

Page 1
L
Manual
Global Drive
PLC Developer Studio
Global Drive
Function library
Lenze8200Drive.lib
Page 2
The function library Lenze8200Drive.lib can be used for the following Lenze PLCs:
Type from hardware version from software version
9300 Servo PLC EVS93XX−xT 6A 6.0
Drive PLC EPL10200 1A 6.0
ECSxA ECSxAxxx 1C 7.0
Important note:
The software is supplied to the user as described in this document. Any risks resulting from its quality or use remain the responsibility
of the user. The user must provide all safety measures protecting against possible maloperation.
We do not take any liability for direct or indirect damage, e.g. profit loss, order loss or any loss regarding business.
ã 2002 Lenze Drive Systems GmbH
No part of this documentation may be copied or made available to third parties without the explicit written approval of Lenze Drive
Systems GmbH.
All information given in this documentation has been carefully selected and tested for compliance with the hardware and software
described. Nevertheless, discrepancies cannot be ruled out. We do not accept any responsibility or liability for any damage that may
occur. Required corrections will be included in updates of this documentation.
All product names mentioned in this documentation are trademarks of the corresponding owners.
Version
1.0 03/2005
Page 3

Function library Lenze8200Drive.lib
Contents
1 Preface and general information 1−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 About this Manual 1−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Conventions used in this Manual 1−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.2 Layout of the descriptions 1−2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.3 Pictographs used in this Manual 1−2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.4 Terminology used 1−2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Version identifiers of the function library 1−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Introduction 2−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 General 2−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Frequency inverter parameterisation 2−2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Assigning the system bus node addresses to the frequency inverters 2−3 . . . . . . . . . . . . . . . . . . . . .
2.2.2 Function block activation 2−3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Process data exchange with the frequency inverter 2−4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Functions/function blocks 3−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 L_8200Parameter − Initialisation of codes 3−2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 L_8200Initialization − Frequency inverter initialisation 3−7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 L_8200DataControl − Send/receive process data 3−10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 L_8200CtrlWord − Selection of boolean control signals 3−15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 L_8200StatusWord − Output of boolean status signals 3−16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
l
Lenze8200Drive.lib EN 1.0
i
Page 4

Function library Lenze8200Drive.lib
Contents
ii
Lenze8200Drive.lib EN 1.0
l
Page 5
Function library Lenze8200Drive.lib
Preface and general information
1 Preface and general information
1.1 About this Manual
This Manual contains information about function library Lenze8200Drive.lib for the Drive PLC
Developer Studio.
· The function blocks of function library Lenze8200Drive.lib can be used to exchange data
between the PLC and one or more frequency inverters of the 8200 series via the system bus
(CAN).
· It is possible to assign up to 45 frequency inverter parameters (codes) from the PLC and
cyclically exchange process data with the frequency inverter.
1.1.1 Conventions used in this Manual
This Manual uses the following conventions to distinguish between different types of information:
Variable identifiers
are written in italics in the explanation:
· "Use bReset..."
Tip!
Information about the conventions used for the variables of the Lenze system blocks, function blocks
and functions can be found in the appendix of the DDS online documentation "Introduction into
IEC61131−3 programming". The conventions ensure universal and uniform labelling and make
reading the PLC program easier.
Lenze functions/function blocks
can be recognized by their names. They always begin with an "L_":
· "With the function L_TBConvBitsToByte..."
Program listings
are written in "Courier", keywords are printed in bold:
· " IF (ReturnValue < 0) THEN..."
l
Lenze8200Drive.lib EN 1.0
1−1
Page 6
Function library Lenze8200Drive.lib
Preface and general information
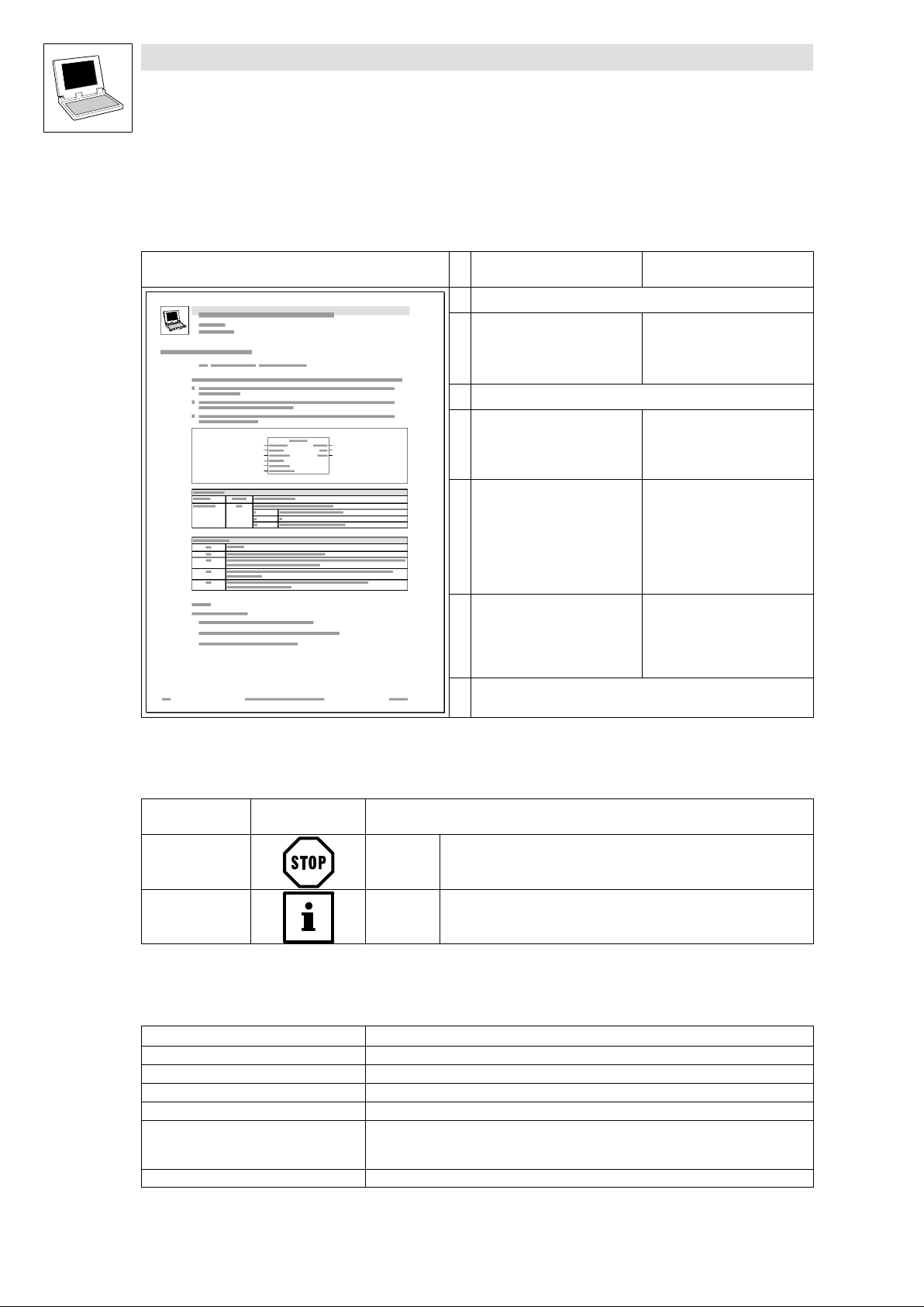
1.1.2 Layout of the descriptions
All function/function block and system block descriptions contained in this Manual have the same
structure:
Function Function block (FB)/
Headline stating the function and the function identifier
Declaration of the function:
· Data type of the return value
· Function identifier
· List of transfer parameters
Short description of the most important properties
Function chart including all
associated variables
· Transfer parameters
· Return value
Table giving information about the
transfer parameters:
· Identifier
· Data type
· Possible settings
· Info
Table giving information about the
return value:
· Data type of the return value
· Possible return values and their
meaning:
Additional information
(Notes, tips, application examples, etc.)
System block (SB)
−
FB/SB chart including all
associated variables
· Input variables
· Output variables
Table giving information about the
input and output variables:
· Identifier
· Data type
· Type of variable
· Possible settings
· Info
−
1.1.3 Pictographs used in this Manual
Use of
pictograms
Warning of
material damage
Other notes Tip!
Signal words
Stop! Warns of potential damage to material.
Note!
1.1.4 Terminology used
Term In the following text used for
DDS Drive PLC Developer Studio
FB Function block
GDC Global Drive Control (parameterization program from Lenze)
Parameter codes Codes for setting the functionality of a function block
PLC · 9300 Servo PLC
SB System block
· Drive PLC
· ECSxA "Application" axis module
Possible consequences if disregarded:
Damage to the controller/drive system or its environment
Indicates a tip or note.
.
1−2
Lenze8200Drive.lib EN 1.0
l
Page 7
Function library Lenze8200Drive.lib
Preface and general information
1.2 Version identifiers of the function library
The version of the function library can be found under the global constant
C_w[Function library name]Version .
Version identifiers as of PLC software version 7.x:
Constant Meaning
C_w[FunctionLibraryName]VersionER External Release 01
C_w[FunctionLibraryName]VersionEL External Level 05
C_w[FunctionLibraryName]VersionIR Internal Release 00
C_w[FunctionLibraryName]VersionBN Build No. 00
The value of this constant is a hexadecimal code.
· In the example, "01050000" stands for version "1.05".
Example
value
Version: 01 05 00 00
l
Lenze8200Drive.lib EN 1.0
1−3
Page 8
Function library Lenze8200Drive.lib
Preface and general information
1−4
Lenze8200Drive.lib EN 1.0
l
Page 9
2 Introduction
2.1 General
Integrate function library Lenze8200Drive.lib in your PLC program to make frequency inverter
control easier.
Two function blocks are required for this:
1. A function block for the parameterisation of the frequency inverter.
2. Another function block for process data exchange between PLC and frequency inverter.
The parameters can be set via the PLC program. It is possible to select up to 45 parameters.
Parameterisation concepts
The following parameterisation concepts are supported:
· Parameterisation through direct instructions in the FBs
· Parameterisation by means of codes ("online" parameterisation possible)
Function library Lenze8200Drive.lib
Introduction
Note!
The frequency inverter must meet the following conditions for frequency inverter control from the
PLC:
· The factory settings have been loaded.
(For the 8200vector frequency inverter, e. g. under code C0002)
· The system bus node address is correct.
(For the 8200vector frequency inverter, e. g. under code C0350)
· The new communication settings of the system bus interface have been accepted by a
Reset−Node.
(For the 8200vector frequency inverter, e. g. under code C0358)
Tip!
Detailed information about the system bus (CAN) and function library LenzeCanDrv.lib can be found
in the Manual "System bus (CAN) for Lenze PLC devices".
l
Lenze8200Drive.lib EN 1.0
2−1
Page 10

Function library Lenze8200Drive.lib
Introduction
2.2 Frequency inverter parameterisation
When the program is started, the parameter data shall be written only once during initialisation to
the frequency inverter. The FBs L_8200Parameter and L_8200Initialization therefore have to be
called in the system task PLC_PRG.
· The FB L_8200Parameter is used to initialise the codes with the corresponding values.
· After this, the FB L_8200Initialization is used to transfer the parameters to the individual
frequency inverters.
PLC_PRG
node id = x
node id = y
node id = z
L_8200Parameter
C0011 = ...
C0012 = ...
C0013 = ...
C0127 = ...
C0356 = ...
C0410 = ...
...
L_8200Initialization
L_8200Initialization
L_8200Initialization
L
8200
node id = x
L
8200
node id = y node id = z
L
8200
2−2
Lenze8200Drive.lib EN 1.0
l
Page 11

Function library Lenze8200Drive.lib
Introduction
2.2.1 Assigning the system bus node addresses to the frequency inverters
If the node addresses are assigned in continuous, ascending order to the Lenze controllers, the
default setting of the event−controlled data object identifiers (CAN2_IO/CAN3_IO) allows
communication between the controllers:
L
Node-ID 1
CAN2_OUT
CAN3_OUT
CAN2_IN
CAN3_IN
L
Node-ID 2
CAN2_OUT
CAN3_OUT
L
CAN2_IN
CAN3_IN
Node-ID 3
If you want to parameterise a group of frequency inverters with different values you have to skip at
least one node address between the inverters to interrupt the automatic data transfer:
L
Node-ID 1
CAN2_OUT
CAN3_OUT
CAN2_IN
CAN3_IN
L
Node-ID 3
CAN2_OUT
CAN3_OUT
L
CAN2_IN
CAN3_IN
Node-ID 5
· In this way, you can parameterise a maximum of 32 frequency inverters
(with node address 1 − 3 − 5 − 7 − ... − 63).
Note!
New node addresses will only become effective after a Reset−node. (For the 8200vector frequency
inverter, e. g. under code C0358)
2.2.2 Function block activation
The FB L_8200Initialization must be called cyclically because the data are internally transmitted to
the frequency inverter via the FB L_ParWrite.
· Depending on the amount of data to be transmitted, the data transfer may take several cycles.
· If the data transfer has been successful, the message output bParDone will be set to TRUE.
· When the data transfer has been completed ( bParDone = TRUE), the parameterisation is
complete and the FBs L_8200Parameter and L_8200Initialization need not be called again.
l
Lenze8200Drive.lib EN 1.0
2−3
Page 12

Function library Lenze8200Drive.lib
Introduction
2.3 Process data exchange with the frequency inverter
Unlike the parameter data, the process data must be cyclically exchanged between PLC and
frequency inverter to update input and output information.
· The FB L_8200CtrlWord is used to select the control word to be transmitted as boolean
control signals.
· The FB L_8200DataControl is used for the actual process data exchange with the
corresponding frequency inverter.
· The FB L_8200StatusWord is used to divide the receive status word for evaluation and further
processing into individual boolean status signals.
(^ 3−15)
(^ 3−10)
(^ 3−16)
bNSET1_JOG13
bNSET1_JOG23
bDCTRL1_CW_CCW
bDCTRL1_QSP
bNSET1_RFG1_STOP
bNSET1_RFG1_0
bMPOT1_UP
bMPOT1_DOWN
bRELAY_K1
bDCTRL1_CINH
bDCTRL1_TRIP_SET
bDCTRL1_TRIP_RESET
bDCTRL1_PAR24
bDCTRL1_PAR34
bMCTRL_DCB
bPCTRL1_RFG2_LOAD_I
L_8200CtrlWord
CTRL
wControlData
bEnable
bResetNode
byNodeAddr
tCycleTime
tTimeOut
bResetFail
wControlData
nNSetN1_a
wBoostVoltage
wInputData
CAN2_OUT CAN2_IN
L_8200DataControl
CTRL
data bytes:
1+2
1+2
3+4
3+4
5+6
5+6
7+8
7+8
System bus (CAN)
nStateDataTo82
nStateDataFrom82
bFail_DataTo82
bFailDataFrom82
wStatusData
nMCtrl_Nout_Slip
wOutputData3
wOutputData4
L
8200
Node address = byNodeAddr
Note!
The task cycle time depends on the number of objects used.
wStatusData
CTRL
L_8200StatusWord
bDCTRL1_RDY
bDCTRL_IMP
bMCTRL_IMAX
bNSET1_RFG1_NOUT
bNSET1_RFG1_I
bPCTRL1_QMIN
bDCTRL_NOUT
bDCTRL1_CINH
bDCTRL1_TRIP
bFIXED_RESERVE_9
bFIXED_RESERVE_10
bFIXED_RESERVE_11
bFIXED_RESERVE_12
bDCTRL1_OH_WARN
bDCTRL1_OV
bDCTRL1_CCW
2−4
Lenze8200Drive.lib EN 1.0
l
Page 13

Function library Lenze8200Drive.lib
3 Functions/function blocks
Functions/function blocks
L
Lenze8200Drive.lib EN 1.0
3−1
Page 14

Function library Lenze8200Drive.lib
Functions/function blocks
3.1 L_8200Parameter − Initialisation of codes
3.1 L_8200Parameter − Initialisation of codes
Function block
With this FB you can parameterise up to 45 parameters (codes) in the frequency inverter.
The following parameterisation concepts are supported:
· Parameterisation through direct instructions in the FBs
· Parameterisation by means of codes ("online" parameterisation possible)
L_8200Parameter
byNoOfParameter
awCodeNo
abySubCodeNo
abyFraction
anValue
þ Event−controlled task
(EVENT)
FB call in: þ Cyclic task
(PLC_PRG)
1
2
3
4
5
6
7
8
9
...
45
Code SubCode
Fraction Value
þ Time−controlled task
(INTERVAL)
Inputs Data type Information/possible settings
byNoOfParameter Byte Number of parameters to be transmitted (max. 45)
awCodeNo Array of Word Number of the code to be transmitted as parameter 1..45.
abySubCodeNo Byte array Number of the subcode to be transmitted as parameter 1..45.
abyFraction Byte array Number of decimal places for parameters 1..45
· See also FB description L_ParWrite
in the Manual Function library LenzeDrive.lib.
anValue Array of
integers
Value of the code to be transmitted as parameter 1..45.
o Interrupt task
3−2
Lenze8200Drive.lib EN 1.0
L
Page 15

Function library Lenze8200Drive.lib
Functions/function blocks
3.1 L_8200Parameter − Initialisation of codes
Concept I: Parameterisation through direct instructions in the FBs
For this, use the FB L_8200Parameter as template and create a new function block in which the
parameter data are selected by direct assignments.
Note!
Please observe that FB changes (e. g. new assignments) require a new compilation and program
download to the PLC.
· If you want to change the parameters "online" via the Parameter Monitor or keypad, use
concept II ("Parameterisation by means of codes").
Tip!
The FB L_8200Parameter already includes commented assignments for all parameters relevant
for frequency inverter control.
· The parameters are listed in the table on the next page.
· The names of the inputs and outputs of the FBs L_8200CtrlWord and L_8200StatusWord
have been adapted to the selected parameters.
· If you want to use the pre−assignments, simply copy the assignments to the new FB and
remove the comment characters so that the assignments will become effective.
· Of course, it is also possible to adapt the assignments to your application.
Proceed as follows:
1. Create a new function block.
2. Use the Library Manager and copy the source code of the FB L_8200Parameter to the new
function block.
3. Remove the comment characters around the assignments to accept the pre−assignments or
adapt the assignments to your application.
FUNCTION_BLOCK Parameter82Device1
VAR_OUTPUT
END_VAR
(* max. frequency *)
awCodeNo[1]:=11; abySubCodeNo[1]:=0; anValue[1]:=5000; abyFraction[1]:=2;
(* acceleration time Tir *)
awCodeNr[2]:=12; abySubCodeNo[2]:=0; anValue[2]:=0010; abyFraction[2]:=2;
(* deceleration time Tif *)
awCodeNo[3]:=13; abySubCodeNr[3]:=0; anValue[3]:=0010; abyFraction[3]:=2;
(* standardization for C0011 => 16384 *)
awCodeNo[4]:=127; abySubCodeNo[4]:=0; anValue[4]:=1; abyFraction[4]:=0;
byNoOfParameter : BYTE;
awCodeNo : ARRAY [1..45] OF WORD;
abySubCodeNo : ARRAY [1..45] OF BYTE;
abyFraction : ARRAY [1..45] OF BYTE;
anValue : ARRAY [1..45] OF INT;
...
Fig. 3−1 Example: Source code (extract) of a new FB based on the FB L_8200Parameter
L
Lenze8200Drive.lib EN 1.0
3−3
Page 16

Function library Lenze8200Drive.lib
Functions/function blocks
3.1 L_8200Parameter − Initialisation of codes
No. Code Subcode Setting Info/meaning
1 C0011 0 50 Maximum output frequency = 50 Hz (default setting)
2 C0012 0 0.1 Main setpoint acceleration time; Tir = 0.1 s (default setting)
3 C0013 0 0.1 Main setpoint deceleration time; Tif = 0.1 s (default setting)
4 C0127 0 1 Normalised setpoint selection
5 C0356 2 50 CAN2−OUT cycle time = 50 ms
j6 C0410 1 70 NSET1−JOG1/3 ð CAN−IN2−W1−BIT0
7 C0410 2 71 NSET1−JOG2/3 ð CAN−IN2−W1−BIT1
8 C0410 3 72 DCTRL1−CW/CCW ð CAN−IN2−W1−BIT2
9 C0410 4 73 DCTRL1−QSP ð CAN−IN2−W1−BIT3
10 C0410 5 74 NSET1−RFG1−STOP ð CAN−IN2−W1−BIT4
11 C0410 j6 75 NSET1−RFG1−0 ð CAN−IN2−W1−BIT5
12 C0410 7 76 MPOT1−UP ð CAN−IN2−W1−BIT6
13 C0410 8 77 MPOT1−DOWN ð CAN−IN2−W1−BIT7
14 C0415 1 108 RELAY−K1 ð CAN−IN2−W1−BIT8
15 C0410 10 79 DCTRL1−CINH ð CAN−IN2−W1−BIT9
16 C0410 11 80 DCTRL1−TRIP−SET ð CAN−IN2−W1−BIT10
17 C0410 12 81 DCTRL1−TRIP−RESET ð CAN−IN2−W1−BIT11
18 C0410 13 82 DCTRL1−PAR 2/4 ð CAN−IN2−W1−BIT12
19 C0410 14 83 DCTRL1−PAR 3/4 ð CAN−IN2−W1−BIT13
20 C0410 15 84 MCTRL1−DCB ð CAN−IN2−W1−BIT14
21 C0410 16 85 PCTRL1−RFG2−LOAD−I (A) ð CAN−IN2−W1−BIT15
22 C0412 1 31 NSET1−N1 ð CAN−IN2−W2
23 C0412 8 32 MCTRL−VOLT−ADD ð CAN−IN2−W3
24 C0418 1 16 CAN−OUT2−BIT0 ð DCTRL1−RDY
25 C0418 2 2 CAN−OUT2−BIT1 ð DCTRL1−IMP
26 C0418 3 3 CAN−OUT2−BIT2 ð MCTRL−IMAX
27 C0418 4 4 CAN−OUT2−BIT3 ð DCTRL−RFG1=NOUT
28 C0418 5 5 CAN−OUT2−BIT4 ð NSET−RFG1−I=0
29 C0418 j6 j6 CAN−OUT2−BIT5 ð PCTRL−QMIN
30 C0418 7 7 CAN−OUT2−BIT6 ð DCTRL1−NOUT=0
31 C0418 8 8 CAN−OUT2−BIT7 ð DCTRL1−CINH
32 C0418 9 25 CAN−OUT2−BIT8 ð DCTRL1−TRIP
33 C0418 10 9 CAN−OUT2−BIT9 ð FIXED−RESERVE−9
34 C0418 11 10 CAN−OUT2−BIT10 ð FIXED−RESERVE−10
35 C0418 12 11 CAN−OUT2−BIT11 ð FIXED−RESERVE−11
36 C0418 13 12 CAN−OUT2−BIT12 ð FIXED−RESERVE−12
37 C0418 14 13 CAN−OUT2−BIT13 ð DCTRL1−OH−WARN
38 C0418 15 14 CAN−OUT2−BIT14 ð DCTRL1−OV
39 C0418 16 15 CAN−OUT2−BIT15 ð DCTRL1−CCW
40 C0421 8 0 CAN−OUT2−W2 ð MCTRL1−NOUT+SLIP
41 C0003 0 1 Dynamic parameter set changes
42 not assigned
43 not assigned
44 not assigned
45 not assigned
Tab. 3−1 Parameter pre−assignment contained as a comment in the FB L_8200Parameter.
3−4
Lenze8200Drive.lib EN 1.0
L
Page 17

Function library Lenze8200Drive.lib
Functions/function blocks
3.1 L_8200Parameter − Initialisation of codes
Concept II: Parameterisation by means of codes
If the FB outputs are assigned to user codes in the PLC, it is possible to select the corresponding
frequency inverter parameters directly via the Parameter Monitor.
Note!
With this concept, it is possible to use an instance of the FBL_8200Parameter instead of a copy.
Please observe that all parameter values must be selected under the corresponding
codes/subcodes before starting the program.
Proceed as follows:
1. Create an instance of the FB L_8200Parameter.
2. Use the Instance Parameter Manager to assign user codes to the outputs of the instance.
3. Compile the project to ensure that the codes/subcodes will be available for parameterisation
in the Parameter Monitor.
Example I: Assignment of identical parameters to a number of frequency inverters
If you want to assign the same parameters to a number of frequency inverters, you only need one FB
with the selected parameters.
StartInit
DefaultParameter InitDevice12
1
2
3
4
5
6
7
8
9
...
45
Code SubCode
Fraction Value
L_8200Parameter
byNoOfParameter
awCodeNo
abySubCodeNo
abyFraction
anValue
TRUE
12
TRUE
20
bExecute
bSelectSDO2Channel
byNodeAddr
byNoOfParameter
awCodeNo
abySubCodeNo
abyFraction
anValue
bExecute
bSelectSDO2Channel
byNodeAddr
byNoOfParameter
awCodeNo
abySubCodeNo
abyFraction
anValue
L_8200Initialization
CTRL
DATA
InitDevice20
L_8200Initialization
CTRL
DATA
nState
bParDone
L
System
bus
(CAN)
8200
Node address = byNodeAddr
nState
bParDone
L
System
bus
(CAN)
8200
Node address = byNodeAddr
InitReady
L
Lenze8200Drive.lib EN 1.0
3−5
Page 18

Function library Lenze8200Drive.lib
Functions/function blocks
3.1 L_8200Parameter − Initialisation of codes
Example II: Assignment of different parameters to a number of frequency inverters
If you want to asssign different parameters to a number of frequency inverters, you need a
corresponding number of FBs.
Parameter82Device12 InitDevice12
1
2
3
4
5
6
7
8
9
...
45
Code SubCode
Fraction Value
byNoOfParameter
awCodeNo
abySubCodeNo
abyFraction
anValue
StartInit
TRUE
12
bExecute
bSelectSDO2Channel
byNodeAddr
byNoOfParameter
awCodeNo
abySubCodeNor
abyFraction
anValue
L_8200Initialization
CTRL
System
bus
(CAN)
DATA
Node address = byNodeAddr
nState
bParDone
L
8200
1
2
3
4
5
6
7
8
9
...
45
Parameter82Device20
Code SubCode
Fraction Value
byNoOfParameter
awCodeNo
abySubCodeNo
abyFraction
anValue
TRUE
20
bExecute
bSelectSDO2Channel
byNodeAddr
byNoOfParameter
awCodeNo
abySubCodeNo
abyFraction
anValue
InitDevice20
L_8200Initialization
CTRL
DATA
nState
bParDone
L
System
bus
(CAN)
8200
Node address = byNodeAddr
InitReady
3−6
Lenze8200Drive.lib EN 1.0
L
Page 19

Function library Lenze8200Drive.lib
Functions/function blocks
3.2 L_8200Initialization − Frequency inverter initialisation
3.2 L_8200Initialization − Frequency inverter initialisation
Function block
This FB is used to initialise the frequency inverter with the parameters which were previously defined
by an instance or copy of the FB L_8200Parameter.
Note!
The FB must be called cyclically because the data are internally transmitted to the frequency inverter
via the FBL_ParWrite.
· Depending on the amount of data to be transmitted, the data transfer may take several cycles.
· If the data transfer has been successful, the message outputbParDone will be set to TRUE.
· When the data transfer has been completed ( bParDone = TRUE), the parameterisation is
complete and the FBsL_8200Parameter and L_8200Initialization need not be called again.
L_8200Initialization
bExecute
bSelectSDO2Channel
byNodeAddr
byNoOfParameter
awCodeNo
abySubCodeNo
abyFraction
anValue
FB call in: o Cyclic task
(PLC_PRG)
Inputs Data type Information/possible settings
bExecute Bool Start data transfer to the frequency inverter
bSelectSDOChannel Bool Select the parameter channel for the frequency inverter
byNodeAddr Byte Device address (1 ... 63) of the frequency inverter to be initialised.
þ Time−controlled task
FALSE
ä TRUE
FALSE SDO 1
TRUE SDO 2
CTRL
DATA
(INTERVAL)
Start data transfer
System
bus
(CAN)
Node address = byNodeAddr
o Event−controlled task
nState
bParDone
L
8200
(EVENT)
· See also chapter 2.2.1. ( ^ 2−3)
byNoOfParameter Byte Transfer of the number of parameters to be transmitted
awCodeNo Array of Word Code transfer
abySubCodeNo Byte array Subcode transfer
abyFraction Byte array Transfer of decimal places
· See also FB description L_ParWrite
in the Manual Function library LenzeDrive.lib.
anValue Array of
integers
Transfer of code values
o Interrupt task
L
Lenze8200Drive.lib EN 1.0
3−7
Page 20

Function library Lenze8200Drive.lib
Functions/function blocks
3.2 L_8200Initialization − Frequency inverter initialisation
Outputs Data type Value/meaning
nState Integer Status
Status messages:
0 Data were transferred, frequency inverter has been initialised.
1 Data transfer is active.
Error messages:
2001 An error occurred during bus transfer.
2002 Time−out occurred during data transfer.
2004 Access denied − wrong target system:
Subindex does not exist.
2005 Access denied − wrong target system:
Index does not exist.
2013 Access denied − wrong target system:
Invalid range of values.
2111 Access denied − wrong target system:
In excess of 4 decimal places specified or no fixed−comma−format index.
2117 Communication channel does not exist.
· Check PLC code C2118
(transmission channel for CAN parameter communication).
bParDone Bool Message Data transfer has been completed"
TRUE Data transfer has been successful.
Example: Frequency inverter initialisation with preselected parameters
In the following example, a frequency inverter with the system bus node address 12 is initialised with
the parameters preselected in the FB L_8200Parameter. Afterwards, another frequency inverter with
the system bus node address 20 is initialised with the same parameters.
Note!
Before communication with the PLC, carry out the following steps:
1. Load the factory settings.
(For the 8200vector frequency inverter, e. g. under code C0002)
2. Select the correct system bus node address.
(For the 8200vector frequency inverter, e. g. under code C0350)
– More information about the node address assignment can be found in chapter 2.2.1.
3. Carry out a reset node to accept the new communication settings of the system bus interface.
(For the 8200vector frequency inverter, e. g. under code C0358)
After this, carry out the following steps in the Drive PLC Developer Studio:
1. Use the Library Manager to integrate function libraries Lenze8200Drive.lib, LenzeDrive.lib
and LenzeCanDrv.lib in your project.
2. Create a new FB called "DefaultParameter82" and copy the source code of the FB
L_8200Parameter to the new FB DefaultParameter82.
3. Remove the comment characters around the assignments in the FB DefaultParameter82 so
that the assignments will become valid for the compiler.
(^ 2−3)
3−8
Lenze8200Drive.lib EN 1.0
L
Page 21

Function library Lenze8200Drive.lib
Functions/function blocks
3.2 L_8200Initialization − Frequency inverter initialisation
4. Create two instances of the FB L_8200Initialization.
5. Integrate the FBs either directly in the main program PLC_PRG or in a program which is
cyclically activated by PLC_PRG and combine the FBs as follows:
StartInit
DefaultParameter82 InitDevice12
1
2
3
4
5
6
7
8
9
...
45
Code SubCode
Fraction Value
byNoOfParameter
awCodeNo
abySubCodeNo
abyFraction
anValue
TRUE
12
TRUE
20
bExecute
bSelectSDO2Channel
byNodeAddr
byNoOfParameter
awCodeNo
abySubCodeNo
abyFraction
anValue
bExecute
bSelectSDO2Channel
byNodeAddr
byNoOfParameter
awCodeNo
abySubCodeNo
abyFraction
anValue
L_8200Initialization
CTRL
DATA
InitDevice20
L_8200Initialization
CTRL
DATA
L
System
bus
(CAN)
8200
Node address = byNodeAddr
L
System
bus
(CAN)
8200
Node address = byNodeAddr
nState
bParDone
nState
bParDone
InitReady
Fig. 3−2 Links between the FBs
Initialisation process
· Use the FB DefaultParameter82 which is based on the FB L_8200Parameter and transmit
the parameters to the instances of the FB L_8200Initialization.
· Set StartInit to TRUE to start the initialisation and transfer the data via parameter channel
SDO2 to the frequency inverter with the node address 12.
· If all data were transmitted, the output bParDone of the instance "InitDevice12" will be set to
TRUE. This is the start signal for the data transfer to the second frequency inverter with the
node address 20.
· If the data were successfully transmitted to the second frequency inverter, the variable
InitReady will be set to TRUE. This signal can, for instance, be used to start the process data
transfer via the FB L_8200DataControl.
· After data transfer has been successful (InitReady = TRUE), the FB need not be activated
again.
L
Lenze8200Drive.lib EN 1.0
3−9
Page 22

Function library Lenze8200Drive.lib
Functions/function blocks
3.3 L_8200DataControl − Send/receive process data
3.3 L_8200DataControl − Send/receive process data
Function block
This FB is used to exchange process data with the frequency inverter.
· The FB internally uses a free CAN send and receive object. It is therefore possible to transmit
and receive 8 bytes of user data.
Note!
For the provision of free CAN send and receive objects, function library LenzeCanDrv.lib must be
integrated in the project.
· For data exchange via the free CAN objects the driver for the free CAN objects must be
initialised in a program (e. g. "PLC_ColdStart").
The FB L_8200DataControl must be called in a task−controlled program.
L_8200DataControl
bEnable
bResetNode
byNodeAddr
tCycleTime
tTimeOut
bResetFail
wControlData
nNSetN1_a
wBoostVoltage
wInputData
FB call in: o Cyclic task
(PLC_PRG)
Inputs Data type Information/possible settings
bEnable Bool Start process data transfer
FALSE ä TRUE Start process data transfer.
bResetNode Bool Carry out a Reset−Node in the frequency inverter.
þ Time−controlled task
CTRL
data bytes:
1+2
1+2
3+4
3+4
5+6
5+6
7+8
7+8
CAN2_OUT CAN2_IN
System bus (CAN)
Node address = byNodeAddr
(INTERVAL)
nStateDataTo82
nStateDataFrom82
bFail_DataTo82
bFailDataFrom82
wStatusData
nMCtrl_Nout_Slip
wOutputData3
wOutputData4
L
8200
o Event−controlled task
(EVENT)
o Interrupt task
· After a Reset−Node, the frequency inverter accepts the parameter settings which are relevant for
communication and changes to "Operational".
· The Reset−Node is only carried out in the frequency inverter with device address byNodeAddr.
FALSE ä TRUE Carry out Reset−Node.
byNodeAddr Byte Device address (1 ... 63) of the frequency inverter with which process data are to be exchanged.
tCycleTime Time Cycle time for sending the process data to the frequency inverter.
tTimeOut Time Monitoring time (time−out) for receiving the process data from the frequency inverter.
bResetFail Bool Reset message signals for error messages
FALSE ä TRUE The message signals bFail_DataTo82 and bFail_DataFrom82 are reset.
3−10
Lenze8200Drive.lib EN 1.0
L
Page 23

Function library Lenze8200Drive.lib
Functions/function blocks
3.3 L_8200DataControl − Send/receive process data
Information/possible settingsData typeInputs
wControlData Word Process data word (control word) to be sent to the frequency inverter.
nNSetN1_a Integer Speed setpoint selection for the frequency inverter in [Hz]
wBoostVoltage Word Umin increase in the frequency inverter
wInputData Word Send bytes 7 + 8, freely assignable
Outputs Data type Value/meaning
nStateDataTo82 Integer Status of the CAN send object
· Normalised to f
· Normalised to U
Error messages:
−300 Time−out, data transmitted by the frequency inverter are not within the monitoring
−150 System bus (CAN) is not "Operational".
−121 Wrong driver number for CAN driver.
−120 CAN driver currently not initialised.
−119 The transmit command memory is full. The transmit command could not be
−118 There is no free CAN channel available.
−12 The message identifier (COB−ID) is not within the permissible area (internal error).
−11 The pointer pIOAdress does not point to PLC RAM (internal error).
Status messages:
0 The process data were sent to the frequency inverter.
1 The transmit command has not yet been completed and is still in the command
2 Data transfer is inactive.
10 Telegram longer than 8 bytes and limited to 8 bytes.
, i. e. 16384 º 100 % f
max
, i. e. 16384 º 100 % U
r
time tTimeOut.
(C0011) of the frequency inverter
max
of the frequency inverter
r
· Check the initialisation of the CAN driver.
· Check the initialisation of the CAN driver.
entered.
· Increase the activation cycle time of the FB.
memory.
· Frequency inverter parameterisation not yet complete or bEnable is set FALSE.
L
Lenze8200Drive.lib EN 1.0
3−11
Page 24

Function library Lenze8200Drive.lib
Functions/function blocks
3.3 L_8200DataControl − Send/receive process data
Value/meaningData typeOutputs
nStateDataFrom82 Integer Status of the CAN receive object
Error messages:
−300 Time−out, data transmitted by the frequency inverter are not within the monitoring
time tTimeOut.
−150 System bus (CAN) is not "Operational".
−121 Wrong driver number for CAN driver.
· Check the initialisation of the CAN driver.
−120 CAN driver currently not initialised.
· Check the initialisation of the CAN driver.
−12 The message identifier (COB−ID) is not within the permissible area (internal error).
−11 The pointer pIOAdress does not point to PLC RAM (internal error).
Status messages:
0 The process data were received by the frequency inverter.
2 Data transfer is inactive.
· Frequency inverter parameterisation not yet complete or bEnable is set FALSE.
10 Telegram longer than 8 bytes and limited to 8 bytes.
200 Data in receive memory were overwritten.
· Reduce the activation cycle of the FB or increase the data transmission cycle of
the frequency inverter.
bFail_DataTo82 Bool Message Transmit command cancelled or not executed".
TRUE Transmit command was cancelled or not executed.
· The corresponding error number is output at nStateDataTo82.
bFail_DataFrom82 Bool Message Receive command cancelled or not executed".
TRUE Receive command was cancelled or not executed.
· The corresponding error number is output at nStateDataFrom82.
wStatusData Word Process data word (status word) sent by the frequency inverter.
nMCtrl_Nout_Slip Integer Actual frequency inverter speed (including slip) in [Hz].
wOutputData3 Word Receive bytes 5 + 6, freely assignable
wOutputData3 Word Receive bytes 7 + 8, freely assignable
3−12
Lenze8200Drive.lib EN 1.0
L
Page 25

Function library Lenze8200Drive.lib
Functions/function blocks
3.3 L_8200DataControl − Send/receive process data
Process data exchange
If the input bEnable is set to TRUE, the FB L_8200DataControl starts to exchange process data
· The data are exchanged via the identifiers of the process data object CAN2_IO which consist
of the basic identifier and the node address of the frequency inverter selected at the input
byNodeAdr:
Identifier + Basis Identifier ) node address of frequency invertor
Basic identifier
dec hex
CAN2_IO (event or time−controlled process data)
CAN2_IN 640 280
CAN2_OUT 641 281
· If a FALSE−TRUE transition occurs at the input bResetNode, the frequency inverter with the
node address byNodeAdr accepts the data which are relevant for communication and
changes to "Operational".
· The cycle time tCycleTime is used to send the data to the frequency inverter.
Tip!
Process data transfer is only possible if the node address is correct and the frequency inverter is in
the state "Operational".
· Therefore, the input bResetNode should always be set to TRUE.
Assignment of send and receive bytes
Send byte Assignment Receive byte Assignment
1 + 2 Control word wControlData 1 + 2 Status word wStatusData
3 + 4 Setpoint nNSetN1_a 3 + 4 Actual value nMCtrl_Nout_Slip
5 + 6 a
7 + 8 freely assignable via wInputData 7 + 8 freely assignable via wOutputData4
boost wBoostVoltage 5 + 6 freely assignable via wOutputData3
min
L
Lenze8200Drive.lib EN 1.0
3−13
Page 26

Function library Lenze8200Drive.lib
Functions/function blocks
3.3 L_8200DataControl − Send/receive process data
Time monitoring
The input tTimeOut is used to monitor the transfer time of the data received from the frequency
inverter.
· With a time > t#0ms the monitoring is activated, otherwise it is deactivated.
· The monitoring time must be adapted to the cycle and task time of the process data object
CAN2_IO.
Status messages
The status outputs nStateDataTo82 and nStateDataFrom82 indicate the current state of the send
and receive objects.
· If an error occurs, an error number will be indicated and the corresponding message output
bFail_DataTo82 or bFail_DataFrom82 will be set to TRUE.
· The status and message outputs can be reset by setting bReset to TRUE.
· The last message/error number is saved in an internal variable (nLastMessageNo or
nLastFailureNo).
Selection of boolean control signals and output of boolean status messages
· The FB L_8200CtrlWord is used to select the control word to be transmitted as boolean
control signals.
(^ 3−15)
· The FB L_8200StatusWord is used to divide the receive status word for evaluation and further
processing into individual boolean status signals.
bNSET1_JOG13
bNSET1_JOG23
bDCTRL1_CW_CCW
bDCTRL1_QSP
bNSET1_RFG1_STOP
bNSET1_RFG1_0
bMPOT1_UP
bMPOT1_DOWN
bRELAY_K1
bDCTRL1_CINH
bDCTRL1_TRIP_SET
bDCTRL1_TRIP_RESET
bDCTRL1_PAR24
bDCTRL1_PAR34
bMCTRL_DCB
bPCTRL1_RFG2_LOAD_I
L_8200CtrlWord
CTRL
wControlData
bEnable
bResetNode
byNodeAddr
tCycleTime
tTimeOut
bResetFail
wControlData
nNSetN1_a
wBoostVoltage
wInputData
1+2
3+4
5+6
7+8
CAN2_OUT CAN2_IN
L_8200DataControl
CTRL
data bytes:
1+2
3+4
5+6
7+8
System bus (CAN)
Node address = byNodeAddr
(^ 3−16)
nStateDataTo82
nStateDataFrom82
bFail_DataTo82
bFailDataFrom82
wStatusData
nMCtrl_Nout_Slip
wOutputData3
wOutputData4
L
8200
wStatusData
CTRL
L_8200StatusWord
bDCTRL1_RDY
bDCTRL_IMP
bMCTRL_IMAX
bNSET1_RFG1_NOUT
bNSET1_RFG1_I
bPCTRL1_QMIN
bDCTRL_NOUT
bDCTRL1_CINH
bDCTRL1_TRIP
bFIXED_RESERVE_9
bFIXED_RESERVE_10
bFIXED_RESERVE_11
bFIXED_RESERVE_12
bDCTRL1_OH_WARN
bDCTRL1_OV
bDCTRL1_CCW
3−14
Lenze8200Drive.lib EN 1.0
L
Page 27

Function library Lenze8200Drive.lib
Functions/function blocks
3.4 L_8200CtrlWord − Selection of boolean control signals
3.4 L_8200CtrlWord − Selection of boolean control signals
Function block
This FB can be used to select the control word to be sent to the frequency inverter which is expected
by the FB L_8200DataControl at the FB input wControlData as boolean control signals.
L_8200CtrlWord
bNSET1_JOG13
bNSET1_JOG23
bDCTRL1_CW_CCW
bDCTRL1_QSP
bNSET1_RFG1_STOP
bNSET1_RFG1_0
bMPOT1_UP
bMPOT1_DOWN
bRELAY_K1
bDCTRL1_CINH
bDCTRL1_TRIP_SET
bDCTRL1_TRIP_RESET
bDCTRL1_PAR24
bDCTRL1_PAR34
bMCTRL_DCB
bPCTRL1_RFG2_LOAD_I
CTRL
wControlData
FB call in: þ Cyclic task
Inputs Data type Information/possible settings
bNSET1_JOG13 Bool
bNSET1_JOG23 Bool
bDCTRL1_CW_CCW Bool
bDCTRL1_QSP Bool
bNSET1_RFG1_STOP Bool
bNSET1_RFG1_0 Bool
bMPOT1_UP Bool
bMPOT1_DOWN Bool
bRELAY_K1 Bool
bDCTRL1_CINH Bool
bDCTRL1_TRIP_SET Bool
bDCTRL1_TRIP_RESET Bool
bDCTRL1_PAR24 Bool
bDCTRL1_PAR34 Bool
bMCTRL_DCB Bool
bPCTRL1_RFG2_LOAD_I Bool
Outputs Data type Value/meaning
wControlData Word Control word to be sent to the frequency inverter.
(PLC_PRG)
Detailed information about the meaning of the individual control signals can be found in the
Operating Instructions for the 8200 frequency inverter.
Note!
The composition of the control word depends on the parameterisation of the frequency inverter!
· The names of the control signals contained in this Manual have been adapted to the commented
þ Time−controlled task
(INTERVAL)
assignments in the FB L_8200Parameter. ( ^ 3−2)
þ Event−controlled task
· Connect this output with the input wControlData
of the FB L_8200DataControl. ( ^ 3−10)
(EVENT)
o Interrupt task
L
Lenze8200Drive.lib EN 1.0
3−15
Page 28

Function library Lenze8200Drive.lib
Functions/function blocks
3.5 L_8200StatusWord − Output of boolean status signals
3.5 L_8200StatusWord − Output of boolean status signals
Function block
This FB is used to divide the status word received by the frequency inverter which is provided by the
FB L_8200DataControl at the FB output wStatusData into boolean status signals.
L_8200StatusWord
bDCTRL1_RDY
bDCTRL_IMP
bMCTRL_IMAX
CTRL
wStatusData
bNSET1_RFG1_NOUT
bNSET1_RFG1_I
bPCTRL1_QMIN
bDCTRL_NOUT
bDCTRL1_CINH
bDCTRL1_TRIP
bFIXED_RESERVE_9
bFIXED_RESERVE_10
bFIXED_RESERVE_11
bFIXED_RESERVE_12
bDCTRL1_OH_WARN
bDCTRL1_OV
bDCTRL1_CCW
FB call in: þ Cyclic task
(PLC_PRG)
Inputs Data type Information/possible settings
wStatusData Word Status word received by the frequency inverter.
þ Time−controlled task
(INTERVAL)
þ Event−controlled task
· Connect this input with the output wStatusData
of the FB L_8200DataControl. ( ^ 3−10)
Outputs Data type Value/meaning
bDCTRL1_RDY Bool
bDCTRL_IMP Bool
bMCTRL_IMAX Bool
bNSET1_RFG1_NOUT Bool
bNSET1_RFG1_I Bool
bPCTRL1_QMIN Bool
bDCTRL_NOUT Bool
bDCTRL1_CINH Bool
bDCTRL1_TRIP Bool
bFIXED_RESERVE_9 Bool
bFIXED_RESERVE_10 Bool
bFIXED_RESERVE_11 Bool
bFIXED_RESERVE_12 Bool
bDCTRL1_OH_WARN Bool
bDCTRL1_OV Bool
bDCTRL1_CCW Bool
Detailed information about the meaning of the individual status signals can be found in the
Operating Instructions for the 8200 frequency inverter.
Note!
The composition of the status word depends on the parameterisation of the frequency inverter!
· The names of the status signals contained in this Manual have been adapted to the commented
assignments in the FB L_8200Parameter.( ^ 3−2)
(EVENT)
o Interrupt task
3−16
Lenze8200Drive.lib EN 1.0
L
 Loading...
Loading...