

Page 1
SGLG@, SGLF@, SGLT@
Moteurs linéaires Sigma
Servomoteurs linéaires en direct pour des
cycles de machines plus rapides.
• Contrôle direct des moteurs en utilisant des drivers
XtraDrive et Sigma-II
• Amélioration des performances des machines
• Simplicité d'utilisation et grande fiabilité
• Conçu pour une densité de force élevée dans des
boîtiers compacts
• Linéarité exceptionnelle de force même près des
pics de force
• Utilisation optimale de la puissance grâce à ses circuits magnétiques optimisés et enroulements haute
densité
• Peut atteindre des vitesses allant jusqu'à 5 mètres
par seconde.
• Modèles sans noyau et à noyau en acier disponibles
Valeurs nominales
• 230 Vc.a. monophasé 13,5 à 560 N (1200 N pic)
• 400 Vc.a. triphasé 80 à 2 000 N (7 500 N pic)
Servomoteurs
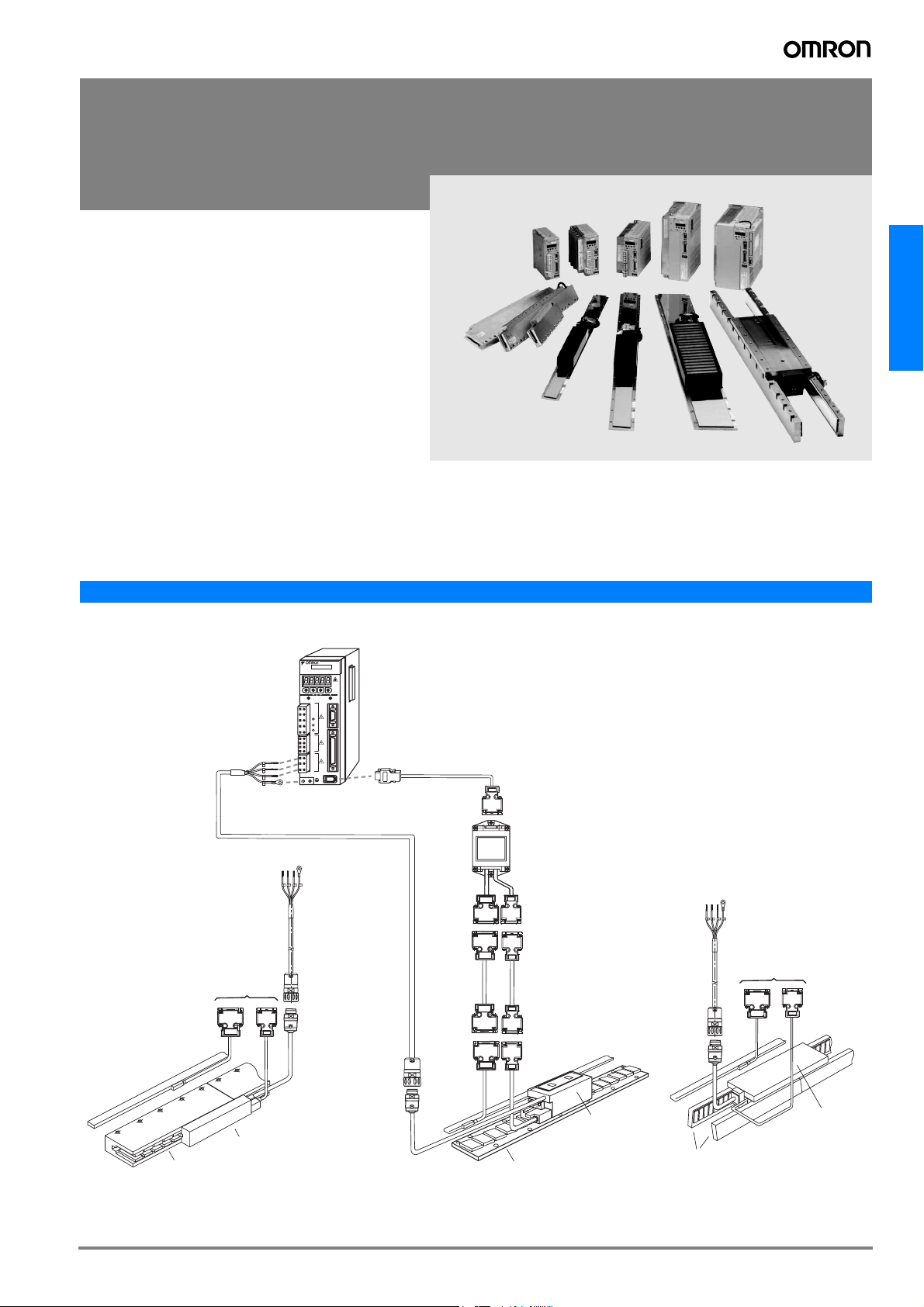
Configuration système
Câble d'alimentation
Câble
d'alimentation
(vers la carte de
conversion série)
Echelle
Capteur
linéaire
de Hall
Echelle linéaire
Bobine linéaire
Course magnétique
SGLGM
SGLG SERVOMOTEUR
LINEAIRE
SGLGW
Servodriver Sigma-II
ou XtraDrive
SERVOPACK
SGDH- 08AE - S- OY
Ver.
400 V
MODE/SET DATA/
CHARGE POWER
CN3
L1
L2
+ 1
+ 2
-
CN1
L1C
L2C
B1
B2
U
V
W
CN2
Alimentation
Alimentation
Câble de conversion série
Câble d'échelle
linéaire
(extension)
Capteur
Echelle
de Hall
linéaire
Course magnétique
SGLFM
SGLF SERVOMOTEUR
LINEAIRE
Carte de conversion
série
Câble de capteur
de Hall
(extension)
Câble
d'alimentation
Bobine linéaire
SGLFW
Câble
d'alimentation
Alimentation
Course magnétique
SGLTM
(vers la carte de
conversion série)
Capteur
Echelle
linéaire
de Hall
Bobine linéaire
SGLTW
SGLT SERVOMOTEUR
LINEAIRE
143Moteurs linéaires Sigma
Page 2
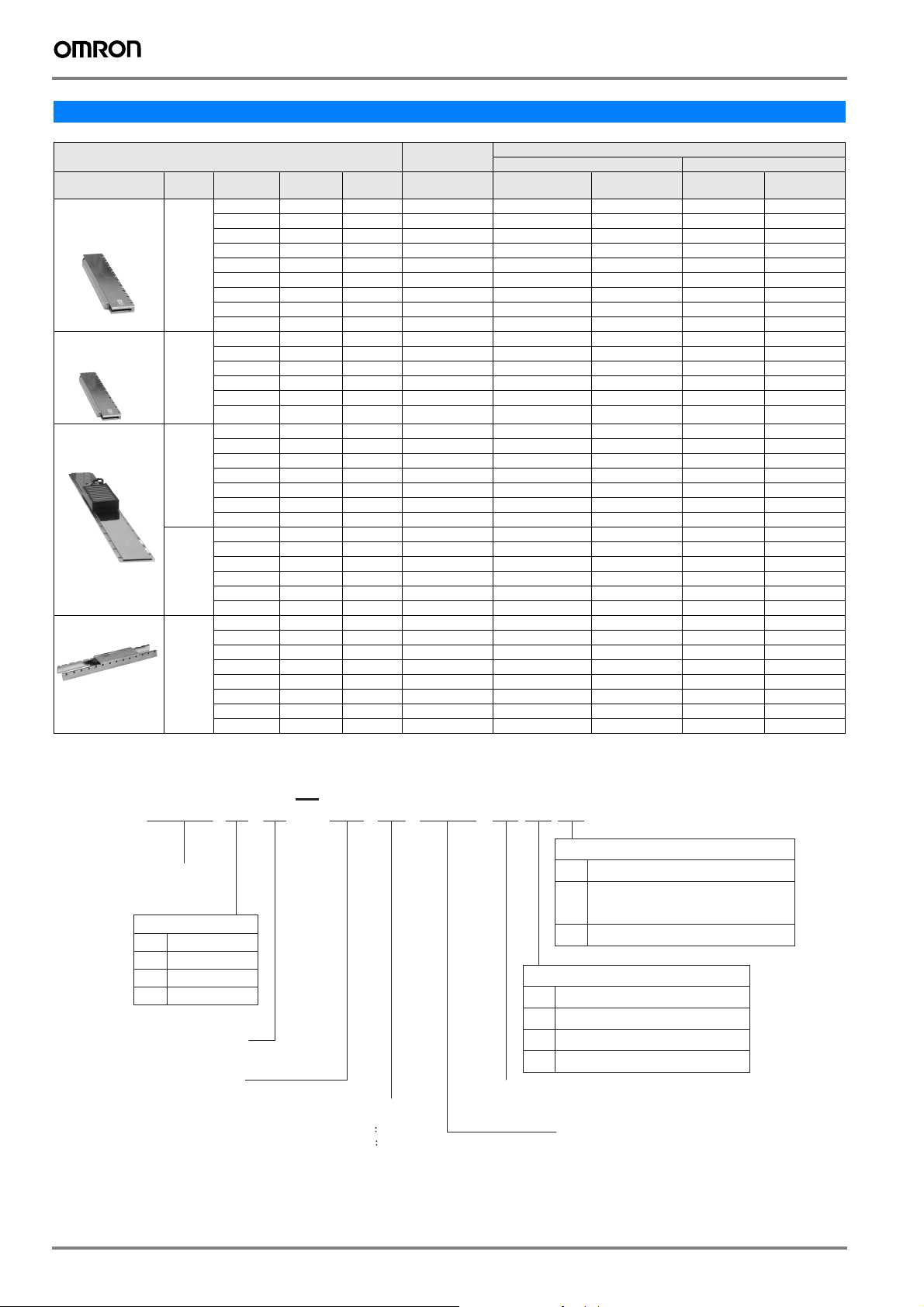
Combinaison servomoteur / driver
Servomoteur linéaire de la série Sigma Convertisseur
Type Tension Force nomi-
SGLGW sans noyau
Force standard
Courses magnétiques
SGLGW sans noyau
Force élevée
Courses magnétiques
SGLFW
Moteurs linaires
SGLTW
Moteurs linaires
230 V 13,5 N 40 N 30A050B 158 SGDH-A5AE-OY - XD-P5-MN01 -
230 V 57 N 230 N 40A140B 063 SGDH-02AE-OY - XD-02-MN01 -
230 V 25 N 86 N 20A090A 017 SGDH-02AE-OY - XD-02-MN01
400 V 80 N 220 N 35D120A 211 - SGDH-05DE-OY - XD-05-TN
400 V 300 N 600 N 35D170H 193 - SGDH-10DE-OY - XD-10-TN
série
nale
27 N 80 N 30A080B 156 SGDH-01AE-OY - XD-01-MN01 47 N 140 N 40A140B 001 SGDH-01AE-OY - XD-01-MN01 73 N 220 N 60A140B 004 SGDH-02AE-OY - XD-02-MN01 -
93 N 280 N 40A253B 002 SGDH-02AE-OY - XD-02-MN01 140 N 420 N 40A365B 003 SGDH-04AE-OY - XD-04-MN01 147 N 440 N 60A253B 005 SGDH-04AE-OY - XD-04-MN01 220 N 660 N 60A365B 006 SGDH-08AE-S-OY - XD-08-MN 325 N 1 300 N 90A200A 101 SGDH-15AE-S-OY - - -
114 N 460 N 40A253B 059 SGDH-04AE-OY - XD-04-MN01 171 N 690 N 40A365B 060 SGDH-08AE-S-OY - XD-08-MN -
89 N 360 N 60A140B 061 SGDH-02AE-OY - XD-02-MN01 178 N 720 N 60A253B 062 SGDH-08AE-S-OY - XD-08-MN 267 N 1 080 N 60A365B 047 SGDH-15AE-S-OY - - -
40 N 125 N 20A120A 018 SGDH-02AE-OY - XD-02-MN01
80 N 220 N 35A120A 019 SGDH-02AE-OY - XD-02-MN01
160 N 440 N 35A230A 020 SGDH-08AE-S-OY - XD-08-MN01
280 N 600 N 50A200B 181 SGDH-08AE-S-OY - XD-08-MN
560 N 1 200 N 50A380B 182 SGDH-15AE-S-OY - 560 N 1 200 N 1ZA200B 183 SGDH-15AE-S-OY
160 N 440 N 35D230A 212 - SGDH-05DE-OY - XD-05-TN
280 N 600 N 50D200B 189 - SGDH-10DE-OY - XD-10-TN
560 N 1 200 N 50D380B 190 - SGDH-15DE-OY - XD-15-TN
560 N 1 200 N 1ZD200B 191 - SGDH-15DE-OY - XD-15-TN
1 120 N 2 400 N 1ZD380B 192 - SGDH-30DE-OY - XD-30-TN
600 N 1 200 N 35D320H 194 - SGDH-20DE-OY - XD-20-TN
450 N 900 N 50D170H 195 - SGDH-10DE-OY - XD-10-TN
900 N 1 800 N 50D320H 196 - SGDH-20DE-OY - XD-20-TN
670 N 2 600 N 40D400B 197 - SGDH-30DE-OY - XD-30-TN
1 000 N 4 000 N 40D600B 198 - SGDH-50DE-OY - 1 300 N 5 000 N 80D400B 199 - SGDH-50DE-OY - 2 000 N 7 500 N 80D600B 200 - SGDH-75DE-OY - -
Force pic Modèle JZDP-A008-@ 230 V (monophasé) 400 V (triphasé) 230 V
Série Sigma-II XtraDrive
Servodriver
(monophasé)
400 V (triphasé)
Bobine du moteur
Série Σ linéaire
Servomoteur linéaire
Modèle de servomoteur
Code
G
F
T
W : Assemblage de la bobine
Hauteur des aimants
Caractéristiques
techniques
Sans noyau
Noyau de fer de type F
Noyau de fer de type T
WFSGL
35 D 120 A P
Code
P
C
H
Ordre de révision de conception
Tension
200 Vc.a.
A
400 Vc.a.
D
A,B,C yyy
D
Connecteur du câble pour le câble du circuit principal
Code
Connecteur MS ou connecteur fabriqué
−
par Tyco Electronics AMP K.K
Connecteur fabriqué par Interconnectron
D
Caractéristiques techniques
Avec capteur de hall (standard)
Avec capteur de hall et refroidissement forcé
Longueur de l'assemblage de la bobine
Caractéristiques
Options
Refroidissement forcé
144 Servomoteurs
Page 3
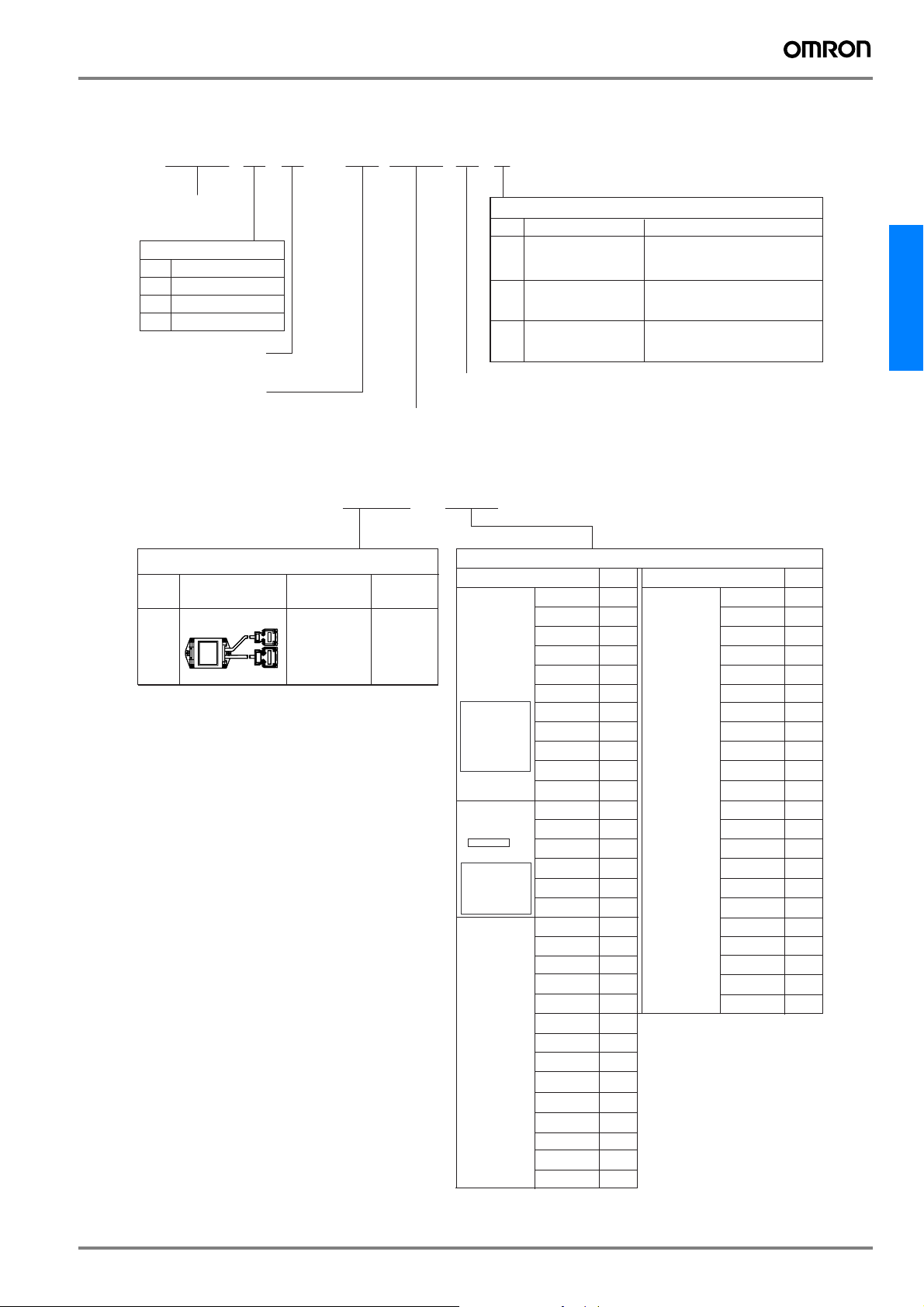
Course magnétique
SGL 35 324 A C
Série Σ linéaire
Servomoteur linéaire
Caractéristiques techniques
Code
G
Sans noyau
F
Noyau en acier de type F
T
Noyau en acier de type T
M : Course magnétique
Largeur magnétique
Convertisseur série
Modèle de carte de convertisseur série
Symbole
A008
Note : * Un câble d'extension est nécessaire en cas d'utilisation d'une
échelle linéaire fabriquée par Heidenhain
FM
Modèle
Présentation
-
Longueur de course magnétique
A008JZDP - - 001
Echelle
linéaire applicable
Produit par
Renishaw
(ou
Heidenhain *)
Capteur
de Hall
Oui
Code
C
- M
- Y
Caractéristiques
techniques
Avec couverture
magnétique
Force axiale élevée
Avec base et
couverture
magnétique
Ordre de révision de conception
A,B,C yyy
Servomoteur linéaire applicable
Modèle du servomoteur
30A050B
30A080B
40A140B
40A253B
SGLGW-
(Sans noyau)
En cas
d'utilisation
d'une course
magnétique à
force standard.
SGLGW +
SGLGM-
- M
(Sans noyau)
En cas
d'utilisation
d'une course
magnétique à
force élevée.
SGLFW-
(noyau en
acier,
type F)
40A365B
60A140B
60A253B
60A365B
90A200A
90A370A
90A535A
40A140B
40A253B
40A365B
60A140B
60A253B
60A365B
20A090A
20A120A
35A120A
35A230A
50A200B
50A380B
1ZA200B
1ZA380B
35D120A
35D230A
50D200B
50D380B
1ZD200B
1ZD380B
Symbole
158
156
001
002
003
004
005
006
101
102
103
063
059
060
061
062
047
017
018
019
020
181
182
183
184
211
212
189
190
191
192
Options
Remarques
Uniquement pour les types
avec noyau en acier
- SGLFM
- SGLTM
Uniquement pour les types
sans noyau
Seulement pour les types à
noyau en acier de type T
Modèle du servomoteur
20A170A
20A320A
20A460A
35A170A
35A320A
35A460A
35A170H
35A320H
50A170H
SGLTW-
(noyau en
acier,
type T)
50A320H
40A400B
40A600B
80A400B
80A600B
35D170H
35D320H
50D170H
50D320H
40D400B
40D600B
80D400B
80D600B
Servomoteurs
Symbole
011
012
013
014
015
016
105
106
108
109
185
186
187
188
193
194
195
196
197
198
199
200
Moteurs linéaires Sigma 145
Page 4
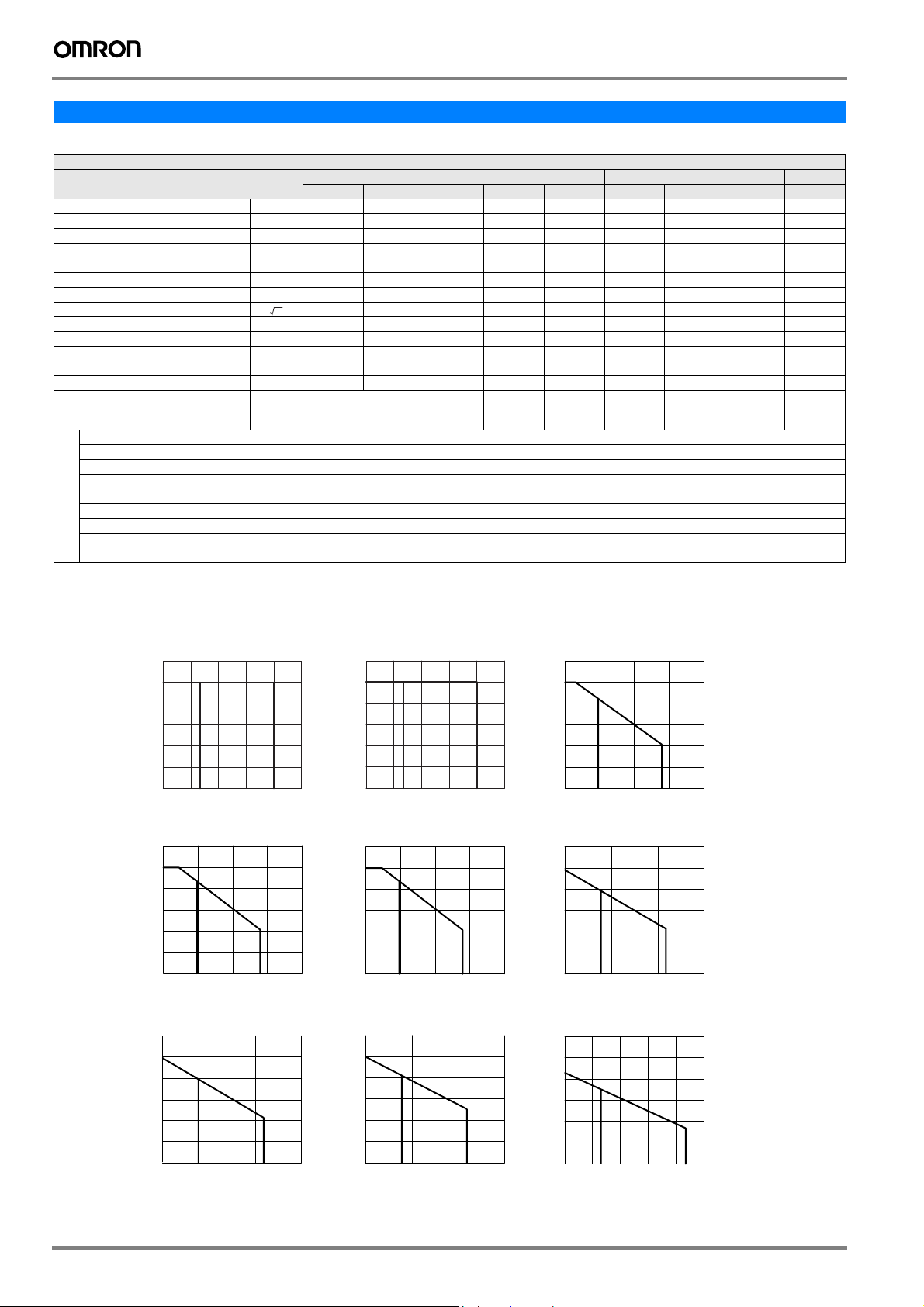
Spécifications du servomoteur
SGLGW/SGLGM sans noyau - (avec courses magnétiques de force standard)
Tension 230 V
Servomoteur linéaire
Modèle SGLGW-
Force nominale
Courant nominal
Force pic instantanée
Courant pic instantané
∗
∗
∗
∗
N 13,5 27 47 93 140 73 147 220 325
Arms 0,55 0,85 0,8 1,6 2,4 1,2 2,3 3,5 4,4
N 40 80 140 280 420 220 440 660 1300
Arms 1,62 2,53 2,4 4,9 7,3 3,5 7,0 10,5 17,6
Poids du jeu de bobinage kg 0,10 0,15 0,34 0,60 0,87 0,42 0,76 1,10 2,15
Constante de force N / A
rms 26,4 33,9 61,5 61,5 61,5 66,6 66,6 66,6 78
Constante BEMF V /(m / s) 8,8 11,3 20,5 20,5 20,5 22,2 22,2 22,2 26,0
Constante moteur 3,7 5,6 7,8 11,0 13,5 11,1 15,7 19,2 26,0
N / w
Constante de temps électrique ms 0,2 0,4 0,4 0,4 0,4 0,5 0,5 0,5 1,4
Constante de temps mécanique ms 7,30 4,78 5,59 4,96 4,77 3,41 3,08 2,98 3,18
Résistance thermique (avec radiateur) K / W 4,89 2,93 1,87 0,98 0,65 1,62 0,80 0,53 0,44
Résistance thermique (sans radiateur) K / W - - 3,39 2,02 1,38 2,69 1,54 1,20 Attraction magnétique N 000000000
Taille de radiateur mm 200 x
Temps nominal Continu
Classe d'isolation Classe B
Température ambiante 0 à +40 °C
Humidité ambiante 20 à 80% (sans condensation)
Résistance d'isolation 500 Vc.c., 10 MΩ min.
Excitation Aimant permanent
Rigidité diélectrique 1500 Vc.a. pendant 1 minute
Méthodes de protection Auto-refroidi, refroidissement à l'air
Température d'enroulement autorisée 130 °C
Caractéristiques de base
30A 40A 60A 90A
050B 080B 140B 253B 365B 140B 253B 365B 200A
300 x
12
300 x
400 x
12
400 x
500 x
12
200 x
300 x
12
300 x
400 x
12
400 x
500 x
12
800 x
900 x
12
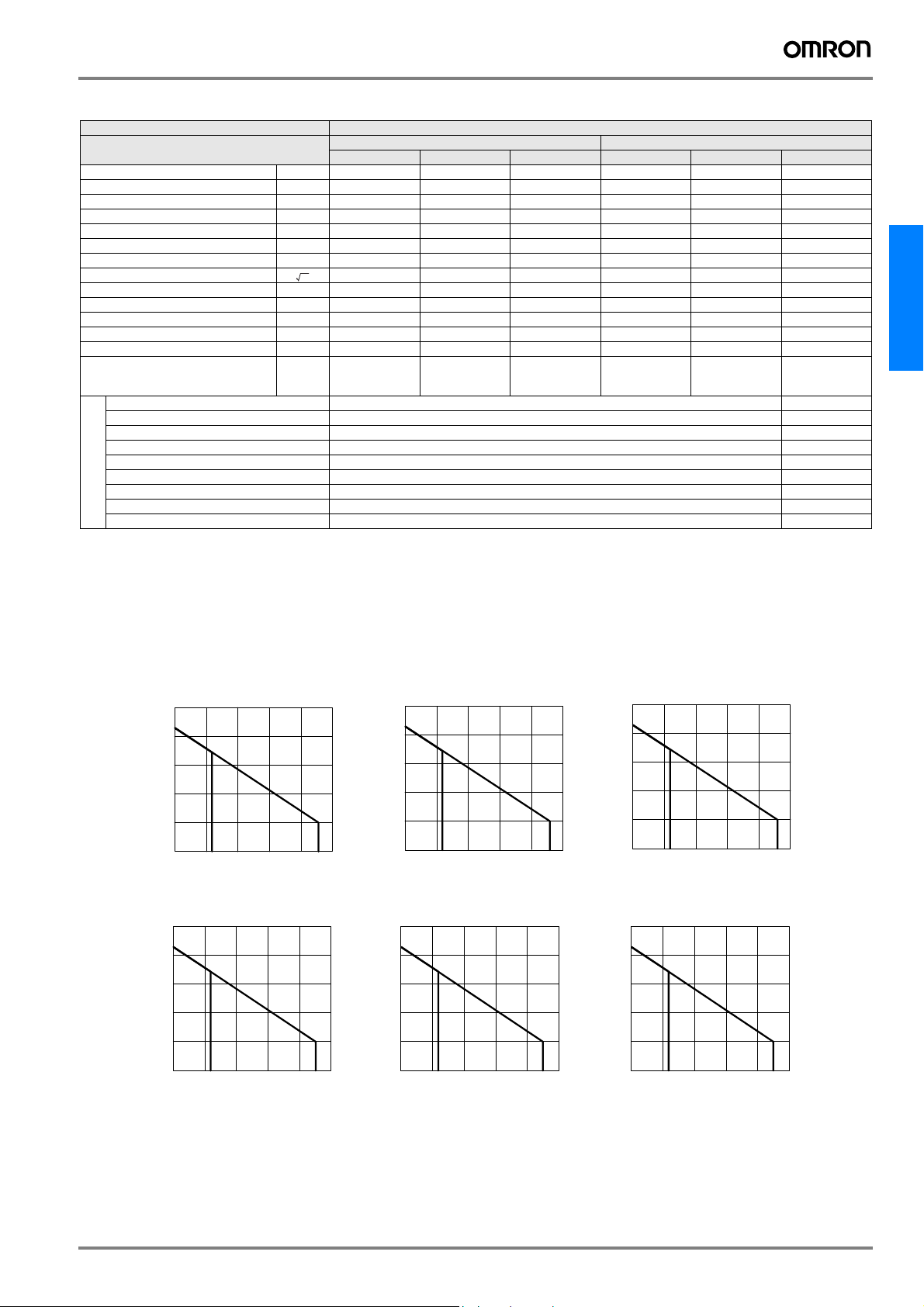
Caractéristiques Force-Vitesse - (avec courses magnétiques de force standard)
A : Zone de fonctionnement continu
B : Zone de fonctionnement intermittent
Vitesse
du
moteur
(m/s)
Vitesse
du
moteur
(m/s)
Vitesse
du
moteur
(m/s)
SGLGW-30A050B
6,0
5,0
4,0
3,0
A
2,0
1,0
0
0 10203040
Force (N)
SGLGW-40A253B
6,0
5,0
4,0
A
3,0
2,0
1,0
0
0 100 200 300 400
B
Force (N)
SGLGW-60A253B
6,0
5,0
4,0
A
3,0
2,0
1,0
0
0 200 400 600
B
Force (N)
Vitesse
du
moteur
B
50
(m/s)
Vitesse
du
moteur
(m/s)
Vitesse
du
moteur
(m/s)
SGLGW-30A080B
6,0
5,0
4,0
3,0
A
2,0
1,0
0
0 20406080
Force (N)
SGLGW-40A365B
6,0
5,0
4,0
A
3,0
2,0
1,0
0
0 150 300 450 600
B
Force (N)
SGLGW-60A365B
6,0
5,0
4,0
A
3,0
2,0
1,0
0
0 300 600 900
B
Force (N)
6,0
5,0
4,0
Vitesse
du
moteur
(m/s)
Vitesse
du
moteur
(m/s)
Vitesse
du
moteur
(m/s)
3,0
2,0
1,0
0
0 50 100 150 200
6,0
5,0
4,0
3,0
2,0
1,0
0
0 100 200 300
6,0
5,0
4,0
3,0
2,0
1,0
0
0 300 600 900 1200 1500
B
100
SGLGW-40A140B
A
B
Force (N)
SGLGW-60A140B
A
B
Force (N)
SGLGW-90A200A
A
B
Force (N)
146 Servomoteurs
Page 5
SGLGW/SGLGM sans noyau - (avec courses magnétiques de force élevée)
Tension 230 V
Servomoteur linéaire
Modèle SGLGW-
Force nominale
Courant nominal
Force pic instantanée
Courant pic instantané
Poids du jeu de bobinage kg 0,34 0,60 0,87 0,42 0,76 1,10
Constante de force N / A
Constante BEMF V /(m / s) 25,3 25,3 25,3 25,8 25,8 25,8
Constante moteur 9,6 13,6 16,7 12,9 18,2 22,3
Constante de temps électrique ms 0,4 0,4 0,4 0,5 0,5 0,5
Constante de temps mécanique ms 3,69 3,24 3,12 2,52 2,29 2,21
Résistance thermique (avec radiateur) K / W 1,87 0,98 0,65 1,62 0,80 0,53
Résistance thermique (sans radiateur) K / W 3,39 2,02 1,38 2,69 1,54 1,20
Attraction magnétique N 0 0 0 0 0 0
Taille de radiateur mm 200 x
Temps nominal Continu
Classe d'isolation Classe B
Température ambiante 0 à +40 °C
Humidité ambiante 20 à 80% (sans condensation)
Résistance d'isolation 500 Vc.c., 10 MΩ min.
Excitation Aimant permanent
Rigidité diélectrique 1 500 Vc.a. pendant 1 minute
Méthodes de protection Auto-refroidi, refroidissement à l'air
Température d'enroulement autorisée 130 °C
Caractéristiques de base
∗
∗
∗
∗
N 57 114 171 89 178 267
Arms 0,81,62,41,22,33,5
N 230 460 690 360 720 1080
Arms 3,2 6,5 9,7 5,0 10,0 14,9
rms 76,0 76,0 76,0 77,4 77,4 77,4
N / w
140B 253B 365B 140B 253B 365B
300 x
12
40A 60A
300 x
400 x
12
400 x
500 x
12
200 x
300 x
12
300 x
400 x
400 x
12
500 x
Servomoteurs
12
Note : 1. Les éléments repérés par * et les “Caractéristiques de force et de vitesse” sont les valeurs applicables à une température d'enroulement
moteur de 100 ° C pendant son fonctionnement en combinaison avec un servodriver. Les autres s'appliquent à 20 °C (68 ° F).
2. Les spécifications ci-dessus représentent les valeurs sous condition de refroidissement lorsqu'un radiateur (carte aluminium) répertorié
dans le tableau suivant est monté sur le jeu de bobinage.
Caractéristiques Vitesse-Force - (avec courses magnétiques de force élevée)
A : Zone de fonctionnement continu
B : Zone de fonctionnement intermittent
SGLGW-40A365B
5
4
3
2
A
1
0
0 150 450300 600 750
B
Force (N)
SGLGW-60A365B
5
4
3
2
A
1
0
0 240 720480 960 1200
B
Force (N)
Vitesse
du
moteur
(m/s)
Vitesse
du
moteur
(m/s)
SGLGW-40A140B
5
4
3
2
A
1
0
0 50 150100 200 250
B
Force (N)
SGLGW-60A140B
5
4
3
2
A
1
0
0 80 240160 320 400
B
Force (N)
Vitesse
du
moteur
(m/s)
Vitesse
du
moteur
(m/s)
SGLGW-40A253B
5
4
3
2
A
1
0
0 100 300200 400 500
B
Force (N)
SGLGW-60A253B
5
4
3
2
A
1
0
0 160 480320 640 800
B
Force (N)
Vitesse
du
moteur
(m/s)
Vitesse
du
moteur
(m/s)
Moteurs linéaires Sigma 147
Page 6
SGLFW/SGLFM à noyau en acier (200 V)
Tension 230 V
Servomoteur linéaire
Modèle SGLFW-
Force nominale
Courant nominal
Force pic instantanée
Courant pic instantané
∗
∗
∗
∗
N 25 40 80 160 280 560 560
Arms 0,7 0,8 1,4 2,8 5,0 10,0 8,7
N 86 125 220 440 600 1200 1200
Arms 3,0 2,9 4,4 8,8 12,4 25,0 21,6
Poids du jeu de bobinage kg 0,7 0,9 1,3 2,3 3,5 6,9 6,4
Constante de force N / A
rms 36,0 54,0 62,4 62,4 60,2 60,2 69,0
Constante BEMF V /(m / s) 12,0 18,0 20,8 20,8 20,1 20,1 23,0
Constante moteur 7,9 9,8 14,4 20,4 34,3 48,5 52,4
N / w
Constante de temps électrique ms 3,2 3,3 3,6 3,6 15,9 15,8 18,3
Constante de temps mécanique ms 11,0 9,3 6,2 5,5 3,0 2,9 2,3
Résistance thermique (avec radiateur) K / W 4,35 3,19 1,57 0,96 0,82 0,32 0,6
Résistance thermique (sans radiateur) K / W 7,69 5,02 4,10 1,94 1,48 0,74 0,92
Attraction magnétique N 314 462 809 1586 1650 3260 3300
Taille de radiateur mm 125 x 125 x 13 254 x 254 x 25 400 x 500 x 40 254 x 254 x 25
Temps nominal Continu
Classe d'isolation Classe B
Température ambiante 0 à +40 °C
Humidité ambiante 20 à 80% (sans condensation)
Résistance d'isolation 500 Vc.c., 10 MΩ min.
Excitation Aimant permanent
Rigidité diélectrique 1 500 Vc.a. pendant 1 minute
Méthodes de protection Auto-refroidi
Température d'enroulement autorisée 130 °C
Caractéristiques de base
20A 35A 50A 1ZA
090A 120A 120A 230A 200B 380B 200B
Note : 1. Les éléments repérés par * et les “Caractéristiques de force et de vitesse” sont les valeurs applicables à une température d'enroulement
moteur de 100 ° C pendant son fonctionnement en combinaison avec un servodriver. Les autres s'appliquent à 20 ° C (68 ° F).
2. Les spécifications ci-dessus représentent les valeurs sous condition de refroidissement lorsqu’un radiateur (carte aluminium) répertorié
dans le tableau suivant est monté sur le jeu de bobinage.
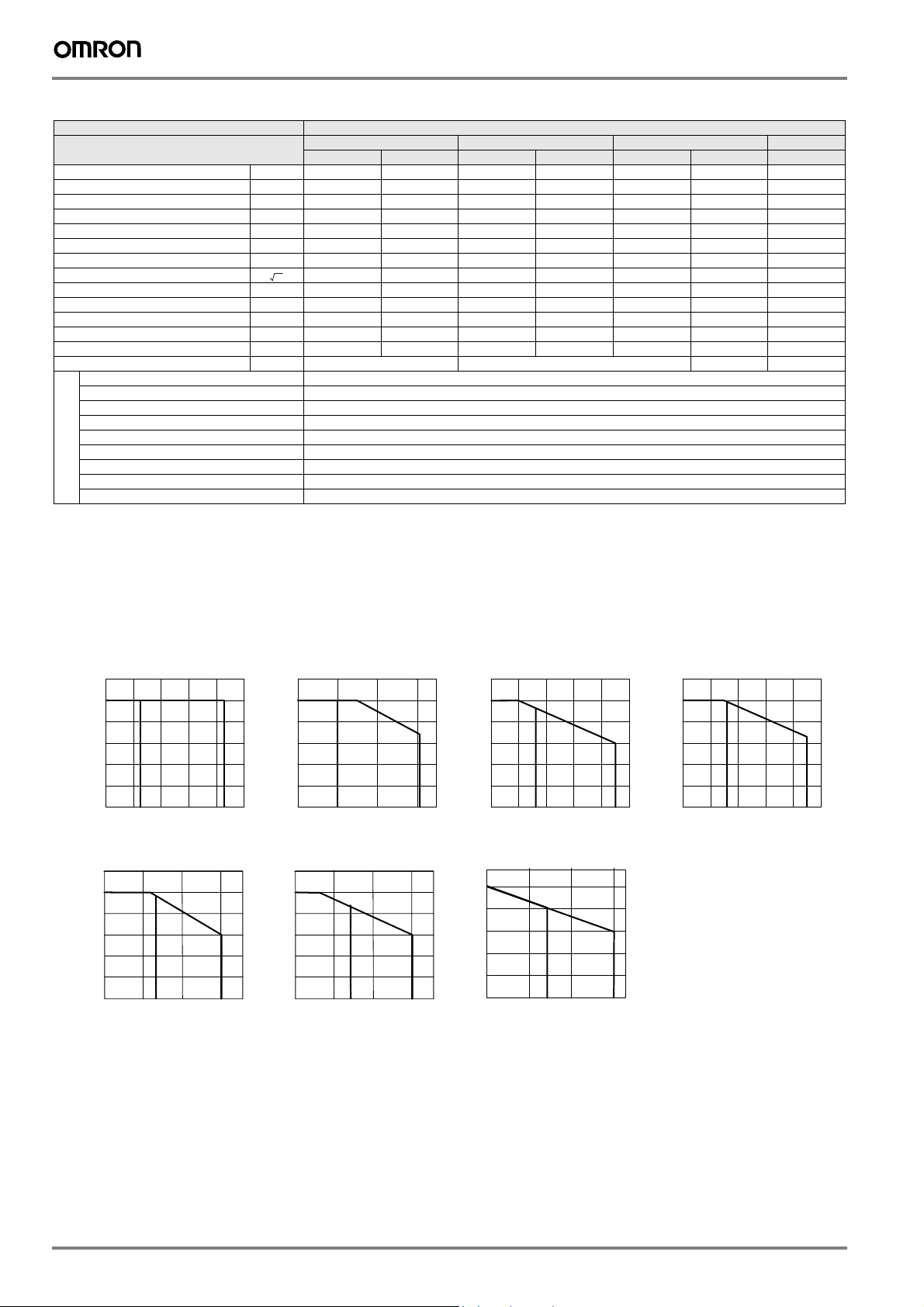
Caractéristiques Force-Vitesse (200 V)
A : Zone de fonctionnement continu
B : Zone de fonctionnement intermittent
SGLFW-20A090A
6
5
4
Vitesse
du
3
moteur
(m/s)
A
2
1
0
0 20 40 60 80 100
SGLFW-50A200B
6
5
4
Vitesse
du
3
moteur
(m/s)
2
1
0
0 400200 600
Force (N)
Force (N)
Vitesse
du
moteur
B
BA
(m/s)
Vitesse
du
moteur
(m/s)
SGLFW-20A120A SGLFW-35A120A SGLFW-35A230A
6
5
4
3
A
2
1
0
0 40 80 120 140
B
Force (N)
SGLFW-50A380B
6
5
4
3
2
1
0
0 800400 1200
Force (N)
BA
6
5
4
Vitesse
du
3
moteur
(m/s)
Vitesse
du
moteur
(m/s)
6
5
4
3
2
1
0
A
2
1
0
0 50 100 150 200 250
SGLFW-1ZA200B
0 800400 1200
B
Force (N)
BA
Force (N)
6
5
4
Vitesse
du
3
moteur
(m/s)
A
2
1
0
0 100 200 300 400 500
B
Force (N)
148 Servomoteurs
Page 7
SGLFW/SGLFM à noyau d'acier (400 V)
Tension 400 V
Servomoteur linéaire
Modèle SGLFW-
Force nominale
Courant nominal
∗
∗
Force pic instantanée
Courant pic instantané
N 80 160 280 560 560 1120
∗
∗
Arms 0,7 1,4 2,3 4,5 4,9 9,8
N 220 440 600 1200 1200 2400
Arms 2,3 4,6 5,6 11,0 12,3 24,6
120A 230A 200B 380B 200B 380B
Poids du jeu de bobinage kg 1,3 2,3 3,5 6,9 6,4 11,5
Constante de force N / A
rms 120,2 120,2 134,7 134,7 122,6 122,6
Constante BEMF V /(m / s) 40,1 40,1 44,9 44,9 40,9 40,9
Constante moteur 13,8 19,5 33,4 47,2 51,0 72,1
N / w
Constante de temps électrique ms 3,5 3,5 15,0 15,0 17,4 17,2
Constante de temps mécanique ms 5,5 5,5 3,2 3,2 2,5 2,2
Résistance thermique (avec radiateur) K / W 1,57 0,96 0,82 0,32 0,6 0,28
Résistance thermique (sans radiateur) K / W 4,1 1,94 1,48 0,74 0,92 0,55
Attraction magnétique N 810 1590 1650 3260 3300 6520
Taille de radiateur mm 254 x 254 x 25 400 x 500 x 40 254 x 254 x 25 400 x 500 x 40
Temps nominal Continu
Classe d'isolation Classe B
Température ambiante 0 à +40 °C
Humidité ambiante 20 à 80% (sans condensation)
Résistance d'isolation 500 Vc.c., 10 MΩ min.
Excitation Aimant permanent
Rigidité diélectrique 1 500 Vc.a. pendant 1 minute
Méthodes de protection Auto-refroidi
Température d'enroulement autorisée 130 °C
Caractéristiques de base
35D 50D 1ZD
Servomoteurs
Note : 1. Les éléments repérés par * et les “Caractéristiques de force et de vitesse” sont les valeurs applicables à une température d'enroulement
moteur de 100 ° C pendant son fonctionnement en combinaison avec un servodriver. Les autres s'appliquent à 20 °C (68 ° F).
2. Les spécifications ci-dessus représentent les valeurs sous condition de refroidissement lorsqu’un radiateur (carte aluminium) répertorié
dans le tableau suivant est monté sur le jeu de bobinage.
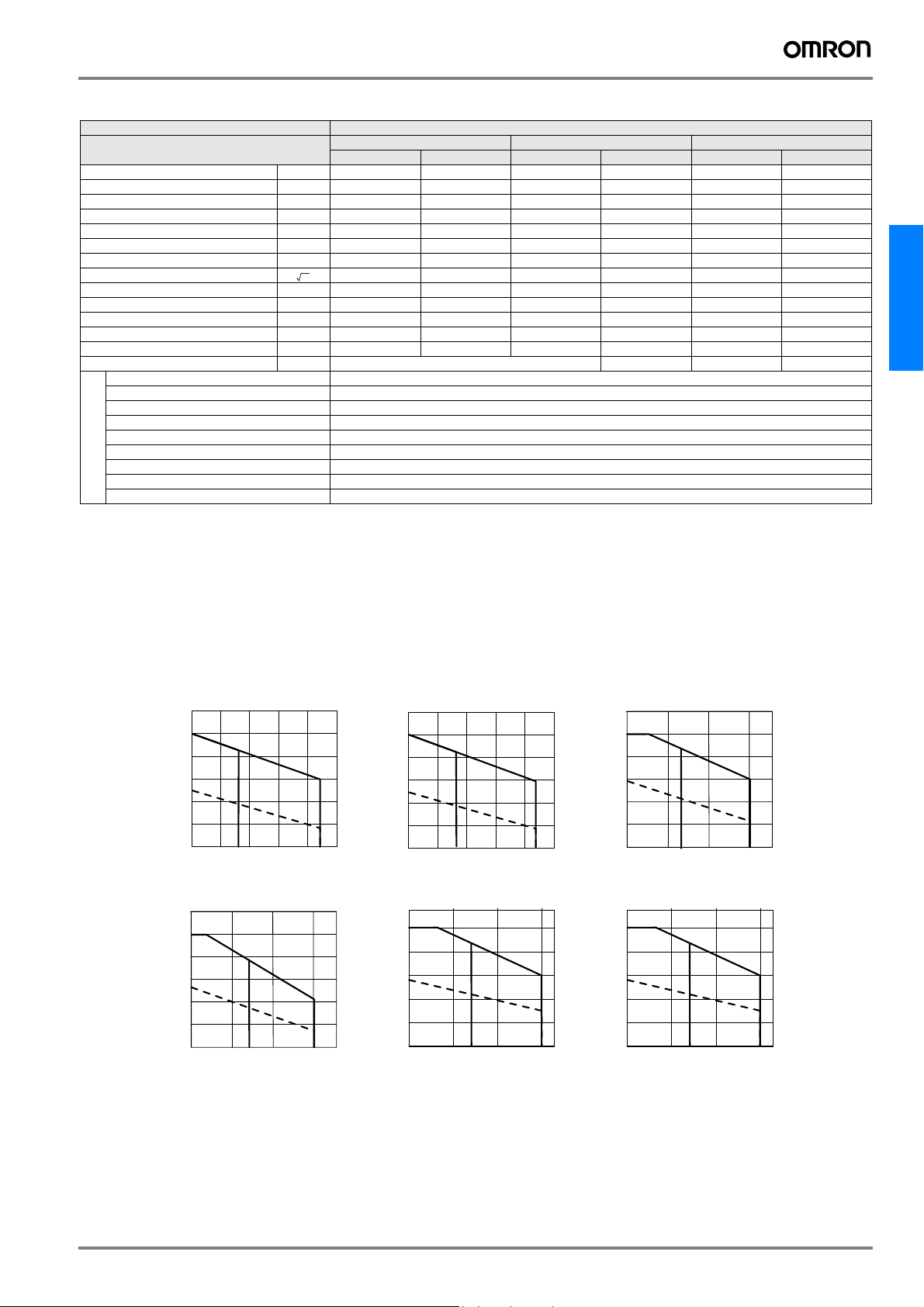
Caractéristiques Force-Vitesse (400 V)
A : Zone de fonctionnement continu
B : Zone de fonctionnement intermittent
Vitesse
du
moteu
(m/s)
Vitesse
du
moteur
(m/s)
SGLFW-35D120A
6
5
4
3
2
1
0
0 15050 100 200
Force (N)
SGLFW-50D380B
6
5
4
3
2
1
0
0 800400 1200
A
Force (N)
B
SGLFW-35D230A
6
5
4
Vitesse
du
3
250
moteur
(m/s)
2
BA
1
0
0 100 200 300 400 500
BA
Force (N)
SGLFW-1ZD200B
6
5
4
Vitesse
du
moteur
(m/s)
3
2
1
0
0 800400 1200
A
B
Force (N)
Vitesse
du
moteur
(m/s)
Vitesse
du
moteur
(m/s)
SGLFW-50D200B
6
5
4
3
A
2
1
0
0 400200 600
6
5
4
3
2
1
0
0
Force (N)
SGLFW-1ZD380B
A
1600800 2400
Force (N)
B
B
Note : La ligne en pointillés représente les caractéristiques lorsque le servomoteur linéaire pour 400 Vc.a. est utilisé avec une alimentation
d'entrée pour 200 Vc.a. Dans ce cas, il est recommandé de changer de convertisseur série. Contactez vos interlocuteurs Omron-Yaskawa.
Moteurs linéaires Sigma 149
Page 8
SGLTW/SGLTM à noyau d'acier (400 V)
Tension 400 V
Servomoteur linéaire
Modèle SGLFW-
Force nominale
Courant nominal
Force pic instantanée
Courant pic instantané
∗
∗
∗
∗
N 300 600 450 900 670 1000 1300 2000
Arms 3,2 6,5 3,2 6,3 3,7 5,5 7,2 11,1
N 600 1200 900 1800 2600 4000 5000 7500
Arms 7,5 15,1 7,3 14,6 20,7 30,6 37,6 56,4
Poids du jeu de bobinage kg 4,7 8,8 6 11 15 23 25 36
Constante de force N / A
rms 99,6 99,6 153,3 153,3 196,1 196,1 194,4 194,4
Constante BEMF V /(m / s) 33,2 33,2 51,1 51,1 65,4 65,4 64,8 64,8
Constante moteur 36,3 51,4 48,9 69,1 59,6 73 85,9 105,2
N / w
Constante de temps électrique ms 14,3 14,3 15,6 15,6 14,4 14,4 15,4 15,4
Constante de temps mécanique ms 3,5 3,5 2,5 2,5 4,2 4,2 3,2 3,2
Résistance thermique (avec radiateur) K / W 0,76 0,4 0,61 0,3 0,24 0,2 0,22 0,18
Résistance thermique (sans radiateur) K / W 1,26 0,83 0,97 0,8 0,57 0,4 0,47 0,33
Attraction magnétique
Attraction magnétique
∗1
∗2
N 00000000
N 1400 2780 2000 3980 3950 5890 7650 11400
Taille de radiateur mm 400 x 500 x 40 609 x 762 x 50
Temps nominal Continu
Classe d'isolation Classe B
Température ambiante 0 à +40 °C
Humidité ambiante 20 à 80% (sans condensation)
Résistance d'isolation 500 Vc.c., 10 MW min.
Excitation Aimant permanent
Rigidité diélectrique 1 500 Vc.a. pendant 1 minute
Méthodes de protection Auto-refroidi
Température d'enroulement autorisée 130 °C
Caractéristiques de base
*1, L’espace magnétique non équilibré résultant des conditions d'installation du jeu de bobinage provoque une attraction magnétique sur le jeu de
bobinage.
*2, La valeur indique l'attraction magnétique générée d'un côté de la course magnétique.
Note : 1. Les éléments repérés par * et les “Caractéristiques de force et de vitesse” sont les valeurs applicables à une température d'enroule-
ment moteur de 100 °C pendant son fonctionnement en combinaison avec un servodriver. Les autres s'appliquent à 20 °C (68 °F).
2. Les spécifications ci-dessus représentent les valeurs sous condition de refroidissement lorsqu'un radiateur (carte aluminium) réperto-
rié dans le tableau suivant est monté sur le jeu de bobinage.
35D 50D 40D 80D
170H 320H 170H 320H 400B 600B 400B 600B
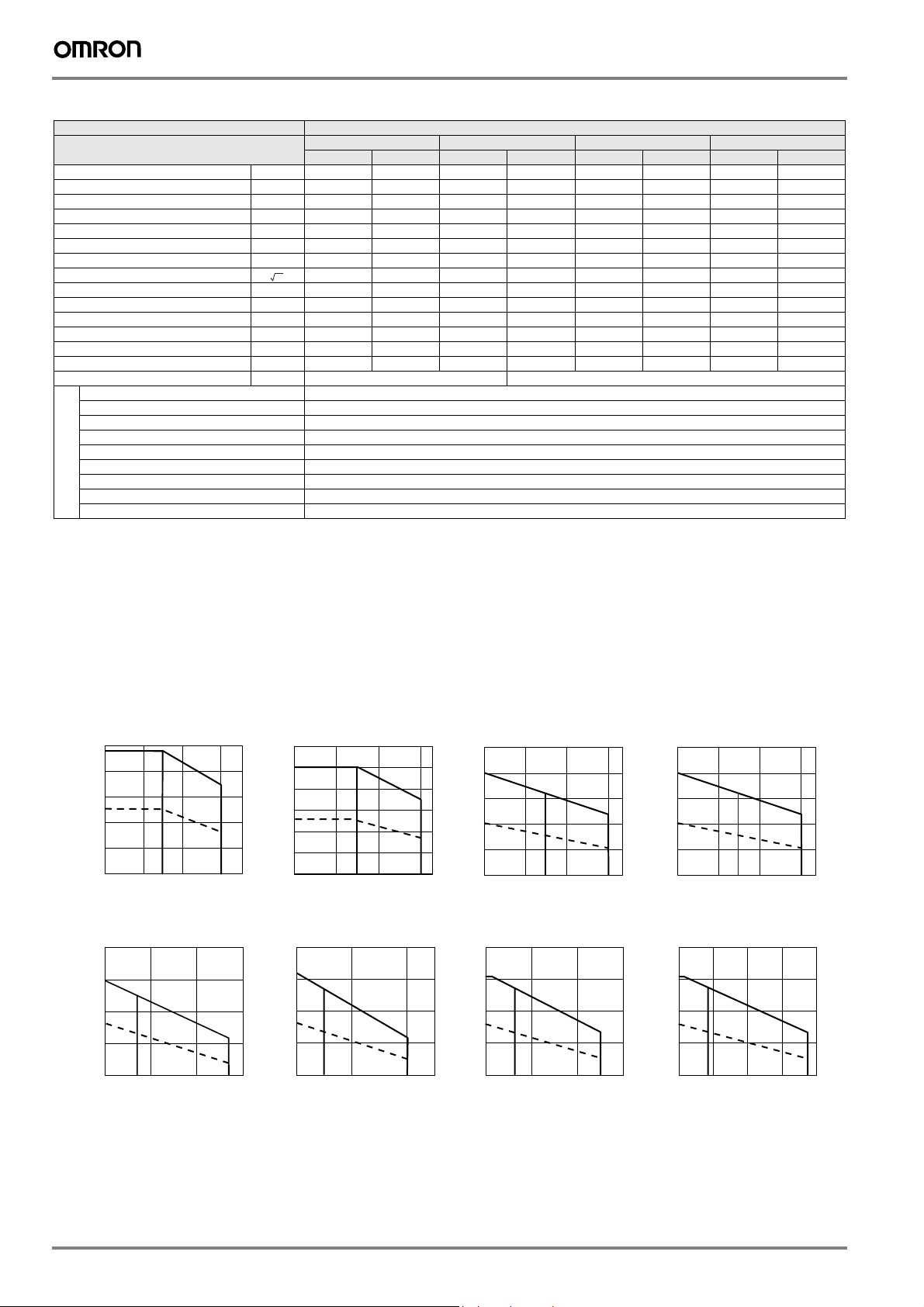
Caractéristiques Force-Vitesse (400 V)
A : Zone de fonctionnement continu
B : Zone de fonctionnement intermittent
SGLTW-35D170H SGLTW-35D320H
5
4
3
Vitesse
du
2
moteur
(m/s)
1
0
0 400200 600
SGLTW-40D400B SGLTW-40D600B
4
3
Vitesse
du
moteur
(m/s)
A
2
1
0
0 20001000 3000
BA
Force (N)
B
Force (N) Force (N)
6
5
4
Vitesse
du
3
moteur
2
(m/s)
1
0
0 800400 1200
4
3
Vitesse
du
2
moteur
(m/s)
1
0
0 40002000
SGLTW-50D170H SGLTW-50D320H
5
4
Vitesse
3
du
moteur
(m/s)
2
1
0
0 1200600 1800
BA
Force (N)
5
4
Vitesse
3
du
BA
moteur
(m/s)
2
1
0
0 600300 900
Force (N) Force (N)
BA
SGLTW-80D400B SGLTW-80D600B
4
3
A
B
Vitesse
du
moteur
(m/s)
A
2
1
0
0 4000 60002000
B
Force (N) Force (N)
Vitesse
du
moteur
(m/s)
4
3
2
1
0
0 4000 6000 80002000
A
B
150 Servomoteurs
Page 9

Dimensions
SGLG@-30 sans noyau
Jeu de bobinage SGLGW-30A@@@B@D
Jeu de bobinage,
modèle SGLGW-
30A050BD 50483020200,85 0,14
30A050BD 80725030250,95 0,19
L1 L2 L3 L4 L5 G (Gap) Poids approx.
(kg)
∗
*Cette valeur indique le poids du jeu de bobinage
avec un capteur de Hall.
2´vis
#4-40 UNC
Câble
UL20276,AWG26
50
±
22
12
500
17
44
(57)
G (Gap)
(1)
G (Gap)
N
YASKAWA ELECTRIC CORPORATION JAPAN
24
Capteur de Hall
Spécifications de connecteur
6
Vu
Type de connecteur broche :
17JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur homologue
Type de connecteur femelle :
17JE-13090-02 (D8C)
Type de tige : 17L-002C ou
17L-002C1
1
N˚ broche
1
5
2
3
4
5
6
7
8
9
Course magnétique SGLGM-30@@@A
Course magnétique,
modèle SGLGM-
30108A 108 54 2 0,6
30216A 216 162 4 1,1
30432A 432 378 8 2,3
L1
mm
L2
mm
50
Plaque
constructeur
±
500
(f5,3)
(f5)
WIns.
3
May cause injury.
Keep magneic materials away.
Servomoteur linéaire
Spécifications de connecteur
Nom
+5 V (Alimentation)
Phase U
Phase V
Phase W
0 V (Alimentation)
Inutilisé
Inutilisé
Inutilisé
Inutilisé
1
6
7
5
N Poids approx.
La bobine se déplace dans la direction indiquée par la flèche lorsque
le courant circule dans l'ordre des phases U, V et W.
Câble
UL2517, AWG25
L1
15
L3
L2
2
Extension : SROC06JMSCN169
3
Type de broche : 021.421.1020
fabriqué par Interconnectron
4
Le connecteur homologue
Type mâle : SPOC06KFSDN169
N˚ broche
1
2
3
4
5
6
7
(kg)
Nom
Phase U
Phase V
Phase W
Inutilisé
Inutilisé
FG
Inutilisé
2´2 vis de fixation M4 profondeur :
5 mm des deux côtés
1
48,5
Couleur de fil
Rouge
Blanc
Bleu
Vert/Jaune
Alimentation
inversée
(V)
4´Vis de montage M4,
profondeur 5
L5
L4
WARNING
Unités : mm
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la
direction indiquée par la flèche sur la
figure, la relation entre les signaux de
sortie du capteur de Hall Su, Sv, Sw et
l'alimentation inversée de chaque phase
du moteur Vu, Vv, Vw devient celle
indiquée dans la figure ci-dessous.
Vu
Su
Vv
Sv
Vw
0 180 360 540
Sw
Angle électrique (°)
Servomoteurs
Plaque constructeur
CORELESS LINEAR SERVO MOTOR
A
W
Ins.
N
YASKAWA ELECTRIC CORPORATION JAPAN
4,5
36
27
Etiquette d'avertissement
May cause injury.
Keep magnetic materials
away.
WARNING
N×trous 4,5
Pas 54
8×contre perforation 5L
L2
-0,1
L1 (1 unit)
-0,3
N×Trous de montage M4, profondeur 6
Pas 54
L2
(18)
(27)
7,6
44
24
Unités : mm
Moteurs linéaires Sigma 151
Page 10

SGLG@-40 sans noyau
Jeu de bobinage : SGLGW-40A@@@B@D
Jeu de bobinage,
modèle SGLGW-
40A140BD 140 125 90 30 52,5 45 3 4 0,40
40A253BD 252,5 237,5 180 37,5 60 135 5 8 0,66
40A365BD 365 350 315 30 52,5 270 8 14 0,93
L1 L2 L3 L4 L5 L6 N1 N2 Poids approx.
kg
∗
*Cette valeur indique le
poids du jeu de bobinage
avec un capteur de Hall.
2×vis
#4-40 UNC
25,4
7,2
6,5
4,8
0,5
14
Gap 0,8
Gap 0,8
Capteur de Hall
Spécifications de connecteur
9
5
Type de connecteur broche :
17JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur homologue
Type de connecteur femelle :
17JE-13090-02 (D8C)
Type de tige : 17L-002C ou
17L-002C1
L6
Trous de montage
N2×Filetage M4, profondeur 6 mm
L1
L3
Trous de montage des deux côtés
N1×Filetage M4, profondeur 6 mm
W
N
YASKAWA ELECTRIC CORPORATION JAPAN
Ins.
Plaque constructeur
15
50
±
500
(f5,3)
L5
50
±
500
(
f
7)
16
17
La bobine se déplace dans la direction indiquée par la flèche dans l'ordre des phases U, V et W.
L4
4
45
45
15
1
78
30
(7,5)
63
7
Servomoteur linéaire
6
N˚ broche
1
1
+5 V (Alimentation)
2
3
4
5
0 V (Alimentation)
6
7
8
9
Nom
Phase U
Phase V
Phase W
Inutilisé
Inutilisé
Inutilisé
Inutilisé
Spécifications de connecteur
2
1
6
7
5
Extension : SROC06JMSCN169
3
Type de broche : 021.421.1020
fabriqué par Interconnectron
4
Le connecteur homologue
Type mâle : SPOC06KFSDN169
Nom
N˚ broche
Phase U
1
Phase V
2
Phase W
3
Inutilisé
4
Inutilisé
5
FG
6
Inutilisé
7
Couleur de fil
Rouge
Blanc
Bleu
Vert/Jaune
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la
direction indiquée par la flèche sur la figure, la
relation entre les signaux de sortie du capteur
de Hall Su, Sv, Sw et l'alimentation inversée
de chaque phase du moteur Vu, Vv, Vw
devient celle indiquée dans la figure cidessous.
Vu
Su
Alimentation
Vv
inversée
(V)
Sv
Vw
0 180 360 540
Angle électrique (°)
Unités : mm
Sw
Course magnétique de force standard : SGLGM-40@@@B Course magnétique de force élevée : SGLGM-40@@@B-M
Course magnétique de force
standard, modèle SGLGM-
40090B 90 45 2 0,8
40225B 225 180 5 2,0
40360B 360 315 8 3,1
40405B 405 360 9 3,5
40450B 450 405 10 3,9
-0,1
(1 unité)
L1
-0,3
CORELESS LINEAR SERVO MOTOR
A
W
N
YASKAWA ELECTRIC CORPORATION JAPAN
Plaque constructeur
X
7
X
22,5
22,5
May cause injury.
Ins.
Keep magnetic materials
away.
Etiquette d'avertissement
Pas 45
N×φTrous de fixation 5,5 (par unité)
Pas 45
N×Vis de montage M5, profondeur 13
L2
L2
L1mmL2 mm N Poids approx.
(22,5)
(22,5)
12,7
φ10
4-C1
(kg)
7,4
25,4
5,4
5,4
φ5,5
X-X
Unités : mm
Course magnétique de force
standard, modèle SGLGM-
L1mmL2 mm N Poids approx.
(kg)
40090B-M 90 45 2 1,0
40225B-M 225 180 5 2,6
40360B-M 360 315 8 4,1
40 405B-M 405 360 9 4,6
40450B-M 450 405 10 5,1
-0,1
L1 (1 unité)
Plaque
constructeur
CORELESS LINEAR SERVO MOTOR
-
A
W
Ins.
N
O/N -
S/N
WARNING
62
φ10
YASKAWA ELECTRIC CORPORATION JAPON
7
Pas 45
N×φ5,5 trous de montage (par unité)
sur les deux côtés, φ10 filetés, profondeur 5,4 L
22,5 L2
Pas 45
N×vis de montage M5, profondeur 13 mm
Etiquette
d'avertissement
May cause injury.
Keep magnetic materials
away.
-0,3
L222,5
4-C1
7,4
31,8
Unités : mm
62
152 Servomoteurs
Page 11

SGLG@-60 sans noyau
N
Ins.
A
W
Jeu de bobinage : SGLGW-60A@@@B@D
Jeu de bobinage,
modèle SGLGW-
60A140BD 140 125 90 30 52,5 45 3 4 0,48 *Cette valeur indique le poids du
60A253BD 252,5 237,5 180 37,5 60 135 5 8 0,82
60A365BD 365 350 315 30 52,5 270 8 14 1,16
L1 L2 L3 L4 L5 L6 N1 N2 Poids
approx.
kg
∗
jeu de bobinage avec un capteur
de Hall.
2×vis
#4-40 UNC
25,4
6,5
7,2
4,8
0,5
14
15
1
7
Gap 0,8
Gap 0,8
Capteur de Hall
Spécifications de connecteur
9
5
Type de connecteur broche :
17JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur homologue
Type de connecteur femelle :
17JE-13090-02 (D8C)
Type de tige : 17L-002C ou
17L-002C1
6
L5
45
L6
Trous de montage
N2×Filetage M4, profondeur 6 mm
Plaque constructeur
Servomoteurs
17
50
50
±
500
(f5,3)
(f7)
±
500
16
La bobine se déplace dans la direction indiquée par la flèche dans l'ordre des phases U, V et W.
L4
45
4
L1
L3
Trous de montage des deux côtés
N1×Filetage M4, profondeur 6 mm
15
30
98
L2
(7,5)
83
Unités : mm
Servomoteur linéaire
N˚ broche
1
+5 V (Alimentation)
2
1
3
4
5
6
7
8
9
Phase U
Phase V
Phase W
0 V (Alimentation)
Inutilisé
Inutilisé
Inutilisé
Inutilisé
Nom
Spécifications de connecteur
2
1
5
6
7
3
4
N˚ broche
1
2
3
4
5
6
7
Extension : SROC06JMSCN169
Type de broche : 021.421.1020
fabriqué par Interconnectron
Le connecteur homologue
Type mâle : SPOC06KFSDN169
Nom
Phase U
Phase V
Phase W
Inutilisé
Inutilisé
FG
Inutilisé
Couleur de fil
Rouge
Blanc
Bleu
Vert/Jaune
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la
direction indiquée par la flèche sur la figure,
la relation entre les signaux de sortie du
capteur de Hall Su, Sv, Sw et l'alimentation
inversée de chaque phase du moteur Vu,
Vv, Vw devient celle indiquée dans la figure
ci-dessous.
Vu
Su
Alimentation
Vv
inversée
(V)
Sv
Vw
0 180 360 540
Angle électrique (°)
Sw
Course magnétique de force standard : SGLGM-60@@@B Course magnétique de force élevée : SGLGM-60@@@B-M
Course magnétique de force
standard, modèle SGLGM-
60090B 90 45 2 1,1
60225B 225 180 5 2,6
60360B 360 315 8 4,1
60405B 405 360 9 4,6
60450B 450 405 10 5,1
-0,1
(1 unité)
L1
-0,3
CORELESS LINEAR SERVO MOTOR
A
W
N
YASKAWA ELECTRIC CORPORATION JAPAN
Plaque constructeur
X
7
X
22,5
22,5
May cause injury.
Ins.
Keep magnetic materials
away.
Etiquette d'avertissement
Pas 45
N×φTrous de montage 5,5 (par unité)
Pas 45
N×Vis de montage M5, profondeur 13 mm
L2
L2
L1mmL2 mm N Poids approx.
4-C1
(kg)
7,4
82
(22,5)
(22,5)
12,7
φ10
25,4
φ10
5,4
5,4
φ5,5
X-X
Unités : mm
Course magnétique de force
standard, modèle SGLGM-
60090B-M 90 45 2 1,3
60225B-M 225 180 5 3,3
60360B-M 360 315 8 5,2
60405B-M 405 360 9 5,9
60450B-M 450 405 10 6,6
Plaque
constructeur
CORELESS LINEAR SERVO MOTOR
-
A
W
Ins.
N
O/N -
S/N
YASKAWA ELECTRIC CORPORATION JAPON
7
22,5 L2
Pas 45
Etiquette
d'avertissement
May cause injury.
Keep magnetic materials
away.
WARNING
Pas 45
N×φ5,5 trous de montage (par unité)
sur les deux côtés, φ10 filetés, profondeur 5,4 L
N×vis de montage M5, profondeur 13 mm
-0,1
L1 (1 unité)
-0,3
L222,5
L1mmL2 mm N Poids approx.
4-C1
(kg)
7,4
31,8
Unités : mm
62
Moteurs linéaires Sigma 153
Page 12

SGLG@-90 sans noyau
Jeu de bobinage : SGLGW-90A200A@D
Jeu de bobinage,
modèle SGLGW-
90A200A 199 189 130 40 60 95 3 4 2,2 *Cette valeur indique le poids du
L1 L2 L3 L4 L5 L6 N1 N2 Poids
L6L5
95
N2×Vis de fixation M6,
profondeur 9 mm
approx.
(kg)
∗
jeu de bobinage avec un capteur
de Hall.
49
2
26
110
Gap1
Capteur de Hall
Spécifications de connecteur
Type de connecteur broche :
17JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur homologue
Type de connecteur femelle :
17JE-13090-02 (D8C)
Type de tige : 17L-002C ou
17L-002C1
Gap1
11,8
50,8
9
5
6
1
2×vis
#4-40 UNC
Câble
UL20276,AWG26
(φ5,3)
138
N˚ broche
1
+5 V (Alimentation)
2
3
4
5
0 V (Alimentation)
6
7
8
9
±50
500
Câble
UL2517,AWG15
Nom
Phase U
Phase V
Phase W
Inutilisé
Inutilisé
Inutilisé
Inutilisé
Plaque constructeur
±50
500
65
(φ10,5)
Remarque : La bobine se déplace dans la direction indiquée
par la flèche lorsque le courant circule dans
l'ordre des phases U, V et W.
Servomoteur linéaire
Spécifications de connecteur
2
1
6
7
5
Extension : SROC06JMSCN169
3
Type de broche : 021.421.1020
fabriqué par Interconnectron
4
Le connecteur homologue
Type mâle : SPOC06KFSDN169
Nom
N˚ broche
Phase U
1
Phase V
2
Phase W
3
Inutilisé
4
Inutilisé
5
FG
6
Inutilisé
7
Couleur de fil
Rouge
Blanc
Bleu
Vert/Jaune
L1
L3L4
(voir remarque)
L2
2×N1 Vis de fixation M6, profondeur 9 mm
(des deux côtés)
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la
direction indiquée par la flèche sur la
figure, la relation entre les signaux de
sortie du capteur de Hall Su, Sv, Sw et
l'alimentation inversée de chaque phase
du moteur Vu, Vv, Vw devient celle
indiquée dans la figure ci-dessous.
Vu
Su
Alimentation
Vv
inversée
(V)
Sv
Vw
0 180 360 540
Angle électrique (° )
32
8
121
Unités : mm
Sw
Course magnétique SGLGM-90@@@A
Course magnétique,
modèle SGLGM-
90252A 252 189 4 7,3
90504A 504 441 8 14,7
8,5
19
L1
mm
Plaque constructeur
CORELESS LINEAR SERVO MOTOR
A
W
Ins.
N
YASKAWA ELECTRIC CORPORATION JAPAN
L2
mm
Etiquette d'avertissement
May cause injury.
Keep magnetic materials
away.
X
X
Pas 63
31,5
N trous de montage (par unité)
Pas 63
N vis de fixation M6, profondeur 14,5
N Poids approx.
-0,1
(1 unité)
L1
-0,3
L2
L2
(kg)
(44)
(31,5)
110
φ12
6,5
13,8
95,5
φ6,6
X-X
Unités : mm
18,5
50,8
154 Servomoteurs
Page 13

SGLF@-20 à noyau d'acier
Jeu de bobinage : SGLFW-20A@@@A@D
Jeu de bobinage,
modèle SGLFW-
20A090A 91 36 72 2 0,7
20A120A 127 72 108 3 0,9
L1 L2 L3 N Poids approx.
(kg)
(44)
(22) (22)
(6)
(10,2 : avec capot magnétique)
(10 : sans capot magnétique)
c
Capteur de Hall
Spécifications du connecteur
5
Type de connecteur broche :
17JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur homologue
Type de connecteur femelle :
17JE-13090-02(D8C)
Type de tige : 17L-002C ou
17L-002C1
6
9
1
(32)
2
22
(20)
0,5
12,5
(4,2 : avec capot magnétique)
34
(4 : sans capot magnétique)
(Espace 0,8 : avec capot magnétique)
(Espace 1 : sans capot magnétique)
45±
0,1
SGLFW-20A090AD
20
30 36
12,5
N˚ broche
1
2
3
4
5
6
7
8
9
17,5
40
22,5
22,5
Nom
Phase U
Phase V
Phase W
Inutilisé
Inutilisé
Inutilisé
Inutilisé
Course magnétique
2×vis
#4-40 UNC
Servomoteur linéaire
Spécifications du connecteur
1
6
7
5
5,5
2×trous filetés M4, profondeur 5,5
+5 V (Alimentation)
0 V (Alimentation)
Capteur de Hall
50
±
500
50
(φ4,2)
±
500
Plaque constructeur
2
Extension : SROC06JMSCN169
3
Type de broche : 021.421.1020
fabriqué par Interconnectron
4
Le connecteur homologue
Type mâle : SPOC06KFSDN169
Nom
N˚ broche
Phase U
1
Phase V
2
Phase W
3
Inutilisé
4
Inutilisé
5
FG
6
Inutilisé
7
50 mini.
30 mini.
(φ6,1
)
Remarque : la bobine se déplace dans la direction indiquée par la flèche
lorsque le courant circule dans l'ordre des phases U, V et W.
d
SGLFW-20A120AD
20
30
12,5
Couleur du fil
Rouge
Blanc
Bleu
Vert/Jaune
L1
(
25)
L23030
36
12)
7,5)
(
(
20
AA
)
)
10
(
12,5
(
Voir les schémas
d
et
12
36
72
c
ci-dessous.
3×trous filetés M4, profondeur 5,5
L3
A - A
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la
direction indiquée par la flèche sur la
figure, la relation entre les signaux de
sortie du capteur de Hall Su, Sv, Sw et
l'alimentation inversée de chaque phase
du moteur Vu, Vv, Vw devient celle
indiquée dans la figure ci-dessous.
Vu
Alimentation
Vv
inversée
(V)
Vw
(voir remarque)
7
8
2,55,5
22,5
Unités : mm
Su
Sv
0 180 360 540
Sw
Angle électrique (° )
Servomoteurs
Course magnétique : SGLFM-20@@@A
Course magnétique,
modèle SGLFM-
20324A 324 270 (54 × 5) (331,6) 6 0,9
20540A 540 486 (54 × 9) (547,6) 10 1,4
20756A 756 702 (54 × 13) (763,6) 14 2
6
10
Note : 1. Il est possible de connecter plusieurs courses magnétiques SGLFM-20A. Connectez les courses magnétiques de sorte que les
repères de référence se correspondent dans la même direction que celle indiquée sur la figure.
2. La course magnétique peut avoir des influences sur les pacemakers. Restez à une distance d'au moins 200 mm de la course magné-
tique
L1
-0,3
Ensemble bobine
4
(34)
45±0,1
-0,1
17,5)
(
(22,5)
(Espace1)
L2 (L3) N Poids approx.
9,9˚
4,5)
(
22)
(
40)
(
(Deux marques φ4 sont gravées.)
Vis de montage
44
4,5 35
Marques de référence
Hauteur de la tête de la vis : 4,2 mm maxi.
22
0
30,8
-0,2
SNSN
YASKAWA
TYPE :
54
(kg)
(
L3)
O/N
S/N
FABRIQUEE AU JAPON
Plaque constructeur
L2
L1
-0,1
-0,3
Trous de montage
2×N×φ4,8
Marque de référence
SNSN
(54)
(30,8)
Unités : mm
YASKAWA
YASKAWA
TYPE :
Marque de
référence
O/N
S/N
MADE
Moteurs linéaires Sigma 155
Page 14

SGLF@-35 à noyau d'acier
Jeu de bobinage : SGLFW-35@@@@A@D
Jeu de bobinage,
modèle SGLFW-
35120AD 127 72 108 6 1,3
35230AD 235 180 216 12 2,3
L1 L2 L3 N Poids approx.
(kg)
(60)
(10,2 : avec capot magnétique)
(10 : sans capot magnétique)
Capteur de Hall
Spécifications de connecteur
Type de connecteur broche :
7JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur homologue
Type de connecteur femelle :
17JE-13090-02 (D8C)
Type de tige : 17L-002C ou
17L-002C1
6
9
5
1
2
(32)
(30)
(30)
(6)
0,5
(4,2 : avec capot magnétique)
34
(4 : sans capot magnétique)
(Espace 0.8 : avec capot magnétique)
(Espace1 : sans capot magnétique)
45±0,1
SGLFW-35120AD
18
35
30 36
8,5
12,5
Nom
N˚ broche
1
+5 V (Alimentation)
2
Phase U
3
Phase V
4
Phase W
5
0 V (Alimentation)
6
Inutilisé
7
Inutilisé
8
Inutilisé
9
Inutilisé
5,5
37
(35)
12,5
6×Trous filetés M4, profondeur 5,5
72
Course magnétique
25
55
30
2×vis
#4-40 UNC
30
SGLFW-35AAD
Servomoteur linéaire 200 V
Spécifications de connecteur
1
2
6
3
7
4
5
N˚ broche
1
2
3
4
5
6
7
Capteur de Hall
50
500±
50
(φ4,2)
500±
(
φ6,1
)
Plaque constructeur
SGLFW-35230AD
35
12,5
Extension : SROC06JMSCN169
Type de broche : 021.421.1020
fabriqué par Interconnectron
Le connecteur homologue
Type mâle : SPOC06KFSDN169
Nom
Phase U
Phase V
Phase W
Inutilisé
Inutilisé
FG
Inutilisé
50 mini.
30
30
Voir les schémas
30 mini.
12
A - A
188,5
30 36
SGLFW-35DAD
Servomoteur linéaire 400 V
Spécifications de connecteur
5
4
N˚ broche
L1
L2
36
(10,5)
AA
18
(8,5)
et ci-dessous.
L3
8
2,5
La bobine se déplace dans la
direction indiquée par la flèche
lorsque le courant circule dans
l'ordre des phases U, V et W.
5,5
12×Trous filetés M4, profondeur 5,5
180 (36 × 5)
Extension : LRRA06AMRPN182
6
1
Type de broche : 021.147.2000
fabriqué par Interconnectron
2
Le connecteur homologue
Type mâle : LPRA06BFRBN170
Nom
Phase U
1
Phase V
2
Phase W
4
Inutilisé
5
Inutilisé
6
Masse
25
(7,5)
35
(12,5)
7
30
Unités : mm
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la
direction indiquée par la flèche sur la
figure, la relation entre les signaux de
sortie du capteur de Hall Su, Sv, Sw et
l'alimentation inversée de chaque phase
du moteur Vu, Vv, Vw devient celle
indiquée dans la figure ci-dessous.
Alimentation
inversée
(V)
Vu
Su
Vv
Sv
Vw
0 180 360 540
Sw
Angle électrique (° )
Course magnétique : SGLFM-35@@@A
6104
L1
-0,3
Ensemble bobine
(34)
45±
0,1
-0,1
(25)
(55)
(30)
(Deux marques φ4 sont gravées.)
(Espace1)
Dimensions de l'ensemble
L2 (L3) N Poids approx.
9,9°
(4,5)
60
51
30 (30)
4,5
Marques de référence
La hauteur de tête de vis doit être de 4,2 mm max.
0
32,2
-0,2
YASKAWA
TYPE:
54
SSNSSNNN
Plaque constructeur
O/N
S/N
MADE IN JAPAN
DATE
(L3)
L2
-0,1
L1
-0,3
(kg)
2×N - trous de montage φ4,8
Marque de référence
(54)
(32,2)
Unités : mm
YASKAWA
TYPE:
Marque de
référence
O/N
S/N
MADE
Course magnétique,
modèle SGLFM-
35324A 324 270 (54 × 5) (334,4) 6 1,2
35540A 540 486 (54 × 9) (550,4) 10 2
35756A 756 702 (54 × 13) (766,4) 14 2,9
Note : 1. Il est possible de connecter plusieurs courses magnétiques SGLFM-35A. Connectez les courses magnétiques de sorte que les
repères de référence se correspondent dans la même direction que celle indiquée sur la figure.
2. La course magnétique peut avoir des influences sur les pacemakers. Restez à une distance d'au moins 200 mm de la course magnéti-
que.
156 Servomoteurs
Page 15

SGLF@-50 à noyau d'acier
é
)
()
Jeu de bobinage : SGLFW-50@@@@B@D
Jeu de bobinage,
modèle SGLFW-
50200BD 215 120 180 6 3,5
50380BD 395 300 360 12 6,9
L1 L2 L3 N Poids approx.
(kg)
(40)
(37,5)
(75)
(37,5)
(9)
43
0,1
58±
(Espace 0,8 : avec capot magnétique)
(Espace1 : sans capot magn
(14,2 : avec capot magnétique)
(14 : sans capot magnétique)
Capteur de Hall
Spécifications de connecteur
Type de connecteur broche :
7JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur homologue
Type de connecteur femelle :
17JE-13090-02 (D8C)
Type de tige : 17L-002C ou
17L-002C1
6
9
5
1
3
7
33,7537,75
71,5
50,5
(47,5)
14
0,5
(5,2 : avec capot magnétique)
(5 : sans capot magnétique)
SGLFW-50200BD
23,5
47,5
12
14
30 60
Nom
N˚ broche
1
+5 V (Alimentation)
2
Phase U
3
Phase V
4
Phase W
5
0 V (Alimentation)
6
Inutilisé
7
Inutilisé
8
Inutilisé
9
Inutilisé
Course magnétique
2×vis
#4-40 UNC
tique
6×Trous filetés M4, profondeur 7
120
Capteur de Hall
50
500±
(φ4,2)
500±
SGLFW-50AAD
Servomoteur linéaire 200 V
Spécifications de connecteur
1
6
7
5
50 mini.
50
(φ
7
,
4
)
Plaque constructeur
2
Extension : SROC06JMSCN169
3
Type de broche : 021.421.1020
fabriqué par Interconnectron
4
Le connecteur homologue
Type mâle : SPOC06KFSDN169
Nom
N˚ broche
Phase U
1
Phase V
2
Phase W
3
Inutilisé
4
Inutilisé
5
FG
6
Inutilisé
7
50 mini.
30
25
55
60
Voir les schémas
et ci-dessous.
L3
SGLFW-50380BD
23,5
47,5
30 60
12
14
SGLFW-50DAD
Servomoteur linéaire 400 V
Spécifications de connecteur
5
4
L1
L2
(15)
AA
23,5
La bobine se déplace dans la direction
(12)
indiquée par la flèche lorsque le courant
circule dans l'ordre des phases U, V et W.
9,5
2,5
7
A - A
12×Trous filetés M4, profondeur 7
300 (60 × 5)
Extension : LRRA06AMRPN182
6
1
Type de broche : 021.147.2000
fabriqué par Interconnectron
2
Le connecteur homologue
Type mâle : LPRA06BFRBN170
Nom
N˚ broche
Phase U
1
Phase V
2
Phase W
4
Inutilisé
5
Inutilisé
6
Masse
(10)
47,5
(14)
Unités : mm
Alimentation
inversée
(V)
40
10
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la di-
rection indiquée par la flèche sur la figure, la relation entre les signaux de sortie
du capteur de Hall Su, Sv, Sw et
l'alimentation inversée de chaque phase
du moteur Vu, Vv, Vw devient celle indiquée dans la figure ci-dessous.
Vu
Su
Vv
Sv
Vw
0 180 360 540
Sw
Angle électrique (° )
Servomoteurs
Course magnétique : SGLFM-50@@@A
9
14
-0,1
L1
-0,3
Ensemble bobine
5
(43)
(Espace1)
0,1
58±
Dimensions de l'ensemble
L2 (L3) N Poids approx.
8,6°
(5)5
75
65
(71,5)
Marques de référence
(37,5)
37,5
39,4
SSSNSNNN
O/N
YASKAWA
S/N
TYPE:
MADE IN JAPAN
DATE
Plaque constructeur
0
-0,2
67,5
L1
(33,75)
(37,75)
(Deux marques φ4 sont gravées.)
La hauteur de la tête de vis doit être de 5,2 mm max.
L2
-0,1
-0,3
(kg)
2×N - trous de montage φ5,8
Marque de référence
(67,5)
Unités : mm
(39,4)
YASKAWA
TYPE:
Marque de
référence
Course magnétique,
modèle SGLFM-
50405A 405 337,5 (67,5 × 5) (416,3) 6 2,8
50675A 675 607,5 (67,5 × 9) (686,3) 10 4,6
50945A 945 877,5 (67,5 × 13) (956,3) 14 6,5
Note : 1. Il est possible de connecter plusieurs courses magnétiques SGLFM-50A. Connectez les courses magnétiques de sorte que les
repères de référence se correspondent dans la même direction que celle indiquée sur la figure.
2. La course magnétique peut avoir des influences sur les pacemakers. Restez à une distance d'au moins 200 mm de la course magné-
tique
Moteurs linéaires Sigma 157
Page 16

SGLF@-1Z à noyau d'acier
q
éérence
S
A
Jeu de bobinage : SGLFW-1Z@@@@B@D
Jeu de bobinage,
modèle SGLFW-
1Z200BD 215 120 180 8 6,4
1ZD380BD 395 300 360 18 11,5
L1 L2 L3 N Poids approx.
(kg)
50 min.
50 min.
25
(φ8,4)
Plaque
constructeur
d
SGLFW-1ZD380BD
35,535,5
95
12
14
55
Extension : SROC06JMSCN169
Type de broche : 021.421.1020
fabriqué par Interconnectron
Le connecteur homologue
Type mâle : SPOC06KFSDN169
Nom
Phase U
Phase V
Phase W
Inutilisé
Inutilisé
FG
Inutilisé
(125)
(62,5) (62,5)
(9)
(14,2 : avec capot magnétique)
(14 : sans capot magnétique)
c
14
Capteur de Hall
Spécifications du connecteur
6
9
5
Type de connecteur broche :
17JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur homologue
Type de connecteur
femelle :
17JE-13090-02 (D8C)
Type de tige : 17L-002C ou
17L-002C1
1
(40)
3
7
98
(95)
14
0,5
(5,2 : avec capot magnétique)
43
(5 : sans capot magnétique)
(Espace 0.8 : avec capot magnétique)
±
0,1
58
(Espace1 : sans capot magnétique)
SGLFW-1Z200BD
35,535,5
95
12
55
Nom
N˚ broche
1
+5 V (Alimentation)
Phase U
2
Phase V
3
Phase W
4
5
0 V (Alimentation)
6
Inutilisé
7
Inutilisé
8
Inutilisé
9
Inutilisé
Course magnétique
57,561,5
119
2×vis
#4-40 UNC
9 × trous filetés M5, profondeur 7
60
120
SGLFW-1ZA200AD
Servomoteur linéaire 200 V
Spécifications du connecteur
1
6
7
5
Capteur de Hall
500
(φ4.2)
500±50
2
3
4
N˚
broche
1
2
3
4
5
6
7
±50
Course magnétique : SGLFM-1Z@@@A
Course magnétique,
modèle SGLFM-
1Z405A 405 337,5 (67,5 × 5) (423,9) 6 7,3
1Z675A 675 607,5 (67,5 × 9) (693,9) 10 12
1Z945A 945 877,5 (67,5 × 13) (963,9) 14 17
-0,1
L1
-0,3
L2 (L3) N Poids approx.
5530
60
Voir les schémas
c et d ci-dessous.
18 × trous filetés M5, profondeur 7
60
SGLFW-1ZDAD
Servomoteur linéaire 400 V
Spécifications du connecteur
6
5
1
2
4
N˚
broche
1
2
4
5
6
L1
L2
(15)
A A
35,535,5
La bobine se déplace dans la direction
(12)
indiquée par la flèche lorsque le
courant circule dans l'ordre des phases U, V et W.
9,5
2,5
7
A-A
×
5)
300 (60
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la
direction indiquée par la flèche sur la
Extension : LRRA06AMRPN182
Type de broche : 021.147.2000
fabriqué par Interconnectron
Le connecteur homologue
Type mâle : LPRA06BFRBN170
Nom
Phase U
Phase V
Phase W
Inutilisé
Inutilisé
Masse
figure, la relation entre les signaux de
sortie du capteur de Hall Su, Sv, Sw et
l'alimentation inversée de chaque phase
du moteur Vu, Vv, Vw devient celle
indiquée dans la figure ci-dessous.
Alimentation
inversée
(V)
(kg)
40
(10)
95
(14)
10L3
Unités : mm
Vu
Su
Vv
Sv
Vw
0 180 360 540
Angle électrique (° )
Sw
(L3)
2×N - trous de montage φ7
contre perforation φ11,5,
profondeur 1,5
O/N
S/N
MADE IN JAPAN
DATE
Marque de référence
L2
-0,1
L1
-0,3
KAW
ue de
Unités : mm
9
14
(Espace1)
Ensemble bobine
125
(119)
(61,5) (57,5)
5
(43)
58
±
0,1
Dimensions de l'ensemble
Marques de référence
(Deux marques φ4 sont gravées.)
1,5
φ11,5
La hauteur de tête de vis doit être de 6,7 mm max.
8,6°
(62,5)62,5
1126,5 (6,5)
0
43,2
-0,2
S
SSSNNNN
YASKAWA
TYPE:
Plaque constructeur
67,5
Note : 1. Il est possible de connecter plusieurs courses magnétiques SGLFM-1ZA. Connectez les courses magnétiques de sorte que les
repères de référence se correspondent dans la même direction que celle indiquée sur la figure.
2. La course magnétique peut avoir des influences sur les pacemakers. Restez à une distance d'au moins 200 mm de la course magnétique.
158 Servomoteurs
Page 17

SGLT@-35 à noyau d'acier
82
90
,3
+0,6
(12)
()
)
(30,6)()
e
course
gn
é
tique de sorte
que ses angles
g
q
é
paulement interne.
course
gn
é
que ses angles
g
é
paulement interne.
de la bobine su
e.
φ
φ
)
g( p p )
Jeu de bobinage : SGLTW-35D@@@H@D
Jeu de bobinage,
modèle SGLTW-
35D320HD 315 288 (48 × 6) (17) 14 8,8
L1 L2 (L3) N Poids approx.
(kg)
X
30
(70)
66
62,5
O/N
S/N
YASKAWA ELECTRIC FABRIQUEE AU JAPON
AV
28
DATE
ins.
30
Plaque constructeur
12
W
m/sN
SERVO MOTEUR linéaire
TYPE
P
Course
X
magnétique
1
±0,1
60
120
30 L1
10
20
Capteur de Hall
(90)(15) (15)
0,15
±0,1
20
±0,05
80
Tube de protection
500
Nom
0 V
±50
(φ4,2)
500
±50
35
43
63 min.
Servomoteur linéaire
Spécifications du connecteur
6
5
1
2
4
Extension : LRRA06AMRPN182
Type de broche : 021.147.2000
fabriqué par Interconnectron
Le connecteur homologue
Type mâle : LPRA06BFRBN170
(19,2 : avec capot magnétique)
(19 : sans capot magnétique)
(Espace 0.8 : avec capot magnétique)
(Espace 1 : sans capot magnétique)
Spécification du câblage
du capteur de Hall
96
1
5
Type de connecteur broche :
17JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur correspondant
Type de connecteur
femelle :
17JE-13090-02 (D8C)
Type de tige : 17L-002C ou
17L-002C1
2×vis
#4×40 UNC
Câble
UL20276, AWG28
N˚
broche
1
+5 Vc.c.
2
Phase U
3
Phase V
4
Phase W
5
6
Inutilisé
7
Inutilisé
8
Inutilisé
9
Inutilisé
Course magnétique : SGLTM-35@@@H
Course magnétique,
modèle SGLGM-
35324H 324 270 (54 × 5) 6 4,8
35540H 540 486 (54 × 9) 10 8
35756H 756 702 (54 × 13) 14 11
Note : 1. Deux courses magnétiques pour les deux extrémités d'un
jeu de bobinage constituent un ensemble. Des rondelles h
sont montées sur les courses magnétiques pour plus de
sécurité lors du transport. Ne pas les retirer avant le montage du jeu de bobinage sur la machine
-0,1
L1
-0,3
Monter la
ma
91,5±1 (standard)
123 max. (standard)
∗
∗
L2 N Poids approx.
±0,1
P
15
0,2 Y
±0,3
90
∗
0,2 X
±0,1
±0,1
P
4,2
15
Inclut une couverture magnétique de 0,2 mm d'épaisseur.
R0,5 max.
Dimensions de l'ensembl
Y
(0,8)
±0,3
X
0,8
Espace
0
(70)
55
C1
C1
47
(8)
Monter la
ma
(kg)
Ensemble
bobine
(120)
tique de sorte
0
-0,2
9,9°
34,5
∗
107
±0,3
2,4
2×N trous filetés M6,
profondeur 8
9,9°
∗
±0,3
2,4
34,5
N×trous filetés M6, profondeur 12
48
±0,15
±0,15
L2
100
La bobine se déplace dans la direction
indiquée par la flèche lorsque le courant
circule dans l'ordre des phases U, V et W.
N˚
broche
Nom
1
Phase U
2
Phase V
4
Phase W
5
Inutilisé
6
Inutilisé
Masse
Alimentation
inversée
(V)
2. La course magnétique peut avoir des influences sur les pace-
makers. Restez à une distance d'au moins 200 mm de la
course magnétique.
3. Deux courses magnétiques d'un ensemble peuvent être con-
nectées l'une à l'autre.
4. Les dimensions repérées par * sont les dimensions entre les
courses magnétiques. Assurez-vous de suivre exactement
les dimensions spécifiées dans la figure ci-dessus. Montez
les courses magnétiques comme indiqué dans les Dimensions d'ensembles. Les valeurs portant un * sont les dimensions valables avant livraison.
5. Utilisez des vis six pans creux de classe de dureté 10,9 mini-
mum pour les vis de montage de course magnétique. N'utilisez pas de vis en inox.
-0,1
L1
-0,3
54
0
33
-0,2
54
7 trous de montage (Voir la vue en section pour la profondeur.
54
0
-0,2
L215
L2
Plaque constructeur
YASKAWA
L1
L239
-0,1
-0,3
(L3)
Unités : mm
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la direction indiquée par la flèche sur la figure,
la relation entre les signaux de sortie du
capteur de Hall Su, Sv, Sw et l'alimentation
inversée de chaque phase du moteur Vu,
Vv, Vw devient celle indiquée dans la figure
ci-dessous
Vu
Su
Vv
Sv
Vw
Sw
0 180 360 540
Angle électrique (° )
(54)
(30,6)
FABRIQUEE AU JAPON DATE
S/N
O/N
(54)
TYPE :
YASKAWA
Rondelle : ne pas les retirer avant le montage
4
(54)
Servomoteurs
r la machin
Moteurs linéaires Sigma 159
Page 18

SGLT@-50 à noyau d'acier
)
A
O/N
S/N
N
5
0
,2
φ
φ
e
e
et
é
,
p
8
course
gn
é
tique de sorte
s'alignent avec
é
paulement interne.
g
gn
é
tique de sorte
s'alignent avec
é
paulement interne.
g
ge
e.
φ
)
.
Jeu de bobinage : SGLTW-50D@@@H@D
Jeu de bobinage,
modèle SGLTW-
50D170HD 170 144 (48 × 3) (16) 8 6
50D320HD 315 288 (48 × 6) (17) 14 11
L1 L2 (L3) N Poids approx.
(kg)
0,2
±0,1
20
(19,1)
±0,05
(90)
80
(19,1)
(23,3 : avec capot magnétique)
(23,1 : sans capot magnétique)
Spécification du câblage
du capteur de Hall
96
5
Type de connecteur broche :
17JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur homologue
Type de connecteur
femelle :
17JE-13090-02 (D8C)
Type de tige : 17L-002C ou
17L-002C1
(85)
X
2830
Plaque constructeur
(Espace 0.8 : avec capot magnétique)
(Espace 1 : sans capot magnétique)
Câble
UL20276,AWG28
1
81
62,5
12
SERVO MOTEUR linéaire
TYPE
O/N
S/N
YASKAWA ELECTRIC FABRIQUEE AU JAPON
W
AV
DATE
ins.
m/sN
2×vis
#4×40 UNC
N˚ broche
P
Course
magnétique
X
(4,1)
1
±0,1
60
120
30 L1
10
48
20
Capteur de Hall
Tube de protection
500
±50
(φ4,2)
500
±50
35
43
63 min.
Servomoteur linéaire
Spécifications des connecteurs
Nom
1
+5 Vc.c.
2
Phase U
3
Phase V
4
Phase W
5
0 V
6
Inutilisé
7
Inutilisé
8
Inutilisé
9
Inutilisé
6
5
1
2
4
Extension : LRRA06AMRPN182
Type de broche : 021.147.2000
fabriqué par Interconnectron
Le connecteur homologue
Type mâle : LPRA06BFRBN170
Course magnétique : SGLTM-50@@@H
Course magnétique,
modèle SGLGM-
50324H 324 270 (54 × 5) 6 8
50540H 540 486 (54 × 9) 10 13
50756H 756 702 (54 × 13) 14 18
Note : 1. Deux courses magnétiques pour les deux extrémités d'un jeu de
bobines constituent un ensemble. Des rondelles h sont montées sur
les courses magnétiques pour plus de sécurité lors du transport. Ne
pas les retirer avant le montage du jeu de bobinage sur la machine
-0,1
L1
-0,3
L2 N Poids approx.
(kg)
0
-0,2
42
N×trous filetés M6, profondeur 12
±0,15
±0,15
100
N˚
broche
1
2
4
5
6
54
L2
La bobine se déplace dans la direction
indiquée par la flèche lorsque le courant
circule dans l'ordre des phases U, V et W.
(L3)
Unités : mm
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la direction indiquée par la flèche sur la figure, la re-
Nom
lation entre les signaux de sortie du capteur
Phase U
de Hall Su, Sv, Sw et l'alimentation inversée
de chaque phase du moteur Vu, Vv, Vw de-
Phase V
vient celle indiquée dans la figure ci-dessous
Phase W
Inutilisé
Inutilisé
Masse
2. La course magnétique peut avoir des influences sur les pacemakers.
Restez à une distance d'au moins 200 mm de la course magnétique.
3. Deux courses magnétiques d'un ensemble peuvent être connectées
l'une à l'autre.
4. Les dimensions repérées par * sont les dimensions entre les courses
magnétiques. Assurez-vous de suivre exactement les dimensions
spécifiées dans la figure ci-dessus. Montez les courses magnétiques
comme indiqué dans les Dimensions d'ensembles. Les valeurs portant un * sont les dimensions valables avant livraison.
5. Utilisez des vis six pans creux de classe de dureté 10,9 minimum pour
les vis de montage de course magnétique. N'utilisez pas de vis en
inox.
-0,1
L1
-0,3
L29
Alimentation
inversée
(V)
Vu
Su
Vv
Sv
Vw
Sw
0 180 360 540
Angle électrique (° )
(54)
91,5±1 (standard)
∗
131 max. (standard)
∗
Monter la
ma
±0,1
P
19,1
±0,3
90
∗
±0,1
19,1
R0,5 max.
Y
(0,8)
0,2
Y
0,2 X
C1
C1
±0,3
±0,1
P
X
0,8
4,2
Espace
Inclut une couverture magnétique de 0,2 mm d'épaisseur
R1 max.
Dimensions de l'ensembl
(85)
70
(120) (4,1)
(8)
ma
Ensemble bobin
N trous fil
rofondeur
62
0
-0,2
27 L2
112
54
Plaque constructeur
12
YASKAW
7 trous de montage (Voir la vue en section pour la profondeur.
42
s M6
54
-0
(27)
FABRIQUEE AU JAPON DATE
S/N
O/N
FABRIQUEE AU JAPO
L2
-0,1
L1
-0,3
(54)
TYPE :
YASKAWA
Rondelle : ne pas les retirer avant le monta
de la bobine sur la machin
4
(54)4
160 Servomoteurs
Page 19

SGLT@-40 à noyau d'acier
Jeu de bobinage : SGLTW-35D@@@H@D
Jeu de bobinage,
modèle SGLTW-
40D400B 395 360 (60 × 6) (15) 14 20
40D600B 585 540 (60 × 9) (25) 20 30
L1 L2 (L3) N Poids approx.
(kg)
(83)
78
75
(19,1)
(111,8)
97
16
(19,1)
(25,3 : avec capot magnétique)
(25,1 : sans capot magnétique)
(Espace 1.2 : avec capot magnétique)
(Espace 1.4 : sans capot magnétique)
Capteur de Hall
Spécifications de connecteur
9
5
Type de connecteur broche :
17JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur homologue
Type de connecteur femelle :
17JE-13090-02 (D8C)
Type de tige : 17L-002C ou
17L-002C1
6
1
Réceptacle
Course magnétique
1
98
150
30 38
2×vis
#4-40 UNC
500±
N˚ broche
1
2
3
4
5
6
7
8
9
Capteur de Hall
(φ4,2)
50
Nom
+5 V (Alimentation)
Phase U
Phase V
Phase W
0 V (Alimentation)
Inutilisé
Inutilisé
Inutilisé
Inutilisé
N×trous filetés M8, profondeur 16 mm
63 L1
40 60
124
La bobine se déplace dans la direction indiquée par la flèche lorsque le
64 min.
YASKAWA ELECTRIC
TYPE
O/N
SERVO MOTEUR linéaire
S/N
W
A
N
V
MADE IN JAPAN
ins.
DATE
m/s
courant circule dans l'ordre des phases U, V et W.
Plaque constructeur
Servomoteur linéaire
Spécifications de connecteur
Type de réceptacle : MS3102A-22-22P
produit par DDK Ltd.
Le connecteur homologue
Type de prise en L : MS3108E22-22S
N˚ broche
L2
(L3)20
Servomoteurs
Unités : mm
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la
Nom
direction indiquée par la flèche sur la
Phase U
A
Phase V
B
Phase W
C
P
figure, la relation entre les signaux de
sortie du capteur de Hall Su, Sv, Sw et
l'alimentation inversée de chaque phase
du moteur Vu, Vv, Vw devient celle
indiquée dans la figure ci-dessous.
Masse
Vu
Alimentation
inversée
Vv
(V)
Vw
0 180 360 540
Su
Sv
Sw
Angle électrique (° )
Course magnétique : SGLTM-40@@@A
Course magnétique,
modèle SGLGM-
40405A 405 337,5 (67,5 × 5) 6 9
40675A 675 607,5 (67,5 × 9) 10 15
40945A 945 877,5 (67,5 × 13) 14 21
Note : 1. Deux courses magnétiques pour les deux extrémités d'un jeu de
bobines constituent un ensemble. Des rondelles h sont montées sur
les courses magnétiques pour plus de sécurité lors du transport. Ne
pas les retirer avant le montage du jeu de bobinage sur la machine
-0,1
L1
-0,3
1 (standard)
±
∗113
∗153 max. (standard)
R0,5 max.
Monter la course
magnétique de sorte
que ses angles
s'alignent avec
l'épaulement interne.
L2 N Poids approx.
(83)
63
48
Monter la course
magnétique de sorte
que ses angles
s'alignent avec
l'épaulement interne.
Ensemble bobine
(15)
4
19,1
±0,3
±0,3
∗111,8
19,1
25,1
Gap 1,4
(1,4)
C1
C1
R1 max.
+0,6
100
0
±0,3
∗111,8
Dimensions de l'ensemble
(kg)
39
37,5
131
(150)
∗1,4
2×N vis M8, profondeur 10
∗1,4
39
52,5
15
(36,1)
5,6˚
±0,3
±0,3
(7,6)
-0,2
5,6˚
-0,2
-0,2
2. La course magnétique peut avoir des influences sur les pacemakers.
Restez à une distance d'au moins 200 mm de la course magnétique.
3. Deux courses magnétiques d'un ensemble peuvent être connectées
l'une à l'autre.
4. Les dimensions repérées par * sont les dimensions entre les courses
magnétiques. Assurez-vous de suivre exactement les dimensions
spécifiées dans la figure ci-dessus. Montez les courses magnétiques
comme indiqué dans les Dimensions d'ensembles. Les valeurs portant un * sont les dimensions valables avant livraison.
5. Utilisez des vis six pans creux de classe de dureté 10,9 minimum pour
les vis de montage de course magnétique. N'utilisez pas de vis en
inox.
-0,1
L1
67,5
67,5
-0,3
L2
DATE
L2
MADE IN JAPAN
S/N
O/N
YASKAWA
(67,5)
TYPE :
(67,5)
(36,1)
R7
2×N-φ9 trous de montage (Voir la vue en section pour la profondeur.)
Plaque constructeur
YASKAWA
TYPE :
67,5
Rondelle : Ne pas les retirer avant le montage de l'ensemble
O/N
S/N
MADE IN JAPAN
bobine sur la machine.
L2
-0,1
L1
-0,3
16
(67,5)
O/N
YASKAWA
S/N
TYPE :
MADE I
Unités : mm
Moteurs linéaires Sigma 161
Page 20

SGLT@-80 à noyau d'acier
Jeu de bobinage : SGLTW-80D@@@B@
Jeu de bobinage,
modèle SGLTW-
80D400B 395 360 (60 × 6) (15) 14 30
80D600B 585 540 (60 × 9) (25) 20 43
L1 L2 (L3) N Poids approx.
(kg)
(120)
115
(19,1)
(111,8)
97
75
(19,1)
(25,3 : avec capot magnétique)
(25,1 : sans capot magnétique)
(Espace 1.2 : avec capot magnétique)
(Espace 1.4 : sans capot magnétique)
Capteur de Hall
Spécifications de connecteur
9
5
Type de connecteur broche :
17JE-23090-02(D8C)
produit par DDK Ltd.
Le connecteur homologue
Type de connecteur femelle :
17JE-13090-02 (D8C)
Type de tige : 17L-002C ou
17L-002C1
6
1
Ensemble bobine
16
1
30 38
2×vis
#4-40 UNC
98
150
N˚ broche
1
2
3
4
5
6
7
8
9
Réceptacle
500
+5 Vc.c.
Phase U
Phase V
Phase W
Capteur de Hall
(φ4,2)
±50
Plaque constructeur
Nom
0 V
Inutilisé
Inutilisé
Inutilisé
Inutilisé
N×Trous filetés M8, profondeur 16
63
20
6040
124
64 min.
TYPE
O/N
SERVO MOTEUR linéaire
S/N
W
A
YASKAWA ELECTRIC
V
MADE IN JAPAN
ins.
DATE
m/s
Servomoteur linéaire
Spécifications de connecteur
Type de réceptacle : MS3102A-22-22P
produit par DDK Ltd.
Le connecteur homologue
Type de prise en L : MS3108E22-22S
L1
L2
La bobine se déplace dans la direction indiquée par la flèche lorsque
le courant circule dans l'ordre des phases U, V et W.
(L3)
Unités : mm
Signaux de sortie du capteur de Hall
Lorsque la bobine se déplace dans la
direction indiquée par la flèche sur la
Nom
N˚ broche
A
B
C
P
Phase U
Phase V
Phase W
figure, la relation entre les signaux de
sortie du capteur de Hall Su, Sv, Sw et
l'alimentation inversée de chaque phase
du moteur Vu, Vv, Vw devient celle
indiquée dans la figure ci-dessous
Masse
Vu
Alimentation
Vv
inversée
(V)
Vw
0 180 360 540
Su
Sv
Sw
Angle électrique (° )
Course magnétique : SGLTM-80@@@A
Course magné-
tique
modèle SGLTM-
80405A 405 337,5
80675A 675 607,5
80945A 945 877,5
-0,1
L1
-0,3
(67,5 × 5)
(67,5 × 9)
(67,5 × 13)
153 max. (standard)
∗
R0,5 max.
Monter la course
magnétique de sorte
que ses angles s'alignent
avec l'épaulement interne.
L2 L3 N1 N2 Poids approx.
337,5
(33,75 × 10)
607,5
(33,75 × 18)
887,5
(33,75 × 26)
(120)
19,1
0,3
(1,4)
1 (standard)
111,8±
∗
113±
∗
25,1
19,1
R1 max.
100
∗
111,8±
Dimensions de l'ensemble
100
0,3
C1
Gap 1,4±
85
C1
+0,6
0
0,3
611 14
10 19 24
14 27 34
Ensemble bobine
(150)
(15)
2 × N1 vis M8, profondeur 10
4
Monter la course
magnétique de sorte que
ses angles s'alignent
avec l'épaulement interne.
∗
1,5±
Note : 1. Deux courses magnétiques pour les deux extrémités d'un jeu de
(kg)
0
16,9
-0,2
67,5
5,6
57
°
0
39,4
-0,2
131
∗
1,5±
0,3
(37,9)
5,6°
0,3
57
0
50,6
-0,2
(11,3)
33,75
R7
2×N2-φ9 trous de montage (Voir la vue en section pour la profondeur.)
Plaque constructeur
O/N
YASKAWA
S/N
TYPE :
MADE IN JAPAN
DATE
67,5
bobines constituent un ensemble. Des rondelles h sont montées sur
les courses magnétiques pour plus de sécurité lors du transport. Ne
pas les retirer avant le montage du jeu de bobinage sur la machine
2. La course magnétique peut avoir des influences sur les pacemakers.
Restez à une distance d'au moins 200 mm de la course magnétique.
3. Deux courses magnétiques d'un ensemble peuvent être connectées
l'une à l'autre.
4. Les dimensions repérées par * sont les dimensions entre les courses
magnétiques. Assurez-vous de suivre exactement les dimensions
spécifiées dans la figure ci-dessus. Montez les courses magnétiques
comme indiqué dans les Dimensions d'ensembles. Les valeurs portant un * sont les dimensions valables avant livraison.
5. Utilisez des vis six pans creux de classe de dureté 10,9 minimum
pour les vis de montage de course magnétique. N'utilisez pas de vis
en inox.
-0,1
L1
-0,3
L2
L3
L2
-0,1
L1
-0,3
(67,5)
MADE IN JAPAN
DATE
TYPE :
S/N
YASKAWA
O/N
(67,5)
Rondelles : Ne pas les retirer
avant le montage de l'ensemble
8
bobine sur la machine
(37,9)
(67,5)
O/N
YASKAWA
S/N
TYPE :
MADE IN JAPAN
Unités : mm
162 Servomoteurs
Page 21

Convertisseur série
JZDP-A008-@@@
Caractéristiques techniques
Caractéristiques
électriques
Caractéristiques
mécaniques
Conditions ambiantes Température de fonctionnement 0 °C à 55 °C (32 à 131 °F)
Tension d'alimentation +5,0 V±5%, ondulation 5% max.
Consommation
∗1
120 mA typique 350 mA maximum
Résolution de signal Onde sinusoïdale biphasée d'entrée : 1/256 pas
Fréquence de réponse maximale 250 kHz
Signaux d'entrée analogique (cos,
sin, Réf)
Signal d'entrée de capteur de pôle Niveau CMOS
Signaux de sortie
∗3
Méthode de sortie Format de protocole de transmission de données série (HDLC (High-level Data Link Control) avec
Amplitude d'entrée différentielle : 0,4 V à 1,2 V, niveau de signal d'entrée : 1,5 V à 3,5 V
Données de position, informations sur le capteur de Hall et alarmes
codes Manchester)
Cycle de transmission 62,5 µs
Circuit de sortie Emetteur-récepteur compensé (SN75LBC176 ou équivalent), résistance terminale interne : 120 Ω
Poids approx. 150 g
Résistance aux vibrations 98 m/s
Résistance aux chocs 980 m/s
2
max. (1 à 2500 Hz) dans les trois directions
2
, (11 ms) deux fois dans trois directions
Température de stockage -20 °C à +80 °C (-4 à +176 °F)
Humidité 20 à 90% (sans condensation)
Fin d'échelle linéaire
Connecteur d'entrée de signal
de capteur de Hall (CN3)
Servomoteurs
2×trous filetés #4-40 UNC
Extrémité SERVOPACK Connecteur
de sortie données série (CN1)
CN1
Fin de SERVOPACK
sortie de données
série
9
6
N˚ broche Signal
5
1
2×trous φ4,2
24,99±0,4
1,5
3
14,35±0,4
4×trous filetés M5, profondeur 10
1 +5V
2
Sortie S-phase
Vide
3
4
Vide
0 V
5
Sortie /S-phase
6
Vide
7
Vide
8
Vide
9
Blindage
Boîtier
4×trous φ4,2
60
10
52±0,3
CN2
Fin d'échelle linéaire
Entrée du signal
analogique
1
9
15
8
Plaque constructeur
65±0,3
72
82±0,3
90
N˚ broche Signal
1 Entrée /cos (V1-)
Entrée /sin (V2-)
2
3
Entrée Réf. (V0+)
4 +5V
5 Vs
5
6
Vide
7
Vide
8
Vide
Entrée cos (V1+)
9
Entrée sin (V2+)
10
Entrée /Réf. (V0-)11
12
0 V
13
0 Vs
Vide
14
Interne
15
BlindageBoîtier
300±30
22,5
Fin d'échelle linéaire
Connecteur d'entrée de
signal analogique (CN2)
Unités : mm
CN3
Fin d'échelle linéaire
Entrée du signal du
capteur de Hall
1
6
9
5
N˚ broche Signal
1 +5V
2
Entrée phase U
3
Entrée phase V
4
Entrée phase W
0 V
5
6
Vide
Vide
7
Vide
8
Vide
9
Blindage
Boîtier
Note : 1. Ne pas utiliser de broches vides.
2. L'échelle linéaire (sortie analogique 1Vp-p, D-sub 15 broches, mâle) par Renishaw Inc. peut être connectée directement. Cependant,
les signaux BID et DIR ne peuvent pas être connectés.
3. Utilisez le connecteur d'extrémité d'échelle linéaire pour modifier les spécifications de point zéro de l'échelle linéaire.
Moteurs linéaires Sigma 163
Page 22

Informations pour la commande
Configuration du système
Câble d'alimentation
E
(vers la carte de
conversion série)
Echelle
Capteur
linéaire
de Hall
Echelle linéaire
Bobine linéaire
SGLGW
Course magnétique
SGLGM
B
SGLG SERVOMOTEUR
LINEAIRE
A
SERVOPACK
SGDH- 08AE - S- OY
Ver.
400 V
MODE/SET DATA/
CHARGE POWER
CN3
L1
L2
+ 1
+ 2
-
CN1
L1C
L2C
B1
B2
U
V
W
CN2
E
Câble
d'alimentation
Alimentation
Servodriver Sigma-II
ou XtraDrive
D
Câble de conversion
série Sigma-II
Alimentation
F
G
Câble d'échelle
linéaire
(extension)
Echelle
Capteur
linéaire
de Hall
SGLF SERVOMOTEUR
LINEAIRE
Carte convertisseur
série
C
H
Câble de capteur
de Hall
(extension)
Câble
d'alimentation
Course magnétique
SGLFM
B
Bobine linéaire
SGLFW
A
E
Câble
d'alimentation
Alimentation
Course magnétique
SGLTM
(vers la carte de
conversion série)
Capteur
Echelle
linéaire
de Hall
Bobine linéaire
SGLTW
B
SGLT SERVOMOTEUR
LINEAIRE
A
SGLGW / SGLGM modèle sans noyau (200 V)
Avec courses magnétiques de force standard - 230 Vc.a. monophasée
Symbole Caractéristiques
ABCD
techniques
Force
nominale
13,5 N 40 N SGLGW-30A050BPD SGLGM-30108A
Force pic A Bobine linéaire BCourse magnétique C Convertisseur série D Servodriver
27 N 80 N SGLGW-30A080BPD JZDP-A008-156 SGDH-01AE-OY XD-01-MN01
SGLGM-30216A
SGLGM-30432A
47 N 140 N SGLGW-40A140BPD SGLGM-40090B
93 N 280 N SGLGW-40A253BPD JZDP-A008-002 SGDH-02AE-OY XD-02-MN01
140 N 420 N SGLGW-40A365BPD JZDP-A008-003 SGDH-04AE-OY XD-04-MN01
SGLGM-40225B
SGLGM-40360B
SGLGM-40405B
SGLGM-40450B
73 N 220 N SGLGW-60A140BPD SGLGM-60090B
147 N 440 N SGLGW-60A253BPD JZDP-A008-005 SGDH-04AE-OY XD-04-MN01
220 N 660 N SGLGW-60A365BPD JZDP-A008-006 SGDH-08AE-S-OY XD-08-MN
325 N 1 300 N SGLGW-90A200APD SGLGM-90252A
SGLGM-60225B
SGLGM-60360B
SGLGM-60405B
SGLGM-60450B
SGLGM-90504A
Avec courses magnétiques de force élevée – 230 Vc.a. monophasées
Symbole Caractéristiques
ABCD
techniques
Force
nominale
Force pic A Bobine linéaire BCourse magnétique C Convertisseur série D Servodriver
57 N 230 N SGLGW-40A140BPD SGLGM-40090B-M
114 N 460N SGLGW-40A253BPD JZDP-A008-059 SGDH-04AE-OY XD-04-MN01
171 N 690 N SGLGW-40A365BPD JZDP-A008-060 SGDH-08AE-S-OY XD-08-MN
SGLGM-40225B-M
SGLGM-40360B-M
SGLGM-40405B-M
SGLGM-40450B-M
89 N 360N SGLGW-60A140BPD SGLGM-60090B-M
178 N 720 N SGLGW-60A253BPD JZDP-A008-062 SGDH-08AE-S-OY XD-08-MN
267 N 1 080 N SGLGW-60A365BPD JZDP-A008-047 SGDH-15AE-S-OY -
SGLGM-60225B-M
SGLGM-60360B-M
SGLGM-60405B-M
SGLGM-60450B-M
Modèle
Série Sigma-II XtraDrive
JZDP-A008-158 SGDH-A5AE-OY XD-P5-MN01
JZDP-A008-001 SGDH-01AE-OY XD-01-MN01
JZDP-A008-004 SGDH-02AE-OY XD-02-MN01
JZDP-A008-101 SGDH-15AE-S-OY -
Modèle
Série Sigma-II XtraDrive
JZDP-A008-063 SGDH-02AE-OY XD-02-MN01
JZDP-A008-061 SGDH-02AE-OY XD-02-MN01
164 Servomoteurs
Page 23

SGLFW / SGLFM modèle à noyau d'acier
230 Vc.a. monophasé
Symbole Caractéristiques
ABCD
techniques
Force
nominale
160 N 440 N SGLFW-35A230APD JZDP-A008-020 SGDH-08AE-S-OY XD-08-MN01
280 N 600 N SGLFW-50A200BPD SGLFM-50405AC
560 N 1 200 N SGLFW-50A380BPD JZDP-A008-182 SGDH-15AE-S-OY -
560 N 1 200 N SGLFW-1ZA200BPD SGLFM-1Z405AC
Force pic A Bobine linéaire B Course
25 N 86 N SGLFW-20A090APD SGLFM-20324AC
40 N 125 N SGLFW-20A120APD JZDP-A008-018 SGDH-02AE-OY XD-02-MN01
80 N 220 N SGLFW-35A120APD SGLFM-35324AC
400 Vc.a. triphasé
Symbole Caractéristiques tech-
ABCD
niques
Force
nominale
80 N 220 N SGLFW-35D120APD SGLFM-35324AC
160 N 440 N SGLFW-35D230APD JZDP-A008-212 SGDH-05DE-OY XD-05-TN
280 N 600 N SGLFW-50D200BPD SGLFM-50405AC
560 N 1 200 N SGLFW-50D380BPD JZDP-A008-190 SGDH-15DE-OY XD-15-TN
560 N 1 200 N SGLFW-1ZD200BPD SGLFM-1Z405AC
1 120 N 2 400 N SGLFW-1ZD380BPD JZDP-A008-192 SGDH-30DE-OY XD-30-TN
Force pic A Bobine linéaire B Course
magnétique
SGLFM-20540AC
SGLFM-20756AC
SGLFM-35540AC
SGLFM-35756AC
SGLFM-50675AC
SGLFM-50945AC
SGLFM-1Z675AC
SGLFM-1Z945AC
magnétique
SGLFM-35540AC
SGLFM-35756AC
SGLFM-50675AC
SGLFM-50945AC
SGLFM-1Z675AC
SGLFM-1Z945AC
Modèle
C Convertisseur série D Servodriver
Série Sigma-II XtraDrive
JZDP-A008-017 SGDH-02AE-OY XD-02-MN01
JZDP-A008-019 SGDH-02AE-OY XD-02-MN01
JZDP-A008-181 SGDH-08AE-S-OY XD-08-MN
JZDP-A008-183 SGDH-15AE-S-OY -
Modèle
C Convertisseur série D Servodriver
Série Sigma-II XtraDrive
JZDP-A008-211 SGDH-05DE-OY XD-05-TN
JZDP-A008-189 SGDH-10DE-OY XD-10-TN
JZDP-A008-191 SGDH-15DE-OY XD-15-TN
Servomoteurs
SGLTW / SGLTM modèle à noyau d'acier
400 Vc.a. triphasé
Symbole Caractéristiques
ABCD
techniques
Force
nominale
300 N 600 N SGLTW-35D170HPD SGLTM-35324HC
600 N 1 200 N SGLTW-35D320HPD JZDP-A008-194 SGDH-20DE-OY XD-20-TN
450 N 900 N SGLTW-50D170HPD SGLTM-50324HC
900 N 1 800 N SGLTW-50D320HPD JZDP-A008-196 SGDH-20DE-OY XD-20-TN
670 N 2 600 N SGLTW-40D400BP SGLTM-40405AC
1 000 N 4 000 N SGLTW-40D600BP JZDP-A008-198 SGDH-50DE-OY -
1 300 N 5 000 N SGLTW-80D400BP SGLTM-80405AC
2 000 N 7 500 N SGLTW-80D600BP JZDP-A008-200 SGDH-75DE-OY -
Force pic A Bobine linéaire B Course
magnétique
SGLTM-35540HC
SGLTM-35756HC
SGLTM-50540HC
SGLTM-50756HC
SGLTM-40675AC
SGLTM-40945AC
SGLTM-80675AC
SGLTM-80945AC
Modèle
C Convertisseur série D Servodriver
Série Sigma-II XtraDrive
JZDP-A008-193 SGDH-10DE-OY XD-10-TN
JZDP-A008-195 SGDH-10DE-OY XD-10-TN
JZDP-A008-197 SGDH-30DE-OY XD-30-TN
JZDP-A008-199 SGDH-50DE-OY -
Moteurs linéaires Sigma 165
Page 24

Câbles d'alimentation
Symbole Caractéristiques techniques Modèle Présentation
E
Pour servomoteurs 200 V
SGLGW-30A@@@B@D
SGLGW-40A@@@B@D
SGLGW-60A@@@B@D
SGLFW-20A@@@A@D
SGLFW-35A@@@A@D
Pour servomoteurs 200 V
SGLGW-90A200B@D
SGLFW-50A@@@B@D
SGLFW-1ZA200B@D
Pour servomoteurs 400 V
SGLFW-35D@@@A@D
SGLFW-50D200@D
SGLTW-35D170H@D
SGLTW-50D170H@D
Pour servomoteurs 400 V
SGLFW-50D380@D
SGLFW-1ZD@@@B@D
SGLTW-35D320H@D
SGLTW-50D320H@D
Pour servomoteurs 400 V
SGLTW-40D@@@B@
SGLTW-80D@@@B@
3 m R88A-CAWA003S-DE
5 m R88A-CAWA005S-DE
10 m R88A-CAWA010S-DE
15 m R88A-CAWA015S-DE
20 m R88A-CAWA020S-DE
3 m R88A-CAWB003S-DE
5 m R88A-CAWB005S-DE
10 m R88A-CAWB010S-DE
15 m R88A-CAWB015S-DE
20 m R88A-CAWB020S-DE
3 m R88A-CAWK003S-DE
5 m R88A-CAWK005S-DE
10 m R88A-CAWK010S-DE
15 m R88A-CAWK015S-DE
20 m R88A-CAWK020S-DE
3 m R88A-CAWL003S-DE
5 m R88A-CAWL005S-DE
10 m R88A-CAWL010S-DE
15 m R88A-CAWL015S-DE
20 m R88A-CAWL020S-DE
3 m R88A-CAWD003S-E
5 m R88A-CAWD005S-E
10 m R88A-CAWD010S-E
15 m R88A-CAWD015S-E
20 m R88A-CAWD020S-E
Câble du convertisseur série vers le servodriver
Symbole Caractéristiques techniques Modèle Présentation
F
Driver Sigma-II vers convertisseur série
Câble
Driver XtraDrive vers convertisseur série
Câble
3 m JZSP-CLP70-03-E
5 m JZSP-CLP70-05-E
10 m JZSP-CLP70-10-E
15 m JZSP-CLP70-15-E
20 m JZSP-CLP70-20-E
3 m XD-CLP70-03-E
5 m XD-CLP70-05-E
10 m XD-CLP70-10-E
15 m XD-CLP70-15-E
20 m XD-CLP70-20-E
Câble d'échelle linéaire vers convertisseur série
Symbole Caractéristiques techniques Modèle Présentation
G
Câble de rallonge pour échelle linéaire
Renishaw vers convertisseur série.
(Connecteur DB-15)
(Le câble de rallonge est optionnel)
Câble de rallonge pour échelle linéaire
Heidenhain vers convertisseur série.
(Connecteur DB-15)
(Le câble de rallonge est obligatoire en
cas d'utilisation d'une échelle Heidenhain)
1 m JZSP-CLL00-01-E
3 m JZSP-CLL00-03-E
5 m JZSP-CLL00-05-E
10 m JZSP-CLL00-10-E
15 m JZSP-CLL00-15-E
1 m JZSP-CLL20-01-E
3 m JZSP-CLL20-03-E
5 m JZSP-CLL20-05-E
10 m JZSP-CLL20-10-E
15 m JZSP-CLL20-15-E
Câble du capteur de Hall vers convertisseur série
Symbole Caractéristiques techniques Modèle Présentation
H
Connecteurs
Caractéristiques techniques Modèle
Connecteur de contrôle E/S (pour CN1) R88A-CNU11C
Connecteur de codeur de driver Sigma-II (pour CN2) JZSP-CMP9-1
Connecteur de codeur XtraDive (pour CN2) DE9406973
Connecteur d'alimentation Hypertac IP67
(pour bobines de moteurs 200 V SGL@W-
@@A@@@@@D)
Connecteur d'alimentation Hypertac IP67
(pour bobines de moteurs 400 V SGL@W-
@@D@@@@@D)
Câble de rallonge d'échelle linéaire vers
convertisseur série
(Le câble de rallonge est optionnel)
1 m JZSP-CLL10-01-E
3 m JZSP-CLL10-03-E
5 m JZSP-CLL10-05-E
10 m JZSP-CLL10-10-E
15 m JZSP-CLL10-15-E
ou JZSP-CKI9
SPOC-06K-FSDN169
LPRA-06B-FRBN170
Caractéristiques techniques Modèle
Connecteur d'alimentation Militaire IP67
(pour bobines de moteur SGLTW-40@/80@ )
Logiciel de dimensionnement
Caractéristiques techniques Modèle
SigmaSize CD MOTION TOOLS
Accessoires Servodriver
Note : Reportez-vous au chapitre Servomoteurs Sigma-II ou XtraDrive
pour plus d'informations.
MS3108E22-22S
166 Servomoteurs
Page 25

Servomoteurs
Moteurs linéaires Sigma 167
Page 26

TOUTES LES DIMENSIONS INDIQUEES SONT EN MILLIMETRES.
Pour convertir les millimètres en pouces, multipliez par 0,03937. Pour convertir les grammes en onces, multipliez par 0,03527.
Cat. No. I17E-FR-01
Afin d’améliorer le produit, les spécifications peuvent être modifiées sans préavis.
168 Servomoteurs
 Loading...
Loading...