

Page 1

EDKCSEX064
.Ll*
Ä.Ll*ä
Montageanleitung
Mounting Instructions
Instructions de montage
ECS
ECSESxxx / ECSEPxxx / ECSEMxxx / ECSEAxxx
Achsmodul "Einbaugerät"
Panel−mounted axis module
Module d’axe en montage sur panneau
Page 2

Lesen Sie zuerst diese Anleitung, bevor Sie mit den Arbeiten beginnen!
Beachten Sie die enthaltenen Sicherheitshinweise.
Please read these instructions before you start working!
Follow the enclosed safety instructions.
Veuillez lire attentivement cette documentation avant toute action !
Les consignes de sécurité doivent impérativement être respectées.
Page 3

ECSEA_003A
Page 4

0Abb. 0Tab. 0
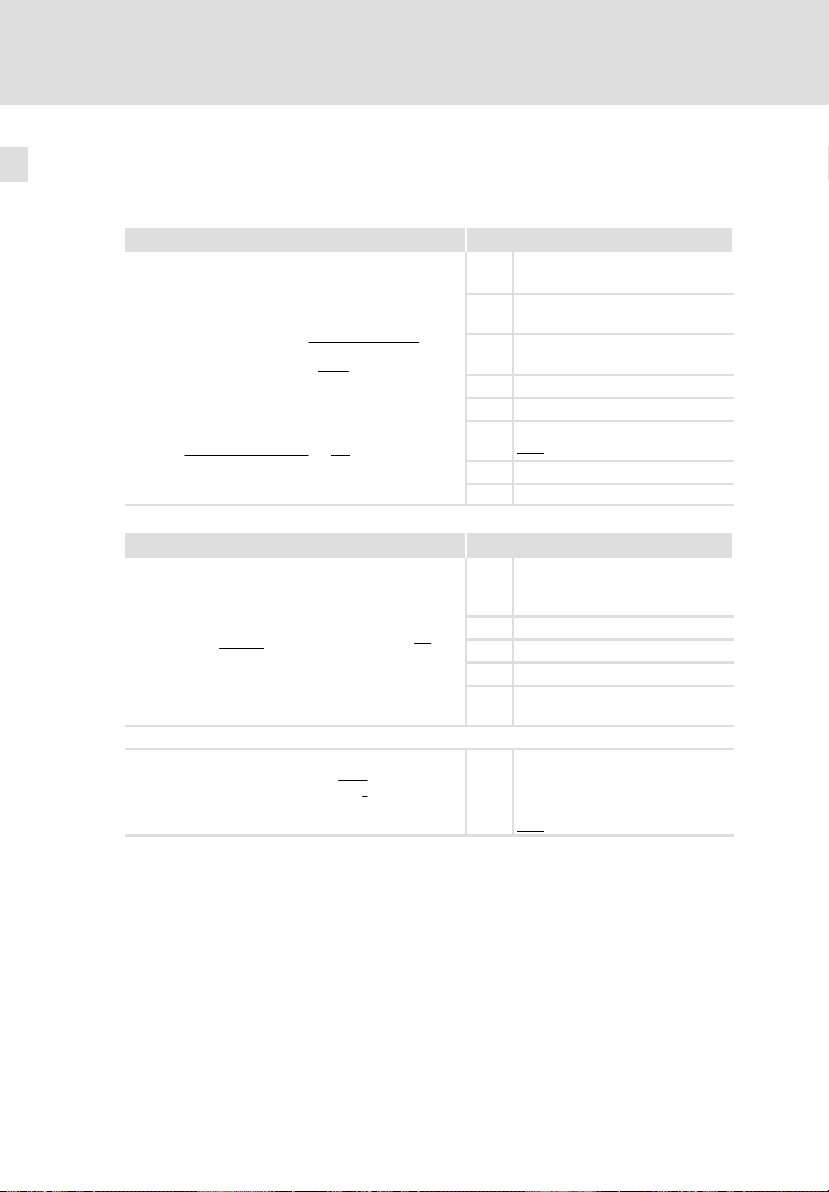
Lieferumfang
Position Beschreibung Anzahl
A Achsmodul ECSExxx 1
C Beipack mit Befestigungsmaterial 1
Montageanleitung 1
Bohrschablone 1
Anwendungs−Software: S = Speed & Torque P = Posi & Shaft
M = Motion A = Application
Hinweis!
Das Steckverbinder−Set ECSZA000X0B muss gesondert bezogen werden.
Anschlüsse und Schnittstellen
Position Beschreibung Ausführliche
Informationen
X23 Anschlüsse
l DC−Zwischenkreisspannung
l PE
35
B LEDs: Anzeige Status und Störung
X1 Automatisierungs−Interface (AIF) für
l Kommunikationsmodul
l Bedienmodul (Keypad XT)
X2 PE−Anschluss AIF
X3 Konfiguration analoger Eingang 46
X4 Anschluss CAN
l MotionBus (CAN) / bei ECSxA: Systembus (CAN)
l Schnittstelle zur übergeordneten Steuerung
54
X14 Anschluss CAN−AUX
l Systembus (CAN)
l PC−Schnittstelle/HMI zur Parametrierung und Diagnose
X6 Anschlüsse
l Niederspannungsversorgung
l Digitale Eingänge und Ausgänge
l Analog−Eingang
l "Sicher abgeschaltetes Moment" (ehem. "Sicherer Halt")
41
45
46
48
S1 DIP−Schalter
l CAN−Knotenadresse
l CAN−Übertragungsrate
X7 Anschluss Resolver 59
X8 Anschluss Encoder
l Inkrementalgeber (TTL−Geber)
l SinCos−Encoder
60
X25 Anschluss Bremsenansteuerung 39
X24 Anschluss Motor 38
4
EDKCSEX064 DE/EN/FR 6.0
Page 5

Statusanzeigen
LED
Betriebszustand Kontrolle
rot grün
aus an Antriebsregler freigegeben, keine Störung
aus blinkt Antriebsregler gesperrt (CINH), Einschaltsperre Codestelle C0183
blinkt aus Störung/Fehler (TRIP) aktiv Codestelle C0168/1
blinkt an Warnung/FAIL−QSP aktiv Codestelle C0168/1
Identifikation
ECS E x xxx C 4 x xxx XX xx xx
Gerätetyp
Bauform
E = Standard−Einbaugerät IP20
D = Durchstoß−Technik (therm.
separiert)
C = Cold−Plate−Technik
Applikation
S = "Speed and Torque"
P = "Posi and Shaft"
M = "Motion"
A = "Application"
Spitzenstrom
004 = 4 A
008 = 8 A
016 = 16 A
032 = 32 A
048 = 48 A
064 = 64 A
ATTENTION
L´appareil est sous tension
pendant 180s après la coupure
de la tension réseau
WARNING
Device is live up to 180s
after removing
mains voltage
Feldbus−Schnittstelle
C = Systembus CAN
Spannungsklasse
4 = 400 V/500 V
Technische Ausführung
B = Standard
V = verlackt
I = für IT−Netze, unverlackt
K= für IT−Netze, verlackt
Variante
Stand Hardware
1A oder höher
Stand Betriebs−Software (B−SW)
EDKCSEX064 DE/EN/FR 6.0
5
Page 6

Inhalti
1 Über diese Dokumentation 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Sicherheitshinweise 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Allgemeine Sicherheits− und Anwendungshinweise für
Lenze−Antriebsregler 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Motor thermisch überwachen 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Fremdbelüftete oder selbstgekühlte Motoren 14 . . . . . . . . .
2.2.2 Eigenbelüftete Motoren 16 . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Restgefahren 19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Sicherheitshinweise für die Installation nach UL 21 . . . . . . . . . . . . . . . . .
3 Technische Daten 22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Allgemeine Daten und Einsatzbedingungen 22 . . . . . . . . . . . . . . . . . . .
3.2 Bemessungsdaten 24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Mechanische Installation 26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Wichtige Hinweise 26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Montage mit Befestigungsschienen (Standard−Einbau) 27 . . . . . . . . . . .
4.2.1 Abmessungen 27 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Elektrische Installation 29 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Installation überprüfen 67 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 Montageschritte 28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 EMV−gerechte Installation
(Aufbau des CE−typischen Antriebssystems) 29 . . . . . . . . . . . . . . . . . . . .
5.2 Leistungsanschlüsse 32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Anschluss an den DC−Zwischenkreis (+UG, −UG) 35 . . . . . . . .
5.2.2 Anschluss Motor 38 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.3 Anschluss Motorhaltebremse 39 . . . . . . . . . . . . . . . . . . . . . . .
5.3 Steueranschlüsse 41 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Digitale Eingänge und Ausgänge 45 . . . . . . . . . . . . . . . . . . . .
5.3.2 Analog−Eingang 46 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.3 Sicher abgeschaltetes Moment 48 . . . . . . . . . . . . . . . . . . . . . .
5.4 Systembus (CAN) verdrahten 54 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Rückführsystem verdrahten 58 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.1 Anschluss Resolver 59 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.2 Anschluss Encoder 60 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.3 Leitfrequenzeingang/−ausgang
(Encoder−Nachbildung) 64 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
EDKCSEX064 DE/EN/FR 6.0
Page 7

Über diese Dokumentation 1
1 Über diese Dokumentation
Informationen zur Gültigkeit
Diese Dokumentation ist gültig für Achsmodule
ƒ ECSES... ˘ "Speed & Torque"
ƒ ECSEP... ˘ "Posi & Shaft"
ƒ ECSEM... ˘ "Motion"
ƒ ECSEA... ˘ "Application"
Tipp!
Informationen und Hilfsmittel rund um die Lenze−Produkte finden
Sie im Download−Bereich unter
http://www.Lenze.com
Zielgruppe
Diese Dokumentation richtet sich an qualifiziertes Fachpersonal nach
IEC 60364.
Qualifiziertes Fachpersonal sind Personen, die für die auszuführenden Tätigkeiten bei der Aufstellung, Montage, Inbetriebsetzung und dem Betrieb des Produkts über entsprechende Qualifikationen verfügen.
EDKCSEX064 DE/EN/FR 6.0
7
Page 8

2
Sicherheitshinweise
Allgemeine Sicherheits− und Anwendungshinweise für Lenze−Antriebsregler
2 Sicherheitshinweise
2.1 Allgemeine Sicherheits− und Anwendungshinweise für Lenze−Antriebsregler
(gemäß Niederspannungsrichtlinie 2006/95/EG)
Zu Ihrer persönlichen Sicherheit
Wenn Sie die folgenden grundlegenden Sicherheitsmaßnahmen missachten,
kann dies zu schweren Personenschäden und Sachschäden führen:
ƒ Das Produkt ausschließlich bestimmungsgemäß verwenden.
ƒ Das Produkt niemals trotz erkennbarer Schäden in Betrieb nehmen.
ƒ Das Produkt niemals unvollständig montiert in Betrieb nehmen.
ƒ Keine technischen Änderungen am Produkt vornehmen.
ƒ Nur das für das Produkt zugelassene Zubehör verwenden.
ƒ Nur Original−Ersatzteile des Herstellers verwenden.
ƒ Alle am Einsatzort geltenden Unfallverhütungsvorschriften, Richtlinien
und Gesetze beachten.
ƒ Nur qualifiziertes Fachpersonal die Arbeiten zum Transport, zur
Installation, zur Inbetriebnahme und zur Instandhaltung ausführen
lassen.
– IEC 364 bzw. CENELEC HD 384 oder DIN VDE 0100 und IEC−Report 664
oder DIN VDE 0110 und nationale Unfallverhütungsvorschriften
beachten.
– Qualifiziertes Fachpersonal im Sinne dieser grundsätzlichen
Sicherheitshinweise sind Personen, die mit Aufstellung, Montage,
Inbetriebsetzung und Betrieb des Produkts vertraut sind und die über
die ihrer Tätigkeit entsprechenden Qualifikationen verfügen.
ƒ Alle Vorgaben dieser Dokumentation beachten.
– Dies ist Voraussetzung für einen sicheren und störungsfreien Betrieb
sowie für das Erreichen der angegebenen Produkteigenschaften.
– Die in dieser Dokumentation dargestellten verfahrenstechnischen
Hinweise und Schaltungsausschnitte sind Vorschläge, deren
Übertragbarkeit auf die jeweilige Anwendung überprüft werden muss.
Für die Eignung der angegebenen Verfahren und Schaltungsvorschläge
übernimmt Lenze Automation GmbH keine Gewähr.
ƒ Lenze−Antriebsregler (Frequenzumrichter, Servo−Umrichter, Stromrichter)
und zugehörige Komponenten können während des Betriebs − ihrer
Schutzart entsprechend − spannungsführende, auch bewegliche oder
rotierende Teile haben. Oberflächen können heiß sein.
– Bei unzulässigem Entfernen der erforderlichen Abdeckung, bei
unsachgemäßem Einsatz, bei falscher Installation oder Bedienung
besteht die Gefahr von schweren Personen− oder Sachschäden.
– Weitere Informationen entnehmen Sie der Dokumentation.
8
EDKCSEX064 DE/EN/FR 6.0
Page 9

Sicherheitshinweise
Allgemeine Sicherheits− und Anwendungshinweise für Lenze−Antriebsregler
ƒ Im Antriebsregler treten hohe Energien auf. Deshalb bei Arbeiten am
Antriebsregler unter Spannung immer eine persönliche Schutzausrüstung
tragen (Körperschutz, Kopfschutz, Augenschutz, Gehörschutz,
Handschutz).
Bestimmungsgemäße Verwendung
Antriebsregler sind Komponenten, die zum Einbau in elektrische Anlagen oder
Maschinen bestimmt sind. Sie sind keine Haushaltsgeräte, sondern als Komponenten ausschließlich für die Verwendung zur gewerblichen Nutzung bzw. professionellen Nutzung im Sinne der EN 61000−3−2 bestimmt.
Bei Einbau der Antriebsregler in Maschinen ist die Inbetriebnahme (d. h. die Aufnahme des bestimmungsgemäßen Betriebs) solange untersagt, bis festgestellt
wurde, dass die Maschine den Bestimmungen der EG−Richtlinie 2006/42/EG
(Maschinenrichtlinie) entspricht; EN 60204 beachten.
Die Inbetriebnahme (d. h. die Aufnahme des bestimmungsgemäßen Betriebs)
ist nur bei Einhaltung der EMV−Richtlinie (2004/108/EG) erlaubt.
Die Antriebsregler erfüllen die Anforderungen der Niederspannungsrichtlinie
2006/95/EG. Die harmonisierte Norm EN 61800−5−1 wird für die Antriebsregler
angewendet.
Die technischen Daten und die Angaben zu Anschlussbedingungen entnehmen
Sie dem Leistungsschild und der Dokumentation. Halten Sie diese unbedingt
ein.
Warnung: Die Antriebsregler sind Produkte, die nach EN 61800−3 in Antriebssysteme der Kategorie C2 eingesetzt werden können. Diese Produkte können im
Wohnbereich Funkstörungen verursachen. In diesem Fall kann es für den Betreiber erforderlich sein, entsprechende Maßnahmen durchzuführen.
Transport, Einlagerung
Beachten Sie die Hinweise für Transport, Lagerung und sachgemäße Handhabung.
Halten Sie die klimatischen Bedingungen gemäß den technischen Daten ein.
Aufstellung
Sie müssen die Antriebsregler nach den Vorschriften der zugehörigen Dokumentation aufstellen und kühlen.
Die Umgebungsluft darf den Verschmutzungsgrad 2 nach EN 61800−5−1 nicht
überschreiten.
Sorgen Sie für sorgfältige Handhabung und vermeiden Sie mechanische Überlastung. Verbiegen Sie bei Transport und Handhabung weder Bauelemente noch
ändern Sie Isolationsabstände. Berühren Sie keine elektronischen Bauelemente
und Kontakte.
Antriebsregler enthalten elektrostatisch gefährdete Bauelemente, die Sie durch
unsachgemäße Handhabung leicht beschädigen können. Beschädigen oder
zerstören Sie keine elektrischen Komponenten, da Sie dadurch Ihre Gesundheit
gefährden können!
2
EDKCSEX064 DE/EN/FR 6.0
9
Page 10

2
Sicherheitshinweise
Allgemeine Sicherheits− und Anwendungshinweise für Lenze−Antriebsregler
Elektrischer Anschluss
Beachten Sie bei Arbeiten an unter Spannung stehenden Antriebsreglern die
geltenden nationalen Unfallverhütungsvorschriften (z. B. VBG 4).
Führen Sie die elektrische Installation nach den einschlägigen Vorschriften
durch (z. B. Leitungsquerschnitte, Absicherungen, Schutzleiteranbindung). Zusätzliche Hinweise enthält die Dokumentation.
Die Dokumentation enthält Hinweise für die EMV−gerechte Installation (Schirmung, Erdung, Anordnung von Filtern und Verlegung der Leitungen). Beachten
Sie diese Hinweise ebenso bei CE−gekennzeichneten Antriebsreglern. Der Hersteller der Anlage oder Maschine ist verantwortlich für die Einhaltung der im Zusammenhang mit der EMV−Gesetzgebung geforderten Grenzwerte. Um die am
Einbauort geltenden Grenzwerte für Funkstöraussendungen einzuhalten, müssen Sie die Antriebsregler in Gehäuse (z. B. Schaltschränke) einbauen. Die Gehäuse müssen einen EMV−gerechten Aufbau ermöglichen. Achten Sie besonders darauf, dass z. B. Schaltschranktüren möglichst umlaufend metallisch mit
dem Gehäuse verbunden sind. Öffnungen oder Durchbrüche durch das Gehäuse auf ein Minimum reduzieren.
Lenze−Antriebsregler können einen Gleichstrom im Schutzleiter verursachen.
Wird für den Schutz bei einer direkten oder indirekten Berührung an einem
3−phasig versorgten Antriebsregler ein Differenzstromgerät (RCD) verwendet,
ist auf der Stromversorgungsseite des Antriebsreglers nur ein Differenzstromgerät (RCD) vom Typ B zulässig. Wird der Antriebsregler 1−phasig versorgt, ist
auch ein Differenzstromgerät (RCD) vom Typ A zulässig. Neben der Verwendung eines Differenzstromgerätes (RCD) können auch andere Schutzmaßnahmen angewendet werden, wie z. B. Trennung von der Umgebung durch doppelte oder verstärkte Isolierung oder Trennung vom Versorgungsnetz durch
einen Transformator.
Betrieb
Sie müssen Anlagen mit eingebauten Antriebsreglern ggf. mit zusätzlichen
Überwachungs− und Schutzeinrichtungen gemäß den jeweils gültigen Sicherheitsbestimmungen ausrüsten (z. B. Gesetz über technische Arbeitsmittel, Unfallverhütungsvorschriften). Sie dürfen die Antriebsregler an Ihre Anwendung
anpassen. Beachten Sie dazu die Hinweise in der Dokumentation.
Nachdem der Antriebsregler von der Versorgungsspannung getrennt ist, dürfen
Sie spannungsführende Geräteteile und Leistungsanschlüsse nicht sofort berühren, weil Kondensatoren aufgeladen sein können. Beachten Sie dazu die entsprechenden Hinweisschilder auf dem Antriebsregler.
Halten Sie während des Betriebs alle Schutzabdeckungen und Türen geschlossen.
Hinweis für UL−approbierte Anlagen mit eingebauten Antriebsreglern: UL warnings sind Hinweise, die nur für UL−Anlagen gelten. Die Dokumentation enthält
spezielle Hinweise zu UL.
10
EDKCSEX064 DE/EN/FR 6.0
Page 11

Sicherheitshinweise
Allgemeine Sicherheits− und Anwendungshinweise für Lenze−Antriebsregler
Sicherheitsfunktionen
Bestimmte Varianten der Antriebsregler unterstützen Sicherheitsfunktionen
(z. B. "Sicher abgeschaltetes Moment", ehem. "Sicherer Halt") nach den Anforderungen der EG−Richtlinie 2006/42/EG (Maschinenrichtlinie). Beachten Sie unbedingt die Hinweise in der Dokumentation zur integrierten Sicherheitstechnik.
Wartung und Instandhaltung
Die Antriebsregler sind wartungsfrei, wenn die vorgeschriebenen Einsatzbedingungen eingehalten werden.
Entsorgung
Metalle und Kunststoffe zur Wiederverwertung geben. Bestückte Leiterplatten
fachgerecht entsorgen.
Beachten Sie unbedingt die produktspezifischen Sicherheits− und Anwendungshinweise in dieser Anleitung!
2
EDKCSEX064 DE/EN/FR 6.0
11
Page 12

2
2.2 Motor thermisch überwachen
Sicherheitshinweise
Motor thermisch überwachen
Hinweis!
2
ƒ Die I
ƒ Die berechnete Motorbelastung wird beim Netzschalten
ƒ Die Funktion ist UL−zertifiziert, d. h. in UL−approbierten Anlagen
ƒ Die I
2
x t−Belastung des Motors wird in C0066 angezeigt.
Die I
Die thermische Belastungsfähigkeit des Motors wird durch die thermische Mo-
tor−Zeitkonstante (
sungsdaten des Motors oder fragen Sie den Hersteller des Motors.
2
x t−Überwachung ist so ausgelegt, dass bei einem Motor mit einer thermi-
Die I
schen Motor−Zeitkonstante von 5 Minuten (Lenze−Einstellung C0128), einem
Motorstrom von 1,5 x I
chung nach 179 s ausgelöst wird.
Durch zwei einstellbare Auslöseschwellen können Sie unterschiedliche Reaktionen festlegen.
ƒ Einstellbare Reaktion OC8 (TRIP, Warnung, Aus).
– Die Auslöseschwelle wird in C0127 eingestellt.
– Die Reaktion wird in C0606 eingestellt.
– Die Reaktion OC8 kann beispielsweise für eine Vorwarnung genutzt
werden.
ƒ Feste Reaktion OC6−TRIP.
– Die Auslöseschwelle wird in C0120 eingestellt.
x t−Überwachung basiert auf einem mathematischen
Modell, das aus den erfassten Motorströmen eine thermische
Motorbelastung berechnet.
gespeichert.
sind keine zusätzlichen Schutzmaßnahmen für den Motor
erforderlich.
2
x t−Überwachung ist trotzdem kein Motorvollschutz, da
andere Einflüsse auf die Motorbelastung nicht erfasst werden
können, wie veränderte Kühlungsbedingungen (z. B.
Kühlluftstrom unterbrochen oder zu warm).
t, C0128) ausgedrückt. Entnehmen Sie den Wert den Bemes-
und einer Auslöseschwelle von 100 % die Überwa-
N
12
EDKCSEX064 DE/EN/FR 6.0
Page 13

Sicherheitshinweise
Motor thermisch überwachen
Verhalten der I2 x t−Überwachung Bedingung
Die I2 x t−Überwachung wird deaktiviert.
Es wird C0066 = 0 % und
MCTRL−LOAD−I2XT = 0,00 % gesetzt.
Die I2 x t−Überwachung wird angehalten.
Der aktuelle Wert in C0066 und am Ausgang
MCTRL−LOAD−I2XT wird eingefroren.
Die I2 x t−Überwachung ist deaktiviert.
Die Motorbelastung wird in C0066 angezeigt.
Bei C0120 = 0 % und C0127 = 0 % die Reglersperre setzen.
Bei C0120 = 0 % und C0127 = 0 % die Reglerfreigabe erteilen.
C0606 = 3 (Off) und C0127 > 0 % setzen.
Hinweis!
Eine Fehlermeldung OC6 oder OC8 lässt sich erst zurücksetzen,
wenn die I
unterschritten hat.
2
x t−Belastung die eingestellte Auslöseschwelle um 5 %
2
EDKCSEX064 DE/EN/FR 6.0
13
Page 14

2
Sicherheitshinweise
Motor thermisch überwachen
Fremdbelüftete oder selbstgekühlte Motoren
2.2.1 Fremdbelüftete oder selbstgekühlte Motoren
Parametrieren
2
x t−Überwachung können Sie folgende Codestellen einstellen:
Zur I
Codestelle Bedeutung Wertebereich Lenze−Einstellung
C0066 Anzeige der I2 x t−Belastung des Motors 0 ... 250 % −
C0120 Schwelle: Auslösung Fehler "OC6" 0 ... 120 % 0 %
C0127 Schwelle: Auslösung Fehler "OC8" 0 ... 120 % 0 %
C0128 Thermische Motor−Zeitkonstante 0,1 ... 50,0 min 5,0 min
C0606 Reaktion auf Fehler "OC8" TRIP, Warnung, Off Warnung
Auslösezeit und I2 x t−Belastung berechnen
Formel zur Auslösezeit Information
t +*(t) ln
ȡ
ȧ
ȧ
Ȣ
1 *
z ) 1
I
Mot
ǒ
Ǔ
I
N
2
100
ȣ
ȧ
ȧ
Ȥ
I
Aktueller Motorstrom (C0054)
Mot
I
Motor−Bemessungsstrom (C0088)
N
t Thermische Motor−Zeitkonstante
(C0128)
z Schwellenwert in C0120 (OC6)
C0127 (OC8)
oder
14
Formeln zur I2 x t−Belastung Information
L(t) Zeitlicher Verlauf der I2 x t−Bela-
stung des Motors
2
I
Mot
ǒ
L(t) +
Bei gesperrtem Antriebsregler vermindert sich die I2 x t−Belastung:
Ǔ
100% ǒ1 * e
I
N
L(t) + L
Start
Ǹ
e
*t
Ǔ
t
t
*
t
(Anzeige: C0066)
I
Aktueller Motorstrom (C0054)
Mot
I
Motor−Bemessungsstrom (C0088)
N
t Thermische Motor−Zeitkonstante
(C0128)
L
I2 x t−Belastung vor Reglersperre
Start
Der Wert entspricht bei Fehler−
Auslösung dem eingestellten
Schwellenwert in C0120 (OC6)
oder
C0127 (OC8).
EDKCSEX064 DE/EN/FR 6.0
Page 15

Sicherheitshinweise
0
Motor thermisch überwachen
Fremdbelüftete oder selbstgekühlte Motoren
Auslösezeit im Diagramm ablesen
Diagramm zur Ermittlung der Auslösezeiten bei einem Motor mit einer thermischen Motor−Zeitkonstante von 5 Minuten (Lenze−Einstellung C0128):
2
L [%]
120
100
50
0
Abb. 2−1 I2 × t−Überwachung: Auslösezeiten bei unterschiedlichen Motorströmen und
I = 3 × I
Mot N
0 100 200 300 400 500 600 700 8
Auslöseschwellen
I
Mot
I
N
LI
t Zeit
I = 2 × I
Mot N
Aktueller Motorstrom (C0054)
Motor−Bemessungsstrom (C0088)
2
x t−Belastung des Motors (Anzeige: C0066)
I = 1.5 × I
Mot N
I = 1 × I
Mot N
9300STD105
EDKCSEX064 DE/EN/FR 6.0
15
Page 16

2
Sicherheitshinweise
Motor thermisch überwachen
Eigenbelüftete Motoren
2.2.2 Eigenbelüftete Motoren
Konstruktionsbedingt sind eigenbelüftete Normmotoren im Vergleich zu
fremdbelüfteten Motoren im unteren Drehzahlbereich einer erhöhten Wärmeentwicklung ausgesetzt.
Warnings!
Zur Einhaltung der UL 508C Norm müssen Sie über die Codestelle
C0129/x die drehzahlabhängige Bewertung des zulässigen
Drehmomentes einstellen.
Parametrieren
2
x t−Überwachung können Sie folgende Codestellen einstellen:
Zur I
Codestelle Bedeutung Wertebereich Lenze−Einstellung
C0066 Anzeige der I2 x t−Belastung des Motors 0 ... 250 % −
C0120 Schwelle: Auslösung Fehler "OC6" 0 ... 120 % 0 %
C0127 Schwelle: Auslösung Fehler "OC8" 0 ... 120 % 0 %
C0128 Thermische Motor−Zeitkonstante 0,1 ... 50,0 min 5,0 min
C0606 Reaktion auf Fehler "OC8" TRIP, Warnung, Off Warnung
C0129/1 S1−Drehmomentkennlinie I1/I
C0129/2 S1−Drehmomentkennlinie n2/n
N
N
10 ... 200 % 100 %
10 ... 200 % 40 %
16
EDKCSEX064 DE/EN/FR 6.0
Page 17

Wirkung der Codestelle C0129/x
I / I
N
Sicherheitshinweise
Motor thermisch überwachen
Eigenbelüftete Motoren
2
1.1
1.0
3
0.9
0.8
0.7
0
0.6
0
0 0.1
Abb. 2−2 Betriebspunkt im Bereich der Kennlinienabsenkung
2
C0129/1
0.132
C0129/2
1
0.2 0.3 0.4
n / n
N
9300STD350
Die abgesenkte Drehzahl−/Drehmomentkennlinie (Abb. 2−2) reduziert die zulässige thermische Belastung eigenbelüfteter Normmotoren. Die Kennlinie ist
eine Gerade zu deren Definition zwei Punkte notwendig sind:
ƒ Punkt : Festlegung mit C0129/1
Mit diesem Wert ist auch eine Anhebung der maximal zulässigen Belastung
möglich.
ƒ Punkt : Festlegung mit C0129/2
Mit größer werdenden Drehzahlen bleibt die maximal zulässige Belastung
unverändert (I
Mot
= IN).
In Abb. 2−2 kann für jeden Betriebspunkt () auf der Kennlinie ( ... ) die Motordrehzahl und der entsprechende zulässige Motorstrom bzw. das Motordrehmoment () abgelesen werden. kann auch mit den Werten in C0129/1 und
C0129/2 berechnet werden (Bewertungskoeffizient "y", 18).
EDKCSEX064 DE/EN/FR 6.0
17
Page 18
2
Sicherheitshinweise
Motor thermisch überwachen
Eigenbelüftete Motoren
Auslösezeit und I2 x t−Belastung berechnen
Berechnen Sie die Auslösezeit und I
2
x t−Belastung des Motors unter Berücksich-
tigung der Werte in C0129/1 und C0129/2 (Bewertungskoeffizient "y").
Formeln zur Auslösezeit Information
T Auslösezeit der I2 x t−Überwa-
chung
ȡ
T +*(t) ln
ȧ
ȧ
1 *
Ȣ
100% * C0129ń1
y +
Formeln zur I2 x t−Belastung Information
Bei gesperrtem Antriebsregler vermindert sich die I2 x t−Belastung:
L(t) +
C0129ń2
I
Mot
ǒ
y I
L(t) + L
2
Ǔ
100% ǒ1 * e
N
Start
I
Mot
ǒ
y I
Ǹ
e
z ) 1
2
Ǔ
100
N
n
) C0129ń1
n
N
t
*
t
t Thermische Motor−Zeitkonstante
*t
ȣ
ȧ
ȧ
Ȥ
Ǔ
t
(C0128)
In Funktion: Natürlicher Logarith-
mus
I
Aktueller Motorstrom (C0054)
Mot
I
Motor−Bemessungsstrom (C0088)
N
z Schwellenwert in C0120 (OC6)
y Bewertungskoeffizient
nNNenndrehzahl (C0087)
L(t) Zeitlicher Verlauf der I2 x t−Bela-
y Bewertungskoeffizient
I
Mot
I
N
t Thermische Motor−Zeitkonstante
L
Start
C0127 (OC8)
oder
stung des Motors
(Anzeige: C0066)
Aktueller Motorstrom (C0054)
Motor−Bemessungsstrom (C0088)
(C0128)
I2 x t−Belastung vor Reglersperre
Der Wert entspricht bei Fehler−
Auslösung dem eingestellten
Schwellenwert in C0120 (OC6)
C0127 (OC8).
oder
18
EDKCSEX064 DE/EN/FR 6.0
Page 19

2.3 Restgefahren
Personenschutz
ƒ Überprüfen Sie vor Arbeiten am Achsmodul, ob alle Leistungsklemmen
spannungslos sind, da
– nach dem Abschalten der Netzspannung am Versorgungsmodul die
Leistungsklemmen +UG, −UG, U, V und W noch mindestens 3 Minuten
gefährliche Spannung führen.
– bei gestopptem Motor die Leistungsklemmen +UG, −UG, U, V und W
gefährliche Spannung führen.
ƒ Die Betriebstemperatur des Kühlkörpers ist > 70 °C:
– Hautkontakt mit dem Kühlkörper führt zu Verbrennungen.
ƒ Der Ableitstrom gegen PE ist > 3,5 mA AC bzw. > 10 mA DC.
– Nach EN 61800−5−1 ist eine Festinstallation erforderlich.
– Der PE−Anschluss muss nach EN 61800−5−1 ausgeführt sein.
– Weitere Bedingungen der EN 61800−5−1 für hohen Ableitstrom
einhalten.
Geräteschutz
ƒ Alle steckbaren Anschlussklemmen nur im spannungslosen Zustand
aufstecken oder abziehen!
ƒ Die Leistungsklemmen +UG, −UG, U, V, W und PE sind nicht
verpolungssicher ausgelegt.
– Polarität der Leistungsklemmen beim Verdrahten beachten!
ƒ Erst wenn alle Geräte im Leistungsverbund betriebsbereit sind, darf
Leistung umgesetzt werden. Sonst kann die Eingangsstrombegrenzung
zerstört werden.
Häufiges Netzschalten (z. B. Tipp−Betrieb über Netzschütz) kann die Eingangsstrombegrenzung des Achsmoduls überlasten und zerstören, wenn
ƒ das Achsmodul über das Versorgungsmodul ECSxE versorgt wird und die
Eingangsstrombegrenzung abhängig von der DC−Zwischenkreisspannung
aktiviert wird (C0175 = 1 oder 2).
ƒ das Achsmodul über ein nicht von Lenze geliefertes Versorgungsmodul
versorgt wird.
ƒ die Niederspannungsversorgung (24 V) ausgeschaltet ist.
Deshalb müssen bei diesen Betriebsbedingungen zwischen zwei Einschaltvorgängen mindestens 3 Minuten vergehen!
Verwenden Sie bei häufigen sicherheitsbedingten Abschaltungen die Sicherheitsfunktion ˜Sicher abgeschaltetes Moment˜ (STO).
Sicherheitshinweise
Restgefahren
2
EDKCSEX064 DE/EN/FR 6.0
19
Page 20

2
Sicherheitshinweise
Restgefahren
Motorschutz
ƒ Nur Motoren verwenden, deren Isolationsfestigkeit min. û = 1,5 kV,
min. du/dt = 5 kV/ms beträgt.
– Lenze−Motoren erfüllen diese Bedingungen.
ƒ Wenn Sie Motoren einsetzen, deren Isolationsfestigkeit Ihnen nicht
bekannt ist, nehmen Sie bitte Rücksprache mit Ihrem Motorenlieferanten.
ƒ Bei bestimmten Einstellungen der Achsmodule kann der angeschlossene
Motor überhitzt werden, z. B. längerer Betrieb eigenbelüfteter Motoren
bei kleinen Drehzahlen.
ƒ Zur Temperaturüberwachung des Motors Kaltleiter oder
Temperaturschalter mit PTC−Charakteristik einsetzen.
20
EDKCSEX064 DE/EN/FR 6.0
Page 21

Sicherheitshinweise
Sicherheitshinweise für die Installation nach UL
2.4 Sicherheitshinweise für die Installation nach UL
Warnings!
General markings:
ƒ Use 60/75 °C or 75 °C copper wire only.
ƒ Maximum ambient temperature 55 °C, with reduced output
current.
Markings provided for the supply units:
ƒ Suitable for use on a circuit capable of delivering not more than
5000 rms symmetrical amperes, 480 V max, when protected by
K5 or H Fuses (400/480 V devices).
ƒ Alternate − Circuit breakers (either inverse−time, instantaneous
trip types or combination motor controller type E) may be used in
lieu of above fuses when it is shown that the let−through
energy (i
current−limiting circuit breaker will be less than that of the
non−semiconductor type K5 fuses with which the drive has been
tested.
ƒ Alternate − An inverse−time circuit breaker may be used, sized
upon the input rating of the drive, multiplied by 300 %.
Markings provided for the inverter units:
ƒ The inverter units shall be used with supply units which are
provided with overvoltage devices or systems in accordance with
UL840 2nd ed., Table 5.1.
ƒ The devices are provided with integral overload and integral
thermal protection for the motor.
ƒ The devices are not provided with overspeed protection.
Terminal tightening torque of lb−in (Nm)
2
t) and peak let−through current (Ip) of the inverse−time
2
Terminal lb−in Nm
X 21, X 22, X 23, X 24 10.6 ... 13.3 1.2 ... 1.5
X4, X6, X14 1.95 ... 2.2 0.22 ... 0.25
X 25 4.4 ... 7.1 0.5 ... 0.8
Wiring diagram AWG
Terminal AWG
X 21, X 22, X 23, X 24 12 ... 8
X4, X6, X14 28 ... 16
X 25 24 ... 12
EDKCSEX064 DE/EN/FR 6.0
21
Page 22

3
Technische Daten
Allgemeine Daten und Einsatzbedingungen
3 Technische Daten
3.1 Allgemeine Daten und Einsatzbedingungen
Normen und Einsatzbedingungen
Konformität CE
Approbationen
Max. zulässige
Motorleitungslänge
Verpackung (EN ISO 4180) Versandverpackung
Einbau l Einbau in Schaltschrank IP20
Einbaulage senkrechthängend
Einbaufreiräume
geschirmt 50 m bei Netz−Bemessungsspannung und Schaltfrequenz
oberhalb ³ 65 mm
unterhalb ³ 65 mm
seitlich ohne Abstand anreihbar
UL 508C
CSA 22.2 No. 14
l Für die Funktion "Sicher abgeschaltetes Moment" (ehem. "Sicherer
Halt"): Einbau in Schaltschrank IP54
mit Schirmbefestigung ECSZS000X0B: > 195 mm
Niederspannungsrichtlinie (2006/95/EG)
Power Conversion Equipment
Underwriter Laboratories (File No. E132659)
für USA und Kanada
8 kHz
Umweltbedingungen
Klima 3k3 nach IEC/EN 60721−3−3
Lagerung IEC/EN 60721−3−1 1K3 (−25 ... + 55 °C)
Transport IEC/EN 60721−3−2 2K3 (−25 ... +70 °C)
Betrieb IEC/EN 60721−3−3 3K3 (0 ... + 55 °C)
Aufstellhöhe 0 ... 4000 m üNN
Verschmutzung EN 61800−5−1, UL840: Verschmutzungsgrad 2
Vibrationsfestigkeit Beschleunigungsfest bis 0,7 g (Germanischer Lloyd, allgemeine Bedingungen)
22
Betauung, Spritzwasser und Eisbildung
nicht zulässig.
l Luftdruck: 86 ... 106 kPa
l Über +40 °C: Ausgangs−Bemessungs-
strom um 2 %/°C reduzieren.
l Über 1000 m üNN: Ausgangs−Bemes-
sungsstrom um 5 %/1000 m reduzieren.
l Über 2000 m üNN: Einsatz nur er-
laubt in Umgebungen mit Überspannungskategorie II
EDKCSEX064 DE/EN/FR 6.0
Page 23

Technische Daten
Allgemeine Daten und Einsatzbedingungen
Allgemeine elektrische Daten
EMV Einhaltung der Anforderungen nach EN 61800−3
Störaussendung Einhaltung der Grenzwertklasse C2 nach EN 61800−3
Störfestigkeit
Isolationsfestigkeit EN61800−5−1, UL840: Überspannungskategorie III
Ableitstrom gegen PE
(nach EN 61800−5−1)
Schutzart IP20 bei
Schutzmaßnahmen gegen l Kurzschluss Leistungsklemmen
Schutzisolierung von Steuerschaltkreisen
1)
Die Störfestigkeit in den genannten Schärfegraden muss durch den Schaltschrank
gewährleistet sein. Der Anwender muss die Einhaltung der genannten Schärfegrade prüfen.
(erreicht mit anwendungstypischem Summenfilter)
Anforderungen nach EN 61800−3
Anforderung Norm Schärfegrade
1)
ESD
leitungsgeführte Hochfrequenz
HF−Einstrahlung (Gehäuse) EN 61000−4−3 3, d. h. 10 V/m;
Burst EN 61000−4−4 3/4, d. h. 2 kV/5 kHz
Surge (Stoßspannung auf
Netzleitung)
> 3,5 mA AC
l Standardmontage (Einbaugerät)
l Montage in Cold−Plate−Technik
l Montage mit thermischer Separierung (Durchstoß−Technik), IP54 auf
der Kühlkörperseite
– Motorklemme eingeschränkt kurzschlussfest (Nach Kurzschlusser-
kennung muss die Störungsmeldung zurückgesetzt werden.)
l Kurzschluss Hilfsstromkreise
– Digital−Ausgänge: kurzschlussfest
– Bus− und Gebersysteme: eingeschränkt kurzschlussfest (Ggf. können
Überwachungsfunktionen abschalten. Störungsmeldungen müssen
dann zurückgesetzt werden.)
l Erdschluss (erdschlussfest im Betrieb, eingeschränkt erdschlussfest
beim Netz−Einschalten)
l Überspannung
l Kippen des Motors
l Motor−Übertemperatur (Eingang für KTY, I
Schutztrennung vom Netz
Doppelte/verstärkte Isolierung nach EN 61800−5−1
EN 61000−4−2 3, d. h.
EN 61000−4−6 10 V; 0,15 ... 80 MHz
EN 61000−4−5 3, d. h. 1,2/50 ms
l 8 kV bei Luftentladung
l 6 kV bei Kontaktentla-
80 ... 1000 MHz
l 1 kV Phase−Phase
l 2 kV Phase−PE
2
x t−Überwachung)
3
dung
EDKCSEX064 DE/EN/FR 6.0
23
Page 24

3
Technische Daten
Bemessungsdaten
3.2 Bemessungsdaten
Bemessungsdaten Typ
Ausgangsleistung 400 V−Netz SN [kVA] 1,3 2,6 5,3
Daten für Betrieb mit vorgeschaltetem Versor-
gungsmodul an Netzspannung
DC−Zwischenkreisspannung UZK [V] 15 ... 770
Zwischenkreisstrom IZK [A] 2,5 2,0 4,9 3,9 9,8 7,8
Ausgangs−Bemessungsstrom bei 4 kHz
(führt bei 20 °C Umgebungstemperatur zu 70 °C
Kühlkörpertemperatur)
Ausgangs−Bemessungsstrom bei 8 kHz (führt
bei 20 °C Umgebungstemperatur zu 70 °C Kühlkörpertemperatur)
max. Ausgangsstrom
(Beschleunigungsstrom)
Dauerstrom im Stillstand
(Haltestrom bei 90 °C, 4 kHz)
Kurzz. Stillstandsstrom
(Haltestrom bei 90 °C, 4 kHz)
Kurzz. Stillstandsstrom
(Haltestrom bei 70 °C, 4 kHz)
Kurzz. Stillstandsstrom
(Haltestrom bei 70 °C, 8 kHz)
Verlustleistung (Betrieb mit
Bemessungsstrom bei
4 kHz / 8 kHz)
max. Ausgangsfrequenz f
Masse m [kg] ca. 2,4
Achsmodul
ECSx004 ECSx008 ECSx016
U
[V] 400 480 400 480 400 480
Netz
IN [A] 2,0 1,6 4,0 3,2 8,0 6,4
IN [A] 1,4 1,1 2,7 2,2 5,3 4,2
1)
I
[A] 4,0 8,0 16,0
max
I
[A] 2,0 1,6 4,0 3,2 8,0 6,4
0,eff 4 kHz
I
[A] 2,3 4,6 9,1
2)
2)
2)
Gesamt
Innenraum 13,3 17,3 20,7
Kühlkörper 14,0 29,0 64,0
1)
Wenn die Temperatur des Kühlkörpers 70 °C erreicht, wird automatisch auf Schaltfrequenz 4 kHz umgeschaltet.
2)
Die angegebene Temperatur ist die gemessene Temperatur des Kühlkörpers (C0061).
Applikationssoftware:
0,eff 4 kHz
I
[A] 3,0 6,0 12,0
0,eff 4 kHz
I
[A] 1,5 3,0 6,0
0,eff 8 kHz
27,3 46,3 84,7
PV [W]
[Hz] 600
out
S = Speed & Torque P = Posi & Shaft
M = Motion A = Application
24
EDKCSEX064 DE/EN/FR 6.0
Page 25

Technische Daten
Bemessungsdaten
3
Bemessungsdaten Typ
ECSx032 ECSx048 ECSx064
Ausgangsleistung 400 V−Netz SN [kVA] 8,3 11,2 13,2
Daten für Betrieb mit vorgeschaltetem Versor-
gungsmodul an Netzspannung
DC−Zwischenkreisspannung UZK [V] 15 ... 770
Zwischenkreisstrom IZK [A] 15,6 12,5 20,9 16,8 24,5 19,6
Ausgangs−Bemessungsstrom bei 4 kHz
(führt bei 20 °C Umgebungstemperatur zu 70 °C
Kühlkörpertemperatur)
Ausgangs−Bemessungsstrom bei 8 kHz (führt
bei 20 °C Umgebungstemperatur zu 70 °C Kühlkörpertemperatur)
max. Ausgangsstrom
(Beschleunigungsstrom)
Dauerstrom im Stillstand
(Haltestrom bei 90 °C, 4 kHz)
Kurzz. Stillstandsstrom
(Haltestrom bei 90 °C, 4 kHz)
Kurzz. Stillstandsstrom
(Haltestrom bei 70 °C, 4 kHz)
Kurzz. Stillstandsstrom
(Haltestrom bei 70 °C, 8 kHz)
Verlustleistung (Betrieb mit
Bemessungsstrom bei
4 kHz / 8 kHz)
max. Ausgangsfrequenz f
Masse m [kg] ca. 2,4 ca. 3,3
1)
2)
2)
2)
2)
Gesamt
Innenraum 27,5 34,5 41,0
Kühlkörper 117,0 132,0 158,0
1)
Wenn die Temperatur des Kühlkörpers 70 °C erreicht, wird automatisch auf Schaltfrequenz 4 kHz umgeschaltet.
2)
Die angegebene Temperatur ist die gemessene Temperatur des Kühlkörpers (C0061).
Applikationssoftware:
U
[V] 400 480 400 480 400 480
Netz
IN [A] 12,7 10,2 17,0 13,6 20,0 16,0
IN [A] 8,5 6,8 11,3 9,0 13,3 10,6
I
[A] 32,0 48,0 64,0
max
I
[A] 16,0 12,8 23,0 18,4 27,0 21,6
0,eff 4 kHz
I
[A] 18,1 27,2 36,3
0,eff 4 kHz
I
[A] 24,0 36,0 48,0
0,eff 4 kHz
I
[A] 12,1 18,1 24,2
0,eff 8 kHz
144,5 166,5 199,0
PV [W]
[Hz] 600
out
S = Speed & Torque P = Posi & Shaft
M = Motion A = Application
Achsmodul
EDKCSEX064 DE/EN/FR 6.0
25
Page 26

4
Mechanische Installation
Wichtige Hinweise
4 Mechanische Installation
4.1 Wichtige Hinweise
ƒ Achsmodule der Reihe ECS verfügen über die Schutzart IP20 und sind
daher nur für den Einbau in Schaltschränken bestimmt.
ƒ Bei verunreinigter Kühlluft (Staub, Flusen, Fette, aggressive Gase):
– Ausreichende Gegenmaßnahmen treffen, z. B. separate Luftführung,
Einbau von Filtern, regelmäßige Reinigung.
ƒ Mögliche Einbaulagen:
– Senkrecht an der Montageplatte
– DC−Zwischenkreisanschlüsse (X23) oben
– Motoranschluss (X24) unten
ƒ Halten Sie die angegebenen Einbaufreiräume oberhalb und unterhalb zu
anderen Installationen ein!
– Bei Verwendung der Schirmbefestigung ECSZS000X0B ist ein
zusätzlicher Freiraum erforderlich.
– Achten Sie auf ungehinderten Zutritt der Kühlluft und ungehinderten
Austritt der Abluft.
– Sie können mehrere Module der Reihe ECS im Schaltschrank ohne
Zwischenraum nebeneinander befestigen.
ƒ Die Montageplatte des Schaltschranks
– muss elektrisch leitfähig sein.
– darf nicht lackiert sein.
ƒ Bei dauerhaften Schwingungen oder Erschütterungen den Einsatz von
Schwingungsdämpfern prüfen.
26
EDKCSEX064 DE/EN/FR 6.0
Page 27

Mechanische Installation
Montage mit Befestigungsschienen (Standard−Einbau)
4.2 Montage mit Befestigungsschienen (Standard−Einbau)
4.2.1 Abmessungen
Hinweis!
Montage mit Schirmbefestigung ECSZS000X0B:
ƒ Einbaufreiraum unterhalb des Moduls > 195 mm
4
Abmessungen
0
g
³ 65 mm
³ 65 mm
Abb. 4−1 Abmessungen bei Bauform "Einbaugerät"
Achsmodul Maße [mm]
Typ Baugröße a b d d1 e h g
ECSE004
ECSE008
ECSE016
ECSE032
ECSE048
ECSE064
1)
max. 212 mm, je nach aufgestecktem Kommunikationsmodul
e
131
88,5
h
d
d1
g
a
240 276 260
b
d
d1
176
1)
212
1
g
h
g
a
10
b
ECSxA005
6,5
(M6)
Anwendungs−Software: S = Speed & Torque P = Posi & Shaft
EDKCSEX064 DE/EN/FR 6.0
M = Motion A = Application
27
Page 28

4
4.2.2 Montageschritte
Mechanische Installation
Montage mit Befestigungsschienen (Standard−Einbau)
Montageschritte
So montieren Sie das Achsmodul:
1. Befestigungsbohrungen auf Montagefläche vorbereiten.
– Dazu Bohrschablone anlegen.
2. Befestigungsschienen dem Beipack im Karton entnehmen.
3. Schienen in die Nuten des Kühlkörpers schieben:
– von oben: lange Seite einschieben.
– von unten: kurze Seite einschieben.
4. Achsmodul auf Montagefläche befestigen.
28
EDKCSEX064 DE/EN/FR 6.0
Page 29

Elektrische Installation
EMV−gerechte Installation (Aufbau des CE−typischen Antriebssystems)
5 Elektrische Installation
5.1 EMV−gerechte Installation (Aufbau des CE−typischen Antriebssystems)
Allgemeine Hinweise
ƒ Die elektromagnetische Verträglichkeit einer Maschine ist abhängig von
der Art und Sorgfalt der Installation. Beachten Sie besonders:
– Aufbau
– Filterung
– Schirmung
– Erdung
ƒ Bei abweichender Installation ist für die Bewertung der Konformität zur
EMV−Richtlinie die Überprüfung der Maschine oder Anlage auf Einhaltung
der EMV−Grenzwerte erforderlich. Dies gilt z. B. bei:
– Verwendung ungeschirmter Leitungen
– Verwendung von Sammel−Entstörfiltern anstelle der zugeordneten
Funk−Entstörfilter
– Betrieb ohne Funk−Entstörfilter
ƒ Die Verantwortung für die Einhaltung der EMV−Richtlinie in der
Maschinenanwendung liegt beim Weiterverwender.
– Wenn Sie die folgenden Maßnahmen beachten, können Sie davon
ausgehen, dass beim Betrieb der Maschine keine vom Antriebssystem
verursachten EMV−Probleme auftreten und die EMV−Richtlinie bzw. das
EMV−Gesetz erfüllt ist.
– Werden in der Nähe der ECS−Module Geräte betrieben, die der
CE−Anforderung hinsichtlich der Störfestigkeit EN 61000−6−2 nicht
genügen, können diese Geräte durch die ECS−Module
elektromagnetisch beeinträchtigt werden.
5
EDKCSEX064 DE/EN/FR 6.0
29
Page 30

5
Elektrische Installation
EMV−gerechte Installation (Aufbau des CE−typischen Antriebssystems)
Aufbau
ƒ ECS−Module, Funk−Entstörfilter und Netzdrossel großflächig mit geerdeter
Montageplatte verbinden:
– Montageplatten mit elektrisch leitender Oberfläche (verzinkt oder
rostfreier Stahl) erlauben eine dauerhafte Verbindung.
– Lackierte Platten sind nicht geeignet für die EMV−gerechte Installation.
ƒ Verwendung des Kondensatormoduls ECSxK...:
– Installieren Sie das Kondensatormodul zwischen dem
Versorgungsmodul und dem/den Achsmodul(en).
– Ist die Gesamtleitungslänge im Zwischenkreisverbund > 5 m,
installieren Sie das Kondensatormodul möglichst nah am Achsmodul
mit der größten Leistung.
ƒ Verwendung mehrerer Montageplatten:
– Montageplatten großflächig leitend miteinander verbinden (z. B. mit
Kupferbändern).
ƒ Beim Verlegen der Leitungen auf räumliche Trennung der Motorleitung
von Signal− und Netzleitungen achten.
ƒ Eine gemeinsame Klemmen−/Steckerleiste für Netzeingang und
Motorausgang vermeiden.
ƒ Leitungsführung möglichst dicht am Bezugspotenzial. Frei schwebende
Leitungen wirken wie Antennen.
Filterung
Verwenden Sie nur die den Versorgungssmodulen zugeordneten Funk−Entstörfilter und Netzdrosseln:
ƒ Funk−Entstörfilter reduzieren unzulässige hochfrequente Störgrößen auf
ein zulässiges Maß.
ƒ Netzdrosseln reduzieren niederfrequente Störgrößen, die insbesondere
durch die Motorleitungen bedingt werden und von deren Länge abhängig
sind.
30
EDKCSEX064 DE/EN/FR 6.0
Page 31

Elektrische Installation
EMV−gerechte Installation (Aufbau des CE−typischen Antriebssystems)
Schirmung
ƒ Am Achsmodul den Schirm der Motorleitung
– mit der Schirmbefestigung ECSZS000X0B auflegen.
– großflächig mit der Montageplatte unterhalb des Achsmoduls
verbinden.
– Empfehlung: Schirm mit Erdungsschellen auf metallisch blanken
Montageflächen ausführen.
ƒ Bei Schützen, Motorschutzschalter oder Klemmen in der Motorleitung:
– Die Schirme der dort angeschlossenen Leitungen miteinander
verbinden und ebenfalls großflächig mit der Montageplatte
kontaktieren.
ƒ Im Klemmenkasten des Motors oder am Motorgehäuse den Schirm
großflächig mit PE verbinden:
– Metallische Kabelverschraubungen am Motorklemmkasten
gewährleisten eine großflächige Verbindung des Schirms mit dem
Motorgehäuse.
ƒ UG−Leitungen und Steuerleitungen ab 0,3 m Länge abschirmen:
– Schirme digitaler Steuerleitungen beidseitig auflegen.
– Schirme analoger Steuerleitungen einseitig auflegen.
– Schirme auf kürzestem Weg mit den Schirmanschlüssen am Achsmodul
verbinden.
ƒ Einsatz der ECS−Module in Wohngebieten:
– Zur Begrenzung der Störstrahlung zusätzliche Schirmdämpfung ³ 10 dB
vorsehen. Diese wird in der Regel durch Einbau in handelsübliche,
geschlossene, metallische und geerdete Schaltschränke oder −kästen
erreicht.
Erdung
ƒ Alle metallisch leitfähigen Komponenten (z. B. ECS−Module,
Funk−Entstörfilter, Motorfilter, Netzdrosseln) durch entsprechende
Leitungen von einem zentralen Erdungspunkt (PE−Schiene) erden.
ƒ Die in den Sicherheitsvorschriften definierten Mindestquerschnitte
einhalten:
– Für die EMV ist nicht der Leitungsquerschnitt, sondern die Oberfläche
der Leitung und der flächigen Kontaktierung entscheidend.
5
EDKCSEX064 DE/EN/FR 6.0
31
Page 32

5
5.2 Leistungsanschlüsse
Elektrische Installation
Leistungsanschlüsse
32
Abb. 5−1 Steckerleisten für die Leistungsanschlüsse
Gefahr!
Gefährliche elektrische Spannung
Der Ableitstrom gegen Erde (PE) ist > 3.5 mA AC bzw. > 10 mA DC.
Mögliche Folgen:
ƒ Tod oder schwere Verletzungen beim Berühren des Gerätes im
Fehlerfall.
Schutzmaßnahmen:
ƒ Die in der EN 61800−5−1 geforderten Maßnahmen umsetzen.
Insbesondere:
– Festinstallation
– PE−Anschluss normgerecht ausführen (PE−Leiterdurchmesser
³ 10 mm2 oder PE−Leiter doppelt auflegen)
ECSXA080
EDKCSEX064 DE/EN/FR 6.0
Page 33

Elektrische Installation
Leistungsanschlüsse
Stop!
Kein Geräteschutz gegen zu hohe Netzspannung
Der Netzeingang ist intern nicht abgesichert.
Mögliche Folgen:
ƒ Zerstörung des Gerätes bei zu hoher Netzspannung.
Schutzmaßnahmen:
ƒ Beachten Sie die maximal zulässige Netzspannung.
ƒ Sichern Sie das Gerät netzseitig fachgerecht gegen
Netzschwankungen und Spannungsspitzen ab.
ƒ Alle Leistungsanschlüsse sind steckbar ausgeführt und kodiert. Das
Steckverbinder−Set ECSZA000X0B muss gesondert bezogen werden.
ƒ Installation der Leitungen nach EN 60204−1.
ƒ Die verwendeten Leitungen müssen den geforderten Approbationen am
Einsatzort entsprechen (z. B. VDE, UL usw.).
Belegung der Steckerleisten
Steckerleiste/
Klemme
X23 Anschluss DC−Zwischenkreisspannung
X23/+UG
X23/+UG
X23/−UG
X23/−UG
X23/PE
X23/PE
X24 Anschluss Motor
X24/U Motorphase U
X24/V
X24/W Motorphase W
X24/PE Anschluss Erde
X25 Anschluss Motorhaltebremse
X25/BD1 Bremsenanschluss +
X25/BD2 Bremsenanschluss −
Funktion Elektrische Daten
Positive Einspeisung DC−Zwischenkreisspannung
Negative Einspeisung DC−Zwischenkreisspannung
Anschluss Erde
Motorphase V
anwendungs− und typabhängig
0 ... 770 V
2 ... 24,5 A (
anwendungs− und typabhängig
0 ... 480 V
1,6 ... 20 A (
23 ... 30 V DC,
max. 1,5 A
24)
24)
5
EDKCSEX064 DE/EN/FR 6.0
33
Page 34

5
Elektrische Installation
Leistungsanschlüsse
Leitungsquerschnitte und Schraubenanzugsmomente
Leitungstyp
Steckerleiste X23 und X24
starr ˘
flexibel
Steckerleiste X25
flexibel
Aderendhülse Mögliche Leitungs-
ohne Aderendhülse
mit Aderendhülse
isoliert
mit TWIN−Aderendhülse isoliert
mit Aderendhülse
isoliert
ohne Aderendhülse
querschnitte
0,2 ... 10 mm
(AWG 24 ... 8)
0,2 ... 10 mm
(AWG 24 ... 8)
0,25 ... 6 mm
(AWG 22 ... 10)
0,25 ... 4 mm
(AWG 22 ... 12)
0,25 ... 2,5 mm
(AWG 22 ... 12)
0,2 ... 2,5 mm
(AWG 24 ... 12)
2
2
2
2
2
Anzugsmoment Abisolierlänge
5 mm bei Schrauban-
1,2 ... 1,5 Nm
(10.6 ... 13.3 lb−in)
2
0,5 ... 0,8 Nm
(4.4 ... 7.1 lb−in)
schluss
10 mm bei Federkraftanschluss
5 mm bei Schraubanschluss
10 mm bei Federkraftanschluss
Geschirmte Leitungen
Folgende Faktoren bestimmen maßgeblich die Wirkung der geschirmten Leitungen:
ƒ Gute Schirmanbindung
– Schirm großflächig auflegen
ƒ Niedriger Schirmwiderstand
– Nur Schirme mit verzinntem oder vernickeltem Kupfergeflecht
verwenden (Schirme aus Stahlgeflecht sind ungeeignet).
ƒ Hoher Überdeckungsgrad des Schirmgeflechts
– Mindestens 70 ... 80 % mit 90° Überdeckungswinkel
Klemmbügel und Schirmblech enthält die Schirmbefestigung ECSZS000X0B.
34
EDKCSEX064 DE/EN/FR 6.0
Page 35

Elektrische Installation
Leistungsanschlüsse
Anschluss an den DC−Zwischenkreis (+U
, −UG)
G
5
5.2.1 Anschluss an den DC−Zwischenkreis (+UG, −UG)
Stop!
Kein Geräteschutz bei Spannungsschüben im DC−Zwischenkreis
In passiven Achsmodulen (ohne 24 V−Versorgung) kann die
Ladeschaltung durch Spannungsschübe (Spannungsschwankungen)
im DC−Zwischenkreis überlastet werden.
Mögliche Folgen:
ƒ Zerstörung des Gerätes
Schutzmaßnahmen:
ƒ Alle Achsmodule im Zwischenkreisverbund grundsätzlich mit
24 V− Steuerspannung versorgen.
ƒ Bei einer Gesamtleitungslänge > 20 m installieren Sie ein Achsmodul oder
ein Kondensatormodul direkt am Versorgungsmodul.
ƒ ±U
ƒ Leitungslänge (Modul « Modul) > 30 cm: ±U
−Leitungen verdrillt und möglichst kurz ausführen. Auf
G
kurzschlusssichere Verlegung achten!
verlegen.
Dokumentation des Versorgungsmoduls ECSxE
Beachten Sie die enthaltenen Hinweise.
−Leitungen geschirmt
G
Dokumentation des Kondensatormoduls ECSxK
EDKCSEX064 DE/EN/FR 6.0
Beachten Sie die enthaltenen Hinweise.
35
Page 36

5
Elektrische Installation
Leistungsanschlüsse
Anschluss an den DC−Zwischenkreis (+U
K1
L1
L2
L3
N
F1...F3
F4
Z1
, −UG)
G
Off
On
K1
"
"
ECSxE...
L1 L2
T1
L3
PE
BR0
BR1
X21
X6
...
T2
PE
+UG
+UG
-UG
X22
+UG
+UG
PE
-UG
PE
-UG
X23
ECSxS/P/M/A...
X24
X25
BD2
BD1
UV
PE
W
X7
+UG
-UG
-UG
+UG
X23
ECSxS/P/M/A...
X24
X25
BD2
BD1
UV
0
"
"
+
M
3~
J
"
"
2
"
"
6
R
M
3~
+
Abb. 5−2 Leistungsverbund: Versorgungsmodul ECSxE mit Achsmodulen ECSxS/P/M/A
HF−Schirmabschluss durch großflächige Anbindung an Funktionserde (siehe
Montageanleitung Schirmbefestigung ECSZS000X0B)
verdrillte Leitungen
K1 Netzschütz
F1 ... F4 Sicherung
Z1 Netzdrossel / Netzfilter, optional
J KTY−Temperatursensor des Motors
Systemleitung ˘ Rückführung
Leitungsquerschnitt
Leitungslänge (Modul−Modul)
bis 20 m
> 20 m
Aderendhülse Leitungsquer-
ohne Aderendhülse
mit Aderendhülse
isoliert
schnitt
(AWG 10)
6 mm
2
ohne Aderendhülse
mit Aderendhülse
isoliert
Bei Verdrahtung
Stiftkabelschuhe
verwenden!
10 mm
(AWG 8)
Anzugsmoment Abisolierlänge
1,2 ... 1,5 Nm
(10.6 ... 13.3 lb−in)
2
5 mm bei Schraubanschluss
10 mm bei Federkraftanschluss
PE
PE
X7
PE
W
0
"
"
6
R
J
2
ECSXA011
36
EDKCSEX064 DE/EN/FR 6.0
Page 37

Elektrische Installation
Anschluss an den DC−Zwischenkreis (+U
Leistungsanschlüsse
Sicherungen
ƒ Netzsicherungen sind nicht im Lenze−Lieferprogramm enthalten.
Verwenden Sie handelsübliche Sicherungen.
ƒ Eine Absicherung der DC−Zwischenkreisversorgung ist bei Verwendung
netzseitig abgesicherter Versorgungsmodule der Reihe ECSxE nicht
erforderlich.
ƒ Bei Versorgung von ECS−Achsmodulen durch Geräte der Reihen 82xx oder
93xx, die einen Dauerstrom > 40 A liefern können, setzen Sie zwischen
dem versorgenden Gerät und den ECS−Geräten folgende Sicherungen ein:
Schmelzsicherung Halterung
Wert [A] Lenze−Typ Lenze−Typ
50 EFSGR0500ANIN EFH20007
ƒ Beachten Sie nationale und regionale Vorschriften (VDE, UL, EVU, ...).
, −UG)
G
Warnings!
ƒ Nur UL−approbierte Leitungen, Sicherungen und Sicherungshalter
verwenden.
ƒ UL−Sicherung:
– Spannung 500 ... 600 V
– Auslösecharakteristik "H", "K5" oder "CC"
5
Defekte Sicherungen auswechseln
Gefahr!
EDKCSEX064 DE/EN/FR 6.0
Gefährliche elektrische Spannung
Bauteile können bis zu 3 Minuten nach Netz−Ausschalten
gefährliche Spannung führen.
Mögliche Folgen:
ƒ Tod oder schwere Verletzungen beim Berühren des Gerätes.
Schutzmaßnahmen:
ƒ Defekte Sicherungen nur im spannungslosen Zustand
auswechseln.
– Im Verbundbetrieb bei allen Achsmodulen Reglersperre (CINH)
setzen und alle Versorgungsmodule vom Netz trennen.
37
Page 38

5
Elektrische Installation
Leistungsanschlüsse
Anschluss Motor
5.2.2 Anschluss Motor
Abb. 5−3 Anschluss Motor und Motorhaltebremse
Motorleitungen
ƒ Kapazitätsarme Motorleitungen verwenden. Kapazitätsbelag:
– Ader/Ader: max. 75 pF/m
– Ader/Schirm: max. 150 pf/m
ƒ Länge: max. 50 m, geschirmt
ƒ Den Querschnitt der Motorleitungen wählen Sie entsprechend dem
Motorstillstandsstrom (I
dem Motorbemessungsstrom (I
ƒ Länge der ungeschirmten Anschlussenden: 40 ... 100 mm (je nach
Leitungsquerschnitt)
ƒ Lenze−Systemleitungen erfüllen diese Bedingungen.
ƒ Für eine EMV−gerechte Verdrahtung verwenden Sie die
Schirmbefestigung ECSZS000X0B.
ECSXA010
) bei Verwendung von Synchron−Motoren bzw.
0
) bei Asynchron−Motoren.
N
38
Montageanleitung zur Schirmbefestigung ECSZS000X0B
Hier finden Sie weitere Informationen zur EMV−gerechten
Verdrahtung.
EDKCSEX064 DE/EN/FR 6.0
Page 39

5.2.3 Anschluss Motorhaltebremse
Die Motorhaltebremse
ƒ wird an X25/BD1 und X25/BD2 angeschlossen.
ƒ wird über X6/B+ und X6/B− mit Niederspannung versorgt:
+23 ... +30 V DC, max. 1,5 A
Stop!
ƒ X6/B+ mit einer Sicherung F 1,6 A absichern.
ƒ Wird keine passende Spannung (falsche Größe, falsche Polarität)
an die Bremse gelegt, fällt diese ein und kann durch den
weiterdrehenden Motor überhitzt und zerstört werden.
5.2.3.1 Funkenlöschglied
Im Achsmodul ist bereits ein Funkenlöschglied zum Schutz der Kontakte des integrierten Bremsenrelais beim Schalten der Motorhaltebremse (induktive Last)
integriert.
5.2.3.2 Überwachung des Bremsenanschlusses
Der Anschluss der Motorhaltebremse lässt sich auf Spannungsausfall und Kabelbruch überwachen, wenn die Überwachung in C0602 aktiviert ist.
Die Überwachung des Bremsenanschlusses spricht unter folgenden Bedingungen an:
Fall 1, Motorhaltebremse gelüftet (Bremsenrelaiskontakt geschlossen):
ƒ Strom über Haltebremse (I
ƒ Spannung an X6/B+ und X6/B− (U
Fall 2, Motorhaltebremse geschlossen (Bremsenrelaiskontakt geöffnet):
ƒ Spannung an X6/B+ und X6/B− (U
) < 140 mA +/−10 % oder
B
B
B
Elektrische Installation
Leistungsanschlüsse
Anschluss Motorhaltebremse
) < +4 V +/−10 %
) < +4 V +/−10 %
5
EDKCSEX064 DE/EN/FR 6.0
39
Page 40
5
Elektrische Installation
Leistungsanschlüsse
Anschluss Motorhaltebremse
5.2.3.3 Anforderungen an die Bremsenleitung
ƒ Lenze−Systemleitung mit integrierter Bremsenleitung verwenden.
– Schirmung der Bremsenleitung getrennt auflegen.
ƒ Länge: max. 50 m
ƒ Ist eine getrennt verlegte Bremsenleitung notwendig, verlegen Sie diese
geschirmt.
Hinweis!
Durch die Schaltung zur Überwachung des Bremsenanschlusses
entsteht ein zusätzlicher konstanter Spannungsabfall von 1,5 V. Der
Spannungsabfall kann durch eine höhere Spannung am
Leitungseingang kompensiert werden.
Die erforderliche Spannung an X6/B+ und X6/B− errechnet sich für die Lenze−Systemleitungen wie folgt:
V
ƪ
m @ A
ƫ
[V] + UB[V] ) 0, 08
U
K
UKErforderliche Spannung an 6X/B+ und X6/B− [V]
UBNennbetriebsspannung der Bremse [V]
Länge der Bremsenleitung [m]
L
L
IBBremsenstrom [A]
@ LL[m] @ IB[A] ) 1, 5[V]
40
1.5 A
B-
B+
X6
F 1.6 A
_
+
+23 ... +30 V DC
max. 1.5 A
Abb. 5−4 Anschluss der Motorhaltebremse an X25
HF−Schirmabschluss durch großflächige Anbindung an Funktionserde (siehe
Montageanleitung Schirmbefestigung ECSZS000X0B)
X25
"
"
BD2
BD1
_
+
M
3~
+
ECSXA017
EDKCSEX064 DE/EN/FR 6.0
Page 41
5.3 Steueranschlüsse
Elektrische Installation
Steueranschlüsse
5
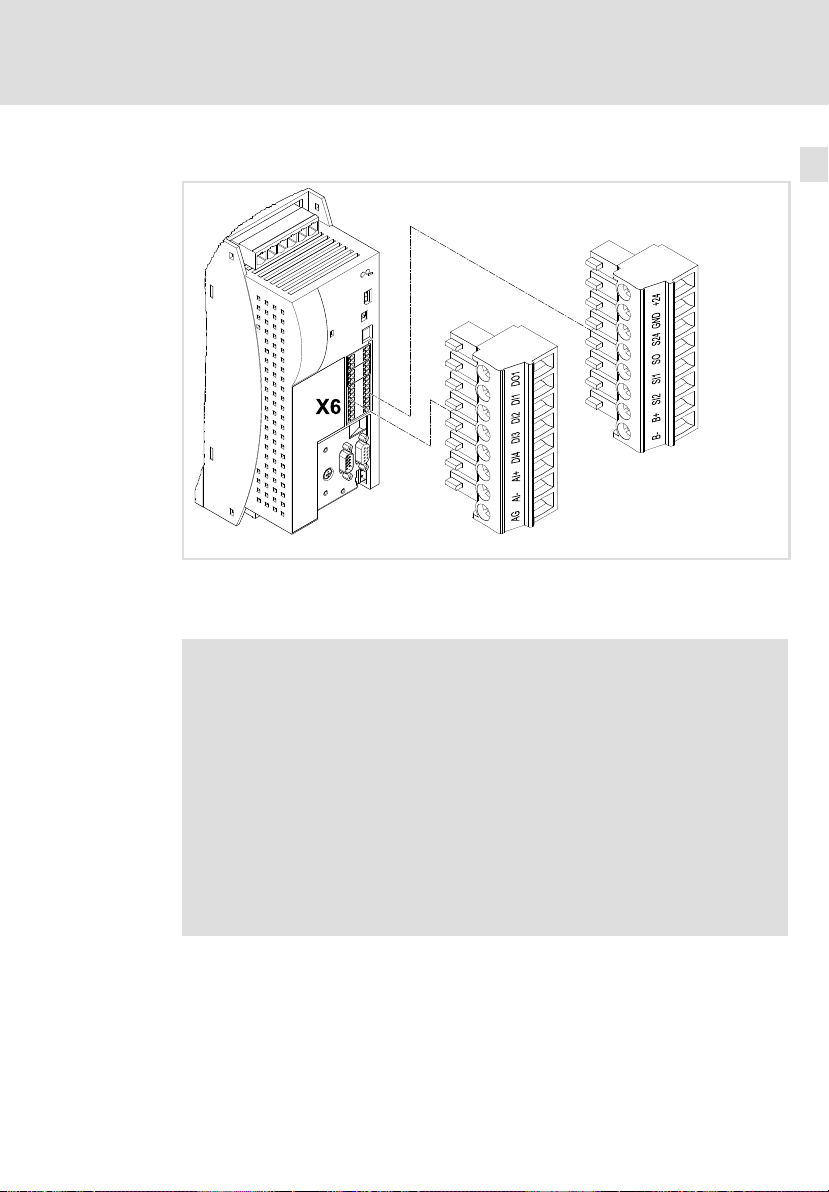
ECSXA070
Abb. 5−5 Steckerleisten für die Steueranschlüsse (X6)
Für die Versorgung der Steuerelektronik ist eine externe 24 V−Gleichspannung
an den Klemmen X6/+24 und X6/GND erforderlich.
Stop!
ƒ Führen Sie die Steuerleitungen immer geschirmt aus, um
Störeinkopplungen zu vermeiden.
ƒ Die Spannungsdifferenz zwischen X6/AG, X6/GND und dem PE
des Achsmoduls darf maximal 50 V betragen.
ƒ Die Spannungsdifferenz begrenzen Sie durch:
– überspannungsbegrenzende Bauelemente oder
– direkte Anbindung von X6/AG und X6/GND mit PE.
ƒ Die Verschaltung muss sicherstellen, dass bei X6/DO1 = 0
(LOW−Pegel) die angeschlossenen Achsmodule keine Energie aus
dem Zwischenkreis entnehmen. Sonst kann das
Versorgungsmodul beschädigt werden.
EDKCSEX064 DE/EN/FR 6.0
41
Page 42

5
Elektrische Installation
Steueranschlüsse
Schirmauflage der Steuerleitungen und Signalleitungen
Das Blech auf der Gerätevorderseite dient als Montagestelle (zwei Gewindebohrungen M4) für die Schirmauflage der Signalleitungen. Die verwendeten
Schrauben dürfen max. 10 mm in den Innenraum des Gerätes hineinragen. Für
eine optimale Kontaktierung der Schirmauflage verwenden Sie die Klemmbügel der Schirmbefestigung ECSZS000X0B.
+UG
L1 L2
X21
L3
PE
BR0
BR1
X22
+UG
-UG
PE
+UG
+UG
X23
-UG-UG
PEPE
"
"
0
T1
T2
ECSxE...
X6
DI1
DI2
DO1
D24
+24V
GND
1
+24 VDC
GND
ECSxS/P/M/A...
DI1
DI2
DI3
DO1
DI4
"
"
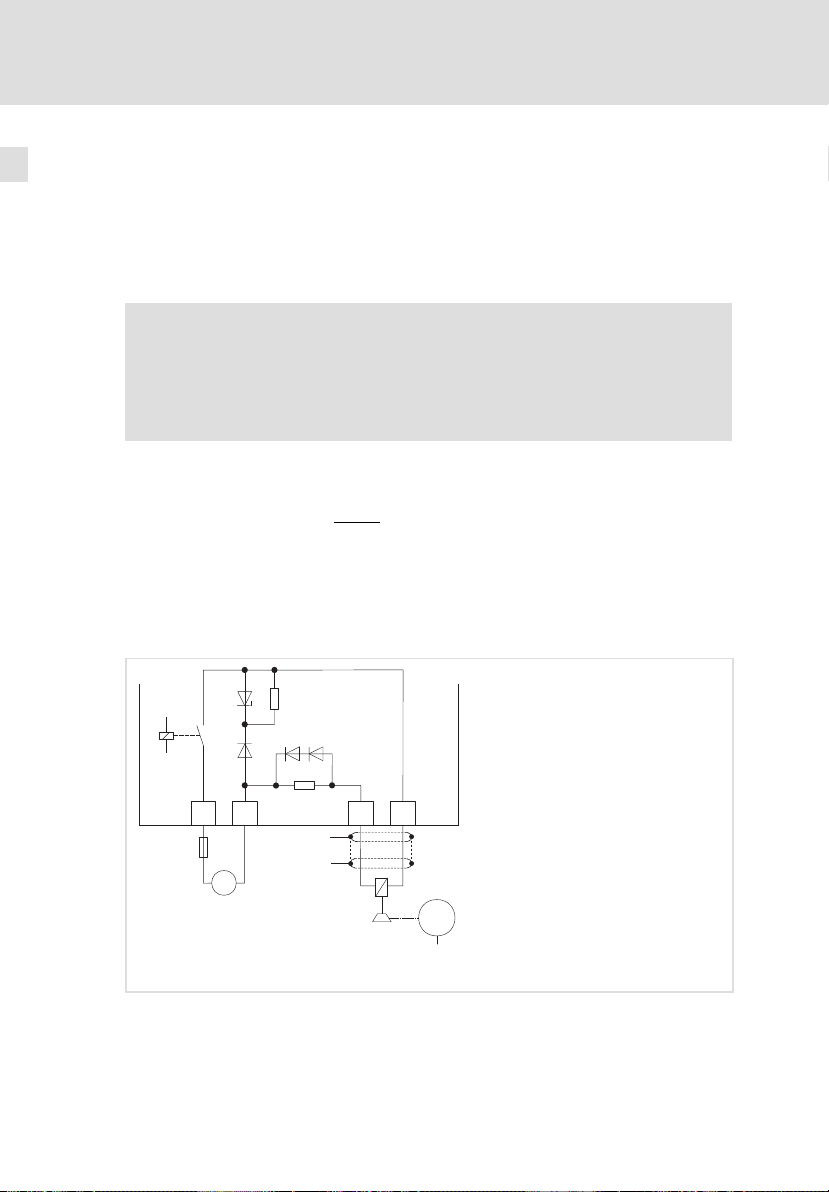
Abb. 5−6 Verbund: Steuersignale mit internem Bremswiderstand
HF−Schirmabschluss durch großflächige Anbindung an Funktionserde (siehe
Montageanleitung Schirmbefestigung ECSZS000X0B)
/ Hilfsschütz/−relais
Spannungsversorgung Motorhaltebremse 23 ... 30 V DC, max. 1,5 A
Sicher abgeschaltetes Moment (ehem. "Sicherer Halt")
Reglerfreigabe/−sperre
X6
AI-
AI+
=
24 VDC
B-
B+
AG
+24V
-
+
+
-
SI1
SO
SI2
S24
GND
"
F 1,6 A
U
"
2
"
3
=
4
ECSXA013
42
EDKCSEX064 DE/EN/FR 6.0
Page 43

Elektrische Installation
Steueranschlüsse
Einschaltsequenz des Hilfsrelais
Stop!
Überlastung der Ladeschaltung im Versorgungsmodul
Die Reglerfreigabe der Achsen darf erst erfolgen, wenn der
Ladevorgang des DC−Zwischenkreises abgeschlossen ist und das
Versorgungsmodul somit betriebsbereit ist.
Mögliche Folgen:
ƒ Zerstörung des Versorgungsmoduls
Schutzmaßnahmen:
ƒ Nutzung der Schaltung zur zentralen Reglerfreigabe der Achsen
über die Ein− und Ausgänge DI2 und DO1 des
Versorgungsmodules (siehe nachfolgende Beschreibung).
Die Einschaltsequenz des Hilfsrelais (siehe Abb. 5−6) ist wie folgt:
1. Am Versorgungsmodul wird der Digitaleingang X6/DI1 (Netzfreigabe) von
der übergeordneten Steuerung oder vom Bediener auf HIGH geschaltet.
– Der DC−Zwischenkreis lädt auf.
2. Der Betriebsbereit−Ausgang des Achsmoduls (DO1) schaltet nun über
Relais den Digitaleingang X6/DI2 (zentrale Reglerfreigabe) des
Versorgungsmoduls.
– In den ECS−Achsmodulen ist in der Lenze−Werkseinstellung DO1 auf
"Betriebsbereit" eingestellt. "Betriebsbereit" steht erst an, wenn
mindestens eine bestimmte DC−Zwischenkreisspannung erreicht ist.
3. Über den Ausgang X6/DO1 des Versorgungsmodules erfolgt die zentrale
Reglerfreigabe für die Achsmodule. Die zentrale Reglerfreigabe DO1
schaltet erst, wenn der Ladevorgang des DC−Zwischenkreises
abgeschlossen ist UND der Eingang X6/DI2 gesetzt ist.
5
EDKCSEX064 DE/EN/FR 6.0
43
Page 44
5
Elektrische Installation
Steueranschlüsse
Belegung der Steckerleisten
Steckerleiste X6
Klemme Funktion Elektrische Daten
X6/+24 Niederspannungsversorgung der Steuer-
X6/GND Bezugspotenzial Niederspannungsversor-
X6/DO1 Digitaler Ausgang 1 24 V DC, 0,7 A (max. 1,4 A)
X6/DI1 Digitaler Eingang 1
X6/DI2 Digitaler Eingang 2
X6/DI3 Digitaler Eingang 3
X6/DI4 Digitaler Eingang 4
X6/AI+ Analog−Eingang +
X6/AI− Analog−Eingang −
X6/AG Bezugspotenzial Analog−Eingang (interne
X6/B+ Bremsenversorgung +
X6/B− Bremsenversorgung −
X6/S24
X6/SO
X6/SI1
X6/SI2
elektronik
gung
Masse)
Anschluss "Sicher abgeschaltetes Moment" (ehem. "Sicherer Halt")
20 ... 30 V DC, 0,5 A (max. 1 A)
bei 24 V Einschaltstrom:
max. 2 A für 50 ms
kurzschlussfest
LOW:
−3 ... +5 V;
−3 ... +1,5 mA
HIGH:
+15 ... +30 V;
+2 ... +15 mA
Eingangsstrom bei 24 V DC:
8 mA pro Eingang
einstellbar mit Jumperleiste X3:
−10 ... +10 V, max. 2 mA
−20 ... +20 mA
Auflösung: 11 Bit + Vorzeichen
23 ... 30 V DC
max. 1,5 A
Bremsenspannung so einstellen, dass die
zulässige Spannung an der Bremse nicht
unter− oder überschritten wird ˘ sonst
Fehlfunktion oder Zerstörung!
48
44
Leitungsquerschnitte und Schraubenanzugsmomente
Leitungstyp
flexibel
Aderendhülse Leitungsquer-
ohne Aderendhülse
mit Aderendhülse
isoliert
schnitt
0,08 ... 1,5 mm
(AWG 28 ... 16)
0,25 ... 0,5 mm
(AWG 22 ... 20)
Anzugsmoment Abisolierlänge
2
(1.95 ... 2.2 lb−in)
2
0,22 ... 0,25 Nm
5 mm bei Schraubanschluss
9 mm bei Federkraftanschluss
Wir empfehlen Steuerleitungen mit einem Leitungsquerschnitt von 0,25 mm
zu verwenden.
EDKCSEX064 DE/EN/FR 6.0
2
Page 45

5.3.1 Digitale Eingänge und Ausgänge
Stop!
Bei Anschluss induktiver Last an X6/DO1 ein Funkenlöschglied mit
einer Begrenzungsfunktion auf max. 50 V ± 0 % vorsehen.
GNDext
47k
1k
3k3
3k3
3k3
3k3
Elektrische Installation
Steueranschlüsse
Digitale Eingänge und Ausgänge
1.5 A
5
X6
DI1
DI2
DI3
DI4
GND
DO1
"
"
_
=
24 VDC
+
Abb. 5−7 Digitale Eingänge und Ausgänge an X6
HF−Schirmabschluss durch großflächige Anbindung an Funktionserde (siehe
Montageanleitung Schirmbefestigung ECSZS000X0B)
+24
ECSXA014
EDKCSEX064 DE/EN/FR 6.0
45
Page 46

5
Elektrische Installation
Steueranschlüsse
Analog−Eingang
5.3.2 Analog−Eingang
82k5
3.3 nF
AI-
X6
"
"
Abb. 5−8 Analog−Eingang an X6
HF−Schirmabschluss durch großflächige Anbindung an Funktionserde (siehe
82k5
X3
250R
5
6
GND
3.3 nF
=
=
AI+
AG
Montageanleitung Schirmbefestigung ECSZS000X0B)
ECSXA015
46
EDKCSEX064 DE/EN/FR 6.0
Page 47

Elektrische Installation
Steueranschlüsse
Analog−Eingang
Konfiguration Analog−Eingang
ƒ Stellen Sie über C0034 ein, ob der Eingang für eine Leitspannung (±10 V)
oder einen Leitstrom (+4 ... 20 mA oder ±20 mA) verwendet werden soll.
ƒ Jumperleiste X3 entsprechend der Einstellung in C0034 setzen:
Stop!
Jumper nicht auf die Pins 3−4 stecken! Das Achsmodul kann so nicht
initialisiert werden.
Jumperleiste X3 Einstellung Messbereich
C0034 = 0 (Leitspannung)
5
3
1
5
3
1
6
4
Jumper auf 1−2: Parkstellung
2
6
4
5−6 geschlossen
2
5−6 offen
l Pegel: −10 ... +10 V
l Auflösung: 5 mV (11 Bit + Vorzei-
chen)
l Normierung:
±10 V º ±16384 º ±100 %
C0034 = 1 (Leitstrom)
l Pegel: +4 ... +20 mA
l Auflösung: 20 mA (10 Bit ohne Vor-
zeichen)
l Normierung:
+4 mA º 0 º 0 %
+20 mA º 16384 º 100 %
C0034 = 2 (Leitstrom)
l Pegel: −20 ... +20 mA
l Auflösung: 20 mA (10 Bit + Vorzei-
chen)
l Normierung:
±20 mA º ±16384 º ±100 %
5
EDKCSEX064 DE/EN/FR 6.0
47
Page 48

5
Elektrische Installation
Steueranschlüsse
Sicher abgeschaltetes Moment
5.3.3 Sicher abgeschaltetes Moment
5.3.3.1 Realisierung
Die Achsmodule unterstützen die Sicherheitsfunktion "Sicher abgeschaltetes
Moment" (ehem. "Sicherer Halt"), "Schutz gegen unerwarteten Anlauf", nach
den Anforderungen der EN ISO 13849−1, Performance Level Pld. Dafür sind die
Achsmodule mit zwei unabhängigen Sicherheitswegen ausgestattet. Der Performance Level Pld wird erreicht, wenn das Ausgangssignal an X6/SO zusätzlich
auf Richtigkeit überprüft wird.
Die Schaltung "Sicher abgeschaltetes Moment" ist im Achsmodul mit Optokopplern ausgeführt. Die Optokoppler trennen folgende Bereiche galvanisch gegeneinander ab:
ƒ die digitalen Eingänge und Ausgänge:
– Eingang X6/SI1 (Reglerfreigabe/−sperre)
– Eingang X6/SI2 (Impulsfreigabe/−sperre)
– Bremsenausgang X6/B+, B−
– Ausgang X6/SO ("Sicher abgeschaltetes Moment" aktiv/inaktiv)
ƒ die Schaltung für die interne Steuerung
ƒ die Leistungsendstufe
48
EDKCSEX064 DE/EN/FR 6.0
Page 49

Elektrische Installation
5
Steueranschlüsse
Sicher abgeschaltetes Moment
µP
U
V
W
X
Y
Z
X6
Sl1
Sl2
S24
SO
GND
B+
B-
X25
BD2
BD1
Abb. 5−9 Realisierung der Funktion "Sicher abgeschaltetes Moment"
Bereich 1: Eingänge und Ausgänge
Bereich 2: Schaltung für die interne Steuerung
Bereich 3: Leistungsendstufe
>1
&
&
&
&
&
&
Stop!
Bei Verdrahtung der Schaltkreise "Sicher abgeschaltetes Moment"
an X6 isolierte Aderendhülsen verwenden.
X2
U
V
W
ECSXA100
Verschaltungsbeispiele finden Sie im Download−Bereich
EDKCSEX064 DE/EN/FR 6.0
(Application Knowledge Base) unter:
www.Lenze.com
49
Page 50

5
5.3.3.2 Funktionsbeschreibung
Elektrische Installation
Steueranschlüsse
Sicher abgeschaltetes Moment
Der Zustand "Sicher abgeschaltetes Moment" lässt sich jederzeit über die Eingangsklemmen X6/SI1 (Reglerfreigabe/−sperre) und X6/SI2 (Impulsfreigabe/−
sperre) einleiten. Dazu muss an beiden Klemmen ein LOW−Pegel anliegen:
ƒ X6/SI1 = LOW (Regler gesperrt):
Der Wechselrichter wird über das Mikrocontroller−System gesperrt.
ƒ X6/SI2 = LOW (Impulse gesperrt):
Die Versorgungsspannung für die Optokoppler der Leistungsteiltreiber wird
abgeschaltet, d. h. der Wechselrichter kann über das Mikrocontroller−System nicht mehr freigegeben und angesteuert werden.
Das Eingangssignal an X6/SI2 an die Hardware wird zusätzlich an das Mikrocontroller−System geleitet und dort für die Zustandssteuerung ausgewertet. Für die externe Weiterverarbeitung wird für den Zustand "Sicher abgeschaltetes Moment aktiv" am digitalen Ausgang X6/SO ein HIGH−Pegel
ausgegeben.
Die Ansteuerung des Wechselrichters wird so über zwei unterschiedliche, voneinander unabhängige Methoden unterbunden. Somit wird sicher verhindert,
dass der Motor unerwartet wieder anlaufen kann.
50
EDKCSEX064 DE/EN/FR 6.0
Page 51

5.3.3.3 Wichtige Hinweise
Gefahr!
Mit der Funktion "Sicher abgeschaltetes Moment" ist ohne
zusätzliche Maßnahmen kein "Not−Aus" möglich!
Zwischen Motor und Achsmodul gibt es keine galvanische
Trennung, keinen "Serviceschalter" oder "Reparaturschalter".
Mögliche Folgen:
ƒ Tod oder schwerste Verletzungen
ƒ Zerstörung oder Beschädigung der Maschine/des Antriebs
Schutzmaßnahmen:
Für einen "Not−Aus" ist die galvanische Trennung des Leitungswegs
zum Motor erforderlich, z. B. durch ein zentrales Netzschütz mit
"Not−Aus"−Verschaltung.
Installation/Inbetriebnahme
ƒ Nur qualifiziertes Personal darf die Funktion "Sicher abgeschaltetes
Moment" installieren und in Betrieb nehmen.
ƒ Alle Steuerungskomponenten (Schalter, Relais, SPS, ...) und der
Schaltschrank müssen die Anforderungen der EN ISO 13849 erfüllen. Dazu
gehören unter anderem:
– Schalter, Relais in Schutzart IP54.
– Schaltschrank in Schutzart IP54.
– Alle weiteren Anforderungen der EN ISO 13849 entnehmen.
ƒ Die Verdrahtung mit isolierten Aderendhülsen ist unbedingt notwendig.
ƒ Alle sicherheitsrelevanten Leitungen (z. B. Ansteuerleitung für das
Sicherheitsrelais, Rückmeldekontakt) außerhalb des Schaltschranks
unbedingt geschützt verlegen, z. B. im Kabelkanal. Dabei unbedingt
sicherstellen, dass Kurzschlüsse zwischen den einzelnen Leitungen sicher
ausgeschlossen sind. Weitere Maßnahmen siehe EN ISO 13849.
ƒ Ist beim "Sicher abgeschalteten Moment" mit Krafteinwirkung von außen
zu rechnen (z. B. ein Durchsacken hängender Achsen), sind zusätzliche
Maßnahmen erforderlich (z. B. mechanische Bremsen).
Elektrische Installation
Steueranschlüsse
Sicher abgeschaltetes Moment
5
Während des Betriebs
ƒ Nach der Installation muss der Betreiber die Funktion der Schaltung
"Sicher abgeschaltetes Moment" prüfen.
ƒ Die Funktionsprüfung muss in regelmäßigen Zeitabständen wiederholt
werden, spätestens jedoch nach einem Jahr.
EDKCSEX064 DE/EN/FR 6.0
51
Page 52

5
Elektrische Installation
Steueranschlüsse
Sicher abgeschaltetes Moment
5.3.3.4 Technische Daten
Klemmenbelegung
Steckerleiste X6
Klemme Funktion Pegel Elektrische Daten
X6/S24 Niederspannungsversor-
X6/SO Ausgang Rückmeldung
X6/SI1 Eingang 1 (Reglerfreiga-
X6/SI2 Eingang 2 (Impulsfrei-
gung
"Sicher abgeschaltetes Moment"
be/−sperre)
gabe/−sperre)
Leitungsquerschnitte und Schraubenanzugsmomente
LOW während des Betriebs
HIGH "Sicher abgeschaltetes
Moment" aktiv
LOW Antriebsregler gesperrt
HIGH Antriebsregler freigege-
ben
LOW Impulse für Leistungs-
teil gesperrt
HIGH Impulse für Leistungs-
teil freigegeben
18 ... 30 V DC
0,7 A
24 V DC
0,7 A (max. 1,4 A)
kurzschlussfest
LOW−Pegel:
−3 ... +5 V
−3 ... +1,5 mA
HIGH−Pegel:
+15 ... +30 V
+2 ... +15 mA
Eingangsstrom bei
24 V DC:
8 mA pro Eingang
52
Leitungstyp
flexibel
Aderendhülse Leitungsquer-
mit Aderendhülse
isoliert
ohne Aderendhülse
schnitt
0,25 ... 1,5 mm
(AWG 22 ... 16)
Bei Verwendung der Funktion "Sicher abgeschaltetes Moment"
Anzugsmoment Abisolierlänge
2
(1.95 ... 2.2 lb−in)
0,22 ... 0,25 Nm
nicht erlaubt
5 mm bei Schraubanschluss
9 mm bei Federkraftanschluss
EDKCSEX064 DE/EN/FR 6.0
Page 53

5.3.3.5 Funktionsprüfung
ƒ Nach der Installation muss der Betreiber die Funktion der Schaltung
"Sicher abgeschaltetes Moment" prüfen.
ƒ Die Funktionsprüfung muss in regelmäßigen Zeitabständen wiederholt
werden, spätestens jedoch nach einem Jahr.
Stop!
Führt die Funktionsprüfung zu unzulässigen Zuständen an den
Klemmen, ist die Inbetriebnahme untersagt!
Prüfvorschrift
ƒ Prüfen Sie die Verschaltung auf richtige Funktion.
ƒ Prüfen Sie direkt an den Klemmen, ob die Funktion "Sicher abgeschaltetes
Moment" im Achsmodul fehlerfrei arbeitet:
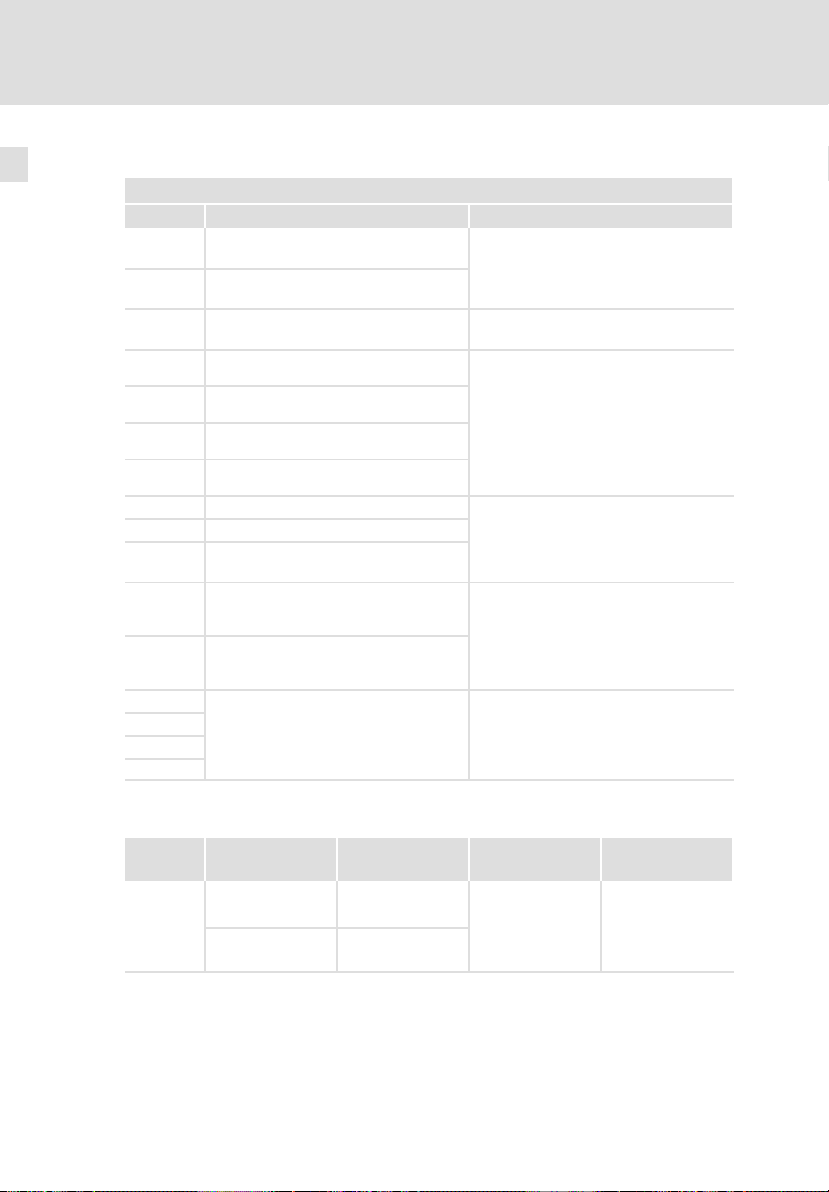
Zustände der Funktion "Sicher abgeschaltetes Moment" am Achsmodul
Pegel an Eingangsklemme
X6/SI1 X6/SI2 X6/SO X6/SO
LOW LOW HIGH LOW
LOW HIGH LOW
HIGH LOW LOW
HIGH HIGH LOW
Elektrische Installation
Sicher abgeschaltetes Moment
Resultierender Pegel an
Ausgangsklemme
Steueranschlüsse
Unzulässiger Pegel an
Ausgangsklemme
HIGH
5
EDKCSEX064 DE/EN/FR 6.0
53
Page 54

5
5.4 Systembus (CAN) verdrahten
Elektrische Installation
Systembus (CAN) verdrahten
Hinweis!
Systembus (CAN)
Beim Achsmodul ECSxA... kann die Kommunikation mit einem
übergeordneten Leitsystem (SPS) oder weiteren Antriebsreglern
über beide CAN−Schnittstellen (X4 oder X14) erfolgen.
MotionBus (CAN)
Der Begriff "MotionBus (CAN)" drückt die Funktionalität der
CAN−Schnittstelle X4 bei den Achsmodulen ECSxS/P/M... aus. Bei
diesen Geräten erfolgt die Kommunikation mit einem
übergeordneten Leitsystem (SPS) oder weiteren Antriebsreglern
ausschließlich über die Schnittstelle X4. Über Schnittstelle X14
(CAN−AUX) erfolgt ausschließlich die Parametrierung und Diagnose.
54
EDKCSEX064 DE/EN/FR 6.0
Page 55

Elektrische Installation
Systembus (CAN) verdrahten
Abb. 5−10 Busanschlüsse am Antriebsregler
Belegung der Steckerleisten
X4 (CAN) X14 (CAN−AUX) Beschreibung
CH CAH CAN−HIGH
CL CAL CAN−LOW
CG CAG Bezugspotenzial
5
ECS_COB003
Spezifikation des Übertragungskabels
Wir empfehlen CAN−Kabel nach ISO 11898−2 zu verwenden:
CAN−Kabel nach ISO 11898−2
Kabeltyp Paarverseilt mit Abschirmung
Impedanz 120 W (95 ... 140 W)
Leitungswiderstand/−querschnitt
Signallaufzeit £ 5 ns/m
EDKCSEX064 DE/EN/FR 6.0
Kabellänge £ 300 m £ 70 mW/m / 0.25 0.34 mm2 (AWG22)
Kabellänge 301 1000 m £ 40 mW/m / 0.5 mm2 (AWG20)
55
Page 56

5
Elektrische Installation
Systembus (CAN) verdrahten
Verdrahtung des Systembus(CAN)
56
Abb. 5−11 Beispiel: Verdrahtung des Systembus (CAN) über Schnittstelle X4
ECS ECS−Achsmodul
M Übergeordnete Steuerung, z. B. ETC
Hinweis!
Schließen Sie je einen Busabschluss−Widerstand (120 W) am ersten
und letzten Knoten des Systembus (CAN) an.
ECS_COB004
EDKCSEX064 DE/EN/FR 6.0
Page 57

Elektrische Installation
Systembus (CAN) verdrahten
Busleitungslänge
Hinweis!
Halten Sie die zulässigen Leitungslängen unbedingt ein.
1. Überprüfen Sie die Einhaltung der Gesamt−Leitungslänge in Tab. 5−1.
Durch die Übertragungsrate ist die Gesamt−Leitungslänge festgelegt.
CAN−Übertragungsrate [kBit/s] Max. Buslänge [m]
50 1500
125 630
250 290
500 120
1000 25
Tab. 5−1 Gesamt−Leitungslänge
2. Überprüfen Sie die Einhaltung der Segment−Leitungslänge in Tab. 5−2.
Die Segment−Leitungslänge wird durch den verwendeten Leitungsquerschnitt
und die Teilnehmeranzahl festgelegt. Ohne Repeater ist die Segment−Leitungslänge gleich der Gesamt−Leitungslänge.
5
Anzahl Teilnehmer
2 240 m 430 m 650 m 940 m
5 230 m 420 m 640 m 920 m
10 230 m 410 m 620 m 900 m
20 210 m 390 m 580 m 850 m
32 200 m 360 m 550 m 800 m
63 170 m 310 m 470 m 690 m
Tab. 5−2 Segment−Leitungslänge
3. Vergleichen Sie die beiden ermittelten Werte miteinander.
Wenn der aus Tab. 5−2 ermittelte Wert kleiner als die zu realisierende Gesamt−
Leitungslänge aus Tab. 5−1 ist, müssen Repeater eingesetzt werden. Repeater
unterteilen die Gesamt−Leitungslänge in Segmente.
Betriebsanleitung zum ECS−Achsmodul
EDKCSEX064 DE/EN/FR 6.0
Leitungsquerschnitt
0,25 mm
2
0,5 mm
2
0,75 mm
2
1,0 mm
2
Hier finden Sie ausführliche Informationen zum Repeater−Einsatz.
57
Page 58

5
5.5 Rückführsystem verdrahten
Elektrische Installation
Rückführsystem verdrahten
An das Achsmodul können Sie verschiedene Rückführsysteme anschließen:
ƒ Resolver an X7 ( 59)
ƒ Encoder an X8 ( 60)
– Inkrementalgeber mit 5V−TTL−Pegel, RS−422
– SinCos−Encoder mit Nullspur ohne Hiperface, Signalpegel 1 Vss
– SinCos−Absolutwertgeber (single−turn/multi−turn) mit serieller
Kommunikation (Hiperface®−Schnittstelle), Versorgungsspannung
5 ... 8 V
Hinweis!
Ist eine "Sichere Trennung" nach EN 61140 zwischen Geberleitung
und Motorleitung durch anlagenseitige Installation auf der
gesamten Leitungslänge (z. B. durch Trennstege im Kabelkanal oder
getrennte Schleppketten) nicht sichergestellt, muss die
Geberleitung eine Isolationsfestigkeit von 300 V aufweisen.
Lenze−Geberleitungen erfüllen diese Anforderung.
ƒ Wir empfehlen, für die Verdrahtung Lenze−Geberleitungen zu
verwenden.
ƒ Bei selbstkonfektionierten Leitungen
– nur Leitungen mit paarweise verdrillten und abgeschirmten
Adern verwenden.
– Hinweise zur Verdrahtung/Konfektionierung auf den
folgenden Seiten beachten.
58
EDKCSEX064 DE/EN/FR 6.0
Page 59

Elektrische Installation
Rückführsystem verdrahten
Anschluss Resolver
5
5.5.1 Anschluss Resolver
Hinweis!
ƒ Verwenden Sie für den Anschluss eines Resolvers die
vorkonfektionierten Lenze−Systemleitungen.
ƒ Leitungslänge: max. 50 m
ƒ Parametrieren Sie je nach Leitungslänge und verwendetem
Resolver die Codestelle C0416 (Resolver−Erregungsamplitude).
Kontrollieren Sie die Resolver−Ansteuerung mit Codestelle C0414
(empfohlene Werte: 0,5 ... 1,2; Idealwert: 1,0).
ƒ Vor Einsatz eines Resolvers eines anderen Herstellers bitte
Rücksprache mit Lenze halten.
Über die 9−polige Sub−D−Buchse X7 schließen Sie einen Resolver an.
Eigenschaften
ƒ Resolver: U = 10 V, f = 4 kHz
ƒ Resolver und Resolver−Zuleitung werden auf Drahtbruch überwacht
(Störungsmeldung "Sd2").
KTY
Abb. 5−12 Anschluss Resolver
+REF
-REF
+COS
-COS
+SIN
-SIN
R1 (+KTY)
R2 (-KTY)
X7
Æ
mm2AWG
1
2
3
4
5
6
7
8
9
0.5
0.14
20
26
X7
1
5
6
9
ECSXA022
Belegung der Buchsenleiste X7: Sub−D 9−polig
Pin 1 2 3 4 5 6 7 8 9
Signal +REF −REF GND +COS −COS +SIN −SIN R1
EDKCSEX064 DE/EN/FR 6.0
0,5 mm
(AWG 20)
2
˘
0,14 mm
(AWG 26)
(+KTY)R2(−KTY)
2
59
Page 60

5
Elektrische Installation
Rückführsystem verdrahten
Anschluss Encoder
5.5.2 Anschluss Encoder
Gefahr!
Gültig bei Verwendung einer Betriebssoftware bis einschließlich
V7.0:
Unkontrollierte Bewegungen des Antriebs bei Verwendung von
Absolutwertgebern möglich!
Wird ein Absolutwertgeber während des Betriebs vom Achsmodul
getrennt, tritt die Störung OH3−TRIP auf. Wird der Absolutwertgeber
nun wieder an X8 angeschlossen und TRIP−RESET ausgeführt, kann
der Antrieb unkontrolliert mit hoher Drehzahl und hohem
Drehmoment anlaufen. Es tritt nicht, wie zu erwarten wäre, ein
Sd8−TRIP auf.
Mögliche Folgen:
ƒ Tod oder schwerste Verletzungen
ƒ Zerstörung oder Beschädigung der Maschine/des Antriebs
Schutzmaßnahmen:
ƒ Tritt während der Inbetriebnahme bei Verwendung eines
Absolutwertgebers eine Störung (TRIP) auf, kontrollieren Sie den
Historienspeicher C0168. Steht an zweiter oder dritter Stelle ein
Sd8−TRIP, muss zwingend
die 24−V−Versorgung der Steuerelektronik aus− und wieder
einschalten.
eine Neuinitialisierung erfolgen. Dazu
60
EDKCSEX064 DE/EN/FR 6.0
Page 61

Elektrische Installation
Rückführsystem verdrahten
Über den 9−poligen Sub−D−Stecker X8 können Sie folgende Encoder anschließen:
ƒ Inkrementalgeber (TTL−Encoder)
Anschluss Encoder
– mit zwei um 90° elektrisch versetzten 5−V−Komplementärsignalen
(RS−422).
– mit wahlweise anzuschließender Nullspur.
ƒ SinCos−Geber (Singleturn− oder Multiturn−Drehgeber)
– mit Versorgungspannung (5 ... 8 V).
– mit serieller Kommunikation.
Die Initialisierungszeit des Achsmoduls verlängert sich dadurch auf
ca. 2 s.
Der Encoder erhält seine Versorgungsspannung vom Antriebsregler.
Mit C0421 stellen Sie die Versorgungsspannung V
Spannungsabfall [DU] auf der Encoder−Leitung zu kompensieren:
(5 ... 8 V) ein, um ggf. den
CC
DU ^ 2 @ LL[m] @ Rńm[Wńm] @ IG[A]
DU Spannungsabfall auf der Encoder−Leitung [V]
Leitungslänge [m]
L
L
R/m Ohmscher Widerstand pro Meter Leitungslänge [W/m]
I
Geber−Strom [A]
G
5
Stop!
EDKCSEX064 DE/EN/FR 6.0
Beachten Sie die zulässige Versorgungsspannung des verwendeten
Gebers. Eine zu hohe Einstellung in C0421 kann den Geber
zerstören!
61
Page 62
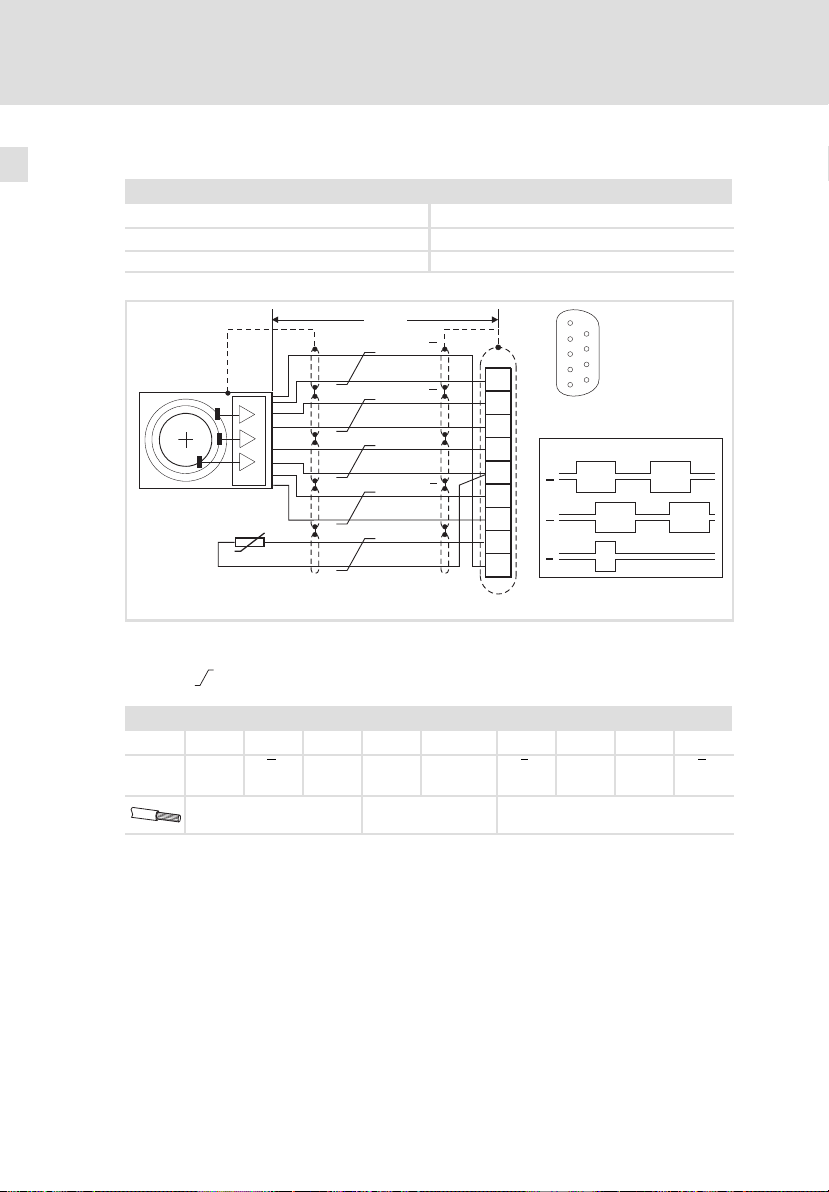
5
Elektrische Installation
Rückführsystem verdrahten
Anschluss Encoder
Inkrementalgeber (TTL−Encoder)
Eigenschaften
Eingangs−/Ausgangsfrequenz: 0 ... 200 kHz
Stromaufnahme: 6 mA pro Kanal
Strom an Ausgang VCC (X8/Pin 4): max. 200 mA
<50m
B
B
A
A
V
CC
GND
Z
KTY
Abb. 5−13 Anschluss Inkrementalgeber mit TTL−Pegel (RS−422)
Signale bei Rechtslauf
Paarweise verdrillte Adern
Belegung der Stiftleiste X8: Sub−D 9−polig
Pin 1 2 3 4 5 6 7 8 9
Signal B A A V
2
0,14 mm
(AWG 26)
R1 (+KTY)
R2 (-KTY)
CC
1 mm
(AWG 18)
Z
GND
(R1/+KTY)
2
5
X8
1
1
2
3
4
A
5
A
6
B
7
B
8
Z
Z
9
Z Z R2
9
6
(−KTY)
0,14 mm
(AWG 26)
ECSXA026
2
B
62
EDKCSEX064 DE/EN/FR 6.0
Page 63
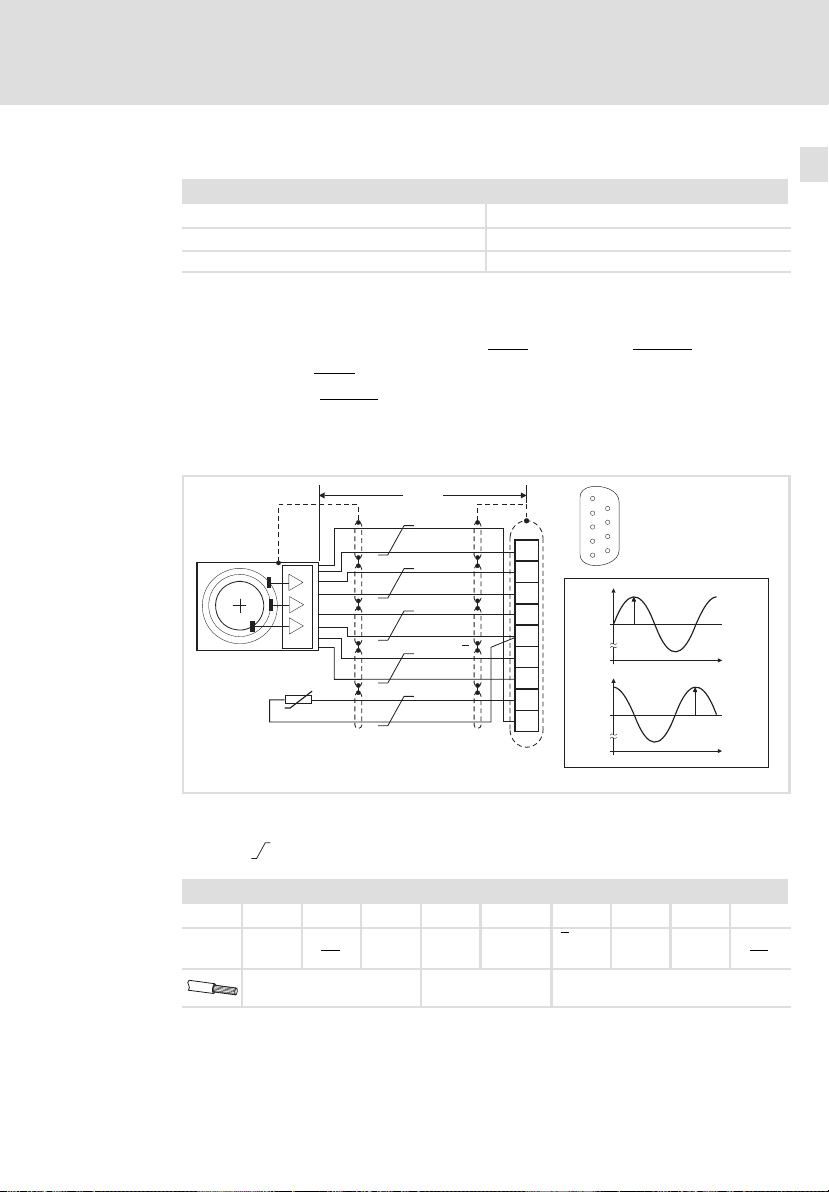
Elektrische Installation
Rückführsystem verdrahten
Anschluss Encoder
SinCos−Encoder und SinCos−Absolutwertgeber mit Hiperface
Eigenschaften
Eingangs−/Ausgangsfrequenz: 0 ... 200 kHz
Innenwiderstand (Ri): 221 W
Offset−Spannung für Signale SIN, COS, Z: 2,5 V
ƒ Die Differenzspannung zwischen der Signalspur und der Referenzspur
darf 1 V ± 10 % nicht übersteigen.
ƒ Der Anschluss ist drahtbruchüberwacht (Störungsmeldung "Sd8")
ƒ Bei Gebern mit Spurangaben sinus, sinus und cosinus, cosinus:
– RefSIN mit sinus belegen.
– RefCOS mit cosinus belegen.
ƒ Bei SinCos−Absolutwertgebern mit Hiperface ist an Stelle der Nullspur
(Z−Spur) die serielle Schnittstelle (RS 485) vorhanden.
5
KTY
<50m
RefCOS
R1 (+KTY)
R2 (-KTY)
RefSIN
SIN
COS
GND
V
CC
Z
Z
5
X8
1
9
6
1
2
3
4
5
6
7
8
9
SIN
2.5 V
0V
COS
2.5 V
0V
0.5V
0.5 V
RefSIN
RefCOS
ECSXA023
Abb. 5−14 Anschluss SinCos−Geber
Signale bei Rechtslauf
Paarweise verdrillte Adern
Belegung der Stiftleiste X8: Sub−D 9−polig
Pin 1 2 3 4 5 6 7 8 9
Signal SIN RefCOS
(cos
0,14 mm
(AWG 26)
)
2
COS V
CC
1 mm
(AWG 18)
GND
(R2/−KTY)
2
Z oder
−RS458
Z oder
+RS485
0,14 mm
(AWG 26)
R1
(+KTY)
2
RefSIN
(sin
)
EDKCSEX064 DE/EN/FR 6.0
63
Page 64

5
Elektrische Installation
Rückführsystem verdrahten
Leitfrequenzeingang/−ausgang (Encoder−Nachbildung)
5.5.3 Leitfrequenzeingang/−ausgang (Encoder−Nachbildung)
Die Leitfrequenzkopplung bei den Achsmodulen ECSxS/P/A erfolgt grundsätzlich als Master−Slave−Verbindung über die Schnittstelle X8. Diese Schnittstelle
kann entweder als Leitfrequenzeingang oder als Leitfrequenzausgang (z. B. zur
Encoder−Nachbildung) genutzt werden (Konfiguration über C0491).
Eigenschaften
X8 als Leitfrequenzeingang X8 als Leitfrequenzausgang
l Eingangsfrequenz: 0 ... 200 kHz
l Stromaufnahme: max. 6 mA pro Kanal
l 2−spurig mit inversen 5 V−Signalen und Null-
spur
l Mögliche Eingangssignale:
– Inkrementalgeber mit zwei um 90° ver-
setzten 5 V−Komplementärsignalen (TTL−
Geber)
l Die Funktion der Eingangssignale ist über
C0427 einstellbar.
l Ausgangsfrequenz: 0 ... 200 kHz
l Strombelastbarkeit: max. 20 mA pro Kanal
l 2−spurig mit inversen 5 V−Signalen (RS422)
l Die Funktion der Ausgangssignale ist über
C0540 einstellbar.
64
EDKCSEX064 DE/EN/FR 6.0
Page 65

Elektrische Installation
Rückführsystem verdrahten
Leitfrequenzeingang/−ausgang (Encoder−Nachbildung)
Verdrahtung
ƒ 1 Slave am Master:
Master und Slave direkt über Schnittstelle X8 miteinander verdrahten.
5
<50m
X8
(ECS-Master)
1
2
3
4
5
6
7
B
B
A
A
GND
Z
Z
8
9
Abb. 5−15 Anschluss des Leitfrequenzeingangs/−ausgangs X8 (Master « Slave)
Signale bei Rechtslauf
Paarweise verdrillte Adern
Belegung der Stiftleiste X8: Sub−D 9−polig
Pin 1 2 3 4 5 6 7 8 9
Eingangssignal B A A ˘ GND Z Z ˘ B
Ausgangssignal B A A ˘ GND Z Z ˘ B
0,14 mm
(AWG 26)
2
1
2
3
4
5
6
7
8
9
1 mm
(AWG 18)
X8
(ECS-Slave)
2
5
9
6
1
A
A
B
B
Z
Z
ECSXA029
2
0,14 mm
(AWG 26)
EDKCSEX064 DE/EN/FR 6.0
65
Page 66

5
Elektrische Installation
Rückführsystem verdrahten
Leitfrequenzeingang/−ausgang (Encoder−Nachbildung)
ƒ 2 bis 3 Slaves am Master:
ECS−Achsmodule über den Leitfrequenzverteiler EMF2132IB mit Master−
Leitfrequenzleitung EYD0017AxxxxW01W01 und Slave−Leitfrequenzlei-
tung EYD0017AxxxxW01S01 verdrahten.
PLC
X
E-Shaft Master Slave 3
ECS ECS ECS ECS
S
120
120
X8 X8 X8X8
Slave 1
X4X4
X14X14
Slave 2
X4X4
X14X14
0 111
X5
X2
X1
X3
Abb. 5−16 ECS−Achsmodule im Leitfrequenz−Verbund mit Leitfrequenzverteiler EMF2132IB
PLC Übergeordnete Steuerung (PLC) oder ein PLC−Gerät zur Steuerung des
E−Shaft
Master
Slave 1...3 Slave 1, Slave 2, Slave 3 (Achsmodul ECSxP)
Master−Leitfrequenzleitung EYD0017AxxxxW01W01 (Buchse/Buchse)
Slave−Leitfrequenzleitung EYD0017AxxxxW01S01 (Stecker/Buchse)
Antriebsverbundes
Leitwert−Master (Achsmodul ECSxP)
EMF2132IB
X4
120120
120120
ECSXP001
66
Tipp!
"xxxx" in den Typen−Bezeichnungen der Leitfrequenzleitungen
dient als Platzhalter für die Angabe der Leitungslänge in Dezimeter.
Beispiel: EYD0017A0015W01W01 ® Leitungslänge = 15 dm
EDKCSEX064 DE/EN/FR 6.0
Page 67

6 Installation überprüfen
Überprüfen Sie nach Abschluss der Installation die Verdrahtung auf Vollständigkeit, Kurzschluss und Erdschluss:
ƒ Leistungsanschluss:
Polung der Einspeisung der Zwischenkreisspannung über Klemmen +UG,
−UG
ƒ Motoranschluss:
Phasenrichtiger Anschluss zum Motor (Drehrichtung)
ƒ Verdrahtung "Sicher abgeschaltetes Moment" (ehem. "Sicherer Halt")
ƒ Rückführsystem
ƒ Steuerklemmen:
Verdrahtung angepasst an die Signalbelegung der Steuerklemmen.
Hinweis!
Der nächste Schritt ist die Inbetriebnahme. Informationen dazu
finden Sie in der Betriebsanleitung des ECS−Achsmoduls.
ƒ Lesen Sie die Betriebsanleitung, bevor Sie das Achsmodul
einschalten.
ƒ Führen Sie die Inbetriebnahme nach den Anweisungen in der
Betriebsanleitung durch.
ƒ Wenn Sie die Funktion "Sicher abgeschaltetes Moment"
verwenden, müssen Sie die Funktion der Schaltung prüfen.
Installation überprüfen 6
EDKCSEX064 DE/EN/FR 6.0
67
Page 68

0Fig. 0Tab. 0
Scope of supply
Position Description Number
A ECSE axis module xxx 1
C Accessory kit with fixings 1
Mounting instructions 1
Drilling jig 1
Application software: S = Speed & Torque P = Posi & Shaft
M = Motion A = Application
Note!
The ECSZA000X0B connector set must be ordered separately.
Connections and interfaces
Position Description Detailed
information
X23 Connections
l DC−bus voltage
l PE
99
B LEDs: Status and fault display
X1 Automation interface (AIF) for
l Communication module
l Operating module (keypad XT)
x2 PE connection of AIF
X3 Analog input configuration 111
X4 CAN connection
l MotionBus (CAN) / for ECSxA: System bus (CAN)
l Interface to the master control
119
X14 CAN−AUXconnection
l System bus (CAN)
l PC interface/HMI for parameter setting and diagnostics
X6 Connections
l Low−voltage supply
l Digital inputs and outputs
l Analog input
l "Safe torque off" (formerly "safe standstill")
106
110
111
113
S1 DIP switch
l CAN node address
l CAN baud rate
X7 Resolver connection 124
X8 Encoder connection
l Incremental encoder (TTL encoder)
l Sin/cos encoder
125
X25 Brake control connection 104
X24 Motor connection 103
68
EDKCSEX064 DE/EN/FR 6.0
Page 69

Status displays
LED
Operating state Check
Red Green
Off On Controller enabled, no fault
Off Blinking Controller inhibited (CINH), switch−on inhibit Code C0183
Blinking Off Fault/error (TRIP) active Code C0168/1
Blinking On Warning/FAIL−QSP active Code C0168/1
Identification
ECS E x xxx C 4 x xxx XX xx xx
Device type
Design
E = standard panel−mounted unit,
IP20
D = push−through technique
(thermally separated)
C = cold−plate technique
Application
S = "Speed and Torque"
P = "Posi and Shaft"
M = "Motion"
A = "Application"
Peak current
004 = 4 A
008 = 8 A
016 = 16 A
032 = 32 A
048 = 48 A
064 = 64 A
ATTENTION
L´appareil est sous tension
pendant 180s après la coupure
de la tension réseau
WARNING
Device is live up to 180s
after removing
mains voltage
Fieldbus interface
C = system bus CAN
Voltage class
4 = 400 V/500 V
Technical version
B = standard
V = coated
I = for IT systems, uncoated
K= for IT systems, coated
Variant
Hardware version
1A or higher
Operating software version (B−SW)
EDKCSEX064 DE/EN/FR 6.0
69
Page 70

Contentsi
1 About this documentation 71 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Safety instructions 72 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 General safety and application notes for Lenze controllers 72 . . . . . . . .
2.2 Thermal motor monitoring 76 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Forced ventilated or naturally ventilated motors 78 . . . . . . .
2.2.2 Self−ventilated motors 80 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Residual hazards 83 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Safety instructions for the installation according to UL 85 . . . . . . . . . . .
3 Technical data 86 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 General data and operating conditions 86 . . . . . . . . . . . . . . . . . . . . . . .
3.2 Rated data 88 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Mechanical installation 90 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Important notes 90 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Mounting with fixing rails (standard installation) 91 . . . . . . . . . . . . . . .
4.2.1 Dimensions 91 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 Mounting steps 92 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Electrical installation 93 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Installation according to EMC
(installation of a CE−typical drive system) 93 . . . . . . . . . . . . . . . . . . . . . .
5.2 Power terminals 96 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Connection to the DC bus (+UG, −UG) 99 . . . . . . . . . . . . . . . .
5.2.2 Motor connection 103 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.3 Motor holding brake connection 104 . . . . . . . . . . . . . . . . . . . .
5.3 Control terminals 106 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Digital inputs and outputs 110 . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Analog input 111 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.3 Safe torque off 113 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Wiring of system bus (CAN) 119 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Wiring of the feedback system 123 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.1 Resolver connection 124 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.2 Encoder connection 125 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.3 Digital frequency input/output (encoder simulation) 129 . . .
6 Installation check 132 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
EDKCSEX064 DE/EN/FR 6.0
Page 71

1 About this documentation
Validity information
This documentation applies to axis modules
ƒ ECSES... ˘ "Speed & Torque"
ƒ ECSEP... ˘ "Posi & Shaft"
ƒ ECSEM... ˘ "Motion"
ƒ ECSEA... ˘ "Application"
Tip!
Information and auxiliary devices related to the Lenze products can
be found in the download area at
http://www.Lenze.com
Target group
This documentation is directed at qualified skilled personnel according to
IEC 60364.
Qualified skilled personnel are persons who have the required qualifications to
carry out all activities involved in installing, mounting, commissioning, and
operating the product.
About this documentation 1
EDKCSEX064 DE/EN/FR 6.0
71
Page 72

2
Safety instructions
General safety and application notes for Lenze controllers
2 Safety instructions
2.1 General safety and application notes for Lenze controllers
(in accordance with Low−Voltage Directive 2006/95/EC)
For your personal safety
Disregarding the following safety measures can lead to severe injury to persons
and damage to material assets:
ƒ Only use the product as directed.
ƒ Never commission the product in the event of visible damage.
ƒ Never commission the product before assembly has been completed.
ƒ Do not carry out any technical changes on the product.
ƒ Only use the accessories approved for the product.
ƒ Only use original spare parts from Lenze.
ƒ Observe all regulations for the prevention of accidents, directives and
laws applicable on site.
ƒ Transport, installation, commissioning and maintenance work must only
be carried out by qualified personnel.
– Observe IEC 364 and CENELEC HD 384 or DIN VDE 0100 and IEC
report 664 or DIN VDE 0110 and all national regulations for the
prevention of accidents.
– According to this basic safety information, qualified, skilled personnel
are persons who are familiar with the assembly, installation,
commissioning, and operation of the product and who have the
qualifications necessary for their occupation.
ƒ Observe all specifications in this documentation.
– This is the condition for safe and trouble−free operation and the
achievement of the specified product features.
– The procedural notes and circuit details described in this
documentation are only proposals. It is up to the user to check whether
they can be transferred to the particular applications. Lenze
Automation GmbH does not accept any liability for the suitability of the
procedures and circuit proposals described.
ƒ Depending on their degree of protection, some parts of the Lenze
controllers (frequency inverters, servo inverters, DC speed controllers) and
their accessory components can be live, moving and rotating during
operation. Surfaces can be hot.
– Non−authorised removal of the required cover, inappropriate use,
incorrect installation or operation, creates the risk of severe injury to
persons or damage to material assets.
– For more information, please see the documentation.
72
EDKCSEX064 DE/EN/FR 6.0
Page 73

Safety instructions
General safety and application notes for Lenze controllers
ƒ High amounts of energy are produced in the controller. Therefore it is
required to wear personal protective equipment (body protection,
headgear, eye protection, ear protection, hand guard).
Application as directed
Controllers are components which are designed for installation in electrical
systems or machines. They are not to be used as domestic appliances, but only
for industrial purposes according to EN 61000−3−2.
When controllers are installed into machines, commissioning (i.e. starting of the
operation as directed) is prohibited until it is proven that the machine complies
with the regulations of the EC Directive 2006/42/EC (Machinery Directive);
EN 60204 must be observed.
Commissioning (i.e. starting of the operation as directed) is only allowed when
there is compliance with the EMC Directive (2004/108/EC).
The controllers meet the requirements of the Low−Voltage Directive
2006/95/EC. The harmonised standard EN 61800−5−1 applies to the controllers.
The technical data and supply conditions can be obtained from the nameplate
and the documentation. They must be strictly observed.
Warning: Controllers are products which can be installed in drive systems of
category C2 according to EN 61800−3. These products can cause radio
interferences in residential areas. In this case, special measures can be
necessary.
Transport, storage
Please observe the notes on transport, storage, and appropriate handling.
Observe the climatic conditions according to the technical data.
Installation
The controllers must be installed and cooled according to the instructions given
in the corresponding documentation.
The ambient air must not exceed degree of pollution 2 according to
EN 61800−5−1.
Ensure proper handling and avoid excessive mechanical stress. Do not bend any
components and do not change any insulation distances during transport or
handling. Do not touch any electronic components and contacts.
Controllers contain electrostatic sensitive devices which can easily be damaged
by inappropriate handling. Do not damage or destroy any electrical components
since this might endanger your health!
2
EDKCSEX064 DE/EN/FR 6.0
73
Page 74
2
Safety instructions
General safety and application notes for Lenze controllers
Electrical connection
When working on live controllers, observe the applicable national regulations
for the prevention of accidents (e.g. VBG 4).
The electrical installation must be carried out according to the appropriate
regulations (e.g. cable cross−sections, fuses, PE connection). Additional
information can be obtained from the documentation.
This documentation contains information on installation in compliance with
EMC (shielding, earthing, filter, and cables). These notes must also be observed
for CE−marked controllers. The manufacturer of the system is responsible for
compliance with the limit values demanded by EMC legislation. The controllers
must be installed in housings (e.g. control cabinets) to meet the limit values for
radio interferences valid at the site of installation. The housings must enable an
EMC−compliant installation. Observe in particular that e.g. the control cabinet
doors have a circumferential metal connection to the housing. Reduce housing
openings and cutouts to a minimum.
Lenze controllers may cause a DC current in the PE conductor. If a residual
current device (RCD) is used for protection against direct or indirect contact for
a controller with three−phase supply, only a residual current device (RCD) of type
B is permissible on the supply side of the controller. If the controller has a
single−phase supply, a residual current device (RCD) of type A is also permissible.
Apart from using a residual current device (RCD), other protective measures can
be taken as well, e.g. electrical isolation by double or reinforced insulation or
isolation from the supply system by means of a transformer.
Operation
If necessary, systems including controllers must be equipped with additional
monitoring and protection devices according to the valid safety regulations (e.g.
law on technical equipment, regulations for the prevention of accidents). The
controllers can be adapted to your application. Please observe the
corresponding information given in the documentation.
After the controller has been disconnected from the supply voltage, all live
components and power terminals must not be touched immediately because
capacitors can still be charged. Please observe the corresponding stickers on the
controller.
All protection covers and doors must be shut during operation.
Notes for UL−approved systems with integrated controllers: UL warnings are
notes that only apply to UL systems. The documentation contains special UL
notes.
Safety functions
Certain controller versions support safety functions (e.g. "Safe torque off",
formerly "Safe standstill") according to the requirements of the EC Directive
2006/42/EC (Machinery Directive). The notes on the integrated safety system
provided in this documentation must be observed.
74
EDKCSEX064 DE/EN/FR 6.0
Page 75

Safety instructions
General safety and application notes for Lenze controllers
Maintenance and servicing
The controllers do not require any maintenance if the prescribed operating
conditions are observed.
Disposal
Recycle metal and plastic materials. Ensure professional disposal of assembled
PCBs.
The product−specific safety and application notes given in these instructions
must be observed!
2
EDKCSEX064 DE/EN/FR 6.0
75
Page 76

2
2.2 Thermal motor monitoring
Safety instructions
Thermal motor monitoring
Note!
2
ƒ I
x t monitoring is based on a mathematical model which
calculates a thermal motor load from the detected motor
currents.
ƒ The calculated motor load is saved when the mains is switched.
ƒ The function is UL−certified, i.e. no additional protective
measures are required for the motor in UL−approved systems.
2
x t monitoring is no full motor protection as other
t, C0128). Find the value in the rated motor data or contact the
ƒ However, I
influences on the motor load could not be detected as for
instance changed cooling conditions (e.g. interrupted or too
warm cooling air flow).
2
x t load of the motor is displayed in C0066.
Die I
The thermal loading capacity of the motor is expressed by the thermal motor
time constant (
manufacturer of the motor.
2
x t monitoring has been designed such that it will be activated after 179
The I
s in the event of a motor with a thermal motor time constant of 5 minutes
(Lenze setting C0128), a motor current of 1.5 x I
100 %.
Two adjustable trigger thresholds provide for different responses.
ƒ Adjustable response OC8 (TRIP, warning, off).
– The trigger threshold is set in C0127.
– The response is set in C0606.
– The response OC8, for instance, can be used for an advance warning.
ƒ Fixed response OC6−TRIP.
– The trigger threshold is set in C0120.
and a trigger threshold of
N
76
EDKCSEX064 DE/EN/FR 6.0
Page 77

Safety instructions
Thermal motor monitoring
Behaviour of the I2 x t monitoring Condition
The I2 x t monitoring is deactivated.
C0066 is set = 0 % and
MCTRL−LOAD−I2XT is set = 0.00 %.
I2 x t monitoring is stopped.
The current value in C0066 and at the
MCTRL−LOAD−I2XT output is frozen.
I2 x t monitoring is deactivated.
The motor load is displayed in C0066.
When C0120 = 0 % and C0127 = 0 %, set
controller inhibit.
When C0120 = 0 % and C0127 = 0 %, set
controller enable.
Set C0606 = 3 (off) and C0127 > 0 %.
Note!
An error message OC6 or OC8 can only be reset if the I2 x t load falls
below the set trigger threshold by 5 %.
2
EDKCSEX064 DE/EN/FR 6.0
77
Page 78

2
Safety instructions
Thermal motor monitoring
Forced ventilated or naturally ventilated motors
2.2.1 Forced ventilated or naturally ventilated motors
Parameter setting
2
The following codes can be set for I
Code Meaning Value range Lenze setting
C0066 Display of the I2 x t load of the motor 0 ... 250 % −
C0120 Threshold: Triggering of error "OC6" 0 ... 120 % 0 %
C0127 Threshold: Triggering of error "OC8" 0 ... 120 % 0 %
C0128 Thermal motor time constant 0.1 ... 50.0 min 5.0 min
C0606 Response to error "OC8" TRIP, warning, off Warning
x t monitoring:
Calculate release time and I2 x t load
Formula for release time Information
I
Mot
I
r
t Thermal motor time constant
z Threshold value in C0120 (OC6) or
t +*(t) ln
ȡ
ȧ
ȧ
Ȣ
1 *
ȣ
z ) 1
I
Mot
ǒ
Ǔ
I
N
2
100
ȧ
ȧ
Ȥ
Actual motor current (C0054)
Rated motor current (C0088)
(C0128)
C0127 (OC8)
78
Formulae for I2 x t load Information
L(t) Chronological sequence of the
2
x t load of the motor
I
2
I
Mot
ǒ
L(t) +
If the controller is inhibited, the I2 x t load is reduced:
Ǔ
100% ǒ1 * e
I
N
L(t) + L
Start
Ǹ
e
*t
Ǔ
t
t
*
t
(Display: C0066)
I
Actual motor current (C0054)
Mot
Ir Rated motor current (C0088)
t Thermal motor time constant
(C0128)
L
I2 x t load before controller inhibit
Start
If an error is triggered, the value
corresponds to the threshold
value set in C0120 (OC6) or
(OC8).
C0127
EDKCSEX064 DE/EN/FR 6.0
Page 79

Safety instructions
0
Thermal motor monitoring
Forced ventilated or naturally ventilated motors
Read release time in the diagram
Diagram for detecting the release times for a motor with a thermal motor time
constant of 5 minutes (Lenze setting C0128):
2
L [%]
120
100
50
0
Fig. 2−1 I2 × t−monitoring: Release times for different motor currents and trigger thresholds
I = 3 × I
Mot N
0 100 200 300 400 500 600 700 8
I
Mot
I
r
LI
T Time
I = 2 × I
Mot N
Actual motor current (C0054)
Rated motor current (C0088)
2
x t load of the motor (display: C0066)
I = 1.5 × I
Mot N
I = 1 × I
Mot N
9300STD105
EDKCSEX064 DE/EN/FR 6.0
79
Page 80

2
Safety instructions
Thermal motor monitoring
Self−ventilated motors
2.2.2 Self−ventilated motors
Due to the construction, self−ventilated standard motors are exposed to an
increased heat generation in the lower speed range compared to forced
ventilated motors.
Warnings!
For complying with the UL 508C standard, you have to set the
speed−dependent evaluation of the permissible torque via code
C0129/x.
Parameter setting
The following codes can be set for I
Code Meaning Value range Lenze setting
C0066 Display of the I2 x t load of the motor 0 ... 250 % −
C0120 Threshold: Triggering of error "OC6" 0 ... 120 % 0 %
C0127 Threshold: Triggering of error "OC8" 0 ... 120 % 0 %
C0128 Thermal motor time constant 0.1 ... 50.0 min 5.0 min
C0606 Response to error "OC8" TRIP, warning, off Warning
C0129/1 S1 torque characteristic I1/I
C0129/2 S1 torque characteristics n2/n
2
x t monitoring:
rated
rated
10 ... 200 % 100 %
10 ... 200 % 40 %
80
EDKCSEX064 DE/EN/FR 6.0
Page 81

Effect of code C0129/x
I / I
N
Safety instructions
Thermal motor monitoring
Self−ventilated motors
2
1.1
1.0
3
0.9
0.8
0.7
0.6
Fig. 2−2 Working point in the range of characteristic lowering
0
0
0 0.1
C0129/1
0.132
C0129/2
1
2
0.2 0.3 0.4
n / n
N
9300STD350
The lowered speed / torque characteristic (Fig. 2−2) reduces the permissible
thermal load of self−ventilated standard motors. The characteristic is a line the
definition of which requires two points:
ƒ Point : Definition with C0129/1
This value also enables an increase of the maximally permissible load.
ƒ Point : Definition with C0129/2
With increasing speeds, the maximally permissible load remains
unchanged (I
Mot
= I
rated
).
In Fig. 2−2, the motor speed and the corresponding permissible motor torque ()
can be read for each working point (on the characteristic () ... ). can also
be calculated using the values in C0129/1and C0129/2 (evaluation
coefficient "y", 82)
EDKCSEX064 DE/EN/FR 6.0
81
Page 82

2
Safety instructions
Thermal motor monitoring
Self−ventilated motors
Calculate release time and I2 x t load
Calculate the release time and the I
2
x t load of the motor considering the values
in C0129/1 and C0129/2(evaluation coefficient "y").
Formulae for release time Information
T Release time of the I2 x t
monitoring
ȡ
T +*(t) ln
ȧ
ȧ
1 *
Ȣ
100% * C0129ń1
y +
Formulae for I2 x t load Information
If the controller is inhibited, the I2 x t load is reduced:
L(t) +
C0129ń2
I
Mot
ǒ
y I
L(t) + L
2
Ǔ
100% ǒ1 * e
N
Start
I
Mot
ǒ
y I
Ǹ
e
z ) 1
2
Ǔ
100
N
n
) C0129ń1
n
N
t
*
t
t Thermal motor time constant
*t
ȣ
ȧ
ȧ
Ȥ
Ǔ
t
(C0128)
In Function: Natural logarithm
I
Actual motor current (C0054)
Mot
I
Rated motor current (C0088)
r
z Threshold value in C0120 (OC6) or
C0127 (OC8)
y Evaluation coefficient
n
Rated speed (C0087)
rated
L(t) Chronological sequence of the
2
I
(Display: C0066)
y Evaluation coefficient
I
Actual motor current (C0054)
Mot
Ir Rated motor current (C0088)
t Thermal motor time constant
(C0128)
L
I2 x t load before controller inhibit
Start
If an error is triggered, the value
corresponds to the threshold
value set in C0120 (OC6) or
(OC8).
x t load of the motor
C0127
82
EDKCSEX064 DE/EN/FR 6.0
Page 83

2.3 Residual hazards
Protection of persons
ƒ Before working on the axis module, check that no voltage is applied to the
power terminals, because
– the power terminals +UG, −UG, U, V and W remain live for at least 3
minutes after mains switch−off.
– the power terminals +UG, −UG, U, V and W remain live when the motor
is stopped.
ƒ The heatsink has an operating temperature of > 70 °C:
– Direct skin contact with the heatsink results in burns.
ƒ The discharge current to PE is > 3.5 mA AC or. > 10 mA DC.
– EN 61800−5−1 requires a fixed installation.
– The PE connection must comply with EN 61800−5−1.
– Comply with the further requirements of EN 61800−5−1 for high
discharge currents!
Device protection
ƒ All pluggable connection terminals must only be connected or
disconnected when no voltage is applied!
ƒ The power terminals +UG, −UG, U, V, W and PE are not protected against
polarity reversal.
– When wiring, observe the polarity of the power terminals!
ƒ Power must not be converted until all devices of the power system are
ready for operation. Otherwise, the input current limitation may be
destroyed.
Frequent mains switching (e.g. inching mode via mains contactor) can overload
and destroy the input current limitation of the axis module, if
ƒ the axis module is supplied via the ECSxE supply module and the input
current limitation is activated depending on the DC−bus voltage
(C0175 = 1 or 2).
ƒ the axis module is not supplied via a supply module delivered by Lenze.
ƒ the low−voltage supply (24 V) is switched off.
For this reason allow a break of at least three minutes between two starting
operations!
Use the safety function ˜Safe torque off˜ (STO) for frequent disconnections for
safety reasons.
Safety instructions
Residual hazards
2
EDKCSEX064 DE/EN/FR 6.0
83
Page 84
2
Safety instructions
Residual hazards
Motor protection
ƒ Only use motors with a minimum insulation resistance of û = 1.5 kV,
min. du/dt = 5 kV/ms.
– Lenze motors meet these requirements.
ƒ When using motors with an unknown insulation resistance, please
contact your motor supplier.
ƒ Some settings of the axis module lead to an overheating of the connected
motor, e.g. longer operation of self−ventilated motors with low speeds.
ƒ Use PTC thermistors or thermostats with PTC characteristic for motor
temperature monitoring.
84
EDKCSEX064 DE/EN/FR 6.0
Page 85

Safety instructions
Safety instructions for the installation according to UL
2.4 Safety instructions for the installation according to UL
Warnings!
General markings:
ƒ Use 60/75 °C or 75 °C copper wire only.
ƒ Maximum ambient temperature 55 °C, with reduced output
current.
Markings provided for the supply units:
ƒ Suitable for use on a circuit capable of delivering not more than
5000 rms symmetrical amperes, 480 V max, when protected by
K5 or H Fuses (400/480 V devices).
ƒ Alternate − Circuit breakers (either inverse−time, instantaneous
trip types or combination motor controller type E) may be used in
lieu of above fuses when it is shown that the let−through
energy (i
current−limiting circuit breaker will be less than that of the
non−semiconductor type K5 fuses with which the drive has been
tested.
ƒ Alternate − An inverse−time circuit breaker may be used, sized
upon the input rating of the drive, multiplied by 300 %.
Markings provided for the inverter units:
ƒ The inverter units shall be used with supply units which are
provided with overvoltage devices or systems in accordance with
UL840 2nd ed., Table 5.1.
ƒ The devices are provided with integral overload and integral
thermal protection for the motor.
ƒ The devices are not provided with overspeed protection.
Terminal tightening torque of lb−in (Nm)
2
t) and peak let−through current (Ip) of the inverse−time
2
Terminal lb−in Nm
X 21, X 22, X 23, X 24 10.6 ... 13.3 1.2 ... 1.5
X4, X6, X14 1.95 ... 2.2 0.22 ... 0.25
X 25 4.4 ... 7.1 0.5 ... 0.8
Wiring diagram AWG
Terminal AWG
X 21, X 22, X 23, X 24 12 ... 8
X4, X6, X14 28 ... 16
X 25 24 ... 12
EDKCSEX064 DE/EN/FR 6.0
85
Page 86

3
Technical data
General data and operating conditions
3 Technical data
3.1 General data and operating conditions
Standards and operating conditions
Conformity CE
Approvals
Max. permissible
Motor cable
length
Packaging (EN ISO 4180) Shipping package
Installation l Installation into IP20 control cabinet
Mounting position vertically suspended
Free space
shielded 50 m For rated mains voltage and switching frequency of
above ³ 65 mm
below ³ 65 mm
to the sides can be mounted directly side by side without any clearance
UL 508C
CSA 22.2 No. 14
l For the "safe torque off" function (formerly "safe standstill"):
mounting in IP54 control cabinet
With ECSZS000X0B shield mounting kit: > 195 mm
Low−Voltage Directive (2006/95/EG)
Power Conversion Equipment
Underwriter Laboratories (File No. E132659)
for USA and Canada
8 kHz
Environmental conditions
Climate 3k3 in accordance with IEC/EN
Storage IEC/EN 60721−3−1 1K3 (−25 ... + 55 °C)
Transport IEC/EN 60721−3−2 2K3 (−25 ... +70 °C)
Operation IEC/EN 60721−3−3 3K3 (0 ... + 55 °C)
Site altitude 0 ... 4000 m amsl
Pollution EN 61800−5−1, UL840: Degree of pollution 2
Vibration resistance Acceleration resistant up to 0.7 g (Germanischer Lloyd, general conditions)
86
60721−3−3
Condensation, splash water and ice
formation not permissible.
l Atmospheric pressure: 86 ... 106 kPa
l Above +40 °C: reduce the rated
output current by 2 %/°C.
l Reduce rated output current by
5 %/1000 m above 1000 m amsl.
l Over 2000 m amsl: Use is only
permitted in environments with
overvoltage category II
EDKCSEX064 DE/EN/FR 6.0
Page 87

Technical data
General data and operating conditions
General electrical data
EMC Compliance with the requirements acc. to EN 61800−3
Noise emission Compliance with the limit class C2 acc. to EN 61800−3
Noise immunity
Insulation resistance EN61800−5−1, UL840: Overvoltage category III
Discharge current to PE
(Acc. to EN 61800−5−1)
Enclosure IP20 for
Protective measures against l Short circuit in power terminals
Protective insulation of control
circuits
1)
Noise immunity in the above−mentioned severities must be guaranteed by the control
cabinet! The user must check the compliance with the severities!
(achieved by using collective filters typical for the application)
Requirements acc. to EN 61800−3
Requirement Standard Severity
1)
ESD
Conducted high frequency EN 61000−4−6 10 V; 0.15 ... 80 MHz
RF interference (housing) EN 61000−4−3 3, i. e. 10 V/m;
Burst EN 61000−4−4 3/4, i. e. 2 kV/5 kHz
Surge (surge voltage on
mains cable)
> 3.5 mA AC
l Standard installation (built−in unit)
l Cold−plate technique
l Mounting with thermal separation (push−through technique), IP54 on
heatsink side
– Motor terminal has a limited protection against short circuit (after
short circuit detection, the error message must be reset.)
l Short circuit in auxiliary circuits
– Digital outputs: Short−circuit−proof
– Bus and encoder systems: Limited protection against short circuit (if
necessary, monitoring functions can be switched off, in this case,
error messages must be reset:)
l Earth fault (earth−fault protected during operation, limited earth−fault
protection on mains power−up)
l Overvoltage
l Motor stalling
l Motor overtemperature (input for KTY, I
Protective separation from the mains
Double/reinforced insulation acc. to EN 61800−5−1
EN 61000−4−2 3, i. e.
EN 61000−4−5 3, i. e. 1.2/50 ms
l 8 kV for air discharge
l 6 kV for contact
discharge
80 ... 1000 MHz
l 1 kV phase/phase
l 2 kV phase/PE
2
x t monitoring)
3
EDKCSEX064 DE/EN/FR 6.0
87
Page 88

3
Technical data
Rated data
3.2 Rated data
Rated data Type
Output power 400 V mains S
Data for operation with upstream power supply
module on mains voltage
DC−bus voltage V
DC−bus current I
Rated output current at 4 kHz
(causes a heatsink temperature of 70°C at an
ambient temperature of 20°C)
Rated output current at 8 kHz (at an ambient
temperature of 20°C it causes a heatsink
temperature of 70°C)
Max. output current
(acceleration current)
Continuous current at standstill
(holding current at 90°C, 4 kHz)
Short−time standstill current
(holding current at 90 °C, 4 kHz)
Short−time standstill current
(holding current at 70 °C, 4 kHz)
Short−time standstill current
(holding current at 70 °C, 8 kHz)
Power loss (operation with
rated current at 4 kHz / 8 kHz)
Max. output frequency f
Mass m [kg] approx. 2.4
Axis module
ECSx004 ECSx008 ECSx016
[kVA] 1.3 2.6 5.3
rated
V
[V] 400 480 400 480 400 480
mains
[V] 15 ... 770
DC−bus
[A] 2.5 2.0 4.9 3.9 9.8 7.8
DC−bus
Ir [A] 2.0 1.6 4.0 3.2 8.0 6.4
Ir [A] 1.4 1.1 2.7 2.2 5.3 4.2
1)
I
[A] 4.0 8.0 16.0
max
I
[A] 2.0 1.6 4.0 3.2 8.0 6.4
0,eff 4 kHz
I
[A] 2.3 4.6 9.1
2)
2)
2)
Inside the
Heatsink 14.0 29.0 64.0
1)
If the heatsink temperature reaches 70°C, the switching frequency automatically changes to
4 kHz.
2)
The indicated temperature is the measured heatsink temperature (C0061).
Application software:
0,eff 4 kHz
I
[A] 3.0 6.0 12.0
0,eff 4 kHz
I
[A] 1.5 3.0 6.0
0,eff 8 kHz
Total
P
[W]
device
loss
[Hz] 600
out
S = Speed & Torque P = Posi & Shaft
M = Motion A = Application
27.3 46.3 84.7
13.3 17.3 20.7
88
EDKCSEX064 DE/EN/FR 6.0
Page 89
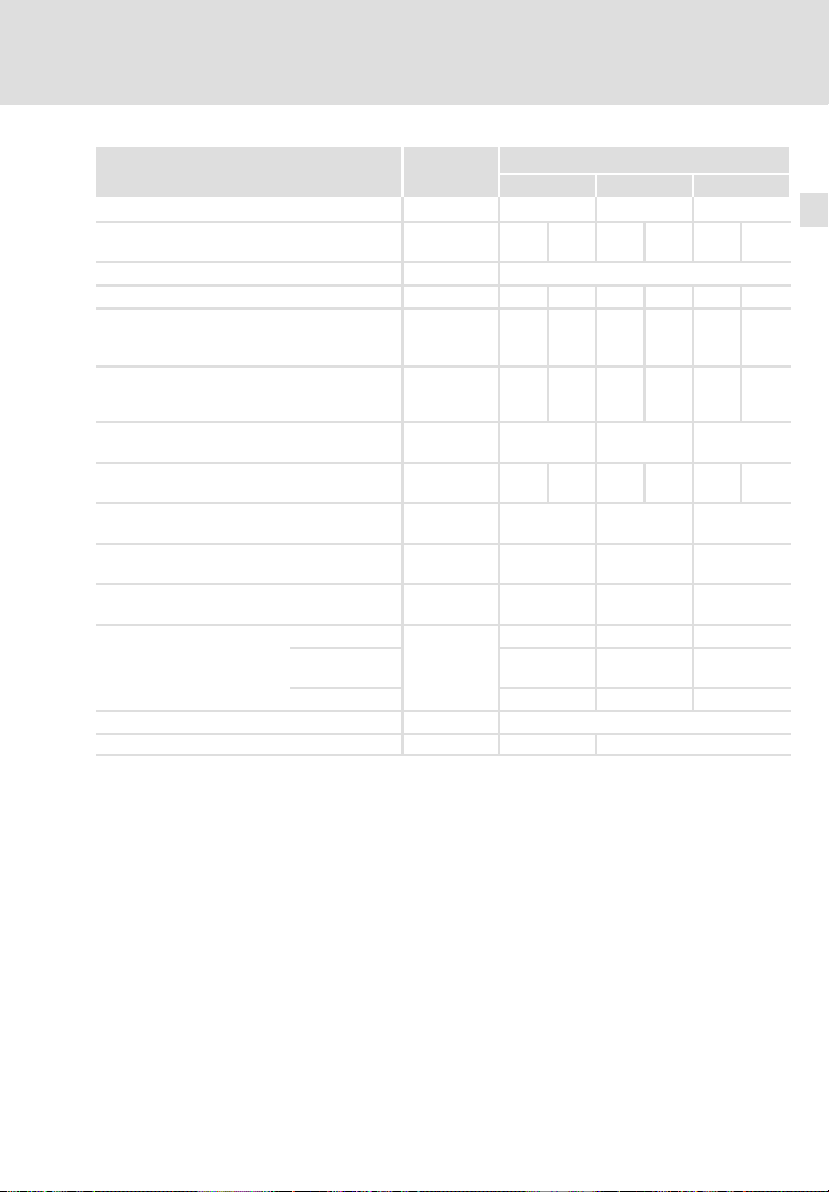
Technical data
Rated data
3
Rated data Type
ECSx032 ECSx048 ECSx064
Output power 400 V mains S
Data for operation with upstream power supply
module on mains voltage
DC−bus voltage V
DC−bus current I
Rated output current at 4 kHz
(causes a heatsink temperature of 70°C at an
ambient temperature of 20°C)
Rated output current at 8 kHz (at an ambient
temperature of 20°C it causes a heatsink
temperature of 70°C)
Max. output current
(acceleration current)
Continuous current at standstill
(holding current at 90°C, 4 kHz)
Short−time standstill current
(holding current at 90 °C, 4 kHz)
Short−time standstill current
(holding current at 70 °C, 4 kHz)
Short−time standstill current
(holding current at 70 °C, 8 kHz)
Power loss (operation with
rated current at 4 kHz / 8 kHz)
Max. output frequency f
Mass m [kg] approx. 2.4 approx. 3.3
1)
2)
2)
2)
2)
Total
Inside the
device
Heatsink 117.0 132.0 158.0
1)
If the heatsink temperature reaches 70°C, the switching frequency automatically changes to
4 kHz.
2)
The indicated temperature is the measured heatsink temperature (C0061).
Application software:
[kVA] 8.3 11.2 13.2
rated
U
[V] 400 480 400 480 400 480
mains
[V] 15 ... 770
DC−bus
[A] 15.6 12.5 20.9 16.8 24.5 19.6
DC−bus
Ir [A] 12.7 10.2 17.0 13.6 20.0 16.0
Ir [A] 8.5 6.8 11.3 9.0 13.3 10.6
I
[A] 32.0 48.0 64.0
max
I
[A] 16.0 12.8 23.0 18.4 27.0 21.6
0,eff 4 kHz
I
[A] 18.1 27.2 36.3
0,eff 4 kHz
I
[A] 24.0 36.0 48.0
0,eff 4 kHz
I
[A] 12.1 18.1 24.2
0,eff 8 kHz
144.5 166.5 199.0
P
[W]
loss
[Hz] 600
out
S = Speed & Torque P = Posi & Shaft
M = Motion A = Application
27.5 34.5 41.0
Axis module
EDKCSEX064 DE/EN/FR 6.0
89
Page 90

4
Mechanical installation
Important notes
4 Mechanical installation
4.1 Important notes
ƒ Axis modules of the ECS series provide IP20 enclosure and can therefore
only be used for installation in control cabinets.
ƒ If the cooling air contains air pollutants (dust, fluff, grease, aggressive
gases):
– Take suitable preventive measures , e.g. separate air duct, installation
of filters, regular cleaning.
ƒ Possible mounting positions:
– Vertical at the mounting plate
– DC bus connections (X23) at the top
– Motor connection (X24) at the bottom
ƒ Maintain the specified clearances (above and below) to other
installations!
– If the ECSZS000X0B shield mounting kit is used, an additional clearance
is required.
– Ensure unimpeded ventilation of cooling air and outlet of exhaust air.
– Several modules of the ECS series can be installed in the control cabinet
next to each other without any clearance.
ƒ The mounting plate of the control cabinet
– must be electrically conductive.
– must not be varnished.
ƒ In case of continuous vibrations or shocks use shock absorbers.
90
EDKCSEX064 DE/EN/FR 6.0
Page 91

Mechanical installation
Mounting with fixing rails (standard installation)
4.2 Mounting with fixing rails (standard installation)
4.2.1 Dimensions
Note!
Mounting with ECSZS000X0B shield mounting kit:
ƒ Mounting clearance below the module > 195 mm
4
Dimensions
0
g
³ 65 mm
³ 65 mm
Fig. 4−1 Dimensions for "panel−mounted" design
Axis module Dimensions [mm]
Type Size a b d d1 e h g
ECSE004
ECSE008
ECSE016
ECSE032
ECSE048
ECSE064
1)
Max. 212 mm, depending on the plugged−on communication module
e
131
88,5
h
d
d1
g
a
240 276 260
b
d
d1
176
1)
212
1
g
h
g
a
10
b
ECSxA005
6,5
(M6)
Application software: S = Speed & Torque P = Posi & Shaft
EDKCSEX064 DE/EN/FR 6.0
M = Motion A = Application
91
Page 92

4
4.2.2 Mounting steps
Mechanical installation
Mounting with fixing rails (standard installation)
Mounting steps
How to install the axis module:
1. Prepare the fixing holes on the mounting surface.
– Use the drilling jig for this purpose.
2. Take the fixing rails from the accessory kit in the cardboard box.
3. Push the rails into the slots of the heatsink:
– From above: Push in the long side.
– From below: Push in the short side.
4. Attach the axis module to the mounting surface.
92
EDKCSEX064 DE/EN/FR 6.0
Page 93

Electrical installation
Installation according to EMC (installation of a CE−typical drive system)
5 Electrical installation
5.1 Installation according to EMC (installation of a CE−typical drive system)
General information
ƒ The electromagnetic compatibility of a machine depends on the type of
installation and care taken.Especially consider the following:
– Assembly
– Filtering
– Shielding
– Earthing
ƒ For diverging installations, the evaluation of the conformity to the EMC
Directive requires a check of the machine or system regarding the EMC
limit values. This for instance applies to:
– Use of unshielded cables
– Use of collective interference filters instead of the assigned RFI filters
– Operating without RFI filters
ƒ The compliance of the machine application with the EMC Directive is in
the responsibility of the user.
– If you observe the following measures, you can assume that the
machine will operate without any EMC problems caused by the drive
system, and that compliance with the EMC Directive and the EMC law is
achieved.
– If devices which do not comply with the CE requirement concerning
noise immunity EN 61000−6−2 are operated close to the ECS modules,
these devices may be electromagnetically affected by the ECS modules.
5
EDKCSEX064 DE/EN/FR 6.0
93
Page 94
5
Electrical installation
Installation according to EMC (installation of a CE−typical drive system)
Assembly
ƒ Connect the ECS modules, RFI filters, and mains choke to the earthed
mounting plate with a surface as large as possible:
– Mounting plates with conductive surfaces (zinc−coated or stainless
steel) allow for permanent contact.
– Painted plates are not suitable for an EMC−compliant installation.
ƒ If you use the ECSxK... capacitor module:
– Install the capacitor module between the power supply module and the
axis module(s).
– If the total cable length in the DC−bus connection is > 5 m, install the
capacitor module as close as possible to the axis module with the
greatest power.
ƒ If you use several mounting plates:
– Connect as much surface of the mounting plates as possible (e.g. with
copper bands).
ƒ Ensure the separation of the motor cable and the signal or mains cables.
ƒ Avoid a common terminal/power strip for the mains input and motor
output.
ƒ Lay the cables as close as possible to the reference potential. Freely
suspended cables act like aerials.
Filters
Only use RFI filters and mains chokes which are assigned to the power supply
modules:
ƒ RFI filters reduce impermissible high−frequency interferences to a
permissible value.
ƒ Mains chokes reduce low−frequency interferences which in particular
depend on the motor cables and their lengths.
94
EDKCSEX064 DE/EN/FR 6.0
Page 95

Electrical installation
Installation according to EMC (installation of a CE−typical drive system)
Shielding
ƒ Connect the motor cable shield to the axis module
– with the ECSZS000X0B shield mounting kit.
– extensively to the mounting plate below the axis module.
– Recommendation: For the shield connection, use earthing clamps on
bare metal mounting surfaces.
ƒ If contactors, motor protection switches or terminals are located in the
motor cable:
– Connect the shields of the connected cables to each other and connect
them to the mounting plate, too, with a surface as large as possible.
ƒ Connect the shield in the motor terminal box or on the motor housing
extensively to PE:
– Metal glands at the motor terminal box ensure an extensive connection
of the shield and the motor housing.
ƒ Shield UG cables and control cables from a length of 0.3 m:
– Connect both shields of the digital control cables.
– Connect one shield end of the analog control cables.
– Always connect the shields to the shield connection at the axis module
over the shortest possible distance.
ƒ Use of the ECS modules in residential areas:
– Additionally dampen the shield in order to limit the interfering
radiation: ³10 dB . This can be achieved by using standard, closed,
metallic, and earthed control cabinets or boxes.
Earthing
ƒ Earth all metallically conductive components (e.g. ECS modules, RFI filters,
motor filters, mains chokes) using suitable cables connected to a central
earthing point (PE rail).
ƒ Maintain the minimum cross−sections prescribed in the safety
regulations:
– For EMC not the cable cross−section is important, but the surface of the
cable and the contact with a cross−section as large as possible, i.e. large
surface.
5
EDKCSEX064 DE/EN/FR 6.0
95
Page 96
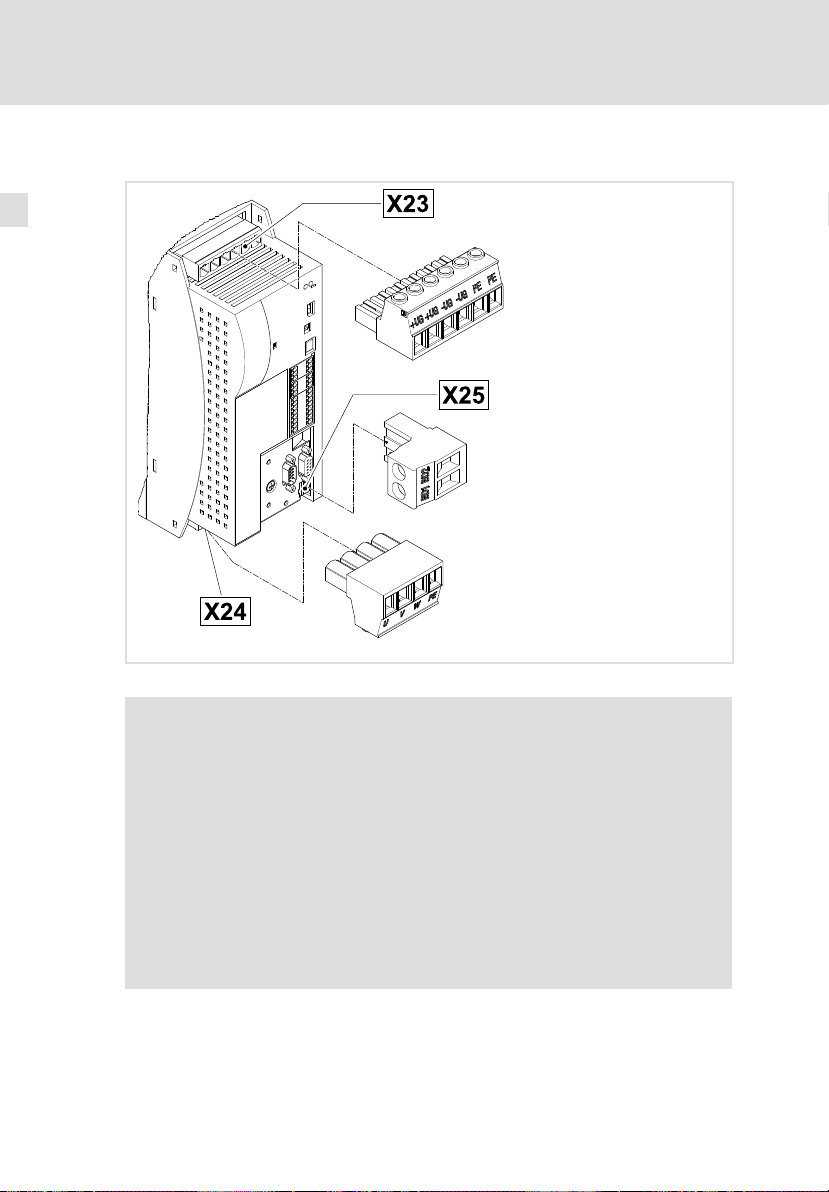
5
5.2 Power terminals
Electrical installation
Power terminals
96
Fig. 5−1 Plug connectors for power terminals
Danger!
Dangerous voltage
The leakage current to earth (PE) is > 3.5 mA AC or > 10 mA DC.
Possible consequences:
ƒ Death or severe injuries when the device is touched in the event
of a fault.
Protective measures:
ƒ Implement the actions required in the EN 61800−5−1. Especially:
– Fixed installation
– PE connection must conform to standards (PE conductor
diameter ³ 10 mm
2
or PE conductor must be connected twice)
ECSXA080
EDKCSEX064 DE/EN/FR 6.0
Page 97

Electrical installation
Power terminals
Stop!
No device protection if the mains voltage is too high
The mains input is not internally fused.
Possible consequences:
ƒ Destruction of the device if the mains voltage is too high.
Protective measures:
ƒ Observe the maximally permissible mains voltage.
ƒ Fuse the device correctly on the supply side against mains
fluctuations and voltage peaks.
ƒ All power connections are plug connections and coded. The ECSZA000X0B
plug connector set must be ordered separately.
ƒ Installation of the cables to EN 60204−1.
ƒ The cables used must comply with the approvals required at the site of
use (e.g. VDE, UL, etc.).
Assignment of the plug connectors
Plug
connector/termi
nal
X23 DC−bus voltage connection
X23/+UG
X23/+UG
X23/−UG
X23/−UG
X23/PE
X23/PE
X24 Motor connection
X24/U Motor phase U
X24/V
X24/W Motor phase W
X24/PE Earth connection
X25 Motor holding brake connection
X25/BD1 Brake connection +
X25/BD2 Brake connection −
Function Electrical data
Positive DC−bus voltage
Negative DC−bus voltage
Earth connection
Motor phase V
Dependent on application and
type
0 ... 770 V
2 ... 24.5 A (
Dependent on application and
type
0 ... 480 V
1.6 ... 20 A (
23 ... 30 V DC,
max. 1.5 A
88)
88)
5
EDKCSEX064 DE/EN/FR 6.0
97
Page 98

5
Electrical installation
Power terminals
Cable cross−sections and screw−tightening torques
Cable type Wire end ferrule Possible cable
Plug connectors X23 and X24
Rigid ˘
Without wire end
ferrule
Flexible
Plug connector X25
Flexible
Insulated with wire
end ferrule
Insulated with wire
end ferrule
Insulated with wire
end ferrule
Without wire end
ferrule
cross−sections
0.2 ... 10 mm
(AWG 24 ... 8)
0.2 ... 10 mm
(AWG 24 ... 8)
0.25 ... 6 mm
(AWG 22 ... 10)
0.25 ... 4 mm
(AWG 22 ... 12)
0.25 ... 2.5 mm
(AWG 22 ... 12)
0.2 ... 2.5 mm
(AWG 24 ... 12)
Tightening torque Stripping length
2
2
2
(10.6 ... 13.3 lb−in)
2
2
(4.4 ... 7.1 lb−in)
2
1.2 ... 1.5 Nm
0.5 ... 0.8 Nm
5 mm for screw
connections
10 mm for spring
connections
5 mm for screw
connections
10 mm for spring
connections
Shielded cables
The following factors decisively determine the effect of the shielded cables:
ƒ Good shield connection
– Ensure a contact surface as large as possible
ƒ Low shield resistance
– Only use shields with tin−plated or nickel−plated copper braids (shields
with steel braids cannot be used).
ƒ High overlap rate of the braid
– At least 70 ... 80 % with 90° overlap angle
The ECSZS000X0B shield mounting kit includes a wire clamp and shield sheet.
98
EDKCSEX064 DE/EN/FR 6.0
Page 99

Electrical installation
Power terminals
Connection to the DC bus (+U
, −UG)
G
5
5.2.1 Connection to the DC bus (+UG, −UG)
Stop!
No device protection for DC bus voltage surges
In passive axis modules (without 24 V−supply), the charging circuit
can be overloaded through DC bus voltage surges.
Possible consequences:
ƒ Destruction of the device
Protective measures:
ƒ All axis modules in the DC−bus connection should be basically
supplied with a control voltage of 24 V.
ƒ If the total cable length is > 20 m, install an axis module or a capacitor
module directly at the power supply module.
ƒ Design the ±U
short−circuit−proof routing!
ƒ Cable length (module « module) > 30 cm: install shielded ±U
cables twisted and as short as possible. Ensure
G
Documentation of the ECSxE power supply module
Observe the enclosed notes.
Documentation of the ECSxK capacitor module
Observe the enclosed notes.
cables.
G
EDKCSEX064 DE/EN/FR 6.0
99
Page 100

5
Electrical installation
Power terminals
Connection to the DC bus (+U
K1
L1
L2
L3
N
F1...F3
F4
Z1
, −UG)
G
Off
On
K1
"
"
ECSxE...
L1 L2
T1
L3
PE
BR0
BR1
X21
X6
...
T2
PE
+UG
+UG
-UG
X22
+UG
+UG
PE
-UG
PE
-UG
X23
ECSxS/P/M/A...
X24
X25
BD2
BD1
UV
PE
W
X7
+UG
-UG
-UG
+UG
X23
ECSxS/P/M/A...
X25
BD2
BD1
UV
0
"
"
+
M
3~
J
"
"
2
"
"
6
R
+
Fig. 5−2 Power system: ECSxE power supply module with ECSxS/P/M/A axis modules
HF−shield termination by large−surface connection to functional earth (see
Mounting Instructions for ECSZS000X0B shield mounting kit)
Twisted cables
K1 Mains contactor
F1 ... F4 Fuse
Z1 Mains choke / mains filter, optional
J KTY thermal sensor of the motor
System cable for feedback˘
PE
PE
X24
X7
PE
W
0
"
"
J
2
ECSXA011
6
R
M
3~
100
EDKCSEX064 DE/EN/FR 6.0
 Loading...
Loading...