

TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Rev. 03 — 21 July 2000 Product specification
1. General description
The TDA8752B is a triple 8-bit ADC with controllable amplifiers and clamps for the
digitizing of large bandwidth RGB signals.
The clamp level, the gain and all other settings are controlled via a serial interface
(either I2C-bus or 3-wire serial bus, selected via a logic input).
The IC also includes a PLL that can be locked to the horizontal line frequency and
generates the ADC clock. The PLL jitter is minimized for high resolution PC graphics
applications. An external clock can also be input to the ADC.
It is possible to set the TDA8752B serial bus address to four different values, when
several TDA8752B ICs are used in a system, by means of the I2C-bus interface (for
example, two ICs used in an odd/even configuration).
2. Features
■ Triple 8-bit ADC
■ Sampling rate up to 110 Msps
c
c
■ IC controllable via a serial interface, which can be either I2C-bus or 3-wire serial
bus, selected via a TTL input pin
■ IC analog voltageinputfrom0.4 to 1.2 V (p-p) to produce a full-scale ADC input of
1 V (p-p)
■ Three clamps for programming a clamping code between −63.5 and +64 in steps
of1⁄2LSB for RGB signals, and from +120 to +136 in steps of1⁄2LSB for YUV
signals
■ Three controllable amplifiers: gain controlled via the serial interface to produce a
full-scale resolution of1⁄2LSB peak-to-peak
■ Amplifier bandwidth of 250 MHz
■ Low gain variation with temperature
■ PLL controllable via the serial interface to generate the ADC clock which can be
locked to a line frequency of 15 to 280 kHz
■ Integrated PLL divider
■ Programmable phase clock adjustment cells
■ Internal voltage regulators
■ TTL compatible digital inputs and outputs
■ Chip enable high-impedance ADC output
Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
■ Power-down mode
■ Possibility to use up to four ICs in the same system when using the I2C-bus
interface, or more when using the 3-wire serial bus interface
■ 1.1 W power dissipation.
3. Applications
■ RGB high-speed digitizing
■ LCD panels drive
■ LCD projection systems
■ VGA and higher resolutions
■ Using two ICs in parallel, a higher display resolution can be obtained: 200 MHz
pixel frequency.
4. Quick reference data
Table 1: Quick reference data
Symbol Parameter Conditions Min Typ Max Unit
V
CCA
V
DDD
V
CCD
V
CCO
V
CCA(PLL)
V
CCO(PLL)
I
CCA
I
DDD
I
CCD
I
CCO
I
CCA(PLL)
I
CCO(PLL)
f
clk
f
ref(PLL)
f
VCO
INL DC integral non-linearity from analog input to digital
DNL DC differential non-linearity from analog input to digital
∆G
amp
B amplifier bandwidth −3 dB; T
t
set
9397 750 07338
Product specification Rev. 03 — 21 July 2000 2 of 38
analog supply voltage for R, G and B channels 4.75 5.0 5.25 V
logic supply voltage for I2C-bus and 3-wire
4.75 5.0 5.25 V
serial bus
digital supply voltage 4.75 5.0 5.25 V
output stages supply voltage for R, G and B channels 4.75 5.0 5.25 V
analog PLL supply voltage 4.75 5.0 5.25 V
output PLL supply voltage 4.75 5.0 5.25 V
analog supply current − 120 − mA
logic supply current for I2C-bus and 3-wire − 1.0 − mA
digital supply current − 40 − mA
output stages supply current f
= 110 MHz; ramp input − 26 − mA
clk
analog PLL supply current − 28 − mA
output PLL supply current − 5 − mA
clock frequency −−110 MHz
PLL reference clock
15 − 280 kHz
frequency
VCO output clock frequency 12 − 110 MHz
−±0.5 ±1.5 LSB
output; full-scale; ramp
input; f
= 110 MHz
clk
−±0.5 ±1.0 LSB
output; full-scale; ramp
/∆T amplifier gain stability as a
function of temperature
settling time of the ADC block
plus AGC
input; f
V
ref
100 ppm/°C maximum
input signal settling
time <1 ns; T
= 110 MHz
clk
= 2.5 V with
=25°C 250 −−MHz
amb
amb
−−200 ppm/°C
−−6ns
=25°C
© Philips Electronics N.V. 2000. All rights reserved.
Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Table 1: Quick reference data
…continued
Symbol Parameter Conditions Min Typ Max Unit
DR
PLL
P
tot
j
PLL(rms)
PLL divider ratio 100 − 4095
total power dissipation f
maximum PLL phase jitter
(RMS value)
= 110 MHz; ramp input − 1.1 − W
clk
f
= 66.67 kHz;
ref
= 110 MHz
f
clk
− 112 − ps
5. Ordering information
Table 2: Ordering information
Type number Package Sampling
Name Description Version
TDA8752BH/8 QFP100 plastic quad flat package; 100 leads (lead length
SOT317-2 110
1.95 mm); body 14 × 20 × 2.8 mm
frequency (MHz)
9397 750 07338
Product specification Rev. 03 — 21 July 2000 3 of 38
© Philips Electronics N.V. 2000. All rights reserved.
Philips Semiconductors
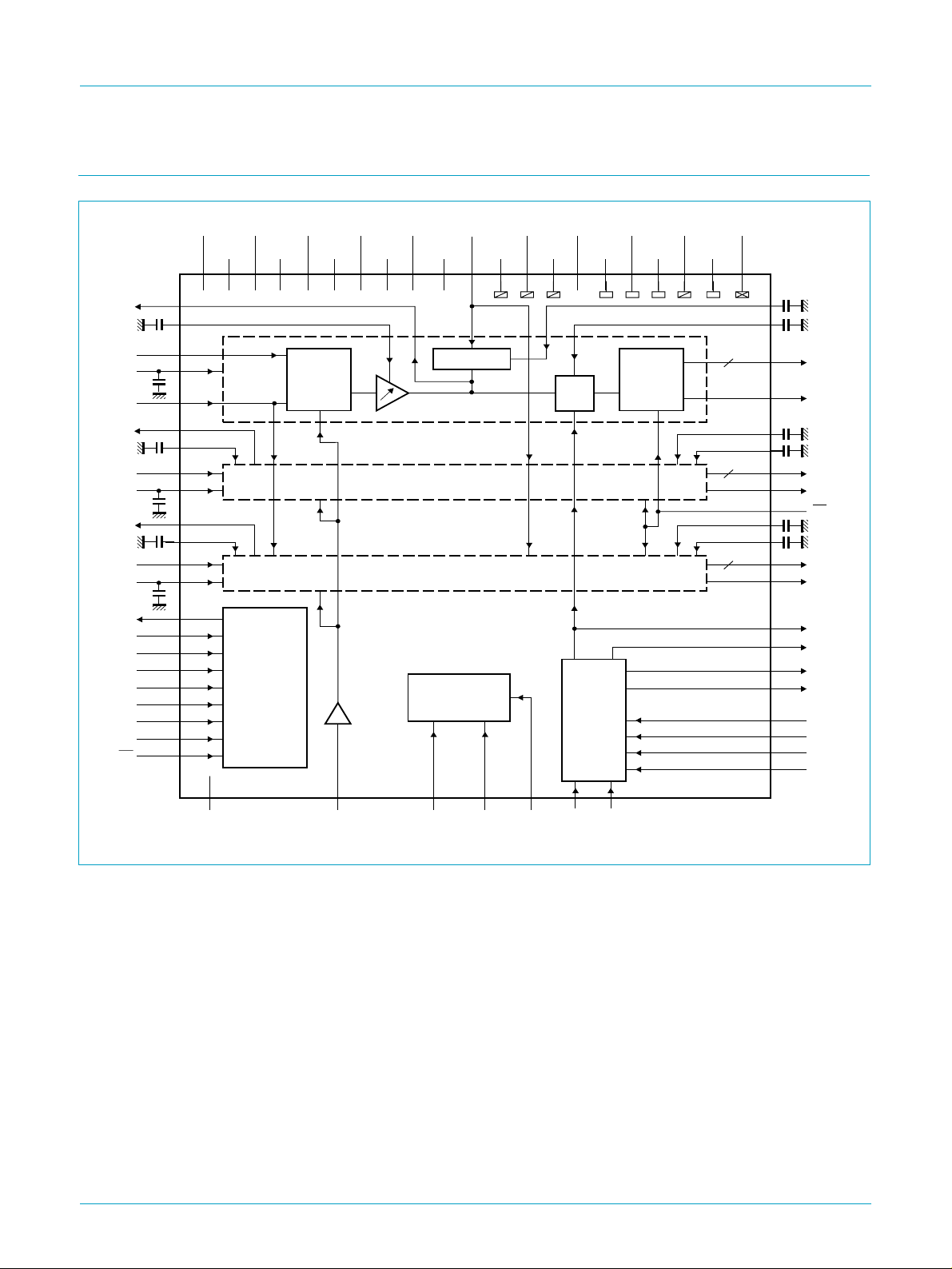
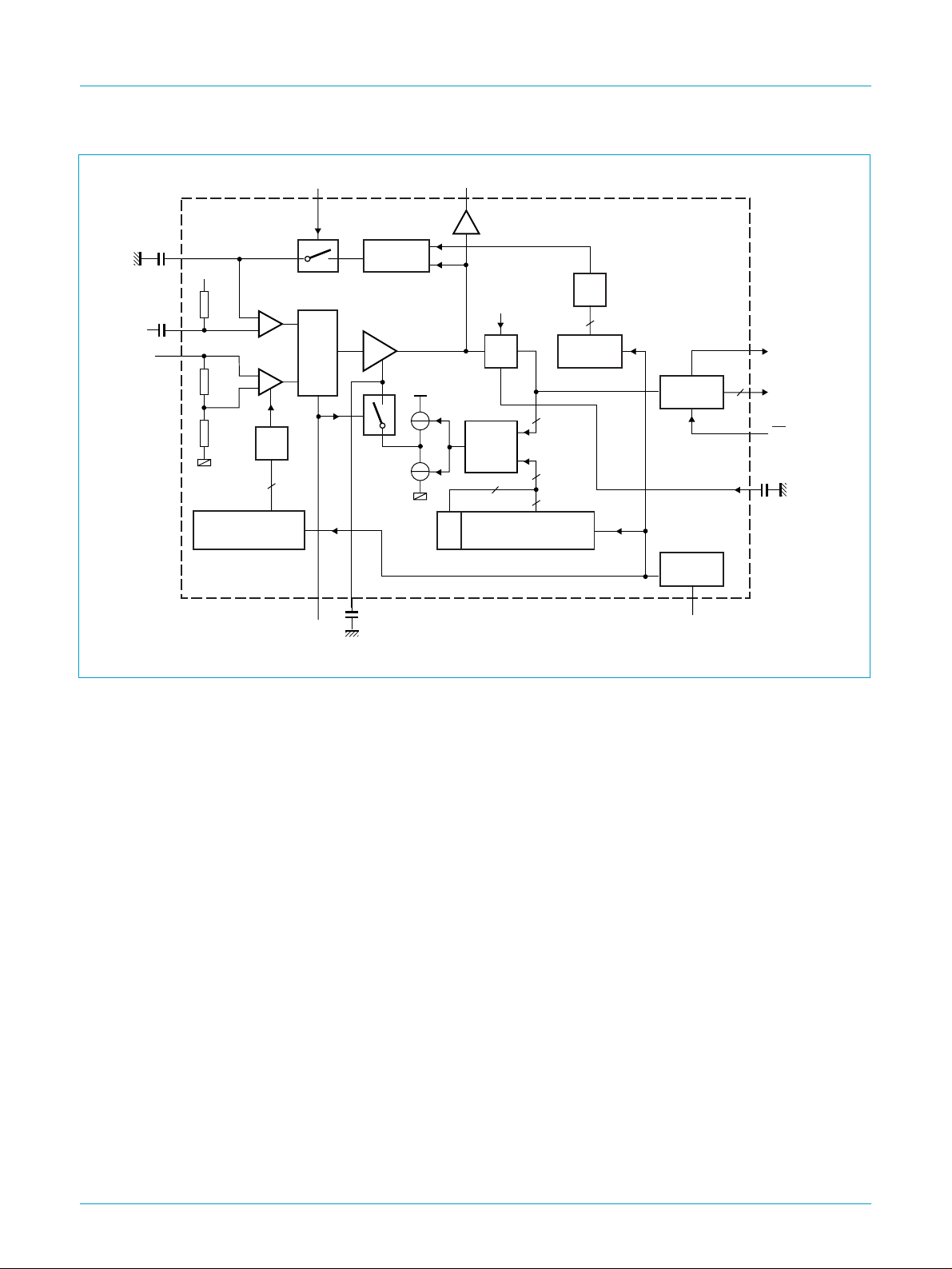
6. Block diagram
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
RAGC
RGAINC
RIN
RDEC
V
GAGC
GGAINC
GIN
GDEC
BAGC
BGAINC
BIN
BDEC
TDO
TCK
ADD2
ADD1
SEN
SCL
SDA
DIS
2
I
C/3W
V
ref
CCA(R)
V
CCA(G)
11
6
8
12
10
3
14
16
20
18
22
24
28
26
36
35
34
33
38
42
39
37
32
1, 5, 30, 31, 43 , 44
50, 51, 100
V
CCA(B)
V
DDD
19
27
SERIAL
INTERFACE
2
I
C-BUS
OR
3-WIRE
V
CCO(R)
40
V
CCO(G)
79
MUX
V
CCO(B)
69
HSYNCI
2
C-bus; 1-bit
I
(Hlevel)
90
59
V
CCA(PLL)
V
V
CCD
95
99
GREEN CHANNEL
G
AGND
21
V
SSD
B
29
ADC
CCO(PLL)
85
CLAMP
CLP
AGND
89
AGND
R
13
RED CHANNEL
BLUE CHANNEL
TDA8752B
REGULATOR
4 2 88 97 98
DEC2DEC1HSYNCn.c.
PWDWN
CP
OGND
41
PLL
OGND
70
CZ
G
OGND
R
60
OUTPUTS
AGND
B
48
PLL
OGND
96
DGND
PLL
86
82
71 to 78
61 to 68
49, 52 to 58
FCE467
45
17
15
25
23
47
84
83
81
80
92
91
93
94
9
7
46
87
RCLP
RBOT
R0 to R7
ROR
GCLP
GBOT
G0 to G7
GOR
OE
BCLP
BBOT
B0 to B7
BOR
CKADCO
CKBO
CKAO
CKREFO
CKEXT
INV
COAST
CKREF
Fig 1. Block diagram.
9397 750 07338
Product specification Rev. 03 — 21 July 2000 4 of 38
© Philips Electronics N.V. 2000. All rights reserved.
Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
CLP RAGC
RCLP
V
P
150
RIN
V
ref
kΩ
3 kΩ
45 kΩ
FINE GAIN ADJUST
2
I
DAC
5
REGISTER
C-bus: 5 bits (Fr) I2C-bus: 7 bits (Cr)
Fig 2. Red channel diagram.
MUX
HSYNCI
CLAMP
CONTROL
AGC
RGAINC
V
CCAR
CLKADC
ADC
8
D
D ≥ R
R
8
1
7
1
REGISTER
COARSE GAIN ADJUST
DAC
8
REGISTER
2
C-bus: 8 bits (Or)
I
OUTPUTS
I2C-BUS
ROR
8
R0 to R7
OE
RBOT
FCE468
9397 750 07338
© Philips Electronics N.V. 2000. All rights reserved.
Product specification Rev. 03 — 21 July 2000 5 of 38
Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
CKREF
2
I
C-bus; 1 bit
(Vlevel)
edge selector
2
I
C-bus;
1 bit
(Edge)
COAST
PHASE
FREQUENCY
DETECTOR
2
C-bus; 5 bits
I
(Ip, Up, Do)
DIV N (100 to 4095)
2
C-bus; 12 bits (Di)
I
C
Z
CZ CP
loop filter
2
I
C-bus;
3 bits (Z)
C
P
VCO
2
C-bus;
I
2 bits (Vco)
12 to
100 MHz
phase selector A
2
I
C-bus;
5 bits (Pa)
phase selector B
2
C-bus; 5 bits (Pb)
I
CKEXT INV
MUX
2
C-bus;
I
1 bit (Cka)
NCKBO
SYNCHRO
0°/180°
CLKADC
MUX
MUX
2
C-bus;
I
1 bit (Ckab)
2
C-bus;
I
1 bit (Ckb)
FCE465
CKADCO
CKBO
CKAO
CKREFO
Fig 3. PLL diagram.
9397 750 07338
© Philips Electronics N.V. 2000. All rights reserved.
Product specification Rev. 03 — 21 July 2000 6 of 38
Philips Semiconductors
7. Pinning information
7.1 Pinning
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
DEC2
V
DEC1
RAGC
RBOT
RGAINC
RCLP
RDEC
V
CCA(R)
RIN
AGND
GAGC
GBOT
GGAINC
GCLP
GDEC
V
CCA(G)
GIN
AGND
BAGC
BBOT
BGAINC
BCLP
BDEC
V
CCA(B)
AGND
n.c.
n.c.
BIN
n.c.
CKADCO
CKBO
PLL
OGND
CKAO
80
79
78
77
76
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
5130
CKREFO
V
CCO(R)
R7
R6
R5
R4
R3
R2
R1
R0
OGND
V
CCO(G)
G7
G6
G5
G4
G3
G2
G1
G0
OGND
V
CCO(B)
B7
B6
B5
B4
B3
B2
B1
n.c.
R
G
PLL
CCA(PLL)
n.c.
V
CZCPAGND
99989796959493929190898887868584838281
100
1
2
3
ref
4
5
6
7
8
9
10
11
12
13
R
14
15
16
17
18
19
20
21
G
22
23
24
25
26
27
28
29
B
CCD
V
CKREF
COAST
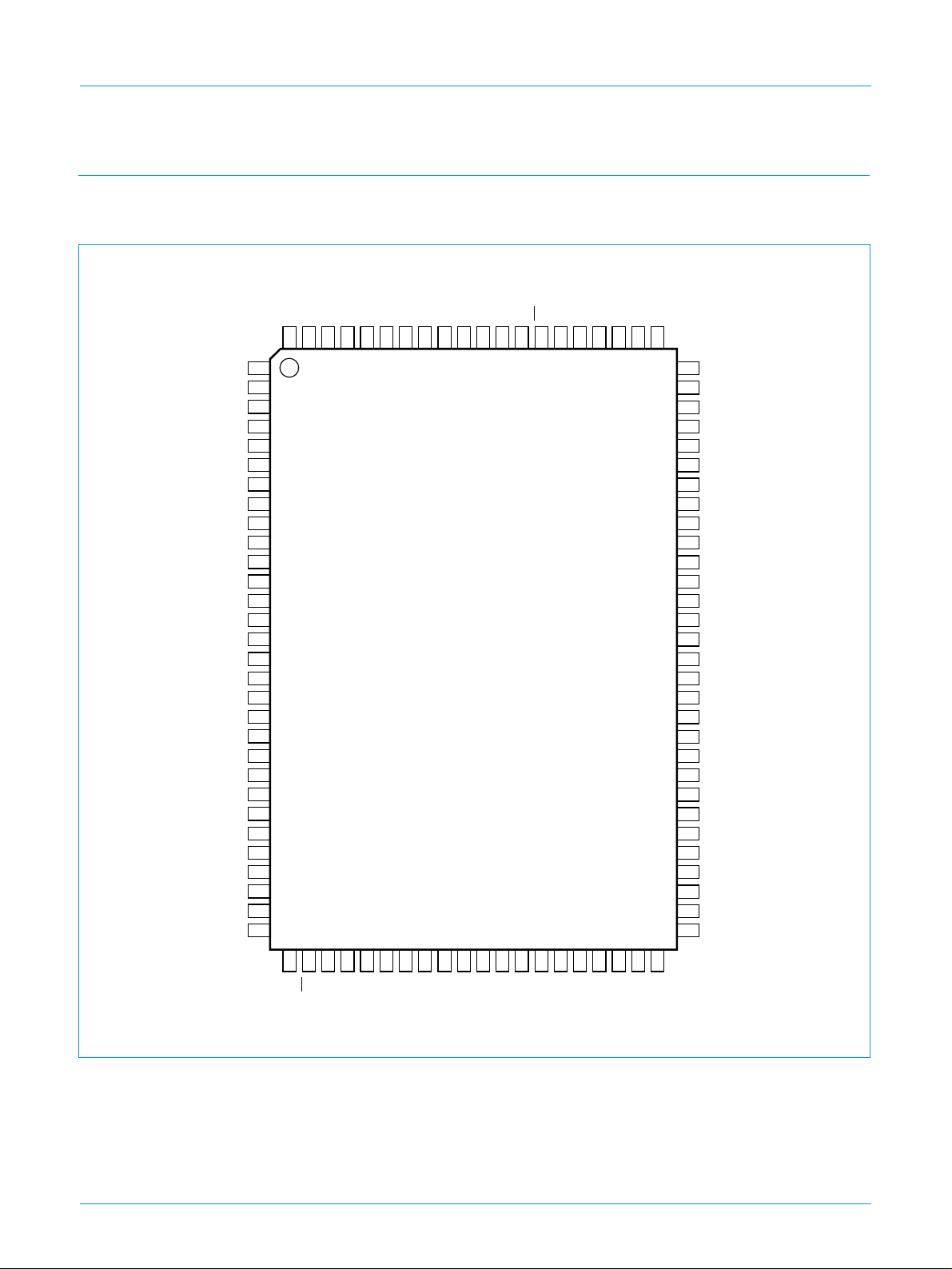
TDA8752BH
CKEXT
INV
HSYNC
CLP
PWDWNOEDGND
V
CCO(PLL)
31323334353637383940414243444546474849
n.c.
n.c.
C/3W
2
I
ADD1
ADD2
TCK
TDO
DIS
SEN
SDA
DDD
V
SSD
V
SCL
n.c.
ROR
GOR
BOR
B
B0
OGND
50
n.c.
FCE469
Fig 4. Pin configuration.
9397 750 07338
Product specification Rev. 03 — 21 July 2000 7 of 38
© Philips Electronics N.V. 2000. All rights reserved.
Philips Semiconductors
7.2 Pin description
Table 3: Pin description
Symbol Pin Description
n.c. 1 not connected
DEC2 2 main regulator decoupling input 2
V
ref
DEC1 4 main regulator decoupling input 1
n.c. 5 not connected
RAGC 6 red channel AGC output
RBOT 7 red channel ladder decoupling input (BOT)
RGAINC 8 red channel gain capacitor input
RCLP 9 red channel gain clamp capacitor input
RDEC 10 red channel gain regulator decoupling input
V
CCA(R)
RIN 12 red channel gain analog input
AGND
GAGC 14 green channel AGC output
GBOT 15 green channel ladder decoupling input (BOT)
GGAINC 16 green channel gain capacitor input
GCLP 17 green channel gain clamp capacitor input
GDEC 18 green channel gain regulator decoupling input
V
CCA(G)
GIN 20 green channel gain analog input
AGND
BAGC 22 blue channel AGC output
BBOT 23 blue channel ladder decoupling input (BOT)
BGAINC 24 blue channel gain capacitor input
BCLP 25 blue channel gain clamp capacitor input
BDEC 26 blue channel gain regulator decoupling input
V
CCA(B)
BIN 28 blue channel gain analog input
AGND
n.c. 30 not connected
n.c. 31 not connected
2
C/3W 32 selection input between I2C-bus (active HIGH) and 3-wire
I
ADD1 33 I
ADD2 34 I
TCK 35 scan test mode input (active HIGH)
TDO 36 scan test output
DIS 37 I
SEN 38 select enable for 3-wire serial bus input (see Figure 10)
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
3 gain stabilizer voltage reference input
11 red channel gain analog power supply
R
G
B
13 red channel gain analog ground
19 green channel gain analog power supply
21 green channel gain analog ground
27 blue channel gain analog power supply
29 blue channel gain analog ground
serial bus (active LOW)
2
C-bus address control input 1
2
C-bus address control input 2
2
C-bus and 3-wire serial bus disable control input (disable at
HIGH level)
9397 750 07338
Product specification Rev. 03 — 21 July 2000 8 of 38
© Philips Electronics N.V. 2000. All rights reserved.
Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Table 3: Pin description
…continued
Symbol Pin Description
SDA 39 I2C-bus/3-wire serial bus data input
V
DDD
V
SSD
SCL 42 I
40 logic I2C-bus/3-wire serial bus digital power supply
41 logic I2C-bus/3-wire serial bus digital ground
2
C-bus/3-wire serial bus clock input
n.c. 43 not connected
n.c. 44 not connected
ROR 45 red channel ADC output bit out of range
GOR 46 green channel ADC output bit out of range
BOR 47 blue channel ADC output bit out of range
OGND
B
48 blue channel ADC output ground
B0 49 blue channel ADC output bit0 (LSB)
n.c. 50 not connected
n.c. 51 not connected
B1 52 blue channel ADC output bit1
B2 53 blue channel ADC output bit2
B3 54 blue channel ADC output bit3
B4 55 blue channel ADC output bit4
B5 56 blue channel ADC output bit5
B6 57 blue channel ADC output bit6
B7 58 blue channel ADC output bit7 (MSB)
V
CCO(B)
OGND
G
59 blue channel ADC output power supply
60 green channel ADC output ground
G0 61 green channel ADC output bit 0 (LSB)
G1 62 green channel ADC output bit 1
G2 63 green channel ADC output bit 2
G3 64 green channel ADC output bit 3
G4 65 green channel ADC output bit 4
G5 66 green channel ADC output bit 5
G6 67 green channel ADC output bit 6
G7 68 green channel ADC output bit 7 (MSB)
V
CCO(G)
OGND
R
69 green channel ADC output power supply
70 red channel ADC output ground
R0 71 red channel ADC output bit 0 (LSB)
R1 72 red channel ADC output bit 1
R2 73 red channel ADC output bit 2
R3 74 red channel ADC output bit 3
R4 75 red channel ADC output bit 4
R5 76 red channel ADC output bit 5
R6 77 red channel ADC output bit 6
R7 78 red channel ADC output bit 7 (MSB)
V
CCO(R)
79 red channel ADC output power supply
9397 750 07338
Product specification Rev. 03 — 21 July 2000 9 of 38
© Philips Electronics N.V. 2000. All rights reserved.
Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Table 3: Pin description
…continued
Symbol Pin Description
CKREFO 80 reference output clock re-synchronized horizontal pulse
CKAO 81 PLL clock output 3 (in phase with reference output clock
CKBO)
OGND
PLL
CKAO or
82 PLL digital ground
CKBO 83 PLL clock output 2
CKADCO 84 PLL clock output1 (in phase with internal ADC clock)
V
CCO(PLL)
85 PLL output power supply
DGND 86 digital ground
OE 87 outputenable; active LOW (when OEis HIGH, the outputs are
in high-impedance)
PWDWN 88 power-down control input (device is in Power-down mode
when this pin is HIGH)
CLP 89 clamp pulse input (clamp active HIGH)
HSYNC 90 horizontal synchronization input pulse
INV 91 PLL clock output inverter command input (invert when HIGH)
CKEXT 92 external clock input
COAST 93 PLL coast command input
CKREF 94 PLL reference clock input
V
CCD
AGND
PLL
95 digital power supply
96 PLL analog ground
CP 97 PLL filter input
CZ 98 PLL filter input
V
CCA(PLL)
99 PLL analog power supply
n.c. 100 not connected
9397 750 07338
Product specification Rev. 03 — 21 July 2000 10 of 38
© Philips Electronics N.V. 2000. All rights reserved.
Philips Semiconductors
8. Functional description
This triple high-speed 8-bit ADC is designed to convert RGB signals, coming from an
analog source, into digital data used by a LCD driver (pixel clockupto 200 MHz when
using 2 ICs).
8.1 IC analog video inputs
The video inputs are internally DC polarized. These inputs are AC coupled externally.
8.2 Clamps
Three independent parallel clamping circuits are used to clamp the video input
signals on the black level and to control the brightness level. The clamping code is
programmable between code −63.5 and +64 and from +120 to +136 in steps of
1
⁄2LSB. The programming of the clamp value is achieved via an 8-bit DAC. Each
clamp must be able to correct an offset from ±0.1 V to ±10 mV within 300 ns, and
correct the total offset in 10 lines.
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Fig 5. Clamp definition.
8.3 Variable gain amplifiers
The clamps are controlled by an external TTL positive going pulse (pin CLP). The
drop of the video signal is <1 LSB.
Normally, the circuit operates with a 0 code clamp, corresponding to the 0 ADC code.
This clamp code can be changed from −63.5 to +64 as represented in Figure 5, in
steps of1⁄2LSB. The digitizedvideo signal is alwaysbetween code 0 and code 255 of
the ADC. It is also possible to clamp from code 120 to code 136 corresponding to
120 ADC code to 136 ADC code. Then clamping on code 128 of the ADC is possible.
255
digitized
video signal
CLP
video
signal
code 64
code 0
−63.5
code
clamp
programming
FCE471
= 120 to 136
Three independent variable gain amplifiers are used to provide, to each channel, a
full-scale input range signal to the 8-bit ADC. The gain adjustment range is designed
so that for an input range varying from 0.4 to 1.2 V (p-p), the output signal
corresponds to the ADC full-scale input of 1 V (p-p).
To ensure that the gain does not vary over the whole operating temperature range, an
external supplied reference voltage V
= 2.5 V (DC), with a maximum variation of
ref
100 ppm/°C, is used to calibrate the gain at the beginning of each video line before
the clamp pulse.
9397 750 07338
Product specification Rev. 03 — 21 July 2000 11 of 38
© Philips Electronics N.V. 2000. All rights reserved.
Philips Semiconductors
The calibration of the gains is done using the following principle.
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
From the reference voltage V
a reference signal of 0.156 V (p-p) (1⁄16V
ref
ref
) is
generated internally. During the synchronization part of the video line, the multiplexer,
controlled by the TTL synchronization signal (HSYNCI, coming from HSYNC;
see Figure 1) with a width equal to one of the video synchronization signals (e.g. the
signal coming from a synchronization separator), is switched between the two
amplifiers.
The output of the multiplexer is either the normal video signal or the 0.156 V
reference signal (during HSYNC).
The corresponding ADC outputs are then compared to a preset value loaded in a
register. Depending on the result of the comparison, the gain of the variable gain
amplifiers is adjusted (coarse gain control; see Figure 2 and 6). The three 7-bit
registers receive data via a serial interface to enable the gain to be programmed.
The preset value loaded in the 7-bit register is chosen between approximately
67 codes to ensure the full-scale input range (see Figure 6). A contrast control can be
achieved using these registers. In this case care should be taken to stay within the
allowed code range (32 to 99).
A fine correction using three 5-bit DACs, also controlled via the serial interface, is
used to fine tune the gain of the three channels (fine gain control; see Figure 2 and 7)
and to compensate the channel-to-channel gain mismatch.
With a full-scale ADC input, the resolution of the fine register corresponds to1⁄2LSB
peak-to-peak variation.
Fig 6. Coarse gain control.
To use these gain controls correctly,it is recommended to fix the coarse gain (to have
a full-scale ADC input signal) to within 4 LSB and then adjust it with the fine gain. The
gain is adjusted during HSYNC. During this time the output signal is not related to the
amplified input signal. The outputs, when the coarse gain system is stable, are
related to the programmed coarse code (see Figure 6).
0.6
ADC output
code
255
227
160
128
V
i (p-p)
2
FCE472
N
COARSE
coarse
register
value
(67 codes)
code
127
99
32
0
0.156 =
G
(max)
G
(min)
V
0.2
ref
16
9397 750 07338
Product specification Rev. 03 — 21 July 2000 12 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
coarse
register
value
(67 codes)
ADC
output code
255
227
N
COARSE
160
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
G
NCOARSE
G
(max)
G
(min)
128
Fig 7. Fine gain correction for a coarse gain G
8.4 ADCs
The ADCs are 8-bit with a maximum clock frequency of 110 Msps. The ADCs input
range is 1 V (p-p) full-scale. One out of range bit exists per channel (ROR, GOR and
BOR). It will be at logic 1 when the signal is out of range of the full-scale of the ADCs.
Pipeline delay in the ADCs is 1 clock cycle from sampling to data output.
The ADCs reference ladders regulators are integrated.
8.5 ADC outputs
ADC outputs are straight binary. An output enable pin (OE; active LOW) enables the
output status between active and high-impedance (OE = HIGH) to be switched; it is
recommended to load the outputs with a 10 pF capacitive load. The timing must be
checked very carefully if the capacitive load is more than 10 pF.
8.6 Phase-locked loop
NCOARSE
N
FINE
.
N
FINE
= 31
= 0
V
ref
FCE473
The ADCs are clocked either by an internal PLL locked to the CKREF clock (all of the
PLL is on-chip except the loop filter capacitance) or by an external clock applied to
pin CKEXT. Selection is performed via the serial interface bus.
The reference clock (CKREF) range is between 15 and 280 kHz. Consequently, the
VCO minimum frequency is 12 MHz and the maximum frequency is 110 MHz. The
gain of the VCO part can be controlled via the serial interface, depending on the
frequency range to which the PLL is locked.
To increase the bandwidth of the PLL, the charge pump current, controlled by the
serial interface, must also be increased. The relationship between the frequency and
the current is given by the following equation:
1
f
------
n
2π
9397 750 07338
Product specification Rev. 03 — 21 July 2000 13 of 38
KOIP⋅
------------------------------------- -⋅=
CZCP+()DR⋅
(1)
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
Where:
fn= the natural PLL frequency
KO= the VCO gain
DR = PLL divider ratio
CZ and CP= capacitors of the PLL filter.
The other PLL equation is as follows:
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
f
=
z
1
----------------------------- -
2π R× CZ×
and ξ
f
1
n
×=
-- -
-----
2
f
z
(2)
Where:
fz= loop filter zero frequency
R = the chosen resistance for the filter
ξ = the damping factor
FO= 0 dB loop gain frequency.
Different resistances for the filter can be programmed via the serial interface. To
improve the performances, the PLL parameters should be chosen so that:
2ξ fn⋅ RIP⋅⇒
==
O
F
O
0.15 R I
--------- -
f
ref
2π DR× FO×
---------------------------------- -
K
O
0.3π DR× f
≤⋅⇒≤ Lim=
----------------------------------------- -
P
×
K
O
ref
(3)
(4)
The values of R and IP must be chosen so that the product is the closest to Lim. In
the eventthat there are several choices, the couple forwhich the ξ value is the closest
to 1 must be chosen.
A software program called “PLL calculator’” is available on Philips Semiconductor
Internet site to calculate the best PLL parameters.
It is possible to control (independently) the phase of the ADC clock and the phase of
an additional clock output (which could be used to drive a second TDA8752B). For
this, two serial interface-controlled digital phase-shift controllers are included
(controlled by 5-bit registers, phase-shift controller steps are 11.25 deg each on the
whole PLL frequency range).
CKREF is re-synchronized, by the synchro block, on the CKAO clock. The output is
CKREFO (LOW during 8 clock periods). CKAO is the clock at the output of the phase
selector A. This clock can be used as the clocks for CKBO and CKADCO. The timing
is given in Figure 8.
Pin COAST is used to disconnect the PLL phase frequency detector during the frame
flyback or the unavailability of the CKREF signal. This signal can normally be derived
from the VSYNC signal.
The clock output is able to drive an external 10 pF load (for the on-chip ADCs).
9397 750 07338
Product specification Rev. 03 — 21 July 2000 14 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
The PLL can be used in three different methods:
•
•
•
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
The IC can be used as stand-alone with a sampling frequency of up to 110 MHz.
When an RGB signal is at a pixel frequency exceeding 100 to 200 MHz, it is
possible to follow one of the two possibilities given below:
– Using one TDA8752B: the sampling rate can be reduced by a factor of two, by
sampling the even pixels in the even frame and the odd pixels in the odd frame.
Pin INV is used to toggle between the frames.
– Using two TDA8752Bs: the PLL of the master TDA8752B is used to drive both
ADC clocks. The PLL of the slave TDA8752B is disconnected and the CKBO of
the master TDA8752Bis connected to pin CKEXT of the TDA8752B master and
CKAO to the slave TDA8752B. In this case, on pin CKAO CKBO will be the
output (with bit CKAB of the master at logic 1).
The master TDA8752B is used to sample the even pixels and the slave
TDA8752B forodd pixels,using a 180 deg phase shift between the clocks (both
pins CKADCO). The master chip and the slave chip have their pin INV LOW,
which guarantees the 180 deg shift ADC clock drive. It is then necessary to
adjust phase B of the master chip. Special care should be taken with the quality
of the input signal (input settling time).
If CKREFO output signal at the master chip is needed, it is possible to use one
of the two phase A values in order to avoid set-up and hold problems in the
SYNCHRO function; e.g. PHASEA = 100000 and PHASEA = 111111.
When INV is LOW, CKADCO is equal to CKEXT inverted.
CKREF
CKAO
CKREFO
t
CKAO=tCLK(buffer)+tphase selector
t
= either t
CKREFO
CKAO
Fig 8. Timing diagram.
t
CKAO
t
CKREFO
[t
CLK(buffer)
T
CLK(pixel)
− if PHASEA ≥ 01000 or t
------------------------
2
= 10 ns and t
phase selector
t
phase selector
=].
-------------------------- -
2π
T
CLK(pixel)
+ if PHASEA < 01000.
------------------------
CKAO
2
T
×
FCE470
CLK(pixel)
9397 750 07338
Product specification Rev. 03 — 21 July 2000 15 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
CKREF
Triple high-speed Analog-to-Digital Converter 110 Msps
COAST CKEXT INV
12 to
100 MHz
MUX
phase selector A
PLL
2
I
C-bus;
5 bits (Pa)
phase selector B
2
C-bus; 5 bits (Pb)
I
Master TDA8752B
(even pixels)
2
I
C-bus;
1 bit (Cka)
(Cka = 1)
NCKBO
SYNCHRO
0 /180
I2C-bus;
1 bit (Ckab)
(Ckab = 1)
CLKADC
MUX
MUX
I2C-bus;
1 bit (Ckb)
(Ckb = 1)
TDA8752B
CKADCO
CKBO
CKAO
CKREFO
CKEXT INV
MUX
2
I
C-bus;
1 bit (Cka)
(Cka = 1)
NCKBO
SYNCHRO
0 /180
I2C-bus;
1 bit (Ckab)
(Ckab = 0)
CLKADC
MUX
MUX
I2C-bus;
1 bit (Ckb)
(Ckb = 0)
CKADCO
CKBO
CKAO
CKREFO
FCE466
CKREF
PLL
COAST
12 to
100 MHz
phase selector A
2
I
C-bus;
5 bits (Pa)
phase selector B
2
C-bus; 5 bits (Pb)
I
Slave TDA8752B
(odd pixels)
Slave at 180 deg phase shift with respect to pin CKADCO of the master TDA8752B.
Fig 9. Dual TDA8752B solution for pixel clock rate with a single phase adjustment (100 to 200 MHz).
8.7 I2C-bus and 3-wire serial bus interface
The I2C-bus and 3-wire serial buses control the status of the different control DACs
and registers. Control pin DIS enables or disables the full serial interface function
(disable at HIGH level). Four ICs can be used in the same system and programmed
by the same bus. Therefore, two pins (ADD1 and ADD2) are available to set each
address respectively, for use with the I2C-bus interface. All programming is described
in Section 9 “I2C-bus and 3-wire serial bus interfaces”.
9397 750 07338
© Philips Electronics N.V. 2000. All rights reserved.
Product specification Rev. 03 — 21 July 2000 16 of 38

Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
9. I2C-bus and 3-wire serial bus interfaces
9.1 Register definitions
The configuration of the different registers is shown in Table 4.
Table 4: I2C-bus and 3-wire serial bus registers
Function
name
SUBADDR −−−−−−−−X X X Mode Sa3 Sa2 Sa1 Sa0 XXX1 0000
OFFSETR XXXX0000Or7 Or6 Or5 Or4 Or3Or2Or1Or00111 1111
COARSER XXXX0001Or8 Cr6 Cr5 Cr4 Cr3Cr2Cr1Cr00010 0000
FINER XXXX0010X X X Fr4 Fr3 Fr2 Fr1 Fr0 XXX0 0000
OFFSETG XXXX0011Og7 Og6 Og5 Og4 Og3Og2Og1Og00111 1111
COARSEG XXXX0100Og8 Cg6 Cg5 Cg4 Cg3Cg2Cg1Cg00010 0000
FINEG XXXX0101X X X Fg4 Fg3Fg2Fg1Fg0XXX0 0000
OFFSETB XXXX0110Ob7 Ob6 Ob5 Ob4 Ob3Ob2Ob1Ob00111 1111
COARSEB XXXX0111Ob8 Cb6 Cb5 Cb4 Cb3Cb2Cb1Cb00010 0000
FINEB XXXX1000X X X Fb4 Fb3Fb2Fb1Fb0XXX0 0000
CONTROL XXXX1001VlevelHlevelEdge Up Do Ip2 Ip1 Ip0 0000 0100
VCO XXXX1010Z2 Z1 Z0 Vco1 Vco0 Di11 Di10 Di9 0110 0001
DIVIDER
(LSB)
PHASEA XXXX1100X Di0 Cka Pa4 Pa3Pa2Pa1Pa0X000 0000
PHASEB XXXX1101X Ckab Ckb Pb4 Pb3 Pb2 Pb1 Pb0 X000 0000
Subaddress Bit definition Default
A7 A6 A5 A4 A3 A2 A1 A0 MSB LSB
XXXX1011Di8 Di7 Di6 Di5 Di4 Di3 Di2Di11001 0000
value
All the registers are defined by a subaddress of 8 bits; bit A4 refers to the mode which
is used with the I2C-bus interface; bits Sa3 to Sa0 are the subaddresses of each
register.
Bit Mode, used only with the I2C-bus, enables two modes to be programmed:
Mode 0 if bit Mode = 0, each register is programmed independently by giving its
subaddress and its content
Mode 1 if bit Mode = 1, all the registers are programmed one after the other by
giving this initial condition (XXX1 1111) as the subaddress state; thus,
the registers are charged following the predefined sequence of 16 bytes
(from subaddress 0000 to 1101).
9.1.1 Offset register
This register controls the clamp levelforthe RGB channels. The relationship between
the programming code and the level of the clamp code is given in Table 5.
9397 750 07338
Product specification Rev. 03 — 21 July 2000 17 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
Table 5: Coding
Programmed code Clamp code ADC output
0 −63.5 underflow
1 −63
2 −62.5
... ...
127 0 0
... ... ...
254 63.5 63 or 64
255 64 64
256 120 120
... ... ...
287 136 136
The default programmed value is:
•
•
•
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Programmed code = 127
Clamp code = 0
ADC output = 0.
9.1.2 Coarse and fine registers
These two registers enable the gain control, the AGC gain with the coarse register
and the reference voltage with the fine register. The coarse register programming
equation is as follows:
GAIN
Where: V
N
COARSE
----------------------------------------------- -
V
1
⋅
ref
= 2.5 V.
ref
N
–
----------------- -
32 16×
1+
FINE
The gain correspondence is given in Table 6. The gain is linear with reference to the
programming code (N
Table 6: Gain correspondence (COARSE)
N
COARSE
32 0.825 1.212
99 2.5 0.4
FINE
The default programmed value is as follows:
N
•
COARSE
Gain = 0.825
•
Vi to be full-scale = 1.212 V.
•
=32
1
×
----- -
16
N
COARSE
--------------------------------------------------
V
512 N
ref
1+
–()⋅
FINE
32×==
= 0).
Gain Vi to be full-scale (V)
(5)
To modulate this gain, the fine register is programmed using the above equation. With
a full-scale ADC input, the fine register resolution is a1⁄2LSB peak-to-peak
(see Table 7 for N
9397 750 07338
Product specification Rev. 03 — 21 July 2000 18 of 38
COARSE
= 32).
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
Table 7: Gain correspondence (FINE)
N
FINE
0 0.825 1.212
31 0.878 1.139
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Gain Vi to be full-scale (V)
The default programmed value is: N
9.1.3 Control register
COAST and HSYNC signals can be inverted by setting the I2C-bus control bits
‘Vlevel’ and ‘Hlevel’ respectively. When ‘Vlevel’ and ‘Hlevel’ are set to zero
respectively, COAST and HSYNC are active HIGH.
The bit ‘Edge’ defines the rising or falling edge of CKREF to synchronize the PLL. It
will be on the rising edge if the bit is at logic 0 and on the falling edge if the bit is at
logic 1.
The bits ‘Up’ and ‘Do’ are used for the test, to force the charge pump current. These
bits have to be logic 0 during normal use.
The bits ‘Ip0’, ‘Ip1’ and ‘Ip2’ control the charge pump current, to increase the
bandwidth of the PLL, as shown in Table 8.
Table 8: Charge pump current control
Ip2 Ip1 Ip0 Current (µA)
0 0 0 6.25
0 0 1 12.5
01025
01150
100100
101200
110400
111700
FINE
=0.
The default programmed value is as follows:
Charge pump current = 100 µA
•
Test bits: no test mode; bits ‘Up’ and ‘Do’ at logic 0
•
Rising edge of CKREF: bit ‘Edge’ at logic 0
•
COAST and HSYNC inputs are active HIGH: bits ‘Vlevel’ and ‘Hlevel’ at logic 0.
•
9.1.4 VCO register
The bits ‘Z2’, ‘Z1’ and ‘Z0’ enable the internal resistance for the VCO filter to be
selected.
9397 750 07338
Product specification Rev. 03 — 21 July 2000 19 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
Table 9: VCO register bits
Z2 Z1 Z0 Resistance (kΩ)
0 0 0 high impedance
001128
01032
01116
1008
1014
1102
1111
Table 10: VCO gain control
Vco1 Vco0 VCO gain (MHz/V) Pixel clock
0 0 15 10to20
0 1 20 20to40
1 0 35 40to70
115070to110
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
frequency range
(MHz)
The bits Vco1 and Vco0 control the VCO gain.
The default programmed value is as follows:
Internal resistance = 16 kΩ
•
VCO gain = 15 MHz/V.
•
9397 750 07338
Product specification Rev. 03 — 21 July 2000 20 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
9.1.5 Divider register
This register controls the PLL frequency. The bits are the LSB bits.
The default programmed value is 0011 0010 0000 = 800.
The MSB bits (Di11, Di10 and Di9) and the LSB bit (Di0) have to be programmed
before bits ‘Di8’ to ‘Di1’ are programmed, to obtain the required divider ratio. Bit ‘Di0’
is used for the parity divider number (bit ‘Di0’ = 0 means even number, while
bit ‘Di0’ = 1 means odd number). It should be noted that if the I2C-bus programmingis
done in mode 1 (bit Mode = 1) and bit ‘Di0’ has to be toggled, then the registers have
to be loaded twice to have the update divider ratio.
9.1.6 Power-down mode
•
•
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
When the supply is completely switched off, the registers are set to their default
values; in that event they have to be reprogrammed if the required settings are
different (e.g. through an EEPROM)
When the device is in Power-down mode, the previously programmed register
values remain unaffected.
9.1.7 PHASEA and PHASEB registers
Bit ‘Cka’ is logic 0 when the used clock is the PLL clock, and logic 1 when the used
clock is the external clock.
Bit ‘Ckb’ is logic 0 when the second clock is not used.
Bits ‘Pa4’ to ‘Pa0’ and bits ‘Pb4’ to ‘Pb0’ are used to program the phase shift for the
clock, CKADCO,CKAO and CKBO (see Table 11). Concerning the PHASEB register,
bit ‘Ckab’ is used to have either CKAO or CKBO at pin CKAO (pin 81).
Table 11: Phase registers bits
Pa4 and Pb4 Pa3 and Pb3 Pa2 and Pb2 Pa1 and Pb1 Pa0 and Pb0 Phase shift (deg)
000000
0000111.25
... ... ... ... ... ...
11110337.5
11111348.75
The default programmed value is as follows:
No external clock: bit ‘Cka’ is logic 0
•
No use of the second clock: bit ‘Ckb’ is logic 0
•
Phase shift for CKAO and CKADCO is 0 deg
•
Phase shift for CKBO is 0 deg
•
Clock CKAO at pin CKAO: bit ‘Ckab’ is logic 0.
•
9397 750 07338
Product specification Rev. 03 — 21 July 2000 21 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
Triple high-speed Analog-to-Digital Converter 110 Msps
9.2 I2C-bus protocol
Table 12: I2C-bus address
A7 A6 A5 A4 A3 A2 A1 A0
1 0 0 1 1 ADD2 ADD1 0
The I2C-bus address of the circuit is 1001 1xx0.
Bits ‘A2’ and ‘A1’ are fixed by the potential on pins ADD1 and ADD2. Thus, four
TDA8752Bs can be used on the same system, using the addresses for
ADD1 and ADD2 with the I2C-bus. Bit ‘A0’ must always be equal to logic 0 because it
is not possible to read the data in the register. The timing and protocol for the I2C-bus
are standard. Two sequences are available, see Table 13 and 14.
Table 13: Address sequence for mode 0
Where: S = START condition, ACK = acknowledge and P = STOP condition.
S IC ADDRESS ACK SUBADDRESS
REGISTER1
ACK DATA
REGISTER1
(see Table 4)
ACK SUBADDRESS
REGISTER2
TDA8752B
ACK ... P
Table 14: Address sequence for mode 1
Where: S = START condition, ACK = acknowledge and P = STOP condition.
S IC ADDRESS ACK SUBADDRESS
XXX1 1111
ACK DATA
REGISTER1
(see Table 4)
ACK DATA
REGISTER2
ACK ... P
9397 750 07338
Product specification Rev. 03 — 21 July 2000 22 of 38
© Philips Electronics N.V. 2000. All rights reserved.

9397 750 07338
Product specification Rev. 03 — 21 July 2000 23 of 38
9.3 3-wire serial bus protocol
For the 3-wire serial bus the first byte refers to the register address which is programmed. The second byte refers to the
data to be sent to the chosen register (see Table 4). The acquisition is achieved via SEN.
Using the 3-wire serial bus interface, an indefinite number of ICs can operate on the same system. Pin SEN is used to
validate the circuits.
SEN
t
= 600 ns
r3W
1199
SCL
t
= 100 ns
s3W
t
h3W
Philips Semiconductors
100 ns
= 100 ns
SDA
Fig 10. 3-wire serial bus protocol.
© Philips Electronics N.V. 2000. All rights reserved.
XXXXA3A2A1A0XD7D6D5D4D3D2D1D0X
FCE474
Triple high-speed Analog-to-Digital Converter 110 Msps
TDA8752B

Philips Semiconductors
10. Limiting values
Table 15: Limiting values
In accordance with the Absolute Maximum Rating System (IEC 60134).
Symbol Parameter Conditions Min Max Unit
V
V
V
V
∆V
V
I
o
I
I(OE)
I
I(PWDWN)
T
T
T
CCA
CCD
DDD
CCO
CC
i(RGB)
stg
amb
j
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
analog supply voltage −0.3 +7.0 V
digital supply voltage −0.3 +7.0 V
logic supply voltage −0.3 +7.0 V
output stages supply voltage −0.3 +7.0 V
supply voltage differences
− V
V
CCA
CCD
− V
; V
V
V
V
CCO
CCA
CCA
− V
− V
CCD
DDD
CCO
; V
CCO
CCD
− V
− V
DDD
DDD
RGB input voltage range referenced
to AGND
output current − 10 mA
input current pin OE − 1.0 mA
input current pin PWDWN − 1.0 mA
storage temperature −55 +150 °C
ambient temperature 0 70 °C
junction temperature − 150 °C
−1.0 +1.0 V
−1.0 +1.0 V
−1.0 +1.0 V
−1.0 +1.0 V
−0.3 +7.0 V
11. Thermal characteristics
Table 16: Thermal characteristics
Symbol Parameter Conditions Value Unit
R
th(j-a)
thermal resistance from junction to
in free air 52 K/W
ambient
12. Characteristics
Table 17: Characteristics
V
CCA=V11
(V
86
OGND (V
values measured at V
Symbol Parameter Conditions Min Typ Max Unit
Supplies
V
CCA
V
CCD
V
DDD
V
CCO
I
CCA
9397 750 07338
Product specification Rev. 03 — 21 July 2000 24 of 38
(or V19,V27or V99) referenced to AGND (V13,V21,V29or V96) = 4.75 to 5.25 V; V
) = 4.75 to 5.25 V; V
48,V60,V70
or V82) = 4.75 to 5.25 V; AGND, DGND, OGND andV
CCA=VDDD=VCCD=VCCO
DDD=V40
referenced to V
(V41) = 4.75 to 5.25 V; V
SSD
= 5 V and T
=25°C; unless otherwise specified.
amb
SSD
analog supply voltage 4.75 5.0 5.25 V
digital supply voltage 4.75 5.0 5.25 V
logic supply voltage 4.75 5.0 5.25 V
output stages supply
voltage
analog supply current − 120 − mA
CCD=V95
CCO=V59
(or V69,V79or V85) referenced to
connected together; T
referenced to DGND
= 0 to 70°C; typical
amb
4.75 5.0 5.25 V
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Table 17: Characteristics
V
CCA=V11
(V
86
OGND (V
(or V19,V27or V99) referenced to AGND (V13,V21,V29or V96) = 4.75 to 5.25 V; V
) = 4.75 to 5.25 V; V
48,V60,V70
values measured at V
…continued
DDD=V40
referenced to V
(V41) = 4.75 to 5.25 V; V
SSD
or V82) = 4.75 to 5.25 V; AGND, DGND, OGND andV
CCA=VDDD=VCCD=VCCO
= 5 V and T
=25°C; unless otherwise specified.
amb
CCO=V59
connected together; T
SSD
(or V69,V79or V85) referenced to
CCD=V95
referenced to DGND
= 0 to 70°C; typical
amb
Symbol Parameter Conditions Min Typ Max Unit
I
DDD
logic supply current for
2
C-bus and 3-wire serial
I
− 1.0 − mA
bus
I
CCD
I
CCO
I
CCO(PLL)
I
CCA(PLL)
∆V
CC
P
tot
P
pd
digital supply current − 40 − mA
output stages supply current ramp input; f
= 110 MHz − 26 − mA
clk
output PLL supply current − 5 − mA
analog PLL supply current − 28 − mA
supply voltage differences
− V
V
V
V
V
V
V
CCA
CCO
CCO
CCA
CCD
CCA
− V
− V
− V
− V
− V
CCD
CCD
DDD
DDD
DDD
CCO
;
;
total power dissipation ramp input; f
power dissipation in
= 110 MHz − 1.1 − W
clk
−0.25 − +0.25 V
−0.25 − +0.25 V
−0.25 − +0.25 V
−0.25 − +0.25 V
− 87 − mW
Power-down mode
R, G and B amplifiers
B bandwidth −3 dB; T
t
set
settling time of the block
ADC plus AGC
full-scale (black-to-white)
transition; input signal settling
=25°C 250 −−MHz
amb
− 4.5 6 ns
time <1 ns (1 to 99%);
=25°C
T
amb
G
NCOARSE
coarse gain range V
= 2.5 V; minimum coarse
ref
−−1.67 − dB
gain register; code = 32
(see Figure 6)
maximum coarse gain
− 8 − dB
register; code = 99
(see Figure 6)
G
FINE
fine gain correction range fine register input code = 0
− 0 − dB
(see Figure 7)
fine register input code = 31
−−0.5 − dB
(see Figure 7)
∆G
/∆T amplifier gain stability as a
amp
function of temperature
I
t
GC
stab
gain current −±20 −µA
amplifier gain adjustment
speed
V
i(p-p)
input voltage range
(peak-to-peak value)
t
r(Vi)
t
f(Vi)
9397 750 07338
Product specification Rev. 03 — 21 July 2000 25 of 38
input voltage rise time fi= 110 MHz; square wave −− 2.5 ns
input voltage fall time fi= 110 MHz; square wave −− 2.5 ns
V
= 2.5 V with 100 ppm/°C
ref
maximum variation
HSYNC active; capacitors on
pins 8, 16 and 24 = 22 nF
corresponding to full-scale
output
−− 200 ppm/°C
− 25 − mdB/µs
0.4 − 1.2 V
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Table 17: Characteristics
V
CCA=V11
(V
86
OGND (V
(or V19,V27or V99) referenced to AGND (V13,V21,V29or V96) = 4.75 to 5.25 V; V
) = 4.75 to 5.25 V; V
48,V60,V70
values measured at V
…continued
DDD=V40
referenced to V
(V41) = 4.75 to 5.25 V; V
SSD
or V82) = 4.75 to 5.25 V; AGND, DGND, OGND andV
CCA=VDDD=VCCD=VCCO
= 5 V and T
=25°C; unless otherwise specified.
amb
CCO=V59
connected together; T
SSD
(or V69,V79or V85) referenced to
CCD=V95
referenced to DGND
= 0 to 70°C; typical
amb
Symbol Parameter Conditions Min Typ Max Unit
G
E(rms)
channel-to-channel gain
matching (RMS value)
maximum coarse gain;
=25°C
T
amb
minimum coarse gain;
=25°C
T
amb
− 1 − %
− 2 − %
Clamps
P
CLP
precision black level noise on RGB
−1 − +1 LSB
channels = 10 mV (max.)
amb
=25°C
−− 300 ns
t
COR1
clamp correction time to
within ±10 mV
(RMS value); T
±100 mV black level input
variation; clamp
capacitor = 4.7 nF
t
COR2
clamp correction time to
less than 1 LSB
±100 mV black level input
variation; clamp
−− 10 lines
capacitor = 4.7 nF
t
W(CLP)
CLP
E
clamp pulse width 500 − 2000 ns
channel-to-channel clamp
−1 − +1 LSB
matching
A
off
code clamp reference clamp register input code = 0 −−63.5 − LSB
clamp register input
− +64 − LSB
code = 255
clamp register input
− +120 − LSB
code = 367
clamp register input
− +136 − LSB
code = 398
Phase-locked loop
j
PLL(rms)
maximum PLL phase jitter
f
= 110 MHz; see Table 18 − 112 − ps
clk
(RMS value)
DR divider ratio 100 − 4095
f
ref
reference clock frequency
15 − 280 kHz
range
f
PLL
output clock frequency
12 − 110 MHz
range
t
COAST(max)
t
recap
t
cap
Φ
step
maximum coast mode time −− 40 lines
PLL recapture time when coast mode is aborted − 3 − lines
PLL capture time in start-up conditions −− 5ms
phase shift step T
=25°C − 11.25 − deg
amb
ADCs
f
s
maximum sampling
110 −−MHz
frequency
INL DC integral non-linearity from IC analog input to digital
−±0.5 ±1.5 LSB
output; ramp input;
f
= 110 MHz
clk
9397 750 07338
Product specification Rev. 03 — 21 July 2000 26 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Table 17: Characteristics
V
CCA=V11
(V
86
OGND (V
(or V19,V27or V99) referenced to AGND (V13,V21,V29or V96) = 4.75 to 5.25 V; V
) = 4.75 to 5.25 V; V
48,V60,V70
values measured at V
…continued
DDD=V40
referenced to V
(V41) = 4.75 to 5.25 V; V
SSD
or V82) = 4.75 to 5.25 V; AGND, DGND, OGND andV
CCA=VDDD=VCCD=VCCO
= 5 V and T
=25°C; unless otherwise specified.
amb
CCO=V59
connected together; T
SSD
(or V69,V79or V85) referenced to
CCD=V95
referenced to DGND
= 0 to 70°C; typical
amb
Symbol Parameter Conditions Min Typ Max Unit
DNL DC differential non linearity from IC analog input to digital
−±0.5 ±1.0 LSB
output; ramp input;
= 110 MHz
f
clk
ENOB effective number of bits from IC analog input to digital
[1]
− 7.4 − bits
output; 10 kHz sine wave
input; ramp input;
f
= 110 MHz
clk
Signal-to-noise ratio
S/N signal-to-noise ratio maximum gain; f
minimum gain; f
= 110 MHz − 45 − dB
clk
= 110 MHz − 44 − dB
clk
Spurious free dynamic range
SFDR spurious free dynamic
range
maximum gain; f
minimum gain; f
= 110 MHz − 60 − dB
clk
= 110 MHz − 60 − dB
clk
Clock timing output (CKADCO, CKBO and CKAO)
η
ext
f
clk
ADC clock duty cycle 100 MHz output 45 50 55 %
clock frequency −− 110 MHz
Clock timing input (CKEXT)
f
clk
t
CPH
t
CPL
t
d(CLKO)
∆t-t
d(CLKO)
clock frequency −− 110 MHz
clock pulse width HIGH 3.6 −−ns
clock pulse width LOW 4.5 −−ns
delay from CKEXT to
CKADCO
time difference between
samples
INV set to LOW 9.5 10.1 10.7 ns
1
⁄2t
INV set to HIGH − 10.1 +
when operated in the same
− 0.1 0.3 ns
− ns
clk
supply and temperature
conditions
Data timing (see Figure 11); f
t
t
t
d(s)
d(o)
h(o)
sampling delay time referenced to CKADCO −− − ns
output delay time −−2 −1.5 ns
output hold time 1.5 2.3 − ns
= 110 MHz; CL=10pF;
clk
[2]
3-state output delay time (see Figure 12)
t
t
t
t
dZH
dZL
dHZ
dLZ
output enable HIGH − 12 − ns
output enable LOW − 10 − ns
output disable HIGH − 50 − ns
output disable LOW − 65 − ns
PLL clock output
V
OL
V
OH
I
OL
I
OH
LOW-level output voltage Io=1mA − 0.3 0.4 V
HIGH-level output voltage Io= −1 mA 2.4 3.5 − V
LOW-level output current VOL= 0.4 V − 2 − mA
HIGH-level output current VOH= 2.7 V −−0.4 − mA
9397 750 07338
Product specification Rev. 03 — 21 July 2000 27 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Table 17: Characteristics
V
CCA=V11
(V
86
OGND (V
(or V19,V27or V99) referenced to AGND (V13,V21,V29or V96) = 4.75 to 5.25 V; V
) = 4.75 to 5.25 V; V
48,V60,V70
values measured at V
…continued
DDD=V40
referenced to V
(V41) = 4.75 to 5.25 V; V
SSD
or V82) = 4.75 to 5.25 V; AGND, DGND, OGND andV
CCA=VDDD=VCCD=VCCO
= 5 V and T
=25°C; unless otherwise specified.
amb
CCO=V59
connected together; T
SSD
(or V69,V79or V85) referenced to
CCD=V95
referenced to DGND
= 0 to 70°C; typical
amb
Symbol Parameter Conditions Min Typ Max Unit
ADC data outputs
V
OL
V
OH
I
OL
I
OH
LOW-level output voltage Io=1mA − 0 0.4 V
HIGH-level output voltage Io= −1 mA 2.4 V
CCD
− V
LOW-level output current VOL= 0.4 V − 2 − mA
HIGH-level output current VOH= 2.7 V −−0.4 − mA
TTL digital inputs (CKREF, COAST, CKEXT, INV, HSYNC and CLP)
V
IL
V
IH
I
IL
I
IH
Z
i
C
i
TTL digital inputs (PWDWN,
V
IL
V
IH
I
I(OE)
I
I(PWDWN)
LOW-level input voltage −− 0.8 V
HIGH-level input voltage 2.0 −−V
LOW-level input current VIL= 0.4 V 400 −−µA
HIGH-level input current VIH= 2.7 V −− 100 µA
input impedance − 4 − kΩ
input capacitance − 4.5 − pF
OE)
LOW-level input voltage −− 0.8 V
HIGH-level input voltage 2.0 −−V
input current pin OE with 10 kΩ resistor
input current pin PWDWN with 10 kΩ resistor
[3]
−− 1.0 mA
[3]
−− 1.0 mA
3-wire serial bus
t
rst
reset time of the chip before
− 600 − ns
3-wire serial bus
communication
t
su
t
h
2
C-bus
I
f
SCL
t
BUF
data set-up time − 100 − ns
data hold time − 100 − ns
[4]
clock frequency 0 − 100 kHz
time the bus must be free
4.7 −−µs
before new transmission
can start
t
HD;STA
t
SU;STA
t
CKL
t
CKH
t
SU;DAT
t
HD;DAT
t
r
t
f
t
SU;STOP
C
L(bus)
start condition hold time 4.0 −−µs
start condition set-up time repeated start 4.7 −−µs
LOW-level clock period 4.7 −−µs
HIGH-level clock period 4.0 −−µs
data set-up time 250 −−ns
data hold time 0 −−ns
SDA and SCL rise time f
SDA and SCL fall time f
= 100 kHz −− 1.0 µs
SCL
= 100 kHz −− 300 ns
SCL
stop condition set-up time 4.0 −−µs
bus line capacitive loading −− 400 pF
9397 750 07338
Product specification Rev. 03 — 21 July 2000 28 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
[1] Effective bits are obtained via a Fast Fourier Transform (FFT) treatment taking 8000 acquisition points per equivalent fundamental
period. The calculation takes into account all harmonics and noise up to half clock frequency (NYQUIST frequency).
Conversion-to-noise ratio: S/N = EB × 6.02 + 1.76 dB.
[2] Output data acquisition is available after the maximum delay time t
timings are given for a 10 pF capacitive load. A higher load can be used but the timing must then be rechecked.
[3] The input current must be limited in accordance with the limiting values.
[4] The I2C-bus timings are given for a frequency of 100kbit/s (100 kHz). This bus can be used at a frequency of 400 kbit/s (400 kHz).
, which is the time during which the data is available. All the
d(o)
CKADCO
DATA
R0 to R7, ROR
G0 to G7, GOR
B0 to B7, BOR
V
in
Fig 11. Data timing diagram.
handbook, full pagewidth
OE
output
data
output
data
V
CCD
t
dLZ
LOW
10%
n
I
n − 1
t
CPH
t
d(s)
sample N
HIGH
t
dZL
I
n
sample N + 1
t
dHZ
HIGH
50%
t
CPL
t
d(o)
I
n + 1
t
sample N + 2
90%
h(o)
LOW
TDA8752B
I
n + 2
50%
t
dZH
50 % = 1.4 V
2.4 V
1.4 V
0.4 V
FCE475
50%
3.3 kΩ
S1
V
CCD
10 pF
FCE476
fOE= 100 kHz; switch S1 connected to V
CCD
for t
dLZ
and t
OE
; switch S1 connected to GND for t
dZL
dHZ
and t
dZH
.
Fig 12. Timing diagram and test conditions of 3-state output delay time.
9397 750 07338
Product specification Rev. 03 — 21 July 2000 29 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Table 18: Examples of PLL settings and performance
V
CCA=VDDD=VCCD=VCCO
Video standards f
CGA: 640 × 200 15.75 14.3 912 15 39 0.15 100 8 593 3.56
VGA: 640 × 480 31.5 25.18 800 20 39 0.15 200 4 255 1.53
VGA: 640 × 482 48.07 38.4 800 20 39 0.15 400 4 173 1.04
VESA: 800 × 600
(SVGA 72 Hz)
VESA: 1024 × 768
(XGA 75 Hz)
SUN: 1152 × 900 66.67 100 1500 50 39 0.15 400 4 115 0.69
VESA: 1280 × 1024
(SXGA 60 Hz)
[1] PLL long-term time jitter is measured at the end of the video line, where it is at its maximum.
=5V; T
ref
(kHz)
amb
f
(MHz)
=25°C.
clk
N K
O
(MHz/V)
C
Z
(nF)
C
P
(nF)
I
P
(µA)Z(kΩ)
Long-term time jitter
RMS-value
(ps)
peak-to-peak
value (ns)
48.08 50 1040 35 39 0.15 200 4 200 1.2
60.02 78.75 1312 50 39 0.15 700 2 122 0.73
63.98 108 1688 50 39 0.15 400 4 112 0.67
[1]
9397 750 07338
Product specification Rev. 03 — 21 July 2000 30 of 38
© Philips Electronics N.V. 2000. All rights reserved.
Philips Semiconductors
13. Application information
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
2.5 V
RIN
GIN
BIN
10 nF
4.7 nF
100 nF
75 Ω or 50 Ω
10 nF
4.7 nF
100 nF
75 Ω or 50 Ω
10 nF
4.7 nF
100 nF
75 Ω or 50 Ω
10 nF
1.5 nF
22 nF
10 nF
22 nF
10 nF
22 nF
10 nF
DEC2
DEC1
RAGC
RBOT
RGAINC
RCLP
RDEC
V
CCA(R)
AGND
GAGC
GBOT
GGAINC
GCLP
GDEC
V
CCA(G)
AGND
BAGC
BBOT
BGAINC
BCLP
BDEC
V
CCA(B)
AGND
PWDWN
150 pF
39 nF
CP
CZ
V
CCA(PLL)
n.c.
100 99 98 97 96 95 94 93 92 91 90 89 88 87 86 85 84 83 82 81
n.c.
1
2
V
ref
3
4
n.c.
5
6
7
8
9
10
11
RIN
12
R
13
14
15
16
17
18
19
GIN
20
G
21
22
23
24
25
26
27
BIN
28
B
29
n.c.
30
31 40 4132 4233 4334 4435 4536 4637 4738 4839 49 50
AGND
V
CCD
PLL
CKREF
COAST
CKEXT
TDA8752B
HSYNC
INV
CLP
R1 R2
OE
V
CCO(PLL)
DGND
CKADCO
CKBO
OGND
CKAO
80
79
78
77
76
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
PLL
CKREFO
V
CCO(R)
R7
R6
R5
R4
R3
R2
R1
R0
OGND
V
CCO(G)
G7
G6
G5
G4
G3
G2
G1
G0
OGND
V
CCO(B)
B7
B6
B5
B4
B3
B2
B1
n.c.
R
G
n.c.
2
I
C/3W
ADD1
ADD2
TCK
TDO
DIS
SEN
SDA
V
DDD
V
DDD
V
SSD
4.7
kΩ
SCL
V
DDD
4.7
kΩ
BORRORn.c.
B0
n.c.GORn.c.
OGND
B
FCE477
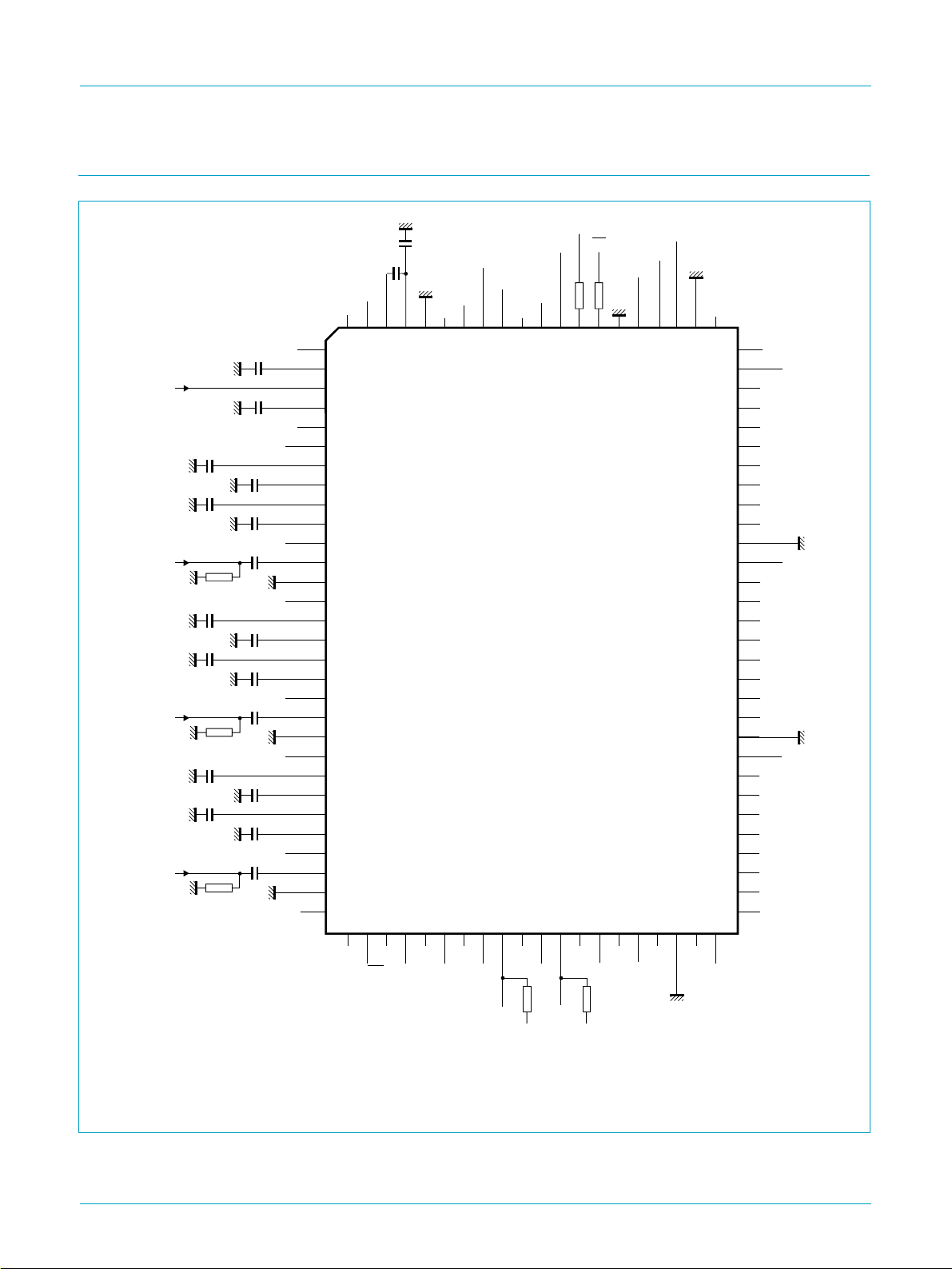
All supplypins haveto be decoupled,with two capacitors: one forthe high frequencies(approximately 1 nF) and one forthe low
frequencies (approximately 100 nF orhigher). If a capacitor of39 nF betweenpins CZ and CPis notavailable, use a higherone
as close as possible to this value. Resistors R1 and R2 must be connected: the recommended value is 10 kΩ.
Fig 13. Application diagram.
9397 750 07338
Product specification Rev. 03 — 21 July 2000 31 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
14. Package outline
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
QFP100: plastic quad flat package; 100 leads (lead length 1.95 mm); body 14 x 20 x 2.8 mm
c
y
X
E
e
w M
p
A
A
H
E
E
2
A
A
1
80 51
81
pin 1 index
100
1
50
Z
b
31
30
detail X
L
p
L
SOT317-2
(A )
3
θ
w M
b
0.25
0.40
0.25
p
D
H
D
(1) (1)(1)
D
0.25
20.1
0.14
19.9
e
DIMENSIONS (mm are the original dimensions)
UNIT A1A2A3bpcE
Note
1. Plastic or metal protrusions of 0.25 mm maximum per side are not included.
A
max.
0.25
mm
3.20
OUTLINE
VERSION
SOT317-2 MO-112
0.05
2.90
2.65
IEC JEDEC EIAJ
Z
D
B
0 5 10 mm
scale
(1)
eHELL
H
D
14.1
0.65
13.9
REFERENCES
24.2
23.6
18.2
17.6
v M
v M
A
B
Zywv θ
Z
E
D
o
1.0
0.8
0.4
7
o
0.6
0
ISSUE DATE
97-08-01
99-12-27
1.0
0.6
p
0.15 0.10.21.95
EUROPEAN
PROJECTION
Fig 14. SOT317-2 package outline.
9397 750 07338
Product specification Rev. 03 — 21 July 2000 32 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
15. Handling information
Inputs and outputs are protected against electrostatic discharge in normal handling.
However, to be completely safe, it is desirable to take normal precautions appropriate
to handling integrated circuits.
16. Soldering
16.1 Introduction to soldering surface mount packages
This text gives a very brief insight to a complex technology. A more in-depth account
of soldering ICs can be found in our
Packages
There is no soldering method that is ideal for all surface mount IC packages. Wave
soldering can still be used for certain surface mount ICs, but it is not suitable for fine
pitch SMDs. In these situations reflow soldering is recommended.
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Data Handbook IC26; Integrated Circuit
(document order number 9398 652 90011).
16.2 Reflow soldering
Reflow soldering requires solder paste (a suspension of fine solder particles, flux and
binding agent) to be applied to the printed-circuit board by screen printing, stencilling
or pressure-syringe dispensing before package placement.
Several methods exist for reflowing; for example, convection or convection/infrared
heating in a conveyor type oven. Throughput times (preheating, soldering and
cooling) vary between 100 and 200 seconds depending on heating method.
Typical reflow peak temperatures range from 215 to 250 °C. The top-surface
temperature of the packages should preferable be kept below 220 °C for thick/large
packages, and below 235 °C small/thin packages.
16.3 Wave soldering
Conventional single wave soldering is not recommended for surface mount devices
(SMDs) or printed-circuit boards with a high component density, as solder bridging
and non-wetting can present major problems.
To overcome these problems the double-wave soldering method was specifically
developed.
If wave soldering is used the following conditions must be observed for optimal
results:
Use a double-wave soldering method comprising a turbulent wave with high
•
upward pressure followed by a smooth laminar wave.
For packages with leads on two sides and a pitch (e):
•
– larger than or equal to 1.27 mm, the footprint longitudinal axis is preferred to be
parallel to the transport direction of the printed-circuit board;
– smaller than 1.27 mm, the footprint longitudinal axis must be parallel to the
transport direction of the printed-circuit board.
9397 750 07338
Product specification Rev. 03 — 21 July 2000 33 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
•
During placement and before soldering, the package must be fixed with a droplet of
adhesive. The adhesive can be applied by screen printing, pin transfer or syringe
dispensing. The package can be soldered after the adhesive is cured.
Typical dwell time is 4 seconds at 250 °C. A mildly-activated flux will eliminate the
need for removal of corrosive residues in most applications.
16.4 Manual soldering
Fix the component by first soldering two diagonally-opposite end leads. Use a low
voltage (24 V or less) soldering iron applied to the flat part of the lead. Contact time
must be limited to 10 seconds at up to 300 °C.
When using a dedicated tool, all other leads can be soldered in one operation within
2 to 5 seconds between 270 and 320 °C.
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
The footprint must incorporate solder thieves at the downstream end.
For packages with leads on four sides, the footprint must be placed at a 45° angle
to the transport direction of the printed-circuit board. The footprint must
incorporate solder thieves downstream and at the side corners.
16.5 Package related soldering information
Table 19: Suitability of surface mount IC packages for wave and reflow soldering
methods
Package Soldering method
Wave Reflow
BGA, LFBGA, SQFP, TFBGA not suitable suitable
HBCC, HLQFP, HSQFP, HSOP, HTQFP,
HTSSOP, SMS
[3]
PLCC
LQFP, QFP, TQFP not recommended
SSOP, TSSOP, VSO not recommended
[1] All surface mount (SMD)packages are moisture sensitive. Depending upon the moisture content, the
[2] These packages arenot suitable for wavesoldering as a solder joint between the printed-circuit board
[3] If wave soldering is considered, then the package must be placed at a 45° angle to the solder wave
[4] Wave soldering is only suitable for LQFP, QFP and TQFP packages with a pitch (e) equal to or larger
[5] Wave soldering is onlysuitable forSSOP andTSSOP packages with a pitch(e) equal to or largerthan
, SO, SOJ suitable suitable
maximum temperature(with respect totime) and bodysize of thepackage, there is a risk that internal
or external package cracks may occur due to vaporization of the moisture in them (the so called
popcorn effect). For details, refer to the Drypack information in the
Circuit Packages; Section: Packing Methods
and heatsink (atbottom version) can not be achieved, and as solder may stickto the heatsink (on top
version).
direction. The package footprint must incorporate solder thieves downstream and at the side corners.
than 0.8 mm; it is definitelynot suitable for packages with a pitch (e)equal to orsmaller than 0.65 mm.
0.65 mm; it is definitely not suitable for packages with a pitch (e) equal to or smaller than 0.5 mm.
not suitable
.
[2]
[3][4]
[5]
Data Handbook IC26; Integrated
suitable
suitable
suitable
[1]
9397 750 07338
Product specification Rev. 03 — 21 July 2000 34 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
17. Revision history
Table 20: Revision history
Rev Date CPCN Description
3 20000721 Product specification
2 20000110 Preliminary specification
1 19991111 Objective specification
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
9397 750 07338
Product specification Rev. 03 — 21 July 2000 35 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
18. Data sheet status
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Datasheet status Product status Definition
Objective specification Development This data sheet contains the design target or goal specifications for product development. Specification may
change in any manner without notice.
Preliminary specification Qualification This data sheet contains preliminary data, and supplementary data will be published at a later date. Philips
Semiconductors reserves the right to make changes at any time without notice in order to improve design and
supply the best possible product.
Product specification Production This data sheet contains final specifications. Philips Semiconductors reserves the right to make changes at any
time without notice in order to improve design and supply the best possible product.
[1] Please consult the most recently issued data sheet before initiating or completing a design.
19. Definitions
Short-form specification — The data in a short-form specification is
extracted from a full data sheet with the same type number and title. For
detailed information see the relevant data sheet or data handbook.
Limiting values definition — Limiting values given are in accordance with
the Absolute Maximum Rating System (IEC 60134). Stress above one or
more of the limiting values may cause permanent damage to the device.
These are stress ratings only and operation of the device at these or at any
other conditions above those given in the Characteristics sections of the
specification is not implied. Exposure to limiting values for extended periods
may affect device reliability.
Application information — Applications that are described herein for any
of these products are for illustrative purposes only. Philips Semiconductors
make no representation or warranty that such applications will be suitable for
the specified use without further testing or modification.
20. Disclaimers
Life support — These products are not designed for use in life support
appliances, devices, or systems where malfunction of these products can
reasonably be expected to result in personal injury. Philips Semiconductors
[1]
customers using or selling these products for use in such applications do so
at their own risk and agree to fully indemnify Philips Semiconductors for any
damages resulting from such application.
Right to make changes — Philips Semiconductors reserves the right to
make changes, without notice, in the products, including circuits, standard
cells, and/or software, described or contained herein in order to improve
design and/or performance. Philips Semiconductors assumes no
responsibility or liability for the use of any of these products, conveys no
licence or title under any patent, copyright, or mask work right to these
products, and makes no representations or warranties that these products
are free from patent, copyright, or mask work right infringement, unless
otherwise specified.
21. Licenses
Purchase of Philips I2C components
2
Purchase of Philips I
under the Philips’ I
2
I
C system provided the system conforms to the I2C
specification defined by Philips. This specification can be
ordered using the code 9398 393 40011.
C components conveys a license
2
C patent to use the components in the
9397 750 07338
© Philips Electronics N.V. 2000 All rights reserved.
Product specification Rev. 03 — 21 July 2000 36 of 38

Philips Semiconductors
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
Philips Semiconductors - a worldwide company
Argentina: see South America
Australia: Tel. +61 2 9704 8141, Fax. +61 2 9704 8139
Austria: Tel. +43 160 101, Fax. +43 160 101 1210
Belarus: Tel. +375 17 220 0733, Fax. +375 17 220 0773
Belgium: see The Netherlands
Brazil: see South America
Bulgaria: Tel. +359 268 9211, Fax. +359 268 9102
Canada: Tel. +1 800 234 7381
China/Hong Kong: Tel. +852 2 319 7888, Fax. +852 2 319 7700
Colombia: see South America
Czech Republic: see Austria
Denmark: Tel. +45 3 288 2636, Fax. +45 3 157 0044
Finland: Tel. +358 961 5800, Fax. +358 96 158 0920
France: Tel. +33 14 099 6161, Fax. +33 14 099 6427
Germany: Tel. +49 40 23 5360, Fax. +49 402 353 6300
Hungary: see Austria
India: Tel. +91 22 493 8541, Fax. +91 22 493 8722
Indonesia: see Singapore
Ireland: Tel. +353 17 64 0000, Fax. +353 17 64 0200
Israel: Tel. +972 36 45 0444, Fax. +972 36 49 1007
Italy: Tel. +39 039 203 6838, Fax +39 039 203 6800
Japan: Tel. +81 33 740 5130, Fax. +81 3 3740 5057
Korea: Tel. +82 27 09 1412, Fax. +82 27 09 1415
Malaysia: Tel. +60 37 50 5214, Fax. +60 37 57 4880
Mexico: Tel. +9-5 800 234 7381
Middle East: see Italy
Netherlands: Tel. +31 40 278 2785, Fax. +31 40 278 8399
New Zealand: Tel. +64 98 49 4160, Fax. +64 98 49 7811
Norway: Tel. +47 22 74 8000, Fax. +47 22 74 8341
Philippines: Tel. +63 28 16 6380, Fax. +63 28 17 3474
Poland: Tel. +48 22 5710 000, Fax. +48 22 5710 001
Portugal: see Spain
Romania: see Italy
Russia: Tel. +7 095 755 6918, Fax. +7 095 755 6919
Singapore: Tel. +65 350 2538, Fax. +65 251 6500
Slovakia: see Austria
Slovenia: see Italy
South Africa: Tel. +27 11 471 5401, Fax. +27 11 471 5398
South America: Tel. +55 11 821 2333, Fax. +55 11 829 1849
Spain: Tel. +34 33 01 6312, Fax. +34 33 01 4107
Sweden: Tel. +46 86 32 2000, Fax. +46 86 32 2745
Switzerland: Tel. +41 14 88 2686, Fax. +41 14 81 7730
Taiwan: Tel. +886 22 134 2451, Fax. +886 22 134 2874
Thailand: Tel. +66 23 61 7910, Fax. +66 23 98 3447
Turkey: Tel. +90 216 522 1500, Fax. +90 216 522 1813
Ukraine: Tel. +380 44 264 2776, Fax. +380 44 268 0461
United Kingdom: Tel. +44 208 730 5000, Fax. +44 208 754 8421
United States: Tel. +1 800 234 7381
Uruguay: see South America
Vietnam: see Singapore
Yugoslavia: Tel. +381 11 3341 299, Fax. +381 11 3342 553
For all other countries apply to: Philips Semiconductors,
Marketing Communications,
Building BE, P.O. Box 218, 5600 MD EINDHOVEN,
The Netherlands, Fax. +31 40 272 4825
Internet: http://www.semiconductors.philips.com
(SCA70)
9397 750 07338
Product specification Rev. 03 — 21 July 2000 37 of 38
© Philips Electronics N.V. 2000. All rights reserved.

Philips Semiconductors
Contents
1 General description. . . . . . . . . . . . . . . . . . . . . . 1
2 Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
3 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
4 Quick reference data . . . . . . . . . . . . . . . . . . . . . 2
5 Ordering information. . . . . . . . . . . . . . . . . . . . . 3
6 Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . 4
7 Pinning information. . . . . . . . . . . . . . . . . . . . . . 7
7.1 Pinning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
7.2 Pin description . . . . . . . . . . . . . . . . . . . . . . . . . 8
8 Functional description . . . . . . . . . . . . . . . . . . 11
8.1 IC analog video inputs . . . . . . . . . . . . . . . . . . 11
8.2 Clamps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
8.3 Variable gain amplifiers . . . . . . . . . . . . . . . . . 11
8.4 ADCs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
8.5 ADC outputs . . . . . . . . . . . . . . . . . . . . . . . . . . 13
8.6 Phase-locked loop . . . . . . . . . . . . . . . . . . . . . 13
8.7 I
9I
9.1 Register definitions . . . . . . . . . . . . . . . . . . . . . 17
9.1.1 Offset register . . . . . . . . . . . . . . . . . . . . . . . . . 17
9.1.2 Coarse and fine registers . . . . . . . . . . . . . . . . 18
9.1.3 Control register . . . . . . . . . . . . . . . . . . . . . . . . 19
9.1.4 VCO register. . . . . . . . . . . . . . . . . . . . . . . . . . 19
9.1.5 Divider register . . . . . . . . . . . . . . . . . . . . . . . . 21
9.1.6 Power-down mode . . . . . . . . . . . . . . . . . . . . . 21
9.1.7 PHASEA and PHASEB registers . . . . . . . . . . 21
9.2 I
9.3 3-wire serial bus protocol . . . . . . . . . . . . . . . . 23
10 Limiting values. . . . . . . . . . . . . . . . . . . . . . . . . 24
11 Thermal characteristics. . . . . . . . . . . . . . . . . . 24
12 Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . 24
13 Application information. . . . . . . . . . . . . . . . . . 31
14 Package outline . . . . . . . . . . . . . . . . . . . . . . . . 32
15 Handling information. . . . . . . . . . . . . . . . . . . . 33
16 Soldering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
16.1 Introduction to soldering surface mount
16.2 Reflow soldering . . . . . . . . . . . . . . . . . . . . . . . 33
16.3 Wave soldering. . . . . . . . . . . . . . . . . . . . . . . . 33
16.4 Manual soldering . . . . . . . . . . . . . . . . . . . . . . 34
16.5 Package related soldering information . . . . . . 34
17 Revision history. . . . . . . . . . . . . . . . . . . . . . . . 35
18 Data sheet status. . . . . . . . . . . . . . . . . . . . . . . 36
19 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
20 Disclaimers. . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
21 Licenses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2
C-bus and 3-wire serial bus interface. . . . . . 16
2
C-bus and 3-wire serial bus interfaces . . . . 17
2
C-bus protocol . . . . . . . . . . . . . . . . . . . . . . . 22
packages . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
TDA8752B
Triple high-speed Analog-to-Digital Converter 110 Msps
© Philips Electronics N.V. 2000. Printed in The Netherlands
All rights are reserved. Reproduction in whole or in part is prohibited without the prior
written consent of the copyright owner.
The information presented in this document does not form part of any quotation or
contract, is believed to be accurate and reliable and may be changed without notice. No
liability will be accepted by the publisher for any consequence of its use. Publication
thereof does not convey nor imply any license under patent- or other industrial or
intellectual property rights.
Date of release: 21 July 2000 Document order number: 9397 750 07338
 Loading...
Loading...