

Page 1

www.omega.com
e-mail: info@omega.com
User’s Guide
OME-PCI-1602
PCI Data Acquisition Board
Windows Software Manual
Shop online at
Page 2
Servicing North America:
USA: One Omega Drive, P.O. Box 4047
ISO 9001 Certified Stamford CT 06907-0047
TEL: (203) 359-1660 FAX: (203) 359-7700
e-mail: info@omega.com
Canada: 976 Bergar
Laval (Quebec) H7L 5A1, Canada
TEL: (514) 856-6928 FAX: (514) 856-6886
e-mail: info@omega.ca
For immediate technical or application assistance:
USA and Canada: Sales Service: 1-800-826-6342 / 1-800-TC-OMEGA
®
Customer Service: 1-800-622-2378 / 1-800-622-BEST
®
Engineering Service: 1-800-872-9436 / 1-800-USA-WHEN
®
TELEX: 996404 EASYLINK: 62968934 CABLE: OMEGA
Mexico: En Espan˜ol: (001) 203-359-7803 e-mail: espanol@omega.com
FAX: (001) 203-359-7807 info@omega.com.mx
Servicing Europe:
Benelux: Postbus 8034, 1180 LA Amstelveen, The Netherlands
TEL: +31 (0)20 3472121 FAX: +31 (0)20 6434643
Toll Free in Benelux: 0800 0993344
e-mail: sales@omegaeng.nl
Czech Republic: Frystatska 184, 733 01 Karviná, Czech Republic
TEL: +420 (0)59 6311899 FAX: +420 (0)59 6311114
Toll Free: 0800-1-66342 e-mail: info@omegashop.cz
France: 11, rue Jacques Cartier, 78280 Guyancourt, France
TEL: +33 (0)1 61 37 29 00 FAX: +33 (0)1 30 57 54 27
Toll Free in France: 0800 466 342
e-mail: sales@omega.fr
Germany/Austria: Daimlerstrasse 26, D-75392 Deckenpfronn, Germany
TEL: +49 (0)7056 9398-0 FAX: +49 (0)7056 9398-29
Toll Free in Germany: 0800 639 7678
e-mail: info@omega.de
United Kingdom: One Omega Drive, River Bend Technology Centre
ISO 9002 Certified Northbank, Irlam, Manchester
M44 5BD United Kingdom
TEL: +44 (0)161 777 6611 FAX: +44 (0)161 777 6622
Toll Free in United Kingdom: 0800-488-488
e-mail: sales@omega.co.uk
OMEGAnet®Online Service Internet e-mail
www.omega.com info@omega.com
It is the policy of OMEGA to comply with all worldwide safety and EMC/EMI regulations that
apply. OMEGA is constantly pursuing certification of its products to the European New Approach
Directives. OMEGA will add the CE mark to every appropriate device upon certification.
The information contained in this document is believed to be correct, but OMEGA Engineering, Inc. accepts
no liability for any errors it contains, and reserves the right to alter specifications without notice.
WARNING: These products are not designed for use in, and should not be used for, patient-connected applications.
Page 3

Table of Contents
1. INTRODUCTION ..........................................................................................................................5
1.1 SOFTWARE INSTALLATION ......................................................................................................6
1.2 REFERENCE: ............................................................................................................................7
2. DECLARATION FILES................................................................................................................8
2.1 THE P1602.H ...........................................................................................................................8
2.2 THE P1602.BAS....................................................................................................................12
2.3 THE P1602.PAS ....................................................................................................................16
2.4 LABVIEW CALL DLLS.........................................................................................................22
2.5 DEMO PROGRAM ...................................................................................................................24
3. DESCRIPTION OF FUNCTIONS..............................................................................................29
3.1 THE CONFIGURATION CODE TABLE ......................................................................................31
3.2 THE TEST FUNCTIONS ...........................................................................................................32
3.2.1 P1602_FloatSub2.........................................................................................................32
3.2.2 P1602_ShortSub2.........................................................................................................32
3.2.3 P1602_GetDllVersion...................................................................................................33
3.2.4 P1602_GetDriverVersion.............................................................................................33
3.3 THE M_FUNCTIONS ............................................................................................................34
3.3.1 P1602_M_FUN_1 .........................................................................................................34
3.3.2 P1602_M_FUN_2..........................................................................................................35
3.3.3 P1602_M_FUN_3 .........................................................................................................36
3.4 THE DIO FUNCTIONS ..........................................................................................................38
3.4.1 P1602_Di........................................................................................................................38
3.4.2 P1602_Do.......................................................................................................................38
3.5 THE D/A FUNCTIONS ..........................................................................................................39
3.5.1 P1602_Da.....................................................................................................................39
3.6 THE A/D FIXED-MODE FUNCTIONS.......................................................................................40
3.6.1 P1602_SetChannelConfig ............................................................................................40
3.6.2 P1602_AdPolling .........................................................................................................40
3.6.3 P1602_AdsPolling........................................................................................................41
3.6.4 P1602_AdsPacer..........................................................................................................42
3.7 THE MAGICSCAN FUNCTIONS .............................................................................................43
3.7.1 P1602_ClearScan.........................................................................................................43
3.7.2 P1602_StartScan..........................................................................................................44
3.7.3 P1602_ReadScanStatus................................................................................................45
3
Page 4

3.7.4 P1602_AddToScan...........................................................................................................46
3.7.5 P1602_SaveScan ..........................................................................................................47
3.7.6 P1602_WaitMagicScanFinish ......................................................................................48
3.8 THE PULG&PLAY FUNCTIONS.............................................................................................49
3.8.1 P1602_DriverInit..........................................................................................................49
3.8.2 P1602_DriverClose......................................................................................................49
3.8.3 P1602_GetConfigAddressSpace...................................................................................50
3.8.4 P1602_WhichBoardActive............................................................................................50
3.8.5 P1602_ActiveBoard......................................................................................................51
3.9 MULTIBOARD BATCH CAPTURE ............................................................................................52
3.9.1 P1602_FunA_Start.......................................................................................................52
3.9.2 P1602_FunA_ReadStatus.............................................................................................54
3.9.3 P1602_FunA_Stop........................................................................................................55
3.9.4 P1602_FunA_Get.........................................................................................................55
3.10 THE SINGLE BOARD BATCH CAPTURE ...................................................................................56
3.10.1 P1602_FunB_Start......................................................................................................56
3.10.2 P1602_FunB_ReadStatus............................................................................................57
3.10.3 P1602_FunB_Stop.......................................................................................................58
3.10.4 P1602_FunB_Get........................................................................................................58
THE CONTINUOUS CAPTURE FUNCTIONS..............................................................................................59
3.10.5 P1602_Card0_StartScan...........................................................................................59
3.10.6 P1602_Card0_ReadStatus.........................................................................................60
3.10.7 P1602_Card0_Stop....................................................................................................60
3.10.8 P1602_Card1_StartScan...........................................................................................61
3.10.9 P1602_Card1_ReadStatus.........................................................................................62
3.10.10 P1602_Card1_Stop....................................................................................................62
3.11 OTHER FUNCTIONS................................................................................................................63
3.11.1 P1602_DelayUs.........................................................................................................63
4. DEMO PROGRAMS....................................................................................................................64
4
Page 5

1. Introduction
The driver is a collection of DLLs for Windows 95/98/NT/2000/XP applications.
These DLLs are standard Win32 DLLs (32 bits) and can be called from Visual C/C++,
BC++, Visual BASIC, Delphi, BCB and LabVIEW.
These DLLs can perform a variety of data acquisition operations including:
z Get software version
z Initialization
z Digital Input/Output
z A/D conversion
z D/A conversion
5
Page 6
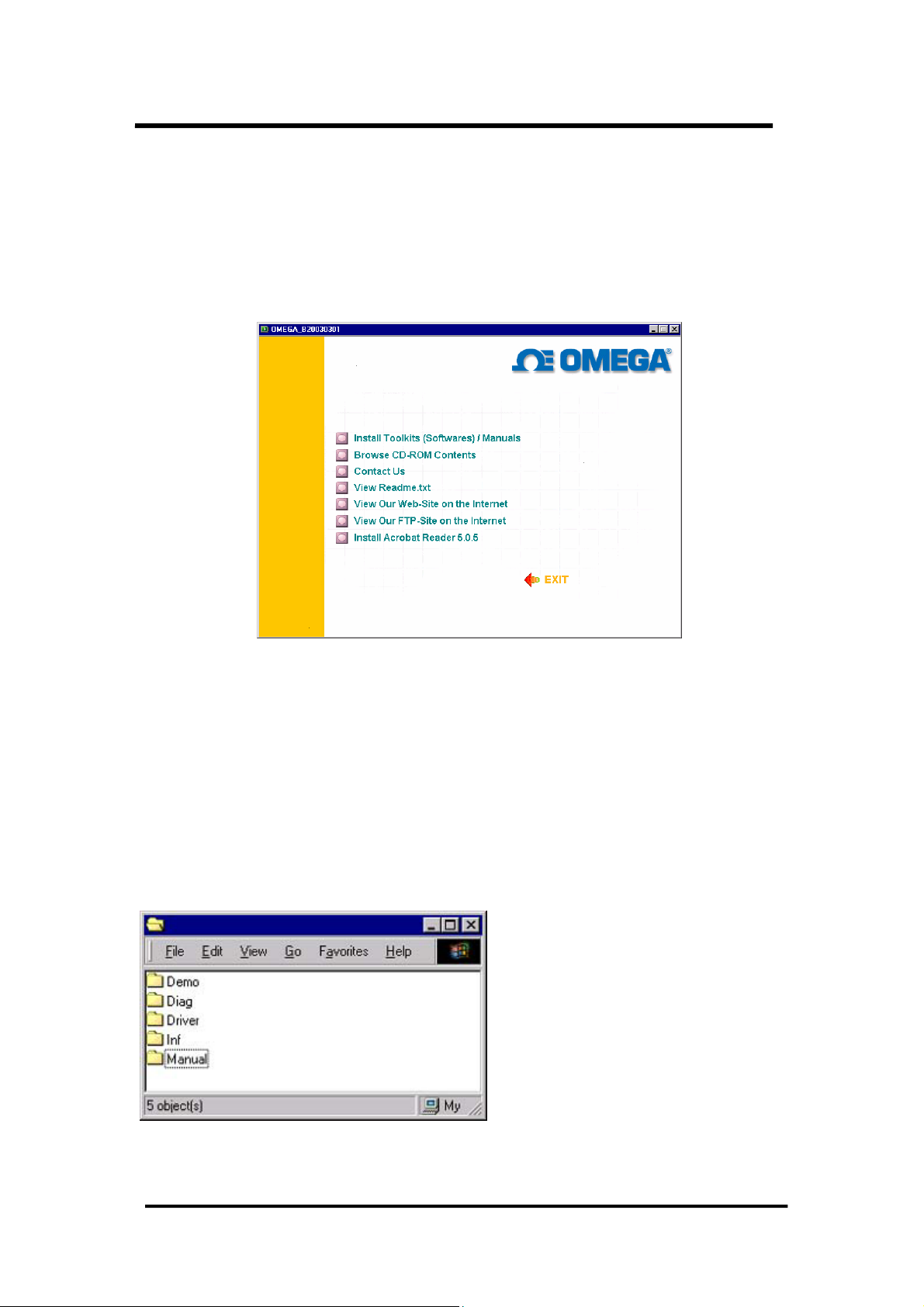
1.1 Software Installation
Insert the CD ROM included with your OME-PCI-1602 board and the following
installation screen should auto-start.
Follow the instructions on the screen to complete the software installation. The
software is designed to support the entire OME family of data acquisition hardware, so
during the installation, you will be asked to specify your particular hardware (OME-
PCI-1602 board in this case). During the installation process, you will also be
prompted to enter the operating system you will be using.
After installation the following folders will be created on your computer.
6
Page 7
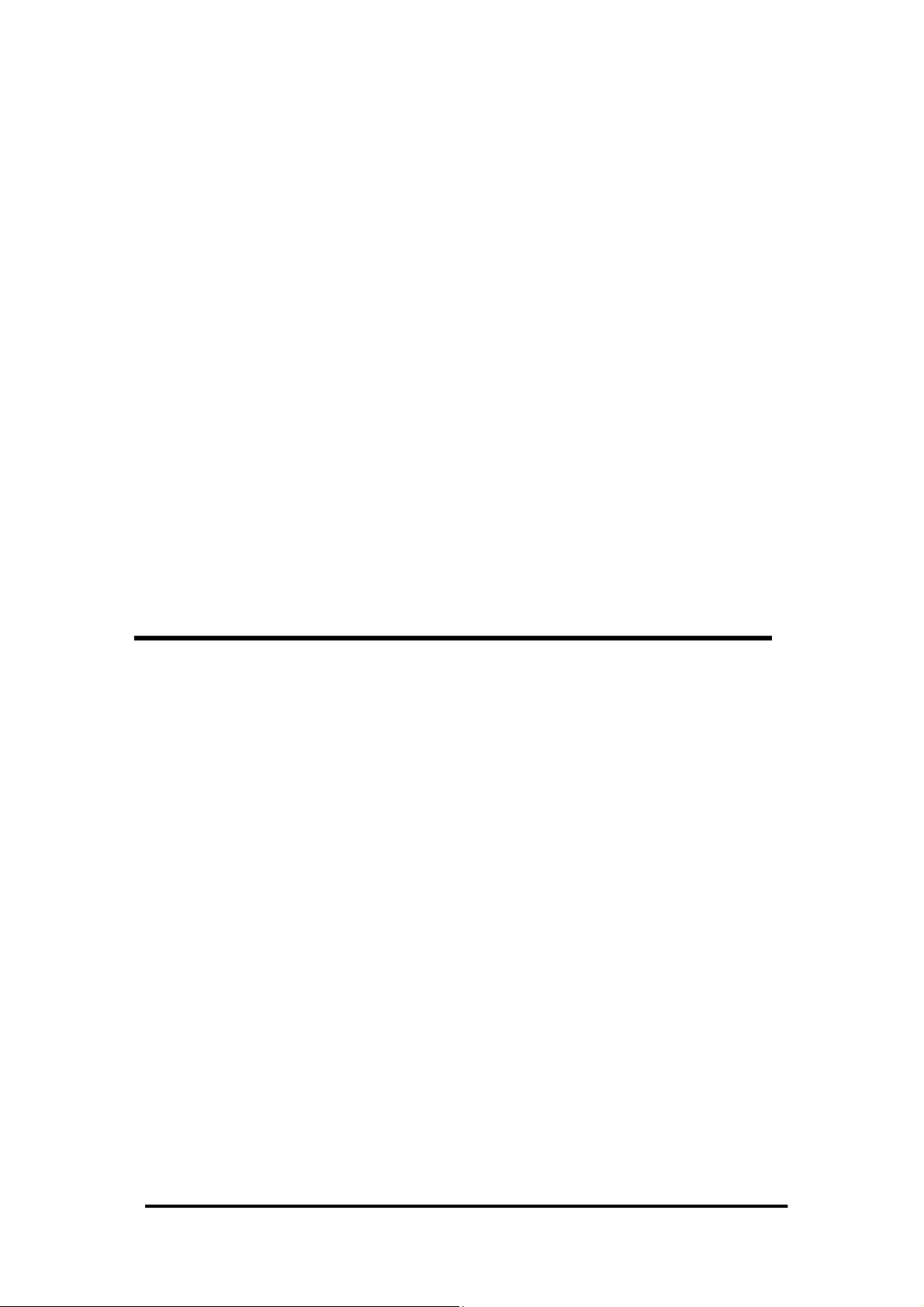
Demo Folder
Contains all demonstration programs including their source codes. Examples are
provided for Visual C++, Borland C++, Visual Basic and Delphi.
Please note: The VC++ demos are developed with VC++ 4.0. After setting up the
environment, use NMAKE.EXE to compiling and link the demo code. For example,
C:\P1602\DEMO\VC\nmake /f demo1.mak
Driver Folder
Contains software drivers, include files and definition files for the programming
languages.
Manual Folder
Contains hardware user manuals, software user manuals and technical notes.
Diag Folder
Contains card diagnostic programs
Inf Folder
Contains tech notes and .INF file for the plug and play installation (only available for
operating systems that support plug and play).
1.2 Reference:
Please refer to the following user manuals for more information.
CallDll.pdf:
Calling the DLL with VB5, VC5, Delphi3, and BCB3.
ResCheck.pdf:
How to check the system resources.(IRQ, IO Port, and DMA)
PnPInstall.pdf:
Installing the information file (.inf ) under Windows 95/98/2000/XP with Plug & Play.
SoftInst.pdf:
Installing the software driver (package).
7
Page 8
2. Declaration files
2.1 The P1602.h
#define EXPORTS extern "C" __declspec (dllimport)
//#define EXPORTS
// return code
#define NoError 0
#define DriverHandleError 1
#define DriverCallError 2
#define AdControllerError 3
#define M_FunExecError 4
#define ConfigCodeError 5
#define FrequencyComputeError 6
#define HighAlarm 7
#define LowAlarm 8
#define AdPollingTimeOut 9
#define AlarmTypeError 10
#define FindBoardError 11
#define AdChannelError 12
#define DaChannelError 13
#define InvalidDelay 14
#define DelayTimeOut 15
#define InvalidData 16
#define FifoOverflow 17
#define TimeOut 18
#define ExceedBoardNumber 19
#define NotFoundBoard 20
#define OpenError 21
#define FindTwoBoardError 22
#define ThreadCreateError 23
#define StopError 24
#define AllocateMemoryError 25
8
Page 9

EXPORTS float CALLBACK P1602_FloatSub2(float fA, float fB);
EXPORTS short CALLBACK P1602_ShortSub2(short nA, short nB);
EXPORTS WORD CALLBACK P1602_GetDllVersion(void);
EXPORTS WORD CALLBACK P1602_DriverInit(WORD *wTotalBoards);
EXPORTS void CALLBACK P1602_DriverClose(void);
EXPORTS WORD CALLBACK P1602_GetDriverVersion(WORD *wVxdVersion);
EXPORTS WORD CALLBACK P1602_GetConfigAddressSpace(WORD
wBoardNo, WORD *wAddrTimer,WORD *wAddrCtrl, WORD *wAddrDio, WORD
*wAddrAdda);
EXPORTS WORD CALLBACK P1602_ActiveBoard( WORD wBoardNo );
EXPORTS WORD CALLBACK P1602_WhichBoardActive(void);
EXPORTS WORD CALLBACK P1602_M_FUN_1(WORD wDaFrequency, WORD
wDaWave, float fDaAmplitude, WORD wAdClock, WORD wAdNumber, WORD
wAdConfig, float fAdBuf[], float fLowAlarm, float fHighAlarm);
EXPORTS WORD CALLBACK P1602_M_FUN_2(WORD wDaNumber, WORD
wDaWave, WORD wDaBuf[], WORD wAdClock, WORD wAdNumber, WORD
wAdConfig, WORD wAdBuf[]);
EXPORTS WORD CALLBACK P1602_M_FUN_3(WORD wDaFrequency, WORD
wDaWave, float fDaAmplitude, WORD wAdClock, WORD wAdNumber, WORD
wChannelStatus[], WORD wAdConfig[], float fAdBuf[], float fLowAlarm, float
fHighAlarm);
EXPORTS WORD CALLBACK P1602_M_FUN_4(WORD wType, WORD
wDaFrequency, WORD wDaWave, float fDaAmplitude, WORD wAdClock, WORD
wAdNumber, WORD wChannelStatus[], WORD wAdConfig[], float fAdBuf[], float
fLowAlarm, float fHighAlarm);
EXPORTS WORD CALLBACK P1602_Di(WORD *wDi);
EXPORTS WORD CALLBACK P1602_Do(WORD wDo);
EXPORTS WORD CALLBACK P1602_Da(WORD wDaChannel, WORD wDaVal);
EXPORTS WORD CALLBACK P1602_SetChannelConfig(WORD wAdChannel,
9
Page 10
WORD wConfig);
EXPORTS WORD CALLBACK P1602_AdPolling(float *fAdVal);
EXPORTS WORD CALLBACK P1602_AdsPolling(float fAdVal[], WORD wNum);
EXPORTS WORD CALLBACK P1602_AdsPacer(float fAdVal[], WORD wNum,
WORD wSample);
EXPORTS WORD CALLBACK P1602_ClearScan(void);
EXPORTS WORD CALLBACK P1602_StartScan(WORD wSampleRateDiv,
DWORD dwNum, SHORT nPriority);
EXPORTS void CALLBACK P1602_ReadScanStatus(WORD *wStatus,
DWORD *dwLowAlarm, DWORD *dwHighAlarm);
EXPORTS WORD CALLBACK P1602_AddToScan(WORD wAdChannel, WORD
wConfig, WORD wAverage, WORD wLowAlarm, WORD wHighAlarm, WORD
wAlarmType);
EXPORTS WORD CALLBACK P1602_SaveScan(WORD wAdChannel, WORD
wBuf[]);
EXPORTS void CALLBACK P1602_WaitMagicScanFinish(WORD *wStatus,
DWORD *dwLowAlarm, DWORD *dwHighAlarm);
EXPORTS WORD CALLBACK P1602_StopMagicScan();
EXPORTS WORD CALLBACK P1602_DelayUs(WORD wDelayUs);
EXPORTS WORD CALLBACK P1602_Card0_StartScan(WORD wSampleRate,
WORD wChannelStatus[], WORD wChannelConfig[],WORD wCount);
EXPORTS WORD CALLBACK P1602_Card0_ReadStatus(WORD wBuf[], WORD
wBuf2[], DWORD *dwP1, DWORD *dwP2, WORD *wStatus);
EXPORTS void CALLBACK P1602_Card0_Stop(void);
EXPORTS WORD CALLBACK P1602_Card1_StartScan(WORD wSampleRate,
WORD wChannelStatus[], WORD wChannelConfig[],WORD wCount);
EXPORTS WORD CALLBACK P1602_Card1_ReadStatus(WORD wBuf[], WORD
wBuf2[], DWORD *dwP1, DWORD *dwP2, WORD *wStatus);
EXPORTS void CALLBACK P1602_Card1_Stop(void);
EXPORTS WORD CALLBACK P1602_FunA_Start(WORD wClock0Div, WORD
wChannel0[], WORD wConfig0[], WORD *Buffer0, DWORD dwMaxCount0,
WORD wClock1Div, WORD wChannel1[],WORD wConfig1[], WORD *Buffer1,
10
Page 11

DWORD dwMaxCount1, SHORT nPriority);
EXPORTS WORD CALLBACK P1602_FunA_ReadStatus(void);
EXPORTS WORD CALLBACK P1602_FunA_Stop(void);
EXPORTS WORD CALLBACK P1602_FunA_Get(DWORD *P0, DWORD *P1);
EXPORTS WORD CALLBACK P1602_FunB_Start(WORD wClock0Div, WORD
wChannel0[], WORD wConfig0[], WORD *Buffer0, DWORD dwMaxCount0,
SHORT nPriority);
EXPORTS WORD CALLBACK P1602_FunB_ReadStatus(void);
EXPORTS WORD CALLBACK P1602_FunB_Stop(void);
EXPORTS WORD CALLBACK P1602_FunB_Get(DWORD *P0);
EXPORTS WORD CALLBACK P1602_MemoryStatus(DWORD *dwTotalPhys,
DWORD *dwAvailPhys, DWORD *dwTotalPageFile, DWORD *dwAvailPageFile,
DWORD *dwTotalVirtual, DWORD *dwAvailVirtual);
EXPORTS WORD CALLBACK P1602_AllocateMemory(HGLOBAL *hMem,
WORD *Buffer, DWORD dwSize);
EXPORTS WORD CALLBACK P1602_FreeMemory(HGLOBAL hMem);
EXPORTS WORD CALLBACK P1602_StartScanPostTrg(WORD wSampleRateDiv,
DWORD dwNum, SHORT nPriority);
EXPORTS WORD CALLBACK P1602_StartScanPreTrg(WORD wSampleRateDiv,
DWORD dwNum, SHORT nPriority);
EXPORTS WORD CALLBACK P1602_StartScanMiddleTrg(WORD
wSampleRateDiv, DWORD dwN1, DWORD dwN2, SHORT nPriority);
EXPORTS WORD CALLBACK P1602_StartScanPreTrgVerC(WORD
wSampleRateDiv, DWORD dwNum, SHORT nPriority);
EXPORTS WORD CALLBACK P1602_StartScanMiddleTrgVerC(WORD
wSampleRateDiv, DWORD dwN1, DWORD dwN2, SHORT nPriority);
11
Page 12

2.2 The P1602.BAS
Attribute VB_Name = "P1602"
Option Explicit
Global Const NoError = 0
Global Const DriverHandleError = 1
Global Const DriverCallError = 2
Global Const AdControllerError = 3
Global Const M_FunExecError = 4
Global Const ConfigCodeError = 5
Global Const FrequencyComputeError = 6
Global Const HighAlarm = 7
Global Const LowAlarm = 8
Global Const AdPollingTimeOut = 9
Global Const AlarmTypeError = 10
Global Const FindBoardError = 11
Global Const AdChannelError = 12
Global Const DaChannelError = 13
Global Const InvalidDelay = 14
Global Const DelayTimeOut = 15
Global Const InvalidData = 16
Global Const FifoOverflow = 17
Global Const TimeOut = 18
Global Const ExceedBoardNumber = 19
Global Const NotFoundBoard = 20
Global Const OpenError = 21
Global Const FindTwoBoardError = 22
Global Const ThreadCreateError = 23
Global Const StopError = 24
Global Const AllocateMemoryError = 25
12
Page 13

Declare Function P1602_DriverInit Lib "P1602.dll" (wTotalBoards As Integer) As
Integer
Declare Sub P1602_DriverClose Lib "P1602.dll" ()
Declare Function P1602_GetDriverVersion Lib "P1602.dll" (wVxdVersion As
Integer) As Integer
Declare Function P1602_GetConfigAddressSpace Lib "P1602.dll" (ByVal wBoardNo
As Integer, wAddrTimer As Integer, wAddrCtrl As Integer, wAddrDio As Integer,
wAddrAdda As Integer) As Integer
Declare Function P1602_ActiveBoard Lib "P1602.dll" (ByVal wBoardNo As Integer)
As Integer
Declare Function P1602_WhichBoardActive Lib "P1602.dll" () As Integer
Declare Function P1602_M_FUN_1 Lib "P1602.dll" (ByVal wDaFrequency As
Integer, ByVal wDaWave As Integer, ByVal fDaAmplitude As Single, ByVal
wAdClock As Integer, ByVal wAdNumber As Integer, ByVal wAdConfig As Integer,
fAdBuf As Single, ByVal fLowAlarm As Single, ByVal fHighAlarm As Single) As
Integer
Declare Function P1602_M_FUN_2 Lib "P1602.dll" (ByVal wDaNumber As Integer,
ByVal wDaWave As Integer, wDaBuf As Integer, ByVal wAdClock As Integer,
ByVal wAdNumber As Integer, ByVal wAdConfig As Integer, wAdBuf As Integer)
As Integer
Declare Function P1602_M_FUN_3 Lib "P1602.dll" (ByVal wDaFrequency As
Integer, ByVal wDaWave As Integer, ByVal fDaAmplitude As Single, ByVal
wAdClock As Integer, ByVal wAdNumber As Integer, wChannelStatus As Integer,
wAdConfig As Integer, fAdBuf As Single, ByVal fLowAlarm As Single, ByVal
fHighAlarm As Single) As Integer
Declare Function P1602_M_FUN_4 Lib "P1602.dll" (ByVal wType As Integer,
ByVal wDaFrequency As Integer, ByVal wDaWave As Integer, ByVal fDaAmplitude
As Single, ByVal wAdClock As Integer, ByVal wAdNumber As Integer,
wChannelStatus As Integer, wAdConfig As Integer, fAdBuf As Single, ByVal
fLowAlarm As Single, ByVal fHighAlarm As Single) As Integer
Declare Function P1602_Di Lib "P1602.dll" (wDi As Integer) As Integer
Declare Function P1602_Do Lib "P1602.dll" (ByVal wDo As Integer) As Integer
Declare Function P1602_Da Lib "P1602.dll" (ByVal wDaChannel As Integer, ByVal
wDaVal As Integer) As Integer
Declare Function P1602_SetChannelConfig Lib "P1602.dll" (ByVal wAdChannel As
Integer, ByVal wConfig As Integer) As Integer
Declare Function P1602_AdPolling Lib "P1602.dll" (fAdVal As Single) As Integer
Declare Function P1602_AdsPolling Lib "P1602.dll" (fAdVal As Single, ByVal
13
Page 14

wNum As Integer) As Integer
Declare Function P1602_AdsPacer Lib "P1602.dll" (fAdVal As Single, ByVal wNum
As Integer, ByVal wSample As Integer) As Integer
Declare Function P1602_ClearScan Lib "P1602.dll" () As Integer
Declare Function P1602_StartScan Lib "P1602.dll" (ByVal wSampleRate As Integer,
ByVal dwNum As Long, ByVal nPriority As Integer) As Integer
Declare Sub P1602_ReadScanStatus Lib "P1602.dll" (wStatus As Integer,
dwLowAlarm As Long, dwHighAlarm As Long)
Declare Function P1602_AddToScan Lib "P1602.dll" (ByVal wAdChannel As Integer,
ByVal wConfig As Integer, ByVal wAverage As Integer, ByVal wLowAlarm As
Integer, ByVal wHighAlarm As Integer, ByVal wAlarmType As Integer) As Integer
Declare Function P1602_SaveScan Lib "P1602.dll" (ByVal wOridinalOrder As
Integer, wBuf As Integer) As Integer
Declare Sub P1602_WaitMagicScanFinish Lib "P1602.dll" (wStatus
As Integer, wLowAlarm As Integer, _ wHighAlarm As Integer)
Declare Function P1602_StopMagicScan Lib "P1602.dll" () As Integer
Declare Function P1602_DelayUs Lib "P1602.dll" (ByVal wDelayUs As Integer) As
Integer
'------------------------ FunB series ---------------------------Declare Function P1602_FunB_Start Lib "P1602.dll" (ByVal wClockDiv As Integer,
wChannel As Integer, wConfig As Integer, Buffer As Integer,
ByVal dwMaxCount As Long, ByVal nPriority As Integer) As Integer
Declare Function P1602_FunB_ReadStatus Lib "P1602.dll" () As Integer
Declare Function P1602_FunB_Stop Lib "P1602.dll" () As Integer
Declare Function P1602_FunB_Get Lib "P1602.dll" (P0 As Long) As Integer
Declare Function P1602_Card0_StartScan Lib "P1602.dll" (ByVal wSampleRate As
Integer, wChannelStatus As Integer, wChannelConfig As Integer, ByVal wCount As
Integer) As Integer
Declare Function P1602_Card0_ReadStatus Lib "P1602.dll" (wBuf As Integer, wBuf2
As Integer, dwP1 As Long, dwP2 As Long, wStatus As Integer) As Integer
Declare Sub P1602_Card0_Stop Lib "P1602.dll" ()
Declare Function P1602_Card1_StartScan Lib "P1602.dll" (ByVal wSampleRate As
Integer, wChannelStatus As Integer, wChannelConfig As Integer, ByVal wCount As
Integer) As Integer
Declare Function P1602_Card1_ReadStatus Lib "P1602.dll" (wBuf As Integer, wBuf2
As Integer, dwP1 As Long, dwP2 As Long, wStatus As Integer) As Integer
Declare Sub P1602_Card1_Stop Lib "P1602.dll" ()
Declare Function GetTickCount Lib "kernel32" () As Long
Declare Sub Sleep Lib "kernel32" (ByVal dwMilliseconds As Long)
Global AdBuf(10000) As Single
Global Channel(32) As Integer
Global ConfigCode(32) As Integer
14
Page 15

Global Buf(10000) As Integer
Global Buf1(10000) As Integer
Global Buf2(10000) As Integer
Global Card0Buf0(10000) As Integer
Global Card0Buf1(10000) As Integer
Global Card1Buf0(10000) As Integer
Global Card1Buf1(10000) As Integer
Global AdNumber As Integer
Global CR
Global LF
15
Page 16

2.3 The P1602.PAS
unit P1602;
interface
type PSingle=^Single;
type PWord=^Word;
const
// return code
NoError = 0;
DriverHandleError = 1;
DriverCallError = 2;
AdControllerError = 3;
M_FunExecError = 4;
ConfigCodeError = 5;
FrequencyComputeError = 6;
HighAlarm = 7;
LowAlarm = 8;
AdPollingTimeOut = 9;
AlarmTypeError = 10;
FindBoardError = 11;
AdChannelError = 12;
DaChannelError = 13;
InvalidDelay = 14;
DelayTimeOut = 15;
InvalidData = 16;
FifoOverflow = 17;
TimeOut = 18;
ExceedBoardNumber = 19;
NotFoundBoard = 20;
OpenError = 21;
FindTwoBoardError = 22;
ThreadCreateError = 23;
StopError = 24;
16
Page 17

AllocateMemoryError = 25;
// Function of Test
function P1602_FloatSub2(fA:Single; fB:Single):Single ; stdCall;
function P1602_ShortSub2(nA:SmallInt; nB:SmallInt):SmallInt ; stdCall;
function P1602_GetDllVersion:WORD ; stdCall;
// Function of Driver
function P1602_DriverInit(Var wTotalBoards:Word):WORD ; stdCall;
procedure P1602_DriverClose; stdCall;
function P1602_GetDriverVersion(var wDriverVersion:Word):WORD ; stdCall;
function P1602_GetConfigAddressSpace(wBoardNo:Word;var wAddrTimer:Word;
var wAddrCtrl:Word; var wAddrDio:Word;
var wAddrAdda:Word):WORD ; stdCall;
function P1602_ActiveBoard(wBoardNo:Word):WORD ; stdCall;
function P1602_WhichBoardActive:WORD ; stdCall;
// Function of M_Fun series
function P1602_M_FUN_1(wDaFrequency:WORD; wDaWave:WORD;
fDaAmplitude:Single; wAdClock:WORD; wAdNumber:WORD; wAdConfig:WORD;
fAdBuf:PSingle; fLowAlarm:Single; fHighAlarm:Single):WORD ; stdCall;
function P1602_M_FUN_2(wDaNumber:WORD; wDaWave:WORD;
wDaBuf:PWord; wAdClock:WORD; wAdNumber:WORD; wAdConfig:WORD;
wAdBuf:PWord):WORD ; stdCall;
function P1602_M_FUN_3(wDaFrequency:WORD; wDaWave:WORD;
fDaAmplitude:Single; wAdClock:WORD; wAdNumber:WORD;
wChannelStatus:PWord; wAdConfig:PWord; fAdBuf:PSingle;
fLowAlarm:Single; fHighAlarm:Single):WORD ; stdCall;
function P1602_M_FUN_4(wType:WORD; wDaFrequency:WORD;
wDaWave:WORD; fDaAmplitude:Single; wAdClock:WORD; wAdNumber:WORD;
wChannelStatus:PWord; wAdConfig:PWord; fAdBuf:PSingle; fLowAlarm:Single;
fHighAlarm:Single):WORD ; stdCall;
// Function of DI/DO
17
Page 18

function P1602_Do(wOutData:Word):Word; stdCall;
function P1602_Di(var wDiData:Word):WORD ; stdCall;
// Function of AD/DA
function P1602_Da(wDaChannel:Word; wDaVal:Word):WORD ; stdCall;
function P1602_SetChannelConfig(wAdChannel:Word; wConfig:Word):WORD ;
stdCall;
function P1602_AdPolling(var fAdVal:Single):WORD ; stdCall;
function P1602_AdsPolling(fAdVal:PSingle; wNum:Word):WORD ; stdCall;
function P1602_AdsPacer(fAdVal:PSingle; wNum:Word;
wSamplingDiv:Word ):WORD ; stdCall;
//*******************
function P1602_ClearScan:WORD ; stdCall;
function P1602_StartScan(wSampleRateDiv:WORD; dwNum:LongInt;
nPriority:SmallInt):WORD ; stdCall;
procedure P1602_ReadScanStatus(var wStatus:WORD; var dwLowAlarm:LongInt;
var dwHighAlarm:LongInt); stdCall;
function P1602_AddToScan(wAdChannel:WORD; wConfig:WORD;
wAverage:WORD; wLowAlarm:WORD; wHighAlarm:WORD;
wAlarmType:WORD):WORD ; stdCall;
function P1602_SaveScan(wAdChannel:WORD; wBuf:PWord):WORD ; stdCall;
procedure P1602_WaitMagicScanFinish(var wStatus:WORD; var
dwLowAlarm:LongInt; var dwHighAlarm:LongInt); stdCall;
function P1602_StopMagicScan:WORD ; stdCall;
//*******************
function P1602_DelayUs(wDelayUs:WORD):WORD ; stdCall;
//*******************
//function P1602_Card0_StartScan( wSampleRate:WORD; wChannelStatus:PWORD;
// wChannelConfig:PWORD; wCount:WORD):WORD ; stdCall;
function P1602_Card0_StartScan( wSampleRate:WORD; wChannelStatus:PWORD;
wChannelConfig:PWORD; wCount:WORD):WORD ; stdCall;
function P1602_Card0_ReadStatus(wBuf:PWORD; wBuf2:PWORD;
var dwP1:LongInt; var dwP2:LongInt;
var wStatus:WORD):WORD ; stdCall;
procedure P1602_Card0_Stop; stdCall;
18
Page 19

function P1602_Card1_StartScan(wSampleRate:WORD; wChannelStatus:PWORD;
wChannelConfig:PWORD; wCount:WORD):WORD ; stdCall;
function P1602_Card1_ReadStatus(wBuf:PWORD; wBuf2:PWORD; var
dwP1:LongInt; var dwP2:LongInt; var wStatus:WORD):WORD ; stdCall;
procedure P1602_Card1_Stop; stdCall;
//*******************
function P1602_FunA_Start( wClock0Div:WORD; wChannel0:PWord;
wConfig0:PWord; Buffer0:PWord; dwMaxCount0:LongInt; wClock1Div:WORD;
wChannel1:PWord; wConfig1:PWord; Buffer1:PWord; dwMaxCount1:LongInt;
nPriority:SmallInt):WORD ; stdCall;
function P1602_FunA_ReadStatus:WORD ; stdCall;
function P1602_FunA_Stop:WORD ; stdCall;
function P1602_FunA_Get(var P0:LongInt; var P1:LongInt):WORD ; stdCall;
//*******************
function P1602_FunB_Start( wClock0Div:WORD; wChannel0:PWord;
wConfig0:PWord; Buffer0:PWord; dwMaxCount0:LongInt;
nPriority:SmallInt):WORD ; stdCall;
function P1602_FunB_ReadStatus:WORD ; stdCall;
function P1602_FunB_Stop:WORD ; stdCall;
function P1602_FunB_Get(var P0:LongInt):WORD ; stdCall;
//********************************************************************/
/*********************************************************************
implementation
function P1602_FloatSub2; external 'P1602.DLL' name 'P1602_FloatSub2';
function P1602_ShortSub2; external 'P1602.DLL' name 'P1602_ShortSub2';
function P1602_GetDllVersion; external 'P1602.DLL' name 'P1602_GetDllVersion';
function P1602_GetDriverVersion; external 'P1602.DLL' name
'P1602_GetDriverVersion';
19
Page 20

function P1602_DriverInit; external 'P1602.DLL' name 'P1602_DriverInit';
procedure P1602_DriverClose; external 'P1602.DLL' name 'P1602_DriverClose';
function P1602_GetConfigAddressSpace;
external 'P1602.DLL' name 'P1602_GetConfigAddressSpace';
function P1602_ActiveBoard; external 'P1602.DLL' name 'P1602_ActiveBoard';
function P1602_WhichBoardActive;
external 'P1602.DLL' name 'P1602_WhichBoardActive';
// Function of M_Fun series
function P1602_M_FUN_1; external 'P1602.DLL' name 'P1602_M_FUN_1';
function P1602_M_FUN_2; external 'P1602.DLL' name 'P1602_M_FUN_2';
function P1602_M_FUN_3; external 'P1602.DLL' name 'P1602_M_FUN_3';
function P1602_M_FUN_4; external 'P1602.DLL' name 'P1602_M_FUN_4';
function P1602_Do; external 'P1602.DLL' name 'P1602_Do';
function P1602_Di; external 'P1602.DLL' name 'P1602_Di';
function P1602_Da; external 'P1602.DLL' name 'P1602_Da';
function P1602_SetChannelConfig;
external 'P1602.DLL' name 'P1602_SetChannelConfig';
function P1602_AdPolling; external 'P1602.DLL' name 'P1602_AdPolling';
function P1602_AdsPolling; external 'P1602.DLL' name 'P1602_AdsPolling';
function P1602_AdsPacer; external 'P1602.DLL' name 'P1602_AdsPacer';
//*********************
function P1602_ClearScan; external 'P1602.DLL' name 'P1602_ClearScan';
function P1602_StartScan; external 'P1602.DLL' name 'P1602_StartScan';
procedure P1602_ReadScanStatus; external 'P1602.DLL' name
'P1602_ReadScanStatus';
function P1602_AddToScan; external 'P1602.DLL' name 'P1602_AddToScan';
function P1602_SaveScan; external 'P1602.DLL' name 'P1602_SaveScan';
procedure P1602_WaitMagicScanFinish; external 'P1602.DLL' name
'P1602_WaitMagicScanFinish';
function P1602_StopMagicScan; external 'P1602.DLL' name
'P1602_StopMagicScan';
//*********************
20
Page 21

function P1602_DelayUs; external 'P1602.DLL' name 'P1602_DelayUs';
//*******************
function P1602_Card0_StartScan; external 'P1602.DLL' name
'P1602_Card0_StartScan';
function P1602_Card0_ReadStatus; external 'P1602.DLL' name
'P1602_Card0_ReadStatus';
procedure P1602_Card0_Stop; external 'P1602.DLL' name 'P1602_Card0_Stop';
function P1602_Card1_StartScan; external 'P1602.DLL' name
'P1602_Card1_StartScan';
function P1602_Card1_ReadStatus; external 'P1602.DLL' name
'P1602_Card1_ReadStatus';
procedure P1602_Card1_Stop; external 'P1602.DLL' name 'P1602_Card1_Stop';
//*******************
function P1602_FunA_Start; external 'P1602.DLL' name 'P1602_FunA_Start';
function P1602_FunA_ReadStatus; external 'P1602.DLL' name
'P1602_FunA_ReadStatus';
function P1602_FunA_Stop; external 'P1602.DLL' name 'P1602_FunA_Stop';
function P1602_FunA_Get; external 'P1602.DLL' name 'P1602_FunA_Get';
//*******************
function P1602_FunB_Start; external 'P1602.DLL' name 'P1602_FunB_Start';
function P1602_FunB_ReadStatus; external 'P1602.DLL' name
'P1602_FunB_ReadStatus';
function P1602_FunB_Stop; external 'P1602.DLL' name 'P1602_FunB_Stop';
function P1602_FunB_Get; external 'P1602.DLL' name 'P1602_FunB_Get';
end.
21
Page 22

2.4 LabVIEW Call DLLs
LabVIEW is an industrial graphical programming system developed by National
Instruments. With LabVIEW, the user can quickly design a user interface and
application program as a block diagram.
NAPPCI\Win\VIEW\P1602.Dll Æ DLLs
NAPPCI\Win\VIEW\DEMO1.VI Æ Demo VI
NAPPCI\Win\VIEW\MFUN1.VI Æ Driver VI
NOTE:
1. Tested under Windows 95/98/NT and LabVIEW 4.0
2. The demo1.VI will call MFUN1.VI to perform M_Functions. The M_Functions
can send out an arbitrary waveform to the D/A output port and perform A/D input
at the same time. If you connect D/A channel_0 to A/D channel_0, the
M_Functions can measure the D/A output back. The output response is shown in
Fig 8 and the connecting diagram of demo1.VI is given in Fig. 9.
Fig 8. The output of DEMO1.VI. (call M_FUN_1)
22
Page 23

Fig 9. The connection diagram for DEMO1.VI (call MFUN1.VI)
Fig 10. The connection diagram for MFUN1.VI (call DLL M_FUN_1)
23
Page 24

2.5 Demo Program
A common demo program is used for all P1602.dll examples. The demo program
will accept wDaFreq and wAdClk and call the different driver functions for
demonstration purposes.
#include <windows.h>
#include <stdlib.h>
#include <stdio.h>
#include <conio.h>
#include "P1602.H"
/********************************************************************/
/* DEMO1 program for one P1602 cards in the PC system. */
/* Please set the resolution of your monitor to at least 1024*768 */
/********************************************************************/
/* First Card: some P1602 function call demo. */
/* For the proper operation the P1602, the following functions */
/* must be used. */
/* P1602_DriverInit(); <-- initial the driver */
/* P1602_DriverClose(); <-- close the driver */
/********************************************************************/
short nDMA=-1, nIRQ=-1; // not used
WORD wBase=0x220,wAdBuf[510],wFlag=0,wAddrCtrl;
int iLine;
DWORD dwDaNum=90,dwAdClk=24;
WORD wTotalBoard,wInitialCode;
void READ_CMD(char *);
short ASCII_TO_HEX(char);
void TEST_CMD(HWND, int, int, int, int);
LRESULT CALLBACK WndProc(HWND, UINT, WPARAM, LPARAM);
void SHOW_WAVE(HWND hwnd);
/* ---------------------------------------------------------------- */
int WINAPI WinMain (HINSTANCE hInstance, HINSTANCE hPrevInstance,
PSTR szCmdLine, int iCmdShow)
{
static char szAppName[] = "P1602 Demo1";
HWND hwnd ;
MSG msg ;
WNDCLASSEX wndclass ;
wndclass.cbSize = sizeof(wndclass);
wndclass.style = CS_HREDRAW|CS_VREDRAW;
wndclass.lpfnWndProc = WndProc;
wndclass.cbClsExtra = 0;
wndclass.cbWndExtra = 0;
wndclass.hInstance = hInstance;
wndclass.hIcon = LoadIcon(NULL, IDI_APPLICATION);
wndclass.hCursor = LoadCursor(NULL, IDC_ARROW);
wndclass.hbrBackground = (HBRUSH)GetStockObject(WHITE_BRUSH);
wndclass.lpszMenuName = NULL;
wndclass.lpszClassName = szAppName;
wndclass.hIconSm = LoadIcon(NULL, IDI_APPLICATION);
24
Page 25

RegisterClassEx(&wndclass) ;
hwnd=CreateWindow(szAppName,"P1602 Demo1 Program",
WS_OVERLAPPEDWINDOW,
CW_USEDEFAULT, CW_USEDEFAULT,
CW_USEDEFAULT, CW_USEDEFAULT,
NULL, NULL, hInstance, NULL) ;
ShowWindow(hwnd,SW_SHOWMAXIMIZED);
UpdateWindow(hwnd);
while (GetMessage(&msg, NULL, 0, 0))
{
TranslateMessage(&msg);
DispatchMessage(&msg);
}
return msg.wParam;
}
/* ---------------------------------------------------------------- */
LRESULT CALLBACK WndProc(HWND hwnd, UINT iMsg, WPARAM wParam, LPARAM
lParam)
{
static int cxChar, cyChar, cxClient, cyClient,cxBuffer;
static int cyBuffer, xCaret, yCaret;
static char cBuf[80];
HDC hdc;
TEXTMETRIC tm;
PAINTSTRUCT ps;
int i;
switch (iMsg)
{
case WM_CREATE : // window initial
/**************************************************************/
/* NOTICE: call P1602_DriverInit() to initialize the driver. */
/**************************************************************/
// Initialize the device driver, and return the board number in the PC
wInitialCode=P1602_DriverInit(&wTotalBoard);
if( wInitialCode!=NoError )
{
MessageBox(hwnd,"No P1602 card in this system !!!",
"P1602 Card Error",MB_OK);
}
hdc=GetDC(hwnd);
SelectObject(hdc,GetStockObject(SYSTEM_FIXED_FONT));
GetTextMetrics(hdc, &tm);
cxChar=tm.tmAveCharWidth;
cyChar=tm.tmHeight;
ReleaseDC(hwnd, hdc);
return 0;
case WM_SIZE :
cxClient=LOWORD(lParam); // window size in pixels
cyClient=HIWORD(lParam);
cxBuffer=max(1,cxClient/cxChar); // window size in characters
cyBuffer=max(1,cyClient/cyChar);
return 0;
case WM_SETFOCUS :
CreateCaret(hwnd, NULL, cxChar, cyChar);
SetCaretPos(xCaret * cxChar, yCaret * cyChar);
25
Page 26

ShowCaret(hwnd);
return 0;
case WM_KILLFOCUS :
HideCaret(hwnd);
DestroyCaret();
return 0;
case WM_CHAR : // user press KEYBOARD
for (i = 0 ; i < (int) LOWORD(lParam) ; i++)
{
switch (wParam)
{
case '\b' : // backspace pressed
if (xCaret > 0)
{
xCaret-- ;
cBuf[xCaret]=' ';
HideCaret(hwnd);
hdc=GetDC(hwnd);
SelectObject(hdc,GetStockObject(SYSTEM_FIXED_FONT));
TextOut(hdc, xCaret * cxChar, yCaret *
cyChar,cBuf+xCaret,1);
ShowCaret(hwnd);
ReleaseDC(hwnd, hdc);
}
break;
case '\r' : // carriage return pressed
if (wFlag==1)
{
InvalidRect(hwnd, NULL, TRUE);
wFlag=0;
break;
}
wFlag=1;
cBuf[xCaret]=0;
if (xCaret!=0) {xCaret=0; yCaret++;}
READ_CMD(cBuf);
TEST_CMD(hwnd,xCaret, cxChar, yCaret,cyChar);
xCaret=0; yCaret+=iLine;
if (yCaret >= cyBuffer) InvalidRect(hwnd, NULL, TRUE);
break ;
case '\x1B' : // escape pressed
InvalidRect (hwnd, NULL, TRUE) ;
xCaret=yCaret=0;
break;
default : // other KEY pressed
cBuf[xCaret]=(char) wParam;
HideCaret(hwnd);
hdc=GetDC (hwnd);
SelectObject(hdc,GetStockObject(SYSTEM_FIXED_FONT));
TextOut(hdc,xCaret*cxChar,yCaret*cyChar,cBuf+xCaret,1);
ShowCaret(hwnd);
ReleaseDC(hwnd, hdc);
xCaret++;
break ;
}
}
SetCaretPos(xCaret*cxChar, yCaret*cyChar);
return 0;
case WM_PAINT : // clr and show HELP
InvalidRect(hwnd, NULL, TRUE);
hdc=BeginPaint(hwnd, &ps);
26
Page 27

SelectObject(hdc,GetStockObject(SYSTEM_FIXED_FONT));
sprintf(cBuf,"Press any key to continue");
TextOut(hdc,0,0,cBuf,strlen(cBuf));
xCaret = 0 ; yCaret=1;
SetCaretPos(0,yCaret*cyChar);
EndPaint(hwnd, &ps);
return 0;
case WM_DESTROY :
/**************************************************************/
/* NOTICE: call P1602_DriverClose() to close the driver. */
/**************************************************************/
P1602_DriverClose(); // close the driver
PostQuitMessage(0);
return 0 ;
}
return DefWindowProc(hwnd, iMsg, wParam, lParam);
}
/* -------------------------------------------------------------------
- */
/* [0][1][2][3][4]=wII, [6][7][8][9]=dwAdClk */
void READ_CMD(char szCmd[])
{
DWORD nT1,nT2,nT3,nT4,nT5;
if(szCmd[0]==0) return; // only press [Enter]
nT1=ASCII_TO_HEX(szCmd[0]); // HEX format
nT2=ASCII_TO_HEX(szCmd[1]);
nT3=ASCII_TO_HEX(szCmd[2]);
nT4=ASCII_TO_HEX(szCmd[3]);
nT5=ASCII_TO_HEX(szCmd[4]);
dwDaNum=nT1*10000+nT2*1000+nT3*100+nT4*10+nT5;
nT1=ASCII_TO_HEX(szCmd[6]); // HEX format
nT2=ASCII_TO_HEX(szCmd[7]);
nT3=ASCII_TO_HEX(szCmd[8]);
nT4=ASCII_TO_HEX(szCmd[9]);
dwAdClk=(DWORD)(nT1*1000+nT2*100+nT3*10+nT4);
}
short ASCII_TO_HEX(char cChar)
{
if(cChar<='9') return(cChar-'0');
else if (cChar<='F') return(cChar-'A'+10);
else return(cChar-'a'+10);
}
/* -------------------------------------------------------------------- */
void TEST_CMD(HWND hwnd, int x, int dx, int y, int dy)
{
Test subroutine placed here
27
Page 28

}
The READ_COM only accepts fix format command. The command
format is given as below:
space key
Enter key
0
z if = Æ accept current setting of wDaFreq and wAdClk
demo programs share similar setup code as above. The separate testing functions are
placed in “
placed in TEST_CMD is shown in subsequent listings in this manual.
1 2 3 4 5
wDaFreq
0
The steps to compile and link the demo program are described in Sec. 1.3. All
Enter key
6 7 8 9
wAdClk
10
TEST_CMD(….) { ……….}”. Only the code that would be
28
Page 29

3. Description of Functions
The DLL functions are divided the following groups:
z The Test functions
z The M_Functions function
z The D/I/O functions
z The D/A function
z The A/D fixed-mode functions
z The A/D MagicScan mode functions
z The A/D continuous capture functions
z The A/D batch capture functions
z The Plug & Play functions
z Other functions
•
The functions of the fixed-channel mode are as follows:
1. P1602_SetChannelConfig
2. P1602_AdPoling
3. P1602_AdsPolling
4. P1602_AdsPacer
•
The functions of the MagicScan mode are as follows:
1. P1602_ClearScan
2. P1602_StartScan
3. P1602_AddToScan
4. P1602_SaveScan
5. P1602_ReadMagicScanResult
•
The functions of the M_functions are as follows:
1. P1602_M_FUN_1
data in float format
data in 16 bits HEX format
2. P1602_M_FUN_2
3. P1602_M_FUN_3
29
Page 30

•
The multiboard batch capture functions are as follows:
1. P1602_FunA_Start
2. P1602_FunA_ReadStatus
3. P1602_FunA_Stop
4. P1602_FunA_Get
•
The single board batch capture functions are as follows:
1. P1602_FunB_Start
2. P1602_FunB_ReadStatus
3. P1602_FunB_Stop
4. P1602_FunB_Get
•
The continuous capture functions are as following:
1. P1602_Card0_StartScan
2. P1602_Card0_ReadStatus
3. P1602_Card0_StopScan
4. P1602_Card1_StartScan
5. P1602_Card1_ReadStatus
6. P1602_Card1_StopScan
Group-0: for card_0 continuous capture function
Group-1: for card_1 continuous capture function
30
Page 31

3.1 The Configuration Code Table
OME-PCI-1602 Configuration Code Table
Bipolar/Unipolar Input Signal Range Gain Settling Time Configuration Code
Bipolar +/- 10V 1 10 us 0
Bipolar +/- 5V 2 10 us 1
Bipolar +/- 2.5V 4 10 us 2
Bipolar +/- 1.25V 8 10 us 3
OME-PCI-1602F Configuration Code Table
Bipolar/Unipolar Input Signal Range Gain Settling Time Configuration Code
Bipolar +/- 10V 1 5 us 0
Bipolar +/- 5V 2 5 us 1
Bipolar +/- 2.5V 4 5 us 2
Bipolar +/- 1.25V 8 5 us 3
31
Page 32

3.2 The Test Functions
3.2.1 P1602_FloatSub2
z Description:
Calculates C=A-B in float format, float=4 bytes floating point number. This function is
provided to test DLL linkage.
• Syntax: float P1602_FloatSub2(float fA, float fB);
z Input Parameter :
fA : 4 bytes floating point value
fB : 4 bytes floating point value
z Return Value : return=fA-fB
z Demo Program : DEMO1.C
3.2.2 P1602_ShortSub2
Description :
z
Calculates C=A-B in SHORT formats, SHORT=16 bits signed number.
is provided to test DLL linkage.
• Syntax : short P1602_ShortSub2(Short nA, Short nB);
z Input Parameter :
nA : 16 bits value
This function
nB : 16 bits value
z Return Value : return=nA-nB
z Demo Program : DEMO1.C
32
Page 33

3.2.3 P1602_GetDllVersion
z Description :
Reads the version of the P1602.DLL.
z Syntax : WORD P1602_GetDllVersion(void);
z Input Parameter : void
z Return Value :
return=0x200 Æ Version 2.0
z Demo Program : DEMO1.C
3.2.4 P1602_GetDriverVersion
z Description : This function will read the software version number of
Nappci.VxD for Windows 95/98 or Napwnt.SYS for Windows NT.
z Syntax : WORD P1602_GetDriverVersion(WORD *wDriverVersion);
Input Parameter : *wDriverVersion : address of wDriverVersion
z
wDriverVersion=0x200 Æ Version 2.0
z Return Value :
NoError : OK
DriverHandleError : the NAPPCI.VxD open error for Windows 95/98
the Napwnt.SYS open error for Windows NT
DriverCallError : call NAPPCI.VxD return error
call Napwnt.SYS return error
z Demo Program : DEMO1.C
33
Page 34

3.3 The M_Functions
3.3.1 P1602_M_FUN_1
z Description :
The P1602_M_FUN_1 will calculate the waveform image automatically. (Refer to the
“OME-PCI-1602 Hardware Manual” chapter-5 for details) (input=A/D channel_0,
output=D/A channel_0)
• Syntax :
WORD P1602_M_FUN_1(WORD wDaFrequency, WORD wDaWave, float
fDaAmplitude, WORD wAdClock, WORD wAdNumber, WORD wAdConfig,
float fAdBuf[], float fLowAlarm, float fHighAlarm)
z Input Parameter :
wDaFrequency : D/A output frequency = 1.8M/wDaFrequency (Pentium 120)
wDaWave : Number of D/A waveform to be output
fDaAmplitude : Amplitude of D/A output. NOTE : the hardware J1 must select +/-10V
wAdClock : A/D sampling clock = 8000000/wAdClock samples/sec
wAdNumber: Number of A/D data to be read
wAdConfig : A/D input range configuration code
Refer to "Section 3.1 Configuration Table"
fAdBuf[] : the starting address of fAdBuf which store the A/D data
fLowAlarm : low alarm limit. if fAdBuf[?]< fLowAlarm Æ LowAlarm
fHighAlarm : high alarm limit. if fAdBuf[?]>fHighAlarm Æ HighAlarm
Return Value :
z
NoError : OK
DriverHandleError : Invalid VxD/SYS handle
DriverCallError : VxD/SYS function call error
ExceedBoardNumber: invalid board number
FindBoardError: no OME-PCI-1602 board
AdControllerError : embedded controller handshake error
M_FunExecError : M_Functions return code error
ConfigCodeError : wAdConfig
Refer to "Section 3.1 Configuration Table"
HighAlarm : fAdBuf[?]>fHighAlarm
configuration code error
LowAlarm : fAdBuf[?]< fLowAlarm
z Demo Program : DEMO5.C
34
Page 35

3.3.2 P1602_M_FUN_2
z Description :
The P1602_M_FUN_2 will
“OME-PCI-1602 Hardware Manual” chapter-5 for details) (input=A/D channel_0,
output=D/A channel_0)
not compute the waveform image automatically. (Refer to
• Syntax :
WORD P1602_M_FUN_2(WORD wDaNumber, WORD wDaWave, WORD wDaBuf[],
WORD wAdClock, WORD wAdNumber, WORD wAdConfig, WORD
wAdBuf[]);
z Input Parameter :
wDaNumber: number of D/A samples in one waveform
wDaWave : Number of D/A waveform to be output
wDaBuf[] : The array stores the D/A waveform image
wAdClock : A/D sampling clock = 8000000/wAdClock samples/sec
wAdNumber: Number of A/D data to be read
wAdConfig : A/D input range configuration code.
Refer to "Section 3.1 Configuration Table"
wAdBuf[] : the starting address of fAdBuf which store the A/D data
z Return Value :
NoError : OK
DriverHandleError : Invalid VxD/SYS handle
DriverCallError : VxD/SYS function call error
ExceedBoardNumber: invalid board number
FindBoardError: no OME-PCI-1602 board
AdControllererror : embedded controller handshake error
M_FunExecError : M_Functions return code error
ConfigCodeError : wAdConfig configuration code error, Refer to "Section 3.1"
z Demo Program : DEMO7.C
The D/A output waveform generator is a
output frequency = 1.8M/wDaNumber is machine dependent. Some benchmarks
are shown below:
D/A output frequency = 1.8M/dwDaNumber for Pentium 120
D/A output frequency = 2.0M/dwDaNumber for Pentium 133
machine dependent function. The D/A
The user should benchmark their system before using M_FUN_1,
M_FUN_2 and M_FUN_3.
35
Page 36

3.3.3 P1602_M_FUN_3
z Description :
The P1602_M_FUN_3 will calculate the waveform image automatically. (Refer to
“OME-PCI-1602 Hardware Manual” chapter-5 for details) (input=programable channels,
output=D/A channel_0) This function will refer to the current active OME-PCI-1602 board.
Use the P1602_ActiveBoard(….) to select the active board. Refer to Sec. 2.4.2 for more
information.
z Syntax :
WORD P1602_M_FUN_3(WORD wDaFrequency, WORD wDaWave, float
fDaAmplitude, WORD wAdClock, WORD wAdNumber, WORD
wChannelStatus[], WORD wAdConfig[], float fAdBuf[], float fLowAlarm, float
fHighAlarm)
z Input Parameter :
wDaFrequency : D/A output frequency = 1.8M/wDaFrequency (Pentium 120)
wDaWave : Number of D/A waveform to be output
fDaAmplitude : Amplitude of D/A output. NOTE : the hardware jumper J1 must be set
to +/-10V
wAdClock : A/D sampling clock = 8000000/wAdClock samples/sec
wAdNumber: Number of A/D samples to be read
wAdChannel[]: 1=scan, 0=no scan
wAdConfig[]: configuration code
Refer to "Section 3.1 Configuration Table"
fAdBuf[] : the starting address of fAdBuf which store the A/D data
fLowAlarm : low alarm limit. if fAdBuf[?]< fLowAlarm Æ LowAlarm
fHighAlarm : high alarm limit. if fAdBuf[?]>fHighAlarm Æ HighAlarm
Return Value :
z
NoError : OK
DriverHandleError : Invalid VxD/SYS handle
DriverCallError : VxD/SYS function call error
ExceedBoardNumber: invalid board number
FindBoardError: no OME-PCI-1602 board
AdControllerError : embedded controller handshake error
M_FunExecError : M_Functions return code error
ConfigCodeError : wAdConfig
HighAlarm : fAdBuf[?]>fHighAlarm
LowAlarm : fAdBuf[?]< fLowAlarm
configuration code error, Refer to "Section 3.1"
36
Page 37

• Demo Program : DEMO9.C
37
Page 38

3.4 The DIO Functions
3.4.1 P1602_Di
z Description : This function will read the 16 bit data from the digital input (D/I) port.
This function will refer to the current active OME-PCI-1602. Use the
P1602_ActiveBoard(….) to select the active board.
z Syntax : WORD P1602_Di(WORD *wDi);
z Input Parameter :
*wDi : address of wDi which contains the 16 bits of D/I data
z Return Value :
NoError : OK
FindBoardError : cannot find the OME-PCI-1602 board
ExceedBoardNumber: invalid board number
Demo Program : DEMO1.C
z
3.4.2 P1602_Do
Description : This function will write the 16 bit data to the digital output(D/O) port.
z
This function will refer to the current active OME-PCI-1602 board. Use the
P1602_ActiveBoard(….) to select the active board.
z
Syntax : WORD P1602_Do(WORD wDo);
z Input Parameter :
wDo : the 16 bits of data sent to the D/O port
z Return Value :
NoError : OK
ExceedBoardNumber: invalid board number
FindBoardError : cannot find the OME-PCI-1602 board
z Demo Program : DEMO1.C
38
Page 39

3.5 The D/A Functions
3.5.1 P1602_Da
Description: This function will write the 12 bit data to D/A port. This function will
refer to the current active OME-PCI-1602 board. Use the P1602_ActiveBoard(….) to select
the active board.
z Syntax : WORD P1602_Da(WORD wChannel, WORD wDaVal);
z Input Parameter :
wChannel : 0 for channel_0 D/A, 1 for channel_1 D/A
wDaVal : 12 bit data sent to D/A port. 0=minimum and 4095=maximum. The D/A
output can be +/- 5V or +/- 10V depending on the setting hardware jumper JP1.
The software cannot detect the state of JP1, the user must be aware of its state.
z Return Value :
NoError : OK
FindBoardError : cannot find the OME-PCI-1602 board
ExceedBoardNumber: invalid board number
DaChannelError : channel number must be 0 or 1
Demo Program : DEMO1.C
z
39
Page 40

3.6 The A/D Fixed-mode Functions
3.6.1 P1602_SetChannelConfig
z Description : This function will set the A/D channel’s configuration code. This
function will set the active A/D channel for P1602_AdPolling, P1602_AdsPolling and
P1602_AdsPacer functions. This function will refer to the current active OME-PCI-1602
board. Use the P1602_ActiveBoard(….) to select the active board.
z Syntax : WORD P1602_SetChannelConfig(WORD wChannel, WORD wConfig);
z Input Parameter :
wChannel : A/D channel number
wConfig : Configuration code. Refer to "Section 3.1 Configuration Table"
z Return Value :
NoError : OK
ExceedBoardNumber: invalid board number
FindBoardError : cannot find the OME-PCI-1602 board
AdControllerError : MagicScan controller hardware handshake error
Demo Program : DEMO1.C
z
3.6.2 P1602_AdPolling
z Description : This function will perform a single A/D conversion by software
polling. The P1602_SetChannelConfig function can be used to change channel or
configuration code used by the P1602_AdPolling function. This function will refer to the
current active OME-PCI-1602 board. Use the P1602_ActiveBoard(….) to select the
active board.
z Syntax : WORD P1602_AdPolling(float *fAdVal);
z Input Parameter :
*fAdVal : address of fAdVal which will contain the A/D data (16 bits), this data
is automatically converted to volts based on the setting
P1602_SetChannelConfig.
z Return Value :
NoError : OK
ExceedBoardNumber: invalid board number
FindBoardError : cannot find the OME-PCI-1602 board
AdPollingTimeOut : hardware timeout error
z Demo Program : DEMO1.C
40
Page 41

3.6.3 P1602_AdsPolling
z Description : This function will perform multiple A/D conversions by polling. The
P1602_SetChannelConfig function can be used to change the channel or configuration
code used by the P1602_AdsPolling function. This function will refer to the current
active OME-PCI-1602 board. Use the P1602_ActiveBoard(….) to select the active board.
z Syntax : WORD P1602_AdsPolling(float fAdVal[], WORD wNum);
z Input Parameter :
fAdVal[]: starting address of A/D data buffer (16 bit), the data will be
automatically converted to volts based on the setting of the
P1602_SetChannelConfig function.
wNum: number of A/D conversions to be performed.
• Return Value :
NoError: OK
ExceedBoardNumber: invalid board number
FindBoardError: cannot find the OME-PCI-1602 board
AdPollingTimeOut: hardware timeout error
z Demo Program : DEMO1.C
41
Page 42

3.6.4 P1602_AdsPacer
z Description : This function will perform multiple A/D conversions by pacer trigger.
The P1602_SetChannelConfig function can be used to change channel or configuration
code. The hardware pacer will generate a periodic trigger signal to the A/D converter.
Software polling is used by the P1602_AdsPolling function, so the A/D conversion
process could be interrupted by the computer’s operating system. Since the
P1602_AdsPacer function uses the hardware pacer, operating system interrupts will not
affect it. For this reason the P1602_AdsPacer function should be used if a waveform
must be precisely reconstructed. This function will refer to the current active OME-
PCI-1602 board. Use the P1602_ActiveBoard(….) to select the active board.
z Syntax : WORD P1602_AdsPacer(float fAdVal[], WORD wNum, WORD wSample);
z Input Parameter :
fAdVal[] : starting address of the A/D data buffer (16 bit), the data will be
automatically converted to volts based on the setting of the
P1602_SetChannelConfig function.
wNum : number of A/D conversions to be performed.
wSample : A/D sample rate = 8M/wSample.
for example: wSample=24 Æ sample rate=8M/24=330K
z Return Value :
NoError : OK
ExceedBoardNumber: invalid board number
FindBoardError : cannot find the OME-PCI-1602 board
AdPollingTimeOut : hardware timeout error
z Demo Program : DEMO1.C
P1602_SetChannelConfig
P1602_AdPolling
P1602_AdsPollng
Fix channel A/D conversion mode
P1602_AdsPacer
42
Page 43

3.7 The MagicScan Functions
3.7.1 P1602_ClearScan
z Description : This function will initialize the MagicScan controller. This function
will refer to the current active OME-PCI-1602 board. Use the P1602_ActiveBoard(….) to
select the active board.
z Syntax : WORD P1602_ClearScan();
z Input Parameter : void
z Return Value :
NoError : OK
ExceedBoardNumber: invalid board number
FindBoardError : cannot find the OME-PCI-1602 board
AdControllerError : MagicScan controller hardware handshake error
z Demo Program : DEMO11.C
43
Page 44

3.7.2 P1602_StartScan
z Description : This function will start the MagicScan operation. This
function will return to the caller before the MagicScan operation finishes. The
user can use the P1602_WaitMagicScanFinish(…) function or the
P1602_ReadScanStatus(…) function to check the state of MagicScan operation.
This function will refer to the current active OME-PCI-1602 board. Use the
P1602_ActiveBoard(….) to select the active board.
z Syntax : WORD P1602_StartScan(WORD wSampleRate, WORD wNum);
z Input Parameter :
wSampleRate : A/D sample rate = 8M/wSampleRate.
wSampleRate=24 Æ sample rate=8M/24=330K
wNum : Number of MagicScan cycles to perform
z Return Value :
NoError : OK
ExceedBoardNumber: invalid board number
FindBoardError : cannot find the OME-PCI-1602 board
AdControllerError : MagicScan controller hardware handshake error
z Demo Program : DEMO11.C
44
Page 45

3.7.3 P1602_ReadScanStatus
z Description : This function will read the status of the MagicScan operation. This
function will refer to the current active OME-PCI-1602 board. Use the
P1602_ActiveBoard(….) to select the active board.
z Syntax : void P1602_ReadScanStatus(WORD *wStatus, WORD
*wLowAlarm, WORD *wHighAlarm);
z Input Parameter :
*wStatus : address of wStatus which will contain the MagicScan status
*wLowAlarm : address of wLowAlarm which will contain the MagicScan alarm
status
*wHighAlarm : address of wHighAlarm which will contain the MagicScan alarm
status
z Return Value : void
Demo Program : DEMO11.C
z
wStatus = 0x00 Æ MagicScan initial condition (idle state)
= 0x01 Æ MagicScan operation started
= 0x02 Æ MagicScan stage 1 controller timeout
= 0x04 Æ MagicScan stage 2 controller timeout
= 0x08 Æ MagicScan FIFO overflow
= 0x80 Æ MagicScan function OK
wLowAlarm Æ 32 bits corresponding to 32 channels
Æ 0 = no low alarm
Æ 1 = is low alarm
wLowAlarm=0 Æ all channels OK, no low alarm
wLowAlarm=1 Æ channel_0 is low alarm, others are OK
wLowAlarm=3 Æ channel_0 and channel_1 are low alarm, others are OK
wHighAlarm Æ 32 bits corresponding to 32 channels
Æ 0 = no high alarm
Æ 1 = is high alarm
wHighAlarm=0 Æ all channels OK, no high alarm
wHighAlarm=1 Æ channel_0 is high alarm, others are OK
wHighAlarm=3 Æ channel_0 and channel_1 are high alarm, others are
OK
45
Page 46

3.7.4 P1602_AddToScan
z Description : This function will add one channel to the MagicScan circular queue.
This function will refer to the current active OME-PCI-1602 board. Use the
P1602_ActiveBoard(….) function to select the active board.
z Syntax : word P1602_AddToScan(WORD wAdChannel, WORD wConfig, WORD
wAverage, WORD wLowAlarm, WORD wHighAlarm, WORD wAlarmType);
z Input Parameter :
wAdChannel : A/D channel number
wConfig : the configuration code
Refer to "Section 3.1 Configuration Table"
wAverage : the digital average filter factor
wLowAlarm : 16 bit low alarm data
wHighAlarm : 16 bit high alarm data
wAlarmType : 0=no alarm, 1=high alarm, 2=low alarm, 3=in-alarm, 4=out-alarm
z Return Value :
NoError : Ok
ExceedBoardNumber: invalid board number
FindBoardError : cannot find the OME-PCI-1602 board
AdChannelError : invalid A/D channel
AlarmTypeError : only 0/1/2/3/4 are valid
AdControllerError : MagicScan controller hardware handshake error
Demo Program : DEMO11.C
z
46
Page 47

3.7.5 P1602_SaveScan
z Description : This function will specify the starting address of A/D data buffer for
MagicScan.
z Syntax : void P1602_SaveScan(WORD wAdChannel, WORD wBuf[]);
z Input Parameter :
wAdChannel : Scan number in the scan queue.
(Note: not the A/D channel number.)
wBuf : starting address of the A/D data buffer for the channel specified in
wAdChannel
z Return Value :
NoError : Ok
ExceedBoardNumber: invalid board number
FindBoardError : cannot find the OME-PCI-1602 board
AdChannelError : invalid A/D channel
Demo Program :.DEMO11.C
z
• Code Fragment
WORD wV0[100000]; // A/D ch:0 buffer
WORD wV2[100000]; // A/D ch:2 buffer
:
:
wRetVal=P1602_ClearScan();
//**** For OME-PCI-1602L
wRetVal += P1602_AddToScan(0,0,1,0,0,0); // CH:0 to scan
wRetVal += P1602_SaveScan(0,wV0);
wRetVal += P1602_AddToScan(2,0,1,0,0,0); // CH:2 to scan
wRetVal += P1602_SaveScan(1,wV2); // Notice: 1 not 2
// ^ Notice: This is a ordinal number in
// Scan Queue not a channel number.
wSampleRateDiv=80; // sample rate=8M/wSampleRateDiv
P1602_StartScan(wSampleRateDiv,DATALENGTH,nPriority);
47
Page 48

3.7.6 P1602_WaitMagicScanFinish
z Description : This function will delay until the MagicScan operation is finished.
This function will refer to the current active OME-PCI-1602 board. Use the
P1602_ActiveBoard(….) to select the active board.
z Syntax : void P1602_WaitMagicScanFinish(WORD *wStatus, WORD
*wLowAlarm, WORD *wHighAlarm);
z Input Parameter :
*wStatus : address of wStatus which will contain the MagicScan status
*wLowAlarm : address of wLowAlarm which will contain the MagicScan alarm
status
*dwHighAlarm : address of wHighAlarm which will contain the MagicScan
alarm status
z Return Value : void
Demo Program : DEMO11.C
z
wStatus = 0x00 Æ MagicScan initial condition (idle state)
= 0x01 Æ MagicScan operation started
= 0x02 Æ MagicScan stage 1 controller timeout
= 0x04 Æ MagicScan stage 2 controller timeout
= 0x08 Æ MagicScan FIFO overflow
= 0x80 Æ MagicScan function OK
wLowAlarm Æ 32 bits corresponding to 32 channels
Æ 0 = no low alarm
Æ 1 = is low alarm
wLowAlarm=0 Æ all channels OK, no low alarm
wLowAlarm=1 Æ channel_0 is low alarm, others are OK
wLowAlarm=3 Æ channel_0 and channel_1 are low alarm, others are OK
wHighAlarm Æ 32 bits corresponding to 32 channels
Æ 0 = no high alarm
Æ 1 = is high alarm
wHighAlarm=0 Æ all channels OK, no high alarm
wHighAlarm=1 Æ channel_0 is high alarm, others are OK
wHighAlarm=3 Æ channel_0 and channel_1 are high alarm, others are OK
48
Page 49

3.8 The Pulg&Play Functions
3.8.1 P1602_DriverInit
z Description: This function will detect all of the OME-PCI-1602 boards installed in
the system. This function must be called once before any other function is called.
z Syntax : WORD P1602_DriverInit(WORD *wTotalBoard);
z Input Parameter : *wTotalBoard: address of wTotalBoard
wTotalBoard=1 Æ one OME-PCI-1602 card in the system
wTotalBoard=n Æ n*OME-PCI-1602 cards in the system
z Return Value :
NoError : OK
NoFoundBoard: can not detect any OME-PCI-1602
FindBoardError: handshake check error
DriverHandleError : the NAPPCI.VxD .open error for Windows 95
the Napwnt.SYS .open error for Windows NT
DriverCallError : call NAPPCI.VxD return error
Call Napwnt.SYS return error
z Demo Program: All DEMO programs.
3.8.2 P1602_DriverClose
z Description: Returns all resources to the system. This function should be called
before the program is terminated.
z Syntax : void P1602_DriverClose(void);
Input Parameter : void
z
z
Return Value : void
Demo Program: All DEMO programs.
z
49
Page 50

3.8.3 P1602_GetConfigAddressSpace
z Description: Gets the I/O address of OME-PCI-1602 board n. This function
is for debugging purposes only. It is not necessary to call this function.
z Syntax : WORD P1602_GetConfigAddressSpace(WORD wBoardNo, WORD
*wAddrTimer,WORD *wAddrCtrl, WORD *wAddrDio, WORD *wAddrAdda);
z Input Parameter :
wBoardNo: OME-PCI-1602 board number
wAddrTimer, wAddrCtrl, wAddrDio, wAddrAdda: refer to the “OME-PCI-1602
Hardware manual” chapter-3 for details.
z Return Value :
NoError : OK
FindBoardError: handshake check error
ExceedBoardError: wBoardNo is invalid
Demo Program : DEMO1.C
z
3.8.4 P1602_WhichBoardActive
z Description: Returns the board number of the active board.
z Syntax: WORD P1602_WhichBoardActive(void);
z Input Parameter: void
z Return Value: board number of the active board.
z Demo Program: DEMO1.C
50
Page 51

3.8.5 P1602_ActiveBoard
z Description: This function will make active one of the OME-PCI-1602 boards
installed in the system. This function must call once before the D/I/O, A/D, D/A functions
are called.
z Syntax: WORD P1602_ActiveBoard(WORD wBoardNo);
z Input Parameter:
wBoardNo: board number
Return Value :
z
NoError : OK
ExceedBoardError: wBoardNo is invalid
z Demo Program : All DEMO programd.
The P1602_ActiveBoard(…) function will effect all functions except the following:
1. P1602_FloatSub2
2. P1602_ShortSub2
3. P1602_GetDriverVersion
4. P1602_DriveInit
5. P1602_DriveClose
6. P1602_GetConfigAddressSpace
7. P1602_Card0_StartScan
8. P1602_Card0_ReadData
9. P1602_Card0_Stop
10. P1602_Card1_StartScan
11. P1602_Card1_ReadData
12. P1602_Card1_Stop
51
Page 52

3.9 Multiboard Batch Capture
(Two boards operating simultaneously)
3.9.1 P1602_FunA_Start
Description: This function will start the batch capture process for two boards
z
operating simultaneously.
z
Syntax :
WORD P1602_FunA_Start(WORD wClockDiv0, WORD wChannel0[],
WORD wConfig0[], WORD *Buffer0, DWORD dwMaxCount0,
WORD wClockDiv1, WORD wChannel1[],
WORD wConfig1[], WORD *Buffer1, DWORD dwMaxCount1
Short nPriority);
Input Parameter :
z
wClockDiv0: the A/D sample rate divisor for first board.
the sample rate is 8M/wClockDiv0.
wChannel0[]: (0=no scan, 1=scan) for each channel of the first board
wConfig0[]: configuration code for each channel of the first board
Refer to "Section 3.1 Configuration Table"
*Buffer0: buffer to store the A/D data of the first board
dwMaxCount0: sample count for the first board
wClockDiv1: the A/D sample rate divisor for the second board.
the sample rate is 8M/wClockDiv1.
WChannel1[]: (0=no scan, 1=scan) for each channel of the second board
WConfig1[]: configuration code for each channel of the second board
Refer to "Section 3.1 Configuration Table"
*Buffer1: buffer to store the A/D data of the second board
dwMaxCount1: sample count for the second board
52
Page 53

nPriority: A/D thread priority. The value of nPriority range from:
-2: THREAD_PRIORITY_LOWEST
-1: THREAD_PRIORITY_BELOW_NORMAL
0: THREAD_PRIORITY_NORMAL
1: THREAD_PRIORITY_ABOVE_NORMAL
2: THREAD_PRIORITY_HIGHEST
Other: THREAD_PRIORITY_NORMAL
z Return Value :
NoError : OK
FindTwoBoardError : cannot find out two OME-PCI-1602 boards
z Demo Program : DEMO20.C
53
Page 54

3.9.2 P1602_FunA_ReadStatus
z Description : This function will read the status of the batch capture process.
z Syntax :
WORD P1602_FunA_ReadStatus( void );
z Input Parameter :
void;
Return Value :
z
0: data is ready
1: data not ready
z Demo Program : DEMO20.C
54
Page 55

3.9.3 P1602_FunA_Stop
z Description: This function will stop the batch capture function.
z Syntax:
word P1602_FunA_Stop(void);
z Input Parameter:
void
z Return Value :
NoError : OK
StopError : Stop Error
Demo Program : DEMO20.C
z
3.9.4 P1602_FunA_Get
z Description: This function will retrieve the number A/D samples acquired.
z Syntax:
word P1602_FunA_Get(DWORD *P0, DWORD *P1);
Input Parameter:
z
*P0: [output] the number of A/D samples that have been acquired for the first board.
*P1: [output] the number of A/D samples that have been acquired for the second board.
z
Return Value :
NoError : OK
z Demo Program : DEMO20.C
55
Page 56

3.10 The Single Board Batch Capture
3.10.1 P1602_FunB_Start
z
Description : This function will start the batch capture process.
z Syntax :
WORD P1602_FunB_Start(WORD wClockDiv0, WORD wChannel0[],
WORD wConfig0[], WORD *Buffer0, DWORD dwMaxCount0,
SHORT nPriority);
Input Parameter :
z
wClockDiv0: the A/D sample rate divisor for this board.
the sample rate is 8M/wClockDiv0.
wChannel0[]: (0=no scan, 1=scan) for each channel of this board
wConfig0[]: configuration code for each channel of this board
Refer to "Section 3.1 Configuration Table"
*Buffer0: buffer to store the A/D data of this board
dwMaxCount0: to specify the data length of this board
nPriority: Thread priority. The value of nPriority ranges from:
-2: THREAD_PRIORITY_LOWEST
-1: THREAD_PRIORITY_BELOW_NORMAL
0: THREAD_PRIORITY_NORMAL
1: THREAD_PRIORITY_ABOVE_NORMAL
2: THREAD_PRIORITY_HIGHEST
Other: THREAD_PRIORITY_NORMAL
z Return Value :
NoError : OK
FindBoardError : cannot find the OME-PCI-1602 board
AdControllerError : MagicScan controller hardware handshake error
z Demo Program : DEMO21.C
56
Page 57

3.10.2 P1602_FunB_ReadStatus
z Description : This function provides the status of the batch capture.
z Syntax :
WORD P1602_FunB_ReadStatus( void );
z Input Parameter :
void;
z Return Value :
0: data is ready
1: data not ready
Demo Program : DEMO21.C
z
57
Page 58

3.10.3 P1602_FunB_Stop
z Description: This function will stop the batch capture function.
z Syntax:
word P1602_FunB_Stop(void);
z Input Parameter:
void
Return Value :
z
NoError : OK
StopError : Stop Error
z Demo Program : DEMO21.C
3.10.4 P1602_FunB_Get
z Description: This function will retrieve the number of A/D samples that have
been acquired.
Syntax:
z
word P1602_FunB_Get(DWORD *P0);
z
Input Parameter:
*P0: [output] the number of A/D samples that have been acquired.
z Return Value :
NoError : OK
Demo Program : DEMO21.C
z
58
Page 59

The Continuous Capture Functions
3.10.5 P1602_Card0_StartScan
z Description : This function will start the continuous capture function for card
0. The continuous capture functions are best suited for low speed, long duration
collection. Although computer dependent, sample rates should generally be kept
under 40kHz. Refer to the OME-PCI-1602 Hardware User Manual, for additional
details on this function.
z Syntax : WORD P1602_Card0_StartScan(WORD wSampleRate, WORD
wChannelStatus[], WORD wChanelConfig[], WORD wCount);
z Input Parameter :
wSampleRate : A/D sample rate = 8M/wSampleRate.
wSampleRate=240 Æ sample rate=8M/240=33KHz
wChannelStatus[]: (0=no scan, 1=scan) for each channel
wChannelConfig[]: configuration code for each channel
Refer to "Section 3.1 Configuration Table"
wCount: number of A/D data for each scan channel
z Return Value :
NoError : OK
FindBoardError : cannot find the OME-PCI-1602 board
AdControllerError : MagicScan controller hardware handshake error
Demo Program : DEMO13.C
z
59
Page 60

3.10.6 P1602_Card0_ReadStatus
z Description : This function will read the data collected by the continuous
capture function.
z Syntax : P1602_Card0_ReadStatus(WORD wBuf[], WORD wBuf2[],
DWORD *dwP1, DWORD *dwP2, WORD *wStatus);
z Input Parameter :
wBuf[]: in scan sequence order(012…N012…N……012…N)
wBuf2[]: in channel sequence order(00000…..11111……22222….NNNNN….)
dwP1: reserved
dwP2: reserved
wStatus: 1=thread start, 2=TimeOut, 8=FIFO overflow, 0x80=thread finish
z Return Value :
0: data is ready
1: data not ready
Demo Program : DEMO13.C
z
3.10.7 P1602_Card0_Stop
Description : This function will stop the continuous capture function.
z
z
Syntax : void P1602_Card0_Stop(void);
z Input Parameter :void
Return Value :void
z
z
Demo Program : DEMO13.C
60
Page 61

3.10.8 P1602_Card1_StartScan
z Description: This function will start the continuous capture function for card
1. The continuous capture functions are best suited for low speed, long duration
collection. Although computer dependent, sample rates should generally be kept
under 40kHz. Refer to the OME-PCI-1602 Hardware User Manual, for additional
details on this function.
z Syntax : WORD P1602_Card1_StartScan(WORD wSampleRate, WORD
wChannelStatus[], WORD wChanelConfig[], WORD wCount);
z Input Parameter :
wSampleRate : A/D sample rate = 8M/wSampleRate.
wSampleRate=240 Æ sample rate=8M/240=33KHz
wChannelStatus[]: (0=no scan, 1=scan) for each channel
wChannelConfig[]: configuration code for each channel
Refer to "Section 3.1 Configuration Table"
wCount: number of A/D data for each scan channel
z Return Value :
NoError : OK
FindBoardError : cannot find the OME-PCI-1602 board
AdControllerError : MagicScan controller hardware handshake error
z Demo Program : DEMO14.C
61
Page 62

3.10.9 P1602_Card1_ReadStatus
z Description: This function will read the data collected by the continuous
capture function.
z Syntax: P1602_Card1_ReadStatus(WORD wBuf[], WORD wBuf2[], DWORD
*dwP1, DWORD *dwP2, WORD *wStatus);
z Input Parameter:
wBuf[]: in scan sequence order(012…N012…N……012…N)
wBuf2[]: in channel sequence order(00000…..11111……22222….NNNNN….)
dwP1: reserved
dwP2: reserved
wStatus: 1=thread start, 2=TimeOut, 8=FIFO overflow, 0x80=thread finish
z Return Value:
0: data is ready
1: data not ready
Demo Program: DEMO14.C
z
3.10.10 P1602_Card1_Stop
Description: This function will stop the continuous capture function.
z
z
Syntax: void P1602_Card1_Stop(void);
z Input Parameter: void
Return Value: void
z
z
Demo Program: DEMO14.C
62
Page 63

3.11 Other Functions
3.11.1 P1602_DelayUs
z Description: This is a machine independent timer. This function can be
used to create the settling time delay or used as a general purpose machine
independent timer. This function will refer to the current active OME-PCI-1602
board. Use the P1602_ActiveBoard(….) to select the active board.
z Syntax: word P1602_DelayUs(WORD wDelayUs);
z Input Parameter:
wDelayUs : number of us to delay, 8191 Max
wDelayUs=1 Æ delay 1 µs
wDelayUs=1000 Æ delay 1000 us = 1 ms
wDelayUs=8191 Æ delay 8191 us = 8.191 ms (maximum delay)
wDelayUs=8192 Æ invalid delay (will return error)
z Return Value:
NoError : OK
ExceedBoardNumber: invalid board number
FindBoardError : cannot find the OME-PCI-1602 board
InvalidDelay : dwDelayUs > 8191
Demo Program : DEMO1.C
z
Long Time Delay :
z
WORD DelayMs(WORD wDelayMs) // maximum delay=4294967.295 sec
{
WORD wDelay,wRetVal
wRetVal=0;
for (wDelay=0; wDelay<wDelayMs; wDelay++)
wRetVal+=P1602_DelayUs(1000);
return(wRetVal);
}
63
Page 64

4. Demo Programs
The following demonstration programs are provided on the included CD:
z demo1: one board, D/I/O test, D/A test, A/D polling & pacer trigger test, general test
z demo2: two boards, same as demo1
z demo3: one board, all 32 channels of A/D by software trigger(by polling)
z demo4: two boards, same as demo3
z demo5: one board, M_function_1 demo
z demo6: two boards, same as demo5
z demo7: one board, M_function_2 demo
z demo8: two boards, same as demo7
z demo9: one board, M_function_3 demo
z demo10: two boards, same as demo9
z demo11: one board, MagicScan demo
z demo12: two boards, same as demo11
z demo13: one board, continuous capture demo
z demo14: two boards, continuous capture demo (Windows 95/98/NT only)
z demo15: all installed boards, D/I/O test for board number identification
z demo16: one board, performance evaluation demo
z demo17: one board, MagicScan demo, scan sequence: 4Æ3Æ5
z demo18: one board, MagicScan demo, scan 32 channel, show channel
0/1/15/16/17
z demo19: one board, A/D calibration.
z demo20: two boards, P1602_FUNA, batch capture demo
z demo21: single board, P1602_FUNB, batch capture demo
64
Page 65

WARRANTY/DISCLAIMER
OMEGA ENGINEERING, INC. warrants this unit to be free of defects in materials and workmanship for a
period of 13 months from date of purchase. OMEGA’s WARRANTY adds an additional one (1) month
grace period to the normal one (1) year product warranty to cover handling and shipping time. This
ensures that OMEGA’s customers receive maximum coverage on each product.
If the unit malfunctions, it must be returned to the factory for evaluation. OMEGA’s Customer Service
Department will issue an Authorized Return (AR) number immediately upon phone or written request.
Upon examination by OMEGA, if the unit is found to be defective, it will be repaired or replaced at no
charge. OMEGA’sWARRANTY does not apply to defects resulting from any action of the purchaser, including but not limited to mishandling, improper interfacing, operation outside of design limits,
improper repair, or unauthorized modification. This WARRANTY is VOID if the unit shows evidence of
having been tampered with or shows evidence of having been damaged as a result of excessive corrosion;
or current, heat, moisture or vibration; improper specification; misapplication; misuse or other operating
conditions outside of OMEGA’s control. Components which wear are not warranted, including but not
limited to contact points, fuses, and triacs.
OMEGA is pleased to offer suggestions on the use of its various products. However,
OMEGA neither assumes responsibility for any omissions or errors nor assumes liability for any
damages that result from the use of its products in accordance with information provided by
OMEGA, either verbal or written. OMEGA warrants only that the parts manufactured by it will be
as specified and free of defects. OMEGA MAKES NO OTHER WARRANTIES OR
REPRESENTATIONS OF ANY KIND WHATSOEVER, EXPRESS OR IMPLIED, EXCEPT THAT OF TITLE,
AND ALL IMPLIED WARRANTIES INCLUDING ANY WARRANTY OF MERCHANTABILITY AND
FITNESS FOR A PARTICULAR PURPOSE ARE HEREBY DISCLAIMED. LIMITATION OF
LIABILITY: The remedies of purchaser set forth herein are exclusive, and the total liability of
OMEGA with respect to this order, whether based on contract, warranty, negligence,
indemnification, strict liability or otherwise, shall not exceed the purchase price of the
component upon which liability is based. In no event shall OMEGA be liable for
consequential, incidental or special damages.
CONDITIONS: Equipment sold by OMEGA is not intended to be used, nor shall it be used: (1) as a “Basic
Component” under 10 CFR 21 (NRC), used in or with any nuclear installation or activity; or (2) in medical
applications or used on humans. Should any Product(s) be used in or with any nuclear installation or
activity, medical application, used on humans, or misused in any way, OMEGA assumes no responsibility
as set forth in our basic WARRANTY / DISCLAIMER language, and, additionally, purchaser will indemnify
OMEGA and hold OMEGA harmless from any liability or damage whatsoever arising out of the use of the
Product(s) in suc h a manner.
RETURN REQUESTS/INQUIRIES
Direct all warranty and repair requests/inquiries to the OMEGA Customer Service Department. BEFORE
RETURNING ANY PRODUCT(S) TO OMEGA, PURCHASER MUST OBTAIN AN AUTHORIZED RETURN
(AR) NUMBER FROM OMEGA’S CUSTOMER SERVICE DEPARTMENT (IN ORDER TO AVOID
PROCESSING DELAYS). The assigned AR number should then be marked on the outside of the return
package and on any correspondence.
The purchaser is responsible for shipping charges, freight, insurance and proper packaging to prevent
breakage in transit.
FOR W
ARRANTY RETURNS, please have the
following information available BEFORE
contacting OMEGA:
1. Purc hase Order number under which the product
was PURCHASED,
2. Model and serial number of the product under
warranty, and
3. Repair instructions and/or specific problems
relative to the product.
FOR NON-WARRANTY REPAIRS,
consult OMEGA
for current repair charges. Have the following
information available BEFORE contacting OMEGA:
1. Purchase Order number to cover the COST
of the repair,
2. Model and serial number of the product, and
3. Repair instructions and/or specific problems
relative to the product.
OMEGA’s policy is to make running changes, not model changes, whenever an improvement is possible. This affords
our customers the latest in technology and engineering.
OMEGA is a registered trademark of OMEGA ENGINEERING, INC.
© Copyright 2002 OMEGA ENGINEERING, INC. All rights reserved. This document may not be copied, photocopied,
reproduced, translated, or reduced to any electronic medium or machine-readable form, in whole or in part, without the
prior written consent of OMEGA ENGINEERING, INC.
Page 66

M3931/0203
Where Do I Find Everything I Need for
Process Measurement and Contr ol?
OMEGA…Of Course!
Shop online at www.omega.com
TEMPERA TURE
Thermocouple, RTD & Thermistor Probes, Connectors, Panels & Assemblies
Wire: Thermocouple, RTD & Thermistor
Calibrators & Ice Point References
Recorders, Controllers & Process Monitors
Infrared Pyrometers
PRESSURE, STRAIN AND FORCE
Transducers & Strain Gages
Load Cells & Pressure Gages
Displacement Transducers
Instrumentation & Accessories
FLOW/LEVEL
Rotameters, Gas Mass Flowmeters & Flow Computers
Air Velocity Indicators
Turbine/Paddlewheel Systems
Totalizers & Batch Controllers
pH/CONDUCTIVITY
pH Electrodes, Testers & Accessories
Benchtop/Laboratory Meters
Controllers, Calibrators, Simulators & Pumps
Industrial pH & Conductivity Equipment
DA TA ACQUISITION
Data Acquisition & Engineering Software
Communications-Based Acquisition Systems
Plug-in Cards for Apple, IBM & Compatibles
Datalogging Systems
Recorders, Printers & Plotters
HEA TERS
Heating Cable
Cartridge & Strip Heaters
Immersion & Band Heaters
Flexible Heaters
Laboratory Heaters
ENVIRONMENT AL
MONITORING AND CONTROL
Metering & Control Instrumentation
Refractometers
Pumps & Tubing
Air, Soil & Water Monitors
Industrial Water & Wastewater Treatment
pH, Conductivity & Dissolved Oxygen Instruments
 Loading...
Loading...