency Stop switch needs to be installed, the selected
device must comply with the requirements of IEC 60204-1. After an Emergency Stop, factory reset, or any other
safety incident, refer and abide by the relevant chapters in Safety Manual in accordance with its software and
hardware version.
2.9 Movement without Drive Power
Robot without Drive Power could be found in three circumstances: Emergency stop, when disengaging packaging
posture to initial booting, and power loss. The first two could enter Safe Start up Mode by means of releasing the
Emergency Switch; the latter one is when robot loses external power. Regarding how to operate as well as safety
precautions refer and abide by the relevant chapters in the Safety Manual.
If the robot loses power, and joints need to be moved in order to clear error conditions, you will need to release
the brake for each joint as follows:
1. Remove joint cover screws (M3, Torx-T10) and joint cover.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 13
Page 14
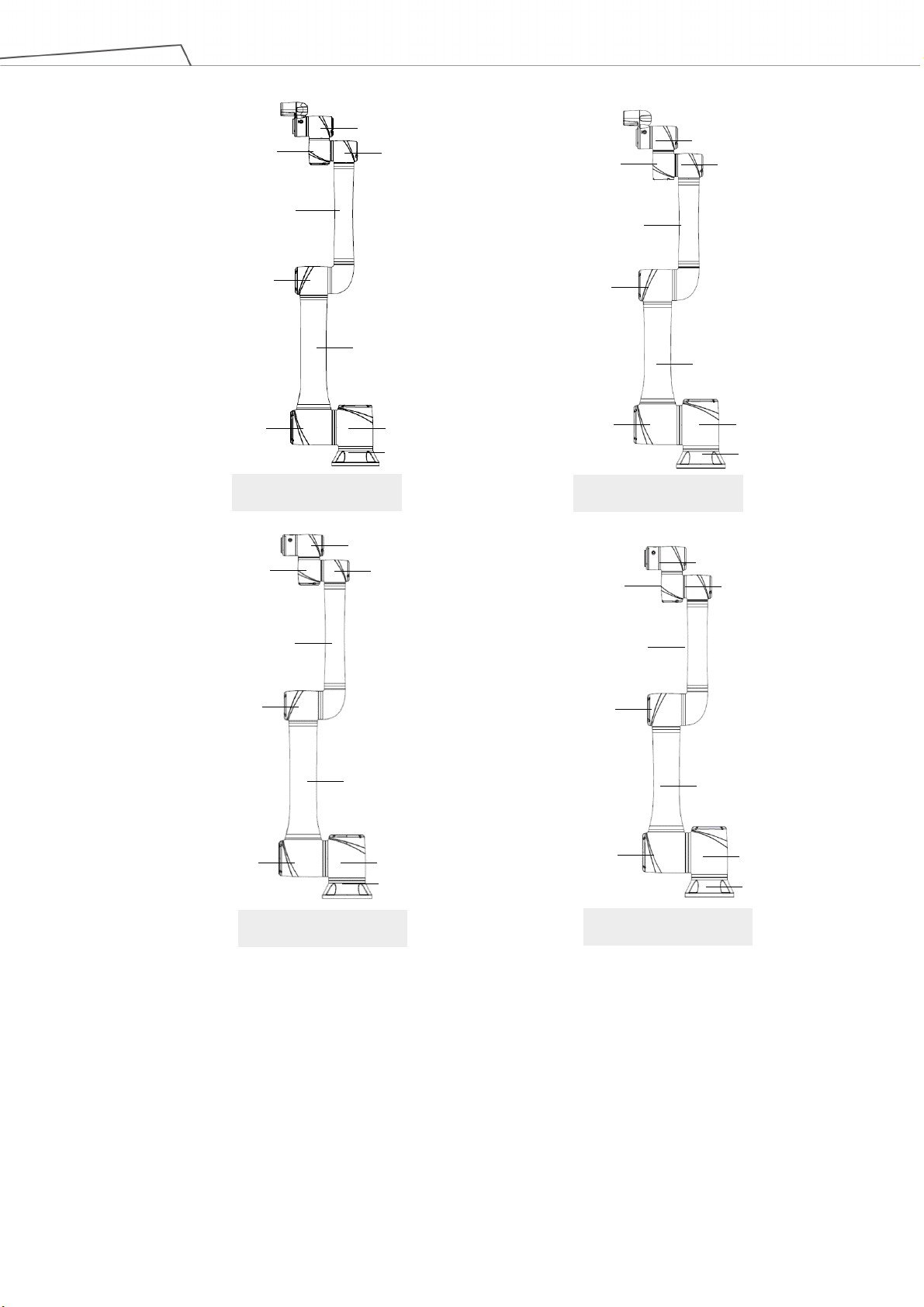
TM12 / TM12M
TM14 / TM14M
2nd Joint
3rd Joint
TM12X
1st Joint
2nd Joint
6th Joint
TM14X
6th Joint
5th Joint
Lower arm
3rd Joint
2nd Joint
5th Joint 4th Joint
4th Joint
Upper arm
1st Joint
Base
5th Joint
Lower arm
5th Joint
6th Joint
4th Joint
Upper arm
1st Joint
Base
6th Joint
4th Joint
Lower arm
3rd Joint
Upper arm
Base
Lower arm
3rd Joint
2nd Joint
Figure 1: References of Joints by Models
2. Release the brake by pushing the pin on the brake solenoid shown in the following figures.
Upper arm
1st Joint
Base
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 14
Page 15

when manually releasing the brake.
+/- 45。.
1st / 2nd Joint
3rd Joint
4th / 5th /6th Joint
Figure 2: Reference of Brake Solenoid by Joints
WARNING:
1. Due to gravity, additional supports are recommended
2. When manually moving each robot joint, the movement angle must be within a range of
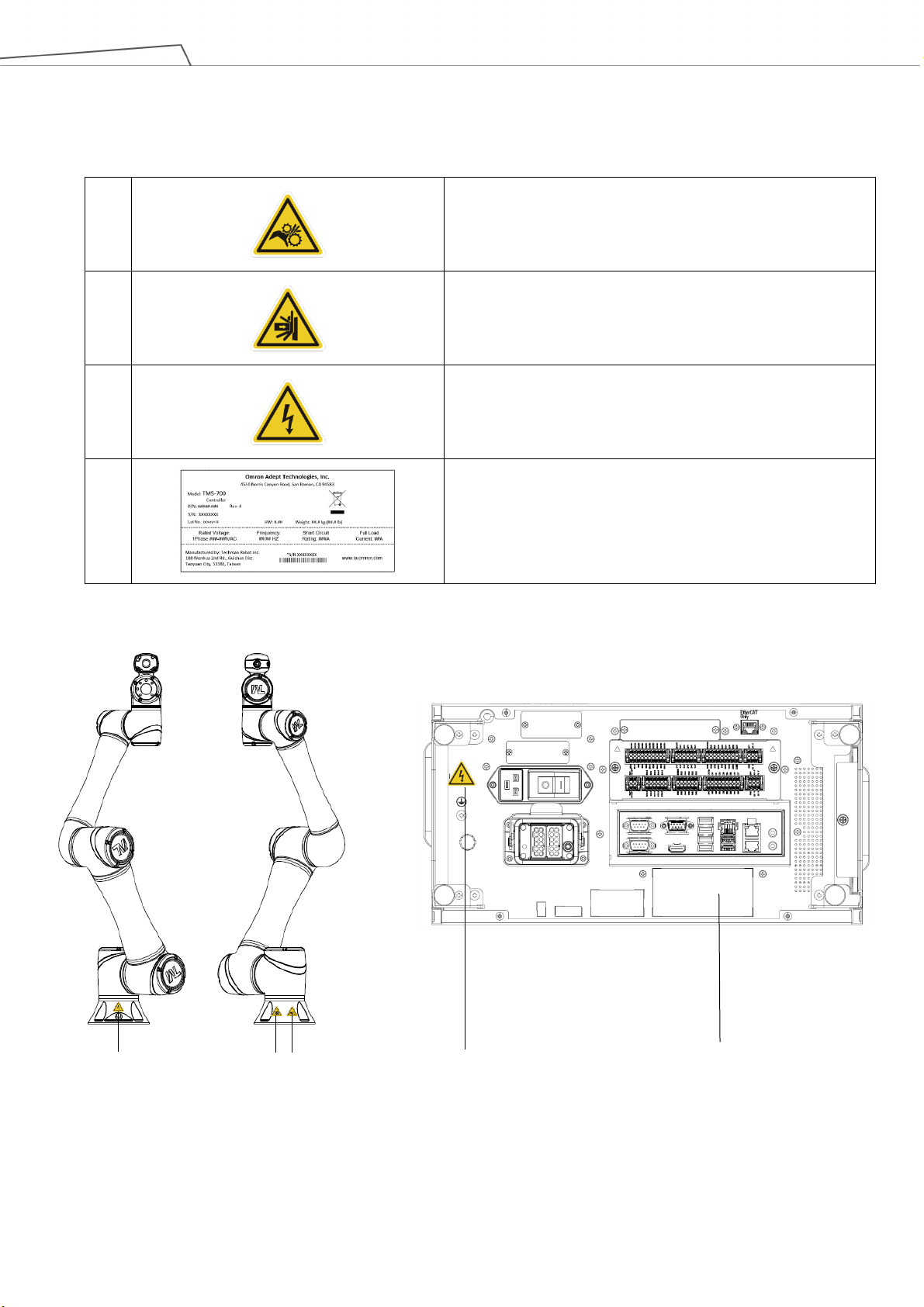
2.10 Labels
The following labels, especially the warning ones, are attached to the locations where specific dangers may occur.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 15
Page 16
c parts to avoid electric
Be sure to comply with description and warnings of the labels when operating to avoid accidents. Do not tear,
damage, or remove the labels. Be very careful if you need to handle the parts where the labels are attached.
A
Do not put your hand or fingers close to moving parts
Be careful not to be close to the moving parts and nearby
B
areas to avoid impact
Do not touch any internal electri
C
shock
D
Product label
Table 3: Denotation of Labels
C
B A
C
D
Figure 3: Locations of Labels
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 16
Page 17
injury. The Corporation will not be liable for any injuries caused during transportation.
3. Transportation and Storage
Transport the TM Robot using its original packing materials. If you will need to transport the TM Robot after
unpacking, store the packing materials in a dry place. Hold both arms of the TM Robot during transportation.
Support the arms while tightening the base screws.
Lift the control box by its handles. Store the cables before transportation.
WARNING:
Pay attention to your posture when moving the arm and control box cartons to avoid back
WARNING:
This product must be shipped and stored in a temperature-controlled environment, within the
range -20°C to 60°C (-4°F to 140°F). The recommended humidity is up to 75 percent,
non-condensing. It should be shipped and stored in the supplied package, which is designed
to prevent damage from normal shock and vibration, You should protect the package from
excessive shock and vibration.
The product must always be stored and shipped in an upright position in a clean, dry area that
is free from condensation. Do not lay the package on its side or any other non-upright position.
This could damage the product.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 17
Page 18

Robot arm
Control Box
Robot Stick
4. System Hardware
4.1 Overview
This chapter introduces the mechanical interface of the TM Robot System.
4.2 System Overview
TM Robot is made up of the robot arm and control box (including a robot stick).
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 18
Page 19
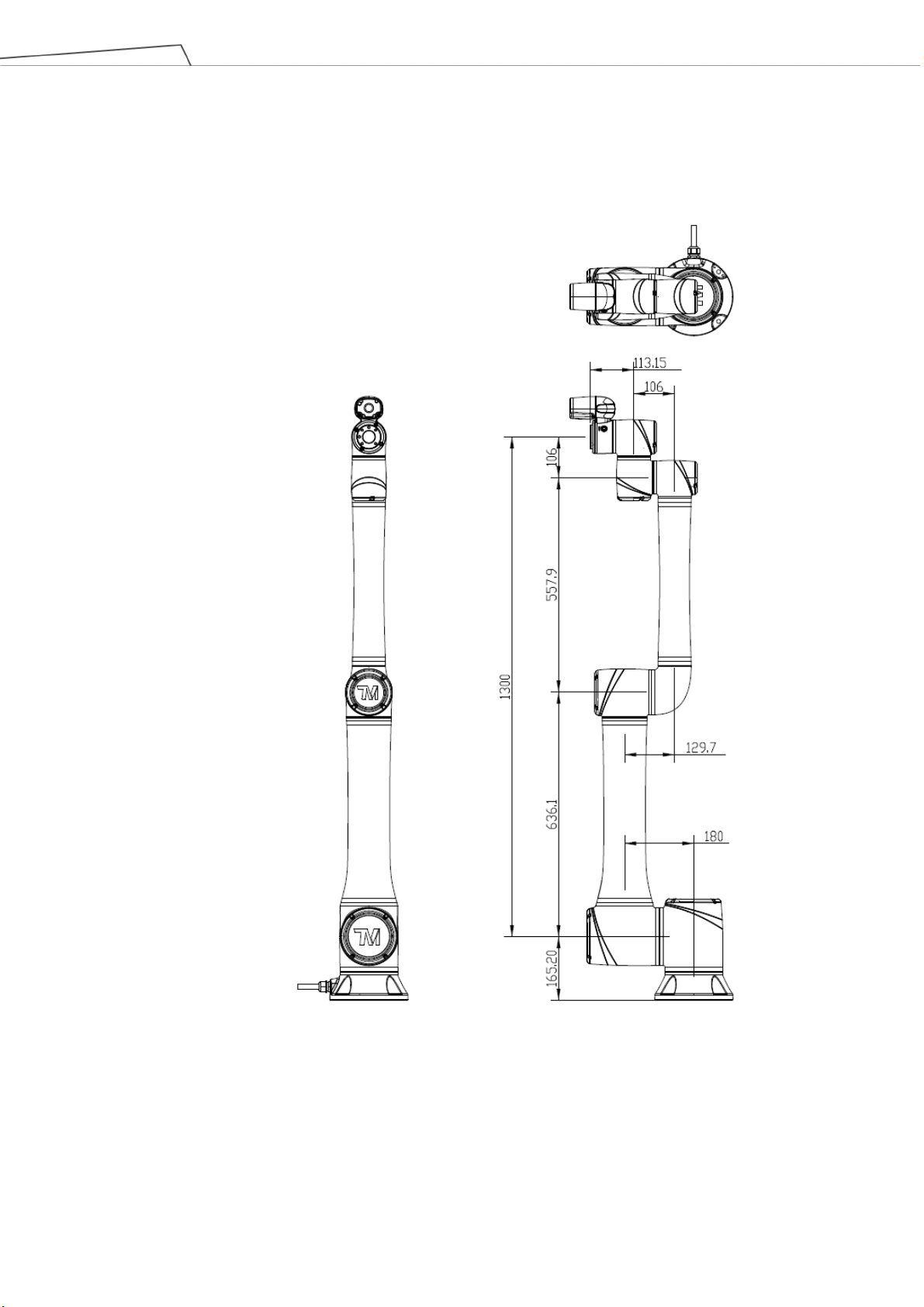
4.2.1 Robot Arm
4.2.1.1 Dimension Drawings of Robot
Shown below is the dimension drawing of the robot
Figure 5: Dimension of TM12 / TM12M
*All measures are in mm.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 19
Page 20
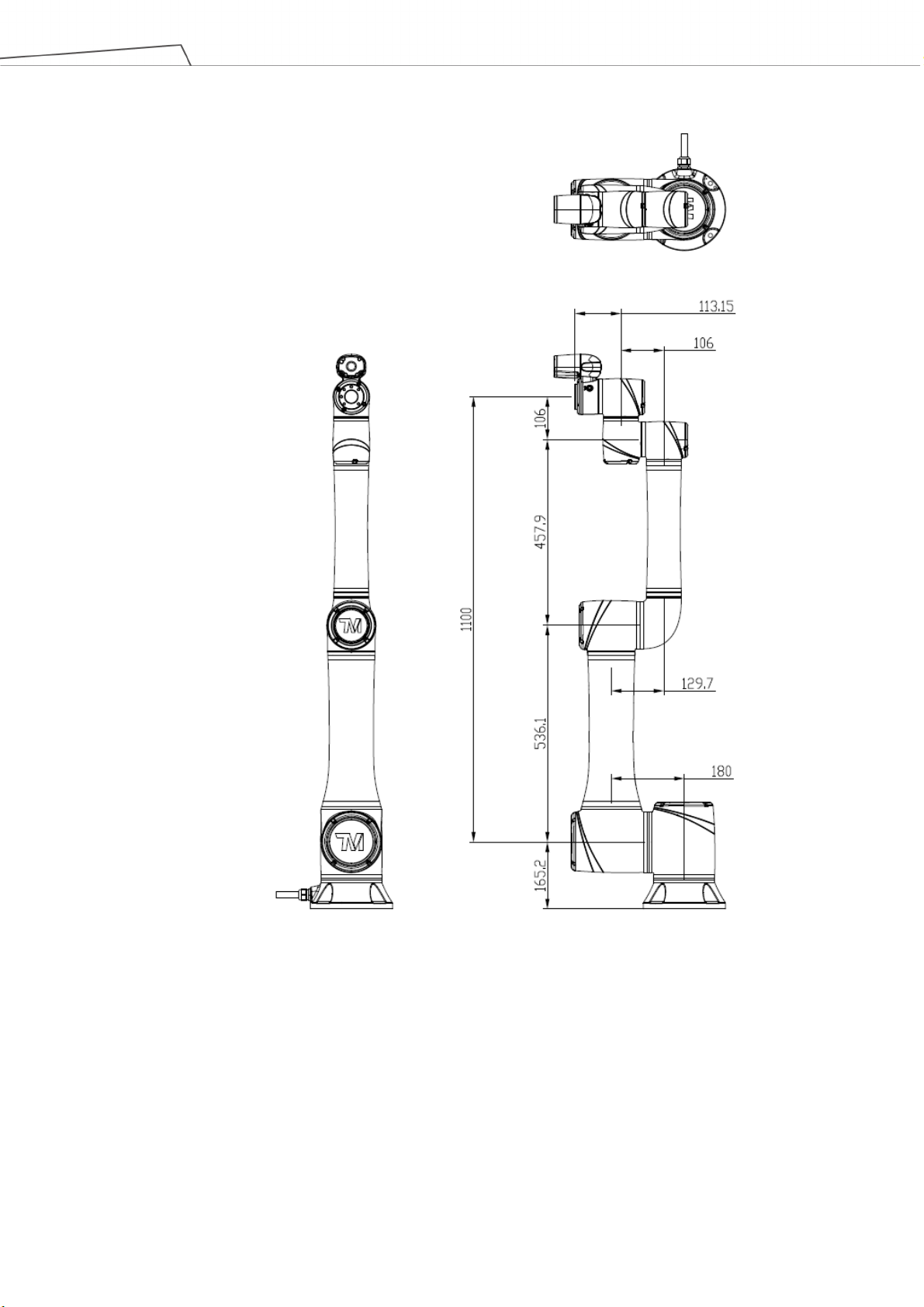
Figure 6: Dimension of TM14 / TM14M
*All measures are in mm.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 20
Page 21
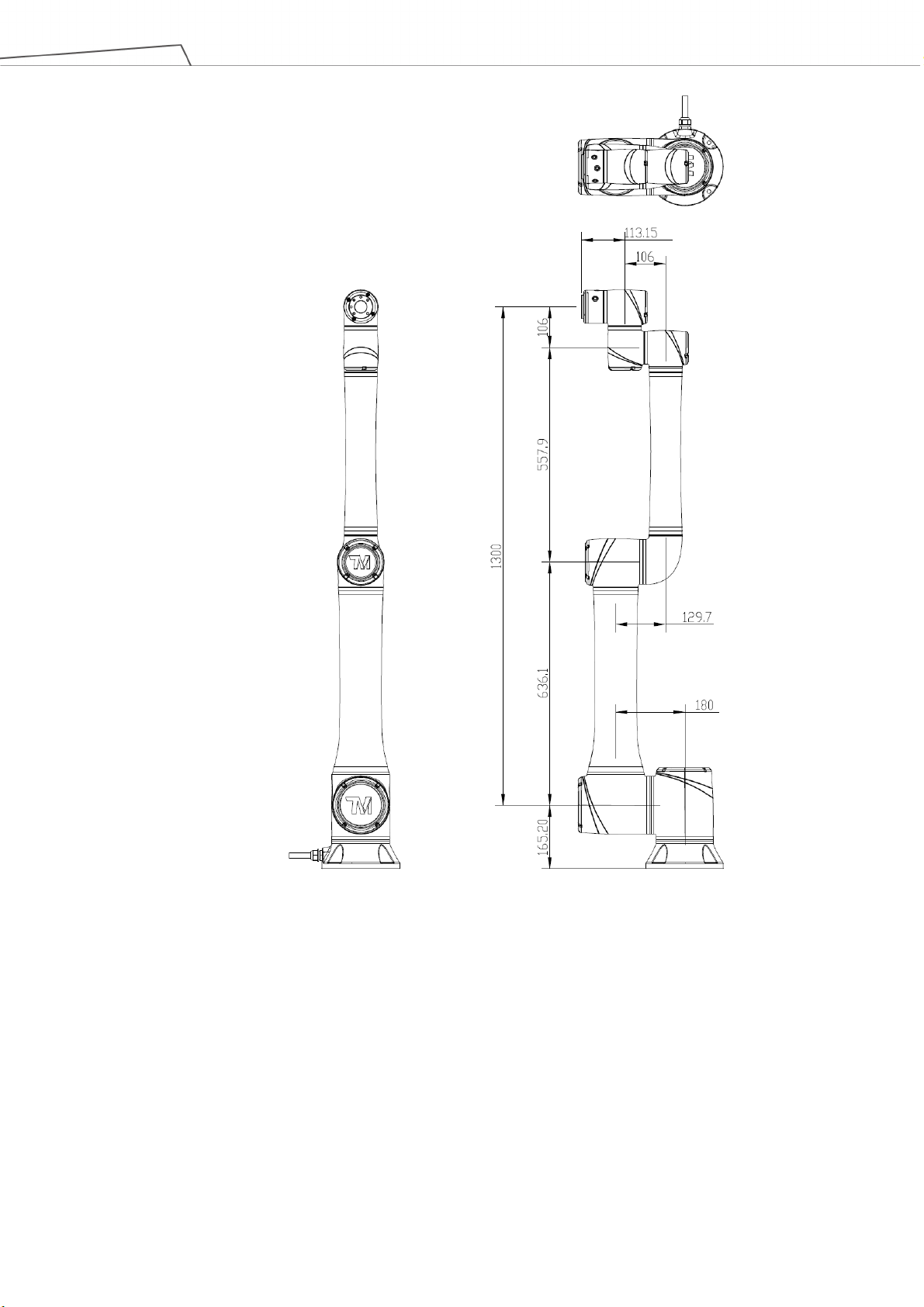
Figure 7: Dimension of TM12X
*All measures are in mm.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 21
Page 22
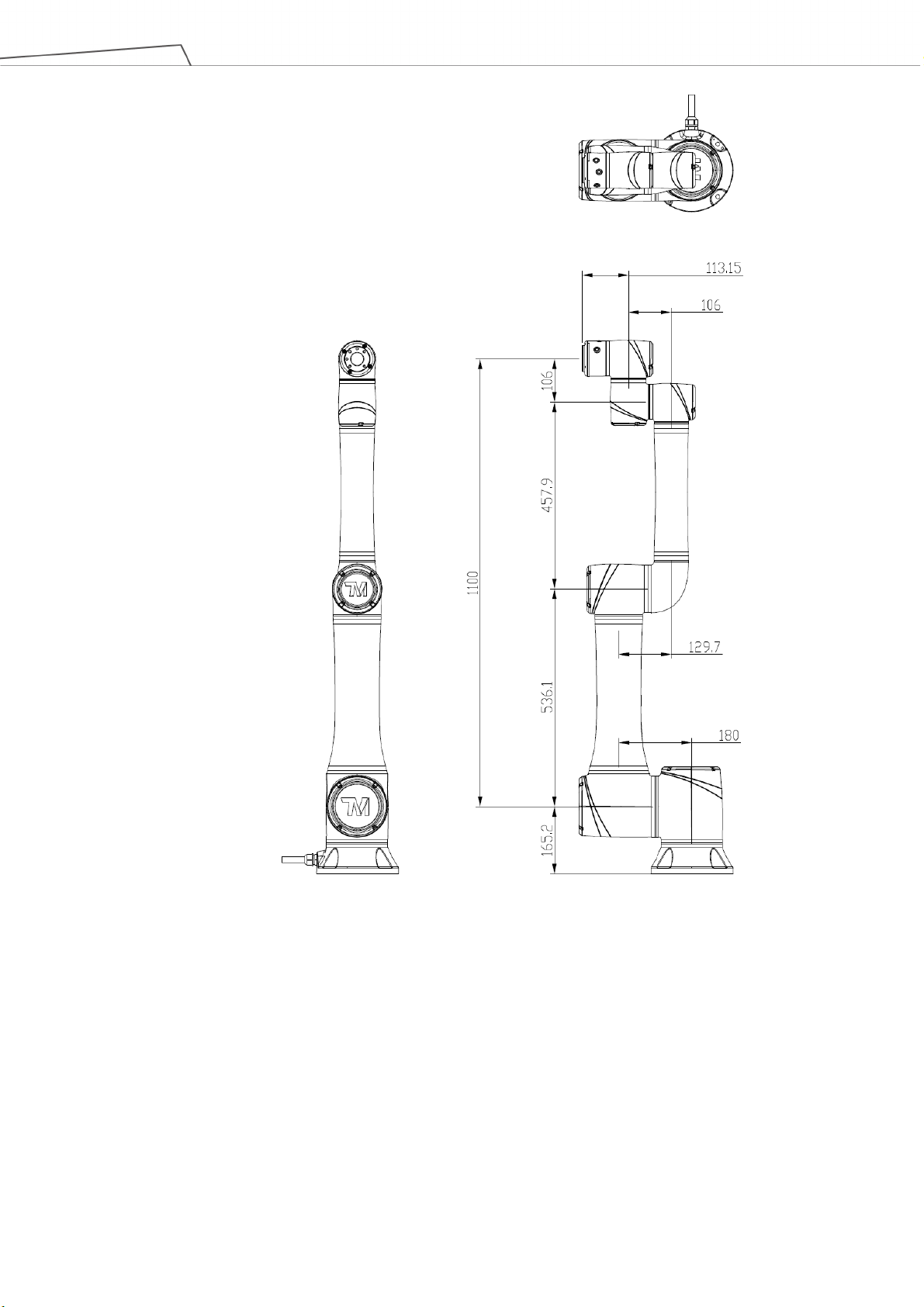
Figure 8: Dimension of TM14X
*All measures are in mm.
4.2.1.2 Robot Assembly Diagram
Shown below is an illustration of the robot components. To avoid safety risks, do not attempt to
disassemble any component on your own. Contact your local corporation support for any service
request.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 22
Page 23
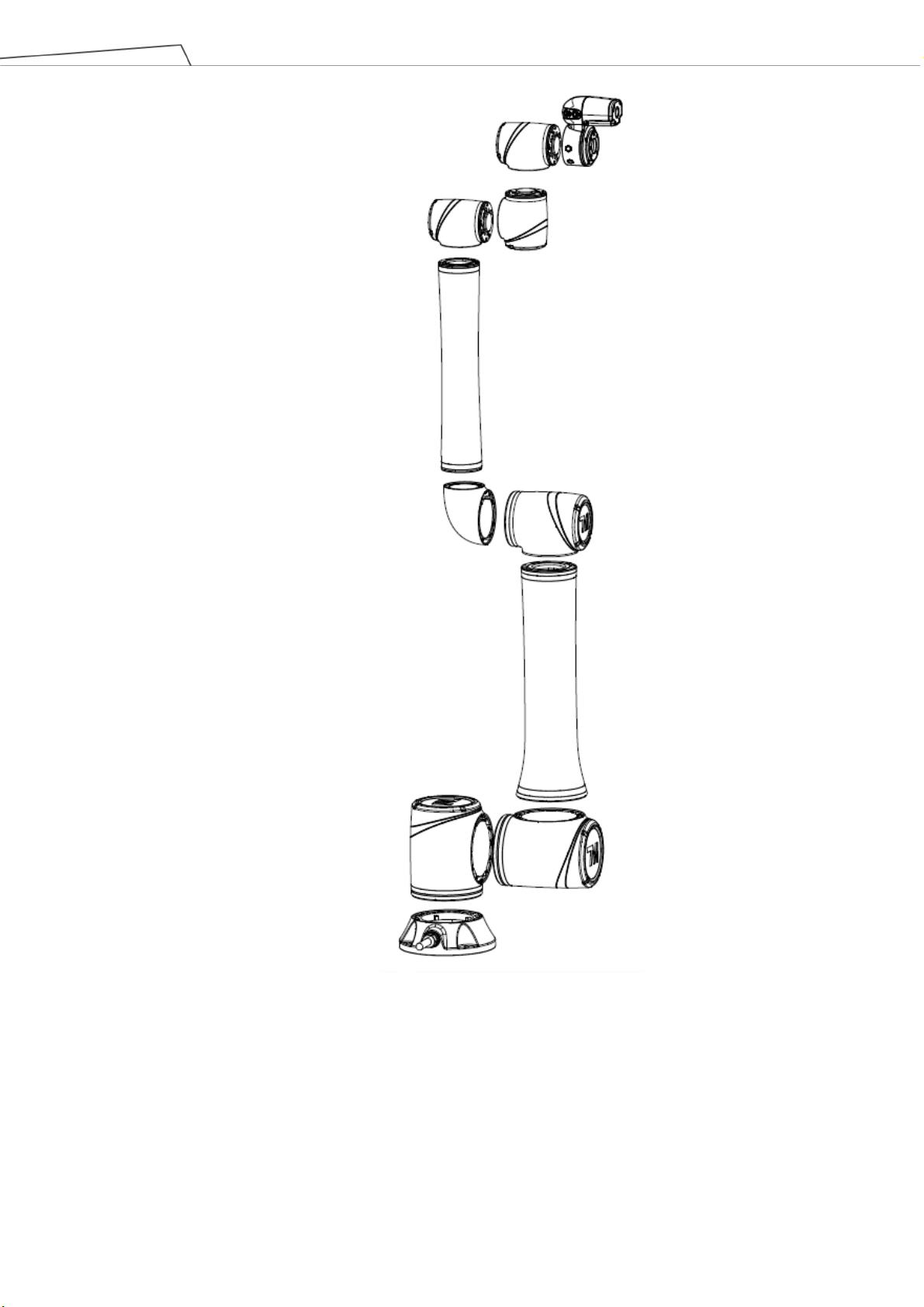
Figure 9: Assembly of TM12 / TM12M
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 23
Page 24

Figure 10: Assembly of TM14 / TM14M
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 24
Page 25
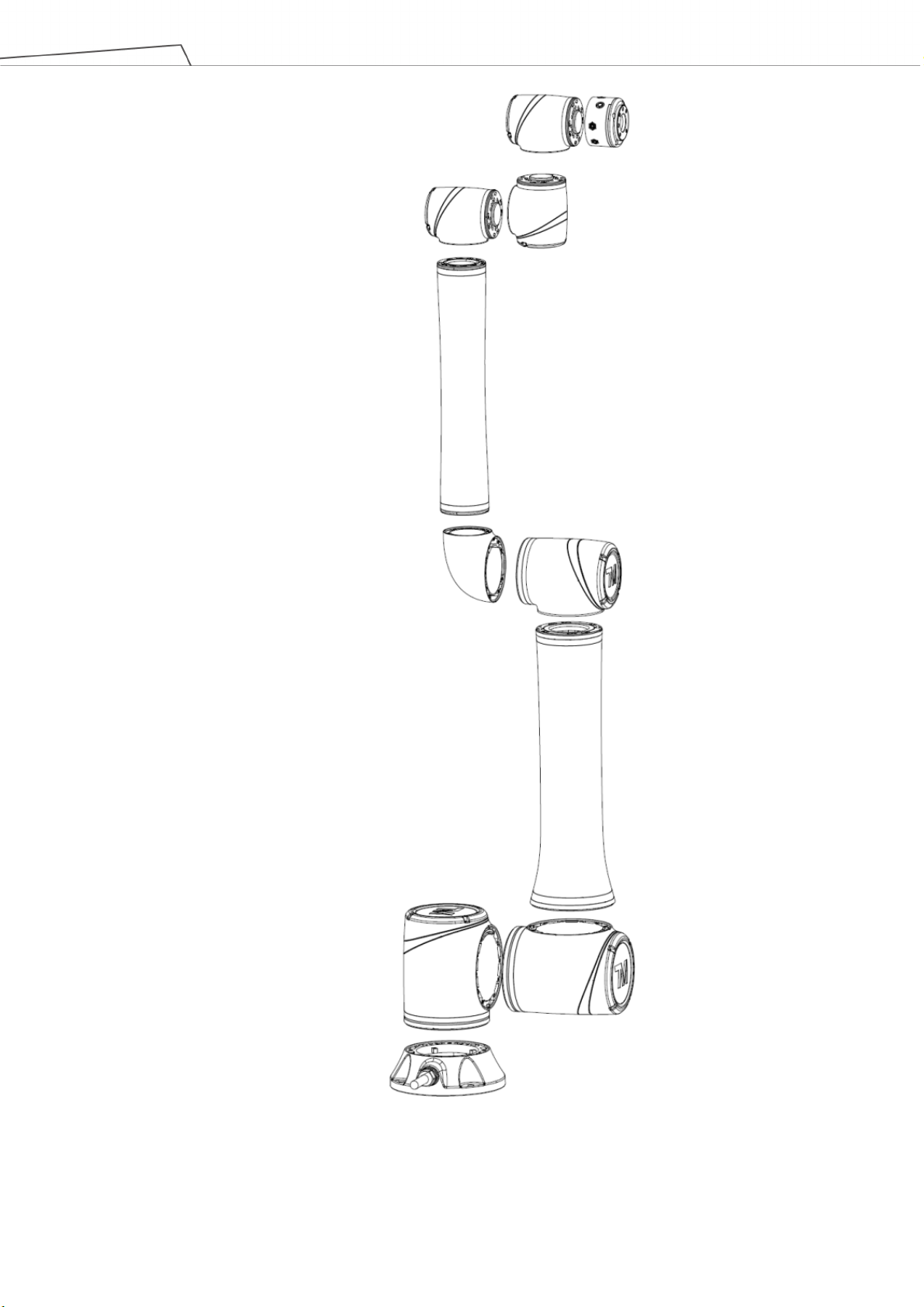
Figure 11: Assembly of TM12X
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 25
Page 26

Figure 12: Assembly of TM14X
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 26
Page 27

enter to press any buttons on the robot stick.
TM12 / TM1M / TM12X Movement Range Diagram
4.2.1.3 Range of Motion
The working spherical (radius) range from the base is 1300 mm for the TM12 series and 1100 mm for
the TM14 series.
DANGER:
With the exception of an individual being in full control of robot motion during hand-guiding,
personnel shall be outside the safeguarded space when the robot is in motion while in manual
mode (i.e. teaching).
The emergency stop on the robot stick must be readily accessible during manual mode. At
least one emergency switch is installed outside of the motion range of the robot. When no
motion limit is set for the robot, the motion range of the robot is equal to the maximum motion
range of the robot arm. You can set a motion limit to avoid the situation whereby all operators
have to be outside of the maximum motion range of the robot arm.
The robot stick should be placed in an area that the robot cannot reach. Users should also
make sure that the movement of the robot will not be within any area where personnel will
Figure 13: Side View of TM12 / TM12M / TM12X Movement Range Diagram
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 27
*All measures are in mm.
Page 28

Operator Position
the operating area of the arm.
ning: Risk of collision within
the operating area of the arm.
Figure 14: Pictorial view of TM12 / TM12M / TM12X Movement Range Diagram
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 28
Warning: Risk of crushing within
War
Figure 15: Top view of TM12 / TM12M / TM12X Movement Range Diagram
*All measures are in mm.
Page 29

TM14 / TM14M / TM14X Movement Range Diagram
Figure 16: Side view of TM14 / TM14M / TM14X Movement Range Diagram
*All measures are in mm.
Pictorial view
Figure 17: Pictorial view of TM14 / TM14M / TM14X Movement Range Diagram
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 29
Page 30

Operator Position
Warning: Risk of crushing within
the operating area of the arm.
Warning: Risk of collision within
the operating area of the arm.
Figure 18: Top View of TM14 / TM14M / TM14X Movement Range Diagram
*All measures are in mm.
4.2.1.4 Robot Hazard Zone Diagram and Operator Position Diagram
Shown below is an illustration of the robot hazard zone and operator position diagrams. Do not operate
the robot while anyone is inside of the hazard zone to avoid safety risks.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 30
Page 31

Operator Position
the operating area of the arm.
Warning: Risk of crushing within
Warning: Risk of collision within
the operating area of the arm.
Figure 19: Robot Hazard Zone Diagram and Operator Position Diagram of TM12 / TM12M / TM12X
*All measures are in mm.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 31
Page 32

Operator Position
the operating area of the arm.
TM14 / TM14M / TM14X
Figure 20: Robot Hazard Zone Diagram and Operator Position Diagram of TM14 / TM14M / TM14X
4.2.1.5 Payload and Torque
The maximum allowed payload of the robot arm is related to its center of gravity offset, which is defined
as the distance from the center point of tool flange to the payload’s center of gravity.
The following figure shows the relationship between payload and the center of gravity offset:
Warning: Risk of crushing within
the operating area of the arm.
*All measures are in mm.
Warning: Risk of collision within
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 32
Page 33

TM12 / TM12M / TM12X
Payload [kg]
TM14 / TM14M / TM14X
Payload [kg]
Center of gravity offset [mm]
Figure 21: Relationship between Payload and the Center of Gravity Offset in TM12 / TM12M / TM12X
Center of gravity offset [mm]
Figure 22: Relationship between Payload and the Center of Gravity Offset in TM14 / TM14M / TM14X
Refer the table below for the rated torque and the limit of repeated peak torque of the robot. Exceeding
torque may reduce the life of the robot or damage the robot.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 33
Page 34

entire system.
screwed down before use. The strength of the
N reaction force to the
mounting surface and screws. In order to avoid decreased performance caused by robot
mm or less, its surface roughness should be Rz25 or
immerse TM Robot in water. Installation in water or a humid environment will
Model TM12 Series TM14 Series
Limit for repeated
Item Rated torque
J1
J2
J3
J4
J5
J6
Table 4: Rated Torque and Limit for Repeated Peak Torque of Regular Payload Robot Series
WARNING:
Use the total weight of the end-effector and the payload to stay within the payload rating of the
robot. Ensure that the system never exceeds that maximum payload. Users should perform a
full risk assessment that includes the end-effector and payload samples to prevent hazards
such as shocks, vibrations, collisions, entanglements, stabbings, and piercings to secure the
311
311
118
34
34
34
peak torque
353
353
157
54
54
54
Rated torque
311
311
118
41
41
34
Limit for repeated
peak torque
353
353
157
54
54
54
Unit: Nm
4.2.1.6 Robot Arm Installation
The robot can be secured to another surface with the use of (4) M10 screws and washers. The mounting
pattern is shown below. The recommended tightening torque is 40 Nm.
Optional - Two openings for 6 mm position pins are provided for more secure position mounting.
Ensure the strength of the mounting surface and its surround area before installations for upside down
mounting and side mounting such as on the ceiling or the wall. Wherever the installation takes place, the
robot setting remains equivalent.
DANGER:
1. The TM Robot must be securely and tightly
mounting surface must be sufficient.
When operating at high speed, the robot can generate up to 710
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 34
slip or vibration, the recommended mounting surface should be a steel plate at least 20
mm thick, its flatness should be 0.1
less. The recommended screw should be M10 x L30 mm, at least 8.8 strength.
2. Do not
permanently damage the robot.
Page 35

WARNING:
In contact with liquids with chemical substances such as chemical solvents, lubricants,
sanitizers, cleansers, etc. may cause damage to the joint covers or other components of the
robot.
Use the M4L5 pan head screw to secure the ground wire with the robot as shown below.
Figure 23: Bottom View of Robot Base
*All measures are in mm.
Figure 24: Securing the ground wire with the robot
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 35
Page 36

GRIPPER Button
Camera module
Flange (ISO 9409-1-50-4-M6)
Digital I/O
Indication Light Ring
Analog I/O
FREE Button
VISION Button
POINT Button
4.2.2 Robot End Module
4.2.2.1 End Module Components
TM12 / TM12M / TM14 / TM14M End Module Components
Figure 25: References of TM12 / TM12M / TM14 / TM14M End Module Components
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 36
Light module
Page 37

GRIPPER Button
Flange (ISO 9409-1-50-4-M6)
POINT Button
Digital I/O
Analog I/O
FREE Button
TM12X / TM14X End Module Components
Indication Light Ring
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 37
Figure 26: References of TM12X / TM14X End Module Components
Page 38

4.2.2.2 End Flange Surface
Analog l/O
Digital l/O
Camera
Figure 27: References of End Flange Surface
*All measures are in mm.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 38
Page 39

it may result in short circuits or irreparable damages at the bottom of the flange
L
Length of the screw to secure tools. Unit: ㎜
8
Depth of the thread in the screw hole at the end of the flange. Unit: ㎜
T
Thickness of the object to be fixed. Unit: ㎜
The application of mounting an actuator in the tool end with high vibration or impact may cause
cylinder/system with shock absorb/buffer/cushion design to prevent this.
4.2.2.3 End Mounting Caution
The TM12/14 Series uses four M6 threaded holes on the end flange and four M6 screws for mounting
tools. The strength of the M6 screw should be 8.8 or above, and the tightening torque of 9 Nm is
recommended. If your application requires higher precision, you can use two positioning pins with a
diameter of 6 mm for a more secure mounting.
DANGER:
1. Tools must be properly tightened when using this product. Improper tightening may
cause the tool or part to fall out, or even cause personal injury and death.
2. Follow the rule L ≤ 8 + T to choose the screw to secure tools at the end of the flange,
otherwise
leading to the relevant parts replacement.
4.2.2.4 End Indication Light Ring Table
4.2.3 Control Box
CAUTION:
damage to the robot. Design the tool with proper anti-vibration/impact such as
damping/cushion or shock absorber, or use low impact actuator such as pneumatic
The Indication Light Ring of the TM Robot has several colors which represent different modes and error
status. Refer to the Software Manual for the definition of the light colors.
Figure 28: The Exterior and Diagram of the Control Box
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 39
Page 40

Emergency Switch
Default emergency button for the robot
Power Button
Power initiation (single press)/ Shutdown (long press)
Button
Play/Pause Button
Play/Pause Project (single press)
Stop Button
Press this button to stop any project.
CAUTION:
The control box can be placed on the floor or in your working cell. Note that 5 cm clearance
should be left at both sides for ventilation.
Use the M4L6 screw to secure the ground wire with the control box as shown below.
Figure 29: Securing the ground wire with control box
4.2.3.1 Robot Stick
The Robot Stick has 6 function buttons, 3 indicator lights, 1 Emergency Switch, 1 set of speed indicator,
and 1 QR-code. Their functions are as follow:
Power Button
Power Indicator
Mode Indicator Lights
Stop Button
Emergency Switch
Figure 30: Robot Stick
CAUTION:
When operating the robot stick, do not use other objects than fingers to press the robot stick.
M/ A Mode Switch Button
+ Button
QR Code Label
- Button
Play/Pause Button
Speed Indicator
Items Basic Function
M/ A Mode Switch
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 40
Toggle Manual/Auto Mode (single press). See Safety Manual for details.
Page 41

See Safety Manual for details.
Constant: Startup completed
always be on.
10% such as 4 in blue and 1 in green equals to 45%.
QR Code Label
The content of the SSID is also the robot's name in TCP/IP network.
- Press and release to enter Safe Start up Mode while booting.
Play/Pause Button
Play/pause visual calibration operation (single press)
Stop Button
Stop visual calibration operation (single press)
to lock/unlock the Robot Stick (except the Power Button)
damage caused by pulling.
when any of
dusty and
3. Be noted that the control box can only be in standing pose for the IP32 rating.
+- Button
Power Indicator
Adjust project speed (single press) under Manual Trial Run Mode.
This indicator shows the robot's power status.
Not on: Switched off
Flashing: Booting
Mode Indicator
Lights
Speed Indicator
One is Manual Mode, the other one is Auto Mode. They show the
robot's current operating mode. Once boot up is complete only one will
Display the current project speed. Lit in green for 5% and in blue for
Table 5: Robot Stick Basic Functions
Items Advanced Function
- Press and release, and then wait for 3 seconds to enter Safe Start up
Emergency Switch
Mode.
- Hold to jog the robot at the HMI robot controller page (Hold to Run).
See Safety Manual for details.
+- Button
- Lock/ Unlock: press and hold both the + button and the - button until
the mode indicator light flashes, then follow the sequence "-, +, -, -, +
"
CAUTION:
The robot stick is magnetic so that it can be attached to iron or steel surfaces. However, the risk
of falling or rotating caused by poor attachment should be taken into account. It is
recommended using the Robot Stick Stand (official accessory) to secure the robot stick. The
Robot Stick Stand should be fixed with screws. Always attach the robot stick when it is not in
use. The robot stick should be placed in a way such that the signal cables are routed to avoid
DANGER:
1. The control box, cables, power signal cables, and robot stick cannot be used
them is in contact with liquids. This may result in personal injury or death.
2. The control box comes with the IP32 rating, but it is not recommended to use in
humid environments. Pay extra attention to environments with conductive dust (such as
metal particles).
Table 6: Robot Stick Advanced Functions
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 41
Page 42

4.2.4 Robot Light Module
4.2.4.1 Light Module Surface
4.2.4.2 Install Light Module
The light module uses 4 of M3 screws to fix, and the recommended tightening torque is 1 Nm. For higher
accuracy on usages in demand, use both of the 2 mm diameter openings with the positioning pins to get
the better steadiness. Users can replace the light module by applications in demand. The choice
depends on the torque load of the light module, the available load of the robot, the possible influence the
other light module made to the camera's field of view, and the electrical specifications.
1. The torque load of the light module (M): this torque load must be lower than 900 kgfmm, which is
the available strength of the camera module M3 screw can be loaded.
Calculation formula: M = (L+59.2)*W
The weight of the light module W kgf
Figure 31: Light Module Surface
*All measures are in mm.
The center of gravity of the light module L mm
Table 7: Reference of the Symbol and Unit in Calculation the Torque Load of the Light Module
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 42
Page 43

Light Module
Figure 32: Calculation the Torque Load of the Light Module
2. The maximum allowed payload of the robot: the weight of the light module must match the relative
relationship between the maximum allowed payload and the center of gravity offset distance. If the
tool end flange goes with additional applications, it is required to generate the equivalent center of
gravity for its position and total load from the combination of the light module and the application
tool as well as follow 4.2.1.5 Payload and Torque of this manual.
3. Refer to 4.4 for Working distance and field of view of TM Robot’s EIH camera.
4. Electrical Specification of the Light Module
Voltage:
24V
Current:
< 900mA
The total current of the tool end and the light module has to be lower than 1.5A.
Table 8: Electrical Specification of the Light Module
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 43
Page 44

users replace with the other light modules.
Fill light cable:
(+)
(-)
Figure 33: Electrical Polarity of Fill Light Cable
Connector:
Dimming mode:
2P/1.5 mm pin pitch. Refer to JST model ZHR-4 series.
PWM control
NOTE:
The robot comes with the IP54 rating, but the Corporation does not guarantee this rating if
DANGER:
Be aware that the tool must be correctly and firmly secured to use with this product; otherwise,
personal injuries or death may occur should the tool or the workpiece fall.
4.3 Operating Position of TM Robot with AGV/AIV
When TM Robot is placed on an AGV/AIV in operation, the TM Robot should be paused and should not exceed
the footprint of the AGV/AIV.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 44
Page 45

AGV/AIV Footprint
Figure 34: Top View of TM Robot Placed on the AGV/AIV
4.4 Working distance and field of view of TM Robot’s EIH camera
The field of view of TM Robot’s EIH camera varies linearly in accordance with the working distance. The minimum
working distance is about 100 mm and the maximum working distance is about 300 mm. The zero working
distance point is approximately 49 mm in front of the flange surface and right behind the center of the protection
lens.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 45
Page 46

46.5
Working distance = 0
Figure 35: Working Distance and Field of View of TM Robot’s EIH camera
*All measures are in mm.
The relation between the working distance and the field of view is listed below.
Working distance (mm)
300 100
Field of view (mm)
Width
Height
281.6 96.9
211.2 72.7
Table 9: The Relation between the Working Distance and the Field of View
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 46
Page 47

Ensure all pieces of the equipment are kept dry. If water enters the equipment, disconnect
fire or electric shock.
install while arm is on to avoid abnormal shutdown.
Control Box I/O configuration
5. Electrical Interface
5.1 Overview
This chapter introduces all electrical interfaces of the robot arm and control box.
5.2 Electrical Warnings and Cautions
The application design and installation of the robot should comply with the following warnings.
DANGER:
1.
the power and contact your supplier.
2. Only use the original cables included with the robot. If you need longer cables, contact
your supplier.
3. Ensure that the robot is properly grounded. If the grounding is not correct, it may cause a
5.3 Control Box
WARNING:
The I/O cables used for the link between the control box and other pieces of equipment
should not be longer than 30 meters, unless testing shows that longer cables are feasible.
WARNING:
Except for USB ports, other interfaces have to be installed while arm is powered off. Do not
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 47
Figure 36: Control Box I/O Configuration (1/2)
Page 48

Figure 37: Control Box I/O Configuration (2/2)
Input Output
Safety
Connector
SI0-1
SI0-2
SI1-1
SI1-2
SI2-1
SI2-2
SI3-1
SI3-2
Definition SF Input
User Connected
SF1
ESTOP Input
User Connected
External Safeguard
SF3
Input
User Connected
External Safeguard
Input for Human–
SF9
Machine Safety
Settings
User Connected
Enabling Device
SF15
Input
Safety
Connector
SO0-1
SO0-2
SO1-1
SO1-2
SO2-1
SO2-2
SO3-1
SO3-2
Definition SF Output
Robot ESTOP
SF10
Output
User Connected
External Safeguard
SF11
Output
User Connected
External Safeguard
Output for Human–
SF12
Machine Safety
Settings
Robot Internal
Protective Stop
SF13
Output
User Connected
SI4-1
SI4-2
ESTOP Input without
Robot ESTOP
SF16
SO4-1
SO4-2
Robot Encoder
SF14
Standstill Output
Output
Table 10: Definitions of Safety Connectors
NOTE:
For details about safety functions, please refer to the Safety Manual.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 48
Page 49

5.3.1 Safety Connector
Safety I/O comes with dual redundant channel connector and has to keep both channel input/output the
same value simultaneously. Single fault on either one of the single channel will not result in failure of
safety functions.
5.3.1.1 Safety Input Connector
1. User Connected ESTOP Input Port is a N.C. contact (Normally closed). When User Connected
ESTOP Input Port is OPEN, the robot enters the Emergency STOP state.
2. User Connected External Safeguard Input Port is a N.C. contact (Normally closed). When User
Connected External Safeguard Input Port is OPEN, the robot enters the Protective Stop state.
3. User Connected External Safeguard Input Port for Human–Machine Safety Settings is a N.C. contact
(Normally closed). When User Connected External Safeguard Input Port for Human–Machine Safety
Settings is OPEN, the robot decrease the limits to which is set in Human-Machine Safety Settings
4. User Connected Enabling Device Input Port is an N.C. contact (Normally closed). When User
Connected Enabling Device Input Port is OPEN in Manual mode, the robot is unable to present
manual control operation. When User Connected Enabling Device Input Port is CLOSED in Manual
mode, the robot is able to present manual control operation.
5. User Connected ESTOP Input Port without Robot ESTOP Output functions as the User Connected
ESTOP Input Port above, but it does not trigger the function of Robot ESTOP output.
Figure 38: Safety Input Connector
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 49
Page 50

Figure 39: The Wiring Diagram Example of Switch Type Safety Device.
Figure 40: The Wiring Diagram Example of PNP Output Type Safety Device
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 50
Page 51

Figure 41: The Wiring Diagram Example of PNP Output Type Safety Device
5.3.1.2 Safety Output Connector
1. Robot ESTOP Output Port. When the robot triggers the Robot (stick) Emergency Stop signal, the
output will be LOW.
2. User Connected External Safeguard Output Port. When the robot triggers the User Connected
External Safeguard Input, the output will be LOW.
3. User Connected External Safeguard Output Port for Human–Machine Safety Settings. When the
robot triggers the User Connected External Safeguard Input for Human–Machine Safety Settings,
the output will be LOW.
4. Robot Internal Protective Stop Output Port. When the robot triggers the internal Protective Stop,
the output will be LOW.
5. Robot Encoder Standstill Output Port. When the Encoder Standstill is not monitoring (robot is
moving), the output will be LOW.
For details about the safety functions, please refer to the Safety Manual.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 51
Page 52

check the safety functions for a regular basis.
Figure 42: Safety Output Connector
Figure 43: Safety Output Connector Wiring Diagram
DANGER:
1. Do not connect the safety signals to a non-safety device without the fulfilled safety level.
Failure to do so may result in injury or death due to a malfunction of the safety stop.
2. All safety I/Os come with dual redundant channel connectors. Maintain both redundant
channels while pairing and connecting to make sure that single fault on either one of the
single channel will not result in failure of safety functions.
3. Before putting to use the robot, be sure to check the safety functions and schedule to
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 52
Page 53

5.3.2 Power Connector
1. During boot, the control box will check for an external 24V input. If none is found, then it will switch to
the internal 24V supply.
2. The control box itself offers a 24V/2A output (24_EX). If the 24V load exceeds 2A, it enters Safe Mode
and disables the 24V output.
3. EX24V provides an external 24V input port. If the load exceeds 2A an external power supply can be
used instead. The load on EX24V must not exceed 3.5A.
5.3.3 Digital In/Out
Digital input/output each has 16 channels, and its application is connected to the following sections.
5.3.3.1 Digital Input
Figure 44: Power Connector
Inputs can be set to either sink input or source input by selection.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 53
Page 54

Figure 45: Digital Input
Set to sink input type
When a device such as a transistor output sensor is connected, NPN open collector transistor output
can be used.
Figure 46: Set to Sink Input Type
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 54
Page 55

Set to Source input type
When a device such as a transistor output sensor is connected, PNP open collector transistor output can
be used.
Figure 47: Set to Source Input Type
5.3.3.2 Digital Output
Outputs can be set to either sink output or source output by selection.
The maximum drive current is 300mA per channel. If the load exceeds 300mA, a relay should be used to
drive it.
Figure 48: Digital Output
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 55
Page 56

Set to sink output type
Connect DO_COM terminal to the minus side of the power supply.
Figure 49: Set to Sink Output Type
Set to source output type
Connect DO_COM terminal to the plus side of the power supply.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 56
Page 57

5.3.4 Analog In
Figure 50: Set to Source Output Type
Figure 51: Analog In
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 57
Page 58

5.3.5 Analog Out
Figure 52: Analog Out
Range Resolution Accuracy Conversion Time
Analog In +10.00V~-10.00V 11bit ≤ 0.2% 1 ms
Analog Out +10.00V~-10.00V 11bit ± 0.07% 1 ms
5.3.6 System Remote Power ON/OFF
The function of Remote ON/OFF shares the same functionality of the Robot Stick Power Button.
Table 11: Analog In & Analog Out
Figure 53: System Remote Power ON/OFF
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 58
Page 59

connector while the robot is on.
5.3.7 EtherCAT: For EtherCAT Slave I/O Expansion
WARNING:
The robot must be powered off when installing the EtherCAT Slave. Do not plug or unplug the
5.3.8 USB Port
The USB port of the control box is used for connecting the keyboard, mouse and external storage devices.
External storage devices should only be used for the import/export functions of TMflow. No other device
Figure 54: EtherCAT
than those listed above should be connected. Be noted that the external storage device should be labelled
TMROBOT.
5.4 Tool End I/O Interface
There are two small connectors on the tool end of the robot: the 8-pin connector is for digital I/O and the 5-pin
connector is for analog I/O.
5.4.1 I/O Terminals
The tool end 24V has a total maximum output current of 1.5A included 900mA of the light module. If
overloaded, overload protection is activated and the robot will turn off the 24V output power.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 59
Page 60

Pin Wire color Pin define
1 Brown +24v 24V output
2 Red DI_0 Digital Input0
3 Orange DI_1 Digital Input1
4 Yellow DI_2 Digital Input2
Digital
5 Green DO_0
Output0
Digital
6 Blue DO_1
Output1
Digital
7 Purple DO_2
Output2
8 Black +0V +0v
*The M8/8PIN connector complies with the regulation of IEC 61076-2-104.
Table 12: 8-pin Digital I/O Connectors of Cable
Pin Wire Color Pin Define
1 Brown +24v 24V output
2 Red DI_0 Digital intput0
3 Orange DI_1 Digital intput1
4 Yellow DI_2 Digital intput2
5 Green DO_0
6 Blue DO_1
7 Purple DO_2
8 Black +0V +0V
Digital
outtput0
Digital
outtput1
Digital
outtput2
Table 13: 8-pin Digital I/O Connector of Robot
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 60
Page 61

Pin Wire Color Pin Define
1 Black +24V 24V output
2 Brown DI_3 Digital Input3
3 Red DO_3
Digital
Output3
4 Orange AI Analog Input
5 Yellow +0V GND
*The M8/5PIN connector complies with the regulation of IEC 61076-2-104.
Table 14: 5-pin Analog I/O Connector of Cable
Pin Wire Color Pin Define
1 Black +24V 24V output
2 Brown DI_3 Digital Input3
3 Red DO_3 Digital Output3
4 Orange AI Analog Input
5 Yellow +0V GND
5.4.2 Connecting Tool End Digital Output
The following figure shows how to connect the tool end digital output:
Table 15: 5-pin Analog I/O connector of Robot
Figure 55: Connecting Tool End Digital Output
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 61
Page 62

-
+
5.4.3 Connecting Tool End Digital Input
The following figure shows how to connect the tool end digital input:
NOTE: If sensors are connected directly then they should be NPN.
Figure 56: Connecting Tool End Digital Input
5.4.4 Connecting Tool End Analog Input
Range Resolution Accuracy Conversion Time
+10.00V~-10.00V 11bit ≤ 0.2% 1 ms
Table 16: Analog Input Range
The following figure shows how to connect the tool end Analog input:
(Because AIN_GND is connected to ground, when AIN is a dead contact, a pressure difference will occur,
which is a normal phenomenon.)
Figure 57: Connecting Tool End Analog Input
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 62
Page 63

connection may cause the robot to stop.
USB3.0*2
COM1
USB 2.0 *4
HDMI
LAN for GigE Camera*2
Line-out
COM2
COM3
LAN
Mic-in
5.5 Control Box Interfaces
Robot Status Display
Figure 58: Front View of the Control Box
CAUTION:
The ETHERCAT interface can only be used to connect ETHERCAT devices. Improper
AC Adapter
AC Power Switch
Power Remote ON/OFF
I/O Interface
EtherCAT
v
Air Filter Screw
PE
Robot Cable Adapter
Figure 59: Interfaces of the TM12 / TM14 / TM12X / TM14X Series
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 63
Page 64

External Power Supply Remote Control
DC IN for External Power Supply
USB
3.0*2
COM1
Robot Cable Adapter
USB 2.0 *4
HDMI
LAN for GigE Camera*2
Line-out
COM2
COM3
LAN
Mic-in
External Power Supply Remote Control
DC IN for External Power Supply
USB
3.0*2
COM1
Robot Cable Adapter
USB 2.0 *4
HDMI
LAN for GigE Camera*2
Line-out
COM2
COM3
LAN
Mic-in
PE
DC IN Power
Power Remote ON/OFF
DC Power Switch
I/O Interface
Figure 60: Interfaces of the TM12M / TM14M Series
EtherCAT
Air Filter Screw
EtherCAT
Air Filter Screw
PE
EMO
DC IN Power
DC Power Switch
Power Remote ON/OFF
I/O Interface
Figure 61: Interfaces of the TM12M SEMI / TM14M SEMI Series
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 64
Page 65

(100V~120V)
AC Adapter
DC IN Power
External Power Supply Remote Control
DC IN for External Power Supply
-
+
TM12M / TM14M
TM12 / TM14 / TM12X / TM14X
5.6 Control Box Power Interface and Robot Interface
5.6.1 Control Box Power Interface
TM12 / TM14 / TM12X / TM14X:
The power cable of the control box has an IEC plug. The local power plug is connected to the IEC plug.
The AC power switch must be in OFF state before plugging in or out the power cable.
TM12M / TM14M:
The power cable of the control box has Hirose (HRS) DF60 series connector.
AC Adapter:IEC plug
DC IN Power Connector:( HRS)DF60-3EP-10.16C
DC IN for External Power Supply Connector: Contact the Corporation for
purchasing
External Power Supply Remote Control Connector:Contact the Corporation
for purchasing
Figure 62: Control Box Power Interfaces
The power supply should be equipped with the following:
• Grounding
• Main fuse
• Residual current device (RCD)
It is recommended to install a master switch on the equipment power supply for robot applications for
servicing and inspection.
Parameters Minimum value Typical value Maximum value Unit
Input voltage 100 - 240 VAC
External mains fuse
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 65
- - 15 A
Page 66

(220V~240V)
use genuine power cables correctly.
not connected to the connection interface, do not turn on the robot.
External mains fuse
- - 10 A
Input frequency 43 - 63 Hz
Table 17: TM12 / TM14 / TM12X / TM14X Series Electrical Specifications
*If using AC100V~AC199V power supply, the Robot will automatically limit the total output power
Parameters Minimum Value Typical value Maximum value Unit
Input voltage 22 - 60 V (DC)
Power consumption 300 1500 W
Table 18: TM12M / TM14M Series Electrical Specifications
*If using DC22~47V power supply or operating at high speed, the Robot will automatically limit the total output power.
*The maximum power consumption of TM12M / TM14M series defaults to 1500W. For appliations with more power consumptions,
please contact the Corporation to purchase the external power supply.
5.6.2 Robot Interface
The following figure shows the connection interface of the robot. The cables of the robot are connected to
the control box through the interface.
DANGER:
1. Ensure that the robot is correctly grounded (electrical grounding).
2. Ensure that the input current of the control box is protected by the Residual Current
Device (RCD) and appropriate fuses.
3. Ensure that all cables are correctly connected before the control box is energized. Always
Figure 63: Robot Interface
WARNING:
1. When the robot is turned on, do not disconnect the cable of robot. When the cable of robot is
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 66
Page 67

request for flexible or longer cable, contact the corporation.
EMO
2. Do not extend or modify the original cable of robot.
3. The cable of the robot is only suitable for a fixed installation. If the applications have the
5.6.3 SEMI Emergency Off Interfaces (SEMI series exclusive)
Refer below for the SEMI Emergency Off interfaces. The SEMI Emergency Off switch is connected with
control box through the EMO port. Please remove the padlock on the power interface for the power cable
or the power switch, and secure the padlock back to the box with the screws for shipping the box.
5.6.3.1 TM12M SEMI / TM14M SEMI Series
CAUTION:
For SEMI series, when SEMI Emergency Off Switch is not connected with EMO, the TM Robot
cannot be booted.
WARNING:
When SEMI Emergency Off Switch is pressed, all power will be cut off immediately. This action
impacts on the motion of the robot. Users should take with caution.
5.6.4 Detachable I/O Panel
(SEMI series exclu sive)
Figure 64: The TM12M SEMI / TM14M SEMI
SEMI Emergency Off Interface
To facilitate the wiring of the detachable I/O panel which comes with a 15 cm cable, users can loosen the
tethered screws to remove the detachable I/O panel and install easily in the other place. Users are free to
change the cable for the placement farther away; however, it is suggested to use the cable no longer than
3 m. The box header connector comes with 40 pins and 44 pins in spacing for 2.54 mm.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 67
Page 68

disassembling detachable I/O panel from its original location.
screw
screw
Figure 65: Detachable I/O Panel
NOTE:
The control box comes with the IP32 rating, but the Corporation does not guarantee this rating for
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 68
Page 69

5. Unload any hardware attached to the robot arm.
6. Unboxing & Installation
6.1 Overview
These instructions guide Users of the TM Robot through the first set up. Users must thoroughly read and
understand this Guide before performing the operations of this Chapter. Fail to do so may cause serious danger.
WARNING:
If this is your first time using the TM Robot, follow instructions in this chapter to perform
installation and initial set up. If the robot has been implemented in the working environment,
please note the following:
1. To avoid potential hazards after changing the original environment setting, verify with
current responsible operator and to back up all necessary software settings and
hardware wirings scheme.
2. Remove all of the control box's external I/O connections including the analog I/O,
EtherCAT port and network port. Remove all air lines or external power lines connected
to the optional equipment before Commissioning.
3. Remove all of the control box's connections to external devices / external storage
devices through USB interface, Serial port, and network interface.
4. Unload any object/end effector attached to the end flange, and any electrical connection
between the end effector and end module / control box of the robot.
6.2 Inspecting the Equipment
6.2.1 Before Unpacking
Carefully inspect all shipping crates for evidence of damage during transit. If any damage is indicated,
request that the carrier's agent be present at the time the container is unpacked
6.2.2 Upon Unpacking
Before signing the carrier’s delivery sheet, compare the actual items received (not just the packing slip)
with your equipment purchase order and verify that all items are present and that the shipment is correct
and free of visible damage. If the items received do not match the packing slip or are damaged, do not
sign the receipt, contact your corporation support as soon as possible. If the items received do not match
your order, contact your corporation support immediately. Inspect each item for external damage as it is
removed from its container. If any damage is evident, contact your corporation support (see HOW Can I
Get Help? on 1.2)
Retain all shipping containers and packaging materials. These items may be necessary to settle claims or
at a later date, to relocate equipment.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 69
Page 70

6.3 Unboxing
6.3.1 Carton Types
The TM Robot product comes with 2 cartons: the robot arm carton, and the control box carton, as shown
below. Also, a SEMI Emergency OFF switch carton will comes along with the SEMI series. For TM12
SEMI or TM14 SEMI,, there will be an additional carton comes with the SEMI Emergency OFF Box. Refer
below for the ratio of the cartons. The actual sizes of the cartons may differ from measurements
6.3.2 Contents of Each Carton
Figure 66: Robot Arm Carton
Figure 67: Control Box Carton
Each carton has the following contents. Check them when you unpack the cartons for the first time. If any
item is missing, contact your vendor.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 70
Page 71

The robot arm carton contains:
Robot arm
Table 19: The Robot Arm Carton Contents
The control box carton contains:
Control box
Product Brief Information
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 71
Page 72

Calibration Plates
(One large calibration plate and one small
calibration plate. Peel the protective wrap off before
using.) *The Calibration Plate comes only with TM
Robots fitted with the hand-eye camera.
IO cables
(One 8-pin digital I/O cable and one 5-pin analog
I/O cable)
Cable Length: 100 cm
Landmark
(Two Landmarks. Peel the protective wrap off
before using.)
*The Landmark comes only with TM robots fitted
with the hand-eye camera.
Landmark size: 50.5 * 50.5 ㎜ (tolerance ± 0.1 ㎜)
Power cord of the control box
(TM12 / TM14 / TM12X / TM14X)
(4 cable, Type B, I, G, F)
Cable Length: 180 cm
Power cable of the control box
(TM12M / TM14M)
(1 cable)
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 72
Cable Length: 120 cm
Page 73

robot; otherwise you risk robot arm damage or personal injury. Do not install the robot alone.
(SEMI series exclusive)
Ground Wire
(2 wires)
Wire Length: 200 cm
Jumper Wire
(1 pair)
Wire Length: 3 cm
Table 20: The Control Box Carton Contents
The SEMI Emergency OFF Switch carton contains:
SEMI Emergency OFF Switch
(1 pack)
Cable length: 300 cm
Table 21: The SEMI Emergency OFF Switch Carton Contents
6.4 Installing Your Robot
The TM Robot arm cannot stand independently after being removed from the carton. Therefore, prepare the
mounting base with the corresponding holes as described in 4.2.1.6 Robot Arm Installation, and follow the
instructions below to install the robot.
WARNING:
At the installation site, at least two people should simultaneously perform installation of the
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 73
Page 74

damage.
WARNING:
Do not attempt to move any robot links until the robot has been secured in position. Failure to
comply could result in the robot falling and causing either personnel injury or equipment
6.4.1 Remove the Control Box
After checking the contents, remove the contents in order and perform installation.
Control box carton:
Remove the Calibration Plates and TM Landmark
Remove the power cable of the control box
Remove the control box (At least two people should remove the control box from the carton.
Refer the figure below for the correct holding positions.)
Connect the power cable to the control box
Place the control box near the robot base
Figure 68: Moving the Control Box (1/2)
The control box should be carried by at least two people. One should hold on to the control box handles,
while the other should carry the foot stands. Before handling, the cable of the robot stick should not be
pulled to avoid any performance degradation.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 74
Page 75

may cause equipment damage.
Figure 69: Moving the Control Box (2/2)
WARNING:
At this stage, do not connect the power cable of the control box to any electrical outlet, or it
6.4.2 Verification Before Removal of the Robot Arm
The TM Robot arm cannot stand independently after being removed from the carton. Prepare four screws
(M10 *4) that used to attach the robot to the base near the robot base in advance. If the base is designed
with corresponding pinholes, mount them to the base.
6.4.3 Removal of the Robot Arm and Tightening
At least two people should remove the robot arm from the carton. For the correct holding positions, refer to
the figure below. Place the robot on the mounting base. If it is designed with connection pins, align the
pinholes of the robot base module. Tighten two locking screws with metal washers for the robot base that
are diagonally across from each other, and then tighten the other two locking screws.
Follow the tightening torque recommended in 4.2.1.6 Robot Arm Installation
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 75
Page 76

Otherwise, the robot arm may tip, result in equipment damage or personal injury.
Figure 70: Moving the Robot Arm (1/2)
The Robot Arm itself should be handled with at least two people. One person should carry the Lower arm
st
and Upper arm, and the other should hold on to the position between the base and 1
Joint as well as the
th
6
Joint. Before the Robot Base is fastened with screws tightly, the Robot Arm should always be
supported to avoid tipping.
Figure 71: Moving the Robot Arm (2/2)
WARNING:
When the robot is installed to the base, make sure two people work together to install it. If it is
designed with pinholes, pay attention to your safety to avoid pinching. If you do not have
connection parts at hand, such as the connecting pins and screws, do not leave the robot
without completely tightening it (with the 4 screws completely tightened). One person should
continuously support the robot arm while the other person goes to get required parts.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 76
Page 77

3. Do not extend or modify the original cables of the robot.
6.4.4 Connect the Robot and the Control Box
1. Connect the cable from the robot to the robot interface of the control box.
2. Connect the power cable between the wall socket and the power interface of the control box.
Figure 72: Connecting the Robot and the Control Box
For the SEMI series users only, connect the SEMI Emergency OFF switch to the EMO interface of the
control box.
WARNING:
1. Ensure that all cables are correctly connected before the control box is energized. Always
use genuine power cables correctly.
2. When the robot is turned on, do not disconnect cables of the robot. When cables of the robot
are not connected to the connection interface, do not turn on the robot.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 77
Page 78

sure that each setting satisfies the original conditions before resuming
Safety Software Settings
7. Maintenance and Repair
The following table gives a summary of the preventive maintenance procedures and guidelines:
Items Period Remark
Warning, Safety labels 1 week
Check Filter 1 month Replace filter every 3 months.
Check Emergency Switch 1 month
Check User Connected External Safeguard
Input Port, User Connected External
Safeguard Input Port for Human–Machine
1 month
Safety Settings, & User Connected
Enabling Device Input Port
Ensure labels are present and legible.
Replace them if necessary.
Press the Emergency Switch and the IO
E-Stop in open-loop status. Verify that each
shuts off power.
When the User Connected External
Safeguard Input Port is open, the current
motion is supposed to stop, and the
indication light of current mode will be
constantly flashing.
When the User Connected External
Safeguard Input Port for Human–Machine
Safety Setting is open, the purple light will be
alternating between the indication light of the
current mode.
When the User Connected Enabling Device
Input Port is open, the current motion is
supposed to stop, and the indication light of
current mode will be constantly flashing. This
function is invalid in auto mode.
Check Robot Mounting Screws 3 months Follow ”4.2.1.6 Robot Arm Installation”
EMO button (SEMI version only) 6 months
Table 22: Summary of the Preventive Maintenance Procedures and Guidelines
Only the legal distributor or authorized service center should repair the TM Robot. Users should not repair it by
themselves.
DANGER:
Before performing maintenance or service record the details of each setting for the robot for
normal operation. Make
normal operation, including but not limited to:
Press the EMO button. Verify that power
shuts off.
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 78
Page 79

I/O Wiring
3. Pull out the air filter tray and replace the filter with a new one.
screw
tray
rubber
Safety I/O
Preset operation project
TCP Settings
I/O Settings
NOTE:
The filter must be changed regularly to maintain efficiency. Please contact the Corporation to
purchase the filter if in demand.
edge trim
Removal method:
1. Turn of the power and lay the control box flat.
2. Remove the rubber edge trim and loosen the air filter screw.
Figure 73: Air Filter Tray
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 79
Page 80

Appendix A. Technical Specifications
Model TM14 TM12 TM14X TM12X TM14M TM12M TM14MX TM12MX
Weight 32.6Kg 33.3Kg 32.3Kg 33Kg 32.6Kg 33.3Kg 32.3Kg 33Kg
Maximum Payload 14kg 12kg 14kg 12kg 14kg 12kg 14kg 12kg
Reach 1100mm 1300mm 1100mm 1300mm 1100mm 1300mm 1100mm 1300mm
Typical Speed 1.1m/s 1.3m/s 1.1m/s 1.3m/s 1.1m/s 1.3m/s 1.1m/s 1.3m/s
J1,J6 +/- 270° +/- 270° +/- 360° +/- 360° +/- 270° +/- 270° +/- 360° +/- 360°
Joint ranges
Speed
Repeatability +/- 0.1 mm
Degrees of freedom 6 rotating joints
I/O ports
I/O power supply 24V 2.0A for control box and 24V 1.5A for tool
IP classification IP54 (Robot Arm); IP32 (Control Box)
J2,J4,J5 +/- 180° +/- 180° +/- 360° +/- 360° +/- 180° +/- 180° +/- 360° +/- 360°
J3 +/- 163° +/- 166° +/- 163° +/- 166° +/- 163° +/- 166° +/- 163° +/- 166°
J1~J2 120°/s
J3 180°/s
J4~J5 150°/s 180°/s 150°/s 180°/s 150°/s 180°/s 150°/s 180°/s
J6 180°/s
Control box
Digital in
Digital out
Analog in
Analog out
16
16
2
1
Tool conn.
4
4
1
0
Power consumption Typical 220 watts
Temperature The robot can work in a temperature range of 0-50°C
Power supply 100-240 VAC, 50-60 Hz 22-60 VDC
I/O Interface
Communication
Programming Environment
Certification CE, SEMI S2 (optional)
Robot Vision
Eye in Hand (Built in) 1.2M/5M pixels,
color camera
Eye to Hand (Optional) Support Maximum 2 GigE cameras
*Refer to the official website of TM Plug&Play for camera models compatible to TM Robot.
3×COM, 1×HDMI, 3×LAN, 4×USB2.0, 2×USB3.0
RS232, Ethernet, Modbus TCP/RTU (master & slave)
TMflow, flowchart based
1.2M/5M pixels,
N/A
color camera
N/A
Table 23: Technical Specifications
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 80
Page 81

Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 81
Page 82

© Techman Robot Inc. 2018-2021 All Rights Reserved
Medium & Heavy Payload Series-Hardware Installation Manual TM12/14 Series Hardware Version: 3.2 82
I624-E-09
0221
19888-200 J
 Loading...
Loading...