

Moog MSD Servo Drive single axis system, MSD Servo Drive Compact, MSD Servo Drive multi axis system User Manual
Page 1

MSD Servo Drive
User Manual
moog
Single Axis System
Multi Axis System
Compact
Page 2
moog
This document details the functionality of the following equipment
MSD Servo Drive single axis system
MSD Servo Drive multi axis system
MSD Servo Drive Compact
MSD Servo Drive User Manual CANopen/EtherCAT
CANopen/EtherCAT for MSD Servo Drive User Manual
ID no.: CA65647-001, Rev. 1.0
Status: 03/2012
We reserve the right to make technical changes.
Technical alterations reserved.
The contents of our documentation have been compiled with greatest care and in
compliance with our present status of information.
Nevertheless we would like to point out that this document cannot always be updated
parallel to the technical further development of our products.
Information and specifications may be changed at any time. For information on the
latest version please refer to drives-support@moog.com.
Page 3

How to use the document
Dear User,
This manual is intended for project engineers, commissioning engineers or programmers
of drive and automation solutions on the CANopen and EtherCAT fieldbus.
It is assumed that you are already familiar with these fieldbus systems through appropriate training and from reading the relevant literature. We assume that your drive is
already in operation – if not, you should first consult the Operation Manual.
NOTE: This manual applies to the MSD Servo Drive family.
General introduction
Mounting and connection of CANopen
Mounting and Connection of EtherCAT
Commissioning and Configuration CANop.
Setting the Device Parameters for CANopen
Setting the Device Parameters for EtherCAT
Implemented CiA402 functionality
Operation modes CiA402
Emergency objects
Technology functions
EDS file, object directory, parameter list
Bibliography
Appendix: Glossary
11
22
33
44
55
66
77
88
99
1010
1111
1212
1313
moog
MSD Servo Drive User Manual CANopen/EtherCAT
3
Page 4
moog
Pictograms
MSD Servo Drive User Manual CANopen/EtherCAT
4
!
Important! Misoperation may result in damage to the drive or malfunctions.
Danger from electrical voltage! Improper behaviour may endanger human life.
Danger from rotating parts! Drive may start up automatically.
Note: Useful information.
Page 5

Table of Contents
Drive ADmi nistr Ator
1 General Introduction ................................................................ 7
1.1 Measures for your safety .........................................................................................7
1.2 Introduction to CANopen .......................................................................................7
1.3 Introduction to EtherCAT ........................................................................................8
1.4 System requirements ...............................................................................................8
1.5 Further documentation ........................................................................................... 8
2 Mounting and Connection of CANopen ................................... 9
2.1 Setting the address .................................................................................................9
2.2 Meanings of LEDs ...................................................................................................10
2.3 Installation ..............................................................................................................11
2.4 Transmission speeds ................................................................................................12
2.5 Display of operating states via 7-segment display ....................................................13
2.6 Hardware enable ....................................................................................................13
3 Mounting and Connection of EtherCAT ................................. 15
3.1 Installation and cabling ...........................................................................................15
3.2 Pin assignment of the RJ45 socket ..........................................................................16
3.3 Meanings of LEDs ...................................................................................................16
3.4 Display of operating statuses via 7-segment display ................................................17
3.5 Hardware enable ....................................................................................................18
4 Commissioning and Configuration of CANopen ..................... 19
4.1 General commissioning of CANopen/EtherCAT ......................................................19
4.1.1 Commissioning ............................................................................................19
4.1.2 Commissioning sequence ............................................................................19
4.1.3 Commissioning via Moog
4.1.4 Operation mode selection (modes of operation) ..........................................20
4.1.5 Functionality of operation modes ................................................................20
4.1.6 Setting the timing parameters .....................................................................21
4.2 CAN-specific configuration .....................................................................................21
4.2.1 Setting the software address and baud rate ................................................21
4.2.2 Commissioning instructions .........................................................................21
4.2.3 Testing the higher-order drive ......................................................................22
4.2.4 Data handling ..............................................................................................22
4.2.5 Control functions .........................................................................................22
4.3 Commissioning and Configuration of EtherCAT ......................................................23
................................................20
5 Setting the Device Parameters for CANopen .......................... 25
5.1 Implemented CiA301 functionality .........................................................................25
5.1.1 Communication objects ...............................................................................25
5.1.2 Object directory of CiA301 ..........................................................................25
5.2 Parameter channel (Ser vice Data Objects) ...............................................................26
5.2.1 Data types ...................................................................................................27
5.2.2 Representation of data types in the control protocol ...................................27
5.2.3 Access to device parameters ........................................................................27
5.3 Examples of SDO handling ......................................................................................28
5.3.1 Parameter set download ..............................................................................31
5.4 PDO transmission types ........................................................................................... 32
5.5 Event-controlled TxPDO transmission...........................................................32
moog
MSD Servo Drive User Manual CANopen/EtherCAT
5
Page 6
moog
MSD Servo Drive User Manual CANopen/EtherCAT
6
5.6 PDO mapping .........................................................................................................33
5.6.1 Mapping – general ......................................................................................33
5.6.2 Mapping notes ............................................................................................33
5.7 Heartbeat function .................................................................................................34
5.8 Monitoring of telegram failure ................................................................................35
6 Setting the Device Parameters for EtherCAT ........................... 37
6.1 Supported EtherCAT functionality ...........................................................................37
6.2 Configuration for operation in a drive .....................................................................40
7 Implemented CiA402 functionality ......................................... 41
7.1 Device control and state machine ...........................................................................41
7.1.1 General information ....................................................................................41
7.1.2 State machine ..............................................................................................41
7.1.3 Device states ................................................................................................42
7.2 Option codes ..........................................................................................................44
7.3 Device control objects ............................................................................................. 44
7.4 Units and scalings, factor group .............................................................................. 45
7.5 I/O map ...................................................................................................................47
7.5.1 Object 60FDh – digital inputs ......................................................................47
7.5.2 Object 2079h – MPRO_ INPUT_STATE ..........................................................47
7.5.3 Object 208Fh – MRPO_OUTPUT_STATE.......................................................47
7.5.4 Setting digital outputs via fieldbus ...............................................................48
7.5.5 Object 60FE, digital outputs: .......................................................................48
8 Operation modes CiA402 ...................................................... 49
8.1 CiA402 compatible operation modes ......................................................................49
8.1.1 Configuring MSD Servo Drive for activation via CiA402 ...............................49
8.1.2 Control word CiA402 ..................................................................................49
8.1.3 Status word CiA402 ....................................................................................51
8.2 Operation modes with profile generation in drive ...................................................52
8.2.1 Profile velocity mode ...................................................................................52
8.2.2 Homing mode .............................................................................................54
8.2.3 Profile position mode ...................................................................................55
8.2.4 Velocity mode (V/F mode) ............................................................................57
8.3 Cyclical operation modes, profile generation in the drive ........................................58
8.3.1 Interpolated position mode .........................................................................58
8.3.2 Cyclic Synchronous Position mode (EtherCAT only) ......................................59
8.3.3 Cyclic Synchronous Velocity mode (EtherCAT only) ......................................60
8.3.4 Cyclic Synchronous Torque mode (EtherCAT only)........................................61
8.3.5 External pre-control of speed/torque ...........................................................61
9 Emergency objects ................................................................. 63
9.1 Error acknowledgement, general ............................................................................63
9.2 Error acknowledgement via bus system ..................................................................63
10 Technology functions ............................................................. 65
10.1 Touch probe ............................................................................................................65
10.1.1 Description of manufacturer-specific implementation ..................................65
10.1.2 Control-led homing .....................................................................................66
10.2 Indexing table function ...........................................................................................66
11 EDS file, object directory, parameter list.................................. 69
11.1 EDS file, object directory .........................................................................................69
12 Bibliography........................................................................... 71
Page 7
1 General Introduction
1.
1.1 Measures for your safety
1.2 Introduction to CANopen
CANopen is an interconnection concept based on the CAN (Controller Area Network)
serial bus system. CAN has many specific advantages, in particular multi-master capability, real-time capability, resistant response to electromagnetic interference, a high level
of availability and the low cost of drive chips. These advantages have resulted in CAN
being introduced into widespread use in automation too.
The MSD Servo Drives quick and safe to handle. For your own safety and for the safe
functioning of your device, please be sure to observe the following points:
Read the operation manual first!
• Follow the safety instructions!
Electric drives are dangerous:
• Electrical voltages > 230 V/460 V:
Dangerously high voltages may still be present 10 minutes after the power
is cut, so always make sure the system is no longer live.
• Rotating parts.
• Hot surfaces.
Your qualification:
• In order to prevent personal injury and damage to property, only qualified
electrical engineers may work on the device.
• Knowledge of national accident prevention regulations (e.g. VBG4 in
Germany).
• Knowledge of layout and interconnection with the CAN bus fieldbus.
U
U
V
V
N
N
L+
L+
RB
RB
L-
L-
L3
L3
L2
L2
L1
L1
During installation observe the following instructions:
• Always comply with the connection conditions and technical specifications.
• Electrical installation standards, e.g. for cable cross-section, shielding etc.
• Do not touch electronic components and contacts (elec trostatic discharge
may destroy components).
Simplified cross-manufacturer communication
The integration of any number of devices in a manufacturer-specific network involves
substantial expense. CANopen was developed to solve this problem. In CANopen the
use of CAN identifiers (message addresses), the time response on the bus, the network
management (e.g. system start and user monitoring) and the coding of the data contents is specified in a uniform way. CANopen makes it possible for devices from different
manufacturers to communicate in a network at minimal cost. CANopen uses a subset
of the communication services offered by CAL to define an open interface. The selected
CAL services are summarised in a kind of "user guide". This guide is called the CANopen
Communication Profile.
CANopen functionality of MSD Servo Drive
The CANopen Communication Profile is documented in CiA301 and regulates the way
communication is executed. It distinguishes between process data objects (PDOs) and
service data objects (SDOs). The Communication Profile additionally defines a simplified
network management system.
The device profile for CiA402 (Rev. 2.0) variable-speed drives was compiled on the basis
of the CiA301 (Rev. 4.01) communication services. It describes the operation modes and
device parameters supported.
The following sections will provide you with an overview of the CANopen functionality
integrated in MSD Servo Drive, followed by the information necessary for commissioning.
[ Section 1 ]
moog
MSD Servo Drive User Manual CANopen/EtherCAT
7
Page 8

moog
MSD Servo Drive User Manual CANopen/EtherCAT
8
1.3 Introduction to EtherCAT
As far as real-time Ethernet systems are concerned, EtherCAT has become well established in the area of automation. The decisive factor here is not only the IEEE 802.3/
100BaseTX Ethernet physics known in the home office area, but also the excellent
value for money with regard to implementation in the master and slave modules.
Interconnection can be executed as required in a star, ring or line structure using standard patch or crossover cables and is therefore easily adapted to the machine infrastructure.
To reduce the amount of training required, familiar communication and device profiles
were used as of the application layer. In this way, users familiar with CANopen profiles
such as CiA301 or CiA402 can change over to this new fieldbus technology with minimal training.
In MSD Servo Drive we have combined all our past experience in the CANopen area with
this new fieldbus technology and achieved maximum compatibility and functionality.
1.4 System requirements
It is assumed you have a standard CANopen setup program and a CANopen interface
dr iver.
For the precise protocol definitions, please refer to the CAL specification.
With the aid of these objects it is possible to configure the actual CANopen communication very flexibly and adapt it to the specific needs of the user.
• EtherCAT Communication Specification Version 1.0 2004
• EtherCAT Indicator Specification Proposal V0.91 2005
• IEC 61158-2-12 to IEC 61158-6-12
1.5 Further documentation
• Operation manual, for commissioning of the drive unit
• Application manual, for additional parameter setting to adapt to the application.
• CiA301 (Rev. 4.0): Application Layer and Communication Profile
• CiA402 (Rev. 2.0): Device Profile Drives and Motion Control
Page 9
2 Mounting and Connection
1.
2.
ACHTUNG
WARNING
Kondensatorenent-
ladezeit > 3 min.
Betriebsanleitung
beachten!
Capacitor discharge
time > 3 min.
Pay attention to the
operation manual!
X
15
X
16
H
1
of CANopen
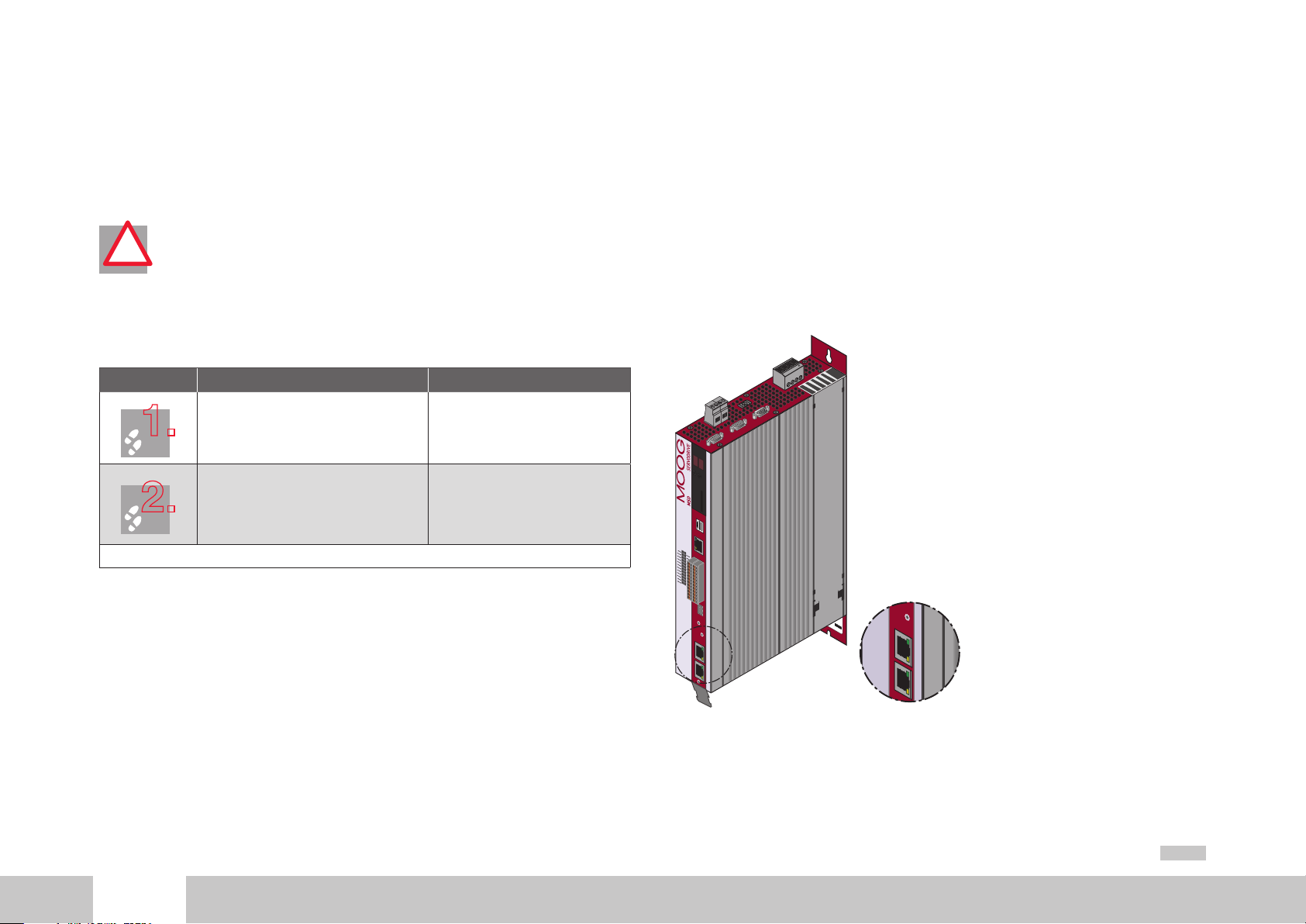
ATTENTION: Do NOT insert or remove the CANopen connector during
operation.
!
2.1 Setting the address
Step Action Note
Find out which address is assigned to the
device you are installing.
Select the mode of addressing:
• by bus address parameter
• by DIP switch (S4)
• by bus address parameter and DIP
switch (S4)
Address setting finished; for further procedure see Installation.
Ask your project engineer.
See below
Three possible methods of address allocation
1. Only using bus address parameter P 2005-COM_CAN_Adr: You will find parameter
P 2005-COM_CAN_Adr (factory setting 1) in the "fieldbus" subject area under
CANopen.
2. Only using DIP switch S4
3. Combination of bus address parameter and DIP switch S4 CAN address = hardware address (S4) + parameter P 2005-COM_CAN_Adr. This option is advanta-
geous if, for example, you intend always to use the same parameter set with up to
15 drives, but the lowest address is 30. Parameter P 2005-COM_CAN_Adr is then
set to 30. The device address is then defined using the coding switch, which
ranges from 0-15.
L3
L2
L1
11
X
J+
J-
J+
J-
J+
J-
J+
J-
10
REL
REL
ISDSH
ISD06
ISD05
ISD04
ISD03
ISD02
ISD01
ISD00
+24 V
DGND
ACHTUNG
Kondensatorenent-
Betriebsanleitung
WARNING
Capacitor discharge
Pay attention to the
operation manual!
X
X
9
5
6
1
X
2
X
3
X
24
12
RSH
23
11
RSH
22
10
4
X
ENPO
21
9
OSD02
20
8
OSD01
19
7
OSD00
18
6
17
ISA1-
5
ISA1+
16
4
15
ISA0-
3
14
ISA0+
2
13
+24 V
1
DGND
5
X
1
H
15
X
ladezeit > 3 min.
beachten!
time > 3 min.
16
X
X
8
X
7
X
6
356
33 Lah
www.l
Type:
M
u
nau
ad
s
t
SOA84.006.0
-
e
te
i
n
c
German
.
d
e
In:
C
y
000.00
US
LISTED
Out:
Ind. Co
00.0
19BB
nt. Eq.
SN.:
Fig. 2.1
moog
Position of CAN connection on MSD Servo Drive
MSD Servo Drive User Manual CANopen/EtherCAT
9
[ Section 2 ]
Page 10
moog
MSD Servo Drive User Manual CANopen/EtherCAT
10
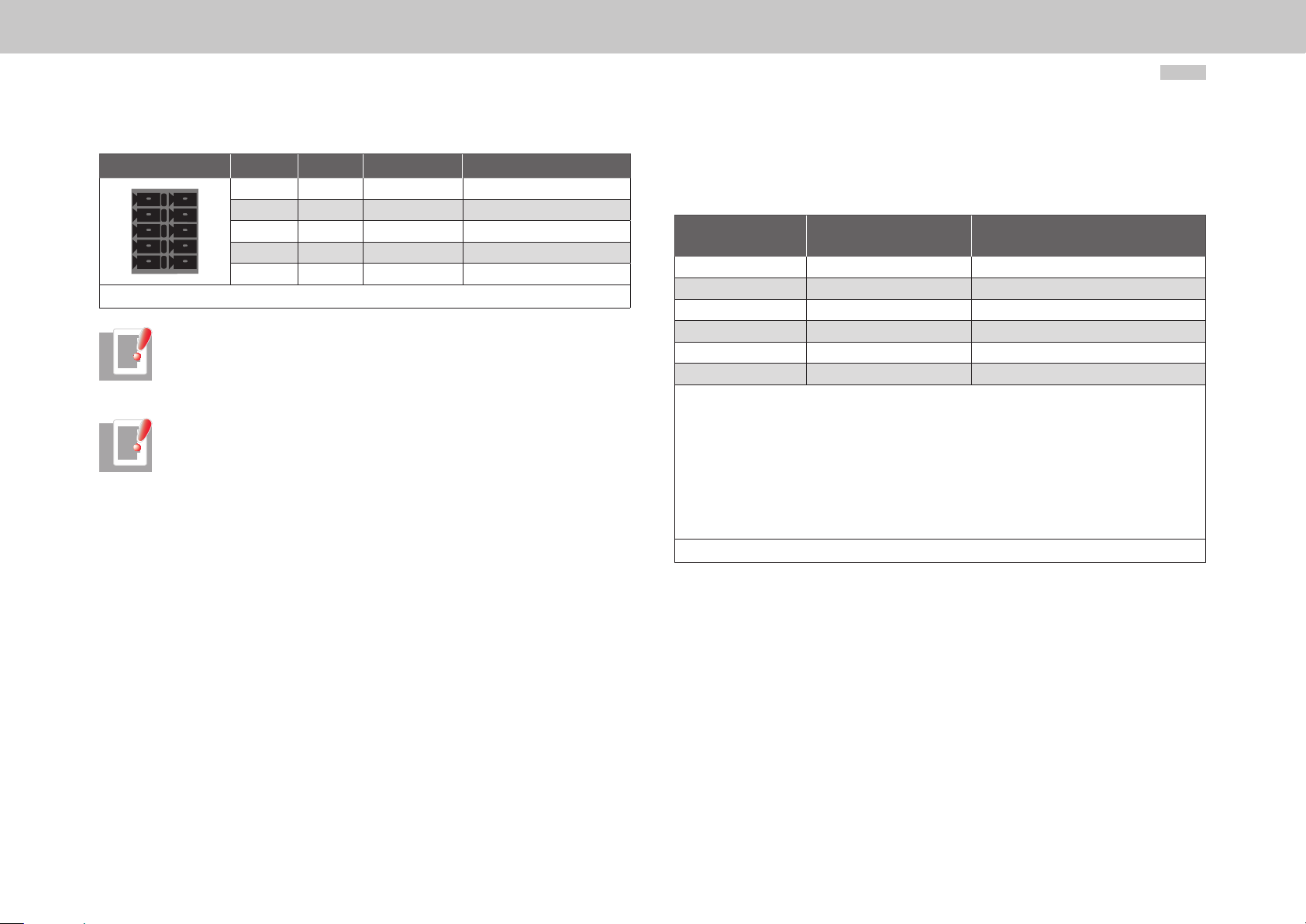
Address setting using DIP switch
An address between 0 and 127 can be selected decimally using DIP switch S4 on the
position drive.
The DIP switch is assigned as follows: Positions 1-7 are reserved for the address setting,
position 8 for the activation/deactivation of the 120 Ohm bus termination in the device.
Function/assignment:
DIP switch 1 significance 20 = 1
DIP switch 2 significance 2
DIP switch 3 significance 2
1
= 2
2
= 4
...
DIP switch 7 significance 2
6
= 64
DIP switch 8 = bus termination ON/OFF
12345678
Fig. 2.2
Device with CANopen Option
Example of use of the DIP switches:
Setting address "3" using the DIP switches:
- Set switch 1 and switch 2 to ON
0
- 2
+ 21 = 3
- Resulting device address = 3
- (If the software address = 0 is set)
IMPORTANT: Switch 8 = bus termination!
!
Note: Changes to the CAN address are applied on a
- Reset node command
- Restart (device power-up).
Note: The active bus address can be found in the boot-up message.
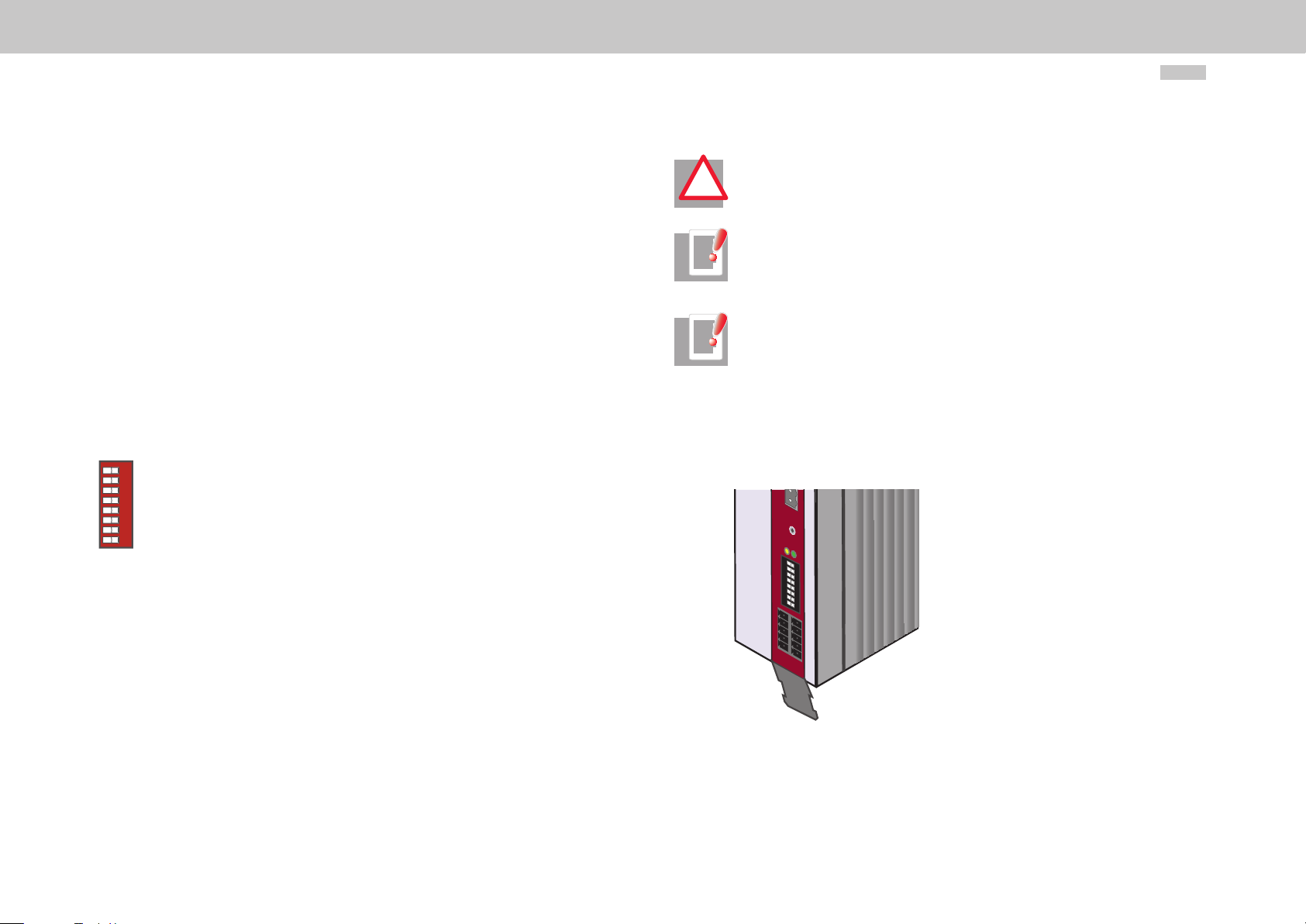
2.2 Meanings of LEDs
The CAN option of MSD Servo Drive has two diagnostic LEDs (H14, H15).
14
H
15
H
4
S
ACHTUNG
Kondensatorenent-
ladezeit >3 min.
Betriebsanleitung
beachten!
WARNING
Capacitordischarge
Pay attentionto the
time> 3 min.
operation m
Fig. 2.3 Device with CANopen Option
1 2 3 4 5 6 7 8
anual!
32
X
Page 11
The LEDs have the following function:
1.
2.
3.
LED Function Meaning
The LED displays the current network status.
• NMT STOPPED
H14 (yellow LED)
CANopen
network status
• NMT PRE-OPERATIONAL
• NMT OPERATIONAL
H15 (green LED)
Voltage supply
CAN option
Permanently lit if the 24 V supply is
powering the CAN option via the CAN bus.
Table 2.1 Meanings of LEDs
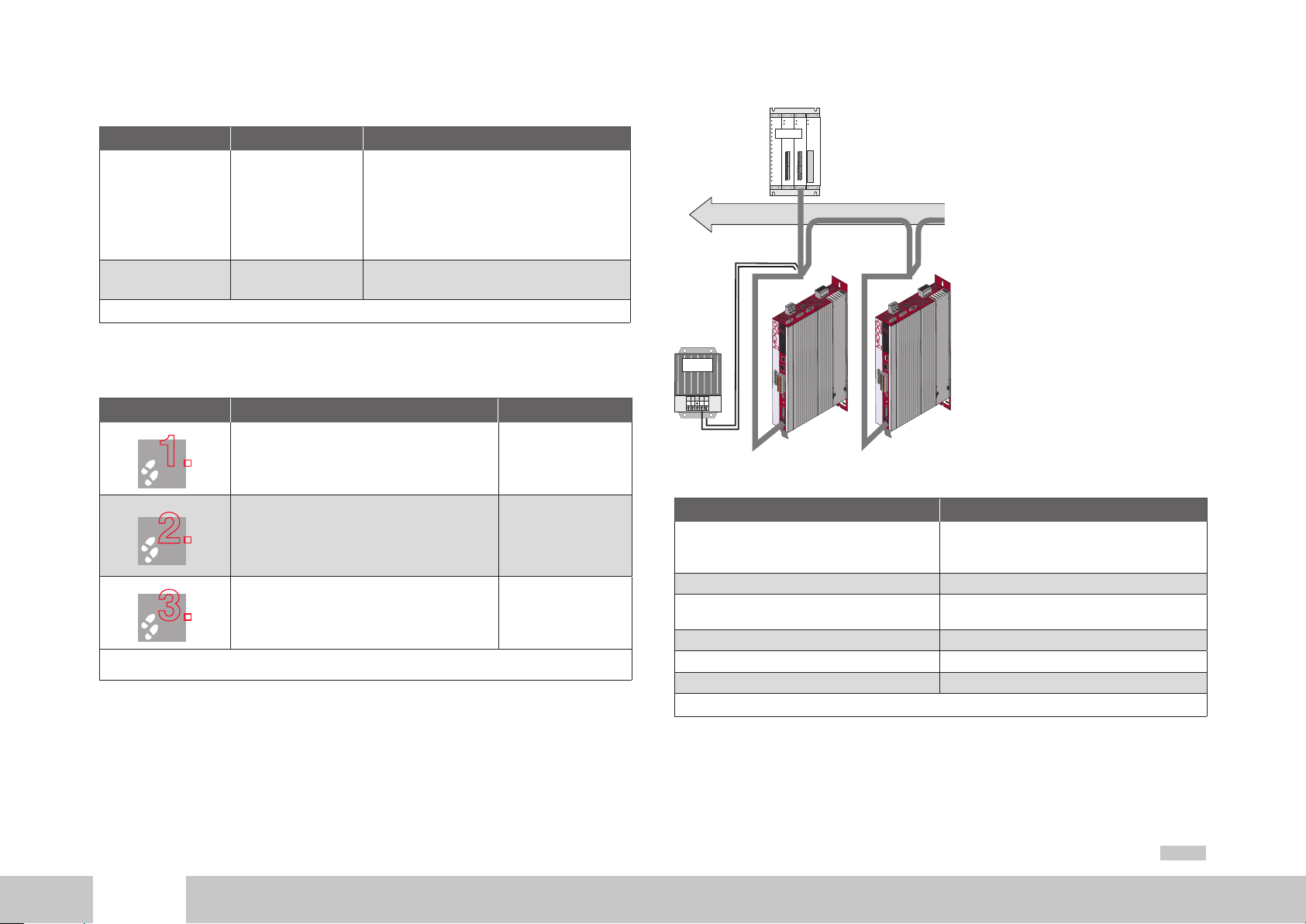
2.3 Installation
Step Action Note
flashing with 800 ms cycle
flashing with 1600 ms cycle
permanently lit.
24 VDC
N
L1
L-
CAN-Bus
L+
SPS/PLC
X
5
6
1
X
2
X
3
X
REL
24
REL
1
2
R
23
S
H
IS
1
DS
1
R
22
H
S
IS
H
1
4
D
0
06
X
ENPO
21
ISD
9
05
OSD02
20
ISD
8
04
OSD01
19
IS
7
D
03
OSD00
18
IS
D02
6
17
IS
A
IS
1-
5
D01
ISA
16
IS
1+
D00
4
15
IS
+24
A
0-
3
V
14
ISA
D
0+
G
2
N
D
13
+
2
4
1
V
D
G
ND
5
X
14
H
1
5
H
4
S
8
7
6
ACHTUNG
5
Kon
d
4
e
n
satore
lad
3
Bet
eze
n
r
i
e
t
iebsa
n
>
2
t3
m
n
i
leitun
n
1
.
be
ach
WARNING
g
C
ten!
a
pacit
o
r
disch
P
a
y
t
im
atte
arg
e
op
>
nti
e
3
e
m
rat
on
i
n.
ion
to
t
m
h
e
an
ual
!
3
2
X
12345678910
1234
5678910
1112 1314
1112 1314 15 16 17 18 1920
1516 17 18 1920
L
3
L
3
L
2
L
1
11
X
J+
J-
J+
J-
J+
J-
J+
J
10
X
X
8
9
X
7
X
6
REL
24
REL
1
23
IS
1
DS
22
H
ISD
1
06
21
ISD
05
20
ISD
04
19
ISD
03
18
IS
D02
17
IS
D01
16
IS
D00
15
+24
V
14
D
G
N
D
13
3
5
6
3
www
3
L
T
a
y
hna
.
M
l
u
pe
ad
st-
u
SO
e i
t
:
ec.
n
A8
G
d
er
e
4
ma
.
00
In
n
C
y
:
6.
0
00
U
LI
0.
S
S
000
Ou
T
I
nd
E
0.0
t
D
.
C
:
o
1
n
t.
9B
E
q
.
B
S
N.:
ACHTUNG
Kond
en
satore
lad
Bet
eze
r
i
ie
bsa
be
WARNING
C
a
pacit
o
r
disch
P
a
y
t
im
atte
op
nti
e
rat
io
n
L
2
L
1
11
X
J+
J-
J+
J-
J+
J-
J+
J
10
X
X
8
X
9
X
7
X
6
5
6
1
X
2
X
3
X
2
R
S
H
1
R
S
H
4
0
X
ENPO
9
OSD02
8
OSD01
7
OSD00
6
IS
A
1-
5
ISA
1+
4
IS
A
0-
3
ISA
0+
2
+
2
4
1
V
D
G
ND
5
X
14
H
1
5
H
4
S
8
7
6
5
4
3
n
e
t
n
2
>
t 3
m
n
i
le
n
1
.
itun
ach
g
ten
!
arg
e
>
3
e
m
on
i
n
to
.
t
m
h
e
an
ual
!
3
2
X
3
5
6
3
www
3
L
T
a
y
hna
.
M
l
u
pe
a
s
d
t
u
SO
-
e i
t
:
ec
n
A8
G
.
d
er
e
4
ma
.
00
n
In
C
y
:
6.
0
00
U
LI
0.
S
S
000
Ou
T
I
nd
E
0.0
t
D
.
Co
:
1
n
t.
9B
E
q
.
B
S
N.:
Make sure the hardware enable is wired on
MSD Servo Drive (X4).
Wire the CAN connection using connector X32
• Connection of CAN signal cables
• Connection of interface power supply
• Activation of the internal bus terminating resistor
on the final servo drive
• See Operation
Manual
See Specification of
CAN bus connection
table and A ssignment
of connection X19 table
Switch on the drive device.
Electrical installation is finished; for how to proceed further, refer to section 4 "Commissioning and
configuration".
The CANopen interface is integrated in MSD Servo Drive. The connection is made via
connector X32. The interface is isolated from the servo drive electronics. The supply to
the isolated secondary side is provided by the customer via connector X32.
moog
[ Section 2 ]
Fig. 2.4
System connection
Connection Spring-type terminal
Wave terminating resistor
- Bus termination -
Max. input frequency 1 MHz
Ext. voltage supply
Voltage ripple Max. 3 Vss
Power consumption Max. 50 mA per user
Cable type 4-wire, surge impedance 120 W
• 120 W (internal)
• Activation of the bus termination in the device via
switch 8 on the CAN option
+24 V +25%, 50 mA
(isolated from servo drive)
Table 2.2 Specification of CAN bus connection
MSD Servo Drive User Manual CANopen/EtherCAT
11
Page 12
moog
MSD Servo Drive User Manual CANopen/EtherCAT
12
Terminal X32 PIN PIN Function Description
10 5 CAN_+24 V External 24 V supply
9 4 CAN_H CAN High
8 3 CAN_SHLD CAN Shield (optional)
7 2 CAN_L CAN Low
6 1 CAN_GND CAN Ground (0V)
Table 2.3 Assignment of connection X19
NOTE: Both connectors on terminal X32 are connected to each other in
the device.
NOTE: The external 24 V supply for the option board is essential. It is not
powered by the device.
2.4 Transmission speeds
The CAN bus can be operated at the following baud rates:
Transmission speed
1000 kBaud 25 m • Factory setting
500 kBaud 100 m
250 kBaud
125 kBaud
50 kBaud
20 kBaud
1) Rounde d bus length estimation (worst case) on basis 5 ns /m propagation delay and a t otal effe ctive device interna l in-out
delay as follows:
1M–800 kbit/s: 210 ns
500–250 kbit/s: 3 00 ns (includes 2 * 40 ns for optocouplers)
125 kbit/s: 450 ns (includes 2 * 100 ns for optocouple rs)
50–10 kbit/s: Effective delay = delay recessive to dominant plus dominant to recessi ve divided by two.
2) For a bus length gre ater than abo ut 200 m, the us e of optocouplers is recommende d. If optocouplers ar e placed between
the CAN Co ntroller and the transce iver this af fects the maximum bus length d epending upon the propagation delay of the
optocouplers, i.e. - 4 m per 10 ns prop agation de lay of employed optocoupler typ e.
3) For a bus length gre ater than abo ut 1 km, bridge or repeater device s may be need ed.
2)
2)
3)
3)
Table 2.4 Transmission speeds
When selecting the transmission rate it should, however, be ensured that the line length
does not exceed the permissible line length for the transmission rate in question.
Maximum line length
over the entire network
250 m
500 m
1000 m
2500 m
1)
Page 13

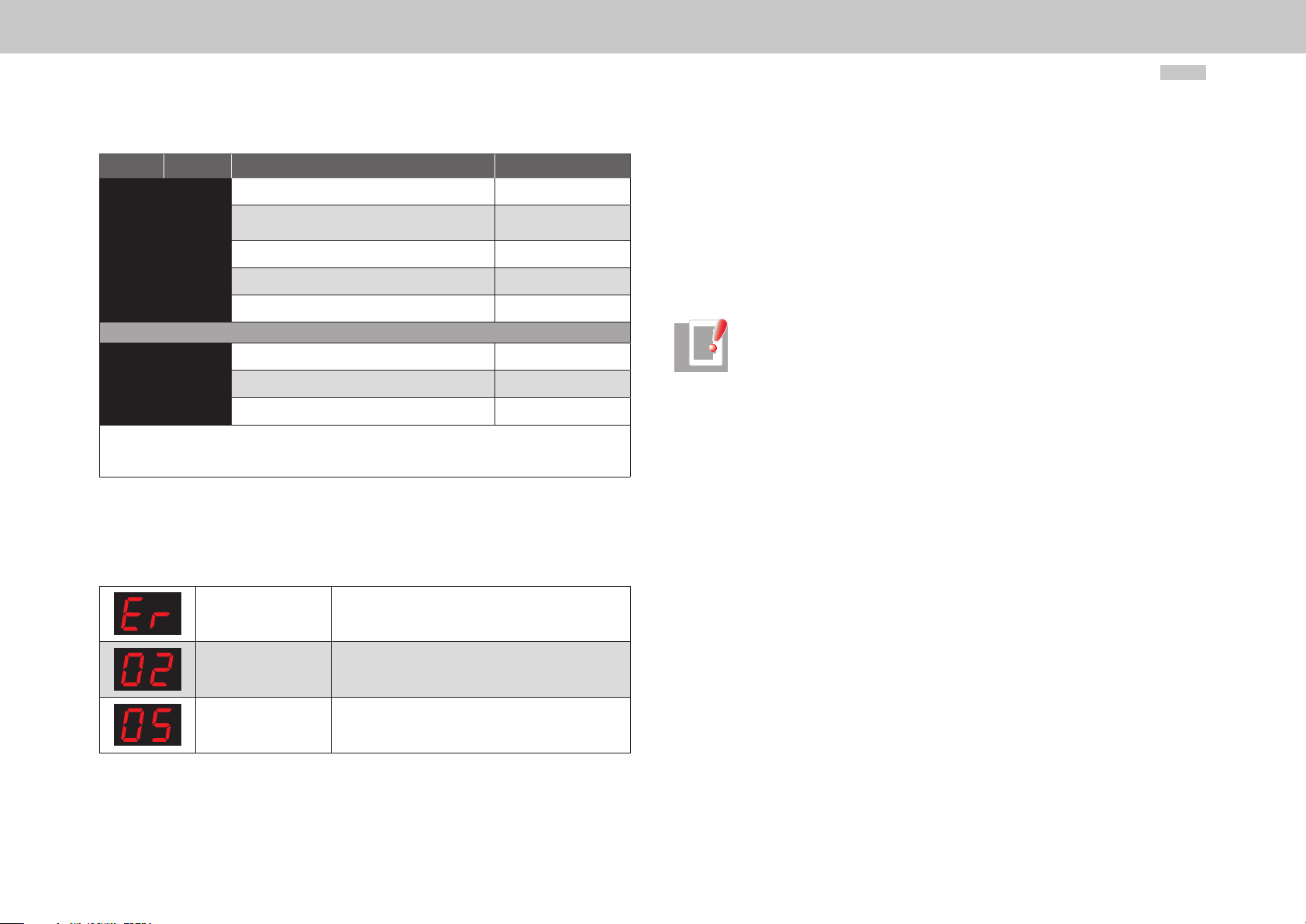
2.5 Display of operating states via 7-segment display
Example of the flash sequence:
ER > 02 > 05 * ER > 02 > 05 ...
D1 D2 Meaning Parameter
System statuses
8.
8.
0.
S.*) 1.
S.*) 2.
3.
4.
5.
6.
7.
E R
The following appear alternately in the event of error
E R.
X X
Y Y
1) S. flashes if t he STO (Safe Torqu e Off) functio n is active; the display is not lit if the func tion is not ac tive.
*) This is not a "safe display" under the terms of EN 61800-5-2.
2) The point flashes if the power stage is active.
Device in reset status
Auto-initialisation on device startup (Start)
1) Not ready to switch on (no DC link voltage) (NotReadyToSwitchOn)
1) Starting lockout (DC link is OK, power stage not
ready)
Ready to switch on (power stage is ready) (ReadyToSwitchOn)
On (power is connected to the device)
Drive ready (current applied to drive and drive ready
for input of setpoint)
Quick stop
Fault response active
Fault (see below) (Fault)
Display for errors or non-acknowledgeable errors
Error number (decimal)
Error localisation (decimal)
2)
2)
2)
2)
(SwitchOnDisabled)
(SwitchedOn)
(OperationEnable)
(QuickStopActive)
(FaultReactionActive)
Error: ER = "Fault"
Error name: 02 = "Error in the parameter list"
Description of error: 05 = "Function for checking current parameter list"
2.6 Hardware enable
MSD Servo Drive has a control input for ENPO hardware enable on the control terminal.
This input must be configured to operate the power stage at 24 V.
The device also provides the function "STO (Safe Torque Off)" (see Operation Manual
or Application Manual MSD Servo Drive), category 3, control terminal ISDSH. For these
devices the relevant function logic must be implemented by way of the higher-order
drive as per the Application Manual.
NOTE: When the inputs ENPO and ISDSH are not configured, the device stays
in status 1 = "Not Ready to Switch On" or 2 = "Switch On Disabled".
Only after correct configuration can the status be exited by a "Shutdown"
command via bus.
moog
[ Section 2 ]
MSD Servo Drive User Manual CANopen/EtherCAT
13
Page 14
moog
MSD Servo Drive User Manual CANopen/EtherCAT
14
Page 15
3 Mounting and Connection
ACHTUNG
WARNING
Kondensatorenent-
ladezeit > 3 min.
Betriebsanleitung
beachten!
Capacitor discharge
time > 3 min.
Pay attention to the
operation manual!
X
15
X
16
H
1
of EtherCAT
3.1 Installation and cabling
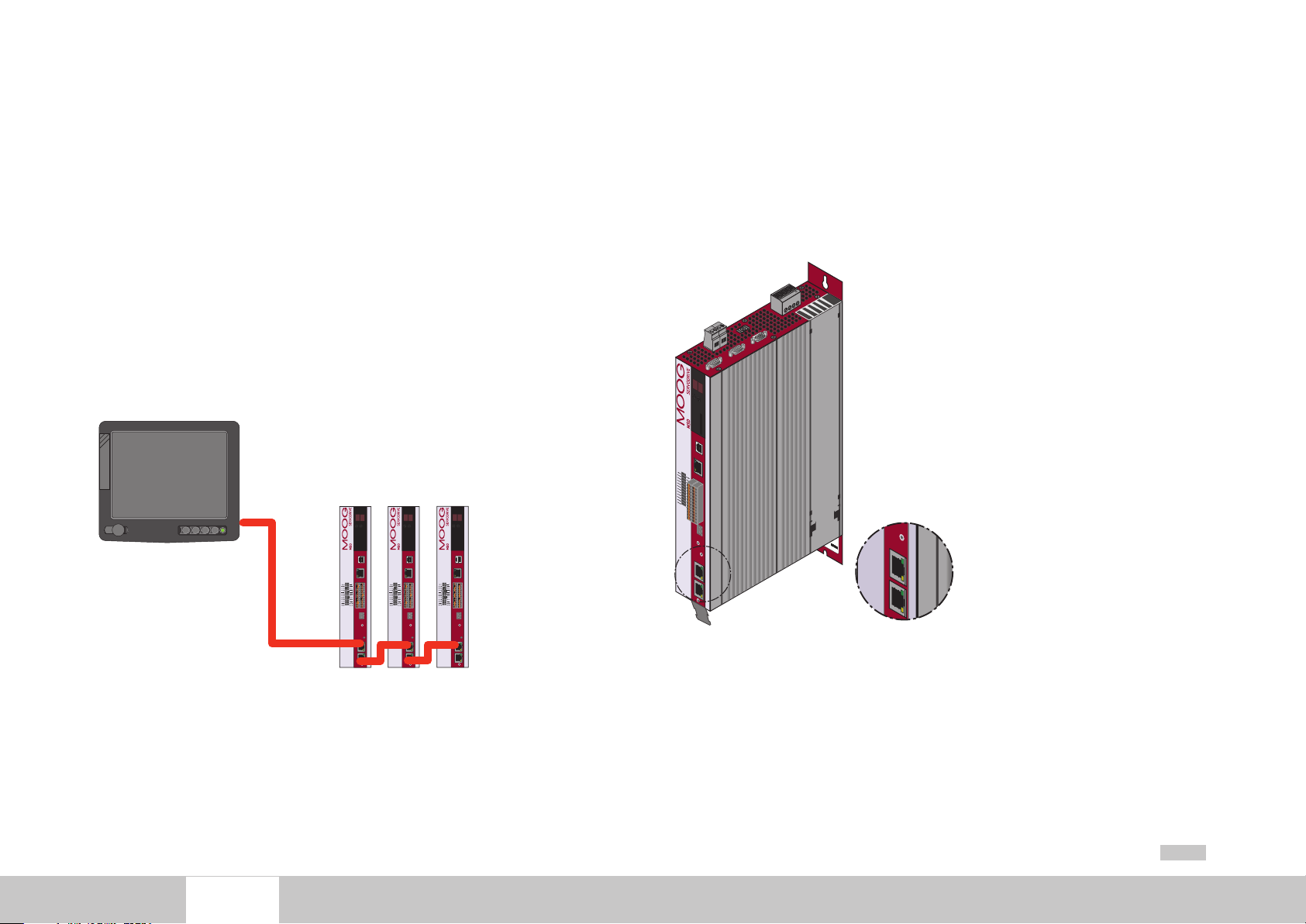
Setup of the EtherCAT network
In an EtherCAT network there is always one EtherCAT master (e.g. an industrial PC) and
a variable number of slaves (e.g. servo drive, bus terminals etc). Each EtherCAT slave has
two Ethernet ports. Slave to slave cabling is thus possible. All EtherCAT users are generally connected in a line with the master at the beginning of the circuit. On the last slave
in the line the second Ethernet port remains open.
IPC
56
1
X
2
X
3
X
4
X
5
X
4
1
H
15
12345678
4
S
19
X
16
1
X
2
X
3
X
4
X
REL
RSH
24
12
23
11
RSH
REL
22
10
ENPO
ISDSH
21
9
OSD02
ISD06
20
8
ISD05
OSD01
19
7
OSD00
ISD04
18
6
ISA1-
ISD03
17
5
ISA1+
ISD02
16
4
ISA0-
ISD01
15
3
ISD00
ISA0+
14
2
+24 V
+24 V
13
1
DGND
DGND
5
X
4
X
1
H
15
12345678
X
4
S
19
ACHTUNG
X
Kondensatorenent-
ladezeit > 3 min.
Betriebsanleitung
beachten!
WARNING
Capacitor discharge
time > 3 min.
Pay attention to the
operation manual!
16
X
Fig. 3.1
EtherCAT connection
56
REL
RSH
24
12
23
11
RSH
REL
22
10
ENPO
ISDSH
21
9
OSD02
ISD06
20
8
ISD05
OSD01
19
7
OSD00
ISD04
18
6
ISA1-
ISD03
17
5
ISA1+
ISD02
16
4
ISA0-
ISD01
15
3
ISD00
ISA0+
14
2
+24 V
+24 V
13
1
DGND
DGND
X
X
ACHTUNG
Kondensatorenent-
ladezeit > 3 min.
Betriebsanleitung
beachten!
WARNING
Capacitor discharge
time > 3 min.
Pay attention to the
operation manual!
X
56
1
X
2
X
3
X
4
X
REL
RSH
24
12
23
11
RSH
REL
22
10
ENPO
ISDSH
21
9
OSD02
ISD06
20
8
ISD05
OSD01
19
7
OSD00
ISD04
18
6
ISA1-
ISD03
17
5
ISA1+
ISD02
16
4
ISA0-
ISD01
15
3
ISD00
ISA0+
14
2
+24 V
+24 V
13
1
DGND
DGND
5
X
4
X
1
H
15
12345678
X
4
S
19
ACHTUNG
X
Kondensatorenent-
ladezeit > 3 min.
Betriebsanleitung
beachten!
WARNING
Capacitor discharge
time > 3 min.
Pay attention to the
operation manual!
16
X
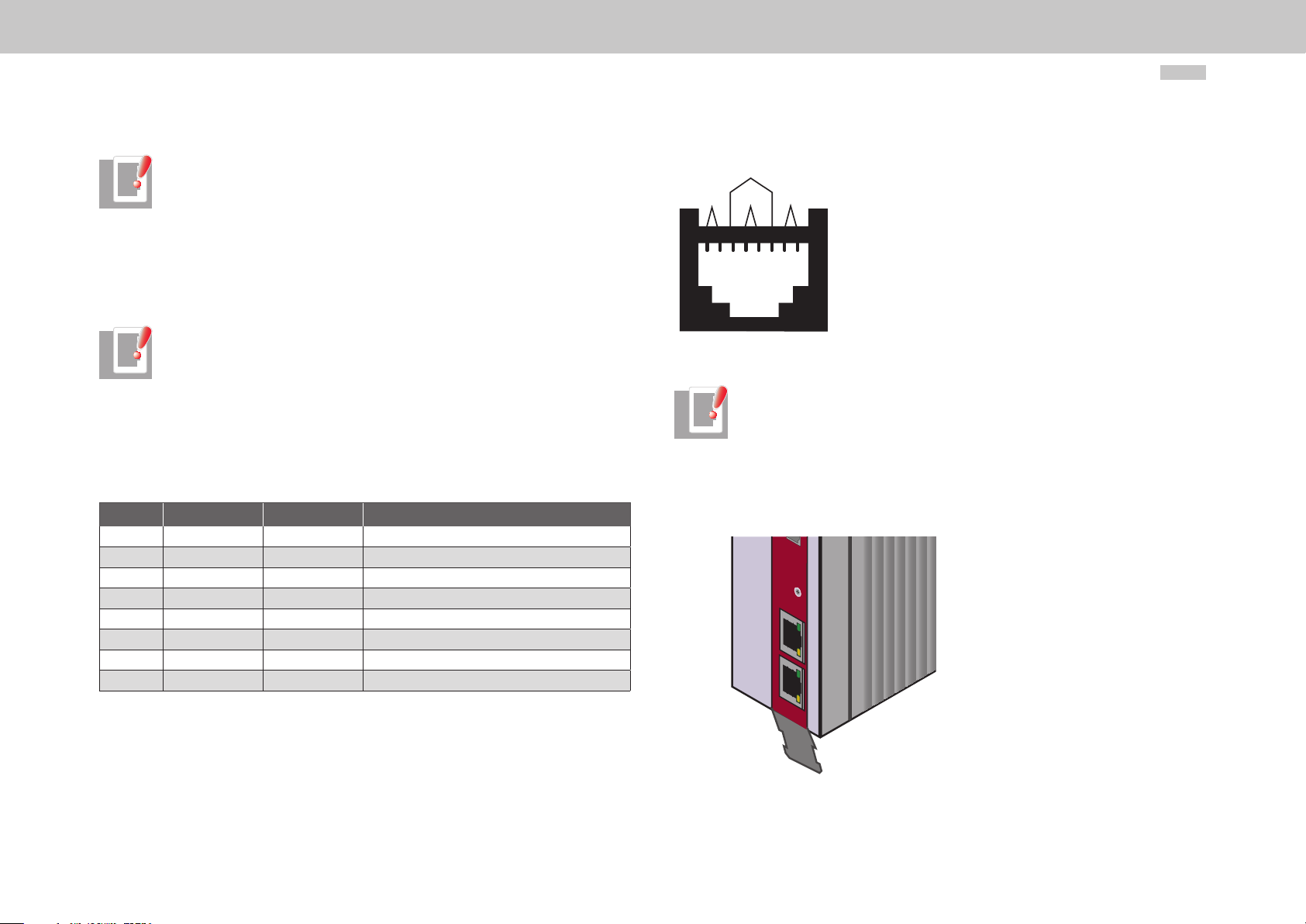
IN and OUT socket (RJ45 input/output)
Each EtherCAT slave has two RJ45 sockets. The upper port (X15) is the input (IN) and the
lower port (X16) is the output (OUT) of the slave. The incoming cable (from the direction
of the master) is connected using the IN port, and the outgoing cable is connected to
the next slave using the OUT port. The OUT port remains blank for the last slave in the
series. An open output on a slave leads internally to a logical short circuit of the transmit
(Tx) and receive (Rx) cables. For this reason every EtherCAT network can be regarded as
a logical ring in terms of its topology.
L3
L2
L1
11
X
J+
J-
J+
J-
J+
J-
J+
J-
10
X
X
9
5
6
1
X
2
X
3
X
REL
24
REL
12
RSH
23
ISDSH
11
RSH
22
ISD06
10
4
X
ENPO
21
ISD05
9
OSD02
20
ISD04
8
OSD01
19
ISD03
7
OSD00
18
ISD02
6
17
ISA1-
ISD01
5
ISA1+
16
ISD00
4
15
ISA0-
+24 V
3
14
ISA0+
DGND
2
13
+24 V
1
DGND
5
X
1
H
15
X
ACHTUNG
Kondensatorenent-
ladezeit > 3 min.
Betriebsanleitung
beachten!
WARNING
Capacitor discharge
Pay attention to the
time > 3 min.
operation manual!
16
X
Fig. 3.2
Upper RJ45 port = input
Lower RJ45 port = output
X
8
X
7
X
6
EtherCAT option
356
33 Lah
www.l
Type:
Made
u
nau
s
t
SOA84.00
-
te
i
n
c
German
.
d
e
In:
C
y
6.0
000.00
US
LISTED
Out:
Ind. Co
00.0
19BB
nt. Eq.
SN.:
moog
MSD Servo Drive User Manual CANopen/EtherCAT
15
[ Section 3 ]
Page 16
moog
Pair #
MSD Servo Drive User Manual CANopen/EtherCAT
16
IMPORTANT: Errors in cabling (incorrect connection of input and output)
can lead to faulty addressing by the master.
Connecting cables
Ethernet patch cables or crossover cables are suitable connection cables as per the
CAT5e specification. Cables lengths of 0.3 m to a max. 100 m are permissible.
IMPORTANT: Never use EtherCAT and standard Ethernet together in one
physical network.
This can lead to impairments including communication outages!
To avoid confusion, always use different colours for EtherCAT and Ethernet
cables.
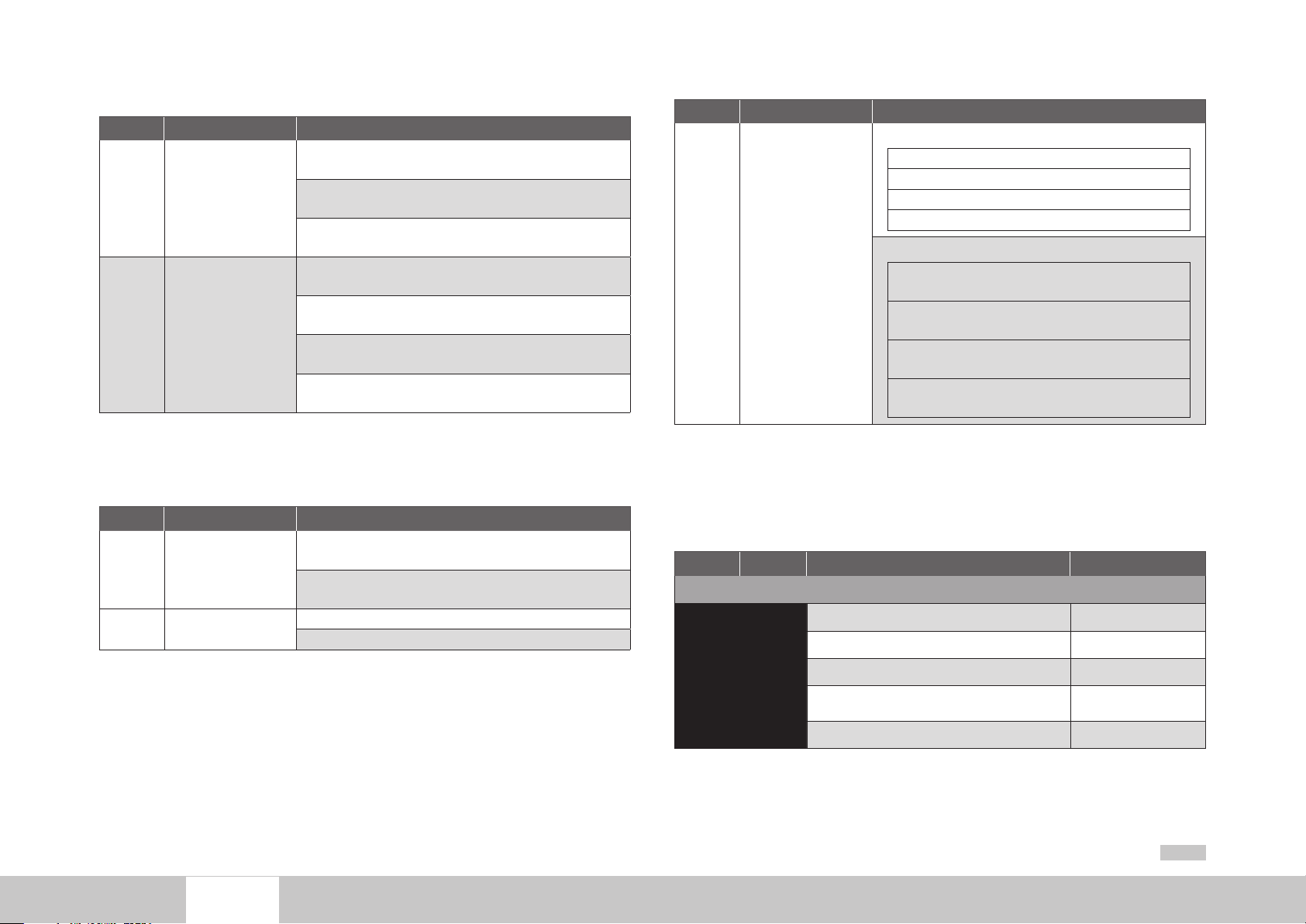
3.2 Pin assignment of the RJ45 socket
The two LEDs on the RJ45 socket mean the following:
PIN Colour Cable wire pairs Function
1 White/orange 2 TxData +
2 Orange 2 TxData -
3 White/green 3 RecvData +
4 Blue 1 Unused
5 White/ blue 1 Unused
6 Green 3 RecvData -
7 White/brown 4 Unused
8 Brown 4 Unused
Table 3.1 Meaning of LEDs without additional status/error LED
3
4
1
2
1234 5678
Fig. 3.3
RJ45 socket
NOTE: Ethernet cables are available in various lengths in the IT specialist
trade. Use CAT5e cable or better.
3.3 Meanings of LEDs
There are 2 LEDs on each RJ45 socket.
1
H
15
X
ACHTUNG
Kondensatorenent-
ladezeit> 3 min.
Betriebsanleitung
beachten!
WARNING
Capacitor discharge
Payattention to the
time > 3 min.
operationmanual!
16
X
Fig. 3.4
Device with EtherCAT option
Page 17
The two LEDs on the RJ45 socket mean the following:
LED Function Meaning
Off = no link
No connection with another user
Upper LED Link/activity
RUN
Lower
LED
(only active on
the lower port
if another user is
connected here)
On = link
Connection with another user exists, no data exchange
Flashing = activity
Data exchange active
Off = initialisation
Device is in initialisation state
Flashing = pre-operational
Device is in "pre-operational" state
Single flash = safe-operational
Device is in "safe-operational" state
On = operational
Device ready to start
Table 3.2 Meaning of LEDs without additional status/error LED
Depending on the device's hardware status, an additional status/error LED may be present in addition to the two LEDs on the two RJ45 sockets. In this case, the meaning of
the LEDs is as shown in the table below.
LED Function Meaning
Off = no link
Upper LED Link/activity
Lower LED Link (PHY)
Table 3.3 Meaning of LEDs with additional status/error LED
No connection with another user
On = link
Connection with another user exists, no data exchange
On = link
Off = no link
LED Function Meaning
Red = error
Off = no error
Flashing = invalid configuration
Single flash = local error
Double flash = watchdog timeout
Status LED
(RUN/
error)
Status/error
Green = RUN
Off = initialisation
Device is in initialisation state
Flashing = pre-operational
Device is in "pre-operational" state
Single flash = safe-operational
Device is in "safe-operational" state
On = operational
Device ready to start
Table 3.3 Meaning of LEDs with additional status/error LED
3.4 Display of operating statuses via 7-segment display
D1 D2 Meaning Parameter
System statuses
8.
8.
0.
S.*) 1.
S.*) 2.
3.
Device in reset status
Auto-initialisation on device startup (Start)
1) Not ready to switch on (no DC link voltage) (NotReadyToSwitchOn)
1) Starting lockout (DC link is OK, power stage not
ready)
Ready to switch on (power stage is ready) (ReadyToSwitchOn)
(SwitchOnDisabled)
moog
[ Section 3 ]
MSD Servo Drive User Manual CANopen/EtherCAT
17
Page 18
moog
MSD Servo Drive User Manual CANopen/EtherCAT
18
D1 D2 Meaning Parameter
4.
5.
6.
7.
E R
The following appear alternately in the event of error
E R.
X Y
X Y
1) S. flashes if t he STO (Safe Torqu e Off) functio n is active; the display is not lit if the func tion is not ac tive.
*) This is not a "safe display" under the terms of EN 61800-5-2.
2) The point flashes if the power stage is active.
On (power is connected to the device)
Drive ready (current applied to drive and drive ready
for input of setpoint)
Quick stop
Fault response active
Fault (see below) (Fault)
Display for errors or non-acknowledgeable errors
Error number (decimal)
Error localisation (decimal)
2)
2)
2)
2)
(SwitchedOn)
(OperationEnable)
(QuickStopActive)
(FaultReactionActive)
Example of the flash sequence:
ER > 02 > 05 * ER > 02 > 05 ...
Error: ER = "Fault"
3.5 Hardware enable
MSD Servo Drive has a control input for ENPO hardware enable on the control terminal.
This input must be configured to operate the power stage at 24 V.
The device also provides the function "STO (Safe Torque Off)" (see Operation Manual
or Application Manual MSD Servo Drive), category 3, control terminal ISDSH. For these
devices the relevant function logic must be implemented by way of the higher-order
drive as per the Application Manual.
Note: When the inputs ENPO and ISDSH are not configured, the device
stays in status 1 = "Not Ready to Switch On" or 2 = "Switch On Disabled".
Only after correct configuration can the status be exited by a "Shutdown
command" via bus.
Error name: 02 = "Error in the parameter list"
Description of error: 05 = "Function for checking current parameter list"
Page 19
4 Commissioning and Configu-
Drive ADmin istrAtor
Drive ADmin istrAtor
1.
2.
3.
4.
5.
6.
7.
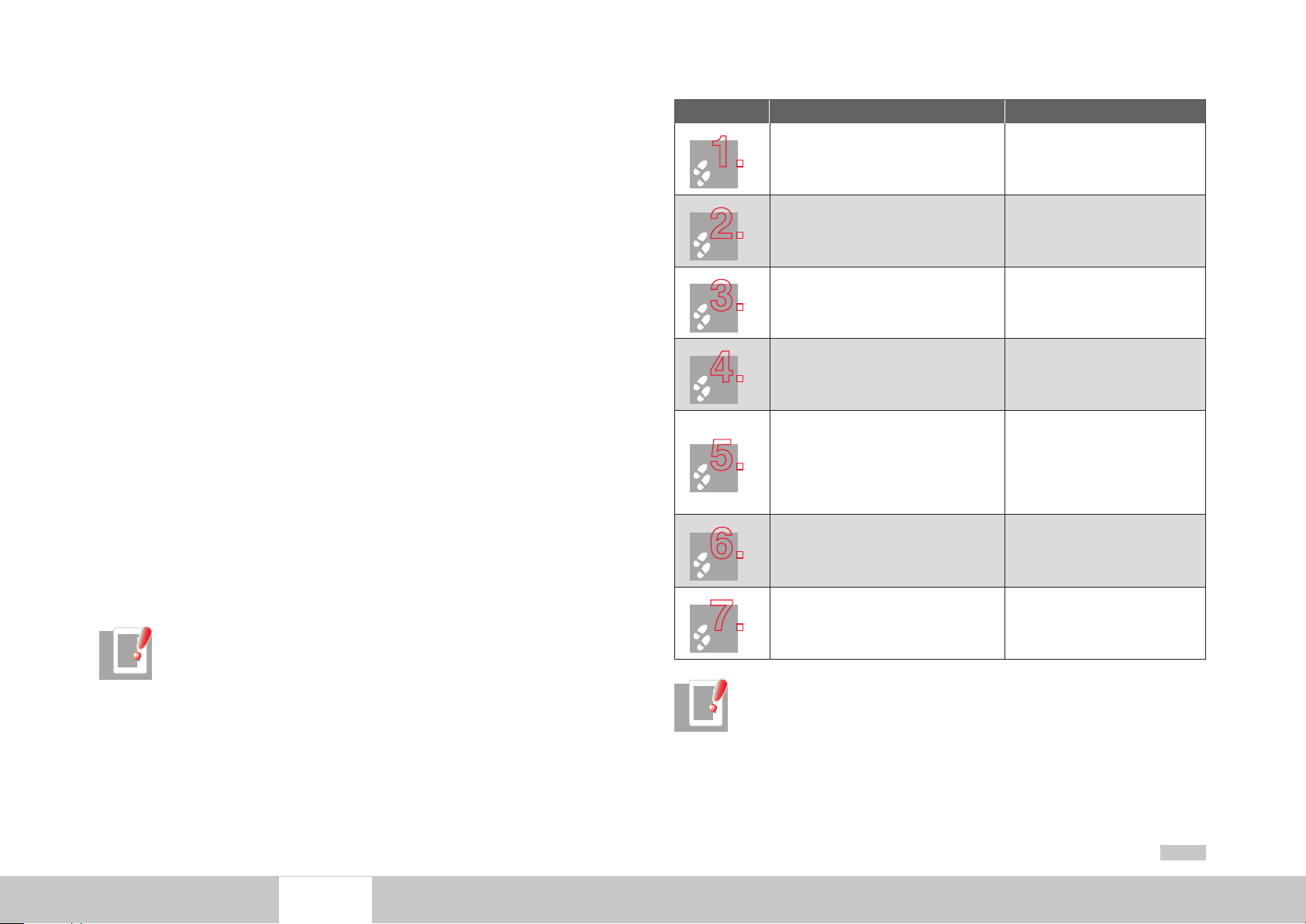
Step Action Note
ration of CANopen
4.1 General commissioning of CANopen/Ether-
CAT
4.1.1 Commissioning
The Moog
drive system. The Moog
access to a motor database for servo motors and enables general device configuration.
First commissioning is a separate subject regarding operation via the user interface and
is described in detail in the device's application manual.
4.1.2 Commissioning sequence
Preconditions:
• The drive device is wired as specified in the operation manual and first commis-
sioning is completed. (To test CAN communication, it is sufficient to connect
the voltage supply of the CAN option and the control voltage).
• If current is to be applied to the motor, the hardware enable (ENPO) and the
"STO (Safe Torque Off)" must also be correctly configured.
NOTE: For more detailed information on optimisation of the software func-
tions and control circuits, refer to the device application manual.
user interface is used for general commissioning of the
includes tools to identify motor data, provides
Check the wiring. Make sure the ENPO
hardware enable (X4) is not connected.
Switch on the mains power and the 24 V
supply to the CAN interface.
Configure the drive device using the
application manual.
Test the control quality and optimise
the drive settings as necessar y using the
operation manual.
Set the parameters for the CAN communication. The baud rate and the device
address are required. The address can be
selected using software and hardware.
The mapping must also be completed and
the active operation mode selected as per
CiA301/402.
Test the drive on the higher-order drive –
see section 3.4.
Finally, save the setting.
(Inputs/outputs, software functions
etc.)
Software and hardware address
are added...
Save device setting
Non-volatile in device
moog
[ Section 4 ]
NOTE: For more information on the subject of "Units and scalings", please
refer to section 7.4.
MSD Servo Drive User Manual CANopen/EtherCAT
19
Page 20
moog
DriveADministrAtor
1.
2.
3.
4.
5.
Drive ADminis trAtor
MSD Servo Drive User Manual CANopen/EtherCAT
20
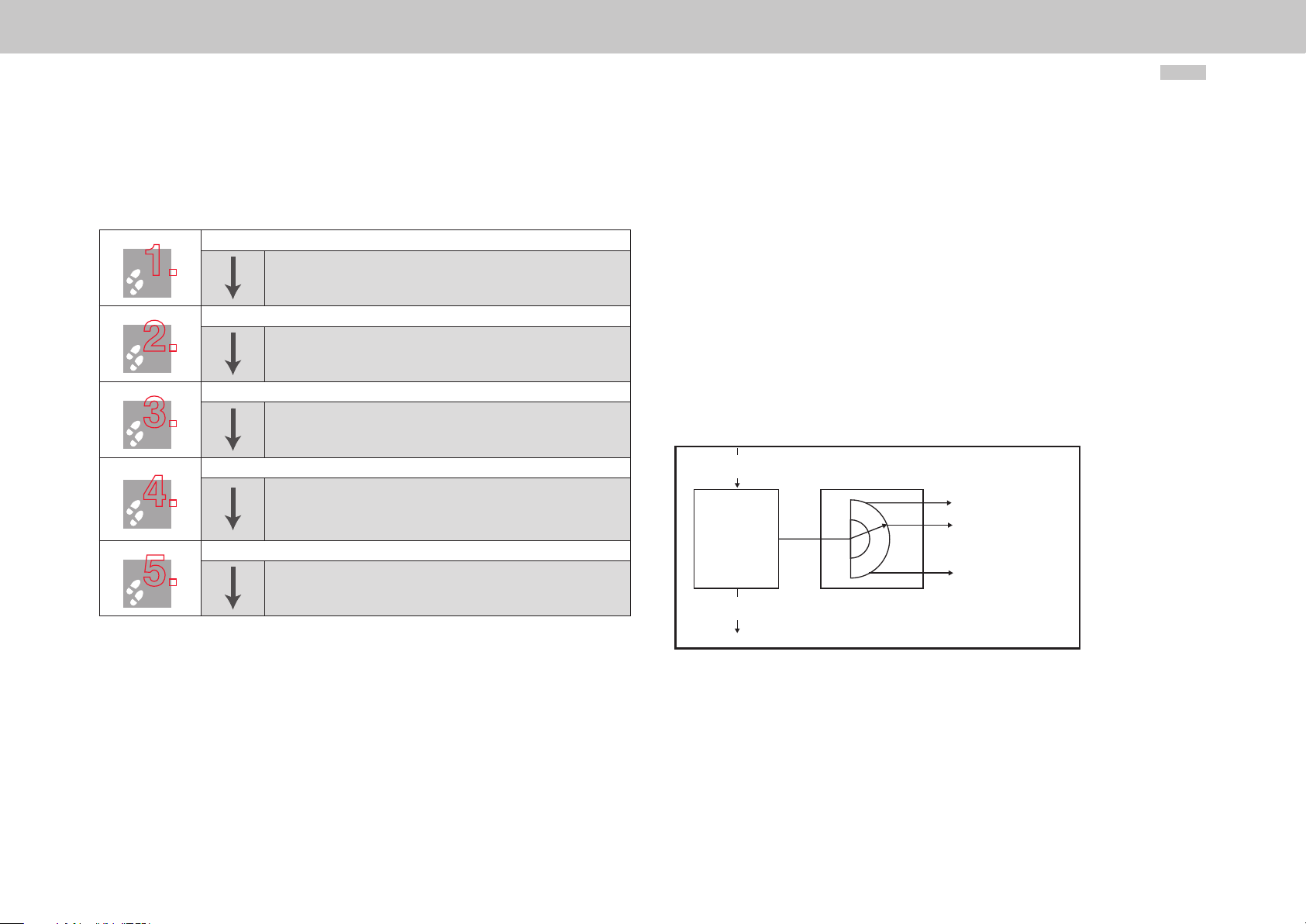
4.1.3 Commissioning via Moog
Procedure for commissioning with the aid of the application manual
First commissioning based on operation manual
A precondition for this is first commissioning with the aid of the operation manual.
The user manual only covers adjustment of the soft ware functions.
Commissioning as per application manual
Setting the servo drive parameters using the application manual.
This includes, for example, the configuration of technology functions.
Commissioning based on CA Nopen user manual
Configuration of fieldbus-specific settings (e.g. baud rate) using this
document.
Checking the set application solution
To preserve the safety of personnel and machiner y, the application
solution should only be checked at low speed. Make sure the direction
of rotation is correct. In case of emergency the drive power stage can
be disabled, and the drive stopped, by removing the ENPO signal.
Completing commissioning
When you have successfully completed commissioning, save your
settings (using Moog
device.
) and store the data set in the
– Interpolated Position mode
– Cyclic Synchronous Position mode (EtherCAT only)
– Cyclic Synchronous Velocity mode (EtherCAT only)
– Cyclic Synchronous Torque mode (EtherCAT only)
In the course of first commissioning the user implements the drive settings using motor
data, control settings, I/O configuration etc.
A relevant control mode is also directly connected with the respective operation mode.
By switching modes of operation via CANopen/EtherCAT, it is possible to switch directly
between position control, speed control and torque control.
The drive is thus in speed control for Profile Velocity mode and in position control for
Profile Position mode.
4.1.5 Functionality of operation modes
modes_of_operation
(6060h)
Profile Position Mode
Operation
Mode
Function
modes_of_operation_display
(6061h)
Profile Velocity Mode
Homing Mode
4.1.4 Operation mode selection (modes of operation)
There are different control modes for operation of the devices via CANopen. The active
operation mode is always selected via CiA402 object 6060h (Modes of Operation).
MSD Servo Drive supports the operation modes as per the CiA402:
– Profile Position mode
– Profile Velocity mode
– Homing mode
Fig. 4.1
Users can switch between the various operation modes, as long as these are supported
by the device.
The status word contains bits, the meaning of which depends on the operation mode.
For monitoring, it is necessary for the bits to change their meaning when switching
operation modes; see also Chapter 6.
Changing functionality of operation modes in the display
Page 21
4.1.6 Setting the timing parameters
Drive ADmin istrAtor
To ensure correct communication with the drive, three timing parameters have to be set
on MSD Servo Drive. As a rule, these should all be set to the same value. It should be
borne in mind that different units have to be used when setting the three parameters
(see table).
Para ID Name/object Unit
P 0306 Internal interpolator cycle time ms
P 2015 Communication cycle period/0x1006 µs
P 2266
Index 0
Index 1
Table 4.1 Setting the timing parameters
0x60C2
Interpolation time base
Interpolation time exponent
s
-
For EtherCAT, parameter P 2266 MPRO_402_IntTimePeriod (object 0x60C2) must be set
to the cycle time for the setpoints (or the telegrams).
4.2 CAN-specific configuration
4.2.1 Setting the software address and baud rate
The software address and baud rate can be set using the following device parameters via
Moog
Parameter Function Description
P 2005-COM_CAN_Adr CANopen address Address assignment via parameter. For
P 2006-COM_CAN_Baudrate Baud rate Permissible baud rates – see section 2.3
Table 4.2 Parameters on the Bus Systems function screen
:
more information on setting the address,
see section 2.1
NOTE: MSD Servo Drive has a default baud rate of 1 Mbit.
The actual address is calculated by adding the software and hardware
address and is displayed using parameter P 2058 COM_CAN_Adr_Act.
Any change to the baud rate in parameter P 2006 COM_CAN_Baudrate only takes effect once MSD Servo Drive has been restarted. The current baud rate is displayed using
parameter P 2059 COM_CAN_Baudrate_act.
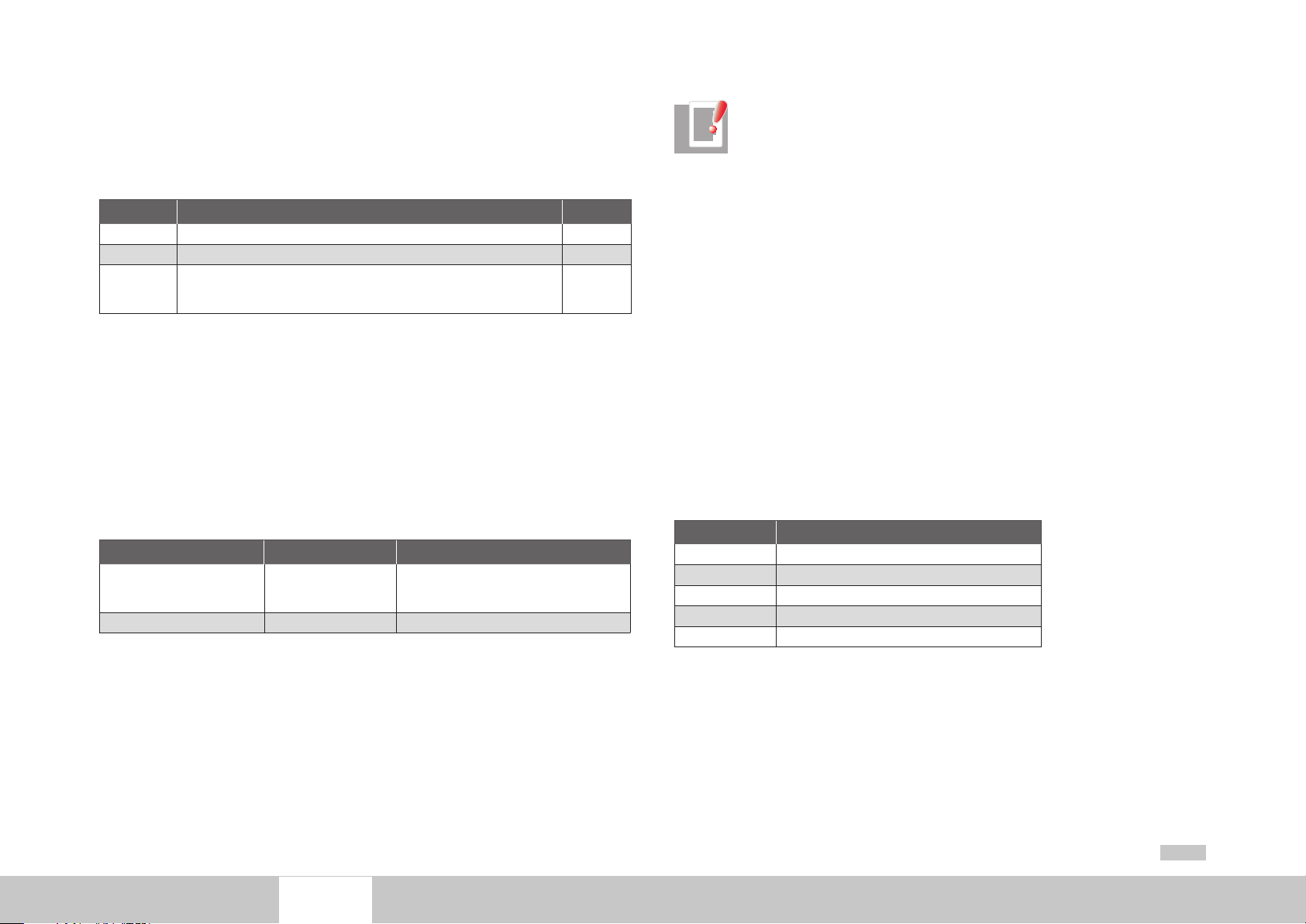
4.2.2 Commissioning instructions
A drive device may not respond to a telegram for a variety of reasons:
• There is no reply if the scope of telegram (baud rate, data length) on the master
computer is not correct.
• There is no reply if a drive device is addressed with the wrong bus address.
• There is no reply if the serial connection between the master computer and the
drive device is not correctly set up.
• There is no reply if the 24 V supply to the CAN connection is missing or the cabling
is faulty.
• There is no valid reply if several devices with the same device address are con-
nected to the bus.
• There is no reply if the device has certain network statuses. The current network
status can be checked using parameter P 2060 COM_CAN_NMT_State.
Parameter 2060 Description
0 Boot- up
1 Init
4 Stopped /safe OP
5 Operational
127 Pre-Operational
Table 4.3 Parameter P 2060
moog
[ Section 4 ]
MSD Servo Drive User Manual CANopen/EtherCAT
21
Page 22
moog
Drive ADmin istrAtor
Drive ADmin istrAtor
Drive ADmin istrAtor
Drive ADmin istrAtor
MSD Servo Drive User Manual CANopen/EtherCAT
22
4.2.3 Testing the higher-order drive
To activate changed settings the device must be switched off and back on again. When
the power is connected, after an initialisation period of a few seconds the device must
transmit a one-off boot-up message (ID 700h + node ID = 701h for device address 1).
If this happens, the communication is OK.
NOTE: When transferring data to the device via SDO telegrams the number
of data bytes transferred should be taken into account. For this the correct
length information must be transferred in the control byte.
Alternatively, however, an SDO transfer without specification of the data
length is also possible. The correct operation of the control byte in the SDO
telegram should also be observed.
4.2.4 Data handling
Saving the settings
All configuration data can be backed up by the Moog
NOTE: Please note, however, that some objects are RAM variables, which
must be correctly operated and initialised by the drive. This includes, for example, object 6060h: Modes of Operation.
.
Restoring factory defaults
There are two possible ways of restoring the devices' default factory settings:
Via fieldbus
• Write value 1 to subindex 3 of object 200BH-PARA _SetCmd. The factory settings
are then applied to the whole device.
NOTE: Please note that this also affects the settings for the baud rate/device
address. The changes take effect after a "Reset node" command or device
restart.
Via Moog
Object 200BH-PARA_SetCmd Subindex 1 is automatically set to 0 by the device after
the save operation. This process can be used for timeout monitoring of the function.
• First select the relevant MSD Servo Drive in the Moog
ture. The right mouse button opens a context menu from which you can select the
"Reset Device Setting" entry.
NOTE: In both cases it takes approx. 10 seconds for the device to signal that
it is ready for operation again. During this time the device performs a self-test
and changes all its settings to the factory setting. However, this setting is only
retained if the data is backed up in the device. Data backup is initiated via the
Moog
SetCmd Subindex 1 = 1 via the bus system. The save operation can also be
executed using object 1010 hex.
ATTENTION: Data backup takes a few hundred ms. During that time the
device must not be switched off, otherwise the settings will be lost.
!
user interface or by writing to object 200BH-PARA_
tree struc-
4.2.5 Control functions
Control functions can be optimally adapted to the relevant application. Consequently,
several control formats are offered. The appropriate formats can be selected by the master during the setup phase via the bus, or by adjusting the relevant device parameters.
The drive devices' state machine has a cycle time of 1 ms.
All control commands and setpoints are processed within that cycle time by the drive
device.
NOTE: Control PDOs are processed in a minimum cycle time of 1 ms. If
protocols arrive at the device faster, the telegram that arrived most recently
overwrites the previous one. An error message is not generated if telegrams
are overwritten as a result of insufficient cycle time.
Page 23

4.3 Commissioning and Configuration of
EtherCAT
Commissioning via EtherCAT is possible using the XML file supplied on your drive. All
further commissioning and configuration steps depend on the drive used. For notes on
this, please refer to the documentation provided by your drive manufacturer.
moog
[ Section 4 ]
MSD Servo Drive User Manual CANopen/EtherCAT
23
Page 24
moog
MSD Servo Drive User Manual CANopen/EtherCAT
24
Page 25

5 Setting the Device Parameters
for CANopen
5.1 Implemented CiA301 functionality
5.1.2 Object directory of CiA301
For a full overview of the supported CAN objects of MSD Servo Drive, please refer to the
EDS file.
Here you can refer both to the CANopen objects of CiA301 and CiA402, and to the
manufacturer-specific objects of the device.
The following list shows an extract of the object directories with important CiA301
objects. For these objects the transmission types or mapping, for example, are explained
below.
5.1.1 Communication objects
• Boot-up to CiA301 V4.01 (guarding boot-up via identifier 700h)
• Four variably mappable TxPDOs (transmission type 1 to 240, 254 and 255 dec
possible)
• Four variably mappable RxPDOs (transmission type 1 to 240, 254 and 255 dec
possible)
• One SDO server – pay attention to definition of time conditions (typical processing
time in device approx. 5 ms, depending on capacity utilisation)
• One emergency object error code to CiA402 plus manufacturer-specific error loca-
tion and number, operating hours of the device
• One Sync object
• NMT state machine to CiA301
• Node guarding and heartbeat (see below)
• Processing cycle:
PDO protocols can be processed in a minimum cycle time of 1 ms. If protocols
arrive faster, the previous protocols are overwritten.
• SDO protocols and NMT services are processed acyclically. Typical processing times
lie between 1 and 5 ms.
• Initialisation values of the COB IDs based on Predefined Connection Set
• Access to device parameters 2000h–5FFFh (expedited/non-expedited)
Object
no.
0x1000 Device_Type VAR Unsigned32 ro
0x1001 Error_ Register VAR Unsigned8 ro
0x1003 Pre-Defined_Error_Field One
0x1005 COB-ID_SYNC VAR Unsigned32 rw
0x1006 Communication_Cycle_Period VAR Unsigned32 rw
0x1007 Synchronous_Window_Length VAR Unsigned32 rw
0x1008 Manufacturer device name String
0x1009 Manufacturer hardware version String
0x100A Manufacturer software version String
0x100C Guard_Time VA R Unsigned16
0x100D Life_Time_Factor VAR Unsigned8
0x1010 Store parameters AR R AY Unsigned32 rw
0x1011 Restore default parameters AR R AY Unsigned32 rw
0x1014 COD - ID _EMCY VAR Unsigned32
0x1017 Producer_Heartbeat_Time VAR Unsigned16 rw
0x1018 Identity_Object: support all 4
0x14 00 1st_ Receive_ PDO_Parameter RECORD PDO CommPar rw
0x14 01 2nd_Receive_ PDO_Parameter R ECORD PDO CommPar rw
0x14 02 3rd_Receive_PDO_ Parameter RECO RD PDO CommPar rw
Table 5.1 Object directory
Object name
subentry
entries (serial number etc.)
Object
code
AR R AY Unsigned32 ro
RECORD Identity (23h) ro
Typ e At tr.
moog
[ Section 5 ]
MSD Servo Drive User Manual CANopen/EtherCAT
25
Page 26

moog
MSD Servo Drive User Manual CANopen/EtherCAT
26
Object
no.
0x14 03 4th_ Receive_ PDO_ Parameter RECO RD PDO CommPar rw
0x1600 1st_Receive_ PDO_Mapping
0x1601 2nd_Receive_PDO_Mapping
0x1602 3rd_Receive_ PDO_Mapping
0x1603 4th_Receive_ PDO_Mapping
max. 8
objects
0x1800 1st_Transmit_PDO_Parameter RE COR D PDO CommPar (20h) rw
0x1801 2nd_Transmit_PDO_Parameter RECORD PDO CommPar (20h) rw
0x1802 3rd_Transmit_PDO_Parameter RECORD PDO CommPar rw
0x1803 4th_Transmit_PDO_Parameter RECORD PDO CommPar rw
0x1A00 1st_Transmit_PDO_Mapping
max. 8
objects
0x1A01 2nd_Transmit_PDO_ Mapping
max. 8
objects
0x1A02 3rd_Transmit_PDO_Mapping
max. 8
objects
0x1A03 4th_Transmit_PDO_Mapping
max. 8
objects
Object name
max. 8 objects
max. 8 objects
max. 8 objects
Object
code
RECORD PDO Mapping (21h) rw
RECORD PDO Mapping rw
RECORD PDO Mapping rw
RECORD PDO Mapping rw
RECORD PDO Mapping rw
RECORD PDO Mapping rw
RECORD PDO Mapping rw
RECORD PDO Mapping rw
Typ e At tr.
Table 5.1 Object directory
5.2 Parameter channel (Service Data Objects)
The Service Data Object (SDO) permits write and read access to the object directory.
This SDO is implemented according to the CAL specification by the Multiplexed Domain
CMS object. The protocol is designed for the transfer of data of any length. An SDO
server is integrated into the device for SDO transfer. Communication is by way of two
reserved identifiers.
Receive SDO: 600 h
Transmit SDO: 580 h
SDO client
600H + node-ID Byte 0 1 2 3 4 5 6 7
580H + node-ID Byte 0 1 2 3 4 5 6 7
Fig. 5.1
Example of an SDO data transfer in Expedited mode
Data
Subindex
Index
Control field
Subindex
Index
Control field
The CAL specification makes a basic distinction between three protocol services:
• Download protocol (Write)
• Upload protocol (Read)
• Abort protocol (Error)
The upload and download protocols also differentiate between:
• Expedited Multiplexed Domain protocol, for access to objects with a data length
of up to 4 bytes (shown above) and
• Multiplexed Domain protocol, for access to objects of any length
SDO server
Object
directory
Servo
drive
Page 27

The entries in the "Control field" are generated by the CANopen driver. They are only
Drive ADmin istrAtor
Drive ADmin istrAtor
Drive ADmin istrAtor
included to fully document the examples cited. The entries are dependent on the transferred data.
The control field is described in the CiA301 profile.
5.2.1 Data types
NOTE: The Moog
settings in the form of value substitution texts.
Example: Parameter 45 0-MOT_Type = PSM
When writing and reading via the fieldbus the corresponding numerical values for these
value substitution texts must be used. These values are displayed in brackets ( ) when the
parameter is opened in Moog
Example:
Parameter 45 0-MOT_Type = PSM (1)
The drive units support the following parameter data formats:
user interface displays many parameter
.
5.2.2 Representation of data types in the control protocol
All data types are represented as 32-bit variables in Intel format, and with the correct
preceding sign.
Data bytes in the
control protocol
USIGN8/INT8*
USI GN16 / IN T16*
USIGN32/INT 32
FLOAT32 IEEE format
STRING See examples
* filled up with the appropriate preceding sign (00H or FFH)
Table 5.3 Assignment of data types in the data field
3 4 5 6
Low Word
Low Byte
Low Word High
Byte
High Word Low
Byte
High Word
High Byte
5.2.3 Access to device parameters
Where can I find the device parameters?
Data type Value range Function
USIGN8 0...255
UnsignedUSI GN16 0...65535
USIGN32 0...4294967295
INT8 -128 ...127
Integer, signedINT8 -32768 ...32767
INT32 -21474836 48 ...2147483647
FLOAT32 see IEEE
STRING
Table 5.2 Data types
32-bit floating point number in IEEE
format
ASCII characters, max. 100 bytes in
bus mode incl. zero terminator
moog
[ Section 5 ]
All device parameters are addressed by way of a parameter number.
In addition to the standard objects, the CANopen profile also provides an area for
manufacturer-specific entries. This area lies between 2000 h and 5FFF h. If you then
want to read or write parameter 455-MOT_FNOM (rated motor frequency) of the device,
the object index is generated from 2000 h + parameter number (hex).
In our example: Index = 2000 h + 1C7 H
NOTE: Profile-specific parameters are visible in Moog
, but
only in the 1000H... (CiA301 objects)/6000H... (CiA402 objects) writeable/
readable range. This means parameters stored both as device parameters
(2xxxH range) and as profile parameters (CiA301/CiA402) can only be read
and written to via their object number (CiA301/CiA402 profile).
MSD Servo Drive User Manual CANopen/EtherCAT
27
Page 28

moog
Example:
The object 1000h Device Type exists both in the CiA301 profile and also as a device
parameter with parameter number 2011. Simultaneous two-way access would therefore
be possible via CANopen or EtherCAT. In order to uniquely configure the access, the
read/write access for this object is only possible via profile-specific object number 1000h
(as per CiA301).
5.3 Examples of SDO handling
The CANopen objects and the servo drive parameters can be accessed via the Receive
SDO (COB IDs: 600 h + node ID).
In a data transfer protocol a maximum of 4 data bytes can be transferred in Expedited
mode. This means all device parameters, apart from String parameters, can be written
to with a single transfer protocol.
String parameters can be written to using the Multiplexed Domain protocol.
MSD Servo Drive User Manual CANopen/EtherCAT
28
Page 29
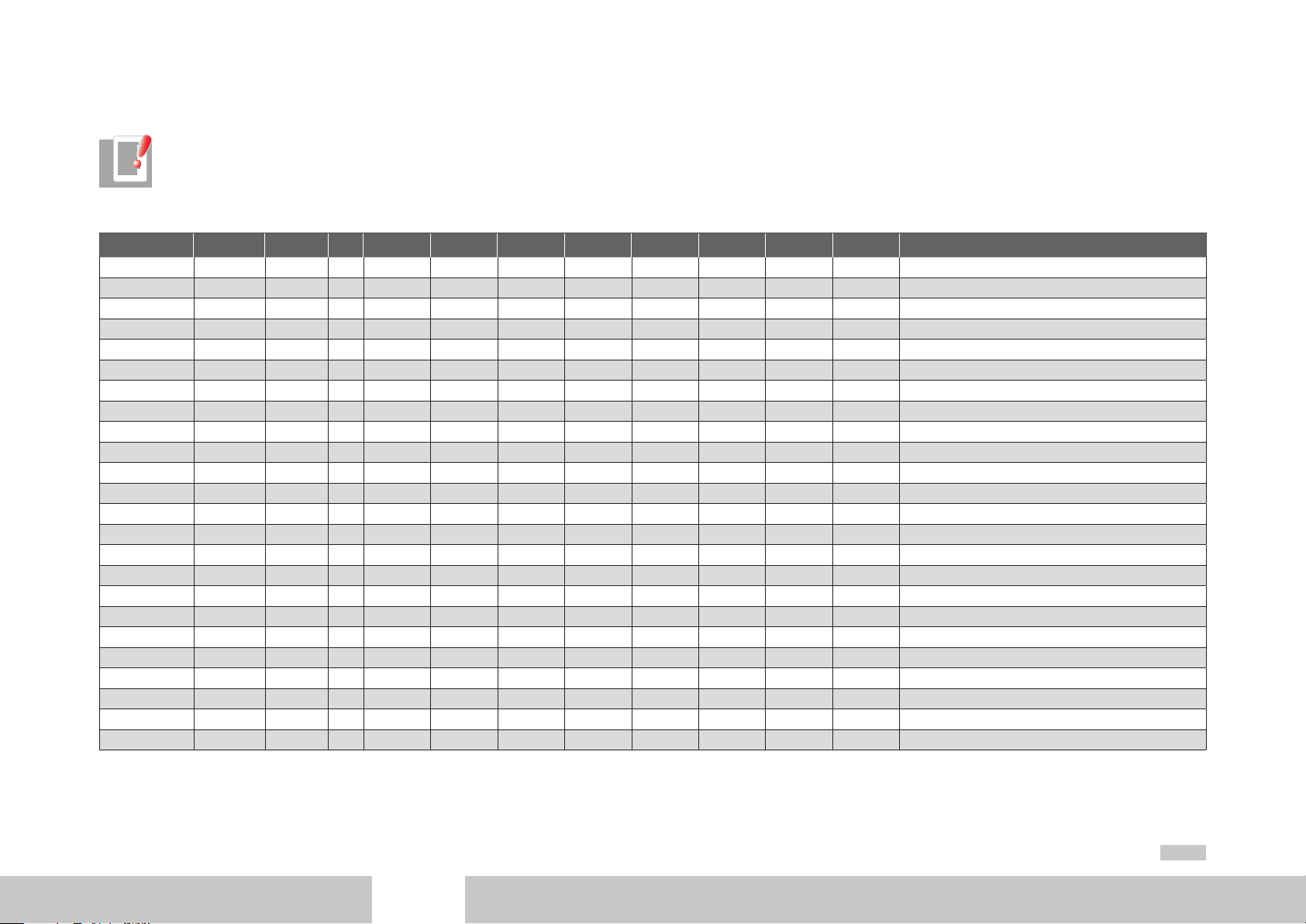
Example of read access to string parameters (parameter 3 DV_DeviceAliasName)
Note:
- All numeric values are hexadecimal
- The string "X-axis" is to be transferred
- This text is entered in MSD Servo Drive parameter 3 DV_DeviceAliasName
TIME ID Direction DLC Byte 0 Byte 1 Byte 2 Byte 3 By te 4 Byte 5 Byte 6 Byte 7 Comments
18.992445 Tx 6 01 8 40 03 20 00 00 00 00 00 Read object 2003h (= parameter 3)
18.992972 Rx 581 8 41 03 20 00 64 00 00 00 Reply: 64h --> 100 bytes are to be transferred
35.514341 Tx 601 8 60 00 00 00 00 00 00 00 Requirement: segment 1
35.514 59 4 Rx 581 8 00 58 2d 41 78 69 73 00 Reply: segment 1 – contains "X-axis"
36.269620 Tx 601 8 70 00 00 00 00 00 00 00 Requirement: segment 2
36 .270175 Rx 581 8 10 00 00 00 00 00 00 00 Reply: segment 2
36.982385 Tx 601 8 60 00 00 00 00 00 00 00 Requirement: segment 3
36.982664 Rx 581 8 00 00 00 00 00 00 00 00 Reply: segment 3
37.686447 Tx 601 8 70 00 00 00 00 00 00 00 Requirement: segment 4
37.686706 Rx 581 8 10 00 00 00 00 00 00 00 Reply: segment 4
38 .4213 44 Tx 601 8 60 00 00 00 00 00 00 00 Requirement: segment 5
38.4216 04 Rx 581 8 00 00 00 00 00 00 00 00 Reply: segment 5
39.053526 Tx 601 8 70 00 00 00 00 00 00 00 Requirement: segment 6
39.053787 Rx 581 8 10 00 00 00 00 00 00 00 Reply: segment 6
39.749 0 81 Tx 6 01 8 60 00 00 00 00 00 00 00 Requirement: segment 7
39.749347 Rx 581 8 00 00 00 00 00 00 00 00 Reply: segment 7
40.428981 Tx 601 8 70 00 00 00 00 00 00 00 Requirement: segment 8
40.429249 Rx 581 8 10 00 00 00 00 00 00 00 Reply: segment 8
41.0 85 839 Tx 601 8 60 00 00 00 00 00 00 00 Requirement: segment 9
41.086198 Rx 581 8 00 00 00 00 00 00 00 00 Reply: segment 9
41.74075 5 Tx 601 8 70 00 00 00 00 00 00 00 Requirement: segment 10
41.741148 Rx 581 8 10 00 00 00 00 00 00 00 Reply: segment 10
42.514 034 Tx 601 8 60 00 00 00 00 00 00 00 Requirement: segment 11
42.514294 Rx 581 8 00 00 00 00 00 00 00 00 Reply: segment 11
moog
[ Section 5 ]
MSD Servo Drive User Manual CANopen/EtherCAT
29
Page 30
moog
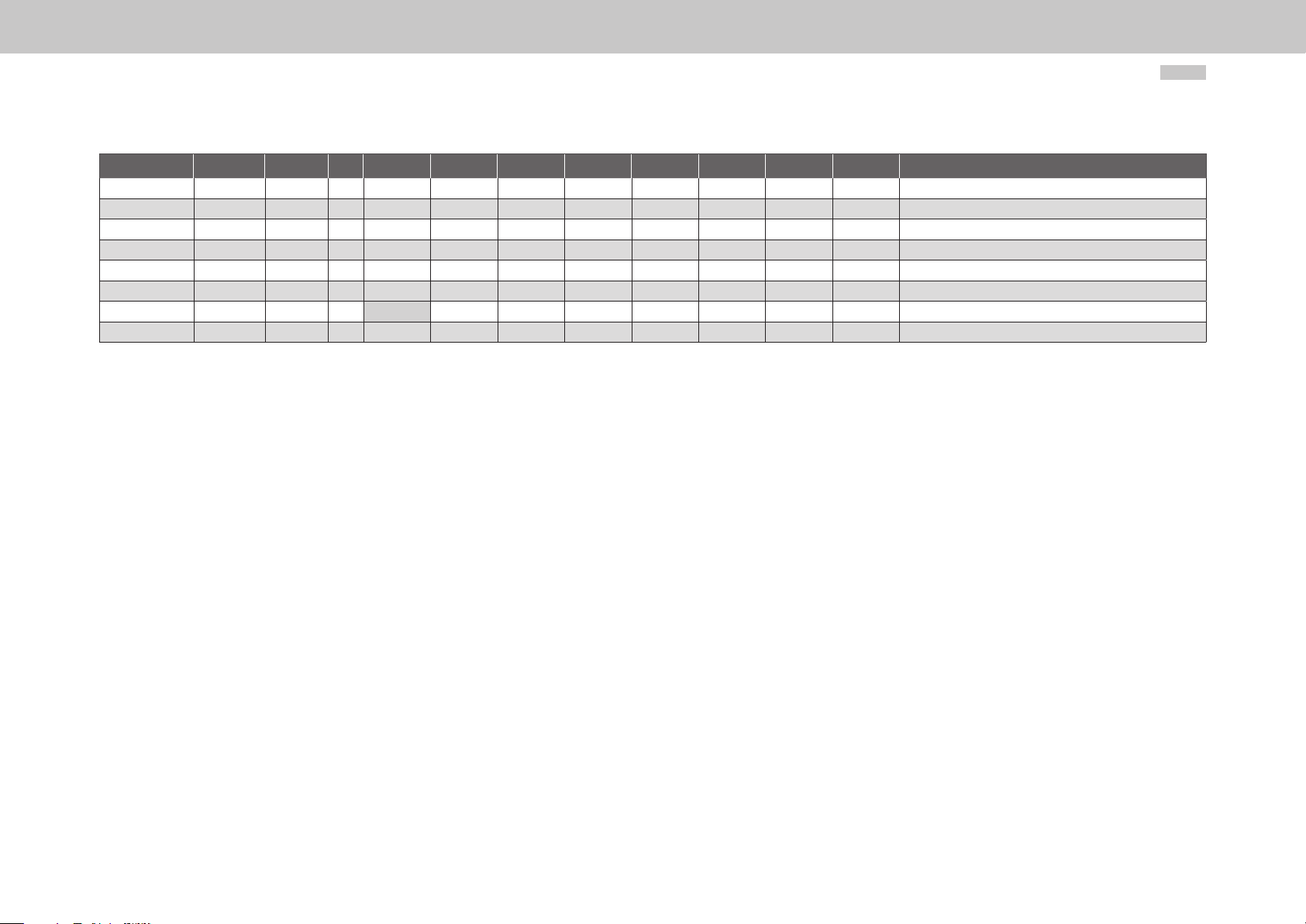
TIME ID Direction DLC Byte 0 Byte 1 Byte 2 Byte 3 By te 4 Byte 5 Byte 6 Byte 7 Comments
43.172512 Tx 601 8 70 00 00 00 00 00 00 00 Requirement: segment 12
43.172787 Rx 581 8 10 00 00 00 00 00 00 00 Reply: segment 12
43.908571 Tx 601 8 60 00 00 00 00 00 00 00 Requirement: segment 13
43.908831 Rx 581 8 00 00 00 00 00 00 00 00 Reply: segment 13
44.668466 Tx 601 8 70 00 00 00 00 00 00 00 Requirement: segment 14
44.66 874 0 Rx 581 8 10 00 00 00 00 00 00 00 Reply: segment 14
53.884 044 Tx 601 8 60 00 00 00 00 00 00 00 Requirement: segment 15
53. 8 84414 Rx 581 8 0b 00 00 00 00 00 00 00 Reply: segment 15 – No further segments
MSD Servo Drive User Manual CANopen/EtherCAT
Transmission of transferred values (ASCII):
At 6 bytes, the string "X-axis" is so short that it can be fully transferred in the first
segment.
The following segments (of 100 bytes of the parameter) therefore only include zeroes...
Transmitted bytes (HEX) 58 2d 41 78 69 73
Interpretation (ASCII) X - a x i s
30
Page 31

5.3.1 Parameter set download
Drive ADmin istrAtor
The following data can be transferred to MSD Servo Drive via the CANopen interface:
• Parameter set
• A parameter data set can be downloaded by SDO transfer or via the
Moog
ic device parameters are also accessible via objects 2000h–5FFFh
If a unified valid data set (i.e. not just individual parameters) needs to be transferred from
the CAN master to the device, the following points must be considered:
On every transfer of an individual parameter the servo drive checks whether the parameter matches its existing data set. The check of the new parameter value sometimes
refers to existing parameter values. This means it is possible that the servo drive may
reject a parameter, even though it originates from a valid parameter data set, because
the parameter set is not yet complete in the device.
Since a simple error reset may not eliminate the cause of the error, it may be necessary
to reset to the factory defaults.
user interface version 5 or higher. All manufacturer-specif-
Remedy:
The parameter data set is transferred to the servo drive without a logic check. At the
end of the download, the logic check is reactivated and the servo drive checks the
transferred parameters for plausibility. During this check parameter settings that do not
functionally match are reported as errors.
Download procedure for a completed parameter data set:
1. Reporting a download without logic check
To deactivate the logic check and to report the download of a data set, the value 1
is written to parameter 11 subindex 4.
3. Completing download and activating plausibility check
Once all parameter data has been transferred to the servo drive, parameter 11
subindex 4 is reset to the value 0. Then a logic check of the device parameters is
carried out. In case of error the user receives an emergency message.
NOTE: The download of a complete parameter data set is only possible when
the system is at a standstill. Make sure the servo drive is not switched on for
the duration of the download.
2. Downloading the parameter data to the servo drive
In this step the individual parameters of the data set are sequentially transferred
to the drive. Despite the deactivated logic check, basic checking mechanisms are
still active. These monitor, for example, the maintenance of parameter limits and
become active if these are infringed. Therefore, if a value range limit is infringed
by the download of a parameter, this SDO protocol is directly rejected (Abort message).
moog
[ Section 5 ]
MSD Servo Drive User Manual CANopen/EtherCAT
31
Page 32

moog
MSD Servo Drive User Manual CANopen/EtherCAT
32
5.4 PDO transmission types
In connection with the PDO transfer, various transmission types are defined in CANopen
profile CiA301. The transmission type and event control can be set separately for all supported RxPDOs and TxPDOs. The servo drive supports the following transmission types:
Acyclic synchronous type no. 0 h
Meaning: RxPDOs are evaluated once a device-specific event has been triggered and
the next SYNC object has been received; the TxPDO is then transmitted (from firmware
version 2.15-00).
Cyclic synchronous types no. 1–F0 h
Meaning: The difference between this and the acyclic synchronous transmission type is
that RxPDOs are only evaluated after receipt of 1–F0 h Sync objects and TxPDOs are only
transmitted every 1–F0 h Sync objects.
Asynchronous types no. FE h and FF h
Meaning: RxPDOs are evaluated immediately on receipt; TxPDOs are transmitted by
a device-specific event. The Sync object is irrelevant to this mode of transfer. Special
feature of type FF h:
For this the event is defined in the associated device profile.
NOTE: The desired transmission types are set by way of the corresponding
CANopen objects 1400h for RxPDOs and 1800h for TxPDOs.
5.5 Event-controlled TxPDO transmission
Note: Event control is only active when the relevant "transmission type" is set
to asynchronous (FEh or FFh).
Function of event control:
Any bit changes within the TxPDO can serve as an event for the transmission of a TxPDO.
This means that only the mapped contents of this TxPDO can be used as an event for
transmission of a TxPDO. Accordingly it is not possible to send a TxPDO dependent on
the changes in content of another TxPDO.
Example:
The status word 6041h is mapped in TxPDO1. TxPDO2 contains the current actual position. A change in the status word in TxPDO1 can therefore not be used as an event
for transmission of the TxPDO2. If this is required, the status word 6041h can also be
mapped in TxPDO2 however.
Selecting events:
In MSD Servo Drive every bit (or any change to it) in a TxPDO can be defined as an event.
By default all bits (max. 64bit = 8byte) are monitored for changes and are evaluated as
events. Individual bits can be displayed using screens, however, and therefore are no
longer used for event generation.
Screens enabling the display of individual bits of TxPDOs are defined in field parameter
2007. Each TxPDO has subindexes, and each subindex is responsible for 32 bits of the
TxPDO. Its structure is thus as follows:
Page 33

Parameter P 2007 – COM_301_EvMask
"Event mask for asynchronous transmit PDOs"
Sub
ID
0 EvMsk_TxPdo1L FFFFFFFFh Event mask for TxPDO 1 byte 0 –3 uint32
1 EvMsk_TxPdo1H FFFFFFFFh Event mask for TxPDO 1 byte 4 –8 uint32
2 EvMsk_TxPdo2L FFFFFFFFh Event mask for TxPDO 2 byte 0 –3 uint32
3 EvMsk_TxPdo2H FFFFFFFFh Event mask for TxPDO 2 byte 4 –8 uint32
4 EvMsk_TxPdo3L FFFFFFFFh Event mask for TxPDO 3 byte 0–3 uint32
5 EvMsk_TxPdo3H FFFFFFFFh Event mask for TxPDO 3 byte 4 –8 uint32
6 EvMsk_TxPdo4L FFFFFFFFh Event mask for TxPDO 4 byte 0 –3 uint32
7 EvMsk_TxPdo4H FFFFFFFFh Event mask for TxPDO 4 byte 4 –8 uint32
Table 5.4 Field parameter P 2007
Name Value Description Typ e
Example of application of the screens:
To only allow the lower 16 bits of the TxPDO1 as an event, the subindexes of parameter
P 2007 are described as follows:
– Subindex 0 (event mask TxPDO1 bytes 0–3) = 0000FFFFh
– Subindex 1 (event mask TxPDO1 bytes 4–7) = 00000000h
NOTE: The cyclic transmission of the TxPDOs is activated by setting a cy-
cle time in ms in the objects 0x1800 (TxPDO1), 0x1801(TxPDO2), 0x1802
(TxPDO3) and 0x1803 (TxPDO4) subindex 5 (event timer).
5.6 PDO mapping
Most device-specific parameters form part of the manufacturer-specific area (2001h–
5FFFh) and can also be mapped in one of the PDOs. For these parameters (objects), refer
to the EDS file of the servo drive.
5.6.2 Mapping notes
Unlike earlier devices MSD Servo Drive no longer has predefined mapping or mapping
selectors. This means that the drive must write the mapping to the servo drive prior to
a communication via PDO. Transfer of the data set is also possible.
By default all mapping settings are set to 0, i.e. the PDOs do not contain any mapping.
The communication settings (mapping/transmission types etc.) can be saved in the
device, however, and are subject to data set handling. This means they do not have to be
rewritten each time and can be transferred with the data set.
The following objects are relevant for mapping:
RxPDOs:
1600h RxPDO1 mapping
1601h RxPDO2 mapping
1602h RxPDO3 mapping
1603h RxPDO4 mapping
TxPDOs:
1A00h TxPDO1 mapping
1A01h TxPDO2 mapping
1A02h TxPDO3 mapping
1A03h TxPDO4 mapping
NOTE: A maximum of 8 objects can be mapped per PDO. In a PDO a maxi-
mum of 8 bytes can be mapped.
5.6 .1 Mapping – general
Variable mapping of parameters is possible on the MSD Servo Drive for all four RxPDOs
and TxPDOs. Mapping works as defined in the CANopen communication profile CiA301.
moog
[ Section 5 ]
NOTE: Remember that the PDO must always be assigned an even number of
bytes! If an uneven number is required, this must be completed with a "dummy byte" for example. Parameter P 2055 "COM_301_U8" (object 0x2807) is
available for this purpose.
MSD Servo Drive User Manual CANopen/EtherCAT
33
Page 34

moog
Write Heartbeat
5.7 Heartbeat function
MSD Servo Drive User Manual CANopen/EtherCAT
34
The Heartbeat function according to CiA301 (V4.01) is supported. MSD Servo Drive can
then only be used as a heartbeat producer, i.e. it sends heartbeat telegrams to the drive.
To this end object 1017H Producer Heartbeat Time is implemented.
A time value (in ms) is entered as a value for this object. The time value represents the
cyclic interval during which the servo drive sends its heartbeat telegrams.
Heartbeat protocol
The Heartbeat protocol defines an ERROR CONTROL SERVICE without using REMOTE
FRAMES. A HEARTBEAT PRODUCER sends a cyclic HEARTBEAT MESSAGE. One or more
HEARTBEAT CONSUMERS receive this message. The relationship between the PRODUCER and the CONSUMER can be configured by way of the objects described below. The
HEARTBEAT CONSUMER monitors receipt of the HEARTBEAT PROTOCOL taking account
of the preset HEARTBEAT CONSUMER TIME.
If the HEARTBEAT PROTOCOL is not received within the HEARTBEAT CONSUMER TIME,
a HEARTBEAT event is generated.
The HEARTBEAT PROTOCOL starts directly after entry of the HEARTBEAT PRODUCER
TIME. If the device is powered up with a HEARTBEAT PRODUCER TIME setting not
equal to 0, the HEARTBEAT PROTOCOL starts with the status transition INITIALISING ->
PRE-OPERATIONAL.
In this case the BOOTUP MESSAGE is classed as the first HEARTBEAT MESSAGE.
Heartbeat
Producer
request
Heartbeat
Producer
request
Fig. 5.2
Time
Heartbeat protocol
COB-ID = 700 + Node-ID
01
7
6 .. 9
r
01
7
r
s
6 .. 9
s
r: reserved (always 0)
s: the status of the Heartbeat producer
0: BOOTUP
4: STOPPED
5: OPERATIONAL
127: PRE-OPERATIONAL
NOTE: The NODE GUARDING and HEARTBEAT functions cannot be used in
a device simultaneously. If the HEARTBEAT PRODUCER TIME is not equal to 0,
the HEARTBEAT PROTOCOL is used.
Heartbeat
Consumer
indication
indication
indication
Heartbeat
Consumer
Time
indication
indication
indication
Heartbeat
Consumer
Time
Heartbeat Event
Page 35

5.8 Monitoring of telegram failure
MSD Servo Drive can be used to monitor the incoming SYNC telegrams and RxPDOs and
to trigger an error message after a configurable number of failed telegrams.
The two parameters shown in the following table are used to configure monitoring:
Para ID Name Description
P 2061 COM_CAN_Timeout_Type
P 2062 COM_CAN_Timeout_Value
Table 5.5 Data types
Parameter P 2061 COM_CAN_Timeout_Type can be used to select whether the incoming
SYNC signals or the RxPDOs are to be monitored. Parameter P 2062 COM_CAN_Time-
out_Value specifies the minimum time in milliseconds that must lapse after the last
configured signal before a telegram failure is identified.
Telegram failure monitoring is only active in the NMT status "Operational".
Selection of signal to be monitored:
0: SYNC, 1: RxPDO
Timeout time [ms]
0 = monitoring inactive
moog
[ Section 5 ]
MSD Servo Drive User Manual CANopen/EtherCAT
35
Page 36

moog
MSD Servo Drive User Manual CANopen/EtherCAT
36
Page 37

6 Setting the Device Parameters
for EtherCAT
6.1 Supported EtherCAT functionality
Below you will find an overview of the EtherCAT functionality implemented in
MSD Servo Drive. The diagram below shows the basis for the description that follows. It
shows the structure of EtherCAT based on the OSI 7 layer model.
Application
(device profile CiA-402)
Object Dictionary
SDO PDO Mapping
Process Data
AL
DL
Mailbox
HTTP, FTP ...
TCP
UDP
IP
Ethernet
EoE
EtherCAT Data Link Layer
Emergency / SDO /
SDO Information Service
All services that are not time-sensitive, i.e. intervention of their execution/contents in
process data is not time-sensitive, are grouped together in the mailbox. The mailbox is
used as a service data channel and thus also enables access to drive parameters. This is
done via the SDO (Service Data Objects) channel. The mailbox service also provides the
basis for EoE (Ethernet over EtherCAT) services and error handling (emergency telegrams).
The process data is structured on the basis of CANopen (CiA301). This means objects are
mapped in PDOs (Process Data Objects) that are transferred cyclically. This process data
includes, for example, cyclic position, speed or torque reference values and actual values.
The basis for both SDO and PDO accesses to the drive is always the object directory,
which is also based on CANopen. For the user this means that these objects can be
accessed both via CANopen and via EtherCAT.
In the case of MSD Servo Drive the CiA402 device profile is again set up on the application layer. For information on this layer, please refer to the sections "Implemented
CiA402 functionality" and "CiA402 operation modes".
An overview of the EtherCAT functionality of MSD Servo Drive is provided below:
Process data
• 4 RxPDOs
• 4 TxPDOs
• Transfer length = max. 8 bytes per PDO
• Variable mapping as per CiA301 (cf. CANopen)
ATTENTION: The PDO must have an even number of bytes assigned.
If an uneven number is required, this must be completed with a "dummy
byte" for example. The dummy byte is entered as object 0x2807.
(Ethernet)
Fig. 6.1
Physical Layer
EtherCAT structure
The physical layer of EtherCAT based on IEEE802.3/100 BaseTX Ethernet physics.
The EtherCAT Data Link Layer (DL) is then based on this, and is split into mailbox and
process data. The following layer is called the Application Layer (AL) and includes the
services CoE (CAN over EtherCAT) and EoE (Ethernet over EtherCAT).
moog
[ Section 6 ]
MSD Servo Drive User Manual CANopen/EtherCAT
37
Page 38

moog
moog Dri veADm inistr Ator
MSD Servo Drive User Manual CANopen/EtherCAT
38
• Cycle times
Transfer of cyclic position setpoints at max. 8 kHz (125 µs)
Transfer of cyclic speed setpoints at max. 8 kHz (125 µs)
Transfer of cyclic torque setpoints at max. 8 kHz (125 µs)
Mailbox
MSD Servo Drive supports the CAN over EtherCAT (CoE) and Ethernet over EtherCAT
(EoE) protocol. The following functions/services are implemented:
CoE
• SDO/Abort
– Initiate SDO Download
– Download SDO Segment
– Initiate SDO Upload
– Upload SDO Segment
– Abort SDO Transfer
– All device parameters are accessible via object ID 2000H + x
Note: Profile-specific parameters are visible in
only in the 1000H... (CiA301 objects)/6000H... (CiA402 objects) writeable/
readable range. This means parameters stored both as device parameters
(2xxxH range) and as profile parameters (CiA301/CiA402) can only be read
and written to via their object number (CiA301/CiA402 profile).
, but
Example
The object 1000h Device Type exists both in the CiA301 profile and also as a device
parameter with parameter number 2011. Simultaneous two-way access would therefore
be possible via CANopen or EtherCAT. In order to uniquely configure the access, the
read/write access for this object is only possible via profile-specific object number 1000h
(as per CiA301).
Emergency
The Emergency service is designed for the transfer of error messages. In contrast to
CANopen, emergency messages in EtherCAT are not autonomously sent from the slave
but are retrieved by the master.
Functionality in MSD Servo Drive:
• Error codes as per the CiA402 device profile are supported.
For the structure/content of the emergency message, please refer to the section
• "Emergency Objects"
SDO Information Service
The SDO Information Service allows the master to read the object directory of the
slave. In this way, the master can determine the supported objects of the slave with the
required additional information (e.g. data type/access rights etc.). The SDO Information
Service therefore represents an alternative to the use of EDS files familiar from CANopen.
Functionality in MSD Servo Drive:
• Access to the object list and description
• Alternative to integrating the EDS file
EoE
Functions such as the tunnelling of standard Ethernet frames in EtherCAT frames generally fall under Ethernet over EtherCAT. This enables protocols, for example TCP/IP, to be
transferred via EtherCAT.
Implemented functionality in MSD Servo Drive:
• Initiate EoE request
• Initiate EoE response
• EoE fragment request
• EoE fragment response
Page 39

Distributed clocks
Synchronisation in EtherCAT is implemented on the basis of distributed clocks. Each slave
has its own clock, which is synchronised with the others using a synchronisation pulse.
The reference clock with which users are synchronised is accommodated in a slave.
NOTES on MSD Servo Drive:
• All configuration of distributed clocks takes place in the drive.
• Multiples of 125 µs (time basis for control) must always be used as cycle
times.
(OI)
Init
(IP) (PI) (IB) (BI)
Pre-Operational
(PS) (SP)
(SI)
Bootstrap
(optional)
XML file
The XML file is used to integrate an EtherCAT slave into an EtherCAT master (control).
It includes the configuration (mapping etc.) for the respective operation modes.
NOTES on MSD Servo Drive:
• The XML file is supplied with the firmware.
• Integration of this file is control-specific.
NMT (Network Management)
The Network Management is essentially based on the network management of CANopen, although Stopped (CANopen) status has been replaced by Safe Operational
(EtherCAT) status.
Depending on the range of functions offered by the control software, individual status
transitions can be executed automatically or via the PLC.
(OP)
Safe-Operational
(SO) (OS)
Operational
Fig. 6.2
EtherCAT state machine
Status Description
Init Initialisation: the device starts up.
Pre-Operational
Safe-operational
Operational
Table 6.1 Status description
Transitions Operations
IP Start Mailbox Communication
PI Stop Mailbox Communication
PS Start Input Update
SP Stop Input Update
Table 6.2 Status transitions
The device is ready to be configured.
Mailbox communication is possible.
PDO input data (TxPDO device) can be read.
PDO output data (RxPDO device) is ignored.
Cyclic I/O communication
PDO output data (RxPDO device) is processed.
moog
[ Section 6 ]
MSD Servo Drive User Manual CANopen/EtherCAT
39
Page 40
moog
Drive ADmin istrAtor
Transitions Operations
SO Start Output Update
OS Stop Output Update
OP Stop Output Update/Stop Input Update
SI Stop Input Update/Stop Mailbox Communication
OI Stop Output Update/Stop Input Update/Stop Mailbox Communication
Table 6.2 Status transitions
6.2 Configuration for operation in a drive
The services described in the previous section (e.g. PDO mapping etc.) are all operated by
the drive (EtherCAT master). The communication-specific configuration of
MSD Servo Drive is performed on the basis of the supplied XML files by the master.
The configuration of control settings, scaling etc. can also be performed via the
Moog
object directory.
. Alternatively all parameters can also be configured via the
MSD Servo Drive User Manual CANopen/EtherCAT
40
Page 41

7 Implemented CiA402
functionality
The functions in this section relate to activation in the modes of operation of the CiA402
profile
1 – Profile Position mode
3 – Profile Velocity mode
6 – Homing mode
7 – Interpolated Position mode
8 – Cyclic Synchronous Position mode (EtherCAT only)
9 – Cyclic Synchronous Velocity mode (EtherCAT only)
10 – Cyclic Synchronous Torque mode (EtherCAT only)
7.1 Device control and state machine
The drive is controlled via the DRIVECOM state machine defined in CiA402
(see CiA402 10.1.1 state machine). No remote signal is provided.
controlword
(6040h)
Device Controlling
Operation Mode State Machine
statusword
(6041h)
Fig. 7.1
The status of the drive is controlled by way of the control word. The status of the drive
is displayed in the STATUS WORD. In REMOTE MODE the drive is controlled directly from
the CANopen network by PDO and SDO.
The state machine is controlled by the control word. The state machine is also influenced
by internal events, such as errors.
Device controlling
Remote
Te rminals
Fault
modes of operation
(6060h)
7.1.1 General information
The DEVICE CONTROL FUNCTION monitors all the functions of the drive.
This function is subdivided into
– device control of the state machine
– operation mode function
moog
[ Section 7 ]
7.1.2 State machine
The state machine describes the CONTROLLER STATUS and the possible options for
control by the master. A single status indicates a specific internal or external response.
At the same time, the status of a drive restricts the possible control commands. For example, initiating a point-to-point positioning operation is only possible in the OPERATION ENABLE state.
States may change because of the control word or other internal events. The current
status is displayed in the STATUS WORD. The state machine describes the drive status
with regard to user commands and internal error messages.
MSD Servo Drive User Manual CANopen/EtherCAT
41
Page 42

moog
controlword
(6040h)
State Machine
statusword
(6041h)
Actions
Fig. 7.2
State machine
7.1.3 Device states
Power
Disabled
Start
0
Not Ready to
Switch On
1
Switch On
Disabled
Power
Enabled
Fig. 7.3
2
3
9 8
Switched On
4
State machine
Ready to
Switch On
Operation
Enable
7
6
5
Internal
Events
10
12
11
16
Fault
13
Fault
Reaction Active
14
Fault
15
Quick Stop
Activ
MSD Servo Drive User Manual CANopen/EtherCAT
The following device states are possible:
NOT READY TO SWITCH ON:
Only low voltage is connected to the drive.
The drive is initialised or is performing a self-test.
If installed, the brake engages in this state.
The drive function is deactivated.
SWITCH ON DISABLED: (Starting lockout)
Drive initialisation is complete.
Drive parameters have been set.
Drive parameters have been changed.
No power to device (for safety reasons).
The drive function is deactivated.
"STO (Safe Torque Off)" standstill and/or ENPO not active
READY TO SWITCH ON:
Power is connected to the device.
Drive parameters have been changed.
Drive function is deactivated.
SWITCHED ON:
Power is connected to the device.
POWER AMPLIFIER is ready for operation.
Drive parameters have been changed.
The drive function is deactivated.
OPERATION ENABLE: (Technology ready)
No errors were detected.
Drive function is enabled and power is connected to motor.
Drive parameters have been changed.
(Refers to standard application of the drive.)
QUICK STOP ACTIVE:
Drive parameters have been changed.
QUICK STOP function being executed.
Drive function is enabled and power is connected to motor.
If the QUICK STOP OPTION CODE is set to 5 (remain in
QUICK STOP ACTIVE status), you cannot quit the QUICK STOP
ACTIVE status, but you can switch to OPERATION ENABLE status using
the ENABLE OPERATION command.
42
Page 43

FAULT REACTION ACTIVE:
Drive parameters have been changed.
An error has occurred in the device.
The QUICK STOP function has been executed.
The drive function is enabled and power is connected to motor.
FAU LT:
Drive parameters have been changed.
An error has occurred and the fault reaction has been executed.
Power disconnection and connection depends on the application.
The drive function is deactivated.
Bit combinations of the DRIVECOM state machine
Device control commands:
The following bit combinations of control bits 0-3 and 7 form the device control commands for the status transitions of the state machine:
Command
SHUTDOWN 0 X 1 1 0 2, 6, 8
POWER-UP 0 X 1 1 1 3
DISABLE POWER 0 X X 0 1 7, 9, 10, 12
QUICK STOP 0 X 0 1 X 11
DISABLE OPERATION 0 0 1 1 1 5
ENABLE OPERATION 0 1 1 1 1 4
RESET FAULT
Control word
7 3 2 1 0
0
> 1X X X X 15
Transitions
Device status table
Status
6 5 3 2 1 0
NOT R EA DY 0 X 0 0 0 0
STARTING LOCKOUT 1 X 0 0 0 0
READY 0 1 0 0 0 1
ON 0 1 0 0 1 1
OPERATION ENABLED 0 1 0 1 1 1
FAULT 0 X 1 0 0 0
FAULT REACTION ACTIVE 0 X 1 1 1 1
QUICK STOP ACTIVE 0 0 0 1 1 1
Table 7.2 Bit combinations of the DRIVECOM state machine
Status bit
Table 7.1 Bit combinations
moog
[ Section 7 ]
MSD Servo Drive User Manual CANopen/EtherCAT
43
Page 44
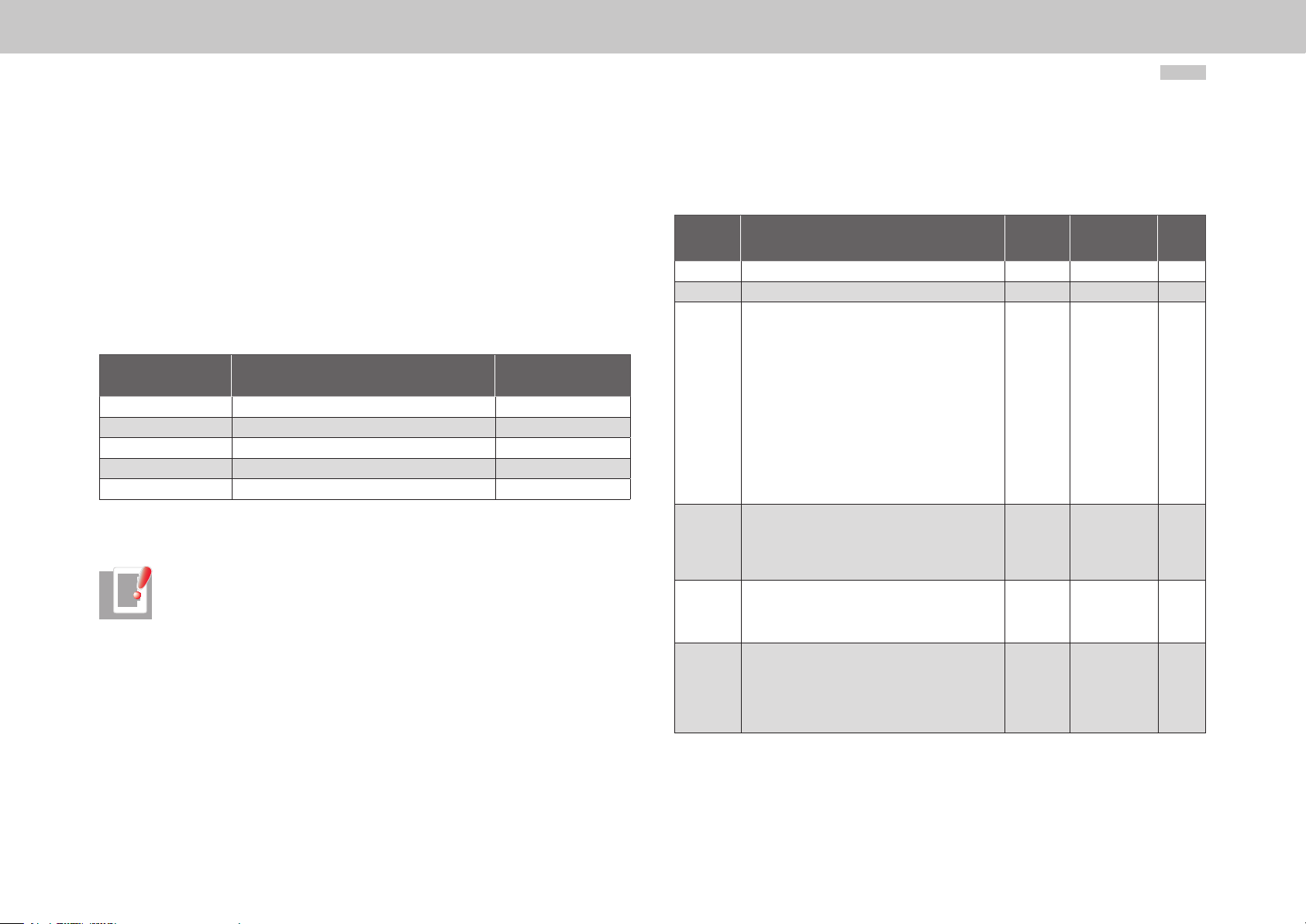
moog
MSD Servo Drive User Manual CANopen/EtherCAT
44
7.2 Option codes
The devices support option codes for four different options for shutting down the drive.
These four options are:
• HALT function – interrupt an ongoing movement
• Drive disable function – stop movement by cancelling the drive enable (software)
• Quick-stop function – stop movement by initiating a quick stop
• Fault reaction function – stop movement in case of an error
For all variants, the option code sets the parameters for the desired device response.
CANopen Function
Object 605Ah Quick stop option code 0 to 8
Object 605Bh Shutdown option code -1 to 1
Object 605Ch Disable operation option code 0 and 1
Object 605Dh Halt option code 0 to 4
Object 605Eh Fault reaction option code 0 to 4
Table 7.3 Option codes
The objects form part of the data set as standard parameters of the devices.
NOTE: The quick-stop ramp is always executed with the smoothing preset
for the driving profile ramps. The error stop ramp is always executed without
smoothing, even when smoothing is programmed.
Supported
settings
7.3 Device control objects
The following table lists the implemented objects for controlling the drive:
Object
no.
0x6040 Control word VAR Unsigned16 rw
0x6041 Status word VAR Unsigned16 ro
Quick_Stop_Option_Code
0: disable drive function
1: slow down on slow down ramp
2: slow down on quick stop ramp
3: slow down on the current limit
4: slow down on the voltage limit
0x605A
0x605B
0x605C
0x605D
5: slow down on slow down ramp and stay in
QUICK STOP
6: slow down on quick stop ramp and stay in
QUICK STOP
7: slow down on the current limit and stay in
QUICK STOP
8: slow down on the voltage limit and stay in
QUICK STOP
Shutdown_Option_Code
-1: Response as per Quick_Stop_Option_Code
0: disable drive function
1: slow down with slow down ramp; disable
the drive function
Disable_Operation_Option_Code
0: disable drive function
1: slow down with slow down ramp and then
disable the drive function
Halt_Option_Code
0: disable drive, motor is free to rotate
1: slow down on slow down ramp
2: slow down on quick stop ramp
3: slow down on the current limit
4: slow down on the voltage limit
Object
name
Table 7.4 Device control objects
Object
Code
VAR Integ er16 rw
VAR Integ er16 rw
VAR Integ er16 rw
VAR Integ er16 rw
Typ e At t r.
Page 45

Object
Drive ADmin istrAtor
Drive ADmin istrAtor
Drive ADmin istrAtor
no.
0x605E
0x6060
0x6061
Object
name
Fault_Reaction_Option_Code
0: disable drive, motor is free to rotate
1: slow down on slow down ramp
2: slow down on quick stop ramp
3: slow down on the current limit
4: slow down on the voltage limit
Modes_Of_Operation
1: profile position mode
3: profile velocity mode
6: homing mode
7: interpolated position mode
8: cyclic sync position mode (EtherCAT ONLY)
9: cyclic sync velocity mode (EtherCAT ONLY)
10: cyclic sync torque mode (EtherCAT ONLY)
Modes_Of_Operation_Display
see 0x6060
Object
Code
VAR Integ er16 rw
VAR Integer8 wo
VAR Integer8 ro
Typ e At t r.
Table 7.4 Device control objects
7.4 Units and scalings, factor group
The Moog
means of configuring the scaling of mechanical and electrical units of variables necessary for control. The Wizard translates the application variables into representation of
the parameters from the CiA402 factor group. The parameters from the factor group are
listed below, and can also be set directly by the user.
Correlations must be calculated externally and the final results entered in the relevant
factor group parameter.
It is generally easier to have the Scaling Wizard calculate the parameter settings.
user interface offers a Scaling Wizard as a user-friendly
NOTE: The following objects are directly calculated in MSD Servo Drive:
- Position factor
- Velocity encoder factor
- Acceleration factor
The calculation is based on the objects stored in the formulae (e.g. feed constant, gear
ratio etc.). It is in fact possible to change these variables in Moog
or
via the bus, but they will be overwritten by the internal calculation as part of the control
initialisation.
NOTE: In this section you will find an overview of the objects from the factor
group and the underlying formulae for the calculation. You will find practical
examples for the implementation of scaling in the Application Manual.
Factor group as per CiA402:
Object
no.
0x607E Polarity VAR Unsigned8 rw
0x6089 Position_Notation_Index VAR Integer8 rw
0x608A
0x608B Velocity_Notation_Index VAR Integer8 rw
0x608C
0x608D Acceleration_Notation_Index VAR Integer8 rw
0x608E
0x608F Position_Encoder_Resolution VAR Unsigned8 rw
0x6090 Velocity_Encoder_Resolution AR R AY Unsigned32 rw
0x6091 Gear_Ratio AR R AY Unsigned32 rw
0x6092 Feed_Constant ARR AY Unsigned32 rw
0x6093 Position_ Factor ARR AY Unsigned32 rw
0x6094 Velocity_Encoder_Factor A RRAY Unsigned32 rw
0x6097 Acceleration_Factor AR R AY Unsigned32 rw
Position_Dimension_Index
Only display for scaling block
Velocity_Dimension_Index
Only display for scaling block
Acceleration_Dimension_Index
Only display for scaling block
Object
name
Table 7.5 Factor group
The factor group objects can be calculated and entered directly by the user, independently of the Moog
Scaling Wizard. The corresponding encoder set-
tings must be made however.
Object
Code
VAR Unsigned8 rw
VAR Unsigned8 rw
VAR Unsigned8 rw
Typ e At t r.
moog
[ Section 7 ]
MSD Servo Drive User Manual CANopen/EtherCAT
45
Page 46

moog
encoder increments
increments
motor shaft revolutions
feed
position encoder resolution • gear ratio
velocity unit • velocity encoder factor
MSD Servo Drive User Manual CANopen/EtherCAT
46
Calculation correlations for factor group parameters
Object 608Fh: Position encoder resolution
The position encoder resolution defines the relationship between the encoder and motor
revolutions.
position encoder resolution =
Object 6090h: Velocity encoder resolution
The velocity encoder resolution defines the relationship between the encoder increments
per second and motor revolutions per second
velocity encoder resolution =
Object 6091h: Gear ratio
Gear ratio defines the transmission ratio of a gear in relation to the motor.
It is defined as follows:
gear ratio =
driving shaft revolutions
motor revolutions
encoder
motor
revolutions
second
second
Object 6093h: Position factor
The position factor converts the desired position (in position units) into the internal
format (in increments).
position factor =
feed constant
Object 6094h: Velocity encoder factor
The velocity encoder factor converts the desired velocity (in velocity units) into the internal format (in increments).
velocity encoder factor =
velocity encoder resolution • gear ratio • position unit • F velocity (notation index)
feed constant • velocity unit • second • F position (notation index)
An example of F velocity
would be 102 or 10-6
(notation index)
or F position
(notation index)
Object 6097h: Acceleration factor
The acceleration factor converts the acceleration (in acceleration units per second) into
the internal format (in increments per second).
acceleration factor =
acceleration unit • second
Object 6092h: Feed constant
The feed constant defines the feed per drive shaft revolution in position units.
This includes the gear if present.
feed constant =
driving shaft revolutions
Object 607Eh: Polarity
The position setpoint and position actual value are multiplied by 1 or -1 depending
on the value of the polarity flag.
The same applies to the speed reference and actual speed value.
Please observe the operation of the object polarity as per CiA402 V2.0.
Page 47

Bits 0 to 5 = reserved (don't use)
Bit 6 = velocity polarity
Bit 7 = position polarity
NOTE: As in the case of the other objects in the factor group, changes in
polarity only take effect if the control is switched off.
7.5 I/O map
The status of the servo drive's inputs and outputs can be determined using various objects. The following objects and parameters are implemented:
7.5 .1 Object 60FDh – digital inputs
This object is implemented in compliance with device profile CiA402. It allows digital
input functions defined in the profile to be evaluated. That is, it does not offer an input
map of existing physical inputs, but rather a function-related input map.
So the input to which, for example, a limit switch is connected is irrelevant. The bit that
defines the state of the limit switch is permanently defined within the object.
Bit Assignment
0 Negative limit switch
1 Positive limit switch
2 Home switch
3 to 15 Reserved
16 to 31 Manufacturer-specific (curr. not implemented)
18 Status requirement for safe standstill
19 ENPO
Table 7.6 Object 60FDh – digital inputs
7.5 .2 Object 2079h – MPRO_INPUT_STATE
This manufacturer-specific object provides an input map of all the MSD Servo Drive digital inputs. The object is mappable and transferable by PDO. The assignment is as follows:
Bit Assignment
0 Status of input ENPO
1 Status of input ISD00
2 Status of input ISD01
3 Status of input ISD02
4 Status of input ISD03
5 Status of input ISD04
6 Status of input ISD05
7 Status of input ISDSH
8 to 15 Don’t use
16 Status of input ISD06
17 Don’t use
18 Status of input ISA00
19 Status of input ISA01
30 to 31 Don’t use
Table 7.7 Object 2079h – MPRO_INPUT_STATE
7.5 .3 Object 208Fh – MRPO_OUTPUT_STATE
This manufacturer-specific object provides an input map of all the MSD Servo Drive
digital
outputs. The object is mappable and transferable by PDO. The assignment is as follows:
Bit Assignment
0 Status of output OSD00
1 Status of output OSD01
2 Status of output OSD02
3 to 5 Don’t use
6 Status of output motor brake
Table 7.8 Object 208Fh – MPRO_OUTPUT_STATE
moog
[ Section 7 ]
MSD Servo Drive User Manual CANopen/EtherCAT
47
Page 48
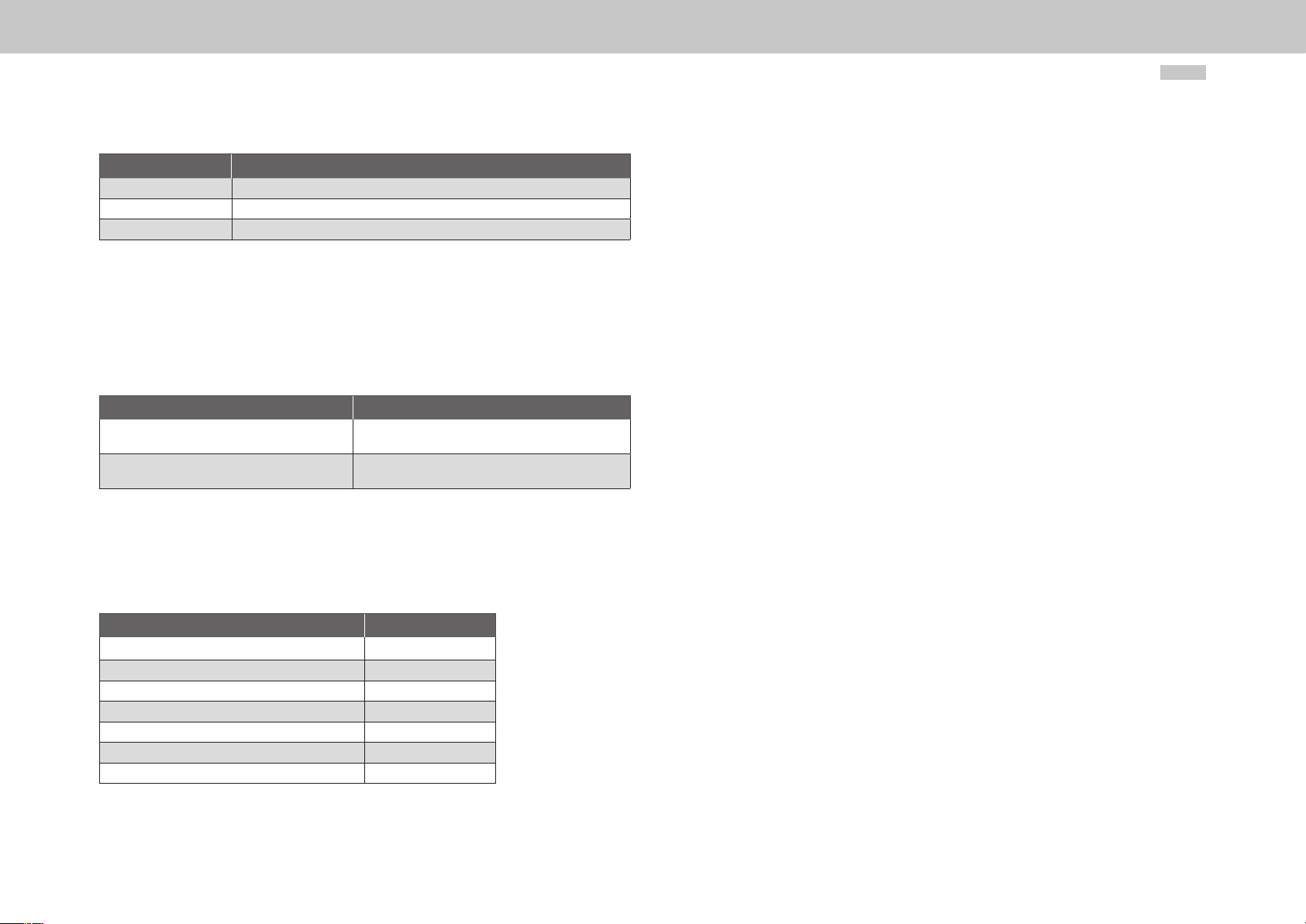
moog
Bit Assignment
7 Status of relay output
8 to 14 Don’t use
15 Status of relay output "STO (Safe Torque Off)"
Table 7.8 Object 208Fh – MPRO_OUTPUT_STATE
7.5 .4 Setting digital outputs via fieldbus
In order to be able to set or reset digital outputs OSD00–OSD02 via the bus, the
"MPRO_Output_FS_OSDxx" output selectors (parameter 122–124) must be configured
for access via fieldbus. The two setting options provided for this are valid for all three
digital outputs (OSD00, OSD01, OSD02) and are shown in the following table.
Setting Description
(39) Output set via communication option in
1 ms cycle
(40) Output set via communication option in
NC cycle
Table 7.9 Setting "MPRO_Output_FS_OSDxx" parameters (122–124)
Output set via communication option, updated in
1 ms cycle
Output set via communication option, updated in
control cycle (62.5 µs)
MSD Servo Drive User Manual CANopen/EtherCAT
48
7.5.5 Object 60FE, digital outputs:
When the manufacturer-specific parameter “Function selector for digital output” is set
to CAN (13), the associated output can be influenced by way of this object.
Bit assignment of the object Bit
60FE assignment
OSD00 16
OSD01 17
OSD02 18
OSD03 25
OSD04 26
OSD05 27
Page 49

8 Operation modes CiA402
8.1 CiA402 compatible operation modes
Devices from the MSD Servo Drive families support CiA402 operation modes
– Profile position mode
– Profile velocity mode
If the drive is operated in an operation mode in which the internal profile generator
is inactive and cyclic setpoints are transferred (e.g. cyclic synchronous position mode),
the interpolation time must be configured.
No. Name Function
306 CON_IpRefTs Cycle time of setpoints in IP mode
Table 8.2 Configuring MSD Servo Drive
The interpolation time CON_IpRefTs represents the cycle time in which setpoints from
a higher-level drive are expected.
8.1. 2 Control word CiA402
– Homing mode
– Interpolated position mode
– Cyclic Synchronous Position mode (EtherCAT only)
– Cyclic Synchronous Velocity mode (EtherCAT only)
– Cyclic Synchronous Torque mode (EtherCAT only)
The operation mode is switched via CANopen object 6060h modes of operation. This
switch is possible in "Operation enable" (power to motor) status. The current operation
mode is indicated in the CANopen object 6061h modes of operation display.
8.1.1 Configuring MSD Servo Drive for activation via
CiA402
For activation via CANopen (or CoE – EtherCAT) as per CiA402 profile, the following
parameters must be set in the device:
No. Name Function Setting
159 MPRO_CTRL_SEL
165 PRO _REF_ SEL Setpoint selector CiA4 02
Table 8.1 Configuring MSD Servo Drive
These parameters can be found under "Motion Profile" --> "Basic Settings"
Control location
selector
CiA4 02
Object 6040h-control word
The object is also mapped in the parameter P 2208-MP_Controlword. The control word
contains bits for:
– status control,
– control of operating modes and
– manufacturer-specific options.
The bits in the control word are defined as follows:
15 11 10 9 8 7 6 4 3 2 1 0
Manufac turer-
specific
O O O M O M M M M
MSB LSB
O – Optional M – Mandatory
Table 8.3 Control word CiA402
reserved Stop
Fault
Reset
Operation
mode-
specific
Enable
operation
Quick
stop
Enable
voltage
Switch
on
moog
[ Section 8 ]
MSD Servo Drive User Manual CANopen/EtherCAT
49
Page 50

moog
MSD Servo Drive User Manual CANopen/EtherCAT
50
Bits 0–3 and 7:
DEVICE CONTROL COMMANDS are triggered by the following schema in the control
word:
Bit of the control word
Command
Shutdown 0 X 1 1 0 2, 6, 8
Switch on 0 0 1 1 1 3*
Switch on 0 1 1 1 1 3**
Disable
voltage
Quick stop 0 X 0 1 X 7, 10, 11
Disable
operation
Enable
operation
Fault reset
Bits marked X are irrelevant.
* ... In SWITCHED ON status the drive executes the functionality of this state.
** .. There is no functionality in SWITCHED ON status. The drive does not do any thing in this state.
Fault
reset
0 X X 0 X 7, 9, 10, 12
0 0 1 1 1 5
0 1 1 1 1 4, 16
Enable
operation
X X X X 15
Quick
stop
Enable
voltage
Switch
Table 8.4 Device control commands
Transitions
on
Bits 4–6 and 8
Bits 4–6 and 8 are interpreted differently according to the active operation mode
("modes of operation display" object).
Operation mode
Cyclic
synchro-
nous
position
mode
(Ether-
Bit
Profile
position
mode
Profile
velocity
mode
Homing
mode
Interpo-
lated
position
mode
CAT)
4
5
6 abs/rel reserved reserved reserved reserved reserved reserved
8 Stop Stop Stop Stop reserved reserved reserved
New
setpoint
Change set
immediately
reserved
reserved reserved reserved reserved reserved reserved
Homing
operation
start
Enable IP
mode-
reserved reserved reserved
Cyclic
synchro-
nous
velocity
mode
(Ether-
CAT)
synchro-
torque
(Ether-
Table 8.5 Mode-specific bits in the control word
Use of the specific bits is explained in more detail in the sections on the operation
modes.
Bits 7 and 11–15
Bit Name Value Description
7
11 No function
.
.
.
15 No function
Fault
Reset
0 1
Fault reset
No function
Cyclic
nous
mode
CAT)
Page 51

8.1.3 Status word CiA402
Bits 0–3, 5 and 6:
Object 6041h status word
The content of the object is also mapped in parameter P 2209 – MP_Statusword. The
status word indicates the current status of the drive. It contains the following bits for:
– current state of the device,
– status of the operation mode and
– manufacturer-specific options.
Status word bits
Bit Description M/O
0 Ready to switch on M
1 Switched on M
2 Operation enabled M
3 Fault M
4 Voltage enabled M
5 Quick stop M
6 Switch on disabled M
7 Warning O
8 Manufacturer-specific O
9 Remote M
10 Target reached M
11 Internal limit active M
12 – 13 Operation mode-specific O
14 – 15 Manufacturer-specific O
Table 8.6 Bits in the status word
These BITS indicate the STATUS of the drive.
Value (binary) State
xxxx xxxx x0xx 0000 Not ready to switch on
Xxxx xxxx x1xx 0000 Switch on disabled
Xxxx xxxx x01x 0001 Ready to switch on
Xxxx xxxx x01x 0011 Switched on
Xxxx xxxx x01x 0111 Operation enabled
Xxxx xxxx x00x 0111 Quick stop active
Xxxx xxxx x0xx 1111 Fault reaction active
Xxxx xxxx x0xx 1000 Fault
Table 8.7 Device state bits in the status word
Bit 4: Voltage enabled
Power supply is connected.
Bit 5: Quick stop
In the LOW state this bit indicates that the drive is executing a "quick stop". Bits 0, 1 and
2 of the status word are set to 1 when the drive is ready for operation. The other bits
indicate additional states of the drive, such as execution of a "quick stop".
In the event of an error the FAULT bit is set.
Bit 7: Warning
Warnings, such as temperature limits, are indicated in bit 7. The device state does not
change when warnings are issued. For more information on the warning given, refer to
the FAULT CO DE.
moog
Bit 8: Manufacturer-specific
Currently not used.
MSD Servo Drive User Manual CANopen/EtherCAT
[ Section 8 ]
51
Page 52

moog
MSD Servo Drive User Manual CANopen/EtherCAT
52
Bit 9: Remote
Currently not used.
Bit 10: Target reached
The bit is automatically set when a SETPOINT is reached. The setpoint depends on
the OPERATING MODE. A change to the setpoint by the master changes this bit.
With "quick stop" OPTION CODE 5, 6, 7 or 8, this bit is set when the "quick stop" ends.
This bit is also set at a standstill in response to a STOP request.
Bit 11: Internal limit active
This bit is set when internal limits are reached. This bit is dependent on OPERATION
MODE.
Bits 12 and 13:
These bits are dependent on OPERATION MODE – see following section.
The following table provides an overview:
Operation mode
Cyclic
synchro-
nous
torque
mode
(Ether-
CAT)
Targe t
torque
ignored
Bit
12
13
Table 8.8 Mode-specific bits in the control word
Profile
position
mode
Setpoint
acknowledge
Following
error
Profile
velocity
mode
Speed
Max. slip-
page error
Homing
mode
Homing
attained
Homing
error
Interpo-
lated
position
mode
IP mode
active
reserved
Cyclic
synchro-
nous
position
mode
(Ether-
CAT)
Targe t
position
ignored
Following
error
Cyclic
synchro-
nous
velocity
mode
(Ether-
CAT)
Targe t
velocity
ignored
reserved reserved
Bits 14 and 15:
These bits are implemented specific to the manufacturer; explanatory notes for them
are given in the sections on the various operation modes.
8.2 Operation modes with profile generation
in drive
For operation modes with profile generation in the drive, the drive merely transmits
a target position or speed for the movement to the servo drive. How the servo drive
reaches this position/speed – i.e. the configuration of the driving profile (e.g. trapezoidal,
triangular/steepness of ramps etc.) – is determined and executed entirely by the servo
drive.
8.2.1 Profile velocity mode
This operation mode (mode of operation = 3) is used to activate the device at a velocity
setpoint as per the CiA402 profile. The drive is in speed control in this operation mode.
The units, setpoint and ramp variables are derived from the factor group settings.
See also section 7.4 "Units and scalings".
The device supports the following objects for this operation mode:
Object
no.
0x606C Velocity actual value VAR Int32
0x60FF Target velocity VAR Int32
0x6094 Velocity encoder factor A RR AY Int32
0x6083 Profile acceleration VAR Int 32
0x6084 Profile deceleration VAR Int32
0x6085 Quick stop deceleration VAR UInt32
0x607E Polarity VAR UInt8
Table 8.9 Profile velocity mode
Object
name
Object
code
Typ e
Page 53

Note: In addition to the objects listed in the table, object 0x6064 "Position
Actual Value" is also updated cyclically in profile velocity mode.
Structure of operation mode
Mode-dependent bits in the control word
The structure presented below is based on this operation mode:
Object
no.
8 Stop
Table 8.10 Profile velocity mode bits in the status word
Object
name
Object
code
0 Execute the motion
1 Stop axle
Typ e
Fig. 8.1 Structure of profile velocity mode
moog
[ Section 8 ]
MSD Servo Drive User Manual CANopen/EtherCAT
53
Page 54
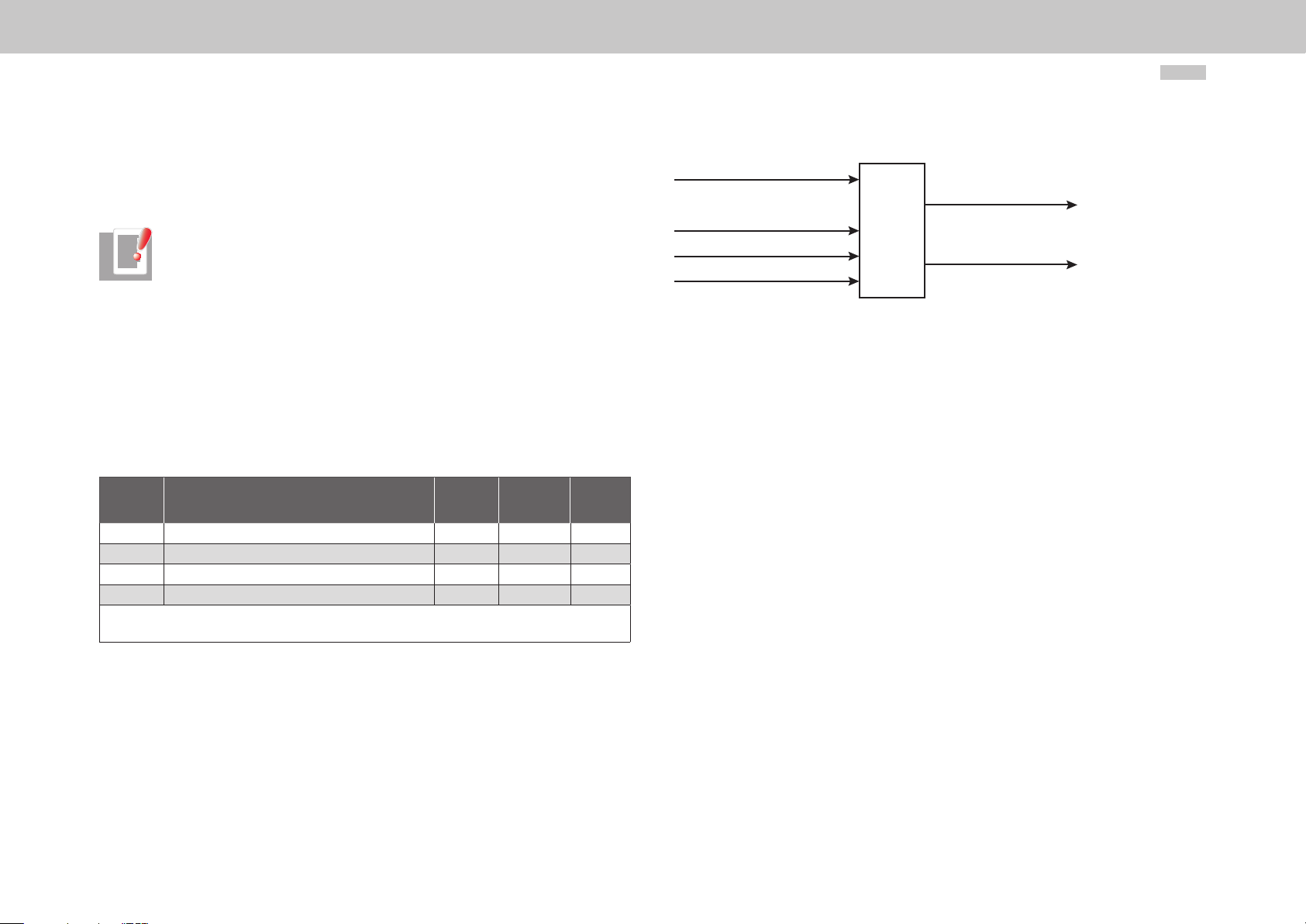
moog
g Drive ADmin istrAtor
MSD Servo Drive User Manual CANopen/EtherCAT
54
8.2.2 Homing mode
This operation mode (mode of operation = 6) is used for homing a position-controlled
axle. The drive executes a movement according to the programmed homing method.
Note: The Touch probe function enables control-led homing of the drive.
See section 10.1.
The various homing methods differ in the integration of the hardware limit switch, home
switch and index signal into the encoder system. It should be noted here that appropriate digital inputs should be configured for limit switch and home switch functionality:
– Limit switch function
– LCW – right-hand hardware limit switch
– LCCW – left-hand hardware limit switch
– HOMSW – home switch
The following objects are supported by the device for this operation mode:
Object
no.
0x607C Home_Offset VAR Integer32 rw
0x6098 Homing_Method VAR Integer8 rw
0x6099 Homing_Speeds * AR R AY Unsigned32 rw
0x609A Homing_ Acceleration VAR Unsigned32 rw
0x6099.01 – quick jog
*
0x6099.02 – slow jog
Table 8.11 Homing mode
Object
name
Object
code
Typ e Attr.
control_word
status_word
homing_speeds
homing_acceleration
home_offset
Fig. 8.2
Homing function
Homing
position_demand_value*
MSD Servo Drive supports all 35 homing methods defined in CiA402.
The individual homing methods' functions and movement sequences are described
in the device application manuals.
Home offset:
The HOME OFFSET object is the difference between position 0 of the application and
the HOME POSITION found during homing. It is represented in position units. At the end
of a homing run the HOME OFFSET is added to the HOME POSITION found. All subsequent absolute positioning operations relate to this new home position.
The homing method and the associated properties can be changed in two ways.
Homing can be changed either via Moo
or via CAN.
For configuration via CANopen the objects of the homing mode can be directly addressed. For example, for a change to the homing method, object 0x6098 can be
changed.
Mode-specific bits in the control word
Bit 4 – HOMING OPERATION START
Bit 8 – STOP
Page 55

Bit Name Value Description
0 Homing mode inactive
4
8 Stop
Homing
operation start
0 1
0 Homing mode active
1 0
0 Execute the instructions of bit 4
1 Stop axle with profile deceleration
Start homing mode
Interrupt homing mode
Table 8.12 Homing mode bits in the control word
Mode-specific bits in the status word
Bit 10 – TARGET REACHED
Bit 12 – HOMING ATTAINED
Bit 13 – HOMING ERROR
Bit 14 – ROT_0
Bit Name Value Description
0
10 Target reached
1
12
13
14 ROT_0 1
Homing
attained
Homing
error
0 Homing mode not yet completed
1 Homing mode carried out successfully
0 No homing error
1
Table 8.13 Homing mode bits in the status word
Stop = 0: Home position not reached
Stop = 1: Axle decelerates
Stop = 0: Home position reached
Stop = 1: Axle has velocity 0
Homing error occurred;
Homing mode not carried out successfully
The error cause is found by reading the
error code
Axle at standstill
Speed is much lower than parameter
745 MON_REFWINDOW
8.2.3 Profile position mode
In this operation mode (mode of operation = 1) the axle executes relative or absolute
single positioning movements.
Object
no.
0x607A Target_Position VAR Integer32 rw
0x607d Software position limit A R RAY Inte ge r32 rw
0x6081 Profile_Velocity VAR Unsigned32 rw
0x6083 Profile_Acceleration VAR Unsigned32 rw
0x6084 Profile_Deceleration VAR Unsigned32 rw
0x6085 Quick stop deceleration VAR Unsigned32 rw
0x6064 Position actual value VAR Int eg er32 r
0x607E Polarity VAR Unsigned8 rw
Table 8.14 Profile position mode
Units of the parameters are set by way of the Scaling Wizard or the objects from the
factor group.
Object
name
Object
code
Typ e Attr.
moog
[ Section 8 ]
MSD Servo Drive User Manual CANopen/EtherCAT
55
Page 56

moog
MSD Servo Drive User Manual CANopen/EtherCAT
56
Structure of operation mode
target_position
(607Ah)
profile_velocity
(6081h)
end_velocity
(6082h)
max_profile_velocity
(607Fh)
max_motor_speed
(6080h)
profile_acceleration
(6083h)
profile_deceleration
(6084h)
quick_stop_deceleration
(6084h)
Fig. 8.3 Structure of profile position mode
[position
units]
[speed units]
[speed units]
[speed units]
Multiplier
velocity_factor_1
(6095h)
[acceleration units]
[acceleration units]
[acceleration units]
Limit
Function
positio_range_limit (607Bh)
software_position_limit
(607Dh)
home_offset (607Ch)
Minimum
Comparator
Multiplier
position_factor
(6093h)
polarity (607Eh)
Limit Function
velocity
limit
Limit Function
max_acceleration
(60C5h)
max_deceleration
(60C8h)
position
velocity
acceleration
Mode-specific bits in the control word
Bit 4 – New setpoint
Bit 5 – Change set immediately
Bit 6 – abs/rel
Bit 8 – Stop
Bit Name Value Description
4 New setpoint
5
Change set
immediately
6 abs/rel
8 Stop
Table 8.15 Profile position mode bits in the control word
0 Does not assume target position
1 Assume target position
0
1
Finish the current positioning and then
start the next positioning
Interrupt the actual positioning and start
the next positioning
0 Target position is an absolute value
1 Target position is a relative value
0 Execute positioning
1
Stop axle with profile deceleration (if not
supported with profile acceleration)
Mode-specific bits in the status word
Bit 10 – Target reached
Bit 12 – Setpoint acknowledge
Bit 13 – Following error
Bit 14 – ROT_0
Bit Name Value Description
10
12
Targe t
reached
Setpoint
acknowledge
0
1
0
1
Table 8.16 Profile position mode bits in the status word
Stop = 0: Target position not reached
Stop = 1: Axle decelerates
Stop = 0: Target position reached
Stop = 1: Velocity of axle is 0
Trajectory generator has not assumed
the positioning values ( yet)
Trajectory generator has assumed the
positioning values
Page 57

Bit Name Value Description
13 Following error
14 ROT_0 1
Table 8.16 Profile position mode bits in the status word
0 No following error
1 Following error
Axle at standstill speed is much lower than
parameter 745 MON _REFWINDOW
Functional description
This OPERATION MODE supports two different options for target position input.
data
new_setpoint
change_set_immediately
setpoint_acknowledge
(1)
(6)
(2)
(3)
(4)
(5)
SET OF SETPOINTS:
When the target position is reached, the drive directly approaches the next target position; the axle is not stopped when the first target position is reached.
SINGLE SETPOINT:
When the target position is reached the drive indicates the fact to the master. Then the
drive receives a new setpoint. At each target position the drive is stopped before being
moved on to the next target position.
The two options are controlled via the timing of the NEW SETPOINT and CHANGE SET
IMMEDIATELY bits in the control word and the SETPOINT
ACKNOWLEDGE bit in the status word. These bits allow a new positioning
operation to be initiated even while the current one is ongoing.
Fig. 8.4
Setpoint transmission from a host computer
If the ‘CHANGE SET IMMEDIATELY’ bit is set to "0" (solid line in above diagram) a SINGLE SETPOINT is expected by the drive (1).
When the setpoint has been transmitted to the drive, the master activates the positioning by setting the "new setpoint" bit in the control word (2). The drive responds by setting the "setpoint acknowledge" bit in the status word (3) once the new data has been
detected and saved. Now the master can delete the "new setpoint" bit (4). Then the
drive deletes the "set-point acknowledge" bit to signal that a new setpoint is accepted
(5). In the diagram the mechanism initiates a speed 0 on reaching the target position
at time t1. After the message indicating the target position has been reached, the next
target position can be initiated at time t2.
8.2.4 Velocity mode (V/F mode)
This operation mode (mode of operation = 2) is used to control the drive in frequencyregulated mode (V/F mode).
The units, setpoint and ramp variables are derived from the factor group settings.
See also section 5.4 "Units and scalings".
MSD Servo Drive supports the following objects in this operation mode:
Object no. Object name Object code Ty pe
0x6042 vl target velocity VAR Inte ger16
Table 8 .17 Velocity mode
moog
[ Section 8 ]
MSD Servo Drive User Manual CANopen/EtherCAT
57
Page 58
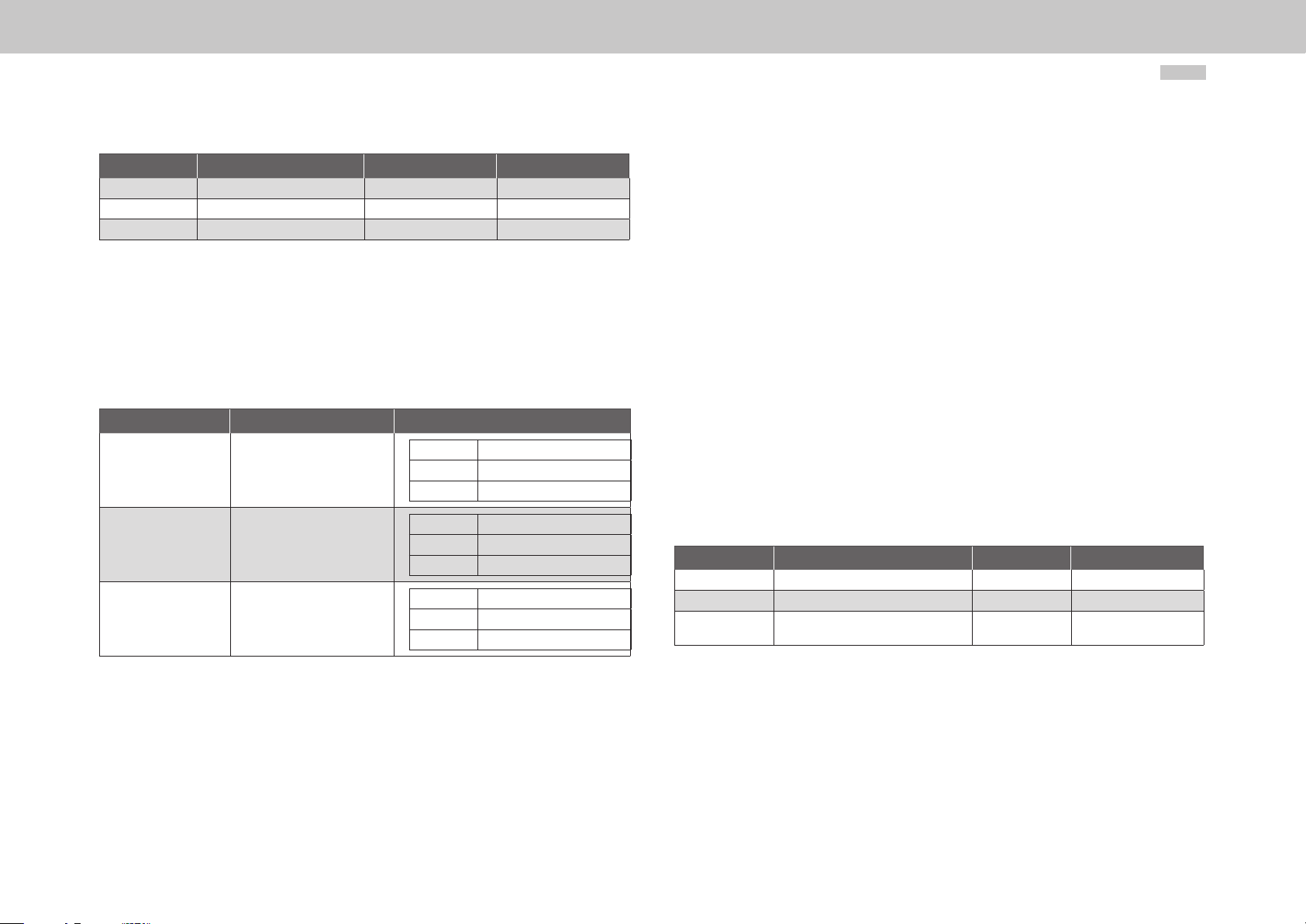
moog
MSD Servo Drive User Manual CANopen/EtherCAT
58
Object no. Object name Object code Ty pe
0x6046 vl min./max. amount AR R AY Unsigned32
0x6048 vl velocity acceleration A RRAY Unsigned32
0x6049 vl velocity deceleration A RRAY Unsigned32
Table 8 .17 Velocity mode
In this operation mode, the device must be scaled in the unit Hertz (Hz). This requires
the following settings using the Scaling Wizard in the standard/CiA402 area:
Position rev
Speed rev/s (=> 1/s => Hz)
Acceleration rev/s/s
The limits then also have to be set. Specifically, these are:
Object no. Object name Description
0x6046 vl min./max. amount
0x6048 vl velocity acceleration
0x6049 vl velocity deceleration
Table 8.18 Limits in V/F mode
Index
0 Min. speed in user unit
1 Max. speed in user unit
Index
0 Speed change in user unit
1 Per time unit
Index
0 Speed change in user unit
1 Per time unit
8.3 Cyclical operation modes, profile generation
in the drive
In the cyclical operation modes described below, the profile generation takes place
in the drive; the drive's internal profile generator is not active. The drive interpolates
between the drive setpoints transmitted cyclically (according to position, speed, torque
operation mode).
8. 3.1 Interpolated position mode
The "interpolated position mode" operation mode (mode of operation = 7) is a further
option, alongside profile position mode, for positioning axles via CANopen. It is used for
co-ordinated movement of multiple axles (or a single axle) via one control.
In Interpolated Position mode, though, the driving profile is created entirely by the control. It cyclically transmits roughly interpolated position values between which the servo
drive handles the fine interpolation (e.g. linear). Accordingly,
the profile for the axle to follow is determined through the change in target positions for
each time unit. Position control is therefore implemented not only in the drive, but also
at the control level.
The following objects are supported by the device for this operation mode:
Object no. Object name Object code Typ e
0x60C0 Interpolation sub mode select VAR Inte ger16
0x60C1 Interpolation data record AR RAY Integer32
0x60C2 Interpolation time period R ECORD Index0: Unsigned8
Index1: Integer8
Table 8.19 Supported objects
Page 59

Fig. 8.5 Structure of interpolated position mode
Mode-specific bits in the control word
Bit Name Value Description
4 Enable IP mode
8 Stop
Table 8.20 Mode-specific bits in the control word
0 Interpolated position mode inactive
1 Interpolated position mode active
0 Execute the instruction of bit 4
1 Stop axle
Mode-specific bits in the status word
Bit Name Value Description
Stop = 0: Position not (yet) reached
Stop = 1: Axle decelerates
Stop = 0: Position reached
Stop = 1: Axle has velocity 0
10 Target reached
12 IP mode active
14 A xle synchronised
0
1
0 Interpolated position mode inactive
1 Interpolated position mode active
0 Axle not synchronised
1 Axle synchronised
Table 8.21 Mode-specific bits in the control word
8.3.2 Cyclic Synchronous Position mode (EtherCAT only)
In this operation mode (mode of operation = 8) the drive cyclically provides the position
setpoints for the drive. The position, speed and current are controlled by the drive.
As an option, an additional speed and torque setpoint can be transmitted as a precontrol value.
The following objects are supported by the device for this operation mode:
Object no. Object name Object code Type
0x607A Target position VAR I nte ge r32
0x60B1 Velocity offset VAR Integer32
0x60B2 Torque offset VA R I nte ge r16
Table 8.22 Supported objects
moog
[ Section 8 ]
MSD Servo Drive User Manual CANopen/EtherCAT
59
Page 60

moog
Fig. 8.6 Overview of cyclic synchronous position mode
Mode-specific bits in the status word
Bit Name Value Description
12 Target position
13 Following error
Table 8.23 Mode-specific bits in the status word
0 Target position ignored
1 Target position shall be used as input
0 No following error
1 Following error
MSD Servo Drive User Manual CANopen/EtherCAT
The following objects are supported by the device for this operation mode:
Object no. Object name Object code Type
0x60FF Target velocity VAR Integ er32
0x60B1 Velocity offset VAR Integer32
0x60B2 Torque offset VA R I nte ge r16
Table 8.24 Supported objects
Fig. 8.7
Overview of cyclic synchronous velocity mode
60
8.3.3 Cyclic Synchronous Velocity mode (EtherCAT only)
In this operation mode (mode of operation = 9) the drive cyclically transmits speed
setpoints to the drive, which controls the speed and current. As an option, an additional
speed setpoint and additional torque setpoint for torque pre-control can be transmitted
by the drive.
Mode-specific bits in the status word
Bit Name Value Description
12 Target velocity
Table 8.25 Mode-specific bits in the status word
0 Target velocity ignored
1 Target velocity shall be used as input
Page 61

8.3.4 Cyclic Synchronous Torque mode (EtherCAT only)
8.3.5 External pre-control of speed/torque
In this operation mode (mode of operation = 10) the drive cyclically transmits torque
setpoints to the drive, which controls the current. As an option, an additional torque
setpoint can be transmitted.
Object no. Object name Object code Type
0x6071 Target torque VAR Integer16
0x60B2 Torque offset VA R I nte ge r16
Table 8.26 Supported objects
Fig. 8.8
Overview of cyclic synchronous torque mode
Mode-specific bits in the status word
When using the servo drive in the cyclic synchronous position mode (CSP, see section
9.3.2) or cyclic synchronous velocity mode (CSV, see section 9.3.3), it is possible to
specify external pre-control values for the speed and torque via the drive. The internal
pre-control function in the drive must be deactivated for this. The relevant settings can
be found in the tables below:
Object no. Object name Data type Scaling
0x60B1 Velocity offset Integer32 As per scaling for speeds (CiA402 factor group)
0x60B2 Torque offset I ntege r16 In [‰] based on rated motor torque in object 0x6076, i.e.
Table 8.28 CiA402 objects for external pre-control
Parameter Function Value
375 – CON_IP_SFF-
Scale
376 – CON_IP_TFF-
Scale
379 – CON_ IP_FF-
Mode
•Subindex0 PositionHighResolution 0 = 32-bit position setpoint (default)
•Subindex1 Source for speed pre-control values 0 = internal pre-control (default)
•Subindex2 Source for torque pre-control
Table 8.29 MSD Servo Drive/MSD Servo Drive Compact device parameters
Scaling of speed pre-control 0–100% based on the pre-control value
Scaling of torque pre-control 0–100% based on the pre -control value
Switchover of pre-control sources
and specific setpoint formats
values
a value of 1000 corresponds to the rated motor torque.
See individual subindexes
1 = external pre-control
0 = internal pre-control (default)
1 = external pre-control
Bit Name Value Description
12 Target torque
Table 8.27 Mode-specific bits in the status word
0 Target torque ignored
1 Target torque shall be used as input
moog
Types of interpolation:
When using external pre-control via EtherCAT, both linear and cubic or spline interpolation can be applied. The type of interpolation is set via parameter P 370 – CON_IP.
However, do NOT use the setting "SplineExtFF". This type of interpolation is reserved for
a different operation mode.
MSD Servo Drive User Manual CANopen/EtherCAT
[ Section 8 ]
61
Page 62

moog
DriveADministr Ator
MSD Servo Drive User Manual CANopen/EtherCAT
62
Checking pre-control variables in Moog
You can check the transmitted external pre-control variables in MSD Servo Drive in 2
ways:
1. The objects for pre-control can be found in the CANopen/EtherCAT subject area
as device parameters
2. The variables nref_Ext (external speed pre-control) and mref_Ext (external torque
pre-control) can be recorded with the internal oscilloscope.
5
Page 63
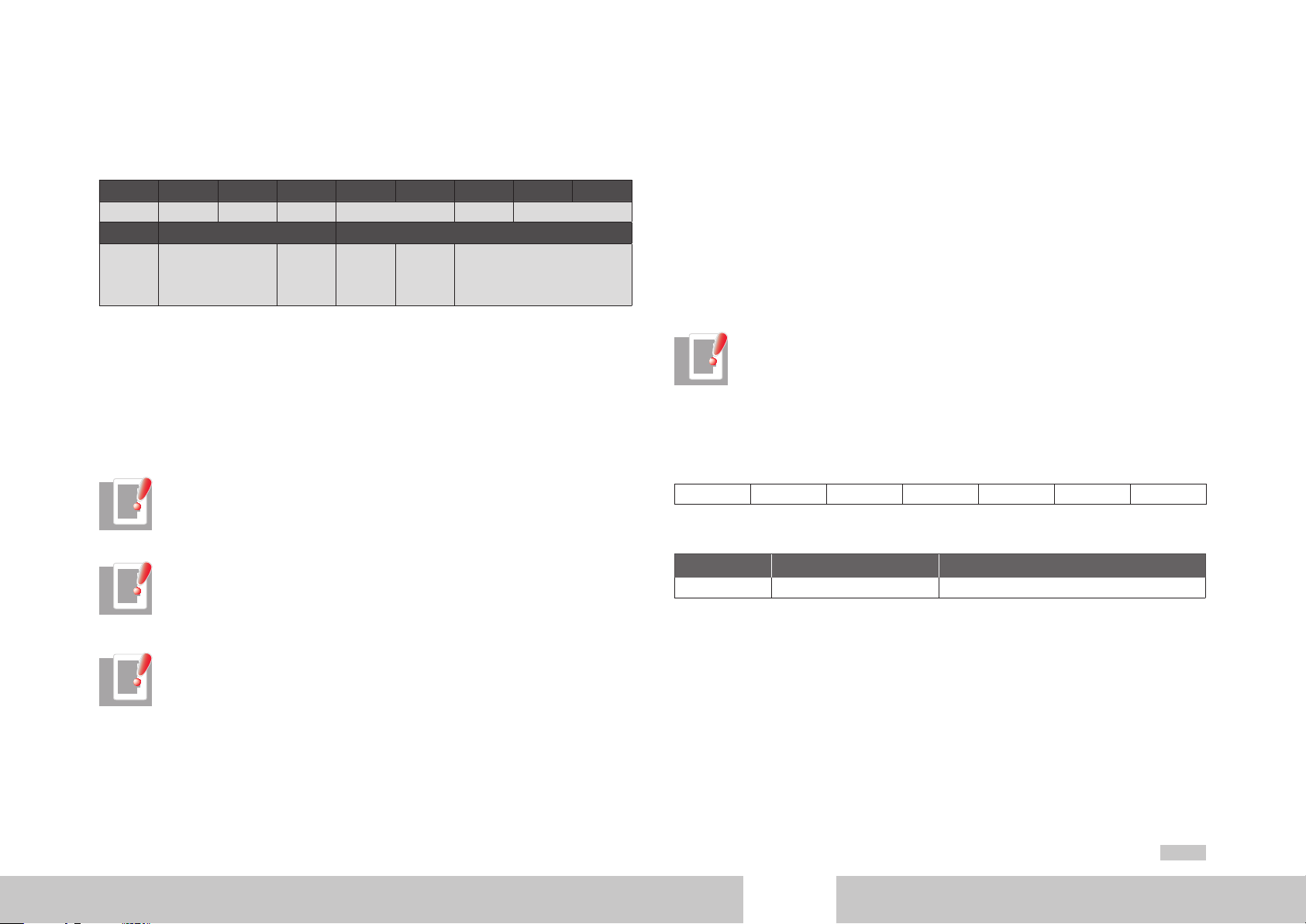
9 Emergency objects
Drive ADmin istrAtor
Byte 0 1 2 3 4 5 6 7
Bit: 0 ... 7 8 ... 15 16 ... 23 24 ... 39 40 ... 47 4 8 ... 63
Profile Device profile CiA402 Servo drive
Error
Table 9.1 Emergency telegram
Emergency error
code as per
CiA4 02
The decisive factors for rapid localisation are the error code and error location. Byte 3 of
the emergency telegram contains the error code, which provides an initial categorisation
of the cause of the error. The precise cause of the error is specified by the error location
in byte 4. Bytes 5, 6 and 7 contain the internal operating hours meter of the device.
CANopen errors – i.e. incorrect configurations, bus disturbances etc. – are indicated by
error code 0xFF00.
Error
register
(object
1001 h)
Error
number
Error
location
Operating hours meter
(in full hours)
9.1 Error acknowledgement, general
Device errors can be acknowledged by the following mechanisms:
• Control word bit 7, edge-controlled
• Control input with programmed reset functionality
• Hardware enable ENPO to control terminal
• Operation via two buttons
• Moog
user interface
• Writing value 1 to parameter 153 MPRO_DRVCOM_FaultReset via the control unit
or bus system
NOTE: For a detailed list of all error messages and remedial measures, please
refer to the MSD Servo Drive Application Manual on our product CD.
9.2 Error acknowledgement via bus system
Note: When an error occurs the drive executes a response as per the param-
eterised error response. These can be set separately for individual errors.
Note: The status indicators of the 7-segment display are explained in the ap-
plication manual.
Note: A full list of all error messages from MSD Servo Drive, including assign-
ment of the corresponding emergency code, can be found in the
MSD Servo Drive Application Manual.
moog
Another option is available via the object 6040 h control word:
Draft 402 6040h VAR Control word I nte ger16 rw M
An error acknowledgement is executed by a rising edge at bit 7 in the control word.
Resetting of the error is signalled by transmission of the following emergency message:
ID Data bytes Description
Emergency 00 00 00 00 00 00 00 00 Emergency message acknowledgement error
Table 9.2 Error acknowledgement
If the cause of the error is not eliminated, the servo drive returns to error status after
transmission of another emergency message.
MSD Servo Drive User Manual CANopen/EtherCAT
[ Section 9 ]
63
Page 64
moog
MSD Servo Drive User Manual CANopen/EtherCAT
64
Page 65

10 Technology functions
10.1 Touch probe
Positions of the drive can be recorded on the basis of certain input signals using the
Touch probe function. Possible input signals are:
• Digital input ISD05
• Digital input ISD06
• Index signal
It is possible to switch between different implementations using parameter P 2285
"Touch probe function selector".
• CiA402 implementation (not yet implemented)
• Manufacturer-specific implementation
10 .1.1 Description of manufacturer-specific implementation
In order to be able to use this function, parameter P 2285 Touch probe function selector must first be set to 2 = "BECK2" (the setting "BECK1" is currently not supported).
If signals are to be recorded via the two digital inputs ISD05 and ISD06, these will have
to be configured using parameters P 106 + P 107 MPRO_Input_FS_ISD0x as measuring
buttons (setting 15). These parameters can be found in the subject area "Configuration
of inputs/outputs Digital inputs".
Finally, the following objects also have to be mapped:
RxPDO 0x60B8 Touch probe function
TxPDO 0x60B9 Touch probe status
0x60BA Touch probe pos1 pos value
Object 0x60B8 "Touch probe function" is used to specify whether the touch probe function is to be triggered on the falling edge, rising edge or on both edges of the respective
signal. Setting the corresponding bit (0 –4) activates the respective function (edge-controlled).
The reading of the stored position is controlled by bits 8 – 12. On receipt of the configured signal, a new measurement must be started by resetting and then reconfiguring
the corresponding bit.
Bit Value (bin)
0
1
2
3
4
5–7 - - reserved
8–12
13–15 - - reserved
Table 10.1 Object 0x60B8: Touch probe function
00000000
00000001
00000000
00000010
00000000
00000100
00000000
00001000
00000000
00010000
00000001
00000000
00000010
00000000
00000011
00000000
00000100
00000000
00000101
00000000
Value
(hex)
xx01
xx02
xx04 Enable external latch 2 (positive rise)
xx08 Enable external latch 2 (negative rise)
xx10
01xx
02xx
03xx Read external latch 2 (positive rise)
04xx Read external latch 2 (negative rise)
05xx
Enable external latch 1 (positive rise) via Touch probe
module
Enable external latch 1 (negative rise) via Touch probe
module
Enable internal latch C (positive rise) via MC_Home
module
Read external latch 1 (positive rise) via Touch probe
module
Read external latch 1 (negative rise) via Touch probe
module
Read internal latch C (positive rise) via MC_Home
module
Description
Object 0x60B9 returns the status of the Touch probe function. If a signal activated by
object 0x60B8 has been registered, this is indicated in the status word by setting the
corresponding bit (0– 4).
moog
MSD Servo Drive User Manual CANopen/EtherCAT
[ Section 10 ]
65
Page 66

moog
Drive ADmin istrAtor
MSD Servo Drive User Manual CANopen/EtherCAT
66
Bit Value (bin)
0
1
2
3
4
5–7 - - reserved
8 –11
12–15
00000000
00000001
00000000
00000010
00000000
00000100
00000000
00001000
00000000
00010000
00000001
00000000
00000010
00000000
00000011
00000000
00000100
00000000
00000101
00000000
00010000
00000000
00100000
00000000
01000000
00000000
10000000
00000000
Value
(hex)
xx01
xx02
xx04 E xternal latch 2 valid
xx08 External latch 2 valid
xx10 Internal latch C valid (positive rise) via MC_Home module
01xx
02xx
03xx Acknowledge value external latch 2 (positive rise)
04xx Acknowledge value external latch 2 (negative rise)
05xx
1xxx reserved
2xxx reserved
4xxx reserved
8xxx reserved
External latch 1 valid (positive rise) via Touch probe
module
External latch 1 valid (negative rise) via Touch probe
module
Acknowledge value ex ternal latch 1 (positive rise)
via Touch probe module
Acknowledge value ex ternal latch 1 (negative rise)
via Touch probe module
Acknowledge value internal latch C (positive rise)
via MC_Home module
Description
Table 10.2 Object 0x60B9: Touch probe status
The stored position is written to object 0x60BA after bits 8–11 have been set in the
status word.
Time flowchart:
The time sequence of a measurement is shown using the example of measuring button
ISD05 and the corresponding bits. The time sequence applies analogously to the other
configurable signals.
Fig. 10.1 Time sequence of Touch probe function
10 .1. 2 Control-led homing
The Touch probe function enables control-led homing of an axis. All the input signals
described in section 10.1.1 can be used for this.
10.2 Indexing table function
The indexing table function is set in Moog
in the Movement Profile Scalings/Units subject area.
A detailed description of the function can be found in the MSD Servo Drive Application
Manual.
5 using the Scaling Wizard
Page 67

The following objects are used to configure the function.
Object no. Object name
0x607B
0x60F2
Position range
limit
Positioning
option code
Object
code
AR R AY Inte ger32
VAR Unsigned16
Table 10.3 Objects for indexing table function
Typ e
Object 0x60F2 "Positioning option code" is used for the indexing table, as opposed to
the scaling defined according to CiA402. Only bits 6 and 7 are significant (see table).
Value (hex) Meaning
0x00 As for linear
0x40 Anti-clockwise rotation
0x80 Clockwise rotation
0xC0 Distance optimised
Table 10.4 Bit assignment for object 0x60F2
moog
MSD Servo Drive User Manual CANopen/EtherCAT
[ Section 10 ]
67
Page 68

moog
MSD Servo Drive User Manual CANopen/EtherCAT
68
Page 69

11 EDS file, object directory,
parameter list
11.1 EDS file, object directory
An EDS file is available for integrating the devices into the CAN master. The file is
shipped with the firmware. It contains all the CAN objects of the servo drives.
NOTE: MSD Servo Drive has parameters with default values in the device that
may deviate from the default values in the EDS file. These are power stagespecific parameters with contents that are dependent on the size.
Examples of such parameters are:
Para P 0302 – CON_SwitchFreq
Para P 0307 – CON_VoltageSupply
Para P 0651 – DV_CAL_VDC
moog
MSD Servo Drive User Manual CANopen/EtherCAT
[ Section 11 ]
69
Page 70

CANopen/EtherCAT for MSD Servo Drive User Manual
70
Page 71

12 Bibliography
MSD Servo Drive Operation Manual Moog GmbH
MSD Servo Drive User Manual Moog GmbH
CiA301 (Rev. 4.0): Application Layer and Communication Profile http:// www.can-cia.org/
CiA402 (Rev. 2.0): Device Profile Drives and Motion Control http://ww w.can-cia.org/
EtherCAT Communication Specification Version 1.0 2004 http://www.ethercat.org/
EtherCAT Indicator Specification Proposal V0.91 2005 http://www.ethercat.org/
IEC 61158-2-12 to IEC 61158- 6-12
Hanns-Klemm-Straße 28
D-71034 Böblingen
www.moog.com/industrial
drives-support@moog.com
Hanns-Klemm-Straße 28
D-71034 Böblingen
www.moog.com/industrial
drives-support@moog.com
moog
MSD Servo Drive User Manual CANopen/EtherCAT
[ Section 12 ]
71
Page 72

moog
MSD Servo Drive User Manual CANopen/EtherCAT
72
Page 73

Fig. 13.1 Appendix: Glossary
CAL: (CAN Application Layer). CiA protocol, primarily describes the way in which
CAN open: Based on CAL definition
CiA: (CAN in Automation). CAN bus user group, generally defines a protocol for
variables are transmitted without defining their function or content.
Subsets:
CMC: (CAN based Message Specification). Sets out the definition described
above. Is accepted by most CAN suppliers. Moog GmbH conforms to this
definition.
NMT: (Network Management). Required for masters in the CAN system.
Not implemented by Moog GmbH because servo drives are always slaves and
have no "control function".
LMT: (Layer Management). See NMT
DBT: (Identifier Distributor). See NMT
Corresponds to CiA Draft Standard 301
Expands the CAL definition to include function and unit assignment of the
predefined variables
This definition is being drafted by CiA and various user groups (MOTION for
drive technology and I /O for input s/outputs) (e.g. variable for torque in Nm).
automation.
General points on the various protocol definitions
CAL: Mainly in use in Europe, Moog GmbH has currently implemented a protocol
DeviceNet: Mainly in the USA (corresponds to CAL definition).
which can be activated by a CAL master.
Initialisation has been simplified compared to CAL (CCDA), e.g. addressing via
jumper, although this does not affect operation.
moog
MSD Servo Drive User Manual CANopen/EtherCAT
73
[ Section 13 ]
Page 74

moog
MSD Servo Drive User Manual CANopen/EtherCAT
74
Page 75

Index
DriveADministrAtor
A
Access to device parameters .....................................................................27
Address setting ...........................................................................................9
Address setting using DIP switch ...............................................................10
Appendix ..................................................................................................73
ASCII 30
Assignment ...............................................................................................10
Assignment of connection X19 .................................................................12
Assignment of data types in the data field ................................................27
Asynchronous types no. FE h and FF h .......................................................32
B
Bibliography ..............................................................................................71
Bit combinations .......................................................................................43
Bit combinations of the DRIVECOM state machine ....................................43
Control functions ......................................................................................22
Control word CiA402 ...............................................................................49
Cross-manufacturer communication ............................................................7
Cyclic synchronous types no. 1–F0 h .........................................................32
D
Data handling ...........................................................................................22
Data types ..........................................................................................27, 35
Device control and state machine ..............................................................41
Device control commands .........................................................................50
Device controlling .....................................................................................41
Device control objects ...............................................................................44
Device with CANopen Option ...................................................................10
Digital inputs ............................................................................................47
DIP switches ................................................................................................9
Display of operating states via 7-segment display ......................................13
Display of operating statuses via 7-segment display ...................................17
Distributed clocks ......................................................................................39
E
C
CANopen functionality of MSD Servo Drive .................................................7
CiA402 .....................................................................................................45
CiA402 compatible operation modes ........................................................49
Commissioning ...................................................................................19, 23
Commissioning instructions ......................................................................21
Commissioning, sequence .........................................................................19
Commissioning via Moog
Communication objects ............................................................................25
Configuration ...........................................................................................19
Configuration for the operation in a drive .................................................40
Configuration of EtherCAT ........................................................................23
Configuring MSD Servo Drive ....................................................................49
Connecting cables ....................................................................................16
moog
..............................................20
EDS file .....................................................................................................69
Emergency ................................................................................................38
Emergency objects ....................................................................................63
Emergency telegram .................................................................................63
EoE .......................................................................................................38
Error acknowledgement ............................................................................63
Error acknowledgement, general ..............................................................63
Error acknowledgement via bus system .....................................................63
EtherCAT connection ................................................................................15
EtherCAT option .......................................................................................15
EtherCAT state machine ............................................................................39
EtherCAT structure ....................................................................................37
Event-controlled TxPDO transmission ........................................................32
Example ....................................................................................................32
Example of an SDO data transfer in Expedited mode .................................26
MSD Servo Drive User Manual CANopen/EtherCAT
75
[ Section 14 ]
Page 76

moog
MSD Servo Drive User Manual CANopen/EtherCAT
76
Example of application of the screens .......................................................33
Example of read access .............................................................................29
Example of the flash sequence ............................................................13, 18
Example of use of the DIP switches ...........................................................10
Examples of SDO handling ........................................................................28
F
Factor group .............................................................................................45
First commissioning ...................................................................................20
Function ...................................................................................................10
Functionality of operation modes ..............................................................20
Function of event control ..........................................................................32
Further documentation ...............................................................................8
G
General information ..................................................................................41
General Introduction ...................................................................................7
Glossary ....................................................................................................73
H
Hardware enable ................................................................................13, 18
Heartbeat function ....................................................................................34
Heartbeat protocol ....................................................................................34
Homing function .......................................................................................54
Homing mode ...........................................................................................54
Homing mode bits in the control word ......................................................55
Homing mode bits in the status word .......................................................55
How to use this manual ..............................................................................3
IN and OUT socket ....................................................................................15
Input/output .............................................................................................15
Installation and cabling .............................................................................15
Introduction to CANopen ............................................................................7
Introduction to EtherCAT ............................................................................8
I/O map ....................................................................................................47
L
LED meaning ............................................................................................17
M
Mailbox ....................................................................................................38
Mapping – general ....................................................................................33
Mapping notes .........................................................................................33
Meanings of LEDs ...............................................................................10, 16
Measures for your safety .............................................................................7
Mode-dependent bits in the control word .................................................53
Mode-dependent bits in the status word ...................................................53
Modes of operation ..................................................................................20
Mode-specific bits in the control word ....................................50, 52, 54, 56
Mode-specific bits in the status word ..................................................55, 56
Mounting and Connection of CANopen ......................................................9
Mounting and Connection of EtherCAT ....................................................15
N
NMT (Network Management) ...................................................................39
O
I
Id no.: CA65647-001 ..................................................................................2
Implemented CiA301 functionality ............................................................25
Implemented CiA402 functionality ............................................................41
Object 60FDh – digital inputs ....................................................................47
Object directory ..................................................................................25, 69
Object directory of CiA301 .......................................................................25
Operation modes ......................................................................................20
Operation modes CiA402 .........................................................................49
Page 77

Operation mode selection .........................................................................20
Option codes ............................................................................................44
P
Parameter channel ....................................................................................26
Parameter list ............................................................................................69
Parameter set download ...........................................................................31
Parameters on the Bus Systems function screen ........................................21
PDO mapping ...........................................................................................33
PDO transmission types .............................................................................32
Pictograms ..................................................................................................4
Pin assignment of the RJ45 socket ............................................................16
Position of CAN connection on MSD Servo Drive .........................................9
Procedure for commissioning ....................................................................20
Process data ..............................................................................................37
Profile position mode ................................................................................55
Profile position mode bits in the control word ...........................................56
Profile position mode bits in the status word .............................................56
Profile velocity mode .................................................................................52
Protocol definitions ...................................................................................73
Q
Quick stop ................................................................................................51
R
Representation of data types in the control protocol .................................27
Restoring factory defaults .........................................................................22
Service Data Objects .................................................................................26
SET OF SETPOINTS ....................................................................................57
Setpoint transmission from a host computer .............................................57
Setting the address .....................................................................................9
Setting the Device Parameters for CANopen .............................................25
Setting the Device Parameters for EtherCAT ..............................................37
Setting the software address and baud rate ..............................................21
Setup of the EtherCAT network ................................................................15
SINGLE SETPOINT ......................................................................................57
State machine .....................................................................................41, 42
Status transitions ......................................................................................39
Status word bits ........................................................................................51
Status word CiA402 ..................................................................................51
Structure of operation mode .....................................................................53
Structure of profile position mode .............................................................56
Structure of profile velocity mode ..............................................................53
Supported EtherCAT functionality .............................................................37
System requirements ...................................................................................8
T
Testing the higher-order drive ....................................................................22
Three possible methods of address allocation ..............................................9
Transmission of transferred values .............................................................30
Transmission rate ......................................................................................12
Transmission speeds ..................................................................................12
U
Units and scalings .....................................................................................45
S
Safety instructions .......................................................................................7
Saving the settings ....................................................................................22
SDO Information Service ...........................................................................38
Selecting events ........................................................................................32
moog
V
Voltage enabled ........................................................................................51
MSD Servo Drive User Manual CANopen/EtherCAT
77
[ Section 14 ]
Page 78

moog
W
Where can I find the device parameters? ...................................................27
X
XML file ....................................................................................................39
Y
Your qualification ........................................................................................7
MSD Servo Drive User Manual CANopen/EtherCAT
78
Page 79

Page 80

TAKE A CLOSE LOOK.
Moog solutions are only a click away. Visit our worldwide Web site for more information and the Moog facility nearest you.
moog
Moog GmbH
Hanns-Klemm-Straße 28
D-71034 Böblingen
Phone +49 7031 622 0
Telefax +49 7031 622 100
www.moog.com/industrial
drives-support@moog.com
Moog is a registered trademark of Moog, Inc. and its subsidiaries.
All quoted trademarks are property of Moog, Inc. and its subsidiaries.
All rights reserved.
© 2012 Moog GmbH
Technical alterations reserved.
The contents of our documentation have been compiled with
greatest care and in compliance with our present status of information.
Nevertheless we would like to point that this document cannot
always be updated parallel to the technical further development
of our products.
Information and specifications may be changed at any time. For
information on the latest version please refer to
drives-support@moog.com.
ID no.: CA65647-001 Rev. 1.0, 03/2012
 Loading...
Loading...