

Page 1

INTEL® FALCON™ 8+
USER MANUAL
UNMANNED AIRCRAFT SYSTEM
ENGLISH
AUGUST 2017
Page 2

COPYRIGHT
This publication is protected by copyright. No part of the publication may be used, reproduced, or translated, in any
form, without the prior written consent of Intel Corporation.
AscTec, Ascending Technologies, the Ascending Technologies and Falcon logos are trademarks of Intel Corporation.
© 2017 Intel Corporation. All rights reserved.
Intel and the Intel logo are trademarks of Intel Corporation.
Other names and brands may be claimed as the property of others.
DISCLAIMER
The information contained herein is subject to change without notice. All statements, information and
recommendations contained herein do not constitute a warranty of any kind, express or implied. All images are for
illustration purposes only; actual items shown in the images may vary as to, without limitation, size, color, and
labeling. Please review this product guide thoroughly, paying particular attention to any safety sections, to make sure
that you use your unmanned aircraft system safely.
Intel Corporation reserves the right to change, amend or update all available documents, including this Aircraft Flight
Manual, at any time and without notice regarding the Intel® Falcon 8+ Unmanned Aircraft System. Contact your Intel
Corporation representative or go to http://intel.com/FalconManual to obtain the latest documentation for this
product.
The features and benefits of the unmanned aircraft system depend on system configuration and may require enabled
hardware, software, or service activation. Technical results may have been estimated or simulated using internal
analysis or architecture simulation or modeling of any one or more of the following companies, and are provided to
you for informational purposes: Intel Corporation, Ascending Technologies GmbH, which became an Intel
Corporation subsidiary after acquisition by Intel Corporation, or Intel Deutschland GmbH, the Intel Corporation
subsidiary into which Ascending Technologies GmbH merged after Intel Corporation acquired it. Any differences in
your system hardware, software or configuration may affect actual performance.
Learn more at http://intel.com/FalconManual.
Intel Corporation (Intel), and its subsidiaries, disclaim all other warranties, of any kind, express, implied, statutory, or
otherwise, published specifications, including, without limitation, warranties of merchantability, fitness for a
particular purpose, and non-infringement, as well as any warranty arising from course of performance, course of
dealing, or usage in trade.
To the extent permitted by applicable law, Intel disclaims all liability for any damages, direct or indirect, arising from
the use of the unmanned aircraft system (UAS) outside of its intended use, in breach of Intel Corporation's Safety
Guidelines, Safety Precautions or any other documentation for this product, in violation of any applicable laws or
regulations, or in violation of any of the operating limitations of the aircraft, or from any error of the Operator.
© 2017 Intel Corporation. All rights reserved.
No license of any kind, whether express, implied, statutory, by estoppel or otherwise to any intellectual property
rights, technology, software, in each case whether in whole or part, is granted by Intel, or any of its subsidiaries, in this
User Manual.
Page 3
RECORD OF REVISION
REVISION NUMBER REVISION DATE
Version 1 April 2017
Version 1.0.1 May 2017
Version 2 July 2017
Version 2.1 July 2017
Version 2.2 August 2017
Version 2.2.1 August 2017
Described Firmware Versions:
NAV/PER: 0.95
Intel® Cockpit Controller (CTR): 0.95
Cockpit Control application (on tablet): 1.1.10
Page 4

USER MANUAL
INTEL® FALCON™ 8+ UAS
TABLE OF CONTENTS
1. INTEL® FALCON™ 8+ UAS ............................................................................................................. 7
1.1. SAFETY FIRST .........................................................................................................7
1.1.1. Intended Use ......................................................................................................................... 7
1.1.2. Safety Guidelines ................................................................................................................ 8
1.2. UAS AND SAFETY CHECK ...............................................................................11
1.3. PRE-FLIGHT CHECK ...........................................................................................13
1.4. POST-FLIGHT CHECK .......................................................................................16
2. DESCRIPTION OF THE SYSTEM .................................................................................................. 18
2.1. THE INTEL® FALCON™ 8+ UAV ......................................................................18
2.1.1. Central Unit ..........................................................................................................................20
2.1.2. Motor Rails Of The UAV .................................................................................................22
2.1.3. Actively Stabilized Camera Mount (Gimbal) ..........................................................23
2.2. THE INTEL® COCKPIT CONTROLLER (CTR) .............................................23
2.2.1. The Status Display ............................................................................................................27
2.2.2. The Touchscreen Tablet ................................................................................................27
2.3. THE INDEPENDENT CAMERA CONTROL (ICC) .......................................28
2.4. THE 2ND OPERATOR MONITOR ..................................................................29
2.5. PAYLOADS - CAMERA OPTIONS .................................................................30
2.5.1. Changing a Payload (Camera) ......................................................................................32
2.5.2. Payload and Compass Calibration .............................................................................34
2.5.3. Sony Alpha 7R Full Frame Camera ............................................................................37
2.5.4. Inspection Payload ...........................................................................................................41
2.6. THE INTEL® POWERPACK BATTERIES ......................................................46
2.6.1. Charging the Intel® Powerpack Batteries ................................................................49
2.6.2. Operating The BMS Menu .............................................................................................50
2.6.3. .Battery Update ..................................................................................................................53
2.6.4. Battery Information Safety Instructions And Warnings ...................................53
2.7. TRANSPORT CASES & INTEL® BACKPACK ..............................................57
2.7.1. Packing Instructions .........................................................................................................57
2.8. SOFTWARE FEATURE PACKAGES ...............................................................61
2.8.1. Activating Software Feature Packages .....................................................................62
2.8.2. Checking Activated Software Feature Packages .................................................63
2.9. INTEL® FALCON™ 8+ UAV FLIGHT LOGS ..................................................64
3. OPERATING THE SYSTEM .........................................................................................................68
3.1. PREPARING THE INTEL® FALCON™ 8+ UAV ............................................68
3.2. PREPARING THE INTEL® COCKPIT CONTROLLER (CTR) ...................70
3.3. THE TOUCHSCREEN TABLET ........................................................................72
© 2017 Intel Corporation. All rights reserved 4
Page 5

USER MANUAL
INTEL® FALCON™ 8+ UAS
3.3.1. PATH Projects .....................................................................................................................76
3.3.2. AscTec Navigator Software Projects .........................................................................84
3.4. AUTOMATED START-UP CHECKS ..............................................................88
3.4.1. Magnetic Field Warning ..................................................................................................88
3.5. LINK LOSS PROCEDURE ..................................................................................90
3.6. FLIGHT MODES ....................................................................................................93
3.6.1. GPS-Mode ............................................................................................................................95
3.6.2. Height-Mode .......................................................................................................................99
3.6.3. Manual-Mode ...................................................................................................................100
3.7. STARTING AND STOPPING THE MOTORS ........................................... 101
3.8. TAKING OFF ....................................................................................................... 101
3.8.1. Launching In GPS-Mode .............................................................................................102
3.8.2. Launching In Height-Mode ........................................................................................102
3.8.3. Launching In Manual-Mode .......................................................................................103
3.9. THE FLIGHT ........................................................................................................ 103
3.9.1. Controlling The Intel® Falcon™ 8+ UAV From The CTR .................................105
3.9.2. Mission Planning ............................................................................................................106
3.9.3. In-Flight ..............................................................................................................................107
3.9.4. General Operating Tips ...............................................................................................107
3.9.5. Battery Warnings ............................................................................................................108
3.10. IN-FLIGHT EMERGENCIES .........................................................................110
3.11. LANDING ........................................................................................................... 117
3.11.1. Landing In GPS-Mode ...............................................................................................117
3.11.2. Landing In Height-Mode ...........................................................................................117
3.11.3. Landing In Manual-Mode .........................................................................................118
3.11.4. Switching OFF The UAS ............................................................................................119
3.12. WARNINGS ....................................................................................................... 119
3.12.1. Magnetic Field Warning ............................................................................................121
3.12.2.Critical Battery Levels & Warnings Of The UAV And The CTR ..................123
3.12.3. Data Link Warnings .....................................................................................................125
3.12.4. GPS Warning .................................................................................................................126
3.12.5. Motor Failure Warning ..............................................................................................127
3.12.6. CTR Warnings ...............................................................................................................127
3.12.7. AscTec Trinity Control Unit System Warnings ...............................................129
3.13. OPERATIONAL LIMITATIONS .................................................................. 137
4. STATUS DISPLAY ................................................................................................................... 138
4.1. STATUS DISPLAY OVERVIEW .................................................................... 138
4.1.1. Status Display Menu Structure .................................................................................139
4.1.2. The Main Information Screens .................................................................................150
5. SPECIAL FUNCTIONS ...............................................................................................................155
5.1. CIRCLE OF INTEREST (COI) ..........................................................................155
© 2017 Intel Corporation. All rights reserved 5
Page 6

USER MANUAL
INTEL® FALCON™ 8+ UAS
5.2. PANORAMA ........................................................................................................ 156
5.3. QUICK SURVEYING ASSISTANT ................................................................ 160
5.4. WAYPOINT NAVIGATION Using AscTec Navigator Software ....... 164
6. MAINTENANCE, TROUBLESHOOTING, AND SUPPORT ...............................................................165
6.1. MAINTENANCE .................................................................................................165
6.1.1. Intel® Falcon™ 8+ UAS Firmware Updates ...........................................................165
6.1.2. Caring for the Intel® Falcon™ 8+ UAV ....................................................................170
6.1.3. Propeller Replacement ................................................................................................171
6.2. TROUBLESHOOTING ..................................................................................... 172
6.2.1. Establishing A Connection Between The CTR And The UAV ......................172
6.2.2. Analyzing Data Link Connection Issues ................................................................173
6.2.3. No Preview Video On The Touchscreen Tablet Of The CTR .......................174
6.2.4. Flight Logs .........................................................................................................................174
6.3. SUPPORT ............................................................................................................176
7. TECHNICAL SPECIFICATION .....................................................................................................178
LIST OF FIGURES ........................................................................................................................ 184
LIST OF TABLES .......................................................................................................................... 186
INDEX ........................................................................................................................................187
© 2017 Intel Corporation. All rights reserved 6
Page 7

USER MANUAL
INTEL® FALCON™ 8+ UAS
1. INTEL® FALCON™ 8+ UAS
Thank you very much for choosing the Intel® Falcon™ 8+ UAS!
The Intel® Falcon™ 8+ UAV is the first-choice drone for the most challenging
professional UAV inspections and surveying operations. Small and portable with a
maximum take-off weight of only 2.8 kg, but with a payload weight of 0.8 kg, the Intel®
Falcon™ 8+ UAV can carry professional cameras like the Sony Alpha 7R, offering the full
quality of an airborne image studio. The in-house developed AscTec Trinity Control
Unit - the world's first triple redundant, fully adaptive control unit for multi-rotor
aircrafts - makes the Intel® Falcon™ 8+ UAV the most advanced and reliable unmanned
aerial vehicle. Thanks to the modular concept, you can spontaneously exchange the
payload at any time, and get the very best out of each project by using the most
suitable camera.
In the following text, Unmanned Aircraft System (UAS) is used if the whole system
(including Intel® Cockpit™ Controller, payload, etc.) is referenced; Unmanned Aerial
Vehicle (UAV) is used when only the aircraft itself is referenced.
1.1. SAFETY FIRST
The following sections contain important safety information. Any personnel operating
the UAS must read, understand and accept these warnings and guidelines before
operating the Intel® Falcon™ 8+ UAV.
1.1.1. Intended Use
This product is an Unmanned Aircraft System (UAS) that is intended for commercial
use only, such as for visual inspection of infrastructure, surveying and mapping. It is not
intended for any consumer or recreational use. Acrobatic flight is prohibited.
You must read, understand, and agree to all documentation before using the Intel®
Falcon™ 8+ UAS. By using the Intel® Falcon™ 8+ UAS, you certify that you have read and
understand all the material in this document, as well as all user documentation, and
agree to abide by said materials.
Use the Intel® Falcon™ 8+ UAS only as intended. Always operate in accordance with the
operating limitations stated in the later sections of this User Manual.
Operating the system while ignoring these guidelines and warnings may be illegal and
subject to fine.
© 2017 Intel Corporation. All rights reserved 7
Page 8

USER MANUAL
INTEL® FALCON™ 8+ UAS
1.1.2. Safety Guidelines
Failure to adhere to the following guidelines and warnings and to operate within the
limitations of the UAS could result in an accident and death, serious injury, property
damage, or damage to the UAS.
• You are responsible for knowing and complying with all laws and regulations
applicable to the airspace in which you operate. Jurisdictions have different
safety rules pertaining to authorization for flying UAVs; flying near airports,
manned aircrafts, or people; operation within visual line of sight; altitude limits;
operation at night or twilight; operation of multiple UAVs at the same time; and
airspace usage. Know and understand all applicable laws before you fly. Follow
applicable laws at all times.
• Some jurisdictions also have rules that may affect your operation of UAS, such
as laws relating to receipt of wireless signals, aerial photography, aerial
surveying, privacy, and trespassing. You must know and follow all laws and
regulations applicable to your region.
• In some jurisdictions, the operator may be required to have a pilot certification
from the aviation authority or advance approval from the aviation authority or
air traffic control. Check your local laws before operating the UAS. You are
always responsible for operating the UAS safely and responsibility, and in
compliance with all laws.
• Professional drone operators must comply with all applicable insurance and
aviation-specific liability requirements.
• Completion of a UAS safety check, pre-flight check, and post-flight check
according to the following sections before every operation is compulsory for
every flight.
• Rotating propellers can cause serious personal injury and property damage.
Keep a safe distance and/or wear appropriate safety equipment (e.g. safety
goggles, gloves).
• Our UAS, like all comparable aircraft systems, can in rare cases, suffer electrical,
mechanical, and/or other failures. This may lead to a partial or complete loss of
flying capability. Therefore, the pilot is responsible for conducting all flights at a
safe distance from people, moving vehicles, etc. such that in the event of loss of
flight control no personal injury or property damage will occur.
• Operating the UAV close to power lines, power transformers or other areas with
high electromagnetic disturbances, or in urban canyons, can have severe effects
on the GPS stability and/or the magnetic field sensor, which ultimately also
effects GPS stability. The Intel® Falcon™ 8+ UAV is designed to compensate for
these errors in most cases, but the function is not guaranteed in any scenario.
Therefore, a pilot must have the training and ability to fly the Intel® Falcon™ 8+
UAV in Height-Mode in any situation. Only operate in these environments if you
have sufficient training!
© 2017 Intel Corporation. All rights reserved 8
Page 9

USER MANUAL
INTEL® FALCON™ 8+ UAS
• Risk of fire or explosion: Do not operate the UAV in potentially explosive
environments such as fueling stations, fueling areas, fuel or chemical storage
facilities, or areas where the air may contain chemical or dust particles, such as
grain particles or metal powders.
If possible, and if you can do so safely, physically remove this product from any
such environment. Do not connect any accessory cables or press any of the
product's buttons until outside of these environments.
• GPS-Mode will limit your maximum speed. Flying the Intel® Falcon™ 8+ UAV at
wind speeds above 12 m/s is not recommended. Please note that wind
conditions on the ground and in the air can differ.
• Do not fly the UAV outside the specified temperature range, see “TECHNICAL
SPECIFICATION” on page 178 for further details.
• The UAS and payloads are not waterproof. Do not operate the UAS in adverse
weather (sand storm, rain, fog, snow, etc.) or at night.
• Only operate the UAV on clear days and during daylight hours. The UAV has LED
position lights, but not anti-collision lights.
• The UAV is not equipped with a sense-and-avoid system. The operator is
responsible for seeing and avoiding all other traffic, persons, structures, and
obstacles. We recommend two-person operations (pilot and observer). All sense
and avoid is done by the pilot and observer.
• Avoid placing the UAV or the Intel® Cockpit Controller (CTR) next to heat
sources, leaving it in the direct sunlight for extended periods, or leaving it in a
place where the temperature may exceed the specified range (such as a parked
car on a hot day).
• Do not disassemble the UAS.
• Do not transport the UAS in transport containers not approved by Intel.
• Do not modify the UAS. Any modifications may compromise safety features,
increasing risk of injury, death, or property damage. There are no user
serviceable parts inside this UAS. Refer all service to your local support.
• Using devices in combination with the UAS other than those approved by Intel
(e. g. batteries, battery chargers, cameras, etc.) is prohibited. Any unapproved
modification of the UAS is prohibited.
• The UAS is equipped with a 2.4 GHz radio link for remote control and a 5.8 GHz
radio link for video transmission. Please note that local laws may apply and
restrictions in using radio equipment may exist in your area. The UAV may only
be used for flight with the original accessories and under the defined
environmental conditions.
• The UAV is equipped with Global Positioning System (GPS) or Assisted GPS
(AGPS) technology, which may be used to determine the approximate location
of the UAV. Please check the settings of any installed applications to ensure that
© 2017 Intel Corporation. All rights reserved 9
Page 10
USER MANUAL
INTEL® FALCON™ 8+ UAS
you manage these location-based services in accordance with your privacy
preferences.
• The pilot of an Intel UAV should always act according to his or her best
judgment focusing on the safety of the populace and the environment within
which he or she is flying.
• Every pilot must undergo intensive training to operate the UAV in all flight
modes and to maintain the UAV in a safe and airworthy condition - this is
mandatory.
• Do not operate the UAS under the influence of alcohol or drugs.
CAUTION: HAZARDOUS MOVING PARTS; KEEP FINGERS AND OTHER
BODY PARTS AWAY. THIS PRODUCT USES REPLACEABLE
BATTERIES; THERE IS RISK OF EXPLOSION IF BATTERY IS REPLACED
WITH AN INCORRECT TYPE. DISPOSE OF USED BATTERIES
ACCORDING TO THE INSTRUCTIONS.
CAUTION: ALWAYS FLY SAFELY AND RESPONSIBLY.
THIS MEANS, FOR EXAMPLE:
• Always keep a safe distance between the UAV and people.
• Do not fly too close to obstacles (e.g. houses, trees, etc.). The UAV could damage
third party property and/or the GPS signal might suffer from shadowing and
worsen the positional accuracy.
• Do not fly beyond the line of sight.
• Never fly in closed or restricted areas.
• Always keep both hands on the control sticks. You must be able to react at any
time, to prevent critical situations.
• Be aware of dogs or birds as they might attack your UAV.
• Always give way to other aircrafts! Watch out for low flying helicopters!
• All control inputs are given to the UAV as if you were sitting in the UAV as a pilot.
• We strongly recommend attending the basic training and to frequently practice
Height-Mode.
• Never exceed a speed of 16 m/s (35 mph) in Height-Mode.
• Never descend faster than 10 m/s (22 mph) in Manual Mode.
• In case of any problems close to the ground, ascend to a safe height.
• Always keep the left control stick, controlling the altitude, completely down
when the UAV is on the ground and the motors are running.
© 2017 Intel Corporation. All rights reserved 10
Page 11

USER MANUAL
INTEL® FALCON™ 8+ UAS
These safety guidelines are subject to change without prior notice. Errors and
omissions excepted.
Privacy and Property Rights
As the operator of a UAS, you must comply with all applicable laws, especially privacy,
property, and copyright laws. This includes the below common types of rules that may
apply in the jurisdiction in which you operate. Always consult the laws of your
jurisdiction before operating the UAS, as jurisdictions have different laws.
• Monitoring and filming public areas where individuals are staying may be only
permitted under limited circumstances, e.g. for safety reasons and provided
sufficient notice is provided.
• Monitoring and filming private areas may require the consent of the owner and,
potentially, any residents or visitors.
• Filming individuals and using their pictures (such as sharing them) may infringe
an individual's rights of his/her own image.
• Under copyright laws, some pictures may only be used for private purposes. In
addition, taking pictures of buildings may breach copyrights.
• Take-offs and landings of the UAV may only be allowed with consent of the
owner of the property on which take-offs / landings occur.
Violations of the laws and regulations referred to above may lead to penalties, damage
claims from individuals, or even criminal prosecution.
This information is provided for informational purposes and is not an exhaustive
description of legal requirements. This information is not designed to provide any legal
advice or include any kind of warranty regarding the usability of the UAS. Please
contact legal counsel for any specific and binding advice on the use of the UAS in your
jurisdiction.
1.2. UAS AND SAFETY CHECK
The UAS and safety check must be performed once per day before the first flight or any
time it may be necessary (e.g. after any incident like a hard landing). If you notice
anything unusual (any loose part, strange noise from the motors, or any other unusual
occurrence), please contact support through your reseller, if you purchased through a
reseller, or support at Intel, if you purchased directly from Intel. Please include a
detailed description of your observation and photos if applicable.
© 2017 Intel Corporation. All rights reserved 11
Page 12
USER MANUAL
INTEL® FALCON™ 8+ UAS
You must follow these steps to complete a close UAS and safety check:
Table 1.1: Safety Check List
1. Is the transport case free
of visible damage?
2. Is the UAV free of visible
damage?
3. Are all the propellers in
good condition?
4. Are all the propellers
firmly mounted to the
motors?
If there is new visible damage from the last
transport, please take special care during the
check of the complete UAS.
If there is visible damage, please contact your
support as noted directly above this table.
Replace propellers if there are any cracks,
breaks or other damages.
Move each propeller gently while holding the
connected motor. The nut on top of the propellers is self-tightening. It only needs to be
finger tight (20 Ncm +- 5 Ncm). Never tighten
it with too much force, as it might damage
the motor.
To tighten the nut, use the supplied screwwrench. Put the screw wrench on the nut,
hold the motor head with thumb and index
finger of one hand, and use the index finger
of the other hand to turn the screw wrench.
As soon as the motor head starts turning as
well, sufficient force has been applied
□
□
□
□
5. Nudge every single
propeller so that it turns,
and check if any unusual
sound can be heard, or if a
propeller spins slower
than the others and stops
spinning abruptly.
6. Is the User SD card of the
“Black Box” (flight logger)
correctly inserted?
© 2017 Intel Corporation. All rights reserved 12
If there is a scratching sound or if a propeller
spins slower than the others without any
unusual sound, this might come from an
obstacle inside the motor. Please try canned
pressurized air to clean the motor. If there is
a rattling sound this might come from a propeller which is not attached tightly enough. In
this case, carefully check the self-tightening
nut on top of the propeller.
Tighten the nut as described in step 4.
Check the User SD card in the back of the
Intel® Falcon™ 8+ UAV. If on the Status Display of the CTR there is the message No user
SD card, please take out the card, make a
backup copy, format it and re-insert it into
the Intel® Falcon™ 8+ UAV
□
□
Page 13
USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 1.1: Safety Check List (Continued)
7. Is the gimbal correctly
attached, and its
thumbscrew installed in
the back of the Intel®
Falcon™ 8+ UAV?
Make sure that the camera mount is pushed
all the way in and that the thumbscrew is
installed finger tight.
□
8. Is the payload adapter
firmly connected to the
central unit?
9. Are all the batteries fully
charged?
WARNING VIOLATION OF THESE SAFETY PRECAUTIONS RESULTS IN
THE LOSS OF WARRANTY!
Make sure that the connector plug of the
adapter is connected to the equivalent at the
front side of the UAV.
Make sure that the ball of the ball link connector of the roll servo is fixed in the respective slot in the payload adapter.
Voltage level can easily be checked using the
BMS of the batteries. It will be shown by the
LEDs on the front of the batteries.
1.3. PRE-FLIGHT CHECK
You must follow these steps for a close pre-flight check:
Table 1.2: Pre Flight Check List
□
□
1. Is the UAS in proper condition (according to the points listed in “UAS AND
SAFETY CHECK” on page 11)?
2. Make sure to have an empty and correctly formatted SD card inserted in
the camera.
3. Are there two batteries fully inserted into the Intel® Falcon™ 8+ UAV, with
the colored label facing upwards and secured by the retaining clips?
4. Is the battery of the Intel® Cockpit Controller (CTR) fully inserted, with the
colored Intel label facing downwards?
5. Is the Intel® Cockpit Controller in proper condition (no loose parts) and the
antenna panel folded out?
© 2017 Intel Corporation. All rights reserved 13
□
□
□
□
□
Page 14
USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 1.2: Pre Flight Check List (Continued)
6. Place the UAV on the take-off location and verify the following:
• There is enough space to take-off and land (no people, animals or
obstacles within a radius of 10 m).
• There are no obstacles around that could shadow the GPS signal.
• The surface allows all propellers to spin freely.
• There are no small rocks, dust or sand which could be sucked into the
motors.
• There are no magnetic fields to be expected.
CAUTION: TO AVOID INTERFERENCES WITH THE UAS PLEASE SET
YOUR SMARTPHONE TO AIRPLANE (FLIGHT) MODE AS THEY USE
THE SAME 2.4 GHZ AND 5.8 GHZ FREQUENCIES.
Table 1.3: Pre Flight Checklist (Continued)
□
7. Always switch on the UAS in the following order:
1. Payload
2. Intel® Falcon™ 8+ UAV
3. Touchscreen tablet
4. Intel® Cockpit Controller (CTR)
Wait for the link to be established.
8. The end of the boot process is marked by a triple beep emitted by the
Intel® Falcon™ 8+ UAV. During boot up, the Intel® Falcon™ 8+ UAV does not
need to stand still. It can be moved - for example, it can be started from a
moving boat.
9. The start-up process is finished when camera mount stabilization starts
working. A gentle buzzing sound can be heard from the gimbal.
10. Make sure to comply with all points in the checklist presented on the
touchscreen tablet. Confirm the checklist on the tablet.
11. Confirm the preview video image is visible on the touchscreen tablet of
the Intel® Cockpit Controller.
12.Choose a Link Loss Procedure, which is suitable for the current flight
mission.
□
□
□
□
□
□
13.Confirm the displayed battery capacity of the CTR is sufficient for the
planned mission (displayed in minutes in the Status Display - see “STATUS
DISPLAY” on page 138).
© 2017 Intel Corporation. All rights reserved 14
□
Page 15
USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 1.3: Pre Flight Checklist (Continued)
14.Confirm the battery capacity of the UAV is at least 80% (displayed in the
top line of the tablet).
15.The bottom line in the Status Display shows OK.
16.Is the GPS quality greater than or equal to 4 bars? This is mandatory if you
want to fly in GPS-Mode.
17.Confirm the wind speed is within the operational limits: 16 m/s in HeightMode or 12 m/s in GPS-Mode.
18.Choose the correct flight mode (usually GPS-Mode or Height-Mode).
19.Switch the motors on (with both hands, only in idle mode).
While the Intel® Falcon™ 8+ UAV is on the ground with running motors,
always keep the left control stick, which controls the height, in the fully
downward position.
□
□
□
□
□
□
20.Are all the motors running correctly?
21.Ready for take-off!
WARNING VIOLATION OF THE SAFETY PRECAUTIONS RESULTS IN THE
LOSS OF WARRANTY!
□
□
© 2017 Intel Corporation. All rights reserved 15
Page 16
USER MANUAL
INTEL® FALCON™ 8+ UAS
1.4. POST-FLIGHT CHECK
You must follow these steps closely for a post-flight check:
Table 1.4: Post-flight Check List
1. Before landing the Intel® Falcon™ 8+ UAV, adjust the camera to a horizontal
position.
2. Land the Intel® Falcon™ 8+ UAV.
Always keep the left control stick, which controls the height, in the fully
downward position when the system is on the ground with running
motors.
3. When the system is on the ground, switch off the motors.
Always switch off the system in the following order:
• Camera (depending on the payload, wait at least 10 seconds until the
camera has stored all data and is fully powered down).
□
□
• Intel® Falcon™ 8+ UAV
• Push and hold the power button.
The LED position lights will increase brightness.
The LED position lights will decrease brightness and
simultaneously there will be a short beep from the UAV.
• After the beep, let go of the button.
• Touchscreen tablet
• Push and hold the power button until “Slide to shut down your
PC” is shown.
• Let go of the button.
• Follow the instructions on the tablet to fully power down the
touchscreen tablet.
• Intel® Cockpit Controller (CTR)
• Push and hold the POWER button.
The CTR will vibrate a few seconds later.
• Let go of the button.
4. Remove all batteries of the Intel® Falcon™ 8+ UAV.
□
□
5. Store the UAV safely in the transport case or in the backpack.
□
© 2017 Intel Corporation. All rights reserved 16
Page 17
USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 1.4: Post-flight Check List (Continued)
6. Remove the battery of the CTR.
7. Fold in the antenna panel of the CTR.
8. Remove the shoulder harness of the CTR.
9. Store the CTR and all accessories safely in the transport case or in the
backpack.
CAUTION: ALWAYS REMOVE ALL BATTERIES FROM BOTH THE
INTEL® FALCON™ 8+ UAV AND CTR WHEN THE SYSTEM IS NO
LONGER IN USE.
□
□
□
□
WARNING VIOLATION OF THESE SAFETY PRECAUTIONS RESULTS IN
THE LOSS OF WARRANTY!
© 2017 Intel Corporation. All rights reserved 17
Page 18

USER MANUAL
1
2
2
3
4
4
4
4
1
2
2
3
4
4
5
5
INTEL® FALCON™ 8+ UAS
2. DESCRIPTION OF THE SYSTEM
In this chapter, you find a description of the whole system and its components:
• The Intel® Falcon™ 8+ UAV
• The Intel® Cockpit Controller (CTR)
• Payloads/Cameras
• The Intel® Powerpack Batteries
2.1. THE INTEL® FALCON™ 8+ UAV
The following section describes the single parts of the Intel® Falcon™ 8+ UAV.
Figure 2.1: The Intel® Falcon™ 8+ UAV Components
The Intel® Falcon™ 8+ UAV consists of
several components:
(1) Actively stabilized camera mount
(gimbal) with camera
(2) Motor rails
(3) Central unit
(4) Carbon cross
The Intel® Falcon™ 8+ UAV bottom view:
(1) Actively stabilized camera mount with
camera
(2) Motor rails
(3) Center cross piece with LEDs
(4) Carbon cross
(5) Landing feet
For orientation reasons, the UAV has
three LED position lights:
• white at the bottom
• green on the right side
• red on the left side
© 2017 Intel Corporation. All rights reserved 18
Page 19
USER MANUAL
Data
Data
Video
Video
INTEL® FALCON™ 8+ UAS
Figure 2.1: The Intel® Falcon™ 8+ UAV Components (Continued)
The Intel® Falcon™ 8+ UAV bottom view,
Carbon Cross with center cross piece,
antenna arrangement:
The data link antennas (2.4 GHz) as well
as the video link antennas (5.8 GHz) are
integrated into the landing feet.
They are diagonally arranged as shown
in the image to the left.
© 2017 Intel Corporation. All rights reserved 19
Page 20

USER MANUAL
1
2
3
4
4
5
6
7
7
8
INTEL® FALCON™ 8+ UAS
2.1.1. Central Unit
The following figures describe the single parts of the Central Unit.
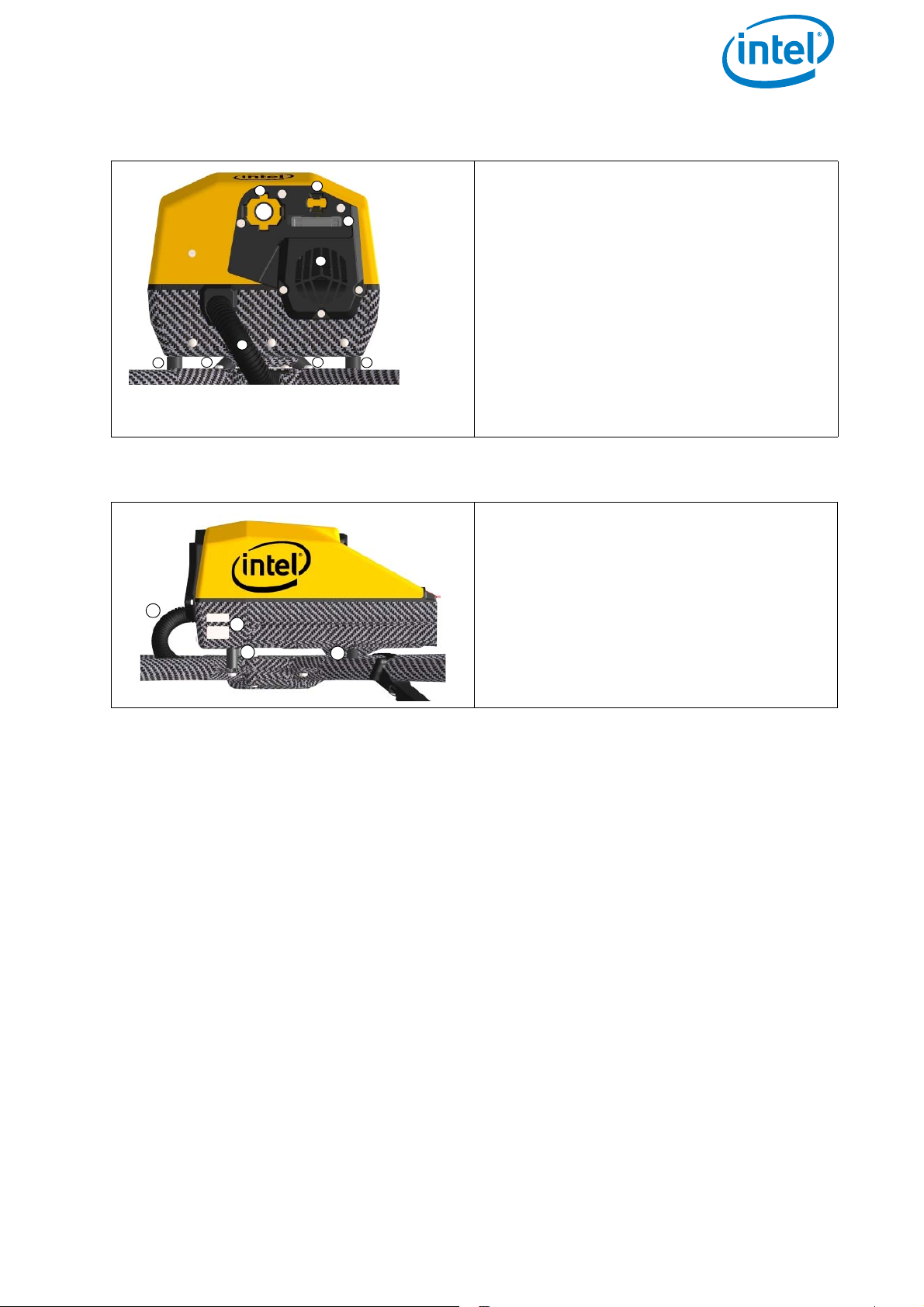
Figure 2.2: Central Unit Back View without Gimbal (Camera Mount)
The Central Unit consists of:
(1) Carbon fiber chassis
(2) USB stick slot (supports up to 16 GB,
file system: FAT32, allocation unit
size: 32 kilobytes) for firmware
updates
(3) Hole for the camera mount’s carbon
rod, see “Units of the Gimbal” on
page 23
(4) Battery compartments with retaining
clips (7) for batteries
(5) Power button
(6) Micro SD-card slot (SD card: speed
class 10 minimum, supports up to 16
GB, file system: FAT32, allocation unit
size: 32 kilobytes), for flight logs
(“Black Box”), must be inserted
contacts upwards
(7) Retaining clips for the batteries
(8) Place for the label with the serial
number of the UAV
Built inside:
• The electronics for flight
stabilization and power supply
• Diversity Data Link modules
• Video Transmitter module
© 2017 Intel Corporation. All rights reserved 20
Page 21
USER MANUAL
4
5
1
2
6
6
6
6
3
1
2
3
2
INTEL® FALCON™ 8+ UAS
Figure 2.3: Central Unit Front View without Gimbal (Camera Mount)
Front view:
(1) Hole for the camera mount’s carbon
rod
(2) Connector slot for the plug of the
payload adapter, (see no. (1) in “Units
of the Gimbal” on page 23
(3) Retaining clip for the payload adapter
(4) Cable tube (contains the cabling of
the antennas)
(5) Fan for the internal cooling behind
the slots
(6) Vibration dampers
Figure 2.4: Central Unit Side View, Left Side without Gimbal (Camera Mount)
Side view (left):
(1) LED position light (red when UAV is
running), same on the right side
(green when UAV is running)
(2) Vibration dampers
(3) Cable tube (which contains, e.g., the
cabling of the antennas)
© 2017 Intel Corporation. All rights reserved 21
Page 22
USER MANUAL
1
1
2
2
3
3
4
5
6
INTEL® FALCON™ 8+ UAS
2.1.2. Motor Rails Of The UAV
The following figure shows the front part of the left motor rail.
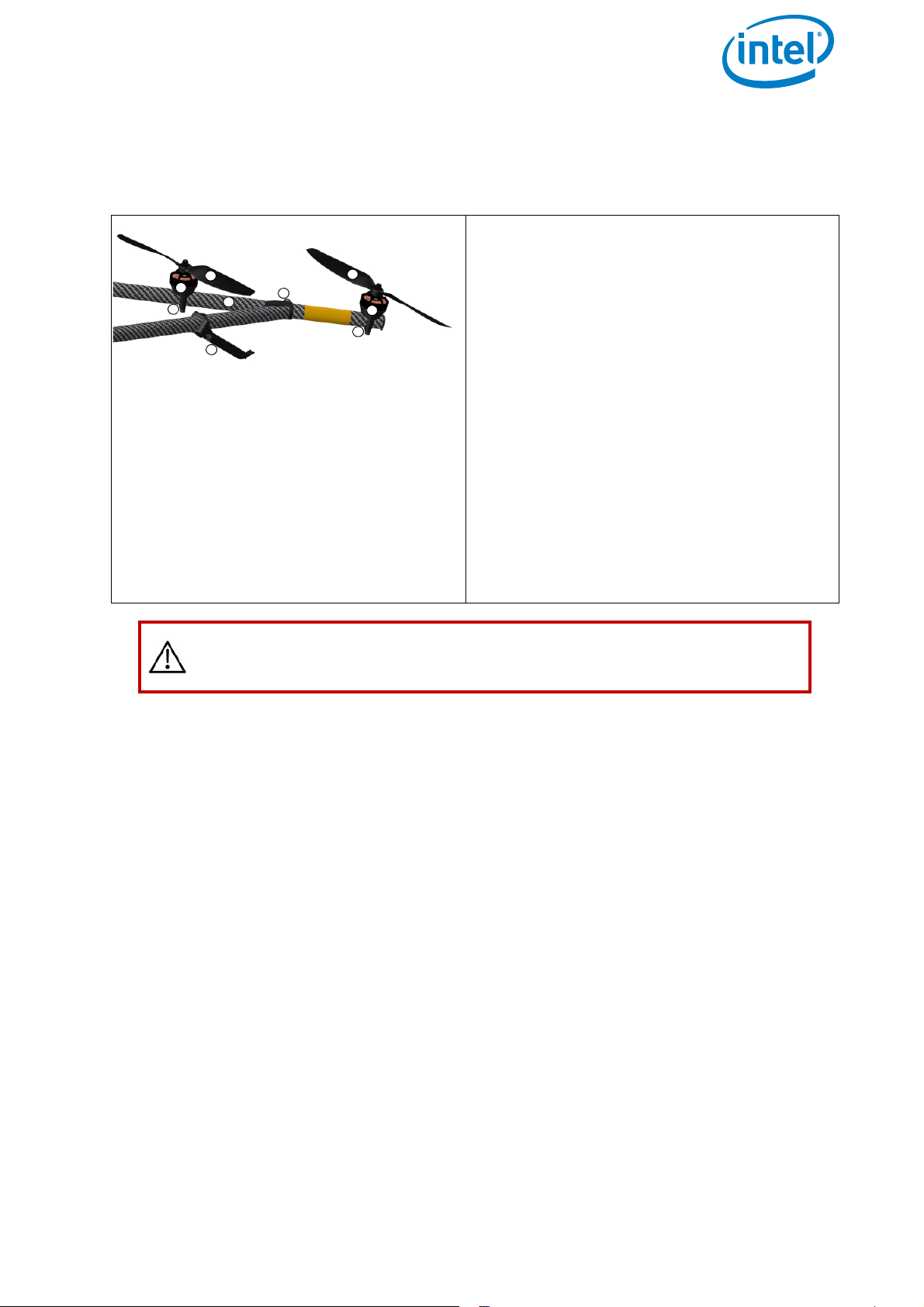
Figure 2.5: Motor Rails and Equipment
The motor rails and the related elements
consist of:
(1) Propellers, mounted directly on the
motors
(2) Brushless motors, mounted directly
onto the motor mounts
(3) Motor mount
(4) Carbon fiber tube
(5) Connector between carbon cross and
motor rails
(6) Landing foot (front left shown): the
video link antenna (or data link
antenna as applicable) is integrated
(see “The Intel® Falcon™ 8+ UAV
Components” on page 18).
Each motor rail consists of four motor
controllers seated within the carbon tube.
CAUTION: HAZARDOUS MOVING PARTS, KEEP FINGERS AND OTHER
BODY PARTS AWAY.
The motor rails are connected by a carbon cross which consists of four carbon tubes
connected by a center cross piece.
The antenna cabling is found inside the tubes of the carbon cross.
© 2017 Intel Corporation. All rights reserved 22
Page 23
USER MANUAL
1
2
3
4
5
6
3
1
2
4
INTEL® FALCON™ 8+ UAS
2.1.3. Actively Stabilized Camera Mount (Gimbal)
The following figure describes the parts (or sub-assemblies) of the gimbal.
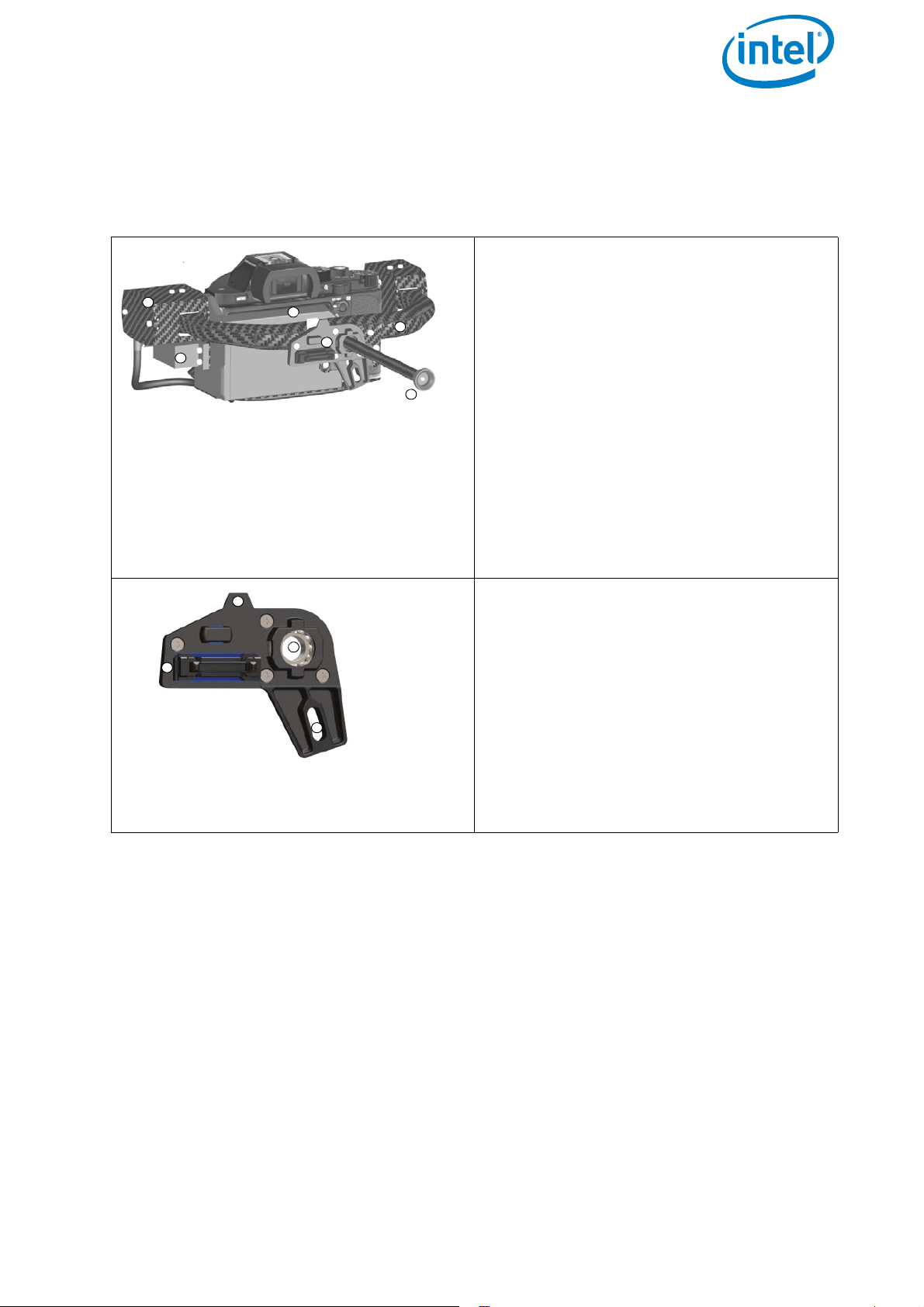
Figure 2.6: Units of the Gimbal
The actively stabilized camera mount
consists of:
(1) Circuitry for controlling the camera
(2) Payload (e. g. Sony Alpha 7R)
(3) Pitch servo
(4) Carbon fiber structure
(5) Knurled securing nut for the actively
stabilized camera mount
(6) Payload adapter (see below for
details). The payload adapter is the
connection between the camera
mount and the central unit of the
UAV. It is movable when mounted on
the rod of the camera mount and
connected by a cable.
The payload adapter (backside)
(1) Connector plug, should be connected
to the equivalent at the front side of
the UAV (see no. (2) in “Central Unit
Front View without Gimbal (Camera
Mount)” on page 21).
(2) Adapter slot for the ball link
connector of the roll servo
(3) Releasing clip
(4) Hole for the camera mount’s carbon
rod
2.2. THE INTEL® COCKPIT CONTROLLER (CTR)
The CTR is the main control hub for the Intel® Falcon™ 8+ UAV and the attached
payloads/ cameras. It is designed to be carried and operated by one person and
displays all relevant flight information.
The communication between the CTR and the Intel® Falcon™ 8+ UAV is ensured by two
independent 2.4 GHz digital data links. The preview video is transmitted digitally on 5.8
GHz. The CTR uses the same battery type as the Intel® Falcon™ 8+ UAV. The battery is in
© 2017 Intel Corporation. All rights reserved 23
Page 24
USER MANUAL
1
2
3
1
2
3
INTEL® FALCON™ 8+ UAS
the battery compartment which can be accessed from the bottom of the CTR (see
“Preparing the CTR” on page 70).
The CTR serves as an interface device to the flight system. It is pre-programmed and
ready to use.
The Status Display is used for communication between the CTR and the Intel® Falcon™
8+ UAV.
The touchscreen tablet displays the live video preview from the attached camera.
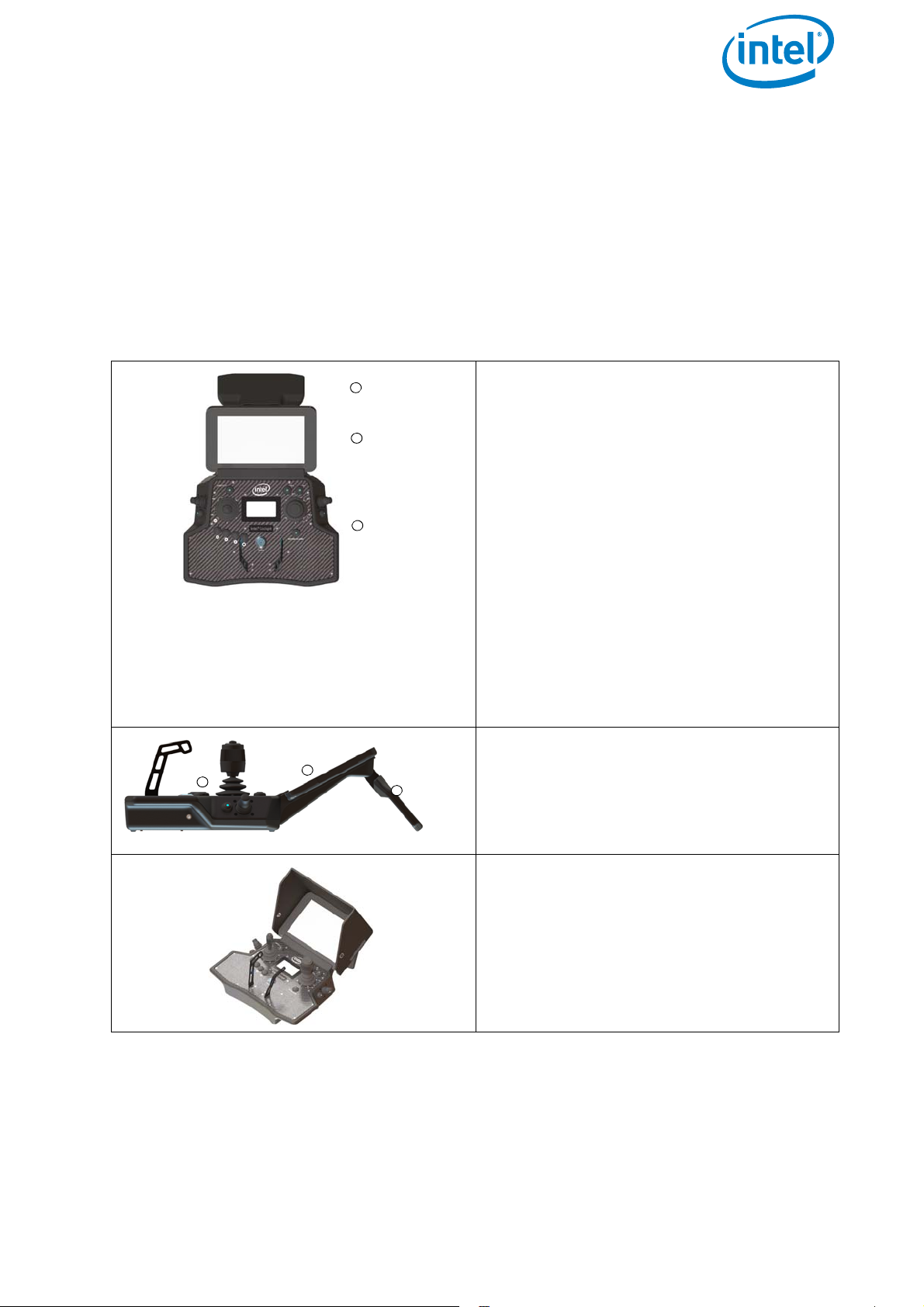
Figure 2.7: Intel® Cockpit Controller (CTR) Overview
Front view, with unfolded antenna panel.
The CTR can be divided into (from bot-
tom to top):
(1) Remote control unit
(2) Touchscreen tablet (for preview video
and more, see “THE TOUCHSCREEN
TABLET” on page 72), displayed
without sun shade
(3) Antenna panel (unfolded). All
communication between CTR and the
Intel® Falcon™ 8+ UAV is sent and
received by the antenna panel. It
features 2.4 GHz antennas for all
control and telemetry communication
and 5.8 GHz antennas to receive the
preview video.
Overview, side view right side.
(1) Remote control unit
(2) Touchscreen tablet, displayed
without sun shade
(3) Antenna panel (unfolded)
To avoid reflections, there is a sun shield
permanently attached to the touchscreen tablet. It folds away for storage
and transport.
© 2017 Intel Corporation. All rights reserved 24
Page 25
USER MANUAL
1
2 3
4
4
5
5
6
7
7
8
9
10
11
INTEL® FALCON™ 8+ UAS
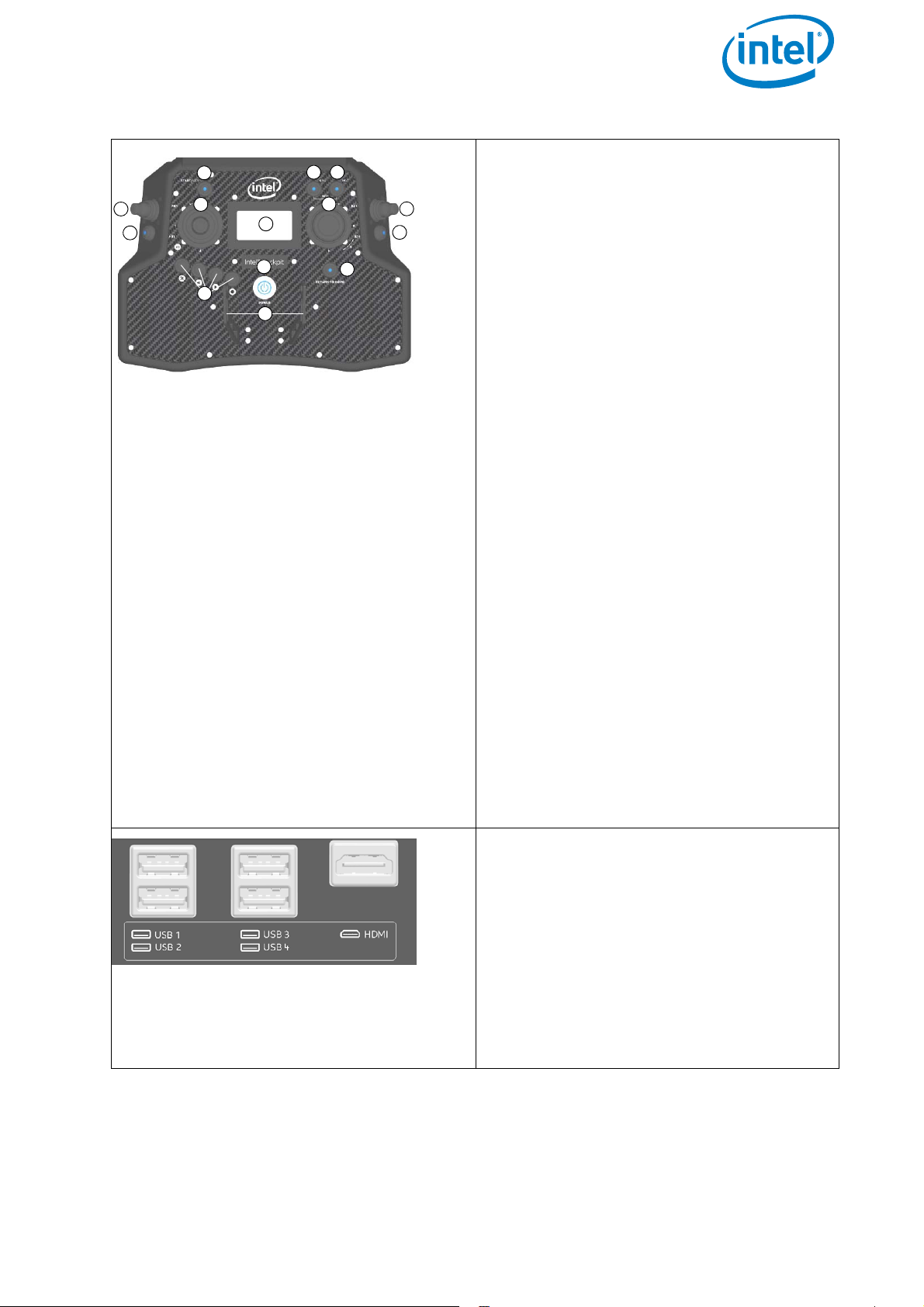
Figure 2.7: Intel® Cockpit Controller (CTR) Overview (Continued)
The functional elements of the CTR
remote control unit are:
(1) START/STOP button: starts/stops the
motors when the left stick is
simultaneously held down (see
“STARTING AND STOPPING THE
MOTORS” on page 101).
(2) GPS button: GPS-Mode ON
(3) HGT button: Height-Mode ON. When
both buttons are switched ON/lit
Manual-Mode is activated
(4) Left rocker switch (R1) controls the
camera pitch angle, right rocker
switch (R2), controls different camera
functions depending on the attached
payload
(5) Left and right control sticks
(6) Status Display (see “STATUS
DISPLAY” on page 138).
(7) Left push button (B1) sets the camera
to predefined angles +/- 90°, +/- 45°
and 0° when the left rocker switch R1
(4) is pushed simultaneously, right
push button (B2) controls different
camera functions depending on the
attached payload
(8) Four function buttons for the Status
Display
(9) RETURN TO HOME button
(10)POWER button
(11)Integrated shoulder harness holders
There are different connectors on the
back of the CTR:
4 X USB
1 X HDMI
The USB port labeled USB 1 can only be
used to perform firmware updates from a
USB stick. The other USB ports can be
used to connect the Independent Camera Control (ICC) or USB sticks with preplanned flight missions.
© 2017 Intel Corporation. All rights reserved 25
Page 26
USER MANUAL
2
1
INTEL® FALCON™ 8+ UAS
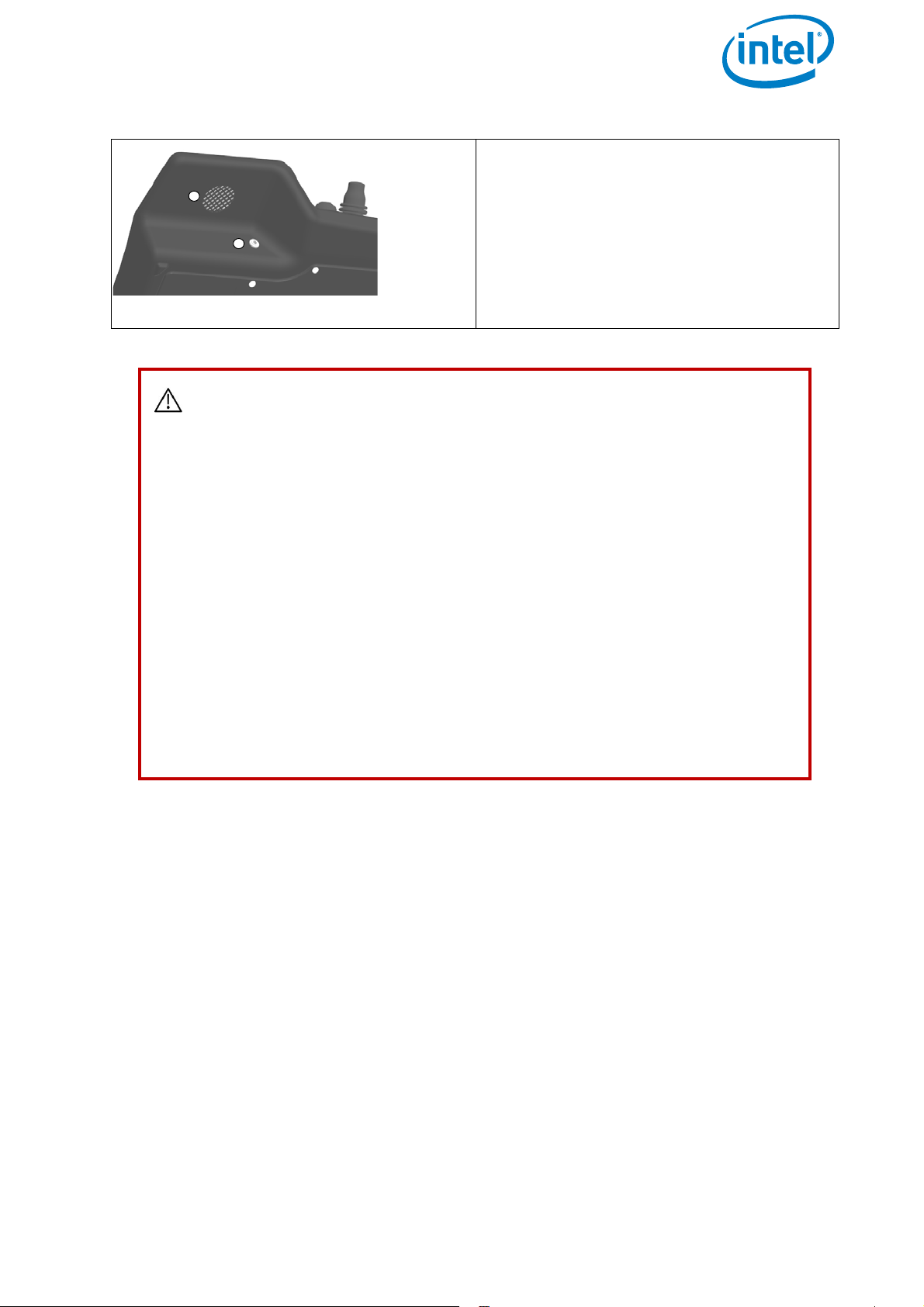
Figure 2.7: Intel® Cockpit Controller (CTR) Overview (Continued)
A headphone port (mini jack) is located
on the lower right-hand side of the CTR
remote control unit (1). It is possible to
connect headphones, which might be
helpful under noisy conditions.
Without headphones connected, acoustic warnings are played back through a
small loudspeaker (2) inside the CTR.
CAUTION: RISK OF PERMANENT HEARING LOSS FROM USING
EARPHONES OR HEADPHONES WITH THIS PRODUCT AT HIGH
VOLUME.
BEFORE PLACING HEADPHONES OR EARPHONES NEAR THE EAR, 1)
FIND A QUIET ENVIRONMENT, 2) TURN THE VOLUME DOWN ON
THIS PRODUCT TO THE MINIMUM SETTING, 3) CONNECT THE
EARPHONE OR HEADPHONE TO THE PRODUCT, 4) PLACE THE
EARPHONE OR HEADPHONE NEAR OR ON THE EAR AND 5) SLOWLY
INCREASE THE VOLUME ON THE PRODUCT TO A COMFORTABLE
LEVEL. AVOID INCREASING THE VOLUME ABOVE THIS LEVEL.
INCREASING THE VOLUME TO BE LOUDER THAN A NOISY
ENVIRONMENT, SUCH AS A CITY STREET, MAY EXCEED SAFE
LISTENING LEVELS. IF YOU EXPERIENCE DISCOMFORT OR BUZZING
IN YOUR EARS, REDUCE THE VOLUME OR DISCONTINUE USE OF
YOUR EARPHONES OR HEADPHONES.
RISK OF PERMANENT HEARING LOSS FROM USING THE
LOUDSPEAKER IN CLOSE PROXIMITY TO THE EAR.
© 2017 Intel Corporation. All rights reserved 26
Page 27

USER MANUAL
INTEL® FALCON™ 8+ UAS
2.2.1. The Status Display
The Status Display shows all relevant information for flying. It is built into the CTR
remote control unit. For further information about the handling of the Status Display
see “STATUS DISPLAY” on page 138).
Figure 2.8: Status Display
Via the Status Display you can view the
current settings and adjust specific functions of the UAV. In order to do so, use
the four buttons under the lower left corner of the Status Display.
Escape (left side) is used to leave
menus / sub-menus and to clear
functions. In the following text, it is
displayed as ESC.
With the arrow LEFT button (middle,
left side)
and the arrow RIGHT button (middle,
right side) you can scroll through
menus or alter parameters.
Enter (right side) is used to enter
menus and activate functions. In the
following text, it is displayed as ENT.
2.2.2. The Touchscreen Tablet
The Intel® based Windows® touchscreen tablet has an 8.3-inch screen with a resolution
of 1920 X 1200 pixels. It is directly mounted on the remote control unit of the Intel®
Cockpit Controller (CTR) and cannot be removed.
The tablet is powered by the battery of the CTR and must be switched ON before the
CTR is powered ON.
The touchscreen tablet serves as a video monitor, displays flight information and gives
access to extended functionality (see “THE TOUCHSCREEN TABLET” on page 72).
© 2017 Intel Corporation. All rights reserved 27
Page 28
USER MANUAL
1
INTEL® FALCON™ 8+ UAS
Figure 2.9: The Touchscreen Tablet
Power button on the top edge, right side
(1)
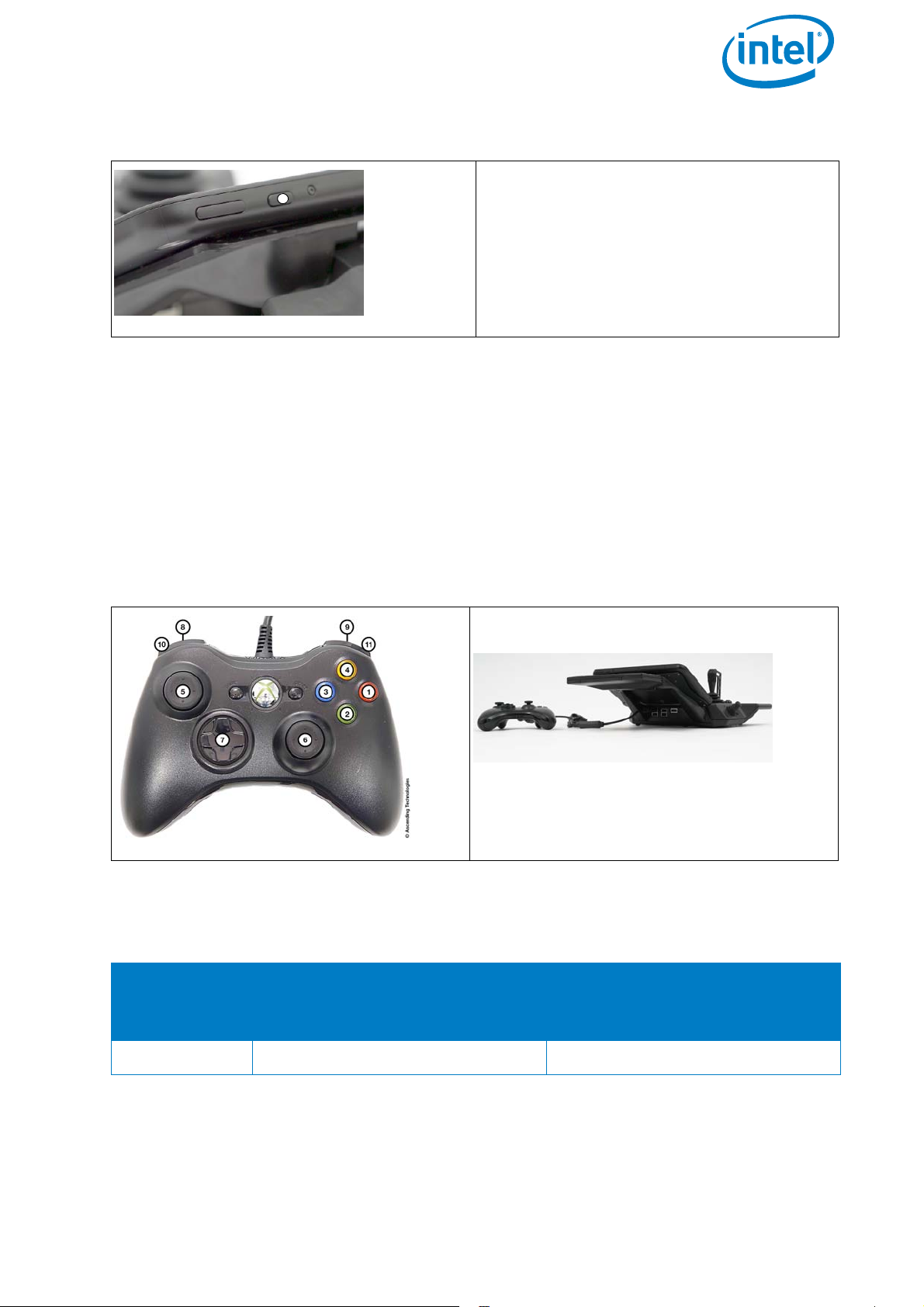
2.3. THE INDEPENDENT CAMERA CONTROL (ICC)
The Independent Camera Control (ICC) is an optional part of the Inspection Package
(see “SOFTWARE FEATURE PACKAGES” on page 61). Thanks to the ICC, a camera
operator can control the main camera functions from a gamepad, which is connected
to the CTR via a USB port (USB port 2 – 4). The USB ports are in the back of the CTR in
the upper left corner (see “Intel® Cockpit Controller (CTR) Overview” on page 24).
Figure 2.10: Independent Camera Control (ICC)
The following table presents an overview of the function assignment:
Table 2.1: Operating a Camera By ICC
BUTTON
REFERENCED
ON ICC
SONY ALPHA 7R INSPECTION-PAYLOAD TZ71
CAMERA
(1) Start/Stop video /
© 2017 Intel Corporation. All rights reserved 28
Page 29
USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 2.1: Operating a Camera By ICC (Continued)
(2) Trigger photo Trigger photo (both cameras)
(3) View last image /
(4) /
(5)
(6)
(7)
(8) Shutter speed -
(9) Shutter speed +
(10) Camera tilt velocity - Camera tilt velocity -
(11) Camera tilt velocity + Camera tilt velocity +
Camera tilt (up/down)
Yaw (left/right)
Camera tilt (up/down)
Yaw (left /right)
Horizontal tilt (adjust camera
horizon) (left/right)
Exposure compensation +/- (up/
down)
Change color palette (when FLIR
is active)
Camera tilt (up/down)
Yaw (left/right)
Camera tilt (up/down)
Yaw (left/right)
Horizontal tilt (adjust camera
horizon) (left/right)
Switch camera (up/down)
Zoom - (when RGB camera is
active)
Zoom + (when RGB camera is
active)
2.4. THE 2ND OPERATOR MONITOR
The 2nd operator monitor is an optional part of the UAS and can be delivered as an
additional accessory.
It can be used as a video preview monitor for the 2nd pilot, especially when used with
the ICC (see “THE INDEPENDENT CAMERA CONTROL (ICC)” on page 28). There is no
further (flight) information shown on this monitor.
Thanks to the 2nd monitor, a camera operator can control the video preview of the
camera used. It is connected to the CTR via the HDMI port by a cable. The HDMI port is
in the back of the CTR in the upper left corner (see “Intel® Cockpit Controller (CTR)
Overview” on page 24).
© 2017 Intel Corporation. All rights reserved 29
Page 30
USER MANUAL
1
2
3
4
5
6
7
8
INTEL® FALCON™ 8+ UAS
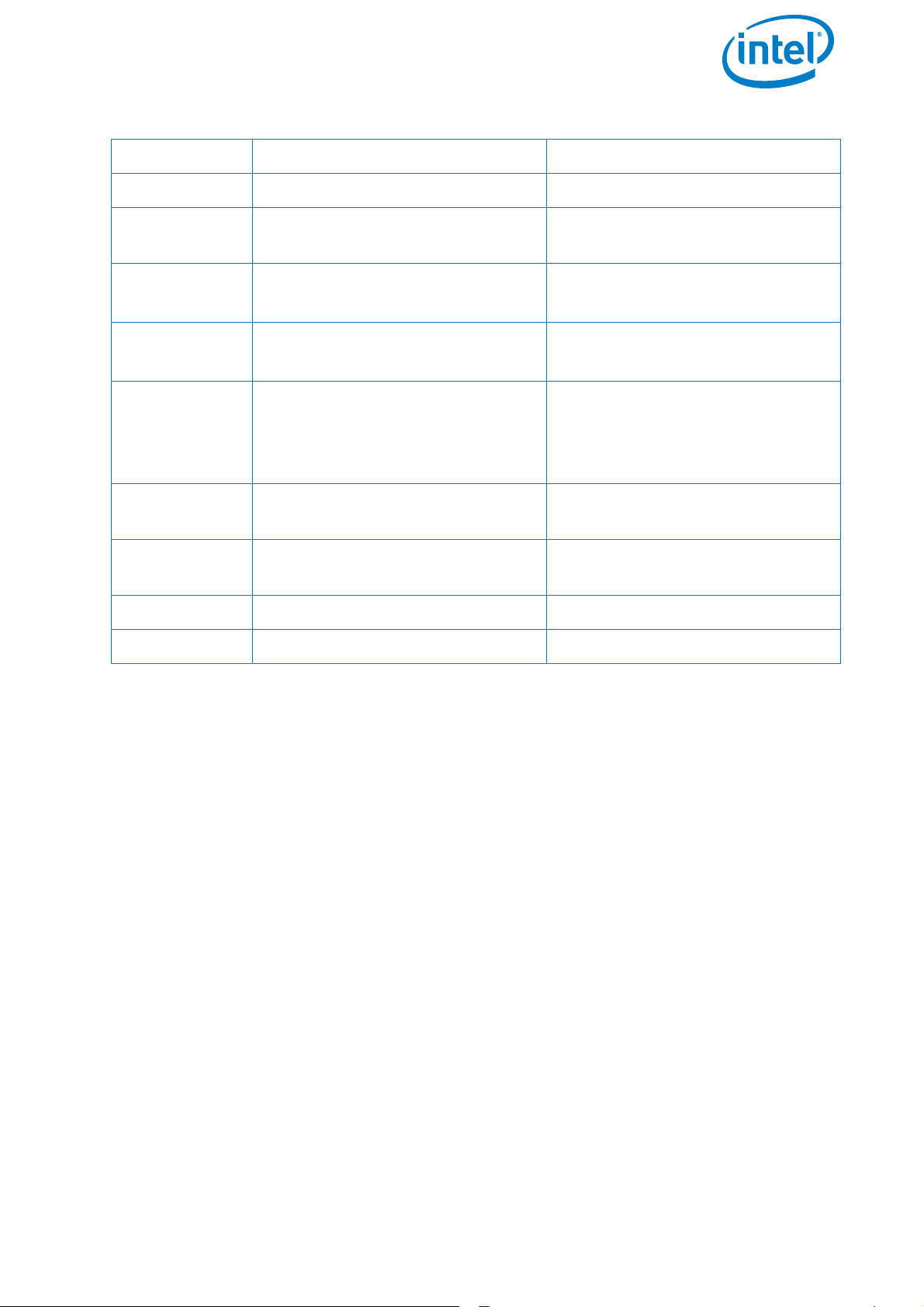
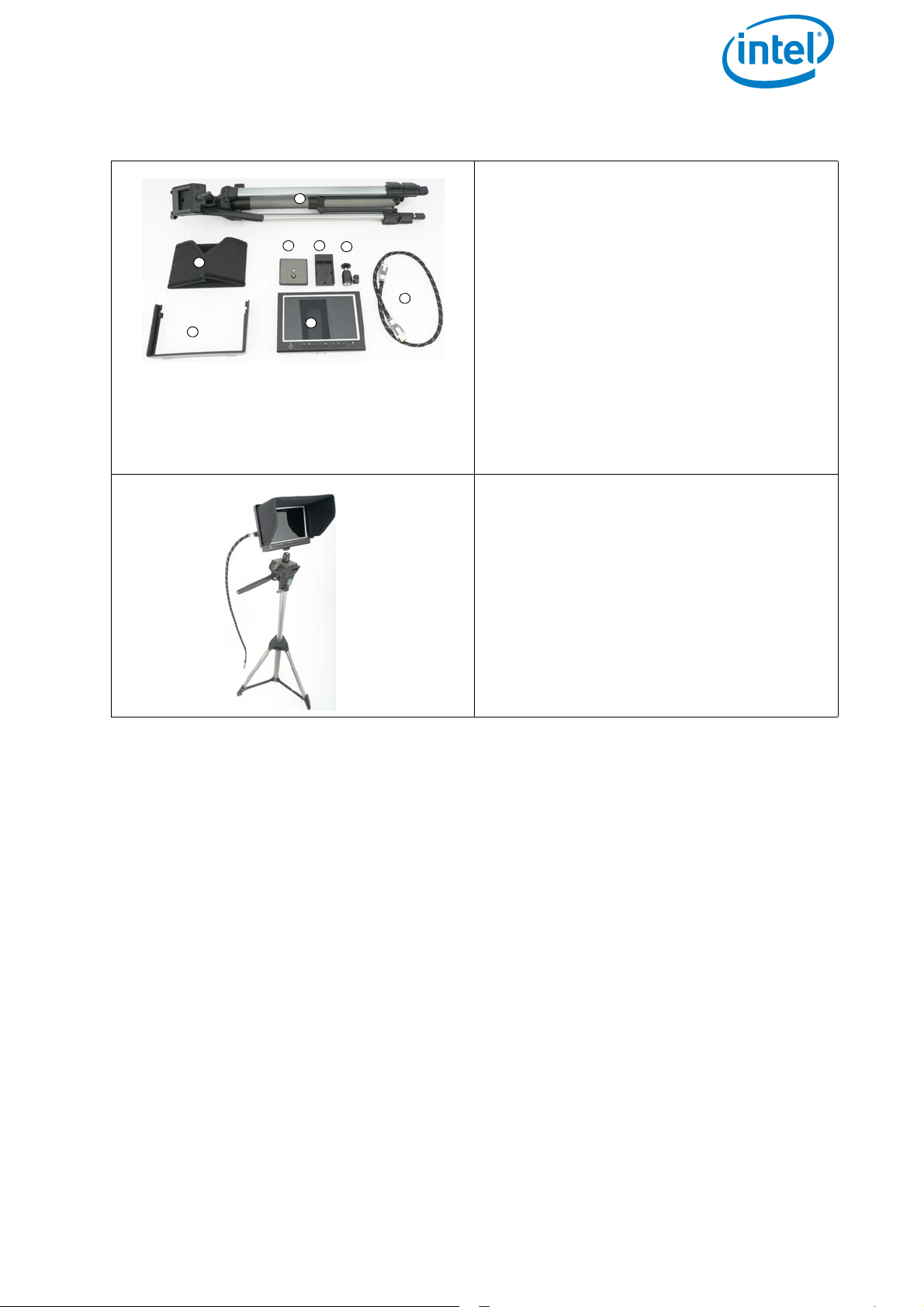
Figure 2.11: 2nd Operator Monitor Package
The elements of the 2nd operator monitor package are:
(1) Tripod
(2) Sunshield
(3) Adapter plate for tripod
(4) Battery adapter
(5) Monitor adapter
(6) Frame for sunshield
(7) Monitor
(8) HDMI cable
Not shown:
• Battery
•Charger
The 2nd operator monitor fully assembled.
2.5. PAYLOADS - CAMERA OPTIONS
Because of the deep integration of cameras, it is possible to change settings like
aperture, shutter speed or zoom (depending on the camera) directly from the Intel®
Cockpit Controller (CTR), while the system is airborne. To ensure complete integration
into the Intel® Falcon™ 8+ UAV, every payload must undergo mechanical and electrical
modifications. Therefore, only payloads approved by Intel are allowed. Payloads which
have not been integrated might affect the compass calibration due to magnetic
emissions by the camera and could have detrimental effects on the flight performance.
If you require assistance with determining which payload to choose for your
application, please contact our support team: support@intel.com.
© 2017 Intel Corporation. All rights reserved 30
Page 31

USER MANUAL
1
2
3
4
5
6
7
8
INTEL® FALCON™ 8+ UAS
Figure 2.12: Camera Control Via the Intel® Cockpit Controller (CTR)
All cameras integrated on the Intel® Falcon™ 8+ UAV can be controlled via the
CTR. Several switches on the CTR are
assigned to camera controls.
(1) Push Button B1: sets the camera to
predefined angles +/- 90°, +/- 45°
and 0° when R1 (4) is pushed
simultaneously (see below for details)
(2) Push Button B2: changes the function
depending on the connected payload
(3) Push Button B3: trigger button on top
of the left control stick (S1)
(4) Rocker Switch R1: camera tilt
(5) Rocker-Switch R2: changes its
function depending on the camera
used
(6) Control Stick S2: turning the right
control stick (S2) controls the yaw
axis of the UAV.
(7) Status Display and related control
buttons
(8) ESC, LEFT, RIGHT, ENT: depending
on the payload, additional options
can be accessed via the Status
Display. Pushing ENT and selecting
Camera Options opens the respective
menu (see “Status Display” on
page 27 and see “STATUS DISPLAY”
on page 138).
For exact details regarding accessible
functions see the individual payload
descriptions.
© 2017 Intel Corporation. All rights reserved 31
Page 32

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 2.12: Camera Control Via the Intel® Cockpit Controller (CTR) (Continued)
Setting the Camera Angle
The Main Screen of the Status Display shows the camera angle. 0° means the camera
is looking straight forward and is leveled horizontally. -90° means the camera is
looking down, 90° means it is looking up.
Push the Rocker-Switch R1 away from you to tilt the camera downwards. Pull the
Rocker-Switch R1 towards you to tilt the camera upwards. The further R1 is pulled or
pushed the quicker the tilt movement.
When the camera is not at 0°, a single push of button B1 will set it back to 0°. When
the camera is at 0°, pushing and holding B1 and simultaneously pushing R1 shortly,
will set the camera to -45°, another short push of R1 while holding B1 will set it to 90°. When pulling R1 while holding B1 the camera can be tilted upwards accordingly
in 45° increments.
2.5.1. Changing a Payload (Camera)
Cameras are designed to remain within their gimbal (camera mount). The complete
gimbal with camera can be exchanged without tools. The Intel® Falcon™ 8+ UAV
automatically identifies the attached camera and the menus of the Status Display on
the CTR are changed accordingly.
© 2017 Intel Corporation. All rights reserved 32
Page 33

USER MANUAL
1
2
3
4
2
1
3
INTEL® FALCON™ 8+ UAS
Figure 2.13: Installing the Camera Mount
To install the camera mount:
1. Feed the camera mount carbon rod
into the front side of the central unit
(1). The Thumbscrew (2) is not
attached at this time. Make sure the
carbon rod is not at an angle when it
is inserted.
2. Fix the payload adapter (3).
Take care that the connector plug of
the adapter fits to the equivalent at
the front side of the UAV. See detail
#1 below.
3. On the roll servo, make sure the ball
link connector ball is fixed in the
respective slot in the adapter when
you fix the camera mount onto the
UAV. See detail # 2 below.
4. Press the releasing clip of the payload
adapter into the respective
counterpart opening at the front side
of the UAV. See detail # 3 below.
5. Install the thumbscrew nut (2) on the
back side of the central unit (Finger
tight. See detail # 4 below.
The payload adapter is the connection
between the camera mount and the central unit of the UAV. The payload adapter
is movable when mounted on the rod of
the camera mount and is connected by a
cable.
(1) Connector plug
(2) Adapter slot for the roll servo with
ball link connector inserted
(3) Releasing clip
(4) Knurled securing nut of the actively
stabilized camera mount
© 2017 Intel Corporation. All rights reserved 33
Page 34

USER MANUAL
1
2
INTEL® FALCON™ 8+ UAS
Figure 2.14: Removing the Camera Mount
To remove the camera mount:
1. Remove the knurled securing nut (1)
of the camera mount at the back side
of the central unit.
2. Carefully disconnect the payload
adapter with pressure against the
release clip of the adapter (2).
3. Disconnect the ball of the ball link
connector of the roll servo out of the
adapter slot.
4. Pull out the camera mount gently.
Make sure it comes out straight (not
at an angle)
2.5.2. Payload and Compass Calibration
CAUTION: WHEN INSTALLING A NEW PAYLOAD ONTO AN INTEL®
FALCON™ 8+ UAV, IT IS NECESSARY TO PERFORM A PAYLOAD
CALIBRATION AND A COMPASS CALIBRATION (STRICTLY IN THAT
ORDER).
THE INTEL® FALCON™ 8+ UAV WILL SAVE THE CALIBRATIONS FOR
THAT EXACT PAYLOAD AND REMEMBER IT THE NEXT TIME THE
PAYLOAD IS USED.
IF YOU FAIL TO CALIBRATE, THE SYSTEM WILL USE DEFAULT
PARAMETERS WHICH WILL LEAD TO DECREASED HEADING
ACCURACIES.
TO PERFORM THE CALIBRATIONS, PLEASE FOLLOW THE STEPS
BELOW.
The payload calibration is stored in the payload itself, and the compass calibration is
stored in the UAV.
© 2017 Intel Corporation. All rights reserved 34
Page 35

USER MANUAL
INTEL® FALCON™ 8+ UAS
2.5.2.1. Payload Calibration
The payload calibration can be done indoors with the motors switched off.
1. Attach the payload you are performing the calibration on.
2. Switch the payload ON, then the Intel® Falcon™ 8+ UAV, then the touchscreen tablet
and the finally the CTR.
3. On the CTR push the ENT button of the Status Display and navigate to Settings >
Payload calib (see “STATUS DISPLAY” on page 138).
4. Make sure the camera can turn freely from the full down position to the full up
position (with the Inspection Payload, you will need to raise the Intel® Falcon™ 8+
UAV to make sure the payload does not hit the ground and cause damage when it
tilts downwards).
5. Push ENT to start the calibration. The camera will first rotate fully downwards and
then progressively move to the fully upwards position. Do not touch the Intel®
Falcon™ 8+ UAV during the process.
6. When the payload does not move anymore, switch off the payload, then the Intel®
Falcon™ 8+ UAV, then the touchscreen tablet and finally, the CTR.
7. Restart the system in the specific sequence (see step #2 above).
CAUTION: IT IS IMPORTANT TO RESTART THE SYSTEM
IMMEDIATELY AFTER EACH CALIBRATION. THE NEW CALIBRATION
PARAMETERS WILL ONLY BECOME ACTIVE AFTER RESTARTING THE
SYSTEM.
8. Repeat the above steps for each new payload to be used with the Intel® Falcon™ 8+
UAV. Once a payload has been calibrated, the Intel® Falcon™ 8+ UAV will recall the
settings.
2.5.2.2. Compass Calibration
The compass calibration needs to be done outdoor in flight.
1. Attach the payload you are performing the calibration on.
2. Take the Intel® Falcon™ 8+ UAV out to a spot with good GPS reception and no
magnetic disturbances.
3. Switch the payload ON, then the Intel® Falcon™ 8+ UAV, then the touchscreen
tablet, and finally, the CTR; take off.
4. Have the Intel® Falcon™ 8+ UAV hover in GPS mode at about 30 m above ground
level where no magnetic disturbances are to be expected.
5. On the CTR push the ENT button of the Status Display to navigate to
Compass Calib (see “STATUS DISPLAY” on page 138).
Settings >
6. Push ENT to confirm. The Intel® Falcon™ 8+ UAV will make a 400° turn.
© 2017 Intel Corporation. All rights reserved 35
Page 36

USER MANUAL
INTEL® FALCON™ 8+ UAS
7. Once the Intel® Falcon™ 8+ UAV has finished the turn, land, switch off the camera,
then the Intel® Falcon™ 8+ UAV, then the touchscreen tablet, and finally, the CTR.
Restart the complete system in the specific sequence (see step #2 above).
CAUTION: IT IS IMPORTANT TO LAND AND RESTART THE SYSTEM
IMMEDIATELY AFTER EACH CALIBRATION PROCESS. THE NEW
CALIBRATION PARAMETERS WILL ONLY BECOME ACTIVE AFTER
RESTARTING THE SYSTEM.
8. Repeat the above steps for each new payload to be used with the Intel® Falcon™ 8+
UAV. Once a payload has been calibrated, the Intel® Falcon™ 8+ UAV will recall the
settings.
2.5.2.3. Adjusting The Camera Horizon
The zero position of the camera horizon and/or tilt angle might occasionally need
adjustment, as it might change due to temperature variations. The adjustment of the
camera horizon can be done indoors with the motors switched off.
To re-adjust the zero position, follow these steps:
1. Switch the Intel® Falcon™ 8+ UAV and the CTR ON as usual.
2. Select the Link Loss Procedure.
3. Push the left control stick of the CTR fully upwards and hold it.
4. While holding the left control stick fully upwards, use the right control stick to
adjust the camera. It now directly controls the camera angles.
5. When the position is set correctly, release both control sticks. This position will
automatically be saved as the new zero position.
It is also possible to adjust the camera horizon in flight, but not the tilt angle.
To adjust the horizon in flight:
1. Enter the menu of the Status Display by pushing ENT.
2. Navigate to
3. Push ENT.
4. Use the arrow LEFT/RIGHT keys of the Status Display to change the horizon.
5. Push ENT to confirm.
Camera Options > Adjust Horizon.
© 2017 Intel Corporation. All rights reserved 36
Page 37

USER MANUAL
INTEL® FALCON™ 8+ UAS
2.5.3. Sony Alpha 7R Full Frame Camera
The Sony Alpha 7R has two main function dials that can be controlled through the CTR
(see “Camera Control By The CTR” on page 38).
Figure 2.15: Sony Alpha 7R and SD Card Slot
Specifications:
• Sensor size: 35.90 mm x 24.00 mm
• Resolution: 36.4 Mpx (7360 x 4912
pixels)
• Lens: Sonnar® T* FE 35 mm F2.8 ZA
(SEL35F28Z)
• Weight incl. lens and gimbal: ~ 790 g.
• Approximate max. flight time: 16 min
• Suggested applications: Aerial photography, inspection and surveying
Approved lenses:
• Sonnar® T* FE 35 mm F2.8 ZA
(SEL35F28Z)
Please note that all other available full frame
lenses are too heavy and cannot be approved
Images are stored on an SD card, which is
inserted underneath a lid on the right back side
of the camera. To transfer images to the computer, please use an SD card reader which is
connected to the computer.
For further information: https://esupport.sony.com/US/p/modelhome.pl?mdl=ILCE7R&LOC=3#/manalsTab
2.5.3.1. General Care
• Always handle the gimbal with care. If you need to tilt the camera manually
(when not connected or while the Intel® Falcon™ 8+ UAV is switched off), please
do so very cautiously. If too much force is applied, the gear wheels of the servo
motors might break.
• The camera is powered by the Intel® Falcon™ 8+ UAV battery to save weight.
When you switch off the system, switch off the camera first and wait for 10
seconds to allow the camera to fully power down and store all images and
settings. Only then should you switch off the Intel® Falcon™ 8+ UAV. If you switch
© 2017 Intel Corporation. All rights reserved 37
Page 38

USER MANUAL
1
2
3
4
5
6
8
7
INTEL® FALCON™ 8+ UAS
off the Intel® Falcon™ 8+ UAV too early, you will cut the power supply of the
camera and risk losing data.
• Keep the airplane mode of the camera switched on, to avoid radio interference
from the camera (MENU > > Airplane Mode > ON).
2.5.3.2. Camera Control By The CTR
This section describes how the Sony Alpha 7R can be operated by using the functional
elements of the CTR.
Figure 2.16: Sony Alpha 7R CTR Control Layout
Push Button B1 (1): sets the camera to
predefined angles +/-90°, +/-45° and 0°
when Rocker Switch R1 (4) is pushed
Push Button B2 (2): changes the function
depending on the connected payload
Push Button B3 (3): trigger button
Rocker Switch R1 (4): camera tilt; Dial 1
or Dial 2, depending on B2
Rocker Switch R2 (5): camera tilt; Dial 1
or Dial 2, depending on B2
Control Stick S2 (6): turning the right
control stick (S2) controls the yaw axis of
the UAV
Status Display (7): see “Camera Options
By The Status Display” on page 39
ESC, LEFT, RIGHT, ENT (8): Status Display control buttons (see “Status Display” on page 27).
© 2017 Intel Corporation. All rights reserved 38
Page 39

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 2.16: Sony Alpha 7R CTR Control Layout (Continued)
The Sony Alpha 7R has two main function dials that can be controlled by the
CTR.
The function of Dial 1 on the Sony A7R
can be controlled by R2, when B2 is in
position 1 (LED off). The function of Dial
2 can be controlled by R2, when B2 is in
position 2 (LED on/blue) or via the Status
Display by pushing ENT > Camera
Options > Dial 2
The default functions of Dial 1 and 2
depend on the selected shooting mode
on the camera. The table below shows
the dependencies.
2.5.3.3. Camera Options By The Status Display
.
Table 2.1: Sony Alpha 7R Camera Control By Camera Functions
B2
POSITION
1 (LED off) Dial 1 Shutter speed Aperture Aperture
2 (LED on/
blue)
Push the ENT button of the Status Display to enter the menu. Navigate to Camera
Options
Table 2.2: Sony Alpha 7R Camera Control By Status Display
. The following options are available for the Sony Alpha 7R.
THE FOLLOWING OPTIONS ARE AVAILABLE FOR THE SONY ALPHA 7R.
Dial 2
Record/Stop
R2
FUNCTION
Starts and stops a video recording
CAMERA SET
TO
S MODE
(SHUTTER
PRIORITY)
Exposure compensation
CAMERA SET
TO
A MODE
(APERTURE
PRIORITY)
Exposure
compensation
CAMERA SET TO
M MODE
(MANUAL)
Shutter speed
Dial 2
Review
© 2017 Intel Corporation. All rights reserved 39
See previous table for details.
Reviews images already stored on the SD card of the camera.
Use Rocker Switch R2 (no. 5 in figure above) to navigate.
Page 40

USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 2.2: Sony Alpha 7R Camera Control By Status Display (Continued)
THE FOLLOWING OPTIONS ARE AVAILABLE FOR THE SONY ALPHA 7R.
Occasionally the neutral position of the Gimbal's Servo Motors
might need to be re-adjusted. Use this command to adjust the
Adjust
Horizon
Roll Comp.
On/Off
2.5.3.4. Camera Settings
The following section describes the most important settings of the camera when used
with the Intel® Falcon™ 8+ UAV.
horizon (roll angle) while flying. If the system is still on the
ground and the motors are not running this can also be done in
both axes (roll and tilt) with the control sticks. see “Adjusting The
Camera Horizon” on page 36.
Default = ON.
When Roll Comp. = Off the gimbal will no longer compensate
roll movements of the Intel® Falcon™ 8+ UAV.
This can be useful when doing dynamic video flights.
Figure 2.17: Camera Settings By Camera Sony Alpha 7R
The most important settings can be
quickly accessed via the buttons:
(1) Fn: see below
(2) MENU: see below
(3) C2: provides quick access to the
Focus Mode
(4) WB: provides quick access to White
Balance.
ISO can be quickly accessed by turning
the control wheel in the back of the camera.
© 2017 Intel Corporation. All rights reserved 40
Page 41

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 2.17: Camera Settings By Camera Sony Alpha 7R (Continued)
After pushing the Fn button (number (1)
above) by default the following parameters can be accessed:
Top row:
Drive Mode / Flash Mode / Flash Comp. /
Focus Mode / Focus Area / Exposure
Comp.
Bottom row:
ISO / Metering Mode / White Balance /
DRO/Auto HDR / Creative Style / Shoot
Mode
The camera menu can be accessed by
pushing the MENU button (number (2)
above). On the first page of the menu, the
Image Size and Quality can be set. Refer
to the camera manual for further details.
2.5.4. Inspection Payload
The Inspection Payload consists of two cameras: Panasonic RGB camera and infrared
(IR) camera FLIR TAU 2 640.
• Weight of the complete payload including gimbal: 550 g
• Approximate maximum flight time: approximately 18 minutes
© 2017 Intel Corporation. All rights reserved 41
Page 42

USER MANUAL
INTEL® FALCON™ 8+ UAS
.
Figure 2.18: Inspection Payload
Specifications of the Panasonic RGB camera:
• Sensor size: CMOS Sensor 1/2.3”, 6.2 x
4.6 mm
• Resolution: 12.1 Mpx (4000 x 3000 pixel)
• Lens: LEICA DC VARIO-ELMAR F3,3 - 6,4
/ Multistage Iris Diaphragma (F3,3 - 8,0
(W), F6,4 - 8,0 (T))
• Focal length: 4.3 - 129 mm (24 - 720 mm,
35 mm equiv.)
• Optical zoom: 30x
• Suggested applications: Inspection
Specifications of the IR camera FLIR Tau 2 640:
• Thermal Imager: Uncooled VOx
Microbolometer
• Resolution: 640 × 512 pixel
• Pixel pitch: 17 μm
• Spectral band: 7.5 - 13.5 μm
• Focal length: 19 mm (~ 59 mm, 35 mm
eqiv.)
Further details: http://www.flir.com/cores/display/?id=54717
The Panasonic camera needs its own fully
charged battery to work. The battery slot can be
accessed from the bottom of the payload.
The SD card of the camera is inserted next to
the battery.
A separate charger for the Panasonic batteries
is supplied with the payload.
© 2017 Intel Corporation. All rights reserved 42
Page 43

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 2.18: Inspection Payload (Continued)
The FLIR Tau 2 640 camera is powered by the
Intel® Falcon™ 8+ UAV battery to save weight,
and does not need to be switched ON or OFF.
The micro SD card of the FLIR Tau is inserted at
the side of the camera, with the contacts of the
micro SD facing towards the camera lens.
Each time the Intel® Falcon™ 8+ UAV is switched
on, a new, subsequently numbered sub-folder
(FLIR0000, FLIR0001, FLIR0002...) is created on
the micro SD card. Up to 128 image files are
stored in one folder. If more than 128 images
are taken during one flight, a new sub-folder
will be created where the additional images are
stored. Before the camera can be used, the
black cap must be removed from the lens.
The images are stored in a proprietary file format .ARA. The 14-bit RAW output from the
camera is captured, which allows the displayed
temperature range to be set during post processing. Using Thermal Editor (part of AscTec
Navigator), the RAW images can be displayed
and converted into a FLIR Tools-compatible
Radiometric JPEG file.
AscTec Navigator Software can be downloaded
from the download area: http://intel.com/FalconDownloads
A detailed manual of the software is available
here: http://intel.com/FalconManual
When an Inspection Payload is attached, the
number 999 will appear underneath the flight
mode icon of the menu on the Status Display.
This number signifies the number of images
which can be stored onto the Micro SD card of
the FLIR Tau 2 640. The maximum number that
can be displayed on the screen is 999, however,
the actual number of images the SD card can
store is higher than 999. Therefore, the displayed number will not count down until the SD
Card has a capacity of less then 999 images.
© 2017 Intel Corporation. All rights reserved 43
Page 44

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 2.18: Inspection Payload (Continued)
When the FLIR Tau 2 640 IR Raw Data Logger
cannot access the SD card, an error message
ERR will be displayed instead of the number of
remaining images.
In case this happens, please take out the SD
card and troubleshoot.
If after reinserting, if the error message remains,
reformat the SD card.
Format settings are:
• File system: FAT32
• Allocation unit size: 64 kilobytes
• Volume label: FLIRSD
The FLIR and the Panasonic RGB camera can record video. When a video
actively recording on the Panasonic RGB camera, the camera will not output any
Note
preview video. This means that the preview video on the touchscreen tablet of
the CTR must be switched to show the FLIR image (see “Inspection Payload
Control By The CTR” on page 44).
2.5.4.1. General Care
• Always handle the gimbal with care. If you need to tilt the camera manually
(when not connected or while the Intel® Falcon™ 8+ UAV is switched off), please
do so very cautiously. If too much force is applied, the gear wheels of the servo
motors might break.
• Keep the airplane mode of the camera switched on, to avoid radio interference
from the camera (MENU > Setup > Page 2 > Airplane Mode > ON).
2.5.4.2. Inspection Payload Control By The CTR
The following figure describes in detail how the Inspection Payload can be controlled
by the functional elements of the CTR.
Figure 2.19: Inspection Payload: CTR Control Layout
FLIR Tau 2 640 performs flat field correction (FFC). The FLIR automatically performs
a FCC every 10 seconds (for more information about the FFC please read: http://
www.flir.com/cvs/cores/knowledgebase/index.cfm?CFTREEITEMKEY=327&view=35774
© 2017 Intel Corporation. All rights reserved 44
Page 45

USER MANUAL
1
2
3
4
5
6
8
7
INTEL® FALCON™ 8+ UAS
Figure 2.19: Inspection Payload: CTR Control Layout (Continued)
Push Button B1 (1): sets the camera to
predefined angles +/-90°, +/-45° and 0°
Push Button B2 (2): Switches between
the cameras for live preview (FLIR and
Panasonic)
Push Button B3 (3): Trigger button. Both
cameras will be triggered simultaneously, regardless of which camera is
selected for the live preview.
Rocker Switch R1 (4): camera tilt
Rocker Switch R2 (5): Changes its func-
tion depending which camera is selected
for live preview. See the table below for
details.
Control Stick S2 (6): turning the right
control stick (S2) controls the yaw axis of
the UAV
Status Display (7): see “Inspection Payload Control By The Status Display” on
page 46.
ESC, LEFT, RIGHT, ENT (8): Status Dis-
play control buttons. (see “Status Display” on page 27). The table below
shows the available parameters depending on the shooting mode of the camera.
Table 2.1: Inspection Payload: CTR Control Layout
B2
POSITION
ACTIVATED
CAMERA
R2 FUNCTION
Parameters like shutter
1 (LED off)
Panasonic
camera
Zoom in/out
speed, aperture and ISO
need to be set directly on
the camera before take-off.
Up - Trigger flat field
2 (LED on/
red)
FLIR
correction
Down - Cycle through
color palette
© 2017 Intel Corporation. All rights reserved 45
Parameters like isotherms
and ACG need to be set via
configuration file on the
FLIR SD card before takeoff.
Page 46

USER MANUAL
INTEL® FALCON™ 8+ UAS
2.5.4.3. Inspection Payload Control By The Status Display
Push the ENT button of the Status Display to enter the menu. Navigate to Camera
Options
Table 2.2: Inspection Payload Control By Status Display
. The following options are available for the Inspection Payload:
Switch
Camera
Adjust
Horizon
Roll
Comp.
On/Off
Notes Shooting parameters need to be set directly on the camera before take-off.
Additional cameras may be available. Please check http://intel.com/FalconManual for
an updated version of the manual.
Switches the live image preview on the touchscreen between the FLIR
Tau 2 640 and the Panasonic Lumix camera.
Occasionally the neutral position of the gimbal's servo motors might
need to be re-adjusted. Use this command to adjust the horizon (roll
angle) while flying. If the system is still on the ground and the motors
are not running this can also be done in both axes (roll and tilt) with the
control sticks, see “Adjusting The Camera Horizon” on page 36.
Default = ON. When Roll Comp. = Off, the gimbal will no longer
compensate roll movements of the Intel® Falcon™ 8+ UAV. This can be
useful when doing dynamic video flights.
2.6. THE INTEL® POWERPACK BATTERIES
The Intel® Powerpack batteries power the Intel® Falcon™ 8+ UAV and the Intel® Cockpit
Controller (CTR). The battery features a One-Button/Five-LEDs user interface, an
intelligent Battery Management System (BMS), automatic balancing, storage mode and
charging. It provides direct access to general information of the battery; for example,
the remaining battery life, which is shown by the five LEDs (see “Operating The BMS
Menu” on page 50).
The BMS safely monitors the status of each of the four cells of the battery to ensure a
safe charging process. Its cell balancing technology assures the consistency in the
performance of the batteries.
The following sections give you information about the Intel® Powerpack batteries you
need for the Intel® Falcon™ 8+ UAV and the CTR.
For charging an Intel® Powerpack Battery you need one of the deliverable power
supply units.
© 2017 Intel Corporation. All rights reserved 46
Page 47

USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 2.3: Technical Specifications of the Battery
BATTERY
TYPES
Intel®
Powerpack™
Battery
On the front panel of the battery there is a sticker. An area is marked by a dot
surrounded by a circle (see next figure The Intel® Powerpack Battery. This area has the
function of a button.
Figure 2.20: LED Description
ELECTRIC
CHARGE
[MAH]
4000 14.8 16.8 14.0 4
VOLTAGE
STANDARD
[V]
Led Description
The LEDs are integrated in the front panel of
the battery.
LED number / color from left to right:
VOLTAGE
FULLY
CHARGED
[V]
•1 / red
VOLTAGE
LOWEST
RECOMMENDED
(UNDER LOAD) [V]
NO. OF
CELLS
•2 / yellow
• 3 / green
• 4 / green
• 5 / green
Please note the limitations mentioned on the labels of the Intel® Powerpack Battery.
© 2017 Intel Corporation. All rights reserved 47
Page 48

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 2.21: The Intel® Powerpack Battery
The front of the Intel Powerpack battery The back of the Intel Powerpack battery
© 2017 Intel Corporation. All rights reserved 48
Page 49

USER MANUAL
INTEL® FALCON™ 8+ UAS
Even if the battery is not in use, it is possible to get information on the actual charging
state by the BMS. One short push (< 2 sec) on the button (shown above) and the battery
will show the charging state represented by the respective number of LEDs.
Table 2.4: Charging State
THE LEDS SHOW THE STATE / PHASE OF CHARGE OF THE BATTERY.
STATUS OF LED NO. 1 2 3 4 5 CHARGING STATE
ON OFF OFF OFF OFF 0% - 20%
ON ON OFF OFF OFF 20% - 40%
ON ON ON OFF OFF 40% - 60%
ON ON ON ON OFF 60% - 80%
ON ON ON ON ON 80% - 100%
2.6.1. Charging the Intel® Powerpack Batteries
For charging the Intel® Powerpack Battery you need the supplied power supply unit.
Figure 2.22: Charging
To charge the Intel® Powerpack:
1. Connect the Intel® Powerpack Battery
to the adapter of the power supply
unit.
2. Connect the power supply unit to a
wall socket.
Charging will begin immediately indicated by flashing LEDs.
During the charging process (defined as when the battery is connected to the power
supply unit and the power supply unit is connected to a wall outlet 100 V - 240 V AC 50
Hz - 60 Hz) the actual battery state and the progress of the charging process is
automatically shown by the LEDs.
As displayed in the table above, the number of permanently lighted LEDs shows the
actual progress of charging. Additionally, the next higher LED is flashing. This means
that this charging step is not yet finished.
When the charging process is finished and the battery is at full capacity, all five LEDs
will continue flashing simultaneously.
When charging is finished, unplug the battery and the AC adapter.
© 2017 Intel Corporation. All rights reserved 49
Page 50

USER MANUAL
INTEL® FALCON™ 8+ UAS
2.6.2. Operating The BMS Menu
For further information about the battery you can activate the BMS menu. The battery
does not need to be connected to the power supply unit to activate the BMS menu.
To activate the menu:
1. Push/hold down the button (> 2 sec). When the first LED (no. 1, red) is flashing, the
first menu option can be activated by another long push (> 2 sec) on the button.
2. Every further short push (< 2 sec) on the button navigates to the next menu option
which can be activated by another long push (> 2 sec) on the button, indicated by
the flashing of the respective LED.
If there is no user input, the LED menu will close after 33 seconds.
The five menu options are the following:
Menu Option 1, Charging State
When LED 1 is flashing, menu option 1 can be activated. When activated the LEDs show
the state of charge of the battery (see “Charging State” on page 49). After showing the
state of charge of the battery for 8 seconds, the menu is closed automatically (all LEDs
off).
Menu Option 2, Storage Mode
When LED 2 is flashing, Menu Option 2 can be activated. When you select this option
by pushing/holding down the button for more than 2 seconds, the battery Storage
Mode is activated. When this mode is activated, all but one LEDs are on. The off-LED
moves from right to left.
In the Storage Mode, the BMS automatically balances the battery down to 3.8V / Cell (=
15.2 V per battery). The battery Storage Mode can be deactivated by pushing the
battery button for more than 2 seconds.
We recommend using this mode when you plan to store the battery for 2 days or
longer. When it is necessary to activate storage mode on batteries, make sure to have
them discharged by flying with them before they are stored.
It will take a very long time to discharge full batteries to the storage voltage since there
is only a small resistive load.
Menu Option 3, Charging Cycles
When LED 3 is flashing, menu option 3 can be activated. The LEDs show the current
battery charging cycles, i.e. how often the battery was charged.
The total number of charging cycles of the battery is shown by the LEDs in a binary
system by powers of 2 from right to left multiplied by 10.
© 2017 Intel Corporation. All rights reserved 50
Page 51

USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 2.5: Charging Cycles
THE LEDS SHOW THE TOTAL NUMBER OF CHARGING CYCLES OF THE BATTERY
FROM RIGHT TO LEFT BEGINNING WITH LED 5 (GREEN) = 20, THIS NUMBER
SHOULD BE MULTIPLIED BY 10
STATUS OF LED NO. 1 2 3 4 5
(EXAMPLES)
OFF OFF OFF OFF ON 20 = 1 X 10 ≙ 0 - 10
OFF OFF OFF ON OFF 21 = 2 X 10 ≙ 11 - 20
OFF OFF OFF ON ON 20 + 21 = 3 X 10 ≙ 21 - 30
OFF OFF ON OFF ON 20 + 22 = 5 X 10 ≙ 41 - 50
OFF ON ON ON ON 20 + 21 + 22 + 23 = 15 X 10 ≙ 141 - 150
CHARGING STATE
Menu Option 4, Overall Capacity
Menu option 4 shows the current possible amount of charge the battery may hold
when fully charged (as a percentage) compared to the factory battery capacity.
Table 2.6: Battery Capacity
THE LEDS SHOW THE CURRENT POSSIBLE BATTERY CAPACITY AS PERCENTAGE
COMPARED TO THE FACTORY BATTERY CAPACITY
STATUS OF LED NO. 1 2 3 4 5 REMAINING CAPACITY
ON OFF OFF OFF OFF 51% - 60%
ON ON OFF OFF OFF 61% - 70%
ON ON ON OFF OFF 71% - 80%
ON ON ON ON OFF 81% - 90%
ON ON ON ON ON > 90%
Menu Option 5, Battery Status
Menu option 5 shows the difference (as a percentage) between the highest measured
cell voltage and the lowest measured cell voltage, measured at the same time.
The BMS tries to balance the charging status of all 4 battery cells to the same level. By
measuring the difference between the highest cell voltage and the lowest cell voltage,
the actual battery status is determined. This status can be shown by activating menu 5.
© 2017 Intel Corporation. All rights reserved 51
Page 52

USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 2.7: Battery Status
THE LEDS SHOW THE STATUS OF THE BATTERY
STATUS OF LED NO. 1 2 3 4 5 VOLTAGE
DIFFEREN
CE
OFF OFF OFF OFF OFF <= 5% Best, the battery can be used
ON OFF OFF OFF OFF > 5% Still everything fine
ON ON OFF OFF OFF > 10% Battery still usable
ON ON ON OFF OFF > 15% Bad, think about changing the battery
ON ON ON ON OFF > 20%
ON ON ON ON ON > 25%
To get a comparable result, this battery status check is done best directly after use/
flight.
Very bad (the battery might still be
used in the CTR)
Worst (e.g. 3.8 V on the highest and
2,85 V on the lowest cell, measured at
the same time), the use of the battery
is no longer possible
MEANING
BMS Error Mode
If during the charging process the LEDs are lit alternatively LED2 and LED4 ON with
LED3 ON, the charging process is interrupted for one of the following reasons:
• The battery cells are too hot or too cold
• Charge Control Circuitry too hot
The charging process will resume automatically once the temperature of the cells is
normalized.
When the battery shows LED1 ON and LED5 ON alternating with LED2 and LED4 ON,
the battery was operated out of specifications (e. g. too hot during discharge).
When a battery shows this behavior, it can still be used to discharge its remaining
capacity, but it must not be used anymore.
When you have a battery showing this error mode, push the battery button once. As a
result, a few LEDs will be lit. Please either take a photo of the lit LEDs or note which
ones are lit (no. 1 is the LED most left, no. 5 is the LED most right). Contact the support
team at Intel and provide the information which LEDs are lit. In case this state became
active during a flight, please also provide a log file of this flight.
If you see any other behavior of the LEDs contact Intel Support.
© 2017 Intel Corporation. All rights reserved 52
Page 53

USER MANUAL
INTEL® FALCON™ 8+ UAS
2.6.3. Battery Update
The firmware version of the BMS is automatically managed by the firmware of the UAV.
As soon as a battery is inserted into the UAV and used, the firmware version of the
battery is checked. If the firmware version of the BMS on the battery is older than the
one currently installed on the UAV, it will be noted and the battery will be updated
automatically by the UAV.
During this process, which takes less than a minute, a message is shown in the status
line at the bottom of the Status Display (see “STATUS DISPLAY” on page 138) and it is
not possible to start the UAV.
Figure 2.23: Battery Update
The progress of the battery update process
is shown in percent in the status line at the
bottom of the Status Display. It can take up
to maximum 1 minute.
During this period it is not possible to start
the UAV.
2.6.4. Battery Information Safety Instructions And Warnings
CAUTION: PLEASE READ THE FOLLOWING SAFETY INSTRUCTIONS
AND WARNINGS CAREFULLY BEFORE CHARGING OR USING THE
BATTERIES!
INTEL CANNOT ASSUME ANY LIABILITY FOR FAILURES TO COMPLY
WITH THESE WARNINGS AND SAFETY GUIDELINES.
• Lithium Polymer (LiPo) batteries do not have any memory effect. Never fully
discharge LiPo batteries, as it will permanently damage the batteries.
• Do not store batteries fully charged. It will lead to a shorter life span of the
battery. Use the BMS battery Storage Mode for long-term storing (> 2 days) (See
Operating The BMS Menu, “Menu Option 2, Storage Mode” on page 50.
• LiPo batteries are volatile. Failure to read and follow the below instructions may
result in fire, personal injury and damage to property if charged or used
improperly.
• The battery charging/discharging and storage area should be free from any
materials which can catch fire such as: wood tables, carpet, or gasoline
containers. The ideal surface for charging and storing LiPo batteries is metal,
concrete or ceramic.
• Extinguishing Media: Water, CO2.
© 2017 Intel Corporation. All rights reserved 53
Page 54

USER MANUAL
INTEL® FALCON™ 8+ UAS
• Special Fire-Fighting Procedures: Self-contained breathing apparatus.
• Unusual Fire and Explosion Hazards: Cell may vent when subjected to excessive
heat-exposing battery contents.
• Hazardous Combustion Products: Carbon monoxide, carbon dioxide, lithium
oxide fumes.
• By purchasing this battery, the customer assumes all risks associated with
lithium batteries. If you do not agree with these conditions, return the battery
immediately before use.
General Guidelines and Warnings
• It is crucial that all cells in a LiPo battery maintain the same voltage across all
cells at all times.
• Never charge batteries unattended. When charging LiPo batteries, you should
always remain nearby to monitor the charging process and react to potential
problems that may occur.
• Never continue to charge LiPo batteries if the battery LEDs fail to recognize full
charge. Overheating of the LiPo cells indicates a problem. In the event of
overheating, the battery should be immediately disconnected from the power
supply and placed in a fireproof location.
• Since delayed chemical reaction can occur, it is best to monitor the battery as a
safety precaution. Battery monitoring should occur in a safe area outside of any
building or vehicle, and away from any combustible material. Always charge LiPo
batteries in a fireproof location.
• A battery can ignite even after the charging process has been completed.
• In the event of a crash, you must remove the battery for observation and place it
in a safe open area away from any combustible material for an appropriate
period.
• Never store or charge a battery inside of your car in extreme temperatures, since
extreme temperature could cause a fire.
Charging
• Before charging, visually inspect the battery. Look for any damaged connectors
or other irregularities. Do not use it if you find any of the above issues with your
battery.
• If any damage to the battery is found or if the voltage is significantly less for your
battery than what is specified below, do not attempt to charge or fly with the
battery; contact your supplier.
© 2017 Intel Corporation. All rights reserved 54
Page 55

USER MANUAL
INTEL® FALCON™ 8+ UAS
• You may witness a battery starting to balloon or swell up. This may lead to a
deformed housing where the battery no longer fits into the UAV battery
compartment. If you notice such a deformation, do not start charging this
battery. If you already started charging, discontinue the charging process
immediately. Disconnect the battery and observe it in a safe place for an
appropriate period. Continuing to charge a battery that has begun to swell will
result in fire. Never use a battery if you find it swollen or ballooned.
• Never charge batteries unattended.
• Charge in an isolated area, away from flammable materials. Use deliverable
LiPo-safe bags or a non-flammable case for charging.
• Let the battery cool down to ambient temperature before charging.
Discharging
Do not discharge a battery to a level below 3.5 V per cell. Deep discharging a battery
cell below 3.5 V can reduce battery performance or even destroy the battery.
Storage & Transportation
Preparing for storage: Storing a fully charged battery has negative effects on its life
span. The battery comes in a mode, where it slowly unloads itself to a healthy storage
voltage using the internal circuitry.
• Whenever possible, store the batteries in the Storage Mode (see Operating The
BMS Menu, “Menu Option 2, Storage Mode” on page 50) and only completely
charge them immediately before the next flight.
• For transporting and storing the batteries, use LiPo-safe bags or cases.
• Always store batteries within the specified temperature ranges. “TECHNICAL
SPECIFICATION” on page 178 for further details.
• Do not expose batteries to direct sunlight or heat for extended periods.
• Never leave the LiPo batteries with a full charge for more than 2 - 3 days. For
longer intermissions, you need to activate the Battery Storage Mode (see
Operating The BMS Menu, “Menu Option 2, Storage Mode” on page 50) for safe
storage until you are ready to use the battery again. Recharge the batteries right
before the next mission.
Caring for Batteries
• Please check the battery voltage after charging. It is shown on the Main Screen
of the Status display and by the LEDs of the battery.
• The voltage for a 4-cell battery should fall between 16.4 V – 16.8 V.
• Do not discharge batteries to a level below 14 V. Deep discharge below 14 V will
deteriorate the battery performance.
• Never puncture the battery cells. Punctured cells may cause fire.
© 2017 Intel Corporation. All rights reserved 55
Page 56

USER MANUAL
INTEL® FALCON™ 8+ UAS
Operating Temperatures
Refer to “TECHNICAL SPECIFICATION” on page 178 for details regarding operating
temperatures.
Figure 2.24: Temperature Depending LiPo Battery Capacity
The capacity of LiPo batteries drops dramatically if the temperature is below 5° C.
Please keep the batteries warm when flying in cold conditions or heat them up
before flying to approximately 30° C.
Battery Life
Batteries that have lost 20% of their capacity (see Operating The BMS Menu, “Menu
Option 5, Battery Status” on page 51) must be removed from service and disposed of
properly.
Disposal
For proper treatment, recovery and recycling, please take these products to designated
collection points where they will be accepted on a free of charge basis. Alternatively,
send the battery for disposal back to Intel. Disposing of this product correctly will help
to save valuable resources, and prevent any potential negative effects on human health
and the environment, which could otherwise arise from inappropriate waste handling.
For disposal, please discharge the battery to 3V or below per cell, then wrap the
battery in a bag for disposal.
Product Warranty
Product warranty is limited to original defects in material and workmanship. Warranty
does not cover collateral damage. Due to the nature and use of this product there is no
term warranty. Misuse, abuse, incorrect charging, failure to comply with the above
warnings and guidelines, and other inappropriate use of this product are not covered
under warranty.
© 2017 Intel Corporation. All rights reserved 56
Page 57

USER MANUAL
INTEL® FALCON™ 8+ UAS
2.7. TRANSPORT CASES & INTEL® BACKPACK
The transport set consists of different cases with precision water jet cut inlays designed
for the Intel® Falcon™ 8+ UAS with all its accessories. For easy one-person
transportation, the Intel® Falcon™ 8+ UAS cases have retractable handles and wheels.
The Intel® Backpack is not safe for air freighting, but very useful for missions in remote
areas, since it is light and relatively compact.
Figure 2.25: Transport Cases & Backpack
The transport cases offer great advantages:
• Thanks to fold-able handles and wheels,
they can be easily transported by one
person.
• The foam bolster inlay of the payload
case can be used as load security for the
payload when the UAV is transported
with mounted payload in the Intel®
Falcon™ 8+ UAV case.
If transported by plane - please follow the prescribed guidelines from the air freight carrier.
CAUTION: THE INTEL® FALCON™ 8+ UAV AND THE INTEL® COCKPIT
CONTROLLER (CTR) MUST BE TRANSPORTED FULLY ASSEMBLED.
FOR SECURE TRANSPORTATION WE RECOMMEND USING THE
SUPPLIED CASES.
2.7.1. Packing Instructions
To ensure a safe and optimal transport of your flight system, please see the images
below for the right boxing.
CAUTION: WHEN SHIPPING THE INTEL® FALCON™ 8+ UAV IN THE
TRANSPORT CASE WITH A MOUNTED PAYLOAD, YOU MUST USE
THE FOAM INLET OF THE PAYLOAD CASE TO AVOID DAMAGES
DURING TRANSPORT OR YOU MUST TRANSPORT IT IN THE SPECIAL
PAYLOAD CASE (SEE FOLLOWING).
© 2017 Intel Corporation. All rights reserved 57
Page 58

USER MANUAL
1
2
2
3
4
5
6
7
8
INTEL® FALCON™ 8+ UAS
Figure 2.26: Packing Instructions for the Intel® Falcon™ 8+ UAS Cases
Intel® Falcon™ 8+ System Case
This case is used for all necessary parts
of your Intel® Falcon™ 8+ UAV.
Following the numbers, the slots contains:
1. Intel® Falcon™ 8+ UAV without
payload
2. Power supply units for charging the
Intel® Powerpack batteries (6)
3. Space for accessories, e.g. sunglasses
4. Toolkit with spare propellers (see
below)
5. Space for the payload when mounted
directly on the UAV.
For load security, you must take the
foam bolster inlet supplied with the
payload case.
6. Space for the Intel® Powerpack
batteries (optional, shipped
separately)
7. ICC gamepad (optional)
8. Space for extra equipment, if any, that
is not part of the System, e.g.
reflective safety vest or video goggles
Toolkit and spare parts
© 2017 Intel Corporation. All rights reserved 58
Page 59

USER MANUAL
1
2
3
INTEL® FALCON™ 8+ UAS
Figure 2.26: Packing Instructions for the Intel® Falcon™ 8+ UAS Cases (Continued)
Intel® Cockpit Controller (CTR)
Case
This case contains:
CTR with mounted sun shield
1. When transporting the CTR in the
case, the sunshield must be arranged
like shown to provide extra
protection of the touchscreen tablet
against scratches during
transportation.
2. Additional space
3. Additional space e.g. for an extra
power supply
Included in the case but not shown:
Shoulder harness is underneath the sun
shield protected touchscreen tablet.
Payload Case
The payload of the Intel® Falcon™ 8+ UAS
must be placed as shown on this image.
Make sure that it is placed conveniently
inside of the foam bolster. The foam bolster cover (not shown) on top of the payload should be used to secure the
payload when it is transported mounted
on the UAV in the Intel® Falcon™ 8+ UAV
case.
© 2017 Intel Corporation. All rights reserved 59
Page 60

USER MANUAL
1
2
3
1
1
1
3
INTEL® FALCON™ 8+ UAS
Figure 2.26: Packing Instructions for the Intel® Falcon™ 8+ UAS Cases (Continued)
Intel® Backpack
The backpack is the optimal solution to
transport the complete UAS over rough
terrain or on longer walks.
When placing the UAV into the backpack
always align the bottom two propellers
(in the image on the top, with the Intel®
Falcon™ 8+ UAV facing down) parallel to
the top of the backpack like shown in the
image. The other propellers are oriented
parallel to the motor rails.
1. Use the four big Velcro tapes to
secure the Intel® Falcon™ 8+ UAV
inside the backpack. They should be
very tight so that they “lift” the
system up, and away from the CTR.
2. At the bottom part, there is space for
the CTR. Before placing it inside of
the backpack make sure that the sun
shield is arranged as shown in the
image to protect the touchscreen
tablet and that you secure it with the
Velcro tape.
3. On the outside, there are two
separate pockets for the Intel®
Powerpack batteries.
Another large pocket is located on the lid
(not shown in the image). There is
enough space for items such as another
Intel® Powerpack battery, the power supply unit or a notebook and the shoulder
harness.
The images of the items above are just for illustration purpose and the actual item(s)
packed with your Intel® Falcon™ 8+ UAS may differ from the one(s) depicted here
depending on, for example, which payload you ordered.
© 2017 Intel Corporation. All rights reserved 60
Page 61

USER MANUAL
INTEL® FALCON™ 8+ UAS
2.8. SOFTWARE FEATURE PACKAGES
There are optional software feature packages available for the Intel® Falcon™ 8+ UAS.
They offer useful functions for specific applications.
There are two different licensing models for obtaining the software feature packages.
• One option is a perpetual software license that remains on the UAV. The
advantage of a perpetual license is that it remains on the UAV forever and can
be used with any payload.
• The other option is an annual software license. This is stored on the payload,
and the license terminates one year after the activation date if the subscription
is not renewed. The advantage of an annual license is that it can be used with
one payload on any UAV.
The available software feature packages can be purchased at any time and unlocked
remotely by your Intel® Falcon™ 8+ UAS reseller. The Intel® Falcon™ 8+ UAS does not
need to be sent back.
• When ordering a perpetual license, please provide the serial number of the UAV,
which can be found on top of the central unit and as well via the Status Display
(see “Perpetual Software Feature Packages” on page 63).
• When ordering an annual license, please provide the serial number of the
payload. (see “Annual Software Feature Packages” on page 63).
Please find detailed instructions on how to unlock software feature packages in
Chapter 2.8.1 Activating Software Feature Packages.
Table 2.8: Description Packages
FUNCTIONALITY DESCRIPTION
SURVEY PACKAGE
Fly and survey areas fully automated. You can plan complex
Flight planning
Quick survey
waypoint missions on your notebook with the flight planning
AscTec Navigator Software even before you go out in the field.
This function lets you generate an automated survey flight while
in the field (without notebook) within seconds. Set the ground
sample distance (GSD), the area to cover, and start the survey
flight.
INSPECTION PACKAGE
With the Cockpit Control application, you can create, load, mod-
WP+P
© 2017 Intel Corporation. All rights reserved 61
ify and save PATH projects and any related waypoints on the
touch screen tablet of the Intel® Cockpit Controller (CTR).
Page 62

USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 2.8: Description Packages (Continued)
Independent Camera Control (see “THE INDEPENDENT CAMERA
CONTROL (ICC)” on page 28). This function enables a second
operator to control the camera via a gamepad, which is con-
ICC
COI
nected to the CTR, while the pilot can fully concentrate on flying.
Recommended for inspection flights. Usually video goggles are
used so that the second operator has an independent video preview.
With the Circle of Interest (COI) it is possible to fly an automated
360° circle around an object and take photos at predefined positions. These photos can later be processed by 3D modeling software such as Agisoft PhotoScan to build a 3D model of the
object.
2.8.1. Activating Software Feature Packages
To purchase a software feature package, please contact your local Intel® Falcon™ 8+
UAS reseller. Once you have purchased your software feature package, you will receive
an email with your license key file "f8p_license.asc" which is required to activate the
software feature packages. It may come from Intel as an email attachment or from your
sales representative.
It may be in the form of a ZIP file. Please store this file on your computer, if necessary
unzip it and follow the step by step instructions below.
If you have questions regarding software feature packages or need assistance, please
contact your sales representative.
1. Take the USB stick from your Intel® Falcon™ 8+ UAV.
2. Plug it into your computer.
3. Format the USB stick (file system: FAT32, allocation unit size: 32 kilobytes).
4. Copy the “f8p_license.asc” file onto the USB stick.
5. Plug the USB stick into the Intel® Falcon™ 8+ UAV.
6. Switch ON the UAV.
7. After the initialization of the Intel® Falcon™ 8+ UAV is complete, wait 10 seconds.
Then switch OFF the UAV.
8. Remove the USB stick from the Intel® Falcon™ 8+ UAV.
9. Power on the UAS and check the activated software feature packages as described
in “Checking Activated Software Feature Packages” on page 63
10.Perform a test flight and try one function of every newly unlocked software feature
package.
11.Check the Main Screen of the Status Display, making sure there are no messages
displayed regarding missing packages.
© 2017 Intel Corporation. All rights reserved 62
Page 63

USER MANUAL
INTEL® FALCON™ 8+ UAS
2.8.2. Checking Activated Software Feature Packages
In the following section, you will find the instructions on how to determine which
software feature packages are activated on your system.
Perpetual Software Feature Packages
To check which perpetual software feature packages are activated on your system, turn
ON the Intel® Falcon™ 8+ UAV, the touchscreen tablet and the CTR and confirm the Link
Loss Procedure.
1. Push ENT to open the menu on the Status Display.
2. Use the arrow RIGHT button to navigate to Settings.
3. Push ENT to open the Settings menu.
4. Use the arrow RIGHT button to navigate to Falcon Info and confirm by pushing ENT.
The next screen shows the serial number of the UAV, the installed firmware versions,
and the activated perpetual packages.
Figure 2.27: Show Activated Perpetual License
Perpetual licenses:
In the example, there are two perpetual software feature
packages activated:
• Survey = Survey package
• Inspec = Inspection package
Annual Software Feature Packages
To check which annual software feature packages are activated on your system, turn
ON the Intel® Falcon™ 8+ UAV, the touchscreen tablet and the CTR and confirm the Link
Loss Procedure.
1. Push ENT to open the menu on the Status Display.
2. Use the arrow RIGHT button to navigate to Settings.
3. Push ENT to open the Settings menu.
4. Use the arrow RIGHT button to navigate to Payload Info and confirm by
pushing ENT.
The next screen shows the serial number of the payload, the type of the camera used,
and the activated annual software feature packages with the respective expiration date.
© 2017 Intel Corporation. All rights reserved 63
Page 64

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 2.28: Show activated annual license
Annual licenses:
In the example, there are two annual software feature
packages with the expiration day (Year/Month/Day) activated:
• Inspec = Inspection package
• Survey = Survey package
Only licenses/packages with an expiration date shown are
valid.
2.9. INTEL® FALCON™ 8+ UAV FLIGHT LOGS
The Intel® Falcon™ 8+ UAV is constantly logging all flight controller data onto two
different storage devices: an SD card inserted in the back of the Intel® Falcon™ 8+ UAV
(User SD card) and an internal SD card, which can only be accessed by opening the
canopy of the central unit (Internal SD card).
The data logged onto the different devices may differ, which is why in support cases we
ask you to please always send logs from the User SD card. In rare occasions, we might
also ask for the logs from the Internal SD card. In such a case, we will provide detailed
instructions on how to access the Internal SD card.
The file structure on all storage devices are identical.
Logs are always stored in a directory called ASCTEC. Every time the Intel® Falcon™ 8+
UAV is switched on, a new directory with a subsequent number will be created inside
the ASCTEC directory. All files always have the same creation date and time, but if
available, GPS time will be stored in the log. One log directory always contains four
files: ASCHP.LOG, ASCTEC.IFO, ASCTEC.LOG, FLIGHT.KML.
None of these files can be accessed directly, but by using the AscTec Navigator
Software, it is possible to get a map view of the flight, or export a flight track as .KML or
.GPX file. AscTec Navigator Software can be downloaded from the download area
http://intel.com/FalconDownloads (see “Intel® Falcon™ 8+ UAS Firmware Updates” on
page 165). The corresponding manual can be found here: http://intel.com/
FalconManual.
In the AscTec Navigator Software, the Flightbook gives a chronological overview of all
flights stored on the SD cards (see following):
© 2017 Intel Corporation. All rights reserved 64
Page 65

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 2.29: AscTec Navigator Software Flightbook
The map view shows the flight path and photo trigger positions, the list view underneath the map shows: the log ID (subsequent number), start time and date, the GPS
position (WGS84), the number of image tags (triggers) during the flight, and the flight
time. The buttons above the map view allow exporting a single flight as KML or GPX,
or an overview of all flights into a CSV file. It is also possible to export a log file as a
ZIP file to be able to send it by email.
Please see the chapter 5. Flightbook in the AscTec Navigator Software Manual for
further details. The manual can be found here: http://intel.com/FalconManual.
It might happen that the Intel® Falcon™ 8+ UAV cannot access a logging storage device.
Usually, it is caused by a mechanical connection issue or a corrupted file system on the
storage device. If the Intel® Falcon™ 8+ UAV cannot access a storage device, a
respective warning will be displayed (see following).
© 2017 Intel Corporation. All rights reserved 65
Page 66

USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 2.9: Possible Warning
CAUSE VISUAL SIGNAL POSSIBLE FIX
Take out the User SD card, make a
backup copy and format it (file system: FAT32, allocation unit size: 32
kilobytes). After reinserting the SD
card into the Intel® Falcon™ 8+ UAV, it
should again be accessible.
If no backup copy is needed, the User
SD card can also be formatted
directly by the UAV. To do so:
1. Push ENT to open the menu on
the Status Display.
2. Push the arrow RIGHT button to
navigate to Settings.
3. Push ENT and use the arrow
RIGHT button to navigate to
Format User SD.
4. Push ENT to confirm.
The shown screen appears:
User SD card
cannot be
accessed.
<- Check Msg appears
in the status line of the Status Display. Push the
related arrow LEFT button
on the Intel® Cockpit Controller (CTR) until the Error
Message Screen is shown.
No user SD card will
be shown.
5. Push ENT to confirm the
formatting of the User SD card.
The process starts, a progress
bar is shown.
Pushing ESC cancels the
function and brings you back
to the Main Screen.
When the formatting of the SD card is
finished, the Intel® Falcon™ 8+ UAV
will immediately create a new log file
and start logging again.
© 2017 Intel Corporation. All rights reserved 66
Page 67

USER MANUAL
INTEL® FALCON™ 8+ UAS
Table 2.9: Possible Warning (Continued)
<- Check Msg appears
in the status line of the Sta-
Internal SD
card cannot
be accessed.
tus Display. Push the
related arrow LEFT button
on the CTR until the Error
Message Screen is shown.
No internal SD card
will be shown.
The Intel® Falcon™ 8+ UAV can fly without any active logging device. It is the
Note
The User SD card will not be deleted or formatted by the flight system. We recommend
to regularly make backup copies of these storage devices and reformat them
afterwards. Especially when working on complex projects, during which the logs are
needed for geo-referencing, it is helpful to start with clean storage media.
responsibility of the user to make sure that all flights can be properly logged if it
is a legal requirement in the country where the system is used.
Switch OFF the Intel® Falcon™ 8+
UAV. Wait 10 seconds and switch it
ON again. During boot up, the internal
SD card will be formatted and it
should again be accessible. If this
does not help, contact the Intel support team to get instructions on how
to proceed.
© 2017 Intel Corporation. All rights reserved 67
Page 68

USER MANUAL
1
2
2
INTEL® FALCON™ 8+ UAS
3. OPERATING THE SYSTEM
In this chapter, you will find a description how to operate the Intel® Falcon™ 8+ UAS.
3.1. PREPARING THE INTEL® FALCON™ 8+ UAV
The following section shows and describes how to prepare the Intel® Falcon™ 8+ UAV
for flight.
When using the Intel® Falcon™ 8+ system for the first time, some additional steps are
required, which only need to be performed once. It might be necessary to repeat them
only in rare exceptions. In detail, these steps are:
• Establish the initial connection between Intel® Falcon™ 8+ UAV and Intel®
Cockpit Controller (CTR) (see “Establishing A Connection Between The CTR And
The UAV” on page 172).
• Set the system date and time on the touchscreen tablet of the CTR (see “” on
page 71).
• Perform a payload and compass calibration with every new payload (see
“Payload and Compass Calibration” on page 34).
• Visit https://intel.com/FalconDownloads and install the latest firmware on the
system (see “Intel® Falcon™ 8+ UAS Firmware Updates” on page 165). Regularly
check the website for updates.
Always strictly follow the instructions in “PRE-FLIGHT CHECK” on page 13 to make sure
that the UAV is in perfect condition and setup for flight.
Figure 3.1: Preparing the UAV
1. Slide the batteries with the colored (“Intel”)
label facing upwards (1) into the battery
compartment. Slide them all the way in until
they are stopped and flush with the ends of
the slots. Check that each battery is locked
by its retaining clip (2).
© 2017 Intel Corporation. All rights reserved 68
Page 69

USER MANUAL
1
INTEL® FALCON™ 8+ UAS
CAUTION: THE INTEL® FALCON™ 8+ UAV MUST ALWAYS BE FLOWN
WITH TWO BATTERIES INSERTED.
Figure 3.2: Preparing the UAV (Continued)
2. Switch on the camera and remove the
lens cap. The image shows the Sony
Alpha 7R as an example.
Please note that the ON/OFF switch on
each payload is different.
3. Press the power button (1) for
approximately 2 seconds until you
hear a short beep. After
approximately 3 seconds the LEDs on
both sides of the Intel® Falcon™ 8+
UAV will be lit and you will hear the
internal fan running. The UAV is
initialized when the camera mount
(gimbal) starts to automatically
correct movements of the UAV, which
also can be heard. It requires
approximately 15 seconds to
completely power the UAV ON, and is
indicated by a triple beep from the
Intel® Falcon™ 8+ UAV
The AscTec Trinity Control Unit allows you to start the UAV even from a moving platform, for example a boat.
The UAS is ready for take-off as soon as the initialization has successfully finished
and the link to the CTR has been established.
© 2017 Intel Corporation. All rights reserved 69
Page 70

USER MANUAL
1
1
1
INTEL® FALCON™ 8+ UAS
3.2. PREPARING THE INTEL® COCKPIT CONTROLLER (CTR)
The following section describes how to prepare the CTR.
Figure 3.3: Preparing the CTR
1. Open the lid of the battery compartment (1).
It is located at the bottom of the lower lefthand side of the CTR. The flap of the
compartment is equipped with a magnetic
closure.
The Intel® Powerpack Battery provides power to
the CTR as well as the touchscreen tablet.
2. Slide the battery with the colored “Intel”
label (1) facing downwards into the battery
compartment. Slide it all the way in until it is
stopped and flush with the end of the slot.
The Intel® Powerpack battery provides
power to the CTR as well as the touchscreen
tablet (the battery is the same for the Intel®
Falcon™ 8+; see “THE INTEL® POWERPACK
BATTERIES” on page 46)
3. Install the shoulder harness by connecting
the carabiners of the harness to the first
eyelet of the integrated holder (red circle in
this image) on each side of the CTR.
4. Switch on the touchscreen tablet by pushing
the power button (1) on the top edge, right
side for approximately 2 seconds until a
short vibration is felt.
© 2017 Intel Corporation. All rights reserved 70
Page 71

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.3: Preparing the CTR (Continued)
5. Unfold the antenna panel on the backside of
the touchscreen tablet. The antenna panel
must always be pointed at the UAV to ensure
best possible transmission quality.
6. Switch on the CTR by pushing and holding
the POWER button for a few seconds until a
short vibration is felt.
WARNING DO NOT POWER ON OR OPERATE THE CTR WITHOUT FULLY
EXTENDING THE ANTENNA PANEL
CAUTION: WHEN SWITCHING ON THE CTR, THE CENTER POSITION
OF THE TWO CONTROL STICKS IS CALIBRATED. MAKE SURE TO NOT
MOVE THEM WHILE THE CTR IS POWERING UP. OTHERWISE THERE
WILL BE AN ERROR MESSAGE “JOYSTICK ERROR” IN THE STATUS
DISPLAY AND IN THE NOTIFICATION AREA OF THE TOUCHSCREEN
TABLET AND THE MOTORS CANNOT BE STARTED. IF THIS OCCURS,
SWITCH OFF THE CTR AND SWITCH IT ON AGAIN WITHOUT
TOUCHING THE CONTROL STICKS.
© 2017 Intel Corporation. All rights reserved 71
Page 72

USER MANUAL
INTEL® FALCON™ 8+ UAS
3.3. THE TOUCHSCREEN TABLET
The Intel® based Windows® touchscreen tablet is directly mounted on the remote
control unit of the Intel® Cockpit Controller (CTR) and cannot be removed. It serves as
video monitor, displays general flight information and telemetry data, and allows the
user to activate automated functions. The battery of the CTR provides power to the
touchscreen tablet as well.
To switch the touchscreen tablet ON or OFF, you must push the button located at the
top edge of the touchscreen tablet on the right side of the frame for a few seconds (see
“Preparing the CTR” on page 70).
After switching the touchscreen tablet ON, you will initially see the blue welcome
screen, which, after a few seconds, will change to display the Preflight Checklist where
the most important safety aspects are listed.
When starting the touchscreen tablet for the first time, before the Preflight Checklist
you will see the window for time and date settings (see following figure).
Figure 3.4: The Cockpit Control Application
Time and Date Setting
When starting the touchscreen tablet for
the first time a window for time and date
settings will appear before the
Preflight Checklist.
If necessary, you can make changes here
and confirm by tapping on the APPLY
SETTINGS
button. If you tap on the
SKIP SETTINGS button this screen will
be shown every time you start the touchscreen tablet.
Every time after installing new updates,
this window will be displayed again.
When tapping on the
button a warning is shown.
Tapping on the
you back to time and date settings.
Tapping on the OK button leads to the
CANCEL button brings
SKIP SETTINGS
Preflight Checklist (see below).
© 2017 Intel Corporation. All rights reserved 72
Page 73

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.4: The Cockpit Control Application (Continued)
Preflight Checklist
Make sure to comply with all aspects of
the Preflight Checklist. Check all 3 topics:
Check Permissions, Check UAV and
Check Environment, and tap on OK
before take-off. You may tap on SKIP,
but it is recommended you follow the
checklist and tap on OK.
After tapping on OK or SKIP, the main
screen of the application is opened (see
next picture).
Now you can:
• use the touchscreen as a preview
video monitor;
• load, modify and save PATH
projects and the related
waypoints (optional);
• load and fly AscTec Navigator
Software projects
© 2017 Intel Corporation. All rights reserved 73
Page 74

USER MANUAL
1
2
3
4
5
INTEL® FALCON™ 8+ UAS
Figure 3.4: The Cockpit Control Application (Continued)
Main Screen
The center of the screen shows the preview video of the mounted payload. All symbols and icons shown here are created by the camera, and do not have any touch
functionality. In the above example, the Sony A7R is the payload used. Please refer to
“Sony Alpha 7R Full Frame Camera” on page 37, and the Sony camera manual for
further information. The Sony camera manual can be accessed online on the Sony
support website: https://esupport.sony.com/US/p/modelhome.pl?mdl=ILCE7R&LOC=3#/manuals
In the notification area at the top of this window, general flight information is given.
In the left corner under GPS (1), the quality of the GPS signal can be seen, indicated
by 1 to 5 bars.
Next to the right of the window, you find the place for system messages (2). If every-
thing is fine, SYSTEM OK is shown in a green bar. In case there are warnings, the
field will turn red and display the respective warning. For possible warnings see
“Error warnings and messages” below.
Next to the system messages, you find another green bar which indicates the remaining battery capacity of the UAV as a percentage (3) followed by the elapsed flight
time (4) and the selected flight mode (GPS) (5).
© 2017 Intel Corporation. All rights reserved 74
Page 75

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.4: The Cockpit Control Application (Continued)
Main Screen (continued)
Tapping on this button, located in the top right corner, displays the
preview video in full screen mode (the notification area on top is hidden)
and the button changes into the following.
Tapping on this button exits the full screen mode, and the notification
area on top is shown again.
In the lower right corner, you find more flight information, which refers to
the UAV: Orientation (shown graphically), Height and Distance from
the take-off point. Tapping on that flight information field will toggle the
view between the video preview and a map view (in case a map has been
loaded from an AscTec Navigator project). Learn more about the AscTec
Navigator in the at http://intel.com/FalconManual. In the top left corner
(under GPS) the buttons for three different functions are found:
Tapping on the PATH button opens the PATH function where you can
store and edit individual waypoints and paths (see “PATH Projects” on
page 76). This function is an optional part of the Inspection Package (see
“SOFTWARE FEATURE PACKAGES” on page 61).
Tapping on the NAVIGATOR button opens the ASCTEC NAVIGATOR
PROJECT
projects (see “AscTec Navigator Software Projects” on page 84).
Tapping on this button opens a window which gives you information
about the software (version, available updates, etc.). Tapping on the
button again closes the window.
window, where you can load and fly existing Navigator
© 2017 Intel Corporation. All rights reserved 75
Page 76

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.4: The Cockpit Control Application (Continued)
Error Messages and Warnings
If SYSTEM ERROR. CHECK STATUS
DISPLAY!
area on top of the touchscreen tablet,
you must check the Status Display on the
CTR.
If there is only one warning, it will be fully
displayed in the notification area.
If more than one warning is present, a
popup & drop-down menu is shown.
Tapping the drop-down button will display all warnings. The related text is
shown:
• in CAPITALS if an error occured
which has to be checked via the
Status Display,
is shown in the notification
• small letters in the drop-down
menu.
If the warning is critical and can lead to
an imminent crash, the text is shown in a
red bar, if it is a warning message it is
shown in yellow bar.
The following warnings are only shown
on the touchscreen tablet:
Tablet battery weak! = The bat-
tery of the touchscreen tablet is low.
Tablet battery empty! =The bat-
tery of the touchscreen tablet is empty.
For further details of all possible warn-
ings see “WARNINGS” on page 119
3.3.1. PATH Projects
This function is an optional part of the Inspection Package (see “SOFTWARE FEATURE
PACKAGES” on page 61).
With the Cockpit Control application, you can create, load, modify and save PATH
projects and any related waypoints. To use this functionality a USB stick (FAT 32
formatted) must be inserted into one of the USB ports, located at the back of the CTR.
© 2017 Intel Corporation. All rights reserved 76
Page 77

USER MANUAL
3
INTEL® FALCON™ 8+ UAS
It is possible to store and edit individual waypoints (GPS position, height, camera
heading, and camera pitch angle) onto a USB stick, which is inserted into the CTR. A
waypoint can later be recalled, and the Intel® Falcon™ 8+ UAV will fly to this position
and take an image with the stored heading and pitch angle. Camera settings such as
shooting mode, or zoom, cannot be stored, and must be set manually before flight.
Multiple waypoints can be combined to create a path.
Figure 3.5: The Cockpit Control Application and PATH Projects
PATH PROJECT
Tapping on the PATH button in the main screen opens the window PATH PROJECT.
Here you can create, save, and load individual Paths projects (including the GPS position, height, camera heading, and camera pitch angle).
Executing the PATH function via the touchscreen tablet:
Tapping on New Project opens the window PATH PROJECT - NEW with an
integrated keyboard (see below)
Tapping on Load Project opens a window in which you can load an already
stored PATH project from a USB stick, which is inserted into the CTR.
Save project: This button becomes active after creating a new, or modifying, a
new or existing project. Tap on this button to save the actual PATH project to the
inserted USB stick.
Close project: Tap here to close the actual PATH project.
© 2017 Intel Corporation. All rights reserved 77
Page 78

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.5: The Cockpit Control Application and PATH Projects (Continued)
PATH PROJECT - NEW
Preparing and planning a new mission,
and generating a new project, is best
done before launching the UAV, when
you are still on the ground. Tapping on
New Project in the PATH PROJECT
window (see above) opens the window
PATH PROJECT - NEW. In this win-
dow, you find a keyboard at the bottom.
With the help of this keyboard you may
give a name to the new project by tapping on the related keys. Under the
Name field the Description field is
seen, where you can describe the project
in more details.
Tapping on this button hides the
keyboard. The keyboard can also be
hidden by tapping anywhere in the
empty area above.
After hiding the keyboard, you first
must tap on the button in the lower
right corner.
Tapping on this button opens a window with a summary of the data of
your new project, and some instructions how to use this function.
If you did not already insert a USB
stick, you will see a corresponding
warning in red. You can now insert
the USB stick.
Tap on this button if you want to
make changes. You return to the
input window, where you can make
your changes.
If you want to accept the data of
your project, tap on the check mark
in the lower right corner.
Tapping on the check mark saves
your new project.
When creating a new project, it is stored
in an automatically generated directory
<USB stick>:\CockpitConrol\projects.
© 2017 Intel Corporation. All rights reserved 78
Page 79

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.5: The Cockpit Control Application and PATH Projects (Continued)
New Project / Record Mode
This functionality allows the pilot to add/generate new waypoints during flight, by
using the camera trigger (left control stick S1).
The so named teach-in mode, is activated by using the record button. Waypoints created accidentally can immediately be deleted by tapping the delete button.
The teach-in mode is stopped by tapping on the stop button.
After finishing recording, an automatic flight to all stored waypoints can be executed
by using the play icon.
Projects can be saved to the inserted USB stick, and can be reloaded at any time.
After entering the data of your new project, and tapping on the check mark (see
above), you can start your new project.
1. Launch the UAV.
2. Climb to a minimum of 10 m height.
3. Tap on the record button to activate the record mode.
4. Fly to the first desired waypoint, and make sure the camera points towards the
desired spot.
5. Push the camera trigger (left control stick S1) to store this and all following
desired waypoints in your project.
Waypoints created accidentally can immediately be deleted by tapping the delete
button.
6. To stop recording at the end of your path, tap on the stop button.
7. To save your new PATH project tap on the PATH button in the upper left
corner. This opens the PATH PROJECT window again.
8. Tap on the Save Project button.
The actual state of your project will be saved on the inserted USB stick.
© 2017 Intel Corporation. All rights reserved 79
Page 80

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.5: The Cockpit Control Application and PATH Projects (Continued)
Loading an Existing Project
Tapping on Load Project in the PATH
PROJECT window (see above), opens the
window PATH PROJECT - LOAD. In this
window, you can select/ load an already
stored project, with recorded waypoints,
to be edited and/or flown, from an USB
stick.
The USB stick must be inserted at the
back of the CTR.
Tapping on the project name, in the left
side window, highlights it and shows the
related data.
Tapping on the check mark, in the
lower right corner opens the
selected project (see next image).
Tapping on this button in the lower
left corner brings you back to the
last screen.
In the lower right corner, the UAV is indicated by a yellow arrowhead with its
actual orientation, Height and
Distance if there is a connection
between the UAV and the CTR.
© 2017 Intel Corporation. All rights reserved 80
Page 81

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.5: The Cockpit Control Application and PATH Projects (Continued)
Flying an Existing Project
After loading an existing project, you can
fly (and/or modify) the path and the
related waypoints.
Tapping on the play button causes
the (already launched) UAV to fly
the path, and to take pictures at
the stored waypoints.
After tapping on the play button, it
changes into the pause button as shown
below.
Tapping on this button starts the
record mode (teach-in mode).
Every time you trigger an additional picture, with the left control
stick, you generate a new waypoint
and any related data is stored (see
above).
Tapping on this button zooms your
project (all waypoints) back to fit
into the window size; e.g. if you
zoomed in or out by pinching and/
or spreading.
Tapping on this button (only displayed during flight) sets the mission to stand-by.
Tapping on this button stops the
mission.
This icon shows the actual home
position of the UAV.
Completed waypoints will be marked
green in the preview of the touchscreen
tablet.
CAUTION: WHEN FLYING A PATH PROJECT, THE UAV FLIES A
DIRECT STRAIGHT TRAJECTORY BETWEEN THE WAYPOINTS! KEEP
THIS IN MIND WHEN TEACH-IN!
© 2017 Intel Corporation. All rights reserved 81
Page 82

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.6: The Cockpit Control Application and PATH Projects (Continued)
Modifying an Existing Project
As soon as you selected one or more waypoints for modification by tapping on them,
the buttons at the bottom, and the related properties on the right side of the screen,
are activated accordingly. For easier selection, it is possible to zoom in and out by
pinching and spreading the screen. To move the map/project sector drag to alter the
view as needed. Tapping anywhere in the map area without selecting a waypoint will
de-select all previously selected waypoints.
If only one waypoint is selected, the following described functions can be executed
by tapping the related button.
If multiple waypoints are selected, only the “delete”, “move to right” and “move to
left” buttons are active.
© 2017 Intel Corporation. All rights reserved 82
Page 83

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.6: The Cockpit Control Application and PATH Projects (Continued)
(Continued)
Modifying an Existing Project (Continued)
Tapping on this button selects the waypoint next to the actual selected waypoint, against the direction of the teach-in order.
Tapping on this button selects the waypoint next to the actual selected waypoint, in direction of the teach-in order.
Tapping on this button sets the selected waypoint as the new start point.
Tapping on this button sets the selected waypoint as the new end-point.
Tapping on the “delete” button deletes the selected waypoint(s).
Tapping on the “move to left” button shows the notification “Choose the waypoint to follow the selected waypoints”. After tapping on the corresponding
waypoint, the direction order of the selected waypoints is changed against
the teach-in order.
Tapping on the “move to right” button shows the notification: “Choose the
waypoint to precede the selected waypoints”. After tapping on the corresponding waypoint, the direction order of the selected waypoints is changed
in direction of the teach-in order.
On the right side of the window you see the total number of waypoints, and the
actual selected number of waypoints, contained within the selected project.
If only one waypoint is selected, the values of the related properties of this waypoint
are displayed below.
Latitude and Longitude show the
related coordinates of the (one) selected
point.
Height shows the height of the
selected point.
Yaw shows the heading at which the
waypoint was stored.
Camera Pitch shows the actual
stored pitch angle of the camera.
To change these properties, select the
one you want to change to highlight it.
The value of the selected property can
be changed by tapping on the buttons
depicted below.
© 2017 Intel Corporation. All rights reserved 83
The size of a step can be changed by tapping on the number right to it. This
opens a number keypad. With help of the
keypad you can enter a new number.
The number behind
shows how often you tapped on the
related button (cumulated number of
steps).
Tapping on this button once, subtracts the value mentioned at Stepsize.
Tapping on this button once, adds
the value mentioned at Stepsize.
Change Amount
Page 84

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.6: The Cockpit Control Application and PATH Projects (Continued)
(Continued)
Save PATH Project
After modifying one or more waypoints
you can save the modifications by tap-
ping on the PATH button (top left corner). The window PATH PROJECT is
opened again (shown to the left). Tap-
ping on Save Project saves the mod-
ifications to the project.
3.3.2. AscTec Navigator Software Projects
With the help of the Cockpit Control application you can load and fly survey projects
created in the AscTec Navigator Software. To do this, export the existing project from
the AscTec Navigator Software by clicking in the AscTec Navigator Software in the Pull-
down-Menu File on Export Cockpit project. A file with the extension .ANP
will be created, which you must store onto a USB stick. Further information on the
AscTec Navigator Software can be found here: http://wiki.asctec.de/display/APL/
AscTec+Navigator+Manual
Insert the USB stick, containing the exported .ANP file, into a USB port of the CTR and
tap on the NAVIGATOR button in the main screen of the Cockpit Control application
(see “The Cockpit Control Application” on page 72).
AscTec Navigator Software missions can only be executed on the CTR. It is not
Note
Things to consider before flying a survey mission:
• During the complete mission, the pilot must always be able to take over control.
• The flight system must always remain within line of sight.
• A good GPS signal needs to be available in the complete area in which the UAV
• The space in which the Intel® Falcon™ 8+ UAV will be flying, must be free of
possible to modify projects. If necessary, please open the project in the AscTec
Navigator Software, make the modifications, and then export it to the CTR with
help of the USB stick.
Commands given on the CTR will override waypoint flight commands and stop
the flight immediately.
will fly in (> 75% = 4 bars).
obstacles.
© 2017 Intel Corporation. All rights reserved 84
Page 85

USER MANUAL
INTEL® FALCON™ 8+ UAS
• Always plan missions with sufficient distance from obstacles and people. There
will always be positioning errors of your UAV due to GPS drift and external
influences like wind. In addition, the map file may not be absolutely accurate.
• In windy conditions, the UAV may not always fly in a straight line between two
waypoints. Plan the mission accordingly.
• Always plan missions with enough height above ground. The UAV may
temporarily lose as much as 5 meters of height when flying between waypoints
(due to variations in barometric air pressure - drift in sensor values). Due to
these variations, it is recommended to plan missions at a height of at least 15
meters above the highest object.
Figure 3.7: The Cockpit Control Application And AscTec Navigator Software Projects
ASCTEC NAVIGATOR PROJECT
Tapping on the NAVIGATOR button in the main
screen window of the Cockpit Control application (see “The Cockpit Control Application” on
page 72) opens the window ASCTEC
NAVIGATOR PROJECT
can load an exported AscTec Navigator Software project from an inserted USB stick.
. In this window, you
ASCTEC NAVIGATOR PROJECT - LOAD
Tapping on Load Project in the ASCTEC
NAVIGATOR PROJECT
opens the window ASCTEC NAVIGATOR
PROJECT - LOAD
the desired project by tapping on it.
The previously stored waypoint path, and the
map view of the AscTec Navigator Software, will
be loaded.
Tapping on the check mark in the lower
right corner under the Map Preview,
transfers the exported project onto the
touchscreen tablet.
The window with additional flight information,
in the lower right corner changes to video preview
window (see above)
. In this window, you select
© 2017 Intel Corporation. All rights reserved 85
Page 86

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.7: The Cockpit Control Application And AscTec Navigator Software Projects
Fly an AscTec Navigator Software Project
After loading an AscTec Navigator Software
project you can fly the mission. First you must
take-off and climb to a minimum of 10 m
height.
After reaching the minimum height, and
tapping on the shown play button, the
UAV starts the mission and flies to the
next waypoint on the path. After tapping
on the black play button, it changes into
the blue pause button shown below.
After tapping on the play button, during flight,
you see the following buttons on the right side:
Tapping on this button sets the mission
to stand-by.
Tapping on the stop button stops the
mission. The UAV stops and remains at
the actual height and position.
For further information on the AscTec Navigator
Software, see the AscTec Navigator Software
Manual which can be found here: http://
wiki.asctec.de/display/APL/AscTec+Navigator+Manual
Starting and Flying an AscTec Navigator Software Mission
1. When you are ready, take-off and climb to the approximate height and position of
the first waypoint.
2. Tap on the play button (see before).
WARNING OBJECTS BETWEEN THE STARTING POSITION AND THE FIRST
OR INTERMEDIATE WAYPOINT AND OBJECTS BETWEEN
WAYPOINTS MUST BE CONSIDERED! THE UAV WILL
APPROACH WAYPOINTS OF THE MATRIX IN A STRAIGHT
LINE, ASCENDING (OR DESCENDING) CONTINUOUSLY BY
ITSELF IF NECESSARY!
3. Intel® Falcon™ 8+ UAV starts to fly the mission.
4. Completed waypoints will be marked green on the preview of the touchscreen
tablet.
© 2017 Intel Corporation. All rights reserved 86
Page 87

USER MANUAL
INTEL® FALCON™ 8+ UAS
A green waypoint indicates that the Intel® Falcon™ 8+ UAV successfully
Note
5. When all waypoints are done, the UAV will stop at the last waypoint at the actual
height.
6. The UAV can now be landed to change batteries, and be prepared for the next
mission.
Interrupting A Mission
A planned flight may be interrupted at any time, for example to change the batteries
during larger survey missions. There are three ways to interrupt a flight manually:
• Tapping on the pause button (see above): the upload of new waypoints will be
stopped, and the UAV will stop and hover in the air, until you tap on the (blue)
play button again.
• Tapping on the stop button (see above): the upload of new waypoints will be
stopped, and the UAV will stop and hover in the air.
passed the waypoint, sent a trigger command to the camera, and a tag
was created in the log. It does not necessarily mean that the camera
successfully triggered, and stored the image.
• Taking over manually, and giving the UAV a command from the CTR. This will
stop the flight of the UAV immediately, as well as the flight mission.
Resuming A Mission
If a survey flight was interrupted, it can be resumed at the position where is was
interrupted.
If you interrupted the mission by tapping on the pause button, resuming a mission is
easily done:
1. Launch the UAV up to the minimum height of 10 m.
2. Fly close to the waypoint from which the flight shall proceed.
3. Tap on the play button.
The UAV resumes the mission automatically by heading for the next waypoint.
If you had to abort a mission by tapping on the stop button, you should note the last
waypoint passed when you tapped on the stop button. The number of this waypoint is
shown on the right side of the map area on the touchscreen tablet. The number of
already passed waypoints in comparison to the total number is shown right to
passed: located at the right side of the screen.
To resume the mission, you must:
1. Tap on the waypoint (to select it on the touchscreen tablet) from which the flight
will proceed.
2. Tap on the button to declare the selected waypoint as the new start point.
3. Launch the UAV and climb to a minimum height of 10 m.
© 2017 Intel Corporation. All rights reserved 87
Page 88

USER MANUAL
INTEL® FALCON™ 8+ UAS
4. Make sure that there are no obstacles in the direct trajectory between UAV, and the
new start point.
5. Tap on the play button.
The mission will be continued from the waypoint that was selected as the new start
point.
3.4. AUTOMATED START-UP CHECKS
Approximately 15 seconds after switching on the UAV a triple beep from the autopilot
electronics signalizes the end of the initialization phase.
During the initialization, the system performs an automated start-up check:
• Sensors are checked for functionality.
• Sensor data is checked for plausibility.
• All three flight controller units are checked.
• The “Black Box” (flight logger) SD card is checked.
• The current magnetic field is compared with the expected magnetic field.
Irregularities that might affect the flight behavior are reported by a corresponding error
notification on the Status Display (for detailed descriptions of possible error messages,
see “WARNINGS” on page 119). In case of an error, please try to start the system again
at a different location. If the error persists, please contact your local support
representative.
3.4.1. Magnetic Field Warning
In flight, the Intel® Falcon™ 8+ UAV uses algorithms to detect possible disturbances of
the compass sensors. If there are discrepancies between the magnetometer output and
the expected orientation, the UAV's heading is estimated using the other available IMU
(Inertial Measurement Unit) sensors. This technology enhances the robustness of the
UAV against external disturbances of the magnetic field.
© 2017 Intel Corporation. All rights reserved 88
Page 89

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.8: Magnetic Field Warning
Since the IMU sensors (like accelerometers) are
needed to estimate the heading, the compass esti-
mation does not work if the UAV is standing still
on the ground. During start-up, the current mag-
netic field is com-pared to the expected magnetic
field. If there is a discrepancy, there will be an uninterrupted acoustic signal. The Status Display will
display the shown warning.
If this warning occurs, never take off from that
spot in GPS-Mode! It might lead to unexpected
positional changes of the UAV.
The warning can be canceled by pushing the ENT
button of the Status Display on the Intel® Cockpit
Controller (CTR).
IMPORTANT:
As long as the Intel® Falcon™ 8+ UAV remains
switched on, the canceled magnetic field warning
will not be presented again. So, if the Intel® Falcon™ 8+ UAV is moved to a different location
while switched on, there will be no warning, even
if there is a magnetic disturbance present.
Usually disturbances on the ground come from underground lines and can quickly be
resolved by switching off the Intel® Falcon™ 8+ UAS. Chose a different starting position,
switch the UAS on again and check if the magnetic field warning is not shown again. In
many situations, the disturbances are limited to small areas. If this is not possible, you
can:
1. Switch to Height-Mode and take off in Height-Mode to avoid any position
corrections by the system, which might occur unexpectedly in GPS-Mode.
2. Fly to open space and keep Height-Mode activated for at least 20 seconds (it will
help the estimation algorithms to do some movements forward, backward, left and
right).
3. Switch to GPS-Mode in open space. The magnetic disturbance will then be at a safe
distance and the estimation algorithms will be active.
4. Always be prepared to switch back to Height-Mode anytime.
For more information about the different flight modes see “FLIGHT MODES” on
page 93
© 2017 Intel Corporation. All rights reserved 89
Page 90

USER MANUAL
INTEL® FALCON™ 8+ UAS
3.5. LINK LOSS PROCEDURE
When the UAS has successfully initialized, an appropriate Link Loss Procedure must be
selected each time the UAS is switched ON.
The Link Loss Procedure of the Intel® Falcon™ 8+ UAV is automatically activated when
there is no data link connection between the Intel® Cockpit Controller (CTR) and the
UAV. The UAV has a fully redundant data link, meaning that there are two independent
transmitter / receiver connections. If only one of the data link connections is
interrupted, the pilot still has complete control over the UAV. The warning LINK
WEAK!
longer be possible to control the UAV from the CTR. The warning LINK LOST! will be
displayed and the Link Loss Procedure is activated. This can occur if the UAV is flown
too far from the CTR and/or the antenna panel orientation is not ideal. External
influences like shadowing (see “Shadowing” on page 97) or other networks (e.g. WiFi)
can also disturb the data link.
There are three different Link Loss Procedures available. One of them must be chosen
deliberately each time the UAS is switched on. Every flight may require a different
procedure. Therefore, please chose the procedure carefully considering the current
mission.
will be displayed on the Status Display. Only if both links are lost, it will no
With the RIGHT/LEFT buttons you switch between the three procedures. By pushing
ENT, you select the procedure shown on the screen of the Status Display.
Figure 3.9: The Link Loss Procedures
ComeHome Straight
In case the connection between the CTR and the
UAV gets lost (if it is higher than 20 m above the
take-off height) the UAV will stop at its current
position and fly back to the home position
(where the motors were started) at its current
height.
If the UAV is lower than 20 m at the time the
connection is lost, it will first ascend to approximately 20 m above take-off height and then fly
back to the home position. Once the UAV has
reached the spot above the home position, it
will descend at 1.5 m/s until it lands.
© 2017 Intel Corporation. All rights reserved 90
Page 91

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.9: The Link Loss Procedures (Continued)
ComeHome High
In case the connection between CTR and UAV
gets lost, the UAV will stop at its current position
and ascend. After arriving at the maximum altitude, that was reached during this flight, it will
fly back to the home position and descend with
1.5 m/s until it lands.
WARNING IF THE BATTERY IS LOW AT THE END OF A FLIGHT, THE
EXTRA POWER NEEDED FOR THE ASCENT COULD DEPLETE
THE BATTERY AND LEAD TO A CRITICAL SITUATION.
Figure 3.10: The Link Loss Procedures (Continued)
Direct Landing
In case the connection between CTR and UAV
gets lost, the UAV will stop and start a controlled
descend at 1.5 m/s at its current position until it
lands. If no GPS signal is available, the UAV will
always use Direct Landing.
Please note that in a situation without GPS signal, the UAV will drift with the wind while
descending.
© 2017 Intel Corporation. All rights reserved 91
Page 92

USER MANUAL
INTEL® FALCON™ 8+ UAS
Home Position
The home position is set automatically each time the motors are started.
Figure 3.11: New Home Position
It is possible to define a new home position while
the UAV is in the air.
To do so:
1. Push ENT at the Status Display.
You enter the shown menu.
2. Push the arrow RIGHT button one time to
highlight Navigation.
3. Push ENT.
You enter the shown menu.
New Home Position is highlighted.
4. Push ENT.
The new home position is set at the current location
of the UAV at the moment the ENT button is pushed
and you return to the Main Screen.
Please note the following points:
• The flight path back to the home position may not be a straight line, but it may
be curved in windy conditions.
• When the UAV is flown in Height-Mode (an H is shown in the upper right corner
of the Status Display) or in Manual-Mode (an M is shown in the upper right corner
of the Status Display) and the Link Loss Procedure is activated, the UAV will
automatically switch to GPS-Mode (a G is shown in the upper right corner of the
Status display) if a GPS signal is available.
CAUTION: IN CASE THE LINK LOSS PROCEDURE HAS BEEN
ACTIVATED, IT IS RECOMMENDED NOT TO USE MANUAL-MODE.
BECAUSE THE UAV WILL AUTOMATICALLY CONTROL THE HEIGHT,
USING GPS- OR HEIGHT-MODE, WILL MAKE IT EASIER FOR THE
PILOT TO REACT CORRECTLY WHEN THE DATA LINK IS
REESTABLISHED AND THE LINK LOSS PROCEDURE IS
INTERRUPTED.
• Should the connection between the CTR and the UAV be re-established during
the Link Loss Procedure, the UAV will immediately stop the procedure, enter the
flight mode selected on the CTR and follow any control input from the pilot.
© 2017 Intel Corporation. All rights reserved 92
Page 93

USER MANUAL
INTEL® FALCON™ 8+ UAS
• If the UAV performed a direct landing because of a lost data link connection, and
if you are having difficulties locating it, the last known position of the Intel®
Falcon™ 8+ UAV (which is stored in the Status Display of the CTR) might be
helpful.
Figure 3.12: Last Known Position
Push the arrow RIGHT button of the Status Display
once (while not connected) and latitude and longitude of last known position will be displayed.
Situations With Varying GPS Reception
• If no GPS reception is available, when a data link connection is lost, the Intel®
Falcon™ 8+ UAV will use Direct Landing.
• If GPS reception is lost during an active ComeHome procedure, the Intel®
Falcon™ 8+ UAV will immediately switch to Direct Landing.
• If no GPS reception is available while the motors are started, the home position
cannot be set. If GPS reception becomes available later during the flight, the
home position will be set to the location where a valid GPS signal was first
received. This home position will be used for the ComeHome procedures. If this
does not suit the flight situation, chose Direct Landing.
If the system has landed itself during a Link Loss Procedure, the propellers will
continue to turn for 10 seconds when the UAV is already on the ground. After this the
motors will be switched OFF automatically.
3.6. FLIGHT MODES
The Intel® Falcon™ 8+ UAV can be operated in three different flight modes:
• GPS-Mode
• Height-Mode
• Manual-Mode
Flying in GPS-Mode is easiest as it provides the highest level of automation.
Nevertheless, there will be situations where no GPS signal is available and therefore it
is necessary that every pilot is capable to safely control the UAV in Height-Mode. We
strongly recommend taking part in an Intel® Falcon™ 8+ UAS operator's training, to
learn the basics of flying under qualified supervision. If you are interested in attending
a training course, contact your local sales representative.
© 2017 Intel Corporation. All rights reserved 93
Page 94

USER MANUAL
1
2
INTEL® FALCON™ 8+ UAS
Figure 3.13: Selecting The Flight Modes
The flight modes can be selected with the two
buttons on the upper right corner of the CTR
(see “THE INTEL® COCKPIT CONTROLLER (CTR)”
on page 23).
For most applications, the Intel® Falcon™ 8+
UAV is best to be flown in GPS-Mode. If necessary, Height-Mode can be conveniently and
quickly activated or deactivated with the index
finger of the right hand without letting go of the
control stick.
• When the button GPS is pushed and is lit,
GPS-Mode is active
• When the button HGT is pushed and is lit,
Height-Mode is active
• When both buttons are pushed
simultaneously and are both lit, ManualMode is active
When the system is switched on, GPS-Mode will be activated by default. If there is
no sufficient GPS reception, Height-Mode will be activated automatically and the
Height-Mode button will be lit. In this case, the GPS-Mode button will be flashing
to indicate that the system will switch to GPS Mode as soon as there is a valid GPS
signal. In such a situation, it is recommended to actively switch to Height-Mode by
pushing the respective button before taking off. This way any unexpected switch
of the flight mode can be avoided.
The different flight modes differ in the degree of automation.
Table 3.1: Controlled Parameters Depending On The Flight Mode
GPS
BUTTON
HGT
BUTTON
ATTITUDE
CONTROL
HEIGHT
CONTROL
POSITION
CONTROL
GPS-Mode ON (lit) OFF √√√
HeightMode
ManualMode
OFF ON (lit) √√-
ON (lit) ON (lit) √ --
© 2017 Intel Corporation. All rights reserved 94
Page 95

USER MANUAL
INTEL® FALCON™ 8+ UAS
CAUTION: THE PILOT MUST BE ABLE TO CONTROL THE UAV NOT
ONLY IN GPS-MODE BUT ALSO IN HEIGHT-MODE!
IF THE SYSTEM SEEMS TO BE UNSTABLE OR HAS DIFFICULTIES IN
KEEPING ITS CURRENT POSITION IN GPS-MODE, PLEASE
IMMEDIATELY ACTIVATE HEIGHT-MODE. BE PREPARED THAT YOU
NOW NEED TO CONTROL THE POSITION MANUALLY.
IF THE SYSTEM PERFORMS DRAMATIC CHANGES IN ALTITUDE
WITHOUT ANY RELATED COMMAND FROM THE CTR, PLEASE
IMMEDIATELY ACTIVATE MANUAL-MODE.
BE PREPARED THAT YOU NOW NEED TO CONTROL THE POSITION
AND THE ALTITUDE MANUALLY.
3.6.1. GPS-Mode
Table 3.2: Controlled Parameters In GPS-Mode
HGT
BUTTON
GPS-Mode OFF ON √√√
When there is no input from the pilot, the UAV will:
• Keep its orientation in the air.
• Maintain its position within the limits of the GPS accuracy
(approximately 2 – 5 m).
• Keep its height within the limits of the height controller (approximately 1 – 3 m).
• Compensate for wind speeds up to 12 m/s.
For safety reasons and to make operation as easy as possible, there are some
limitations:
• Roll and pitch angles are limited to 45°.
• Speed in horizontal plane is limited to 4.5 m/s.
• Ascend rate is limited to 3 m/s.
• Descend rate is limited to 3 m/s.
GPS
BUTTON
ATTITUDE
CONTROL
HEIGHT
CONTROL
POSITION
CONTROL
In this mode, the inputs via the CTR directly control the speed of the UAV. For example,
moving the right control stick completely to the left (which controls pitch and roll)
means the system will fly at 4.5 m/s to the left, independent of the wind strength and
direction.
© 2017 Intel Corporation. All rights reserved 95
Page 96

USER MANUAL
INTEL® FALCON™ 8+ UAS
CAUTION: WHEN THE GPS QUALITY IS INSUFFICIENT, HEIGHTMODE WILL AUTOMATICALLY BE ACTIVATED. SHORTLY BEFORE
THIS POINT, POSITIONAL ACCURACY MIGHT ALREADY BE TOO LOW
AND IT IS STRONGLY RECOMMENDED TO ACTIVELY SWITCH TO
HEIGHT-MODE IN SITUATIONS WITH INSUFFICIENT GPS QUALITY.
IF THE SYSTEM AUTOMATICALLY SWITCHES FROM GPS-MODE TO
HEIGHT-MODE, THE GPS-MODE BUTTON WILL BE FLASHING, WHILE
THE HEIGHT-MODE BUTTON WILL BE LIT PERMANENTLY. THIS
INDICATES THAT THE SYSTEM WILL SWITCH BACK TO GPS-MODE
AUTOMATICALLY, WHEN A VALID GPS SIGNAL WILL BE RECEIVED.
IF THE SYSTEM SEEMS TO BE UNSTABLE OR HAS DIFFICULTIES TO
KEEP ITS CURRENT POSITION IN GPS-MODE, IMMEDIATELY
ACTIVATE HEIGHT-MODE. BE PREPARED THAT YOU NOW NEED TO
CONTROL THE POSITION MANUALLY ON THE CTR.
Figure 3.14: GPS Accuracy
The GPS module of the Intel® Falcon™ 8+ UAV supports GPS and GLONASS. Under
ideal conditions, the horizontal accuracy can reach around +/- 2 m. The short-term
accuracy is usually higher, because of the data fusion with other available sensor
outputs from the IMU. Vertical accuracy of GPS is lower and the measured altitude
can vary up to 15 m depending on satellite constellation. A barometric measurement
is used for altitude instead of relying on GPS. Height is always measured above
ground level and is reset to zero when the rotors are being started. Throughout the
duration of a mission there can be a drift of +/- 5 m due to all possible errors: temperature, drift, weather changes, etc.
IMPORTANT:
The GPS receiver module of the Intel®
Falcon™ 8+ UAV is placed directly
underneath the canopy of the central
unit and is surrounded by an antenna.
The canopy of the Intel® Falcon™ 8+
UAV is made from a material which
does not influence the satellite signals,
but anything on the top of the Intel®
Falcon™ 8+ UAV can potentially disturb
the signal. Never cover the GPS receiver
module nor the antenna area to ensure
best possible GPS reception.
© 2017 Intel Corporation. All rights reserved 96
Page 97

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.15: Shadowing
The position accuracy can be impaired when obstacles block the direct line-of-sight
from many satellites. The obstacle virtually casts a GNSS-shadow over the concerned
area. This results in fewer received satellite signals and a changed geometry of the
signals themselves. This effect is very common in urban areas, where satellites can be
blocked by tall buildings. You may experience one side of the street has good position
accuracy, while on the other side position accuracy is extremely poor. If the UAV moves
out of the shadow and more satellite signals can be used to calculate the position, the
UAV can suddenly change its position due to the new calculation. Therefore, the pilot
needs to pay special attention in such situations. Whenever there are potential
shadings of the GPS signal, it is recommended to not use GPS-Mode but to activate
Height-Mode on the CTR.
When the Intel® Falcon™ 8+ UAV detects a low GPS quality, it automatically activates
Height-Mode and gives the respective GPS lost warning (see “GPS Warning” on
page 126). Nevertheless, it is strongly recommended to actively switch to Height-Mode
on the CTR beforehand, because it is unpredictable when the system will switch
between flight modes. Additionally, the system might only switch to Height-Mode
when the positional accuracy already low for the current flight situation.
© 2017 Intel Corporation. All rights reserved 97
Page 98

USER MANUAL
INTEL® FALCON™ 8+ UAS
Figure 3.16: GPS Multi Path Effects
When the UAV is placed close to walls which can reflect the satellite signal, the GPS
receiver has no possibility of identifying if the signal comes from a reflection or directly
from a satellite. Therefore, there might be situations (often in narrow streets) where
reflections are interpreted incorrectly and full GPS reception is displayed, but the
actual position accuracy is very low. Therefore, the pilot needs to pay special attention
in such situations. Whenever there are potential shadings or reflections of the GPS
signal, it is recommended to not use the GPS-Mode.
Compass Error Estimation
In addition to the compass sensors of the Intel® Falcon™ 8+ UAS, the UAV is equipped
with a compass error estimation algorithm.
The compass error estimation uses, among others, GPS-data to estimate the heading
of the UAV. For this purpose, horizontal flight movements are necessary. The collected
data is used to compensate for potential external disturbances of the compass sensors.
Directly after launching it can take the compass error estimator up to 30 seconds to
work properly.
The compass error estimator is active only in GPS-Mode. It is not active in Height-Mode
and in Manual-Mode. Which means that in case of an external magnetic disturbance,
the heading of the UAV might be influenced, resulting in an un-commanded yaw
movement of the UAV, which must be compensated for by the pilot.
© 2017 Intel Corporation. All rights reserved 98
Page 99

USER MANUAL
INTEL® FALCON™ 8+ UAS
3.6.2. Height-Mode
Table 3.3: Controlled Parameters in Height-Mode
HGT
BUTTON
Height-Mode ON OFF √√-
CAUTION: THE SYSTEM WILL NEITHER KEEP ITS POSITION NOR
COMPENSATE FOR WIND. THE POSITION MUST BE HELD MANUALLY
BY THE PILOT.
Attitude and height control is active. When there is no input from the pilot, the UAV will
only:
• Keep its orientation in the air (system will be leveled).
• Keep its height within the limits of the height controller (approximately 1 – 3 m).
For safety reasons and to make operation as easy as possible, there are some
limitations:
• Roll and pitch angles are limited to 50°.
• Ascend rate is limited to 3 m/s.
GPS
BUTTON
ATTITUDE
CONTROL
HEIGHT
CONTROL
POSITION
CONTROL
• Descend rate is limited to 3 m/s.
WARNING AVOID FULL CONTROL STICK INPUTS IN HEIGHT-MODE! THE
UAV CAN BE OVERSTRESSED IN CERTAIN SITUATIONS, SUCH
AS FLYING ABRUPT MANEUVERS WITH A LOW BATTERY.
In this mode the inputs, via the CTR, control the roll and pitch angles of the UAV. For
example, giving full input to the left (using the right control stick, which controls pitch
and roll) means the UAV will roll 50° to the left. With this configuration, the wind
direction and speed will influence the direction and speed of the UAV.
© 2017 Intel Corporation. All rights reserved 99
Page 100

USER MANUAL
INTEL® FALCON™ 8+ UAS
3.6.3. Manual-Mode
Table 3.4: Controlled Parameters Depending On The Flight Mode
HGT
BUTTON
Height-Mode ON ON √ --
CAUTION: THE UAV WILL NOT KEEP ITS POSITION AND HEIGHT,
NOR WILL IT COMPENSATE FOR WIND. CONTROLLING THE
POSITION, AND HEIGHT, MUST BE DONE MANUALLY BY THE PILOT
FROM THE CTR.
Only attitude control is active. When there is no input from the pilot, the UAV will:
• Keep its orientation in the air (system will be leveled).
For safety reasons and to make it impossible to flip the system:
• Roll and pitch angles are limited to 50°.
WARNING THE MANUAL-MODE IS FOR EXPERTS ONLY
In this mode the inputs, via the CTR, control the roll and pitch angles and the thrust of
the UAV. The direction and the speed of the UAV is influenced by the wind direction
and speed.
GPS
BUTTON
ATTITUDE
CONTROL
HEIGHT
CONTROL
POSITION
CONTROL
Having the left control stick in the middle (50%) does not mean the UAV will keep its
height. This means the UAV will, depending on the weight of the payload, either ascend
or descend when switching from any other mode to Manual-Mode! In most cases with
full payload, the system will start to descend. Be prepared to give some thrust to
counteract the described effect when switching to Manual-Mode.
© 2017 Intel Corporation. All rights reserved 100
 Loading...
Loading...