

Microchip Technology Inc PIC16C73-JW, PIC16C73A-04ISO, PIC16C72-JW, PIC16C72A-04-SO, PIC16C72A-04-SP Datasheet
...
1997 Microchip Technology Inc. DS30390E-page 1
PIC16C7X
8-Bit CMOS Microcontrollers with A/D Converter
Devices included in this data sheet:
PIC16C7X Microcontroller Core Features:
• High-performance RISC CPU
• Only 35 single word instructions to learn
• All single cycle instructions except for program
branches which are two cycle
• Operating speed: DC - 20 MHz clock input
DC - 200 ns instruction cycle
• Up to 8K x 14 words of Program Memory,
up to 368 x 8 bytes of Data Memory (RAM)
• Interrupt capability
• Eight level deep hardware stack
• Direct, indirect, and relative addressing modes
• Power-on Reset (POR)
• Power-up Timer (PWRT) and
Oscillator Start-up Timer (OST)
• Watchdog Timer (WDT) with its own on-chip RC
oscillator for reliable operation
• Programmable code-protection
• Power saving SLEEP mode
• Selectable oscillator options
• Low-power, high-speed CMOS EPROM
technology
• Fully static design
• PIC16C72 • PIC16C74A
• PIC16C73 • PIC16C76
• PIC16C73A • PIC16C77
• PIC16C74
• Wide operating voltage range: 2.5V to 6.0V
• High Sink/Source Current 25/25 mA
• Commercial, Industrial and Extended temperature
ranges
• Low-power consumption:
•
< 2 mA @ 5V, 4 MHz
•
15 µ A typical @ 3V, 32 kHz
•
< 1 µ A typical standby current
PIC16C7X Peripheral Features:
• Timer0: 8-bit timer/counter with 8-bit prescaler
• Timer1: 16-bit timer/counter with prescaler,
can be incremented during sleep via external
crystal/clock
• Timer2: 8-bit timer/counter with 8-bit period
register, prescaler and postscaler
• Capture, Compare, PWM module(s)
• Capture is 16-bit, max. resolution is 12.5 ns,
Compare is 16-bit, max. resolution is 200 ns,
PWM max. resolution is 10-bit
• 8-bit multichannel analog-to-digital converter
• Synchronous Serial Port (SSP) with
SPI
and I
2
C
• Universal Synchronous Asynchronous Receiver
Transmitter (USART/SCI)
• Parallel Slave Port (PSP) 8-bits wide, with
external RD
, WR and CS controls
• Brown-out detection circuitry for
Brown-out Reset (BOR)
PIC16C7X Features 72 73 73A 74 74A 76 77
Program Memory (EPROM) x 14 2K 4K 4K 4K 4K 8K 8K
Data Memory (Bytes) x 8 128 192 192 192 192 368 368
I/O Pins 22 22 22 33 33 22 33
Parallel Slave Port — — — Yes Yes — Yes
Capture/Compare/PWM Modules 1 222222
Timer Modules 3 333333
A/D Channels 5 558858
Serial Communication SPI/I
2
C SPI/I
2
C,
USART
SPI/I
2
C,
USART
SPI/I
2
C,
USART
SPI/I
2
C,
USART
SPI/I
2
C,
USART
SPI/I
2
C,
USART
In-Circuit Serial Programming Yes Yes Yes Yes Yes Yes Yes
Brown-out Reset Yes — Yes — Yes Yes Yes
Interrupt Sources 8 11 11 12 12 11 12
PIC16C7X
DS30390E-page 2
1997 Microchip Technology Inc.
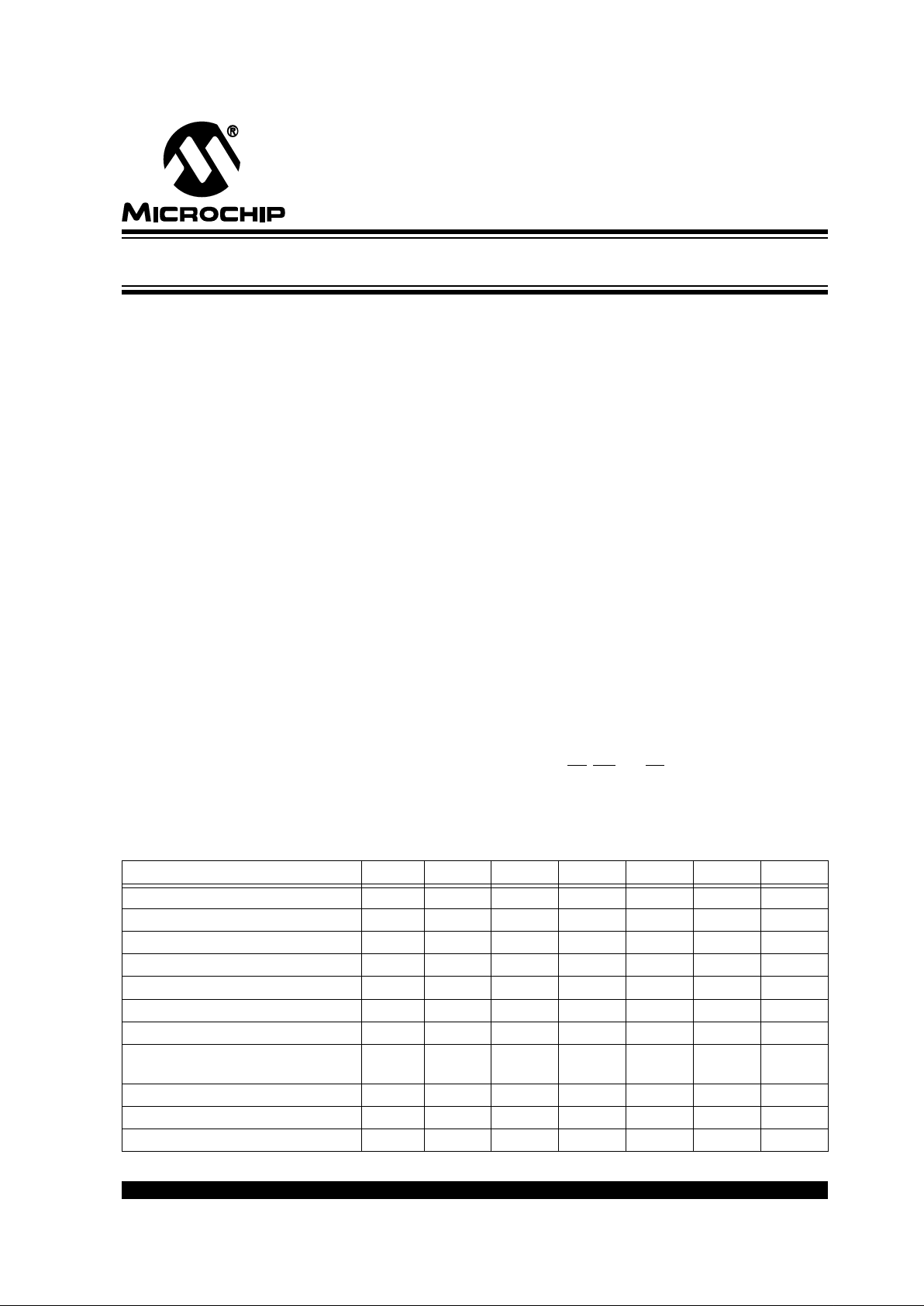
Pin Diagrams
PIC16C72
MCLR/VPP
RA0/AN0
RA1/AN1
RA2/AN2
RA3/AN3/VREF
RA4/T0CKI
RA5/SS/AN4
V
SS
OSC1/CLKIN
OSC2/CLKOUT
RC0/T1OSO/T1CKI
RC1/T1OSI
RC2/CCP1
RC3/SCK/SCL
RB7
RB6
RB5
RB4
RB3
RB2
RB1
RB0/INT
VDD
VSS
RC7
RC6
RC5/SDO
RC4/SDI/SDA
• 1
2
3
4
5
6
7
8
9
10
11
12
13
14
28
27
26
25
24
23
22
21
20
19
18
17
16
15
SDIP, SOIC, Windowed Side Brazed Ceramic
PIC16C72
MCLR/VPP
RA0/AN0
RA1/AN1
RA2/AN2
RA3/AN3/VREF
RA4/T0CKI
RA5/SS/AN4
V
SS
OSC1/CLKIN
OSC2/CLKOUT
RC0/T1OSO/T1CKI
RC1/T1OSI
RC2/CCP1
RC3/SCK/SCL
RB7
RB6
RB5
RB4
RB3
RB2
RB1
RB0/INT
VDD
VSS
RC7
RC6
RC5/SDO
RC4/SDI/SDA
• 1
2
3
4
5
6
7
8
9
10
11
12
13
14
28
27
26
25
24
23
22
21
20
19
18
17
16
15
SSOP
PIC16C73
MCLR/VPP
RA0/AN0
RA1/AN1
RA2/AN2
RA3/AN3/VREF
RA4/T0CKI
RA5/SS/AN4
V
SS
OSC1/CLKIN
OSC2/CLKOUT
RC0/T1OSO/T1CKI
RC1/T1OSI/CCP2
RC2/CCP1
RC3/SCK/SCL
RB7
RB6
RB5
RB4
RB3
RB2
RB1
RB0/INT
VDD
VSS
RC7/RX/DT
RC6/TX/CK
RC5/SDO
RC4/SDI/SDA
• 1
2
3
4
5
6
7
8
9
10
11
12
13
14
28
27
26
25
24
23
22
21
20
19
18
17
16
15
PIC16C73A
SDIP, SOIC, Windowed Side Brazed Ceramic
PIC16C76
PDIP , Windowed CERDIP
RB7
RB6
RB5
RB4
RB3
RB2
RB1
RB0/INT
V
DD
VSS
RD7/PSP7
RD6/PSP6
RD5/PSP5
RD4/PSP4
RC7/RX/DT
RC6/TX/CK
RC5/SDO
RC4/SDI/SDA
RD3/PSP3
RD2/PSP2
MCLR/VPP
RA0/AN0
RA1/AN1
RA2/AN2
RA3/AN3/V
REF
RA4/T0CKI
RA5/SS
/AN4
RE0/RD
/AN5
RE1/WR/AN6
RE2/CS
/AN7
V
DD
VSS
OSC1/CLKIN
OSC2/CLKOUT
RC0/T1OSO/T1CKI
RC1/T1OSI/CCP2
RC2/CCP1
RC3/SCK/SCL
RD0/PSP0
RD1/PSP1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
PIC16C74
PIC16C74A
PIC16C77
1997 Microchip Technology Inc. DS30390E-page 3
PIC16C7X
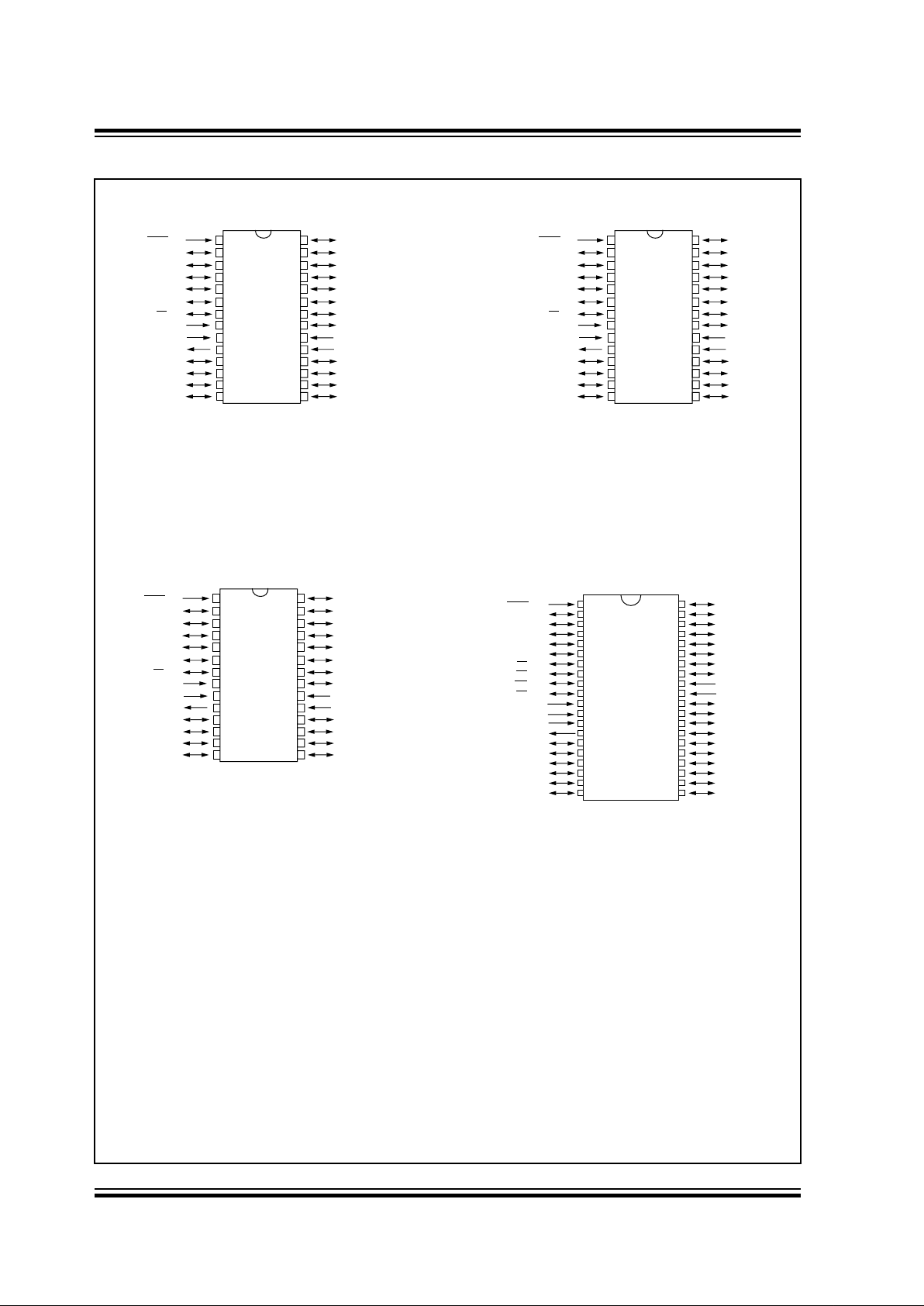
Pin Diagrams (Cont.’d)
NC
RC0/T1OSO/T1CKI
OSC2/CLKOUT
OSC1/CLKIN
V
SS
VDD
RE2/CS/AN7
RE1/WR
/AN6
RE0/RD
/AN5
RA5/SS
/AN4
RA4/T0CKI
RC7/RX/DT
RD4/PSP4
RD5/PSP5
RD6/PSP6
RD7/PSP7
V
SS
VDD
RB0/INT
RB1
RB2
RB3
RC6/TX/CK
RC5/SDO
RC4/SDI/SDA
RD3/PSP3
RD2/PSP2
RD1/PSP1
RD0/PSP0
RC3/SCK/SCL
RC2/CCP1
RC1/T1OSI/CCP2
NC
1
2
3
4
5
6
7
8
9
10
11
33
32
31
30
29
28
27
26
25
24
23
4443424140393837363534
2221201918171615141312
PIC16C74
MQFP
RB3
RB2
RB1
RB0/INT
V
DD
VSS
RD7/PSP7
RD6/PSP6
RD5/PSP5
RD4/PSP4
RC7/RX/DT
RA4/T0CKI
RA5/SS
/AN4
RE0/RD
/AN5
RE1/WR
/AN6
RE2/CS/AN7
V
DD
VSS
OSC1/CLKIN
OSC2/CLKOUT
RC0/T1OSO/T1CKI
NC
RA3/AN3/VREF
RA2/AN2
RA1/AN1
RA0/AN0
MCLR
/VPP
NC
RB7
RB6
RB5
RB4
NC
7
8
9
10
11
12
13
14
15
16
17
39
38
37
36
35
34
33
32
31
30
29
NC
RC6/TX/CK
RC5/SDO
RC4/SDI/SDA
RD3/PSP3
RD2/PSP2
RD1/PSP1
RD0/PSP0
RC3/SCK/SCL
RC2/CCP1
65432
1
4443424140
2827262524232221201918
PIC16C74
NC
RC0/T1OSO/T1CKI
OSC2/CLKOUT
OSC1/CLKIN
V
SS
VDD
RE2/CS/AN7
RE1/WR
/AN6
RE0/RD
/AN5
RA5/SS
/AN4
RA4/T0CKI
RC7/RX/DT
RD4/PSP4
RD5/PSP5
RD6/PSP6
RD7/PSP7
V
SS
VDD
RB0/INT
RB1
RB2
RB3
RC6/TX/CK
RC5/SDO
RC4/SDI/SDA
RD3/PSP3
RD2/PSP2
RD1/PSP1
RD0/PSP0
RC3/SCK/SCL
RC2/CCP1
RC1/T1OSI/CCP2
NC
1
2
3
4
5
6
7
8
9
10
11
33
32
31
30
29
28
27
26
25
24
23
RA3/AN3/VREF
RA2/AN2
RA1/AN1
RA0/AN0
MCLR
/VPP
RB7
RB6
RB5
RB4
NC
NC
4443424140393837363534
2221201918171615141312
MQFP
PLCC
PIC16C74A
PIC16C74A
TQFP
PIC16C77
PIC16C77
RC1/T1OSI/CCP2
RA3/AN3/V
REF
RA2/AN2
RA1/AN1
RA0/AN0
MCLR
/VPP
RB7
RB6
RB5
RB4
NC
NC
PIC16C7X
DS30390E-page 4
1997 Microchip Technology Inc.
Table of Contents
1.0 General Description....................................................................................................................................................................... 5
2.0 PIC16C7X Device Varieties...........................................................................................................................................................7
3.0 Architectural Overview................................................................................................................................................................... 9
4.0 Memory Organization................................................................................................................................................................... 19
5.0 I/O Ports....................................................................................................................................................................................... 43
6.0 Overview of Timer Modules......................................................................................................................................................... 57
7.0 Timer0 Module............................................................................................................................................................................. 59
8.0 Timer1 Module............................................................................................................................................................................. 65
9.0 Timer2 Module............................................................................................................................................................................. 69
10.0 Capture/Compare/PWM Module(s).............................................................................................................................................. 71
11.0 Synchronous Serial Port (SSP) Module....................................................................................................................................... 77
12.0 Universal Synchronous Asynchronous Receiver Transmitter (USART)...................................................................................... 99
13.0 Analog-to-Digital Converter (A/D) Module ................................................................................................................................. 117
14.0 Special Features of the CPU ..................................................................................................................................................... 129
15.0 Instruction Set Summary............................................................................................................................................................ 147
16.0 Development Support................................................................................................................................................................ 163
17.0 Electrical Characteristics for PIC16C72..................................................................................................................................... 167
18.0 Electrical Characteristics for PIC16C73/74................................................................................................................................ 183
19.0 Electrical Characteristics for PIC16C73A/74A........................................................................................................................... 201
20.0 Electrical Characteristics for PIC16C76/77................................................................................................................................ 219
21.0 DC and AC Characteristics Graphs and Tables ........................................................................................................................ 241
22.0 Packaging Information............................................................................................................................................................... 251
Appendix A: ................................................................................................................................................................................... 263
Appendix B: Compatibility............................................................................................................................................................. 263
Appendix C: What’s New............................................................................................................................................................... 264
Appendix D: What’s Changed....................................................................................................................................................... 264
Appendix E: PIC16/17 Microcontrollers ....................................................................................................................................... 265
Pin Compatibility ................................................................................................................................................................................ 271
Index .................................................................................................................................................................................................. 273
List of Examples................................................................................................................................................................................. 279
List of Figures..................................................................................................................................................................................... 280
List of Tables...................................................................................................................................................................................... 283
Reader Response.............................................................................................................................................................................. 286
PIC16C7X Product Identification System........................................................................................................................................... 287
For register and module descriptions in this data sheet, device legends show which devices apply to those sections. As
an example, the legend below would mean that the following section applies only to the PIC16C72, PIC16C73A and
PIC16C74A devices.
Applicable Devices
72
73 73A 74 74A 76 77
To Our Valued Customers
We constantly strive to improve the quality of all our products and documentation. We have spent an exceptional
amount of time to ensure that these documents are correct. However, we realize that we may have missed a few
things. If you find any information that is missing or appears in error, please use the reader response form in the
back of this data sheet to inform us. We appreciate your assistance in making this a better document.

1997 Microchip Technology Inc. DS30390E-page 5
PIC16C7X
1.0 GENERAL DESCRIPTION
The PIC16C7X is a family of
low-cost, high-performance, CMOS, fully-static, 8-bit microcontrollers with
integrated analog-to-digital (A/D) converters, in the
PIC16CXX mid-range family.
All PIC16/17 microcontrollers employ an advanced
RISC architecture. The PIC16CXX microcontroller family has enhanced core features, eight-level deep stack,
and multiple internal and external interrupt sources.
The separate instruction and data buses of the Harvard
architecture allow a 14-bit wide instruction word with
the separate 8-bit wide data. The two stage instruction
pipeline allows all instructions to execute in a single
cycle, except for program branches which require two
cycles. A total of 35 instructions (reduced instruction
set) are available . Additionally, a large register set gives
some of the architectural innovations used to achie v e a
very high performance.
PIC16CXX microcontrollers typically achieve a 2:1
code compression and a 4:1 speed improvement over
other 8-bit microcontrollers in their class.
The PIC16C72 has 128 bytes of RAM and 22 I/O pins.
In addition several peripheral features are available
including: three timer/counters, one Capture/Compare/
PWM module and one serial port. The Synchronous
Serial Port can be configured as either a 3-wire Serial
Peripheral Interface (SPI) or the two-wire Inter-Integrated Circuit (I
2
C) bus. Also a 5-channel high-speed
8-bit A/D is provided. The 8-bit resolution is ideally
suited for applications requiring low-cost analog interface, e.g. thermostat control, pressure sensing, etc.
The PIC16C73/73A devices have 192 bytes of RAM,
while the PIC16C76 has 368 byes of RAM. Each de vice
has 22 I/O pins. In addition, several peripheral features
are available including: three timer/counters, two Capture/Compare/PWM modules and two serial ports. The
Synchronous Serial Port can be configured as either a
3-wire Serial Peripheral Interface (SPI) or the two-wire
Inter-Integrated Circuit (I
2
C) bus. The Universal Synchronous Asynchronous Receiver Transmitter
(USART) is also known as the Serial Communications
Interface or SCI. Also a 5-channel high-speed 8-bit A/
D is provided.The 8-bit resolution is ideally suited for
applications requiring low-cost analog interface, e.g.
thermostat control, pressure sensing, etc.
The PIC16C74/74A devices have 192 bytes of RAM,
while the PIC16C77 has 368 bytes of RAM. Each
device has 33 I/O pins. In addition several peripheral
features are available including: three timer/counters,
two Capture/Compare/PWM modules and two serial
ports. The Synchronous Serial Port can be configured
as either a 3-wire Serial Peripheral Interface (SPI) or
the two-wire Inter-Integrated Circuit (I
2
C) bus. The Universal Synchronous Asynchronous Receiver Transmitter (USART) is also known as the Serial
Communications Interface or SCI. An 8-bit Parallel
Slave Port is provided. Also an 8-channel high-speed
8-bit A/D is provided. The 8-bit resolution is ideally
suited for applications requiring low-cost analog interface, e.g. thermostat control, pressure sensing, etc.
The PIC16C7X family has special features to reduce
external components, thus reducing cost, enhancing
system reliability and reducing power consumption.
There are four oscillator options, of which the single pin
RC oscillator provides a low-cost solution, the LP oscillator minimizes power consumption, XT is a standard
crystal, and the HS is for High Speed crystals. The
SLEEP (power-down) feature provides a power saving
mode. The user can wake up the chip from SLEEP
through several external and internal interrupts and
resets.
A highly reliable Watchdog Timer with its own on-chip
RC oscillator provides protection against software lockup.
A UV erasable CERDIP packaged version is ideal for
code development while the cost-effective One-TimeProgrammable (OTP) version is suitable for production
in any volume.
The PIC16C7X family fits perfectly in applications ranging from security and remote sensors to appliance control and automotive. The EPROM technology makes
customization of application programs (transmitter
codes, motor speeds, receiver frequencies, etc.)
extremely fast and convenient. The small footprint
packages make this microcontroller series perfect for
all applications with space limitations. Low cost, low
power, high performance, ease of use and I/O flexibility
make the PIC16C7X very versatile ev en in areas where
no microcontroller use has been considered before
(e.g. timer functions, serial communication, capture
and compare, PWM functions and coprocessor applications).
1.1 F
amily and Upward Compatibility
Users familiar with the PIC16C5X microcontroller family will realize that this is an enhanced version of the
PIC16C5X architecture. Please refer to Appendix A for
a detailed list of enhancements. Code written for the
PIC16C5X can be easily ported to the PIC16CXX family of devices (Appendix B).
1.2 De
velopment Support
PIC16C7X devices are supported by the complete line
of Microchip Development tools.
Please refer to Section 16.0 for more details about
Microchip’s development tools.
PIC16C7X
DS30390E-page 6
1997 Microchip Technology Inc.
TABLE 1-1: PIC16C7XX FAMILY OF DEVCES
PIC16C710
PIC16C71 PIC16C711 PIC16C715 PIC16C72 PIC16CR72
(1)
Clock
Maximum Frequency
of Operation (MHz)
20 20 20 20 20 20
Memory
EPROM Program Memory
(x14 words)
512 1K 1K 2K 2K —
ROM Program Memory
(14K words)
—————2K
Data Memory (bytes) 36 36 68 128 128 128
Peripherals
Timer Module(s) TMR0 TMR0 TMR0 TMR0 TMR0,
TMR1,
TMR2
TMR0,
TMR1,
TMR2
Capture/Compare/
PWM Module(s)
————1 1
Serial Port(s)
(SPI/I
2
C, USART)
— — — — SPI/I
2
C SPI/I
2
C
Parallel Slave Port — — — — — —
A/D Converter (8-bit) Channels 4 4 4 4 5 5
Features
Interrupt Sources 4 4 4 4 8 8
I/O Pins 13 13 13 13 22 22
Voltage Range (Volts) 3.0-6.0 3.0-6.0 3.0-6.0 3.0-5.5 2.5-6.0 3.0-5.5
In-Circuit Serial Programming Yes Yes Yes Yes Yes Yes
Brown-out Reset Yes — Yes Yes Yes Yes
Packages 18-pin DIP,
SOIC;
20-pin SSOP
18-pin DIP,
SOIC
18-pin DIP,
SOIC;
20-pin SSOP
18-pin DIP,
SOIC;
20-pin SSOP
28-pin SDIP,
SOIC, SSOP
28-pin SDIP,
SOIC, SSOP
PIC16C73A
PIC16C74A PIC16C76 PIC16C77
Clock
Maximum Frequency of Operation (MHz)
20 20 20 20
Memory
EPROM Program Memory
(x14 words)
4K 4K 8K 8K
Data Memory (bytes) 192 192 368 368
Peripherals
Timer Module(s) TMR0,
TMR1,
TMR2
TMR0,
TMR1,
TMR2
TMR0,
TMR1,
TMR2
TMR0,
TMR1,
TMR2
Capture/Compare/PWM Module(s)
2222
Serial Port(s) (SPI/I
2
C, US-
ART)
SPI/I
2
C, USART SPI/I
2
C, USART SPI/I
2
C, USART SPI/I
2
C, USART
Parallel Slave Port — Yes — Yes
A/D Converter (8-bit) Channels 5858
Features
Interrupt Sources 11 12 11 12
I/O Pins 22 33 22 33
Voltage Range (Volts) 2.5-6.0 2.5-6.0 2.5-6.0 2.5-6.0
In-Circuit Serial Programming Yes Yes Yes Yes
Brown-out Reset Yes Yes Yes Yes
Packages 28-pin SDIP,
SOIC
40-pin DIP;
44-pin PLCC,
MQFP, TQFP
28-pin SDIP,
SOIC
40-pin DIP;
44-pin PLCC,
MQFP, TQFP
All PIC16/17 Family devices ha ve Pow er-on Reset, selectab le Watchdog Timer, selectab le code protect and high I/O current capability. All PIC16C7XX Family devices use serial programming with clock pin RB6 and data pin RB7.
Note 1: Please contact your local Microchip sales office for availability of these devices.
1997 Microchip Technology Inc. DS30390E-page 7
PIC16C7X
2.0 PIC16C7X DEVICE VARIETIES
A variety of frequency ranges and packaging options
are available . Depending on application and production
requirements, the proper device option can be selected
using the information in the PIC16C7X Product Identification System section at the end of this data sheet.
When placing orders, please use that page of the data
sheet to specify the correct part number.
For the PIC16C7X family, there are two device “types”
as indicated in the device number:
1. C , as in PIC16 C 74. These devices have
EPROM type memory and operate over the
standard voltage range.
2. LC , as in PIC16 LC 74. These devices have
EPROM type memory and operate over an
extended voltage range.
2.1 UV Erasab
le Devices
The UV erasable version, offered in CERDIP package
is optimal for prototype development and pilot
programs. This version can be erased and
reprogrammed to any of the oscillator modes.
Microchip's PICSTART
Plus and PRO MATE
II
programmers both support programming of the
PIC16C7X.
2.2 O
ne-Time-Programmable (OTP)
Devices
The availability of OTP devices is especially useful for
customers who need the flexibility for frequent code
updates and small volume applications.
The OTP devices, packaged in plastic packages, permit the user to program them once. In addition to the
program memory, the configuration bits must also be
programmed.
2.3 Q
uick-Turnaround-Production (QTP)
Devices
Microchip offers a QTP Programming Service for factory production orders. This service is made available
for users who choose not to program a medium to high
quantity of units and whose code patterns have stabilized. The devices are identical to the OTP devices but
with all EPROM locations and configuration options
already programmed by the factory. Certain code and
prototype verification procedures apply before production shipments are available. Please contact your local
Microchip Technology sales office for more details.
2.4 Serializ
ed Quick-Turnaround
Production (SQTP
SM
)
Devices
Microchip offers a unique programming service where
a few user-defined locations in each device are programmed with different serial numbers. The serial numbers may be random, pseudo-random, or sequential.
Serial programming allows each device to have a
unique number which can serve as an entry-code,
password, or ID number.

PIC16C7X
DS30390E-page 8
1997 Microchip Technology Inc.
NOTES:
1997 Microchip Technology Inc. DS30390E-page 9
PIC16C7X
3.0 ARCHITECTURAL OVERVIEW
The high performance of the PIC16CXX family can be
attributed to a number of architectural features commonly found in RISC microprocessors. To begin with,
the PIC16CXX uses a Harvard architecture, in which,
program and data are accessed from separate memories using separate buses. This improves bandwidth
over traditional von Neumann architecture in which program and data are fetched from the same memory
using the same bus. Separating program and data
buses further allows instructions to be sized differently
than the 8-bit wide data word. Instruction opcodes are
14-bits wide making it possible to have all single word
instructions. A 14-bit wide program memory access
bus fetches a 14-bit instruction in a single cycle. A twostage pipeline overlaps fetch and execution of instructions (Example 3-1). Consequently, all instructions (35)
execute in a single cycle (200 ns @ 20 MHz) e xcept f or
program branches.
The table below lists program memory (EPROM) and
data memory (RAM) for each PIC16C7X device.
The PIC16CXX can directly or indirectly address its
register files or data memory. All special function registers, including the program counter, are mapped in the
data memory. The PIC16CXX has an orthogonal (symmetrical) instruction set that makes it possible to carry
out any operation on any register using any addressing
mode. This symmetrical nature and lack of ‘special
optimal situations’ make programming with the
PIC16CXX simple yet efficient. In addition, the learning
curve is reduced significantly.
Device
Program
Memory
Data Memory
PIC16C72 2K x 14 128 x 8
PIC16C73 4K x 14 192 x 8
PIC16C73A 4K x 14 192 x 8
PIC16C74 4K x 14 192 x 8
PIC16C74A 4K x 14 192 x 8
PIC16C76 8K x 14 368 x 8
PIC16C77 8K x 14 386 x 8
PIC16CXX devices contain an 8-bit ALU and working
register. The ALU is a general purpose arithmetic unit.
It performs arithmetic and Boolean functions between
the data in the working register and any register file.
The ALU is 8-bits wide and capable of addition, subtraction, shift and logical operations. Unless otherwise
mentioned, arithmetic operations are two's complement in nature. In two-operand instructions, typically
one operand is the working register (W register). The
other operand is a file register or an immediate constant. In single operand instructions, the operand is
either the W register or a file register.
The W register is an 8-bit working register used for ALU
operations. It is not an addressable register.
Depending on the instruction executed, the ALU may
affect the values of the Carry (C), Digit Carry (DC), and
Zero (Z) bits in the STATUS register. The C and DC bits
operate as a borro
w bit and a digit borrow out bit,
respectively, in subtraction. See the SUBLW and SUBWF
instructions for examples.
PIC16C7X
DS30390E-page 10 1997 Microchip Technology Inc.
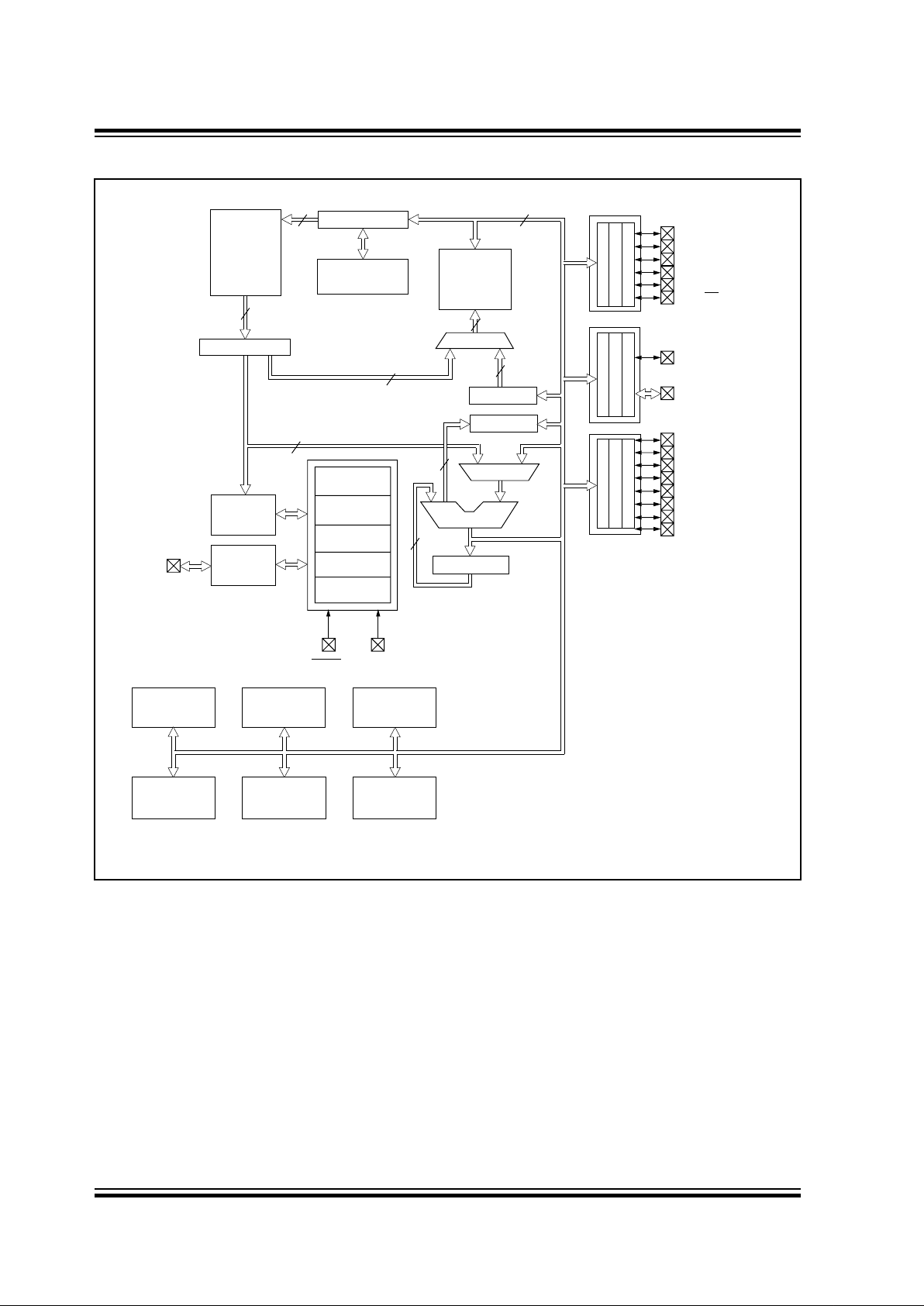
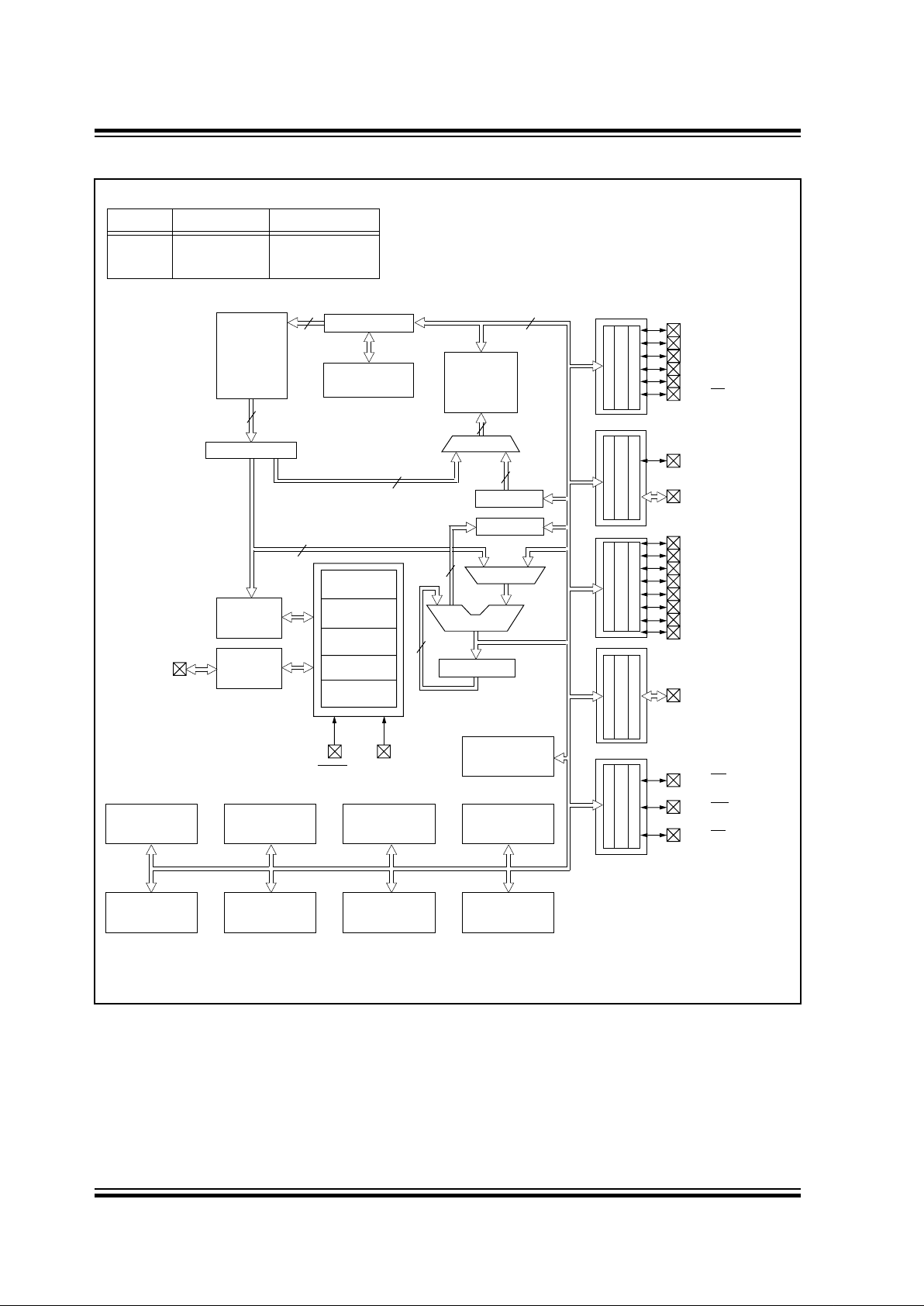
FIGURE 3-1: PIC16C72 BLOCK DIAGRAM
EPROM
Program
Memory
2K x 14
13
Data Bus
8
14
Program
Bus
Instruction reg
Program Counter
8 Level Stack
(13-bit)
RAM
File
Registers
128 x 8
Direct Addr
7
RAM Addr
(1)
9
Addr MUX
Indirect
Addr
FSR reg
STATUS reg
MUX
ALU
W reg
Power-up
Timer
Oscillator
Start-up Timer
Power-on
Reset
Watchdog
Timer
Instruction
Decode &
Control
Timing
Generation
OSC1/CLKIN
OSC2/CLKOUT
MCLR
VDD, VSS
Timer0
A/D
Synchronous
Serial Port
PORTA
PORTB
PORTC
RB0/INT
RB7:RB1
RC0/T1OSO/T1CKI
RC1/T1OSI
RC2/CCP1
RC3/SCK/SCL
RC4/SDI/SDA
RC5/SDO
RC6
RC7
8
8
Brown-out
Reset
Note 1: Higher order bits are from the STATUS register.
CCP1
Timer1 Timer2
RA4/T0CKI
RA5/SS
/AN4
RA3/AN3/VREF
RA2/AN2
RA1/AN1
RA0/AN0
8
3

1997 Microchip Technology Inc. DS30390E-page 11
PIC16C7X
FIGURE 3-2: PIC16C73/73A/76 BLOCK DIAGRAM
EPROM
Program
Memory
13
Data Bus
8
14
Program
Bus
Instruction reg
Program Counter
8 Level Stack
(13-bit)
RAM
File
Registers
Direct Addr
7
RAM Addr
(1)
9
Addr MUX
Indirect
Addr
FSR reg
STATUS reg
MUX
ALU
W reg
Power-up
Timer
Oscillator
Start-up Timer
Power-on
Reset
Watchdog
Timer
Instruction
Decode &
Control
Timing
Generation
OSC1/CLKIN
OSC2/CLKOUT
MCLR
VDD, VSS
USART
PORTA
PORTB
PORTC
RB0/INT
RB7:RB1
RC0/T1OSO/T1CKI
RC1/T1OSI/CCP2
RC2/CCP1
RC3/SCK/SCL
RC4/SDI/SDA
RC5/SDO
RC6/TX/CK
RC7/RX/DT
8
8
Brown-out
Reset
(2)
Note 1: Higher order bits are from the STATUS register.
2: Brown-out Reset is not available on the PIC16C73.
CCP1 CCP2
Synchronous
A/DTimer0 Timer1 Timer2
Serial Port
RA4/T0CKI
RA5/SS
/AN4
RA3/AN3/VREF
RA2/AN2
RA1/AN1
RA0/AN0
8
3
Device Program Memory Data Memory (RAM)
PIC16C73
PIC16C73A
PIC16C76
4K x 14
4K x 14
8K x 14
192 x 8
192 x 8
368 x 8
PIC16C7X
DS30390E-page 12 1997 Microchip Technology Inc.
FIGURE 3-3: PIC16C74/74A/77 BLOCK DIAGRAM
EPROM
Program
Memory
13
Data Bus
8
14
Program
Bus
Instruction reg
Program Counter
8 Level Stack
(13-bit)
RAM
File
Registers
Direct Addr
7
RAM Addr
(1)
9
Addr MUX
Indirect
Addr
FSR reg
STATUS reg
MUX
ALU
W reg
Power-up
Timer
Oscillator
Start-up Timer
Power-on
Reset
Watchdog
Timer
Instruction
Decode &
Control
Timing
Generation
OSC1/CLKIN
OSC2/CLKOUT
MCLR
VDD, VSS
PORTA
PORTB
PORTC
PORTD
PORTE
RA4/T0CKI
RA5/SS/AN4
RB0/INT
RB7:RB1
RC0/T1OSO/T1CKI
RC1/T1OSI/CCP2
RC2/CCP1
RC3/SCK/SCL
RC4/SDI/SDA
RC5/SDO
RC6/TX/CK
RC7/RX/DT
RD7/PSP7:RD0/PSP0
RE0/RD
/AN5
RE1/WR
/AN6
RE2/CS
/AN7
8
8
Brown-out
Reset
(2)
Note 1: Higher order bits are from the STATUS register.
2: Brown-out Reset is not available on the PIC16C74.
USART
CCP1 CCP2
Synchronous
A/DTimer0 Timer1 Timer2
Serial Port
RA3/AN3/VREF
RA2/AN2
RA1/AN1
RA0/AN0
Parallel Slave Port
8
3
Device Program Memory Data Memory (RAM)
PIC16C74
PIC16C74A
PIC16C77
4K x 14
4K x 14
8K x 14
192 x 8
192 x 8
368 x 8

1997 Microchip Technology Inc. DS30390E-page 13
PIC16C7X
TABLE 3-1: PIC16C72 PINOUT DESCRIPTION
Pin Name
DIP
Pin#
SSOP
Pin#
SOIC
Pin#
I/O/P
Type
Buffer
Type
Description
OSC1/CLKIN 9 9 9 I
ST/CMOS
(3)
Oscillator crystal input/external clock source input.
OSC2/CLKOUT 10 10 10 O — Oscillator crystal output. Connects to crystal or resonator in
crystal oscillator mode. In RC mode, the OSC2 pin outputs
CLKOUT which has 1/4 the frequency of OSC1, and denotes
the instruction cycle rate.
MCLR
/VPP
1 1 1 I/P ST Master clear (reset) input or programming voltage input. This
pin is an active low reset to the device.
PORTA is a bi-directional I/O port.
RA0/AN0 2 2 2 I/O TTL RA0 can also be analog input0
RA1/AN1 3 3 3 I/O TTL RA1 can also be analog input1
RA2/AN2 4 4 4 I/O TTL RA2 can also be analog input2
RA3/AN3/VREF 5 5 5 I/O TTL RA3 can also be analog input3 or analog reference voltage
RA4/T0CKI 6 6 6 I/O ST RA4 can also be the clock input to the Timer0 module.
Output is open drain type.
RA5/SS/AN4 7 7 7 I/O TTL RA5 can also be analog input4 or the slave select for the
synchronous serial port.
PORTB is a bi-directional I/O port. PORTB can be software
programmed for internal weak pull-up on all inputs.
RB0/INT 21 21 21 I/O TTL/ST
(1)
RB0 can also be the external interrupt pin.
RB1 22 22 22 I/O TTL
RB2 23 23 23 I/O TTL
RB3 24 24 24 I/O TTL
RB4 25 25 25 I/O TTL Interrupt on change pin.
RB5 26 26 26 I/O TTL Interrupt on change pin.
RB6 27 27 27 I/O TTL/ST
(2)
Interrupt on change pin. Serial programming clock.
RB7 28 28 28 I/O TTL/ST
(2)
Interrupt on change pin. Serial programming data.
PORTC is a bi-directional I/O port.
RC0/T1OSO/T1CKI 11 11 11 I/O ST RC0 can also be the Timer1 oscillator output or Timer1
clock input.
RC1/T1OSI 12 12 12 I/O ST RC1 can also be the Timer1 oscillator input.
RC2/CCP1 13 13 13 I/O ST RC2 can also be the Capture1 input/Compare1 output/
PWM1 output.
RC3/SCK/SCL 14 14 14 I/O ST RC3 can also be the synchronous serial clock input/output
for both SPI and I
2
C modes.
RC4/SDI/SDA 15 15 15 I/O ST RC4 can also be the SPI Data In (SPI mode) or
data I/O (I2C mode).
RC5/SDO 16 16 16 I/O ST RC5 can also be the SPI Data Out (SPI mode).
RC6 17 17 17 I/O ST
RC7 18 18 18 I/O ST
VSS 8, 19 8, 19 8, 19 P — Ground reference for logic and I/O pins.
VDD 20 20 20 P — Positive supply for logic and I/O pins.
Legend: I = input O = output I/O = input/output P = power
— = Not used TTL = TTL input ST = Schmitt Trigger input
Note 1: This buffer is a Schmitt Trigger input when configured as the external interrupt.
2: This buffer is a Schmitt Trigger input when used in serial programming mode.
3: This buffer is a Schmitt Trigger input when configured in RC oscillator mode and a CMOS input otherwise.
PIC16C7X
DS30390E-page 14 1997 Microchip Technology Inc.
TABLE 3-2: PIC16C73/73A/76 PINOUT DESCRIPTION
Pin Name
DIP
Pin#
SOIC
Pin#
I/O/P
Type
Buffer
Type
Description
OSC1/CLKIN 9 9 I
ST/CMOS
(3)
Oscillator crystal input/external clock source input.
OSC2/CLKOUT 10 10 O — Oscillator crystal output. Connects to crystal or resonator in
crystal oscillator mode. In RC mode, the OSC2 pin outputs
CLKOUT which has 1/4 the frequency of OSC1, and denotes
the instruction cycle rate.
MCLR
/VPP
1 1 I/P ST Master clear (reset) input or programming voltage input. This
pin is an active low reset to the device.
PORTA is a bi-directional I/O port.
RA0/AN0 2 2 I/O TTL RA0 can also be analog input0
RA1/AN1 3 3 I/O TTL RA1 can also be analog input1
RA2/AN2 4 4 I/O TTL RA2 can also be analog input2
RA3/AN3/VREF 5 5 I/O TTL RA3 can also be analog input3 or analog reference voltage
RA4/T0CKI 6 6 I/O ST RA4 can also be the clock input to the Timer0 module.
Output is open drain type.
RA5/SS/AN4 7 7 I/O TTL RA5 can also be analog input4 or the slave select for the
synchronous serial port.
PORTB is a bi-directional I/O port. PORTB can be software
programmed for internal weak pull-up on all inputs.
RB0/INT 21 21 I/O TTL/ST
(1)
RB0 can also be the external interrupt pin.
RB1 22 22 I/O TTL
RB2 23 23 I/O TTL
RB3 24 24 I/O TTL
RB4 25 25 I/O TTL Interrupt on change pin.
RB5 26 26 I/O TTL Interrupt on change pin.
RB6 27 27 I/O TTL/ST
(2)
Interrupt on change pin. Serial programming clock.
RB7 28 28 I/O TTL/ST
(2)
Interrupt on change pin. Serial programming data.
PORTC is a bi-directional I/O port.
RC0/T1OSO/T1CKI 11 11 I/O ST RC0 can also be the Timer1 oscillator output or Timer1
clock input.
RC1/T1OSI/CCP2 12 12 I/O ST RC1 can also be the Timer1 oscillator input or Capture2
input/Compare2 output/PWM2 output.
RC2/CCP1 13 13 I/O ST RC2 can also be the Capture1 input/Compare1 output/
PWM1 output.
RC3/SCK/SCL 14 14 I/O ST RC3 can also be the synchronous serial clock input/output
for both SPI and I
2
C modes.
RC4/SDI/SDA 15 15 I/O ST RC4 can also be the SPI Data In (SPI mode) or
data I/O (I2C mode).
RC5/SDO 16 16 I/O ST RC5 can also be the SPI Data Out (SPI mode).
RC6/TX/CK 17 17 I/O ST RC6 can also be the USART Asynchronous Transmit or
Synchronous Clock.
RC7/RX/DT 18 18 I/O ST RC7 can also be the USART Asynchronous Receive or
Synchronous Data.
VSS 8, 19 8, 19 P — Ground reference for logic and I/O pins.
VDD 20 20 P — Positive supply for logic and I/O pins.
Legend: I = input O = output I/O = input/output P = power
— = Not used TTL = TTL input ST = Schmitt Trigger input
Note 1: This buffer is a Schmitt Trigger input when configured as the external interrupt.
2: This buffer is a Schmitt Trigger input when used in serial programming mode.
3: This buffer is a Schmitt Trigger input when configured in RC oscillator mode and a CMOS input otherwise.
1997 Microchip Technology Inc. DS30390E-page 15
PIC16C7X
TABLE 3-3: PIC16C74/74A/77 PINOUT DESCRIPTION
Pin Name
DIP
Pin#
PLCC
Pin#
QFP
Pin#
I/O/P
Type
Buffer
Type
Description
OSC1/CLKIN 13 14 30 I ST/CMOS
(4)
Oscillator crystal input/external clock source input.
OSC2/CLKOUT 14 15 31 O — Oscillator crystal output. Connects to crystal or resonator in
crystal oscillator mode. In RC mode, OSC2 pin outputs
CLKOUT which has 1/4 the frequency of OSC1, and
denotes the instruction cycle rate.
MCLR/VPP 1 2 18 I/P ST Master clear (reset) input or programming voltage input.
This pin is an active low reset to the device.
PORTA is a bi-directional I/O port.
RA0/AN0 2 3 19 I/O TTL RA0 can also be analog input0
RA1/AN1 3 4 20 I/O TTL RA1 can also be analog input1
RA2/AN2 4 5 21 I/O TTL RA2 can also be analog input2
RA3/AN3/VREF 5 6 22 I/O TTL RA3 can also be analog input3 or analog reference
voltage
RA4/T0CKI 6 7 23 I/O ST RA4 can also be the clock input to the Timer0 timer/
counter. Output is open drain type.
RA5/SS/AN4 7 8 24 I/O TTL RA5 can also be analog input4 or the slave select for
the synchronous serial port.
PORTB is a bi-directional I/O port. PORTB can be softw are
programmed for internal weak pull-up on all inputs.
RB0/INT 33 36 8 I/O TTL/ST
(1)
RB0 can also be the external interrupt pin.
RB1 34 37 9 I/O TTL
RB2 35 38 10 I/O TTL
RB3 36 39 11 I/O TTL
RB4 37 41 14 I/O TTL Interrupt on change pin.
RB5 38 42 15 I/O TTL Interrupt on change pin.
RB6 39 43 16 I/O TTL/ST
(2)
Interrupt on change pin. Serial programming clock.
RB7 40 44 17 I/O TTL/ST
(2)
Interrupt on change pin. Serial programming data.
Legend: I = input O = output I/O = input/output P = power
— = Not used TTL = TTL input ST = Schmitt Trigger input
Note 1: This buffer is a Schmitt Trigger input when configured as an external interrupt.
2: This buffer is a Schmitt Trigger input when used in serial programming mode.
3: This buffer is a Schmitt Trigger input when configured as general purpose I/O and a TTL input when used in the Parallel
Slave Port mode (for interfacing to a microprocessor bus).
4: This buffer is a Schmitt Trigger input when configured in RC oscillator mode and a CMOS input otherwise.
PIC16C7X
DS30390E-page 16 1997 Microchip Technology Inc.
PORTC is a bi-directional I/O port.
RC0/T1OSO/T1CKI 15 16 32 I/O ST RC0 can also be the Timer1 oscillator output or a
Timer1 clock input.
RC1/T1OSI/CCP2 16 18 35 I/O ST RC1 can also be the Timer1 oscillator input or
Capture2 input/Compare2 output/PWM2 output.
RC2/CCP1 17 19 36 I/O ST RC2 can also be the Capture1 input/Compare1 output/
PWM1 output.
RC3/SCK/SCL 18 20 37 I/O ST RC3 can also be the synchronous serial clock input/
output for both SPI and I2C modes.
RC4/SDI/SDA 23 25 42 I/O ST RC4 can also be the SPI Data In (SPI mode) or
data I/O (I2C mode).
RC5/SDO 24 26 43 I/O ST RC5 can also be the SPI Data Out
(SPI mode).
RC6/TX/CK 25 27 44 I/O ST RC6 can also be the USART Asynchronous Transmit or
Synchronous Clock.
RC7/RX/DT 26 29 1 I/O ST RC7 can also be the USART Asynchronous Receive or
Synchronous Data.
PORTD is a bi-directional I/O port or parallel slave port
when interfacing to a microprocessor bus.
RD0/PSP0 19 21 38 I/O ST/TTL
(3)
RD1/PSP1 20 22 39 I/O ST/TTL
(3)
RD2/PSP2 21 23 40 I/O ST/TTL
(3)
RD3/PSP3 22 24 41 I/O ST/TTL
(3)
RD4/PSP4 27 30 2 I/O ST/TTL
(3)
RD5/PSP5 28 31 3 I/O ST/TTL
(3)
RD6/PSP6 29 32 4 I/O ST/TTL
(3)
RD7/PSP7 30 33 5 I/O ST/TTL
(3)
PORTE is a bi-directional I/O port.
RE0/RD/AN5 8 9 25 I/O ST/TTL
(3)
RE0 can also be read control for the parallel slave port,
or analog input5.
RE1/WR/AN6 9 10 26 I/O ST/TTL
(3)
RE1 can also be write control for the parallel slave port,
or analog input6.
RE2/CS/AN7 10 11 27 I/O ST/TTL
(3)
RE2 can also be select control for the parallel slave
port, or analog input7.
VSS 12,31 13,34 6,29 P — Ground reference for logic and I/O pins.
VDD 11,32 12,35 7,28 P — Positive supply for logic and I/O pins.
NC — 1,17,28,4012,13,
33,34
— These pins are not internally connected. These pins should
be left unconnected.
TABLE 3-3: PIC16C74/74A/77 PINOUT DESCRIPTION (Cont.’d)
Pin Name
DIP
Pin#
PLCC
Pin#
QFP
Pin#
I/O/P
Type
Buffer
Type
Description
Legend: I = input O = output I/O = input/output P = power
— = Not used TTL = TTL input ST = Schmitt Trigger input
Note 1: This buffer is a Schmitt Trigger input when configured as an external interrupt.
2: This buffer is a Schmitt Trigger input when used in serial programming mode.
3: This buffer is a Schmitt Trigger input when configured as general purpose I/O and a TTL input when used in the Parallel
Slave Port mode (for interfacing to a microprocessor bus).
4: This buffer is a Schmitt Trigger input when configured in RC oscillator mode and a CMOS input otherwise.
1997 Microchip Technology Inc. DS30390E-page 17
PIC16C7X
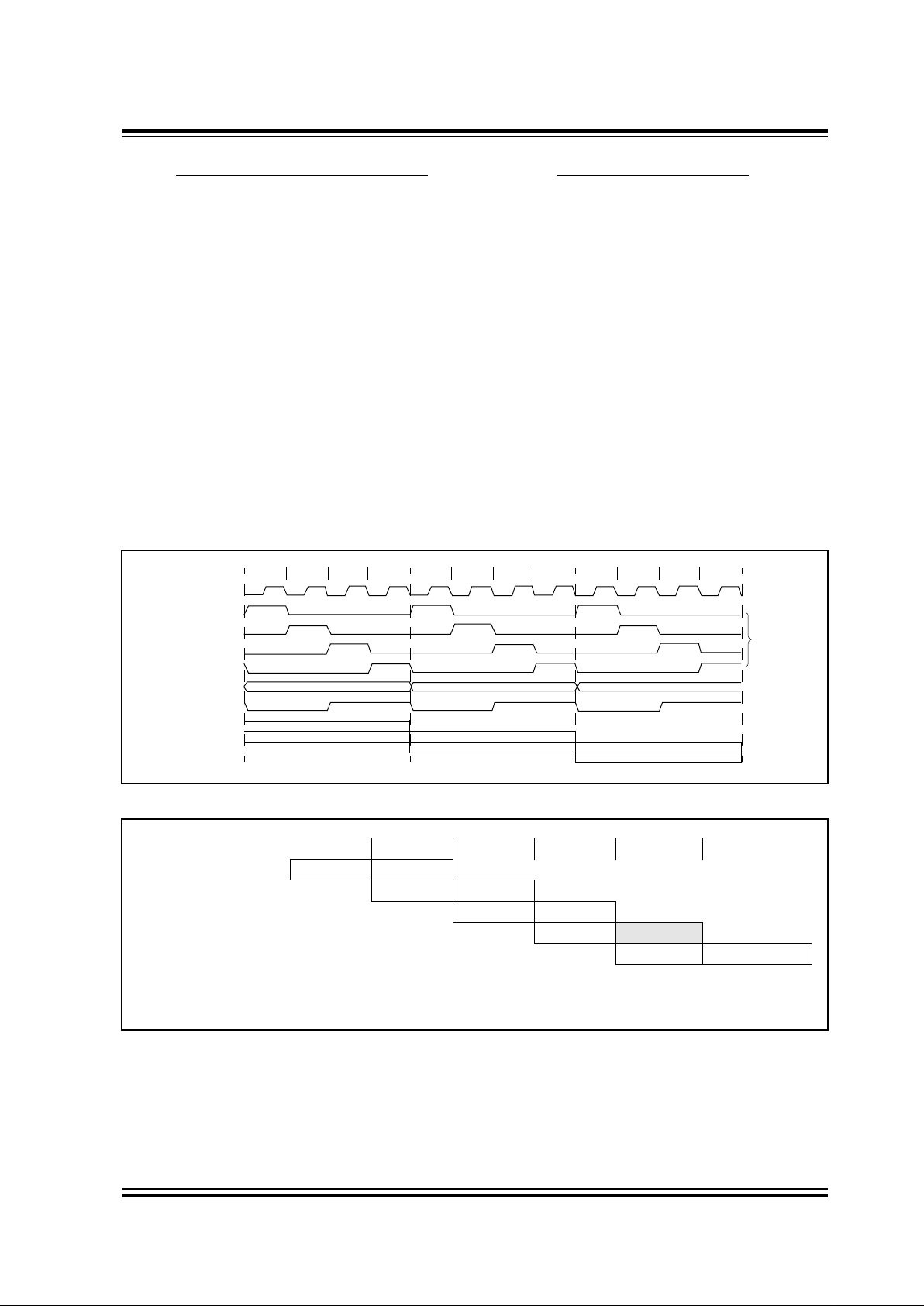
3.1 Clocking Scheme/Instruction Cycle
The clock input (from OSC1) is internally divided by
four to generate four non-overlapping quadrature
clocks namely Q1, Q2, Q3 and Q4. Internally, the program counter (PC) is incremented every Q1, the
instruction is fetched from the program memory and
latched into the instruction register in Q4. The instruction is decoded and executed during the following Q1
through Q4. The clocks and instruction execution flow
is shown in Figure 3-4.
3.2 Instruction Flow/Pipelining
An “Instruction Cycle” consists of four Q cycles (Q1,
Q2, Q3 and Q4). The instr uction fetch and execute are
pipelined such that fetch takes one instruction cycle
while decode and execute takes another instruction
cycle. However, due to the pipelining, each instruction
effectively executes in one cycle. If an instruction
causes the program counter to change (e.g. GOTO)
then two cycles are required to complete the instruction
(Example 3-1).
A fetch cycle begins with the program counter (PC)
incrementing in Q1.
In the execution cycle, the f etched instruction is latched
into the “Instruction Register" (IR) in cycle Q1. This
instruction is then decoded and executed during the
Q2, Q3, and Q4 cycles. Data memory is read during Q2
(operand read) and written during Q4 (destination
write).
FIGURE 3-4: CLOCK/INSTRUCTION CYCLE
EXAMPLE 3-1: INSTRUCTION PIPELINE FLOW
Q1
Q2 Q3 Q4
Q1
Q2 Q3 Q4
Q1
Q2 Q3 Q4
OSC1
Q1
Q2
Q3
Q4
PC
OSC2/CLKOUT
(RC mode)
PC PC+1 PC+2
Fetch INST (PC)
Execute INST (PC-1) Fetch INST (PC+1)
Execute INST (PC) Fetch INST (PC+2)
Execute INST (PC+1)
Internal
phase
clock
All instructions are single cycle, except for any program branches. These take two cycles since the fetch
instruction is “flushed” from the pipeline while the new instruction is being fetched and then executed.
Tcy0 Tcy1 Tcy2 Tcy3 Tcy4 Tcy5
1. MOVLW 55h
Fetch 1 Execute 1
2. MOVWF PORTB
Fetch 2 Execute 2
3. CALL SUB_1
Fetch 3 Execute 3
4. BSF PORTA, BIT3 (Forced NOP)
Fetch 4 Flush
5. Instruction @ address SUB_1
Fetch SUB_1 Execute SUB_1

PIC16C7X
DS30390E-page 18 1997 Microchip Technology Inc.
NOTES:
1997 Microchip Technology Inc. DS30390E-page 19
PIC16C7X
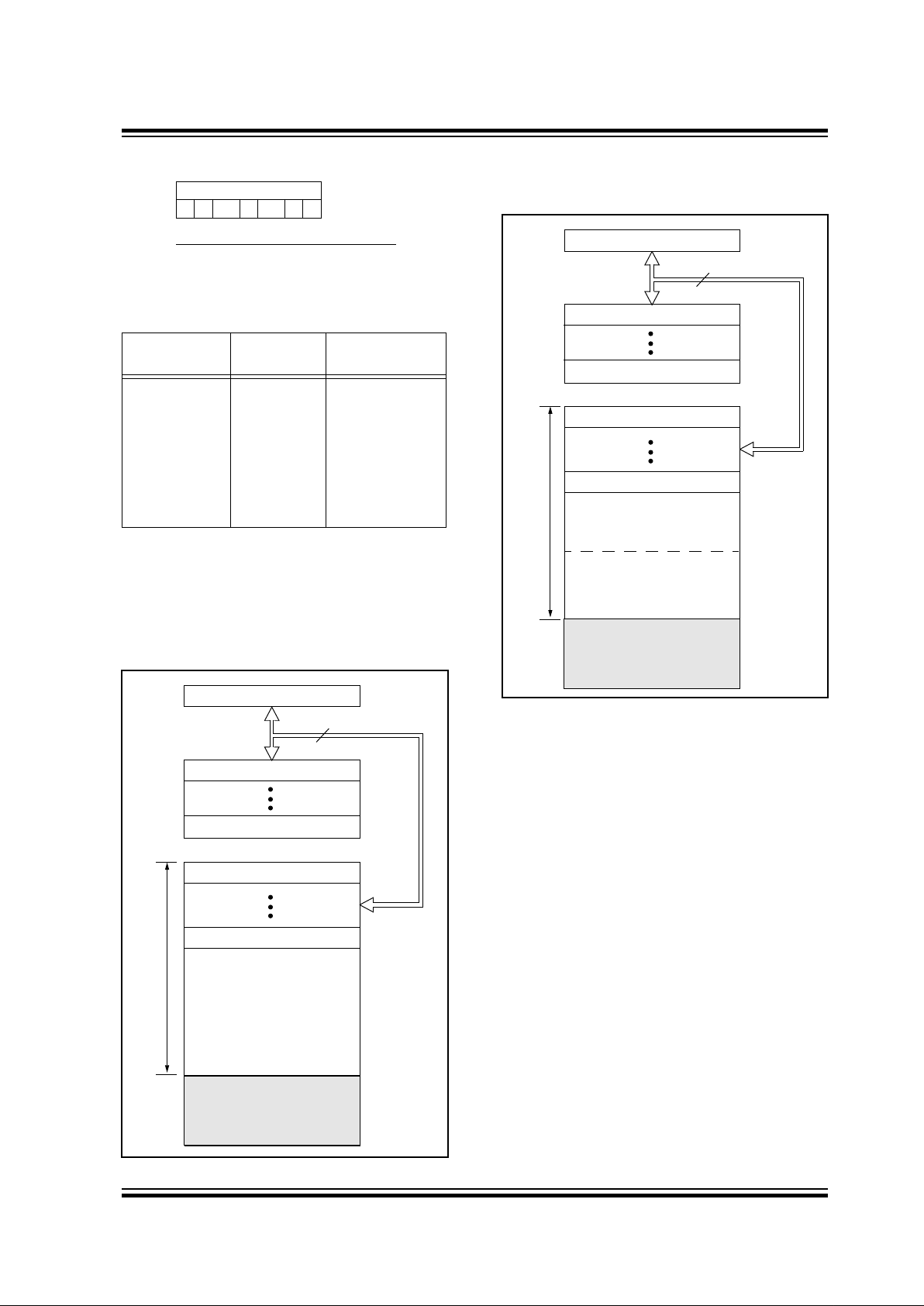
4.0 MEMORY ORGANIZATION
4.1 Program Memory Organization
The PIC16C7X family has a 13-bit program counter
capable of addressing an 8K x 14 program memory
space. The amount of program memory available to
each device is listed below:
For those devices with less than 8K program memory,
accessing a location above the physically implemented
address will cause a wraparound.
The reset vector is at 0000h and the interrupt vector is
at 0004h.
FIGURE 4-1: PIC16C72 PROGRAM
MEMORY MAP AND STACK
Applicable Devices
72 73 73A 74 74A 76 77
Device
Program
Memory
Address Range
PIC16C72 2K x 14 0000h-07FFh
PIC16C73 4K x 14 0000h-0FFFh
PIC16C73A 4K x 14 0000h-0FFFh
PIC16C74 4K x 14 0000h-0FFFh
PIC16C74A 4K x 14 0000h-0FFFh
PIC16C76 8K x 14 0000h-1FFFh
PIC16C77 8K x 14 0000h-1FFFh
PC<12:0>
13
0000h
0004h
0005h
07FFh
1FFFh
Stack Level 1
Stack Level 8
Reset V ector
Interrupt Vector
On-chip Program
Memory
CALL, RETURN
RETFIE, RETLW
0800h
User Memory
Space
FIGURE 4-2: PIC16C73/73A/74/74A
PROGRAM MEMORY MAP
AND STACK
PC<12:0>
13
0000h
0004h
0005h
07FFh
0800h
0FFFh
1000h
1FFFh
Stack Level 1
Stack Level 8
Reset V ector
Interrupt Vector
On-chip Program
On-chip Program
Memory (Page 1)
Memory (Page 0)
CALL, RETURN
RETFIE, RETLW
User Memory
Space
PIC16C7X
DS30390E-page 20 1997 Microchip Technology Inc.
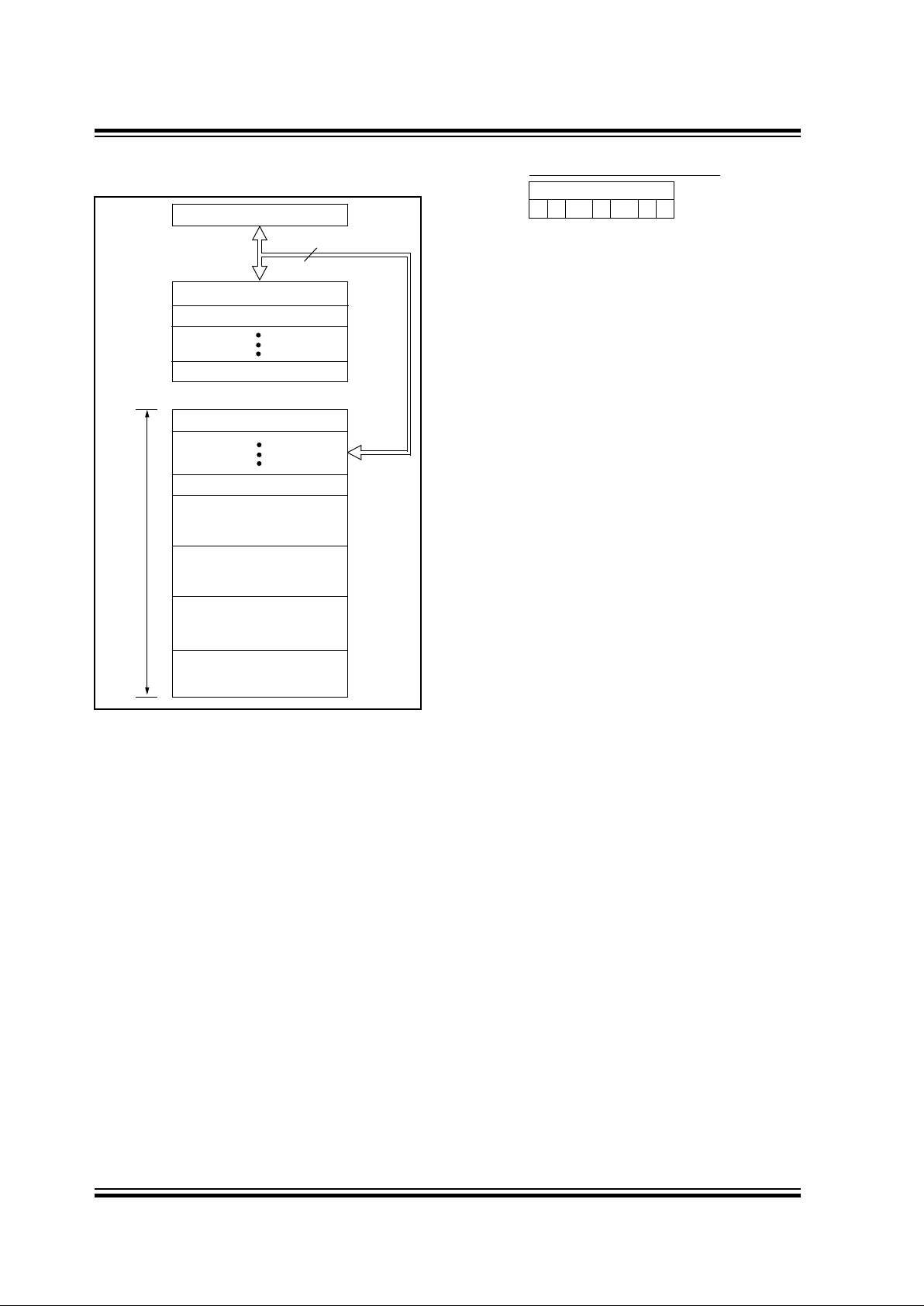
FIGURE 4-3: PIC16C76/77 PROGRAM
MEMORY MAP AND STACK
PC<12:0>
13
0000h
0004h
0005h
Stack Level 1
Stack Level 8
Reset V ector
Interrupt Vector
CALL, RETURN
RETFIE, RETLW
1FFFh
Stack Level 2
Page 0
Page 1
Page 2
Page 3
07FFh
0800h
0FFFh
1000h
17FFh
1800h
User Memory
Space
On-Chip
On-Chip
On-Chip
On-Chip
4.2 Data Memory Organization
The data memory is partitioned into multiple banks
which contain the General Purpose Registers and the
Special Function Registers. Bits RP1 and RP0 are the
bank select bits.
RP1:RP0 (STATUS<6:5>)
= 00 → Bank0
= 01 → Bank1
= 10 → Bank2
= 11 → Bank3
Each bank extends up to 7Fh (128 bytes). The lower
locations of each bank are reserved for the Special
Function Registers. Above the Special Function Registers are General Purpose Registers, implemented as
static RAM. All implemented banks contain special
function registers. Some “high use” special function
registers from one bank may be mirrored in another
bank for code reduction and quicker access.
4.2.1 GENERAL PURPOSE REGISTER FILE
The register file can be accessed either directly , or indi-
rectly through the File Select Register FSR
(Section 4.5).
Applicable Devices
72 73 73A 74 74A 76 77
1997 Microchip Technology Inc. DS30390E-page 21
PIC16C7X
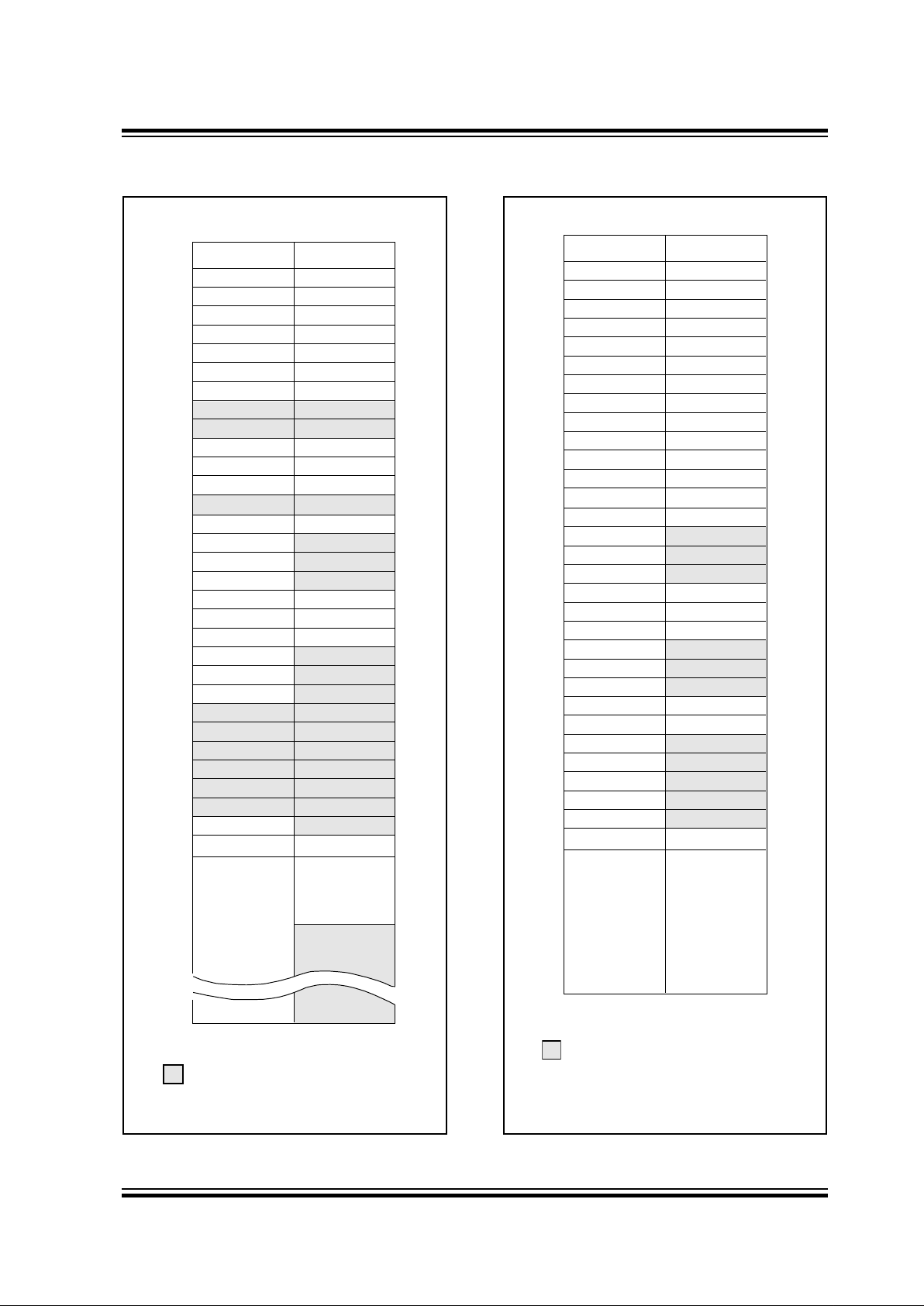
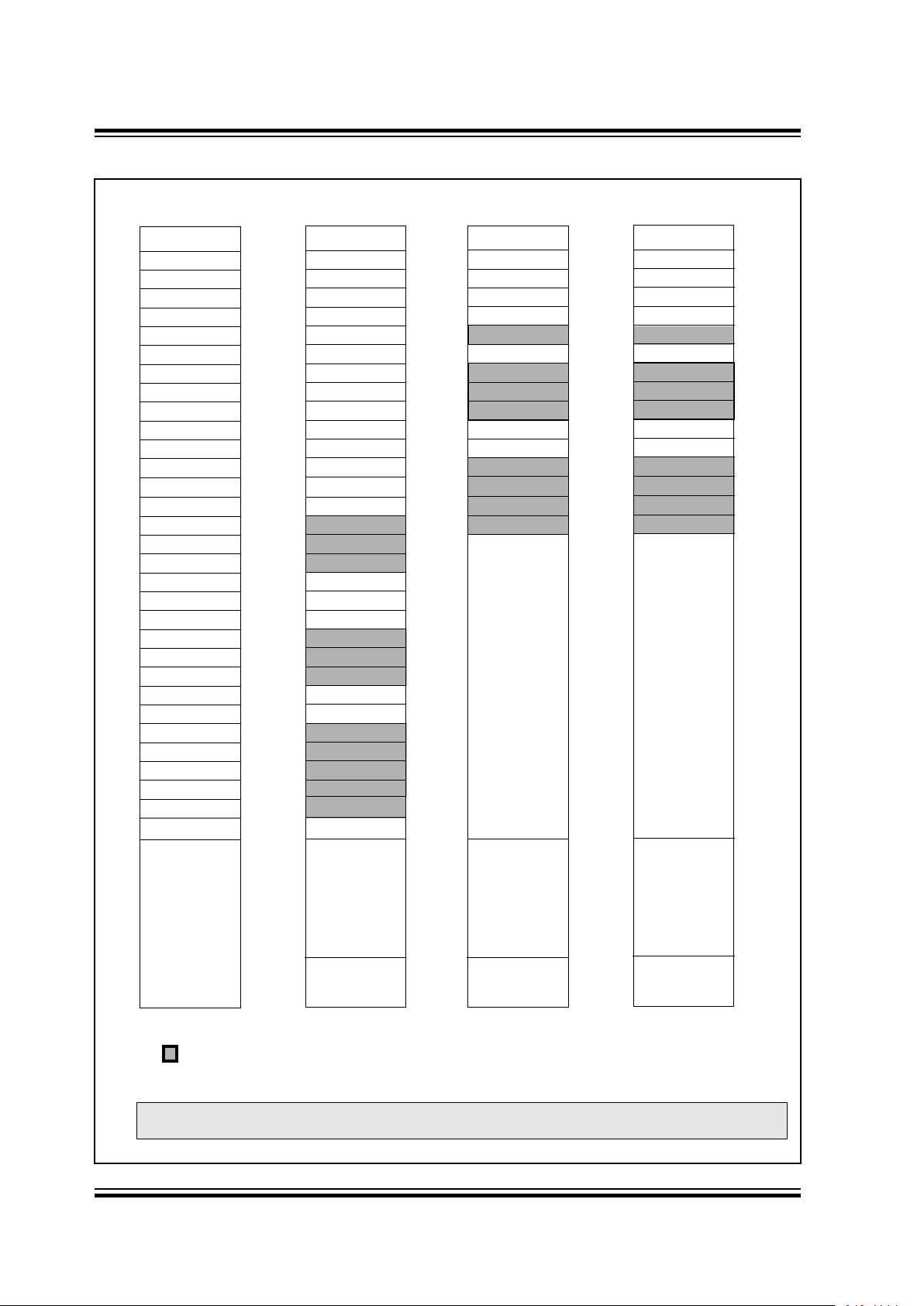
FIGURE 4-4: PIC16C72 REGISTER FILE
MAP
INDF
(1)
TMR0
PCL
STATUS
FSR
PORTA
PORTB
PORTC
PCLATH
INTCON
PIR1
TMR1L
TMR1H
T1CON
TMR2
T2CON
SSPBUF
SSPCON
CCPR1L
CCPR1H
CCP1CON
ADRES
ADCON0
INDF
(1)
OPTION
PCL
STATUS
FSR
TRISA
TRISB
TRISC
PCLATH
INTCON
PIE1
PCON
PR2
SSPADD
SSPSTAT
ADCON1
00h
01h
02h
03h
04h
05h
06h
07h
08h
09h
0Ah
0Bh
0Ch
0Dh
0Eh
0Fh
10h
11h
12h
13h
14h
15h
16h
17h
18h
19h
1Ah
1Bh
1Ch
1Dh
1Eh
1Fh
80h
81h
82h
83h
84h
85h
86h
87h
88h
89h
8Ah
8Bh
8Ch
8Dh
8Eh
8Fh
90h
91h
92h
93h
94h
95h
96h
97h
98h
99h
9Ah
9Bh
9Ch
9Dh
9Eh
9Fh
20h
A0h
General
Purpose
Register
General
Purpose
Register
7Fh
FFh
Bank 0 Bank 1
File
Address
BFh
C0h
Unimplemented data memory locations, read as
'0'.
Note 1: Not a physical register.
File
Address
FIGURE 4-5: PIC16C73/73A/74/74A
REGISTER FILE MAP
INDF
(1)
TMR0
PCL
STATUS
FSR
PORTA
PORTB
PORTC
PORTD
(2)
PORTE
(2)
PCLATH
INTCON
PIR1
PIR2
TMR1L
TMR1H
T1CON
TMR2
T2CON
SSPBUF
SSPCON
CCPR1L
CCPR1H
CCP1CON
RCSTA
TXREG
RCREG
CCPR2L
CCPR2H
CCP2CON
ADRES
ADCON0
INDF
(1)
OPTION
PCL
STATUS
FSR
TRISA
TRISB
TRISC
TRISD
(2)
TRISE
(2)
PCLATH
INTCON
PIE1
PIE2
PCON
PR2
SSPADD
SSPSTAT
TXSTA
SPBRG
ADCON1
00h
01h
02h
03h
04h
05h
06h
07h
08h
09h
0Ah
0Bh
0Ch
0Dh
0Eh
0Fh
10h
11h
12h
13h
14h
15h
16h
17h
18h
19h
1Ah
1Bh
1Ch
1Dh
1Eh
1Fh
80h
81h
82h
83h
84h
85h
86h
87h
88h
89h
8Ah
8Bh
8Ch
8Dh
8Eh
8Fh
90h
91h
92h
93h
94h
95h
96h
97h
98h
99h
9Ah
9Bh
9Ch
9Dh
9Eh
9Fh
20h A0h
General
Purpose
Register
General
Purpose
Register
7Fh
FFh
Bank 0 Bank 1
File
Address
File
Address
Unimplemented data memory locations, read as
'0'.
Note 1: Not a physical register.
2: These registers are not physically imple-
mented on the PIC16C73/73A, read as '0'.
PIC16C7X
DS30390E-page 22 1997 Microchip Technology Inc.
FIGURE 4-6: PIC16C76/77 REGISTER FILE MAP
Indirect addr.
(*)
TMR0
PCL
STATUS
FSR
PORTA
PORTB
PORTC
PCLATH
INTCON
PIR1
TMR1L
TMR1H
T1CON
TMR2
T2CON
SSPBUF
SSPCON
CCPR1L
CCPR1H
CCP1CON
OPTION
PCL
STATUS
FSR
TRISA
TRISB
TRISC
PCLATH
INTCON
PIE1
PCON
PR2
SSPADD
SSPSTAT
00h
01h
02h
03h
04h
05h
06h
07h
08h
09h
0Ah
0Bh
0Ch
0Dh
0Eh
0Fh
10h
11h
12h
13h
14h
15h
16h
17h
18h
19h
1Ah
1Bh
1Ch
1Dh
1Eh
1Fh
80h
81h
82h
83h
84h
85h
86h
87h
88h
89h
8Ah
8Bh
8Ch
8Dh
8Eh
8Fh
90h
91h
92h
93h
94h
95h
96h
97h
98h
99h
9Ah
9Bh
9Ch
9Dh
9Eh
9Fh
20h
A0h
7Fh
FFh
Bank 0
Bank 1
Unimplemented data memory locations, read as '0'.
* Not a physical register.
Note 1: PORTD, PORTE, TRISD, and TRISE are unimplemented on the PIC16C76, read as '0'.
Note: The upper 16 bytes of data memory in banks 1, 2, and 3 are mapped in Bank 0. This may require
relocation of data memory usage in the user application code if upgrading to the PIC16C76/77.
File
Address
Indirect addr.
(*)
Indirect addr.
(*)
PCL
STATUS
FSR
PCLATH
INTCON
PCL
STATUS
FSR
PCLATH
INTCON
100h
101h
102h
103h
104h
105h
106h
107h
108h
109h
10Ah
10Bh
10Ch
10Dh
10Eh
10Fh
110h
111h
112h
113h
114h
115h
116h
117h
118h
119h
11Ah
11Bh
11Ch
11Dh
11Eh
11Fh
180h
181h
182h
183h
184h
185h
186h
187h
188h
189h
18Ah
18Bh
18Ch
18Dh
18Eh
18Fh
190h
191h
192h
193h
194h
195h
196h
197h
198h
199h
19Ah
19Bh
19Ch
19Dh
19Eh
19Fh
120h
1A0h
17Fh
1FFh
Bank 2
Bank 3
Indirect addr.
(*)
PORTD
PORTE
TRISD
TRISE
TMR0
OPTION
PIR2
PIE2
RCSTA
TXREG
RCREG
CCPR2L
CCPR2H
CCP2CON
ADRES
ADCON0
TXSTA
SPBRG
ADCON1
General
Purpose
Register
General
Purpose
Register
General
Purpose
Register
General
Purpose
Register
1EFh
1F0h
accesses
70h - 7Fh
EFh
F0h
accesses
70h-7Fh
16Fh
170h
accesses
70h-7Fh
General
Purpose
Register
General
Purpose
Register
TRISB
PORTB
96 Bytes
80 Bytes 80 Bytes 80 Bytes
16 Bytes
16 Bytes
(1)
(1)
(1)
(1)
1997 Microchip Technology Inc. DS30390E-page 23
PIC16C7X
4.2.2 SPECIAL FUNCTION REGISTERS
The Special Function Registers are registers used by
the CPU and Peripheral Modules for controlling the
desired operation of the device. These registers are
implemented as static RAM.
The special function registers can be classified into two
sets (core and peripheral). Those registers associated
with the “core” functions are described in this section,
and those related to the operation of the peripheral features are described in the section of that peripheral feature.
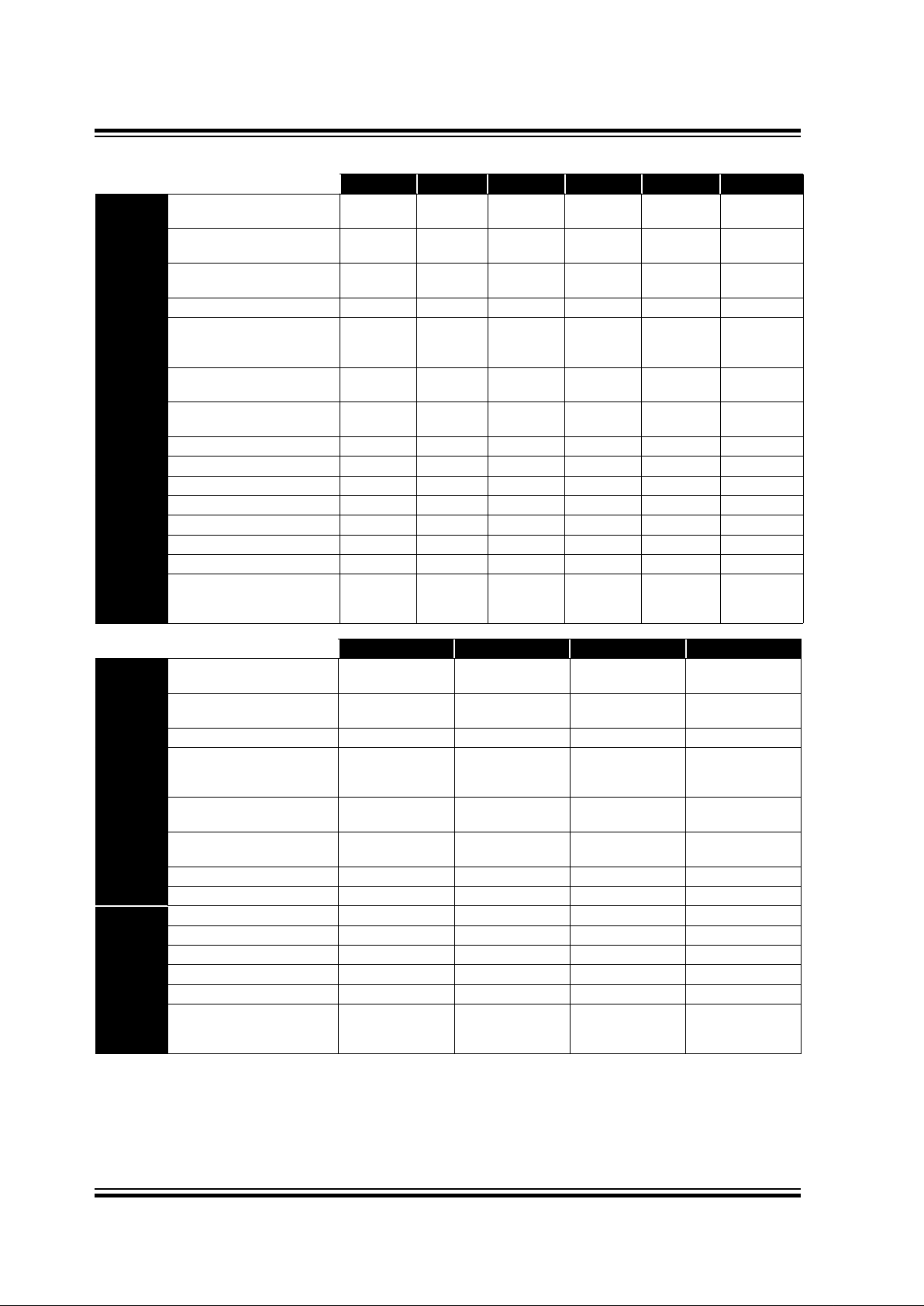
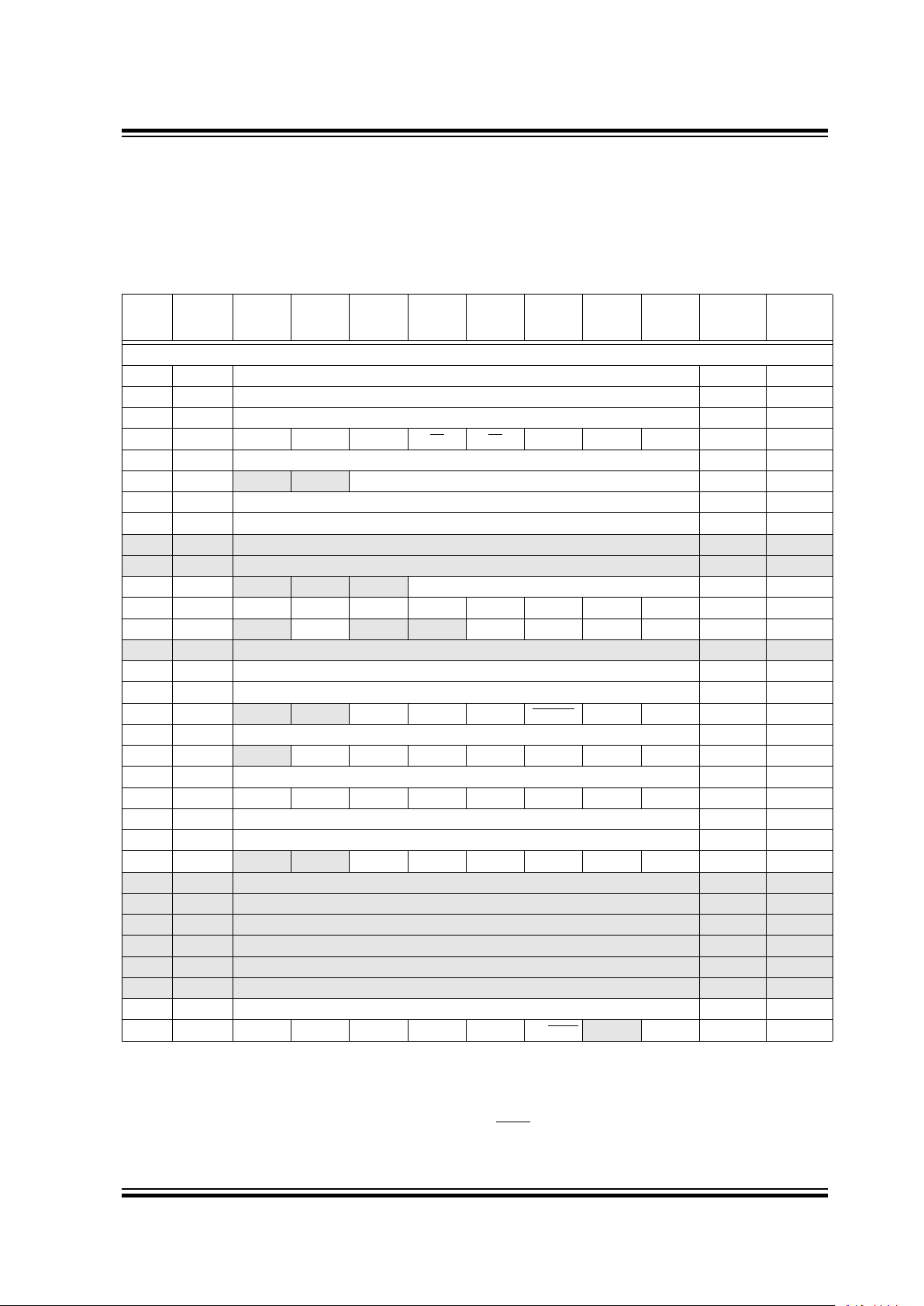
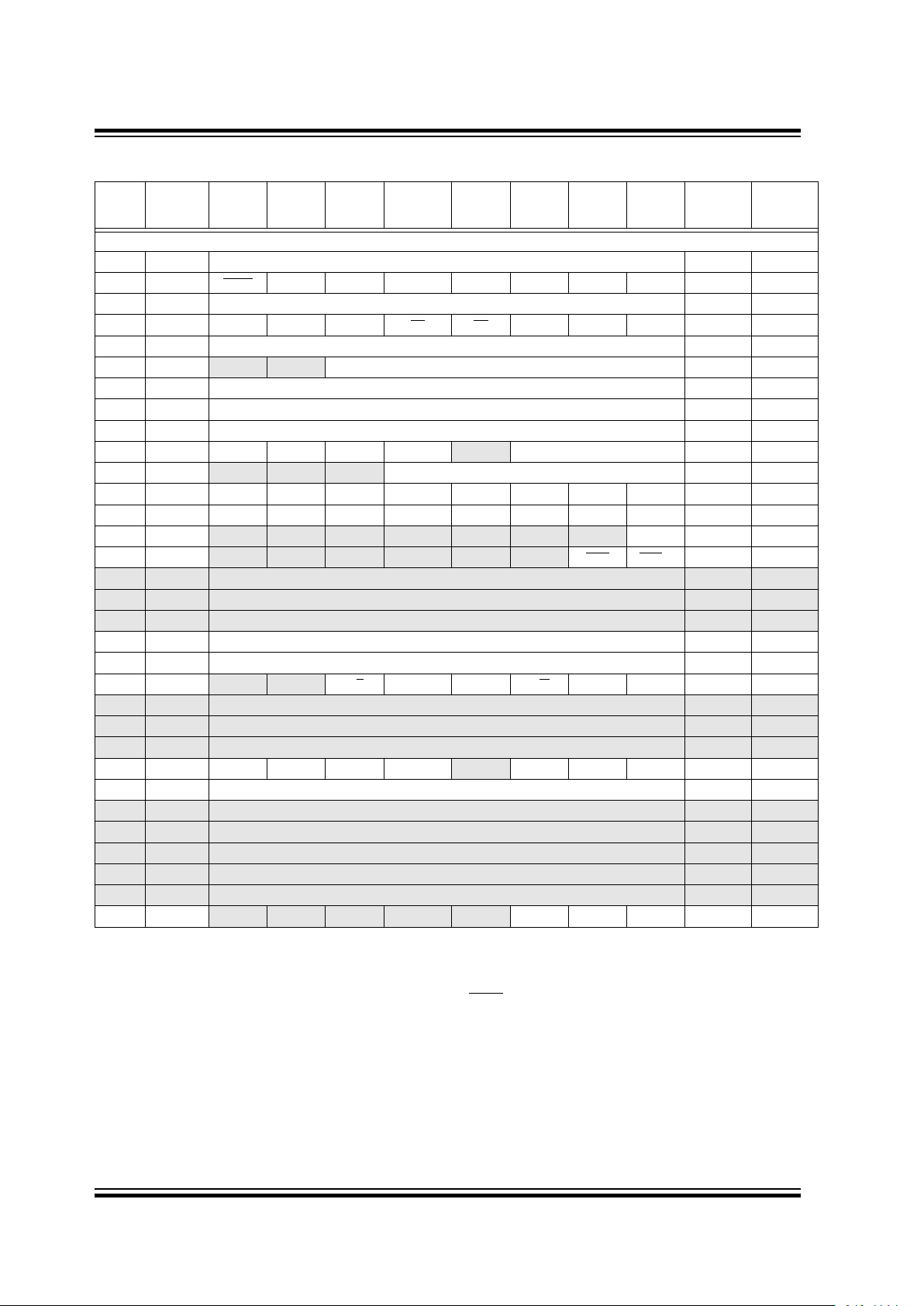
TABLE 4-1: PIC16C72 SPECIAL FUNCTION REGISTER SUMMARY
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
(3)
Bank 0
00h
(1)
INDF Addressing this location uses contents of FSR to address data memory (not a physical register) 0000 0000 0000 0000
01h TMR0 Timer0 module’s register xxxx xxxx uuuu uuuu
02h
(1)
PCL Program Counter's (PC) Least Significant Byte 0000 0000 0000 0000
03h
(1)
STATUS IRP
(4)
RP1
(4)
RP0 TO PD ZDCC0001 1xxx 000q quuu
04h
(1)
FSR Indirect data memory address pointer xxxx xxxx uuuu uuuu
05h PORTA — — PORTA Data Latch when written: PORTA pins when read --0x 0000 --0u 0000
06h PORTB PORTB Data Latch when written: PORTB pins when read xxxx xxxx uuuu uuuu
07h PORTC PORTC Data Latch when written: PORTC pins when read xxxx xxxx uuuu uuuu
08h — Unimplemented — —
09h — Unimplemented — —
0Ah
(1,2)
PCLATH — — — Write Buffer for the upper 5 bits of the Program Counter ---0 0000 ---0 0000
0Bh
(1)
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
0Ch PIR1 — ADIF — — SSPIF CCP1IF TMR2IF TMR1IF -0-- 0000 -0-- 0000
0Dh — Unimplemented — —
0Eh TMR1L Holding register for the Least Significant Byte of the 16-bit TMR1 register xxxx xxxx uuuu uuuu
0Fh TMR1H Holding register for the Most Significant Byte of the 16-bit TMR1 register xxxx xxxx uuuu uuuu
10h T1CON — — T1CKPS1 T1CKPS0 T1OSCEN T1SYNC TMR1CS TMR1ON --00 0000 --uu uuuu
11h TMR2 Timer2 module’s register 0000 0000 0000 0000
12h T2CON — TOUTPS3 TOUTPS2 TOUTPS1 TOUTPS0 TMR2ON T2CKPS1 T2CKPS0 -000 0000 -000 0000
13h SSPBUF Synchronous Serial Port Receive Buffer/Transmit Register xxxx xxxx uuuu uuuu
14h SSPCON WCOL SSPOV SSPEN CKP SSPM3 SSPM2 SSPM1 SSPM0 0000 0000 0000 0000
15h CCPR1L Capture/Compare/PWM Register (LSB) xxxx xxxx uuuu uuuu
16h CCPR1H Capture/Compare/PWM Register (MSB) xxxx xxxx uuuu uuuu
17h CCP1CON — — CCP1X CCP1Y CCP1M3 CCP1M2 CCP1M1 CCP1M0 --00 0000 --00 0000
18h — Unimplemented — —
19h — Unimplemented — —
1Ah — Unimplemented — —
1Bh — Unimplemented — —
1Ch — Unimplemented — —
1Dh — Unimplemented — —
1Eh ADRES A/D Result Register xxxx xxxx uuuu uuuu
1Fh ADCON0 ADCS1 ADCS0 CHS2 CHS1 CHS0 GO/DONE — ADON 0000 00-0 0000 00-0
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented read as '0'.
Shaded locations are unimplemented, read as ‘0’.
Note 1: These registers can be addressed from either bank.
2: The upper byte of the program counter is not directly accessible. PCLATH is a holding register for the PC<12:8> whose
contents are transferred to the upper byte of the program counter.
3: Other (non power-up) resets include external reset through MCLR and Watchdog Timer Reset.
4: The IRP and RP1 bits are reserved on the PIC16C72, always maintain these bits clear.
PIC16C7X
DS30390E-page 24 1997 Microchip Technology Inc.
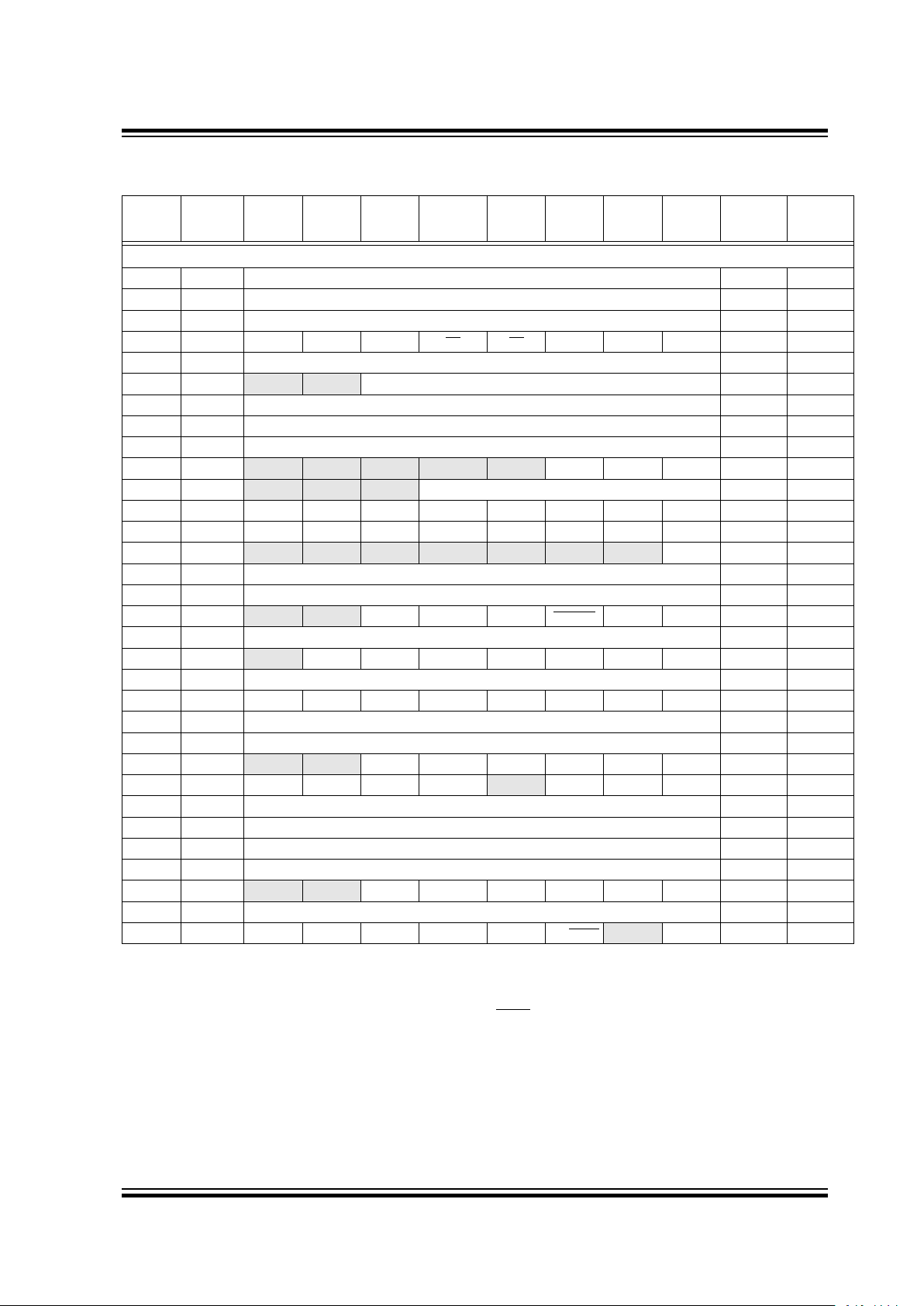
Bank 1
80h
(1)
INDF Addressing this location uses contents of FSR to address data memory (not a physical register) 0000 0000 0000 0000
81h OPTION RBPU INTEDG T0CS T0SE PSA PS2 PS1 PS0 1111 1111 1111 1111
82h
(1)
PCL Program Counter's (PC) Least Significant Byte 0000 0000 0000 0000
83h
(1)
STATUS IRP
(4)
RP1
(4)
RP0 TO PD ZDCC0001 1xxx 000q quuu
84h
(1)
FSR Indirect data memory address pointer xxxx xxxx uuuu uuuu
85h TRISA — — PORTA Data Direction Register --11 1111 --11 1111
86h TRISB PORTB Data Direction Register 1111 1111 1111 1111
87h TRISC PORTC Data Direction Register 1111 1111 1111 1111
88h — Unimplemented — —
89h — Unimplemented — —
8Ah
(1,2)
PCLATH — — — Write Buffer for the upper 5 bits of the PC ---0 0000 ---0 0000
8Bh
(1)
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
8Ch PIE1 — ADIE — — SSPIE CCP1IE TMR2IE TMR1IE -0-- 0000 -0-- 0000
8Dh — Unimplemented — —
8Eh PCON — — — — — — POR BOR ---- --qq ---- --uu
8Fh — Unimplemented — —
90h — Unimplemented — —
91h — Unimplemented — —
92h PR2 Timer2 Period Register 1111 1111 1111 1111
93h SSPADD Synchronous Serial Port (I2C mode) Address Register 0000 0000 0000 0000
94h SSPSTAT — — D/A P S R/W UA BF --00 0000 --00 0000
95h — Unimplemented — —
96h — Unimplemented — —
97h — Unimplemented — —
98h — Unimplemented — —
99h — Unimplemented — —
9Ah — Unimplemented — —
9Bh — Unimplemented — —
9Ch — Unimplemented — —
9Dh — Unimplemented — —
9Eh — Unimplemented — —
9Fh ADCON1 — — — — — PCFG2 PCFG1 PCFG0 ---- -000 ---- -000
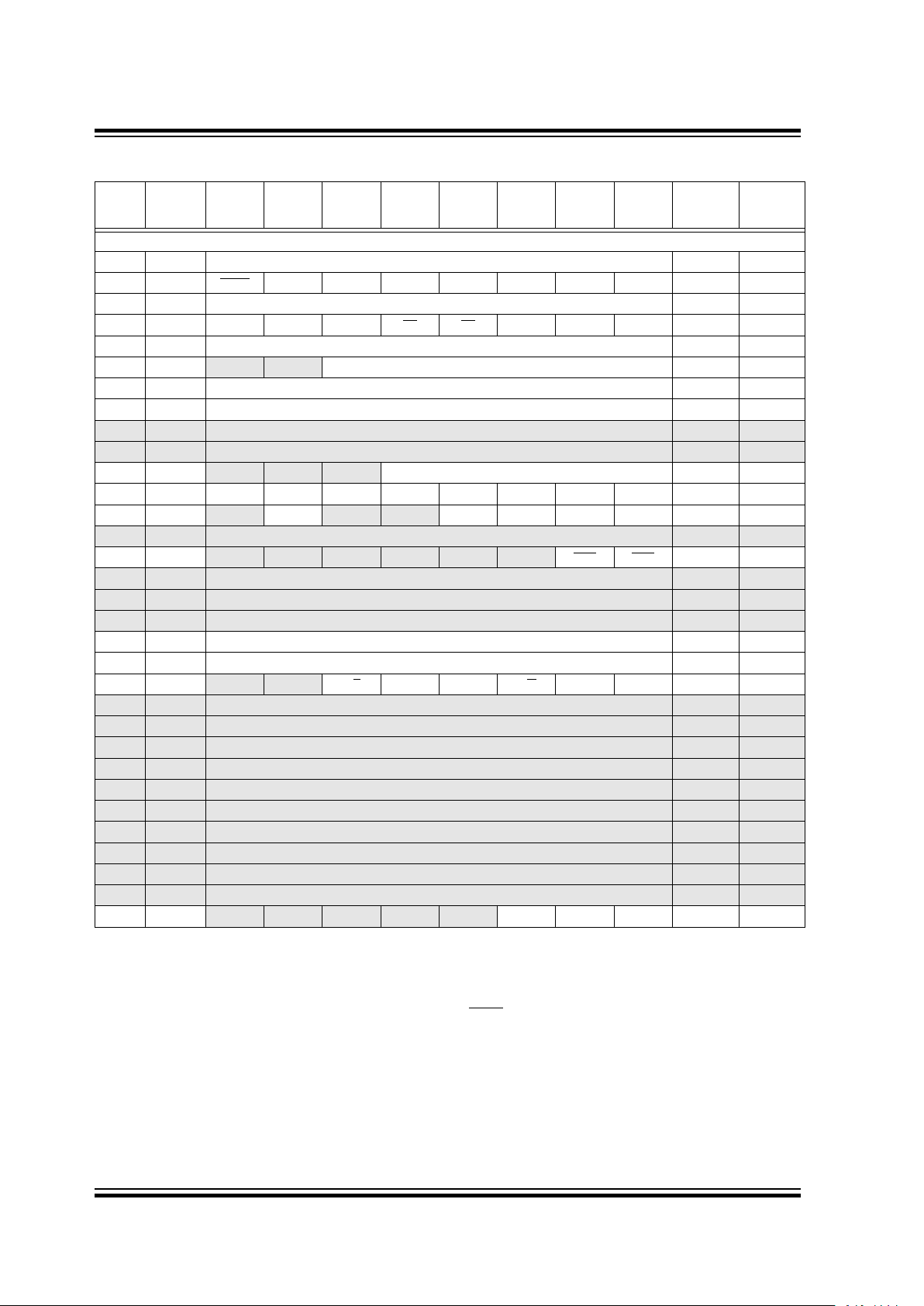
TABLE 4-1: PIC16C72 SPECIAL FUNCTION REGISTER SUMMARY (Cont.’d)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
(3)
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented read as '0'.
Shaded locations are unimplemented, read as ‘0’.
Note 1: These registers can be addressed from either bank.
2: The upper byte of the program counter is not directly accessible. PCLATH is a holding register for the PC<12:8> whose
contents are transferred to the upper byte of the program counter.
3: Other (non power-up) resets include external reset through MCLR and Watchdog Timer Reset.
4: The IRP and RP1 bits are reserved on the PIC16C72, always maintain these bits clear.
1997 Microchip Technology Inc. DS30390E-page 25
PIC16C7X
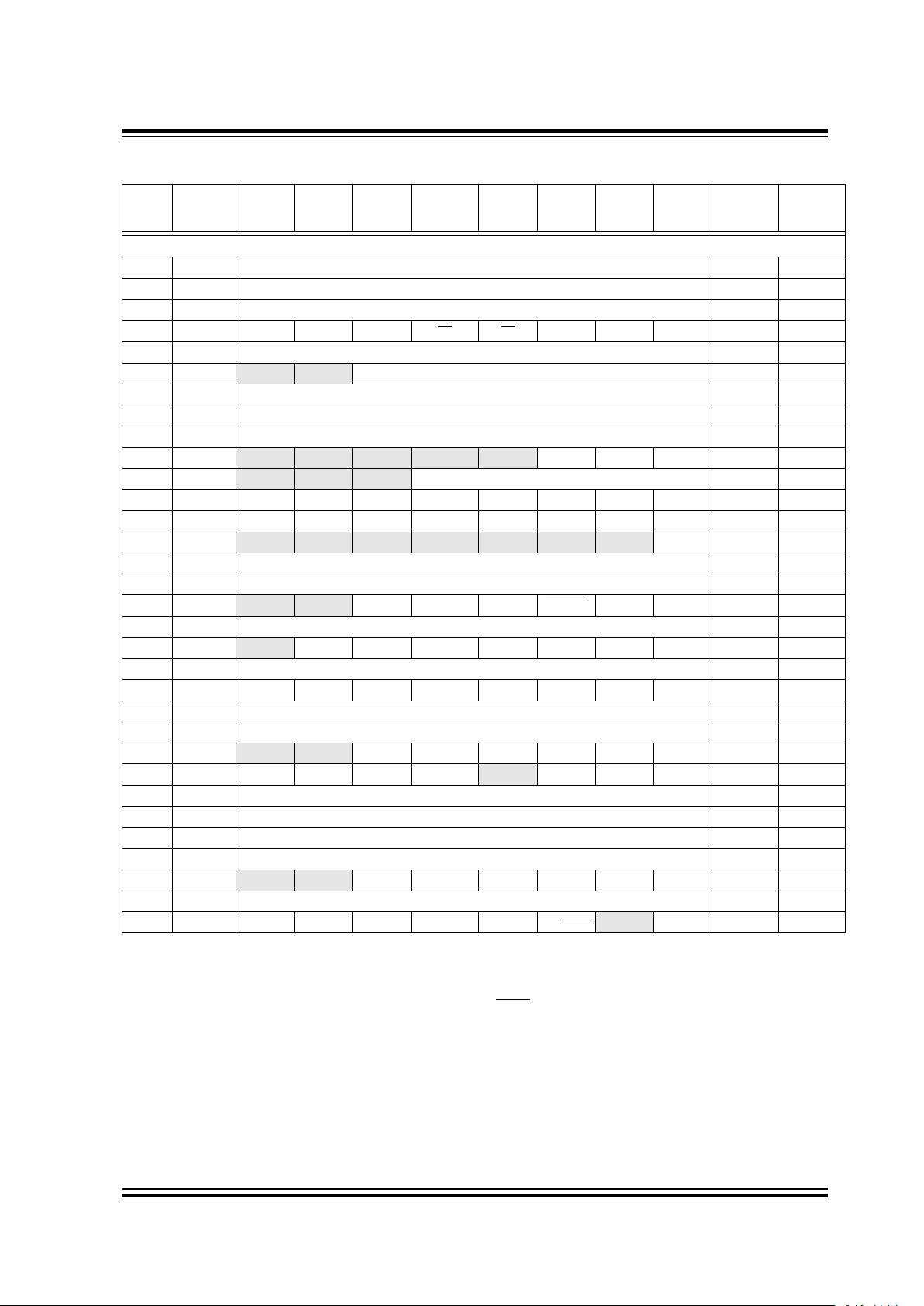
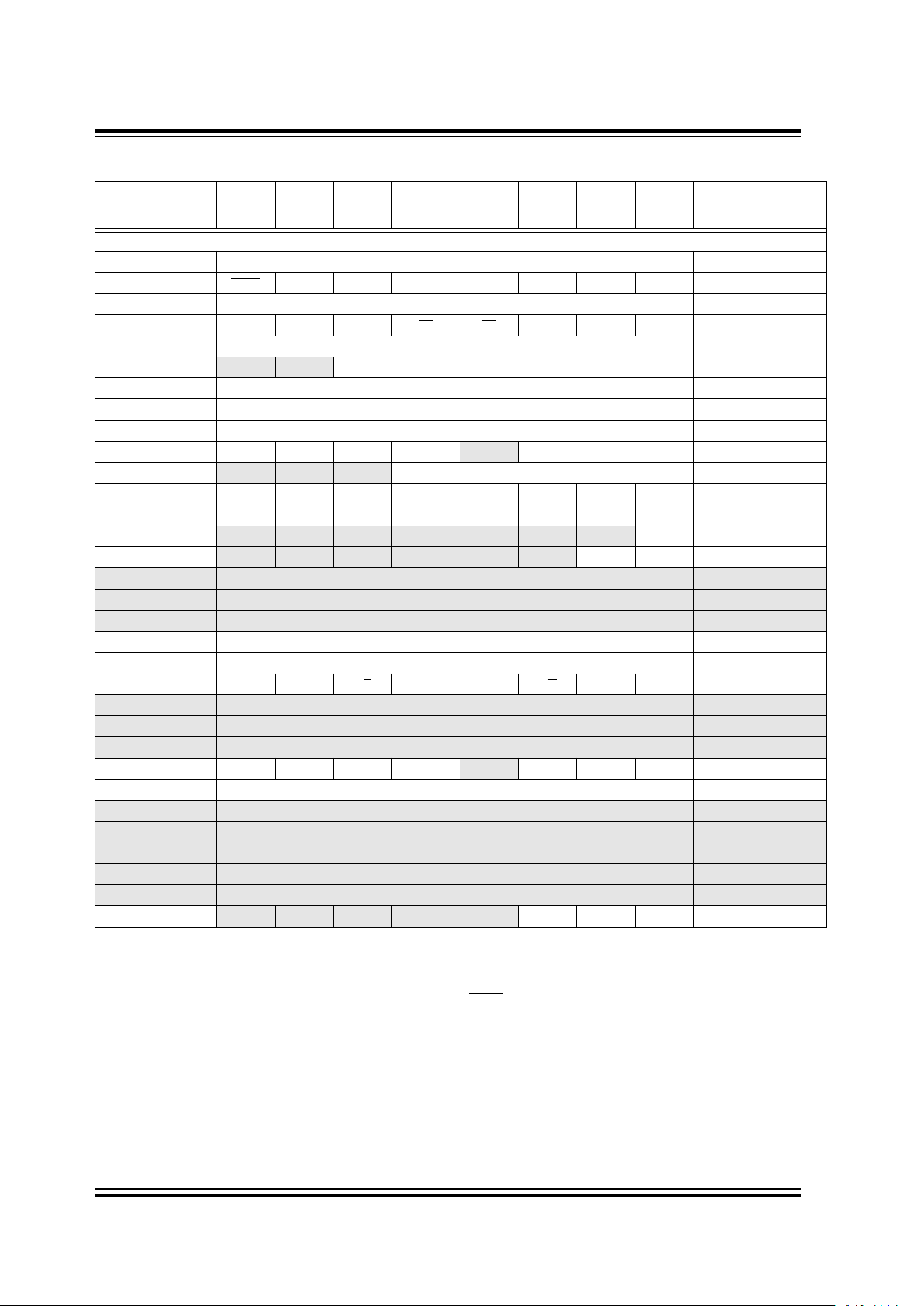
TABLE 4-2: PIC16C73/73A/74/74A SPECIAL FUNCTION REGISTER SUMMARY
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
(2)
Bank 0
00h
(4)
INDF Addressing this location uses contents of FSR to address data memory (not a physical register) 0000 0000 0000 0000
01h TMR0 Timer0 module’s register xxxx xxxx uuuu uuuu
02h
(4)
PCL Program Counter's (PC) Least Significant Byte 0000 0000 0000 0000
03h
(4)
STATUS IRP
(7)
RP1
(7)
RP0 TO PD ZDCC0001 1xxx 000q quuu
04h
(4)
FSR Indirect data memory address pointer xxxx xxxx uuuu uuuu
05h PORTA
— — PORTA Data Latch when written: PORTA pins when read --0x 0000 --0u 0000
06h PORTB PORTB Data Latch when written: PORTB pins when read xxxx xxxx uuuu uuuu
07h PORTC PORTC Data Latch when written: PORTC pins when read xxxx xxxx uuuu uuuu
08h
(5)
PORTD PORTD Data Latch when written: PORTD pins when read xxxx xxxx uuuu uuuu
09h
(5)
PORTE — — — — — RE2 RE1 RE0 ---- -xxx ---- -uuu
0Ah
(1,4)
PCLATH — — — Write Buffer for the upper 5 bits of the Program Counter ---0 0000 ---0 0000
0Bh
(4)
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
0Ch PIR1 PSPIF
(3)
ADIF RCIF TXIF SSPIF CCP1IF TMR2IF TMR1IF 0000 0000 0000 0000
0Dh PIR2 — — — – — — — CCP2IF ---- ---0 ---- ---0
0Eh TMR1L Holding register for the Least Significant Byte of the 16-bit TMR1 register xxxx xxxx uuuu uuuu
0Fh TMR1H Holding register for the Most Significant Byte of the 16-bit TMR1 register xxxx xxxx uuuu uuuu
10h T1CON — — T1CKPS1 T1CKPS0 T1OSCEN T1SYNC TMR1CS TMR1ON --00 0000 --uu uuuu
11h TMR2 Timer2 module’s register 0000 0000 0000 0000
12h T2CON — TOUTPS3 TOUTPS2 TOUTPS1 TOUTPS0 TMR2ON T2CKPS1 T2CKPS0 -000 0000 -000 0000
13h SSPBUF Synchronous Serial Port Receive Buffer/Transmit Register xxxx xxxx uuuu uuuu
14h SSPCON WCOL SSPOV SSPEN CKP SSPM3 SSPM2 SSPM1 SSPM0 0000 0000 0000 0000
15h CCPR1L Capture/Compare/PWM Register1 (LSB) xxxx xxxx uuuu uuuu
16h CCPR1H Capture/Compare/PWM Register1 (MSB) xxxx xxxx uuuu uuuu
17h CCP1CON — — CCP1X CCP1Y CCP1M3 CCP1M2 CCP1M1 CCP1M0 --00 0000 --00 0000
18h RCSTA SPEN RX9 SREN CREN — FERR OERR RX9D 0000 -00x 0000 -00x
19h TXREG USART Transmit Data Register 0000 0000 0000 0000
1Ah RCREG USART Receive Data Register 0000 0000 0000 0000
1Bh CCPR2L Capture/Compare/PWM Register2 (LSB) xxxx xxxx uuuu uuuu
1Ch CCPR2H Capture/Compare/PWM Register2 (MSB) xxxx xxxx uuuu uuuu
1Dh CCP2CON — — CCP2X CCP2Y CCP2M3 CCP2M2 CCP2M1 CCP2M0 --00 0000 --00 0000
1Eh ADRES A/D Result Register xxxx xxxx uuuu uuuu
1Fh ADCON0 ADCS1 ADCS0 CHS2 CHS1 CHS0 GO/DONE — ADON 0000 00-0 0000 00-0
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented read as '0'.
Shaded locations are unimplemented, read as ‘0’.
Note 1: The upper byte of the program counter is not directly accessible. PCLATH is a holding register for the PC<12:8> whose con-
tents are transferred to the upper byte of the program counter.
2: Other (non power-up) resets include external reset through MCLR and Watchdog Timer Reset.
3: Bits PSPIE and PSPIF are reserved on the PIC16C73/73A, always maintain these bits clear.
4: These registers can be addressed from either bank.
5: PORTD and PORTE are not physically implemented on the PIC16C73/73A, read as ‘0’.
6: Brown-out Reset is not implemented on the PIC16C73 or the PIC16C74, read as '0'.
7: The IRP and RP1 bits are reserved on the PIC16C73/73A/74/74A, always maintain these bits clear.
PIC16C7X
DS30390E-page 26 1997 Microchip Technology Inc.
Bank 1
80h
(4)
INDF Addressing this location uses contents of FSR to address data memory (not a physical register) 0000 0000 0000 0000
81h OPTION RBPU INTEDG T0CS T0SE PSA PS2 PS1 PS0 1111 1111 1111 1111
82h
(4)
PCL Program Counter's (PC) Least Significant Byte 0000 0000 0000 0000
83h
(4)
STATUS IRP
(7)
RP1
(7)
RP0 TO PD ZDCC0001 1xxx 000q quuu
84h
(4)
FSR Indirect data memory address pointer xxxx xxxx uuuu uuuu
85h TRISA — — PORTA Data Direction Register --11 1111 --11 1111
86h TRISB PORTB Data Direction Register 1111 1111 1111 1111
87h TRISC PORTC Data Direction Register 1111 1111 1111 1111
88h
(5)
TRISD PORTD Data Direction Register 1111 1111 1111 1111
89h
(5)
TRISE IBF OBF IBOV PSPMODE — PORTE Data Direction Bits 0000 -111 0000 -111
8Ah
(1,4)
PCLATH — — — Write Buffer for the upper 5 bits of the Program Counter ---0 0000 ---0 0000
8Bh
(4)
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
8Ch PIE1 PSPIE
(3)
ADIE RCIE TXIE SSPIE CCP1IE TMR2IE TMR1IE 0000 0000 0000 0000
8Dh PIE2 — — — — — — — CCP2IE ---- ---0 ---- ---0
8Eh PCON — — — — — — POR BOR
(6)
---- --qq ---- --uu
8Fh — Unimplemented — —
90h — Unimplemented — —
91h — Unimplemented — —
92h PR2 Timer2 Period Register 1111 1111 1111 1111
93h SSPADD Synchronous Serial Port (I2C mode) Address Register 0000 0000 0000 0000
94h SSPSTAT — — D/A P S R/W UA BF --00 0000 --00 0000
95h — Unimplemented — —
96h — Unimplemented — —
97h — Unimplemented — —
98h TXSTA CSRC TX9 TXEN SYNC — BRGH TRMT TX9D 0000 -010 0000 -010
99h SPBRG Baud Rate Generator Register 0000 0000 0000 0000
9Ah — Unimplemented — —
9Bh — Unimplemented — —
9Ch — Unimplemented — —
9Dh — Unimplemented — —
9Eh — Unimplemented — —
9Fh ADCON1 — — — — — PCFG2 PCFG1 PCFG0 ---- -000 ---- -000
TABLE 4-2: PIC16C73/73A/74/74A SPECIAL FUNCTION REGISTER SUMMARY (Cont.’d)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
(2)
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented read as '0'.
Shaded locations are unimplemented, read as ‘0’.
Note 1: The upper byte of the program counter is not directly accessible. PCLATH is a holding register for the PC<12:8> whose con-
tents are transferred to the upper byte of the program counter.
2: Other (non power-up) resets include external reset through MCLR and Watchdog Timer Reset.
3: Bits PSPIE and PSPIF are reserved on the PIC16C73/73A, always maintain these bits clear.
4: These registers can be addressed from either bank.
5: PORTD and PORTE are not physically implemented on the PIC16C73/73A, read as ‘0’.
6: Brown-out Reset is not implemented on the PIC16C73 or the PIC16C74, read as '0'.
7: The IRP and RP1 bits are reserved on the PIC16C73/73A/74/74A, always maintain these bits clear.
1997 Microchip Technology Inc. DS30390E-page 27
PIC16C7X
TABLE 4-3: PIC16C76/77 SPECIAL FUNCTION REGISTER SUMMARY
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
(2)
Bank 0
00h
(4)
INDF Addressing this location uses contents of FSR to address data memory (not a physical register) 0000 0000 0000 0000
01h TMR0 Timer0 module’s register xxxx xxxx uuuu uuuu
02h
(4)
PCL Program Counter's (PC) Least Significant Byte 0000 0000 0000 0000
03h
(4)
STATUS IRP RP1 RP0 TO PD ZDCC0001 1xxx 000q quuu
04h
(4)
FSR Indirect data memory address pointer xxxx xxxx uuuu uuuu
05h PORTA — — PORTA Data Latch when written: PORTA pins when read --0x 0000 --0u 0000
06h PORTB PORTB Data Latch when written: PORTB pins when read xxxx xxxx uuuu uuuu
07h PORTC PORTC Data Latch when written: PORTC pins when read xxxx xxxx uuuu uuuu
08h
(5)
PORTD PORTD Data Latch when written: PORTD pins when read xxxx xxxx uuuu uuuu
09h
(5)
PORTE — — — — — RE2 RE1 RE0 ---- -xxx ---- -uuu
0Ah
(1,4)
PCLATH — — — Write Buffer for the upper 5 bits of the Program Counter ---0 0000 ---0 0000
0Bh
(4)
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
0Ch PIR1 PSPIF
(3)
ADIF RCIF TXIF SSPIF CCP1IF TMR2IF TMR1IF 0000 0000 0000 0000
0Dh PIR2 — — — – — — — CCP2IF ---- ---0 ---- ---0
0Eh TMR1L Holding register for the Least Significant Byte of the 16-bit TMR1 register xxxx xxxx uuuu uuuu
0Fh TMR1H Holding register for the Most Significant Byte of the 16-bit TMR1 register xxxx xxxx uuuu uuuu
10h T1CON — — T1CKPS1 T1CKPS0 T1OSCEN T1SYNC TMR1CS TMR1ON --00 0000 --uu uuuu
11h TMR2 Timer2 module’s register 0000 0000 0000 0000
12h T2CON — TOUTPS3 TOUTPS2 TOUTPS1 TOUTPS0 TMR2ON T2CKPS1 T2CKPS0 -000 0000 -000 0000
13h SSPBUF Synchronous Serial Port Receive Buffer/Transmit Register xxxx xxxx uuuu uuuu
14h SSPCON WCOL SSPOV SSPEN CKP SSPM3 SSPM2 SSPM1 SSPM0 0000 0000 0000 0000
15h CCPR1L Capture/Compare/PWM Register1 (LSB) xxxx xxxx uuuu uuuu
16h CCPR1H Capture/Compare/PWM Register1 (MSB) xxxx xxxx uuuu uuuu
17h CCP1CON — — CCP1X CCP1Y CCP1M3 CCP1M2 CCP1M1 CCP1M0 --00 0000 --00 0000
18h RCSTA SPEN RX9 SREN CREN — FERR OERR RX9D 0000 -00x 0000 -00x
19h TXREG USART Transmit Data Register 0000 0000 0000 0000
1Ah RCREG USART Receive Data Register 0000 0000 0000 0000
1Bh CCPR2L Capture/Compare/PWM Register2 (LSB) xxxx xxxx uuuu uuuu
1Ch CCPR2H Capture/Compare/PWM Register2 (MSB) xxxx xxxx uuuu uuuu
1Dh CCP2CON — — CCP2X CCP2Y CCP2M3 CCP2M2 CCP2M1 CCP2M0 --00 0000 --00 0000
1Eh ADRES A/D Result Register xxxx xxxx uuuu uuuu
1Fh ADCON0 ADCS1 ADCS0 CHS2 CHS1 CHS0 GO/DONE — ADON 0000 00-0 0000 00-0
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented read as '0'.
Shaded locations are unimplemented, read as ‘0’.
Note 1: The upper byte of the program counter is not directly accessible. PCLATH is a holding register for the PC<12:8> whose con-
tents are transferred to the upper byte of the program counter.
2: Other (non power-up) resets include external reset through MCLR and Watchdog Timer Reset.
3: Bits PSPIE and PSPIF are reserved on the PIC16C76, always maintain these bits clear.
4: These registers can be addressed from any bank.
5: PORTD and PORTE are not physically implemented on the PIC16C76, read as ‘0’.
PIC16C7X
DS30390E-page 28 1997 Microchip Technology Inc.
Bank 1
80h
(4)
INDF Addressing this location uses contents of FSR to address data memory (not a physical register) 0000 0000 0000 0000
81h OPTION RBPU INTEDG T0CS T0SE PSA PS2 PS1 PS0 1111 1111 1111 1111
82h
(4)
PCL Program Counter's (PC) Least Significant Byte 0000 0000 0000 0000
83h
(4)
STATUS IRP RP1 RP0 TO PD ZDCC0001 1xxx 000q quuu
84h
(4)
FSR Indirect data memory address pointer xxxx xxxx uuuu uuuu
85h TRISA — — PORTA Data Direction Register --11 1111 --11 1111
86h TRISB PORTB Data Direction Register 1111 1111 1111 1111
87h TRISC PORTC Data Direction Register 1111 1111 1111 1111
88h
(5)
TRISD PORTD Data Direction Register 1111 1111 1111 1111
89h
(5)
TRISE IBF OBF IBOV PSPMODE — PORTE Data Direction Bits 0000 -111 0000 -111
8Ah
(1,4)
PCLATH — — — Write Buffer for the upper 5 bits of the Program Counter ---0 0000 ---0 0000
8Bh
(4)
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
8Ch PIE1 PSPIE
(3)
ADIE RCIE TXIE SSPIE CCP1IE TMR2IE TMR1IE 0000 0000 0000 0000
8Dh PIE2 — — — — — — — CCP2IE ---- ---0 ---- ---0
8Eh PCON — — — — — — POR BOR ---- --qq ---- --uu
8Fh — Unimplemented — —
90h — Unimplemented — —
91h — Unimplemented — —
92h PR2 Timer2 Period Register 1111 1111 1111 1111
93h SSPADD Synchronous Serial Port (I2C mode) Address Register 0000 0000 0000 0000
94h SSPSTAT SMP CKE D/A P S R/W UA BF 0000 0000 0000 0000
95h — Unimplemented — —
96h — Unimplemented — —
97h — Unimplemented — —
98h TXSTA CSRC TX9 TXEN SYNC — BRGH TRMT TX9D 0000 -010 0000 -010
99h SPBRG Baud Rate Generator Register 0000 0000 0000 0000
9Ah — Unimplemented — —
9Bh — Unimplemented — —
9Ch — Unimplemented — —
9Dh — Unimplemented — —
9Eh — Unimplemented — —
9Fh ADCON1 — — — — — PCFG2 PCFG1 PCFG0 ---- -000 ---- -000
TABLE 4-3: PIC16C76/77 SPECIAL FUNCTION REGISTER SUMMARY (Cont.’d)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
(2)
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented read as '0'.
Shaded locations are unimplemented, read as ‘0’.
Note 1: The upper byte of the program counter is not directly accessible. PCLATH is a holding register for the PC<12:8> whose con-
tents are transferred to the upper byte of the program counter.
2: Other (non power-up) resets include external reset through MCLR and Watchdog Timer Reset.
3: Bits PSPIE and PSPIF are reserved on the PIC16C76, always maintain these bits clear.
4: These registers can be addressed from any bank.
5: PORTD and PORTE are not physically implemented on the PIC16C76, read as ‘0’.
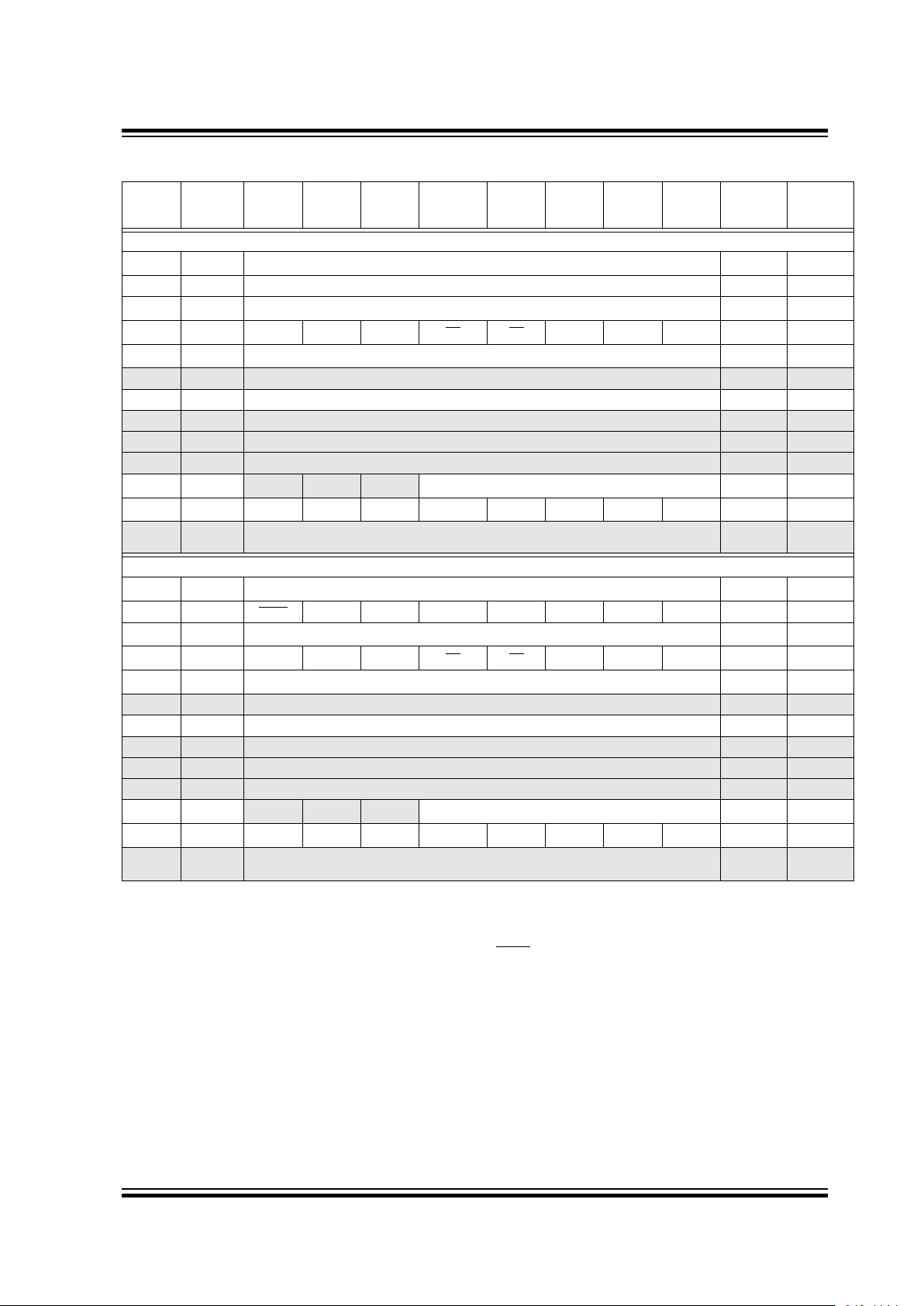
1997 Microchip Technology Inc. DS30390E-page 29
PIC16C7X
Bank 2
100h
(4)
INDF Addressing this location uses contents of FSR to address data memory (not a physical register) 0000 0000 0000 0000
101h TMR0 Timer0 module’s register xxxx xxxx uuuu uuuu
102h
(4)
PCL Program Counter's (PC) Least Significant Byte 0000 0000 0000 0000
103h
(4)
STATUS IRP RP1 RP0 TO PD ZDCC0001 1xxx 000q quuu
104h
(4)
FSR Indirect data memory address pointer xxxx xxxx uuuu uuuu
105h — Unimplemented — —
106h PORTB PORTB Data Latch when written: PORTB pins when read xxxx xxxx uuuu uuuu
107h — Unimplemented — —
108h — Unimplemented — —
109h — Unimplemented — —
10Ah
(1,4)
PCLATH — — — Write Buffer for the upper 5 bits of the Program Counter ---0 0000 ---0 0000
10Bh
(4)
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
10Ch-
10Fh
— Unimplemented — —
Bank 3
180h
(4)
INDF Addressing this location uses contents of FSR to address data memory (not a physical register) 0000 0000 0000 0000
181h OPTION RBPU
INTEDG T0CS T0SE PSA PS2 PS1 PS0 1111 1111 1111 1111
182h
(4)
PCL Program Counter's (PC) Least Significant Byte 0000 0000 0000 0000
183h
(4)
STATUS IRP RP1 RP0 TO PD ZDCC0001 1xxx 000q quuu
184h
(4)
FSR Indirect data memory address pointer xxxx xxxx uuuu uuuu
185h — Unimplemented — —
186h TRISB PORTB Data Direction Register 1111 1111 1111 1111
187h — Unimplemented — —
188h — Unimplemented — —
189h — Unimplemented — —
18Ah
(1,4)
PCLATH — — —
Write Buffer for the upper 5 bits of the Program Counter
---0 0000 ---0 0000
18Bh
(4)
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
18Ch-
18Fh
— Unimplemented — —
TABLE 4-3: PIC16C76/77 SPECIAL FUNCTION REGISTER SUMMARY (Cont.’d)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
(2)
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented read as '0'.
Shaded locations are unimplemented, read as ‘0’.
Note 1: The upper byte of the program counter is not directly accessible. PCLATH is a holding register for the PC<12:8> whose con-
tents are transferred to the upper byte of the program counter.
2: Other (non power-up) resets include external reset through MCLR and Watchdog Timer Reset.
3: Bits PSPIE and PSPIF are reserved on the PIC16C76, always maintain these bits clear.
4: These registers can be addressed from any bank.
5: PORTD and PORTE are not physically implemented on the PIC16C76, read as ‘0’.
PIC16C7X
DS30390E-page 30 1997 Microchip Technology Inc.
4.2.2.1 STATUS REGISTER
The ST ATUS register, shown in Figure 4-7, contains the
arithmetic status of the ALU, the RESET status and the
bank select bits for data memory.
The STATUS register can be the destination for any
instruction, as with any other register. If the STATUS
register is the destination for an instruction that affects
the Z, DC or C bits, then the write to these three bits is
disabled. These bits are set or cleared according to the
device logic. Furthermore, the T
O and PD bits are not
writable. Therefore, the result of an instruction with the
STATUS register as destination may be different than
intended.
Applicable Devices
72 73 73A 74 74A 76 77
For example, CLRF STATUS will clear the upper-three
bits and set the Z bit. This leaves the STATUS register
as 000u u1uu (where u = unchanged).
It is recommended, therefore, that only BCF, BSF,
SWAPF and MOVWF instructions are used to alter the
STATUS register because these instructions do not
affect the Z, C or DC bits from the STA TUS register. For
other instructions, not affecting any status bits, see the
"Instruction Set Summary."
Note 1: For those devices that do not use bits IRP
and RP1 (STATUS<7:6>), maintain these
bits clear to ensure upward compatibility
with future products.
Note 2: The C and DC bits operate as a borro
w
and digit borrow bit, respectively, in subtraction. See the SUBLW and SUBWF
instructions for examples.
FIGURE 4-7: STATUS REGISTER (ADDRESS 03h, 83h, 103h, 183h)
R/W-0 R/W-0 R/W-0 R-1 R-1 R/W-x R/W-x R/W-x
IRP RP1 RP0 TO PD Z DC C R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7: IRP: Register Bank Select bit (used for indirect addressing)
1 = Bank 2, 3 (100h - 1FFh)
0 = Bank 0, 1 (00h - FFh)
bit 6-5: RP1:RP0: Register Bank Select bits (used for direct addressing)
11 = Bank 3 (180h - 1FFh)
10 = Bank 2 (100h - 17Fh)
01 = Bank 1 (80h - FFh)
00 = Bank 0 (00h - 7Fh)
Each bank is 128 bytes
bit 4: T
O: Time-out bit
1 = After power-up, CLRWDT instruction, or SLEEP instruction
0 = A WDT time-out occurred
bit 3: PD
: Power-down bit
1 = After power-up or by the CLRWDT instruction
0 = By execution of the SLEEP instruction
bit 2: Z: Zero bit
1 = The result of an arithmetic or logic operation is zero
0 = The result of an arithmetic or logic operation is not zero
bit 1: DC: Digit carry/borro
w bit (ADDWF, ADDLW,SUBLW,SUBWF instructions) (for borrow the polarity is reversed)
1 = A carry-out from the 4th low order bit of the result occurred
0 = No carry-out from the 4th low order bit of the result
bit 0: C: Carry/borro
w bit (ADDWF, ADDLW,SUBLW,SUBWF instructions)
1 = A carry-out from the most significant bit of the result occurred
0 = No carry-out from the most significant bit of the result occurred
Note: For borro
w the polarity is reversed. A subtraction is executed by adding the two’s complement of the
second operand. For rotate (RRF, RLF) instructions, this bit is loaded with either the high or low order bit of
the source register.

1997 Microchip Technology Inc. DS30390E-page 31
PIC16C7X
4.2.2.2 OPTION REGISTER
The OPTION register is a readable and writable register which contains various control bits to configure the
TMR0/WDT prescaler, the External INT Interrupt,
TMR0, and the weak pull-ups on PORTB.
Applicable Devices
72 73 73A 74 74A 76 77
Note: To achieve a 1:1 prescaler assignment for
the TMR0 register, assign the prescaler to
the Watchdog Timer .
FIGURE 4-8: OPTION REGISTER (ADDRESS 81h, 181h)
R/W-1 R/W-1 R/W-1 R/W-1 R/W-1 R/W-1 R/W-1 R/W-1
RBPU INTEDG T0CS T0SE PSA PS2 PS1 PS0 R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7: RBPU: PORTB Pull-up Enable bit
1 = PORTB pull-ups are disabled
0 = PORTB pull-ups are enabled by individual port latch values
bit 6: INTEDG: Interrupt Edge Select bit
1 = Interrupt on rising edge of RB0/INT pin
0 = Interrupt on falling edge of RB0/INT pin
bit 5: T0CS: TMR0 Clock Source Select bit
1 = Transition on RA4/T0CKI pin
0 = Internal instruction cycle clock (CLKOUT)
bit 4: T0SE: TMR0 Source Edge Select bit
1 = Increment on high-to-low transition on RA4/T0CKI pin
0 = Increment on low-to-high transition on RA4/T0CKI pin
bit 3: PSA: Prescaler Assignment bit
1 = Prescaler is assigned to the WDT
0 = Prescaler is assigned to the Timer0 module
bit 2-0: PS2:PS0: Prescaler Rate Select bits
000
001
010
011
100
101
110
111
1 : 2
1 : 4
1 : 8
1 : 16
1 : 32
1 : 64
1 : 128
1 : 256
1 : 1
1 : 2
1 : 4
1 : 8
1 : 16
1 : 32
1 : 64
1 : 128
Bit Value TMR0 Rate WDT Rate

PIC16C7X
DS30390E-page 32 1997 Microchip Technology Inc.
4.2.2.3 INTCON REGISTER
The INTCON Register is a readable and writable register which contains various enable and flag bits for the
TMR0 register overflow, RB Port change and Exter nal
RB0/INT pin interrupts.
Applicable Devices
72 73 73A 74 74A 76 77
Note: Interrupt flag bits get set when an interrupt
condition occurs regardless of the state of
its corresponding enable bit or the global
enable bit, GIE (INTCON<7>).
FIGURE 4-9: INTCON REGISTER
(ADDRESS 0Bh, 8Bh, 10Bh, 18Bh)
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-x
GIE PEIE T0IE INTE RBIE T0IF INTF RBIF R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7: GIE:
(1)
Global Interrupt Enable bit
1 = Enables all un-masked interrupts
0 = Disables all interrupts
bit 6: PEIE: Peripheral Interrupt Enable bit
1 = Enables all un-masked peripheral interrupts
0 = Disables all peripheral interrupts
bit 5: T0IE: TMR0 Overflow Interrupt Enable bit
1 = Enables the TMR0 interrupt
0 = Disables the TMR0 interrupt
bit 4: INTE: RB0/INT External Interrupt Enable bit
1 = Enables the RB0/INT external interrupt
0 = Disables the RB0/INT external interrupt
bit 3: RBIE: RB Port Change Interrupt Enable bit
1 = Enables the RB port change interrupt
0 = Disables the RB port change interrupt
bit 2: T0IF: TMR0 Overflow Interrupt Flag bit
1 = TMR0 register has overflowed (must be cleared in software)
0 = TMR0 register did not overflow
bit 1: INTF: RB0/INT External Interrupt Flag bit
1 = The RB0/INT external interrupt occurred (must be cleared in software)
0 = The RB0/INT external interrupt did not occur
bit 0: RBIF: RB Port Change Interrupt Flag bit
1 = At least one of the RB7:RB4 pins changed state (must be cleared in software)
0 = None of the RB7:RB4 pins have changed state
Note 1: For the PIC16C73 and PIC16C74, if an interrupt occurs while the GIE bit is being cleared, the GIE bit
may be unintentionally re-enabled by the RETFIE instruction in the user’s Interrupt Service Routine.
Refer to Section 14.5 for a detailed description.
Interrupt flag bits get set when an interrupt condition occurs regardless of the state of its corresponding enable bit or the
global enable bit, GIE (INTCON<7>). User software should ensure the appropriate interrupt flag bits are clear prior to
enabling an interrupt.

1997 Microchip Technology Inc. DS30390E-page 33
PIC16C7X
4.2.2.4 PIE1 REGISTER
This register contains the individual enable bits for the
peripheral interrupts.
Applicable Devices
72 73 73A 74 74A 76 77
Note: Bit PEIE (INTCON<6>) must be set to
enable any peripheral interrupt.
FIGURE 4-10: PIE1 REGISTER PIC16C72 (ADDRESS 8Ch)
U-0 R/W-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0
— ADIE — — SSPIE CCP1IE TMR2IE TMR1IE R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7: Unimplemented: Read as '0'
bit 6: ADIE: A/D Converter Interrupt Enable bit
1 = Enables the A/D interrupt
0 = Disables the A/D interrupt
bit 5-4: Unimplemented: Read as '0'
bit 3: SSPIE: Synchronous Serial Port Interrupt Enable bit
1 = Enables the SSP interrupt
0 = Disables the SSP interrupt
bit 2: CCP1IE: CCP1 Interrupt Enable bit
1 = Enables the CCP1 interrupt
0 = Disables the CCP1 interrupt
bit 1: TMR2IE: TMR2 to PR2 Match Interrupt Enable bit
1 = Enables the TMR2 to PR2 match interrupt
0 = Disables the TMR2 to PR2 match interrupt
bit 0: TMR1IE: TMR1 Overflow Interrupt Enable bit
1 = Enables the TMR1 overflow interrupt
0 = Disables the TMR1 overflow interrupt

PIC16C7X
DS30390E-page 34 1997 Microchip Technology Inc.
FIGURE 4-11: PIE1 REGISTER PIC16C73/73A/74/74A/76/77 (ADDRESS 8Ch)
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
PSPIE
(1)
ADIE RCIE TXIE SSPIE CCP1IE TMR2IE TMR1IE R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7: PSPIE
(1)
: Parallel Slave Port Read/Write Interrupt Enable bit
1 = Enables the PSP read/write interrupt
0 = Disables the PSP read/write interrupt
bit 6: ADIE: A/D Converter Interrupt Enable bit
1 = Enables the A/D interrupt
0 = Disables the A/D interrupt
bit 5: RCIE: USART Receive Interrupt Enable bit
1 = Enables the USART receive interrupt
0 = Disables the USART receive interrupt
bit 4: TXIE: USART Transmit Interrupt Enable bit
1 = Enables the USART transmit interrupt
0 = Disables the USART transmit interrupt
bit 3: SSPIE: Synchronous Serial Port Interrupt Enable bit
1 = Enables the SSP interrupt
0 = Disables the SSP interrupt
bit 2: CCP1IE: CCP1 Interrupt Enable bit
1 = Enables the CCP1 interrupt
0 = Disables the CCP1 interrupt
bit 1: TMR2IE: TMR2 to PR2 Match Interrupt Enable bit
1 = Enables the TMR2 to PR2 match interrupt
0 = Disables the TMR2 to PR2 match interrupt
bit 0: TMR1IE: TMR1 Overflow Interrupt Enable bit
1 = Enables the TMR1 overflow interrupt
0 = Disables the TMR1 overflow interrupt
Note 1: PIC16C73/73A/76 devices do not have a Parallel Slave Port implemented, this bit location is reserved
on these devices, always maintain this bit clear.

1997 Microchip Technology Inc. DS30390E-page 35
PIC16C7X
4.2.2.5 PIR1 REGISTER
This register contains the individual flag bits for the
Peripheral interrupts.
Applicable Devices
72 73 73A 74 74A 76 77
Note: Interrupt flag bits get set when an interrupt
condition occurs regardless of the state of
its corresponding enable bit or the global
enable bit, GIE (INTCON<7>). User software should ensure the appropriate interrupt flag bits are clear prior to enabling an
interrupt.
FIGURE 4-12: PIR1 REGISTER PIC16C72 (ADDRESS 0Ch)
U-0 R/W-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0
— ADIF — — SSPIF CCP1IF TMR2IF TMR1IF R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7: Unimplemented: Read as '0'
bit 6: ADIF: A/D Converter Interrupt Flag bit
1 = An A/D conversion completed (must be cleared in software)
0 = The A/D conversion is not complete
bit 5-4: Unimplemented: Read as '0'
bit 3: SSPIF: Synchronous Serial Port Interrupt Flag bit
1 = The transmission/reception is complete (must be cleared in software)
0 = Waiting to transmit/receive
bit 2: CCP1IF: CCP1 Interrupt Flag bit
Capture Mode
1 = A TMR1 register capture occurred (must be cleared in software)
0 = No TMR1 register capture occurred
Compare Mode
1 = A TMR1 register compare match occurred (must be cleared in software)
0 = No TMR1 register compare match occurred
PWM Mode
Unused in this mode
bit 1: TMR2IF: TMR2 to PR2 Match Interrupt Flag bit
1 = TMR2 to PR2 match occurred (must be cleared in software)
0 = No TMR2 to PR2 match occurred
bit 0: TMR1IF: TMR1 Overflow Interrupt Flag bit
1 = TMR1 register overflowed (must be cleared in software)
0 = TMR1 register did not overflow
Interrupt flag bits get set when an interrupt condition occurs regardless of the state of its corresponding enable bit or the
global enable bit, GIE (INTCON<7>). User software should ensure the appropriate interrupt flag bits are clear prior to
enabling an interrupt.

PIC16C7X
DS30390E-page 36 1997 Microchip Technology Inc.
FIGURE 4-13: PIR1 REGISTER PIC16C73/73A/74/74A/76/77 (ADDRESS 0Ch)
R/W-0 R/W-0 R-0 R-0 R/W-0 R/W-0 R/W-0 R/W-0
PSPIF
(1)
ADIF RCIF TXIF SSPIF CCP1IF TMR2IF TMR1IF R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7: PSPIF
(1)
: Parallel Slave Port Read/Write Interrupt Flag bit
1 = A read or a write operation has taken place (must be cleared in software)
0 = No read or write has occurred
bit 6: ADIF: A/D Converter Interrupt Flag bit
1 = An A/D conversion completed (must be cleared in software)
0 = The A/D conversion is not complete
bit 5: RCIF: USART Receive Interrupt Flag bit
1 = The USART receive buffer is full (cleared by reading RCREG)
0 = The USART receive buffer is empty
bit 4: TXIF: USART Transmit Interrupt Flag bit
1 = The USART transmit buffer is empty (cleared by writing to TXREG)
0 = The USART transmit buffer is full
bit 3: SSPIF: Synchronous Serial Port Interrupt Flag bit
1 = The transmission/reception is complete (must be cleared in software)
0 = Waiting to transmit/receive
bit 2: CCP1IF: CCP1 Interrupt Flag bit
Capture Mode
1 = A TMR1 register capture occurred (must be cleared in software)
0 = No TMR1 register capture occurred
Compare Mode
1 = A TMR1 register compare match occurred (must be cleared in software)
0 = No TMR1 register compare match occurred
PWM Mode
Unused in this mode
bit 1: TMR2IF: TMR2 to PR2 Match Interrupt Flag bit
1 = TMR2 to PR2 match occurred (must be cleared in software)
0 = No TMR2 to PR2 match occurred
bit 0: TMR1IF: TMR1 Overflow Interrupt Flag bit
1 = TMR1 register overflowed (must be cleared in software)
0 = TMR1 register did not overflow
Note 1: PIC16C73/73A/76 devices do not have a Parallel Slave Port implemented, this bit location is reserved
on these devices, always maintain this bit clear.
Interrupt flag bits get set when an interrupt condition occurs regardless of the state of its corresponding enable bit or the
global enable bit, GIE (INTCON<7>). User software should ensure the appropriate interrupt flag bits are clear prior to
enabling an interrupt.

1997 Microchip Technology Inc. DS30390E-page 37
PIC16C7X
4.2.2.6 PIE2 REGISTER
This register contains the individual enable bit for the
CCP2 peripheral interrupt.
Applicable Devices
72 73 73A 74 74A 76 77
FIGURE 4-14: PIE2 REGISTER (ADDRESS 8Dh)
U-0 U-0 U-0 U-0 U-0 U-0 U-0 R/W-0
— — — — — — — CCP2IE R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7-1: Unimplemented: Read as '0'
bit 0: CCP2IE: CCP2 Interrupt Enable bit
1 = Enables the CCP2 interrupt
0 = Disables the CCP2 interrupt

PIC16C7X
DS30390E-page 38 1997 Microchip Technology Inc.
4.2.2.7 PIR2 REGISTER
This register contains the CCP2 interrupt flag bit.
Applicable Devices
72 73 73A 74 74A 76 77
.
Note: Interrupt flag bits get set when an interrupt
condition occurs regardless of the state of
its corresponding enable bit or the global
enable bit, GIE (INTCON<7>). User software should ensure the appropriate interrupt flag bits are clear prior to enabling an
interrupt.
FIGURE 4-15: PIR2 REGISTER (ADDRESS 0Dh)
U-0 U-0 U-0 U-0 U-0 U-0 U-0 R/W-0
— — — — — — — CCP2IF R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7-1: Unimplemented: Read as '0'
bit 0: CCP2IF: CCP2 Interrupt Flag bit
Capture Mode
1 = A TMR1 register capture occurred (must be cleared in software)
0 = No TMR1 register capture occurred
Compare Mode
1 = A TMR1 register compare match occurred (must be cleared in software)
0 = No TMR1 register compare match occurred
PWM Mode
Unused
Interrupt flag bits get set when an interrupt condition occurs regardless of the state of its corresponding enable bit or the
global enable bit, GIE (INTCON<7>). User software should ensure the appropriate interrupt flag bits are clear prior to
enabling an interrupt.

1997 Microchip Technology Inc. DS30390E-page 39
PIC16C7X
4.2.2.8 PCON REGISTER
The Power Control (PCON) register contains a flag bit
to allow differentiation between a Power-on Reset
(POR) to an external MCLR Reset or WDT Reset.
Those devices with brown-out detection circuitry contain an additional bit to differentiate a Brown-out Reset
condition from a Power-on Reset condition.
Applicable Devices
72
73 73A 74 74A 76 77
Note: BOR is unknown on Power-on Reset. It
must then be set by the user and checked
on subsequent resets to see if BOR
is
clear, indicating a brown-out has occurred.
The BOR
status bit is a don't care and is
not necessarily predictable if the brown-out
circuit is disabled (by clearing the BODEN
bit in the Configuration word).
FIGURE 4-16: PCON REGISTER (ADDRESS 8Eh)
U-0 U-0 U-0 U-0 U-0 U-0 R/W-0 R/W-q
— — — — — — POR BOR
(1)
R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7-2: Unimplemented: Read as '0'
bit 1: POR
: Power-on Reset Status bit
1 = No Power-on Reset occurred
0 = A Power-on Reset occurred (must be set in software after a Power-on Reset occurs)
bit 0: BO
R
(1)
: Brown-out Reset Status bit
1 = No Brown-out Reset occurred
0 = A Brown-out Reset occurred (must be set in software after a Brown-out Reset occurs)
Note 1: Brown-out Reset is not implemented on the PIC16C73/74.

PIC16C7X
DS30390E-page 40 1997 Microchip Technology Inc.
4.3 PCL and PCLATH
The program counter (PC) is 13-bits wide. The low byte
comes from the PCL register, which is a readable and
writable register. The upper bits (PC<12:8>) are not
readable, but are indirectly writable through the
PCLATH register. On any reset, the upper bits of the
PC will be cleared. Figure 4-17 shows the two situations for the loading of the PC. The upper example in
the figure shows how the PC is loaded on a write to
PCL (PCLATH<4:0> → PCH). The lower example in
the figure shows how the PC is loaded during a CALL
or GOTO instruction (PCLATH<4:3> → PCH).
FIGURE 4-17: LOADING OF PC IN
DIFFERENT SITUATIONS
4.3.1 COMPUTED GOTO
A computed GOTO is accomplished by adding an off-
set to the program counter (ADDWF PCL). When doing
a table read using a computed GOTO method, care
should be exercised if the tab le location crosses a PCL
memory boundary (each 256 byte block). Refer to the
application note
“Implementing a Table Read"
(AN556).
4.3.2 STACK
The PIC16CXX family has an 8 lev el deep x 13-bit wide
hardware stack. The stack space is not part of either
program or data space and the stack pointer is not
readable or writable. The PC is PUSHed onto the stac k
when a CALL instruction is executed or an interrupt
causes a branch. The stack is POPed in the event of a
RETURN, RETLW or a RETFIE instruction execution.
PCLATH is not affected by a PUSH or POP operation.
The stack operates as a circular buff er . This means that
after the stack has been PUSHed eight times, the ninth
push overwrites the value that was stored from the first
push. The tenth push overwrites the second push (and
so on).
Applicable Devices
72
73 73A 74 74A 76 77
PC
12 8 7 0
5
PCLATH<4:0>
PCLATH
Instr
uction with
ALU
GOTO, CALL
Opcode <10:0>
8
PC
12 11 10 0
11
PCLATH<4:3>
PCH PCL
87
2
PCLATH
PCH PCL
PCL as
Destination
4.4 Program Memory Paging
PIC16C7X devices are capable of addressing a continuous 8K word block of program memory. The CALL and
GOTO instructions provide only 11 bits of address to
allow branching within any 2K program memory page.
When doing a CALL or GOTO instruction the upper 2 bits
of the address are provided by PCLATH<4:3>. When
doing a CALL or GOTO instruction, the user must ensure
that the page select bits are programmed so that the
desired program memory page is addressed. If a return
from a CALL instruction (or interrupt) is executed, the
entire 13-bit PC is pushed onto the stack. Therefore,
manipulation of the PCLATH<4:3> bits are not required
for the return instructions (which POPs the address
from the stack).
Note 1: There are no status bits to indicate stack
overflow or stack underflow conditions.
Note 2: There are no instructions/mnemonics
called PUSH or POP. These are actions
that occur from the execution of the
CALL, RETURN, RETLW, and RETFIE
instructions, or the vectoring to an interrupt address.
Applicable Devices
72
73 73A 74 74A 76 77
Note: PIC16C7X devices with 4K or less of pro-
gram memory ignore paging bit
PCLATH<4>. The use of PCLATH<4> as a
general purpose read/write bit is not recommended since this may affect upward
compatibility with future products.

1997 Microchip Technology Inc. DS30390E-page 41
PIC16C7X
Example 4-1 shows the calling of a subroutine in
page 1 of the program memory. This example assumes
that PCLA TH is sa ved and restored b y the interrupt service routine (if interrupts are used).
EXAMPLE 4-1: CALL OF A SUBROUTINE IN
PAGE 1 FROM PAGE 0
ORG 0x500
BSF PCLATH,3 ;Select page 1 (800h-FFFh)
BCF PCLATH,4 ;Only on >4K devices
CALL SUB1_P1 ;Call subroutine in
: ;page 1 (800h-FFFh)
:
:
ORG 0x900
SUB1_P1: ;called subroutine
: ;page 1 (800h-FFFh)
:
RETURN ;return to Call subroutine
;in page 0 (000h-7FFh)
4.5 Indirect Addressing, INDF and FSR
Registers
The INDF register is not a physical register . Addressing
the INDF register will cause indirect addressing.
Indirect addressing is possible by using the INDF register. Any instruction using the INDF register actually
accesses the register pointed to by the File Select Register, FSR. Reading the INDF register itself indirectly
(FSR = '0') will read 00h. Writing to the INDF register
indirectly results in a no-operation (although status bits
may be affected). An effective 9-bit address is obtained
by concatenating the 8-bit FSR register and the IRP bit
(STATUS<7>), as shown in Figure 4-18.
A simple program to clear RAM locations 20h-2Fh
using indirect addressing is shown in Example 4-2.
EXAMPLE 4-2: INDIRECT ADDRESSING
movlw 0x20 ;initialize pointer
movwf FSR ;to RAM
NEXT clrf INDF ;clear INDF register
incf FSR,F ;inc pointer
btfss FSR,4 ;all done?
goto NEXT ;no clear next
CONTINUE
: ;yes continue
Applicable Devices
72
73 73A 74 74A 76 77
FIGURE 4-18: DIRECT/INDIRECT ADDRESSING
For register file map detail see Figure 4-4, and Figure 4-5.
Data
Memory
Indirect AddressingDirect Addressing
bank select location select
RP1:RP0 6
0
from opcode
IRP FSR register
7
0
bank select
location select
00 01 10 11
Bank 0 Bank 1 Bank 2 Bank 3
not used
FFh
80h
7Fh
00h
17Fh
100h
1FFh
180h

PIC16C7X
DS30390E-page 42 1997 Microchip Technology Inc.
NOTES:
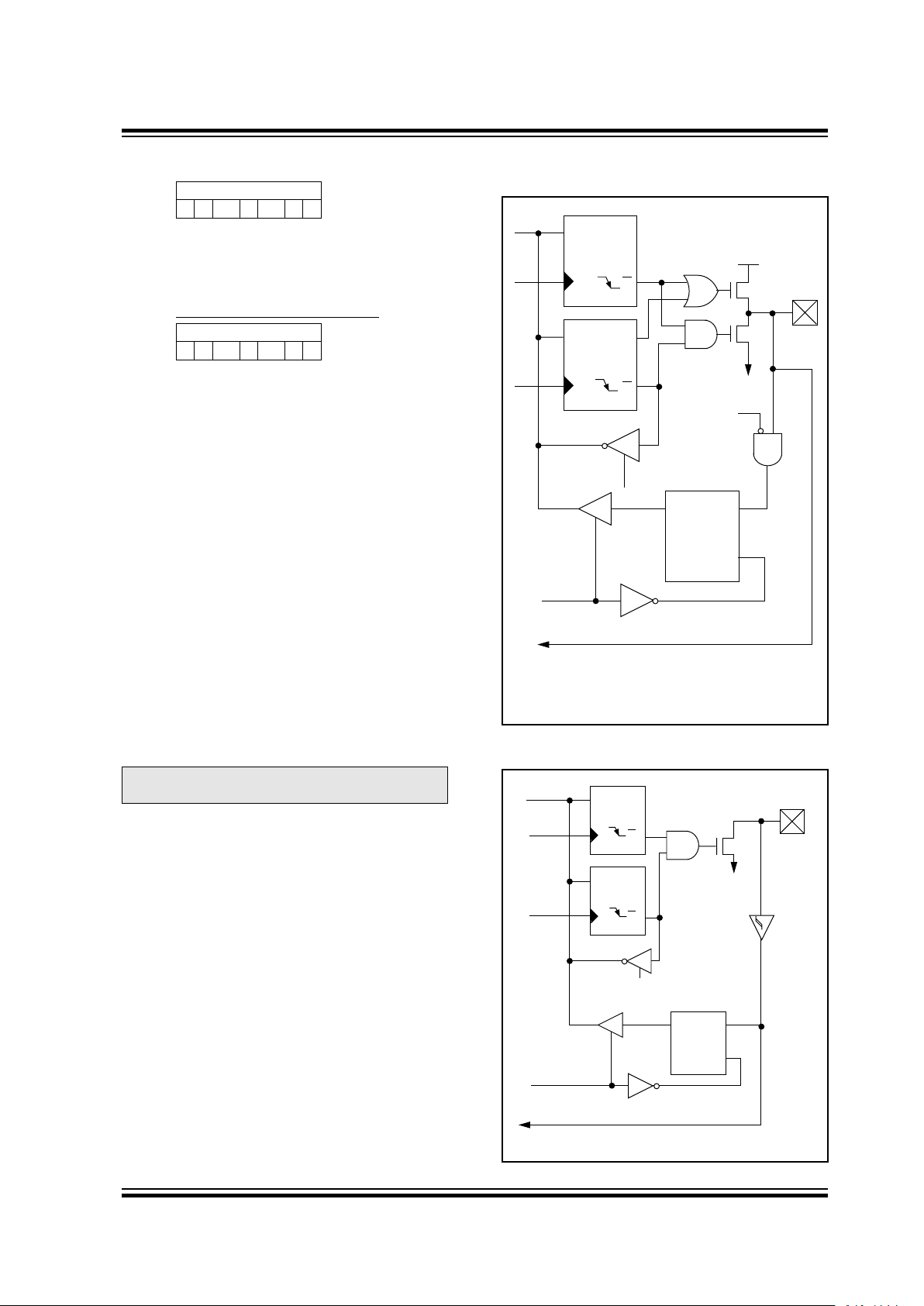
1997 Microchip Technology Inc. DS30390E-page 43
PIC16C7X
5.0 I/O PORTS
Some pins for these I/O ports are multiplexed with an
alternate function for the peripheral features on the
device. In general, when a peripheral is enabled, that
pin may not be used as a general purpose I/O pin.
5.1 PORTA and TRISA Registers
PORTA is a 6-bit latch.
The RA4/T0CKI pin is a Schmitt Trigger input and an
open drain output. All other RA port pins have TTL input
levels and full CMOS output drivers. All pins have data
direction bits (TRIS registers) which can configure
these pins as output or input.
Setting a TRISA register bit puts the corresponding output driver in a hi-impedance mode. Clearing a bit in the
TRISA register puts the contents of the output latch on
the selected pin(s).
Reading the PORTA register reads the status of the
pins whereas writing to it will write to the port latch. All
write operations are read-modify-write operations.
Therefore a write to a port implies that the port pins are
read, this value is modified, and then written to the port
data latch.
Pin RA4 is multiplexed with the Timer0 module clock
input to become the RA4/T0CKI pin.
Other PORTA pins are multiplexed with analog inputs
and analog V
REF input. The operation of each pin is
selected by clearing/setting the control bits in the
ADCON1 register (A/D Control Register1).
The TRISA register controls the direction of the RA
pins, even when they are being used as analog inputs.
The user must ensure the bits in the TRISA register are
maintained set when using them as analog inputs.
EXAMPLE 5-1: INITIALIZING PORTA
BCF STATUS, RP0 ;
BCF STATUS, RP1 ; PIC16C76/77 only
CLRF PORTA ; Initialize PORTA by
; clearing output
; data latches
BSF STATUS, RP0 ; Select Bank 1
MOVLW 0xCF ; Value used to
; initialize data
; direction
MOVWF TRISA ; Set RA<3:0> as inputs
; RA<5:4> as outputs
; TRISA<7:6> are always
; read as '0'.
Applicable Devices
72
73 73A 74 74A 76 77
Applicable Devices
72
73 73A 74 74A 76 77
Note: On a Power-on Reset, these pins are con-
figured as analog inputs and read as '0'.
FIGURE 5-1: BLOCK DIAGRAM OF
RA3:RA0 AND RA5 PINS
FIGURE 5-2: BLOCK DIAGRAM OF RA4/
T0CKI PIN
Data
bus
QD
Q
CK
QD
Q
CK
QD
EN
P
N
WR
Port
WR
TRIS
Data Latch
TRIS Latch
RD TRIS
RD PORT
V
SS
VDD
I/O pin
(1)
Note 1: I/O pins have protection diodes to VDD and
VSS.
Analog
input
mode
TTL
input
buffer
To A/D Converter
Data
bus
WR
PORT
WR
TRIS
RD PORT
Data Latch
TRIS Latch
RD TRIS
Schmitt
T rigger
input
buffer
N
V
SS
I/O pin
(1)
TMR0 clock input
Note 1: I/O pin has protection diodes to V
SS only.
QD
Q
CK
QD
Q
CK
EN
QD
EN

PIC16C7X
DS30390E-page 44 1997 Microchip Technology Inc.
TABLE 5-1: PORTA FUNCTIONS
TABLE 5-2: SUMMARY OF REGISTERS ASSOCIATED WITH PORTA
Name Bit# Buffer Function
RA0/AN0 bit0 TTL Input/output or analog input
RA1/AN1 bit1 TTL Input/output or analog input
RA2/AN2 bit2 TTL Input/output or analog input
RA3/AN3/V
REF bit3 TTL Input/output or analog input or VREF
RA4/T0CKI bit4 ST Input/output or external clock input for Timer0
Output is open drain type
RA5/SS
/AN4 bit5 TTL Input/output or slave select input for synchronous serial port or analog input
Legend: TTL = TTL input, ST = Schmitt Trigger input
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
05h PORTA — — RA5 RA4 RA3 RA2 RA1 RA0 --0x 0000 --0u 0000
85h TRISA — — PORTA Data Direction Register --11 1111 --11 1111
9Fh ADCON1 — — — — — PCFG2 PCFG1 PCFG0 ---- -000 ---- -000
Legend: x = unknown, u = unchanged, - = unimplemented locations read as '0'. Shaded cells are not used by PORTA.

1997 Microchip Technology Inc. DS30390E-page 45
PIC16C7X
5.2 PORTB and TRISB Registers
PORTB is an 8-bit wide bi-directional port. The corresponding data direction register is TRISB. Setting a bit
in the TRISB register puts the corresponding output
driver in a hi-impedance input mode. Clearing a bit in
the TRISB register puts the contents of the output latch
on the selected pin(s).
EXAMPLE 5-2: INITIALIZING PORTB
BCF STATUS, RP0 ;
CLRF PORTB ; Initialize PORTB by
; clearing output
; data latches
BSF STATUS, RP0 ; Select Bank 1
MOVLW 0xCF ; Value used to
; initialize data
; direction
MOVWF TRISB ; Set RB<3:0> as inputs
; RB<5:4> as outputs
; RB<7:6> as inputs
Each of the PORTB pins has a weak internal pull-up. A
single control bit can turn on all the pull-ups. This is
performed by clearing bit RBPU
(OPTION<7>). The
weak pull-up is automatically turned off when the port
pin is configured as an output. The pull-ups are disabled on a Power-on Reset.
FIGURE 5-3: BLOCK DIAGRAM OF
RB3:RB0 PINS
Applicable Devices
72
73 73A 74 74A 76 77
Data Latch
RBPU
(2)
P
V
DD
QD
CK
QD
CK
QD
EN
Data bus
WR Port
WR TRIS
RD TRIS
RD Port
weak
pull-up
RD Port
RB0/INT
I/O
pin
(1)
TTL
Input
Buffer
Note 1: I/O pins have diode protection to V
DD and VSS.
2: To enable weak pull-ups, set the appropriate TRIS bit(s)
and clear the RBPU bit (OPTION<7>).
Schmitt T rigger
Buffer
TRIS Latch
Four of PORTB’s pins, RB7:RB4, have an interrupt on
change feature. Only pins configured as inputs can
cause this interrupt to occur (i.e. any RB7:RB4 pin configured as an output is excluded from the interrupt on
change comparison). The input pins (of RB7:RB4) are
compared with the old value latched on the last read of
PORTB. The “mismatch” outputs of RB7:RB4 are
OR’ed together to generate the RB Port Change Interrupt with flag bit RBIF (INTCON<0>).
This interrupt can wake the device from SLEEP. The
user, in the interrupt service routine, can clear the interrupt in the following manner:
a) Any read or write of PORTB. This will end the
mismatch condition.
b) Clear flag bit RBIF.
A mismatch condition will continue to set flag bit RBIF.
Reading PORTB will end the mismatch condition, and
allow flag bit RBIF to be cleared.
This interrupt on mismatch feature, together with software configurable pull-ups on these four pins allow
easy interface to a keypad and make it possible for
wake-up on key-depression. Refer to the Embedded
Control Handbook,
"Implementing Wake-Up on Key
Stroke"
(AN552).
The interrupt on change feature is recommended for
wake-up on key depression operation and operations
where PORTB is only used for the interrupt on change
feature. Polling of PORTB is not recommended while
using the interrupt on change feature.
Note: For the PIC16C73/74, if a change on the
I/O pin should occur when the read operation is being executed (start of the Q2
cycle), then interrupt flag bit RBIF may not
get set.

PIC16C7X
DS30390E-page 46 1997 Microchip Technology Inc.
FIGURE 5-4: BLOCK DIAGRAM OF
RB7:RB4 PINS (PIC16C73/74)
Data Latch
From other
RBPU
(2)
P
V
DD
I/O
QD
CK
QD
CK
QD
EN
QD
EN
Data bus
WR Port
WR TRIS
Set RBIF
TRIS Latch
RD TRIS
RD Port
RB7:RB4 pins
weak
pull-up
RD Port
Latch
TTL
Input
Buffer
pin
(1)
Note 1: I/O pins have diode protection to VDD and VSS.
ST
Buffer
RB7:RB6 in serial programming mode
2: To enable weak pull-ups, set the appropriate TRIS bit(s)
and clear the RBPU
bit (OPTION<7>).
FIGURE 5-5: BLOCK DIAGRAM OF
RB7:RB4 PINS (PIC16C72/
73A/74A/76/77)
Data Latch
From other
RBPU
(2)
P
V
DD
I/O
QD
CK
QD
CK
QD
EN
QD
EN
Data bus
WR Port
WR TRIS
Set RBIF
TRIS Latch
RD TRIS
RD Port
RB7:RB4 pins
weak
pull-up
RD Port
Latch
TTL
Input
Buffer
pin
(1)
Note 1: I/O pins have diode protection to VDD and VSS.
ST
Buffer
RB7:RB6 in serial programming mode
Q3
Q1
2: To enable weak pull-ups, set the appropriate TRIS bit(s)
and clear the RBPU
bit (OPTION<7>).
TABLE 5-3: PORTB FUNCTIONS
Name Bit# Buffer Function
RB0/INT bit0 TTL/ST
(1)
Input/output pin or external interrupt input. Internal software
programmable weak pull-up.
RB1 bit1 TTL Input/output pin. Internal software programmable weak pull-up.
RB2 bit2 TTL Input/output pin. Internal software programmable weak pull-up.
RB3 bit3 TTL Input/output pin. Internal software programmable weak pull-up.
RB4 bit4 TTL Input/output pin (with interrupt on change). Internal software programmable
weak pull-up.
RB5 bit5 TTL Input/output pin (with interrupt on change). Internal software programmable
weak pull-up.
RB6 bit6 TTL/ST
(2)
Input/output pin (with interrupt on change). Internal software programmable
weak pull-up. Serial programming clock.
RB7 bit7 TTL/ST
(2)
Input/output pin (with interrupt on change). Internal software programmable
weak pull-up. Serial programming data.
Legend: TTL = TTL input, ST = Schmitt Trigger input
Note 1: This buffer is a Schmitt Trigger input when configured as the external interrupt.
2: This buffer is a Schmitt Trigger input when used in serial programming mode.

1997 Microchip Technology Inc. DS30390E-page 47
PIC16C7X
TABLE 5-4: SUMMARY OF REGISTERS ASSOCIATED WITH PORTB
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
06h, 106h PORTB RB7 RB6 RB5 RB4 RB3 RB2 RB1 RB0 xxxx xxxx uuuu uuuu
86h, 186h TRISB PORTB Data Direction Register 1111 1111 1111 1111
81h, 181h OPTION RBPU INTEDG T0CS T0SE PSA PS2 PS1 PS0 1111 1111 1111 1111
Legend: x = unknown, u = unchanged. Shaded cells are not used by PORTB.

PIC16C7X
DS30390E-page 48 1997 Microchip Technology Inc.
5.3 PORTC and TRISC Registers
PORTC is an 8-bit bi-directional port. Each pin is individually configurable as an input or output through the
TRISC register. PORTC is multiplexed with several
peripheral functions (Table 5-5). PORTC pins have
Schmitt Trigger input buffers.
When enabling peripheral functions, care should be
taken in defining TRIS bits for each PORTC pin. Some
peripherals override the TRIS bit to make a pin an output, while other peripherals override the TRIS bit to
make a pin an input. Since the TRIS bit override is in
effect while the peripheral is enabled, read-modifywrite instructions (BSF, BCF, XORWF) with TRISC as
destination should be avoided. The user should refer to
the corresponding peripheral section for the correct
TRIS bit settings.
EXAMPLE 5-3: INITIALIZING PORTC
BCF STATUS, RP0 ; Select Bank 0
BCF STATUS, RP1 ; PIC16C76/77 only
CLRF PORTC ; Initialize PORTC by
; clearing output
; data latches
BSF STATUS, RP0 ; Select Bank 1
MOVLW 0xCF ; Value used to
; initialize data
; direction
MOVWF TRISC ; Set RC<3:0> as inputs
; RC<5:4> as outputs
; RC<7:6> as inputs
Applicable Devices
72
73 73A 74 74A 76 77
FIGURE 5-6: PORTC BLOCK DIAGRAM
(PERIPHERAL OUTPUT
OVERRIDE)
PORT/PERIPHERAL Select
(2)
Data bus
WR
PORT
WR
TRIS
RD
Data Latch
TRIS Latch
RD TRIS
Schmitt
T rigger
QD
Q
CK
QD
EN
Peripheral Data Out
0
1
QD
Q
CK
P
N
VDD
VSS
PORT
Peripheral
OE
(3)
Peripheral input
I/O
pin
(1)
Note 1: I/O pins have diode protection to VDD and VSS.
2: P ort/Peripheral select signal selects between port
data and peripheral output.
3: Peripheral OE (output enable) is only activated if
peripheral select is active.
TABLE 5-5: PORTC FUNCTIONS
Name Bit# Buffer Type Function
RC0/T1OSO/T1CKI
bit0
ST Input/output port pin or Timer1 oscillator output/Timer1 clock input
RC1/T1OSI/CCP2
(1)
bit1 ST Input/output port pin or Timer1 oscillator input or Capture2 input/
Compare2 output/PWM2 output
RC2/CCP1 bit2 ST Input/output port pin or Capture1 input/Compare1 output/PWM1
output
RC3/SCK/SCL bit3 ST
RC3 can also be the synchronous serial clock for both SPI and I
2
C
modes.
RC4/SDI/SDA bit4 ST
RC4 can also be the SPI Data In (SPI mode) or data I/O (I
2
C mode).
RC5/SDO bit5 ST Input/output port pin or Synchronous Serial Port data output
RC6/TX/CK
(2)
bit6 ST Input/output port pin or USART Asynchronous Transmit, or USART
Synchronous Clock
RC7/RX/DT
(2)
bit7 ST Input/output port pin or USART Asynchronous Receive, or USART
Synchronous Data
Legend: ST = Schmitt Trigger input
Note 1: The CCP2 multiplexed function is not enabled on the PIC16C72.
2: The TX/CK and RX/DT multiplexed functions are not enabled on the PIC16C72.

1997 Microchip Technology Inc. DS30390E-page 49
PIC16C7X
TABLE 5-6: SUMMARY OF REGISTERS ASSOCIATED WITH PORTC
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
07h PORTC RC7 RC6 RC5 RC4 RC3 RC2 RC1 RC0 xxxx xxxx uuuu uuuu
87h TRISC PORTC Data Direction Register 1111 1111 1111 1111
Legend: x = unknown, u = unchanged.

PIC16C7X
DS30390E-page 50 1997 Microchip Technology Inc.
5.4 PORTD and TRISD Registers
PORTD is an 8-bit port with Schmitt Trigger input buffers. Each pin is individually configurable as an input or
output.
PORTD can be configured as an 8-bit wide microprocessor port (parallel slave port) by setting control bit
PSPMODE (TRISE<4>). In this mode, the input buffers
are TTL.
Applicable Devices
72 73 73A 74 74A 76 77
FIGURE 5-7: PORTD BLOCK DIAGRAM (IN
I/O PORT MODE)
Data
bus
WR
PORT
WR
TRIS
RD PORT
Data Latch
TRIS Latch
RD TRIS
Schmitt
T rigger
input
buffer
I/O pin
(1)
Note 1: I/O pins have protection diodes to VDD and VSS.
QD
CK
QD
CK
EN
QD
EN
TABLE 5-7: PORTD FUNCTIONS
TABLE 5-8: SUMMARY OF REGISTERS ASSOCIATED WITH PORTD
Name Bit# Buffer Type Function
RD0/PSP0 bit0 ST/TTL
(1)
Input/output port pin or parallel slave port bit0
RD1/PSP1 bit1 ST/TTL
(1)
Input/output port pin or parallel slave port bit1
RD2/PSP2 bit2 ST/TTL
(1)
Input/output port pin or parallel slave port bit2
RD3/PSP3 bit3 ST/TTL
(1)
Input/output port pin or parallel slave port bit3
RD4/PSP4 bit4 ST/TTL
(1)
Input/output port pin or parallel slave port bit4
RD5/PSP5 bit5 ST/TTL
(1)
Input/output port pin or parallel slave port bit5
RD6/PSP6 bit6 ST/TTL
(1)
Input/output port pin or parallel slave port bit6
RD7/PSP7 bit7 ST/TTL
(1)
Input/output port pin or parallel slave port bit7
Legend: ST = Schmitt Trigger input TTL = TTL input
Note 1: Input buffers are Schmitt Triggers when in I/O mode and TTL buffer when in Parallel Slave Port Mode.
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
08h PORTD RD7 RD6 RD5 RD4 RD3 RD2 RD1 RD0 xxxx xxxx uuuu uuuu
88h TRISD PORTD Data Direction Register 1111 1111 1111 1111
89h TRISE
IBF OBF IBOV PSPMODE — PORTE Data Direction Bits 0000 -111 0000 -111
Legend: x = unknown, u = unchanged, - = unimplemented read as '0'. Shaded cells are not used by PORTD.

1997 Microchip Technology Inc. DS30390E-page 51
PIC16C7X
5.5 PORTE and TRISE Register
PORTE has three pins RE0/RD/AN5, RE1/WR/AN6
and RE2/CS
/AN7, which are individually configurable
as inputs or outputs. These pins have Schmitt Trigger
input buffers.
I/O PORTE becomes control inputs for the microprocessor port when bit PSPMODE (TRISE<4>) is set. In
this mode, the user must make sure that the
TRISE<2:0> bits are set (pins are configured as digital
inputs) and that register ADCON1 is configured for digital I/O. In this mode the input buffers are TTL.
Figure 5-9 shows the TRISE register, which also controls the parallel slave port operation.
PORTE pins are multiplexed with analog inputs. The
operation of these pins is selected by control bits in the
ADCON1 register. When selected as an analog input,
these pins will read as '0's.
TRISE controls the direction of the RE pins, even when
they are being used as analog inputs. The user must
make sure to keep the pins configured as inputs when
using them as analog inputs.
Applicable Devices
72 73 73A 74 74A 76 77
FIGURE 5-8: PORTE BLOCK DIAGRAM (IN
I/O PORT MODE)
Note: On a Power-on Reset these pins are con-
figured as analog inputs.
Data
bus
WR
PORT
WR
TRIS
RD PORT
Data Latch
TRIS Latch
RD TRIS
Schmitt
T rigger
input
buffer
QD
CK
QD
CK
EN
QD
EN
I/O pin
(1)
Note 1: I/O pins have protection diodes to VDD and VSS.
FIGURE 5-9: TRISE REGISTER (ADDRESS 89h)
R-0 R-0 R/W-0 R/W-0 U-0 R/W-1 R/W-1 R/W-1
IBF OBF IBOV PSPMODE — bit2 bit1 bit0 R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7 : IBF: Input Buffer Full Status bit
1 = A word has been received and is waiting to be read by the CPU
0 = No word has been received
bit 6: OBF: Output Buffer Full Status bit
1 = The output buffer still holds a previously written word
0 = The output buffer has been read
bit 5: IBOV: Input Buffer Overflow Detect bit (in microprocessor mode)
1 = A write occurred when a previously input word has not been read (must be cleared in software)
0 = No overflow occurred
bit 4: PSPMODE: Parallel Slave Port Mode Select bit
1 = Parallel slave port mode
0 = General purpose I/O mode
bit 3: Unimplemented: Read as '0'
PORTE Data Direction Bits
bit 2: Bit2: Direction Control bit for pin RE2/CS/AN7
1 = Input
0 = Output
bit 1: Bit1: Direction Control bit for pin RE1/WR/AN6
1 = Input
0 = Output
bit 0: Bit0: Direction Control bit for pin RE0/RD
/AN5
1 = Input
0 = Output

PIC16C7X
DS30390E-page 52 1997 Microchip Technology Inc.
TABLE 5-9: PORTE FUNCTIONS
TABLE 5-10: SUMMARY OF REGISTERS ASSOCIATED WITH PORTE
Name Bit# Buffer Type Function
RE0/RD
/AN5 bit0 ST/TTL
(1)
Input/output port pin or read control input in parallel slave port mode or
analog input:
RD
1 = Not a read operation
0 = Read operation. Reads PORTD register (if chip selected)
RE1/WR
/AN6 bit1 ST/TTL
(1)
Input/output port pin or write control input in parallel slave port mode or
analog input:
WR
1 = Not a write operation
0 = Write operation. Writes PORTD register (if chip selected)
RE2/CS
/AN7 bit2 ST/TTL
(1)
Input/output port pin or chip select control input in parallel slave port
mode or analog input:
CS
1 = Device is not selected
0 = Device is selected
Legend: ST = Schmitt Trigger input TTL = TTL input
Note 1: Input buffers are Schmitt Triggers when in I/O mode and TTL buffers when in Parallel Slave Port Mode.
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
09h PORTE — — — — — RE2 RE1 RE0 ---- -xxx ---- -uuu
89h TRISE IBF OBF IBOV PSPMODE — PORTE Data Direction Bits 0000 -111 0000 -111
9Fh ADCON1 — — — — — PCFG2 PCFG1 PCFG0 ---- -000 ---- -000
Legend: x = unknown, u = unchanged, - = unimplemented read as '0'. Shaded cells are not used by PORTE.

1997 Microchip Technology Inc. DS30390E-page 53
PIC16C7X
5.6 I/O Programming Considerations
5.6.1 BI-DIRECTIONAL I/O PORTS
Any instruction which writes, operates internally as a
read followed by a write operation. The BCF and BSF
instructions, for example, read the register into the
CPU, ex ecute the bit operation and write the result back
to the register. Caution must be used when these
instructions are applied to a port with both inputs and
outputs defined. For example, a BSF operation on bit5
of PORTB will cause all eight bits of PORTB to be read
into the CPU. Then the BSF operation takes place on
bit5 and PORTB is written to the output latches. If
another bit of PORTB is used as a bi-directional I/O pin
(e.g., bit0) and it is defined as an input at this time, the
input signal present on the pin itself would be read into
the CPU and rewritten to the data latch of this particular
pin, overwriting the previous content. As long as the pin
stays in the input mode, no problem occurs . However, if
bit0 is switched to an output, the content of the data
latch may now be unknown.
Reading the port register, reads the values of the port
pins. Wr iting to the por t register wr ites the value to the
port latch. When using read-modify-write instructions
(ex. BCF, BSF , etc.) on a port, the value of the port pins
is read, the desired operation is done to this value, and
this value is then written to the port latch.
Example 5-4 shows the effect of two sequential readmodify-write instructions on an I/O port.
Applicable Devices
72
73 73A 74 74A 76 77
EXAMPLE 5-4: READ-MODIFY-WRITE
INSTRUCTIONS ON AN I/O
PORT
;Initial PORT settings: PORTB<7:4> Inputs
; PORTB<3:0> Outputs
;PORTB<7:6> have external pull-ups and are
;not connected to other circuitry
;
; PORT latch PORT pins
; ---------- -------- BCF PORTB, 7 ; 01pp pppp 11pp pppp
BCF PORTB, 6 ; 10pp pppp 11pp pppp
BSF STATUS, RP0 ;
BCF TRISB, 7 ; 10pp pppp 11pp pppp
BCF TRISB, 6 ; 10pp pppp 10pp pppp
;
;Note that the user may have expected the
;pin values to be 00pp ppp. The 2nd BCF
;caused RB7 to be latched as the pin value
;(high).
A pin actively outputting a Low or High should not be
driven from external devices at the same time in order
to change the level on this pin (“wired-or”, “wired-and”).
The resulting high output currents may damage the
chip.
5.6.2 SUCCESSIVE OPERATIONS ON I/O PORTS
The actual write to an I/O port happens at the end of an
instruction cycle, whereas for reading, the data must be
valid at the beginning of the instruction cycle (Figure 5-
10). Therefore, care must be exercised if a write followed by a read operation is carried out on the same I/
O port. The sequence of instructions should be such to
allow the pin voltage to stabilize (load dependent)
before the next instruction which causes that file to be
read into the CPU is executed. Otherwise, the previous
state of that pin may be read into the CPU rather than
the new state. When in doubt, it is better to separate
these instructions with a NOP or another instruction not
accessing this I/O port.
FIGURE 5-10: SUCCESSIVE I/O OPERATION
PC PC + 1 PC + 2
PC + 3
Q1 Q2
Q3
Q4
Q1 Q2
Q3
Q4
Q1 Q2
Q3
Q4
Q1 Q2
Q3
Q4
Instruction
fetched
RB7:RB0
MOVWF PORTB
write to
PORTB
NOP
Port pin
sampled here
NOP
MOVF PORTB,W
Instruction
executed
MOVWF PORTB
write to
PORTB
NOP
MOVF PORTB,W
PC
TPD
Note:
This example shows a write to PORTB
followed by a read from PORTB.
Note that:
data setup time = (0.25TCY - TPD)
where T
CY = instruction cycle
TPD = propagation delay
Therefore, at higher clock frequencies,
a write followed by a read ma y be problematic.

PIC16C7X
DS30390E-page 54 1997 Microchip Technology Inc.
5.7 Parallel Slave Port
PORTD operates as an 8-bit wide Parallel Slave Port,
or microprocessor port when control bit PSPMODE
(TRISE<4>) is set. In slave mode it is asynchronously
readable and writable by the external world through RD
control input pin RE0/RD/AN5 and WR control input pin
RE1/WR
/AN6.
It can directly interface to an 8-bit microprocessor data
bus. The external microprocessor can read or write the
PORTD latch as an 8-bit latch. Setting bit PSPMODE
enables port pin RE0/RD
/AN5 to be the RD input, RE1/
WR
/AN6 to be the WR input and RE2/CS /AN7 to be the
CS
(chip select) input. For this functionality, the corresponding data direction bits of the TRISE register
(TRISE<2:0>) must be configured as inputs (set) and
the A/D port configuration bits PCFG2:PCFG0
(ADCON1<2:0>) must be set, which will configure pins
RE2:RE0 as digital I/O.
There are actually two 8-bit latches, one for data-out
(from the PIC16/17) and one for data input. The user
writes 8-bit data to PORTD data latch and reads data
from the port pin latch (note that they have the same
address). In this mode, the TRISD register is ignored,
since the microprocessor is controlling the direction of
data flow.
A write to the PSP occurs when both the CS
and WR
lines are first detected low. When either the CS or WR
lines become high (level triggered), then the Input
Buffer Full status flag bit IBF (TRISE<7>) is set on the
Q4 clock cycle, following the next Q2 cycle, to signal
the write is complete (Figure 5-12). The interrupt flag bit
PSPIF (PIR1<7>) is also set on the same Q4 clock
cycle. IBF can only be cleared by reading the PORTD
input latch. The input Buffer Overflow status flag bit
IBOV (TRISE<5>) is set if a second write to the Par allel
Slave P ort is attempted when the previous b yte has not
been read out of the buffer.
A read from the PSP occurs when both the CS
and RD
lines are first detected low. The Output Buffer Full status flag bit OBF (TRISE<6>) is cleared immediately
(Figure 5-13) indicating that the PORTD latch is waiting
to be read by the external bus. When either the CS
or
RD
pin becomes high (level triggered), the interrupt flag
bit PSPIF is set on the Q4 clock cycle, following the
next Q2 cycle, indicating that the read is complete.
OBF remains low until data is written to PORTD by the
user firmware.
When not in Parallel Slav e P ort mode, the IBF and OBF
bits are held clear. However, if flag bit IBOV was previously set, it must be cleared in firmware.
An interrupt is generated and latched into flag bit
PSPIF when a read or write operation is completed.
PSPIF must be cleared by the user in firmware and the
interrupt can be disabled by clearing the interrupt
enable bit PSPIE (PIE1<7>).
Applicable Devices
72 73 73A 74 74A 76 77
FIGURE 5-11: PORTD AND PORTE BLOCK
DIAGRAM (PARALLEL
SLAVE PORT)
Data bus
WR
PORT
RD
RDx
QD
CK
EN
QD
EN
PORT
pin
One bit of PORTD
Set interrupt flag
PSPIF (PIR1<7>)
Read
Chip Select
Write
RD
CS
WR
Note: I/O pin has protection diodes to VDD and VSS.
TTL
TTL
TTL
TTL

1997 Microchip Technology Inc. DS30390E-page 55
PIC16C7X
FIGURE 5-12: PARALLEL SLAVE PORT WRITE WAVEFORMS
FIGURE 5-13: PARALLEL SLAVE PORT READ WAVEFORMS
TABLE 5-11: REGISTERS ASSOCIATED WITH PARALLEL SLAVE PORT
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
08h PORTD Port data latch when written: Port pins when read xxxx xxxx uuuu uuuu
09h PORTE — — — — — RE2 RE1 RE0 ---- -xxx ---- -uuu
89h TRISE IBF OBF IBOV PSPMODE — PORTE Data Direction Bits 0000 -111 0000 -111
0Ch PIR1 PSPIF ADIF RCIF TXIF SSPIF CCP1IF TMR2IF TMR1IF 0000 0000 0000 0000
8Ch PIE1 PSPIE ADIE RCIE TXIE SSPIE CCP1IE TMR2IE TMR1IE 0000 0000 0000 0000
9Fh ADCON1 — — — — — PCFG2 PCFG1 PCFG0 ---- -000 ---- -000
Legend: x = unknown, u = unchanged, - = unimplemented read as '0'. Shaded cells are not used by the Parallel Slave Port.
Q1 Q2 Q3 Q4CSQ1 Q2 Q3 Q4 Q1 Q2 Q3 Q4
WR
RD
IBF
OBF
PSPIF
PORTD<7:0>
Q1 Q2 Q3 Q4CSQ1 Q2 Q3 Q4 Q1 Q2 Q3 Q4
WR
IBF
PSPIF
RD
OBF
PORTD<7:0>

PIC16C7X
DS30390E-page 56 1997 Microchip Technology Inc.
NOTES:

1997 Microchip Technology Inc. DS30390E-page 57
PIC16C7X
6.0 OVERVIEW OF TIMER
MODULES
The PIC16C72, PIC16C73/73A, PIC16C74/74A,
PIC16C76/77 each have three timer modules.
Each module can generate an interrupt to indicate that
an event has occurred (i.e. timer overflow). Each of
these modules is explained in full detail in the following
sections. The timer modules are:
• Timer0 Module (Section 7.0)
• Timer1 Module (Section 8.0)
• Timer2 Module (Section 9.0)
6.1 Timer0 Overview
The Timer0 module is a simple 8-bit overflow counter.
The clock source can be either the internal system
clock (Fosc/4) or an external clock. When the clock
source is an external clock, the Timer0 module can be
selected to increment on either the rising or falling
edge.
The Timer0 module also has a programmable prescaler option. This prescaler can be assigned to either
the Timer0 module or the Watchdog Timer. Bit PSA
(OPTION<3>) assigns the prescaler, and bits PS2:PS0
(OPTION<2:0>) determine the prescaler value. Timer0
can increment at the following rates: 1:1 (when prescaler assigned to Watchdog timer), 1:2, 1:4, 1:8, 1:16,
1:32, 1:64, 1:128, and 1:256 (Timer0 only).
Synchronization of the external clock occurs after the
prescaler. When the prescaler is used, the external
clock frequency may be higher then the device’s frequency. The maximum frequency is 50 MHz, given the
high and low time requirements of the clock.
6.2 Timer1 Overview
Timer1 is a 16-bit timer/counter. The clock source can
be either the internal system clock (Fosc/4), an external
clock, or an external crystal. Timer1 can operate as
either a timer or a counter. When operating as a
counter (external clock source), the counter can either
operate synchronized to the device or asynchronously
to the device. Asynchronous operation allo ws Timer1 to
operate during sleep, which is useful for applications
that require a real-time clock as well as the power savings of SLEEP mode.
Timer1 also has a prescaler option which allows
Timer1 to increment at the following rates: 1:1, 1:2, 1:4,
and 1:8. Timer1 can be used in conjunction with the
Capture/Compare/PWM module. When used with a
Applicable Devices
72
73 73A 74 74A 76 77
Applicable Devices
72
73 73A 74 74A 76 77
Applicable Devices
72
73 73A 74 74A 76 77
CCP module, Timer1 is the time-base for 16-bit Capture or the 16-bit Compare and must be synchronized
to the device.
6.3 Timer2 Overview
Timer2 is an 8-bit timer with a programmable prescaler
and postscaler, as well as an 8-bit period register
(PR2). Timer2 can be used with the CCP1 module (in
PWM mode) as well as the Baud Rate Generator for
the Synchronous Serial Port (SSP). The prescaler
option allows Timer2 to increment at the following
rates: 1:1, 1:4, 1:16.
The postscaler allows the TMR2 register to match the
period register (PR2) a programmable number of times
before generating an interrupt. The postscaler can be
programmed from 1:1 to 1:16 (inclusive).
6.4 CCP Overview
The CCP module(s) can operate in one of these three
modes: 16-bit capture, 16-bit compare, or up to 10-bit
Pulse Width Modulation (PWM).
Capture mode captures the 16-bit value of TMR1 into
the CCPRxH:CCPRxL register pair. The capture event
can be programmed for either the falling edge, rising
edge, fourth rising edge, or the sixteenth rising edge of
the CCPx pin.
Compare mode compares the TMR1H:TMR1L register
pair to the CCPRxH:CCPRxL register pair. When a
match occurs an interrupt can be generated, and the
output pin CCPx can be forced to given state (High or
Low), TMR1 can be reset (CCP1), or TMR1 reset and
start A/D conversion (CCP2). This depends on the control bits CCPxM3:CCPxM0.
PWM mode compares the TMR2 register to a 10-bit
duty cycle register (CCPRxH:CCPRxL<5:4>) as well as
to an 8-bit period register (PR2). When the TMR2 register = Duty Cycle register, the CCPx pin will be forced
low. When TMR2 = PR2, TMR2 is cleared to 00h, an
interrupt can be generated, and the CCPx pin (if an output) will be forced high.
Applicable Devices
72
73 73A 74 74A 76 77
Applicable Devices
72
73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 58 1997 Microchip Technology Inc.
NOTES:

1997 Microchip Technology Inc. DS30390E-page 59
PIC16C7X
7.0 TIMER0 MODULE
The Timer0 module timer/counter has the f ollowing f eatures:
• 8-bit timer/counter
• Readable and writable
• 8-bit software programmable prescaler
• Internal or external clock select
• Interrupt on overflow from FFh to 00h
• Edge select for external clock
Figure 7-1 is a simplified block diagram of the Timer0
module.
Timer mode is selected by clearing bit T0CS
(OPTION<5>). In timer mode, the Timer0 module will
increment every instruction cycle (without prescaler). If
the TMR0 register is written, the increment is inhibited
for the following two instruction cycles (Figure 7-2 and
Figure 7-3). The user can work around this by writing
an adjusted value to the TMR0 register.
Counter mode is selected by setting bit T0CS
(OPTION<5>). In counter mode, Timer0 will increment
either on every rising or falling edge of pin RA4/T0CKI.
The incrementing edge is determined by the Timer0
Applicable Devices
72
73 73A 74 74A 76 77
Source Edge Select bit T0SE (OPTION<4>). Clear ing
bit T0SE selects the rising edge. Restr ictions on the
external clock input are discussed in detail in
Section 7.2.
The prescaler is mutually exclusively shared between
the Timer0 module and the Watchdog Timer. The prescaler assignment is controlled in software by control bit
PSA (OPTION<3>). Clearing bit PSA will assign the
prescaler to the Timer0 module. The prescaler is not
readable or writable. When the prescaler is assigned to
the Timer0 module, prescale values of 1:2, 1:4, ...,
1:256 are selectable. Section 7.3 details the operation
of the prescaler.
7.1 Timer0 Interrupt
The TMR0 interrupt is generated when the TMR0 register overflows from FFh to 00h. This overflow sets bit
T0IF (INTCON<2>). The interr upt can be masked by
clearing bit T0IE (INTCON<5>). Bit T0IF must be
cleared in software by the Timer0 module interrupt service routine before re-enabling this interrupt. The
TMR0 interrupt cannot awaken the processor from
SLEEP since the timer is shut off during SLEEP. See
Figure 7-4 for Timer0 interrupt timing.
Applicable Devices
72
73 73A 74 74A 76 77
FIGURE 7-1: TIMER0 BLOCK DIAGRAM
FIGURE 7-2: TIMER0 TIMING: INTERNAL CLOCK/NO PRESCALE
Note 1: T0CS, T0SE, PSA, PS2:PS0 (OPTION<5:0>).
2: The prescaler is shared with Watchdog Timer (refer to Figure 7-6 for detailed block diagram).
RA4/T0CKI
T0SE
0
1
1
0
pin
T0CS
FOSC/4
Programmable
Prescaler
Sync with
Internal
clocks
TMR0
PSout
(2 cycle delay)
PSout
Data bus
8
PSA
PS2, PS1, PS0
Set interrupt
flag bit T0IF
on overflow
3
PC-1
Q1 Q2 Q3 Q4
Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4
PC
(Program
Counter)
Instruction
Fetch
TMR0
PC PC+1 PC+2 PC+3 PC+4 PC+5 PC+6
T0
T0+1 T0+2 NT0 NT0 NT0 NT0+1 NT0+2
T0
MOVWF TMR0
MOVF TMR0,W MOVF TMR0,W MOVF TMR0,W MOVF TMR0,W MOVF TMR0,W
Write TMR0
executed
Read TMR0
reads NT0
Read TMR0
reads NT0
Read TMR0
reads NT0
Read TMR0
reads NT0 + 1
Read TMR0
reads NT0 + 2
Instruction
Executed

PIC16C7X
DS30390E-page 60 1997 Microchip Technology Inc.
FIGURE 7-3: TIMER0 TIMING: INTERNAL CLOCK/PRESCALE 1:2
FIGURE 7-4: TIMER0 INTERRUPT TIMING
PC+
6
PC-1
Q1 Q2 Q3 Q4
Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4
PC
(Program
Counter)
Instruction
Fetch
TMR0
PC PC+1 PC+2 PC+3 PC+4 PC+5 PC+6
T0 NT0+1
MOVWF TMR0
MOVF TMR0,W MOVF TMR0,W MOVF TMR0,W MOVF TMR0,W MOVF TMR0,W
Write TMR0
executed
Read TMR0
reads NT0
Read TMR0
reads NT0
Read TMR0
reads NT0
Read TMR0
reads NT0
Read TMR0
reads NT0 + 1
T0+1
NT0
Instruction
Execute
Q2Q1 Q3 Q4Q2Q1 Q3 Q4 Q2Q1 Q3 Q4 Q2Q1 Q3 Q4 Q2Q1 Q3 Q4
1
1
OSC1
CLKOUT(3)
Timer0
T0IF bit
(INTCON<2>)
FEh
GIE bit
(INTCON<7>)
INSTR
UCTION
PC
Instruction
fetched
PC
PC +1 PC +1 0004h 0005h
Instruction
executed
Inst (PC)
Inst (PC-1)
Inst (PC+1)
Inst (PC)
Inst (0004h) Inst (0005h)
Inst (0004h)Dummy cycle Dummy cycle
FFh 00h 01h 02h
Note 1: Interrupt flag bit T0IF is sampled here (every Q1).
2: Interrupt latency = 4Tcy where Tcy = instruction cycle time.
3: CLKOUT is available only in RC oscillator mode.
FLO
W

1997 Microchip Technology Inc. DS30390E-page 61
PIC16C7X
7.2 Using Timer0 with an External Clock
When an external clock input is used for Timer0, it must
meet certain requirements. The requirements ensure
the external clock can be synchronized with the internal
phase clock (T
OSC). Also, there is a delay in the actual
incrementing of Timer0 after synchronization.
7.2.1 EXTERNAL CLOCK SYNCHRONIZATION
When no prescaler is used, the external clock input is
the same as the prescaler output. The synchronization
of T0CKI with the internal phase clocks is accomplished by sampling the prescaler output on the Q2 and
Q4 cycles of the internal phase clocks (Figure 7-5).
Therefore, it is necessary for T0CKI to be high for at
least 2Tosc (and a small RC delay of 20 ns) and low for
at least 2Tosc (and a small RC delay of 20 ns). Refer to
the electrical specification of the desired device.
Applicable Devices
72
73 73A 74 74A 76 77
When a prescaler is used, the external clock input is
divided by the asynchronous ripple-counter type prescaler so that the prescaler output is symmetrical. For
the external clock to meet the sampling requirement,
the ripple-counter must be taken into account. Therefore, it is necessary for T0CKI to have a period of at
least 4Tosc (and a small RC delay of 40 ns) divided by
the prescaler value. The only requirement on T0CKI
high and low time is that they do not violate the minimum pulse width requirement of 10 ns. Ref er to parameters 40, 41 and 42 in the electrical specification of the
desired device.
7.2.2 TMR0 INCREMENT DELAY
Since the prescaler output is synchronized with the
internal clocks, there is a small delay from the time the
external clock edge occurs to the time the Timer0 module is actually incremented. Figure 7-5 shows the dela y
from the external clock edge to the timer incrementing.
FIGURE 7-5: TIMER0 TIMING WITH EXTERNAL CLOCK
Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4
External Clock Input or
Prescaler output
(2)
External Clock/Prescaler
Output after sampling
Increment Timer0 (Q4)
Timer0
T0 T0 + 1 T0 + 2
Small pulse
misses sampling
Note 1: Delay from clock input change to Timer0 increment is 3Tosc to 7Tosc. (Duration of Q = Tosc).
Therefore, the error in measuring the interval between two edges on Timer0 input = ±4Tosc max.
2: External clock if no prescaler selected, Prescaler output otherwise.
3: The arrows indicate the points in time where sampling occurs.
(3)
(1)

PIC16C7X
DS30390E-page 62 1997 Microchip Technology Inc.
7.3 Prescaler
An 8-bit counter is available as a prescaler for the
Timer0 module, or as a postscaler for the Watchdog
Timer, respectively (Figure 7-6). For simplicity, this
counter is being referred to as “prescaler” throughout
this data sheet. Note that there is only one prescaler
available which is mutually exclusively shared between
the Timer0 module and the Watchdog Timer. Thus, a
prescaler assignment for the Timer0 module means
that there is no prescaler for the Watchdog Timer, and
vice-versa.
Applicable Devices
72
73 73A 74 74A 76 77
The PSA and PS2:PS0 bits (OPTION<3:0>) determine
the prescaler assignment and prescale ratio.
When assigned to the Timer0 module, all instructions
writing to the TMR0 register (e.g. CLRF 1, MOVWF 1,
BSF 1,x....etc.) will clear the prescaler. When
assigned to WDT, a CLRWDT instruction will clear the
prescaler along with the Watchdog Timer. The prescaler is not readable or writable.
Note: Writing to TMR0 when the prescaler is
assigned to Timer0 will clear the prescaler
count, but will not change the prescaler
assignment.
FIGURE 7-6: BLOCK DIAGRAM OF THE TIMER0/WDT PRESCALER
RA4/T0CKI
T0SE
pin
M
U
X
CLKOUT (=Fosc/4)
SYNC
2
Cycles
TMR0 reg
8-bit Prescaler
8 - to - 1MUX
M
U
X
M U X
Watchdog
Timer
PSA
0
1
0
1
WDT
Time-out
PS2:PS0
8
Note: T0CS, T0SE, PSA, PS2:PS0 are (OPTION<5:0>).
PSA
WDT Enable bit
M
U
X
0
1
0
1
Data Bus
Set flag bit T0IF
on Overflow
8
PSA
T0CS

1997 Microchip Technology Inc. DS30390E-page 63
PIC16C7X
7.3.1 SWITCHING PRESCALER ASSIGNMENT
The prescaler assignment is fully under software con-
trol, i.e., it can be changed “on the fly” during program
execution.
EXAMPLE 7-1: CHANGING PRESCALER (TIMER0→WDT)
To change prescaler from the WDT to the Timer0 module use the sequence shown in Example 7-2.
EXAMPLE 7-2: CHANGING PRESCALER (WDT→TIMER0)
CLRWDT ;Clear WDT and prescaler
BSF STATUS, RP0 ;Bank 1
MOVLW b'xxxx0xxx' ;Select TMR0, new prescale value and
MOVWF OPTION_REG ;clock source
BCF STATUS, RP0 ;Bank 0
TABLE 7-1: REGISTERS ASSOCIATED WITH TIMER0
Note: To avoid an unintended device RESET, the
following instruction sequence (shown in
Example 7-1) must be executed when
changing the prescaler assignment from
Timer0 to the WDT. This sequence must
be followed even if the WDT is disabled.
1) BSF STATUS, RP0 ;Bank 1
Lines 2 and 3 do NOT have to
be included if the final desired
prescale value is other than 1:1.
If 1:1 is final desired value, then
a temporary prescale value is
set in lines 2 and 3 and the final
prescale value will be set in lines
10 and 11.
2) MOVLW b'xx0x0xxx' ;Select clock source and prescale value of
3) MOVWF OPTION_REG ;other than 1:1
4) BCF STATUS, RP0 ;Bank 0
5) CLRF TMR0 ;Clear TMR0 and prescaler
6) BSF STATUS, RP1 ;Bank 1
7) MOVLW b'xxxx1xxx' ;Select WDT, do not change prescale value
8) MOVWF OPTION_REG ;
9) CLRWDT ;Clears WDT and prescaler
10) MOVLW b'xxxx1xxx' ;Select new prescale value and WDT
11) MOVWF OPTION_REG ;
12) BCF STATUS, RP0 ;Bank 0
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on all
other resets
01h,101h TMR0 Timer0 module’s register xxxx xxxx uuuu uuuu
0Bh,8Bh,
10Bh,18Bh
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
81h,181h OPTION RBPU INTEDG T0CS T0SE PSA PS2 PS1 PS0 1111 1111 1111 1111
85h TRISA — — PORTA Data Direction Register --11 1111 --11 1111
Legend: x = unknown, u = unchanged, - = unimplemented locations read as '0'. Shaded cells are not used by Timer0.

PIC16C7X
DS30390E-page 64 1997 Microchip Technology Inc.
NOTES:

1997 Microchip Technology Inc. DS30390E-page 65
PIC16C7X
8.0 TIMER1 MODULE
The Timer1 module is a 16-bit timer/counter consisting
of two 8-bit registers (TMR1H and TMR1L) which are
readable and writable. The TMR1 Register pair
(TMR1H:TMR1L) increments from 0000h to FFFFh
and rolls over to 0000h. The TMR1 Interrupt, if enabled,
is generated on overflow which is latched in interrupt
flag bit TMR1IF (PIR1<0>). This interrupt can be
enabled/disabled by setting/clearing TMR1 interrupt
enable bit TMR1IE (PIE1<0>).
Timer1 can operate in one of two modes:
• As a timer
• As a counter
The operating mode is determined by the clock select
bit, TMR1CS (T1CON<1>).
Applicable Devices
72
73 73A 74 74A 76 77
In timer mode, Timer1 increments every instruction
cycle. In counter mode, it increments on every rising
edge of the external clock input.
Timer1 can be enabled/disabled by setting/clearing
control bit TMR1ON (T1CON<0>).
Timer1 also has an internal “reset input”. This reset can
be generated by either of the two CCP modules
(Section 10.0). Figure 8-1 shows the Timer1 control
register.
For the PIC16C72/73A/74A/76/77, when the Timer1
oscillator is enabled (T1OSCEN is set), the RC1/
T1OSI/CCP2 and RC0/T1OSO/T1CKI pins become
inputs. That is, the TRISC<1:0> value is ignored.
For the PIC16C73/74, when the Timer1 oscillator is
enabled (T1OSCEN is set), RC1/T1OSI/CCP2 pin
becomes an input, however the RC0/T1OSO/T1CKI
pin will have to be configured as an input by setting the
TRISC<0> bit.
FIGURE 8-1: T1CON: TIMER1 CONTROL REGISTER (ADDRESS 10h)
U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— — T1CKPS1 T1CKPS0 T1OSCEN T1SYNC TMR1CS TMR1ON
R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7-6: Unimplemented: Read as '0'
bit 5-4: T1CKPS1:T1CKPS0: Timer1 Input Clock Prescale Select bits
11 = 1:8 Prescale value
10 = 1:4 Prescale value
01 = 1:2 Prescale value
00 = 1:1 Prescale value
bit 3: T1OSCEN: Timer1 Oscillator Enable Control bit
1 = Oscillator is enabled
0 = Oscillator is shut off
Note: The oscillator inverter and feedback resistor are turned off to eliminate power drain
bit 2: T1SYNC
: Timer1 External Clock Input Synchronization Control bit
TMR1CS = 1
1 = Do not synchronize external clock input
0 = Synchronize external clock input
TMR1CS = 0
This bit is ignored. Timer1 uses the internal clock when TMR1CS = 0.
bit 1: TMR1CS: Timer1 Clock Source Select bit
1 = External clock from pin RC0/T1OSO/T1CKI (on the rising edge)
0 = Internal clock (F
OSC/4)
bit 0: TMR1ON: Timer1 On bit
1 = Enables Timer1
0 = Stops Timer1

PIC16C7X
DS30390E-page 66 1997 Microchip Technology Inc.
8.1 Timer1 Operation in Timer Mode
Timer mode is selected by clearing the TMR1CS
(T1CON<1>) bit. In this mode, the input clock to the
timer is F
OSC/4. The synchronize control bit T1SYNC
(T1CON<2>) has no effect since the internal clock is
always in sync.
8.2 Timer1 Operation in Synchronized
Counter Mode
Counter mode is selected by setting bit TMR1CS. In
this mode the timer increments on every rising edge of
clock input on pin RC1/T1OSI/CCP2 when bit
T1OSCEN is set or pin RC0/T1OSO/T1CKI when bit
T1OSCEN is cleared.
If T1SYNC
is cleared, then the external clock input is
synchronized with internal phase clocks. The synchronization is done after the prescaler stage. The prescaler stage is an asynchronous ripple-counter.
In this configuration, during SLEEP mode, Timer1 will
not increment even if the external clock is present,
since the synchronization circuit is shut off. The prescaler however will continue to increment.
Applicable Devices
72
73 73A 74 74A 76 77
Applicable Devices
72 73 73A 74 74A 76 77
8.2.1 EXTERNAL CLOCK INPUT TIMING FOR
SYNCHRONIZED COUNTER MODE
When an external clock input is used for Timer1 in synchronized counter mode, it must meet certain requirements. The external clock requirement is due to
internal phase clock (Tosc) synchronization. Also, there
is a delay in the actual incrementing of TMR1 after synchronization.
When the prescaler is 1:1, the external clock input is
the same as the prescaler output. The synchronization
of T1CKI with the internal phase clocks is accomplished by sampling the prescaler output on the Q2 and
Q4 cycles of the internal phase clocks. Therefore, it is
necessary for T1CKI to be high for at least 2Tosc (and
a small RC delay of 20 ns) and low for at least 2Tosc
(and a small RC delay of 20 ns). Refer to the appropriate electrical specifications, parameters 45, 46, and 47.
When a prescaler other than 1:1 is used, the external
clock input is divided by the asynchronous ripplecounter type prescaler so that the prescaler output is
symmetrical. In order for the external clock to meet the
sampling requirement, the ripple-counter must be
taken into account. Therefore, it is necessary for T1CKI
to have a period of at least 4Tosc (and a small RC delay
of 40 ns) divided by the prescaler value. The only
requirement on T1CKI high and low time is that the y do
not violate the minimum pulse width requirements of
10 ns). Refer to the appropriate electrical specifications, parameters 40, 42, 45, 46, and 47.
FIGURE 8-2: TIMER1 BLOCK DIAGRAM
TMR1H
TMR1L
T1OSC
T1SYNC
TMR1CS
T1CKPS1:T1CKPS0
SLEEP input
T1OSCEN
Enable
Oscillator
(1)
FOSC/4
Internal
Clock
TMR1ON
on/off
Prescaler
1, 2, 4, 8
Synchronize
det
1
0
0
1
Synchronized
clock input
2
RC0/T1OSO/T1CKI
RC1/T1OSI/CCP2
(2)
Note 1: When the T1OSCEN bit is cleared, the inverter and feedback resistor are turned off. This eliminates power drain.
2: The CCP2 module is not implemented in the PIC16C72.
3: For the PIC16C73 and PIC16C74, the Schmitt Trigger is not implemented in external clock mode.
Set flag bit
TMR1IF on
Overflow
TMR1
(3)
1997 Microchip Technology Inc. DS30390E-page 67
PIC16C7X
8.3 Timer1 Operation in Asynchronous
Counter Mode
If control bit T1SYNC (T1CON<2>) is set, the external
clock input is not synchronized. The timer continues to
increment asynchronous to the internal phase clocks.
The timer will continue to run during SLEEP and can
generate an interrupt on overflow which will wake-up
the processor. However, special precautions in software are needed to read/write the timer (Section 8.3.2).
In asynchronous counter mode, Timer1 can not be
used as a time-base for capture or compare operations.
8.3.1 EXTERNAL CLOCK INPUT TIMING WITH
UNSYNCHRONIZED CLOCK
If control bit T1SYNC
is set, the timer will increment
completely asynchronously. The input clock must meet
certain minimum high time and low time requirements.
Refer to the appropriate Electrical Specifications Section, timing parameters 45, 46, and 47.
8.3.2 READING AND WRITING TIMER1 IN
ASYNCHRONOUS COUNTER MODE
Reading TMR1H or TMR1L while the timer is running,
from an external asynchronous clock, will guarantee a
valid read (taken care of in hardware). However, the
user should keep in mind that reading the 16-bit timer
in two 8-bit values itself poses certain problems since
the timer may overflow between the reads.
For writes, it is recommended that the user simply stop
the timer and write the desired values. A write contention may occur by writing to the timer registers while the
register is incrementing. This may produce an unpredictable value in the timer register.
Reading the 16-bit value requires some care.
Example 8-1 is an example routine to read the 16-bit
timer value. This is useful if the timer cannot be
stopped.
Applicable Devices
72
73 73A 74 74A 76 77
EXAMPLE 8-1: READING A 16-BIT FREE-
RUNNING TIMER
; All interrupts are disabled
MOVF TMR1H, W ;Read high byte
MOVWF TMPH ;
MOVF TMR1L, W ;Read low byte
MOVWF TMPL ;
MOVF TMR1H, W ;Read high byte
SUBWF TMPH, W ;Sub 1st read
; with 2nd read
BTFSC STATUS,Z ;Is result = 0
GOTO CONTINUE ;Good 16-bit read
;
; TMR1L may have rolled over between the read
; of the high and low bytes. Reading the high
; and low bytes now will read a good value.
;
MOVF TMR1H, W ;Read high byte
MOVWF TMPH ;
MOVF TMR1L, W ;Read low byte
MOVWF TMPL ;
; Re-enable the Interrupt (if required)
CONTINUE ;Continue with your code
8.4 Timer1 Oscillator
A crystal oscillator circuit is built in between pins T1OSI
(input) and T1OSO (amplifier output). It is enabled by
setting control bit T1OSCEN (T1CON<3>). The oscillator is a low power oscillator rated up to 200 kHz. It will
continue to run during SLEEP. It is primarily intended
for a 32 kHz crystal. Table 8-1 shows the capacitor
selection for the Timer1 oscillator.
The Timer1 oscillator is identical to the LP oscillator.
The user must provide a software time delay to ensure
proper oscillator start-up.
TABLE 8-1: CAPACITOR SELECTION
FOR THE TIMER1
OSCILLATOR
Applicable Devices
72
73 73A 74 74A 76 77
Osc Type Freq C1 C2
LP 32 kHz 33 pF 33 pF
100 kHz 15 pF 15 pF
200 kHz 15 pF 15 pF
These values are for design guidance only.
Crystals Tested:
32.768 kHz Epson C-001R32.768K-A ± 20 PPM
100 kHz Epson C-2 100.00 KC-P ± 20 PPM
200 kHz STD XTL 200.000 kHz ± 20 PPM
Note 1: Higher capacitance increases the stability
of oscillator but also increases the start-up
time.
2: Since each resonator/crystal has its own
characteristics, the user should consult the
resonator/crystal manufacturer for appropriate values of external components.

PIC16C7X
DS30390E-page 68 1997 Microchip Technology Inc.
8.5 Resetting Timer1 using a CCP Trigger
Output
The CCP2 module is not implemented on the
PIC16C72 device.
If the CCP1 or CCP2 module is configured in compare
mode to generate a “special event trigger"
(CCP1M3:CCP1M0 = 1011), this signal will reset
Timer1.
Timer1 must be configured for either timer or synchronized counter mode to take advantage of this feature.
If Timer1 is running in asynchronous counter mode, this
reset operation may not work.
In the event that a write to Timer1 coincides with a special event trigger from CCP1 or CCP2, the write will
take precedence.
In this mode of operation, the CCPRxH:CCPRxL registers pair effectively becomes the period register for
Timer1.
Applicable Devices
72
73 73A 74 74A 76 77
Note: The special event triggers from the CCP1
and CCP2 modules will not set interrupt
flag bit TMR1IF (PIR1<0>).
8.6 Resetting of Timer1 Register Pair
(TMR1H, TMR1L)
TMR1H and TMR1L registers are not reset to 00h on a
POR or any other reset except by the CCP1 and CCP2
special event triggers.
T1CON register is reset to 00h on a Power-on Reset or
a Brown-out Reset, which shuts off the timer and
leaves a 1:1 prescale. In all other resets, the register is
unaffected.
8.7 Timer1 Prescaler
The prescaler counter is cleared on writes to the
TMR1H or TMR1L registers.
Applicable Devices
72
73 73A 74 74A 76 77
Applicable Devices
72
73 73A 74 74A 76 77
TABLE 8-2: REGISTERS ASSOCIATED WITH TIMER1 AS A TIMER/COUNTER
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on
all other
resets
0Bh,8Bh,
10Bh,18Bh
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF
0000 000x 0000 000u
0Ch PIR1 PSPIF
(1,2)
ADIF RCIF
(2)
TXIF
(2)
SSPIF CCP1IF TMR2IF TMR1IF
0000 0000 0000 0000
8Ch PIE1 PSPIE
(1,2)
ADIE RCIE
(2)
TXIE
(2)
SSPIE CCP1IE TMR2IE TMR1IE
0000 0000 0000 0000
0Eh TMR1L Holding register for the Least Significant Byte of the 16-bit TMR1 register
xxxx xxxx uuuu uuuu
0Fh TMR1H Holding register for the Most Significant Byte of the 16-bit TMR1 register
xxxx xxxx uuuu uuuu
10h T1CON — — T1CKPS1 T1CKPS0 T1OSCEN T1SYNC TMR1CS TMR1ON
--00 0000 --uu uuuu
Legend: x = unknown, u = unchanged, - = unimplemented read as '0'. Shaded cells are not used by the Timer1 module.
Note 1: Bits PSPIE and PSPIF are reserved on the PIC16C73/73A/76, always maintain these bits clear.
2: The PIC16C72 does not have a Parallel Slave Port or a USART, these bits are unimplemented, read as '0'.
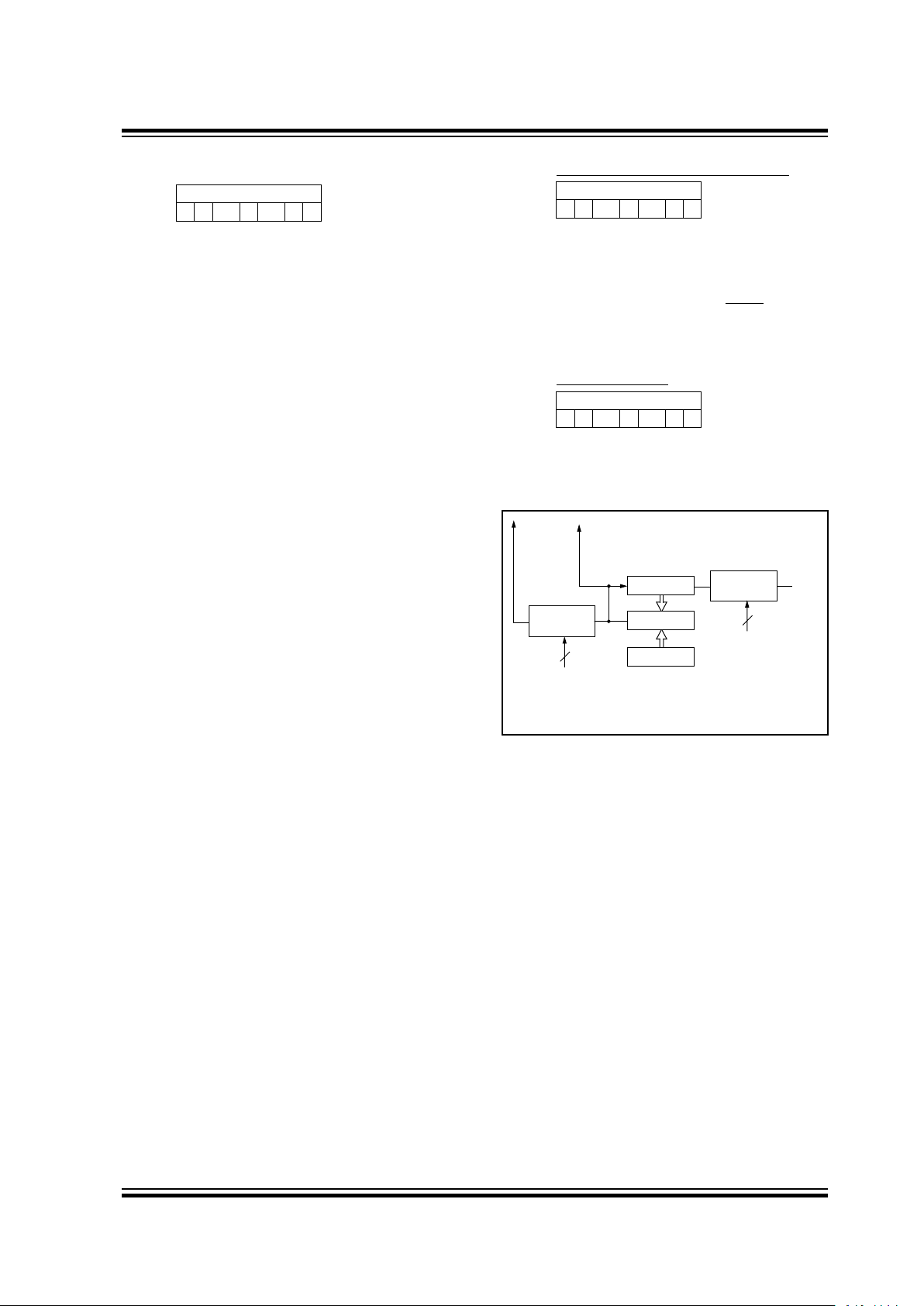
1997 Microchip Technology Inc. DS30390E-page 69
PIC16C7X
9.0 TIMER2 MODULE
Timer2 is an 8-bit timer with a prescaler and a
postscaler. It can be used as the PWM time-base for
PWM mode of the CCP module(s). The TMR2 register
is readable and writable, and is cleared on any device
reset.
The input clock (F
OSC/4) has a prescale option of 1:1,
1:4 or 1:16, selected by control bits
T2CKPS1:T2CKPS0 (T2CON<1:0>).
The Timer2 module has an 8-bit period register PR2.
Timer2 increments from 00h until it matches PR2 and
then resets to 00h on the next increment cycle. PR2 is
a readable and writable register. The PR2 register is initialized to FFh upon reset.
The match output of TMR2 goes through a 4-bit
postscaler (which gives a 1:1 to 1:16 scaling inclusive)
to generate a TMR2 interrupt (latched in flag bit
TMR2IF, (PIR1<1>)).
Timer2 can be shut off by clearing control bit TMR2ON
(T2CON<2>) to minimize power consumption.
Figure 9-2 shows the Timer2 control register.
Applicable Devices
72
73 73A 74 74A 76 77
9.1 Timer2 Prescaler and Postscaler
The prescaler and postscaler counters are cleared
when any of the following occurs:
• a write to the TMR2 register
• a write to the T2CON register
• any device reset (Power-on Reset, MCLR
reset,
Watchdog Timer reset, or Brown-out Reset)
TMR2 is not cleared when T2CON is written.
9.2 Output of TMR2
The output of TMR2 (bef ore the postscaler) is fed to the
Synchronous Serial Port module which optionally uses
it to generate shift clock.
FIGURE 9-1: TIMER2 BLOCK DIAGRAM
Applicable Devices
72
73 73A 74 74A 76 77
Applicable Devices
72
73 73A 74 74A 76 77
Comparator
TMR2
Sets flag
TMR2 reg
output
(1)
Reset
Postscaler
Prescaler
PR2 reg
2
F
OSC/4
1:1 1:16
1:1, 1:4, 1:16
EQ
4
bit TMR2IF
Note 1: TMR2 register output can be software selected
by the SSP Module as a baud clock.
to

PIC16C7X
DS30390E-page 70 1997 Microchip Technology Inc.
FIGURE 9-2: T2CON: TIMER2 CONTROL REGISTER (ADDRESS 12h)
TABLE 9-1: REGISTERS ASSOCIATED WITH TIMER2 AS A TIMER/COUNTER
U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— TOUTPS3 TOUTPS2 TOUTPS1 TOUTPS0 TMR2ON T2CKPS1 T2CKPS0 R = Readable bit
W = Writable bit
U = Unimplemented bit,
read as ‘0’
- n = Value at POR reset
bit7 bit0
bit 7: Unimplemented: Read as '0'
bit 6-3: TOUTPS3:TOUTPS0: Timer2 Output Postscale Select bits
0000 = 1:1 Postscale
0001 = 1:2 Postscale
•
•
•
1111 = 1:16 Postscale
bit 2: TMR2ON: Timer2 On bit
1 = Timer2 is on
0 = Timer2 is off
bit 1-0: T2CKPS1:T2CKPS0: Timer2 Clock Prescale Select bits
00 = Prescaler is 1
01 = Prescaler is 4
1x = Prescaler is 16
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on
all other
resets
0Bh,8Bh,
10Bh,18Bh
INTCON GIE PEIE
T0IE INTE RBIE T0IF INTF RBIF
0000 000x 0000 000u
0Ch PIR1 PSPIF
(1,2)
ADIF RCIF
(2)
TXIF
(2)
SSPIF CCP1IF TMR2IF TMR1IF
0000 0000 0000 0000
8Ch PIE1
PSPIE
(1,2)
ADIE RCIE
(2)
TXIE
(2)
SSPIE CCP1IE TMR2IE TMR1IE
0000 0000 0000 0000
11h TMR2 Timer2 module’s register
0000 0000 0000 0000
12h T2CON
— TOUTPS3 TOUTPS2 TOUTPS1 TOUTPS0 TMR2ON T2CKPS1 T2CKPS0
-000 0000 -000 0000
92h PR2 Timer2 Period Register
1111 1111 1111 1111
Legend: x = unknown, u = unchanged, - = unimplemented read as '0'. Shaded cells are not used by the Timer2 module.
Note 1: Bits PSPIE and PSPIF are reserved on the PIC16C73/73A/76, always maintain these bits clear.
2: The PIC16C72 does not have a Parallel Slave Port or a USART, these bits are unimplemented, read as '0'.

1997 Microchip Technology Inc. DS30390E-page 71
PIC16C7X
10.0 CAPTURE/COMPARE/PWM
MODULE(s)
Each CCP (Capture/Compare/PWM) module contains
a 16-bit register which can operate as a 16-bit capture
register, as a 16-bit compare register or as a PWM
master/slave Duty Cycle register. Both the CCP1 and
CCP2 modules are identical in operation, with the
exception of the operation of the special event trigger.
Table 10-1 and Table 10-2 show the resources and
interactions of the CCP module(s). In the following sections, the operation of a CCP module is described with
respect to CCP1. CCP2 operates the same as CCP1,
except where noted.
Applicable Devices
72 73 73A 74 74A 76 77 CCP1
72 73 73A 74 74A 76 77 CCP2
CCP1 module:
Capture/Compare/PWM Register1 (CCPR1) is comprised of two 8-bit registers: CCPR1L (low byte) and
CCPR1H (high byte). The CCP1CON register controls
the operation of CCP1. All are readable and writable.
CCP2 module:
Capture/Compare/PWM Register2 (CCPR2) is comprised of two 8-bit registers: CCPR2L (low byte) and
CCPR2H (high byte). The CCP2CON register controls
the operation of CCP2. All are readable and writable.
For use of the CCP modules, refer to the Embedded
Control Handbook,
"Using the CCP Modules"
(AN594).
TABLE 10-1: CCP MODE - TIMER
RESOURCE
CCP Mode Timer Resource
Capture
Compare
PWM
Timer1
Timer1
Timer2
TABLE 10-2: INTERACTION OF TWO CCP MODULES
CCPx Mode CCPy Mode Interaction
Capture Capture Same TMR1 time-base.
Capture Compare The compare should be configured for the special event trigger, which clears TMR1.
Compare Compare The compare(s) should be configured for the special event trigger, which clears TMR1.
PWM PWM The PWMs will have the same frequency, and update rate (TMR2 interrupt).
PWM Capture None
PWM Compare None

PIC16C7X
DS30390E-page 72 1997 Microchip Technology Inc.
FIGURE 10-1: CCP1CON REGISTER (ADDRESS 17h)/CCP2CON REGISTER (ADDRESS 1Dh)
U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— — CCPxX CCPxY CCPxM3 CCPxM2 CCPxM1 CCPxM0 R = Readable bit
W =Writable bit
U = Unimplemented bit,
read as ‘0’
- n =Value at POR reset
bit7 bit0
bit 7-6: Unimplemented: Read as '0'
bit 5-4: CCPxX:CCPxY: PWM Least Significant bits
Capture Mode: Unused
Compare Mode: Unused
PWM Mode: These bits are the two LSbs of the PWM duty cycle. The eight MSbs are found in CCPRxL.
bit 3-0: CCPxM3:CCPxM0: CCPx Mode Select bits
0000 = Capture/Compare/PWM off (resets CCPx module)
0100 = Capture mode, every falling edge
0101 = Capture mode, every rising edge
0110 = Capture mode, every 4th rising edge
0111 = Capture mode, every 16th rising edge
1000 = Compare mode, set output on match (CCPxIF bit is set)
1001 = Compare mode, clear output on match (CCPxIF bit is set)
1010 = Compare mode, generate software interrupt on match (CCPxIF bit is set, CCPx pin is unaffected)
1011 = Compare mode, trigger special event (CCPxIF bit is set; CCP1 resets TMR1; CCP2 resets TMR1
and starts an A/D conversion (if A/D module is enabled))
11xx = PWM mode
10.1 Capture Mode
In Capture mode, CCPR1H:CCPR1L captures the
16-bit value of the TMR1 register when an e v ent occurs
on pin RC2/CCP1. An event is defined as:
• Every falling edge
• Every rising edge
• Every 4th rising edge
• Every 16th rising edge
An event is selected by control bits CCP1M3:CCP1M0
(CCP1CON<3:0>). When a capture is made, the interrupt request flag bit CCP1IF (PIR1<2>) is set. It must
be cleared in software. If another capture occurs bef ore
the value in register CCPR1 is read, the old captured
value will be lost.
10.1.1 CCP PIN CONFIGURATION
In Capture mode, the RC2/CCP1 pin should be config-
ured as an input by setting the TRISC<2> bit.
Applicable Devices
72
73 73A 74 74A 76 77
Note: If the RC2/CCP1 is configured as an out-
put, a write to the port can cause a capture
condition.
FIGURE 10-2: CAPTURE MODE
OPERATION BLOCK
DIAGRAM
10.1.2 TIMER1 MODE SELECTION
Timer1 must be running in timer mode or synchronized
counter mode for the CCP module to use the capture
feature. In asynchronous counter mode, the capture
operation may not work.
10.1.3 SOFTWARE INTERRUPT
When the Capture mode is changed, a false capture
interrupt may be generated. The user should keep bit
CCP1IE (PIE1<2>) clear to avoid false interrupts and
should clear the flag bit CCP1IF following any such
change in operating mode.
CCPR1H CCPR1L
TMR1H TMR1L
Set flag bit CCP1IF
(PIR1<2>)
Capture
Enable
Q’s
CCP1CON<3:0>
RC2/CCP1
Prescaler
÷ 1, 4, 16
and
edge detect
Pin

1997 Microchip Technology Inc. DS30390E-page 73
PIC16C7X
10.1.4 CCP PRESCALER
There are four prescaler settings, specified by bits
CCP1M3:CCP1M0. Whenever the CCP module is
turned off, or the CCP module is not in capture mode,
the prescaler counter is cleared. This means that any
reset will clear the prescaler counter.
Switching from one capture prescaler to another may
generate an interrupt. Also, the prescaler counter will
not be cleared, therefore the first capture may be from
a non-zero prescaler. Example 10-1 shows the recommended method for switching between capture prescalers. This example also clears the prescaler counter
and will not generate the “false” interrupt.
EXAMPLE 10-1: CHANGING BETWEEN
CAPTURE PRESCALERS
CLRF CCP1CON ;Turn CCP module off
MOVLW NEW_CAPT_PS ;Load the W reg with
; the new prescaler
; mode value and CCP ON
MOVWF CCP1CON ;Load CCP1CON with this
; value
10.2 Compare Mode
In Compare mode, the 16-bit CCPR1 register value is
constantly compared against the TMR1 register pair
value. When a match occurs, the RC2/CCP1 pin is:
• Driven High
• Driven Low
• Remains Unchanged
The action on the pin is based on the value of control
bits CCP1M3:CCP1M0 (CCP1CON<3:0>). At the
same time, interrupt flag bit CCP1IF is set.
FIGURE 10-3: COMPARE MODE
OPERATION BLOCK
DIAGRAM
Applicable Devices
72
73 73A 74 74A 76 77
CCPR1H CCPR1L
TMR1H TMR1L
Comparator
QS
R
Output
Logic
Special Event Trigger
Set flag bit CCP1IF
(PIR1<2>)
match
RC2/CCP1
TRISC<2>
CCP1CON<3:0>
Mode Select
Output Enable
Pin
Special event trigger will:
reset Timer1, but not set interrupt flag bit TMR1IF (PIR1<0>),
and set bit GO/DONE
(ADCON0<2>)
which starts an A/D conversion (CCP1 only for PIC16C72,
CCP2 only for PIC16C73/73A/74/74A/76/77).
10.2.1 CCP PIN CONFIGURATION
The user must configure the RC2/CCP1 pin as an out-
put by clearing the TRISC<2> bit.
10.2.2 TIMER1 MODE SELECTION
Timer1 must be running in Timer mode or Synchro-
nized Counter mode if the CCP module is using the
compare feature. In Asynchronous Counter mode, the
compare operation may not work.
10.2.3 SOFTWARE INTERRUPT MODE
When generate software interrupt is chosen the CCP1
pin is not affected. Only a CCP interrupt is generated (if
enabled).
10.2.4 SPECIAL EVENT TRIGGER
In this mode, an internal hardware trigger is generated
which may be used to initiate an action.
The special event trigger output of CCP1 resets the
TMR1 register pair. This allows the CCPR1 register to
effectively be a 16-bit programmable period register for
Timer1.
The special trigger output of CCP2 resets the TMR1
register pair, and starts an A/D conversion (if the A/D
module is enabled).
For the PIC16C72 only, the special event trigger output
of CCP1 resets the TMR1 register pair, and starts an
A/D conversion (if the A/D module is enabled).
Note: Clearing the CCP1CON register will force
the RC2/CCP1 compare output latch to the
default low level. This is not the data latch.
Note: The special event trigger from the
CCP1and CCP2 modules will not set interrupt flag bit TMR1IF (PIR1<0>).

PIC16C7X
DS30390E-page 74 1997 Microchip Technology Inc.
10.3 PWM Mode
In Pulse Width Modulation (PWM) mode, the CCPx pin
produces up to a 10-bit resolution PWM output. Since
the CCP1 pin is multiplexed with the POR TC data latch,
the TRISC<2> bit must be cleared to make the CCP1
pin an output.
Figure 10-4 shows a simplified block diagram of the
CCP module in PWM mode.
For a step by step procedure on how to set up the CCP
module for PWM operation, see Section 10.3.3.
FIGURE 10-4: SIMPLIFIED PWM BLOCK
DIAGRAM
A PWM output (Figure 10-5) has a time base (period)
and a time that the output stays high (duty cycle). The
frequency of the PWM is the inverse of the period
(1/period).
FIGURE 10-5: PWM OUTPUT
Applicable Devices
72
73 73A 74 74A 76 77
Note: Clearing the CCP1CON register will force
the CCP1 PWM output latch to the default
low level. This is not the PORTC I/O data
latch.
CCPR1L
CCPR1H (Slave)
Comparator
TMR2
Comparator
PR2
(Note 1)
R
Q
S
Duty cycle registers
CCP1CON<5:4>
Clear Timer,
CCP1 pin and
latch D.C.
TRISC<2>
RC2/CCP1
Note 1: 8-bit timer is concatenated with 2-bit internal Q clock
or 2 bits of the prescaler to create 10-bit time-base.
Period
Duty Cycle
TMR2 = PR2
TMR2 = Duty Cycle
TMR2 = PR2
10.3.1 PWM PERIOD
The PWM period is specified by writing to the PR2 reg-
ister. The PWM period can be calculated using the following formula:
PWM period = [(PR2) + 1] • 4 • T
OSC •
(TMR2 prescale value)
PWM frequency is defined as 1 / [PWM period].
When TMR2 is equal to PR2, the f ollowing three e v ents
occur on the next increment cycle:
• TMR2 is cleared
• The CCP1 pin is set (exception: if PWM duty
cycle = 0%, the CCP1 pin will not be set)
• The PWM duty cycle is latched from CCPR1L into
CCPR1H
10.3.2 PWM DUTY CYCLE
The PWM duty cycle is specified by writing to the
CCPR1L register and to the CCP1CON<5:4> bits. Up
to 10-bit resolution is available: the CCPR1L contains
the eight MSbs and the CCP1CON<5:4> contains the
two LSbs. This 10-bit value is represented by
CCPR1L:CCP1CON<5:4>. The following equation is
used to calculate the PWM duty cycle in time:
PWM duty cycle = (CCPR1L:CCP1CON<5:4>) •
Tosc • (TMR2 prescale value)
CCPR1L and CCP1CON<5:4> can be written to at any
time, but the duty cycle value is not latched into
CCPR1H until after a match between PR2 and TMR2
occurs (i.e., the period is complete). In PWM mode,
CCPR1H is a read-only register.
The CCPR1H register and a 2-bit internal latch are
used to double buffer the PWM duty cycle. This double
buffering is essential for glitchless PWM operation.
When the CCPR1H and 2-bit latch match TMR2 concatenated with an internal 2-bit Q clock or 2 bits of the
TMR2 prescaler, the CCP1 pin is cleared.
Maximum PWM resolution (bits) for a given PWM
frequency:
Note: The Timer2 postscaler (see Section 9.1) is
not used in the determination of the PWM
frequency . The postscaler could be used to
have a servo update rate at a different frequency than the PWM output.
Note: If the PWM duty cycle value is longer than
the PWM period the CCP1 pin will not be
cleared.
log(
F
PWM
log(2)
F
OSC
)
bits
=

1997 Microchip Technology Inc. DS30390E-page 75
PIC16C7X
EXAMPLE 10-2: PWM PERIOD AND DUTY
CYCLE CALCULATION
Desired PWM frequency is 78.125 kHz,
Fosc = 20 MHz
TMR2 prescale = 1
1/78.125 kHz= [(PR2) + 1] • 4 • 1/20 MHz • 1
12.8 µs = [(PR2) + 1] • 4 • 50 ns • 1
PR2 = 63
Find the maximum resolution of the duty cycle that can
be used with a 78.125 kHz frequency and 20 MHz
oscillator:
1/78.125 kHz= 2
PWM RESOLUTION
• 1/20 MHz • 1
12.8 µs= 2
PWM RESOLUTION
• 50 ns • 1
256 = 2
PWM RESOLUTION
log(256) = (PWM Resolution) • log(2)
8.0 = PWM Resolution
At most, an 8-bit resolution duty cycle can be obtained
from a 78.125 kHz frequency and a 20 MHz oscillator,
i.e., 0 ≤ CCPR1L:CCP1CON<5:4> ≤ 255. Any value
greater than 255 will result in a 100% duty cycle.
In order to achieve higher resolution, the PWM frequency must be decreased. In order to achieve higher
PWM frequency, the resolution must be decreased.
Table 10-3 lists example PWM frequencies and resolutions for Fosc = 20 MHz. The TMR2 prescaler and PR2
values are also shown.
10.3.3 SET-UP FOR PWM OPERATION
The following steps should be taken when configuring
the CCP module for PWM operation:
1. Set the PWM period by writing to the PR2 register.
2. Set the PWM duty cycle by writing to the
CCPR1L register and CCP1CON<5:4> bits.
3. Make the CCP1 pin an output by clearing the
TRISC<2> bit.
4. Set the TMR2 prescale value and enable Timer2
by writing to T2CON.
5. Configure the CCP1 module for PWM operation.
TABLE 10-3: EXAMPLE PWM FREQUENCIES AND RESOLUTIONS AT 20 MHz
TABLE 10-4: REGISTERS ASSOCIATED WITH CAPTURE, COMPARE, AND TIMER1
PWM Frequency 1.22 kHz 4.88 kHz 19.53 kHz 78.12 kHz 156.3 kHz 208.3 kHz
Timer Prescaler (1, 4, 16) 16 4 1111
PR2 Value 0xFF 0xFF 0xFF 0x3F 0x1F 0x17
Maximum Resolution (bits) 10 10 10 8 7 5.5
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on
all other
resets
0Bh,8Bh,
10Bh,18Bh
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
0Ch PIR1
PSPIF
(1,2)
ADIF RCIF
(2)
TXIF
(2)
SSPIF CCP1IF TMR2IF TMR1IF 0000 0000 0000 0000
0Dh
(2)
PIR2 — — — — — — — CCP2IF ---- ---0 ---- ---0
8Ch PIE1
PSPIE
(1,2)
ADIE RCIE
(2)
TXIE
(2)
SSPIE CCP1IE TMR2IE TMR1IE 0000 0000 0000 0000
8Dh
(2)
PIE2 — — — — — — — CCP2IE ---- ---0 ---- ---0
87h TRISC PORTC Data Direction Register 1111 1111 1111 1111
0Eh TMR1L Holding register for the Least Significant Byte of the 16-bit TMR1 register xxxx xxxx uuuu uuuu
0Fh TMR1H Holding register for the Most Significant Byte of the 16-bit TMR1register xxxx xxxx uuuu uuuu
10h T1CON
— — T1CKPS1 T1CKPS0 T1OSCEN T1SYNC TMR1CS TMR1ON --00 0000 --uu uuuu
15h CCPR1L Capture/Compare/PWM register1 (LSB) xxxx xxxx uuuu uuuu
16h CCPR1H Capture/Compare/PWM register1 (MSB) xxxx xxxx uuuu uuuu
17h CCP1CON
— — CCP1X CCP1Y CCP1M3 CCP1M2 CCP1M1 CCP1M0 --00 0000 --00 0000
1Bh
(2)
CCPR2L Capture/Compare/PWM register2 (LSB) xxxx xxxx uuuu uuuu
1Ch
(2)
CCPR2H Capture/Compare/PWM register2 (MSB) xxxx xxxx uuuu uuuu
1Dh
(2)
CCP2CON — — CCP2X CCP2Y CCP2M3 CCP2M2 CCP2M1 CCP2M0 --00 0000 --00 0000
Legend: x = unknown, u = unchanged, - = unimplemented read as '0'. Shaded cells are not used by Capture and Timer1.
Note 1: Bits PSPIE and PSPIF are reserved on the PIC16C73/73A/76, always maintain these bits clear.
2: The PIC16C72 does not have a Parallel Slave Port, USART or CCP2 module, these bits are unimplemented, read as '0'.

PIC16C7X
DS30390E-page 76 1997 Microchip Technology Inc.
TABLE 10-5: REGISTERS ASSOCIATED WITH PWM AND TIMER2
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on
all other
resets
0Bh,8Bh,
10Bh,18Bh
INTCON GIE PEIE
T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
0Ch PIR1
PSPIF
(1,2)
ADIF RCIF
(2)
TXIF
(2)
SSPIF CCP1IF TMR2IF TMR1IF 0000 0000 0000 0000
0Dh
(2)
PIR2 — — — — — — — CCP2IF ---- ---0 ---- ---0
8Ch PIE1
PSPIE
(1,2)
ADIE RCIE
(2)
TXIE
(2)
SSPIE CCP1IE TMR2IE TMR1IE 0000 0000 0000 0000
8Dh
(2)
PIE2 — — — — — — — CCP2IE ---- ---0 ---- ---0
87h TRISC PORTC Data Direction Register 1111 1111 1111 1111
11h TMR2 Timer2 module’s register 0000 0000 0000 0000
92h PR2 Timer2 module’ s period register 1111 1111 1111 1111
12h T2CON
— TOUTPS3 TOUTPS2 TOUTPS1 TOUTPS0 TMR2ON T2CKPS1 T2CKPS0 -000 0000 -000 0000
15h CCPR1L Capture/Compare/PWM register1 (LSB) xxxx xxxx uuuu uuuu
16h CCPR1H Capture/Compare/PWM register1 (MSB) xxxx xxxx uuuu uuuu
17h CCP1CON
— — CCP1X CCP1Y CCP1M3 CCP1M2 CCP1M1 CCP1M0 --00 0000 --00 0000
1Bh
(2)
CCPR2L Capture/Compare/PWM register2 (LSB) xxxx xxxx uuuu uuuu
1Ch
(2)
CCPR2H Capture/Compare/PWM register2 (MSB) xxxx xxxx uuuu uuuu
1Dh
(2)
CCP2CON — — CCP2X CCP2Y CCP2M3 CCP2M2 CCP2M1 CCP2M0 --00 0000 --00 0000
Legend: x = unknown, u = unchanged, - = unimplemented read as '0'. Shaded cells are not used by PWM and Timer2.
Note 1: Bits PSPIE and PSPIF are reserved on the PIC16C73/73A/76, always maintain these bits clear.
2: The PIC16C72 does not have a Parallel Slave Port, USART or CCP2 module, these bits are unimplemented, read as '0'.

1997 Microchip Technology Inc. DS30390E-page 77
PIC16C7X
11.0 SYNCHRONOUS SERIAL
PORT (SSP) MODULE
11.1 SSP Module Overview
The Synchronous Serial Port (SSP) module is a serial
interface useful for communicating with other peripheral or microcontroller devices. These peripheral
devices may be Serial EEPROMs, shift registers, display drivers, A/D converters, etc. The SSP module can
operate in one of two modes:
• Serial Peripheral Interface (SPI)
• Inter-Integrated Circuit (I
2
C)
The SSP module in I
2
C mode works the same in all
PIC16C7X devices that have an SSP module . However
the SSP Module in SPI mode has differences between
the PIC16C76/77 and the other PIC16C7X devices.
The register definitions and operational description of
SPI mode has been split into two sections because of
the differences between the PIC16C76/77 and the
other PIC16C7X devices. The default reset values of
both the SPI modules is the same regardless of the
device:
11.2 SPI Mode for PIC16C72/73/73A/74/74A..........78
11.3 SPI Mode for PIC16C76/77..............................83
11.4 I2C™ Overview................................................89
11.5 SSP I2C Operation...........................................93
Refer to Application Note AN578,
“Use of the SSP
Module in the I
2
C Multi-Master Environment.”
Applicable Devices
72 73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 78 1997 Microchip Technology Inc.
11.2 SPI Mode for PIC16C72/73/73A/74/74A
This section contains register definitions and operational characteristics of the SPI module for the
PIC16C72, PIC16C73, PIC16C73A, PIC16C74,
PIC16C74A.
FIGURE 11-1: SSPSTAT: SYNC SERIAL PORT STATUS REGISTER (ADDRESS 94h)
U-0 U-0 R-0 R-0 R-0 R-0 R-0 R-0
— — D/A P S R/W UA BF R = Readable bit
W =Writable bit
U = Unimplemented bit,
read as ‘0’
- n =Value at POR reset
bit7 bit0
bit 7-6: Unimplemented: Read as '0'
bit 5: D/A: Data/Address bit (I2C mode only)
1 = Indicates that the last byte received or transmitted was data
0 = Indicates that the last byte received or transmitted was address
bit 4: P: Stop bit (I
2
C mode only. This bit is cleared when the SSP module is disabled, SSPEN is cleared)
1 = Indicates that a stop bit has been detected last (this bit is '0' on RESET)
0 = Stop bit was not detected last
bit 3: S: Start bit (I
2
C mode only. This bit is cleared when the SSP module is disabled, SSPEN is cleared)
1 = Indicates that a start bit has been detected last (this bit is '0' on RESET)
0 = Start bit was not detected last
bit 2: R/W
: Read/Write bit information (I2C mode only)
This bit holds the R/W bit information following the last address match. This bit is valid from the address
match to the next start bit, stop bit, or A
CK bit.
1 = Read
0 = Write
bit 1: UA: Update Address (10-bit I
2
C mode only)
1 = Indicates that the user needs to update the address in the SSPADD register
0 = Address does not need to be updated
bit 0: BF: Buffer Full Status bit
Receiv
e (SPI and I2C modes)
1 = Receive complete, SSPBUF is full
0 = Receive not complete, SSPBUF is empty
T
ransmit (I2C mode only)
1 = Transmit in progress, SSPBUF is full
0 = Transmit complete, SSPBUF is empty
Applicable Devices
72 73 73A 74 74A 76 77

1997 Microchip Technology Inc. DS30390E-page 79
PIC16C7X
FIGURE 11-2: SSPCON: SYNC SERIAL PORT CONTROL REGISTER (ADDRESS 14h)
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
WCOL SSPOV SSPEN CKP SSPM3 SSPM2 SSPM1 SSPM0 R = Readable bit
W =Writable bit
U = Unimplemented bit,
read as ‘0’
- n =Value at POR reset
bit7 bit0
bit 7: WCOL: Write Collision Detect bit
1 = The SSPBUF register is written while it is still transmitting the previous word
(must be cleared in software)
0 = No collision
bit 6: SSPOV: Receive Overflow Detect bit
In SPI mode
1 = A new byte is received while the SSPBUF register is still holding the pre vious data. In case of ov erflow ,
the data in SSPSR register is lost. Overflow can only occur in slave mode. The user must read the SSPBUF, even if only transmitting data, to avoid setting overflow. In master mode the overflow bit is not set
since each new reception (and transmission) is initiated by writing to the SSPBUF register.
0 = No overflow
In I
2
C mode
1 = A byte is received while the SSPBUF register is still holding the pre vious byte. SSPOV is a "don’t care"
in transmit mode. SSPOV must be cleared in software in either mode.
0 = No overflow
bit 5: SSPEN: Synchronous Serial Port Enable bit
In SPI mode
1 = Enables serial port and configures SCK, SDO, and SDI as serial port pins
0 = Disables serial port and configures these pins as I/O port pins
In I
2
C mode
1 = Enables the serial port and configures the SDA and SCL pins as serial port pins
0 = Disables serial port and configures these pins as I/O port pins
In both modes, when enabled, these pins must be properly configured as input or output.
bit 4: CKP: Clock Polarity Select bit
In SPI mode
1 = Idle state for clock is a high level. Transmit happens on falling edge, receive on rising edge.
0 = Idle state for clock is a low level. Transmit happens on rising edge, receive on falling edge.
In I
2
C mode
SCK release control
1 = Enable clock
0 = Holds clock low (clock stretch) (Used to ensure data setup time)
bit 3-0: SSPM3:SSPM0: Synchronous Serial Port Mode Select bits
0000 = SPI master mode, clock = Fosc/4
0001 = SPI master mode, clock = Fosc/16
0010 = SPI master mode, clock = Fosc/64
0011 = SPI master mode, clock = TMR2 output/2
0100 = SPI slave mode, clock = SCK pin. SS
pin control enabled.
0101 = SPI slave mode, clock = SCK pin. SS
pin control disabled. SS can be used as I/O pin.
0110 = I
2
C slave mode, 7-bit address
0111 = I
2
C slave mode, 10-bit address
1011 = I
2
C firmware controlled Master Mode (slave idle)
1110 = I
2
C slave mode, 7-bit address with start and stop bit interrupts enabled
1111 = I
2
C slave mode, 10-bit address with start and stop bit interrupts enabled
Applicable Devices
72 73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 80 1997 Microchip Technology Inc.
11.2.1 OPERATION OF SSP MODULE IN SPI
MODE
The SPI mode allows 8-bits of data to be synchronously transmitted and received simultaneously. To
accomplish communication, typically three pins are
used:
• Serial Data Out (SDO)
• Serial Data In (SDI)
• Serial Clock (SCK)
Additionally a fourth pin may be used when in a slave
mode of operation:
• Slave Select (SS
)
When initializing the SPI, several options need to be
specified. This is done by programming the appropriate
control bits in the SSPCON register (SSPCON<5:0>).
These control bits allow the following to be specified:
• Master Mode (SCK is the clock output)
• Slave Mode (SCK is the clock input)
• Clock Polarity (Output/Input data on the Rising/
Falling edge of SCK)
• Clock Rate (Master mode only)
• Slave Select Mode (Slave mode only)
The SSP consists of a transmit/receive Shift Register
(SSPSR) and a Buffer register (SSPBUF). The SSPSR
shifts the data in and out of the device, MSb first. The
SSPBUF holds the data that was written to the SSPSR,
until the received data is ready. Once the 8-bits of data
have been received, that b yte is mo v ed to the SSPBUF
register. Then the Buffer Full bit, BF (SSPSTAT<0>)
and flag bit SSPIF are set. This double buffering of the
received data (SSPBUF) allows the next byte to start
reception before reading the data that was just
received. Any write to the SSPBUF register during
transmission/reception of data will be ignored, and the
write collision detect bit, WCOL (SSPCON<7>) will be
set. User software must clear bit WCOL so that it can
be determined if the following write(s) to the SSPBUF
completed successfully. When the application software
is expecting to receive v alid data, the SSPB UF register
should be read before the next byte of data to transfer
is written to the SSPBUF register. The Buffer Full bit BF
(SSPSTAT<0>) indicates when the SSPBUF register
has been loaded with the received data (transmission
is complete). When the SSPBUF is read, bit BF is
cleared. This data may be irrelevant if the SPI is only a
transmitter. Generally the SSP Interrupt is used to
determine when the transmission/reception has completed. The SSPBUF register must be read and/or written. If the interrupt method is not going to be used, then
software polling can be done to ensure that a write collision does not occur. Example 11-1 shows the loading
of the SSPBUF (SSPSR) register for data transmission.
The shaded instruction is only required if the received
data is meaningful.
Applicable Devices
72
73 73A 74 74A 76 77
EXAMPLE 11-1: LOADING THE SSPBUF
(SSPSR) REGISTER
The block diagram of the SSP module, when in SPI
mode (Figure 11-3), shows that the SSPSR register is
not directly readable or writable, and can only be
accessed from addressing the SSPBUF register. Additionally, the SSP status register (SSPSTAT) indicates
the various status conditions.
FIGURE 11-3: SSP BLOCK DIAGRAM
(SPI MODE)
BSF STATUS, RP0 ;Specify Bank 1
LOOP BTFSS SSPSTAT, BF ;Has data been
;received
;(transmit
;complete)?
GOTO LOOP ;No
BCF STATUS, RP0 ;Specify Bank 0
MOVF SSPBUF, W ;W reg = contents
;of SSPBUF
MOVWF RXDATA ;Save in user RAM
MOVF TXDATA, W ;W reg = contents
; of TXDATA
MOVWF SSPBUF ;New data to xmit
Read Write
Internal
data bus
RC4/SDI/SDA
RC5/SDO
RA5/SS
/AN4
RC3/SCK/
SSPSR reg
SSPBUF reg
SSPM3:SSPM0
bit0
shift
clock
SS
Control
Enable
Edge
Select
Clock Select
TMR2 output
T
CY
Prescaler
4, 16, 64
TRISC<3>
2
Edge
Select
2
4
SCL
Applicable Devices
72 73 73A 74 74A 76 77

1997 Microchip Technology Inc. DS30390E-page 81
PIC16C7X
To enable the serial port, SSP enable bit SSPEN
(SSPCON<5>) must be set. To reset or reconfigure SPI
mode, clear enable bit SSPEN, re-initialize SSPCON
register, and then set enable bit SSPEN. This configures the SDI, SDO, SCK, and SS
pins as serial port
pins. For the pins to behave as the serial port function,
they must have their data direction bits (in the TRIS register) appropriately programmed. That is:
• SDI must have TRISC<4> set
• SDO must have TRISC<5> cleared
• SCK (Master mode) must have TRISC<3>
cleared
• SCK (Slave mode) must have TRISC<3> set
•SS
must have TRISA<5> set (if implemented)
Any serial port function that is not desired may be overridden by programming the corresponding data direction (TRIS) register to the opposite value. An example
would be in master mode where you are only sending
data (to a display driver), then both SDI and SS
could
be used as general purpose outputs by clearing their
corresponding TRIS register bits.
Figure 11-4 shows a typical connection between two
microcontrollers. The master controller (Processor 1)
initiates the data transfer by sending the SCK signal.
Data is shifted out of both shift registers on their programmed clock edge, and latched on the opposite edge
of the clock. Both processors should be programmed to
the same Clock Polarity (CKP), then both controllers
would send and receive data at the same time.
Whether the data is meaningful (or dummy data)
depends on the application software. This leads to
three scenarios for data transmission:
• Master sends data — Slave sends dummy data
• Master sends data — Slave sends data
• Master sends dummy data — Slave sends data
The master can initiate the data transfer at any time
because it controls the SCK. The master deter mines
when the slave (Processor 2) is to broadcast data by
the software protocol.
In master mode the data is transmitted/received as
soon as the SSPBUF register is written to. If the SPI is
only going to receive, the SCK output could be disabled
(programmed as an input). The SSPSR register will
continue to shift in the signal present on the SDI pin at
the programmed clock rate. As each byte is received, it
will be loaded into the SSPBUF register as if a normal
received byte (interrupts and status bits appropriately
set). This could be useful in receiver applications as a
“line activity monitor” mode.
In slave mode, the data is transmitted and received as
the external clock pulses appear on SCK. When the
last bit is latched interrupt flag bit SSPIF (PIR1<3>) is
set.
The clock polarity is selected by appropriately programming bit CKP (SSPCON<4>). This then would give
waveforms for SPI communication as shown in
Figure 11-5 and Figure 11-6 where the MSB is transmitted first. In master mode, the SPI cloc k rate (bit r ate)
is user programmable to be one of the following:
• Fosc/4 (or T
CY)
• Fosc/16 (or 4 • T
CY)
• Fosc/64 (or 16 • T
CY)
• Timer2 output/2
This allows a maximum bit clock frequency (at 20 MHz)
of 5 MHz. When in slave mode the external clock must
meet the minimum high and low times.
In sleep mode, the slave can transmit and receive data
and wake the device from sleep.
FIGURE 11-4: SPI MASTER/SLAVE CONNECTION
Serial Input Buffer
(SSPBUF register)
Shift Register
(SSPSR)
MSb
LSb
SDO
SDI
PROCESSOR 1
SCK
SPI Master SSPM3:SSPM0 = 00xxb
Serial Input Buffer
(SSPBUF register)
Shift Register
(SSPSR)
LSb
MSb
SDI
SDO
PROCESSOR 2
SCK
SPI Slave SSPM3:SSPM0 = 010xb
Serial Clock
Applicable Devices
72 73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 82 1997 Microchip Technology Inc.
The SS pin allows a synchronous slave mode. The
SPI must be in slave mode (SSPCON<3:0> = 04h)
and the TRISA<5> bit must be set the for synchronous slave mode to be enabled. When the SS
pin is
low, transmission and reception are enabled and
the SDO pin is driven. When the SS
pin goes high,
the SDO pin is no longer driven, even if in the middle of a transmitted byte, and becomes a floating
output. If the SS
pin is taken low without resetting
SPI mode, the transmission will continue from the
point at which it was taken high. External pull-up/
pull-down resistors may be desirable , depending on the
application.
To emulate two-wire communication, the SDO pin can
be connected to the SDI pin. When the SPI needs to
operate as a receiver the SDO pin can be configured as
an input. This disables transmissions from the SDO.
The SDI can always be left as an input (SDI function)
since it cannot create a bus conflict.
FIGURE 11-5: SPI MODE TIMING, MASTER MODE OR SLAVE MODE W/O SS CONTROL
FIGURE 11-6: SPI MODE TIMING, SLAVE MODE WITH SS CONTROL
TABLE 11-1: REGISTERS ASSOCIATED WITH SPI OPERATION
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on
all other
resets
0Bh,8Bh INTCON GIE PEIE
T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
0Ch PIR1 PSPIF
(1,2)
ADIF RCIF
(2)
TXIF
(2)
SSPIF CCP1IF TMR2IF TMR1IF 0000 0000 0000 0000
8Ch PIE1 PSPIE
(1,2)
ADIE RCIE
(2)
TXIE
(2)
SSPIE CCP1IE TMR2IE TMR1IE 0000 0000 0000 0000
87h TRISC PORTC Data Direction Register 1111 1111 1111 1111
13h SSPBUF Synchronous Serial Port Receive Buffer/Transmit Register xxxx xxxx uuuu uuuu
14h SSPCON WCOL SSPOV SSPEN CKP SSPM3 SSPM2 SSPM1 SSPM0 0000 0000 0000 0000
85h TRISA — — PORTA Data Direction Register --11 1111 --11 1111
94h SSPSTAT — — D/A P S R/W UA BF --00 0000 --00 0000
Legend: x = unknown, u = unchanged, - = unimplemented read as '0'. Shaded cells are not used by the SSP in SPI mode.
Note 1: Bits PSPIE and PSPIF are reserved on the PIC16C73/73A, always maintain these bits clear.
2: The PIC16C72 does not have a Parallel Slave Port or USART, these bits are unimplemented, read as '0'.
SCK
(CKP = 0)
SCK
(CKP = 1)
SDO
SDI
SSPIF
bit7
bit7 bit0
bit6 bit5 bit4 bit3 bit2 bit1 bit0
SCK
(CKP = 0)
SCK
(CKP = 1)
SDO
SDI
SSPIF
bit7
bit7 bit0
bit6 bit5 bit4 bit3 bit2 bit1 bit0
SS
Applicable Devices
72 73 73A 74 74A 76 77
1997 Microchip Technology Inc. DS30390E-page 83
PIC16C7X
11.3 SPI Mode for PIC16C76/77
This section contains register definitions and operational characteristics of the SPI module on the
PIC16C76 and PIC16C77 only.
FIGURE 11-7: SSPSTAT: SYNC SERIAL PORT STATUS REGISTER (ADDRESS 94h)(PIC16C76/77)
R/W-0 R/W-0 R-0 R-0 R-0 R-0 R-0 R-0
SMP CKE D/A
P S R/W UA BF R = Readable bit
W =Writable bit
U = Unimplemented bit,
read as ‘0’
- n =Value at POR reset
bit7 bit0
bit 7: SMP: SPI data input sample phase
SPI Master Mode
1 = Input data sampled at end of data output time
0 = Input data sampled at middle of data output time
SPI Sla
ve Mode
SMP must be cleared when SPI is used in slave mode
bit 6: CKE: SPI Clock Edge Select (Figure 11-11, Figure 11-12, and Figure 11-13)
CKP = 0
1 = Data transmitted on rising edge of SCK
0 = Data transmitted on falling edge of SCK
CKP = 1
1 = Data transmitted on falling edge of SCK
0 = Data transmitted on rising edge of SCK
bit 5: D/A
: Data/Address bit (I2C mode only)
1 = Indicates that the last byte received or transmitted was data
0 = Indicates that the last byte received or transmitted was address
bit 4: P: Stop bit (I
2
C mode only. This bit is cleared when the SSP module is disabled, or when the Start bit is
detected last, SSPEN is cleared)
1 = Indicates that a stop bit has been detected last (this bit is '0' on RESET)
0 = Stop bit was not detected last
bit 3: S: Start bit (I
2
C mode only. This bit is cleared when the SSP module is disabled, or when the Stop bit is
detected last, SSPEN is cleared)
1 = Indicates that a start bit has been detected last (this bit is '0' on RESET)
0 = Start bit was not detected last
bit 2: R/W
: Read/Write bit information (I2C mode only)
This bit holds the R/W bit information following the last address match. This bit is only valid from the
address match to the next start bit, stop bit, or A
CK bit.
1 = Read
0 = Write
bit 1: UA: Update Address (10-bit I
2
C mode only)
1 = Indicates that the user needs to update the address in the SSPADD register
0 = Address does not need to be updated
bit 0: BF: Buffer Full Status bit
Receiv
e (SPI and I2C modes)
1 = Receive complete, SSPBUF is full
0 = Receive not complete, SSPBUF is empty
T
ransmit (I2C mode only)
1 = Transmit in progress, SSPBUF is full
0 = Transmit complete, SSPBUF is empty
Applicable Devices
72 73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 84 1997 Microchip Technology Inc.
FIGURE 11-8: SSPCON: SYNC SERIAL PORT CONTROL REGISTER (ADDRESS 14h)(PIC16C76/77)
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
WCOL SSPOV SSPEN CKP SSPM3 SSPM2 SSPM1 SSPM0 R = Readable bit
W =Writable bit
U = Unimplemented bit,
read as ‘0’
- n =Value at POR reset
bit7 bit0
bit 7: WCOL: Write Collision Detect bit
1 = The SSPBUF register is written while it is still transmitting the previous word
(must be cleared in software)
0 = No collision
bit 6: SSPOV: Receive Overflow Indicator bit
In SPI mode
1 = A new byte is received while the SSPBUF register is still holding the pre vious data. In case of ov erflow ,
the data in SSPSR is lost. Ov erflow can only occur in sla v e mode . The user must read the SSPBUF, even
if only transmitting data, to avoid setting overflow. In master mode the overflow bit is not set since each
new reception (and transmission) is initiated by writing to the SSPBUF register.
0 = No overflow
In I
2
C mode
1 = A byte is received while the SSPBUF register is still holding the pre vious byte. SSPOV is a "don’t care"
in transmit mode. SSPOV must be cleared in software in either mode.
0 = No overflow
bit 5: SSPEN: Synchronous Serial Port Enable bit
In SPI mode
1 = Enables serial port and configures SCK, SDO, and SDI as serial port pins
0 = Disables serial port and configures these pins as I/O port pins
In I
2
C mode
1 = Enables the serial port and configures the SDA and SCL pins as serial port pins
0 = Disables serial port and configures these pins as I/O port pins
In both modes, when enabled, these pins must be properly configured as input or output.
bit 4: CKP: Clock Polarity Select bit
In SPI mode
1 = Idle state for clock is a high level
0 = Idle state for clock is a low level
In I
2
C mode
SCK release control
1 = Enable clock
0 = Holds clock low (clock stretch) (Used to ensure data setup time)
bit 3-0: SSPM3:SSPM0: Synchronous Serial Port Mode Select bits
0000 = SPI master mode, clock = F
OSC/4
0001 = SPI master mode, clock = F
OSC/16
0010 = SPI master mode, clock = F
OSC/64
0011 = SPI master mode, clock = TMR2 output/2
0100 = SPI slave mode, clock = SCK pin. SS
pin control enabled.
0101 = SPI slave mode, clock = SCK pin. SS
pin control disabled. SS can be used as I/O pin
0110 = I
2
C slave mode, 7-bit address
0111 = I
2
C slave mode, 10-bit address
1011 = I
2
C firmware controlled master mode (slave idle)
1110 = I
2
C slave mode, 7-bit address with start and stop bit interrupts enabled
1111 = I
2
C slave mode, 10-bit address with start and stop bit interrupts enabled
Applicable Devices
72 73 73A 74 74A 76 77

1997 Microchip Technology Inc. DS30390E-page 85
PIC16C7X
11.3.1 SPI MODE FOR PIC16C76/77
The SPI mode allows 8-bits of data to be synchro-
nously transmitted and received simultaneously. To
accomplish communication, typically three pins are
used:
• Serial Data Out (SDO) RC5/SDO
• Serial Data In (SDI) RC4/SDI/SDA
• Serial Clock (SCK) RC3/SCK/SCL
Additionally a fourth pin may be used when in a slave
mode of operation:
• Slave Select (SS
) RA5/SS/AN4
When initializing the SPI, several options need to be
specified. This is done by programming the appropriate
control bits in the SSPCON register (SSPCON<5:0>)
and SSPSTAT<7:6>. These control bits allow the following to be specified:
• Master Mode (SCK is the clock output)
• Slave Mode (SCK is the clock input)
• Clock Polarity (Idle state of SCK)
• Clock edge (output data on rising/falling edge of
SCK)
• Clock Rate (Master mode only)
• Slave Select Mode (Slave mode only)
The SSP consists of a transmit/receive Shift Register
(SSPSR) and a buffer register (SSPBUF). The SSPSR
shifts the data in and out of the device, MSb first. The
SSPBUF holds the data that was written to the SSPSR
until the received data is ready. Once the 8-bits of data
have been received, that b yte is mo v ed to the SSPBUF
register. Then the buffer full detect bit BF
(SSPSTAT<0>) and interrupt flag bit SSPIF (PIR1<3>)
are set. This double buffering of the received data
(SSPBUF) allows the next byte to start reception before
reading the data that was just received. An y write to the
SSPBUF register during transmission/reception of data
will be ignored, and the write collision detect bit WCOL
(SSPCON<7>) will be set. User software m ust clear the
WCOL bit so that it can be determined if the following
write(s) to the SSPBUF register completed successfully. When the application software is expecting to
receive valid data, the SSPBUF should be read before
the next byte of data to transfer is written to the
SSPBUF. Buffer full bit BF (SSPSTAT<0>) indicates
when SSPBUF has been loaded with the received data
(transmission is complete). When the SSPBUF is read,
bit BF is cleared. This data may be irrelevant if the SPI
is only a transmitter. Generally the SSP Interrupt is
used to determine when the transmission/reception
has completed. The SSPBUF must be read and/or written. If the interrupt method is not going to be used, then
software polling can be done to ensure that a write collision does not occur. Example 11-2 shows the loading
of the SSPBUF (SSPSR) for data transmission. The
shaded instruction is only required if the received data
is meaningful.
EXAMPLE 11-2: LOADING THE SSPBUF
(SSPSR) REGISTER
(PIC16C76/77)
BCF STATUS, RP1 ;Specify Bank 1
BSF STATUS, RP0 ;
LOOP BTFSS SSPSTAT, BF ;Has data been
;received
;(transmit
;complete)?
GOTO LOOP ;No
BCF STATUS, RP0 ;Specify Bank 0
MOVF SSPBUF, W ;W reg = contents
; of SSPBUF
MOVF TXDATA, W ;W reg = contents
; of TXDATA
MOVWF SSPBUF ;New data to xmit
The block diagram of the SSP module, when in SPI
mode (Figure 11-9), shows that the SSPSR is not
directly readable or writable, and can only be accessed
from addressing the SSPBUF register. Additionally, the
SSP status register (SSPSTAT) indicates the various
status conditions.
FIGURE 11-9: SSP BLOCK DIAGRAM
(SPI MODE)(PIC16C76/77)
MOVWF RXDATA ;Save in user RAM
Read Write
Internal
data bus
RC4/SDI/SDA
RC5/SDO
RA5/S
S/AN4
RC3/SCK/
SSPSR reg
SSPBUF reg
SSPM3:SSPM0
bit0
shift
clock
SS
Control
Enable
Edge
Select
Clock Select
TMR2 output
T
CY
Prescaler
4, 16, 64
TRISC<3>
2
Edge
Select
2
4
SCL
Applicable Devices
72 73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 86 1997 Microchip Technology Inc.
To enable the serial port, SSP Enable bit, SSPEN
(SSPCON<5>) must be set. To reset or reconfigure SPI
mode, clear bit SSPEN, re-initialize the SSPCON register, and then set bit SSPEN. This configures the SDI,
SDO, SCK, and SS
pins as serial port pins. For the pins
to behave as the serial port function, they must have
their data direction bits (in the TRISC register) appropriately programmed. That is:
• SDI must have TRISC<4> set
• SDO must have TRISC<5> cleared
• SCK (Master mode) must have TRISC<3>
cleared
• SCK (Slave mode) must have TRISC<3> set
•SS
must have TRISA<5> set
Any serial port function that is not desired may be overridden by programming the corresponding data direction (TRIS) register to the opposite value. An example
would be in master mode where you are only sending
data (to a display driver), then both SDI and SS
could
be used as general purpose outputs by clearing their
corresponding TRIS register bits.
Figure 11-10 shows a typical connection between two
microcontrollers. The master controller (Processor 1)
initiates the data transfer by sending the SCK signal.
Data is shifted out of both shift registers on their programmed clock edge, and latched on the opposite edge
of the clock. Both processors should be programmed to
same Clock Polarity (CKP), then both controllers would
send and receive data at the same time. Whether the
data is meaningful (or dummy data) depends on the
application firmware. This leads to three scenar ios for
data transmission:
• Master sends data — Slave sends dummy data
• Master sends data — Slave sends data
• Master sends dummy data — Slave sends data
The master can initiate the data transfer at any time
because it controls the SCK. The master deter mines
when the slave (Processor 2) is to broadcast data by
the firmware protocol.
In master mode the data is transmitted/received as
soon as the SSPBUF register is written to. If the SPI is
only going to receive, the SCK output could be disabled
(programmed as an input). The SSPSR register will
continue to shift in the signal present on the SDI pin at
the programmed clock rate. As each byte is received, it
will be loaded into the SSPBUF register as if a normal
received byte (interrupts and status bits appropriately
set). This could be useful in receiver applications as a
“line activity monitor” mode.
In slave mode, the data is transmitted and received as
the external clock pulses appear on SCK. When the
last bit is latched the interrupt flag bit SSPIF (PIR1<3>)
is set.
The clock polarity is selected by appropriately programming bit CKP (SSPCON<4>). This then would give
waveforms for SPI communication as shown in
Figure 11-11, Figure 11-12, and Figure 11-13 where
the MSB is transmitted first. In master mode, the SPI
clock rate (bit rate) is user programmable to be one of
the following:
•F
OSC/4 (or TCY)
•F
OSC/16 (or 4 • TCY)
•F
OSC/64 (or 16 • TCY)
• Timer2 output/2
This allows a maximum bit clock frequency (at 20 MHz)
of 5 MHz. When in slave mode the external clock must
meet the minimum high and low times.
In sleep mode, the slave can transmit and receive data
and wake the device from sleep.
FIGURE 11-10: SPI MASTER/SLAVE CONNECTION (PIC16C76/77)
Serial Input Buffer
(SSPBUF)
Shift Register
(SSPSR)
MSb
LSb
SDO
SDI
PROCESSOR 1
SCK
SPI Master SSPM3:SSPM0 = 00xxb
Serial Input Buffer
(SSPBUF)
Shift Register
(SSPSR)
LSb
MSb
SDI
SDO
PROCESSOR 2
SCK
SPI Slave SSPM3:SSPM0 = 010xb
Serial Clock
Applicable Devices
72 73 73A 74 74A 76 77

1997 Microchip Technology Inc. DS30390E-page 87
PIC16C7X
The SS pin allows a synchronous slave mode. The
SPI must be in slave mode (SSPCON<3:0> = 04h)
and the TRISA<5> bit must be set for the synchronous slave mode to be enabled. When the SS
pin is
low, transmission and reception are enabled and
the SDO pin is driven. When the SS
pin goes high,
the SDO pin is no longer driven, even if in the middle of a transmitted byte, and becomes a floating
output. If the SS
pin is taken low without resetting
SPI mode, the transmission will continue from the
point at which it was taken high. External pull-up/
pull-down resistors may be desirable , depending on the
application.
.
To emulate two-wire communication, the SDO pin can
be connected to the SDI pin. When the SPI needs to
operate as a receiver the SDO pin can be configured as
an input. This disables transmissions from the SDO.
The SDI can always be left as an input (SDI function)
since it cannot create a bus conflict.
Note: When the SPI is in Slave Mode with SS pin
control enabled, (SSPCON<3:0> = 0100)
the SPI module will reset if the SS
pin is set
to V
DD.
Note: If the SPI is used in Slave Mode with
CKE = '1', then the SS
pin control must be
enabled.
FIGURE 11-11: SPI MODE TIMING, MASTER MODE (PIC16C76/77)
FIGURE 11-12: SPI MODE TIMING (SLAVE MODE WITH CKE = 0) (PIC16C76/77)
SCK (CKP = 0,
SDI (SMP = 0)
SSPIF
bit7 bit6 bit5
bit4
bit3
bit2
bit1 bit0
SDI (SMP = 1)
SCK (CKP = 0,
SCK (CKP = 1,
SCK (CKP = 1,
SDO
bit7
bit7 bit0
bit0
CKE = 0)
CKE = 1)
CKE = 0)
CKE = 1)
SCK (CKP = 0)
SDI (SMP = 0)
SSPIF
bit7 bit6 bit5
bit4
bit3
bit2
bit1 bit0
SCK (CKP = 1)
SDO
bit7 bit0
SS (optional)
Applicable Devices
72 73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 88 1997 Microchip Technology Inc.
FIGURE 11-13: SPI MODE TIMING (SLAVE MODE WITH CKE = 1) (PIC16C76/77)
TABLE 11-2: REGISTERS ASSOCIATED WITH SPI OPERATION (PIC16C76/77)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on:
POR,
BOR
Value on
all other
resets
0Bh,8Bh.
10Bh,18Bh
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF 0000 000x 0000 000u
0Ch PIR1 PSPIF
(1)
ADIF RCIF TXIF SSPIF CCP1IF TMR2IF TMR1IF 0000 0000 0000 0000
8Ch PIE1 PSPIE
(1)
ADIE RCIE TXIE SSPIE CCP1IE TMR2IE TMR1IE 0000 0000 0000 0000
87h TRISC PORTC Data Direction Register 1111 1111 1111 1111
13h SSPBUF Synchronous Serial Port Receive Buffer/Transmit Register xxxx xxxx uuuu uuuu
14h SSPCON WCOL SSPOV SSPEN CKP SSPM3 SSPM2 SSPM1 SSPM0 0000 0000 0000 0000
85h TRISA
— — PORTA Data Direction Register --11 1111 --11 1111
94h SSPSTAT SMP CKE D/A P S R/W UA BF 0000 0000 0000 0000
Legend: x = unknown, u = unchanged, - = unimplemented read as '0'. Shaded cells are not used by the SSP in SPI mode.
Note 1: Bits PSPIE and PSPIF are reserved on the PIC16C76, always maintain these bits clear.
SCK (CKP = 0)
SDI (SMP = 0)
SSPIF
bit7
bit6 bit5
bit4
bit3
bit2
bit1 bit0
SCK (CKP = 1)
SDO
bit7 bit0
SS
(not optional)
Applicable Devices
72 73 73A 74 74A 76 77

1997 Microchip Technology Inc. DS30390E-page 89
PIC16C7X
11.4 I2C™ Overview
This section provides an overview of the Inter-Integrated Circuit (I
2
C) bus, with Section 11.5 discussing
the operation of the SSP module in I
2
C mode.
The I
2
C bus is a two-wire serial interface developed by
the Philips Corporation. The original specification, or
standard mode, was for data transfers of up to 100
Kbps. The enhanced specification (fast mode) is also
supported. This device will communicate with both
standard and fast mode devices if attached to the same
bus. The clock will determine the data rate.
The I
2
C interface employs a comprehensiv e protocol to
ensure reliable transmission and reception of data.
When transmitting data, one device is the “master”
which initiates transfer on the bus and generates the
clock signals to permit that transfer, while the other
device(s) acts as the “slave.” All portions of the slave
protocol are implemented in the SSP module’s hardware, except general call support, while portions of the
master protocol need to be addressed in the
PIC16CXX software. Table 11-3 defines some of the
I
2
C bus terminology. For additional information on the
I
2
C interface specification, refer to the Philips docu-
ment “
The I2C bus and how to use it.”
#939839340011,
which can be obtained from the Philips Corporation.
In the I
2
C interface protocol each device has an
address. When a master wishes to initiate a data transfer, it first transmits the address of the device that it
wishes to “talk” to. All devices “listen” to see if this is
their address. Within this address, a bit specifies if the
master wishes to read-from/write-to the slave device.
The master and slave are always in opposite modes
(transmitter/receiver) of operation during a data transfer . That is they can be thought of as operating in either
of these two relations:
• Master-transmitter and Slave-receiver
• Slave-transmitter and Master-receiver
In both cases the master generates the clock signal.
The output stages of the clock (SCL) and data (SDA)
lines must have an open-drain or open-collector in
order to perform the wired-AND function of the bus.
External pull-up resistors are used to ensure a high
level when no de vice is pulling the line do wn. The number of devices that may be attached to the I
2
C bus is
limited only by the maximum bus loading specification
of 400 pF.
11.4.1 INITIATING AND TERMINATING DATA
TRANSFER
During times of no data transfer (idle time), both the
clock line (SCL) and the data line (SDA) are pulled high
through the external pull-up resistors. The START and
STOP conditions determine the start and stop of data
transmission. The STAR T condition is defined as a high
to low transition of the SDA when the SCL is high. The
STOP condition is defined as a low to high transition of
the SDA when the SCL is high. Figure 11-14 shows the
START and STOP conditions. The master generates
these conditions for starting and terminating data transfer. Due to the definition of the START and STOP conditions, when data is being transmitted, the SDA line
can only change state when the SCL line is low.
FIGURE 11-14: START AND STOP
CONDITIONS
SDA
SCL
S
P
Start
Condition
Change
of Data
Allowed
Change
of Data
Allowed
Stop
Condition
TABLE 11-3: I2C BUS TERMINOLOGY
Term Description
Transmitter The device that sends the data to the bus.
Receiver The device that receives the data from the bus.
Master The device which initiates the transfer, generates the clock and terminates the transfer.
Slave The device addressed by a master.
Multi-master More than one master device in a system. These masters can attempt to control the bus at the
same time without corrupting the message.
Arbitration Procedure that ensures that only one of the master devices will control the bus. This ensure that
the transfer data does not get corrupted.
Synchronization Procedure where the clock signals of two or more devices are synchronized.
Applicable Devices
72 73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 90 1997 Microchip Technology Inc.
11.4.2 ADDRESSING I2C DEVICES
There are two address formats. The simplest is the
7-bit address format with a R/W
bit (Figure 11-15). The
more complex is the 10-bit address with a R/W
bit
(Figure 11-16). For 10-bit address format, two bytes
must be transmitted with the first five bits specifying this
to be a 10-bit address.
FIGURE 11-15: 7-BIT ADDRESS FORMAT
FIGURE 11-16: I
2
C 10-BIT ADDRESS FORMAT
11.4.3 TRANSFER ACKNOWLEDGE
All data must be transmitted per byte, with no limit to the
number of bytes transmitted per data transfer. After
each byte, the slave-receiver generates an acknowledge bit (A
CK) (Figure 11-17). When a slave-receiver
doesn’t acknowledge the slave address or received
data, the master must abort the transfer. The slave
must leave SDA high so that the master can generate
the STOP condition (Figure 11-14).
S
R/W
ACK
Sent by
Slave
slave address
S
R/W
Read/Write pulse
MSb LSb
Start Condition
ACK
Acknowledge
S 1 1 1 1 0 A9 A8 R/W ACK A7 A6 A5 A4 A3 A2 A1 A0 ACK
sent by slave
= 0 for write
S
R/W
ACK
- Start Condition
- Read/Write Pulse
- Acknowledge
FIGURE 11-17: SLAVE-RECEIVER
ACKNOWLEDGE
If the master is receiving the data (master-receiver), it
generates an acknowledge signal for each received
byte of data, except for the last byte. To signal the end
of data to the slave-transmitter, the master does not
generate an acknowledge (not acknowledge). The
slave then releases the SDA line so the master can
generate the STOP condition. The master can also
generate the STOP condition during the acknowledge
pulse for valid termination of data transfer.
If the slave needs to delay the transmission of the next
byte, holding the SCL line low will f orce the master into
a wait state. Data transfer continues when the slave
releases the SCL line. This allows the slave to move the
received data or fetch the data it needs to transfer
before allowing the clock to start. This wait state technique can also be implemented at the bit level,
Figure 11-18. The sla ve will inherently stretch the cloc k,
when it is a transmitter, b ut will not when it is a receiver.
The slave will have to clear the SSPCON<4> bit to
enable clock stretching when it is a receiver.
S
Data
Output by
Transmitter
Data
Output by
Receiver
SCL from
Master
Start
Condition
Clock Pulse for
Acknowledgment
not acknowledge
acknowledge
1
2
8
9
FIGURE 11-18: DATA TRANSFER WAIT STATE
12 789 123 • 89
P
SDA
SCL
S
Start
Condition
Address R/W
ACK Wait
State
Data ACK
MSB acknowledgment
signal from receiver
acknowledgment
signal from receiver
byte complete
interrupt with receiver
clock line held low while
interrupts are serviced
Stop
Condition
Applicable Devices
72 73 73A 74 74A 76 77

1997 Microchip Technology Inc. DS30390E-page 91
PIC16C7X
Figure 11-19 and Figure 11-20 show Master-transmitter and Master-receiver data transfer sequences.
When a master does not wish to relinquish the bus (by
generating a STOP condition), a repeated START condition (Sr) must be generated. This condition is identical to the start condition (SDA goes high-to-low while
SCL is high), but occurs after a data transfer acknowledge pulse (not the bus-free state). This allows a master to send “commands” to the slave and then receive
the requested information or to address a different
slave device. This sequence is shown in Figure 11-21.
FIGURE 11-19: MASTER-TRANSMITTER SEQUENCE
FIGURE 11-20: MASTER-RECEIVER SEQUENCE
FIGURE 11-21: COMBINED FORMAT
For 7-bit address:
S
Slave Address
First 7 bits
S R/W
A1Slave Address
Second byte
A2
Data A Data P
A master transmitter addresses a slave receiver
with a 10-bit address.
A/A
Slave AddressR/W A Data A Data A/A P
'0' (write) data transferred
(n bytes - acknowledge)
A master transmitter addresses a slave receiver with a
7-bit address. The transfer direction is not changed.
From master to slave
From slave to master
A = acknowledge (SDA low)
A
= not acknowledge (SDA high)
S = Start Condition
P = Stop Condition
(write)
For 10-bit address:
For 7-bit address:
S
Slave Address
First 7 bits
S R/W
A1Slave Address
Second byte
A2
A master transmitter addresses a slave receiver
with a 10-bit address.
Slave AddressR/W
A Data A Data A P
'1' (read) data transferred
(n bytes - acknowledge)
A master reads a slave immediately after the first byte.
From master to slave
From slave to master
A = acknowledge (SDA low)
A
= not acknowledge (SDA high)
S = Start Condition
P = Stop Condition
(write)
For 10-bit address:
Slave Address
First 7 bits
Sr R/W A3 AData A PData
(read)
Combined format:
S
Combined format - A master addresses a slave with a 10-bit address, then transmits
Slave AddressR/W A Data A/A Sr P
(read) Sr = repeated
Transfer direction of data and acknowledgment bits depends on R/W
bits.
From master to slave
From slave to master
A = acknowledge (SDA low)
A
= not acknowledge (SDA high)
S = Start Condition
P = Stop Condition
Slave Address
First 7 bits
Sr R/W A
(write)
data to this slave and reads data from this slave.
Slave Address
Second byte
Data Sr Slave Address
First 7 bits
R/W
A Data A A PA A Data A/A Data
(read)
Slave Address R/W
A Data A/A
Start Condition
(write) Direction of transfer
may change at this point
(read or write)
(n bytes + acknowledge)
Applicable Devices
72 73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 92 1997 Microchip Technology Inc.
11.4.4 MULTI-MASTER
The I
2
C protocol allows a system to have more than
one master. This is called multi-master. When two or
more masters try to transfer data at the same time, arbitration and synchronization occur.
11.4.4.1 ARBITRATION
Arbitration takes place on the SDA line, while the SCL
line is high. The master which transmits a high when
the other master transmits a low loses arbitration
(Figure 11-22), and turns off its data output stage. A
master which lost arbitration can generate clock pulses
until the end of the data byte where it lost arbitration.
When the master devices are addressing the same
device, arbitration continues into the data.
FIGURE 11-22: MULTI-MASTER
ARBITRATION
(TWO MASTERS)
Masters that also incorporate the slave function, and
have lost arbitration must immediately switch over to
slave-receiver mode. This is because the winning master-transmitter may be addressing it.
Arbitration is not allowed between:
• A repeated START condition
• A STOP condition and a data bit
• A repeated START condition and a STOP condi-
tion
Care needs to be taken to ensure that these conditions
do not occur.
transmitter 1 loses arbitration
DATA 1 SDA
DATA 1
DATA 2
SDA
SCL
11.2.4.2 Clock Synchronization
Clock synchronization occurs after the devices have
started arbitration. This is performed using a
wired-AND connection to the SCL line. A high to low
transition on the SCL line causes the concerned
devices to start counting off their low period. Once a
device clock has gone low, it will hold the SCL line low
until its SCL high state is reached. The low to high transition of this clock may not change the state of the SCL
line, if another device clock is still within its low period.
The SCL line is held low by the device with the longest
low period. Devices with shorter low periods enter a
high wait-state, until the SCL line comes high. When
the SCL line comes high, all devices start counting off
their high periods. The first device to complete its high
period will pull the SCL line low. The SCL line high time
is determined by the device with the shortest high
period, Figure 11-23.
FIGURE 11-23: CLOCK SYNCHRONIZATION
CLK
1
CLK
2
SCL
wait
state
start counting
HIGH period
counter
reset
Applicable Devices
72 73 73A 74 74A 76 77

1997 Microchip Technology Inc. DS30390E-page 93
PIC16C7X
11.5 SSP I2C Operation
The SSP module in I2C mode fully implements all slave
functions, except general call support, and provides
interrupts on start and stop bits in hardware to facilitate
firmware implementations of the master functions. The
SSP module implements the standard mode specifications as well as 7-bit and 10-bit addressing. Two pins
are used for data transfer. These are the
RC3/SCK/SCL pin, which is the clock (SCL), and the
RC4/SDI/SDA pin, which is the data (SDA). The user
must configure these pins as inputs or outputs through
the TRISC<4:3> bits. The SSP module functions are
enabled by setting SSP Enable bit SSPEN (SSPCON<5>).
FIGURE 11-24: SSP BLOCK DIAGRAM
(I2C MODE)
The SSP module has five registers for I2C operation.
These are the:
• SSP Control Register (SSPCON)
• SSP Status Register (SSPSTAT)
• Serial Receive/Transmit Buffer (SSPBUF)
• SSP Shift Register (SSPSR) - Not directly accessible
• SSP Address Register (SSPADD)
Read Write
SSPSR reg
Match detect
SSPADD reg
Start and
Stop bit detect
SSPBUF reg
Internal
data bus
Addr Match
Set, Reset
S, P bits
(SSPSTAT reg)
RC3/SCK/SCL
RC4/
shift
clock
MSb
SDI/
LSb
SDA
The SSPCON register allows control of the I2C operation. Four mode selection bits (SSPCON<3:0>) allow
one of the following I
2
C modes to be selected:
•I
2
C Slave mode (7-bit address)
•I
2
C Slave mode (10-bit address)
•I
2
C Slave mode (7-bit address), with start and
stop bit interrupts enabled
•I
2
C Slave mode (10-bit address), with start and
stop bit interrupts enabled
•I
2
C Firmware controlled Master Mode, slave is
idle
Selection of any I
2
C mode, with the SSPEN bit set,
forces the SCL and SDA pins to be open drain, provided these pins are programmed to inputs by setting
the appropriate TRISC bits.
The SSPSTAT register gives the status of the data
transfer. This information includes detection of a
START or STOP bit, specifies if the received byte was
data or address if the next byte is the completion of
10-bit address, and if this will be a read or write data
transfer. The SSPSTAT register is read only.
The SSPBUF is the register to which transfer data is
written to or read from. The SSPSR register shifts the
data in or out of the device. In receive operations, the
SSPBUF and SSPSR create a doubled buffered
receiver. This allows reception of the next byte to begin
before reading the last byte of received data. When the
complete byte is received, it is transferred to the
SSPBUF register and flag bit SSPIF is set. If another
complete byte is received before the SSPBUF register
is read, a receiver overflow has occurred and bit
SSPOV (SSPCON<6>) is set and the byte in the
SSPSR is lost.
The SSPADD register holds the slave address. In 10-bit
mode, the user first needs to write the high byte of the
address (1111 0 A9 A8 0). Following the high byte
address match, the low byte of the address needs to be
loaded (A7:A0).
Applicable Devices
72 73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 94 1997 Microchip Technology Inc.
11.5.1 SLAVE MODE
In slave mode, the SCL and SDA pins must be config-
ured as inputs (TRISC<4:3> set). The SSP module will
override the input state with the output data when
required (slave-transmitter).
When an address is matched or the data transfer after
an address match is received, the hardware automatically will generate the acknowledge (A
CK) pulse, and
then load the SSPBUF register with the received value
currently in the SSPSR register.
There are certain conditions that will cause the SSP
module not to give this A
CK pulse. These are if either
(or both):
a) The buffer full bit BF (SSPSTAT<0>) was set
before the transfer was received.
b) The overflow bit SSPO V (SSPCON<6>) w as set
before the transfer was received.
In this case, the SSPSR register value is not loaded
into the SSPBUF, but bit SSPIF (PIR1<3>) is set.
Table 11-4 shows what happens when a data transfer
byte is received, given the status of bits BF and SSPO V.
The shaded cells show the condition where user software did not properly clear the overflow condition. Flag
bit BF is cleared by reading the SSPBUF register while
bit SSPOV is cleared through software.
The SCL clock input must have a minimum high and
low for proper operation. The high and low times of the
I
2
C specification as well as the requirement of the SSP
module is shown in timing parameter #100 and parameter #101.
11.5.1.1 ADDRESSING
Once the SSP module has been enabled, it waits for a
START condition to occur. Following the START condition, the 8-bits are shifted into the SSPSR register. All
incoming bits are sampled with the rising edge of the
clock (SCL) line. The value of register SSPSR<7:1> is
compared to the value of the SSPADD register. The
address is compared on the falling edge of the eighth
clock (SCL) pulse. If the addresses match, and the BF
and SSPOV bits are clear, the following events occur:
a) The SSPSR register value is loaded into the
SSPBUF register.
b) The buffer full bit, BF is set.
c) An A
CK pulse is generated.
d) SSP interrupt flag bit, SSPIF (PIR1<3>) is set
(interrupt is generated if enabled) - on the falling
edge of the ninth SCL pulse.
In 10-bit address mode, two address bytes need to be
received by the slav e (Figure 11-16). The five Most Significant bits (MSbs) of the first address byte specify if
this is a 10-bit address. Bit R/W
(SSPSTAT<2>) must
specify a write so the slave device will receive the second address byte. For a 10-bit address the first byte
would equal ‘1111 0 A9 A8 0’, where A9 and A8 are
the two MSbs of the address. The sequence of events
for 10-bit address is as follows, with steps 7- 9 for
slave-transmitter:
1. Receive first (high) byte of Address (bits SSPIF,
BF, and bit UA (SSPSTAT<1>) are set).
2. Update the SSPADD register with second (low)
byte of Address (clears bit UA and releases the
SCL line).
3. Read the SSPBUF register (clears bit BF) and
clear flag bit SSPIF.
4. Receive second (low) byte of Address (bits
SSPIF, BF, and UA are set).
5. Update the SSPADD register with the first (high)
byte of Address, if match releases SCL line, this
will clear bit UA.
6. Read the SSPBUF register (clears bit BF) and
clear flag bit SSPIF.
7. Receive repeated START condition.
8. Receive first (high) byte of Address (bits SSPIF
and BF are set).
9. Read the SSPBUF register (clears bit BF) and
clear flag bit SSPIF.
TABLE 11-4: DATA TRANSFER RECEIVED BYTE ACTIONS
Status Bits as Data
Transfer is Received
SSPSR
→ SSPBUF
Generate A
CK
Pulse
Set bit SSPIF
(SSP Interrupt occurs
if enabled)
BF SSPOV
00 Yes Yes Yes
10 No No Yes
11 No No Yes
0 1 No No Yes
Applicable Devices
72 73 73A 74 74A 76 77

1997 Microchip Technology Inc. DS30390E-page 95
PIC16C7X
11.5.1.2 RECEPTION
When the R/W
bit of the address byte is clear and an
address match occurs, the R/W
bit of the SSPST AT register is cleared. The received address is loaded into the
SSPBUF register.
When the address byte overflow condition exists, then
no acknowledge (A
CK) pulse is given. An ov erflo w condition is defined as either bit BF (SSPSTAT<0>) is set
or bit SSPOV (SSPCON<6>) is set.
An SSP interrupt is generated for each data transfer
byte. Flag bit SSPIF (PIR1<3>) m ust be cleared in software. The SSPSTAT register is used to deter mine the
status of the byte.
FIGURE 11-25: I2C WAVEFORMS FOR RECEPTION (7-BIT ADDRESS)
P
9
8
7
6
5
D0
D1
D2
D3D4
D5
D6D7
S
A7 A6 A5 A4
A3 A2 A1SDA
SCL
1234
5
6
7
8
9
1234
56
7
89
123
4
Bus Master
terminates
transfer
Bit SSPOV is set because the SSPBUF register is still full.
Cleared in software
SSPBUF register is read
A
CK
Receiving Data
Receiving Data
D0
D1
D2
D3D4
D5
D6D7
A
CK
R/W=0
Receiving Address
SSPIF (PIR1<3>)
BF (SSPSTAT<0>)
SSPOV (SSPCON<6>)
A
CK
ACK is not sent.
Applicable Devices
72 73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 96 1997 Microchip Technology Inc.
11.5.1.3 TRANSMISSION
When the R/W
bit of the incoming address byte is set
and an address match occurs, the R/W
bit of the
SSPSTAT register is set. The received address is
loaded into the SSPBUF register. The A
CK pulse will
be sent on the ninth bit, and pin RC3/SCK/SCL is held
low. The transmit data must be loaded into the SSPBUF register, which also loads the SSPSR register.
Then pin RC3/SCK/SCL should be enabled by setting
bit CKP (SSPCON<4>). The master must monitor the
SCL pin prior to asserting another clock pulse. The
slave devices may be holding off the master by stretching the clock. The eight data bits are shifted out on the
falling edge of the SCL input. This ensures that the SD A
signal is valid during the SCL high time (Figure 11-26).
An SSP interrupt is generated for each data transfer
byte. Flag bit SSPIF must be cleared in software, and
the SSPSTAT register is used to determine the status
of the byte. Flag bit SSPIF is set on the falling edge of
the ninth clock pulse.
As a slave-transmitter, the A
CK pulse from the master-receiver is latched on the rising edge of the ninth
SCL input pulse. If the SDA line was high (not A
CK),
then the data transfer is complete. When the A
CK is
latched by the slave, the slave logic is reset (resets
SSPSTAT register) and the slave then monitors for
another occurrence of the START bit. If the SDA line
was low (A
CK), the transmit data must be loaded into
the SSPBUF register, which also loads the SSPSR register. Then pin RC3/SCK/SCL should be enabled by
setting bit CKP.
FIGURE 11-26: I2C WAVEFORMS FOR TRANSMISSION (7-BIT ADDRESS)
SDA
SCL
SSPIF (PIR1<3>)
BF (SSPSTAT<0>)
CKP (SSPCON<4>)
A7 A6 A5 A4 A3 A2 A1 ACK D7 D6 D5 D4 D3 D2 D1 D0
A
CKTransmitting DataR/W = 1Receiving Address
123456789 123456789
P
cleared in software
SSPBUF is written in software
From SSP interrupt
service routine
Set bit after writing to SSPBUF
S
Data in
sampled
SCL held low
while CPU
responds to SSPIF
(the SSPBUF must be written-to
before the CKP bit can be set)
Applicable Devices
72 73 73A 74 74A 76 77

1997 Microchip Technology Inc. DS30390E-page 97
PIC16C7X
11.5.2 MASTER MODE
Master mode of operation is supported in firmware
using interrupt generation on the detection of the
START and STOP conditions. The STOP (P) and
START (S) bits are cleared from a reset or when the
SSP module is disabled. The STOP (P) and ST ART (S)
bits will toggle based on the START and STOP conditions. Control of the I
2
C bus may be taken when the P
bit is set, or the bus is idle and both the S and P bits are
clear.
In master mode the SCL and SDA lines are manipulated by clearing the corresponding TRISC<4:3> bit(s).
The output level is always low, irrespective of the
value(s) in PORTC<4:3>. So when transmitting data, a
'1' data bit must have the TRISC<4> bit set (input) and
a '0' data bit must have the TRISC<4> bit cleared (output). The same scenario is true for the SCL line with the
TRISC<3> bit.
The following events will cause SSP Interrupt Flag bit,
SSPIF, to be set (SSP Interrupt if enabled):
• START condition
• STOP condition
• Data transfer byte transmitted/received
Master mode of operation can be done with either the
slave mode idle (SSPM3:SSPM0 = 1011) or with the
slave active. When both master and slave modes are
enabled, the software needs to differentiate the
source(s) of the interrupt.
11.5.3 MULTI-MASTER MODE
In multi-master mode, the interrupt generation on the
detection of the START and STOP conditions allows
the determination of when the bus is free. The STOP
(P) and START (S) bits are cleared from a reset or
when the SSP module is disabled. The STOP (P) and
START (S) bits will toggle based on the START and
STOP conditions. Control of the I
2
C bus may be taken
when bit P (SSPSTAT<4>) is set, or the bus is idle and
both the S and P bits clear. When the bus is busy,
enabling the SSP Interrupt will generate the interrupt
when the STOP condition occurs.
In multi-master operation, the SDA line must be monitored to see if the signal level is the expected output
level. This check only needs to be done when a high
level is output. If a high level is expected and a low lev el
is present, the device needs to release the SDA and
SCL lines (set TRISC<4:3>). There are two stages
where this arbitration can be lost, these are:
• Address T r ansfer
• Data T r ansfer
When the slave logic is enabled, the slave continues to
receive. If arbitration was lost during the address transfer stage, communication to the device may be in
progress. If addressed an A
CK pulse will be generated.
If arbitration was lost during the data transfer stage, the
device will need to re-transfer the data at a later time.
TABLE 11-5: REGISTERS ASSOCIATED WITH I2C OPERATION
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on
POR,
BOR
Value on all
other resets
0Bh, 8Bh,
10Bh,18Bh
INTCON GIE PEIE T0IE INTE RBIE T0IF INTF RBIF
0000 000x 0000 000u
0Ch
PIR1 PSPIF
(1)
ADIF RCIF TXIF SSPIF CCP1IF TMR2IF TMR1IF 0000 0000 0000 0000
8Ch
PIE1 PSPIE
(1)
ADIE RCIE TXIE SSPIE CCP1IE TMR2IE TMR1IE 0000 0000 0000 0000
13h SSPBUF Synchronous Serial Port Receive Buffer/Transmit Register
xxxx xxxx uuuu uuuu
93h SSPADD Synchronous Serial Port (I2C mode) Address Register
0000 0000 0000 0000
14h SSPCON WCOL SSPOV SSPEN CKP SSPM3 SSPM2 SSPM1 SSPM0
0000 0000 0000 0000
94h SSPSTAT SMP
(2)
CKE
(2)
D/A P S R/W UA BF
0000 0000 0000 0000
87h TRISC
PORTC Data Direction register
1111 1111 1111 1111
Legend: x = unknown, u = unchanged, - = unimplemented locations read as '0'.
Shaded cells are not used by SSP module in SPI mode.
Note 1: PSPIF and PSPIE are reserved on the PIC16C73/73A/76, always maintain these bits clear.
2: The SMP and CKE bits are implemented on the PIC16C76/77 only. All other PIC16C7X devices have these two bits unim-
plemented, read as '0'.
Applicable Devices
72 73 73A 74 74A 76 77

PIC16C7X
DS30390E-page 98 1997 Microchip Technology Inc.
FIGURE 11-27: OPERATION OF THE I2C MODULE IN IDLE_MODE, RCV_MODE OR XMIT_MODE
IDLE_MODE (7-bit):
if (Addr_match) { Set interrupt;
if (R/W
= 1) { Send ACK = 0;
set XMIT_MODE;
}
else if (R/W
= 0) set RCV_MODE;
}
RCV_MODE:
if ((SSPBUF=Full) OR (SSPOV = 1))
{ Set SSPOV;
Do not acknowledge;
}
else { transfer SSPSR → SSPBUF;
send A
CK = 0;
}
Receive 8-bits in SSPSR;
Set interrupt;
XMIT_MODE:
While ((SSPBUF = Empty) AND (CKP=0)) Hold SCL Low;
Send byte;
Set interrupt;
if ( A
CK Received = 1) { End of transmission;
Go back to IDLE_MODE;
}
else if ( A
CK Received = 0) Go back to XMIT_MODE;
IDLE_MODE (10-Bit):
If (High_byte_addr_match AND (R/W
= 0))
{ PRIOR_ADDR_MATCH = FALSE;
Set interrupt;
if ((SSPBUF = Full) OR ((SSPOV = 1))
{ Set SSPOV;
Do not acknowledge;
}
else { Set UA = 1;
Send A
CK = 0;
While (SSPADD not updated) Hold SCL low;
Clear UA = 0;
Receive Low_addr_byte;
Set interrupt;
Set UA = 1;
If (Low_byte_addr_match)
{ PRIOR_ADDR_MATCH = TRUE;
Send A
CK = 0;
while (SSPADD not updated) Hold SCL low;
Clear UA = 0;
Set RCV_MODE;
}
}
}
else if (High_byte_addr_match AND (R/W
= 1)
{ if (PRIOR_ADDR_MATCH)
{ send A
CK = 0;
set XMIT_MODE;
}
else PRIOR_ADDR_MATCH = FALSE;
}
Applicable Devices
72 73 73A 74 74A 76 77

1997 Microchip Technology Inc. DS30390E-page 99
PIC16C7X
12.0 UNIVERSAL SYNCHRONOUS
ASYNCHRONOUS RECEIVER
TRANSMITTER (USART)
The Universal Synchronous Asynchronous Receiver
Transmitter (USART) module is one of the two serial
I/O modules. (USART is also known as a Serial Communications Interface or SCI). The USART can be configured as a full duplex asynchronous system that can
communicate with peripheral devices such as CRT terminals and personal computers, or it can be configured
Applicable Devices
72 73 73A 74 74A 76 77
as a half duplex synchronous system that can communicate with peripheral devices such as A/D or D/A integrated circuits, Serial EEPROMs etc.
The USART can be configured in the following modes:
• Asynchronous (full duplex)
• Synchronous - Master (half duplex)
• Synchronous - Slave (half duplex)
Bit SPEN (RCSTA<7>), and bits TRISC<7:6>, have to
be set in order to configure pins RC6/TX/CK and RC7/
RX/DT as the Universal Synchronous Asynchronous
Receiver Transmitter.
FIGURE 12-1: TXSTA: TRANSMIT STATUS AND CONTROL REGISTER (ADDRESS 98h)
R/W-0 R/W-0 R/W-0 R/W-0 U-0 R/W-0 R-1 R/W-0
CSRC TX9 TXEN SYNC
— BRGH TRMT TX9D R = Readable bit
W =Writable bit
U = Unimplemented bit,
read as ‘0’
- n =Value at POR reset
bit7 bit0
bit 7: CSRC: Clock Source Select bit
Asynchronous mode
Don’t care
Synchronous mode
1 = Master mode (Clock generated internally from BRG)
0 = Slave mode (Clock from external source)
bit 6: TX9: 9-bit Transmit Enable bit
1 = Selects 9-bit transmission
0 = Selects 8-bit transmission
bit 5: TXEN: Transmit Enable bit
1 = Transmit enabled
0 = Transmit disabled
Note: SREN/CREN overrides TXEN in SYNC mode.
bit 4: SYNC: USART Mode Select bit
1 = Synchronous mode
0 = Asynchronous mode
bit 3: Unimplemented: Read as '0'
bit 2: BRGH: High Baud Rate Select bit
Asynchronous mode
1 = High speed
Note: For the PIC16C73/73A/74/74A, the asynchronous high speed mode (BRGH = 1) may expe-
rience a high rate of receive errors. It is recommended that BRGH = 0. If you desire a higher
baud rate than BRGH = 0 can support, refer to the device errata for additional information,
or use the PIC16C76/77.
0 = Low speed
Synchronous mode
Unused in this mode
bit 1: TRMT: Transmit Shift Register Status bit
1 = TSR empty
0 = TSR full
bit 0: TX9D: 9th bit of transmit data. Can be parity bit.

PIC16C7X
DS30390E-page 100 1997 Microchip Technology Inc.
FIGURE 12-2: RCSTA: RECEIVE STATUS AND CONTROL REGISTER (ADDRESS 18h)
R/W-0 R/W-0 R/W-0 R/W-0 U-0 R-0 R-0 R-x
SPEN RX9 SREN CREN
— FERR OERR RX9D R = Readable bit
W =Writable bit
U = Unimplemented bit,
read as ‘0’
- n =Value at POR reset
bit7 bit0
bit 7: SPEN: Serial Port Enable bit
1 = Serial port enabled (Configures RC7/RX/DT and RC6/TX/CK pins as serial port pins)
0 = Serial port disabled
bit 6: RX9: 9-bit Receive Enable bit
1 = Selects 9-bit reception
0 = Selects 8-bit reception
bit 5: SREN: Single Receive Enable bit
Asynchronous mode
Don’t care
Synchronous mode - master
1 = Enables single receive
0 = Disables single receive
This bit is cleared after reception is complete.
Synchronous mode - sla
ve
Unused in this mode
bit 4: CREN: Continuous Receive Enable bit
Asynchronous mode
1 = Enables continuous receive
0 = Disables continuous receive
Synchronous mode
1 = Enables continuous receive until enable bit CREN is cleared (CREN overrides SREN)
0 = Disables continuous receive
bit 3: Unimplemented: Read as '0'
bit 2: FERR: Framing Error bit
1 = Framing error (Can be updated by reading RCREG register and receive next valid byte)
0 = No framing error
bit 1: OERR: Overrun Error bit
1 = Overrun error (Can be cleared by clearing bit CREN)
0 = No overrun error
bit 0: RX9D: 9th bit of received data (Can be parity bit)
 Loading...
Loading...