

Mitsubishi M34514M8-XXXFP, M34514M6-XXXFP, M34514E8FP, M34513M8-XXXFP, M34513M6-XXXFP Datasheet
...
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
DESCRIPTION
The 4513/4514 Group is a 4-bit single-chip microcomputer designed with CMOS technology. Its CPU is that of the 4500 series
using a simple, high-speed instruction set. The computer is
equipped with serial I/O, four 8-bit timers (each timer has a reload
register), and 10-bit A-D converter.
The various microcomputers in the 4513/4514 Group include variations of the built-in memory type and package as shown in the
table below.
FEATURES
●Minimum instruction execution time ................................ 0.75 µs
(at 4.0 MHz oscillation frequency, in high-speed mode, VDD = 4.0
V to 5.5 V)
●Supply voltage
• Middle-speed mode
...... 2.5 V to 5.5 V (at 4.2 MHz oscillation frequency, for Mask
ROM version and One Time PROM version)
...... 2.0 V to 5.5 V (at 3.0 MHz oscillation frequency, for Mask
ROM version)
(Operation voltage of A-D conversion: 2.7 V to 5.5 V)
• High-speed mode
...... 4.0 V to 5.5 V (at 4.2 MHz oscillation frequency, for Mask
ROM version and One Time PROM version)
...... 2.5 V to 5.5 V (at 2.0 MHz oscillation frequency, for Mask
ROM version and One Time PROM version)
...... 2.0 V to 5.5 V (at 1.5 MHz oscillation frequency, for Mask
ROM version)
(Operation voltage of A-D conversion: 2.7 V to 5.5 V)
●Timers
Timer 1...................................... 8-bit timer with a reload register
Timer 2...................................... 8-bit timer with a reload register
Timer 3...................................... 8-bit timer with a reload register
Timer 4...................................... 8-bit timer with a reload register
●Interrupt ........................................................................ 8 sources
●Serial I/O....................................................................... 8 bit-wide
●A-D converter .................. 10-bit successive comparison method
●Voltage comparator........................................................2 circuits
●Watchdog timer ................................................................. 16 bits
●Voltage drop detection circuit
●Clock generating circuit (ceramic resonator)
●LED drive directly enabled (port D)
APPLICATION
Electrical household appliance, consumer electronic products, office automation equipment, etc.
Product
M34513M2-XXXSP/FP
M34513M4-XXXSP/FP
M34513E4SP/FP (Note)
M34513M6-XXXFP
M34513M8-XXXFP
M34513E8FP (Note)
M34514M6-XXXFP
M34514M8-XXXFP
M34514E8FP (Note)
Note: shipped in blank
ROM (PROM) size
(✕ 10 bits)
2048 words
4096 words
4096 words
6144 words
8192 words
8192 words
6144 words
8192 words
8192 words
RAM size
(✕ 4 bits)
128 words
256 words
256 words
384 words
384 words
384 words
384 words
384 words
384 words
Package
SP: 32P4B FP: 32P6U-A
SP: 32P4B FP: 32P6U-A
SP: 32P4B FP: 32P6U-A
32P6U-A
32P6U-A
32P6U-A
42P2R-A
42P2R-A
42P2R-A
ROM type
Mask ROM
Mask ROM
One Time PROM
Mask ROM
Mask ROM
One Time PROM
Mask ROM
Mask ROM
One Time PROM
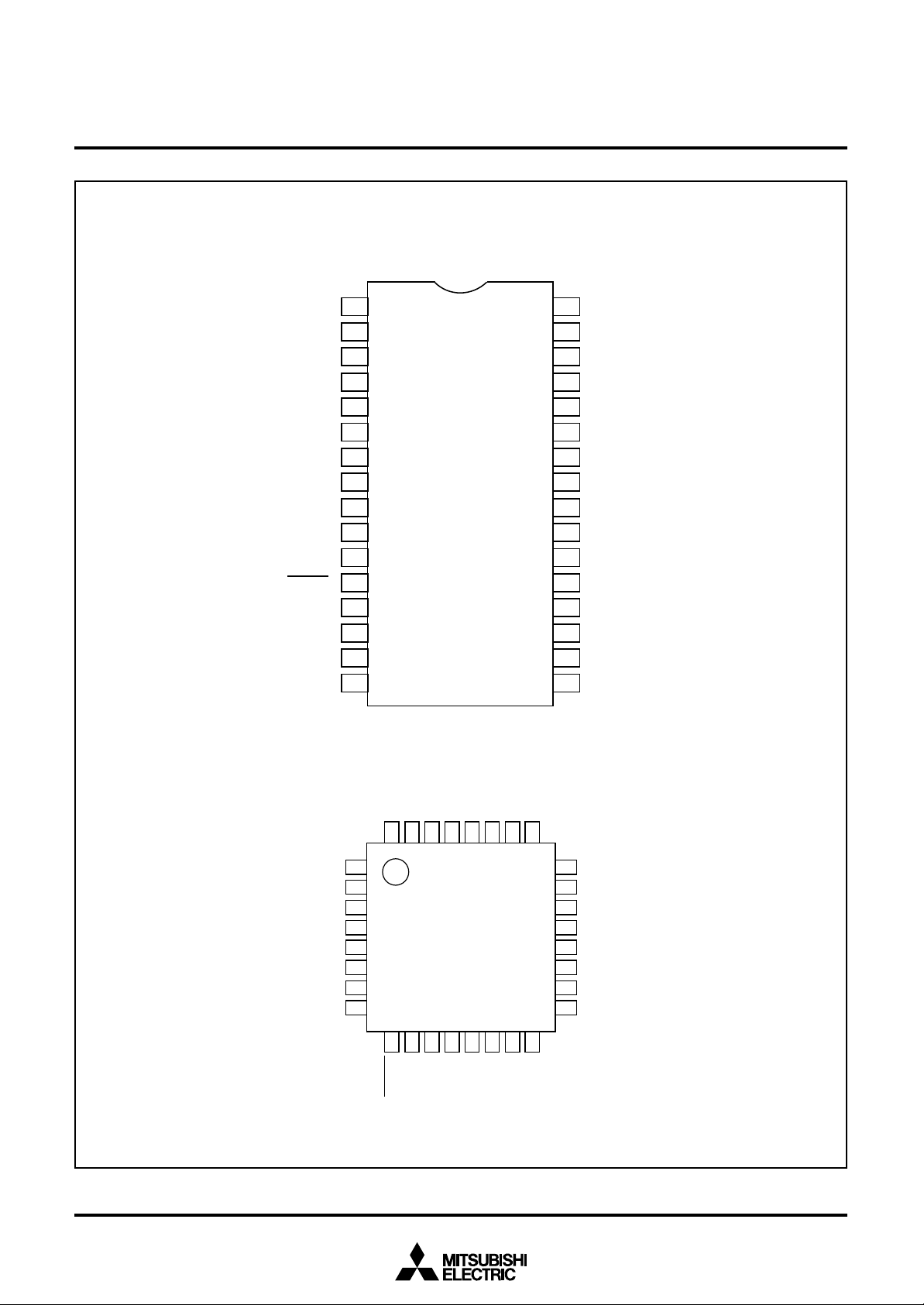
PIN CONFIGURATION (TOP VIEW) 4513 Group
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
D
D
D
D
D
D
D6/ C N T R 0
D
7
/ C N T R 1
P 2
0
/ S
C K
P 21/ S
O U T
P22/S
IN
R E S E T
C N V
S S
X
O U T
X
I N
V
S S
1
0
2
1
3
2
M
M
4
3
5
4
6
5
7
8
9
1 0
1 1
1 2
1 3
1 4
1 5
1 6
3 4 5 1 3 E 4 S
P
3 4 5 1 3 M x - X X X S
P
32
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
P1
3
P1
2
P1
1
P1
0
P0
3
P0
2
P0
1
P0
0
A
IN3
/CMP1+
A
IN2
/CMP1-
A
IN1
/CMP0+
A
IN0
/CMP0P31/INT1
P30/INT0
VDCE
DD
V
O u t l i n e 3 2 P 4 B
D6/ C N T R
D7/ C N T R
P 20/ S
P 21/ S
O U T
P22/S
3
2
1
0
1
P
D
D
V
1
P
62
51
E
V
D C
I N T
3
0
P
5
24
P 0
2
23
P 0
1
22
P 0
0
21
A
I N 3
/ C M P 1 +
20
A
I N 2
/ C M P 1 -
19
A
I N 1
/ C M P 0 +
18
A
I N 0
/ C M P 0 -
17
P 3
1
/ I N T 1
6
0
/
0
3
P
1
T
O
X
92
82
21
31
N
I
X
1
P
S
S
V
72
41
D2D1D0P
3
23
13
02
1
D
3
2
D
4
3
D
5
M 3 4 5 1 3 M x - X X X F P
4
0
5
C K
1
6
7
8
IN
M 3 4 5 1 3 E x F P
9
1
01
11
T
S
S
V
U
R
E S E
C
N
O u t l i n e 3 2 P 6 U - A
2
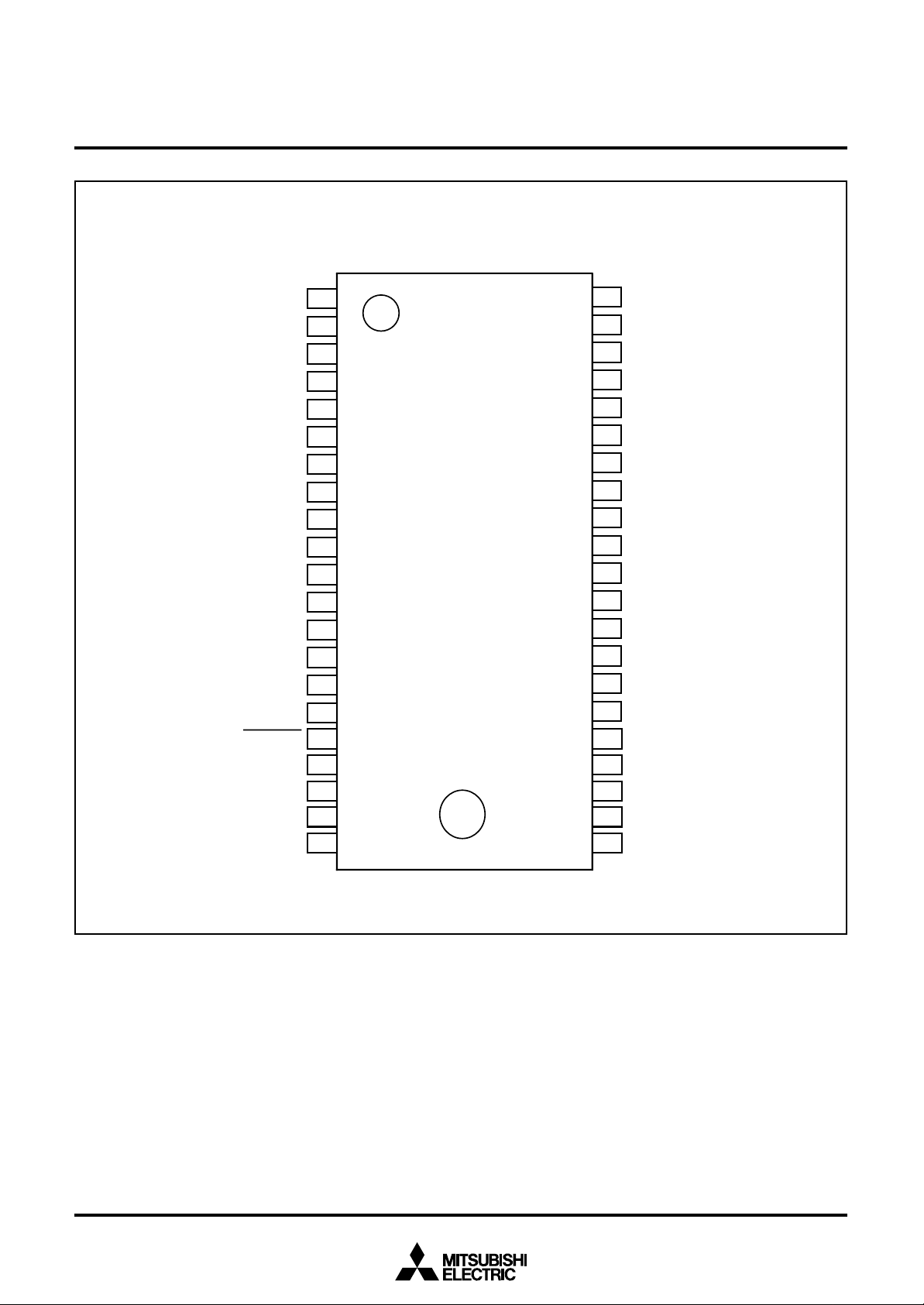
PIN CONFIGURATION (TOP VIEW) 4514 Group
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
P1
D
D
D
D
D
D
D6/CNTR0
7
/CNTR1
D
P5
P5
P5
P5
P20/S
CK
1/SOUT
P2
P22/S
IN
RESET
CNV
SS
X
OUT
X
IN
V
SS
1
3
2
0
3
1
4
2
5
3
6
4
7
5
8
9
10
0
11
1
12
2
13
3
14
15
16
17
18
19
20
21
M34514E8FP
M34514Mx-XXXFP
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
P1
2
P1
1
P1
0
P0
3
P0
2
P0
1
P0
0
P43/A
P42/A
P41/A
P40/A
A
IN3
A
IN2
A
IN1
A
IN0
P3
3
P3
2
P3
1
/INT1
P3
0
/INT0
VDCE
DD
V
IN7
IN6
IN5
IN4
/CMP1+
/CMP1/CMP0+
/CMP0-
Outline 42P2R-A
3
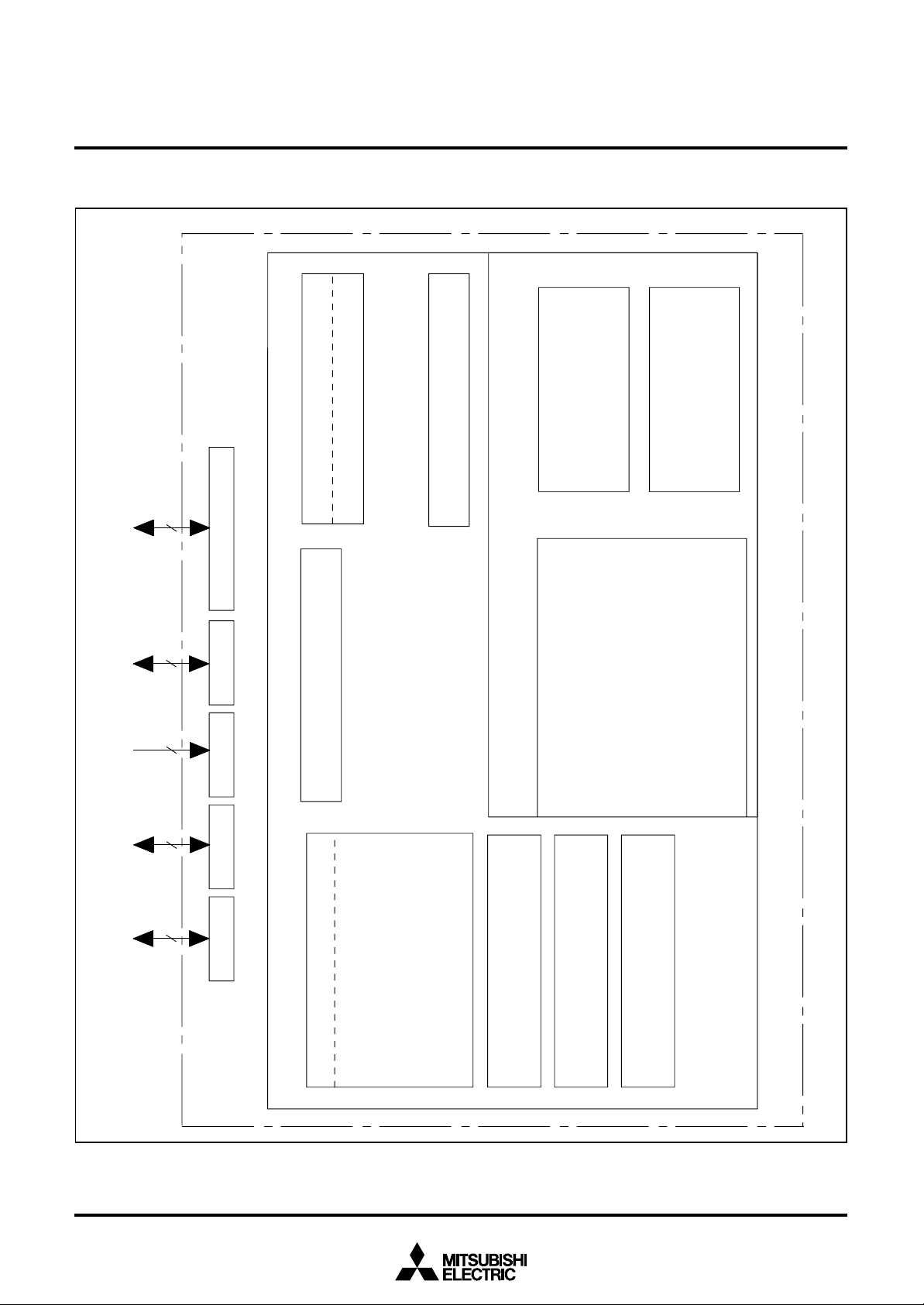
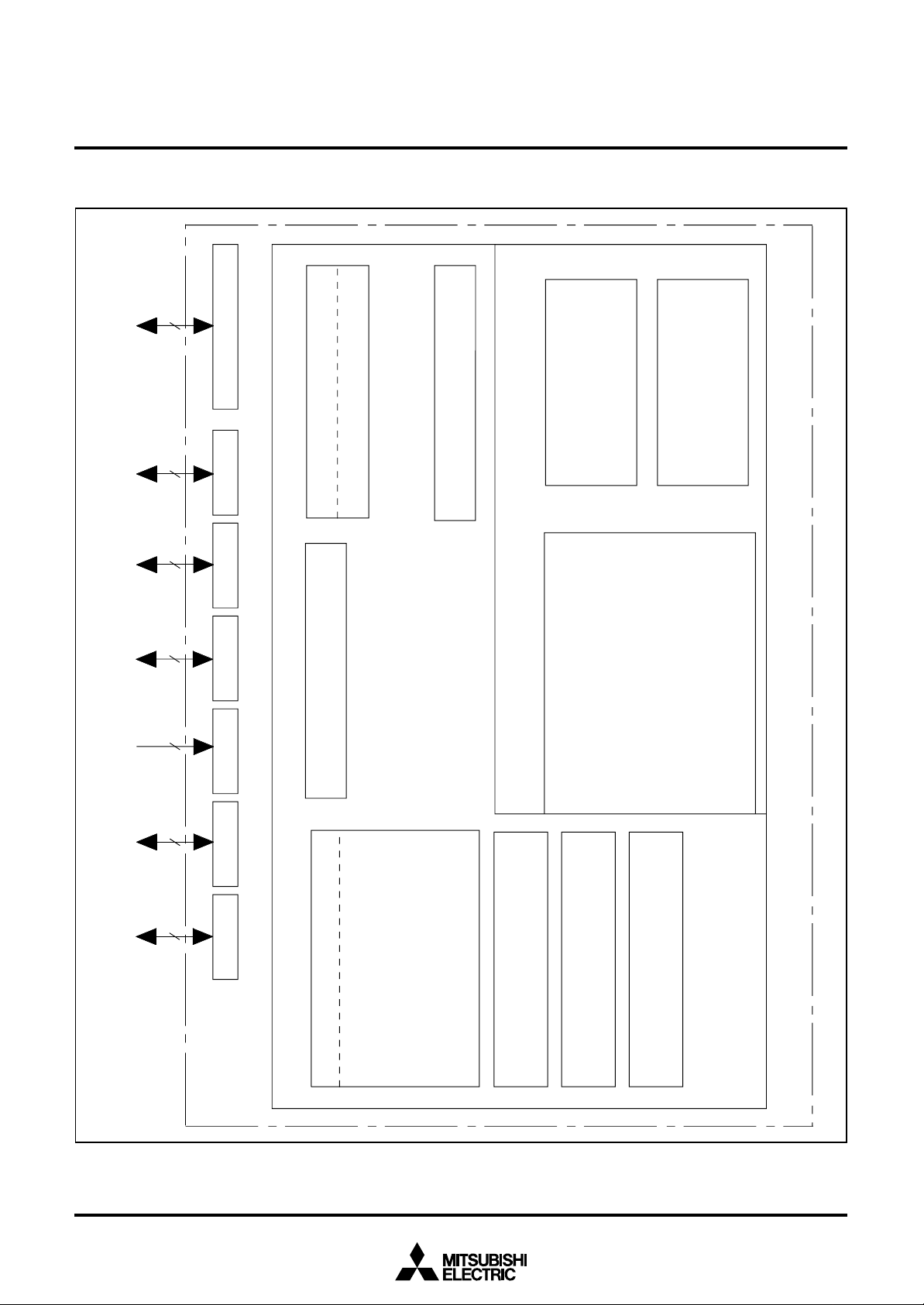
BLOCK DIAGRAM (4513 Group)
V
o l t a g e d r o p d e t e c t i o n c i r c u i
t
S
e r i a l I /
O
(
8 b i t s
✕
1
)
o
l
t
a
g
e
c
o
m
p
a
r
a
t
o
r
(
2 c i r c u i t s
)
X
I
N
—
X
O
U
T
I
/ O p o r
t
n
t
e
r
n
a
l
p
e
r
i
p
h
e
r
a
l
f
u
n
c
t
i
o
n
s
T
i m e
r
S
y s t e m c l o c k g e n e r a t i n g c i r c u i
t
W
a t c h d o g t i m e
r
(
1 6 b i t s
)
e
m
o
r
y
R
O
M
2
0 4 8 , 4 0 9 6 , 6 1 4 4 , 8 1 9
2
w
o r d s
✕
1 0 b i t
s
R
A
M
1
2 8 , 2 5 6 , 3 8 4 w o r d s
✕
4 b i t
s
4
5 0 0 S e r i e s
C
P U c o r
e
A
L U ( 4 b i t s
)
R
e g i s t e r A ( 4 b i t s ) R e g i s t e r B ( 4 b i t s
)
R
e g i s t e r D ( 3 b i t s ) R e g i s t e r E ( 8 b i t s
)
S
t a c k r e g i s t e r S K ( 8 l e v e l s
)
I
n t e r r u p t s t a c k r e g i s t e r S D P ( 1 l e v e l
)
T
i m e r 1 ( 8 b i t s
)
T
i m e r 2 ( 8 b i t s
)
T
i m e r 3 ( 8 b i t s
)
T
i m e r 4 ( 8 b i t s
)
A
- D c o n v e r t e
r
(
1
0
b
i
t
s
✕
4 c h
)
P
o r t
D
P
o r t P
3
P
o r t P
2
P
o r t P
1
P
o r t P
0
4
4
2
8
3
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
4
BLOCK DIAGRAM (4514 Group)
o
l
t
a
g
e
d
r
o
p
d
e
t
e
c
t
i
o
n
c
i
r
c
u
i
t
S
e r i a l I /
O
(
8 b i t s
✕
1
)
o
l
t
a
g
e
c
o
m
p
a
r
a
t
o
r
(
2 c i r c u i t s
)
X
I
N
—
X
O
U
T
I
/ O p o r
t
I
n t e r n a l p e r i p h e r a l f u n c t i o n
s
T
i m e
r
y
s
t
e
m
c
l
o
c
k
g
e
n
e
r
a
t
i
n
g
c
i
r
c
u
i
t
W
a t c h d o g t i m e
r
(
1 6 b i t s
)
M
e m o r
y
R
O
M
6
1
4
4
,
8
1
9
2
w
o
r
d
s
✕
1
0
b
i
t
s
R
A
M
3
8 4 w o r d s
✕
4 b i t
s
4
5 0 0 S e r i e s
C
P U c o r
e
A
L U ( 4 b i t s
)
R
e g i s t e r A ( 4 b i t s ) R e g i s t e r B ( 4 b i t s
)
R
e g i s t e r D ( 3 b i t s ) R e g i s t e r E ( 8 b i t s
)
S
t a c k r e g i s t e r S K ( 8 l e v e l s
)
I
n t e r r u p t s t a c k r e g i s t e r S D P ( 1 l e v e l
)
T
i m e r 1 ( 8 b i t s
)
T
i m e r 2 ( 8 b i t s
)
T
i m e r 3 ( 8 b i t s
)
T
i m e r 4 ( 8 b i t s
)
A
- D c o n v e r t e
r
(
1
0
b
i
t
s
✕
8 c h
)
o
r
t
D
P
o r t P
3
o
r
t
P
2
o
r
t
P
1
o
r
t
P
0
o
r
t
P
5
o
r
t
P
4
4
4
4
4
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
5
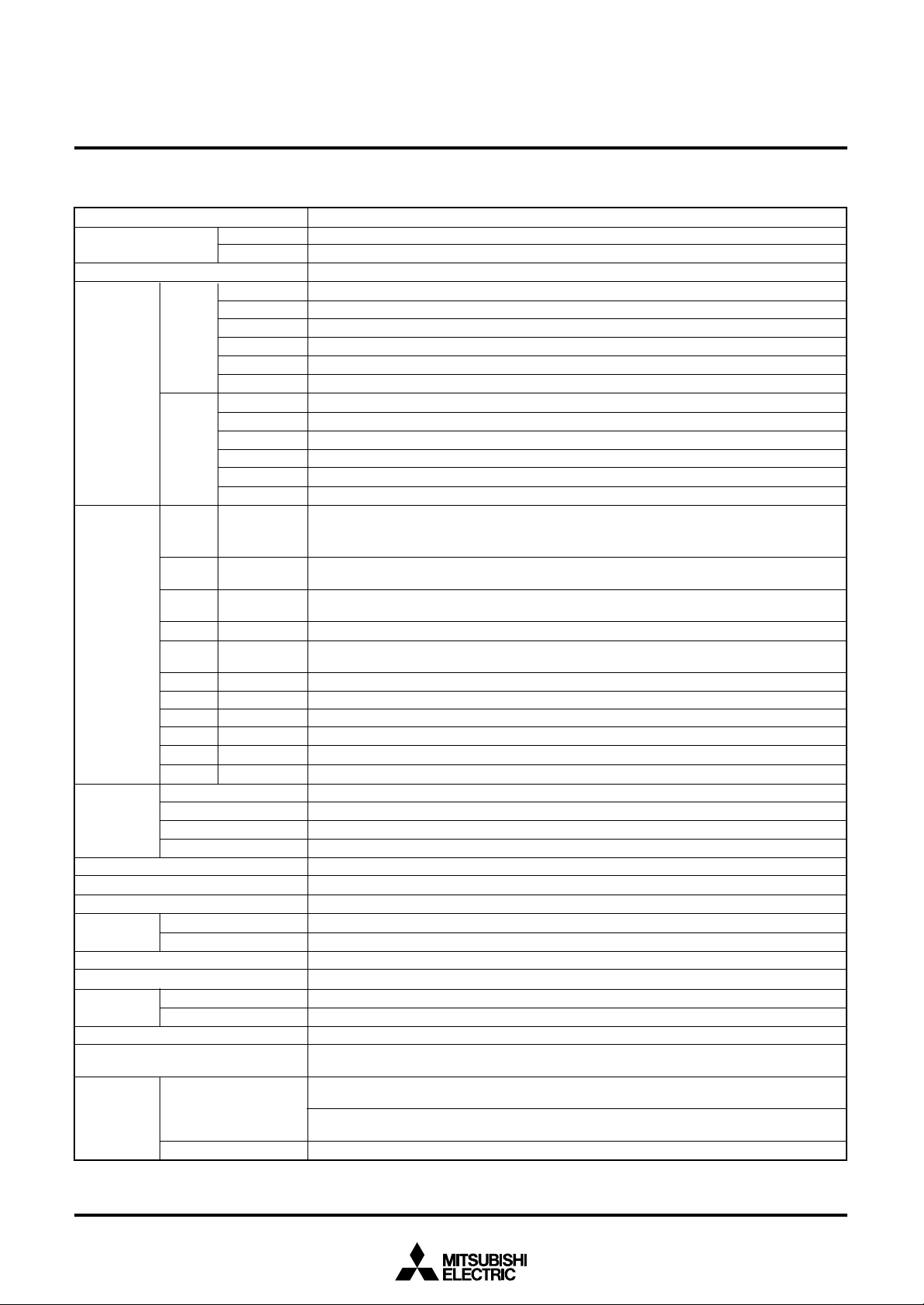
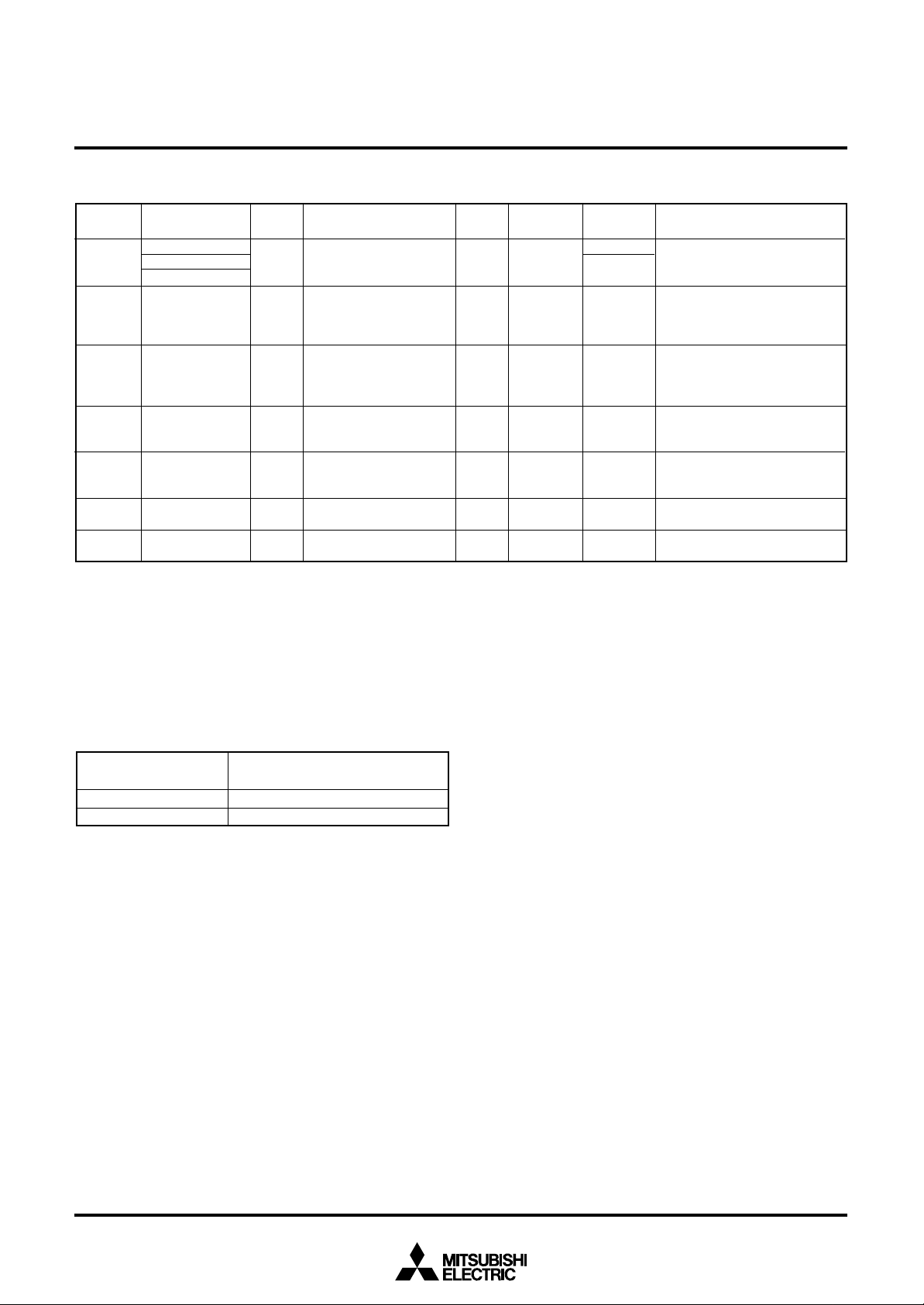
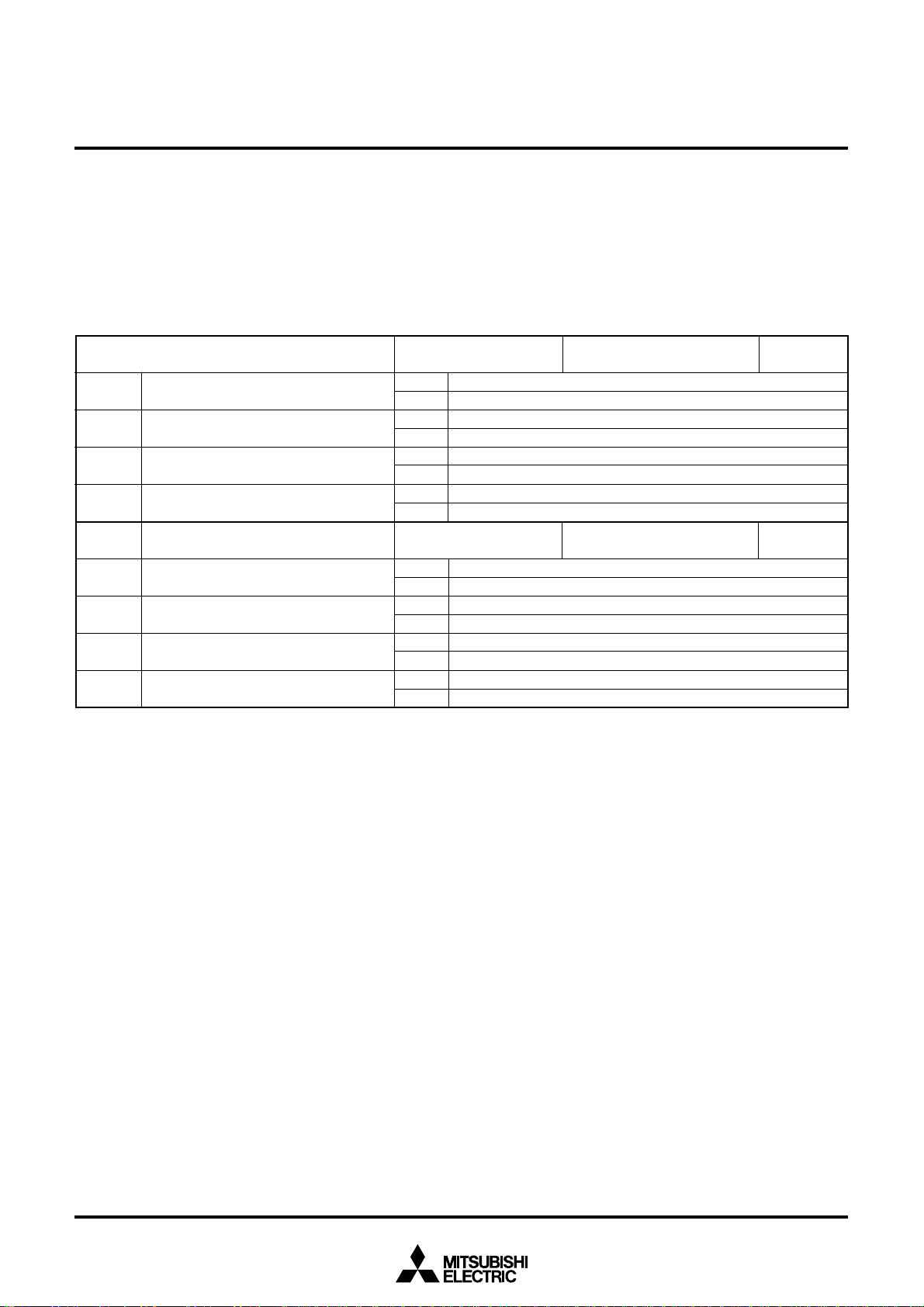
PERFORMANCE OVERVIEW
Parameter
Number of
basic instructions
Minimum instruction execution time
Memory sizes
Input/Output
ports
Timers
A-D converter
Voltage comparator
Serial I/O
Interrupt
Subroutine nesting
Device structure
Package
Operating temperature range
Supply voltage
Power
dissipation
(typical value)
ROM
RAM
D
0–D7
P00–P03
P10–P13
P20–P22
P30–P33
P40–P43
P50–P53
CNTR0
CNTR1
INT0
INT1
Timer 1
Timer 2
Timer 3
Timer 4
Sources
Nesting
4513 Group
4514 Group
Active mode
RAM back-up mode
4513 Group
4514 Group
M34513M2
M34513M4/E4
M34513M6
M34513M8/E8
M34514M6
M34514M8/E8
M34513M2
M34513M4/E4
M34513M6
M34513M8/E8
M34514M6
M34514M8/E8
I/O (Input is
examined by
skip decision)
I/O
I/O
Input
I/O
I/O
I/O
I/O
I/O
Input
Input
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
Function
123
128
0.75
µ
s (at 4.0 MHz oscillation frequency, in high-speed mode)
2048 words ✕ 10 bits
4096 words ✕ 10 bits
6144 words ✕ 10 bits
8192 words ✕ 10 bits
6144 words ✕ 10 bits
8192 words ✕ 10 bits
128 words ✕ 4 bits
256 words ✕ 4 bits
384 words ✕ 4 bits
384 words ✕ 4 bits
384 words ✕ 4 bits
384 words ✕ 4 bits
Eight independent I/O ports;
ports D6 and D7 are also used as CNTR0 and CNTR1, respectively.
4-bit I/O port; each pin is equipped with a pull-up function and a key-on wakeup function. Both
functions can be switched by software.
4-bit I/O port; each pin is equipped with a pull-up function and a key-on wakeup function. Both
functions can be switched by software.
3-bit input port; ports P20, P21 and P22 are also used as SCK, SOUT and SIN, respectively.
4-bit I/O port (2-bit I/O port for the 4513 Group); ports P30 and P31 are also used as INT0 and
INT1, respectively. The 4513 Group does not have ports P32, P33.
4-bit I/O port; The 4513 Group does not have this port.
4-bit I/O port with a direction register; The 4513 Group does not have this port.
1-bit I/O; CNTR0 pin is also used as port D6.
1-bit I/O; CNTR1 pin is also used as port D7.
1-bit input; INT0 pin is also used as port P30 and equipped with a key-on wakeup function.
1-bit input; INT1 pin is also used as port P31 and equipped with a key-on wakeup function.
8-bit programmable timer with a reload register.
8-bit programmable timer with a reload register is also used as an event counter.
8-bit programmable timer with a reload register.
8-bit programmable timer with a reload register is also used as an event counter.
10-bit wide, This is equipped with an 8-bit comparator function.
2 circuits (CMP0, CMP1)
8-bit ✕ 1
8 (two for external, four for timer, one for A-D, and one for serial I/O)
1 level
8 levels
CMOS silicon gate
32-pin plastic molded SDIP (32P4B)/LQFP(32P6U-A)
42-pin plastic molded SSOP (42P2R-A)
–20 °C to 85 °C
2.0 V to 5.5 V for Mask ROM version, 2.5 V to 5.5 V for One Time PROM version (Refer to the
electrical characteristics because the supply voltage depends on the oscillation frequency.)
1.8 mA (at VDD = 5.0 V, 4.0 MHz oscillation frequency, in middle- speed mode, output transis-
3.0 mA (at VDD = 5.0 V, 4.0 MHz oscillation frequency, in high-speed mode, output transistors
0.1 µA (at room temperature, VDD = 5 V, output transistors in the cut-off state)
tors in the cut-off state)
in the cut-off state)
6
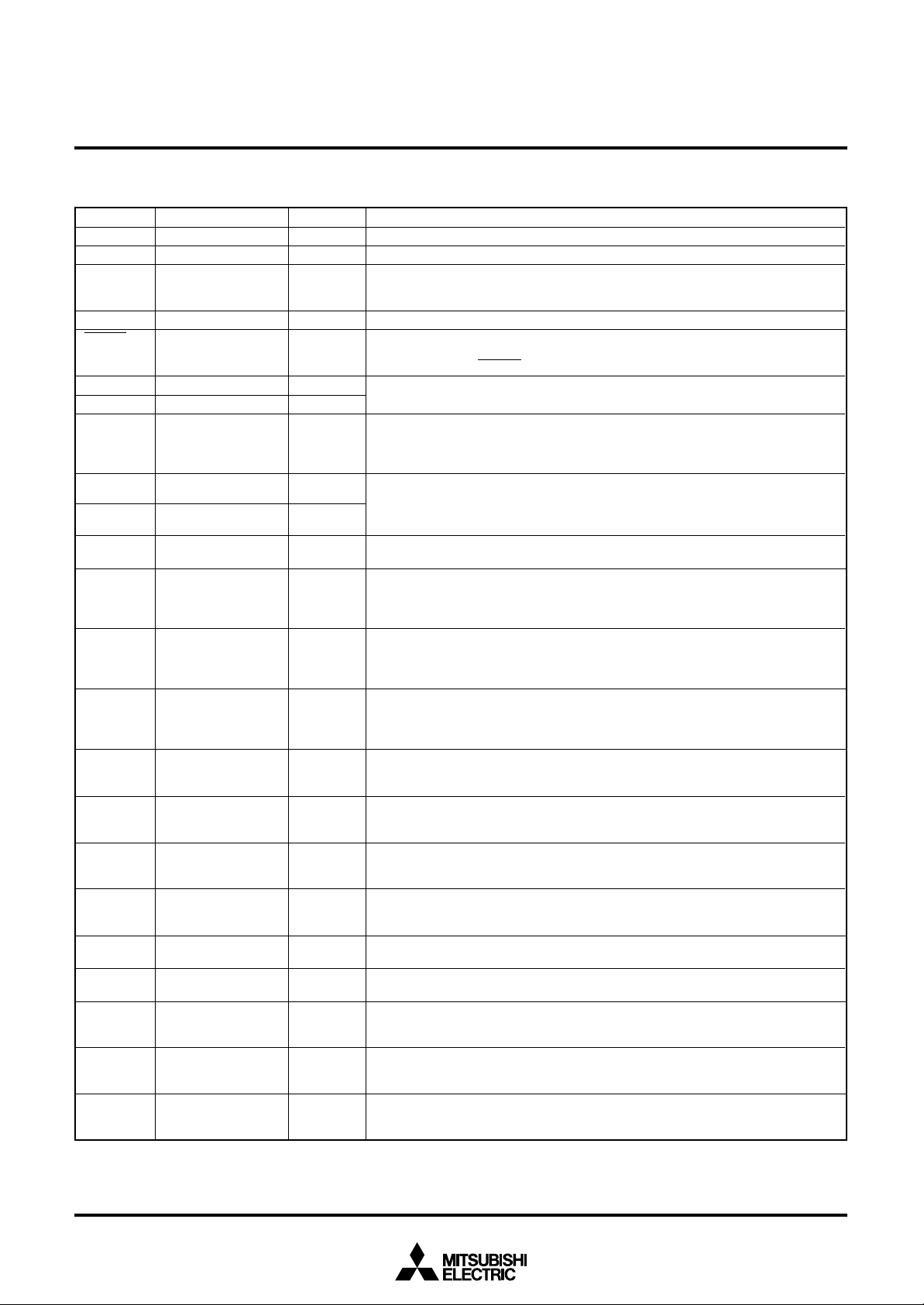
PIN DESCRIPTION
Pin
DD
V
VSS
VDCE
CNVSS
RESET
XIN
XOUT
D0–D7
P00–P03
P10–P13
P20–P22
P30–P33
P40–P43
P50–P53
AIN0–AIN7
CNTR0
CNTR1
INT0, INT1
SIN
SOUT
SCK
CMP0CMP0+
CMP1CMP1+
Name
Power supply
Ground
Voltage drop detec-
tion circuit enable
SS
CNV
Reset input
System clock input
System clock output
I/O port D
(Input is examined
by skip decision.)
I/O port P0
I/O port P1
Input port P2
I/O port P3
I/O port P4
I/O port P5
Analog input
Timer input/output
Timer input/output
Interrupt input
Serial data input
Serial data output
Serial I/O clock
input/output
Voltage comparator
input
Voltage comparator
input
Input/Output
—
—
Input
—
I/O
Input
Output
I/O
I/O
I/O
Input
I/O
I/O
I/O
Input
I/O
I/O
Input
Input
Output
I/O
Input
Input
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
Function
Connected to a plus power supply.
Connected to a 0 V power supply.
VDCE pin is used to control the operation/stop of the voltage drop detection circuit.
When “H” level is input to this pin, the circuit is operating. When “L” level is inpu to
this pin, the circuit is stopped.
Connect CNVSS to VSS and apply “L” (0V) to CNVSS certainly.
An N-channel open-drain I/O pin for a system reset. When the watchdog timer
causes the system to be reset or system reset is performed by the voltage drop detection circuit, the RESET pin outputs “L” level.
I/O pins of the system clock generating circuit. XIN and XOUT can be connected to
ceramic resonator. A feedback resistor is built-in between them.
Each pin of port D has an independent 1-bit wide I/O function. Each pin has an output latch. For input use, set the latch of the specified bit to “1.” The output structure
is N-channel open-drain.
Ports D6 and D7 are also used as CNTR0 and CNTR1, respectively.
Each of ports P0 and P1 serves as a 4-bit I/O port, and it can be used as inputs
when the output latch is set to “1.” The output structure is N-channel open-drain.
Every pin of the ports has a key-on wakeup function and a pull-up function. Both
functions can be switched by software.
3-bit input port. Ports P20, P21 and P22 are also used as SCK, SOUT and SIN, respectively.
4-bit I/O port (2-bit I/O port for the 4513 Group). For input use, set the latch of the
specified bit to “1.” The output structure is N-channel open-drain. Ports P30 and
P31 are also used as INT0 and INT1, respectively.
The 4513 Group does not have ports P32, P33.
4-bit I/O port. For input use, set the latch of the specified bit to “1.” The output
structure is N-channel open-drain. Ports P40–P43 are also used as analog input
pins AIN4–AIN7, respectively.
The 4513 Group does not have port P4.
4-bit I/O port. Each pin has a direction register and an independent 1-bit wide I/O
function. For input use, set the direction register to “0.” For output use, set the direction regiser to “1.” The output structure is CMOS.
The 4513 Group does not have port P5.
Analog input pins for A-D converter. AIN0–AIN3 are also used as voltage comparator input pins and AIN4–AIN7 are also used as port P4.
The 4513 Group does not have AIN4–AIN7.
CNTR0 pin has the function to input the clock for the timer 2 event counter, and to
output the timer 1 underflow signal divided by 2.
CNTR0 pin is also used as port D6.
CNTR1 pin has the function to input the clock for the timer 4 event counter, and to
output the timer 3 underflow signal divided by 2.
CNTR1 pin is also used as port D7.
INT0, INT1 pins accept external interrupts. They also accept the input signal to return the system from the RAM back-up state.
INT0, INT1 pins are also used as ports P30 and P31, respectively.
SIN pin is used to input serial data signals by software.
SIN pin is also used as port P22.
SOUT pin is used to output serial data signals by software.
SOUT pin is also used as port P21.
SCK pin is used to input and output synchronous clock signals for serial data transfer by software.
SCK pin is also used as port P20.
CMP0-, CMP0+ pins are used as the voltage comparator input pin when the voltage comparator function is selected by software.
CMP0-, CMP0+ pins are also used as AIN0 and AIN1.
CMP1-, CMP1+ pins are used as the voltage comparator input pin when the voltage comparator function is selected by software.
CMP1-, CMP1+ pins are also used as AIN2 and AIN3.
7
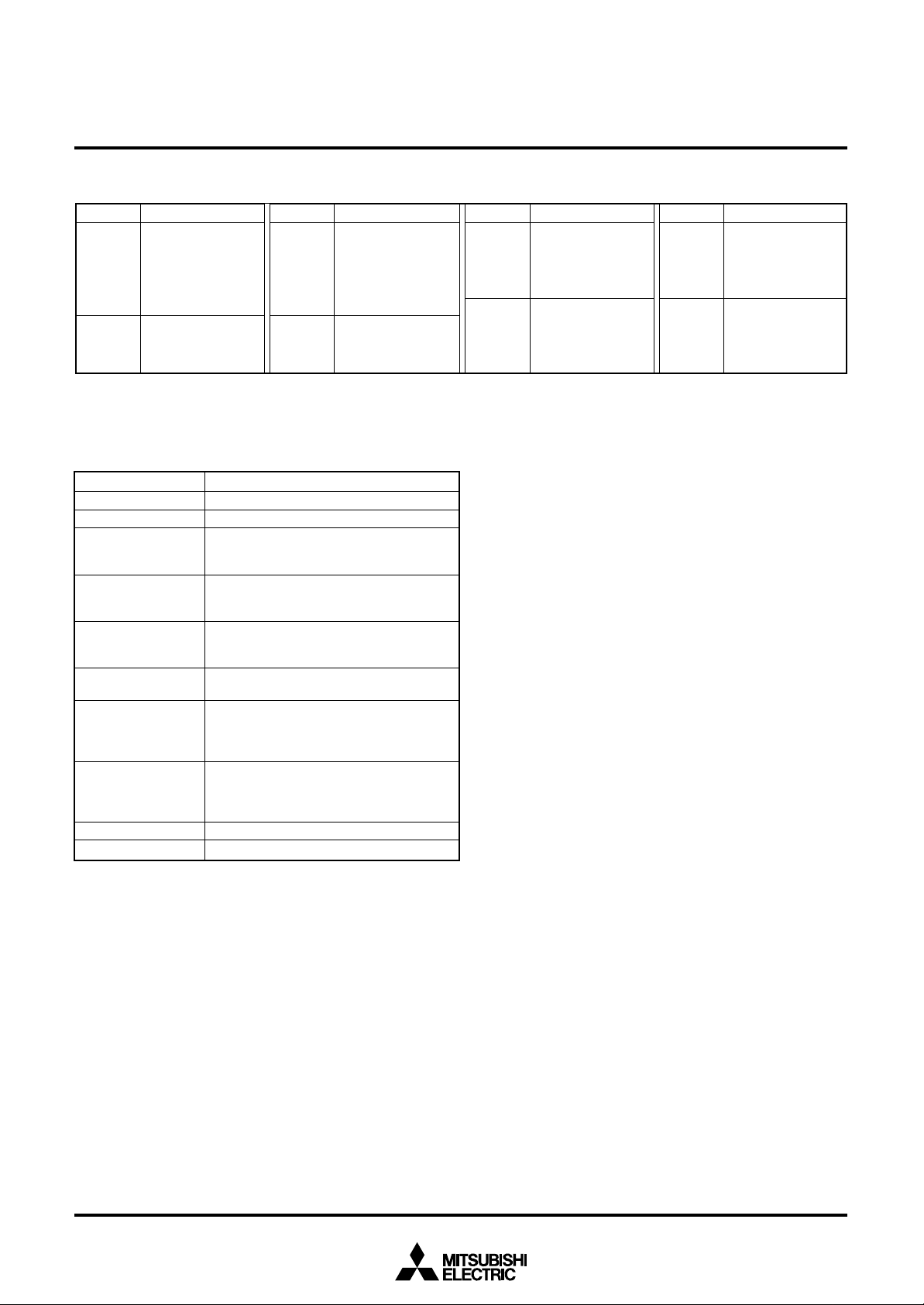
MULTIFUNCTION
Pin
D6
D7
P20
P21
P22
P30
P31
Notes 1: Pins except above have just single function.
2: The input of D
S
3: The 4513 Group does not have P4
Multifunction
CNTR0
CNTR1
SCK
SOUT
SIN
INT0
INT1
6, D7, P20–P22, CMP0-, CMP0+, CMP1-, CMP1+ and the input/output of P30, P31, P40–P43 can be used even when CNTR0, CNTR1,
CK, SOUT, SIN, INT0, INT1, and AIN0–AIN7 are selected.
Pin
CNTR0
CNTR1
SCK
SOUT
SIN
INT0
INT1
0/AIN4–P43/AIN7.
CONNECTIONS OF UNUSED PINS
Pin
XOUT
VDCE
D0–D5
D6/CNTR0
D7/CNTR1
P20/SCK
P21/SOUT
P22/SIN
P30/INT0
P31/INT1
P32, P33
P40/AIN4–P43/AIN7
P50–P53 (Note 1)
AIN0/CMP0AIN1/CMP0+
AIN2/CMP1AIN3/CMP1+
P00–P03
P10–P13
Open (when using an external clock).
Connect to VSS.
Connect to VSS, or set the output latch to
“0” and open.
Connect to VSS.
Connect to VSS, or set the output latch to
“0” and open.
Connect to VSS, or set the output latch to
“0” and open.
When the input mode is selected by software, pull-up to VDD through a resistor or
pull-down to VDD.
When selecting the output mode, open.
Connect to VSS.
Open or connect to VSS (Note 2)
Open or connect to VSS (Note 2)
Connection
Multifunction
D6
D7
P20
P21
P22
P30
P31
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
Pin
AIN0
AIN1
AIN2
AIN3
P40
P41
P42
P43
Notes 1: After system is released from reset, port P5 is in an input mode (di-
2: When the P0
(Note when the output latch is set to “0” and pins are open)
● After system is released from reset, port is in a high-impedance state un-
til it is set the output latch to “0” by software. Accordingly, the voltage
level of pins is undefined and the excess of the supply current may occur
while the port is in a high-impedance state.
● To set the output latch periodically by software is recommended because
value of output latch may change by noise or a program run away
(caused by noise).
(Note when connecting to V
● Connect the unused pins to V
shortest distance against noise.
Multifunction
CMP0CMP0+
CMP1CMP1+
AIN4
AIN5
AIN6
AIN7
rection register FR0 = 0000
0–P03 and P10–P13 are connected to VSS, turn off
their pull-up transistors (register PU0i=“0”) and also invalidate the
key-on wakeup functions (register K0i=“0”) by software. When
these pins are connected to V
tions are left valid, the system fails to return from RAM back-up
state. When these pins are open, turn on their pull-up transistors
(register PU0i=“1”) by software, or set the output latch to “0.”
Be sure to select the key-on wakeup functions and the pull-up
functions with every two pins. If only one of the two pins for the
key-on wakeup function is used, turn on their pull-up transistors by
software and also disconnect the other pin. (i = 0, 1, 2, or 3.)
SS and VDD)
Pin
CMP0CMP0+
CMP1CMP1+
AIN4
AIN5
AIN6
AIN7
2)
SS while the key-on wakeup func-
SS and VDD using the thickest wire at the
Multifunction
AIN0
AIN1
AIN2
AIN3
P40
P41
P42
P43
8
PORT FUNCTION
Port
Port D
Port P0
Port P1
Port P2
Port P3
(Note 1)
Port P4
(Note 2)
Port P5
(Note 2)
Notes 1: The 4513 Group does not have P32 and P33.
2: The 4513 Group does not have these ports.
Pin
D0–D5
D6/CNTR0
D7/CNTR1
P00–P03
P10–P13
P20/SCK
P21/SOUT
P22/SIN
P30/INT0
P31/INT1
P32, P33
P40/AIN4
–P43/AIN7
P50–P53
Input
Output
I/O
(8)
I/O
(4)
I/O
(4)
Input
(3)
I/O
(4)
I/O
(4)
I/O
(4)
N-channel open-drain
N-channel open-drain
N-channel open-drain
N-channel open-drain
N-channel open-drain
CMOS
Output structure
I/O
unit
1
4
4
3
4
4
4
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
Control
instructions
SD, RD
SZD
CLD
OP0A
IAP0
OP1A
IAP1
IAP2
OP3A
IAP3
OP4A
IAP4
OP5A
IAP5
Control
registers
W6
PU0, K0
PU0, K0
J1
I1, I2
Q2
FR0
Remark
Built-in programmable pull-up
functions
Key-on wakeup functions
(programmable)
Built-in programmable pull-up
functions
Key-on wakeup functions
(programmable)
Built-in key-on wakeup
function
(P30/INT0, P31/INT1)
DEFINITION OF CLOCK AND CYCLE
● System clock
The system clock is the basic clock for controlling this product.
The system clock is selected by the bit 3 of the clock control register MR.
Table Selection of system clock
Register MR
MR3
0
1
Note: f(XIN)/2 is selected after system is released from reset.
● Instruction clock
The instruction clock is a signal derived by dividing the system
clock by 3. The one instruction clock cycle generates the one
machine cycle.
● Machine cycle
The machine cycle is the standard cycle required to execute the
instruction.
System clock
f(XIN)
f(XIN)/2
9
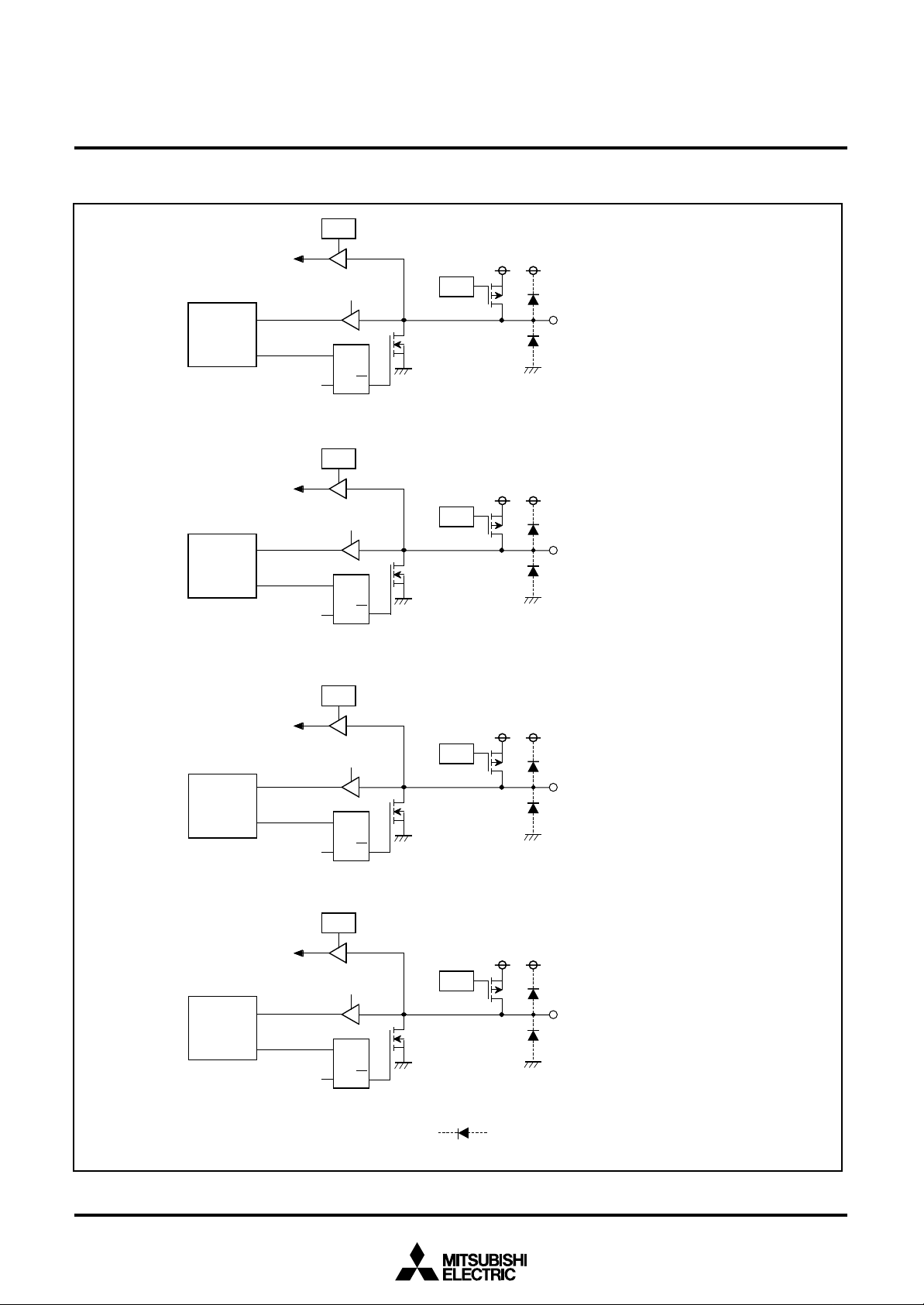
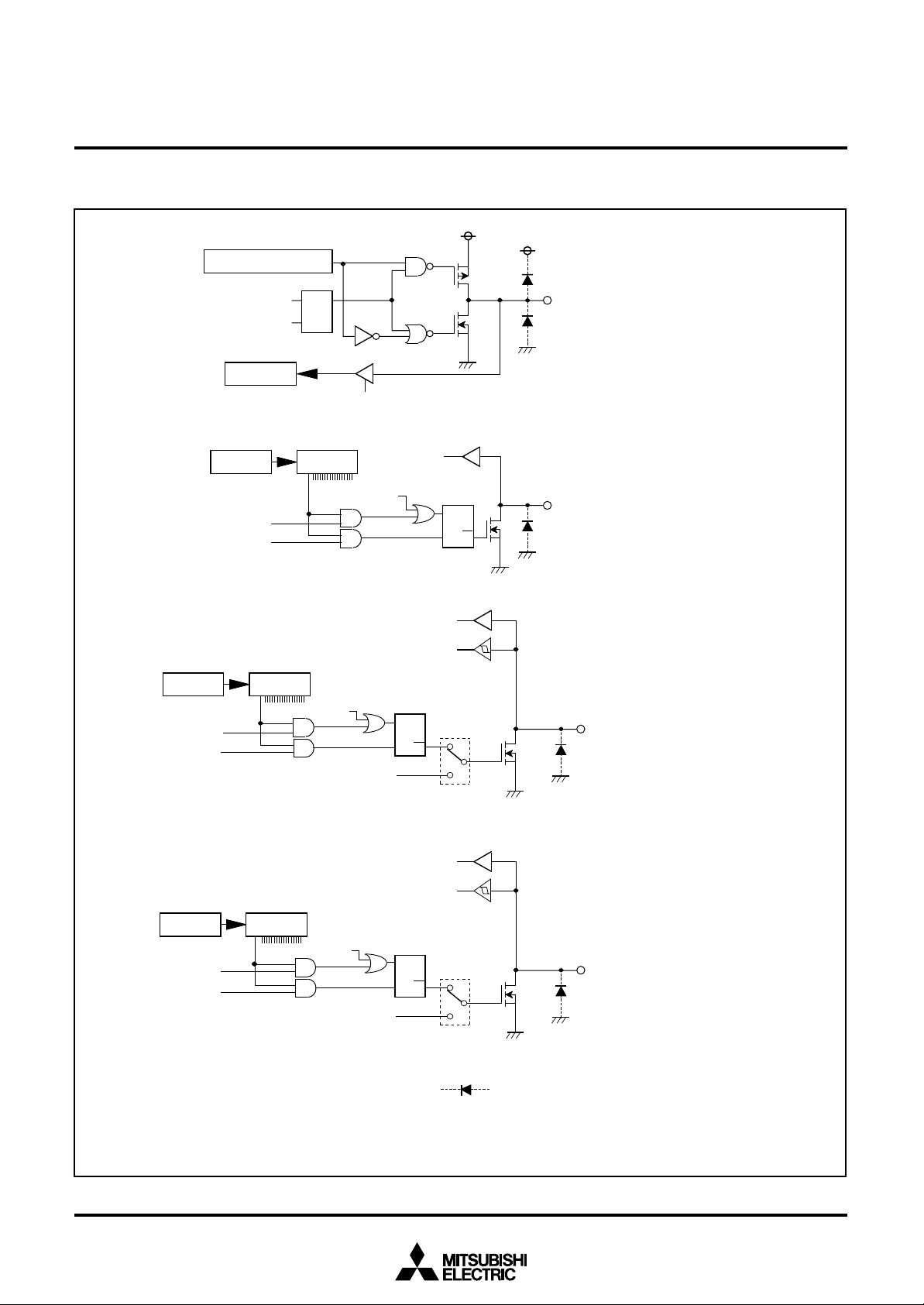
PORT BLOCK DIAGRAMS
0
2
3
A
A
Key-on wakeup input
K 0
0
I A P 0 i n s t r u c t i o n
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
P u l l - u p t r a n s i s t o r
PU0
R e g i s t e r A
A i
O P 0 A i n s t r u c t i o n
K e y - o n w a k e u p i n p u t
R e g i s t e r A
Ai
O P 0 A i n s t r u c t i o n
Key-on wakeup input
R e g i s t e r
D
T
Q
K 0
1
IAP0 instruction
D
Q
T
K 0
2
I A P 1 i n s t r u c t i o n
P u l l - u p t r a n s i s t o r
PU0
1
Pull-up transistor
PU0
P 00, P 0
P 02, P 0
P 10, P 1
1
3
1
10
A i
O P 1 A i n s t r u c t i o n
K e y - o n w a k e u p i n p u t
R e g i s t e r
A i
O P 1 A i n s t r u c t i o n
D
T
Q
K0
3
IAP1 instruction
D
T
Q
Pull-up transistor
PU0
•
i r e p r e s e n t s 0 , 1 , 2 , o r 3 .
•
T h i s s y m b o l r e p r e s e n t s a p a r a s i t i c d i o d e o n t h e p o r t .
P12,P1
3
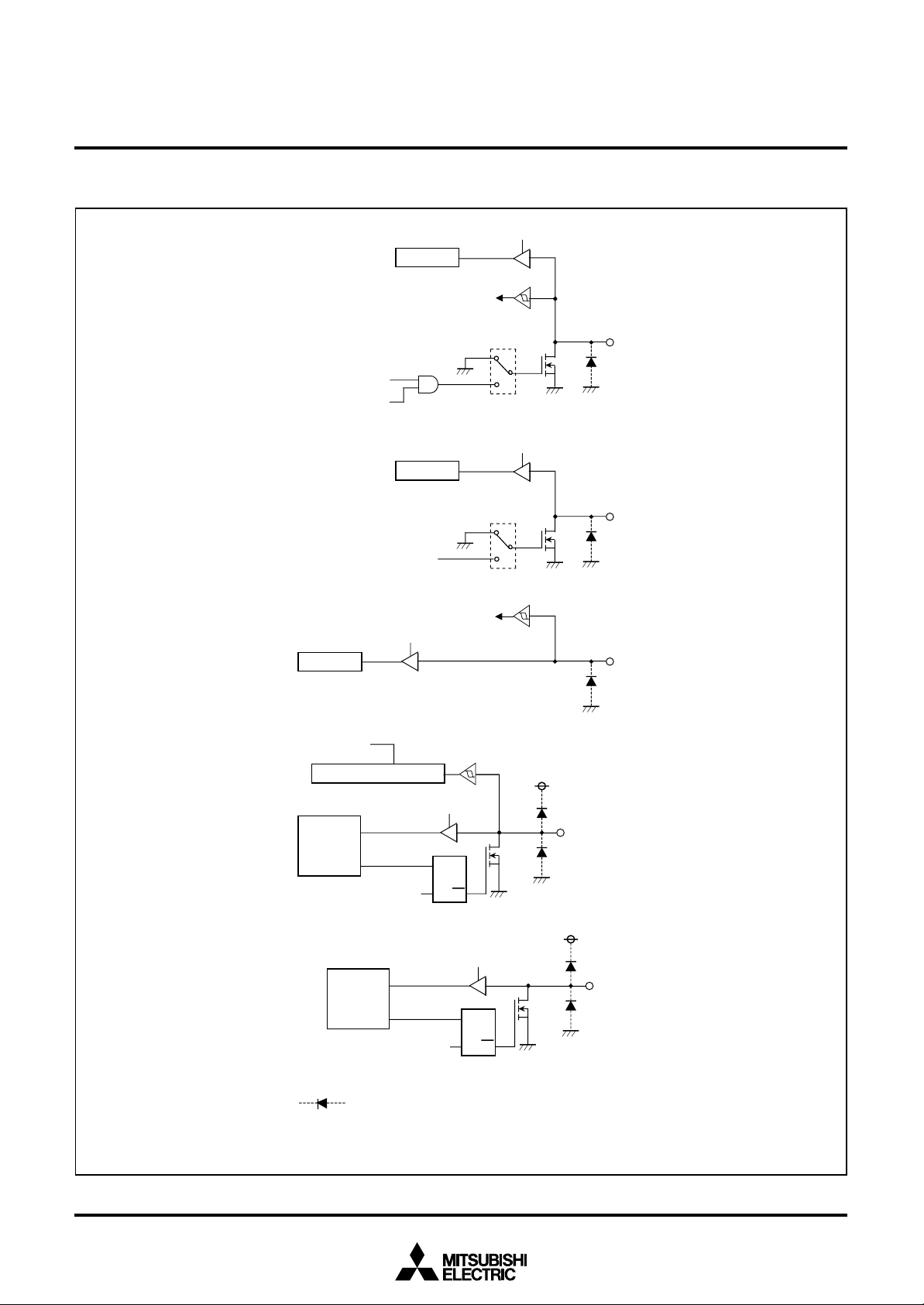
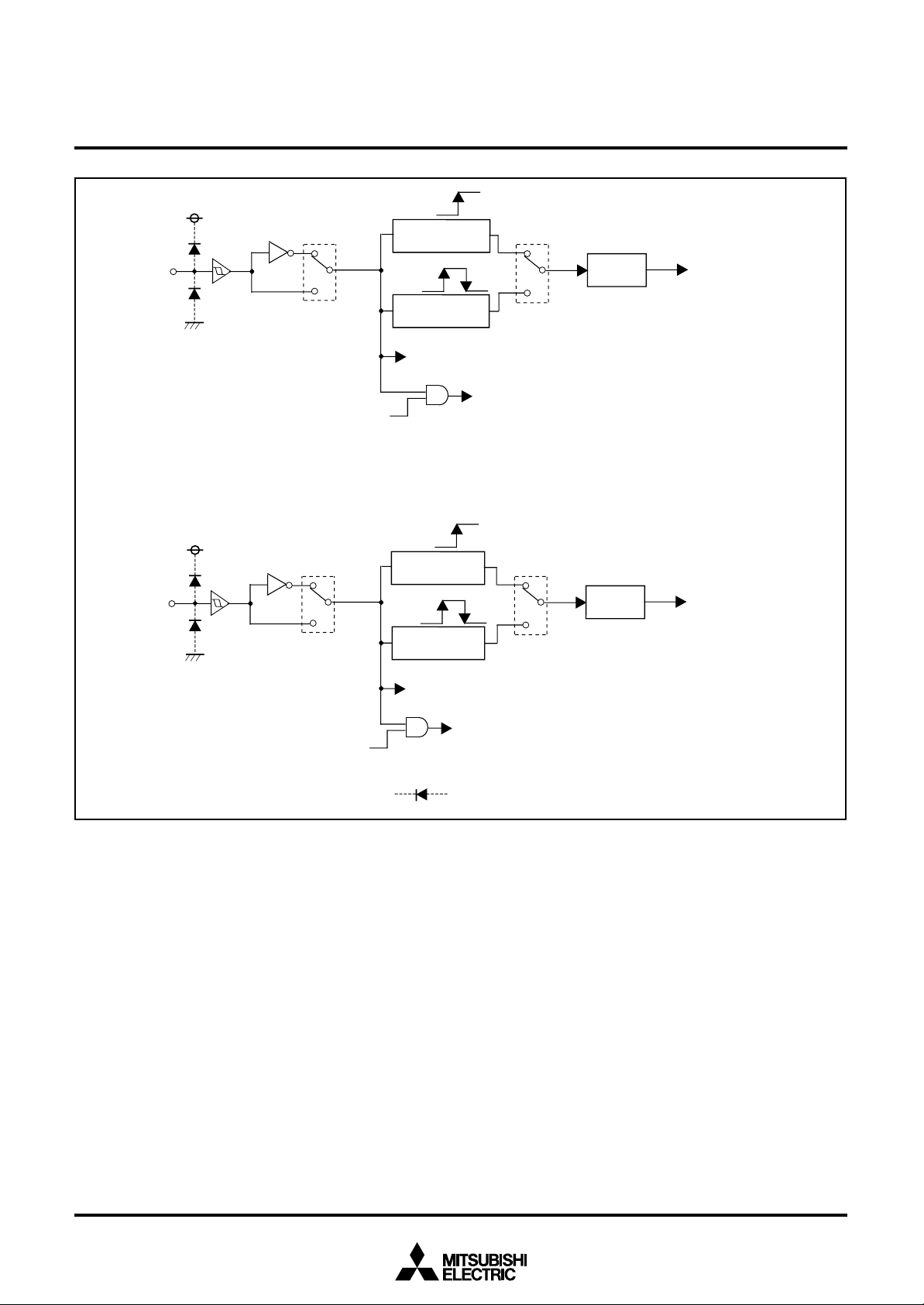
PORT BLOCK DIAGRAMS (continued)
Synchronous clock input for serial transfer
Synchronous clock output for serial transfer
J1
Register A
0
Register A
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
IAP2 instruction
J1
1
0
1
IAP2 instruction
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
P20/S
CK
Serial data output
Register A
Key-on wakeup input
External interrupt circuit
Register A
Ai
OP3A instruction
Register A
Serial data input
IAP2 instruction
IAP3 instruction
D
T
IAP3 instruction
1
J1
0
1
P21/S
P22/S
OUT
IN
P30/INT0,P31/INT1
Q
P32,P3
3
11
Ai
OP3A instruction
•
• Applied potential to ports P2
• i represents 0, 1, 2, or 3.
• The 4513 Group does not have ports P3
This symbol represents a parasitic diode on the port.
D
T
Q
0
—P22 must be VDD.
2
, P33.
PORT BLOCK DIAGRAMS (continued)
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
Q1
Decoder
Analog input
Q3
0
CMP0
Analog input
Analog input
Q3
1
Q3
A
IN0
/CMP0-
-
+
2
Q1
Decoder
A
IN1
/CMP0+
Q1
Decoder
A
IN2
/CMP1-
-
+
Analog input
Register A
Ai
OP4A instruction
Analog input
CMP1
IAP4 instruction
D
T
Q
Q3
3
Q1
Decoder
A
IN3
/CMP1+
P40/A
IN4
–P43/A
IN7
Q1
Decoder
•
• i represents 0, 1, 2, or 3.
• The 4513 Group does not have port P4.
This symbol represents a parasitic diode on the port.
12
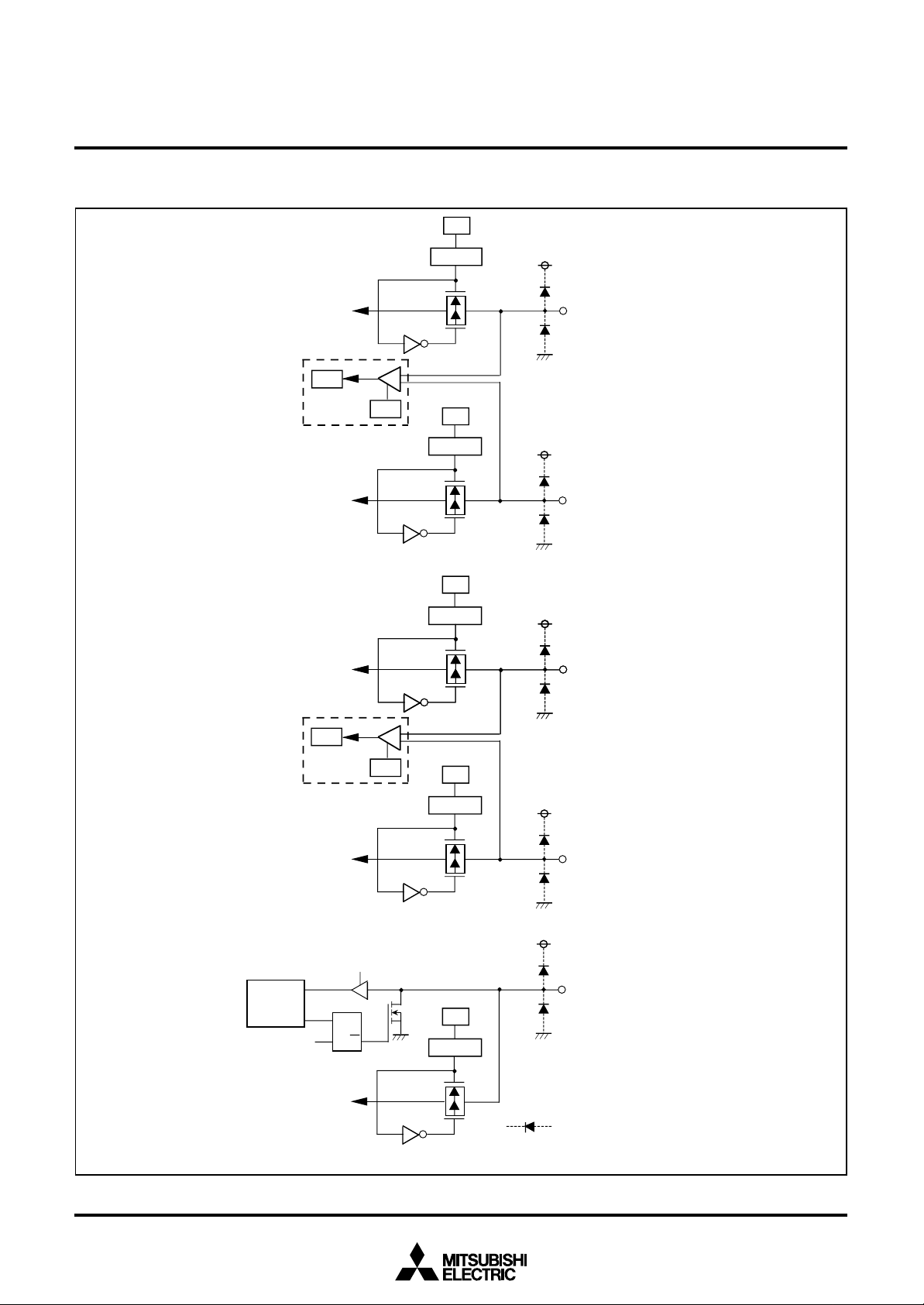
PORT BLOCK DIAGRAMS (continued)
DTQ
A i
S
R
Q
S
R
Q
W
S
R
Q
W
D i r e c t i o n r e g i s t e r F R 0 i
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
O P 5 A i n s t r u c t i o n
R e g i s t e r A
I A P 5 i n s t r u c t i o n
R e g i s t e r Y
D e c o d e r
C L D i n s t r u c t i o n
S D i n s t r u c t i o n
RD instruction
S k i p d e c i s i o n
C l o c k i n p u t f o r t i m e r 2 e v e n t c o u n t
D e c o d e rR e g i s t e r Y
CLD instruction
S D i n s t r u c t i o n
R D i n s t r u c t i o n
T i m e r 1 u n d e r f l o w s i g n a l d i v i d e d b y 2 o r
s i g n a l o f A N D o p e r a t i o n b e t w e e n
t i m e r 1 u n d e r f l o w s i g n a l d i v i d e d b y 2 a n d
t i m e r 2 u n d e r f l o w s i g n a l d i v i d e d b y 2
S k i p d e c i s i o n
(SZD instruction)
( S Z D i n s t r u c t i o n )
P 50– P 5
D0– D
0
6
0
1
3
5
D6/CNTR0
S k i p d e c i s i o n
(SZD instruction)
C l o c k i n p u t f o r t i m e r 4 e v e n t c o u n t
D e c o d e rR e g i s t e r Y
C L D i n s t r u c t i o n
SD instruction
R D i n s t r u c t i o n
T i m e r 3 u n d e r f l o w s i g n a l d i v i d e d b y 2 o r
2
0
1
D7/CNTR1
6
s i g n a l o f A N D o p e r a t i o n b e t w e e n
t i m e r 3 u n d e r f l o w s i g n a l d i v i d e d b y 2 a n d
t i m e r 4 u n d e r f l o w s i g n a l d i v i d e d b y 2
•
• A p p l i e d p o t e n t i a l t o p o r t s D
T h i s s y m b o l r e p r e s e n t s a p a r a s i t i c d i o d e o n t h e p o r t .
0
– D7 m u s t b e 1 2 V .
• i r e p r e s e n t s 0 , 1 , 2 , o r 3 .
• T h e 4 5 1 3 G r o u p d o e s n o t h a v e p o r t P 5 .
13
P3
0
/INT0
I1
2
Falling
Rising
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
One-sided edge
0
1
detection circuit
Both edges
detection circuit
Wakeup
SNZI0
Skip
I1
1
0
EXF0
1
External 0
interrupt
P3
1
/INT1
External interrupt circuit structure
I2
2
Falling
Rising
0
1
SNZI1
One-sided edge
detection circuit
Both edges
detection circuit
Wakeup
Skip
This symbol represents a parasitic diode on the port.
I2
1
0
EXF1
1
External 1
interrupt
14
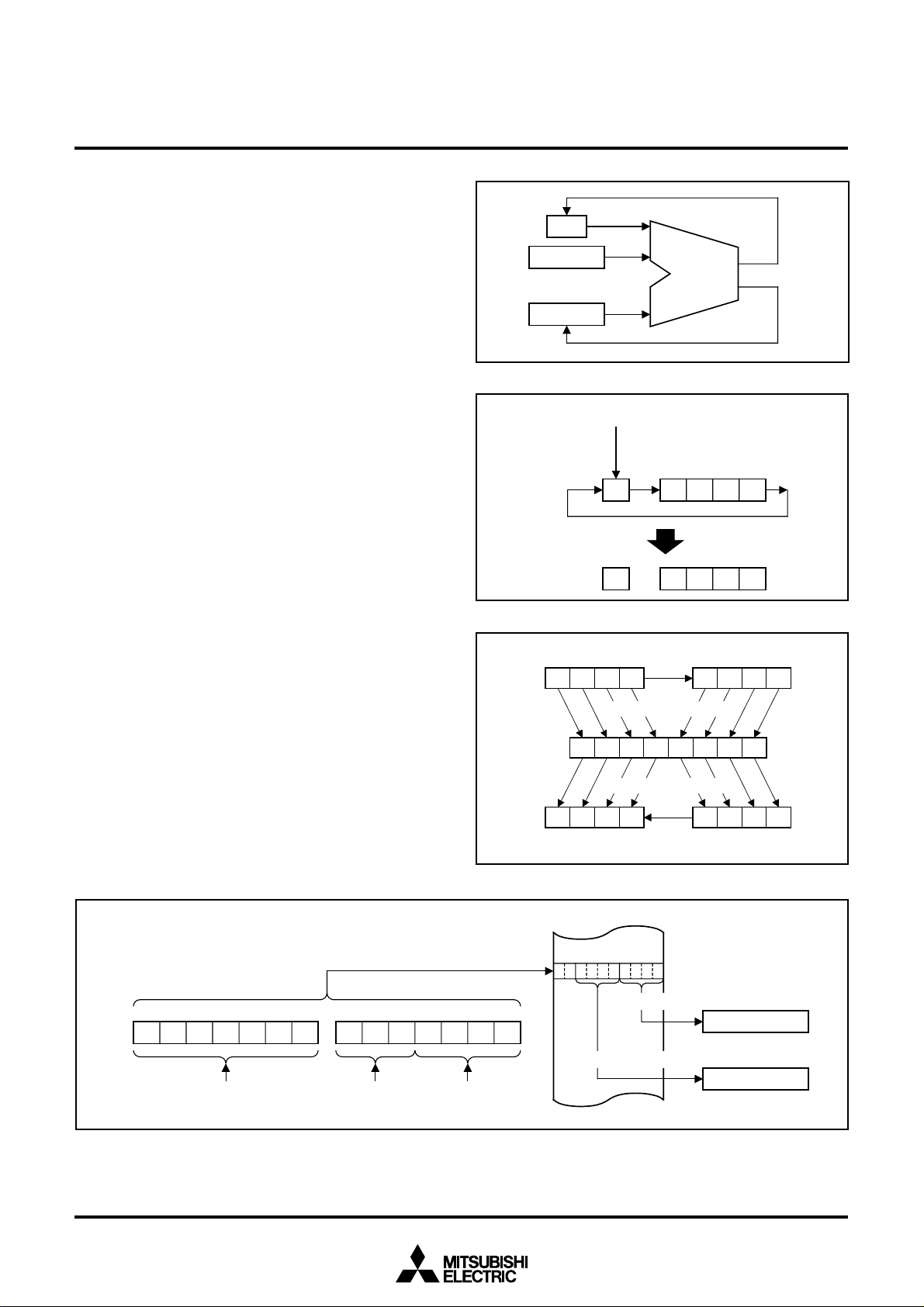
FUNCTION BLOCK OPERATIONS
CPU
(1) Arithmetic logic unit (ALU)
The arithmetic logic unit ALU performs 4-bit arithmetic such as 4bit data addition, comparison, AND operation, OR operation, and
bit manipulation.
(2) Register A and carry flag
Register A is a 4-bit register used for arithmetic, transfer, exchange, and I/O operation.
Carry flag CY is a 1-bit flag that is set to “1” when there is a carry
with the AMC instruction (Figure 1).
It is unchanged with both A n instruction and AM instruction. The
value of A0 is stored in carry flag CY with the RAR instruction (Figure 2).
Carry flag CY can be set to “1” with the SC instruction and cleared
to “0” with the RC instruction.
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
<Carry>
(CY)
(M(DP))
Addition
(A)
Fig. 1 AMC instruction execution example
<Set>
SC instruction
RC instruction
CY A3A2A1A
ALU
<Result>
<Clear>
0
(3) Registers B and E
Register B is a 4-bit register used for temporary storage of 4-bit
data, and for 8-bit data transfer together with register A.
Register E is an 8-bit register. It can be used for 8-bit data transfer
with register B used as the high-order 4 bits and register A as the
low-order 4 bits (Figure 3).
(4) Register D
Register D is a 3-bit register.
It is used to store a 7-bit ROM address together with register A and
is used as a pointer within the specified page when the TABP p,
BLA p, or BMLA p instruction is executed (Figure 4).
TABP p instruction
Specifying address
RAR instruction
A
0
Fig. 2 RAR instruction execution example
Register B Register A
B3B2B1B
Register E
Fig. 3 Registers A, B and register E
E7E6E5E4E3E2E1E
B3B2B1B
Register B Register A
CY A3A2A
TAB instruction
0
TEAB instruction
TABE instruction
0
TBA instruction
A3A2A1A
A3A2A1A
ROM
840
<Rotation>
1
0
0
0
PC
H
p6p5p4p3p2p1p
Immediate field
value p
Fig. 4 TABP p instruction execution example
15
0
DR2DR1DR
The contents of
register D
PC
L
A3A2A1A
0
The contents of
register A
Low-order 4bits
0
Register A (4)
Middle-order 4 bits
Register B (4)
MITSUBISHI MICROCOMPUTERS
n
M
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
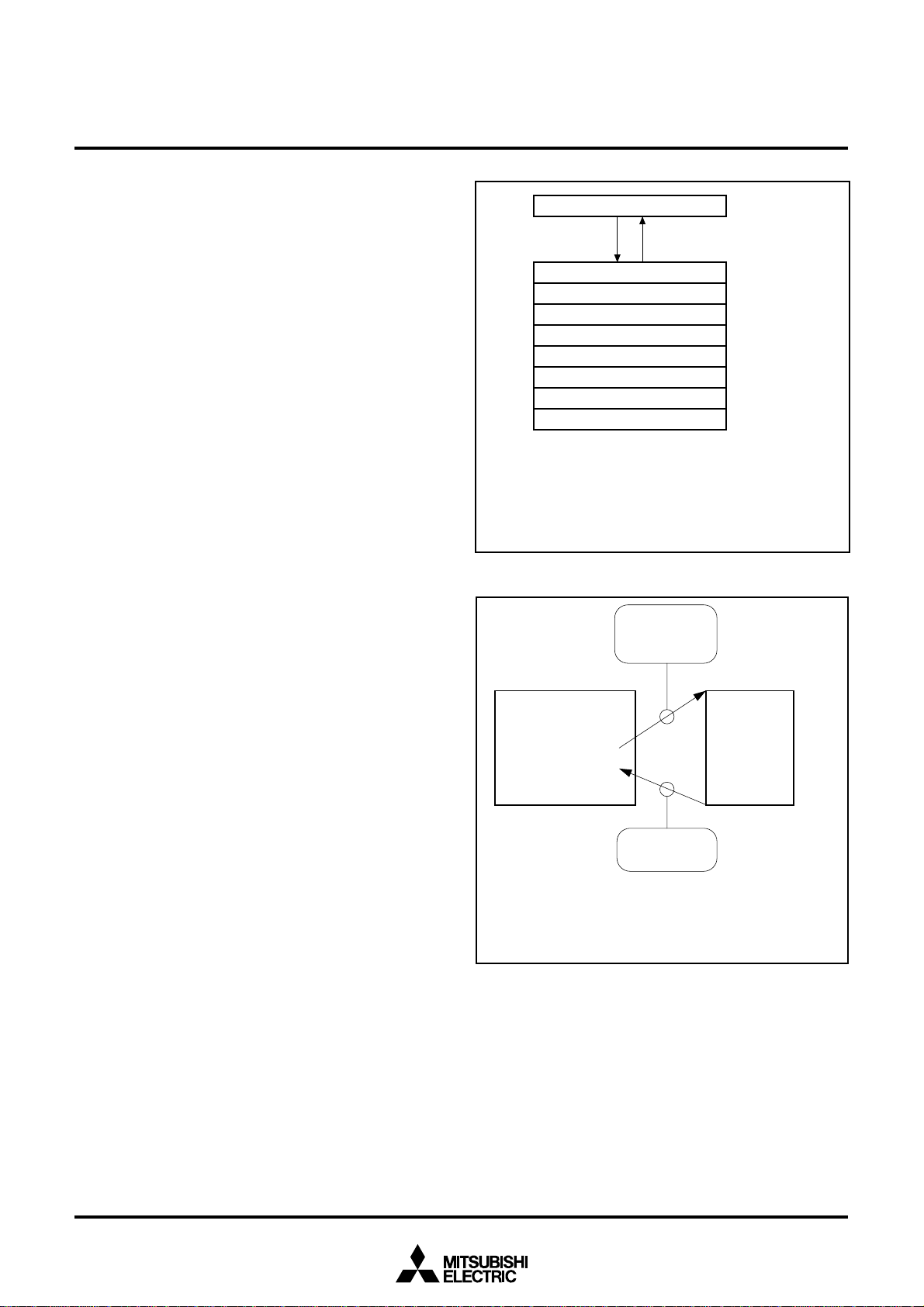
(5) Stack registers (SKS) and stack pointer (SP)
Stack registers (SKs) are used to temporarily store the contents of
program counter (PC) just before branching until returning to the
original routine when;
• branching to an interrupt service routine (referred to as an interrupt service routine),
• performing a subroutine call, or
• executing the table reference instruction (TABP p).
Stack registers (SKs) are eight identical registers, so that subroutines can be nested up to 8 levels. However, one of stack registers
is used respectively when using an interrupt service routine and
when executing a table reference instruction. Accordingly, be careful not to over the stack when performing these operations
together. The contents of registers SKs are destroyed when 8 levels are exceeded.
The register SK nesting level is pointed automatically by 3-bit
stack pointer (SP). The contents of the stack pointer (SP) can be
transferred to register A with the TASP instruction.
Figure 5 shows the stack registers (SKs) structure.
Figure 6 shows the example of operation at subroutine call.
(6) Interrupt stack register (SDP)
Interrupt stack register (SDP) is a 1-stage register. When an interrupt occurs, this register (SDP) is used to temporarily store the
contents of data pointer, carry flag, skip flag, register A, and register B just before an interrupt until returning to the original routine.
Unlike the stack registers (SKs), this register (SDP) is not used
when executing the subroutine call instruction and the table reference instruction.
(7) Skip flag
Skip flag controls skip decision for the conditional skip instructions
and continuous described skip instructions. When an interrupt occurs, the contents of skip flag is stored automatically in the interrupt
stack register (SDP) and the skip condition is retained.
Program counter (PC)
SK
SK
SK
SK
SK
SK
SK
SK
0
1
2
3
4
5
6
7
Executing RT
instruction
Executing BM
instruction
Stack pointer (SP) points “7” at reset or
returning from RAM back-up mode. It points “0”
by executing the first BM instruction, and the
contents of program counter is stored in SK
When the BM instruction is executed after eight
stack registers are used ((SP) = 7), (SP) = 0
and the contents of SK
Fig. 5 Stack registers (SKs) structure
0
is destroyed.
(SP) ← 0
0
) ← 0001
(SK
(PC) ← SUB1
16
Main program
Address
16
NOP
0000
16
BM SUB1
0001
000216 NOP
(SP) = 0
(SP) = 1
(SP) = 2
(SP) = 3
(SP) = 4
(SP) = 5
(SP) = 6
(SP) = 7
Subroutine
SUB1 :
NOP
RT
0
.
·
·
·
16
(PC) ← (SK0)
(SP) ← 7
Returning to the BM instruction executio
Note :
address with the RT instruction, and the B
instruction becomes the NOP instruction.
Fig. 6 Example of operation at subroutine call
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
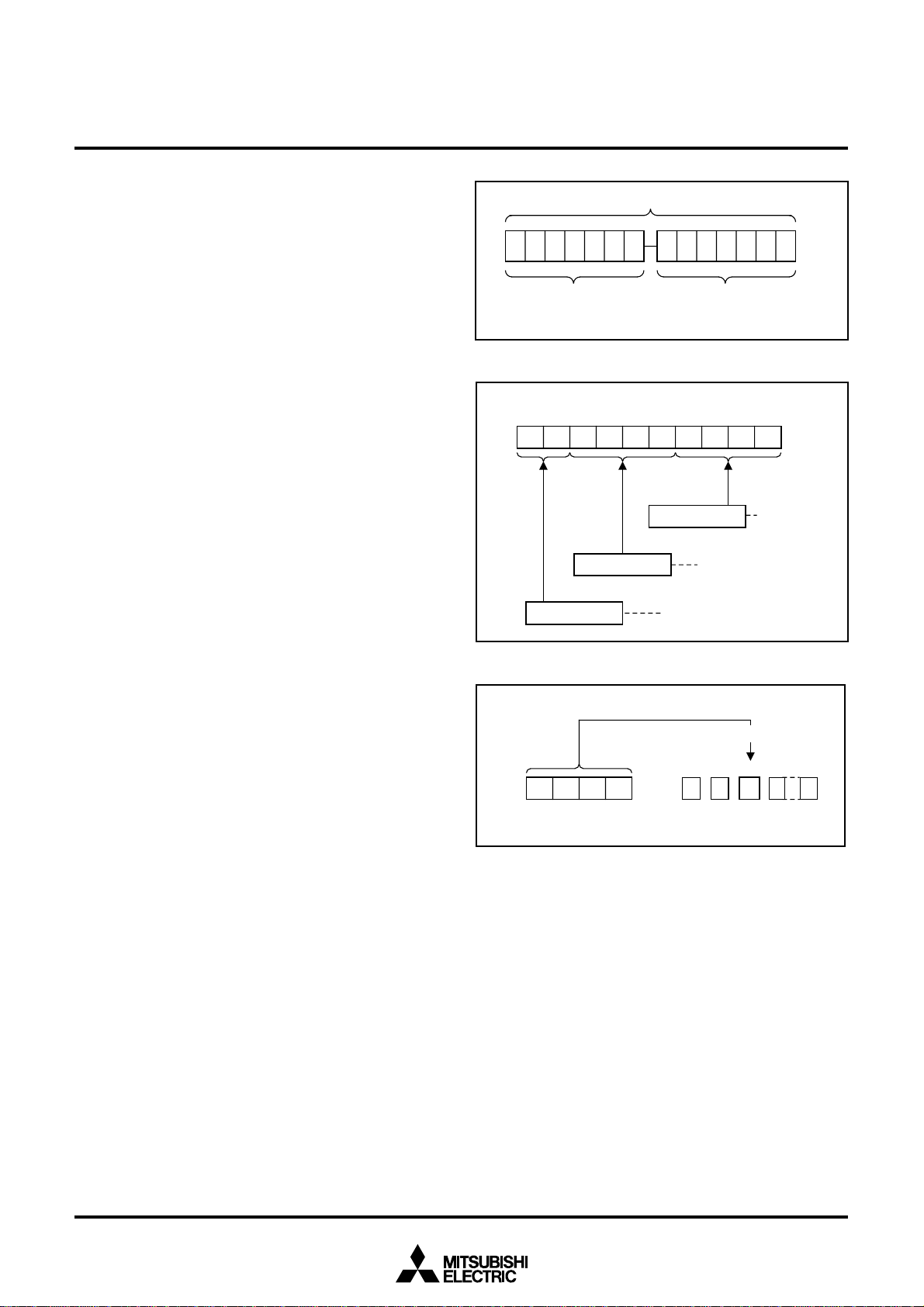
(8) Program counter (PC)
Program counter (PC) is used to specify a ROM address (page and
address). It determines a sequence in which instructions stored in
ROM are read. It is a binary counter that increments the number of
instruction bytes each time an instruction is executed. However,
the value changes to a specified address when branch instructions,
subroutine call instructions, return instructions, or the table reference instruction (TABP p) is executed.
Program counter consists of PCH (most significant bit to bit 7)
which specifies to a ROM page and PCL (bits 6 to 0) which specifies an address within a page. After it reaches the last address
(address 127) of a page, it specifies address 0 of the next page
(Figure 7).
Make sure that the PCH does not specify after the last page of the
built-in ROM.
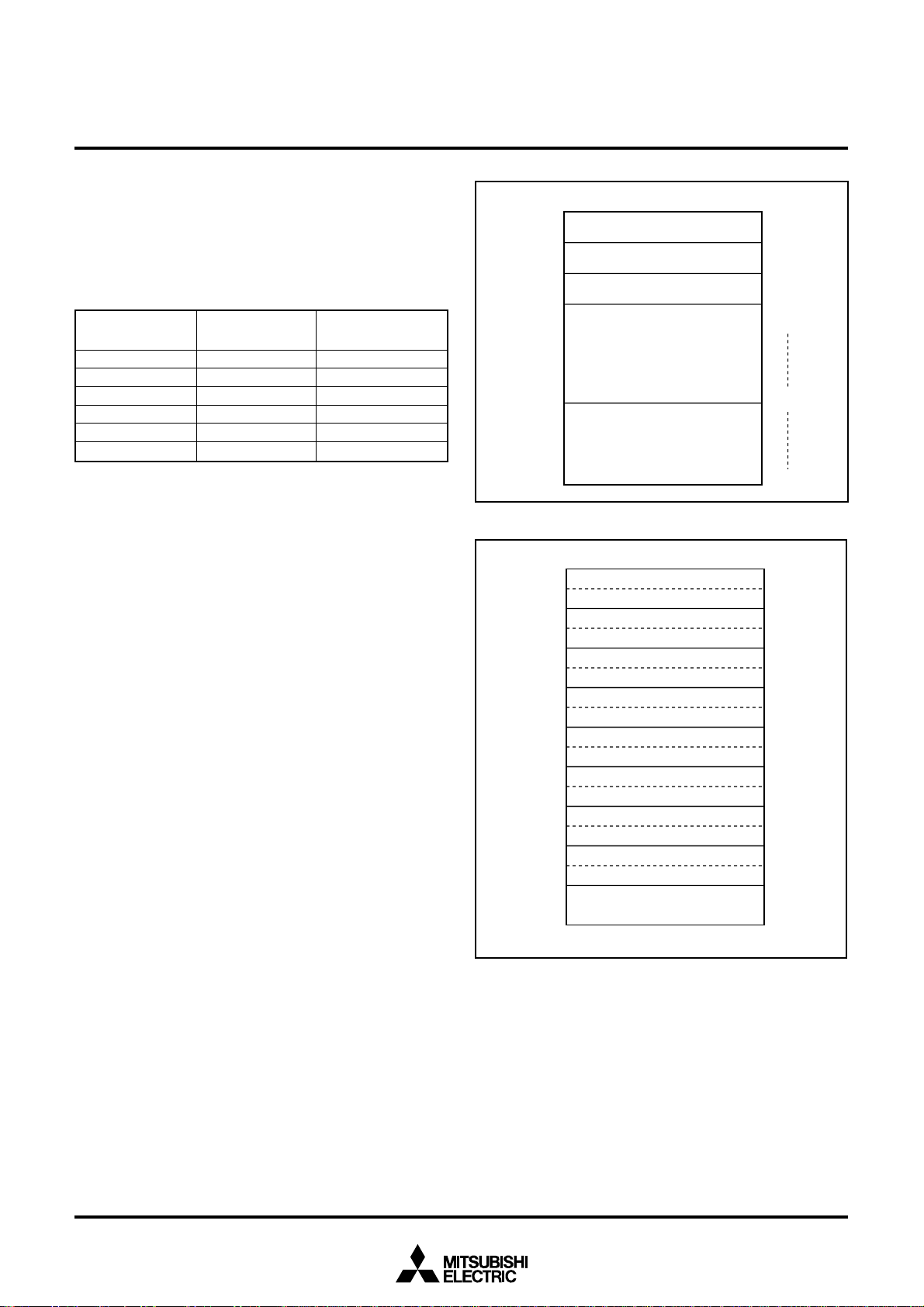
(9) Data pointer (DP)
Data pointer (DP) is used to specify a RAM address and consists
of registers Z, X, and Y. Register Z specifies a RAM file group, register X specifies a file, and register Y specifies a RAM digit (Figure
8).
Register Y is also used to specify the port D bit position.
When using port D, set the port D bit position to register Y certainly
and execute the SD, RD, or SZD instruction (Figure 9).
Program counter
p5p4p3p2p1p0a6a5a4a3a2a1a
p
6
PC
Specifying page
Fig. 7 Program counter (PC) structure
H
Specifying address
Data pointer (DP)
Z1Z0X3X2X1X0Y3Y2Y1Y
Register Y (4)
Register X (4)
Register Z (2)
Specifying RAM file group
0
PC
L
0
Specifying
RAM digit
Specifying RAM file
Fig. 8 Data pointer (DP) structure
Specifying bit position
D
7
0101 1
Register Y (4)
Fig. 9 SD instruction execution example
Port D output latch
Set
D
5
D
6
D4D
0
17
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
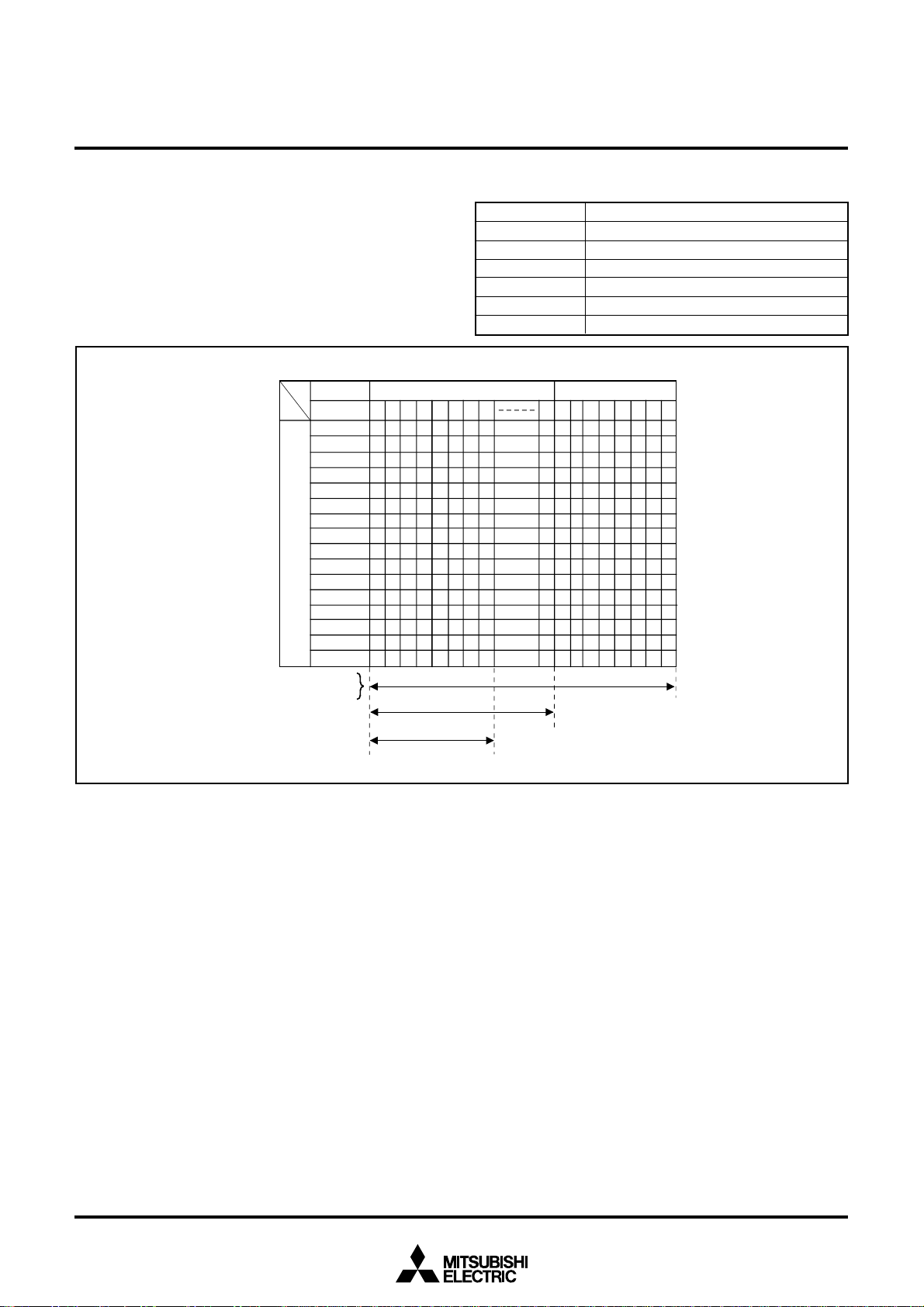
PROGRAM MEMOY (ROM)
The program memory is a mask ROM. 1 word of ROM is composed
of 10 bits. ROM is separated every 128 words by the unit of page
(addresses 0 to 127). Table 1 shows the ROM size and pages. Figure 10 shows the ROM map of M34514M8/E8.
Table 1 ROM size and pages
Product
M34513M2
M34513M4/E4
M34513M6
M34513M8/E8
M34514M6
M34514M8/E8
A part of page 1 (addresses 008016 to 00FF16) is reserved for interrupt addresses (Figure 11). When an interrupt occurs, the
address (interrupt address) corresponding to each interrupt is set
in the program counter, and the instruction at the interrupt address
is executed. When using an interrupt service routine, write the instruction generating the branch to that routine at an interrupt
address.
Page 2 (addresses 010016 to 017F16) is the special page for subroutine calls. Subroutines written in this page can be called from
any page with the 1-word instruction (BM). Subroutines extending
from page 2 to another page can also be called with the BM instruction when it starts on page 2.
ROM pattern (bits 7 to 0) of all addresses can be used as data areas with the TABP p instruction.
ROM size
(✕ 10 bits)
2048 words
4096 words
6144 words
8192 words
6144 words
8192 words
Pages
16 (0 to 15)
32 (0 to 31)
48 (0 to 47)
64 (0 to 63)
48 (0 to 47)
64 (0 to 63)
9
16
0000
007
F
16
0080
16
00
FF
0100
017
0180
0
FFF
1
FFF
F
Interrupt address page
16
16
Subroutine special page
16
16
16
16
Fig. 10 ROM map of M34514M8/E8
9087654321
16
0080
0082
0084
0086
0088
External 0 interrupt address
External 1 interrupt address
16
Timer 1 interrupt address
16
16
Timer 2 interrupt address
Timer 3 interrupt address
16
087654321
Page 0
Page 1
Page 2
Page 3
Page 31
Page 63
008A
16
Timer 4 interrupt address
16
008C
008E
16
00FF
16
Fig. 11 Page 1 (addresses 008016 to 00FF16) structure
A-D interrupt address
Serial I/O interrupt address
18
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
DATA MEMORY (RAM)
1 word of RAM is composed of 4 bits, but 1-bit manipulation (with
the SB j, RB j, and SZB j instructions) is enabled for the entire
memory area. A RAM address is specified by a data pointer. The
data pointer consists of registers Z, X, and Y. Set a value to the
data pointer certainly when executing an instruction to access
RAM.
Table 2 shows the RAM size. Figure 12 shows the RAM map.
RAM 384 words ✕ 4 bits (1536 bits)
Register Z
01 7
23 6 015
M34513M6
M34513M8/E8
M34514M6
M34514M8/E8
M34513M4/E4
Register X
0
1
2
3
4
5
6
7
8
9
Register Y
10
11
12
13
14
15
Z=0, X=0 to 15
Z=1, X=0 to 7
Z=0, X=0 to 15
Table 2 RAM size
M34513M2
M34513M4/E4
M34513M6
M34513M8/E8
M34514M6
M34514M8/E8
0
45
Product
128 words ✕ 4 bits (512 bits)
256 words ✕ 4 bits (1024 bits)
384 words ✕ 4 bits (1536 bits)
384 words ✕ 4 bits (1536 bits)
384 words ✕ 4 bits (1536 bits)
384 words ✕ 4 bits (1536 bits)
1
1723 6
256 words
45
384 words
RAM size
Fig. 12 RAM map
M34513M2
Z=0, X=0 to 7
128 words
19
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
INTERRUPT FUNCTION
The interrupt type is a vectored interrupt branching to an individual
address (interrupt address) according to each interrupt source. An
interrupt occurs when the following 3 conditions are satisfied.
• An interrupt activated condition is satisfied (request flag = “1”)
• Interrupt enable bit is enabled (“1”)
• Interrupt enable flag is enabled (INTE = “1”)
Table 3 shows interrupt sources. (Refer to each interrupt request
flag for details of activated conditions.)
(1) Interrupt enable flag (INTE)
The interrupt enable flag (INTE) controls whether the every interrupt enable/disable. Interrupts are enabled when INTE flag is set to
“1” with the EI instruction and disabled when INTE flag is cleared to
“0” with the DI instruction. When any interrupt occurs, the INTE flag
is automatically cleared to “0,” so that other interrupts are disabled
until the EI instruction is executed.
(2) Interrupt enable bit
Use an interrupt enable bit of interrupt control registers V1 and V2
to select the corresponding interrupt or skip instruction.
Table 4 shows the interrupt request flag, interrupt enable bit and
skip instruction.
Table 5 shows the interrupt enable bit function.
(3) Interrupt request flag
When the activated condition for each interrupt is satisfied, the corresponding interrupt request flag is set to “1.” Each interrupt
request flag is cleared to “0” when either;
• an interrupt occurs, or
• the next instruction is skipped with a skip instruction.
Each interrupt request flag is set when the activated condition is
satisfied even if the interrupt is disabled by the INTE flag or its interrupt enable bit. Once set, the interrupt request flag retains set
until a clear condition is satisfied.
Accordingly, an interrupt occurs when the interrupt disable state is
released while the interrupt request flag is set.
If more than one interrupt request flag is set when the interrupt disable state is released, the interrupt priority level is as follows
shown in Table 3.
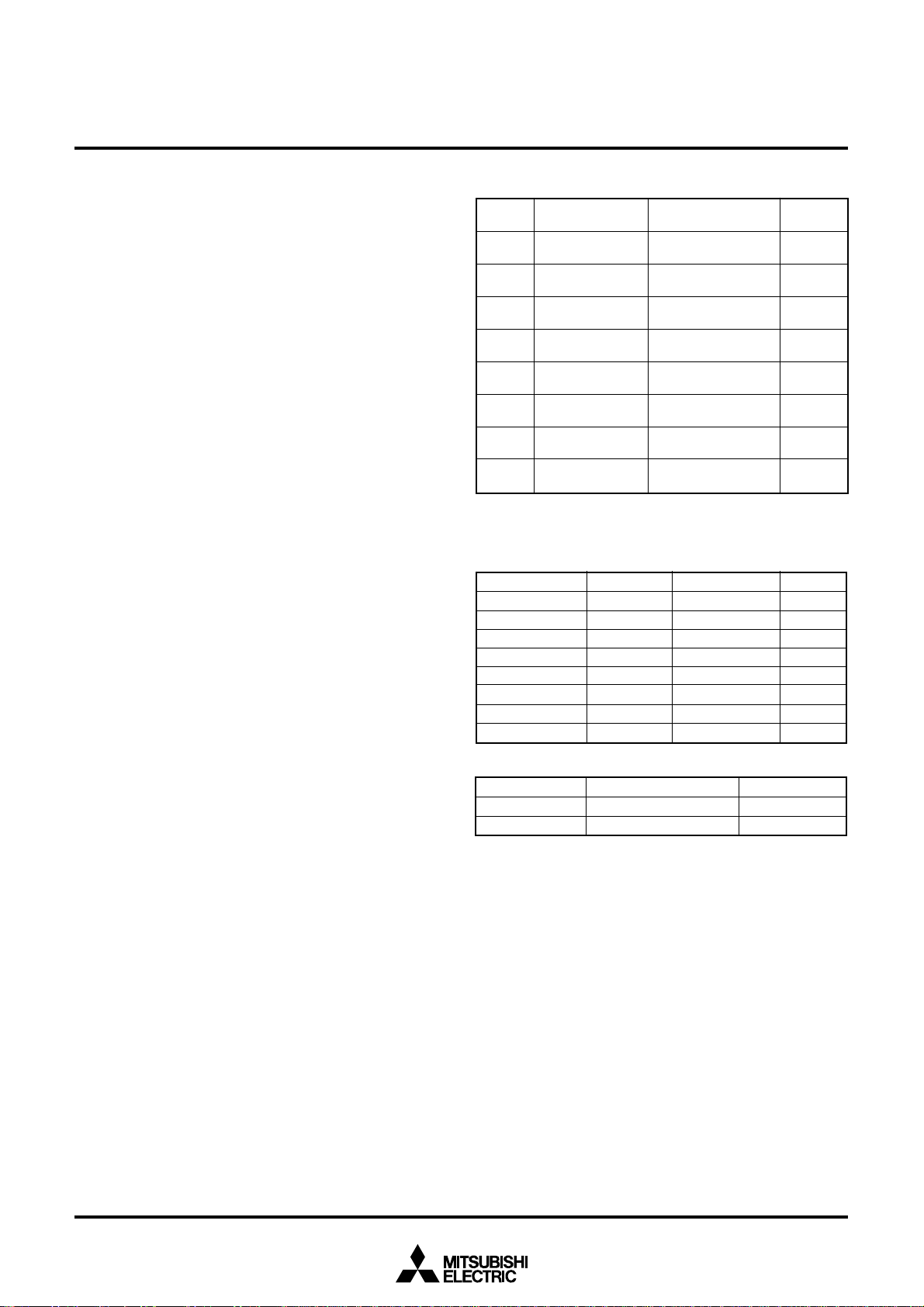
Table 3 Interrupt sources
Priority
level
1
2
3
4
5
6
7
8
Table 4 Interrupt request flag, interrupt enable bit and skip in-
Interrupt name
External 0 interrupt
External 1 interrupt
Timer 1 interrupt
Timer 2 interrupt
Timer 3 interrupt
Timer 4 interrupt
A-D interrupt
Serial I/O interrupt
Table 5 Interrupt enable bit function
Interrupt enable bit
Interrupt name
External 0 interrupt
External 1 interrupt
Timer 1 interrupt
Timer 2 interrupt
Timer 3 interrupt
Timer 4 interrupt
A-D interrupt
Serial I/O interrupt
struction
Request flag
Occurrence of interrupt
1
0
Activated condition
Level change of
INT0 pin
Level change of
INT1 pin
Timer 1 underflow
Timer 2 underflow
Timer 3 underflow
Timer 4 underflow
Completion of
A-D conversion
Completion of
serial I/O transfer
EXF0
EXF1
T1F
T2F
T3F
T4F
ADF
SIOF
Enabled
Disabled
Skip instruction
SNZ0
SNZ1
SNZT1
SNZT2
SNZT3
SNZT4
SNZAD
SNZSI
Interrupt
address
Address 0
in page 1
Address 2
in page 1
Address 4
in page 1
Address 6
in page 1
Address 8
in page 1
Address A
in page 1
Address C
in page 1
Address E
in page 1
Enable bit
V10
V11
V12
V13
V20
V21
V22
V23
Skip instruction
Invalid
Valid
20
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
(4) Internal state during an interrupt
The internal state of the microcomputer during an interrupt is as
follows (Figure 14).
• Program counter (PC)
An interrupt address is set in program counter. The address to be
executed when returning to the main routine is automatically
stored in the stack register (SK).
• Interrupt enable flag (INTE)
INTE flag is cleared to “0” so that interrupts are disabled.
• Interrupt request flag
Only the request flag for the current interrupt source is cleared to
“0.”
• Data pointer, carry flag, skip flag, registers A and B
The contents of these registers and flags are stored automatically in the interrupt stack register (SDP).
(5) Interrupt processing
When an interrupt occurs, a program at an interrupt address is executed after branching a data store sequence to stack register.
Write the branch instruction to an interrupt service routine at an interrupt address.
Use the RTI instruction to return from an interrupt service routine.
Interrupt enabled by executing the EI instruction is performed after
executing 1 instruction (just after the next instruction is executed).
Accordingly, when the EI instruction is executed just before the RTI
instruction, interrupts are enabled after returning the main routine.
(Refer to Figure 13)
• Program counter (PC)
............................................................... Each interrupt address
• Stack register (SK)
....................................................................................................
The address of main routine to be
executed when returning
• Interrupt enable flag (INTE)
.................................................................. 0 (Interrupt disabled)
• Interrupt request flag (only the flag for the current interrupt
source)................................................................................... 0
• Data pointer, carry flag, registers A and B, skip flag
........ Stored in the interrupt stack register (SDP) automatically
Fig. 14 Internal state when interrupt occurs
INT0 pin
(L→H or
H→L input)
INT1 pin
(L→H or
H→L input)
Timer 1
underflow
EXF0
EXF1 V1
T1F V1
V1
0
1
2
Address 0
in page 1
Address 2
in page 1
Address 4
in page 1
Main
routine
Interrupt
service routine
Interrupt
occurs
•
•
•
•
EI
RTI
Interrupt is
enabled
: Interrupt enabled state
: Interrupt disabled state
Fig. 13 Program example of interrupt processing
Timer 2
underflow
Timer 3
underflow
Timer 4
underflow
Completion of
A-D conversion
Completion of
serial I/O transfer
Activated
condition
T2F V1
T3F V2
T4F V2
ADF V2
SIOF V2
Request flag
(state retained)
Fig. 15 Interrupt system diagram
3
0
1
2
3
Enable
bit
INTE
Enable
flag
Address 6
in page 1
Address 8
in page 1
Address A
in page 1
Address C
in page 1
Address E
in page 1
21
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
(6) Interrupt control registers
• Interrupt control register V1
Interrupt enable bits of external 0, external 1, timer 1 and timer 2
are assigned to register V1. Set the contents of this register
through register A with the TV1A instruction. The TAV1 instruction
can be used to transfer the contents of register V1 to register A.
Table 6 Interrupt control registers
Interrupt control register V1
V13
V12
V11
V10
V23
V22
V21
V20
Note: “R” represents read enabled, and “W” represents write enabled.
Timer 2 interrupt enable bit
Timer 1 interrupt enable bit
External 1 interrupt enable bit
External 0 interrupt enable bit
Interrupt control register V2
Serial I/O interrupt enable bit
A-D interrupt enable bit
Timer 4 interrupt enable bit
Timer 3 interrupt enable bit
• Interrupt control register V2
Interrupt enable bits of timer 3, timer 4, A-D and serial I/O are assigned to register V2. Set the contents of this register through
register A with the TV2A instruction. The TAV2 instruction can be
used to transfer the contents of register V2 to register A.
0
Interrupt disabled (SNZT2 instruction is valid)
1
Interrupt enabled (SNZT2 instruction is invalid)
0
Interrupt disabled (SNZT1 instruction is valid)
1
Interrupt enabled (SNZT1 instruction is invalid)
0
Interrupt disabled (SNZ1 instruction is valid)
1
Interrupt enabled (SNZ1 instruction is invalid)
0
Interrupt disabled (SNZ0 instruction is valid)
1
Interrupt enabled (SNZ0 instruction is invalid)
at reset : 00002
0
Interrupt disabled (SNZSI instruction is valid)
1
Interrupt enabled (SNZSI instruction is invalid)
0
Interrupt disabled (SNZAD instruction is valid)
1
Interrupt enabled (SNZAD instruction is invalid)
0
Interrupt disabled (SNZT4 instruction is valid)
1
Interrupt enabled (SNZT4 instruction is invalid)
0
Interrupt disabled (SNZT3 instruction is valid)
1
Interrupt enabled (SNZT3 instruction is invalid)
at RAM back-up : 00002
R/Wat RAM back-up : 00002at reset : 00002 R/Wat RAM back-up : 00002at reset : 00002
R/W
22
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
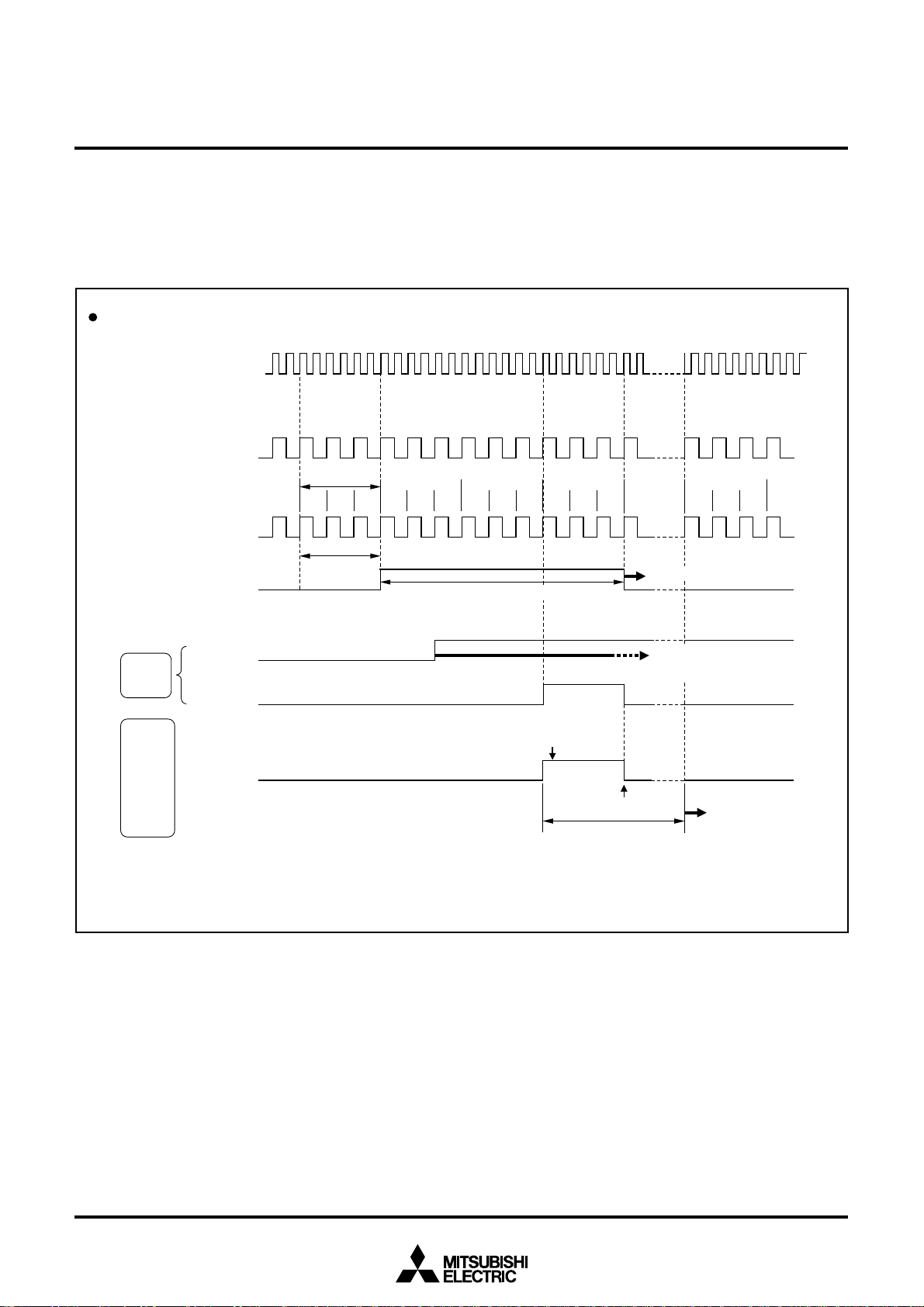
(7) Interrupt sequence
Interrupts only occur when the respective INTE flag, interrupt enable bits (V10–V13 and V20–V23), and interrupt request flag are
“1.” The interrupt actually occurs 2 to 3 machine cycles after the
cycle in which all three conditions are satisfied. The interrupt oc-
When an interrupt request flag is set after its interrupt is enabled (Note 1)
f (XIN) (middle-speed mode)
f (XIN) (high-speed mode)
1 machine cycle
System clock
Interrupt enable
flag (INTE)
T2 T3
T1
EI instruction
execution cycle
T2 T3
T1
curs after 3 machine cycles only when the three interrupt conditions are satisfied on execution of other than one-cycle instructions
(Refer to Figure 16).
T2 T3
T1
Interrupt enabled state
T2 T3
T1
Interrupt disabled state
T2 T3
T1
INT0, INT1
External
interrupt
EXF0, EXF1
Timer 1,
Timer 2,
Timer 3,
Timer 4,
A-D, and
Serial I/O
interrupts
Notes 1: The 4513/4514 Group operates in the middle-speed mode after system is released from reset.
T1F, T2F, T3F,
T4F, ADF,SIOF
2: The address is stacked to the last cycle.
3: This interval of cycles depends on the executed instruction at the time when each interrupt activated condition is satisfied.
Fig. 16 Interrupt sequence
Interrupt activated
condition is satisfied.
2 to 3 machine cycles
(Notes 2, 3)
Retaining level of system
clock for 4 periods or more
is necessary.
Flag cleared
The program starts from
the interrupt address.
23
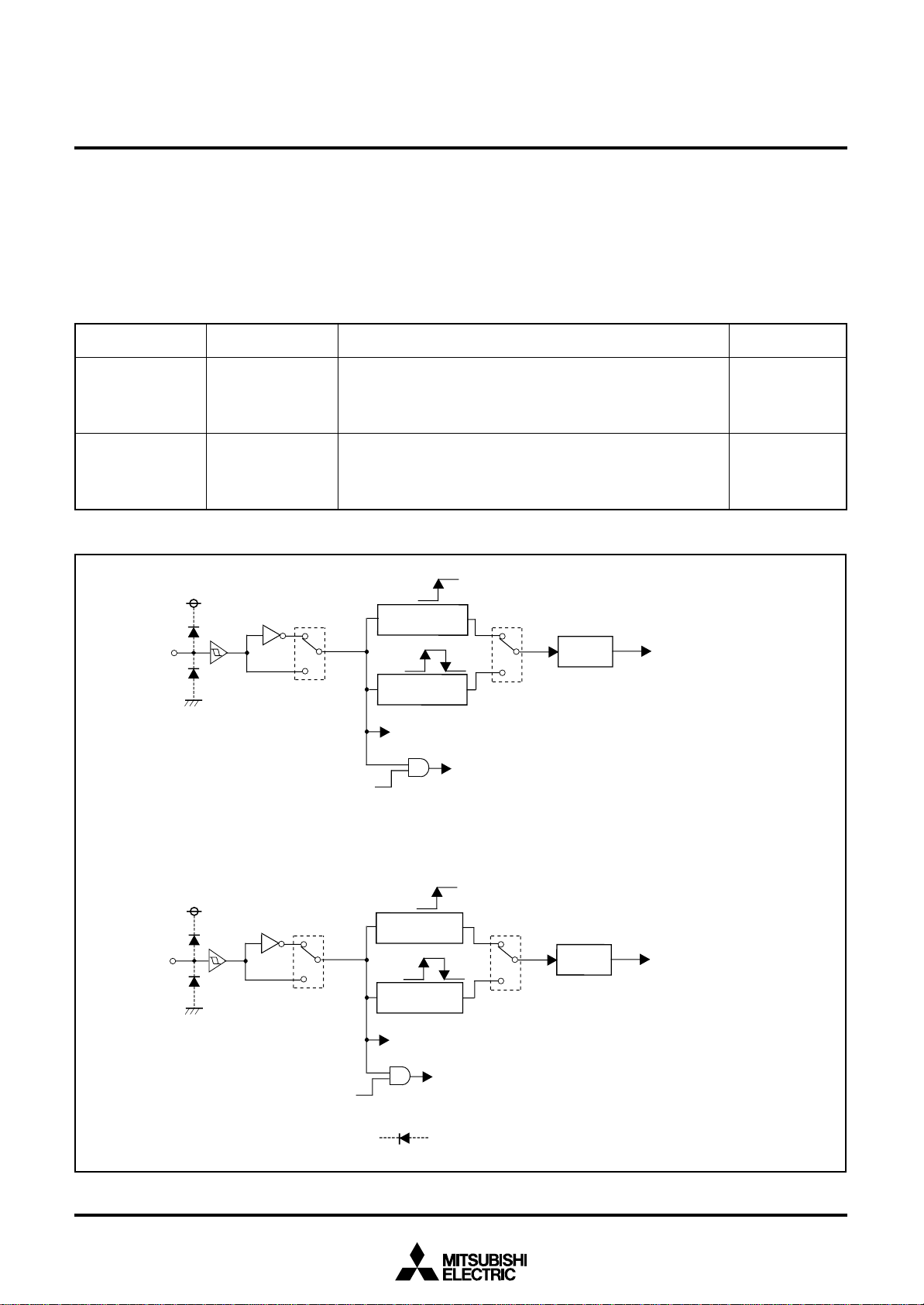
EXTERNAL INTERRUPTS
The 4513/4514 Group has two external interrupts (external 0 and
external 1). An external interrupt request occurs when a valid
waveform is input to an interrupt input pin (edge detection).
The external interrupts can be controlled with the interrupt control
registers I1 and I2.
Table 7 External interrupt activated conditions
Name
External 0 interrupt
External 1 interrupt
Input pin
P30/INT0
P31/INT1
When the next waveform is input to P30/INT0 pin
• Falling waveform (“H”→“L”)
• Rising waveform (“L”→“H”)
• Both rising and falling waveforms
When the next waveform is input to P31/INT1 pin
• Falling waveform (“H”→“L”)
• Rising waveform (“L”→“H”)
• Both rising and falling waveforms
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
Activated condition
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
Valid waveform
selection bit
I11
I12
I21
I22
P3
P3
0
/INT0
1
/INT1
I1
2
Falling
Rising
I2
2
Falling
Rising
One-sided edge
0
1
0
1
detection circuit
Both edges
detection circuit
Wakeup
SNZI0
One-sided edge
detection circuit
Both edges
detection circuit
Wakeup
Skip
I1
1
0
1
I2
1
0
1
EXF0
EXF1
External 0
interrupt
External 1
interrupt
Fig. 17 External interrupt circuit structure
24
Skip
SNZI1
This symbol represents a parasitic diode on the port.

MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
(1) External 0 interrupt request flag (EXF0)
External 0 interrupt request flag (EXF0) is set to “1” when a valid
waveform is input to P30/INT0 pin.
The valid waveforms causing the interrupt must be retained at their
level for 4 clock cycles or more of the system clock (Refer to Figure
16).
The state of EXF0 flag can be examined with the skip instruction
(SNZ0). Use the interrupt control register V1 to select the interrupt
or the skip instruction. The EXF0 flag is cleared to “0” when an interrupt occurs or when the next instruction is skipped with the skip
instruction.
The P30/INT0 pin need not be selected the external interrupt input
INT0 function or the normal I/O port P30 function. However, the
EXF0 flag is set to “1” when a valid waveform is input even if it is
used as an I/O port P30.
• External 0 interrupt activated condition
External 0 interrupt activated condition is satisfied when a valid
waveform is input to P30/INT0 pin.
The valid waveform can be selected from rising waveform, falling
waveform or both rising and falling waveforms. An example of
how to use the external 0 interrupt is as follows.
➀ Select the valid waveform with the bits 1 and 2 of register I1.
➁ Clear the EXF0 flag to “0” with the SNZ0 instruction.
➂ Set the NOP instruction for the case when a skip is performed
with the SNZ0 instruction.
➃ Set both the external 0 interrupt enable bit (V10) and the INTE
flag to “1.”
(2) External 1 interrupt request flag (EXF1)
External 1 interrupt request flag (EXF1) is set to “1” when a valid
waveform is input to P31/INT1 pin.
The valid waveforms causing the interrupt must be retained at their
level for 4 clock cycles or more of the system clock (Refer to Figure
16).
The state of EXF1 flag can be examined with the skip instruction
(SNZ1). Use the interrupt control register V1 to select the interrupt
or the skip instruction. The EXF1 flag is cleared to “0” when an interrupt occurs or when the next instruction is skipped with the skip
instruction.
The P31/INT1 pin need not be selected the external interrupt input
INT1 function or the normal I/O port P31 function. However, the
EXF1 flag is set to “1” when a valid waveform is input even if it is
used as an I/O port P31.
• External 1 interrupt activated condition
External 1 interrupt activated condition is satisfied when a valid
waveform is input to P31/INT1 pin.
The valid waveform can be selected from rising waveform, falling
waveform or both rising and falling waveforms. An example of
how to use the external 1 interrupt is as follows.
➀ Select the valid waveform with the bits 1 and 2 of register I2.
➁ Clear the EXF1 flag to “0” with the SNZ1 instruction.
➂ Set the NOP instruction for the case when a skip is performed
with the SNZ1 instruction.
➃ Set both the external 1 interrupt enable bit (V11) and the INTE
flag to “1.”
The external 0 interrupt is now enabled. Now when a valid waveform is input to the P30/INT0 pin, the EXF0 flag is set to “1” and the
external 0 interrupt occurs.
The external 1 interrupt is now enabled. Now when a valid waveform is input to the P31/INT1 pin, the EXF1 flag is set to “1” and the
external 1 interrupt occurs.
25
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
(3) External interrupt control registers
• Interrupt control register I1
Register I1 controls the valid waveform for the external 0 interrupt. Set the contents of this register through register A with the
TI1A instruction. The TAI1 instruction can be used to transfer the
contents of register I1 to register A.
Table 8 External interrupt control registers
Interrupt control register I1 R/Wat RAM back-up : state retained
I13
I12
I11
I10
I23
I22
I21
I20
Notes 1: “R” represents read enabled, and “W” represents write enabled.
Not used
Interrupt valid waveform for INT0 pin/
return level selection bit (Note 2)
INT0 pin edge detection circuit control bit
INT0 pin
timer 1 control enable bit
Interrupt control register I2 R/Wat RAM back-up : state retainedat reset : 00002
Not used
Interrupt valid waveform for INT1 pin/
return level selection bit (Note 3)
INT1 pin edge detection circuit control bit
INT1 pin
timer 3 control enable bit
2: When the contents of I1
3: When the contents of I2
2 is changed, the external interrupt request flag EXF0 may be set. Accordingly, clear EXF0 flag with the SNZ0 instruction.
2 is changed, the external interrupt request flag EXF1 may be set. Accordingly, clear EXF1 flag with the SNZ1 instruction.
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
• Interrupt control register I2
Register I2 controls the valid waveform for the external 1 interrupt. Set the contents of this register through register A with the
TI2A instruction. The TAI2 instruction can be used to transfer the
contents of register I2 to register A.
at reset : 00002
This bit has no function, but read/write is enabled.
Falling waveform (“L” level of INT0 pin is recognized with the SNZI0
instruction)/“L” level
Rising waveform (“H” level of INT0 pin is recognized with the SNZI0
instruction)/“H” level
One-sided edge detected
Both edges detected
Disabled
Enabled
This bit has no function, but read/write is enabled.
Falling waveform (“L” level of INT1 pin is recognized with the SNZI1
instruction)/“L” level
Rising waveform (“H” level of INT1 pin is recognized with the SNZI1
instruction)/“H” level
One-sided edge detected
Both edges detected
Disabled
Enabled
26
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
TIMERS
The 4513/4514 Group has the programmable timers.
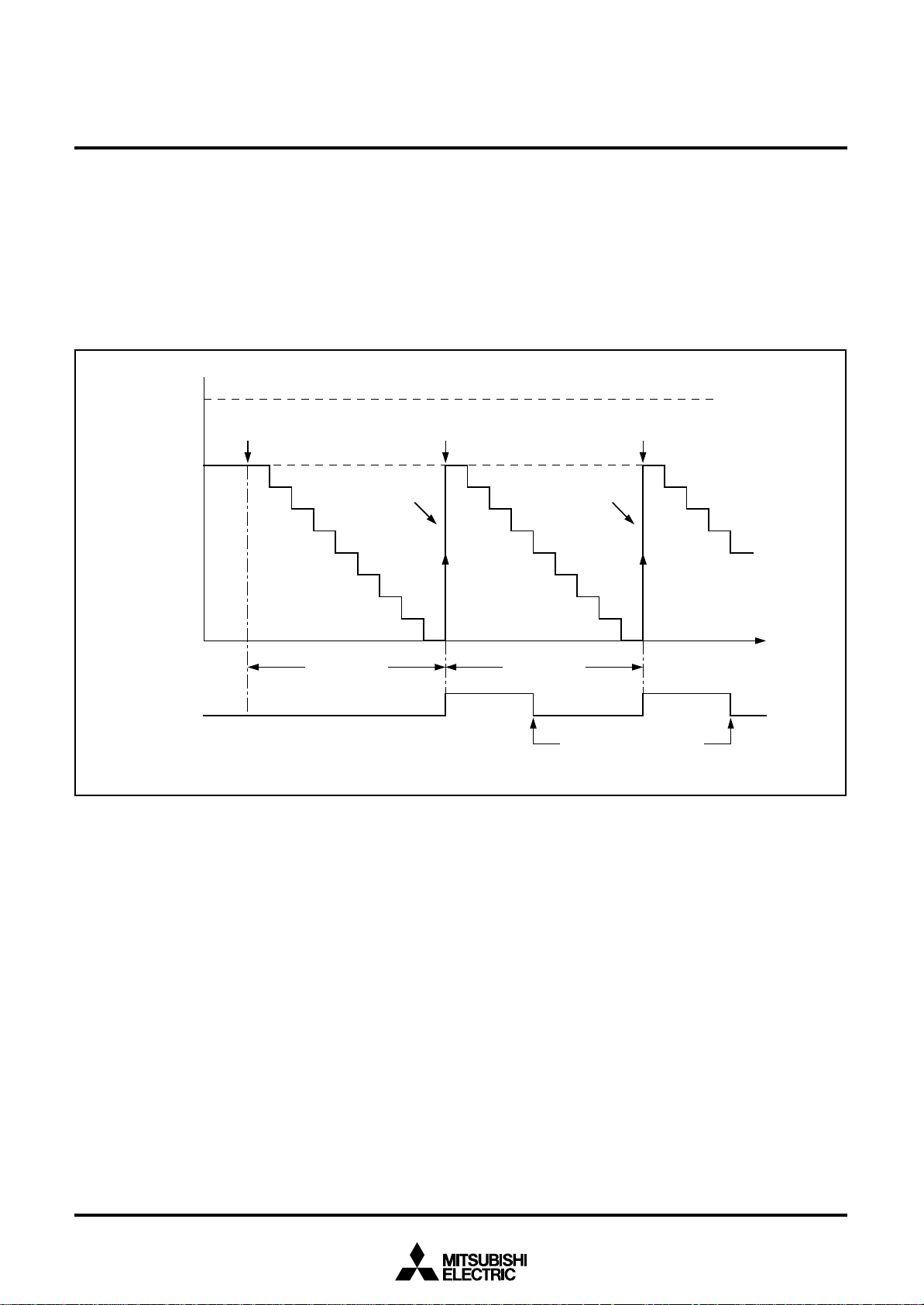
• Programmable timer
The programmable timer has a reload register and enables the
frequency dividing ratio to be set. It is decremented from a setting
value n. When it underflows (count to n + 1), a timer interrupt request flag is set to “1,” new data is loaded from the reload
register, and count continues (auto-reload function).
FF
16
n : Counter initial value
Count starts
n
1st underflow 2nd underflow
The contents of counter
16
00
n+1 count n+1 count
• Fixed dividing frequency timer
The fixed dividing frequency timer has the fixed frequency dividing ratio (n). An interrupt request flag is set to “1” after every n
count of a count pulse.
Reload Reload
Time
Timer interrupt
request flag
Fig. 18 Auto-reload function
“1”
“0”
An interrupt occurs or
a skip instruction is executed.
27
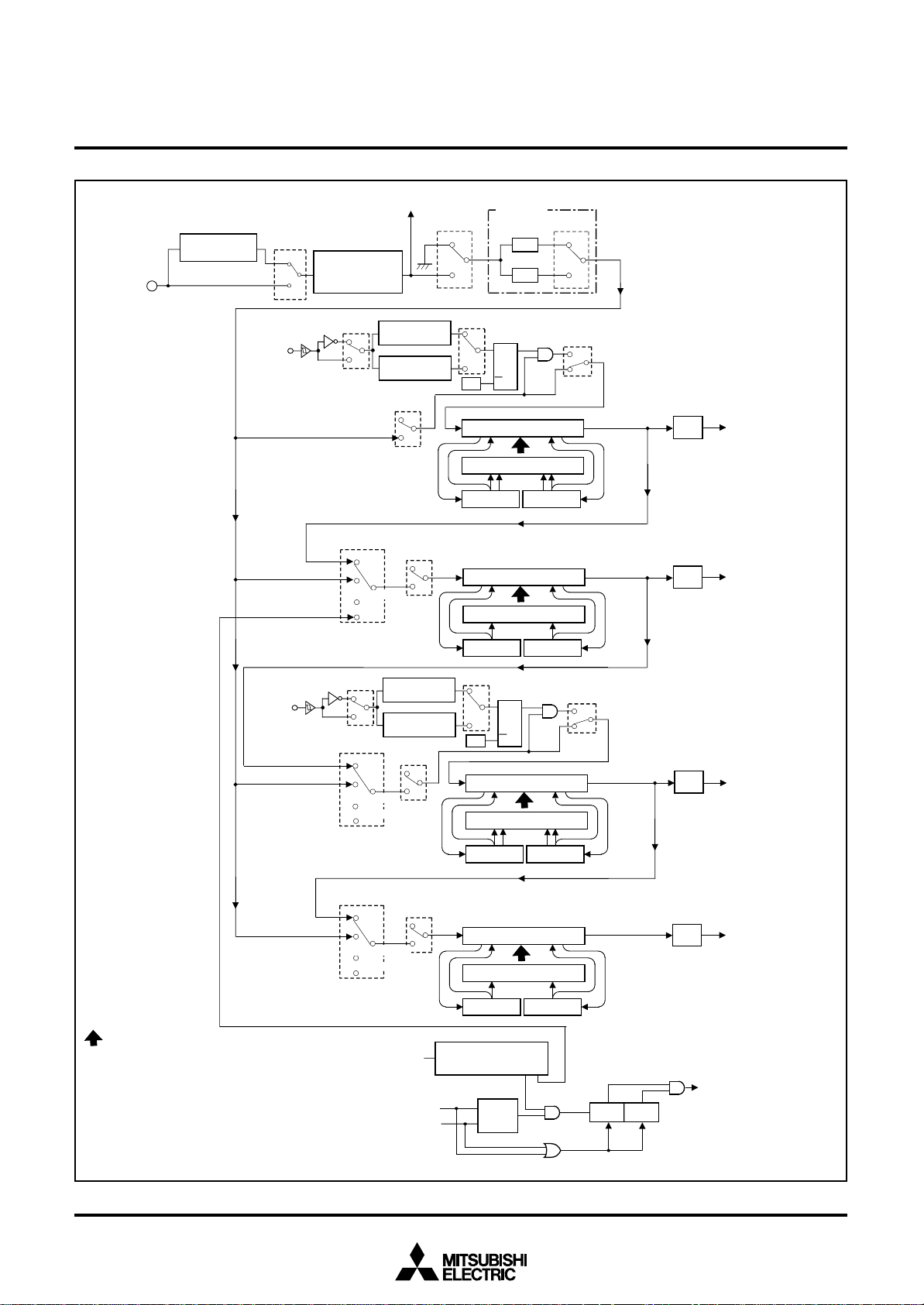
The 4513/4514 Group timer consists of the following circuits.
• Prescaler : frequency divider
• Timer 1 : 8-bit programmable timer
• Timer 2 : 8-bit programmable timer
• Timer 3 : 8-bit programmable timer
• Timer 4 : 8-bit programmable timer
(Timers 1 to 4 have the interrupt function, respectively)
• 16-bit timer
Prescaler and timers 1 to 4 can be controlled with the timer control
registers W1 to W6. The 16-bit timer is a free counter which is not
controlled with the control register.
Each function is described below.
Table 9 Function related timers
Circuit
Prescaler
Timer 1
Timer 2
Timer 3
Timer 4
16-bit timer
Structure
Frequency divider
8-bit programmable
binary down counter
(link to P30/INT0 input)
8-bit programmable
binary down counter
8-bit programmable
binary down counter
(link to P31/INT1 input)
8-bit programmable
binary down counter
16-bit fixed dividing
frequency
Count source
• Instruction clock
• Prescaler output (ORCLK)
• Timer 1 underflow
• Prescaler output (ORCLK)
• CNTR0 input
• 16-bit timer underflow
• Timer 2 underflow
• Prescaler output (ORCLK)
• Timer 3 underflow
• Prescaler output (ORCLK)
• CNTR1 input
• Instruction clock
Frequency
dividing ratio
4, 16
1 to 256
1 to 256
1 to 256
1 to 256
65536
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
Use of output signal
• Timer 1, 2, 3 and 4 count sources
• Timer 2 count source
• CNTR0 output
• Timer 1 interrupt
• Timer 3 count source
• Timer 2 interrupt
• CNTR0 output
• Timer 4 count source
• Timer 3 interrupt
• CNTR1 output
• Timer 4 interrupt
• CNTR1 output
• Watchdog timer
(The 15th bit is counted twice)
• Timer 2 count source
(16-bit timer underflow)
Control
register
W1
W1
W6
W2
W6
W3
W6
W4
W6
28
MITSUBISHI MICROCOMPUTERS
4513/4514 Group
SINGLE-CHIP 4-BIT CMOS MICROCOMPUTER
Instruction clock
W1
Divistion circuit
(divided by 2)
X
IN
P30/INT0
MR
3
1
0
Internal clock
generating circuit
(divided by 3)
I1
2
One-sided edge
Falling
detection circuit
0
1
Both edges
detection circuit
Rising
1
(Note 3)W1
0
1
3
0
1
I1
I1
1
0
(Note 1)
1
0
Timer 1 (8)
Prescaler
1/4
1/16
Q
S
R
W1
ORCLK
W1
2
0
1
0
1
0
T1F
Timer 1
interrupt
Reload register R1 (8)
T1AB
Register A
Register A
Timer 2 underflow signal
W3
2
1
0
T3AB
Register A
T2F
T3F
Timer 2
interrupt
Timer 3
interrupt
P31/INT1
W21,W2
00
01
Not available
10
11
I2
2
Falling
0
1
Rising
W31,W3
00
01
Not available
10
11
Not available
(TAB1)
0
W23(Note 3)
0
1
(TAB2)
One-sided edge
detection circuit
Both edges
detection circuit
0
W33(Note 3)
0
1
(TAB3)
T1AB
(TR1AB)
Register B
Timer 1 underflow signal
Timer 2 (8)
Reload register R2 (8)
(T2AB)
Register B
I2
1
0
(Note 2)
Q
S
1
I2
0
R
Timer 3 (8)
Reload register R3 (8)
T3AB
(TR3AB)
Register B
Data is set automatically from each reload
register when timer 1, 2, 3, or 4 underflows
(auto-reload function)
Notes 1: Timer 1 count start synchronous circuit is set
by the valid edge of P3
bits 1 (I1
1
) and 2 (I12) of register I1.
0
/INT0 pin selected by
2: Timer 3 count start synchronous circuit is set
by the valid edge of P3
bits 1 (I2
1
) and 2 (I22) of register I2.
1
/INT1 pin selected by
3: Count source is stopped by clearing to “0.”
Fig. 19 Timers structure
29
W41,W4
0
00
01
Not available
10
Not available
11
W43(Note 3)
(TAB4)
Instruction clock
WRST instruction
Reset signal
Timer 3 underflow signal
0
1
Reload register R4 (8)
Register B
16-bit timer (WDT)
1 - - - - - - - - - - - 15 16
S
WEF
R
Timer 4 (8)
(T4AB)
Register A
Q
WDF1 WDF2
T4F
System reset
Timer 4
interrupt
 Loading...
Loading...