

Page 1

Northstar Technologies
8700 GPS Position Sensor
8800 Series Beacon Sensors
8900 Series GPS/DGPS Position Sensors
Technical Reference Manual
Revision H
May 1, 1997
Part No. GM8900
© 1997 Northstar Technologies
a division of CMC Electronics, Inc.
Northstar Technologies
30 Sudbury Road
Acton, Massachusetts 01720
Sales: 508/897-6600
Service: 508/897-7251
Fax: 508/897-7241
Page 2

Page 3

Revision history
Date Pages Revision
May 1, 1997 ALL H
Ordering information
To receive additional copies of this publication, order the Northstar Sensors Technical Reference Manual (Part No. GM8900).
Page 4

Limited warranty policy
Northstar 8700, 8800 series, and 8900 series sensors
Northstar Technologies, a division of CMC Electronics, Inc., warrants its family of 8700, 8800 series, and 8900 series sensors to be
free from defects in materials and workmanship for a period of
two (2) years. This warranty applies to the original purchaser and
to any subsequent owner during the warranty period, which
begins on the date of shipment of the unit, F.O.B. Acton, Massachusetts, to an authorized Northstar dealer.
During the unit’s warranty period, Northstar will repair or replace,
at its option, any part of the unit it finds to be defective due to
faulty material (s) or workmanship. All such repairs and/or
replacements will be performed by Northstar free-of-charge to the
owner, excluding freight costs incurred in shipping to the factory.
Return shipments from Northstar to points within the United
States are made via ground transportation, freight prepaid. Special
shipping charges (overnight, two-day, and so on) are the responsibility of the owner.
To be covered by this warranty, the Northstar equipment must
have been in normal use. The warranty does not apply to units
with defects caused by improper installation, physical damage,
abuse, tampering, lightning, or other abnormal electrical discharge, or to units with defaced or altered serial numbers, or to
units repaired by unauthorized persons or repaired in a manner
that violates Northstar’s recommended service procedures.
All repairs and/or replacements made under this warranty must
be performed at Northstar’s facilities in Acton, Massachusetts.
Performance of warranty work elsewhere will not be authorized,
and Northstar will not pay for any charges for such work. Northstar will not be responsible for payment of any charges imposed
by a Northstar dealer or other party for services requested by
and/or performed for a unit’s owner in connection with this warranty. Such services might include removal or the unit from a
vehicle, inspection, packaging, handling, reinstallation, and the
like.
Northstar assumes no responsibility for any consequential losses
of any nature with respect to any of its products or services sold,
rendered, or delivered. The foregoing is the only warranty
expressed or implied. No other warranty exists.
* Certain Northstar control heads are warranty-protected against
damage due to water leakage, provided the head has not been
tampered with.
Page 5

Table of Contents
Section 1 - About this manual . . . . . . . . . . . . . . . . . . . . 1
1.1 Scope of this manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Audience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.2 Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.3 Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.4 Glossary and acronyms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.5 Registration card . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.6 Service and repair . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Section 2 - Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 Northstar 8700. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.2 Northstar 8800 series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.3 Northstar 8900 series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.4 Sensor dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.5 Power. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.6 Interfacing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Section 3 - Packaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 Housing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.2 Northstar 8700 parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.3 Northstar 8800 series parts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.4 Northstar 8900 series parts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Section 4 - GPS receivers. . . . . . . . . . . . . . . . . . . . . . . . . 11
4.1 Northstar 8700 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.1.1 Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.1.2 Technical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.1.3 Operating modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Section 5 - Beacon receivers . . . . . . . . . . . . . . . . . . . . . 15
5.1 Northstar 8800 series. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1.1 About the Northstar 8801 . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1.2 Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.1.3 Technical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.1.4 Operating modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Section 6 - GPS/beacon combination receivers . . 19
6.1 Northstar 8900 series. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6.1.1 About the Northstar 8901 . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6.1.2 Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6.1.3 Technical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Page 6

Section 7 - Antennas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.2 GPS antenna (AN145) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.2.1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.2.2 Dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.2.3 Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.2.4 Mounting location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.3 GPS antenna (AN150) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.3.1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.3.2 Dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.3.3 Gain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.3.4 Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.3.5 Mounting location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.4 GPS/DGPS combination antenna (AN190/AN200) . . . . . . . . 24
7.4.1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.4.2 Dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
7.4.3 Gain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
7.4.4 Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
7.4.5 Mounting location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
7.5 DGPS-only H-field antenna (AN195). . . . . . . . . . . . . . . . . . . . 25
7.5.1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
7.5.2 Dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
7.5.3 Cable length . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.5.4 Mounting location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.6 Whip antenna (8410 ACU) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.6.1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.6.2 Dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.6.3 Cable length . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
7.6.4 Mounting location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Section 8 - Input/output configurations . . . . . . . . . . 29
8.1 I/O ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
8.2 Sensor signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
8.3 Standard configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
8.4 Configuration details . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
8.5 Connector pin assignments . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
8.6 Input and output signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
8.6.1 RTCM SC-104 output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
8.6.2 BDM control input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
8.6.3 BDM monitor input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
8.6.4 BDM monitor output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
8.6.5 GPS auxiliary input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
8.6.6 GPS auxiliary output. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
8.6.7 GPS primary input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
8.6.8 GPS primary output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
8.6.9 Remote POWER ON control . . . . . . . . . . . . . . . . . . . . . . . . . 35
8.6.10 DC power input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
8.6.11 Time mark . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Section 9 - Connector pinouts. . . . . . . . . . . . . . . . . . . . 37
Page 7

9.1 Standard pinouts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
9.1.1 Wiring power control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
9.1.2 8700 connector pinouts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
9.1.3 8800 connector pinouts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
9.1.4 8900 connector pinouts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
9.1.5 Alternate connector pinouts for the 8900. . . . . . . . . . . . . . 40
Section 10 - NMEA protocols
10.1 Beacon monitor control messages. . . . . . . . . . . . . . . . . . . . . 43
10.1.1 NMEA 0183 format control messages . . . . . . . . . . . . . . . . 43
10.2 GPS serial protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
10.2.1 Input sentences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
10.2.2 Output sentences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Section 11 - Beacon receiver binary protocol
11.1 Beacon receivers (8800 series and 8900 series) . . . . . . . . . 61
11.1.1 Binary control messages . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
11.2 GPS binary protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Section 12 - 8X00 engine monitor program
12.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
12.1.1 BDM data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
12.1.2 GPS data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
12.1.3 Satellite data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
12.1.4 Function key tasks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
12.2 Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
12.2.1 Hardware and software requirements . . . . . . . . . . . . . . . . 64
12.2.2 Start-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
12.2.3 About data files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
12.2.4 About scrolling data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
12.2.5 About the monitor message line . . . . . . . . . . . . . . . . . . . . 65
12.3 Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
. . . . . . . . . . . . . . . . . . . . . 43
. . . . . 61
. . . . . . 63
Section 13 - Glossary
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Section 14 - Abbreviations and initialisms
Index
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
. . . . . . . 69
Page 8

Tables
Table 1 — 8700 parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Table 2 — 8800 parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Table 3 — 8801 parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Table 4 — 8900 parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Table 5 — 8901 parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Table 6 — I/O ports. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Table 7 — Standard configurations. . . . . . . . . . . . . . . . . . . . 30
Table 8 — Configuration 7 . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Table 9 — Configuration 6 . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Table 10 — Configuration 5 . . . . . . . . . . . . . . . . . . . . . . . . . 32
Table 11 — Configuration 4 . . . . . . . . . . . . . . . . . . . . . . . . . 32
Table 12 — Configuration 3 . . . . . . . . . . . . . . . . . . . . . . . . . 32
Table 13 — Hardware pin numbers/signal levels . . . . . . . . . 33
Table 14 — 8700 connector pinouts/config. 3 . . . . . . . . . . . 37
Table 15 — 8800 power/interface connector pins/config. 5. 38
Table 16 — 8900 standard connector pinouts/config. 7 . . . . 39
Table 17 — 8900 alternate connector pinouts/config. 6 . . . . 40
Table 18 — 8900 alternate connector pinouts/config. 4 . . . . 41
Table 19 — Command parameters . . . . . . . . . . . . . . . . . . . . 44
Table 20 — Command parameter examples. . . . . . . . . . . . . 44
Table 21 — Approved sentence structure. . . . . . . . . . . . . . . 45
Table 22 — NMEA field definitions. . . . . . . . . . . . . . . . . . . 45
Table 23 — Primary port input sentences. . . . . . . . . . . . . . . 47
Table 24 — Character/baud rate . . . . . . . . . . . . . . . . . . . . . . 47
Table 25 — Initialization command . . . . . . . . . . . . . . . . . . . 48
Table 26 — Example B sentence contents . . . . . . . . . . . . . . 48
Table 27 — Output-configuration message identifiers. . . . . 49
Table 28 — Set output configuration command. . . . . . . . . . 50
Table 29 — Switch to reprogramming mode command. . . . 50
Table 30 — NVM command. . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 31 — Character/element . . . . . . . . . . . . . . . . . . . . . . . 51
Table 32 — Radio-beacon command message . . . . . . . . . . . 51
Table 33 — Primary-port output sentences. . . . . . . . . . . . . . 52
Table 34 — Navigation status sentence . . . . . . . . . . . . . . . . 53
Table 35 — Self-test sentence. . . . . . . . . . . . . . . . . . . . . . . . 54
Table 36 — Radio-beacon proprietary sentence. . . . . . . . . . 54
Page 9

Table 37 — GPS-fix data sentence . . . . . . . . . . . . . . . . . . . . 55
Table 38 — Example N sentence . . . . . . . . . . . . . . . . . . . . . 56
Table 39 — Geographic position sentence . . . . . . . . . . . . . . 56
Table 40 — GPS DOP and active satellite sentence. . . . . . . 57
Table 41 — GPS-satellites-in-view sentence . . . . . . . . . . . . 57
Table 42 — MSS radio-beacon signal status sentence . . . . . 58
Table 43 — Recommended-minimum-specific sentence . . . 59
Table 44 — Track made good/ground-speed sentence . . . . . 59
Table 45 — UTC time, data, and local time-zone sentence . 60
Figures
Figure 1 - 8700/8800 series/8900 series dimensions . . . . . . . 4
Figure 2 - 8700 ALLSTAR engine operating modes . . . . . . 12
Figure 3 - Radio-beacon coverage map . . . . . . . . . . . . . . . . 15
Figure 4 - Northstar AN145 antenna . . . . . . . . . . . . . . . . . . 23
Figure 5 - Northstar AN150 antenna . . . . . . . . . . . . . . . . . . 24
Figure 6 - AN190 combination antenna . . . . . . . . . . . . . . . . 25
Figure 7 - Northstar AN195 H-Field antenna . . . . . . . . . . . . 26
Figure 8 - Northstar 8410 ACU . . . . . . . . . . . . . . . . . . . . . . 27
Figure 9 - 8X00 ALLSTAR engine monitor screen . . . . . . . 63
Page 10

Page 11

Section 1 - About this manual
To use this manual effectively, please read this entire two-page section
first. This document doesn’t contain basic installation information. If
you’re looking for instructions about mounting the sensors and antennas,
connecting the cables, or other details on interfacing the Northstar sensors to other Northstar receivers, please refer to the corresponding North-
star Installation Manual.
1.1 Scope of this manual
Section 1 - About this manual
1.1.1 Audience
1.1.2 Contents
The Northstar Sensors Technical Reference Manual is intended for readers
with a good technical knowledge of the components of GPS consumer
navigational instruments. This audience includes engineers and other
technical product-development persons in original equipment manufacturer (OEM) environments; experienced dealers of marine, land-based, or
other navigational equipment; and small start-up companies, all looking
for ways to interface their products with Northstar sensors.
This manual presents this technical information in a logical, easy-to-use
format; each section is organized for access to specific information. In this
way, you can go directly to the source of that information without sifting
through unnecessary levels to find what you need.
The manual covers the following products:
• Northstar 8700 GPS Position Sensor
• Northstar 8800 Series Beacon Sensors
• Northstar 8900 Series GPS/DGPS Position Sensors
Additional high-level information about antennas, pinouts and configurations, NMEA protocol, beacon binary protocol, RS-422 and RS-232 interfaces, and the 8X00 ALLSTAR Engine Monitor Program is all contained
within this manual. In fact, if you own this Northstar Sensors Technical
Reference Manual, you should have received a copy of the Northstar
8X00 ALLSTAR Engine Monitor Program. (If you didn’t receive this program, call the Northstar sales department and order Northstar Part Number GS8900, shipped on a 3-½ inch diskette at no charge.)
This document supersedes the Northstar Installation and Operation Man-
ual (Northstar Part Number GM8900, Revision G).
1.1.3 Conventions
05/01/97 REV H PAGE 1
The conventions listed below are used throughout the manual to consistently refer to certain information, as follows:
and
NOTE
reader information. Be sure to read the information in these note and
caution boxes.
NMEA command is the bold typeface used when the text refers to a com-
mand given to, or output by, the sensors;
(without bold) used when a table refers to a command given to, or output
by, the sensors.
CAUTION
are the headings for text boxes containing important
NMEA command is the typeface
Page 12
Section 1 - About this manual
1.1.4 Glossary and acronyms
1.1.5 Registration card
1.1.6 Service and repair
This manual contains two separate sections to clarify technical terms,
abbreviations, acronyms, and initialisms. Each new term is defined when
it first appears; however, a term once defined is not redefined each time it
appears. Consequently, you may want to refer to the back of this manual
if you find a term you don’t understand.
Make sure you fill out the owner’s registration card included with the
sensor and return it to Northstar Technologies. We must have your complete mailing address (not just a company name) so we can send you any
future product information.
In case of an operating problem with a Northstar sensor, you may contact
your dealer or return the sensor to the Northstar factory for diagnosis
and repair. Be as complete and accurate as possible when you describe an
operating problem. If you need immediate assistance, feel free to call
Northstar service at (508) 897-7251.
Each sensor is covered by a two-year limited warranty, which, in summary, states that if a sensor is returned to the factory by the owner during
the warranty period, Northstar will repair or replace, free-of-charge, any
part found to be defective due to faulty materials or workmanship, if the
sensor has been properly installed and hasn’t been abused. The only cost
to the owner will be the one-way shipping charges that might be imposed
by the dealer.
Shipments to Northstar Technologies should be made to the following
address:
Northstar Technologies, 30 Sudbury Road, Acton, MA 01720
If you have special overnight or two-day shipping requirements (UPS or
Federal Express), please call the Northstar factory for turnaround time
and freight costs before shipping your sensor.
Refer to the Limited Warranty Policy at the beginning of this manual for
further details on warranty and service policies and procedures.
PAGE 2 05/01/97 REV H
Page 13

2.1 Overview
Section 2 - Introduction
Section 2 - Introduction
Northstar’s family of position sensors, comprised of models 8700, the
8800 series, and the 8900 series, features self-contained, 12-channel GPS
modules with two-channel, automatic, medium-frequency radio-beacon
receivers, packaged in rugged “black box” aluminum enclosures.
These high-performance units provide reliable GPS and/or DGPS positioning for the following applications:
• Custom OEM systems requiring superior, “all-in-view” GPS perfor-
mance
• Automatic vehicle location (AVL) and monitoring systems, including
railroads, highways, emergency, public transportation, and trucking
• Mobile ground information systems (GIS) data acquisition, including
asset management and mapping
• Precision agriculture, including yield mapping, yield monitoring, and
sampling
• Forestry, including aerial spraying, planting, and forest mapping
• Surveying/mapping, including aerial, highway, and legal surveys;
utility mapping
• Marine navigation
2.1.1 Northstar 8700
2.1.2 Northstar
8800 series
2.1.3 Northstar
8900 series
The Northstar 8700 is a 12-parallel-channel, DGPS-ready, fast-acquisition
GPS receiver that continuously tracks all available satellites. The 8700
accepts DGPS corrections from any source of Radio Technical Commission for Maritime Services (RTCM) SC-104 data. See Section 4, “GPS
Receivers,” for complete information about the Northstar 8700.
The Northstar 8800 series (comprised of either the 8800 or the 8801, an
8800 bundled for agricultural applications) is a two-channel, auto-tuning,
Minimum Shift Keying (MSK) radio-beacon receiver, also known as a beacon demodulator, or BDM, which supplies fully automatic differential
corrections for an external DGPS-ready receiver. While the 8800 series’
Channel 1 processes real-time corrections, Channel 2 automatically
searches for alternates. The 8800 series works worldwide with beacons
that conform to the SC-104 specification.
See Section 5, “Beacon Receivers” for complete information about the
Northstar 8800 series.
Northstar combines the 8700 and the 8800 to form the Northstar 8900
series of sensors, which provide optimum performance in self-contained,
fully automatic DGPS units. See Section 6, “GPS/Beacon Combination
Receivers” for complete information about the Northstar 8900 series.
05/01/97 REV H PAGE 3
Page 14

Section 2 - Introduction
(A
l dimensions in inches
)
2.1.4 Sensor dimensions
The sensors share common dimensions as outlined below.
• Height = 2.0 inches
• Width = 4.6 inches
• Depth = 8.9 inches
• Weight < 2 pounds
2.1.5 Power
l
FIGURE 1 - 8700/8800 series/8900 series dimensions
Each sensor is easy to use: Just connect the antenna and supply the
power.
CAUTION!
Before you apply power to the system, double-check
all wiring. A small, but significant number of units
sustain damage because of incorrectly wired connections. This damage isn’t covered under warranty. Be
sure you don’t apply primary voltage directly to any
of the signal input/output wires of the GPS sensor;
this may vaporize circuit-board conductors within
the sensor.
Status indicator light
NOTE:
The information below only applies to the Northstar
8800 series and 8900 series sensors; NOT to the
Northstar 8700 sensor.
PAGE 4 05/01/97 REV H
Page 15

Section 2 - Introduction
The status indicator light illuminates when the unit’s power is turned on.
When you first turn power on, the light turns green for just a few seconds. The light then turns red, and stays red as long as the sensor is
searching for a beacon. Once the sensor has locked onto a beacon, the
light will then turn green.
Another function of the status indicator light is flashing red/green. The
light will only flash red/green if the beacon antenna (not GPS) is open or
shorted. Check your antenna or antenna wiring to determine the problem, if you see the flashing red/green light. Once the problem has been
fixed, the light will turn red for as long as several minutes, while the sensor searches for a beacon. The light will return to green once it has locked
onto a beacon.
The status indicator light in the 8800 and 8900 sensors refers to beacon
status, not GPS status.
2.1.6 Interfacing
You can interface Northstar position sensors to a wide variety of external
devices, such as navigators, computers, yield monitors, and so on. These
external devices, or host systems, receive and process the data from the
sensor, and in some applications, may control the sensor.
Each sensor has two, full-duplex serial I/O ports that may be connected to
a host system in a variety of ways and for different applications. The function of each I/O port is determined by a Programmed Array Logic (PAL)
chip that acts as a matrix switch, which can configure the I/O port to several configurations.
All three sensors use identical I/O hardware and circuitry, configured for
specific applications by jumper options controlling the PAL chip. Any one
of the eight standard configurations (see Section 8, “Input/Output Configurations” for a complete list of standard configurations) is selectable from
combinations of three jumper pins located on the 25-pin data/power connector.
The standard, recommended configuration for each sensor described in
this manual is further described in its corresponding Northstar Installa-
tion Manual. Custom configurations also may be available for large quantities of sensors as special orders.
05/01/97 REV H PAGE 5
Page 16

Section 2 - Introduction
PAGE 6 05/01/97 REV H
Page 17
3.1 Housing
Section 3 - Packaging
Section 3 - Packaging
The sensor is housed in a rugged aluminum enclosure with a mounting
flange.
NOTE:
The housing isn’t completely waterproof, so keep the
sensor away from direct contact with water spray or
splash.
The sensor enclosure includes keyhole slots, located at the rear of the
sensors, which aid in installations of limited access. You can mount the
sensors either horizontally or vertically; see Figure 1 in Section 2, “Introduction,” for case and mounting dimensions.
Northstar ships each sensor system with the following parts; check with
Northstar if these parts aren’t included with your sensor.
3.2 Northstar 8700 parts
Part # Description
8700–A 8700 GPS position sensor
8700–PK
KS130
KS131
KS133
GM630 Northstar 8700 GPS Sensor Installation Manual
8700 parts kit, consisting of:
3.3 Northstar 8800 series parts
Part # Description
8800–A 8800 beacon sensor
8900–PK
8900 series parts kit, consisting of:
Table 1: 8700 parts
25-pin female DB–25 connector
DB–25 shielded junction shell
DB-25 short screw lock for KS131
Table 2: 8800 parts
KS130
KS131
KS133
8410 Optional DGPS antenna coupling unit (ACU) used
05/01/97 REV H PAGE 7
25-pin female DB-25 connector
DB–25 shielded junction shell
DB-25 short screw lock for KS131
with four-foot whip antenna
Page 18

Section 3 - Packaging
WC100 DGPS antenna connecting cable (RG-58U coaxial, 25
feet). Standard with 8410
AN195 Optional H-field DGPS-only antenna with 20 feet of
RG-59U coaxial cable
GM635 Northstar 8800 and 8801 Beacon Receivers Installa-
tion Manual
Table 3: 8801 parts
Part # Description
8800–A 8800 beacon sensor
8801-CA Interface cable with nine-pin I/O connector and
power leads
AN195 H-field DGPS-only antenna with 20 feet of RG-59U
coaxial cable
GM635 Northstar 8800 and 8801 Beacon Receivers Installa-
tion Manual
3.4 Northstar 8900 series parts
Part # Description
8900–A 8900 integrated GPS/DGPS position sensor
8900–PK
KS130
KS131
KS133
8410 Optional DG PS antenna coupling unit (not used with
WC100 DGPS antenna connecting cable (RG-58U coaxial, 25
AN145 Optional GPS antenna (includes 25 feet of RG-59U
AN150 Optional GPS active antenna (includes 50 feet of
8900 parts kit, consisting of:
combo antenna).
feet). Not used with combo antenna. Standard with
8410.
cable)
RG-59U cable)
Table 4: 8900 parts
25-pin female DB-25 connector
DB–25 shielded junction shell
Short screw lock for KS131
AN190 Optional GPS/DGPS combo antenna with external
splitter. Includes 50 feet of RG-59U cable.
AN195 Optional H-field DGPS-only antenna. Includes 20
feet of RG-59U cable.
PAGE 8 05/01/97 REV H
Page 19

Section 3 - Packaging
GM640 Northstar 8900 DGPS Sensor Installation Manual
8902-CA Optional interfacing cable for connecting to North-
star 800 series GPS-ready Lorans (only supplied with
units for connection to 800-GPS or 800X-GPS, if
specified at time of order.
Table 5: 8901 parts
Part # Description
8901-A 8901 integrated GPS/DGPS position sensor with
internal splitter
AN200 Combination antenna with 20 feet of RG-59U coaxial
cable
GM-625 Northstar 8901/8901AL Ag DGPS Sensors Field Instal-
lation Manual
8901-CA Optional interfacing cable for agricultural applica-
tions
8903-CA Optional interfacing cable for AgLeader applications
(included with Northstar 8901AL sensor)
05/01/97 REV H PAGE 9
Page 20

Section 3 - Packaging
PAGE 10 05/01/97 REV H
Page 21

Section 4 - GPS receivers
4.1 Northstar 8700
The Northstar 8700 GPS position sensor decodes satellite radio signals,
and provides three-dimensional position, velocity, time, and other status
information at a maximum rate of once per second.
Each of the 12 parallel channels continuously tracks a GPS satellite signal.
To support faster acquisition of GPS signals, the sensor makes provisions
for external initialization of data. Further, the sensor can use externally-provided differential corrections to reduce inherent GPS inaccuracies; WGS-84 (World Geodetic System) is used as its reference datum.
Section 4 - GPS receivers
4.1.1 Features
4.1.2 Technical specifications
• 12-channel correlator for “all-in-view” reception
• External antenna
• Code and carrier tracking of L1 GPS frequency (1,574.42 MHz) for
increased accuracy
• Very fast signal reacquisition after signal obscuration
• Two serial input/output data ports: One to transmit navigation data,
another for differential data input or other needs. Either one can be
used for maintenance (reprogramming mode).
Power requirements
• 10 to 40 VDC
• 6 watts power consumption
• 0°C to +55°C temperature range of operation
• Internal, two-amp fuse
Electrical requirements
The 8700’s power supply is protected against reverse-polarity power
inputs, and features a remote turn-on ability. The 8700 turns on whenever power is applied to pin 25, ground to pin 13, and remote-on pin 12 is
connected to a source of +5 to +40 VDC.
Dynamics
• Velocity: 1800 km/h
• Acceleration: 4 g
• Jerk: 2 m/sec
3
Position accuracy
• 3 m horizontal, with DGPS, 95 percent confidence
• 30 m horizontal, without Selective Availability (SA) imposed, 95 per-
cent confidence
• 100 m horizontal, with SA imposed, 95 percent confidence
05/01/97 REV H PAGE 11
Page 22

Section 4 - GPS receivers
Acquisition time
• 60 seconds typical Time-To-First-Fix (TTFF) with current almanac
Reacquisition time
• < 1 second typical to re-acquire (5-second obscuration)
• < 3 seconds typical to re-acquire (60-second obscuration)
Sensitivity
• -124 to -130 dBm (antenna input level)
Coarse acquisition
• C/A code (1.023 MHz chip rate — code and carrier phase tracking)
Environment
• Operating temperature: Zero to 55° C
• Relative humidity: 95 percent (non-condensing)
4.1.3 Operating modes
The 8700 automatically switches between six operating modes:
• Self-test
• Initialization
• Acquisition
• Navigation (includes four sub-modes: differential 3-D, differential
2-D, 3-D nav, and 2-D altitude-hold)
• Dead reckoning
• Fault
FIGURE 2 - 8700 ALLSTAR engine operating modes
The six modes are described in detail below.
PAGE 12 05/01/97 REV H
Page 23

Section 4 - GPS receivers
Self-test
Upon request from an external source via the GPS primary port, using
either RS-232 or RS-422, the 8700 enters self-test mode. This test requires
no more than 15 seconds. Upon completion, the 8700 reports the test
results on its primary port through an NMEA message that’s displayed on
the host PC, if available. Then, the 8700 proceeds either to initialization
mode if it passes the test, or to fault mode if it detects a problem.
Initialization
When either power is applied or the self-test mode is complete, the 8700
enters initialization mode. While in this mode, the 8700 retrieves satellite-orbit data stored in its EEPROM memory. To ensure accuracy, the
8700 performs integrity checks on all data retrieved from the EEPROM.
After initialization, the sensor enters acquisition mode.
Acquisition mode
Whenever sufficient real-time satellite data is available to produce an initial navigation solution, the 8700 enters acquisition mode. Acquisition
mode can be entered from initialization, navigation, or dead-reckoning
modes (see below for separate descriptions of navigation and dead-reckoning modes).
The 8700 uses almanac data (stored in EEPROM memory) that describes
the satellite orbits, which helps quickly acquire signals from the GPS satellites. After each satellite in view is acquired, the 8700 collects its ephemeris data by decoding the satellite down-link data message. When enough
satellites are being tracked, the unit computes position, velocity, and
time, then enters navigation mode.
If valid almanac data is absent, and the 8700 can’t acquire signals normally, it initiates a “search the sky” acquisition, attempting to acquire all
satellites in the GPS constellation. In search the sky, the TTFF typically is
less than five minutes. After it acquires each satellite, ephemeris data is
decoded from the satellite down-link message. When enough satellites
are being tracked, the 8700 enters navigation mode—although it exits to
fault mode if it detects a problem.
Navigation mode
The 8700 enters navigation mode whenever sufficient satellite information and measurement data is available to produce a GPS fix. The unit
enters navigation mode from acquisition or dead-reckoning modes, and
exits to dead-reckoning or fault mode.
Navigation mode consists of four sub-modes. The 8700 automatically
chooses the highest-performance sub-mode available for the satellite data
that it currently receives. On its primary port, it reports the current navigation sub-mode:
• 3-D Differential
This navigation mode has the highest performance. The 8700
operates in this mode when it receives data from at least four
satellites with adequate geometry and differential corrections.
Differential SC-104 corrections can be taken in the auxiliary data
port using either RS-232 or RS-422.
05/01/97 REV H PAGE 13
Page 24

Section 4 - GPS receivers
• 2-D Differential
When 3-D differential mode can’t be used, this is the
highest-performance navigation mode. The 8700 operates in this
mode when it receives data from only three satellites with adequate
geometry and differential corrections. SC-104 differential corrections
can be taken in on the auxiliary data port using either RS-232 or
RS-422.
• 3-D Nav
When sufficient differential corrections aren’t available, this is the
preferred navigation mode. The 8700 operates in this mode when it
receives data from at least four satellites with adequate geometry,
but no differential corrections.
• Altitude-Hold (2-D Nav)
This is the least-preferred navigation mode. If satellite
measurements are insufficient to produce a 3-D navigation solution,
but sufficient when altitude information is available, the 8700
operates in this mode, where the altitude is assumed constant.
Dead-reckoning mode
The 8700 enters dead-reckoning mode when it can’t remain in navigation
mode. The speed and direction of the vehicle are assumed constant to
allow the 8700 to provide an estimated position.
Fault mode
The 8700 enters fault mode from any mode—except initialization—when
and if the 8700 determines that one or more critical system faults are
affecting its outputs. Fault mode supersedes all others, and remains active
until the next power-down/power-up cycle.
PAGE 14 05/01/97 REV H
Page 25
Section 5 - Beacon receivers
5.1 Northstar 8800 series
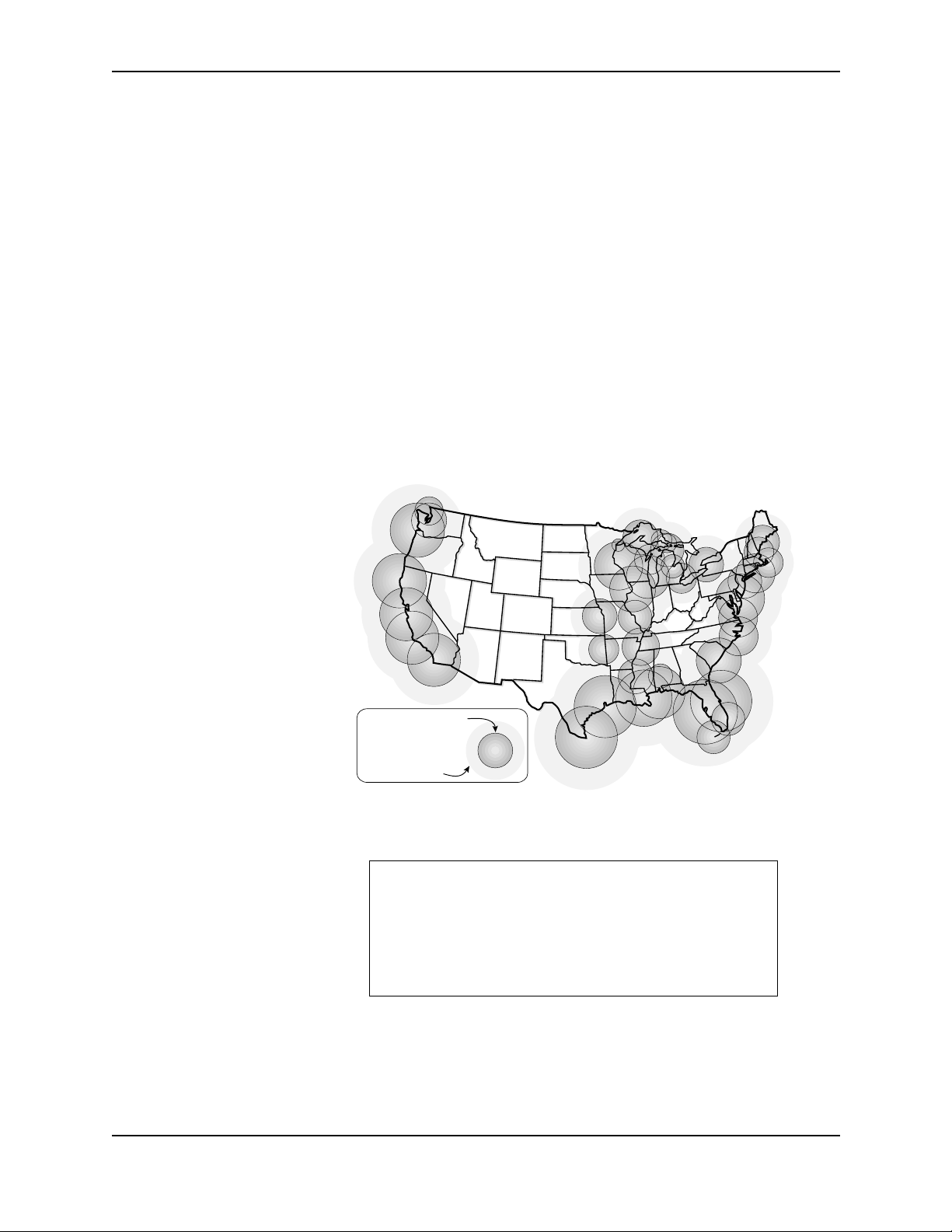
The Northstar 8800 series DGPS beacon sensor system receives corrections broadcast by land-based marine radio beacons situated along most
of the U.S. coastline and inland waterways (see Figure 3 below). GPS
receivers can use these corrections to improve their GPS accuracy to 10
meters or better, with three-meter accuracy 95 percent of the time commonly available.
The 8800 can significantly enhance the accuracy and performance of all
differential-capable GPS receivers that support the standard RTCM
SC-104 DGPS corrections format. DGPS corrections remove the errors
caused by atmospheric variations and Selective Availability, or SA. SA is
the intentional degradation of satellite signals by the U.S. Department of
Defense.
Section 5 - Beacon receivers
WA
OR
NV
CA
Approximate limit of
µV signal strength
75
Additional probable
coverage area for
µV sensitivity
20
MT
ID
UT
AZ
WY
NM
CO
ND
SD
TX
NE
KS
OK
MN
WI
MI
IA
MO
AR
LA
IL
MS
IN
TN
AL
KY
OH
GA
WV
PA
VA
NC
SC
FL
FIGURE 3 - Radio-beacon coverage map
NOTE:
Figure 3 is current as of 03/01/97. For the absolute latest in radio-beacon coverage information, please visit
the Northstar web site at http://www.north-
starcmc.com. Then, follow the “What’s new” link,
click on “Interesting web links,” and select the USCG
Navigation Center.
NY
ME
VT
NH
MA
CT
N
J
5.1.1 About the
Northstar 8801
The 8800 and 8801 sensors are functionally identical; the only difference
is their configuration. The 8800 can be used with either the Northstar
8410 ACU or the Northstar AN195 H-field antenna, and is intended primarily for marine applications. The 8801 is a bundled system intended
05/01/97 REV H PAGE 15
Page 26
Section 5 - Beacon receivers
primarily for agricultural and other land-based applications. It includes
the AN195 H-field antenna and the Northstar 8801-CA cable assembly,
which provides a standard nine-pin connector to interface the 8800 to a
personal computer or other equipment designed to receive differential
corrections.
Because the two units are functionally identical, this section uses the
common term 8800 to refer to both models.
5.1.2 Features
5.1.3 Technical specifications
• Two channels
• Automatic evaluation of available radio-beacon signals
• Automatic selection of best stations
• Superior channel performance and impulse blanking techniques
Wiring diagrams on connecting the 8800 to Northstar GPS receivers are
provided in the Northstar 8800 and 8801 Beacon Receivers Installation
Manual (Northstar Part Number GM635); these receivers include the
Northstar 806, 806X, and Europa GPS navigators; and the Northstar 8000,
8100, 8300, 8700, and 9300 DGPS sensors used with the Northstar 800
and 9000 series navigators. For other receivers, use the Northstar diagrams as a guide, and consult the interfacing diagrams supplied with
your receiver. You can use the 8800 with any brand of GPS receiver that
supports the standard RTCM SC-104 DGPS corrections format.
NOTE:
Some Northstar units may require a software upgrade
for use with the 8800.
Power requirements
• 10 to 40 VDC input voltage
• 5 watts power consumption
• Remote turn-on ability
• 2-amp input fuse
Signal processing
• Two channels
• 283.5 - 325.0 kHz frequency range
• < 2 Hz tuning resolution
• Minimum signal strength: < 5 µV/m @ 100 bps
• > 100 dB dynamic range
• > 50 dB at 1 kHz adjacent channel rejection
• Acquisition time: Five seconds, manual command; 15 seconds, auto-
matic warm start; 15 minutes, automatic cold start (only at first turn
on after installation—time varies, depending on local beacon frequencies)
• Predictive variable-length noise blanker
PAGE 16 05/01/97 REV H
Page 27

Section 5 - Beacon receivers
• Signal detection: acquisition via frequency-locked loop (FLL); track-
ing via phase-locked loop (PLL)
Data processing
• Minimum shift keying (MSK) demodulation
• Data decoding: parallel-matched digital filters
• MSK bit rates: 25, 50, 100, 200 (automatically selected)
Data ports
• Control input port: RS-232-C and RS-422 or NMEA 0183; 9600 or
4800 baud (jumper-selectable)
• DGPS correction output port: RTCM SC-104 Version 2.1; 6 of 8
RS-232-C and RS-422; 9600 or 4800 baud (jumper-selectable)
• Monitor/control port: Bi-directional RS-232-C or RS-422 at 9600
baud
Environment
• Operating temperature: Zero to 55° C
• Relative humidity: 95 percent (non-condensing)
5.1.4 Operating modes
Electrical requirements
The 8800’s power supply is protected against reverse-polarity power
inputs, and features a remote turn-on ability. The 8800 turns on whenever power is applied to pin 25, ground to pin 13, and remote turn-on pin
12 is connected to a source of 5 to 40 VDC.
The 8800 runs in two operating modes:
• Automatic
• Manual
Automatic mode
At power-up, the 8800 enters automatic mode, requiring no further
supervision from the host GPS receiver. The 8800 operates automatically
by using two independent channels: Channel 1 tracks the best beacon
signal available (the signal with the lowest data error rate), and sends the
demodulated DGPS corrections to the GPS receiver; Channel 2
ously
scans the entire beacon frequency band (283.5 kHz to 325 kHz),
locating and measuring received DGPS beacon signals.
The 8800 then stores this information as a DGPS beacon “directory” in
battery-powered memory. If the signal that’s received and monitored by
Channel 1 degrades for any reason, the 8800 selects a better frequency
from its beacon “memory.” This function lets the 8800 automatically
switch to the best beacon signal before affecting your GPS accuracy.
Automatic mode can be used for all applications except specialized ones,
and is the only mode supported by most commercially-available GPS
receivers.
continu-
05/01/97 REV H PAGE 17
Page 28

Section 5 - Beacon receivers
Manual mode
At any time, the host device can override automatic station selection by
issuing tuning commands on the serial interface. In manual mode, the
8800 will output DGPS corrections from the selected station, restoring
automatic mode either the next time the unit is powered on or when the
controlling device specifies a station frequency of zero.
PAGE 18 05/01/97 REV H
Page 29

Section 6 - GPS/beacon combination receivers
Section 6 - GPS/beacon combination receivers
6.1 Northstar 8900 series
The Northstar 8900 GPS/DGPS position sensor system has a unique combination of performance and operational features, including 12-channel
GPS with fully automatic, dual-channel beacon performance for the ultimate in position accuracy. The 8900 sensor combines the Northstar 8700
GPS sensor and the Northstar 8800 differential sensor to create a product
ideal for applications requiring a high level of position accuracy, such as
vehicle tracking, yield monitoring, field mapping, and other specialized
OEM applications.
The 8900’s advanced DGPS system provides greater accuracy than GPS
alone by accepting differential signal corrections from strategically-located transmitters, or beacons. DGPS corrections remove the
errors caused by atmospheric variations and Selective Availability, or SA.
SA is the intentional degradation of satellite signals by the U.S. Department of Defense. Once set up and configured to your application’s
requirements, the 8900 sensor needs only minimal supervision. By virtually eliminating any attention needed to operate the unit, you can devote
more time to other aspects of your work.
6.1.1 About the
Northstar 8901
6.1.2 Features
To add worldwide positioning capability, you can easily interface the
8900 to other sources of differential corrections using the SC-104 corrections format. For further information, see Section 8, “Input/Output Configurations.” See Section 4, “GPS Receivers,” and Section 5, “Beacon
Receivers,” for a description of the operation of the 8900’s GPS receiver
and beacon receiver, respectively.
The 8900 and 8901 sensors are functionally identical; the only difference
is their configuration. Like the 8900, the 8901 is a 12-channel GPS with
dual-channel, automatic differential. The 8900 can use either two separate antennas (GPS and beacon receiver), or a combo antenna and external signal splitter; however, the 8901 is configured to operate only with
the Northstar AN200 combination antenna (a Northstar AN190 antenna
with a 20-foot cable). Accordingly, the 8901 features a convenient internal splitter for quick connection.
The 8901 is primarily used for precision agricultural applications, including soil sampling, field mapping, and yield monitoring. Because the two
units are functionally identical, this section uses the common term 8900
to refer to both models.
• 12-channel, high-performance GPS precision and dependability
• Two-channel, fully automatic DGPS beacon receiver for accuracy as
good as three meters 95 percent of the time
• Speed measurements accurate to about 0.1 m.p.h.
• Course-over-ground (COG) measurements to about 0.5° accuracy
• Accurate, worldwide position data in any weather, 24 hours a day
05/01/97 REV H PAGE 19
Page 30

Section 6 - GPS/beacon combination receivers
• Fast signal acquisition
• Fast-reacting, accurate speed and course
• Remote turn-on ability
6.1.3 Technical specifications
Power requirements
• 10 to 40 VDC
• 8 watts power consumption
• Internal 2-amp fuse
• Remote turn-on ability
Electrical requirements
The 8900’s power supply is protected against reverse-polarity power
inputs, and features a remote turn-on ability. The 8900 turns on whenever power is applied to pin 25, ground to pin 13, and remote turn-on pin
12 is connected to a source of 5 to 40 VDC.
Signal processing
• Two channels
• 283.5 - 325.0 kHz frequency range
• < 2 Hz tuning resolution
• Minimum signal strength: < 5 µV/m @ 100 bps
• > 100 dB dynamic range
• > 50 dB at 1 kHz adjacent channel rejection
• Acquisition time: Five seconds, manual command; 15 seconds, auto-
matic warm start; 15 minutes, automatic cold start (only at first turn
on after installation—time varies depending on local beacon frequencies)
• Predictive variable-length noise blanker
• Signal detection: acquisition via frequency-locked loop (FLL); track-
ing via phase-locked loop (PLL)
Data processing
• Minimum shift keying (MSK) demodulation
• Data decoding: parallel-matched digital filters
• MSK bitrates: 25, 50, 100, 200 (automatically selected)
Data ports
• Control input port: RS-232-C and RS-422 or NMEA 0183; 9600 or
4800 baud (jumper-selectable)
• DGPS correction output port: RTCM SC-104 Version 2.1; 6 of 8
RS-232-C and RS-422 9600 or 4800 baud (jumper-selectable)
• Monitor/control port: Bi-directional RS-232-C or RS-422 at 9600
baud
PAGE 20 05/01/97 REV H
Page 31

Section 6 - GPS/beacon combination receivers
Environment
• Operating temperature: Zero to 55° C
• Relative humidity: 95 percent (non-condensing)
05/01/97 REV H PAGE 21
Page 32

Section 6 - GPS/beacon combination receivers
PAGE 22 05/01/97 REV H
Page 33

7.1 Overview
Section 7 - Antennas
Section 7 - Antennas
Northstar offers a variety of antenna options to suit any application. The
Northstar sensors’ standard antenna system consists of the following:
• antenna
• antenna coupling unit (ACU) that provides impedance-matching cir-
cuitry for the antenna, and serves as a mounting base
• coaxial cable connecting the ACU to the sensor
Antennas are sold separately from the sensors, since customers’ needs
vary as to antenna reception, cable length, and so on; however, the 8801
and 8901 are the two exceptions to this rule. The 8801 is shipped with
the Northstar AN195 H-field antenna, and the 8901 is shipped with the
Northstar AN200 GPS/DGPS antenna. See Section 3, “Packaging,” to determine which antennas are appropriate for your particular sensor.
7.2 GPS antenna (AN145)
7.2.1 Description
7.2.2 Dimensions
The Northstar AN145 is a passive GPS antenna that’s shipped with 25 feet
of RG-59U coaxial cable.
3. 00
.91
1. 82
ANTENNA
O-RING
ADAPTER
CAPTIVE SCREW
FIGURE 4 - Northstar AN145 antenna
7.2.3 Cables
7.2.4 Mounting location
05/01/97 REV H PAGE 23
The AN145 antenna doesn’t operate properly with an antenna cable over
25 feet. If you require an antenna cable over 25 feet, contact Northstar
about substituting the AN150 antenna.
For land-based applications, mount the AN145 near the top of the vehicle, where a clear and unobstructed view of the horizon is available in all
directions.
Page 34

Section 7 - Antennas
For marine applications, mount the AN145 low on the vessel to avoid
extra motion from pitching and rolling. Be sure to install the AN145 lower
than high-power transmitting antennas, such as radar or satcom.
7.3 GPS antenna (AN150)
7.3.1 Description
7.3.2 Dimensions
The Northstar AN150 is similar to the AN145; however, it contains an
active preamplifier that can drive up to 100 feet of RG-59U coaxial cable.
It’s shipped with 50 feet of RG-59U coaxial cable for connecting the
antenna to the sensor.
3. 00
.91
1. 82
ANTENNA
O-RING
ADAPTER
CAPTIVE SCREW
FIGURE 5 - Northstar AN150 antenna
7. 3 . 3 G ai n
7.3.4 Cables
7.3.5 Mounting location
12 dB
The length of coaxial cable must be a minimum of 20 feet of RG-59U
coaxial, but not more than 100 feet.
For land-based applications, mount the AN150 near the top of the vehicle, where a clear and unobstructed view of the horizon is available in all
directions.
For marine applications, mount the AN150 low on the vessel to avoid
extra motion from pitching and rolling. Be sure to install the AN150 lower
than high-power transmitting antennas, such as radar or satcom.
7.4 GPS/DGPS combination antenna (AN190/AN200)
7.4.1 Description
PAGE 24 05/01/97 REV H
Northstar combines the AN195 antenna and the AN150 antenna to form
a single-unit GPS/DGPS combination antenna: the AN190. This “combo”
antenna provides an easier, more attractive installation, and, in many
cases, its loop antenna improves the noise rejection of DGPS signals for
Page 35

7.4.2 Dimensions
Section 7 - Antennas
better performance. The AN190 is shipped with 50 feet of coaxial cable
and an external splitter.
The AN200 is an AN190 with 20 feet of RG-59U coaxial cable. The AN200
is shipped as standard equipment with the Northstar 8901 sensor).
7. 00
2.5
TNC
3. 5
FIGURE 6 - AN190 combination antenna
7. 4 . 3 G ai n
7.4.4 Cables
7.4.5 Mounting location
12 dB
The length of coaxial cable to the combo antenna must be a minimum of
20 feet, but not more than 100 feet. Coil up any unused length of cable;
do not cut it to less than 20 feet! Be sure that all cable connectors are
securely fastened, and that the cable itself isn’t subject to any tight bends.
For land-based applications, mount the AN190 near the top of the vehicle, where a clear and unobstructed view of the horizon is available in all
directions.
For marine applications, mount the AN190 low on the vessel to avoid
extra motion from pitching and rolling. Be sure to install the AN190 lower
than high-power transmitting antennas, such as radar or satcom.
7.5 DGPS-only H-field antenna (AN195)
7.5.1 Description
The Northstar AN195 H-Field antenna is a low-profile, high-performance
DGPS antenna that can be used in place of the 8410 four-foot whip
antenna; its small size is ideal for applications that require minimal overhead clearances.
7.5.2 Dimensions
05/01/97 REV H PAGE 25
The AN195 is housed in the same waterproof body as the AN190
“combo” antenna, but contains only the circuitry for receiving differential
GPS corrections.
Page 36

Section 7 - Antennas
7. 00
2.5
TNC
3. 5
FIGURE 7 - Northstar AN195 H-Field antenna
7.5.3 Cable length
7.5.4 Mounting location
The length of the RG-58U coaxial cable must be a minimum of 20 feet,
but not more than 300 feet. Coil up any unused length of cable; do not
cut it to less than 20 feet! Be sure that all cable connectors are securely
fastened, and that the cable itself isn’t subject to any tight bends.
Although the H-field antenna is generally less susceptible to impulse
noise than the whip antenna (see below), the H-Field antenna’s location
remains critical in achieving optimum performance.
7.6 Whip antenna (8410 ACU)
7.6.1 Description
7.6.2 Dimensions
The Northstar 8410 Antenna Coupling Unit (ACU) consists of two polycarbonate pieces, a base and an upper unit, which is threaded to accept a
standard four-foot fiberglass whip antenna.
The actual four-foot whip antenna is NOT included
with the Northstar 8410 ACU antenna system.
The 8410 dimensions are listed below.
Height = 11 inches
NOTE:
Diameter = 2.6 inches
Weight = 1.5 pounds
PAGE 26 05/01/97 REV H
Page 37

48” antenna
11” ACU
Section 7 - Antennas
5.5” ACU
7.6.3 Cable length
7.6.4 Mounting location
5.5 ” ACU base
FIGURE 8 - Northstar 8410 ACU
The 8410 uses a 25-foot length of RG-58U coaxial cable to carry DGPS
signals to the receiver and DC power to the ACU amplifier. More cable
may be added if the DC voltage drop across the cable doesn’t exceed 0.5
volts. In normal installations, cable length up to 300 feet is acceptable.
To accurately receive and effectively use differential corrections under a
wide variety of weather conditions, proper installation of your Northstar
8410 DGPS antenna is of utmost importance. You must mount the whip
antenna as high as conveniently possible—but not at the highest
point—and as far as possible from other antennas. If you have several possible antenna locations, evaluate each one by operating the receiver with
the antenna temporarily mounted in each location: The location providing the lowest Sferics count (atmospheric impulse noise generated by
thunderstorms and other weather conditions) and highest Signal-to-Noise
Ratio (SNR) is the best location. Sferics and SNRs are best measured using
the monitor port and a portable computer or ASCII terminal.
Remember: The antenna is a vital link between the DGPS receiver and the
outside world. Aesthetics and easy access should be secondary to providing strong and reliable signals to the receiver. Much like a loran antenna,
you minimize the effects of P-static if you mount the 8410 DGPS antenna
so that it isn’t the highest metallic object on the vessel. (The highest
metal object acts much like a lightning rod, attracting tiny static dis-
05/01/97 REV H PAGE 27
Page 38

Section 7 - Antennas
charges in the atmosphere. If the beacon receiver antenna is the highest
object, these discharges can totally override the beacon signals and cause
poor operation in bad weather.)
The optimal antenna location is high and clear for fair-weather operation,
but below the top of a metal mast or other antenna for best foul-weather
operation. On sailing vessels, the antenna might be mounted on top of a
low mast, or on the stern rail, if no other suitable location is available.
PAGE 28 05/01/97 REV H
Page 39

Section 8 - Input/output configurations
Section 8 - Input/output configurations
The Northstar 8700, 8800 series, and 8900 series sensors contain either a
GPS sensor, a BDM receiver, or both. Each sensor has two full-duplex
serial ports that you can interconnect with each other and/or external
devices in various ways as required for your applications. Both RS-422
and RS-232 inputs and outputs are provided, and have separate pins on
the I/O connector. RS-422 and RS-232 outputs may be used simultaneously; however, only one receiver input for a particular port should
be connected.
To allow for various installation requirements, the sensor contains a programmable matrix switch that can connect any GPS or BDM receiver signal to any sensor’s I/O port. Five program configurations are available
with the standard product; one of these is selected by grounding appropriate pins on the sensor’s 25-pin data/power connector. The wiring diagram for each sensor model shows the required configuration of these
pins. For other specialized applications requiring different configurations,
contact Northstar to determine the cost and feasibility of customized programming.
8.1 I/O ports
The signal levels of the available I/O ports are shown below.
Table 6: I/O ports
Pin # I/O port
7 RS-232 receiver 1 input
21 RS-232 receiver 2 input
10 RS-232 receiver 3 input
15, 3 RS-422 receiver 1 input (A/B)
1, 14 RS-422 receiver 2 input (A/B)
6 RS-232 transmitter 1 output
20 RS-232 transmitter 2 output
9 RS-232 transmitter 3 output
5, 18 RS-422 transmitter 1 output (A/B)
16, 4 RS-422 transmitter 2 output (A/B)
8.2 Sensor signals
The available sensor signals are listed below.
• GPS primary output
• GPS auxiliary output
• BDM SC-104 output
05/01/97 REV H PAGE 29
Page 40

Section 8 - Input/output configurations
• BDM monitor output
• GPS time mark output
• GPS primary input
• GPS auxiliary input
• BDM control input
• BDM monitor input
• Echo port
These signals may be internally connected to the sensor’s I/O ports in various ways. The most common configurations are programmed into
Northstar’s standard sensors. Custom configurations may be available in
OEM quantities.
8.3 Standard configurations
Pins 11, 23, and 24 on the 25-pin data/power connectors let you select a
configuration (each pin is pulled up internally and should be either left
unconnected or connected to ground). The eight standard configurations
are shown in Table 7 below, which lists one to three standard configurations recommended for each sensor type (these configurations relate to
Northstar PAL Version 2.6. If problems occur, contact Northstar customer
service for assistance):
Table 7: Standard configurations
Sensor Configuration #Configuration
pin #24
8900 with internal BDM feeding
GPS receiver
8900 with external SC-104 input
feeding GPS receiver
8800 (BDM only) 5 Open GND Open
8900 with time mark output 4 Open GND GND
8700 (GPS only) 3 GND Open Open
Not used 2 GND Open GND
Not used 1 GND GND Open
Factory test 0 GND GND GND
The port connections of each of these standard configurations are
detailed throughout Section 8.4.
7 Open Open Open
6 Open Open GND
Configuration
pin #11
Configuration
pin #23
8.4 Configuration details
Configurations 7 and 6 are used with the 8900, which contains both a
GPS sensor and a BDM receiver. In configuration 7, the SC-104 output
from the BDM receiver passes directly to the auxiliary input of the GPS
PAGE 30 05/01/97 REV H
Page 41

Section 8 - Input/output configurations
sensor (for pinouts, see Table 16 on page 39). Configuration 6 is similar,
except that the GPS sensor takes the SC-104 corrections from port 2,
either RS-232 or RS-422 (for pinouts, see Table 17 on page 40).
NOTE:
You can easily switch between internal BDM and
external SC-104 operation simply by opening or
grounding pin 23 on the connector.
Table 8: Configuration 7
Pin # I/O port Sensor signal
6 RS-232 output 1 GPS primary output
20 RS-232 output 2 BDM SC-104 output
9 RS-232 output 3 BDM monitor output
5,18 RS-422 output 1 GPS primary output
16,4 RS-422 output 2 Echo of RS-232 input 1 or RS-422 input 1
7 or 15 & 3 RS-232 input 1 or RS-422 input 1 GPS primary input
21 or 1 & 14 RS-232 input 2 or RS-422 input 2 BDM control input
10 RS-232 input 3 BDM monitor input
Table 9: Configuration 6
Pin # I/O port Sensor signal
6 RS-232 output 1 GPS primary output
20 RS-232 output 2 BDM SC-104 output
9 RS-232 output 3 BDM monitor output
5,18 RS-422 output 1 GPS primary output
16,4 RS-422 output 2 Echo of RS-232 input 1 or RS-422 input 1
7 or 15 & 3 RS-232 input 1 or RS-422 input 1 GPS primary input
21 or 1 & 14 RS-232 input 2 or RS-422 input 2 GPS auxiliary input
10 RS-232 input 3 BDM monitor input
Configuration 5 (for pinouts, see Table 15 on page 38) is used with the
Northstar 8800, which only contains a BDM. Inputs and outputs from
both BDM ports are available in RS-232 and RS-422 signal levels.
05/01/97 REV H PAGE 31
Page 42

Section 8 - Input/output configurations
Table 10: Configuration 5
Pin # I/O ports Sensor signal
6 RS-232 output 1 BDM monitor output
20 RS-232 output 2 BDM SC-104 output
9 RS-232 output 3 BDM SC-104 output
5,18 RS-422 output 1 Echo of RS-232 input 2 or RS-422 input 2
16,4 RS-422 output 2 BDM SC-104 output
7 or 15 & 3
or 10
21 or 1 & 14RS-232 input 1 or RS-422 input 1 BDM monitor input
RS-232 input 2 or RS-422 input 2 or
RS-232 input 3
BDM control input
Table 11: Configuration 4
Pin # I/O port Sensor signal
6 RS-232 output 1 GPS primary output
20 RS-232 output 2 Time mark output
9 RS-232 output 3 GPS auxiliary output
5,18 RS-422 output 1 BDM monitor output
16,4 RS-422 output 2 BDM SC104 output
7 RS-232 input 1 GPS primary input
21 or 1 & 14 RS-232 input 2 or RS-422 input 2 BDM control input
15 & 3 RS-422 input 1 BDM monitor input
Configuration 3 (for pinouts, see Table 14 on page 37) is used with the
Northstar 8700, which contains only a GPS sensor. Inputs and outputs
from both GPS ports are available in RS-232 and RS-422.
Table 12: Configuration 3
Pin # I/O ports Sensor signal
6 RS-232 output 1 GPS primary output
20 RS-232 output 2 Time mark output
9 RS-232 output 3 GPS auxiliary output
5,18 RS-422 output 1 GPS primary output
16,4 RS-422 output 2 Echo of RS-232 input 1 or RS-422 input 1
7 or 15 & 3 RS-232 input 1 or RS-422 input 1 GPS primary input
PAGE 32 05/01/97 REV H
Page 43

Section 8 - Input/output configurations
21 or 1 &
14 or 10
RS-232 input 2 or RS-422 input 2 or
RS-232 input 3
8.5 Connector pin assignments
Table 13 below contains the hardware port numbers and signal levels
available on all the sensor’s connector pins. Specific signal assignments
for standard 8700, 8800, and 8900 configurations are found in Section 9,
“Connector Pinouts.”
Table 13: Hardware pin numbers/signal levels
Pin # Signal level Pin # Signal level
1 RS-422 input 2A 14 RS-422 input 2B
2 Ground 15 RS-422 input 1A
3 RS-422 input 1B 16 RS-422 output 2A
4 RS-422 output 2B 17 Ground
5 RS-422 output 1A 18 RS-422 output 1B
6 RS-232 output 1 19 Ground
GPS auxiliary input
7 RS-232 input 1 20 RS-232 output 2
8 Ground 21 RS-232 input 2
9 RS-232 output 3 22 Not Used
10 RS-232 input 3 23 Configuration pin A
11 Configuration pin B 24 Configuration pin C
12 Remote ON 25 (+) DC power input
13 (–) DC power input (Ground) — —
8.6 Input and output signals
8.6.1 RTCM SC-104 output
The SC-104 port supplies differential corrections. The port characteristics
are listed below.
• Signal type: RS-232 or RS-422
• Data format: RTCM SC-104
• Baud rate: 4800 or default of 9600 (8 bits, no parity, 1 stop bit)
• Jumper-selectable.
There is some lack of industry-standard labeling of
RS-422 pin pairs listed as A and B or as + and –. If the
interface doesn’t work, try swapping the polarity of
the pairs.
NOTE:
05/01/97 REV H PAGE 33
Page 44

Section 8 - Input/output configurations
8.6.2 BDM control input
8.6.3 BDM
monitor input
8.6.4 BDM
monitor output
The BDM control input accepts tuning commands in either NMEA 0183
format messages or Magnavox MX-50R-compatible binary control commands. For details, see Section 10.1.1, “NMEA 0183 format control messages” on page 43. The port characteristics are listed below.
• Signal type: RS-232-C or RS-422
• Data format: NMEA 0183 or binary control commands.
• Baud rate: 4800 or default of 9600 (8 bits, no parity, 1 stop bit),
jumper-selectable
The BDM monitor input port accepts the same messages as the BDM control input port. The port characteristics are listed below.
• Signal type: RS-232-C or RS-422
• Data format: NMEA 0183 or binary control commands
• Baud rate: 9600 (8 bits, no parity, 1 stop bit)
The BDM monitor output port provides status output messages in ASCII
format. The port characteristics are listed below.
• Signal type: RS-232-C or RS-422
• Data format: ASCII status messages
• Baud rate: 9600 (8 bits, no parity, 1 stop bit)
8.6.5 GPS auxiliary input
8.6.6 GPS auxiliary
output
8.6.7 GPS primary input
The auxiliary input port is used to receive RTCM SC-104 V2.1 differential
correction messages. The port characteristics are listed below.
• Signal type: RS-232-C or RS-422
• Data format: NMEA 0183 or binary control commands.
• Baud rate: 300 to 38,400, default of 9600 (8 bits, no parity, 1 stop bit),
jumper-selectable
The output port is used for BDM control functions as well as for future
uses. The port characteristics are listed below.
• Signal type: RS-232 or RS-422
• Data format: NMEA 0183 or binary control commands
• Baud rate: 300 to 38400, default of 9600 (8 bits, no parity, 1 stop bit),
jumper-selectable
The primary input port supports communications via the NMEA-1083
V2.0 and CMC Binary protocols. The port characteristics are listed below.
• Signal type: RS-232 or RS-422
• Data format: NMEA 0183 or binary control commands
• Baud rate: 300 to 38,400, default of 4800 (8 bits, no parity, 1 stop bit),
jumper-selectable
PAGE 34 05/01/97 REV H
Page 45

Section 8 - Input/output configurations
8.6.8 GPS primary
output
8.6.9 Remote
POWER ON
control
8.6.10 DC power input
8.6.11 Time mark
The primary input port supports communications via the NMEA-1083
V2.0 and CMC Binary protocols. The port characteristics are listed below.
• Signal type: RS-232 or RS-422
• Data format: NMEA 0183 or binary control commands
• Baud rate: 300 to 38,400, default of 4800 (8 bits, no parity, 1 stop bit),
jumper-selectable
5 to 40 VDC
10 to 40 VDC
1 Hz timing pulse with 1 Hz duty cycle.
05/01/97 REV H PAGE 35
Page 46

Section 8 - Input/output configurations
PAGE 36 05/01/97 REV H
Page 47

Section 9 - Connector pinouts
9.1 Standard pinouts
Section 9 - Connector pinouts
9.1.1 Wiring
power control
9.1.2 8700
connector pinouts
You can wire the sensor’s control pin in one of two ways:
• For permanent power “on,” connect pin 12 to pin 25. This configura-
tion is for installations in which there isn’t any “remote-on” output
available from the host GPS device. As long as power is connected to
power input pin 25, the 8700 remains on.
• For remote turn-on by the host device, connect pin 12 to any 5 to 40
VDC output of the host device. In this configuration, the 8700 turns
itself on whenever the host device is turned on.
NOTE:
Be sure to always connect pin 25 to DC power and pin
13 to ground, no matter which way you wire power
control to the sensor.
The 8700’s configuration pins should be wired as shown in Table 14, with
pins 11 and 23 left open and pin 24 grounded. With this configuration,
signals appear on the connector pins as described below in Table 14
(functions highlighted in bold indicate the suggested pins for a normal
installation, and are the minimum connections required to operate the
8700). Use either RS-422 or RS-232 connections:
Table 14: 8700 connector pinouts/config. 3
Pin # Description Pin # Description
1 GPS auxiliary input 2A (RS-422) 14 GPS auxiliary input 2B (RS-422)
2 Ground 15 GPS primary input 1A (RS-422)
3 GPS primary input 1B (RS-422) 16 Output 2A (Echo of input 1 - pin 15 &
3 or 7) (RS-422)
4 Output 2B (Echo of input 1 - pin 15 &
3 or 7) (RS-422)
5 GPS primary output 1A (RS-422) 18 GPS primary output 1B (RS-422)
6 GPS primary output 1 (RS-232) 19 Ground
7 GPS primary input 1 (RS-232) 20 Time mark output 2 (RS-232)
8 Ground 21 GPS auxiliary input 2 (RS-232)
9 GPS auxiliary output 3 (RS-232) 22 Program control
10 GPS auxiliary input 3 (RS-232) 23 Configuration pin A (leave open)
11 Configuration pin B (leave open) 24 Configuration pin C (to GND)
05/01/97 REV H PAGE 37
17 Ground
Page 48

Section 9 - Connector pinouts
Pin # Description Pin # Description
12 Remote POWER ON control 25 (+) DC power input
13 (-) DC power input (ground) ——
Input signals may be connected to any appropriately labeled input pin;
output signals may be taken from any appropriately labeled output pin.
Choose either RS-422 or RS-232 pins as required by the host device. Both
RS-422 and RS-232 outputs may be used simultaneously; however, only
one receiver input for a particular port should be connected. You may
use other pins if complex installations require additional inputs or outputs.
• Echo port: An exact copy of the noted inputs.
• GPS primary output: NMEA-format output data from the GPS sensor.
See Section 10.2, “GPS Serial Protocol,” and Section 10.2.2, “Output
Sentences.”
• GPS auxiliary output: Status messages as described in Section 8,
“Input/Output Configurations.”
• GPS primary input: Optional NMEA-format commands. See Section
10.2, “GPS Serial Protocol,” and Section 10.2.1, “Input Sentences.”
• GPS auxiliary input: DGPS corrections to the GPS sensor. See “Sec-
tion 10.2, “GPS Serial Protocol,” and Section 10.2.1, “Input Sentences.”
• Time mark: 1 Hz timing pulse available during navigation mode.
9.1.3 8800
connector pinouts
Pin # Description Pin # Description
1 BDM control input 2A (RS-422) 14 BDM control input 2B (RS-422)
2 Ground 15 BDM monitor input 1A (RS-422)
3 BDM monitor input 1B (RS-422) 16 BDM RTCM SC-104 output 2A
4 BDM RTCM SC-104 output 2B
(RS-422)
5 Output 1A (Echo of input 2 - pin 21
or 1 & 14) (RS-422)
6 BDM monitor output 1 (RS-232) 19 Ground
7 BDM monitor input 1 (RS-232) 20 BDM RTCM SC-104 output 2
The 8800’s configuration pins should be wired as shown in Table 15, with
connector pins 23 and 24 left open and pin 11 grounded. With this configuration, signals appear on the connector pins as described below in
Table 15 (functions highlighted in bold indicate the suggested pins for a
normal installation, and are the minimum connections required for operation of the 8800):
Table 15: 8800 power/interface connector pins/config. 5
(RS-422)
17 Ground
18 Output 1B (Echo of input 2 - pin 21
or 1 & 14) (RS-422)
(RS-232)
PAGE 38 05/01/97 REV H
Page 49

Section 9 - Connector pinouts
Pin # Description Pin # Description
8 Ground 21 BDM control input 2 (RS-232)
9 BDM RTCM SC-104 output 3
(RS-232)
10 BDM control input 3 (RS-232) 23 Configuration pin A (leave OPEN)
11 Configuration pin B (to GROUND) 24 Configuration pin C (leave OPEN)
12 Remote POWER ON control 25 (+) DC power input
13 (-) DC power input (Ground) ——
Input signals may be connected to any appropriately labeled input pin,
and output signals may be taken from any appropriately labeled output
pin. Choose either RS-422 or RS-232 pins as required by the host device.
Both RS-422 and RS-232 outputs may be used simultaneously; however,
only one receiver input for a particular port should be connected. You
may use other pins if complex installations require additional inputs or
outputs.
• BDM RTCM SC-104 output: The primary output pins supplying dif-
ferential corrections.
• BDM monitor output: ASCII status messages from the BDM.
• BDM control input: NMEA or binary commands to the BDM.
• BDM monitor input: NMEA or binary commands to the BDM.
• Echo port: An exact copy of the noted inputs.
22 Not used
9.1.4 8900
connector pinouts
The 8900’s configuration pins should be wired as shown in Table 16, with
connector pins 11, 23, and 24 left open. With this configuration, SC-104
signals pass directly from the BDM receiver to the GPS receiver. In this
configuration, signals appear on the connector pins as described below in
Table 16 (functions highlighted in bold indicate the suggested pins for a
normal installation, and are the minimum connections required for operation of the 8900):
Table 16: 8900 standard connector pinouts/config. 7
Pin # Description Pin # Description
1 BDM control input 2A (RS-422) 14 BDM control input 2B (RS-422)
2 Ground 15 GPS primary input 1A (RS-422)
3 GPS primary input 1B (RS-422) 16 Output 2A (Echo of input 1 - pin 7 or 3
& 15 ) (RS-422)
4 Output 2B (Echo of pin 7 or 3 & 15)
(RS-422)
5 GPS primary output 1A (RS-422) 18 GPS primary output 1B (RS-422)
6 GPS primary output 1 (RS-232) 19 Ground
17 Ground
05/01/97 REV H PAGE 39
Page 50

Section 9 - Connector pinouts
Pin # Description Pin # Description
7 GPS primary input 1 (RS-232) 20 BDM SC104 output (RS-232)
8 Ground 21 BDM control input 2 (RS-232)
9 BDM monitor output 3 (RS-232) 22 Not used
10 BDM monitor input 3 (RS-232) 23 Configuration pin A (leave OPEN)
11 Configuration pin B (leave OPEN) 24 Configuration pin C (leave OPEN)
12 Remote POWER ON control 25 (+) DC power input
13 (-) DC power input (Ground ——
9.1.5 Alternate
connector pinouts
for the 8900
An alternate configuration for the 8900 lets the BDM and GPS receivers
operate independently, whereby the GPS receiver accepts differential corrections from an external device rather than the internal BDM receiver.
This is configuration 6: For this configuration, pin 23 is grounded and
pins 11 and 24 are left open. Pin connections for configuration 6 are
described below in Table 17 (functions highlighted in bold indicate the
suggested pins for a normal installation, and are the minimum connections required for operation of the 8900):
Table 17: 8900 alternate connector pinouts/config. 6
Pin # Description Pin # Description
1 GPS auxiliary input 2A (RS-422) 14 GPS auxiliary input 2B (RS-422)
2Ground 15 GPS primary input 1A (RS-422)
3 GPS primary input 1B (RS-422) 16 Output 2A (Echo of input 1 - pins 7 or
15 & 3) (RS-422)
4 Output 2B (Echo of input 1 - pins 7 or
15 & 3) (RS-422)
5 GPS primary output 1A (RS-422) 18 GPS primary output 1B (RS-422)
6 GPS primary output 1 (RS-232) 19 Ground
17 Ground
7 GPS primary input 1 (RS-232) 20 BDM SC-104 output 2 (RS-232)
8 Ground 21 GPS auxiliary input 2 (RS-232)
9 BDM monitor output 3 (RS-232) 22 Not used
10 BDM monitor input 3 (RS-232) 23 Configuration pin A (to GROUND)
11 Configuration pin B (leave OPEN) 24 Configuration pin C (leave OPEN)
12 Remote POWER ON control 25 (+) DC power input
13 (-) DC power input (Ground) ——
Input signals may be connected to any appropriately labeled input pin;
output signals may be taken from any appropriately labeled output pin.
PAGE 40 05/01/97 REV H
Page 51

Choose either RS-422 or RS-232 pins as required by the host device. You
may use other pins if complex installations require additional inputs or
outputs.
• Echo port: An exact copy of the noted inputs.
• GPS primary output: NMEA-format output data from the GPS sensor.
See Section 10.2, “GPS Serial Protocol,” and Section 10.2.2, “Output
Sentences.”
• GPS auxiliary output: Status messages as described in Section 8,
“Input/Output Configurations.”
• GPS primary input: Optional NMEA-format commands. See Section
10.2, “GPS Serial Protocol,” and Section 10.2.1, “Input Sentences.”
• GPS auxiliary input: DGPS corrections to the GPS sensor. See Section
10.2, “GPS Serial Protocol,” and Section 10.2.1, “Input Sentences.”
• Time mark: 1 Hz timing pulse available during navigation mode.
Table 18: 8900 alternate connector pinouts/config. 4
Pin # Description Pin # Description
Section 9 - Connector pinouts
1 BDM control input 2A (RS-422) 14 BDM control input 2B (RS-422)
2 Ground 15 BDM monitor input 1A (RS-422
3 BDM monitor input 1B (RS-422) 16 BDM SC-104 output 2A (RS-422)
4 BDM SC-104 output 2B (RS-422) 17 Ground
5 BDM monitor output 1A (RS-422) 18 BDM monitor output 1B (RS-422)
6 GPS primary output 1 (RS-232) 19 Ground
7 GPS primary input 1 (RS-232) 20 Time mark output 2 (RS-232)
8 Ground 21 BDM control input 1 (RS-232)
9 GPS auxiliary output 3 (RS-232) 22 Not used
10 Not used 23 Configuration pin A (leave OPEN)
11 Configuration pin B (leave OPEN) 24 Configuration pin C (leave OPEN)
12 Remote POWER ON control 25 (+) DC power input
13 (-) DC power input (Ground ——
05/01/97 REV H PAGE 41
Page 52

Section 9 - Connector pinouts
PAGE 42 05/01/97 REV H
Page 53

Section 10 - NMEA protocols
10.1 Beacon monitor control messages
This section supplies information for special applications and for when
you require manual control of the Northstar DGPS beacon receiver.
Messages to control operation of the Northstar DGPS beacon receivers are
accepted on either the monitor or control input ports, or both. Two control protocols are implemented: NMEA 0183 and binary; either or both
may be used. This section covers the NMEA 0183 format control messages, and Section 11 covers the beacon binary protocol.
Section 10 - NMEA protocols
10.1.1 NMEA 0183
format control
messages
These control messages are formatted according to a widely used NMEA
0183 specification, with serial communication parameters of eight bits,
no parity, and either a standard baud rate of 4800 or a nonstandard 9600.
NMEA messages begin with a
and parameter fields separated by commas. They may also contain an
optional checksum (a hexadecimal value following an asterisk). If specified, the optional checksum is enforced, otherwise no checksum test is
applied. Normally, hard-wired serial data connections are so reliable that
the use of a NMEA 0183 checksum isn’t required or recommended. The
messages end with a carriage return/line feed (CR) (LF) sequence.
NMEA 0183 format control messages are buffered within the beacon
receiver until the messages are ready to be processed, then they’re echoed back to the controlling device. Messages received on either the control input port or the monitor input port are echoed to the monitor
output port.
All alphabetical characters must be upper case, and messages must not
include embedded tab characters or spaces.
Here’s the NMEA 0183 format basic tuning command:
$PSLIB,frequency(CR)(LF)
where frequency is a decimal value (in kHz) that specifies the radio-beacon frequency to be received and demodulated. This frequency can be
specified with up to four digits following the decimal point, giving a tuning resolution of <2 Hz. This command tunes channel 1 of the beacon
receiver to the specified frequency, and presents its demodulated RTCM
SC-104 data to the GPS receiver; channel 2 continues to scan the beacon
band.
$ character. They contain identification
If you specify a frequency of zero in the basic tuning command, the beacon receiver is commanded back to its automatic mode:
$PSLIB,0(CR)(LF)
When the bitrate of a broadcast is known as well as its frequency, it’s
highly advantageous to specify it in an extended format tuning command
as follows:
$PSLIB,frequency,bitrate(CR)(LF)
where frequency is in the format specified above, and bitrate is one
of the values 0, 25, 50, 100, or 200. (The value of zero indicates that the
05/01/97 REV H PAGE 43
Page 54

Section 10 - NMEA protocols
bitrate is unknown, in which case it’s determined automatically.) If a correct broadcast bitrate is specified, the beacon receiver uses that additional
information to improve acquisition and tracking of weak and noisy signals.
$PSLIB,f,b,command,(CR) (LF)
Special beacon receiver DGPS receiver functions are requested by
extended NMEA 0183 format commands, which include a command
parameter. Unless otherwise indicated below, the frequency and bitrate
parameters are ignored. The command parameter is optional and can be
one of the following capital letters:
Table 19: Command parameters
Command
letter
A
B
C
D
F
R
S
T
M
Description
Output parsed RTCM SC-104 ASCII messages to the
monitor port.
Do not output parsed RTCM SC-104 messages
(default).
Erase the stored beacon directory and perform a
power-on reset.
List the stored beacon directory to the monitor port.
(Test Mode 2) Tune both channels to the specified
frequency and bitrate with AFC disabled.
Perform a power-on reset.
Skip channel 2 to next search frequency.
(Test Mode 1) Tune both channels to the specified
frequency and bitrate with AFC enabled.
Add to the stored beacon directory a tentative entry
with the specified frequency and bitrate (this entry
will be deleted after some time if the 8800 doesn’t
confirm its validity).
E
Delete the specified frequency and bitrate entry from
the stored beacon directory.
Table 20: Command parameter examples
Extended command Description
$PSLIB,304,100,M(CR)(LF)
$PSLIB,304,100(CR)(LF)
PAGE 44 05/01/97 REV H
Create a beacon directory for 304.000 kHz
@ 100 bps.
Demodulate 100-bps data from a DGPS
beacon broadcast at 304 kHz.
Page 55

Section 10 - NMEA protocols
$PSLIB,0,(CR)(LF)
$PSLIB,,,R(CR)(LF)
$PSLIB,284.5,0(CR)(LF)
10.2 GPS serial protocol
This section describes the serial protocol used by the GPS sensor to communicate with the host device. The serial communication runs under the
following setup:
• Speed: 300 to 38,400 baud (default is 4800)
• Format: 8-bit data, 1 start bit, 1 stop bit, no parity (10 bits/character)
Data information passed on the serial line is divided in one or more
NMEA-approved or proprietary sentences having the following structure.
Data field Contents
$PMCAG,xxx,xxx,xx,xx,...*CK<CR><LF>
Return to automatic mode. The best broadcast available will be demodulated.
Restart.
Demodulate data from a DGPS beacon
broadcast at 284.5 kHz, with the bit rate to
be automatically determined.
Table 21: Approved sentence structure
$
P
MCA
G
xxx,xxx,x
Record sync character
Special ID (P = proprietary)
Originator ID (MCA = Canadian Marconi Company)
Interface ID (G = GPS)
Data (first field = message identifier)
x,xx...
*
CK
<CR><LF>
Checksum field delimiter
Checksum
End of sentence
Table 22: NMEA field definitions
Field type Symbol Description
Special format fields
Status
A
Single character field:
A = Yes, data valid, warning flag clear
V = No, data invalid, warning flag set
05/01/97 REV H PAGE 45
Page 56

Section 10 - NMEA protocols
Field type Symbol Description
Latitude
llll.ll
Fixed/variable length field:
degrees/minutes.decimal - two fixed digits of degrees and
minutes, and a variable number of digits for decimal-fraction of minutes. Decimal point and associated decimal-fraction are optional if full resolution isn’t required.
Longitude
yyyyy.yy
Fixed/variable length field:
degrees/minutes.decimal - three fixed digits of degrees; two
fixed digits of minutes; and a variable number of digits for
decimal-fraction of minutes. Decimal point and associated
decimal-fraction are optional if full resolution isn’t
required.
Time
hhmmss.ss
Fixed/variable length field:
hours/minutes/seconds.decimal - two fixed digits of hours,
minutes, and seconds, and a variable number of digits for
decimal-fraction of seconds. Decimal point and associated
decimal-fraction are optional is full resolution isn’t
required.
Defined field — Some fields are specified to contain pre-defined constants,
mostly alpha characters. Such a field is indicated in this
standard by the presence of one or more valid characters.
The following characters are excluded from the list of
allowable ones, which are used to indicate field types: “
“
a,” “c,” “hh,” “hhmmss.ss,” “llll.lll,” “x,” “yyyy.yy.”
A,”
Numeric value fields
Variable
numbers
x.x
Variable length integer or floating numeric field. Optional
leading and trailing zeroes. Decimal point and associated
decimal-fraction are optional if full resolution isn’t
required. (Example: 73.10 = 73.1 = 073.1 = 73.)
Fixed HEX
hh_____
Fixed-length HEX number only, MSB on the left
field
Information fields
Variable text
Fixed alpha
c-c
aa_____
Variable-length valid character field
Fixed length field of upper- or lower-case alpha characters
field
Fixed num-
xx_____
Fixed length field of numeric characters
ber field
Fixed text
cc_____
Fixed length field of valid characters
field
NOTES:
1. Spaces can’t be used in variable text field.
2. A negative sign “-” (HEX 2D) is the first character in a field if the value is negative. The
sign is optional if the value is positive.
PAGE 46 05/01/97 REV H
Page 57

Section 10 - NMEA protocols
10.2.1 Input sentences
Message identifier
000
001
003
004
005
006
007
MSK
This section defines the valid input sentences available on the primary
port. Table 23 below contains all the valid input sentence types for the
GPS receivers. Each section that follows provide detailed descriptions of
these sentences.
Table 23: Primary port input sentences
Name Maximum sentence
length
(characters)
Configure primary port command 17
Initialization data command 77
Initiate self-test command 15
Request output message command 19
Set output configuration command 67
Switch to reprogramming mode command 20
Erase non-volatile memory (NVM) 18
Command message to radio-beacon board 27
Configure primary port command ($PMCAG,000)
This message changes the primary-port mode. Once this command is
issued to the GPS receiver, NMEA communications with the GPS receiver
can only be restored by using binary message #110 of Appendix E in the
ALLSTAR OEM CMT-1200 Specifications Rev. H. (To order this document,
call the Northstar sales department.) On power-up, with non-volatile
memory (NVM), the primary port stays in the same mode; without NVM,
the default mode is monitor mode (CMC binary).
Header
$PMCAG,000, x*hh<CR><LF>
x
Contents of data fields
= Baud rate selection (see Table 24 below)
Table 24: Character/baud rate
Character Baud rate
0
1
2
3
4
19200
300
600
1200
2400
5
05/01/97 REV H PAGE 47
4800
Page 58

Section 10 - NMEA protocols
Character Baud rate
6
7
8
Example A: Configure the primary port to monitor mode at 19200 baud
rate.
9600
19200
38400
$PMCAG,000,0*58<CR><LF>
Initialization data command ($PMCAG,001)
This message initializes the GPS receiver with reference Universal Coordinated Time (UTC) date and time, and user position.
Table 25: Initialization command
Data field Contents
$PMCAG,001,xx,xx,xxxx,hhmmss.ss,±xx,xx,±llll.ll,a,yyyyy.yy,a,±x.x,c*hh<C
R><LF>
xx.xx.xxxx
hhmmss.ss
UTC date (day 1..31, month 1..12, year 1980..2079)
UTC time (hour 0..23, minutes 0..59, seconds 0..59)
±xx,xx
±llll.ll,a
yyyyy.yy,a
±x.x
c*hh<CR><LF>
Example B: Set reference position sentence
Reserved (must be 00)
Latitude, N/S with respect to WGS-84
Longitude, E/W with respect to WGS-84
Altitude (in meters above/below mean sea level; resolution 0.1
meter
Reserved (no character)
$PMCAG,001,09,07,1995,16,37,21,00,00,5301.97,N,00133.48,E,35.35,*6C<CR><LF>
Table 26: Example B sentence contents
Data field Contents
Date 09/07/1995
Time 16:37:21
Reserved Must be 00
Local zone minutes Must be 00
Latitude 53° 01.97’ North
PAGE 48 05/01/97 REV H
Page 59

Section 10 - NMEA protocols
Data field Contents
Longitude 1° 33.48’ East
Altitude 35.35 m above mean sea level
Reserved No character
Initiate self-test command ($PMCAG, 003)
This message requests a complete self-test of the GPS sensor. Test results
will be automatically output (output message
put port at completion of the self-test sequence:
902) on the primary out-
$PMCAG,003*hh<CR><LF>
Example C: Request a complete self-test of the GPS
$PMCAG,003*47<CR><LF>
Request output message command ($PMCAG, 004)
This message asks the unit to output any NMEA data message one time
only:
$PMCAG,004,ccc*hh<CR><LF>
Valid message identifiers for ccc above are listed below in Table 27.
Example D: Request the approved sentence GPGGA
$PMCAG,004,GGA*2D<CR><LF>
Set output configuration command ($PMCAG, 005)
This message configures the output of the primary port. The message
contains the primary-port baud rate and the list of message identifiers
with the minimum time interval between consecutive transmissions.
Table 27: Output-configuration message identifiers
Identifier Description
900
GGA
GLL
GSA
Navigation status
GPS fix data
Geographic position (latitude/longitude)
GPS DOP and active satellites
GSV
RMC
VTG
ZDA
05/01/97 REV H PAGE 49
GPS satellites in view
Recommended-minimum-specific GPS data
Track made good and ground speed
UTC time and date
Page 60

Section 10 - NMEA protocols
Table 28: Set output configuration command
Data field Contents
$PMCAG,005,x.x,ccc,xxx,...,ccc,xxxx*hh<CR><LF>
x.x
ccc,xxx
(first)
ccc,xxx
(nth)
Example E:
Baud rate. Valid baud rates: 0.3, 0.6, 1.2, 2.4, 4.8, 9.6,
19.2, and 38.4 (in KBaud units); 0 = keep the same
baud rate (no effect), 1 = save the included list in
NVM and overwrite the previous one.
Message block.
ccc is the message identifier,
xxx is the time interval between transmissions (one
to 999 seconds; 000 will stop the transmission).
$PMCAG,005,4.8,GGA,010,RMC,001,VTG,001,ZDA,010*48<CR><LF
Here, output messages GGA and ZDA are transmitted every 10 seconds;
RMC and VTG are transmitted every second at 4800 baud.
Example F:
$PMCAG,005,1,GLL,001*2A<CR><LF>
Here, GGL is transmitted every second at 4800 baud; and GLL is saved in
NVM.
Switch to reprogramming mode command ($PMCAG, 006)
This message switches to reprogramming mode.
Table 29: Switch to reprogramming mode command
Data field Contents
$PMCAG,006,xx.x*hh<CR><LF>
xx.x
Example G:
Baud rate. Valid baud rates are 0.3, 0.6, 1.2, 2.4, 4.8,
9.6, 19.2, or 38.4 (in KBaud unit).
$PMCAG,006,19.2*7A<CR><LF>
Erase NVM command ($PMCAG, 007)
This message erases the NVM element.
Table 30: NVM command
Data field Contents
$PMCAG,007,xx*hh<CR><LF>
PAGE 50 05/01/97 REV H
Page 61

Data field Contents
Section 10 - NMEA protocols
xx
Element. NVM element to erase as shown below in
Table 31.
Table 31: Character/element
Characters Element
00
01-04
05
06
07-08
09
10
11
12
13
All (Note 1)
Reserved
Almanac
Ionospheric data
Reserved
TCXO parameters
UTC parameters
Position
Time
DGPS configuration
14
15
Example H:
Default NMEA message list
RS-232 configuration (This command forces the 8700 to go into
binary mode at 9600 baud at next
power-up.)
$PMCAG,007,15*6B<CR><LF>
Erases configuration of the primary port, and CMC binary message list is
transmitted by default after each power-up.
Command message to the radio beacon ($GPMSK)
This message configures the frequency and bitrate parameters of the
radio beacon, and also sets the rate of the output message
MSS and
$PMCAG,903.
Table 32: Radio-beacon command message
Data field Contents
MSK,x.x,a,x.x,a,x.x*hh<CR><LF>
x.x
a
05/01/97 REV H PAGE 51
Radio-beacon frequency, 285.5 to 325.0 kHz
Auto/manual frequency, A/M
Page 62

Section 10 - NMEA protocols
Data field Contents
10.2.2 Output sentences
Message
identifier
Name Maximum sentence
x.x
a
x.x
Beacon bit rate (25, 50, 100, 200) bits/sec
Auto/manual bit rate
Interval for sending $PCMCAG, 903, and MSS mes-
sage in seconds. (When status data won’t be transmitted, this field is “null.” If not null, the
MSS and
$PCMCAG, 903 sentences are sent at the specified
rate.)
Example I:
$GPMSK,288.0,A,100,A,004*6b<CR><LF>
Here, MSS and 903 are transmitted every four seconds; set the frequency
to
288.0 in automatic mode, and bitrate to 100 in automatic mode.
This section defines the valid output sentences available on the primary
port. Table 33 contains all the valid output-sentence types for the GPS
receivers, and each section that follows provides detailed descriptions of
these sentences.
Table 33: Primary-port output sentences
Rate
length (characters)
900
901
902
903
GGA
GLL
GSA
GSV
MSS
RMC
VTG
ZDA
Navigation status 21 Adjustable
Data request list overflow 15 N/A
Self-test results 39 On request
Radio-beacon proprietary info 40 Adjustable
(via MSK)
GPS fix data 82 Adjustable
Geographic position—latitude/longitude 51 Adjustable
GPS DOP and active satellites 66 Adjustable
GPS satellites in view 3*70 Adjustable
MSS radio-beacon receiver signal status 29 Adjustable
(via MSK)
Recommended minimum specific GPS data 69 Adjustable
Track made good and ground speed 37 Adjustable
UTC time and date and local time zone 39 Adjustable
Navigation status ($PMCAG, 900)
This message provides the current navigation mode and GPS fix quality
indicator.
PAGE 52 05/01/97 REV H
Page 63

Table 34: Navigation status sentence
Data field Contents
$PMCAG,900,ccc,c*hh<CR><LF>
Section 10 - NMEA protocols
ccc
c
Navigation mode.
•
•
•
•
•
•
•
GPS fix quality indicator.
•
•
: 3-D fix with differential aiding
3DD
: 3-D fix
3-D
: 2-D fix (constant altitude) with differential
2DD
aiding
: 2-D fix (constant altitude)
2-D
: Dead reckoning
D-R
: Initialized (from last good fix or external
INI
initialization)
: No computed data. Fix data isn’t valid and
NCD
should be ignored. The GPS sensor doesn’t have
a valid time and/or position from last good fix or
external initialization.
: Low. Navigation solution is obtained from
L
fewer than five satellite measurements.
: High. Navigation solution is obtained from at
H
least five satellite measurements.
Example J:
$PMCAG,900,3-D,H*5F<CR><LF>
Here, navigation mode is 3-D fix.
Data request list overflow ($PMCAG, 901)
This message is returned when more than eight data requests are pending:
$PMCAG,901*hh<CR><LF>
Example K:
$PMCAG,901*4C<CR><LF>
Self-test results ($PMCAG, 902)
This message provides results of the 8700 GPS sensor self-test. The message is automatically output in response to an initiated BIT self-test
request (see input message identifier
requested through input message identifier
status of the sensor without initiating a self-test sequence.
05/01/97 REV H PAGE 53
003). This message also can be
004 to retrieve the current
Page 64

Section 10 - NMEA protocols
Table 35: Self-test sentence
Data field Contents
$PMCAG,902,xxxxxx,xxx,a,aaaa,xx,xx*hh<CR><LF>
xxxxxx
xxx
a
aaaa
xx
xx
Software part number (root number)
Software variation number
Software revision letter
Sensor self-test result, from the last initiated test
(PASS, FAIL)
Number of active faults
Faults identifier
Example L:
$PMCAG,902,613913,042,A,PASS,00,63*23<CR><LF>
-and-
$PMCAG,902,613913,042,A,FAIL,03,49*3B<CR><LF>
Radio-beacon proprietary information ($PMCAG, 903)
This message is automatically output in response to an MSK request (see
input message identifier MSK).
Table 36: Radio-beacon proprietary sentence
Data field Contents
$PMCAG,903,x.x,aa,x.x,x.x,x.x,x.x,x.x*hh<CR><LF>
x.x
aa
x.x
x.x
x.x
x.x
x.x
Example M:
$PMCAG,903,6,,2.24,0,0,0,0*62<CR><LF>
Impulse noise count
Radio-beacon self-test result (zeroes mean all tests
passed: bit 0 = antenna fault detected; bit 1 = battery-backed RAM invalid; bits 2 through 5 =
reserved)
Software part number (root number)
Reserved (will be null)
Reserved (will be null)
Reserved (will be null)
Reserved (will be null)
PAGE 54 05/01/97 REV H
Page 65

Section 10 - NMEA protocols
GPS-fix data ($GPGGA)
This message provides time, position, and fix-related data.
Table 37: GPS-fix data sentence
Data field Contents
$GPGGA,hhmmss.ss,llll.llll,a,yyyyy.yyyy,a,x,xx,xx.x,
±xxxxx.x,M,xxxx,M,xxxx,xxxx*hh<CR><LF>
hhmmss.ss
llll.llll
a
yyyy.yyyy
a
x
xx
xx.x
±xxxxx.x
M
xxxx
UTC of position
Latitude (with respect to WGS-84). Two digits of
degrees and minutes; four digits of decimal fraction
of minutes
N/S (North or South)
Longitude (with respect to WGS-84). Three digits of
degrees; two digits of minutes; four digits of decimal
fraction of minutes
E/W (East or West)
Quality indicator (GPS quality indicator). 0 = fix
unavailable or invalid; 1 = GPS fix; 2 = DGPS fix.
SVs in use (may be different from number in view).
HDOP
Altitude (with respect to mean sea level)
Units of antenna altitude, in meters
Geoidal separation. The difference between the
WGS-84 earth ellipsoid and mean sea level (geoid). If
negative, mean sea level is below ellipsoid.
M
xxxx
xxxx
Example N:
Units of geoidal separation, in meters
Age of DGPS data (time, in seconds, since the last
SC-104 Type 1 or 9 update; empty field when DGPS
isn’t used)
Differential reference station ID (0000-1023)
$GPGGA,012338.61,5619.2837,N,17235.8964,E,1,05,02.3,-00
034.2,M,,M,,*66<CR><LF>
05/01/97 REV H PAGE 55
Page 66

Section 10 - NMEA protocols
Table 38: Example N sentence
Data field Contents
$GPGGA,012338.61,5619.2837,N,17235.8964,E,1,05,02.3,
-00034.2,M,,M,,*66<CR><LF>
UTC 01:23:38.61
Latitude 56° 19.2837’ North
Longitude 172° 35.8964’ East
Quality GPS fix
Satellites
used
HDOP 2.3
Altitude -34.2 m below sea level
5
Geographic position—latitude/longitude ($GPGLL)
This message provides latitude and longitude of present position, time of
position, and status.
Table 39: Geographic position sentence
Data field Contents
$GPGLL,llll.llll,a,yyyyy.yyyy,a,hhmmss.ss,A*hh<CR><L
F>
llll.llll
a
Latitude with respect to WGS-84. Two digits of
degrees and minutes; four digits of decimal fraction
of minutes
N/S (North or South)
yyyyy.yyy
y
a
hhmmss.ss
A
Longitude with respect to WGS-84. Three digits of
degrees; two digits of minutes; four digits of decimal
fractions of minutes
E/W (East or West)
UTC of position
Status: A = valid; V = data invalid
GPS DOP and active satellites ($GPGSA)
This message provides operating mode, satellites used for navigation, and
DOP values from the GPS sensor.
PAGE 56 05/01/97 REV H
Page 67

Section 10 - NMEA protocols
Table 40: GPS DOP and active satellite sentence
Data field Contents
$GPGSA,a,x,xx,xx,xx,xx,xx,xx,xx,xx,xx,xx,xx,xx,xx.x,
xx.x,xx.x*hh<CR><LF>
a
x
xx,xx,xx,
xx,xx,xx,
Mode. M = manual, forced to operate in 2-D or 3-D
mode; A = automatic, allowed to automatically
switch 2-D/3-D.
Mode. 1 = fix unavailable; 2 = 2-D; 3 = 3-D.
PRNs of SVs used. PRN numbers of satellites used in
solution (null for unused fields).
xx,xx,xx,
xx,xx,xx
xx.x
xx.x
xx.x
Example O:
PDOP
HDOP
VDOP
$GPGSA,A,3,14,22,03,09,08,29,17,,,,,,2.7,2.2,1.6*3A<CR><LF>
In this example, mode is Automatic/3-D; SVs used are PRNs 14, 22, 03, 09,
08, 29, and 17; PDOP is 2.7; HDOP is 2.2; and VDOP is 1.6.
GPS satellites in view ($GPGSV)
This message provides number of SVs in view, PRN numbers, elevation,
azimuth, and SNR values. The first sentence can have four satellites maximum per transmission, and additional satellite data is sent in the second
or third sentence.
Table 41: GPS-satellites-in-view sentence
Data field Contents
$GPGSV,x,x,xx,xx,xx,xxx,xx.x..........,xx,xx,xxx,xx.
x*hh<CR><LF>
x
x
xx
xx
xx
05/01/97 REV H PAGE 57
Total number of messages, 1 to 3
Message number, 1 to 3
Total number of satellites in view
Satellite PRN number
Elevation in degrees (elevation range 00 to 90
degrees)
Page 68

Section 10 - NMEA protocols
Data field Contents
xxx
xx.x
.........
Azimuth, degrees (azimuth range 000 to 359
degrees)
SNR (C/N) 00.0-99.9 dB; null when not tracking
Second, third, and fourth SV
.,xx,xx,x
xx,xx.x
Example P:
$GPGSV,2,1,06,03,12,238,06.0,07,82,008,15.5,11,04,053,,27,43,178,12.3*67<CR>
<LF>
In this example, messages are 2; message number is 1; SV visible is 6; PRN
is 03; elevation is 12°; azimuth is 238°; SNR is 6 dB; PRN is 07; elevation is
82°; azimuth is 8°; SNR is 15.5 dB; PRN is 11; elevation is 4°; azimuth is
53°; SNR is not tracked; PRN is 27; elevation is 43°; azimuth is 178°; and
SNR is 12.3 dB.
Example Q:
$GPGSV,2,2,06,15,23,187,8.2,17,35,323,11.1,,,,,,,,*4D<CR><LF>
In this example, messages are 2; message number is 2; SV visible is 6; PRN
is 15; elevation is 23°; azimuth is 187°; SNR is 8.2 dB; PRN is 17; elevation
is 35°; azimuth is 323°; and SNR is 11.1 dB.
MSS radio-beacon receiver signal status ($GPMSS)
This message sends the information about the SNR and signal strength,
frequency, and bit rate from an MSK (beacon) receiver.
Table 42: MSS radio-beacon signal status sentence
Data field Contents
$GPMSS,x.x,x.x,x.x,x.x*hh<CR><LF>
SS
x.x
x.x
x.x
Example R:
Signal strength (SS), dB re: 1uV/m
SNR, dB
Radio-beacon frequency, 285.5 - 325.0 kHz
Beacon bit rate (25, 50, 100, 200) bits per sec
$GPMSS,32,13,288.0,100,*68<CR><LF>
Recommended minimum specific GPS data ($GPRMC)
This message provides time, date, position, course, and speed data.
PAGE 58 05/01/97 REV H
Page 69

Section 10 - NMEA protocols
Table 43: Recommended-minimum-specific sentence
Data field Contents
$GPRMC,hhmmss.ss,A,llll.llll,a,yyyyy.yyyy,a,xxx.x,xx
x.x,xxxxxx,,*hh<CR><LF>
hhmmss.ss
A
llll.llll
a
yyyyy.yyy
y
a
xxx.x
xxx.x
xxxxxx
Example S:
UTC of position fix
Status. A = data valid; V = nav receiver warning
Latitude. Two digits of degrees and minutes, four digits of decimal fraction of minutes.
N/S (North or South)
Longitude. Three digits of degrees; two digits of minutes; four digits of decimal fraction of minutes.
E/W (East or West)
Speed, in knots
Track (track made good, measured in clockwise-from-North direction, at the current position.
Range: 0 to 360°)
Date (two digits for day, month, and year: ddmmyy)
$GPRMC,224512.45,G,2518.3847,S,08339.8367,E,003.8,311.5,080793,,*2E<CR><LF>
In this example, UTC is 22:45:12.45; status is Good; latitude is 25°
18.3847' South; longitude is 083° 39.8367' East; speed is 3.8 knots; heading is 311.5° from North; and date is 08/07/93.
Track made good and ground speed ($GPVTG)
This message provides actual track made good and speed relative to the
ground.
Table 44: Track made good/ground-speed sentence
Data field Contents
$GPVTG,xxx.x,T,,,xxx.x,N,xxx.x,K*hh<CR><LF
xxx.x
T
xxx.x
N
xxx.x
05/01/97 REV H PAGE 59
Track
Degrees true
Speed
Knots (speed, in number of)
Speed
Page 70

Section 10 - NMEA protocols
Data field Contents
K*hh
Example T:
Km (speed, in kilometers per hour)
$GPVTG,234.6,T,,,075.3,N,139.5,K*21<CR><LF>
In this example, track is 234.6° from North; speed is 75.3 knots; and speed
is 139.5 km/hr.
UTC time and date ($GPZDA)
This message provides UTC time, date, and local time zone.
Table 45: UTC time, data, and local time-zone sentence
Data field Contents
$GPZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh<CR><LF>
hhmmss.ss
xx
xx
UTC time
Day
Month
xxxx
xx
xx
Example U:
Yea r
Local zone description: The number of whole hours
added to local time to obtain UTC. Zone description
is negative for East longitudes. (-13 to +13 hours)
Local zone minutes description: Local zone minutes
(00 to 59). Same sign as local hours.
$GPZDA,224512.45,12,01,2003,–6,00,*hh<CR><LF>
In this message, UTC is 22:45:12.45; date is 01/12/2003; and local zone
are 6 zones (hours) east of GMT.
PAGE 60 05/01/97 REV H
Page 71

Section 11 - Beacon receiver binary protocol
Section 11 - Beacon receiver binary protocol
11.1 Beacon receivers (8800 series and 8900 series)
11.1.1 Binary
control messages
If your differential-ready GPS receiver is compatible with the Magnavox
MX-50R radio-beacon interface protocol, a subset of this command protocol can be used to control the 8800 DGPS receiver. These binary control
messages consist of a function byte followed by parameter bytes.
Like NMEA 0183 control messages, binary control messages are accepted
on either the monitor or control input ports; they aren’t echoed. Any output that’s generated in response to a binary control message is directed to
the RTCM SC-104 output port where it’s interspersed with the RTCM
SC-104 data bytes. (Since the bytes contain two-bit type flags, there isn’t
any interference with normal RTCM SC-104 data processing.)
Frequency select
The frequency-select command consists of the hexadecimal byte CE followed by a two-byte frequency-selection code. Divide the desired tuning
frequency by 100 Hz, then encode that number into two bytes: The first
byte is hexadecimal
ond byte is
for this command is:
For example, tune channel 1 to 304.5 kHz:
C0 plus the six least significant bits (lsb6). The general format
C0 plus the six most significant bits (msb6); the sec-
CE C0+
msb6
C0+
CE EF E5
lsb6
Commanding a frequency of zero returns the 8800 to its automatic mode.
For example, return the 8800 to automatic mode:
CE C0 C0
Bitrate select
An explicit bitrate for the received beacon signals must be specified when
using the binary control protocol. You may specify it either before or
after the frequency selection. Here are the hexadecimal bit-rate selection
codes:
• D4 = select 25 bits per second (bps)
• D5 = 50 bps
• D6 = 100 bps
• D7 = 200 bps
05/01/97 REV H PAGE 61
Page 72

Section 11 - Beacon receiver binary protocol
Request configuration
The hexadecimal control byte C1 asks the 8800 to report its configuration
as a sequence of bytes on the RTCM SC-104 output port. The structure of
this reply follows:
• C1 = message identifier
• C0+msb6 = current frequency select, six MSBs
• C0+lsb6 = current frequency select, six LSBs
• Dn = current bit rate select, D4–D7 as defined above
• F0 = indicates no EDAC method in use
• F4 = indicates no interleave in use
• Cn = indicates software version “n”
Request status
The hexadecimal control byte C5 asks the 8800 to report its current status as a sequence of bytes on the RTCM SC-104 output port. The structure of this reply follows:
• C5 = message identifier
• C0+msb6 = encoded signal strength, six MSBs
• C0+lsb6 = encoded signal strength, six LSBs
• C0+snr = encoded SNR, six bits
The signal strength is a 12-bit value that gives the strength in units of
dBµV, with the special value 1 indicating that the 8800 isn’t currently
decoding RTCM SC-104 DGPS correction data. The SNR is the estimated
Signal-to-Noise Ratio in dB.
11.2 GPS binary protocol
The standard configuration for all Northstar sensors is NMEA protocol
NMEA 0183 Version 2.0; however, the sensors are capable of talking in
binary protocol (CMC binary). For details on this protocol, see Appendix
E, “CMC Binary Protocol,” in the ALLSTAR OEM CMT-1200 Specifications
Rev H. To order this document, call the Northstar sales department.
PAGE 62 05/01/97 REV H
Page 73

Section 12 - 8X00 engine monitor program
Section 12 - 8X00 engine monitor program
12.1 Overview
12.1.1 BDM data
12.1.2 GPS data
FIGURE 9 - 8X00 ALLSTAR engine monitor screen
The 8X00 engine monitor is a PC-based computer program that receives
NMEA sentences from the 12-channel CMC ALLSTAR GPS engine and
beacon receiver, then displays the sensor’s output data and status. This
program runs on most IBM-compatible PCs, and interfaces with the 8700,
8800, and 8900’s data ports, letting you monitor and log a sensor’s out-
put. Status information fields are included in screen sections for BDM
data, GPS data, and satellite data:
• Noise count
• Frequency
• Signal strength
• Beacon bit rate
• Signal/noise
• Latitude
• Longitude
• Altitude
• Time (UTC)
• Mode (DGPS, for example)
• Software revision (SW rev)
• Course-over-ground (COG)
• Speed-over-ground (SOG)
• Self-test results
05/01/97 REV H PAGE 63
Page 74

Section 12 - 8X00 engine monitor program
• PDOP
• HDOP
12.1.3 Satellite data
12.1.4 Function key tasks
• PRN
• Azimuth
• Elevation
• SNR
• “*” indicator if used in position calculation
The main program screen contains a menu for nine of the keyboard function keys. Pressing each of the keys tells the program to perform the following tasks:
• F1: Initialize the GPS engine
• F2: Send a “GPS self-test” command to the GPS engine
• F3: Send a file to the GPS engine
• F4: Scrolls the GPS data to allow direct message observation
• F5: Scrolls the beacon monitor port to allow direct message observa-
tion
• F6: Start a GPS log file
• F7: Start a BDM log file
• F8: Send a file to the BDM
• F10: Quit the program
12.2 Installation
12.2.1 Hardware
and software
requirements
12.2.2 Start-up
Baud rates are fixed at 4800 (GPS) and 9600 (beacon receiver).
• An IBM-compatible PC (386 or faster)
• The executable file “8X00MON.EXE”
• The self-test message file “SELFTEST.ALL”
• The initialization message file “INITFILE.ALL”
In DOS:
1. Copy the contents of the GS8900 software disk (
related files) onto any subdirectory on your hard disk.
2. Change to that directory, then run the program by typing
8X00MON.”
“
In Windows:
1. Click on Start, then Run.
2. Type the path that contains the program, then run the program by
typing “
8X00MON.”
8X00MON.EXE and
PAGE 64 05/01/97 REV H
Page 75

Section 12 - 8X00 engine monitor program
12.2.3 About data files
12.2.4 About
scrolling data
Messages within data files can be read in by the 8X00 program and sent
to the ALLSTAR engine. Lines beginning with a comment character “
are ignored by the program when the file is read by the receivers. Lines
containing a comment character “
acter. The “
Data files can have any acceptable DOS filename. The self-test and initialization files are fixed as “
tively.
;” and all characters following in the line are ignored.
SELFTEST.ALL” and “INITFILE.ALL,” respec-
;” are truncated at the comment char-
;”
About log files
Log files are in ASCII, and appear exactly as data scrolls on screen. During
logging, the selected
function of F6 and/or F7 keys changes from
can’t be reopened once logging is stopped; reselecting the same filename
destroys old data in the file (user is prompted). Use a new file name. Data
files can have any acceptable DOS filename.
Monitor screen data (Lat/Lon, etc.) isn’t visible or updated while scrolling
data is active. The function key that activates the scroll screen (F4 for
GPS, F5 for beacon) also restores the monitor screen. In addition, an ESC
key restores the monitor screen.
FILENAME flashes on screen; also, the displayed
START to STOP. Log files
12.2.5 About the
monitor message
line
12.3 Operation
Operator messages, including error and prompt messages, appear on the
bottom line of the screen. This line is for data entry, such as a Log file
name. Pressing any key pauses, or continues, the scrolling of these messages.
NMEA messages from the engine are checksummed, if a checksum is provided. Bad messages are shown (within space limits). NMEA messages
from the operator's command file are shown as they’re sent to the engine.
If the checksum in the file isn’t correct, the correct value is displayed
(message isn’t sent). You can use the program to calculate the required
sums (return to DOS and edit the message file).
1. Enter the command 8X00MON, followed optionally by COM port
numbers for GPS and BEACON. If you don’t enter COM port numbers, the program uses
Valid start-up commands include:
• 8X00MON (default ports above used)
• 8X00MON 1 (GPS = COM1 BEACON not monitored)
• 8X00MON 2 (GPS = COM2 BEACON not monitored)
• 8X00MON 1 2 (GPS = COM1 BEACON = COM2)
• 8X00MON 2 1 (GPS = COM2 BEACON = COM1)
COM1 for GPS and COM2 for beacon.
05/01/97 REV H PAGE 65
Page 76

Section 12 - 8X00 engine monitor program
PAGE 66 05/01/97 REV H
Page 77

Section 13 - Glossary
Section 13 - Glossary
Almanac The compilation of satellite identification and orbital data used by a GPS
receiver.
Ephemeris data A uniform measure of data defined by the orbital motion of the planets.
The data is used to calculate exact satellite positions, continually updated
and derived from information relayed to the sensor in each satellite’s data
stream.
Host The customer system receiving position data from the 8700/8800
series/8900 series.
Selective Availability
(SA)
Sentence A group of data in one of several formats defined by the National Marine
Sferics count Sferics count is the number of noise impulses that were blanked in the
The intentional degrading by the U.S. Department of Defense of satellite
signals tracked and measured by GPS receivers to determine position,
time, and velocity. SA limits civilian GPS accuracy to about 100 meters,
and velocity accuracy to about one to two knots.
Electronics Association (NMEA). For standard applications, the Northstar
sensors are factory-programmed to output necessary sentences; for custom applications, the Northstar sensors can be programmed to output
any of several sentence types.
previous 10-second interval. It’s increased by poor weather conditions
and lightning.
05/01/97 REV H PAGE 67
Page 78

Section 13 - Glossary
PAGE 68 05/01/97 REV H
Page 79

Section 14 - Abbreviations and initialisms
Section 14 - Abbreviations and initialisms
BDM Beacon DeModulator (receiver for differential correction signals)
CMC Canadian Marconi Company
dBm deciBel relative to 1 milliWatt
EEPROM Electrically Erasable Programmable Read- Only Memory
FLL Frequency-locked loop
HDOP Horizontal Dilution of Precision
L1 The frequency band used by the GPS sensor
LSB Least Significant Bit
MF Medium Frequency band
MSB Most Significant Bit
MSK Minimum Shift Keying (type of modulation used by the BDM)
NMEA National Marine Electronics Association. The industry group that has
established standards for exchanging data between electronic navigation
equipment. NMEA 0183 is the current standard, which specifies the format for “sentences” containing specific types of data.
NVM Non-Volatile Memory
OEM Original Equipment Manufacturer
PLL Phase-locked loop
PRN A satellite’s two-digit Pseudo Random Number,
HUQPHQW
RTCM Radio Technical Commission for Maritime Services
SC-104 The specification for the differential corrections format.
SNR The estimated Signal-to-Noise Ratio of the broadcast signal, an approxi-
mate indication of signal quality; the larger SNRs indicate a better signal.
Antenna and grounding adjustments can be optimized while monitoring
the reported SNR of a known DGPS radio beacon.
TDOP Time Dilution of Precision
TTFF Time-To-First Fix
UTC Universal Coordinated Time
VDOP Vertical Dilution of Precision
WGS–84 World Geodetic System – 1984
.
DVVLJQHGýE\ýWKHý8ï6ïýJRYð
05/01/97 REV H PAGE 69
Page 80

Section 14 - Abbreviations and initialisms
PAGE 70 05/01/97 REV H
Page 81

Index
Numerics
8X00 ALLSTAR Engine Monitor Program
installation
keyboard functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
ordering a copy of . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
sentences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
startup commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
A
ALLSTAR OEM CMT-1200 Specifications Rev. H
ordering
Almanac data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
defined. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Antennas
antenna systems
cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23–27
DGPS-only
8410 ACU
AN195 H-field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23–27
GPS
AN145
AN150 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
GPS/DGPS combination
AN190
AN200 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Applications, for Northstar sensors. . . . . . . . . . . . . . . . . . . . . . . 3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Index
B
Beacon receivers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
binary protocol. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
manual control of. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
operating modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
special applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
technical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
data ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
data processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
electrical requirements. . . . . . . . . . . . . . . . . . . . . . . . . 17
environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
power requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
signal processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
C
Combination
beacon/GPS receivers
Configurations
custom
standard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
05/01/97 REV H PAGE 71
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Page 82

Index
Conventions, understanding . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
D
Data/power connector
pin assignments
standard configurations . . . . . . . . . . . . . . . . . . . . . . . . 30–32
DGPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Dimensions
of Northstar sensors
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
E
Ephemeris
data
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
defined. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
G
GPS receivers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
binary protocol. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
operating modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
sub-modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
serial protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
input sentences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
output sentences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
technical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
acquisition time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
coarse acquisition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
position accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
power requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
reacquisition time . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
sensitivity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
GPS/beacon combination receivers. . . . . . . . . . . . . . . . . . . . . . 19
features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
technical specifications
data ports
data processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
electrical requirements. . . . . . . . . . . . . . . . . . . . . . . . . 20
environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
power requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
signal processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
H
Host device
defined
interfacing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
wiring power to . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Housing
installation
maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
PAGE 72 05/01/97 REV H
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Page 83

I
I/O ports. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
RS-232 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
RS-422 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Interfacing all Northstar sensors
using I/O ports
Interfacing beacon receivers
to Northstar GPS receivers
to other GPS receivers . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
. . . . . . . . . . . . . . . . . . . . . . . . . 16
M
Maintenance
of housing
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
N
NMEA messages
0183 protocol format control messages
during self test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
in 8X00 ALLSTAR engine monitor program . . . . . . . . . . . . 63
sentence, defined . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Northstar 8700
introducing
parts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Northstar 8800
introducing
parts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Northstar 8801
applications
introducing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
parts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Northstar 8900 series
introducing
parts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Northstar 8901
applications
introducing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
parts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Northstar Sensors Technical Reference Manual
contents of
using . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
. . . . . . . . . . . . . . . 43
Index
O
Operating modes
GPS receivers
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
P
Power
supplying
wiring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Programmed Array Logic (PAL) chip. . . . . . . . . . . . . . . . . . . . . . 5
05/01/97 REV H PAGE 73
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
permanent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
remote . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Page 84

Index
custom configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
standard configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
R
Radio-beacon coverage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Registration card, filling out . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
S
Search the sky . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Selective Availability
and satellite signals
defined. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Service and repair procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Sferics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Shipping address for returns. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Status indicator light, functions of the . . . . . . . . . . . . . . . . . . . . 4
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
W
Web address. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Wiring power to the sensors. . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
PAGE 74 05/01/97 REV H
Page 85

Index
05/01/97 REV H PAGE 75
 Loading...
Loading...