

PRELIMINARY
DP83953 (RIC2A)
Repeater Interface Controller with Security Features,
Internal Drivers and Integrated Filters
DP83953 (RIC2A) Repeater Interface Controller with Security Features, Internal Drivers and Integrated Filters
March 1998
General Description
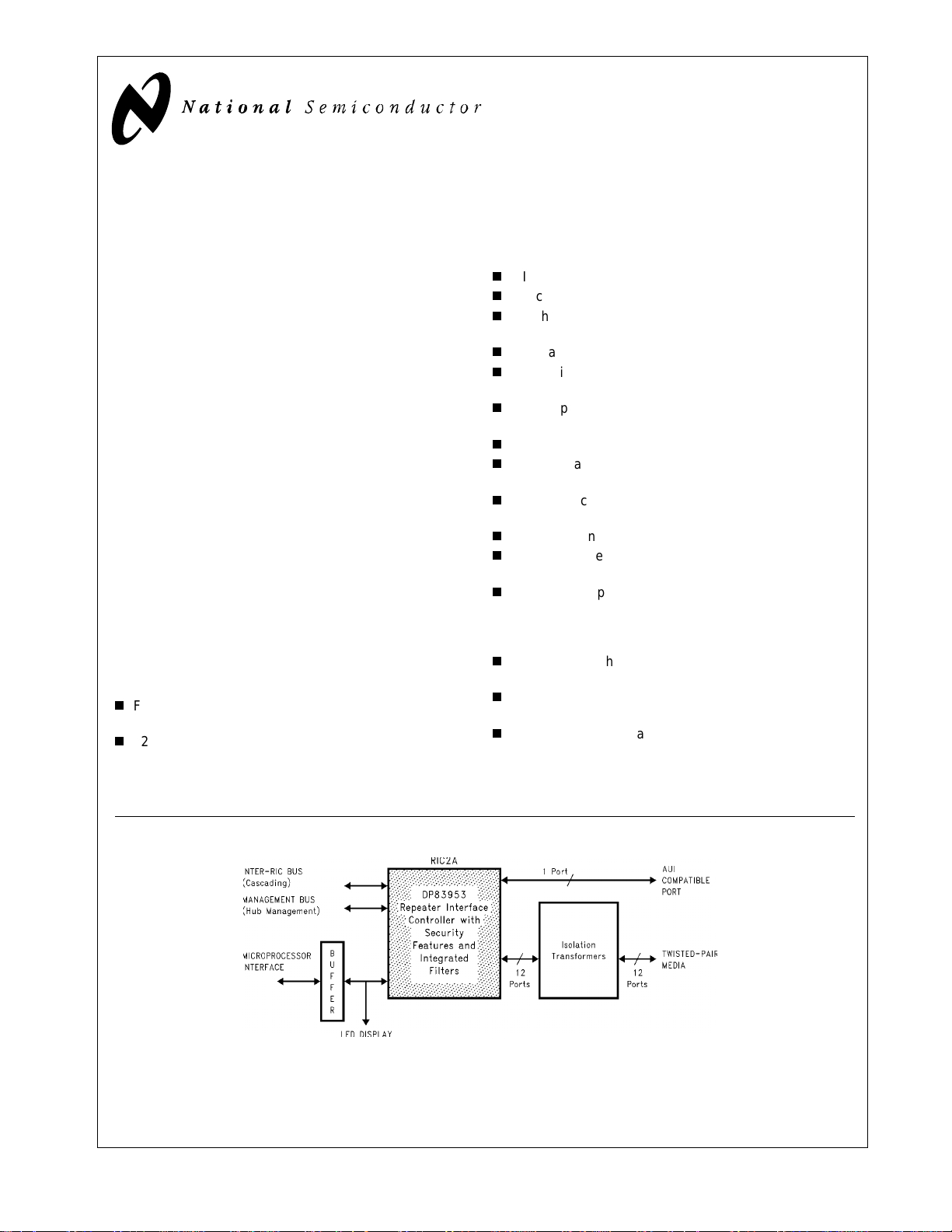
The DP83953 Repeater Interface Controller with Security
Features and Integrated Transmit Filters (RIC2A) is an enhanced v ersi on of t he DP83952 Repeat er Inter f ace Control ler with Security Features (RIC II). The RIC2A integrates
driver and f il ter circuitry into the RIC II design.
The functionality of the RIC2A is essentially similar to the
RIC II, but the pin definitions have been modified to reflect
the added integrated drivers and filters. Additionally, the
power and ground pin locations have been rearranged.
Therefore, the RIC2A is not a drop in replacement for the
RIC ll.
The RIC2A is National Semiconductor’s managed repeater
solution designed to comply with IEEE 802.3 Repeater
Specifica tions. Segment partiti on and jabber loc kup protection state machines are implemented in accordance with
this standard. The RIC2A has thirteen network interface
ports available, including an AUI compatible port. The AUI
port incorporates driv ers to connect an ext ernal MAU using
maximum length cable. Similarly, the other twelve interface
ports integrat e 10BASE- T t ransc eiv ers with supporting dri ver and transmit filter circuitry. (continued)
Features
Fully compliant with the IEEE 802.3 Repeater Specification
12 IEEE 802.3 10BASE-T compatible ports with built-in
drivers and analog transmit filters; additional external
isolation transformers are required to implement hubs
1 IEEE 802.3 compatible AUI port
Cascadable for la rger hub applications
On chip Elasticity Buffer, Manchester encoder and decoder
Separate Partition state machines for each port
Compatible with 802.3k Hub Management requirements
LED displays to provide port status information, including receive, collision, partition, jabber and link status,
Power-up configuration options
Repeater and Partition Specifications, Status Display,
Processor Operati ons
Simple processor interface for repeater management
and port disable.
On-chip Event Counte rs and Event Flag Arrays
Serial Management Bus Interface to combine packet
and repeater status information
Single 5V supply
The Security Features
Prevents unauthorized eavesdropping and/or intrusion
on a per port basis
58 On Chip CAMs (Content Addressable Memory) allow storage of acceptable addresses
Learn mode automatically records addresses of attached node
System Diagram
FAST® and TRI-STATE® are registered trademarks of National Semiconductor Corporation.
™
is a trademark of National Semiconductor Corporation
100RIC
™
SONIC
is a trademark of National Semiconductor Corporation
Ethernet is a trademark of Xerox Corporation
is a registered trademark of Lattice Semiconductor
GAL
®
PAL
is a registered trademark of and license from Advanced Micro Devices, Inc.
®
© 1998 National Semiconduct or Corporation
www.national.com
General Description
(continued)
The RIC2A repeater consists of two major functional
blocks: The segment specific block and the shared functional b locks. The segment specific b lock incorporates relevant IEEE specifications on a per port basis. The shared
functional bl ocks incorporate core logic for the entire IEEE
repeater unit. The core logic blocks consist of a repeater
receive multiple xor, a phase locked loop (PLL), a Manches ter decoder, an elasticity buffer, a transmit encoder and a
demultip lexor.
A larger repeater system may be constructed by cascading
several RIC2A devices via the Inter-RIC bus. This method
Table of Contents
1.0 Connection Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.0 Pin Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.0 Block Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.0 Functional Description . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.1 Summary of DP83953 RIC2A Feature
Enhancements from DP83952 RIC II . . . . . . . . . 12
4.2 Overview Of RIC2A Functions . . . . . . . . . . . . . . . 12
4.3 Description Of Repeater Operations . . . . . . . . . . 14
4.4 Examples Of Packet Repetition
Scenarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.5 Description Of Hardware Connection For Inter-ric
Bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.6 Processor and Display Interface . . . . . . . . . . . . . 28
4.7 Description Of Hardware Connection For Processor
And Display Interface . . . . . . . . . . . . . . . . . . . . . . 30
of cascading allows the RIC2A system to function as a single repeater unit without introducing additional repeater
hops.
The RIC2A is configurable for specific applications. It provides port status information for LED array displays and a
simple interface for system processors. The RIC2A possesses multifunctional counters and status flag arrays to
facilitate network statistics gathering, as well as a serial
Hub Management Interf ace Bus for collect ing, e v ent dat a in
managed hub applications.
5.0 HUB Management Support . . . . . . . . . . . . . . . . . . . . . 35
5.1 Event Counting Function . . . . . . . . . . . . . . . . . . 35
5.2 Event Record Function . . . . . . . . . . . . . . . . . . . . 36
5.3 Management Interface Operation . . . . . . . . . . . . 37
5.4 Description of Hardware Connection for
Management Interface . . . . . . . . . . . . . . . . . . . . 43
6.0 Port Block Functions . . . . . . . . . . . . . . . . . . . . . . . . . 44
6.1 Transceiver Functions . . . . . . . . . . . . . . . . . . . . 44
6.2 Segment Partition . . . . . . . . . . . . . . . . . . . . . . . . 47
6.3 Port Status Register Functions . . . . . . . . . . . . . . 47
6.4 Local Ports and Expected Activity . . . . . . . . . . . 49
7.0 RIC2A Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.0 Board Layout Recommendations . . . . . . . . . . . . . . . 75
9.0 DC and AC Specification . . . . . . . . . . . . . . . . . . . . . . 77
10.0 Physical Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . 90
2 www.national.com
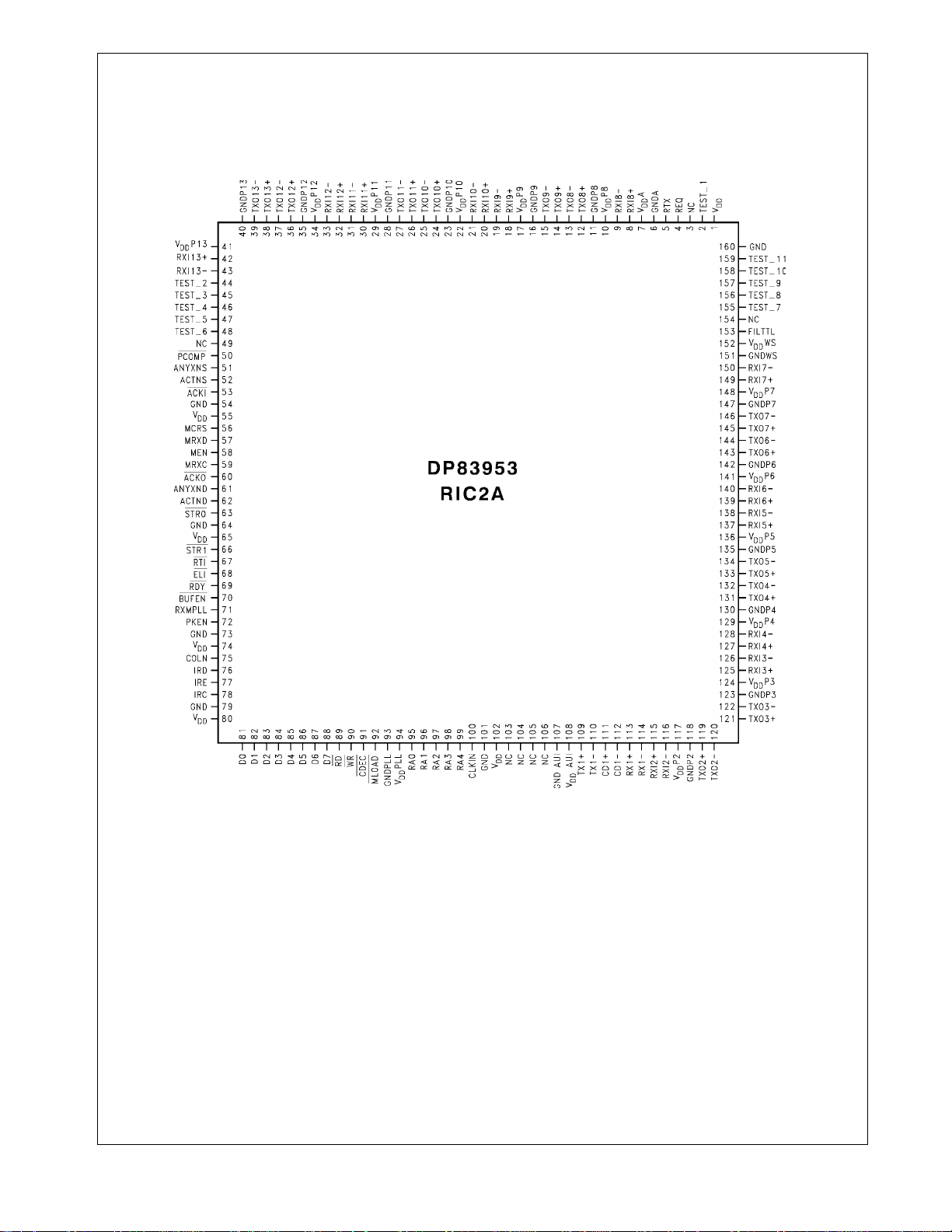
1.0 Connection Diagram
Order Number DP83953VUL
NS Package Number VUL160A
3 www.national.com
1.0 Connection Diagram
(Continued)
12 T.P. Ports + 1 AUI
PIN NAME PIN NO. PIN NAME PIN NO. PIN NAME PIN NO. PIN NAME PIN NO.
GNDP13 40 V
DD
TXO13- 39 GND 79 TXO2+ 119 TEST_11 159
TXO13+ 38 IRC 78 GNDP2 118 TES T_10 158
TXO12- 37 IRE 77 V
TXO12+ 36 IRD 76 RXI2- 116 TEST_8 156
GNDP12 35 COLN 75 RXI2+ 115 TEST_7 155
P12 34 V
V
DD
DD
RXI12- 33 GND 73 RX1+ 113 FIL TTL 153
RXI12+ 32 PKEN 72 CD1- 112 V
RXI11- 31 RXMPLL 71 CD1+ 111 GNDWS 151
RXI11+ 30
V
P11 29
DD
GNDP11 28
TXO11- 27
TXO11+ 26
TXO10- 25 V
BUFEN
RDY
ELI
RTI
STR0
DD
TXO10+ 24 GND 64 NC 104 TXO6- 144
GNDP10 23
P10 22 ACTND 62 V
V
DD
STR0
RXI10- 21 ANYXND 61 GND 101 V
RXI10+ 20
ACKO
RXI9- 19 MRXC 59 RA4 99 RXI6+ 139
RXI9+ 18 MEN 58 RA3 98 RXI5- 138
P9 17 MRXD 57 RA2 97 RXI5+ 137
V
DD
GNDP9 16 MCRS 56 RA1 96 V
TXO9- 15 V
DD
TXO9+ 14 GND 54 V
TXO8- 13
ACKI
TXO8+ 12 ACTNS 52
GNDP8 11 ANYXNS 51
P8 10
V
DD
PCOMP
RXI8- 9 NC 49
RXI8+ 8 TEST_6 48 D7 88 RXI4- 128
V
A 7 TEST_5 47 D6 87 RXI4+ 127
DD
GNDA 6 TEST_4 46 D5 86 RXI3- 126
RTX 5 TEST_3 45 D4 85 RXI3+ 125
REQ 4 TEST_2 44 D3 84 V
NC 3 RXI13- 43 D2 83 GNDP3 123
TEST_1 2 RXI13+ 42 D1 82 TXO3- 122
V
DD
Note 1: NC = No Connect
Note 2: Port
Note 3: The path to each port
V
1V
and GND are denoted as
DD
V
and GND must have a very low impedance.
DD
P13 41 D0 81 TXO3+ 121
DD
V
Px and GNDPx, where x=2-13 for all twisted pair ports.
DD
80 TXO2- 120 GND 160
P2 117 TEST_9 157
DD
74 RX1- 114 NC 154
WS 152
DD
70 TX1- 110 RXI7- 150
69 TX1+ 109 RXI7+ 149
68 VDD AUI 108 VDDP7 148
67 GND AUI 107 GNDP7 147
66 NC 106 TXO7- 146
65 NC 105 TXO7+ 145
63 NC 103 TXO6+ 143
DD
102 GNDP6 142
P6 141
DD
60 CLKIN 100 RXI6- 140
P5 136
DD
55 RA0 95 GNDP5 135
PLL 94 TXO5- 134
DD
53 GNDPLL 93 TXO5+ 133
92 TXO4- 132
91 TXO4+ 131
90 GNDP4 130
89 VDDP4 129
P3 124
DD
50
MLOAD
CDEC
WR
RD
4 www.national.com
2.0 Pin Descriptions
Pin Name Pin No.
Driver
Type
I/O Description
Network Interface Pins
RXI2- to RXI13- TP I Twisted Pair Receive Input Negative
RXI2+ to RXI13+ TP I Twisted Pair Receive Input Posi tive
TXO2- to TXO13- TP O Twisted Pair Transmit Output Negative
TXO2+ to TXO13+ TP O Twisted Pair Transmit Output Positive
FIL
TTL
ter/
FILTTL 153 TT I
: This pin can be utilized for the PCB diagnostic pur-
poses.
0:
Normal repeater operation
1:
Differential transmit signals change to TTL l evel +TX and de-
layed +TX.
REQ 4 Analog I Equalization Resistor: A re sisto r connect ed bet ween this pin and
GND or
V
adjusts the equalization step amplitude on the
DD
Manchester encoded t ransmit data. Care m ust be taken to ensure
system timing integrity when using cable lengt hs greater than
100m. The value here is depende nt upon board layout.
RTX 5 Analog I Extended Cable Resist or: A resistor connected between this pin
and GND or
V
adjusts th e am plitude of the differential transmit
DD
outputs. Care must be taken to ensure system timing integrity
when using cable lengt hs greater than 100m. The value here is
dependent upon boar d layout.
AUI Port
CD1+ 111 AL I AUI Collision Detect Input Positive
CD1- 112 AL I AUI Collision Detect Input Negative
RX1+ 113 AL I AUI Receive Input Positive
RX1- 114 AL I AUI Receive Input Negative
TX1+ 109 AD O AUI Transmit Output Positive
TX1- 110 AD O AUI Transmit Output Negati ve
TP
= Twisted Pair interface compatibl e, TT = TTL compatible, I = Input, O = Output, Analog = current dependent eff ect,
AL
= AUI Level, AD = AUI Drive
5 www.national.com
2.0 Pin Descriptions
(Continued)
Pin Name Pin No.
Driver
Type
I/O Description
Processor Bus Pins
R
RA0 - RA4 TT I
EGISTER ADDRESS INPUTS: These five pins are used to
select a register to be read or wri tten. The st ate of these i nputs
is ignored when the read, write and Mode Load input strobes
are high. (Even under these conditions these inputs must n ot be
allowed to float at an undefined logic state). See text and table
for proper Mode Load Operat ion strapping.
STR0 63 C O DISPLAY UPDATE
Maximum Display Mode:
display data for network ports 1 to 7 into the off chip display
latches.
Minimum Display Mode:
display data for the RIC2 A into the off chip display latch.
During processor access cycles (read or write is asserted) thi s
signal is inactive (high).
STR1 66 C O DISPLAY UPDATE
Maximum Display Mode:
display data for network ports 8 to 13 into the off chip display
latches.
Minimum Display Mode:
During processor access cycles (read or write is asserted) thi s
signal is inactive (high).
STR
OBE 0
This signal controls the latching of
This signal control s the latching of
STR
OBE 1
This signal controls the latching of
No operation
D
D0 - D7 TT B, Z
ata Bus
Display Update Cycles:
These pins becom e outputs providing
display data and por t addr ess information.
Processor Access Cycles:
Data input or output is performed
via these pins. The r ead, write an d mode load input s control t he
direction o f the signal s.See text and tabl e for prope r Mode Loa d
Operation strap ping.
Note: The data pins remain in their display update function, i.e., asserted as outputs unless either the read or write strobe is asserted.
BUFEN 70 C O
BUF
FER ENABLE: This output contr ols th e TRI-STATE
®
operation of the bus transcei ver which provides the int erface between the RIC2A's data pins and the processor's data bus.
Note: The buffer enable output indicates the function of the data pins. When it is
high they are performing display update cycles, when it is low a processor access
or mode load cycle is occurring.
RDY 69 C O DATA READY STROBE: The falling edge of this si gnal during
a read cycle indicates th at data is stable and val id for sampling.
In write cycles the falling edge of RDY
denotes that the write
data has been latch ed by the RIC2A. The refore data mu st have
been available and stable for this operatio n to be successful.
E
ELI 68 C O
VENT LOGGING INTERRUPT: A low level on the ELI
output
indicates the RIC2A's hub managem ent logic requires CPU attention. The interrupt i s cleared b y accessing the Port Even t Recording regi ster or Event Counter that produced it. Al l i nterrupt
sources may be masked.
6 www.national.com
2.0 Pin Descriptions
RTI 67 C O
(Continued)
R
EAL TIME INTERRUPT: A low level on the RTI
cates the RIC2A's real t ime (packet specific) i nterrupt logic requires CPU attention. The interrupt is cleared by reading the
Real Time Interrupt St atus register. Al l interrupt sources m ay be
masked.
output indi-
C
CDEC 91 TT I
WR 90 TT I
RD 89 TT I
MLOAD 92 TT I DEVICE RESET AND MODE
TT
= TTL compatible, B = Bi-directional, C = CMOS compatible, OD = Open Drain, I = Input, O = Output,
Z
= high impedance
OUNTER
strobe decrements all of the RIC2A's Port Event Counters by
one. This input is int ernally synchronized and if necessary the
operation of the signal is delayed if there is a simultaneous internally generated counting operation.
WR
ITE STROBE: Strobe from the CPU use d to write an internal
register defined by the RA0 - RA4 inputs.
READ
register defined by the RA0 - RA4 inputs.
back up from low to high, all of the RIC2A's state machines,
counters and network ports are reset and hel d inactive. On the
rising edge of MLOAD
and RA0 - RA4 inputs are lat ched into the RIC2A's conf iguration
registers. The ri sing edge of MLOAD
of the display test oper ation. The clock signal must be present
on the CLKIN pin during MLOAD
DEC
REMENT: A rising edge on the CDEC
STROBE: Strobe from the CPU used to rea d an internal
LOAD:
the logic levels present on the D0 - 7 pins
When this input cycles
also signal s the beginning
assertion and de-ass ertion.
input
7 www.national.com
2.0 Pin Descriptions
(Continued)
Pin Name Pin No.
Inter-RIC Bus Pins
ACKI 53 TT I
ACKO 60 TT O
IRD 76 TT B,Z
IRE 77 TT B,Z
IRC 78 TT B,Z
Driver
Type
I/O Description
ACK
NOWLEDGE INPUT: Input to the network ports' arbitration
chain.
ACK
NOWLEDGE OUTPUT: Output from the networ k ports' arbi-
tration chain.
I
vides a serial data st ream in NRZ format . The signal is ass erted by
a RIC2A when it is receiving data fr om one of its network segments. The default condition of this signal i s to be an input. In this
state it may be driven by other devices on the Inter-RIC bus.
I
vides an activ ity f raming en able fo r the se rial dat a strea m. The sig nal is asserted by a RIC2A wh en it is rec eivi ng data f rom one of i ts
network segments. The default condition of this signal is to be an
input. In this state it may be driven by other devices on the InterRIC bus.
I
vides a clock signal for the serial data stream. Data (IRD) is
changed on the fal ling ed ge of the clock. The s ignal i s asser ted by
a RIC2A when it is receiving data fr om one of its network segments. The default condition of this signal is to be an input. When
an input, IRD is sampled on the rising edge of the clock. In this
state it may be driven by other devices on the Inter-RIC bus.
NTER-
NTER-
NTER-
RIC D
ATA: When asserted as an output this signal pro-
RIC E
NABLE: When asser ted as an output this signal pro-
RIC C
LOCK: When asserted as an output this signal pro-
COL
COLN 75 TT B,Z
PKEN 72 C O
CLKIN 100 TT I 40 MHz CLOCK INPUT: This input is used t o generate the
ACTND 62 OD O
ACTNS 52 TT I
ANYXND 61 OD O
ANYXNS 51 TT I
TT
= TTL compatible, B = Bi-directional, C = CMOS compatible, OD = Open Drain, I = Input, O = Output,
Z
= high impedance,
LISION ON PORT N: This denotes that a c ollision is occ urring
on the port r eceiving the dat a packet. The defaul t condition of this
signal is to be an input. In this state it may be driven by other devices on the Inter-RIC bus.
PACK
ET ENABLE: This output acts as an active high enable for
an external bus transceiver (if require d) fo r the IRE, IRC IRD and
COLN signals. When high the bus transceiver should be transmitting on to the bus, i.e. t his RIC2A is dr iving the IRD, IRE, I RC, and
COLN bus lines. When low the bus transceiver should receive from
the bus.
RIC2A's timing refer ence for the state machines, and phase lock
loop decoder.
ACT
IVITY ON PORT
RIC2A is recei ving data or c ollision infor m ati on from one o f its network segments.
ACT
IVITY ON PORT
other RIC2A in a multi-RIC2A system is receivin g data or collis ion
information.
A
CTIVITY ON ANY PORT EXCLUDING PORT
output is active when a RIC2A is experiencing a transmit collision
or multiple ports have active collisions on their network segmen ts.
A
CTIVITY ON ANY PORT EXCLUDING PORT
put senses when this RIC2A or ot her RIC2As in a multi-RI C2A system are experiencing transmit collisions or multiple ports have
active collisions on their network segments.
N D
RIVE: This output is active when the
N S
ENSE: This input s enses when this or an-
N D
RIVE: This
N S
ENSE: This in-
8 www.national.com
2.0 Pin Descriptions
(Continued)
Pin Name Pin No.
Driver
Type
I/O Description
Management Bus Pins
M
MRXC 59 TT O,Z
ANAGEMENT RECEIVE CLOCK: When asserted this signal provides a clock si gnal for the MRXD serial data stream . The MR XD
signal is chan ged on the falling edge of this clock. The signal is asserted when a RIC2A is receiving data from one of its network segments. Other w ise the signal is inactive.
M
MCRS 56 TT B,Z
ANAGEMENT CARRIER SENSE: When asserted this signal provides an activ ity framing enable for the serial data stream. The signal is asserted when a RIC2A is receiving data from one of its
network segments. Otherwise the signal is an input.
M
MRXD 57 TT O,Z
ANAGEMENT RECEIVE DATA: When asserted this signal provides a seri al data stream i n NRZ format. The data stream is made
up of the data packet and RIC2A status information. The signal is
asserted when a RIC2A is receiving data from one of its network
segments. Otherwise the signal is inactive.
M
MEN 58 C O
ANAGEMENT BUS OUTPUT ENABLE: This output act s as an active high enable for an external bus transcei ver (if required) for the
MRXC, MCRS
and MRXD signals. When high the bus transceiver
should be transmi tting on to the bus.
PCOMP 50 TT I
P
ACKET
packet compress l ogi c. A low level on this si gnal when MCRS
tive will cause that packet to be compressed. If PCOMP
all packets are compressed, if PCO M P
COMP
RESS: This input is used to activ ate the RIC2A's
is tied high packet co mpres -
is ac-
is tied low
sion is inhibit ed.
External Decoder Pins
R
RXMPLL 71 TT O
ECEVE DATA MANCHESTER FORMAT: This output makes the
data, in Manc hester format , recei ved by po rt N avai labl e for test purposes. If not use d for testing this pin should be le ft open.
Test Pins
TEST_(12:7) 154-159 TT I Factory test control pins - this pin should be connected to GND for
proper operat ion of the repeater.
TEST_(6:2) 44-48 TT I Factory test control pins - this pin should be connected to GND for
proper operat ion of the repeater.
TEST_1 2 TT O Factory test control pins - this pin should be le ft unconnected for
proper operat ion of the repeater.
Po we r and Ground Pins
V
DD
GND 54, 64, 73, 79, 101,
1, 55, 65, 74, 80, 102 Positive Supply
Nega tive S u pp ly
160
V
A 7 Positive Supply for Analog circuitr y
DD
GNDA 6 Negative Supply for Analog circuitry
V
PLL 94 Positive Supply for Phase Lock Loop
DD
GNDPLL 93 Negative Supply for Phase Lock Loop
V
WS 152 Positive Supply for Wave Shape circuitry
DD
GNDWS 151 Negative Supply for Wave Shape circuitry
VDD P
n
10, 17, 22, 29, 34, 41,
117, 124, 129, 136,
Positiv e su pp l y fo r p or t N . C o nne c t for all por ts .
141, 148
GND P
n
11, 16, 23, 28, 35, 40,
Negative supply for port N. Connect for all ports.
118, 123, 130, 135,
142, 147
VDD AUI 108 Positive sup ply for AUI port.
GND AUI 107 Negative supply for AUI port.
TT
= TTL compatible, B = Bi-directional, C = CMOS compatible, OD = Open Drain, I = Input, O = Output,
Z
= high impedance
9 www.national.com
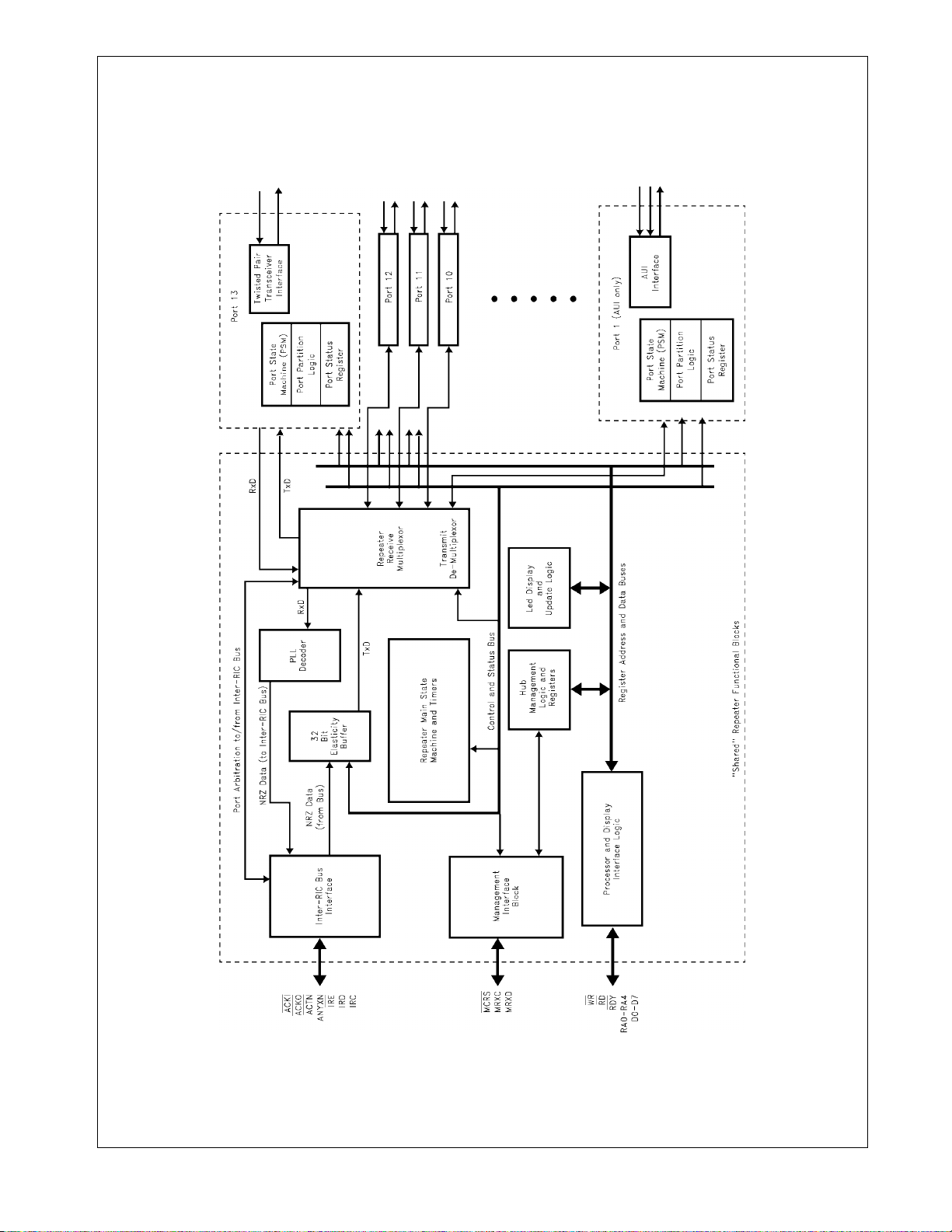
3.0 Block Diagrams
Figure 1. Shared Repeater and Segment Functional Blocks
10 www.national.com
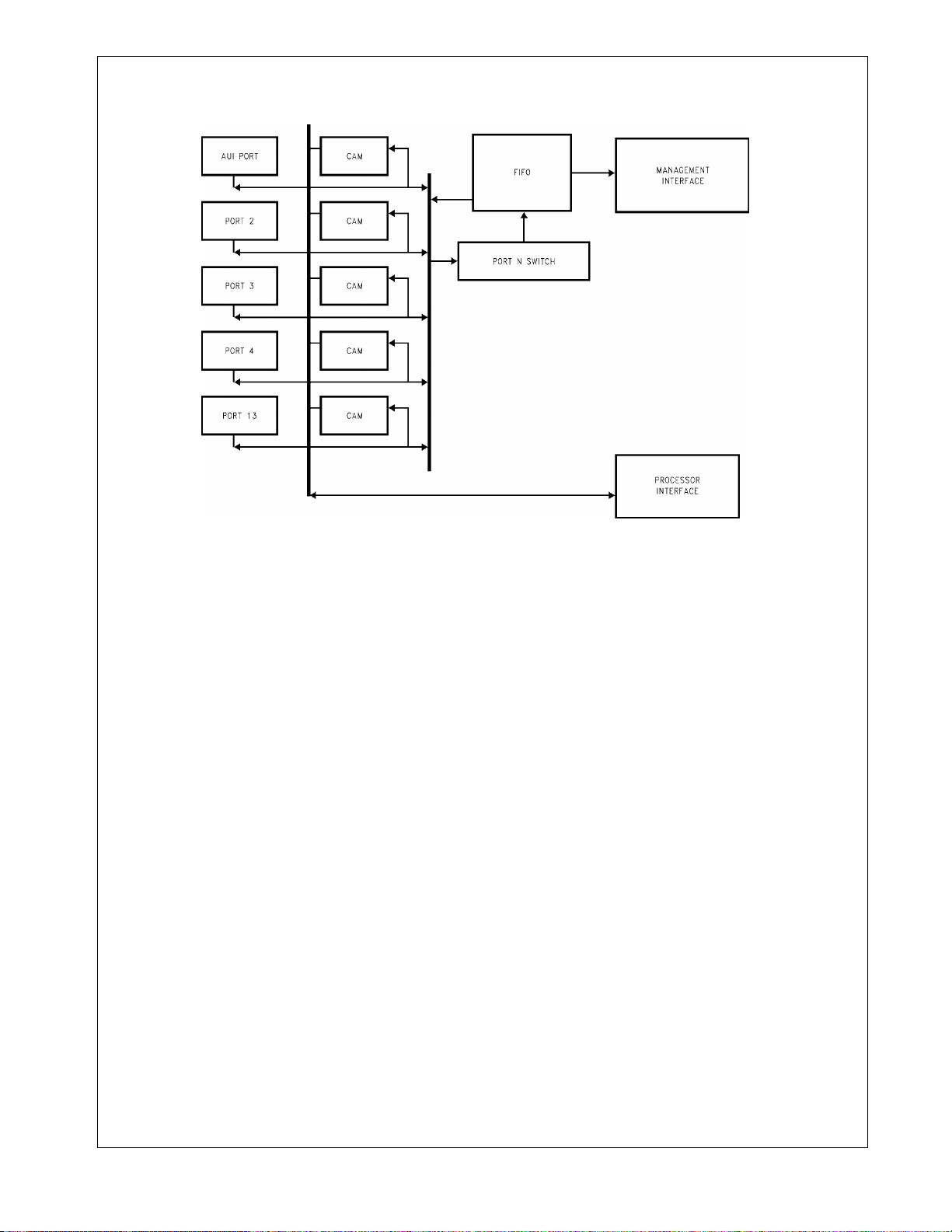
3.0 Block Diagrams
(Continued)
Figure 2. RIC2A Port Architecture Security Block Diagram
Note: The block di agram for the RIC2A , when use d in the non-secur e mode , is identi cal to the “sha red” repea ter funct ional blo ck diag ram.(
in secure mode, additional security logic is used when operating the device (
Figure 2
)
Figure 1
). But,
11 www.national.com
4.0 Functional Description
The IEEE 802.3 repeater specification delineates the functional criteria that all compliant repeater systems must
adhere to. An implementation of these requirements
strongly suggest a multiport modular design style. In such
a design, functionality is split between those tasks common
to all data channels and those exclusive to each individual
channel. The RIC2A follows this approach. Certain functional blocks are replicated for each network attachment,
(also known as a repeater port), and others are shared.
The following subsections provide an overview of the
RIC2A architecture. First, RIC2A feature enhancements
from the RIC II is discussed. Then, the RIC2A functional
blocks are described.
4.1 Summary of DP83953 RIC2A Feature Enhancements from DP83952 RIC II
1. The DP83953 RIC2A integrat es transmit filter s and drivers on a per port basis. These additional features allow
a system dev eloper to add l itt le more tha n exter nal is olation tran sformer s in o rder t o bu ild f ully secure d/man aged
hub products.
2. The functionality of the DP83953 is essentia lly similar to
DP83952, but some of the pin definitions have been
modified to reflect the new integrated drivers and transmit filter s. Therefore, the RIC2A is
ment for the RICII
locations have been rearranged to accommodate additional pins.
3. Integrated network port drivers provide controlled rise
and fall time output signals. These port drivers will facil itate EMI compliance without procuring additional components.
4. Compared to DP83952, the DP83 953 requires additiona l
current dr ive. The additional current is required to im plement the new integrated drivers and transmit filters.
. Additionally, power and ground pin
not a drop in replace-
4.2 Overview Of RIC2A Functions
Segment Specific Bloc k: Network Port
As shown in the block diagram, the segment specific b locks
consist of
A logic sectio n and a physical layer interface section.
The logic bloc k is required for perform ing repeater operations upon that particular segment. It is known as the
“port” lo gic since it is the access “port” the segm ent has
to the rest of the network.
This function is repeated 13 times in the RIC2A (one for
each port) and is shown on the right side of the block diagram, Figure 1.
The physical layer interface depends upon the port. Port 1
has an AUI compliant interface for use with AUI compatible
transceiver boxes and cable. Ports 2 to 13 are twisted pair
ports.
The four dist inct functions insi de the port logic block are:
1. The Port State Machine "PSM" performs data and collision repetition as described by the IEEE repeater specification. For exampl e, i t may det ermi ne if this p ort sho uld
be receiving from or transmitting to a particular network
segment.
2. The Port Partition Logic implements the segment partitioning algorithm. This algorithm is defined by the IEEE
specificatio n and is used t o protect t he network f rom malfunctioning segments.
3. The Port Status Register r eflects the cur rent stat us of the
port. The system processor may access this register to
obtain port status information or to configure certain po rt
options, such as port disable.
4. The Port security configuration logic determines if the
transmitted or received packet will cont ain intact or pseudo random data. This logic consists of two dedicated
CAM locations p er por t f or lea rning, storing, and compa ring port source addresses.
Shared Functional Blocks: Repeater Core Logic
The shared functional blocks consists of the repeater Main
State Machine (MSM), Timers, a 32 bit Elasticity Buffer,
PLL Decoder, Receive and Transmit Multiplexors, and
Security Logic with 32 shareable CAM locations. These
blocks perform the majority of the operations needed to fulfill the requirements of the IEEE repeater specification.
When a packet is received by a port it is then sent via the
Receive Multiplexor to the PLL Decoder. Notification of the
data and collision status is sent to the MSM through the
receive multiplexor and collis ion activity stat us signals. T his
enables the MSM to determine th e source and type of data
to be transmitted and eventually repeated to all ports. This
information may be valid data or the jam pattern.
According to the IEEE repeater specifications, after a collision has been determined, the transmit data will be
replaced with a jam pattern consisting of a alternating ones
and zeros. (e.g. 1010...) for at least 96 bit times. If a collision occurs during the preamb le, the addr ess field, the type
field, or the data field the RIC2A will immediately switch to
the jam pattern to be transmit ted to all ports.
If the RIC2A is configured for the "non-secure" mode, the
valid received data is transmitted to all of the other ports,
except the port which is rec eiving the pack et.
If the RIC2A is configured for the "secure" mode, the
source and destination addresses within each packet are
first chec ked against the addresses of the local and shared
CAMs assigned to the port. Based on this comparison , and
the port configuration will be either:
1. A pseudo random bit pattern may be generated in the
data field of the designated “secure” packet and then
transmitted to their respective port(s). Or,
2. The received data may be transmitted intact.
The data always remains intact on the Inter-RIC bus (IRB
to be described later) to allow any cascaded repeaters to
compare all destination addresses with their l ocal CAMs. In
12 www.national.com
4.0 Functional Description
the case of a source address mismatch, the RIC2A will
immediately switch to a random bit pattern on both the
local transmit t ing po rts and th e IRB.
The main state machine operates in conjunction with a
series of counter timers. These timers will ensure that all
associated IEEE specification times (referred to as the
TW1 to TW6 times) are met.
An IEEE repeater system must meet the same signal jitter
performance as any other receiving n ode attached to a network segment. Consequently, a phase locked loop
Manchester decoder is required so that the packet may be
decoded, and the jitter accumulated over the receiving segment recovered. The decode logic outputs data in non
return to zero (NRZ) format with an associated clock and
enable. This format allows the packet to be conveniently
transferred to o ther attached devices, such as network controllers and other repeaters through the Inter-RIC bus
(IRB). The data may then be re-encoded into Manchester
data and transmitted.
During reception and/or transmission through the physical
layer transceivers a loss of bits in the preamble field of a
packet may occur. This loss must be replaced according to
the IEEE repeater specification. To accomplish this, an
elasticity buffer is employed to restore a full length preamble upon transmission.
(Continued)
The Sequence of Operation
Soon after the network segment receiving a packet has
been identified, the RIC2A will transmit the preamble pattern (1010...) to all other network segments. While the preamble is being transmitted, the elasticity buffer will monitor
the decoded received clock and data signals via the InterRIC bus (IRB). When the start of frame delimiter (SFD) is
detected, the received dat a stream will be written into the
elasticity buffer. The removal of stored data from the elasticity buffer for re-transmission is not allowed until a valid
length preamble pattern has been transmitted.
Internal CAMs
To implement the security features, the RIC2A uses two
sets of Content Addressable Memory (CAMs) for address
comparison: port CAMs, and shared CAMs.
Port CAMs
The RIC2A provides two CAM locations (48 bits wide) per
port for comparison. The tw o CAM locati ons contai n sour ce
address(es) for incoming packets on their respective ports.
The addresses can be stored (CPU access) or learned
(Learn Mode). While in learning mode, LME=1, external
processor access is not advised or allowed, since the contents of the two CAM registers may not be valid. Once the
addresses are learned, they are used to make comparisons between the source and destination addresses. An
address can only be learned when a packet has been
received with a valid CRC. External processor/logic access
to these registers is fine while learning is not in progress,
LME=0 in the port security configuration register.
Shared CAMs
The RIC2A provides thirty-two shareable CAM locations
(48 bits wide) to store Ethernet addresses associated with
the ports. The Ethernet addresses are stored by writing to
these CAM locati ons where the addresses could be shared
among the thirteen ports. By using shared CAMs, multiple
Ethernet addresses can be associated with a single port,
or multiple ports can be allocated to a single Ethernet
address. After the destination address of the received
packet is completely buffered, the RIC2A will compare this
address with the stored addresses in the CAM locations.
The source address is compared in a similar fashion.
These shared CAM locations are user defined onl y, and wil l
not be filled in learning mode.
A CAM entry could be shared among the thirteen local
ports. This is done through a 16-bit CAM Location Mask
Register (CLMR). For each CAM entry there is only one
CLMR, therefore there are 32 registers for the 32 CAM
entries.
Since register access is performed on a byte basis, six
write cycles must be completed to program the Ethernet
address into the CAM. The upper three bits of the CAM
Location Mask Register (CLMR) act as a pointer indicating
which byte of the 6-byte address will be accessed next.
This pointer will increment every time a read or write cycle
is completed to the CAM entry. The pointer starts at 1, indicating the least significant byte of the address.
Four additional registers are provided to validate the 32
shared CAM entries and are referred to as the Shared
CAM Validation Registers 1-4 (SCVR 1-4, Page 9H,
Address 16-19H). Each bit of the SCVR is mapped to one
CAM loc ati on. An ad dress in the CA M loc ation will o nly be
valid when a corres ponding bit Address Valid (ADV bit) has
been set in this register. The RIC2A will include only valid
CAM locations f or address comparison.
The contents of all CAM locations are unknown at power
up. This is not a problem since corresponding Address
Valid (ADV) bits are not set for each CAM. Therefore, comparisons will not take pl ace with the CAM contents.
Inter-RIC Bus (IRB) Interface
A RIC2A based repeater system may be constructed to
support many more network attachments than those available through a single chip. The split functions described
earlier, allow data packets and collision status to be transferred between multiple RIC2As while allowing the system
to function as a single logical repeater. Since all RIC2As in
a multiple RIC2A system are identical and capable of performing all repetition functions, the fail ure of one RIC2A will
not cause a failure of the entire system. This is an important issue, especially with respect to large multi-port
repeaters.
In a multi-RIC2A system, the RIC2As can communicate
through a specialized interface known as the Inter-RIC
bus(IRB). This bus allows the data packet to be transferred
from the receiving RIC2A to other RIC2As in the system.
Each RIC2A then transmits the datastream to its segments.
13 www.national.com
4.0 Functional Description
The notification of collisions occurring across the network
is just as important as data transfers. The Inter-RIC bus
has a set of status lines capable of conveying collision
information between RIC2As in order to ensure that their
main state machines operate in the appropri ate manner.
(Continued)
LED Interface and Hub Management Function
Repeater systems usually possess optical displays indicating network activity and the status of specific repeater
operations. The display update block of the RIC2A c an provide the system designer with a wide variety of indicators.
The updates are completely autonomous and merely
require SSI logic to drive the display devices, usually made
up of light emitting diodes (LEDs). The status display is
very fle xib le and allo ws the user to choose appropri ate indicators for the specification of his equipment.
The RIC2A was designed for those interested in implementing large repe aters with hub managem ent capabi lit ies .
Hub management uses the unique position of repeaters in
a network to gather statistics about the network segments
they are attached to. Important events are gathered by the
management block from logic blocks throughout the chip.
These e vents are then stored in on-chip latches, or counted
in on-chip counters according to the developer’s supplied
latching and counting masks.
The fundamental task of a hub management system implementation is to associate the current packet and any management status information with the network segment. An
example could be keeping track of packets received on a
repeater’s ports. An ideal system would place the combined data packet and status field in system memory for
future examination by hub management software. The
main function of the RIC2A's hub management support
logic is to provide this function.
To accomplish this task, the RIC2A util izes a dedicate d hub
management interface. This is similar to the Inter-RIC bus
since it allows the data packet to be recovered from the
receiving RIC2A. Unlike the Inter-RIC bus, the intended
recipient is not another RIC2A, but typical National Semiconductor's DP83932 ("SONIC
allows a management status field to be appended at the
end of each packet without affecting the operation of the
entire repeater system.
In addition to the cou nter s provided on the RIC DP83950B,
the RIC2A implements thirteen more (8 bit wide) counters.
These counters will count events specified in the Event
Count and Interrupt Mask Register2 (ECIMR2). These
include items such as Frame Check Sequences, Frame
Alignment Errors, Partitions, and Out of Window Collisions.
This register also includes "Reset On Read" and "Freeze
When Full" contr ol bits.
It should be noted that Counter Decrement (CDEC) will not
be used with the ECMR2. Also, real time or event logging
interrupts (RTI or ELI) will not be generated for this register.
Processor Interface
The RIC2A's processor interface uses an octal bi-directional data bus in order to interface to a system processor.
The RIC2A has on-chip registers to indicate the status of
™
"). This dedicated bus
the hub management functions, chip configuration, and
port status. These registers are accessed by pl acing the
respective address at the Register Address (RA4 - RA0)
input pins.
Display update cycles and processor accesses occur utilizing the same data bus. An on-chip arbiter in the processor/display block schedules and controls the accesses and
ensures the correct information is written into the display
latches. During the display update cycles the RIC2A
behaves as a master of its data bus. This is the default
state of the data bus. Consequently, a TRI-STATE buffer
must be placed between the RIC2A and the system processor's data bus. This ensures that bus contention problems are avoided during simultaneous display update
cycles and processor accesses of other devices on the
system bus. When the processor accesses a RIC2A register, the RIC2A enables the data buffer and selects the
operation, eit her input or output, of the data pins.
For faster regi ster accesses, the RIC2A provides the added
feature of disabling display update cycles. Setting the Disable LED Update bit, DLU in the Lower Event Information
register (Page 1H, Address 1FH) stops the RIC LED
update cycles. This disables the shared mode of the data
bus, leaving the RI C2A in slave access mode. In this mode,
the maximum read/write cycle time is reduced to approximately 400 ns.
4.3 Description Of Repeater Operations
In order to implement a multi-chip repeater system that
behav es as a singl e logical rep eat er , special conside rati ons
must be taken into account with respect to the data path
used for packet repetition. For example, we must consider
where in the data path specific operations such as
Manchester decoding and elasticity buffering are performed. Additionally, the system state machines, which utilize available network activity signals, must accommodate
various packet repetition and collision scenarios according
to the IEEE repeater specification.
The RIC2A contains two types of interacting state
machines. They are:
1. Port State Machines (PSMs) Every network attachment
has its own PSM.
2. Main State Machine (MSM) This state machine controls
the shared functional blocks as shown in the block diagram Figure 1.
14 www.national.com
4.0 Functional Description
(Continued)
Repeater Port and Main State Machines
The Port and Main State Machines are described with terminology used in the IEEE Repeater specification. For a
detailed explanation of terms, please refer to that specification. References made to repeater states or terms
described in the IEEE specification will be shown in italics.
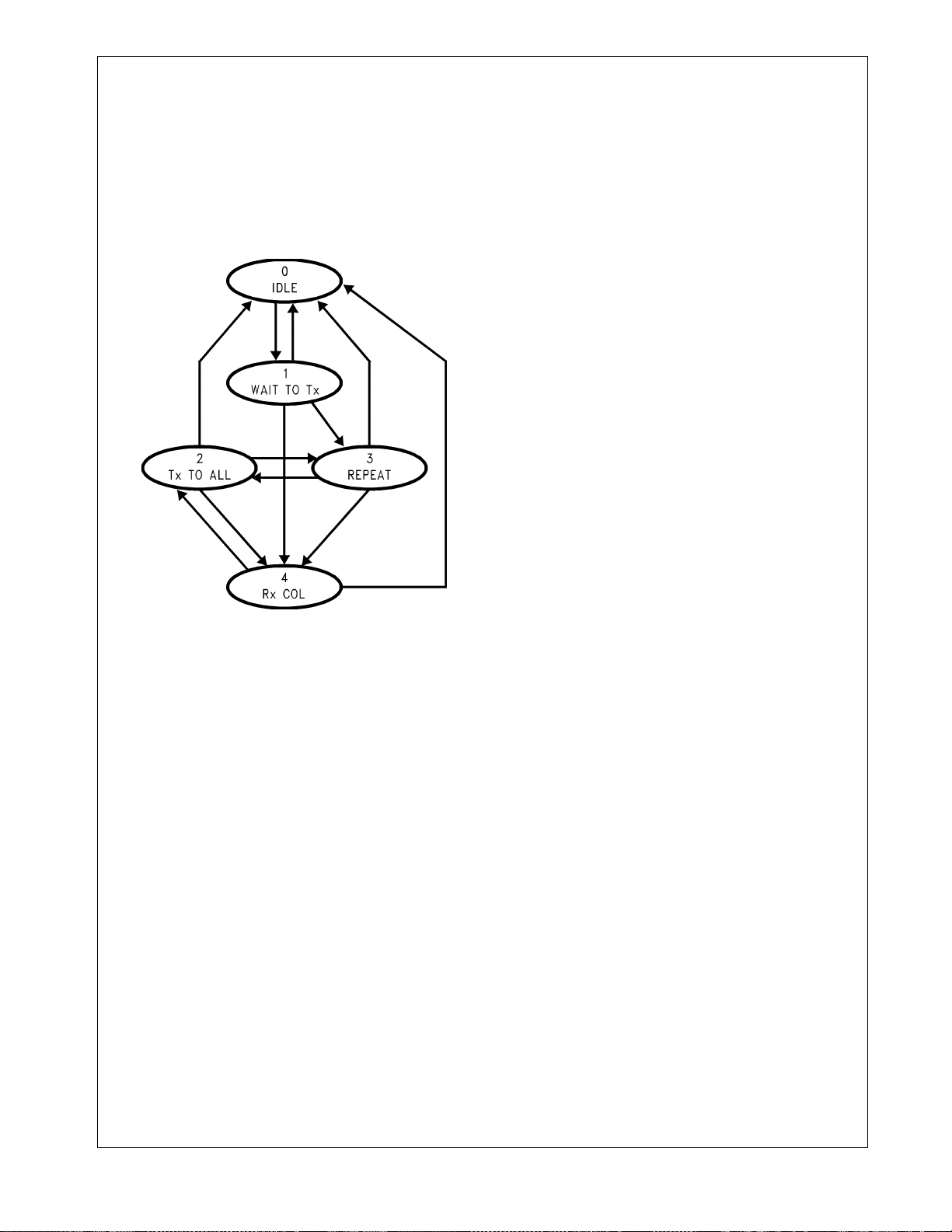
Figure 3 shows the Inter-RIC Bus State Diagram and Figure 4 shows the IEEE State Diagram.
Figure 3. Inter-RIC bus State Diag ram
15 www.national.com
4.0 Functional Description
(Continued)
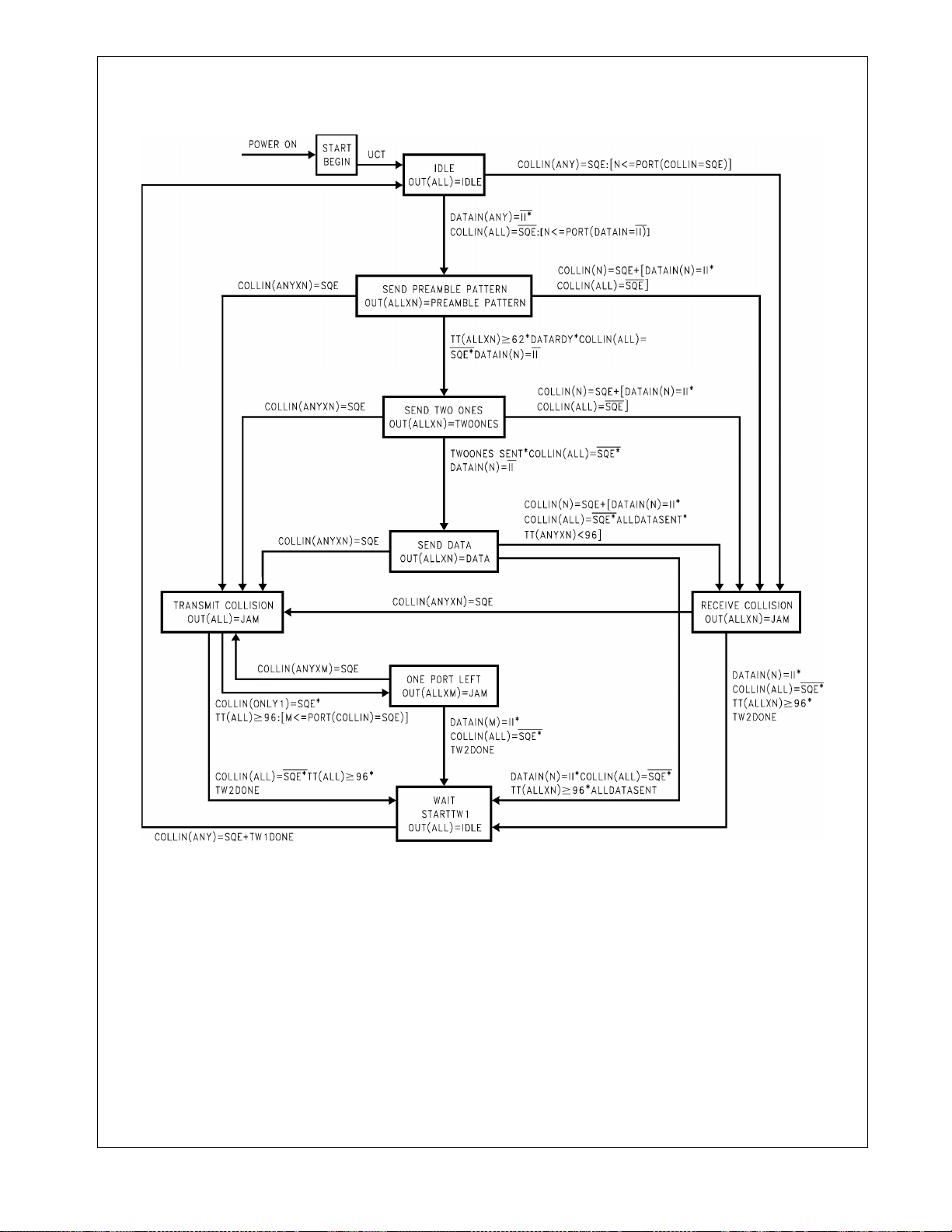
Figure 4. IEEE Repeater Main State Diagram
16 www.national.com
4.0 Functional Description
(Continued)
The Port State Machine (PSM)
The two primary functions of t he PSM are to:
1. Control the transmission of repeated data, pseudo random data, and jam signal s over the attached segments .
2. Determine if a port will be the source of data or collision
informati on to be repe ated over t he network. This repeater port i s known as
quired to enable the repeater to transition from an
state to the
COLLISION
to locate the port that will be
packet.The dat a recei ved f ro m
PLL decoder and transmitted over the Inter-RIC bus. If a
collision occurs, the repeater enters the
COLLISION
tion is performed in order to determine which port is
PORT M. PORT M
other ports if the repeater enters the
state. In this state
ment. At that time, all other ports are still required to
transmit to t heir segments.
PORT N
SEND PREAMBLE PATTERN
states. (See Figure 4) This process is used
state. Then a subsequent arbitration opera-
is differentiated from the repeater’s
PORT M
. An arbit rati on proc ess is r e-
IDLE
or
RECEIVE
PORT N
for that particular
PORT N
is direct ed t o t he
TRANSMIT
ONE PORT LEFT
does not transmit to its seg-
The Main State Machine (MSM)
The MSM controls the operation of the shared f unct ional
blocks in each RIC2A as shown in the block diagram,
Figure 1, and performs the majority of the data and collision operations as defined by the IEEE specification.
Inter-RIC Bus (IRB) Operation
Overview
The IRB consists of eight signals. These signals implem ent
a protocol that may be used to connect multiple RIC2As
together. In this configuration, the logical function of a single repeater is maintained. The resulting multi- RIC2A
repeater syst em is compliant with the IEEE 802.3 Repeater
Specification and may even encompass several hundred
network segments. Figure 5 shows an example of a multiport RIC2A system.
Function Action
Preamble
Regeneration
Fragment
Extension
Elasticity Buffer
Control
Jam / Preamble
Pattern Generation
Transmit
Collision
Enforcement
Data Encoding
Control
Tw1
Enforcement
Tw2
Enforcement
Restore the length of the preamble pattern to the defined size.
Extend received dat a or col lision fragments to meet the minimum fragment
length of 96 bits.
A portion of the received pac ket may require storage in an Elasticity Buffer to
accommodate preamble regeneration.
In cases of receive or transmit collisions, a RIC2A is req uired t o t ransmit a
jam pattern (1010...).
Note: This pattern is the same as that used for preamble regeneration.
The
TRANSMIT COLLISION
quires a repeater to r emai n in this sta te
for at least 96 bit ti m es.
NRZ formatted data in the ela sticity
buffer must be encoded i nto Manchester formatted data pri or to re-transmission.
Enforce the Transmi t Recovery Time
specification.
Enforce Carrier Recovery Time specification on all ports with active collisi ons.
state re-
The interaction of the main and port state machines is visible, i n part, through the Inter-RIC bus.
17 www.national.com
4.0 Functional Description
(Continued)
The IRB connects multiple RIC2As to realize the following
operations:
Port N
Identification (which port the repeater receives
data from)
Port M
Identification (which port last experienced a colli-
sion)
Data Transfer
RECEIVE COLLISION
identification
TRANSMIT COLLISION
DISABLE OUTPUT
identification
(jabber protection)
The following table briefly describes the operation of the
Inter-RIC bus signals, the conditions required for a RIC2A
to assert a signal, and which RIC2As (in a multi-RIC2A
system) would monitor the signal.
Inter-RIC
Bus Signal
Function
ACKI Input signal to Th e PSM arbit rati on
chain. This chain is employed to
identify
Note: A RIC2A whic h contains
PORT M
nal being low when its
PORT N
may be identified by its
and
ACKI
PORT M
input is high.
PORT N
ACKO
ACKO Output signal from the PSM arbi-
tration chain.
ACTN This sig nal denotes there i s activity
on
PORT N
or
PORT M.
ANYXN This signal denotes that a repeater
port that is not
PORT N
or
PORT M
is experiencing a collision.
COLN Denotes
PORT N
or
PORT M
periencing a collision.
IRE This signal ac ts as an act ivi ty fra m-
ing signal for the IRC and IRD signals.
Conditions Required for a RIC2A
to Drive this Signal
RIC2A Receiving the Signal
Not applicable This is depende nt upon the
method used to casca de
.
or
sig-
If this RIC2A contains port N, then
the device will assert this signal.
RIC2As , desc r ib ed in a follo w ing section.
This is dependent upon the
method used to casca de
RIC2As , desc r ib ed in a follo w ing section.
A RIC2A must contain
PORT M.
Note: Although this signal n ormally has only
one source asserting the signal active it is used
in a wired-or configuration.
Any RIC2A which satisfies the a bove
condition.
Note: This bus line is used in a wired-or configuration.
is ex-
A RIC2A must contain
PORT M.
PORT N
PORT N
or
The signal is monitored by all
RIC2As in the re peater syst em.
The signal is monitored by all
RIC2As in the re peater syst em.
or
The signal is monitored by all
other RIC2As in the repeater
system.
A RIC2A must contain
PORT N.
The signal is monitored by all
other RIC2As in the repeater
system.
IRD Decoded ser ial data, in NRZ for-
mat, received from the net work
segment attached to
PORT N.
IRC Clock signal associated with IRD
and IRE.
A RIC2A must contain
A RIC2A must contain
18 www.national.com
PORT N.
PORT N.
The signal is monitored by all
other RIC2As in the repeater
system.
The signal is monitored by all
other RIC2As in the repeater
system.
4.0 Functional Description
Methods of RIC2A Cascading
In order to build multi-RIC2A repeaters,
PORT M
RIC2As in the system. Inside each RIC2A, the PSMs are
arranged in a logical arbitration chain where port 1 is the
highest and port 13 the lowest. The top of the chain, the
input to port 1 is accessible to the user via the RIC2A's
ACKI
becomes the ACKO
PORT N
chain with receive or collision activity.
is performed when the repeater is in the
M
when the repeater leaves the
state. In order for the arbitration chain to function, all that
needs to be done is to tie the ACKI
state. In multi-RIC2A systems there are two methods to
propagate the arbitration chain between RIC2As:
The first and most straight forward is to extend the arbitration chain by daisy chaining the ACKI
between RIC2As. In this approach one RIC2A is placed at
the top of the chain (its ACKI
ACKO
the next RIC2A and so on. This arrangement is simple to
implement but it places some topological restrictions upon
the repeater system. In particular, if the repeater is constructed using a backplane with removable pr inted circuit
boards. (These boards contain the RIC2As and their associated components.) If one of the boards is removed then
the ACKI
not operate cor rectly.
The second method of
this problem. This second technique relies on an external
parallel arbiter which monitors all o f the RIC2As' ACKO
nals and responds to the RIC2A with the highest priority. In
this scheme each RIC2A is assigned with a priority level.
One method of doing this is to assign a priority number
which reflects the position of a RIC2A board on the
repeater backplane, i.e., its slot number. When a RIC2A
experiences receive activity and the repeater system is in
the
nal arbitration logic drives the identifi cation number onto an
arbitration bus and the RIC2A containing
identified. An identical proced ure is used in the
COLLISION
not subject to the problems caused by missing boards, i.e.,
empty slots in the backplane. The logic associated with
asserting this arbi tration v ector in the v ario us packet repetition scenarios could be implemented in PAL® or GAL®
type devices.
Both of the above methods employ the same signals:
ACKI
tion.
The Inter-RIC bus allows mul ti -RIC2A operations to be performed in exactly the same manner as if there is only a single RIC2A in the system. The simplest way to describe the
operation of Inter-RIC bus is to see how it is used in a number of common packet repetition scenarios.
identification must be performed across all the
input pin. The output from the bottom of the chain
output pin. In a single RIC2A system
is defined as the highest port in the arbitration
is defined as the highest port in the chain with a collision
input is tied high), then the
signal from this RIC2A is sent to the ACKI input of
ACK O chain will be br oken and th e repeater will
PORT N or M
IDLE
state, the RIC2A board will assert ACKO. Exter-
state to identify
, ACKO and ACTN to perform
PORT M.
(Continued)
Por t N
IDLE
PORT N
identification
state.
and
PORT
TRANSMIT COLLISION
signal to a logic high
ACKO signals
identification avoids
sig-
PORT N
will be
TRANSMIT
Parallel arbitration is
PORT N
or M arbitra-
4.4 Examples Of Packet Repetition Scenarios
The operation of RIC2A is described b y the f oll owi ng e xamples of packet repetition scena rios.
Data Repetition Overview
When a packet is received at one port, the RIC2A checks
the source, and destination addresses of the packet. The
port configuration causes either a pseudo random bit
sequence, or the received packet to be transmi tt ed to diff erent ports.
If there is a destination address mismatch (secure mode),
then the RIC2A will generate a random pattern from the
first bit of the data field to that port. The data remains intact
on the Inter-RIC bus so other cascaded repeaters could
compare the destinat ion address with their local CAMs.
On a valid source address mismatch (secure mode),
RIC2A shall switch to random pattern both on the local
transmitt ing ports and the Inter-RIC bus.
Collision Scenari os Overview
The RIC 2A will adhere to all c ollision scenarios. When a
collisi on occ urs, RIC2A w ill switch to a jam patte r n to com ply with IEEE repeater specifications.
FIFO Condition Overview
Elasticity buffer error (ELBER) or FIFO overflow burst is
another condition that could take place anytime during the
packet transmission. The sequence of events for FIFO
burst is the same as those for collisi on.
Data Repetition Process
The first task to be performed is
This is an arbitration process performed by the Port State
Machines in the system. In situations where two or more
ports simultaneously receive packets, the Inter-RIC bus
operates by choosing one of the active ports, and forcing
the others to transmit data (real data or pseudo random
data). This is done in accordance with the IEEE specification's allowed exit paths from the
SEND PREAMBLE PATTERN
states.
The packet begins with a preamble pattern derived from
the RIC2A's on chip jam/preamble generator. The data
received at
plexor to the PLL decoder. Once phase lock has been
achieved, the decoded data (in NRZ f ormat) with its associated clock and enable signals, is asserted onto the IRD,
IRC, and IRE of the Inter-RIC bus. This serial data stream
is received from the bus by all RIC2As in the repeater and
directed to their elasticity buffers. Logic circuits monitor the
data stream and look for the Start of Frame Delimiter
(SFD). When it has been detected, data is loaded into the
elasticity buffer for later transmission. This will occur when
sufficient preamble has been transmitted and certain internal state machine oper ations have been fulfilled.
PORT N
is directed t hrough the receive multi-
PORT N
IDLE
or
RECEIVE COLLISION
identification.
state, i.e., to the
19 www.national.com
4.0 Functional Description
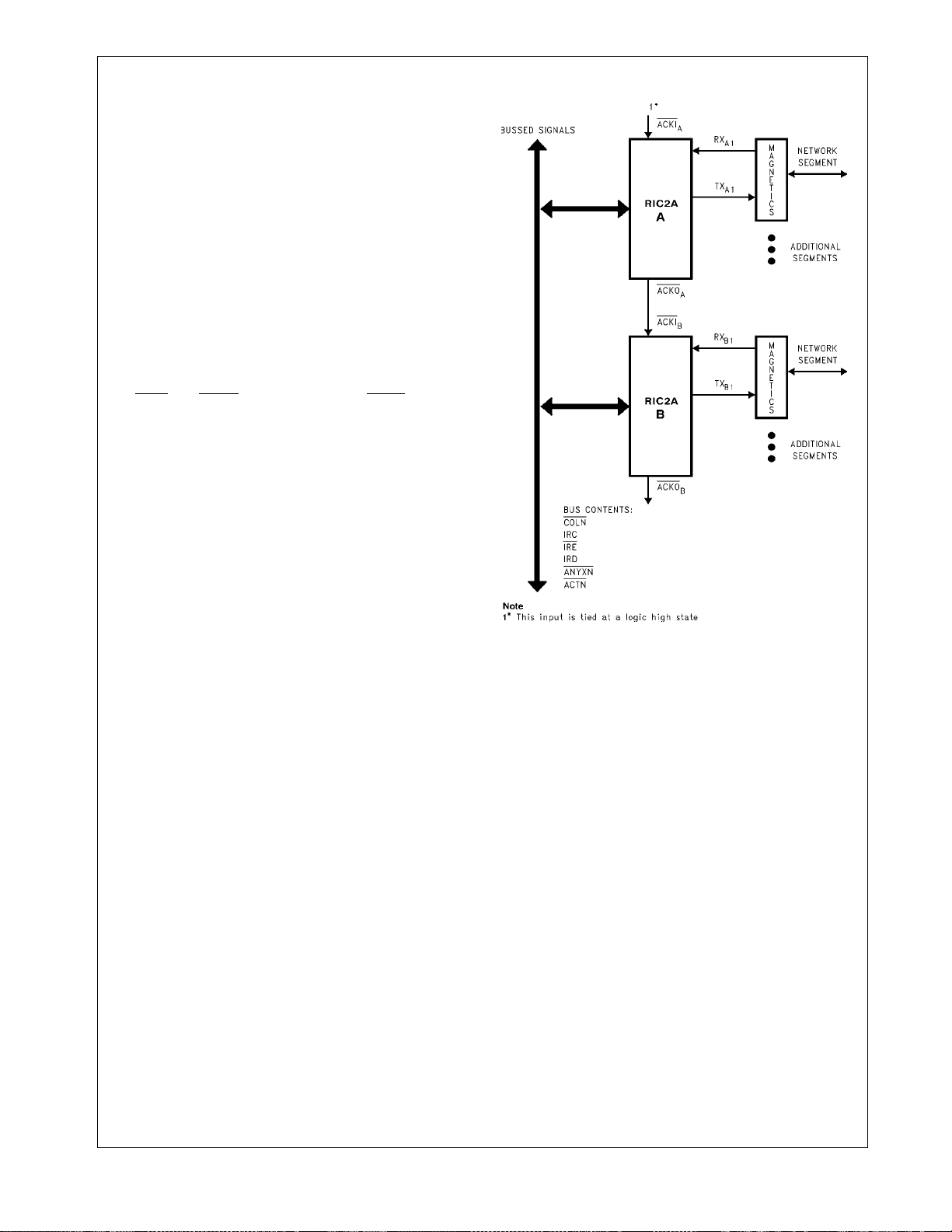
Figure 5 shows two RIC2As A and B, daisy chained
together with RIC2A-A positioned at the top of the chain. If
a packet is received at port B1 of RIC2A-B, and then
repeated to the other ports in the system (non-secure
mode). Figure 6 shows the functional timing diagram for
the packet repetition si gnals. In this example only two ports
in the system are shown. In non-secure mode, the other
ports also repeat the packet. It also indicates the operation
of the RIC2As' st ate machines in so far as can be seen by
observing the Inter-RIC bus. For reference, the repeater's
state transitions are shown in terms of the states defined
by the IEEE specification. The location of
shown. The following section describes the repeater and
Inter-RIC bus transitions sho wn in Fi gure 6.
The repeater activity is stimulated by the data signal
received by port B1. The RIC2As in the system are alerted
to forthcoming repeater operation by the falling edges on
the ACKI
Following a defined start up delay the repeater moves to
the
the start up delay to perform port arbitration. When packet
transmission begins, the RIC2A system enters the
REPEAT state. The expected, for normal packet repetition,
sequence of repeater states,
SFD
the Inter-RIC bus. They are then merged into a single
REPEAT state. Similarly, the
as a combin ed Inte r-RI C bus I D L E stat e.
Once a REPEAT operation has begun (e.g. the repeater
leaves the
bits of data or jam/preamble onto its network segments. If
the duration of the received signal from
than 96 bits, the r epeater transitions to the
LISION
fragment extension.
After the packet data has been repeated, including the
emptying of the RIC2As' elasticity buffers, the RIC2A performs the
formed during the
diagram.
and ACKO daisy chain and the ACTN bus signal.
SEND PREAMBLE
and
SEND DATA
state. The RIC2A system utilizes
are followed, but are not visible at
WAIT
IDLE
state), it is required to transmit at least 96
state (described later). This behavior is known as
Tw 1
transmit recovery operation. This is per-
WAIT
state shown in the repeater state
(Continued)
PORT N
is also
SEND PREAMBLE, SEND
and
IDLE
states appear
PORT N
is shorter
RECE IVE COL -
Figure 5. RIC2A System Topology
20 www.national.com

4.0 Functional Description
(Continued)
Note:
The activity shown on RX A1 represents the transmitted signal on TX A1 after being looped back by the attached transceiver.
1*
Figure 6. Data Repetition
21 www.national.com
4.0 Functional Description
(Continued)
Note: 1 SEND PREAMBLE, SEND SFD, SEND DATA
AUI port shown.
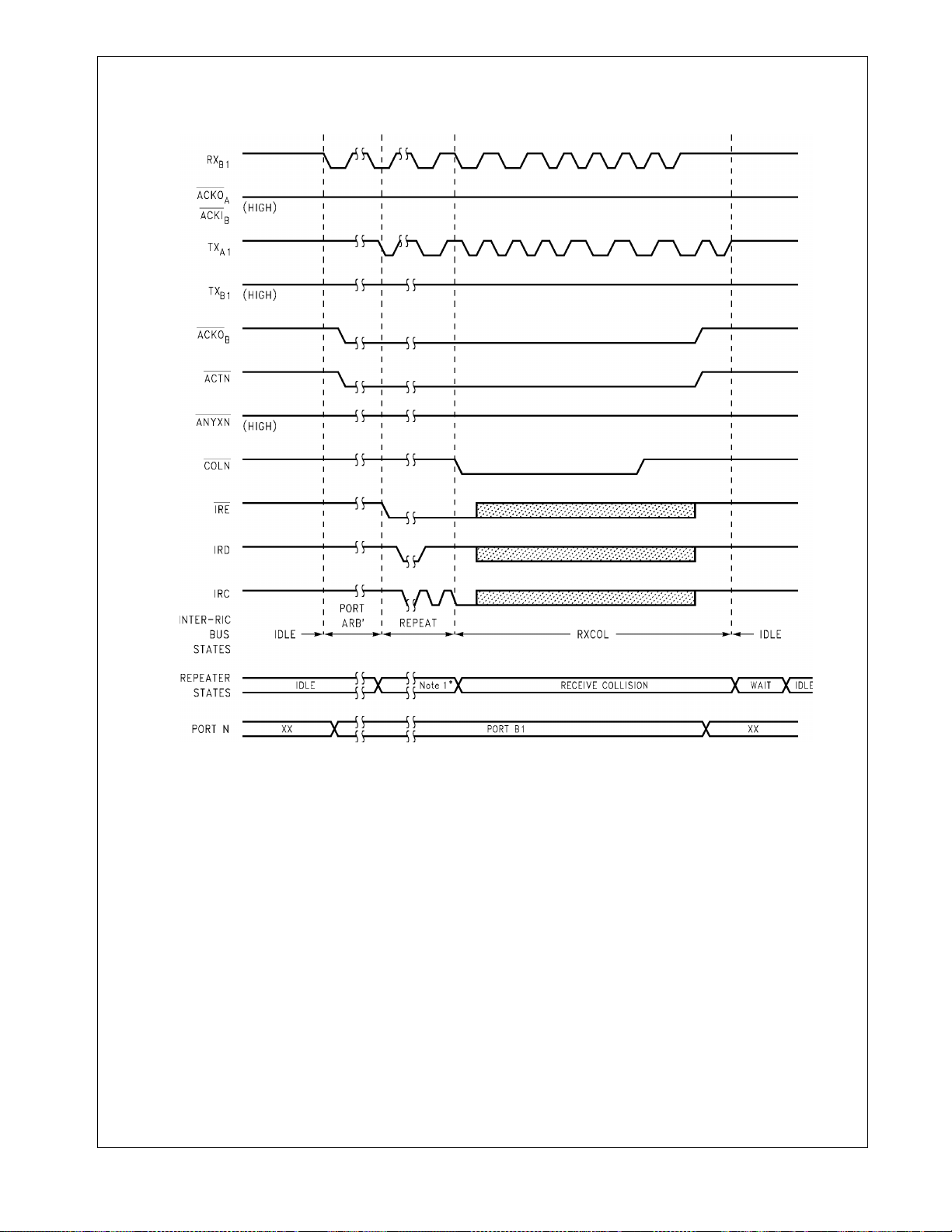
Figure 7. Receive Collision
22 www.national.com
4.0 Functional Description
(Continued)
Receive Collisions (AUI Port only)
A receive collision is a collision which occurs on the network segment attached to the AUI port.
"receiv ed" in a similar manner as a data packet is received,
and then repeated to the other network segments. Not surprisingly, the receive collision propagation follows a similar
sequence of operations as data repetit ion.
An arbitration process is performed to find
preamble/jam pattern is transmitted by the repeater's other
ports. When the AUI port as
its segment the COLN
This forces all the RIC2As in the system to transmit a preamble/jam pattern to their segments. This is important
since they may be a lr eady transmitt ing data from their elasticity buffers. The repeater moves to the
SION
state and begins to transmit the jam pattern. The
repeater remains in this state until both the following conditions have been fulfill ed:
1. at least 96 bits have been transmitted onto the network,
2. the activity has ended.
Under close exami natio n, the repeate r specif ication reveals
that the actual end of activity has its own permutations of
conditions:
1. collision and receive data signals may end simulta-
neously,
2. receive data may appear t o end before co lli sion si gnals,
3. receive data may continue for some time after the end o f
the collision signal.
Network segments using coaxial media may experience
spurious gaps in segment activity when the collision signal
goes inactive. This arises from the inter-action between the
receive and collision signal squelch circuits, implemented
in coaxial transceivers, and the properties of the coaxial
cable itself. The repeater specification avoids propagation
of these activity gaps by extending collision activity by the
Tw2
wait time. Jam pattern transmission must be sustai ned
throughout this period. After this, the repeater will move to
the
WAIT
state unless there is a data signal being r eceived
by the AUI port as
The functional timing diagram, Figure 7, shows the opera-
tion of a repeater system during a receive collision. The
system configuration is the same as earlier described and
is shown in Figur e6.
The RIC2As perform the same
data repetition operations described previously. The system is noti fied of the receive collision on the AUI port by the
COLN
bus signal going active. This signal informs the main
state machines to send out the jam pattern rather than
valid data stored in the elasticity buffers. Once a collision
has occurred, the IRC, IRD and IRE
become undefined. When the collision has ended and the
Tw2
operation perfor med, the repeater moves to the
state.
PORT N.
PORT N
Inter-RIC bus signal is asserted.
PORT N
The collision is
PORT N
detects a collision on
and a
RECEIVE COLLI-
arbitration and
bus signals may
WAIT
Transmit Collisions
A transmit collision is a collision that is detected upon a
segment to whi ch the repeater system is transmitting. The
port state machine monitoring the colliding segment
asserts the ANYXN
causes
to the
had been
encoded 1 on to its network segment. While i n the
PORT M
TRANSMIT COLLISION
PORT N
MIT COLLISION
mit the 1010... jam pattern, and
performed. Ea ch RIC2A is obligated, by the IEEE spec if ication, to ensure all of its ports transmit for at least 96 bits
once the
This tra n s mit activ ity is e nfor c ed by th e A N Y XN
While ANYXN
To ensure this situation lasts for at least 96 bits, the MSM
inside the RIC2As assert the ANYXN
period. After this period has elapsed, ANYXN
asserted if there are multiple ports with active collisions on
their network segments.
There are two possible ways for a repeater to leave the
TRANSMIT COLLISION
TRANSMIT COLLISION
when network activity, i.e., collisions and their
sions, end before the 96 bit enforced period expires. Under
these conditions the repeater system may move directly to
the
WAIT
state when 96 bits have been transmitted to all
ports. If the MSM enforced period ends and there is still
one port experiencing a collision, the
state is entered. This may be seen on the Inter-RIC bus
when ANYXN
ting to its network segment. In this circumstance the InterRIC bus transitions to the RECEIVE COLLISION state.
The repeater will remain in this state while
sion,
Tw2
collision extension and any receive signals are
present. When these conditions ar e not true, packet repetition finishes and the repeater enters the
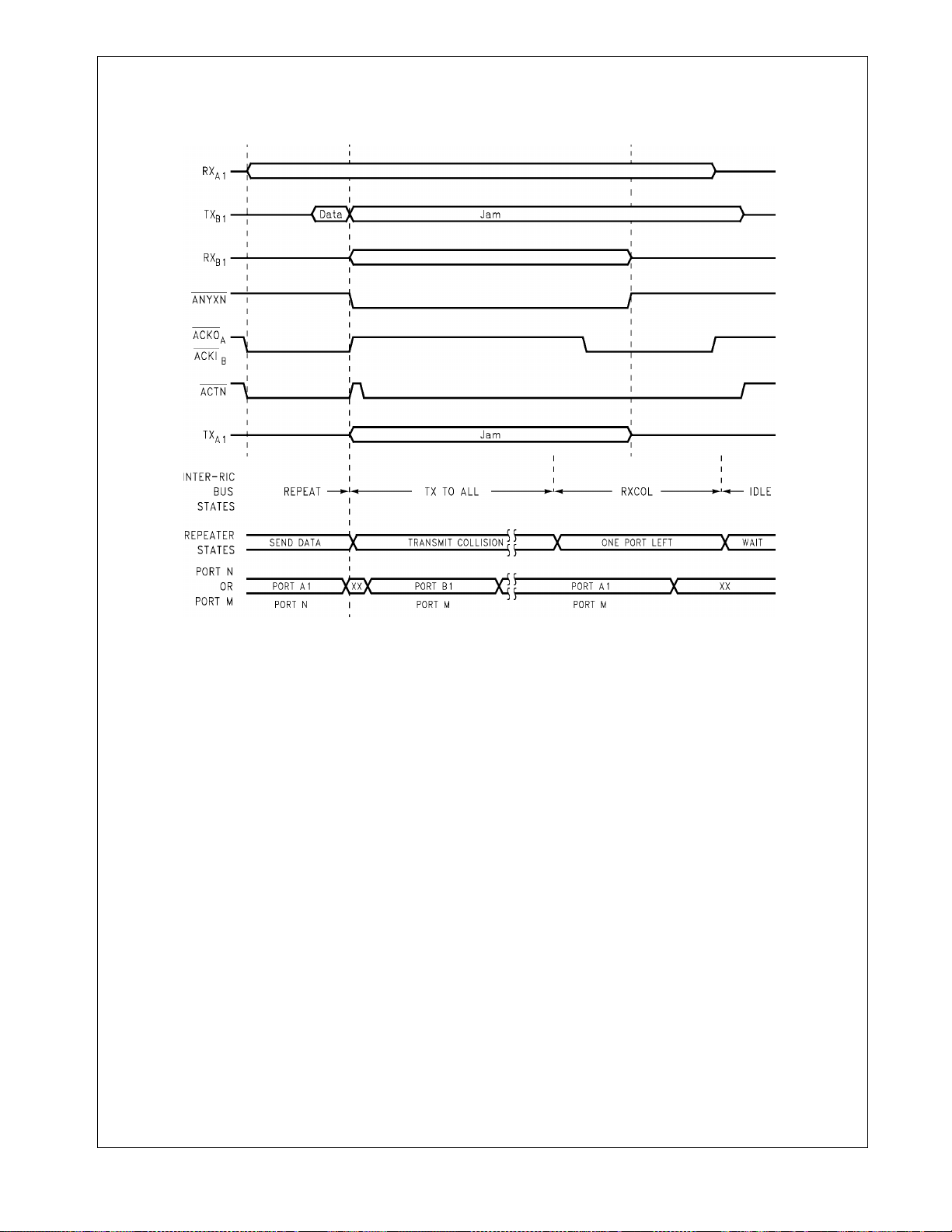
Figure 8 shows a multi-RIC2A system operating under
transmit collision conditions. There are many different scenarios which may occur during a transmit collision, this figure illustrates one of these. The diagram begins with
packet reception by port A1. Port B1 experiences a collision, since it is not
the main state machines in the system to switch from data
to jam pattern transmission.
Port A1 is also monitoring the ANYXN
tion forces A1 to relinquish its
mitting, stop asserting ACTN
PSM arbitration signals (ACKO
it transmits will be a Manchester encoded "1" in the jam
pattern. Since port B1 is the only port with a collision, it
attains
does however assert ACTN
the PSM arbitratio n chain (forces ACKO
ensure that ANYXN
ports, including
After some time port A1 e xperiences a collision. This ari ses
from the presence of the packet being received from port
A1's segment and the jam signal the repeater is now transmitting onto this segment. Simultaneous receive and transmit activity on one segment results in a collision. Port A1
fulfills the same criteria as B1, i.e., it has an active collision
PORT M
bus signal. The assertion of ANYXN
arbitration to begin. The repeater moves
state when the port which
starts to transmit a Manchester
TRANS-
state, all ports of the repeater must trans-
PORT M
state has been entered.
is active, all R IC2A port s will transmit ja m.
signal through out this
state. The most straight forward is
arbitration is
bus signal.
will on ly be
Tw2
exten-
ONE PORT LEFT
is de-asserted and
PORT N
status and stops asserting ANYXN. It
stays active and thus force all of the
PORT M,
to transmit to their segm ents.
PORT M
it asserts ANYXN. This alerts
PORT N
and release its hold on the
A and ACKI B). The first bit
, and exer t its presence upon
stops transmit-
PORT M's
WAIT
state.
bus line. Its a sser-
status, start trans-
B low). The MSMs
colli-
23 www.national.com
4.0 Functional Description
(Continued)
on its segment, but in addition it is higher in the arbitration
chain. This priority yields no benefits for port A1 since the
ANYXN
driving ANYXN
signal is still active. There are now two sources
, the MSMs and the collision on port B1.
Eventually the collision on port B1 ends and the ANYXN
extension by the MSMs expires. There is only one collision
on the network ( this may be deduced since ANYXN
tive) so the repeater will move to the
ONE PORT LEFT
is inac-
state. The RIC2A system treats this state in a similar manner to a receive collision with
PORT M
fulfillin g the role of
the receiving port. The difference from a true receive collision is that the switch from packet data to the jam pattern
has already been made (controlled by ANYXN
state of COLN
common with the operation of the
has no effect upon repeater operations. In
RECEIVE COLLISION
). Thus the
state, the repeater remains in this condition until the collision and receive activity on
repetition operation complete s when the
in the
WAIT
state has been perf ormed.
Note: In transmit collision conditions
which contained
during the
PORT N
TRANSMIT COLLISION
at the start of pac ket rep etition c ontai ns
PORT M
subside. The packet
Tw1
will only go active if the RIC2A
COLN
and
ONE PORT LEF T
recover y time
PORT M
states.
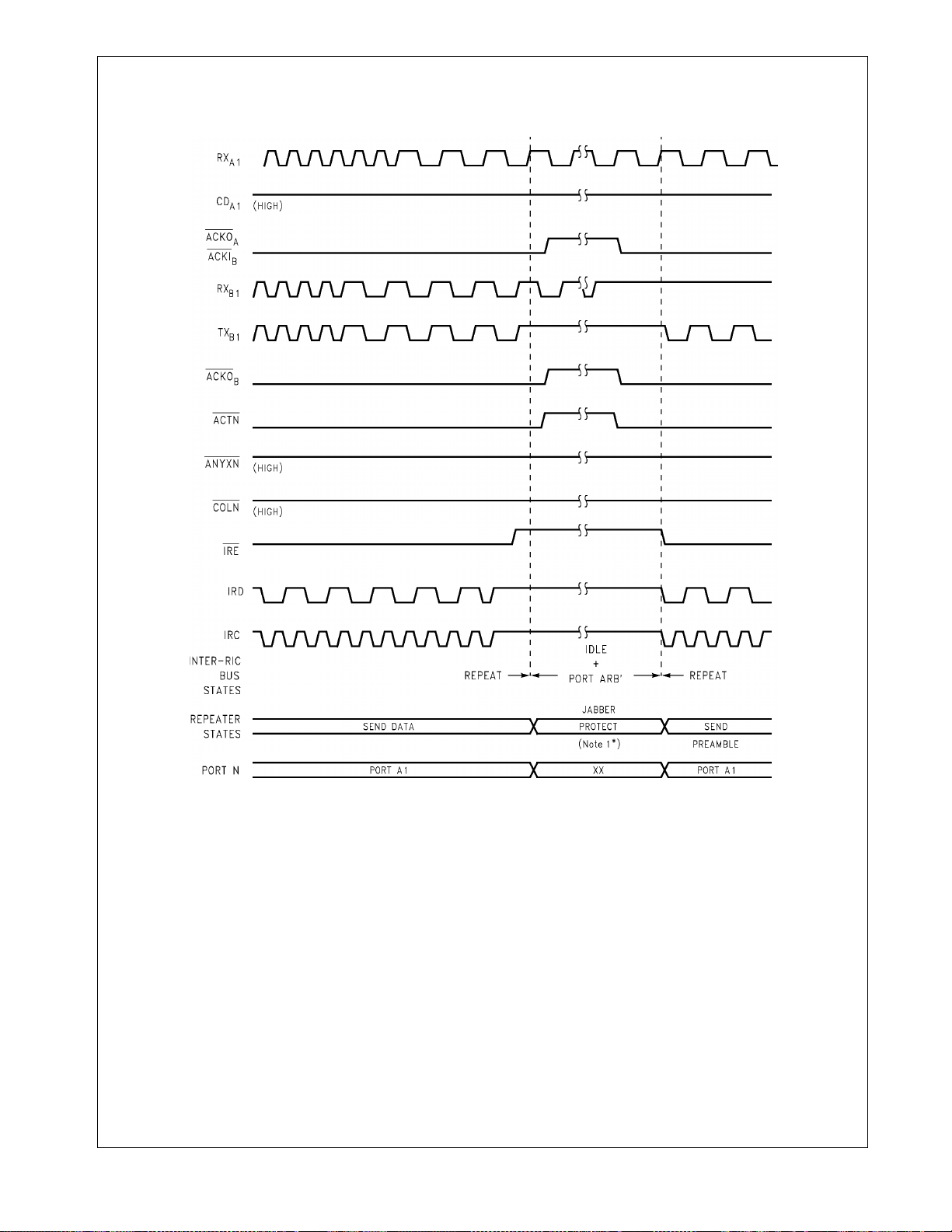
Jabber Protection
A repeater is required to disable transmit activity if the
length of its current transmission reaches the jabber protect limit. This is defined by the specification's
The repeater disables output for a time period defined by
the
Tw4
specification, after this period normal operation
may resum e.
Figure 9 shows the effect of a jabber length packet upon a
RIC2A based repeater system. The
state is entered from the
SEND DATA
JABBER PROTECT
state. While the
period is observed the Inter-RIC bus displays the IDLE
state. Thi s is misl eading si nce new pa ck et activi ty or co ntinuous activity (as shown in the diagram) does not result in
packet repetition. This may only occur when the
quirement has been sati sfied.
Tw3
Tw4
time.
Tw4
re-
24 www.national.com
4.0 Functional Description
(Continued)
Note: The Inter-RIC bus is configured to use active low signals. AUI port shown
Figure 8. Transmit Colli sion
25 www.national.com
4.0 Functional Description
(Continued)
Note:1* The IEEE Specificati on does not have a jabber protect s tate defined in i ts main state diagr am, this
behavior is defined in an additional MAU Jabber Lockup Protection state diagram.
Note: The Inter-RIC bus is configured to use active low signals. AUI port shown
Figure 9. Jabber Protect
26 www.national.com
4.0 Functional Description
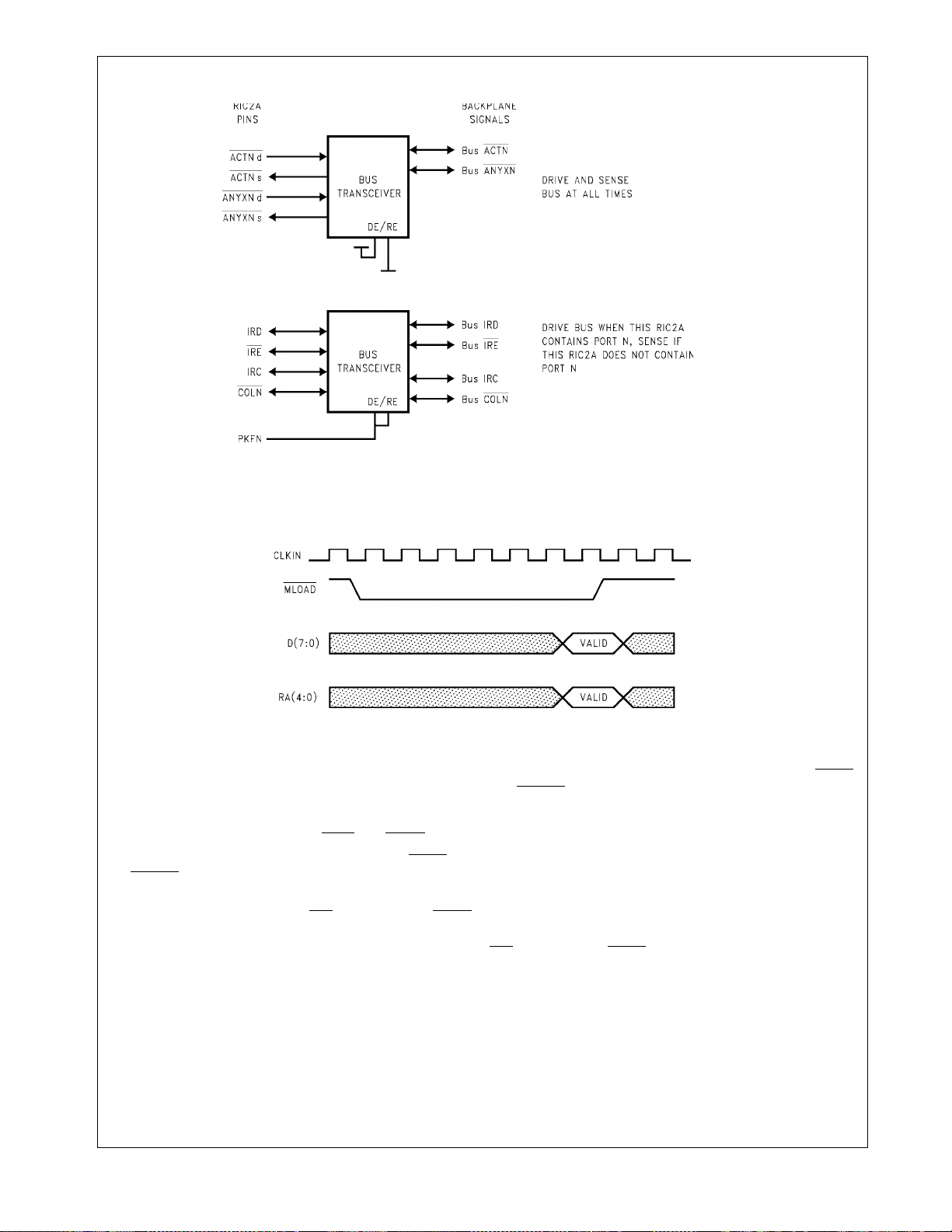
Note: DE = Bus Drive Enable active high, /RE = Bus Receive Enable active low
Note: The Inter-RIC bus is configured to use active low signals.
Figure 10. External Bus Trans ceiver Connection Diagram
(Continued)
Figure 11. Mode Load Operation
4.5 Description Of Hardware Connection For Inter-ric Bus
When considering the hardware interface, the Inter-RIC
bus may be viewed as consisting of three gr oups of signals:
1. Port Arbitration chain, namely: ACKI
2. Simultaneous drive and sense signals, i.e., ACTN
ANYXN
tiple devices).
3. Drive or sense signals, i.e., IRE
(Only one device ass erts these si gnals at any inst ance in
time).
The first set of signals are either used as point to point
links, or with external arbitration logic. In both cases the
load on these signals will not be large, so the on-chip drivers are adequate. This may not be true for signal classes
(2) and (3 ) .
The Inter-RIC bus has been designed to connect RIC2As
together di rectly, or via external bus transceiver s. The latter
is advantageous in large repeaters. In the second application the backplane is often heavily loaded and is beyond
. (Potenti ally these signals may be dr iven by mul-
and ACKO.
and
, IRD, IRC and COLN.
the drive capabilities of the on-chip bus drivers. The need
for simultaneous sense and drive capabilities on the ACTN
and ANYXN signals, and the desire to allow operation with
external bus transceivers, makes it necessary for the se bus
signals to each have a pair of pins on the RIC2A. One
drives the bus, the other senses the bus signal. When
external bus transceivers are used, they must be open collector / open drain to allow wire-ORing of the signals. Additionally, the drive and sense enables of the bus transceiver
should be tied in the acti ve state.
The uni-directional nature of information transfer on the
IRE
, IRD, IRC and COLN signals, means a RIC2A is either
driving these signals or receiving them from the bus, but
not both at the same time. Thus a single bi-directional
input / output pin is adequate for each of these signals. If
an external bus transceiver is used with these signals the
Packet Enable "PKEN" RIC2A output pin performs the
function of a drive enable and sense disable.
Figure 10 shows the RIC2A con nected to the Inter-RIC bus
via external bus transceivers, such as National's DS3893A
bus transceiv ers.
27 www.national.com
 Loading...
Loading...