

Omron SGDV-A5A01A-OY, SGDV-01A11A-OY, SGDV-02A01A-OY, SGDV-02A11A-OY, SGDV-04A01A-OY Datasheet
...Page 1
1Sigma-5 servo drive
SGDV-@
Sigma-5 servo drive
The High perfomance servo family for motion
control. Compact size, reduced space and
integrated MECHATROLINK-II.
• Advance autotuning function
• Enhanced vibration supression function
• Standard support for analog voltage/pulse train reference series or MECHATROLINK-II communications reference series.
• Support for direct drive servomotors, linear servomotors and linear sliders
• Integrated safety stop function
• Oscilloscope available via software tool
• Windows based configuration and commissioning
software
Ratings
• 230 VAC Single-phase 50 W to 1.5 kW (4.77 Nm)
• 400 VAC Three-phase 500 W to 15 kW (95.4 Nm)
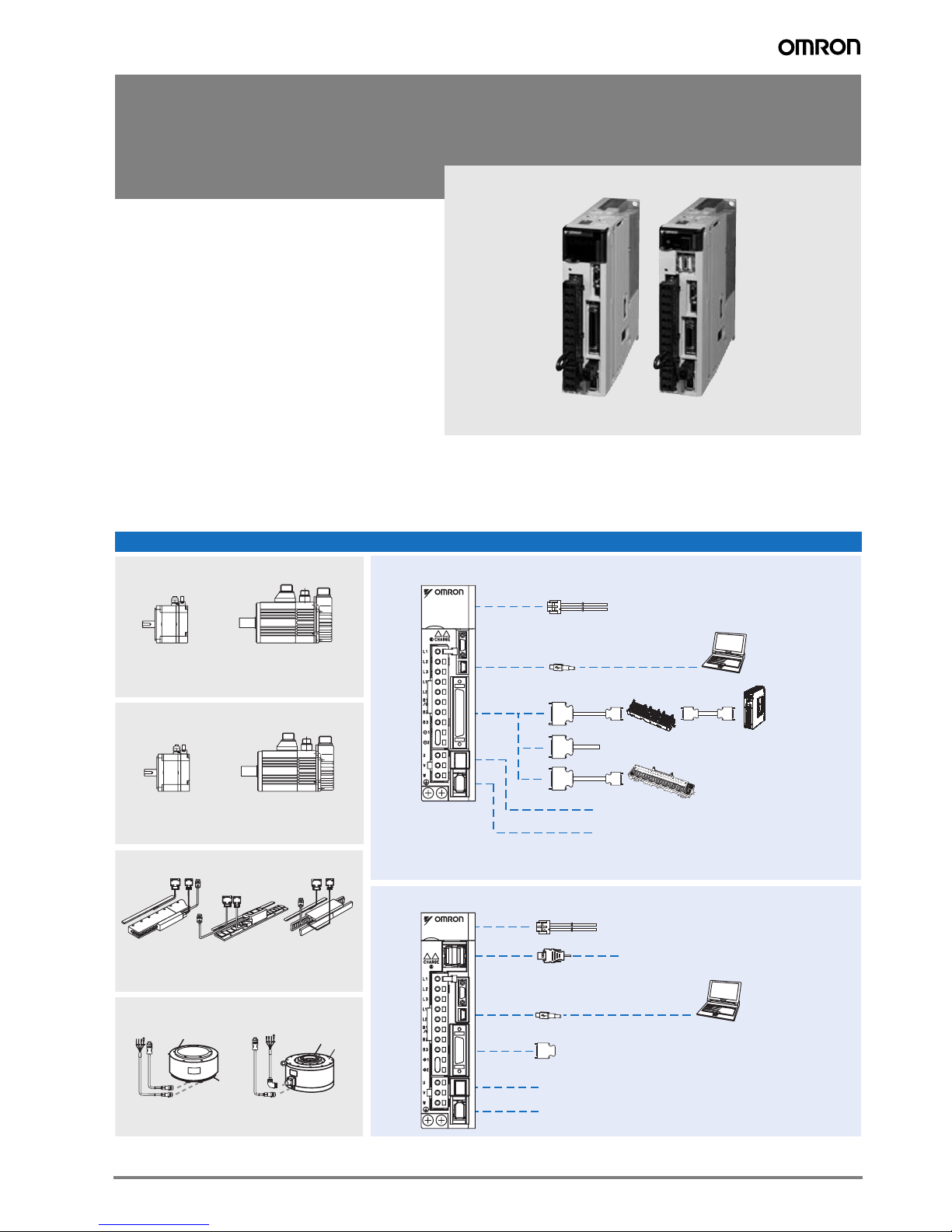
System configuration
SGMGH, SGMUH, SGMSH,
SGMBH Servo Motor
(Refer to chapter Sigma linear motors)
SGMAH, SGMPH
Servo Motor
SGLT_ linear
Servo Motor
SGLG_ linear
Servo Motor
SGLF_ linear
Servo Motor
(Refer to chapter Sigma-II rotary motors)
SGMGV, SGMSV
Servo Motor
SGMJV, SGMAV, SGMEV
Servo Motor
(Refer to chapter Sigma-5 rotary motors)
Direct drive servo motor
SGMCS-@-@B, C, D, E
Direct drive servo motor
SGMCS-@-@M, N
(Refer to chapter Sigma direct drive motors)
Battery case for absolute encoder
Analog monitor cable
USB cable
Safety cable
MECHATROLINK-II network
CN5
CN7
CN1
CN8
CN2
CN6
General purpose connector
Personal
computer
Battery case for absolute encoder
Analog monitor cable
USB cable
Safety cable
CN5
CN7
CN1
CN8
Sigma-5 Analog/Pulse Reference Servo Drive
CN2
Position control unit
Terminal block
position control
Unit
General purpose cable
Personal
computer
Sigma-5 MECHATROLINK-II Servo Drive
Page 2
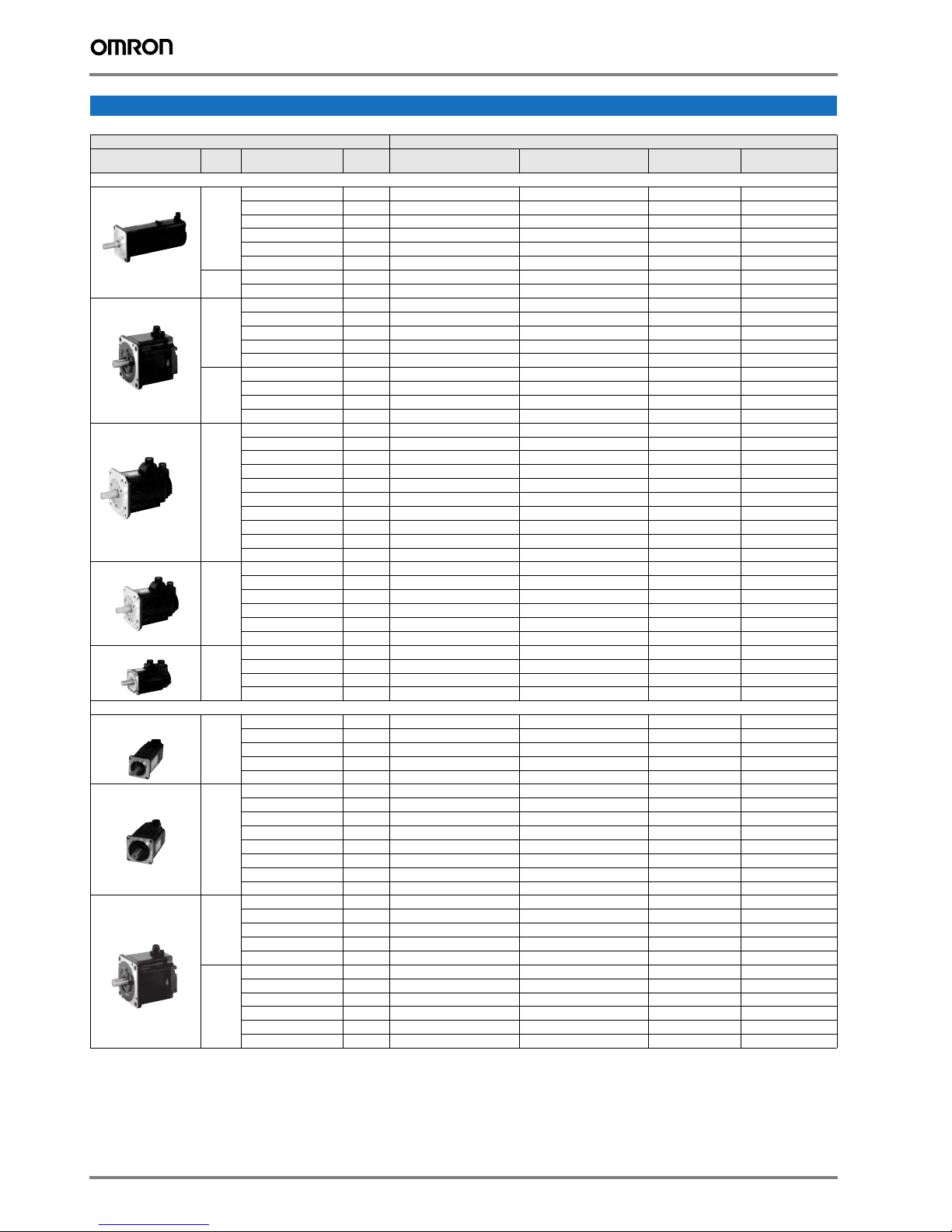
2 AC servo systems
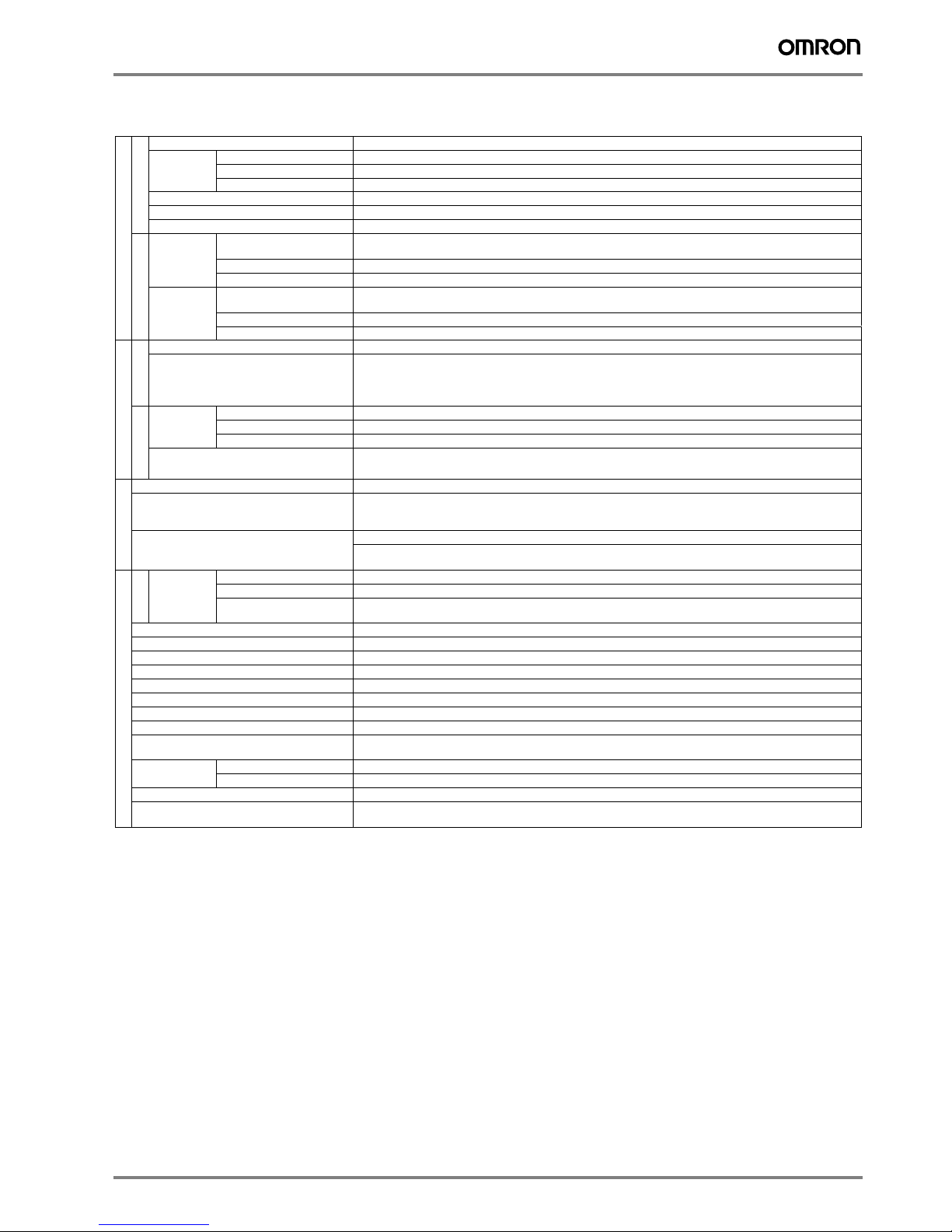
Servo motor / servo drive combination
Servo motor Sigma-5 Servo drive
Family Voltage Rated torque Capacity 230 V (1 phase)
Analog/Pulse
230 V (1 phase)
MECHATROLINK-II
400 V (3 phase)
Analog/Pulse
400 V (3 phases)
MECHATROLINK-II
Sigma-II series motors (refer to the Sigma-II rotary motors chapter for details)
SGMAH (3000 min
-1
) 230 V 0.0955 Nm 30 W SGDV-A5A01A-OY SGDV-A5A11A-OY - -
0.159 Nm 50 W SGDV-A5A01A-OY SGDV-A5A11A-OY - -
0.318 Nm 100 W SGDV-01A01A-OY SGDV-01A11A-OY - -
0.637 Nm 200 W SGDV-02A01A-OY SGDV-02A11A-OY - -
1.27 Nm 400 W SGDV-04A01A-OY SGDV-04A11A-OY - -
2.39 Nm 750 W SGDV-08A01A-OY SGDV-08A11A-OY - -
400 V 0.955 Nm 300 W - - SGDV-05D01A-OY SGDV-05D11A-OY
2.07 Nm 650 W - - SGDV-10D01A-OY SGDV-10D11A-OY
SGMPH (3000 min
-1
)230 V 0.318 Nm 100 W SGDV-01A01A-OY SGDV-01A11A-OY - -
0.637 Nm 200 W SGDV-02A01A-OY SGDV-02A11A-OY - -
1.27 Nm 400 W SGDV-04A01A-OY SGDV-04A11A-OY - -
2.39 Nm 750 W SGDV-08A01A-OY SGDV-08A11A-OY - -
4.77 Nm 1500 W SGDV-15A01A-OY-008000 SGDV-15A11A-OY-008000 - -
400 V 0.637 Nm 200 W - - SGDV-05D01A-OY SGDV-05D11A-OY
1.27 Nm 400 W - - SGDV-05D01A-OY SGDV-05D11A-OY
2.39 Nm 750 W - - SGDV-10D01A-OY SGDV-10D11A-OY
4.77 Nm 1500 W - - SGDV-15D01A-OY SGDV-15D11A-OY
SGMGH (1500 min
-1
)400 V 2.84 Nm 0.45 kW - - SGDV-05D01A-OY SGDV-05D11A-OY
5.39 Nm 0.85 kW - - SGDV-10D01A-OY SGDV-10D11A-OY
8.34 Nm 1.3 kW - - SGDV-15D01A-OY SGDV-15D11A-OY
11.5 Nm 1.8 kW - - SGDV-20D01A-OY SGDV-20D11A-OY
18.6 Nm 2.9 kW - - SGDV-30D01A-OY SGDV-30D11A-OY
28.4 Nm 4.4 kW - - SGDV-50D01A-OY SGDV-50D11A-OY
35.0 Nm 5.5 kW - - SGDV-210D01A SGDV-210D11A
48.0 Nm 7.5 kW - - SGDV-260D01A SGDV-260D11A
70.0 Nm 11 kW - - SGDV-280D01A SGDV-280D11A
95.4 Nm 15 kW - - SGDV-370D01A SGDV-370D11A
SGMSH (3000 min
-1
) 400 V 3.18 Nm 1.0 kW - - SGDV-10D01A-OY SGDV-10D11A-OY
4.90 Nm 1.5 kW - - SGDV-15D01A-OY SGDV-15D11A-OY
6.36 Nm 2.0 kW - - SGDV-20D01A-OY SGDV-20D11A-OY
9.80 Nm 3.0 kW - - SGDV-30D01A-OY SGDV-30D11A-OY
12.6 Nm 4.0 kW - - SGDV-50D01A-OY SGDV-50D11A-OY
15.8 Nm 5.0 kW - - SGDV-50D01A-OY SGDV-50D11A-OY
SGMUH (6000 min
-1
) 400 V 1.59 Nm 1.0 kW - - SGDV-10D01A-OY SGDV-10D11A-OY
2.45 Nm 1.5 kW - - SGDV-15D01A-OY SGDV-15D11A-OY
4.9 Nm 3.0 kW - - SGDV-30D01A-OY SGDV-30D11A-OY
6.3 Nm 4.0 kW - - SGDV-50D01A-OY SGDV-50D11A-OY
Sigma-5 series motors (refer to the Sigma-5 rotary motors chapter for details)
SGMJV (3000 min
-1
) 230 V 0.159 Nm 50 W SGDV-A5A01A-OY SGDV-A5A11A-OY - -
0.318 Nm 100 W SGDV-01A01A-OY SGDV-01A11A-OY - -
0.637 Nm 200 W SGDV-02A01A-OY SGDV-02A11A-OY - -
1.27 Nm 400 W SGDV-04A01A-OY SGDV-04A11A-OY - -
2.39 Nm 750 W SGDV-08A01A-OY SGDV-08A11A-OY - -
SGMAV (3000 min
-1
) 230 V 0.159 Nm 50 W SGDV-A5A01A-OY SGDV-A5A11A-OY - -
0.318 Nm 100 W SGDV-01A01A-OY SGDV-01A11A-OY - -
0.477 Nm 150 W SGDV-02A01A-OY SGDV-02A11A-OY - -
0.637 Nm 200 W SGDV-02A01A-OY SGDV-02A11A-OY - -
1.27 Nm 400 W SGDV-04A01A-OY SGDV-04A11A-OY - -
1.75 Nm 550 W SGDV-08A01A-OY SGDV-08A11A-OY - -
2.39 Nm 750 W SGDV-08A01A-OY SGDV-08A11A-OY - -
3.18 Nm 1.0 kW SGDV-15A01A-OY-008000 SGDV-15A11A-OY-008000 - -
SGMEV (3000 min
-1
)230 V 0.318 Nm 100 W SGDV-01A01A-OY SGDV-01A11A-OY - -
0.637 Nm 200 W SGDV-02A01A-OY SGDV-02A11A-OY - -
1.27 Nm 400 W SGDV-04A01A-OY SGDV-04A11A-OY - -
2.39 Nm 750 W SGDV-08A01A-OY SGDV-08A11A-OY - -
4.77 Nm 1.5 kW SGDV-15A01A-OY-008000 SGDV-15A11A-OY-008000 - -
400 V 0.637 Nm 200 W - - SGDV-05D01A-OY SGDV-05D11A-OY
0.955 Nm 300 W - - SGDV-05D01A-OY SGDV-05D11A-OY
1.27 Nm 400 W - - SGDV-05D01A-OY SGDV-05D11A-OY
2.07 Nm 650 W - - SGDV-10D01A-OY SGDV-10D11A-OY
2.39 Nm 750 W - - SGDV-10D01A-OY SGDV-10D11A-OY
4.77 Nm 1.5 kW - - SGDV-15D01A-OY SGDV-15D11A-OY
Page 3
Sigma-5 servo drive 3
SGMGV (1500 min-1) 400 V 1.96 Nm 300 W - - SGDV-05D01A-OY SGDV-05D11A-OY
2.86 Nm 450 W - - SGDV-05D01A-OY SGDV-05D11A-OY
5.39 Nm 850 W - - SGDV-10D01A-OY SGDV-10D11A-OY
8.34 Nm 1.3 kW - - SGDV-15D01A-OY SGDV-15D11A-OY
11.5 Nm 1.8 kW - - SGDV-20D01A-OY SGDV-20D11A-OY
18.6 Nm 2.9 kW - - SGDV-30D01A-OY SGDV-30D11A-OY
28.4 Nm 4.4 kW - - SGDV-50D01A-OY SGDV-50D11A-OY
35.0 Nm 5.5 Kw - - SGDV-210D01A SGDV-210D11A
48.0 Nm 7.5 Kw - - SGDV-260D01A SGDV-260D11A
70.0 Nm 11 Kw - - SGDV-280D01A SGDV-280D11A
95.4 Nm 15 Kw - - SGDV-370D01A SGDV-370D11A
SGMSV (3000 min
-1
) 400 V 3.18 Nm 1 kW - - SGDV-10D01A-OY SGDV-10D11A-OY
4.9 Nm 1.5 kW - - SGDV-15D01A-OY SGDV-15D11A-OY
6.36 Nm 2 kW - - SGDV-20D01A-OY SGDV-20D11A-OY
7.96 Nm 2.5 kW - - SGDV-30D01A-OY SGDV-30D11A-OY
9.8 Nm 3 kW - - SGDV-30D01A-OY SGDV-30D11A-OY
12.6 Nm 4 kW - - SGDV-50D01A-OY SGDV-50D11A-OY
15.8 Nm 5 kW - - SGDV-50D01A-OY SGDV-50D11A-OY
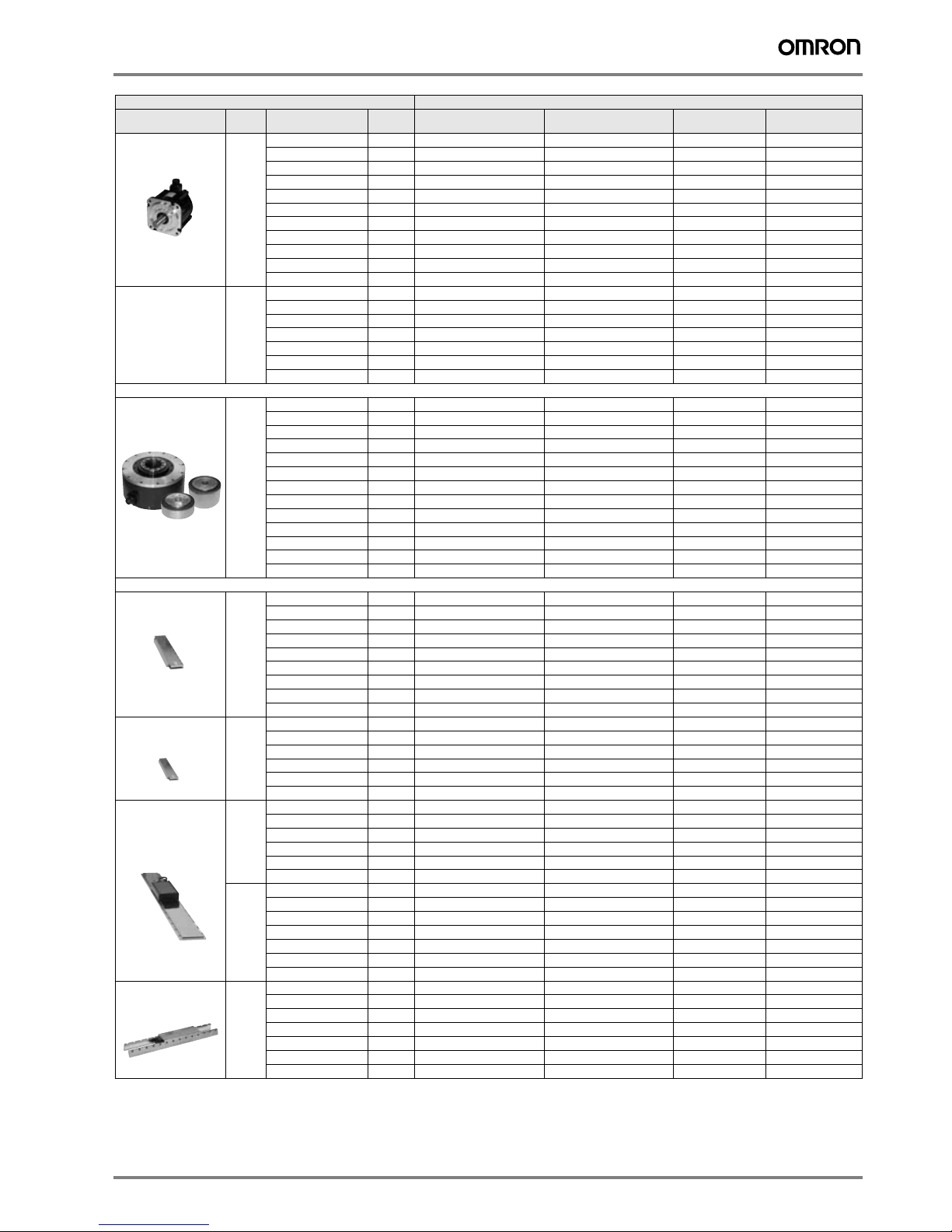
Sigma direct drive motors (refer to the Sigma direct drive motors chapter for details)
SGMCS (200 min
-1
) 230 V 2.0 Nm 42 W SGDV-04A01A-OY SGDV-04A11A-OY - -
5.0 Nm 105 W SGDV-04A01A-OY SGDV-04A11A-OY - -
7.0 Nm 147 W SGDV-02A01A-OY SGDV-02A11A-OY - -
4.0 Nm 84 W SGDV-04A01A-OY SGDV-04A11A-OY - -
10.0 Nm 209 W SGDV-04A01A-OY SGDV-04A11A-OY - -
14.0 Nm 293 W SGDV-04A01A-OY SGDV-04A11A-OY - -
8.0 Nm 168 W SGDV-04A01A-OY SGDV-04A11A-OY - -
17.0 Nm 356 W SGDV-04A01A-OY SGDV-04A11A-OY - -
25.0 Nm 393 W SGDV-04A01A-OY SGDV-04A11A-OY - -
16.0 Nm 335 W SGDV-08A01A-OY SGDV-08A11A-OY - -
35.0 Nm 550 W SGDV-08A01A-OY SGDV-08A11A-OY - -
45.0 Nm 707 W SGDV-15A01A-OY-008000 SGDV-15A11A-OY-008000 - -
80.0 Nm 1260 W SGDV-15A01A-OY-008000 SGDV-15A11A-OY-008000 - -
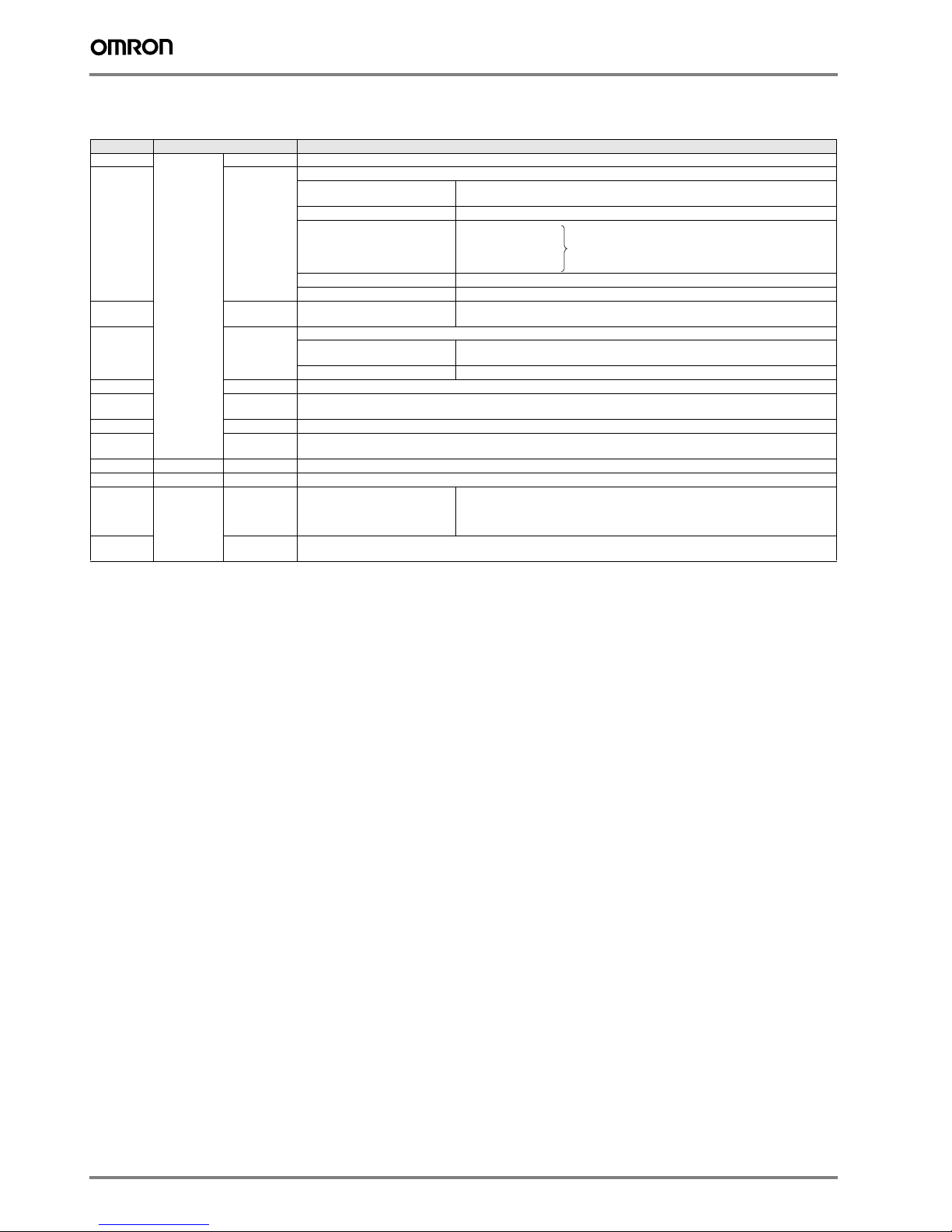
Sigma linear motors (refer to the Sigma linear motors chapter for details)
SGLGW coreless
standard-force
magnetic ways
230 V 12.5 N (40 N peak) - SGDV-A5A05A-OY SGDV-A5A15A-OY - -
25 N (80 N peak) - SGDV-01A05A-OY SGDV-01A15A-OY - 47 N (140 N peak) - SGDV-01A05A-OY SGDV-01A15A-OY - 70 N (220 N peak) - SGDV-02A05A-OY SGDV-02A15A-OY - 93 N (280 N peak) - SGDV-02A05A-OY SGDV-02A15A-OY - -
140 N (420 N peak) - SGDV-04A05A-OY SGDV-04A15A-OY - 140 N (440 N peak) - SGDV-04A05A-OY SGDV-04A15A-OY - 210 N (660 N peak) - SGDV-08A05A-OY SGDV-08A15A-OY - -
325 N (1300 N peak) - SGDV-15A05A-OY-008000 SGDV-15A15A-OY-008000 - -
SGLGW coreless
high-force
magnetic ways
230 V 57 N (230 N peak) - SGDV-02A05A-OY SGDV-02A15A-OY - -
114 N (460 N peak) - SGDV-02A05A-OY SGDV-02A15A-OY - 171 N (690 N peak) - SGDV-08A05A-OY SGDV-08A15A-OY - -
85 N (360 N peak) - SGDV-02A05A-OY SGDV-02A15A-OY - -
170 N (720 N peak) - SGDV-08A05A-OY SGDV-08A15A-OY - -
255 N (1080 N peak) - SGDV-08A05A-OY SGDV-08A15A-OY - -
SGLFW
Linear motors
230 V 25 N (86 N peak) - SGDV-02A05A-OY SGDV-02A15A-OY - -
40 N (125 N peak) - SGDV-01A05A-OY SGDV-01A15A-OY - 80 N (220 N peak) - SGDV-02A05A-OY SGDV-02A15A-OY - -
160 N (440 N peak) - SGDV-04A05A-OY SGDV-04A15A-OY - 280 N (600 N peak) - SGDV-08A05A-OY SGDV-08A15A-OY - -
560 N (1200 N peak) - SGDV-15A05A-OY-008000 SGDV-15A15A-OY-008000 - -
400 V 80 N (220 N peak) - - - SGDV-05D05A-OY SGDV-05D15A-OY
160 N (440 N peak) - - - SGDV-05D05A-OY SGDV-05D15A-OY
280 N (600 N peak) - - - SGDV-10D05A-OY SGDV-10D15A-OY
560 N (1200 N peak) - - - SGDV-15D05A-OY SGDV-15D15A-OY
1120 N (2400 N peak) - - - SGDV-30D05A-OY SGDV-30D15A-OY
1500 N (3600 N peak) - - - SGDV-20D05A-OY SGDV-20D15A-OY
2250 N (5400 N peak) - - - SGDV-30D05A-OY SGDV-30D15A-OY
SGLTW
Linear motors
400 V 300 N (600 N peak) - - - SGDV-10D05A-OY SGDV-10D15A-OY
600 N (1200 N peak) - - - SGDV-20D05A-OY SGDV-20D15A-OY
450 N (900 N peak) - - - SGDV-10D05A-OY SGDV-10D15A-OY
900 N (1800 N peak) - - - SGDV-20D05A-OY SGDV-20D15A-OY
670 N (2600 N peak) - - - SGDV-30D05A-OY SGDV-30D15A-OY
1000 N (4000 N peak) - - - SGDV-50D05A-OY SGDV-50D15A-OY
1300 N (5000 N peak) - - - SGDV-50D05A-OY SGDV-50D15A-OY
Servo motor Sigma-5 Servo drive
Family Voltage Rated torque Capacity 230 V (1 phase)
Analog/Pulse
230 V (1 phase)
MECHATROLINK-II
400 V (3 phase)
Analog/Pulse
400 V (3 phases)
MECHATROLINK-II
Page 4
4 AC servo systems
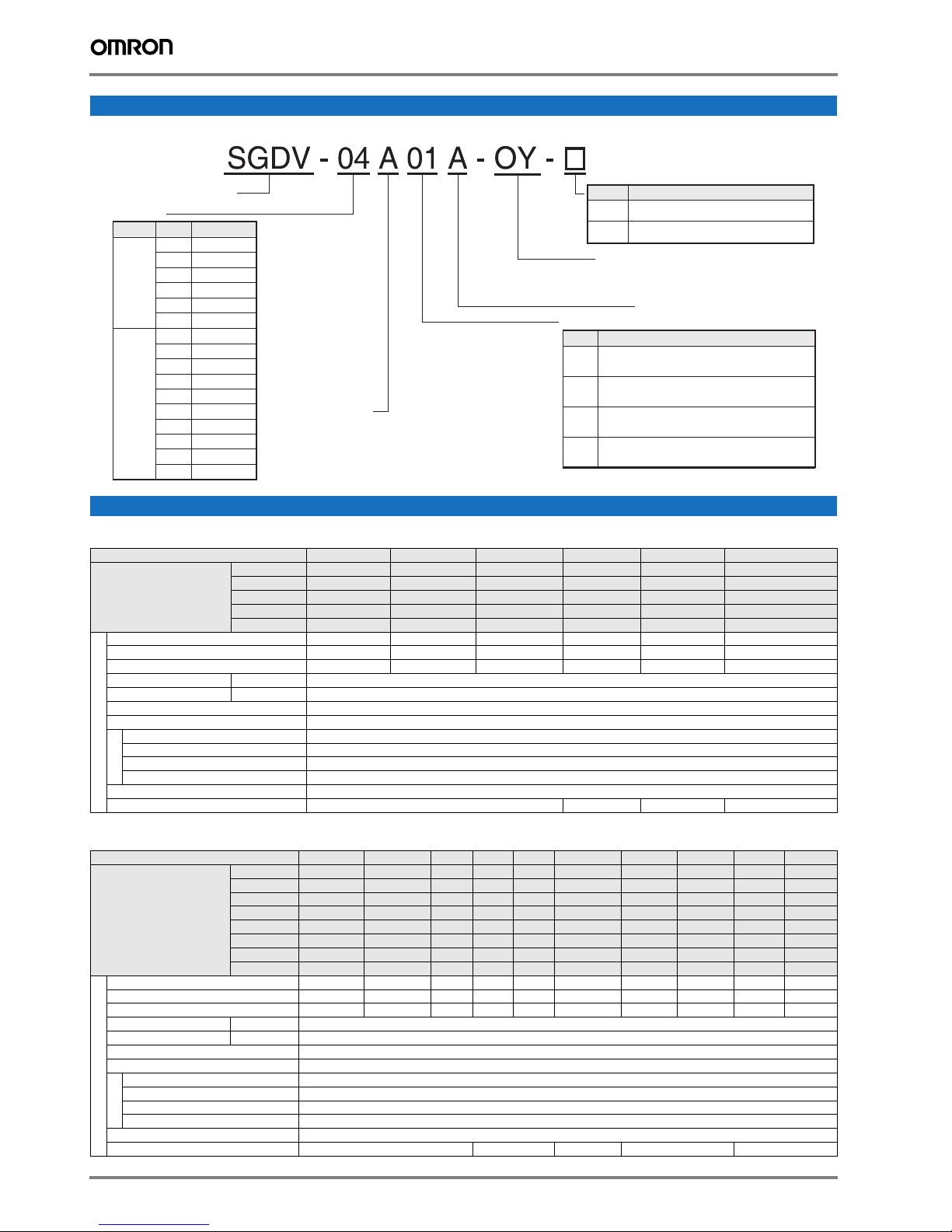
Servo drive
Single-phase, 230 V
Three-phase, 400 V
Type designation
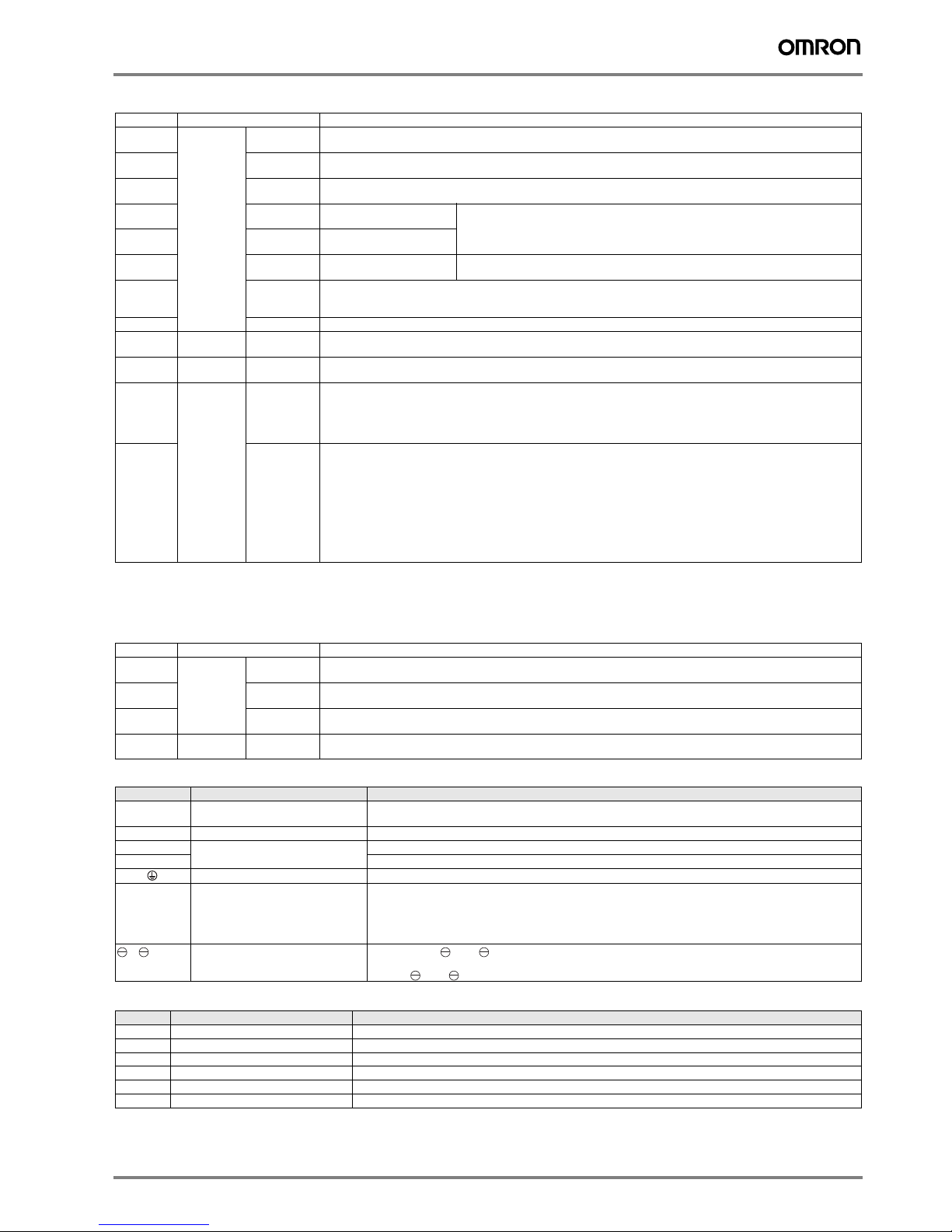
Servo drive specifications
Servo drive type SGDV- @ A5A@@A-OY 01A@@A-OY 02A@@A-OY 04A@@A-OY 08A@@A-OY 15A@@A-OY-008000
Applicable
servo motor
SGMAH-@ A3A@/A5A@ 01A@ 02A@ 04A@ 08A@ -
SGMPH-@ - 01A@ 02A@ 04A@ 08A@ 15A@
SGMJV-@ A5A@ 01A@ 02A@ 04A@ 08A@ -
SGMAV-@ A5A@ 01A@ C2A@/02A@ 04A@ 06A@/08A@ 10A@
SGMEV-@ - 01A@ 02A@ 04A@ 08A@ 15A@
Basic specifications
Max. applicable motor capacity W 50 100 200 400 750 1500
Continuous output current Arms 0.66 0.91 1.6 2.8 5.5 11.6
Max. output current Arms 2.1 2.9 6.5 9.3 16.9 28
Input power Main circuit Single-phase, 200 to 230 VAC + 10 to -15% (50/60 Hz)
Supply Control circuit Single-phase, 200 to 230 VAC + 10 to -15% (50/60 Hz)
Control method Single phase full-wave rectification / IGBT / PWM / sine-wave current drive method
Feedback Serial encoder (incremental/absolute)
Conditions
Usage/storage temperature 0 to +55 °C / -20 to 85 °C
Usage/storage humidity 90%RH or less (non-condensing)
Altitude 1000m or less above sea level
Vibration/shock resistance 4.9 m/s
2
/ 19.6 m/s
2
Configuration Base mounted
Approx. weight Kg 0.9 1.0 1.5 2.8
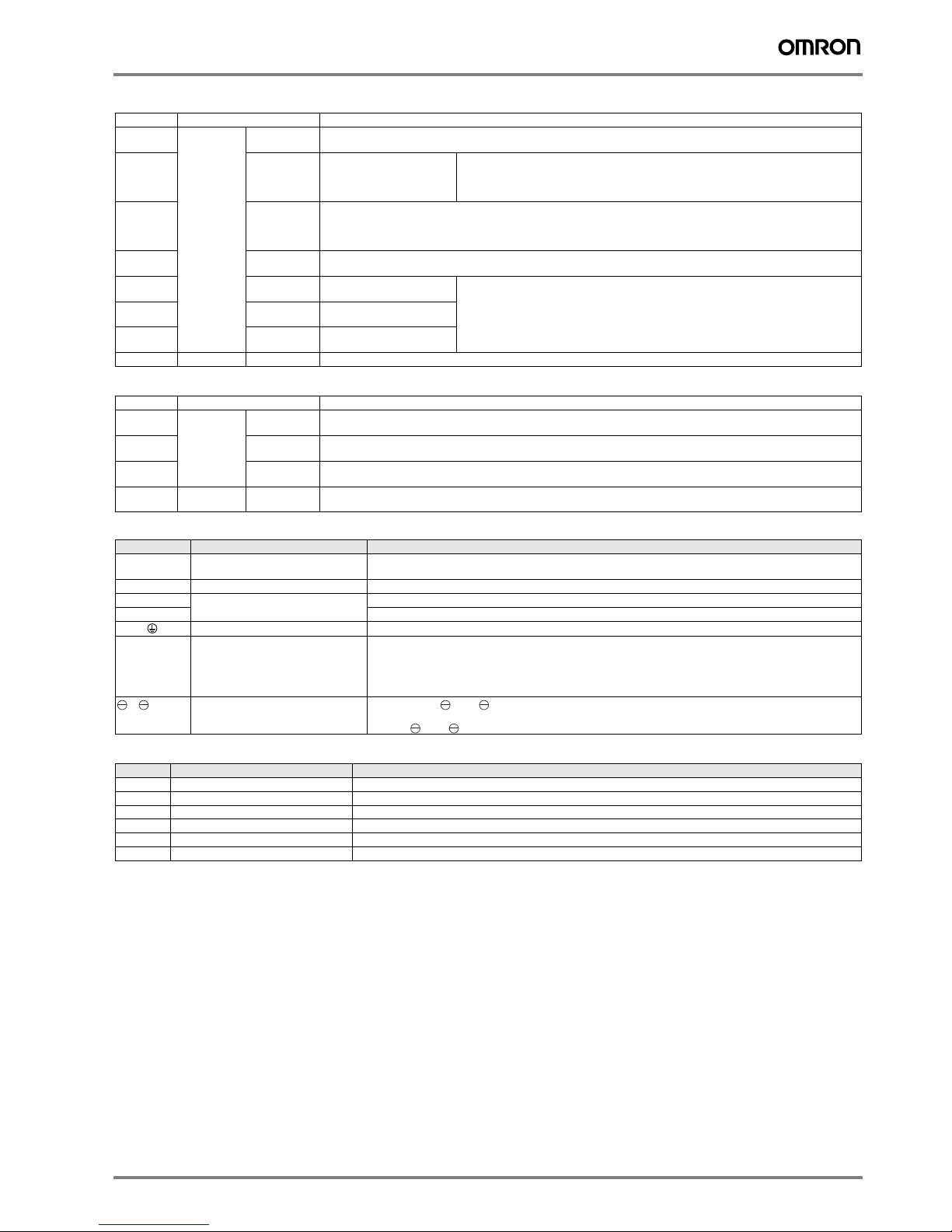
Servo drive type SGDV-@ 05D@ 10D@ 15D@ 20D@ 30D@ 50D@ 210D@ 260D@ 280D@ 370D@
Applicable
servo motor
SGMAH-@ 03D@ 07D@ - - - - - - - -
SGMPH-@ 02D@/04D@ 08D@ 15D@ - - - - - - -
SGMGH-@ 05D@ 09D@ 13D@ 20D@ 30D@ 44D@ 55D@ 75D@ 1AD@ 1ED@
SGMSH-@ - 10D@ 15D@ 20D@ 30D@ 40D@/50D@ - - - -
SGMUH-@ - 10D@ 15D@ - 30D@ 40D@ - - - -
SGMEV-@ 02/03/04D@ 07D@/08D@ 15D@ - - - - - - -
SGMGV-@ 03D@/05D@ 09D@ 13D@ 20D@ 30D@ 44D@ 55D@ 75D@ 1AD@ 1ED@
SGMSV-@ - 10D@ 15D@ 20D@ 25D@ 40D@/50D@ - - - -
Basic specifications
Max. applicable motor capacity kW 0.5 1.0 1.5 2.0 3.0 5.0 6.0 7.5 11 15
Continuous output current Arms 1.9 3.5 5.4 8.4 11.9 16.5 20.8 25.4 28.1 37.2
Max. output current Arms 5.5 8.5 14 20 28 42 55 65 70 85
Input power Main circuit Three-phase, 380 to 480 VAC + 10 to -15% (50/60Hz)
Supply Control circuit 24 VDC +/-15%
Control method Three phase full-wave rectification / IGBT / PWM / sine-wave current drive method
Feedback Serial encoder (incremental/absolute)
Conditions
Usage/storage temperature 0 to +55 °C / -20 to +85 °C
Usage/storage humidity 90%RH or less (non-condensing)
Altitude 1000 m or less above sea level
Vibration/shock resistance 4.9 m/s
2
/ 19.6 m/s
2
Configuration Base mounted
Ap prox . we igh t K g 2 .7 3. 7 5. 6 11 .3 16 .2
Sigma-5 servo drive
Design Revision Order: A, B...
Source voltage
A: 230 V
D: 400 V
Code
01
05
11
15
Specifications
Analog voltage/pulse train reference type
(for rotary servomotors)
Analog voltage/pulse train reference type
(for linear servomotors)
MECHATROLINK-II comms reference type
(for rotary servomotors)
MECHATROLINK-II comms reference type
(for linear servomotors)
Interface
Voltage Code
230 V
Output
Capacity
50 W
400 V
A5
01
02
04
08
15
05
10
15
20
30
50
200 W
100 W
400 W
750 W
1.5 kW
500 W
1.0 kW
1.5 kW
2.0 kW
3.0 kW
5.0 kW
210
260
280
370
6.0 kW
7.5 kW
11 kW
15 kW
Omron-Yaskawa Motion Control B.V.
(Note: all models except 6 to 15 kW)
Code
Blank
008000
Specifications
Standard
Servo drive 1.5 kW single-phase 230 V
Page 5
Sigma-5 servo drive 5
Sigma-5 Analog/Pulse Reference Servo Drive
General specifications
Speed/torque control mode
Performance
Speed control range 1:5000
Speed
variance
Load variance During 0 to 100% load ±0.01% max. (at rated speed)
Voltage variance Rated voltage ±10%:0% (at rated speed)
Temperature variance 25 ±25 °C: ±0.1 % max. (at rated speed)
Frequency characteristics 1.6 kHz
Torque control accuracy (Repeatability) ±1%
Soft start time setting 0 to 10 s (acceleration, deceleration can each be set.)
Input signal
Speed
reference
input
Reference voltage ±6 VDC (forward motor rotation if positive reference) at rated speed: Set at delivery
Variable setting range: ±2 to ±10 VDC at rated speed/ max. input voltage: ±12 V
Input impedance Approx. 14 kΩ
Circuit time constant Approx. 30 µs
Torque
reference
input
Reference voltage ±3 VDC (forward rotation if positive reference) at rated torque: Set at delivery
Variable setting range ±1 to ±10 VDC at rated torque reference, max. input voltage: ±12 V
Input impedance Approx. 14 KΩ
Circuit time constant Approx. 30 µs
Position control mode
performance
Feedforward compensation 0 to 100% (setting resolution: 1%)
Position completed width setting 0 to 1073741824 command units (setting resolution: 1 command unit)
Input signal
Command
pulse
Input pulse type Sign + pulse train, 90° phase displacement 2-phase pulse (A-phase+ B-phase) or CCW/CW pulse train
Input pulse form Non-insultated line driver (+5 V level) , open collector.
Input pulse frequency 0 to 4 Mpps (200 Kpps max. at open collector)
Control signal Clears error pulse by external signal
I/O signal
Position signal output A-phase, B.phase, C-phase: line driver output.
Sequence input signal Servo ON, P control (or control mode switching, forward/reverse motor rotation by internal speed setting, zero
clamp, command pulse inhibit), forward/reverse run prohibit, forward/reverse current limit (or internal speed
switching), alarm reset.
Sequence output signal Servo alarm, alarm codes (3-bit output): CN1 output terminal is fixed
It is possible to output three types of signal form incl.: positioning complete, speed coincidence detection, servo-
motor rotation detection, servo ready, current limit detection, speed limit detection, brake release, warning, NEAR.
Integrated functions
USB
Communications
Interface Personal computer
Communications standard Compliant with USB1.1 standard (12 Mbps)
Function Status display, parameter settings, adjustment functions, utility functions, alarm traceback display, JOG run/au-
totuning operations and graphing functions for speed/torque command signal, etc
Automatic load inertia detection Automatic motor parameter setting. One parameter rigidity setting.
Dynamic brake (DB) Operates during main power OFF, servo alarm, servo OFF or overtravel
Regenerative processing Internal resistor included in models from 500 W to 5 kW. Regenerative resistor externally mounted (option).
Overtravel (OT) prevention function DB stop, deceleration stop or coast to stop during P-OT, N-OT operation
Encoder divider function Optional division pulses possible
Electronic gearing 0,01< Numerator/Denominator<100
Internal speed setting function 3 speeds may be set internally
Protective functions Overcurrent, overvoltage, low voltage, overload, regenerative error
Analog monitor functions for supervision Integrates analog monitor connector for supervision of the speed and torque reference signals, etc.
Number of channels: 2 (Output voltage: +/-10V DC)
Panel operator Display functions CHARGE, 7-segments LEDx5
Panel operator keys Used to set parameters (4 keys)
Safety functions Hard wire base block signal and status monitor (fixed output) of safety circuit
Others Reverse connection, zero search, automatic motor discrimination function, and DC reactor connection terminal
for high frequency power suppression function.
Page 6
6 AC servo systems
I/O specifications
I/O signals (CN1) - input signals
Note: 1. Pin numbers in parentheses () indicate signal grounds.
2. The functions allocated to /S-ON, /P-CON. P-OT, N-OT, /ALM-RST, /P-CL, and /N-CL input signals can be changed by using the
parameters.
3. The voltage input range for speed and torque references is a maximum of ±12 V.
Pin No. Signal name Function
40 Common /S-ON Servo ON: Turns ON the servo motor.
41 /P-CON Function selected by parameter.
Proportional control reference Switches the speed control loop from PI (proportional/integral) to P (proportional)
control when ON.
Direction reference With the internal set speed selected: switch the rotation direction.
Control mode
switching
Zero-clamp reference Speed control with zero-clamp function: reference speed is zero when ON.
Reference pulse block Position control with reference pulse stop: stops reference pulse input when ON.
42
43
P-OT
N-OT
Forward run prohibited
Reverse run prohibited
Overtravel prohibited: Stops servo motor when movable part travels beyond the
allowable range of motion.
45
46
/P-CL
/N-CL
Function selected by parameter.
Forward external torque limit ON
Reverse external torque limit ON
Current limit function enabled when ON.
Internal speed switching With the internal set speed selected: switches the internal speed settings.
44 /ALM-RST Alarm reset: releases the servo alarm state.
47 +24VIN Control power supply input for sequence signals: users must provide the +24 V power supply.
Allowable voltage fluctuation range: 11 to 25 V
4 (2) SEN Initial data request signal when using an absolute encoder.
21
22
BAT (+)
BAT (-)
Connecting pin for the absolute encoder backup battery.
Do not connect when the encoder cable for the battery case is used.
5 (6) Speed V-REF Speed reference input: ±2 to ±10 V/rated motor speed (Input gain can be modified using a parameter).
9 (10) Torque T-REF Torque reference input: ±1 to ±10 V/rated motor torque (Input gain can be modified using a parameter).
7
8
11
12
Position PULS
/PULS
SIGN
/SIGN
Reference pulse input
for line driver only
Input mode is set from the following pulses:
Sign + pulse string
CCW/CW pulse
Two-phase pulse (90° phase differential)
15
14
CLR
/CLR
Positional error pulse clear input: clears the positional error pulse during position control.
Tor que ↔ speed
Position
↔
torque
Position
↔
speed
Enables control mode switching
Page 7
Sigma-5 servo drive 7
I/O signals (CN1) - output signals
Note: 1. Pin numbers in parentheses () indicate signal grounds.
2. The functions allocated to /TGON, /S-RDY, and /V-CMP (/COIN) output signals can be changed by using the parameters. /CLT, /VLT, /
BK, /WARN and /NEAR signals can also be changed.
I/O signals (CN8) - safety signals
Terminal specifications
Encoder connector (CN2)
Pin No. Signal Name Function
31
32
Common ALM+
ALM-
Servo alarm: Turns OFF when an error is detected.
27
28
/TGON+
/TGON-
Detection during servo motor rotation: detects when the servo motor is rotating at a speed higher than the motor speed
setting.
29
30
/S-RDY+
/S-RDY-
Servo ready: ON if there is no servo alarm when the control/main circuit power supply is turned ON.
33
34
PAO
/PAO
Phase-A signal Two-phase pulse encoder output pulse signal
35
36
PBO
/PBO
Phase-B signal
19
20
PCO
/PCO
Phase-C signal
Zero-point pulse signal
37 (1)
38 (1)
39 (1)
ALO1
ALO2
ALO3
Alarm code output: Outputs 3-bit alarm codes.
Shell FG Connected to frame ground if the shield wire of the I/O signal cable is connected to the connector shell.
25
26
Speed /V-CMP+
/V-CMP-
Turns ON when whether the motor speed is within the setting range is detected and if it matches the reference speed
value.
25
26
Position /COIN+
/COIN-
Turns ON when the number of position error pulse reaches the value set.
- Reserved /CLT
/VLT
/BK
/WARN
/NEAR
Reserved terminals
The functions allocated to /TGON, /S-RDY, and /V-CMP (/COIN) can be changed by using the parameters.
/CLT, /VLT, /BK, /WARN and /NEAR signals can also be changed.
3
13
16
17
18
23
24
48
49
50
- Terminals not used.
Do not connect.
Pin No. Signal Name Function
4
3
Common /HWBB1+
/HWBB1-
Hard wire baseblock input 1
6
5
/HWBB2+
/HWBB2-
Hard wire baseblock input 2
8
7
EDMI+
EDMI-
Monitored circuit status output 1:
ON when the hard wire baseblock function is normally activated.
1
2
Reserved - Terminals not used.
Do not connect.
Symbol Name Function
L1, L2 or
L1, L2, L3
Main circuit AC input terminal AC power input terminals for the main circuit
U, V, W Servo motor connection terminal Terminals for outputs to the servo motor.
L1C, L2C Control power input terminal AC power input terminals for the control circuit.
24V, 0V 24V DC power input terminals for the control circuit.
Frame ground Ground terminal. Ground to a maximum of 100 Ω. (class 3).
B1/ ⊕, B2, B3 Main circuit DC output terminal Up to 400 W: If the regenerative capacity is insufficient, connect an external regenerative resistor
(option) between B1/ ⊕ and B2.
From 500 W to 5 kW: Normally short B2 and B3. If the internal regenerative resistor is insufficient, remove
the wire between B2 and B3 and connect an external regenerative resistor between
B1/ ⊕ and B2.
1, 2 DC reactor connection terminal for
suppressing power supply harmonic
waves
Normally, short 1 and 2.
If a countermeasure against power supply harmonic waves is needed, connect a DC reactor
between 1 and 2.
Pin No. Signal Name Function
1 E5V Encoder power supply + 5 V
2 E0V Encoder power supply ground
3 BAT+ Battery + (used only with absolute encoder)
4 BAT– Battery – (used only with absolute encoder)
5 S+ Encoder serial signal input
6 S– Encoder serial signal input
Page 8

8 AC servo systems
Sigma-5 MECHATROLINK-II Servo Drives
General specifications
I/O specifications
I/O signals (CN1) - input signals
Note: 1. The functions allocated to /DEC, P-OT, N-OT, /EXT1,-/EXT2 and /EXT3 input signals can be changed by using the
parameters.
2. If the Forward/ Reverse run prohibited function is used, the software can be used to stop the Servo drive. If the application does not satisfy
the requirements, add an external circuit for safety reasons as required.
Position/speed/torque control mode
Performance
Speed control range 1:5000
Speed
variance
Load variance During 0 to 100% load ±0.01% max. (at rated speed)
Voltage variance Rated voltage ±10%:0% (at rated speed)
Temperature variance 25 ±25 °C: ±0.1 % max. (at rated speed)
Frequency characteristics 1.6 kHz
Torque control accuracy (Repeatability) ±1%
Soft start time setting 0 to 10 s (acceleration, deceleration can each be set.)
Command input
MECHATROLINK
Communication
MECHATROLINK-II commands
(for sequence, motion, data setting/reference, monitor, adjustment and other commands)
I/O signal
Position signal output A-phase, B.phase, C-phase: line driver output.
Sequence input signal Homing deceleration limit switch, forward/reverse run prohibited, external latch signals, forward/reverse current
limit.
Sequence output signal It is possible to output three types of signal form incl.: positioning complete, speed coincidence detection, servo-
motor rotation detection, servo ready, current limit detection, speed limit detection, brake release, warning, NEAR.
Integrated functions
Communications
USB
Communications
Interface Personal computer
Communications standard Compliant with USB1.1 standard (12 Mbps)
Function Status display, parameter setting, adjusting functions, utility functions, alarm traceback display, JOG run/autotun-
ing operations and graphing functions for speed/torque command signal, etc
Mechatrolink
Communications
Communications protocol MECHATROLINK-II
Station Address 41H to 5FH (max. number of slaves: 30)
Transmission Speed 10 Mbps
Transmission Cycle 250 µs, 0.5 to 4.0 ms (multiple of 0.5 ms)
Data length 17-bytes and 32-bytes
Automatic load inertia detection Automatic motor parameter setting. One parameter rigidity setting.
Dynamic brake (DB) Operates during main power OFF, servo alarm, servo OFF or overtravel
Regenerative processing Internal resistor included in models from 500 W to 5 kW. Regenerative resistor externally mounted (option).
Overtravel (OT) prevention function DB stop, deceleration stop or coast to stop during P-OT, N-OT operation
Encoder divider function Optional division pulses possible
Electronic gearing 0,01< Numerator/Denominator<100
Internal speed setting function 3 speeds may be set internally
Protective functions Overcurrent, overvoltage, low voltage, overload, regeneration error
Analog monitor functions for supervision Integrates analog monitor connectors for supervision of the speed and torque reference signals, etc.
Number of channels: 2 (Output volatge: +/-10V DC).
Panel operator Display functions CHARGE, 7-segments LEDX1
Switches Rotary switch: MECHATROLINK-II station address setting (16 channels)
DIP switch: MECHATROLINK-II communications setting (4 channels)
Safety functions Hard wire base block signal and status monitor (fixed output) of safety circuit
Others Reverse connection, zero search, automatic motor discrimination function, and DC reactor connection terminal
for high frequency power suppression function.
Pin No. Signal name Function
9 Common /DEC Homing deceleration limit switch Connects the deceleration limit switch for homing.
7
8
P-OT
N-OT
Forward run prohibited
Reverse run prohibited
Overtravel prohibited: Stops servo motor when movable part travels beyond the
allowable range of motion.
10
11
12
/EXT 1
/EXT 2
/EXT 3
External latch signal 1
External latch signal 2
External latch signal 3
Connects the external signals that latch the current feedback pulse counter.
6 +24VIN Control power supply input for sequence signals: users must provide the +24 V power supply.
Allowable voltage fluctuation range: 11 to 25 V.
14
15
BAT (+)
BAT (-)
Connecting pin for the absolute encoder backup battery.
Do not connect when a battery is connected to the host controller.
13 /SIO General-purpose input signal:
Monitored in the I/O monitor field of MECHATROLINK-II.
Page 9
Sigma-5 servo drive 9
I/O signals (CN1) - output signals
I/O signals (CN8) - safety signals
Terminal specifications
Encoder connector (CN2)
Pin No. Signal Name Function
3
4
Common ALM+
ALM-
Servo alarm: Turns OFF when an error is detected.
1
2
/BK+
(/SO1+)
/BK(/SO1-)
Brake interlock signal Controls the brake. The brake is released when the signal turns ON.
Allocation can be changed to general-purpose output signals (/SO1+, /SO1-).
23
24
25
26
/S
O2+
/S
O2-
/S
O3+
/S
O3-
General-purpose output signal.
Note: Set the parameter to allocate a function.
16 FG Signal ground:
Connected to frame ground if the shield wire of the I/O signal cable is connected to the connector shell.
17
18
PAO
/PAO
Phase-A signal Dividing ratio can be set by parameter
(proper line receiver is SN75175 manufactured by Texas instruments or the equivalent
corresponding to MC3486)
19
20
PBO
/PBO
Phase-B signal
21
22
PCO
/PCO
Phase-C signal
5 Reserved - Terminal not used. Do no connect.
Pin No. Signal Name Function
4
3
Common /HWBB1+
/HWBB1-
Hard wire baseblock input 1
6
5
/HWBB2+
/HWBB2-
Hard wire baseblock input 2
8
7
EDMI+
EDMI-
Monitored circuit status output 1:
ON when the hard wire baseblock function is normally activated.
1
2
Reserved - Terminals not used.
Do not connect.
Symbol Name Function
L1, L2 or
L1, L2, L3
Main circuit AC input terminal AC power input terminals for the main circuit
U, V, W Servo motor connection terminal Terminals for outputs to the servo motor.
L1C, L2C Control power input terminal AC power input terminals for the control circuit.
24V, 0 24V DC power input terminals for the control circuit.
Frame ground Ground terminal. Ground to a maximum of 100 Ω. (class 3).
B1/ ⊕, B2, B3
or
B1, B2, B3
Main circuit DC output terminal Up to 400 W: If the regenerative capacity is insufficient, connect an external regenerative resistor
(option) between B1/ ⊕ and B2.
From 500 W to 5 kW: Normally short B2 and B3. If the internal regenerative resistor is insufficient, remove
the wire between B2 and B3 and connect an external regenerative resistor between
B1/ ⊕ and B2.
1, 2 DC reactor connection terminal for
suppressing power supply harmonic
waves
Normally, short 1 and 2.
If a countermeasure against power supply harmonic waves is needed, connect a DC reactor
between 1 and 2.
Pin No. Signal Name Function
1 E5V Encoder power supply + 5 V
2 E0V Encoder power supply ground
3 BAT+ Battery + (used only with absolute encoder)
4 BAT– Battery – (used only with absolute encoder)
5 S+ Encoder serial signal input
6 S– Encoder serial signal input
Page 10

10 AC servo systems
Sigma-5 Analog/Pulse Reference Servo Drive
Panel operator
Changing modes
To change modes, press the MODE/SET key.
Status display mode
Keys
Sigma-5 MECHATROLINK-II Servo Drives
Display panel Status display mode
Operation
Keys
Display panel
With front cover open
Power ON
Status Display Mode
Utility Function Mode
Param. setting mode
Monitor mode
Baseblock
Alarm history display mode
Function selection switch
Speed feedback
(Display example)
MODE/SET
MODE/SET
MODE/SET
MODE/SET
Symbol Status
bb Baseblock (servo OFF)
rUn Operating (servo on)
p%t Forward rotation prohibited (forward overtravel)
n%t Reverse rotation prohibited (reverse overtravel)
h.bb Hard Wire Base Block. Servo drive is baseblocked by the safe-
ty function
tst Mode test without motor
020 Alarm. Blinks the alarm number
Key name SGDV-@@@0@A-OY Function
MODE/SET
Key
Selects the display mode (status display mode, utility function mode, parameter setting mode and monitor
mode). Used as a data setting key
while in setting mode.
Turns the servo ON or OFF while jog
operations are being perfomed.
UP Key
Increments parameter settings. Used
as a forward rotation start key during
jog operation.
DOWN Key
Decrements parameter settings.
Used as a reverse rotation start key
during jog operation.
DATA/SHIFT
Key
To set and display the set value.
Selects the digit whose setting is to be
changed. When selected, the digit
flashes.
UP Key
+
DOWN Key
Pressing the UP Key and the Down
Key simultaneoulsy, resets an alarm.
Control-circuit power supply ON
Baseblock
Motor rotation detection
Main-circuit power supply ON
Bit display Symbol display
Speed coincidence
(during speed/torque control)
Positioning complete
(during position control)
Speed command being input
(during speed control)
Command pulses being input
(during position control)
To rque command being input
(during torque control)
Error counter reset signal being
input (during position control)
MODE/SET
DATA
/
MODE/SET
DATA
/
MODE/SET
DATA
/
MODE/SET
DATA
/
MODE/SET
DATA
/
With front cover open
Display panel
Symbol Status
a.e60 A.E60.Alarm number 60
h. b b Hard Wire Base Block. Servo drive is baseblocked by the safe-
ty function
tst Mode test without motor
Control-circuit power supply ON
Baseblock
Command reference being input
Motor rotation detection
Bit display
Page 11

Sigma-5 servo drive 11
Sigma-5 Analog/Pulse Reference Servo Drive
SGDV-A5A0@A-OY to -02A0@A-OY (230 V, 50 to 200 W)
SGDV-04A0@A-OY (230 V, 400 W)
SGDV-08A0@A-OY (230 V, 750 W)
Dimensions
40
35
Servo drive
Rear View
Ground Terminal
2-M4 Screws
Two Terminals
Nameplate
40
(17)
(4)
(25)
(75)
140
23
(20)
(120˚)
CN2
CN8
160
CN1
CN7
CN3
160
150±0.5(Mounting Pitch)
5
Mounting Hole Diagram
Cooling Fan
2-M4 Screw Holes
40
5
Servo drive
Rear View
2-M4 Screw Holes
Ground Terminal
2-M4 Screws
Two Terminals
Nameplate
40
(17)
(4)
(25)
(75)
170
23
(20)
(120˚)
CN2
CN8
160
CN1
CN7
CN3
Cooling Fan
160
150±0.5(Mounting Pitch)
30±0.5
(Mounting
Pitch)
5
Mounting Hole Diagram
CN3
CN7
CN1
CN8
CN2
70
160
Two Terminals
Ground Terminal
2-M4 Screws
(20)
(17)
(120˚)
180
23
(25)
(75)
(4)
Cooling Fan
Nameplate
Mounting Hole Diagram
6
70
Servo drive
Rear View
3-M4
Screw Holes
5
160
150
±
0.5(Mounting Pitch)
58±0.5
(Mounting Pitch)
Page 12

12 AC servo systems
SGDV-15A0@A-OY (230 V, 1.5 kW)
SGDV-05D0@A-OY to -15D0@A-OY (400 V, 0.5 to 1.5 kW)
Terminal
14-M4 Screws
Air Flow
Input Voltage
Model
CN3
CN7
CN1
CN8
CN2
100
180
Ground Terminal
2-M4 Screws
Nameplate
(20)
(17)
(120˚)
180
22
(75)
(4)
(100˚)
(40)
Cooling Fan
Mounting Hole Diagram
5
100
SERVOPACK
Rear View
4-M4 Screw Holes
5
180
170
±0.5(Mounting Pitch)
90±0.5
(Mounting Pitch)
Air Flow
110
48
Servo drive
Rear View
4-M4 Screw Holes
Ground Terminal
2-M4 Screws
Two Terminals
Cooling Fan
110
(17)
7237
17.5
(2)
(25)
(75)
23
24.5
180
(20)
(120˚)
CN2
CN8
160
195
CN1
CN7
CN3
195
166 Min.
180±0.5(Mounting Pitch)
50±0.5
(Mounting Pitch)
7.5
7
Mounting Hole Diagram
Nameplate
Page 13

Sigma-5 servo drive 13
SGDV-20/30D0@A-OY (400 V, 2/3 kW)
SGDV-50D0@A-OY (400 V, 5 kW)
Mounting Hole Diagram
30
110
Servo drive
Rear View
4-M5 Screw Holes
6
285
270±0.5(Mounting Pitch)
50±0.5
(Mounting Pitch)
7.5
(20)
(17)
(120˚
)
180
24.5
22
(75)
(2)
CN3
CN7
CN1
CN8
CN2
110
250
Ground Terminal
2-M4 Screws
285
80
15
17.5
Te r mi n al
14-M4 Screws
Te r mi n al Details
Cooling Fan
(40)
(100˚)
258 Min.
Nameplate
Cooling Fan
Terminal
6-M5 Screws
Te r mi n al
5-M4 Screws
4-M5 Screw Holes
135
35
285
6
7.5
258 Min.
Servo drive
Rear View
Terminal
3-M5 Screws
Ground Terminal
2-M5 Screws
Terminal Details
Nameplate
230
24.5
135
20 80
(75)
(83)
(2)
(17)
(20
)
(120˚)
(100˚)
22
285
17.
5
250
CN3
CN7
CN1
CN8
CN2
50±0.5
(Mounting Pitch)
270±0.5(Mounting Pitch)
Page 14

14 AC servo systems
SGDV-210D0@A to 260D0@A (400 V, 6 to 7.5 kW)
SGDV-280D0@A to 370D0@A (400 V, 11 to 15 kW)
180±0.5
(
Mounting Pitch
)
Ter m in al
24-M Screws
Ground Terminal
26-M Screws
Terminal
66-M Screws
Terminal
46-M Screws
CN
2
CN
8
CN
1
CN
7
CN
3
Model
Input Voltage
230
230
(75)
(
17
)
(
20
)
(
120
˚
)
210
13
25
Servo drive
Rear View
350
350
7
.
5
335
±0.5 (Mounting Pitch)
Mounting Hole Diagram
46-M Screw Holes
Ground Terminal
26-M Screws
Ter m in al
24-M Screws
Terminal
66-M Screws
Terminal
46-M Screws
230
400
CN
2
CN
8
CN
1
CN
7
CN
3
Model
Input Voltage
(
75
)
(
17
)
(
20
)
(
120
˚
)
250
13 180
±0.5
(
Mounting Pitch
)
230
25
Servo drive
Rear View
400
7
.
5
385
±0.5 (Mounting Pitch)
Mounting Hole Diagram
46-M Screw Holes
Page 15

Sigma-5 servo drive 15
Sigma-5 MECHATROLINK-II Servo Drives
SGDV-A5A1@A-OY to -02A1@A-OY (230 V, 50 to 200 W)
SGDV-04A1@A-OY (230 V, 400 W)
SGDV-08A1@A-OY (230 V, 750 W)
140
23
(25)
(75)
(15)
(7)
(120˚)
35
40
Servo drive Rear View
2-M4 Screw Holes
5
160
150
±0.5(Mounting Pitch)
Mounting Hole Diagram
(4)
CN6
40
160
CN3
CN7
CN1
CN8
CN2
Two Terminals
Ground Terminal
2-M4 Screws
Cooling Fan
Nameplate
Mounting Hole Diagram
5
40
Servo drive Rear View
2-M4 Screw Holes
5
160
150
±0.5(Mounting Pitch)
30±0.5
(Mounting Pitch)
(15)
(7)
(120˚)
170
23
(25)
(75)
(4)
Model
CN6
CN3
CN7
CN1
CN8
CN2
40
160
Two Terminals
Ground Terminal
2-M4 Screws
Nameplate
Cooling Fan
Model
CN6
CN3
CN7
CN1
CN8
CN2
70
160
o Terminals
Ground Terminal
2-M4 Screws
(15)
(7)
(120˚)
180
23
(25)
(75)
(4)
Cooling Fan
Mounting Hole Diagram
6
70
Servo drive Rear View
3-M4 Screw Holes
5
160
150
±
0.5(Mounting Pitch)
58±0.5
(Mounting Pitch)
ameplate
Page 16

16 AC servo systems
SGDV-15A1@A-OY (230 V, 1.5 kW)
SGDV-05D1@A-OY to -15D1@A-OY (400 V, 0.5 to 1.5 kW)
Mounting Hole Diagram
5
100
SERVOPACK Rear View
4-M4 Screw Holes
6
180
170
±0.5(Mounting Pitch)
90±0.5
(Mounting Pitch)
(15)
(17)
(120˚)
180
22
(75)
(4)
Air Flow
Input Voltage
Model
CN6
CN3
CN7
CN1
CN8
CN2
100
180
Ground Terminal
2-M4 Screws
Air Flow
Terminal
14-M4 Screws
Cooling Fan
(40)
(100˚)
Nameplate
Cooling Fan
Mounting Hole Diagram
5
110
Servo drive Rear View
4-M4 Screw Holes
5.5
160
149.5
±
0.5
(Mounting Pitch)
100±0.5
(Mounting Pitch)
(15)
(7)
(120˚)
180
23
(25)
(75)
(4)
Model
CN6
CN3
CN7
CN1
CN8
CN2
110
160
Two Te rm in als
Ground Terminal
2-M4 Screws
Nameplate
Page 17

Sigma-5 servo drive 17
SGDV-20/30D1@A-OY (400 V, 2/3 kW)
SGDV-50D1@A-OY (400 V, 5 kW)
Mounting Hole Diagram
5
110
Servo drive
Rear View
4-M5 Screw Holes
6
250
238.5
±0.5(Mounting Pitch)
100±0.5
(Mounting Pitch)
(15)
(7)
(120˚)
180
22
(75)
(4)
Model
CN6
CN3
CN7
CN1
CN8
CN2
110
250
Ground Terminal
2-M4 Screws
Terminal
14-M4 Screws
Terminal Details
Cooling Fan
(40)
(100˚)
Nameplate
Cooling Fan
Nameplate
Input Voltage
Model
CN6
CN3
CN7
CN1
CN8
CN2
250
135
(15)
(7)
(120˚)
(100˚)
22
230
(75)
(1.6)
(3.2)
(83)
5
135
Servo drive Rear View
4-M5 Screw Holes
6
250
238.5±0.5 (Mounting Pitch)
125±0.5
(Mounting Pitch)
Terminal Details
Terminal
3-M5 Screws
Ground Terminal
2-M5 Screws
Terminal
5-M4 Screws
Terminal
6-M5 Screws
Page 18

18 AC servo systems
SGDV-210D1@A to 260D1@A (400 V, 6 to 7.5 kW)
SGDV-280D1@A to 370D1@A (400 V, 11 to 15 kW)
180±0.5
(
Mounting Pitch
)
Ter m in al
24-M Screws
Ground Terminal
26-M Screws
Terminal
66-M Screws
Terminal
46-M Screws
CN
2
CN
8
CN
1
CN
7
CN
3
CN
6
Model
Input Voltage
230
230
(75)
(
7
)
(
15
)
(
120
˚
)
210
13
25
Servo drive
Rear View
350
350
7
.
5
335
±0.5 (Mounting Pitch)
Mounting Hole Diagram
46-M Screw Holes
Ground Terminal
26-M Screws
Ter m in al
24-M Screws
Ter m in al
66-M Screws
Ter m in al
46-M Screws
230
400
CN
2
CN
8
CN
1
CN
7
CN
3
Input Voltage
CN
6
(75)
(
7
)
(
15
)
(
120
˚
)
250
13
180
±0.5
(
Mounting Pitch
)
230
25
Servo drive
Rear View
400
7
.
5
385
±0.5 (Mounting Pitch)
Mounting Hole Diagram
Model
46-M Screw Holes
Page 19

Sigma-5 servo drive 19
Filters
R88A-FI5-1005-RE
R88A-FI5-1009-RE
R88A-FI5-1016-RE
R88A-FI5-3004-RE
R88A-FI5-3008-RE
R88A-FI5-3012-RE
190
200±1
164±120±1
7
5
150
20 12
44±1
30
drive mounts
3 x M4
mounts Ø5.0
30
output flexes 18AWG
2 x 320mm with ferrules
CABLE SIZE
0 to 6 mm
2
.
strip 7 mm
M5 Earth Stud
each end
15
Units: mm
(1) Connect to the servodrive ground in case not footprint installation
(1)
190
200±1
164±120±1
7
5
150
50 11
72±1
30
15
drive mounts
3 x M4
M5 Earth Stud
each end
mounts
Ø5.0
58
output flexes 18AWG
2 x 320mm with ferrules
CABLE SIZE
0 to 6 mm
2
.
strip 7 mm
Units: mm
(1) Connect to the servodrive ground in case not footprint installation
(1)
210
220±1
184±120±1
7
5
170
80 12
104±1
40
20
mounts
Ø5.0
90
output flexes 16AWG
2 x 350mm with M4 spades
CABLE SIZE
0 to 6 mm
2
.
strip 7 mm
drive mounts
M4
(1) Connect to the servodrive ground in case not footprint installation
(1)
M5 Earth Stud
each end
Units: mm
190
200±1
164±120±1
7
5
150
90 12
114±1
40
20
drive mounts
4 x M4
mounts
Ø5.0
100
output flexes 16AWG
3 x 350mm with ferrules
CABLE SIZE
0 to 6 mm
2
.
strip 7 mm
M5 Earth Stud
each end
Units: mm
(1) Connect to the servodrive ground in case not footprint installation
(1)
279
290±1
255±120±1
8
6
239
90 13
116±1
40
20
drive mounts
4 x M5
M5 Earth Stud
each end
mounts
Ø5.5
100
output flexes 16AWG
3 x 350mm with ferrules
CABLE SIZE
0 to 6 mm
2
.
strip 7 mm
(1)
Units: mm
(1) Connect to the servodrive ground in case not footprint installation
279
290±1
255±120±1
8
6
239
115 13
141±1
40
20
drive mounts
4 x M5
M5 Earth Stud
each end
mounts
Ø5.5
125
output flexes 16AWG
3 x 420mm with ferrules
CABLE SIZE
0 to 6 mm
2
.
strip 7 mm
(1)
Units: mm
(1) Connect to the servodrive ground in case not footprint installation
Page 20

20 AC servo systems
Single-phase, 230 VAC
*1 The time constant for the primary filter is 30 µs.
*2 Connect when using an absolute encoder. When the encoder cable for the battery case is connected, do not connect a backup battery.
*3 Regenerative resistor can be connected between B1 and B2. For 750 W servo drives types normally short B2 and B3.
*4 For servo ON, connect to safety device and set wiring to enable safety function. When not using the safety function, use the servo drive with
the plug (JZSP-CVH05-E, provided as an accessory) inserted into the CN8.
10
V-REF
SG
A / D
5
6
LPF
T-REF
SG
9
LPF
2
+5 V
0 V
SEN
SG
BAT(+)
BAT(-)
ALO1
ALO2
ALO3
PBO
PCO
/PBO
PAO
/PAO
/PCO
/V-CMP+ (/COIN+)
/V-CMP- (/COIN-)
/TG
ON
+
/TG
ON
-
/S-RDY+
ALM+
ALM-
4
22
14
15
21
27
28
29
30
31
32
(SO1)
(SI0)
(SI1)
(SI2)
(SI3)
(SI4)
(SI5)
(SI6)
(SO2)
(SO3)
26
25
19
33
34
35
36
20
37
38
39
+24 V
+24 VIN
3.3 k
Ω
/S-ON
/P-CON
P-OT
N-OT
/ALM-RST
/N-CL
47
41
43
42
44
45
/P-CL
46
40
/S-RDY-
∗
3
150
Ω
PULS
SIGN
CLR
CLR
/CLR
1
SG
Alarm code output
Max. operating voltage:
30 VDC
Max. operating current:
20 mA DC
Encoder output pulses
Applicable line receiver
SN75175 or MC3486
manufactured by Texas
Instruments or the equivalent
Servo ON
(Servo ON when ON)
Reverse run prohibited
(Prohibited when OFF)
Forward run prohibited
(Prohibited when OFF)
Alarm reset
(Reset when ON)
Reverse current limit
(Limit when ON)
Forward current limit
(Limit when ON)
SEN signal input
Backup battery ∗2
2.8 to 4.5 V
P control
(P control when ON)
Speed coincidence detection
(ON when speed coincides)
(COIN: Positioning completed
(ON when positioning
completes.))
Running output
(ON when the motor speed
exceeds the settings.)
Servo ready output
(ON when ready)
Servo alarm output
(OFF for an alarm)
Photocoupler output
Max. operating voltage:
30 VDC
Max. operating current:
50 mA DC
Position
reference
CW
Phase A
CCW
Phase B
7
8
12
11
/PULS
SIGN
/SIGN
PULS
150Ω
150Ω
EDM1+
EDM1-
FG
Connect shield to
connector shell.
/HWBB1+
/HWBB1-
/HWBB2+
/HWBB2-
Switch
fuse
24 V
0 V
Safety device *4
CN8
6
3
4
5
8
7
Speed reference
(±2 to ±10 V/rated motor speed)
Tor que reference
(
±1 to ±10 V/rated torque)
Be sure to
ground
Be sure to prepare the end of
the shielded wire properly
Optical encoder
Servo motor
Be sure to attach a surge suppressor to the excitation
coil of the magnetic contactor and relay
Alarm processing
Power
Off
Power
ON
Noise filter
Single-Phase 200 to 230 VAC
SGDV
Analog/Pulse Reference
Servo Drive
Monitored circuit status output
(ON when the hard wire baseblock
function is normally activated)
Connector
shell
∗
1
∗
1
CN1
Page 21

Sigma-5 servo drive 21
Three-phase, 400 VAC
*1 The time constant for the primary filter is 30 µs.
*2 Connect when using an absolute encoder. When the encoder cable for the battery case is connected, do not connect a backup battery.
*3 Normally short B2 and B3. If the internal regenerative resistor is insufficient, remove the wire between B2 and B3 and connect an external re-
generative resistor between B1 and B2.
*4 For servo ON, connect to safety device and set wiring to enable safety function. When not using the safety function, use the servo drive with
the plug (JZSP-CVH05-E, provided as an accessory) inserted into the CN8.
*5 It is the user’s responsibility to obtain 24 VDC power supply.
10
V-RE F
SG
A / D
5
6
LPF
T-RE F
SG
9
LPF
2
+5 V
0 V
SEN
SG
BAT(+)
BAT(-)
ALO1
ALO2
ALO3
PBO
PCO
/PBO
PAO
/PAO
/PCO
/V-CMP+ (/COIN+)
/V-CMP- (/COIN-)
/TG
ON
+
/TG
ON
-
/S-RDY+
ALM+
ALM-
4
22
14
15
21
27
28
29
30
31
32
(SO1)
(SI0)
(SI1)
(SI2)
(SI3)
(SI4)
(SI5)
(SI6)
(SO2)
(SO3)
26
25
19
33
34
35
36
20
37
38
39
+24 V
+24 VIN
3.3 k
Ω
/S-ON
/P-CON
P-OT
N-OT
/ALM-RST
/N-CL
47
41
43
42
44
45
/P-CL
46
40
/S-RDY-
∗
3
150
Ω
PULS
SIGN
CLR
CLR
/CLR
1
SG
Alarm code output
Max. operating voltage:
30 VDC
Max. operating current:
20 mA DC
Encoder output pulses
Applicable line receiver
SN75175 or MC3486
manufactured by Texas
Instruments or the equivalent
Servo ON
(Servo ON when ON)
Reverse run prohibited
(Prohibited when OFF)
Forward run prohibited
(Prohibited when OFF)
Alarm reset
(Reset when ON)
Reverse current limit
(Limit when ON)
Forward current limit
(Limit when ON)
SEN signal input
Backup battery ∗2
2.8 to 4.5 V
P control
(P control when ON)
Speed coincidence detection
(ON when speed coincides)
(COIN: Positioning completed
(ON when positioning
completes.))
Running output
(ON when the motor speed
exceeds the settings.)
Servo ready output
(ON when ready)
Servo alarm output
(OFF for an alarm)
Photocoupler output
Max. operating voltage:
30 VDC
Max. operating current:
50 mA DC
Position
reference
CW
Phase A
CCW
Phase B
7
8
12
11
/PULS
SIGN
/SIGN
PULS
150Ω
150Ω
EDM1+
EDM1-
FG
Connect shield to
connector shell.
/HWBB1+
/HWBB1-
/HWBB2+
/HWBB2-
Switch
fuse
24 V
0 V
Safety device *4
CN8
6
3
4
5
8
7
Speed reference
(±
2 to ±10 V/rated motor speed)
Tor que reference
(
±
1 to ±10 V/rated torque)
Be sure to
ground
Be sure to prepare the end of
the shielded wire properly
Optical encoder
Servo motor
Be sure to attach a surge suppressor to the excitation
coil of the magnetic contactor and relay
Alarm processing
Power
Off
Power
ON
Noise filter
Three-Phase 380 to 480 VAC
Monitored circuit status output
(ON when the hard wire baseblock
function is normally activated)
Connector
shell
∗
1
∗
1
3
Power supply
∗
5
24 VDC +10%,-15%
+24 V
0 V
3
24 V
0 V
CN1
SGDV
Analog/Pulse Reference
Servo Drive
Page 22

22 AC servo systems
Single-phase, 230 VAC
*1 Connect when using an absolute encoder. When the encoder cable for the battery case is connected, do not connect a backup battery.
*2 Regenerative resistor can be connected between B1 and B2. For 750 W servo drives types normally short B2 and B3.
*3 For servo ON, connect to safety device and set wiring to enable safety function. When not using the safety function, use the servo drive with
the plug (JZSP-CVH05-E, provided as an accessory) inserted into the CN8.
ALM+
ALM-
SO1+ / BK+
SO1- / BK-
/SO2+
/SO2-
/SO3+
23
24
25
26
2
1
3
4
/SO3-
∗
2
BAT(+)
BAT(-)
15
14
Backup battery ∗1
2.8 to 4.5 V
Brake interlock
(Brake released when ON)
Servo alarm output
(OFF for an alarm)
Photocoupler output
Max. operating voltage:
30 VDC
Max. operating current:
50 mA DC
CN1
+24 VIN
+24V
3.3 k
Ω
/SI1
/SI2
/SI3
/SI4
/SI5
/SIO
6
8
10
9
11
12
/SI6
13
7
Control power supply
for sequence signal
Reverse run prohibited
(Prohibited when OFF)
Forward run prohibited
(Prohibited when OFF)
External latch signal 1
(Latched when ON)
Homing deceleration
switch
(Decelerated when ON)
EDM1+
EDM1-
FG
Connect shield to
connector shell.
/HWBB1+
/HWBB1-
/HWBB2+
/HWBB2-
Switch
fuse
24 V
0 V
Safety device *3
CN8
6
3
4
5
8
7
Be sure to
ground
Be sure to prepare the end of
the shielded wire properly
Optical encoder
Servo motor
Be sure to attach a surge suppressor to the excitation
coil of the magnetic contactor and relay
Alarm processing
Power
Off
Power
ON
Noise filter
Single-Phase 200 to 230 VAC
SGDV
MECHATROLINK-II
Servo Drive
Monitored circuit status output
(ON when the hard wire baseblock
function is normally activated)
Connector
shell
PBO
PCO
/PBO
PAO
/PAO
/PCO
21
17
18
19
20
22
16
SG
Encoder output pulses
Applicable line receiver
SN75175 or MC3486
manufactured by Texas
Instruments or the equivalent
Signal ground
P-OT
N-OT
/DEC
/EXT1
/EXT2
/EXT3
External latch signal 2
(Latched when ON)
External latch signal 3
(Latched when ON)
General purpose
Page 23

Sigma-5 servo drive 23
Three-phase, 400 VAC
*1 Connect when using an absolute encoder. When the encoder cable for the battery case is connected, do not connect a backup battery.
*2 Normally short B2 and B3. If the internal regenerative resistor is insufficient, remove the wire between B2 and B3 and connect an external
regenerative resistor between B1 and B2.
*3 For servo ON, connect to safety device and set wiring to enable safety function. When not using the safety function, use the servo drive with
the plug (JZSP-CVH05-E, provided as an accessory) inserted into the CN8.
*4 It is the user’s responsibility to obtain 24 VDC power supply.
ALM+
ALM-
SO1+ / BK+
SO1- / BK-
/SO2+
/SO2-
/SO3+
23
24
25
26
2
1
3
4
/SO3-
∗
2
BAT(+)
BAT(-)
15
14
Backup battery ∗1
2.8 to 4.5 V
Brake interlock
(Brake released when ON)
Servo alarm output
(OFF for an alarm)
Photocoupler output
Max. operating voltage:
30 VDC
Max. operating current:
50 mA DC
CN1
+24 VIN
+24V
3.3 k
Ω
/SI1
/SI2
/SI3
/SI4
/SI5
/SIO
6
8
10
9
11
12
/SI6
13
7
Control power supply
for sequence signal
Reverse run prohibited
(Prohibited when OFF)
Forward run prohibited
(Prohibited when OFF)
External latch signal 1
(Latched when ON)
Homing deceleration
switch
(Decelerated when ON)
EDM1+
EDM1-
FG
Connect shield to
connector shell.
/HWBB1+
/HWBB1-
/HWBB2+
/HWBB2-
Switch
fuse
24 V
0 V
Safety device *3
CN8
6
3
4
5
8
7
Be sure to
ground
Be sure to prepare the end of
the shielded wire properly
Optical encoder
Servo motor
Be sure to attach a surge suppressor to the excitation
coil of the magnetic contactor and relay
Alarm processing
Power
Off
Power
ON
Noise filter
Single-Phase 200 to 230 VAC
Monitored circuit status output
(ON when the hard wire baseblock
function is normally activated)
Connector
shell
PBO
PCO
/PBO
PAO
/PAO
/PCO
21
17
18
19
20
22
16
SG
Encoder output pulses
Applicable line receiver
SN75175 or MC3486
manufactured by Texas
Instruments or the equivalent
Signal ground
P-OT
N-OT
/DEC
/EXT1
/EXT2
/EXT3
External latch signal 2
(Latched when ON)
External latch signal 3
(Latched when ON)
General purpose
3
3
Power supply
∗
4
24 VDC +10%,-15%
+24 V
0 V
24 V
0 V
SGDV
MECHATROLINK-II
Servo Drive
Page 24

24 AC servo systems
Sigma-5 Analog/Pulse Reference Configuration
Note: The symbols ABCDE... show the recommended sequence to select the components in a Sigma-5 servo system
Servo motors, power & encoder cables
Note: AB Refer to the servo motors chapter for detailed motor specifications and selection
Ordering information
Position control unit
Terminal block
position control
Unit
General purpose cable
Battery case for absolute encoder
Analog monitor cable
USB cable
Safety cable
Cables
Cables
SGMGH, SGMUH, SGMSH, SGMBH
Servo Motor
(Refer to chapter Sigma linear motors)
SGMAH, SGMPH
Servo Motor
SGLT_ linear
Servo Motor
SGLG_ linear
Servo Motor
SGLF_ linear
Servo Motor
(Refer to chapter Sigma-II rotary motors)
Cables
SGMGV, SGMSV
Servo Motor
SGMJV, SGMAV
Servo Motor
(Refer to chapter Sigma-5 rotary motors)
Direct drive servo motor
SGMCS-@-@B, C, D, E
Direct drive servo motor
SGMCS-@-@M, N
Cables
(Refer to chapter Sigma direct drive motors)
Sigma-5
Servo Drives
CN5
CN7
CN1
CN8
Analog/Pulse
Models
C
D
J
I
E
G
L
M
F
H
Filter
A
A
A
A
A
A
A
A A
B
B
B
B
CN2
K
Personal
computer
Page 25

Sigma-5 servo drive 25
Servo drives
Symbol Specifications Model Compatible rotary servo motors A Compatible direct drive motors A Compatible linear motors A
C
1 phase
230 VAC
50 W SGDV-A5A01A-OY SGMAH-A5D@, SGMJV-A5A@,
SGMAV-A5A@
--
SGDV-A5A05A-OY - - SGLGW-30A050@
100 W SGDV-01A01A-OY SGMAH-01A@, SGMPH-01A@,
SGMJV-01A@, SGMAV-01A@,
SGMEV-01A@
- -
SGDV-01A05A-OY - - SGLGW-30A080@,
SGLGW-40A140@
200 W SGDV-02A01A-OY SGMAH-02A@, SGMPH-02A@,
SGMJV-02A@, SGMAV-02A@,
SGMEV-02A@
SGMCS-07B@ -
SGDV-02A05A-OY - - SGLGW-60A140@,
SGLGW-40A253@,
SGLFW-20A@,
SGLFW-35A120@
400 W SGDV-04A01A-OY SGMAH-04A@, SGMPH-04A@,
SGMJV-04A@, SGMAV-04A@,
SGMEV-04A@
SGMCS-02B@, SGMCS-05B@,
SGMCS-04C@, SGMCS-10C@,
SGMCS-14C@, SGMCS-08D@,
SGMCS-17D@, SGMCS-25D@
-
SGDV-04A05A-OY - - SGLGW-40A365@,
SGLGW-60A253A@
750 W SGDV-08A01A-OY SGMAH-08A@, SGMPH-08A@,
SGMJV-08A@, SGMAV-08A@,
SGMEV-08A@
SGMCS-16E@, SGMCS-35E@ -
SGDV-08A05A-OY - - SGLGW-60A365A@,
SGLFW-35A230@,
SGLFW-50A200@
1.5 kW SGDV-15A01A-OY SGMPH-15A@, SGMAV-10A@,
SGMEV-15A@
SGMCS-45M@, SGMCS-80M@,
SGMCS-80N@
-
SGDV-15A05A-OY - - SGLGW-90A200A@,
SGLFW-50A380@,
SGLFW-1ZA200@
3 phase
400 VAC
0.5 kW SGDV-05D01A-OY SGMAH-03D@, SGMPH-04D@,
SGMGH-05D@, SGMEV-04D@,
SGMGV-05D@
--
SGDV-05D05A-OY - - SGLFW-35D@
1.0 kW SGDV-10D01A-OY SGMAH-07D@, SGMPH-08D@,
SGMGH-09D@, SGMSH-10D@,
SGMUH-10D@, SGMEV-08D@,
SGMGV-09D@, SGMSV-10D@,
--
SGDV-10D05A-OY - - SGLFW-50D200@,
SGLTW-35D170@,
SGLTW-50D170@
1.5 kW SGDV-15D01A-OY SGMPH-15D@, SGMGH-13D@,
SGMSH-15D@, SGMUH-15D@,
SGMEV-15D@, SGMGV-13D@,
SGMSV-15D@
--
SGDV-15D05A-OY - - SGLFW-50D380@,
SGLFW-1ZD200@
2 kW SGDV-20D01A-OY SGMGH-20D@, SGMSH-20D@,
SGMGV-20D@, SGMSV-20D@
--
SGDV-20D05A-OY - - SGLFW-1ED380@,
SGLTW-35D320@,
SGLTW-50D320@
3 kW SGDV-30D01A-OY SGMGH-30D@, SGMSH-30D@,
SGMUH-30D@, SGMGV-30D@,
SGMGV-30D@
-
-
SGDV-30D05A-OY - - SGLFW-1ZD380@,
SGLFW-1ED560@,
SGLTW-40D400@
5 kW SGDV-50D01A-OY SGMGH-44D@, SGMSH-50D@,
SGMUH-40D@, SGMGV-44D@,
SGMSV-50D@
--
SGDV-50D05A-OY - - SGLTW-40D60@,
SGLTW-80D400@
6 kW SGDV-210D01A SGMGH-55D@, SGMGV-55D@ --
7.5 kW SGDV-260D01A SGMGH-75D@, SGMGV-75D@ --
11 kW SGDV-280D01A SGMGH-1AD@, SGMGV-1AD@ --
15 kW SGDV-370D01A SGMGH-1ED@,
SGMGV-1ED@ --
Page 26

26 AC servo systems
Control cables (for CN1)
Battery backup for absolute encoder (for CN2 encoder cable)
Note: when the encoder cables with a battery case are used, no battery is re-
quired for CN1 (between pin 21 and 22). Battery for CN1 is ER6VCN3.
Cable (for CN5)
USB personal computer cable (for CN7)
Note: doble shield USB cable recommended
Cable for Safety Functions (for CN8)
Note: when using the safety function, connect this cable to the safety devices.
Even when not using the safety function, use servo drive with the Safe Jumper
Connector (JZSP-CVH05-E) connected.
Filters
Connectors
Computer software
Symbol Description Connect to Model
D
Servo relay unit CJ1W-NC1@3 XW2B-20J6-1B (1 axis)
CJ1W-NC2@3/4@3 XW2B-40J6-2B (2 axis)
CJ1M-CPU22/23 XW2B-20J6-8A (1 axis)
XW2B-40J6-9A (2 axis)
E Cable to servo drive Servo relay units XW2B-@0J6-@B 1 m XW2Z-100J-B4
2 m XW2Z-200J-B4
F Position control unit
connecting cable
CJ1W-NC113 0.5 m XW2Z-050J-A14
1 m XW2Z-100J-A14
CJ1W-NC213/413 0.5 m XW2Z-050J-A15
1 m XW2Z-100J-A15
CJ1W-NC133 0.5 m XW2Z-050J-A18
1 m XW2Z-100J-A18
CJ1W-NC233/433 0.5 m XW2Z-050J-A19
1 m XW2Z-100J-A19
CJ1M-CPU22/23 0.5 m XW2Z-050J-A27
1 m XW2Z-100J-A27
G Control cable For general purpose controllers 1 m R88A-CPW001S
2 m R88A-CPW002S
H Relay terminal block cable General purpose controller 1 m R88A-CTW001N
2 m R88A-CTW002N
Relay terminal block - XW2B-50G5
Symbol Name Model
I
Battery JZSP-BA01
Symbol Name Model
J
Analog monitor cable R88A-CMW001S
DE9404559
Symbol Name Note
K
USB Mini Connector cable JZSP-CVS06-02-E
Symbol Name Model
L
Safety connector with 3 m cable (with
Loose Wires at one End)
JZSP-CVH03-03-E
Symbol Applicable servo drive Filter model Rated current Rated voltage
M SGDV-A5A@@A-OY,SGDV-01A@@A-OY, SGDV-02A@@A-OY, SGDV-04A@@A-OY R88A-FI5-1005-RE 5 A 250 VAC single-phase
SGDV-08A@@A-OY R88A-FI5-1009-RE 9 A
SGDV-15A@@A-OY R88A-FI5-1016-RE 16 A
SGDV-05D@@A-OY, SGDV-10D@@A-OY, SGDV-15D@@A-OY R88A-FI5-3004-RE 4.3 A 400 VAC three-phase
SGDV-20D@@A-OY, SGDV-30D@@A-OY R88A-FI5-3008-RE 8.6 A
SGDV-50D@@A-OY R88A-FI5-3012-RE 14.5 A
Specifications Model
I/O connector kit (for CN1) R88A-CNU11C
Sigma-5 drive encoder connector (for CN2) JZSP-CMP9-1
Safe Jumper Connector JZSP-CVH05-E
Specifications Model
Configuration and monitoring software tool for servo drives and inverters. (CX-drive version 1.50 or higher) CX-drive
Complete OMRON software package including CX-drive. (CX-One version 3.0.2 or higher) CX-One
Page 27

Sigma-5 servo drive 27
Sigma-5 MECHATROLINK Servo Drive Configuration
Note: The symbols ABCDE... show the recommended sequence to select the components in a Sigma-5 servo system
Servo motors, power & encoder cables
Note: AB Refer to the servo motors chapter for detailed motor specifications and selection
Ordering information
Battery case for absolute encoder
Analog monitor cable
USB cable
Safety cable
Cables
Cables
SGMGH, SGMUH, SGMSH, SGMBH
Servo Motor
(Refer to chapter Sigma linear motors)
SGMAH, SGMPH
Servo Motor
SGLT_ linear
Servo Motor
SGLG_ linear
Servo Motor
SGLF_ linear
Servo Motor
(Refer to chapter Sigma-II rotary motors)
Cables
SGMGV, SGMSV
Servo Motor
SGMJV, SGMAV
Servo Motor
(Refer to chapter Sigma-5 rotary motors)
Direct drive servo motor
SGMCS-@-@B, C, D, E
Direct drive servo motor
SGMCS-@-@M, N
Cables
(Refer to chapter Sigma direct drive motors)
Sigma-5
Servo Drives
CN5
CN7
CN1
CN8
C
D
Filter
A
A
A
A
A
A
A
A
A
B
B
B
B
CN2
MECHATROLINK-II
Models
MECHATROLINK-II network
CN6
General purpose connector
E
F
G
H
I
J
Personal
computer
Page 28

28 AC servo systems
Servo drives
Symbol Specifications Model Compatible rotary servo motors A Compatible direct drive motors A Compatible linear motors A
C
1 phase
230 VAC
50 W SGDV-A5A11A-OY SGMAH-A5D@, SGMJV-A5A@,
SGMAV-A5A@
--
SGDV-A5A15A-OY - - SGLGW-30A050@
100 W SGDV-01A11A-OY SGMAH-01A@, SGMPH-01A@,
SGMJV-01A@, SGMAV-01A@,
SGMEV-01A@
- -
SGDV-01A15A-OY - - SGLGW-30A080@,
SGLGW-40A140@
200 W SGDV-02A11A-OY SGMAH-02A@, SGMPH-02A@,
SGMJV-02A@, SGMAV-02A@,
SGMEV-02A@
SGMCS-07B@ -
SGDV-02A15A-OY - - SGLGW-60A140@,
SGLGW-40A253@,
SGLFW-20A@,
SGLFW-35A120@
400 W SGDV-04A11A-OY SGMAH-04A@, SGMPH-04A@,
SGMJV-04A@, SGMAV-04A@,
SGMEV-04A@
SGMCS-02B@, SGMCS-05B@,
SGMCS-04C@, SGMCS-10C@,
SGMCS-14C@, SGMCS-08D@,
SGMCS-17D@, SGMCS-25D@
-
SGDV-04A15A-OY - - SGLGW-40A365@,
SGLGW-60A253A@
750 W SGDV-08A11A-OY SGMAH-08A@, SGMPH-08A@,
SGMJV-08A@, SGMAV-08A@,
SGMEV-08A@
SGMCS-16E@, SGMCS-35E@ -
SGDV-08A15A-OY - - SGLGW-60A365A@,
SGLFW-35A230@,
SGLFW-50A200@
1.5 kW SGDV-15A11A-OY SGMPH-15A@, SGMAV-10A@,
SGMEV-15A@
SGMCS-45M@, SGMCS-80M@,
SGMCS-80N@
-
SGDV-15A15A-OY - - SGLGW-90A200A@,
SGLFW-50A380@,
SGLFW-1ZA200@
3 phase
400 VAC
0.5 kW SGDV-05D11A-OY SGMAH-03D@, SGMPH-04D@,
SGMGH-05D@, SGMEV-04D@,
SGMGV-05D@
--
SGDV-05D15A-OY - - SGLFW-35D@
1.0 kW SGDV-10D11A-OY SGMAH-07D@, SGMPH-08D@,
SGMGH-09D@, SGMSH-10D@,
SGMUH-10D@, SGMEV-08D@,
SGMGV-09D@, SGMSV-10D@,
--
SGDV-10D15A-OY - - SGLFW-50D200@,
SGLTW-35D170@,
SGLTW-50D170@
1.5 kW SGDV-15D11A-OY SGMPH-15D@, SGMGH-13D@,
SGMSH-15D@, SGMUH-15D@,
SGMEV-15D@, SGMGV-13D@,
SGMSV-15D@
--
SGDV-15D15A-OY - - SGLFW-50D380@,
SGLFW-1ZD200@
2 kW SGDV-20D11A-OY SGMGH-20D@, SGMSH-20D@,
SGMGV-20D@, SGMSV-20D@
--
SGDV-20D15A-OY - - SGLFW-1ED380@,
SGLTW-35D320@,
SGLTW-50D320@
3 kW SGDV-30D11A-OY SGMGH-30D@, SGMSH-30D@,
SGMUH-30D@, SGMGV-30D@,
SGMGV-30D@
-
-
SGDV-30D15A-OY - - SGLFW-1ZD380@,
SGLFW-1ED560@,
SGLTW-40D400@
5 kW SGDV-50D11A-OY SGMGH-44D@, SGMSH-50D@,
SGMUH-40D@, SGMGV-44D@,
SGMSV-50D@
--
SGDV-50D15A-OY - - SGLTW-40D60@,
SGLTW-80D400@
6 kW SGDV-210D11A SGMGH-55D@, SGMGV-55D@ --
7.5 kW SGDV-260D11A SGMGH-75D@, SGMGV-75D@ --
11 kW SGDV-280D11A SGMGH-1AD@, SGMGV-1AD@- -
15 kW SGDV-370D11A SGMGH-1ED@,
SGMGV-1ED@- -
Page 29

Sigma-5 servo drive 29
Battery backup for absolute encoder (for CN2 encoder cable)
Note: when the encoder cables with a battery case JUSP-BA01 are used, no bat-
tery is required for CN1 (between pin 21 and 22). Battery for CN1 is ER6VCN3.
Cable (for CN5)
USB personal computer cable (for CN7)
Note: doble shield USB cable recommended
Cable for Safety Functions (for CN8)
Note: when using the safety function, connect this cable to the safety devices.
Even when not using the safety function, use servo drive with the Safe Jumper
Connector (JZSP-CVH05-E) connected.
Mechatrolink-II cables (for CN6)
Filters
Connectors
Computer software
Symbol Name Model
E
Battery JZSP-BA01
Symbol Name Model
F
Analog monitor cable R88A-CMW001S
DE9404559
Symbol Name Note
H
USB Mini Connector cable JZSP-CVS06-02-E
Symbol Name Model
I
Safety connector with 3 m cable (with
Loose Wires at one End)
JZSP-CVH03-03-E
Symbol Specifications Length Model
G Mechatrolink-II Terminator resistor JEPMC-W6022
Mechatrolink-II Cables 0.5 m JEPMC-W6003-A5
1 m JEPMC-W6003-01
3 m JEPMC-W6003-03
5 m JEPMC-W6003-05
10 m JEPMC-W6003-10
20 m JEPMC-W6003-20
30 m JEPMC-W6003-30
Symbol Applicable servo drive Filter model Rated current Rated voltage
J SGDV-A5A@@A-OY,SGDV-01A@@A-OY, SGDV-02A@@A-OY, SGDV-04A@@A-OY R88A-FI5-1005-RE 5 A 250 VAC single-phase
SGDV-08A@@A-OY R88A-FI5-1009-RE 9 A
SGDV-15A@@A-OY R88A-FI5-1016-RE 16 A
SGDV-05D@@A-OY, SGDV-10D@@A-OY, SGDV-15D@@A-OY R88A-FI5-3004-RE 4.3 A 400 VAC three-phase
SGDV-20D@@A-OY, SGDV-30D@@A-OY R88A-FI5-3008-RE 8.6 A
SGDV-50D@@A-OY R88A-FI5-3012-RE 14.5 A
Specification Model
I/O connector kit (for CN1) R88A-CNW01C
Sigma-5 drive encoder connector (for CN2) JZSP-CMP9-1
Safe Jumper Connector JZSP-CVH05-E
Specifications Model
Configuration and monitoring software tool for servo drives and inverters. (CX-drive version 1.50 or higher) CX-drive
Complete OMRON software package including CX-drive. (CX-One version 3.0.2 or higher) CX-One
Page 30

30 AC servo systems
In the interest of product improvement, specifications are subject to change without notice.
ALL DIMENSIONS SHOWN ARE IN MILLIMETERS.
To convert millimeters into inches, multiply by 0.03937. To convert grams into ounces, multiply by 0.03527.
Cat. No. I48E-EN-01
 Loading...
Loading...