

MicroE Mercury II 6000V User Manual
Mercury
IIII
TM
6000 & 6000V
MicroE Systems - World Headquarters: 125 Middlesex Turnpike, Bedford, MA USA 01730-1409
IM-Mercury_II_6000_6000V Rev D
www.microesys.com info@microesys.com T. 781-266-5700 F. 781-266-5112 ©2010 MicroE Systems
Installation Manual
and Reference Guide
Section- A
IInnttrroodduuccttiioonn
MicroE Systems was founded to advance encoder technology to a level never
before achieved. Our objective was to design encoder systems that would be
small enough to fit into densely packed OEM equipment designs, affordable
enough for cost-sensitive applications and easy enough to enable installation,
setup and alignment by assemblers with little training. We are pleased to say that
all of these goals have been realized with the introduction of the original
Mercury
TM
family of encoder systems. Now, the Mercury II series offers all of that
plus improved performance, ease of use and versatility.
PPaatteennttss
Covered by the following patents: US 5,991,249; EP 895,239; JP 3,025,237; US
6,897,435; and EP 1,451,933. Additional patents and patents pending may apply.
PPrreeccaauuttiioonnss
Follow standard ESD precautions. Turn power off before connecting the sensor. Do not touch the electrical pins without static protection such as a grounded wrist strap.
Do not touch the glass scale unless you are wearing talc-free gloves or finger
cots. Please read this installation manual for full instructions.
LLAASSEERR SSAAFFEETTYY IINNFFOORRMMAATTIIOONN:: MMeerrccuurryy && CChhiippEEnnccooddeerr
1
2
This product is sold solely for use as a component (or replacement) in an electronic product; therefore it is not
required to, and does not comply with, 21 CFR 1040.10 and 1040.11 which pertain to complete laser
products. The manufacturer of the complete system-level electronic product is responsible for complying with
21 CFR 1040.10 and 1040.11 and for providing the user with all necessary safety warnings and
information.
MicroE encoders contain an infrared laser diode or diodes. Emitted invisible laser radiation levels have been
measured to be within the CDRH Class 1 range, which is not considered hazardous; however, to minimize
exposure to the diverging beam, the encoder sensor should be installed in its operational configuration in
close proximity to the encoder scale before power is applied.
• Invisible laser radiation; wavelength: 850 nm
• Max power 2.4 mW CW (4.8 mW CW for Mercur
y II™)
• CAUTION – The use of optical instruments with this product will increase eye hazard. DO NOT VIEW
DIRECTLY WITH OPTICAL INSTRUMENTS (MICROSCOPES, EYE LOUPES OR MAGNIFIERS).
• All maintenance procedures such as cleaning must be per
formed with the MicroE encoder turned off.
• Do not inser
t any reflective surface into the beam path when the encoder is powered.
• Do not attempt to ser
vice the MicroE encoder.
Mercury II models are CE and RoHS compliant.
INVISIBLE LASER RADIATION
DO NOT VIEW DIRECTLY WITH OPTICAL
INSTRUMENTS
(MICROSCOPES, EYE LOUPES OR
MAGNIFIERS)
Page 3
System Overview
Encoder with PurePrecision™Tape or Glass Scales
A1.0 Mercury
II
TM
6000
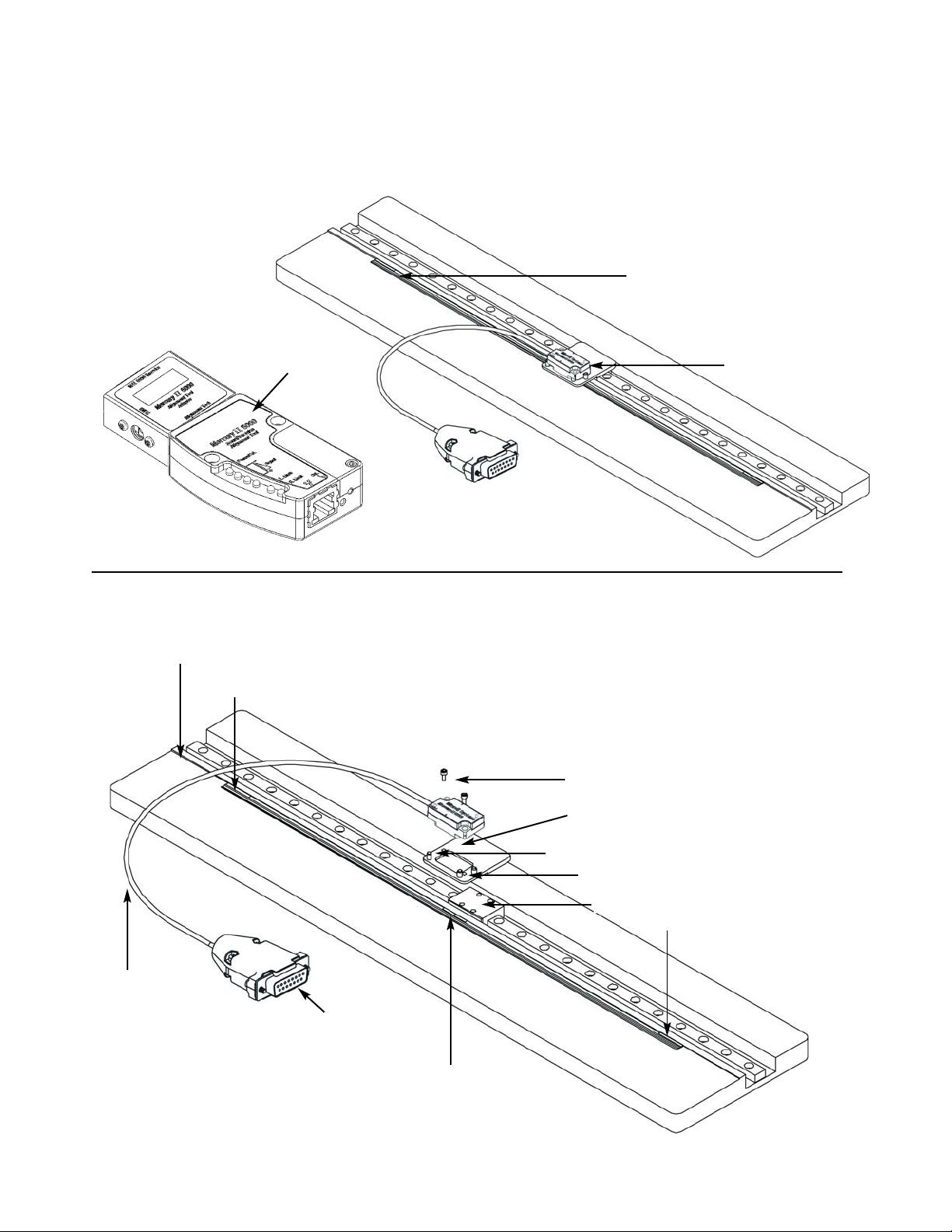
System View
Expanded View
Mounting Screws
Double
Shielded
Cable
Sensor
Shown mounted on a
linear bearing using a
mounting bracket
Tape Scale
Shown mounted on a fixed
(non-moving) substrate
Sensor Mounting Holes
Sensor Benching Pins
Bracket Mounting Holes
15 pin
Male D-sub
Connector
Typical User Supplied
Sensor Mounting Bracket
Left Limit Marker
Scale Mounting Surface Reference Edge (Benching Surface)
Right Limit Marker
Index Marker
Section A - System Overview
Alignment Tool

Page 4
Section A - System Overview
System Overview
PurePrecision™Tape Scale
A2.1
Items Required for Mercury IITMEncoder
Installation Using Tape Scale
In addition to the items in the System Views,
you will need the following items available:
• Index and Limit Marker sheet
• Hex Wrench for Sensor Mounting Screws
• Shears
• Tape Applicator T
ool
(not required for some installations)
•
Finger Cots or talc-free gloves
• Acetone or isopropyl alcohol
• Lint-free cotton cloths or wipes
• Two-part epoxy (Tra-Con Tra-Bond 2116)
• Stick and disposable surface for stirring epoxy
•
Stick and disposable surface for stirring epoxy

Page 5
Section A - System Overview
System Overview
Encoder with Linear Glass Scale
A2.2
Items Required for Mercury IITMEncoder
Installation Using Glass Scales
In addition to the items in the System Views,
you will need the following items available:
• Index and Limit Marker sheet
• Hex Wrench for Sensor Mounting Screws
• Finger Cots or talc-free gloves
• Acetone or isopropyl alcohol
• Lint-free cotton cloths or wipes
• Two-part epoxy (Tra-Con Tra-Bond 2116)
• Stick and disposable surface for stirring epoxy
• Silicone adhesive
Section B - Sensor Head Installation, Alignment and Calibration
Page 6
Sensor Head Installation
B1.1
Install the sensor on the mounting surface referencing
the appropriate datum surface as shown on the
Interface Drawing. Use two M-2 screws to loosely
affix the sensor.
Benching pins may be used to locate the sensor if the
system's mechanical tolerances are adequate. Refer to
the Interface Drawing for recommended locations and
heights of pins.
Mercury
II
Sensor Alignment Tolerances
Axis Alignment Tolerance
X Direction of Motion
Y ± 0.20mm
Z ± 0.15mm
θ
X
± 1.0°
θ
Y
± 1.0°
θ
Z
± 2.0°
B1.0
Verify Sensor Mounting Surface Height
Verify that the vertical distance between the reference
surface of the sensor and the top of the scale is
as follows:
Tape scale after blue protective film is removed:
3.09 mm +/-0.13
Linear or rotary glass scales: 2.93 mm +/-0.13
Check the height at a location on the scale where
there are no index or limit markers.

Page 7
Section B - Sensor Head Installation, Alignment and Calibration
Sensor Head Alignment -
Mercury II™6000 Models
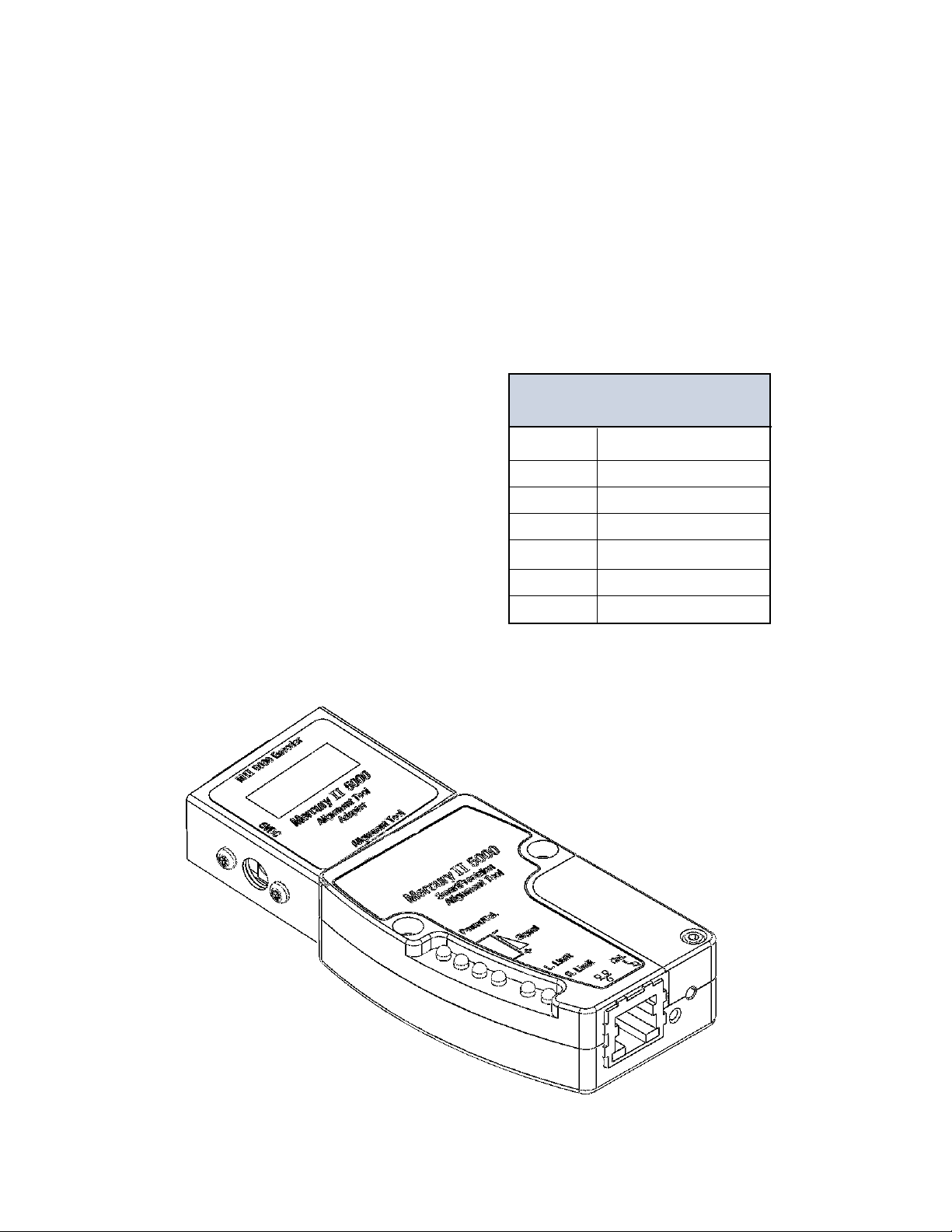
Access to Cal. button
B2.0
SmartPrecision Alignment Tool
Installing the MII6000 requires sensor alignment
and setup using the MII5000 SmartPrecision
Alignment Tool.
The Alignment Tool can perform sensor alignment,
calibration and setup by two methods -
A)
”Pushbutton:” using the Calibration (“Cal.”)
button and the LED indicators on the
Alignment T
ool
OR
B) ”Software:” Using the SmartPrecision
II
Software - see B2.4.
Page 8
Section B - Sensor Head Installation, Alignment and Calibration
Sensor Head Alignment -
Mercury II™6000 Models
B2.1
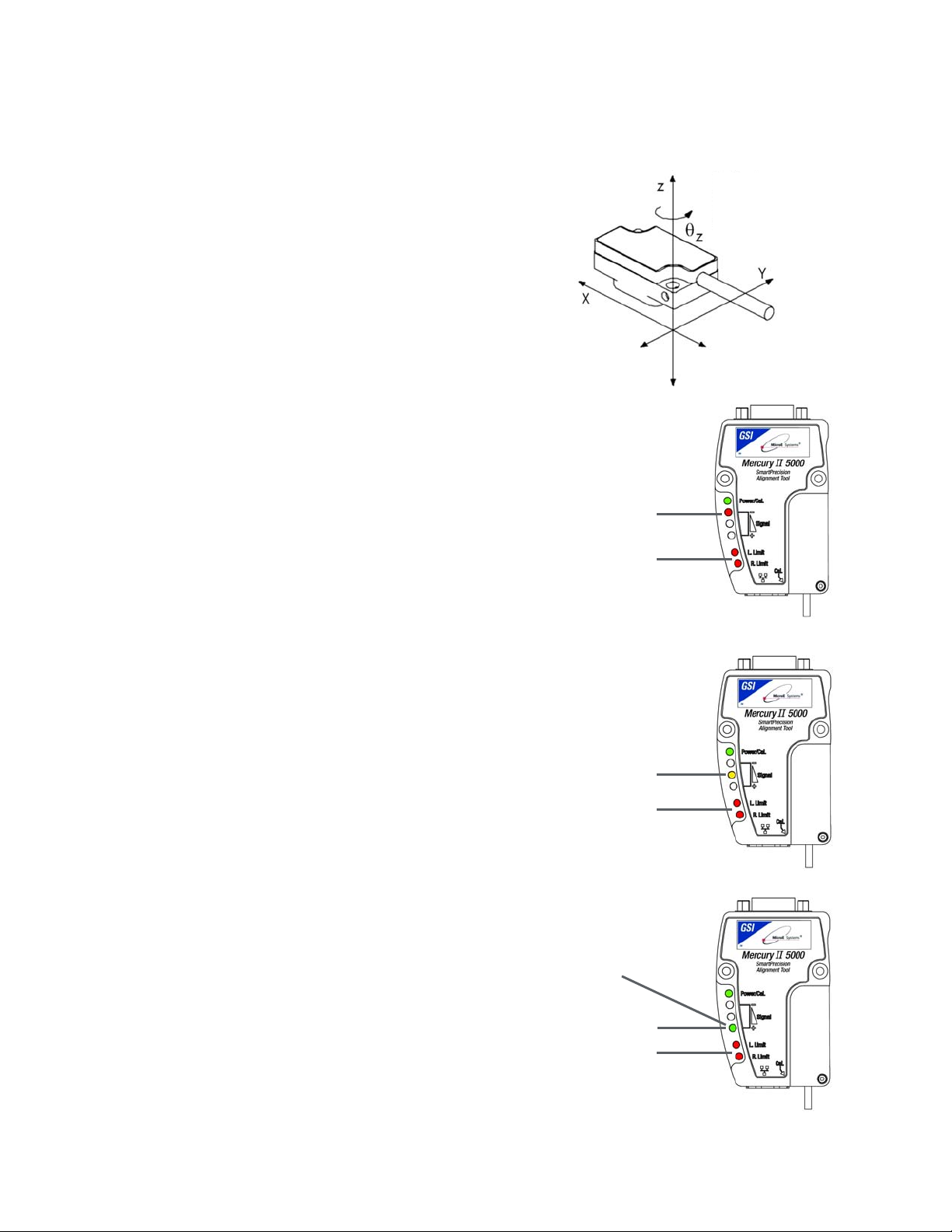
MII6000 Pushbutton Setup Sensor Alignment
Make sure that the 5VDC power input is
disconnected. Connect the MII6000 encoder to the
SmartPrecision Alignment Tool. Insert the 5VDC
power connector and apply power.
BB22..11..11
To enter Alignment Mode, push and release
the Cal. button quickly (within a second).
The limit LED’s will begin to blink slowly.
BB22..11..22
Align the sensor by slowly sliding the sensor
on its mounting surface in the Y or θ
z
directions until the green Signal Strength
LED is illuminated. Tighten the sensor
mounting screws (0.37Nm [3.3 inch-lbs.]
maximum torque).
BB22..11..33
Move the senor over the index mark and
confirm that the green Signal Strength LED
blinks. (If the green Signal Strength LED
does not blink when the sensor passes over
the index, loosen the mounting screws and
repeat the alignment procedure.)
BB22..11..44
Move the sensor over the entire length of
the scale. If the green signal strength LED
remains illuminated over the entire length of
travel (the yellow and red LED’s do not
illuminate), proceed to the next step.
Otherwise, clean the scale and try again. If
cleaning the scale is not successful, loosen
the sensor mounting screws and repeat the
alignment procedure.
BB22..11..55
Push and release the Cal. button quickly to
exit Alignment Mode. The limit LED’s will
stop blinking.
To align the
sensor move it
in the Y or θz
directions
Improper
Alignment LED (red)
Limits LEDs blinking (in
Alignment Mode)
Limits LEDs blinking (in
Alignment Mode)
Limits LEDs blinking (in
Alignment Mode)
Improved Alignment
LED (yellow)
Proper Alignment LED
(green)
Optimum Alignment
LED (bright green)
Z
Y
X
θ
z
Page 9
Section B - Sensor Head Installation, Alignment and Calibration
B2.2
MII6000 Pushbutton Setup -
Setup / Calibration - Linear Scales, or Rotary
Scales Used in Applications <360°
Setup / calibration must be performed whenever
the sensor is moved or the scale is replaced.
NNoottee:: aallll pprroocceedduurreess bbeellooww mmuusstt bbee ppeerrffoorrmmeedd aatt
≤≤11mm//ss rreellaattiivvee mmoottiioonn bbeettwweeeenn tthhee sseennssoorr aanndd tthhee
ss
ccaallee..
BB22..22..11
To start calibration, push and hold the Cal.
button for about two seconds – until the
Power/Cal. LED starts blinking slowly.
BB22..22..22
Move the sensor 50mm to perform Gain /
Offset / Phase calibration. Move the sensor
back and forth if your scale has <50mm of
measuring length. After calibration both
limit LED’s come on steady.
BB22..22..33
Move the sensor to an area of the scale
away from the index and limit markers.
Push the Cal. button once quickly. The
Power/Cal. LED will start blinking quickly.
BB22..22..44
Move the sensor over the index up to 20
passes (one pass is a cycle back and
forth). The Left Limit LED will start blinking
quickly. (Note: if the sensor is positioned
over the left limit marker, the Left Limit LED
will come on steady).
BB22..22..55
Move the sensor over the left limit marker
Setup and Calibration -
Mercury II™6000 Models – Pushbutton Setup
and press the Cal. button once quickly.
The Right Limit LED will start blinking.
(Note: if the sensor is positioned over the
right limit marker, the Right Limit LED will
come on steady.)
BB22..22..66
Move the sensor over the right limit
marker and press the Cal. button once
quickly. All LED’s will flash together twice
to indicate that setup is completed.
BB22..22..77
The encoder is now ready for connection
to the controller for use in servo control.
NNoottee:: ttoo sskkiipp aannyy ppoorrttiioonn ooff tthhiiss ccaalliibbrraattiioonn aanndd aanndd mmoovvee oonn ttoo tthhee nneexxtt ppoorrttiioonn,, ppuusshh aanndd hhoolldd tthhee CCaall.. bbuuttttoonn
ffoorr ttwwoo sseeccoonnddss..
Note:
Calibration of the left and right limits should always
be performed while “Limit Polarity” is in the “Limits
Normal” mode. This mode is set in the “Calibration
and Align” tab of SmartPrecision
II Software.

Page 10
Setup and Calibration -
Mercury II™6000 Models – Pushbutton Setup
Section B - Sensor Head Installation, Alignment and Calibration
B2.3
MII6000 Pushbutton Setup -
Setup / Calibration - Rotary Scales Used in
Applications >360° Without Limit Markers
Setup / calibration must be performed whenever the
sensor is moved or the scale is replaced.
NNoottee:: aallll pprroocceedduurreess bbeellooww mmuusstt bbee ppeerrffoorrmmeedd aatt
≤≤11mm//ss rreellaattiivvee mmoottiioonn bbeettwweeeenn tthhee sseennssoorr aanndd tthhee
ss
ccaallee..
BB22..33..11
To start calibration, push and hold the Cal.
button for about 10 seconds – until the three
signal LED’s blink twice to indicate that rotary
calibration has been activated.
BB22..33..22
Move the sensor 50mm to perform Gain /
Offset / Phase calibration. After calibration
both limit LED’s come on steady. Move the
sensor back and forth if your scale has a
circumference of <50mm.
BB22..33..33
Move the sensor to an area of the scale away
from the index marker. Push the Cal. button
once quickly. The Power/Cal. LED will start
blinking quickly.
BB22..33..44
Move the sensor over the index up to 20
passes (one pass is a cycle back and forth).
The Power/Cal. LED and both limits LED’s will
start to blink in sets of three.
BB22..33..55
Move the sensor away from the index and
press the Cal. button once quickly. The
Power/Cal. LED and both limit LED’s will start
to blink in sets of two.
BB22..33..66
Move the sensor over the index once. The
LED’s will change to Power/Cal. LED and
both limit LED’s blinking just once.
BB22..33..77
Make a full revolution of the rotary scale
in order to go over the index again in the
same direction. The two passes over the
index must be at least 1000 20μm fringes
apart (equivalent of 20mm linear travel), if
they are not the Alignment Tool will wait
for another pass that is 1000 fringes from
the first.
BB22..33..88
The encoder is now ready for connection
to the controller for use in servo control.
NNoottee:: ttoo sskkiipp aannyy ppoorrttiioonn ooff tthhiiss ccaalliibbrraattiioonn aanndd aanndd mmoovvee oonn ttoo tthhee nneexxtt ppoorrttiioonn,, ppuusshh aanndd hhoolldd tthhee CCaall.. bbuuttttoonn
ffoorr ttwwoo sseeccoonnddss..

Page 11
Sensor Head Alignment -
Mercury II™6000 Models – Setup using Software
B2.4.1
Connect the Alignment Tool and Encoder
Verify that the Alignment Tool Adapter /
SmartPrecision
II Alignment Tool is not powered.
Connect the MII 6000 encoder and Ethernet
cable as shown below. Power up the Alignment
Tool Adapter / SmartPrecision II Alignment Tool
by plugging in the power supply. The green LED
labeled “On” will light when the Alignment Tool
is powered.
B2.4.2
Find the Encoder Using FindMII.exe
Once the encoder is connected to the
computer using an Ethernet cable, run the
program FindMII.exe, version 1.2.2.1 or
higher, available by downloading from
www.microesys.com/m2/software.html
This program locates the encoder and
allows you to use the SmartPrecision II
Software embedded in it. Once located,
the FindMII program will list all the
encoders connected to the network.
DC Power Supply
Ethernet
Cable
Windows
OS
Computer
Section B - Sensor Head Installation, Alignment and Calibration
Double-click the name of the encoder to open the SmartPrecision II Software.

Page 12
Section- A
Sensor Head Alignment and Calibration
Mercury II™6000 Models – Setup using Software
B2.4.3
Calibrating the Encoder
Once the SmartPrecision II Software is open,
the encoder can be aligned and calibrated
using the Calibrate and Align tab. Click on the
Calibrate and Align tab and perform sensor
alignment using the Align Mode “Turn On”
and “Turn Off” buttons. Turn on Align Mode,
adjust the sensor until the maximum signal
strength is achieved, tighten the sensor
mounting screws, check for index indication
(using the status display at the top right of the
screen), and turn off Align Mode.
Next, perform setup by checking the Calibrate
GOP, Calibrate Index, Set Left Limit, and Set
Right Limit boxes, as shown.
Ensure that the calibration type is correctly selected for your encoder and
press Start. Follow the steps in the Calibration Status Box to complete setup of
the MII 6000 encoder.
Sensor Head Alignment -
Mercury II™6000 Models – Alignment Verification
with Connector LEDs
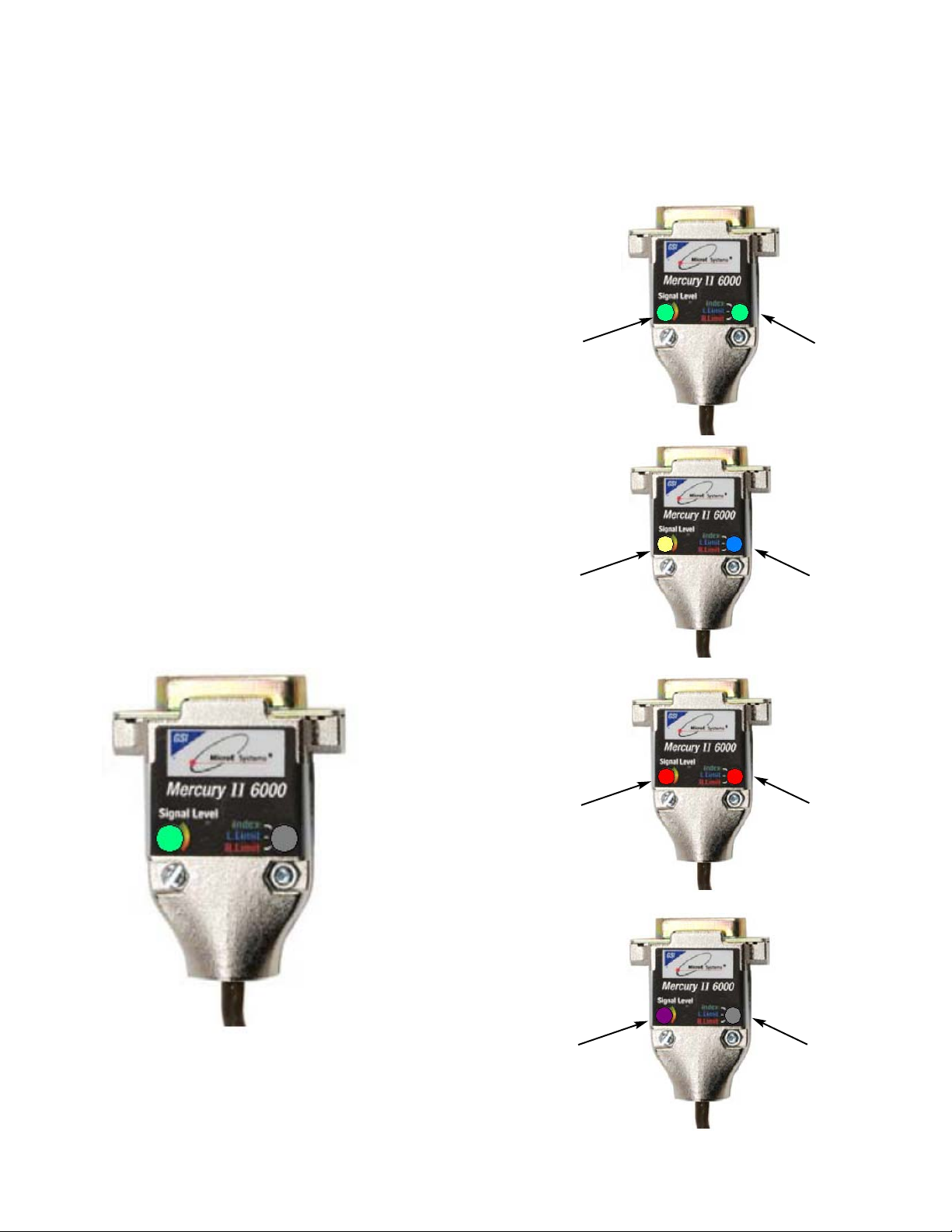
B3.0
Connector LED Indicators
Once the encoder is aligned and calibrated using
the alignment tool, alignment can be visually
verified using the LED indicators on the MII6000
sensor’s connector. The left hand indicator reports
signal strength of the main track. The right hand
indicator reports the presence of the left limit, right
limit, and index marks.
Normal Operation
Optimal Signal
Strength
Marginal Signal
Strength
Bad Signal
Strength
Saturated Signal
Strength
Over Index
Mark
Over Left Limit
Mark
Over Right
Limit Mark
Not Over Any
Mark
Page 14
Section B - Sensor Head Installation, Alignment and Calibration
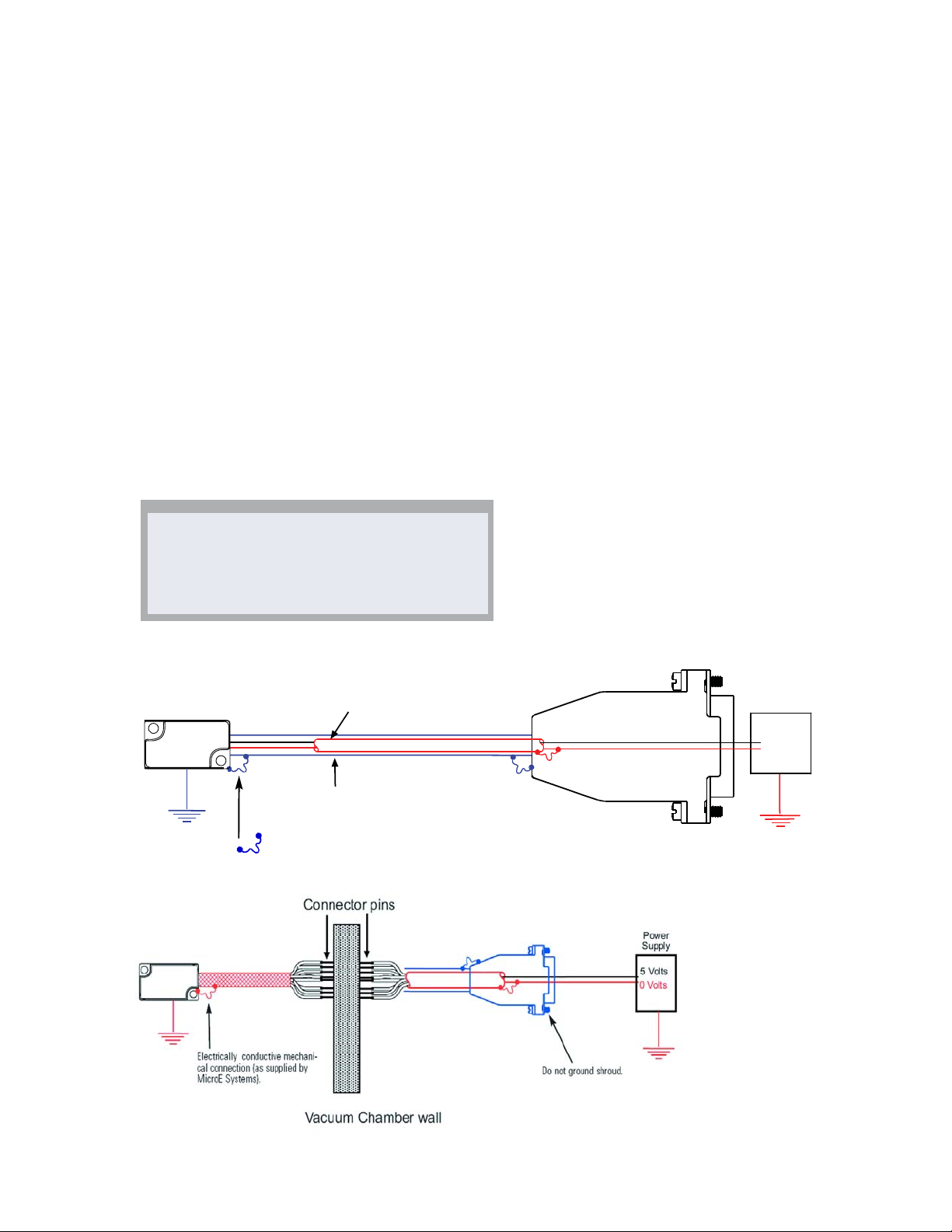
Grounding Instructions -
Mercury II™6000
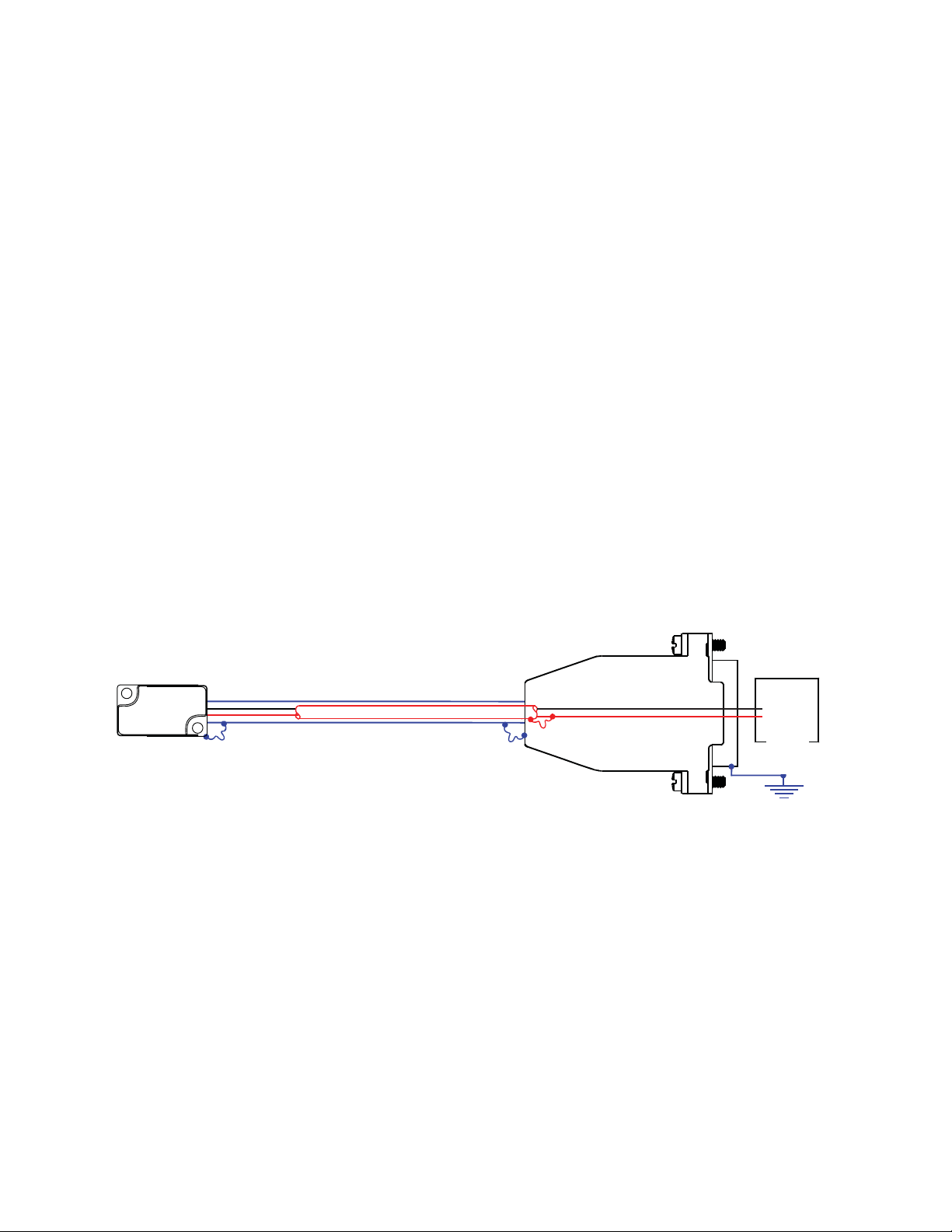
C1.0
Grounding Instructions
For Mercury II 6000 encoder systems to operate
reliably, it is essential that the sensor and cable shield
are grounded properly according to the following
instructions. The diagrams below show how to make
the connections when the encoder's connector is
plugged into the customer's controller chassis. If a
customer-supplied extension cable is used, it should be
a double shielded cable with conductive connector
shells and must provide complete shielding over the
conductors contained within it over its entire length.
Furthermore, the shields should be grounded at the
connection to the controller chassis the same way as
the encoder connectors in the diagrams below.
NOTE:
For best performance, isolate the encoder outer
shield from motor cable shields and separate the
encoder cable as far possible from motor cables.
Sensor mounted with good electrical
contact to a well-grounded surface
(preferred)
CC11..11..11
15-pin D-sub connector grounding:
The encoder's connector shell must
be in intimate, electrically conductive
contact with the customer-supplied mating
connector, which must be isolated from the
controller's ground. If a customer-supplied
shielded cable connects the encoder to
the controller, then the outer shield on the
customer-supplied cable must be isolated
from the controller's ground.
CC11..11..22
The sensor mounting surface must have a
low impedance (DC/AC) connection to
ground. The encoder sensor mounting
surface may have to be masked during
painting or anodizing to insure good
electrical contact with the sensor.
5 Volts
0 Volts
Electrically conductive
mechanical connection
(as supplied by MicroE Systems).
POWER
SUPPLY
INNER SHIELD:
Insulated from outer shield, sensor case, and
connector housing. Connected to circuit common
internally as supplied by MicroE Systems
OUTER SHIELD: Connected to
sensor and connector housing
Page 15
Section C - Reference
Grounding Instructions -
Mercury II™6000
Sensor mounted to a surface that is
grounded through bearings or a poorlygrounded surface, or mounted to a nonconducting surface
CC11..22..11
15-pin D-sub connector grounding: The
encoder's connector shell must be in intimate,
electrically conductive contact with the
customer-supplied mating connector, which
must be connected to the controller's ground.
If a customer-supplied shielded cable
connects the encoder to the controller, then
the outer shield on the customer-supplied
cable must be connected to the controller's
ground. The controller must be grounded to
earth at the point of installation.
CC11..22..22
The encoder sensor must be mounted so that
it is electrically isolated from ground.
5 Volts
0 Volts
POWER
SUPPLY

Page 16
Section C - Reference
Recommendations for Power;
Installation Considerations
C2.0
Recommendations for Power
Mercury
II
™
encoders require a minimum of 4.75V
DC continuously. When designing circuits and
extension cables to use Mercury II encoders, be
sure to account for voltage loss over distance and
tolerances from the nominal supply voltage so that
at least 4.75V DC is available to the Mercury
II
encoder under all operating conditions. The input
voltage should not exceed 5.25V DC.
C2.1
Installation Considerations
The Mercury
II encoder is a precision electronic
instrument. It has been designed to function in a
wide range of applications and environments. To
take full advantage of the Mercury
II modular
system design, considerations should be made to
allow easy access to the sensor (and interpolator
modules where applicable) for service and/or
replacement.
For optimal performance and reliability:
DO follow standard ESD precautions while
handling the sensor and interpolator.
DO allow proper clearance for sensor head
alignment.
DO follow setup and calibration instructions for
the encoder system.
DO, where possible, install the scales in an
inverted or vertical position to minimize
accumulation of dust.
DO NOT store sensors in an uncontrolled
environment.
DO NOT electrically overstress the sensor
(Power supply ripple/noise).
DO NOT intentionally “hot swap” the sensor
if the device is energized.
DO NOT use in high contamination applications
(dust, oil, excessive humidity, or other airborne
contaminants.).
Page 17
Section C - Reference
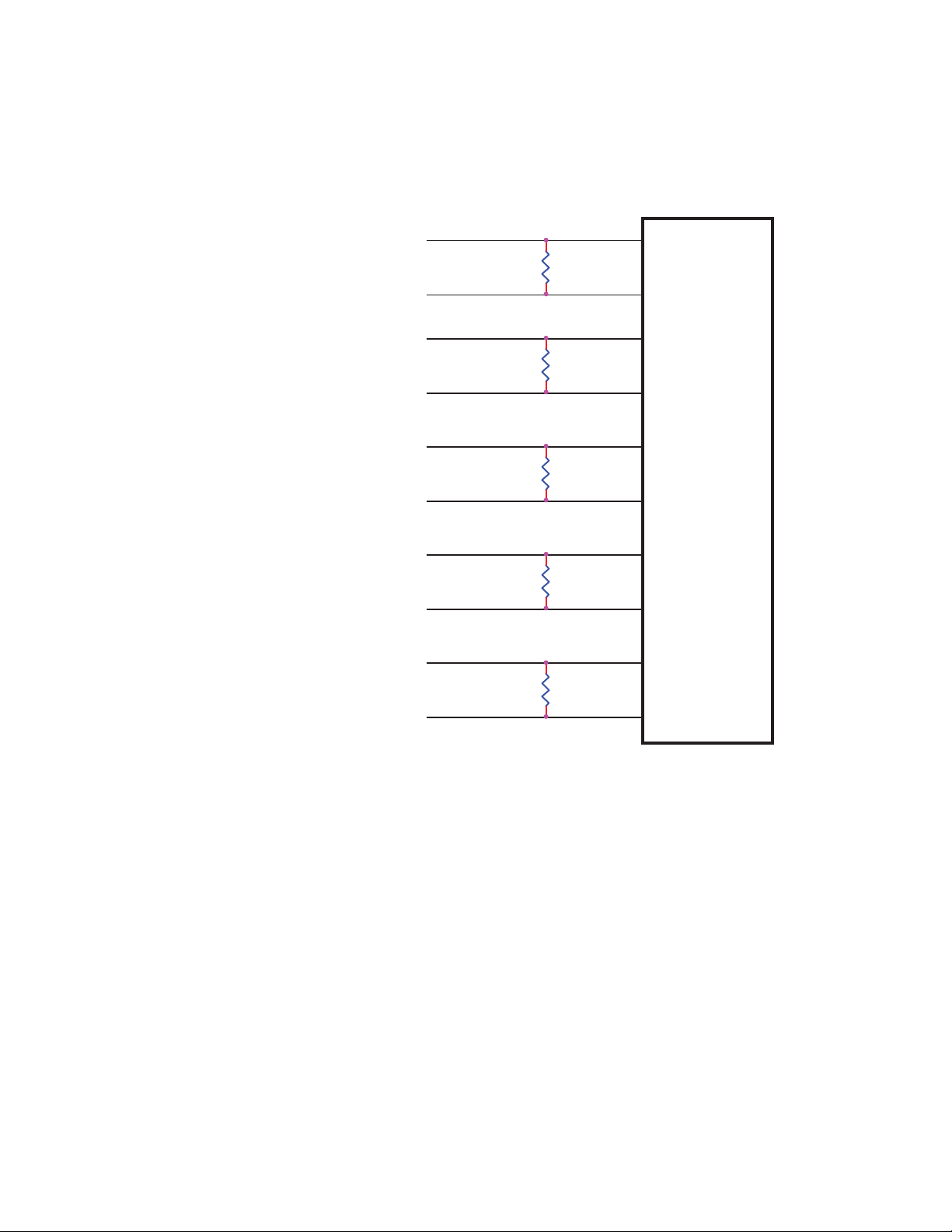
Recommended Interface Termination
C3.0
Customer Differential Line Receiver:
For Mercury II™6000
R
120 ohm
R
120 ohm
R
120 ohm
R
120 ohm
A+
A-
B+
B-
IW+
IW-
Left Limit+
Left Limit -
Right Limit+
Right Limit -
422 Receiving Electronics
R
120 ohm
Section C - Reference
Page 18
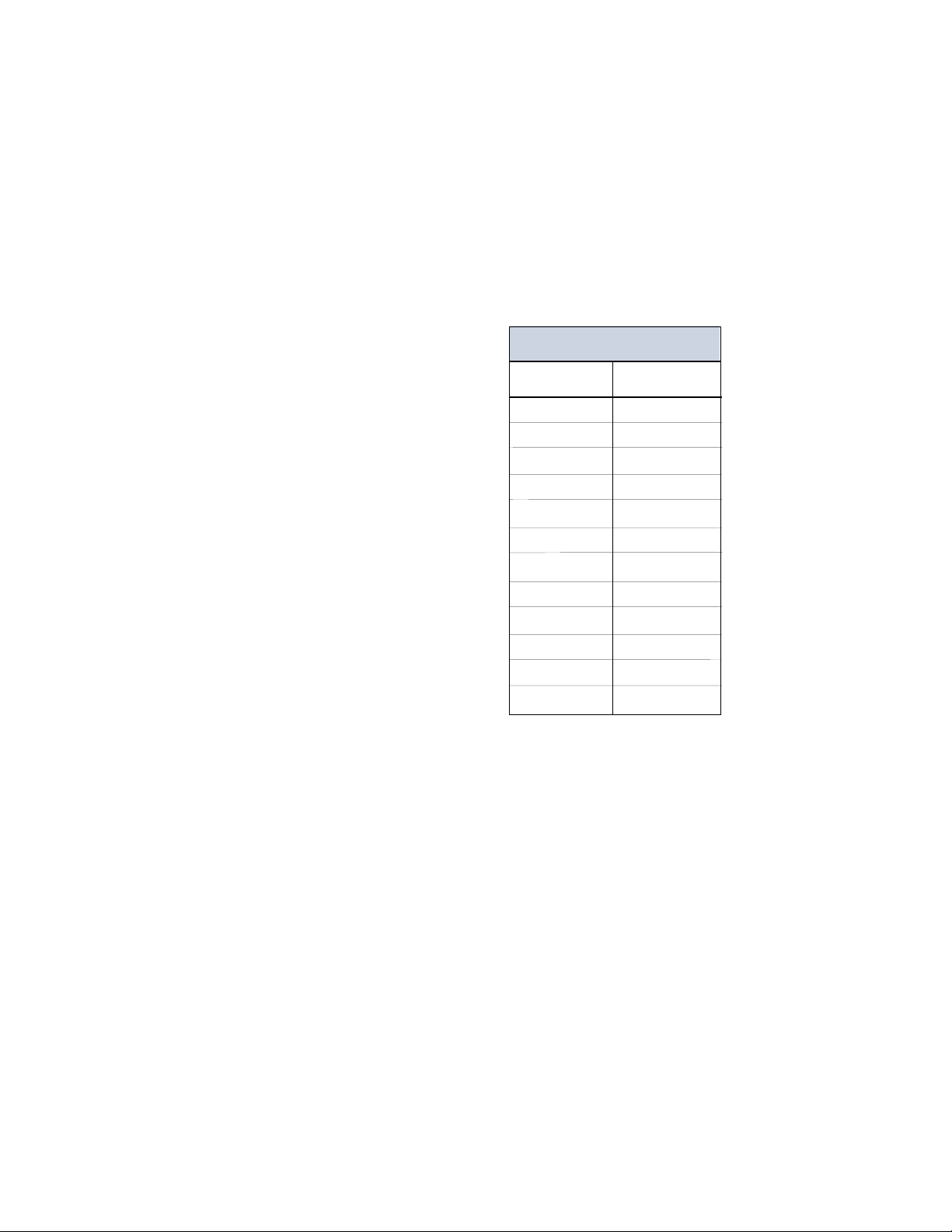
Customer Interface
Cable Requirements
Mercury II™6000
Signal Twisted Pair
A+ Pair 1
A-
B+ Pair 2
B-
Index+ Pair 3
Index-
Left Limit + Pair 4
Left Limit -
Right Limit + Pair 5
Right Limit -
+5V Pair 6
GND
C4.0
Customer cables that interface to Mercury II™series
encoders must have the following characteristics:
• Twisted pair signal wiring.
• Characteristic impedance of 100-120 ohms.
• Sufficient wire gauge to meet the minimum
voltage requirement at the encoder, for example
24AWG gauge wire for a 2m length cable.
Examples of acceptable cables with 24AWG
gauge wire and 4 twisted pairs are Belden
9831, 8104, and 9844 or other
manufacturer’s equivalents.
• Single shield cable with a minimum of 90%
coverage. Note that a double shielded cable
may be required in high-noise applications.
C4.1
Signal Wiring
Each differential signal should be connected to
a corresponding twisted pair as follows:
Page 19
Section C - Reference
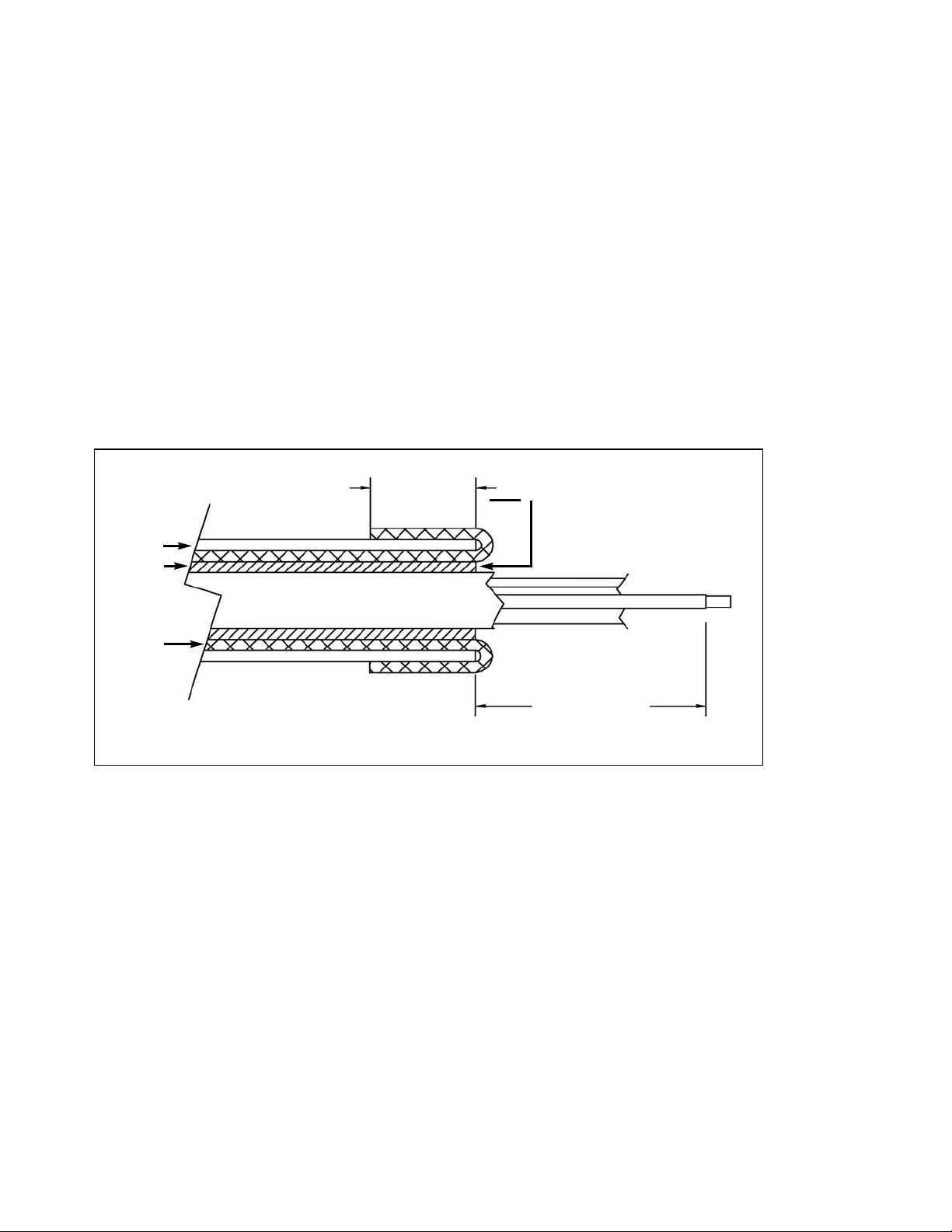
Customer Interface
Cable Requirements
Fold braided shield back over jacket. Example shows double-shielded cable.
Dimensions shown are for illustration only.
7.6 [.30]
28.7 [1.13]
Aluminum Polyester Shield not to
be exposed in this area.
Do not twist.
Jacket
Aluminum
Polyester
Shied
Braided
Shield
C4.2
Shield Termination:
The customer's cable shield should be in 360° contact
with the connector shroud and the connector shell to
provide complete shielding. The connector shell should
be metal with conductive surfaces. Suggested metal
connector shells for use with Mercury
II
™
encoders:
AMP 748676-1 or equivalent; where the dash
number is dependent on the customer's outside cable
diameter. The shield should be terminated as
illustrated in the following diagram.

Index Speed Considerations
for MII6000
C5.0 Maximum Speed for MII6000 Index
after Power-up (MII6800, MII6700
and MII6500 Models)
Each time an MII6800, MII6700 or MII6500
encoder is powered up, the first pass over
the index mark must occur at a speed ≤1m/s.
Once the index is initially detected, the index
will function at all speeds (up to 10m/s) until
the next power cycle.
Page 20
Section C - Reference

Section- D - Encoder Troubleshooting
Page 21
Troubleshooting
D1.0
Problem
The Power/Calibration indicator
will not come on.
Solution
• Make sure that the SmartPrecision
™
II
electronics’ 15-pin D-sub connector is fully
seated and connected.
• Confirm that +5 Volts DC is being applied to
pin 7 and 8 on the SmartPrecision II electronics’
15-pin connector and that pin 2 and 9 is
connected to ground.
Problem
Can't get the SmartPrecision II electronics’
"Signal" LEDs better than red or yellow; or the
green, “ Proper Alignment” indicator doesn't
stay illuminated over the full length of the scale.
Solution
• Verify that the sensor is mounted in the correct
orientation with reference to the scale and scale
mounting reference edge. Refer to the Interface
Drawing.
• Verify that the sensor has been aligned to the
scale and that the mounting screws are tight.
Check the dimensions for the mechanical
mounting holes (and clamps if any) to make
sure that the sensor is correctly located over
the scale in the Y and Z dimensions. Refer to
the Interface Drawing.
• Check that the scale is firmly mounted and
can't jiggle or move in any direction other than
the axis of motion.
• Make sure that the scale is clean over its entire
length or circumference.
Problem
The green Power/Calibration indicator LED or limit
LEDs are flashing unexpectedly.
Solution
• Part of the normal setup procedure is to
activate the SmartPrecision
II Electronics’
Calibration/Setup process by pressing the
recessed button in the electronics module.
The Power/Cal. LED or limit LEDs will begin
to flash until the relevant setup process is
complete. See the instructions beginning at
section B2.2.
Problem
Can't Complete the Calibration/Setup process the green Power/Calibration indicator doesn't
stop flashing.
Solution
• Verify that the sensor is mounted in the correct
orientation to the scale for the desired index mark.
Refer to the Interface Drawing.
• Refer to section B1.0 to insure proper sensor
alignment and index marker operation.
 Loading...
Loading...