

Page 1
查询MPC7400EC供应商
Order Number: MPC7400EC/D
Rev. 1.1, 11/2000
Semiconductor Products Sector
™
Advance Information
MPC7400 RISC Microprocessor
Hardware Specifications
The MPC7400 is an implementation of the PowerPC™ family of reduced instruction set computing (RISC)
microprocessors. This document describes pertinent electrical and physical characteristics of the MPC7400.
For functional characteristics of the processor, refer to the MPC7400 RISC Microprocessor User’s Manual.
This document contains the following topics:
Topic Page
Section 1.1, “Overview” 2
Section 1.2, “Features” 4
Section 1.3, “General Parameters” 7
Section 1.4, “Electrical and Thermal Characteristics” 7
Section 1.5, “Pin Assignments” 25
Section 1.6, “Pinout Listings” 26
Section 1.7, “Package Description” 29
Section 1.8, “System Design Information” 31
Section 1.9, “Document Revision History” 43
Section 1.10, “Ordering Information” 43
To locate updates for this document, refer to the website at http://www.motorola.com/sps. For the most
current part errata document, please contact your Motorola Sales Office.
This document contains information on a new product under development by Motorola.
Motorola reserves the right to change or discontinue this product without notice.
© Motorola, Inc., 2000. All rights reserved.
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 2

Overview
1.1 Overview
The MPC7400 is the first implementation of the fourth generation (G4) of PowerPC microprocessors from
Motorola. The MPC7400 implements the full PowerPC 32-bit architecture and is targeted at both portable
and computing systems applications. Some comments on the MPC7400 (with respect to MPC750):
• The MPC7400 adds an implementation of the new AltiVec™ technology instruction set
• The MPC7400 includes significant improvements in memory subsystem (MSS) bandwidth and
offers an optional, high-bandwidth MPX bus interface
• The MPC7400 adds full hardware-based multiprocessing capability, including a 5-state cache
coherency protocol (4 MESI states plus a fifth state for shared intervention)
• The MPC7400 is implemented in a next generation process technology for core frequency
improvement
• The MPC7400 floating-point unit has been improved to make latency equal for double-precision
and single-precision operations involving multiplication
• The completion queue has been extended to 8 slots
• There are no other significant changes to scalar pipelines, decode/dispatch/completion mechanisms,
or the branch unit. The MPC750’s 4-stage pipeline model is unchanged (fetch, decode/dispatch,
execute, complete/writeback)
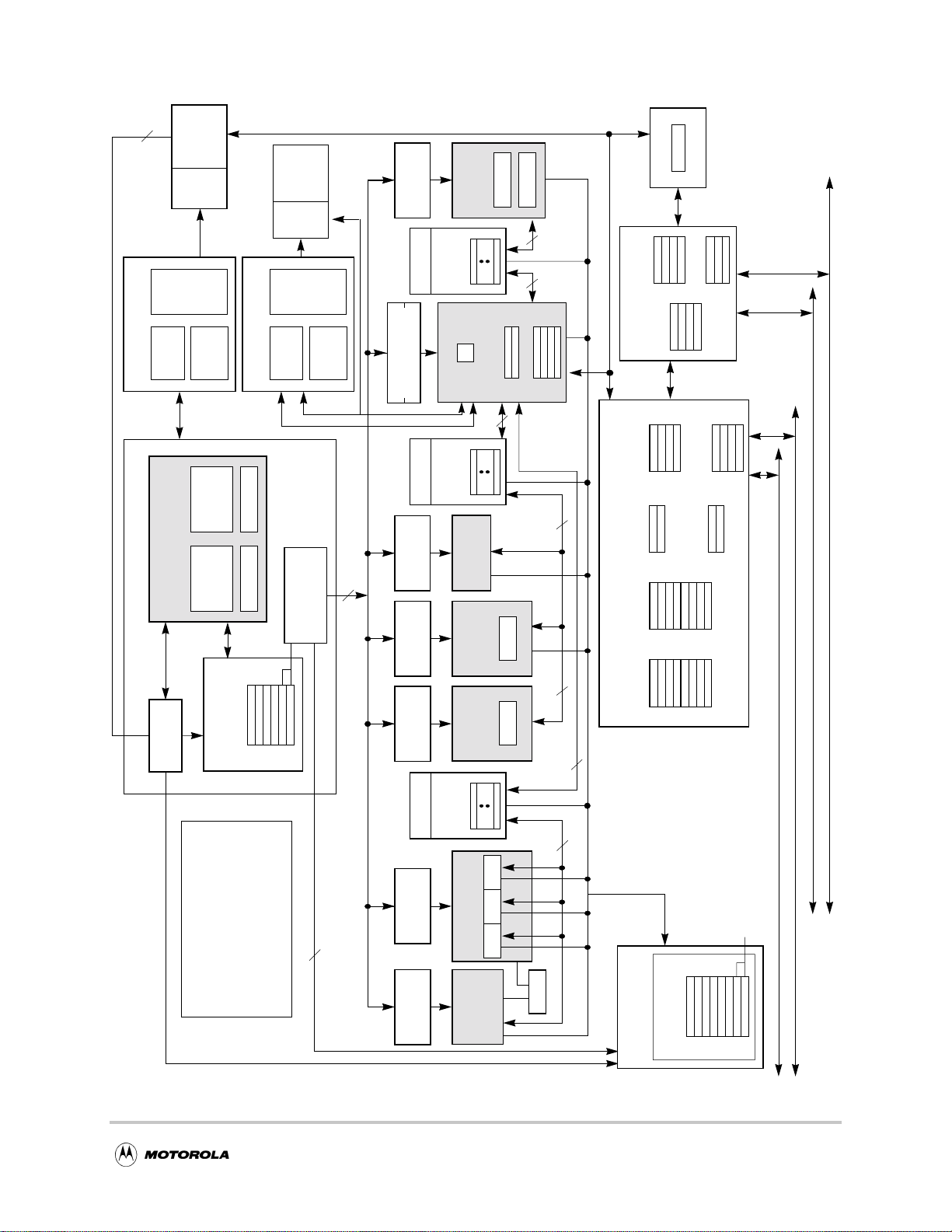
Figure 1 shows a block diagram of the MPC7400.
2
MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 3
Overview
128-Bit
(4 Instructions)
SRs
Instruction MMU
Branch Processing
Instruction Unit
i Cache
32-Kbyte
Tags
IBAT
Array
(Shadow)
128-Entry
BHT
Unit
BTIC
Data MMU
ITLB
CTRLR
(512 Entry)
(64 Entry)
32-Kbyte
SRs
(Original)
EA
D Cache
Tags
Array
DBAT
DTLB
128-Entry
PA
64-Bit (2 Instructions)
Dispatch Unit
Station
Station
Reservation
Reservation
Buffers
FPR File
6 Rename
Reservation
Station (2 Entry)
Load/Store Unit
Buffers
GPR File
6 Rename
Station
Reservation
Station
Reservation
FPSCR
+ x ÷
Floating-
Point Unit
+
Register UnitUnit 1 Unit 2
Integer
FPSCR
Finished Stores
(EA Calculation)
Completed Stores
32-Bit
+
64-Bit
64-Bit
32-Bit
L2CR
L2 Tags
L2 Controller
L2 MissL2 Data
L2 Bus Interface Unit
Queue
Load Fold
Instruction
Reload Queue
Bus Interface Unit
Queue
Data Reload
L2 Castout
Transaction
L1Operations
Instruction
Reload Table
Queue
64-/128-Bit L2 Data Bus
19-Bit L2 Address Bus
(6 Word)
Fetcher
Instruction Queue
Additional Features
• Time Base Counter/
Decrementer
2 Instructions
• Clock Multiplier
• JTAG/COP Interface
• Power Management
32-Bit
Station
Reservation
Buffers
VR File
6 Rename
Station
Reservation
Station
Reservation
+ x ÷
Integer System
128-Bit
128-Bit
VCIU
VSIU VFPU
Unit
Vector Vector ALU
Permute
VSCR
Figure 1. MPC7400 Block Diagram
Table
Data Reload
(8 Entry)
Reorder Buffer
Completion Unit
32-Bit 60x/MAX Address Bus
64-Bit 60x Data Bus/128-Bit MAX Data Bus
Ability to complete up
to two instructions per clock
MPC7400 RISC Microprocessor Hardware Specifications
3
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 4

Features
1.2 Features
This section summarizes features of the MPC7400’s implementation of the PowerPC architecture. Major
features of the MPC7400 are as follows:
• Branch processing unit
— Four instructions fetched per clock
— One branch processed per cycle (plus resolving 2 speculations)
— Up to 1 speculative stream in execution, 1 additional speculative stream in fetch
— 512-entry branch history table (BHT) for dynamic prediction
— 64-entry , 4-way set associative Branch Target Instruction Cache (BTIC) for eliminating branch
delay slots
• Dispatch unit
— Full hardware detection of dependencies (resolved in the execution units)
— Dispatch two instructions to eight independent units (system, branch, load/store, fixed-point
unit 1, fixed-point unit 2, floating-point, AltiV ec permute, AltiV ec ALU)
— Serialization control (predispatch, postdispatch, execution serialization)
• Decode
— Register file access
— Forwarding control
— Partial instruction decode
• Completion
— 8 entry completion buffer
— Instruction tracking and peak completion of two instructions per cycle
— Completion of instructions in program order while supporting out-of-order instruction
execution, completion serialization and all instruction flow changes
• Fixed-point units (FXUs) that share 32 GPRs for integer operands
— Fixed-point unit 1 (FXU1)—multiply, divide, shift, rotate, arithmetic, logical
— Fixed-point unit 2 (FXU2)—shift, rotate, arithmetic, logical
— Single-cycle arithmetic, shifts, rotates, logical
— Multiply and divide support (multi-cycle)
— Early out multiply
• Three-stage floating-point unit and a 32-entry FPR file
— Support for IEEE-754 standard single and double-precision floating-point arithmetic
— 3 cycle latency, 1 cycle throughput (single or double precision)
— Hardware support for divide
— Hardware support for denormalized numbers
— Time deterministic non-IEEE mode
• System unit
— Executes CR logical instructions and miscellaneous system instructions
— Special register transfer instructions
4
MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 5

Features
• AltiVec Unit
— Full 128-bit data paths
— Two dispatchable units: vector permute unit and vector ALU unit.
— Contains its own 32-entry 128-bit vector register file (VRF) with 6 renames
— The vector ALU unit is further sub-divided into the vector simple integer unit (VSIU), the
vector complex integer unit (VCIU), and the vector floating-point unit (VFPU).
— Fully pipelined
• Load/store unit
— One cycle load or store cache access (byte, half word, word, double-word)
— 2 cycle load latency with 1 cycle throughput
— Effective address generation
— Hits under misses (multiple outstanding misses)
— Single-cycle unaligned access within double word boundary
— Alignment, zero padding, sign extend for integer register file
— Floating-point internal format conversion (alignment, normalization)
— Sequencing for load/store multiples and string operations
— Store gathering
— Executes the cache and TLB instructions
— Big- and little-endian byte addressing supported
— Misaligned little-endian supported
— Supports FXU, FPU, and AltiVec load/store traffic
— Complete support for all 4 architecture AltiVec DST streams
• Level 1 (L1) cache structure
— 32K, 32-byte line, 8-way set associative instruction cache (iL1)
— 32K, 32-byte line, 8-way set associative data cache (dL1)
— Single-cycle cache access
— Pseudo least-recently-used (LRU) replacement
— Data cache supports AltiVec LRU and transient instructions algorithm
— Copy-back or write-through data cache (on a page per page basis)
— Supports all PowerPC memory coherency modes
— Non-blocking instruction and data cache
— Separate copy of data cache tags for efficient snooping
— No snooping of instruction cache except for ICBI instruction
• Level 2 (L2) cache interface
— Internal L2 cache controller and tags; external data SRAMs
— 512K, 1M, and 2Mbyte 2-way set associative L2 cache support
— Copyback or write-through data cache (on a page basis, or for all L2)
— 32 byte (512K), 64 byte (1M), or 128 byte (2M) sectored line size
— Supports pipelined (register-register) synchronous burst SRAMs and pipelined (register-
register) late-write synchronous burst SRAMs
— Core-to-L2 frequency divisors of ÷1, ÷1.5, ÷2, ÷2.5, ÷3, ÷3.5, and ÷4 supported
— 64 bit data bus
— Selectable interface voltages of 1.8, 2.5, and 3.3V.
MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
5
Page 6
• Memory management unit
— 128 entry, 2-way set associative instruction TLB
— 128 entry, 2-way set associative data TLB
— Hardware reload for TLBs
— 4 instruction BATs and 4 data BATs
— Virtual memory support for up to 4 exabytes (2
— Real memory support for up to 4 gigabytes (2
52
) of virtual memory
32
) of physical memory
— Snooped and invalidated for TLBI instructions
•Efficient data flow
— All data buses between VRF, load/store unit, dL1, iL1, L2, and the bus are 128-bits wide
— dL1 is fully pipelined to provide 128 bits/cycle to/from the VRF
— L2 is fully pipelined to provide 128 bits per L2 clock cycle to the L1s
— Up to 8 outstanding, out-of-order, cache misses between dL1 and L2/bus
— Up to 7 outstanding, out-of-order transactions on the bus
— Load folding to fold new dL1 misses into older, outstanding load and store misses to the same
line
— Store miss merging for multiple store misses to the same line. Only coherency action taken (i.e.,
address only) for store misses merged to all 32 bytes of a cache line (no data tenure needed).
— 2-entry finished store queue and 4-entry completed store queue between load/store unit and dL1
— Separate additional queues for efficient buffering of outbound data (castouts, write throughs,
etc.) from dL1 and L2
• Bus interface
— New MPX bus extension to 60X processor interface
— Mode-compatible with 60x processor interface
— 32-bit address bus
— 64 bit data bus
— Bus-to-core frequency multipliers of 2x, 2.5x, 3x, 3.5x, 4x, 4.5x, 5x, 5.5x, 6x, 6.5x, 7x, 7.5x,
8x supported
— Selectable interface voltages of 1.8 and 3.3V.
• Power management
— Low-power design with thermal requirements very similar to MPC740 and MPC750.
— 1.8 volt processor core
— Selectable interface voltages below 3.3V can reduce power in output buffers
— Three static power saving modes: doze, nap, and sleep
— Dynamic power management
• Testability
— LSSD scan design
— IEEE 1149.1 JTAG interface
— Array built-in self test (ABIST)—factory test only.
— Redundancy on L1 data arrays and L2 tag arrays
• Reliability and serviceability
— Parity checking on 60x and L2 cache buses
Features
6
MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 7
General Parameters
1.3 General Parameters
The following list provides a summary of the general parameters of the MPC7400:
Technology 0.20 µm CMOS, six-layer metal
Die size 7.86 mm x 10.58 mm (83 mm
2
)
Transistor count 10.5 million
Logic design Fully-static
Packages Surface mount 360 ceramic ball grid array (CBGA)
Core power supply: 1.8V ± 100 mV dc (nominal; see Table 3 for recommended operating
conditions)
I/O power supply 1.8V ± 100 mV dc or
2.5V ± 100 mV dc or
3.3V ± 5% (input thresholds are configuration pin selectable)
1.4 Electrical and Thermal Characteristics
This section provides the AC and DC electrical specifications and thermal characteristics for the MPC7400.
1.4.1 DC Electrical Characteristics
The tables in this section describe the MPC7400 DC electrical characteristics. T able 1 provides the absolute
maximum ratings.
Table 1. Absolute Maximum Ratings
Characteristic Symbol Maximum Value Unit Note
Core supply voltage Vdd –0.3 to 2.1 V 4
PLL supply voltage AVdd –0.3 to 2.1 V 4
L2 DLL supply voltage L2AVdd –0.3 to 2.1 V 4
Processor bus supply voltage OVdd –0.3 to 3.465 V 3
L2 bus supply voltage L2OVdd –0.3 to 3.465 V 3
Input voltage Processor bus V
L2 Bus V
JTAG Signals V
Storage temperature range T
Notes:
1. Functional and tested operating conditions are given in Table 3. Absolute maximum ratings are stress ratings only, and
functional operation at the maximums is not guaranteed. Stresses beyond those listed may affect device reliability or cause
permanent damage to the device.
2. Caution: Vin must not exceed OVdd or L2OVdd by more than 0.3V at any time including during power-on reset.
3. Caution: L2OVdd/OVdd must not exceed Vdd/AVdd/L2AVdd by more than 2.0V at any time including during power-on
reset.
in
in
in
stg
1
–0.3 to OVdd + 0.3V V 2,5
–0.3 to L2OVdd + 0.3V V 2,5
–0.3 to 3.6 V
–55 to 150 °C
MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
7
Page 8
Electrical and Thermal Characteristics
4. Caution: Vdd/AVdd/L2AVdd must not exceed L2OVdd/OVdd by more than 0.4V at any time including during power-on
reset. In addition, operation at nominal Vdd/AVdd/L2AVdd greater than nominal L2OVdd or OVdd in the 1.8V input
threshold select mode can cause erratic operation and AC timing values worse than described in this specification.
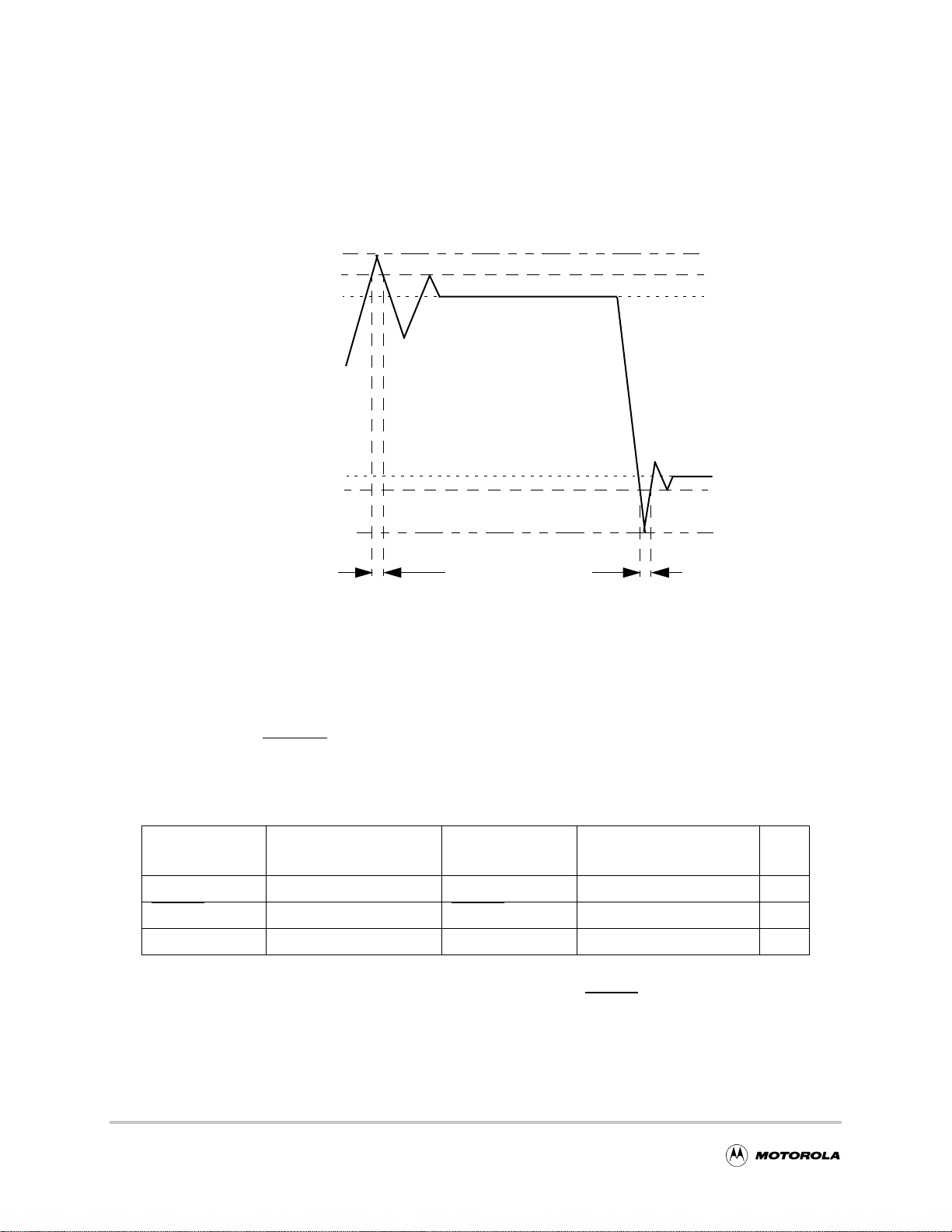
may overshoot/undershoot to a voltage and for a maximum duration as shown in Figure 2.
5. V
in
Figure 2 shows the undershoot and overshoot voltage on the MPC7400.
(L2)OVdd + 20%
(L2)OVdd + 5%
(L2)OVdd
V
IH
V
IL
Gnd
Gnd - .3V
Gnd - 0.7V
Not to exceed 10%
of t
SYSCLK
Figure 2. Overshoot/Undershoot Voltage
The MPC7400 provides several I/O voltages to support both compatibility with existing systems and
migration to future systems. The MPC7400 “core” voltage must always be provided at nominal 1.8V (see
Table 3 for actual recommended core voltage). Voltage to the L2 I/Os and processor interface I/Os are
provided through separate sets of supply pins and may be provided at the voltages shown in Table 2. The
input voltage threshold for each bus is selected by sampling the state of the voltage select pins at the
negation of the signal HRESET
. The output voltage will swing from GND to the maximum voltage applied
to the OVdd or L2OVdd power pins.
Table 2. Input Threshold Voltage Setting
BVSEL Signal
0 1.8V 0 1.8 1
HRESET
1 3.3V 1 3.3 1
Notes:
1. Caution: The input threshold selection must agree with the OVdd/L2OVdd voltages supplied.
2. To select the 2.5 volt threshold option, L2VSEL / BVSEL should be tied to HRESET
change state together.
Processor Bus Input
Threshold is Relative to:
2.5V HRESET 2.5 1,2
L2VSEL Signal
L2 Bus Input Threshold is
Relative to:
so that the two signals
Note
8
MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 9
Electrical and Thermal Characteristics
Table 3 provides the recommended operating conditions for the MPC7400.
Table 3. Recommended Operating Conditions
Characteristic Symbol
Core supply voltage Vdd 1.8v ± 100mv V 1
PLL supply voltage AVdd 1.8v ± 100mv V 1
L2 DLL supply voltage L2AVdd 1.8v ± 100mv V 1
Processor bus supply
voltage
L2 bus supply voltage L2VSEL = 0 L2OVdd 1.8v ± 100mv V 1
Input voltage Processor bus V
Die-junction temperature T
Note:
1. These are the recommended and tested operating conditions. Proper device operation outside of these
conditions is not guaranteed.
2. The extended temperature parts have die-junction temperature of -40 to 105 ˚C.
BVSEL = 0 OVdd 1.8v ± 100mv V 1
BVSEL = HRESET
BVSEL = 1 OVdd 3.3v ± 165mv V 1
L2VSEL = HRESET
L2VSEL = 1 L2OVdd 3.3v ± 165mv V 1
L2 Bus V
JTAG Signals V
OVdd 2.5v ± 100mv V 1
L2OVdd 2.5v ± 100mv V 1
in
in
in
j
Recommended
Value
GND to OVdd V 1
GND to L2OVdd V 1
GND to OVdd V 1
0 to 105 °C 2
Unit Note
Table 4 provides the package thermal characteristics for the MPC7400.
Table 4. Package Thermal Characteristics
Characteristic Symbol Value Rating
CBGA package thermal resistance, junction-to-case thermal resistance (typical)
CBGA package thermal resistance, die junction-to-lead thermal resistance
(typical)
Note: Refer to Section 1.8, “System Design Information,” for more details about thermal management.
θ
JC
θ
JB
0.03 °C/W
3.8 °C/W
The MPC7400 incorporates a thermal management assist unit (T AU) composed of a thermal sensor , digitalto-analog converter, comparator, control logic, and dedicated special-purpose registers (SPRs). See the
MPC7400 RISC Microprocessor User’s Manual for more information on the use of this feature.
Specifications for the thermal sensor portion of the TAU are found in Table 5.
Table 5. Thermal Sensor Specifications
At recommended operating conditions (See Table 3)
Characteristic Min Max Unit Notes
Temperature range 0 127
Comparator settling time 20 — µs 2
°C
1
MPC7400 RISC Microprocessor Hardware Specifications
9
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 10
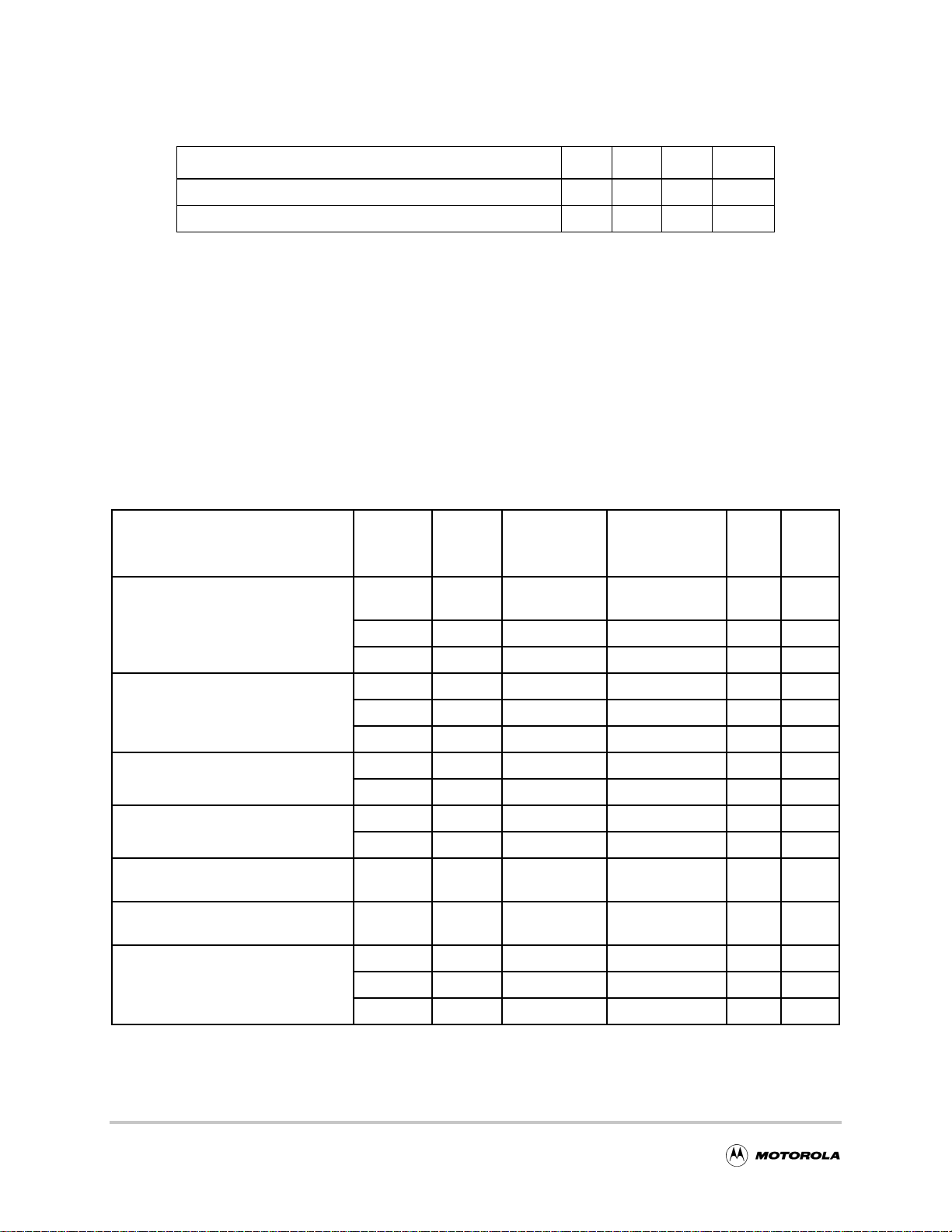
Table 5. Thermal Sensor Specifications
At recommended operating conditions (See Table 3)
Characteristic Min Max Unit Notes
Electrical and Thermal Characteristics
Resolution 4 —
Accuracy -12 +12
°C
°C
3
Notes:
1. The temperature is the junction temperature of the die. The thermal assist unit’s raw output does not indicate an absolute
temperature, but it must be interpreted by software to derive the absolute junction temperature. For information about the
use and calibration of the TAU, see Motorola application note, “Programming the Thermal Assist Unit in the MPC750
Microprocessor,” (order #: AN1800/D).
2. The comparator settling time value must be converted into the number of CPU clocks that need to be written into the
THRM3 SPR.
3. Guaranteed by design and characterization.
Table 6 provides the DC electrical characteristics for the MPC7400.
Table 6. DC Electrical Specifications
At recommended operating conditions (See Table 3)
Nominal
Characteristic
Input high voltage (all inputs except
SYSCLK)
Input low voltage (all inputs except
SYSCLK)
SYSCLK input high voltage 1.8 CV
SYSCLK input low voltage 1.8 CV
Input leakage current, V
= L2OVdd/
in
OVdd
Bus
1
Voltage
1.8 V
2.5 V
3.3 V
1.8 V
2.5 V
3.3 V
3.3 CV
3.3 CV
I
in
Symbol Min Max Unit Notes
IH
0.65 *
(L2)OVdd + 0.3 V 2,3
(L2)OVdd
IH
IH
IL
IL
IL
IH
IH
IL
IL
1.7 (L2)OVdd + 0.3 V 2,3
2.0 (L2)OVdd + 0.3 V 2,3
-0.3 0.35 * OVdd V
-0.3 0.2 * (L2)OVdd V
-0.3 0.8 V
1.5 OVdd + 0.3 V 2
2.4 OVdd + 0.3 V 2
-0.3 0.2 V
-0.3 0.4 V
— 10 µA 2,3
Hi-Z (off-state) leakage current, V
L2OVdd/OVdd
Output high voltage, I
10
= -6 mA 1.8 V
OH
MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
=
in
2.5 V
3.3 V
I
TSI
OH
OH
OH
— 10 µA 2,3,5
(L2)OVdd–0.45 — V
1.7 — V
2.4 — V
Page 11
Electrical and Thermal Characteristics
Table 6. DC Electrical Specifications (Continued)
At recommended operating conditions (See Table 3)
Nominal
Characteristic
Output low voltage, I
Capacitance, V
=
in
6 mA 1.8 V
=
OL
0 V, f = 1 MHz C
Notes:
1. Nominal voltages; See Table 3 for recommended operating conditions.
2. For processor bus signals, the reference is OVdd
3. Excludes test signals (LSSD_MODE, L1_TSTCLK, L2_TSTCLK) and IEEE 1149.1 boundary scan (JTAG) signals.
Bus
Voltage
2.5 V
3.3 V
Symbol Min Max Unit Notes
1
OL —
OL —
OL —
in
— 7.5 pF 3,4
while L2OVdd is the reference for the L2 bus signals.
0.45 V
0.4 V
0.4 V
MPC7400 RISC Microprocessor Hardware Specifications
11
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 12
Electrical and Thermal Characteristics
4. Capacitance is periodically sampled rather than 100% tested.
5. The leakage is measured for nominal OVdd and Vdd, or both OVdd and Vdd must vary in the same direction (for example,
both OVdd and Vdd vary by either +5% or -5%).
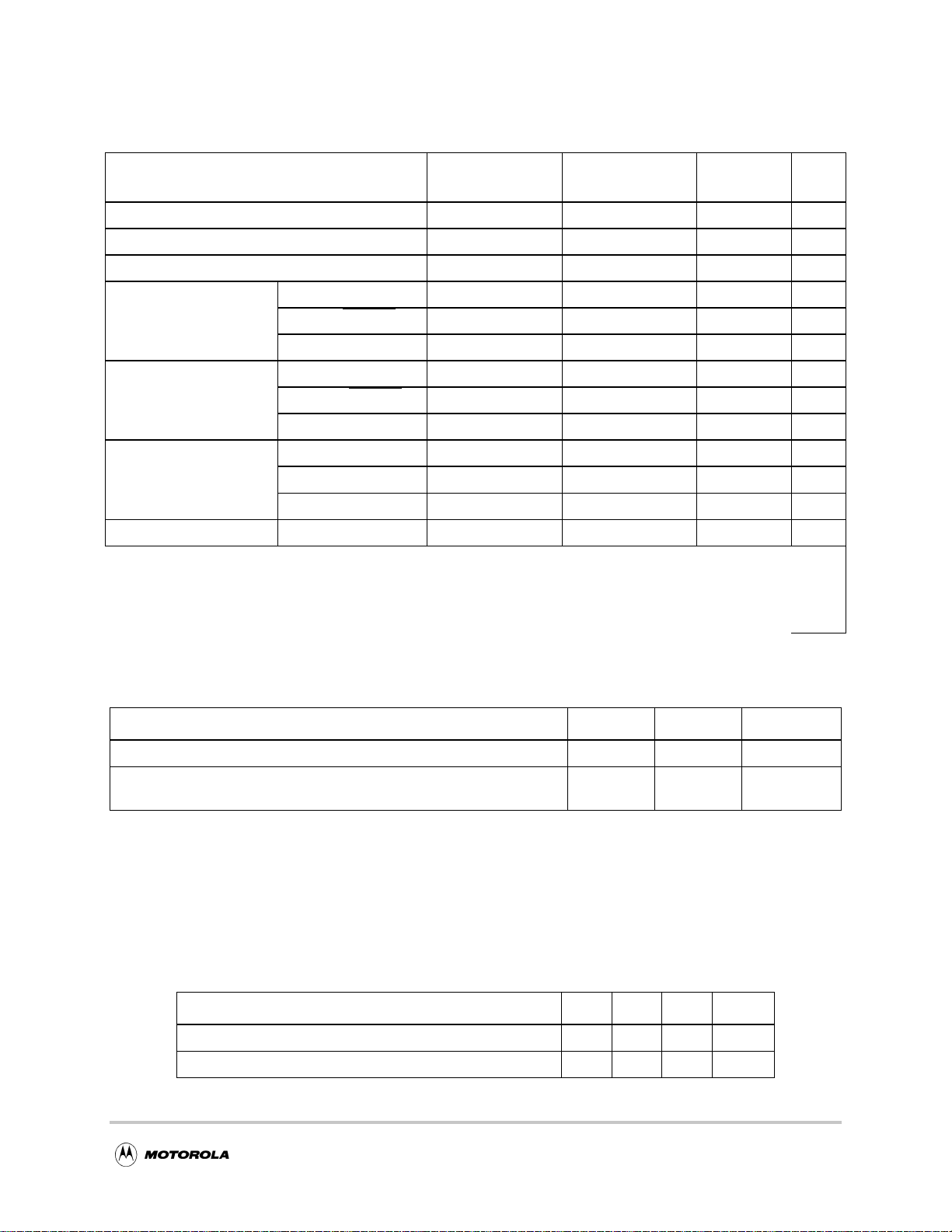
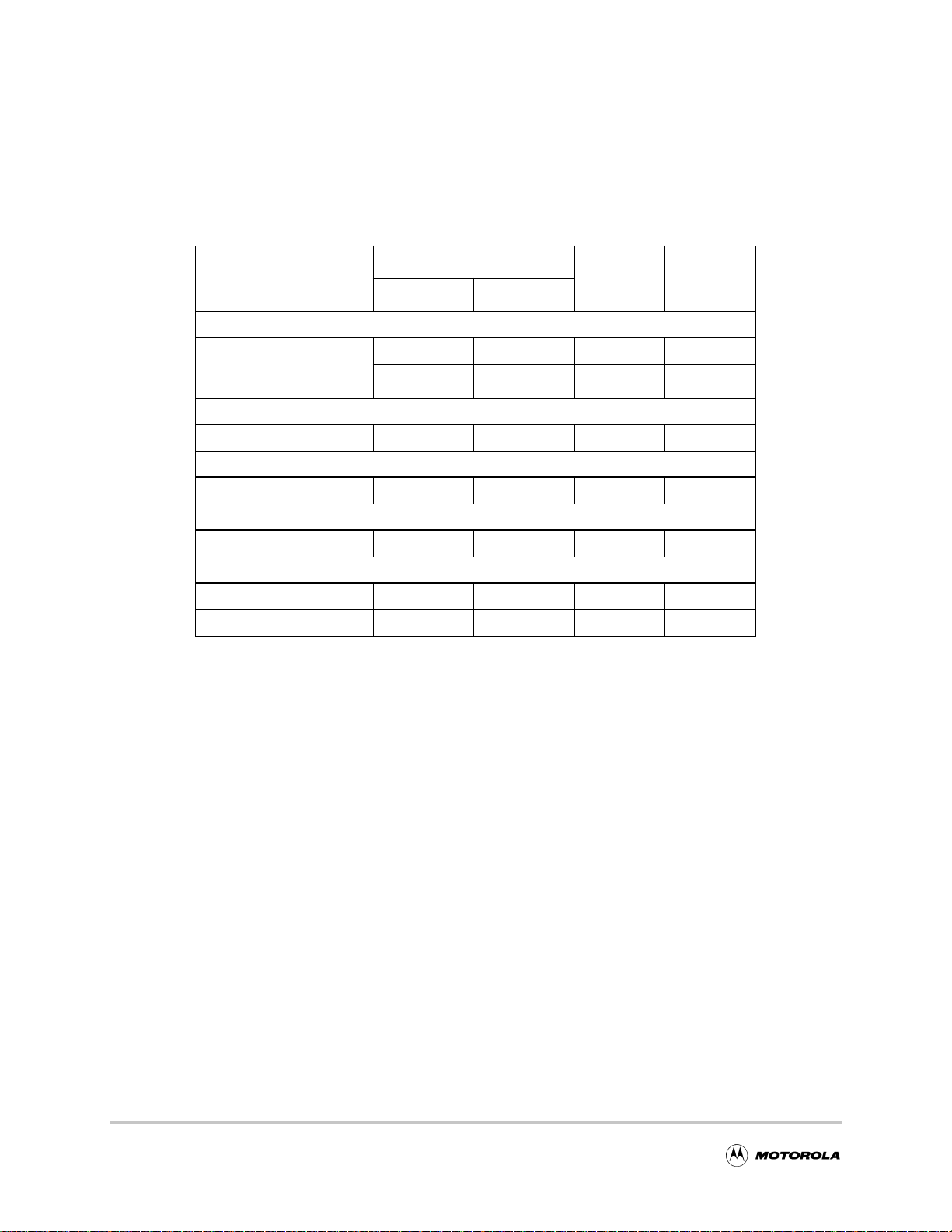
Table 7 provides the power consumption for the MPC7400.
Table 7. Power Consumption for MPC7400
Processor (CPU) Frequency
Unit Notes
350 MHz 400 MHz
Full-On Mode
Typical
Maximum
Doze Mode
Maximum 4.4 5.0 W 1, 2
Nap Mode
Maximum 1.75 2.0 W 1, 2
Sleep Mode
Maximum 1.75 2.0 W 1, 2
Sleep Mode—PLL and DLL Disabled
Typical 600 600 mW 1, 3
Maximum 1.0 1.0 W 1, 2
Notes:
1. These values apply for all valid processor bus and L2 bus ratios. The values do not include
I/O Supply Power (OVdd and L2OVdd) or PLL/DLL supply power (AVdd and
L2AVdd). OVdd and L2OVdd power is system dependent, but is typically <10% of Vdd
power. Worst case power consumption for AVdd = 15 mw and L2AVdd = 15 mW.
2. Maximum power is measured at Vdd = 1.9V while running an entirely cache-resident,
contrived sequence of instructions which keep the execution units, including AltiVec,
maximally busy.
3. Typical power is an average value measured at Vdd = AVdd = L2AVdd = 1.8V, OVdd =
L2OVdd = 3.3V in a system while running a codec application that is AltiVec intensive.
4. These values include the use of AltiVec. Without AltiVec operation, estimate a 25%
decrease.
4.6 5.3 W 1, 3
9.9 11.3 W 1, 2, 4
1.4.2 AC Electrical Characteristics
This section provides the AC electrical characteristics for the MPC7400. After fabrication, functional parts
are sorted by maximum processor core frequency as shown in Section 1.4.2.1, “Clock AC Specifications,”
and tested for conformance to the AC specifications for that frequency. The processor core frequency is
determined by the bus (SYSCLK) frequency and the settings of the PLL_CFG[0–3] signals. Parts are sold
by maximum processor core frequency; see Section 1.10, “Ordering Information.”
12
MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 13
Electrical and Thermal Characteristics
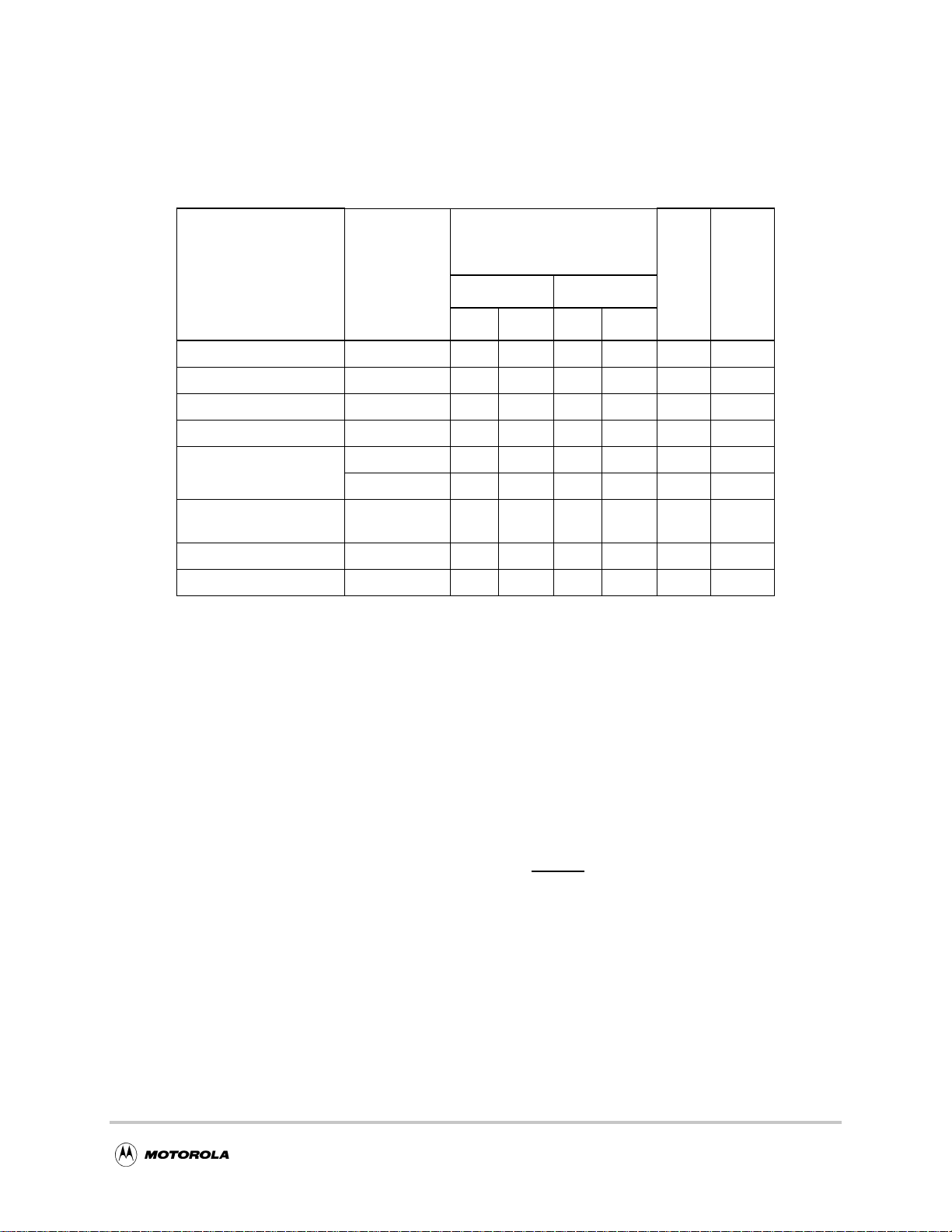
1.4.2.1 Clock AC Specifications
Table 8 provides the clock AC timing specifications as defined in Figure 3.
Table 8. Clock AC Timing Specifications
At recommended operating conditions (See Table 3)
Maximum Processor Core
Frequency
Characteristic Symbol
350 MHz 400 MHz
Min Max Min Max
Processor frequency f
VCO frequency f
SYSCLK frequency f
SYSCLK cycle time t
SYSCLK rise and fall time t
SYSCLK duty cycle
core
VCO
SYSCLK
SYSCLK
&
KR
&
t
KR
t
KHKL
t
KF
t
KF
/t
SYSCLK
measured at OVdd/2
SYSCLK jitter — ±150 — ±150 ps 5
300 350 300 400 MHz 1
600 700 600 800 MHz 1
25 100 25 100 MHz 1
10 40 7.5 40 ns
— 1.0 — 1.0 ns 2
— 0.5 — 0.5 ns 3
40 60 40 60 % 4
Unit Notes
Internal PLL relock time — 100 — 100
µ
s6
Notes:
1. Caution: The SYSCLK frequency and PLL_CFG[0–3] settings must be chosen such that the
resulting SYSCLK (bus) frequency, CPU (core) frequency, and PLL (VCO) frequency do not
exceed their respective maximum or minimum operating frequencies. Refer to the PLL_CFG[0–
3] signal description in Section 1.8.1, “PLL Configuration,” for valid PLL_CFG[0–3] settings
2. Rise and fall times for the SYSCLK input measured from 0.4V to 2.4V when OVdd = 3.3V
nominal.
3. Rise and fall times for the SYSCLK input measured from 0.4V to 1.4V when OVdd = 1.8V
nominal.
4. Timing is guaranteed by design and characterization.
5. This represents total input jitter—short term and long term combined—and is guaranteed by
design.
6. Relock timing is guaranteed by design and characterization. PLL-relock time is the maximum
amount of time required for PLL lock after a stable Vdd and SYSCLK are reached during the
power-on reset sequence. This specification also applies when the PLL has been disabled and
subsequently re-enabled during sleep mode. Also note that HRESET
must be held asserted for a
minimum of 255 bus clocks after the PLL-relock time during the power-on reset sequence.
MPC7400 RISC Microprocessor Hardware Specifications
13
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 14
Electrical and Thermal Characteristics
Figure 3 provides the SYSCLK input timing diagram.
CV
SYSCLK VMVMVM
t
KHKL
t
SYSCLK
CV
IL
IH
t
KR
t
KF
VM = Midpoint Voltage (OVDD/2)
Figure 3. SYSCLK Input Timing Diagram
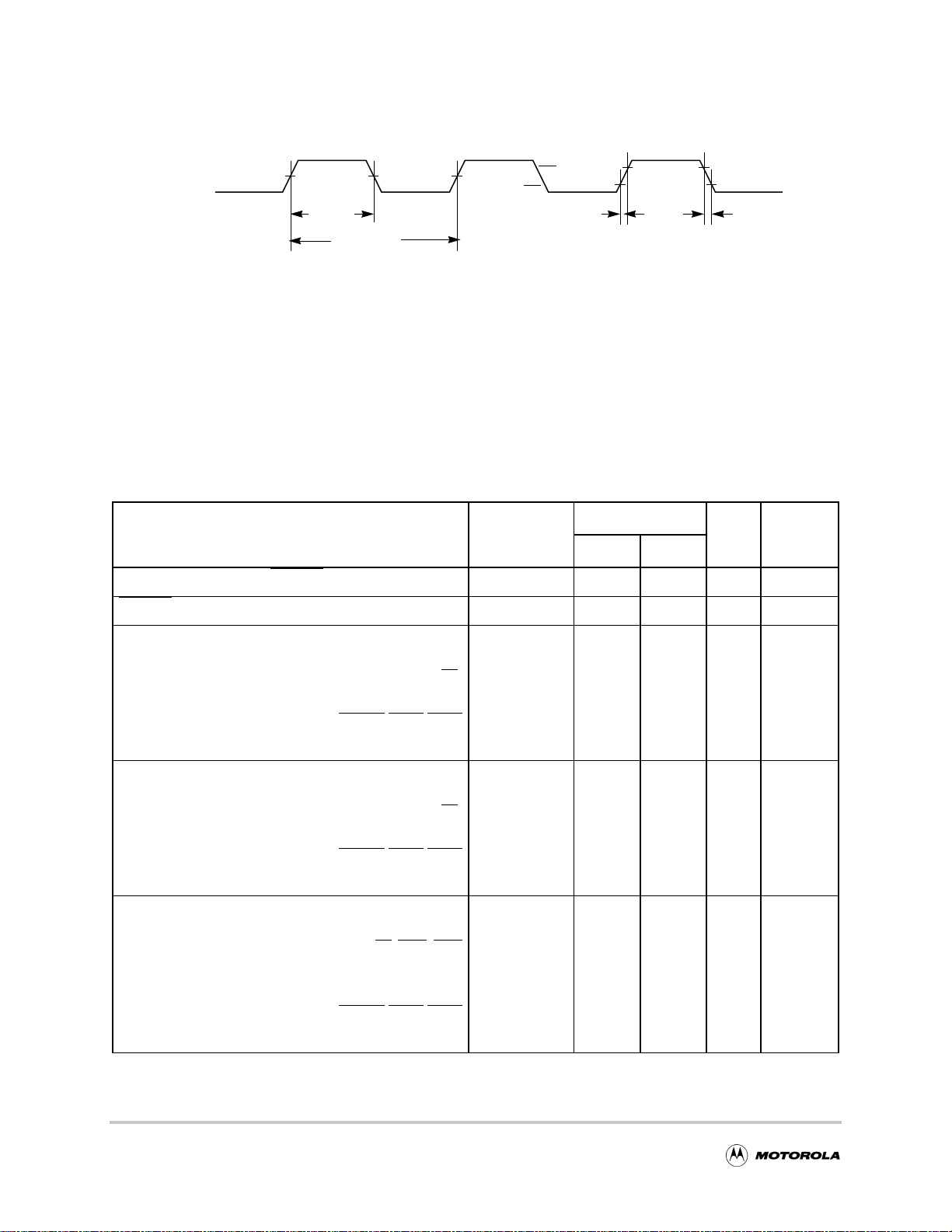
1.4.2.2 Processor Bus AC Specifications
Table 9 provides the processor bus AC timing specifications for the MPC7400 as defined in Figure 4 and
Figure 5. Timing specifications for the L2 bus are provided in Section 1.4.2.3, “L2 Clock AC
Specifications.”y
Table 9. Processor Bus AC Timing Specifications
1
At Vdd=AVdd=1.8V±100mV; 0 ≤ Tj ≤ 105°C, OVdd = 3.3V±165mV or OVdd = 2.5V±100mV or OVdd=1.8V±100mV
350, 400 MHz
Unit Notes
Parameter Symbol
2
Min Max
Mode select input setup to HRESET
HRESET
to mode select input hold t
Setup Times:
Input Hold Times:
Valid Times:
Address/Transfer Attribute
Transfer Start (TS
Data/Data Parity
TRY/SHD0/SHD1
AR
All Other Inputs
Address/Transfer Attribute
Transfer Start (TS
Data/Data Parity
TRY/SHD0/SHD1
AR
All Other Inputs
Address/Transfer Attribute
, ABB, DBB
TS
Data
Data Parity
TRY/SHD0/SHD1
AR
All Other Outputs
t
MVRH
MXRH
t
AVKH
t
)
)
TSVKH
t
DVKH
t
ARVKH
t
IVKH
t
AXKH
t
TSXKH
t
DXKH
t
ARXKH
t
IXKH
t
KHAV
t
KHTSV
t
KHDV
t
KHDPV
t
KHARV
t
KHOV
8—t
sysclk
3,4,5,6
0 — ns 2,3,5
ns
1.6
1.6
1.6
1.6
1.6
—
—
—
—
—
7
—
8
—
9
ns
0
0
0
0
0
—
—
—
—
—
7
—
8
—
9
ns
—
—
—
—
—
—
3.2
3.4
3.5
3.5
2.5
3.2
7
—
8
8
—
10
14
MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 15

Electrical and Thermal Characteristics
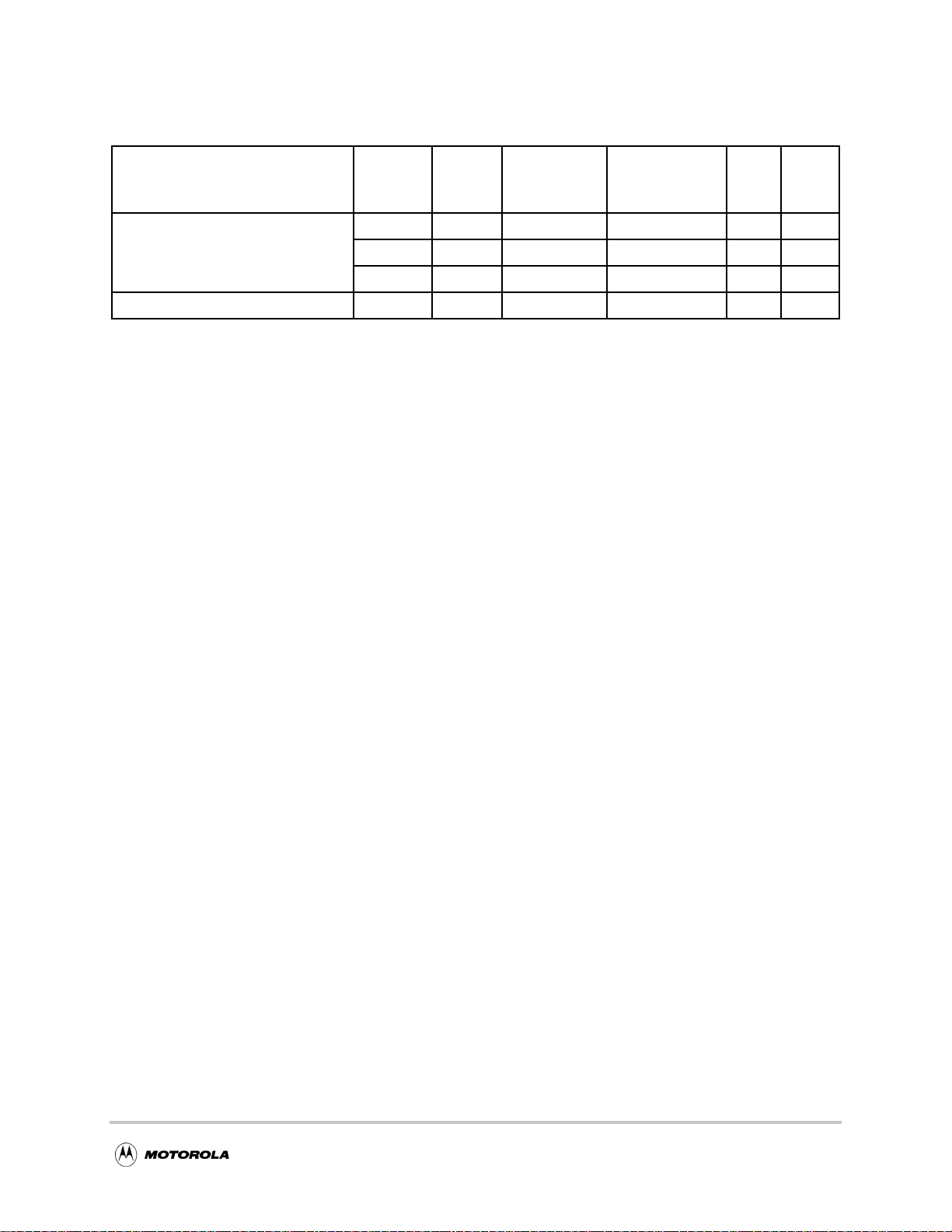
Table 9. Processor Bus AC Timing Specifications1 (Continued)
At Vdd=AVdd=1.8V±100mV; 0 ≤ Tj ≤ 105°C, OVdd = 3.3V±165mV or OVdd = 2.5V±100mV or OVdd=1.8V±100mV
Parameter Symbol
Output Hold Times:
Address/Transfer Attribute
, ABB, DBB
TS
Data/Data Parity
TRY/SHD0/SHD1
AR
All Other Outputs
SYSCLK to Output Enable t
SYSCLK to Output High Impedance (all except TS
, ABB/
AMON(0), ARTRY/SHD, DBB/DMON(0) )
SYSCLK to TS
, ABB/AMON(0), DBB/DMON(0) High
Impedance after precharge
Maximum Delay to AR
SYSCLK to AR
TRY/SHD0/SHD1 Precharge t
TRY/SHD0/SHD1 High Impedance After
Precharge
t
KHAX
t
KHTSX
t
KHDX
t
KHARX
t
KHOX
KHOE
t
KHOZ
t
KHABPZ
KHARP
t
KHARPZ
2
350, 400 MHz
Min Max
0.75
0.75
0.6
0.75
0.75
—
—
—
—
—
0.5 — ns
— 4.0 ns
— 1.0 t
—1 t
—2 t
Unit Notes
ns
7
—
8
—
10
sysclk
sysclk
sysclk
5,11,13
5,12, 13
5,12, 13
MPC7400 RISC Microprocessor Hardware Specifications 15
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 16

Electrical and Thermal Characteristics
Table 9. Processor Bus AC Timing Specifications1 (Continued)
At Vdd=AVdd=1.8V±100mV; 0 ≤ Tj ≤ 105°C, OVdd = 3.3V±165mV or OVdd = 2.5V±100mV or OVdd=1.8V±100mV
350, 400 MHz
Unit Notes
Parameter Symbol
2
Min Max
Notes:
1. All input specifications are measured from the midpoint of the signal in question to the midpoint of the rising edge of the
input SYSCLK. All output specifications are measured from the midpoint of the rising edge of SYSCLK to the
midpoint of the signal in question. All output timings assume a purely resistive 50 ohm load (See Figure 4). Input and
output timings are measured at the pin;time-of-flight delays must be added for trace lengths, vias, and connectors in the
system.
2. The symbology used for timing specifications herein follows the pattern of t
t
(reference)(state)(signal)(state)
for outputs. For example, t
symbolizes the time input signals (I) reach the valid state (V)
IVKH
(signal)(state)(reference)(state)
relative to the SYSCLK reference (K) going to the high(H) state or input setup time. And t
KHOV
for inputs and
symbolizes the time
from SYSCLK(K) going high(H) until outputs (O) are valid (V) or output valid time. Input hold time can be read as the
time that the input signal (I) went invalid (X) with respect to the rising clock edge (KH) - note the position of the
reference and its state for inputs -and output hold time can be read as the time from the rising edge (KH) until the output
went invalid (OX). For additional explanation of AC timing specifications in Motorola PowerPC microprocessors, see
the application note “Understanding AC Timing Specifications for PowerPC Microprocessors.”
3. The setup and hold time is with respect to the rising edge of HRESET
4. This specification is for configuration mode select only. Also note that the HRESET
(see Figure 5).
must be held asserted for a
minimum of 255 bus clocks after the PLL re-lock time during the power-on reset sequence.
5. t
is the period of the external clock (SYSCLK) in nanoseconds (ns). The numbers given in the table must be
sysclk
multiplied by the period of SYSCLK to compute the actual time duration (in nanoseconds) of the parameter in question.
6. Mode select signals are BVSEL, EMODE, L2VSEL, PLL_CFG[0-3]
7. Address/Transfer Attribute signals are composed of the following—A[0–31], AP[0–3], TT[0–4], TBST
GBL
, WT , CI
, TSIZ[0–2],
8. Data signals are composed of the following—DH[0–31], DL[0–31]; Data Parity signals are composed of DP[0–7].
9. All other input signals are composed of the following— AACK
HRESET
, INT, MCP, QACK, SMI, SRESET, TA, TBEN, TEA, TLBISYNC.
10. All other output signals are composed of the following— BR
, BG, CKSTP_IN, DBG, DBWO/DTI[0], DTI[1-2],
, CKSTP_OUT, DRDY, HIT, QREQ, RSRV
11. According to the 60x bus protocol, TS, ABB and DBB are driven only by the currently active bus master. They are
asserted low then precharged high before returning to high-Z as shown in Figure 6. The nominal precharge width for
TS
, ABB or DBB is 0.5* t
TS
, ABB, or DBB on the following clock will not contend with the precharge. Output valid and output hold timing is
, i.e. less than the minimum t
SYSCLK
period, to ensure that another master asserting
SYSCLK
tested for the signal asserted. Output valid time is tested for precharge.The high-Z behavior is guaranteed by design.
12. According to the 60x bus protocol, AR
immediately following AACK
. Bus contention is not an issue since any master asserting ARTRY will be driving it low.
Any master asserting it low in the first clock following AACK
it high during the second cycle after the assertion of AACK
it should be high-Z as shown in Figure 6 before the first opportunity for another master to assert AR
TRY can be driven by multiple bus masters through the clock period
will then go to high-Z for one clock before precharging
. The nominal precharge width for ARTRY is 1.0 t
TRY. Output valid
sysclk
; i.e.
and output hold timing is tested for the signal asserted. Output valid time is tested for precharge.The high-Z behavior is
guaranteed by design.
13. Guaranteed by design and not tested.
16 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 17

Electrical and Thermal Characteristics
Figure 4 provides the AC test load for the MPC7400.
OUTPUT
Z0 = 50Ω
RL = 50Ω
Figure 4. AC Test Load
Figure 5 provides the mode select input timing diagram for the MPC7400.
HRESET
MODE SIGNALS
t
MVRH
VM = Midpoint Voltage (OVDD/2)
Figure 5. Mode Input Timing Diagram
VM
t
MXRH
OVdd/2
MPC7400 RISC Microprocessor Hardware Specifications 17
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 18

Figure 6 provides the input/output timing diagram for the MPC7400.
Electrical and Thermal Characteristics
SYSCLK
ALL INPUTS
ALL OUTPUTS
(Except TS, ABB,
ARTRY, DBB)
ALL OUTPUTS
(Except TS, ABB,
ARTRY, DBB)
TS,
/AMON(0),
ABB
DBB
/DMON(0)
ARTRY,
SHD0,
SHD1
t
KHOE
VM
VM
t
AVKH
t
TSVKH
t
DVKH
t
ARVKH
t
IVKH
t
t
t
t
KHAV
KHDV
KHDPV
KHOV
t
KHTSV
t
t
t
t
t
t
t
t
KHTSV
t
KHARV
VM = Midpoint Voltage (OVDD/2)
AXKH
t
TSXKH
t
DXKH
ARXKH
IXKH
KHAX
KHDX
KHOX
t
KHOZ
t
KHABPZ
KHTSX
t
t
KHARP
t
KHARX
KHARV
VM
t
KHARPZ
Figure 6. Input/Output Timing Diagram
1.4.2.3 L2 Clock AC Specifications
The L2CLK frequency is programmed by the L2 Configuration Register (L2CR[4:6]) core-to-L2 divisor
ratio. See T able 15 for example core and L2 frequencies at various divisors. Table 10 provides the potential
range of L2CLK output AC timing specifications as defined in Figure 7.
The L2SYNC_OUT signal is intended to be routed halfway out to the SRAMs and then returned to the
L2SYNC_IN input of the MPC7400 to synchronize L2CLKOUT at the SRAM with the processor’s internal
clock. L2CLKOUT at the SRAM can be offset forward or backward in time by shortening or lengthening
the routing of L2SYNC_OUT to L2SYNC_IN. See Motorola Application Note AN179/D “PowerPC™
Backside L2 Timing Analysis for the PCB Design Engineer.”
18 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 19

Electrical and Thermal Characteristics
The minimum L2CLK frequency of Table 10 is specified by the maximum delay of the internal DLL. The
variable-tap DLL introduces up to a full clock period delay in the L2CLKOUTA, L2CLKOUTB, and
L2SYNC_OUT signals so that the returning L2SYNC_IN signal is phase aligned with the next core clock
(divided by the L2 divisor ratio). Do not choose a core-to-L2 divisor which results in an L2 frequency below
this minimum, or the L2CLKOUT signals provided for SRAM clocking will not be phase aligned with the
MPC7400 core clock at the SRAMs.
The maximum L2CLK frequency shown in Table 10 is the core frequency divided by one. Very few L2
SRAM designs will be able to operate in this mode. Most designs will select a greater core-to-L2 divisor to
provide a longer L2CLK period for read and write access to the L2 SRAMs. The maximum L2CLK
frequency for any application of the MPC7400 will be a function of the AC timings of the MPC7400, the
AC timings for the SRAM, bus loading, and printed circuit board trace length.
Motorola is similarly limited by system constraints and cannot perform tests of the L2 interface on a
socketed part on a functional tester at the maximum frequencies of T able 10. Therefore functional operation
and AC timing information are tested at core-to-L2 divisors of 2 or greater.
L2 input and output signals are latched or enabled respectively by the internal L2CLK (which is SYSCLK
multiplied up to the core frequency and divided down to the L2CLK frequency). In other words, the AC
timings of T able 11 are entirely independent of L2SYNC_IN. In a closed loop system, where L2SYNC_IN
is driven through the board trace by L2SYNC_OUT, L2SYNC_IN only controls the output phase of
L2CLKOUTA and L2CLKOUTB which are used to latch or enable data at the SRAMs. However, since in
a closed loop system L2SYNC_IN is held in phase alignment with the internal L2CLK, the signals of T able
11 are referenced to this signal rather than the not-externally-visible internal L2CLK. During manufacturing
test, these times are actually measured relative to SYSCLK.
Table 10. L2CLK Output AC Timing Specifications
At recommended operating conditions (See Table 3)
350 MHz 400 MHz
Parameter Symbol
Min Max Min Max
L2CLK frequency f
L2CLK cycle time t
L2CLK duty cycle t
Internal DLL-relock time 640 — 640 — L2CLK 3
DLL capture window 0 10 0 10 ns 5
L2CLKOUT output-to-
output skew
L2CLKOUT output jitter ±150 ±150 ps 6
Notes:
1. L2CLK outputs are L2CLK_OUTA, L2CLK_OUTB, and L2SYNC_OUT pins. The L2CLK frequency to core frequency
settings must be chosen such that the resulting L2CLK frequency and core frequency do not exceed their respective
maximum or minimum operating frequencies. The maximum L2LCK frequency will be system dependent..
L2CLK_OUTA and L2CLK_OUTB must have equal loading.
2. The nominal duty cycle of the L2CLK is 50% measured at midpoint voltage.
3. The DLL re-lock time is specified in terms of L2CLKs. The number in the table must be multiplied by the period of
L2CLK to compute the actual time duration in nanoseconds. Re-lock timing is guaranteed by design and characterization.
4. The L2CR[L2SL] bit should be set for L2CLK frequencies less than 110 MHz. This adds more delay to each tap of the
DLL.
L2CLK
L2CLK
CHCL/tL2CLK
t
L2CSKW
100 350 133 400 MHz 1,4
2.86 10 2.5 7.5 ns
50 50 % 2
50 50 ps 6
Unit Notes
MPC7400 RISC Microprocessor Hardware Specifications 19
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 20

Electrical and Thermal Characteristics
5. Allowable skew between L2SYNC_OUT and L2SYNC_IN.
6. Guaranteed by design and not tested. This output jitter number represents the maximum delay of one tap forward or one tap
back from the current DLL tap as the phase comparator seeks to minimize the phase difference between L2SYNC_IN and
the internal L2CLK. This number must be comprehended in the L2 timing analysis. The input jitter on SYSCLK affects
L2CLKOUT and the L2 address/data/control signals equally and therefore is already comprehended in the AC timing and
does not have to be considered in the L2 timing analysis.
The L2CLK_OUT timing diagram is shown in Figure 7.
L2 Single-Ended Clock Mode
L2CLK_OUTA
VM
t
CHCL
t
L2CLK
VM
VM
t
L2CR
t
L2CF
L2CLK_OUTB
L2SYNC_OUT
VM
VM
VM
VM
VMVM
t
L2CSKW
VM
VM
L2 Differential Clock Mode
t
L2CLK
t
L2CLK_OUTB
L2CLK_OUTA
L2SYNC_OUT
CHCL
VM VM VM
VM VM VM
VM = Midpoint Voltage (L2OVdd/2)
Figure 7. L2CLK_OUT Output Timing Diagram
1.4.2.4 L2 Bus AC Specifications
T able 1 1 provides the L2 bus interface AC timing specifications for the MPC7400 as defined in Figure 8 and
Figure 9 for the loading conditions described in Figure 10.
Table 11. L2 Bus Interface AC Timing Specifications
At Vdd=AVdd=L2AVdd=1.8V±100mV; 0 ≤ Tj ≤ 105°C, L2OVdd = 3.3V±165mV or L2OVdd = 2.5V±100mV or L2OVdd=1.8V±100mV
350, 400 MHz
Parameter Symbol
Unit Notes
Min Max
L2SYNC_IN rise and fall time t
Setup Times:
Data and parity t
Input Hold Times:
Data and parity t
& t
L2CR
DVL2CH
DXL2CH
L2CF
— 1.0 ns 1
ns 2
1.5 —
ns 2
0.0 —
20 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 21

Electrical and Thermal Characteristics
Table 11. L2 Bus Interface AC Timing Specifications (Continued)
At Vdd=AVdd=L2AVdd=1.8V±100mV; 0 ≤ Tj ≤ 105°C, L2OVdd = 3.3V±165mV or L2OVdd = 2.5V±100mV or L2OVdd=1.8V±100mV
Parameter Symbol
Unit Notes
Min Max
350, 400 MHz
Valid Times:
All outputs when L2CR[14-15] = 00
All outputs when L2CR[14-15] = 01
All outputs when L2CR[14-15] = 10
t
L2CHOV
2.5
-
3.0
-
3.5
-
4.0
-
ns 3,4
All outputs when L2CR[14-15] = 11
Output Hold Times
All outputs when L2CR[14-15] = 00
All outputs when L2CR[14-15] = 01
All outputs when L2CR[14-15] = 10
t
L2CHOX
0.4
1.0
1.4
1.8
ns 3
-
-
-
-
All outputs when L2CR[14-15] = 11
L2SYNC_IN to high impedance:
All outputs when L2CR[14-15] = 00
All outputs when L2CR[14-15] = 01
All outputs when L2CR[14-15] = 10
t
L2CHOZ
2.0
-
2.5
-
3.0
-
3.5
-
ns
All outputs when L2CR[14-15] = 11
Notes:
1. Rise and fall times for the L2SYNC_IN input are measured from 20% to 80% of L2OVdd.
2. All input specifications are measured from the midpoint of the signal in question to the
midpoint voltage of the rising edge of the input L2SYNC_IN (see Figure 8). Input timings
are measured at the pins.
3. All output specifications are measured from the midpoint voltage of the rising edge of
L2SYNC_IN to the midpoint of the signal in question. The output timings are measured at
the pins. All output timings assume a purely resistive 50 ohm load (See Figure 10).
4.The outputs are valid for both single-ended and differential L2CLK modes. For pipelined
registered synchronous burst RAMs, L2CR[14–15] = 00 is recommended. For pipelined
late-write synchronous burst SRAMs, L2CR[14–15] = 10 is recommended.
Figure 8 shows the L2 bus input timing diagrams for the MPC7400.
t
L2CR
L2SYNC_IN
L2 DATA AND DATA
PARITY INPUTS
t
DVL2CH
VM = Midpoint Voltage (L2OVDD/2)
Figure 8. L2 Bus Input Timing Diagrams
MPC7400 RISC Microprocessor Hardware Specifications 21
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
VM
t
DXL2CH
t
L2CF
Page 22

Figure 9 shows the L2 bus output timing diagrams for the MPC7400.
Electrical and Thermal Characteristics
L2SYNC_IN
ALL OUTPUTS
L2DATA BUS
VM
t
L2CHOV
VM = Midpoint Voltage (L2OVDD/2)
VM
t
L2CHOX
t
L2CHOZ
Figure 9. L2 Bus Output Timing Diagrams
Figure 10 provides the AC test load for L2 interface of the MPC7400.
OUTPUT
Z0 = 50Ω
R
= 50Ω
L
Figure 10. AC Test Load for the L2 Interface
L2OVdd/2
1.4.2.5 IEEE 1149.1 AC Timing Specifications
Table 12 provides the IEEE 1149.1 (JTAG) AC timing specifications as defined in Figure 12, Figure 13,
Figure 14, and Figure 15.
Table 12. JTAG AC Timing Specifications (Independent of SYSCLK)1
At recommended operating conditions (See Table 3)
Parameter Symbol Min Max Unit Notes
TCK frequency of operation f
TCK cycle time t
TCK clock pulse width measured at 1.4V t
TCK rise and fall times t
TRST assert time t
Input Setup Times:
Boundary-scan data
TMS, TDI
Input Hold Times:
Boundary-scan data
TMS, TDI
TCLK
TCLK
JHJL
JR
TRST
t
DVJH
t
IVJH
t
DXJH
t
IXJH
& t
JF
0 33.3 MHz
30—ns
15—ns
02ns
25—ns 2
ns
4
0
20
25
—
—
ns
—
—
3
3
22 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 23

Electrical and Thermal Characteristics
Table 12. JTAG AC Timing Specifications (Independent of SYSCLK)1 (Continued)
At recommended operating conditions (See Table 3)
Parameter Symbol Min Max Unit Notes
Valid Times:
Boundary-scan data
TDO
t
JLDV
t
JLOV
4
4
20
25
ns
Output Hold Times:
Boundary-scan data
TCK to output high impedance:
Boundary-scan data
TDO
TDO
t
JLDX
t
JLOX
t
JLDZ
t
JLOZ
ns
3
3
19
9
Notes:
1. All outputs are measured from the midpoint voltage of the falling/rising edge of TCLK to the midpoint of the signal
in question. The output timings are measured at the pins. All output timings assume a purely resistive 50 ohm load
(See Figure 11). Time-of-flight delays must be added for trace lengths, vias, and connectors in the system.
2.
TRST is an asynchronous level sensitive signal. The setup time is for test purposes only.
3. Non-JTAG signal input timing with respect to TCK.
4. Non-JTAG signal output timing with respect to TCK.
5. Guaranteed by design and characterization.
Figure 11 provides the AC test load for TDO and the boundary-scan outputs of the MPC7400.
OUTPUT
Z0 = 50Ω
R
L
= 50Ω
OVdd/2
4
4,5
5
Figure 11. Alternate AC Test Load for the JTAG Interface
Figure 12 provides the JTAG clock input timing diagram.
TCLK VMVMVM
t
JHJL
t
TCLK
VM = Midpoint Voltage (OVDD/2)
Figure 12. JTAG Clock Input Timing Diagram
MPC7400 RISC Microprocessor Hardware Specifications 23
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
t
JR
t
JF
Page 24

Figure 13 provides the TRST timing diagram.
Electrical and Thermal Characteristics
TRST
VM VM
t
TRST
VM = Midpoint Voltage (OVDD/2)
Figure 13. TRST Timing Diagram
Figure 14 provides the boundary-scan timing diagram.
TCK
BOUNDARY
DATA INPUTS
BOUNDARY
DATA OUTPUTS
BOUNDARY
DATA OUTPUTS
VM
t
JLDX
t
OUTPUT DATA VALID
t
JLDV
JLDZ
t
DVJH
VM
INPUT
DATA VALID
OUTPUT DATA VALID
t
DXJH
VM = Midpoint Voltage (OVDD/2)
Figure 14. Boundary-Scan Timing Diagram
Figure 15 provides the test access port timing diagram.
TCK
TDI, TMS
TDO
TDO
VM
t
JLOX
t
JLOZ
OUTPUT DATA VALID
VM
= Midpoint Voltage (OVDD/2)
t
JLOV
t
IVJH
VM
INPUT
DATA VALID
OUTPUT DATA VALID
t
IXJH
Figure 15. Test Access Port Timing Diagram
24 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 25

Pin Assignments
1.5 Pin Assignments
Figure 16 (in part A) shows the pinout of the MPC7400, 360 CBGA package as viewed from the top surface.
Part B shows the side profile of the CBGA package to indicate the direction of the top surface view.
Part A
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
T
17 18 19
Part B
U
V
W
Not to Scale
Substrate Assembly
Encapsulant
Figure 16. Pinout of the MPC7400, 360 CBGA Package as Viewed from the Top Surface
MPC7400 RISC Microprocessor Hardware Specifications 25
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
View
Die
Page 26

1.6 Pinout Listings
Table 13 provides the pinout listing for the MPC7400, 360 CBGA package.
Table 13. Pinout Listing for the MPC7400, 360 CBGA Package
Pinout Listings
I/F Voltages Supported
Signal Name Pin Number Active I/O 1.8v 2.5v 3.3v Notes
A[0–31] A13, D2, H11, C1, B13, F2, C13, E5,
D13, G7, F12, G3, G6, H2, E2, L3,
G5, L4, G4, J4, H7, E1, G2, F3, J7,
M3, H3, J2, J6, K3, K2, L2
AACK
ABB
AMON(0)
AP[0–3] C4, C5, C6, C7 High I/O √√ √
AR
TRY L6 Low I/O √√ √
AVDD A8 — Input 1.8V 1.8V 1.8V
BG
BR
BVSEL W1 High Input GND HRESET
CHK
CI
CKSTP_IN
CKSTP_OUT
CLK_OUT E3 High Output √√ √
DBB
DMON(0)
DBG
DH[0–31] W12, W11, V11, T9, W10, U9, U10,
DL[0-31] M6, P3, N4, N5, R3, M7, T2, N6, U2,
N3 Low Input √√ √
L7 Low Output √√ √12
H1 Low Input √√ √
E7 Low Output √√ √
K11 Low Input √√ √4, 8, 9
C2 Low I/O √√ √
B8 Low Input √√ √
D7 Low Output √√ √
K5 Low Output √√ √12
K1 Low Input √√ √
M11, M9, P8, W7, P9, W9, R10, W6,
V7, V6, U8, V9, T7, U7, R7, U6, W5,
U5, W4, P7, V5, V4, W3, U4, R5
N7, P11, V13, U12, P12, T13, W13,
U13, V10, W8, T11, U11, V12, V8,
T1, P1, V1, U1, N1, R2, V3, U3, W2
High I/O √√ √
High I/O √√ √
High I/O √√ √
1
3.3V 3, 8, 9
DP[0–7] L1, P2, M2, V2, M1, N2, T3, R1 High I/O √√ √
DRDY
DBWO
DTI[0]
DTI[1-2] H6, G1 High Input √√ √10, 13
EMODE
K9 Low Output √√ √6, 8, 13
D1 Low Input √√ √
A3 Low Input √√ √7, 10
26 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 27

Pinout Listings
Table 13. Pinout Listing for the MPC7400, 360 CBGA Package (Continued)
I/F Voltages Supported
Signal Name Pin Number Active I/O 1.8v 2.5v 3.3v Notes
GBL B1 Low I/O √√ √
GND D10, D14, D16, D4, D6, E12, E8, F4,
F6, F10, F14, F16, G9, G11, H5, H8,
H10, H12, H15, J9, J11, K4, K6, K8,
K10, K12, K14, K16, L9, L11, M5,
M8, M10, M12, M15, N9, N11, P4,
P6, P10, P14, P16, R8, R12, T4, T6,
T10, T14, T16
HIT
HRESET
INT
L1_TSTCLK F8 High Input √√ √2
L2ADDR[0–16] L17, L18, L19, M19, K18, K17, K15,
L2ADDR[17] K19 High Output √√ √8
L2ASPARE W19 High Output √√ √ 8
L2AVDD L13 — Input 1.8V 1.8V 1.8V
L2CE
L2CLKOUTA N15 High Output √√ √
B5 Low Output √√ √6, 8
B6 Low Input √√ √
C11 Low Input √√ √
J19, J18, J17, J16, H18, H17, J14,
J13, H19, G18
P17 Low Output √√ √
— — GND GND GND
High Output √√ √
1
L2CLKOUTB L16 High Output √√ √
L2DATA[0–63] U14, R13, W14, W15, V15, U15,
W16, V16, W17, V17, U17, W18,
V18, U18, V19, U19, T18, T17, R19,
R18, R17, R15, P19, P18, P13, N14,
N13, N19, N17, M17, M13, M18,
H13, G19, G16, G15, G14, G13, F19,
F18, F13, E19, E18, E17, E15, D19,
D18, D17, C18, C17, B19, B18, B17,
A18, A17, A16, B16, C16, A14, A15,
C15, B14, C14, E13
L2DP[0–7] V14, U16, T19, N18, H14, F17, C19,
B15
L2OVDD D15, E14, E16, H16, J15, L15, M16,
K13, P15, R14, R16, T15, F15
L2SYNC_IN L14 High Input √√ √
L2SYNC_OUT M14 High Output √√ √
L2_TSTCLK F7 High Input √√ √2
L2VSEL A19 High Input GND HRESET
L2WE
L2ZZ G17 High Output √√ √
N16 Low Output √√ √
High I/O √√ √
High I/O √√ √
— — 1.8V 2.5V 3.3V 11
3.3V 1, 3, 8, 9
MPC7400 RISC Microprocessor Hardware Specifications 27
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 28

Table 13. Pinout Listing for the MPC7400, 360 CBGA Package (Continued)
Pinout Listings
I/F Voltages Supported
Signal Name Pin Number Active I/O 1.8v 2.5v 3.3v Notes
LSSD_MODE
MCP
OVDD D5, D8, D12, E4, E6, E9, E11, F5,
PLL_CFG[0–3] A4, A5, A6, A7 High Input √√ √
QACK
QREQ
V D3 Low Output √√ √
RSR
SHD0
SHD1
SMI
SRESET
SYSCLK H9 — Input √√ √
A F1 Low Input √√ √
T
TBEN A2 High Input √√ √
TBST
TCK B10 High Input √√ √
F9 Low Input √√ √2
B11 Low Input √√ √
— — 1.8V 2.5V 3.3V
H4, J5, L5, M4, P5, R4, R6, R9, R11,
T5, T8, T12
B2 Low Input √√ √
J3 Low Output √√ √
B3 Low I/O √√ √8
B4 Low I/O √√ √5, 8
A12 Low Input √√ √
E10 Low Input √√ √
A11 Low Output √√ √
1
TDI B7 High Input √√ √9
TDO D9 High Output √√ √
TEA
TMS C8 High Input √√ √9
TRST
TS
TSIZ[0–2] A9, B9, C9 High Output √√ √
TT[0–4] C10, D11, B12, C12, F11 High I/O √√ √
WT
VDD G8, G10, G12, J8, J10, J12, L8, L10,
Notes:
1. OVdd supplies power to the processor bus, JT AG, and all control signals except the L2 cache controls (L2CE
L2ZZ
); L2OVDD supplies power to the L2 cache interface (L2ADDR[0-16], L2ASPARE, L2DATA[0-63], L2DP[0-7]
and L2SYNC-OUT) and the L2 control signals; and Vdd supplies power to the processor core and the PLL and DLL (after
filtering to become AVDD and L2AVDD respectively). These columns serve as a reference for the nominal voltage
supported on a given signal as selected by the BVSEL/L2VSEL pin configurations of Table 2 and the voltage supplied.
For actual recommended value of Vin or supply voltages see Table 3.
2. These are test signals for factory use only and must be pulled up to OVdd for normal machine operation.
J1 Low Input √√ √
A10 Low Input √√ √9
K7 Low I/O √√ √
C3 Low I/O √√ √
— — 1.8V 1.8V 1.8V
L12, N8, N10, N12
, L2WE, and
28 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 29

Package Description
3. To allow for future I/O voltage changes, provide the option to connect BVSEL and L2VSEL independently to either
OVDD (selects 3.3v), OGND (selects 1.8v), or to HRESET
options. (See Table 2. Input Threshold Voltage Setting)
4. Connect to HRESET
5. Ignored in 60x bus mode.
6. Unused output in 60x bus mode.
7. Deasserted (pulled high) at HRESET
8. Uses one of 9 existing no-connects in MPC750’s 360-BGA package.
9. Internal pull up on die.
10. Reuses MPC750’s DR
11. The VOLTDET pin position on the MPC750 360-CBGA package is now an L2OVDD pin on the MPC7400 360-CBGA
package.
12. Output only for MPC7400, was I/O for MPC750.
13. Enhanced mode only.
to trigger post power-on-reset (por) internal memory test.
for 60x bus mode.
TRY, DBDIS, and TLBISYNC pins (DTI1, DTI2, and EMODE respectively).
(selects 2.5v). The Processor bus and L2 bus support all 3
1.7 Package Description
The following sections provide the package parameters and mechanical dimensions for the MPC7400, 360
CBGA packages.
1.7.1 Package Parameters for the MPC7400
The package parameters are as provided in the following list. The package type is 25 x 25 mm, 360-lead
ceramic ball grid array (CBGA).
Package outline 25 x 25 mm
Interconnects 360 (19 x 19 ball array - 1)
Pitch 1.27 mm (50 mil)
Minimum module height 2.65 mm
Maximum module height 3.20 mm
Ball diameter 0.89 mm (35 mil)
MPC7400 RISC Microprocessor Hardware Specifications 29
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 30

Package Description
1.7.2 Mechanical Dimensions of the MPC7400
Figure 17 provides the mechanical dimensions and bottom surface nomenclature of the MPC7400, 360
CBGA package.
A1 CORNER
E2
E
2X
B
e
0.2
D
D2
D3
C5-1
C5-2
C4-1
C4-2
E3
12X
12X
J3
J1
C3-1
C3-2
12345678910111213141516
255X
0.15
2X
0.2
A
C6-2
C6-1
K2
K1
C1-1
C1-2
L2
C2-2
C2-1
12X
J2
L1
T
R
P
N
M
L
K
J
H
G
F
E
D
C
B
A
0.2 C
M
A3
A4
A
b
BC
A0.3
C
NOTES:
1. DIMENSIONING AND TOLERANCING
PER ASME Y14.5M, 1994.
2. DIMENSIONS IN MILLIMETERS.
3. TOP SIDE A1 CORNER INDEX IS A
C
METALIZED FEATURE WITH
VARIOUS SHAPES. BOTTOM SIDE A1
CORNER IS DESIGNATED WITH A
BALL MISSING FROM THE ARRAY.
Millimeters
DIM MIN MAX
A 2.65 3.20
A1 0.79 0.99
A2 1.10 1.30
A3 -- 0.6
A4 0.82 0.9
b 0.82 0.93
C1-1 L2OVDD
C1-2 GND
C2-1 L2OVDD
C2-2 GND
C3-1 VDD
C3-2 GND
C4-1 OVDD
A2
A1
C4-2 GND
C5-1 OVDD
C5-2 GND
C6-1 VDD
C6-2 GND
D 25.00 BSC
D2 9.6 typ.
D3 7.85
e 1.27 BSC
E 25.00 BSC
E2 12.3 typ.
E3 10.58
J1 0.89 BSC
J2 3.2 BSC
J3 0.68 BSC
K1 6.56
K2 8.13
L1 9.04
L2 7.47
M 2.00
Figure 17. Mechanical Dimensions and Bottom Surface Nomenclature of the MPC7400
30 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 31

System Design Information
1.8 System Design Information
This section provides electrical and thermal design recommendations for successful application of the
MPC7400.
1.8.1 PLL Configuration
The MPC7400’s PLL is configured by the PLL_CFG[0–3] signals. For a given SYSCLK (bus) frequency,
the PLL configuration signals set the internal CPU and VCO frequency of operation. The PLL configuration
for the MPC7400 is shown in Table 14 for example frequencies.
Table 14. MPC7400 Microprocessor PLL Configuration
Example Bus-to-Core Frequency in MHz (VCO Frequency in MHz)
PLL_CFG
[0–3]
0100 2x 2x
0110 2.5x 2x
1000 3x 2x 300 (600)
1110 3.5x 2x 350 (700)
1010 4x 2x 300 (600) 400
0111 4.5x 2x 300
1011 5x 2x 333
1001 5.5x 2x 366
1101 6x 2x 300 (600) 400
0101 6.5x 2x 325
0010 7x 2x 350 (700)
0001 7.5x 2x 375
1100 8x 2x 400
0000 9x 2x 300
0011 PLL off/bypass PLL off, SYSCLK clocks core circuitry directly, 1x bus-to-core
Bus-to-
Core
Multiplier
Core-to
VCO
Multiplier
Bus
25 MHz
Bus
33.3
MHz
(600)
Bus
50 MHz
(630)
(750)
(800)
450
(900)
(600)
(666)
(733)
(800)
433
(866)
implied
Bus
66.6
MHz
Bus
75 MHz
337 (675) 450 (900)
375 (750)
412
(825)
450 (900)
Bus
100 MHz
(800)
MPC7400 RISC Microprocessor Hardware Specifications 31
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 32

System Design Information
Table 14. MPC7400 Microprocessor PLL Configuration (Continued)
Example Bus-to-Core Frequency in MHz (VCO Frequency in MHz)
PLL_CFG
[0–3]
1111 PLL off PLL off, no core clocking occurs
Notes:
1. PLL_CFG[0–3] settings not listed are reserved.
2. The sample bus-to-core frequencies shown are for reference only. Some PLL configurations may select
bus, core, or VCO frequencies which are not useful, not supported, or not tested for by the MPC7400;
see Section 1.4.2.1, “Clock AC Specifications,” for valid SYSCLK, core, and VCO frequencies.
3. In PLL-bypass mode, the SYSCLK input signal clocks the internal processor directly, the PLL is
disabled, and the bus mode is set for 1:1 mode operation. This mode is intended for factory use only.
Note: The AC timing specifications given in this document do not apply in PLL-bypass mode.
4. In PLL-off mode, no clocking occurs inside the MPC7400 regardless of the SYSCLK input.
Bus-to-
Core
Multiplier
Core-to
VCO
Multiplier
Bus
25 MHz
Bus
33.3
MHz
Bus
50 MHz
Bus
66.6
MHz
Bus
75 MHz
Bus
100 MHz
The MPC7400 generates the clock for the external L2 synchronous data SRAMs by dividing the core clock
frequency of the MPC7400. The divided-down clock is then phase-adjusted by an on-chip delay-lock-loop
(DLL) circuit and should be routed from the MPC7400 to the external RAMs. A separate clock output,
L2SYNC_OUT is sent out half the distance to the SRAMs and then returned as an input to the DLL on pin
L2SYNC_IN so that the rising-edge of the clock as seen at the external RAMs can be aligned to the clocking
of the internal latches in the L2 bus interface.
The core-to-L2 frequency divisor for the L2 PLL is selected through the L2CLK bits of the L2CR register.
Generally, the divisor must be chosen according to the frequency supported by the external RAMs, the
frequency of the MPC7400 core, and the phase adjustment range that the L2 DLL supports. Table 15 shows
various example L2 clock frequencies that can be obtained for a given set of core frequencies. The minimum
L2 frequency target is 100MHz.
Table 15. Sample Core-to-L2 Frequencies
Core Frequency in MHz ÷1 ÷1.5 ÷2 ÷2.5 ÷3 ÷3.5 ÷4
300 300 200 150 120 100 — —
333 333 222 166 133 111 — —
350 — — 175 140 117 100 —
366 — — 183 147 122 105 —
400 — — 200 160 133 114 100
Note:
1. The core and L2 frequencies are for reference only. Some examples may represent core or L2
frequencies which are not useful, not supported, or not tested for by the MPC7400; see
Section 1.4.2.3, “L2 Clock AC Specifications,” for valid L2CLK frequencies. The
L2CR[L2SL] bit should be set for L2CLK frequencies less than 110 MHz.
1.8.2 PLL Power Supply Filtering
The AVdd and L2AVdd power signals are provided on the MPC7400 to provide power to the clock
generation phase-locked loop and L2 cache delay-locked loop respectively. To ensure stability of the
internal clock, the power supplied to the AVdd input signal should be filtered of any noise in the 500kHz to
10MHz resonant frequency range of the PLL. A circuit similar to the one shown in Figure 18 using surface
mount capacitors with minimum Effective Series Inductance (ESL) is recommended.
32 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 33

System Design Information
The circuit should be placed as close as possible to the AVdd pin to minimize noise coupled from nearby
circuits. An identical but separate circuit should be placed as close as possible to the L2AVdd pin. It is often
possible to route directly from the capacitors to the AVdd pin, which is on the periphery of the 360 CBGA
footprint, without the inductance of vias. The L2AVdd pin may be more difficult to route but is
proportionately less critical.
10 Ω
Vdd AVdd (or L2AVdd)
2.2 µF 2.2 µF
Low ESL surface mount capacitors
GND
Figure 18. PLL Power Supply Filter Circuit
1.8.3 Power Supply Voltage Sequencing
The notes in T able 1 contain cautions about the sequencing of the external bus voltages and core voltage of
the MPC7400 (when they are different). These cautions are necessary for the long term reliability of the part.
If they are violated, the ESD (Electrostatic Discharge) protection diodes will be forward biased and
excessive current can flow through these diodes. If the system power supply design does not control the
voltage sequencing, one or both of the circuits of Figure 19 can be added to meet these requirements. The
MUR420 Schottky diodes of Figure 19 control the maximum potential difference between the external bus
and core power supplies on power-up and the 1N5820 diodes regulate the maximum potential difference on
power-down.
3.3V 1.8V
MUR420
MUR420 MUR420
1N5820
1N5820
Figure 19. Example Voltage Sequencing Circuits
2.5V 1.8V
MUR420
MUR420
1N5820
1N5820
1.8.4 Decoupling Recommendations
Due to the MPC7400’s dynamic power management feature, large address and data buses, and high
operating frequencies, the MPC7400 can generate transient power surges and high frequency noise in its
power supply, especially while driving large capacitive loads. This noise must be prevented from reaching
other components in the MPC7400 system, and the MPC7400 itself requires a clean, tightly regulated source
of power. Therefore, it is recommended that the system designer place at least one decoupling capacitor at
each Vdd, OVdd, and L2OVdd pin of the MPC7400. It is also recommended that these decoupling
capacitors receive their power from separate Vdd, (L2)OVdd, and GND power planes in the PCB, utilizing
short traces to minimize inductance.
These capacitors should have a value of 0.01 µF or 0.1 µF. Only ceramic SMT (surface mount technology)
capacitors should be used to minimize lead inductance, preferably 0508 or 0603 orientations where
connections are made along the length of the part. Consistent with the recommendations of Dr. Howard
MPC7400 RISC Microprocessor Hardware Specifications 33
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 34

System Design Information
Johnson in High Speed Digital Design: A Handbook of Black Magic (Prentice Hall, 1993) and contrary to
previous recommendations for decoupling PowerPC microprocessors, multiple small capacitors of equal
value are recommended over using multiple values of capacitance.
In addition, it is recommended that there be several bulk storage capacitors distributed around the PCB,
feeding the Vdd, L2OVdd, and OVdd planes, to enable quick recharging of the smaller chip capacitors.
These bulk capacitors should have a low ESR (equivalent series resistance) rating to ensure the quick
response time necessary. They should also be connected to the power and ground planes through two vias
to minimize inductance. Suggested bulk capacitors—100-330 µF (AVX TPS tantalum or Sanyo OSCON).
1.8.5 Connection Recommendations
To ensure reliable operation, it is highly recommended to connect unused inputs to an appropriate signal
level. Unused active low inputs should be tied to OVdd. Unused active high inputs should be connected to
GND. All NC (no-connect) signals must remain unconnected.
Power and ground connections must be made to all external Vdd, OVdd, L2OVdd, and GND pins of the
MPC7400.
See Section 1.4.2.3, “L2 Clock AC Specifications” for a discussion of the L2SYNC_OUT and L2SYNC_IN
signals.
1.8.6 Output Buffer DC Impedance
The MPC7400 60x and L2 I/O drivers are characterized over process, voltage, and temperature. T o measure
Z
, an external resistor is connected from the chip pad to OVdd or GND. Then, the value of each resistor is
0
varied until the pad voltage is OVdd/2 (see Figure 20).
The output impedance is the average of two components, the resistances of the pull-up and pull-down
devices. When Data is held low, SW2 is closed (SW1 is open), and RN is trimmed until the voltage at the
pad equals OVdd/2. R
SW1 is closed (SW2 is open), and R
becomes the resistance of the pull-up devices. R
Then Z
= (RP + RN)/2.
0
then becomes the resistance of the pull-down devices. When Data is held high,
N
is trimmed until the voltage at the pad equals OVdd/2. RP then
P
Data
and RN are designed to be close to each other in value.
P
OVdd
R
N
SW2
Pad
SW1
R
P
OGND
Figure 20. Driver Impedance Measurement
34 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 35

System Design Information
T able 16 summarizes the signal impedance results. The driver impedance values were characterized at 0°C,
65 °C, and 105 °C. The impedance increases with junction temperature and is relatively unaffected by bus
voltage.
Table 16. Impedance Characteristics
Vdd = 1.8V, OVdd = 3.3V, Tj = 0 - 105 °C
Impedance Processor bus L2 bus Symbol Unit
R
N
R
P
32-43 39-48 Z
36-48 41-50 Z
0
0
Ohms
Ohms
1.8.7 Pull-up Resistor Requirements
The MPC7400 requires high-resistive (weak: 10 KΩ) pull-up resistors on several control pins of the bus
interface to maintain the control signals in the negated state after they have been actively negated and
released by the MPC7400 or other bus masters. These pins are TS
In addition, the MPC7400 has one open-drain style output that requires a pull-up resistor (weak or stronger:
4.7 KΩ–10 KΩ) if it is used by the system. This pin is CKSTP_OUT
During inactive periods on the bus, the address and transfer attributes may not be driven by any master and
may therefore float in the high-impedance state for relatively long periods of time. Since the MPC7400 must
continually monitor these signals for snooping, this float condition may cause excessive power draw by the
input receivers on the MPC7400 or by other receivers in the system. It is recommended that these signals
be pulled up through weak (10 KΩ) pull-up resistors by the system, or that they may be otherwise driven by
the system during inactive periods of the bus. The snooped address and transfer attribute inputs are:
A[0:31], AP[0:3], TT[0:4], and GBL
.
The data bus input receivers are normally turned off when no read operation is in progress and therefore do
not require pull-up resistors on the bus. Other data bus receivers in the system, however, may require
pullups, or that those signals be otherwise driven by the system during inactive periods by the system. The
data bus signals are: D[0:63], DP[0:7]
, ARTRY, SHDO, and SHD1.
.
If address or data parity is not used by the system, and the respective parity checking is disabled through
HID0, the input receivers for those pins are disabled, and those pins do not require pull-up resistors and
should be left unconnected by the system. If all parity generation is disabled through HID0, then all parity
checking should also be disabled through HID0, and all parity pins may be left unconnected by the system.
The L2 interface does not normally require pull-up resistors.
1.8.8 JTAG Configuration Signals
Boundary scan testing is enabled through the JTAG interface signals. (BSDL descriptions of the MPC7400
are available on the internet at www.mot.com/PowerPC/teksupport.) The TRST
IEEE 1149.1 specification but is provided on all PowerPC implementations. While it is possible to force the
TAP controller to the reset state using only the TCK and TMS signals, more reliable power-on reset
performance will be obtained if the TRST
signal is asserted during power-on reset. Since the JT AG interface
is also used for accessing the common on-chip processor (COP) function of PowerPC processors, simply
tying TRST
to HRESET isn’t practical.
The common on-chip processor (COP) function of PowerPC processors allows a remote computer system
(typically a PC with dedicated hardware and debugging software) to access and control the internal
operations of the processor. The COP interface connects primarily through the JTAG port of the processor,
with some additional status monitoring signals. The COP port requires the ability to independently assert
MPC7400 RISC Microprocessor Hardware Specifications 35
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
signal is optional in the
Page 36

System Design Information
HRESET or TRST in order to fully control the processor. If the target system has independent reset sources,
such as voltage monitors, watchdog timers, power supply failures, or push-button switches, then the COP
reset signals must be merged into these signals with logic.
The arrangement shown in Figure 21 allows the COP to independently assert HRESET or TRST, while
insuring that the target can drive HRESET
as well. The pull-down resistor on TRST ensures that the JTAG
scan chain is initialized during power-on if a JTAG interface cable is not attached; if it is, it is responsible
for driving TRST
when needed.
From Tar get
Board
Sources
HRESET
QACK
2KΩ
2KΩ
COP Header
Figure 21. Suggested TRST connection
MPC7400
HRESET
QACK
TRST
The COP header shown in Figure 21 adds many benefits—breakpoints, watchpoints, register and memory
examination/modification and other standard debugger features are possible through this interface – and can
be as inexpensive as an unpopulated footprint for a header to be added when needed.
The COP interface has a standard header for connection to the target system, based on the 0.025" squarepost 0.100" centered header assembly (often called a “Berg” header). The connector typically has pin 14
removed as a connector key, as shown in Figure 22.
TCK
HRESET
CKSTP_OUT
13
15 11 7
KEY
16 12 8 4
No pin
Ground
TMS
SRESET
9 5 1
CHKSTP_IN
Figure 22. COP Connector Diagram
TDI
RUN/STOP
3
610 2
TRST
VDD_SENSE
TDO
TOP VIEW
Pins 10, 12 and 14 are no-connects.
Pin 14 is not physically present
QACK
36 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 37

System Design Information
There is no standardized way to number the COP header shown in Figure 22; consequently, many different
pin numbers have been observed from emulator vendors. Some are numbered top-to-bottom then left-toright, while others use left-to-right then top-to-bottom, while still others number the pins counter clockwise
from pin one (as with an IC). Regardless of the numbering, the signal placement recommended in Figure
22 is common to all known emulators.
The QACK
signal shown in T able 17 is usually hooked up to the PCI bridge chip in a system and is an input
to the MPC7400 informing it that it can go into the quiescent state. Under normal operation this occurs
during a low power mode selection. In order for COP to work the MPC7400 must see this signal asserted
(pulled down). While shown on the COP header, not all emulator products drive this signal. To preserve
correct power down operation, QACK
should be merged so that it also can be driven by the PCI bridge.
Table 17 shows the pin definitions.
Table 17. COP Pin Definitions
Pins Signal Connection Special Notes
1 TDO TDO
2 QACK QACK Add 2K pulldown to ground. Must be merged with on-board QACK,
if any.
3 TDI TDI
4 TRST TRST Add 2K pulldown to ground. Must be merged with on-board TRST, if
any. See Figure 21
5 RUN/ST
6 VDD_SENSE VDD Add 2K pullup to OVDD (for short circuit limiting protection only).
7 TCK TCK
8 CKSTP_IN
OP No Connect Used on 604e; leave no-connect for all other processors.
CKSTP_IN Optional. Add 10K pullup to OVDD. Used on several emulator
products. Useful for checkstopping the processor from a logic
analyzer of other external trigger.
9 TMS TMS
10 N/A
11 SRESET
12 N/A
13 HRESET
14 N/A Key location; pin should be removed.
15 CKSTP_OUT
16 Ground Digital Ground
SRESET Merge with on-board SRESET, if any.
HRESET Merge with on-board HRESET.
CKSTP_OUT Add 10K pullup to OVDD.
1.8.9 Thermal Management Information
This section provides thermal management information for the ceramic ball grid array (CBGA) package for
air-cooled applications. Proper thermal control design is primarily dependent upon the system-level
design—the heat sink, airflow and thermal interface material. To reduce the die-junction temperature, heat
sinks may be attached to the package by several methods—adhesive, spring clip to holes in the printedcircuit board or package, and mounting clip and screw assembly; see Figure 23. This spring force should
not exceed 5.5 pounds of force.
MPC7400 RISC Microprocessor Hardware Specifications 37
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 38

System Design Information
Heat Sink
Heat Sink
Clip
Adhesive
or
Thermal Interface Material
Figure 23. Package Exploded Cross-Sectional View with Several Heat Sink Options
CBGA Package
Printed-Circuit Board
Option
The board designer can choose between several types of heat sinks to place on the MPC7400. There are
several commercially-available heat sinks for the MPC7400 provided by the following vendors:
Chip Coolers Inc. 800-227-0254 (USA/Canada)
333 Strawberry Field Rd. 401-739-7600
Warwick, RI 02887-6979
International Electronic Research Corporation (IERC)818-842-7277
135 W. Magnolia Blvd.
Burbank, CA 91502
Thermalloy 214-243-4321
2021 W. Valley View Lane
P.O. Box 810839
Dallas, TX 75731
Wakefield Engineering 617-245-5900
60 Audubon Rd.
Wakefield, MA 01880
Aavid Engineering 603-528-3400
One Kool Path
Laconia, NH 03247-0440
Ultimately, the final selection of an appropriate heat sink depends on many factors, such as thermal
performance at a given air velocity, spatial volume, mass, attachment method, assembly, and cost.
1.8.9.1 Internal Package Conduction Resistance
For the exposed-die packaging technology, shown in Table 3, the intrinsic conduction thermal resistance
paths are as follows:
• The die junction-to-case (or top-of-die for exposed silicon) thermal resistance
• The die junction-to-ball thermal resistance
38 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 39

System Design Information
Figure 24 depicts the primary heat transfer path for a package with an attached heat sink mounted to a
printed-circuit board.
External Resistance
Heat Sink
Internal Resistance
Printed-Circuit Board
External Resistance
(Note the internal versus external package resistance)
Figure 24. C4 Package with Heat Sink Mounted to a Printed-Circuit Board
Radiation Convection
Thermal Interface Material
Die/Package
Die Junction
Package/Leads
Radiation Convection
Heat generated on the active side of the chip is conducted through the silicon, then through the heat sink
attach material (or thermal interface material), and finally to the heat sink where it is removed by forced-air
convection.
Since the silicon thermal resistance is quite small, for a first-order analysis, the temperature drop in the
silicon may be neglected. Thus, the heat sink attach material and the heat sink conduction/convective
thermal resistances are the dominant terms.
1.8.9.2 Adhesives and Thermal Interface Materials
A thermal interface material is recommended at the package lid-to-heat sink interface to minimize the
thermal contact resistance. For those applications where the heat sink is attached by spring clip mechanism,
Figure 25 shows the thermal performance of three thin-sheet thermal-interface materials (silicone, graphite/
oil, floroether oil), a bare joint, and a joint with thermal grease as a function of contact pressure. As shown,
the performance of these thermal interface materials improves with increasing contact pressure. The use of
thermal grease significantly reduces the interface thermal resistance. That is, the bare joint results in a
thermal resistance approximately 7 times greater than the thermal grease joint.
Heat sinks are attached to the package by means of a spring clip to holes in the printed-circuit board (see
Figure 24). This spring force should not exceed 10 pounds of force. Therefore, the synthetic grease offers
the best thermal performance, considering the low interface pressure. Of course, the selection of any thermal
interface material depends on many factors—thermal performance requirements, manufacturability , service
temperature, dielectric properties, cost, etc.
MPC7400 RISC Microprocessor Hardware Specifications 39
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 40

System Design Information
/W)
2
Specific Thermal Resistance (Kin
2
1.5
1
0.5
0
0 1020304050607080
Contact Pressure (psi)
Silicone Sheet (0.006 inch)
Bare Joint
Floroether Oil Sheet (0.007 inch)
Graphite/Oil Sheet (0.005 inch)
Synthetic Grease
Figure 25. Thermal Performance of Select Thermal Interface Material
The board designer can choose between several types of thermal interface. Heat sink adhesive materials
should be selected based upon high conductivity, yet adequate mechanical strength to meet equipment
shock/vibration requirements. There are several commercially-available thermal interfaces and adhesive
materials provided by the following vendors:
Dow-Corning Corporation 517-496-4000
Dow-Corning Electronic Materials
PO Box 0997
Midland, MI 48686-0997
Chomerics, Inc. 617-935-4850
77 Dragon Court
Woburn, MA 01888-4850
Thermagon Inc. 216-741-7659
3256 West 25th Street
Cleveland, OH 44109-1668
Loctite Corporation 860-571-5100
1001 Trout Brook Crossing
Rocky Hill, CT 06067
AI Technology (e.g. EG7655) 609-882-2332
1425 Lower Ferry Rd.
Trent, NJ 08618
40 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 41

System Design Information
1.8.9.3 Heat Sink Selection Example
The following section provides a heat sink selection example using one of the commercially available heat
sinks.
For preliminary heat sink sizing, the die-junction temperature can be expressed as follows:
= Ta + Tr + (θjc + θ
T
j
+ θsa) * Pd
int
Where:
is the die-junction temperature
T
j
is the inlet cabinet ambient temperature
T
a
is the air temperature rise within the computer cabinet
T
r
is the junction-to-case thermal resistance
θ
jc
is the adhesive or interface material thermal resistance
θ
int
is the heat sink base-to-ambient thermal resistance
θ
sa
is the power dissipated by the device
P
d
During operation the die-junction temperatures (T
) should be maintained less than the value specified in
j
Table 3. The temperature of the air cooling the component greatly depends upon the ambient inlet air
temperature and the air temperature rise within the electronic cabinet. An electronic cabinet inlet-air
temperature (T
range of 5 to 10 °C. The thermal resistance of the thermal interface material (θ
W . Assuming a T
watts, the following expression for T
Die-junction temperature: T
For a Thermalloy heat sink #2328B, the heat sink-to-ambient thermal resistance (θ
) may range from 30 to 40 °C. The air temperature rise within a cabinet (Tr) may be in the
a
of 30 °C, a T
a
of 5 °C, a CBGA package θjc = 0.03, and a power consumption (Pd) of 5.0
r
is obtained:
j
= 30 °C + 5 °C + (0.03 °C/W + 1.0 °C/W + θsa) * 5.0 W
j
) is typically about 1 °C/
int
) versus airflow
sa
velocity is shown in Figure 26.
MPC7400 RISC Microprocessor Hardware Specifications 41
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 42

System Design Information
8
7
6
5
4
3
Heat Sink Thermal Resistance (ºC/W)
2
1
0 0.5 1 1.5 2 2.5 3 3.5
Approach Air Velocity (m/s)
Figure 26. Thermalloy #2328B Heat Sink-to-Ambient Thermal Resistance Versus Airflow Velocity
Thermalloy #2328B Pin-fin Heat Sink
(25 x28 x 15 mm)
Assuming an air velocity of 0.5 m/s, we have an effective Rsa of 7 °C/W, thus
= 30 °C + 5 °C + (0.03 °C/W +1.0 °C/W + 7 °C/W) * 5.0 W,
T
j
resulting in a die-junction temperature of approximately 75 °C which is well within the maximum operating
temperature of the component.
Other heat sinks offered by Chip Coolers, IERC, Thermalloy, Wakefield Engineering, and Aavid
Engineering offer different heat sink-to-ambient thermal resistances, and may or may not need air flow.
Though the die junction-to-ambient and the heat sink-to-ambient thermal resistances are a common figure-
of-merit used for comparing the thermal performance of various microelectronic packaging technologies,
one should exercise caution when only using this metric in determining thermal management because no
single parameter can adequately describe three-dimensional heat flow. The final die-junction operating
temperature, is not only a function of the component-level thermal resistance, but the system-level design
and its operating conditions. In addition to the component's power consumption, a number of factors affect
the final operating die-junction temperature—airflow, board population (local heat flux of adjacent
components), heat sink efficiency , heat sink attach, heat sink placement, next-level interconnect technology ,
system air temperature rise, altitude, etc.
Due to the complexity and the many variations of system-level boundary conditions for today's
microelectronic equipment, the combined effects of the heat transfer mechanisms (radiation, convection and
conduction) may vary widely. For these reasons, we recommend using conjugate heat transfer models for
the board, as well as, system-level designs.
42 MPC7400 RISC Microprocessor Hardware Specifications
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 43

Document Revision History
(
)
1.9 Document Revision History
Table 18 provides a revision history for this hardware specification.
Table 18. Document Revision History
Document Revision Substantive Change(s)
Rev 0 Initial release
Rev 1 Added 2.5 V support for Processor Bus
Raised Min Core Frequency and lowered Max Sysclk Frequency in Table 8.
Reduced L2 Output Hold Time for L2CR[14-15] = 00 from 0.6ns to 0.4ns in
Table 11.
Reduced 400 MHz SYSCLK from 133 MHz to 100MHz in Table 8.
Rev 1.1 Table 3 adds notes on extended temperature parts.
Figure 27 adds Application Modifier for extended temperature.
Figure 17 adds capacitor pad dimensions.
Fixed T able 13 to reflect 2.5 V Processor Bus support added in previous rev of
document.
1.10 Ordering Information
Figure 27 provides the Motorola part numbering nomenclature for the MPC7400. Note that the individual
part numbers correspond to a maximum processor core frequency. For available frequencies, contact your
local Motorola sales office. In addition to the processor frequency, the part numbering scheme also consists
of a part modifier and application modifier. The part modifier indicates any enhancement(s) in the part from
the original production design. The bus divider may specify special bus frequencies or application
conditions. Each part number also contains a revision code. This refers to the die mask revision number and
is specified in the part numbering scheme for identification purposes only.
.
MPC 7400 RX XXX X X
Revision Level
Product Code
Part Identifier
Figure 27. Motorola Part Number Key
(Contact Local Motorola Sales Office)
Application Modifier
(L = Full Spec, 1.8V±100mV, 0-105°C T
(T = Ext. Temp Spec, 1.8V±100mV, -40-105°C Tj)
Processor Frequency
Package
RX = BGA
)
j
MPC7400 RISC Microprocessor Hardware Specifications 43
PRELIMINARY—SUBJECT TO CHANGE WITHOUT NOTICE
Page 44

Mfax is a trademark of Motorola, Inc.
The PowerPC name, the PowerPC logotype, and PowerPC 603e are trademarks of International Business Machines Corporation used by Motorola under license from
International Business Machines Corporation.
Information in this document is provided solely to enable system and software implementers to use PowerPC microprocessors. There are no express or implied
copyright licenses granted hereunder to design or fabricate PowerPC integrated circuits or integrated circuits based on the information in this document.
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty, representation or guarantee regarding the
suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and
specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters can and do vary in different
applications. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. Motorola does not
convey any license under its patent rights nor the rights of others. Motorola products are not designed, intended, or authorized for use as components in systems
intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of the Motorola
product could create a situation where personal injury or death may occur. Should Buyer purchase or use Motorola products for any such unintended or unauthorized
application, Buyer shall indemnify and hold Motorola and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages,
and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized
use, even if such claim alleges that Motorola was negligent regarding the design or manufacture of the part.
Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal Opportunity/Affirmative Action Employer.
Motorola Literature Distribution Centers:
USA/EUROPE: Motorola Literature Distribution; P.O. Box 5405; Denver, Colorado 80217; Tel.: 1-800-441-2447 or 1-303-675-2140;
World Wide Web Address: http://ldc.nmd.com/
JAPAN: Nippon Motorola Ltd SPD, Strategic Planning Office 4-32-1, Nishi-Gotanda Shinagawa-ku, Tokyo 141, Japan Tel.: 81-3-5487-8488
ASIA/PACIFIC: Motorola Semiconductors H.K. Ltd Silicon Harbour Centre 2, Dai King Street Tai Po Industrial Estate Tai Po, New Territories, Hong Kong
Mfax™: RMFAX0@email.sps.mot.com; TOUCHTONE 1-602-244-6609; US & Canada ONLY (800) 774-1848;
World Wide Web Address: http://sps.motorola.com/mfax
INTERNET: http://motorola.com/sps
Technical Information: Motorola Inc. SPS Customer Support Center 1-800-521-6274; electronic mail address: crc@wmkmail.sps.mot.com.
Document Comments: FAX (512) 895-2638, Attn: RISC Applications Engineering.
World Wide Web Addresses: http://www.motorola.com/PowerPC
http://www.motorola.com/netcomm
http://www.motorola.com/Coldfire
MPC7400EC/D
 Loading...
Loading...